

Page 1

Sigma FSP Amplifier
User’s Manual
Page 2
Copyright © 2006 by YEA, Yaskawa Electric America, Inc.
FSP Amplifier User’s Manual
Catalog No.YEA-SIA-FSP-3, Revision 0
December, 2006
All rights reserved. No part of this publication may be stored in a retrieval system,
or reproduced in any way, including but not limited to photocopy, photography,
magnetic or other recording, without the prior agreement and written permission of
the publisher. Program listings may be entered, stored and executed in a computer
system, but not reproduced for publication.
This guide is designed to provide information about the FSP Amplifier hardware.
Every effort has been made to make this guide complete and as accurate as
possible. However, no warranty of suitability, purpose or fitness is made or
implied. YEA Inc. is not liable or responsible to any person or entity for loss or
damage in connection with or stemming from the use of the FSP Amplifier and/or
the information contained in this publication
YEA Inc. bears no responsibility for errors, which may appear in this publication
and retains the right to make changes to the products and the guide without prior
notice.
Yaskawa Electric America, Inc.
2121 Norman Drive South
Waukegan, IL 60085
United States
Tel: 1-800-927-5292
Fax: 1-847-887-7310
motionproducts@yaskawa.com
For more information refer to our web site: www.yaskawa.com
ii iii
Page 3

Page 4
WARNING
YEA manufactures component parts that can be used in a wide variety of industrial applications.
The selection and application of YEA products remain the responsibility of the equipment designer
or end user. YEA accepts no responsibility for the way its products are incorporated into the final
system design.
Under no circumstances should any YEA product be incorporated into any product or design as the
exclusive or sole safety control. Without exception, all controls should be designed to detect faults
dynamically and fail safely under all circumstances. All products designed to incorporate a
component part manufactured by YEA must be supplied to the end user with appropriate warnings
and instructions as to that part’s safe use and operation. Any warnings provided by YEA must be
promptly provided to the end user.
YEA offers an express warranty only as to the quality of its products in conforming to standards
and specifications published in YEA’s manual. NO OTHER WARRANTY, EXPRESS OR
IMPLIED, IS OFFERED. YEA assumes no liability for any personal injury, property damage,
losses, or claims arising from misapplication of its products.
iv
Page 5

v
Page 6

Safety Information
The following defines the symbols used in this manual to indicate varying degrees
of safety precautions and to identify the corresponding level of hazard inherent to
each. Failure to follow precautions provided in this manual can result in serious,
possibly even fatal, injury, and/or damage to the persons, products, or related
equipment and systems.
WARNING
WARNING: Indicates a potentially hazardous situation, which, if not
heeded, could result in death or serious injury.
CAUTION
CAUTION: Indicates a potentially hazardous situation, which, if not
avoided, may result in minor or moderate injury.
vi vii
Page 7

Page 8

FSP Amplifier User’s Manual Table of Contents/Preface
Table of Contents
1. Checking Product and Part Names.................................................................1-1
1.1. Checking the FSP Amplifier Series Products on Delivery ........................... 1-2
1.1.1. Servo Amplifiers.......................................................................................1-2
1.2. Product Part Names........................................................................................ 1-3
1.2.1. Servo Amplifiers.......................................................................................1-3
1.2.2. Model Numbers.........................................................................................1-4
2. Installation.........................................................................................................2-1
2.1. Servo Amplifiers ............................................................................................ 2-2
2.1.1. Storage Conditions....................................................................................2-2
2.1.2. Installation Site.......................................................................................... 2-2
2.1.3. Orientation.................................................................................................2-3
2.1.4. Installation................................................................................................. 2-3
3. Wiring................................................................................................................3-1
3.1. Connecting to Peripheral Devices.................................................................. 3-2
3.1.1. Single-Phase 100 V/200 V Main Circuit Specifications..........................3-3
3.1.2. Single-Phase 220 V 0.75 & 1.5kW Main Circuit S pecification s............ 3-4
3.1.3. Three-phase 200 V Main Circuit Specifications......................................3-5
3.1.4. Three-Phase 400 V Main Circuit Specifications......................................3-6
3.2. FSP Amplifier Internal Block Diagrams....................................................... 3-7
3.2.1. Single-phase 30 W to 400 W, 100 V/2 00 V Models...............................3-7
3.2.2. Three-phase 1 kW to 3 kW, 200 V Models .............................................3-8
3.2.3. Three-phase 0.5 kW to 3.0 kW, 400 V Models....................................... 3-9
3.2.4. Three-phase 5 kW, 400 V Model...........................................................3-10
3.3. Main Circuit W iring..................................................................................... 3-11
3.3.1. Names and Descriptions of Main Circuit Terminal............................... 3-12
3.3.2. Typical Main Circuit Wiring Example...................................................3-13
3.3.3. Servo Amplifier Power Losses...............................................................3-14
3.3.4. Wiring Main Circuit Terminal Blocks...................................................3-15
3.4. I/O Signals.................................................................................................... 3-16
3.4.1. Example of Typical I/O Signal Connections..........................................3-16
3.4.2. List of CN1 Terminals............................................................................ 3-17
3.4.3. I/O Signal Names and Functions............................................................3-18
3.4.4. Interface Circuits.....................................................................................3-20
3.5. Wiring Encoders (for SGMGH and SGMSH Motors Only) ...................... 3-24
3.5.1. Encoder Connections..............................................................................3-24
3.5.2. CN2 Encoder Connector Terminal Layou t and Types..........................3-25
3.6. Examples of Standard Connections............................................................. 3-26
4. Trial Operation.................................................................................................4-1
4.1. Two-Step Trial Operation.............................................................................. 4-2
4.1.1. Step 1: Trial Operation for Servomotor without Load.............................4-3
4.1.2. Step 2: Trial Operation with Servomotor Connected to Machine........... 4-9
4.2. Additional Setup Procedures in Trial Operation ......................................... 4-10
4.2.1. Servomotors with Brakes........................................................................4-10
4.2.2. Position Control by Host Controller.......................................................4-11
viii
Page 9

FSP Amplifier User’s Manual Table of Contents/Preface
4.3. Minimum Parameters and Input Signals ..................................................... 4-12
4.3.1. Parameters...............................................................................................4-12
4.3.2. Input Signals............................................................................................4-12
5. Parameter Settings and Functions ..................................................................5-1
5.1. Settings According to Device Characteristics............................................... 5-4
5.1.1. Switching Servomotor Rotation Direction...............................................5-4
5.1.2. Setting the Overtravel Limit Function......................................................5-5
5.1.3. Limiting Torque........................................................................................ 5-8
5.2. Settings According to Host Controller ........................................................ 5-12
5.2.1. Speed Reference......................................................................................5-12
5.2.2. Position Reference ..................................................................................5-14
5.2.3. Using the Encoder Signal Output...........................................................5-20
5.2.4. Sequence I/O Signals..............................................................................5-23
5.2.5. Using the Electronic Gear Function.......................................................5-25
5.2.6. Contact Input Speed Control...................................................................5-29
5.2.7. Using Torque Control............................................................................. 5-34
5.2.8. Torque Feed-Forward Function..............................................................5-40
5.2.9. Torque Limiting by Analog Voltage Reference.....................................5-42
5.2.10. Reference Pulse Inhibit Function (/INHIBIT) .......................................5-44
5.3. Setting Up the Servo Amplifier................................................................... 5-45
5.3.1. Parameters...............................................................................................5-45
5.3.2. JOG Speed...............................................................................................5-46
5.3.3. Input Circuit Signal Allocation...............................................................5-46
5.3.4. Output Circuit Signal Allocation............................................................5-50
5.3.5. Control Mode Selection..........................................................................5-52
5.4. Setting Stop Functions ................................................................................. 5-54
5.4.1. Adjusting Offset......................................................................................5-54
5.4.2. Servo OFF Stop Mode Selection............................................................5-55
5.4.3. Using the Zero Clamp Function............................................................. 5-56
5.4.4. Using the Holding Brake........................................................................5-58
5.5. Forming a Protective Sequence ................................................................... 5-61
5.5.1. Using Servo Alarm and Alarm Code Outp uts.......................................5-61
5.5.2. Using the Servo ON Input Signal (/S-ON).............................................5-63
5.5.3. Using the Positioning Completed Output S ignal (/COIN)....................5-64
5.5.4. Speed Coincidence Output (/V-CMP)....................................................5-65
5.5.5. Using the Running Output Signal (/TGON).......................................... 5-67
5.5.6. Using the Servo Ready Output Signal (/S-RDY )...................................5-68
5.5.7. Using the Warning Output Signal (/WARN).........................................5-69
5.5.8. Handling Power Loss..............................................................................5-71
5.6. Selecting a Regenerative Resistor................................................................ 5-72
5.6.1. External Regenerative Resistor...............................................................5-73
5.6.2. Calculating the Regenerative Power Capacity.......................................5-74
5.7. Absolute Encoders........................................................................................ 5-78
5.7.1. Interface Circuit.......................................................................................5-79
5.7.2. Configuring an Absolute Encoder..........................................................5-80
5.7.3. Absolute Encoder Setup..........................................................................5-81
ix
Page 10

FSP Amplifier User’s Manual Table of Contents/Preface
5.7.4. Absolute Encoder Reception Sequence..................................................5-84
5.8. AB Encoders................................................................................................. 5-89
5.9. Defining User Units and Setup.................................................................... 5-91
5.9.1. Position Control.......................................................................................5-91
5.9.1.1. Defining User Units for Motion Profiles..................................5-91
5.9.1.2. Position Units............................................................................5-91
5.9.1.3. Speed Units...............................................................................5-92
5.9.1.4. Acceleration Units ....................................................................5-93
5.9.1.5. Setting Default Motion Profile Parameters...............................5-95
5.9.1.6. Profile Speed (Pn2A2, Pn2A3).................................................5-95
5.9.1.7. Profile Acceleration (Pn2A4, Pn2A5) ......................................5-95
5.9.1.8. Jerk Smoothing Time (Pn2A6).................................................5-96
5.9.1.9. Quick Stop Deceleration (Pn2A8, Pn2A9)...............................5-96
5.9.1.10. Motion End Window (Pn2C0)..................................................5-96
5.9.2. Torque Control........................................................................................5-97
5.9.2.1. Torque Slope (Pn2C1) ..............................................................5-97
5.9.3. Homing....................................................................................................5-97
5.9.4. Digital I/O................................................................................................5-98
5.9.5. Auto Tuning ............................................................................................5-99
5.10. Auto Running a User Program................................................................... 5-100
6. Servo Adjustment..............................................................................................6-1
6.1. Selection of Control Mode............................................................................. 6-2
6.2. Analog Input or Contact Input Velocity Control........................................... 6-3
6.2.1. Principle and Block Diagram of the Velo city Contro l.............................6-3
6.2.2. Parameters of the Velocity Control.......................................................... 6-4
6.2.3. Setting the Input Gain...............................................................................6-4
6.2.4. Adjusting Offset........................................................................................6-5
6.2.5. Using the Soft Start Function....................................................................6-6
6.2.6. Load Inertia Setting...................................................................................6-7
6.2.7. Adjusting Speed Loop Gain......................................................................6-8
6.2.8. Setting the Torque Reference Filter Time Constant................................6-9
6.2.9. Notch Filter................................................................................................6-9
6.2.10. Gain Setting Reference Values...............................................................6-10
6.3. NCT Position Control .................................................................................. 6-12
6.3.1. Load Inertia Setting.................................................................................6-12
6.3.2. Position Control Block Diagram............................................................6-14
6.3.3. NCT Gain Parameters.............................................................................6-15
6.3.4. Additional Parameters Tuning................................................................ 6-16
6.3.5. Filters.......................................................................................................6-16
6.3.6. Flexible System Parameters....................................................................6-18
6.3.7. Gain Factor..............................................................................................6-18
6.3.8. Integral Clear Parameters........................................................................6-19
6.3.9. Tuning Procedure for Position Control Parameters...............................6-19
6.4. Analog Monitor............................................................................................ 6-21
7. Using the Panel Operator.................................................................................7-1
7.1. Basic Operation.............................................................................................. 7-2
x
Page 11

FSP Amplifier User’s Manual Table of Contents/Preface
7.1.1. Panel Operator...........................................................................................7-2
7.1.2. Resetting Servo Alarms............................................................................7-3
7.1.3. Basic Mode Selection................................................................................7-3
7.1.4. Status Display Mode.................................................................................7-4
7.1.5. Operation in Parameter Setting Mode......................................................7-6
7.1.6. Operation in Monitor Mode....................................................................7-11
7.2. Applied Operation........................................................................................ 7-16
7.2.1. Operation in Alarm Traceback Mode.....................................................7-17
7.2.2. JOG Operation ........................................................................................7-18
7.2.3. Automatic Adjustment of Speed and Torque Reference Offset............7-20
7.2.4. Manual Adjustment of Speed and Torque Reference Offset.................7-22
7.2.5. Clearing Alarm Traceback Data.............................................................7-25
7.2.6. Checking the Motor Model.....................................................................7-26
7.2.7. Checking the Software Version..............................................................7-27
7.2.8. Origin Search Mode................................................................................7-28
7.2.9. Initializing Parameter Settings................................................................7-30
7.2.10. Manual Zero & Gain Adjustment of Analog M onitor Output .............7-31
7.2.11. Adjusting the Motor Current Detection Offset ......................................7-34
7.2.12. Write Protection Setting..........................................................................7-36
8. Ratings, Specifications and Dimensional Drawings.......................................8-1
8.1. Ratings and Specifications............................................................................. 8-2
8.2. Single-phase 100 V FSP Amplifier and Motors Combinations....................8-6
8.3. Single-phase 200 V FSP Amplifier and Motors Combinations....................8-7
8.4. Three-phase 200 V FSP Amplifier and Motor Combinations...................... 8-8
8.5. Three-phase 400 V FSP Amplifier and Motors Combinations..................... 8-9
8.6. Base-mounted Dimensional Drawings........................................................ 8-10
8.6.1. FSP-A3B* to -01B* (Single-phase 100 V, 30 to 100 W)
FSP-A3A* to -02A* (Single-phase 200 V, 30 to 200 W).....................8-10
8.6.2. FSP-02B* (Single-phase 100 V, 200 W)
FSP-04A* (Single-phase 200 V, 400 W)...............................................8-11
8.6.3. FSP-08A* (Single-phase 200 V, 0.75 kW)
FSP-10A* (Three-phase 200 V, 1.0 kW)...............................................8-12
8.6.4. FSP-05D*, 10D*, 15D* (Three-phase 400 V, 0.5 to 1.5kW)...............8-13
8.6.5. FSP-20*, -30* (Three-phase 200 V, 400 V, 2.0 and 3.0 kW)
FSP-15A* (Single-phase 200 V, 1.5 kW)..............................................8-14
8.6.6. FSP-50D* (Three-phase 400 V, 5.0 kW)...............................................8-15
8.7. Servomotors: Ratings, Specifications and Dimensional Drawings ............ 8-16
8.7.1. SGMAH Servomotors ............................................................................8-16
8.7.2. SGMPH Servomotors.............................................................................8-21
8.7.3. SGMGH Servomotors ............................................................................8-25
8.7.4. SGMSH Servomotors.............................................................................8-29
8.7.5. SGMUH Servomotors ............................................................................8-33
9. Inspection, Maintenance, and Troubleshooting.............................................9-1
9.1. FSP Amplifier Inspection and Maintenance.................................................. 9-2
9.1.1. Servomotor Inspection..............................................................................9-2
9.1.2. Servo Amplifier Inspection.......................................................................9-3
xi
Page 12

FSP Amplifier User’s Manual Table of Contents/Preface
9.1.3. Replacing the Battery for the Absolute Encoder......................................9-4
9.2. Troubleshooting.............................................................................................. 9-5
9.2.1. Troubleshooting Problems with Alarm Displays.....................................9-5
9.2.2. Troubleshooting Problems with No Alarm Display..............................9-37
9.2.3. Alarm Display Table...............................................................................9-39
9.2.4. Warning Displays....................................................................................9-41
Appendix A. Host Controller Connection Examples .......................................A-1
A.1. Connecting the GL-series MC20 Motion Module ........................................A-2
A.2. Connecting the CP-9200SH Servo Controller Module (SVA).....................A-3
A.3. Connecting the GL-series B2813 Positioning Module .................................A-4
A.4. Connecting OMRON's C500-NC221 Position Control Unit........................A-5
A.5. Connecting OMRON's C500-NC112 Position Control Unit........................A-6
A.6. Connecting MITSUBISHI's AD72 Positioning Unit....................................A-7
A.7. Connecting MITSUBISHI's AD75 Positioning Unit....................................A-8
Appendix B. Special Wiring ...............................................................................B-1
B.1. Wiring Precautions.........................................................................................B-2
B.2. Wiring for Noise Control ...............................................................................B-5
B.3. Using More Than One FSP Amplifier.........................................................B-10
B.4. Extending Encoder Cables...........................................................................B-11
B.5. 400 V Power Supply Voltage ......................................................................B-13
B.6. Reactor for Harmonic Suppression..............................................................B-15
Appendix C. Specifications for Peripheral Devices..........................................C-1
C.1. Connector Terminal Block Converter Unit JUSP-TA50P............................C-2
C.2. DC Reactors for Power Supplies Designed for Minimum Harmonics........C-4
C.3. Surge Suppressor............................................................................................C-6
C.4. Magnetic Contactor........................................................................................C-6
C.5. Variable Resistor for Speed Setting...............................................................C-6
C.6. CN1 I/O Signal Connector.............................................................................C-6
C.7. Connecting Pulse A/B Encoder without C Pulse (Index Pulse) ...................C-7
C.8. Absolute Encoder Battery..............................................................................C-8
C.9. Connecting Regenerative Resistors ...............................................................C-9
Appendix D. List of Parameters.........................................................................D-1
D.1. Parameters ......................................................................................................D-2
D.2. Switches..........................................................................................................D-7
D.3. Input Signal Selections.................................................................................D-11
D.3.1. Home Switches.......................................................................................D-12
D.3.2. Extended input signal selection.............................................................D-12
D.4. Output Signal Selections..............................................................................D-13
D.4.1. Extended Output Signal Selection.........................................................D-13
D.5. Auxiliary Functions......................................................................................D-14
D.6. Monitor Modes.............................................................................................D-14
Appendix E. External Regenerative Resistor Specifications...........................E-1
xii
Page 13

FSP Amplifier User’s Manual Table of Contents/Preface
xiii
Page 14
FSP Amplifier User’s Manual Table of Contents/Preface
Using This Manual
Intended Audience
This manual is intended for the following users.
• Those designing FSP Amplifier servo systems.
• Those installing or wiring FSP Amplifier servo systems.
• Those performing trial operation or adjustments of FSP Amplifier servo
systems.
• Those maintaining or inspecting FSP Amplifier servo systems.
Description of Technical Terms
In this manual, the following terms are defined as follows:
• Servomotor = SGMAH/SGMPH/SGMGH/SGMSH/SGMUH or other
compatible servomotor.
• Servo Amplifier = FSP Amplifier Series.
• Servo Drive = A set including a servomotor and servo amplifier.
• Servo System = A servo control system that includes the combination
of a servo drive with a host computer and peripheral devices.
Indication of Inverted Signals
In this manual, the names of inverted signals (ones that are valid when low)
are written with a forward slash (/) before the signal name, as shown in the
following equations:
• S–ON = /S–ON
• P–CON = /P–CON
xiv
Page 15
FSP Amplifier User’s Manual Table of Contents/Preface
Safety Precautions
The following precautions are for checking products upon delivery, installation,
wiring, operation, maintenance and inspections.
Checking Products upon Delivery
CAUTION
• Always use the servomotor and servo amplifier in one of the specified
combinations.
Not doing so may cause fire or malfunction.
Installation
CAUTION
• Never use the products in an environment subject to water, corrosive
gases, inflammable gases, or combustibles.
Doing so may result in electric shock or fire.
Wiring
WARNING
• Connect the ground terminal to a class 3 ground (10 V or less).
Improper grounding may result in electric shock or fire.
CAUTION
• Do not connect a three-phase power supply to the U, V, or W output
terminals.
Doing so may result in injury or fire.
• Securely fasten the power supply terminal screws and motor output
terminal screws.
Not doing so may result in fire.
Operation
CAUTION
• Never touch any rotating motor parts while the motor is running.
Doing so may result in injury.
xv
Page 16

FSP Amplifier User’s Manual Table of Contents/Preface
CAUTION
• Conduct trial operation on the servomotor alone with the motor shaft
disconnected from machine to avoid any unexpected accidents.
Not doing so may result in injury.
• Before starting operation with a machine connected, change the settings
to match the parameters of the machine.
Starting operation without matching the proper settings may cause the machine to run
out of control or malfunction.
• Before starting operation with a machine connected, make sure that an
emergency stop can be applied at any time.
Not doing so may result in injury.
• Do not touch the heat sinks during operation.
Not doing so may result in burns due to high temperatures.
Maintenance and Inspection
WARNING
• Do not remove the panel cover while the power is ON.
Doing so carries a risk of electric shock.
• Do not touch terminals for five minutes after the power has been turned
OFF.
Residual voltage may cause electric shock.
• Never touch the inside of the servo amplifier.
Doing so may result in electric shock.
CAUTION
• Do not disassemble the servomotor.
Doing so may result in electric shock or injury.
• Do not attempt to change wiring while the power is ON.
Doing so may result in electric shock or injury.
xvi
Page 17

FSP Amplifier User’s Manual Table of Contents/Preface
General Precautions
NOTE THE FOLLOWING TO ENSURE
SAFE APPLICATION:
• The drawings presented in this manual are sometimes shown without covers or
protective guards. Always replace the cover or protective guard as specified
first, and then operate the products in accordance with the manual.
• The drawings presented in this manual are typical examples and may not match
the product you received.
• This manual is subject to change due to product improvement, specification
modification, and manual improvement. When this manual is revised, the
manual code is updated, and the new manual is published as a next edition. The
edition number appears on the back cover.
• If the manual must be ordered due to loss or damage, inform your nearest YEA
representative or one of the offices listed on the back of this manual.
• YEA will not take responsibility for the results of unauthorized modifications of
this product. YEA shall not be liable for any damages or trouble resulting from
unauthorized modification.
xvii
Page 18

FSP Amplifier User’s Manual Chapter 1: Checking Product and Part Names
1. Checking Product and Part Names
This chapter describes the procedure for checking products upon delivery as well as
names for product parts.
1.1. Checking the FSP Amplifier Series Products on Delivery .............................1-2
1.1.1. Servo Amplifiers.....................................................................................1-2
1.2. Product Part Names.........................................................................................1-3
1.2.1. Servo Amplifiers.....................................................................................1-3
1.2.2. Model Numbers ......................................................................................1-4
1-1
Page 19

FSP Amplifier User’s Manual Chapter 1: Checking Product and Part Names
1.1. Checking the FSP Amplifier Series Products on Delivery
The following procedure is suggested to check FSP Amplifier series products upon
delivery.
Use the following checklist when FSP Amplifier series products are delivered.
Initial Inspection Comments
Are the delivered products
the ones that were ordered?
Does the servomotor shaft
rotate smoothly?
Is there any damage? Check the overall appearance, and
Are there any loose screws? Check screws for looseness using a
If any of the above are faulty or incorrect, contact YEA or an authorized distributor.
Check the model numbers marked on
the nameplates of the servomotor and
servo amplifier. (Refer to the
descriptions of model numbers on the
following pages)
The servomotor shaft is normal if it
can be turned smoothly by hand.
Servomotors with brakes, however,
cannot be turned manually.
check for damage or scratches that
may have occurred during shipping.
screwdriver.
1.1.1. Servo Amplifiers
External Appearance and Nameplate Examples
1-2
Page 20

FSP Amplifier User’s Manual Chapter 1: Checking Product and Part Names
1.2. Product Part Names
This section describes product part names.
1.2.1. Servo Amplifiers
The figure below shows the part names for servo amplifiers.
1-3
Page 21

FSP Amplifier User’s Manual Chapter 1: Checking Product and Part Names
1.2.2. Model Numbers
FSP - 05 D - MC
Flex ible Se rvoP ack
Max. Applicable
Servomotor Power
(see table below)
Input Voltage
B - 100VAC, or
A - 200VAC, or
D - 400VAC
Control Method
MC - Se ri al
MH - A-B quadrature
Options
- No options
C - Pre-loaded ECA M
S - Single-phase amplifier
(08 and 15 only)
Output Capacity
Code
Max. Applicable
Servomotor Power
(kW)
A3 0.03
A5 0.05
01 0.10
02 0.20
04 0.40
05 0.50
08 0.75
10 1.00
15 1.50
20 2.00
30 3.00
50 5.00
1-4
Page 22

FSP Amplifier User’s Manual Chapter 2: Installation
2. Installation
This chapter describes precautions for the FSP amplifier series servomotor and the
servo amplifier installation.
2.1. Servo Amplifiers .............................................................................................. 2-2
2.1.1. Storage Conditions...................................................................................2-2
2.1.2. Installation Site ........................................................................................ 2-2
2.1.3. Orientation ............................................................................................... 2-3
2.1.4. Installation................................................................................................ 2-3
2-1
Page 23

FSP Amplifier User’s Manual Chapter 2: Installation
2.1. Servo Amplifiers
The FSP Amplifier servo amplifiers are base-mounted. Incorrect installation will
cause problems. Follow the installation instructions below.
2.1.1. Storage Conditions
Store the servo amplifier within the following temperature range, as long as
it is stored with the power cable disconnected.
Temperature range: -20 to 85°C
2.1.2. Installation Site
The following precautions apply to the installation site.
Situation Installation Precaution
Installation in a Control Panel
Installation near a Heating Unit
Installation near a Source of Vibration
Design the control panel size, unit layout, and cooling
method so the temperature around the servo amplifier does
not exceed 55°C.
Minimize heat radiated from the heating unit as well as any
temperature rise caused by natural convection so the
temperature around the servo amplifier does not exceed
55°C.
Install a vibration isolator beneath the servo amplifier to
avoid subjecting it to vibration.
Installation at a Site Exposed to
Corrosive Gas
Other Situations
Corrosive gas does not have an immediate effect on the
servo amplifier, but will eventually cause electronic
components and contactor-related devices to malfunction.
Take appropriate action to avoid corrosive gas.
Do not install the servo amplifier in hot and humid locations
or locations subject to excessive dust or iron powder in the
air.
2-2
Page 24

FSP Amplifier User’s Manual Chapter 2: Installation
2.1.3. Orientation
Install the servo amplifier perpendicular to the wall as shown in the figure.
The servo amplifier must be oriented this way because it is designed to be
cooled by natural convection or by a cooling fan.
Secure the servo amplifier using the mounting holes. The number of holes
varies (from two to four) with the frame size of the servo amplifier.
2.1.4. Installation
Follow the procedure below to install multiple servo amplifiers side-byside in a control panel.
)
.
in
FAN
C
N
3
C
N
1
C
N
2
C
N
3
C
N
1
C
N
2
FAN
C
N
3
C
N
1
C
N
2
10mm(0.4in.)or more
e
r
2
(
o
m
m
r
m
o
0
5
C
N
3
C
N
1
C
N
2
)
.
n
e
i
r
2
o
(
m
m
r
m
o
0
5
30mm(1.2in.)or more
30mm(1.2in.)or more
2-3
Page 25

FSP Amplifier User’s Manual Chapter 2: Installation
Servo Amplifier Orientation
Install the servo amplifier perpendicular to the wall so the front panels’
connectors face outward.
Cooling
As shown in the figure, allow sufficient space around each servo amplifier
for cooling by cooling fans or natural convection.
Side-by-side Installation
When installing servo amplifiers side-by-side as shown in the figure, allow
at least 0.39 in (10 mm) between and at least 1.97 in (50 mm) above and
below each servo amplifier. Install cooling fans above the servo amplifiers
to avoid excessive temperature rise and to maintain even temperature inside
the control panel.
Environmental Conditions in the Control
Panel
• Ambient Temperature: 0 to 55°C
• Humidity: 90% RH or less
• Vibration: 0.5 G (4.9 m/s2)
• Condensation and Freezing: None
• Ambient Temperature for Long-term Reliability: 45°C max.
2-4
Page 26

FSP Amplifier User’s Manual Chapter 3: Wiring
3. Wiring
This chapter describes the procedure used to connect FSP Amplifier Series products
to peripheral devices and gives typical examples of main circuit wiring as well as
I/O signal connections.
3.1. Connecting to Peripheral Devices....................................................................3-2
3.1.1. Single-Phase 100 V/200 V Main Circuit Specifications.......................... 3-3
3.1.2. Single-Phase 220 V 0.75 & 1.5 kW Main Circuit Specifications............ 3-4
3.1.3. Three-Phase 200 V Main Circuit Specifications ..................................... 3-5
3.1.4. Three-Phase 400 V Main Circuit Specifications ..................................... 3-6
3.2. FSP Amplifier Internal Block Diagrams.......................................................... 3-7
3.2.1. Single-phase 30 W to 400 W, 100 V/200 V Models ...............................3-7
3.2.2. Three-phase 1 kW to 3 kW, 200 V Models .............................................3-8
3.2.3. Three-phase 0.5 kW to 3.0 kW, 400 V Models .......................................3-9
3.2.4. Three-phase 5 kW, 400 V Model........................................................... 3-10
3.3. Main Circuit Wiring....................................................................................... 3-11
3.3.1. Names and Descriptions of Main Circuit Terminal...............................3-12
3.3.2. Typical Main Circuit Wiring Example .................................................. 3-13
3.3.3. Servo Amplifier Power Losses ..............................................................3-14
3.3.4. Wiring Main Circuit Terminal Blocks...................................................3-15
3.4. I/O Signals ..................................................................................................... 3-16
3.4.1. Example of Typical I/O Signal Connections .........................................3-16
3.4.2. List of CN1 Terminals ........................................................................... 3-17
3.4.3. I/O Signal Names and Functions ...........................................................3-18
3.4.4. Interface Circuits.................................................................................... 3-20
3.5. Wiring Encoders (for SGMGH and SGMSH Motors Only) ......................... 3-24
3.5.1. Encoder Connections ............................................................................. 3-24
3.5.2. CN2 Encoder Connector Terminal Layout and Types ..........................3-25
3.6. Examples of Standard Connections ............................................................... 3-26
3-1
Page 27

FSP Amplifier User’s Manual Chapter 3: Wiring
3.1. Connecting to Peripheral Devices
This section provides examples of standard FSP Amplifier Series product
connections to peripheral devices.
It also briefly explains how to connect each peripheral device.
3-2
Page 28

FSP Amplifier User’s Manual Chapter 3: Wiring
3.1.1. Single-Phase 100 V/200 V Main Circuit Specifications
Cable type: P/N YS-12
Brake power supply
Used for a servomotor
with a brake.
Host controller
FSP Amplifier is compa tible with
most PLC motion controllers and
index ers.
3-3
Page 29

FSP Amplifier User’s Manual Chapter 3: Wiring
3.1.2. Single-Phase 220 V 0.75 & 1.5 kW Main Circuit
Specifications
Observe the following points:
1. Connect main power supply shown below to L1 and L3 terminals. Power supply is
single-phase, 220 to 230 VAC +10% to –15%, 50/60 Hz. If power supply of 187 V
(-15% of 220 V) or less is used, alarm A.41 indicating voltage shortage, may occur
when accelerating to max speed with max torque of motor.
2. Short-circuit B2 and B3 terminals using the internal regenerative resistor. If capacity
of the regenerative resistor is insufficient, remove the lead between B2 and B3
terminals and connect an external regenerative resistor unit to B1 and B2 terminals.
Brake powe r supply
Used for a servomotor
with a brake.
Cable type: P/N YS-12
Host controller
FSP Amp lifier is compa tible with most
PLC motion controllers and indexers.
3-4
Page 30

FSP Amplifier User’s Manual Chapter 3: Wiring
3.1.3. Three-Phase 200 V Main Circuit Specifications
3-5
Page 31

FSP Amplifier User’s Manual Chapter 3: Wiring
3.1.4. Three-Phase 400 V Main Circuit Specifications
3-6
Page 32

FSP Amplifier User’s Manual Chapter 3: Wiring
3.2. FSP Amplifier Internal Block Diagrams
The following sections show internal block diagrams of the servo amplifiers.
3.2.1. Single-Phase 30 W to 400 W, 100 V/200 V Models
3-7
Page 33

FSP Amplifier User’s Manual Chapter 3: Wiring
3.2.2. Three-Phase 1 kW to 3 kW, 200 V Models
3-8
Page 34

FSP Amplifier User’s Manual Chapter 3: Wiring
3.2.3. Three-Phase 0.5 kW to 3.0 kW, 400 V Models
3-9
Page 35

FSP Amplifier User’s Manual Chapter 3: Wiring
3.2.4. Three-Phase 5 kW, 400 V Model
3-10
Page 36
FSP Amplifier User’s Manual Chapter 3: Wiring
3.3. Main Circuit Wiring
This section shows typical examples of main circuit wiring for FSP Amplifier
Series servo products, functions of main circuit terminals, and the power ON
sequence.
Observe the following precautions when wiring.
CAUTION
• Do not bundle or run power and signal lines together in the same duct.
Keep power and signal lines separated by at least 30 cm (11.81 in).
Not doing so may cause a malfunction.
• Use twisted pair wires or multi-core shielded-pair wires for signal and
encoder (PG) feedback lines.
The maximum length is 3 m (118.11 in) for reference input lines and is 20 m (787.40 in) for
PG feedback lines.
• Do not touch the power terminals for 5 minutes after turning power OFF
because high voltage may still remain in the servo amplifier.
Make sure the charge indicator is out first before starting an inspection.
• Avoid frequently turning power ON and OFF. Do not turn power ON or
OFF more than once per minute.
Since the servo amplifier has a capacitor in the power supply, a high charging current flows
for 0.2 seconds when power is turned ON. Frequently turning power ON and OFF causes
main power devices like capacitors and fuses to deteriorate, resulting in unexpected
problems.
3-11
Page 37

FSP Amplifier User’s Manual Chapter 3: Wiring
3.3.1. Names and Descriptions of Main Circuit Terminal
The following table gives the names and a description of main circuit
terminals.
Table 3.1: Main Circuit Names and Descriptions
Terminal
Symbol
L1, L2
L1, L2, L3*
U, V, W
L1C, L2C
24V, 0V
(2 places)
B1, B2 or
B1, B2, B3
Name Description
30 W to 1.0 kW Single-phase 200 to 230 V (+10%, -15%), 50/60 Hz
Main circuit AC input
terminal
Servomotor
connection terminal
Control power input
terminal
Ground terminal Connects to the power supply ground terminals and motor ground terminal.
External regenerative
resistor terminal
1.0 kW to 3.0 kW Three-phase 200 to 230 V (+10%, -15%), 50/60 Hz
2.0 kW to 5.0 kW
400 V
Connects to the Servomotor.
30 W to 5.0 kW
30 W to 400 W
800 W to 5.0 kW
Three-phase 380 to 480 V (+10%, -15%), 50/60 Hz
Single-phase 200 to 230 V (+10%, -15%), 50/60 Hz
Three-phase 200 to 230 V (+10%, -15%), 50/60 Hz
24 VDC (±15%) 400 V units only
Normally not connected.
Connect an external regenerative resistor (provided by
customer) between B1 and B2 if the regenerative
capacity is insufficient.
Note: No B3 terminal.
Normally short B2 and B3 (for an internal regenerative
resistor).
Remove the wire between B2 and B3 and connect an
external regenerative resistor (provided by customer)
between B1 and B2 if the capacity of the internal
regenerative resistor is insufficient.
1, 2
DC reactor terminal
connection for power
supply harmonic wave
countermeasure
Main circuit Positive
terminal
Main circuit Negative
terminal
Normally short
If a countermeasure against power supply harmonic waves is needed,
connect a DC reactor between
The amplifier is delivered from the factory with these terminals shorted. See
Appendix B.6 Reactor for Harmonic Suppression for details.
Normally not connected.
Normally not connected.
1 and 2.
1 and 2.
*Models FSP-08A* and FSP-15A* are single-phase, 220 V power supply specifications.
Connect the following power supply between L1 and L3.
Single-phase 220 to 230 VAC +10%, -15% (50/60 Hz)
When a power supply of 187 V (-15% of 220 V) or less is used, an alarm A.41, indicating
voltage shortage, may occur when accelerating to max speed with max torque of motor.
3-12
Page 38

FSP Amplifier User’s Manual Chapter 3: Wiring
3.3.2. Typical Main Circuit Wiring Example
The following figure shows a typical example of main circuit wiring.
FSP Amplifier
Designing a Power ON Sequence
Note the following when designing the power ON sequence.
• Design the power ON sequence so that power is turned OFF when a
servo alarm signal is output. (See the circuit figure above.)
• Hold the power ON button for at least two seconds. The servo amplifier
will output a servo alarm signal for two seconds or less when power is
turned ON. This is required in order to initialize the servo amplifier.
Power supply
2.0 s max.
Servo alarm (ALM)
output signal
3-13
Page 39

FSP Amplifier User’s Manual Chapter 3: Wiring
3.3.3. Servo Amplifier Power Losses
The following table shows servo amplifier power losses at the rated output.
Table 3.2: Servo Amplifier Power Losses at Rated Output
Main
Circuit
Power
Supply
Single-
phase
100 V
Single-
phase
200 V
Single-
phase
220 V
Three-
phase
200 V
Three-
phase
400 V
Maximum
Applicable
Servomotor
Capacity
[kW]
0.03 FSP-A3B* 0.66 3.5 16.5
0.05 FSP-A5B* 0.95 5.2 18.2
0.10 FSP-01B* 2.4 12 25
0.20 FSP-02B* 3.0 16.4
0.03 FSP-A3A* 0.44 3.1 16.1
0.05 FSP-A5A* 0.64 4.6 17.6
0.10 FSP-01A* 0.91 6.7 19.7
0.20 FSP-02A* 2.1 13.3 26.3
0.40 FSP-04A* 2.8 20
0.75 FSP-08A* 4.4 47 12 74
1.50 FSP-15A* 7.5 60 14
1.00 FSP-10A* 7.6 55 12 82
2.00 FSP-20A* 18.5 120 163
3.00 FSP-30A* 7.5 60
0.50 FSP-05D* 1.9 19 48
1.00 FSP-10D* 3.5 35 64
1.50 FSP-15D* 5.4 53
2.00 FSP-20D* 8.4 83 126
3.00 FSP-30D* 11.9 118
Servo Amplifier
Model
Output
Current
(Effective
Value) [A]
5.00 FSP-50D* 16.5 192 36 15 243
Main
Circuit
Power
Loss
[W]
Regenerative
Resistor
Power Loss
[W]
— 13
— 13
28
14
28
Control
Circuit
Power
Loss
[W]
15
15
15
Total
Power
Loss
[W]
29.4
33
89
198
82
161
Note: Regenerative resistor power losses are allowable losses. Take the following action if this value is exceeded:
• Disconnect the internal regenerative resistor in the servo amplifier by removing the wire
between terminals B2 and B3.
• Install an external regenerative resistor between terminals B1 and B2.
See 5.6 Selecting a Regenerative Resistor for more details on the resistors.
3-14
Page 40

FSP Amplifier User’s Manual Chapter 3: Wiring
3.3.4. Wiring Main Circuit Terminal Blocks
Observe the following precautions when wiring main circuit terminal
blocks.
CAUTION
• Remove the terminal block from the servo amplifier prior to wiring.
• Insert only one wire per terminal on the terminal block.
• Make sure that the core wire is not electrically shorted to adjacent core
wires.
• Reconnect any wires that were accidentally pulled out.
Servo amplifiers with a capacity below 1.5 kW will have connector-type terminal
blocks for main circuit terminals. Follow the procedure below when connecting to
the terminal block.
Connection Procedure
• Strip the end of the wire, leaving the ends twisted together.
• Open the wire insert opening of the terminal block (plug) with a tool
using either of the two procedures shown in Fig. A and Fig. B on the
following page.
1. Fig. A: Use the provided lever to open the wire insert opening.
Fig. B: Using a commercially available 1/8 in (3.0 to 3.5 mm)
slotted screwdriver, press down firmly on the screwdriver insert
opening to release the wire insert slot.
2. Figs A and B: Insert the wire end into the opening and then clamp
it tightly by releasing either the lever or the screwdriver.
3-15
Page 41

FSP Amplifier User’s Manual Chapter 3: Wiring
3.4. I/O Signals
This section describes I/O signals for the FSP Amplifier.
3.4.1. Example of Typical I/O Signal Connections
FSP Ampli f ier
3-16
Page 42

FSP Amplifier User’s Manual Chapter 3: Wiring
3.4.2. List of CN1 Terminals
The following diagram shows the layout and specifications of CN1
terminals.
Table 3.3: CN1 Terminal Layout
2 SG GND
4 SEN
6 SG GND
8 /PULS
10 SG GND
12 /SIGN
14 /CLR Clear input
16 TMON
18 PL3
20 /PCO
22 BAT (-) Battery (-)
24 — —
SEN signal
input
Reference
pulse input
Reference
symbol input
Analog
Monitor Output
Open-collector
reference
power supply
PG divided
output
C-phase
Note: 1. Do not use unused terminals for relays.
2. Connect the shield of the I/O signal cable to the connector’s shell.
3. Connect to the FG (frame ground) at the servo amplifier-end connector.
1 SG GND
3 PL1
5 V-REF
7 PULS
9 T-REF
11 SIGN
13 PL2
15 CLR Clear input
17 VTG
19 PCO
21 BAT (+) Battery (+)
23 — —
/V-CMP+
25
(/COIN+)
Open-collector
reference
power supply
Reference
speed input
Reference
pulse input
Torque
reference input
Reference sign
input
Open-collector
reference
power supply
Analog Monitor
PG divided
output Cphase
Speed
coincidence
detection output
Output
27 /TGON+
29 /SRDY+
31 ALM+
33 PAO
35 PBO
37 AL01
39 AL03
41 P-CON
43 N-OT
45 /P-CL
47 +24V -IN
49 /PSO
TGON signal
output
Servo ready
output
Servo alarm
output
PG divided
output Aphase
PG divided
output Bphase
Alarm code
output
Opencollector
output
P operation
input
Reverse
overtravel
input
Forward
current limit
ON input
External
input power
supply
S-phase
signal output
/V-CMP-
26
(/COIN-)
28 /TGON
30 /S-RDY
32 ALM
34 /PAO
36 /PBO
38 AL02
40 /S-ON
42 P-OT
44 /ALMRST
46 /N-CL
48 PSO
50 — —
Speed
coincidence
detection
output
TGON signal
output
Servo ready
output
Servo alarm
output
PG divided
output Aphase
PG divided
output Bphase
Alarm code
output
Servo ON
input
Forward
overtravel
input
Alarm reset
input
Reverse
current limit
ON input
S-phase
signal output
CN1 Specifications
FSP Amplifier Internal
Connector
10250-52A2JL or Equivalent
50-pin Right Angle Plug
Applicable Receptacle Kit (YEA P/N: JZSP-CK19)
Connector Case Manufacturer
10150-3000VE 50-pin 10350-52A0-008
Sumitomo 3M
Co.
3-17
Page 43

FSP Amplifier User’s Manual Chapter 3: Wiring
3.4.3. I/O Signal Names and Functions
The following section describes servo amplifier I/O signal names and
functions.
Input Signals
Signal Name Pin No.
Common
Speed
Reference
Torque
Reference
Position
Reference
PL1
Note: 1. The functions allocated to /S-ON, /P-CON. P-OT, N-OT, /ALM-RST, /P-CL, and /N-CL input signals
/S-ON 40
/P-CON
P-OT
N-OT
/P-CL
/N-CL
/ALM
-RST
+24VIN 47
SEN 4 (2) Initial data request signal when using an absolute encoder. 5.2.3
BAT+
BAT-
V-REF 5 (6)
T-REF 9 (10)
PULS
/PULS
SIGN
/SIGN
CLR
/CLR
PL2
PL3
can be changed with parameters. (See 5.3.3 Input Circuit Signal Allocation).
2. Pin numbers in parenthesis ( ) indicate signal grounds.
3. The voltage input range for speed and torque references is a maximum of ±12 V.
41
42
43
45
46
44
21
22
7
8
11
12
15
14
3
13
18
Servo ON: Turns ON the servomotor when the gate block in
the inverter is released.
1
Function selected via parameter.
Proportional
operation
reference
Direction
reference
Control mode
switching
Zero-clamp
reference
Reference
pulse block
Forward Run
prohibited
Reverse Run
prohibited
1
Function selected with a parameter. —
Forward current
limit ON
Reverse current
limit ON
Internal speed
switching
Switches the speed control loop from PI
(proportional/integral) to P (proportional)
control when ON.
With internal reference speed selected:
Switches the direction of rotation.
Position Speed
Speed Torque
Torque Speed
Speed control with zero-clamp function:
reference speed is zero when ON.
Position control with reference pulse stop:
stops reference pulse input when ON.
Overtravel prohibited: stops servomotor
when movable part travels beyond the
allowable range of motion.
Current limit function used when ON. 5.1.3
With internal reference speed selected:
switches the internal speed settings.
Alarm reset: Releases the servo alarm state. 5.5.1
Control power supply input for sequence signals: users must
provide the +24V power supply.
Connecting pins for the absolute encoder backup battery. 5.2.3
Speed reference input: ±2 to ±10 V/rated motor speed (Input
gain can be modified with a parameter.)
Torque reference input: ±1 to ±10 V/rated motor speed
(Input gain can be modified with a parameter.)
Corresponds to
reference pulse
input
Line-driver
Open-collector
Error counter clear: Clears the error counter during position
control.
+12V pull-up power supply when PULS, SIGN and CLR
reference signals is open-collector outputs (+12V power
supply is built into the servo amplifier).
Input mode
• Code + pulse string
• CCW/CW pulse
• Two-phase pulse (90° phase differential)
Function Reference
Enables control
mode
switching.
5.5.2
5.2.1
5.2.7
5.2.1
5.2.6
5.2.7
5.4.3
5.2.10
5.1.2
5.2.6
5.2.4
5.2.1
5.2.1
5.2.1
5.2.1
5.2.1
3-18
Page 44

FSP Amplifier User’s Manual Chapter 3: Wiring
Output Signals
Signal Name
Common
Speed
Position
Not used.
Note: 1. Pin numbers in parenthesis () indicate signal grounds.
ALM+
ALM-
/TGON+
/TGON-
/S-RDY+
/S-RDYPAO
/PAO
PBO
/PBO
PCO
/PCO
PSO
/PSO
ALO1
ALO2
ALO3
TMON 16 Analog monitor signal —
VTG 17 Analog monitor signal —
/V-CMP+
/V-CMP-
/COIN+
/COIN-
2. The functions allocated to /TGON, /S-RDY, and /V-CMP (/COIN) can be changed via parameters.
Functions /CLT, /VCT, /BK, /WARN, and /NEAR signals can also be changed. (See 5.3.4 Output
Circuit Signal Allocation).
Pin
No.
31
32
27
28
29
30
33(1)
34
35
36
19
20
48
49
37
38
39(1)
25
26
25
26
23
24
50
Function Reference
Servo alarm: Turns OFF when an error is detected. 5.5.1
Detection during servomotor rotation: detects
whether the servomotor is rotating at a speed higher
than the motor speed setting. Motor speed detection
can be set via parameter.
Servo ready: ON if there is no servo alarm when the
control/main circuit power supply is turned ON.
A phase
signal
B phase
signal
C phase
signal
S phase
signal
Alarm code output: Outputs 3-bit alarm codes.
Open-collector: 30 V and 20 mA rating maximum.
Converted two-phase pulse (A and
B phase) encoder output signal
and origin pulse (C phase) signal:
RS-422 or the equivalent.
With an absolute encoder: outputs
serial data corresponding to the
number of revolutions (RS-422 or
equivalent).
5.5.5
5.5.6
5.2.3
—
5.5.1
Speed coincidence (output in Speed Control Mode):
detects whether the motor speed is within the
setting range and if it matches the reference speed
value.
Positioning completed (output in Position Control
Mode): turns ON when the number of error pulses
reaches the value set. The setting is the number of
error pulses set in reference units (input pulse units
defined by the electronic gear).
These terminals are not used.
Do not connect relays to these terminals.
5.5.4
5.5.3
—
3-19
Page 45

FSP Amplifier User’s Manual Chapter 3: Wiring
3.4.4. Interface Circuits
This section shows examples of servo amplifier I/O signal connection to
the host controller.
Interface for Reference Input Circuits
Analog Input Circuit
Analog signals are either speed or torque reference signals at the
impedance below.
• Speed reference input: About 14 kΩ
• Torque reference input: About 14 kΩ
The maximum allowable voltage for input signals is ±12 V.
FSP Amplifier
Reference Position Input Circuit
An output circuit for the reference pulse and error counter clear signal at
the host controller can be either line-driver or open-collector outputs. These
are shown below by type.
• Line-driver Output Example:
FSP Amplifier
Applicable line-driver
SN75174
manufactured by Texas
Instruments or the
equivalent.
• Open-collector Output, Example 1: External power supply
FSP Amplifier
3-20
Page 46

FSP Amplifier User’s Manual Chapter 3: Wiring
The following examples show how to select the pull-up resistor R1 so the
input current (I) falls between 7 and 15mA.
Application Examples
R1 = 2.2 kΩ with
= 24 V ±5%
V
CC
R1 = 1 kΩ with
VCC = 12 V ±5%
R1 = 180 Ω with
VCC = 5 V ±5%
• Open-collector Output, Example 2: Using a servo amplifier with an
internal 12 V power supply
This circuit uses the 12 V power supply built into the servo amplifier.
The input is not isolated in this case.
FSP Am pl ifier si de
CN1 terminals
Sequence Input Circuit Interface
The sequence input circuit interface connects through a relay, opencollector transistor or NPN sensor circuit. Select a low-current relay;
otherwise a faulty contact will result.
FSP Amplifier FSP Amplifier
FSP Amplifier
3-21
Page 47

FSP Amplifier User’s Manual Chapter 3: Wiring
Output Circuit Interfaces
Any of the following three types of servo amplifier output circuits can be
used. Connect an input circuit at the host controller following one of these
types.
• Connecting a line-driver output circuit
Encoder serial data
output signals (PAO, /PAO, PBO, /PBO), origin pulse signals (PCO,
/PCO) and S phase rotation signals (PSO, /PSO) are output via linedriver output circuits that normally comprise the position control
system at the host controller. Connect the line-driver output circuit
through a line receiver circuit at the host controller.
FSP Amplifier
converted to two-phase (A and B phase) pulse
See 3.5 Wiring Encoders for connection circuit examples.
• Connecting an open-collector output circuit
Alarm code signals are output from open-collector transistor output
circuits. (AL01 – CN1-37, AL02 – CN1-38, AL03 – CN1-39)
Connect an open-collector output circuit through an optocoupler, relay,
or line receiver circuit.
FSP Amplifier
FSP Amplifier
FSP
Amplifier
Note: The maximum allowable voltage and current capacities for open-collector circuits are:
• Voltage: 30 VDC
• Current: 20 mADC
3-22
Page 48

FSP Amplifier User’s Manual Chapter 3: Wiring
• Connecting an optocoupler output circuit
An optocoupler output circuits are used for servo alarm, servo ready,
and other sequence output signal circuits.
Connect an optocoupler output circuit through a relay or line receiver
circuit.
FSP Amplif ier FSP Amplifier
Note: The maximum allowable capacities for optocoupler output circuits are:
• Voltage: 30 VDC
• Current: 50 mADC
• Connecting two FSP Amplifiers (master-slave mode):
Connect output of “master” FSP Amplifier to input of “slave” FSP
Amplifier.
FSP Mast e r
FSP Slave
• Connecting an external load to FSP Amplifier’s output.
Maximum current: 50 mA.
FSP Ampl ifier
3-23
Page 49

FSP Amplifier User’s Manual Chapter 3: Wiring
3.5. Wiring Encoders (for SGMGH and SGMSH Motors Only)
The following sections describe the procedure for wiring a servo amplifier to the
encoder.
3.5.1. Encoder Connections
The following diagrams show the wiring of the encoder output from the
motor to CN2 of the servo amplifier, and PG output signals from CN1 to
the controller. This applies to both incremental and absolute encoders of
SGMGH and SGMSH motors only. The numbers in parentheses ( ) are
applicable to SGMAH motors. For SGMPH motors, refer to the Sigma
FSP Servo System Catalog (YEA-KAA-FSP-6).
Incremental Serial Encoders
FSP Amplifier
Output line driver SN 75ALS194
manuf act ured by Tex as
Ins trument s or e quiv alent.
Absolute Serial Encoders
Output line driver SN75ALS194
manufacture d by Tex as
Instruments or eq uivalent.
FSP Amplifier
Applicab le line
receiver SN75175
manufactu red by
Texas Instruments
or equivalent.
App licable line
recei ver
SN75175
manufacture d by
Texas
Instruments or
equivalent.
3-24
Page 50

FSP Amplifier User’s Manual Chapter 3: Wiring
3.5.2. CN2 Encoder Connector Terminal Layout
The following tables describe CN2 connector terminal layout and types.
CN2 Connector Terminal Layout for the standard FSP
Amplifier (models FSP-MC
1 PPG0V PG GND
3 PPG0V PG GND
5 PPG5V PG +5V
7 NC* —
9 /PS
Note: NC* – Leave contact open.
Serial PG
/S-phase
10 SPG5V
2 PPG0V PG GND
4 PPG5V PG +5V
6 PPG5V PG +5V
8 PS
Serial PG
S-phase
Serial PG
+5V
11 SPG0V
13 BAT-
15 /PC
17 /PA
19 /PB
Serial PG
GND
Battery -
input
PG
/C-phase
PG
/A-phase
PG
/B-phase
12 BAT+
14 PC
16 PA
18 PB
20 NC* —
Battery +
input
PG
C-phase
PG
A-phase
PG
B-phase
CN2 Connector with Commutation Sensors Terminal
Layout for Hall Effect FSP Amplifiers (models
FSP-MH)
1 PPG0V PG GND
3 PPG0V PG GND
5 PPG5V PG +5V
7 /UIN
9 /VIN
U – Phase
Hall Effect
V – Phase
Hall Effect
10 SPG5V +5V
Note: NC* – Leave contact open.
CN2 Connector Models
FSP Amplifier
Internal
Connector
2 PPG0V PG GND
4 PPG5V PG +5V
6 PPG5V PG +5V
8 NC* —
Applicable Plug (or Socket)
Soldered Plug Case
11 SPG0V GND
13 BAT-
15 /PC
17 /PA
19 /PB
Battery -
input
/C-phase
/A-phase
/B-phase
PG
PG
PG
12 BAT+
14 PC
16 PA
18 PB
20 /WIN
Battery +
input
PG
C-phase
PG
A-phase
PG
B-phase
W – Phase
Hall Effect
10220-52A2JL
10120-3000VE 20PIN 10320-52A0-008
20 PIN
YEA P/N: DTCR6973
Previous P/N: DE9406973
3-25
Page 51

FSP Amplifier User’s Manual Chapter 3: Wiring
3.6. Examples of Standard Connections
The following diagrams show examples of standard servo amplifier connections
by specifications and type of control.
Note for single-phase power supply specifications:
FSP Amplifier FSP-08A and FSP-15A are single-phase drivers. Main circuit
connection terminals (L1, L2, L3) remained.
These devices have terminal B3 and internal regenerative resistor. Observe the
following points.
1. Connect main power supply shown below to L1 and L3 terminals. Power
supply is single-phase, 220 to 230 VAC +10% to –15%, 50/60 Hz. If power
supply of 187 V (-15% of 220 V) or less is used, alarm A.41 indicating
voltage shortage, may occur when accelerating to max speed with max torque
of motor.
2. Short-circuit B2 and B3 terminals using the internal regenerative resistor. If
capacity of the regenerative resistor is insufficient, remove the lead between
B2 and B3 terminals and connect an external regenerative resistor unit to B1
and B2 terminals.
Brake power supply
Used for a servomotor
with a brake.
3-26
Cable type: P/N YS-12
Host controller
FSP A mp lifie r is compat i b le with most PLC
motion controllers and indexers.
Page 52

FSP Amplifier User’s Manual Chapter 3: Wiring
Position Control Mode
FSP Ampl if ier
*1. P represents twisted-pair wires.
*2. The time constant for the primary filter is 47 μs.
*3. Connect only with an absolute encoder.
*4. Used only with an absolute encoder. *8. Use a double-insulated 24 VDC power supply.
between terminals B1 and B2 (for FSP Amplifiers
with big capacity).
*6. These circuits are hazardous, therefore are
separated by protecting separator.
*7. These circuits are SELV circuits, therefore are
separated from all other circuits by double and
reinforced insulator.
*9. Optional – not available in all models. *5. Connect an external regenerative resistor
*10. Resistors are different for each model.
*11. ∅ Represents contacts of CN1 connector.
3-27
Page 53

FSP Amplifier User’s Manual Chapter 3: Wiring
Speed Control Mode
FSP Ampl if ier
*1. P represents twisted-pair wires.
*2. The time constant for the primary filter is 47us.
*3. Connect only with an absolute encoder.
*4. Used only with an absolute encoder. *8. Use a double-insulated 24VDC power supply.
between terminals B1 and B2 (for FSP Amplifiers
with big capacity).
*6. These circuits are hazardous, therefore are
separated by protecting separator.
*7. These circuits are SELV circuits, therefore are
separated from all other circuits by double and
reinforced insulator.
*9. Optional – not available in all models. *5. Connect an external regenerative resistor
*10. Resistors are different for each model.
*11. ∅ Represents contacts of CN1 connector.
3-28
Page 54

FSP Amplifier User’s Manual Chapter 3: Wiring
Torque Control Mode
FSP Ampl i f ier
*1. P represents twisted-pair wires.
*2. The time constant for the primary filter is 47us.
*3. Connect only with an absolute encoder.
*4. Used only with an absolute encoder. *8. Use a double-insulated 24 VDC power supply.
between terminals B1 and B2 (for FSP Amplifiers
with big capacity).
*6. These circuits are hazardous, therefore are
separated by protecting separator.
*7. These circuits are SELV circuits, therefore are
separated from all other circuits by double and
reinforced insulator.
*9. Optional – not available in all models. *5. Connect an external regenerative resistor
*10. Resistors are different for each model.
*11. ∅ Represents contacts of CN1 connector.
3-29
Page 55

Page 56

FSP Amplifier User’s Manual Chapter 4: Trial Operation
4. Trial Operation
This chapter describes a two-step trial operation. Be sure to complete step 1 before
proceeding to step 2.
4.1. Two-Step Trial Operation ................................................................................ 4-2
4.1.1. Step 1: Trial Operation for Servomotor without Load............................. 4-3
4.1.2. Step 2: Trial Operation with Servomotor Connected to Machine ........... 4-9
4.2. Additional Setup Procedures in Trial Operation............................................ 4-10
4.2.1. Servomotors with Brakes.......................................................................4-10
4.2.2. Position Control by Host Controller ...................................................... 4-11
4.3. Minimum Parameters and Input Signals........................................................4-12
4.3.1. Parameters..............................................................................................4-12
4.3.2. Input Signals .......................................................................................... 4-12
4-1
Page 57

FSP Amplifier User’s Manual Chapter 4: Trial Operation
A
4.1. Two-Step Trial Operation
Make sure that all wiring is completed prior to starting trial operation.
For your own safety, perform the trial operation in the order given below (step 1
and 2). See 4.1.1 Trial Operation for Servomotor without Load and 4.1.2 Trial
Operation for Servomotor Connected to Machine for more details on the trial
operation.
Step 1: Trial Operation for Servomotor without Load
Make s ure the Servomotor is wired properly and then turn the
shaft pr ior to connec ting the Servomotor to the equipment.
Step 2: Trial Operation with the Equipment and Servomotor Connected
Adjust the Servomotor according to equipment characteristics,
connect the Servomotor to the equipment, and perform the trial
operation.
djust speed by autotuning
Servomotor
FSP Amplifier
Connect to the equipment
4-2
Page 58

FSP Amplifier User’s Manual Chapter 4: Trial Operation
4.1.1. Step 1: Trial Operation for Servomotor without Load
Caution
• Do not operate the servomotor while it is connected to the equipment.
To prevent accidents, initially perform step 1 where the trial operation is conducted under noload conditions (with all couplings and belts disconnected) .
In step 1, make sure that the servomotor is wired properly as shown below.
Incorrect wiring is generally the reason why servomotors fail to operate
properly during trial operation.
• Check main power supply circuit wiring.
• Check servomotor wiring.
• Check CN1 I/O signal wiring.
Make sure the host controller and other adjustments are completed as much
as possible in step 1 (prior to connecting the servomotor to equipment).
Note: Check the items on the following pages in the order given during the servomotor trial operation.
See 4.2.1 Servomotors with Brakes, if you are using a servomotor with brakes.
4-3
Page 59

FSP Amplifier User’s Manual Chapter 4: Trial Operation
1. Secure the servomotor.
Secure the servomotor mounting plate to the equipment in order to
prevent the servomotor from moving during operation.
2. Check the wiring.
Disconnect the CN1 connector and check the servomotor wiring in the
power supply circuit. CN1 I/O signals are not used, so leave the
connector disconnected.
3. Turn ON power.
Normal dis play
Example of alarm di splay
Alt ernative display
Turn ON servo amplifier’s power. If the servo amplifier has turned ON
normally, the LED display on its front panel will appear as shown
above. Power is not supplied to the servomotor because the servo is
OFF.
If an alarm display appears on the LED indicator as shown above, the
power supply circuit, servomotor wiring, or encoder wiring is incorrect.
In this case, turn OFF power and take appropriate action. See 9.2
Troubleshooting.
Note: If an absolute encoder is used, it must be set up. Refer to 5.7.3 Absolute Encoder Setup.
4-4
Page 60

FSP Amplifier User’s Manual Chapter 4: Trial Operation
4. Operate with the panel operator.
Operate the servomotor using the panel operator. Check to see if the
servomotor runs normally.
See 7.2.2 JOG Operation for more details on the procedure.
5. Connect the signal lines.
Use the following procedure to connect the CN1 connector.
a) Turn OFF power.
b) Connect the CN1 connector.
c) Turn ON power again.
6. Check the input signals.
Check input signal wiring in Monitor Mode using the panel operator.
See 7.1.6 Operation in Monitor Mode for more details on the
procedure.
Turn ON and OFF each signal line to see if the LED monitor bit display
on the panel changes as shown below.
Input signal LED display
P-OT
N-OT
/ALM-RST
/P -CL
/N-CL
SEN
/P-CON
/S-ON
Top lights when OFF (high level).
Bott om light s when ON (low level).
4-5
Page 61

FSP Amplifier User’s Manual Chapter 4: Trial Operation
r
r
Input Signal Status LED Display
OFF (high level) Top LED indicators light.
ON (low level) Bottom LED indicators light.
Note: The servomotor will not operate properly if the following signal lines are not wired correctly. Short-circuit
the signal lines if they will be unused. Input signal selections (parameters Pn50A to Pn50D) can be used to
eliminate the need for external short-circuiting.
Signal Symbol Connector Pin
Number
P-OT CN1-42
N-OT CN1-43
/S-ON CN1-40
+24VIN CN1-47
The servomotor can rotate in forward direction
when this signal line is low (0V).
The servomotor can rotate in reverse direction
when this signal line is low (0V).
The servomotor is turned ON when this signal
line is low (0V). Leave the servomotor OFF.
Control power supply terminal for sequence
signals.
Description
Note: IF an absolute encoder is being used, the servo will not turn ON when the servo ON signal (/S-ON) is input
unless the SEN signal is also ON.
When the SEN signal is checked in Monitor mode, the top of the LED will light because the SEN signal is
high when ON.
7. Turn ON the servo.
/S-ON
0V
FSP Amplifie
CN1-40
Turn ON
Servomoto
Turn ON the servo using the following procedure:
a) Make sure there are no reference signal inputs.
• Set V-REF (CN1-5) and T-REF (CN1-9) to 0V for speed and
torque control.
• Set PULS (CN1-7) and SIGN (CN1-11) to low for position
control.
b) Turn ON the servo ON signal.
Di splay wi th servo ON.
4-6
Page 62

FSP Amplifier User’s Manual Chapter 4: Trial Operation
Set /S-ON (CN1-40) to 0V. If everything is normal, the servomotor
will turn ON and the LED indicator on the front panel will display
as shown. If an alarm display appears, take appropriate action as
described in 9.2 Troubleshooting.
Note: If there is noise in the reference voltage for speed control, the “-” on the left of the 7-segment LED may
flash.
Operation Using Reference Input
The operating procedure here depends on the parameter settings (control
mode selection at memory switch Pn000.1). Use the following procedure
for operations with speed and position control.
Operating Procedure in Speed Control Mode:
Set Pn000.1 to 0
This description applies to the standard speed control setting.
FSP Amplifier
V- REF
CN1-5
SG
CN1-6
Servomot or
Servomotor rotates at a speed proportional
to the reference voltage.
1. Gradually increase the reference speed input (V-REF, CN1-5) voltage.
The servomotor will rotate.
2. Check the following items in Monitor mode. See 7.1.6 Operation in
Monitor Mode.
Un000 Actual motor speed
Un001 Reference speed
• Has the reference speed been input?
• Is the motor speed as defined?
• Does the reference speed coincide with the actual motor speed?
• Does the servomotor stop when the speed reference is 0?
3. If the servomotor rotates at extremely slow speed with 0V specified for
the reference voltage, correct the reference offset value as described in
7.2.3 Automatic Adjustment of the Speed and Torque Reference Offset
or 7.2.4 Manual Adjustment of the Speed and Torque Reference Offset.
4. Reset the following parameters to change the motor speed or direction
of rotation.
Pn300
Pn000.0
Sets the reference speed input gain.
See 5.2.1 Speed Reference.
Selects the rotation direction.
See 5.1.1 Switching Servomotor Rotation
Direction.
4-7
Page 63

FSP Amplifier User’s Manual Chapter 4: Trial Operation
r
Operating Procedure In Position Control Mode:
Set Pn000.1 to C
1. Set the parameter Pn200.0 so that the reference pulse form is the same
as the host controller output form.
To select the reference pulse form, see 5.2.2 Position Reference.
2. Input a slow speed pulse from the host controller and execute low-
speed operation.
Reference
pulse
Host controller
PULS
/PULS
SIGN
/SIGN
FSP Amplifie
Servomotor
CN1-7
CN1-8
CN1-11
CN1-12
3. Check the following data in Monitor mode. See 7.1.6 Operation in
Monitor Mode.
Un000 Actual motor speed
Un007 Reference pulse speed display
Un008 Position offset
• Has the reference pulse been input?
• Is the motor speed as defined?
• Does the reference speed coincide with the actual motor speed?
• Does the servomotor stop when the speed reference is 0?
4. Reset the parameters shown below to change the motor speed or
direction of rotation.
Pn202, Pn203
Pn000.0
Electronic gear ratio
5.2.5 Using the Electronic Gear Function.
See
Selects the direction of rotation.
5.1.1 Switching Servomotor Rotation Direction.
See
If an alarm occurs or the servomotor fails to operate during the above
operation, the CN1 connector wiring is incorrect or the parameter
settings do not match the host controller specifications. Check the
wiring and review the parameter settings, then repeat step 1.
Note: References
•
List of alarms: See 9.2.3 Alarm Display Table.
•
List of parameters: See Appendix D, List of Parameters.
4-8
Page 64

FSP Amplifier User’s Manual Chapter 4: Trial Operation
4.1.2. Step 2: Trial Operation with Servomotor Connected to
Machine
Warning
• Follow the procedure below for step 2 operation precisely as given.
Malfunctions that occur after the servomotor is connected to the equipment not only damage
the equipment, but may also cause an accident resulting in death or injury.
Before proceeding to step 2, repeat step 1 (Servomotor Trial Operation
without a Load) until all concerns including parameters and wiring have
fully satisfied expectations.
After step 1 has been completed, proceed to step 2 for trial operation with
the servomotor connected to the equipment. The servo amplifier is now
adjusted in the following ways to meet the specific equipment’s
characteristics.
• Using auto-tuning to match the servo amplifier to the equipment’s
characteristics.
• Matching direction of rotation and speed to the equipment’s
specifications.
• Checking the final control form.
Servomotor
Connect to the machine
FSP Amplifier
Follow the procedure below to perform the trial operation.
1. Make sure power is OFF.
2. Connect the servomotor to the equipment.
3. Use auto-tuning to match the servo amplifier to equipment
characteristics.
See 5.7.5. Auto-tuning
4. Operate the servomotor by reference input as described in step 1 of
4.1.1 Step 1: Trial Operation for Servomotor without Load. Tune to
match the host controller at this time, as well.
5. Set parameters as required and record all settings for later use during
maintenance.
Note: The servomotor will not be primed completely during the trial operation. Therefore, let the system run for a
sufficient amount of time after trial operation has been completed to ensure that it is properly primed.
4-9
Page 65

FSP Amplifier User’s Manual Chapter 4: Trial Operation
4.2. Additional Setup Procedures in Trial Operation
For two equipment configurations, which are delineated in the subsequent
sections, precautionary setup procedures must be followed before starting trial
operation.
4.2.1. Servomotors with Brakes
Use a servomotor with a brake for vertical shaft applications or for the
application of external force to the shaft to prevent rotation due to gravity
or external force during a power loss.
The servo amplifier uses the brake interlock output (/BK) signal to control
the holding brake operation when using servomotors with brakes.
Vertical shaft
Servomotor
Holding brake
Preve nts the
Servomotor from
rotati ng due to gravity.
Shaft wi th External Fo rce Applied
External
force
Servomotor
Note: To prevent faulty operation when using gravity or external force, first make sure that both the servomotor
and the holding brake work properly. When assured that each operates properly, connect the servomotor to
the rest of the equipment to start the trial operation.
The following figure shows wiring for a servomotor with brakes. See 5.4.4
Using the Holding Brake for details on wiring.
Power supply
Single-phase 200V
FSP Amplifier
U,V, W
Servomotor with brakes
M
Encoder
PG
Single-phase
200V
CN 2
Magnetic contactor
Brake power supply
4-10
Page 66

FSP Amplifier User’s Manual Chapter 4: Trial Operation
4.2.2. Position Control by Host Controller
If the position control algorithm of the host controller has not been
established or finalized, disconnect the servomotor from the equipment
before performing a trial operation. This will prevent the servomotor from
running out of control and damaging the equipment.
Reference
speed
Host
controller
FSP Amplifier
M
Check servomotor operation as described in the following table.
Controller
Reference
JOG
Operation
(Constant
Reference
Speed Input
from Host
Controller)
Simple
Positioning
Overtravel
(P-OT and
N-OT Used)
Speed control
Trial operation for
servomotor without load
Check Procedure Description
Check motor speed as follows:
Motor speed
Number of
motor
rotations
Whether the
servomotor
stops rotating
when P-OT
and N-OT
signals are
applied
• Use the speed monitor (Un000) on
the Panel Operator.
• Run the servomotor at low speed.
Input a reference speed of 60 rpm,
for example, to see if the servomotor
makes one revolution per second.
Input a reference equivalent to one
servomotor rotation and visually
check to see if the shaft makes one
revolution.
Check to see if the servomotor stops
when P-OT and N-OT signals are
input during continuous servomotor
operation.
Check the parameter
setting at Pn300 to see
if the reference speed
gain is correct.
Check the parameter
setting at Pn201 to see
if the number of
dividing pulses is
correct.
Review P-OT and
N-OT wiring if the
servomotor does not
stop.
4-11
Page 67
FSP Amplifier User’s Manual Chapter 4: Trial Operation
4.3. Minimum Parameters and Input Signals
This section describes the minimum parameters and input signals required for
trial operation.
4.3.1. Parameters
See 7.1.5 Operation in Parameter Setting Mode for more details on setting
parameters.
Turn power OFF once after changing any parameter except Pn300.
The change will not be valid until power is restored.
Basic Parameters
Pn000.1
Function Selection Basic Switches:
Control Mode Selection
See
5.3.5
Speed Control
5.2.1
Pn300 Speed Reference
Pn201 Using the Encoder Signal Output
See
See
5.2.3
Position Control
Pn200.0 Position Reference
Pn202 Using the Electronic Gear Function (Numerator)
Pn203 Using the Electronic Gear Function (Denominator)
Changing Servomotor Rotation Direction
If the specified direction differs from the actual direction of rotation, wiring
may be incorrect. Recheck the wiring and correct if necessary. Use the
following parameter to reverse the direction of rotation.
Pn000.0 Switching Servomotor Rotation Direction
4.3.2. Input Signals
Input signal selection settings through parameters can be used to eliminate
the need for external short circuits.
Signal Name Pin Number Description
/S-ON Servo ON CN1-40
P-OT
N-OT
Forward run
prohibited
Reverse run
prohibited
CN1-42
CN1-43
See
See
See
See
5.5.2 for more details on turning
See
ON and OFF the servomotor.
5.1.2 for more details on the
See
overtravel limit switch.
5.2.2
5.2.5
5.2.5
5.1.1
4-12
Page 68

FSP Amplifier User’s Manual Chapter 5: Parameter Settings and Functions
5. Parameter Settings and Functions
5.1. Settings According to Device Characteristics.................................................. 5-4
5.1.1. Switching Servomotor Rotation Direction............................................... 5-4
5.1.2. Setting the Overtravel Limit Function ..................................................... 5-5
5.1.3. Limiting Torque ....................................................................................... 5-6
5.2. Settings According to Host Controller............................................................. 5-6
5.2.1. Speed Reference....................................................................................... 5-6
5.2.2. Position Reference ................................................................................... 5-6
5.2.3. Using the Encoder Signal Output ............................................................5-6
5.2.4. Sequence I/O Signals ...............................................................................5-6
5.2.5. Using the Electronic Gear Function......................................................... 5-6
5.2.6. Contact Input Speed Control.................................................................... 5-6
5.2.7. Using Torque Control .............................................................................. 5-6
5.2.8. Torque Feed-Forward Function ............................................................... 5-6
5.2.9. Torque Limiting by Analog Voltage Reference ......................................5-6
5.2.10. Reference Pulse Inhibit Function (/INHIBIT) ......................................... 5-6
5.3. Setting Up the Servo Amplifier .......................................................................5-6
5.3.1. Parameters................................................................................................5-6
5.3.2. JOG Speed ............................................................................................... 5-6
5.3.3. Input Circuit Signal Allocation................................................................5-6
5.3.4. Output Circuit Signal Allocation ............................................................. 5-6
5.3.5. Control Mode Selection ........................................................................... 5-6
5.4. Setting Stop Functions ..................................................................................... 5-6
5.4.1. Adjusting Offset.......................................................................................5-6
5.4.2. Servo OFF Stop Mode Selection .............................................................5-6
5.4.3. Using the Zero Clamp Function............................................................... 5-6
5.4.4. Using the Holding Brake .........................................................................5-6
5.5. Forming a Protective Sequence ....................................................................... 5-6
5.5.1. Using Servo Alarm and Alarm Code Outputs .........................................5-6
5.5.2. Using the Servo ON Input Signal (/S-ON) .............................................. 5-6
5.5.3. Using the Positioning Completed Output Signal (/COIN) ......................5-6
5.5.4. Speed Coincidence Output (/V-CMP) ..................................................... 5-6
5.5.5. Using the Running Output Signal (/TGON) ............................................ 5-6
5.5.6. Using the Servo Ready Output Signal (/S-RDY) ....................................5-6
5.5.7. Using the Warning Output Signal (/WARN)........................................... 5-6
5.5.8. Handling Power Loss ............................................................................... 5-6
5.6. Selecting a Regenerative Resistor.................................................................... 5-6
5.6.1. External Regenerative Resistor................................................................ 5-6
5.6.2. Calculating the Regenerative Power Capacity......................................... 5-6
5.7. Absolute Encoders ........................................................................................... 5-6
5.7.1. Interface Circuit ....................................................................................... 5-6
5.7.2. Configuring an Absolute Encoder ...........................................................5-6
5.7.3. Absolute Encoder Setup........................................................................... 5-6
5.7.4. Absolute Encoder Reception Sequence ...................................................5-6
5.8. AB Encoders .................................................................................................... 5-6
5-1
Page 69

FSP Amplifier User’s Manual Chapter 5: Parameter Settings and Functions
5.9. Defining User Units and Setup ........................................................................ 5-6
5.9.1. Position Control .......................................................................................5-6
5.9.1.1. Defining User Units for Motion Profiles ......................................... 5-6
5.9.1.2. Position Units................................................................................... 5-6
5.9.1.3. Speed Units ...................................................................................... 5-6
5.9.1.4. Acceleration Units ........................................................................... 5-6
5.9.1.5. Setting Default Motion Profile Parameters......................................5-6
5.9.1.6. Profile Speed (Pn2A2, Pn2A3) ........................................................ 5-6
5.9.1.7. Profile Acceleration (Pn2A4, Pn2A5) .............................................5-6
5.9.1.8. Jerk Smoothing Time (Pn2A6) ........................................................ 5-6
5.9.1.9. Quick Stop Deceleration (Pn2A8, Pn2A9) ......................................5-6
5.9.1.10. Motion End Window (Pn2C0)......................................................... 5-6
5.9.2. Torque Control.........................................................................................5-6
5.9.2.1. Torque Slope (Pn2C1) .....................................................................5-6
5.9.3. Homing .................................................................................................... 5-6
5.9.4. Digital I/O ................................................................................................ 5-6
5.9.5. Auto-Tuning............................................................................................. 5-6
5.10. Auto Running a User Program..................................................................... 5-6
5-2
Page 70

FSP Amplifier User’s Manual Chapter 5: Parameter Settings and Functions
Before Reading this Chapter
This chapter describes the use of each CN1 connector I/O signals in the
FSP Amplifier as well as the procedure for setting the related parameters
for the intended purposes.
The following sections can be used as references for this chapter.
• List of CN1 I/O signals: See 3.4.3. I/O Signal Names and Functions.
• CN1 I/O signal terminal layout: See 3.4.2. List of CN1 Terminals.
• List of parameters: Appendix D. List of Parameters.
• Parameter setting procedure: 7.1.5 Operation in Parameter Setting
Mode
The CN1 connector is used to exchange signals with the host controller and
external circuits.
Parameter Configurations
Parameters are comprised of the types shown in the following table. See
Appendix D. List of Parameters.
Type
Function Selection Constants
Servo Gain and Other
Constants
Position Control Constants
Speed Control Constants Pn300 to Pn308
Torque Control Constants Pn400 to Pn40A
Sequence Constants
Others Pn600 to Pn601
Auxiliary Function Execution Fn000 to Fn013
Monitor Modes Un000 to Un00D
Parameter
Number
Pn000 to Pn007
Pn550 to Pn551
Pn100 to Pn11E
Pn1A0 to Pn1C0
Pn200 to Pn216
Pn2A2 to Pn2CB
Pn500 to Pn511
Pn200 to Pn2D2
Description
Select basic and application functions such as
the type of control or the stop mode used when
an alarm occurs.
Set numerical values (speed control).
Set numerical values (position control).
Set position control parameters such as the
reference pulse input form gear ratio and
application setting.
Set speed control parameters such as speed
reference input gain and soft start deceleration
time.
Set torque control parameters such as the
torque reference input gain and
forward/reverse torque limits.
Set output conditions for all sequence signals
and change I/O signal selections and
allocations.
Specify the capacity for an external
regenerative resistor and reserved constants.
Execute auxiliary functions such as JOG Mode
operation.
Enable speed and torque reference
monitoring, as well as monitoring to check
whether I/O signals are ON or OFF.
Encoder Selection Pn190 to Pn192 Encoder type selection
5-3
Page 71

FSP Amplifier User’s Manual Chapter 5: Parameter Settings and Functions
5.1. Settings According to Device Characteristics
This section describes the procedure for setting parameters according to the
dimensions and performance characteristics of the equipment used.
5.1.1. Switching Servomotor Rotation Direction
The FSP Amplifier has a Reverse Rotation mode that reverses the direction
of servomotor rotation without rewiring. Forward rotation in the standard
setting is defined as counterclockwise as viewed from the load.
With the Reverse Rotation mode, the direction of the servomotor rotation
can be reversed without changing other parameters. Only the direction
(+, −) of the shaft motion is reversed.
Standard Setting Reverse Rotation Mode
Forward Reference
Reverse Reference
Enc oder output
ccw
fromXtraDrive
PA O (phase A)
PBO (phas e B)
Enc oder output
cw
fromXtraDrive
PA O (phase A)
PBO (phase B)
FSP Amplifier
FSP Amplifier
Encoder output
cw
from XtraDrive
ccw
FSP Amplifier
PA O ( ph ase A )
PBO ( ph as e B)
Encoder output
FSP Amplifier
from XtraDrive
PA O (phase A)
PBO (phase B)
Setting Reverse Rotation Mode
Use the parameter Pn000.0.
Parameter Signal Setting Control Mode
Pn000.0 Direction Selection Default Setting: 0
Use the following settings to select the direction of servomotor rotation.
Setting Description
Speed, Torque, Position
Control, and Programming
0
1
Forward rotation is defined as counterclockwise
(CCW) rotation as viewed from the load.
Forward rotation is defined as clockwise (CW)
rotation as viewed from the load.
(Standard setting)
(Reverse Rotation Mode)
5-4
Page 72

FSP Amplifier User’s Manual Chapter 5: Parameter Settings and Functions
5.1.2. Setting the Overtravel Limit Function
The overtravel limit function forces movable equipment parts to stop if
they exceed the allowable range of motion.
Using the Overtravel Function
To use the overtravel function, connect the overtravel limit switch input
signal terminals shown below to the correct pins of the servo amplifier
CN1 connector.
Input Ö P-OT CN1-42
Input Ö N-OT CN1-43
Forward Run Prohibited
(Forward Overtravel)
Reverse Run Prohibited
(Reverse Overtravel)
Speed, Torque, and Position
Control
Speed, Torque, and Position
Control
Connect limit switches as shown below to prevent damage of equipment
during linear motion.
Reverse rotation end
Servomotor
Forward rotation end
FSP Amplifier
CN1-42
P-OT
N-OT
CN1-43
The drive status with an input signal ON or OFF is shown in the following
table.
Signal State Input Level Description
ON CN1-42: low
P-OT
OFF CN1-42: high
ON CN1-43: low
N-OT
OFF CN1-43: high
Forward rotation allowed, (normal
operation status).
Forward rotation prohibited
(reverse rotation allowed).
Reverse rotation allowed, (normal
operation status).
Reverse rotation prohibited
(forward rotation allowed).
Enabling/Disabling Input Signals
Set the following parameters to specify whether input signals are used for
overtravel or not. The default setting is 8, “NOT USED.”
Parameter Signal Setting Control Mode
Pn50A.3
Pn50B.0
P-OT Signal Mapping
(Forward Run Prohibit Input
Signal)
N-OT Signal Mapping
(Reverse Run Prohibit Input
Signal)
Default Setting: 8
Default Setting: 8
5-5
Speed, Torque, and
Position Control
Speed, Torque, and
Position Control
Page 73

FSP Amplifier User’s Manual Chapter 5: Parameter Settings and Functions
Servomotor Stop Mode for P-OT and N-OT Input Signals
Set the following parameters to specify the servomotor Stop mode when POT and N-OT input signals are used.
Specify the servomotor Stop mode when either of the following signals is
input during servomotor operation.
• Forward run prohibited input (P-OT, CN1-42)
• Reverse run prohibited input (N-OT, CN1-43)
• Set the parameters according to limit switch type (NO or NC)
Parameter Signal Setting Description
Uses the P-OT input signal to prevent
Example: 2
P-OT Signal
Mapping
Pn50A.3
(Forward Run
Prohibit Input
Signal)
Default Setting: 8
Example: B
For more options of parameters Pn50A.3 and Pn50B.0 refer to Appendix D.3. Input Signal
Selections
Example: 3
N-OT Signal
Mapping
Pn50B.0
(Reverse Run
Prohibit Input
Signal)
Default Setting: 8
Example: C
Connection example:
Normally Closed type
P-OT
FSP Amplifier
CN1-42
N-OT
CN1-43
forward rotation. (Forward rotation is
prohibited when CN1-42 is open and is
allowed when CN1-42 is at 0 V).
Does not use the P-OT input signal to
prevent forward rotation. (Forward
rotation is always allowed and has the
same effect as shorting CN1-42 to 0 V).
Inputs the reverse signal from CN1-42
input terminal.
Uses the N-OT input signal to prevent
reverse rotation. (Reverse rotation is
prohibited when CN1-43 is open and is
allowed when CN1-43 is at 0 V).
Does not use the N-OT input signal to
prevent reverse rotation. (Reverse
rotation is always allowed and has the
same effect as shorting CN1-43 to 0 V).
Inputs the reverse signal from CN1-43
input terminal.
COM of 24 V
5-6
Page 74

FSP Amplifier User’s Manual Chapter 5: Parameter Settings and Functions
A
Parameter Signal Setting Control Mode
Pn001.1 Overtravel Stop Mode Default Setting: 0
Speed, Torque, and
Position Control
Overtravel
Pn001.0
Pn001.1 = 0
Pn001.1 = 1 or 2
= 0
Stop Mode
dynamic brake
1
2
Coast to a stop
Decelerate
Stop by
to a stop
fter Stopping
Coast status
Zero clam p
Coast status
Pn001.1
setting
0
1
2
Note: For torque control, the servomotor will be placed in coast status after either decelerating or coasting to a stop
(according to the Stop mode set in Pn001.0), regardless of the setting of Pn001.1.
Parameter Signal Setting Control Mode
Stops the servomotor the same way as
turning the servo OFF (according to Pn001.0).
Decelerates the servomotor to a stop at the
preset torque, and then locks the servomotor
in Zero Clamp mode.
Torque setting: Pn406 Emergency Stop
Torque
Decelerates the servomotor to a stop at the
preset torque, and puts the servomotor in
coast status.
Torque setting: Pn406 Emergency Stop
Torque
Pn001.1
0
1
Overtravel Stop
Mode
2
Pn406 specifies the stop torque applied for overtravel when the input signal
for prohibiting forward or reverse rotation is used.
The torque limit is specified as a percentage of rated torque.
Parameter Signal
Emergency Stop Torque
Pn406
(Valid when Pn001.1 is 1
or 2)
Forward run
prohibit input
P- OT (CN1 -42)
Reverse run
prohibit input
N - OT (CN1 -43)
Setting
(% of Rated Torque)
Range: 0 to 800
Default Setting: 800
Stop Mode
Stop by dynamic brake
Coast to a stop
Decelerate to a stop
5-7
Control Mode
Speed, Torque, and
Position Control
Max. torque setting for an
emergency stop
Pn406
Page 75

FSP Amplifier User’s Manual Chapter 5: Parameter Settings and Functions
5.1.3. Limiting Torque
The FSP Amplifier limits torque as follows:
• Level 1: Limits maximum output torque to protect equipment or work
piece.
• Level 2: Limits torque after the servomotor moves the equipment to a
specified position (external torque limit).
• Level 3: Always limits output torque rather than speed.
• Level 4: Switches between speed and torque limit.
The application of level 1 and 2 in the torque limit function is described
below.
Setting Level 1: Internal Torque Limits
Maximum torque is limited to the values set in the following parameters.
Parameter Signal
Pn402 Forward Torque Limit
Pn403 Reverse Torque Limit
(% of Rated Torque)
Sets the maximum torque limits for forward and reverse rotation.
Setting
Range: 0 to 800
Default Setting: 800
Range: 0 to 800
Default Setting: 800
Control Mode
Speed, Torque,
Position Control, and
Programming
Speed, Torque,
Position Control, and
Programming
Used when torque must be limited due to equipment conditions.
The torque limit function always monitors torque and outputs the signals
below when the limit is reached.
Signal Description
/CLT
Monitor Mode (Un006) Output signal monitor
Generated when Pn50F.0 allocates an output terminal from SO1 to
SO3.
Torque limits are specified as a percentage of the rated torque.
Note: If the torque limit is set higher than the maximum torque of the servomotor, the maximum torque of the
servomotor is the limit.
Application Example: Equipment Protection
Motor
speed
Torque limit
Too small a torque limit will result in an
insufficient torque during acceleration and
deceleration
Torque
5-8
Page 76

FSP Amplifier User’s Manual Chapter 5: Parameter Settings and Functions
Using the /CLT Signal
The following section describes the use of the contact output signal /CLT
as a torque limit output signal.
FSP Amplifier
Output Ö /CLT CN1-*1 Torque Limit Output
This signal indicates whether the servomotor output torque (current) is
being limited.
Status Conditions Description
ON
OFF
The circuit between CN1-1 and 2
is closed.
CN1-1 is at low level.
The circuit between CN1-1 and 2
is open.
CN1-1 is at high level.
Servomotor output torque is being limited.
(Internal torque reference is greater than the
limit setting).
Servomotor output torque is not being
limited. (Internal torque reference is less
than the limit setting).
Settings: Pn402 (Forward Torque Limit)
Pn403 (Reverse Torque Limit)
Pn404 (Forward External Torque Limit): /P-CL input only
Pn405 (Reverse External Torque Limit): /N-CL input only
When the /CLT signal is used, the following parameter must be used to
select the output signal.
Parameter Signal Setting Control Mode
Pn50F
Output Signal
Selections 2
Default Setting: 0000
Speed, Torque, and
Position Control
Speed, Torque,
Position Control, and
Programming
Pn50F.0
/CLT
Torq ue li mit
detection
Output terminal
CN1-25, 26 (SO1)
CN1-27, 28 (SO2)
CN1-29, 30 (SO3)
Use the following table to select which terminal will output the /CLT signal.
Parameter Setting
0 — —
Pn50F.0
Note: Multiple signals allocated to the same output circuit are output using OR logic. Set other output signals to a
value other than the one allocated to the /CLT signal in order to use just the /CLT output signal. See 5.3.4
Output Circuit Signal Allocation.
1 25 26
2 27 28
3 29 30
Output Terminal (CN1-)
*
1
*
2
5-9
Page 77

FSP Amplifier User’s Manual Chapter 5: Parameter Settings and Functions
Setting Level 2: External Torque Limit
A contact input signal is used to enable the torque (current) limits
previously set in parameters. Torque limits can be set separately for
forward and reverse rotation.
Reverse
rotation
/P- CL
CN1 -45
Forward
rotation
/ N - CL
CN1 -46
Ö Input /P-CL CN1-45
Ö Output /N-CL CN1-46
FSP Amplifier
Rotation
speed
Torque
Rotation
speed
Torque
Rotation
speed
Torque
Rotation
speed
Torque
Forward External Torque Limit
Input
Reverse External Torque Limit
Input
Torque limit
Pn402
Torque limit
Pn402 or Pn404
(limited by whichever
is smaller)
Torque limit
Pn403
Torque limit
Pn403 or Pn405
(limited by whichever
is smaller)
Speed, Torque, and Position
Control
Speed, Torque, and Position
Control
This is the external torque (current) limit input for forward and reverse
rotation.
Check input signal allocation status when using this function (see 5.3.3
Input Circuit Signal Allocation). Default settings are given in the table
below.
Signal Signal Status Comments Description
CN1-45 at low level when ON Use forward torque limit. Limit: Pn404
/P-CL
CN1-45 at high level when OFF
CN1-46 at low level when ON Use reverse torque limit. Limit: Pn405
/N-CL
CN1-46 at high level when OFF
Do not use forward torque
limit. Normal operation.
Do not use reverse torque
limit. Normal operation.
—
—
5-10
Page 78

FSP Amplifier User’s Manual Chapter 5: Parameter Settings and Functions
The following output signals and monitor methods are used when torque is
being limited.
Signal Description
/CLT
Monitor Mode (Un006) —
Generated when Pn50F.0 is allocated to an
output terminal from SO1 to SO3.
• Un005: Numbers 6 and 7 (with default
settings)
• Un006: Depending on output signal
allocation conditions.
Application Examples:
• Forced stop
• Robot holding a workpiece
Parameter Signal
Pn404 Forward External Torque Limit
Pn405 Reverse External Torque Limit
Set the torque limits when the torque is limited by an external contact
input.
Signal Description
/P-CL (CN1-45) Input Pn404 torque limit applied.
Refer to 7.1.6 Operation in Monitor Mode.
—
Setting
(% of Rated Torque)
Range: 0 to 800
Default Setting: 100
Range: 0 to 800
Default Setting: 100
Control Mode
Speed, Torque, and
Position Control
Speed, Torque, and
Position Control
/N-CL (CN1-46) Input Pn405 torque limit applied.
See 5.2.9 Torque Limiting by Analog Voltage Reference.
Using /P-CL and /N-CL Signals
The procedure for using /P-CL and /N-CL as torque limit input signals is
illustrated below.
FSP Amplifier
5-11
Page 79

FSP Amplifier User’s Manual Chapter 5: Parameter Settings and Functions
5.2. Settings According to Host Controller
This section describes the procedure for connecting an FSP Amplifier to a host
controller, including the procedure for setting related parameters.
5.2.1. Speed Reference
Input the speed reference using the input signal: Speed Reference Input.
Since this signal has various uses, set the optimal reference input for the
system created.
FSP Amplifier
Torque reference input
(analog voltage input)
Speed reference input
(analog voltage input)
Ö Input V-REF CN1-5
Ö Input SG CN1-6
The above inputs are used for speed control (analog reference). (Pn000.1 =
0, 4, 9, or A.) Always wire for normal speed control.
Refer to 7.1.6 Operation in Monitor Mode. The motor speed is controlled
in proportion to the input voltage between V-REF and SG.
CN1-9
P
CN1-10
CN1-5
P
CN1-6
represents twisted-pair wires
P
Torque
reference
Speed
reference
Speed Reference Input Speed Control
Signal Ground Speed Control
Rated m otor sp eed
Facto ry setting
-8-12
-4
12
8
4
Input voltage (V)
Rate d m oto r s peed
The slope is set in Pn300.
Setting Examples
Pn300 = 600: This setting means that 6 V is equivalent to the rated motor
speed.
Speed Reference
Input
+6 V
+1 V
-3 V
Parameter Pn300 can be used to change the voltage input range.
Rotation Direction Motor Speed
Forward rotation Rated motor speed
Forward rotation (1/6) rated motor speed
Reverse rotation (1/2) rated motor speed
SGMAH
Servomotor
3000 rpm
500 rpm
1500 rpm
5-12
Page 80

FSP Amplifier User’s Manual Chapter 5: Parameter Settings and Functions
Ω
V
Input Circuit Example
+ 12
470 Ω, 1/2 W min.
2k
V-REF
P
FSP Amplifier
CN1-5
CN1-6
SG
Always use twisted pair cable for noise control.
Recommended variable resistor: Model 25HP-10B manufactured by Sakae
Tsushin Kogyo Co., Ltd.
Connect V-REF and SG to the speed reference output terminals on the host
controller when using a host controller, such as a programmable controller,
for position control.
Host controller
Speed
reference
output
terminals
Feedback
pulse input
terminals
V-REF
P
P
P
SG
PAO
/PAO
PBO
/PBO
FSP Amplifier
CN1-5
CN1-6
CN1-33
CN1-34
CN1-35
CN1-36
P: Indicates twisted-pair
Adjust Pn300 according to the output voltage specifications of the host
controller.
Adjust the speed reference input adjustment factor in the following
parameter.
Parameter Signal Setting (0.01 V / Rated
Motor Speed)
Pn300
Speed Reference Input
Adjustment Factor
Range: 150 to 3000
Control Mode
Speed Control and
Programming
Set the voltage range for the V-REF speed reference input at CN1-5
according to the host controller and external circuit output range.
Reference
speed (rpm)
Reference
voltage (V)
Set this slope
The default setting is adjusted so that a 6 V input is equivalent to the rated
motor speed of all applicable servomotors.
Note: The maximum allowable voltage to the speed reference input (between CN1-5 and 6) is ± 12 VDC.
5-13
Page 81

FSP Amplifier User’s Manual Chapter 5: Parameter Settings and Functions
Using the /P-CON Signal
Ö Input P-CON CN1-41
The /P-CON input signal switches the Speed Control mode from PI
(proportional-integral) to P (proportional) control.
Proportional control can be used in the following two ways:
• When an operation is performed by sending speed references from the
host controller to the servo amplifier, the host controller can selectively
use the P control mode for particular conditions only. This method can
prevent the occurrence of overshoot and also shorten settling time.
• If PI control mode is used when the speed reference has a reference
offset, the motor may rotate at a very slow speed and fail to stop even if
0 is specified as speed reference. In this case, use the P control mode to
stop the motor.
Proportional Control
Reference
Speed Control, Position
Control
5.2.2. Position Reference
The reference pulse, reference code, and clear inputs are used for the
position reference. Since this signal can be used in different ways, set the
optimal reference input for the system created.
Reference by Pulse Input
Positioning is controlled by entering a reference pulse for a move.
FSP Ampli f ier
Any of the following forms can be used for the position reference:
• Line-driver output
• +12 V open-collector output
• +5 V open-collector output
5-14
Page 82

FSP Amplifier User’s Manual Chapter 5: Parameter Settings and Functions
Connection Example 1: Line-driver Output
Applicable line driver: SN75174, manufactured by Texas Instruments Inc.,
MC3487 or equivalent
FSP Amplif ier
Ω
Connection Example 2: Open-collector Output
Set limiting resistor R1 so that input current I falls within the following
range:
FSP Amplif ier
Ω
The examples below show how to select the pull-up resistor R1 so that the
input current I falls between 7 and 15 mA.
Application Examples of V = IR
R1 = 1 kΩ with V
= 12 V ±5% R1 = 180 Ω with VCC = 5 V ±5%
CC
Note: The following table shows the signal logic for an open-collector output.
Tr1 Output Level Signal Logic
ON Equivalent to high-level input
OFF Equivalent to low-level input
5-15
Page 83

FSP Amplifier User’s Manual Chapter 5: Parameter Settings and Functions
This circuit uses the 12 V power supply built into the servo amplifier. The
input is not isolated in this case.
FSP Amplif ier
Ω
Ω
Note: The noise margin of the input signal will decrease if the reference pulse is provided by an open-collector
output. Set parameter Pn200.3 to 1 if the position drifts due to noise.
Selecting a Reference Pulse Form
Use the following parameters to select the reference pulse form used.
Ö Input PULS CN1-7 Reference Pulse Input Position Control
Ö Input /PULS CN1-8 Reference Pulse Input Position Control
Ö Input SIGN CN1-11 Reference Code Input Position Control
Ö Input /SIGN CN1-12 Reference Code Input Position Control
The servomotor only rotates at an angle proportional to the input pulse.
Parameter Signal Setting Control Mode
Pn200.0 Reference Pulse Form Default Setting: 4
Set reference pulse form input to the servo amplifier from the host
controller.
Note: This function works only with a Pulse Reference, not with a Serial Command.
Host
controller
Position
reference
pulse
PULSE
SIGN
FSP Amplifier
CN1-7
CN1-11
Position Control and
Programming
Since the reference pulse form can be selected from among those listed on
the next page, set one according to host controller specifications.
5-16
Page 84

FSP Amplifier User’s Manual Chapter 5: Parameter Settings and Functions
Reference
Pulse Form
Pn200.0
Parameter
Input
Pulse
Logic
Multiplier
Forward Rotation
PULS
0
Sign + pulse
train
---
(CN1-7)
SIGN
(CN1-11)
PULS
CW pulse +
1
CCW pulse
2 x1
Two-phase
pulse train
3 x2
4
5
with 90°
phase
differential
Sign + pulse
train
---
x4
---
Positive
(CN1-7)
SIGN
(CN1-11)
PULS
(CN1-7)
SIGN
(CN1-11)
PULS
(CN1-7)
SIGN
(CN1-11)
PULS
CW pulse +
6
CCW pulse
7 x1
Two-phase
pulse train
8 x2
9
with 90°
phase
differential
---
x4
Negative
(CN1-7)
SIGN
(CN1-11)
PULS
(CN1-7)
SIGN
(CN1-11)
Reference
High
Low
90°
Low
High
90°
Reverse Rotation
Reference
PULS
(CN1-7)
SIGN
Low
(CN1-11)
PULS
(CN1-7)
SIGN
(CN1-11)
PULS
(CN1-7)
SIGN
(CN1-11)
Low
90°
PULS
(CN1-7)
SIGN
(CN1-11)
High
PULS
(CN1-7)
SIGN
(CN1-11)
High
90°
PULS
(CN1-7)
SIGN
(CN1-11)
Input Pulse Multiplier
The input pulse multiplier function can be used if the reference pulse is a
two-phase pulse train with a 90° phase differential. The electronic gear
function can also be used to convert input pulses.
5-17
Page 85

FSP Amplifier User’s Manual Chapter 5: Parameter Settings and Functions
Example of I/O Signal Generation Timing
Note: 1. For the input pulse to register, the interval from the time the servo ON signal is turned ON until a
reference pulse is entered must be a minimum of 40 ms.
2. The error counter clear signal must be ON for at least 20 μs.
Reference Pulse Input Signal Timing
Reference
Pulse Form
Sign + pulse
train input
(SIGN +
PULS signal)
Maximum
reference
frequency:
500 kpps
(200 kpps
open-collector
output)
CW pulse and
CCW pulse
Maximum
reference
frequency:
500 kpps
(200 kpps
open-collector
output)
Two-phase
pulse train
with 90º
phase
differential (A
phase + B
phase)
Maximum
reference
frequency x1:
500 kpps
(200 kpps
open-collector
output)
x2: 400 kpps
x4: 200 kpps
Electrical Specifications Remarks
Sign
(SIGN)
H =
Forward
reference
L =
Reverse
reference
—
Parameter
Pn200.0 is
used to
switch the
input pulse
multiplier
mode.
5-18
Page 86

FSP Amplifier User’s Manual Chapter 5: Parameter Settings and Functions
Error Counter Clear Input
The procedure for clearing the error counter is described below.
Ö Input CLR CN1-15
Ö Input /CLR CN1-14
The following occurs when the CLR signal is set to high level.
Clear Input Position Control
Clear Input Position Control
CLR
FSP Amplifier
Clear
Position loop
error counter
• The error counter inside the servo amplifier is set to 0.
• Position loop control is prohibited.
Use this signal to clear the error counter of the host controller or select the
following clear operation through parameter Pn200.1.
Parameter Signal Setting Control Mode
Pn200.1 Error Counter Clear Signal Form Default Setting: 0 Position Control
Select the pulse form for the error counter clear signal CLR (CN1-15).
Pn200.1
Setting
0
Clears the error counter when the CLR signal goes high.
Error pulses do not accumulate as long as the signal
remains high.
Description Clear Timing
CLR
(CN1-15)
High
Cleared state
Clears the error counter on the rising edge of the CLR
1
2
3
signal.
Clears the error counter only once on the rising edge of
the CLR signal.
Clears the error counter when the CLR signal goes low.
Error pulses do not accumulate as long as the signal
remains low.
Clears the error counter on the falling edge of the CLR
signal.
Clears the error counter only once on the falling edge of
the CLR signal.
CLR
(CN1-15)
Cleared only onc e at this point
CLR
(CN1-15)
CLR
(CN1-15)
Cleared only once at t his point
High
Low
Cleared st ate
Low
5-19
Page 87

FSP Amplifier User’s Manual Chapter 5: Parameter Settings and Functions
5.2.3. Using the Encoder Signal Output
Encoder output signals are divided inside the servo amplifier and can be
output externally. These signals can be used to form a position control loop
in the host controller.
Encoder
PG
FSP Amplifier
Frequency
dividing
circuit
CN2
CN1
These outputs
explained here
Phase A
Phase B
Phase C
Host
controller
The output circuit is for line-driver output. Connect each signal line
according to the following circuit diagram.
FSP Amplifier
Note: Dividing means converting an input pulse train from the encoder mounted on the servomotor according to
the preset pulse density and outputting the converted pulse. The units are pulses per revolution (PPR).
I/O Signals
I/O signals are described below.
Output Ö PAO CN1-33 Encoder Output Phase A Speed, Torque, Position Control, and Programming
Output Ö /PAO CN1-34 Encoder Output Phase /A Speed, Torque, Position Control, and Programming
Output Ö PBO CN1-35 Encoder Output Phase B Speed, Torque, Position Control, and Programming
Output Ö /PBO CN1-36 Encoder Output Phase /B Speed, Torque, Position Control, and Programming
Output Ö PCO CN1-19 Encoder Output Phase C Speed, Torque, Position Control, and Programming
Output Ö /PCO CN1-20 Encoder Output Phase /C Speed, Torque, Position Control, and Programming
Divided encoder signals are outputs; therefore always connect these signal terminals
when a position loop is formed in the host controller for position control.
Set a dividing ratio using the following parameter: PG Dividing Ratio Pn201
The dividing ratio setting is not related to the gear ratio setting (Pn202 and Pn203) for the
servo amplifier electronic gear function during position control.
5-20
Page 88

FSP Amplifier User’s Manual Chapter 5: Parameter Settings and Functions
r
Output Phase Form
Forward
rotation
90
°
Reverse
rotation
90
°
t
Ö Input SEN CN1-4 SEN Signal Input Speed, Torque, Position Control, and Programming
Ö Input /SEN CN1-2 Signal Ground Speed, Torque, Position Control, and Programming
Output Ö PSO CN1-48 Encoder Output Phase S Speed, Torque, Position Control, and Programming
Output Ö /PSO CN1-49 Encoder Output Phase /S Speed, Torque, Position Control, and Programming
Ö Input BAT (+) CN1-21
Ö Input /BAT (-) CN1-22 Battery (-) Speed, Torque, Position Control, and Programming
Battery (+)
Speed, Torque, Position Control, and Programming
t
Use SEN to BAT (-) signals for absolute encoders. See 5.7 Absolute Encoders for more
details.
Output Ö SG CN1-1 Signal ground Speed, Torque, Position Control, and Programming
SG: Connect to 0 V on the host controller.
IMPORTANT
• When using the servo amplifier phase C pulse signal to return to the
machine origin, always turn the servomotor at least twice before starting
the original return operation.
If the configuration of the mechanical system prevents turning the servomotor before the
origin return operation, then perform the origin return operation at a servomotor speed of
600 rpm or below. The phase C pulse signal may not be correctly applied if the servomotor
turns faster than 600 rpm.
Pulse Divider Setting
Set the pulse dividing ratio in the following parameter:
Parameter Signal Setting (PPR) Control Mode
Pn201 PG Divider
Range: 0 to 65535
Default Setting: 2048
Serial encoder
Set the number of pulses for PG output signals (PAO, /PAO, PBO, /PBO).
Encoder
PG
Serial
data
FSP Amplifie
Frequency
division
Output terminals: PAO (CN1
Phase A
Phase B
Output
Pulses from the servomotor encoder (PG) are divided by the preset number
before being output.
The number of output pulses per revolution is set by this parameter. Set
the value using the reference units of the equipment or the controller used.
The setting range varies with the encoder used.
5-21
Position Control and
Programming
-33)
/PAO (CN1 -34)
PBO (CN1 -35)
/PBO (CN1 -36)
Page 89
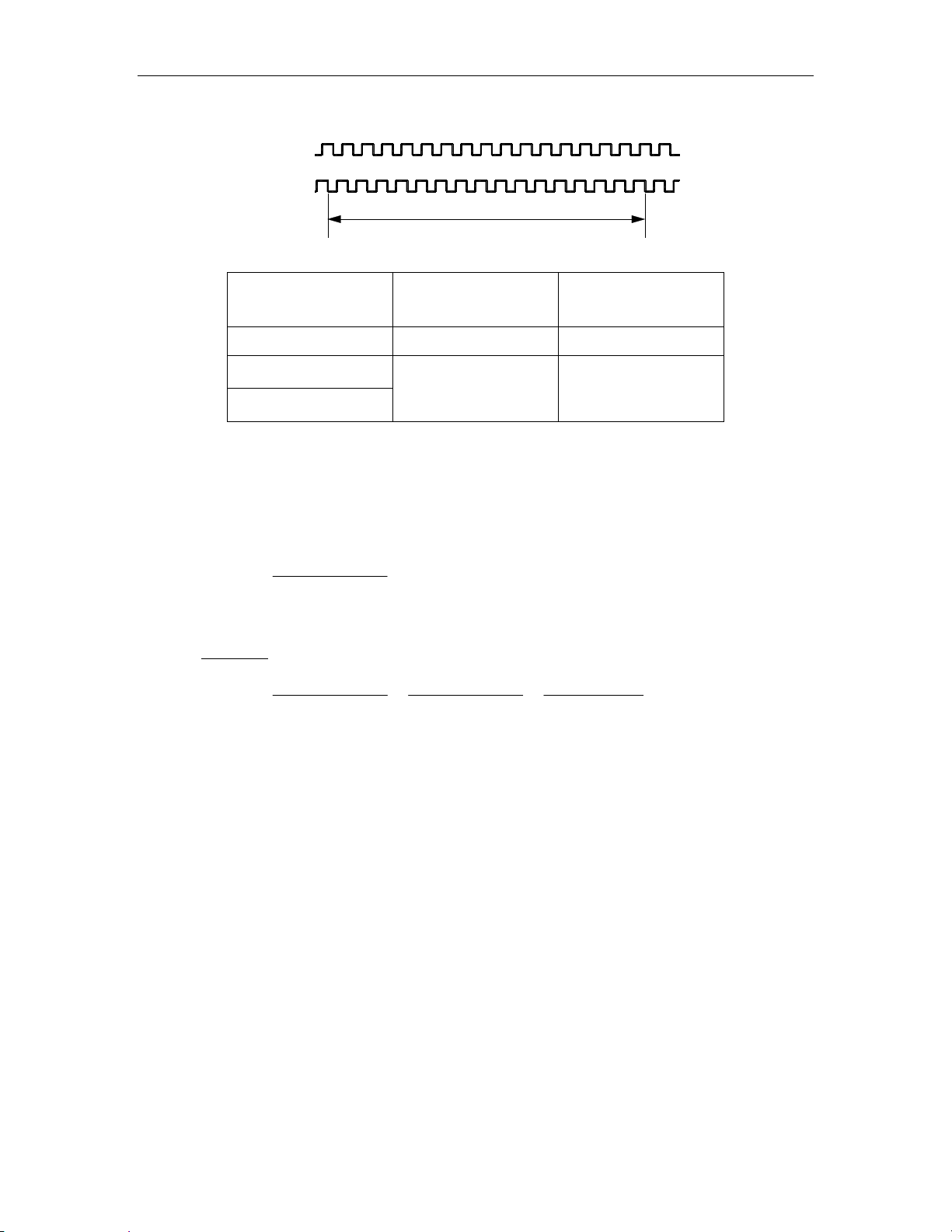
FSP Amplifier User’s Manual Chapter 5: Parameter Settings and Functions
P
×
×
P
Preset va lue: 16
PA O
PBO
1 revolution
Resolution
(Bits)
13 2048 16 to 2048
16
17
Number of Encoder
Pulses Per
Revolution (PPR)
16384 16 to 16384
Setting Range
Note: 1. Turn OFF power once and turn ON again after changing the parameter.
2. A 13-bit encoder will run at 2048 PPR even if the setting at Pn201 is set higher than 2049.
A quad B Encoder – Setting of the pulse-dividing ratio.
65536
Pn
201
PGout
=
×
n
4192
×
PGout – number of required out pulses per revolution.
Example: 1000 counts per revolution needed using 8000 counts encoder.
8000
100065536
8192
×
201 =
Pn
=
PGout
Counts
6553665536
=
n
PGout
4192
×
=
Note: If a 1:1 ratio (for each incoming pulse, one output pulse generated) is
required, set Pn201 = 0.
5-22
Page 90

FSP Amplifier User’s Manual Chapter 5: Parameter Settings and Functions
5.2.4. Sequence I/O Signals
Sequence I/O signals are used to control servo amplifier operation. Connect
these signal terminals as required.
Input Signal Connections
Connect the sequence input signals as shown below.
XtraDrive
FSP Amplifier
+24V
Ho st controller
OV
Note: Provide a separate external I/O power supply; the servo amplifier does not have an internal 24 V power
supply.
External power supply specifications: 24 V ±1 VDC, 50 mA minimum.
Yaskawa recommends using the same type of external power supply as the one used for output circuits.
The function allocation for sequence input signal circuits can be changed.
See 5.3.3 Input Circuit Signal Allocation for more details.
Ö Input +24 VIN CN1-47
External I/O Power Supply Input
Speed, Torque, Position Control, and
Programming
The external power supply input terminal is common to sequence input
signals.
I/O power supply
+24 V
Connect an external I/O power supply
FSP Amplifier
CN1-47
Contact input signals: /S-ON (CN1-40)
/P-CON (CN1-41)
P-OT (CN1-42)
N-OT (CN1-43)
/ALM-RST (CN1-44)
/P-CL (CN1-45)
/N-CL (CN1-46)
5-23
Page 91

FSP Amplifier User’s Manual Chapter 5: Parameter Settings and Functions
Output Signal Connections
Connect the sequence output signals as shown in the following figure.
FSP Amplifier
XtraDrive
0V
31
32
25
26
27
28
29
30
37
38
39
1
ALM+
ALM/V-C M P+
/V-C M P/TGO N+
/TGO N/S-RDY+
/S-RDY-
ALO1
ALO2
ALO3
SG
I/O power supply
+24V
0V
0V
Note: Provide a separate external I/O power supply; the servo amplifier does not have an internal 24 V power
supply. It is recommended to use the same type of external power supply as the one used for input circuits.
Function allocation for some sequence output signal circuits can be
changed.
See 5.3.4 Output Circuit Signal Allocation for more details.
5-24
Page 92
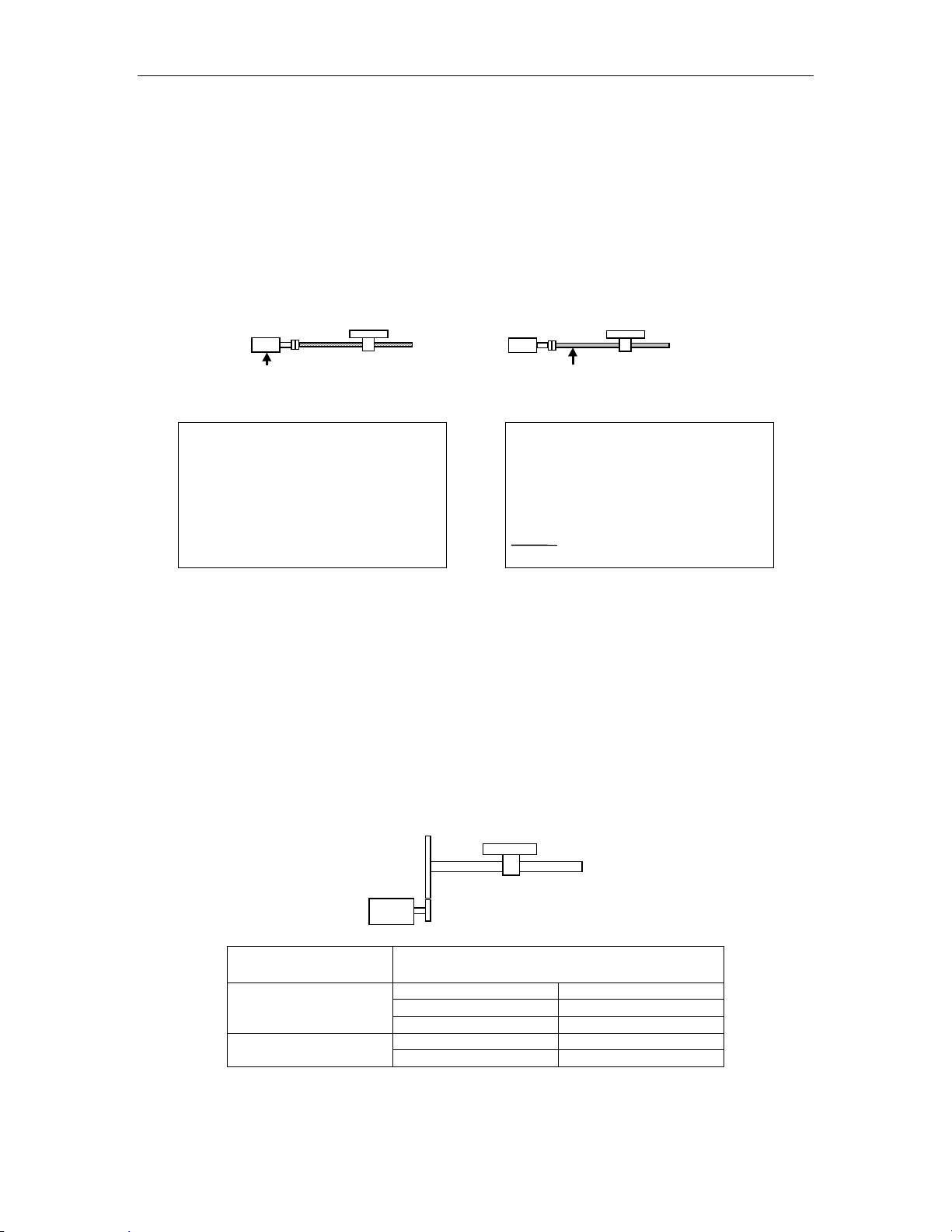
FSP Amplifier User’s Manual Chapter 5: Parameter Settings and Functions
5.2.5. Using the Electronic Gear Function
The electronic gear function enables the servomotor travel distance per
input reference pulse to be set to any value. It allows the pulses generated
by the host controller to be used for control without having to consider the
equipment gear ratio or the number of encoder pulses.
When the electronic gear
function is not used
When the electronic gear
function is used
Payload
To move a payload 10 mm (0.39 in):
1 revolution is 6 mm. Therefore,
10 ÷ 6 = 1.6666 revolutions
2048 x 4 pulses is 1 revolution.
Therefore,1.6666 x 2048 x 4 = 13653
pulses are input as reference.
The equation must be calculated at the
host controller.
Ball screw pitch:
Equipment conditions and reference
must be defined for the electronic
units
gear function beforehand.
To move a payload 10 mm (0.39 in):
Reference unit is 1μm. Therefore,
10 mm
1μm
Payload
6 mm
(0.24 in)
= 10000 pulses
No. of encoder pulses: 2048
Setting the Electronic Gear (for Reference Pulses)
Calculate the electronic gear ratio (B/A) using the following procedure, and
set the values in parameters Pn202 and Pn203.
1. Check equipment specifications related to the electronic gear:
• Deceleration ratio
• Ball screw pitch
• Pulley diameter
Ball screw pitch
Deceleration ratio
Encoder Type
Incremental encoder
Absolute encoder
Note: The number of bits representing the resolution of the applicable encoder is not the same as the number of
encoder signal pulses (A and B phase) output from the servo amplifier.
Number of Encoder Pulses
Per Revolution (PPR)
13-bit 2048
16-bit 16384
17-bit 32768
16-bit 16384
17-bit 32768
5-25
Page 93
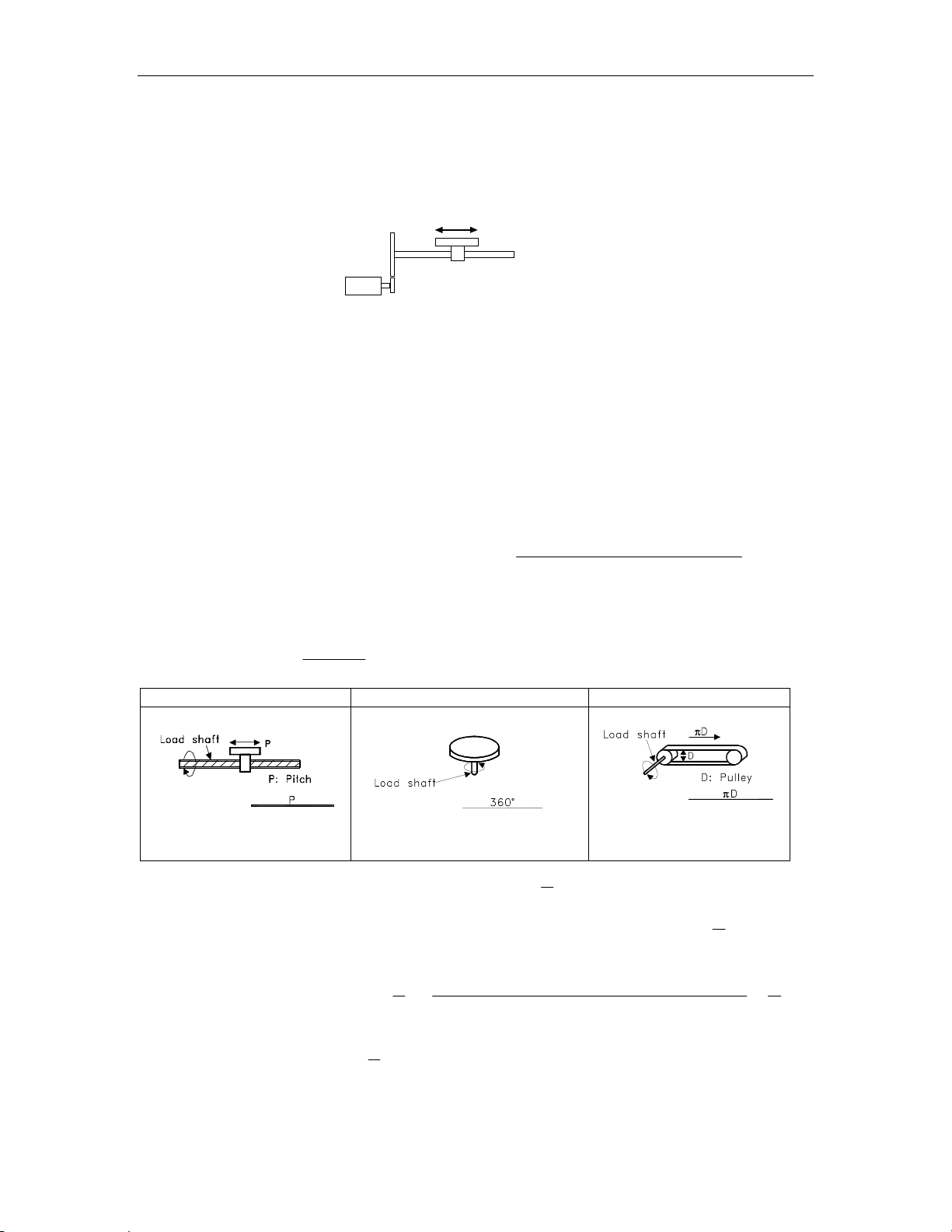
FSP Amplifier User’s Manual Chapter 5: Parameter Settings and Functions
2. Determine the reference unit used.
A reference unit is the minimum position data unit used to move a load
(minimum unit of reference from the host controller).
To move a t able in 0.001 mm units
Reference unit: 0.001 mm
Determi ne the reference uni t according to
equipment speci ficati ons and positioning ac curacy .
Examples (in mm):
• Reference unit can be 0.1 in or 0.01 in or 0.01 mm or 0.001 mm,
etc. A reference unit of one pulse moves the load by one reference
unit.
• When the reference unit is 1µm
If a reference of 50000 units is input, the load moves 50 mm (1.97
in) (50000 ⋅ 0.001 mm = 50 mm).
3. Determine the travel distance per load shaft revolution in reference
units.
Travel distance per load shaft revolution =
revolutionshaft loadper distance Travel
UnitReference
• When the ball screw pitch is 0.20 in (5 mm) and the reference unit
is 0.00004 in (0.001 mm),
20.0
= 5000 (reference units)
00004.0
Ball Screw Disc Table Belt and Pulley
1 revolution =
1 revolution =
1 revolution =
reference unit
1 revolution =
1 revolution =
reference unit
1 revolution =
B
⎞
4. Electronic gear ratio is given as:
⎛
⎟
⎜
A
⎠
⎝
If the gear ratio of the motor and the load shaft is given as:
is the rotation of the motor and n is the rotation of the load shaft,
B
⎞
Electronic gear ratio
Note: Make sure the electronic gear ratio satisfies the following condition:
0.01 ≤ Electronic gear ratio
The servo amplifier will not work properly if the electronic gear ratio exceeds this range. In that case,
modify either the load configuration or the reference unit.
⎛
=
⎟
⎜
A
⎠
⎝
B
⎞
⎛
≤ 100
⎟
⎜
A
⎠
⎝
4x pulsesencoder ofNumber
reference unit
m
where m
n
unit) (reference revolutionshaft loadper distance Travel
x
m
n
5-26
Page 94

FSP Amplifier User’s Manual Chapter 5: Parameter Settings and Functions
_
A
5. Set the parameters.
Reduce the electronic gear ratio to lower terms so that both A and B are
integers smaller than 65535, then set A and B in the respective
parameters:
B
⎞
⎛
⎟
⎜
A
⎠
⎝
Pn202 Electronic Gear Ratio (Numerator)
Pn203 Electronic Gear Ratio (Denominator)
Parameter Signal Setting Control Mode
Pn202
Pn203
Electronic Gear Ratio
(Numerator)
Electronic Gear Ratio
(Denominator)
Range: 1 to 65535
Default Setting: 1
Range: 1 to 65535
Default Setting: 1
Position Control and
Programming
Position Control and
Programming
Set the electronic gear ratio according to equipment specifications.
Reference
input pulse
FSP Ampli fier
Electronic
gear
B
Motor
M
Electronic Gear Ratio =
B
⎞
⎛
⎟
⎜
A
⎠
⎝
=
202Pn
203Pn
• B = [(Number of encoder pulses) × 4] × [motor speed]
• A = [Reference units (travel distance per load shaft revolution)] ×
[load shaft revolution speed]
Electronic Gear Setting Examples
The following examples show electronic gear settings for different load
mechanisms.
Ball Screws
Travel distance per load shaft revolution =
Electronic gear ratio =
⎛
⎜
⎝
Values
in24.0
= 6000
in00004.0
B
⎞
=
⎟
A
⎠
Pn202 8192 Preset
Pn203 6000
6000
1x 4x 2048
=
202Pn
203Pn
5-27
Page 95
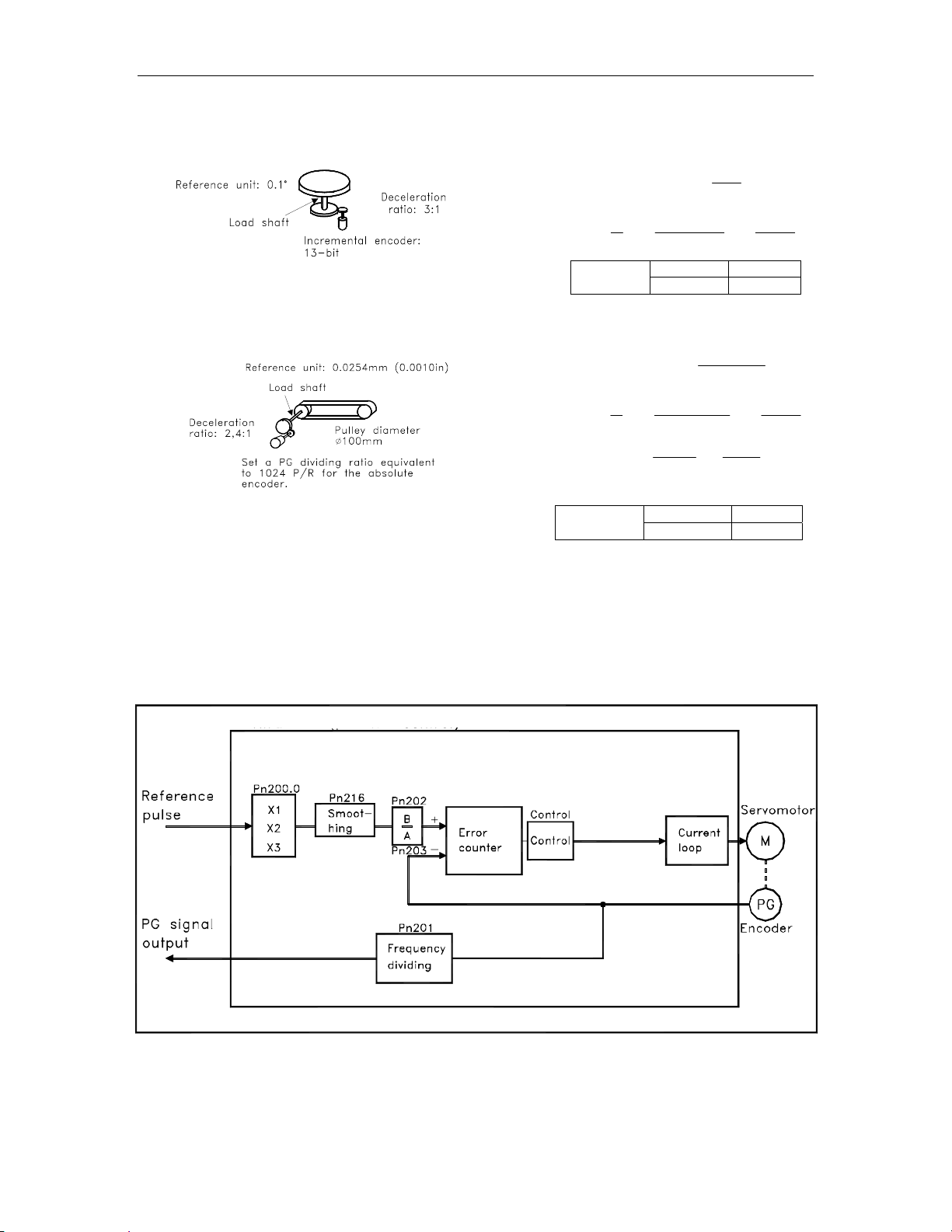
FSP Amplifier User’s Manual Chapter 5: Parameter Settings and Functions
Circular Tables
Belts and Pulleys
Control Block Diagram
Travel distance per load shaft revolution =
B
⎞
⎛
Electronic gear ratio
Travel distance per load shaft revolution =
Electronic gear ratio =
=
=
Values
⎟
⎜
A
⎠
⎝
Values
B
⎞
⎛
⎟
⎜
A
⎠
⎝
=
3600
Pn202 24576 Preset
Pn203 3600
=
12566
196608
12566
Pn202 20480 Preset
Pn203 1309
=
360
3x 4x 2048
3x 4x 16384
20480
1309
= 3600
°°1.0
=
in0010.0
=
202Pn
203Pn
in4x1416.3
= 12566
202Pn
203Pn
The following diagram illustrates a control block for position control.
FSP Amplifier (position cont rol)
5-28
Page 96

FSP Amplifier User’s Manual Chapter 5: Parameter Settings and Functions
5.2.6. Contact Input Speed Control
This function provides a method for easy speed control. It allows the user
to initially set three different motor speeds with parameters, and then select
one of the speeds externally using a contact input.
FSP Amplifier
/P- CON (/ SPD - D)
CN1-41
Contact
input
/P- CL (/ SPD - A)
CN1-45
/ N - CL (/ SPD - B)
CN1-46
Speed selection
External speed
setting devices and
pulse generation
are not required.
SPEED 1 Pn301
SPEED 2 Pn302
SPEED 3 Pn303
User constants
Using Contact Input Speed Control
Follow steps 1 to 3 below to use the contact input speed control function.
1. Set the following parameter to one of the speed control selections. The
default setting is "programming mode".
Parameter Signal Setting Control Mode
Pn000.1
Control Mode
Selection
Default Setting: D
M
Servomotor
Servomotor operates at
the speed set in the user
constant.
Speed, Torque,
Position Control,
and Programming
The speed can be controlled via contact inputs.
Servo operates
Contact
input
at the internally
set speed
SPEED 1
SPEED 2
SPEED 3
M
Servomotor
5-29
Page 97

FSP Amplifier User’s Manual Chapter 5: Parameter Settings and Functions
Meanings for the following signals change when the contact input
speed control function is used:
Pn000.1
Setting
0, 2, 8, 9, A,
B, C
3, 4, 6
Note: 1. 0: OFF (high level); 1: ON (low level)
2. /P-CON, /P-CL and /N-CL functions differ from those in the table above when Pn000.1 is set to 3, 4, or 6.
The function is switched automatically when Pn50A. 0 is set to 0.
3. The /SPD-D, /SPD-A, and /SPD-B signals can be used only when signals are allocated to the input
circuits. See
Description Input Signal
Input
contacts.
Speed control
function is not
used.
Input
contacts.
Speed control
function is
used.
5.3.3 Input Circuit Signal Allocation.
/P-CON (CN1-41)
/P-CL (CN1-45)
/N-CL (CN1-46)
/P-CON
(/SPD-D)
Direction
of rotation
0:
Forward
1:
Reverse
/P-CL
(/SPD-A)
0 0
0 1
1 1
1 0
Used to switch between P and PI
control.
Used to switch between forward
external torque limit ON and OFF.
Used to switch between reverse
external torque limit ON and OFF.
/N-CL
(/SPD-B)
Speed
setting
0 reference
etc.
SPEED 1
(Pn301)
SPEED 2
(Pn302)
SPEED 3
(Pn303)
2. Set the motor speeds using the following parameters.
Parameter Signal Setting (rpm) Control Mode
Pn301
Pn302
Pn303
Speed 1 (SPEED 1)
(Contact Input Speed
Control)
Speed 2 (SPEED 2)
(Contact Input Speed
Control)
Speed 2 (SPEED 2)
(Contact Input Speed
Control)
Range: 0 to 10000
Default Setting: 100
Range: 0 to 10000
Default Setting: 200
Range: 0 to 10000
Default Setting: 300
Speed Control
Speed Control
Speed Control
These parameters are used to set motor speeds when the contact input
speed control function is selected. If the setting is higher than the
maximum motor speed of the servomotor, then the servomotor will
rotate at its maximum speed.
Speed selection input signals /P-CL(SPD-A)(CN1-45) and /N-CL
(/SPD-B) (CN1-46) and the rotation direction selection signal /P-CON
(/SPD-D)(CN1-41) enable the servomotor to run at the preset speeds.
5-30
Page 98

FSP Amplifier User’s Manual Chapter 5: Parameter Settings and Functions
A
3. Set the soft start time.
Parameter Signal Setting (ms) Control Mode
Pn305
Pn306
Soft Start Acceleration
Time
Soft Start Deceleration
Time
Range: 0 to 10000
Default Setting: 0
Range: 0 to 10000
Default Setting: 0
Speed Control
Speed Control
The servo amplifier internal speed reference controls the speed by
applying this acceleration setting.
Speed
reference
FSP
Xt r a D ri v e
mplifier
internal speed
internal
reference
speed
reference
Pn305: Sets this time interval
Maximum speed
Pn306: Sets this time interval
Soft start
Maximum speed
Smooth speed control can be performed by entering a progressive speed
reference or using contact input speed control. Set each constant to 0 for
normal speed control.
Set each parameter to the following time intervals.
• Pn305: Time interval from when the servomotor starts until it
reaches maximum speed.
• Pn306: Time interval from when the servomotor reaches maximum
speed until it stops.
Operation by Contact Input Speed Control
The following describes operation by contact input speed control.
Start and Stop
The following input signals are used to start and stop the servomotor.
Speed Selection 1
Ö Input /P-CL CN1-45
Ö Input /N-CL CN1-46
Note: Position Control is used here only by Pulse Reference, not by Serial Command
(Forward External Torque Limit
Input)
Speed Selection 2
(Reverse External Torque Limit
Input)
Speed, Torque, and Position
Control
Speed, Torque, and Position
Control
5-31
Page 99

FSP Amplifier User’s Manual Chapter 5: Parameter Settings and Functions
Use the following table when contact input speed control is used.
Contact Signal Parameter
/P-CON
(/SPD-D)
Direction of
rotation
0: Forward
1: Reverse
Note: 1. 0: OFF (high level); 1: ON (low level)
2. Input signals indicated by the horizontal bar (-) are optional.
— 0 0
/P-CL
(/SPD-A)
0 1 SPEED 1 (Pn301)
1 1 SPEED 2 (Pn302)
1 0
/N-CL
(/SPD-B)
Pn000.1
3
4
6
3, 4, 6,
Common
Selected Speed
Stopped by an internal
speed reference of 0.
Analog speed reference (VREF) input
Analog torque reference
input (torque control)
SPEED 3 (Pn303)
When contact input speed control is not used, input signals are used as
external torque limit inputs.
Note: The contact input speed control function is used only when signals are allocated to /SPD-D, /SPD-A, and
/SPD-B.
Selection of Rotation Direction
The input signal /P-CON(/SPD-D) is used to specify the direction of the
servomotor rotation.
Ö Input /P-CON CN1-41
• When contact input speed control is used, the input signal /P-CON
(/SPD-D) specifies the direction of servomotor rotation.
/P-CON (/SPD-D) Input
Level
Note: 0: OFF (high level); 1: ON (low level)
• When contact input speed control is not used, the /P-CON signal is
used for proportional control, zero clamping, and torque/speed control
switching.
• Position Control is used here only by Pulse Reference, not by Serial
Command.
Speed Selection 1
(Forward External Torque Limit
Input)
Signal Logic
0 Forward rotation
1 Reverse rotation
Speed, Torque, and Position
Control
5-32
Page 100

FSP Amplifier User’s Manual Chapter 5: Parameter Settings and Functions
Example of Contact Input Speed Control Operation
The following example shows operation by contact input speed control.
Using the soft start function reduces physical shock when the speed is
changed.
Motor sp eed
+SPEED 3
+SPEED 2
+SPEED 1
- SPEED 1
-SPEED 2
-SPEED 3
Spe e d 2
Spe e d 1
Sto p
0
Spe e d 3
Set a c c eleration an d
d eceleratio n at Pn305 and
Pn3 0 6 (soft start times).
Sto p
Speed1
Speed2
Speed3
Sto p
/P-CL (/SPD-A)
/N-CL (SPD-B)
/P-CON (SPD-D)
OFF OFF
OFF
ON ON ON ON
ON ON ON ON
ON ON
OFF OFF
OFFOFF
OFF OFF OFF OFF OFF
ON ON
OFF
OFF OFF
5-33
 Loading...
Loading...