

Page 1
YASKAWA AC Drive
F7 to A1000
Product Transition Guide
Type: CIMR-F7U
Models:
1/2 to 175 HP Normal Duty
Type: CIMR-AU
Models:
3/4 to 175 HP Normal Duty
240 V Class, Three-Phase Input: 1/2 to 150 HP Heavy Duty*
480 V Class, Three-Phase Input: 1/2 to 500 HP Heavy Duty*
1/2 to 600 HP Normal Duty
240 V Class, Three-Phase Input: 3/4 to 150 HP Heavy Duty*
480 V Class, Three-Phase Input: 3/4 to 900 HP Heavy Duty*
3/4 to 1000 HP Normal Duty
TM
* Note: This guide lists only comparable models. Refer to the product catalog for a list of all available models.
The Heavy Duty drive ratings (HD) are primarily used in this guide to facilitate data comparison.
DOCUMENT NO. PL.A1000.02
Page 2

2 YASK AWA PL.A1000.02 F7 to A1000 - Product Transition Guide
Page 3

Replacing F7 with A1000
1 FEATURE OVERVIEW . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
2 F7 TO A1000 FEATURE SPECIFICATIONS . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
3 DIGITAL OPERATOR COMPARISON . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .6
4 FRONT COVER & COOLING FAN COMPARISON. . . . . . . . . . . . . . . . . . . . . . . 7
5 NAMEPLATE/LABELING DIFFERENCES . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
6 MAIN CONTROL PCB COMPARISON . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
7 A1000 DRIVE OPTIONS. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
8 DETAILS ON NEW A1000 FEATURES AND FUNCTIONS . . . . . . . . . . . . . . . 16
9 APPENDIX 1 RATINGS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
10 APPENDIX 2 PARAMETER CROSS REFERENCE . . . . . . . . . . . . . . . . . . . . . 30
11 APPENDIX 3 TERMINAL SIZE AND WIRE GAUGE . . . . . . . . . . . . . . . . . . . . . 56
YASK AWA PL.A1000.02 F7 to A1000 - Product Transition Guide 3
Page 4

1 Feature Overview
1 Feature Overview
This document details differences between the F7 and A1000 product to assist in product transistion and new product
introductions.
F7 Drive A1000 Drive
The F7 drive is primarily used for general purpose industrial applications.
The A1000 drive is primarily used for general purpose and high performance industrial
applications, including those that require precise torque and speed control as well as control
of both induction and permanent magnet motors.
Table 1 Key A1000 Features and Functions
Key A1000 Features and Functions Key A1000 Features and Functions
• Closed or open loop vector control for outstanding regulation, torque production, and
position control capability
• Continuous Auto-tuning optimizes performance by compensating for changes in motor
temperature
• High Frequency Injection enables high precision open loop control of Interior Permanent
Magnet Motors
• Fast acting current and voltage limiters help achieve continuous drive operation during
periods of excessive demand
• High Slip Braking reduces installation cost and the need for dynamic braking resistors
• Communication options for all major industrial networks provides high speed control and
monitoring, reducing installation cost
• DriveWizard computer software and Application Sets for easy configuration • Integrated DC Reactor (standard on 30 HP and larger) for input harmonic reduction
• Auxiliary Control Power Unit maximizes production time and efficiency by maintaining
network communication while main power is removed
• Embedded Safe Torque Off minimizes downtime for applications requiring occasional
intervention (SIL CL2, PLd, Category 3)
• Embedded function blocks, programmable with DriveWorksEZ, provide additional
application flexibility and the opportunity to eliminate separate controllers
• USB Copy Unit and Keypad configuration storage provide speed and convenience for
duplicate configuration of multiple drives
• Removable terminal board with configuration storage provides convenience of
configuration backup
• Made with RoHS compliant materials
4 YASK AWA PL.A1000.02 F7 to A1000 - Product Transition Guide
Page 5

2 F7 to A1000 Feature Specifications
2 F7 to A1000 Feature Specifications
Table 2 Feature Specifications
Feature Item Yaskawa F7 Yaskawa A1000
200 V 240V 0.5 to 150 HP (HD) 0.5 to 175 HP (ND) <1>
HP Range
Input Voltage Rated Voltage
Motor types — Induction Induction, Permanent Magnet
PWM Carrier Frequency Range See Appendix 1 See Appendix 1
Maximum Output Frequency Hz
Keypad Design
Digital Input Terminal NPN/PNP Switchable NPN/PNP Switchable NPN/PNP
Digital output Terminal
Analog Output Output Level
Pulse Input
Pulse Output
Quick Disconnect Terminals Type Yes Yes
Auto Tuning Methods Rotating, Stationary Rotating, Stationary, Continuous, Inertia /ASR
Preset Speeds Qty. 17 17
Speed Search
Auto Restart Time Between Attemps 0.0 – 5.0 sec (selectable) 0.0 – 5.0 sec (selectable)
Energy Savings Mode Man/Auto Man/Auto Man/Auto
DC Injection Function At Start/At Stop At Start/At Stop +HSB during stop At Start/At Stop +HSB during stop
Braking Function
Cooling Fan On/Off Control Power/Run Run Based Selectable Always Active/During Run
Timer Function On/Off Delay On/Off Delay (0-3000 s) On/Off Delay (0-3000 s)
Fault Code Additions — 10 additional 10 with elapsed time stamp
Torque Limit/Current Limit/
Stall Prevention
Harmonic Counter Measures
Ambient Temperature ºC
Storage Temperature ºC -20ºC ~ +60ºC -20ºC ~ +60ºC
Network Communications
Unique Feature/Function — HSB – High Slip Braking Over-excitation Braking
400 V 480V 0.5 to 500 HP (HD) 0.5 to 600 HP (ND) 480 V 0.75 to 900 HP (HD) 0.75 to 1000 HP (ND)
600 V — 600 V 2 to 250 HP (ND)
3-phase, 200-240 Vac
3-phase, 380-480 Vac
300 Hz (HD) 400 Hz (ND)
1000 Hz optional
Display 5 Line X 16 Character LCD 5 Line X 16 Character LCD
Copy Function Yes Yes
Open Collector 0 0
Relay Output 3 x Form A, 1 x Form C 3 x Form A, 1 x Form C
2 channels
with independent level selections
0-10 V (10 bit plus sign) or
–10-+10 V or 10 bit plus sign or 4-20 ma 10 bit
Qty: 1 1
Input Frequency 1-32 kHz 1-32 kHz
Qty: 1 1
Output Frequency 1-32 kHz 1-32 kHz
Bi/Uni-Directional Bi-Directional Bi-Directional
Method Current/Speed Current/Speed Estimation
DB Transistor Built-in to 25 HP Built-in to 40 HP (HD)
Special High Slip Braking High Slip/Over-excitation Braking
Stall Prevention
—
—
Built-In DC Bus Reactor
Standard Modbus RTU via terminal I/O RS485/422
Optional DeviceNet, Profibus-DP, ControlNet, Ethernet
During Accel/Run/Decel (V/F)
Torque Limit in 4 Quadrants (Vector)
Software Current Limit (HD=150 %, ND=120 %)
12 Pulse: 30 HP and Above
Filters/Reactors (Options)
240 Vac:30-150 HP (HD)
480 Vac: 30-500 HP (HD)
-10ºC ~ +40ºC (IP21)
-10ºC ~ +45ºC (IP00)
<1> HD = Heavy Duty, ND = Normal Duty
240 V 0.75 to 150 HP (HD) 0.75 to 175 HP (ND)
3-phase, 200-240 Vac
3-phase, 380-480 Vac
3-phase, 500-600 Vac
400 Hz (1000 Hz optional)
2 channels with independent level selections
0-10 V (10 bit plus sign) or
–10-+10 V or 10 bit plus sign or 4-20 ma 10 bit
Stall Prevention
During Accel/Run/Decel (V/F)
Torque Limit in 4 Quadrants (Vector)
Software Current Limit (HD=150 %, ND=120 %)
Filters/Reactors (Options)
240 Vac: 30-175 HP (ND)
480 Vac: 30-1000 HP (ND)
600 Vac: 30-250 HP (ND)
-10 to +50°C (Open Chassis Installation)
-10 to +40°C (Chassis with zero side clearance, or Type 1)
Modbus RTU
via terminal I/O RS485/422
DeviceNet, Profibus-DP, ProfiNet, Ethernet,
Modbus TCP/IP, Mechatrolink
YAS KA WA PL.A1000.02 F7 to A1000 - Product Transition Guide 5
Page 6

3 Digital Operator Comparison
3 Digital Operator Comparison
• Enhanced LCD operator with built-in copy function and parameter verify for A1000
• Soft Keys simplify operation and programming
• Optional LED operator available for A1000
• LCD contrast adjustment
• Simplified parameter grouping for easier navigation and set-up
• The A1000 has a new layout for faster parameter selection
Table 3 Digital Operator
F7 Operator New A1000 Operator
LCD Backlit Display
5 Line x 16 Characters
LCD Backlit Display
5 Line x 16 Characters
New Button Layout
Soft Keys (F1/F2)
Smaller
• A1000 copy keypad is capable of uploading all of the parameter settings from the A1000 drive memory.
• Upload of F7 parameters to the A1000 is not available.
• A1000 drives must have the same software version, model, and control mode to copy parameters between A1000
drives.
• A Quick Start menu is added to aid in simple start up.
• The Quick Start menu consists of 26 parameters. The advanced menu offers full parameter access.
• There is a new button layout for quicker drive navigation.
Table 4 Menu Structure Comparison
F7 A1000
Operation “DRIVE” Operation
Quick Setting “QUICK” Auto-Tuning
Programming “ADV” Programming
Modified Constants “VERIFY” Quick Settings
Auto-Tuning “A.TUNE” Modified Constants
— Monitor Menu
6 YASK AWA PL.A1000.02 F7 to A1000 - Product Transition Guide
Page 7

4 Front Cover & Cooling Fan Comparison
4 Front Cover & Cooling Fan Comparison
F7 - Split Front Cover A1000 - Split Front Cover
The A1000 is provided with a split cover to allow terminal only access. The split cover limits
exposure to the control PCB and power structure during wiring.
F7 Modular Cooling
• The A1000 features an easy to remove
top mounted heat sink fan.
• Fan operation is parameter controlled.
• Fan operation time can be monitored for
preventative maintenance.
A1000 - New Modular Top-Mounted Cooling Fan
YAS KA WA PL.A1000.02 F7 to A1000 - Product Transition Guide 7
Page 8

5 Nameplate/Labeling Differences
5 Nameplate/Labeling Differences
Table 5 Nameplates and Front Labels
F7 Side Nameplate A1000 Side Nameplate
F7 Front Label A1000 Front Label
8 YASK AWA PL.A1000.02 F7 to A1000 - Product Transition Guide
Page 9

6 Main Control PCB Comparison
F7 Control PCB New A1000 Control PCB
6 Main Control PCB Comparison
A1000 Removable Terminal Board
YAS KA WA PL.A1000.02 F7 to A1000 - Product Transition Guide 9
Page 10

6 Main Control PCB Comparison
Terminal Board Set-Up Comparison
Figure 1
Figure 1 F7 Terminal Board Configuration
Figure 2
Figure 2 A1000 Terminal Board Configuration
10 YASK AWA PL.A1000.02 F7 to A1000 - Product Transition Guide
Page 11

F7 to A1000 Terminal Comparison
Table 6 Factory Default Terminal Functions 2-Wire Control
F7 Terminal A1000 Terminal (Designations similar to F7)
Typ e F7 Terminal Default Function A1000 Terminal Default Function A1000 Description
S1 Forward run/stop command S1 Forward run/stop
S2 Reverse run/stop command S2 Reverse run/stop
S3 External fault input S3 External fault, N.O.
S4 Fault reset S4 Fault reset
Multi-step speed reference 1
(Master/auxiliary switch)
Analog input or speed
command
Shield wire, optional ground
line connection point
During run
(N.O. contact)
Zero speed
(N.O. contact)
Frequency agree
(N.O. contact)
Digital Input Signals
Safe Disable Inputs
Analog Input Signals
Digital Output Signals
S5
S6 Multi-step speed reference 2 S6 Multi-step speed reference 2
S7 Jog frequency reference S7 Jog reference
S8 External baseblock N.O. S8 External baseblock
SC Factory connected to SP SC
SN Digital input common SN
SP Factory connected to SC SP
——
RP Pulse input RP
+V +15 Vdc power output +V
-V -15 Vdc power output -V
A1
A2 Add to terminal A1 A2
A3 Aux. frequency reference 1 A3
AC Analog common AC
E(G)
M1
M2 M2
M3
M4 M4
M5
M6 M6
6 Main Control PCB Comparison
Multi-function inputs 1-8
Photocoupler
S5 Multi-step speed reference 1
Multi-function input
common
Digital input power supply
0 V
Digital input power supply
+24 Vdc
H1 Safe Disable input 1 • 24 Vdc, 8mA
H2 Safe Disable input 2
HC
A1
E(G)
M1
M3
M5
Safe Disable function
common
Multi-function pulse train
input (frequency reference)
Power supply for analog
inputs
Power supply for analog
inputs
Multi-function analog input
1 (Frequency reference bias)
Multi-function analog input
2 (Frequency reference bias)
Multi-function analog input
3 (Auxiliary frequency
reference)/PTC input
Analog frequency reference
common
Ground for shielded lines
and option cards
During run
(closed at run)
Zero speed
(closed at zero speed)
Speed Agree 1
(closed at speed agree)
24 Vdc, 8 mA
Set the S3 jumper to select
between sinking, sourcing
mode, and the power supply.
24 Vdc power supply for
digital inputs, 150 mA max
(only when not using digital
input option DI-A3)
• One or both open: Output
disabled
• Both closed: Normal
operation
• Internal impedance: 3.3 kΩ
• Of time of at least 1 ms
Disconnect the wire jumpers
shorting terminals H1, H2,
and HC to use the Safe
Disable inputs. Set the S5
jumper to select between
sinking, sourcing mode, and
the power supply.
Input frequency range: 0 to 32
kHz
Signal Duty Cycle: 30 to 70 %
High level: 3.5 to 13.2 Vdc,
low level: 0.0 to 0.8 Vdc
Input impedance: 3 kΩ
10.5 Vdc (max allowable
current 20 mA)
-10.5 Vdc (max allowable
current 20 mA)
-10 to 10 Vdc, 0 to 10 Vdc
(input impedance: 20 kΩ)
-10 to 10 Vdc, 0 to 10 Vdc
(input impedance: 20 kΩ)
4 to 20 mA, 0 to 20 mA (input
impedance: 250 kΩ)
Voltage or current input must
be selected by DIP switch S1
and H3-09.
-10 to 10 Vdc, 0 to 10 Vdc
(input impedance: 20 kΩ
Use DIP switch S4 on the
terminal board to select
between analog and PTC
input
• Multi-function digital
outputs,
• N.O. contacts, 30 Vdc,
10 mA to 1 A
• 250 Vac, 10 mA to 1 A
• Minimum load: 5 Vdc,
10 mA
—
)
0 V
—
YAS KA WA PL.A1000.02 F7 to A1000 - Product Transition Guide 11
Page 12

6 Main Control PCB Comparison
F7 Terminal A1000 Terminal (Designations similar to F7)
Typ e F7 Terminal Default Function A1000 Terminal Default Function A1000 Description
MA
Fault Relay
Analog Output Signals
RS-485/422
Safety Monitor Output
MB MB N.C. output
MC MC Fault output common
FM Output frequency FM
AM Output current AM
AC Analog common AC Monitor common 0 V
MP Pulse monitor MP
R+ Modbus communication
R- R- Communications input (-)
S+ Modbus communication
S- S- Communications output (-)
IG Signal common IG Shield ground
— — DM+ Safety monitor output Output status of Safe Disable
——DM-
Fault output signal
(SPDT)
Differential input,
PHC isolation
Differential output,
PHC isolation
MA N.O.
Analog monitor output 1
(Output frequency)
Analog monitor output 2
(Output current)
Pulse train output (Output
frequency)
R+ Communications input (+)
S+ Communications output (+)
Safety monitor output
common
30 Vdc, 10 mA to 1 A;
250 Vac, 10 mA to 1 A
-10 to +10 Vdc, or
0 to +10 Vdc
32 kHz (max)
MEMOBUS/Modbus
communication: Use an RS485 or RS-422 cable to
connect the drive.
RS-485/422 MEMOBUS/
Modbus comm. protocol:
115.2 kbps (max.)
function Closed when both
Safe Disable channels are
closed.
Open Collector: +48 Vdc 50
mA maximum
12 YASK AWA PL.A1000.02 F7 to A1000 - Product Transition Guide
Page 13

Figure 3
External Fault
Fault Reset
Multi-Step Ref 1
Multi-Step Ref 2
Jog Reference
Baseblock
2-Wire
Control
Run command (run on momentary close)
Stop command (stop on momentary open)
Forward/reverse command (multi-function input)
Sequence input common
Fwd/Rev
S1
S2
S5
Stop
switch
(NC
contact)
Operation
switch
(NO
contact)
)
S
n
S1
2
5
p
s
ch
C
)
h
(NO
)
3-Wire Control
SN
Digital Inputs 1-2
24Vdc, 8mA
Multi-function
Digital Inputs 3-8
24Vdc, 8mA
6 Main Control PCB Comparison
Sto
wit
(N
contact
Fwd/Rev
Operation
switc
contact
Run command (run on momentary close
S
Stop command (stop on momentary open)
S
Forward/reverse command (multi-function input)
equence input commo
Figure 3 F7 Connection Diagram
YAS KA WA PL.A1000.02 F7 to A1000 - Product Transition Guide 13
Page 14

6 Main Control PCB Comparison
Figure 4
Terminals -, +1, +2, B1, B2 are
for connection options. Never
connect power supply lines to
these terminals
Wiring sequence should shut off
power to the drive when a fault
output is triggered.
Main
Three-Phase
Power Supply
200 to 600 V
50/60 Hz
(Depending on
model capacity)
Models CIMR-A 4A930 and
4A1200 are compatible with
12-Phase Rectification.
R
S
T
(default setting)
Multi-function
analog/pulse
train inputs
Safety
switch
Open
Safety relay /
Multi-function
digtial inputs
controller
Fuse
Switch
Forward Run / Stop
Reverse Run / Stop
External fault
Fault reset
Multi-speed step 1
Multi-speed step 2
Jog speed
External Baseblock
Sink / Source mode
selection wire link
(default: Sink)
k
2
MEMOBUS/Modbus
comm. RS485/422
max. 115.2 kBps
S2
S
1
Ω
Safe Disable inputs
EMC
Filter
<5>
Wire
jumper
<12>
<7>
<7>
DC link choke
(option)
UX
UX
Jumper
Main Circuit
R/L1
S/L2
T/L3
S
Control Circuit
1
S2
S3
S4
S5
S6
<1>
Thermal relay
++
++
㧙
B112
Drive
<4>
Option board
connectors
CN5-C
CN5-B
CN5-A
Terminal board
jumpers and switches
V
Off
S7
S
8
SN
SC
PTC
AI
SP
<6>
+
24 V
Shield ground terminal
RP
Pulse Train Input (max 32 kHz)
Power supply +10.5 Vdc, max. 20 mA
+
V
Analog Input 1 (Frequency Reference Bias)
A
1
-10 to +10 Vdc (20 k )
Analog Input 2 (Frequency Reference Bias)
A2
-10 to +10 Vdc (20 k )
0 or 4 to 20 mA (250 )
Analog Input 3 / PTC Input (Aux. frequency
A3
reference)
-10 to +10 Vdc (20 k )
AC
0
V
Power supply, -10.5 Vdc, max. 20 mA
−
V
Termination resistor
(120 , 1/2 W)
Ω
DIP
+
+
R
R
+
+
S
S
Switch S2
Ω
Ω
Ω
Ω
<10>
AMFM
<8>
<9>
IG
1
H
<11>
H2
HC
(option)
<2>
B2
DIP Switch S1
I
A2 Volt/Curr. Sel
DIP Switch S2
On
Term. Res. On/Off
Jumper S3
H1, H2
Sink/Source Sel.
DIP Switch S4
A3 Analog/PTC
Input Sel
Jumper S5
V
AM/FM Volt./Curr.
I
Selection
Braking resistor
(option)
<3>
PGX3
(option)
<14>
<6>
<15>
FU
FV
FW
U/T
V/T2
W/T
1
3
Ground
U
V
W
TB1
A+
A
B+
B
Z+
Z
SD
FE
TB2
IP
IG
a+
ab+
b-
A track monitor
B track monitor
z+
z-
MA
Fault relay output
250 Vac, max. 1 A
MB
30 Vdc, max 1 A
MC
(min. 5 Vdc, 10 mA)
Multi-function relay output (During Run)
M
1
250 Vac, max. 1 A
M2
30 Vdc, max 1 A
(min. 5 Vdc, 10 mA)
Multi-function relay output (Zero Speed)
M3
250 Vac, max. 1 A
M4
30 Vdc, max 1 A
(min. 5 Vdc, 10 mA)
Multi-function relay output (Speed Agree 1)
M5
250 Vac, max. 1 A
M6
30 Vdc, max 1 A
(min. 5 Vdc, 10 mA)
MP
Multi-function pulse train output
(Output frequency)
AC
0 to 32 kHz (2.2 k )
0 V
FM
㧙
AM
AC
㧙
0 V
E (G)
EDM (Safety Electronic Device Monitor)
+
+
DM
㧙
㧙
DM
M
Cooling fan
M
PG
Ω
Multi-function analog output 1
(Output frequency)
+
FM
-10 to +10 Vdc (2mA)
or 4 to 20 mA
Multi-function analog output 2
+
(Output current)
AM
-10 to +10 Vdc (2mA)
or 4 to 20 mA
<13>
<13>
shielded line
twisted-pair shielded line
control circuit terminal
main circuit terminal
Figure 4 A1000 Connection Diagram
14 YASK AWA PL.A1000.02 F7 to A1000 - Product Transition Guide
Page 15

7 A1000 Drive Options
Category Option Name Model Number
Network Communication Profibus-DP SI-P3
DeviceNet SI-N3
Mechatrolink SI-T3
EtherNet/IP SI-EN3
Modbus TCP/IP SI-EM3
ProfiNET SI-EP3
Line Driver PG PG-X3
Motor Feedback
Input/Output
Keypad
Control Power Unit 24 V Control Power Unit
Parameter Management
DriveWorksEZ
Open Collector PG PG-B3
Serial Absolute FB FG-F3
Resolver Feedback PG-RT3
Analog Input AI-A3
Analog Output AO-A3
Digital Input DI-A3
Digital Output DO-A3
120 Vac Interface Board (Contact factory)
LCD Keypad JVOP-180
LED Keypad JVOP-182
Remote Mount Keypad Kit - Blank UUX000526
Remote Mount Keypad Kit - YEA UUX000527
LCD Operator Extension Cable, 1 m UWR0051
LCD Operator Extension Cable, 3 m UWR0052
Y-Stick USB Copy Unit JVOP-181
Drive Wizard Pro PC Support Tool DriveWizard Industrial
PC Support Tool Cable UWR0638 USB Cable, 10 ft, male A-type to male B-type
DriveWorksEZ Std (Contact factory)
DriveWorksEZ Pro (Contact factory)
7 A1000 Drive Options
PS-A10H for 480 V and 600 V class
PS-A10L for 240 V class
YAS KA WA PL.A1000.02 F7 to A1000 - Product Transition Guide 15
Page 16
8 Details on New A1000 Features and Functions
Motor Speed
DC Bus V
Output Current
Output Frequency
8 Details on New A1000 Features and Functions
Note: This section details significant A1000 features.
Over-Excitation Braking
This braking method allows for faster stops without the addition of a dynamic braking resistor. While still not as fast or powerful as
DB, it offers a very necessary middle ground for those applications that may not require the full power of dynamic braking, saving
money in hardware.
Figure 5
Figure 5 Over-Excitation Braking
16 YASK AWA PL.A1000.02 F7 to A1000 - Product Transition Guide
Page 17

8 Details on New A1000 Features and Functions
Motor Speed
DC Bus V
Output Current
Output Frequency
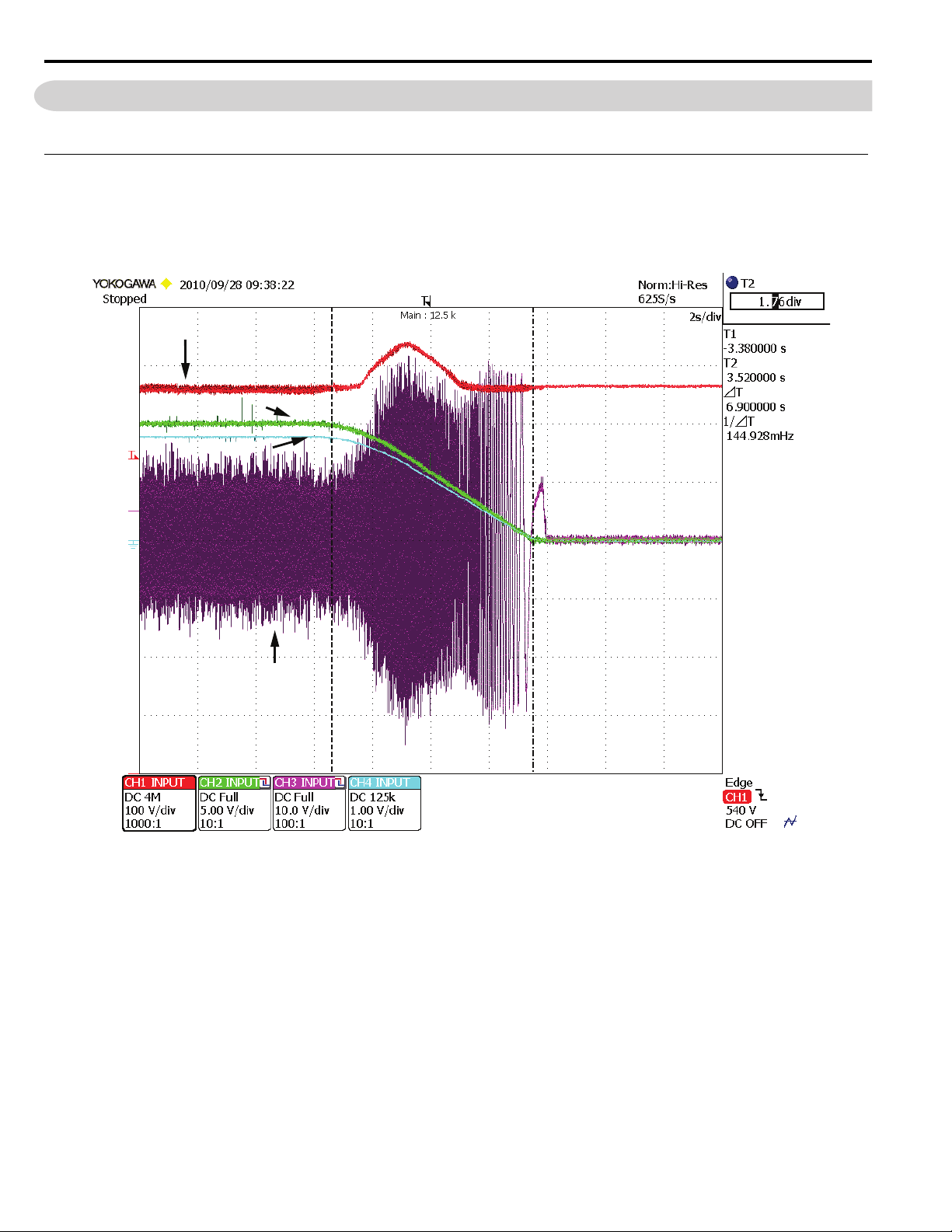
Self-Activated KEB
Internally activated Kinetic Energy Braking eliminates the need for external voltage sensing relays. Load inertia is used to decelerate
the system in a controlled manner in the event of power loss. Extremely fast scan rates accommodate loads near 100 %.
Figure 6
Figure 6 Self-Activated KEB
YAS KA WA PL.A1000.02 F7 to A1000 - Product Transition Guide 17
Page 18

8 Details on New A1000 Features and Functions
Bidirectional Speed Search
Multiple speed search methods to accommodate nearly any application. Bumpless synchronization with reverse motor rotation is
easily accomplished with Speed Estimation Speed Search.
Figure 7
DC Bus V
Motor Speed
Output Frequency
DC Bus V
Motor Speed
Output Current
Output Frequency
Output Current
SPEED SEARCH 45 Hz
SPEED SEARCH 60 Hz
Figure 7 Bi-Directional Speed Search
Top Mounted Easily Removable Cooling Fan
The heatsink fan is located on the top of the drive which improves the ease of replacement. With a tooless removal process, faulty
fans are easily replaced.
18 YASK AWA PL.A1000.02 F7 to A1000 - Product Transition Guide
Page 19

8 Details on New A1000 Features and Functions
New “Heavy Duty” and “Normal Duty” Ratings for the A1000
The drive’s capacity is rated for two types of load characteristics, Heavy Duty (HD) and Normal Duty (ND). The table below explains
the drive characteristics for HD and ND ratings. Parameter C6-01 affects the drives carrier frequency setting, and in certain models,
the value of 100 % output current rating is also affected.
Table 7 Drive Selections
C6-01 Setting Carrier Frequency Output Current Ratings Overload Capacity Maximum Output Frequency
0: Heavy Duty
1: Normal Duty
(A1000 default)
Product C6-01 Heavy/Normal Duty Setting
New A1000
F7
2 kHz (default)
Can be increased w/o derate
(Refer to Appendix 1)
2 kHz (default)
Can be increased with derate
(Refer to Appendix 1)
HD nameplate rating 150 % 400 Hz
ND nameplate rating
ND rating > HD rating
(On certain models, see ratings table)
120 % 400 Hz
Table 8 C6-01 Heavy/Normal Duty Setting
C6-01 Drive Duty Selection Setting
0: Heavy Duty
• Rated output current is the HD (Heavy Duty) rating on drive nameplate.
• Overload capacity is 150 % for 1 minute.
• Carrier frequency is defaulted to 2 kHz but can be increased to 8 kHz or 5 kHz w/o derating on certain models (Refer to Appendix 1)
• Carrier frequency is automatically reduced when:
• output frequency is < 6.0 Hz and current is >100 %
• output frequency is > 6.0 Hz and current is > 112 %
• Maximum output frequency is 400 Hz (except on larger models)
• L8-15: OL2 Characteristic selection@low speed (=1 Enabled) expedites OL2 at low output frequencies below 6 Hz.
1: Normal Duty (default)
• Output current is ND (Normal Duty) rating on drive nameplate.
• Overload capacity is 120 % for 1 minute
• Carrier frequency is defaulted to Swing PWM (2kHz) but can be increased with derating on most models (Refer to Appendix 1)
• Carrier is automatically reduced when:
• output frequency is < 6.0 Hz and current is >100 %
• output frequency is > 6.0 Hz and current is > 112 %
• Maximum output frequency is 400 Hz (except on certain larger models)
• L8-15: OL2 Characteristic selection@low speed (=1 Enabled) expedites OL2 at low output frequencies below 6 Hz.
0: Heavy Duty (default)
• Rated output current is HD (Heavy Duty) rating on drive nameplate.
• Overload Capacity is 150 % for 1 min.
• Carrier frequency is fixed at 2 kHz
• Maximum output frequency is 300 Hz.
• L8-15: OL2 Characteristic selection@low speed (=1 Enabled) expedites OL2 at low output frequencies below 6 Hz.
2: Normal Duty 2
• Output current is ND (Normal Duty) rating on drive nameplate.
• Overload capacity varies by model. (See Appendix 1)
• Setting C6-02 Carrier Frequency greater than default is prohibited. (Default is highest possible setting)
• Maximum output frequency is 400 Hz.
• Fixed low speed protection method: Carrier is automatically lowered when output frequency is < 6.0 Hz and current is >100 %.
• L8-15: OL2 Characteristic selection@low speed (=1 Enabled) expedites OL2 at low output frequencies below 6 Hz.
YAS KA WA PL.A1000.02 F7 to A1000 - Product Transition Guide 19
Page 20

9 Appendix 1 Ratings
9 Appendix 1 Ratings
Output Amps, Carrier and Overload
Table 9 240 V Heavy Duty Ratings
240 V Heavy Duty
A1000 (C6-01 = 0) F7 Model (C6-01 = 0)
NEC HP 230 V NEC Amps
0.5 2.2
0.75 3.2
1 4.2 0006 5 2 (8) 150 20P71 4.2 2 150
1.5 6
2 6.8
3 9.6
5 15.2 0021 17.5 2 (8) 150 23P71 15.2 2 150
7.5 22 0030 25 2 (8) 150 25P51 23 2 150
10 28 0040 33 2 (8) 150 27P51 31 2 150
15 42 0056 47 2 (8) 150 20111 45 2 150
20 54 0069 60 2 (8) 150 20151 58 2 150
25 68 0081 75 2 (8) 150 20181 71 2 150
30 80 0110 85 2 (8) 150 20221 85 2 150
40 104 0138 115 2 (8) 150 20301 115 2 150
50 130 0169 145 2 (5) 150 20371 145 2 150
60 154 0211 180 2 (5) 150 20451 180 2 150
75 192 0250 215 2 (5) 150 20551 215 2 150
100 248 0312 283 2 (5) 150 20751 283 2 150
125 312 0360 346 2 (5) 150 20900 346 2 150
150 360 0415 415 2 (5) 150 21100 360 2 138
A1000
Model
CIMR-AU2A
0004 3.2 2 (8) 150 20P41 3.2 2 150
0008
0010
0012 11 2 (8) 150
0018 14 2 (8) 150
Output Amps
Heavy Duty
6.9
8
<1> Carrier setting in parenthesis indicates maximum value without derating (applies to HD rating only).
Fc
kHz
Heavy
Duty <1>
2 (8) 150 21P51 7.0 2 150
Overload %
Heavy Duty
F7
Model
CIMR-F7U
22P21 9.6 2 150
Output Amps
Heavy Duty
F c
kHz
Heavy Duty
OL %
Heavy Duty
Table 10 240 V Normal Duty Ratings
240 V Normal Duty
A1000 (C6-01 = 1) F7 (C6-01 = 2)
NEC HP 230 V NEC Amps
0.5 2.2
0.75 3.2
1 4.2
1.5 6
2 6.8 0008 8.0 2 (SPWM) 120 21P51 7.8 10 108
3 9.6
5 15.2 0018 17.5 2 (SPWM) 120 23P71 16.8 10 107
7.5 22 0021 21 2 (SPWM) 120 25P51 23 15 120
10 28 0030 30 2 (SPWM) 120 27P51 31 15 102
15 42 0040 40 2 (SPWM) 120 20111 46.2 8 117
20 54 0056 56 2 (SPWM) 120 20151 59.4 10 117
A1000
Model
CIMR-AU2A
0004 3.5 2 (SPWM) 120 20P41 3.6 10 107
0006 6.0 2 (SPWM) 120 20P71 4.6 10 107
0010
0012
Output Amps
Normal Duty
9.6
12
Fc kHz
NormalDuty
2 (SPWM) 120 22P21 10.8 8 107
Overload %
Normal Duty
20 YASK AWA PL.A1000.02 F7 to A1000 - Product Transition Guide
F7
Model
CIMR-F7U
Output Amps
Normal Duty
Fc kHz
Normal Duty
Overload %
Normal Duty
Page 21

9 Appendix 1 Ratings
240 V Normal Duty
A1000 (C6-01 = 1) F7 (C6-01 = 2)
NEC HP 230 V NEC Amps
25 68 0069 69 2 (SPWM) 120 20181 74.8 10 114
30 80 0081 81 2 (SPWM) 120 20221 88 10 116
40 104 0110 110 2 (SPWM) 120 20301 115 10 120
50 130 0138 138 2 (SPWM) 120
60 154 0169 169 2 (SPWM) 120
75 192 0211 211 2 (SPWM) 120
100 248 0250 250 2 (SPWM) 120
125 312 0312 312 2 (SPWM) 120
150 360 0360 360 2 (SPWM) 120
175 360 0415 415 2 (SPWM) 120
A1000
Model
CIMR-AU2A
Output Amps
Normal Duty
Fc kHz
NormalDuty
Overload %
Normal Duty
F7
Model
CIMR-F7U
20370 162 5 107
20450
20550
20750 312 2 109
20900
21100
Output Amps
Normal Duty
192
215
360
415
Fc kHz
Normal Duty
5
8
2
2
Table 11 480 V Heavy Duty Ratings
480 V He avy Duty
A1000 (C6-01 = 0) F7 (C6-01 = 0)
NEC HP 460 V NEC Amps
0.5 1.1
0.75 1.6
12.1
1.5 3
23.4
34.8
5.0 7.6
7.5 11 0018 14.8 2 (8) 150 45P51 12.5 2 150
10 14 0023 18 2 (8) 150 47P51 17 2 150
15 21 0031 24 2 (8) 150 40111 24 2 150
20 27 0038 31 2 (8) 150 40151 31 2 150
25 34 0044 39 2 (8) 150 40181 39 2 150
30 40 0058 45 2 (8) 150 40221 45 2 150
40 52 0072 60 2 (8) 150 40301 60 2 150
50 65 0088 75
60 77 0103 91 40451 91
75 96 0139 112 2 (5) 150 40551 112 2 150
100 124 0165 150 2 (5) 150 40750 150 2 150
125 156
150 180
200 240 0296 260 2 (5) 150 41320 260 2 150
250 302 0362 304 2 (5) 150 41600 304 2 150
300 361 0414 370 2 (5) 150 41850 370 2 150
350 414 0515 450 2 (2) 150 42200 414 2 150 <2>
400 477
500 590
A1000
Model
CIMR-AU4A
0002 1.8 2 (8) 150 40P41 1.8 2 150
0004 3.4 2 (8) 150
0005
0007
0009 7.2 2 (8) 150 43P71 7.6 2 150
0011 9.2 2 (8) 150 44P01 8.7 2 150
0208
0250
0675 605 2 (2) 150 43000 590 2 150 <2>
Output Amps
Heavy Duty
4.8
5.5
180
216
Fc kHz
Heavy
Duty <1>
2 (8) 150 42P21 5.3 2 150
2 (8) 150
2 (5) 150
Overload %
Heavy Duty
F7
Model
CIMR-F7U
40P71 2.1 2 150
41P51 3.7 2 150
40371 75
40900
41100
Output Amps
Heavy Duty
180
216
Fc kHz
Heavy Duty
2 150
2 150
Overload %
Normal Duty
113
120
115
120
Overload %
Heavy Duty
YAS KA WA PL.A1000.02 F7 to A1000 - Product Transition Guide 21
Page 22

9 Appendix 1 Ratings
480 V He avy Duty
A1000 (C6-01 = 0) F7 (C6-01 = 0)
NEC HP 460 V NEC Amps
650 780 0930 810 2 (2) 150
900 1080 1200 1090 2 (2) 150
A1000
Model
CIMR-AU4A
Output Amps
Heavy Duty
<1> Carrier setting in parenthesis indicates maximum without derating (applies to HD rating only).
<2> Heavy Duty overload current rating for model no. 42200 and 43000 is 150% of rated output current for 45 seconds.
Table 12 480 V Normal Duty Ratings
A1000 (C6-01 = 1) F7 (C6-01 = 2)
NEC HP 460 V NEC Amps
0.5 1.1
0.75 1.6 40P41
1 2.1
1.5 3
2 3.4
3 4.8
5.0 7.6 0009 8.8 2 (SPWM) 120
7.5 11 0011 11.1 2 (SPWM) 120 45P51 12.5 15 120
10 14 0018 17.5 2 (SPWM) 120 47P51 17 15 120
15 21 0023 23 2 (SPWM) 120
20 27 0031 31 2 (SPWM) 120
25 34 0038 38 2 (SPWM) 120 40151 34 10 109
30 40 0044 44 2 (SPWM) 120
40 52 0058 58 2 (SPWM) 120
50 65 0072 72 2 (SPWM) 120
60 77 0088 88 2 (SPWM) 120 40371 77 8 117
75 96 0103 103 2 (SPWM) 120 40451 96 8 114
100 124 0139 139 2 (SPWM) 120 40551 125 5 108
125 156 0165 165 2 (SPWM) 120 40750 156 5 115
150 180 0208 208 2 (SPWM) 120 40900 180 8 120
200 240 0250 250 2 (SPWM) 120
250 302 0296 296 2 (SPWM) 120 41600 304 5 120
300 361 0362 362 2 (SPWM) 120
350 414 0414 414 2 (SPWM) 120
400 477
450 515
500 590
600 —
800 — 0930 930 2 (SPWM) 120 — — — —
1000 — 1200 1200 2 (SPWM) 120 — — — —
A1000
Model
CIMR-AU4A
0002 2.1 2 (SPWM) 120
0004 4.1 2 (SPWM) 120
0005
0007
0515 515 2 (SPWM) 120 42200 515 2 118
0675 675 2 (SPWM) 120 43000 675 2 120
Output Amps
Normal Duty
5.4
6.9
Fc kHz
Heavy
Duty <1>
480 V Normal Duty
Fc kHz
Normal Duty
2 (SPWM) 120 42P21 5.3 15 120
Overload %
Heavy Duty
Overload %
Normal Duty
F7
Model
CIMR-F7U
————
F7
Model
CIMR-F7U
40P41
40P71 2.1 15 120
41P51 3.7 15 120
43P71 7.6 15 120
44P01 8.7 15 120
40111 27 8 107
40181
40221
40301 67.2 8 107
41100 240 5 108
41320 260 5 120
41850
41850
Output Amps
Heavy Duty
Output Amps
Normal Duty
1.8 15 120
40
50.4
414 2 107
Fc kHz
Heavy Duty
Fc kHz
Normal Duty
10
Overload %
Heavy Duty
Overload %
Normal Duty
117
107
22 YASK AWA PL.A1000.02 F7 to A1000 - Product Transition Guide
Page 23

Drive Derate Charts
Carrier Frequency Derate
240 Volt Class Drives:
Figure 8
Figure 8 Carrier Frequency Derating (CIMR-A2A0004 to 2A0138)
Figure 9
9 Appendix 1 Ratings
Figure 10
480 Volt Class Drives:
Figure 11
Figure 9 Carrier Frequency Derating (CIMR-A2A0169 to 2A0415)
Figure 10 Carrier Frequency Derating (CIMR-A4A0414)
Figure 11 Carrier Frequency Derating (CIMR-A4A0002 to 4A0103)
YAS KA WA PL.A1000.02 F7 to A1000 - Product Transition Guide 23
Page 24

9 Appendix 1 Ratings
Figure 12
Figure 13
Figure 14
Figure 12 Carrier Frequency Derating (CIMR-A4A0139 to 4A0362)
Figure 13 Carrier Frequency Derating (CIMR-A4A0515 to 4A0675)
Figure 14 Carrier Frequency Derating (CIMR-A4A0930 to 4A1200)
Temperature Derating
Figure 15
Figure 15 Temperature Derating
24 YASK AWA PL.A1000.02 F7 to A1000 - Product Transition Guide
Page 25

9 Appendix 1 Ratings
Altitude Derating
The drive standard ratings are valid for installation altitudes up to 1000 m. For installations from 1000 m to 3000 m, the
drive rated output current must be derated for 1 % per 100 m above 1000 m.
Dimensions
Table 13 Open-Chassis/IP00
NOTE:
Unshaded cells show drives that are provided with standard NEMA Type 1/IP20 enclosures. Remove the conduit box and top cover plate to convert these drives
to Open-Chassis/IP00 enclosure type, then use the Open-Chassis dimensions provided in this table.
Voltage
Class
3-Phase
240 V Class
3-Phase
480 V Class
F7 Model
F7U
20P4 2A0004
20P7 2A0006
21P5
22P2
23P7 2A0021
25P5 2A0030
27P5 2A0040
2011 2A0056 12.2 (310) 7.09 (180) 11.81 (300) 7.36 (187)
2015 2A0069
2018 2A0081 14.96 (380)
2022 2A0110 10.20 (259) 15.75 (400)
2030 2A0138 10.83 (275) 17.72 (450) 10.98 (279) 17.72 (450)
2037 2A0169
2045 2A0211 12.99 (330)
2055 2A0250
2075 2A0312
2090 2A0360 19.69 (500) 33.46 (850) 14.22 (361)
2110 2A0415 22.64 (575) 34.84 (885) 14.96 (380)
40P4 4A0002
40P7
41P5
42P2
44P0 4A0011
45P5 4A0018
47P5 4A0023
4011 4A0031
4015 4A0038
4018 4A0044 8.66 (220) 13.78 (350) 7.76 (197)
4022 4A0058
4030 4A0072 10.98 (279) 17.72 (450)
4037 4A0088
4045 4A0103
4055 4A0139
4075 4A0165
4090 4A0208
A1000
Model
CIMR-AU
2A0008
2A0010
2A0012
2A0018
4A0004
4A0005
4A0007
F7 A1000
W H D W H D
5.51
(140)
7.87
(200)
9.45
(240)
14.76
(375)
17.72 (450) 28.54 (725) 13.78 (350)
5.51
(140)
7.87
(200)
9.45 (240) 13.78 (350) 8.27 (210)
10.83 (275) 17.72 (450) 10.24 (260)
12.8 (325) 21.65 (550) 11.22 (285)
17.72
(450)
11.02
(280)
11.81
(300)
13.78 (350)
23.62
(600)
11.02
(280)
11.81
(300)
28.54
(725)
Outer Dimensions, Inches (mm)
6.30
(160)
5.51
(140)
7.09
(180)
7.87
(200)
8.27
(210)
10.24 (260)
11.81 (300)
6.30
(160)
7.09
(180)
7.87
(200)
13.78
(350)
8.66
(220)
10.00 (254) 15.75 (400)
12.95 (329) 21.65 (550) 11.14 (283)
17.95
(456)
19.84 (504) 31.5 (800) 13.78 (350)
5.51
(140)
7.09
(180)
10.00 (254) 15.75 (400)
12.95
(329)
17.72
(450)
10.24
(260)
13.78
(350)
27.76
(705)
10.24
(260)
11.81
(300)
20.08
(510)
21.65
(550)
27.76
(705)
5.79
(147)
6.46 (164)
6.57
(167)
7.76
(197)
10.16
(258)
12.99
(330)
5.79
(147)
6.46 (164)43P7 4A0009
6.57
(167)
7.36 (187)
10.16
(258)
11.14
(283)
12.99
(330)
YAS KA WA PL.A1000.02 F7 to A1000 - Product Transition Guide 25
Page 26

9 Appendix 1 Ratings
NOTE:
Unshaded cells show drives that are provided with standard NEMA Type 1/IP20 enclosures. Remove the conduit box and top cover plate to convert these drives
to Open-Chassis/IP00 enclosure type, then use the Open-Chassis dimensions provided in this table.
Voltage
Class
(continued)
3-Phase
480 V Class
F7 Model
F7U
4110 4A0250
4160 4A0362 22.64 (575) 36.06 (916) 14.88 (378)
4185 4A0414
4220 4A0515
4300 4A00675 36.06 (916) 58.07 (1475) 16.34 (415)
A1000
Model
CIMR-AU
4A0930 — — —
4A1200 — — —
W H D W H D
19.69 (500) 33.46 (850) 14.17 (360)
37.40
(950)
F7 A1000
57.09
(1450)
Table 14 NEMA Type 1/IP20
NOTE:
Models noted with cell shading are provided as standard with Open/IP00 Protected Chassis. Order the appropriate NEMA Type 1/IP20 end cap kit when
NEMA 1/IP20 is required for these models.
Voltage Class
3-Phase 240 V
Class
3-Phase 480 V
Class
F7 Model CIMR-
F7U
20P4 2A0004
20P7 2A0006
21P5
22P2
23P7 2A0021
25P5 2A0030
27P5 2A0040
2011 2A0056 12.20 (310) 7.09 (180) 13.39 (340) 7.36 (187)
2015 2A0069
2018 2A0081 14.96 (380)
2022 2A0110 10 (254) 21.06 (535) 10.24 (260) 10.00 (254) 21.02 (534)
2030 2A0138 10.98 (279) 24.21 (615) 10.24 (260) 10.98 (279) 24.17 (614)
2037 2A0169
2045 2A0211 12.99 (330)
2055 2A0250
2075 2A0312
2090 2A0360 19.69 (500) 48.92 (1243) 14.22 (361) 19.84 (504) 45.98 (1168) 13.78 (350)
40P4 4A0002
40P7
41P5
42P2
43P7
44P0
45P5 4A0018
47P5 4A0023
4011 4A0031
4015 4A0038
4018 4A0044 8.66 (220) 15.75 (400) 7.76 (197)
A1000
Model CIMR-AU
2A0008
2A0010
2A0012
2A0018
4A0004
4A0005
4A0007
4A0009
4A0011
F7 A1000
W H D W H D
5.51
(140)
7.87 (200)
9.45 (240)
14.76 (375) 31.85 (809)
17.72 (450) 40.44 (1027) 13.78 (350)
5.51
(140)
7.87 (200) 11.81 (300) 7.87 (200)
9.45 (240) 13.78 (350) 8.27 (210)
11.02
(280)
11.81 (300)
13.78 (350)
11.02
(280)
Outer Dimensions, Inches (mm)
19.69 (500)
17.13
(435)
Outer Dimensions, Inches (mm)
6.30
(160)
7.09 (180)
7.87 (200)
8.27(210)
11.74 (300)
6.30
(160)
7.09
(180)
26.38
(670)
49.21
(1250)
5.51
(140
8.66
(220)
12.95 (329) 28.74 (730) 11.14 (283)
17.95
(456)
5.51
(140)
7.09
(180)
31.5 (800) 13.78 (350)4132 4A0296
37.40
(950)
44.88
(1140)
54.33
(1380)
11.81
(300)
15.75
(400)
37.80
(960)
11.81
(300)
13.39
(340)
14.57
(370)
This dimension
applies to all
larger models.
5.79
(147)
6.46 (164)
6.57
(167)
7.76
(197)
10.16
(258)
12.99
(330)
5.79
(147)
6.46 (164)
6.57
(167)
7.36 (187)
26 YASK AWA PL.A1000.02 F7 to A1000 - Product Transition Guide
Page 27

9 Appendix 1 Ratings
NOTE:
Models noted with cell shading are provided as standard with Open/IP00 Protected Chassis. Order the appropriate NEMA Type 1/IP20 end cap kit when
NEMA 1/IP20 is required for these models.
Outer Dimensions, Inches (mm)
10.00 (254) 18.31 (465)
11.22
(285)
16.34 (415)
12.95
(329)
19.84 (504) 45.98 (1168) 13.78 (350)
24.80
(630)
28.74
(730)
—
Voltage Class
(continued)
3-Phase 480 V
Class
F7 Model CIMR-
F7U
4022 4A0058
4030 4A0072 10.98 (279) 20.28 (515)
4037
4045
- 4A0103
4055 4A0139
4075 4A0165
4090
4110
4132
4160 4A0362 23.12 (587) 52.13 (1324) 14.96 (380)
4185 4A0414
4220 4A0515
4300
A1000
Model CIMR-AU
4A0088
4A0208 17.95 (456) 37.80 (960) 12.99 (330)
4A0250
4A0296 19.69 (500) 48.92 (1243) 14.22 (361)
4A0675 36.54 (928) 76 (1930)
4A0930 — — —
4A1200 — — —
W H D W H D
10.98 (279) 21.06 (535) 10.24 (260)
12.95
(329)
17.72 (450) 40.44 (1027) 13.78 (350)
28.43 (722) 70 (1778)
F7 A1000
25 (635)
28.15
(715)
Braking Resistor Installation Attachment
10.16
(258)
11.14
(283)
The F7 allows a braking resistor to be installed directly to the unit on the backside (heatsink). The A1000 requires a
special attachment for installation. The table below lists the attachment sizes according to the drive capacity.
The attachment will increase the overall size of the drive when installing a braking resistor to certain A1000 models.
Figure 16
'
+
'
'
'
:
Figure 16 Installing a Braking Resistor on A1000 (240 V class 0.4 kW, or 0.5 HP)
YAS KA WA PL.A1000.02 F7 to A1000 - Product Transition Guide 27
Page 28

9 Appendix 1 Ratings
Voltage
Class
Capacity
HP
W H D1 D2 D W H D1 D2 D3 D
Table 15 A1000 Dimensions after Installing Resistor Attachment
Dimensions, inches (mm)
F7 A1000
D1, D2, D3
Differences
(in)
Attachment for
Braking Resistor
Model (Parts Code)
3-Phase
200 V
Class
3-Phase
400 V
Class
0.5
1 +0.71
5.51
5.51
11.02
(280)
11.02
(280)
2 +0.71
(140)
3 +0.71
5
0.5
1 +0.71
2 +0.71
(140)
3
5 +0.71
4.65
(118)
4.65
(118)
1.54
(39)
2.32
(59)
1.54
(39)
2.32
(59)
6.18
(157)
6.97
(177)
6.18
(157)
6.97
(177)
5.51
(140)
5.51
(140)
10.24
(260)
10.24
(260)
4.29
(109)
4.29
(109)
1.5
(38)
2.17
(55)
1.5
(38)
2.17
(55)
1.10
(28)
1.10
(28)
6.89
(175)
7.56
(192)
6.89
(175)
7.56
(192)
+0.71
+0.71
+0.71
+0.71
EZZ020805A
(100-048-123)
Note: Use of the braking resistor attachment may void certain vibration and shock requirements, particularly when installed in
combination with other attachments for retrofitting A1000 to the F7 installation. For areas where vibration is a major concern,
install the braking resistor directly to a seperate panel board instead of using the resistor attachment.
Table 16 Heat Loss Data
Heat Loss Data (F7 and A1000)
F7 Model
CIMR-F7U
20P4 2A0004 39 19 58 44 15 59 112.8 78.9 101.7
20P7 2A0006 42 26 68 48 24 72 114.3 92.3 105.9
21P5
22P2
23P7 2A0021 74 110 184 67 101 168 90.5 91.8 91.3
25P5 2A0030 84 164 248 92 194 286 109.5 118.3 115.3
27P5 2A0040 113 219 332 105 214 319 92.9 97.7 96.1
2011 2A0056 168 357 525 130 280 410 77.4 78.4 78.1
2015 2A0069 182 416 598 163 395 558 89.6 95.0 93.3
2018 2A0081 208 472 680 221 460 681 106.3 97.5 100.1
2022 2A0110 252 583 835 211 510 721 83.7 87.5 86.3
2030 2A0138 333 883 1216 250 662 912 75.1 75.0 75.0
2037 2A0169 421 1010 1431 306 816 1122 72.7 80.8 78.4
2045 2A0211 499 1228 1727 378 976 1354 75.8 79.5 78.4
2055 2A0250 619 1588 2207 466 1514 1980 75.3 95.3 89.7
2075 2A0312 844 1956 2800 588 1936 2524 69.7 99.0 90.1
2090 2A0360 964 2194 3158 783 2564 3347 81.2 116.9 106.0
2110 2A0415 1234 2733 3967 954 2564 3518 77.3 93.8 88.7
40P4 4A0002 39 14 53 45 16 61 115.4 114.3 115.1
40P7
41P5
42P2
43P7 4A0009 68 80 148 55 53 108 80.9 66.3 73.0
44P0 4A0011 70 90 160 61 69 130 87.1 76.7 81.3
45P5 4A0018 81 127 208 86 135 221 106.2 106.3 106.3
47P5 4A0023 114 193 307 97 150 247 85.1 77.7 80.5
4011 4A0031 158 232 390 115 208 323 72.8 89.7 82.8
4015 4A0038 169 296 465 141 263 404 83.4 88.9 86.9
4018 4A0044 201 389 590 179 330 509 89.1 84.8 86.3
4022 4A0058 233 420 653 170 349 519 73.0 83.1 79.5
4030 4A0072 297 691 988 217 484 701 73.1 70.0 71.0
4037
4045
A1000 Model
CIMR-AU
2A0008
2A0010
2A0012
2A0018
4A0004
4A0005
4A0007
4A0088
─ 4A0103 ───299 723 1022 ───
Internal External Tota l Internal External Total Internal External
50 48 98
59 68 127
41
48
56 59 115
332
386
F7 Watts A1000 Watts
17
36
801
901
58
84
1133
1287
49
52
58
60
46 25 71 112.2 147.1 122.4
49
53
254 563 817 76.5 70.3 72.1
35
43
64
77
37
48
84
95
122
137
87
101
A1000 Heat Loss
Comparison (% of F7)
98.0 72.9 85.7
98.3 94.1 96.1
87.5 62.7 75.7
Tot al
28 YASK AWA PL.A1000.02 F7 to A1000 - Product Transition Guide
Page 29

9 Appendix 1 Ratings
Heat Loss Data (F7 and A1000)
F7 Model
CIMR-F7U
4055 4A0139 478 1204 1682 416 908 1324 87.0 75.4 78.7
4075 4A0165 562 1285 1847 580 1340 1920 103.2 104.3 104.0
4090 4A0208 673 1614 2287 541 1771 2312 80.4 109.7 101.1
4110
4132
4160 4A0362 1144 2791 3935 985 3075 4060 86.1 110.2 103.2
4185 4A0414 1328 2636 3964 1164 3578 4742 87.7 135.7 119.6
4220 4A0515 1712 3797 5509 1386 3972 5358 81.0 104.6 97.3
4300 4A0675 2482 5838 8320 1685 4191 5876 67.9 71.8 70.6
A1000 Model
CIMR-AU
─ 4A0250 ───715 2360 3075
4A0296
─ 4A0930 ───2455 6912 9367 ───
─ 4A1200 ───3155 7626 10781 ───
Internal External Total Internal External Tot al Internal External
847
1005
F7 Watts A1000 Watts
1889
2388
2736
3393
787 2391 3178 92.9 126.6 116.2
A1000 Heat Loss
Comparison (% of F7)
Total
Minimum Connectable Resistance
Table 17 Drive Minimum Braking Resistance
F7 Drive Capacity CIMR-F7U
20P1 — 2A0004 48
20P2 — 2A0006 48
20P4 48 2A0008 48
20P7 48 2A0010 48
21P5 48 2A0012 16
22P2 16 2A0018 16
23P7 16 2A0021 16
25P5 16 2A0030 16
27P5 9.6 2A0040 9.6
2011 9.6 2A0056 9.6
2015 9.6 2A0069 9.6
2018 9.6 2A0081 9.6
40P2 — 2A0110 6.4
40P4 96 2A0138 6.4
40P7 96 4A0002 96
41P5 64 4A0004 96
42P2 64 4A0005 64
43P7 32 4A0007 64
44P0 32 4A0009 32
45P5 32 4A0011 32
47P5 32 4A0018 32
4011 20 4A0023 32
4015 20 4A0031 20
4018 19.2 4A0038 20
— — 4A0044 19.2
— — 4A0058 19.2
— — 4A0072 19.2
Minimum Connectable Resistance
(Ω)
A1000 Drive Capacity CIMR-AU
Minimum Connectable Resistance
(Ω)
YAS KA WA PL.A1000.02 F7 to A1000 - Product Transition Guide 29
Page 30

10 Appendix 2 Parameter Cross Reference
10 Appendix 2 Parameter Cross Reference
Parameter Setting Procedure
This document lists the information needed to upgrade from F7 to a new A1000 drive. The A1000 drive must be set for Heavy Duty. First, set A1000
1.
parameter C6-01 to 0.
2. Check all F7 parameters that have been changed from their default settings by using the Modified Constants Menu.
3. Set the same control mode used for F7 to A1000.
4. Set parameters as described in this section.
Note: Default Values in the table below are listed for A1000 200 V Class 0.4 kW Drive Using Open Loop Vector Control
Table 18 Parameter Cross Reference
Parameter Name
Environment
Settings
Environment
Settings
F7 A1000 Setting
Parameter Default Parameter Default F7 A1000
A1-00 A1-00
0: English 0: English
1: Japanese 1: Japanese
Language
Selection
Access Level
Selection
Control Method
Selection
Initialize
Parameters
Password A1-04 0 A1-04 0000 —
Password Setting A1-05 0 A1-05 0000 —
User Parameters
A1-00 0 A1-00 0
A1-01 2 A1-01 2
A1-02 2 A1-02 2
A1-03 0 A1-03 0
A2-01 to
A2-32
—
A2-01 to
A2-32
2: German 2: German
3: French 3: French
4: Italian 4: Italian
5: Spanish 5: Spanish
6: Portuguese 6: Portuguese
—7: Chinese
A1-01 A1-01
0: Operation only
(monitors only)
1: User Parameters 1: User Parameters *
2: All parameters 2: All parameters
*Set parameters A2-01 through A2-32
A1-02 A1-02
0: V/f Control 0: V/f Control
1: V/f w/PG Control 1: V/f w/PG Control
2: Open Loop Vector 2: Open Loop Vector
3: Flux Vector 3: Closed Loop Vector
— 5: Open Loop Vector for PM
— 6: Advanced Open Loop Vector for PM
— 7: Closed Loop Vector for PM
A1-03 A1-03
0: No initialization 0: No initialization
1110: User initialize 1110: User initialize
2220: 2-wire sequence 2220: 2-wire sequence
3330: 3-wire sequence 3330: 3-wire sequence
— 5550: Reset OPE04
— If setting A1-01 to 1, refer to the manual and set parameters A2-01 top A2-32.
0: Operation only (monitors only)
30 YASK AWA PL.A1000.02 F7 to A1000 - Product Transition Guide
Page 31

10 Appendix 2 Parameter Cross Reference
Parameter Name
Operation Mode
Selection
Operation Mode
Selection
DC Injection
Braking
Frequency
Reference
Selection
Operation Method
Selection
Stopping Method
Selection
Reverse Operation
Selection
Operation
Selection for
Setting E1-09 or
Less
Digital Input Scan
Time
Operation
Selection After
Switching to
Remote Mode
Run Command
Selection while in
Programming
Mode
Run Command at
Power Up
DC Injection
Braking Start
Frequency
DC Injection
Braking current
DC Injection
Braking Time at
Start
DC Injection
Braking Time at
Stop
Magnetic Flux
Compensation
Va lu e
F7 A1000 Setting
Parameter Default Parameter Default F7 A1000
b1-01 b1-01
0: Operator 0: Operator
1: Control circuit terminal
b1-01 1 b1-01 1
b1-02 1 b1-02 1
b1-03 0 b1-03 0
b1-04 0 b1-04 0
b1-05 0 b1-05 0
b1-06 1 b1-06 1
b1-07 0 b1-07 0
b1-08 0 b1-08 0
──b1-17 0
b2-01 0.5 Hz b2-01 0.5 Hz* *Determined by parameter A1-02, Control Method Selection
b2-02 50% b2-02 50 % —
b2-03 0.00 s b2-03 0.00 s —
b2-04 0.00 s b2-04
b2-08 0% b2-08 0% —
0.50 s
(analog input)
2: MEMOBUS comm. 2: MEMOBUS comm.
3: Option card 3: Option card
4: Pulse train input 4: Pulse train input
b1-02 b1-02
0: Operator 0: Operator
1: Control circuit terminal 1: Control circuit terminal
2: MEMOBUS comm. 2: MEMOBUS comm.
3: Option card 3: Option card
b1-03 b1-03
0: Ramp to stop 0: Ramp to stop
1: Coast to stop 1: Coast to stop
2: DC Injection Braking 2: DC Injection Braking
3: Coast to stop with timer 3: Coast to stop with timer
b1-04 b1-04
0: Reverse enabled 0: Reverse enabled
1: Reverse disabled 1: Reverse disabled
2: Exchange Phase —
b1-05 b1-05
0: Run at frequency
reference
1: Shut off drive output 1: Shut off drive output
2: Operate by E1-09 2: Operate by E1-09
3: Zero speed 3: Zero speed
b1-06 b1-06
0: 2 ms - 2 scans 0: 1 ms - 1 scan
1: 5 ms - 2 scans 1: 1 ms - 2 scans
b1-07 b1-07
0: Cycle Run command 0: Cycle Run command
1: Accept external Run
cmd
b1-08 b1-08
0: Disabled. 0: Disabled.
1: Enabled - Run cmd
always accepted
0: Prohibited 1: Allowed
Change b1-17 to 1 to match F7 (Caution: drive will run at power on)
*
*Determined by the control mode selected.
1: Control circuit terminal
(analog input)
0: Run at frequency reference
1: Accept external Run cmd
1: Enabled - Run cmd always accepted
YAS KA WA PL.A1000.02 F7 to A1000 - Product Transition Guide 31
Page 32

10 Appendix 2 Parameter Cross Reference
Parameter Name
Speed Search
Speed Search
Timers
PID Control
F7 A1000 Setting
Parameter Default Parameter Default F7 A1000
b3-01 b3-01 b3-24
Speed Search
Selection
b3-01 2
b3-01 0*
b3-24 0
0: Disabled
(Speed Estimation)
1: Enabled
(Speed Estimation)
2: Disabled
(Current Detection)
3: Enabled
(Current Detection)
0: Disabled 1: Speed Estimation
1: Enabled 1: Speed Estimation
0: Disabled 0: Current Detection
1: Enabled 0: Current Detection
*Determined by parameter A1-02, Control Method Selection.
Speed Search
Operating Current
Speed Search
Deceleration Time
Speed Search
Delay Time
Speed Search
Detection
Compensation
b3-02
b3-03 2.0 s b3-03 2.0 s —
b3-05 0.2 s b3-05 0.2 s —
b3-10 1.10 b3-10 1.05 —
120 %
*
b3-02
120 %
*
*Default value changes according to the control mode.
Gain
b3-14 b3-14
Bi-Directional
Speed Search
Selection
b3-14 1 b3-14
0: Disabled 0: Disabled
*
0
1: Enabled 1: Enabled
*Determined by the control mode selected
Speed Search
Restart Current
Level
Speed Search
Detection Time
Number of Speed
Search Restarts
Timer Function
On-Delay Time
Timer Function
Off-Delay Time
b3-17 150 % b3-17 150 % —
b3-18 0.10 s b3-18 0.10 s —
b3-19 0 b3-19 3 —
b4-01 0.0 s b4-01 0.0 s —
b4-02 0.0 s b4-02 0.0 s —
b5-01 b5-01
0: Disabled 0: Disabled
1: D = feedback 1: D = feedback
PID Control
Method Selection
Proportional Gain
Setting (P)
Integral Time
Setting (I)
Integral Limit
Setting
Derivative Time
(D)
b5-01 0 b5-01 0
b5-02 1.00 b5-02 1.00 —
b5-03 1.0 s b5-03 1.0 s —
b5-04 100.0 % b5-04 100.0 % —
b5-05 0.00 s b5-05 0.00 s —
2: D = feed-forward 2: D = feed-forward
3: Freq. Ref. + PID output
(D = Feedback)
4: Freq. Ref. + PID output
(D = Feed-forward)
3: Freq. Ref. + PID output (D = Feedback)
4: Freq. Ref. + PID output (D = Feed-forward)
PID Output Limit b5-06 100.0% b5-06 100.0 % —
PID Offset Tuning b5-07 0.0 % b5-07 0.0 % —
PID Primary Delay
Time
b5-08 0.00 s b5-08 0.00 s —
32 YASK AWA PL.A1000.02 F7 to A1000 - Product Transition Guide
Page 33

10 Appendix 2 Parameter Cross Reference
Parameter Name
PID Control
PID Control
Dwell Function
Droop Control
Energy Saving
Control
Zero Servo
F7 A1000 Setting
Parameter Default Parameter Default F7 A1000
PID Output Level
Selection
PID Output Gain
Setting
PID Output
Reverse Selection
PID Feedback
Reference Missing
Detection
Selection
PID Feedback Loss
Detection Level
PID Feedback Loss
Detection Time
PID Sleep
Function Start
Level
PID Sleep Delay
Time
PID Accel/Decel
Time
Dwell Reference at
Start
Dwell Time at Start b6-02 0.0 s b6-02 0.0 s —
Dwell Frequency
at Stop
Dwell Time at Stop b6-04 0.0 s b6-04 0.0 s —
Droop Control
Level
Droop Control
Delay Time
Energy Saving
Control Selection
Energy Saving
Gain
Energy Saving
Control Filter Time
Constant
Energy Saving
Coefficient Value
Power Detection
Filter Time
Search Operation
Voltage Limit
Zero Servo Gain b9-01 5 b9-01 5 —
Zero Servo
Completion Width
b5-09 0 b5-09 0
b5-10 1.0 b5-10 1.00 Minimum setting units vary.
b5-11 0 b5-11 0
b5-12 0 b5-12 0
b5-13 0 % b5-13 0 % —
b5-14 1.0 s b5-14 1.0 s —
b5-15 0.0 Hz b5-15 0.0 Hz —
b5-16 0.0 s b5-16 0.0 s —
b5-17 0.0 s b5-17 0.0 s —
b6-01 0.0 Hz b6-01 0.0 Hz —
b6-03 0.0 Hz b6-03 0.0 Hz —
b7-01 0.0 % b7-01 0.0 % —
b7-02 0.05 s b7-02 0.05 s —
b8-01 0 b8-01 0*
b8-02 1.0 b8-02 * Determined by parameter A1-02.
b8-03
b8-04
b8-05 20 ms b8-05 20 ms —
b8-06 0 % b8-06 0 % —
b9-02 10 b9-02 10 —
Varies by
kVA
Varies by
kVA
b8-03 * Dependent on parameters A1-02, C6-01, and o2-04.
b8-04 *
b5-09 b5-09
0: Normal 0: Normal
1: Reverse 1: Reverse
b5-11 b5-11
0: Negative PID output
triggers zero limit
1: Rotation direction
reverses with negative PID
output.
b5-12 b5-12
0: No Detection 0: No Detection
1: Alarm 1: Alarm and MFO (@PID enable only)
2: Fault 2: Fault and MFO (@PID enable only)
—
—
—
b8-01 b8-01
0: Energy Saving disabled 0: Energy Saving disabled
1: Energy Saving enabled 1: Energy Saving enabled
*Determined by parameter A1-02.
Dependent on parameters o2-04 and C6-01. Value changes automatically if E2-11 is
manually changed or changed by Auto-Tuning.
0: Negative PID output triggers zero limit
1: Rotation direction reverses with negative PID output.
3: Multi-function output only (no display indication, @
PID enable/disable)
4: An alarm is triggered and the drive continues
running, @ PID enable/disable.
5: Fault is triggered and output is shut off, @ PID
enable/disable.
YAS KA WA PL.A1000.02 F7 to A1000 - Product Transition Guide 33
Page 34

10 Appendix 2 Parameter Cross Reference
Parameter Name
Accel/Decel Time
S-Curve
Characteristics
Slip Compensation
Torque
Compensation
F7 A1000 Setting
Parameter Default Parameter Default F7 A1000
Acceleration Time
1
Deceleration Time
1
Acceleration Time
2
Deceleration Time
2
Acceleration Time
3
Deceleration Time
3
Acceleration Time
4
Deceleration Time
4
C1-01 10.0 s C1-01 10.0 s —
C1-02 10.0 s C1-02 10.0 s —
C1-03 10.0 s C1-03 10.0 s —
C1-04 10.0 s C1-04 10.0 s —
C1-05 10.0 s C1-05 10.0 s —
C1-06 10.0 s C1-06 10.0 s —
C1-07 10.0 s C1-07 10.0 s —
C1-08 10.0 s C1-08 10.0 s —
Fast Stop Time C1-09 10.0 s C1-09 10.0 s —
Accel/Decel Time
Setting Units
Accel/Decel
Switch Frequency
S-Curve
Characteristic at
Accel Start
S-Curve
Characteristic at
Accel End
S-Curve
Characteristic at
Decel Start
S-Curve
Characteristic at
Decel End
Slip Compensation
Gain
C1-10 1 C1-10 1
C1-11 0.0 Hz C1-11 0.0 Hz —
C2-01 0.20 s C2-01 0.20 s —
C2-02 0.20 s C2-02 0.20 s —
C2-03 0.20 s C2-03 0.20 s —
C2-04 0.00 s C2-04 0.00 s —
C3-01 1.0 C3-01
1.0
*
C1-10 C1-10
0: 0.01 sec units 0: 0.01 sec units
1: 0.1 sec units 1: 0.1 sec units
*Determined by the control mode selected (A1-02).
Slip Compensation
Primary Delay
Time
Slip Compensation
Limit
Slip Compensation
Selection during
Regeneration
Output Voltage
Limit Operation
Selection
Torque
Compensation
Gain
C3-02 200 ms C3-02 200 ms* *Determined by the control mode selected (A1-02).
C3-03 200 % C3-03 200 % —
C3-04 C3-04
C3-04 0 C3-04 0
0: Disabled 0: Disabled
1: Enabled 1: Enabled
C3-05 C3-05
C3-05 0 C3-05 0
0: Disabled 0: Disabled
1: Enabled 1: Enabled
*
C4-01 1.00 C4-01
1.00
*Determined by the control mode selected (A1-02).
Torque
Compensation
Primary Delay
Time
Torque
Compensation at
Forward Start
Torque
Compensation at
Reverse Start
Torque
Compensation
Time Constant
C4-02 20 ms C4-02
C4-03 0.0% C4-03 0.0 % —
C4-04 0.0% C4-04 0.0 % —
C4-05 10 ms C4-05 10 ms —
20 ms
*
*Determined by the control mode and drive model selected (A1-02 and o2-04).
34 YASK AWA PL.A1000.02 F7 to A1000 - Product Transition Guide
Page 35

10 Appendix 2 Parameter Cross Reference
Parameter Name
Speed Control
(ASR)
Carrier Frequency
Frequency
Reference
F7 A1000 Setting
Parameter Default Parameter Default F7 A1000
ASR Proportional
Gain 1
ASR Integral Time
1
ASR Proportional
Gain 2
ASR Integral Time
2
C5-01 20.00 C5-01
C5-02 0.500 sec C5-02
C5-03 20.00 C5-03
C5-04 0.500 sec C5-04
20.00
0.500 sec
20.00
0.500 sec
*
*
*Determined by the control mode selected (A1-02). Default shown here is for when
suing Closed Loop Vector Control.
*
*
ASR Limit C5-05 5.0 % C5-05 5.0 % —
ASR Primary
Delay Time
Constant
C5-06 0.004 sec C5-06
0.004 sec
*Determined by the control mode selected (A1-02). Default shown here is for when
*
suing Closed Loop Vector.
ASR Gain
Switching
Frequency
C5-07 0.0 Hz C5-07 0.0 Hz —
ASR Integral Limit C5-08 400% C5-08 400% —
Parameter contents differ between F7 and A1000
Drive Duty
Selection
C6-01 0 C6-01 1
C6-01 C6-01
0: Heavy Duty 0: Heavy Duty
1: Normal Duty 1
2: Normal Duty 2
1: Normal Duty
C6-02 C6-02
0: Low Noise PWM —
1: 2.0 kHz 1: 2.0 kHz
2: 5.0 kHz 2: 5.0 kHz
3: 8.0 kHz 3: 8.0 kHz
Carrier Frequency
Selection
C6-02
Varies by
kVA
C6-02 *
4: 10.0 kHz 4: 10.0 kHz
5: 12.5 kHz 5: 12.5 kHz
6: 15.0 kHz 6: 15.0 kHz
— 7 to A: Swing PWM 1-4
— B to E: No setting possible
F: User-set F: User-set
*Dependent on A1-02, C6-01, and o2-04.
Carrier Frequency
Upper Limit
Carrier Frequency
Lower Limit
Carrier Frequency
Proportional Gain
Frequency
Reference 1
Frequency
Reference 2
Frequency
Reference 3
Frequency
Reference 4
Frequency
Reference 5
Frequency
Reference 6
Frequency
Reference 7
Frequency
Reference 8
Frequency
Reference 9
Frequency
Reference 10
Frequency
Reference 11
Frequency
Reference 12
Frequency
Reference 13
Frequency
Reference 14
C6-03
C6-04
C6-05 0 C6-05 * *Dependent on C6-02.
d1-01 0.00 Hz d1-01 0.00 Hz —
d1-02 0.00 Hz d1-02 0.00 Hz —
d1-03 0.00 Hz d1-03 0.00 Hz —
d1-04 0.00 Hz d1-04 0.00 Hz —
d1-05 0.00 Hz d1-05 0.00 Hz —
d1-06 0.00 Hz d1-06 0.00 Hz —
d1-07 0.00 Hz d1-07 0.00 Hz —
d1-08 0.00 Hz d1-08 0.00 Hz —
d1-09 0.00 Hz d1-09 0.00 Hz —
d1-10 0.00 Hz d1-10 0.00 Hz —
d1-11 0.00 Hz d1-11 0.00 Hz —
d1-12 0.00 Hz d1-12 0.00 Hz —
d1-13 0.00 Hz d1-13 0.00 Hz —
d1-14 0.00 Hz d1-14 0.00 Hz —
Varies by
kVA
Varies by
kVA
C6-03 * *Dependent on C6-02.
C6-04 * *Dependent on C6-02.
YAS KA WA PL.A1000.02 F7 to A1000 - Product Transition Guide 35
Page 36

10 Appendix 2 Parameter Cross Reference
Parameter Name
Frequency
Reference
Frequency Limits
Jump Frequency
Frequency
Reference Hold
Torque Control
Magnetic Field
Control
V/f Characteristics
F7 A1000 Setting
Parameter Default Parameter Default F7 A1000
Frequency
Reference 15
Frequency
Reference 16
Jog Frequency
Reference
Frequency
Reference Upper
Limit Value
Frequency
Reference Lower
Limit Value
Main Speed
Reference Lower
Limit Value
Jump Frequency 1 d3-01 0.0 Hz d3-01 0.0 Hz —
Jump Frequency 2 d3-02 0.0 Hz d3-02 0.0 Hz —
Jump Frequency 3 d3-03 0.0 Hz d3-03 0.0 Hz —
Jump Frequency
Width
Frequency
Reference Hold
Function Selection
Trim Control Level d4-02 10 %
Torque Control
Selection
Torque Reference
Delay
Time
Speed Limit
Selection
Speed Limit d5-04 0% d5-04 0% —
Speed Limit Bias d5-05 10% d5-05 10% —
Speed/Torque
Control
Switchover Timer
Field Weakening
Level
Field Frequency d6-02 0.0 Hz d6-02 0.0 Hz —
Field Forcing
Function Selection
Field Forcing
Limit
Input Voltage
Setting
d1-15 0.00 Hz d1-15 0.00 Hz —
d1-16 0.00 Hz d1-16 0.00 Hz —
d1-17 6.00 Hz d1-17 6.00 Hz —
d2-01 100.0 % d2-01 100.0% —
d2-02 0.0 % d2-02 0.0% —
d2-03 0.0 % d2-03 0.0% —
d3-04 1.0 Hz d3-04 * *Determined by parameter A1-02.
d4-01 d4-01
d4-01 0 d4-01 0
d7-01 0.0 %
d7-02 0.0 %
d5-01 0 d5-01 0
d5-02 0 ms d5-02 0 ms —
d5-03 1 d5-03 1
d5-06 0 ms d5-06 0 ms —
d6-01 80 % d6-01 80 % —
d6-03 0 d6-03 0
d6-06 400 % d6-06 400 % —
E1-01
200 V
*
E1-01
230 V
0: Disabled 0: Disabled
1: Enabled 1: Enabled
H1-01 to
H1-06
1C:+Speed
Ref
1D: -Speed
Ref
0: Speed Control 0: Speed Control
1: Torque Control 1: Torque Control
1: Analog Input 1: Limited by b1-01
2: Program Setting 2: Limited by d5-04
0: Disabled 0: Disabled
1: Enabled 1: Enabled
*
*Double values for 400 V class drives.
d4-02
Setting
value
Setting
value
d5-01 d5-01
d5-03 d5-03
d6-03 d6-03
H1-01 to
H1-08
44
45
d7-01 d7-02
Setting
value
No need to
set
No need to
set
- (Setting
Va lu e )
H1-01 to
H1-06
1C:+Speed
Ref
1D: -Speed
Ref
36 YASK AWA PL.A1000.02 F7 to A1000 - Product Transition Guide
Page 37

10 Appendix 2 Parameter Cross Reference
Parameter Name
V/f Characteristics
V/f Characteristic
Motor Parameters
F7 A1000 Setting
Parameter Default Parameter Default F7 A1000
E1-03 E1-03
0: 50 Hz 0: 50 Hz (constant torque 1)
1: 60 Hz saturation 1: 60 Hz (constant torque 2)
2: 50 Hz saturation 2: 60 Hz (constant torque 3), 50 Hz base
3: 72 Hz, 60 Hz base 3: 72 Hz (constant torque 4), 60 Hz base
4: 50 Hz VT1 4: 50 Hz VT1
5: 50 Hz VT2 5: 50 Hz VT2
6: 60 Hz VT1 6: 60 Hz VT3
V/f Pattern
Selection
E1-03 F E1-03 F
7: 60 Hz VT2 7: 60 Hz VT4
8: 50 Hz HST1 8: 50 Hz HST1
9: 50 Hz HST2 9: 50 Hz HST2
A: 60 Hz HST1 A: 60 Hz HST3
B: 60 Hz HST2 B: 60 Hz HST4
C: 90 Hz (60 Hz base) C: 90 Hz (60 Hz base)
D: 120 Hz (60 Hz base) D: 120 Hz (60 Hz base)
E: 180 Hz (60 Hz base) E: 180 Hz (60 Hz base)
F: Custom V/f pattern F: Custom V/f pattern
FF: Custom w/o limit —
Max Output
Frequency
E1-04 60.0 Hz E1-04
Max Voltage E1-05
Base Frequency E1-06
Mid. Output
Frequency
Mid. Output
Frequency Voltage
Minimum Output
Frequency
Minimum Output
Frequency Voltage
Mid. Output
Frequency 2
E1-07
E1-08
E1-09
E1-10
E1-11 0.0 Hz E1-11 0.0 Hz —
*
230.0 V
60.0 Hz
*
3.0 Hz
12.6 V or
*
25.3 V
*
0.5 Hz
2.3 V or 4.6
*
V
E1-05 *
*
E1-06 *
E1-07 3.0 Hz
E1-08 *
E1-09 *
E1-10 *
60.0 Hz
*
*Depends on the parameters A1-02, C6-01, o2-04, and E5-01
*Double values for 400 V class drives. Depends on the parameters A1-02, C6-01, o204, and E5-01
*Depends on the control mode and the V/f pattern selected. Depends on the
parameters A1-02, C6-01, o2-04, and E5-01
*Depends on the control mode and the V/f pattern selected. Depends on the
parameters A1-02, C6-01, and o2-04
*Depends on the control mode and the V/f pattern selected.
Double values for 400 V class drives. Depends on the parameters A1-02, C6-01, and
o2-04 in A1000 drives
*Depends on the control mode and the V/f pattern selected. Depends on the
parameters A1-02, C6-01, o2-04, and E5-01
*Depends on the control mode and the V/f pattern selected.
Double values for 400 V class drives. Depends on the parameters A1-02, C6-01, and
o2-04
Mid. Output
Frequency Voltage 2E1-12 0.0 V E1-12 0.0 V —
Base Voltage E1-13 0.0 V E1-13 0.0 V —
Motor Rated
Current
E2-01 * E2-01 * —
Motor Rated Slip E2-02 * E2-02 * *Varies by kVA; for A1000, dependent on parameters C6-01 and o2-04
Motor No-Load
Current
Number of Motor
Poles
Motor Line-toLine Resistance
Motor Leakage
Inductance
Motor Iron Core
Saturation CoEfficient 1
Motor Iron Core
Saturation CoEfficient 2
Motor Mechanical
Loss
E2-03 * E2-03 * *Varies by kVA; for A1000, dependent on parameters C6-01 and o2-04
E2-04 4 poles E2-04 4 poles —
E2-05 * E2-05 * *Varies by kVA; for A1000, dependent on parameters C6-01 and o2-04
E2-06 * E2-06 * *Varies by kVA; for A1000, dependent on parameters C6-01 and o2-04
E2-07 0.50 E2-07 0.50 —
E2-08 0.75 E2-08 0.75 —
E2-09 0.0 % E2-09 0.0 % —
Motor Iron Loss
for Torque
Compensation
Motor Rated
Output
E2-10 * E2-10 * *Varies by kVA; for A1000, dependent on parameters C6-01 and o2-04
E2-11 * E2-11 * *Varies by kVA; for A1000, dependent on parameters C6-01 and o2-04
YAS KA WA PL.A1000.02 F7 to A1000 - Product Transition Guide 37
Page 38

10 Appendix 2 Parameter Cross Reference
Parameter Name
Motor 2 V/f
Characteristics
Motor 2 Parameter
PG speed Control
Card
F7 A1000 Setting
Parameter Default Parameter Default F7 A1000
E3-01 E3-01
Motor 2 Control
Method Selection
Motor 2 Max
Output Frequency
Motor 2 Max
Voltage
Motor 2 Base
Frequency
Motor 2 Mid.
Output Frequency
Motor 2 Mid.
Output Voltage VA
Motor 2 Minimum
Output Frequency
Motor 2 Minimum
Output Voltage
Motor 2 Rated
Current
Motor 2 Rated Slip E4-02 * E4-02 * *Varies by kVA; A1000 dependent on C6-01 and o2-04
Motor 2 No-Load
Current
Motor 2 Number of
Poles
Motor 2 Line-toLine Resistance
Motor 2 Leakage
Inductance
Motor 2 Rated
Output
PG 1 Pulses Per
Revolution
Operation
Selection at PG
Open Circuit
(PGO)
Operation
Selection at
Overspeed (OS)
Operation
Selection at
Deviation
PG 1 Rotation
Selection
E3-01 2 E3-01 0
E3-02 60.0 Hz E3-04 * *Dependent on E3-01 and control method selected
E3-03
E3-04 60.0 Hz E3-06 * *Dependent on E3-01 and control method selected
E3-05 3.0 Hz E3-07 * *Dependent on E3-01 and control method selected
E3-06
E3-07 0.5 Hz E3-09 * *Dependent on E3-01 and control method selected
E3-08
E4-01 * E4-01 * *Varies by kVA; A1000 dependent on C6-01 and o2-04
E4-03 * E4-03 * *Varies by kVA; A1000 dependent on C6-01 and o2-04
E4-04 4 E4-04 4 —
E4-05 * E4-05 * *Varies by kVA; A1000 dependent on C6-01 and o2-04
E4-06 * E4-06 * *Varies by kVA; A1000 dependent on C6-01 and o2-04
E4-07 * E4-11 * *Varies by kVA; A1000 dependent on C6-01 and o2-04
F1-01 1024 F1-01 1024 —
F1-02 1 F1-02 1
F1-03 1 F1-03 1
F1-04 3 F1-04 3
F1-05 0 F1-05 0*
230 V or
460 V
12.6 V or
25.3 V
2.3 V or
4.6 V
*
*
E3-05 *
E3-08 *
E3-10 *
0: V/f 0: V/f
1: V/f w/PG 1: V/f w/PG
2: Open Loop Vector 2: Open Loop Vector
3: Flux Vector Control 3: Closed Loop Vector
*Dependent on E3-01 and control method selected
Double values for 400 V class drives
*Dependent on E3-01 and control method selected
Double values for 400 V class drives
*Dependent on E3-01 and control method selected
Double values for 400 V class drives
F1-02 F1-02
0: Ramp to stop 0: Ramp to stop
1: Coast to stop 1: Coast to stop
2: Fast Stop 2: Fast Stop
3: Alarm Only 3: Alarm Only
— 4: No Alarm Display
F1-03 F1-03
0: Ramp to stop 0: Ramp to stop
1: Coast to stop 1: Coast to stop
2: Fast Stop 2: Fast Stop
3: Alarm Only 3: Alarm Only
F1-04 F1-04
0: Ramp to stop 0: Ramp to stop
1: Coast to stop 1: Coast to stop
2: Fast Stop 2: Fast Stop
3: Alarm Only 3: Alarm Only
F1-05 F1-05
0: FWD = Phase A leads 0: FWD = Phase A leads
1: FWD = Phase B leads 1: FWD = Phase B leads
*Determined by parameter A1-02
38 YASK AWA PL.A1000.02 F7 to A1000 - Product Transition Guide
Page 39

10 Appendix 2 Parameter Cross Reference
Parameter Name
PG speed Control
Card
Analog Command
Card
Digital Command
Card
PG Division Rate
(PG Pulse
Monitor)
Integral Function
During Accel/
Decel Selection
Overspeed
Detection Level
Overspeed
Detection Delay
Time
Excessive Speed
Deviation
Detection Level
Excessive Speed
Deviation
Detection Delay
Time
Number of PG
Gear Teeth 1
Number of PG
Gear Teeth 2
PG Open-Circuit
Detection Time
AI-14 Input
Selection
DI-08/DI-16H2
Input Selection
Digital Input
Option DI-A3 Data
Length Selection
F7 A1000 Setting
Parameter Default Parameter Default F7 A1000
F1-06 1 F1-06 1 Enabled when using the PG-B2 option card.
F1-07 C5-12
F1-07 0 C5-12 0
F1-08 115 % F1-08 115 % —
F1-09 0.0 s F1-09 * *Determined by parameter A1-02
F1-10 10% F1-10 10 % —
F1-11 0.5 s F1-11 0.5 s —
F1-12 0 F1-12 0 —
F1-13 0 F1-13 0 —
F1-14 2.0 s F1-14 2.0 s —
F2-01 0 F2-01 0
F3-01 0 F3-01 0
──F3-03
0: Disabled 0: Disabled
1: Enabled 1: Enabled
F2-01 F2-01
0: Separate channels 0: Separate channels
1: Sum of channel values 1: Sum of channel values
*The digital option card determines the setting
DI-08: 0 (8 bit)
DI-16H: Set switch S1 to determine input signal:
S1 switch 1: 2 (16 bit)
S1 switch S1: 1 (12 bit)
F3-01 F3-01 F3-03
0: BCD 1% units 0: BCD 1% units 0: 8 bit
1: BCD 0.1% units 1: BCD 0.1% units 1: 12 bit
2: BCD 0.01% units 2: BCD 0.01% units 2: 16 bit
3: BCD 1 Hz units 3: BCD 1 Hz units —
4: BCD 0.1 Hz units 4: BCD 0.1 Hz units —
5: BCD 0.01 Hz units 5: BCD 0.01 Hz units —
*
2
6: BCD customized
setting (5-digit), 0.01 Hz
units
7: Binary input 7: Binary input —
6: BCD customized
setting (5-digit), 0.02 Hz
units
—
YAS KA WA PL.A1000.02 F7 to A1000 - Product Transition Guide 39
Page 40

10 Appendix 2 Parameter Cross Reference
Parameter Name
Analog Monitor
Card
Analog Monitor
Card
Channel 1 Monitor
Selection
Channel 1 Monitor
Selection
Ter min a l V 1
Monitor Gain
Ter min a l V 2
Monitor Selection
Ter min a l V 2
Monitor Gain
Ter min a l V 1
Monitor Bias
Ter min a l V 2
Monitor Bias
Ter min a l V 1
Signal Level
Ter min a l V 2
Signal Level
F7 A1000 Setting
Parameter Default Parameter Default F7 A1000
F4-01, F4-03, H4-01,
H4-04, o1-01
01: Frequency reference 101: Frequency reference
02: Output frequency 102: Output frequency
03: Output current 103: Output current
05: Motor speed 105: Motor speed
06: Output voltage
reference
07: Main circuit DC
voltage
08: Output power 108: Output power
09: Torque ref (Internal) 109: Torque ref (Internal)
F4-01 2 F4-01 102
F4-01 2 F4-01 102
F4-02 100.0 % F4-02 100.0 % —
F4-03
F4-04 50.0 % F4-04 50.0 % —
F4-05 0.0 % F4-05 0.0 % —
F4-06 0.0 % F4-06 0.0 % —
F4-07 0 F4-07 0
F4-08 0 F4-08 0
*
3
F4-03
103
15: Freq ref, A1 voltage 113: Freq ref, A1 voltage
16: Freq ref, A2 voltage 114: Freq ref, A2 voltage
17: Freq ref, A3 voltage 115: Freq ref, A3 voltage
18: Secondary current (Iq) 601: Secondary current (Iq)
19: Motor excitation
current (Id)
20: Output after soft start 116: Output after soft start
21: ASR input 603: ASR input
22: ASR output 604: ASR output
24: PID feedback amount 501: PID feedback amount
26: Output voltage ref
(Vq)
27: Output voltage ref
(Vd)
32: ACR output (q-axis) 607: ACR output (q-axis)
33: ACR output (d-axis) 608: ACR output (d-axis)
36: PID input amount 502: PID input amount
37: PID output amount 503: PID output amount
38: PID setpoint 504: PID setpoint
44: ASR output , no filter 625: ASR output , no filter
45: Feed Forward output 626: Feed Forward output
*
*See the comments column for F4-01.
F4-07 F4-07
0: 0 to 10 V 0: 0 to 10 V
1: -10 to +10 V 1: -10 to +10 V
F4-08 F4-08
0: 0 to 10 V 0: 0 to 10 V
1: -10 to +10 V 1: -10 to +10 V
F4-01, F4-03, H4-01, H4-04, o1-01
106: Output voltage reference
107: Main circuit DC voltage
602: Motor excitation current (Id)
605: Output voltage ref (Vq)
606: Output voltage ref (Vd)
40 YASK AWA PL.A1000.02 F7 to A1000 - Product Transition Guide
Page 41

10 Appendix 2 Parameter Cross Reference
Parameter Name
Digital Output
Card
Communication
Option Card
Terminal P1-PC
Output Selection
Terminal P2-PC
Output Selection
Terminal P3-PC
Output Selection
Terminal P4-PC
Output Selection
Terminal P5-PC
Output Selection
Terminal P6-PC
Output Selection
Terminal M1-M2
Output Selection
Terminal M3-M4
Output Selection
DO-08/DO-A3
Output Mode
Selection
Operation
Selection After
Communications
Error
External Fault
from Comm.
Option Board
Detection
Selection
External Fault
from Comm.
Option Board
Operation
Selection
Trace Sampling
from Comm.
Option Board
Torque Reference/
Torque Limit
Selection from
Communications
Option
NetRef/ComRef
Selection
Operation
Selection at
Watchdog Timer
Error
MECHATROLINK bUS Error
Detection
F7 A1000 Setting
Parameter Default Parameter Default F7 A1000
F5-01
F5-02
F5-03
F5-04
F5-05
F5-06
F5-07
F5-08
*
0
*
1
*
2
*
4
*
6
*
37
*
F
*
F
F5-01
F5-02
F5-03
F5-04
F5-05
F5-06
F5-07
F5-08
*
2
*
4
*
6
*
37
*See the Comments column on page 32 for H2-01 through H2-03.
*
F
*
F
*
0
*
1
F5-09 F5-09
F5-01=0
F5-01=0
F5-02=1 F5-02=1
F5-03=2 F5-03=2
F5-04=4 F5-04=4
F5-09 0 F5-09 0
0
F5-05=6 F5-05=6
F5-06=37 F5-06=37
0
F5-07=F F5-07=F
F5-08=F F5-08=F
1: Binary code output 1: Binary code output
2: 8-channel Selected -
Output according to
F5-01 to 08
F6-01 F6-01
0: Ramp to stop 0: Ramp to stop
F6-01 1 F6-01 1
F6-02 0 F6-02 0
F6-03 1 F6-03 1
F6-04 0 ──F6-04 corresponds to bUS Error Detection Time (default: 2.0 sec) in A1000.
F6-06 0 F6-06 0
──F6-07 0 Disable multi-step speed by setting F6-07 to 0. Enable by setting F6-07 to 1.
──F6-25 1
──F6-26 2 Sets the number of option communication errors (bUS) with a range of 2 to 10.
1: Coast to stop 1: Coast to stop
2: Fast Stop 2: Fast Stop
3: Alarm Only 3: Alarm Only
F6-02 F6-02
0: Always detected 0: Always detected
1: Detected during run 1: Detected during run
F6-03 F6-03
0: Ramp to stop 0: Ramp to stop
1: Coast to stop 1: Coast to stop
2: Fast Stop 2: Fast Stop
3: Alarm Only 3: Alarm Only
0: Switching via comm. network is disabled
F6-06 F6-06
0: Disabled 0: Disabled
1: Enabled 1: Enabled
Parameter F6-25 set to 1 enables coast to stop. 0 = Ramp to stop using time in C1-02;
2 = Fast stop using time in C1-09; 3 = Alarm Only
2: 8-channel Selected - Output according to F5-01
to 08
YAS KA WA PL.A1000.02 F7 to A1000 - Product Transition Guide 41
Page 42

10 Appendix 2 Parameter Cross Reference
Parameter Name
Multi-Function
Relay Input
Multi-Function
Digital Input
Ter min a l S 1
Function Selection
Multi-Function
Digital Input
Ter min a l S 2
Function Selection
Ter min a l S 3
Function Selection
Ter min a l S 4
Function Selection
F7 A1000 Setting
Parameter Default Parameter Default F7 A1000
*Input functions for terminals S1 and S2 are fixed in F7, but multi-functional in
A1000.
H1-01 to H1-06 (S3-S8) H1-01 to H1-08 (S1-S8)
0: 3-wire sequence 0: 3-wire sequence
— — H1-01*40Use this
——
H1-0124H1-0324
H1-0214H1-0414
H1-02
setting
*
41
Use this
setting
1: LOCAL/REMOTE
selection
2: Option/Drive selection
3: Multi-Step Frequency
Ref. 1
4: Multi-Step Frequency
Ref. 2
5: Multi-Step Frequency
Ref. 3
6: Jog freq ref selection 6: Jog freq ref selection
7: Accel/Decel Time
Selection 1
8: External Baseblock
(N.O.)
9: External Baseblock
(N.C.)
A: Accel/decal Ramp
Hold
B: External overheat alarm
(OH2)
C: Terminal A2 Enable C: Analog Terminal input selection
D: V/f with PG Disabled D: PG encoder disable
E: ASR integral reset E: ASR integral reset
F: Not used F: Through-mode
10: MOP Increase 10: Up command
11: MOP Decrease 11: Down command
12: FWD jog 12: FWD jog
13: REV jog 13: REV jog
14: Fault Reset 14: Fault Reset
15: Fast Stop (N.O.) 15: Fast Stop (N.O.)
16: Motor 2 selection 16: Motor 2 selection
17: Fast Stop (N.C.) 17: Fast Stop (N.C.)
18: Timer function input 18: Timer function input
19: PID disable 19: PID disable
1A: Accel/decel time
selection 2
1B: Program Lockout 1B: Program Lockout
1: LOCAL/REMOTE selection
2: External Ref. ½ Selection
b1-15*
b1-16*
3: Option card
3: Option card
*Used when closed. When open, source is determined
by b1-01 and b1-02
3: Multi-Step Frequency Ref. 1
4: Multi-Step Frequency Ref. 2
5: Multi-Step Frequency Ref. 3
7: Accel/decel time selection 1
8: External Baseblock (N.O.)
9: Baseblock command (N.C.)
A: Accel/decel ramp hold
B: Drive overheat alarm
1A: Accel/decel time selection 2
42 YASK AWA PL.A1000.02 F7 to A1000 - Product Transition Guide
Page 43

10 Appendix 2 Parameter Cross Reference
Parameter Name
Multi-Function
Relay Input
Ter min al S 5
Function Selection
Ter min al S 5
Function Selection
F7 A1000 Setting
Parameter Default Parameter Default F7 A1000
1C: Trim Control Increase —
H1-03 3 (0) H1-05 3 (0)
H1-03 3 (0) H1-05 3 (0)
1D: Trim Control
Decrease
1E: Analog freq ref
sample hold
20: External fault (N.O.,
Always detected, Ramp to
stop)
21: External fault (N.C.,
Always detected, Ramp to
stop)
22: External fault (N.O.,
Detected during run,
Ramp to stop)
23: External fault (N.C.,
Detected during run,
Ramp to stop)
24: External fault (N.O.,
Always detected, Coast to
stop)
25: External fault (N.C.,
Always detected, Coast to
stop)
26: External fault (N.O.,
Detected during run, Coast
to stop)
27: External fault (N.C.,
Detected during run, Coast
to stop)
28: External Fault (N.O.,
always detected, Fast
Stop)
29: External fault (N.C.,
always detected, Fast
Stop)
2A: External Fault (N.O.,
detected during run, Fast
Stop)
1E: Analog freq ref sample/hold
20: External fault (N.O.,
Always detected, Ramp to stop)
21: External fault (N.C.,
Always detected, Ramp to stop)
22: External fault (N.O.,
Detected during run, Ramp to stop)
23: External fault (N.C.,
Detected during run, Ramp to stop)
24: External fault (N.O.,
Always detected, Coast to stop)
25: External fault (N.C.,
Always detected, Coast to stop)
26: External fault (N.O.,
Detected during run, Coast to stop)
27: External fault (N.C.,
Detected during run, Coast to stop)
28: External Fault (N.O.,
always detected, Fast Stop)
29: External fault (N.C.,
always detected, Fast Stop)
2A: External Fault
(N.O.,
detected during run, Fast Stop)
—
YAS KA WA PL.A1000.02 F7 to A1000 - Product Transition Guide 43
Page 44

10 Appendix 2 Parameter Cross Reference
Parameter Name
Multi-Function
Relay Input
Multi-Function
Relay Input
Ter min a l S 6
Function Selection
Ter min a l S 7
Function Selection
Ter min a l S 7
Function Selection
Ter min a l S 8
Function Selection
F7 A1000 Setting
Parameter Default Parameter Default F7 A1000
H1-04 4 (3) H1-06 4 (3)
H1-05 6 (4) H1-07 6 (4)
H1-05 6 (4) H1-07 6 (4)
H1-06 8 (6) H1-08 8
2B: External fault (N.C.,
detected during run, Fast
Stop)
2C: External fault (N.O.,
always detected, alarm
only)
2D: External fault (N.C.,
always detected, alarm
only)
2E: External Fault (N.O.,
detected during run, alarm
only)
2F: External Fault (N.C.,
detected during run, alarm
only)
30: PID integral reset 30: PID integral reset
31: PID integral hold 31: PID integral hold
32: Multi-step speed
reference 4
34: PID Soft Starter cancel 34: PID Soft Starter cancel
35: PID input (error)
polarity switch
— 40: Forward run command
— 41: Reverse run command
— 42: Run command
— 43: Forward/Reverse command 2
— 44: Offset frequency 1
— 45: Offset frequency 2
— 46: Off-set frequency 3
— 47: Node setup
60: DC Injection Braking 60: DC Injection Braking
61: Speed search 1 61: Speed search 1
62: Speed search 2 62: Speed search 2
63: Magnetic field
weakening
64: Speed search 3 64: Speed search 3
65: KEB Ride-thru (N.C.) 65: KEB Ride-thru (N.C.)
66: KEB Ride-thru (N.O.) 66: KEB Ride-thru (N.O.)
67: Comm. test mode 67: Comm. test mode
68: High Slip Braking 68: High Slip Braking
69: Jog 2 —
6A: Drive Enable 6A: Drive enable
71: Speed/Torque Control
selection
72: Zero Servo 72: Zero Servo
— 75: UP 2
— 76: DOWN 2
77: ASR gain switch 77: ASR gain switch
78: Polarity Reversing
Command for External
Torque Control
— 7A: KEB Ride-Thru 2 (N.C.)
— 7B: KEB Ride-Thru 2 (N.O.)
— 7C: Short Braking command (N.O.)
— 7D: Short Braking command (N.C.)
— 7E: Forward/reverse Detection
— 90 to 97: DriveWorksEZ 1 to 8
— 9F: DriveWorksEZ disable
2B: External fault (N.C.,
detected during run, Fast Stop)
2C: External fault (N.O.,
always detected, alarm only)
2D: External fault (N.C.,
always detected, alarm only)
2E: External Fault (N.O.,
detected during run, alarm only)
2F: External Fault (N.C.,
detected during run, alarm only)
32: Multi-step speed reference 4
35: PID input level selection
63: Magnetic field weakening
71: Speed/Torque Control switch
78: External torque ref, polarity inversion
44 YASK AWA PL.A1000.02 F7 to A1000 - Product Transition Guide
Page 45

10 Appendix 2 Parameter Cross Reference
Parameter Name
Multi-Function
Relay Output
Terminal M1 and
M2 Function
Selection
F7 A1000 Setting
Parameter Default Parameter Default F7 A1000
H2-01 to H2-03 H2-01 to H2-03
0: During Run 1 0: During run
1: Zero Speed 1: Zero speed
2: Fref/Fout Agree 1 2: Speed agree 1
3: Fref/Set agree 1 3: User-set speed agree 1
4: Frequency detection 1 4: Frequency detection 1
H2-01 0 H2-01 0
5: Frequency detection 2
(used when L4-07=1)
6: Drive ready 6: Drive ready
7: DC bus undervoltage 7: DC bus undervoltage
8: Baseblock 1 (N.O.) 8: During Baseblock (N.O.)
9: Option reference 9: Freq ref source
A: Local/Remote
operation
B: Torque detection 1
(N.O.)
C: Frequency reference
loss
D: Braking resistor
overheat
E: Fault E: Fault
F: Not used F: Through-mode
10: Minor Fault - Alarm 10: Minor Fault - Alarm
11: Reset command active 11: Fault reset command active
5: Frequency detection 2
(used when L4-07=1)
A: Run cmd source
B: Torque detection 1 (N.O.)
C: Frequency reference loss
D: Braking resistor overheat
YAS KA WA PL.A1000.02 F7 to A1000 - Product Transition Guide 45
Page 46

10 Appendix 2 Parameter Cross Reference
Parameter Name
Multi-Function
Relay Output
Multi-Function
Relay Output
Terminal M3-M4
Function Selection
Terminal M5-M6
Function Selection
Terminal M5-M6
Function Selection
F7 A1000 Setting
Parameter Default Parameter Default F7 A1000
12: Timer output 12: Timer output
13: Fref/Fout agree 2 13: Speed agree 2
14: Fref/Fout agree 2 14: User-Set speed agree 2
15: Frequency detection 3 15: Frequency detection 3
16: Frequency detection 4 16: Frequency detection 4
H2-02 1 H2-02 1
H2-03 2 H2-03 2
H2-03 2 H2-03 2
17: Torque detection 1
(N.C.)
18: Torque detection 2
(N.O.)
19: Torque detection 2
(N.C.)
1A: Reverse run 1A: During reverse
1B: During baseblock 2
(N.C.)
1C: Motor 2 selection 1C: Motor 2 selection
1D: Regenerating 1D: During Regeneration
1E: Fault restart enabled 1E: Fault restart enabled
1F: Motor overload alarm 1F: Motor overload alarm
20: Drive overheat
prealarm
— 22: Mechanical weakening detection
— 2F: Maintenance period
30: During torque limit 30: During torque limit
31: During speed limit 31: During speed limit
32: During Speed limit in
Torque Control
33: Zero servo complete 33: Zero servo complete
37: During run 2 37: During frequency output
38: Drive Enable 38: Drive enabled
— 39: Watt hour pulse output
— 3C: Local/Remote mode
— 3D: During Speed Search
— 3E: PID feedback low (during loss )
— 3F: PID feedback high (fault)
— 4A: During KEB Ride-thru
— 4B: During Short Circuit Braking
— 4C: During Fast Stop
— 4D: oH pre-alarm time limit
— 4E: Braking transistor fault (rr)
— 4F: Braking resistor overheat (oH)
— 60:: C ooling fan alarm
— 61: Rotor position detection complete
— 90 to 92: DriveWorksEZ, outputs 1-3
— 100 to 192: Inverse Output of 0-92
17: Torque detection 1 (N.C.)
18: Torque detection 2 (N.O.)
19: Torque detection 2 (N.C.)
1B: During baseblock (N.C.)
20: Drive overheat prealarm
32: During Speed limit in Torque Control
46 YASK AWA PL.A1000.02 F7 to A1000 - Product Transition Guide
Page 47

10 Appendix 2 Parameter Cross Reference
Parameter Name
Analog Input
Ter min al A 1
Signal Level
Selection
Ter min al A 1
Function Selection
Terminal A1 Gain
Setting
Terminal A1 Bias
Setting
Ter min al A 3
Signal Level
Selection
Ter min al A 3
Function Selection
F7 A1000 Setting
Parameter Default Parameter Default F7 A1000
Terminal A1 in A1000 is multi-functional.
H3-01 0 H3-01 0
──H3-02 0 For A1000, set H3-02 to 0.
H3-02 100.0%
H3-03 0.0%
H3-04 0 H3-05 0
H3-05 2 H3-06 2
H3-03 100.0 % —
F2-02 100.0 %
H3-04 0.0 %
F2-03 0.0 %
H3-01 H3-01
0: 0 to +10 V 0: 0 to +10 V (uses lower limit)
1: -10 to 10 V 1: -10 to 10 V (no lower limit)
Set this parameter when using an analog option card to determine the gain added to
the analog reference.
Set this parameter when using an analog option card to determine the gain added to
the analog reference.
H3-04 H3-05
0: 0 to +10 V 0: 0 to +10 V (uses lower limit)
1: -10 to 10 V 1: -10 to 10 V (no lower limit)
H3-05, H3-09 H3-06, H3-10
0: Terminal A1 bias 0: Frequency bias
1: Frequency reference
gain
2: Auxiliary freq ref 1 2: Auxiliary freq ref 1
3: Auxiliary freq ref 2 3: Auxiliary frequency reference 2
4: Output voltage bias 4: Output voltage bias
5: Accel/decel time
coefficient
6: DC Injection Braking
current
7: Torque detection level 7: Torque detection level
8: Stall Prevention level
during run
9: Frequency Ref. lower
limit
A: Jump frequency 4 —
B: PID feedback B: PID feedback
C: PID setpoint C: PID setpoint
D: Frequency Reference
bias 2
E: Motor temperature E: Motor temperature
F: Through- mode F: Through- mode
1: Frequency gain
5: Accel/decel time gain
6: DC Injection Braking current
8: Stall Prevention level during run
9: Output freq lower limit level
D: Frequency bias
YAS KA WA PL.A1000.02 F7 to A1000 - Product Transition Guide 47
Page 48

10 Appendix 2 Parameter Cross Reference
Parameter Name
Analog Input
Multi-Function
Analog Output
Ter min a l A 3
Function Selection
Terminal A3 Gain
Setting
Terminal A3 Bias
Setting
Ter min a l A 2
Signal Level
Selection
Ter min a l A 2
Function Selection
Terminal A2 Gain
Setting
Terminal A2 Bias
Setting
Analog Input Filter
Time Constant
Analog Output 1
Ter min a l F M
Monitor Selection
Analog Output 1
Terminal FM Gain
Analog Output 1
Terminal FM Bias
Analog Output 2
Ter min a l A M
Selection
Analog Output 2
Terminal AM Gain
Analog Output 2
Terminal AM Bias
Analog Output 1
Signal Level (FM)
Selection
Analog Output 2
Signal Level (AM)
Selection
F7 A1000 Setting
Parameter Default Parameter Default F7 A1000
10: FWD torque limit 10: FWD torque limit
11: REV torque limit 11: REV torque limit
H3-05 2 H3-06 2
12: Torque limit during
regen
13: Torque ref/Torque
limit during Torque
Control
12: Torque limit during regen
13: Torque ref/Torque limit
14: Torque compensation 14: Torque compensation
15: Fwd/Rev torque limit 15: General torque limit
— 16: Differential PID feedback
1F: Not used 1F: Through-mode
— 30 to 32: DriveWorksEZ, Analog input 1 to 3
H3-06 100.0 % H3-07 100.0 % —
H3-07 0.0 % H3-08 0.0 % —
H3-08 H3-09
0: 0 to 10 V 0: 0 to +10 V (with lower limit)
H3-08 2 H3-09 2
1: -10 to 10 V 1: -10 to +10 V (no lower limit)
2: 4 to 20 mA 2: 4 to 20 mA
— 3: 0 to 20 mA
H3-09
*
0
H3-10
*
*For A1000, see the description for H3-06.
0
H3-10 100.0 % H3-11 100.0 % —
H3-11 0.0 % H3-12 0.0 % —
H3-12 0.03 s H3-13 0.03 s —
H4-01
*
2
H4-01
102
*
*See the description for F4-01
H4-02 100 % H4-02 100.0 % —
H4-03 0.0 % H4-03 0.0 % —
H4-04
*
3
H4-04
103
*
*See the description for F4-01
H4-05 50.0 % H4-05 50.0 % —
H4-06 0.0 % H4-06 0.0 % —
H4-07 H4-07
H4-07 0 H4-07 0
0: 0 to +10 V output 0: 0 to +10 Vdc output
1: -10 to 10 Vdc output 1: -10 to 10 Vdc output
2: 4 to 20 mA 2: 4 to 20 mA
H4-08 H4-08
H4-08 0 H4-08 0
0: 0 to +10 V output 0: 0 to +10 Vdc output
1: -10 to 10 Vdc output 1: -10 to 10 Vdc output
2: 4 to 20 mA 2: 4 to 20 mA
48 YASK AWA PL.A1000.02 F7 to A1000 - Product Transition Guide
Page 49

10 Appendix 2 Parameter Cross Reference
Parameter Name
MEMOBUS
Communication
Pulse Train I/O
Pulse Train I/O
Drive Node
Address
Communication
Speed Selection
Communication
Parity Selection
Stopping Method
After
Communication
Error
Communication
Fault Detection
Selection
Drive Transmit
Wait Time
RTS Control
Selection
Unit Selection for
MEMOBUS
Register 0025H
Pulse Train Input
Function Selection
Pulse Train Input
Scaling
Pulse Train Input
Gain
Pulse Train Input
Bias
Pulse Train Input
Filter Time
Pulse Train
Monitor Selection
Pulse Train
Monitor Scaling
F7 A1000 Setting
Parameter Default Parameter Default F7 A1000
H5-01 1F H5-01 1F —
H5-02 H5-02
0: 1200 bps 0: 1200 bps
1: 2400 bps 1: 2400 bps
2: 4800 bps 2: 4800 bps
H5-02 3 H5-02 3
H5-03 0 H5-03 0
H5-04 3 H5-04 0
H5-05 1 H5-05 0
H5-06 5 ms H5-06 5 ms —
H5-07 1 H5-07 1
H5-10 0 H5-10 0
H6-01 0 H6-01 0
H6-02 1440 Hz H6-02 1440 Hz —
H6-03 100.0 % H6-03 100.0 % —
H6-04 0.0 % H6-04 0.0 % —
H6-05 0.10 s H6-05 0.10 s —
H6-06 2 H6-06 102
H6-07 1440 Hz H6-07 1440 Hz —
3: 9600 bps 3: 9600 bps
4: 19200 bps 4: 19200 bps
— 5: 38400 bps
— 6: 57600 bps
— 7: 76800 bps
— 8: 115200 bps
H5-03 H5-03
0: No parity 0: No parity
1: Even parity 1: Even parity
2: Odd parity 2: Odd parity
H5-04 H5-04
0: Ramp to stop 0: Ramp to stop
1: Coast to stop 1: Coast to stop
2: Fast Stop 2: Fast Stop
3: Alarm Only 3: Alarm Only
H5-05 H5-05
0: Disabled 0: Disabled
1: Enabled 1: Enabled
H5-07 H5-07
0: Disabled
(RTS always on)
1: Enabled
(RTS enabled during send
only)
H5-10 H5-10
0: 0.1 V units 0: 0.1 V units
1: 1 V units 1: 1 V units
H6-01 H6-01
0: Frequency reference 0: Frequency reference
1: PID feedback value 1: PID feedback value
2: PID setpoint value 2: PID setpoint value
— 3: V/f Control with Simple PG feedback
H6-06 H6-06
01: Frequency reference 101: Frequency reference
02: Output frequency 102: Output frequency
05: Motor speed 105: Motor speed
20: Output frequency after
soft start
24: PID feedback 501: PID feedback
36: PID input amount 502: PID input amount
0: Disabled
(RTS always on)
1: Enabled
(RTS enabled during send only)
116: Output frequency after soft start
YAS KA WA PL.A1000.02 F7 to A1000 - Product Transition Guide 49
Page 50

10 Appendix 2 Parameter Cross Reference
Parameter Name
Motor Protection
Function
Motor Protection
Function
Momentary Power
Loss Process
Momentary Power
Loss Process
Motor Overload
Protection
Selection
Motor Overload
Protection Time
Motor Overheat
Alarm Operation
Selection
Motor Overheat
Fault Operation
Selection
Motor Temperature
Input Filter Time
Momentary Power
Loss Detection/
Operation
Selection
Momentary Power
Loss Ride-Thru
Time
Momentary Power
Loss Minimum
Baseblock Time
Momentary Power
Loss Voltage
Recovery Ramp
Time
Undervoltage
Detection Level
KEB Deceleration
Time
KEB Acceleration
Time After Power
Recovery
Frequency Gain at
KEB Start
F7 A1000 Setting
Parameter Default Parameter Default F7 A1000
L1-01 L1-01
0: Disabled 0: Disabled
1: Standard fan cooled 1: General-purpose motor
2: Standard blower cooled 2: Drive-dedicated motor with a speed range of 1:10
L1-01 1 L1-01
L1-02 8.0 min. L1-02 1.0 min. —
L1-03 3 L1-03 3
L1-04 1 L1-04 1
L1-05 0.20 s L1-05 0.20 s —
L2-01 0 L2-01 0
L2-02 * L2-02 * *Dependent on kVA and parameters C6-01 and o2-04
L2-03 * L2-03 * *Dependent on kVA and parameters C6-01 and o2-04
L2-04 * L2-04 * *Dependent on kVA and parameters C6-01 and o2-04
L2-05 190 V L2-05 190 V
L2-06 0.0 s L2-06 0.0 s Sets the deceleration time during KEB.
L2-07 0.0 s L2-07 0.0 s —
L2-08 100 % L2-08 100 % —
*
3: Vector motor 3: Vector motor with a speed range of 1:100
1
— 4: PM motor with variable torque
— 5: PM motor with constant torque control
— 6: General purpose motor (50 Hz)
*Determined by parameter A1-02
L1-03 L1-03
0: Ramp to stop 0: Ramp to stop
1: Coast to stop 1: Coast to stop
2: Fast Stop 2: Fast Stop
3: Alarm Only 3: Alarm Only
L1-04 L1-04
0: Ramp to stop 0: Ramp to stop
1: Coast to stop 1: Coast to stop
2: Fast Stop 2: Fast Stop
L2-01 L2-01
0: Disabled 0: Disabled
1: Power Loss Ride Thru
Time
2: CPU Power Active 2: Recover as long as CPU Power Active
— 3: KEB deceleration for time set in L2-02
— 4: KEB deceleration as long as CPU has power.
— 5: KEB deceleration to stop.
380 V for a 400 class drive.
But if E1-01 is set lower than 400, then for set 350 V for A1000.
1: Recover within the time set in L2-02
50 YASK AWA PL.A1000.02 F7 to A1000 - Product Transition Guide
Page 51

10 Appendix 2 Parameter Cross Reference
Parameter Name
Stall Prevention
Function
Stall Prevention
Function
Frequency
Detection
Reference
Detection
Fault Restart
F7 A1000 Setting
Parameter Default Parameter Default F7 A1000
Stall Prevention
Selection during
Acceleration
Stall Prevention
Level during
Acceleration
Stall Prevention
Limit during
Acceleration
Stall Prevention
Selection during
Deceleration
Stall Prevention
Selection during
Run
Stall Prevention
Level during Run
Overvoltage
Supression
Function Selection
F7: Overvoltage
Suppression
Voltage Level
A1000: Target DC
Bus Voltage for
L3-01 1 L3-01 1
L3-02 * L3-02
L3-03 50 % L3-03 50 % —
L3-04 1 L3-04 1
L3-05 1 L3-05 1
L3-06 * L3-06 **
L3-110L3-110
L3-12
380 V
*
L3-17
150 %
370 V
**
*
L3-01 L3-01
0: Disabled 0: Disabled
1: General purpose 1: General purpose
2: Intelligent 2: Intelligent
*Varies by Duty Rating
**Upper limit is determined by C6-01 and L8-38.
L3-04 L3-04
0: Disabled 0: Disabled
1: General purpose 1: General purpose
2: Intelligent 2: Intelligent
3: Stall Prevention with
braking resistor
— 4: Overexcitation Deceleration
— 5: Overexcitation Deceleration 2
L3-05 L3-05
0: Disabled 0: Disabled
1: Enabled (Decel Time 1) 1: Enabled (Decel Time 1)
2: Enabled (Decel Time 2) 2: Enabled (Decel Time 2)
*Varies by duty rating (Defaults:HD = 150 %, ND = 120 %)
**Upper limit is determined by C6-01 and L8-38.
L3-11 L3-11
0: Disabled 0: Disabled
1: Enabled 1: Enabled
*Double values for 400 V class drives.
3: Stall Prevention with braking resistor
Overvoltage
Suppression and
Stall Prevention
Speed Agreement
Detection Level
Speed Agreement
Detection Width
Speed Agreement
Detection Level (+/-)L4-03 0.0 Hz L4-03 0.0 Hz —
Speed Agreement
Detection Width
(+/-)
Frequency
Reference Loss
Detection
Selection
Frequency
Reference Level at
Loss Frequency
Number of Auto
Restart Attempts
Auto Restart
Operation
Selection
L4-01 0.0 Hz L4-01 0.0 Hz —
L4-02 2.0 Hz L4-02 * *Dependent on parameter A1-02
L4-04 2.0 Hz L4-04 * *Dependent on parameter A1-02
L4-05 L4-05
L4-05 0 L4-05 0
L4-06 80.0 % L4-06 80.0 % —
L5-01 0 times L5-01 0 times —
L5-02 0 L5-02 0
0: Stop 0: Stop
1: Run at L4-06 PrevRef 1: Run at the level set to L4-06
In A1000, the setting range for the frequency reference when the reference is lost
(L4-06) is 0 to 100 % (default: 80 %)
L5-02 L5-02
0: No Fault Relay 0: Fault output not active
1: Fault Relay Active 1: Fault output active during restart attempt
YAS KA WA PL.A1000.02 F7 to A1000 - Product Transition Guide 51
Page 52

10 Appendix 2 Parameter Cross Reference
Overtorque
Detection
Overtorque
Detection
Torque Limit
Hardware
Protection
Parameter Name
Torque Detection
Selection 1
Torque Detection
Level 1
Torque Detection
Time 1
Torque Detection
Selection 2
Torque Detection
Level 2
Torque Detection
Time 2
Forward Torque
Limit
Reverse Torque
Limit
Forward
Regenerative
Torque Limit
Reverse
Regenerative
Torque Limit
Torque Limit
Integral Time
Constant
Torque Limit
Control Method
Selection During
Accel/Decel
Internal Dynamic
Braking Resistor
Protection
Selection (ERF)
Overheat
Pre-Alarm Level
F7 A1000 Setting
Parameter Default Parameter Default F7 A1000
L6-01, L6-04 L6-01, L6-04
0: Disabled 0: Disabled
1: oL3 detection only
active during speed agree,
operation continues after
detection
2: oL3 detection always
active during run,
operation continues after
detection
3: oL3 detection only
active during speed agree,
output shuts down on an
oL3 fault
4: oL3 detection always
active during run, output
L6-01 0 L6-01 0
L6-02 150 % L6-02 150 % —
L6-03 0.1 s L6-03 0.1 s —
L6-04
L6-05 150 % L6-05 150 % —
L6-06 0.1 s L6-06 0.1 s —
L7-01 200 % L7-01 200 % —
L7-02 200 % L7-02 200 % —
L7-03 200 % L7-03 200 % —
L7-04 200 % L7-04 200 % —
L7-06 200 ms L7-06 200 ms —
L7-07 0 L7-07 0
L8-01 0 L8-01 0
L8-02 95°C L8-02 * *Determined by parameters C6-01 and o2-04
*
0
L6-04
shuts down on an oL3
fault
5: UL3 detection only
active during speed agree,
operation continues after
detection
6: UL3 detection always
active during run,
operation continues after
detection
7: UL3 detection only
active during speed agree,
output shuts down on an
oL3 fault
8: UL3 detection always
active during run, output
shuts down on an oL3
fault
*See the description for L6-01; replace “oL3” and “UL3” with “oL4” and “UL4”,
*
0
respectively
L7-07 L7-07
0: Proportional Control
(60 Hz VT2)
1: Integral Control
(50 Hz HST1)
L8-01 L8-01
0: Not Provided 0: Disabled
1: Provided 1: Enabled
1: oL3 detection only active during speed agree,
operation continues after detection
2: oL3 detection always active during run, operation
continues after detection
3: oL3 detection only active during speed agree, output
shuts down on an oL3 fault
4: oL3 detection always active during run, output shuts
down on an oL3 fault
5: UL3 detection only active during speed agree,
operation continues after detection
6: UL3 detection always active during run, operation
continues after detection
7: UL3 detection only active during speed agree, output
shuts down on an oL3 fault
8: UL3 detection always active during run, output shuts
down on an oL3 fault
0: Proportional control
1: Integral control
52 YASK AWA PL.A1000.02 F7 to A1000 - Product Transition Guide
Page 53

10 Appendix 2 Parameter Cross Reference
Parameter Name
Hardware
Protection
Hunting
Prevention
Function
Speed Feedback
Detection Control
Function
High slip Braking
Feed Forward
Control
Overheat PreAlarm Operation
Selection
Input Phase Loss
Protection
Selection
Output OpenPhase Protection
Selection
Output Ground
Fault Detection
Selection
Heatsink Cooling
Fan Operation
Selection
Heatsink Cooling
Fan Operation
Delay Time
Ambient
Temperature
Setting
oL2 Characteristics
Selection at Low
Speeds
Soft CLA
Selection
Hunting
Prevention
Function Selection
Hunting
Prevention Gain
Setting
Speed Feedback
Detection Control
(AFR) Gain
Speed Feedback
Detection Control
(AFR) Time
Constant
Speed Feedback
Detection Control
(AFR) Time
Constant 2
High-Slip Braking
Deceleration
Frequency Width
High-Slip Braking
Current Limit
High-Slip Braking
Dwell Time at Stop
High-Slip Braking
Overload Time
Feed Forward
Control Selection
Motor
Acceleration Time
Feed Forward
Control Ratio Gain
F7 A1000 Setting
Parameter Default Parameter Default F7 A1000
L8-03 L8-03
0: Ramp to stop 0: Ramp to stop
L8-03 3 L8-03 3
L8-05 0 L8-05 1
L8-07 0 L8-07 1
L8-09 1 L8-09 1*
L8-10 0 L8-10 0
L8-11 60 s L8-11 60 s —
L8-12 45°C L8-12 40°C Set the ambient temperature where the drive is being used.
L8-15 1 L8-15 1
L8-18 1 L8-18 1
n1-01 1 n1-01 1
n1-02 1.00 n1-02 1.00 —
n2-01 1.00 n2-01 1.00 —
n2-02 50 ms n2-02 50 ms —
n2-03 750 ms n2-03 750 ms —
n3-01 5 % n3-01 5 % —
n3-02 150 % n3-02
n3-03 1.0 s n3-03 1.0 s —
n3-04 40 s n3-04 40 s —
— — n5-01 0 New for the A1000.
--- — n5-02 *
— — n5-03 1.00 New for the A1000.
150 %
1: Coast to stop 1: Coast to stop
2: Fast Stop 2: Fast Stop
3: Alarm Only 3: Continue operation (Alarm triggered)
— 4: Continue operation at reduced speed as set in L8-19
L8-05 L8-05
0: Disabled 0: Disabled
1: Enabled 1: Enabled
L8-07 L8-07
0: Disabled 0: Disabled
1: Enabled (triggered by a
single phase loss)
2: Enabled (triggered
when two phases are lost)
L8-09 L8-09
0: Disabled 0: Disabled
1: Enabled 1: Enabled
*Determined by parameters C6-01 and o2-04
L8-10 L8-10
0: During run only 0: During run only
1: Fan always on 1: Fan always on
L8-15 L8-15
0: Disabled 0: Disabled
1: Enabled 1: Enabled
L8-18 L8-18
0: Disabled 0: Disabled
1: Enabled 1: Enabled
n1-01 n1-01
0: Disabled 0: Disabled
1: Enabled 1: Enabled
*
*Upper limit is determined by L8-38 and C6-01
*Determined by C6-01, o2-04, and E5-01.
New for the A1000.
1: Enabled (triggered by a single phase loss)
2: Enabled (triggered when two phases are lost)
YAS KA WA PL.A1000.02 F7 to A1000 - Product Transition Guide 53
Page 54

10 Appendix 2 Parameter Cross Reference
Parameter Name
Display Setting/
Selection
F7 A1000 Setting
Parameter Default Parameter Default F7 A1000
Drive Mode Unit
Monitor Selection
User Monitor
Selection After
Power Up
Digital Operator
Display Selection
Setting Unit for
Frequency
Parameters Related
to V/f
Characteristics
LCD Brightness o1-05 3 — — This parameter is not available in A1000.
o1-01
o1-02 1 o1-02 1
o1-03 0 o1-03 *
o1-04 0 o1-04 *
*
6
o1-01
106
*
*See the comments given for parameter F4-01.
o1-02 o1-02
1: Frequency reference 1: Frequency reference
2: Output frequency 3: Output frequency
3: Output current 4: Output current
4: User-selected Monitor
(set by o1-01)
— 2: Direction
o1-03 o1-03
0: Hz units 0: 0.01 Hz units
1: % units
(100 % = E1-04)
2 to 39: RPM 2: r/min units
40 to 39999: User display
o1-10: Determines how the units for the frequency reference.
o1-11: Sets the decimal point for the frequency reference display
*Determined by parameter A1-02
Ex. : For a max output frequency of 200.0, set the following:
Setting value :
o1-03=12000
2 0 0 0
1
│ └ Max value, excluding decimal point → o1-10= “2000”
└── digits displayed to the right of the decimal → o1-11= 1
o1-04 o1-04
0: Hz units 0: Hz units
1: r/min units 1: r/min units
*Determined by A1-02
5: User-selected Monitor (set by o1-01)
1: 0.01 % units
3: User-set units
o1-10 o1-11
1 to 60000 0 to 3
Setting value: o1-03=3
: o1-10=2000
: o1-11=1
54 YASK AWA PL.A1000.02 F7 to A1000 - Product Transition Guide
Page 55

10 Appendix 2 Parameter Cross Reference
Parameter Name
Multi-Function
Selection
Multi-Function
Selection
Copy Function
LOCAL/REMOTE
Key Function
Selection
STOP Key
Function Selection
User Parameter
Default Value
Drive Model
Selection
Frequency
Reference Setting
Method Selection
Operation
Selection when
Digital Operator is
Disconnected
Cumulative
Operation Time
Setting
Cumulative
Operation Time
Selection
Initialization
Specification
Selection
Fan Operation
Time
(A1000: Cooling
Fan Operation
Time Setting)
Fault Trace/Fault
History Clear
Function (A1000:
U2, U3
Initialization)
kWh User Monitor
Initialization
Copy Function
Selection
Copy Allowed
Selection
F7 A1000 Setting
Parameter Default Parameter Default F7 A1000
o2-01 o2-01
o2-01 1 o2-01 1
o2-02 1 o2-02 1
o2-03 0 o2-03 0
o2-04 * o2-04 *
o2-05 0 o2-05 0
o2-06 0 o2-06 1
o2-07 0 o4-01 0 h —
o2-08 0 o4-02 0
o2-09 1 o2-09 * *Do not change this setting. Factory use only
o2-10 0 o4-03 0 h
o2-12 0 o4-11 0
o2-14 0 o4-12 0
o3-01 0 o3-01 0
o3-02 0 o3-02 0
0: Disabled 0: Disabled
1: Enabled 1: Enabled
o2-02 o2-02
0: Disabled 0: Disabled
1: Enabled 1: Enabled
o2-03 o2-03
0: No change 0: No change
1: Set defaults 1: Save values
2: Clear all 2: Clear all
Do not change this setting. Varies by kVA
Determined by drive capacity.
o2-05 o2-05
0: ENTER required 0: ENTER required
1: ENTER key not
required
o2-06 o2-06
0: Disabled
1: Enabled
o2-08 o4-02
0: Power on time 0: Logs power-on time
1: Running time 1: Logs operation time when the drive output is active
F7 Setting Range : 0 to 65535
A1000 Setting Range : 0 to 9999
o2-12 o4-11
0: No change 0: No change
1: Reset U2, U3
parameters
o2-14 o4-12
0: No change 0: No change
1: U1-29 and o2-14 are
reset to zero
o3-01 o3-01
0: COPY SELECT 0: No action
1: READ 1: Read LCD operation
2: COPY 2: Write to the drive
3: VERIFY 3: Verify
o3-02 o3-02
0: Read prohibited 0: Read prohibited
1: Read allowed 1: Read allowed
1: ENTER key not required
0: Continues operation if digital operator is
disconnected
1: An oPr fault is triggered and the motor coasts to a
stop
1: Reset U2, U3 parameters
1: U4-10 and U4-11 are reset
YAS KA WA PL.A1000.02 F7 to A1000 - Product Transition Guide 55
Page 56

11 Appendix 3 Terminal Size and Wire Gauge
11 Appendix 3 Terminal Size and Wire Gauge
Terminal Size and Wire Gauge
The table below lists the wiring sizes based on national electrical codes. Gauges are recommended, and users may select different gauges at their
own discretion. For wire gauges applicable in the United States refer to "Chapter 3. Electrical Installation" of the A1000 Quick Start Guide
(TOEPC71061641).
Table 19 3-Phase 240 V Class Main Circuit Terminal Size and Wire Gauge
Series Model Term i nal S ign al
R/L1, S/L2, T/L3,
F7
A1000
F7 21P5
A1000
F7 22P2
A1000 2A0012
F7 23P7
20P4
20P7
2A0004
2A0006
2A0008
2A0010
U/T1, V/T2, W/T3,
-, +1, +2, B1, B2,
Figure17
R/L1, S/L2, T/L3,
U/T1, V/T2, W/T3,
-, +1, +2, B1, B2,
R/L1, S/L2, T/L3,
U/T1, V/T2, W/T3,
-, +1, +2, B1, B2
R/L1, S/L2, T/L3,
U/T1, V/T2, W/T3,
-, +1, +2, B1, B2,
R/L1, S/L2, T/L3,
U/T1, V/T2, W/T3,
-, +1, +2, B1, B2,
R/L1, S/L2, T/L3,
U/T1, V/T2, W/T3,
-, +1, +2, B1, B2
R/L1,S/L2,T/L3,
U/T1,V/T2,W/T3,
-,+1, +2, B1, B2,
Ter mi nal
Screw
M4
M4
M4
M4
M4
M4
M4
M4
Tightening Torque
N ・ m (lb.in.)
1.2 to 1.5
(10.6 to 13.3)
1.2 to 1.5
(10.6 to 13.3)
1.2 to 1.5
(10.6 to 13.3)
1.2 to 1.5
(10.6 to 13.3)
1.2 to 1.5
(10.6 to 13.3)
1.2 to 1.5
(10.6 to 13.3)
1.2 to 1.5
(10.6 to 13.3)
1.2 to 1.5
(10.6 to 13.3)
Wire Range
AWG, kcmil
14 to 10 14
14 to 10 14, 10 (Ground)
14 to 10 14
14 to10 14, 10 (Ground)
14 to10 14
14 to 10 10 (L1-L3), 14
14 to 10 10
12 to 10 12
Recommended
Gauge AWG, kcmil
A1000
F7 25P5
A1000 2A0030
F7 27P5
2A0018
2A0021
R/L1,S/L2,T/L3,
-,+1, +2
U/T1,V/T2,W/T3,
B1, B2 M4
R/L1, S/L2, T/L3,
U/T1, V/T2, W/T3,
-, +1, +2, B1, B2,
R/L1, S/L2, T/L3,
-, +1, +2
U/T1, V/T2, W/T3 M4
B1, B2 M4
R/L1, S/L2, T/L3,
U/T1, V/T2, W/T3,
-, +1, +2, B1, B2,
M4
M4
M4
M4
M5
M5
1.2 to 1.5
(10.6 to 13.3)
1.2 to 1.5
(10.6 to 13.3)
1.2 to 1.5
(10.6 to 13.3)
1.2 to 1.5
(10.6 to 13.3)
1.2 to 1.5
(10.6 to 13.3)
1.2 to 1.5
(10.6 to 13.3)
1.2 to 1.5
(10.6 to 13.3)
2 to 2.5
(17.7 to 22.1)
2.5
(21.99)
12 to 10 10
12 to 10 10
14 to 10 —
10 10
10 to 6 8
10 to 6 8
14 to 10 —
10 to 8 8
8 to 6 8
56 YASK AWA PL.A1000.02 F7 to A1000 - Product Transition Guide
Page 57

11 Appendix 3 Terminal Size and Wire Gauge
Series Model Terminal Signal
R/L1, S/L2, T/L3,
-, +1, +2
A1000 2A0040
F7 2011
A1000 2A0056
F7 2015
A1000 2A0069
F7 2018
A1000 2A0081
F7 2022
U/T1, V/T2, W/T3 M4
B1, B2 M4
R/L1, S/L2, T/L3,
U/T1, V/T2, W/T3,
-, +1, +2, B1, B2,
R/L1, S/L2, T/L3,
-, +1, +2
U/T1, V/T2, W/T3 M6
B1, B2 M5
R/L1, S/L2, T/L3,
U/T1, V/T2, W/T3,
-, +1, +2
B1, B2 M5
R/L1, S/L2, T/L3,
-, +1, +2
U/T1, V/T2, W/T3, M8
B1, B2 M5
R/L1, S/L2, T/L3,
U/T1, V/T2, W/T3,
-, +1, +2
B1, B2 M5
R/L1, S/L2, T/L3,
-, +1, +2
U/T1, V/T2, W/T3 M8
B1, B2 M5
R/L1, S/L2, T/L3,
U/T1, V/T2, W/T3,
-, +1,
R1/L11, S1/L21,
T1/L31
+3 M6
Ter mi nal
Screw
M4
M5
M5
M6
M6
M6
M6
M8
M6
M8
M6
M8
M6
M8
M8
Tightening Torque
N ・ m (lb.in.)
1.2 to 1.5
(10.6 to 13.3)
1.2 to 1.5
(10.6 to 13.3)
1.2 to 1.5
(10.6 to 13.3)
2 to 2.5
(17.7 to 22.1)
2.5
(21.99)
4 to 6
(35.4 to 53.1)
4 to 6
(35.4 to 53.1)
2 to 2.5
(17.7 to 22.1)
4 to 6
(35.4 to 53.1)
4 to 5
(35.2 to 43.99)
2.5
(21.99)
4 to 5
(35.2 to 43.99)
9 to 11
(79.7 to 97.4)
9 to 11
(79.7 to 97.4)
2 to 2.5
(17.7 to 22.1)
4 to 6
(35.4 to 53.1)
9 to 10
(79.2 to 87.97)
2.5
(21.99)
4 to 5
(35.2 to 43.99)
9 to 11
(79.7 to 97.4)
9 to 11
(79.7 to 97.4)
2 to 2.5
(17.7 to 22.1)
4 to 6
(35.4 to 53.1)
9 to 10
(79.2 to 87.97)
4 to 5
(35.2 to 43.99)
9 to 10
(79.2 to 87.97)
Wire Range
AWG, kcmil
8 to 6 6
8 to 6 8
12 to 10 —
10 to 8 8
6 to 4 4, 6 (Ground and T1-3)
6 to 4 4
6 to 4 4
10 to 6 —
8 to 6 6
4 to 2 3, 4 (T1-3)
8 to 6 —
44
4 to 3 3
4 to 3 3
8 to 6 —
6 to 4 6
3 to 2 2, 3 (T1-3)
8 to 6 —
44
3 to 2 2
3 to 2 2
6—
6 to 4 6
N/A 1, 2 (T1-3)
N/A —
N/A 4
Recommended
Gauge AWG, kcmil
YAS KA WA PL.A1000.02 F7 to A1000 - Product Transition Guide 57
Page 58

11 Appendix 3 Terminal Size and Wire Gauge
Series Model Term i nal S ign al
R/L1, S/L2, T/L3,
U/T1, V/T2, W/T3
-, +1 M8
A1000 2A0110
F7 2030
A1000 2A0138
F7 2037
B1, B2 M8
R/L1, S/L2, T/L3,
U/T1, V/T2, W/T3,
-, +1,
R1/L11, S1/L21,
T1/L31
+3 M6
R/L1, S/L2, T/L3,
U/T1, V/T2, W/T3
-, +1 M10
B1, B2 M10
R/L1, S/L2, T/L3,
U/T1, V/T2, W/T3, -,
+1,
R1/L11, S1/L21,
T1/L31
+3 M8
r/ 1, / 2 M4
R/L1, S/L2, T/L3,
U/T1, V/T2, W/T3
-, +1 M10
A1000 2A0169
F7 2045
+3 M10
R/L1, S/L2, T/L3,
U/T1, V/T2, W/T3,
-, +1,
R1/L11, S1/L21,
T1/L31
+3 M8
r/ 1, / 2 M4
Ter mi nal
Screw
M8
M8
M8
M8
M10
M8
M10
M10
M10
M10
M10
M10
Tightening Torque
N ・ m (lb.in.)
9 to 11
(79.7 to 97.4)
9 to 11
(79.7 to 97.4)
9 to 11
(79.7 to 97.4)
9 to 11
(79.7 to 97.4)
9 to 10
(79.2 to 87.97)
4 to 5
(35.2 to 43.99)
9 to 10
(79.2 to 87.97)
18 to 23
(159 to 204)
18 to 23
(159 to 204)
18 to 23
(159 to 204)
9 to 11
(79.7 to 97.4)
17.6 to 22.5
(154.8 to 197.9)
8.8 to 10.8
(77.4 to 95.0)
17.6 to 22.5
(154.8 to 197.9)
1.3 to 1.4
(11.4 to 12.3)
18 to 23
(159 to 204)
18 to 23
(159 to 204)
18 to 23
(159 to 204)
18 to 23
(159 to 204)
17.6 to 22.5
(154.8 to 197.9)
8.8 to 10.8
(77.4 to 95.0)
17.6 to 22.5
(154.8 to 197.9)
1.3 to 1.4
(11.4 to 12.3)
Wire Range
AWG, kcmil
3 to 1/0 1/0
2 to 1/0 —
6 to 1/0 —
6 to 4 6
N/A 1/0
N/A —
N/A 4
1 to 2/0 2/0
1/0 to 3/0 —
4 to 2/0 —
44
N/A 4/0
N/A —
N/A 2
N/A 16
2/0 to 4/0, 3/0 to 4/0 (T1-
3)
1 to 4/0 —
1/0 to 4/0 —
4 to 2 4
N/A 300, 250 (T1-3)
N/A —
N/A 1
N/A 16
Recommended
Gauge AWG, kcmil
4/0
58 YASK AWA PL.A1000.02 F7 to A1000 - Product Transition Guide
Page 59

11 Appendix 3 Terminal Size and Wire Gauge
Series Model Terminal Signal
R/L1, S/L2, T/L3 M10
U/T1, V/T2, W/T3 M10
A1000 2A0211
F7 2055
-, +1 M10
+3 M10
R/L1, S/L2, T/L3,
-, +1
U/T1, V/T2, W/T3,
R1/L11, S1/L21,
T1/L31
+3 M8
r/ 1, / 2 M4
R/L1, S/L2, T/L3 M12
U/T1, V/T2, W/T3 M12
A1000 2A0250
F7 2075
-, +1 M12
+3 M10
-, +1 M12
R/L1, S/L2, T/L3,
U/T1, V/T2, W/T3,
R1/L11, S1/L21,
T1/L31
+3 M8
r/ 1, / 2 M4
R/L1, S/L2, T/L3 M12
U/T1, V/T2, W/T3 M12
A1000 2A0312
F7 2090
-, +1 M12
+3 M10
R/L1, S/L2, T/L3,
-, +1, R1/L11, S1/L21,
T1/L31
U/T1, V/T2, W/T3 M12
+3 M8
r/ 1, / 2 M4
Ter mi nal
Screw
M10
M10
M10
M10
M12
M10
M12
M12
M12
M12
Tightening Torque
N ・ m (lb.in.)
18 to 23
(159 to 204)
18 to 23
(159 to 204)
18 to 23
(159 to 204)
18 to 23
(159 to 204)
18 to 23
(159 to 204)
17.6 to 22.5
(154.8 to 197.9)
17.6 to 22.5
(154.8 to 197.9)
8.8 to 10.8
(77.4 to 95.0)
17.6 to 22.5
(154.8 to 197.9)
1.3 to 1.4
(11.4 to 12.3)
32 to 40
(283 to 354)
32 to 40
(283 to 354)
32 to 40
(283 to 354)
18 to 23
(159 to 204)
32 to 40
(283 to 354)
31.4 to 39.2
(276.2 to 344.8)
17.6 to 22.5
(154.8 to 197.9)
8.8 to 10.8
(77.4 to 95.0)
31.4 to 39.2
(276.2 to 344.8)
1.3 to 1.4
(11.4 to 12.3)
32 to 40
(283 to 354)
32 to 40
(283 to 354)
32 to 40
(283 to 354)
18 to 23
(159 to 204)
32 to 40
(283 to 354)
31.4 to 39.2
(276.2 to 344.8)
31.4 to 39.2
(276.2 to 344.8)
8.8 to 10.8
(77.4 to 95.0)
31.4 to 39.2
(276.2 to 344.8)
1.3 to 1.4
(11.4 to 12.3)
Wire Range
AWG, kcmil
1/0 to 2/0 1/0×2P
1/0 to 2/0 1/0×2P
1 to 4/0 —
1/0 to 4/0 —
4 to 1/0 4
N/A 1/0×2P
N/A 1/0×2P
N/A —
N/A 1/0
N/A 16
3/0 to 300 3/0×2P
3/0 to 300 3/0×2P
3/0 to 300 —
2 to 300 —
3 to 300 3
N/A 3/0×2P
N/A 4/0×2P, 3/0×2P (T1-3)
N/A —
N/A 3/0
N/A 16
3/0 to 300 4/0×2P
3/0 to 300 3/0×2P
3/0 to 300 —
3/0 to 300 —
2 to 300 2
N/A 250×2P
N/A 4/0×2P
N/A —
N/A 2/0×2P
N/A 16
Recommended
Gauge AWG, kcmil
YAS KA WA PL.A1000.02 F7 to A1000 - Product Transition Guide 59
Page 60

11 Appendix 3 Terminal Size and Wire Gauge
Series Model Term i nal S ign al
R/L1, S/L2, T/L3 M12
U/T1, V/T2, W/T3 M12
A1000 2A0360
F7 2110
-, +1 M12
+3 M10
R/L1, S/L2, T/L3,
-, +1, R1/L11, S1/L21,
T1/L31
U/T1, V/T2, W/T3 M12
+3 M8
r/ 1, / 2
R/L1, S/L2, T/L3 M12
U/T1, V/T2, W/T3 M12
A1000 2A0415
-, +1 M12
+3 M10
Ter mi nal
Screw
M12
M12
M12
M4
M12
Tightening Torque
N ・ m (lb.in.)
32 to 40
(283 to 354)
32 to 40
(283 to 354)
32 to 40
(283 to 354)
18 to 23
(159 to 204)
32 to 40
(283 to 354)
31.4 to 39.2
(276.2 to 344.8)
31.4 to 39.2
(276.2 to 344.8)
8.8 to 10.8
(77.4 to 95.0)
31.4 to 39.2
(276.2 to 344.8)
1.3 to 1.4
(11.4 to 12.3)
32 to 40
(283 to 354)
32 to 40
(283 to 354)
32 to 40
(283 to 354)
18 to 23
(159 to 204)
32 to 40
(283 to 354)
Wire Range
AWG, kcmil
4/0 to 600 250×2P
4/0 to 600 4/0×2P
250 to 600 —
3/0 to 600 —
1 to 350 1
N/A 350×2P
N/A 300×2P
N/A —
N/A 300×2P
N/A 16
250 to 600 350×2P
300 to 600 300×2P
300 to 600 —
3/0 to 600 —
1 to 350 1
Recommended
Gauge AWG, kcmil
Table 20 3-Phase 400 V Class Main Circuit Terminal Size and Gauge
Series Model Termi n al S i gna l
R/L1, S/L2, T/L3,
F7
A1000
F7
A1000
F7 43P7
40P4
40P7
4A0002
4A0004
41P5
42P2
4A0005
4A0007
4A0009
U/T1, V/T2, W/T3,
-, +1, +2, B1, B2,
R/L1, S/L2, T/L3,
U/T1, V/T2, W/T3,
-, +1, +2, B1, B2,
R/L1, S/L2, T/L3,
U/T1, V/T2, W/T3,
-, +1, +2, B1, B2,
R/L1, S/L2, T/L3,
U/T1, V/T2, W/T3,
-, +1, +2, B1, B2
R/L1, S/L2, T/L3,
U/T1, V/T2, W/T3,
-, +1, +2, B1, B2
Ter mi nal
Screw
M4
M4
M4
M4
M4
M4
M4
Tightening Torque
N ・ m (lb.in.)
1.2 to 1.5
(10.6 to 13.2)
1.2 to 1.5
(10.6 to 13.2)
1.2 to 1.5
(10.6 to 13.2)
1.2 to 1.5
(10.6 to 13.2)
1.2 to 1.5
(10.6 to 13.2)
1.2 to 1.5
(10.6 to 13.2)
1.2 to 1.5
(10.6 to 13.2)
Wire Range AWG,
kcmil
14 to 10 14
14 to 10 14, 12 (Ground)
14 to 10 14
14 to 10 14
14 to 10 10
14 to 10 12
14 to 10 14
Recommended
Gauge AWG, kcmil
60 YASK AWA PL.A1000.02 F7 to A1000 - Product Transition Guide
Page 61

11 Appendix 3 Terminal Size and Wire Gauge
Series Model Terminal Signal
R/L1, S/L2, T/L3,
U/T1, V/T2, W/T3,
A1000 4A0011
F7 45P5
A1000 4A0018
F7 47P5
A1000 4A0023
-, +1, +2, B1, B2
R/L1, S/L2, T/L3,
U/T1, V/T2, W/T3,
-, +1, +2, B1, B2
R/L1, S/L2, T/L3,
U/T1, V/T2, W/T3,
-, +1, +2
B1, B2 M4
R/L1, S/L2, T/L3,
U/T1, V/T2, W/T3,
-, +1, +2, B1, B2
R/L1, S/L2, T/L3,
U/T1, V/T2, W/T3,
-, +1, +2
B1, B2 M4
Ter mi nal
Screw
M4
M4
M4
M4
M4
M5
M4
M4
M4
M5
Tightening Torque
N ・ m (lb.in.)
1.2 to 1.5
(10.6 to 13.2)
1.2 to 1.5
(10.6 to 13.2)
1.2 to 1.5
(10.6 to 13.2)
1.2 to 1.5
(10.6 to 13.2)
1.2 to 1.5
(10.6 to 13.2)
1.2 to 1.5
(10.6 to 13.2)
2 to 2.5
(17.7 to 22.1)
1.8
(15.6)
1.8
(15.6)
1.2 to 1.5
(10.6 to 13.3)
1.2 to 1.5
(10.6 to 13.3)
2 to 2.5
(17.7 to 22.1)
Wire Range AWG,
kcmil
14 to 10 12, 14 (T1-3)
14 to 10 10
12 to 10 12
14 to 10 14
12 to 6 10
12 to 6 —
14 to 10 10
10 10
12 to 10 12
10 to 6, 12 to 6 (-, +1, +2) 10
12 to 10 —
12 to 10 10
Recommended
Gauge AWG, kcmil
F7 4011
A1000 4A0031
F7 4015
A1000 4A0038
R/L1, S/L2, T/L3,
U/T1, V/T2, W/T3,
-, +1, +2, B1, B2
R/L1, S/L2, T/L3,
-, +1, +2
U/T1, V/T2, W/T3 M5
B1, B2 M5
R/L1, S/L2, T/L3,
U/T1, V/T2, W/T3,
-, +1, +2, B1, B2
R/L1, S/L2, T/L3,
U/T1, V/T2, W/T3
-, +1, +2 M5
B1, B2 M5
M5
M5
M5
M6
M5
M5, M6
M5
M6
2.5
(21.99)
2.5
(21.99)
2 to 2.5
(17.7 to 22.1)
2 to 2.5
(17.7 to 22.1)
2 to 2.5
(17.7 to 22.1)
4 to 6
(35.4 to 53.1)
2.5
(21.99)
2.5 (21.99), 4.0 to 5.0
(35.2 to 43.99)
2 to 2.5
(17.7 to 22.1)
2 to 2.5
(17.7 to 22.1)
2 to 2.5
(17.7 to 22.1)
4 to 6
(35.4 to 53.1)
10 to 6 8
10 to 6 10
8 to 6, 10 to 6 (-, +1, +2) 8
10 to 6 8
10 to 8 —
10 to 8 8
8 to 6 8
10 to 6 10
8 to 6 6, 8 (T1-3)
8 to 6 —
10 to 8 —
10 to 6 6
YAS KA WA PL.A1000.02 F7 to A1000 - Product Transition Guide 61
Page 62

11 Appendix 3 Terminal Size and Wire Gauge
Series Model Termi n al S i gna l
R/L1, S/L2, T/L3,
U/T1, V/T2, W/T3,
-, +1, +2
F7 4018
A1000 4A0044
F7 4022
A1000 4A0058
F7 4030
A1000 4A0072
F7 4037
A1000 4A0088
B1, B2 M5
R/L1, S/L2, T/L3,
U/T1, V/T2, W/T3,
-, +1, +2
B1, B2 M5
R/L1, S/L2, T/L3,
U/T1, V/T2, W/T3,
-, +1, +3,
R1/L11, S1/L21,
T1/L31
R/L1, S/L2, T/L3,
U/T1, V/T2, W/T3
-, +1 M8
B1, B2 M8
R/L1, S/L2, T/L3,
U/T1, V/T2, W/T3,
-, +1, +3,
R1/L11, S1/L21,
T1/L31
R/L1, S/L2, T/L3,
U/T1, V/T2, W/T3
-, +1
B1, B2
R/L1, S/L2, T/L3,
U/T1, V/T2, W/T3,
-, +1,
R1/L11, S1/L21,
T1/L31
+3 M6
R/L1, S/L2, T/L3,
U/T1, V/T2, W/T3
-, +1 M8
+3 M8
Ter mi nal
Screw
M6
M6
M6
M6
M6
M8
M8
M8
M6
M8
M8
M8
M8
M8
M8
M8
M8
Tightening Torque
N ・ m (lb.in.)
4 to 5
(35.2 to 43.99)
2.5
(21.99)
4 to 5
(35.2 to 43.99)
4 to 6
(35.4 to 53.1)
2 to 2.5
(17.7 to 22.1)
4 to 6
(35.4 to 53.1)
4 to 5
(35.2 to 43.99)
9 to 10
(79.2 to 87.97)
9 to 11
(79.7 to 97.4)
9 to 11
(79.7 to 97.4)
9 to 11
(79.7 to 97.4)
9 to 11
(79.7 to 97.4)
4 to 5
(35.2 to 43.99)
9 to 10
(79.2 to 87.97)
9 to 11
(79.7 to 97.4)
9 to 11
(79.7 to 97.4)
9 to 11
(79.7 to 97.4)
9 to 10
(79.2 to 87.97)
4 to 5
(35.2 to 43.99)
9 to 10
(79.2 to 87.97)
9 to 11
(79.7 to 97.4)
9 to 11
(79.7 to 97.4)
9 to 11
(79.7 to 97.4)
9 to 11
(79.7 to 97.4)
Wire Range AWG,
kcmil
8 to 2 6, 8 (T1-3)
88
8 to 4 8
6 to 4 6
10 to 8 —
8 to 6 6
N/A 4, 6 (T1-3)
N/A 6
6 to 4 4
6 to 1 —
8 to 4 —
8 to 6 6
N/A 3, 4 (T1-3)
N/A 4
4 to 3 3
4 to 1, 6 to 3 (B1, B2) —
66
N/A 2, 3 (T1-3)
N/A —
N/A 4
3 to 1/0 2
3 to 1/0 —
6 to 1/0 —
6 to 4 4
Recommended
Gauge AWG, kcmil
62 YASK AWA PL.A1000.02 F7 to A1000 - Product Transition Guide
Page 63

11 Appendix 3 Terminal Size and Wire Gauge
Series Model Terminal Signal
R/L1, S/L2, T/L3,
U/T1, V/T2, W/T3,
-, +1,
R1/L11, S1/L21,
F7 4045
A1000 4A0103
F7 4055
A1000 4A0139
F7 4075
T1/L31
+3 M6
R/L1, S/L2, T/L3,
U/T1, V/T2, W/T3
-, +1 M8
+3 M8
R/L1, S/L2, T/L3,
U/T1, V/T2, W/T3,
-, +1,
R1/L11, S1/L21,
T1/L31
+3 M6
R/L1, S/L2, T/L3 M10
U/T1, V/T2, W/T3 M10
-, +1 M10
+3 M10
R/L1, S/L2, T/L3,
R1/L11, S1/L21,
T1/L31, -, +1
U/T1, V/T2, W/T3 M10
+3 M8
Ter mi nal
Screw
M8
M8
M8
M8
M8
M8
M10
M10
M10
Tightening Torque
N ・ m (lb.in.)
9 to 10
(79.2 to 87.97)
4 to 5
(35.2 to 43.99)
9 to 10
(79.7 to 87.97)
9 to 11
(79.7 to 97.4)
9 to 11
(79.7 to 97.4)
9 to 11
(79.7 to 97.4)
9 to 11
(79.7 to 97.4)
9 to 10
(79.2 to 87.97)
4 to 5
(35.2 to 43.99)
9 to 10
(79.2 to 87.97)
18 to 23
(159 to 204)
18 to 23
(159 to 204)
18 to 23
(159 to 204)
18 to 23
(159 to 204)
18 to 23
(159 to 204)
17.6 to 22.5
(154.8 to 197.5)
17.6 to 22.5
(154.8 to 197.5)
8.8 to 10.8
77.4 to 95.0)
17.6 to 22.5
(154.8 to 197.5)
Wire Range AWG,
kcmil
N/A 1/0, 1 (T1-3)
N/A —
N/A 4
2 to 1/0 1/0, 1 (T1-3)
3 to 1/0 —
4 to 1/0 —
6 to 4 4
N/A 2/0
N/A —
N/A 4
1/0 to 4/0 3/0
1/0 to 4/0 2/0
1/0 to 4/0 —
3 to 4/0 —
44
N/A 4/0
N/A 3/0
N/A —
N/A 2
Recommended
Gauge AWG, kcmil
A1000 4A0165
r/ 1, 200/
200, 400/
2
400
2
R/L1, S/L2, T/L3 M10
U/T1, V/T2, W/T3 M10
-, +1 M10
+3 M10
M4
M10
1.3 to 1.4
(11.4 to 12.3)
18 to 23
(159 to 204)
18 to 23
(159 to 204)
18 to 23
(159 to 204)
18 to 23
(159 to 204)
18 to 23
(159 to 204)
N/A 16
3/0 to 4/0 4/0
3/0 to 4/0 4/0
1 to 4/0 —
1/0 to 4/0 —
4 to 2 4
YAS KA WA PL.A1000.02 F7 to A1000 - Product Transition Guide 63
Page 64

11 Appendix 3 Terminal Size and Wire Gauge
Series Model Termi n al S i gna l
R/L1, S/L2, T/L3,
-, +1, R1/L11, S1/L21,
T1/L31
U/T1, V/T2, W/T3 M10
+3 M8
F7 4090
r/ 1, 200/
200, 400/
2
400
2
R/L1, S/L2, T/L3 M10
U/T1, V/T2, W/T3 M10
A1000 4A0208
F7 4110
-, +1 M10
+3 M10
R/L1, S/L2, T/L3,
-, +1, R1/L11, S1/L21,
T1/L31
U/T1, V/T2, W/T3, M10
+3 M8
Ter mi nal
Screw
M10
M10
M4
M10
M10
M12
Tightening Torque
N ・ m (lb.in.)
17.6 to 22.5
(154.8 to 197.5)
17.6 to 22.5
(154.8 to 197.5)
8.8 to 10.8
(77.4 to 95.0)
17.6 to 22.5
(154.8 to 95.0)
1.3 to 1.4
(11.4 to 12.3)
18 to 23
(159 to 204)
18 to 23
(159 to 204)
18 to 23
(159 to 204)
18 to 23
(159 to 204)
18 to 23
(159 to 204)
17.6 to 22.5
(154.8 to 197.5)
17.6 to 22.5
(154.8 to 197.5)
8.8 to 10.8
(77.4 to 95.0)
31.4 to 39.2
(276.2 to 344.8)
Wire Range AWG,
kcmil
N/A 250
N/A 4/0
N/A —
N/A 1
N/A 16
2 to 300 300
2 to 300 300
1 to 250 —
3 to 3/0 —
4 to 300 4
N/A 2/0×2P
N/A 1/0×2P
N/A —
N/A 2/0
Recommended
Gauge AWG, kcmil
A1000 4A0250
F7 4132
r/ 1, 200/
200, 400/
2
400
2
R/L1, S/L2, T/L3 M10
U/T1, V/T2, W/T3 M10
-, +1 M10
+3 M10
R/L1, S/L2, T/L3,
-, +1, R1/L11, S1/L21,
T1/L31
U/T1, V/T2, W/T3, M10
+3 M8
r/ 1, 200/
200, 400/
2
400
2
M4
M10
M10
M12
M4
1.3 to 1.4
(11.4 to 12.3)
18 to 23
(159 to 204)
18 to 23
(159 to 204)
18 to 23
(159 to 204)
18 to 23
(159 to 204)
18 to 23
(159 to 204)
17.6 to 22.5
(154.8 to 197.5)
17.6 to 22.5
(154.8 to 197.5)
8.8 to 10.8
(77.4 to 95.0)
31.4 to 39.2
(276.2 to 344.8)
1.3 to 1.4
(11.4 to 12.3)
N/A 16
1 to 600 400
1/0 to 600 400
3/0 to 600 —
1 to 325 —
2 to 350 2
N/A 3/0×2P
N/A 2/0×2P
N/A —
N/A 4/0
N/A 16
64 YASK AWA PL.A1000.02 F7 to A1000 - Product Transition Guide
Page 65

11 Appendix 3 Terminal Size and Wire Gauge
Series Model Terminal Signal
R/L1, S/L2, T/L3 M12
U/T1, V/T2, W/T3 M12
A1000 4A0296
F7 4160
-, +1 M12
+3 M10
R/L1, S/L2, T/L3,
-, +1, R1/L11, S1/L21,
T1/L31
U/T1, V/T2, W/T3, M12
+3 M8
r/ 1, 200/
200, 400/
2
400
2
R/L1, S/L2, T/L3 M12
U/T1, V/T2, W/T3 M12
A1000 4A0362
F7 4185
-, +1 M12
+3 M10
R/L1, S/L2, T/L3 M16
U/T1, V/T2, W/T3,
R1/L11, S1/L21,
T1/L31
-, +1 M16
+3 M16
Ter mi nal
Screw
M12
M12
M12
M4
M12
M16
M16
Tightening Torque
N ・ m (lb.in.)
32 to 40
(283 to 354)
32 to 40
(283 to 354)
32 to 40
(283 to 354)
18 to 23
(159 to 204)
32 to 40
(283 to 354)
31.4 to 39.2
(276.2 to 344.8)
31.4 to 39.2
(276.2 to 344.8)
8.8 to 10.8
(77.4 to 95.0)
31.4 to 39.2
(276.2 to 344.8)
1.3 to 1.4
(11.4 to 12.3)
32 to 40
(283 to 354)
32 to 40
(283 to 354)
32 to 40
(283 to 354)
18 to 23
(159 to 204)
32 to 40
(283 to 354)
78.4 to 98
(693.9 to 867.4)
78.4 to 98
(693.9 to 867.4)
78.4 to 98
(693.9 to 867.4)
78.4 to 98
(693.9 to 867.4)
78.4 to 98
(693.9 to 867.4)
Wire Range AWG,
kcmil
2/0 to 600 500
2/0 to 600 500
3/0 to 600 —
1 to 325 —
2 to 350 2
N/A 4/0×2P
N/A 3/0×2P
N/A —
N/A 1/0×2P
N/A 16
3/0 to 600 4/0×2P
3/0 to 600 4/0×2P
4/0 to 600 —
3/0 to 600 —
1 to 350 1
N/A 300×2P
N/A 300×2P
N/A 600×2P
N/A —
N/A 3/0×2P
Gauge AWG, kcmil
Recommended
A1000 4A0414
r/ 1, 200/
200, 400/
2
400
2
R/L1, S/L2, T/L3 M12
U/T1, V/T2, W/T3 M12
-, +1 M12
+3 M12
M4
M12
1.3 to 1.4
(11.4 to 12.3)
32 to 40
(283 to 354)
32 to 40
(283 to 354)
32 to 40
(283 to 354)
32 to 40
(283 to 354)
32 to 40
(283 to 354)
N/A 16
4/0 to 300 300×2P
4/0 to 300 300×2P
3/0 to 300 —
3/0 to 300 —
1 to 3/0 1
YAS KA WA PL.A1000.02 F7 to A1000 - Product Transition Guide 65
Page 66

11 Appendix 3 Terminal Size and Wire Gauge
Series Model Termi n al S i gna l
R/L1, S/L2, T/L3,
R1/L11, S1/L21,
T1/L31
U/T1, V/T2, W/T3, M16
-, +1 M16
F7 4220
+3 M16
r/ 1, 200/
200, 400/
2
400
2
R/L1, S/L2, T/L3 M12
U/T1, V/T2, W/T3 M12
A1000 4A0515
F7 4300
-, +1 M12
+3 M12
R/L1, S/L2, T/L3 M16
R1/L11, S1/L21,
T1/L31
U/T1, V/T2, W/T3 M16
-, +1 M16
+3 M16
Ter mi nal
Screw
M16
M16
M4
M12
M16
M16
Tightening Torque
N ・ m (lb.in.)
78.4 to 98
(693.9 to 867.4)
78.4 to 98
(693.9 to 867.4)
78.4 to 98
(693.9 to 867.4)
78.4 to 98
(693.9 to 867.4)
78.4 to 98
(693.9 to 867.4)
1.3 to 1.4
(11.4 to 12.3)
32 to 40
(283 to 354)
32 to 40
(283 to 354)
32 to 40
(283 to 354)
32 to 40
(283 to 354)
32 to 40
(283 to 354)
78.4 to 98
(693.9 to 867.4)
78.4 to 98
(693.9 to 867.4)
78.4 to 98
(693.9 to 867.4)
78.4 to 98
(693.9 to 867.4)
78.4 to 98
(693.9 to 867.4)
78.4 to 98
(693.9 to 867.4)
Wire Range AWG,
kcmil
N/A 500×2P
N/A 400×2P
N/A 250×4P
N/A —
N/A 250×2P
N/A 16
3/0 to 300 3/0×4P
3/0 to 300 4/0×4P
1/0 to 300 —
1/0 to 300 —
1/0 to 300 1/0
N/A 250×4P
N/A 250×4P
N/A 4/0×4P
N/A 400×4P
N/A —
N/A 400×2P
Gauge AWG, kcmil
Recommended
A1000 4A0675
r/ 1, 200/
200, 400/
2
400
2
R/L1, S/L2, T/L3,
U/T1, V/T2, W/T3
-, +1 M12
+3 M12
M4
M12
M12
1.3 to 1.4
(11.4 to 12.3)
32 to 40
(283 to 354)
32 to 40
(283 to 354)
32 to 40
(283 to 354)
32 to 40
(283 to 354)
N/A 16
4/0 to 300 300×4P
1/0 to 300 —
1/0 to 300 —
2/0 to 300 2/0
66 YASK AWA PL.A1000.02 F7 to A1000 - Product Transition Guide
Page 67

11 Appendix 3 Terminal Size and Wire Gauge
Table 21 Control Circuit Terminal Size and Wire Gauge
Power Supply Series Capacity Terminal Signal Terminal Screw
FM, AC, AM, A1,
A2, A3, +V, -V,
200 V Class
400 V Class
200 V Class
400 V Class
F7 All capacities
A1000 All capacities
S1, S2, S3, S4, S5,
S6,S7, S8, SN, SC,
SP, RP, MA, MB,
MC, M1,M2, M3,
M4, M5, M6,
MP, RP, R+, R-, S+,
S-, IG
E (G) M3.5
FM, AC, AM, P1,
P2, PC,
SC, SN, SP, A1, A2,
A3, +V, -V,
S1, S2, S3, S4, S5,
S6,S7, S8,
MA, MB, MC,
M1-M6
MP, RP, R+, R-, S+,
S-, IG
DM+, DM-, H1, H2,
HC
Phoenix type
Phoenix type
M3
M3
Tightening Torque
lb-in
(N ・ m)
4.2 to 5.3
(0.5 to 0.6)
4.2 to 5.3
(0.5 to 0.6)
7.0 to 8.8
(0.8 to 1.0)
4.4 to 5.3
(0.5 to 0.6)
4.4 to 5.3
(0.5 to 0.6)
Possible Gauges
AWG (mm
Stranded wire: 26 to
(0.14 to 1.5)
Stranded wire:
(0.14 to 1.5)
stranded wire:
Ferrule-Type:
24 to 20 (0.25 to 0.5)
16
26 to 16
20 to 14
(0.5 to 2.0)
24 to 16
(0.2 to 1.0)
solid wire:
24 to 16
(0.2 to 1.5)
2
)
Recommended
Gauges AWG
2
(mm
)
18
(0.75)
18
(0.75)
12
(1.25)
Bare Wire: 18 (0.75)
Ferrule-Type: 20 (0.5)
Bare Wire: 18 (0.75)
Ferrule-Type: 20 (0.5)
E (G) — — — —
YAS KA WA PL.A1000.02 F7 to A1000 - Product Transition Guide 67
Page 68

F7 to A1000
Product Transition Guide
™
2011 YASKAWA AMERICA, INC. All rights reserved.
YASKAWA AMERICA, INC.
DOCUMENT NO. PL.A1000.02
Published in U.S.A January 2011 11-01
 Loading...
Loading...