

Page 1

Instrucciones de servicio
Sensor de radar para la medición
continua de nivel de líquidos
VEGAPULS 61
Protocolo Modbus y Levelmaster
Document ID: 41361
Page 2
Arranque rápido
Montaje
Arranque rápido
El arranque rápido posibilita una puesta en marcha rápida en muchas
aplicaciones. Más informaciones se pueden encontrar en los capítulos correspondientes del manual de instrucciones.
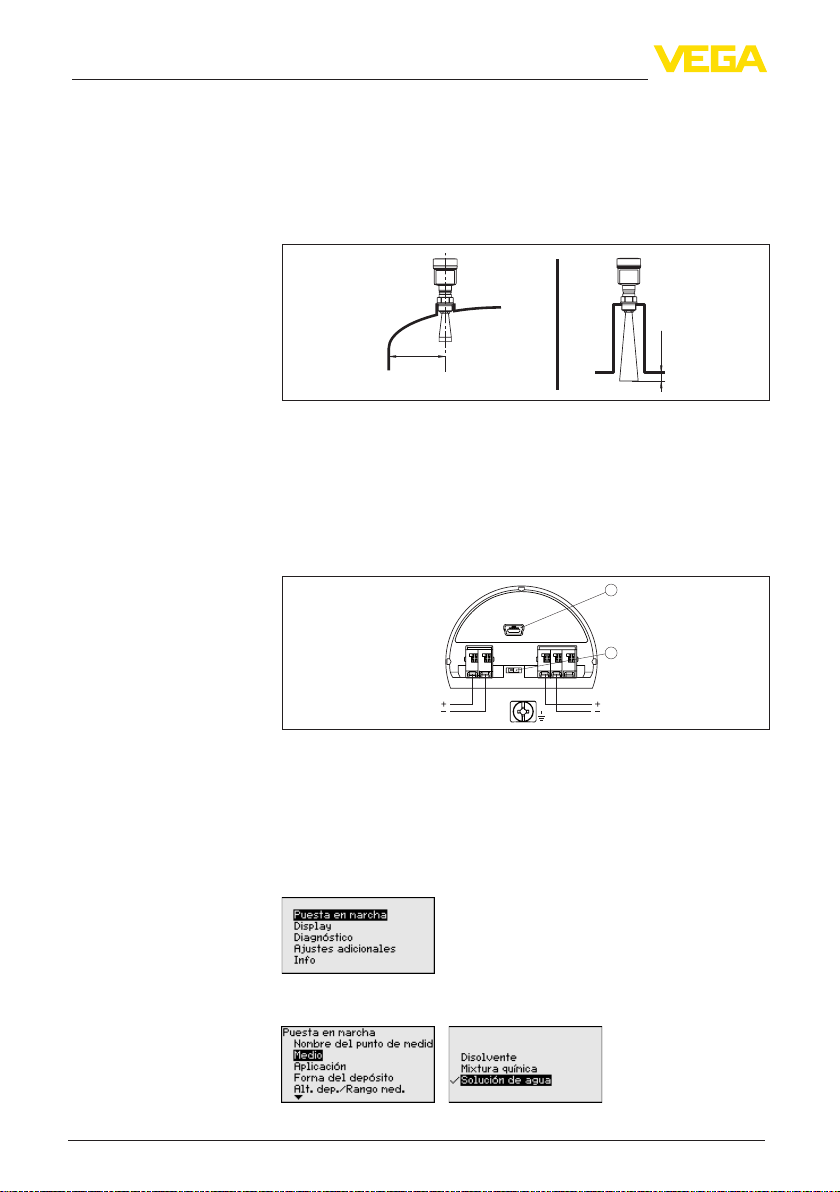
1. Distancia desde la pared del depósito > 200 mm, la antena debe
sobresalir > 10 mm en el depósito
Conexión eléctrica
Ajustar parámetros
> 200 mm
(7.87
")
ca. 10 mm
Fig. 1: Distancia de la antena hasta la pared del depósito/tapa del depósito
2. Atender el diámetro mínimo de tubuladura en dependencia del
largo de la tubuladura
Para más informaciones véase el capítulo "Montaje".
1. Asegurar, que la alimentación de tensión coincida con las especicaciones de la placa de tipos.
2. Conectar el equipo según la gura siguiente
1
USB
MODBUS
)
+
(
power supply
(-)
( )
1345
2off
+
(-)
IS GND
D0
D1
2
on
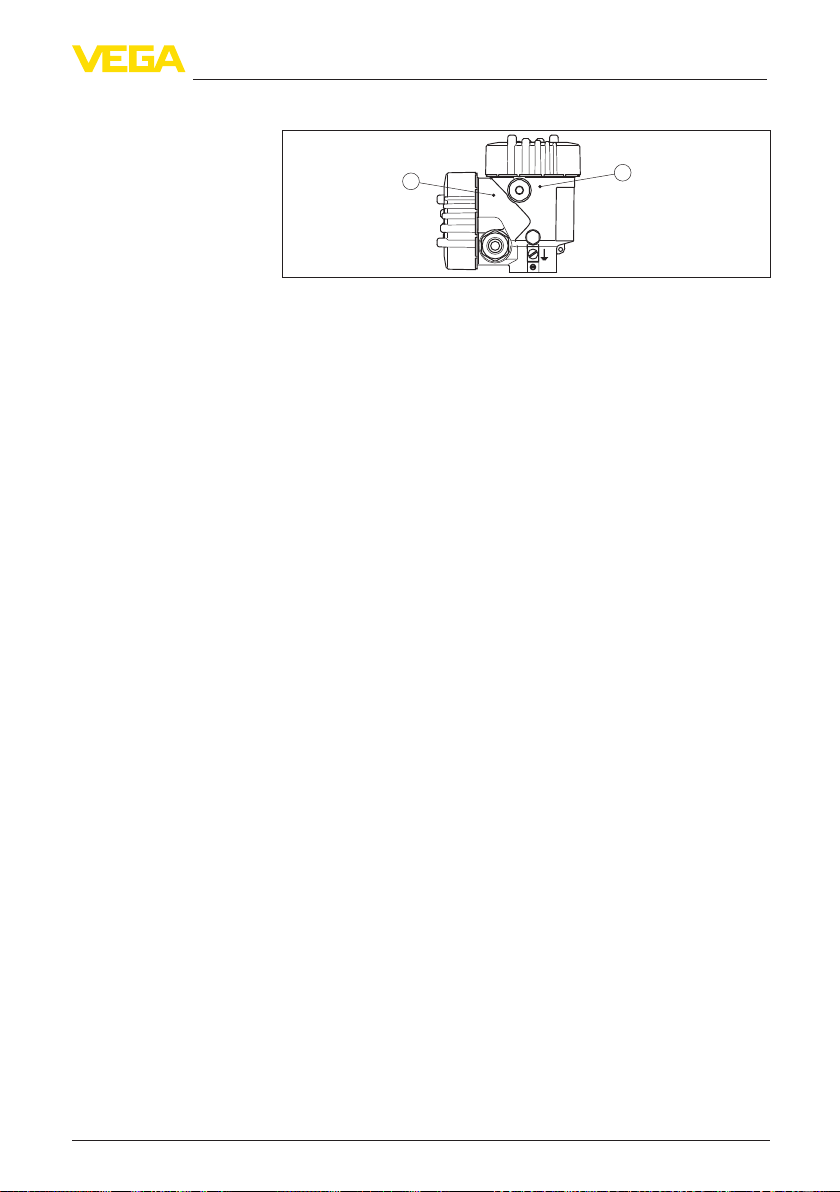
Fig. 2: Compartimiento de conexiones
1 Conexión USB
2 Conmutadordeslizantepararesistenciadeterminaciónintegrada(20Ω)
Para más informaciones véase capítulo "Conectar a la tensión de
alimentación".
1. Ir al menú "Puesta en marcha" a través del módulo de indicación
y conguración.
2. En el punto menú "Medio" seleccionar el medio de su aplicación,
p. Ej. "Solución acuosa".
2
VEGAPULS 61 • Protocolo Modbus y Levelmaster
41361-ES-121113
Page 3
Arranque rápido
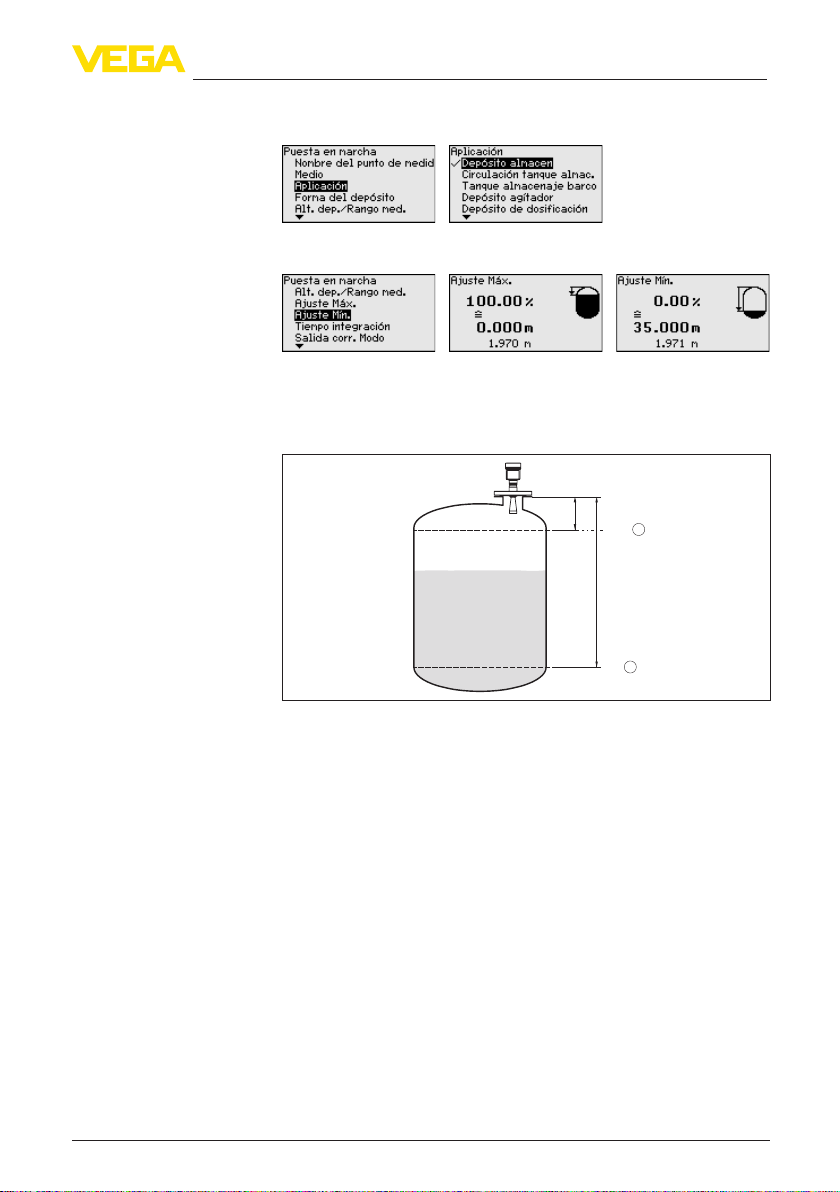
3. En el punto menú "Aplicación" seleccionar el depósito, la aplicación y la forma del depósito, p. Ej. tanque de almacenaje.
4. En los puntos de menú "Ajuste mín." y "Ajuste máx." realizar el
ajuste.
Ejemplo de parametrización
Otros pasos
El sensor de radar mide la distancia del sensor a la supercie del
producto. Para la indicación de la altura verdadera del producto, hay
que realizar una asignación de la distancia medida respecto a la
altura porcentual.
")
0,5 m
(19.68
100%
2
")
5 m
(196.9
0%
1
Fig. 3: Ejemplo de parametrización ajuste mín/máx
1 Nivel mín. = Distancia de medición máx.
2 Nivel máx. = Distancia de medición mín
Para ese ajuste se entra la distancia de los niveles mínimo y máximo.
Si se desconocen esos valores, también se puede ajustar p. Ej. con
las distancias correspondientes al 10 % y el 90 %. El punto de partida
para esos datos de distancia es siempre la supercie de obturación
de la rosca.
1. En el menú "Otros ajustes", punto menú "Atenuación" ajustar la
atenuación deseada de la señal de salida.
2. En el punto menú "Salida de corriente" seleccionar la curva
característica de salida.
De esta forma termina el arranque rápido. Para más informaciones
véase el capítulo "Parametrización".
41361-ES-121113
VEGAPULS 61 • Protocolo Modbus y Levelmaster
3
Page 4

Índice
Índice
1 Acerca de este documento
1.1 Función .............................................................................. 6
1.2 Grupo destinatario .............................................................. 6
1.3 Simbología empleada......................................................... 6
2 Para su seguridad
2.1 Personal autorizado ............................................................ 7
2.2 Empleo acorde con las prescripciones ............................... 7
2.3 Aviso contra uso incorrecto ................................................ 7
2.4 Instrucciones generales de seguridad ................................ 7
2.5 Conformidad CE ................................................................. 8
2.6 Recomendaciones NAMUR ............................................... 8
2.7 Homologación radiotécnica para Europa ........................... 8
2.8 Homologación radiotécnica para USA/Canadá .................. 8
2.9 Instrucciones acerca del medio ambiente .......................... 9
3 Descripción del producto
3.1 Construcción .................................................................... 10
3.2 Principio de operación ...................................................... 11
3.3 Embalaje, transporte y almacenaje .................................. 12
3.4 Accesorios y piezas de repuesto ...................................... 13
4 Montaje
4.1 Instrucciones generales ................................................... 14
4.2 Brida suelta o brida de adaptación ................................... 14
4.3 Preparación de montaje estribo de montaje ..................... 15
4.4 instrucciones de montaje.................................................. 16
5 Conectar a la tensión de alimentación y al sistema de bus
5.1 Preparación de la conexión .............................................. 27
5.2 Conexión .......................................................................... 28
5.3 Esquema de conexión ...................................................... 29
5.4 Fase de conexión ............................................................. 30
6 Congurarelsensorconelmódulodeindicaciónycongu-
ración
6.1 Alcance de conguración ................................................. 31
6.2 Poner módulo de indicación y conguración ................... 31
6.3 Sistema de conguración ................................................. 32
6.4 Ajuste de parámetros ....................................................... 33
6.5 Aseguramiento de los datos de parametrización .............. 45
7 CongurarlainterfacedelsensoryModbusconPACTware
7.1 Conectar el PC ................................................................. 47
7.2 Parametrización con PACTware ........................................ 48
7.3 Aseguramiento de los datos de parametrización .............. 50
8 Puestaenfuncionamientoconotrossistemas
8.1 Programa de conguración DD ........................................ 51
8.2 Communicator 375, 475 ................................................... 51
9 Diagnóstico, Asset Management y servicio
9.1 Mantenimiento ................................................................. 52
41361-ES-121113
4
VEGAPULS 61 • Protocolo Modbus y Levelmaster
Page 5

9.2 Memoria de valores medidos y eventos ........................... 52
9.3 Función Asset-Management ............................................ 53
9.4 Eliminación de fallos ......................................................... 57
9.5 Cambiar módulo electrónico............................................. 60
9.6 Actualización del software ................................................ 61
9.7 Procedimiento en caso de reparación .............................. 61
10 Desmontaje
10.1 Secuencia de desmontaje ................................................ 62
10.2 Eliminación ....................................................................... 62
11 Anexo
11.1 Datos técnicos.................................................................. 63
11.2 Principios Modbus ............................................................ 68
11.3 Registro Modbus .............................................................. 70
11.4 Modbus instrucciones RTU .............................................. 72
11.5 Instrucciones Levelmaster ................................................ 75
11.6 Conguración servidor Modbus típico .............................. 79
11.7 Medidas ........................................................................... 83
Índice
Instrucciones de seguridad para zonas Ex
En caso de aplicaciones Ex tener en cuenta las instrucciones de seguridad especícas Ex.Estas forman parte del manual de instrucciones y están anexas a cada equipo con homologación Ex.
41361-ES-121113
Estado de redacción:2012-09-27
VEGAPULS 61 • Protocolo Modbus y Levelmaster
5
Page 6
1 Acerca de este documento
1 Acerca de este documento
1.1 Función
Este manual de instrucciones suministra las informaciones necesarias para el montaje, la conexión y conguración, así como instrucciones importantes de mantenimiento y eliminación de fallos Por eso
léala antes de la puesta en marcha y consérvela todo el tiempo al
alcance de la mano en las cercanías del equipo como parte integrante del producto.
1.2 Grupo destinatario
El presente manual de instrucciones está dirigido a los especialistas
capacitados. Hay que facilitar el acceso de los especialistas al contenido del presente manual de instrucciones y aplicarlo.
1.3 Simbología empleada
Información,sugerencia,nota
Este símbolo caracteriza informaciones adicionales de utilidad.
Cuidado: En caso de omisión de ese aviso se pueden producir fallos
o interrupciones.
Aviso: En caso de omisión de ese aviso se pueden producir lesiones
personales y/o daños graves del equipo.
Peligro: En caso de omisión de ese aviso se pueden producir lesio-
nes personales graves y/o la destrucción del equipo.
Aplicaciones Ex
Este símbolo caracteriza instrucciones especiales para aplicaciones
Ex.
Lista
•
El punto precedente caracteriza una lista sin secuencia obligatoria
Paso de procedimiento
→
Esa echa caracteriza un paso de operación individual.
1 Secuencia de operación
Los números precedentes caracterizan pasos de operación secuenciales.
Eliminación de baterías
Este símbolo caracteriza indicaciones especiales para la eliminación
de baterías y acumuladores.
41361-ES-121113
6
VEGAPULS 61 • Protocolo Modbus y Levelmaster
Page 7

2 Para su seguridad
2.1 Personal autorizado
Todas las operaciones descritas en este manual de instrucciones
pueden ser realizadas solamente por especialistas capacitados,
autorizados por el operador del equipo.
Durante los trabajos en y con el equipo siempre es necesario el uso
del equipo de protección necesario.
2.2 Empleo acorde con las prescripciones
VEGAPULS 61 es un sensor para la medición continua de nivel.
Informaciones detalladas sobre el campo de aplicación se encuen-
tran en el capítulo "Descripción del producto".
La conabilidad funcional del equipo está garantizada solo en caso
de empleo acorde con las prescripciones según las especicaciones
en el manual de instrucciones del equipo así como las instrucciones
suplementarias.
2.3 Aviso contra uso incorrecto
En caso de empleo inadecuado o contrario a las prescripciones se
pueden producir riesgos de aplicación especícos de este equipo,
por ejemplo, un sobrellenado de depósito o daños en las partes del
equipo a causa de montaje o ajuste erróneo.
2.4 Instrucciones generales de seguridad
El equipo corresponde con el estado tecnológico bajo observación
de las prescripciones y recomendaciones normales. Solamente puede emplearse en estado técnico perfecto y con seguridad funcional.
El operador es responsable por el funcionamiento del equipo sin
fallos.
Además, el operador está en la obligación de determinar durante el
tiempo completo de empleo la conformidad de las medidas de seguridad del trabajo necesarias con el estado actual de las regulaciones
validas en cada caso y las nuevas prescripciones.
El usuario tiene que respetar las instrucciones de seguridad de este
manual de instrucciones, las normas de instalación especícas del
país y las normas validas de seguridad y de prevención de accidentes.
Por motivos de seguridad y de garantía las manipulaciones en el
equipo que excedan las operaciones necesarias descritas en el
manual de instrucciones deben ser realizadas exclusivamente por el
personal autorizado del fabricante
Además, hay que atender a los símbolos e indicaciones de seguridad
puestos en el equipo.
Las frecuencias de transmisión de los sensores de radar están en la
gama de banda C o K en dependencia de la versión del equipo. Las
potencias reducidas de transmisión son muy inferiores a los valores
límites homologados internacionalmente. No se espera ningún tipo
41361-ES-121113
VEGAPULS 61 • Protocolo Modbus y Levelmaster
2 Para su seguridad
7
Page 8

2 Para su seguridad
de perjuicio de la salud en caso de empleo acorde con las prescripciones.
2.5 ConformidadCE
El equipo cumple los requisitos legales de la norma CE correspondiente. Con el símbolo CE conrmamos la comprobación exitosa
La declaración de conformidad CE está en la zona de descarga de
nuestro sitio web.
El equipo está destinado para el empleo en entorno industrial. Aquí
hay que calcular con magnitudes perturbadoras ligadas a las líneas
y a causa de la radiación, como es común en caso de un equipo
clase A según EN 61326-1. Si el equipo se emplea en otro entorno,
entonces hay que asegurar la compatibilidad electromagnética con
los demás equipos a través de medidas apropiadas.
2.6 Recomendaciones NAMUR
NAMUR es la sociedad de intereses técnica de automatización en la
industria de procesos en Alemania. Las recomendaciones NAMUR
editadas se aplican en calidad de estándar en la instrumentación de
campo.
El equipo cumple las requisitos de las recomendaciones NAMUR
siguientes:
NE 21 – Compatibilidad electromagnética de medios de produc-
•
ción
NE 43 – Nivel de señal para información de fallo de convertidores
•
de medición
NE 53 – Compatibilidad con equipos de campo y componentes de
•
indicación y conguración
NE 107 - autocontrol y diagnosis de equipos de campo
•
Para otras informaciones ver www.namur.de.
2.7 Homologación radiotécnica para Europa
El equipo está homologado según EN 302372-1/2 (2006-04) para el
empleo en depósitos cerrados.
2.8 Homologación radiotécnica para USA/
Canadá
Este equipo tiene conformidad con la parte 15 de las recomendaciones de FCC. Para la operación hay que tener en cuenta las determinaciones correspondientes:
El equipo no puede causar ningún tipo de emisiones parásitas
•
El equipo tiene que ser insensible contra emisiones parásitas,
•
incluso contra aquellas que causan estados de operación indeseados
Las modicaciones no autorizadas expresamente por el fabricante
provocan la extinción de la licencia de operación según FCC/IC.
El equipo tiene conformidad con RSS-210 de las proscripciones IC.
8
VEGAPULS 61 • Protocolo Modbus y Levelmaster
41361-ES-121113
Page 9

2 Para su seguridad
El equipo solamente se puede emplear en depósitos cerrados de
metal, hormigón o plástico reforzado con bra de vidrio.
2.9 Instrucciones acerca del medio ambiente
La protección de la base natural de vida es una de las tareas más
urgentes. Por eso hemos introducido un sistema de gestión del
medio ambiente, con el objetivo de mejorar continuamente el medio
ambiente empresarial. El sistema de gestión del medio ambiente está
certicado por la norma DIN EN ISO 14001.
Ayúdenos a satisfacer esos requisitos, prestando atención a las
instrucciones del medio ambiente en este manual:
Capitulo "Embalaje, transporte y almacenaje"
•
Capitulo "Reciclaje"
•
41361-ES-121113
VEGAPULS 61 • Protocolo Modbus y Levelmaster
9
Page 10
3 Descripción del producto
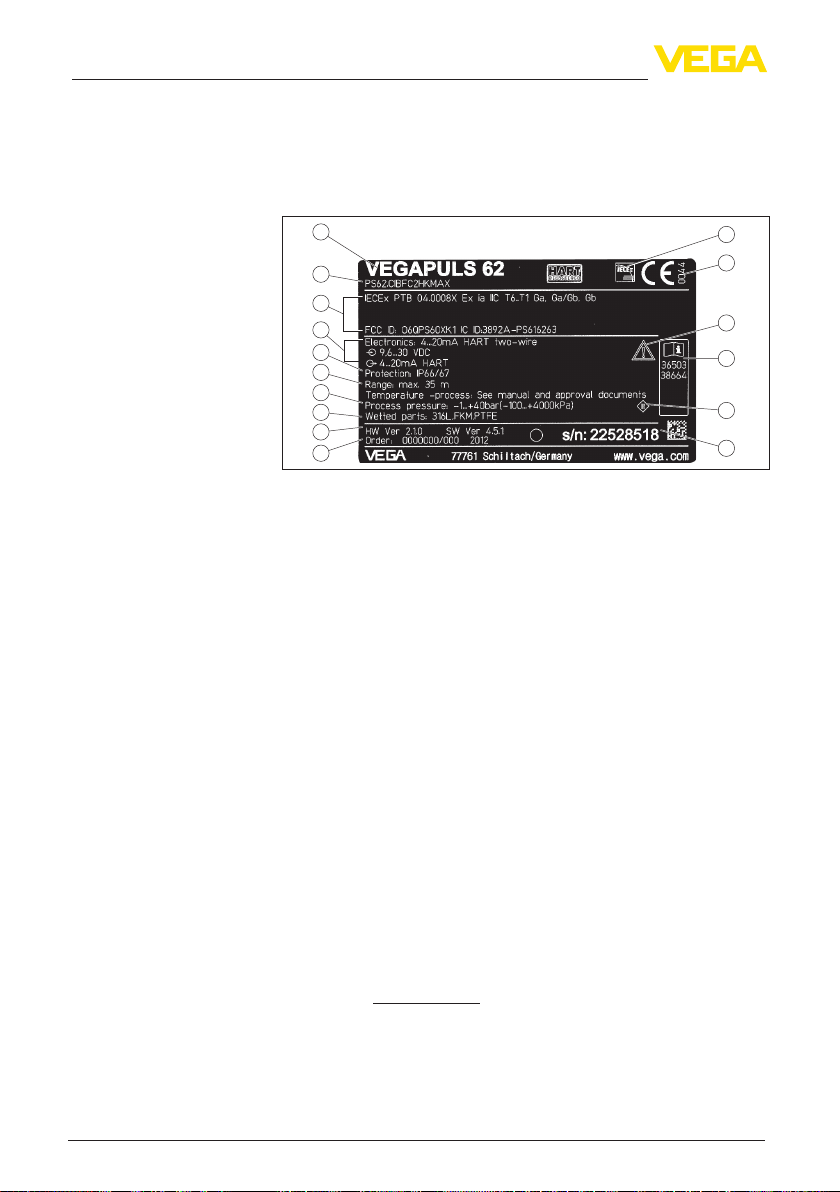
Placa de tipos
3 Descripción del producto
3.1 Construcción
La placa de tipos contiene los datos más importantes para la identicación y empleo del equipo.
1
2
3
4
5
6
7
8
9
10
Fig.4:Montajedelaplacadetipos(Ejemplo)
1 Tipo de equipo
2 Código del producto
3 Homologaciones
4 Alimentación y salida de señal electrónica
5 Tipo de protección
6 Margen de medición
7 Temperatura de proceso y ambiente, presión de proceso
8 Material piezas en contacto con el medio
9 Versión de hardware y software
10 Número de pedido
11 Número de serie del equipo
12 Símbolo para clase de protección de equipo
13 Númerodeidenticacióndocumentacióndelequipo
14 Nota de atención sobre la documentación del equipo
15 OrganismonoticadoparalacerticacióndeconformidadCE
16 Norma de homologación
16
15
14
13
12
11
Número de serie
Diseño electrónico
10
Con el número de serie del equipo en la placa de tipos Usted tiene
acceso a la datos siguientes en nuestra página inicial:
Número de articulo del equipo (HTML)
•
Fecha de suministro (HTML)
•
Características del equipo especícas del pedido (HTML)
•
Manual de instrucciones al momento de suministro (PDF)
•
Datos del sensor especícos del pedido para un cambio de la
•
electrónica (XML)
Certicado de comprobación exactitud de medición (PDF)
•
Para eso ir a www.vega.com y "VEGA Tools".
El equipo tiene dos electrónicas diferentes en sus cámaras de la
carcasa
La electrónica Modbus para la alimentación y la comunicación
•
con el Modbus-RTU
VEGAPULS 61 • Protocolo Modbus y Levelmaster
41361-ES-121113
Page 11
3 Descripción del producto
La electrónica del sensor para las tareas de medición propias
•
Ámbito de vigencia de
este manual de instrucciones
Versiones de la electrónica del sensor
Alcance de suministros
1
Fig. 5: Posición de las electrónicas Modbus y del sensor
1 Electrónica Modbus
2 Electrónica del sensor
El manual de instrucciones siguiente es válido para las versiones de
quipos siguientes:
Hardware a partir de 2.1.0
•
Software a partir de la versión 4.5.1
•
El equipo se suministra en dos versiones electrónicas diferentes.
La selección se realiza según el campo de aplicación, ver capítulo
"Modo de trabajo".
La versión correspondiente se puede determinar mediante el código
del producto en la placa de tipos así como en la electrónica.
Electrónica estándar tipo PS60HK.-
•
Electrónica con alta sensibilidad tipo PS60HS.-
•
El alcance de suministros comprende:
Sensor de radar
•
Documentación
•
– Este manual de instrucciones
– Certicado de comprobación exactitud de medición, en depen-
dencia de la versión VEGAPULS 61 (opcional)
– Manual de instrucciones "Módulodeindicaciónyconguración
PLICSCOM" (opcional)
– instrucción adicional "Calefacción para el modulo de indicación
yconguración" (opcional)
– Instrucción adicional " Conexión roscada de enchufe para
sensores de medición continua" (opcional)
– "Instrucciones de seguridad" especicas EX (para versiones
Ex)
– Otras certicaciones en caso necesario
2
3.2 Principio de operación
Campo de aplicación
41361-ES-121113
VEGAPULS 61 • Protocolo Modbus y Levelmaster
VEGAPULS 61 es un sensor de radar para la medida continua de
nivel de líquidos bajo condiciones simples de proceso.
En dependencia del área de aplicación se emplean diferentes versiones:
11
Page 12

3 Descripción del producto
Medida de nivel de líquidos agresivos en depósitos pequeño:
•
Sistema de antenas encapsulado
Medida de caudal en canales abiertos o medida de nivel en
•
aguas: Antena de trompeta plástica
Productos con un valor εr ≥1,8: Electrónica estándar
•
Productos con valor εr ≥1,5, < 1,8; aplicaciones con muy malas
•
propiedades de reexión: Electrónica con alta sensibilidad
Los valores efectivos realizables dependen de las condiciones de
medición, el sistema antenas, el tubo vertical o bypass
Principiodefuncionamiento
Embalaje
Transporte
Inspección de transporte
Almacenaje
Desde la antena del sensor de radar se emiten impulsos cortos de
radar con una duración aproximada de 1 ns. Dichos impulsos son
reejados por el producto y captados en forma de ecos por la antena.
El tiempo de duración de los impulsos de radar desde la transmisión
hasta la recepción es proporcional a la distancia y de esta forma a la
altura de llenado. La altura de llenado determinada de esta forma se
transforma en una señal de salida correspondiente y emitida como
valor medido.
3.3 Embalaje, transporte y almacenaje
Su equipo está protegido por un embalaje durante el transporte
hasta el lugar de empleo. Aquí las solicitaciones normales a causa
del transporte están aseguradas mediante un control según la norma
DIN EN 24180.
En caso de equipos estándar el embalaje es de cartón, compatible
con el medio ambiente y reciclable. En el caso de versiones especiales se emplea adicionalmente espuma o película de PE. Deseche los
desperdicios de material de embalaje a través de empresas especializadas en reciclaje.
Hay que realizar el transporte, considerando las instrucciones en
el embalaje de transporte. La falta de atención puede tener como
consecuencia daños en el equipo.
Durante la recepción hay que comprobar inmediatamente la integridad del alcance de suministros y daños de transporte eventuales.
Hay que tratar correspondientemente los daños de transporte o los
vicios ocultos determinados.
Hay que mantener los paquetes cerrados hasta el montaje, y almacenados de acuerdo de las marcas de colocación y almacenaje
puestas en el exterior.
Almacenar los paquetes solamente bajo esas condiciones, siempre y
cuando no se indique otra cosa:
No mantener a la intemperie
•
Almacenar seco y libre de polvo
•
No exponer a ningún medio agresivo
•
Proteger de los rayos solares
•
Evitar vibraciones mecánicas
•
41361-ES-121113
12
VEGAPULS 61 • Protocolo Modbus y Levelmaster
Page 13

3 Descripción del producto
Temperaturadealmacenaje y transporte
Módulo de indicación y
conguración
Adaptadordeinterface
Cubierta protectora
Bridas
Temperatura de almacenaje y transporte ver "Anexo - Datos técni-
•
cos - Condiciones ambientales"
Humedad relativa del aire 20 … 85 %
•
3.4 Accesorios y piezas de repuesto
El módulo de indicación y conguración PLICSCOM sirve para la
indicación de valor medido, operación y diagnóstico. Se puede poner
y quitar nuevamente del equipo en cualquier momento.
Otras informaciones se encuentran en el manual de instrucciones
"MódulodeindicaciónyconguraciónPLICSCOM" (Documento de
identidad 27835).
El adaptador de interface VEGACONNECT posibilita la conexión de
equipos con capacidad de comunicación a la interface USB de una
PC. Para la parametrización de estos equipos se necesita un software
de conguración con DTM VEGA.
Otras informaciones se encuentran en el manual de instrucciones
"Adaptador de interface VEGACONNECT" (Documento de identidad
32628).
La tapa protectora protege la carcasa del sensor contra suciedad y
fuerte calentamiento por radiación solar.
Otras informaciones están en la instrucción adicional "Tapa protecto-
ra" (Documento de identidad 34296).
Las bridas roscadas están disponibles en diferentes versiones
según las normas siguientes: DIN 2501, EN 1092-1, ANSI B 16.5,
JIS B 2210-1984, GOST 12821-80.
Otras informaciones están en la instrucción adicional "Bridas según
DIN-EN-ASME-JIS" (Documento de identidad 31088).
Módulo electrónico
Módulo electrónico
Modbus
Cono adaptador de
antena
41361-ES-121113
VEGAPULS 61 • Protocolo Modbus y Levelmaster
El módulo electrónico VEGAPULS Serie 60 es una pieza de recambio
para sensores de radar VEGAPULS Serie 60. Hay disponible una
versión propia para cada salidas de señal.
Otras informaciones están en el manual de instrucciones "Módulo
electrónico VEGAPULS Serie 60" (ID documento 36801).
El módulo electrónico Modbus es una pieza de recambio para sensores de radar VEGAPULS Serie 60. Hay disponible una versión propia
para cada salida de señal.
Otras informaciones están en el manual de instrucciones "Módulo
electrónico Modbus VEGAPULS Serie 60" (ID documento 41864).
El cono adaptador de antena sirve para la transmisión óptima de
microondas y para hermetizar frente el proceso.
Otras informaciones se encuentran en el manual de instrucciones
"Cono adaptador de antena VEGAPULS 62 y 68" (Documento de
identidad 31381).
13
Page 14
4 Montaje
Atornillar
4 Montaje
4.1 Instrucciones generales
En equipos con conexión a proceso con rosca hay que apretar en el
hexágono con una herramienta adecuada.
Advertencia:
!La carcasa no puede emplearse para atornillar! El apriete puede
causar daños en el sistema mecánico de rotación de la carcasa.
Humedad
Idoneidad para las condiciones de proceso
Emplear el cable recomendado (ver capitulo "Conexión a la alimentación de tensión") y je el racor atornillado para cables.
De esta forma Usted protege su equipo adicionalmente contra la entrada de humedad, llevando el cable de conexión hacia abajo antes
del racor atornillado para cables. De esta forma puede gotear el agua
de lluvia y de condensado. Esto se aplica especialmente en montaje
a la intemperie, en lugares donde se calcula con humedad (p. ej., por
procesos de limpieza) o en depósitos refrigerados o caldeados.
Asegurar, que todas las partes del equipo que están en el proceso,
especialmente la pieza de medición activa, las juntas y las conexiones a proceso sean adecuadas para las condiciones de proceso
existentes Dentro de ellas se cuenta especialmente la presión de proceso, la temperatura de proceso así como las propiedades químicas
de los medios.
Las especicaciones respectivas se encuentran en el capítulo Datos
técnicos y en la placa de tipos.
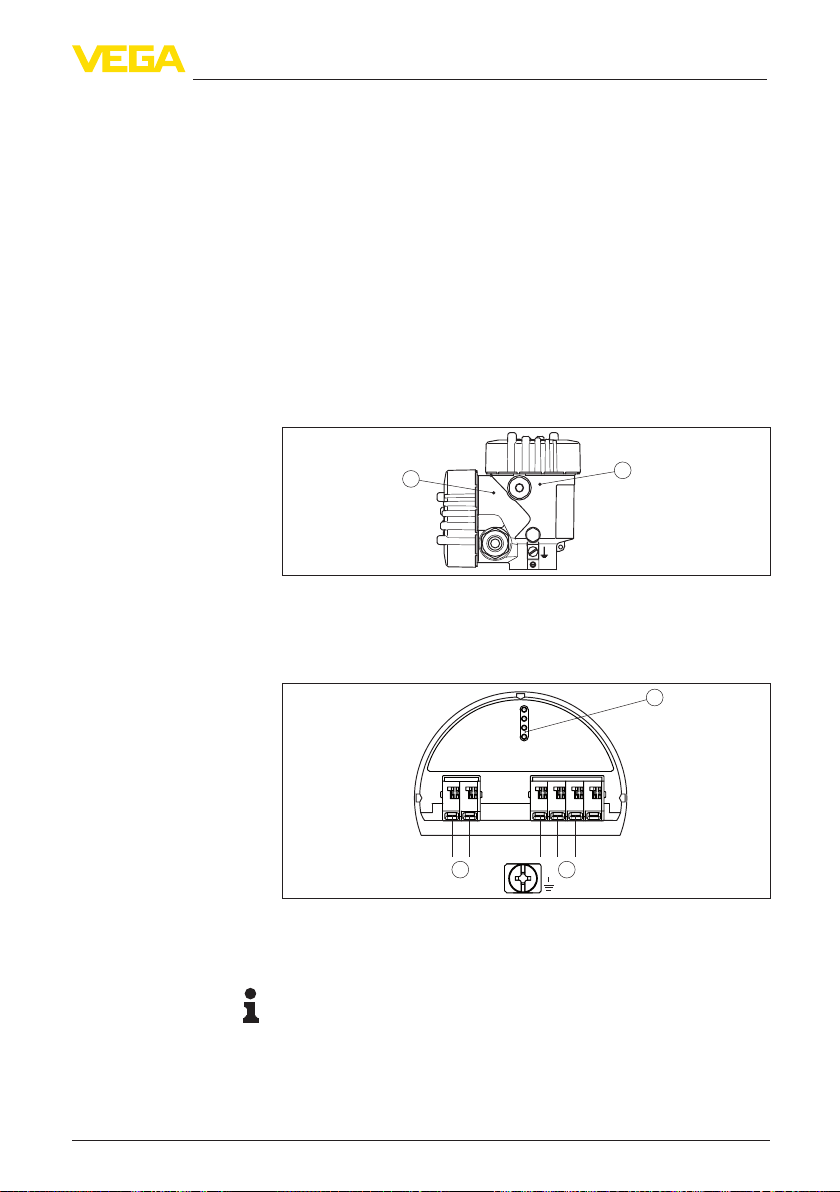
4.2 Brida suelta o brida de adaptación
Para el montaje del equipo en una tubuladura, hay disponible una
brida suelta universal para DN 80 (ASME 3" o JIS 80) también para
el reequipamiento. Opcionalmente el equipo se puede equipar de
fábrica con una brida de adaptación a partir de DN 100 (ASME 4" o
JIS 100).
En el caso de las variantes de carcasas plásticas, cámara única de
aluminio y acero inoxidable se puede pasar la brida suelta directamente sobre la carcasa. En el caso de las variantes de carcasas de
aluminio de dos cámara es imposible el montaje posterior, hay que
denir el tipo de montaje durante el pedido.
Los planos para esas opciones de montaje están en el capítulo
"Medidas".
14
41361-ES-121113
VEGAPULS 61 • Protocolo Modbus y Levelmaster
Page 15
4 Montaje
Fig. 6: Montaje con brida del sensor de radar
4.3 Preparación de montaje estribo de montaje
El estribo de montaje posibilita la jación sencilla a la pared del depósito o el techo del silo. El mismo sirve para el montaje en paredes,
techo o salientes. Ante todo, en caso de depósitos abiertos esto
representa una posibilidad muy simple y efectiva de orientar el sensor
sobre la supercie del producto.
El estribo se suministra suelto y hay que atornillarlo al sensor con 3
tornillos Allen M5 x 10 y arandelas elásticas antes de la puesta en
marcha. Par máximo de apriete ver capitulo "Datos técnicos". Herramientas necesarias: Llave Allen Nº 4.
Para atornillar el estribo al sensor hay dos variantes. En dependencia
de la variante seleccionada se puede girar el sensor en el estribo de
la forma siguiente:
Carcasa de una cámara
•
– Ángulo de inclinación 180° continuo
– Ángulo de inclinación en tres escalones 0°, 90° y 180°
Carcasa de dos cámaras
•
– Ángulo de inclinación 90° continuo
– Ángulo de inclinación en dos escalones 0° y 90°
41361-ES-121113
VEGAPULS 61 • Protocolo Modbus y Levelmaster
15
Page 16
4 Montaje
Montaje hermético de
la antena de trompeta
plástica
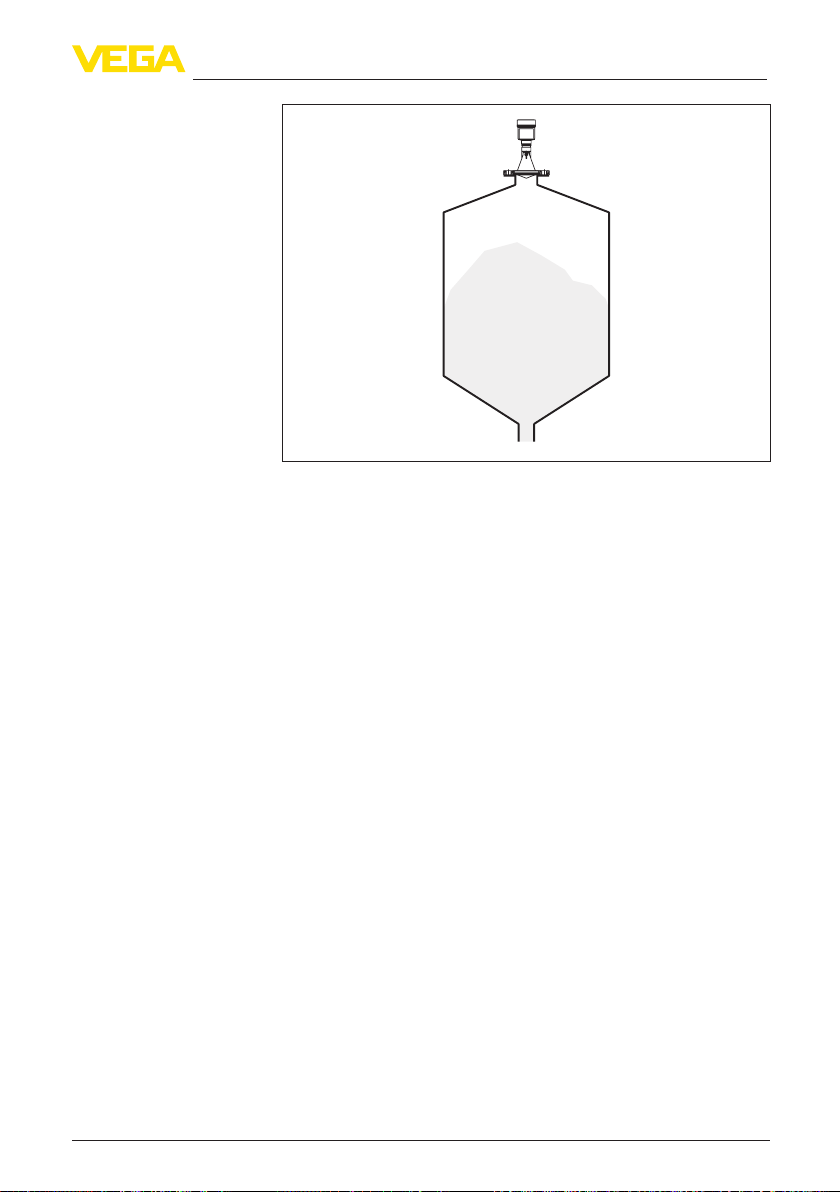
Fig. 7: Ajuste del ángulo de inclinación
Fig.8:Giroconjaciónenelcentro
4.4 instrucciones de montaje
Para el montaje hermético de la versión con antena plástica con brida
suelta o de adaptación hay que cumplir lo siguiente:
1. Emplear junta plana adecuada p. Ej.de EPDM con dureza Shore
25 o 50
2. Cantidad de tornillos de brida según la cantidad de taladros de
brida
3. Hay que apretar todos los tornillos con el par de fuerza indicado
en los datos técnicos.
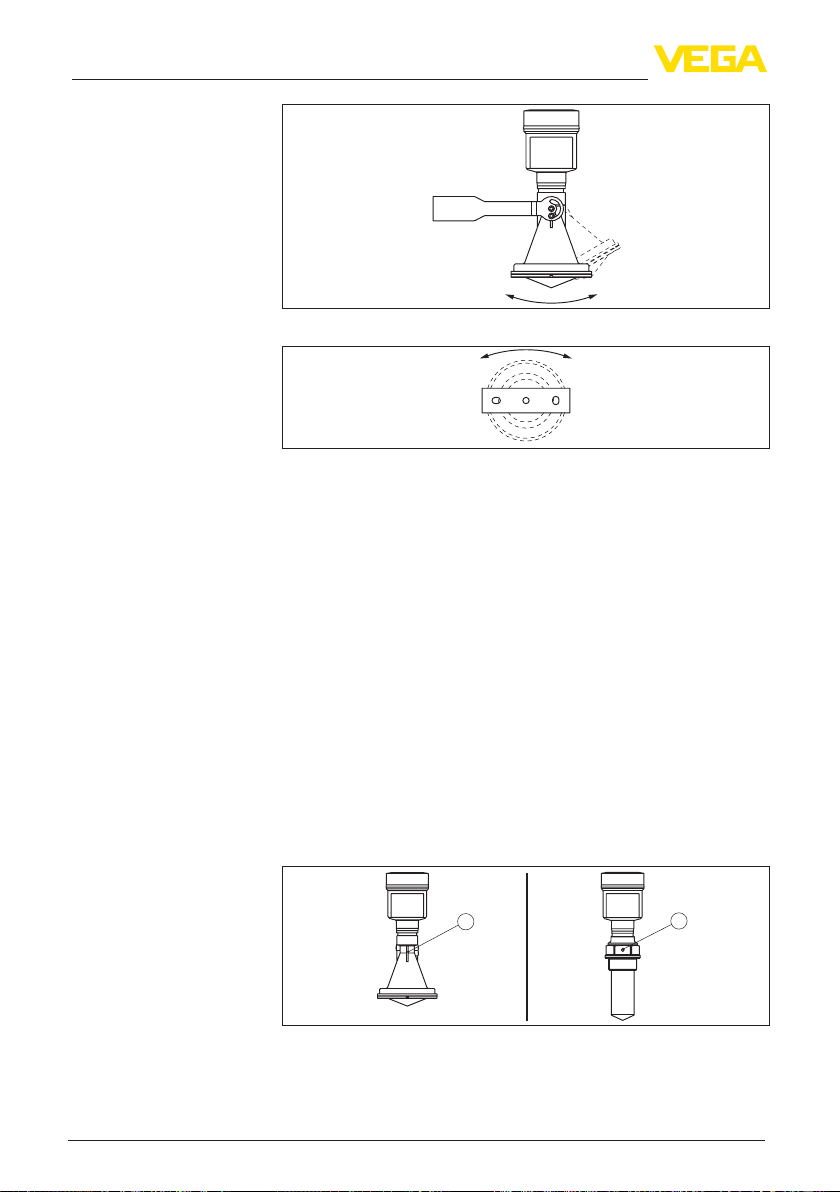
Plano de polarización
16
Los impulsos de radar emitidos del sensor de radar son ondas
electromagnéticas. El plano de polarización es la dirección del
componente eléctrico. Girando el equipo en la brida de conexión o
tubuladura roscada se puede usar la polarización, para la reducir el
efecto de ecos parásitos.
La posición del plano de polarización está caracterizada por una
marca en la conexión a proceso del equipo.
1
Fig. 9: Posición del plano de polarización
1 Marca para la versión con sistema de antena encapsulado
2 Marca para la versión con antena de trompeta plástica
2
VEGAPULS 61 • Protocolo Modbus y Levelmaster
41361-ES-121113
Page 17
4 Montaje
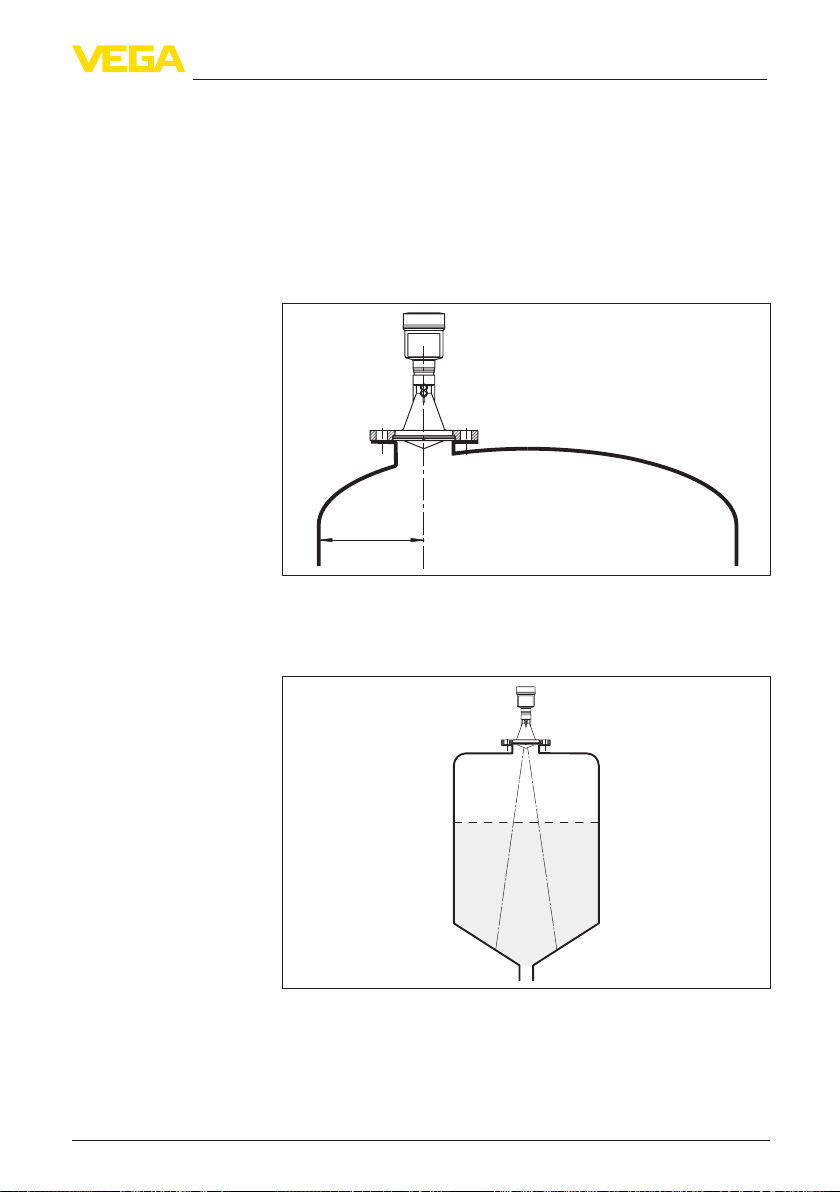
Posición de montaje
Montar el sensor en una posición, alejada por lo menos 200 mm
(7.874 in) de la pared del deposito. Cuando el sensor se monta centrado en depósitos con bóvedas o esquinas redondeadas, pueden
aparecer ecos múltiples con posibilidad de compensación mediante
un ajuste adecuado (ver capítulo " Puesta en marcha").
Si no puede mantenerse dicha distancia, hay que realizar un registro
de señal parásita durante la puesta en marcha. Esto resulta especialmente valido, si se esperan adherencias en la pared del deposito.
En ese caso se recomienda repetir más tarde el registro de señal
parásita con presencia de adherencias.
> 200 mm
(7.87
")
Fig. 10: Montaje del sensor en tapas de depósito redondas
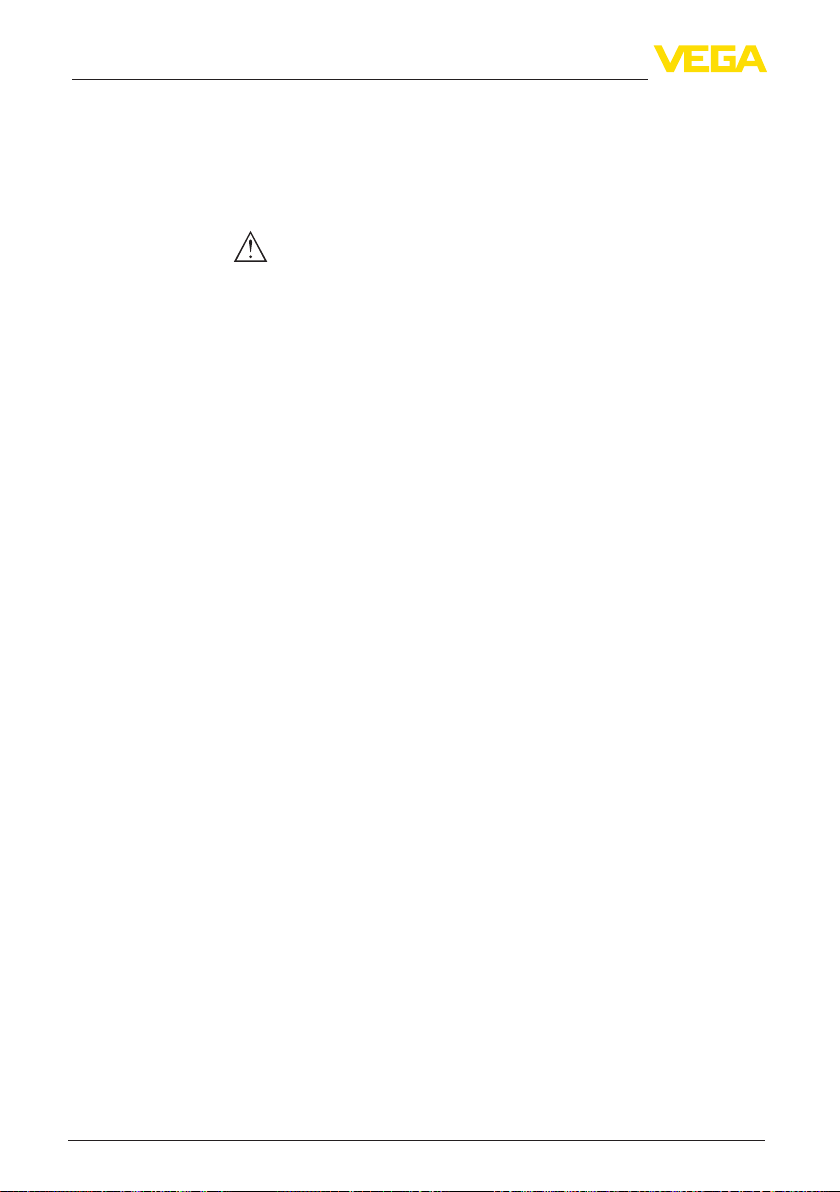
En caso de depósitos de fondo cónico puede resultar ventajoso el
montaje del sensor en el centro del depósito, ya que así es posible la
medición hasta el fondo.
Fig. 11: Montaje del sensor de radar en depósito con fondo cónico
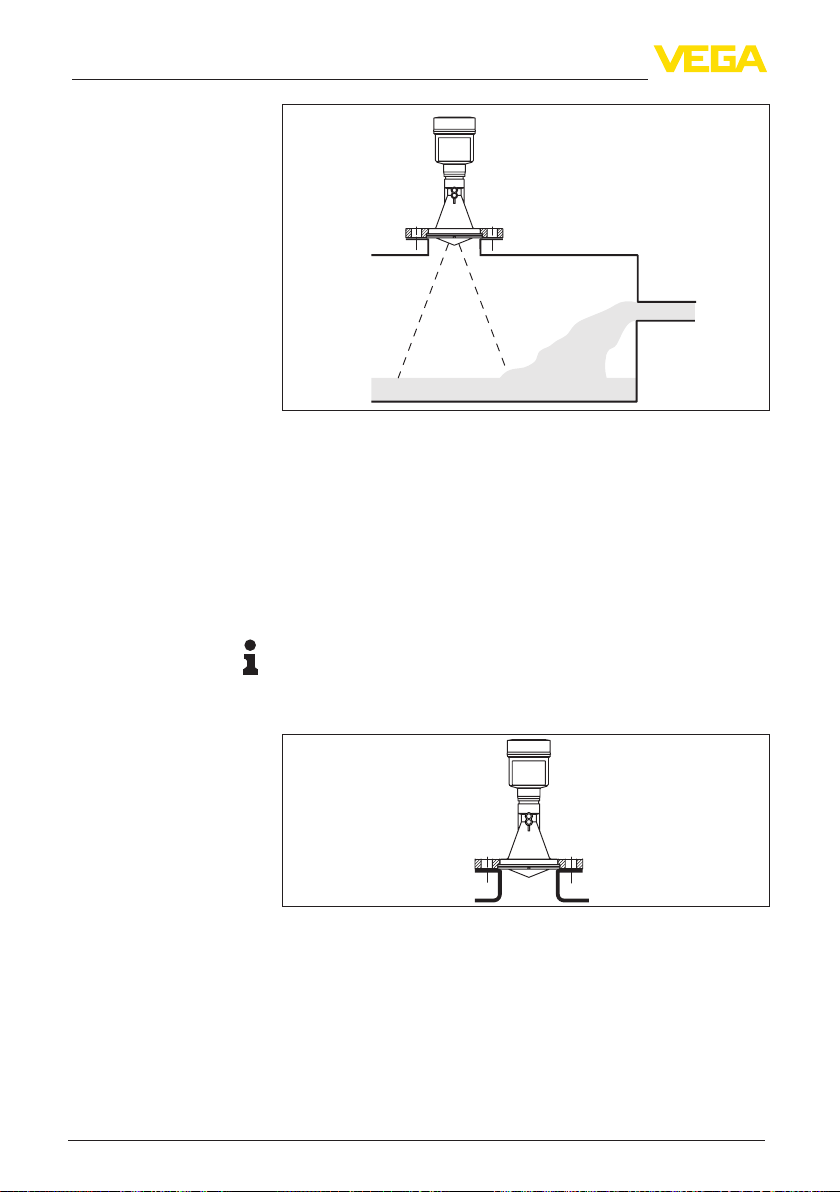
Corriente de llenado del
producto
No montar los equipos sobre la corriente de llenado o dentro de ella.
Asegúrese, de detectar la supercie del producto y no la corriente de
llenado.
41361-ES-121113
VEGAPULS 61 • Protocolo Modbus y Levelmaster
17
Page 18
4 Montaje
Fig.12:Montajedelsensorderadarenujodeentradadeproducto
Tubuladuraparaantenas
de trompeta plástica
Para el montaje del VEGAPULS 61 en una tubuladura hay disponible
una brida suelta correspondiente para DN 80 (ASME 3" o JIS 80) así
como bridas de adaptación adecuadas.
En el caso de las variantes de carcasas plásticas, cámara única de
aluminio y acero inoxidable se puede pasar la brida suelta directamente sobre la carcasa. En el caso de las variantes de carcasas de
aluminio de dos cámara es imposible el montaje posterior, hay que
denir el tipo de montaje durante el pedido.
Información:
Hay que mantener la tubuladura lo más corta posible y el extremo de
la tubuladura debe estar redondeado. De esta forma se mantienen
reducidas las reexiones de interferencia por las tubuladuras del
depósito.
Fig. 13: Montaje recomendado en tubuladuras
En caso de buenas propiedades de reexión del producto, VEGAPULS 61 se puede montar también sobre tubuladuras más largas.
Valores de referencia de las alturas de las tubuladuras se encuentran
en las guras siguientes. Después hay que realizar un registro de
señales parásitas.
41361-ES-121113
18
VEGAPULS 61 • Protocolo Modbus y Levelmaster
Page 19

4 Montaje
h
d
Las tablas a continuación reejan la longitud máxima de tubuladura h
en dependencia del diámetro d.
Diámetro de tubuladura d Longitud de tubuladura h
80 mm 300 mm
100 mm 400 mm
150 mm 500 mm
Diámetro de tubuladura d Longitud de tubuladura h
3" 11.8 in
4" 15.8 in
6" 19.7 in
Consejos:
En el caso de instalaciones nuevas resulta conveniente inclinar las
tubuladuras del depósito en dirección de la descarga. De esta forma
se producen menos reexiones de interferencia desde la pared del
depósito, siendo posible una medición hasta la salida cónica.
Fig. 15: Instalación en silos
41361-ES-121113
VEGAPULS 61 • Protocolo Modbus y Levelmaster
19
Page 20
4 Montaje
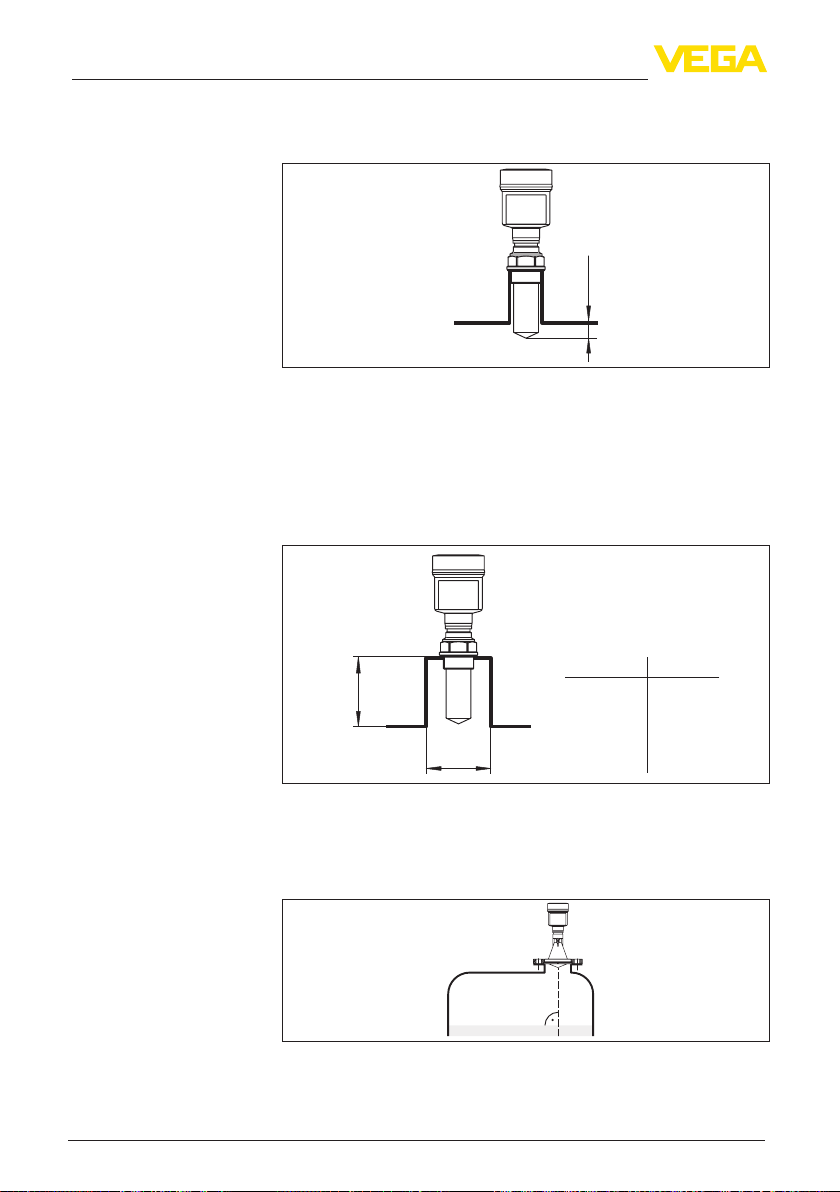
Tubuladurasensistemas
de antenas encapsulados
Preferiblemente hay que dimensionar las tubuladuras, de forma tal
que el extremo de la antena sobresalga como min. 10 mm (0.4 in) de
la tubuladura.
ca. 10 mm
Fig. 16: Montaje recomendado en tubuladuras
En caso de buenas propiedades de reexión del producto también
puede montarse el VEGAPULS 61 sobre tubuladuras, más altas que
la longitud de la antena. Valores de referencia de alturas de tubuladuras se encuentran en la gura siguiente. En este caso los extremos
de las tubuladuras tienen que ser lisos sin rebabas, incluso redondeados si es posible. Después hay que realizar un registro de la señal
parásita.
d
h
d
1½"
50 mm/2"
80 mm/3"
100 mm/4"
150 mm/6"
h
200 mm
250 mm
300 mm
500 mm
800 mm
Orientación del sensor
20
Fig. 17: Medidas diferentes de tubuladuras
Orientar el sensor en los líquidos lo más perpendicular posible
respecto a la supercie del producto, para conseguir una medición
óptima.
41361-ES-121113
Fig. 18: Orientación en líquidos
VEGAPULS 61 • Protocolo Modbus y Levelmaster
Page 21
4 Montaje
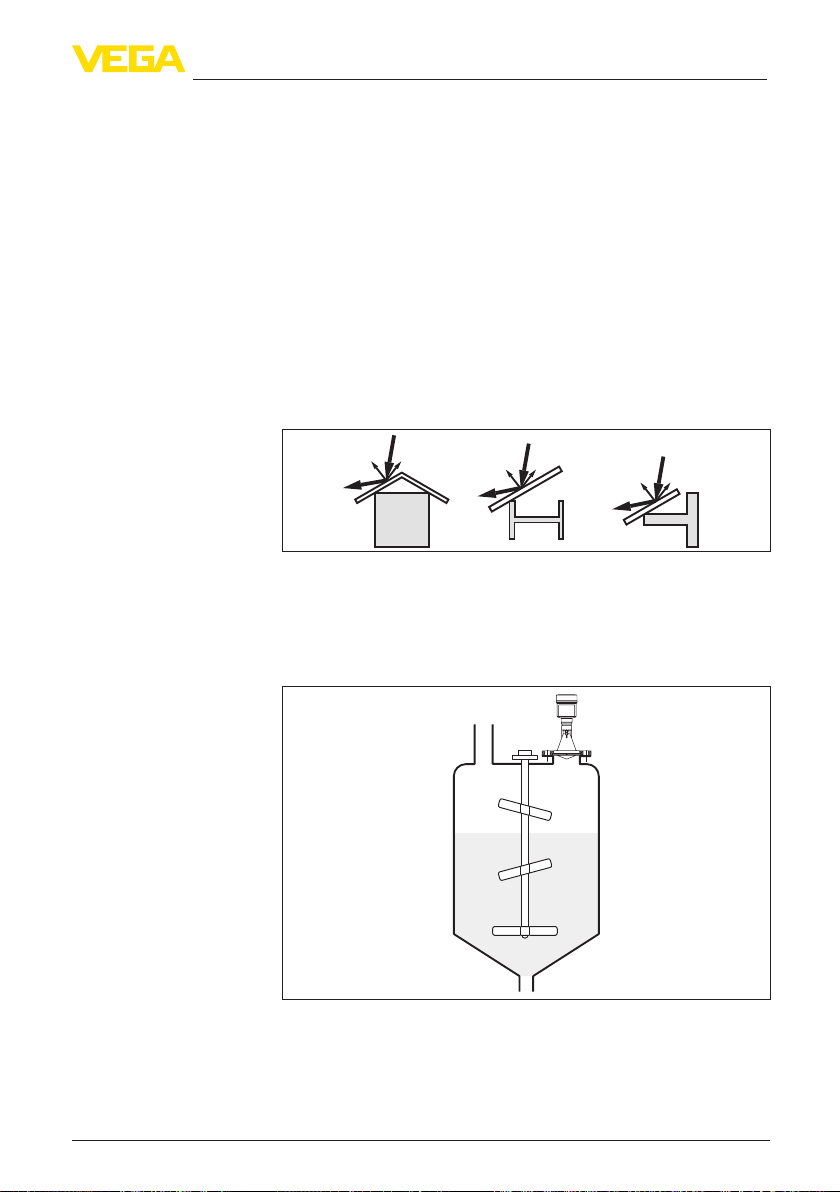
Estructuras internas del
depósito.
Agitadores
Hay que seleccionar la ubicación del sensor de radar de forma
tal que las estructuras internas no se crucen con las señales de
microondas
Las estructuras del depósito, tales como escalerillas, interruptores
límites, serpentines de calefacción, arriostramientos, etc., pueden
causar ecos parásitos que se superponen al eco útil. Al planicar el
punto de medida debe prestarse atención a que las señales de radar
accedan libremente "Vista libre" al producto almacenado.
En caso existencia de estructuras en el depósito hay que realizar un
registro de señal parásita durante la puesta en marcha.
En caso de que estructuras grandes del depósito tales como arriostramientos y soportes produzcan ecos parásitos, se pueden debilitar
los mismos mediante medidas adicionales. Pequeñas pantallas
metálicas colocadas de forma inclinada sobre las estructuras "dispersan" las señales de radar, impidiendo así la reexión directa del eco
parásito de una forma efectiva.
Fig.19:Taparlosperleslisosconpantallasdispersoras
En caso de agitadores en el depósito hay que realizar un registro de
señal parásita durante la marcha del agitador. De esta forma se asegura, que las reexiones parásitas del agitador sean almacenadas en
posiciones diferentes.
Fig. 20: Agitadores
Formación de espuma
A causa del llenado, agitadores u otros procesos en el depósito,
pueden formarse espumas muy compactas parcialmente sobre la
41361-ES-121113
VEGAPULS 61 • Protocolo Modbus y Levelmaster
21
Page 22
4 Montaje
supercie del producto de llenado, que amortiguan fuertemente la
señal de emisión.
En caso de ocurrir errores de medición a causa de la espuma, hay
que emplear antenas de radar lo más grande posible, la electrónica
con alta sensibilidad o sensores de radar de baja frecuencia (Banda
C).
Como alternativa se pueden considerar sensores con microonda
guiada. Estos no son inuenciados por la formación de espuma y son
especialmente apropiados para esas aplicaciones.
Medición en el tubo tranquilizador
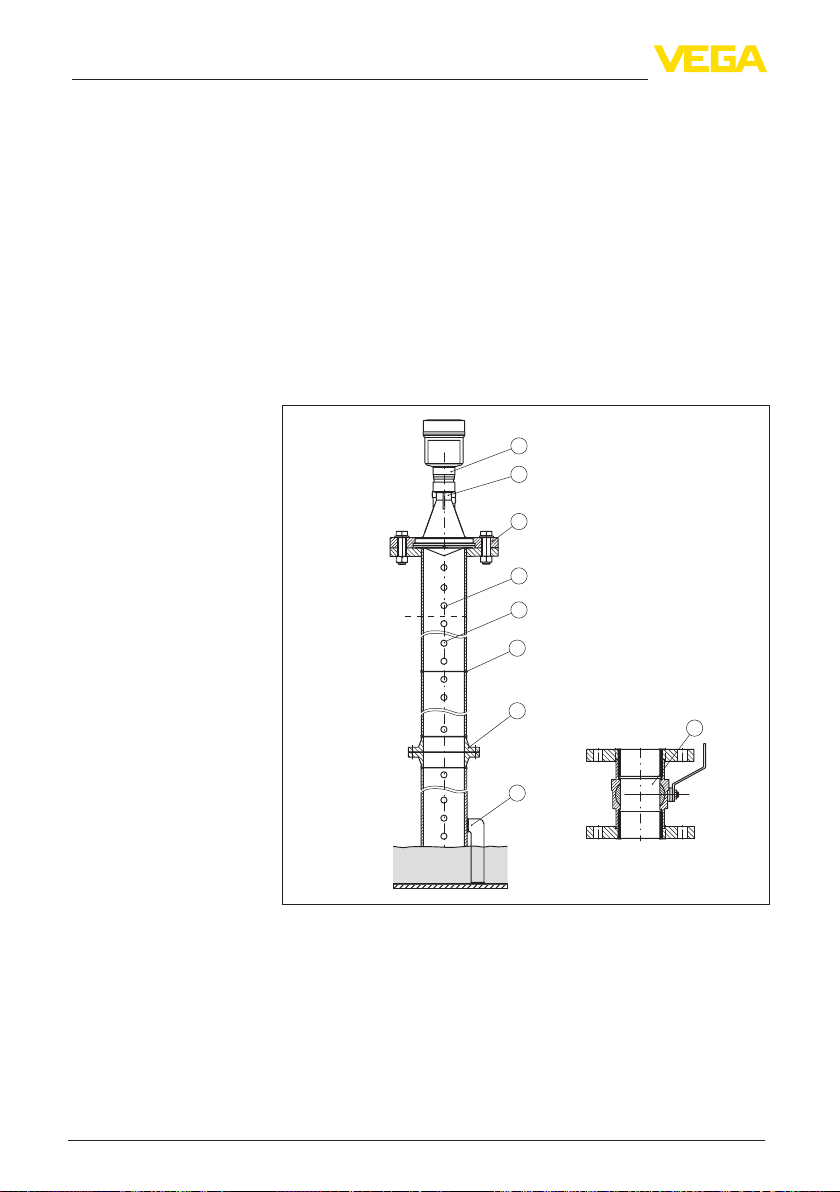
Mediante el empleo en un tubo tranquilizador en el depósito se eliminan las inuencias de estructuras del depósito y turbulencias. Bajo
esas condiciones es posible la medición de productos con baja constante dieléctrica (valor ε
adherencias, no es conveniente la medición en tubo tranquilizador.
≥ 1,6). En productos, con gran tendencia a
r
1
2
3
4
100%
5
6
7
8
9
0%
22
Fig. 21: Estructura tubo tranquilizador
1 Sensor de radar
2 Marcado del sentido de polarización
3 Rosca o brida en el equipo
4 Taladro de ventilación
5 Taladros
6 Costura de soldadura
7 Brida para soldar
8 Llave esférica con sección de paso completa
9 Fijación del tubo tranquilizador
Indicaciones para la orientación:
VEGAPULS 61 • Protocolo Modbus y Levelmaster
41361-ES-121113
Page 23

4 Montaje
Atender las marcas en el plano de polarización del sensor
•
En la conexión roscada la marca está en el hexágono, en la
•
conexión embridada entre dos taladros de brida
Todos los taladros en el tubo rompeolas tienen que estar en un
•
plano con esa marca
Indicaciones para la medición:
El punto 100 % tiene que estar debajo del taladro de descarga de
•
aire superior y del borde de la antena
El punto 0 % es el nal del tubo rompeolas
•
El diámetro de tubo tiene que ser por lo menos DN 40 o 1½" para
•
un tamaño de antena de 40 mm (1½")
Durante la parametrización hay que seleccionar "Aplicación tubo
•
vertical" y entrar el diámetro del tubo, para compensar errores por
desplazamiento del tiempo de funcionamiento
Una supresión de señal parásita con el sensor montado es reco-
•
mendable, pero no obligatoriamente necesaria
Es posible la medición a través de una llave esférica con paso
•
integral
Requisitos constructivos del tubo rompeolas:
Material metálico, interior del tubo liso
•
Preferentemente acero inoxidable estirado o soldado longitudinal-
•
mente
La costura de soldadura debe ser lo más plana posible y estar
•
situada en un eje con los taladros
Las bridas están soldadas al tubo según la orientación del plano
•
de polarización en el tubo
En caso de extensión con brida para soldar o manguito de tubo
•
así como en caso de empleo de una llave esférica, alinear las
reducciones en los lados interiores y jarlas exactamente
Tamaño de ranura para empalmes ≤ 0,1 mm
•
No soldar a través de la pared del tubo. La pared interior del
•
tubo rompeolas tiene que permanecer lisa. Eliminar con limpieza
irregularidades y cordones de soldadura producidos en el lado
interior por penetraciones de soldadura involuntarias, ya que en
caso contrario estos pueden causar ecos parásitos intensos y
favorecer la adherencia de producto
Los tubos rompeolas tienen que llegar hasta la altura mínima
•
de llenado deseada, ya que una medición solamente es posible
dentro del tubo
Diámetro taladros ≤ 5 mm, cantidad arbitraria, de un lado o inter-
•
conectados
El diámetro de antena del sensor debe que coincidir lo más posi-
•
ble con el diámetro interior del tubo.
El diámetro tiene que ser constante por toda la longitud
•
Medición en el bypass
41361-ES-121113
VEGAPULS 61 • Protocolo Modbus y Levelmaster
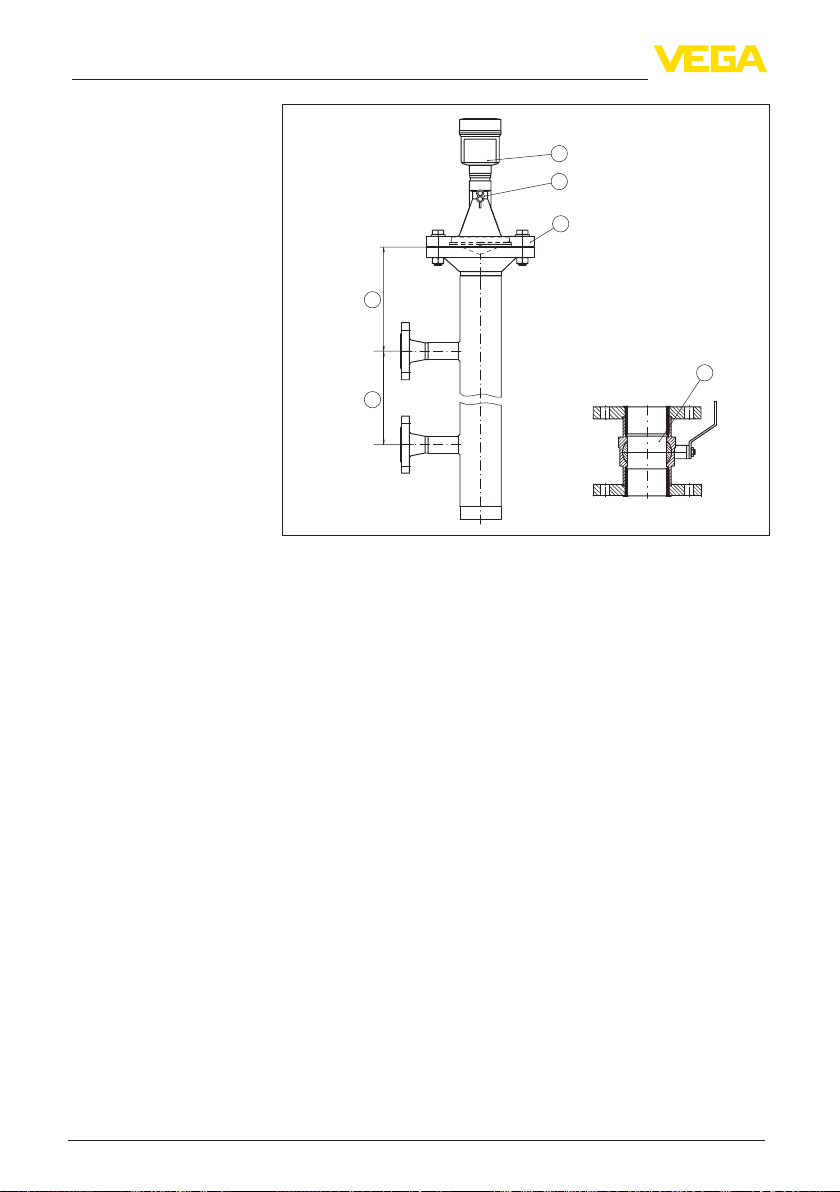
Una alternativa a la medición en el tubo rompeolas es la medición en
una derivación fuera del depósito.
23
Page 24
4 Montaje
1
2
3
4
100 %
6
5
0 %
Fig. 22: Montaje bypass
1 Sensor de radar
2 Marcado del sentido de polarización
3 Brida del equipo
4 Distancia del plano de referencia del sensor a la unión de tubos superior
5 Distancia de las uniones de tubos
6 Llave esférica con sección de paso completa
Indicaciones para la orientación:
Atender las marcas en el plano de polarización del sensor
•
En la conexión roscada la marca está en el hexágono, en la
•
conexión embridada entre dos taladros de brida
Las uniones de tubos hacia el depósito tienen que estar en un
•
plano con esa marca
Indicaciones para la medición:
El punto 100 % no puede estar encima de la unión de tubo supe-
•
rior hacia el depósito
El punto 0 % no puede estar debajo de la unión de tubo inferior
•
hacia el depósito
Distancia mínima plano de referencia del sensor hacia el borde
•
superior de la unión de tubo superior> 300 mm
El diámetro de tubo tiene que ser por lo menos DN 40 o 1½" para
•
un tamaño de antena de 40 mm (1½")
Durante la parametrización hay que seleccionar "Aplicación tubo
•
vertical" y entrar el diámetro del tubo, para compensar errores por
desplazamiento del tiempo de funcionamiento
Una supresión de señal parásita con el sensor montado es reco-
•
mendable, pero no obligatoriamente necesaria
41361-ES-121113
24
VEGAPULS 61 • Protocolo Modbus y Levelmaster
Page 25
4 Montaje
Es posible la medición a través de una llave esférica con paso
•
integral
Requisitos constructivos del tubo bypass:
Material metálico, interior del tubo liso
•
En caso de lado interior de la tubería demasiado rugosa, emplear
•
una tubería encajada (tubería en tubería) o un sensor de radar con
antena tubular
Las bridas están soldadas al tubo según la orientación del plano
•
de polarización en el tubo
Tamaño de ranura para reducciones ≤ 0,1 mm, p. Ej. en caso de
•
empleo de una llave esférica o de bridas intermedias para piezas
de tubo individuales
El diámetro de antena del sensor debe que coincidir lo más posi-
•
ble con el diámetro interior del tubo.
El diámetro tiene que ser constante por toda la longitud
•
Medicióndeujocon
vertedero rectangular
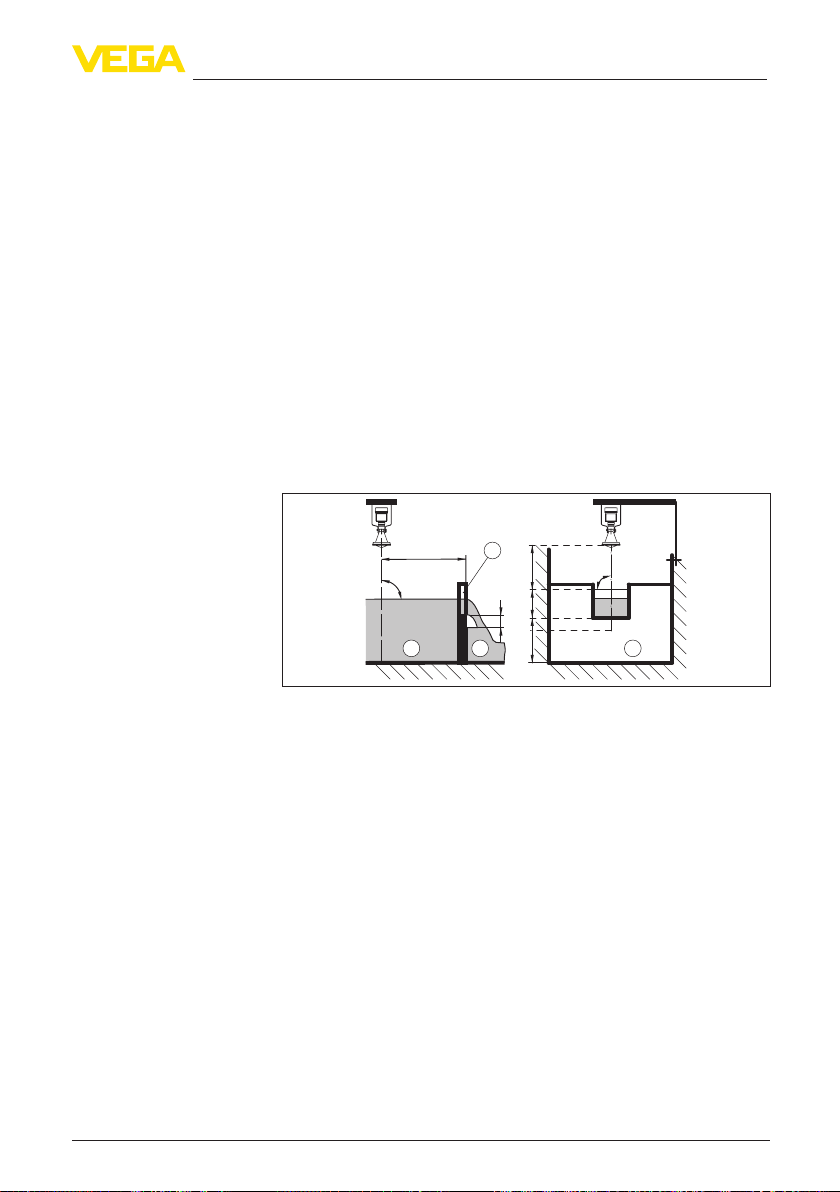
Los ejemplos breves le dan indicaciones introductorias para la medición de ujo. Los datos de proyecto detallados se encuentran donde
el fabricante de canales y en la literatura especializada.
3 ... 4 h
90°
2 3
Fig.23:Medicióndeujoconcanalrectangular:d
sensor(vercapítulo"Datostécnicos");h
cuadrado
1 Compuertadelaliviadero(Vistalateral)
2 Aguas arriba
3 Aguas abajo
4 Compuertadelaliviadero(Vistadeaguasabajo)
1
max
≥ 50 mm
min
d
h
≥ 2 mm x h
max.
90°
max
max
4
= Distancia mínima del
min.
= max. Llenado del aliviadero
Básicamente hay que considerar los puntos de vistas siguientes:
Montaje del sensor por el lado de aguas arriba
•
Montaje en el centro del canal y perpendicular a la supercie del
•
líquido.
Distancia hasta la compuerta del vertedero
•
Distancia abertura de diafragma sobre el piso
•
Distancia mínima de la abertura de diafragma hasta las aguas
•
abajo
Distancia mínima del sensor hasta la altura máxima de embalse
•
41361-ES-121113
VEGAPULS 61 • Protocolo Modbus y Levelmaster
25
Page 26
4 Montaje
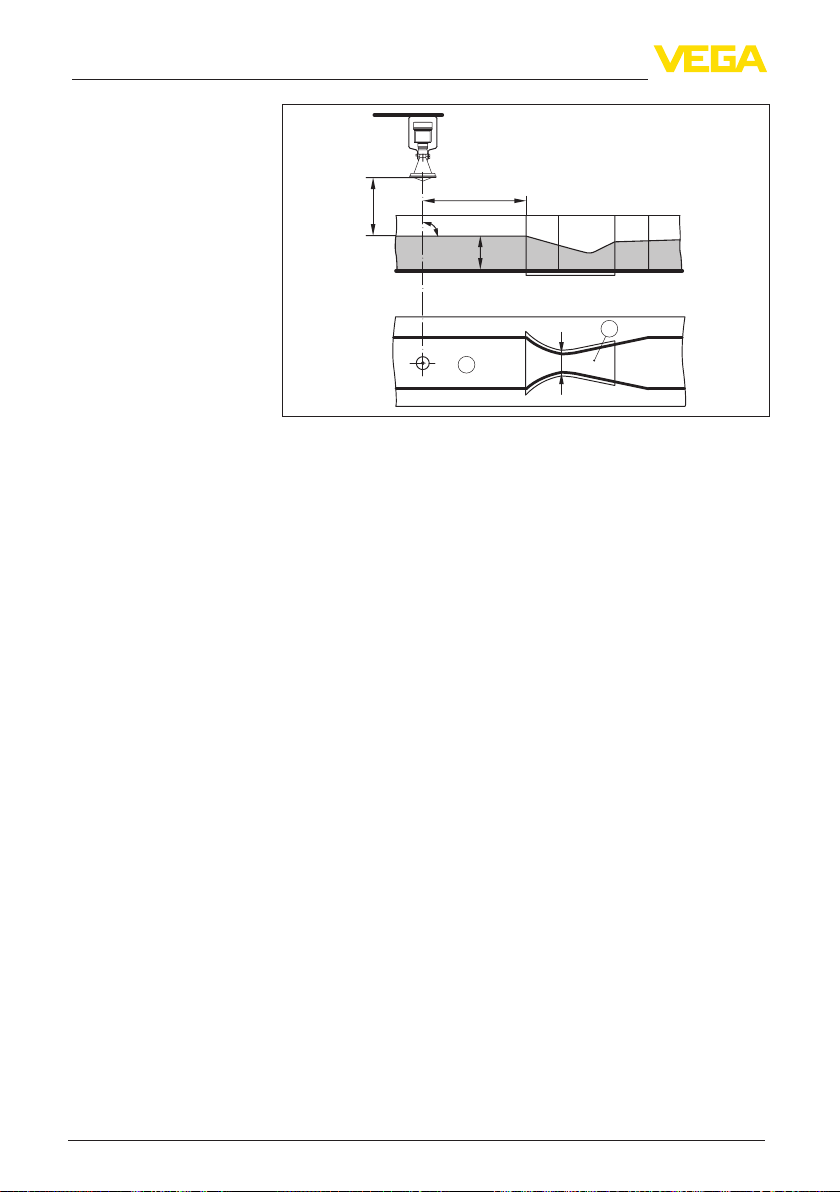
Medicióndeujocon
canalKhafagi-Venturi:
3 ... 4 x h
d
max
90°
h
max
2
1
Fig.24:MedicióndeujoconcanalKhafagi-Venturi:d=distanciamínimadel
sensor;h
1 Posición del sensor
2 Canal venturi
=llenadomáximodelcanal;B=mayorestrechamientodelcanal
max.
B
Básicamente hay que considerar los puntos de vistas siguientes:
Montaje del sensor por el lado de entrada
•
Montaje en el centro del canal y perpendicular a la supercie del
•
líquido.
Distancia hasta el canal venturi
•
Distancia mínima del sensor hasta la altura máxima de embalse
•
26
41361-ES-121113
VEGAPULS 61 • Protocolo Modbus y Levelmaster
Page 27

Instrucciones de seguridad
5 Conectar a la tensión de alimentación y al sistema de bus
5 Conectar a la tensión de alimentación y al
sistema de bus
5.1 Preparación de la conexión
Prestar atención fundamentalmente a las instrucciones de seguridad
siguientes:
Conectar solamente en estado libre de tensión
•
En caso de esperarse sobrecargas de voltaje, hay que montar un
•
equipo de protección contra sobrecarga.
Alimentación de tensión
Cable de conexión
Entradadecables½NPT
Blindaje del cable y conexión a tierra
41361-ES-121113
VEGAPULS 61 • Protocolo Modbus y Levelmaster
El equipo necesita una tensión de trabajo de 8 … 30 V DC. La tensión
de trabajo y la señal digital del bus van por cables de conexión bilares separados.
El equipo se conecta con cable comercial de dos hilos, torcido
adecuado para RS 485. En caso de esperarse interferencias electromagnéticas, superiores a los valores de comprobación de la norma
EN 61326 para zonas industriales, hay que emplear cable blindado.
Emplear cable con sección redonda. Un diámetro exterior del cable
de 5 … 9 mm (0.2 … 0.35 in) garantiza la estanqueidad del racor.
Si se emplea cable de otro diámetro o sección, cambiar la junta o
emplear un racor atornillado adecuado.
Atender que toda la instalación se realice según la especicación
Fieldbus. Hay que prestar especialmente atención a la terminación
del bus a través de las resistencia nales correspondientes.
En las carcasas plásticas hay que atornillar el racor atornillado
para cables NPT o el tubo de acero Conduit sin grasa en el inserto
roscado.
Par máximo de apriete para todas las carcasas ver capítulo "Datos
técnicos".
En el caso de instalaciones con conexión equipotencial poner el
blindaje del cable de la fuente de alimentación, de la carcasa de
conexiones y del sensor directamente al potencial de tierra. Para
eso hay que conectar el blindaje de sensor directamente al terminal
interno de puesta a tierra. El terminal externo de puesta a tierra
de la carcasa tiene que estar conectado con baja impedancia a la
conexión equipotencial.
En instalaciones sin conexión equipotencial conectar el blindaje
del cable en la fuente de alimentación y en sensor directamente al
potencial de tierra. En la caja de conexiones o en el distribuidor en
T el blindaje del cable corto de empalme hacia el sensor no puede
conectarse ni con el potencial a tierra ni con otro blindaje de cable.
Hay que conectar entre si los blindajes de los cables hacia la fuente
de alimentación y hacia el próximo distribuidor, conectándolos con
el potencial a tierra a través de un condensador cerámico (p. Ej.
1 nF, 1500 V). Las corrientes equipotenciales de baja frecuencia se
interrumpen ahora, sin embargo se conserva el efecto protector para
las señales de interferencia de alta frecuencia.
27
Page 28
5 Conectar a la tensión de alimentación y al sistema de bus
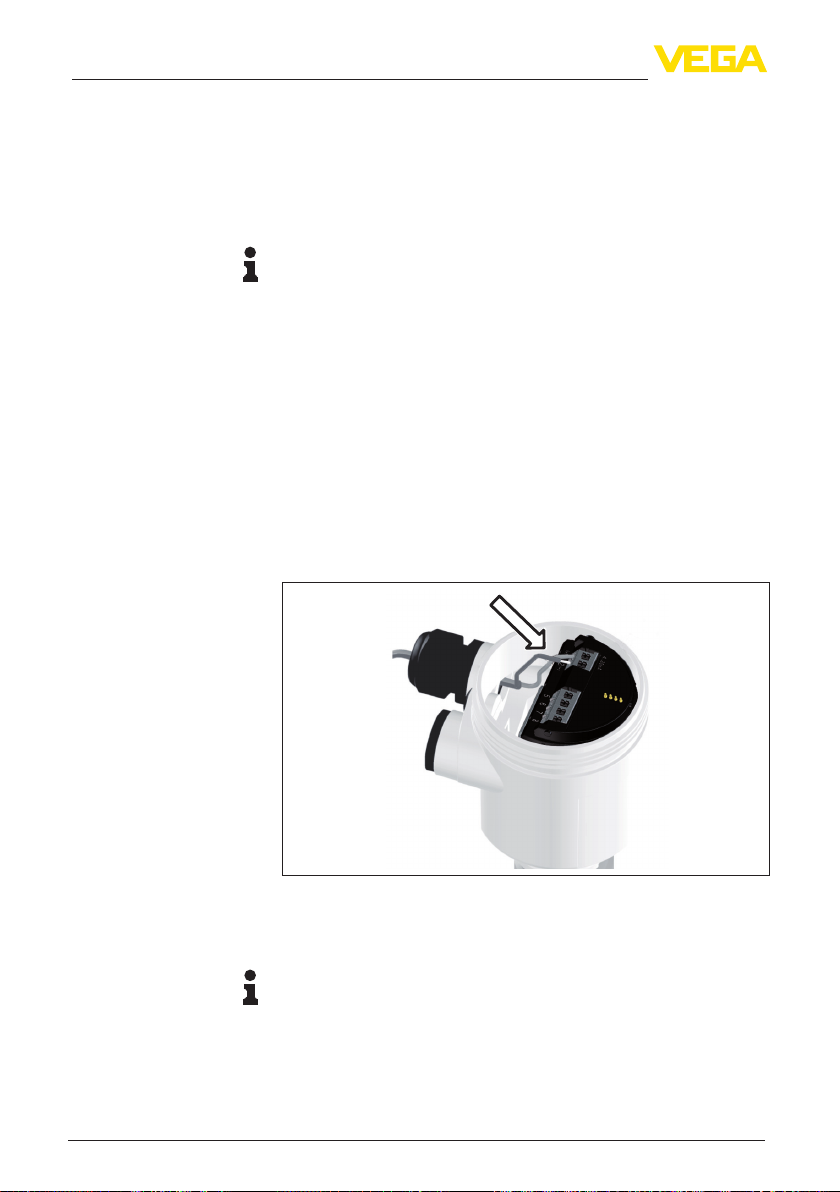
5.2 Conexión
Técnicadeconexión
La conexión de la alimentación de tensión y de la salida de señal se
realizan por los terminales elásticos en la carcasa.
La conexión hacia el módulo de indicación y conguración o hacia el
adaptador de interface se realiza a través de las espigas de contacto
en la carcasa.
Información:
El bloque de terminales es enchufable y se puede sacar de la electrónica. Con ese objetivo, subir y extraer el bloque de terminales con
un destornillador pequeño. Cuando se enchufe nuevamente tiene que
enclavar perceptiblemente.
Pasos de conexión
Proceder de la forma siguiente:
1. Destornillar la tapa de la carcasa
2. Extraer un módulo de indicación y conguración existente eventualmente, girando ligeramente hacia la izquierda
3. Zafar la tuerca de unión del racor atornillado para cables
4. Pelar aproximadamente 10 cm (4 in) de la envoltura del cable de
conexión, quitar aproximadamente 1 cm (0.4 in) de aislamiento a
los extremos de los conductores
5. Empujar el cable en el sensor a través del racor atornillado para
cables
Fig. 25: Pasos de conexión 5 y 6
6. Enchufar los extremos de los conductores en los terminales
según el esquema
Información:
Los conductores jos y los conductores exibles con virolas de
cables se enchufan directamente en las aberturas de los terminales.
Para conductores exibles sin virolas de cables al apretar la cabeza
del terminal con un destornillador pequeño, se libera la abertura del
terminal. Cuando se suelta el destornillador se cierran los terminales
nuevamente.
41361-ES-121113
28
VEGAPULS 61 • Protocolo Modbus y Levelmaster
Page 29
Resumen
5 Conectar a la tensión de alimentación y al sistema de bus
Otras informaciones respecto a la sección máxima de conductor se
encuentran en "Datos técnicos/Datos electromecánicos"
7. Comprobar el asiento correcto de los conductores en los terminales tirando ligeramente de ellos
8. Conectar el blindaje con el terminal interno de puesta a tierra, y el
terminal externo de puesta a tierra con la conexión equipotencial.
9. Apretar la tuerca de unión del racor pasacables, la junta tiene que
abrazar el cable completamente
10. Poner nuevamente el módulo de indicación y conguración disponible eventualmente
11. Atornillar la tapa de la carcasa
Con ello queda establecida la conexión eléctrica.
5.3 Esquema de conexión
Compartimiento de la
electrónica
1
Fig.26:Posicióndelcompartimientodeconexiones(ElectrónicaModbus)yel
compartimientodelaelectrónica(Electrónicadelsensor)
1 Compartimiento de conexiones
2 Compartimiento de la electrónica
2
2
4...20mA
+
( )
(-)
1
2
567
8
11
Fig. 27: Compartimiento de la electrónica con carcasa de dos cámaras.
1 Conexión interna hacia el compartimento de conexión
2 Paraelmódulodeindicaciónyconguraciónoadaptadordeinterface
Información:
La conexión de una unidad de indicación y conguración externa no
es posible con esa carcasa de dos cámara.
41361-ES-121113
VEGAPULS 61 • Protocolo Modbus y Levelmaster
29
Page 30

5 Conectar a la tensión de alimentación y al sistema de bus
Compartimiento de conexiones
power supply
( )
+
Fig. 28: Compartimiento de conexiones
1 Conexión USB
2 Conmutadordeslizantepararesistenciadeterminaciónintegrada(20Ω)
Terminal Función Polaridad
1 Alimentación de tensión +
2 Alimentación de tensión -
3 Señal Modbus D0 +
4 Señal Modbus D1 -
5 Tierra funcional con instala-
ción según CSA
5.4 Fase de conexión
Después de la conexión del VEGAPULS 61 al sistema de bus, el
equipo realiza primeramente un auto chequeo durante 30 segundos
aproximadamente. Se ejecutan los pasos siguientes:
Comprobación interna de la electrónica
•
Indicación del tipo de equipo, versión de hardware y software,
•
nombres del punto de medición en pantalla y PC.
Indicación del aviso de estado "F 105 Determinación valor de
•
medición" en pantalla o PC
El byte de estado se pone momentáneamente en interrupción
•
Inmediatamente que aparece un valor de medición plausible, es
entregado a la línea de señal. El valor corresponde al nivel actual así
como los ajustes realizados previamente, p. Ej., el ajuste de fábrica.
USB
MODBUS
)
+
(
(-)
D0
D1
(-)
1345
2off
on
1
IS GND
2
30
41361-ES-121113
VEGAPULS 61 • Protocolo Modbus y Levelmaster
Page 31

6 Congurar el sensor con el módulo de indicación y conguración
6 Congurarelsensorconelmódulode
indicaciónyconguración
6.1 Alcancedeconguración
El módulo de indicación y conguración sirve exclusivamente para
la parametrización del sensor, es decir la adaptación a la tarea de
medición.
La parametrización de la interface Modbus se realiza a través de un
PC con PACTware. El modo de procedimiento para ello se encuentra
en el capítulo "ConguracióndelsensorylainterfaceModbuscon
PACTw are ".
6.2 Ponermódulodeindicaciónyconguración
El módulo de indicación y conguración se puede montar y desmontar del sensor en cualquier momento. Aquí se pueden seleccionar
cuatro posiciones desplazadas a 90°. Aquí no es necesaria la interrupción de la alimentación eléctrica.
Proceder de la forma siguiente:
1. Destornillar la tapa de la carcasa
2. Poner el módulo de indicación y control sobre el sistema electrónico, girándolo hacia la derecha hasta que enclave.
3. Atornillar jamente la tapa de la carcasa con la ventana.
El desmontaje tiene lugar análogamente en secuencia inversa.
El módulo de indicación y conguración es alimentado por el sensor,
no se requiere ninguna conexión adicional.
Fig.29:Empleodelmódulodeindicaciónyconguraciónencarcasadeuna
cámara
41361-ES-121113
VEGAPULS 61 • Protocolo Modbus y Levelmaster
31
Page 32

6 Congurar el sensor con el módulo de indicación y conguración
Indicaciones:
En caso de que se desee reequipar el equipo con un módulo de indicación y conguración para la indicación continua del valor medido,
se necesita una tapa más alta con ventana.
6.3 Sistemadeconguración
Fig.30:Elementosdeindicaciónyconguración
1 Pantalla LC
2 Teclasdeconguración
Funciones de las teclas
Tecla [OK]:
•
– Cambiar al esquema de menús
– Conrmar el menú seleccionado
– Edición de parámetros
– Almacenar valor
Tecla [->]:
•
– Cambiar representación valor medido
– Seleccionar registro de lista
– Seleccionar posición de edición
Tecla [+]:
•
– Modicar el valor de un parámetro
Tecla-[ESC]:
•
– Interrupción de la entrada
– Retornar al menú de orden superior
1
2
Sistemadeconguración
32
El sensor se congura con las cuatro teclas del módulo de indicación
y conguración. En el display LC aparecen los diferentes puntos del
menú. La función se toma de la representación superior. Aproximadamente 10 minutos después de la última pulsación de teclas tiene
lugar un retorno automático a la indicación de valor medido. Durante
esta operación se pierden los valores que no han sido conrmados
con [OK].
VEGAPULS 61 • Protocolo Modbus y Levelmaster
41361-ES-121113
Page 33

6 Congurar el sensor con el módulo de indicación y conguración
6.4 Ajuste de parámetros
Mediante la parametrización se adapta el equipo a las condiciones
de empleo. La parametrización se lleva a cabo a través de un menú
de conguración.
Menú principal
Puesta en marcha/medio
El menú principal está dividido en cinco zonas con la funcionalidad
siguiente:
Puesta en marcha: Ajustes, p. Ej. para el producto, aplicación, depósito, ajuste, tiempo de atenuación
Display: Cambio de idioma, ajustes para la indicación del valor medido así como iluminación
Diagnóstico: Informaciones p. Ej.sobre el estado del equipo, Indicador de seguimiento, seguridad de medición, simulación, curva de
ecos
Otros ajustes: p. Ej. unidades del equipo, unidad SV 2, supresión de
señales parásitas, linealización, fecha/Hora, Reset, copiar datos del
sensor
Información: Nombre del equipo, versión de hardware y software,
fecha de calibración, ID dispositivo, características del equipo
En el punto del menú principal "Puesta en marcha" se deben que
seleccionar los puntos secundarios del menú secuencialmente
para el ajuste óptimo de la medición, dotándolos de los parámetros
correctos. La forma de procedimiento se describe a continuación.
Cada producto tiene un comportamiento de reexión diferente. En
el caso de los líquidos existen además supercies agitadas del
producto y formación de espuma como factores de interferencia. Y en
el caso de los sólidos estos son el desarrollo de polvo, los conos de
apilado y los ecos adicionales a través de la pared del depósito.
Para adaptar el sensor a las diferentes condiciones de medición,
hay que realizar en ese punto de menú primeramente la selección
"Líquido" o "Sólido a granel".
Con esa selección el sensor se adapta óptimamente al producto,
aumentando considerablemente la seguridad de medición, especialmente en casos de medios con malas propiedades de reexión.
41361-ES-121113
VEGAPULS 61 • Protocolo Modbus y Levelmaster
33
Page 34

6 Congurar el sensor con el módulo de indicación y conguración
Entre los parámetros deseados a través de las teclas correspondientes, almacenar la entrada con [OK] y pasar con [ESC] y [->] al punto
de menú próximo.
Puesta en marcha/Aplicación
Adicionalmente al medio también se puede afectar la aplicación o la
medición.
Ese punto de menú también le posibilita, adaptar el sensor a las
condiciones de medición. Las posibilidades de ajuste dependen de la
selección tomada "Líquido" o "Sólido a granel" en "Medio".
Para "Líquido" están disponible las posibilidades de selección
siguientes:
La selección "Tubo vertical" abre una ventana nueva, en la que se
entra el diámetro interior del tubo vertical empleado.
Las aplicaciones se basan en las características siguientes:
Tanquedealmacenaje
Estructura: de gran espacio, vertical cilíndrica, acostada redonda
•
Velocidad de llenado del producto: llenado y vaciado lento
•
Condiciones de medición/proceso:
•
– Formación de condensado
– Supercie del producto tranquila
– Requisito máximo de exactitud de medición
Tanquedealmacenajeconcirculacióndeproducto:
Estructura: de gran espacio, vertical cilíndrica, acostada redonda
•
Velocidad de llenado del producto: llenado y vaciado lento
•
Depósito: agitador pequeño montado lateralmente o grande
•
montado por arriba
Condiciones de medición/proceso:
•
– Supercie del producto relativamente tranquila
– Requisito máximo de exactitud de medición
– Formación de condensado
– Poca generación de espuma
– Sobrellenado posible
41361-ES-121113
34
VEGAPULS 61 • Protocolo Modbus y Levelmaster
Page 35

6 Congurar el sensor con el módulo de indicación y conguración
Tanquedealmacenajeenbarcos(CargoTank):
Velocidad de llenado del producto: llenado y vaciado lento
•
Depósito:
•
– Tabiques en el fondo (refuerzos, serpentines de calefacción)
– Tubuladura alta 200 … 500 mm, también con diámetro grande
Condiciones de medición/proceso:
•
– Formación de condensado, sedimentación de producto por
movimiento
– Requisito máximo de exactitud de medición a partir de 95 %
Depósitoagitador(Reactor):
Estructura: todos los tamaños de depósito posibles
•
Velocidad del producto
•
– Posibilidad de llenado rápido hasta despacio
– Alta frecuencia de vaciado y llenado del depósito
Depósito:
•
– Tubuladura disponible
– Pala del agitador grande de metal
– Deector antitorbellino, serpentines de calefacción
Condiciones de medición/proceso:
•
– Formación de condensado, sedimentación de producto por
movimiento
– Formación de tromba fuerte
– Supercie de gran movimiento, formación de espuma
Depósitodedosicación:
Estructura: todos los tamaños de depósito posibles
•
Velocidad del producto
•
– Llenado y vaciado muy rápido
– Alta frecuencia de vaciado y llenado del depósito
Depósito: Posición de montaje estrecha
•
Condiciones de medición/proceso:
•
– Formación de condensado, incrustaciones de producto en la
antena
– Formación de espuma
Tubovertical:
Velocidad de llenado del producto: llenado y vaciado muy rápido
•
Depósito:
•
– Taladro de ventilación
– Puntos de unión tales como bridas, costuras de soldadura
– Desplazamiento del tiempo de trabajo en el tubo
Condiciones de medición/proceso:
•
– Formación de condensado
– Incrustaciones
Bypass:
Velocidad del producto
•
– Posibilidad de llenado rápido hasta lento en tubos de bypass
cortos hasta largos
– Frecuentemente se mantiene el nivel a través de una regula-
ción
Depósito:
41361-ES-121113
VEGAPULS 61 • Protocolo Modbus y Levelmaster
•
35
Page 36

6 Congurar el sensor con el módulo de indicación y conguración
– Entradas y salidas laterales
– Puntos de unión tales como bridas, costuras de soldadura
– Desplazamiento del tiempo de trabajo en el tubo
Condiciones de medición/proceso:
•
– Formación de condensado
– Incrustaciones
– Posibilidad de separación de aceite y agua
– Posibilidad de sobrellenado hasta la antena
Tanqueplástico:
Depósito:
•
– Medición ja montada o integrada
– Medición a través de la tapa del depósito en dependencia de la
aplicación
– Con el depósito vacío la medición puede pasar por el fondo
Condiciones de medición/proceso:
•
– Formación de condensado en la tapa plástica
– Posibilidad de acumulación de agua o nieve en la tapa del
depósito
Tanqueplásticotransportable:
Depósito:
•
– Material y espesor diferente
– Medición a través de la tapa del depósito
Condiciones de medición/proceso:
•
– Salto del valor de medición durante el cambio de depósito
Aguasabiertas(medidadeaforo):
Velocidad de variación de nivel: variación lenta de nivel
•
Condiciones de medición/proceso:
•
– La distancia sensor supercie del agua es grande
– Tiempo de atenuación de la señal de salida grande por forma-
ción de oleaje
– Posibilidad de formación de hielo y condensado en la antena
– Arañas e insectos anidan en las antenas
– Material otante o animales esporádicamente en la supercie
del agua
Canalabierto(Medicióndecaudal):
Velocidad de variación de nivel: variación lenta de nivel
•
Condiciones de medición/proceso:
•
– Posibilidad de formación de hielo y condensado en la antena
– Arañas e insectos anidan en las antenas
– Supercie del agua tranquila
– Resultado de medición exacto requerido
– Normalmente distancia relativamente grande hasta la super-
cie del agua
Aliviaderodeagualluvia(Presa):
Velocidad de variación de nivel: variación lenta de nivel
•
Condiciones de medición/proceso:
•
– Posibilidad de formación de hielo y condensado en la antena
– Arañas e insectos anidan en las antenas
41361-ES-121113
36
VEGAPULS 61 • Protocolo Modbus y Levelmaster
Page 37

6 Congurar el sensor con el módulo de indicación y conguración
– Supercie del agua turbulenta
– Posibilidad de inundación del sensor
Demostración:
Ajuste para todas las aplicaciones, que no son la típica medición
•
de nivel
El sensor acepta inmediatamente cualquier variación del valor de
•
medición dentro del rango de medición
Aplicaciones típicas:
•
– Demostración de equipo
– Detección/control de objetos (necesidad de ajuste adicional)
Cuidado:
En caso de que en el depósito aparezca una separación de líquidos
con valores diferentes de ε
entonces el sensor de radar podrá detectar bajo determinadas
circunstancias solamente el producto de mayor constante dieléctrica.
Tener en cuenta, que las capas de separación pueden conducir de
este modo a mediciones erróneas.
Si se desea medir seguramente la altura total de ambos líquidos,
contactar con nuestro servicio o emplear un equipo de separación de
capas.
Para "Sólido a granel" están disponible las posibilidades de selección
siguientes:
, p. Ej., por formación de condensado,
r
Las aplicaciones se basan en las características siguientes:
Silo(delgadoyalto):
Depósito de metal: costuras de soldadura
•
Condiciones de medición/proceso:
•
– Llenado cerca del sensor sensor
– Ruido elevado del sistema con el silo completamente vacío
– Supresión automática de señales parásitas con el depósito
lleno parcialmente
Tolva(degranvolumen):
Depósito de hormigón o metal:
•
– Paredes del depósito estructuradas
– Estructuras disponibles
Condiciones de medición/proceso:
•
– Gran distancia hasta el producto
– Gran ángulo de reposo
Tolvaconllenadorápido:
Depósito de hormigón o metal, también silo multicámaras:
•
– Paredes del depósito estructuradas
– Estructuras disponibles
Condiciones de medición/proceso:
•
– Salto del valor de medición, p. Ej. por llenado del camión
41361-ES-121113
VEGAPULS 61 • Protocolo Modbus y Levelmaster
37
Page 38

6 Congurar el sensor con el módulo de indicación y conguración
– Gran distancia hasta el producto
– Gran ángulo de reposo
Vaciadero:
Montaje del sensor en cinta transportadora móvil
•
Detección del perl del vaciadero
•
Detección de altura durante el llenado
•
Condiciones de medición/proceso:
•
– Saltos de valores de medición p. Ej. por el perl del vaciadero
y traviesas
– Gran ángulo de reposo
– Medición cercana a la corriente de llenado
Trituradora:
Depósito: Estructuras, dispositivos de desgaste y protección
•
disponibles
Condiciones de medición/proceso:
•
– Salto del valor de medición, p. Ej. por llenado del camión
– Velocidad de reacción rápida
– Gran distancia hasta el producto
Demostración:
Ajuste para todas las aplicaciones, que no son la típica medición
•
de nivel
El sensor acepta inmediatamente cualquier variación del valor de
•
medición dentro del rango de medición
Aplicaciones típicas:
•
– Demostración de equipo
– Detección/control de objetos (necesidad de ajuste adicional)
Mediante esa selección el sensor se adapta de forma óptima a la
aplicación o al lugar de aplicación y aumenta considerablemente la
seguridad de medición para las diferentes condiciones básicas.
Entre los parámetros deseados a través de las teclas correspondientes, almacenar la entrada con [OK] y pasar con [ESC] y [->] al punto
de menú próximo.
Puesta en marcha/altura
del depósito, rango de
medida
Puestaenmarcha/forma
del depósito
38
Mediante esa selección el rango de trabajo del sensor se adapta a
la altura del depósito y la seguridad de medición para las diferentes
condiciones básicas aumenta considerablemente.
Independientemente de esto todavía hay que realizar el ajuste mínimo a continuación.
Entre los parámetros deseados a través de las teclas correspondientes, almacenar la entrada con [OK] y pasar con [ESC] y [->] al punto
de menú próximo.
En combinación con el medio y la aplicación la forma del depósito
puede inuenciar también la medición. Para adaptar el sensor a esas
VEGAPULS 61 • Protocolo Modbus y Levelmaster
41361-ES-121113
Page 39

6 Congurar el sensor con el módulo de indicación y conguración
condiciones de medición, este menú le brinda diferentes posibilidades de selección para determinadas aplicaciones para fondos y
tapas de depósitos.
Entre los parámetros deseados a través de las teclas correspondientes, almacenar la entrada con [OK] y pasar con [ESC] y [->] al punto
de menú próximo.
Puesta en marcha/ajuste
Debido a que un sensor de radar es un equipo de medición de
distancia, se mide la distancia desde el sensor a la supercie del
producto. Para indicar la altura real del producto, hay que efectuar
una asignación de la distancia medida respecto a la altura porcentual.
Para la ejecución de ese ajuste se entra la distancia con el depósito
vacío o con el depósito lleno, véase el ejemplo siguiente:
")
0,5 m
(19.68
100%
2
")
5 m
(196.9
0%
1
Fig. 31: Ejemplo de parametrización ajuste mín/máx
1 Nivel mín. = Distancia de medición máx.
2 Nivel máx. = Distancia de medición mín
Si se desconocen esos valores, también se puede ajustar p. Ej. con
las distancias correspondientes al 10 % y el 90 %. El punto de partida
para esos datos de distancia es siempre la supercie de obturación
de la rosca o de la brida. A través de dichas informaciones se calcula
después la verdadera altura de llenado.
El nivel actual no juega ningún tipo de papel durante ese ajuste, el
ajuste Mín-/Máx. siempre se realiza sin variación del producto. De
41361-ES-121113
VEGAPULS 61 • Protocolo Modbus y Levelmaster
39
Page 40

6 Congurar el sensor con el módulo de indicación y conguración
esta forma pueden realizarse esos ajustes previamente sin necesidad de montaje del equipo.
Puesta en marcha/ajuste
mín.
Puesta en marcha/ajuste
máx.
Proceder de la forma siguiente:
1. Seleccionar el punto de menú "Puesta en marcha" con [–>] y
conrmar con [OK]. Seleccionar ahora con [->] el punto de menú
"Ajuste mín." y conrmar con [OK].
2. Editar el valor porcentual con [OK], y poner el cursor con [–>]
sobre el punto deseado.
3. Ajustar el valor porcentual deseado con [+] y almacenarlo con
[OK]. Ahora el cursor salta al valor de distancia.
4. Entrar el valor de distancia correcto en metros adecuado al valor
procentual para el deposito vacío (p. Ej. Distancia del sensor al
fondo del deposito).
5. Almacenar los ajustes con [OK] y cambiar con [ESC] y [->] al
ajuste máx.
Proceder de la forma siguiente:
1. Con [->] seleccionar el punto menú ajuste máx. y conrmar con
[OK].
40
2. Preparar el valor porcentual para la edición con [OK] y poner el
cursor con [–>] sobre el punto deseado.
3. Ajustar el valor porcentual deseado con [+] y almacenarlo con
[OK]. Ahora el cursor salta al valor de distancia.
VEGAPULS 61 • Protocolo Modbus y Levelmaster
41361-ES-121113
Page 41

6 Congurar el sensor con el módulo de indicación y conguración
4. Entrar el valor correcto de distancia en metros, adecuado al valor
porcentual para el depósito lleno. Durante dicha operación favor
de prestar atención, que el nivel máximo tiene que estar debajo
de la distancia mínima hasta el borde de la antena.
5. Almacenar ajustes con [OK]
Diagnóstico/Indicador de
seguimiento
Diagnóstico/Seguridad
de medición.
Diagnóstico/Indicación
curva
En el sensor se almacena en cada caso el valor mínimo y máximo de
temperatura de la electrónica correspondiente. En el punto de menú
"Indicador de seguimiento" se indican esos valores así como el valor
de temperatura actual.
En el caso de sensores de medición sin contacto, se puede inuencia
la medición a través de las condiciones de proceso correspondientes.
En ese punto de menú se indica la seguridad de medición del eco
de nivel en dB. La seguridad de medición es intensidad de medición
menos ruido. Mientras mayor es el valor, más seguramente funciona
la medición. Para una medición en funcionamiento los valores son
> 10 dB.
La "curva de ecos" representa la intensidad de la señal de los ecos a
través del rango de medida en dB. La intensidad de la señal posibilita
una valoración de la calidad de la medición.
La "supresión de señales parásitas" representa los ecos parásitos
almacenados (ver menú "otros ajustes") del depósito vacío con intensidad de señal en "dB" a través del rango de medida.
41361-ES-121113
VEGAPULS 61 • Protocolo Modbus y Levelmaster
41
Page 42

6 Congurar el sensor con el módulo de indicación y conguración
Una comparación de la curva de ecos y de la supresión de señal
parásita permite una información más exacta sobre la seguridad de
medición. La curva seleccionada se actualiza continuamente. Con la
tecla [OK] se abre un menú secundario con funciones de zoom:
"X-Zoom": Función de lupa para la distancia de medición
•
"Y-Zoom": ampliación 1-, 2-, 5- y 10 veces mayor de la señal en
•
"dB"
"Unzoom": retorno de la representación a la gama nominal de
•
medición con ampliación simple
Diagnóstico/memoria de
curva de eco
Otros ajustes/supresión
señal parásita
La función "Memoria de curvas de ecos" posibilita, el almacenaje de
la curva de ecos en el momento de la conguración. Esto es generalmente recomendable, incluso totalmente obligatorio para el uso de
la funcionalidad Asset-Management. Hay que realizar el almacenaje
con el nivel de llenado mínimo posible.
Con el software de conguración PACTware y con el PC se puede
visualizar y emplear la curva de ecos de alta resolución, para detectar
variaciones de señal durante el tiempo de operación. Adicionalmente
también se puede visualizar la curva de ecos de la conguración
en la ventana de curva de ecos y compararla con la curva de ecos
actual.
Las condiciones siguientes causan reexiones de interferencia y
pueden afectar la medición:
Tubuladuras altas
•
Estructuras internas del deposito , tales como arriostramientos
•
Agitadores
•
Adherencias o costuras de soldadura en las paredes del deposito
•
Indicaciones:
Una supresión de la señal parásita detecta, marca y almacena esas
señales parásitas, para que no se consideren más durante la medición de nivel.
Esto debe realizarse con bajo nivel, para poder captar todas las
reexiones de interferencia eventuales existentes.
Proceder de la forma siguiente:
1. Seleccionar el punto de menú "Otros ajustes" con [–>] y conr-
mar con [OK]. Seleccionar con [->] el punto de menú "Supresión
señal parásita" y conrmar con [OK].
41361-ES-121113
42
VEGAPULS 61 • Protocolo Modbus y Levelmaster
Page 43

6 Congurar el sensor con el módulo de indicación y conguración
2. Conrmar nuevamente con [OK].
3. Conrmar nuevamente con [OK].
4. Conrmar con [OK] y entrar la verdadera distancia desde el
sensor hasta la supercie del producto.
5. Todos las señales parásitas existentes en esa zona son detectadas y almacenadas por el sensor después de la conrmación con
[OK].
Indicaciones:
Comprobar la distancia hasta la supercie del producto, ya que en
caso de una especicación falsa (demasiado grande) se salva el
nivel actual como señal parásita. Por consiguiente en esa zona no
puede captarse más el nivel.
Si en el sensor ya se ha implementado una supresión de señal parásita, entonces en caso de selección de "Supresión de señal parásita"
aparece la ventana siguiente:
El punto de menú "Borrar" sirve para borrar completamente una
supresión de señal parásita previamente implementada. Esto es
práctico, cuando la supresión de señal parásita implementada no es
más adecuada para los requisitos de metrología.
El punto de menú "Ampliar" sirve para ampliar una supresión de señal parásita previamente implementada. Esto es práctico p.Ej., si se
ha realizado una supresión de señal parásita con un nivel demasiado
alto y por eso no se han podido detectar todos los ecos parásitos. En
caso de selección de "Ampliar" se indica la distancia hasta la supercie del producto de la supresión de señal parásita implementada. Ese
valor se puede modicar para ampliar supresión de señal parásita en
ese rango.
41361-ES-121113
VEGAPULS 61 • Protocolo Modbus y Levelmaster
43
Page 44

6 Congurar el sensor con el módulo de indicación y conguración
Otros ajustes/curva de
linealización
Otros ajustes/Reset
Para todos los depósitos donde el volumen del depósito no aumenta
linealmente con la altura de nivel - p. Ej., en el caso de un tanque
cilíndrico acostado o esférico - y se desea la indicación o salida del
volumen, es necesaria una linealización. Para esos depósitos se
encuentran consignadas curvas de linealización adecuadas. Las
mismas expresan la relación entre la altura de nivel porcentual y el
volumen del depósito. Mediante la activación de la curva adecuada
se indica correctamente el volumen porcentual del depósito. En caso
de que el volumen no se represente en por ciento, sino en litros o
kilogramos por ejemplo, puede realizarse un ajuste de escala en el
punto de menú "Display".
Entre los parámetros deseados a través de las teclas correspondientes, almacenar la entrada y pasar al punto de menú próximo con las
teclas [ESC] y [->].
En caso de un reset se restauran todos los ajustes excepto unas
pocas excepciones. Las excepciones son: PIN, idioma, iluminación,
modos SIL y HART.
44
Están disponibles las funciones de restauración siguientes:
Estado de suministro: Restauración de los ajustes de paráme-
•
tros al momento del suministro de fábrica. Una supresión de señales parásitas creada, curva de linealización de libre programación,
memoria de valores medidos, memoria de curvas de ecos así
como la memoria de eventos se borran.
Ajustes básicos: Restauración de los ajustes de parámetros,
•
incluyendo los parámetros especiales y de laboratorio, a los
valores por defecto del equipo correspondiente. Una supresión de
señal parásita creada, curvas de linealización de libre programación, memoria de valores medidos, memoria de curvas de ecos
así como la memoria de eventos son borradas.
Puesta en marcha: reposición de los ajustes de parámetros a
•
los valores por defecto del equipo correspondiente en el punto
de menú puesta en marcha. Parámetros referidos al pedido se
conservan, pero no se aceptan en los parámetros actuales. Una
supresión de señal parásita creada, curva de linealización de libre
programación, memoria de valores medidos, memoria de curvas
de ecos así como la memoria de eventos permanecen invariables.
La linealización se pone en lineal.
VEGAPULS 61 • Protocolo Modbus y Levelmaster
41361-ES-121113
Page 45

6 Congurar el sensor con el módulo de indicación y conguración
Supresión señal parásita: Borrar una supresión de señal pará-
•
sita creada anteriormente. La supresión señal parásita creada en
fábrica se mantiene activa.
Indicador de seguimiento valor medido: Reposición de las
•
distancia mín. y máx. medidas al valor medido actual.
Seleccione la función de restauración deseada con [->] y conrme
con[OK].
La tabla siguiente indica los valores por defecto del VEGAPULS 61:
Área de menú Punto de menú Valorpordefecto
Operación Nombre del punto
de medición
Producto Líquido/solución acuosa
Aplicaciones Tanque de almacenaje
Forma del depósito
Altura del depósito/rango de
medida
Ajuste mín Rango máx. de medida recomendado,
Atenuación 0,0 s
Display Idioma Conforme al pedido
Valor indicado Distancia
Unidad de indi-
cación
Escalación 0,00 %, 0 l
Otros ajustes Unidad de dis-
tancia
Unidad de temperatura
Unidad SV2 m
Longitud de sonda de medición
Curva de linealización
Sensor
Sólidos a granel/gravilla, grava
Silo
Fondo del depósito abovedado
Tapa del depósito abovedada
Rango máx. de medida recomendado,
ver "Datos técnicos" en el anexo
ver "Datos técnicos" en el anexo
m(d)
100,00 %, 100 l
m
°C
Longitud del tubo vertical de fábrica
Lineal
6.5 Aseguramiento de los datos de
parametrización
Se recomienda la anotación de los datos ajustados, p. Ej., en el
presente manual de instrucciones, archivándolos a continuación. De
esta forma se encuentran disponible para uso múltiple y para nes de
servicio.
41361-ES-121113
VEGAPULS 61 • Protocolo Modbus y Levelmaster
45
Page 46

6 Congurar el sensor con el módulo de indicación y conguración
Si el equipo está dotado con un módulo de indicación y conguración, entonces se pueden almacenar datos del sensor en el módulo
de indicación y conguración. El modo de procedimiento se describe
en el manual de instrucciones "Módulodeindicaciónyconguración
" en el punto de menú "Copiar datos del sensor". Los datos permanecen salvados permanentemente allí también en caso de una
interrupción de la alimentación del sensor.
Durante este proceso se salvan los datos y ajustes siguientes de la
operación del módulo de indicación y conguración:
Todos los datos de los menús "Conguración" y "Display"
•
En el menú "Otros ajustes“ los puntos "Unidadesespecícasdel
•
sensor, unidad de temperatura y linealización"
Los valores de las curvas de libre programación
•
La función también se puede usar, para transferir ajustes de un
equipo a otro del mismo tipo. Si fuera necesario un cambio de sensor
entonces el módulo de indicación y conguración se enchufa en el
equipo de recambio, escribiendo también los datos en el sensor en el
punto de menú "Copiar datos del sensor".
46
41361-ES-121113
VEGAPULS 61 • Protocolo Modbus y Levelmaster
Page 47

A la electrónica del
sensor
7 Congurar la interface del sensor y Modbus con PACTware
7 Congurarlainterfacedelsensory
ModbusconPACTware
7.1 Conectar el PC
La conexión del PC a la electrónica del sensor se realiza a través del
adaptador de interface VEGACONNECT 4.
Escala de ajuste de parámetros:
Electrónica del sensor
•
2
1
3
Fig. 32: Conexión del PC a través de adaptador de interface directamente en el
sensor
1 Cable USB hacia el PC
2 Adaptador de interface VEGACONNECT 4
3 Sensor
A la electrónica Modbus
41361-ES-121113
VEGAPULS 61 • Protocolo Modbus y Levelmaster
La conexión del PC a la electrónica Modbus se realiza a través de un
cable USB.
Escala de ajuste de parametros:
Electrónica del sensor
•
Electrónica Modbus
•
47
Page 48

7 Congurar la interface del sensor y Modbus con PACTware
1
Fig. 33: Conexión del PC a través de USB a la electrónica Modbus
1 Cable USB hacia el PC
A la línea RS 485
Requisitos
La conexión del PC a la línea RS 485 se realiza a través de un adaptador comercial de interface RS 485/USB.
Escala de ajuste de parametros:
Electrónica del sensor
•
Electrónica Modbus
•
Información:
Para la parametrización es de necesidad obligatoria, desconectar la
conexión hacia RTU
4
5
RS485
USB
3
2
1
Fig. 34: Conexión del PC mediante el adaptador de interface a la línea RS 485
1 Adaptador de interface RS 485/USB
2 Cable USB hacia el PC
3 Línea RS 485
4 Sensor
5 Alimentación de tensión
7.2 ParametrizaciónconPACTware
Para la parametrización del sensor a través de una PC Windows es
necesario el software de conguración PACTware y un excitador de
equipo adecuado (DTM) según la norma FDT. La versión de PACTware actual así como todos los DTM disponibles están resumidos en
una DTM-Collection. Además, los DTM pueden integrarse en otras
aplicaciones generales según la norma FDT.
41361-ES-121113
48
VEGAPULS 61 • Protocolo Modbus y Levelmaster
Page 49

7 Congurar la interface del sensor y Modbus con PACTware
Indicaciones:
Para garantizar el soporte de todas las funciones del equipo, debe
emplearse siempre la DTM-Collection más nueva. Además, no todas
las funciones descritas están dentro de las versiones de rmware
antiguas. El software de equipo más nuevo puede bajarse de nuestro
sitio Web. En Internet también está disponible una descripción de la
secuencia de actualización.
La conguración restante se describe en el manual de instrucciones
"DTM-Collection/PACTware", adjunto en cada DTM Collection y con
posibilidad de descarga desde Internet. Descripciones más detalladas se encuentra en la ayuda en línea de PACTware y el DTM.
Fig. 35: Ejemplo de una vista DTM
Versión estándar/completa
Todos los DTM de equipos están disponibles como versión estándar
gratis y como versión completa sujeta a pago. La versión estándar tiene todas las funciones necesarias para una conguración completa.
Un asistente para la organización simple de proyectos facilita la conguración considerablemente. El almacenaje/impresión del proyecto
asó como la función de importación/exportación también forman
parte de la versión estándar.
En la versión completa hay además una función de impresión
ampliada para la documentación completa del proyecto así como
la posibilidad de almacenaje de valores medidos y curvas de ecos.
Además, aquí hay disponible un programa para el cálculo de tanques
así como un Multiviewer para la indicación y evaluación de los valores
medidos y curvas de ecos almacenados.
La versión estándar se puede descargar de www.vega.com/downloads y "Software". La versión completa Usted la recibe en un CD a
través de su representación correspondiente.
41361-ES-121113
VEGAPULS 61 • Protocolo Modbus y Levelmaster
49
Page 50

7 Congurar la interface del sensor y Modbus con PACTware
7.3 Aseguramiento de los datos de
parametrización
Se recomienda la documentación y registro de los datos de parametrización a través de PACTware. De esta forma se encuentran
disponible para uso múltiple y para nes de servicio.
50
41361-ES-121113
VEGAPULS 61 • Protocolo Modbus y Levelmaster
Page 51

8 Puesta en funcionamiento con otros sistemas
8 Puestaenfuncionamientoconotros
sistemas
8.1 ProgramadeconguraciónDD
Para el equipo hay descripciones de equipos disponibles en forma de
Enhanced Device Description (EDD) para programas de conguración DD tales como p. Ej. AMS™ y PDM.
Los archivos se pueden descargar desde www.vega.com/downloads
y "Software".
8.2 Communicator 375, 475
Para el equipo están disponibles descripciones de equipos en forma
de DD o EDD para la parametrización con el Field Communicator 375
o 475.
Los archivos se pueden descargar desde www.vega.com/downloads
y "Software".
41361-ES-121113
VEGAPULS 61 • Protocolo Modbus y Levelmaster
51
Page 52

9 Diagnóstico, Asset Management y servicio
9 Diagnóstico, Asset Management y servicio
9.1 Mantenimiento
En caso de empleo acorde con las prescripciones no se requiere
mantenimiento alguno durante el régimen normal de funcionamiento.
9.2 Memoria de valores medidos y eventos
El equipo tiene y varias memorias, disponibles con objetos de diagnóstico. Los datos se conservan incluso durante una caída de voltaje.
Memoria de valores
medidos
Memoria de eventos
Hasta 60.000 valores medidos se pueden almacenar en el sensor en
una memoria cíclica. Cada registro contiene fecha/hora, así como el
valor medido correspondiente.Valores almacenables son p. Ej.
Distancia
•
Altura de llenado
•
Valor porcentual
•
Porcentaje lineal
•
Escalado
•
Valor de la corriente
•
Seguridad de medición
•
Temperatura de la electrónica
•
Memoria de valores medidos está activa en estado de suministro y
cada 3 minutos almacena distancia, repetibilidad y temperatura de la
electrónica.
Los valores deseados y las condiciones de registro se determinan
a través de una PC con PACTware/DTM o el sistema de control con
EDD. Por esta vía se leen o se restauran los datos.
Hasta 500 eventos son almacenados automáticamente con cronosellador en el sensor de forma imborrable. Cada registro contiene fecha/
hora, tipo de evento, descripción del evento y valor. Tipos de eventos
son p. Ej.
Modicación de un parámetro
•
Puntos de tiempo de conexión y desconexión
•
Mensajes de estado (según NE 107)
•
Avisos de error (según NE 107)
•
Los datos se leen con una PC con PACTware/DTM o el sistema de
control con EDD.
Memoria de curva de
ecos
52
Aquí las curvas de ecos se almacenan con fecha y hora y los datos
de eco correspondientes. La memoria está dividida en dos registros:
Curvadeecodelaconguración: La misma sirve como curva
de eco de referencia para las condiciones de medición durante la
conguración. De esta forma se pueden detectar fácilmente modicaciones en las condiciones de medición durante la operación o
incrustaciones en el sensor. La curva de eco de la conguración se
almacena a través de:
PC con PACTware/DTM
•
Sistema de control con EDD
•
VEGAPULS 61 • Protocolo Modbus y Levelmaster
41361-ES-121113
Page 53

9 Diagnóstico, Asset Management y servicio
Módulo de indicación y conguración
•
Otras curvas de eco: En esa zona de memoria se pueden almacenar hasta 10 curvas de eco en el sensor en una memoria cíclica. Las
demás curvas de eco se almacenan a través de:
PC con PACTware/DTM
•
Sistema de control con EDD
•
9.3 Función Asset-Management
El equipo tiene una autorregulación y diagnóstico según NE 107 y
VDI/VDE 2650. Para los avisos de estado representados en la tabla
siguiente son visibles avisos de errores detallados en el punto de
menú "Diagnóstico" vía módulo de indicación y conguración, PACTware/DTM y EDD.
Señal de estado
41361-ES-121113
VEGAPULS 61 • Protocolo Modbus y Levelmaster
Los avisos de estado se subdividen en las categorías siguientes:
Fallo
•
Control de funcionamiento
•
Fuera de la especicación
•
Necesidad de mantenimiento
•
y explicado mediante pictogramas
Fig. 36: Pictogramas de los mensajes de estado
1 Fallo(Failure)-rojo
2 Controldefuncionamiento(Functioncheck)-naranja
3 Fueradelaespecicación(Outofspecication)-amarillo
4 Necesidaddemantenimiento(Maintenance)-azul
Fallo(Failure): A causa de una interrupción de funcionamiento
detectada en el equipo, el equipo emite un aviso interrupción.
Ese aviso de estado siempre está activo. Es imposible la desactivación por el usuario.
Controldefuncionamiento(Functioncheck): Se está trabajando
en el equipo, el Valor de medida es es inválido momentáneamente (p.
Ej. Durante la simulación).
Ese aviso de estado es negativo por defecto. Es posible una activación por el usuario a través de PACTware el/DTM o EDD.
Fueradelaespecicación(Outofspecication): El valor de
medida que es un seguro, ya sentaba excedido la especicación del
equipo (p. Ej. Temperatura de la electrónica).
Ese aviso de estado es negativo por defecto. Es posible una activación por el usuario a través de PACTware el/DTM o EDD.
Necesidaddemantenimiento(Maintenance): El funcionamiento
del equipo está limitado por factores externos. La medición se afecta,
pero el valor medido es válido todavía. Planicar el mantenimiento
41 2 3
53
Page 54

9 Diagnóstico, Asset Management y servicio
del equipo, ya que se espera un fallo en un futuro próximo (p. Ej. Por
adherencias).
Ese aviso de estado es negativo por defecto. Es posible una activación por el usuario a través de PACTware el/DTM o EDD.
Failure(Fallo)
La tabla siguiente muestra los códigos y mensajes de texto de la
señal de estado "Failure" y da indicaciones sobre la causa y eliminación.
Código
Mensaje
de texto
F013
No existe
valor me-
dido
F017
Margen de
ajuste muy
pequeño
F025
Error en la
tabla de linealización
F036
Ningún
software
ejecutable
F040
Error en la
electrónica
F080 – Error general de
F105
Determi-
nando valor
medido
F113
Error de
comunica-
ción
Causa Corrección PA DevS-
– El sensor no detecta
ningún eco durante el
funcionamiento
– Sistema de antenas
sucio o defectuoso
– Ajuste no dentro de la
especicación
– Puntos de apoyo no
aumentan continua-
mente p. Ej. pares de
valores ilógicos
– Actualización del
software fracasada o
interrumpida
– Defecto de hardware – Cambiar electrónica
software
– El equipo está todavía
en la fase de arranque, todavía no se ha
podido determinar el
valor medido
– Error en la comunica-
ción interna del equipo
– Comprobar o corregir
montaje y/o parametrización
– Limpiar o cambiar
componente de pro-
ceso o antena
– Cambiar ajuste en
dependencia de los
límites (Diferencia
entre mín. y máx.
≥ 10 mm)
– Comprobar tabla de
linealización
– Borrar tabla/crear
tabla nueva
– Repetir actualización
del software
– Comprobar la versión
electrónica
– Cambiar electrónica
– Enviar el equipo a
reparación
– Enviar el equipo a
reparación
– Desconectar momen-
táneamente la tensión
de trabajo
– Esperar fase de calen-
tamiento
– Dura en dependencia
de la versión y la
parametrización hasta
aprox. 3 min.
– Desconectar momen-
táneamente la tensión
de trabajo
– Enviar el equipo a
reparación
pec
Diagnosis
Bit 0
Bit 1
Bit 2
Bit 3
Bit 4
Bit 5
Bit 6
Bit 7
41361-ES-121113
54
VEGAPULS 61 • Protocolo Modbus y Levelmaster
Page 55

9 Diagnóstico, Asset Management y servicio
Código
Mensaje
de texto
F125
Tempera-
tura de la
electrónica
inadmisible
F260
Error en la
calibración
F261
Error en la
conguración
F264
Error de
montaje/
conguración
F265
Función de
medición
interrumpida
Causa Corrección PA DevS-
– Temperatura de la
electrónica no en el
rango especicado
– Error en la calibración
ejecutada de fábrica
– Error en el EEPROM
– Error durante la con-
guración
– Supresión de señal
parásita errónea
– Erro durante la ejecu-
ción de un reset
– El ajuste no está
dentro de la altura del
depósito/del rango de
medición
– Rango máximo de
medición del equipo
insuciente
– El sensor no realiza
mas ninguna medición
– Tensión de alimenta-
ción demasiado baja
– Comprobar la tempe-
ratura ambiente
– Aislar la electrónica
– Emplear equipo con
mayor rango de temperatura
– Cambiar electrónica
– Enviar el equipo a
reparación
– Repetir conguración
– Repetir reset
– Comprobar o corregir
montaje y/o parametrización
– Emplear equipo con
rango de medida
mayor
– Comprobar tensión de
trabajo
– Ejecutar un reset
– Desconectar momen-
táneamente la tensión
de trabajo
pec
Diagnosis
Bit 8
Bit 9
Bit 10
Bit 11
Bit 12
Functioncheck
La tabla siguiente muestra los códigos de error y mensajes de texto
en la señal de estado "Function check" y da indicaciones sobre la
causa y eliminación.
Código
Mensaje de
texto
C700
Simulación
activa
Outofspecication
La tabla siguiente muestra los códigos de error y mensajes de texto
en la señal de estado "Outofspecication" y da instrucciones sobre
la causa y eliminación.
41361-ES-121113
VEGAPULS 61 • Protocolo Modbus y Levelmaster
Causa Corrección
– Una simulación está activa – Simulación terminada
– Esperar nalización auto-
mática después de 60 min.
55
Page 56

9 Diagnóstico, Asset Management y servicio
Maintenance
Código
Mensaje de
texto
S600
Tempera-
tura de la
electrónica inadmisible
S601
Sobrellenado
Causa Corrección
– Temperatura de la elec-
trónica no en el rango
especicado
– Peligro de sobrellenando
del depósito
– Comprobar la temperatura
ambiente
– Aislar la electrónica
– Emplear equipo con mayor
rango de temperatura
– Asegurar, que no se
produzca más ningún
sobrellenado
– Controlar el nivel en el
depósito
La tabla siguiente muestra los códigos de error y mensajes de texto
en la señal de estado "Maintenance" y da indicaciones sobre la
causa y eliminación.
Código
Mensaje de
texto
M500
Error con el
reset estado
de suministro
M501
Error en la
tabla de linealización no
activa
M502
Error en la
memoria de
diagnóstico
M503
Conabilidad
muy baja
M504
Error en una
interface del
equipo
M505
Ningún eco
disponible
Causa Corrección
– Durante el reset al estado
de suministro no se pudieron restaurar los datos
– Error de hardware
EEPROM
– Error de hardware
EEPROM
– La relación eco/ruido es
muy pequeña para una
medición segura
– Defecto de hardware – Comprobar conexiones
– El eco de nivel de llenado
no se puede detectar más
– Repetir reset
– Cargar archivo XML con
los datos del sensor en el
sensor
– Cambiar electrónica
– Enviar el equipo a repa-
ración
– Cambiar electrónica
– Enviar el equipo a repa-
ración
– Comprobar las condiciones
de montaje y proceso
– Limpiar la antena
– Cambiar la dirección de
polarización
– Emplear equipo con mayor
sensibilidad
– Cambiar electrónica
– Enviar el equipo a repa-
ración
– Limpiar la antena
– Emplear antena/sensor
más adecuado
– Eliminar ecos parásitos
existentes eventualmente
– Optimizar la posición y la
orientación del sensor
41361-ES-121113
56
VEGAPULS 61 • Protocolo Modbus y Levelmaster
Page 57

Comportamiento en caso
defallos
9 Diagnóstico, Asset Management y servicio
9.4 Eliminacióndefallos
Es responsabilidad del operador de la instalación, la toma de medidas necesarias para la eliminación de los fallos ocurridos.
Procedimiento para la
recticacióndefallo
Tratamientodeerroresde
medición en líquidos
Las primeras medidas son:
Evaluación de los avisos de fallo, p. Ej. a través del módulo de
•
indicación y conguración
Control de la señal de salida para equipos de 4 … 20 mA
•
Tratamiento de errores de medición
•
Otras posibilidades más amplias de diagnóstico se tienen con un PC
con software PACTware y el DTM adecuado. En muchos casos por
esta vía puede determinarse las causas y eliminar las interrupciones.
Las tablas situadas a continuación indican ejemplos típicos de errores de medición condicionados por la aplicación en líquidos. Aquí se
diferencia entre errores de medición en caso de:
Nivel constante
•
Llenado
•
Vaciado
•
Las guras en la columna "Patrón de error" indican en cada caso el
nivel real con línea de puntos y el nivel indicado por el sensor con
línea continua.
Level
1
2
0
1 Nivel real
2 Nivel indicado por el sensor
Indicaciones:
Donde quiera, que el sensor indique un valor constante, la causa
•
pudiera estar incluso en el ajuste de interrupción de la salida de
corriente en "Mantener valor"
En caso de nivel demasiado bajo la causa pudiera ser también
•
una resistencia línea demasiado alta
time
41361-ES-121113
VEGAPULS 61 • Protocolo Modbus y Levelmaster
57
Page 58

9 Diagnóstico, Asset Management y servicio
Error de medición con nivel constante
Descripción de errores
1. El valor de medición indica un nivel
demasiado bajo o demasiado alto
2. Valor de medición
salta en dirección 0 %
3. Valor de medición
salta en dirección
100 %
Patrón de
error
Level
0
Level
0
Level
0
Causa Corrección
– Ajuste min.-/max. incorrecto – Adecuar ajuste min.-/max.
– Curva de linealización falsa – Adecuar curva de linealización
time
– Montaje en bypass o tubo
– Eco múltiple (Tapa del depó-
time
– La amplitud del eco del pro-
– No se realizó la supresión de
time
– La amplitud o el lugar de un
vertical, de esta forma se
reduce el retardo relativo (Error
de medición pequeño próximo
al 100 % error grande próximo
al 0 %)
sito, supercie del producto)
con amplitud mayor que el eco
de nivel
ducto disminuye condicionada
por el proceso
señal parásita
eco parásito a variado (p. Ej.
condensado, incrustaciones del
producto); supresión de señal
parásita no ajusta más
falsa
– Parámetro comprobar aplica-
ciones respecto a la forma del
depósito, ajustar en caso necesario (Bypass, tubo vertical,
´diámetro)
– Comprobar la aplicación, en
caso necesario ajustar la tapa
especial del depósito, tipo de
medio, fondo abovedado, constante dieléctrica elevada
– Realizar supresión de señal
parásita
– Determinar las causas de los
ecos parásitos modicados,
realizar una supresión de señal
parásita p. Ej. con condensado
Error de medición durante el llenado
Descripción de errores
4. El valor de medición
se detiene durante el
llenado
5. El valor de medición
se detiene en la zona del fondo durante la
medición
Patrón de
error
Level
0
Level
0
time
time
58
Causa Corrección
– Eco parásito demasiado
grande en las cercanías o
eco del producto demasiado
pequeño
– Fuerte formación de espuma o
trombas
– Ajuste max. incorrecto
– Eliminar ecos parásitos en el
área cercana
– Comprobar la situación de
medición: La antena tiene que
sobresalir de la tubuladura,
estructuras
– Eliminar la suciedad en la
antena
– Reducir las estructuras per-
turbadores en las cercanías,
modicando la dirección de
polarización
– Crear supresión de señal falsa
nueva
– Adecuar ajuste máx.
– Eco del fondo del tanque mayor
que el eco del producto, p. Ej.
para productos con εr < 2,5 a
base de aceite, disolventes
– Comprobar parámetros de apli-
cación tales como medio, altura
y forma del fondo del depósito,
ajustando en caso necesario
VEGAPULS 61 • Protocolo Modbus y Levelmaster
41361-ES-121113
Page 59

9 Diagnóstico, Asset Management y servicio
Descripción de errores
6. El valor de medición
se detiene momentáneamente durante el
llenado y salta después al nivel correcto
7. Durante el llenado el
valor de medición salta
en dirección 0 %
8. Durante el llenado el
valor de medición salta
en dirección 100 %
9. Durante el llenado el
valor de medición salta esporádicamente al
100 %
10. Valor de medición
salta al ≥ 100 % o. 0 m
de distancia
Patrón de
error
Level
0
Level
0
Level
0
Level
0
Level
Causa Corrección
– Turbulencias de la supercie
del producto, llenado rápido
time
– Amplitud de un eco múltiple
(Tapa del depósito – Supercie
del producto) es mayor que el
eco de nivel
time
– El eco de nivel no puede
distinguir del eco parásito en un
punto de eco parásito (salta a
eco múltiple)
– La amplitud del eco del
producto disminuye a causa
de turbulencias fuertes y
formación de espuma. El valor
time
de medición se salta al eco
parásito
– Condensado o suciedad varia-
ble en la antena
time
– El eco de nivel no se detecta
más en el área cercana a
causa de formación de espuma
y ecos parásitos en el área
cercana. El sensor pasa a
seguridad contra sobrellenado.
Se emite el nivel máximo (0 m
distancia) así como el aviso
de estado "Seguridad contra
sobrellenado".
– Comprobar y modicar los
parámetros de aplicación
en caso necesario, p. Ej. en
el depósito de dosicación.
reactor
– Comprobar la aplicación, en
caso necesario ajustar la tapa
especial del depósito, tipo de
medio, fondo abovedado, constante dieléctrica elevada
– Eliminar/reducir eco parásito:
minimizar estructuras perturbadoras, modicando la dirección
de polarización
– Seleccionar una posición de
montaje favorable
– Realizar supresión de señal
parásita
– Aumentar la supresión de
señales parásitas o supresión
de señales parásitas con condensado/suciedad en el área
cercana mediante edición
– Comprobar el punto de medida
: la antena tiene que sobresalir
del zócalo
– Eliminar la suciedad en la
antena
– Emplear el sensor con una
antena mejor más adecuada
41361-ES-121113
VEGAPULS 61 • Protocolo Modbus y Levelmaster
59
Page 60

9 Diagnóstico, Asset Management y servicio
Error de medición durante el vaciado
Descripción de errores
11. El valor de medición se detiene durante
el vaciado en el área
cercana
12. El valor de medición salta en dirección
0 durante el vaciado
13. El valor de
medición salta esporádicamente al 100 %
durante el vaciado
Patrón de
error
Level
0
Level
0
Level
0
Causa Corrección
– Señal parásita mayor que el
– Eco de nivel muy pequeño
time
– Eco del fondo del tanque mayor
time
– Condensado o suciedad varia-
time
eco de nivel
que el eco del producto, p. Ej.
para productos con εr < 2,5 a
base de aceite, disolventes
ble en la antena
– Eliminar eco parásito en el área
cercana. Durante esta operación comprobar, si la antena
sobresale de la tubuladura
– Eliminar la suciedad en la
antena
– Reducir las estructuras per-
turbadores en las cercanías,
modicando la dirección de
polarización
– Después de la eliminación del
eco parásito hay que borrar la
supresión de señal parásita.
Realizar una supresión de
señal parásita nueva
– Comprobar parámetros de
aplicación tales como tipo de
medio, altura y forma del fondo
del depósito, ajustando en caso
necesario
– Realizar supresión de señal
parásita o aumentar la supresión de señal parásita en el
área cercana mediante edición
– En el caso de sólidos emplear
un sensor de radar con
conexión de lavado de aire
Comportamiento después de la eliminación de
fallos
Línea directa de asistencia técnica - Servicio 24
horas
60
En dependencia de la causa de interrupción y de las medidas tomadas hay que realizar nuevamente en caso necesario los pasos de
procedimiento descritos en el capítulo "Puesta en marcha".
Si estas medidas no producen ningún resultado, llamar la línea directa de servicio VEGA en casos urgentes al Tel. +49 1805 858550.
El servicio de asistencia técnica está disponible también fuera del
horario normal de trabajo, 7 días a la semana durante las 24 horas.
Debido a que ofertamos este servicio a escala mundial, el soporte se
realiza en idioma inglés. El servicio es gratuito, el cliente solo paga la
tarifa telefónica normal.
9.5 Cambiar módulo electrónico
En caso de un defecto el módulo electrónico puede ser cambiado por
el usuario.
En caso de aplicaciones Ex solamente se puede emplear un equipo y
un módulo electrónico con la homologación Ex correspondiente.
En caso de no haber ningún módulo electrónico disponible localmente, puede pedirse el mismo a través de la representación competente. Los módulos electrónicos están sintonizados con el sensor
VEGAPULS 61 • Protocolo Modbus y Levelmaster
41361-ES-121113
Page 61

9 Diagnóstico, Asset Management y servicio
correspondiente, diferenciándose además en la salida de señal y en
la alimentación.
Hay que cargar el módulo electrónico nuevo con los ajustes de fábrica del sensor. Para ello existen las posibilidades siguientes:
En la fábrica
•
Local por el cliente
•
En ambos casos es necesaria la especicación del número de serie
del sensor. El número de serie está en la placa de tipos del equipo
en el interior de la carcasa o en el comprobante de suministro del
equipo.
En el caso de carga en el lugar hay que descargar los datos del Internet anteriormente (ver manual de instrucciones Módulo electrónico).
9.6 Actualizacióndelsoftware
Para actualizar el software del sensor se necesitan los componentes
siguientes:
Sensor
•
Alimentación de tensión
•
Adaptador de interface VEGACONNECT 4
•
PC con PACTware
•
Software actual del sensor en forma de archivo
•
El software del sensor actual así como informaciones detalladas para
el procedimiento se encuentran en "www.vega.com/downloads" en
"Software".
Cuidado:
Los equipos con homologación pueden estar unidos a determinados
estados del software. Para eso asegurar, que la homologación permanezca efectiva durante una actualización del Software.
Informaciones detalladas se encuentran en www.vega.com/downloads y "Homologaciones".
9.7 Procedimiento en caso de reparación
Formulario de reparación así como informaciones detalladas para el
procedimiento se encuentran enwww.vega.com/downloads y "Formu-
lariosyCerticados".
De esta forma nos ayudan a realizar la reparación de forma rápida y
sin necesidad de aclaraciones.
Si es necesaria una, proceder de la forma siguiente:
Llenar y enviar un formulario para cada equipo
•
Limpiar el equipo, empacándolo a prueba de rotura
•
Colocar el formulario lleno y una hoja de datos de seguridad even-
•
tualmente en la parte externa del equipo
Favor de consultar la dirección para la devolución en la represen-
•
tación de su competencia, que se encuentran en nuestro sitio
Web www.vega.com
41361-ES-121113
VEGAPULS 61 • Protocolo Modbus y Levelmaster
61
Page 62

10 Desmontaje
10 Desmontaje
10.1 Secuencia de desmontaje
Advertencia:
Antes del desmontaje, prestar atención a condiciones de proceso
peligrosas tales como p. Ej., presión en el depósito, altas temperaturas, productos agresivos o tóxicos, etc.
Atender los capítulos "Montaje" y "Conexión a la alimentación de ten-
sión" siguiendo los pasos descritos allí análogamente en secuencia
inversa.
10.2 Eliminación
El equipo se compone de materiales recuperables por establecimiento especializados de reciclaje. Para ello, hemos diseñado la electrónica de fácil desconexión, empleando materiales recuperables.
Un reciclaje especializado evita consecuencias negativas sobre el
hombre y el medio ambiente, posibilitando la recuperación de materias primas valiosas.
Materiales: ver "Datos técnicos"
Si no tiene posibilidades, de reciclar el equipo viejo de forma es-
pecializada, consulte con nosotros acerca de las posibilidades de
reciclaje o devolución.
Directiva WEEE 2002/96/CE
Este equipo no responde a la directiva WEEE 2002/96/CE y las leyes
nacionales correspondientes. Llevar el equipo directamente a una
empresa especializada de reciclaje, sin emplear para esto los puntos
comunales de recogida. Los mismos pueden emplearse solamente
para productos de uso privado según la directiva WEEE.
62
41361-ES-121113
VEGAPULS 61 • Protocolo Modbus y Levelmaster
Page 63

11 Anexo
11 Anexo
11.1 Datos técnicos
Datos generales
316L equivale a 1.4404 o 1.4435
Materiales, en contacto con el medio para sistemas de antena encapsulados
Ʋ Conexión a proceso PVDF, 316L
Ʋ Junta del proceso FKM (IDG FKM 13-75)
Ʋ Antena PVDF
Materiales, en contacto con el medio para antena de trompeta plásticas
Ʋ Brida adaptadora PP
Ʋ Junta brida adaptadora FKM (COG VI500), EPDM (COG AP310)
Ʋ Antena PBT-GF 30
Ʋ Lente de focalización PP
Materiales, sin contacto con el medio
Ʋ Brida suelta PP
Ʋ Brazo de soporte 316L
Ʋ Tornillo de sujeción estribo de montaje 316L
Ʋ Tornillo de sujeción brida adaptadora 304
Ʋ Carcasa plástica Plástico PBT (Poliéster)
Ʋ Carcasa de fundición a presión de
aluminio
Ʋ Carcasa de acero inoxidable 316L
Ʋ Sello entre la carcasa y la tapa de la
carcasa
Ʋ Ventana en la tapa de la carcasa
(opcional)
Ʋ Terminal de conexión a tierra 316L
Conexiones a proceso
Ʋ Rosca para tubos, cilíndrica
(ISO 228 T1)
Ʋ Rosca para tubos americana, cónica 1½ NPT
Ʋ Bridas DIN a partir de DN 80, ANSI a partir de 3", JIS a partir de
Ʋ Conexiones asépticas Clamp, unión roscada de tubos según DIN 11851, Tuch-
Peso, en dependencia de la conexión a
proceso y el material de la carcasa
Par de fuerza máximo tornillos de montaje estribo de jación en la carcasa del
sensor
Momento de apriete máx. tornillo de brida
Carcasa de fundición a presión de aluminio AlSi10Mg,
con recubrimiento de polvo - Base: Poliéster
NBR (Carcasa de acero inoxidable, fundición de precisión), silicona (Carcasa de aluminio/plástico; carcasa de
acero inoxidable, electropulida)
Policarbonato
G1½
DN 100 10K
enhagen Varivent
0,7 … 3,4 kg (1.543 … 7.496 lbs)
4 Nm
41361-ES-121113
VEGAPULS 61 • Protocolo Modbus y Levelmaster
63
Page 64

11 Anexo
Ʋ Brida suelta universal DN 80 5 Nm (3.689 lbf ft)
Ʋ Brida de adaptación DN 100 7 Nm (5.163 lbf ft)
Par máximo de apriete para racores atornillados para cables NPT y tubos Conduit
Ʋ Carcasa plástica 10 Nm (7.376 lbf ft)
Ʋ Carcasa de aluminio/acero inoxidable 50 Nm (36.88 lbf ft)
Magnitud de entrada
Magnitud de medición La magnitud de medida es la distancia entre la conexión
a proceso del sensor y la supercie del producto. El
plano de referencia es la supercie de obturación en
hexágono o la parte inferior de la brida.
Fig. 51: Datos para la magnitud de entrada
1 Plano de referencia
2 Magnitud medida, rango de medida máx.
3 Longitud de la antena
4 Rango de medida útil
Electrónica estándar
Rango de medición máx. 35 m (114.8 ft)
Rango de medición recomendado
Ʋ Sistema de antenas encapsulado hasta 10 m (32.81 ft)
Ʋ Antena de trompeta plástica hasta 20 m (65.62 ft)
Electrónica con sensibilidad elevada
Rango de medición máx. 35 m (114.8 ft)
Rango de medición recomendado
Ʋ Sistema de antenas encapsulado hasta 10 m (32.81 ft)
Ʋ Antena de trompeta plástica hasta 20 m (65.62 ft)
3
2
4
1
41361-ES-121113
Magnitud de salida
Salida
Ʋ Nivel físico Señal digital de salida según la norma EIA-485
64
VEGAPULS 61 • Protocolo Modbus y Levelmaster
Page 65

11 Anexo
Ʋ Especicaciones del bus Modbus Application Protocol V1.1b, Modbus over serial
line V1.02
Ʋ Protocolos Modbus RTU, Modbus ASCII, Levelmaster
Velocidad de transmisión máx. 9,6 Kbit/s
Precisióndemedición(segúnDINEN60770-1)
Condiciones de referencia de proceso según DIN EN 61298-1
Ʋ Temperatura +18 … +30 °C (+64 … +86 °F)
Ʋ Humedad relativa del aire 45 … 75 %
Ʋ Presión de aire 860 … 1060 mbar/86 … 106 kPa (12.5 … 15.4 psig)
Condiciones de referencia de montaje
Ʋ Distancia mínima hacia las estructuras > 200 mm (7.874 in)
Ʋ Reector Reector de placas plano
Ʋ Reexiones parásitas señal parásita más grande 20 dB menor que el eco útil
Error de medición para líquidos ver los diagramas siguientes
10 mm (0.394 in)
2 mm (0.079 in)
- 2 mm (- 0.079 in)
- 10 mm (- 0.394 in)
0
0,5 m (1.6 ft)
1 2 3
Fig. 52: Error de medición y condiciones de referencia - sistema de antenas encapsulado
1 Plano de referencia
2 Borde de la antena
3 Rango de medición recomendado
10 mm (0.394 in)
2 mm (0.079 in)
- 2 mm (- 0.079 in)
- 10 mm (- 0.394 in)
Fig. 53: Error de medición y condiciones de referencia - antena de bocina plástica
1 Plano de referencia
2 Borde de la antena
3 Rango de medición recomendado
0
0,5 m (1.6 ft)
1
2
41361-ES-121113
VEGAPULS 61 • Protocolo Modbus y Levelmaster
3
65
Page 66

11 Anexo
Reproducibilidad ≤ ±1 mm
Error de medición para sólidos a granel Los valores dependen en gran medida de la aplicación.
Por eso es imposible especicaciones garantizadas.
Factoresdeinuenciasobrelaexactituddemedición
Variación de temperatura - Salida digital ±3 mm/10 K referido al rango de medición máximo o
máx. 10 mm
Error de medición adicional a causa de
< ±50 mm
campos electromagnéticos intensos de
alta frecuencia en el marco de la norma
EN 61326
Características de medición y datos de rendimiento
Frecuencia de medición Banda K (tecnología de 26 GHz)
Tiempo del ciclo de medición
Ʋ Electrónica estándar apróx. 450 ms
Ʋ Electrónica con sensibilidad elevada
700 ms
apróx.
Tiempo de respuesta gradual
Velocidad de seguimiento de la ventana
1)
≤ 3 s
1 m/min
de medición máx.
Ángulo de haz
2)
Ʋ Sistema de antenas encapsulado 22°
Ʋ Antena de trompeta plástica 10°
Potencia emitida de AF (Dependiente de la parametrización)
Ʋ Densidad de potencia de emisión
-14 dBm/MHz EIRP
3)
media espectral
Ʋ Densidad de potencia de emisión
+43 dBm/50 MHz EIRP
espectral máxima
Ʋ Densidad de potencia máxima a 1 m
< 1 µW/cm²
de distancia
Condiciones ambientales
Temperatura ambiente, de almacenaje y
-40 … +80 °C (-40 … +176 °F)
de transporte
Condiciones de proceso
Para las condiciones de proceso hay que considerar adicionalmente las especicaciones en la
placa de tipos. Siempre se aplica el menor valor.
Presión del depósito
Ʋ Sistema de antenas encapsulado -1 … 3 bar (-100 … 300 kPa/-14.5 … 43.5 psi)
Ʋ Antena de trompeta plástica -1 … 2 bar (-100 … 200 kPa/-14.5 … 29.0 psig)
1)
Periodo de tiempo después de la variación repentina de la distancia de medición 0,5 m como máx. en apli-
caciones de líquidos, 2 m como máx. en aplicaciones de sólidos a granel, hasta que la señal de salida haya
alcanzado el 90 % de su valor de régimen (IEC 61298-2).
2)
Fuera del ángulo de radiación especicado la energía de la señal de radar tiene nivel reducido al 50 % (-3 dB)
3)
EIRP: Equivalent Isotropic Radiated Power
66
VEGAPULS 61 • Protocolo Modbus y Levelmaster
41361-ES-121113
Page 67

11 Anexo
Ʋ Versión con brida de adaptación a
-1 … 1 bar (-100 … 100 kPa/-14.5 … 14,5 psig)
partir de DN 150 PP
Temperatura de proceso (medida en la
-40 … +80 °C (-40 … +176 °F)
conexión al proceso)
Resistencia a la vibración
Ʋ Con brida de adaptación 2 g a 5 … 200 Hz según EN 60068-2-6 (Vibración en
caso de resonancia)
Ʋ con estribo de montaje 1 g a 5 … 200 Hz según EN 60068-2-6 (Vibración en
caso de resonancia)
Resistencia a choques térmicos 100 g, 6 ms según EN 60068-2-27 (Choque mecánico)
Datos electromecánicos - versión IP 66/IP 67
Opciones de la entrada de cable
Ʋ Racor atornillado para cables M20 x 1,5 (Cable: ø 5 … 9 mm)
Ʋ Entrada de cables ½ NPT
Ʋ Tapón ciego M20 x 1,5; ½ NPT
Ʋ Tapón roscado M20 x 1,5; ½ NPT
Opciones de enchufe
Ʋ Circuito de alimentación y señal (solo
M12 x 1
con baja tensión)
Ʋ Circuito de indicación M12 x 1
Sección del cable (Bornes elásticos)
Ʋ Alambre macizo, cordón 0,2 … 2,5 mm² (AWG 24 … 14)
Ʋ Cordón con virola de cable 0,2 … 1,5 mm² (AWG 24 … 16)
Módulodeindicaciónyconguración
Alimentación de tensión y transmisión
a través del sensor
de datos
Indicación Display LC en matriz de puntos
Indicación valor de medición
Ʋ Cantidad de cifras 5
Ʋ Tamaño de cifra B x H = 7 x 13 mm
Elementos de conguración 4 teclas
Tipo de protección
Ʋ suelto IP 20
Ʋ Montado en el sensor sin tapa IP 40
Materiales
Ʋ Carcasa ABS
Ʋ Ventana Lamina de poliéster
Reloj integrado
Formato de fecha Día, mes año
Formato de tiempo 12 h/24 h
Huso horario de fábrica CET
41361-ES-121113
VEGAPULS 61 • Protocolo Modbus y Levelmaster
67
Page 68

11 Anexo
Medición temperatura de la electrónica
Resolución 1 °C (1.8 °F)
Exactitud ±1 °C (1.8 °F)
Alimentación de tensión
Tensión de trabajo 8 … 30 V DC
Protección contra polarización inversa Existente
Medidas de protección eléctrica
Tipo de protección en dependencia de la variante de carcasa
Ʋ Carcasa plástica IP 66/IP 67
Ʋ Carcasa de aluminio, carcasa de ace-
IP 66/IP 68 (0,2 bares)
4)
ro inoxidable, fundición de precisión;
carcasa de acero inoxidable electro-
pulida
Ʋ Carcasa de aluminio y acero inoxida-
IP 66/IP 68 (1 bar)
ble, fundición de precisión (opcional)
Categoría de sobretensión III
Clase de protección III
Homologaciones
Los equipos con homologación pueden tener datos técnicos diferentes en dependencia de la
versión.
Para esos equipos hay que considerar los documentos de autorización correspondientes. Los mismos forman parte del alcance de suministros o se pueden descargar de www.vega.com y "VEGA
Tools" así como de www.vega.com/downloads y "Homologaciones".
11.2 Principios Modbus
Descripción del bus
El protocolo Modbus es un protocolo de comunicación para la comunicación entre dos equipos. Se
basa en una arquitectura maestro/esclavo o cliente/servidor. Mediante Modbus se puede conectar
un maestro y varios esclavos. Cada abonado del bus tiene una dirección denida y puede enviar
mensajes en el bus. La iniciativa parte del maestro, el esclavo direccionado responde. Para la
transferencia de datos están disponibles las versiones Ethernet y serial (EIA-232 y EIA-485) así
como los modos de operación ASCII, TCP y RTU. En los modos interesantes aquí RTU y ASCII los
datos se transmiten en forma binaria. El telegrama se compone fundamentalmente de la dirección,
la función, los datos así como el perl de transmisión.
Arquitectura del bus
En la versión Modbus RTU se pueden conectar hasta 32 abonados en un bus. La longitud de línea
de la línea bilar torcida puede ser de hasta 1200 m. El bus tiene que cerrar por ambos lados con
una resistencia de terminación de 120 Ohm en el último abonado del bus. La resistencia está integrada en VEGAPULS 61 previamente y se activa/desactiva con un conmutador deslizante.
4)
Condición para la conservación del tipo de protección es el cable adecuado y el montaje correcto.
68
VEGAPULS 61 • Protocolo Modbus y Levelmaster
41361-ES-121113
Page 69

11 Anexo
4
power supply
USB
MODBUS
)
+
(
(-)
IS GND
D0
D1
power supply
USB
MODBUS
)
+
(
(-)
IS GND
D0
D1
power supply
USB
MODBUS
)
+
(
(-)
IS GND
D0
D1
(-)
( )
1345
2off
+
on
(-)
( )
1345
2off
+
on
(-)
( )
1345
2off
+
on
3 3 3
1
Fig. 54: Arquitectura del bus Modbus
1 RTU
2 Resistencia terminal
3 Abonado del bus
4 Alimentación de tensión
2
Descripción del protocolo
VEGAPULS 61 es adecuado para la conexión en los RTUs siguientes con protocolo Modbus RTU
o ASCII.
RTU Protocol
ABB Totalow Modbus RTU, ASCII
Bristol ControlWaveMicro Modbus RTU, ASCII
Fisher ROC Modbus RTU, ASCII
ScadaPack Modbus RTU, ASCII
Thermo Electron Autopilot Modbus RTU, ASCII
Parámetros para la comunicación de bus
VEGAPULS 61 está preajustado con los valores por defecto:
Parámetro CongurableValues DefaultValue
Baud Rate 1200, 2400, 4800, 9600, 19200 9600
Start Bits 1 1
Data Bits 7, 8 8
Parity None, Odd, Even None
Stop Bits 1, 2 1
Address range Modbus 1 … 255 246
Los bits de arranque y de datos no se pueden modicar
Conguracióngeneraldelservidor
El intercambio de datos con estado y variables entre el dispositivo de campo y el servidor se realiza
a través de registro. Para eso es necesaria una conguración en el servidor. Números de coma
41361-ES-121113
VEGAPULS 61 • Protocolo Modbus y Levelmaster
69
Page 70

11 Anexo
deslizante con exactitud simple (4 Bytes) según IEEE 754 se transmiten con disposición de libre selección de los bytes de datos (Byte transmission order). Ese "Byte transmission order" se especica
en el parámetro "Format Code". De esta forma el RTU conoce los registros del VEGAPULS 61, que
hay que consultar para las informaciones de variable y de estado.
Format Code Byte transmission order
0 ABCD
1 CDAB
2 DCBA
3 BADC
11.3 Registro Modbus
Holding Register
Los registros Holding se componen de 16 bit. Se pueden leer y escribir Antes de cada instrucción
se envía la dirección (1 Byte), después de cada instrucción un CRC (2 Byte).
Register Name Register Num-
Address 200 Word 1 … 255 246 -
Baud Rate 201 Word 1200, 2400,
Parity 202 Word 0 = None, 1 =
Stopbits 203 Word 1 = None, 2 =
Delay Time 206 Word 10 … 250 50 ms
Byte Oder (Floating point format)
ber
3000 Word 0, 1, 2, 3 0 -
Type Congurable
Values
4800, 9600,
19200
Odd, 2 = Even
Two
DefaultValue Unit
9600 -
0 -
1 -
Registro de entrada
Los registros de entrada se componen de 16 bit. Solamente se pueden leer. Antes de cada instrucción se envía la dirección (1 Byte), después de cada instrucción se envía un CRC (2 Byte).
PV, SV, TV y QV se pueden ajustar a través del DTM del sensor.
Register Name Register Number Type Note
Status 100 DWord Bit 0: Invalid Measurement Value PV
Bit 1: Invalid Measurement Value SV
Bit 2: Invalid Measurement Value TV
Bit 3: Invalid Measurement Value QV
PV Unit 104 DWord Unit Code
PV 106 Primary Variable in Byte Order CDAB
SV Unit 108 DWord Unit Code
SV 110 Secondary Variable in Byte Order CDAB
TV Unit 112 DWord Unit Code
70
VEGAPULS 61 • Protocolo Modbus y Levelmaster
41361-ES-121113
Page 71

11 Anexo
Register Name Register Number Type Note
TV 114 Third Variable in Byte Order CDAB
QV Unit 116 DWord Unit Code
QV 118 Quarternary Variable in Byte Order CDAB
Status 1300 DWord See Register 100
PV 1302 Primary Variable in Byte Order of Register 3000
SV 1304 Secondary Variable in Byte Order of Register 3000
TV 1306 Third Variable in Byte Order of Register 3000
QV 1308 Quarternary Variable in Byte Order of Register 3000
Status 1400 DWord See Register 100
PV 1402 Primary Variable in Byte Order CDAB
Status 1412 DWord See Register 100
SV 1414 Secondary Variable in Byte Order CDAB
Status 1424 DWord See Register 100
TV 1426 Third Variable in Byte Order CDAB
Status 1436 DWord See Register 100
QV 1438 Quarternary Variable in Byte Order CDAB
Status 2000 DWord See Register 100
PV 2002 DWord Primary Variable in Byte Order ABCD (Big Endian)
SV 2004 DWord Secondary Variable in Byte Order ABCD (Big Endian)
TV 2006 DWord Third Variable in Byte Order ABCD (Big Endian)
QV 2008 DWord Quarternary Variable in Byte Order ABCD (Big En-
dian)
Status 2100 DWord See Register 100
PV 2102 DWord Primary Variable in Byte-Reihenfolge DCBA (Little En-
dian)
SV 2104 DWord Secondary Variable in Byte-Reihenfolge DCBA (Litt-
le Endian)
TV 2106 DWord Third Variable in Byte-Reihenfolge ABCD DCBA (Litt-
le Endian)
QV 2108 DWord Quarternary Variable in Byte-Reihenfolge DCBA (Litt-
le Endian)
Status 2200 DWord See Register 100
PV 2202 DWord Primary Variable in Byte Order BACD (Middle Endian)
SV 2204 DWord Secondary Variable in Byte Order BACD (Middle En-
dian)
41361-ES-121113
VEGAPULS 61 • Protocolo Modbus y Levelmaster
71
Page 72

11 Anexo
Register Name Register Number Type Note
TV 2206 DWord Third Variable in Byte Order BACD (Middle Endian)
QV 2208 DWord Quarternary Variable in Byte Order BACD (Middle En-
dian)
UnitCodesforRegister104,108,112,116
Unit Code Measurement Unit
32 Degree Celsius
33 Degree Fahrenheit
40 US Gallon
41 Liters
42 Imperial Gallons
43 Cubic Meters
44 Feet
45 Meters
46 Barrels
47 Inches
48 Centimeters
49 Millimeters
111 Cubic Yards
112 Cubic Feet
113 Cubic Inches
11.4 ModbusinstruccionesRTU
FC3 Read Holding Register
Con esa instrucción se puede leer una cantidad arbitraria (1-127) en los registros holding. Se transmiten el registro inicial, desde el que hay que leer y la cantidad de registros.
Request:
Parameter Length Code/Data
Function Code 1 Byte 0x03
Start Address 2 Bytes 0x0000 to 0xFFFF
Number of Registers 2 Bytes 1 to 127 (0x7D)
Response:
Parámetro Longitud Code/Data
Function Code 1 Byte 0x03
Start Address 2 Bytes 2*N
Register Value N*2 Bytes Data
FC4 Read Input Register
Con esa instrucción se puede leer una cantidad arbitraria (1-127) en los registros de entrada. Se
72
VEGAPULS 61 • Protocolo Modbus y Levelmaster
41361-ES-121113
Page 73

transmiten el registro inicial, desde el que hay que leer y la cantidad de registros.
Request:
Parámetro Length Code/Data
Function Code 1 Byte 0x04
Start Address 2 Bytes 0x0000 to 0xFFFF
Number of Registers N*2 Bytes 1 to 127 (0x7D)
Response:
Parámetro Length Code/Data
Function Code 1 Byte 0x04
Start Address 2 Bytes 2*N
Register Value N*2 Bytes Data
FC6 Write Single Register
Con ese código de función solamente se puede escribir un solo registro holding.
Request:
Parámetro Length Code/Data
Function Code 1 Byte 0x06
Start Address 2 Bytes 0x0000 to 0xFFFF
Number of Registers 2 Bytes Data
Response:
Parámetro Length Code/Data
Function Code 1 Byte 0x04
Start Address 2 Bytes 2*N
Register Value 2 Bytes Data
11 Anexo
FC8 Diagnostics
Con ese código de función se pueden iniciar diferentes funciones o valores de diagnóstico.
Request:
Parámetro Length Code/Data
Function Code 1 Byte 0x08
Sub Function Code 2 Bytes
Data N*2 Bytes Data
Response:
Parámetro Length Code/Data
Function Code 1 Byte 0x08
Sub Function Code 2 Bytes
Data N*2 Bytes Data
41361-ES-121113
VEGAPULS 61 • Protocolo Modbus y Levelmaster
73
Page 74

11 Anexo
Códigodefuncionamientoconvertido:
Sub Function Code Nombre
0x00 Return Data Request
0x0B Return Message Counter
Para el código de funcionamiento 0x00 solamente se puede escribir un valor de 16 Bit.
FC16 Write Multiple Register
Con ese código de función solamente se pueden escribir varios registros Holding. Solamente se
pueden escribir registros, que se escriben en sucesión inmediata en una consulta. Si hay huecos
(Registros no existen) entre los registros, entonces estos no se pueden escribir en un telegrama.
Request:
Parámetro Length Code/Data
Function Code 1 Byte 0x10
Start Address 2 Bytes 0x0000 to 0xFFFF
Register Value 2 Bytes 0x0001 to 0x007B
Byte Number 1 Byte 2*N
Register Value N*2 Bytes Data
Response:
Parámetro Length Code/Data
Function Code 1 Byte 0x10
Sub Function Code 2 Bytes 0x0000 to 0xFFFF
Data 2 Bytes 0x01 to 0x7B
FC17 Report Slave ID
Con ese código de funcionamiento se puede consultar el Slave ID.
Request:
Parámetro Length Code/Data
Function Code 1 Byte 0x11
Response:
Parámetro Length Code/Data
Function Code 1 Byte 0x11
Byte Number 1 Byte
Slave ID 1 Byte
Run Indicator Status 1 Byte
FC43Sub14,ReadDeviceIdentication
Con ese código de funcionamiento se puede consultar la identicación del dispositivo (Device Identication).
74
VEGAPULS 61 • Protocolo Modbus y Levelmaster
41361-ES-121113
Page 75

11 Anexo
Request:
Parámetro Length Code/Data
Function Code 1 Byte 0x2B
MEI Type 1 Byte 0x0E
Read Device ID Code 1 Byte 0x01 to 0x04
Object ID 1 Byte 0x00 to 0xFF
Response:
Parámetro Length Code/Data
Function Code 1 Byte 0x2B
MEI Type 1 Byte 0x0E
Read Device ID Code 1 Byte 0x01 to 0x04
Conrmity Level 1 Byte 0x01, 0x02, 0x03, 0x81, 0x82, 0x83
More follows 1 Byte 00/FF
Next Object ID 1 Byte Object ID number
Number of Objects 1 Byte
List of Object ID 1 Byte
List of Object length 1 Byte
List of Object value 1 Byte Depending on the Object ID
11.5 Instrucciones Levelmaster
VEGAPULS 61 también es adecuado para la conexión a los siguientes RTUs con protocolo
Levelmaster. El protocolo Levelmaster se denomina a menudo " Protocolo Siemens-" o "Protocolo
tanque".
RTU Protocol
ABB Totalow Levelmaster
Kimray DACC 2000/3000 Levelmaster
Thermo Electron Autopilot Levelmaster
Parámetros para la comunicación de bus
VEGAPULS 61 está preajustado con los valores por defecto:
Parámetro CongurableValues DefaultValue
Baud Rate 1200, 2400, 4800, 9600, 19200 9600
Start Bits 1 1
Data Bits 7, 8 8
Parity None, Odd, Even None
Stop Bits 1, 2 1
Address range Levelmaster 32 32
Las instrucciones Levelmaster se basan en la sintaxis siguiente:
Las letras en mayúsculas aparecen al principio de determinados campos
•
Las letras en minúsculas están para campos de datos
•
41361-ES-121113
VEGAPULS 61 • Protocolo Modbus y Levelmaster
75
Page 76

11 Anexo
Todas las instrucciones se cierran con "<cr>" (carriage return)
•
Todas las instrucciones comienzan con "Uuu", donde "uu" está para la dirección (00-31)
•
"*" se puede usar como comodín para cada punto en la dirección. El sensor siempre convierte
•
esto en una dirección. Para más de un sensor no se puede usar el comodín, ya que en caso
contrario responden varios esclavos
Instrucciones, que modican el equipo, devuelven la instrucción con "OK“ a continuación. "EE-
•
ERROR“ pone "OK“, si ha habido un problema durante el cambio de conguración
ReportLevel(andTemperature)
Request:
Parámetro Length Code/Data
Report Level (and Temperature) 4 characters ASCII Uuu?
Response:
Parámetro Length Code/Data
Report Level (and Temperature) 24 characters ASCII UuuDlll.llFtttEeeeeWwwww
uu = Address
lll.ll = PV in inches
ttt = Temperature in Fahrenheit
eeee = Error number (0 no error, 1
level data not readable)
wwww = Warning number (0 no war-
ning)
Nivel en pulgadas se repite para sensores con 2 niveles. El valor PV se transmite como primer valor,
SV como segundo valor.
PV, SV, TV y QV se pueden ajustar a través del DTM del sensor.
Report Unit Number
Request:
Parámetro Length Code/Data
Report Unit Number 5 characters ASCII U**N?
Response:
Parámetro Length Code/Data
Report Level (and Temperature) 6 characters ASCII UuuNnn
Assign Unit Number
Request:
Parámetro Length Code/Data
Assign Unit Number 6 characters ASCII UuuNnn
76
VEGAPULS 61 • Protocolo Modbus y Levelmaster
41361-ES-121113
Page 77

11 Anexo
Response:
Parámetro Length Code/Data
Assign Unit Number 6 characters ASCII UuuNOK
uu = new Address
SetnumberofFloats
Request:
Parámetro Length Code/Data
Set number of Floats 5 characters ASCII UuuFn
Response:
Parámetro Length Code/Data
Set number of Floats 6 characters ASCII UuuFOK
Si el número se pone en 0, no se señaliza más ningún nivel
Set Baud Rate
Request:
Parámetro Length Code/Data
Set Baud Rate 8 (12) characters ASCII UuuBbbbb[b][pds]
Bbbbb[b] = 1200, 9600 (default)
pds = parity, data length, stop bit
(optional)
parity: none = 81, even = 71 (de-
fault), odd = 71
Response:
Parámetro Length Code/Data
Set Baud Rate 11 characters ASCII
Ejemplo: U01B9600E71
Cambiar equipo en la dirección 1 a la tasa de baudios 9600, paridad par, 7 bits de datos, 1 bit de
parada
SetReceivetoTransmitDelay
Request:
Parámetro Length Code/Data
Set Receive to Transmit Delay 7 characters ASCII UuuRmmm
mmm = milliseconds (50 bis 250),
default = 127 ms
Response:
Parámetro Length Code/Data
Set Receive to Transmit Delay 6 characters ASCII UuuROK
41361-ES-121113
VEGAPULS 61 • Protocolo Modbus y Levelmaster
77
Page 78

11 Anexo
ReportNumberofFloats
Request:
Parámetro Length Code/Data
Set Receive to Transmit Delay 4 characters ASCII UuuF
Response:
Parámetro Length Code/Data
Set Receive to Transmit Delay 5 characters ASCII UuuFn
n = number of measurement values
(0, 1 or 2)
ReportReceivetoTransmitDelay
Request:
Parámetro Length Code/Data
Report Receive to Transmit Delay 4 characters ASCII UuuR
Response:
Parámetro Length Code/Data
Report Receive to Transmit Delay 7 characters ASCII UuuRmmm
mmm = milliseconds (50 bis 250),
default = 127 ms
Código de error
Error Code Name
EE-Error Error While Storing Data in EEPROM
FR-Error Erorr in Frame (to short, to long, wrong data)
LV-Error Value out of limits
78
41361-ES-121113
VEGAPULS 61 • Protocolo Modbus y Levelmaster
Page 79

11.6 ConguraciónservidorModbustípico
13
Fisher ROC 809
Esquema de conexión
IS GND
D1
(-)
+
( )
MODBUS
USB
1
+8 +30
Vdc
to
GND
3
Fig. 55: Conexión del VEGAPULS 61 a RTU Fisher ROC 809
1 VEGAPULS 61
2 RTU Fisher ROC 809
3 Alimentación de tensión
D0
power supply
45
on
(-)
2off
+
( )
(Rx/Tx -)
B
(Rx/Tx +)
A
Y
Z
COM
11 Anexo
2
Parámetro
Parámetro Value
Baud Rate 9600
Floating Point Format Code 0
RTU Data Type Conversion Code 66
Input Register Base Number 0
El número de base del registro de entrada siempre se suma a la dirección del registro de entrada
VEGAPULS 61.
Por eso para RTU Fisher ROC 809 hay que entrar la dirección 1300 como dirección de registro.
41361-ES-121113
VEGAPULS 61 • Protocolo Modbus y Levelmaster
79
Page 80

11 Anexo
13
ABBTotalFlow
Esquema de conexión
+
MODBUS
USB
IS GND
D1
(-)
D0
( )
power supply
45
on
(-)
2off
+
( )
Bus +
8
7
6
Bus -
2
GND
VBAT
1
1 2
Fig. 56: Conexión del VEGAPULS 61 a RTU ABB Total Flow
1 VEGAPULS 61
2 RTU ABB Total Flow
Parámetro
Parámetro Value
Baud Rate 9600
Floating Point Format Code 0
RTU Data Type 16 Bit Modicon
Input Register Base Number 1
El número de base del registro de entrada siempre se suma a la dirección del registro de entrada
VEGAPULS 61.
Por eso para RTU ABB Total Flow hay que entrar la dirección 1303 como dirección de registro para
1302.
80
41361-ES-121113
VEGAPULS 61 • Protocolo Modbus y Levelmaster
Page 81

11 Anexo
13
ThermoElectronAutopilot
Esquema de conexión
IS GND
D1
(-)
+
( )
MODBUS
USB
1
D0
power supply
45
on
(-)
2off
+
( )
Rx -
2
Rx+
1
2
+8 +30
Vdc
to
GND
3
Fig. 57: Conexión del VEGAPULS 61 a RTU Thermo Electron Autopilot
1 VEGAPULS 61
2 RTU Thermo Electron Autopilot
3 Alimentación de tensión
Parámetro
Parámetro Value
Baud Rate 9600
Floating Point Format Code 0
RTU Data Type IEE Fit 2R
Input Register Base Number 0
El número de base del registro de entrada siempre se suma a la dirección del registro de entrada
VEGAPULS 61.
Por eso para Thermo Electron Autopilot hay que entrar la dirección 1300 como dirección de registro para 1300.
41361-ES-121113
VEGAPULS 61 • Protocolo Modbus y Levelmaster
81
Page 82

11 Anexo
13
Bristol ControlWave Micro
Esquema de conexión
485 on COM1
IS GND
D1
(-)
+
( )
MODBUS
USB
1
D0
power supply
45
on
(-)
2off
+
( )
RS
1 +SV
2 RX3 TX4 GND
5 RXT
6 TXT
7 not used
8 not used
2
+8 +30
Vdc
to
GND
3
Fig. 58: Conexión del VEGAPULS 61 a RTU Bristol ControlWave Micro
1 VEGAPULS 61
2 RTU Bristol ControlWave Micro
3 Alimentación de tensión
Parámetro
Parámetro Value
Baud Rate 9600
Floating Point Format Code 2 (FC4)
RTU Data Type 32-bit registers as 2 16-bit registers
Input Register Base Number 1
El número de base del registro de entrada siempre se suma a la dirección del registro de entrada
VEGAPULS 61.
Por eso para Bristol ControlWave Micro hay que entrar la dirección 1303 como dirección de registro para 1302.
82
VEGAPULS 61 • Protocolo Modbus y Levelmaster
41361-ES-121113
Page 83

ScadaPack
13
Esquema de conexión
11 Anexo
IS GND
D1
(-)
+
( )
MODBUS
USB
1
D0
power supply
45
on
(-)
2off
+
( )
COM Part 3 (C3)
RS485
1
2
3
TXDTXD+
4
GND
5
6
7
8
9
3
+8 +30
Vdc
to
GND
2
Fig. 59: Conexión del VEGAPULS 61 al RTU ScadaPack
1 VEGAPULS 61
2 RTU ScadaPack
3 Alimentación de tensión
Parámetro
Parámetro Value
Baud Rate 9600
Floating Point Format Code 0
RTU Data Type Floating Point
Input Register Base Number 30001
El número de base del registro de entrada siempre se suma a la dirección del registro de entrada
VEGAPULS 61.
Por eso para RTU ScadaPack hay que entrar la dirección 31303 como dirección de registro para
1302.
11.7 Medidas
Los dibujos acotados siguientes representan solo una parte de las versiones posibles. Dibujos
acotados detallados se pueden descargar de www.vega.com/downloads y "Dibujos".
41361-ES-121113
VEGAPULS 61 • Protocolo Modbus y Levelmaster
83
Page 84

11 Anexo
Carcasa
~ 87 mm (3.43")
M16x1,5
ø 84 mm
(3.31")
120 mm (4.72")
M20x1,5/
½ NPT
1
Fig.60:Medidascarcasa-conmódulodeindicaciónyconguraciónintegradoaumentalaalturadelacarcasaen
9mm(0.35in)
VEGAPULS 61, versión roscada
SW 50 mm
(1.97")
G1½A / 1½ NPT
Fig. 61: VEGAPULS 61, versión roscada G1½ y 1½ NPT
43 mm
20 mm
ø 39 mm
(1.54")
(1.69")
(0.79")
78 mm (3.07")
84
41361-ES-121113
VEGAPULS 61 • Protocolo Modbus y Levelmaster
Page 85

VEGAPULS 61, conexión aséptica
11 Anexo
SW 50 mm
(1.97")
SW 50 mm
(1.97")
SW 50 mm
(1.97")
121 mm (4.76")121 mm (4.76")
ø 39 mm
(1.54")
ø 64 mm (2.52")
ø 91 mm (3.58")
1 2
ø 39 mm
(1.54")
ø 68 mm
(2.68")
ø 84 mm
(3.31")
3
ø 39 mm
(1.54")
ø 78 mm (3.07")
ø 95 mm (3.74")
121 mm (4.76")
Fig. 62: VEGAPULS 61, conexión aséptica
1 Clamp2"PN16(ø64mm)y3"PN16(ø91mm)DIN32676,ISO2852
2 Unión roscada según DIN 11851 DN 50 y DN 80
3 Tuchenhagen Varivent DN 32
41361-ES-121113
VEGAPULS 61 • Protocolo Modbus y Levelmaster
85
Page 86

11 Anexo
VEGAPULS 61, versión con estribo de montaje
2,5 mm
1.4301
PBT-GF30
(0.10")
(0.34")
8,5 mm
125 mm
(4.92")
(0.75")
19 mm
(6.69")
170 mm
(11.81")
300 mm
(3.86")
98 mm
PP
9 mm
(0.47")
12 mm
9 mm
(0.35")
(0.35")
12 mm
(0.47")
(3.35")
85 mm
Fig. 63: VEGAPULS 61, estribo de montaje largo 170 o 300 mm
86
VEGAPULS 61 • Protocolo Modbus y Levelmaster
75 mm
(2.95")
107 mm
(4.21")
115 mm
(4.53")
(0.59")
15 mm
41361-ES-121113
Page 87
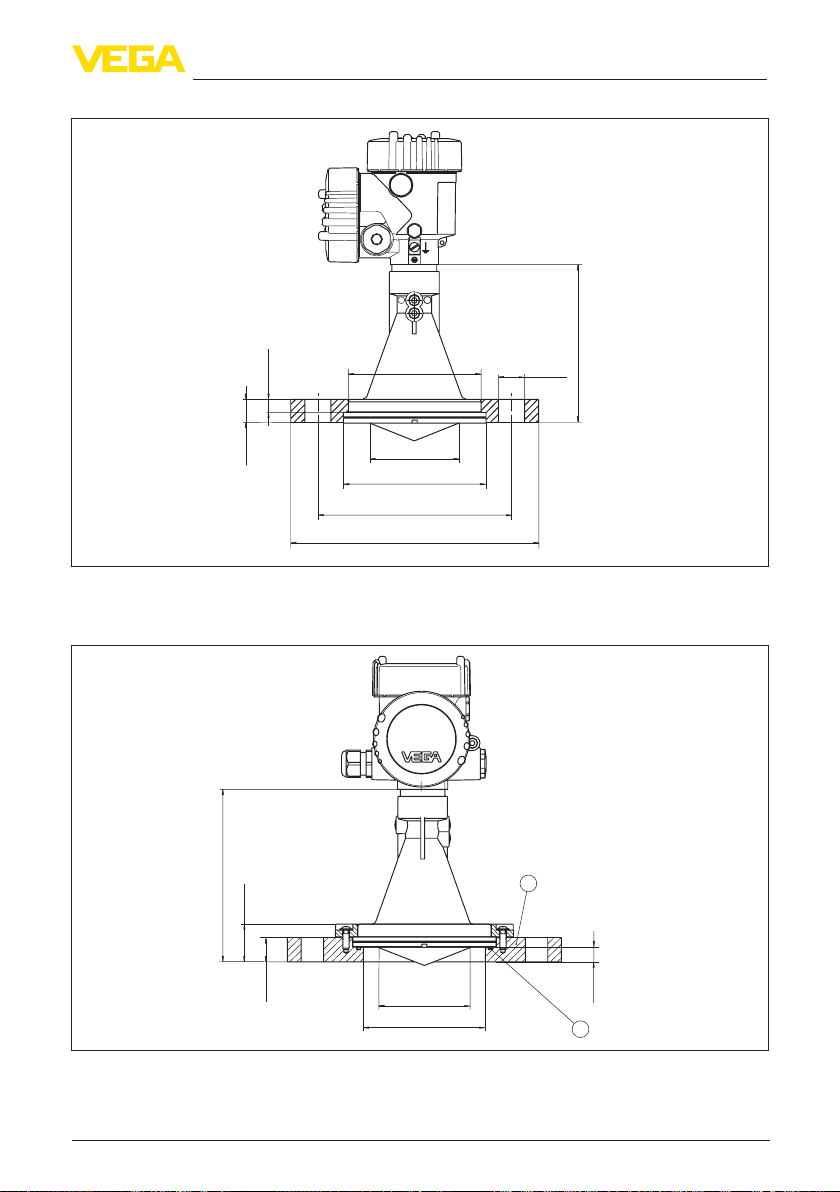
VEGAPULS 61, versión con brida suelta
(0.41")
10,5 mm
ø 107 mm
(4.21")
ø 21 mm
(0.83")
(4.96")
126 mm
11 Anexo
(0.75")
19 mm
ø 75 mm (2.95")
ø 115 mm (4.53")
ø 156 mm (6.14")
ø 200 mm (7.87")
Fig.64:VEGAPULS61,bridasueltaadecuadaparaDN80PN16/ASME3"150lbs/JIS8010K
VEGAPULS 61, versión con brida adaptadora
1
138 mm (5.43")
(1.22")
31 mm
(0.79")
20 mm
ø 75 mm (2.95")
ø 98 mm (3.86")
8 mm
(0.32")
2
Fig. 65: VEGAPULS 61, brida de adaptación
1 Brida adaptadora
2 Junta
41361-ES-121113
VEGAPULS 61 • Protocolo Modbus y Levelmaster
87
Page 88

11 Anexo
11.8 Derechos de protección industrial
VEGA product lines are global protected by industrial property rights. Further information see
www.vega.com.
Only in U.S.A.: Further information see patent label at the sensor housing.
VEGA Produktfamilien sind weltweit geschützt durch gewerbliche Schutzrechte.
Nähere Informationen unter www.vega.com.
Les lignes de produits VEGA sont globalement protégées par des droits de propriété intellectuelle. Pour plus d'informations, on pourra se référer au site www.vega.com.
VEGA lineas de productos están protegidas por los derechos en el campo de la propiedad industrial. Para mayor información revise la pagina web www.vega.com.
Линии продукции фирмы ВЕГА защищаются по всему миру правами на интеллектуальную
собственность. Дальнейшую информацию смотрите на сайте www.vega.com.
VEGA系列产品在全球享有知识产权保护。
进一步信息请参见网站<www.vega.com>。
11.9 Marca registrada
Todas las marcas y nombres comerciales o empresariales empleados pertenecen al propietario/
autor legal.
88
41361-ES-121113
VEGAPULS 61 • Protocolo Modbus y Levelmaster
Page 89

INDEX
INDEX
A
Accesorios
– Adaptador de interface 13
– Bridas 13
– Cubierta protectora 13
– Módulo de indicación y conguración 13
Agitadores 21
Almacenaje 12
Altura del depósito 38
Aplicaciones
– Líquido 34
– Sólido a granel 37
– Tubo vertical 34
Avisos de error 53
B
Bypass 23
C
Compartimiento de la electrónica 29
Corriente de llenado del producto 17
Curva de ecos de la conguración 42
Curva de linealización 44
D
DD (Device Description) 51
E
EDD (Enhanced Device Description) 51
Eliminación de fallo 57
Embalaje 12
Entrada de cables 27
Error de medición 57
Estructuras internas del depósito. 21
F
Formación de espuma 21
Forma del depósito 38
Función de las teclas 32
H
Humedad 14
I
indicador de seguimiento 41
L
Línea directa de asistencia técnica 60
M
Medición de ujo
– Aliviadero rectangular 25
– Canal Khafagi-Venturi 26
Memoria de curva de ecos 52
Memoria de eventos 52
Memoria de valores medidos 52
Menú principal 33
N
NAMUR NE 107
– Failure 54
– Function check 55
– Maintenance 56
– Out of specication 55
O
Operación
– Ajuste máx. 40
– Ajuste mín 40
Orientación del sensor 20
P
Pasos de conexión 28
Piezas de repuesto
– Cono adaptador de antena 13
– Módulo electrónico 13
– Módulo electrónico Modbus 13
Placa de tipos 10
Plano de polarización 16
Posición de montaje 17
Principio de funcionamiento 12
Producto
– Líquido Sólido a granel 33
Propiedades de reexión 33
R
Reparación 61
S
Seguridad de medición 41
Señal de estado 53
Sistema de conguración 32
Supresión de señal parásita 42
T
Técnica de conexión 28
Tubo tranquilizador 22
41361-ES-121113
VEGAPULS 61 • Protocolo Modbus y Levelmaster
89
Page 90

INDEX
V
Visualización de curvas
– Curva de ecos 41
– Supresión de señal parásita 41
Z
Zócalo 18, 20
90
41361-ES-121113
VEGAPULS 61 • Protocolo Modbus y Levelmaster
Page 91

Notes
41361-ES-121113
VEGAPULS 61 • Protocolo Modbus y Levelmaster
91
Page 92

Fecha de impresión:
Las informaciones acera del alcance de suministros, aplicación, uso y condiciones
de funcionamiento de los sensores y los sistemas de análisis corresponden con los
conocimientos existentes al momento de la impresión.
Reservado el derecho de modicación
© VEGA Grieshaber KG, Schiltach/Germany 2012
VEGA Grieshaber KG
Am Hohenstein 113
77761 Schiltach
Alemania
Teléfono +49 7836 50-0
Fax +49 7836 50-201
E-Mail: info.de@vega.com
www.vega.com
41361-ES-121113
 Loading...
Loading...