

Page 1
User Manual
LX-Series Iron Core Linear Servo Motors
Catalog Numbers
LX030100x, LX030200x, LX030300x, LX030400x, LX030600x, LX030800x,
LX050100x, LX050200x, LX050300x, LX050400x, LX050600x, LX050800x,
LX075100x, LX075200x, LX075300x, LX075400x, LX075600x, LX075800x,
LX100100x, LX100200x, LX100300x, LX100400x, LX100600x, LX100800x,
LX150100x, LX150200x, LX150300x, LX150400x, LX150600x, LX150800x,
LX200100x, LX200200x, LX200300x, LX200400x, LX200600x, LX200800x
Page 2
Important User Information
IMPORTANT
Solid-state equipment has operational characteristics differing from those of electromechanical equipment. Safety
Guidelines for the Application, Installation and Maintenance of Solid State Controls (publication SGI-1.1
your local Rockwell Automation sales office or online at http://www.rockwellautomation.com/literature/
important differences between solid-state equipment and hard-wired electromechanical devices. Because of this difference,
and also because of the wide variety of uses for solid-state equipment, all persons responsible for applying this equipment
must satisfy themselves that each intended application of this equipment is acceptable.
In no event will Rockwell Automation, Inc. be responsible or liable for indirect or consequential damages resulting from
the use or application of this equipment.
The examples and diagrams in this manual are included solely for illustrative purposes. Because of the many variables and
requirements associated with any particular installation, Rockwell Automation, Inc. cannot assume responsibility or
liability for actual use based on the examples and diagrams.
No patent liability is assumed by Rockwell Automation, Inc. with respect to use of information, circuits, equipment, or
software described in this manual.
Reproduction of the contents of this manual, in whole or in part, without written permission of Rockwell Automation,
Inc., is prohibited.
Throughout this manual, when necessary, we use notes to make you aware of safety considerations.
WARNING: Identifies information about practices or circumstances that can cause an explosion in a hazardous
environment, which may lead to personal injury or death, property damage, or economic loss.
available from
) describes some
ATTENTION: Identifies information about practices or circumstances that can lead to personal injury or death,
property damage, or economic loss. Attentions help you identify a hazard, avoid a hazard, and recognize the
consequence
SHOCK HAZARD: Labels may be on or inside the equipment, for example, a drive or motor, to alert people that
dangerous voltage may be present.
BURN HAZARD: Labels may be on or inside the equipment, for example, a drive or motor, to alert people that
surfaces may reach dangerous temperatures.
Identifies information that is critical for successful application and understanding of the product.
Allen-Bradley, Anorad, CompactLogix, ControlLogix, Kinetix, Log ix5000, Rockwell Automation, Rockwell Software, RS Logix 5000, TechConnect, Ultra3000, and Ultra5000 are trademarks of Rockwell Automation, Inc
Trademarks not belonging to Rockwell Automation are property of their respective companies.
Page 3

Table of Contents
Preface
Safety Considerations
Start
About This Publication. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
Who Should Use This Manual . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
Additional Resources . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
Chapter 1
Introduction. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
Labels . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
High Energy Magnets . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
Unpacking and Handling . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
Air Freight Restrictions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
Vertical or Incline Installation. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
Operational Guidelines . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
Chapter 2
Introduction. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
Catalog Number Explanation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
Linear Motor Components . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
Design Consideration . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
Motor Air Gap . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
Bumpers, Shock Absorbers, or End Stops . . . . . . . . . . . . . . . . . . . . . . . 17
Linear Encoder. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
Carriage/Heat Sink. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
Maintenance. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
Motor Storage . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
Install the LX-Series Linear
Motor
LX-Series Linear Motor
Connector Data
Chapter 3
Introduction. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
Unpacking and Inspection . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
Installing Linear Motor Components . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
Required Tools. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
Mount a Single Coil with Multiple Magnet Tracks . . . . . . . . . . . . . . 20
Mount a Single Coil with a Single Magnet Track . . . . . . . . . . . . . . . . 25
Chapter 4
Introduction. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
Linear Motor Coil Connectors . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30
Power Connector . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30
Thermal Protection Connector. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30
Hall Effect Module Connectors . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
Feedback Connector. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
Thermal Protection Connector. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33
Encoder Connector. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33
Rockwell Automation Publication LX-UM001A-EN-P - March 2011 3
Page 4

Table of Contents
Chapter 5
Wire the LX-Series Linear
Motor
Configure and Start Up the
LX-Series Linear Motor
Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35
Connect the Linear Motor Coil. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35
Signal and Wire Definitions for Flying Lead Components . . . . . . . . . . . 37
Linear Motor Coil . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37
Hall Effect Module . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38
Making Your Own Extension Cables. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 39
Mounting and Wiring Two Identical Coils in Tandem . . . . . . . . . . . . . . 40
Cables Exit to the Right . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 40
Cables Exit in the Center . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41
Cables Exit on Opposite Ends . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 42
Chapter 6
Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 43
Before You Begin . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 43
Motor Direction Defined. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 43
What You Need. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 44
Required Files . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 44
Follow These Steps . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 45
Update Linear Motor Database . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 45
Set Up the Connection to Kinetix 6000, Kinetix 6500/6200, or
Kinetix 2000 Drive. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 46
Set Up the Connection to an Ultra3000 Drive . . . . . . . . . . . . . . . . . . . . . . 51
Verify Motor Encoder Direction. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 53
Verify Motor Encoder Resolution. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 54
Verify Linear Motor Wiring and Function. . . . . . . . . . . . . . . . . . . . . . . . . . 54
Additional Adjustments for Cooling Plate Option . . . . . . . . . . . . . . . . . . 58
Appendix A
Interconnect Diagrams
Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 59
Wiring Examples . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 59
Appendix B
Sin/Cos Linear Encoder and
Kinetix 6000 Drives
Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 69
Kinetix 6000 Drive Feedback Connection . . . . . . . . . . . . . . . . . . . . . . . . . . 69
Encoder Counting Direction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 70
Set Up the Axis Properties. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 70
Index
4 Rockwell Automation Publication LX-UM001A-EN-P - March 2011
Page 5
Preface
About This Publication
Who Should Use This Manual
Additional Resources
This manual provides detailed installation instructions for mounting, wiring, and
maintaining your LX-Series iron core linear servo motors.
This manual is intended for engineers or technicians directly involved in the
installation, wiring, and maintenance of LX-Seriesiron core linear motors.
If you do not have a basic understanding of linear motors, contact your local
Rockwell Automation sales representative for information on available training
courses before using this product.
These documents contain additional information concerning related Rockwell
Automation products.
Resource Description
LX-Series Iron Core Linear Servo Motor
Product Profile publication LX-PP001
LX-Series Iron Core Linear Servo Motor
Technical Data, publication LX-TD001
Kinetix 2000 Multi-axis Servo Drive User
Manual, publication 2093-UM001
Product highlights and catalog number
ordering key for LX-Series linear motors
Specification and outline drawings for
LX-Series linear motors
How to install, set up, and troubleshoot a
Kinetix 2000 drive
Kinetix 6000 Multi-axis Servo Drive User
Manual, publication 2094-UM001
Ultra3000 Digital Servo Drives Installation
Manual, publication 2098-IN003
Ultra3000 Digital Servo Drives Integration
Manual, publication 2098-IN005
Ultra3000 Digital Servo Drives User
Manual, publication 2098-UM001
Motion Analyzer CD, download at
www.http://ab.com/e-tools
Motion Modules in Logix5000 Control
Systems User Manual,
publication LOGIX-UM002
System Design for Control of Electrical
Noise Reference Manual,
publication GMC-RM001
Kinetix Motion Control Selection Guide,
publication GMC-SG001
Safety Guidelines for the Application,
Installation, and Maintenance of Solid State
Controls, publication SGI-IN001
How to install, set up, and troubleshoot a
Kinetix 6000 drive
How to install, set up, and troubleshoot an
Ultra3000 drive
Instruction on configuring Ultra3000 and
Ultra5000 drives, creating and configuring
project, source, and header files, and
creating and running programs
Drive and motor sizing with application
analysis software
Information on configuring and
troubleshooting your ControlLogix and
CompactLogix SERCOS interface modules,
and using the home to torque-level
sequence
Information, examples, and techniques
designed to minimize system failures
caused by electrical noise
Information about Kinetix products
Characteristics, application, installation,
and maintenance of solid state controls
Rockwell Automation Publication LX-UM001A-EN-P - March 2011 5
Page 6
Preface
Resource Description
Allen-Bradley Industrial Automation
Glossary, publication AG-7.1
Rockwell Automation Product Certification
Website, publication available at
www.http://www.ab.com
National Electrical Code. Published by the
National Fire Protection Association of
Boston, MA.
Industrial Automation Wiring and Grounding
Guidelines, publication 1770-4.1
A glossary of industrial automation terms
and abbreviations
For declarations of conformity (DoC)
currently available from Rockwell
Automation
An article on wire sizes and types for
grounding electrical equipment
Provides general guidelines for installing a
Rockwell Automation industrial system
You can view or download publications at http://www.rockwellautomation.com/
literature/. To order paper copies of technical documentation, contact your local
Rockwell Automation distributor or sales representative.
6 Rockwell Automation Publication LX-UM001A-EN-P - March 2011
Page 7
Safety Considerations
Chapter
1
Introduction
Labels
Table 1 - Safety Labels
Title Location Label Details
Magnetic Field
Danger
This chapter describes the safety issues encountered while using a linear motor
and the precautions you can take to minimize risk. Potential hazards discussed
here are identified by labels affixed to the device.
Topic Page
Labels 7
High Energy Magnets 9
Vertical or Incline Installation 10
Operational Guidelines 11
Here you will find the safety and identification labels affixed to your linear motor
components. To prevent injury and damage to the linear motor, review the safety
label and its details and location before using the linear motor
A The Magnetic Fields label identifies non-ionizing radiation
DANGER
MAGNETIC FIELDS
LOCATED IN THIS AREA.
Can be harmfull to
pacemakers and other
sensitive equipment.
found in the magnet tracks. Magnet tracks are constructed
with strong magnets. Strong magnets can disrupt the
functionality of automatic implantable cardioverter
defibrillators (AICD); people with a pacemaker should not
work near the magnet tracks. Maintenance personnel
working near the magnet tracks should avoid the use of
metallic tools and secure items, such as a badge clip and
other personal effects, that could be attracted by the strong
magnets. Strong magnets can erase magnetic media. Never
let credit cards or electronic media contact or come near the
magnet tracks.
.
Rockwell Automation Publication LX-UM001A-EN-P - March 2011 7
Page 8
Chapter 1 Safety Considerations
D
A
C
B
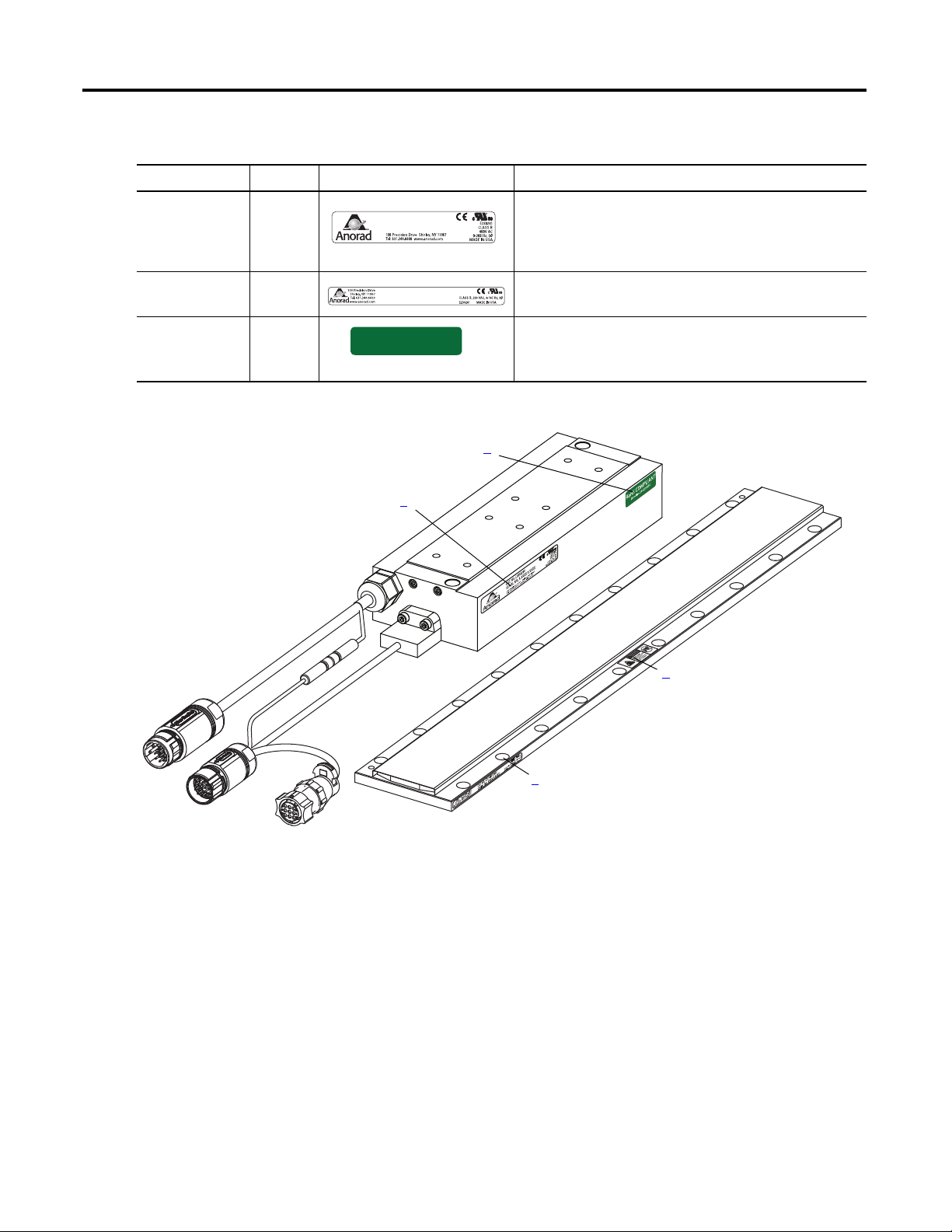
Table 2 - Identification Labels
Title Location Label Details
Coil Nameplate B This nameplate shows the coil catalog number, serial
number, operating voltage, and frequency.
Magnet Track
Nameplate
RoHS Compliant D LX-Series linear motor components are RoHS compliant.
C This nameplate shows the magnet track catalog number,
serial number, operating voltage, and frequency.
RoHS COMPLIANT
Directive 2002/95/EC
Label Locations for LX-Series Linear Motor
8 Rockwell Automation Publication LX-UM001A-EN-P - March 2011
Page 9

Safety Considerations Chapter 1
High Energy Magnets
Linear motor magnets contain high energy magnets that attract ferrous metals
from a considerable distance. Precautions must be taken while unpacking,
handling, and shipping by air.
Unpacking and Handling
Unpack magnet tracks one at a time. Repack magnet tracks after inspection and
before they are stocked or staged for installation. Leave protective wrapping,
cardboard, and flux containment plates in place until the magnet track is
installed. Clear the inspection and repacking area of any ferrous metals that will
be attracted to or attract the magnetic assembly. If magnet tracks must be
unpacked at the same time, maintain a distance of 1.5 m (5 ft) between
assemblies.
Air Freight Restrictions
When air freighting linear motors special preparations and precautions must be
taken. The following information outlines the basic requirements at the
publication date of this document. However, regulations are subject to change
and additional area or carrier restrictions may be imposed. Always check with
your carrier or logistics specialist regarding current local, regional, and national
transportation requirements when shipping this product.
Linear motor magnet tracks contain magnetized material, as classified by
International Air Transport Association (IATA) Dangerous Goods Regulations.
An IATA trained individual must be involved when shipping this product via
domestic or international air freight. Packing Instruction 902 provides
information regarding the preparation of this product for air transportation.
Follow these regulations for general marking and labeling requirements, the
application of specific Magnetized Material Handling Labels, and instructions for
preparing the Shipper's Declaration for Dangerous Goods.
At a minimum, refer to the following IATA Dangerous Goods Regulations:
• Subsection 1.5: Training
• Subsection 3.9.2.2: Classification as Magnetized Material
• Subsection 4.2: Identification as UN 2807, Magnetized Material, Class 9,
Packing Instruction 902
• Subsection 7.1.5: Marking
• Subsection 7.2: Labeling
• Subsection 7.4.1: Magnetized Material Label
• Section 8: Shipper's Declaration for Dangerous Goods
When shipped via ground in the United States, these products are not considered
a U.S. D.O.T. Hazardous Material and standard shipping procedures apply.
Rockwell Automation Publication LX-UM001A-EN-P - March 2011 9
Page 10
Chapter 1 Safety Considerations
Vertical or Incline Installation
A linear motor driven system mounted vertically or on an incline will not
maintain position when the power is removed. Under the influence of gravity, the
motion platform and its payload will fall to the low end of travel. Design
engineers should allow for this by designing in controlled power-down circuits or
mechanical controls to prevent the linear motor driven system and its payload
from being damaged when the power fails.
ATTENTION: Linear motors are capable of high accelerations, sudden
and fast motion. Rockwell Automation is not responsible for misuse, or
improper implementation of this equipment.
ATTENTION: Linear motor driven systems must have end of travel
bumpers. They must be designed to take a large impact from uncontrolled
motion. The payload must be secured to the system such that it will not
sheer off in the event of an impact in excess of the bumper ratings.
ATTENTION: The Hall effect module contains an electrostatic discharge
(ESD) sensitive device. You are required to follow static-control
precautions when you install, test, service, or repair this assembly. If you
do not follow ESD control precautions, components can be damaged. If
you are not familiar with static control precautions, refer to Guarding
Against Electrostatic Damage, publication 8000-4.5.2
applicable ESD awareness handbook.
, or any other
BURN HAZARD: When the linear motors are running at their maximum
rating, the temperature of attached heat sinks can reach 100 ºC (212 ºF).
SHOCK HAZARD: An assembled linear motor will generate power if the
coil or magnet track is moved. Unterminated power cables present an
electrical shock hazard. Never handle flying leads or touch power pins
while moving the motor.
10 Rockwell Automation Publication LX-UM001A-EN-P - March 2011
Page 11
Safety Considerations Chapter 1
IMPORTANT
Operational Guidelines
Please read and follow the guidelines shown here to safely operate the linear
motor created from these linear motor components.
ATTENTION: Observe maximum safe speed. Linear motors are capable
of very high forces, accelerations, and speeds. The maximum obtainable
acceleration and speed is based on the drive output (bus voltage and
current settings). The allowable maximum speed is application specific
and partly based on the linear motion mechanics supplied by others.
ATTENTION: Moving parts can cause injury. Before operating the linear
motor, make sure all components are secure and magnet mounting
hardware is below the magnet surface. Remove all unused parts from the
motor travel assembly to prevent them from jamming in the motor air gap
and damaging the coil or flying off and causing bodily injury.
You are responsible for making sure the servo control system safely
controls the linear motor with regards to maximum safe force,
acceleration, and speed, including runaway conditions.
A runaway condition can be caused by incorrect motor, hall effect, and
position feedback wiring resulting in violent uncontrolled motion.
ATTENTION: Keep away from the line of motor travel at all times.
Always have bumpers in place and securely fastened before applying
power to your linear motor.
ATTENTION: High voltage can kill. Do not operate with exposed wires.
Do not go near electrically live parts.
ATTENTION: Large Position Error Tolerances, such as those calculated by
the Auto Tune function in RSLogix 5000 programming software, or when
configuring a new axis with RSLogix 5000 software, can lead to
undetected and repetitive high energy impacts against axis end stops if
proper precautions are not in place. These tolerances can also lead to
undetected and repetitive high energy impacts against unexpected
obstructions. Such impacts can lead to equipment damage and/or serious
injury.
To identify the safety concerns that you have with default Position Error
Tolerance or after an Auto-Tune Function go to the Rockwell Automation
Knowlegebase. Click Find Technical Support Answers and search for
Answer Id 55937.
Rockwell Automation Publication LX-UM001A-EN-P - March 2011 11
Page 12

Chapter 1 Safety Considerations
Notes:
12 Rockwell Automation Publication LX-UM001A-EN-P - March 2011
Page 13
Start
Chapter
2
Introduction
Use this chapter to become familiar with the linear motor components, their
maintenance needs, and their configuration.
Topic Page
Catalog Number Explanation 14
Linear Motor Components 15
Design Consideration 16
Maintenance 18
Motor Storage 18
Rockwell Automation Publication LX-UM001A-EN-P - March 2011 13
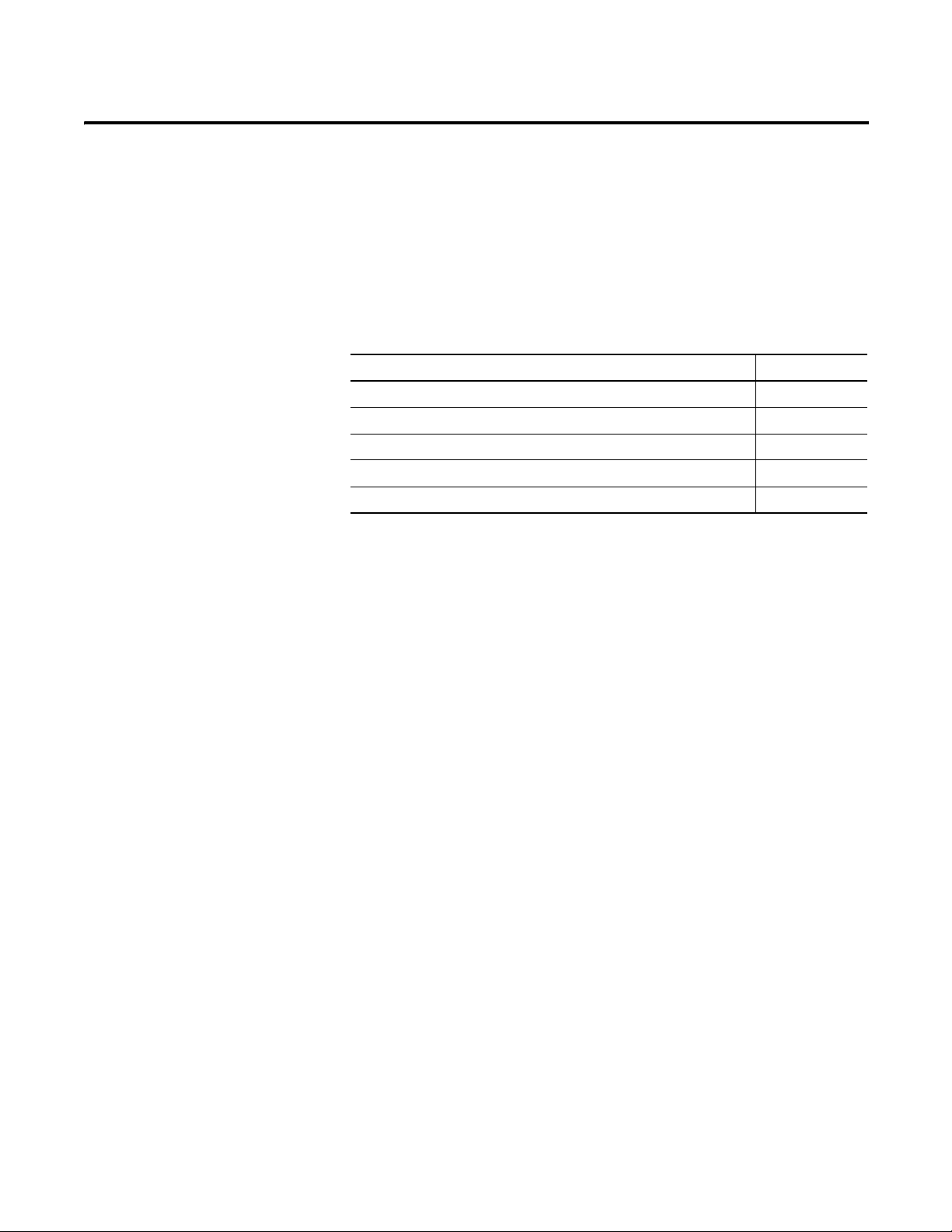
Page 14
Chapter 2 Start
UL Rating
0 = Not UL Recognized U = UL Recognized
Cable Termination
0 = Flying Leads
1 = Speedtec Circular Din-type Connector with Round
Encoder Connector
Cable Length
1 = 600 mm
2 = 1000 mm
Thermal Protection
S = Thermal Switch
T = Positive Temperature Coefficient (PTC) Thermal Sensor
Feedback
N = No Feedback
H = Hall Effect (trapezoidal)
Reserved For Future Option
0 = None
Winding Code
D = D Winding
E = E Winding
F = F Winding
G = G Winding
Coil Length
100 = 134.0 mm (5.28 in.) 400 = 434.0 mm (17.09 in.)
200 = 234.0 mm (9.21 in.) 600 = 634.0 mm (25.31 in.)
300 = 334.0 mm (13.15 in.) 800 = 834.0 mm (32.84 in.)
Frame Size
030 075 150
050 100 200
Bulletin Number
LX
LX xxx xxx x x x x x x x
LDC - x xxx xxx
Magnet Track Length
100 = 100 mm (4.15 in.)
500 = 500 mm (19.7 in.)
Frame Size
030 075 150
050 100 200
Magnet Plate Designation
M = Magnet Plate
Bulletin Number
LDC
Cooling Plate
Coil Length
100 = 134.0 mm (5.28 in.) 400 = 434.0 mm (17.09 in.)
200 = 234.0 mm (9.21 in.) 600 = 634.0 mm (25.31 in.)
300 = 334.0 mm (13.15 in.) 800 = 834.0 mm (32.84 in.)
Frame Size
030 075 150
050 100 200
Bulletin Number
LDC
LDC - xxx - xxx - CP
Catalog Number Explanation
An iron core linear motor is comprised of a coil and one or more magnet tracks.
The fo llowi ng ke ys s how the cata log defini tion for the L X-Serie s linear motors.
14 Rockwell Automation Publication LX-UM001A-EN-P - March 2011
Page 15
Start Chapter 2
1
2
3
5
6
7
LDC-M050500
Magnet Track Shown
LX050200xxxxx1x
Motor Coil Shown
4
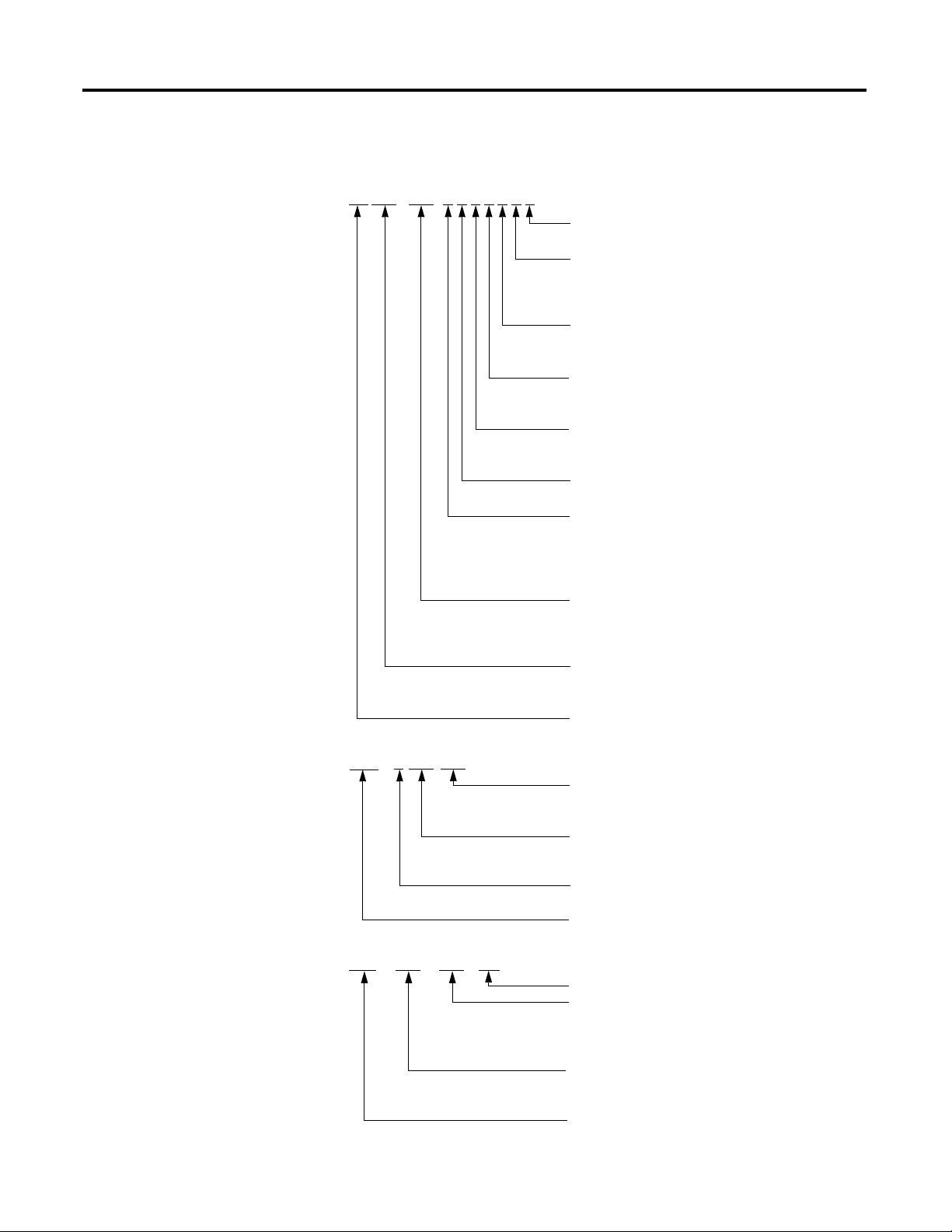
Linear Motor Components
Use the diagrams and descriptions to identify the unique components of the
linear motor.
Figure 1 - Components of Iron Core Motor Coil and Magnet Track
Component
Number
1 Iron core motor coil
2 Magnet track High powered static magnets create the flux field the powered coil interacts with.
3 Encoder connector
4 Feedback connector
5 Power connector
6 Thermal protection connector Connects the thermal protection signal to the feedback connector.
7 Hall effect module
Component Description
Copper coils are contained in an epoxy form. When powered, the coil interacts with
the flux field of the magnet track.
Connect your encoder here by using the connector kit, catalog number LDC-ENCCNCT.
Connect to your drive feedback by using either catalog number 2090-CFBM7DFCDAFxx (for moving coil) or 2090-XXNFMF-Sxx (for moving magnet).
Connect to your drive power by using either catalog number 2090-CPWM7DFxxAFxx (for moving coil) or 2090-XXNPMF-xxSxx (for moving magnet).
This module provides input signals for commutation startup. Replacement catalog
numbers for the Hall effect module are LDC-HALL-C for the LXxxxxxxxxxx1x and
LDC-HALL-F for the LXxxxxxxxxxx0x.
Rockwell Automation Publication LX-UM001A-EN-P - March 2011 15
Page 16

Chapter 2 Start
Overall dimension with cooling plate.
Overall dimension
without cooling plate.
1
2
3
Design Consideration
The information provided here is critical to using linear motor components.
Design your system to comply with the following points to run safely and
successfully.
Motor Air Gap
Maintaining the air gap is critical to proper installation and operation of the
linear motor components. Use the coil, and magnet drawings in the LX-Series
Iron Core Linear Servo Motor Technical Data, publication LX-TD001
cooling plate drawings in the Kinetix Motion Control Selection Guide,
publication GMC-SG001
to calculate the installation envelope dimension. Size
the carriage, bearings, and base plate to withstand the force of attraction between
the coil and magnet track. By maintaining the installation envelope dimension in
your design, the vertical air gap requirement will be met. The following diagram
shows the critical dimensions.
and the
Item Description
1 Magnet track
2Coil
3 Optional cooling plate assembly
16 Rockwell Automation Publication LX-UM001A-EN-P - March 2011
Page 17
Start Chapter 2
1
1
3
4
2
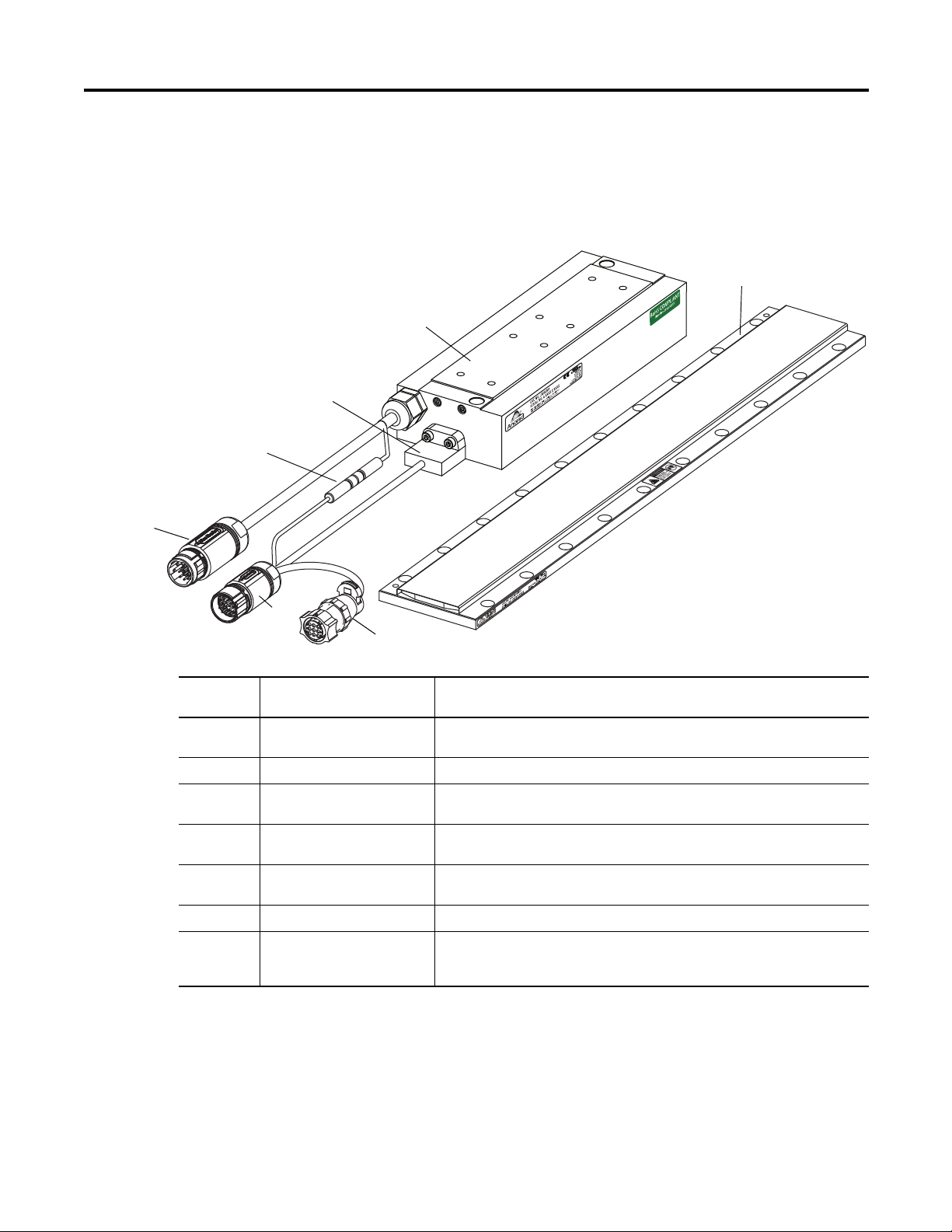
Bumpers, Shock Absorbers, or End Stops
Include in your design a mechanical stop at each end of travel. Design the stops so
they can prevent the moving mass from leaving its travel limits. Take into
consideration the maximum speed and inertia of your moving mass when
designing your mechanical stops. The following diagram shows a minimal system
with mechanical stops.
Figure 2 - Mechanical Stops
Item Description
1 Mechanical stops
2 Carriage/heat sink
3 Encoder readhead
4 Encoder strip
Linear Encoder
Your linear motor components need to be integrated with a linear encoder
purchased from a third party.
Carriage/Heat Sink
The linear motor coil requires a heat sink to maintain performance. The heat sink
requires a minimal mass and surface area as shown in LX-Series Iron Core Linear
Servo Motor Technical Data, publication LX-TD001
carriage in a moving coil system or be designed into the base in a moving magnet
system.
. It can also serve as the
Rockwell Automation Publication LX-UM001A-EN-P - March 2011 17
Page 18

Chapter 2 Start
Maintenance
Motor Storage
Linear motors require no maintenance when operated in relatively clean
environments. For operation in harsh and dirty environments, we recommend
cleaning every 6 months.
Clean the metallic debris and other contaminants from the air gap. Use a strip of
masking tape to remove the metal debris. Apply a strip of tape on the magnet
track and then remove it. Keeping the magnet track clean will prevent witness
marks. Witness marks are caused by metal debris being dragged across the surface
of the stainless steel by the magnet field of the moving coil. Witness marks have
no effect on the performance of the motor.
The motor storage area should be clean, dry, vibration free, and have a relatively
constant temperature. If a motor is stored on equipment, it should be protected
from the weather. All motor surfaces subject to corrosion should be protected by
applying a corrosion resistant coating.
18 Rockwell Automation Publication LX-UM001A-EN-P - March 2011
Page 19
Install the LX-Series Linear Motor
Chapter
3
Introduction
Unpacking and Inspection
In this section you will unpack, inspect, and install your linear motor components
by creating your own linear motor.
Topic Page
Unpacking and Inspection 19
Installing Linear Motor Components 20
Mount a Single Coil with Multiple Magnet Tracks 20
Mount a Single Coil with a Single Magnet Track 25
Read the following guidelines to handle magnet tracks carefully.
ATTENTION: Linear motors contain powerful permanent magnets
which require extreme caution during handling. When handing
multiple magnet tracks do not allow the tracks to come in contact
with each other. Do not disassemble the magnet tracks. The forces
between tracks are very powerful and can cause bodily injury.
Persons with pacemakers or Automatic Implantable Cardiac
Defibrillator (AICD) should maintain a minimum distance of 0.33 m
(1 ft) from magnet assemblies. Additionally, unless absolutely
unavoidable, a minimum distance of 1.5 m (5 ft) must be
maintained between magnet assemblies and other magnetic/
ferrous composite materials. Use only non-metallic
instrumentation when verifying assembly dimension prior to
installation.
Inspect motor components and verify they are damage free. Any damage or
suspected damage should be immediately documented. Claims for damage due to
shipment are usually made against the transportation company. Contact
Rockwell Automation for further advice:
• Compare the purchase order with the packing slip.
• Check the quantity of magnet tracks received matches your job
requirements.
• Identify the options that came with your linear motor.
• Inspect the assemblies and confirm the presence of specified options.
Rockwell Automation Publication LX-UM001A-EN-P - March 2011 19
Page 20
Chapter 3 Install the LX-Series Linear Motor
IMPORTANT
TIP
IMPORTANT
Installing Linear Motor Components
Use one of the following procedures to install the magnet track or tracks and the
motor coil.
Required Tools
• Aluminum straight edge
• Non-magnetic M4 or M5 hex wrench
• Magnet channel alignment tool
The alignment tool is shipped attached to the cables next to the
Hall effect module. Remove before operating the linear motor.
Use non-magnetic tools and hardware made of beryllium
copper, 300 series stainless steel. If these tools are not
available, proceed carefully as the magnet track attracts
magnetic and ferrous items.
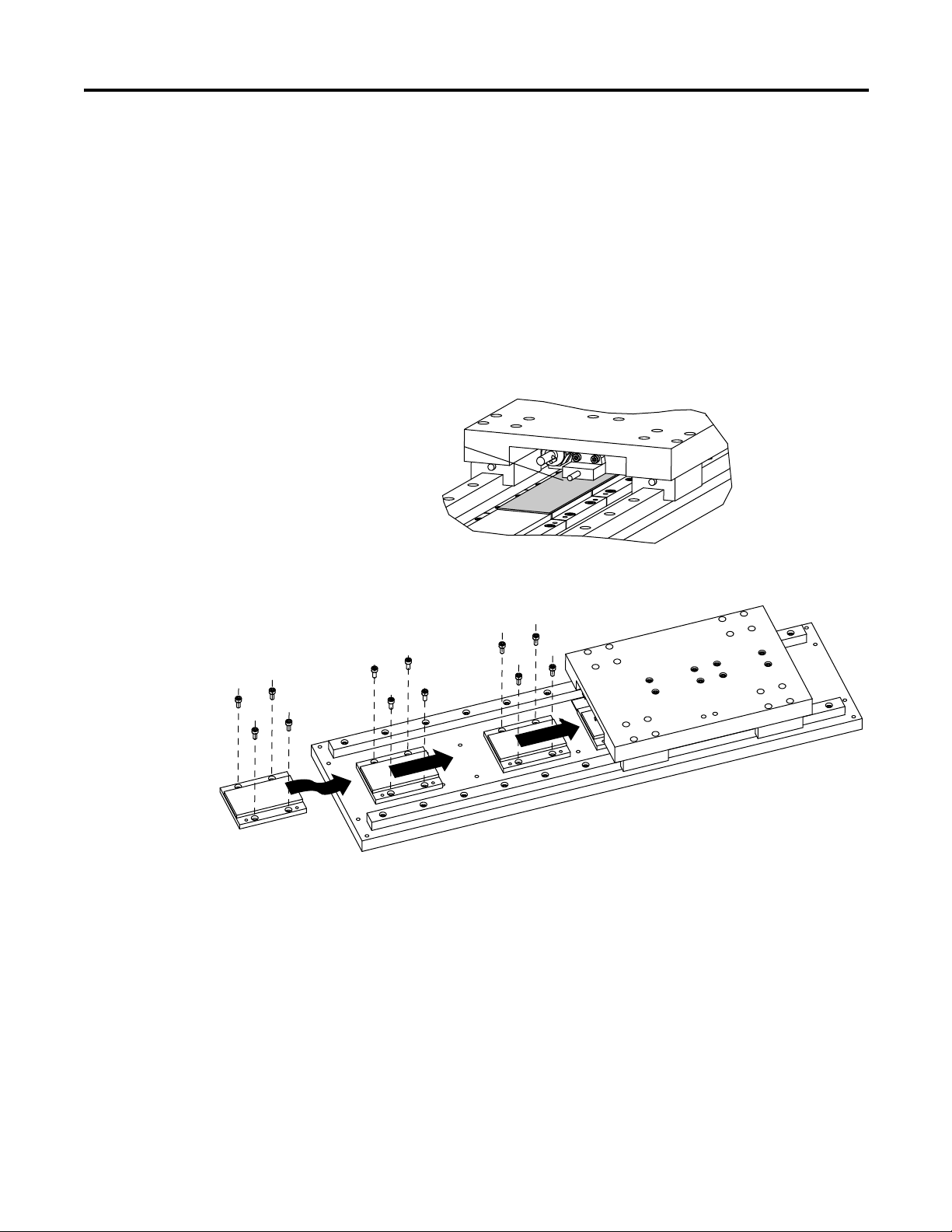
Mount a Single Coil with Multiple Magnet Tracks
Follow these steps to install a single coil with multiple magnet tracks.
ATTENTION: To avoid damage due to the magnetic attraction
between the magnet tracks, maintain a minimum distance of 1.5 m
(5 ft) between the magnet tracks that are being installed and the
magnet tracks awaiting installation. Keep the protective cardboard
and the metal plate in place until the installation is complete.
ATTENTION: Never attempt to place the coil assembly directly on
the magnet plates. Strong magnetic attraction will cause
uncontrolled movement causing a pinch hazard and possible
damage to the components.
1. Clear the magnet track mounting surface of foreign material.
If necessary stone the mounting surface, acetone or methanol may be
applied as cleaning agent.
Do not use abrasives to clean the surface.
2. Verify the flatness of the surface to which the magnet track is to be
mounted.
Total Indicator Reading (TIR) is 0.127 mm (.005 in.) per
300 mm (12.0 in.). TIR or runout correlates to the overall flatness
requirement of the surface.
20 Rockwell Automation Publication LX-UM001A-EN-P - March 2011
Page 21
Install the LX-Series Linear Motor Chapter 3
3. Verify the dimension of the opening for the magnet track, coil, and cooling
plate if used.
4. Remove all burrs and clean the motor coil mounting surface.
5. Position the carriage toward the end of travel where you want the cable to
exit.
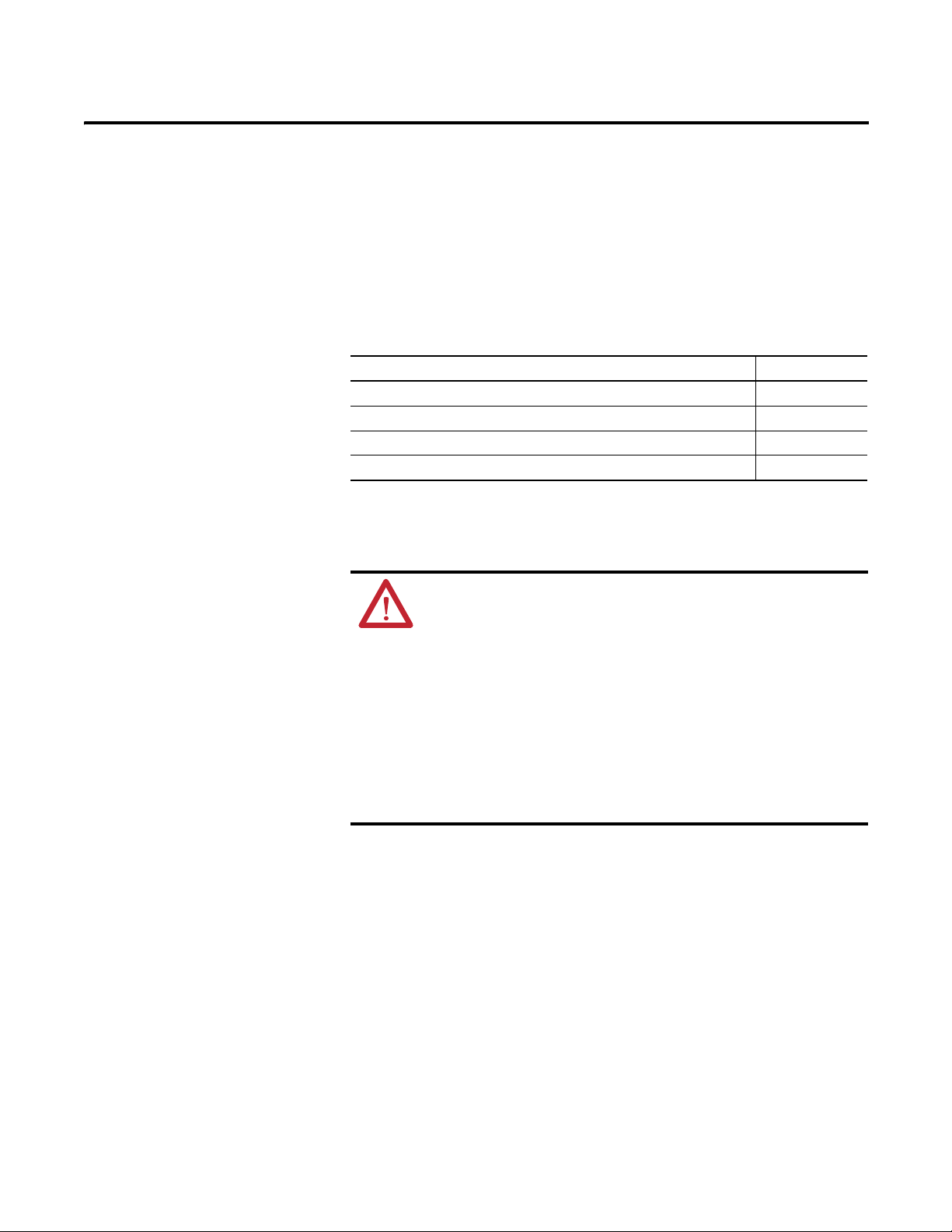
6. Install the motor under the carriage, using M5 x 0.8 bolts that extend
through the slide by at least 12 mm (0.5 in.), but no more then
20 mm (0.7 in.).
7. Tighten the screws but do not torque.
Rockwell Automation Publication LX-UM001A-EN-P - March 2011 21
Page 22
Chapter 3 Install the LX-Series Linear Motor
IMPORTANT
3
2
Alignment Holes
8. On the opposite end of the base, install the first magnet track using
M5 x 0.8 x 16 mm Socket Head Captive Screw (SHCS).
Do not tighten screws.
Use non-magnetic tools and hardware such as beryllium copper,
300 series stainless steel. If not available proceed with care
since ferrous items will be attracted to the magnet tracks.
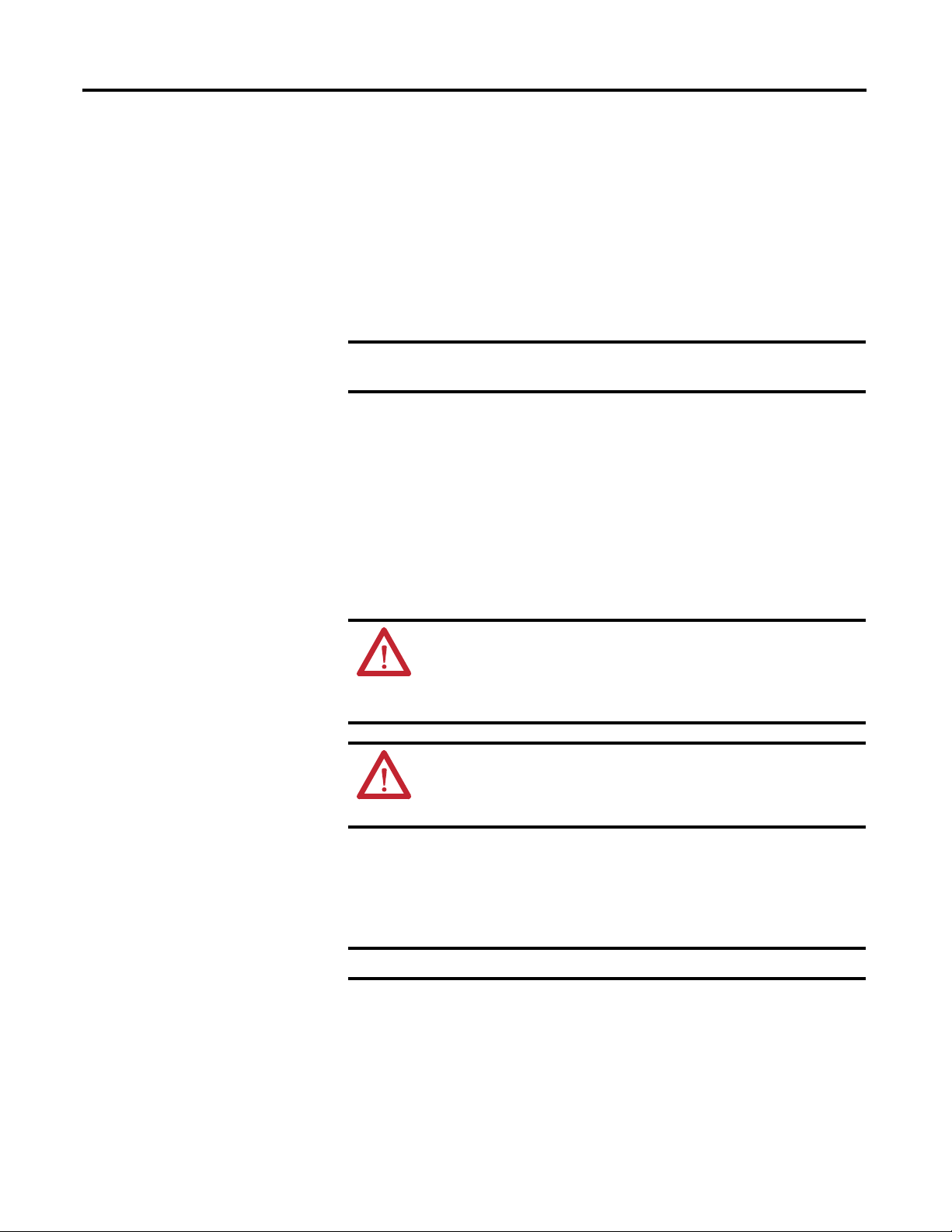
9. Install additional magnet tracks.
Place each magnet track on the base and slide towards the previously install
magnet track. For correct magnetic polarity the alignment holes should all
be on the same side.
22 Rockwell Automation Publication LX-UM001A-EN-P - March 2011
Page 23
Install the LX-Series Linear Motor Chapter 3
Shim
4
5
6
10. Move the carriage with motor coil installed over the installed magnet
tracks.
There may be some resistance while moving onto the tracks, this is normal.
11. Measure the gap between the motor coil and magnet track using plastic
shim stock.
The gap should be 0.79 mm (0.031 in.) to 1.70 mm (0.067 in.). If gap is
too large, add a brass or a stainless steel shim between the motor coil and
carriage. If the gap is too small, machine the slide or place shims under the
bearing pucks.
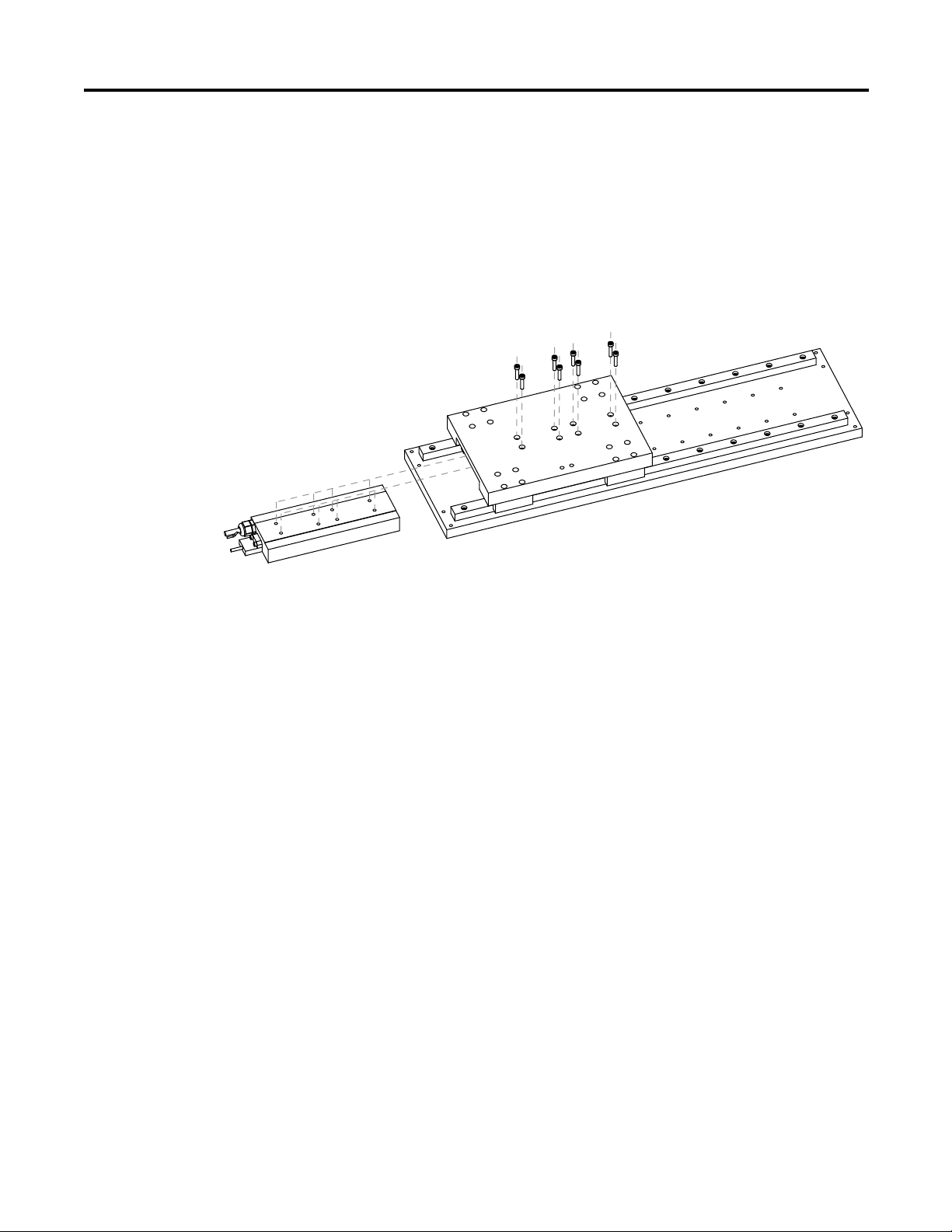
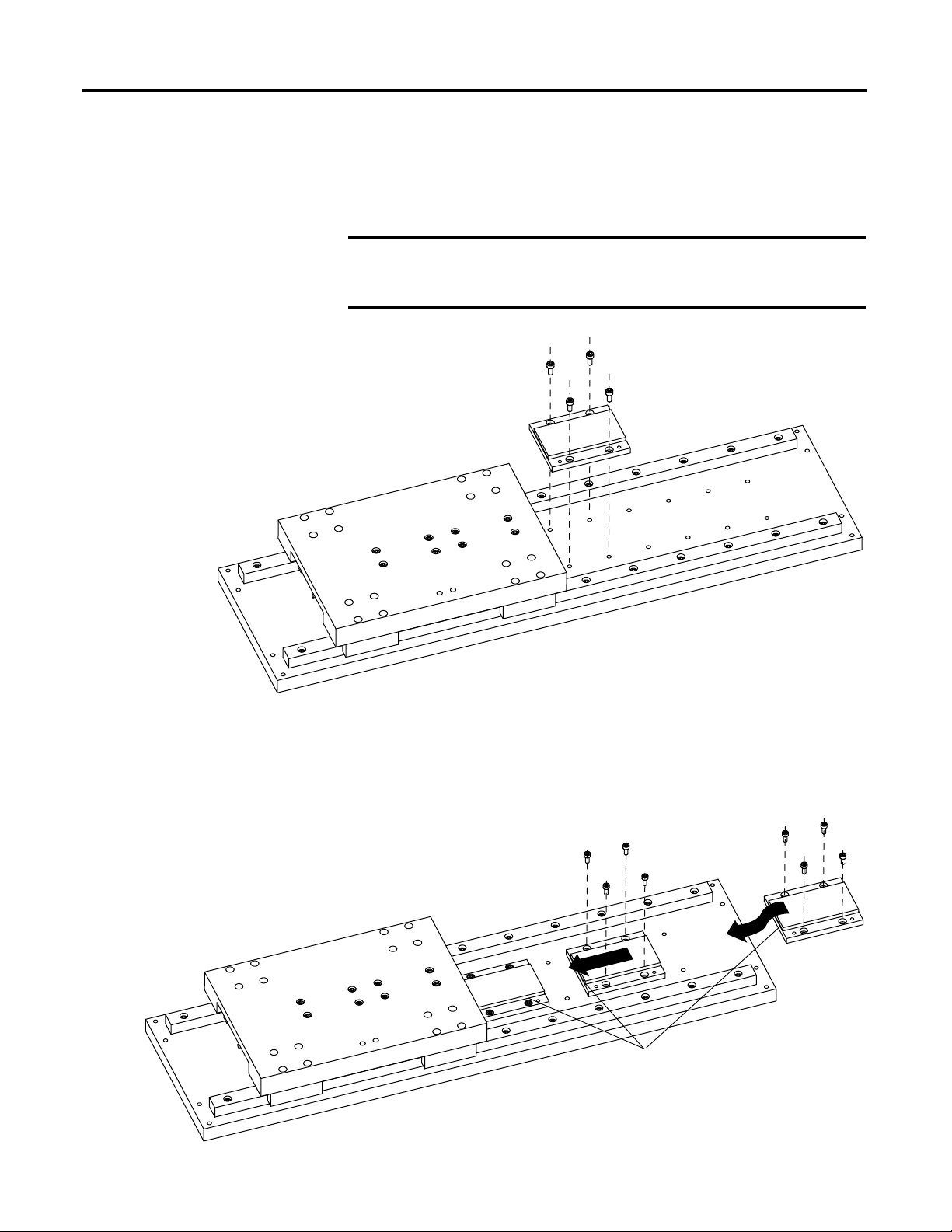
12. Install the remaining magnet tracks in the order shown.
13. Slightly loosen the mounting screws on the exposed magnet tracks.
Do not loosen the magnet tracks that are covered by the motor coil.
Rockwell Automation Publication LX-UM001A-EN-P - March 2011 23
Page 24

Chapter 3 Install the LX-Series Linear Motor
Aluminum Straight Edge
Alignment Tool
TIP
14. Align the magnet tracks with an aluminum straight edge, and the supplied
alignment tool.
15. Place the alignment tool in the holes on each of the magnet tracks.
16. Align the edges of the magnet tracks with the aluminum straight edge and
tighten the bolts.
17. Position the carriage over the complete sections and continue aligning the
remainder of the magnet tracks.
If space limitation prevents the use of an aluminum
straight edge. Place a 0.5 mm (0.020 in.) plastic shim
between the magnet tracks, tighten the bolts, and then
remove the shim.
18. Torque all screws to the values listed in the table, securing assemblies in
place by using all mounting holes.
SHCS Torque
SHCS
M5 9.5 (7.0) 6.36 (4.7)
Black Oxide Steel
N•m (lb•ft)
ATTENTION: Remove the alignment tool and make certain all
magnet-track mounting hardware is flush or below the magnet
surface to prevent damage to the coil.
Stainless Steel
N•m (lb•ft)
24 Rockwell Automation Publication LX-UM001A-EN-P - March 2011
Page 25

Install the LX-Series Linear Motor Chapter 3
Mount a Single Coil with a Single Magnet Track
Follow these steps to install a single coil with single magnet track.
1. Install the magnet track by using M5 x 0.8 x 16 mm SHCS.
2. Remove any burrs and clean the motor-coil mounting surface.
3. Install the motor coil under the carriage, by using M5 x 0.8 screws that
extend through the carriage by at least 12 mm (0.5 in.), but no more than
20 mm (0.7 in.).
4. Tighten screws but do not torque them.
5. Slide the carriage assembly onto the bearing pucks.
Rockwell Automation Publication LX-UM001A-EN-P - March 2011 25
Page 26

Chapter 3 Install the LX-Series Linear Motor
Shim
There will be resistance from magnetic forces while moving onto the
bearing pucks; this is normal.
6. Attach the carriage assembly to the bearing pucks.
7. Measure the gap between the motor and magnet by using plastic shim
stock.
The gap should be 0.79…1.70 mm (0.031…0.067 in.). If the gap is too
large, add a brass or stainless steel shim between the motor and carriage. If
the gap is too small, machine the carriage or place shims under the bearing
pucks.
26 Rockwell Automation Publication LX-UM001A-EN-P - March 2011
Page 27

Install the LX-Series Linear Motor Chapter 3
8. Torque all screws to the values listed in the table, securing assemblies in
place by using all mounting holes.
SHCS Torque
SHCS
M5 9.5 (7.0) 6.36 (4.7)
Black Oxide Steel
N•m (lb•ft)
Stainless Steel
N•m (lb•ft)
ATTENTION: Remove the alignment tool and make certain all the
magnet-track mounting hardware is flush or below the magnet
surface to prevent damage to the coil.
Rockwell Automation Publication LX-UM001A-EN-P - March 2011 27
Page 28

Chapter 3 Install the LX-Series Linear Motor
Notes:
28 Rockwell Automation Publication LX-UM001A-EN-P - March 2011
Page 29

Chapter
LX-Series Linear Motor Connector Data
4
Introduction
This chapter provides power, thermistor, and Hall effect cable-connector
information for the linear motor coil and Hall effect module.
Topic Page
Linear Motor Coil Connectors 30
Hall Effect Module Connectors 31
Rockwell Automation Publication LX-UM001A-EN-P - March 2011 29
Page 30

Chapter 4 LX-Series Linear Motor Connector Data
Mating Connector Kit Allen-Bradley 2090-KPBM4-12AA
Intercontec P/N BKUA090NN00420220000
A
CB
D
E
H
L
F
G
1
4
3
1
4
3
Linear Motor Coil Connectors
There are two connectors on the linear motor coil, catalog number
LXxxxxxxxNxxxx; the power connector and the thermal protection connector.
Power Connector
The following tables identifies the power signals for the DIN-style circular
connector.
Pin Color Signal
A Red U (A) Phase
B White V (B) Phase
C Black W (C) Phase
D Green/Yellow Ground
Case Shield
Cable Shield
and GND
ATTENTION: Properly ground the coil as described in this manual
and the drive manual.
Thermal Protection Connector
These are the feedback connector pinouts for the LX-Series linear motor, catalog
number LXxxxxxxxxxSxxx
Pin Description Signal
1 Thermal Switch + TS+
3 Thermal Switch - TS4– Reserved
These are the feedback connector pinouts for the LX-Series linear motor, catalog
number LXxxxxxxxxxTxxx.
Pin Description Signal
1 PTC thermistor + TS+
3 PTC thermistor - TS4– Reserved
.
30 Rockwell Automation Publication LX-UM001A-EN-P - March 2011
Page 31

LX-Series Linear Motor Connector Data Chapter 4
Hall Effect Module Connectors
Pin Description Signal
1 A quad B TTL (1V p-p), + A differential AM+ (SIN+)
2 A quad B TTL (1V p-p), - A differential AM- (SIN-)
3 A quad B TTL (1V p-p), + B differential BM+ (COS+)
4 A quad B TTL (1V p-p), - B differential BM- (COS+)
5 TTL + index mark differential IM+
6 TTL - index mark differential IM7
8
9 Encoder and Hall sensor power +5V DC
The following tables show the pinouts of the LX-Series linear motors with the
Hall effect module, catalog number LXxxxxxxxxHxxxx.
Feedback Connector
These are the feedback connector pinouts for the LX-Series linear motor, catalog
number LXxxxxxxxxHSxxx.
Reserved –
11
1
12
13
16
10
2
9
3
17
1415
4
8
6
7
5
10 Common Common
11 Reserved –
12 Common Common
13
Thermal switch + TS+
14 Thermal switch - TS15 TTL - trapezoidal Hall commutation S1
16 TTL - trapezoidal Hall commutation S2
17 TTL - trapezoidal Hall commutation S3
Case Shield –
Rockwell Automation Publication LX-UM001A-EN-P - March 2011 31
Page 32

Chapter 4 LX-Series Linear Motor Connector Data
Pin Description Signal
1 A quad B TTL (1V p-p), + A differential AM+ (SIN+)
2 A quad B TTL (1V p-p), - A differential AM- (SIN-)
3 A quad B TTL (1V p-p), + B differential BM+ (COS+)
4 A quad B TTL (1V p-p), - B differential BM- (COS+)
5 TTL + index mark differential IM+
6 TTL - index mark differential IM7
Reserved –
8
9 Encoder and Hall sensor power +5V DC
10 Common Common
11 Reserved –
12 Common Common
These are the feedback connector pinouts for the LX-Series linear motor catalog
number LXxxxxxxxxHTxxx.
11
1
12
13
16
10
2
9
3
17
1415
4
8
6
7
5
13 PTC thermistor sensor + TS+
14 PTC thermistor sensor - TS15 TTL - trapezoidal Hall commutation S1
16 TTL - trapezoidal Hall commutation S2
17 TTL - trapezoidal Hall commutation S3
Case Shield –
32 Rockwell Automation Publication LX-UM001A-EN-P - March 2011
Page 33

LX-Series Linear Motor Connector Data Chapter 4
4
31
4
31
4
1
3
6
9 7
Mating connector available as
part of encoder connector kit,
catalog number LDC-ENC-CNCT.
Thermal Protection Connector
These are the thermal protection connector pinouts for the LX-Series linear
motor, catalog number LXxxxxxxxxHSxxx.
Pin Description Signal
1 Thermal switch + TS+
4Reserved –
3 Thermal switch - TS-
These are the thermal protection connector pinouts for the LX-Series linear
motor, catalog number LXxxxxxxxxHTxxx.
Pin Description Signal
1 PTC thermistor sensor + TS+
4Reserved –
3 PTC thermistor sensor - TS-
Encoder Connector
These are the encoder connector pinouts
Pin Description Signal
1 A quad B TTL, + A differential AM+
2 A quad B TTL, + B differential BM+
3 TTL + index mark differential IM+
4 A quad B TTL, - A differential AM5 A quad B TTL, - B differential BM6 TTL - index mark differential IM7 5V DC return Common
8 Encoder and Hall sensor power +5V DC
9 Shield drain –
Rockwell Automation Publication LX-UM001A-EN-P - March 2011 33
Page 34

Chapter 4 LX-Series Linear Motor Connector Data
Notes:
34 Rockwell Automation Publication LX-UM001A-EN-P - March 2011
Page 35

Wire the LX-Series Linear Motor
Chapter
5
Introduction
Connect the Linear Motor Coil
This section shows you how to wire your LX-Series linear motor.
Topic Page
Connect the Linear Motor Coil 35
Signal and Wire Definitions for Flying Lead Components 37
Making Your Own Extension Cables 39
Mounting and Wiring Two Identical Coils in Tandem 40
Use the following procedure to connect your linear motor, catalog number
LXxxxxxxxx11x.
1. Wire your encoder to the connector by using the Encoder Connector Kit,
catalog number LDC-ENC-CNCT, and the connector data on page 33
ATTENTION: Be sure that cables are installed and restrained to
prevent uneven tension or flexing at the cable connectors. Use the
Bulk Head Connector Kit, catalog number LDC-BULK-HD, for
mounting these connectors.
Excessive and uneven lateral force at the cable connectors may
result in the connector’s environmental seal opening and closing
as the cable flexes.
Failure to observe these safety precautions could result in damage
to the motor and its components.
.
2. Connect your encoder to the encoder connector on the Hall effect
module.
3. Attach the motor feedback and power cables.
ATTENTION: Do not connect or disconnect the motor feedback
cable or the power cable while power is applied. It may result in
unexpected motion or cause damage to the components.
a. If using a quick-connect connector, remove the o-ring before making
the connection.
Rockwell Automation Publication LX-UM001A-EN-P - March 2011 35
Page 36

Chapter 5 Wire the LX-Series Linear Motor
3
1
2
4
6
5
To User Supplied Encoder
To Drive
b. If using thread type connectors, leave the o-ring in place.
ATTENTION: Remove the o-ring when using a quick-connect
connector. The o-ring will block the locking mechanism, rendering
it ineffective.
A threaded connector will fit on the male connector with or without
the o-ring. If the o-ring is not used on a threaded connector, the
connection will eventually vibrate loose.
c. Align flats on each connector.
Do not apply excessive force when mating the cable and motor
connectors. If the connectors do not go together with light hand force,
realign and try again.
Item Description
1 Power connector
2 Feedback connector
3 Encoder connector
4 Connect your encoder using Encoder Connector Kit, catalog
5 Feedback Extension Cable, catalog number 2090-CFB7DF-CDAFxx or 2090-
6 Power Extension Cable, catalog number 2090-CPWM7DF-xxAFxx or 2090-
36 Rockwell Automation Publication LX-UM001A-EN-P - March 2011
number LDC-ENC-CNCT
XXNFMF-Sxx
XXNPMF-xxSxx
Page 37

Wire the LX-Series Linear Motor Chapter 5
ATTENTION: Be sure that cables are installed and restrained to
prevent uneven tension or flexing at the cable connectors.
Excessive and uneven lateral force at the cable connectors may
result in the connector’s environmental seal opening and closing
as the cable flexes. Failure to observe these safety precautions
could result in damage to the motor or encoder.
d. For the quick-connect connector, push the connector on and apply a
quarter turn.
e. For the threaded connector, hand-tighten the knurled collar with five to
six turns to fully seat the connector.
ATTENTION: Keyed connectors must be properly aligned and
hand-tightened the recommended number of turns.
Improper alignment is indicated by the need for excessive force,
such as the use of tools, to fully seat connectors.
Connectors must be fully tightened for connector seals to be
effective.
Failure to observe these safety precautions could result in damage
to the motor, cables, and connector components.
Signal and Wire Definitions for Flying Lead Components
For linear motors, catalog numbers LXxxxxxxxxxxx0x, wire them by using the
wiring diagram on page 61
gauge information see LX-Series Iron Core Linear Servo Motor Technical Data,
publication LX-TD001
Linear Motor Coil
These are the wire colors and signals for the linear motor-coil power and thermal
protection cables, catalog numbers LXxxxxxxxxxxx0x.
Table 3 - Power Signals
. Wire colors and signal types are shown here; for wire
.
Color Signal Comments
Red Motor Phase U (A) • Observe maximum applied voltage specification.
White Motor Phase V (B)
Black Motor Phase W (C)
Green Motor Ground • Terminate per drive manual instructions.
Shield Cable Shield
ATTENTION: Disconnect the input power supply before installing or
servicing the motor. Motor lead connections can short and cause damage
or injury if not well secured and insulated. Insulate the connections, equal
to or better than the insulation on the supply conductors. Properly ground
the motor per the selected drive manual.
• Consult the drive manual or supplier for specific
wiring instructions to the drive. Wiring is phase/
commutation sensitive.
• Shield is not connected to the motor frame.
Rockwell Automation Publication LX-UM001A-EN-P - March 2011 37
Page 38

Chapter 5 Wire the LX-Series Linear Motor
These are the PTC thermistor sensor wire colors and signals for the linear motor
coil power and thermal protection cables, catalog number LXxxxxxxxxxSx0x.
Table 4 - PTC Thermistor Sensor Signals
Color Description Signa l
Black PTC thermistor sensor + TS+
Black PTC thermistor sensor - TS-
These are the thermal switch wire colors and signals for the linear motor coil
power and thermal protection cables, catalog number LXxxxxxxxxxTx0x.
Table 5 - Thermal Switch Signals
Color Description Signal
Blue Thermal switch + TS+
Blue Thermal switch - TS-
Hall Effect Module
This table shows the signal and wire colors for the Hall effect module with flying
leads, Rockwell Automation catalog number LDC-HALL-F for
LXxxxxxxF/Gxxxx motor coils and Anorad part number B91781-D for
LXxxxxxxD/Exxxx motor coils..
Color Signal Signal Spec
Red +V 5…24V DC Hall supply, 20 mA.
Black VRTN Hall effect signal common.
White S1
Blue S2
Orange S3
Silver braid Cable shield
–
Terminate at drive end per drive
manual instructions.
38 Rockwell Automation Publication LX-UM001A-EN-P - March 2011
Page 39

Wire the LX-Series Linear Motor Chapter 5
Making Your Own Extension Cables
Flying lead coil and Hall effect modules require circular DIN-style connectors to
interface with Allen-Bradley extension cables. The following connectors kits are
available for terminating flying lead coils and Hall effect modules.
Connector Kit Cat. No. Application
2090-KFBM7-CAAA Feedback flex extension cable
2090-KPBM4-12AA Power flex extension cable
2090-KFBE7-CAAA Feedback non-flex extension cable
2090-KPBE7-12AA Power non-flex extension cable
The cable length from the coil to drive should be limited to 10 m (32.8 ft). If
longer cables are necessary, a 1321-3Rx-x series line reactor is required. Refer to
the 1321 Power Conditioning Products Technical Data, publication 1321-
TD001, to choose a line reactor for applications requiring cable longer than 10 m
(32.8 ft).
Rockwell Automation Publication LX-UM001A-EN-P - March 2011 39
Page 40

Chapter 5 Wire the LX-Series Linear Motor
Coil #1
Coil #2
Coil #1 is the master.
Hall Effect
Module
L
Mounting and Wiring Two Identical Coils in Tandem
This type of installation requires a custom motor-database file, which is available
upon request. Contact Application Engineering at 631.344.6600 to request this
file.
These tables and figures show the wiring and spacing for two identical coils
mechanically top mounted to the same plate and driven by one amplifier. There
are three configurations shown here for mounting motors in tandem: power and
encoder cables exiting on the right, the center, and on opposite ends.
Coils must have identical part numbers. Using mismatched coils
will cause a hazardous condition resulting in damage to the
equipment and a possible fire.
Cables Exit to the Right
If mounting coils in tandem, such that the power cables exit both the coils on
right side, as shown, use the following table to find the mounting distance and the
phase wiring.
Figure 3 - Mounting Two Coils with Cables Exit to the Right
Table 6 - Phase Wiring for Right-exit Power Cables
L
mm (in.)
133.33 (5.249) Red Red U
(1) Master has Hall effect module.
(2) Slave has no Hall effect module.
40 Rockwell Automation Publication LX-UM001A-EN-P - March 2011
Coil # 1
(1)
Master
White White V
Black Black W
Coil # 2
Slave
(2)
Amplifier
Phase
Page 41

Wire the LX-Series Linear Motor Chapter 5
Coil #1
Coil #2
Coil #1 is the master.
Hall Effect
Module
L
Cables Exit in the Center
If mounting coils in tandem, such that the power cables exit in the center as
shown, use the following table to find the mounting distance and the phase
wiring.
Figure 4 - Mounting Two Coils with Cables Exit in the Center
Table 7 - Phase Wiring for Center-exit Power Cables
L
mm (in.)
133.33 (5.249) Red Black U
(1) Master has Hall effect module.
(2) Slave has no Hall effect module.
Coil # 1
(1)
Master
White White V
Black Red W
Coil # 2
Slave
(2)
Amplifier
Phase
Rockwell Automation Publication LX-UM001A-EN-P - March 2011 41
Page 42

Chapter 5 Wire the LX-Series Linear Motor
Coil #1
Coil #2
Coil #1 is the master.
Hall Effect
Module
L
Cables Exit on Opposite Ends
If mounting coils in tandem such that the power cables exit opposite to each other
as shown, use the following table to find the mounting distance and the phase
wiring.
Figure 5 - Mounting Two Coils with Cables Exit on Opposite Ends
Table 8 - Phase Wiring for Opposite End-exit Power Cables
L
mm (in.)
100.00 (3.94)
133.33 (5.249)
(1) Master has Hall effect module.
(2) Slave has no Hall effect module.
Coil # 1
(1)
Master
Red Red U
White Black V
Black White W
Red Black U
White White V
Black Red W
Coil # 2
Slave
(2)
Amplifier
Phase
42 Rockwell Automation Publication LX-UM001A-EN-P - March 2011
Page 43

Chapter
IMPORTANT
6
Configure and Start Up the LX-Series Linear Motor
Introduction
Before You Begin
This section covers the set up and connection verification of a linear motor with
either Kinetix 6000, Kinetix 6500/6200, Kinetix 2000, or Ultra3000 drives.
Topic Pages
Before You Begin 43
What You Need 44
Required Files 44
Follow These Steps 45
Update the Linear Motor Database 45
Set Up the Connection to a Kinetix 6000, Kinetix 6500/6200, or Kinetix 2000 Drive 46
Set Up the Connection to an Ultra3000 Drive 51
Verify Motor Encoder Direction 53
Verify Motor Encoder Resolution 54
Verify Linear Motor Wiring and Function 54
This chapter assumes you have wired your linear motor and Allen-Bradley drive
as shown in wiring diagrams in Appendix A
starting on page 59.
It is important that the brushless linear motor coil, Hall sensor, and the
linear encoder be wired correctly for proper drive commutation and servo
operation to get positive motion when commutated.
Please read and understand Motor Direction Defined
.
Motor Direction Defined
Positive motion is dependent on encoder orientation, encoder wiring, and coil or
magnet track motion.
Most linear encoders are attached to the motor coil with the encoder cable facing
the same direction as the motor coil cable.
Wire the linear encoder such that the position feedback is positive (phase A+
leads phase B+) when the motor is moving in the positive direction.
Rockwell Automation Publication LX-UM001A-EN-P - March 2011 43
Page 44

Chapter 6 Configure and Start Up the LX-Series Linear Motor
Coil Motion
Stationary Magnet
Stationary Coil
Magnet Motion
When the motor power and Hall sensor wiring is connected as shown in the
wiring diagrams in Appendix A
motor coil moving toward its power cable. This diagram shows positive motion
for both a moving coil and a moving magnet track.
Figure 6 - Motor Direction
, the positive direction of motion is defined as the
What You Need
You need a computer with RSLogix 5000 software installed and current files to
support your motor.
Required Files
Firmware revisions and software versions required to support the linear motors
include the following:
• RSLogix 5000 software, version 16.00 or later
• Kinetix 2000, Kinetix 6000, Kinetix 6200/6500 multi-axis drives, or
Ultra3000 with SERCOS multi-axis drives
– Firmware revision 1.96 or later
– Customer Motor database, LXxxx.cmf
– RSLogix 5000 Motion Database Import Tool, version 2.0.0.4 or later,
this tool is not compatible with Window 7
44 Rockwell Automation Publication LX-UM001A-EN-P - March 2011
Page 45

Configure and Start Up the LX-Series Linear Motor Chapter 6
Update the Linear Motor Database
Verify Motor Encoder
Resolution
Set Up the Connection to a
Kinetix 6000, Kinetix 6500/
6200, or Kinetix 2000 Drive
Verify Motor Encoder
Direction
Verify Linear Motor
Wiring and Function
Set Up the Connection to an
Ultra3000 Drive
Drive Model?
Ultra3000 Drive
without SERCOS
Kinetix 6000 Drive,
Kinetix 6200/6500 Drive,
Kinetix 2000 Drive, or
Ultra3000 with SERCOS
page 54
page 54
page 53
page 51page 46
page 45
• Ultra3000 drives without SERCOS
– Firmware revision 1.52 or later
– Ultraware Software, version 1.63 or later
– Motor Database, motor_LXxxx.mdb
Call Anorad Tech Support 631-344-6600 to obtain the latest files.
Follow These Steps
The following flow chart illustrates the required steps.
Update the Linear Motor
Database
Install the current Motion Database, as required, before commissioning your
linear motor. See the Required Files
Rockwell Automation Publication LX-UM001A-EN-P - March 2011 45
on page 44.
Page 46

Chapter 6 Configure and Start Up the LX-Series Linear Motor
Set Up the Connection to a Kinetix 6000, Kinetix 6500/ 6200, or Kinetix 2000 Drive
Cat. No. Cat. No. Cat. No. Cat. No. Cat. No. Cat. No.
LX030100DHxxxxA/B LX050100DHxxxxA/B LX075100DHxxxxA/B LX100100DHxxxxA/B LX150100DHxxxxA/B LX200100DHxxxxA/B
LX030100FHxxxxA/B LX050100FHxxxxA/B LX075100FHxxxxA/B LX100100FHxxxxA/B LX150100FHxxxxA/B LX200100FHxxxxA/B
LX030200DHxxxxA/B LX050200DHxxxxA/B LX075200DHxxxxA/B LX100200DHxxxxA/B LX150200DHxxxxA/B LX200200DHxxxxA/B
LX030200EHxxxxA/B LX050200EHxxxxA/B LX075200EHxxxxA/B LX100200EHxxxxA/B LX150200EHxxxxA/B LX200200EHxxxxA/B
LX030200FHxxxxA/B LX050200FHxxxxv LX075200FHxxxxA/B LX100200FHxxxxA/B LX150200FHxxxxA/B LX200200FHxxxxA/B
LX030200GHxxxxA/B LX050200GHxxxxv LX075200GHxxxxA/B LX100200GHxxxxA/B LX150200GHxxxxA/B LX200200GHxxxxA/B
LX030300DHxxxxA/B LX050300DHxxxxA/B LX075300DHxxxxA/B LX100300DHxxxxA/B LX150300DHxxxxA/B LX200300DHxxxxA/B
LX030300EHxxxxA/B LX050300EHxxxxA/B LX075300EHxxxxA/B LX100300EHxxxxA/B LX150300EHxxxxA/
LX030300FHxxxxA/B LX050300FHxxxxA/B LX075300FHxxxxA/B LX100300FHxxxxA/B LX150300FHxxxxA/B LX200300FHxxxxA/B
LX030300GHxxxxA/B LX050300GHxxxxA/B LX075300GHxxxxA/B LX100300GHxxxxA/B LX150300GHxxxxA/B LX200300GHxxxxA/B
LX030400DHxxxxA/B LX050400DHxxxxA/B LX075400DHxxxxA/B LX100400DHxxxxA/B LX150400DHxxxxA/B LX200400DHxxxxA/B
LX030400EHxxxxA/B LX050400EHxxxxA/B LX075400EHxxxxA/B LX100400EHxxxxA/B LX150400EHxxxxA/B LX200400EHxxxxA/B
LX030400FHxxxxA/B LX050400FHxxxxA/B LX075400FHxxxxA/B LX100400FHxxxxA/B LX150400FHxxxxA/B LX200400FHxxxxA/B
LX030400GHxxxxA/B LX050400GHxxxxA/B LX075400GHxxxxv LX100400GHxxxxA/B LX150400GHxxxxA/B LX200400GHxxxxA/B
LX030600DHxxxxA/B LX050600DHxxxxv LX075600DHxxxxA/B LX100600DHxxxxA/B LX150600DHxxxxA/B LX200600DHxxxxA/B
LX030600EHxxxxA/B LX050600EHxxxxA/B LX075600EHxxxxA/B LX100600EHxxxxA/B
LX030600FHxxxxA/B LX050600FHxxxxA/B LX075600FHxxxxA/B LX100600FHxxxxA/B LX150600FHxxxxA/B LX200600FHxxxxA/B
LX030600GHxxxxA/B LX050600GHxxxxA/B LX075600GHxxxxA/B LX100600GHxxxxA/B LX150600GHxxxxA/B LX200600GHxxxxA/B
LX030800DHxxxxA/B LX050800DHxxxxA/B LX075800DHxxxxA/B LX100800DHxxxxA/B LX150800DHxxxxA/B LX200800DHxxxxA/B
LX030800EHxxxxA/B LX050800EHxxxxA/B LX075800EHxxxxA/B LX100800EHxxxxA/B LX150800EHxxxxA/B LX200800EHxxxxA/B
LX030800FHxxxxA/B LX050800FHxxxxA/B LX075800FHxxxxA/B LX100800FHxxxxA/B LX150800FHxxxxA/B LX200800FHxxxxA/B
LX030800GHxxxxA/B LX050800GHxxxxA/B LX075800GHxxxxA/B LX100800GHxxxxA/ LX150800GHxxxxA/B LX200800GHxxxxA/B
This procedure configures the Kinetix 6000, Kinetix 6500/ 6200, or
Kinetix 2000 drive for your linear motor and encoder combination.
For help in setting up your linear motor with RSLogix 5000 software, refer to
Additional Resources
on page 5. This procedure assumes you are familiar with
RSLogix 5000 software.
1. Click the Driver/Motor tab.
2. Click Change Catalog and select the appropriate motor catalog number
from the following list.
Your catalog number will have a letter append to the end to indicate what
drive you are using to power it: A = 230V drive and B = 460V drive.
B LX200300EHxxxx
EHxxxxA/B LX200600EHxxxxA/B
LX150600
A/B
46 Rockwell Automation Publication LX-UM001A-EN-P - March 2011
Page 47

Configure and Start Up the LX-Series Linear Motor Chapter 6
3. Using the screen image as a reference, configure the parameters as shown in
the Setting column.
Parameter Setting Comment
Loop Configuration Position Servo –
200 5 µm encoder
500 2 µm encoder
1000 1 µm encoder
Drive Resolution
Drive Counts per Motor Millimeter –
Real Time Axis Information
Attribute 1 Position Feedback –
2000 0.5 µm encoder
10,000 0.1 µm encoder
51200 20 µm pitch Sin/Cos encoder
25600 40 µm pitch Sin/Cos encoder
4. Click OK.
5. Click the Motor Feedback tab.
Rockwell Automation Publication LX-UM001A-EN-P - March 2011 47
Page 48

Chapter 6 Configure and Start Up the LX-Series Linear Motor
6. Using the screen image as a reference, configure the parameters as shown in
the Setting column.
Parameter Setting Comment
Feedback Type TTL or Sin/Cos For RSLogix 5000 software,
TTL with Hall or Sin/Cos with Hall For RSLogix 5000 software,
Cycles 50 5 µm encoder
125 2 µm encoder
250 1 µm encoder
500 0.5 µm encoder
2500 0.1 µm encoder
50 20 µm Sin/Cos encoder
25 40 µm Sin/Cos encoder
per Millimeters –
Interpolation Factor 4 TTL
1024 Sin/Cos
version 16
version 17
Figure 7 - RSLogix 5000 Software, Version 15.00 and 16.00, TTL Encoder
Figure 8 - RSLogix 5000 Software, Version 15.00 and 16.00, Sin/Cos Encoder
48 Rockwell Automation Publication LX-UM001A-EN-P - March 2011
Page 49

Configure and Start Up the LX-Series Linear Motor Chapter 6
EXAMPLE
Figure 9 - RSLogix 5000 Software, Version 17.00 and Later, TTL Encoder
Figure 10 - RSLogix 5000 Software, Version 17.00 and Later, Sin/Cos Encoder
7. Click OK to sets the values.
8. Click the Units tab.
9. Using the screen image as a reference, configure the parameters as shown in
the Setting column.
Parameter Setting
Position Units mm
Average Velocity Timebase 0.25 s
You can change position units to inches, or other units, on this tab.
This is an example for a 5 µm resolution encoder:
200 drive cnts/mm x 25.4 mm/in.
Conversion Constant = 5080 drive cnts/in.
Rockwell Automation Publication LX-UM001A-EN-P - March 2011 49
Page 50

Chapter 6 Configure and Start Up the LX-Series Linear Motor
10. Click OK to set the values.
11. Click the Conversion tab.
12. Using the screen image as a reference, configure the parameters as shown in
the Setting column.
Parameter Setting Comment
Positioning Mode Linear –
Conversion Constant 200 5 µm encoder
500 2 µm encoder
13. Click OK.
1000 1 µm encoder
2000 0.5 µm encoder
10,0000 0.1 µm encoder
51200 20 µm pitch Sin/Cos encoder
25600 40 µm pitch Sin/Cos encoder
50 Rockwell Automation Publication LX-UM001A-EN-P - March 2011
Page 51

Configure and Start Up the LX-Series Linear Motor Chapter 6
Set Up the Connection to an Ultra3000 Drive
This procedure configures the Ultra3000 drive for your linear motor and encoder
combination.
For help using Ultraware software as it applies to setting up your linear motor,
refer to Additional Resources
with Ultraware software.
on page 5. This procedure assumes you are familiar
1. Open your Motor Configurator Utility.
2. Select the linear motor catalog number.
3. From the Edit menu, choose Duplicate.
4. Rename the Model.
5. Click Encoder Type and select either Incremental or Sin/Cos.
6. Click Lines Per Meter and enter the value.
The following tables list typical values for lines per meter.
Incremental Sin/Cos
Resolution Value Encoder Scale Pitch Value
10 µm 25,000 100 µm 10,000
5 µm 50,000 40 µm 25,000
2 µm 125,000 20 µm 50,000
1 µm 250,000
0.5 µm 500,000
0.1 µm 2,500,000
Figure 11 - Incremental Encoder
Figure 12 - Sin/Cos Encoder
7. Click Close.
8. Open your Ultraware software.
9. Configure your Ultra3000 drive.
Rockwell Automation Publication LX-UM001A-EN-P - March 2011 51
Page 52

Chapter 6 Configure and Start Up the LX-Series Linear Motor
10. From the Workspace dialog box, select Motor.
11. Click Motor Model.
12. Choose the model you created from the pull-down menu.
If using an incremental encoder, you are finished. For Sin/Cos encoders,
continue with steps 12 and 13.
13. From the Workspace dialog box, select Encoders.
14. Click Motor Encoder Interpolation.
15. Select a value from the pull-down menu.
This table shows the encoder resolutions that could be achieved when
using a 20 µm Sin/Cos encoder and different interpolation values.
Value Encoder Resolution
X4 5 µm
X8 2.5 µm
X16 1.25 µm
X32 0.625 µm
X64 0.3125 µm
X128 0.15625 µm
X256 0.078125 µm
X512 0.0390 µm
X1024 0.01953125 µm
52 Rockwell Automation Publication LX-UM001A-EN-P - March 2011
Page 53

Configure and Start Up the LX-Series Linear Motor Chapter 6
Verify Motor Encoder Direction
In this section, you use the monitor tags to evaluate the encoder installation.
1. Disable the drive.
2. Note the ActualPostion tag value.
3. Move the axis in the positive direction.
See page 43
for definition for positive direction.
4. Verify that the ActualPostion tag value increases as the axis moves.
If the positive direction of travel does not match what has been defined by
the motor power and Hall Sensing wiring, then change the direction by
rewiring the encoder by using the following table.
Move To
Encoder Phase Drive CN2, Pin Encoder Phase Drive CN2, Pin
A+ 1 B+ 3
A- 2 B- 4
B+ 3 A+ 1
B- 4 A- 2
Rockwell Automation Publication LX-UM001A-EN-P - March 2011 53
Page 54

Chapter 6 Configure and Start Up the LX-Series Linear Motor
IMPORTANT
Verify Motor Encoder Resolution
Verify Linear Motor Wiring and Function
This test compares the physically measured distance to the distance calculated by
the software. It also verifies the encoder setting in the RSLogix 5000 software.
1. Measure and mark a fixed distance of travel on the axis.
2. Record the ActualPosition tag value with carriage at the starting position.
3. Move the carriage to the end position.
4. Record the ActualPosition tag value.
5. Calculate the distance moved by using the record values.
6. Compare the actual distance and the calculated distance.
If the values do not match, verify the resolution of the installed encoder
and the values used in the Motor Feedback, Conversion, and Units tabs.
In RSLogix 5000 software, click the Homing and Hookup tabs to check that the
motor power, Hall sensing, and the encoder signal wiring is correct.
The following components must be wired correctly for your drive and
linear motor to operate properly:
• Hall effect module
• Coil power wires
• Thermistor or thermal switch
• Encoder
Follow these steps to verify your motor wiring and function.
1. Click the Hookup tab.
2. Configure the parameters.
The following table shows the suggested settings.
Parameter Suggested Setting
Test Increment 60.00 mm
Drive Polarity Positive
54 Rockwell Automation Publication LX-UM001A-EN-P - March 2011
Page 55

Configure and Start Up the LX-Series Linear Motor Chapter 6
IMPORTANT
IMPORTANT
3. Click OK.
4. Click Test Marker.
Refer to your encoder user documentation for the location and frequency
of markers.
5. Position the coil so that it can move 60 mm (2.36 in.) in the forward or
reverse direction.
6. Click Test Feedback.
Move the axis by hand at least 60 mm (2.36 in.) when prompted.
When using Allen-Bradley servo drives, match the counting direction of
your position feedback encoder to the direction the motor moves when a
positive current is applied.
7. Click Test Command & Feedback.
Follow the on-screen instructions.
Be sure all the tests on the Hookup tab have passed before
proceeding.
When using a Kinetix 6000 or a Kinetix 2000 drive, the Test
Command Feedback test may pass even though the Hall effect
module is not wired correctly.
Rockwell Automation Publication LX-UM001A-EN-P - March 2011 55
Page 56

Chapter 6 Configure and Start Up the LX-Series Linear Motor
8. Click the Tune tab.
9. Configure the parameters in the Tune tab as suggested in the Initial Setting
column, leaving all other tune options off for your first pass.
If necessary, reduce the Velocity Loop Proportional Gain to maintain
stability.
WARNING: Large Position Error Tolerances, such as those
calculated by the Auto Tune function in the RSLogix 5000
programming software, or when configuring a new axis with the
RSLogix 5000 software, can lead to undetected and repetitive
high-energy impacts against axis end stops if proper precautions
are not in place. These tolerances can also lead to undetected and
repetitive high-energy impacts against unexpected obstructions.
Such impacts can lead to equipment damage and/or serious injury.
To identify the safety concerns that you have with default Position
Error Tolerance or after an Auto Tune Function, go to the Rockwell
Automation Knowlegebase. Click Find Technical Support Answers
and search for Answer ID 55937.
Parameter Initial Setting Units Note
Travel Limit 100 mm Suggested
Speed 250 mm/sec –
Torque/Force 50 % Rated –
Direction Forward Bi-directional – –
Damping Factor 0.8 – (default)
56 Rockwell Automation Publication LX-UM001A-EN-P - March 2011
Page 57

Configure and Start Up the LX-Series Linear Motor Chapter 6
TIP
10. Click the Homing tab.
11. From the Sequence pull-down menu, choose Switch-Marker, or Torque
Level-Marker when a repeatable power-up position is desired.’.
Typical linear TTL and Sin/Cos encoders will home repeatability to
within one count of resolution when their index mark is used.
The Torque Level-Marker is not available for the Kinetix 6500
drive or Ultra3000 drive with SERCOS. There is an Add On
Instruction for Home to Torque for the Kinetix 6500 drive that is
available in the Sample Code Library
Home To Torque AOI.
under the title CIP Axis
Rockwell Automation Publication LX-UM001A-EN-P - March 2011 57
Page 58

Chapter 6 Configure and Start Up the LX-Series Linear Motor
IMPORTANT
Additional Adjustments for Cooling Plate Option
If your linear servo motor has the cooling plate option installed, catalog number
LDC-xxxxxx-CP, follow these steps to adjust Continuous Torque/Force Limit.
1. Click the Limits tab.
2. Set the Continuous Torque/Force Limit to reflect the motor cooling
configuration.
For linear motors, this field data entry is limited to integer values from
0…150%.
Cooling Option Used Value
No cooling plate 0…100%
Cooling plate with forced air 0…120%
Cooling plate with forced water 0…150%
Increasing or decreasing the motor continuous current rating does not
change the drives’ continuous current limiting.
58 Rockwell Automation Publication LX-UM001A-EN-P - March 2011
Page 59

Interconnect Diagrams
Appendix
A
Introduction
This appendix provides wiring examples to assist you in wiring an LX-Series
linear motor to an Allen-Bradley drive.
Topic Page
Introduction 59
Wiring Examples 59
Wiring Example for Kinetix 6000, Kinetix 6500/6200 or Kinetix 2000
Drives and LXxxxxxxxxHxx1x Linear Motor with a TTL Encoder
Wiring Example for Kinetix 6000, Kinetix 6500/6200 or Kinetix 2000
Drives and LXxxxxxxxxHxx1x Linear Motor with a Sin/Cos Encoder
Wiring Example for Kinetix 6000, Kinetix 6500/6200 or Kinetix 2000
Drives and LXxxxxxxxxHxx0x Linear Motor with a TTL Encoder
Wiring Example for Kinetix 6000, Kinetix 6500/6200 or Kinetix 2000
Drives and LXxxxxxxxxHxx0x Linear Motor with a Sin/Cos Encoder
Wiring Example for Ultra3000 Drive and LXxxxxxxxxHxx1x Linear
Motor with a TTL Encoder
Wiring Example for Ultra3000 Drive and LXxxxxxxxxHxx1x Linear
Motor with a Sin/Cos Encoder
Wiring Example for Ultra3000 Drive and LXxxxxxxxxHxx0x Linear
Motor with a TTL Encoder
Wiring Example for Ultra3000 Drive and LXxxxxxxxxHxx0x Linear
Motor with a Sin/Cos Encoder
60
61
62
63
64
65
66
67
Wiring Examples
These notes apply to the wiring examples on the pages that follow.
Note Information
1 Use the cable shield clamp to meet CE requirements. No external connection to ground is
required.
1 For motor cable specifications, refer to the Kinetix Motion Control Selection Guide,
publication GMC-SG001
2 TS + and TS - wires are black for LXxxxxxxxxxSxxx motor coils and red for
LXxxxxxxxxxTxxx motor coils.
3 When using the Sin/Cos encoder with Kinetix 6000 drives, refer to Appendix B
Rockwell Automation Publication LX-UM001A-EN-P - March 2011 59
.
on page 69.
Page 60

Appendix A Interconnect Diagrams
A
B
C
AM+
AMBM+
BM-
IM+
IM-
+5VDC
ECOM
BM+
BM-
IM+
IM-
+5V DC
ECOM
TS-
N/C
N/C
TS+
S3
S2
S1
Green
White/Green
Gray
WHT/Gray
Blue
WHT/Blue
Yellow
WHT/Yellow
WHT/Orange
Red
WHT/Red
AM+
AM-
Black
WHT/Black
4
3
2
1
Green/Yellow
Blue
Black
Brown
GND
W
V
U
10
9
6
5
3
4
2
1
1
4
2
5
3
6
8
7
15
13
14
16
17
2090-CPWM4DF-xxAFxx,
2090-XXNPMF-xxSxx
2090-XXNFMF-Sxx or
2900-CFBM4DF-CDAFxx
1
2
3
4
5
10
14
6
11
12
13
8
Kinetix 2000, Kinetix 6500/
6200 or Kinetix 6000
IAM (inverter) or
AM Module
Motor Power
(MP) Connector
Cable Shield
Clamp
Note 1
Motor Feedback
(MF) Connector
(IAM/AM) Module
Motor Power Cable
Note 2
Feedback Cable
Note 2
Refer to low profile connector
illustration (lower left) for proper
grounding and shield termination
techniques.
Low Profile Connector
TTL Encoder
Turn clamp over to hold
small cables secure.
Clamp
Clamp screw (2)
Ground techniques for
feedback cable shield.
Exposed shield secured
under clamp.
LX-Series Linear Motor Coil
Three-phase
Motor Power
Thermal
Switch or
Sensor
(Use 2090-K6CK-D15M connector for Kinetix 6000 drives
and 2090-K2CK-D15M connector for Kinetix 2000 drives.)
Figure 13 - Wiring Example for Kinetix 6000, Kinetix 6500/6200 or Kinetix 2000
Drives and LXxxxxxxxxHxx1x Linear Motor with a TTL Encoder
60 Rockwell Automation Publication LX-UM001A-EN-P - March 2011
Page 61

Interconnect Diagrams Appendix A
Kinetix 2000, Kinetix 6500/
6200 or Kinetix 6000
IAM (inverter) or
AM Module
Motor Power
(MP) Connector
Cable Shield
Clamp
Note 1
Motor Feedback
(MF) Connector
(IAM/AM) Module
Motor Power Cable
Note 2
Feedback Cable
Note 2
Refer to low profile connector
illustration (lower left) for proper
grounding and shield termination
techniques.
Low Profile Connector
Sin/Cos Encoder
Turn clamp over to hold
small cables secure.
Clamp
Clamp screw (2)
Ground techniques for
feedback cable shield.
Exposed shield secured
under clamp.
LX-Series Linear Motor Coil
Three-phase
Motor Power
Thermal
Switch or
Sensor
Note 4
Figure 14 - Wiring Example for Kinetix 6000, Kinetix 6500/6200 or Kinetix 2000
Drives and LXxxxxxxxxHxx1x Linear Motor with a Sin/Cos Encoder
1
U
2
V
3
W
4
11
12
13
8
6
14
10
5
4
3
2
1
WHT/Orange
N/C
Blue
WHT/Blue
Yellow
WHT/Yellow
WHT/Gray
Gray
White/Green
Green
WHT/Red
Red
WHT/Black
Black
Brown
Black
Blue
Green/Yellow
2090-CPWM4DF-xxAFxx,
2090-XXNPMF-xxSxx
2090-XXNFMF-Sxx or
2900-CFBM4DF-CDAFxx
N/C
A
B
C
TS+
TS-
S1
S2
S3
ECOM
+5V DC
IMIM+
SIN-
SIN+
COSCOS+
13
14
15
16
17
10
9
6
5
4
3
2
1
GND
COS+
COS-
SIN+
SIN-
IM+
IM+5VDC
ECOM
1
4
2
5
3
6
8
7
Rockwell Automation Publication LX-UM001A-EN-P - March 2011 61
Page 62

Appendix A Interconnect Diagrams
W
V
U
W
V
U
AM+
AM-
BM+
BM-
IM+
IM-
POWER
COM
4
3
2
1
Green/Yellow
Black
White
Red
GND
W
V
U
TS+
TS -
Black or Red
Black or Red
White
Red
Black
Power
S1
S2
S3
COM
Blue
Orange
1
2
3
4
5
10
14
6
11
12
13
8
Kinetix 2000, Kinetix 6500/
6200 or Kinetix 6000 IAM
(inverter) or
AM Module
Note 3
Motor Power
(MP) Connector
Cable Shield
Clamp
Note 1
Motor Feedback
(MF) Connector
(IAM/AM) Module
Refer to low profile connector
illustration (lower left) for proper
grounding techniques.
Low Profile Connector
TTL Encoder
Turn clamp over to hold
small cables secure.
Clamp
Clamp screw (2)
Ground techniques for
feedback cable shield.
Exposed shield secured
under clamp.
LX-Series Linear Motor Coil
Three-phase
Motor Power
Hall Effect
Module
Wire as shown here using
cable type appropriate for
your application.
Linear Encoder
Thermal
Switch or
Sensor
Note 3
(Use 2090-K6CK-D15M connector for Kinetix 6000 drives
and 2090-K2CK-D15M connector for Kinetix 2000 drives.)
Figure 15 - Wiring Example for Kinetix 6000, Kinetix 6500/6200 or Kinetix 2000
Drives and LXxxxxxxxxHxx0x Linear Motor with a TTL Encoder
62 Rockwell Automation Publication LX-UM001A-EN-P - March 2011
Page 63

Interconnect Diagrams Appendix A
W
V
U
W
V
U
COS+
COS-
SIN+
SIN-
IM+
IM-
POWER
COM
4
3
2
1
Green/Yellow
Black
White
Red
GND
W
V
U
TS+
TS -
Black or Red
Black or Red
White
Red
Black
Power
S1
S2
S3
COM
Blue
Orange
1
2
3
4
5
10
14
6
11
12
13
8
Kinetix 2000, Kinetix 6500/
6200 or Kinetix 6000 IAM
(inverter) or
AM Module
Note 3
Motor Power
(MP) Connector
Cable Shield
Clamp
Note 1
Motor Feedback
(MF) Connector
(IAM/AM) Module
Refer to low profile connector
illustration (lower left) for proper
grounding techniques.
Low Profile Connector
Sin/Cos Encoder
Note 4
Turn clamp over to hold
small cables secure.
Clamp
Clamp screw (2)
Ground techniques for
feedback cable shield.
Exposed shield secured
under clamp.
LX-Series Linear Motor Coil
Three-phase
Motor Power
Hall Effect
Module
Wire as shown here using
cable type appropriate for
your application.
Linear Encoder
Thermal
Switch or
Sensor
Note 3
(Use 2090-K6CK-D15M connector for Kinetix 6000 drives
and 2090-K2CK-D15M connector for Kinetix 2000 drives.)
Figure 16 - Wiring Example for Kinetix 6000, Kinetix 6500/6200 or Kinetix 2000
Drives and LXxxxxxxxxHxx0x Linear Motor with a Sin/Cos Encoder
Rockwell Automation Publication LX-UM001A-EN-P - March 2011 63
Page 64

Appendix A Interconnect Diagrams
A
B
C
AM+
AM-
BM+
BM-
IM+
IM-
+5VDC
ECOM
BM+
BM-
IM+
IM-
+5V DC
ECOM
TS-
N/C
N/C
TS+
S3
S2
S1
Green
White/Green
Gray
WHT/Gray
Blue
WHT/Blue
Yellow
WHT/Yellow
WHT/Orange
Red
WHT/Red
AM+
AM-
Black
WHT/Black
Green/Yellow
Blue
Black
Brown
GND
W
V
U
10
9
6
5
3
4
2
1
1
4
2
5
3
6
8
7
15
13
14
16
17
2090-CPWM4DF-xxAFxx,
2090-XXNPMF-xxSxx
2090-XXNFMF-Sxx or
2900-CFBM4DF-CDAFxx
1
2
3
4
5
10
14
6
11
12
13
8
2090-UXBB-DM15
Cable Shield
Clamp
Note 1
Motor Power Cable
Note 2
Feedback Cable
Note 2
Refer to low profile connector
illustration (lower left) for proper
grounding and shield termination
techniques.
Wire color shown for Renishaw
RGH22 linear incremental encoder
with its reference mark actuator
installed.
TTL Encoder
LX-Series Linear Motor Coil
Three-phase
Motor Power
Ultra3000 Drive
Motor Power
(TB1) Connector
Motor Feedback
(CN2) Connector
Motor Feed Breakout Board
Cable Tie
Ground techniques for
feedback cable shield.
Exposed shield secured
under clamp.
Thermal
Switch or
Sensor
Figure 17 - Wiring Example for Ultra3000 Drive and LXxxxxxxxxHxx1x Linear Motor
with a TTL Encoder
64 Rockwell Automation Publication LX-UM001A-EN-P - March 2011
Page 65

Interconnect Diagrams Appendix A
Ultra3000 Drive
Motor Power
(TB1) Connector
Cable Shield
Clamp
Note 1
Motor Feedback
(CN2) Connector
Motor Power Cable
Note 2
Feedback Cable
Note 2
Refer to low profile connector
illustration (lower left) for proper
grounding and shield termination
techniques.
Motor Feed Breakout Board
Sin/Cos Encoder
Cable Tie
Ground techniques for
feedback cable shield.
Exposed shield secured
under clamp.
LX-Series Linear Motor Coil
Three-phase
Motor Power
Thermal
Switch or
Sensor
Figure 18 - Wiring Example for Ultra3000 Drive and LXxxxxxxxxHxx1x Linear Motor
with a Sin/Cos Encoder
U
V
W
Brown
Black
Blue
Green/Yellow
2090-CPWM4DF-xxAFxx,
2090-XXNPMF-xxSxx
A
B
C
GND
11
12
13
8
6
14
10
5
4
3
2
1
WHT/Orange
N/C
Blue
WHT/Blue
Yellow
WHT/Yellow
WHT/Gray
Gray
White/Green
Green
WHT/Red
Red
WHT/Black
Black
N/C
2090-XXNFMF-Sxx or
2900-CFBM4DF-CDAFxx
TS+
TS-
S1
S2
S3
ECOM
+5V DC
IM-
IM+
SIN-
SIN+
COSCOS+
13
14
15
16
17
10
9
6
5
4
3
2
1
2090-UXBB-DM15
COS+
COS-
SIN+
SIN-
IM+
IM-
+5V DC
ECOM
1
4
2
5
3
6
8
7
Rockwell Automation Publication LX-UM001A-EN-P - March 2011 65
Page 66

Appendix A Interconnect Diagrams
W
V
U
W
V
U
AM+
AM-
BM+
BM-
IM+
IM-
POWER
COM
Green/Yellow
Black
White
Red
GND
W
V
U
TS+
TS -
Black or Red
Black or Red
White
Red
Black
Power
S1
S2
S3
COM
Blue
Orange
1
2
3
4
5
10
14
6
11
12
13
8
2090-UXBB-DM15
Cable Shield
Clamp
Note 1
Refer to low profile connector
illustration (lower left) for proper
grounding techniques.
TTL Encoder
LX-Series Linear Motor Coil
Three-phase
Motor Power
Hall Effect
Module
Wire as shown here using
cable type appropriate for
your application.
Linear Encoder
Thermal
Switch or
Sensor
Note 3
Ultra3000 Drive
Motor Power
(TB1) Connector
Motor Feedback
(CN2) Connector
Motor Feed Breakout Board
Cable Tie
Ground techniques for
feedback cable shield.
Exposed shield secured
under clamp.
Figure 19 - Wiring Example for Ultra3000 Drive and LXxxxxxxxxHxx0x Linear Motor
with a TTL Encoder
66 Rockwell Automation Publication LX-UM001A-EN-P - March 2011
Page 67

Interconnect Diagrams Appendix A
W
V
U
W
V
U
COS+
COS-
SIN+
SIN-
IM+
IM-
POWER
COM
Green/Yellow
Black
White
Red
GND
W
V
U
TS+
TS -
Black
Black
White
Red
Black
Power
S1
S2
S3
COM
Blue
Orange
1
2
3
4
5
10
14
6
11
12
13
8
2090-UXBB-DM15
Cable Shield
Clamp
Note 1
Refer to low profile connector
illustration (lower left) for proper
grounding techniques.
Sin/Cos Encoder
LX-Series Linear Motor Coil
Three-phase
Motor Power
Hall Effect
Module
Wire as shown here using
cable type appropriate for
your application.
Linear Encoder
Thermal
Switch
Ultra3000 Drive
Motor Power
(TB1) Connector
Motor Feedback
(CN2) Connector
Motor Feed Breakout Board
Cable Tie
Ground techniques for
feedback cable shield.
Exposed shield secured
under clamp.
Figure 20 - Wiring Example for Ultra3000 Drive and LXxxxxxxxxHxx0x Linear Motor
with a Sin/Cos Encoder
Rockwell Automation Publication LX-UM001A-EN-P - March 2011 67
Page 68

Appendix A Interconnect Diagrams
Notes:
68 Rockwell Automation Publication LX-UM001A-EN-P - March 2011
Page 69

Appendix
Feedback Connector
Low Profile Connector
Add a Shottky diode for cable
lengths less then 10 m (32.8 ft).
or equivalent
Resistor
Resistor
B
Sin/Cos Linear Encoder and Kinetix 6000 Drives
Introduction
Kinetix 6000 Drive Feedback Connection
This appendix guides you through commissioning a linear motor with a Sin/Cos
1V peak-to-peak output linear encoder.
Topic Page
Kinetix 6000 Drive Feedback Connection 69
Encoder Counting Direction 70
Set Up the Axis Properties 70
For robust operation when interfacing your Sin/Cos 1V peak-to-peak differential
output linear encoder to a Kinetix 6000 drive, terminate the sine and cosine
signals as follows.
SIN+
SIN-
COS+
COS-
150 Ω
1/4 W, 5%
150 Ω
1/4 W, 5%
AM+
AM-
BM+
BM-
1
2
3
2090-K6CK-D15M
4
1N5819,
(~5.1V DC)
(5.4V DC)+5V DC
14
For systems where the cable length is less than 10 m (32.8 ft), the encoder power
supply from the Kinetix 6000 drive feedback connector should be dropped from
its nominal 5.4…5.1V DC with the addition of a Shottky Diode; see the
schematic.
Rockwell Automation Publication LX-UM001A-EN-P - March 2011 69
Page 70

Appendix B Sin/Cos Linear Encoder and Kinetix 6000 Drives
Encoder Counting Direction
Set Up the Axis Properties
Normally, the encoder signals will output sine-leads-cosine (AM leads BM) when
the linear encoder head is moving towards its cable, relative to the encoder scale.
SERCOS drives count this in a negative direction.
Do these steps to install a Sin/Cos linear encoder.
1. From the Motor Feedback tab, enter these parameters values.
Parameter Value Comment
Feedback Type Sin/Cos –
25 per millimeter For 40 µm pitch encoder scale.
Cycles
50 per millimeter For 20 µm pitch encoder scale.
Interpolation Factor 1024 –
.
70 Rockwell Automation Publication LX-UM001A-EN-P - March 2011
Page 71

Sin/Cos Linear Encoder and Kinetix 6000 Drives Appendix B
2. From the Drive/Motor tab, enter these parameters values.
Parameter Value Comment
Driver Resolution
Drive Counts per Motor millimeter –
25600 For 40 µm pitch encoder scale.
51200 For 20 µm pitch encoder scale.
3. From the Conversion tab, enter these parameters values.
Parameter Value Comment
Driver Resolution
25600 For 40 µm pitch encoder scale.
51200 For 20 µm pitch encoder scale.
.
Rockwell Automation Publication LX-UM001A-EN-P - March 2011 71
Page 72

Appendix B Sin/Cos Linear Encoder and Kinetix 6000 Drives
Notes:
72 Rockwell Automation Publication LX-UM001A-EN-P - March 2011
Page 73

Index
A
air gap 16
alignment tool
aluminum straight edge
automatic implantable cardioverter
20
20
defibrillator (AICD)
7
B
bumper 10, 17
burn hazard
10
C
carriage 17
15
coil
coil power connector
commission
Kinetix 2000 drive
Kinetix 6000 drive 46
Ultra3000 drive
connector
30
15, 33
encoder
feedback 15, 31
power
15, 30
PTC thermistor
30
46
51
15, 30, 33
D
description
15
motor
design consideration
16
air gap
bumper
17
carriage design
heat sink
end of travel bumper
linear encoder
direction
53
17
10
17
E
encoder
resolution
encoder connector
encoder sin/cos
end of travel
bumpers
impact
end stop
54
33
69
10
10
17
F
feedback connector 31
firmware revision
flying leads
44
35
H
Hall effect module 15
heat sink
17
max temperature
10
I
installation 19
firmware
software 44
interconnect diagrams
wiring example notes
44
L
label
identification
large impacts
linear encoder
8
10
17
M
magnet channel 20
magnet track
maintenance
maximum speed
motor
database
direction 53
storage
mount
multiple motors
power cable
15
18
11
44
18
40
30
N
non-magnetic 20
P
perfomance 17
phase alignment
two motors
pinout
coil power
encoder
feedback
power connector
PTC thermistor
power connector
procedure
cleaning magent track
connections
install magnet channel
power connection
verify encoder resolution
PTC thermistor connector
40
30
33
31
30
30, 33
15, 30
35
30
59
18
20
54
30
Rockwell Automation Publication LX-UM001A-EN-P - March 2011 73
Page 74

Index
R
RSLogix software screen
conversion
drive/motor
motor feedback
units
50
46
47
49
S
safety
sudden motion
safety label
location of
SERCOS Drive 69
setup
Kinetix 2000 drive
Kinetix 6000 drive
Ultra3000 drive
shipping
air freight restriction
dangerous goods declaration
form 902 instructions
shock absorber 17
software
required version
spacing
two motors
storage
18
10
8
46
46
51
9
44
40
T
tandem motors 40
temperature
max heat sink
tools 20
torque
magnet channel
10
24, 27
V
verify
direction
resolution 54
53
W
warning
air freight restrictions
automatic implantable cardioverter
9
9
powerful forces
wiring 35
wiring diagram
connectorized
flying lead
defibrillator (AICD)
60
Sin/Cos encoder
TTL encoder
Sin/Cos encoder
TTL encoder
9
7
7
61, 65
60, 64
63, 66, 67
62
74 Rockwell Automation Publication LX-UM001A-EN-P - March 2011
Page 75

Notes:
Index
Rockwell Automation Publication LX-UM001A-EN-P - March 2011 75
Page 76

Rockwell Otomasyon Ticaret A.Ş., Kar Plaza İş Merkezi E Blok Kat:6 34752 İçerenköy, İstanbul, Tel: +90 (216) 5698400
Rockwell Automation Support
Rockwell Automation provides technical information on the Web to assist you in using its products.
At http://www.rockwellautomation.com/support/
application notes, sample code and links to software service packs, and a MySupport feature that you can customize to make the
best use of these tools.
For an additional level of technical phone support for installation, configuration, and troubleshooting, we offer TechConnect
support programs. For more information, contact your local distributor or Rockwell Automation representative,
or visit http://www.rockwellautomation.com/support/
Installation Assistance
If you experience a problem within the first 24 hours of installation, review the information that is contained in this manual.
You can contact Customer Support for initial help in getting your product up and running.
United States or Canada 1.440.646.3434
Outside United States or
Canada
Use the Worldwide Locator
your local Rockwell Automation representative.
, you can find technical manuals, a knowledge base of FAQs, technical and
.
at http://www.rockwellautomation.com/support/americas/phone_en.html, or contact
New Product Satisfaction Return
Rockwell Automation tests all of its products to ensure that they are fully operational when shipped from the manufacturing facility.
However, if your product is not functioning and needs to be returned, follow these procedures.
United States Contact your distributor. You must provide a Customer Support case number (call the phone number above to obtain
Outside United States Please contact your local Rockwell Automation representative for the return procedure.
one) to your distributor to complete the return process.
Documentation Feedback
Your comments will help us serve your documentation needs better. If you have any suggestions on how to improve this document,
complete this form, publication RA-DU002
, available at http://www.rockwellautomation.com/literature/.
Rockwell Automation Publication LX-UM001A-EN-P - March 2011 80 814070
Copyright © 2011 Rockwell Automation, Inc. All rights reserved. Printed in the U.S.A.
 Loading...
Loading...