

Page 1
Allen-Bradley
SLC to SCANportt
Communications
User
Module
(Cat. No 1203–SM1)
Manual
Page 2
Important User Information
Because of the variety of uses for the products described in this
publication, those responsible for the application and use of this
control equipment must satisfy themselves that all necessary steps
have been taken to assure that each application and use meets all
performance and safety requirements, including any applicable laws,
regulations, codes and standards.
The illustrations shown in this guide are intended solely for purposes
of example. Since there are many variables and requirements
associated with any particular installation, Allen-Bradley does not
assume responsibility or liability (to include intellectual property
liability) for actual use based upon the examples shown in this
publication.
Allen-Bradley publication SGI-1.1, Safety Guidelines for the
Application, Installation, and Maintenance of Solid-State Control
(available from your local Allen-Bradley office), describes some
important differences between solid-state equipment and
electromechanical devices that should be taken into consideration
when applying products such as those described in this publication.
Reproduction of the contents of this copyrighted publication, in
whole or in part, without written permission of Allen-Bradley
Company, Inc., is prohibited.
Throughout this manual we use notes to make you aware of safety
considerations:
ATTENTION: Identifies information about practices
or circumstances that can lead to personal injury or
!
Attention statements help you to:
death, property damage or economic loss.
• identify a hazard
• avoid the hazard
• recognize the consequences
Important: Identifies information that is critical for successful
application and understanding of the product.
SCANport is a registered trademark of Allen–Bradley Company, Inc.
SLC 500, SLC–5/02, and PLC–5/15 are registered trademarks of Allen–Bradley Company, Inc.
Page 3

Table of Contents
Preface
Who Should Use this Manual? P–1. . . . . . . . . . . . . . . . . . . . . . . . . . .
Purpose of this Manual P–1. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Contents of this Manual P–2. . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Safety Precautions P–3. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
SLC Product Compatibility P–3. . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Terms and Abbreviations P–3. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Common Techniques Used in this Manual P–4. . . . . . . . . . . . . . . . . . .
Allen–Bradley Support P–4. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Local Product Support P–4. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Technical Product Assistance P–4. . . . . . . . . . . . . . . . . . . . . . . . . .
Overview
Installing the SLC to
SCANport Module
Using Basic Mode
Chapter 1
Chapter Objectives 1–1. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
What is the SLC to SCANport Module? 1–1. . . . . . . . . . . . . . . . . . . . .
What Functions Does the SLC to SCANport Module Provide? 1–2. . . . .
Chapter 2
Chapter Objectives 2–1. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Before You Install the Module 2–1. . . . . . . . . . . . . . . . . . . . . . . . . . . .
Determine the Length of the SCANport Cable(s) 2–2. . . . . . . . . . . . .
Determine the Placement of the SCANport Cables 2–2. . . . . . . . . . .
Locate the DIP Switch 2–3. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Installing the SLC to SCANport Module 2–4. . . . . . . . . . . . . . . . . . . . .
Removing the SLC to SCANport Module 2–6. . . . . . . . . . . . . . . . . . . .
Where Do I Go From Here? 2–6. . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Chapter 3
Chapter Objectives 3–1. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
What Does Basic Mode Provide? 3–1. . . . . . . . . . . . . . . . . . . . . . . . .
Configuring the SLC to SCANport Module for Basic Mode 3–1. . . . . . . .
Transferring Data 3–4. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Channel Status Input Image Definitions 3–5. . . . . . . . . . . . . . . . . . .
Channel Command Output Image Definitions 3–6. . . . . . . . . . . . . . .
Example of Basic Mode Data Transfer 3–6. . . . . . . . . . . . . . . . . . . . . .
Page 4

ii
Using Enhanced Mode
Troubleshooting
Specifications
Chapter 4
Chapter Objectives 4–1. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
What Does Enhanced Mode Provide? 4–1. . . . . . . . . . . . . . . . . . . . . .
What Are Datalinks? 4–2. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
What Is Safe State Configuration Data? 4–2. . . . . . . . . . . . . . . . . . .
What Is Messaging? 4–3. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Configuring the SLC to SCANport Module for Enhanced Mode 4–3. . . .
Using the I/O Image 4–7. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Enhanced Mode Interface 4–7. . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Configuring G Files 4–10. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Using M Files 4–11. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Examples of Enhanced Mode Data Transfer 4–16. . . . . . . . . . . . . . . . .
Datalinks 4–23. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Chapter 5
Chapter Objectives 5–1. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
LED States 5–1. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Chapter 6
M0, M1, and G Files
Chapter Objectives 6–1. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Product Specifications 6–1. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
European Union Directive Compliance 6–2. . . . . . . . . . . . . . . . . . . . . .
EMC Directive 6–2. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Low Voltage Directive 6–2. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Appendix A
Appendix Objectives A–1. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
M0–M1 Files A–1. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Configuring M0–M1 Files Using APS Software A–1. . . . . . . . . . . . . .
Addressing M0–M1 Files A–2. . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Restrictions on Using M0–M1 Data File Addresses A–3. . . . . . . . . . .
Monitoring Bit Addresses A–3. . . . . . . . . . . . . . . . . . . . . . . . . . . . .
M0/M1 Monitoring Option Disabled A–3. . . . . . . . . . . . . . . . . . . .
M0/M1 Monitoring Option Enabled A–4. . . . . . . . . . . . . . . . . . . . .
Transferring Data Between Processor Files and M0 and M1 Files A–4
Access Time A–5. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
SLC 5/02 Processor Example A–6. . . . . . . . . . . . . . . . . . . . . . . .
SLC 5/03 Processor Example A–7. . . . . . . . . . . . . . . . . . . . . . . .
Minimizing the Scan Time A–7. . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Capturing M0–M1 File Data A–8. . . . . . . . . . . . . . . . . . . . . . . . . . .
G Files A–8. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Configuring G Files Using APS Software A–9. . . . . . . . . . . . . . . . . .
Editing G File Data A–10. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Publication 1203–5.9 –– October 1996
Page 5

iii
SCANport Messaging
Appendix B
Appendix Objectives B–1. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Message and Reply Structures B–1. . . . . . . . . . . . . . . . . . . . . . . . . . .
Available SCANport Messages B–4. . . . . . . . . . . . . . . . . . . . . . . . . . .
SLC SCANport Messaging Ladder Program B–4. . . . . . . . . . . . . . . . . .
Example Messages and Replies B–6. . . . . . . . . . . . . . . . . . . . . . . . . .
Read Number of Parameters B–7. . . . . . . . . . . . . . . . . . . . . . . . . .
Read Parameter Value B–8. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Read Parameter Name Text B–9. . . . . . . . . . . . . . . . . . . . . . . . . . .
Write Value to Parameter B–10. . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Read Full Parameter B–1 1. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Scaling Formulas B–13. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Set Default Parameter V alues B–15. . . . . . . . . . . . . . . . . . . . . . . . . .
Restore Parameter Values from Non–volatile Storage B–16. . . . . . . . .
Save Parameter Values to Non–volatile Storage B–17. . . . . . . . . . . . .
Read Enum String for Value in Parameter B–18. . . . . . . . . . . . . . . . .
Read Product Number B–19. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Read Product Text B–20. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Read Product Series Number B–21. . . . . . . . . . . . . . . . . . . . . . . . . .
Read Product Software Version B–22. . . . . . . . . . . . . . . . . . . . . . . .
Scattered Read B–23. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Scattered Write B–25. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Read Parameter Link from Parameter Number B–27. . . . . . . . . . . . . .
Write Parameter Link from Parameter Number B–28. . . . . . . . . . . . . .
Error Codes B–29. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Publication 1203–5.9 –– October 1996
Page 6

iv
Publication 1203–5.9 –– October 1996
Page 7

Preface
Preface
Read this preface to familiarize yourself with the rest of the manual.
This preface covers the following topics:
• who should use this manual
• the purpose of this manual
• safety precautions
• firmware support
• product compatibility
• terms and abbreviations
• conventions used in this manual
• Allen–Bradley support
Who Should Use this Manual?
Purpose of this Manual
Use this manual if you design, install, program, or troubleshoot
control systems that use the Allen–Bradley SLC to SCANport
communications module. You must have previous experience with
and a basic understanding of electrical terminology, configuration
procedures, equipment, and safety precautions for machinery and
control systems.
To efficiently use this communications module, you must be able to
program and operate an Allen-Bradley SLC controller.
This manual provides the information you need to install and use the
SLC to SCANport communications module. This manual describes
the procedures for installing, configuring, and troubleshooting the
SLC to SCANport communications module.
For information on specific product features, refer to the product
manual.
Important: Read this manual in its entirety before installing,
operating, servicing, or configuring the SLC to
SCANport communications module.
Publication 1203–5.9 –– October 1996
Page 8
P–2 Preface
Contents of this Manual
This manual contains the following information:
Chapter: Title: Contents:
Preface
Describes the purpose, background, and scope of this
manual.
1 Overview
Installing the SLC
2
3 Using Basic Mode
4
5 Troubleshooting
6 Specifications
A
B
to SCANport
Module
Using Enhanced
Mode
M0, M1, and G
Files
SCANport Message
Index
Provides an overview of the SLC to SCANport
communications module.
Provides the procedures you need to install your SLC to
SCANport communications module and attach it to the
SCANport network.
Provides information that you need to configure your
SLC to SCANport communications module for SLC
basic mode operation.
Provides information that you need to configure your
SLC to SCANport communications module for SLC
enhanced mode operation.
Provides information about the LED indications and
fault descriptions.
Provides the environmental, electrical, and
communications specifications.
Provides generic information about using the M0, M1,
and G files.
Provides a listing of some of the most commonly used
SCANport message structures.
Publication 1203–5.9 –– October 1996
Page 9

P–3 Preface
Safety Precautions
SLC Product Compatibility
Please read the following safety precautions carefully.
ATTENTION: Only personnel familiar with
SCANport devices and the associated machinery
!
!
The SLC to SCANport module is designed to be used with any SLC
processor or adapter capable of supporting SLC rack–based modules.
should plan or implement the installation, start-up,
configuration, and subsequent maintenance of this
communications module. Failure to comply may result
in personal injury and/or equipment damage.
ATTENTION: The SLC to SCANport module
contains ESD (Electrostatic Discharge) sensitive parts
and assemblies. Static control precautions are required
when installing, testing, or servicing this assembly.
Component damage may result if you do not follow
ESD control procedures. If you are not familiar with
static control procedures, refer to Allen-Bradley
Publication 8000-4.5.2, Guarding against Electrostatic
Damage, or any other applicable ESD protection
handbook.
Terms and Abbreviations
The following terms and abbreviations are specific to this product.
For a complete listing of Allen–Bradley terminology, refer to the
Allen–Bradley Industrial Automation Glossary.
In this manual, we refer to the:
• 1203 SLC to SCANport communications peripheral as the SLC to
SCANport module.
• Any of the connected SCANport products as the drive or
SCANport device. The current list of SCANport devices include
the following: 1305 MICRO, 1336 FORCE, 1336 IMPACT,
1336 PLUS, 1394 digital motion control system, SMC Dialog
Plus, SMP–3 smart motor protector, and 1397 DC drive.
Publication 1203–5.9 –– October 1996
Page 10

P–4 Preface
Common Techniques Used in this Manual
"
Allen–Bradley Support
This manual follows these conventions:
• Bulleted lists provide information, not procedural steps.
• Numbered lists provide sequential steps or hierarchical
information.
• Italic type is used for emphasis and chapter names.
We also use this convention to call attention to helpful information.
Allen–Bradley offers support services worldwide, with over 75
Sales/Support Offices, 512 authorized Distributors and 260
authorized Systems Integrators located throughout the United States
alone, plus Allen–Bradley representatives in every major country in
the world.
Local Product Support
Contact your local Allen–Bradley representative for:
• sales and order support
• product technical training
• warranty support
• support service agreements
Technical Product Assistance
If you need to contact Allen–Bradley for technical assistance, please
review the information in the Troubleshooting chapter first. If you
are still having problems, then call your local Allen–Bradley
representative.
Publication 1203–5.9 –– October 1996
Page 11
Overview
Chapter
1
Chapter Objectives
What is the SLC to SCANport Module?
Chapter 1 provides descriptions of the following:
• the SLC to SCANport module
• the available functions
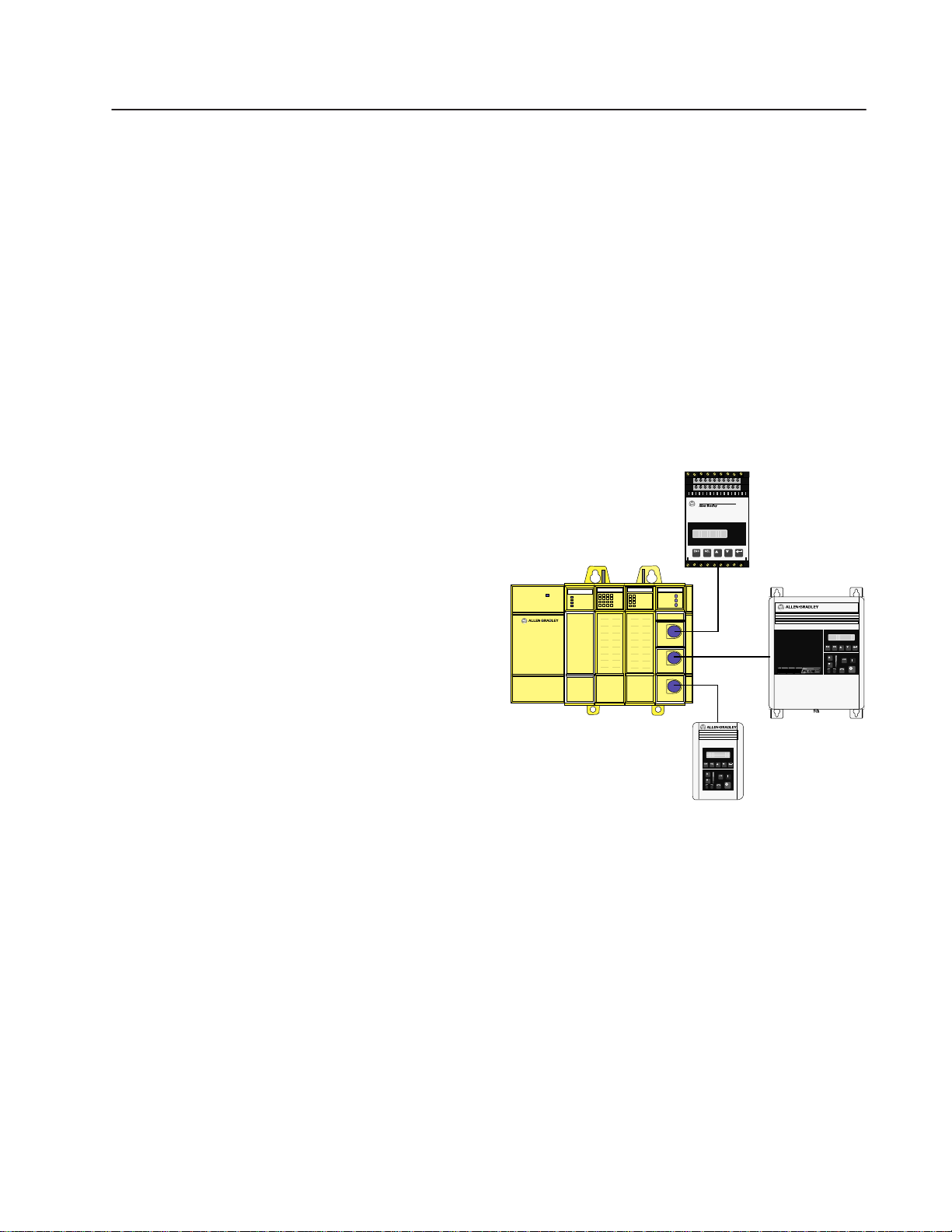
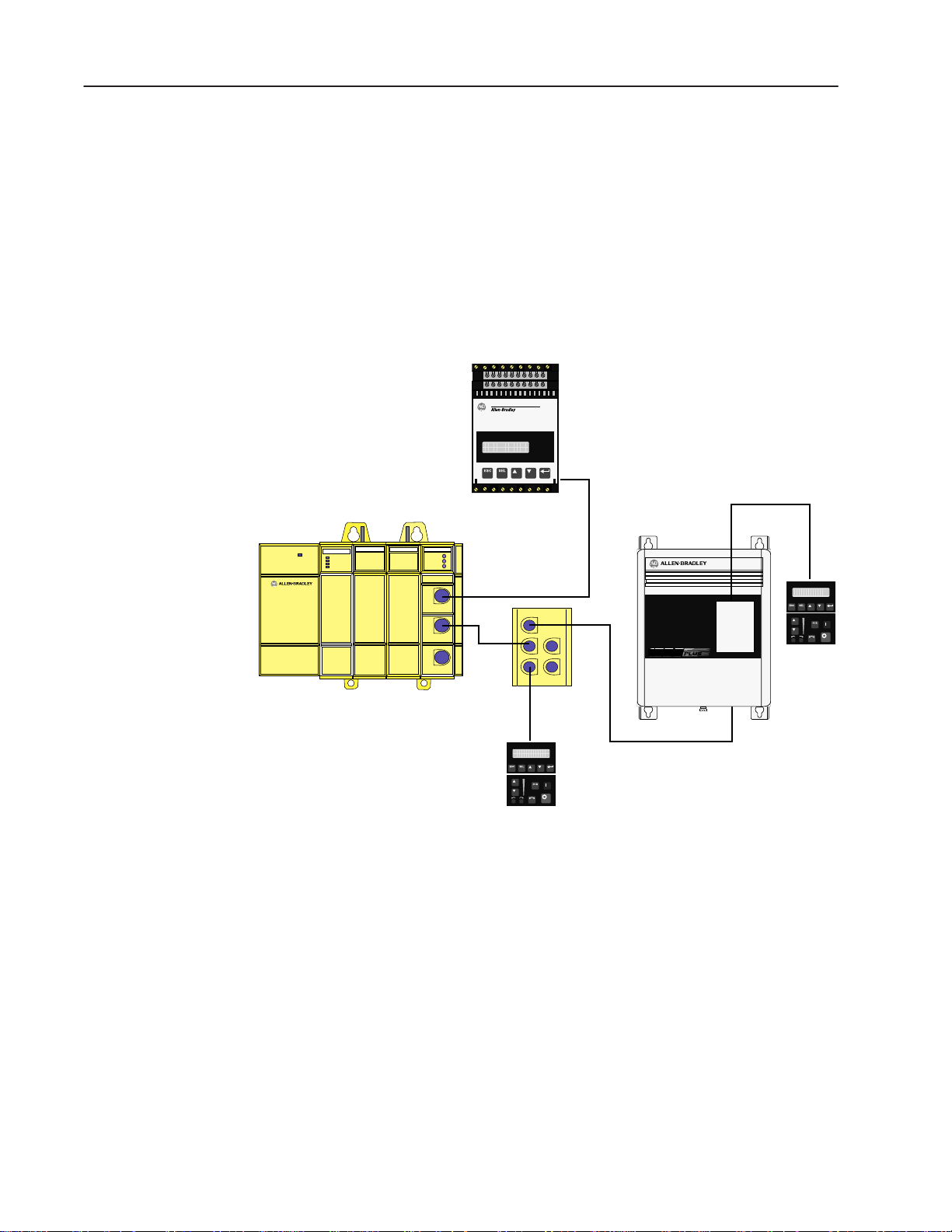
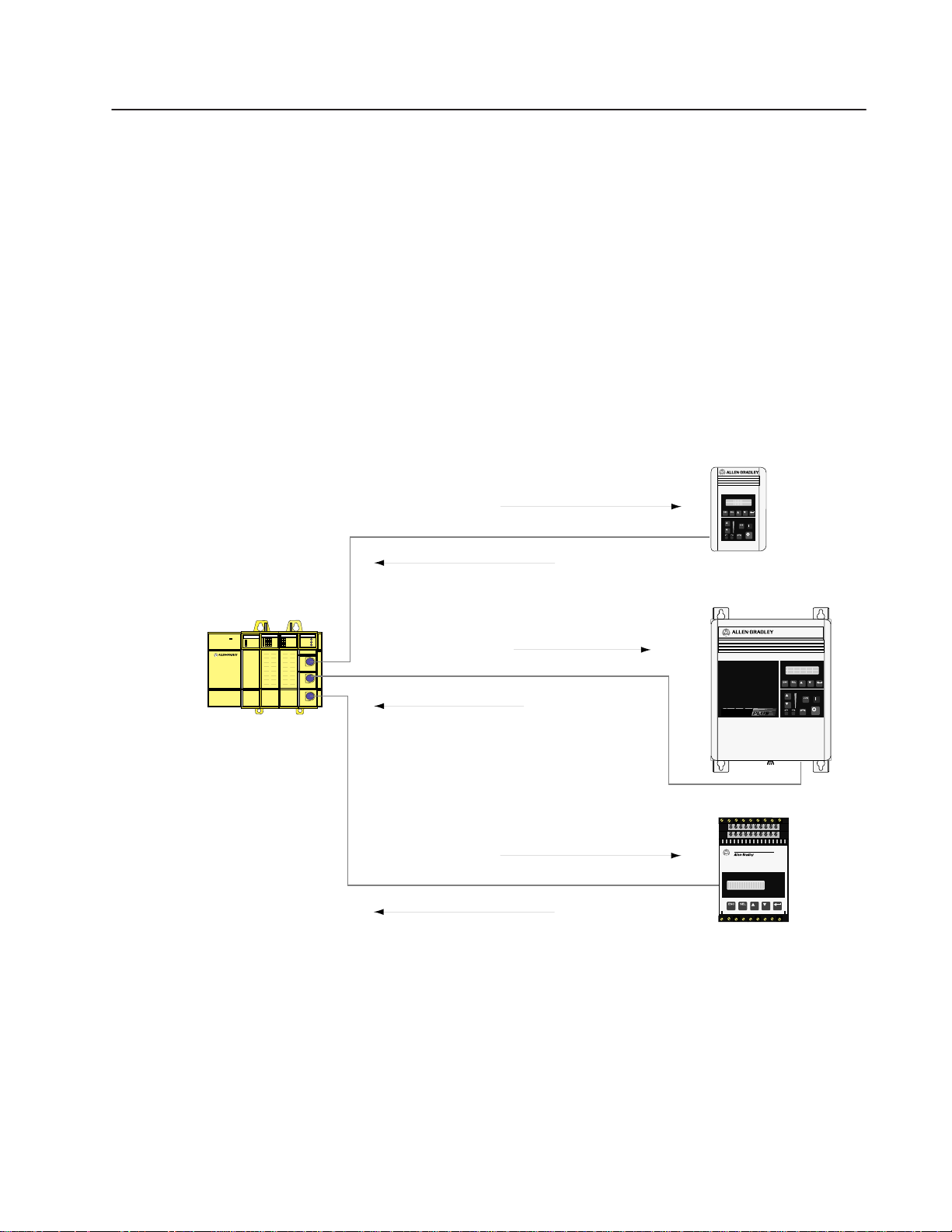
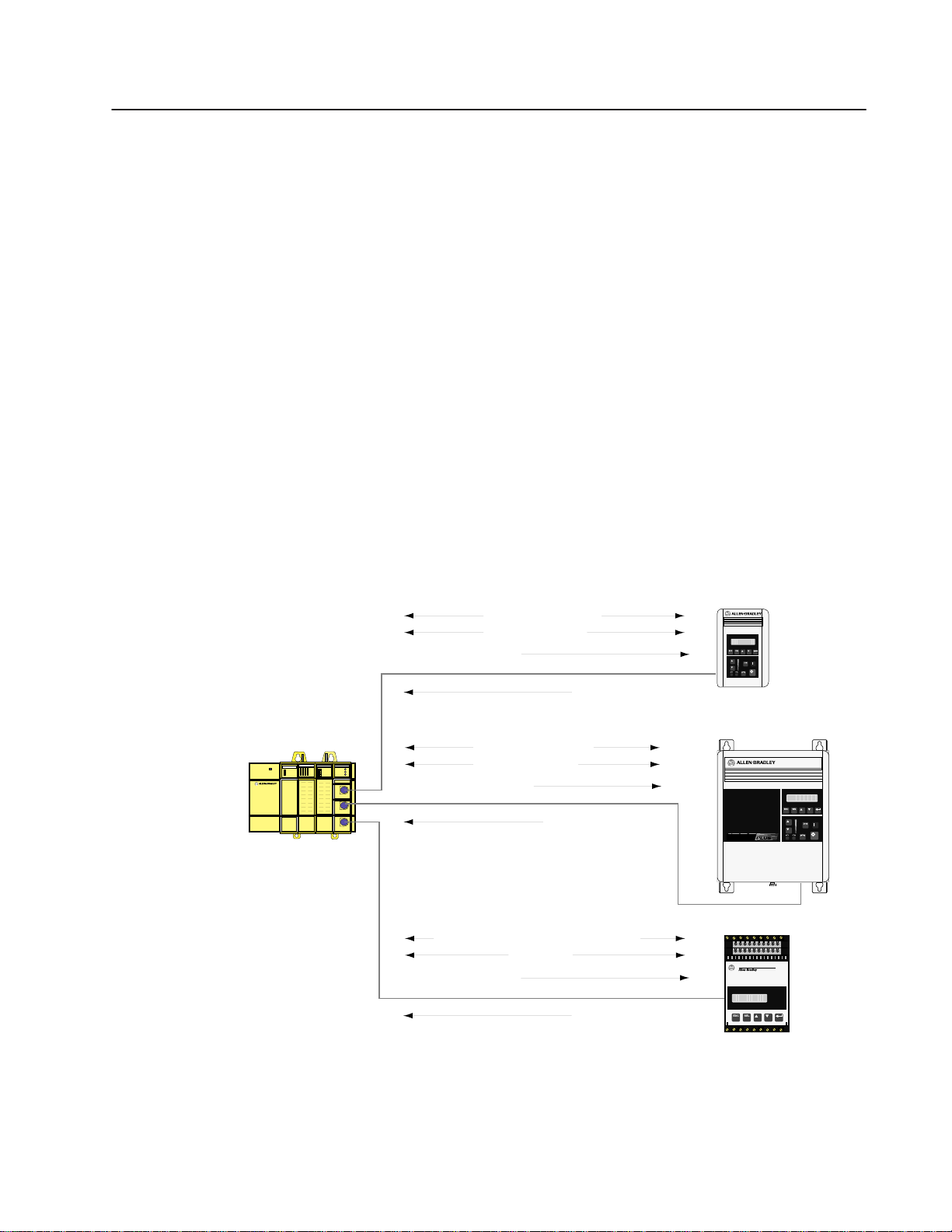
The SLC to SCANport module provides an interface between any
SLC processor or other product that can control modules within a
SLC rack and up to three SCANport devices as shown in Figure 1.1.
Figure 1.1
Example SLC to SCANport Module Set Up
SLC Rack with
SLC to SCANport Module
SMC Dialog Plus
INPUT OUTPUT SCANport
SLC 5/01 CPU
POWER
PC RUN
CPU Fault
FORCED I/O
BATTERY LOW
08
19
210
311
412
513
614
715
08
19
210
311
412
513
614
715
CHANNEL 1
CHANNEL 2
CHANNEL 3
Channel 1
Channel 2
Channel 3
1336 PLUS
1305
To connect more than three SCANport devices in a single rack, add
additional SLC to SCANport modules to your SLC rack system.
You can use your SLC to SCANport module in a 4, 7, 10, or 13 slot
SLC rack or a 2–slot expansion rack available for the fixed I/O
configurations of SLC–500 processors.
Important: An SLC rack using this module needs an enclosure of at
least 200 mm (8 in) in depth. You cannot place an SLC
rack using the SLC to SCANport module in a 150 mm
(6 in) deep enclosure.
Publication 1203–5.9 –– October 1996
Page 12
1–2 Overview
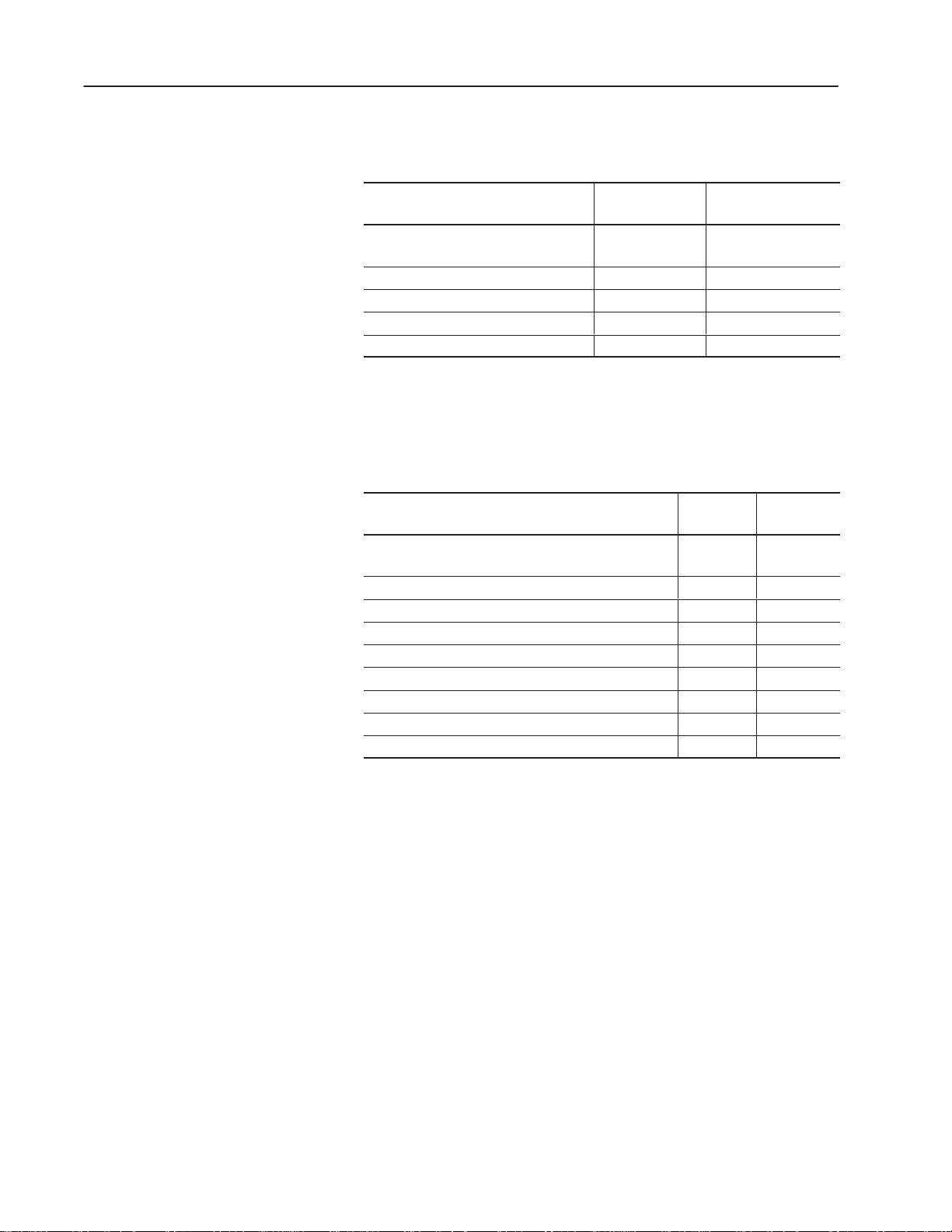
What Functions Does the SLC to SCANport Module Provide?
Your SLC processor or rack adapter determines what functions are
available for the SLC to SCANport module.
If the device in the left hand slot
of the SLC chassis is a:
Fixed style controller (using an
expansion rack)
SLC 5/01 controller Yes No
SLC 5/02, 5/03, or 5/04 controller Yes Yes
1747–OC open controller Yes Yes
Any SLC rack adapter Yes
➀
Future SLC product offerings may support enhanced mode
Is basic mode
supported?
Yes
Is enhanced mode
supported?
➀
No
➀
No
communication.
The following table provides information about basic mode and
enhanced mode.
Function
Maximum number of words of I/O per
SCANport device
T otal number of words of I/O for module 8 32
16–bit Logic Command (to SCANport device) Yes Yes
16–bit Logic Status (from SCANport device) Yes Yes
16–bit Reference (to SCANport device) Yes Yes
16–bit Feedback (from SCANport device) Yes Yes
Datalinks No Yes
Safe State Data No Yes
Messaging No Yes
Basic
Mode
2 10
Enhanced
Mode
Publication 1203–5.9 –– October 1996
Page 13

Chapter
Installing the SLC to SCANport Module
2
Chapter Objectives
Before You Install the Module
Chapter 2 covers the following information:
• what you need to do before you install the SLC to SCANport
module
• how to install the SLC to SCANport module
• how to remove the SLC to SCANport module
Important: You cannot place an SLC rack unit containing an SLC
to SCANport module in an enclosure that is less than
200 mm (8 in) deep.
Before you install your SLC to SCANport module, you need to:
• Determine the length of your SCANport cable(s).
• Determine the placement of your SCANport cables.
• Locate the DIP switch on your SLC to SCANport module.
Publication 1203–5.9 –– October 1996
Page 14
2–2 Installing the SLC to SCANport Module
Determine the Length of the SCANport Cable(s)
To connect your SLC to SCANport module to a SCANport device,
you need to use an Allen–Bradley SCANport cable. The maximum
cable length between any two peripheral devices connected to any
SCANport device cannot exceed 10 meters (33 feet). Therefore, in
Figure 2.1, A+B+C
you would not add the length of cable E to cables A, B, C, or D
because it connects to a separate SCANport device (or channel).
Figure 2.1
Example of SCANport Cable Lengths
≤10 meters and D+B+C≤10 meters. However,
E
SLC 5/01 CPU
POWER
PC RUN
CPU Fault
FORCED I/O
BATTERY LOW
SCANport
CHANNEL 1
CHANNEL 2
CHANNEL 3
Channel 1
Channel 2
Channel 3
C
A
D
B
Determine the Placement of the SCANport Cables
You must keep the SCANport cables away from high power cables.
If your SCANport cables are placed too close to the power cables or
run in parallel with power cables, you may introduce noise into the
communications system, which can cause problems to your system.
Make sure you physically mount and connect SCANport products
following the installation guidelines available for each product.
Publication 1203–5.9 –– October 1996
Page 15
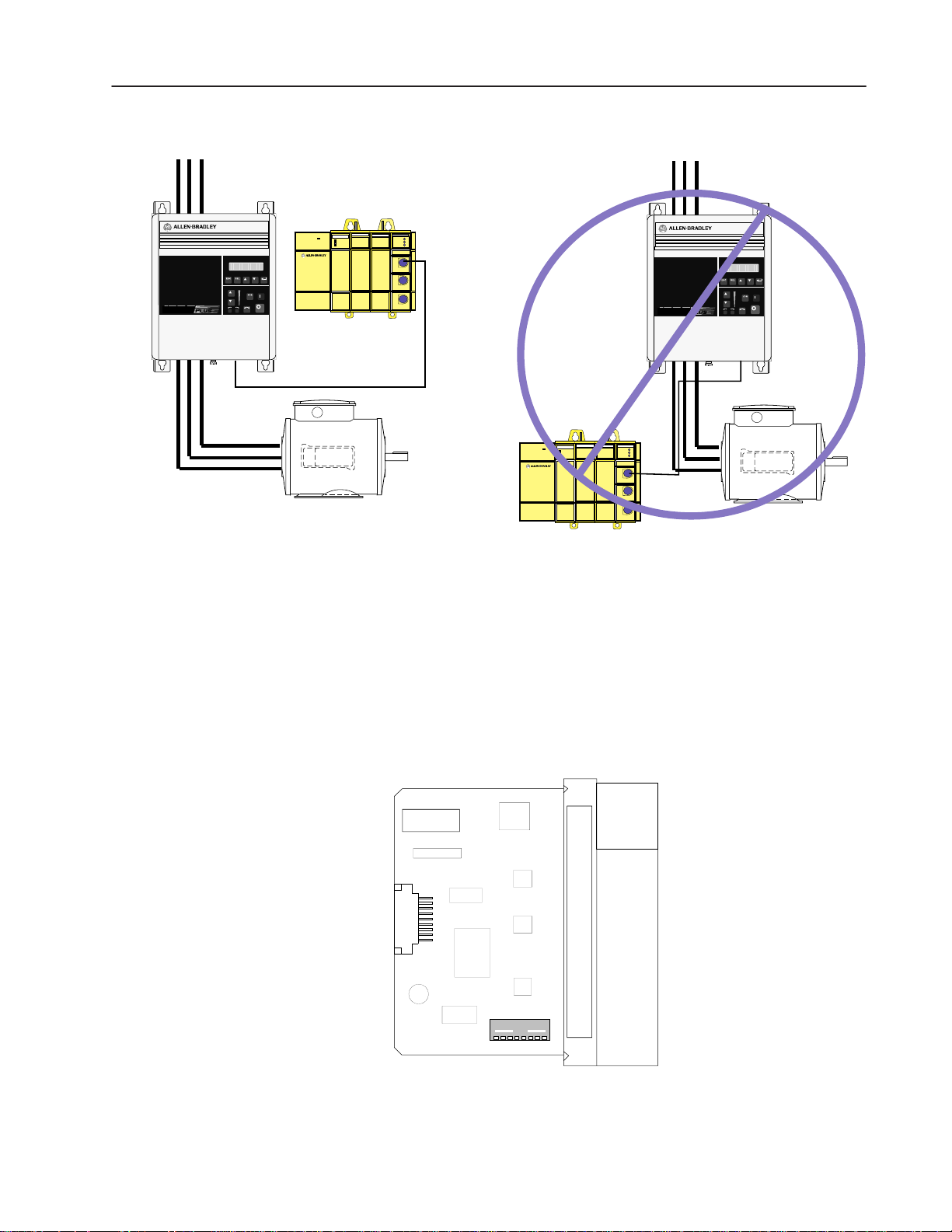
Figure 2.2
Examples of Cable Placements
2–3Installing the SLC to SCANport Module
SLC 5/01 CPU
POWER
PC RUN
CPU Fault
FORCED I/O
BATTERY LOW
B
SCANport
CHANNEL 1
CHANNEL 2
CHANNEL 3
Channel 1
A
Channel 2
Channel 3
A
B
SLC 5/01 CPU
POWER
PC RUN
CPU Fault
FORCED I/O
BATTERY LOW
SCANport
CHANNEL 1
CHANNEL 2
CHANNEL 3
Channel 1
Channel 2
Channel 3
A = Communications wire
B = Power wires
Locate the DIP Switch
You also need to locate a single configuration DIP switch on the
module as shown in Figure 2.3.
Figure 2.3
Side View of the SLC to SCANport Module Showing DIP Switch Location
OPEN
1 7 865432
Publication 1203–5.9 –– October 1996
Page 16
2–4 Installing the SLC to SCANport Module
3
3
3
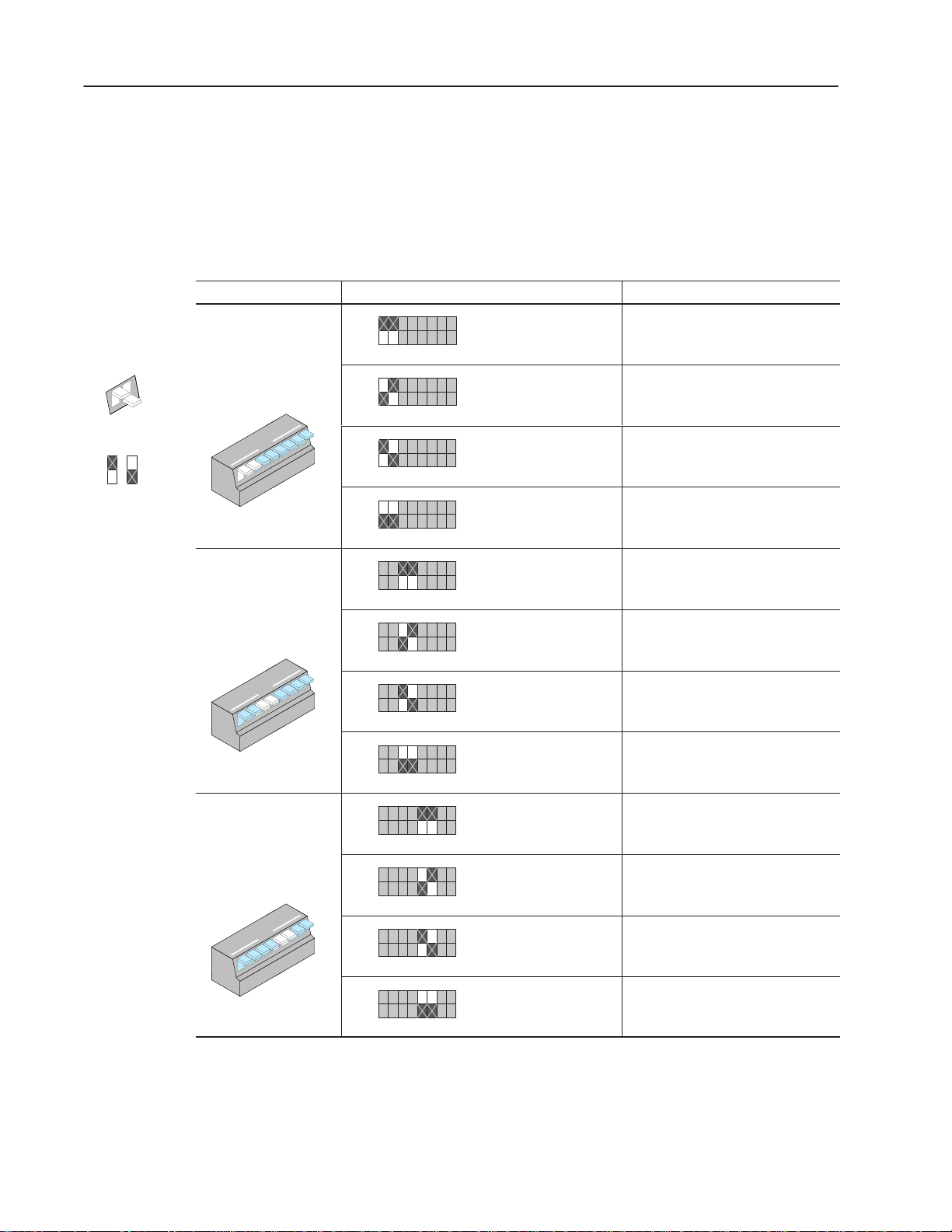
Installing the SLC to SCANport Module
Set this DIP switch: To these settings: To:
Channel 1 Fault/
Program State
(Switches 1 and 2)
12
Switch 1 = Open (Off)
Switch 2 = Closed (On)
O
O
N
F
F
Channel 2 Fault/
Program State
(Switches 3 and 4)
Channel 3 Fault/
Program State
(Switches 5 and 6)
OPEN
345678
12
OPEN
345678
12
OPEN
345678
12
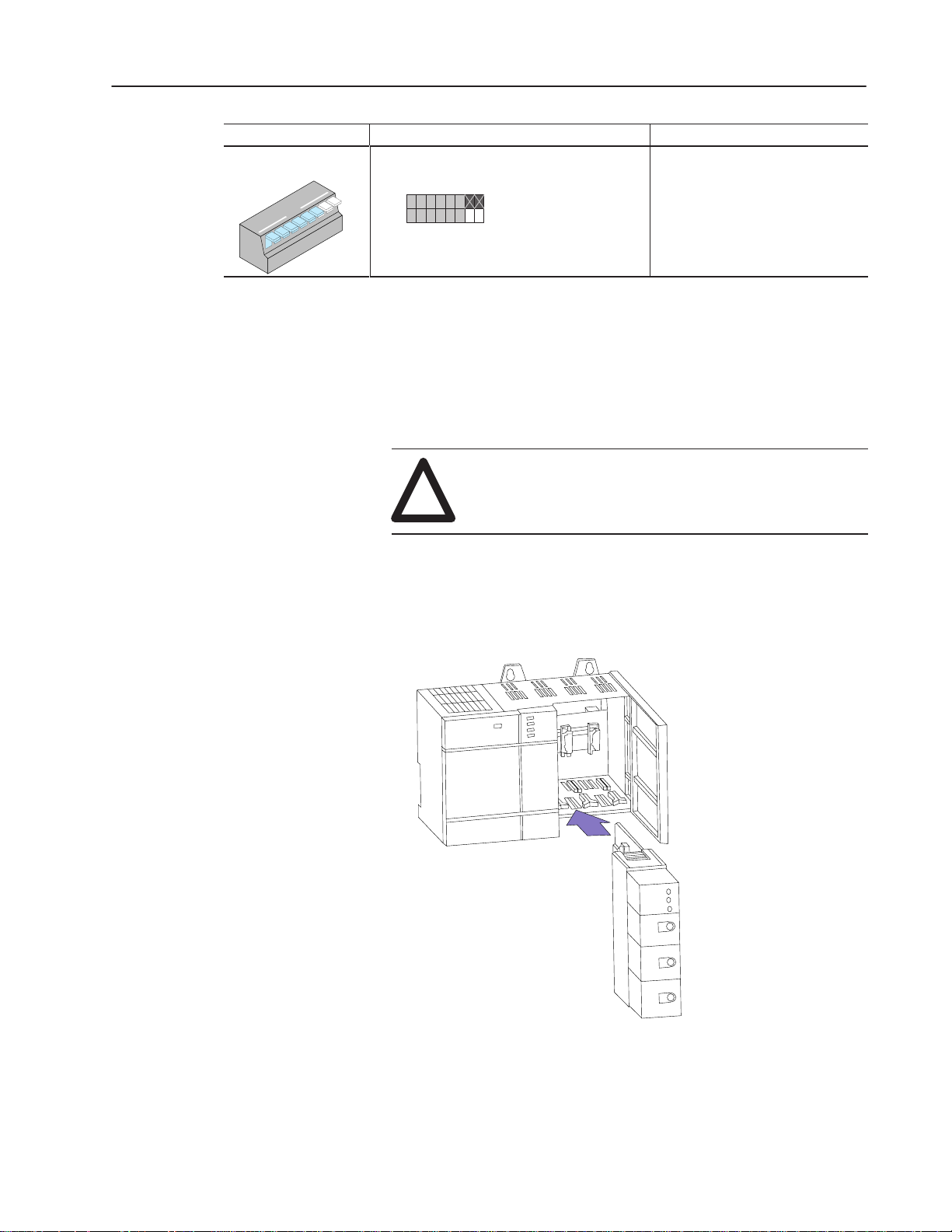
To install the SLC to SCANport module into the chassis:
1. Set the DIP switches. For each SCANport device connected to
the SLC to SCANport module, you need to set two DIP switches
to select what happens when the SLC processor or rack adapter
faults or is placed in program for the appropriate channel.
O
–
12345678
O
–
12345678
O
–
12 345678
O
–
12 345678
O
–
12 345678
O
–
12 345678
O
–
12 345678
O
–
12 345678
O
–
12 345678
O
–
12 345678
O
–
12 345678
O
–
12 345678
SW1 SW2
Open Open
(Off) (Off)
SW1 SW2
Closed Open
(On) (Off)
SW1 SW2
Open Closed
(Off) (On)
SW1 SW2
Closed Closed
(On) (On)
SW3 SW4
Open Open
(Off) (Off)
SW3 SW4
Closed Open
(On) (Off)
SW3 SW4
Open Closed
(Off) (On)
SW3 SW4
Closed Closed
(On) (On)
SW5 SW6
Open Open
(Off) (Off)
SW5 SW6
Closed Open
(On) (Off)
SW5 SW6
Open Closed
(Off) (On)
SW5 SW6
Closed Closed
(On) (On)
Fault SCANport device
(default)
Zero data
Hold last state
Safe state data (enhanced mode
only), Fault (basic mode only)
Fault SCANport device
(default)
Zero data
Hold last state
Safe state data (enhanced mode
only), Fault (basic mode only)
Fault SCANport device
(default)
Zero data
Hold last state
Safe state data (enhanced mode
only), Fault (basic mode only)
Publication 1203–5.9 –– October 1996
Page 17
Set this DIP switch: To:To these settings:
Switches 7 and 8
2–5Installing the SLC to SCANport Module
N
E
P
O
12345678
"
O
–
12 345678
SW7 SW8
Open Open
(Off) (Off)
Reserved
If you select a state other than Fault, the channel enable bits located
in the first two words of output data will retain their last state values.
This ensures that the enabled SCANport connections remain active
for those states. The I/O data transferred to the SCANport device
will change as configured by the DIP switch.
2. Turn off the chassis power supply.
ATTENTION: Do not install the SLC to SCANport
module with the chassis power supply on. Inserting or
!
removing the module with the chassis power supply on
may damage the module.
3. Select a slot for the module in the chassis. You may use any slot
except the leftmost slot, which is reserved for the SLC 5/xx
processor or rack adapter.
4. Insert the module into the slot you have selected.
CHANNEL 1
CHANNEL 2
CHANNEL 3
Channel 1
Channel 2
Channel 3
Publication 1203–5.9 –– October 1996
Page 18
2–6 Installing the SLC to SCANport Module
5. Apply firm, even pressure to seat the module in the I/O chassis
backplane connectors. Make sure the plastic tabs snap into the
rack.
6. Connect the SCANport cable(s) from the SCANport device(s) to
the SCANport connections in the front of the module.
Important: You must keep in mind that the maximum cable
You can insert or remove SCANport cables while a rack is powered.
If a cable is removed while the channel is enabled, the connected
SCANport device will fault unless otherwise configured at the
SCANport device.
distance between any two devices connected to a
single channel cannot exceed 10 meters (33 feet)
of cable. Also, the SCANport cables must not
be in close contact with the power cables.
Removing the SLC to SCANport Module
Where Do I Go From Here?
To remove the SLC to SCANport module from the chassis, you need
to:
1. Remove the SCANport cables.
2. Make sure the rack power is removed.
3. Push in on the hooks on both ends of the module.
4. Gently pull the module from the chassis.
The SLC to SCANport module can operate in either basic mode or
enhanced mode. Refer to Chapter 1 for a description of basic mode
and enhanced mode.
If you plan to use: Go to:
Basic mode Chapter 3
Enhanced mode Chapter 4
Publication 1203–5.9 –– October 1996
Page 19
Using Basic Mode
16-bit analog feedback
Chapter
3
Chapter Objectives
What Does Basic Mode Provide?
INPUT OUTPUT SCANport
SLC 5/01 CPU
POWER
PC RUN
CPU Fault
FORCED I/O
BATTERY LOW
08
08
19
19
210
210
311
311
412
412
513
513
614
614
715
715
Chapter 3 covers the following information:
• a description of what basic mode provides
• how to configure the SLC to SCANport module for basic mode
• how to transfer data
Basic mode sends a 16–bit logic command and a 16–bit analog
reference from the module to each SCANport device. It receives a
16–bit logic status and a 16–bit analog feedback signal from each
connected SCANport device.
16-bit logic command
16-bit analog reference
16-bit logic status
16-bit analog feedback
CHANNEL 1
CHANNEL 2
CHANNEL 3
Channel 1
Channel 2
Channel 3
16-bit logic command
16-bit analog reference
16-bit logic status
16-bit analog feedback
1305
1336
Configuring the SLC to SCANport Module for Basic Mode
16-bit logic command
16-bit analog reference (not used by SMC)
16-bit logic status
To configure the SLC to SCANport module for basic mode using the
Advanced Programming Software (APS), you need to:
1. Create a file.
2. Enter a file name. For example purposes, we are using SM1_AP
as the file name.
3. Highlight the processor as shown in Figure 3.1.
Publication 1203–5.9 –– October 1996
SMC
Page 20

3–2 Using Basic Mode
Highlight the processor
you want to use. For
example, 1747–L532.
Figure 3.1
Example APS Screen
4. Press the F2 key.
5. Depending on your processor and version of APS, you may be
asked to enter the operating system that your processor uses.
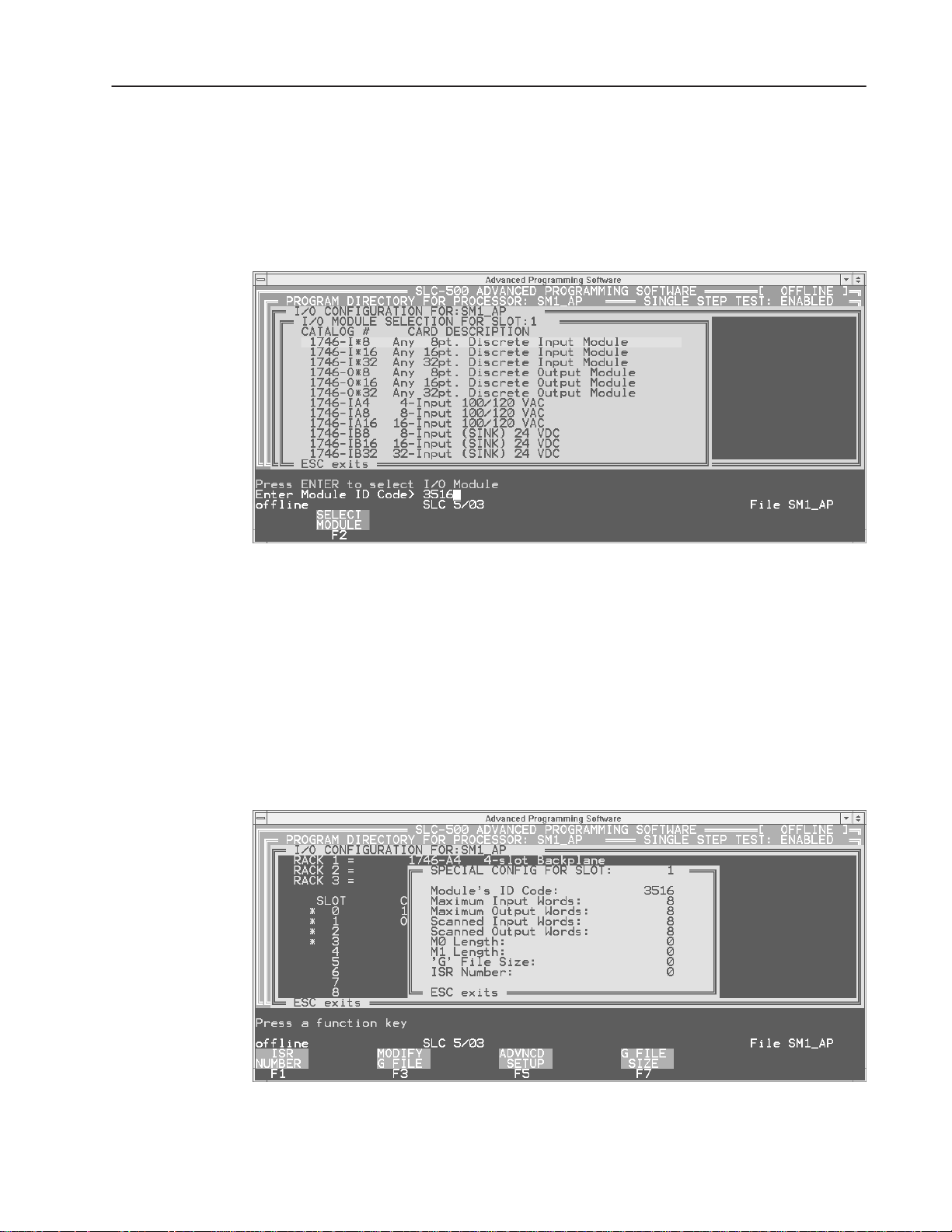
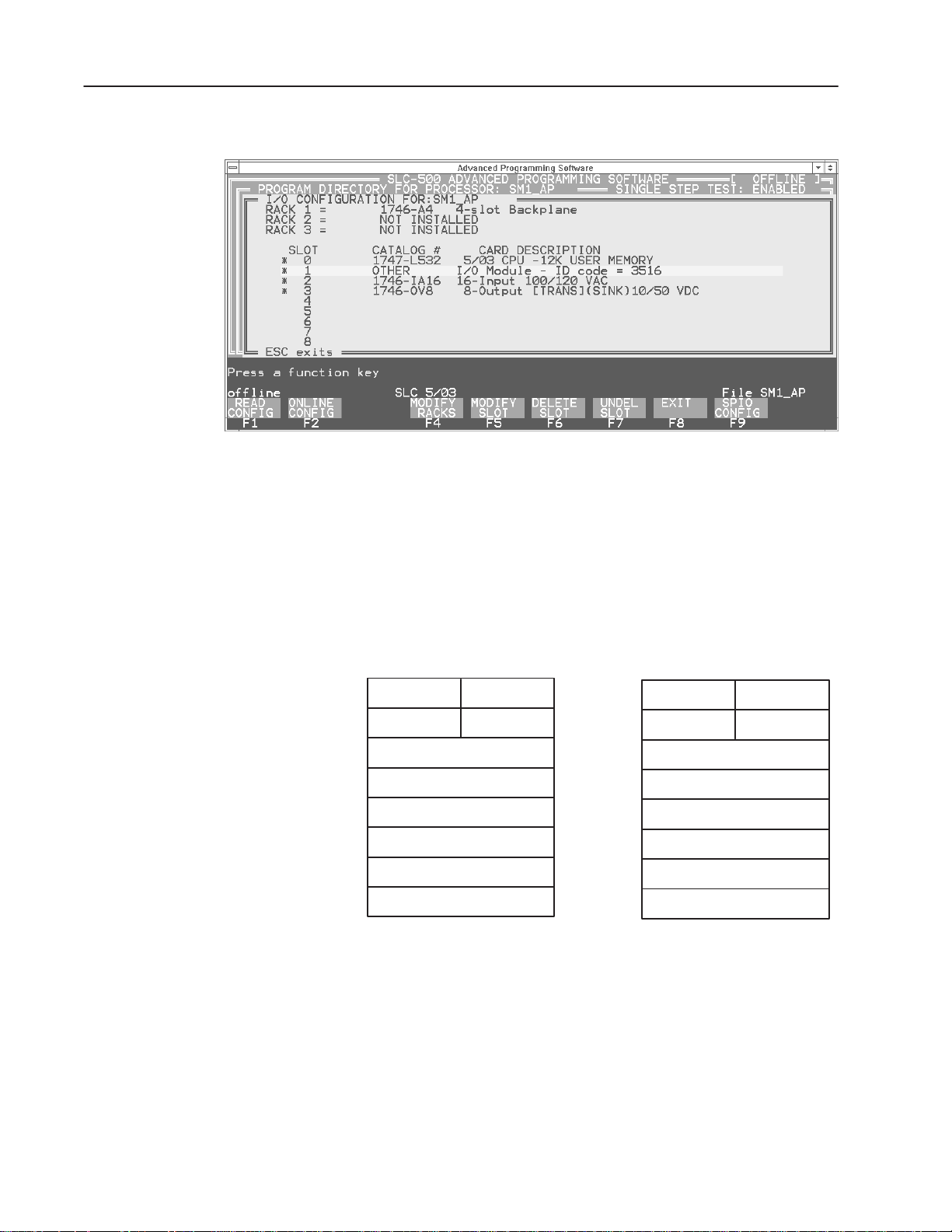
6. Press F5 to configure the I/O. The screen shown in Figure 3.2 is
displayed.
Figure 3.2
Example I/O Configuration Screen
Publication 1203–5.9 –– October 1996
Page 21
7. Move the cursor to the slot containing the SLC to SCANport
module.
8. Press F5 to modify the slot. The screen shown in Figure 3.3 is
displayed.
Figure 3.3
Prompt to Enter the Module ID Code
3–3Using Basic Mode
9. Enter the module ID code. For basic mode, the module ID code
is 3516.
10.Press the Enter key.
When you have entered the module ID code, you are returned to the
screen shown in Figure 3.2 with the selected module now shown. If
you press F9, the screen shown in Figure 3.4 shows the
configuration information for the SLC to SCANport module. You
should not need to change this information for basic mode.
Figure 3.4
Specialty Module Configuration Screen
Figure 3.5 shows an example of a completed I/O configuration.
Publication 1203–5.9 –– October 1996
Page 22
3–4 Using Basic Mode
Figure 3.5
An Example of a Completed I/O Configuration
Transferring Data
To transfer data using the SLC to SCANport module, you need to be
familiar with how the SLC I/O image table represents the internal
data I/O mapping and how the input and output image channel status
bits are defined.
When the SLC to SCANport module is configured as a basic mode
module, the internal data I/O mapping is represented within the SLC
image table as the following:
Output Image Input Image
Channel 2 Cmd Channel 1 Cmd
Reserved Channel 3 Cmd
Logic Command Channel 1
Analog Reference Channel 1
Logic Command Channel 2
Analog Reference Channel 2
Logic Command Channel 3
Analog Reference Channel 3
Word 0
Word 1
Word 2
Word 3
Word 4
Word 5
Word 6
Word 7
Channel 2 Stat Channel 1 Stat
Not Used Channel 3 Stat
Logic Status Channel 1
Analog Feedback Channel 1
Logic Status Channel 2
Analog Feedback Channel 2
Logic Status Channel 3
Analog Feedback Channel 3
Publication 1203–5.9 –– October 1996
Important: Different SCANport devices may define different
meanings for the bits in the Logic Command and Logic
Status fields. They may also use the Reference and
Feedback differently. Refer to the manual for the
specific SCANport device for more information.
Page 23
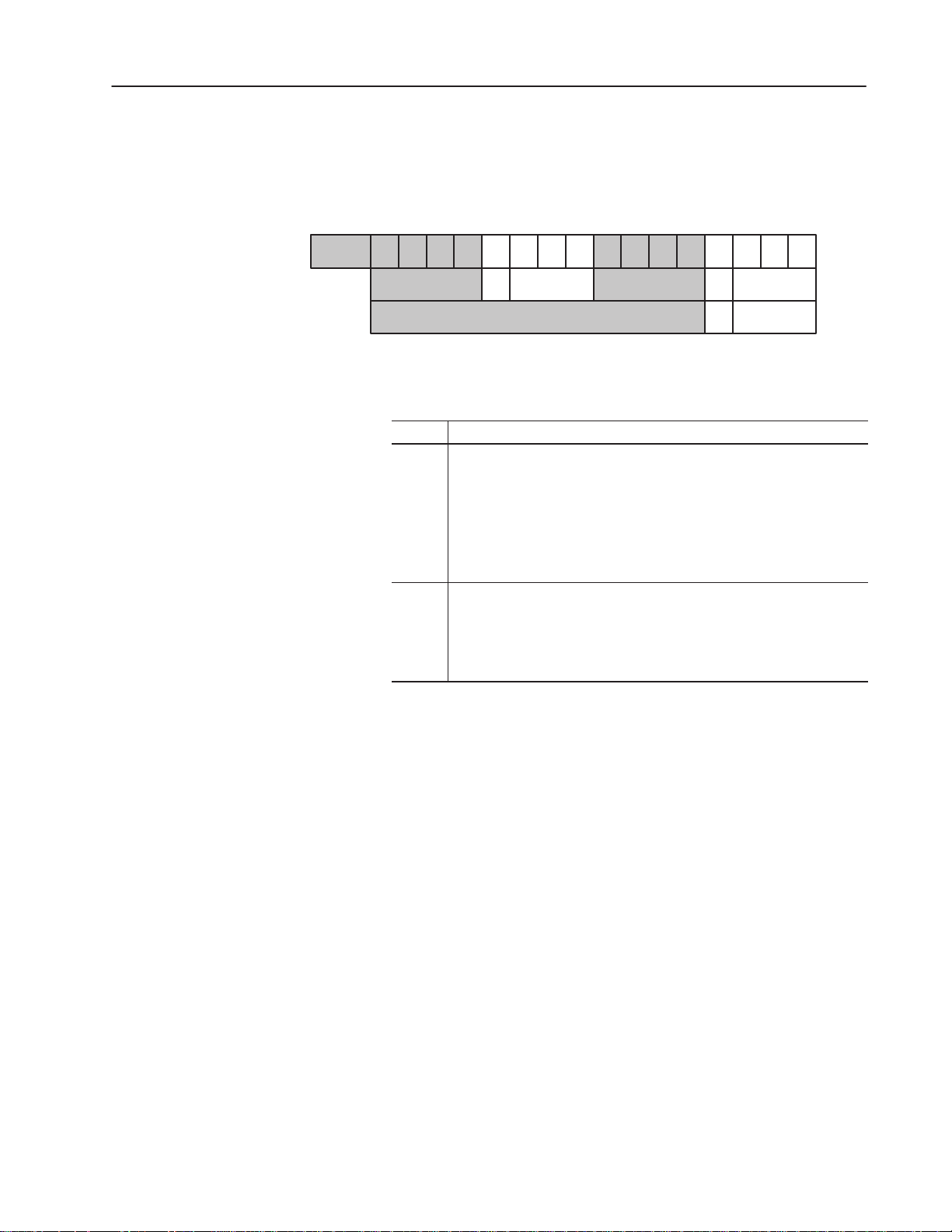
Channel Status Input Image Definitions
The Input Image Channel Status bits are defined as follows:
3–5Using Basic Mode
Channel 2 Status
Bit
15 14 13 12 1 1 10 9 8 765432 1 0
Not Used Not Used
V2 ID2 V1 ID1
Not Used
Channel 1 Status
V3 ID3
Channel 3 Status
Word 0
Word 1
These bits have the following definitions:
This: Represents:
SCANport Channel 1, 2, or 3 Connected Adapter Port ID
Number. This three bit field contains the adapter port number
ID1
ID2
ID3
V1
V2
V3
read from the connector that channel 1, 2, or 3 is connected to on
the SCANport device. ID1, ID2, and ID3 should be between 1
and 7. If ID1, ID 2, or ID3 is 7, the channel is not connected to
a SCANport device, or the SCANport device may not be
powered.
SCANport Channel 1, 2, or 3 Valid Data bit. When high (1), the
Logic Status and Analog Feedback values are valid and can be
used. The V1, V2, and V3 bit will only go high after the
program sets the corresponding data enable bit. When low (0),
the values are not valid.
Publication 1203–5.9 –– October 1996
Page 24
3–6 Using Basic Mode
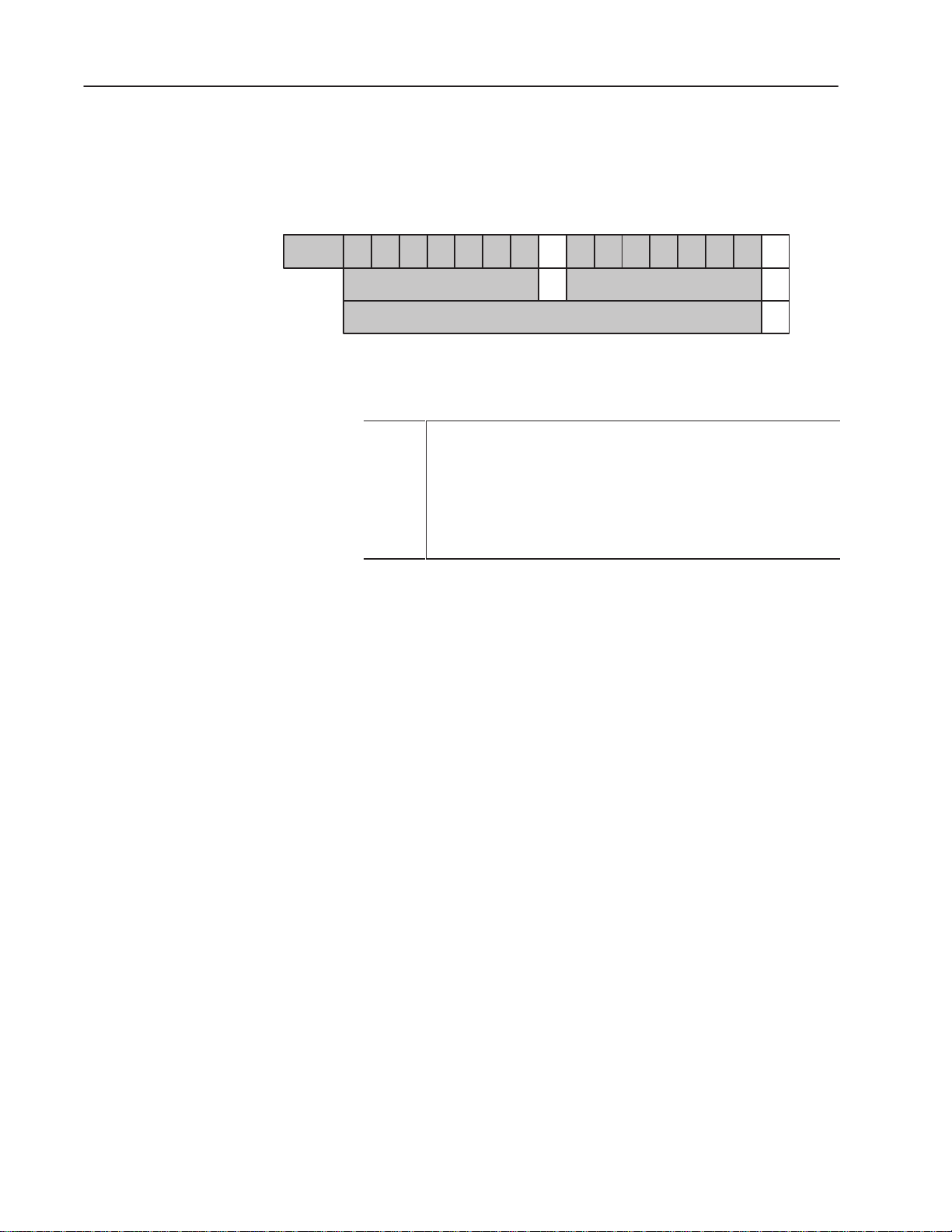
Channel Command Output Image Definitions
The Output Image Channel Command bits are defined as follows:
Example of Basic Mode Data Transfer
Channel 2 Command
Bit
15 14 13 12 1 1 10 9 8 76543210
Not Used Not Used
DE
2
Not Used
Channel 1 Command
DE
1
DE
3
Channel 3 Command
Word 0
Word 1
These bits have the following definitions:
SCANport Channel 1, 2, or 3 Data Enable bit. While low (0),
the channel will not transfer I/O data between the module and
DE1
DE2
DE3
the connected SCANport device. When high (1), the channel
becomes active to the SCANport device and transfers the
appropriate I/O data. When reset to low (0), the channel
disconnects from the SCANport device. This usually causes
the connected SCANport device to fault.
This section contains an example program that uses basic mode data
transfer. The following portion of the program enables all three
SCANport channels on the SLC to SCANport module.
Figure 3.6
Example of Enabling the SCANport Channels
| Channel 1 |
| SCANport |
| Enable |
| O:1.0 |
|––––––––––––––––––––––––––––––––––––––––––––––––––––––( )––––––|
| | 0 | |
| |Channel 2 | |
| |SCANport | |
| |Enable | |
| | O:1.0 | |
| +–––( )––––| |
| | 8 | |
| |Channel 3 | |
| |SCANport | |
| |Enable | |
| | O:1.1 | |
| +–––( )––––+ |
| 0 |
Publication 1203–5.9 –– October 1996
Page 25
3–7Using Basic Mode
The portion of the program shown in Figure 3.7 provides start/stop
control and a frequency reference to the 1305 drive connected to
SCANport channel 1. The user start is a normally open push button,
while the user stop is a normally closed push button.
Figure 3.7
Example of Drive 1 Control and Reference
| Drive 1 Drive 1 Drive 1 |
| User User START |
| Momentary Maintained Command |
| START NOT STOP Bit |
| Input Input |
| I:2.0 I:2.0 O:1.2 |
|–––––] [–––––––––––––––––––] [––––––––––––––––––––––––––––( )–––––|
| | 0 | 1 1 |
| |Drive 1 |Drive 1 | |
| |START |RUNNING | |
| |Command |Status | |
| |Bit |Bit | |
| | O:1.2 I:1.2 | |
| +–––] [––––––––]/[––––+ |
| 1 1 |
| Drive 1 Drive 1 |
| User STOP |
| Maintained Command |
| NOT STOP Bit |
| Input |
| I:2.0 O:1.2 |
|–––––]/[––––––––––––––––––––––––––––––––––––––––––––––––––( )–––––|
| | 1 | 0 |
| |Drive 1 |Drive 1 | |
| |STOP |RUNNING | |
| |Command |Status | |
| |Bit |Bit | |
| | O:1.2 I:1.2 | |
| +–––] [––––––––] [––––+ |
| 0 1 |
| Drive 1 |
| Frequency |
| Reference |
| +MOV–––––––––––––––+ |
|–––––––––––––––––––––––––––––––––––––––––––––|MOVE +–|
| |Source N20:0| |
| | 0| |
| |Dest O:1.3| |
| | 0| |
| +––––––––––––––––––+ |
Publication 1203–5.9 –– October 1996
Page 26

3–8 Using Basic Mode
| Drive 2 Drive 2 Drive 2 |
| User User START |
| Momentary Maintained Command |
| START NOT STOP Bit |
| Input Input |
| I:2.0 I:2.0 O:1.4 |
|–––––] [–––––––––––––––––––] [––––––––––––––––––––––––––––( )–––––|
| | 2 | 3 1 |
| |Drive 2 |Drive 2 | |
| |START |RUNNING | |
| |Command |Status | |
| |Bit |Bit | |
| | O:1.4 I:1.4 | |
| +–––] [––––––––]/[––––+ |
| 1 1 |
| Drive 2 Drive 2 |
| User STOP |
| Maintained Command |
| NOT STOP Bit |
| Input |
| I:2.0 O:1.4 |
|–––––]/[––––––––––––––––––––––––––––––––––––––––––––––––––( )–––––|
| | 3 | 0 |
| |Drive 2 |Drive 2 | |
| |STOP |RUNNING | |
| |Command |Status | |
| |Bit |Bit | |
| | O:1.4 I:1.4 | |
| +–––] [––––––––] [––––+ |
| 0 1 |
| Drive 2 |
| Frequency |
| Reference |
| +MOV–––––––––––––––+ |
|–––––––––––––––––––––––––––––––––––––––––––––|MOVE +–|
| |Source N20:1| |
| | 0| |
| |Dest O:1.5| |
| | 0| |
| +––––––––––––––––––+ |
The portion of the program shown in Figure 3.8 provides start/stop
control and a frequency reference to the 1305 drive connected to
SCANport channel 2. This section functions the same as that shown
in Figure 3.7 except for the changes in addresses.
Figure 3.8
Example of Drive 2 Control and Reference
Publication 1203–5.9 –– October 1996
Page 27

3–9Using Basic Mode
The portion of the program shown in Figure 3.9 provides start/stop
control and a frequency reference to the 1305 drive connected to
SCANport channel 3. This section functions the same as that shown
in Figure 3.7 and Figure 3.8 except for the changes in address.
Figure 3.9
Example of Drive 3 Control and Reference
| Drive 3 Drive 3 Drive 3 |
| User User START |
| Momentary Maintained Command |
| START NOT STOP Bit |
| Input Input |
| I:2.0 I:2.0 O:1.6 |
|–––––] [–––––––––––––––––––] [––––––––––––––––––––––––––––( )–––––|
| | 4 | 5 1 |
| |Drive 3 |Drive 3 | |
| |START |RUNNING | |
| |Command |Status | |
| |Bit |Bit | |
| | O:1.6 I:1.6 | |
| +–––] [––––––––]/[––––+ |
| 1 1 |
| Drive 3 Drive 3 |
| User STOP |
| Maintained Command |
| NOT STOP Bit |
| Input |
| I:2.0 O:1.6 |
|–––––]/[––––––––––––––––––––––––––––––––––––––––––––––––––( )–––––|
| | 5 | 0 |
| |Drive 3 |Drive 3 | |
| |STOP |RUNNING | |
| |Command |Status | |
| |Bit |Bit | |
| | O:1.6 I:1.6 | |
| +–––] [––––––––] [––––+ |
| 0 1 |
| Drive 3 |
| Frequency |
| Reference |
| +MOV–––––––––––––––+ |
|–––––––––––––––––––––––––––––––––––––––––––––|MOVE +–|
| |Source N20:2| |
| | 0| |
| |Dest O:1.7| |
| | 0| |
| +––––––––––––––––––+ |
Publication 1203–5.9 –– October 1996
Page 28

3–10 Using Basic Mode
address 15 data 0
I:1 0000 0000 0000 0000 Drives 1 & 2 SCANport Channel Status
I:1.1 0000 0000 0000 0000 Drive 3 SCANport Channel Status
I:1.2 0000 0000 0000 0000 Drive 1 Logic Status
I:1.3 0000 0000 0000 0000 Drive 1 Feedback
I:1.4 0000 0000 0000 0000 Drive 2 Logic Status
I:1.5 0000 0000 0000 0000 Drive 2 Feedback
I:1.6 0000 0000 0000 0000 Drive 3 Logic Status
I:1.7 0000 0000 0000 0000 Drive 3 Feedback
address 15 data 0
O:1 0000 0000 0000 0000 Drives 1 & 2 SCANport Channel Enables
O:1.1 0000 0000 0000 0000 Drive 3 SCANport Channel Enable
O:1.2 0000 0000 0000 0000 Drive 1 Logic Command
O:1.3 0000 0000 0000 0000 Drive 1 Reference
O:1.4 0000 0000 0000 0000 Drive 2 Logic Command
O:1.5 0000 0000 0000 0000 Drive 2 Reference
O:1.6 0000 0000 0000 0000 Drive 1 Logic Command
O:1.7 0000 0000 0000 0000 Drive 1 Reference
The following data table shows the input data read from the SLC to
SCANport module via the SLC backplane.
The following data table shows the data to be sent to the SLC to
SCANport module via the SLC backplane.
Publication 1203–5.9 –– October 1996
Page 29
Using Enhanced Mode
8 words in/8 words out
Chapter
4
Chapter Objectives
What Does Enhanced Mode Provide?
Chapter 4 covers the following information:
• a description of what enhanced mode provides
• how to configure the SLC to SCANport module for enhanced
mode
• how to use the I/O image
• how to configure G files
• how to use M files
Enhanced mode supports the basic mode features which include a
16–bit logic command and a 16–bit analog reference from the
module to each SCANport device as well as a 16–bit logic status and
a 16–bit analog feedback signal back from each connected
SCANport device.
In addition, enhanced mode optionally provides datalinks, safe state
data, and messaging.
Messages
16-bit logic command
16-bit analog reference
16-bit logic status
16-bit analog feedback
1305
INPUT OUTPUT SCANport
SLC 5/01 CPU
POWER
PC RUN
CPU Fault
FORCED I/O
BATTERY LOW
08
08
19
19
210
210
311
311
412
412
513
513
614
614
715
715
8 words in/8 words out
CHANNEL 1
CHANNEL 2
CHANNEL 3
Channel 1
Channel 2
Channel 3
16-bit logic command
16-bit analog reference
Messages
16-bit logic status
16-bit analog feedback
1336
8 words in/8 words out (not used by SMC)
Messages
16-bit logic command
16-bit analog reference (not used by SMC)
SMC
16-bit logic status
16-bit analog feedback
Publication 1203–5.9 –– October 1996
Page 30
4–2 Using Enhanced Mode
What Are Datalinks?
Datalinks let you cyclically transfer parameter values to and from a
SCANport device (provided that the SCANport device supports
datalinks). By using datalinks, you can change the value of a
parameter without using the SLC to SCANport messaging function.
Each datalink consists of two 16–bit words of input and two 16–bit
words of output when enabled. Up to 8 words in and 8 words out of
data are available if supported in the connected SCANport device.
SCANport devices that support this function have a group of
parameters for datalink configuration. These parameters are
identified as Data In A1–D2 and Data Out A1–D2. To use datalinks,
you need to:
1. Set up a configuration file, called a G file, to enable the datalinks
from the SLC to SCANport module side.
2. Configure or link the Data In A1–D2 and Data Out A1–D2
parameters in the SCANport device.
Setting up the G file is covered in more detail later in this chapter.
What Is Safe State Configuration Data?
You can select constant values that your SLC to SCANport module
will maintain in the event of an SLC processor mode change or error.
These constant values are referred to as safe state data. When the
SLC is placed in program mode or an SLC fault occurs, the control
outputs can be set to automatically switch to the constant values set
in the safe state data words. This lets you define a safe operating
state for controlled devices that depend on a pre–programmed output
from the module.
ATTENTION: Use the G file to configure your safe
state values based on your knowledge of how the
!
Refer to Chapter 2 for the DIP switch configuration for
fault/program state.
SCANport devices connected on each channel operate.
Refer to the manual for your SCANport device for
additional information.
Publication 1203–5.9 –– October 1996
Page 31

4–3Using Enhanced Mode
What Is Messaging?
Messaging lets you get and modify SCANport device parameters as
well as providing access to other internal SCANport–related
information or services. To use messaging, you need to configure
the M file mechanism of the SLC processor. The M file mechanism
is covered later in this chapter. Appendix B, SCANport Messaging,
provides examples of SCANport messages.
Configuring the SLC to SCANport Module for Enhanced Mode
Highlight the processor
you want to use. For
example, 1747–L532.
To configure the SLC to SCANport module for enhanced mode
using the Advanced Programming Software (APS), you need to:
1. Create a file.
2. Enter a file name. For example purposes, we are using SM1_AP2
as the file name.
3. Highlight the processor as shown in Figure 4.1.
Figure 4.1
Example APS Screen
4. Press the F2 key.
5. Depending on your processor and version of APS, you may be
asked to enter the operating system that your processor uses.
Publication 1203–5.9 –– October 1996
Page 32

4–4 Using Enhanced Mode
6. Press F5 to configure the I/O using the screen shown in Figure
4.2.
Figure 4.2
An Example of the I/O Configuration Screen
7. Move the cursor to the slot containing the SLC to SCANport
module.
8. Press F5 to modify the slot using the screen shown in Figure 4.3.
Figure 4.3
Prompt to Enter the Module ID Code
9. Enter the module ID code. For enhanced mode, the module ID
code is 13616.
10.Press the Enter key.
Publication 1203–5.9 –– October 1996
Page 33

4–5Using Enhanced Mode
11. The slot is now configured for the SLC to SCANport module to
be used in enhanced mode. This is shown in Figure 4.4
Figure 4.4
Example I/O Configuration Screen
12.Press F9 to add the information to configure the specialty I/O
using the screen shown in Figure 4.5.
"
Figure 4.5
Specialty I/O Configuration Screen
If you are not familiar with G files and M0/M1 files, you should read
the sections that are provided later in this chapter that pertain to these
files before continuing.
13.Press F7 to set the G file size a value from 2 to 32 words using
the screen shown in Figure 4.5.
Publication 1203–5.9 –– October 1996
Page 34

4–6 Using Enhanced Mode
14.Press F3 to configure the G file data using the screen shown in
Figure 4.6. Figure 4.8 provides the definition of the G file data.
Figure 4.6
Screen Used to Configure G File Data
15.When you return to the screen shown in Figure 4.5, press F5 to
access the advanced set up menu to configure the size of the
messaging buffers.
16.Press F5 to enter the size of the M0 file. For this module, the
maximum file size is 800.
17.Press F6 to enter the size of the M1 file. For this module, the
maximum file size is 400.
Publication 1203–5.9 –– October 1996
Page 35

4–7Using Enhanced Mode
Using the I/O Image
The following SLC I/O image table represents the internal data I/O
mapping for the SLC to SCANport module when configured as an
enhanced mode module.
Figure 4.7
SLC I/O Image Table
Output Image
Channel 2 Cmd Channel 1 Cmd Word 0 Channel 2 Status Channel 1 Status
Reserved Channel 3 Cmd Word 1 Message Status Channel 3 Status
Logic Command Channel 1 Word 2 Logic Status Channel 1
Analog Reference Channel 1 Word 3 Analog Feedback Channel 1
Logic Command Channel 2 Word 4 Logic Status Channel 2
Analog Reference Channel 2 Word 5 Analog Feedback Channel 2
Logic Command Channel 3 Word 6 Logic Status Channel 3
Analog Reference Channel 3 Word 7 Analog Feedback Channel 3
Channel 1 Datalink A1 Input Word 8 Channel 1 Datalink A1 Output
Channel 1 Datalink A2 Input Word 9 Channel 1 Datalink A2 Output
Channel 1 Datalink B1 Input Word 10 Channel 1 Datalink B1 Output
Channel 1 Datalink B2 Input Word 11 Channel 1 Datalink B2 Output
Channel 1 Datalink C1 Input Word 12 Channel 1 Datalink C1 Output
Channel 1 Datalink C2 Input Word 13 Channel 1 Datalink C2 Output
Channel 1 Datalink D1 Input Word 14 Channel 1 Datalink D1 Output
Channel 1 Datalink D2 Input Word 15 Channel 1 Datalink D2 Output
Channel 2 Datalink A1 Input Word 16 Channel 2 Datalink A1 Output
Channel 2 Datalink A2 Input Word 17 Channel 2 Datalink A2 Output
Channel 2 Datalink B1 Input Word 18 Channel 2 Datalink B1 Output
Channel 2 Datalink B2 Input Word 19 Channel 2 Datalink B2 Output
Channel 2 Datalink C1 Input Word 20 Channel 2 Datalink C1 Output
Channel 2 Datalink C2 Input Word 21 Channel 2 Datalink C2 Output
Channel 2 Datalink D1 Input Word 22 Channel 2 Datalink D1 Output
Channel 2 Datalink D2 Input Word 23 Channel 2 Datalink D2 Output
Channel 3 Datalink A1 Input Word 24 Channel 3 Datalink A1 Output
Channel 3 Datalink A2 Input Word 25 Channel 3 Datalink A2 Output
Channel 3 Datalink B1 Input Word 26 Channel 3 Datalink B1 Output
Channel 3 Datalink B2 Input Word 27 Channel 3 Datalink B2 Output
Channel 3 Datalink C1 Input Word 28 Channel 3 Datalink C1 Output
Channel 3 Datalink C2 Input Word 29 Channel 3 Datalink C2 Output
Channel 3 Datalink D1 Input Word 30 Channel 3 Datalink D1 Output
Channel 3 Datalink D2 Input Word 31 Channel 3 Datalink D2 Output
Input Image
Enhanced Mode Interface
The Channel Status and Message Status bits provide additional status
information pertaining to the validity of certain pieces of data. This
information includes the port that the particular channel is connected
to on the SCANport device, the state of the I/O data, and the status of
each message buffer.
Publication 1203–5.9 –– October 1996
Page 36

4–8 Using Enhanced Mode
These status fields are defined as follows:
Channel 2 Status
Bit
15 14 13 12 1 1
D2
C2 B2 A2 D1 C1 B1 A1
M0
STA
MSTAT
CH3
X
Message Status Ch 1–3
10 9 8 765432 1 0
V2 ID2 V1 ID1
MSTAT
CH2
MSTAT
CH1
D3 C3 B3 A3
These bits have the following definitions:
This: Represents the:
SCANport Channel 1, 2, or 3 Connected Adapter Port ID Number. This three
ID1
ID2
ID3
V1
V2
V3
A–D1(–3)
M0 STA
MSTAT
CH1–3
bit field contains the adapter port number that channel 1, 2, or 3 is connected
to on the SCANport device. ID1, ID2, and ID3 should be between 1 and 7. If
ID1, ID2, or ID3 is 7, the channel is not connected to the SCANport device, or
the SCANport device may not be powered.
SCANport Channel 1, 2, or 3 Valid Data bit. When high (1), the Logic Status
and Analog Feedback values are valid and can be used. When low (0), the
values are not valid.
SCANport Channel 1, 2, or 3 Datalink A–D Valid Data bit. When high (1),
the data associated Datalink A–D of the corresponding channel is valid and
can be used. When low (0), the values are not valid.
M0 File Status bit. When high (1), the SLC program can enable any
previously written M0 file message to the module. When low (0), the SLC to
SCANport module is either actively reading the last sent M0 file data changes,
or the SLC program has not loaded any M0 file data into the module. If any
changes are made to the M0 file message buffers, the SLC program should
check this status bit before enabling that message to be sent out any SCANport
channel.
Message Status bits for the message buffer of the corresponding channel.
These two bit fields contain the status of each of the message buffers. There is
one message response buffer for each channel. The first bit (word 1, bits 9,
11, and 13) contains the READY bit. The READY bit is active (high=1) when
a message request can be enabled to the SCANport device. The second bit
(word 1, bits 8, 10, and 12) contains the DONE bit. The DONE bit is active
(high=1) when an M1 file message buffer contains response data to a message
request. When both the READY and the DONE bits are 0, the buffer is in a
BUSY state. This is the state during which the module is actually requesting
the data from the SCANport device. These status bits should never be high at
the same time.
Channel 1 Status
V3 ID3
Channel 3 Status
Word 0
Word 1
Publication 1203–5.9 –– October 1996
Important: Do not enable messages while writing to the message
buffer.
The Channel Command bytes contain I/O Data Enable and Message
Enable bits that are used to activate I/O Data and Messages to a
SCANport device. These functions are independent; you can use
either function by itself or use both functions together.
Page 37

4–9Using Enhanced Mode
The eight unique message buffers in the M0 file can contain a
message for any of the three SCANport channels. You can select
which message buffer is to be used for each channel with the
corresponding MSG ID bits. This lets a message be written into a
buffer only once and used as many times as needed.
To transmit a message, the MSG ID bits are set to select the desired
buffer and a channel’s Message Enable bit is set to 1. When the
message status bits indicate the message is done, the response can be
read from the M1 message buffer area for the corresponding
SCANport channel used. When the Message Enable bit is
subsequently cleared to 0, the DONE status bit will be reset and the
READY bit set to allow for another message sequence.
The definition for the channel command output image is as follows:
Channel 2 Command
Bit
15 14 13 12 1 1
Not Used MSG ID
10 9 8 765432 1 0
ME
DE
2
Not Used MSG ID
2
Not Used MSG IDReserved
Channel 1 Command
ME
DE
1
1
DE
ME
3
3
Channel 3 Command
Word 0
Word 1
These bits have the following definitions:
This: Represents the:
SCANport Channel 1, 2, or 3 Data Enable bit. While low (0),
the channel is not transferring I/O data (including datalink data)
DE1
DE2
DE3
ME1
ME2
ME3
MSG
ID
between the connected SCANport device. When high (1), the
channel becomes active to the SCANport device and transfers
the appropriate I/O data. When cleared to low (0), the channel
disconnects from the SCANport device, which usually causes
the connected SCANport device to fault.
SCANport Channel 1, 2, or 3 Message Enable bit. When set
high (1), the message selected by the Message ID field is
transmitted through the appropriate channel to the SCANport
device. This bit should be held high during the duration of the
request until the status DONE bit is asserted (1). The clearing
(0) of this bit clears the DONE status and returns the message
status to the READY state.
Message Identifier field. This field allows for the selection of
one of the eight message buffers in the M0 file area for each
channel. Multiple channels can use the same message ID buffer
simultaneously.
Publication 1203–5.9 –– October 1996
Page 38

4–10 Using Enhanced Mode
atalin
ation
ld
tat
onfiguration
ation
ata
Configuring G Files
You can use G files to enable additional I/O (datalinks) between the
SCANport device and the SLC to SCANport module. G files also
hold the safe state values for the output data to be transferred to the
SCANport devices when it is switch–configured to use it. The G file
data is specified as follows: G=g–file, s=slot
Figure 4.8
G File Image
G File Image
Reserved Gs:0
Datalink Enables Gs:1
Logic Command Channel 1 Gs:2
Analog Reference Channel 1 Gs:3
Logic Command Channel 2 Gs:4
Analog Reference Channel 2 Gs:5
Logic Command Channel 3 Gs:6
Analog Reference Channel 3 Gs:7
Channel 1 Datalink A1 Input Gs:8
Channel 1 Datalink A2 Input Gs:9
Channel 1 Datalink B1 Input Gs:10
Channel 1 Datalink B2 Input Gs:11
Channel 1 Datalink C1 Input Gs:12
Channel 1 Datalink C2 Input Gs:13
Channel 1 Datalink D1 Input Gs:14
Channel 1 Datalink D2 Input Gs:15
Channel 2 Datalink A1 Input Gs:16
Channel 2 Datalink A2 Input Gs:17
Channel 2 Datalink B1 Input Gs:18
Channel 2 Datalink B2 Input Gs:19
Channel 2 Datalink C1 Input Gs:20
Channel 2 Datalink C2 Input Gs:21
Channel 2 Datalink D1 Input Gs:22
Channel 2 Datalink D2 Input Gs:23
Channel 3 Datalink A1 Input Gs:24
Channel 3 Datalink A2 Input Gs:25
Channel 3 Datalink B1 Input Gs:26
Channel 3 Datalink B2 Input Gs:27
Channel 3 Datalink C1 Input Gs:28
Channel 3 Datalink C2 Input Gs:29
Channel 3 Datalink D1 Input Gs:30
Channel 3 Datalink D2 Input Gs:31
Datalink
Configur
Fie
Safe
S
e
Configur
C
Data
Publication 1203–5.9 –– October 1996
Page 39

The G file datalink configuration field is defined as follows:
4–11Using Enhanced Mode
Bit
15 14 13 12 11 10 9 8 765432 1 0
EC
Not Used
ED
EB
EA
3
3
3
ED
3
2
EB
EA
2EC2
2
ED
EC
EB
1
1
1
EA
Gs.1
1
These bits have the following definitions:
This: Represents:
EA1
EA2
EA3
EB1
EB2
EB3
EC1
EC2
EC3
ED1
ED2
ED3
SCANport Channel 1, 2, or 3 Datalink A Enable bit. When set
high (1), datalink A is enabled for the corresponding channel.
Note: The datalink is only active while the channel’s Data
Enable bit is also set.
SCANport Channel 1, 2, or 3 Datalink B Enable bit. When set
high (1), datalink B is enabled for the corresponding channel.
Note: The datalink is only active while the channel’s Data
Enable bit is also set.
SCANport Channel 1, 2, or 3 Datalink C Enable bit. When set
high (1), datalink C is enabled for the corresponding channel.
Note: The datalink is only active while the channel’s Data
Enable bit is also set.
SCANport Channel 1, 2, or 3 Datalink D Enable bit. When set
high (1), datalink D is enabled for the corresponding channel.
Note: The datalink is only active while the channel’s Data
Enable bit is also set.
Using M Files
You may enable datalinks with or without providing safe state data.
You can configure G files that are between 2 and 32 words in length.
ATTENTION: Configure your safe state values based
on your knowledge of how the SCANport devices
!
connected on each channel operate. Refer to the
manual for your SCANport device for additional
information.
To transfer messages between the SLC processor and any of the
SCANport devices connected through the SLC to SCANport
module, you need to use M files. The SLC to SCANport module
uses M0 and M1 files. The M0 file is a module output file
(write–only), while the M1 file is a module input file (read–only).
Messages to the SCANport module from the SLC processor are sent
using the M0 file, while the M1 file contains the responses.
Publication 1203–5.9 –– October 1996
Page 40

4–12 Using Enhanced Mode
e = slot location
Message Buffer 0
Request Length = n
Req Data 2
Req Data n
The M0 file image contains multiple transmit message buffers set up
as shown in Figure 4.9.
Figure 4.9
M0 File Structure
Service
Class
Instance
Attribute
Req Data 1
...
M0:e.000
M0:e.001
M0:e.002
M0:e.003
M0:e.004
M0:e.005
M0:e.0xx
Message Buffer 4
Service
Class
Instance
Attribute
Request Length = n
Req Data 2
Req Data n
Req Data 1
...
M0:e.400
M0:e.401
M0:e.402
M0:e.403
M0:e.404
M0:e.405
M0:e.4xx
Message Buffer 1
Message Buffer 2
Message Buffer 3
Service
Class
Instance
Attribute
Request Length = n
Req Data 2
Req Data n
Service
Class
Instance
Attribute
Request Length = n
Req Data 2
Req Data n
Service
Class
Instance
Attribute
Request Length = n
Req Data 2
Req Data n
Req Data 1
...
Req Data 1
...
Req Data 1
...
M0:e.100
M0:e.101
M0:e.102
M0:e.103
M0:e.104
M0:e.105
M0:e.1xx
M0:e.200
M0:e.201
M0:e.202
M0:e.203
M0:e.204
M0:e.205
M0:e.2xx
M0:e.300
M0:e.301
M0:e.302
M0:e.303
M0:e.304
M0:e.305
M0:e.3xx
Message Buffer 5
Message Buffer 6
Message Buffer 7
Service
Class
Instance
Attribute
Request Length = n
Req Data 2
Req Data n
Service
Class
Instance
Attribute
Request Length = n
Req Data 2
Req Data n
Service
Class
Instance
Attribute
Request Length = n
Req Data 2
Req Data n
Req Data 1
...
Req Data 1
...
Req Data 1
...
M0:e.500
M0:e.501
M0:e.502
M0:e.503
M0:e.504
M0:e.505
M0:e.5xx
M0:e.600
M0:e.601
M0:e.602
M0:e.603
M0:e.604
M0:e.605
M0:e.6xx
M0:e.700
M0:e.701
M0:e.702
M0:e.703
M0:e.704
M0:e.705
M0:e.7xx
Publication 1203–5.9 –– October 1996
The M0 file contains eight separate buffer areas. Each area can be
used to send messages to any of the three channels. You need to
access a unique area of the M0 files for each message buffer used.
Individual message request status bits (located in Word 1 of the I/O
input image) are used to monitor the progress of each message
request enabled. The Message ID selection field and Message
Enable bits (located in Words 0 and 1 of the I/O output image)
initiate each message transaction and subsequently free the receive
buffer for the next message.
Page 41

Echo of G File Contents
and DIP Switch Read Out
e = slot location
The M1 file image contains the contents of the multi–position DIP
switch, an echo of the contents of the G file data, and three receive
message buffers as shown in Figure 4.10.
Figure 4.10
M1 File Structure
Reserved
Datalink Enables
Logic Command Channel 1
Analog Reference Channel 1
Logic Command Channel 2
Analog Reference Channel 2
Logic Command Channel 3
Analog Reference Channel 3
Channel 1 Datalink A1 In
Channel 1 Datalink A2 In
Channel 1 Datalink B1 In
Channel 1 Datalink B2 In
Channel 1 Datalink C1 In
Channel 1 Datalink C2 In
Channel 1 Datalink D1 In
Channel 1 Datalink D2 In
Channel 2 Datalink A1 In
Channel 2 Datalink A2 In
Channel 2 Datalink B1 In
Channel 2 Datalink B2 In
Channel 2 Datalink C1 In
Channel 2 Datalink C2 In
Channel 2 Datalink D1 In
Channel 2 Datalink D2 In
Channel 3 Datalink A1 In
Channel 3 Datalink A2 In
Channel 3 Datalink B1 In
Channel 3 Datalink B2 In
Channel 3 Datalink C1 In
Channel 3 Datalink C2 In
Channel 3 Datalink D1 In
Channel 3 Datalink D2 In
DIP SW
M1:e.000
M1:e.001
M1:e.002
M1:e.003
M1:e.004
M1:e.005
M1:e.006
M1:e.007
M1:e.008
M1:e.009
M1:e.010
M1:e.011
M1:e.012
M1:e.013
M1:e.014
M1:e.015
M1:e.016
M1:e.017
M1:e.018
M1:e.019
M1:e.020
M1:e.021
M1:e.022
M1:e.023
M1:e.024
M1:e.025
M1:e.026
M1:e.027
M1:e.028
M1:e.029
M1:e.030
M1:e.031
Channel 1
Receive Buffer
Channel 2
Receive Buffer
Channel 3
Receive Buffer
Service (echo or error)
Class (echo)
Instance (echo)
Attribute (echo)
Response Length = n
Resp Data 2
Resp Data n
Service (echo or error)
Response Length = n
Resp Data 2
Resp Data n
Service (echo or error)
Response Length = n
Resp Data 2
Resp Data n
Resp Data 1
Class (echo)
Instance (echo)
Attribute (echo)
Resp Data 1
Class (echo)
Instance (echo)
Attribute (echo)
Resp Data 1
4–13Using Enhanced Mode
M1:e.100
M1:e.101
M1:e.102
M1:e.103
M1:e.104
M1:e.105
...
...
...
M1:e.1xx
M1:e.200
M1:e.201
M1:e.202
M1:e.203
M1:e.204
M1:e.205
M1:e.2xx
M1:e.300
M1:e.301
M1:e.302
M1:e.303
M1:e.304
M1:e.305
M1:e.3xx
SCANport messages access data structures within the SCANport
device. These data structures are called objects. An object contains
information for a particular purpose. For example, a parameter
object can contain information such as parameter values, parameter
names, scaling information, and units.
Publication 1203–5.9 –– October 1996
Page 42

4–14 Using Enhanced Mode
This field: Specifies:
Service
Class
Instance
Attribute
Request
length
Figure 4.11 shows the first M0 message buffer structure.
Figure 4.11
SLC to SCANport Module M0 Buffer 0 Message Structure
M0:e.b00
M0:e.b01
M0:e.b02
M0:e.b03
M0:e.b04
M0:e.b05
M0:e.bxx
e = slot location
b = buffer 0–7
Header
Information
Service
Class
Instance
Attribute
Request Length = n
Req Data 2
Req Data n
Req Data 1
...
Where:
The action or service requested. The following service values are
available:
Enter this value: T o request this service:
0001H (1 decimal) Read Parameter Full/All Info
0005H (5 decimal) Reset to Default
000eH (14 decimal) Get Attribute Single
0010H (16 decimal) Set Attribute Single
0015H (21 decimal) Restore from Storage
0016H (22 decimal) Save to Storage
0032H (50 decimal) Get Attribute Scattered
0034H (52 decimal) Set Attribute Scattered
004bH (75 decimal) Read Enum String
➀
Not all SCANport devices support these services.
For example, if you enter a service value of 0001H (1 decimal), you
are requesting that the SCANport device provide all available
information about a particular object. A service value of 000eH is a
request for only one piece of information about a particular object.
The type of object to access within the SCANport device. The class
is the first index into the SCANport device’s database. It directs the
message to the desired functional database. For example, a class
value of 000fH (15 decimal) indicates that the message is intended to
access the parameter database.
A particular occurrence of an object in the SCANport device. The
instance provides an index into the referenced functional database.
For example, when accessing the parameter database, the instance
value is the parameter number. If you want to access information
about all instances of the object, specify an instance of 0.
A specific piece of information about an object. Values are always
less than 256. For example, in a parameter object, an attribute value
of 0001H (1 decimal) indicates that the message is accessing the
parameter value. An attribute value of 0007H (7 decimal) indicates
that the message is accessing the parameter name text string.
The length, in bytes, in this request. This value is normally less than
or equal to 96 bytes. However, Get/Set Attribute Scattered messages
can be longer.
➀
➀
➀
➀
Publication 1203–5.9 –– October 1996
Page 43

This field: Specifies:
The actual data portion of the request message. Up to a maximum of
Req Data
96 bytes of message data is available. This field is optional
depending on the type of message sent.
The response from the SCANport device appears in the message
buffer of the channel used (Channel 1 = M1:e.100–199, Channel 2 =
M1:e.200–299, Channel 3 = M1:e.300–399).
Figure 4.12 shows the structure of the message response buffers
inside the SLC M1 file.
Figure 4.12
M1 File Message Response Buffer Structures
M0:e.b00
M0:e.b01
M0:e.b02
M0:e.b03
M0:e.b04
M0:e.b05
M0:e.bxx
Header
Information
Service (error or echo)
Class (echo)
Instance (echo)
Attribute (echo)
Response Length = n
Resp Data 2
Resp Data n
Resp Data 1
...
4–15Using Enhanced Mode
e = slot location
b = buffer 0–7
Where:
This field: Contains:
The same value as the service field of the request message if the
message transaction was successful. If an error occurred, the service
Service
will be 0014H (20 decimal) and additional error information will be
placed in the response data field.
The error codes are provided at the end of this appendix.
Class
Instance
Attribute
Response
Length
Resp
➀
Data
The same value that was used for the class field in the request
message.
The same value that was used for the instance field in the request
massage.
The same value that was used for the attribute field in the request
message.
The amount of data, in bytes, in this response. Most messages
contain 96 or fewer bytes of data. However, Get/Set Attribute
➀
Scattered messages can be longer.
The actual data portion of this response. This field varies in length
depending on the message. If an error occurred, this field contains
the SCANport error code.
➀
The size of the returned packets determines the response length.
Some SCANport devices may return lengths greater than the actual
amount of data in the response. These products always return a
length which is a multiple of six. For example, a 1336 PLUS drive
may reply to a Read Number of Parameters message with a length of
six in the response. The first two bytes contain the complete
response data. The extra data bytes should be ignored.
Publication 1203–5.9 –– October 1996
Page 44

4–16 Using Enhanced Mode
Examples of Enhanced Mode Data Transfer
The following examples are portions of the same program that is
used to transfer data using the enhanced mode mechanism.
Figure 4.13 shows an example configuration of the G file for the
SLC to SCANport module. The Advanced Programming Software
(APS) sets the first word; do not modify this word. Each bit in the
second word enables a datalink. Refer to the manual for your
SCANport device for more information about datalinks.
Each additional word in the G file contains safe state data. This is
the data that is sent to the attached SCANport device(s) if the SLC to
SCANport module DIP switch is configured to use safe state data
and the SLC becomes faulted or is changed to program mode.
Publication 1203–5.9 –– October 1996
Page 45

Figure 4.13
Example G File Configuration
address 15 data 0
G1:0 0000 0000 0000 0000 Reserved (Used by SLC)
G1:1 0000 0000 0000 0000 Datalink Enables
|||| |||| |||| ||||
++++ |||| |||| |||+––– Channel 1 Datalink A Enable
| |||| |||| ||+–––– Channel 1 Datalink B Enable
| |||| |||| |+––––– Channel 1 Datalink C Enable
| |||| |||| +–––––– Channel 1 Datalink D Enable
| |||| ||||
| |||| |||+–––––––– Channel 2 Datalink A Enable
| |||| ||+––––––––– Channel 2 Datalink B Enable
| |||| |+–––––––––– Channel 2 Datalink C Enable
| |||| +––––––––––– Channel 2 Datalink D Enable
| ||||
| |||+––––––––––––– Channel 3 Datalink A Enable
| ||+–––––––––––––– Channel 3 Datalink B Enable
| |+––––––––––––––– Channel 3 Datalink C Enable
| +–––––––––––––––– Channel 3 Datalink D Enable
|
+––––––––––––––––––– Not Used
4–17Using Enhanced Mode
G1:2 0000 0000 0000 0000 Safe State Data – Channel 1 Logic Command
G1:3 0000 0000 0000 0000 Safe State Data – Channel 1 Reference
G1:4 0000 0000 0000 0000 Safe State Data – Channel 2 Logic Command
G1:5 0000 0000 0000 0000 Safe State Data – Channel 2 Reference
G1:6 0000 0000 0000 0000 Safe State Data – Channel 3 Logic Command
G1:7 0000 0000 0000 0000 Safe State Data – Channel 3 Reference
G1:8 0000 0000 0000 0000 Safe State Data – Channel 1 Datalink A1
G1:9 0000 0000 0000 0000 Safe State Data – Channel 1 Datalink A2
G1:10 0000 0000 0000 0000 Safe State Data – Channel 1 Datalink B1
G1:11 0000 0000 0000 0000 Safe State Data – Channel 1 Datalink B2
G1:12 0000 0000 0000 0000 Safe State Data – Channel 1 Datalink C1
G1:13 0000 0000 0000 0000 Safe State Data – Channel 1 Datalink C2
G1:14 0000 0000 0000 0000 Safe State Data – Channel 1 Datalink D1
G1:15 0000 0000 0000 0000 Safe State Data – Channel 1 Datalink D2
G1:16 0000 0000 0000 0000 Safe State Data – Channel 2 Datalink A1
G1:17 0000 0000 0000 0000 Safe State Data – Channel 2 Datalink A2
G1:18 0000 0000 0000 0000 Safe State Data – Channel 2 Datalink B1
G1:19 0000 0000 0000 0000 Safe State Data – Channel 2 Datalink B2
G1:20 0000 0000 0000 0000 Safe State Data – Channel 2 Datalink C1
G1:21 0000 0000 0000 0000 Safe State Data – Channel 2 Datalink C2
G1:22 0000 0000 0000 0000 Safe State Data – Channel 2 Datalink D1
G1:23 0000 0000 0000 0000 Safe State Data – Channel 2 Datalink D2
G1:24 0000 0000 0000 0000 Safe State Data – Channel 3 Datalink A1
G1:25 0000 0000 0000 0000 Safe State Data – Channel 3 Datalink A2
G1:26 0000 0000 0000 0000 Safe State Data – Channel 3 Datalink B1
G1:27 0000 0000 0000 0000 Safe State Data – Channel 3 Datalink B2
G1:28 0000 0000 0000 0000 Safe State Data – Channel 3 Datalink C1
G1:29 0000 0000 0000 0000 Safe State Data – Channel 3 Datalink C2
G1:30 0000 0000 0000 0000 Safe State Data – Channel 3 Datalink D1
G1:31 0000 0000 0000 0000 Safe State Data – Channel 3 Datalink D2
Publication 1203–5.9 –– October 1996
Page 46

4–18 Using Enhanced Mode
| Channel 1 |
| SCANport |
| Enable |
| O:1.0 |
|–––––––––––––––––––––––––––––––––––––––––––––––––––––––––( )––––––|
| | 0 | |
| |Channel 2 | |
| |SCANport | |
| |Enable | |
| | O:1.0 | |
| +–––( )––––| |
| | 8 | |
| |Channel 3 | |
| |SCANport | |
| |Enable | |
| | O:1.1 | |
| +–––( )––––+ |
| 0 |
Figure 4.14 shows a portion of the program that enables all three
SCANport channels on the SLC to SCANport module.
Figure 4.14
Example of Enabling the SCANport channels
Publication 1203–5.9 –– October 1996
Page 47

4–19Using Enhanced Mode
The portion of the program shown in Figure 4.15 provides start/stop
control and a frequency reference to the 1305 drive connected to
SCANport channel 1. The user start is a normally open push button,
while the user stop is a normally closed push button.
Figure 4.15
Example of Drive 1 Control and Reference
| Drive 1 Drive 1 Drive 1 |
| User User START |
| Momentary Maintained Command |
| START NOT STOP Bit |
| Input Input |
| I:2.0 I:2.0 O:1.2 |
|–––––] [–––––––––––––––––––] [––––––––––––––––––––––––––––( )–––––|
| | 0 | 1 1 |
| |Drive 1 |Drive 1 | |
| |START |RUNNING | |
| |Command |Status | |
| |Bit |Bit | |
| | O:1.2 I:1.2 | |
| +–––] [––––––––]/[––––+ |
| 1 1 |
| Drive 1 Drive 1 |
| User STOP |
| Maintained Command |
| NOT STOP Bit |
| Input |
| I:2.0 O:1.2 |
|–––––]/[––––––––––––––––––––––––––––––––––––––––––––––––––( )–––––|
| | 1 | 0 |
| |Drive 1 |Drive 1 | |
| |STOP |RUNNING | |
| |Command |Status | |
| |Bit |Bit | |
| | O:1.2 I:1.2 | |
| +–––] [––––––––] [––––+ |
| 0 1 |
| Drive 1 |
| Frequency |
| Reference |
| +MOV–––––––––––––––+ |
|–––––––––––––––––––––––––––––––––––––––––––––|MOVE +–|
| |Source N20:0| |
| | 0| |
| |Dest O:1.3| |
| | 0| |
| +––––––––––––––––––+ |
Publication 1203–5.9 –– October 1996
Page 48

4–20 Using Enhanced Mode
| Drive 2 Drive 2 Drive 2 |
| User User START |
| Momentary Maintained Command |
| START NOT STOP Bit |
| Input Input |
| I:2.0 I:2.0 O:1.4 |
|–––––] [–––––––––––––––––––] [––––––––––––––––––––––––––––( )–––––|
| | 2 | 3 1 |
| |Drive 2 |Drive 2 | |
| |START |RUNNING | |
| |Command |Status | |
| |Bit |Bit | |
| | O:1.4 I:1.4 | |
| +–––] [––––––––]/[––––+ |
| 1 1 |
| Drive 2 Drive 2 |
| User STOP |
| Maintained Command |
| NOT STOP Bit |
| Input |
| I:2.0 O:1.4 |
|–––––]/[––––––––––––––––––––––––––––––––––––––––––––––––––( )–––––|
| | 3 | 0 |
| |Drive 2 |Drive 2 | |
| |STOP |RUNNING | |
| |Command |Status | |
| |Bit |Bit | |
| | O:1.4 I:1.4 | |
| +–––] [––––––––] [––––+ |
| 0 1 |
| Drive 2 |
| Frequency |
| Reference |
| +MOV–––––––––––––––+ |
|–––––––––––––––––––––––––––––––––––––––––––––|MOVE +–|
| |Source N20:1| |
| | 0| |
| |Dest O:1.5| |
| | 0| |
| +––––––––––––––––––+ |
The portion of the program shown in Figure 4.16 provides start/stop
control and a frequency reference to the 1305 drive connected to
SCANport channel 2. This section functions the same as that shown
in Figure 4.15 except for the changes in addresses.
Figure 4.16
Example of Drive 2 Control and Reference
Publication 1203–5.9 –– October 1996
Page 49

4–21Using Enhanced Mode
The portion of the program shown in Figure 4.17 provides start/stop
control and a frequency reference to the 1305 drive connected to
SCANport channel 3. This section functions the same as that shown
in Figure 4.15 and Figure 4.16 except for the changes in address.
Figure 4.17
Example of Drive 3 Control and Reference
| Drive 3 Drive 3 Drive 3 |
| User User START |
| Momentary Maintained Command |
| START NOT STOP Bit |
| Input Input |
| I:2.0 I:2.0 O:1.6 |
|–––––] [–––––––––––––––––––] [––––––––––––––––––––––––––––( )–––––|
| | 4 | 5 1 |
| |Drive 3 |Drive 3 | |
| |START |RUNNING | |
| |Command |Status | |
| |Bit |Bit | |
| | O:1.6 I:1.6 | |
| +–––] [––––––––]/[––––+ |
| 1 1 |
| Drive 3 Drive 3 |
| User STOP |
| Maintained Command |
| NOT STOP Bit |
| Input |
| I:2.0 O:1.6 |
|–––––]/[––––––––––––––––––––––––––––––––––––––––––––––––––( )–––––|
| | 5 | 0 |
| |Drive 3 |Drive 3 | |
| |STOP |RUNNING | |
| |Command |Status | |
| |Bit |Bit | |
| | O:1.6 I:1.6 | |
| +–––] [––––––––] [––––+ |
| 0 1 |
| Drive 3 |
| Frequency |
| Reference |
| +MOV–––––––––––––––+ |
|–––––––––––––––––––––––––––––––––––––––––––––|MOVE +–|
| |Source N20:2| |
| | 0| |
| |Dest O:1.7| |
| | 0| |
| +––––––––––––––––––+ |
Publication 1203–5.9 –– October 1996
Page 50

4–22 Using Enhanced Mode
The following data table shows the input data read from the SLC to
SCANport module via the SLC backplane.
address 15 data 0
I:1 0000 0000 0000 0000 SCANport Channels 1 & 2 Channel Status
I:1.1 0000 0000 0000 0000 SCANport Channel 3 Channel Status
I:1.2 0000 0000 0000 0000 SCANport Channel 1 Logic Status
I:1.3 0000 0000 0000 0000 SCANport Channel 1 Feedback
I:1.4 0000 0000 0000 0000 SCANport Channel 2 Logic Status
I:1.5 0000 0000 0000 0000 SCANport Channel 2 Feedback
I:1.6 0000 0000 0000 0000 SCANport Channel 3 Logic Status
I:1.7 0000 0000 0000 0000 SCANport Channel 3 Feedback
I:1.8 0000 0000 0000 0000 SCANport Channel 1 Datalink A1 Out
I:1.9 0000 0000 0000 0000 SCANport Channel 1 Datalink A2 Out
I:1.10 0000 0000 0000 0000 SCANport Channel 1 Datalink B1 Out
I:1.11 0000 0000 0000 0000 SCANport Channel 1 Datalink B2 Out
I:1.12 0000 0000 0000 0000 SCANport Channel 1 Datalink C1 Out
I:1.13 0000 0000 0000 0000 SCANport Channel 1 Datalink C2 Out
I:1.14 0000 0000 0000 0000 SCANport Channel 1 Datalink D1 Out
I:1.15 0000 0000 0000 0000 SCANport Channel 1 Datalink D2 Out
I:1.16 0000 0000 0000 0000 SCANport Channel 2 Datalink A1 Out
I:1.17 0000 0000 0000 0000 SCANport Channel 2 Datalink A2 Out
I:1.18 0000 0000 0000 0000 SCANport Channel 2 Datalink B1 Out
I:1.19 0000 0000 0000 0000 SCANport Channel 2 Datalink B2 Out
I:1.20 0000 0000 0000 0000 SCANport Channel 2 Datalink C1 Out
I:1.21 0000 0000 0000 0000 SCANport Channel 2 Datalink C2 Out
I:1.22 0000 0000 0000 0000 SCANport Channel 2 Datalink D1 Out
I:1.23 0000 0000 0000 0000 SCANport Channel 2 Datalink D2 Out
I:1.24 0000 0000 0000 0000 SCANport Channel 3 Datalink A1 Out
I:1.25 0000 0000 0000 0000 SCANport Channel 3 Datalink A2 Out
I:1.26 0000 0000 0000 0000 SCANport Channel 3 Datalink B1 Out
I:1.27 0000 0000 0000 0000 SCANport Channel 3 Datalink B2 Out
I:1.28 0000 0000 0000 0000 SCANport Channel 3 Datalink C1 Out
I:1.29 0000 0000 0000 0000 SCANport Channel 3 Datalink C2 Out
I:1.30 0000 0000 0000 0000 SCANport Channel 3 Datalink D1 Out
I:1.31 0000 0000 0000 0000 SCANport Channel 3 Datalink D2 Out
Publication 1203–5.9 –– October 1996
Page 51

4–23Using Enhanced Mode
The following data table shows the data to be sent to the SLC to
SCANport module via the SLC backplane.
address 15 data 0
O:1 0000 0000 0000 0000 SCANport Channels 1 & 2 Channel Command
O:1.1 0000 0000 0000 0000 SCANport Channel 3 Channel Command
O:1.2 0000 0000 0000 0000 SCANport Channel 1 Logic Command
O:1.3 0000 0000 0000 0000 SCANport Channel 1 Reference
O:1.4 0000 0000 0000 0000 SCANport Channel 2 Logic Command
O:1.5 0000 0000 0000 0000 SCANport Channel 2 Reference
O:1.6 0000 0000 0000 0000 SCANport Channel 3 Logic Command
O:1.7 0000 0000 0000 0000 SCANport Channel 3 Reference
O:1.8 0000 0000 0000 0000 SCANport Channel 1 Datalink A1 In
O:1.9 0000 0000 0000 0000 SCANport Channel 1 Datalink A2 In
O:1.10 0000 0000 0000 0000 SCANport Channel 1 Datalink B1 In
O:1.11 0000 0000 0000 0000 SCANport Channel 1 Datalink B2 In
O:1.12 0000 0000 0000 0000 SCANport Channel 1 Datalink C1 In
O:1.13 0000 0000 0000 0000 SCANport Channel 1 Datalink C2 In
O:1.14 0000 0000 0000 0000 SCANport Channel 1 Datalink D1 In
O:1.15 0000 0000 0000 0000 SCANport Channel 1 Datalink D2 In
O:1.16 0000 0000 0000 0000 SCANport Channel 2 Datalink A1 In
O:1.17 0000 0000 0000 0000 SCANport Channel 2 Datalink A2 In
O:1.18 0000 0000 0000 0000 SCANport Channel 2 Datalink B1 In
O:1.19 0000 0000 0000 0000 SCANport Channel 2 Datalink B2 In
O:1.20 0000 0000 0000 0000 SCANport Channel 2 Datalink C1 In
O:1.21 0000 0000 0000 0000 SCANport Channel 2 Datalink C2 In
O:1.22 0000 0000 0000 0000 SCANport Channel 2 Datalink D1 In
O:1.23 0000 0000 0000 0000 SCANport Channel 2 Datalink D2 In
O:1.24 0000 0000 0000 0000 SCANport Channel 3 Datalink A1 In
O:1.25 0000 0000 0000 0000 SCANport Channel 3 Datalink A2 In
O:1.26 0000 0000 0000 0000 SCANport Channel 3 Datalink B1 In
O:1.27 0000 0000 0000 0000 SCANport Channel 3 Datalink B2 In
O:1.28 0000 0000 0000 0000 SCANport Channel 3 Datalink C1 In
O:1.29 0000 0000 0000 0000 SCANport Channel 3 Datalink C2 In
O:1.30 0000 0000 0000 0000 SCANport Channel 3 Datalink D1 In
O:1.31 0000 0000 0000 0000 SCANport Channel 3 Datalink D2 In
Datalinks
A simple datalink application on a 1336 PLUS drive is to set a
parameter number into one of the Data In parameters. The SLC
output image word for that datalink will then control the value of that
parameter.
Publication 1203–5.9 –– October 1996
Page 52

4–24 Using Enhanced Mode
For example, on a 1336 PLUS drive connected to channel 1 of an
SLC to SCANport module installed in slot 1, use datalink A1 to
control the value of parameter 27. To do this, you need to:
1. Set the lowest bit of the second word of the G file to a 1. This
enables Datalink A on channel 1).
2. Use a Human Interface Module (HIM) to set parameter 111 (Data
In A1) to 27.
The value in O:1.8 now controls the value of parameter 27 in the
1336 PLUS drive.
A similar datalink application is to set a parameter number into one
of the Data Out parameters. The value of that parameter is then
displayed in the SLC input image word for that parameter.
For example, on a 1336 PLUS drive connected to channel 1 of a SLC
to SCANport module installed in slot 1, use Datalink A1 to monitor
the value of parameter 27. To do this, you need to:
1. Set the lowest bit of the second word of the G file to a 1. This
enables Datalink A on channel 1).
2. Use a Human Interface Module (HIM) to set parameter 119 (Data
Out A1) to 27.
The value in I:1.8 now monitors the value of parameter 27 in the
1336 PLUS drive.
ATTENTION: If you are using a 1336 FORCE or
1336 IMPACT, the datalink operations work
!
differently. In these products, you need to link other
parameters to the datalink parameters rather than
program an index value. Refer to your user manual for
these SCANport devices for information on creating
links.
Publication 1203–5.9 –– October 1996
Page 53

Troubleshooting
Chapter
5
Chapter Objectives
LED States
LED State Description Suggested action
Off No module power The rack is not receiving power.
Solid
Red
Flashing
Red
Solid
Green
Flashing
Green
Solid
Orange
Channel connection
or power problem
Channel
communication
problem
Channel operational
Channel not enabled
for I/O operations
Connected device
problem
Chapter 5 provides information about the LED states.
The following table provides information about the LED states.
Check the power supply
connections to the rack.
1 Check to make sure that power is
applied to the SCANport device.
The SCANport connection is not
operational, or the SCANport
device is not powered
The module cannot maintain or
establish communications with the
SCANport device.
I/O signals are being passed
between the module and the
SCANport device.
The enable bit for the channel has
not been set. Only messaging
operations are functional.
SCANport device incompatibility. Consult the factory.
2 Check the cable connections.
3 Change the SCANport cable.
4 Try using another channel.
5 Replace either the SLC to
SCANport module or the
SCANport device.
1 Verify the configuration.
2 Remove the SCANport cable.
3 Re–insert the SCANport cable
into the channel to reset the
condition.
None
Program the controller to set the
data enable bit for the appropriate
channel for I/O operation.
Publication 1203–5.9 –– October 1996
Page 54

5–2 Troubleshooting
Publication 1203–5.9 –– October 1996
Page 55

Specifications
Chapter
6
Chapter Objectives
Product Specifications
Operating temperature
Storage temperature
Relative humidity 5 – 95% non–condensing
Shock and vibration
Power consumption
ESD susceptibility IEC 801–2 to Level 3 (4KV contact, 8KV open air)
Regulatory agencies UL 508C and CUL
Chapter 6 provides the specifications that you may need to install,
repair, or use your SLC to SCANport communications module.
The following are the product specifications.
This category: Has these specifications
0 – +60°C (+32 – +140°F)
–40 – +85°C (–104 – +185°F)
Category I – less than 9 kilograms (20 pounds) per A–B
guidelines
300 mA@5V –– SLC Backplane
60 mA@12V –– SCANport load (from each channel)
Publication 1203–5.9 –– October 1996
Page 56

6–2 Specifications
European Union Directive Compliance
If this product is installed within the European Union or EEA
regions and has the CE mark, the following regulations apply.
EMC Directive
This apparatus is tested to meet Council Directive 89/336/EEC
Electromagnetic Compatibility (EMC) using a technical construction
file and the following standards, in whole or in part:
• EN 50081–2 EMC––Generic Emission Standard, Part 2
––Industrial Environment
• EN 50082–2 EMC––Generic Immunity Standard, Part 2
––Industrial Environment
The product described in this manual is intended for use in an
industrial environment.
Low Voltage Directive
This apparatus is also designed to meet Council Directive 73/23/EEC
Low Voltage, by applying the safety requirements of EN61131–2
Programmable Controllers, Part 2––Equipment Requirements and
Tests.
For specific information that the above norm requires, see the
appropriate sections in this manual, as well as the following
Allen–Bradley publications:
• Industrial Automation Wiring and Grounding Guidelines,
publication 1770–4.11
• Guidelines for Handling Lithium Batteries, publication AG–5.4
• Automation Systems Catalog, publication B111
Publication 1203–5.9 –– October 1996
Page 57

Appendix Objectives
M0–M1 Files
"
Appendix
A
This appendix provides information about M0–M1 files and G files.
The information is general in nature and supplements specific
information contained in earlier chapters of this manual. Topics
include:
• M0–M1 files
• G files
The SLC to SCANport module is considered to be a specialty I/O
module.
M0 and M1 files are data files that reside only in specialty I/O
modules, such as the SLC to SCANport module. There is no image
for these files in the processor memory. The application of these
files depends on the function of the particular specialty I/O module.
The M0 file is a module output file (a write only file), and the M1
file is a module input file (a read only file).
M0 and M1 files can be addressed in your ladder program and they
can also be acted upon by the specialty I/O module, independent of
the processor scan. Keep the following in mind when creating and
applying your ladder logic.
Important: During the processor scan, the ladder program can
address M0 and M1 data with bit, word, or file
instructions. Each time an M0–M1 file address is
encountered in the program, an immediate data transfer
to or from the specialty I/O module occurs. The impact
these immediate data transfers have on processor scan
time is described in appendix A of the Advanced
Programming Software User Manual, Publication
Number 1747–6.4.
Configuring M0–M1 Files Using APS Software
M0 and M1 files are configured as part of the I/O configuration
procedure for the processor file. After you have assigned the
specialty I/O module to a slot (the procedure is the same as assigning
other modules), the following functions are displayed at the bottom
of the APS screen:
READ
CONFIG
F1
ONLINE
CONFIG
F2
MODIFY
RACK
F4
MODIFY
SLOT
F5
DELETE
SLOT
F6
UNDEL
SLOT
F7
Publication 1203–5.9 –– October 1996
EXIT
F8
SPIO
CONFIG
F9
Page 58

M0, M1, and G FilesA–2
To configure the M0 and M1 files:
1. Press F9 for Specialty I/O Configuration. The following
functions are displayed.
ISR
NUMBER
F1
MODIFY
G FILE
F3
ADVNCD
SETUP
F5
2. Press F5 for Advanced Setup. The following functions are
displayed:
INPUT
SIZE
F1
OUTPUT
SIZE
F2
SCANNED
INPUT
F3
SCANNED
OUTPUT
F4
M0 FILE
SIZE
F5
3. Press F5 for M0 File Size.
4. Enter the number of M0 file words required (the required number
is listed in the user manual for the specific specialty I/O module).
For the SLC to SCANport module, enter 800.
5. Press F6 for M1 File Size.
6. Enter the number of M1 file words required (the required number
is listed in the user manual for the specific specialty module). For
the SLC to SCANport module, enter 400.
The specialty I/O module may require that you also configure the G
file and specify an ISR (interrupt subroutine) number. The SLC to
SCANport module requires you to configure the G file; you do not
need to specify an ISR number. These tasks are accomplished with
function keys F1, F3, and F7 shown in step 1. G files are covered
later in this appendix.
G FILE
SIZE
F7
M1 FILE
SIZE
F6
Publication 1203–5.9 –– October 1996
Addressing M0–M1 Files
M0 and M1 files use the following address format:
Mf:e.s/b
Where M = module
f = file type (0 or 1)
e = slot (1–30)
s = word (0 to maximum supplied by module)
b = bit (0–15)
Page 59

M0, M1, and G Files A–3
Restrictions on Using M0–M1 Data File Addresses
You can use M0 and M1 data file addresses in all instructions except
the OSR instruction and the following instruction parameters:
Instruction Parameter (uses file indicator #)
BSL, BSR File (bit array)
SQO, SQC, SQL File (sequencer file)
LFL, LFU LIFO (stack)
FFL, FFU FIFO (stack)
Monitoring Bit Addresses
For SLC 5/02 processors, the M0/M1 monitoring option is always
disabled. (This processor does not let you monitor the actual state of
each addressed M0/M1 address.) For SLC 5/03 and SLC 5/04
processors, you can choose to disable or enable the monitoring
option by selecting F6, System Config, from the APS main menu.
M0/M1 Monitoring Option Disabled
When you monitor a ladder program in the Run or Test mode with
the M0/M1 monitoring option disabled, the following bit
instructions, addressed to an M0 or M1 file, are indicated as false
regardless of their actual true/false logical state.
Mf:e.s Mf:e.s Mf:e.s Mf:e.s Mf:e.s
–––] [–– –––]/[–– –––( )–– ––(L)–– –––(U)––
b b b b b
f= file (0 or 1)
When you are monitoring the ladder program in the Run or Test mode, the
APS or HHT display does not show these instructions as being true when
the processor evaluates them as true.
Publication 1203–5.9 –– October 1996
Page 60

M0, M1, and G FilesA–4
If you need to show the state of the M0 or M1 addressed bit, you can
transfer the state to an internal processor bit. This is shown below,
where an internal processor bit is used to indicate the true/false state
of a rung.
B3
B3
B3
] [] [
01
This rung will not show its true rung state because the EQU instruction
is always shown as true and the M0 instruction is always shown as false.
B3
] [] [
01
OTE instruction B3/2 has been added to the rung. This instruction shows
the true or false state of the rung.
EQU
EQUAL
Source A N7:12
Source B N7:3
EQU
EQUAL
Source A N7:12
Source B N7:3
M0:3.0
( )
B3
( )
M0:3.0
( )
1
2
1
M0/M1 Monitoring Option Enabled
Important: The SLC 5/02 processor does not support this option.
The SLC 5/03 and SLC 5/04 processors let you monitor the actual
state of each addressed M0/M1 address (or data table). The
highlighting appears normal when compared to the other processor
data files. The processor’s performance is degraded to the degree of
M0/M1 referenced screen data. For example, if your screen has only
one M0/M1 element, degradation is minimal. If your screen has 69
M0/M1 elements, degradation is significant.
Publication 1203–5.9 –– October 1996
Transferring Data Between Processor Files and M0 and M1 Files
The processor does not contain an image of the M0 or M1 file. As a
result, you must edit and monitor M0 and M1 file data via
instructions in your ladder program. For example, you can copy a
block of data from a processor data file to an M0 or M1 data file or
vice versa using the COP instruction in your ladder program.
Page 61

M0, M1, and G Files A–5
The following COP instructions copy data from a processor bit file
and integer file to an M0 file. For the example, assume the data is
configuration information that affects how the specialty I/O module
operates.
First scan bit. It makes this
rung true only for the first
scan after entering RUN mode.
S:1
] [
15
COP
Copy FILE
Source #B3:0
Dest #M0:1.0
Length 16
COP
Copy FILE
Source #N7:0
Dest #M0:1.16
Length 27
The following COP instruction copies data from an M1 data file to
an integer file. This technique is used to monitor the contents of an
M0 or M1 data file indirectly, in a processor data file.
COP
Copy FILE
Source #M1:4.3
Dest #N10:0
Length 6
Access Time
During the program scan, the processor must access the specialty I/O
card to read/write M0 or M1 data. You need to add this access time
to the execution time of each instruction referencing M0 or M1 data.
For the SLC 5/03 and SLC 5/04 processors, the instruction types
vary in their execution times.
Publication 1203–5.9 –– October 1996
Page 62

M0, M1, and G FilesA–6
All
The following table shows approximate access times per instruction
or word of data for the SLC 5/02, SLC 5/03, and SLC 5/04
processors.
Processor Instruction Type
SLC 5/02 Series B
SLC 5/02 Series C
SLC 5/03 (
Series)
SLC 5/04 OS400
SLC 5/04 OS400
➀
All types
➀
All types
XIC or XIO
OTU, OTE, or OTL
COP to M file ––
COP from M file ––
FLL
MVM to M file
any source or destination M file address
XIC or XIO
OTU, OTE, or OTL
COP to M file ––
COP from M file
FLL
MVM to M file
any source or destination M file address
➀
Except the OSR instruction and the instruction parameters noted on
page A–3.
Access Time per Bit
Instruction or Word
of Data
1930 µs 1580 µs plus 670 µs per word
1160 µs 950 µs plus 400 µs per word
782 µs
925 µs
––
894 µs
730 µs
743 µs
879 µs
––
––
850 µs
694 µs
Access Time per Multi–Word
Instruction
––
––
772 µs plus 23 µs per word
760 µs plus 22 µs per word
753 µs plus 30 µs per word
––
––
––
––
735 µs plus 23 µs per word
722 µs plus 22 µs per word
716 µs plus 30 µs per word
––
––
SLC 5/02 Processor Example
M0:2.1 M1:3.1 M0:2.1
–––] [–– –––]/[–– –––( )––
1 1 10
If you are using an SLC 5/02 Series B processor, add 1930 µs to the
program scan time for each bit instruction addressed to an M0 or M1
data file. If you are using an SLC 5/03 Series C processor, add 1160
µs.
COP
Copy FILE
Source #B3:0
Dest #M:1.0
Length 34
If you are using an SLC 5/02 Series B processor, add 1580 µs plus
670 µs per word of data addressed to the M0 or M1 file. As shown
above, 34 words are copied from #B3:0 to M0:1.0. Therefore, this
adds 24360 µs to the scan time of the COP instruction. If you are
using an SLC 5/02 Series C processor, add 950 µs plus 400 µs per
word. This adds 14550 µs to the scan time of the COP instruction.
Publication 1203–5.9 –– October 1996
Page 63

M0, M1, and G Files A–7
SLC 5/03 Processor Example
The SLC 5/03 access times depend on the instruction type. Consult
the previous table for the correct access times to add. As an
example, if you use a COP to M file instruction like the one shown,
add 772 µs plus 23 µs per word. This adds 1554 µs to the SLC 5/03
scan time due to the COP instruction.
Minimizing the Scan Time
To keep the processor scan time to a minimum, reduce the use of
instructions addressing the M0 or M1 files. For example, XIC
instruction M0:2.1/1 is used in rungs 1 and 2 of the following
example, adding approximately 2 ms to the scan time if you are
using a SLC 5/02 Series B processor.
1
2
M0:2.1
] [
B3
] [
1
12
M0:2.1
] [
1
B3
B3
( )
( )
10
14
XIC instructions in rungs 1 and 2 are addressed to the M0 data file. Each
of these instructions adds approximately 1 ms to the scan time (SLC 5/02
Series B Processor).
In the equivalent rungs shown below, XIC instruction M0:2.1/1 is
used only in rung 1, reducing the SLC 5/02 scan time by
approximately 1 ms.
1
2
M0:2.1
] [
B3
] [
1
12
B3
] [
10
These rungs provide equivalent operation to those of figure A by substituting
XIC instruction B3/10 for XIC instruction M0:2.1/1 in rung 2. Scan time is
reduced by approximately 1 ms (Series B processor).
B3
B3
( )
( )
10
14
Publication 1203–5.9 –– October 1996
Page 64

M0, M1, and G FilesA–8
The following figure shows another economizing technique. The
COP instruction addresses an M1 file, adding approximately 4.29 ms
to the scan time if you are using a SLC 5/02 Series B processor.
Scan time economy is realized by making this rung true only
periodically, as determined by clock bit S:4/8. (Clock bits are
covered in chapter 1 of the Advanced Programming Software
Reference Manual, Publication 1747–6.11.) A rung such as this
might be used when you want to monitor the contents of the M1 file,
but monitoring need not be on a continuous basis.
G Files
S:4/8 causes the #M1:4.3
file to update the #N10:0
file every 2.56 seconds.
S:4
] [
B11
8
]OSR[
0
COP
Copy FILE
Source #M1:4.3
Dest #N10:0
Length 6
Capturing M0–M1 File Data
The first two ladder diagrams in the previous section show a
technique that lets you capture and use M0 or M1 data as it exists at
a particular time. In the first figure, bit M0:2.1/1 could change state
between rungs 1 and 2. This could interfere with the logic applied in
rung 2. The second figure avoids the problem. If rung 1 is true, bit
B3/10 captures this information and places it in rung 2.
In the second example of the last section, a COP instruction is used
to monitor the contents of an M1 file. When the instruction goes
true, the six words of data in file #M1:4.3 is captured as it exists at
that time and placed in file #N10.0.
Some specialty I/O modules use G (confiGuration) files (indicated in
the specific specialty I/O module user’s manual). You can think of
the files as the software equivalent of DIP switches.
Publication 1203–5.9 –– October 1996
You can access and edit the content of G files offline from the I/O
Configuration function. You cannot access G files under the Monitor
File function. Data you enter into the G file is passed to the specialty
I/O module when you download the processor file and enter the
REM Run or any one of the REM Test modes.
Page 65

M0, M1, and G Files A–9
Configuring G Files Using APS Software
The G file is configured as part of the I/O configuration procedure
for the processor file. After you have assigned the specialty I/O
module to a slot (the procedure is the same as assigning other
modules except that you must specify the ID code of the specialty
I/O module), the following functions are displayed at the bottom of
the APS screen:
READ
CONFIG
F1
ONLINE
CONFIG
F2
MODIFY
RACK
F4
MODIFY
SLOT
F5
DELETE
SLOT
F6
UNDEL
SLOT
F7
EXIT
F8
This is the starting point for configuring the G file and other
parameters of the specialty I/O module.
To create and monitor the G file.
1. Press F9 for Specialty I/O Configuration. The following
functions are displayed:
ISR
NUMBER
F1
MODIFY
G FILE
F3
ADVNCD
SETUP
F5
2. Press F7 for G File Size.
3. Specify the number of words required for the specialty I/O
module. For the SLC to SCANport module, enter 32.
4. Press F3 for Modify G File. The content of the G file is
displayed in the display area. Data is shown in the default form,
decimal:
SPIO
CONFIG
F9
G FILE
SIZE
F7
–––––––––––––––––––––––––––––––––––––––––––––––––––––––––
address 0 1 2 3 4 5 6 7 8 9
G1:0 xxxx 0 0 0 0 0 0 0 0 0
G1:10 0 0 0 0 0 0
––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––
The function keys displayed below the data table indicate the three
data formats available to you, binary data, decimal data, and hex/bcd
data:
BINARY
DATA
F1
DECIMAL
DATA
F2
HEX/BCD
DATA
F3
Publication 1203–5.9 –– October 1996
Page 66

M0, M1, and G FilesA–10
ord
file, I
slot
imal format
The following figure shows the three G file data formats that you can
select. Word addresses begin with the file identifier G and the slot
number you have assigned to the specialty I/O module. In this case,
the slot number is 1. Sixteen words have been created (addresses
G1:0 through G1:15).
16–w
16–word G file, I/O slot 1, hex/bcd format
16–word G file, I/O slot 1, binary format
G
/O
address 0 1 2 3 4 5 6 7 8 9
G1:0 xxxx 0 0 0 0 0 0 0 0 0
G1:10 0 0 0 0 0 0
address 0 1 2 3 4 5 6 7 8 9
G1:0 xxxx 0000 0000 0000 0000 0000 0000 0000 0000 0000
G1:10 0000 0000 0000 0000 0000 0000
address 15 data 0
G1:0 xxxx xxxx xxxx xxxx
G1:1 0000 0000 0000 0000
G1:2 0000 0000 0000 0000
G1:3 0000 0000 0000 0000
G1:4 0000 0000 0000 0000
G1:5 0000 0000 0000 0000
G1:6 0000 0000 0000 0000
G1:7 0000 0000 0000 0000
G1:8 0000 0000 0000 0000
G1:9 0000 0000 0000 0000
G1:10 0000 0000 0000 0000
G1:11 0000 0000 0000 0000
G1:12 0000 0000 0000 0000
G1:13 0000 0000 0000 0000
G1:14 0000 0000 0000 0000
G1:15 0000 0000 0000 0000
1, dec
Editing G File Data
Edit the data in the G file according to your application and the
requirements of the specialty I/O module. You edit the data offline
under the I/O configuration function only. With the decimal and
hex/bcd formats, edit data at the word level:
G1:1 = 234 (decimal format)
G1:1 = 00EA (hex/bcd format)
With the binary format, edit data at the bit level:
G1/19 = 1
Important: The processor automatically configures word 0 of the G
file according to the particular specialty I/O module.
You cannot edit word 0.
Publication 1203–5.9 –– October 1996
Page 67

Appendix Objectives
Message and Reply Structures
Appendix
B
SCANport Messaging
This appendix contains information to help you use SCANport. The
following topics are covered:
• message and reply structures
• examples of SCANport message structures
Before you can send a message, you need to copy the message into
one of the M0 message buffers.
SCANport messages access data structures within the SCANport
device. These data structures are called objects. An object contains
information for a particular purpose. For example, a parameter
object can contain information such as parameter values, parameter
names, scaling information, and units.
Figure B.1 shows the first M0 message buffer structure.
Figure B.1
SLC to SCANport Module M0 Buffer 0 Message Structure
M0:e.b00
M0:e.b01
M0:e.b02
M0:e.b03
M0:e.b04
M0:e.b05
M0:e.bxx
Header
Information
Service
Class
Instance
Attribute
Request Length = n
Req Data 2
Req Data n
Req Data 1
...
e = slot location
b = buffer 0–7
Publication 1203–5.9 –– October 1996
Page 68

SCANport MessagingB–2
Where:
This field: Specifies:
The action or service requested. The following service values are
available:
Enter this value: T o request this service:
Service
Class
Instance
Attribute
Request
length
Req Data
0001H (1 decimal) Read Parameter Full/All Info
0005H (5 decimal) Reset to Default
000eH (14 decimal) Get Attribute Single
0010H (16 decimal) Set Attribute Single
0015H (21 decimal) Restore from Storage
0016H (22 decimal) Save to Storage
0032H (50 decimal) Get Attribute Scattered
0034H (52 decimal) Set Attribute Scattered
004bH (75 decimal) Read Enum String
➀
Not all SCANport devices support these services.
For example, if you enter a service value of 0001H (1 decimal), you
are requesting that the SCANport device provide all available
information about a particular object. A service value of 000eH is a
request for only one piece of information about a particular object.
The type of object to access within the SCANport device. The class
is the first index into the SCANport device’s database. It directs the
message to the desired functional database. For example, a class
value of 000fH (15 decimal) indicates that the message is intended to
access the parameter database.
A particular occurrence of an object in the SCANport device. The
instance provides an index into the referenced functional database.
For example, when accessing the parameter database, the instance
value is the parameter number. If you want to access information
about all instances of the object, specify an instance of 0.
A specific piece of information about an object. Values are always
less than 256. For example, in a parameter object, an attribute value
of 0001H (1 decimal) indicates that the message is accessing the
parameter value. An attribute value of 0007H (7 decimal) indicates
that the message is accessing the parameter name text string.
The length, in bytes, in this request. This value is normally less than
or equal to 96 bytes. However, Get/Set Attribute Scattered messages
can be longer.
The actual data portion of the request message. Up to a maximum of
96 bytes of message data is available. This field is optional
depending on the type of message sent.
➀
➀
➀
➀
Publication 1203–5.9 –– October 1996
The response from the SCANport device appears in the message
buffer of the channel used (Channel 1 = M1:e.100–199, Channel 2 =
M1:e.200–299, Channel 3 = M1:e.300–399).
Page 69

SCANport Messaging B–3
Figure B.2 shows the structure of the message response buffers
inside the SLC M1 file.
Figure B.2
M1 File Message Response Buffer Structures
M0:e.b00
M0:e.b01
M0:e.b02
M0:e.b03
M0:e.b04
M0:e.b05
M0:e.bxx
Header
Information
Service (error or echo)
Class (echo)
Instance (echo)
Attribute (echo)
Response Length = n
Resp Data 2
Resp Data n
Resp Data 1
...
Where:
This field: Contains:
The same value as the service field of the request message if the
message transaction was successful. If an error occurred, the service
Service
Class
Instance
Attribute
Response
Length
Resp
➀
Data
will be 0014H (20 decimal) and additional error information will be
placed in the response data field.
The error codes are provided at the end of this appendix.
The same value that was used for the class field in the request
message.
The same value that was used for the instance field in the request
massage.
The same value that was used for the attribute field in the request
message.
The amount of data, in bytes, in this response. Most messages
contain 96 or fewer bytes of data. However, Get/Set Attribute
➀
Scattered messages can be longer.
The actual data portion of this response. This field varies in length
depending on the message. If an error occurred, this field contains
the SCANport error code.
e = slot location
b = buffer 0–7
➀
The size of the returned packets determines the response length.
Some SCANport devices may return lengths greater than the actual
amount of data in the response. These products always return a
length which is a multiple of six. For example, a 1336 PLUS drive
may reply to a Read Number of Parameters message with a length of
six in the response. The first two bytes contain the complete
response data. The extra data bytes should be ignored.
Publication 1203–5.9 –– October 1996
Page 70

SCANport MessagingB–4
Available SCANport Messages
This message:
Read Number of
Parameters
Read Parameter Value B–8 Request the value for a specific parameter.
Read Parameter Name
Text
Write a Value to
Parameter
Read Full Parameter B–11
Set Default Parameter
Values
Restore Parameter Values
from Non–volatile
Storage
Save Parameter Values to
Non–volatile Storage
Read Enum String for a
Value in Parameter
Read Product Number B–19 Request the product number from a device.
Read Product Text B–20 Request the product text from a device.
Read Product Series
Number
Read Product Software
Version
Scattered Read B–23
Scattered Write B–25
Read Parameter Link
from Parameter Number
Write Parameter Link
from Parameter Number
You can use the following SCANport messages:
Shown on page: Lets you:
B–7
Request how many parameters the
SCANport device supports.
B–9 Request the name of a specific parameter.
B–10 Write a value to a specific parameter.
Request the name and value of a specific
parameter.
➀
B–15
B–16
➀
➀
➀
B–17
B–18
B–21
B–22
Reset the values of all parameters to the
factory default values.
Restores the values of all parameters to the
values stored in non–volatile storage.
Saves the values of all parameters to
non–volatile storage.
Request the text string that corresponds to a
specific bit in a specific parameter.
Request the product series number from a
device.
Request the product software version from
a device.
Request the values of multiple parameters,
not necessarily starting from parameter 1.
Write the values of multiple parameters, not
necessarily starting from parameter 1.
B–27
➀
B–28
➀
➀
Not all SCANport devices support these messages.
Request the parameter link information for
a specific parameter.
Write the parameter link information for a
specific parameter.
SLC SCANport Messaging Ladder Program
Publication 1203–5.9 –– October 1996
When B3:0/0 is set to a value of 1, the program shown in Figure B.3
sends the message structure contained in N10:0 to the SCANport
device connected to Channel 1 of the SLC to SCANport module.
When B3:0/0, B3:0/1, and B3:0/2 have all been reset to zero, the
message response has been received in N11:0.
Page 71

SCANport Messaging B–5
Figure B.3
SLC Ladder Program Example
Rung 2:0
| Wait for |SCANport |SCANport |
| Reply to |Channel 1 |Channel 1 |
| Message |READY |DONE |
| B3:0 I:1.1 I:1.1 +COP–––––––––––––––+ |
|––––] [––––––––]/[––––––––] [–––––––––––+–+COPY FILE +–+–|
| 2 9 8 | |Source #M1:1.100| | |
| | |Dest #N11:0| | |
| | |Length 100| | |
| | +––––––––––––––––––+ | |
| | Wait for | |
| | Reply to | |
| | Message | |
| | B3:0 | |
| +––––(U)–––––––––––––––+ |
| | 2 | |
| | Send | |
| | SCANport | |
| | Channel 1 | |
| | Message | |
| | O:1.0 | |
| +––––(U)–––––––––––––––+ |
| 1 |
Rung 2:1
| Send |M0 File |SCANport |SCANport Send |
| Message |Changed |Channel 1 |Channel 1 SCANport |
| |READY |DONE Channel 1 |
| Message |
| B3:0 I:1.1 I:1.1 I:1.1 O:1.0 |
|––––] [––––––––] [––––––––] [––––––––]/[––––––––––+––––(L)–––––+–|
| 1 14 9 8 | 1 | |
| | Send | |
| | Message | |
| | B3:0 | |
| +––––(U)–––––+ |
| | 1 | |
| | Wait for | |
| | Reply to | |
| | Message | |
| | B3:0 | |
| +––––(L)–––––+ |
| 2 |
Publication 1203–5.9 –– October 1996
Page 72

SCANport MessagingB–6
Rung 2:2
| Setup |SCANport |SCANport |
| Send |Channel 1 |Channel 1 |
| Message |READY |DONE |
| Buffer | |
| B3:0 I:1.1 I:1.1 +COP–––––––––––––––+ |
|––––] [––––––––] [––––––––]/[–––––––––––+–+COPY FILE +–+–|
| 0 9 8 | |Source #N10:0| | |
| | |Dest #M0:1.100| | |
| | |Length 100| | |
| | +––––––––––––––––––+ | |
| | Message | |
| | Buffer | |
| | ID# | |
| | O:1.0 | |
| +––––(L)–––––––––––––––+ |
| | 2 | |
| | Message | |
| | Buffer | |
| | ID# | |
| | O:1.0 | |
| +––––(U)–––––––––––––––+ |
| | 3 | |
| | Message | |
| | Buffer | |
| | ID# | |
| | O:1.0 | |
| +––––(U)–––––––––––––––+ |
| | 4 | |
| | Setup | |
| | Send | |
| | Message | |
| | Buffer | |
| | B3:0 | |
| +––––(U)–––––––––––––––+ |
| | 0 | |
| | Send | |
| | Message | |
| | B3:0 | |
| +––––(L)–––––––––––––––+ |
| 1 |
Rung 2:3
| |
|–––––––––––––––––––––––––––––––+END+–––––––––––––––––––––––––––––|
| |
Example Messages and Replies
This section provides examples of SCANport messages that you can
send using the SLC to SCANport module. Each example contains
two parts. The first part provides information about the SCANport
message. Buffer 0 is used to send messages to the SCANport device
connected to Channel 1. The second part provides examples that can
be used with the SLC ladder program shown in Figure B.3. The
message is contained in file N10, and the response is contained in
file N11. All data file values are shown in hexadecimal. Some
example messages also show file N11 in ASCII. You should note
that in ASCII mode, the string is shown in a byte–swapped fashion.
Publication 1203–5.9 –– October 1996
Page 73

SCANport Messaging B–7
Read Number of Parameters
The Read Number of Parameters message lets you request how many
parameters the SCANport device supports. The following is an
example of this request:
Read Number of Parameters
Value
000e
000f
0000
0002
0000
M0:e.000
M0:e.001
M0:e.002
M0:e.003
M0:e.004
Service=Get Attribute Single
Parameter Class
Instance
Attribute=Last Parameter Number
Data Length = 0
Response
Value
000e
000f
0000
0002
0006
00d8
0000
0000
M1:e.100
M1:e.101
M1:e.102
M1:e.103
M1:e.104
M1:e.105
M1:e.106
M1:e.107
Service=Get Attribute Single
Parameter Class
Instance
Attribute=Last Parameter Number
Data Length=6 Bytes
Data=216 Parameters
Discard
Discard
Figure B.4 shows an example of a Read Number of Parameters
request. The reply to the Read Number of Parameters request
message indicates that the SCANport device contains 216 (D8h)
parameters.
Figure B.4
Example of Read Number of Parameters
address 0 1 2 3 4 5 6 7 8 9
N10:0 000e 000f 0000 0002 0000 0000 0000 0000 0000 0000
address 0 1 2 3 4 5 6 7 8 9
N11:0 000e 000f 0000 0002 0006 00d8 0000 0000 0000 0000
Publication 1203–5.9 –– October 1996
Page 74

SCANport MessagingB–8
Read Parameter Value
The Read Parameter Value message lets you request the value for a
specific parameter. The following is an example of this request:
Read Parameter Value
Value
000e
000f
0005
0001
0000
M0:e.000
M0:e.001
M0:e.002
M0:e.003
M0:e.004
Response
Value
000e
000f
0005
0001
0002
0007
Service=Get Attribute Single
Parameter Class
Instance=Parameter #5
Attribute=Value
Data Length=0
M1:e.100
M1:e.101
M1:e.102
M1:e.103
M1:e.104
M1:e.105
Service=Get Attribute Single
Parameter Class
Instance=Parameter #5
Attribute=Value
Data Length=2 Bytes
Data=Value of 7
Figure B.5 shows an example of a Read Parameter Value request.
The value of parameter number 5 is 7.
Figure B.5
Example of Read Parameter Value
address 0 1 2 3 4 5 6 7 8 9
N10:0 000e 000f 0005 0001 0000 0000 0000 0000 0000 0000
address 0 1 2 3 4 5 6 7 8 9
N11:0 000e 000f 0005 0001 0002 0007 0000 0000 0000 0000
Publication 1203–5.9 –– October 1996
Page 75

SCANport Messaging B–9
Read Parameter Name Text
The Read Parameter Name Text message lets you request the name
of a specific parameter. The following is an example of this request:
Read Parameter Name Text
Value
000e
000f
0005
0007
0000
M0:e.000
M0:e.001
M0:e.002
M0:e.003
M0:e.004
Response
Value
000e
000f
0005
0007
0011
4610
6572
2071
6553
656c
7463
3120
2020
0020
Service=Get Attribute Single
Parameter Class
Instance=Parameter #5
Attribute=Parameter Name
Data Length=0
M1:e.100
M1:e.101
M1:e.102
M1:e.103
M1:e.104
M1:e.105
M1:e.106
M1:e.107
M1:e.108
M1:e.109
M1:e.110
M1:e.11 1
M1:e.112
M1:e.113
Service=Get Attribute Single
Parameter Class
Instance=Parameter #5
Attribute=Parameter Name
Data Length=17 Bytes
Lo Byte=Character Count of Parameter Name
Hi Byte=First Character of Parameter Name (1st)
Parameter Name (Chars Lo=2nd, Hi=3rd)
Parameter Name (Chars Lo=4th, Hi=5th)
Parameter Name (Chars Lo=6th, Hi=7th)
Parameter Name (Chars Lo=8th, Hi=9th)
Parameter Name (Chars Lo=10th, Hi=11th)
Parameter Name (Chars Lo=12th, Hi=13th)
Parameter Name (Chars Lo=14th, Hi=15th)
Lo Byte=Last Character of Parameter Name (16th)
Hi Byte=Discard
Figure B.6 shows an example of a Read Parameter Name Text
request. The parameter name text for parameter number 5 is Freq
Select 1. Note that the low byte of word N11:5 indicates that the
name text contains 16 (10h) bytes.
Figure B.6
Example of Read Parameter Name Text
address 0 1 2 3 4 5 6 7 8 9
N10:0 000e 000f 0005 0007 0000 0000 0000 0000 0000 0000
address 0 1 2 3 4 5 6 7 8 9
N11:0 000e 000f 0005 0007 0011 4610 6572 2071 6553 656c
N11:10 7463 3120 2020 0020 0000 0000 0000 0000 0000 0000
address 0 1 2 3 4 5 6 7 8 9
N11:0 \00\0E \00\0F \00\05 \00\07 \00\11 F \10 e r q e S e l
N11:10 t c 1 \00 \00\00 \00\00 \00\00 \00\00 \00\00 \00\00
Publication 1203–5.9 –– October 1996
Page 76

SCANport MessagingB–10
Write Value to Parameter
The Write Value to Parameter message lets you write a value to a
specific parameter. The following is an example of this request:
Write a Value of 6 to Parameter 5
Value
0010
000f
0005
0001
0002
0006
M0:e.000
M0:e.001
M0:e.002
M0:e.003
M0:e.004
M0:e.005
Response
Value
0010
000f
0005
0001
0000
Service=Set Attribute Single
Parameter Class
Instance=Parameter #5
Attribute=Value
Data Length=2 Bytes
Data=Value of 6
M1:e.100
M1:e.101
M1:e.102
M1:e.103
M1:e.104
Service=Set Attribute Single
Parameter Class
Instance=Parameter #5
Attribute=Value
Data Length=0 Bytes
Figure B.7 shows an example of a Write Value to Parameter request.
The drive accepted the message, and parameter number 5 now has a
value of 6.
Figure B.7
Example of Write Value to Parameter
address 0 1 2 3 4 5 6 7 8 9
N10:0 0010 000f 0005 0001 0002 0006 0000 0000 0000 0000
address 0 1 2 3 4 5 6 7 8 9
N11:0 0010 000f 0005 0001 0000 0000 0000 0000 0000 0000
Publication 1203–5.9 –– October 1996
Page 77

The Descriptor and Scaling fields are
described on the following pages.
SCANport Messaging B–11
Read Full Parameter
The Read Full Parameter message lets you request the name and
value of a specific parameter. The following is an example:
Read Full Parameter 7
Value
0001
000f
0007
0000
0000
M0:e.000
M0:e.001
M0:e.002
M0:e.003
M0:e.004
Value
0001
000f
0007
0000
0035
0064
6400
0200
1002
6341
6563
206c
6954
656d
3120
2020
2020
5304
6365
0073
0000
ea60
03e8
0001
000a
0001
0000
0000
0000
0000
0000
0001
Service=Get Attribute All
Parameter Class
Instance=Parameter #7
Attribute
Data Length=0 Bytes
Response
M1:e.100
M1:e.101
M1:e.102
M1:e.103
M1:e.104
M1:e.105
M1:e.106
M1:e.107
M1:e.108
M1:e.109
M1:e.110
M1:e.111
M1:e.112
M1:e.113
M1:e.114
M1:e.115
M1:e.116
M1:e.117
M1:e.118
M1:e.119
M1:e.120
M1:e.121
M1:e.122
M1:e.123
M1:e.124
M1:e.125
M1:e.126
M1:e.127
M1:e.128
M1:e.129
M1:e.130
M1:e.131
Service=Get Attribute All
Parameter Class
Instance=Parameter #7
Attribute
Data Length=53 Bytes
Value
Lo Byte=Link Path Size = 0
Hi Byte=Descriptor Lo Byte
Lo Byte=Descriptor Hi Byte; Hi Byte=Data Type
Lo Byte=Data Size = 2 Bytes
Hi Byte=Character Count of Parameter Name
Parameter Name (Chars Lo=1st, Hi=2nd)
Parameter Name (Chars Lo=3rd, Hi=4th)
Parameter Name (Chars Lo=5th, Hi=6th)
Parameter Name (Chars Lo=7th, Hi=8th)
Parameter Name (Chars Lo=9th, Hi=10th)
Parameter Name (Chars Lo=11th, Hi=12th)
Parameter Name (Chars Lo=13th, Hi=14th)
Parameter Name (Chars Lo=15th, Hi=16th)
Lo Byte=Character Count of Units String
Hi Byte=First Character of Units String (1st)
Units String (Chars Lo=2nd, Hi=3rd)
Lo Byte=Last Character of Units String (4th)
Hi Byte=Character Count of Help String (Always 0)
Minimum Value
Maximum Value
Default Value
Scaling Multiplier
Scaling Divisor
Scaling Base
Scaling Offset
Multiplier Link (Parameter Used as Multiplier Value)
Divisor Link (Parameter Used as Divisor Value)
Base Link (Parameter Used as Base Value)
Offset Link (Parameter Used as Offset V alue)
Lo Byte=Decimal Precision; Hi Byte=Discard
Publication 1203–5.9 –– October 1996
Page 78

SCANport MessagingB–12
Figure B.8 shows an example of a Read Full Parameter request. This
message reads all the information about parameter 7 from the
SCANport device. It is encoded as shown in the following tables.
You should note that the data is not word aligned.
Figure B.8
Example of Read Full Parameter
address 0 1 2 3 4 5 6 7 8 9
N10:0 0001 000f 0007 0000 0000 0000 0000 0000 0000 0000
address 0 1 2 3 4 5 6 7 8 9
N11:0 0001 000f 0007 0000 0035 0064 6400 0200 1002 6341
N11:10 6563 206c 6954 656d 3120 2020 2020 5304 6365 0073
N11:20 0000 ea60 03e8 0001 000a 0001 0000 0000 0000 0000
N11:30 0000 0001 0000 0000 0000 0000 0000 0000 0000 0000
address 0 1 2 3 4 5 6 7 8 9
N11:0 \00\01 \00\0F \00\07 \00\00 \00 5 \00 d d \00 \02\00 \10\02 c A
N11:10 e c l i T e m 1 S \04 c e \00 s
N11:20 \00\00 \EA ‘ \03\E8 \00\01 \00\0A \00\01 \00\00 \00\00 \00\00 \00\00
N11:30 \00\00 \00\01 \00\00 \00\00 \00\00 \00\00 \00\00 \00\00 \00\00 \00\00
The following table shows the starting address of individual
attributes that can be read using the Read Full Parameter request.
Attribute Starting Address Size (Bytes) Description
1 (01h) N11:5 2 Parameter value
2 (02h) N11:6 (Lo Byte) 1 Link path size (always 0)
4 (04h) N11:6 (Hi Byte) 2 Descriptor –– See descriptor table
5 (05h) N11:7 (Hi Byte) 1 Data type –– See Data Types table
6 (06h) N11:8 (Lo Byte) 1 Parameter value data size in bytes
Parameter name string: Accel Time 1
7 (07h) N11:8 (Hi Byte) 17
The Hi byte of N11:8 is the number of characters in
the string and is always 16 (10H)
Units string: Secs
8 (08h) N11:17 5
The Lo byte of N11:17 is the number of characters
in the string and is always 4 (04H)
9 (09h) N11:19 (Hi Byte) 1 Help string (always 0 indicating no help string)
10 (0Ah) N11:20 2 Minimum value
11 (0Bh) N11:21 2 Maximum value
12 (0Ch) N11:22 2 Default Value
13 (0Dh) N11:23 2 Scaling multiplier –– see scaling formula
14 (0Eh) N11:24 2 Scaling divisor –– see scaling formula
15 (0Fh) N11:25 2 Scaling base –– see scaling formula
16 (10h) N11:26 2 Scaling offset –– see scaling formula
17 (11h) N11:27 2
Multiplier link –– parameter containing multiplier
value
18 (12h) N11:28 2 Divisor link –– parameter containing divisor value
19 (13h) N11:29 2 Base link –– parameter containing base value
20 (14h) N11:30 2 Offset link –– parameter containing offset value
21 (15h) N11:31 (Lo Byte) 1 Decimal precision (see scaling formula)
Publication 1203–5.9 –– October 1996
Page 79

SCANport Messaging B–13
The following table shows how the data type field is coded:
Data Type
Value
1 16–bit word
2 16–bit unsigned integer
3 16–bit signed integer
4 Boolean
5 Short integer
6 Double integer
7 Long integer
8 Unsigned short integer
Description of Data Type of Parameter Value Field
The descriptor bits are defined as follows:
This
descriptor bit:
0 Not used. This bit should always be 0.
1 Supports ENUM strings.
2 Supports scaling.
3 Supports scaling links.
4 Read only parameter.
5
6 Supports extended precision scaling.
Has the following definition when set to 1:
Monitor parameter (parameter is continuously updated
by SCANport device).
Scaling Formulas
Four scaling formulas are provided. Two scaling formulas are for
use with extended precision scaling and two are for normal scaling.
The decimal precision variable is always used to locate the decimal
point for a display by counting from the rightmost digit. In extended
precision scaling, the decimal precision variable is also used in the
scaling formula.
Publication 1203–5.9 –– October 1996
Page 80

SCANport MessagingB–14
The four formulas are shown here. The first two formulas are used
when descriptor bit 6 is set to 1.
Engineering Value =
Internal Value =
Engineering Value =
Internal Value =
(Internal Value + Of fset) x Multiplier x Base
Divisor x 10
Engineering Value x Divisor x 10
(Internal Value + Of fset) x Multiplier x Base
Engineering Value x Divisor
Multiplier x Base
Decimal Precision
Multiplier x Base
Divisor
Decimal Precision
– Offset
– Offset
Publication 1203–5.9 –– October 1996
Page 81

SCANport Messaging B–15
Set Default Parameter Values
The Set Default Parameter Values message lets you reset the values
of all parameters to the factory default values. The following is an
example of this request:
Set Default Parameter Values
Value
0005
000f
0000
0000
0000
M0:e.000
M0:e.001
M0:e.002
M0:e.003
M0:e.004
Response
Value
0005
000f
0000
0000
0000
Service=Reset All to Factory Defaults
Parameter Class
Instance
Attribute
Data Length=0 Bytes
M1:e.100
M1:e.101
M1:e.102
M1:e.103
M1:e.104
Service=Reset All to Factory Defaults
Parameter Class
Instance
Attribute
Data Length=0 Bytes
Figure B.9 shows a Set Default Parameter Values request. This
message has set all parameter values in the SCANport device’s
EEPROM and RAM to the factory default values.
Figure B.9
Example of Set Default Parameter Values
address 0 1 2 3 4 5 6 7 8 9
N10:0 0005 000f 0000 0000 0000 0000 0000 0000 0000 0000
address 0 1 2 3 4 5 6 7 8 9
N11:0 0005 000f 0000 0000 0000 0000 0000 0000 0000 0000
Publication 1203–5.9 –– October 1996
Page 82

SCANport MessagingB–16
Restore Parameter Values from Non–volatile Storage
The Restore Parameter Values from Non–volatile Storage message
lets you restore the values of all parameters to the values stored in
non–volatile storage. The following is an example of this request:
Restore Parameter Values from Non–Volatile Storage
Value
0015
000f
0000
0000
0000
M0:e.000
M0:e.001
M0:e.002
M0:e.003
M0:e.004
Response
Value
0015
000f
0000
0000
0000
Service=Restore from Storage
Parameter Class
Instance
Attribute
Data Length=0 Bytes
M1:e.100
M1:e.101
M1:e.102
M1:e.103
M1:e.104
Service=Restore from Storage
Parameter Class
Instance
Attribute
Data Length=0 Bytes
Figure B.10 shows a Restore Parameter Values from Non–volatile
Storage request. This message has successfully restored all
SCANport device parameters in RAM from non–volatile storage.
Figure B.10
Example of Restore Parameter Values from Non–volatile Storage
address 0 1 2 3 4 5 6 7 8 9
N10:0 0015 000f 0000 0000 0000 0000 0000 0000 0000 0000
address 0 1 2 3 4 5 6 7 8 9
N11:0 0015 000f 0000 0000 0000 0000 0000 0000 0000 0000
Publication 1203–5.9 –– October 1996
Page 83

SCANport Messaging B–17
Save Parameter Values to Non–volatile Storage
The Save Parameter Values to Non–volatile Storage message lets you
save the values of all parameters to non–volatile storage. The
following is an example of this request:
Save Parameter Values to Non–V olatile Storage
Value
0016
000f
0000
0000
0000
M0:e.000
M0:e.001
M0:e.002
M0:e.003
M0:e.004
Response
Value
0016
000f
0000
0000
0000
Service=Save to Storage
Parameter Class
Instance
Attribute
Data Length=0 Bytes
M1:e.100
M1:e.101
M1:e.102
M1:e.103
M1:e.104
Service=Save to Storage
Parameter Class
Instance
Attribute
Data Length=0 Bytes
Figure B.11 shows a Save Parameter Values to Non–volatile Storage
request. This message has successfully saved all SCANport device
parameters from RAM to non–volatile storage.
Figure B.11
Example of Save Parameter Values to Non–volatile Storage
address 0 1 2 3 4 5 6 7 8 9
N10:0 0016 000f 0000 0000 0000 0000 0000 0000 0000 0000
address 0 1 2 3 4 5 6 7 8 9
N11:0 0016 000f 0000 0000 0000 0000 0000 0000 0000 0000
Publication 1203–5.9 –– October 1996
Page 84

SCANport MessagingB–18
Read Enum String for Value in Parameter
The Read Enum String for Value in Parameter message lets you
request the text string that corresponds to a specific bit in a specific
parameter. The following is an example of this request:
Read Enum String for a Value of 1 in Parameter #5
Value
004b
000f
0005
0001
0000
M0:e.000
M0:e.001
M0:e.002
M0:e.003
M0:e.004
Response
Value
004b
000f
0005
0001
000c
6552
6f6d
6574
5020
746f
2020
Service=Get Enum String
Parameter Class
Instance=Parameter #5
Attribute=Value/Bit# = 1
Data Length=0 Bytes
M1:e.100
M1:e.101
M1:e.102
M1:e.103
M1:e.104
M1:e.105
M1:e.106
M1:e.107
M1:e.108
M1:e.109
M1:e.110
Service=Get Enum String
Parameter Class
Instance=Parameter #5
Attribute=Value/Bit# = 1
Data Length=12 Bytes
Enum String (Chars Lo=1st, Hi=2nd)
Enum String (Chars Lo=3rd, Hi=4th)
Enum String (Chars Lo=5th, Hi=6th)
Enum String (Chars Lo=7th, Hi=8th)
Enum String (Chars Lo=9th, Hi=10th)
Enum String (Chars Lo=11th, Hi=12th)
Figure B.12 shows a Read Enum String for Value in Parameter
request. In this example, parameter 5 has an Enum string of Remote
Pot associated with a value of 1. Note that enum strings are all 12
characters long.
Figure B.12
Example of Read Enum String for Value in Parameter
address 0 1 2 3 4 5 6 7 8 9
N10:0 004b 000f 0005 0001 0000 0000 0000 0000 0000 0000
address 0 1 2 3 4 5 6 7 8 9
N11:0 004b 000f 0005 0001 000c 6552 6f6d 6574 5020 746f
N11:10 2020 0000 0000 0000 0000 0000 0000 0000 0000 0000
address 0 1 2 3 4 5 6 7 8 9
N11:0 \00 K \00\0F \00\05 \00\01 \00\0C e R o m e t P t o
N11:10 \00\00 \00\00 \00\00 \00\00 \00\00 \00\00 \00\00 \00\00 \00\00
Publication 1203–5.9 –– October 1996
Page 85

SCANport Messaging B–19
Read Product Number
The Read Product Number message lets you request the product
number from the SCANport device. The following is an example of
this request:
Read Product Number
Value
000e
0092
0000
0000
0000
M0:e.000
M0:e.001
M0:e.002
M0:e.003
M0:e.004
Response
Value
000e
0092
0000
0000
0006
0003
0000
0000
Service=Get Attribute Single
Internal A–B Vendor Specific Class
Instance
Attribute
Data Length=0 Bytes
M1:e.100
M1:e.101
M1:e.102
M1:e.103
M1:e.104
M1:e.105
M1:e.106
M1:e.107
Service=Get Attribute Single
Internal A–B Vendor Specific Class
Instance
Attribute
Data Length=6 Bytes
Product Number (Value)
Discard
Discard
Figure B.13 shows a Read Product Number request. In this example,
the product number is 3.
Figure B.13
Example of Read Product Number
address 0 1 2 3 4 5 6 7 8 9
N10:0 000e 0092 0000 0000 0000
address 0 1 2 3 4 5 6 7 8 9
N11:0 000e 0092 0000 0000 0006 0003 0000 0000
Publication 1203–5.9 –– October 1996
Page 86

SCANport MessagingB–20
Read Product Text
The Read Product Text message lets you request the product text
from the SCANport device. The following is an example of this
request:
Read Product Text
Value
000e
0092
0000
0001
0000
M0:e.000
M0:e.001
M0:e.002
M0:e.003
M0:e.004
Response
Value
000e
0092
0000
0001
0012
7542
206C
3331
3633
5020
554c
2053
2020
0000
Service=Get Attribute Single
Internal A–B Vendor Specific Class
Instance
Attribute
Data Length=0 Bytes
M1:e.100
M1:e.101
M1:e.102
M1:e.103
M1:e.104
M1:e.105
M1:e.106
M1:e.107
M1:e.108
M1:e.109
M1:e.110
M1:e.111
M1:e.112
M1:e.113
Service=Get Attribute Single
Internal A–B Vendor Specific Class
Instance
Attribute
Data Length=18 Bytes
Product Name String (Chars Lo=1st, Hi=2nd)
Product Name String (Chars Lo=3rd, Hi=4th)
Product Name String (Chars Lo=5th, Hi=6th)
Product Name String (Chars Lo=7th, Hi=8th)
Product Name String (Chars Lo=9th, Hi=10th)
Product Name String (Chars Lo=11th, Hi=12th)
Product Name String (Chars Lo=13th, Hi=14th)
Product Name String (Chars Lo=9th, Hi=10th)
Discard
Figure B.14 shows a Read Product Text request.
Figure B.14
Example of Read Product Text
address 0 1 2 3 4 5 6 7 8 9
N10:0 000e 0092 0000 0001 0000
address 0 1 2 3 4 5 6 7 8 9
N11:0 000e 0092 0000 0001 0012 7542 206c 3331 3633 5020
N11:10 554c 2053 2020 0000
Publication 1203–5.9 –– October 1996
Page 87

SCANport Messaging B–21
Read Product Series Number
The Read Product Series Number message lets you request the
product series number from a SCANport device. The following is an
example of this request:
Read Product Series Number
Value
000e
0092
0000
0003
0000
M0:e.000
M0:e.001
M0:e.002
M0:e.003
M0:e.004
Response
Value
000e
0092
0000
0003
0006
0001
0000
0000
Service=Get Attribute Single
Internal A–B Vendor Specific Class
Instance
Attribute
Data Length=0 Bytes
M1:e.100
M1:e.101
M1:e.102
M1:e.103
M1:e.104
M1:e.105
M1:e.106
M1:e.107
Service=Get Attribute Single
Internal A–B Vendor Specific Class
Instance
Attribute
Data Length=6 Bytes
Product Series Number (Value 1=A, 2=B, ...)
Discard
Discard
Figure B.15 shows a Read Product Series Number request. The
product series is A (1=A, 2=B, and so forth).
Figure B.15
Example of Read Product Series Number
address 0 1 2 3 4 5 6 7 8 9
N10:0 000e 0092 0000 0003 0000
address 0 1 2 3 4 5 6 7 8 9
N11:0 000e 0092 0000 0003 0006 0001 0000 0000
Publication 1203–5.9 –– October 1996
Page 88

SCANport MessagingB–22
Read Product Software Version
The Read Product Software Version message lets you request the
product software version from a SCANport device. The following is
an example of this request:
Read Product Software Version
Value
000e
0092
0001
0001
0000
M0:e.000
M0:e.001
M0:e.002
M0:e.003
M0:e.004
Response
Value
000e
0092
0001
0001
0006
00ca
0000
0000
Service=Get Attribute Single
Internal A–B Vendor Specific Class
Instance
Attribute
Data Length=0 Bytes
M1:e.100
M1:e.101
M1:e.102
M1:e.103
M1:e.104
M1:e.105
M1:e.106
M1:e.107
Service=Get Attribute Single
Internal A–B Vendor Specific Class
Instance
Attribute
Data Length=6 Bytes
Product Software Version (00ca=202=FRN2.02)
Discard
Discard
Figure B.16 shows a Read Product Software Version request. The
software version for microprocessor 1 is FRN2.02. The instance
number, set into N10:2, determines the microprocessor being
accessed by this message. Some products have multiple
microprocessors, and all products have at least one.
Figure B.16
Example of Read Product Software Version
address 0 1 2 3 4 5 6 7 8 9
N10:0 000e 0092 0001 0001 0000
address 0 1 2 3 4 5 6 7 8 9
N11:0 000e 0092 0001 0001 0006 00ca 0000 0000
Publication 1203–5.9 –– October 1996
Page 89

SCANport Messaging B–23
Scattered Read
The Scattered Read message lets you request the values of multiple
parameters, not necessarily starting from parameter 1. The following
is an example of this request:
Scattered Read
Value
0032
0093
0000
0000
000c
0001
0000
0002
0000
0003
0000
M0:e.000
M0:e.001
M0:e.002
M0:e.003
M0:e.004
M0:e.005
M0:e.006
M0:e.007
M0:e.008
M0:e.009
M0:e.010
Service=Get Attribute Scattered
Internal A–B Vendor Specific Class
Instance
Attribute
Data Length=12 Bytes
Parameter 1
Always 0
Parameter 2
Always 0
Parameter 3
Always 0
Note: The Scattered Read can continue
on in this pattern for up to 47 parameters.
Note: The Scattered Read can continue on
in this pattern for up to 47 parameters.
* If an error has occurred while reading to this
parameter, the MSB of the parameter number
will be set to 1 and the value field will contain
an error code (see the error table at the end of
this appendix).
Response
Value
0032
0093
0000
0000
000c
0001
0078
0002
0000
0003
0000
M1:e.100
M1:e.101
M1:e.102
M1:e.103
M1:e.104
M1:e.105
M1:e.106
M1:e.107
M1:e.108
M1:e.109
M1:e.110
Service=Get Attribute Scattered
Internal A–B Vendor Specific Class
Instance
Attribute
Data Length=12 Bytes
Parameter 1*
Value
Parameter 2*
Value
Parameter 3*
Value
Publication 1203–5.9 –– October 1996
Page 90

SCANport MessagingB–24
Figure B.17 shows a Scattered Read request. This example reads the
values of three parameters.
N10:4 contains the length of the data in bytes (three parameters
require 12 bytes). A pair of words are required for each parameter
being read (starting at N10:5). The first word of each pair is the
parameter number. The second word is a place holder.
The response message (N11 file) has the same structure as the
request message with a few changes. If an error occurred while
reading one of the parameters, the high bit of that parameter number
is set and the second word of the pair contains an error code. If the
high bit of the parameter number is not set, the second word of the
pair contains the parameter value.
Figure B.17
Example of Scattered Read
address 0 1 2 3 4 5 6 7 8 9
N10:0 0032 0093 0000 0000 000c 0001 0000 0002 0000 0003
N10:10 0000
address 0 1 2 3 4 5 6 7 8 9
N11:0 0032 0093 0000 0000 000c 0001 0078 0002 0000 0003
N11:10 0000
Publication 1203–5.9 –– October 1996
Page 91

SCANport Messaging B–25
Scattered Write
The Scattered Write message lets you write the values of multiple
parameters, not necessarily starting from parameter 1. The following
is an example of this request:
Scattered Write
Value
0034
0093
0000
0000
000c
0005
0001
0006
0002
0007
0258
M0:e.000
M0:e.001
M0:e.002
M0:e.003
M0:e.004
M0:e.005
M0:e.006
M0:e.007
M0:e.008
M0:e.009
M0:e.010
Service=Set Attribute Scattered
Internal A–B Vendor Specific Class
Instance
Attribute
Data Length=12 Bytes
Parameter 5
Value
Parameter 6
Value
Parameter 7
Value
Note: The Scattered Write can continue
on in this pattern for up to 47 parameters.
Note: The Scattered Write can continue on
in this pattern for up to 47 parameters.
* If an error has occurred while writing to this
parameter, the MSB of the parameter number
will be set to 1.
Response to Scattered Write
Value
0034
0093
0000
0000
000c
0005
0000
0006
0000
0007
0000
M1:e.100
M1:e.101
M1:e.102
M1:e.103
M1:e.104
M1:e.105
M1:e.106
M1:e.107
M1:e.108
M1:e.109
M1:e.110
Service=Set Attribute Scattered
Internal A–B Vendor Specific Class
Instance
Attribute
Data Length=12 Bytes
Parameter 5*
Status (see error codes)
Parameter 6*
Status (see error codes)
Parameter 7*
Status (see error codes)
Figure B.18 shows a Scattered Write request. This example writes
three parameters.
N10:4 contains the length of the data in bytes (three parameters
require 12 bytes). A pair of words are required for each parameter
being read (starting at N10:5). The first word of each pair is the
parameter number. The second word is the value to be written.
Publication 1203–5.9 –– October 1996
Page 92

SCANport MessagingB–26
The response message (N11 file) has the same structure as the
request message with a few changes. If an error occurred while
writing one of the parameters, the high bit of that parameter number
is set and the second word of the pair contains an error code. If the
high bit of the parameter number is not set, the second word of the
pair contains a zero.
Figure B.18
Example of Scattered Write
address 0 1 2 3 4 5 6 7 8 9
N10:0 0034 0093 0000 0000 000c 0001 0000 0002 0000 0003
N10:10 0000
address 0 1 2 3 4 5 6 7 8 9
N11:0 0034 0093 0000 0000 000c 0001 0078 0002 0000 0003
N11:10 0000
Publication 1203–5.9 –– October 1996
Page 93

SCANport Messaging B–27
Read Parameter Link from Parameter Number
The Read Parameter Link from Parameter Number message lets you
request the parameter link information for a specific parameter. The
following is an example of this request:
Read Parameter Link from Parameter Number 5
Value
000e
0099
0005
0000
0000
M0:e.000
M0:e.001
M0:e.002
M0:e.003
M0:e.004
Response
Value
000e
0099
0005
0000
0006
0006
0000
0000
Service=Get Attribute Single
Internal A–B Vendor Specific Class
Instance=Parameter #5
Attribute=Link
Data Length=0 Bytes
M1:e.100
M1:e.101
M1:e.102
M1:e.103
M1:e.104
M1:e.105
M1:e.106
M1:e.107
Service=Get Attribute Single
Internal A–B Vendor Specific Class
Instance=Parameter #5
Attribute=Link
Data Length=6 Bytes
Link Number
Discard
Discard
Figure B.19 shows a Read Parameter Link from Parameter Number
request. This example is a read of the link value of parameter 5 (the
parameter number is in N10:2). The link value is 6.
Figure B.19
Example of Read Parameter Link from Parameter Number
address 0 1 2 3 4 5 6 7 8 9
N10:0 000e 0099 0005 0000 0000
address 0 1 2 3 4 5 6 7 8 9
N11:0 000e 0099 0005 0000 0006 0006 0000 0000
Publication 1203–5.9 –– October 1996
Page 94

SCANport MessagingB–28
Write Parameter Link from Parameter Number
The Write Parameter Link from Parameter Number message lets you
write the parameter link information for a specific parameter. The
following is an example of this request:
Write Parameter Link to Parameter Number 5
Value
0010
0099
0005
0000
0002
0007
M0:e.000
M0:e.001
M0:e.002
M0:e.003
M0:e.004
M0:e.005
Response
Value
0010
0099
0005
0000
0000
Service=Set Attribute Single
Internal A–B Vendor Specific Class
Instance=Parameter #5
Attribute=Link
Data Length=2 Bytes
Link Number
M1:e.100
M1:e.101
M1:e.102
M1:e.103
M1:e.104
Service=Set Attribute Single
Internal A–B Vendor Specific Class
Instance=Parameter #5
Attribute=Link
Data Length=0
Figure B.20 shows a Write Parameter Link from Parameter Number
request. This example is a write to the link value of parameter 5 (the
parameter number is in N10:2). The link value being written is 6.
Figure B.20
Example of Write Parameter Link from Parameter Number
address 0 1 2 3 4 5 6 7 8 9
N10:0 0010 0099 0005 0000 0002 0006
address 0 1 2 3 4 5 6 7 8 9
N11:0 0010 0099 0005 0000 0000
Publication 1203–5.9 –– October 1996
Page 95

SCANport Messaging B–29
Error Codes
The following error codes are possible:
If you get this
number:
Then:
0 No error occurred. The operation was successful.
1
The service failed. The SCANport device could
not perform this request.
2 Service not supported.
3 Class not supported.
4 Instance not supported.
5 Attribute not supported.
6 Value out of range.
SCANport device conflict –– cannot perform this
7
request while the SCANport device is in the
current state (usually while the drive is running).
0fdH (253)
0feH (254)
Invalid message length. The message is too long
or too short to transmit.
The message timed out before the response was
given. Check the SCANport connection.
Publication 1203–5.9 –– October 1996
Page 96

SCANport MessagingB–30
Publication 1203–5.9 –– October 1996
Page 97

Index
B
basic mode
configuring, 3–1
description of, 3–1
example, 3–6
example of completed configuration,
3–4
module ID code, 3–3
output image channel command, 3–6
SLC I/O image table, 3–4
C
contents of manual, P–2
D
datalinks, 4–2
definitions, P–3
DIP switch
configuration, 2–4
location, 2–1
E
enhanced mode
channel command output image, 4–9
configuring, 4–3
datalinks, 4–2
description of, 4–1
examples, 4–16– 4–25
G files, 4–10
M files, 4–11
module ID code, 4–4
status field definitions, 4–8
error codes, B–29
G
G files
configuring, 4–10, A–9
description of, 4–10, A–8
editing file data, A–10
M
M files
addressing, A–2
restrictions on, A–3
capturing data, A–8
configuring, A–1
description of, 4–11
M0 file image, 4–12
M0 files, explained, A–1
M0 message field, 4–14
M1 file image, 4–13
M1 files, explained, A–1
minimizing scan time, A–7
monitoring bit addresses, A–3
transferring data, A–4
access time, A–5
messaging, 4–3
available SCANport messages, B–4
error codes, B–29
example SLC program, B–4
message and reply structures, B–1
Read Enum String for Value in
Parameter, B–18
Read Full Parameter, B–11–B–15
scaling formulas, B–13
Read Number of Parameters, B–7
Read Parameter Link from Parameter
Number, B–27
Read Parameter Name Text, B–9
Read Parameter Value, B–8
Read Product Number, B–19
Read Product Series Number, B–21
Read Product Software Version, B–22
Read Product Text, B–20
Restore Parameter Values from
Non–volatile Storage, B–16
Save Parameter Values to Non–volatile
Storage, B–17
Scattered Read, B–23–B–25
Scattered Write, B–25–B–27
Set Default Parameter Values,
B–15–B–17
Write Parameter Link from Parameter
Number, B–28
Write V alue to Parameter, B–10
module ID code
for basic mode, 3–3
for enhanced mode, 4–4
L
LED states, 5–1
Page 98

IndexI–2
safe state values, 4–2, 4–1 1
SLC I/O image table
for basic mode, 3–4
for enhanced mode, 4–7
SLC product compatibility, P–3
SLC to SCANport module
configuring for basic mode, 3–1
configuring for enhanced mode, 4–3
described, 1–1
features provided, 1–2
installing, 2–4
removing from chassis, 2–6
specifications, 6–1
terms, P–3
troubleshooting, 5–1
Page 99

We Want Our Manuals to be the Best!
You can help! Our manuals must meet the needs of you, the user. This is your opportunity to make sure they do just
that. By filling out this form you can help us provide the most useful, thorough, and accurate manuals available. Please
take a few minutes to tell us what you think. Then mail this form, FAX it, or send comments via E-Mail.
FAX: to your local Allen-Bradley Sales Office or 414/242-8579
E-Mail: via Internet to “SEPATTER@ABPOST.remnet.ab.com”
PUBLICATION NAME
PUBLICATION NUMBER, DATE AND PART NUMBER (IF PRESENT)
✔ CHECK THE FUNCTION THAT MOST CLEARLY DESCRIBES YOUR JOB.
SUGGEST / RESPONSIBLE FOR THE PURCHASE OF EQUIPMENT ❏ MAINTAIN / OPERATE PROGRAMMABLE MACHINERY
❏
❏
DESIGN / IMPLEMENT ELECTRICAL SYSTEMS ❏ TRAIN / EDUCATE MACHINE USERS
SUPERVISE FLOOR OPERATIONS
❏
✔ WHAT LEVEL OF EXPERIENCE DO YOU HAVE WITH EACH OF THE FOLLOWING PRODUCTS?
NONE LITTLE MODERATE EXTENSIVE
PROGRAMMABLE CONTROL
AC / DC DRIVES ❏❏❏❏
PERSONAL COMPUTERS ❏❏❏❏
NC / CNC CONTROLS ❏❏❏❏
DATA COMMUNICATIONS / LAN ❏❏❏❏
❏❏❏❏
✔ RATE THE OVERALL QUALITY OF THIS MANUAL BY CIRCLING YOUR RESPONSE BELOW. (1) = POOR (5) = EXCELLENT
HELPFULNESS OF INDEX / TABLE OF CONTENTS 1 2 3 4 5
CLARITY 1 2 3 4 5
EASE OF USE 1 2 3 4 5
ACCURACY AND COMPLETENESS 1 2 3 4 5
QUALITY COMPARED TO OTHER COMPANIES’ MANUALS 1 2 3 4 5
QUALITY COMPARED TO OTHER ALLEN-BRADLEY MANUALS 1 2 3 4 5
✔ WHAT DID YOU LIKE MOST ABOUT THIS MANUAL?
✔ WHAT DID YOU LIKE LEAST ABOUT THIS MANUAL?
✔ PLEASE LIST ANY ERRORS YOU FOUND IN THIS MANUAL (REFERENCE PAGE, TABLE, OR FIGURE NUMBERS).
✁
✔ DO YOU HAVE ANY ADDITIONAL COMMENTS?
✔ COMPLETE THE FOLLOWING.
NAME COMPANY
TITLE DEPARTMENT
STREET CITY STATE ZIP
TELEPHONE DATE
Page 100

NO POSTAGE
NECESSARY
IF MAILED
IN THE
UNITED STATES
BUSINESS REPLY MAIL
FIRST CLASS PERMIT NO. 413 MEQUON, WI
POSTAGE WILL BE PAID BY ADDRESSEE
ALLEN-BRADLEY
Attn: Marketing Communications
P.O. Box 760
Mequon, WI 53092-9907
 Loading...
Loading...