



Form 2854
Edition 10
© December 1993
MIC 6000
Installation, Wiring, Operation Manual
Brand

PAGE 2
nformation in this installation, wiring, and operation I manual is subject to change without notice. One
manual is provided with each instrument at the time of shipment. Extra copies are available at the price published on the front cover.
Copyright © December 1993, all rights reserved. No part of this publication may be reproduced, transmitted, transcribed or stored in a retrieval system, or translated into any language in any form by any means without the written permission of the factory.
This is the Tenth Edition of the Manual. It was written and produced entirely on a desk-top-publishing system. Disk versions are available by written request to the factory - Advertising and Publications Department.
We are glad you decided to open this manual. It is written so that you can take full advantage of the features of your new 1/4 DIN Profiling Controller.
NOTE Itisstronglyrecommendedthatfactoryequippedapplicationsincorporateahighor lowlimitprotectivedevicewhichwillshutdowntheequipmentatapresetprocess conditioninordertoprecludepossibledamagetopropertyorproducts.

PAGE 3
TableofContents
SECTION1-GENERAL |
Page Number |
|
1.1 |
Product Description |
5 |
SECTION2-INSTALLATION&WIRING |
|
|
2.1 |
Installation & Wiring |
7 |
2.2 |
Unpacking |
7 |
2.3 |
Location |
7 |
2.4 |
Mounting |
7 |
2.5 |
Preparation for Wiring |
8 |
2.6 |
Wiring Connections |
13 |
SECTION3-CONFIGURATION |
|
|
3.1 |
Configuration |
21 |
3.2 |
Shipped Configuration/Jumper Positioning |
22 |
3.3 |
Start up Procedure |
22 |
3.4 |
Front Panel Operation |
23 |
3.5 |
Operation Summary |
25 |
SECTION4-OPERATION |
|
|
4.1 |
Operation |
38 |
4.2 |
Alarm Operation |
44 |
4.3 |
Tune Mode Operation |
44 |
SECTION5-SERVICE |
|
|
5.1 |
Service |
47 |
5.2 |
Calibration |
47 |
5.3 |
Test Mode Procedures |
52 |
5.4 |
Troubleshooting and Diagnostics |
56 |
APPENDICES |
|
|
A - Board Layouts |
|
|
|
A-1 Power Supply Board |
63 |
|
A-2 Processor Board |
64 |
|
A-3 Option Board (Revision D and Below) |
65 |
|
Option Board (Revision E and Above) |
66 |
B - Glossary |
67 |
|
C - Order Matrix |
70 |
|
D - Specifications |
71 |
|
E - Software Record/Reference Sheet |
75 |
|
F - Profile Development Sheet |
78 |
|
Warranty |
Inside Back Cover |
|
PAGE 4
FiguresandTables
Figure 1-1 |
Front Panel Display |
5 |
Figure 2-1 |
Installation View and Dimensions |
8 |
Figure 2-2 |
Noise Suppression |
10 |
Figure 2-3 |
Noise Suppression |
10 |
Figure 2-4 |
Wiring Connection Diagram |
13 |
Figure 2-5 |
AC Power Input |
14 |
Figure 2-6 |
Thermocouple Input |
14 |
Figure 2-7 |
RTD Input |
15 |
Figure 2-8 |
Volt, Millivolt, milliamp Input |
15 |
Figure 2-9A |
24V Transmitter Power Supply |
16 |
Figure 2-9B |
24V Power Supply |
16 |
Figure 2-10 |
Remote Run/Hold Input |
17 |
Figure 2-11 |
Remote Digital Communications Option |
17 |
Figure 2-12 |
Alternate Remote Digital Communications |
18 |
Figure 2-13 |
Relay Output |
18 |
Figure 2-14 |
SSR Driver Output |
19 |
Figure 2-15 |
Current Output |
20 |
Figure 2-16 |
Position Proportioning Control |
20 |
Figure 4-1 |
Dual Output Control |
42 |
Table 3-1 |
Program Mode Configuration Procedures |
25 |
Table 3-2 |
Tune Mode Configuration Procedures |
32 |
Table 3-3 |
Profile Entry Mode Configuration Procedures |
35 |
Table 3-4 |
Enable Mode Configuration Procedures |
36 |
Table 4-1 |
Profile Continue Mode |
40 |
Table 5-1 |
Calibration Procedures |
48 |
Table 5-2 |
Test Procedures and Description |
53 |
FlowCharts
Flow - Calibration |
47 |
Flow - Enable Mode |
37 |
Flow - Profile Entry |
34 |
Flow - Profile Continue |
39 |
Flow - Program Mode |
26 |
Flow - Tune Mode |
33 |
Flow - Test |
52 |
PAGE 5
ProductDescription1.1
1.1.1GENERAL
This instrument is a microprocessor based profiling controller capable of measuring, displaying, and controlling a process variable from a variety of inputs. Applications include temperature, pressure, level, flow, and others.
Control functions, alarm settings and other parameters are easily entered via the front keypad. All user data can be protected from unauthorized changes by the Enable mode security system, and is protected against loss from AC power failure by battery back-up.
The process input is user configurable to directly connect to either thermocouple, RTD, mVDC, VDC, or mADC inputs. depending on the input type specified. Thermocouple and RTD linearization, as well as thermocouple cold junction compensation, is performed automatically. The instrument's process input is isolated from the rest of the instrument.
The instrument can be ordered to operate on either 115VAC or 230VAC power at 50/ 60Hz. The instrument is housed in an extruded aluminum enclosure suitable for panel mounting.
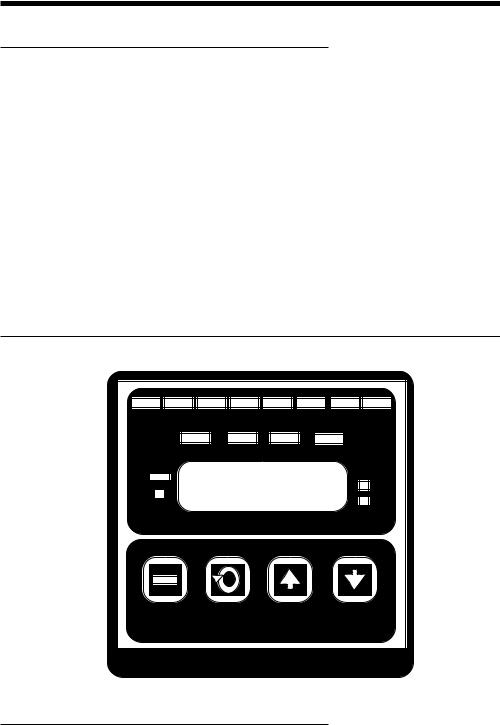
FIGURE1-1
Setpoint Indicator
Minus Sign
SEG1 SEG2 SEG3 SEG4 SEG5 SEG6 RAMP SOAK
MAN OUT1 OUT2 ALRM
 °C
°C
°F
U
RUN |
HOLD |
Operation Status
Indicators
Degrees C, F, or Engineering Units
Run/Hold Scroll |
Up |
Down |
1.1.2DISPLAYS
Each instrument is provided with a digital display and status indicators as shown in Figure 1-1. The digital display is programmable to display the process value only, process and setpoint, deviation from setpoint only, deviation and setpoint, or setpoint continuously.
Status indication is provided for Alarm , Output 1, Output 2, degree C, degree F, engineering units, Manual operation, Segment 1 thru 6, Ramp, and Soak.
Display resolution is programmable for 0.1 or 1 degree for thermocouple and RTD inputs, and 0.001, 0.01, 0.1, or 1 unit for volt, mV input types.
PAGE 6
1.1.3CONTROL
Instruments can be programmed for On-Off, Time Proportioning, Current Proportioning, or Position Proportioning control implementations. Selectable direct or reverse control action is also provided. Proportional control implementations are provided with fully programmable PID parameters.
Automatic to Manual switching is easily accomplished via the Standby mode . Switching is bumpless, and while in manual, manipulation of proportional outputs is possible.
Other standard control features include control output limits, setpoint limits, anti-reset windup control, and a unique Automatic Transfer function, which, if configured, allows manual control of the process until setpoint is reached, at which time the unit will automatically transfer from manual to automatic control.
Remote Run-Hold capability can be provided via the Auxiliary Input.
1.1.4PROGRAMMABLESETPOINTPROFILES
Up to eight profiles can be programmed on any of these Profile Controllers. Each of the eight profiles can contain up to six segments. Each segment contains a ramp and a soak operation. Profiles can be programmed to run continuously or any number of times up to 9999. A combination of profiles may be combined for back to back execution. This has the affect of acting as a single profile of more than six segments.
Assured Soak is provided with the use of two programmable parameters that will activate an Auto/Hold feature. This feature will place a running profile in the Hold condition and prohibit a Soak operation from starting or completing if an acceptable process value is not reached and then maintained.
Event outputs may also be provided. Up to three events may be assigned and can be turned on or off at the beginning of each ramp and soak.
1.1.5ALARMS
Alarm settings are fully programmable. Alarm type may be set as Process direct or reverse (High or Low), Deviation direct or reverse (above or below setpoint), or Deviation Band type (closed or open within band).
Alarm outputs can be provided by assigning any specified relays (SPST or SSR driver) to the respective alarm.
1.1.6DIGITALCOMMUNICATIONS
The instrument can be provided with an RS-422/485 communications port which allows bi-directional multidrop communications with a supervisory computer.
PAGE 7
InstallationandWiring2.1
Read these instructions carefully before proceeding with installation and operation. Electrical code requirements and safety standards should be observed. Installation should be performed by qualified personnel.
CAUTION: TheInstrumentACpowerinputisspecifiedinthemodelnumberandonthewiringlabelforeither115VACor 230VAC.VerfiytheACpowerinputrequiredbytheinstrumentpriortoproceedingwithinstallation.
Unpacking 2.2
Remove the instrument from the carton and inspect it for any damage due to shipment. If any damage is noticed due to transit, report and file a claim with the carrier. Write the model number and serial number of the instrument on the front cover of this Operation Manual for future reference when corresponding with the factory.
Location 2.3
Locate the instrument away from excessive moisture, oil, dust, and vibration. Do not subject the instrument to operating temperatures outside of 0 to 55˚ C (32° to 131° F).
Mounting2.4
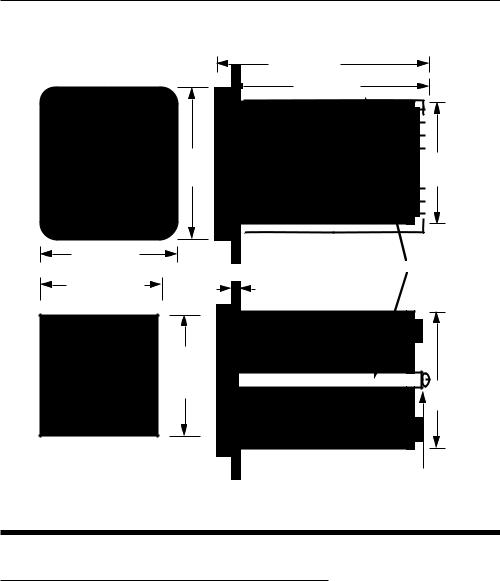
Figure 2-1 (page 8) shows installation view and physical dimensions for the panel mounted instrument.
The electronics can be removed from the housing for installation, if so desired. To remove, loosen the locking screw centered on the bottom face of the unit. The instrument pulls straight out. When installing, be sure that the verically mounted circuit boards are inserted in the correct grooves in the top and bottom of the housing. Also make sure the screw lock is sufficiently tight. When installing multiple instruments, be sure to reinsert the proper instrument into its correct enclosure by matching the serial number with the number inside the housing. This will insure that the accuracy of the control will be within the published specifications. The ambient compensator on the rear of the enclosure is calibrated to the electronics at the factory.
Cut the panel cutout to the dimensions shown in Figure 2-1 (page 8). Insert the instrument housing into the panel cutout and install the mounting bracket. Place the mounting screws on the back of the housing and tighten until the instrument is rigidly mounted. Do not overtighten.
A surface mounting kit is available - part number 64405801. For installation of the instrument in areas subjected to washdowns, a water tight cover option is available (part # 64417801).
PAGE 8
FIGURE2-1
4.8 (.188) MAX PANEL THICKNESS
165.9 (6.53)
146.8 (5.78)
96.0 |
|
90.4 |
(3.78) |
|
|
|
(3.560) |
|
|
|
Side View
96.0 (3.78) |
|
Mounting Bracket |
|
|
|
Panel |
|
92 + or - |
0.8 |
|
|
|
|
||
(3.622 + or - .031) |
|
|
|
PANEL |
|
92+ or-.8 |
|
CUTOUT |
(3.622 |
|
|
+ or-.031) |
|
||
SIZE |
|
90.4 |
|
|
|
||
|
|
|
(3.560) |
Top View
All dimensions shown |
|
in mm and inches. Inches |
|
shown in ( ). |
Mounting screw |
|
PreparationforWiring2.5
2.5.1WIRINGGUIDELINES
Electrical noise is a phenomenon typical of industrial environments. The following are guidelines that must be followed to minimize the effect of noise upon any instrumentation.
2.5.1.1 INSTALLATION CONSIDERATIONS
Listed below are some of the common sources of electrical noise in the industrial environment:
•Ignition Transformers
•Arc Welders
•Mechanical contact relay(s)
•Solenoids
Before using any instrument near the devices listed, the instructions below should be followed:
1.If the instrument is to be mounted in the same panel as any of the listed devices, separate them by the largest distance possible. For maximum electrical noise reduction, the noise generating devices should be mounted in a separate enclosure.
PAGE 9
2.If possible, eliminate mechanical contact relay(s) and replace with solid state relays. If a mechanical relay being powered by an instrument output device cannot be replaced, a solid state relay can be used to isolate the instrument.
3.A separate isolation transformer to feed only instrumentation should be considered. The transformer can isolate the instrument from noise found on the AC power input.
4.If the instrument is being installed on existing equipment, the wiring in the area should be checked to insure that good wiring practicies have been followed.
2.5.1.2 AC POWER WIRING
Earth Ground
The instrument includes noise suppression components that require an earth ground connection to function. To verify that a good earth ground is being attached, make a resistance check from the instrument chassis to the nearest metal water pipe or proven earth ground. This reading should not exceed 100 ohms.
Neutral (For 115VAC)
It is good practice to assure that the AC neutral is at or near ground potential. To verify this, a voltmeter check between neutral and ground should be done. On the AC range, the reading should not be more than 50 millivolts. If it is greater than this amount, the secondary of this AC transformer supplying the instrument should be checked by an electrician. A proper neutral will help ensure maximum performance from the instrument.
2.5.1.3 WIRE ISOLATION
Four voltage levels of input and output wiring may be used with the unit:
*Analog input or output (i.e. thermocouple, RTD, VDC, mVDC or mADC)
*SPST Relays
*SSR driver outputs
*AC power
The only wires that should be run together are those of the same category. If they need to be run parallel with any of the other lines, maintain a minimum 6 inch space between the wires. If wires must cross each other, do so at 90 degrees. This will minimize the contact with each other and reduces "cross talk". "Cross talk" is due to the EMF (Electro Magnetic Flux) emitted by a wire as current passes through it. This EMF can be picked up by other wires running in the same bundle or conduit.
In applications where a High Voltage Transformer is used, (i.e. ignition systems) the secondary of the transformer should be isolated from all other cables.
This instrument has been designed to operate in noisy environments, however, in some cases even with proper wiring it may be necessary to suppress the noise at its source.
2.5.1.4 USE OF SHIELDED CABLE
Shielded cable helps eliminate electrical noise being induced on the wires. All analog signals should be run with shielded cable. Connection lead length should be kept as short as possible, keeping the wires protected by the shielding. The shield should be grounded at one end only. The preferred grounding location is at the sensor, transmitter or transducer.
PAGE 10
2.5.1.5 NOISE SUPPRESSION AT THE SOURCE
Usually when good wiring practices are followed, no further noise protection is necessary. Sometimes in severe electrical environments, the amount of noise is so great that it has to be suppressed at the source. Many manufacturers of relays, contactors, etc. supply "surge suppressors" which mount on the noise source.
For those devices thta do not have surge suppressors supplied, RC (resistance-capacitance) networks and/or MOV (metal oxide varistors) may be added.
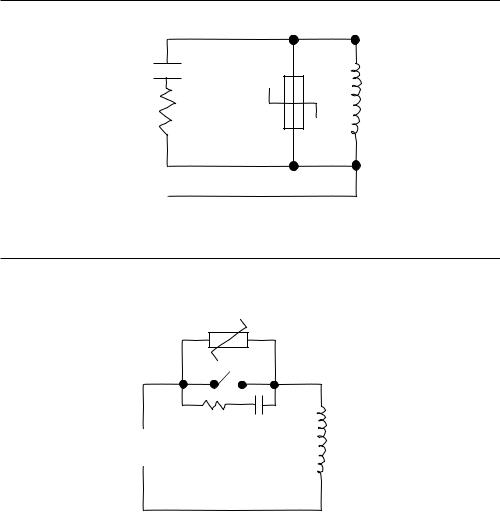
Inductive Coils - MOV's are recommended for transient suppression in inductive coils connected in parallel and as close as possible to the coil. See Figure 2-2. Additional protection may be provided by adding an RC network across the MOV.
Contacts - Arcing may occur across contacts when the contact opens and closes. This results in electrical noise as well as damage to the contacts. Connecting a RC network properly sized can eliminate this arc.
For circuits up to 3 amps, a combination of a 47 ohm resistor and 0.1 microfarad capacitor (1000 volts) is recommended. For circuits from 3 to 5 amps, connect 2 of these in parallel. See Figure 2-3.
FIGURE2-2
0.5 mfd
1000V
Coil
220 ohms
115V 1/4W
230V 1W
FIGURE2-3
MOV
R C
Inductive
Load
PAGE 11
2.5.2SENSORPLACEMENT(ThermocoupleorRTD)
If the temperature probe is to be sufnected to corrosive or abrasive conditions, it should be protected by the appropriate thermowell. The probe should be positioned to reflect true process temperature:
In liquid media - the most agitated area.
In air - the best circulated area.
THERMOCOUPLE LEAD RESISTANCE
Thermocouple lead length can affect instrument accuracy since the size (gauge) and the length of the wire affect lead resistance.
To determine the temperature error resulting from the lead length resistance, use the following equation:
Terr = TLe * L |
where; |
TLe = value from appropriate table below |
|
|
|||||
|
|
|
L = length of leadwire in thousands of feet |
|
|
||||
TABLE 1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
Temperature error in °C per 1000 feet of Leadwire |
|
|
|
|
|||||
AWG |
Thermocouple Type: |
|
|
|
|
|
|
||
No. |
J |
K |
T |
R |
S |
E |
B |
N |
C |
10 |
.34 |
.85 |
.38 |
1.02 |
1.06 |
.58 |
7.00 |
1.47 |
1.26 |
12 |
.54 |
1.34 |
.61 |
1.65 |
1.65 |
.91 |
11.00 |
2.34 |
2.03 |
14 |
.87 |
2.15 |
.97 |
2.67 |
2.65 |
1.46 |
17.50 |
3.72 |
3.19 |
16 |
1.37 |
3.38 |
1.54 |
4.15 |
4.18 |
2.30 |
27.75 |
5.91 |
5.05 |
18 |
2.22 |
5.50 |
2.50 |
6.76 |
6.82 |
3.73 |
44.25 |
9.40 |
8.13 |
20 |
3.57 |
8.62 |
3.92 |
10.80 |
10.88 |
5.89 |
70.50 |
14.94 |
12.91 |
24 |
8.78 |
21.91 |
9.91 |
27.16 |
27.29 |
14.83 |
178.25 |
37.80 |
32.64 |
|
|
|
|
|
|
|
|
|
|
TABLE 2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
Temperature Error in °F per 1000 feet of Leadwire |
|
|
|
|
|||||
AWG |
Thermocouple Type: |
|
|
|
|
|
|
||
No. |
J |
K |
T |
R |
S |
E |
B |
N |
C |
10 |
.61 |
1.54 |
.69 |
1.84 |
1.91 |
1.04 |
12.60 |
2.65 |
2.27 |
12 |
.97 |
2.41 |
1.09 |
2.97 |
2.96 |
1.64 |
19.80 |
4.21 |
3.66 |
14 |
1.57 |
3.86 |
1.75 |
4.81 |
4.76 |
2.63 |
31.50 |
6.69 |
5.74 |
16 |
2.47 |
6.09 |
2.77 |
7.47 |
7.52 |
4.14 |
49.95 |
10.64 |
9.10 |
18 |
4.00 |
9.90 |
4.50 |
12.17 |
12.28 |
6.72 |
79.95 |
10.64 |
9.10 |
20 |
6.43 |
15.51 |
7.06 |
19.43 |
19.59 |
10.61 |
126.90 |
26.89 |
23.24 |
24 |
15.80 |
39.44 |
17.83 |
48.89 |
49.13 |
26.70 |
320.85 |
68.03 |
58.75 |
|
|
|
|
|
|
|
|
|
|
Example:
An MIC is to be located in a control room 660 feet away from the process. Using 16 AWG, type J thermocouple, how much error is induced?
Terr = TLe * L
TLe = 2.47 (°F/1000 ft) from Table 2
Terr = 2.47 (°F/1000 ft) * 660 ft
Terr = 1.6 °F
PAGE 12
RTD LEAD RESISTANCE
RTD lead length can affect instrument accuracy, since the size (gauge) and length of the wire affect lead resistance.
To determine the temperature error resulting from the lead length resistance, use the following equation:
Terr = TLe * L |
where; |
TLe = value from Table 3 if 3 wire RTD or Table 4 if 2 wire RTD |
|||
|
|
|
L = length of lead wire in thousands of feet |
||
TABLE 3 - 3 Wire RTD |
|
|
|
||
|
|
|
|
|
|
AWG No. |
|
Error °C |
Error °F |
|
|
|
|
|
|
|
|
10 |
|
+/- 0.04 |
+/- 0.07 |
|
|
12 |
|
+/- 0.07 |
+/- 0.11 |
|
|
14 |
|
+/- 0.10 |
+/- 0.18 |
|
|
16 |
|
+/- 0.16 |
+/- 0.29 |
|
|
18 |
|
+/- 0.26 |
+/- 0.46 |
|
|
20 |
|
+/- 0.41 |
+/- 0.73 |
|
|
24 |
|
+/- 0.65 |
+/- 1.17 |
|
|
|
|
|
|
|
|
TABLE 4 - 2 Wire RTD |
|
|
|
||
|
|
|
|
|
|
AWG No. |
|
Error °C |
Error °F |
|
|
10 |
|
+/- 5.32 |
+/- 9.31 |
|
|
12 |
|
+/- 9.31 |
+/- 14.6 |
|
|
14 |
|
+/- 13.3 |
+/- 23.9 |
|
|
16 |
|
+/- 21.3 |
+/- 38.6 |
|
|
18 |
|
+/- 34.6 |
+/- 61.2 |
|
|
20 |
|
+/- 54.5 |
+/- 97.1 |
|
|
24 |
|
+/- 86.5 |
+/- 155.6 |
|
|
|
|
|
|
|
|
Example:
An application uses 2000 feet of 18 AWG copper lead wire for a 3 wire RTD sensor. What is the worst case error due to this leadwire length?
Terr = TLe * L
TLe = +/- .46 (°F/1000 ft) from Table 3
Terr = +/- .46 (°F/1000 ft) * 2000 ft
Terr = +/- 0.92°F

PAGE 13
WiringConnections2.6
All wiring connections are typically made to the instrument with it installed. Terminal connections should be made via the rear panel with 14 gauge wire maximum (see Figure 2-4).
FIGURE2-4
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
SERIAL A |
POS. PROP. |
8 |
REMOTE |
|
||
|
|
|
H |
RUN/ |
|
|
||||
|
|
|
WIPER |
|
|
|
||||
|
|
|
|
|
|
|
HOLD |
|
|
|
|
|
RELAY C |
|
|
|
|
|
|
||
|
|
|
POS. PROP. |
|
|
|
|
|||
|
SERIAL B |
7 |
OUT2 |
+ |
|
|||||
|
|
|
G |
|
||||||
|
|
|
|
HIGH |
|
4-20MA |
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
F |
|
|
|
6 |
OUT1 |
+ |
|
|
|
|
|
|
|
4-20MA |
|
|||
|
|
RELAY B |
|
|
|
|
|
|
|
|
|
|
|
E |
|
|
|
5 |
RETURN |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
D |
INPUT RATINGS: |
|
|
4 |
|
|
|
|
|
|
|
115/230 VAC 50/60 HZ 15VA MAX |
|
|
|
|
||
|
|
RELAY A |
RELAY OUTPUT RATINGS: |
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
||
|
|
|
C |
115VAC 5.0A RESISTIVE |
|
3 |
SIGNAL + |
|
||
|
|
|
|
230VAC 2.5A RESISTIVE |
|
|
|
|
|
|
|
|
|
|
230VAC 1/8 HP |
|
|
|
|
|
|
|
|
|
B |
115/230VAC 250VA |
|
|
2 |
CJC |
|
|
|
|
|
MAXIMUM AMBIENT: 55˙C |
|
|
|
||||
|
|
|
115 |
|
|
|
|
|
||
|
|
|
230 VAC |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|||
|
|
|
|
|
|
|
|
|
||
|
|
|
A |
|
|
|
SIGNAL - |
|
||
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
||
|
|
|
|
GROUND |
MADE IN U.S.A. |
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2.6.1INPUTCONNECTIONS
WARNING:Avoidelectricalshock.ACpowerwiringmustnotbeconnectedatthesourcedistributionpaneluntilallwiring connectionsarecompleted.
Consult the model code and the wiring label for the appropriate line voltage for the instrument.
PAGE 14
FIGURE2-5
AC Power
Connect 115 VAC hot and neutral to terminals B and A respectively as illustrated below.
Connect 230 VAC as described below. Connect Earth ground to the ground screw as shown.
115 VAC INSTRUMENT VOLTAGE |
230 VAC INSTRUMENT VOLTAGE |
Rear View |
Rear View |
.5 AMP* FUSE
L1
L2
B
A
GROUND
.25 AMP* FUSE
L1
L2
B
A
GROUND
*Supplied by the customer
*Supplied by customer
FIGURE2-6
Thermocouple Input
Make thermocouple connections as illustrated below. Connect the positive lead of the thermocouple to terminal 3, and the negative to terminal 1. For industrial environments with comparatively high electrical noise levels, shielded thermocouples and extension wire are recommended. Be sure that the input conditioning jumpers are properly positioned for a thermocouple input. See Appendix A-2 (page 64) and A-3 (page 65 or 66).
THERMOCOUPLE INPUT
Rear view
8
7
6
5
4
3
2
1
+
-
300 OHMS MAXIMUM LEAD
PAGE 15
FIGURE2-7
RTD Input
Connections are shown for 3 wire and 2 wire RTD's. If a three wire device is used, install the common wires to terminals 1 and 5. If a two wire device is used, install a jumper between terminals 1 and 5.
2 WIRE RTD INPUT |
3 WIRE RTD INPUT |
Rear View |
Rear View |
|
|
||
8 |
8 |
|
|
||
7 |
7 |
|
6 |
6 |
|
5 |
5 |
|
JUMPER* |
|
|
4 |
4 |
|
3 |
3 |
|
|
||
2 |
2 |
|
1 |
1 |
|
100 OHM* |
100 OHM* |
|
PLATINUM |
||
PLATINUM |
||
|
||
10 FEET |
*Supplied by the customer |
|
LEAD |
||
MAXIMUM |
|
|
*Supplied by customer |
|
FIGURE2-8
Volt, Millivolt and Milliamp Input
Make volt, millivolt or milliamp connections as shown below. Terminal 3 is positive and terminal 1 is negative. Milliamp input requires a shunt resistor be installed across the input terminals as shown. 4-20mA input are accommodated by setting up the instrument for either 10 to 50mVDC or 1 to 5VDC input. Make sure that the appropriate resistor value is used. Terminal 3 is positive and terminal 1 is negative. (.1% resistors recommended.) (Continued on next page)
MILLIAMP DC INPUT |
MILLIAMP DC INPUT |
Rear View
8
7
6
5
4
3
2
1
Rear View
|
8 |
|
7 |
|
6 |
Shielded Twisted |
5 |
|
|
Pair |
4 |
+ |
3 |
|
2 |
- |
1 |
|
MILLIAMP DC SOURCE
250 OHM SHUNT RESISTER REQUIRED
Shielded Twisted
+ Pair
-
MILLIAMP DC SOURCE
2.5 OHM SHUNT RESISTER REQUIRED
NOTE: Fault detection is not functional for 0-5 V or 0-20 mA inputs.
PAGE 16
MILLIVOLT DC INPUT |
VOLT DC INPUT |
Rear View
8
7
6
5
4
3
2
1
Rear View
|
|
8 |
|
|
|
7 |
|
|
|
6 |
|
|
|
5 |
|
+ |
Shielded Twisted |
4 |
|
Pair |
|||
|
|||
|
3 |
||
|
|
||
|
|
2 |
|
|
|
1 |
-
MILLIVOLT DC SOURCE
50 MILLIVOLT DC MAXIMUM
Shielded Twisted
+Pair
-
VOLT DC SOURCE 5 VOLT DC MAXIMUM
FIGURE2-9A
24Volt Transmitter Power Supply (XP Option)
Make connections as shown below. Terminal 3 is positive (+) and terminal 1 is negative (-). Be sure the input conditioning jumpers are properly positioned for the input type selected. See Figure A-2 Processor Board, page 64 and Figure A-3 Option Board, page 65 or 66. Note the 250 ohm shunt resistor is not required.
+3 |
+ |
|
2 |
Two Wire |
|
Transmitter |
||
|
-1 
 -
-
FIGURE2-9B
24 Volt Power Supply (XA Option)
Make connections as shown below. Terminal G is positive (+) and terminal H is negative (-). Be sure the input conditioning jumpers are properly positioned. See Figure A-2 Processor Board, page 64 and Figure A-3 Option Board, page 65 or 66.
H -
24VDC
G +
PAGE 17
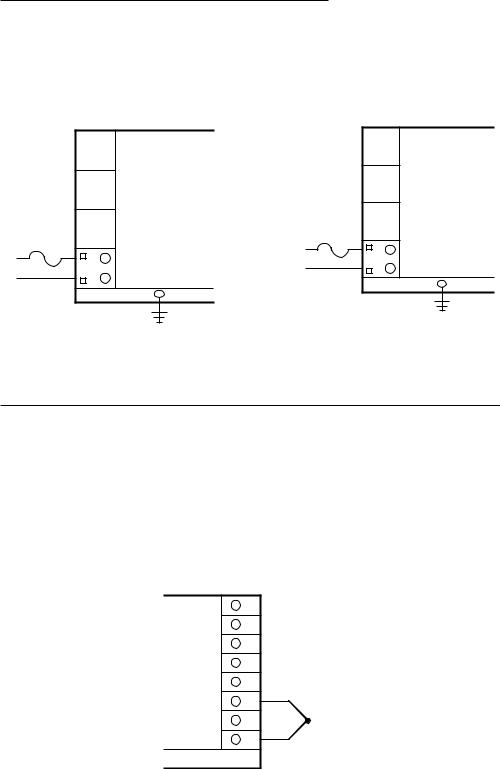
FIGURE2-10
Remote Run/Hold Input
If Remote Run/Hold capability has been specified, make connections as shown. Terminal 5 is the ground and terminal 8 is the input.
|
|
|
Shielded |
||||||||
|
|
|
Multi-Conductor |
||||||||
|
|
|
Cable |
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
8 |
Run/ |
+ |
|
|
|
|
|
|
|
|
|
Hold |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
7 |
Out2 |
+ |
|
|
|
|
|
|
|
|
|
4-20mA |
|
|
|
|
|
|
|
|
Remote |
||
|
|
|
|
|
|
|
|
||||
6 |
Out1 |
+ |
|
|
|
|
|
|
|
|
Dry |
4-20mA |
|
|
|
|
|
|
|
|
Contact |
||
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
5 |
Return |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
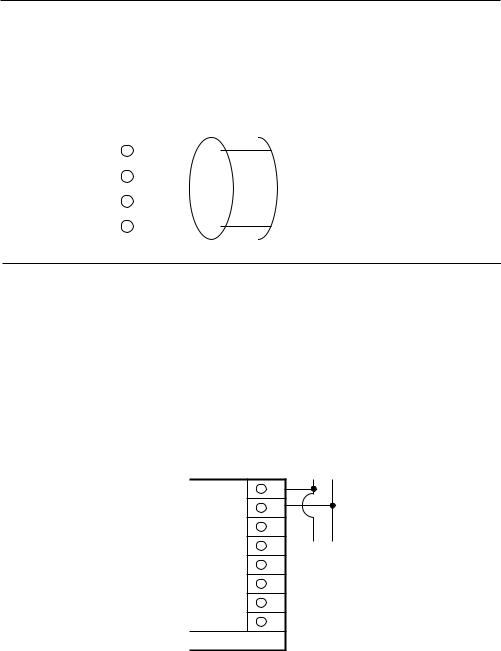
FIGURE2-11
Remote Digital Communications RS-485 Terminals 7 & 8 (Optional)
If the communications network continues on to other units, connect the shields together, but not to the instrument. A terminating resistor should be installed at the terminals of the last instrument in the loop. The shield should be grounded at the computer or the convertor box, if used. See the Protocol Manual (Form 2878) for more details on the use of the digital communications option.
Terminals7&8areused forcommunicationswhen themodelnumberis 6XXYX3Xor6XXYX5X whereX=anyvalidnumber andY=0,1,or2.
DIGITAL COMMUNICATIONS CONNECTIONS - TERMINALS 7 & 8
FROM HOST
COMPUTER
Output 2 cannot be DC Current
8 |
|
7 |
|
6 |
|
5 |
TO OTHER |
4 |
INSTRUMENTS |
|
3
2
1
PAGE 18
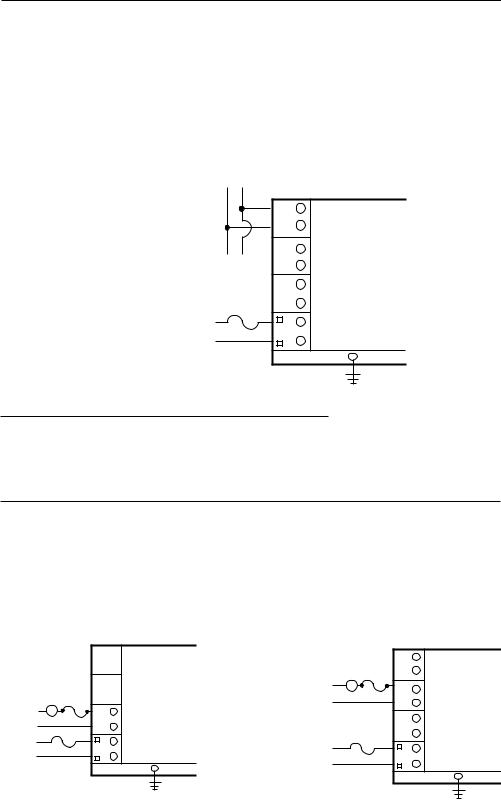
FIGURE2-12
Alternate Remote Digital Communications RS-485 Terminals G & H (Optional)
If the communications network continues on to other units, connect the shields together, but not to the instrument. A terminating resistor should be installed at the terminals of the last instrument in the loop. The shield should be grounded at the computer or the convertor box, if used. See the Protocol Manual (Form 2878) for more details on the use of the digital communications option.
TerminalsG&Hareused forcommunicationswhen themodelnumberis 6XXY04Xor6XXY06Xwhere X=anyvalidnumberand Y=3,4,or5.
DIGITAL COMMUNICATIONS CONNECTIONS - TERMINALS G & H
From Host
Output 3 Must Be 0
Computer
Rear View
|
|
H |
|
|
G |
|
|
F |
|
To Other |
E |
|
Instruments |
|
|
|
|
|
|
D |
|
|
C |
INPUT |
|
B |
POWER |
|
A |
GROUND
2.6.3OUTPUTCONNECTIONS
Output connections include SPST relays, SSR drivers, and 4 to 20mADC. Relay outputs may be assigned control, alarm or event functions. Assignment of output function is accomplished via the front keypad and is described in Section 4 (page 38) of this manual.
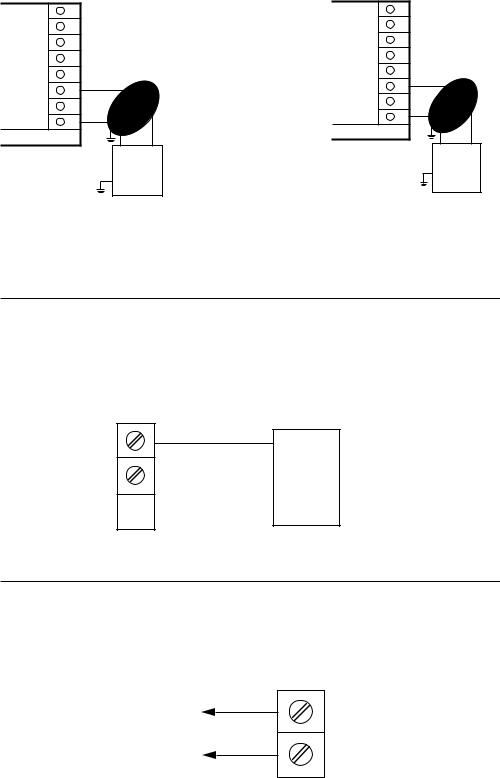
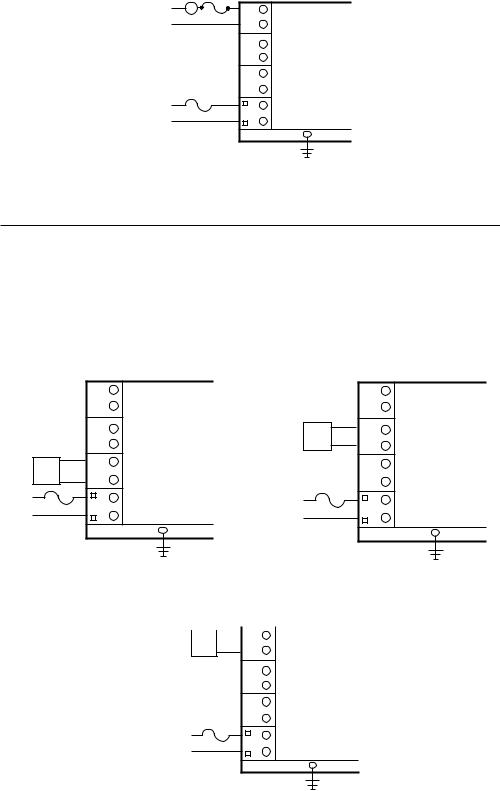
FIGURE2-13
Relay Output
Connections are made to relay A as illustrated below. Connect relay(s) B & C (if present) in the same manner. Relay contacts are rated at 5 amp resistve at 130 VAC.
RELAY A |
RELAY B |
|
|
|
Rear View |
|
|
|
LOAD |
|
|
|
L2 |
|
LOAD |
|
L1 |
|
L2 |
D |
|
|
L1 |
C |
|
|
INPUT |
B |
INPUT |
|
POWER |
|||
|
POWER |
||
|
A |
||
|
|
||
|
|
GROUND |
Rear View
H
G
F
E
D
C
B
A
GROUND
PAGE 19
|
|
RELAY C |
|
LOAD |
Rear View |
|
|
|
L2 |
|
H |
L1 |
|
G |
F
E
D
C
INPUT
B
POWER
A
GROUND
FIGURE2-14
SSR Driver Output
Connections are made to the solid state relay driver output located in the Relay A position as shown. The solid state relay driver is a 5 VDC current sink output type. Connect the solid state relay driver(s) in the Relay B and C position (if present) in the same manner.
SSR DRIVER (RELAY A) |
SSR DRIVER (RELAY B) |
Rear View
|
H |
SOLID STATE |
|
|
G |
||
|
RELAY |
+ |
|
|
|
||
SOLID STATE |
F |
|
- |
|
|
||
RELAY + |
E |
|
|
D
-C
INPUT |
B |
INPUT |
|
POWER |
POWER |
||
|
|||
|
|
||
|
A |
|
|
|
|
GROUND |
Rear View
H
G
F
E
D
C
B
A
GROUND
SSR DRIVER (RELAY C)
SOLID STATE |
Rear View |
||||
|
RELAY |
+ |
|
||
H |
|||||
|
|
|
|
||
|
|
|
|
||
-G
F E
D
C
INPUT |
|
POWER |
B |
|
A |
GROUND

PAGE 20
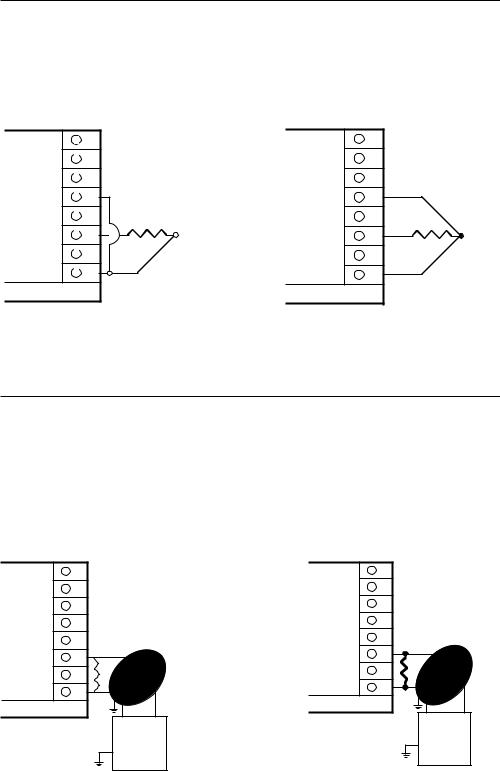
FIGURE2-15 mADC Output
Connections are made to current outputs 1 and 2 as shown. Connect the positive lead to terminal 6 for Output 1 or terminal 7 for Output 2, the negative leads connect to terminal 5. Current outputs will operate up to 650 ohms maximum load. The current output(s) can be selected for either 4-20mADC or 0-20mADC (if EO option is present).
DC CURRENT OUTPUT 1 |
DC CURRENT OUTPUT 2 |
Rear View
8
7
6
5
4
3
2
1
+
-
Rear View
8
Shielded
Twisted 7 Pair
6
5
LOAD
4
650 OHMS
MAXIMUM
3
2
1
+
-
Shielded
Twisted
Pair
LOAD
650 OHMS MAXIMUM
FIGURE2-16
Position Proportioning Control
The relay and slidewire feedback connections are made as illustrated below. The relay assigned to Output 1 will be used to drive the motor in the open direction and the relay asssigned to Output 2 will be used to drive the motor in the closed direction. The minimum slidewire feedback resistance is 135 ohms, the maximum resistance is 10K ohms.
L2 |
|
|
|
|
|
OPEN |
|
|
|
|
CLOSE |
|
|
|
|
|
Modulating Motor |
|
|
|
H |
|
8 |
POS.PROP. |
|
|
WIPER |
||
|
|
|
|
POS.PROP. |
|
G |
|
7 |
HIGH + |
|
F |
Rear View |
6 |
|
|
RELAY B |
|
|
|
|
|
|
|
|
|
E |
|
5 |
RETURN |
|
|
|
||
|
D |
|
4 |
|
|
RELAY A |
|
|
|
L1 |
C |
|
3 |
|
|
B |
|
2 |
|
|
A |
|
1 |
|
|
|
|
|
|
PAGE 21
Configuration 3.1
After completing installation of the unit, the configuration procedures contained within this section must be performed to prepare the instrument for operation on the intended application. The procedures include selecting specific parameters, entering data and possible jumper positioning.
Parameter selections and data entry are made via the front keypad. To ease configuration and operation, user entered data has been divided up into several modes. Each mode contains a different type of data or may be used for specific operating functions. These modes are as follows:
|
Control |
|
Test |
Calibrate |
Program |
Tune |
A |
|
(CtrL) |
|
(tESt) |
(CAL) |
(Prog) |
(tunE) |
|
A |
Standby |
Profile |
Profile |
P1..P8 |
|
|
|
Continue |
OFF |
|
|||||
(Stby) |
|
Entry |
Profile |
|
|||
|
|
(PCon) |
|
|
|||
|
|
|
(PEnt) |
Number |
|
|
|
|
|
|
|
|
|
||
Mode |
|
Display Code |
Function |
Description |
|||
Off |
|
|
oFF |
Operation |
Outputs and Alarm Off |
||
Control |
|
|
CtrL |
Operation |
Operates in automatic |
||
|
|
|
|
|
|
control; |
Change local |
|
|
|
|
|
|
setpoint, Alarms are On |
|
Manual |
|
|
Stby |
Operation |
Manual control of |
||
|
|
|
|
|
|
proportional outputs |
|
Program |
|
|
Prog |
Configuration |
Configures operating |
||
|
|
|
|
|
|
parameters |
|
Tune |
|
|
tunE |
Configuration & Sets alarm settings & |
|||
|
|
|
|
Operation |
tunes the controller to |
||
|
|
|
|
|
|
the process |
|
Profile |
|
|
PCon |
Operation |
Provides Profile |
||
Continue |
|
|
|
|
|
Continue function |
|
Profile |
|
|
PEnt |
Configuration |
Configures profile Entry |
||
Entry |
|
|
|
|
|
parameters |
|
P1 thru P8 |
|
|
P1 - P8 |
Operation |
Executes any of the 8 |
||
|
|
|
|
|
|
profiles |
|
Test |
|
|
tESt |
Service |
|
Performs instrument |
|
|
|
|
|
|
|
tests |
|
Calibration |
|
|
CAL |
Service |
|
Performs instrument |
|
|
|
|
|
|
|
calibration |
|
Enable |
|
|
EnAb |
Configuration |
Locks out or enables |
||
|
|
|
|
|
|
access to any modes |
|
(Continued on next page)
PAGE 22
Associated with each mode is a series of unique displays which are accessed via the front keypad.
Prior to first time operation of the instrument, the configuration procedures for the
Program, Profile Entry and Tune modes must be performed as applicable. The Control, Off, Standby, Profile Continue and Profile execution (P1 thru P8) modes are discussed in Section 4.1 (page 38) of this manual.
Calibration and Test modes are not used as part of instrument configuration or operation. These are used for service and maintenance functions and are discussed in Section 5.2 (page 47) of this manual.
Shipped Configuration/
Jumper Positioning 3.2
All configuration parameters in each mode are set to default values. These defaults are shown in tabular form under the description for each mode. Instrument AC power input is as specified in the instrument model number and as shown on the instrument ratings label.
3.2.1 JUMPER POSITIONING
Jumpers are used in all instruments to provide a security lockout feature and to condition the process input . All jumpers are typically of the three pin type and have two functions. All jumpers are either located on the Options Board or the Processor Board. Board layouts and jumper locations are shown in Appendix A-2 and A-3 (pages 64 and 65 or 66).
Check the actual jumper position in the instrument to be configured and verify the proper position for the intended application. If the current position is not correct, make changes.
Start up Procedures 3.3
Step by step procedures are provided in Tables 3-1 thru 3-4 . These tables provide the display sequence, parameter adjustment and factory setting for each step.
The instrument is provided with a "time out" feature. If the instrument is in any mode and no keypad activity takes place for 30 seconds, the instrument will "time out" and exit the mode automatically. The instrument will display the code for the respective mode. If a mode code is displayed for 5 seconds with no activity it will then "time out" and proceed to either the Control or Off mode, depending upon which operational state the instrument was in last.
3.3.1 POWER UP PROCEDURE
A.Verify that all electrical connections have been properly made before applying power to the instrument.
If the instrument is being configured for the first time, it may be desirable to disconnect the controller output connections as the instrument may go into the Control mode automatically following the power up sequence. Upon verification, power may be applied.

PAGE 23
B.Upon power up, "6XXX" will be displayed (X representing digits), then "XXX-", identifying the seven digit model number as defined in the order matrix. Next, the
software revision level will be displayed in the format "rX.XX". Then "tSt1", "tSt2", and "tSt3" will be displayed while Test 1 thru 3 are executed automatically. Upon successful completion of these tests, "Ctrl" (for the Control mode) or "oFF" (for the Off mode) will be displayed for about three seconds. During this time the operator may select another mode prior to the instrument automatically going into the Control mode.
C.If any error messages are displayed, refer to Section 5.4, page 56 for a definition of these error messages and the required action.
D.If the instrument has been configured or operated previously, the mode that the instrument will go into upon power up, depends on what mode the instrument was in on
power-down and how it has been programmed.
Front Panel Operation 3.4
3.4.1 DIGITAL DISPLAY AND STATUS LED's
The digital display provided has 4 digits and a decimal point. Each digit has seven segments and is capable of producing numeric characters from 0-9 and certain alpha characters. The digital display is used to provide indication of process variable as well as displaying codes used for configuration and operation of the instrument. The display includes the following Status Indicator LED's:
Label |
Color |
Function |
MAN |
Amber |
Lights when the Manual StbY mode is on. |
OUT1 |
Red |
Lights when Output 1 is on. |
OUT2 |
Amber |
Lights when Output 2 is on. |
ALRM |
Red |
Lights when either Alarm is on or active. |
SEG 1 |
Red |
Lights to indicate the profile section segment number |
thru |
|
that is active. |
SEG 6 |
|
|
RAMP |
Red |
Lights during the Ramp section of any profile segment. |
SOAK |
Red |
Lights during the Soak section of any profile segment. |
SP |
Green |
Indicates that the value displayed is the setpoint. |
C |
Red |
Lights to indicate that the process value is in terms of |
|
|
degrees C (Celcius) |
F |
Red |
Lights to indicate that the process value is in terms of |
|
|
degrees F (Farenheit) |
U |
Red |
Lights to indicate that the process value is in terms of |
|
|
engineering units. |
- |
Red |
Lights to indicate a negative displayed value |

PAGE 24
3.4.2 KEYPAD CONTROLS
The keys on the keypad functions include:
SCROLL: Used to: |
1. Display the enabled modes and programmed profiles. |
||
|
2. |
While in a mode, used to sequence the parameter codes and |
|
|
|
values. |
|
|
3. |
Exit some Test and Calibration functions. |
|
|
4. |
Work in conjuction with other keys: |
|
|
|
a. With the UP key to display proportional output % |
|
|
|
when in the Control mode or while a profile is |
|
|
|
running. |
|
|
|
b. With the DOWN key: |
|
|
|
1) |
On power up to alter model # |
|
|
2) |
Enter Cal/Test functions |
|
|
3) |
While a profile is running to view the |
|
|
|
ramp/soak time remaining. |
UP: Used to: |
1. |
Exit a mode. |
|
|
2. |
Turn a mode On in the Enable mode |
|
|
3. |
Increases a parameter numerical value. |
|
|
4. |
View the setpoint. |
|
|
5. |
Increase the setpoint value in the Control mode. |
|
|
6. |
Work in conjuction with the other keys: |
|
|
|
a. With the SCROLL key to display proportional |
|
|
|
output % |
|
|
|
b. With the DOWN key: |
|
|
|
1) |
On power up to reset the instrument |
|
|
2) |
Lamp test |
|
|
3) |
Enter the Enable mode |
DOWN: Used for: |
1. Enter a mode. |
|
|
|
2. |
Turn a mode Off in the Enable mode. |
|
|
3. |
Decrease a parameter numerical value. |
|
|
4. |
To start a profile when the profile number is displayed. |
|
|
5. |
Decrease the setpoint value in the Control mode. |
|
|
6. |
Step display through parameter codes in a mode. |
|
|
7. |
Work in conjuction with the other keys: |
|
|
|
a. With the SCROLL key: |
|
|
|
1) |
On power up to alter the model number |
|
|
|
displayed. |
|
|
2) |
Enter Cal/Test functions |
|
|
b. With the UP key: |
|
|
|
1) |
On power up resets the instrument |
|
|
2) |
Lamp test |
|
|
3) |
Enter the Enable mode |
RUN/HOLD: Used to: |
1. |
To start the profile number being displayed. |
|
|
2. |
Change between the profile Run and Hold profile conditions. |
|

PAGE 25
Operation Summary 3.5
The configuration and operating modes, the method of moving from one mode to another, and the basic parameter functions are described in each individual section . Data and parameter entry is made by stepping through each mode and making an appropriate response or entry to each step.
3.5.1 MODE SELECTION
If the instrument is in either the Off mode or Control mode, repeated depression of the Scroll key will cause the instrument to display the code corresponding to each mode which is enabled and each profile which has been entered. To enter a mode while its code is displayed, depress the Down key.
To exit the OFF mode, press the SCROLL key until CtrL is displayed, then press the DOWN key.
Entry into any mode except the Control, Tune, Standby, Enable and Profile execution, will cause the instrument's outputs to turn off. Access to the Tune mode is provided while the instrument continues normal operation if in Control or running a Profile.
3.5.2 CONFIGURATION DISPLAYS
During configuration, the display is used to show the parameter codes and values. During normal operation, these displays are used to indicate process values, setpoints, etc. .
TABLE 3-1 PROGRAM MODE CONFIGURATION PROCEDURE
Press and release the SCROLL key until Prog is displayed. Press the DOWN key to enter the Program mode. Press the SCROLL key to advance the display through the parameter codes and their values. Use the Up and DOWN keys to adjust the values. After adjusting a parameter, press the SCROLL key to proceed to the next parameter. Each time the DOWN key is pressed while a parameter code is being displayed, such as dFF, the next parameter code in the sequence will be displayed.
After all selections have been made, to exit the mode, press the UP key with a parameter in the display (not a setting ).
For illustration purposes, all available Program mode parameters have been listed. The parameters that will appear on the specific instrument will depend upon the model number (hardware configuration) of the instrument and on the parameter selections previously made.
For future reference, record the parameter selections for the application in the "Your Setting" column and on the Software Reference Sheet in Appendix E (page 75).
To prevent unauthorized changes to the Program mode, the mode can be disabled (turn off) in the Enable mode.
(Continued on next page)
 Loading...
Loading...