

HIT HA13563V, HA13563 Datasheet
HA13563, HA13563V
Three-Phase Brushless Motor Driver
ADE-207-218A (Z)
2nd Edition
December 1998
Description
The HA13563/V are 3-phase brushless motor driver ICs with digital speed control. It is designed for use as
a PPC or LBP drum motor driver and provides the functions and features listed below.
Functions
• Three-phase brushless motor driver
• Direct PWM drive
• Digital discriminator plus PLL speed control
• Speed monitor
• Stuck rotor protection
• Current limiter
• Thermal protection (OTSD)
• Low voltage inhibit (LVI)
Features
• Low saturation voltage
• Fly wheel diodes built-in
• FG signal digital filter built-in
Ordering Information
Product No. Package
HA13563 SP-23TA
HA13563V SP-23TB
HA13563/V
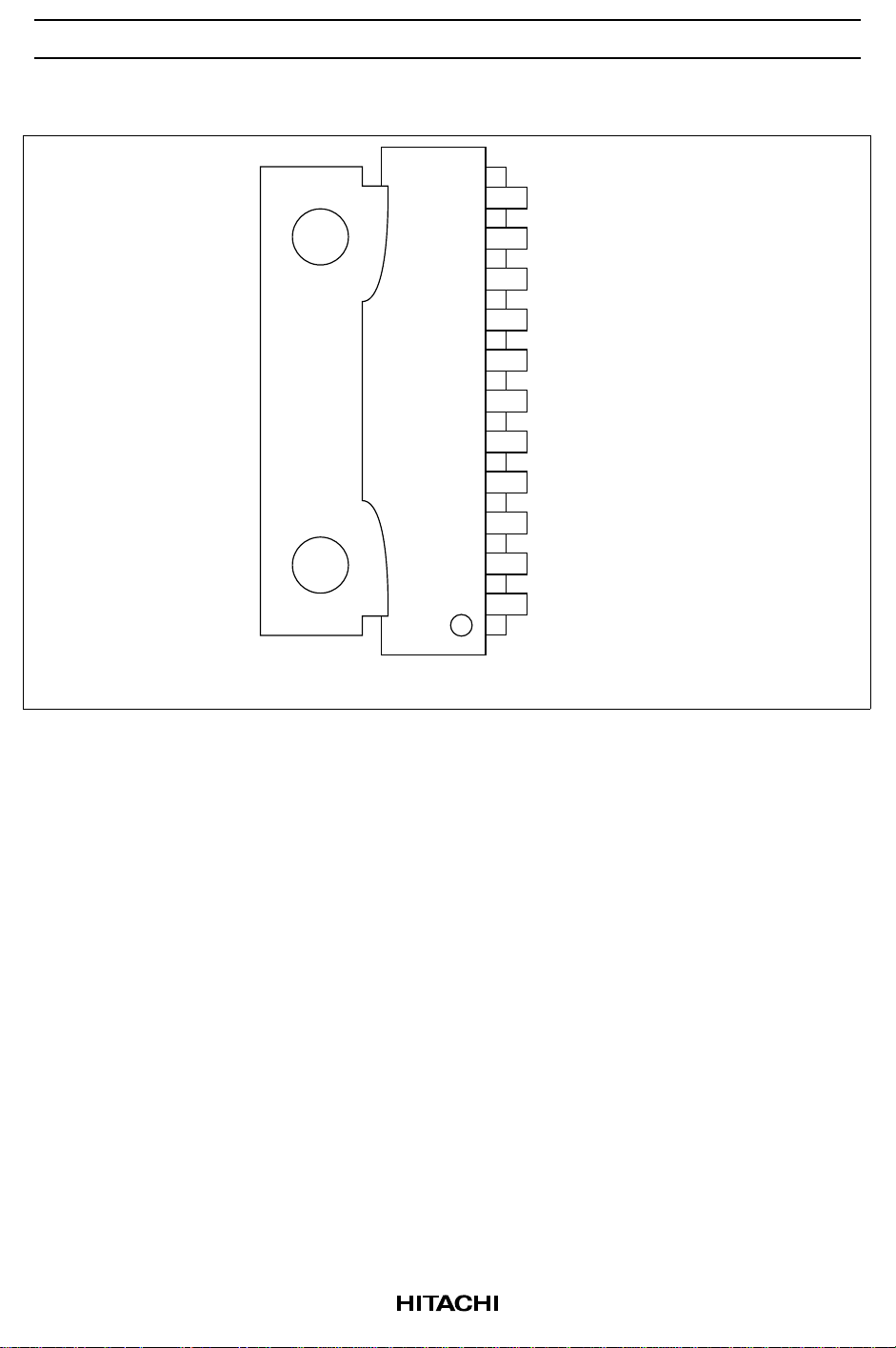
Pin Arrangement
23 R
NF
22 U
21 V
20 W
19 V
CC
18 READY
17 u
16 v
15 w
14 FG+
13 FG−
12 PROT
11 REG
10 PWM
9 CE
8 D2
7 OSC OUT
6 OSC IN
5 PLL OUT
4 DIS OUT
3 INT IN
2 INT OUT
1 GND
(Top view)
2
HA13563/V
Pin Functions
Pin No. Pin Name Function
1 GND Ground
2 INT OUT Integrator output
3 INT IN Integrator input
4 DIS OUT Speed discriminator output
5 PLL OUT PLL output
6 OSC IN Clock oscillator input. Apply the external clock signal to this pin.
7 OSC OUT Clock oscillator output. Use this pin to monitor the oscillator waveform.
8 D2 Clock divider selector input
High: 1/8, Middle or Open: 1/32, and Low: 1/16.
9 CE Chip enable input
High or Open: stop, Low: drive on.
10 PWM PWM carrier oscillator. An external capacitor to charge and discharge, and an
external resistor must be provided.
11 REG 5 V fixed voltage output. Always output regardless of the state of the CE input.
12 PROT An external capacitor sets the time until the stuck rotor protection circuit
operates. If this pin is shorted to ground, the protection circuit will not operate.
After the stuck rotor protection circuit operates, the IC can be reset by turning the
power off and then on again, or switching CE from low to high.
13 FG– FG amplifier – input.
14 FG+ FG amplifier + input. This pin is used for temperature monitoring. See the
reference data.
15 w The w+ and v– Hall amplifier input
16 v The v+, u– Hall amplifier input
17 u The u+, w– Hall amplifier input
18 READY Speed monitor output. Outputs a low level during fixed speed drive. This is an
open collector output.
19 V
20 W W-phase output
21 V V-phase output
22 U U-phase output
23 R
CC
NF
Power supply
Current detector. Connect a current detection resistor to this pin.
3
HA13563/V
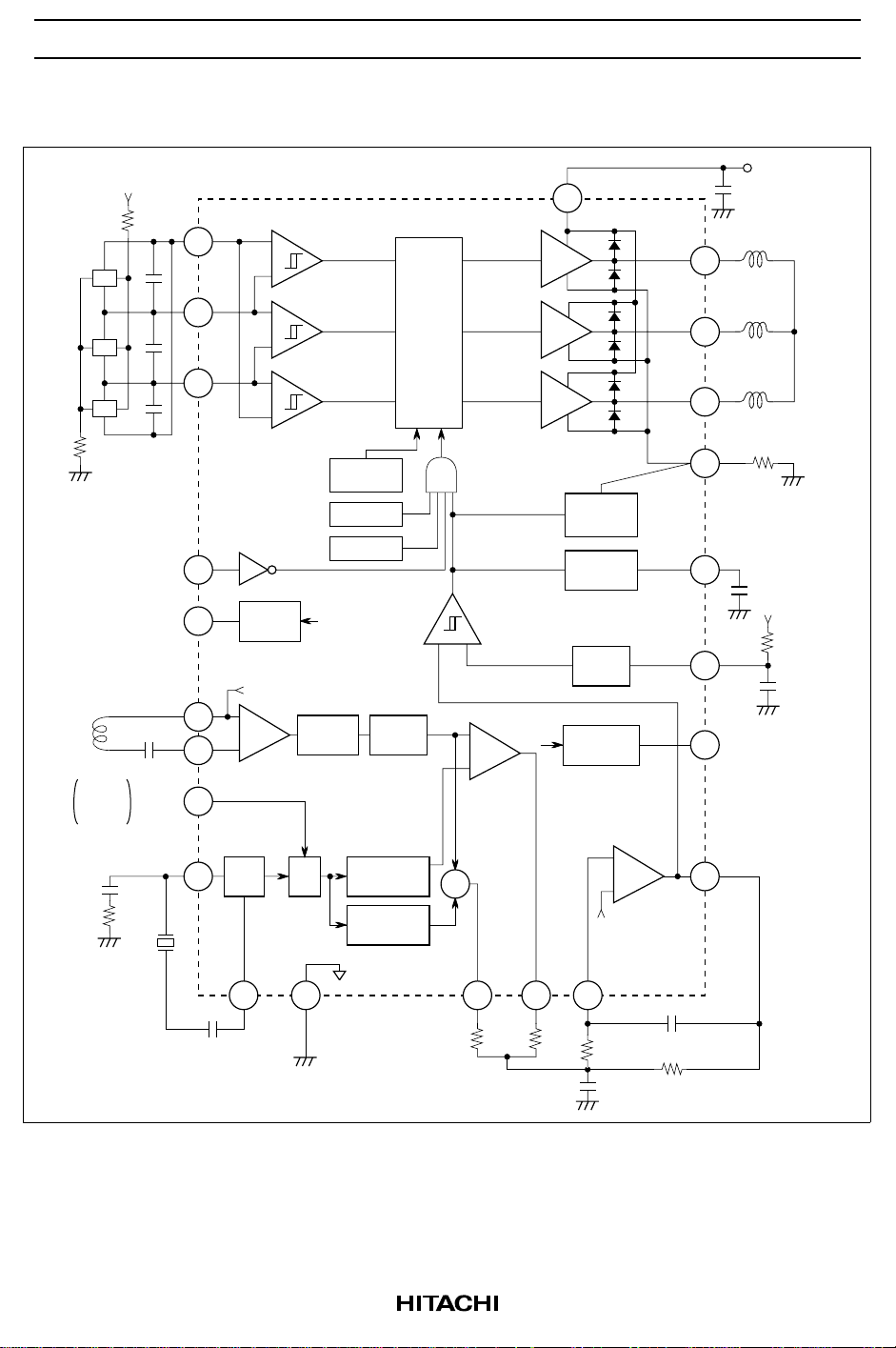
Block Diagram
V
CC
R101
+
Hu
C102C103C104
−
+
Hv
−
+
Hw
−
R102
CE
FG
M:
C109
R103
H:
1/8
1/32
L:
1/16
X'tal
9.2MHz Max
C108
D2
select
Phase
switching
logic
+ −
DIS OUT
Output amplifiers
PLL
−
PLL OUT
R1
R2
Hall amplifiers
17
16
15
9
11
14
13
8
6
C110
+
−
+
−
+
−
Open circuit
protection
LVI
OTSD
PWM
V
REG
FG amplifier
2.1V
+
−
OSC
71 3
shaping
D2
CC
Wave
comparator
Digital
filter
1/1024
Discriminator
54
19
U
V
W
Current
limiter
Vref1
Stuck rotor
protection
PWM
OSC
Speed
monitor
±6.25%
Integrator
2.8V
R3
V
CC
C101
−
+
C2
17.5 to 27.6V
22
21
20
23
12
Ct2
10
Monitor output
Constant speed:
18
Low (O/C)
2
R
NF
Vreg
Rt
Ct1
C1
R4
4

Timing Chart
HA13563/V
Hu Hv Hw
Hall element
output
U-phase
output voltage
V-phase
output voltage
W-phase
output voltage
Vhhys
V
CC
PWMPWM
0
V
CC
PWM
0
V
CC
PWMPWM
0
5
HA13563/V
External Components
Part No. Recommended Value Purpose Note
R1 to R4 — Integration constant 1
R101, R102 — Hall element bias 2
R103 1 kΩ Clock oscillator stabilization 9
R
NF
Rt — PWM carrier oscillator time constant 6
C1, C2 — Integration constant 1
C101 ≥ 0.1 µF Power supply bypass 4
C102, C103, C104 0.047 µF Stabilization 4
C108 — FG coupling 5
C109 0.047 µF Clock oscillator stabilization 9
C110 10 pF Crystal coupling 9
Ct1 1000 pF PWM carrier oscillator time constant 6
Ct2 — Stuck rotor protection circuit time constant 7
X’tal — Reference oscillator 8
Notes: 1. Determine the component values using the following as a guidline:
First determine the angular frequency of ω
ω
= 2π · ffg [rad/sec] (1)
P
— Current detection 3
for DIS OUT and PLL OUT.
P
Determine the the angular frequency of ω
9.55
ωM ≈
1
⋅
N
J
O
Determine the ω
ω
= ωP ⋅ ωM[rad/sec]
O
Determine the integrator’s DC gain G
G
(E)
J ⋅ ω
=
9.55 ⋅ KT ⋅ A
Vref1
R
NF
.
O
O
1
⋅
Z
⋅ 2π ⋅
60
L
Kø
ω
[rad/sec]KT ⋅− T
.
(E)
O
where, kφ : PLL gain = 0.4 (V/rad/sec)
− 0.83 ⋅ VE − Vsat
2 V
A =
CC
Rm ⋅ Vosc
Z : FG pulse per round (P/R)
N
: Motor speed (min–1)
O
ω
: Control loop angular frequency (rad/sec)
O
ffg : FG frequency (Hz)
J : Moment of inertia of the motor (kg m
Rm : Motor coil resistance (Ω/T–T)
for motor.
P
(2)
(3)
(4)
2
)
6
 Loading...
Loading...