

Page 1
User Instructions
User
StarPac II
Control Valves
FCD VLAMN042-01
Interface
Manual
Page 2

Page 3

StarPac II User Interface
Manual
StarPac II User Interface Manual
Page 4

Page 5
Contents
OPERATION
Getting Started ……………..……………………….. 1
StarPac II Local Interface Structure & Operation .. 2
Initial Startup………..……………………………….. 3
Status Menu …………………………………………. 5
Tune Menu ………………....………………………... 9
Calibration Menu …………………………………... 12
Configuration Menu ……………………………….. 17
Changing or Viewing the Fluid Specification …… 25
Setting the Jumpers ………………………………. 26
Troubleshooting …………………………………… 26
APPENDICES
System Setup Checklist …………………………... 28
Detailed StarPac ll Register Map ………………... 29
Fluid Table …………………………………………. 50
StarPac Wiring and Grounding Guidelines …….. 51
INDEX 53
StarPac II User Interface Manual
Page 6

Page 7
Operation
Getting Started
This manual is designed to help you become familiar with, and
efficiently operate, the StarPac
While the information presented in this manual is believed to be
accurate, it is supplied for informative purposes only and should not
be considered to be certified or as a guarantee of satisfactory results
by reliance thereon. Specific instructions for the installation, wiring,
operation and maintenance of the StarPac II are contained in the
StarPac II manual (IOM 42). For information on Personal Computer
software, see the StarTalk for Windows™ Manual.
Because Flowserve is continually improving and upgrading its
product design, the specifications and information included herein
are subject to change without notice.
Flowserve will continue to provide its customers with the best
possible products and service available. Should you have any
questions about these provisions or about Flowserve products,
contact your local Flowserve representative or the Advanced Product
Development Group directly (801 489 2560). You can also access
Flowserve information via the internet HTTP: //www.flowserve.com.
®
II Intelligent Control System.
Restrictions
Copyright ©1996, Flowserve Corporation. All rights reserved. No part
of this manual may be reproduced in any form without the written
permission of the publisher. Due to product changes and periodic
review, the information contained in this manual is subject to change
without notice. All correspondence should be addressed to: Flowserve
Divisional Communication Group, Box 2200, Springville, Utah 84663-
0903.
This manual is not intended to be a replacement for the many manuals
already available for teaching and understanding instrumentation and
process control (such as the Instrument Society of America’s Instrument
Engineers Handbook, Revised Edition, 1982, etc.). A copy of one of these
manuals may prove valuable to the user in determining what StarPac II
parameters need to be set with respect to a particular application or
process.
StarPac II User Interface Manual
1
Page 8
C
g
C
g%C
StarPac II Local interface Structure & Operation
The StarPac II local user interface allows complete user access to
configure and calibrate a StarPac II Intelligent Control Valve
System. The interface consists of a Liquid Crystal Display (LCD)
and a membrane-covered keypad. The LCD is a 4 X 20 character
display with the top two lines user configured for normal operation,
or for displaying instructions or options during configuration. The
bottom two lines are used to indicate menu options that are
selected with the four function keys. To the right of the menu
options, on the bottom two lines, are two normally blank spaces
that indicate Alarm or Error conditions, indicated by a flashing “A”
and/or “E”. A flashing “T” on the right side of the display indicates
that the unit is in Test mode and will not respond to commands
until the unit is set to Manual or Auto mode in the T
The keyboard has three types of keys; the menu control keys (which
consist of the LAST OPTION, F1, F2, F3, and F4 keys); the alphanumeric keys; and the colored shift keys. The F1, F2, F3, and F4
keys refer to the menu options listed in the LCD of the interface. The
LAST OPTION key is used to move back through the menus. The
alpha-numeric keys are used to enter data requested in various
options. The red, blue and green shift keys are used to select the
corresponding colored letter on the alpha-numeric keypad.
UNE menu.
The various menu options have three basic forms. The first type is a
list that is scrolled through by using the F1 and F2 keys labeled
NEXT and PREVIOUS. The second type uses the F1 and F2 keys
to adjust a value up or down, and the third type uses the F1 and F2
keys to move the cursor to a position. The keypad is used to enter
characters. In all of the options, the F3 key is used to cancel the
operation. If the F3 key is pressed before the system returns to the
menu, then all variables are returned to their old values. The F4 key
is used to accept the current values in the display and continue.
al
i
t
o
fi
md
n-
Manu
Posn
Status
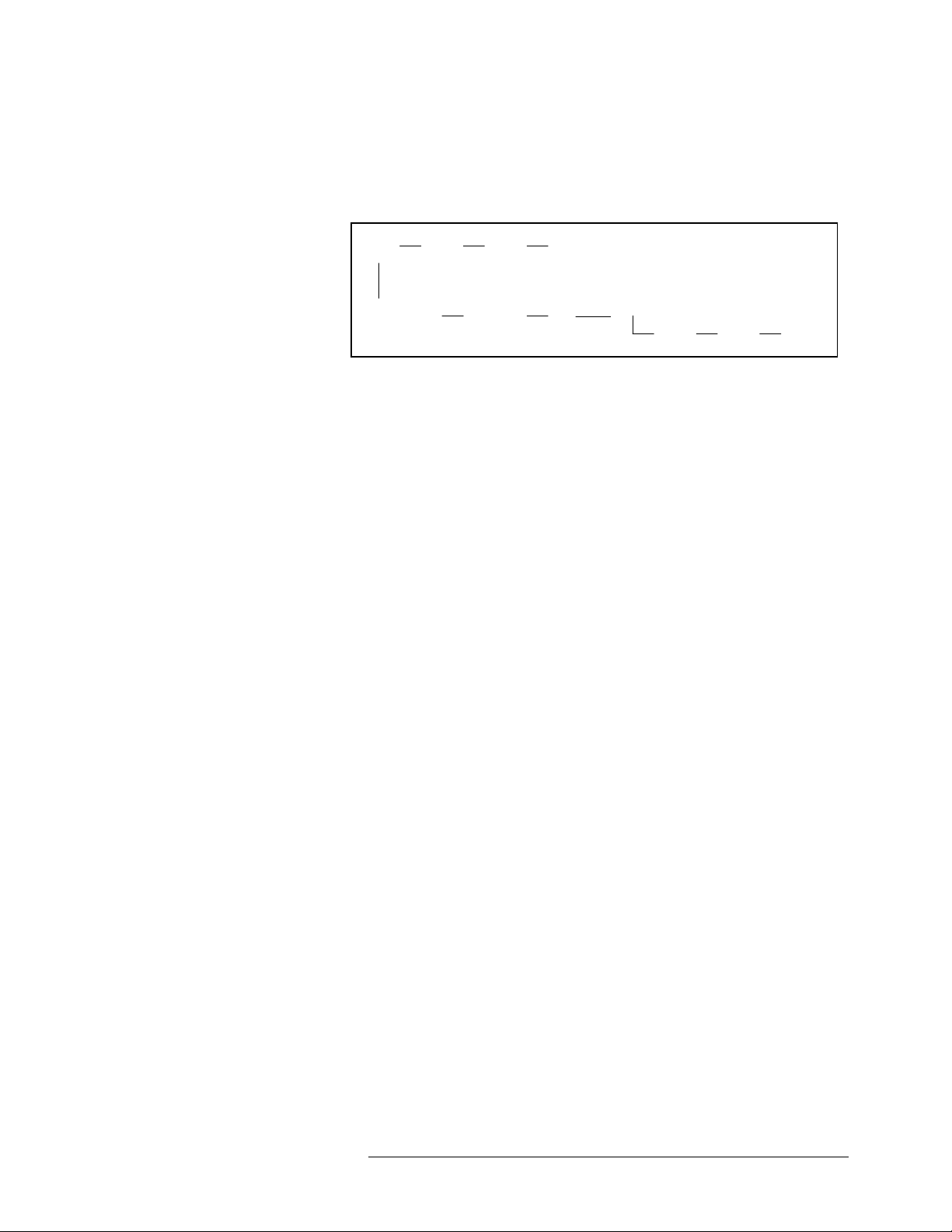
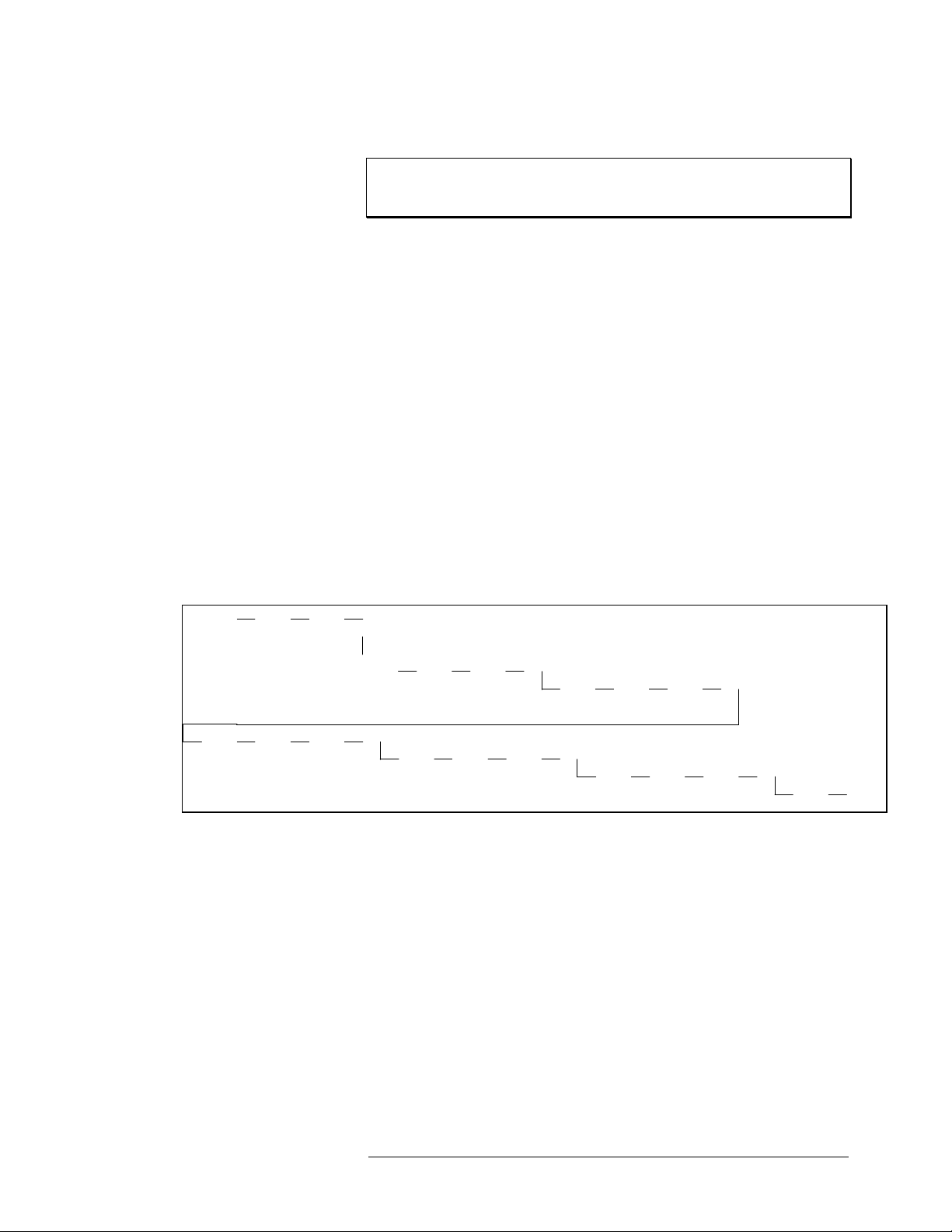
The HOME menu has selections of STATUS, TUNE, CALIBRATE, and
ONFIGURE. Each of these menus has several sub-menus. The
C
bottom two lines define the function keys that control the individual
menus. The top two lines in the display are user configurable and
may not look like Figure 1.
a
Mode-D
l
:
Tu
ne
.0056
br a
Figure 1 - Home Menu
The menus shown in the figures in this manual represent how the
information is laid out in the local display menu tree. The top row of
StarPac II User Interface Manual 2
Page 9

the figures shows the bottom two rows of the display. One of the
fields is in Bold type. Press the F key under this field to bring up the
choices shown on the bottom row. If you see the word ‘Next,’ then
push the F4 button to bring up the continuation of that row. To move
back up the menu tree, push the button labeled ‘Last Option’ to see
the preceding row.
Initial Startup
The StarPac II system is designed to interface with a variety of DCS
systems using analog, discrete, and digital communications.
Because of the processing power of the StarPac II system, a
separate 24 VDC power connection is required and connected to
terminals 16 (-) and 17 (+). This power supply should have a
minimum current capacity of 300 mA.
Before powering up the unit - Read the section “Setting the
System Jumpers” and set them according to the instructions and
particular application.
Powering up the unit on the bench - When the unit is first powered
up, the display will show the version number of the firmware for two
seconds before beginning operation. The StarPac II system sensors
are calibrated at the factory and the fluid data is entered as specified
on the order. However, due to the differing nature of installations,
the units and ranges of the analog and discrete I/O are not
configured at the factory.
The suggested process for setting up a new system on the bench is:
1. In the CONFIGURE menu, select the engineering units you will
be using.
2. If you will be using analog I/O signals, use the CONFIGURE
menu to set up the analog channels to indicate the proper
process variables and ranges you will be using. Note that
the StarPac II system treats gas flow and liquid flow as
different variables and they must each be specified correctly.
3. Connect the instrument air supply (40-150 psi) to the ¼-inch
NPT air supply port located on the back of the unit.
4. Use the STATUS menu and set the Row Two variable to
“valve position.”
5. Use the TUNE menu to put the unit in to Manual mode with a
digital command.
6. Using the “Command %” option in the TUNE menu, enter a 0
percent command and verify that the position follows to
within 0.5 percent.
Note: Command is a term with two meanings. For a
traditional control valve, the command is the signal a
controller sends to the I/P. position the stem. For the StarPac
II, this meaning refers to the signal sent to the positioning
module. When the StarPac II is in Manual mode, Command
also refers to the signal sent to the StarPac II via analog input
No. 1, a digital Modbus channel, or the front keypad. These
commands may differ due to the internal stroke calibration
and an inverted signal for air to close valves.
StarPac II User Interface Manual
3
Page 10

7. Using the Command % option in the T
percent command and verify that the position follows to
within 0.5 percent.
8. If the unit fails either of the tests above, perform a Stroke
calibration in the C
9. Use the STATUS menu and set the Row Two variable to be
“ISA upstream pressure.”
10. Verify that the unit is correctly indicating the ambient
pressure.
11. Use the S
“ISA downstream pressure.”
12. Verify that the unit is correctly indicating ambient pressure.
13. If the unit fails the above tests, re-zero the transducers using
the P1 & P2 option in the C
need to pressurize the sensors and verify the Span if the
calibration is suspect.
14. Use the S
“process temperature.”
15. Verify that the unit is correctly indicating ambient
temperature.
16. If the unit fails the above test, re-calibrate the transducer
using the thermocouple option in the C
calibration requires a Type-K thermocouple simulator or a
temperature bath.)
17. Use the CALIBRATE menu to check the analog channels that
you will be using.
18. Finally, use the TUNE menu to select the process variable
that you will be controlling and set the range.
TATUS menu and set the Row Two variable to be
TATUS menu and set the Row Two variable to be
ALIBRATE menu.
ALIBRATE menu. You may also
UNE menu, enter a 100
ALIBRATE menu. (This
Putting the Unit on line - After installing the unit, use the TUNE
menu to configure the setpoint signal to the proper source for your
DCS system. If you will be using the system in the Automatic mode,
adjust the Proportional-Integral-Derivative (PID) parameters so the
loop responds satisfactorily.
Backing up the system - When you have your unit calibrated and
working according to your needs, back up the configuration into the
safe memory area. This is done in the Save Backup choice in the
Tech option of the C
ONFIGURE menu.
StarPac II User Interface Manual 4
Page 11
r
/
A
Var
Var
g
A
V
g
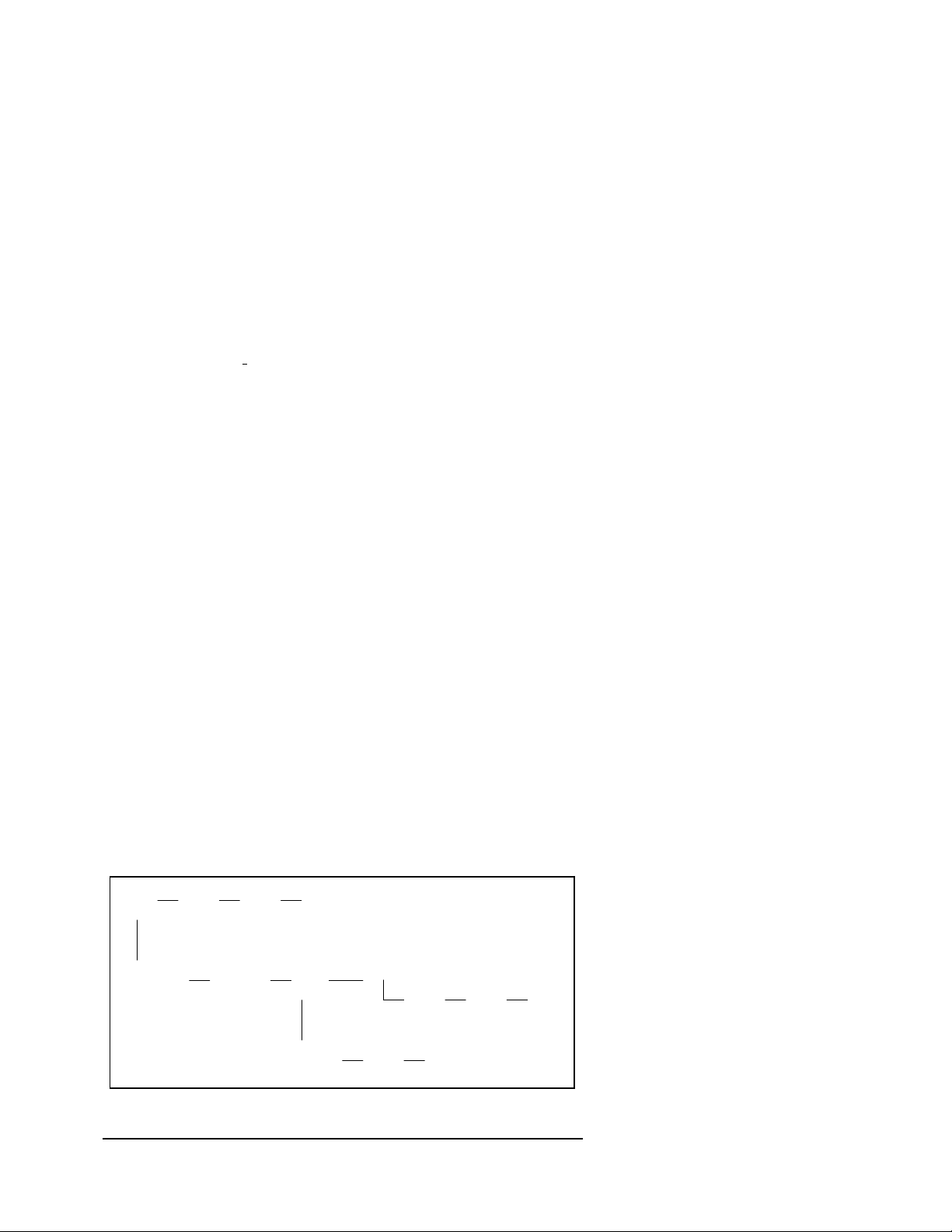
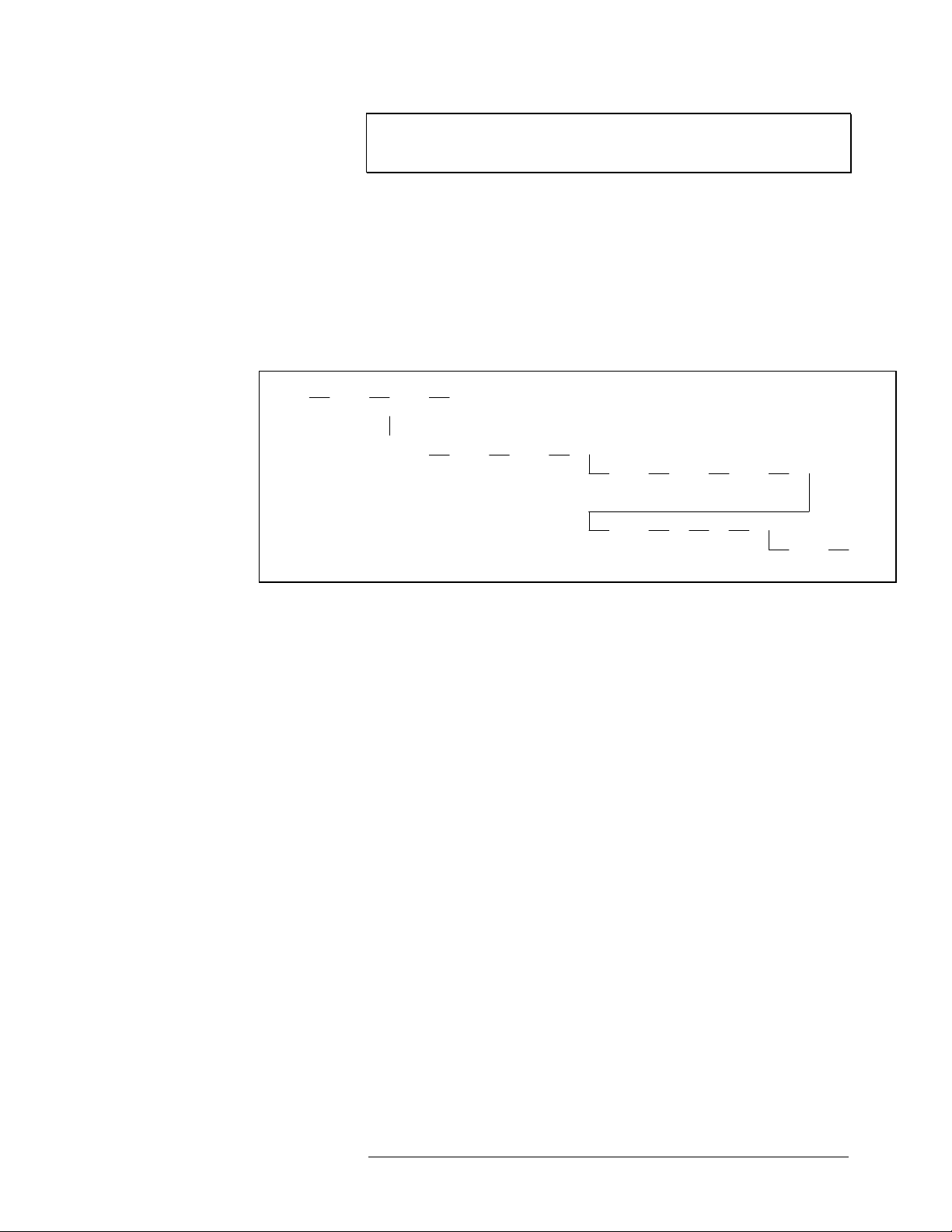
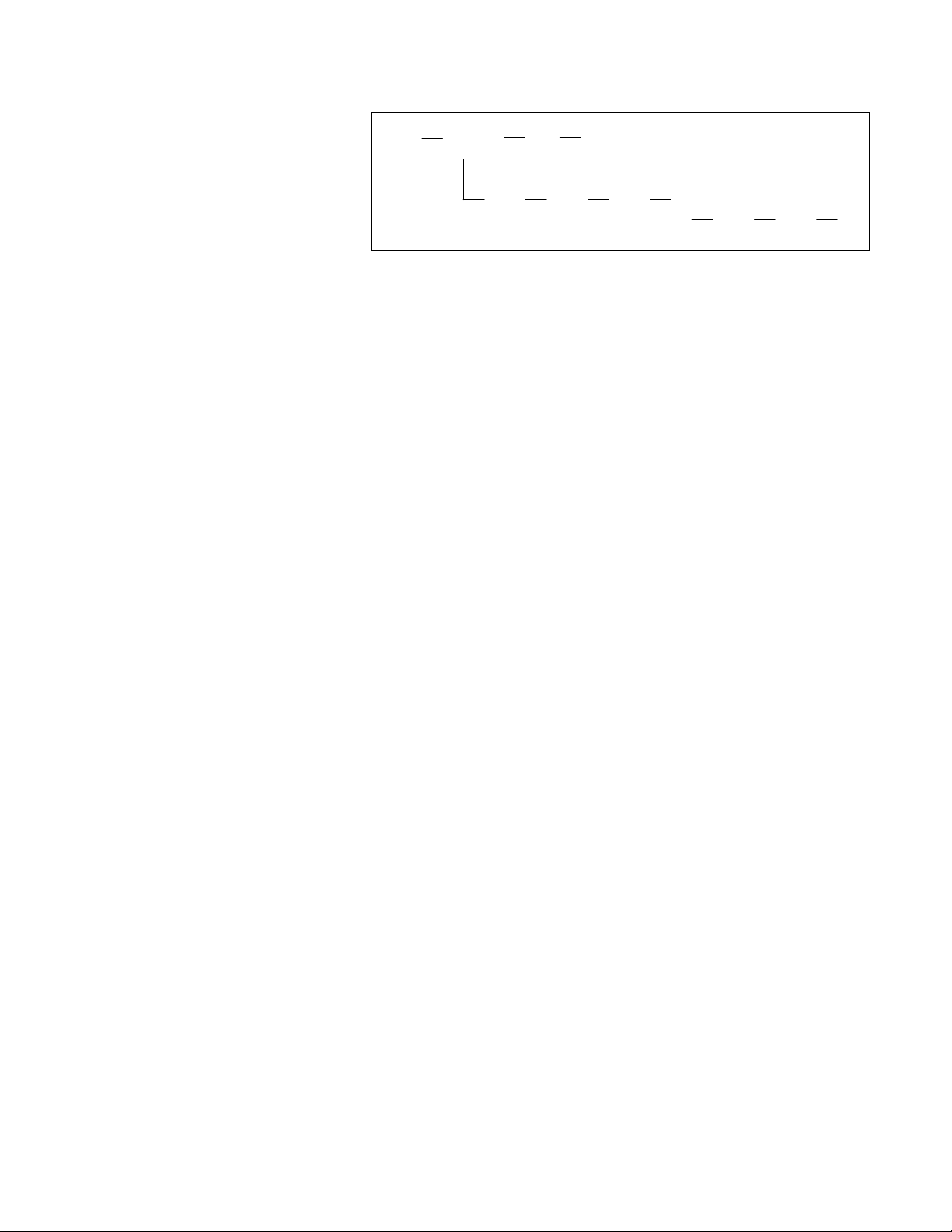
Status Menu
The STATUS menu is used to view information about the configuration
and operation of the system. Errors and alarms can also be viewed
from this menu. The S
Sta-
Tune Cal-
tus
Row1
Each option may have other menus or options to choose from.
Row 1 and Row 2 Var - Selects the information that will be
displayed on the first two rows of the display during normal
operation. Each selection has the same list of options except where
noted.
Mode/Status - Lists the operating mode and any current alarm
or trip conditions. (This option is only available on Row One.)
Scanning Display - Rotates automatically through a list that is
configured through the user interface. (This option is only
available on Row Two.)
Valve Position - Current valve position in percent open.
(Designated as “Posn” in the display.)
Valve Command - Current valve command in percent open.
(Designated as “Comnd” in the display.)
Liquid Flow - Current liquid flow rate in user-defined units.
(Designated as “FlowQ” in the display.)
Gas Flow - Current gas flow rate in user-defined units.
(Designated as “FlowW” in the display.)
ISA Up Stream Press - Current compensated upstream line
pressure in user-defined units. (Defined as two pipe diameters
upstream of the valve, designated as “P1isa” in the display.)
ISA Dn Stream Press - Current compensated downstream line
pressure in user-defined units. (Defined as six pipe diameters
downstream of the valve, designated as “P2isa” in the display.)
ISA Delta Pressure - Current differential pressure using the
pressure definitions above in user-defined units. (Designated as
“dPisa” in the display.)
Process Temperature - Current process temperature in userdefined units. (Designated as “Temp” in the display.)
Liquid Flow Totalizer - Totalized liquid flow in user-defined
units. (Designated as “TotlQ” in the display, the totalizer is reset
from the T
Gas Flow Totalizer - Totalized gas flow in user-defined units.
(Designated as “TotlW” in the display, the totalizer is reset from
the T
Row2
UNE menu.)
UNE menu.)
TATUS menu is arranged as shown in Figure 2.
Con-
brat
fi
Er
rlm
Next
lrm
Set
Figure 2: Status Menu
Sys
Info
iew
Re
StarPac II User Interface Manual
5
Page 12
r
r
g
A
g
Totalizer Time - Operating time since the totalizer was last
reset. (Designated as “TotTm” in the display.)
Valve Cv - Current valve CV at present valve position.
(Designated as “Cv” in the display.)
Setpoint (%) - Controller setpoint as a percent of the maximum.
(Designated as “SP” in the display. The process maximum is set
in the T
operation.)
Process Variable (%) - Process variable in percent of
maximum. (Designated as “PV” in the display. The process
maximum is set in the T
the controller operation.)
Setpoint (units
(Designated as “SP” in the display.)
PV (units) - Current process variable in user-defined units.
(Designated as “PV” in the display.)
fl - Current FL at present valve position. (Designated as “fl” in
the display.)
xt - Current X
the display.)
z - Current compressibility factor at existing process conditions.
(Designated as “z” in the display.)
Cylinder Top Press - Current pressure above the actuator
piston in user-defined units. (Designated as “Ptop” in the
display.)
Cylinder Bot Press - Current pressure below the actuator
piston in user-defined units. (Designated as “Pbot” in the
display.)
Time & Date - Current time and date of the internal clock.
Auxiliary 4-20 Input - Auxiliary input signal in percentage.
(Designated as “AuxIn” in the display.)
Flow State - Liquid non-choked, liquid choked, gas non-choked,
gas choked.
UNE menu with the process variable for the controller
UNE menu with the process variable for
) - Current controller setpoint in user units.
at present valve position. (Designated as “xt” in
T
Errors/Alarms allows the user to view any current errors and alarms
that are indicated by the flashing “A” and/or “E” on the right side of
the display. This option displays three menu choices (see next
page):
Status
StarPac II User Interface Manual 6
Row1
Va
Tune Cal-
brat
Row2
Va
Figure 3: Alarm / Errors Tree
Confi
/
Err
Arlm
Alrm
Next
Sensor
lrm
Set
Device
Sys
Info
View
Re
Page 13

Alarms - Allows the user to view any current alarms using the NEXT
or PREVIOUS function keys. Possible alarms are:
Setpoint Deviation - The controller is unable to maintain the
process at the current setpoint. (Sensitivity is adjusted using
StarTalk software.)
Positioner Deviation - The positioner is unable to maintain the
valve position at the current command. (Sensitivity is adjusted
using StarTalk software.)
Trip Condition - The unit is in a trip condition of either loss of
command, low supply air, or a low flow cutoff. Low flow is
determined when the pressure drop across the valve is less than
0.5% of the calibrated range of the pressure sensors. (Use the
Row 1 Variable M
ODE/STATUS menu selection to display the type
of trip.)
Override Condition - Indicates the controller is not currently
capable of doing any more to achieve the setpoint (or valve
position). This can be any of the trip conditions, or a mechanical
or software travel limit has been reached and the controller has
exceeded the 5 percent current limit.
Sensor Malfunction - One of the sensors has a suspect output.
(See sensor errors for detail.)
Device Malfunction - The electronics has an internal error.
(See device errors for detail.)
Sensor Errors - Allows the user to view any current sensor errors
using the NEXT or PREVIOUS
are:
function keys. Possible sensor errors
Upstream Pressure - The output of the upstream pressure
sensor is out of range.
Downstream Pressure - The output of the downstream
pressure sensor is out of range.
Cylinder Top Press - The output of the top actuator pressure
sensor is out of range.
Cylinder Bot Press - The output of the bottom actuator
pressure sensor is out of range.
Process Temperature - The output of the process temperature
sensor is out of range.
Ambient Temperature - The output of the ambient temperature
sensor is out of range.
Position Feedback - The output of the position feedback sensor
is out of range.
Device Errors - Allows the user to view any device errors using the
NEXT or PREVIOUS
function keys. Possible device errors are:
Watch Dog Timeout - The CPU had an interruption in the
execution cycle. This is sometimes caused by momentary
power interruptions. However, if it persists, this is a serious error
usually requiring hardware replacement. This error can only be
cleared by turning off the device and then turning it on again.
SRAM R/W Failure - The static RAM had an error. This is a
serious error usually requiring hardware replacement if it
StarPac II User Interface Manual
7
Page 14
persists. This error can only be cleared by turning off the device
and then turning it on again.
EPROM Checksum Error - Check the integrity of the firmware.
This error usually occurs when the firmware is changed and can
be cleared with an initialization. (This is done by holding down
the “0” on the keypad while powering up the unit.
Warning: An initialization will also reset the communication
parameters, password, and PID control parameters.
NVRAM R/W Failure - The non-volatile RAM had an error. This
is a serious error usually requiring hardware replacement if it
persists. This error can only be cleared by turning the device off
and then turning it on again.
Thermocouple Burnout - The thermocouple junction is open.
Check interface connections, thermocouple, and/or wire.
A/D Failure - One of the A/D converters is not working correctly.
If slowly cycling the power does not clear the error, then a
hardware replacement is necessary.
Vcc Out of Tolerance - An internal power supply is operating
out of tolerance.
V- Out of Tolerance - An internal power supply is operating out
of tolerance.
V+ Out of Tolerance - An internal power supply is operating out
of tolerance.
Illegal Pointer - One of the configurable arrays is using an
invalid register.
NVRAM Checksum Error - A value in the non-volatile RAM was
changed without resetting the checksum. Performing any write
function, such as a setpoint or command change should reset
the error. If the system behaves erratically after receiving an
error, the NVRAM may have been corrupted and you should
reload the factory configuration table from the disk provided
using the StarTalk for Windows software.
Divide by Zero - The StarPac II unit attempted an illegal math
operation due to bad calibration or configuration settings.
Reload the factory configuration table from the disk provided,
using StarTalk for Windows software.
Alarm Mask - Allows the user to enable or disable individual alarm
functions.
Setpoint Deviation - The controller is unable to maintain the
process at the current setpoint. (Sensitivity is adjusted using
StarTalk software.)
Positioner Deviation - The positioner is unable to maintain the
valve position at the current command. (Sensitivity is adjusted
using StarTalk software.)
Trip Condition - The unit is in a trip condition of either loss of
command, low supply air or a low flow cutoff. (Use the
ODE/STATUS menu selection to display the type of trip.)
M
StarPac II User Interface Manual 8
Page 15

g
p
p
Override Condition - Indicates the controller is currently not
capable doing any more to achieve the setpoint (or valve
position). This can be any of the trip conditions, or a mechanical
or software travel limit has been reached and the controller has
exceeded the 5 percent current limit.
Sensor Malfunction - One of the sensors has a suspect output.
(See sensor errors for detail.)
Device Malfunction - The electronics has an internal error.
(See device errors for detail.)
System Information - Allows the user to check the factory hardware
configuration for reference or spare parts. The following list shows
the items listed:
Valve Serial Number: Spring:
Trim Number: Spring Type:
Trim Characteristic: Air Action:
Trim Type: Electronics S/N:
Pressure Class: EPROM Version:
Valve Model: Sensor Rating:
Flow Direction: Sensor Drawing No.:
Body Size: P1 Serial Number:
Body Material: P2 Serial Number:
Packing Style: P1 Calibration Date:
Packing: P2 Calibration Date:
Gasket Material: Miscellaneous No. 1:
Actuator Size: Miscellaneous No. 2:
Status
Tune
Mode
View Registers - Allows the user to view any internal
integer or floating point Modbus register using the register
map provided (see appendix for a list of registers). String
registers cannot be viewed with this function.
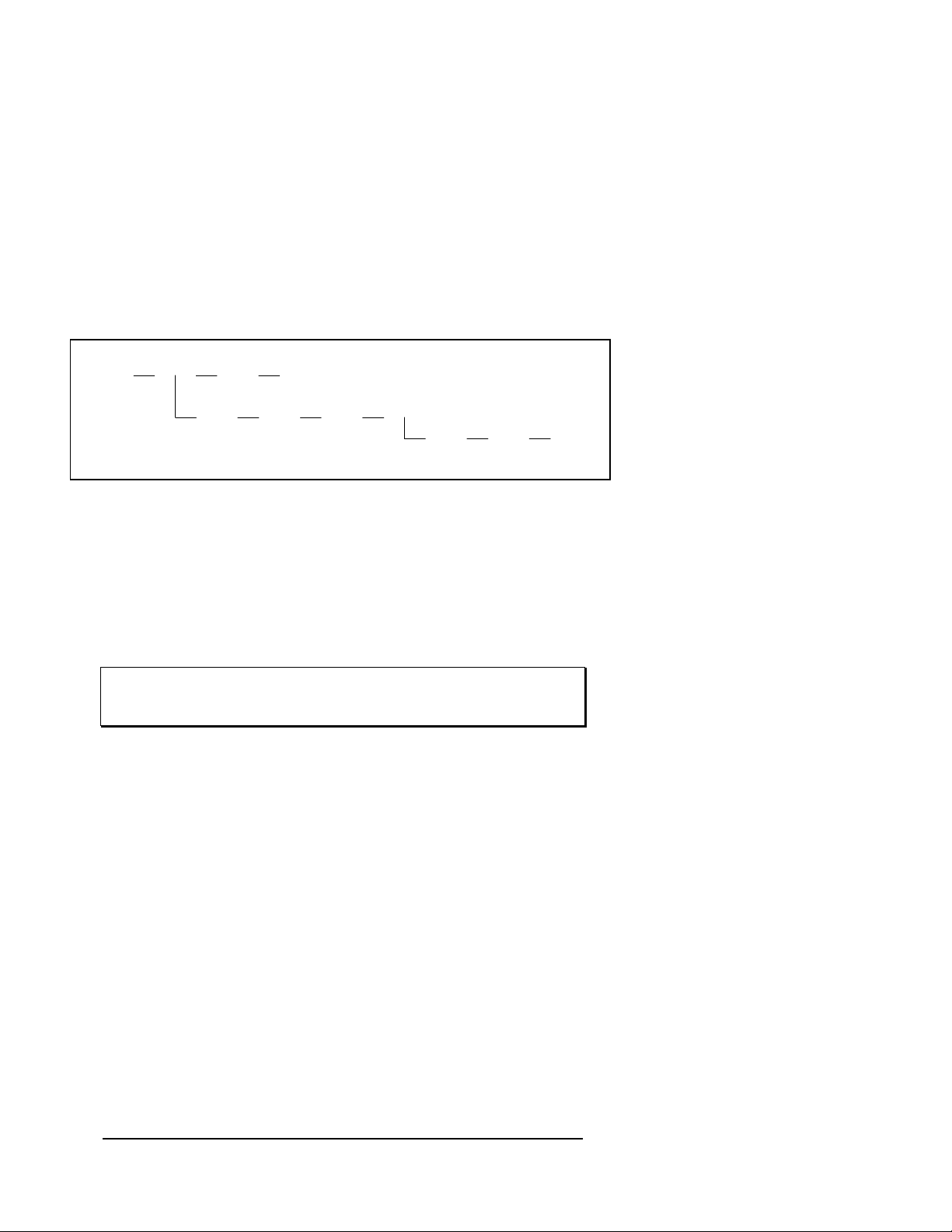
Tune Menu
The T
UNE menu is used to view and configure the controller
variables and gains, change modes, and reset the totalizer. The
Calbrat
Set-
T
Mode - Has two options for defining the current mode and the
source of the mode.
Confi
nt
Command
Next
Pro
Band
Rset
Rate
Time
Figure 4: Tune Menu Tree
UNE menu is arranged as shown in Figure 4.
NextDer
PI
D
tn
PV
Slct
Ac
PV
Scal
Rset
Totl
StarPac II User Interface Manual
9
Page 16
Man/Auto - This option selects or changes the operating mode if
the mode source has been set to digital. If the mode source is
set to Remote or Discrete, the mode can only be changed using
the discrete input or the remote register. In Manual mode the
unit operates as a normal control valve, positioning the valve
according to its current command signal.
In Auto mode the unit will operate as a controller using the PID
settings, process variable, and control action currently defined
using a bumpless transfer algorithm. (Note that if the unit is
using an analog command source, the system will bump
because the 4-20 signal will change from indicating position
command to process setpoint.)
Test mode takes the unit off-line and the system DOES NOT
calculate pressures, temperatures, flow, or PID values; nor does
it support setpoints or any analog or digital commands. Test
mode is the beginning mode after an initialization and is used
during calibration. If power is lost during a calibration setup, the
unit will remain in Test mode and the mode will have to be reset.
If the unit is in Test mode, the letter “T” will flash on the right side
of the display.
Mode Source - This selects where the StarPac II unit will
receive the mode information. “Digital” indicates that the
keypad or the StarTalk software can be used to change the
mode. “Discrete” indicates that an external signal applied to
terminals 33 and 34 will be used to switch the unit between
Auto and Manual modes. The definition is fixed with an
energized state indicating Auto mode. Remote mode is used
when a host system such as a PLC or DCS is used to set the
mode via digital communications.
The difference between Remote and Digital is that if the
Setpoint/command is not refreshed within a given period, the
StarPac II will assume that the unit has lost communication with
the host and will go to a trip condition.
Setpoint - Provides four options used to change the setpoint and
configure the source of the setpoint.
Setpoint % - Allows the direct input of the controller setpoint as
a percentage of maximum, as setup with the process variable,
provided the unit is in the Auto mode with the digital setpoint
selected.
Setpoint User Units - Allows the direct input of the setpoint in
the configured engineering units, provided the unit is in Auto
mode with the digital setpoint selected.
Analog/Digital
will receive the setpoint information.
- This option selects where the StarPac II system
“Digital” indicates that the keypad or the StarTalk software can
be used to change the setpoint.
“Analog” prompts the StarPac II to use the 4-20 mA signal from
analog input No. 1 as the controller setpoint.
“Remote” is used when a host system such as a PLC or DCS is
used to write the setpoint to the unit digitally.
StarPac II User Interface Manual 10
Page 17

Remote Refresh Rate
- This option sets up a time-out on the
receipt of fresh setpoint data when set to operate with a remote
setpoint. If the setpoint is not refreshed within the time frame
entered in this field, the unit will go into a loss-of-command trip
as set up in the C
ONFIGURE menu. A value of “0” disables this
feature and makes the electronics think that the Mode source is
digital. Note that if the digital source is selected, the unit will
hold at the last setpoint indefinitely.
Command - Provides three options used to change the valve
position command and configure the source of the valve command.
Command % - Allows the direct input of the valve position
command as a percentage of valve travel. Zero percent is
closed and 100 percent is open--provided the unit is in Manual
mode with the digital command selected.
Analog/Digital - This option selects where the StarPac II system
will receive the valve position command information.
“Digital” indicates that the keypad or the StarTalk software can
be used to change the valve position command.
“Analog” prompts the StarPac II to use the 4-20 mA signal from
analog input No. 1 as the valve position command.
“Remote” is used when a host system such as a PLC or DCS is
used to write the valve position command to the unit digitally.
Remote Refresh Rate - This option sets up a “timeout” on the
receipt of fresh, valve-position command data when set to
operate with a remote command. If the valve position command
is not refreshed within the time frame entered in this field, the
unit will go into a loss of command trip (as set up in the
ONFIGURE menu). A value of “0” disables this feature. Note
C
that if the digital source is selected, the unit will hold at the last
valve position command indefinitely.
Proportional Band - Sets the proportional band for the controller.
Proportional Band = 100/gain or gain =100/prop. band. Since
proportional band is the inverse of gain, the larger the band value,
the smaller the controller gain.
Reset Rate - This is the integrator term in the PID controller,
referring to the action at which the rate of change of output is
proportional to the error input. “Reset” is the parameter that controls
how the integral control action affects the final control element. The
larger the value, the faster the system tries to eliminate the offset
error. Units are repeats/min.
Derivative Time - Sets the time on the derivative control action of
the PID controller. This time is the interval at which the rate action
advances the effect of the gain on the final control element. Units
are in seconds.
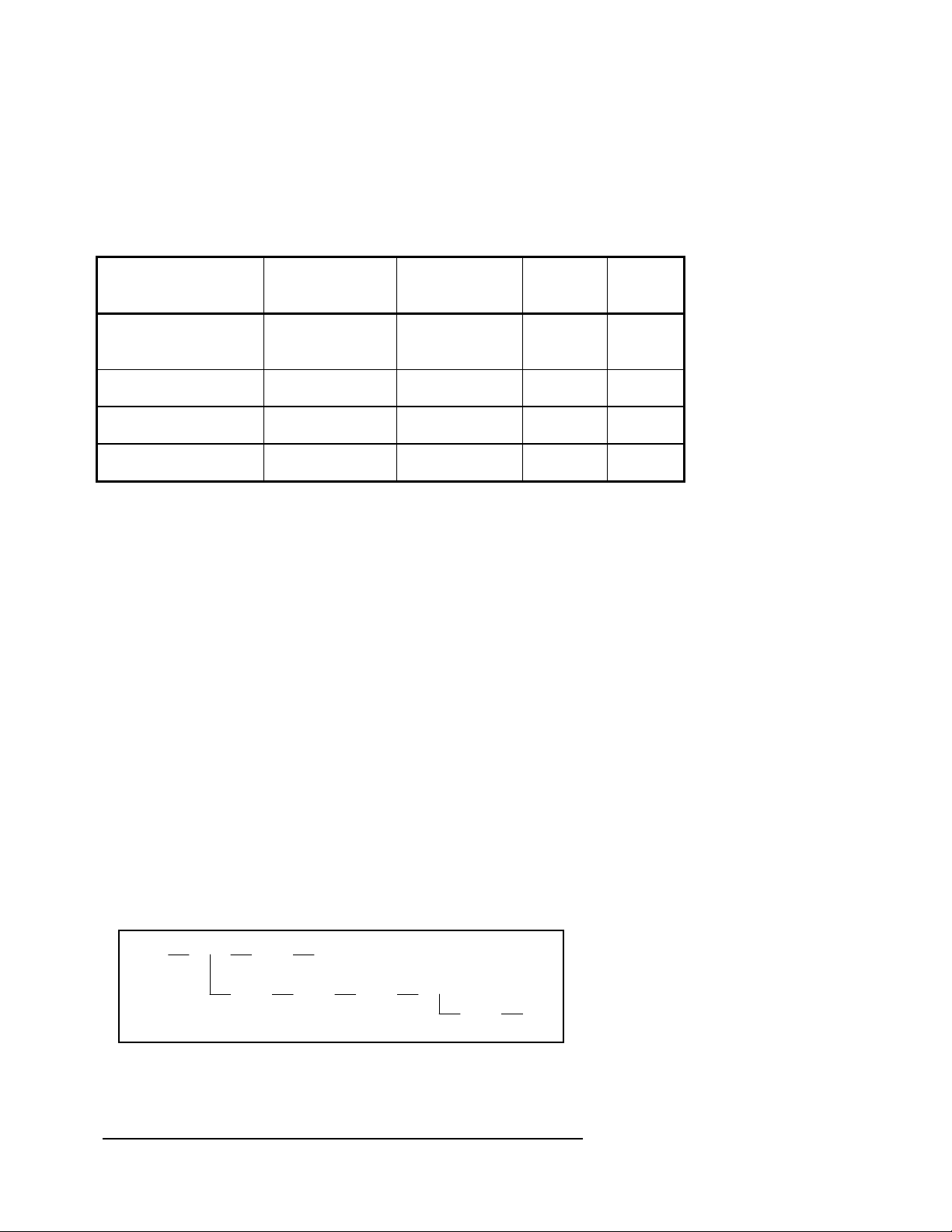
PID Action - This variable determines the response of the controller
to error. Reverse action will cause an air-to-open valve to begin to
close when the process variable is greater than the setpoint. Direct
action has the opposite effect. The following table gives some
guidelines for control action settings:
StarPac II User Interface Manual
11
Page 18
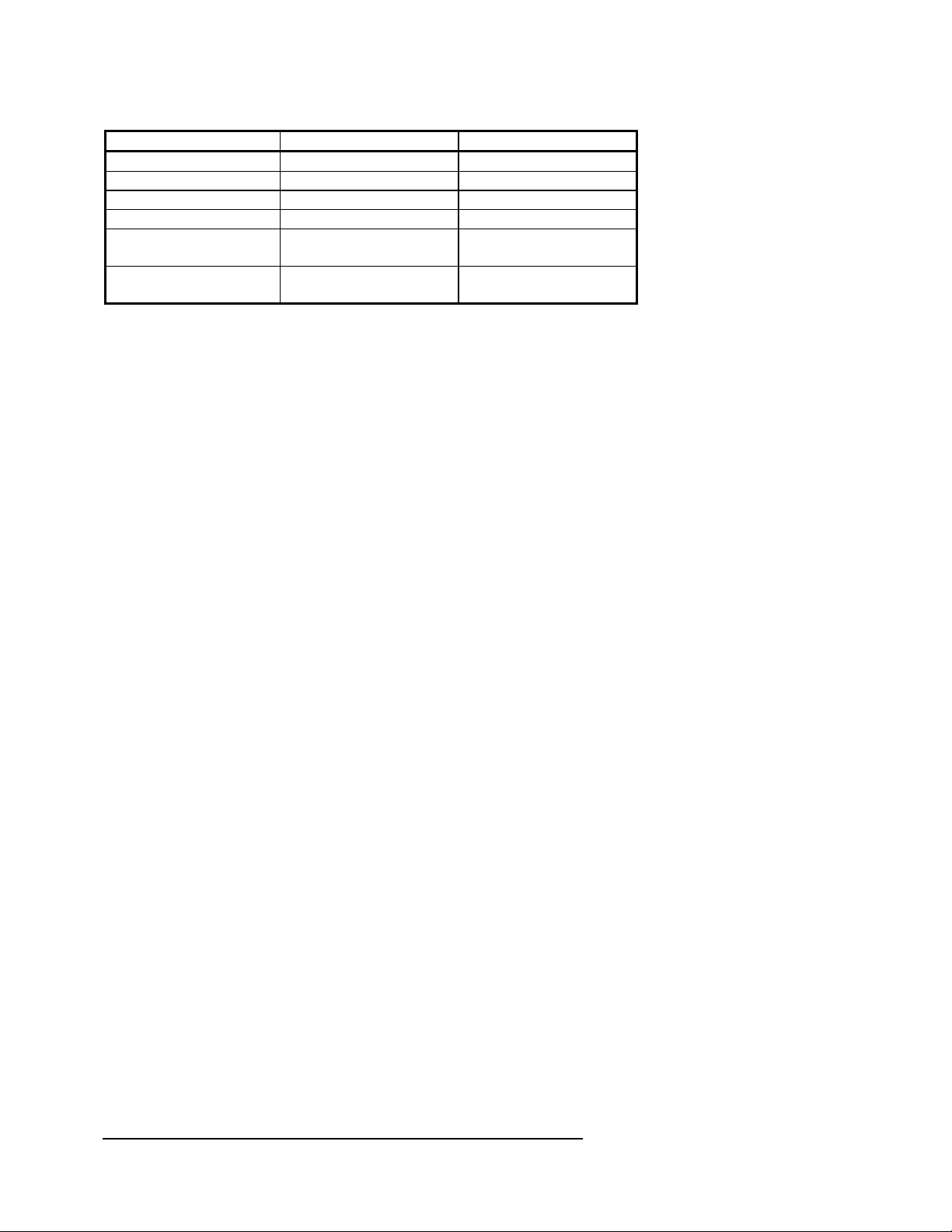
Process Variable Air-to-Open Valve Air-to-Close Valve
Flow Reverse Direct
Upstream Pressure Direct Reverse
Downstream Pressure Reverse Direct
Differential Pressure Direct Reverse
Process Temperature Depends on
installation
Auxiliary 4-20 input Depends on
installation
If the PID action is not set correctly, the controller will hold the valve
either full open or full closed and there will be no control.
Process Variable Select - Selects the process variable that will be
used to control the process.
Liquid Flow - Sets the system to control liquid flow. (If the flow
is gaseous, the system will read the liquid flow value as zero and
respond accordingly.)
ISA Up Stream Press - Sets the system to control using the
current compensated upstream line pressure. (Defined as two
pipe diameters upstream of the valve.)
Depends on
installation
Depends on
installation
ISA Dn Stream Press - Sets the system to control using the
current compensated downstream line pressure. (Defined as six
pipe diameters downstream of the valve.)
ISA Delta Pressure - Current differential pressure using the
pressure definitions above.
Process Temperature - Sets the system to control the process
temperature.
Gas Flow - Sets the system to control gaseous flow (if the flow
is liquid, the system will read the gas flow value as zero and
respond accordingly).
Auxiliary 4-20 Input - Sets the system to use a 4-20 mA signal
attached to Analog Input 2 as the process variable.
Process Variable Scaling - This option sets the full scale process
value that the controller will use in the PID algorithm, using the units
that have been selected in the C
Auxiliary, which is always in units of percent).
Reset Totalizer - Selecting this option resets the time and amount in
the flow totalizer to zero.
ONFIGURE menu (except for
Calibration
Menu
The CALIBRATE menu is used to calibrate the analog inputs and
outputs, process pressure and temperature sensors, as well as the
actuator position and pressure sensors. Before entering the
ALIBRATE menu, the display will indicate that the system will be
C
taken off-line and will ask the user to accept the condition.
StarPac II User Interface Manual 12
Page 19
g
Anlg
Anlg
Anlg
Anlg
p
WARNING: Taking the StarPac II unit off line may cause the
valve to stroke unexpectedly. Notify personnel working nearby
that the valve may stroke.
Status
While the C
will not respond to control signals. To put the unit back on line you
must press the LAST OPTION key until the display prompts you, and
then press ACCEPT. While you are in the C
letter “T” will flash on the right side of the display, indicating that the
unit is in Test mode. The unit may also change the valve position
during some of the calibration processes that could affect the
process if it is not properly isolated. The C
arranged as shown in Figure 5 below.
Tune
Calbrat
ALIBRATE menu is open, the system is in Test mode and
ALIBRATE menu, the
ALIBRATE menu is
Confi
Next
Out1
Out2
In1
In2
P1&
Actuatr
Stroke
NextP1 P2
P2
Figure 5: Calibration Menu Tree
Analog Out No. 1 - This option is used to calibrate the first analog
output of the StarPac II device. During the calibration procedure, a
reference milliamp meter should be connected to terminals 9(-) and
10(+) of the terminal block. The display will give instructions to use
the F1 and F2 keys to adjust the signal until the reference meter
reads 4 mA. When the 4 mA value has been accepted, you will be
prompted to set the 20 mA value. If the CANCEL key is pressed at
any time, all of the calibration values are returned to their original
value. The number shown at the end of the second line indicates the
raw D/A value that the unit is outputting, which is only used for
reference during calibration. Configuration of the variable and scaling
for the channel is performed in the C
ONFIGURE menu.
Next
Thrm
le
c
Psnr
Analog Out No. 2 - This option is used to calibrate the second
analog output of the StarPac II system. During the calibration
procedure a reference milliamp meter should be connected to
terminals 7(-) and 8(+) of the terminal block. The display will give
instructions to use the F1 and F2 keys to adjust the signal until the
reference meter reads 4 mA. When the 4 mA value has been
accepted, the user is then prompted to set the 20 mA value. If the
CANCEL key is pressed at any time, all of the calibration values will
be returned to their original value. The number shown at the end of
the second line indicates the raw D/A value that the unit is
outputting, which is only used for reference during calibration.
Configuration of the variable and scaling for the channel is
performed in the C
Analog In No. 1 - This option is used to calibrate the first analog
input of the StarPac II. During the calibration, a reference milliamp
StarPac II User Interface Manual
ONFIGURE menu.
13
Page 20
source should be connected to terminals 24(-) and 25(+) of the
terminal block. The display will give instructions to adjust the signal
until the reference meter reads 4 mA. When the 4 mA value has
been accepted, the user is then prompted to set the 20 mA value. If
the CANCEL key is pressed at any time, all of the calibration values
are returned to their original value. The number shown at the end of
the second line indicates the raw A/D value that the unit is receiving
and is only for reference during calibration. Configuration of the
variable and scaling for the channel is done in the T
UNE menu.
Analog In No. 2 - This option is used to calibrate the second analog
input of the StarPac II system. During the calibration, a reference
milliamp source should be connected to terminals 22(-) and 23(+) of
the terminal block. The display will give instructions to adjust the
signal until the reference meter reads 4 mA. When the 4 mA value
has been accepted, you are then prompted to set the 20 mA value.
If the CANCEL key is pressed at any time, all of the calibration
values are returned to their original value. The number shown at the
end of the second line indicates the raw A/D value that the unit is
receiving and is only for reference during calibration. Configuration
of the variable and scaling for the channel is done in the C
ONFIGURE
menu.
Actuator - This option calibrates the actuator pressure sensors in
the unit. The process requires that the valve stroke from full open to
full closed. Because the valve will change position during this
process you must confirm that you want to proceed. You will then be
prompted for the instrument air supply pressure to the unit. If the air
supply varies by more than 1 psi during the calibration, the test may
abort. Hence, a regulator may be required if the air supply is not
stable. The unit will then complete the calibration process by
stroking the valve open and closed over 30 to 60 seconds. Upon
successful completion, the display will momentarily flash the
message “Calibration Successful”.
Stroke - This option calibrates the position feedback sensor in the
unit. The process requires that the valve stroke from full open to full
closed. Because the valve will change position during this process
you must confirm that you want to proceed. You will then be
prompted for the valve type; linear or rotary. If the air supply varies
by more than 1 psi during the calibration, the test may abort. Hence,
a regulator may be required if the air supply is not stable. The unit
will then complete the calibration process by stroking the valve open
and closed over one to five minutes. Upon successful completion of
the process, the system will momentarily flash the message
“Calibration Successful”.
WARNING: Notify personnel working nearby that the valve will
stoke during this procedure; otherwise, serious injury may
occur.
P1 and P2 - This option simultaneously calibrates the process
pressure sensors in the unit and is the recommended sensor
calibration method. Because it calibrates both sensors at the same
time, this procedure automatically moves the valve’s stroke to midstroke. This calibration should always be done with the flow through
the valve blocked. If there is flow through the valve you must use
StarPac II User Interface Manual 14
Page 21

the individual calibration options. Because the valve will change
position during this process, you must confirm that you want to
proceed. You will then have three more menu options to set for
ERO, SPAN and SENSOR GAIN.
Z
Zero - Apply the atmospheric pressure or the minimum pressure
you want to use for your reference and press ACCEPT. The two
numbers on the right side of the display are register values that
indicate how steady the pressure is in the valve body. Next,
enter the actual pressure applied in the indicated engineering
units and press ACCEPT.
Span - Apply the maximum pressure you want to use for your
reference and press ACCEPT. The two numbers on the right
side of the display indicate how steady the pressure is in the
valve body. Next, enter the actual pressure applied in the
indicated engineering units and press ACCEPT.
Sensor Gain - This option configures the input amplifier range
for the installed sensors using the Up and Dn function keys.
Valtek’s standard sensors normally use the 39mV < out <
78mV selection. Normally, you should not have to change this
option. If you have questions, consult your Valtek
representative.
P1 - This option calibrates the upstream process pressure sensor in
the unit. You will then have two more menu options to set for Zero
and Span.
Zero - Apply the atmospheric pressure or the minimum pressure
you want to use for your reference and press ACCEPT. The
number on the right side of the display indicates how steady the
pressure is in the valve body. Next, enter the actual pressure
applied in the indicated engineering units and press ACCEPT.
Span - Apply the maximum pressure you want to use for your
reference and press ACCEPT. The numbers on the right side of
the display indicate how steady the pressure is in the valve body.
Next, enter the actual pressure applied in the indicated
engineering units and press ACCEPT.
P2 - This option calibrates the downstream process pressure sensor
in the unit. You will then have two more menu options to set for Zero
and Span.
Zero - Apply the atmospheric pressure or the minimum pressure
you want to use for your reference and press ACCEPT. The
number on the right side of the display indicates how steady the
pressure is in the valve body. Next, enter the actual pressure
applied in the indicated engineering units and press ACCEPT.
Span - Apply the maximum pressure you want to use for your
reference and press ACCEPT. The number on the right side of
the display indicates how steady the pressure is in the valve
body. Next, enter the actual pressure applied in the indicated
engineering units and press ACCEPT.
Thermocouple - This option is used to calibrate the Type-K
thermocouple temperature sensor in the unit. You will then have two
more menu options to set for Zero and Span. Normally this
calibration is done using a temperature controlled bath or a Type-K
StarPac II User Interface Manual
15
Page 22
thermocouple simulator connected to terminals 5 (yellow) and 6
(red).
Zero - Apply a signal equal to the minimum temperature you
want to use for your reference and press ACCEPT. The number
on the right side of the display indicates how steady the
temperature input is reading. Next enter the actual temperature
applied in the indicated engineering units and press ACCEPT.
Span - Apply a signal equal to the maximum temperature you
want to use for your reference and press ACCEPT. The number
on the right side of the display indicates how steady the
temperature input is reading. Next, enter the actual temperature
applied in the indicated engineering units and press ACCEPT.
Positioner - This option is used to set the control gains for the
positioner and also test for proper response.
Figure 6: Positioner Menu Tree
Default Gain - This option sets the default gain for the
positioner. Select the correct actuator size from the list using the
NEXT and PREVIOUS function keys on the menu. Default
selections exist for 25, 50, 100, and 200 square-inch actuators.
Edit Gain - This option allows you to change the gains from the
default value to customize the response of the system.
Proportional Gain - Controls the overall speed of response
of the system. Larger values will speed up the response of
the system.
Static Gain - Controls the response to steps of less than two
percent. Larger values will speed up the response of the
system to small steps (the effect of static gain is more
evident on larger actuators).
Error Gain - This is a dynamic gain variable that increases
the gain with error size to speed the response in larger
actuators. Note that smaller values increase the gain.
Step Test - Allows you to monitor the response of the system to
any step size that you input after pressing the function key. (Be
aware that this operation will cause the valve to stroke.) The
system reports the overshoot and rise time (Tr) for each step.
Pressing ACCEPT will continue to stoke the system up and
down and report on the response for each step. To quit the
positioner tuning press CANCEL.
Open Loop- This test is a diagnostic test to check the
mechanical operation of the postioner module. During this test
StarPac II User Interface Manual 16
Page 23
the valve is forced to full open and full closed by driving the
positioner output to its maximum and minimum values.
WARNING: Notify personnel working nearby that the valve will
stroke during this procedure; otherwise, serious injury may
occur.
Status
Soft
Lmts
Tune
Unit Tag
Calbrat
Name
Configuration
Menu
The CONFIGURE menu is used to set up the variables and scaling for
the analog inputs and outputs, actuator configuration, air supply and
trip limits, units, tagname, communications, LCD controls, and
individual register editing and viewing. Before entering the
ALIBRATE menu, the display will indicate that the system will be
C
taken off-line and ask you to accept that condition. While the
ONFIGURE menu is open, the system is in Test mode and will not
C
respond to control signals. To put the unit back on line, press the
LAST OPTION key until the display asks, “do you want to put the
unit back on line,” and press ACCEPT. When you are in the
ALIBRATE menu, a flashing “T” on the right side of the display will
C
indicate that the unit is in Test mode. Certain functions may cause
valve position to change unexpectedly that could affect the process if
the unit is not properly isolated. The C
ONFIGURE menu is arranged
as shown in Figure 7.
Config
Anlg
Out1
Next
Out2
Pass
Word
Anlg
Cmd
Comm
Port
NextAnlg
LCD
Cont
Anlg
In2
Next
Air
Actn
LCD
BkLt
Low
Air
Tech
Next
Data
Log
Next
Time
Set
Figure 7: Configuration Menu Tree
Puls
Out
Analog Out 1 - This option configures the first analog output
channel. Select a variable from the list using the NEXT and
PREVIOUS function keys on the menu. You will then be asked for a
full scale output value in your selected user units. (This is the
process value that corresponds to 20 mA.) The last step is to enter
the offset or Zero output value in your selected user units. (This is
the process value that corresponds to 4 mA.) Available output
variables are:
Valve Position - Current valve position.
Liquid Flow - Current liquid flow rate.
ISA Up Stream Press - Current compensated upstream line
pressure (defined as two pipe diameters upstream of the valve).
StarPac II User Interface Manual
17
Page 24

ISA Dn Stream Press - Current compensated downstream line
pressure (defined as six pipe diameters downstream of the
valve).
ISA Delta Pressure - Current differential pressure using the
pressure definitions above.
Process Temperature - Current process temperature.
Gas Flow - Current gaseous flow rate.
Auxiliary 4-20 Input - Re-transmits the 4-20 mA signal from
analog in No. 2.
Register Number - Allows the selection of any internal register
value as an output. If a string register is selected, zero will be
displayed in the data field.
Analog Out 2 - This option configures the second analog output
channel. Select a variable from the list using the NEXT and
PREVIOUS function keys on the menu. You will then be asked for a
full scale output value in your selected user units. (This is the
process value that corresponds to 20 mA.) The last step is to enter
the offset or zero output value in your selected user units. (This is
the process value that corresponds to 4 mA.) Available output
variables are:
Valve Position - Current valve position.
Liquid Flow - Current liquid flow rate.
ISA Up Stream Press - Current compensated upstream line
pressure (defined as two pipe diameters upstream of the valve).
ISA Dn Stream Press - Current compensated downstream line
pressure (defined as six pipe diameters downstream of the
valve).
ISA Delta Pressure - Current differential pressure using the
pressure definitions above.
Process Temperature - Current process temperature.
Gas Flow - Current gaseous flow rate.
Auxiliary 4-20 Input - Re-transmits the 4-20 mA signal from
analog in No. 2.
Analog Command - This option sets up the first analog input
(analog No. 1) in the StarPac II system. This analog channel is
reserved as a control input. The signal is used either as a valve
position command, if the StarPac II is in Manual mode, or as the
controller setpoint if the StarPac II is in Auto mode. (The source of
the command or setpoint is selected in the T
UNE menu after it has
been configured here.) When this option is selected you are first
prompted for the interpretation of the analog signal. The signal can
be interpreted as Normal (4-20 mA = 0-100%), which means that 4
mA will indicate the 0 percent signal, or as Reverse (4-20 mA = 1000%), which then interprets 20 mA as the 0 percent signal.
Next, you are prompted for the hold time (in seconds) that you want
the system to hold the last command if the 4-20 mA signal should be
lost (defined as having the signal drop below 3 mA). The last prompt
requests a ramp rate that the system will use to fail the valve if the
signal has been lost and the hold time has expired. A negative value
will ramp the valve closed at the selected rate, and a positive value
StarPac II User Interface Manual 18
Page 25

will open the valve at the selected rate. (Note that this value may be
set different from the spring failure of the actuator.)
Analog In 2 - This option sets up the second analog input in the
StarPac II system. This input can be used as an external input that
is used with the internal PID controller, or as an external sensor input
for the StarPac II to use in its internal operation. If you wish to use
the input as a controller input, you must select the NOT
CONNECTED option since the scaling for the PID input is done in
UNE menu with the Process variable selection. If you want to
the T
feed an external variable into the StarPac II, select the variable from
the list using the NEXT and PREVIOUS function keys on the menu.
Next, you will be asked for a full scale input value in your userdefined units. (This is the process value that corresponds to the 100
percent signal.) The last step is to enter the offset or Zero input
value in your user-defined units. (This is the process value that
corresponds to the 0 percent signal). The available input variables
are:
Not Connected - Configures the StarPac II unit to ignore the
input as an internal variable, but the input may still be used as an
input to the controller that is configured with the process variable
selection in the T
UNE menu.
Process Temperature - Uses the value from the Auxiliary input
channel as the process temperature for all internal calculations
in place of the StarPac II sensor. The electronics assumes that
the Auxiliary input channel gets its signal from a temperature
transmitter.
Up Stream Pressure - Uses the signal from an external
pressure transmitter connected to the Auxiliary input channel as
the process pressure for all internal calculations in place of the
StarPac II sensor.
Down Stream Pressure - Uses an external pressure input as
the process pressure for all internal calculations in place of the
StarPac II sensor.
Valve Delta Pressure - Uses an external pressure input as the
process differential pressure for all internal calculations (in place
of the StarPac II differential pressure calculated by the difference
from the StarPac II internal pressure sensors). The most
common example is when a separate differential pressure
transmitter is used for cases when the application cannot
withstand pressure drops of at least ten percent of inlet
pressure.
Molecular Weight - Uses an external molecular weight input for
all internal calculations in place of the static value stored in the
StarPac II configuration.
Specific Gravity - Uses an external Specific Gravity input for all
internal calculations in place of the static value stored in the
StarPac II configuration.
Liquid Fudge Factor - This input allows you to make dynamic
adjustments to the liquid flow calculation based on the value of
the input.
Gas Fudge Factor - This input allows you to make dynamic
adjustments to the gaseous flow calculation based on the value
of the input.
StarPac II User Interface Manual
19
Page 26
g
q
p
A
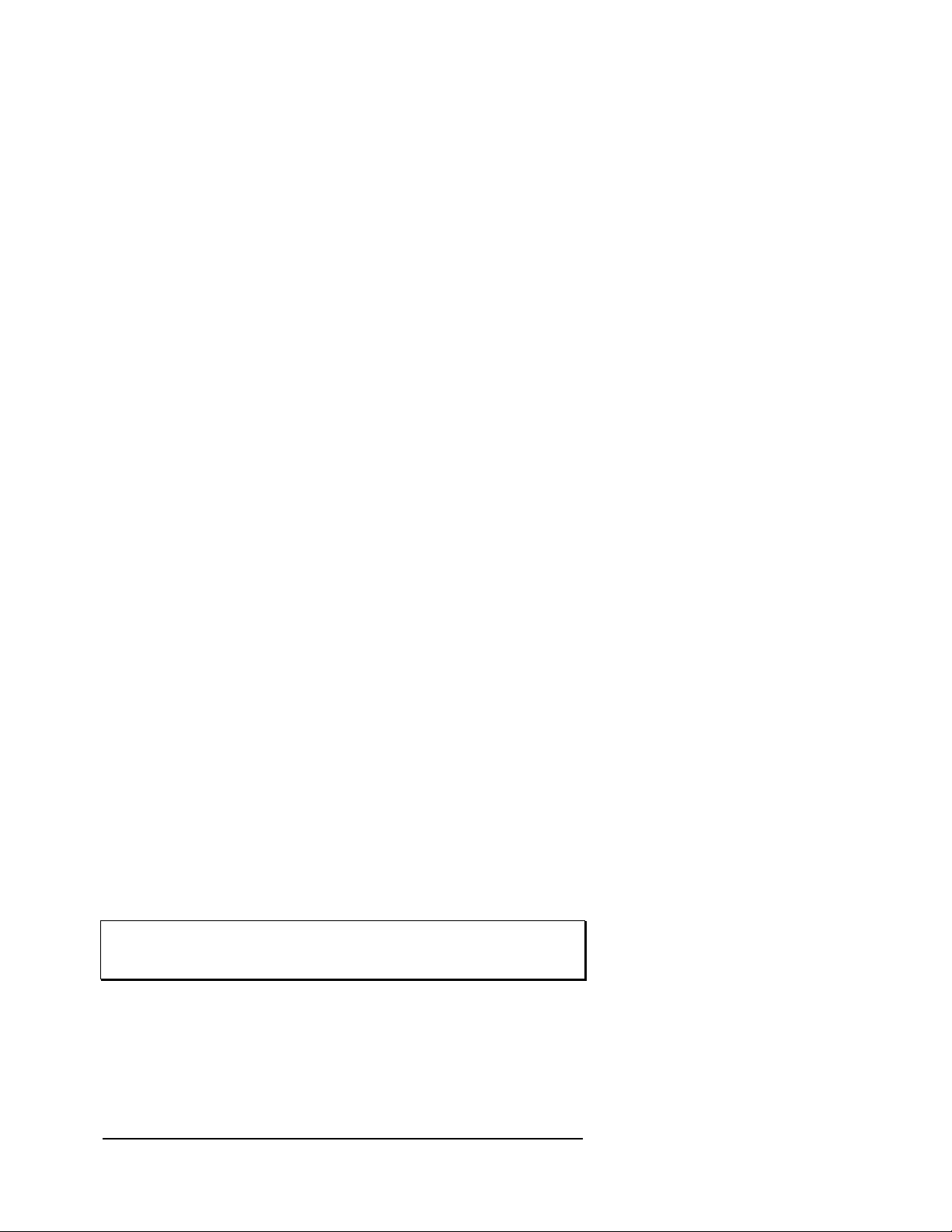
Air Action - Used to set up the StarPac II for the configured actuator
failure mode. ATO (Air-to-Open) is normally used for fail-closed
valves, ATC (Air-to-Close) is normally used for fail-open valves. If
ATC is selected and you will be using an analog command source,
configure the analog command to reverse so that 4 mA equals the
100 percent position (open). The following table lists the possible
configurations:
Failure Mode Output 2
(bottom port) Is
Connected to:
Air loss, fail-closed:
Power loss, failclosed
Air loss, fail-closed;
Power loss, fail-open
Air loss, fail-open;
Power loss, fail-open
Air loss, fail-open;
Power loss, fail-close
actuator top actuator bottom above
actuator bottom actuator top above
actuator bottom actuator top below
actuator top actuator bottom below
Output 1 (top
port) Is
Connected to:
Spring
Failure
Position
piston
piston
piston
piston
Air
Action
ATO
ATC
ATC
ATO
Low Air - This option is used to set the trip parameters for low
supply air to the system, which is continuously monitoring the air
supply in the actuator. Using the actuator pressures, the StarPac II
can infer the supply pressure to within five to 10 psi. If the supply
pressure drops below the Low Air Trip Pressure then the positioner
will attempt to hold the valve for the time specified in the hold
parameter and then ramp to the spring failure position at the
specified Low Air Ramp Rate.
Softlimits - (Softlimits are stroke limits set and maintained by the
system’s electronics or software. These limits are only in effect
when the unit has power and is not in Test mode. When power has
failed or cut off to the StarPac II, the valve will fail to its mechanical
stops or limits.) This option allows you to set software limits on the
travel of the valve. These limits are active in Auto and Manual
modes, but they do not affect failure modes. Normally these limits
are set to -10 and 110 percent of travel so they do not affect valve
operation.
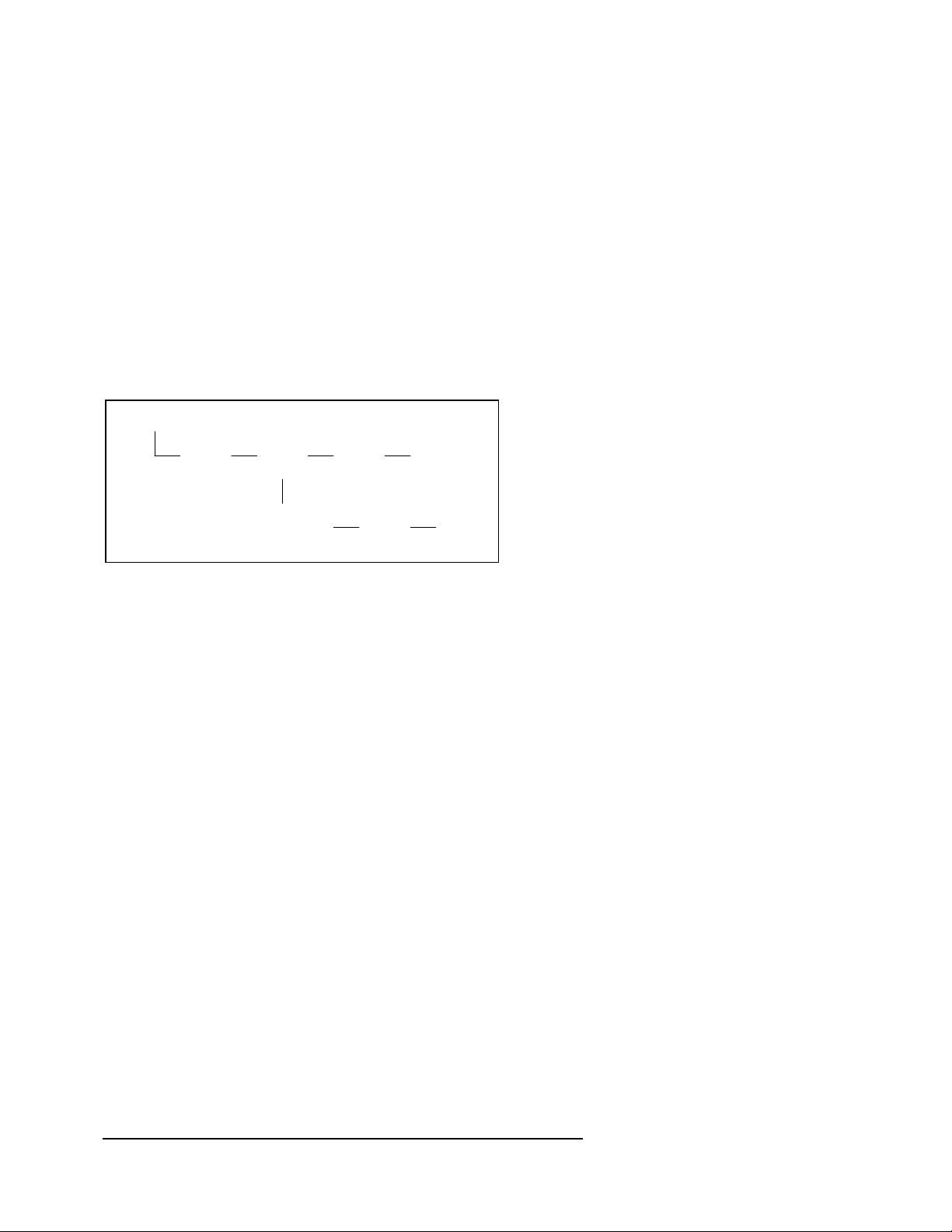
Units -The StarPac II system has individually configurable units for
Process Pressure, Liquid flow, Gas flow, Process temperature, and
actuator pressure. Units for each type of process variable are set in
the Unit menu. (See Figure 8)
NextSoft
Li
Flow
Gas
Flow
Next
Proc
Tem
ct
Pres
Lmts
Unit
Ta
Name
Proc
Pres
Figure 8: Units Menu
StarPac II User Interface Manual 20
Page 27

Process Pressure - This option sets the process pressure
engineering units for the StarPac II system. Use the NEXT and
PREVIOUS function keys to select units from the following list:
PSIG - Pounds per square-inch gauge
PSIA - Pounds per square-inch absolute
kPa G - Kilopascals gauge
kPa A - Kilopascals absolute
kgscmG - Kilograms per square-centimeter gauge
kgscmA - Kilograms per square-centimeter absolute
Bar G - Bar gauge
Bar A - Bar absolute
Liquid Flow - Sets the liquid flow engineering units for the
StarPac II system. Use the NEXT and PREVIOUS function keys
to select units from the following list:
Usgpm - US gallons per minute
l/m - Liters per minute
lbs/hr - Pounds per hour
kg/hr - Kilograms per hour
cm3/hr - Cubic centimeters per hour
bbl/dy - Barrels per day (42 gal/bbl)
Ukgpm - Imperial gallons per minute
CUSTOM - Allows you to create your own custom units by
first entering a multiplier that will operate on the StarPac
native liquid flow units which are Gallons/Minute to create
your new units. Next, select the time base that relates to
your flow rate of seconds, minutes, hours, or days for the
totalizer to use. Then enter the name for the units you want
to display. The name is limited to six characters. Lastly,
enter the name that you want the totalizer to display for the
totalized units.
Gas Flow - Sets the gaseous flow engineering units for the
StarPac II system. Use the NEXT and PREVIOUS function keys
to select units from the following list:
lbs/hr - Pounds per hour
kg/hr - Kilograms per hour
SCFH - Standard cubic feet per hour
MSCFD - Million standard cubic feet per day
SCFM - Standard cubic feet per minute
SCMH - Standard cubic meters per hour
CUSTOM - Allows you to create your own custom units by
first entering a multiplier that will operate on the StarPac
native gas flow units which are Pounds/Hour to create your
new units. Next you select the time base that relates to your
flow rate of seconds, minutes, hours, or days for the totalizer
to use. Next enter the name for the units you want to
display. The name is limited to six characters. Last enter
StarPac II User Interface Manual
21
Page 28

the name that you want the totalizer to display for the
totalized units.
Process Temperature - Sets the process temperature
engineering units for the StarPac II system. Use the NEXT and
PREVIOUS function keys to select units from the following list:
ºC - Degrees Celsius
ºF - Degrees Fahrenheit
ºR - Degrees Rankine
ºK - Degrees Kelvin
Actuator Pressure - Sets the actuator pressure engineering
units for the StarPac II system. Use the NEXT and PREVIOUS
function keys to select units from the following list:
PSIG - Pounds per square-inch gauge
PSIA - Pounds per square-inch absolute
kPa G - Kilopascals gauge
kPa A - Kilopascals absolute
kgscmG - Kilograms per square-centimeter gauge
kgscmA - Kilograms per square-centimeter absolute
Bar G - Bar gauge
Bar A - Bar absolute
Tag Name - This option allows the user to enter a tagname that will
be used as an identifier for the unit on a Modbus network.
Password - This option sets up a password to control access to the
local interface. Access to the T
UNE, CALIBRATE, and CONFIGURE
menus is allowed only with the password after the password has
been enabled. The S
TATUS menu is still accessible even when the
password is enabled. To enable the password, press F1 and enter
the password. The default password is “1234.” (If the system is
initialized by pressing the “0” while powering up the unit, the
password will be reset to “1234.” Note that control and
communication parameters will also be reset with an initialize.) To
disable the password, press F2. To change the password, select F3
and enter the old password, then enter the new password. Note that
when entering a new password the characters are visible on the
screen for verification.
Communication Settings - This option configures the
communication settings for the Modbus communications ports on the
StarPac II system. Both COMM port A and COMM port B use the
same settings--they cannot be set independently. The
communication settings are set in the C
OMM PORT menu (Figure 9).
StarPac II User Interface Manual 22
Page 29
A
y
A
y
Pass
Word
Address - This option sets the Modbus address of the StarPac II
system. Both the A and B COMM ports have the same address;
therefore, they cannot be hooked together on the same network
and must be connected to different networks. The default
address for a StarPac II is “1” after an initialization. Use the Up
or Dn function keys to select the proper address.
Baud Rate - This option sets the Baud Rate for the Modbus
communications. Available Baud Rate settings are: 1200, 2400,
9600, 19200, 31250, 38400, and 57600. The default setting is
19200 Baud after an initialization. Use the Up or Dn function
keys to select the desired Baud Rate.
Parity - This option sets the Parity for the Modbus
communications. Available Parity settings are: None, Even, and
Odd. The default setting is Odd after an initialization. Use the
NEXT or PREVIOUS function keys to select the proper Parity.
Comm
Port
LCD
Cont
ddr
ess
Figure 9: Comm Port Menu
Baud
Rate
Next
Parit
Next
RTU/
ASCI
Port
ccsTXDl
RTU / ASCII - This option sets the communication mode for the
Modbus communications. Available communications mode
settings are: ASCII and RTU. The default setting is RTU after an
initialization. Use the NEXT or PREVIOUS function keys to
select the proper communication mode.
Port Access - This option allows you to control the priority of the
communication ports. A port may be configured so that it can
only be used for monitoring by a remote device. Use the NEXT
and PREVIOUS function keys to select the access from the
following list:
A - R/W B - R/W - Both ports allow read/write access
A - R/W B - RO - “A” port allows read/write access; “B” port
is read only.
A - RO B - R/W - “A” port is read only; “B” port allows
read/write access.
Transmit Delay - This setting controls the time that the
StarPac II system will wait before answering a Modbus request.
The 3.5 character setting provides the best performance for most
systems. Available transmit delays are: 3.5 characters, 50
millisecond, 75 millisecond, 100 millisecond, 150 millisecond,
250 millisecond, 500 millisecond, and 1 second.
LCD Contrast - This option adjusts the viewing angle of the LCD.
Use the Up and Dn function keys to adjust the viewing angle.
StarPac II User Interface Manual
23
Page 30
V
g
g
g
p
p
LCD Backlight - Use this option to set the time that the backlight in
the LCD will stay on after the last pressed key. Available options
are: Always Off, 10 Seconds, 30 Seconds, 1 Minute, 5
Minutes, 15 Minutes, 1 Hour, and Always On. The LCD
backlight has a rated 5000 hour life; therefore, selecting the Always
On option may cause the display backlight to burn out prematurely.
Technician - This option allows you to view and manipulate internal
Modbus registers, backup a configuration in non-volatile RAM and
reset the system operation. These options are selected from the
ECHNICIAN menu. (See Figure 10 below.)
T
Edit
Re
Time
Set
Rset
SPac
Next
Save
Bku
Load
Bku
LCD
BkLt
Tech
Data
Lo
iew
Re
Figure 10: Technician Menu
View Register - This option allows you to view any integer or
floating point Modbus register. A register map is located in the
appendix. (String registers cannot be viewed with this function;
however, they can be viewed by using the StarTalk software.)
Edit Register - This option allows you to view and change any
read/write integer or floating point Modbus register. A register
map is located in the appendix.
Caution: Changing register values will affect the operation of
the system. String registers cannot be edited with this function.
You must use the StarTalk software to Edit string registers.
Reset StarPac II - This option will reset the system’s operation
(the same as powering up the unit) and will also reset some
error conditions while displaying the firmware revision on the
display.
Load
Dflt
Save Backup - This option will backup the current configuration
to a safe area in the non-volatile RAM. Valtek suggests that you
use this option before attempting to reconfigure your system to
ensure that you can restore the configuration should something
go wrong.
Load Backup - This option allows you to restore a known
configuration to the system by working registers from the backup
NVRAM.
Load Default - This option will overwrite the complete register
map in the StarPac II with default data. If you choose this option
all of the flow characterization data, configuration data and
calibration data will be lost. This option should only be used in
the rare case that the configuration of a system has become so
corrupt that all of the data will be re-entered from scratch. It is
StarPac II User Interface Manual 24
Page 31

recommended that you use the StarTalk for windows software to
reload your system information from the factory supplied disk.
Data Logger - This option sets the interval between data points on
the internal data logger. NOTE: You must use StarTalk software to
download a data logger file from the StarPac II.
Time Set - This option sets the internal StarPac II clock. The
internal clock is battery driven and keeps time whether the unit is
powered or not. Use the F1 and F2 function keys to select the field
to edit. Note that the time is in the 24 hour format and the date is the
mm/dd/yy format.
Pulse Relay Output - Configures the Pulse Out channel on the
StarPac II system for the process variable and scaling. First you
must select a variable from the list using the Next and Previous
function keys on the menu. Next you are asked for a full scale
output value in your selected user units. (This is the process value
that corresponds to the maximum frequency.) The last step is to
enter the offset or zero output value in your selected user units (this
is the process value that corresponds to 0 Hz). Available output
variables are the following:
Valve Position - Current valve position.
Liquid Flow - Current liquid flow rate.
ISA Up Stream Press - Current compensated upstream line
pressure (defined as two pipe diameters upstream of the valve).
ISA Dn Stream Press - Current compensated downstream line
pressure (defined as six pipe diameters downstream of the
valve).
ISA Delta Pressure - Current differential pressure using the
pressure definitions above.
Process Temperature - Current process temperature.
Gas Flow - Current gaseous flow rate.
Auxiliary 4-20 Input - Re-transmits the 4-20 mA signal from
analog in No. 2.
Register Number - Allows the selection of any internal register
value as an output.
Changing or Viewing the Fluid Specification
The StarPac II system must be configured for the exact fluid that you
have in your process. The factory configures the system with fluid
data for your system using the information supplied with the order.
Verify that the fluid data is correct for your process. The StarPac
system requires the following fluid data for accurate flow calculation:
Antoine’s A coefficient register 70329
Antoine’s B coefficient register 70331
Antoine’s C coefficient register 70333
Critical Pressure in psia register 70341
Critical Temperature in ºR register 70343
StarPac II User Interface Manual
25
Page 32

F
coefficient (=K/1.4) register 70345
K
Molecular Weight register 70347
Specific Gravity Reference temp in ºR register 70349
Specific Gravity at reference temp register 70351
Viscosity A register 70541
Viscosity B register 70543
The Antoine coefficients are used to calculate the vapor
pressure of the fluid at the temperature measured by the K
thermocouple in the StarPac according to the following equation:
B
VP A
=−
exp( )
TC
where VP is the vapor pressure in psia, T is the temperature in
°R, and A, B, and C are the Antoine coefficients.
Viscosity is calculated according to the following equation:
+
Visc A B T=* *exp
Where Visc is the fluid viscosity in centipoise, T is the process
temperature measured by the thermocouple in °F, and A and B
are the viscosity coefficients.
These registers can be checked using either the View option of the
TATUS menu or the View selection in the Tech option of the
S
ONFIGURE menu. They can be changed using the Edit selection in
C
the Tech option of the C
()
ONFIGURE menu.
Setting the Jumpers
The StarPac II system has several jumpers that are used to
configure the digital and discrete I/O. Two jumpers are on the
personality card (the small card in the lower right-hand side) and are
visible when the inner door is opened. The personality card must be
removed to change the discrete jumpers located on the board below
the personality card. To remove the personality card, remove the
four small screws that hold the card in place and gently remove it by
gripping the notch at the lower right-hand corner of the card.
RS- 485 Termination - On the personality card there are two
termination jumpers for the COMM A and B for the RS-485
communications. These jumpers should only be installed on the two
most remote devices on the network. Count the host computer as
any other device. For example, a single StarPac II system is
communicating with a host PC in the control room. The StarPac II
unit and the RS-485 driver in the host computer would each require
a termination jumper. Remove the termination jumpers in the
devices not considered to be the most remote. Using more than two
termination jumpers in a network may cause the RS-485
communications to fail.
Alarm Relay Setting - Under the personality card is a three position
jumper labeled “Relay.” This jumper, if set in the A-B position,
configures the relay to Normally-open operation. If set to the B-C
StarPac II User Interface Manual 26
Page 33

position, the jumper configures the relay to Normally-closed
operation.
Discrete Input Range Selection - Under the personality card are
two sets of three position jumpers labeled “DI1” and “DI2.” DI1
refers to discrete input No. 1 and DI2 to discrete input No. 2. In the
A-B position the input is set to trigger on 120V AC or DC. In the B-C
position the input is set to trigger on 24V AC or DC. These jumpers
must be moved in pairs for each individual relay, but each relay may
be setup differently.
Troubleshooting
If you experience problems with your system, check the following list
for some common solutions.
LCD blank and no system response - Check 24 VDC supply
polarity and capacity (>300 mA).
LCD Hard to view - In the C
for a better viewing angle.
LCD active, unit will not respond to position or control
commands, and the analog outputs do not change - Check
to see if the unit is in Test mode by looking for a flashing “T” on
the right side of the display. The unit will be in Test mode any
time you are in the C
ALIBRATE or CONFIGURE menu, use the LAST OPTION key
the C
ALIBRATE or CONFIGURE menu. If you are in
to move up to the top of the menu and exit from Test mode. If
that does not clear the flashing “T” from the display, go to the
UNE menu and use the mode command to put the system in
T
Auto or Manual mode. If the system displays a flashing “E” or
“A” on the left side of the display, check the cause of the error or
alarm using the ERR/ALRM option in the S
Alarm is a trip condition, then you can view the cause of the trip
by setting the ROW1 variable to show Mode/Status in the
TATUS menu.
S
System will not respond to discrete commands - Check
jumper selection to make sure the input is set to the proper
range and that the system is not in Test mode.
Pressure sensors appear to saturate prematurely - Check the
rating of the sensors in the system information option of the
TATUS menu to verify the rating (the rating is also etched on the
S
sensor). Check the sensor gain (set in the C
the P1 & P2 option (the standard range is 39 mV < out < 78
mV).
Stroke calibration aborts or hangs - Check the air supply and
make sure it is stable. A regulator may be required to stabilize
the air supply in some systems.
ONFIGURE menu adjust the contrast
TATUS menu. If the
ALIBRATE menu) in
StarPac II User Interface Manual
27
Page 34
Appendices
System Setup Checklist
A. Power
• (24) VDC power at least 300 mA.
• Polarity correct.
• Local display ON. If not, check power supply.
B. System Communications (if connected to a remote computer)
• RS-485 converter properly installed or attached to computer.
• Signal polarity correct.
• Modbus device address set in StarPac device; refer to StarPac Operation section.
• Start software; refer to software section.
• Configure communications in software and hardware to match. Refer to Initial Setup in The
StarTalk II portion of this manual and StarPac Operation section.
• Communications work. If not, recheck settings.
C. Calibration checks
• Air supply turned on.
• Check status screens to verify system calibration; refer to software section.
• Valve stroke calibration to remove installation and handling offsets; refer calibration section.
• Verify process sensor calibration; recalibrate if needed.
D. System Configuration; refer to engineering/configuration section for details
• Set or verify failure modes.
• Set or verify analog output.
• Set or verify command and mode source
• Set or verify stroke limits.
• Set or verify LCD display options.
• Check positioner response and set gain to control speed.
E. Automatic PID Operation; refer to Engineering/Tuning section
• Select process variable.
• Input full scale range.
• Set initial PID parameters.
• Begin Automatic mode and tune system.
F. Other Options; refer to Engineering section
• Set units.
• Reset totalizer.
• Set or verify tagname.
• Set and start Data Logger function.
• Collect and save installed signature, if desired.
G. Save Installed Configuration; refer to technician support section
• Save configuration.
• Make backup copy and archive.
StarPac II User Interface Manual 28
Page 35

Detailed StarPac ll Register Map
This reference will aid you in understanding the configuration of the StarPac ll register table. Registers are
described and notes are provided that give the range and more detailed information.
The StarPac ll register table consists of three different types of information: integers, IEEE floating point
numbers and strings. These types can have a read only (RO) access attribute or a read/write (RW) access
attribute. You can only read RO registers. Writing to a RO register will generate an exception error. You
can both read and write to RW registers.
The register numbering is as follows: a 30000 base indicates RO integers, a 40000 base indicates RW
integers, a 70000 base indicates floating point numbers, and a 50000 base indicates strings. For example,
a register number of 30003 indicates a RO integer.
Two contiguous integer registers make up a floating point register. You will get an exception response if
you try to access into the middle of a floating point register.
Registers making up bit fields follow the MSB/LSB (Most Significant Byte/Least Significant Byte) format.
Internally, Valtek calculates the StarPac ll variable numbers by taking the module of the register number
and 10,000 and subtracting 1. For example, register number 30001 would become variable number 0.
Integer Registers
Integer
Register
Attribute Description Notes
30001 RO ADC value being output by the actuator
bottom pressure transducer.
30002 RO ADC value being output by the actuator
top pressure transducer.
30003 RO Indicates the input ADC value from the
external 4-20 mA command.
30004 RO Monitors the current being input to the
I/P.
30005 RO Monitors the internal +10V reference
supply.
30006 RO Monitors the internal +.33V reference
supply.
30007 RO Monitors the internal +5V supply. Always 3723.
30008 RO Monitors the internal -15V supply. Always 3366.
30009 RO Monitors the internal +15V supply. Always 3344.
30010 RO ADC value being output by the ambient
temperature sensor.
30011 RO ADC value being output by the auxiliary
4-20 mA input channel.
30012 RO ADC value being output by the upstream
process pressure (P
30013 RO ADC value being output by the down-
stream process pressure (P
transducer.
) transducer.
1
)
2
Range -32767 to 32767.
Range -32767 to 32767.
Range 0 to 16383.
Always 98.
Always 547.
Always 273.
Range -32767 to 32767.
Range 0 to 16383.
Range -32767 to 32767.
Range -32767 to 32767.
StarPac II User Interface Manual
29
Page 36
Integer
Attribute Description Notes
Register
30014 RO ADC value being output by the position
feedback Hallpot.
30015 RO ADC value being output by the process
temperature thermocouple.
30016 RO Flow state register. 0 = liquid choked
30017 RO Scaled percentage of full scale process
value for currently selected process
variable.
30018 RO Scaled liquid flow in currently selected
engineering units.
30019 RO Scaled gas flow in currently selected
engineering units.
30020 RO Scaled P1ISA in currently selected
engineering units.
30021 RO Scaled P2ISA currently selected
engineering units.
30022 RO Scaled dP ISA in currently selected
engineering units.
30023 RO Scaled process temperature in currently
selected engineering units.
30024 RO Scaled auxiliary input. Range 0 to 9999. Variable scale. Scalar
30025 RO Scaled 4-20 mA command input. Range 0 to 9999, with fixed scale range -
30026 RO Scaled stem position. Range 0 to 9999, with fixed scale range -
30027 RO Scaled setpoint command. Range 0 to 9999, with fixed scale range -
30028 RO Alarm source register. Bit field/Bit Meaning
Range -32767 to 32767.
Range 0 to 16383.
1 = liquid non-choked
2 = gas non-choked
3 = gas choked
Range -20 to 120. Fixed scale.
Range 0 to 9999. Variable scale. Scalar
registers are 70465, 70467.
Range 0 to 9999. Variable scale. Scalar
registers are 70469, 70471.
Range 0 to 9999. Variable scale. Scalar
registers are 70473, 70475.
Range 0 to 9999. Variable scale. Scalar
registers are 70477, 70479.
Range 0 to 9999. Variable scale. Scalar
registers are 70481, 70483.
Range 0 to 9999. Variable scale. Scalar
registers are 70485, 70487.
registers are 70489, 70491.
12.5 to 112.5 percent.
12.5 to 112.5 percent..
12.5 to 112.5 percent.
0 = Setpoint error
1 = Positioner error
2 = Tripped condition
3 = Unused
4 = Unused
5 = Override status
6 = Sensor malfunction
7 = Hardware malfunction
StarPac II User Interface Manual 30
Page 37
Integer
Attribute Description Notes
Register
30029 RO External 115V accessory A&B on/off
input status.
30030 RO Device address. Range 1 to 254.
40031 RW Process pressure unit selector. 40 = psig
40032 RW Liquid flow unit selector. 01= US gpm
40033 RW Gas flow unit selector. 20 = lb/hr
40034 RW Actuator pressure unit selector. 40 = psig
40035 RW Process temperature unit selector. 60 = deg C
0 = A&B on. (BCD220)
1 = A off, B on (BCD 221)
2 = A on, B off (BCD 222)
3 = A&B off (BCD 223)
41 = psia
42 = kPa g
43 = kPa a
44 = kg/sq cm g
45 = kg/sq cm a
46 = bar g
47 = bar a
2 = lpm
3 = lb/hr
4 = kg/hr
5 = cu m/hr
6 = bbl/d
7 = UK gpm
8 = custom units
21 = kg/hr
22 = scfh
23 = mscfd (million scfd)
24 = scfn
25 = scm/hr
26 = custom units
41 = psia
42 = kPa g
43 = kPa a
44 = kg/sq cm g
45 = kg/sq cm a
46 = bar g
47 = bar a
61 = deg F
62 = deg R
63 = deg K
StarPac II User Interface Manual
31
Page 38
Integer
Attribute Description Notes
Register
40036 RW Atmospheric pressure unit selection. 40 = psig
41 = psia
42 = kPa g
43 = kPa a
44 = kg/sq cm g
45 = kg/sq cm a
46 = bar g
47 = bar a
40037 RW Mode source selector. 0 = Digital
1 = Discrete
2 = Remote
40038 RW Operating mode selector. 0 = Calibration mode
1 = Manual mode
2 = Automatic mode
40039 RW Process variable selector. 1 = Liquid flow
2 = Upstream (P
3 = Downstream (P
4 = Delta pressure
5 = Temperature
6 = Gas flow
7 = Auxiliary 4-20 mA input
40040 RW Controller action selector. 0 = Reverse acting
1 = Direct acting
40041 RW Setpoint source selector. 0 = 4-20 mA input
1 = Digital
2 = Remote
40042 RW Air action selector. 0 = Air-to-open
1 = Air-to-close
40043 RW 4-20 mA output selector. 0 = Position
1 = Liquid flow
2 = Upstream (P
3 = Downstream (P
4 = Delta pressure
5 = Temperature
6 = Gas flow
7 = Auxiliary 4-20 mA input
40044 RW Proportional band for controller. Range 1 to 9999. Percent
40045 RW Derivative time for controller. Range 0 to 9999. Minutes
40046 RW Controller integral reset. Range 0 to 9999. Repeats/minute
) pressure
1
) pressure
2
) pressure
1
) pressure
2
StarPac II User Interface Manual 32
Page 39

Integer
Attribute Description Notes
Register
40047 RW Scaled setpoint command. Range 0 to 9999, with fixed scale range -
12.5 to 112.5 percent.
40048 RW Scaled digital command. Range 0 to 9999, with fixed scale range -
12.5 to 112.5 percent.
40049 RW Flow type indicator. 0 = Liquid
1 = Gas
40050 RW Positioner signal source selector. 0 = Direct 4-20 mA
1 = Digital
40051 RW Analog command signal state selector. 0 = Normal
4 mA = 0% command
20 mA = 100% command
1 = Inverted
4 mA = 100% command
20 mA = 0% command
40052 RW Loss of analog command signal hold
time.
40053 RW Interval between data logger data points. Range 0 to 9999. Seconds
40054 RW Actuator bottom pressure transducer
minimum calibrated ADC value
corresponding to 0 psig.
40055 RW Actuator bottom pressure transducer
maximum calibrated ADC value
corresponding to supply pressure psig.
40056 RW Actuator top pressure transducer
minimum calibrated ADC value
corresponding to 0 psig.
40057 RW Actuator top pressure transducer
maximum calibrated ADC value
corresponding to supply pressure psig.
40058 RW Minimum ADC value corresponding to
calibrated 4 mA command input.
40059 RW Maximum ADC value corresponding to
calibrated 20 mA command input.
40060 RW Output to I/P. Range 0 to 65535. If system is not in
40061 RW Minimum DAC value corresponding to
0% position.
40062 RW Maximum DAC value corresponding to
100% position.
40063 RW Minimum ADC value corresponding to
0 °F ambient temperature.
Range 0 to 9999. Seconds
0 = Data logger inactive.
Range -32768 to 32768
Range -32768 to 32768
Range -32768 to 32768
Range -32768 to 32768
Range 0 to 16384
Range 0 to 16384
Calibration mode, writing to this register
will not have an effect.
Range 0 to 65535.
Range 0 to 65535.
Range -32768 to 32768
StarPac II User Interface Manual
33
Page 40

Integer
Attribute Description Notes
Register
40064 RW Maximum ADC value corresponding to
185 °F ambient temperature.
40065 RW Minimum ADC value corresponding to
4 mA on the auxiliary input channel.
40066 RW Maximum ADC value corresponding to
20 mA on the auxiliary input channel.
40067 RW Output from analog output channel. Range 0 to 65535. If system is not in
40068 RW Minimum DAC value corresponding to
4 mA on analog output channel.
40069 RW Maximum DAC value corresponding to
20 mA on analog output channel.
40070 RW Minimum ADC value corresponding to
0 psig process pressure on upstream
pressure (P
) transducer.
1
40071 RW Maximum ADC value corresponding to
maximum psig process pressure on
upstream pressure (P
) transducer.
1
40072 RW Minimum ADC value corresponding to
0 psig process pressure on downstream
pressure (P
) transducer.
2
40073 RW Maximum ADC value corresponding to
maximum psig process pressure on
downstream pressure (P
) transducer.
2
40074 RW Minimum ADC value corresponding to
0% open from position Hallpot output.
40075 RW Maximum ADC value corresponding to
100% open from position Hallpot output.
40076 RW Minimum ADC value corresponding to
calibrated minimum temperature in °F.
40077 RW Maximum ADC value corresponding to
calibrated maximum temperature in °F.
40078 RW Totalizer reset flag. Range 0 to 1. Writing a value of 1 to this
40079 RW Read real-time clock flag. Range 0 to 1. Writing a value of 1 to this
40080 RW Set real-time clock flag. Range 0 to 1. Writing a value of 1 to this
Range -32768 to 32768
Range 0 to 16384
Range 0 to 16384
Calibration mode, writing to this register
will not have an effect.
Range 0 to 65535.
Range 0 to 65535.
Range -32768 to 32768
Range -32768 to 32768
Range -32768 to 32768
Range -32768 to 32768
Range -32768 to 32768
Range -32768 to 32768
Range 0 to 16384.
Range 0 to 16384.
register causes the device to reset the
totalized flow and time.
register causes the device to load the real-
time clock information into real-time string.
(Register No. 50625)
register causes the device to set the real-
time clock from the real-time string.
(Register No. 50625)
StarPac II User Interface Manual 34
Page 41

Integer
Attribute Description Notes
Register
40081 RW Reset integer scaler flag. Range 0 to 1. Writing a value of 1 to this
register causes the device to recalculate
the scalers used to calculate the integer
process variables.
40082 RW Start signature function flag. Range 0 to 2.
0 = Function complete
1 = Ramp function
2 = Step function
40083 RW Signature/logger data packet to be read. Range 1 to 650.
40084 RW Load signature data packet into
signature registers.
40085 RW Load logger data packet into signature
registers.
30086 RO Number of signature packets available. Range 0 to 650
30087 RO Number of logger packets available. Range 0 to 650
30088 RO Signature/logger accessory on/off status
register.
40089 RW Variable number for process temperature
input to be used in flow calculation.
40090 RW Variable number for upstream process
pressure (P
) input to be used in flow
1
calculation.
40091 RW Variable number for downstream
process pressure (P
) input to be used in
2
flow calculation.
40092 RW Variable number for specific gravity input
to be used in flow calculation.
40093 RW Variable number for molecular weight
input to be used in flow calculation.
Range 0 to 1. Writing a value of 1 to this
register causes the device to load the
signature registers with the signature
packet requested in register No. 40083.
Range 0 to 1. Writing a value of 1 to this
register causes the device to load the
signature registers with the logger packet
requested in register No. 40083.
Range -1 to 1023. Writing a value in the
specified range will cause the device to
use the value from that variable as the
process temperature input to the flow
calculation; -1 disables.
Range -1 to 1023. Writing a value in the
specified range will cause the device to
use the value from that variable as the
upstream process pressure input to the
flow calculation; -1 disables.
Range -1 to 1023. Writing a value in the
specified range will cause the device to
use the value from that variable as the
downstream process pressure input to the
flow calculation; -1 disables.
Range -1 to 1023. Writing a value in the
specified range will cause the device to
use the value from that variable as the
specific gravity input to the flow
calculation; -1 disables.
Range -1 to 1023. Writing a value in the
specified range will cause the device to
use the value from that variable as the
molecular weight input to the flow
calculation; -1 disables.
StarPac II User Interface Manual
35
Page 42
Integer
Attribute Description Notes
Register
40094 RW Variable number for liquid flow scaling
factor input to be used in flow
calculation.
40095 RW Variable number for gas flow scaling
factor input to be used in flow
calculation.
40096 RW Variable number of output No. 1 to be
displayed on Local display.
40097 RW Variable number of output No. 2 to be
displayed on Local display.
40098 RW Variable number of output No. 3 to be
displayed on Local display.
40099 RW Variable number of output No. 4 to be
displayed on Local display.
40100 RW Variable number of output No. 5 to be
displayed on Local display.
40101 RW Variable number of output No. 6 to be
displayed on Local display.
40102 RW Variable number of output No. 7 to be
displayed on Local display.
40103 RW Variable number of output No. 8 to be
displayed on Local display.
40104 RW Variable number of output No. 9 to be
displayed on Local display.
Range -1 to 1023. Writing a value in the
specified range will cause the device to
use the value from that variable as the
liquid flow scaling factor input to the flow
calculation; -1 disables.
Range -1 to 1023. Writing a value in the
specified range will cause the device to
use the value from that variable as the gas
flow scaling factor input to the flow
calculation; -1 disables.
Range -1 to 1023. Writing a value in the
specified range will cause the device to
display the output from that variable on
LCD display; -1 disables.
Range -1 to 1023. Writing a value in the
specified range will cause the device to
display the output from that variable on the
LCD display; -1 disables.
Range -1 to 1023. Writing a value in the
specified range will cause the device to
display the output from that variable on the
LCD display; -1 disables.
Range -1 to 1023. Writing a value in the
specified range will cause the device to
display the output from that variable on the
LCD display; -1 disables.
Range -1 to 1023. Writing a value in the
specified range will cause the device to
display the output from that variable on the
LCD display; -1 disables.
Range -1 to 1023. Writing a value in the
specified range will cause the device to
display the output from that variable on the
LCD display; -1 disables.
Range -1 to 1023. Writing a value in the
specified range will cause the device to
display the output from that variable on the
LCD display; -1 disables.
Range -1 to 1023. Writing a value in the
specified range will cause the device to
display the output from that variable on the
LCD display; -1 disables.
Range -1 to 1023. Writing a value in the
specified range will cause the device to
display the output from that variable on the
LCD display; -1 disables.
StarPac II User Interface Manual 36
Page 43

Integer
Attribute Description Notes
Register
40105 RW Variable number of output No. 10 to be
displayed on Local display.
30106 RO Hardware status register. Bit field Bit Meaning
Range -1 to 1023. Writing a value in the
specified range will cause the device to
display the output from that variable on the
LCD display; -1 disables.
0 Watch dog reset occurred
1 SRAM R/W failure
2 EPROM checksum error
3 NVRAM R/W failure
4 Thermocouple alarm
5 A-D converter No. 1 failure
6 A-D converter No. 2 failure
7 PII failure
8 Vcc supply failure
9 -15V supply failure
10 +.33V reference failure
11 +15V supply failure
12 D-A converter No. 1 failure
13 +10V reference failure
14 NVRAM checksum error
30107 RO Sensor status register. Bit field Bit Meaning
0 = P
sensor error
1
1 = P
sensor error
2
2 = Top actuator sensor error
3 = Bottom actuator sensor error
4 = Thermocouple sensor error
5 = Ambient temperature sensor error
6 = Position sensor error
40108 RW Loss of supply pressure hold time. Range 0 to 9999. Seconds
30109 RO Process Variable unit type Range 0 to 70
30110 RO Override status
40111 RW Remote command refresh rate Range 0 to 30000 sec
40112 RW Enable mask for alarm source bit fields Range 0 to 255, See register 30028, use
BCD
40113 RW Pressure transducer type 0 = voltage
1 = current
40114 RW Var number for dP valve input to be used
-1 to 1023
in flow calculation.
StarPac II User Interface Manual
37
Page 44

Integer
Attribute Description Notes
Register
40115 RW Communication port access. Bit field Bit Meaning
0= A-RW B-RW
1= A-RW B-RO
2= A-RO B-RW
40116 RW Flow factor time base for custom units Bit field Bit Meaning
0= /sec, 1= /min, 2= /hr, 3= /day
40117 to
40150
40151 RW LCD display mode register 0 to 65535
40152 RW LCD row #1 variable pointer -1 to 1023
40153 RW LCD row #2 variable pointer -1 to 1023
40154 RW Positioner null deadband bump 0 to 4095
40155 RW Normal mode proportional gain for
40156 RW Zero-velocity gain for positioner 0 to 20000
N/A Integer expansion.
0 to 20000
positioner
40157 RW Null offset for positioner 0 to 4095
40158 RW HALL-POT slope correction factor 0 to 65535
40159 RW HALL-POT slope correction breakpoint 0 to 65535
40160 RW Proportional gain for dPcyl PI 0 to 20000
40161 RW Time-Integral for dPcyl PI 0 to 20000
40162 RW Perform positioner calibrations 0 to 2
40163 RW Enable register for keypad password
function
40164 RW Variable pointer for Analog Output #1 -1 to 1023
40165 RW Variable pointer for Pulse Relay Output -1 to 1023
30166 RO DAC value for positioner 0 to 4095
30167 RO Position ADC PGA gain 36 or 40
30168 RO P1 & P2 ADCs PGA gain 32 to 60
40169 RW WDT reset exception vector # (CPU32
pg 6-2)
40170 RW Error dependent gain for positioner 0 to 65535
40171 to
40200
N/A Integer expansion.
0 to 1
0 to 1
StarPac II User Interface Manual 38
Page 45
Floating Point Registers
Notice that floating point register numbers go up by two instead of up by one. This is because floating point
registers consist of two adjacent registers. This allows the device to have a four byte area in which to store
IEEE floating point values.
Floating
Point
Register
70201 RO Vapor pressure of current process fluid.
70203 RO Specific gravity of current process fluid.
70205 RO Process temperature in °R.
70207 RO Calculated FL.
70209 RO Calculated Z factor.
70211 RO Calculated XT.
70213 RO Pressure required to attain choked flow.
70215 RO Pressure drop across valve. (psid)
70217 RO Totalized flow in selected units since last
70219 RO Totalized time in seconds since last
70221 RO Position percentage before temperature
70223 RO Analog output percentage.
70225 RO Ambient temperature in °F.
70227 RO Upstream (P1) pressure in psig. (valve)
70229 RO Downstream (P2) pressure in psig.
70231 RO Actuator bottom pressure in psig.
70233 RO Actuator top pressure in psig.
70235 RO I/P input percentage.
70237 RO Valve CV at current opening.
70239 RO Calculated liquid flow in selected units.
70241 RO Calculated gas flow in selected units.
70243 RO Upstream pressure (P1ISA) in selected
70245 RO Downstream pressure (P2ISA) in
70247 RO Delta pressure (dPISA) in selected units.
70249 RO Process temperature in selected units.
70251 RO 4-20 mA analog command signal input
Attribute Description Notes
(psid)
totalizer reset.
totalizer reset.
compensation.
(valve)
units.
selected units.
percentage.
StarPac II User Interface Manual
39
Page 46
Floating
Attribute Description
Notes
Point
Register
70253 RO Output from position Hallpot in percent.
70255 RO 4-20 mA analog auxiliary signal input
percentage.
70257 RO Setpoint to controller in selected units.
70259 RO Selected process variable value in
selected units.
70261 RW Measured mechanical stroke of valve. Range 1.0E-3 to 100
70263 RW Softlimit maximum percentage. Range -20 to 120. System will not open
70265 RW Softlimit minimum percentage. Range -20 to 120. System will not close
70267 RW Full scale auxiliary input percentage. Range .1 to 1.0E9. Value is used to
70269 RW Full scale delta pressure (DPISA) in
selected units.
70271 RW Full scale liquid flow in selected units. Range .1 to 1.0E9. Value is used to
70273 RW Full scale gas flow in selected units. Range .1 to 1.0E9. Value is used to
70275 RW Full scale upstream pressure (P1ISA) in
selected units.
70277 RW Full scale downstream pressure (P2ISA)
in selected units.
70279 RW Full scale process temperature in
selected units.
70281 RW Process temperature in selected units
equal to 0% of process.
70283 RW Percentage of position used to output
20 mA on analog output channel.
70285 RW Percentage of position used to output
4 mA on analog output channel.
70287 RW Percentage of auxiliary input used to
output 20 mA on analog output channel.
70289 RW Percentage of auxiliary input used to
output 4 mA on analog output channel.
70291 RW Delta P (DPISA) in selected units used to
output 20 mA on analog output channel.
70293 RW Delta P (DPISA) in selected units used to
output 4 mA on analog output channel.
70295 RW Liquid flow in selected units used to
output 20 mA on analog output channel.
70297 RW Liquid flow in selected units used to
output 4 mA on analog output channel.
past this percentage.
past this percentage.
calculate the process variable percentage.
Range .1 to 1.0E9.. Value is used to
calculate the process variable percentage.
calculate the process variable percentage.
calculate the process variable percentage.
Range .1 to 1.0E9. Value is used to
calculate the process variable percentage.
Range .1 to 1.0E9. Value is used to
calculate the process variable percentage.
Range -500 to 5000. Value is used to
calculate the process variable percentage.
Range -500 to 5000. Value is used to
calculate the process variable percentage.
Range .1 to 1.0E3.
Range -20 to 120.
Range .1 to 1.0E3.
Range -20 to 120.
Range .1 to 1.0E9.
Range 0 to 1.0E9.
Range .1 to 1.0E9.
Range 0 to 1.0E9.
StarPac II User Interface Manual 40
Page 47
Floating
Attribute Description
Notes
Point
Register
70299 RW Gas flow in selected units used to output
20 mA on analog output channel.
70301 RW Gas flow in selected units used to output
4 mA on analog output channel.
70303 RW P1 process pressure (P1ISA) in selected
units used to output 20 mA on analog
output channel.
70305 RW P1 process pressure (P1ISA) in selected
units used to output 4 mA on analog
output channel.
70307 RW P2 process pressure (P1ISA) in selected
units used to output 20 mA on analog
output channel.
70309 RW P2 process pressure (P1ISA) in selected
units used to output 4 mA on analog
output channel.
70311 RW Process temperature in selected units
used to output 20 mA on analog output
channel.
70313 RW Process temperature in selected units
used to output 4 mA on analog output
channel.
70315 RW Calculated calibration slope for bottom
actuator transducer.
70317 RW Calculated calibration slope for top
actuator transducer.
70319 RW Calculated calibration slope for 4-20 mA
command input channel.
70321 RW Loss of 4-20 mA command signal ramp
rate.
70323 RW Setpoint deviation range. Range .1 to 100. Device will set alarm
70325 RW Setpoint change percentage over one
second.
70327 RW Amount of supply pressure that will be
considered as loss of air supply.
70329 RW Antoine A fluid coefficient. Range -1000 to 1000. Used to calculate
Range .1 to 1.0E9.
Range 0 to 1.0E9.
Range .1 to 1.0E9.
Range 0 to 1.0E9.
Range .1 to 1.0E9.
Range 0 to 1.0E9.
Range -500 to 5000.
Range -500 to 5000.
Range -1.0E9 to 1.0E9
Range -1.0E9 to 1.0E9
Range -1.0E9 to 1.0E9
Range -1.0E6 to 1.0E6. Ramp rate is
percent/minute. Set negative to ramp
closed or positive to ramp open on loss of
analog command input.
status bit (Setpoint deviation) when
setpoint is this far out of range.
Range .1 to 100. Device will set alarm
status bit (Setpoint deviation) when the
indicated process percentage does not
follow the setpoint percentage in one
second.
Range 0 to 200. If air supply goes below
this point, the device will set the alarm
status bit (Trip condition).
the fluid vapor pressure.
StarPac II User Interface Manual
41
Page 48

Floating
Attribute Description
Notes
Point
Register
70331 RW Antoine B fluid coefficient. Range 0 to 1.0E6. Used to calculate the
fluid vapor pressure.
70333 RW Antoine C fluid coefficient. Range -1.0E4 to 1.0E4. Used to calculate
the fluid vapor pressure.
70335 RW Local atmospheric pressure. Range 0.1 to 1000. psig. Any
conversions will have to be done by
external software.
70337 RW Liquid flow multiplier. Range 0.1 to 100. Used to scale the liquid
flow value.
70339 RW Gas flow multiplier. Range 0.1 to 100. Used to scale the gas
flow value.
70341 RW Fluid critical pressure. Range .1 to 1.0E5.
70343 RW Fluid critical temperature Range .1 to 1.0E5.
70345 RW Fluid FK coefficient. Range 0 to 10.
70347 RW Fluid molecular weight. Range 0 to 1.0E3.
70349 RW Fluid reference temperature in °R. Range .1 to 1.0E4.
70351 RW Fluid specific gravity at reference
temperature.
70353 RW Calculated calibration slope for I/P input. Range -1.0E9 to 1.0E9.
70355 RW Calculated calibration slope for ambient
temperature sensor.
70357 RW Calculated calibration slope for 4-20 mA
auxiliary input channel.
70359 RW Calculated calibration slope for upstream
) process pressure transducer.
(P
1
70361 RW Calculated calibration slope for
downstream (P
) process pressure
2
transducer.
70363 RW Calculated calibration slope for position
Hallpot output.
70365 RW Calculated calibration slope for process
temperature thermocouple output.
70367 RW Calculated calibration slope for 4-20 mA
analog output channel.
70369 RW Offset for DPISA calculation. Range 0 to 100.
70371 RW Design stroke of valve. Range .001 to 100.
70373 RW Gas A1 coefficient used in gas flow
calculation.
70375 RW Gas A2 coefficient used in gas flow
calculation.
70377 RW CV A1 curve fit coefficient. Range -1.0E9 to 1.0E9.
70379 RW CV B1 curve fit coefficient. Range -1.0E9 to 1.0E9.
70381 RW CV C1 curve fit coefficient. Range -1.0E9 to 1.0E9.
Range 1.0E-3 to 100.
Range -1.0E9 to 1.0E9.
Range -1.0E9 to 1.0E9.
Range -1.0E9 to 1.0E9.
Range -1.0E9 to 1.0E9.
Range 1.0E-9 to 1.0E6.
Range 1.0E-9 to 1.0E6.
Range 1.0E-9 to 1.0E6.
Range -1000 to 1000.
Range -1000 to 1000.
StarPac II User Interface Manual 42
Page 49
Floating
Attribute Description
Notes
Point
Register
70383 RW CV D1 curve fit coefficient. Range -1.0E9 to 1.0E9.
70385 RW CV E1 curve fit coefficient. Range -1.0E9 to 1.0E9.
70387 RW CV A2 curve fit coefficient. Range -1.0E9 to 1.0E9.
70389 RW CV B2 curve fit coefficient. Range -1.0E9 to 1.0E9.
70391 RW CV C2 curve fit coefficient. Range -1.0E9 to 1.0E9.
70393 RW CV D2 curve fit coefficient. Range -1.0E9 to 1.0E9.
70395 RW CV E2 curve fit coefficient. Range -1.0E9 to 1.0E9.
70397 RW CV curve fit breakpoint. Range 0 to 100.
70399 RW dP A1 curve fit coefficient. Range -1.0E9 to 1.0E9.
70401 RW dP B1 curve fit coefficient. Range -1.0E9 to 1.0E9.
70403 RW dP C1 curve fit coefficient. Range -1.0E9 to 1.0E9.
70405 RW dP D1 curve fit coefficient. Range -1.0E9 to 1.0E9.
70407 RW dP E1 curve fit coefficient. Range -1.0E9 to 1.0E9.
70409 RW dP A2 curve fit coefficient. Range -1.0E9 to 1.0E9.
70411 RW dP B2 curve fit coefficient. Range -1.0E9 to 1.0E9.
70413 RW dP C2 curve fit coefficient. Range -1.0E9 to 1.0E9.
70415 RW dP D2 curve fit coefficient. Range -1.0E9 to 1.0E9.
70417 RW dP E2 curve fit coefficient. Range -1.0E9 to 1.0E9.
70419 RW dP curve fit breakpoint. Range 0 to 100.
70421 RW FL A1 curve fit coefficient. Range -1.0E9 to 1.0E9.
70423 RW FL B1 curve fit coefficient. Range -1.0E9 to 1.0E9.
70425 RW FL C1 curve fit coefficient. Range -1.0E9 to 1.0E9.
70427 RW FL D1 curve fit coefficient. Range -1.0E9 to 1.0E9.
70429 RW FL E1 curve fit coefficient. Range -1.0E9 to 1.0E9.
70431 RW FL A2 curve fit coefficient. Range -1.0E9 to 1.0E9.
70433 RW FL B2 curve fit coefficient. Range -1.0E9 to 1.0E9.
70435 RW FL C2 curve fit coefficient. Range -1.0E9 to 1.0E9.
70437 RW FL D2 curve fit coefficient. Range -1.0E9 to 1.0E9.
70439 RW FL E2 curve fit coefficient. Range -1.0E9 to 1.0E9.
70441 RW FL curve fit breakpoint. Range 0 to 100.
70443 RW XT A1 curve fit coefficient. Range -1.0E9 to 1.0E9.
70445 RW XT B1 curve fit coefficient. Range -1.0E9 to 1.0E9.
70447 RW XT C1 curve fit coefficient. Range -1.0E9 to 1.0E9.
70449 RW XT D1 curve fit coefficient. Range -1.0E9 to 1.0E9.
70451 RW XT E1 curve fit coefficient. Range -1.0E9 to 1.0E9.
70453 RW XT A2 curve fit coefficient. Range -1.0E9 to 1.0E9.
70455 RW XT B2 curve fit coefficient. Range -1.0E9 to 1.0E9.
70457 RW XT C2 curve fit coefficient. Range -1.0E9 to 1.0E9.
StarPac II User Interface Manual
43
Page 50

Floating
Attribute Description
Notes
Point
Register
70459 RW XT D2 curve fit coefficient. Range -1.0E9 to 1.0E9.
70461 RW XT E2 curve fit coefficient. Range -1.0E9 to 1.0E9.
70463 RW XT curve fit breakpoint. Range 0 to 100.
70465 RW Minimum liquid flow in selected units for
register 30018.
70467 RW Maximum liquid flow in selected units for
register 30018.
70469 RW Minimum gas flow in selected units for
register 30019.
70471 RW Maximum gas flow in selected units for
register 30019.
70473 RW Minimum upstream pressure (P1ISA) in
selected units for register 30020.
70475 RW Maximum upstream pressure (P1ISA) in
selected units for register 30020.
70477 RW Minimum downstream pressure (P2ISA)
in selected units for register 30021.
70479 RW Maximum upstream pressure (P2ISA) in
selected units for register 30021.
70481 RW Minimum delta pressure (DPISA) in
selected units for register 30022.
70483 RW Maximum delta pressure (DPISA) in
selected units for register 30022.
70485 RW Minimum process temperature in
selected units for register 30023.
70487 RW Maximum process temperature in
selected units for register 30023.
70489 RW Minimum auxiliary percentage for
register 30024.
70491 RW Maximum auxiliary percentage for
register 30024.
70493 RW Ramp rate for signature test in
percent/minute.
Range 0 to 1.0E9. Represents 0 for the
calculated integer process variable value.
Range .1 to 1.0E9. Represents 9999 for
the calculated integer process variable
value.
Range 0 to 1.0E9. Represents 0 for the
calculated integer process variable value.
Range .1 to 1.0E9. Represents 9999 for
the calculated integer process variable
value.
Range 0 to 1.0E9. Represents 0 for the
calculated integer process variable value.
Range .1 to 1.0E9. Represents 9999 for
the calculated integer process variable
value.
Range 0 to 1.0E9. Represents 0 for the
calculated integer process variable value.
Range .1 to 1.0E9. Represents 9999 for
the calculated integer process variable
value.
Range 0 to 1.0E9. Represents 0 for the
calculated integer process variable value.
Range .1 to 1.0E9. Represents 9999 for
the calculated integer process variable
value.
Range -500 to 5000. Represents 0 for the
calculated integer process variable value.
Range -500 to 5000. Represents 9999 for
the calculated integer process variable
value.
Range -1.0E9 to 1.0E9. Represents 1000
for the calculated integer process variable
value.
Range -1.0E9 to 1.0E9. Represents 9999
for the calculated integer process variable
value.
Range 10 to 150. Valve stem will move at
this rate during a ramp closed or ramp
open test.
StarPac II User Interface Manual 44
Page 51
Floating
Attribute Description
Notes
Point
Register
70495 RW Step time value in seconds. Range 1 to 20. Valve will move to the
stopping position immediately. The device
will collect data for the indicated amount of
time.
70497 RW Signature starting point in percent. Range -10 to 110.
70499 RW Signature stopping point in percent. Range -10 to 110.
70501 RO Signature time data. This value is loaded from device when the
load signature data flag is set to 1.
(Register No. 40084)
70503 RO Signature/Logger top actuator data in
psig.
70505 RO Signature/Logger bottom actuator data in
psig.
70507 RO Signature/Logger I/P input data in
percent.
70509 RO Signature/Logger position Hallpot output
data in percent.
70511 RO Signature/Logger process temperature
data in selected units.
70513 RO Signature/Logger upstream pressure
(P1ISA) data in selected units.
70515 RO Signature/Logger downstream pressure
(P2ISA) data in selected units.
70517 RO Signature/Logger liquid flow data in
selected units.
70519 RO Signature/Logger gas flow data in
selected units.
This value is loaded from device when the
load signature data flag or load data
logger data flag is set to 1. (Registers No.
40084, No. 40085)
This value is loaded from device when the
load signature data flag or load data
logger data flag is set to 1. (Registers No.
40084, No. 40085)
This value is loaded from device when the
load signature data flag or load data
logger data flag is set to 1. (Registers No.
40084, No. 40085)
This value is loaded from device when the
load signature data flag or load data
logger data flag is set to 1. (Registers No.
40084, No. 40085)
This value is loaded from device when the
load signature data flag or load data
logger data flag is set to 1. (Registers No.
40084, No. 40085)
This value is loaded from device when the
load signature data flag or load data
logger data flag is set to 1. (Registers No.
40084, No. 40085)
This value is loaded from device when the
load signature data flag or load data
logger data flag is set to 1. (Registers No.
40084, No. 40085)
This value is loaded from device when the
load signature data flag or load data
logger data flag is set to 1. (Registers No.
40084, No. 40085)
This value is loaded from device when the
load signature data flag or load data
logger data flag is set to 1. (Registers No.
40084, No. 40085)
StarPac II User Interface Manual
45
Page 52
Floating
Attribute Description
Notes
Point
Register
70521 RO Signature/Logger auxiliary 4-20 mA input
data in percent.
70523 RO Logger setpoint data in percent. This value is loaded from device when the
70525 RO Logger process variable data in percent. This value is loaded from device when the
70527 RW Calibration offset for minimum process
temperature.
70529 RW Positioner deviation range. Range .1 to 100. Device will set the alarm
70531 RW Positioner change percentage over one
second.
70533 RW Loss of supply air pressure ramp rate in
percent/minute.
70535 RW Supply pressure in psig. Range 0 to 200.
70537 RO Setpoint data in percent.
70539 RO Process variable in percent.
70541 RW Viscosity A coefficient
70543 RW Viscosity B coefficient
70545 RO Viscosity Correction Factor
70547 RO Alarm state as floating point variable
70549 RW Remote mode change register
70551 RW Remote command
70553 RO Totalized liquid flow (user units)
70555 RO Totalized gas flow (user units)
70557 RO Cylinder top pressure (psig)
70559 RO Cylinder bottom pressure (psig)
70561 RW user units = 20mA at AI #2
70563 RW user units = 4mA at AI #2
70565 RO AI #2 (user units)
70567 RW User flow unit multiplier Greater than zero
70569 to
70575
70577 RO Positioner Command (%)
N/A Floating point expansion space.
This value is loaded from device when the
load signature data flag or load data
logger data flag is set to 1. (Registers No.
40084, No. 40085)
load data logger data flag is set to 1.
(Register No. 40085)
load data logger data flag is set to 1.
(Register No. 40085)
Range -1.0E4 to 1.0E4. Used as
calibrated minimum temperature.
status bit (Positioner deviation) when the
difference between position Hallpot output
and I/P input is greater than this value.
Range .1 to 100. Device will set the alarm
status bit (Positioner deviation) when the
position percentage does not follow the I/P
percentage in one second.
Range 0 to 1.0E6. Rate at which the
valve will close on loss of air supply
pressure.
StarPac II User Interface Manual 46
Page 53

Floating
Attribute Description
Notes
Point
Register
70579 RW user units = 20mA at DAC#1
70581 RW user units = 4mA at DAC#1
70583 RW Full-scale pulse relay output value
70585 RW Offset pulse relay output value
70587 RW Pulse relay full-scale rate .1 to 256 (Hz)
70589 RW Cylinder saturation % for position
calibration
70591 to
70599
N/A Floating point expansion space.
0 to 100 %
StarPac II User Interface Manual
47
Page 54
String Registers
The register numbers in this table are not consecutive because of the varying length of each string in this
area of StarPac memory. Most of these strings are available as RW strings; however, we suggest that you
only write to 50617 (TAGNAME) and 50625 (Real time and date) and leave the others as they are because
that information is factory set.
Trying to access the middle of a string will result in an exception response from the device.
String
Register
50601 RO Embedded software version number. ASCII characters. 16 bytes
50609 RW Valve serial number. ASCII characters. 16 bytes.
50617 RW Tag name for current device. ASCII characters. 16 bytes.
50625 RW Real time and date information. ASCII characters. 3 2 bytes. This string is
50641 RW LCD display descriptors. ASCII characters. 64 bytes. Segmented
50673 RW LCD display units. ASCII characters. 64 bytes. Segmented
50705 RO Device descriptor. Initialized at factory with "StarPac II."
50713 RO Logger real time and date data. This string is loaded from device when
50729 RW Trim number of this system. ASCII characters. 16 bytes.
50737 RW Trim characteristics of this system. ASCII characters. 16 bytes.
50745 RW Trim type of this system. ASCII characters. 16 bytes.
50753 RW Pressure class of this system. ASCII characters. 16 bytes.
50761 RW Valve model. ASCII characters. 16 bytes.
50769 RW Flow direction. ASCII characters. 16 bytes.
50777 RW Valve body size of this system. ASCII characters. 16 bytes.
50785 RW Valve body material of this system. ASCII characters. 16 bytes.
50793 RW Packing style used in this system. ASCII characters. 16 bytes.
50801 RW Packing used in this system. ASCII characters. 16 bytes.
50809 RW Gasket material used for this system. ASCII characters. 16 bytes.
50817 RW Actuator size used on this system. ASCII characters. 16 bytes.
50825 RW Spring used in actuator on this system. ASCII characters. 16 bytes.
Attribute Description Notes
used to reset internal clock when the real
time write flag (Register No. 40080) is set
to 1.
into 12 5 byte strings.
into 12 5 byte strings.
the load data logger data flag is set to 1.
(Register No. 40085)
StarPac II User Interface Manual 48
Page 55

String
Attribute Description Notes
Register
50833 RW Spring type used in actuator on this
system.
50841 RW Air action of this system. ASCII characters. 16 bytes.
50849 RW Electronics serial number. ASCII characters. 16 bytes.
50857 RW EPROM version used in this system. ASCII characters. 16 bytes.
50865 RW Pressure rating of sensors used on this
system.
50873 RW Sensor drawing number. ASCII characters. 16 bytes.
50881 RW Upstream pressure (P1) sensor serial
number.
50889 RW Downstream pressure (P2) sensor serial
number.
50897 RW Upstream pressure (P1) sensor last
calibration date.
50905 RW Downstream pressure (P2) sensor last
calibration date.
ASCII characters. 16 bytes.
ASCII characters. 16 bytes.
ASCII characters. 16 bytes.
ASCII characters. 16 bytes.
ASCII characters. 16 bytes.
ASCII characters. 16 bytes.
50913 RW Miscellaneous data. ASCII characters. 16 bytes.
50921 RW Miscellaneous data. ASCII characters. 16 bytes.
50929 RW Unused string space. ASCII characters. 16 bytes.
50937 RW Calibrated fluid type for this system. ASCII characters. 16 bytes.
50945 RW Custom flow units descriptor ASCII characters. 16 bytes
50953 RW Custom flow units totalizer descriptor ASCII characters. 16 bytes
50961 RW Undefined text string #1 ASCII characters. 16 bytes
50969 RW Undefined text string #2 ASCII characters. 16 bytes
50977 RW Undefined text string #3 ASCII characters. 16 bytes
50985 RW Undefined text string #4 ASCII characters. 16 bytes
50993 RW Undefined text string #5 ASCII characters. 16 bytes
51009 RW Undefined text string #6 ASCII characters. 16 bytes
51017 RW Password String ASCII characters. 16 bytes
51025 to
51097
N/A Unused string space. ASCII characters. 16 bytes.
StarPac II User Interface Manual
49
Page 56

Fluid Table
Name Critical
Press
Critical
Temp
Temp
Ref
Spec
Gr
Mol
Wt
Spec
Heat
Ant A Ant B Ant C ViscA Visc
B
Ratio
AIR 492.445007 227.160004 140.600006 0.804000 28.980000 1.400000 11.009000 1059.699951 11.880000 1.0 0.0
AMMONIA 1636.089966 730.080017 491.799988 0.639000 17.031000 1.310000 13.002000 3838.500000 -59.360001 1.0 0.0
ARGON 707.062012 271.399994 162.000000 1.373000 39.948002 1.670000 11.287000 1260.900024 -10.510000 1.0 0.0
BENZENE 710.000000 1011.780029 520.200012 0.885000 78.113998 1.110000 11.955000 5019.299805 -94.250000 1.0 0.0
BUTANE 551.250000 765.359985 527.400024 0.579000 58.124001 1.090000 11.733000 3878.800049 -61.959999 1.0 0.0
CARBON
DIOXIDE
CARBON
MONOXIDE
CHLORINE 1117.189941 750.599976 430.399994 1.563000 70.905998 1.330000 12.015000 3560.899902 -48.619999 1.0 0.0
DOWTHERM-A 454.695007 1386.800049 960.000000 0.870000 166.000000 1.050000 12.500000 7897.640137 -
ETHANE 708.531006 549.719971 329.399994 0.548000 30.070000 1.190000 11.718000 2720.500000 -30.889999 1.0 0.0
ETHYLENE 730.578003 508.320007 293.399994 0.577000 28.054001 1.240000 11.591000 2424.600098 -32.669998 1.0 0.0
FLUORINE 757.046997 259.739990 153.000000 1.510000 37.997002 1.360000 11.724000 1285.400024 -10.800000 1.0 0.0
FUEL OIL 330.000000 10000.000000 1335.000000 0.880000 0.000000 0.000000 -6.910000 0.000000 100.000000 1.0 0.0
GASOLINE 367.500000 529.640015 67.400002 0.695000 114.232002 1.050000 11.797400 5278.500000 -
GLYCOL 1117.189941 1161.000000 527.400024 1.114000 62.069000 1.090000 16.304001 10840.000000 -50.849998 1.0 0.0
HELIUM 32.929699 9.340000 7.700000 0.123000 4.003000 1.660000 8.306000 60.720001 3.220000 1.0 0.0
HYDROGEN 188.156006 59.759998 36.000000 0.071000 2.016000 1.400000 9.688000 296.820007 5.740000 1.0 0.0
HYDROGEN
CHLORIDE
ISOBUTANE 529.187988 734.580017 527.400024 0.557000 58.124001 1.090000 11.592000 3658.899902 -59.669998 1.0 0.0
ISOBUTYLENE 580.640991 752.219971 527.400024 0.594000 56.108002 1.100000 11.807000 3826.300049 -59.669998 1.0 0.0
KEROSENE 350.000000 10000.000000 935.000000 0.820000 3.000000 0.000000 8.730000 4091.399902 159.199997 1.0 0.0
METHANE 667.375000 343.079987 201.100006 0.425000 16.042999 1.310000 13.470000 2880.510010 69.860001 1.0 0.0
NATURAL GAS 667.375000 343.079987 201.100006 0.425000 16.042999 1.310000 13.470000 2880.510010 69.860001 1.0 0.0
NITROGEN 492.445007 227.160004 140.600006 0.804000 28.013000 1.400000 11.009000 1059.699951 -11.880000 1.0 0.0
NITROUS OXIDE 1051.089966 557.280029 330.500000 1.226000 44.013000 1.280000 12.181000 2711.500000 -46.779999 1.0 0.0
OXYGEN 732.046997 278.279999 162.000000 1.149000 31.999001 1.400000 11.462000 1322.099976 -11.610000 1.0 0.0
PHOSGENE 823.187988 819.000000 527.400024 1.381000 98.816002 1.170000 11.811000 3901.100098 -77.669998 1.0 0.0
PROPANE 615.921997 665.640015 415.799988 0.582000 44.097000 1.130000 11.780000 3370.300049 -45.290001 1.0 0.0
PROPYLENE 670.312012 657.000000 401.399994 0.612000 42.018002 1.150000 11.757000 3253.500000 -47.070000 1.0 0.0
REFRIGERANT
11
REFRIGERANT
12
REFRIGERANT
22
SEA WATER 3200.000000 1165.140015 672.000000 0.940000 18.000000 1.330000 14.390000 6910.799805 -83.029999 1.0 0.0
STEAM 3208.250000 1165.140015 527.400024 0.998000 18.020000 1.330000 14.358000 6869.500000 -83.029999 1.0 0.0
WATER 3208.250000 1165.140015 527.400024 0.998000 18.020000 1.330000 14.358000 6869.500000 -83.029999 1.0 0.0
1070.189941 547.559998 527.400024 0.777000 44.009998 1.290000 13.734500 3803.010010 14.539000 1.0 0.0
507.148010 239.220001 145.800003 0.803000 28.010000 1.400000 10.423000 954.359985 -23.670000 1.0 0.0
149.100006
104.540001
1205.380005 584.280029 338.600006 1.193000 36.460999 1.400000 12.158000 3085.600098 -26.010000 1.0 0.0
639.437988 848.159973 0.000000 0.000000 137.369995 1.120000 11.906000 43323.000000 -65.339996 1.0 0.0
598.281006 693.000000 284.399994 1.750000 120.910004 1.100000 -3.946000 0.000000 0.000000 1.0 0.0
721.953003 664.500000 520.200012 1.230000 86.500000 1.180000 11.600000 3068.600098 -74.300003 1.0 0.0
1.0 0.0
1.0 0.0
StarPac II User Interface Manual 50
Page 57

StarPac Wiring and Grounding Guidelines
This guideline will help you in achieving maximum noise rejection and
performance with a StarPac Intelligent Control System. This guide must
NOT be used to supersede local electrical code or plant safety wiring
practices.
Shielding Versus Grounding
All signals to the StarPac system should be in shielded cables. Shields
must be tied to a ground at only one end of the cable to provide a place
for environmental electrical noise to be removed from the cable. A
ground wire, unlike a shield, is attached at both ends to provide a
continuous path for electrical conductivity.
Grounding Screw
The grounding screw by the user interface terminal block should be
used to provide the unit with an adequate and reliable earth ground
reference. Either one of the mounting screws holding the terminal block
may be used as a grounding screw. This ground should be tied to the
same ground as the electrical conduit. Additionally, the electrical
conduit connecting to the StarPac unit should be earth grounded at both
ends of its run. The StarPac II grounding screw should not be used to
terminate any signal shield wires.
24 VDC Power
The 24 VDC connection points will work best with shielded twisted pair
wire with the shield wire connected only at the source. The input power
is isolated within the StarPac II system and may be referenced to
whatever level is necessary. For best performance the 24 VDC power
supply should not be connected to earth ground.
RS-485 Communication
RS-485 wiring requires shielded twisted pair wire. Maximum
performance will be attained when using cable with a characteristic
impedance of 120 ohms. The shield should be connected only at the
source, not in the StarPac unit. The StarPac II internal system ground
is isolated and not earth ground referenced. The RS-485 port can float
to whatever common mode voltage appears at its input terminals.
These signals are referenced to the StarPac internal system ground,
and because of this it is the main fault path when one of the isolation
points fail. For this reason special care must be taken to ensure that
the RS-485 cable is wired correctly. The RS-485 allows only a -7 to
12V common mode voltage differential between stations. This means
that an RS-485 network connected to multiple devices must not have
more than one grounding point. Valtek's RS-232/RS-485 converter is
not a grounded connection, it is fully isolated and is not a ground point.
However, PC's with internal RS-485 cards are often earth grounded and
if another communication device is on the network that also has an
earth ground, a fault condition will almost certainly exist due to transient
and steady state differences in ground potential.
StarPac II User Interface Manual
51
Page 58

4-20 mA Command Input, Auxiliary Input, and Feedback Output
These signals are isolated but shielded twisted pair wire should be used
to reduce crosstalk from other signals. Again, the shield should be
connected only at the source.
Discrete Inputs and Outputs These signals are isolated, yet because they are frequently used to
switch high voltage (120 VAC), they should be run in separate shielded
wire paths away from the other StarPac signals.
AIB and RS-232 to RS-485 Converter Connection
When connecting a StarPac system to an AIB or RS-232 to RS-485
converter, no shield or ground connections exist, the 24 VDC power
and RS-485 communication shield drain wires must be connected to a
convenient ground near the AIB or converter--no other grounding is
needed.
StarPac II User Interface Manual 52
Page 59

Index
—A—
Actuator
air action, 19
pressure sensor
calibration, 14
stroke, 14
Air supply trip
configuring, 20
Alarms
masking, 8
viewing, 6
Analog command
configuring, 18
Analog in #1
calibration, 13
configuring, 18
Analog in #2
calibration, 14
configuring, 19
Analog out #1
calibration, 13
configuring, 17
Analog out #2
calibration, 13
configuring, 18
—B—
Backup
save, restore, 24
system, 4
—C—
Calibration, 12
Clock, setting, 24
Command, 10
analog, digital, 11
Communication
settings, 22
Configuration, 17
Default, 24
—D—
Data logger, 24
Display
backlight, 23
configuration, 5
contrast, 23
—E—
Errors
device, viewing, 7
sensor, viewing, 7
—F—
Fluid specification, 25
Fluid Table, 50
Function keys, 2
—I—
Initial startup, 3
—J—
Jumper
alarm contact
selection, 26
configuration, 26
discrete input range,
26
RS-485 termination,
26
—M—
Menu
calibration, 12
configuration, 17
main, 2
status, 5
structure, 2
tuning, 9
Mode
discrete, digital, 10
test, auto, manual, 9
—P—
Password, setup, 22
PID
control action, 11
control variable, 12
derivative time, 11
proportional band,
gain, 11
reset, integral, 11
Positioner
tuning, 16
zero, span. See
Actuator, stroke
Power supply, 28
Pressure sensor,
process
calibration, 14
Process variable
scaling, 12
selecting control
variable, 12
Pulse output
configuring, 24
—R—
Registers
editing, 24
viewing, 9, 24
Remote transmitter
configuring, 18
Reset, 24
—S—
Setpoint, 10
analog, digital, 10
Soft limits
travel limits, 20
String Registers, 48
System information
viewing, 9
—T—
Tag name, setting, 22
Temperature sensor
calibration, 15
Totalizer
resetting, 12
—U—
Units selection, 20
custom gas flow, 21
custom liquid flow, 21
StarPac II User Interface Manual
53
Page 60

Page 61

Page 62

 Loading...
Loading...