

Page 1
4-55
Features
• Complete in terfac e to a bi direct iona l T1 link
• D3/D4 or ESF frami ng and S LC-96 comp atib le
• Two frame elastic buffer with 32µs j itter buffer
• Insertion and dete ction of A, B, C, D bits
Signalling freeze , opt iona l debo unc e
• Selectable B8ZS, jammed bit (ZCS) or no zero
code suppression
• Yellow and blue al arm signa l ca pabil ities
• Bipolar violation count, F
T
error count, CRC
error count
• Frame and superframe sync. signals, Tx and Rx
• Per channel , overa ll, and re mote l oop aro und
• 8 kHz synchronization output
• Digital phas e det ector betwe en T1 li ne and S TBUS
• ST-BUS compatible
• Pin compatible with the MH89760
• Inductorless clock recovery
• Loss of Sign al (LO S) indi cation
• Available in standard, narrow and surface
mount form ats
Applications
• DS1/ESF digital trunk interfaces
• Computer to PBX interfaces (DMI and CPI)
• High speed comp uter t o com pute r data links
Descript io n
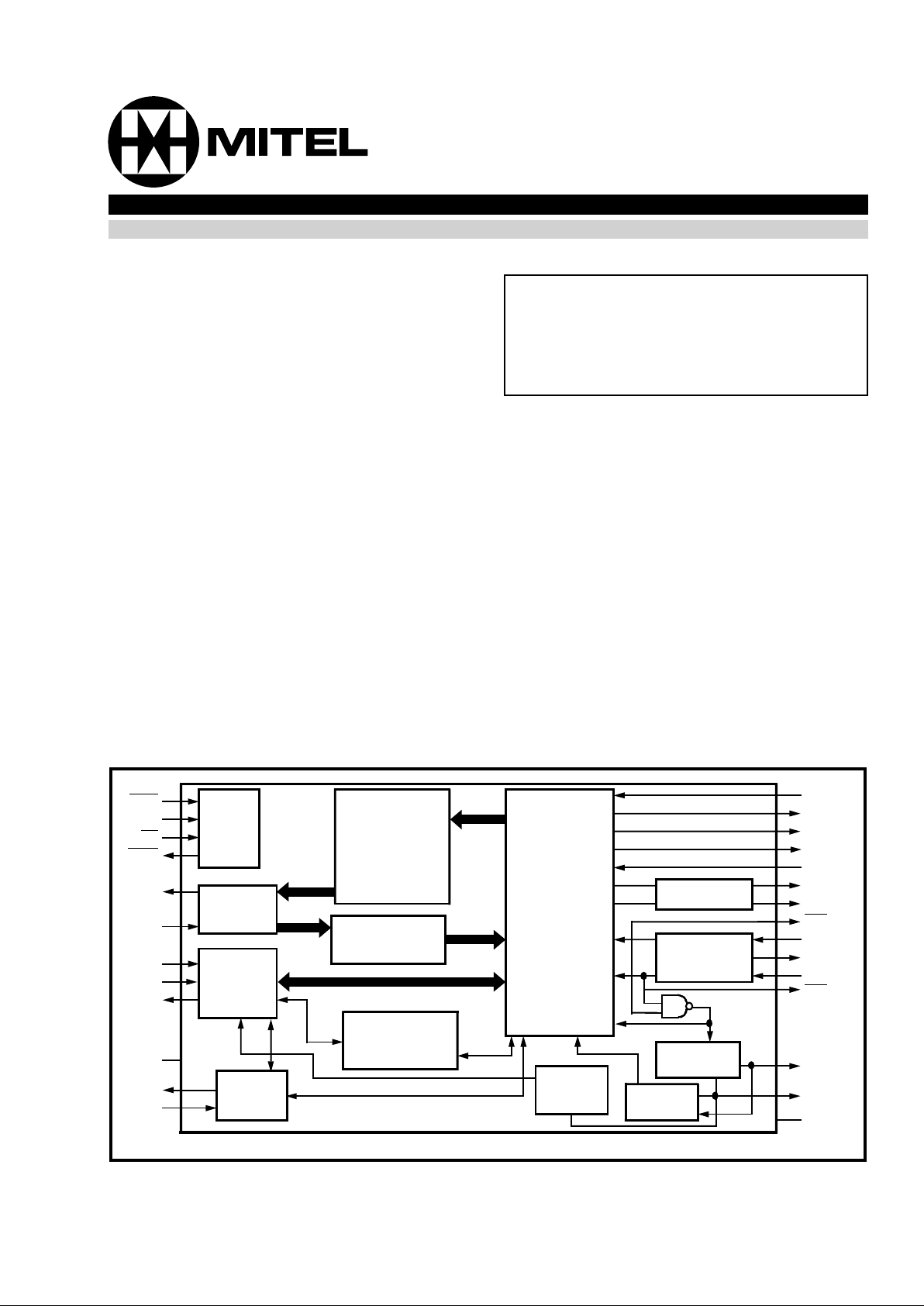
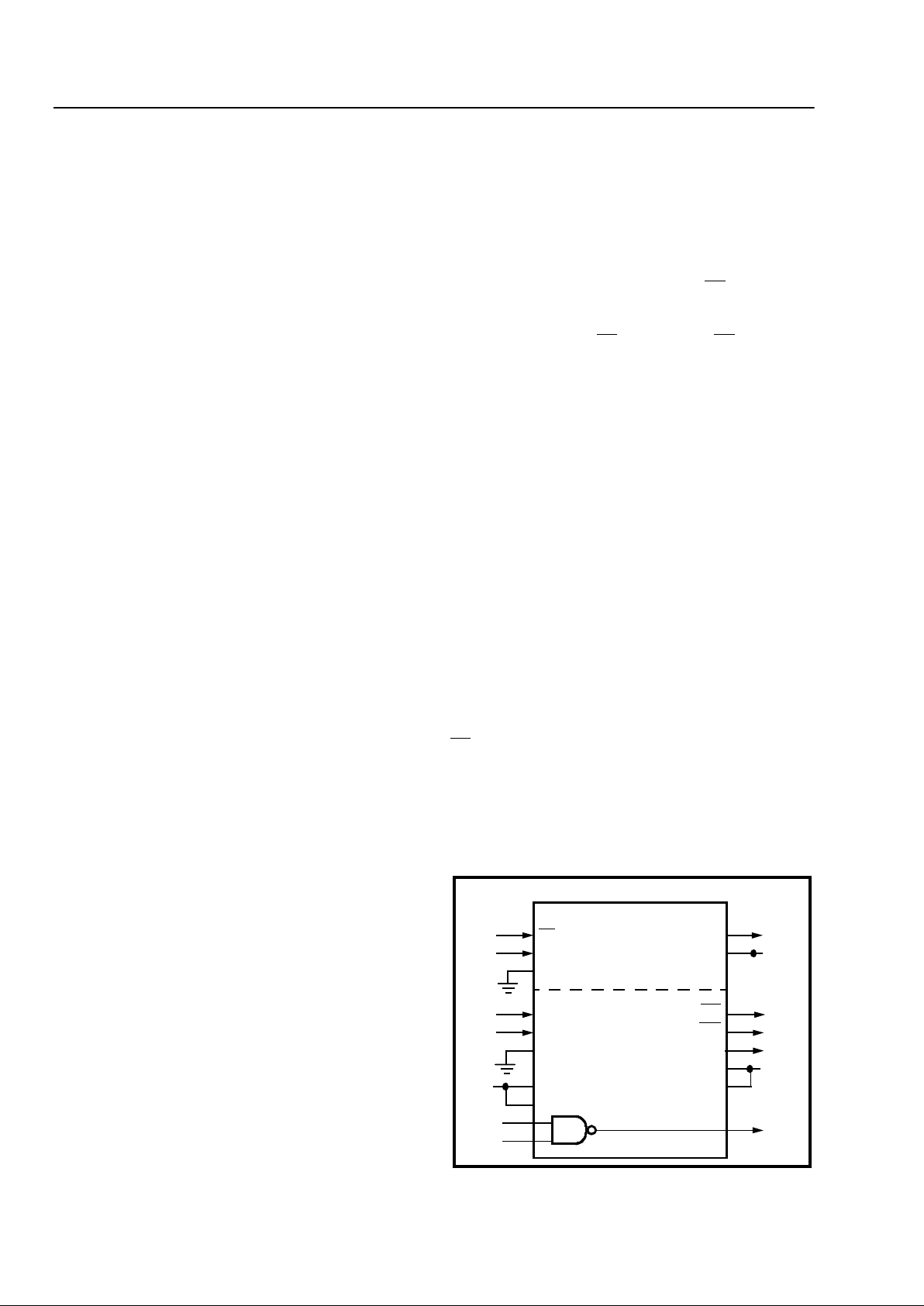
The MH89760B is a complete T1 interface solution,
meeting the Extended Super Frame (ESF), D3/D4
and SLC-96 formats. The MH89760B interfaces to
the DS11.544 Mbit/s ec digital trun k .
The MH89760B is a pin-compatible enhancement of
the MH89760, permitting the removal of the tuneable
inductor and inclusion of the external NAND gate
used for generating RxD.
Figure 1 - Functional Block Diagram
TxSF
C2i
F0i
RxSF
DSTo
DSTi
CSTi0
CSTi1
CSTo
VDD
XCtl
XSt
C1.5i
RxFDLClk
RxFDL
TxFDLClk
TxFDL
OUTA
OUTB
RxA
RxT
LOS
RxR
RxB
E1.5o
E8Ko
VSS
ST-BUS
Timing
Circuitry
Data
Interface
Serial
Control
Interface
Control
Logic
1544-2048
Two Frame
Elastic
Buffer
2048 - 1544
Converte r
ABCD
Signalling RAM
DS1
LINK
INTERFACE
Phase
Detector
DS1
Counter
Clock
Extractor
Receiver
Transmit ter
ISSUE 5 May 1995
Ordering Information
MH89760B 40 Pin DIL Hybrid 1.3" row pitch
MH89760BN 40 Pin DIL Hybrid 0.8" row pitch
MH89760BS 40 Pin Surface Mount Hybrid
0°C to 70°C
MH89760B
T1/ESF Framer & Interface
ST-BUS FAMILY
Preliminary Information
Page 2
4-56
MH89760B Preliminary Information
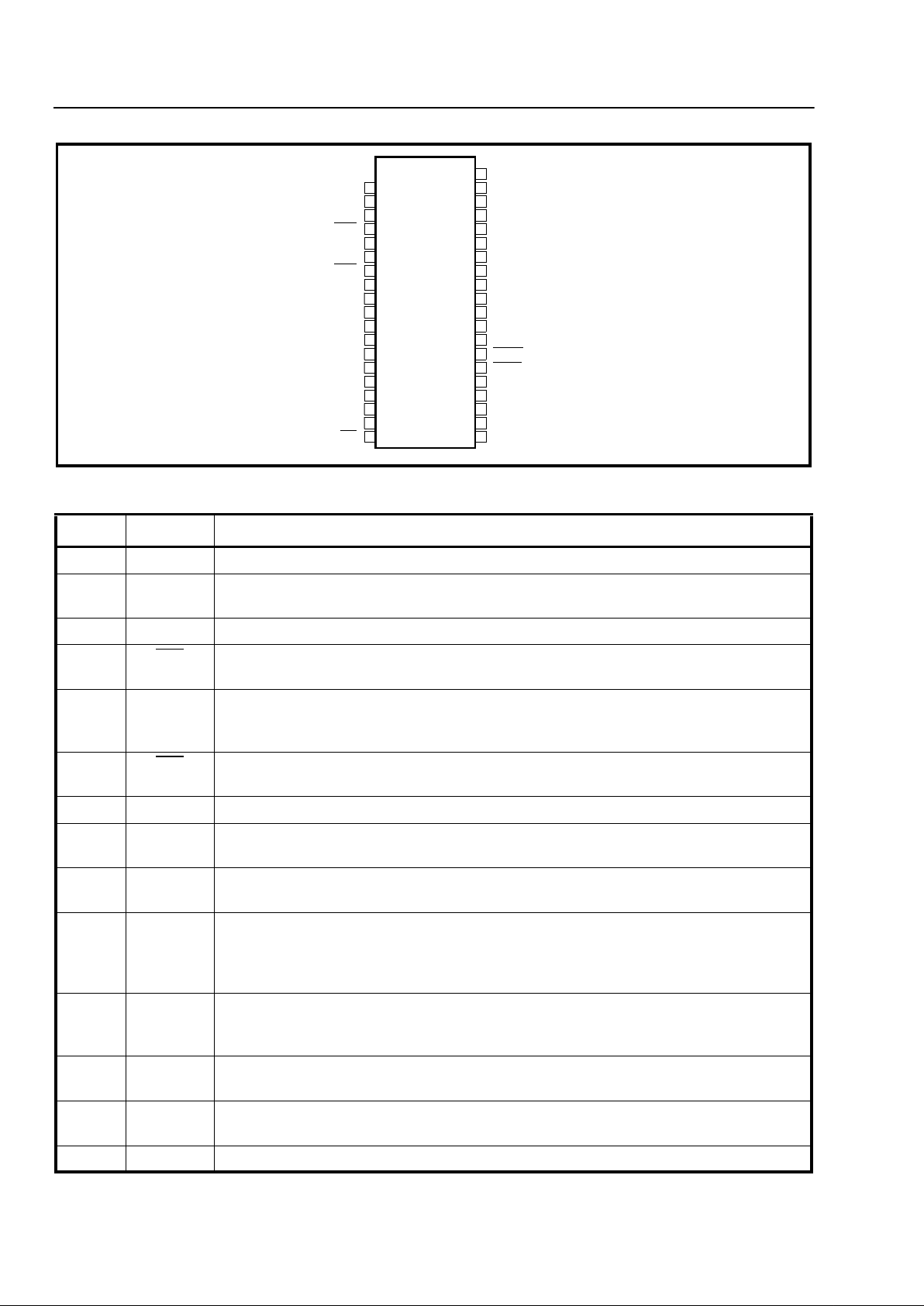
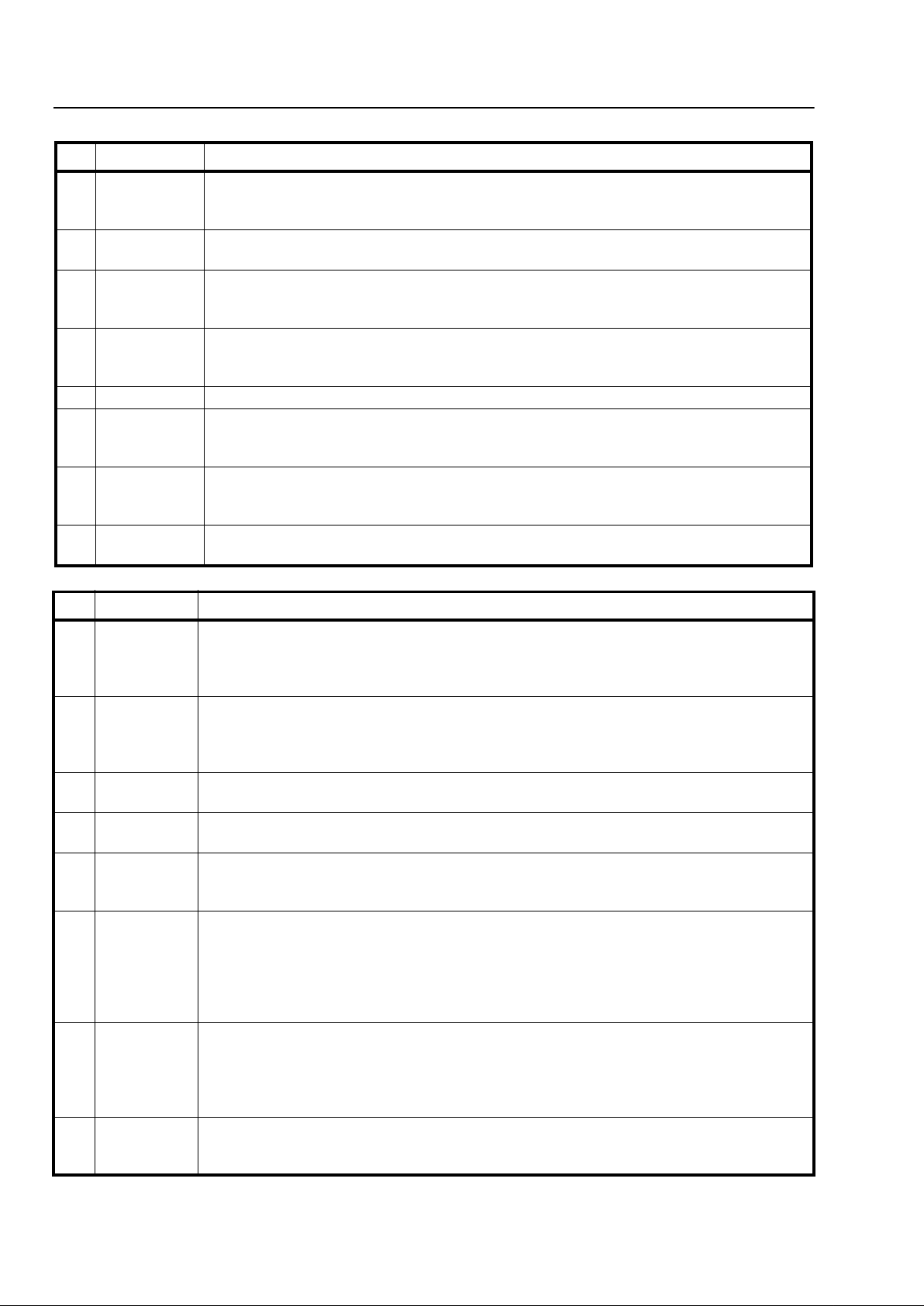
Figure 2 - Pin Connections
Pin Description
Pin # Name Description
2NCNo Connection.
3E1.5o1.544 MHz Extracted Clock (Outpu t): This clock is ext racted by t he device from the
received DS1 signal. It is used internally to clock in data received at RxT and RxR.
4V
DD
System Power S up ply. +5V.
5RxA
Received A (Output): The bipolar DS1 signal received by the device at RxR and RxT is
converted to a unipolar format and output at this pin.
6
7
RxT
RxR
Receive Tip and Ring Inputs: Bipolar split phase inputs designed to be connected
directly to the input transformer. I mpe dance to ground is approximately 1kΩ.
Impedance between pins=430Ω.
8RxB
Received B (Output): The bipolar DS1 signal received by the device at RxR and RxT is
converted to a unipolar format and output at this pin.
9NCNo Connection.
10 CSTi1 Control ST-BUS Input #1: A 2048 kbit/s serial control stream which carries 24 per-
channel control words.
11 CSTi0 Control ST-BUS Input #0: A 2048 kbit/s serial contro l stream that contain s 24 per
channel control words and two master control words.
12 E8Ko 8 kHz Extracted Clock (Outp ut): This is an 8 kH z out put generated by dividing the
extracted 1.544 MHz clock by 193 and aligning it with the received DS1 frame. The 8
kHz signal can be used for synchronizing system clocks to the extracted 1.544 MHz
clock. When digital loopback is enabled, the 8kHz is derived from C1.5.
13 XCtl External Control (Outpu t): This is an uncommitted externa l outpu t pin which is set or
reset via bit 3 in Master Control Word 1 on CSTi0. The state of XCtl is updated once per
frame.
14 XSt External Status (Schmitt Trigger Input): The state of this pin is sampled once per
frame and the status is reported in bit 5 of Master Status Word 2 on CSTo.
15 CSTo Control ST-BUS Output: This is a 2048 kbit/s serial control stream which provides the
24 per-channel status words, and two master status words.
16 NC No Connection.
NC
LOS
NC
TxFDL
NC
TxFDLClk
VSS
RxFDLClk
DSTo
RxFDL
OUTB
C1.5i
RxSF
TxSF
OUTA
NC
NC
NC
VSS
NC
NC
E1.5o
VDD
RxA
RxT
RxR
RxB
NC
CSTi1
CSTi0
E8Ko
XCtl
XSt
CSTo
NC
DSTi
C2i
E1.5o
F0i
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
40
39
38
37
36
35
34
33
32
31
30
29
28
27
26
25
24
23
22
21
Page 3
4-57
Preliminary Information MH89760B
Pin # Name Description
17 DSTi Data ST-BUS Input: This pin accepts a 2048 kbit/s serial stream which contains the 24
PCM or data channels to be transmitted on the T1 trunk.
18 C2i 2.048 MHz S ystem Clock (Inp ut ): This is the master cl oc k for the ST-BUS section of
the chip. All data on the ST-BUS is clocked in on the falling edge of C2i and out on the
rising edge.
19 E1.5o 1.544 MHz Extracted Clock (Outpu t): Internally connected t o Pin 3.
20 F0i
Frame Pulse Input: This is the frame synchronizati on si gnal which def ines the
beginning of the 32 channel ST-BUS frame.
21 V
SS
System ground .
22-24 NC No Connec tion .
25 OUTA Output A (Open Collector Output): This is the output of the DS1 transmitter circuit. It is
suitable for use with an external pulse transformer to generate the transmit bipolar line
signal.
26 TxSF
Transmit Superframe Pulse Input: A low pulse applied at this pin will det erm ine the
start of the next transmit superframe as illustrated in Figure 20. The device will free run if
this pin is held high.
27 RxSF
Received Superframe Pulse Output: A pulse output on this pin indicates tha t the next
frame of data on the ST-BUS is from frame 1 of the received superframe. The period is
12 frames long in D3/D4 modes and 24 frames in ESF mode. Active only when device is
synchronized to received DS1 signal.
28 C1.5i 1.544 MHz Clock Input: The rising edge of this clock is used to output data on OUTA,
OUTB. C1.5i must be pha se -lo c ked to the C2i system cl o c k.
29 OUTB Output B (Open Collector Output): This is the output of the DS1 transmitter circuit. It is
suitable for use with an external pulse transformer to generate the transmit bipolar line
signal.
30 RxFDL Received Facility Data Link (Output): A 4 kbit/s serial output stream that is
demultiplexe d from the FDL bits in ESF mode, or the received F
S
bit pattern when in
SLC96 mode. It is clocked out on the rising edge of RxFDLClk.
31 DSTo Data ST-BUS Output: A 2048 kbit/s serial output stream which contains the 24 PCM or
data channels received from the DS1 line.
32 RxFDLClk Receive Facility Data Link Cl ock Ou tput: A 4 kHz clock used to output FDL
information on RxFDL. Dat a is clocked out on the rising edge of the clock.
33 V
SS
No Connection.
34 TxFDLCl k Transmit Facility Data Link Clock Outp ut: A 4 kHz clock used to input FDL
information on TxFDL. Data is cloc ked in on the rising edge of the clock.
35 NC No Connection.
36 TxFDL Transmit Facility Data Link (Input)
: A 4 kbit/s serial input stream that is muxed into the
FDL bits in the ESF mode, or the F
S
pattern when in SLC96 mode. It is clocked in on the
rising edge of TxFDLClk.
37 NC No Connection.
38 LO S Loss of Signal (Output): This pin goes high when 128 contiguous ZEROs are received
on the RxT and RxR inputs. When LOS is high, RxA
and RxB are forced high. LOS is
reset when 48 ones are received in a two T1-frame period.
39 NC No Connection.
40 NC No Connection .
Pin Description (Contin ue d)
Page 4
4-58
MH89760B Preliminary Information
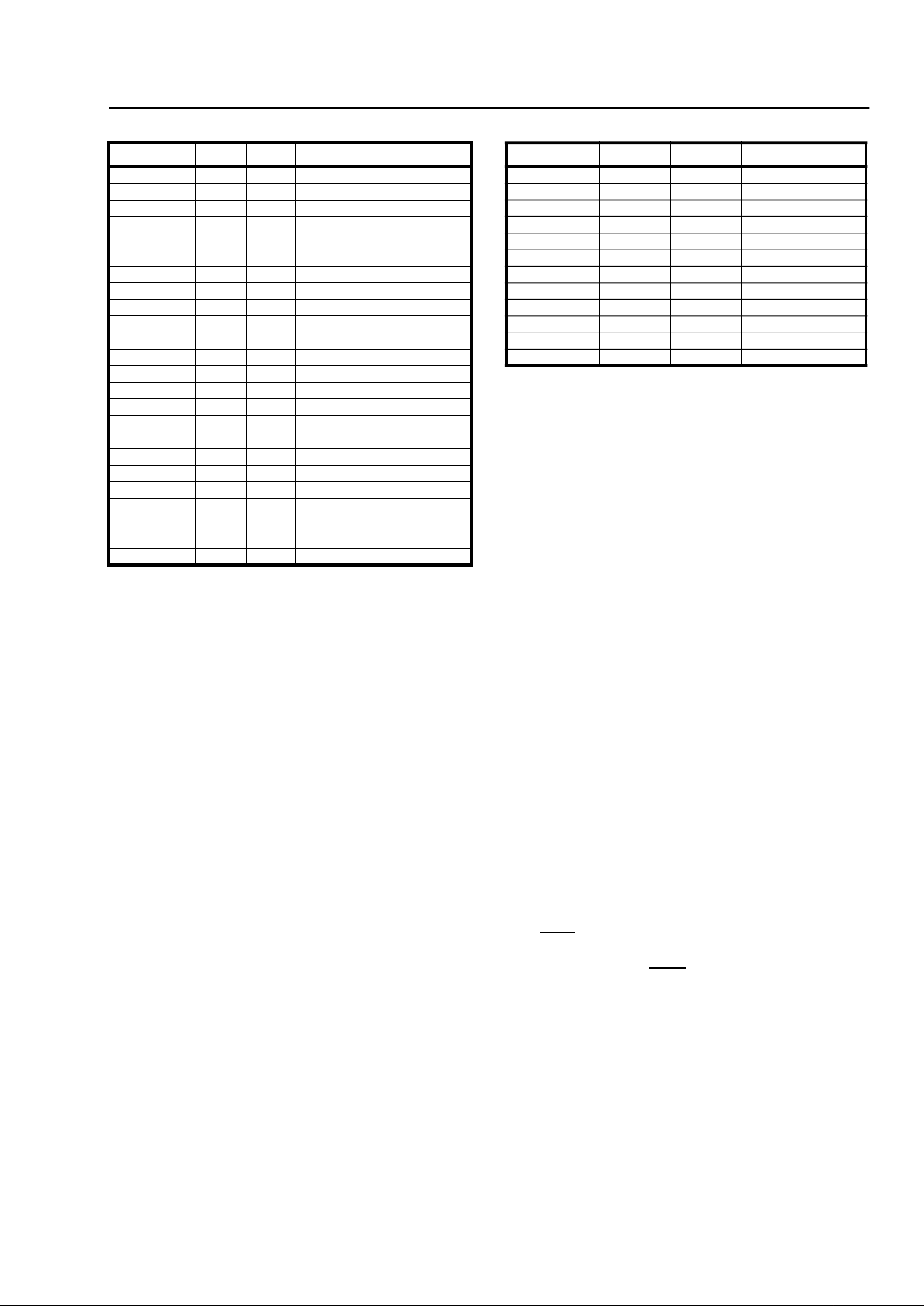
ST-BUS CHANNEL VERSUS DS1 CHANNEL TRANSMITTED
ST-BUS CHANNEL VERSUS DS1 CHA NNEL RECEIVED
PCCW=P er C hannel Con trol Word, M C W1 /2= M as te r C o ntrol Word 1/ 2
ST-BUS CHANNEL VERSUS DS1 CHANNEL CONTROLLED
PCCW=Per Channel Control Word
ST-BUS CHANNEL VERSUS DS1 CHANNEL CONTROLLED
PCSW=Per Channel Status Word, PSW=Phase Status Word, MSW=Master Status Word
ST-BUS VERSUS DS 1 CHANNEL STATUS
X = UNUSED
Figure 3 - ST-BUS Channel Allocations
DSTi 0
X
1234
X
5678
X
9 101112
X
13 14 15 16
X
17 18 19 20
X
21 22 23 24
X
25 26 27 28
X
29 30 31
DS1 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24
DSTo 0
X
1234
X
5678
X
9101112
X
13 14 15 16
X
17 18 19 20
X
21 22 23 24
X
25 26 27 28
X
29 30 31
DS1 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24
CSTi0 0
PC
CW
1
1
PC
CW
1
2
PC
CW
1
3
X
4
PC
CW
1
5
PC
CW
1
6
PC
CW
1
7
X
8
PC
CW
1
9
PC
CW
1
10
PC
CW
1
11
X
12
PC
CW
1
13
PC
CW
1
14
PC
CW
1
15
MC
W1
16
PC
CW
1
17
PC
CW
1
18
PC
CW
1
19
X
20
PC
CW
1
21
PC
CW
1
22
PC
CW
1
23
X
24
PC
CW
1
25
PC
CW
1
26
PC
CW
1
27
X
28
PC
CW
1
29
PC
CW
1
30
PC
CW
1
31
MC
W2
DS1 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24
CSTi1
0
PC
CW
2
1
PC
CW
2
2
PC
CW
2
3
X
4
PC
CW
2
5
PC
CW
2
6
PC
CW
2
7
X
8
PC
CW
2
9
PC
CW
2
10
PC
CW
2
11
X
12
PC
CW
2
13
PC
CW
2
14
PC
CW
2
15
X
16
PC
CW
2
17
PC
CW
2
18
PC
CW
2
19
X
20
PC
CW
2
21
PC
CW
2
22
PC
CW
2
23
X
24
PC
CW
2
25
PC
CW
2
26
PC
CW
2
27
X
28
PC
CW
2
29
PC
CW
2
30
PC
CW
2
31
X
DS1 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24
CSTo 0
PCS
W
1
PCS
W
2
PCS
W
3PSW
4
PCS
W
5
PCS
W
6
PCS
W
7
X
8
PCS
W
9
PCS
W
10
PCS
W
11
X
12
PCS
W
13
PCS
W
14
PCS
W
15
MS
W1
16
PCS
W
17
PCS
W
18
PCS
W
19
X
20
PCS
W
21
PCS
W
22
PCS
W
23
X
24
PCS
W
25
PCS
W
26
PCS
W
27
X
28
PCS
W
29
PCS
W
30
PCS
W
31
MS
W2
DS1 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24
Page 5
4-59
Preliminary Information MH89760B
Functional Description
The MH89760B is a thick film hybrid solution for a T1
interface. All of the formatting and signalling
insertion and detection is done by the device.
Various programmable options in the device include:
ESF, D3/D4 or SLC-96 mode, common channel or
robbed bit signalling, zero code suppression, alarms,
and local and remote loopback. The MH89760B also
has built in bipolar line drivers and receivers and a
clock extraction circuit.
All data and control information is communicated to
the MH89760B via 2048 kbit/s serial streams
conforming to Mitel’s ST-BUS format.
The ST-BUS is a TDM serial bus that operates at
2048 kbits/s. The serial streams are divided into 125
µsec frames that are made up of 32 8-bit channels. A
serial stream that is made up of these 32 8 bit
channels is known as an ST-BUS stream, and one of
these 64 kbit/s channels is known as an ST-BUS
channel.
The system side of the MH89760B is made up of STBUS inputs and outputs, i.e., control inputs and
outputs (CSTi/o) and data inputs and outputs
(DSTi/ o). These signals are functionally represented
in Figure 32. The DS1 line side of the device is made
up of split phase inputs (RxT, RxR) and outputs
(OUTA, OUTB) which can be connected to line
coupling transformers. Functional transmit and
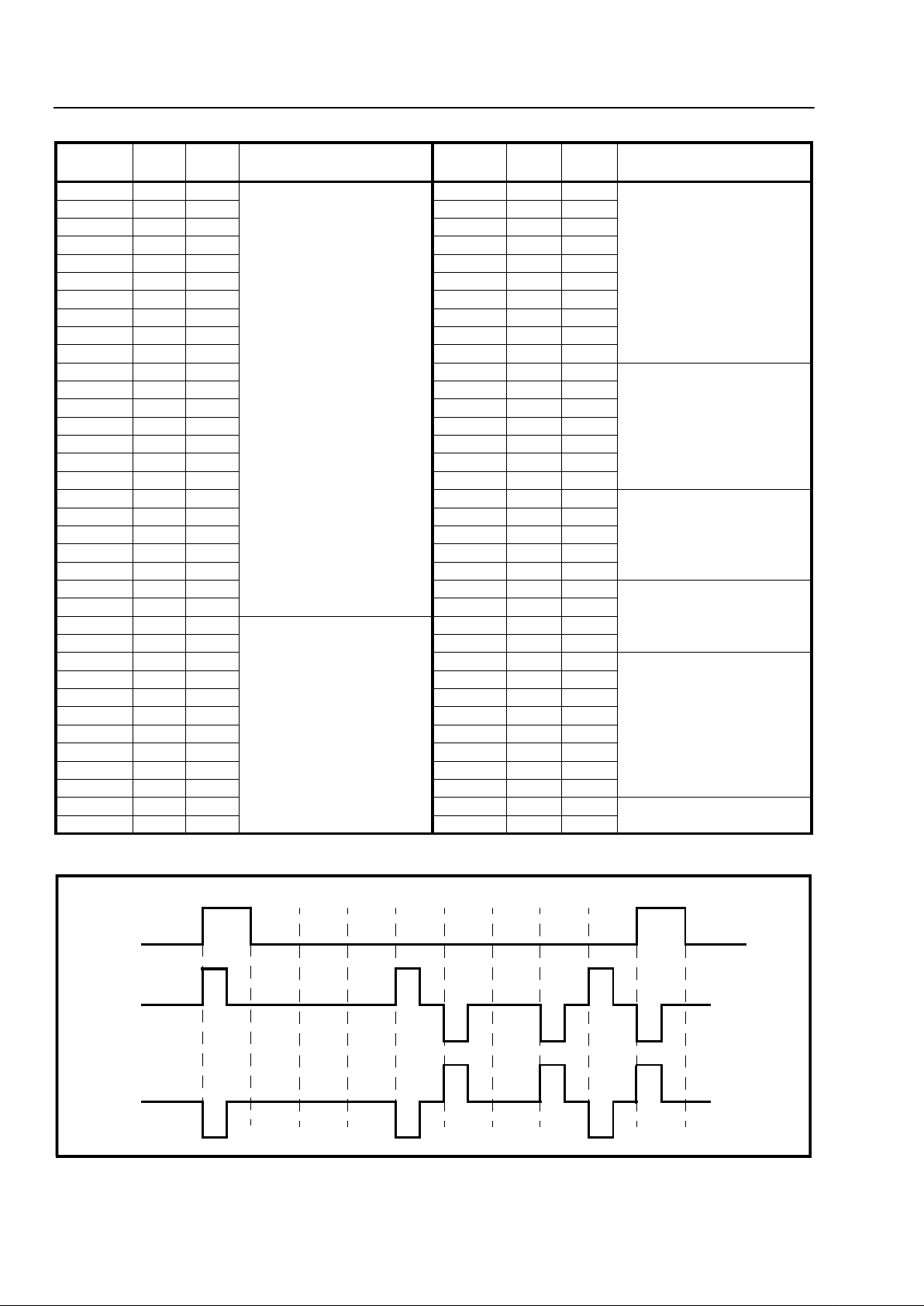
receive timing is shown in Figures 33 and 34.
Data for transmission on the DS1 line is clocked
serially into the device at the DSTi pin. The DSTi pin
accepts a 32 channel time division multiplexed STBUS stream . Data i s clocked in wit h the falli ng edge
of the C2i clock. ST-BUS frame boundaries are
defined by the frame pulse applied at the F0i pin.
Only 24 of the available 32 c hannels on the ST-BUS
serial stream are actually transmitted on the DS1
side. The unused 8 channels are ignored by the
device.
Data recei ved fr om the DS1 l ine i s cl o c ke d o ut of th e
device in a similar manner at the DSTo pin. Data is
clocked out on the rising edge of the C2i clock. Only
24 of the 32 channels output by the device contain
the information from the DS1 line. The DSTo pin is,
however, actively driven during the unused channel
timeslots. Figure 3 shows the correspondence
between the DS1 channels and the ST-BUS
channels.
All control and monitoring of the device is
accomplished through two ST-BUS serial control
inputs and one ser ial control outpu t. Control ST-BUS
input number 0 (CSTi0) accepts an ST-BUS serial
stream which contains the 24 per channel control
words and two master control words. The per chan nel
control words relate directly to the 24 information
channels output on the DS 1 side. The master control
words affect operation of the whole device. Control
ST-BUS input number 1 (CSTi1) accepts an ST-BUS
stream containing the A, B, C and D signalling bits.
The relationship between the CSTi channels and the
controlled DS0 channels is shown in Figure 3. Status
and signalling inform ation is received from the device
via the control ST-BUS output (CSTo). This serial
outpu t stream contain s two m aster st atus wo rds, 24
per channel status words and one Phase Status
Word. Figure 3 shows the correspondence between
the received DS1 channels and the status words.
Detailed information on the operation of the control
interface is presented be low.
Program mabl e Feat ures
The main features in the device are programmed
through two master control words which occupy
channels 15 and 31 in Control ST-BUS input stream
number 0 (CSTi0). These two eight bit words are
used to:
• Select the di fferent op erati ng mo de s of the
device ESF, D3/D4 or SLC-96.
• Activate th e fea tures th at are n ee ded in a
certain application; common channel signalling,
zero code supp ressi on, signal ling d eboun ce,
etc.
• Turn on in service alarm s, d iagno stic lo op
arounds, and the ext erna l cont rol funct ion.
Tables 1 and 2 contain a complete explanation of the
function of the different bits in Master Control Words
1 and 2.
Major Operating Modes
The major operating modes of the device are
enabled by bits 2 and 4 of Master Control Word 2.
The Extended Superframe (ESF) mode is enabled
when bit 4 is set high. Bit 2 has no effect in this
mode. The ESF mode enables the t ransmission of
the S bit pattern shown in Table 3. This includes the
frame/superframe pattern, the CRC-6, and the
Facility Data Link (FDL). The device generates the
frame/multiframe pattern and calculates the CRC for
each superframe. The data clocked into the device
on the TxFDL pin is incorporated into the FDL. ESF
mode will also insert A, B, C and D si gnalling bits into
the 24 f rame multiframe. The DS1 frame begins after
approximately 25 periods of the C1.5i clock from the
F0i
frame pulse.
Page 6
4-60
MH89760B Preliminary Information
.
Table 1. Master Control Word 1 (Channel 15, CSTi0)
Table 2. Master Control Word 2 (Channel 31, CSTi0)
Bit Name Description
7 Debounce When set the received A, B, C and D signalling bits are reported directly in the per
channel status words output at CSTo. When clear, the signalling bits are debounced for
6 to 9 ms before they are placed on CSTo.
6 TSPZCS Transparent Zero Code Suppression. When this bit is set, no zero code suppression is
implemented.
5 B8Z S Bin ary Eig ht Zero Supp ressi on . When this bit is set, B8ZS zero code suppression is
enabled. When clear, bit 7 in data channels containing all zeros is forced high before
being transmitted on the DS1 side. This bit is inactive if the TSPZCS bit is set.
4 8kHSel 8 kHz Output Select. Whe n set, the E8K o pin is held high. Whe n clear, the E8Ko
generates an 8 kHz output derived from the extracted 1.544 MHz clock or C1.5i clock
(see Pin Description for E8Ko).
3 XC tl External Control Pin. When set, the XCtl pin is held high. Whe n clea r, XCtl is held low.
2 ESFYLW ESF Yellow Alarm. Valid only in ESF mode. When set, a sequence of eight 1’s followed
by eight 0’s is sent in the FDL bit positions. When clear , the FDL bit contains data input at
the TxFDL pin.
1 Robbed bit When this bit is set, robbed bit signalling is disabled on all DS0 transmit channels. When
clear, A, B, C and D signalling bits are inserted into bit position 8 of all DS0 channels in
every 6th frame.
0 YLALR Yellow Alarm. When set, bit 2 of all DS0 channels is set low. When clear, bit 2 operates
normally.
Bit Name Description
7 RMLOOP Remote Loopback. When set, the data received at RxR and RxT is looped back to OUTB
and OUTA respective ly. The data is clocked into t he device wit h the extracted 1.54 4 MHz
clock. The device still monitors the received dat a and outpu ts it at DSTo. The device
operates normally when the bit is clear.
6 DGLOOP Digital Loopback. When set, the data input on DSTi is looped around to DSTo. The
normal received data on RxR and RxT is ignored. However, t he dat a input at DSTi is still
transmitted on OUTA and OUTB. The device frames up on the looped data using the C1.5i
clock.
5 ALL1'S All One’s Alarm. When set, the chip transmits an unfram ed all 1's signal on OUTA and
OUTB.
4 ESF/D4 ESF/D4 Select. W hen set, the device is in ESF mode. When clear, the device is in D3/D4
mode.
3 ReFR Reframe. If set for at least one frame and then cleared, the chip will begi n to search for a
new frame position. Only the change from high to low will cause a reframe, not a
continuous low level.
2 SLC-96 SLC-96 Mode Select. The chip is in SLC-96 mode when this bit is set. This enables input
and output of the F
S
bit pattern using the same pins as the facility data link in ESF mode.
The chip will use the same framing algorithm as D3/D4 mo de. Th e user must insert the
valid F
S
bits in 2 out of 6 superframes to allow the receiver to find superframe sync, and
the transmitter to insert A and B bits in every 6th frame. The SLC-96 FDL completely
replaces the F
S
pattern in the outgoing S bit po sition. I nacti ve in ESF mod e.
1 CRC/MIMIC In ESF mode, when set, the chip disregards the CRC calculation durin g synchroniza tion .
When clear, the device will check for a correct CRC before going into synchronization. In
D3/D4 mode, when set, the device will synchronize on the first correct S-bit pattern
detected. When this bit is clear, the device will not synchronize if it has detected more than
one candidate for the fram e ali gnm ent pat te rn (i.e. , a mimic ).
0 Maint. Maintena nce M ode. When set, the device will declare itself out-of-sync if 4 out of 12
consecutive F
T
bits are in error. When clear, th e out-of -s ync thresh old is 2 errors in 4 FT
bits. In this mode, four consecutive bit s follo wing an errored F
T
bit are examined.
Page 7
4-61
Preliminary Information MH89760B
Table 3. ESF Fra me Pat ter n
† These signalling bits are only valid if the robbed bit signalli ng is
active.
During synchronization the receiver locks on to the
incoming frame, calculates the CRC and compares it
to the CRC received in the next multiframe. The
device will not declare itself to be in synchronization unless a valid framing pattern in the S-bit is
detected and a correct CRC is received. The CRC
check in this case provides protect ion against false
framing. The CRC check can be turned off by setting
bit 1 in Master Control Word 2.
The device can be forced to resynchronize itself. If
Bit 3 in Master Cont rol Word 2 is set for one frame
and then subsequently reset, the de vice will start to
search for a new frame position. The decision to
reframe is made by the user’s system processor on
the basis of the status conditions detected in the
received master status words. This may include
consideration of the number of errors in the received
CRC in conjunction with an indication of the
presence of a mimic. When the device attains
synchronization the mimic bit in Master Status Word
1 is set if the device found another possible
candidate when it was searching for the framing
pattern.
Note that the devi ce will r esync hroniz e auto matic ally
if the errors in the terminal framing pattern (F
T
or
FPS) exceed the threshold set with bit 0 in Master
Control Word 2.
Frame # F PS F DL CRC Signalling
†
1X
2CB1
3X
40
5X
6 CB2 A
7X
80
9X
10 CB3
11 X
12 1 B
13 X
14 CB4
15 X
16 0
17 X
18 CB5 C
19 X
20 1
21 X
22 CB6
23 X
24 1 D
Table 4. D3/D4 Framer
† These signalling bits are only valid if the robbed bit signalling is
active.
Standard D3/D4 framing is enabled when bit 4 of
Master Control Word 2 is reset (logic 0). In this mode
the device searches for and inserts the framing
pattern shown in Table 4. This mode only supports
AB bit signalling, and does not contain a CRC check.
The CRC/MIMIC bit in Master Control Word 2, when
set high, allows the device to synchronize in the
presence of a mimic. If this bit is reset, the device will
not synchronize in the presence of a mimic. (Also
refer t o section on Framing Algorit hm.)
In the D3/D4 mode the device can also be made
compatible with SLC-96 by setting bit two of Master
Control Word 2. This allows the user to insert and
extract the signalling framing pattern on the DS1 bit
stream using the FDL input and output pins. The
user must format this 4 kbits of information exter nally
to meet all of the requirements of the SLC-96
specification (see Table 5). The device multiplexes
and demultiplexes this information into the proper
position. This mode of operation can also be used for
any other application that uses all or part of the
signalling framing pattern. As long as the serial
stream clocked into the TxFDL contains two proper
sets of consecutive synchronization bits (as shown in
Table 5 for fr am es 1 to 2 4) , the devic e will be
able to insert and extract the A, B signalling bits.
The TxSF
pin should be held high in this mode.
Superframe boundaries cannot be defined by a pulse
on this inpu t. The RxSF
output functions normally
and indicates the superframe boundaries based on
the synchronization pattern in the F
S
received bit
position.
Zero Code Suppression
The combination of bits 5 and 6 in Master Control
Word 1 allow one of three zero code suppression
schemes to be selected. The three choices are:
none, binary 8 zero suppression (B8ZS), or jammed
bit (bit 7 forced high). No zero code suppression
Frame # F
T
F
S
Signalling
†
11
20
30
40
51
61A
70
81
91
10 1
11 0
12 0 B
Page 8
4-62
MH89760B Preliminary Information
Table 5. SLC-9 6 Fram ing P attern
† Note: The FS pattern has to be supplied by the user.
Figure 4 - B8ZS Output Coding
Frame
#
F
T
F
S
†
Notes
Frame
#
F
T
F
S
†
Notes
11
Resynchronization
Data
Bits
37 1
X = Concentrator
Field Bits
20 38X
30 390
40 40X
51 411
60 42X
70 430
81 44X
91 451
10 1 46 X
11 0 47 0
S = Spoiler Bits
12 1 48 S
13 1 49 1
14 0 50 S
15 0 51 0
16 0 52 S
17 1 53 1
18 0 54 C
C = Maintenance
Field
Bits
19 0 55 0
20 1 56 C
21 1 57 1
22 1 58 C
23 0 59 0
A = Alarm Field
Bits
24 1 60 A
25 1
X =Concentrator
Fiel d Bi ts
61 1
26 X 6 2 A
27 0 63 0
L = Line Sw i tc h
Field Bits
28 X 6 4 L
29 1 65 1
30 X 6 6 L
31 0 67 0
32 X 6 8 L
33 1 69 1
34 X 7 0 L
35 0 71 0
S = Spoiler Bits
36 X 72 S
DATA
B8ZS
B8ZS
B0 00V
B
0
V
B
B
000
V
B
0
V
B
B
V = Violation
B = Bipolar
0 = No Pulse
B
Page 9
4-63
Preliminary Information MH89760B
allows the device to interface with systems that have
already applied some form of zero code suppression
to the data input on DSTi. B8ZS zero code
suppression replaces all strings of 8 zeros with a
known bit pattern and a specific pattern of bipolar
violations. This bit pattern and violation pattern is
shown in Figure 4. The receiver monitors the
received bit pattern and the bipolar violation pattern
and replaces all matching strings with 8 zeros .
Loopback Modes
Remote and digital loopback modes are enabled by
bits 6 and 7 in Master Cont rol Word 2. These modes
can be used for diagnostics in locating the source of
a fault condition. Remote loop around loops back
data received at RxR and RxT back out on OUTA
and OUTB, thus effectively sending the received
DS1 data back to the far end unaltered so that the
transmission line can be tested. The received signal
with the appropriate received channels on the DS1
side made available in the proper format at DSTo.
The digital loop around mode diverts the data
received at DSTi back out the DSTo pin. Data
received on DSTi is, however, still t ransmitted out via
OUTA and OUTB. This loop back mode can be used
to test the near end interface equipment when there
is no transmission line or when there is a suspected
failure of the line.
The all ones transmit alarm (also known as the blue
alarm or the keep alive signal) can be activated in
conjunction with the digital loop around so that the
transmission line sends an all 1's signal while the
normal data is looped back locally.
The MH89760B also has a per channel loopback
mode. See Table 6 and the following section for more
information.
Per Channel Control Features
In addition to the two master control words in CSTi0
there are also 24 Per Channel Control Words. These
control words only affect individual DS0 channels.
The correspondence between the channels on
CSTi0 and the affected DS0 channel is s hown in Fig.
3. Each control word has three bits that enable
robbed bit signalling, DS0 channel loopback and
inversion of the DS0 channel. A full description of
each of the bits is provided in Table 6.
Transmit Signalling Bits
Control ST-BUS input number 1 (CSTi1) contains 24
additional per channel control words. These 24 STBUS channels c ont ain the A, B, C and D signalling
bits that the device uses at transmit time. The
position of these 24 per channel control words in the
ST-BUS is
shown in Figure 3 and the position of the
ABCD signalling bits is shown in Table 7. Even
though the device only inserts the signalling
information in every 6th DS1 frame this information
must be input every ST-B US frame.
Robbed bit signalling can be disabled for all
channels on the DS1 link by bit 1 of M aster Control
Word 1. It can also be disabled on a per channel
basis by bit 0 in the Per Channel Control Word 1.
Table 6. Per Channel Control Word 1 Input at CSTi0
Table 7. Per Channel Control Word 2 Input at CSTi1
Bit Name Description
7-3 IC Internal Connections. Must be kept at 0 for normal operation.
2 Polarity When set, the applicable channel is not inverted on the transmit or the receive side of the device.
When clear, all the bits within the applicable channel are inverted both on transmit and receive
side.
1 Loop Per Channel Loopback. When set, the received DS0 channel is replaced with the transmitted
DS0 channel. Only one DS0 channel may be looped back in this manner at a time. The
transmitted DS0 channel remains unaffect ed. When clear the transmit and receive DS0 sections
operate normally.
0 Data Data Channel Enable. When set, robbed bit si gnalling for the applicable channel is disabled.
When clear, every 6th DS1 frame is available for robbed bi t signalling. This feature is enabled
only if bit 1 in Master Control Word is low.
Bit Name Description
7-4 Unused Keep at 0 for normal operation
3
2
1-0
A
B
C, D
These are the 4 signalling bits inserted in the appropriate channels of the DS1 stream bei ng
output from the chip, when in ESF mode. In D3/D4 modes where there are only two signalling
bits, the values of C and D are ignored.
Page 10
4-64
MH89760B Preliminary Information
.
Table 8. Master Statu s Word 1 (Chan nel 15 , CSTo)
Table 9. Master Statu s Word 2 (Chan nel 31 , CSTo)
Table 10. Phase Status Word (Channel 3, CSTo)
Bit Name Description
7 YLALR Yellow Alarm Indication. This bit is set when the chip is receiving a 0 in bit position 2 of every
DS0 channel.
6MIMICThis bit is set if the frame search algorithm found more than one possible frame candidate when
it went into frame synchronization.
5 ERR Terminal Framing Bit Error. The state of this bit changes every time the chip detects 4 errors in
the F
T
or FPS bit pattern. The bit will not change state more than once every 96ms.
4 ESFYLW ESF Yellow Alarm. This bit is set when the devi ce has observed a sequence of eight one’s and
eight 0’s in the FDL bit positions.
3 MFSYNC
Multiframe Synchronization. This bit is cleared when D3/D4 multiframe synchronization has
been achieved. Applicable only in D3/D4 and SLC-96 modes of operation.
2 BPV Bipolar Violation Count. The state of this bit changes every time the device counts 256 bipolar
violations.
1 SLIP Slip Indication. This bit changes state every time the elastic buffer in the device performs a
controlled slip.
0SYN
Synchronization. This bit is set when t he device has not achieved synchronization. The bit is
clear when the device has synchronized to the received DS1 data stream.
Bit Na me Description
7 BlAlm Blue Alarm. This bit is set if the receiver has detected two frames of 1’s and an out of frame
condition. It is reset by any 250 microsecond interval that contains a zero.
6 FrCnt Frame Count. This is the ninth and most significant bit of the “Phase Status Word" (see Table
10). If the phase status word is incrementing, this bit will toggle when the phase reading exceeds
channel 31, bit 7. If the phase word is decrementing, then this bit will toggle when the reading
goes below channel 0, bit 0.
5 XSt External Status. T his bit reflects the state of the external status pin (XSt). The state of the XSt
pin is sampled once per frame.
4-3 BP VCnt Bipolar Violation Count. These two bits change state every 128 and every 64 bipolar vio lations,
respectively .
2-0 CRCCNT CRC Error Count. These three bits count recei ved CRC errors. The counter will reset to zero
when it reaches terminal count. Valid only in ESF mode.
Bit Name Description
7-3 ChannelCnt Channel Count. These five bits indicate the ST-BUS channel count between the ST-BUS frame
pulse and the rising edge of E8Ko.
2-0 BitCnt Bit Count. These three bits provide one bit resolution within the channel count described above.
Operating Status Information
Status Information regarding the operation of the
device is output serially via the Control ST-BUS
output (CSTo). The CSTo serial stream contains
Master Stat us Words 1 and 2, 24 Per Channe l Status
Words, and a Phase Status Word. The Mas ter Status
Words contain all of the information needed to
determ i n e th e st ate o f t he int e rf ace a nd ho w w e ll i t i s
operating. The information provided includes frame
and super frame synchronization, slip, bipolar
violation counter, alarms, CRC error count, F
T
error
count, synchronization pattern mimic and a phase
status word. Tables 8 and 9 give a description of each
of the bits in M ast er Statu s Word s 1 and 2, and Table
10 gives a descripti on of the Pha se Sta tus Word .
In addition, the MH89760B has a Loss of Signal
(LOS) pin that is set High when 128 consecutive
ZEROs are recei ved . Wh ile LOS is set High , RxA
and
RxB
are forced High. The LOS signa l goes Low w he n
a ONEs density on 12.5% of the bits (equivalent to 48
bits) occurs in a two DS1 frame period.
Page 11
4-65
Preliminary Information MH89760B
.
Table 11. Per Channel Status Word Output on CSTo
Bit Name Description
7-4 Unused Unused Bits. Will be output as 0’s.
3
2
1
0
A
B
C
D
These are the 4 signalling bits as extracted from the received DS1 bit stream.
The bits are debounced for 6 to 9 ms if the debounce feature is enabled via bit 7 in Master
Control Word 1.
Alarm Detect ion
The device detects the yellow alarm for both D3/D4
frame format and ESF format. The D3/D4 yellow
alarm will be activated if a ‘0‘ is received in bit
position 2 of every DS0 channel for 600 msec. It will
be released in 200 msec after the content s of the bit
change. The alarm is detectable in the presence of
errors on the line. The ESF yellow alarm will
become active when the device has detected a string
of eight 0’s followed by eight 1’s in the facility data
link. It is not detectable in the presence of errors on
the line. This means that the ESF yellow alarm will
drop out for relatively short periods of time, so the
system will have to integrate the ESF yellow alarm.
The blue alarm signal, in Master Status Word 2, will
also drop out if there are errors on the line.
Mimic Detect ion
The mimic bit in Ma ster Status Word 1 w ill be set if,
during synchronization, a frame alignment pattern
(F
T
or FPS bit pattern) was observed in more than
one position, i.e., if more than one candidate for the
frame synchronization position was observed. It will
be reset w he n t he de vice resynchronizes. T h e mi mi c
bit, the terminal framing error bit and the CRC error
counter can be used separately or together to decide
if the rec eiv e r s ho u ld b e fo r ced to r e fra me.
Bipolar Violation Counter
The Bipolar Violation bit in Master Status Word 1 will
toggle after 256 violations have been detected in the
received signal. It has a maximum refresh t ime of 96
ms. This means that the bit can not change state
faster than once every 96 ms. For example, if there
are 256 violations in 80 ms the BPV bit will not
change state until 96 ms. Any more errors in that
extra 16 ms are not counted. If there are 256 errors
in 200 ms then the BPV bit will change state after
200 ms. In practical terms this puts an upper limit
on the error rate that can be calculated from the BPV
information, but this rate (1.7 X 10
-3
) is well above
any normal operating condition.
Bits 4 and 3 also provide bipolar violations information. Bit 4 will change state after 128 violations.
Bit 3 changes state after 64 bipolar violations. These
bits are refreshed independently and are not subject
to the 96 ms refresh rate described above.
DS1/ST-BUS Phase Difference
An indication of the phase difference between the
ST-BUS and the DS1 frame can be ascertained from
the information provided by the eight bit Phase
Status Word and the F rame Count bit. Channel t hree
on CSTo contains the Phase Status Word. Bits 7-3 in
this word indicate the number of ST-BUS channels
between the ST-BUS frame pulse and the rising
edge of the E8Ko signal. The remaining three bits
provide one bit resolution within the channel count
indicated by bits 7-3. The frame count bit in Master
Status Word 2 is the ninth and most significant bit of
the phase status word. It will toggle when the phase
status word increments above channel 31, bit 7 or
decrements below channel 0, bit 0. The E8Ko signal
has a specific relationship with received DS1 frame.
The rising edge of E8Ko occurs during bit 2, channel
17 of the received DS1 frame. The Phase Status
Word in conjunction with the frame count bit, can be
used to monitor the phase relationship bet ween the
received DS1 frame and the local ST-BUS frame.
The local 2.048 MHz ST-BUS c lock must be phaselocked to the 1.544 MHz clock extracted from the
received data. When the two clocks are not phaselocked, the input data rate on the DS1 side will differ
from the output data rate on the ST-BUS side. If the
average input data rate is higher than the average
output dat a rate, the channel c ount and bit count in
the phase s tatus word will be seen t o decrease over
time, indicating that the E8Ko rising edge, and
therefore the DS1 frame boundary is moving with
respect to the ST-BUS frame pulse. Conversely, a
lower average input data rate will result in an
increase in the phas e reading.
In an application where it is necessary to minimize
jitter transfer from the received clock to the local
system clock, a phase lock loop with a relatively
large time constant can be implemented using
information provided by the phase status word. In
such a system, the local 2.048 MHz clock is derived
from a precision VCO. Frequency corrections are
made on the basis of the average trend observed in
Page 12
4-66
MH89760B Preliminary Information
the phase status word. For example, if the channel
count in the phase status word is seen to increase
over time, the feedback applied to the VCO is used
to decrease the system clock frequency until a
reversal in the trend is observed.
The elastic buffer in the MH89760B permits the
device to handle eight channels of jitter/wander (see
description of elastic buffer in the next section). In
order to prevent slips from occurring, the frequency
corrections would have to be implemented such that
the deviation in the phase status word is limited to
eight channels peak to peak. It is possible to use a
more sophisticated protocol which would center the
elastic buffer and permit more jitter/wander to be
handled. However, for most applications, the eight
channels of jitter/wander tolerance is acceptable.
Received Signalling Bits
The A, B, C and D signalling bits are output from the
device in the 24 Per Channel Status Words. Their
location in the serial steam output at CSTo is shown
in Figure 3 and the bit positions are shown in Table
11. The internal debouncing of the signalling bits
can be turned on or off by Mast er Control Word 1. In
ESF mode, A, B, C and D bits are valid. Even
though the signalling bits are only received once
every six frames the device stores the information so
that it is available on the ST-BUS every frame. The
ST-BUS will always contain the most recent
signalling bits. The state of the signalling bits is
frozen if synchronization is lost.
In D3/D4 mode, only the A and B bits are valid. The
state of the signalling bits is frozen when terminal
frame synchronization is lost. The freeze is disabled
when the device regains terminal frame
synchronization. The signalling bits may go through
a random transition stage until the device attains
multifram e synchro nization .
Clock and Framing Signals
The MH89760B has a built in clock extraction circuit
which creates a 1.544 MHz clock synchronized to
the received DS1 signal. This clock is used
internally by the MH89760B to clock in data
received on RxT and RxR, and is also output at the
E1.5o pin. The circuit has been designed to
operate within the constraints imposed by the
minimum 1’s density requirements, typically
specified for T1 networks (maximum of 15
consecutive 0’s).
The extracted clock is internally divided by 193 and
aligned with the received D S1 frame. The resulti ng 8
kHz signal is output at the E8Ko pin and can be used
to phase lock the local system C2 and t he transmit
C1.5 clo c ks to the extracted clock .
The MH89760B requires three clock signals which
have to be generated externally. The ST-BUS
interface on the device requires a 2.048 MHz signal
which is applied at the C2i pin and an 8
kHz framing signal applied at the F0i
pin. The
framing signal is used to delimit individual STBUS frames. Figure 19 illustrates the relationship
between the C2i and F0i
signals. The F0i signal can
be derived from the 2.048 MHz C2 clock. The
transmit side of the DS1 interface requires a 1.544
MHz clo c k a ppl ied at C1.5i . Th e C1.5 and C 2 cl o c k s
must be phase locked. There must be 193 clock
cycles of the C1.5 clock for every 256 cycles of the
C2 clock in order for the 2.048 to 1.544 rate
converte r to fu ncti o n p rop er ly.
In synchronous operation the slave end of the link
must have its C2 and C1.5 clocks phase locked to
the extracted clock. In plesiochronous clocking
applications where the master and slave end are
operating under controlled slip conditions, phase
locking to the extracted clock is generally not
required.
Mitel’s MT8941 Digital Phase Lock Loop (DPLL) can
be used to generate all timing signals requir ed by the
MH89760B. The MT8941 has two DPLLs built into
the device. Figure 5 shows how DPLL #1 can be set
up to generate the C1.5 clock phase locked to the
F0i
which in turn is derived from the same source
as the C2 clock. Figure 5 also shows how DPLL
#2 is set up to generate the ST-BUS clocks that are
phase loc ked to th e r e cei ved d ata r a te. If E8 K o f ro m
the MH89760B is connected to the C8Kb input on
the MT8941, DPLL #2 in the device will generate the
ST-B US clocks that are phase locked to the T1 line.
Figure 5 - M T894 1 Clock Ge nera tor
F0i
C12i
MS1
C8Kb
C16i
MS0
MS2
MS3
F0b
C4b
C2o
ENC4o
ENC2o
CVb
ENCv
C1.5
+5V
F0i
C4i
C2i
+5V
Yo
5V
Ai
Bi
MT8941
DPLL #1
DPLL #2
Page 13

4-67
Preliminary Information MH89760B
Figure 6 - Input/Output Configuration
Extracted
Clock
Received
Data
Transmit
Data
OUTA
+12V
L2
C2
OUTB
1:
1:
:0.5
R1
L1
C1
EIT
EIR
EA
EB
EC
SW
RCLT
RCHT
RCLR
RCHR
Ti
Ri
E1.5o
RxA
RxB
RxT
RxR
1:
:1
V
DD
1:
S1
S2
S3
S4
S5
S6
S7
TxT
TxR
TL
RL
TR2
Rx
Line
Receiver
S1
S2
S4
S4
S5
S6
S7
0-150’
CLOSE
OPEN
OPEN
OPEN
OPEN
OPEN
OPEN
150-450’
OPEN
CLOSE
OPEN
CLOSE
OPEN
CLOSE
OPEN
450-655’
OPEN
OPEN
CLOSE
OPEN
CLOSE
OPEN
CLOSE
Equalizer settings
COMPONENT VALUES:
R1 = 150Ω 1% W
C1 = 0.01 µF 5% 250V
C2 = 0.47 µF 5% 100V
L1 = 33 µH 130mA
L2 = 33 µH 165 mA
TR1 = 1:1:0.5 Filtran* Part # TFS2573
TR2 = 1:1:1 Filtran* Part # TFS2574
*Filtran Ltd.
229 Colonnade Road
Nepean, Ontario
Canada K2E 7K3
613-226-1626
Note: The equalizer has been optimized for 22 gauge ABAM
cable. The exact distances may vary with the type of cable and the
output transformer. D ifferent line length settings may be
required if a transformer other than the Filtran TFS2573 is used.
1
4
+5V
MH89760B
MH89761
TR1
DS1 Line Interface
Line Transmitter
The transmit line interface is made up of two open
collector drivers (OUTA and OUTB) that can be
coupled to the line with a center tapped pulse
transformer (see Figure 6). A step function is applied
to the transformer when either of the transistors is
turned on. By operating in the transient portion of the
inductance response, the secondary of the
transformer produces an almost square pulse. The
capacitor and inductor on the center tap of the
transmit transformer shown in Figure 6 suppress
transients in the 12 volt supply. The series RLC
across the output of the transformer shape the pulse
to meet the AT & T or CCITT pulse templates. A
Page 14

4-68
MH89760B Preliminary Information
detailed transformer specification is presented in the
applications se ction of this data sheet.
To comp l ete the interface s to the transmit lin e , a p re equalizer and line impedance matching network is
required. The pulse output at the transformer
secondary must be pre-equalized to drive different
lengths of cable. Mitel‘s MH89761 T1 Equalizer is
configurable to provide pre-emphasis for 0-150, 150450 and 450-655 foot lengths of 22 AWG
transmission line. A separate 6dB pad is also
provided on the MH89761 for use in implementing
external looparound. Both circuits have input and
output impedance of 100Ω. Figure 6 shows how the
equalizer is connected in a typical application. (Refer
to the MH89761 data sheet for more details.)
Line Recei ver
The bipolar receiver inputs on the device, RxT and
RxR, are intended to be coupled to the line through a
center tapped pulse tr ansformer as shown in Figure
6. The device presents a 400Ω impedance to the
receive transformer to permit matching to 100Ω
twisted pair cable. The signal detect threshold level
of the receiver circuit is set at approximately 1.5V.
There is no equalization of the received signal. The
receiver circuit is designed to accurately decode a
signal attenuated by a maximum of 3 dB from the
digital crossconnect point. The MH89760B is not
designed to directly accept a signal from the last
network repeater. Interface to the public network
generally requires a Channel Service Unit (CSU).
The receiver decodes the bipolar signal into a split
phase unipolar return to zero format. The two
resulting unipolar signals are used for bipolar
violation detection within the device and are also
output at RxA
and RxB. The input jitter tolerance of
the MH89760B is shown in Figure 7.
Elastic Buffe r
The MH89760B has a two frame elastic buffer which
absorbs jitter in the received DS1 signal. The buffer
is also used in the rate conversion between the
1.544 Mbit/s DS1 rate and the 2.048 Mbit/s ST-BUS
data rate.
Figure 7 - I npu t Jitte r Tolerance of the M H89 760B
J
120
6k
40k
Typical input jitter tolerance of MH89760B receiver.
Minimum jitter tolerance specified by CCITT in Recommen dati on I.431.
➀
➁
I
T
T
E
R
A
M
P
L
I
T
U
D
E
10010 1k 10k 100k
JITTER FREQUENCY (Hz)
(UI)
PP
➀
➁
0.1
0.5
1.3
5
10
20
1
Page 15

4-69
Preliminary Information MH89760B
The received data is written into the elastic buffer
with the extracted 1.544 MHz clock. The data is read
out of the buffer on the ST-BUS side with the system
2.048 MHz clock. The maximum delay through the
buffer is 1.3 ST-BUS frames (i.e., 42 ST-BUS
channels). The minimum delay required to avoid bus
contention in the buffer memory is two ST-BUS
channels.
Under normal operating conditions, the system C2i
clock is phase locked to the extracted E1.5o clock
using external circuitry. If the two clocks are not
phase-locked, then the rate at which the data is
being written into the device on the DS1 side may
differ from the rate at which it is being read out on
the ST-BUS side. The buffer circuit will perform a
controlled slip if the throughput delay conditions
described above are violated. For example, if the
data on the DS1 side is being written in at a rate
slower than what it is being read out on the ST-B US
side, the delay between the received DS1 write
pointer and the ST-BUS read pointer will begin to
decrease over time. When this delay approaches the
minimum two channel threshold, the buffer will
perform a controlled slip which will reset the internal
ST-BUS read pointers so that there is exactly 34
channels delay between the two pointers. This will
result in some ST-BUS channels containing
information output in the previous frame. Repetition
of up to one DS1 frame of information is possible.
Conversely, if the data on the DS1 side is being
written into the buffer at a rate faster than that at
which it is being read out on the ST-BUS side, the
delay between the DS1 frame and the ST-BUS frame
will increase over time. A controlled slip will be
performed when the throughput delay exceeds 42
ST-BUS channels. This slip will reset the internal STBUS counters so that there is a 10 channel delay
between the DS1 write pointer and the ST-BUS read
pointer, resulting in loss of up to one frame of
received DS1 data.
Note that when the device performs a controlled slip,
the ST-BUS address pointers are repositioned so
that there is either a 10 channel or a 34 channel
delay between the input DS1 frame and the output
ST-BUS frame. Since the buffer performs a
controlled slip only if the delay exceeds 42 channels
or is less than 2 channels, there is an 8 channel
hysteresis built into the slip mechanism. The device
can, therefore, absorb 8 channels or 32.5µs of jitter
in the received signal.
There is no loss of frame sync, multiframe sync or
any errors in the signalling bits when the device
performs a slip. The information on the FDL pins in
ESF or SLC-96 mode will, however, undergo slips at
the same time .
Framin g Algo ri t h m
A state diagram of the framing algorithm is shown in
Figure 8. The dotted lines show which feature can be
switched in and out depending upon the operating
mode of th e device.
In ESF mode, the fr amer searches for the FPS bits.
Once this pattern is detected and verified, bit 0 in
Master Status Word 1 is cleared.
When the device is operating in the D3/D4 format,
the framer searches for the F
T
pattern, i.e., a
repeating 1010... pattern in a specific bit position
every alternate frame. It will synchronize to this
pattern and declare valid terminal frame
synchronization by clearing bit 0 in Master Status
Word 1. The device will subsequently initiate a
search for the F
S
pattern to locate the signalling
frames (see Table 4). When a correct F
S
pattern has
been located, bit 3 in Master Status Word 1 is
cleared indicating that the device has achieved
multiframe synchronization.
Note: the device will remain in terminal frame
synchronization even if no F
S
pattern can be located.
In D3/D4 for mat, when the C RC/MI MIC bit i n M aster
Control Word 1 is cleared, the device will not go into
synchronization if more than one bit position in the
frame has a repeating 1010.... pattern, i.e., if more
than one candidate for the terminal framing position
is located. The framer will continue to search until
only one terminal framing pattern candidate is
discovered. It is, therefore, possible that the device
may not synchronize at all in the presence of PCM
code sequences (e.g., sequences generated by
some types of test signals) w hich contain mimics of
the termin a l fra ming pattern .
Setting CRC/MIMIC bit high will force the framer to
synchronize to the first terminal framing pattern
detected. In s tandard D3/D4 applications, the user ’s
system software should monitor the multiframe
synchronization state indicated by bit 3 in Master
Status Word 1. Failure of the device to achieve
multiframe synchronization within 4.5ms of terminal
frame synchronization, is an indication that the
device has framed up to a terminal framing pattern
mimic and should be forced to reframe.
One of the main features of the framer is that it
performs its function "off line". That is, the framer
repositions the receive circuit only when it has
Page 16

4-70
MH89760B Preliminary Information
Figure 8 - Off-L ine Fr amer Sta te Diagr am
Hunt Mode
False Candidate
False
Candidate
Forced
Reframe
Out of
Sync.
False
Candidate
Candidate
Candidate
CRC
Check
In sync
Candidate
*
Candidate
Vali d Ca n didate
Resync
Receiver
Valid Candidate
New Frame Position
* Note: Only when in ESF mode and CRC
option is enabled.
Maintenance
Verify
detected a val id frame positio n. When the framer
exits maintenance mode the receive counters remain
where they are until the framer has found a new
frame position. This means that if the user forces a
reframe when the device was really in the right
place, there will not be any dis turbance in the circuit
because the framer has no effect on the receiver
until it has found synchronization.
The out of
synchronization criterion can be controlled by bit 0 in
Master Control Word 2. This bit changes the out of
frame conditions for the maintenance state.
The out of sync threshold can be changed from 2 out
of 4 errors in F
T
(or FPS) to 4 out of 12 errors in F
T
(or FPS). The average reframe time is 24 ms for ESF
mode, and 12ms for D3/D4 modes.
Figure 9 is a bar graph which shows the probability
of achieving frame synchronization at a specific time .
The chart shows the results for ESF mode with CRC
check, and D3/D4 modes of operation. The average
reframe time with random data is 24 ms for ESF, and
13 ms for D3/D4 modes. The probability of a
reframe time of 35 ms or less is 88% for ESF
mode, and 97% for D3/D4 modes. In ESF mode it is
recommended that the CRC check be enabled
unless the line has a high error rate. With the CRC
check disabled the average reframe time is greater
because the framer m ust also check for mimics.
Page 17

4-71
Preliminary Information MH89760B
Figure 9 - Reframe Time
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
AAA
AAA
AAA
AAA
AAA
50
40
30
20
10
0
%
078 10 12 14161820222426 28 3032 34
Reframe Time (ms)
Percentage Reframe Time Probability Versus Reframe Time
With Pseudo Random Data
D4
ESF
Applications
1. Ty pical T1 Application
Figure 10 shows the external components that are
required in a typical T1 application using the
MH89760B. The MT8980 is used to control and
monitor the device as well as
switch data to DSTi and
DSTo (refer to Application Note MSAN-123 for more
information on the operation of the MT8980). The
MT8952, HDLC protocol controller, is shown in this
application to illustrate how the data on the FDL
could be used. The digital phase-locked loop, the
MT8941, provides all the clocks necessary to make
a functional interface. The 1.544 MHz clock
extracted by the MH89760B is used to clock in data
at RxT and RxR. It is also internally divided by 193
to obtain an 8 kHz clock which is output at E8Ko.
The MT8941 uses this 8 kHz signal to provide a
phase locked 2.048 MHz clock for the ST-BUS
interface and a 1.544 MHz clock for the DS1 transmit
side.
Note: the configurations shown in Figures 10 and 12
using the MT8941 may not meet specific jitter
performance requirements. A more sophisticated
PLL may be required for applications designed to
meet specific standards. Please refer to the MT8941
data sheet for further details on its jitter performance.
The split phase unipolar signals output by the
MT8976 at TxA and TxB are used by the line driver
circuit to generate a bipolar AMI signal. The line
driver is transformer coupled to an equalization
circuit and the DS1 line. Equalization of the
transmitted signal is required to meet AT & T
specifications for crossconnect compatible equipment (see AT&T Technical Advisory #34). Specifications for the input and output transformers are shown
in Figure 11. On the receive side the bipolar line
signal is converted into a unipolar format by the line
receiver circuit. The resulting split phase signals
are input at the RxA
and RxB pins on the MT8976.
The signals are combined to produce a composite
return to zero signal which is clocked into the
MT8976 at RxD.
2. Interfacing the MH89760B to a Parallel Bus
The MH89760B can be interfaced to a high speed
parallel bus or to a microprocessor using the
MT8920B Parallel Access Circuit (STPA). Fig. 12
shows the MT8976 interfaced to a parallel bus
structure using two STPA‘s operating in modes 1 and
2.
The first STPA operating in mode 2 (MMS = 0,
MS1=1, 24
/32=0), routes data and/or voice information between the parallel telecom bus and the T1
or CEPT link via DSTi and DSTo. The second STPA,
operating in mode 1 (MMS=1) provides access from
Page 18

4-72
MH89760B Preliminary Information
Figure 10 - Typical ESF Configuration
Figure 11 - Typ ical Pa ramete rs of the In put and Outp ut Transformers
From other
interfaces
C8Kb
C2o
MT8941
C4b C2o F0b F0i CVb
16.384
MHz Osc.
12.352
MHz Osc.
To other
interfaces
MT8980
STi2
STo3
STo0
STi0
STi1
STo2
C4i
F0i
STo1
STo7
STi7
MT8926
E8Ko
RxA
RxB
EClk
F0i
C2i
CSTi1
E8Ki
CSTi0
FDLo
DSTo
CSTo
DSTi0
DSTi1
IRQ
1SEC
FDLi
RxA
µP
INT0
INT1
CDSTo
TxCEN
RxCEN
CDSTi
CKi
MT8952
RxB
E1.5o
F0i
C2i
CSTi1
E8Ko
CSTo
TxFDL
DSTi
CSTi0
DSTo
RxFDLClk
RxFDL
TxFDLClk
MH89760B
C1.5i
OUTA
OUTB
RxT
RxR
1:
1:
+12V
DQ
Q
C2
DQ
Q
C2
1:
1:
:1
:0.5
To/From Other Interfaces
EIT
EIR
EA
EB
EC
SW
RCLT
RCHT
RCLR
RCHR
Ti
Ri
V
DD
}
To other T1 Interfaces
To other
Interfaces
MH89761
TxT
TxR
TL
RL
TR1
TR2
V
DD
C2
C2 = 0.47µF, 5% 100V
L1 = 33µH, 130mA
R1=150Ω, 1%, 1/4w
C1 = 0.01µF, 5% 250V
L2 = 33µH, 165mA
R2
R2 = 4.7KΩ
R3 =4.7KΩ
XSt LOS
LOS
C2
L2
C1
L1
T1 RECEIVE
T1 TRANSMIT
R3
R1
TR1 & TR2 see Figures 6 & 11
Paramete r Input Transformer Output Transformer Units
Line Impedance 100 100 Ω
Inductance (1-8) >2.2 (4-8) 0.46 mH
Turns Ra ti o (1-8) :( 3- 6) 1 :1
(1-8):(4-5) 1 :1
(1-5):(4-8) 1.89:1
(2-6):(4-8) 1.89:1
Isolation 1500 1500 V(rms)
Line Side
MH89760B
•
•
•
O
O
O
O
O
O
1
8
3
4
6
5
Line Side
MH89760B
•
•
•
O
O
O
O
O
O
6
4
5
1
8
2
Page 19

4-73
Preliminary Information MH89760B
Figure 12 - Using the MH 89 760B in a Para llel B us Env iron ment
MH89760B
MT8920B
(Mode 2)
D
0-D7
A0-A
5
CS
R/W
OE
MMS MS1 24/32
STo0
STi0
STo1
C4i
F0i
+5V
+5V
MT8976
E8Ko
RxD
RxB
RxA
TxB
TxA
E1.5i
C1.5i
C2i
F0i
CSTi1
CSTo
CSTi0
DSTo
DSTi
Clock
Extractor
MMS
High Speed
Parallel
Telecom Bus
Line
Rx
Driver
Line
Tx
Driver
OUTA
OUTB
RxT
RxR
EQU
DIP
Switch
MT8941
CVb
F0i
C2o
F0b
C4b
C8Kb
12.352 MHz
Osc.
16.384 MHz
Osc.
•
•
•
•
•
•
•
MH89761
Signalling and
Link Control
BUS
IACK
IRQ
DTACK
R/W
DS
CS
A0-A
5
D0-D
7
STo0
STi0
STo1
C4i
F0i
MT8920B
(Mode 1)
1.544 MHz
the signalling and link control bus to the MH89760B
status and control channels. All signalling and link
functions may be controlled easily through the STPA
transmit RAM’s Tx0, Tx1, while status information is
read at receive RAM Rx0. In addition, interrupts can
be set up t o no tify the system in ca s e o f s l ips , lo s s of
sync, alarms, violations, etc.
3. PCM/Voice Channel Ban k
The D3/D4 channel bank is one of the most widely
used pieces of equipment in the North American
network today. The D3/D4 channel converts 24
analog telephone lines into the 24 channels of a T1
serial stream. The channel bank is the int erface point
between a digital switching or transmission system
and the analog telephone loop. The industry is
moving towards end-to-end digital connections
(ISDN), but the analog channel bank will still be in
use for ma ny y ea r s to come.
Figure 13 shows a block diagram of a channel bank
that has been div ided into four sections, the analog
line interface, signalling interface, switch matrix, and
T1 interface. The subscriber line interface circuit
(SLIC) provides interface to the telephone line, i.e.,
provides loop current and ringing voltage, and
converts the analog voice signal into µ-Law PCM.
The SLIC also detects the off-hook condition for
conventional POTS (Plain Old Telephone Set)
signalling.
Once the voice is encoded into digital format the
switch matrix transfers the 24 consecutive channels
that are received from the SLICs to the 24 valid
channels used by the MH89760B. The MH89760B
formats and transmits this information on the T1 line.
Signalling information from the telephone sets can
be routed straight through to the output T1 channel,
or it can be routed to the DTMF receiver pool. This is
Page 20

4-74
MH89760B Preliminary Information
Figure 13 - PCM/Voice Data Channel Bank
Switch Matrix
T1 Interface
Equal-
izer
12.352
MHz Osc.
16.384
MHz Osc.
MT8941
DPLL#1
CVb
F0i
C12i
DPLL#2
F0b
C4b
C2o
C8Kb
C16i
MH89760B
DSTi
DSTo
CSTi0
CSTo
CSTi1
C2i
F0i
C1.5i
OUTA
OUTB
RxR
E8Ko
RxT
µP
MT8980
STo0
STi0
STo3
STi3
F0i
C4i
STo1
STi1
STo2
STi2
STo4
C1.5i
C2i
C4i
F0i
Shift
Reg.
MT8870
MT8964
MT8870
MT8964
Shift
Reg.
CTLo
OFHK
MUX
Signalling Interface
Analog Line Interface
SLIC #1
CTLi
OFHK
STD
#1
D3
Do
#1
#N
Do
STD
D3
#N
PCMi
PCMi
PCMo
T
R
T
R
•
•
•
•
•
•
•
•
•
•
•
•
•
•
•
•
•
•
•
•
•
•
•
•
SLIC #24
easily accomplished by the MT8980 switch matrix
once the SLIC has digit ized the analog signal.
Channel banks must be able to operate in a loop
timed mode so that they meet the clock
synchronization requirements of a level four entity.
Phase-locked loop #2 of the MT8941 generates the
ST-BUS clocks that are synchronized to the
extracted 8kHz clock, and phase-locked loop #1
generates the transmit T1 clock synchronized to the
ST-BUS.
4. ISDN Voice/Data Channel Bank/Concentrator
The ISDN channel bank is a term that is used in this
context to describe a system that performs the s ame
logical function as the D3/D4 channel bank. That is,
it concentrates the subscribers digital loop into the
primary digital transmission scheme, the T1 trunk.
The ISDN channel bank in Figure 14 is divided into
four blocks, the digital line interface, the switch
matrix, the D channel processing, and the T1
interface. Beg in n ing with th e digita l lin e interface, the
MT8910 provides 2B+D 160k bit bidirectional
communication over single twisted pair wiring. The
MT8910 converts the 160kbit line signal into ST-B us
format, where it can be manipulated by the MT8980
switch matrix. The data received from the MT8910 is
then transferred to the D channel processor by the
switch matrix. The D channel processor converts the
2B+D format used on the 160 kBit digital line into the
23B+D format used on the T1 Link.
Page 21

4-75
Preliminary Information MH89760B
Figure 14 - ISDN Voice Data Channel Bank
Digital Line Interface
Switch Matrix
T1 Interface
MT8910
MT8980
MT8910
MT8952 MT8952
MT8952
MT8941
Z
T
Z
T
DSTo
DSTi
DSTo
DSTi
DSTo
DSTi
DSTo
DSTi
DSTo
DSTi
STi0
STo0
C4i
F0i
STo1
STi1
STo2
STi3
STo3
D-Channel Processing
DSTi
DSTo
CSTi0
CSTo
CSTi1
C2i
C1.5i
OUTA
OUTB
RxR
RxT
E8Ko
F0i
F0i
E8Ko
C4o
C2o
F0o
C1.5
Equal-
izer
µP
µP
µP
µP
•
•
•
•
•
•
•
•
•
•
•
•
MH89760B
•
•
•
•
•
•
•
•
•
•
•
•
•
•
To control and monitor the MT8910s and the T1
interface the switch matrix operates some of its input
and output streams in m essage mode. This enables
the system to control all of the functions of the
MT8910s and the T1 interface through the Control
ST-BUS points, (CS Ti/o).
Clock synchronization is done by the MT8941.
Phase-locked loop # 2 generates ST-BUS clocks that
are synchronized to the extracted 8kHz output from
the T1 interface. Phase-locked loop #1 generates
the transmit T1 clock synchronized to the ST-BUS
clocks, which are synchronized to the extracted T1
clock. This scheme will also allow the system to
operate in a loop timed mode.
With appropriate multiplexing a single D channel
processor can handle all 23 2B+D interfaces. If both
B channels on all 24 lines are going to be used then
it would be necessary to use two T1 trunk interfaces.
5. Digital Acc ess Cr oss Co nnect S ystem
(DACS)
The Digital Access Cross Connect System (DACS) is
a T1 switch with 127 T1 lines as input and output
plus one T1 line that is reserved for test and
maintenance purposes. A DACS is capable of
switching any input channel on any T1 trunk to any
output c hannel on any T1 trunk.
There are four main blocks in Figure 15, the T1
interfaces, the switch m atrix, the c ontrol matr ix, and
the clock generator. The digital trunk interface is
made up of the MH89760B plus the additional
components required to interface to the transmission
line. The MH89760B handles all of the required
transmit and receive data formatting, and converts
the 1.544 MHz serial stream into ST-BUS format so
that it can be routed through the MT8980
synchronous s wi tch matrix.
Page 22

4-76
MH89760B Preliminary Information
The switch matrix can be built so that the maximum
throughput delay is 1 frame +2 channels. The switch
matrix will not only route data channels to their
destination, but it will also route the received
signalling bits through to the destination channel.
This is necessary because the receiving MH89760B
decodes the T1 stream, and the transmitting
MH89760B has to reconstruct the outgoing T1
stream. In other words, there is no multiframe
integrity between received data and transmitted
data. The total throughput delay is one frame plus
ten ST-BUS channels for the MH89760B receiver,
2.5 ST-B US channels for the MH89760B transmitter,
and one frame plus two ST-BUS channels for the
switch matrix for a total of 2.5 frames wo r st c a se.
The control block only interfaces with the switch
matrix. Besides routing channels and signalling
through to the proper destination, the switch matrix
must also supply the Master Control Words, and
monitor the Master Status Words for each
MH89760B.
The clock generation block supplies the ST-BUS
clocks and the T1 transmit clocks that are
synchronized to one of the T1 trunks. All of the
extracted 8 kHz outputs are NANDed together before
they are input to PLL #2 of the MT8941.
Phase-locked Loop #2 of the MT8941, will generate
ST-BUS clock signals for the MH89760Bs and the
MT8980s that are synchronized with the chosen T1
line. The E8Ko of all of the other MH89760Bs can be
tristated from the Master Control Word, which allows
the system controller to select any one of 128 T1
lines to act as the synchronization source. By
Figure 15 - Digital Access C ross Connec t System (DACS)
AAAA
AAAA
AAAA
AAAA
Switch
Matrix
M
I
C
R
O
Control
Matrix
MT8980
MT8980
MT8941
MH89760B
MH89760B
T1 Interfaces
Clock
Generator
izer
Equal-
izer
DSTi
DSTo
CSTi0
CSTo
CSTi1
C2i
F0i
C1.5i
OUTA
OUTB
RxT
RxR
E8Ko
DSTi
DSTo
CSTi0
CSTo
CSTi1
C2i
F0i
C1.5i
OUTA
OUTB
RxT
RxR
E8Ko
STi7
STo7
STi0
STo0
F0i
C4i
F0i
C4i
STi7
STo7
STi0
STo0
STo1
STo2
F0i
C4i
C2i
C1.5i
CVb
F0i
F0b
C4b
C20
DPLL #2
C12i
C16i
C8Kb
12.352
MHz Osc.
MHz Osc.
16.384
•
•
•
•
•
•
•
•
•
•
•
•
•
Equal-
DPLL #1
Page 23

4-77
Preliminary Information MH89760B
Figure 16 - Digital Multiplex Interface (DMI)
Asynchronous
Interface
Protocol Converter
Switch Matrix
T1 Interface
R
S
2
3
2
ACIA
A
0-A7
D0-D
7
A0-A
7
A0-A
7
D0-D
7
D0-D
7
ACIA
ACIA
Micro
68008
MT8952
MT8952
MT8952
D
0-D7
D0-D
7
D0-D
7
A0-A
7
A0-A
7
A0-A
7
MT8941
STo3
STi2
STo2
STi1
STo1
C4i
F0i
STo0
STi0
F0i
F0i
C4i
C2i
C2i
C1.5i
C1.5i
OUTA
OUTB
RxT
RxR
E8Ko
CSTi1
CSTo
CSTi0
DSTo
DSTi
izer
Equal-
CVb
C12iF0i
C4b
F0b
C20
C8Kb
DPLL #1
DPLL #2
12.352
MHz
Osc.
MHz
Osc.
16.384
•
•
•
•
•
•
•
•
•
•
•
•
•
•
•
•
•
•
•
•
•
•
•
•
•
•
R
S
2
3
2
R
S
2
3
2
MT8980
MT89760B
connecting the frame pulse output, F0o, o f PLL #2 to
F0i
of PLL # 1, the MT8941 will generate the T1
transmit clock that is phase-locked to F0o
, which i n
turn is phase-locked to the master synchronization
signal, E8Ko. If all of the T1 trunks are from the
network any short term differences in the received
data rate will be absorbed by the elastic buffer in the
MH89760B.
6. Digital Multiplex Interface (DMI)
Figure 16 illustrates an implementation of the Digital
Multiplex Interface (DMI) specification, which defines
a computer to PBX interface. This interface can
convert 300 baud to 64 kbaud asynchronous or
synchronous data channels to T1 format with clear
channel capabilities and common channel signalling.
Figure 16 is broken down into four functional blocks
which are the asynchronous interface (ACIAs), the
protocol convert er (micro and MT8952s), the switch
matrix (MT8980), and the T1 interface (MH89760B).
The Asynchronous Communications Interface
Adapters (ACIA) provide a standard RS232 interface
that is compatible with many off-the-shelf modems
and data sets. A single microprocessor is capable of
handling t he protocol conversion between the RS232
ports and the MT8952 HDLC protocol controller.
The MT8952 interfaces directly to the ST-BUS, which
in turn interfaces directly to the T1 interface devices.
Instead of the MT8952 operating at 64 kbit/s
continuously, it operates at 2.048 Mbit/s and
inputs/outputs an 8 bit burst every 125 µsec. This
feature eliminates the need for an additional rate
conversion circuit to multiplex the HDLC outputs up
to the T1 data rate. Each of the HDLC chips is
assigned a t imeslot on the ST-BUS in a manner that
is similar to enabling a voice codec. When the
MT8952 is not enabled the output driver is tris tated.
Page 24

4-78
MH89760B Preliminary Information
The channel assignment circuit is therefore very
simple.
The switch matrix, in the message mode, passes
monitor and control information between the
microprocessor and the T1 interface over ST-BUS
stream 0. The MT8980 is also used to reformat the
ST-BUS data streams between the protocol
converter and the MH89760B interface.
The MH89760B and the MT8941 form the T1
interface. The MH89760B converts the data received
on the ST-BUS into a 1.544 MHz T1 stream. All of
the formatting and decoding of the T1 signal is
performed by this device. The MT8941 provides the
clock synchronization required to operate in a loop
timed mode. Digital phase-locked loop #2 provides
ST-BUS clocks that are synchronized to the
extracted 8kHz, and digital phase-locked loop #1
provides the transmit 1.544 MHz clock synchronized
to the ST-BUS.
7. High Speed Data Transmission Link
High speed data links are becoming increasingly
popular in private networks and computer
communications. The basic mode of transmission is
to assemble data into packets (e.g., HDLC or
ethernet) which are transported on a T1 link
configured as a 1.536 Mbit/s serial channel. No T1
repeaters are required if the transmission link length
is 1300 ft. or less (e.g., business complex or
university). However, if the t ransmission link length is
greater than 1300 ft., a repeatered T1 line must be
leased from the local telephone operating company.
Figure 17 is divided into three functional blocks
which are the protocol converter, switch matrix, and
T1 interface. The protocol section is dependent on
the particular format that is chosen. In this example it
is assumed that the protocol is HDLC. The Transmit
Clock Enable (TxCEN
) and the Receive Clock
Enable (RxCEN
) of the MT8952 are active for a
period of 24 consecutive ST-BUS channels, and the
clock speed is 2.048 MHz. This enables the protocol
conversion section to interface directly to the switch
matrix. The switch matrix switches the first 24
channels received from the protocol section into the
24 valid tim eslots used by the MH89760B. Once the
data enters the T1 interface the MH89760B formats
and transmits the data on the T1 line.
Figure 17 - Hig h Spee d D ata Transmissio n Link
Protocol Converter
MT8952
CDSTo
CDSTi
TxCEN
RxCEN
F0i
C4i
MICRO
MT8980
STi0
STo0
STo1
STi1
STo2
STi2
STo3
F0i
C4i
•
MH89760B
DSTi
DSTo
CSTi1
CSTo
CSTi0
C2i
C1.5i
OUTA
OUTB
RxT
RxR
E8Ko
F0i
MT8941
DPLL #1
CVb
C1.5i
C12i
DPLL #2
F0b
C4b
C20
C8Kb
C16i
C4i
C2i
F0i
F0i
EQUAL-
IZER
12.352
MHz Osc.
16.384
MHz Osc.
•
T1 Interface
Switch Matrix
Page 25

4-79
Preliminary Information MH89760B
Control and monitoring of the T1 interface is done
through the MT8980 switch matrix. CSTi0 and
CSTo1 are connected to the ST-BUS streams that
are configured for message mode so the controlling
microprocessor can access the Master Control
Words and the Master Status Words.
The received portion of the T1 interf ace extracts the
data from th e T1 stream an d formats it into ST-BUS
channels. The MT8980 switches these ST-BUS
channels into the first 24 consecutive channels of an
ST-BUS stream, which is passed to the protocol
conversion block. HDLC packets are disassembled
from the incoming ST-BUS stream by the MT8952.
Clock generation and synchronization are handled
by the MT8941. DPLL #2 generates ST-BUS clocks
that are phase-locked to the extracted 8KHz, and
DPLL #1 generates the transmit T1 clock that is
phase-locked to the ST-BUS frame pulse. Therefore,
the interface is operating in a loop t imed mode and
there will be no loss of information due to slips. The
MT8941 can also be configured to operate in a
master timing mode.
8. T1 to CEPT Digita l Trunk Convert er
The two main digital trunk transmission formats in
use today are T1 and CEPT. Mitel's T1 and CEPT
interfaces convert the digital trunk format into STBUS format. The c ommon element between the two
systems is the S T-BU S. Therefore, a T1 to CEPT
digital trunk converter can be realized.
Figure 18 shows five blocks which are the T1
interface, switch matrix, CEPT interface, clock
generation and synchronization, and DSP Element.
The T1 interface converts the 1.544 MHz serial
stream into the ST-BUS format which interfaces to
the switch m atrix through DSTi and DSTo. The CEPT
interface converts the 2.048 MHz serial s tream into
the ST-BUS format and interfaces to the switch
matrix through the DSP element.
With both the T1 data and the CEPT data converted
to the ST-BUS format, the two digital trunks can
exchange information through the switch matrix.
Unfortunately, the s ignalling informa tion from the tw o
formats is not exchanged as easily. The T1 A and B
signalling bits must be read by the controlling
microprocessor and converted in software to the
CEPT ABCD signalling bits, and vice versa. The
circuit must also convert all the channels carrying
voice data to the appropriate encoding scheme, (i.e.,
T1 µ-Law or CEPT A-Law). This is done by the block
labelled DSP in Figure 18, Digital Signal Processor.
The final component of the system is the MT8941.
The extracted 8 kHz outputs from the T1 and the
CEPT interfaces are combined with an AND gate
before being connected to the MT8941. One of the
Figure 18 - T1 to CEPT Digital Trunk Converter
CEPT Interface
MH89790B
DSP
Element
Switch Matrix T1 Interface
MT8980
MH89760B
MT89 41
Clock Generator
µP
E8Ki
DPLL #1
DPLL #2
C1.5o
F0o
C2o
C4o
RxA
RxB
F0i
OUTA
OUTB
DSTi
DSTo
CSTi0
CSTi1
CSTo
C2i
E8Ko
STi0
STo0
STo3
STo4
STi4
C4i
F0i
STo1
STi1
STi2
STo2
STo3
DSTi
DSTo
CSTo
CSTi0
CSTi1
F0i
C2i
C1.5i
E8Ko
RxT
RxR
OUTA
OUTB
Page 26

4-80
MH89760B Preliminary Information
interfaces is selected as the synchronization source
by enabling its output through the Master Control
Word of the chosen interface. Phase-locked loop #2
will then generate ST-BUS clocks that are
synchronized to either the T1 net work or the CEPT
network. Phase-locked loop #1 is configured to
generate the T1 transmit clock synchronized to the
ST-BUS. Therefore, i f th e S T-BUS is synch ro ni ze d to
one network then the elastic buffer in the opposite
interfaces will perform controlled slips between that
network a n d th e T 1 to CE PT co n ve rt er.
Magnetics Information
For supporting initial design activities, Mitel
Semiconductor has available the MH89760B
Magnetic Kit which contains the magnetics shown in
Figure 11. Alternatively, they are available directly
from the following manufacturer:
Filtran Ltd.
229 Colonnade Road
Nepean, Ontario
Canada K2E 7K3
Telephone: (613) 226-1626
Please refer to Figure 6 for the transformer part
numbers.
Page 27

4-81
Preliminary Information MH89760B
.
* Exceeding these values may cause pe rman ent dama ge. Functi on al operati on under these co ndition s is not implie d.
‡ Typical figures are at 25° C and are for design aid only: not guaranteed and not subject to production testing.
‡ Typical figures are at 25° C and are for design aid only: not guaranteed and not subject to production testing.
† Timing is over recomm end ed temperatu re & powe r suppl y volt age s.
‡ Typical figures are at 25° C and are for design aid only: not guaranteed and not subject to production testing.
Absolute Maximum Ratings*
Parameter Symbol Min Max Units
1 Supply Voltage with respect to V
SS
V
DD
-0.3 7 V
2 Voltage on any pin other than supplies, OUTA or OUTB V
SS
-0.3 VDD+0.3 V
3 Voltage on OUTA or OUTB 15 V
4 Current at any pin other than supplies, OUTA or OUTB 20 mA
5 Current at OUTA or OUTB 200 mW
6 Storage Tem perature T
ST
-20 85 °C
Recommended Operating Conditions - Voltages are with respect to ground (V
SS
) unless otherwise stated.
Parameters Sym Min Typ‡Max Units Test Conditions
1
I
n
p
u
t
s
Operating Temperature T
OP
070°C
2 Supply Voltage V
DD
4.5 5.0 5.5 V
3 Input High Voltage V
IH
2.4 V
DD
V Digital Inputs
V
IH
3.0 V Line Inputs
4 Input Low Voltage V
IH
V
SS
0.4 V Digital Inputs
V
IL
0.3 V Line Inputs
DC Electrical Characteristics - Clo cked operat io n over recom men ded tem pera tu re ran ges.
Paramete rs Sym Min Ty p‡Max Units Test Condi tio ns
1
I
n
p
u
t
s
Supply Current I
DD
12 25 mA Outputs Unloaded
2 Input High Voltage V
IH
2.0 V Digital In put s
3 Input Low Voltage V
IL
0.8 V Digital Input s
4 Input Leakage Current I
IL
±1 ±10 µA Digital Inputs VIN=0 to V
DD
5
O
u
t
p
u
t
s
Output High Current I
OH
7 20 mA Source Current VOH=2.4V
6 Output Low Current I
OL
2 10 mA Sink Current VOL=0.4V
7 Output Low Voltage
OUTA or OUTB
V
OL
0.25 V IOL=10mA
8 Input Impedance RxT to RxR
RxT or RxR to Gnd
Z
IN
400 Ω
1K Ω
9 Schmitt Trigger Input (XSt) V
T+
4.0 V
V
T-
1.5 V
AC Electrical Characteristics† - Capacitance
Characteristics Sym Min Typ
‡
Max Units Test Con di tions
1 Input Pin Capacitance C
I
10 pF
2 Output Pi n Ca pacit a n ce C
O
10 pF
Page 28

4-82
MH89760B Preliminary Information
NB: Fram e Pu ls e is r e pe ate d ev er y 1 25 µ s in synchronization with the clock.
† Timing is over recommended temperature & power supply voltages.
‡ Typical figures are at 25°C and are for design aid only: not guaranteed and not subject to production testing.
Figure 19 - C lock & F ram e Alignm ent for ST-BUS Streams
Figure 20 - Clock & Frame Pulse Timing for ST-BUS Streams
AC Electrical Characteristics† - Clock Timing (Figures 19 & 20)
Characteristics Sym Min Typ
‡
Max Units Test Conditions
1 C2i Clock Period t
p20
400 488 600 ns
2 C2i Clock Width High or Low t
W20
200 244 300 ns t
P20
= 488 ns
3 Frame Pulse Setup Time t
FPS
50 ns
4 Frame Pulse Hold Time t
FPH
50 ns
5 Frame Pulse Width t
FPW
50 ns
6 RxSF
Output Delay t
FPOD
125 ns 50 pF Load
7TxSF
Hold Time t
TxSFH
0.5 124.5 µs
8TxSF
Setup Time t
TxSFS
0.5 124.5 µ s
F0i
RxSF
TxSF
C2i
ST-BUS
BIT CELLS
Fram e 12/24
Frame 1
Frame 2
Bit7Bit6Bit5Bit
4
Bit7Bit6Bit5Bit
4
Bit7Bit6Bit5Bit
4
AAAA
AAAA
AAAA
AAAA
AAAA
AAAA
AAAA
AAAA
AAAA
AAAA
AAAA
AAAA
AAAA
AAAA
AAAA
AAAA
AAAA
AAAA
AAAA
AAAA
AAAA
AAAA
AAAA
AAAA
AAAA
AAAA
AAAA
AAAA
AAAA
C2i
F0i
RxSF
F0i
C2i
TxSF
V
IH
V
IL
V
IH
V
IL
V
OH
V
OL
V
IH
V
IL
V
IH
V
IL
t
P20
t
W20
t
FPS
t
FPH
t
FPS
t
FPOD
t
FPOD
t
TxSFH
t
TxSFS
Fram e 12/24
Frame 1
t
FPW
t
W20
Page 29

4-83
Preliminary Information MH89760B
† Timing is over recommended temperature & power supply voltage ranges.
‡ Typical figures are at 25 °C and are for design aid only; not guaran tee d and not subject to producti on test ing.
Figure 21 - D S1 Re ceiv e Clock Tim ing
† Timing is over recommended temperature & power supply voltage ranges.
‡ Typical figures are at 25° C and are for desi gn aid only; not gua rantee d and not subje ct to producti on testing.
Figure 2 2 - ST-BUS Strea m Ti mi ng
AC Electrical Characteristics† - Timing For DS1 Link Bit Cells (Figure 21)
Characteristics Sym Min Typ
‡
Max Units Test Conditions
1 E1.50 Clock Period t
PEC
648 ns
2 E1.5o Clock Width High or Low t
WEC
324 ns
3 E1.5o Clock Rise Time t
REC
60 n s
4 E1.5o Clock Fall Time t
FEC
20 n s
AC Electrical Characteristics† - 2048 kbit/s ST-BUS Streams (Figure 22)
Characteristics Sym Min Typ
‡
Max Units Test Conditions
1 Serial Output Delay t
SOD
125 ns 150 pF load
2 Serial Input Setup Time t
SIS
15 ns
3 Serial Input Hold Time t
SIH
50 ns
DS1 BIT CELLS FOR
RECEPTION
E1.5o
V
OH
V
OL
BIT CELL
BIT CELL
t
R1EC
t
W1EC
t
P1EC
t
R1EC
t
W1EC
t
SOD
t
SIH
Bit Cell Boundari e s
V
IH
V
IL
V
OH
V
OL
V
IH
V
IL
C2i
DSTo
or CSTo
DSTi,
CSTi0/CSTi1
t
SIS
t
SOD
Page 30

4-84
MH89760B Preliminary Information
† Timing is over recommended temperature & power supply voltage ranges.
‡ Typical figures are at 25°C and are for design aid only; not gua rantee d and not subje ct to producti on testing.
AC Electrical Characteristics† - XCtl, XSt, & E8Ko (Figures 23, 24, & 25)
Parameters Sym Min Typ
‡
Max Units Test Cond itions
1 External Control Delay t
XCD
140 ns
2 External Status Setup Time t
XSS
100 ns
3 External Status Hold Time t
XSH
400 ns
4 8 kHz Output Delay t
8OD
150 ns
5 8 kHz Output Low Widt h t
8OL
78 µs
6 8 kHz Output High Widt h t
8OH
47 µs
7 8 kHz Rise Time t
8R
10 ns
8 8 kHz Fall Time t
8F
10 ns
Figure 23 - XCtl Timing
ST-BUS Bit Cell Boundary Between
Bit 0 Channel 15 and Bit 7 and Channel 16
C2i
XCtl
2.0V
0.8V
t
XCD
2.4V
0.4V
Figure 24 - XSt Timing
ST-BUS Bit Cell Bound ary Betwe en
Bit 2 Channel 30 and Bit 1 Channel 30
C2i
XSt
2.0V
0.8V
2.0V
0.8V
t
XSH
t
XSS
Figure 25 - E8Ko Timing
Received
DS1 Bits
E1.5o
E8Ko
V
OH
V
OL
V
OH
V
OL
Channel 2
Bit 1
Channel 17
Bit 2
Chan nel 2
Bit 1
• • •
• • •
t
8OD
t
8OD
t
8OD
t
8F
t
8OL
t
8R
t
8OH
t
8F
Page 31

4-85
Preliminary Information MH89760B
† Timing is over recommended operating temperature and power supply voltage ranges.
‡ Typical figures are at 25 °C and are for design aid only: not guaranteed and not subject to production testing.
Figure 26 - Transmi t Timin g for D S1 L ink
Figure 2 7 - Receive Timing for DS1 Link
AC Electrical Characteristics† - DS1 Link Timing (Figures 26 and 27)
Characteristics Sym Min Typ‡Max Un its Test Conditions
1 Transmit Steering Delay t
TSD
50 150 ns 150 pF Load
2 E1.5o Clock Period t
PEC
648 ns
3 E1.5o Clock Width High or Low t
WEC
324 ns
4 Receive Data Setup Time t
RDS
50 ns
5 Receive Data Hold Time t
RDH
50 ns
6 Receive Data Pulse Width t
RDW
324 ns
7 Receive Data Fall Time t
RDF
20 ns
8 Receive Data Rise Time t
RDR
20 ns
9 C1.5i Period t
PC1.5
500 648 800 ns
10 C1.5i Pulse Width High or Low t
WC1.5
250 324 ns
Transmitted DS1 Link
Bit Cells
Bit Cell
C1.5i
OUTA
or
V
IH
V
IL
V
OH
V
OL
t
TSD
t
TSD
OUTB
t
PC1.5
t
WC1.5
Received DS1 Link
Bit Cells
Bit Cell
E1.5o
V
OH
V
OL
RxA
or
V
OH
V
OL
RxB
t
PEC
t
WEC
t
WEC
t
RDS
t
RDH
t
RDF
t
RDW
t
RDR
Page 32

4-86
MH89760B Preliminary Information
† Timing is over recommended temperature & power supply voltage ranges.
‡ Typical figures are at 25°C and are for design aid only; not gua rantee d and not subje ct to producti on testing
.
Figure 28 - Clock & Frame Alignment for RxFDL and TxFDL
Figure 29 - Facility Data Link Timing
AC Electrical Characteristics† - DS1 Link Timing (Figures 28 & 29)
Parameters Sym M i n Typ‡Max Units Test Conditions
1 Transm it FDL Setu p Time t
DLS
110 ns
2 Transmit FDL Hold Time t
DLH
70 ns
3 Receive FDL Output Delay t
DLOD
0 ns 50 pF Load
4 Receive FDL Clock Delay t
FRCD
185 50 pF Load
5 Transmit FDL Clock Delay t
TFCD
135 ns 50 pF Load
Frame 12/24
Frame 1
Frame 2
F0i
C2i
RxFDLClk
RxFDL
TxFDLClk
TxFDL
t
DLS
t
DLH
C2i
TxFDLClk
RxFDLClk
RxFDL
TxFDL
2.0V
0.8V
2.0V
0.8V
2.0V
0.8V
Frame
2.0V
0.8V
2.0V
0.8V
2.0V
0.8V
t
TFCD
t
RFCD
t
DLOD
Page 33

4-87
Preliminary Information MH89760B
Figure 30 - Format of 2048 kbit/s ST/BUS Streams
Figure 31 - DS1 L ink Frame Form at
Figure 32 - Functional ST-BUS Timing
Figure 33 - Functional DS1 Receive Timing
CHANNEL
31
030
NB:
Numbering
differs from
Fig 31.
BIT 7
CHANNEL
CHANNEL
CHANNEL
CHANNEL
31 0
BIT 6
BIT 5
BIT 4
BIT 3
BIT 2
BIT 1
BIT 0
• • • • • • • •
Most
Significant
Bit (First)
Least
Significant
Bit (Last)
125µs
(8/2.048)µ s
CHANNEL
24
CHANNEL
1
CHANNEL
24
CHANNEL
1
CHANNEL
23
BIT 1
BIT 2
BIT 3
BIT 4
BIT 5
BIT 6
BIT 7
BIT 8
NB:
Numbering
differs from
Fig 30.
(1/1 .544)µs
S Bit
S Bit
• • • • • •
Most
Significant
Bit (First)
Least
Significan t
Bit (Last)
125µs
(8/1.544)µs
C2i
DSTi
CSTi0/CSTi1
CSTo
DSTo
765 43210
••••• ••••••
7
••••• ••••••
765 43210 7
125µs
E1.5i
INT DATA
RxT/RxR
LINE SIGNAL
RxA
RxB
E8Ko
10111100
125µs
Page 34

4-88
MH89760B Preliminary Information
Figure 34 - DS1 Transmit Timing
C1.5i
INT DATA
OUTB
AMI LINE
OUTA
Packagin g
The MH89760B is available in three package options
which are:
• The MH89760BS which is a surface mountable
version of th e MH8 9760BN is sui table f or
Infrared Reflow (I.R.) soldering. See Figure 35
for the dimensional drawing, and Figure 36 for
the recommended footprint.
• The MH89760B which is pin compatible with the
MH89760, has a ro w pitc h of 1.3” and is fitted
with a plas tic lid. See Figur e 37 for the
dimensiona l draw ing fo r this part .
• The MH89 760B N which is a narro w version of
the MH89 76 0B an d has a r ow pi t ch of 0 .8” . See
Figure 38 for t he di mens ional drawin g for thi s
part.
Figure 35 - P hys ical Dim en sions for the 40 Pin Dual in L ine S.M .T. Hybrid
AAA
AAA
AAA
AAAA
AAAA
AAAA
AAAA
AAAA
AAAA
AAAA
AAAA
AAAA
AAAA
AAAA
AAAA
AAAA
AAAA
AAAA
AAAA
AA
AA
A
AA
A
AAA
0.020 + 0.002
(0.51 + 0.051)
0.10 +
0.01
(2.54 + 0.25)
MH89760BS
Note 1
Notes:
1) Pin 1 not fitted.
2) All dimensions are typical and in inches (mm).
3) Not to scale.
2.0
(50.8)
0.78
(19.81)
0.9
(22.86)
AAAA
AAAA
AAAA
AAAA
AAAA
AAAA
AAAA
AAAA
AAAA
AAAA
AAAA
AAAA
AAAA
AAAA
AAAA
AAAA
0.25
(6.35)
0.125
(3.18)
0.06
(1.52)
0.06
(1.52)
0.125
(3.18)
Page 35

4-89
Preliminary Information MH89760B
Figure 36 - Recommended Footprint for the 40 Pin Dual in Line S.M.T. Hybrid
Figure 37 - Physica l Dimensions for the 40 Pin Dual in Line Hybrid 1.3" Row Pitch
0.760
(19.3)
Pin 2 position
0.040
(1.02)
0.060
(1.52)
0.090
(2.29)
AAAA
AAAA
AAAA
AAAA
AAAA
AAAA
AAAA
AAAA
AAAA
AAAA
AAAA
AAAA
AAAA
AAAA
AAAA
AAAA
AAAA
AAAA
AAAA
AAAA
AAAA
AAAA
.31
(7.87)
0.260
(6.6)
0.09
(2.3)
0.020 +
0.002
(0.51 + 0.051)
0.10 +
0.01
(2.54 + 0.25)
MH89760B
Note 1
Notes:
1) Pin 1 not fitted.
2) Row pitch is to the centre of the pins.
3) All dimensions are typical and in inches (mm).
4) Not to scale.
2.12
(53.85)
1.3
(33.0)
Note 2
2.0
(50.8)
Page 36

4-90
MH89760B Preliminary Information
Figure 38 - Physica l Dimensions for the 40 Pin Dual in Line Hybrid 0.8" Row Pitch
AAA
AAA
AAA
AAAA
AAAA
AAAA
AAAA
AAAA
AAAA
AAAA
AAAA
AAAA
AAAA
AAAA
AAAA
AAAA
AAAA
AAAA
AAAA
AA
A
AA
A
AA
A
AAA
AAAA
AAAA
AAAA
AAAA
AAAA
AAAA
AAAA
AAAA
AAAA
AAAA
AAAA
AAAA
AAAA
AAAA
AAAA
AAAA
AAAA
AAAA
AAAA
AAAA
AAAA
MH89760BN
Note 1
Notes:
1) Pin 1 not fitted.
2) Row pitch is to the centre of the pins.
3) All dimensions are typical and in inches (mm).
4) Not to scale.
0.10 +
0.01
(2.54 +
0.25)
0.09
(2.3)
0.260
(6.6)
0.25
(6.35)
0.020 +
0.002
(0.51 +
0.051)
0.8
(20.32)
Note 2
2.0
(50.8)
Page 37

4-91
Preliminary Information MH89760B
Appendix
Control and Status Register Summary
Master Co ntro l Word 1 (C hann el 1 5, CSTi0)
Master Co ntro l Word 2 (C hann el 3 1, CSTi0)
Per Chan nel Co ntro l Words (A ll Chan nels on CSTi 0 Excep t Chan nels 3, 7, 11, 15, 19, 23 , 27 and 31)
Per Chan ne l C ont r ol Wo rd s (All Channels on CSTi1 Excep t Channels 3, 7, 11, 15, 19, 23, 27 & 31)
Master S tatus Wo rd 1 (Chan nel 15, CS To)
Master S tatus Wo rd 2 (Chan nel 31, CS To)
Phase Sta tus Word (Chan nel 3, CSTo)
Per Channel Status Word (All Channels on CSTo Except Ch annels 3, 7, 11, 15, 19, 23, 27, 31)
Note 1: I n ESF mode :
1: CRC calc. ignored during Sync.
0: CRC checked for Sync.
In D3/D4 mode:
1: Sync. t o first cor rec t S - bi t p at tern .
0: Will no t Sync. if M im ic d ete c ted .
76543210
Debounce
1 Disabled
0 Enabled
TSPZCS
1 Disabled
0 Enabled
B8ZS
1 B8ZS
0 Jammed
Bit
8KHSel
1 Disabled
0 Enabled
XCtI
1 Set High
0 Cleared
ESFYLW
1 Enabled
0 Disabled
Robbed Bit
1 Disabled
0 Enabled
YLALR
1 Enabled
0 Disabled
RMLOOP
1 Enabled
0 Disabled
DGLOOP
1 Enabled
0 Disabled
ALL1’s
1 Enabled
0 Disabled
ESF/D4
1 ESF
0 D3/D4
Reframe
Device
Reframes on
High to Low
Transition
SLC-96
1 Enabled
0 Disabled
CRC/MIMIC
See Note 1
Maint.
1 4/12
0 2/4
UNUSED - KEEP AT 0
Polarity
1 No Inversion
0 Inversion
Loop
1 Ch. looped
back
0 Normal
Data
1 Enabled
0 Disabled
UNUSED - KEEP AT 0
A
Txt. Sig. Bit
B
Txt. Sig. Bit
C
Txt. Sig. Bit
D
Txt. Sig. Bit
YLAIR
1 Detected
0 Normal
MIMIC
1 Detected
0Not
Detected
ERR
F
T
Error
Count
ESFYLW
1 Detected
0Not
Detected
MFSYNC
1 Not Detected
0 Detected
BPV
Bipolar
Violation
count
SLIP
Changes
State
when Slip
Performed
SYN
1 Out-of-Sync.
0 In-Sync
BlAlm
1 Detected
0 Not Detected
FrCnt
Frame
Count
XSt
1 Xst High
0 Xst Low
BIPOLAR VIOLATION COUNT CRC-ERROR COUNT
CHANNEL COUNT BIT COUNT
UNUSED
A
Rec’d. Sig. BitBRec’d. Sig. BitCRec’d. Sig. BitDRec’d. Sig. Bit
Page 38

4-92
MH89760B Preliminary Information
Notes:
 Loading...
Loading...