

Page 1

N2X
Parameter
CYBELEC SA Tel. ++ 41 24 447 02 00
RUE DES UTTINS 27 Fax ++ 41 24 447 02 01
CH - 1400 YVERDON-LES-BAINS E-Mail: info@cybelec.ch
SWITZERLAND
V-DOC-N2X-DE
Page 2
Die Angaben die in dieser Anleitung e nthalten sind können ohne Meldung geändert werden und bil den
keine Verpflic htung seitens CYBELEC SA. D i e beschriebene Software wird unter Lize nz- oder
Geheimhaltungsvertrag geliefert. Di e Software darf nur dem Vertrag entsprechend benut zt und kopiert
werden. Das Kopieren der Software auf einen im Vertrag nicht vorgesehenen Träger ist gesetzwidrig.
Copyright CYBELEC SA. Alle Rechte vorbehalten.
Bemerkung:
Die vorliegende Anleitung erklärt die normale Standa rdprogrammierung der Numerischen Steuerung. Da
diese vom Maschinenhersteller mit konfigur ierbaren Funktionen für seine spezie llen Bedürfnisse
ausgestattet ist, müssen für die Programmierung dieser Funktionen die vom Herstel ler gelieferten
Zusatzinstruktionen beachtet werden.
Arcnet
CYBELEC
Ethernet
IBM
Machines Corporation.
MS-DOS
Novell Netware
ZeroNet
ist eine Schutzmarke d er Datapoint Corporation.
ist eine Schutzmarke der CYBELEC SA
ist eine Schutzmarke d er Xerox Corporation.
, PC/AT , PC Network , Token Ring Network sind Schutzmar ken der Internati onal Business
ist eine Schutzmarke der Microsoft Corporation.
ist eine Schutzmarke der Novell, Incorporated.
ist eine Schutzmarke der Applied Knowledge Groups, Incorporated.
Page 3
HANDBUCH N2X V
ER
7
V
ERSION
Für die Versionen, die älter sind als die unter "Version 3" aufgeführten
verwenden Sie bitte das Handbuch N2X Version 2
V
ERSION
Gültig für folgende Softwareversionen:
V
ERSION
Gültig für folgende Softwareversionen:
2
3
N2XDN und nachfolgende
N2XEM und nachfolgende
N2XFB und nachfolgende
4
N2XDW und nachfolgende
N2XEV und nachfolgende
N2XFK und nachfolgende
V
ERSION
Gültig für folgende Softwareversionen:
5
N2XDC2 und nachfolgende
N2XEB2 und nachfolgende
N2XFS und nachfolgende
N2XFHA und nachfolgende
Page 4
V
ERSION
Gültig für folgende Softwareversionen:
6
N2XHC und nachfolgende
N2XFU und nachfolgende
V
ERSION
Gültig für folgende Softwareversionen:
7
N2XHC und nachfolgende
N2XFU und nachfolgende
Page 5

02. Februar 2006 Vers. 7.1
INHALTSVERZEICHNIS
LIZENZVERTRAG FÜR CYBELEC-SOFTWARE............................................................................5
N2X KARTENTYPEN.......................................................................................................................9
Karte N2X 200.....................................................................................................................9
Karte DIO 7xx......................................................................................................................10
Karte MAX ...........................................................................................................................11
LISTE DER PARAMETER DER N2X-KARTE..................................................................................13
KONVENTIONEN UND DEFINITIONEN .........................................................................................15
Konventionen.......................................................................................................................15
Einheiten mit Parametern "AUFLÖSUNG GEBER" (P02) 15
Parameter für die Bestimmung der Optionen 15
Definitionen..........................................................................................................................16
POSITIONIER-DIAGRAMM AC ..........................................................................................17
POSITIONIERUNG TYP NAX.............................................................................................17
POSITIONIERDIAGRAMM DC ...........................................................................................18
Positionierung in einer Richtung mit Überlauf Endstufe und Vorabschaltung 18
Positionierung in beiden Richtungen mit Überlauf 18
Vorgang Endstufe (Detail) 19
Direkte Positionierung in beiden Richtungen.......................................................................19
BESCHREIBUNG DER PARAMETER.............................................................................................21
P00 TYP ACHSE.................................................................................................................21
P01 BETRIEBSART ............................................................................................................22
P02 GEBER-AUFLÖSUNG.................................................................................................24
Kugelumlaufspindel: Gewindesteigung = 8 mm/U. 24
Kugelumlaufspindel: Gewindesteigung = 15/32" (also
11,90625mm/U.) 25
Kugelumlaufspindel: Gewindesteigung = 5/8" (also
15,875mm/U.) 25
Berechnung des kumulierten Fehlers: 25
P03 POSITIONIERUNGSTOLERANZ ................................................................................26
P04 ABSTAND VORABSCHALTUNG ................................................................................26
P05 ABSTAND ÜBERLAUF................................................................................................27
P06 ABSTAND KRIECHGANG (Kleine Geschwindigkeit) ..................................................27
P07 ZEIT UMKEHRUNG SP/SN (Verzögerung der Umkehrung).......................................28
P08 ZEIT BESCHLEUNIGUNG...........................................................................................29
P09 ZEIT VERZÖGERUNG (Verlangsamung) ...................................................................29
P10 GESCHWINDIGKEIT POSITIONIERUNG ..................................................................29
P11 GESCHWINDIGKEIT ENDSTUFE ..............................................................................29
P12 GESCHWINDIGKEIT INDEXIERUNG.........................................................................30
P13 GESCHWINDIGKEIT HAND LANGSAM KG...............................................................30
P14 GESCHWINDIGKEIT HAND SCHNELL EG................................................................30
P15 VOREINGESTELLTE SPANNUNG .............................................................................30
P16 SPANNUNG MAX. BEGRENZUNG.............................................................................31
P17 SPANNUNG MIN. BETRIEB (Min. Betriebsspannung)................................................31
N2X7D.DOC
INHALTSVERZEICHNIS SEITE 1
Page 6

P18 OFFSET-SPANNUNG................................................................................................. 33
P19 REGELKREISTOLERANZ ..........................................................................................33
P20 MAX. FOLGEFEHLER ................................................................................................33
P21 ZEIT GEBER-ÜBERWACHUNG................................................................................. 34
P22 VERSTÄRKUNG PROPORTIONAL ........................................................................... 34
P23 VERSTÄRKUNG INTEGRAL...................................................................................... 34
P24 VERSTÄRKUNG DIFFERENTIAL .............................................................................. 34
P25 INDEXIERUNGSART.................................................................................................. 35
P26 INDEX..........................................................................................................................36
P27 ES - (Endschutz -)....................................................................................................... 36
Programmlimiten für Endschalter in Abhängigkeit der Auflösung 36
P28 ES + (Endschutz +) .....................................................................................................36
EINSTELLUNG DER BETRIEBSPARAMETER DER ACHSEN .....................................................37
Bestimmung der Achsen und Überprüfungen .................................................................... 37
Überprüfung der Rotations- und Zählrichtung 37
Offseteinstellung und minimale Betriebsspannung............................................................. 38
Einstellung der Positionierungsparameter .......................................................................... 39
DC-Achse mit PID-Steuerung 39
1) Bestimmung der
POSITIONIERUNGSGESCHWINDIGKEIT (P10) 39
2) Bestimmung der PROPORTIONALVERSTÄRKUNG (P22) 40
3) Bestimmung der DIFFERENTIALVERSTÄRKUNG (P24) 41
4) Bestimmung der BESCHLEUNIGUNGSZEIT (P08) 41
5) Bestimmung der VERLANGSAMUNGSZEIT (P09) 42
6) Bestimmung der INTEGRALVERSTÄRKUNG (P23) 43
DC-Achse im NAX-Modus (ohne PID-Regelkreis) 43
1) Bestimmung der Hauptparameter 43
2) Bestimmung der GESCHWINDIGKEIT IN DER
ENDSTUFE (P11) und der VORABSCHALTUNG (P04) 44
3) Bestimmung der VERLANGSAMUNGSZEIT (P09) 44
4) INTEGRALVERSTÄRKUNG (P23) 44
AC-Achse 44
1) Bestimmung der Hauptparameter 44
2) Bestimmung der VORABSCHALTUNG (P04) 45
3) Bestimmung der DISTANZ KG (P06) 45
4) Bestimmung der VERZÖGERUNG SP/SN (P07) 45
5) Bestimmung der ÜBERLAUFDISTANZ (P05) 45
Endgültige Einstellung der Parameter ................................................................................46
Programmierung der untergeordneten Parameter 46
Einstellung der ENDSCHALTER (P27 und P28) 46
Programmierung der INDEXIERUNGSART (P25) 46
Prüfung und Einstellung der Positionierungen 46
Erste Indexierung der N2X-Achsen ....................................................................................47
Vorgehen 47
ZUSÄTZLICHE N2X SOFTWARE AUF DEM MASTER ................................................................. 49
N2X Parameter...................................................................................................................50
P00 Typ Achse 50
SEITE 2 BETRIEBSANLEITUNG N2X7
Page 7

P01 Betriebsart 50
P02 Geber-Auflösung 50
P03 Positionierungstoleranz 50
P04 Abstand Vorabschaltung 50
P05 Abstand Überlauf 50
P06 Abstand Kriechgang 50
P07 Zeit Umkehrung SP/SN 50
P08 Zeit Beschleunigung 50
P09 Zeit Verzögerung 50
P10 Geschwindigkeit Positionierung 51
P11 Geschwindigkeit Endstufe 51
P12 Geschwindigkeit Indexierung 51
P13 P14 Geschwindigkeit Hand langsam KG und schnell EG 51
P15 Voreingestellte Spannung 51
P16 Spannung max. Begrenzung 51
P17 Spannung min. Betrieb 51
P18 Offset-Spannung 51
P19 Regelkreistoleranz 51
P20 Max. Folgefehler 51
P21 Zeit Geber-Überwachung 52
P22 Verstärkung Proportional 52
P23 Verstärkung Integral 52
P24 Verstärkung Differential 52
P25 Indexierungsart 52
P26 Index 52
P27 et P28 Endschutz - et + 52
Beispiel AC-Motor 2 Geschwindigkeiten 53
Beispiel DC-Motor +/- 10VDC 55
INDEX...............................................................................................................................................57
INHALTSVERZEICHNIS SEITE 3
Page 8

Diese Seite wurde absichtlich leer gelassen.
SEITE 4 BETRIEBSANLEITUNG N2X7
Page 9
LIZENZVERTRAG FÜR CYBELECSOFTWARE
A
LLGEMEINES COPYRIGHT
Die CYBELEC-Software ist urheberrechtlich geschützt und alle Rechte des Kopierens sind vorbehalten.
Die CYBELEC-Softwareprogramme dürfen nur auf den dazu berechtigten Anlagen (PC oder DNC)
installiert und betrieben werden.
Die Benutzer handbücher sind ebenfalls durch Co pyright geschützt, und a l le Rechte des Be nützens und des
Kopierens sind vorbehalten.
Dieses Dokument darf ohne vorherige schriftliche Einwilligung von CYBELEC nicht kop i ert,
photokopiert, reproduziert, übersetzt oder reduziert werden, und zwar weder ganz noch auszugsweise.
S
PEZIELLES DISKETTEN-COPYRIGHT
Den berechtigt en Anwendern dieses Software paketes ist nur gestattet, den Inhalt der Diskette in den
Speicher des Computers zu kopieren um das Programm zu verwenden, und um eine Sicherheitskopie zu
erstellen für den Fall des Verlustes des Originalprogrammes.
Unerlaubtes Kopieren, Duplizieren, Verkaufen oder sonstiges Verteilen dieses Produktes ist
widerrechtlich.
S
PEZIELLES
Die CYBELEC DNC- und CNC-Einheiten in welchen die ursprüngliche CYBELEC-Software durch eine
nicht von CYBELEC erstellte Kopie ersetzt wurde ohne vorhe rige schriftliche Zustimmung von
CYBELEC verli ert unverzüglich jeden Anspruch auf Garantieleistunge n.
EPROM-C
OPYRIGHT
G
ARANTIE
CYBELEC gewährleistet nicht, dass ihre Software-Produkte in jedem Computer und in jedem ProgrammUmfeld einwandfrei funktionieren.
Leistungsbeschränkunge n und technische Spezi fikationen eines Softwarepaketes werden ausschliesslich
durch CYBELEC entschieden; CYBELEC allein ist befugt, über K onformität und Leistungsumfang einer
bestimmten Software zu entscheiden.
Die CYBELEC-Software ist nicht dafür ausgelegt, Inkompatibilitäten von Betriebssystem-Versionen oder
-Revisionen auszugleichen.
Die Anwendung von verschie denen CYBELEC-So ftwareversionen oder -Revisionen, oder das Üb ergehen
von einer Revision oder Version zur andern kann Datenverlust oder Veränder ung von Daten nach sich
ziehen.
LIZENZVERTRAG SEITE 5
Page 10
S
OFTWARE-WARTUNGSDIENST
Der Kauf von CYBELEC-Software ber echtigt den Benut zer, während eines Jahres neue SoftwareVersionen des Typs "Korrektur" zu beziehen.
Während de s Gebrauchs einer revidierten oder korrigierten Software-Versi on kann es vorkommen, dass
Daten (Programme, Parameter et c.) verloren gehen oder dass die Anlage oder deren Anschlüsse geände rt
werden müssen; solche Auswirkungen sind nicht immer voraussehbar und CYBELEC lehnt da für jede
Verantwortung ab .
B
EENDIGUNG DER VEREINBARUNG
Diese Vereinbarung wird auto matisch beendet falls der Lize nznehmer zahlungsunfähig wird, in einem
Konkursverfahren steht, wenn gegen ihn wegen Zahlungsunfähigkeit Prozess geführt wird oder seine
Güter gerichtlich beschlagnahmt werden, wenn er aus finanziellen Gründen unfähig ist, seine Geschäfte
ordnungsgemäss weiterzuführ en, oder wenn sein Unternehmen aufgelöst wird.
CYBELEC hat das Recht, diese V ereinbarung unverzüglich zu beend en falls eine der vorher genannten
Bedingungen durch den Lizenznehmer verletzt wird.
Innere 30 Tagen nach Bee ndigung dieser Ve reinbarung kann der Lizenznehmer, na ch seiner Wahl:
alle bestehenden Kopien der Software und dazugehöriges Material an CYBELEC oder deren
offiziellen Vertreter zurücksenden oder,
CYBELEC einen für CYBELEC zufried enstellenden Be weis e rbringen, dass das Original und
sämtliche Kopien vollständig und in jeder Form vernichtet worden sind.
B
ESCHRÄNKUNG DER HAFTUNG
Die in dieser Vereinbarung er wähnte Garantie erset zt alle andere n i n irgendeiner Form vereinbarten oder
stillschweigenden Garantien.
Der Lizenznehmer anerkennt, dass CYBELEC in keiner Weise haftet für Erwerbsausfall, Ersparnisausfall,
oder andere Konsequenz en die auf die Verwendung der Software, oder auf di e Unmöglichkeit deren
Verwendung, zurückz uführen sind. Der Lizenznehmer anerkennt a uch, dass CYBELEC nicht für
irgendwelche Schadenersatz- oder andere Klagen belangt werden kann, die von einer Drittpartei gegen
den Lizenznehmer erhoben werden.
CYBELEC haftet in keinem Falle für entstandene Schäden, auch nicht wenn CYBELEC auf die
Möglichkeit des Eintretens solcher Schäden aufmerksam gemacht worden ist.
CYBELEC garanti ert nicht, dass die in der Software enthaltenen Funktionen die Bedürfnisse des
Lizenznehmers erfüllen. CYBELEC garantiert auch nicht, dass sich das Arbeiten mit dieser Software
vollständig fehlerfrei abspielen wird.
Sollte die Software fehlerhaft sein, so trägt der Lizenznehmer (und in keinem Falle CYBELEC oder deren
offizieller Händler oder Vertrete r) die ganzen K osten aller not wend igen Kundendienstleistungen,
Reparaturen oder Korrekturen.
CYBELEC garantiert, dass die Disketten, EPROMS oder sonstige n Datenträger auf welchen die
Programme gelie fert werden fehler frei in Materi al und Ausführung sind, und z war für eine Dauer vo n 90
Tagen unter normalem Gebrauch. Die Garantiezeit läuft ab dem Versanddatum, das aus der Kopie des
Lieferscheines ersichtlich ist.
SEITE 6 BETRIEBSANLEITUNG N2X7
Page 11
B
ESCHRÄNKUNG DER MASSNAHMEN ZUR MÄNGELBEHEBUNG
Mängelbeheb ung beschränken sich auf folgende Punkte:
Ersatz der Disketten, EPROMS oder sonstige r Datenträger, die der beschränkten CYBELEC-G arantie
nicht entsprechen, und die zusammen mit der Kopie des Lieferscheines an CYBELEC oder einen
offiziellen CYBELEC-Vertreter zurückgeschickt werden
Falls CYBELEC oder ihr Ver treter nicht in der Lage ist, in Material und Ausführung fehlerfreie
EPROMS, Disketten oder sonstige Datenträger als Ersatz zu liefern, kann der Lizenznehmer die
vorliegende Vereinbarung unter den vorstehenden Bedingunge n beenden, und der Wert wird dem Käufer
zurückbezahlt.
A
LLGEMEINES
Der Lizenznehmer bestätigt, dass er diese Vereinbarung gelesen hat, sie versteht und er si ch laut den
erwähnten Bedingunge n verpflichtet.
Der Lizenznehmer erklärt sich damit einverstanden, CYBELEC von allen Verpflichtungen und jeder
Verantwortung für allfällige Schadenersatzklagen, die auf Nichtbeachten der vorliegenden Vereinbarung
zurückzuführen sind, zu entbinden. Dies gilt ebenfalls - aber nicht nur - für eventuelle Anwalts- und
Gerichtskosten.
Diese Lizenzvereinbarung ist de m Schweizer Recht unte rstellt; Gerichtsstand ist Lausanne, Schweiz.
U
NTERHALT
CYBELEC sichert den Unterhalt der Software während eines Jahres zu. Der Umfang dieses Unterhaltes
und die Reaktionszeit geschieht nach alleinigem Ermessen von CYBELEC. Normalerweise besteht der
Unterhalt aus de r Korrektur von Programmfehlern, vo n Fehlern in der Do kumentation, und aus dem
Zurverfügungstellen e ventueller neuer Softwareversionen, die während der Unterhaltsperiode frei gegeben
werden.
CYBELEC verpflichtet sich auf keinen Fall, technischen Beistand zu leisten um Probleme oder
Schwierigkeiten zu beheben, die daraus entstanden sind, dass der Lizenznehmer die Lizenz-Software
eigenmächtig geändert hat. Vom Lizenznehmer durchgeführte Software-Änderungen geschehen auf eigene
Gefahr.
LIZENZVERTRAG SEITE 7
Page 12

Diese Seite wurde absichtlich leer gelassen.
SEITE 8 BETRIEBSANLEITUNG N2X7
Page 13
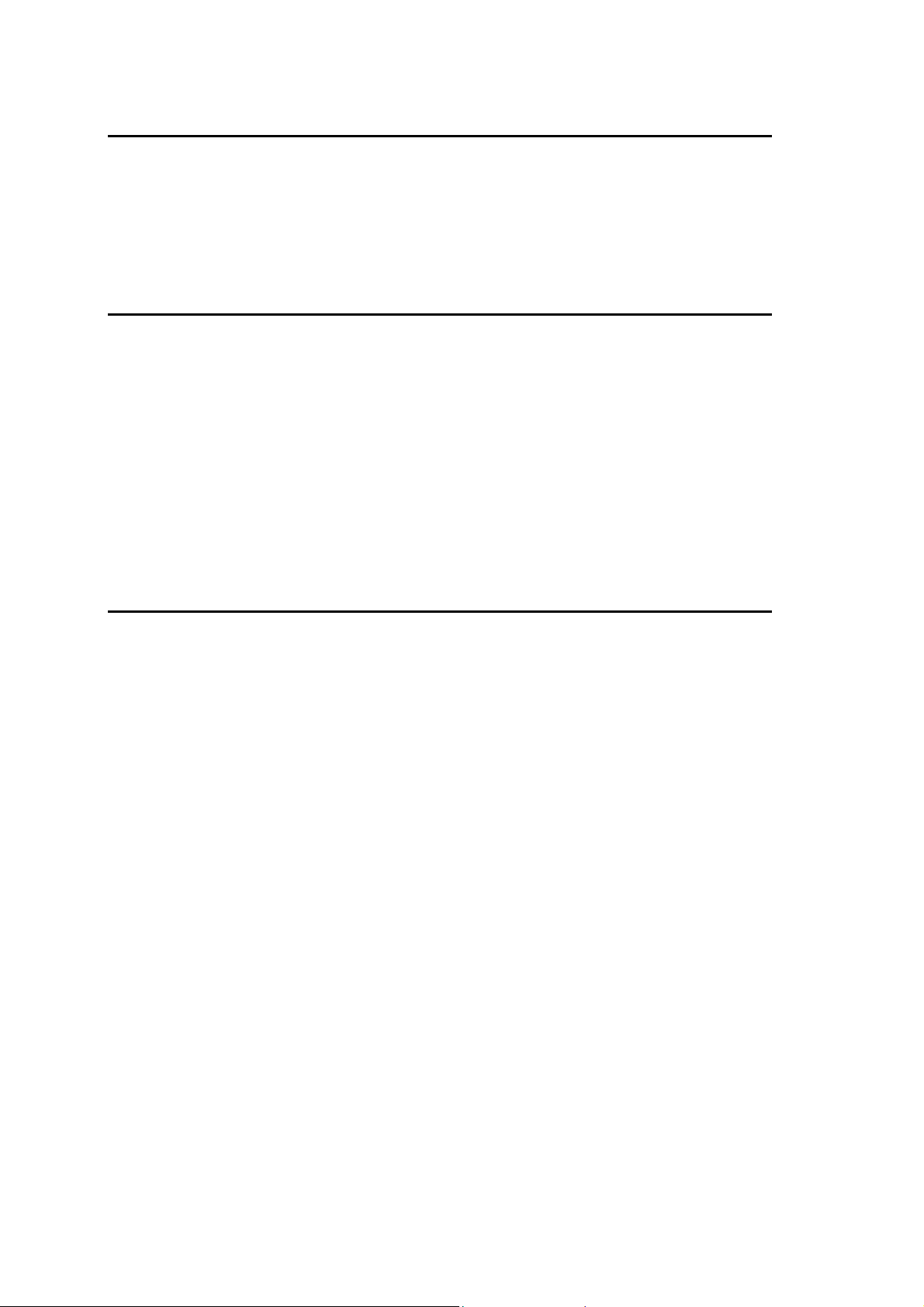
N2X K
ARTE
K
ARTENTYPEN
N2X 200
2
N2X
E
1
A
B
I
E
2
IMPULSGEBER ACHSE 0
LED SIGN AL A ACHSE 0
LED SIGNAL B ACHSE 0
LED INDEX ACHSE 0
IMPULSGEBER ACHSE 1
A
B
I
SP1
SN1
GV1
SP2
SN2
GV2
24V
SP1
SN1
GV1
SP2
SN2
GV2
IN0
IN1
IN2
IN3
IN4
IN5
D0
D1
D3
D4
AN1
AN2
LED SIGN AL A ACHSE 1
LED SIGNAL B ACHSE 1
LED INDEX ACHSE 1
OUT SIGNAL SP1 ACHSE 0
8
OUT SIGNAL SN1 ACHSE 0
OUT SIGNAL EG1 ACHSE 0
B
OUT SIGNAL SP2 ACHSE 1
1
OUT SIGNAL SN2 ACHSE 1
OUT SIGNAL EG2 ACHSE 1
OUT + 24V
1
GND
LED SIGNAL SP1 ACHSE 0
LED SIGNAL SN1 ACHSE 0
LED SIGN AL EG1 ACHSE 0
LED SIGNAL SP2 ACHSE 1
LED SIGNAL SN2 ACHSE 1
LED SIGN AL EG2 ACHSE 1
INPUT PAUSE ACHSE 0
8
INPUT SERVOVERST. OK ACHSE 1
INPUT ZONE INDEX ACHSE 0
B
INPUT PAUSE ACHSE 1
2
INPUT SERVO V ERST. OK ACHSE 1
INPUT ZO NE INDE X A CHSE 1
N.C.
1
GND
LED SIGNAL INPUT PAUSE ACHSE 0
LED SIGNAL INPUT SER VOVERST. OK ACHSE 0
LED SIGNAL INPUT PAUSE ACHSE 1
LED SIGNAL INPUT SER VOVERTS. OK ACHSE 1
4
+/-10V ANALOG AUSGANG SIGNAL ACHSE 0
B
0V ANALOG ACHSE 0
3
+/-10V ANALOG AUSGANG SIGNAL ACHSE 1
1
0V ANALOG ACHSE 1
ANORDNUNGSSCHEMA N2X SEITE 9
Page 14
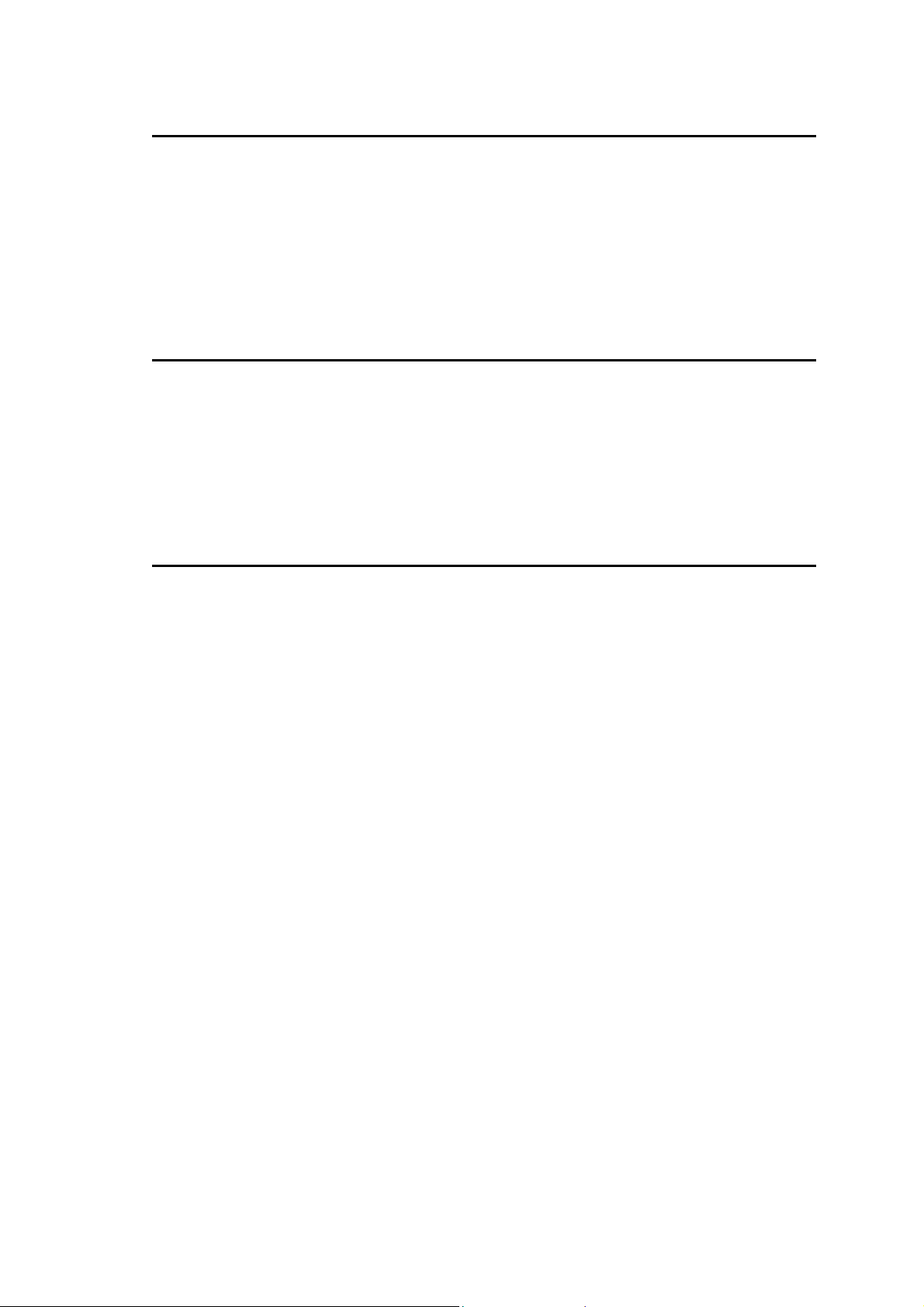
ARTE
K
DIO 7XX
CYBAN
CYBAN
CYBAN
CYBAN
OFFSET
OFFSET
OFFSET
LED SIGNAL A ACHSE 0
LED SIGNAL B ACHSE 0
LED INDEX ACHSE 0
OFFSET
ACHSE 0
IMPULSGEBER ACHSE 0
LED SIGNAL A ACHSE 1
LED SIGNAL B ACHSE 1
LED INDEX ACHSE 1
ACHSE 1
IMPULSGEBER ACHSE 1
LED SIGNAL A ACHSE 2
LED SIGNAL B ACHSE 2
LED INDEX ACHSE 2
ACHSE 2
IMPULSGEBER ACHSE 2
LED SIGNAL A ACHSE 3
LED SIGNAL B ACHSE 3
LED INDEX ACHSE 3
ACHSE 3
IMPULSGEBER ACHSE 3
DIO 7xx
CYBAN
CYBAN
CYBAN
CYBAN
CYBIO
CYBIO
CYBIO
CYBIO
CYBIO
CYBIO
CYBIO
CYBIO
CYBIO
CYBIO
CYBIO
CYBIO
CYBIO
CYBIO
CYBIO
CYBIO
CYBIO
CYBIO
CYBIO
CYBIO
CYBIO
CYBIO
CYBIO
CYBIO
OUTPUT ANALOG +/-10V ACHSE 0
OUTPUT GND ACHSE 0
OUTPUT ANALOG +/-10V ACHSE 1
OUTPUT GND ACHSE 1
OUTPUT ANALOG +/-10V ACHSE 2
OUTPUT GND ACHSE 2
OUTPUT ANALOG +/-10V ACHSE 3
OUTPUT GND ACHSE 3
OUTPUT SIGNAL SP ACHSE 0
OUTPUT SIGNAL SN ACHSE 0
OUTPUT SIGNAL EG1 ACHSE 0
INPUT SIGNAL PAUSE A C H SE 0
INPUT SIGNAL SERVOVERST. OK ACHSE 0
INPUT SIGNAL ZONE INDEX ACHSE 0
OUTPUT SIGNAL SP ACHSE 1
OUTPUT SIGNAL SN ACHSE 1
OUTPUT SIGNAL EG1 ACHSE 1
INPUT SIGNAL PAUSE A C H SE 1
INPUT SIGNAL SERVOVERST. OK ACHSE 1
INPUT SIGNAL ZONE INDEX ACHSE 1
OUTPUT SIGNAL SP ACHSE 2
OUTPUT SIGNAL SN ACHSE 2
OUTPUT SIGNAL EG1 ACHSE 2
INPUT SIGNAL PAUSE A C H SE 2
INPUT SIGNAL SERVOVERST. OK ACHSE 2
INPUT SIGNAL ZONE INDEX ACHSE 2
OUTPUT SIGNAL SP ACHSE 3
OUTPUT SIGNAL SN ACHSE 3
OUTPUT SIGNAL GV1 ACHSE 3
INPUT SIGNAL PAUSE A C H SE 3
INPUT SIGNAL SERVOVERST. OK ACHSE 3
INPUT SIGNAL ZONE INDEX ACHSE 3
INPUT +24V
INPUT 0V
SEITE 10 BETRIEBSANLEITUNG N2X7
Page 15

ARTE
K
MAX
ANORDNUNGSSCHEMA N2X SEITE 11
Page 16

Diese Seite wurde absichtlich leer gelassen.
SEITE 12 BETRIEBSANLEITUNG N2X7
Page 17

LISTE DER PARAMETER DER N2X-KARTE
--ACHSEN-- -X- Grundwert Typen des
Parameters
0 Typ Achse -- 0=DC DC/AC
1 Betriebsart -- 0 DC/AC
2 Auflösung Geber ---,--- 100,000 DC/AC
3 Positionierungstoleranz -,-- 0,01 DC/AC
4 Abst. Vorabsch. -,-- 0,00 DC/AC
5 Abst. Überlauf +--,-- 0,00 DC/AC
6 Abst. Kriechgang --,-- 0,00 DC/AC
7 Zeit Umkehrung -,--- 0 DC/AC
8 Zeit Beschleunigung -,--- 0,500 DC
9 Zeit Verzögerung -,--- 0,500 DC/AC
10 Geschw. Positionierung ----,-- 30,00 DC
11 Geschw. Endstufe --,-- 0,00 DC
12 Geschw. Indexierung ----,-- P10/2 DC
13 Geschw. Hand langsam ---,-- P10/8 DC
14 Geschw. Hand schnell ----,-- P10/2 DC
15 Spann. Max. Geschw. +-,--- 0,000 DC
16 Spann. Max. Begrenzung -,--- 9,999 DC
17 Spann. Min. Betrieb -,--- 0,000 DC
18 Spann. Offset +-,--- 0,000 DC
19 Regelkreistoleranz (%) +-- 100 DC/AC
20 Max. Folge Fehler --,-- nicht aktiv DC
21 Zeit Geber-Überwachung -,--- nicht aktiv DC/AC
22 Verst. Proportional ---- 1000 DC
23 Verst. Integral ---- 500 DC
24 Verst. Differential ---- 0 DC
25 Indexierungsart -- 0 DC/AC
26 Index +-----,-- DC/AC
27 Endschutz - +-----,-- DC/AC
28 Endschutz + +-----,-- DC/AC
* Parameter zur Zeit nicht oder nur teilweise verwaltet
PARAMETERLISTE SEITE 13
Page 18

Diese Seite wurde absichtlich leer gelassen.
SEITE 14 BETRIEBSANLEITUNG N2X7
Page 19
KONVENTIONEN UND DEFINITIONEN
ONVENTIONEN
K
Die Zeitparameter werden in Sekunden programmiert
Die Spannungsparamete r werden in Volt programmiert.
Bemerkung: Die Einheit der Spannungsparameter ist das Volt, um de ren
Programmierung zu erleichtern.
Beispiel: 0.2 = 200 mV
E
INHEITEN MIT PARAMETERN
"AUFLÖSUNG
GEBER" (P02)
Die Abstände sind alle in mm.
Die Geschwindigkeiten sind alle in mm/s.
P
ARAMETER FÜR DIE BESTIMMUNG DER OPTIONEN
Die Parameter deren Programmierung in Bits zu erfolgen hat, (z. B.
Indexierungsar t und Betriebsart) werden durc h die Summe der
gewählten Bit-Gewichte bestimmt:
D0 = Data 0 = Gewicht 1
D1 2
D2 4
D3 8
D4 16
D5 32
D6 64
D7 128
Beispiel: Für einen Parameter bei welchem die Optionen D0, D1, D3 und
D6 gewählt würden, müsste 1+2+8+64 = 75 programmiert
werden.
KONVENTIONEN UND DEFINITIONEN SEITE 15
Page 20

EFINITIONEN
D
Master-Software
SP
SN
EG
KG
D0
ES+
ES-
AC-Achse
Bezeichnet die Software der numerischen
Steuerung, welche die N2X verwendet. Die
"Master-Software" ist der Teil, den der
Benützer sieht und einsetzt.
Positive Richtung
Negative Richtung
Grosse Geschwindigkeit, Eilgang
Kleine Geschwindigkei t, Kriechgang
Optionsparameter (s. vorhergehende Seite)
Positiver Endschutz (Endschalter)
Negativer End s chutz (Endschalter)
Bezeichnet eine Bewegung wie im ACPositionierdiagramm auf Seite 17 beschrieben.
Es handelt sich z.B. um das Positionieren mit
einem asynchronen Dreiphasen (AC)-Motor
mit 2 Geschwindigkeiten. Nicht zu verwechseln
mit einem "Brushless" Motor.
DC-Achse
Bezeichnet eine Achsenbewegung, die mit
einer Sollwertsp annung von zwischen -10V und
+10V DC ausgelöst wird. Diese Ve rwaltung
eignet sich für Gleichstrommotoren mit
Servoverstärker, für "Brushless" Motoren, für
asynchrone, mit Freque nzwandler mit
Sollwertspannung ±10VDC ausgerüstete
Motoren, usw.
SEITE 16 BETRIEBSANLEITUNG N2X7
Page 21

POSITIONIER-DIAGRAMM AC
mit positivem Überlauf
SP+EG
Verhältnis
SP / SN
Abstand Vorabschaltung
Abst. KG
SP
(SRET)
Abb. 1
POSITIONIERUNG TYP NAX
Geschwindigkeit
Toleranz
Vorabschaltun g (SAAV)
SN+EG
ohne Geschwindigkeits-Regulierung
Abb. 2
Dieser Positionierungstyp wird gewählt, indem die Pa rameter
"PROPORTIONALSTEUERUNG" (P22) und
"DIFFERENTIALSTEUERUNG" (P24) mit dem Wert Null programmiert
werden.
KONVENTIONEN UND DEFINITIONEN SEITE 17
Page 22

POSITIONIERDIAGRAMM DC
P
OSITIONIERUNG IN EINER RICHTUNG MIT ÜBERLAUF
E
NDSTUFE UND VORABSCHALTUNG
Zeit
Beschleunigung
P
OSITIONIERUNG IN BEIDEN RICHTUNGEN MIT
Zeit
Verzögerung
Abstand
KG
Überlauf
Abb. 3
Vorabschaltung
Geschwindigkeit
Endstufe
PositionierungsGeschwindigkeit
Ü
BERLAUF
Beschleunigung
Zeit
Zeit
Verzögerung
Abstand KG
Geschwindigkeit
Endstufe
Vorabschaltung
Abb. 4
PositionierungsGeschwindigkeit
SEITE 18 BETRIEBSANLEITUNG N2X7
Page 23

V
ORGANG ENDSTUFE (DETAIL
Zeit
Verzögerung
Abstand KG
)
Sollmass
Vorabschaltung
Geschwindigkeit
Endstufe
Abb. 5
IREKTE POSITIONIERUNG IN BEI DE N RICHTUNGEN
D
Zeit
Beschleunigung
Zeit
Verzögerung
Abb. 6
Sollmass
Positionierung
Geschwindigkeit
KONVENTIONEN UND DEFINITIONEN SEITE 19
Page 24

Diese Seite wurde absichtlich leer gelassen.
SEITE 20 BETRIEBSANLEITUNG N2X7
Page 25

BESCHREIBUNG DER PARAMETER
Die Nummer vor jedem Parameter bestimmt den in diesem Handbuch
beschriebenen Parameter. Für einige Steuerungen ist diese Nummer von der
sich in der DNC befindenden Nummer unabhängig. Ausschlaggebend ist der
Name des Parameters.
Eine Überset zung der Para meternamen in verschiede nen Sprachen befindet
sich am Ende dieses Handbuches.
WICHTIG:
Der Text, der auf jeden Parameter folgt, gibt jeweils dessen Definition. Um
eine Achse einzustellen, muss die im Kapitel " Einstellung der Be triebsParameter" (s. SEITE 37) beschriebene Prozedur befolgt werden, damit die
Wechselwirkung unter den einzelnen Parametern richtig verstanden wird.
P00 TYP ACHSE
D0 & D1
D2 Rotierende Achse: P28 gibt den Modulo-Wert der Achse an.
D3
D4
Bemerkung: Die automatische Kompensation (E i nholung) des Offset (D1
Modus 0: DC-Achse (±10V/SP/SN)
Modus 1: AC-Achse oder Elektroventil (SP/SN/EG)
Modus 2: DC-Achse mit Spannungssteuerung
von 0 bis +10V oder von 0 bis -10V
Das Zeichen der Spannung wird mit P15
(VOREINGESTELLT SPANNUNG)
bestimmt.
Mit D2 wird Modus Unotour angewählt. Bei absoluter
Bewegung wählt die N2X das im Modulo-We rt festgelegte
Mass zu erreic hen; max. Verschiebung 1 Umdrehung
DC-Achse (+/- 10 V / Bestätigung)
Die Drehrichtung wird durch das Vor zeichen der Spa nnung
gegeben; der Se rvoverstärker wird durch das SP-Signal
bestätigt (nur N2XF_ & N2XE_)
von P01) ist in den Modi 1 und 2 nicht möglich.
BESCHREIBUNG DER PARAMETER SEITE 21
Page 26

P01 BETRIEBSART
D0
D1
Geschlossener Regelkreis:
In dieser Betriebsart überwacht die N2X, dass sich die Achse
nicht um mehr als den Toleranzwert (P03) vom Sollmass
entfernt.
( ⏐Mass⏐ ≤ ( ⏐Sollmass⏐ ± Toleranz))
Der P19 gibt der N2X an, bei welchem Abstand vom Sollmass
(% von P03) der Regler eingeschaltet werden muss.
DC-Achse:
(D0, Modus 0 oder 2): der PID ist eingeschaltet.
AC-Achse:
(D0, Modus 1): es erfolgt sofort eine automatische
Neupositionierung. Diese befolgt die
normale Positionierungsr egel des ACmodus, d.h. mit Überlauf.
Wird der bi-direktionelle
Positionierungsmodus (ohne Überlauf)
gewählt, so geht die Achse auf den
ABSTAND KG (P06) "zurück",
bevor sie sich neu positioniert.
Automatische Kompensation des Offset:
Die automatische Kompensation des Offset ist nur beim
Stillstand der Maschine aktiv, wenn die Achse sich in ihrer
Toleranzzone befindet. Wenn der Offset 100mV übersteigt, so
müssen die elektrischen Offsets angepasst werden. Die N2X
überwacht das Abdriften der Achse und gibt eine Spannung im
umgekehrten Sinn zur Achsenbewegung aus.
Funktioniert auch im offenen Regelkreis ( D0 ni cht
programmiert). In diesem Falle bleiben die Ausgänge SP und
SN permanent aktiv. Es wird nicht empfohlen, diese Betriebsart
allein zu verwenden, sondern die p ermanente Regelung (D0
und D1) zu wählen.
D2
SEITE 22 BETRIEBSANLEITUNG N2X7
Positionierung auf Vmax (wird noch nicht verwaltet):
Diese Betriebsart erlaubt die schnellstmöglichen
Positionierungen.
In dieser Betriebsart kann auch eine sehr kleine
Beschleunigungszeit (sogar = 0) ge wählt werden.
Die Geschwindigkeit V max wird nur erreicht wenn man die
Positionierungsgeschwindigkeit (P10) höher als die
Achsengeschwindigkeit bei max. Begrenzungsspannung (P16)
programmiert.
Wenn jedo ch die Achse die in P10 programmierte
Geschwindigkeit err eicht, dann wird di e N2X die
Achsengeschwindigkeit höchstens auf diesen Wert regulieren.
Page 27

Positionierung im Modus "Positionierung auf Vmax" (D2 = 1)
M ax. B egrenzungsspannung
Abb. 7
D3
D4
D5
D6
SP/SN-Signale nicht permanent bei geschlossenem
Regelkreis:
Funktioniert gleic h wie b ei normal geschlossenem Rege l kreis,
ausser dass die Signale SP/SN nicht aktiv sind, wenn sich die
Achse in der Toleranzzone befindet (s. auch P07, Verzöge rung
SP/SN).
Dieser Modus könnte für eine hydraulische Achse verwendet
werden, wobei die SP/SN-Signale (durc h Verwendung von
P07) das Unterdrucksetzen der Ventile verwalten würden. In
den meisten Fällen kann in diesem Modus die automatische
Kompensation des Offset nicht verwendet werden. Der Modus
ist nur möglich, wenn D0 programmiert ist.
Spannung Umin während Regelung:
Ist dieses Bit programmiert , so berücksichtigt die N2X die
Minimalbetriebsspannung nicht, wenn das System mit
Integralverstärkung auf dem Sollwert steht
Umkehrung der Zählrichtung des Gebers (Quadratur-Modus ).
Zählmodus Up/Dow:
Eingang A = Clock
Eingang B = Zählrichtung.
Bemerkung: Wenn D5 und D6 gleichzeitig programmiert werden, so wird
nur die Funktion vo n D5 b erücksichtigt. Die Funktion D6 wird
ignoriert.
BESCHREIBUNG DER PARAMETER SEITE 23
Page 28

P02 GEBER-AUFLÖSUNG
Dieser Parameter bestimmt die Anzahl Geberimpulse welche die DNC für
jede Anzeigeeinheit (Millimeter, Grad, etc.) erhält.
Dieser Parameter ermöglicht es, immer mit de r maximalen vom Ge ber
erlaubten Auflö sung zu arbeiten (Anz ahl Geberimpulse x 4).
Der Paramete r gestattet, de n Auflösungsfaktor mit bis zu 3 Stellen nach dem
Komma zu definieren.
Diese Möglic hkeit gestattet, praktisch mit jeder für eine gegebene Bewegung
und Mechanik notwendige Anzahl Geberimpulsen zu arbeiten.
Die nachstehenden Beispiele zeigen die Anwendung dieses Parameters. Für
die Fälle, wo die Auflösung nicht gestattet, eine Anzahl mit < 3 Stellen nach
dem Komma zu erhalten, zeigt Ihnen ein Beispiel, wie der resultierende
Fehler berec hnet werden kann, um festzustellen, ob der Fehler in der Achsenverschiebung noch annehmbar ist od er nicht.
Wichtig: s. P27, ENDSCHUTZ, Programmlimite
Beispiele
Der Einfachhei t halber nehmen wir als Beispiel eine mecha nische Einrichtung
Motor/Kugelumlaufspindel.
Kugelumlaufspindel: Gewindesteigung = 8 mm/U.
Beispiel 1:
Anzeige ----,--
Beispiel 2:
Anzeige ----,--
Beispiel 3:
Anzeige ----,--
Beispiel 4:
Anzeige ----,--
Geber:
200 Imp/U.
Geber:
250 Imp/U.
Geber:
100 Imp/U.
Geber:
40 Imp/U.
Auflösung:
(200 * 4) : 8= 100.000 also 100 Imp/mm
In diesem Fall ergibt sich 1 Impuls pro
Hundertstel Millimeter. (P02 = 100.000)
Auflösung:
(250 * 4) : 8= 125.000 also 125 Imp/mm
In diesem Fall ergibt sich mehr als 1
Impuls pro Hundertstel Millimeter.
Achse und Anzeige verhal ten sich wie bei
Beispiel 1. (P02 = 125.000)
Auflösung:
(100 * 4) : 8= 50.000 also 50 Imp/mm
In diesem Fall ist es nicht möglich, alle
Hundertstel Millimeter zu positionieren,
sondern nur alle 2/100 mm. Die Anzeige
geht also von 2/100 zu 2/100 mm.
Auflösung:
(40 * 4) : 8= 20.000 also 20 Imp/mm
In diesem Fall geht die Anzeige von
5/100 zu 5/100 mm.
SEITE 24 BETRIEBSANLEITUNG N2X7
Page 29

Kugelumlaufspindel: Gewindesteigung = 15/32" (also
11,90625mm/U.)
Beispiel 5:
Anzeige ----,--
Kugelumlaufspindel: Gewindesteigung = 5/8" (also 15,875mm/U.)
Beispiel 6:
Anzeige ----,--
Gerber:
500 Imp/U.
Geber:
500 Imp/U.
Auflösung:
(500 * 4) : 11,90625 = 167,979
In diesem Fall ist eine korrekte Anzeige
auf der ganzen Länge der Bewegung
möglich, dank den 3 Stellen nach dem
Komma.
Auflösung:
(500 * 4) : 15,875 = 125,984252
In diesem Fall kann die erzielte
Auflösung nicht in die d rei Stellen nach
dem Komma eingetragen werden.
(P02 = 125,984)
Es ergibt sich also ein von der
durchlaufenen Distanz abhängiger
kumulativer Fehler. Es muss da nn ein
Geber verwendet werden, der für die zu
durchlaufende Distanz am wenigsten
Fehler ergibt.
Berechnung des kumulierten Fehlers:
Durchlaufene Distanz: 1000 mm
Theoretische Anzahl Impulse: 1000 x 125.984252 = 125984,252
Von der DNC gezählte Impulse -125984,000
___________
Abweichung in Anzahl Impulsen: 0,252
Abweichung in mm: 0.252 : 125.984252 = 0.002 mm
Andere Methode:
Progr. Verschiebung * theor. Auflösung
---------------------------------------------------- = effektiver Weg
DNC-Auflösung
1000 * 124.984252
------------------------- = 1000.002, d.h. Abweichung v. 0.002 mm
125.984
BESCHREIBUNG DER PARAMETER SEITE 25
Page 30

P03 POSITIONIERUNGSTOLERANZ
Dieser Parameter bestimmt den Abstand über oder unter dem Soll-Mass in
welchem die Achse noch als in richtiger Position betrachtet werden kann. Um
eine Positionier ung ausführen zu können, muss sich die Achse ausserhalb der
Toleranzzone befinden (AC oder DC).
Bemerkung: Siehe P01
P04 ABSTAND VORABSCHALTUNG
Dieser Parameter bestimmt den Abstand vor dem programmierten Soll-Mass
wo die Steuerung und die Sp annung für die Positionierung ausgeschaltet wird.
Dies kompensiert die Träghei t der Bremsung und ergibt eine genaue
Positionierung.
Bemerkung: Die Steuerung der Vorabscha l tung wird erst nach Eintreten in
die Verlangsamungsra mpe aktiv.
Falls die Positionierung in der Endstufe zu erfolgen hat, wird
die Steuerung de r Vorabschal t ung erst in der Endstufe aktiv.
Es ist keine Positionierung innerhalb der Vorabschaltzone
möglich, ausser in dem Fall, wo P05 > P04 programmiert
wird.
Um Probleme mit den AC-Achsen zu vermeiden, muss P03
grösser als oder gleich wie P04 programmiert werden.
Dieser Parameter kann auc h ve rwendet werden, um die Positionierungsendphase der DNC- oder B rushless-Achsen zu beschle unigen. Wird P3 = P4
programmiert, so gibt di e Achsenkarte das Positionierungsende bekannt,
sobald die Achse die Toleranzzone des Sollmasses erreicht hat.
SEITE 26 BETRIEBSANLEITUNG N2X7
Page 31

P05 ABSTAND ÜBERLAUF
Die Programmierung dieses Pa rameters erlaubt die Positionierung der Achse
in einer oder in beiden Richt ungen.
Die Positionierung erfolgt in beiden Richtungen, wenn diesem Parameter der
Wert 0 zugeteilt wird (oder wenn dieser nicht programmiert wird).
Für eine Positionier ung in einer Richtung bestimmt das Zeichen, welches dem
Parameter zugeteilt ist, den Sinn mit welchem sich die Achse am Ende der
Positionierung bewegen wird:
+ = Ende der Positionierung in po sitiver Richtung (SP)
- = Ende der Positionierung in negativer Richtung (SN)
P06 ABSTAND KRIECHGANG (K
ESCHWINDIGKEIT
G
DC-Achse
Dieser Parameter bestimmt den Abstand (Länge) der Endstufe. Der Abstand
der Endstufe wird höchstens dem Abstand des Überlaufes gleich sein (falls
letzterer programmiert worden ist).
Bemerkung: Die Programmierung dieses Parameters erübri gt sich, wenn
AC-Achse
Dieser Par ameter bestimmt den Abstand vor der Vor abschaltung bei welchem
die Achsenbewegung von der grossen Geschwindigke it (Eilgang) auf die
kleine (Kriechgang) umgeschaltet wird (Ausga ng EG).
Wird dieser Parameter mit 0 programmiert so erfolgt die P ositionierung mit
einer einzigen G eschwindigkeit.
Für die mit N2X 102 oder 103 ausgerüsteten DNC kann der Ausgang EG nur
dann gebraucht werden, wenn die Indexi erungsart (P25) ohne
Indexierungszone programmiert wird (es ist ein einziger Eingang-Ausgang für
EG oder für Indexierungszone vorgesehen).
)
man eine Positionierung vom Typ NAX wählt.
LEINE
BESCHREIBUNG DER PARAMETER SEITE 27
Page 32

P07 ZEIT UMKEHRUNG SP/SN (V
MKEHRUNG
DER
U
)
ERZÖGERUNG
DC-Achse
Diese Verzögerung wird in vier verschiedenen Fällen ge braucht:
Am Anfang einer Positionierung, wenn die Befehle SP/SN eventuell
noch nicht eingescha ltet sind. Die Verzögerung bewirkt e ine Phasenverschiebung zwischen der Einschaltung d er SP/SN-Befehle und dem
Beginn der Verwaltung der Soll-Spannung. Di es gestattet dem System
(z.B. hydraulischem Druck), sich vor dem Start der Achse
"vorzubereiten".
Am Ende der Positionierung auf dem Umkehrmass.
Nach Erreiche n des Umkehrmasses dient die SP/SN-Verzögerung
dazu, dass die Positionierung auf das angestrebte Mass erst nach
Stabilisierung der Achse erfolgt.
Am Ende der Positionierung auf dem gewünschten Mass.
Nach Erreichen des angestrebten Masses werden die SP/SN-Befehle
während der Verzögerungszeit aufrecht erhalten (mit Sollspannung =
0), um der Geschwindigkeitssteuerung zu erlauben, die Achse mit
Geschwindigkeit = 0 zu stabilisieren.
Bei Steuerung im geschlo ssenen Regelkreis mit in P01
programmierten D 0 und D1 wenn die Achse d ie Tolera nzzone
verlässt, werden die SP/SN-Signale "Verzögerung SP/SN" Sekunden
bevor der Regler eingreift aktiviert. Umgekehr t wird, wenn der Regler
die Achse auf das angestrebte Mass gebracht hat, die gleiche
Verwaltung durchgeführt am Ende der Positionierung auf da s
gewünschte Mass.
Achtung
Für "Master"-Softwarepakete, die vor September 1990 hergestellt (s. untenstehende Liste der wichtigsten Standard-Softwarepakete) und mit den
Versionen N2XDN, N2XEM, N2XEF und nachfolgenden Versionen geliefert
wurden, muss der Parameter P07 Zeit SP/SN (vorher Zeit Umkehrung)
auf 0 programmiert werden.
Liste der wichtigsten Softwarepakete:
SNXEAE2 und vorhergehende Versionen
SAXDAE2 " " "
GTXDAB " " "
VTXDAE " " "
AC-Achse
Dieser Parameter entspricht der Wartezeit vor e i ner Umkehrung.
Im Moment des Umkehrungsbefehls sind die Positionierungsbefe hle während
der in diesem Parameter programmierten Zeit ausgeschaltet. Dies gestattet,
das Anhalten der Achse abzuwarten, bevor in der entgegengesetzten Richtung
positioniert wird.
SEITE 28 BETRIEBSANLEITUNG N2X7
Page 33

P08 ZEIT BESCHLEUNIGUNG
Dieser Par ameter bestimmt die Dauer der lineare n Beschleunigung der Achse
von 0 bis auf die Positionierungsgeschwindigkeit (P10)
P09 ZEIT VERZÖGERUNG (V
DC-Achse
Dieser Par ameter bestimmt die Dauer der lineare n Verlangsamung der Achse
von der POSITIONIERUNGSGESCHWINDIGKEIT (P10) bis zur
Geschwindigkeit 0.
Bemerkung: Wenn die Software dem Benützer gestattet,
Geschwindigkeiten zu wählen, die kleiner sind als die
POSITIONIERUNGSGESCHWINDIGKEIT (P10), so werden die
Beschleunigungs- und die Verlangsamungszeiten automatisch auf niedrigere
Werte angepasst.
AC-Achse
Diese Dauer entspricht der Stabilisationszeit der Achse nach dem Aufheben
der SN/SP-Befehle beim Erreichen des Vorabschaltmasses. Da nämlich das
Aufheben der Verschiebungsbe fe hle nicht im Stillstand erfolgt, bewirkt die
Trägheit der Achse, dass sich diese noch eine gewisse Zeit verschiebt, bis
sich auf dem Positionsmass stabilisiert. P09 wird verwendet, um dieser
Stabilisationszeit der Achse Re c hnung zu tragen, bevor die Positionierung als
beendet betrachtet wird.
ERLANGSAMUNG
)
P10 GESCHWINDIGKEIT POSITIONIERUNG
Dieser Parameter bestimmt die max. Geschwindigkeit der Achse für die
Positionierung im automatischen Betrieb.
Programmlimite:
P10 * P02 < 2500,00 Einheiten/Sek.
P11 GESCHWINDIGKEIT ENDSTUFE
Dieser Parameter (falls progr ammiert) wählt die DC-Positionierungsart mit
Endstufe und bestimmt die Achsengeschwindigkeit am Ende der
Positionierung.
Programmlimite:
P11 * P02 < 625,00 Einheiten/Sek.
BESCHREIBUNG DER PARAMETER SEITE 29
Page 34

P12 GESCHWINDIGKEIT INDEXIERUNG
Dieser Parameter bestimmt die Geschwindigkeit während der Indexierung
oder während des Herausfahrens aus der Indexzone. Ist dieser Parameter
nicht programmiert, so ist die Indexierungsgeschwindigkeit glei ch der Hälfte
von P10.
Bemerkung: Im AC-Modus geschehen diese Bewegungen immer mit der
geringsten Geschwindigkeit.
Programmlimite: = identisch mit P10.
P13 GESCHWINDIGKEIT HAND LANGSAM KG
Dieser Parameter bestimmt die kleine Geschwindigkeit bei Handbetrieb.
Ist dieser Parameter nicht programmiert, so entspricht die kleine
Geschwindigkeit im Handbetrieb einem Achtel der Geschwindigkeit von
P10.
P14 GESCHWINDIGKEIT HAND SCHNELL EG
Dieser Parameter bestimmt die grosse Geschwindigkeit (Eilgang) bei
Handbetrieb.
Ist dieser Parameter nicht programmiert, so entspricht die grosse
Geschwindigkeit im Handbetrieb der Hälfte der Geschwindigkeit von P10.
P15 VOREINGESTELLTE SPANNUNG
Dieser Parameter bestimmt die Spannung, die der max. Geschwindigkeit der
Positionierung der Achse entspricht, ohne den Einfluss des PID-Reglers zu
berücksichtigen.
Diese Spannung wird für die maximale Positionierungsgeschwindigkeit (P10)
programmiert und passt sich automatisch proportional an für alle anderen
Geschwindigkeiten (manuell, Beschleunigung, Verlangsamung.
Für DC-Achsen ist die Programmierung dieses Parameters besonders
vorteilhaft auf Maschinen, wo der Antri eb keine grossen V erstärkungen
erlaubt (zum Beispiel mit hydraulischen Achsen oder Antrieben mit viel
Spiel).
Der programmierte Wert darf die Soll-Spannung, die de r max.
Positionierungsgeschwindigkeit d er Achse (P10) entspricht, nicht
überschreiten.
SEITE 30 BETRIEBSANLEITUNG N2X7
Page 35

Ist das Vorzeichen von P15 negativ, so wird die von der N2X ausgegebene
Sollspannung invert iert. Es handelt sich um eine Umkehrung der
Sollspannung, ohne dass die Bezugspunkte verändert werden.
Die Programmierung dieses Parameters ist unerlässlich für die Achsen vom
Typ 2 (Spannung 0 bis 10V oder 0 bis -10V) und die Positionierunge n vom
Typ NAX (s. Abschnitt "DC-Achse in NAX-Modus", Seite 43).
Das Vorzeichen dieses Parameter s bestimmt die Polarität der Sollspannung
für Achsen vom Typ 2.
Achse vom Typ 2: gesteuert durch eine Spannung von ausschliesslich 0 b is
10 V oder ausschliesslich 0 bis -10V
Programmlimite:
Folgendes Verhältnis muss beachtet werden.
P15
---------- < 0,077
P10*P02
P15 [Volt]
P10 [Einheit/s]
P02 [Impuls/Einheit]
P16 SPANNUNG MAX. BEGRENZUNG
Bei der Berechnung der Sol lspannung wird die Achsen-Ka rte diese Spannung
maximal auf den in P16 programmierten Wert begrenzen.
Diese Spannung muss der Spannung bei welcher die Achse i hre höchste
Geschwindigkeit erreicht, entsprechen.
Dieser Parameter ist optional, kann aber programmiert werden, um eine
gewisse Sicherheit zu erreichen wenn bei Höchstgeschwindigkeit die
Spannung relative niedrig ist (z.B. 1 bis 7 VDC).
P17 SPANNUNG MIN. BETRIEB (MIN.
ETRIEBSSPANNUNG
B
Dieser Par ameter entspricht der kleinsten Spa nnung, bei welcher die Achse
sich zu bewegen anfängt. Er ist beso nders im Falle von Überlappungsventilen
nützlich.
)
BESCHREIBUNG DER PARAMETER SEITE 31
Page 36

Beispiel eines Überlappungsventils
Abb. 8
In diesem Beispiel dient die Offset-Spannung (P18) dazu, die beiden
Verschiebungsri chtungen symmetrisch zu gestalten.
Die nachstehende Skizze veranschaulicht das Funktionieren dieses
Parameters. U r (U Regler) ist die vom Regler ausgegebene Spannung, welche
um den Offsetwert und Umin. er höht wird, was die von der Achsenkarte
ausgegebene Sollspannung Uc ergibt.
Uc
U
Um in
O ffs e t
Ur
t
Abb. 8a
Bemerkung: Die automatische Kompensation des Offset (D1 von P01) hat
keinen Sinn, wenn das System eine Minimalspannung benötigt.
SEITE 32 BETRIEBSANLEITUNG N2X7
Page 37

P18 OFFSET-SPANNUNG
Diese Spannung erlaubt die Kompensation des Offset des Systems.
(Offsetspannung der N2X-Karte , Potential differenz zwischen d er N2X und
dem Verstärker des Antriebes usw.)
Sie kann auch dazu dienen, die Funktion eines Überlap pungsventils
symmetrisch zu gestalten (s. Fig. 8).
Bemerkung: Der Wert dieses Parameters wird dem gemessenen Offset
zugegeben wenn eine automatische Kompensation des Offset
(D1 von P1) programmiert ist.
P19 REGELKREISTOLERANZ
Dieser Parameter gibt der N2X an, bei welcher Distanz vom Sollmass (% von
P03) der Regler eingeschaltet werden soll, um die Achse in ihrer
Positionierungstolera nz (P03) zu halten.
Siehe auch P01.
Ist dieser Parameter mit 0 programmiert, mit P01 Regelkreis auf 1, so wird,
wenn die Achse sich auf das Mass e inregelt, die Spannung des Reglers
erhalten, auch wenn die Achse in die Toleranzzone gerät, was in diesem Fall
einem Impuls entspricht. Bei normaler Funktionsweise interveniert der Regler
nicht mehr, sobald die Achse an ihre Regelkreisposition zurückgekehrt ist.
P20 MAX. FOLGEFEHLER
Dieser Parameter bestimmt die maximale Ab weic hung zwischen der
Theorieschen und der wirklichen Position der Achse.
Wenn der programmierte Wert überschritten ist, wird die Positionierung
gestoppt und eine Fehlermeldung erscheint im interaktiven Feld.
Es handelt sich um einen Sicherheitsparameter. Es wird also sehr
empfohlen, diesen korrekt zu programmieren.
Um dies zu tun, wird zuerst die Achse einwandfrei eingestellt. Dann werden
Positionierungen bei voller Geschwindigkeit ausgeführt, wobei dieser
Parameter heruntergesetzt wird bis an den Grenzwert, bei welchem die Achse
noch funktioniert ohne Fehler zu verursachen. Dann wird d er Parameter mit
einer Sicherheitsmarge von ca. 20 % programmiert.
Nicht programmiert = kein Test.
BESCHREIBUNG DER PARAMETER SEITE 33
Page 38

P21 ZEIT GEBER-ÜBERWACHUNG
Dieser Parameter bestimmt die max. Zeitspanne zwischen zwei Impulsen die
von der Kar t e erhalten werden wenn ei ne Achsenbewegung befohlen wird.
Ein Folgefehler wird gemeldet, wenn diese Fehlfunktion auftritt.
Im Falle eines Fehlers wird ein Notstop ausgelöst.
Es handelt sich um einen Sicherheitsparameter. Es wird also sehr
empfohlen, diesen korrekt zu programmieren.
Um dies zu tun, wird zuerst die Achse einwandfrei eingestellt. Dann werden
Positionierungen bei minimaler Geschwindigkeit ausgeführ t, wobei dieser
Parameter heruntergesetzt wird bis an den Grenzwert, bei welchem die Achse
noch funktioniert ohne Fehler zu verursachen. Dann wird d er Parameter mit
einer Sicherheitsspanne von ca. 20 % programmiert.
Die gefundenen Werte hängen weitgehend von der Reaktio nszeit des
Antriebssystems ab.
P22 VERSTÄRKUNG PROPORTIONAL
Diese Verstärkung gilt während dem ganzen Positionierungsvorgang eine r
Achse ebenso wie während der Steuerung im geschlossenen Regelkreis.
Dieser Parameter korrigiert die Abweichung zwische n theoretischer und
wirklicher Position der Achse.
P23 VERSTÄRKUNG INTEGRAL
Die integrale Verstärkung kann am Ende der Positionierung wirksam werden,
wenn die theoretische Bewegung vor dem Ende der Positionierung aufhört.
Sie wirkt vor allem während der Steuerung der Position im geschlossenen
Regelkreis.
Bemerkung: Der geschlosse ne Regelkreis wird eingeschaltet sobald die
Achse die Toleranzzone erreicht.
Siehe auch P01.
P24 VERSTÄRKUNG DIFFERENTIAL
Diese Verstärkung gilt während dem ganzen Positionierungsvorgang eine r
Achse ebenso wie während der Steuerung im geschlossenen Regelkreis.
Dieser Parameter dient speziell zur Stabilisierung des Antriebssystems
während der Be schleunigung oder d er Verlangsamung.
Seine Programmierung ist besonders notwendig bei Antrieben mit ServoVentilen und hydraulischen Ventilen sowie auch bei Antrieben mit DCMotoren ohne Tachometer.
SEITE 34 BETRIEBSANLEITUNG N2X7
Page 39

Bemerkung: Die Programmierung mit Wert 0 für die Parameter P22 und
P24 bestimmt den Betrieb Typ NAX.
Mit diesem Modus wird während der Positionierung bis zum
Anfang der Verla ngsamungsrampe keine Geschwindigkeitsregulierung vor genommen. Es wird dann mit der voreingestellten Spannung (P15) gearbeitet.
Es wird eine linea re Verlangsamungsrampe in Bezug auf den
Weg (und nicht auf die Zeit) a ngewendet.
P25 INDEXIERUNGSART
D0
D1
D2
D3
D4
D5
D6
Wird dieser Parameter nicht programmiert, so wird die DNC keine
Indexierung für die betreffe nde Achse verlangen.
Eine Fehlermeldung e rscheint, wenn am Anfang der Indexierung die Achse
sich in der Ind exierungszone be fi ndet und die Indexierungsart mit
Indexierungszone aber ohne a utomatisches Verlassen der Zone (D 3)
programmiert wurde.
mit Indexierungszo ne 24 V
mit Index 5 V (sonst Indexierung ausschliesslich in der
Indexierungszone)
mit Indexaufnahme in SN (sonst SP )
mit Blockierung der Achse in der Ind exierungszone ausserhalb
der Indexierung (sonst: automatisches Verlassen der
Indexierungszone).
mit kompatiblem absolutem Drehgeber ausgerüstet (diese
Option ist nur in ge wissen Master-Softwareversionen verfügbar)
mit Erlaubnis, den Relativ-Modus zu verwenden. Reset des
Zählers vor dem Start der Positionierung (diese Option ist nur
in gewissen Master-Softwareversionen verfügbar).
Nur N2XF_ und N2XH_:
Set des kontinuierlichen Indexierungsmodus. Wenn die d urch
D0 und D1 bestimmten Bedingungen erfüllt sind, indexiert sich
die Achse, wobei das Gewicht von D1 unbedingt notwendig ist.
AC-Achsen
Für die AC-Achsen, auf den Karten N2X 102 oder 103, ist ein Betrieb mit
zwei Geschwindigkeiten (EG) nur dann möglich, wenn die Indexierung allein
mit dem Index 5V ausge führt wird, da der Eingang "Indexierungs-Zone" ni cht
mehr verfügbar ist (wird für Ausgang EG verwende t).
Da pro Achse nur ein einziger Ein-/Ausga ng verfügbar ist, kann die Funktion
"Indexzo ne" nur verwendet werden, wenn die AC-Achse den EG-Ausgang
nicht für eine zweite Geschwindigkeit benötigt.
Das Programmieren oder nicht eines Betriebes mit Indexierungszone in
diesem Parameter bestimmt die Konfiguration dieser Karte mit "Ausgang
EG" oder "Eingang Indexierungszone" .
Die Progr ammierung des EG-Abstand es bestimmt ebenfalls die Verwendung
des Ausganges für den EG .
BESCHREIBUNG DER PARAMETER SEITE 35
Page 40

P26 INDEX
Dieser Parameter bestimmt den Wert (Indexmass) auf welchen der Zähler der
betreffenden Achse gezwungen wird, sobald der Inde x erreicht ist.
P27 ES - (E
Dieser Parameter bestimmt den kleinsten Abstand für das Ende der
Bewegung der Achse.
Wenn dieser Parameter nicht programmiert ist, wird die betreffende Achse
nie aktiviert.
Vorsicht: Ei nige "konfigurierbare" So ftwarepakete haben die
P
ROGRAMMLIMITEN FÜR ENDSCHALTER IN
A
BHÄNGIGKEIT DER AUFLÖSUNG
Die Programmierung der Endschal ter und der Ge berauflösung beschränkt
sich auf ein Verhältnis, das aus folgender Formel entsteht:
(
NDSCHUTZ
Eigenschaft, die Achse durch diesen Parameter zu aktivieren.
Es ist in diesem Fall unerlässlich, diesen Parameter schon bei
der Inbetriebnahme der Maschine zu programmieren.
Das Unterlassen d er Programmierung bei dieser Art von
Software schliesst die Anzeige dieser Achse auf dem
Bildschirm aus und ve rlangt eine Änderung der
Verkabelungsliste der Achsen.
-)
|
P28 - P27|)*P02 muss kleiner sein als 8386608
P28
P27
P02
|
P28 - P27| = Physischer Abstand zwischen den Endschaltern
Wenn ES + mit 99999,99 und ES - mit 99999,99 programmiert sind, so darf
die Geber-Auflösung P02 maximal 41.00 Imp./Einheit betragen.
Bemerkung: Nur die in P05 programmierten Überläufe (o der Kompensier ung
des Gewindespiels) können die elektronischen Endschalter überlaufen.
P28 ES + (E
Dieser Parameter bestimmt die maximale B ewegung der Achse.
Aus Sicherheitsgründen i st die Programmierung dieses Parameters
unerlässlich.
Programmlimite: s. P27
ES + in Einheiten
ES - in Einheiten
Geber-Auflösung i n Impuls/Einheit
NDSCHUTZ
+)
SEITE 36 BETRIEBSANLEITUNG N2X7
Page 41

EINSTELLUNG DER BETRIEBSPARAMETER DER ACHSEN
Wichtig Alle nicht erwähnten Parameter werden als unbestimmt
betrachtet.
In den verschie denen Einstellungsmethoden werden dann die
voreingestellten Werte für die unbestimmten Parameter
angenommen.
ESTIMMUNG DER ACHSEN UND ÜBERPRÜFUNGEN
B
Bestimmung des ACHSENTYPE (P00)
Nicht bestimmt = DC-Achse oder Brushless
Bestimmung der GEBER-AUFLÖSUNG (P02)
Nicht bestimmt = 100.000 Impulse/mm
Für DC-Achsen oder Brushless:
PROPORTIONALE VERSTÄRKUNG (P22) mit niedrigem Wert
bestimmen (z.B. 10)
INTEGRALE VERSTÄRKUNG (P23) mit 0 festlegen.
Bestimmung der ENDSCHALTER (ES)
negativ (P27) und positiv (P28) mit einer genügenden
Sicherheitsspanne, sodass die Endschalter mit einer manuellen
Verschiebung e rreicht werden können (s. P27, Programmlimite).
Eingabe eines Wertes in den Achsenzähler
Achsennullung, wobei de rselbe Nullpunkt verwendet wird wie bei der
Bestimmung der Endscha lter (P27 und P28)
Ü
BERPRÜFUNG DER ROTATIONS- UND ZÄHLRICHTUNG
Überprüfung der Sollspannung:
Kurze manuelle B ewegungen ausführen (KG manuell).
Die Achsendrehrichtung muss dem Drehsinn der Steuerung (manuell +
oder manuell -) entsprechen.
Ist dies nicht der Fall so bestehen zwei Lösungen:
a) Anschlüsse der Sollsp annung invertieren
b) P15 mit negativem Wert (z.B. -0,001) bestimmen
Überprüfung des Gebers:
Kurze manuelle B ewegungen ausführen (KG manuell).
Die Zählrichtung (siehe Positio nsanzeige) muss dem Drehsinn der
Steuerung (manuell + oder manuell -) entsprechen.
Ist dies nicht der Fall, so müssen die Gebersignale invertiert werden,
oder es ist die Zählricht ung (D5 von P01) zu ändern.
BESCHREIBUNG DER PARAMETER SEITE 37
Page 42

FFSETEINSTELLUNG UND MINIMALE
O
ETRIEBSSPANNUNG
B
Um eine symmetrische Achsenbewegung zu erhal ten ist es wichtig, diese
Einstellung vor der Positionierungseinstellung durchzuführen.
AC-Achse (asynchrone Motoren mit 1 oder 2 Geschwindigkeiten):
Für eine AC-Achse kann diese Einstellung unterlassen werden.
DC-Achse oder Brushless ohne minimale Betriebsspannung:
welche im geschlossenen Regelkreis gesteuert bleibt und deren
automatischer Offsetausgleich keine Vibration (Oszillation)
verursacht.
D1 von P01 programmieren. Manuelle Bewegung ausführen und
dann, im Stillstand, sich vergewissern dass der Offset des Systems
weniger als 100mV beträgt
DC-Achse oder Brushless ohne minimale Betriebsspannung:
die nicht im geschlosse nen Regelkreis gesteuert bleiben kann
a) Verstärkungsparameter P22 mit Wert 0 programmieren.
b) Eine manuelle Bewegung in beiden Richt ungen versuchen.
Im Parameter für die OFFSETSPANNUNG (P18) eine der
Bewegung entgegengesetzte Spannung programmieren.
P18 bis auf die kleinstmögliche Achsenbewegung einstel l en.
Bemerkung: Wenn der Absolutwert der gemessenen OFFSETSPANNUNG
grösser ist als 200 mV, so muss die Ursache gesucht werden.
Eine so hohe Spa nnung kann nicht als normal angese hen
werden.
Achse mit Überlappungsspannung:(Siehe P17)
(Kommt typischerweise im Falle von Proportionalventilen vor)
a) Parameter P17, P22 und P23 mit Wert 0 programmieren.
b) Minimalspannung (P17) steigern, bis bei einem manuellen
Bewegungsbefehl (mittels Tasten
Achsenbewegung in einer der beiden Richtungen festgestellt
wird
c) Diesen Wert (Ua) behalten (notieren).
d) P17 weiter steigern bis eine Achsenbewegung in die andere
Richtung festgestellt wird, und de n Wert (Ub) be halten
(notieren).
e) Mittelwert (Ua+Ub)/2 als Wert des Parameters P17
programmieren.
f) Der Offsetspannungsparameter (P18) ermöglicht, die
Achsen-Überla ppung symmetrisch zu erhalten.
Parameter P18 wird wie folgt programmiert:
P18 = Ub - Umin (P17) wenn Ub der positiven Richtung
entspricht.
P18 = Umin (P17) - Ub wenn Ub der ne gativen Richtung
entspricht.
oder ) eine
SEITE 38 BETRIEBSANLEITUNG N2X7
Page 43

INSTELLUNG DER POSITIONIERUNGSPARAMETER
E
Alle Positionierungsversuc he können mit manuellen Bewegungen im EG
ausgeführt werden (ausser wenn anders spezifiziert).
Die anzufahrenden Positionsmasse sind in diesem Fall die positiven oder
negativen Endschalter (ES).
DC-A
CHSE MIT
Bemerkung: Die Verwendung eine s an die Sollwertspannung
1) Bestimmung der POSITIONIERUNGSGESCHWINDIGKEIT (P10) a) POSITIONIERUNGSGESCHWINDIGKEIT (P10) und
MANUELLE GESCHWINDIGKEIT EG (P14) mit dem vom
Maschinenherste ller für die nominal e Betriebsge schwindigkeit
empfohlenen Wert programmieren.
b) PROPORTIONALVERSTÄRKUNG (P22) bis auf den Wert
steigern, der das Erreichen der Geschwindigkeitsstufe EG ermöglicht
(Bewegung muss genügend gross gewählt werden). Es muss eine
stabile Sollwerts pannung gewählt werden, zwischen +9,5V und -9,5V
je nach Bewegungsrichtung.
PID-S
angeschlossenen Speiche roszilloskops wird die Einstellungen
und die Beur t eilung der Resultat e erleichtern.
TEUERUNG
Abb. 10
c) Di e Sollwertspannung für die Geschwindigkeitsstufe EG muss ca. 8V
oder 9V erreichen (8V wenn grosse Kraftschwankungen zu er wart en
sind).
Es können drei Fä lle vorkommen:
1. Die Sollwertspannung befindet sich im Bereich der empfohlenen
Werte (s. Abschnitt "Bestimmung des Parameters
POSITIONIERUNGSGESCHWINDIGKEIT" (c), Seite 39).
Die Geschwindigkeit (P10) kann dann als richtig betrachtet
werden.
BESCHREIBUNG DER PARAMETER SEITE 39
Page 44

2. Die Sollwertspannung li egt unterhalb des Bereiches der
empfohlenen Werte (s. Abschnitt "Bestimmung des Parameters
POSITIONIERUNGSGESCHWINDIGKEIT" (c), Seite 39)
Wenn die programmierte Geschwindigkeit wirklich der
maximalen Geschwindigkeit des Systems entspr i cht und die
Spannung für diese Geschwindigkeit zu niedrig i s t (<7V), muss
der Servoverstärker so eingestellt werden, dass er für diese
Geschwindigkeit eine Ste uerspannung benötigt, die so nahe wie
möglich an den vorgeschriebenen Werten liegt.
Wenn, im Gegenteil, die progr ammierte Geschwindigkeit
nicht der maximalen Geschwindigkeit des Systems entspricht,
können die Geschwindi gkeiten P10 und P14 erhöht werden,
bis die gewünschte Spannung e rreicht ist.
3. Die Sollwertspannung liegt höher als die vorgeschriebenen
Spannungen (d.h. ca 9,5V bis 10V). Die programmierte
Geschwindigkeit ist zu hoch und das System wird bei dieser
Geschwindigkeit nicht mehr richtig arbeiten.
Wenn die programmierte Geschwindigkeit wirklich der
gewünschten Arbeitsleistung entspricht, muss das System
eventuell neu dimensioniert werden (Motor, Servoverstärker).
Vorher sollte das Funktionieren des Systems überprüft
(Motor, Servoverstärker, mechanische Teile) und die Ursache
dieser unerwar t eten Leistung herausgefunden werden.
Im umgekehrten Fall empfehle n wir die Messung mit
kleineren Werten von P10 und P14 durchzuführen, bis zum
Erreichen der gewünschten Spannung.
2) Bestimmung der PROPORTIONALVERSTÄRKUNG (P22)
a) Die PROPORTIONALVERSTÄRKUNG allmählich steigern bis
Vibrationen (Oszillationen) auftreten (mit Oszilloskop auf SollwertSpannung beobachten) oder bis das P ositionierungsmass (ES) deutlich
überschritten ist (Overshoot).
b) P22 mit einem Wert programmieren, welcher 10 bis 20% unter dem
so gefundenen Grenzwert der PROPORTIONALVERSTÄRKUNG
liegt.
SEITE 40 BETRIEBSANLEITUNG N2X7
Abb. 11
Page 45

3) Bestimmung der DIFFERENTIALVERSTÄRKUNG (P24)
Die Progr ammierung dieses Parameters erübrigt sich normalerweise für
Achsen, die mit einer Stromschleife ausgerüstet sind.
P24 wird in jedem Fall zur Verbesserung d er Beschleunigungs- und
Verlangsamungsrampen nützl ich sein. Dieser Parameter erlaubt, unter
anderem, die Beschleunigungszeiten zu programmieren, die ohne
DIFFERENTIALVERSTÄRKUNG, eine Sättigung der Sollwerts pannung
hervorgerufe n hätten.
a) P24 zuerst mit Wert 1 programmieren, dann allmählich steigern bis
Vibrationen (Oszillationen) erscheinen oder Overshoot erfolgt.
b) P24 mit einem Wert programmieren, welcher 20% unter dem so
gefundenen Grenzwert der DIFFERENTIALVERSTÄRKUNG liegt.
4) Bestimmung der BESCHLEUNIGUNGSZEIT (P08)
a) P08 mit einem genügend ho hen Wert programmieren, so dass die
maximale Geschwindigkeitsstufe ohne Sättigung der Sollwert spannung
erreicht wird (mit Oszilloskop auf Sollwertspa nnung beobachten).
Abb. 12a
b) BESCHLEUNIGUNGSZEIT allmählich vermindern, bis eine
Sättigung in der Beschleunigungsrampe beobachtet wird.
BESCHREIBUNG DER PARAMETER SEITE 41
Page 46

P08
c) P08 mit einem Wert programmieren, welcher 10 bis 20% über dem so
gefundenen Grenzwert der BESCHLEUNIGUNGSZEIT liegt.
Sättigung +/-10V
Abb. 12b
5) Bestimmung der VERLANGSAMUNGSZEIT (P09)
a) P09 mit einem genügend hohe Wert progra mmiere n so dass das
angestrebte Mass ohne Overshoot erreicht werden kann.
b) Allmählich die VERLANGSAMUNGSZEIT vermindern bis ein
Overshoot erfolgt.
c) P09 mit einem Wert programmieren, welcher 10 bis 20% über dem so
gefundenen Grenzwert der VERLANGSAMUNGSZEIT liegt.
SEITE 42 BETRIEBSANLEITUNG N2X7
Abb. 12c
Page 47

6) Bestimmung der INTEGRALVERSTÄRKUNG (P23)
a) INTEGRALVERSTÄRKUNG steigern bis eine Verschlechterung de r
Positioniergenauigkeit (Overshoot) erfolgt.
b) P23 mit einem Wert programmieren welcher 10 bis 20% unter dem so
gefundenen Grenzwert der INTEGRALVERSTÄRKUNG liegt.
Bemerkung: Dieser Wert muss noch weiter vermindert werden wenn, im
Falle der Steuerung der Positionierung im geschlossenen
Regelkreis (D0 von P01), Oszillationen oder Vibrationen am
Ende der Positionierung auftreten.
Endgültige Einstellung der P arameter (s. Seite 46) vornehmen.
DC-A
CHSE IM
Dieser Modus wird gewählt, indem man
PROPORTIONALVERSTÄRKUNG (P22) und
DIFFERENTIALVERSTÄRKUNG mit Wert = 0 programmiert (siehe
NAX-Positionierungsdiagramm).
Dieser Positionierungstyp ist besonders nützlich für die Achsen, die nicht für
einen PID-Regelkreis ausgelegt sind.
Die NAX Positionierung ist auch einfacher einzustellen bei Achsen, deren
Hauptmerkmal nicht di e Leistung sein soll.
1) Bestimmung der Hauptparameter
BESCHLEUNIGUNGSZEIT (P08) so klein wie möglic h
programmieren, jedoch unter Berücksichtigung de r Achsendynamik.
Vorsicht: Eine zu kurze BESCHLEUNIGUNGSZEIT überbean-
In erster Zeit eine relativ lange VERLANGSAMUNGSZEIT P09
programmieren (typischerweise 1.000s).
NAX-M
sprucht unnötig das System (Mechani k, Motor, Hydraulik
usw.)
ODUS (OHNE
PID-R
EGELKREIS
)
Die vom Hersteller der Maschine vorgeschriebene
POSITIONIERGESCHWINDIGKEIT (P10) programmieren (Die
Genauigkeit dieses Parameters ist nicht sehr wichtig). P14 mit dem
gleichen Wert programmieren.
VOREINGESTELLTE SPANNUNG (P15) mit dem zum Erreichen
der maximalen Geschwindigke it notwendigen Wert programmieren.
BESCHREIBUNG DER PARAMETER SEITE 43
Page 48

2) Bestimmung der GESCHWINDIGKEIT IN DER ENDSTUFE (P11) und der VORABSCHALTUNG (P04)
a) Zuerst für P11 einen Wert wählen der 10% der POSITIONIERGE-
SCHWINDIGKEIT (P10) entspricht.
b) P11-Wert allmählich vermindern, bis eine relativ genaue
Positionierung möglich ist.
c) VORABSCHALTUNG (P04) einstellen sodass die Positionierung so
genau wie möglich erfol gt.
3) Bestimmung der VERLANGSAMUNGSZEIT (P09)
a) VERLANGSAMUNGSZEIT (P09) allmählich vermindern, bis eine
Verschlechterung der Positionierungsgenauigkeit festgestellt wird.
b) P09 mit einem Wert programmieren, welcher 10 bis 20% über dem so
gefundenen Grenzwert der VERLANGSAMUNGSZEIT liegt.
4) INTEGRALVERSTÄRKUNG (P23)
Soll die INTEGRALVERSTÄRKUNG (P23) verwendet werden, so kann
dieser Parameter wie im Abschnitt "Bestimmung der INTEGRALVER-
STÄRKUNG, (s. Seite 43) beschrieben definiert werden.
AC-A
CHSE
1) Bestimmung der Hauptparameter
a) Für Positionierungen in einer einzigen Richtung:
1.1 Zuerst eine relativ grosse ÜBERLAUFDISTANZ (P05)
(z.B. 15% der max. Achsenverschiebung) programmieren.
Das Vorzei chen dieses Para mete rs bestimmt die Richtung, in
welcher man die Positionier ung beenden will.
2.1 Zuerst eine relativ lange VERZÖGERUNG SP/SN (P07)
programmieren, (z. B. 2.000s).
b) Für eine AC-Achse mit 2 Geschwindigkeiten:
Zuerst eine relativ grosse KG-DISTANZ (P06) (z. B. 10% der max.
Achsenverschiebung) programmieren.
c) Man kann den Parameter der VERLANGSAMUNGSZEIT (P09)
dazu verwenden, um eine Phasenverschi ebung zwischen dem
Unterbruch der SP /SN-Befehle und dem Endsignal der Positionierung
erzielen.
SEITE 44 BETRIEBSANLEITUNG N2X7
Page 49

2) Bestimmung der VORABSCHALTUNG (P04)
a) P04 mit 0 programmieren, oder sicherstellen, dass er nicht
programmiert ist.
b) Manuelle Bewegungen in KG in der Richtung ausführen, in welcher
die Positionierungen enden sollen. (Ta s te n
Bewegungen müssen bis zum Endschalte r ausgeführt werden, damit
die die Achse die Positionierung vollständig abschliessen kann.
c) Den Überlauf der Achse gegenüber dem Positionierungsmass
(Endschalter) feststellen und d ie VORABSCHALTUNG (P04) mit
diesem Wert programmieren.
d) Mehrere weitere Bewegungen mit verschiedenen Längen (immer bis
zum Endschalter und im manuellen Modus KG) ausführen. Wenn
nötig muss die VORABSCHALTUNG (P04) eingestellt werden, bis
die Positionierung die bestmögliche Genauigkeit aufweist.
3) Bestimmung der DISTANZ KG (P06)
(nur für eine AC-Achse mit 2 Geschwindigkeiten)
a) Bewegungen bi s Endschalter in EG und manueller Betriebsart
ausführen (immer in der Richtung, in welcher di e Positionierung ende n
wird). Dann DISTANZ KG allmählich vermindern bis die
Positionierung ungenau wird .
b) P06 mit einem Wert programmieren welcher 10 bis 20% über dem so
gefundenen Grenzwert der DISTANZ KG liegt.
oder ). Diese
4) Bestimmung der VERZÖGERUNG SP/SN (P07)
(Nur für Positionierungen in einer einzigen Richtung)
a) Positionierungen mit Überläufen (in automatischer oder
halbautomatischer Betriebsart) ausführen. Am Motor oder auf der
Positionsanzeige das Anhalten der Achse vor dem Richtungswechsel
beobachten.
b) VERZÖGERUNG SP/SN (P07) allmählich verkürzen, bis die Achse
die Richtung vor dem vollständigen Anhalten wechselt.
c) P07 mit einem Wert programmieren, welcher 10 bis 20% über dem so
gefundenen Grenz wer t der Verzögerung liegt.
5) Bestimmung der ÜBERLAUFDISTANZ (P05)
(Nur für Positionierungen in einer einzigen Richtung)
a) Positionierungen mit Überläufen (in automatischer oder
halbautomatischer Betriebsart) in verschiedenen Längen ausführen.
Dann den ABSTAND ÜBERLAUF (P05) allmählich verkürzen, bis
sich die Positionierungsgenauigkeit verschlechtert.
b) P05 mit einem Wert programmieren welcher 10 bis 20% über dem so
gefundenen Grenzwert der ÜBERLAUFDISTANZ liegt.
BESCHREIBUNG DER PARAMETER SEITE 45
Page 50

NDGÜLTIGE EINSTELLUNG DER PARAMETER
E
P
ROGRAMMIERUNG DER UNTERGEORDNETEN
P
ARAMETER
Geschlossener Rege lkreis (D0 P01), TOLERANZ (P02),
VOREINGESTELLTE SPANNUNG (P15) u.s.w.
E
INSTELLUNG DER
ES für normale Ve rwendung der Achse programmieren.
P
ROGRAMMIERUNG DER
(Falls automatis che Indexaufnahme gewünscht wird)
Einstellung des INDEXMASSES (P26)
Eventuelle Programmierung der INDEXIERUNGSGESCHWINDIGKEIT
(P12)
ENDSCHALTER (P27
INDEXIERUNGSART (P25)
UND
P28)
P
RÜFUNG UND EINSTELLUNG DER POSITIONIERUNGEN
Schliesslich werden (in automatischer oder halbautomatischer Betriebsart)
verschiedene Po sitionierungen mit langen, mittleren bis sehr kurzen
Bewegungen (minimale Bewegungen, die von der Achse verlangt werden
können) in beiden Richtungen probiert. Dann, wenn nötig, einige Parameter
korrigieren, um die Genauigkeit und Geschwindigkeit der Positionierung zu
verbessern.
Für die DC-Achsen kann man P14 (Grundwert ist Vmax/2) gelöscht oder mit
dem gewünschten Wert programmiert werden.
SEITE 46 BETRIEBSANLEITUNG N2X7
Page 51

RSTE INDEXIERUNG DER
E
Bemerkung: Die Verfügbarkeit dieser Funktion hängt von der "Master"-
Software ab.
V
ORGEHEN
a) DNC einscha lten oder RESET durchführen
b) Anschlag von Hand auf ein be kanntes Mass (ode r gegen Matrize bei
der X-Achse) setzen, oder die genaue Position messen
c) Seite für die Achsennullung wählen (Schlüssel auf Stellung 2).
Achsennullung vornehmen (P rogrammierhandbuch der DNC zu Rate
ziehen)
d) Maschinenparameter-Seiten wählen (Schlüssel auf Stell ung 3)
gewünschte Indexierungsart programmieren
Cursor auf Feld "Indexposition" setzen
e) Start-Taste betätigen
Achse nimmt ihren Index auf
nach Indexaufnahme erscheint im interaktiven Feld die
Meldung "Index OK".
N2X-A
CHSEN
Bemerkung: die Indexaufnahme kann nur einzeln, Achse nach Achse,
durchgeführt werd en.
BESCHREIBUNG DER PARAMETER SEITE 47
Page 52

Diese Seite wurde absichtlich leer gelassen.
SEITE 48 BETRIEBSANLEITUNG N2X7
Page 53

Z
USÄTZLICHE
Wahl von die 8 I/O
Konfiguration
N2X S
In einigem Fall ist es notwendig, ein oder z wei d urch den Master verwaltete Achsen
einzurichten. Die zusätzlichen Achsen dürfen nicht kompliz iert werden, nur
bestimmte Arbeitsweisen werden eingerichtet. Dieses oder diese zusätzlichen Achsen
benutzen Eingänge /Ausgänge sowie der Geb er der Achse Y2 (1. definier te Achse)
oder Y1.
Auf DNC 60 ist es möglich, eine Achse an den Master zu haben, für das muss man
die 8 I/O Konfiguration wählen auf d er Seite MASCHINENPARAMETER 01 und
die vorbesetzte Konfigurat ion in den Eingänge / Ausgä nge Seiten suchen ode r den
Ausgang SP X3 mindestens bilden. Wenn das ist gemacht, die N2X Software
Version an Master erscheint auf der ersten Seite Maschinenparameter.
Die Paramete r, die nicht mehr verwaltet werden, sind, mit e inem Punkt nach der
Parameternummer anzuschlagen.
OFTWARE AUF DEM MASTER
N2X Software auf dem Master
MASCHINENPARAMETER -01- IGNORIER
Softs: GIXMDP/ZIAMBA3 PIC:AA5
N2XMnf/ZZAMBA3 N2XSA1 Schl.:0
Sprache: [ ] FR GB DE IT ES PT SE NL
KONFIGURATION 8 I/O: 1
X1: X1 X2: X2
00 Typ Achse __ __
01 Betriebsart __ __
02 Aufl. Geber (I/mm) ___.___ ___.___
03 Toleranz 0.05 0.05
04 Abst. Vorabsch. _.__ _.__
05 Abst. Ueberlauf ___.__ ___.__
06 Abst. Kriechgang __.__ __.__
07 Zeit SP / SN _.___ _.___
08 Zeit Beschleunigung 0.300 0.300
09 Zeit Verzoegerung 0.400 0.400
KONFIG. AUSGAENGE IGNORIER
Um die vorbesetzte
Konfiguration suchen,
1 in diesem Feld
stellen.
SUCHE VORBESETZTE KONFIGURATION _
--- MB6 J10 --- 10100000
09: SchniFre 10: HochMess
11: F1Dig SP 12: F1Dig SN
13: F2Dig SP 14: F2Dig SN
15: F5Dig SP 16: F5Dig SN
--- MB6 J11 --- 00000000
09: 10:
11: 12:
13: 14:
15: SP X3 16: SN X3
N2X SOFTWARE AUF DEM MASTER SEITE 49
Page 54

N2X P
ARAMETER
Für eine vollständige Beschreibung, siehe den Paragraph, de r dem obigen Parameter
entspricht.
- D0 & D1: Modus 0 (DC-Achse +/-10V/SP/SN), Modus 1 (AC-Achse) und Modus
2 (DC-Achse mit Spannungssteuerung von 0 bis +10V oder 0 bis –10V) verwaltet,
Modus 3 nicht verwaltet
- D4 DC-Achse (+/-10V / Bestätigung) verwaltet
- Die anderen Bits werden nicht verwaltet.
- D0 Geschlossener Regelkreis, macht ei ne neue Positionierung, wenn man aus der
Toleranz herauskommt (DC und AC Modus).
- D5 Umkehrung der Zählrichtung des Gebers.
- Die anderen Bits werden nicht verwaltet.
P00 Typ Achse
P01 Betriebsart
P02 Geber-Auflösung
- Nach der Beschreibung N2X ver walteter Parameter.
P03 Positionierungstoleranz
- Nach der Beschreibung N2X ver walteter Parameter.
P04 Abstand Vorabschaltung
- Nach der Beschreibung N2X ver walteter Parameter.
P05 Abstand Überlauf
- Nach der Beschreibung N2X ver walteter Parameter.
P06 Abstand Kriechgang
- Nach der Beschreibung N2X ver walteter Parameter.
P07 Zeit Umkehrung SP/SN
- Nur in AC Modus verwalteter Parameter.
P08 Zeit Beschleunigung
- Di eser Paramete r bestimmt die Dauer der linearen Beschleunigung der Achse von
die Offset-Spannung bis die voreingestellte Spannung (P15).
P09 Zeit Verzögerung
- Di eser Parameter wird für die Berechnung der Bremsungsrampe bei Stopsc hi ld
benutzt.
SEITE 50 BETRIEBSANLEITUNG N2X7
Page 55

P10 Geschwindigkeit Positionierung
- Dieser Parameter wird für die B erechnung der Spannung benutzt für:
- Positionierung in normal Mo dus
- Positionierung Handmodus
- Positionierung Indexie rungsmodus.
P11 Geschwindigkeit Endstufe
- Dieser Para meter wird für die Berechnung der Endstufespannung be nutzt. Am
Ende der Positionierung ist das Ausgangsspannung auf die Endstufespannung
begrenzt, selbst wenn die berechne te Spannung ihm niedriger er ist.
P12 Geschwindigkeit Indexierung
- Dieser Parameter wird für die B erechnung der maximal Spannung während der
Indexierung benutzt.
P13 P14 Geschwindigkeit Hand langsam KG und schnell EG
- Diese Parameter werden für die B erechnungen der manuellen Spannungen KG und
EG Benutzt.
P15 Voreingestellte Spannung OBLIGATORISCHER Parameter
- Di eser Parameter wird als Spannung max. für di e
Positionierungsgeschwindigkeitsbewegungen benutzt. Für die a ndere Typ von
Bewegungen ist die benutzte Spannung nur ein Proportion dieser Spannung.
Beispiel:
Geschwindigkeit Hand KG
Spannung Hand KG = Voreingestellte Spannung —————————————
Geschwindigkeit Positionierung
- I s t das Vorzeichen von dieser P arameter negativ, ist die Ausgangsspannung
invertiert (gleich wie N2X).
P16 Spannung max. Begrenzung
- Nicht verwalteter Parameter.
P17 Spannung min. Betrieb
- Nicht verwalteter Parameter.
P18 Offset-Spannung
- Nach der Beschreibung N2X ver walteter Parameter.
P19 Regelkreistoleranz
- Nicht verwalteter Parameter.
P20 Max. Folgefehler
- Nicht verwalteter Parameter.
N2X SOFTWARE AUF DEM MASTER SEITE 51
Page 56

P21 Zeit Geber-Überwachung
- Nicht verwalteter Parameter.
P22 Verstärkung Proportional
- Dieser Para met er wird für die Berechnung der auf die Achse anzuwendenden
Spannung benutzt. D as Ausgangsspannung entspricht der übriggebl iebenen Distanz
bis zur anvisierten Position, die mit dem proportionalen Verstärkung multipliziert
wurde. Die resultierende Spannung ist auf die Endstufespannung und auf die
Begrenzungsspannung gemäß der Art von B ewegung begrenzt.
P23 Verstärkung Inte gral
- Nicht verwalteter Parameter.
P24 Verstärkung Differential
- Nicht verwalteter Parameter.
P25 Indexierungsart
- Zum Teil verwalteter Parameter. Die verwalteten Bits sind folgende:
- D0 mit Indexierungszone 24V.
- D1 mit Index 5V.
- D2 mit Indexaufnahme in SN.
- D3 mit Blockierung d er Achse in der Indexierungszone ausserhalb der
Indexierung.
- Die anderen Bits werden nicht verwaltet.
P26 Index
- Nach der Beschreibung N2X ver walteter Parameter.
P27 et P28 Endschutz - et +
- Nach der Beschreibung N2X ver walteter Parameter.
SEITE 52 BETRIEBSANLEITUNG N2X7
Page 57

B
EISPIEL
Achtung: in diesem Beispiel haben nur die Mindestparameter, die das
AC-M
OTOR
Funktionieren de r Achse erlauben, einen Wert.
2 G
ESCHWINDIGKEITEN
MASCHINENPARAMETER -01- IGNORIER
Softs: GIXMDP/ZIAMBA3 PIC:AA5
N2XSA1 Schl.:0
Sprache: [..] FR GB DE IT ES PT SE NL
KONFIGURATION 8 I/O: 1
X3: X3
00 Typ Achse 1
01 Betriebsart 1
02 Aufl. Geber (I/mm) 100.000
03 Toleranz _.__
04 Abst. Vorabsch. _.__
05 Abst. Ueberlauf ___.__
06 Abst. Kriechgang 0.50
07 Zeit SP / SN _.___
08 Zeit Beschleunigung _.___
09 Zeit Verzoegerung 0.400
MASCHINENPARAMETER -02- IGNORIER
X3: X3
10 Geschw Position. __.__
11 Geschw Endstufe __.__
12 Geschw Indexierung ____.__
13 Geschw Hand Langsam ___.__
14 Geschw Hand Schnell ____.__
15 Spannung Voreinst __.___
16.Spann. max Begrenz.
17.Spann. min Betrieb
18 Spannung Offset __.___
19.Regelkreistoler.(%)
20.Max Folgefehler
21.Zeit Geberueberw.
22 Verst.Proportional _____
23.Verst.Integral
N2X SOFTWARE AUF DEM MASTER SEITE 53
Page 58

MASCHINENPARAMETER -03- IGNORIER
X3: X3
24.Verst Differential
25 Indexierungsart 2
26 Index 980.35
27 Endschutz - 50.00
28 Endschutz + 1000.00
Die Parameter an undef (__.__) erlauben die Einstellung der Achse zu verbesser n.
Bestimmte Parameter haben ein Grundwert, obschon sie an undef sind. Siehe die
Beschreibung i m Paragraph Liste der Parameter der N2X-Karte.
Geschwindigkeit
SP+EG
Abst. KG
Toleranz
Verhältnis
SP / SN
SP
Abstand Vorabsch altun g
(SRET)
Vorabschaltung (SAAV)
SN+EG
SEITE 54 BETRIEBSANLEITUNG N2X7
Page 59

B
EISPIEL
Achtung: in diesem Beispiel haben nur die Mindestparameter, die das
DC-M
OTOR
Funktionieren de r Achse erlauben, einen Wert.
+/- 10VDC
MASCHINENPARAMETER -01- IGNORIER
Softs: GIXMDP/ZIAMBA3 PIC:AA5
N2XSA1 Schl.:0
Sprache: [..] FR GB DE IT ES PT SE NL
KONFIGURATION 8 I/O: 1
X3: X3
00 Typ Achse 0
01 Betriebsart 1
02 Aufl. Geber (I/mm) 100.000
03 Toleranz _.__
04 Abst. Vorabsch. _.__
05 Abst. Ueberlauf ___.__
06 Abst. Kriechgang __.__
07 Zeit SP / SN _.___
08 Zeit Beschleunigung 0.300
09 Zeit Verzoegerung 0.400
MASCHINENPARAMETER -02- IGNORIER
X3: X3
10 Geschw Position. 30.00
11 Geschw Endstufe __.__
12 Geschw Indexierung ____.__
13 Geschw Hand Langsam ___.__
14 Geschw Hand Schnell ____.__
15 Spannung Voreinst +9.400
16.Spann. max Begrenz.
17.Spann. min Betrieb
18 Spannung Offset __.___
19.Regelkreistoler.(%)
20.Max Folgefehler
21.Zeit Geberueberw.
22 Verst.Proportional 10
23.Verst.Integral
N2X SOFTWARE AUF DEM MASTER SEITE 55
Page 60

MASCHINENPARAMETER -03- IGNORIER
X3: X3
24.Verst Differential
25 Indexierungsart 1
26 Index 983.50
27 Endschutz - 35.00
28 Endschutz + 1000.00
Die Parameter an undef (__.__) erlauben die Einstellung der Achse zu verbesser n.
Bestimmte Parameter haben ein Grundwert, obschon sie an undef sind. Siehe die
Beschreibung i m Paragraph Liste der Parameter der N2X-Karte.
SEITE 56 BETRIEBSANLEITUNG N2X7
Page 61

INDEX
Abstand
Kriechgang, 27, 50
Überlauf, 27, 50
Vorabschaltung, 26, 50
AC-Achse, 16, 28, 44
Anzeigeeinheit, 24
Ausgänge SP und SN, 22
Beschleunigungszeit, 41, 43
Beschreibung der Parameter, 21
Betriebsart, 22, 50
Bit-Gewichte, 15
Copyright, 5
D0, 16
DC-Achse, 16, 43
Differentialverstärkung, 41, 43
Distanz KG, 45
EG, 16
Hydraulische Achsen, 30
Index, 35, 36, 52
Indexierungsart, 35, 52
Indexzone, 30
Integralverstärkung, 43, 44
Karte
DIO 7xx, 10
MAX, 11
N2X 200, 9
KG, 16
KG-Distanz, 44
Kleine Geschwindigkeit, 27
Liste der Parameter, 13
Master, 16
Master-Software, 16, 28
Max. Folgefehler, 33, 51
Min. Betriebsspannung, 31
N2X Software auf dem master, 49
Eilgang, 30
Einstellung der Betriebspa rameter der Achsen,
37
Endgültige Einstellung der P a rameter, 46
Endschalter, 16
Endschutz, 16
Endschutz -, 36, 52
Endschutz +, 36, 52
Endstufe, 29, 44
Erste Indexierung, 47
ES-, 16, 36
ES+, 16, 36
Geberauflösung, 24, 50
Geberimpulse, 24
Geschwindigkeit
Endstufe, 29, 51
Hand langsam KG, 30, 51
Hand schnell EG, 30, 51
in der Endstufe, 44
Indexierung, 30, 51
Positionierung, 29, 51
Grundwert, 13
NAX, 43
NAX Positionierung, 43
Offset, 22, 33, 38
Offset Spannung, 51
Offset-Spannung, 33, 51
Oszillationen, 38, 41, 43
Overshoot, 40, 41
PID-Steuerung, 39
Positioniergeschwindigkeit, 43
Positionierung
AC, 17
DC, 18
Typ NAX, 17
Positionierungsgeschwindigkeit, 39
Positionierungsrichtung, 44
Positionierungstolera nz, 26, 50
Proportionalventile, 38
Proportionalverstärkung, 39, 40, 43
Regelkreistoleranz, 51
Sättigung, 41
, 42
INDEX PAGE 57
Page 62

SN, 16
SP, 16
Spannung
max. Begrenzung, 31, 51
min. Betrieb, 31, 51
Trägheit, 26
Typ Achse, 21, 50
Überlappungsspannung, 38
Überlappungsventile, 31
Überlaufdistanz, 44, 45
Umkehrung der Zählrichtung des Gebers, 23
Verlangsamung, 29
Verlangsamungszeit, 42, 44
Verstärkung, 37, 38
Differential, 34, 52
Integral, 34, 52
Proportional, 34, 52
Verzögerung SP/SN, 44, 45
Vibrationen, 38, 41, 43
Vorabschaltung, 44, 45
Voreingestellte
Spannung, 51
Voreingestellte Spannung, 30, 43
Zählrichtung, 37
Zeit
Beschleunigung, 29, 50
Geber-Überwachung, 34, 52
Umkehrung SP/SN, 28, 50
Verzögerung, 29, 50
SEITE 58 BETRIEBSANLEITUNG N2X7
 Loading...
Loading...