

Page 1

Información de servicio
Información de servicio
ÍNDICE PÁGINA
Información general del sistema
Introducción
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Componentes
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Montaje de la ECU
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Confi guraciones del hardware
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Controladores avanzados EC-60
™
utilizan onda portadora
en líneas de energía (PLC)
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Entradas del controlador EC-60
™
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Interruptor y lámpara indicadora de ABS fuera de carretera
. . . . . . . . . . . . . .
Salidas del controlador EC-60
™
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Secuencia de encendido
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Funcionamiento del ABS
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Funcionamiento del ATC
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
ABS avanzado con control de estabilidad
. . . . . . . . . . . . . . . . . . . . . . . . .
10
Información importante de seguridad
. . . . . . . . . . . . . . . . . . . . . . . . . . . .
11
Modo de prueba con dinamómetro
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
12
Calibración automática del tamaño del neumático
. . . . . . . . . . . . . . . . . . .
12
Apagado parcial del ABS
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
12
Reconfi guración del sistema
Reconfi guración del sistema del controlador EC-60
™
. . . . . . . . . . . . . . . .
13
Solución de problemas
General
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Calibración del sensor de ángulo de dirección
. . . . . . . . . . . . . . . . . . . . . .
Calibración de velocidad de derrape/aceleración lateral
. . . . . . . . . . . . . .
Códigos de parpadeo y códigos de diagnóstico de fallas
. . . . . . . . . . . . .
Uso de diagnósticos manuales o basados en PC
. . . . . . . . . . . . . . . . . . .
Índice de solución de problemas de los códigos
de diagnóstico de fallas
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Pruebas de códigos de fallas
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
24-39
Conectores
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Cableado
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
41-43
Dibujos de cableado
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Glosario
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Códigos J1587 SID y FMI
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
46-51
Información de servicio
Controladores (avanzados) Bendix® EC-60™ ABS / ATC / ESP
Consulte el documento SD-13-4863 para obtener información
sobre los controladores estándar y premium
Se utilizan los cuatro conectores.
(Si solo se utilizan dos o tres conectores,
consulte la hoja SD-13-4863)
FIGURA 1 – CONTROLADOR AVANZADO EC-60
INTRODUCCIÓN
El controlador avanzado EC-60™ de Bendix® es parte de la gama de
dispositivos electrónicos para el sistema de freno antibloqueo (ABS)
diseñados para mejorar las características de frenado de los vehículos
con frenos de aire, incluyendo autobuses, camiones y tractores de uso
pesado y medio. Los controladores de ABS también se denominan
unidades de control electrónico (ECU).
El ABS de Bendix
®
utiliza sensores de velocidad de las ruedas, válvulas
de modulador de presión ABS y una ECU para controlar cuatro o seis
ruedas del vehículo. El controlador EC-60
™
vigila el movimiento de
giro de cada rueda de manera individual durante el frenado y ajusta o
modula la presión de frenado en el extremo de la rueda. Cuando se
detecta el deslizamiento excesivo o bloqueo de la rueda, el controlador
™
EC-60
activará las válvulas del modulador de presión para reducir
automáticamente la presión de frenado en uno o más extremos de la
rueda. Al realizar estas acciones, el sistema ABS ayuda a mantener la
estabilidad lateral y control del volante del vehículo durante la aplicación
fuerte de los frenos o durante el frenado en superfi cies resbaladizas.
Además de la función ABS, los modelos avanzados del controlador
™
EC-60
proporcionan la característica de control de tracción
automático (ATC). El ATC de Bendix puede mejorar la tracción del
vehículo durante la aceleración y la estabilidad lateral al acelerar en
curvas. El ATC utiliza el dispositivo limitador de torsión del motor
(ETL) donde la ECU se comunica con el controlador del motor y/o el
frenado diferencial (DB) en que se utilizan aplicaciones de freno de
rueda individual para mejorar la tracción del vehículo.
Los controladores avanzados EC-60
™
cuentan con una característica de
control de torsión de arrastre que reduce el deslizamiento de la rueda
en el eje de impulsión (debido a la inercia de la línea de impulsión)
comunicándose con el controlador del motor y aumentando la torsión
del motor.La ECU avanzada EC-60
™
proporciona características de
estabilidad basadas en ABS que se denomina programa electrónico
de estabilidad ESP
®
.
ESP® es una marca registrada de DaimlerChrysler y es utilizada por BCVS bajo licencia de DaimlerChrysler.
™
ÍNDICE PÁGINA
Información general del sistema
Introducción
Componentes
Montaje de la ECU
Confi guraciones del hardware
Controladores avanzados EC-60
en líneas de energía (PLC)
Entradas del controlador EC-60
Interruptor y lámpara indicadora de ABS fuera de carretera
Salidas del controlador EC-60
Secuencia de encendido
Funcionamiento del ABS
Funcionamiento del ATC
ABS avanzado con control de estabilidad
Información importante de seguridad
Modo de prueba con dinamómetro
Calibración automática del tamaño del neumático
Apagado parcial del ABS
Reconfi guración del sistema
Reconfi guración del sistema del controlador EC-60
Solución de problemas
General
Calibración del sensor de ángulo de dirección
Calibración de velocidad de derrape/aceleración lateral
Códigos de parpadeo y códigos de diagnóstico de fallas
Uso de diagnósticos manuales o basados en PC
Índice de solución de problemas de los códigos
de diagnóstico de fallas
Pruebas de códigos de fallas
Conectores
Cableado
Dibujos de cableado
Glosario
Códigos J1587 SID y FMI
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1 1
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2 2
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3 3
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3 3
utilizan onda portadora
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3 3
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4 4
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5 5
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6 6
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7 7
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8 8
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1414
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2323
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4040
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4444
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4545
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
El sistema ESP de Bendix es un sistema de estabilidad basado en
ABS que mejora la estabilidad del vehículo reduciendo la aceleración
del motor y aplicando los frenos del vehículo, según la dinámica real
del vehículo. En consecuencia, el sistema ESP sólo está disponible en
ciertas plataformas de vehículos aprobadas después de la aplicación
en el vehículo, esfuerzos de desarrollo y pruebas de validación. Solo
algunas variaciones limitadas de una plataforma del vehículo aprobada
se permiten sin la validación adicional de la aplicación del sistema ESP.
El sistema de estabilidad ESP consta de las características de control
de derrape (YC) y programa de estabilidad antivuelco (RSP).
PRECAUCIÓN
El conductor es el responsable de asegurar la estabilidad del vehículo
durante el funcionamiento, incluso en vehículos equipados con ESP.
. . . . . . . . . . . . . . 4 4
. . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . 1515
. . . . . . . . . . . . . . 1616
. . . . . . . . . . . . . 1717
. . . . . . . . . . . . . . . . . . . 2020
41-43
SD-13-4869S
10
11
12
12
12
13
24-39
46-51
1
Page 2

El sistema ESP solo puede funcionar según los límites de la física. La
funcionalidad del ESP mitiga los incidentes potenciales que pongan
en riesgo la estabilidad del vehículo, pero no los puede evitar en todos
los casos. Hay otros factores, como conducir demasiado rápido para
las condiciones de la carretera, tráfi co o condiciones meteorológicas,
girar excesivamente el volante, centro de gravedad (CG) del vehículo
demasiado alto o carreteras en malas condiciones que pueden causar
la inestabilidad del vehículo que supera la capacidad de mitigación por
parte de todo sistema de estabilidad. Además, la efectividad del ESP
puede verse reducida en gran medida en los vehículos que lleven varias
combinaciones de remolque.
Sensores de
velocidad de 90°
Camisa de sujeción
del sensor
Sensores de
velocidad en
tramos rectos
PRECAUCIÓN
El sistema de estabilidad ESP sólo se puede utilizar en vehículos
probados y aprobados por los ingenieros de Bendix. Las instalaciones
de ESP requieren pruebas en el vehículo y el ajuste del parámetro EC-
™
60
. Consulte la sección “ABS avanzado con control de estabilidad” en
la página 10 para obtener detalles adicionales.
En consecuencia, el controlador EC-60™ se proporciona con un juego
de datos con parámetros correspondientes que se valida para una
plataforma de vehículo específi ca. Por lo tanto, hay pasos específi cos
que son necesarios si se requiere el reemplazo de la ECU. Consulte la
sección “Cómo obtener un nuevo controlador EC-60
™
” en la página 14
para obtener detalles adicionales.
Los vehículos con ESP no se deben conducir en carreteras con mucho
peralte, como las de las pistas de prueba o carrera de alta velocidad. El
personal que realiza las pruebas debe desactivar la funcionalidad ESP
antes de conducir un vehículo con ESP en dichas pistas.
CONTROL DE DERRAPE (YC)
La ECU avanzada puede incluir la funcionalidad de control de derrape
(YC) que cuenta con la capacidad de aplicar los frenos en los extremos
individuales de las ruedas, como también la de aplicar los frenos del
remolque para contrarrestar el “empuje” del remolque, que en ciertas
maniobras puede llevar a la pérdida de control o un accidente con efecto
tijera. Consulte la sección “Estabilidad de derrape” en la página 10 para
obtener detalles adicionales.
PROGRAMA DE ESTABILIDAD ANTIVUELCO (RSP)
El programa de estabilidad antivuelco (RSP) es una solución ABS para
todos los ejes que ayuda a reducir la velocidad del vehículo reduciendo
la aceleración del motor y aplicando todos los frenos del vehículo, según
se requiere, disminuyendo la tendencia al vuelco. El RSP reduce la
velocidad del vehículo por debajo del umbral crítico de vuelco durante
maniobras de cambio de dirección, como conducir en rampas de salida
con curva en las carreteras o al intentar evitar obstáculos en superfi cies
secas y de alta fricción. Consulte la sección “ABS avanzado con control
de estabilidad” en la página 10 para obtener detalles adicionales.
ADVERTENCIAS
Durante la intervención del sistema RSP, el vehículo desacelera
automáticamente. El RSP puede reducir la velocidad del vehículo con
o sin la necesidad de que el conductor presione el pedal del freno
y aun cuando el conductor acelere.
FIGURA 2 - SENSOR DE VELOCIDAD DE RUEDA WS-24™ DE BENDIX®
Entrega
(puerto 2)
Suministro
(puerto 1)
Conector
Modulador
FIGURA 3 – MODULADORES M-32™ Y M-32QR
M-32QR
™
eléctrico
Escape (puerto 3)
™
Modulador
™
M-32
COMPONENTES
La función de ABS del controlador EC-60™ usa los siguientes
componentes:
• Sensores de velocidad de rueda WS-24™ de Bendix® (4 ó 6, según
la confi guración). Cada sensor se instala con la camisa de sujeción
del sensor de Bendix
• Válvulas de modulador de presión M-32
(4, 5 ó 6, según la confi guración)
• Luz indicadora de ABS del tractor montada en el tablero
• Válvula de relé del freno de servicio
• Luz indicadora de ABS del remolque montada en el tablero
• Interruptor de activación del código de parpadeo opcional
• Interruptor para ABS fuera de carretera opcional
La función de ATC del controlador EC-60
componentes adicionales:
• Válvula de control de tracción del eje propulsor (se puede
integrar a la válvula de relé del freno de servicio o puede ser
un dispositivo independiente)
• Luz indicadora/estado del ATC montada en el tablero
• Estándar J1939 de comunicación en serie al módulo de control
del motor
• Entrada del interruptor de la luz de freno (se puede proporcionar
utilizando la entrada de hardware de la ECU o J1939)
• Interruptor del ATC para lodo/nieve opcional (a veces se
denomina interruptor ATC para fuera de carretera)
™
o M-32QR™ de Bendix®
™
usa los siguientes
2
Page 3
Voltaje
de
entrada
12 4/6 4/5/6
TABLA 1 –
Sensores PMV ATC
CARACTERÍSTICAS DEL CONTROLADOR AVANZADO EC-60
ESP/
RSP
Códigos
de
parpadeo
™
La función ESP/RSP del controlador EC-60™ usa los siguientes
componentes adicionales:
• Válvula de control de tracción del eje de viraje (se puede
integrar a la válvula de relé del freno de servicio o puede ser
un dispositivo independiente)
• Luz indicadora/estado del ESP montada en el tablero (también
funciona como luz indicadora/estado del ATC)
• Sensor del ángulo de dirección SAS-60
™
de Bendix (montado
en la columna de la dirección).
PRECAUCIÓN: al cambiar el volante, asegúrese de no
averiar el sensor del ángulo de dirección o interferir con su
funcionamiento. Además, debe volver a calibrar el sensor del
ángulo de dirección (consulte la página 15).
• Sensores YAS-60
™
o YAS-70X™ para velocidad de derrape/
aceleración lateral de Bendix® (generalmente se montan en un
refuerzo transversal cercano a la parte posterior de la cabina
del vehículo)
• Sensores de exigencia de frenado (se instalan en los circuitos
primarios y secundarios de entrega)
• Sensor de carga (generalmente se instala en la bolsa de aire
de la suspensión)
• Una válvula de modulador adicional (válvula de modulador de
presión M-32
™
o M-32QR™ de Bendix®) que controla la presión
que se aplica a los frenos de remolque durante la intervención
del sistema.
Comunicación en serie
PLC
J1587 J1939
Conector
recto
FIGURA 4 – SENSORES DEL ÁNGULO DE DIRECCIÓN
Sensores de derrape/
aceleración lateral
(se muestran
dos ejemplos)
FIGURA 5 – SENSORES DE DERRAPE Y EXIGENCIA DE FRENADO/CARGA
ABS
fuera de
carretera
ATC
para
lodo/
nieve
Sensor de
exigencia de
frenado/carga
Relé
para
freno de
motor
Conector
de 90°
MONTAJE DE LA ECU
El controlador avanzado EC-60™ de Bendix® montado en la cabina no
está protegido contra la humedad y debe montarse en un área protegida
contra los riesgos del clima.
Todos los conectores del arnés del cableado deben estar debidamente
conectados. Se recomienda el uso de bloqueos secundarios.
Las ECU de la cabina utilizan conectores de la gama de productos
AMP MCP 2.8.
CONFIGURACIONES DEL HARWARE
Los controladores avanzados EC-60™ aceptan la aplicación de
instalaciones de hasta seis sensores/seis moduladores (6S/6M) con
ATC y control de torsión de arrastre. Todos los controladores avanzados
EC-60™ soportan PLC (consulte la tabla 1) y están disponibles en
modelos de 12 voltios.
CONTROLADORES AVANZADOS EC-60™ UTILIZAN ONDA
PORTADORA EN LÍNEAS DE ENERGÍA (PLC)
Todos los vehículos de remolque nuevos fabricados a partir del 1 de
marzo de 2001 cuentan con una luz indicadora de ABS del remolque
instalada en la cabina.
Los remolques fabricados a partir del 1 de marzo de 2001 transmiten el
estado del ABS del remolque mediante una línea de energía (cable azul
del conector J560) al tractor utilizando una señal de la onda portadora
en líneas de energía (PLC). Consulte las fi guras 6 y 7. Generalmente,
esta señal la transmite la ECU de ABS del remolque.
FIGURA 6 – LÍNEA DE ENERGÍA SIN SEÑAL PLC
3
Page 4
FIGURA 7 – LÍNEA DE ENERGÍA CON SEÑAL PLC
La aplicación de la tecnología PLC para la industria de uso pesado en
América del Norte se denomina “PLC4Trucks”.
El controlador avanzado EC-60™ es compatible con las comunicaciones
PLC según la norma SAE J2497.
SEÑAL PLC
Se puede utilizar un osciloscopio para medir o identifi car la presencia
de una señal PLC en la línea de energía. La señal PLC es una señal
modulada de amplitud y frecuencia. Según el fi ltrado y la carga en la línea
de energía, la amplitud de la señal PLC puede oscilar entre 5,0 mVp-p
y 7,0 Vp-p. Los valores sugeridos para el osciloscopio son acoplado de
AC, 1 voltio/div, 100 µseg/div. La señal se debe medir en la entrada de
la fuente de encendido del controlador EC-60
™
.
Nota: un remolque con ABS equipado con PLC o una herramienta de
diagnóstico PLC se debe conectar al vehículo para generar una señal
PLC en la línea de energía.
ENTRADAS DEL CONTROLADOR EC-60
™
Entradas de la batería y encendido
La ECU funciona a un voltaje de suministro nominal de 12 voltios. La
entrada de la batería se conecta directamente a través de un fusible
de 30 amperios a la batería.
La entrada de encendido se aplica utilizando un fusible de 5 amperios
en el circuito del interruptor de encendido.
Entrada con conexión a tierra
El controlador EC-60™ acepta una entrada con conexión a tierra.
Consulte la página 44 para ver el dibujo esquemático del sistema.
Entrada con conexión a tierra de la luz indicadora de ABS
Las ECU de cabina para controlador avanzado EC-60™ requieren una
segunda entrada con conexión a tierra (X1-12) para la luz indicadora de
ABS. El conector de arnés de cables X1 contiene un interbloqueo de luz
indicadora de ABS (X1-15), que crea un corto a tierra en el circuito de
luz indicadora ABS (X1-18) si el conector se quita de la ECU.
Sensor de velocidad de rueda WS-24™ de Bendix
El sensor de velocidad de rueda WS-24™ proporciona los datos de la
velocidad de la rueda al controlador EC-60™ (consulte la fi gura 2). Los
vehículos tienen un anillo activador (o “anillo de tono”) que es parte
del ensamblado de la rueda y, cuando esta gira, los dientes del anillo
activador pasan por el sensor de velocidad de la rueda y generan una
señal de CA. El controlador EC-60
en voltaje y frecuencia al cambiar la velocidad de la rueda.
™
recibe una señal de CA que varía
®
Las confi guraciones de los ejes del vehículo determinan la cantidad
de sensores de velocidad de rueda WS-24™ que se deben utilizar. Los
vehículos con un solo eje trasero requieren cuatro sensores de velocidad
de rueda. Los vehículos con dos ejes traseros pueden utilizar seis
sensores de velocidad de rueda para ofrecer un rendimiento óptimo.
Interruptor de diagnóstico de código de parpadeo
Un interruptor momentáneo que pone a tierra la salida de la luz
indicadora de ABS se utiliza para que la ECU entre en el modo de
diagnóstico de código de parpadeo y se ubica generalmente en el
tablero del vehículo.
Operación del interruptor y lámpara indicadora de ABS
fuera de carretera opcional
Los controladores avanzados EC-60™ utilizan un interruptor opcional
montado en el tablero para que el conductor ponga la ECU en el modo
ABS fuera de carretera. Consulte la sección “Modo ABS fuera de
carretera opcional” en la página 8 para obtener detalles adicionales.
En algunos caso, las ECU pueden ser ubicadas en el modo de ABS
fuera de carretera por uno de los otros módulos de control del vehículo
mediante el envío de un mensaje J1939 al controlador EC-60
(Si necesita saber si el controlador EC-60
™
utiliza un mensaje J1939
™
.
para hacer funcionar la luz, envíe un mensaje por correo electrónico a
ABS@bendix.com, especifi cando el número de pieza de la ECU o llame
al 1-800-AIR-BRAKE y hable con el Bendix TechTeam).
ADVERTENCIA: el modo de ABS fuera de carretera no se debe
utilizar en superfi cies normales y pavimentadas porque se pueden ver
afectados de manera adversa la estabilidad y el control del volante.
Cuando la ECU se pone en el modo de ABS fuera de carretera, la luz
indicadora de ABS parpadeará constantemente (a una velocidad de
una vez cada 2,5 segundos) para notifi car al conductor del vehículo
que está activo el modo fuera de carretera.
Operación del interruptor y lámpara indicadora de ATC
para lodo/nieve (fuera de carretera) opcional
también la página 8).
Los controladores avanzados utilizan un interruptor montado en el
tablero para que el conductor ponga la ECU en el modo ATC para
lodo/nieve.
Interruptor de luz de freno (SLS)
El controlador avanzado EC-60™ vigila el estado de las luces de freno del
vehículo. Ciertas funciones del vehículo como ATC y tracción en todas
las ruedas (AWD) utilizan el estado de las luces de freno para determinar
cuando el conductor aplica los frenos. Esto se puede proporcionar a la
ECU mediante las comunicaciones del J1939 o la entrada de hardware.
Sensores de exigencia de frenado
Los sensores de exigencia de frenado proporcionan al controlador una
indicación de presión de frenado aplicada por el conductor. Hay uno
instalado en el circuito primario del freno de aire y otro instalado en el
circuito secundario del freno de aire.
Sensor de carga
El sensor de carga proporciona al controlador una indicación de la
carga del vehículo. Generalmente se instala en una de las bolsas de
aire de la suspensión.
(consulte
4
Page 5

Sensor del ángulo de dirección SAS-60™ de Bendix
®
El sensor de ángulo de dirección (SAS) se utiliza para proporcionar al
controlador los datos del uso de la dirección por parte del conductor.
Informa al controlador sobre la posición del volante utilizando un enlace
de comunicaciones en serie dedicado que se comparte con el sensor de
velocidad de derrape. El controlador suministra las entradas de energía
y de conexión a tierra al sensor SAS-60
El sensor SAS-60
™
está disponible en dos estilos diferentes de
™
.
conectores de arnés de cableado. (Consulte la fi gura 4).
Sensores YAS-60™ o YAS-70X™ de Bendix® para velocidad
de derrape/aceleración lateral
Los sensores de velocidad de derrape/aceleración lateral de Bendix se
utilizan para proporcionar al controlador la indicación de la aceleración
lateral del vehículo y la rotación alrededor del eje vertical. Esta
información se proporciona al controlador utilizando un enlace de
comunicaciones en serie dedicado que se comparte con el sensor SAS-
™
60
. El controlador suministra las entradas de energía y de conexión a
tierra al sensor de velocidad de derrape.
SALIDAS DEL CONTROLADOR EC-60
™
Válvulas del modulador de presión (PMV) M-32™ y
M-32QR
™
de Bendix
El controlador EC-60™ opera las válvulas del modulador de presión
(PMV) M-32™ y M-32QR™ de Bendix® para modifi car la presión de aire
aplicada por el conductor a los frenos de servicio durante la activación de
ABS, ATC, RSP o YC (consulte las páginas 8-9). La PMV es una válvula
de control electroneumática y es la última por donde pasa el aire antes de
llegar a la cámara de frenado. Los solenoides de retención y liberación
del modulador se activan para “modular” o “controlar” la presión del freno
durante un evento de frenado con la función antibloqueo. El solenoide
de retención está normalmente abierto y el solenoide de liberación
está normalmente cerrado, de manera que la PMV permita que el aire
fl uya de manera nominal. Este diseño permite que se entregue aire a
las cámaras de frenado en caso de problemas eléctricos.
El controlador avanzado EC-60
controlar los frenos de servicios del remolque durante intervenciones
de estabilidad.
®
™
también utiliza una PMV adicional para
Válvula de control de tracción (TCV)
Los controladores avanzados EC-60™ utilizan dos TCV, una en el eje
de la dirección y una en el eje propulsor. La TCV puede ser una válvula
separada o integrada en la válvula de relé del eje posterior.
El controlador activará la TCV del eje propulsor durante eventos ATC
de frenado diferencial.
Durante las intervenciones de estabilidad, la ECU activará tanto la
TCV del eje de la dirección como del eje propulsor, según se requiera.
Salida de la luz de freno
El controlador proporciona una salida para controlar un relé que
enciende las luces de freno del vehículo durante intervenciones de
estabilidad. Esta información también está disponible al usar el enlace
de comunicaciones J1939.
Control de la luz indicadora de ABS con interruptor de
diagnóstico de códigos de parpadeo opcional
El controlador avanzado EC-60™ cuenta con circuitos internos para
controlar la luz indicadora de ABS en el tablero.
La luz de ABS se enciende:
1. Durante el encendido (es decir, cuando el vehículo se enciende)
por aproximadamente 3 segundos y se apaga después de que
la autoprueba se termine, siempre que no hayan códigos de
diagnóstico de fallas (DTC) en la ECU.
2. Cuando el funcionamiento total del ABS no está disponible debido
a la presencia de un DTC en la ECU.
3. Si la ECU está desenchufada o no tiene energía.
4. Cuando la ECU se coloca en el modo de ABS fuera de carretera
(la luz parpadea de manera constante a una velocidad de una vez
cada 2,5 segundos).
5. Para ver los códigos de parpadeo para propósitos de diagnóstico
después de activar el interruptor de diagnóstico externo.
El controlador EC-60
™
puede comunicarse con otros módulos de control
del vehículo para hacer funcionar la luz indicadora de ABS utilizando las
comunicaciones en serie. (Si necesita saber si este controlador EC-60
™
utiliza las comunicaciones en serie para hacer funcionar la luz, envíe
un mensaje por correo electrónico a ABS@bendix.com, especifi cando
el número de pieza de la ECU o llame al 1-800-AIR-BRAKE y hable
con el Bendix Tech Team).
Control de luz indicadora utilizando los enlaces de
comunicaciones en serie
Como se menciona anteriormente, según el fabricante del vehículo,
las luces indicadoras en el tablero (ABS, ATC, ESP y ABS del
remolque) se pueden controlar mediante enlaces de comunicaciones
en serie. En estos casos, el controlador EC-60™ enviará un mensaje
de comunicaciones en serie utilizando los enlaces J1939 o J1587 para
indicar el estado requerido de la luz o las luces. Otro módulo de control
del vehículo recibe el mensaje y controla la luz o las luces indicadoras.
Salida de desactivado de relé del freno de motor
La salida de desactivado de relé de freno de motor se puede usar para
controlar el relé de desactivado del freno de motor. Cuando se confi gura
para utilizar esta salida, la ECU encenderá el relé de desactivado del
freno de motor e inhibirá el uso del freno de motor según se necesite.
Comunicaciones en serie SAE J1939.
Un enlace de datos (SAE J1939) de la red de área del controlador
(CAN) se proporciona para la comunicación. Este enlace se usa para
varias funciones, tales como:
• Desactivar los dispositivos de freno de motor durante el
funcionamiento del ABS.
• Solicitar que el convertidor de torsión desactive el bloqueo durante
el funcionamiento del ABS.
• Compartir información como la velocidad de la rueda y el estado
de la ECU con otros módulos de control del vehículo.
Los controladores avanzados EC-60
para:
• Funciones de ATC y control de torsión de arrastre.
• Funciones de estabilidad del vehículo.
™
utilizan el enlace de datos J1939
5
Page 6
Control de la luz indicadora de ABS del remolque
El controlador avanzado EC-60™ activará la luz indicadora de ABS
del remolque (ubicada en el tablero) que indica el estado de la unidad
ABS del remolque en uno o más remolques o carretillas equipados
con la funcionalidad PLC. Generalmente, el controlador EC-60™
controla directamente la luz indicadora del ABS del remolque según la
información que recibe del ABS del remolque mediante el PLC.
En otros casos, algunos vehículos requieren que el controlador EC-60
™
active la luz indicadora del ABS del remolque comunicándose con otros
controladores del vehículo que utilizan las comunicaciones en serie.
(Si necesita saber si el controlador EC-60
™
utiliza un mensaje de
comunicaciones en serie para hacer funcionar la luz, envíe un mensaje
por correo electrónico a ABS@bendix.com, especifi cando el número
de pieza de la ECU o llame al 1-800-AIR-BRAKE y hable con el Bendix
TechTeam).
Comunicaciones en serie SAE J1708/J1587
Para propósitos de diagnóstico, se encuentra disponible un enlace
de datos SAE J1708, con implementación según las prácticas
recomendadas en la norma SAE J1587, así como también los mensajes
de estado de la ECU.
Control de bloqueo diferencial entre ejes
(caja de transferencia AWD)
Las ECU avanzadas pueden controlar el bloqueo diferencial entre ejes
(caja de transferencia AWD). Esto se recomienda para los vehículos con
AWD, pero la ECU debe confi gurarse específi camente para proporcionar
esta característica. Envíe un mensaje por correo electrónico a ABS@
bendix.com para obtener más detalles.
SECUENCIA DE ENCENDIDO
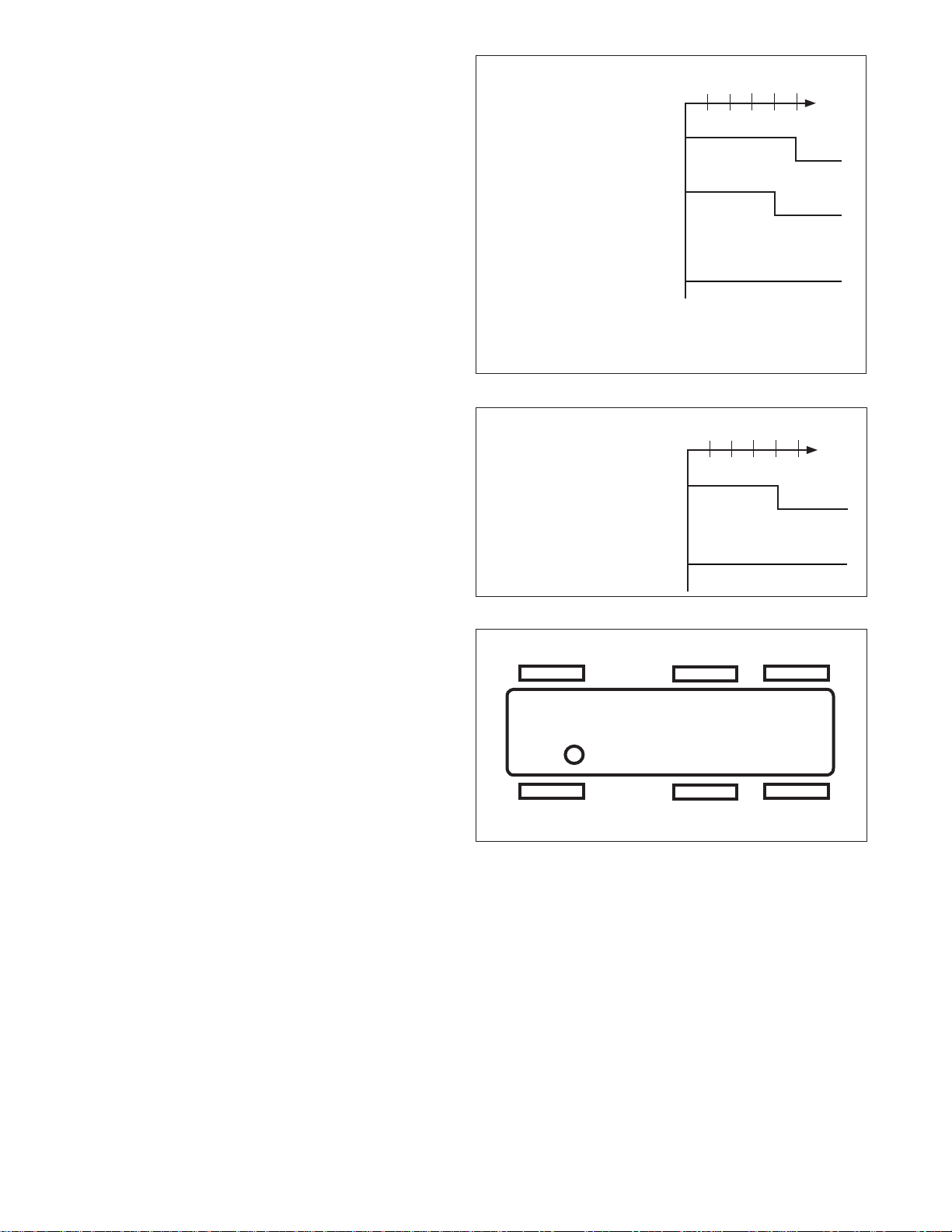
AVISO: El conductor del vehículo debe verifi car el funcionamiento
adecuado de todas las luces indicadoras instaladas (ABS, ATC/ESP y
ABS de remolque) cuando se aplica energía de encendido y durante
el funcionamiento del vehículo. Consulte las fi guras 8 y 9. Las luces
que no se encienden como se espera cuando se aplica la energía de
encendido o que permanecen encendidas, indican que es necesario
realizar el mantenimiento.
Indicadores
Aplicación
de energía
de estado del
sistema ABS
PLC)
ENCENDIDA
APAGADA
ENCENDIDA
APAGADA
ENCENDIDA
APAGADA
Luz indicadora de ABS con el
FIGURA 8 – SECUENCIA DE ENCENDIDO DE LAS LUCES DEL TABLERO ABS
vehículo encendido
Luz indicadora de ABS del
remolque (se detecta PLC)*
Luz indicadora de ABS del
remolque (no se detecta
*Algunos fabricantes de vehículos pueden encender las luces
indicadoras de ABS durante el encendido sin importar si se detecta
o no la señal de PLC del remolque. Consulte la documentación del
fabricante del vehículo para obtener más detalles.
0,5
Indicador de
estado del
sistema A TC/ESP
ATC/ESP activado
No hay ESP o ATC
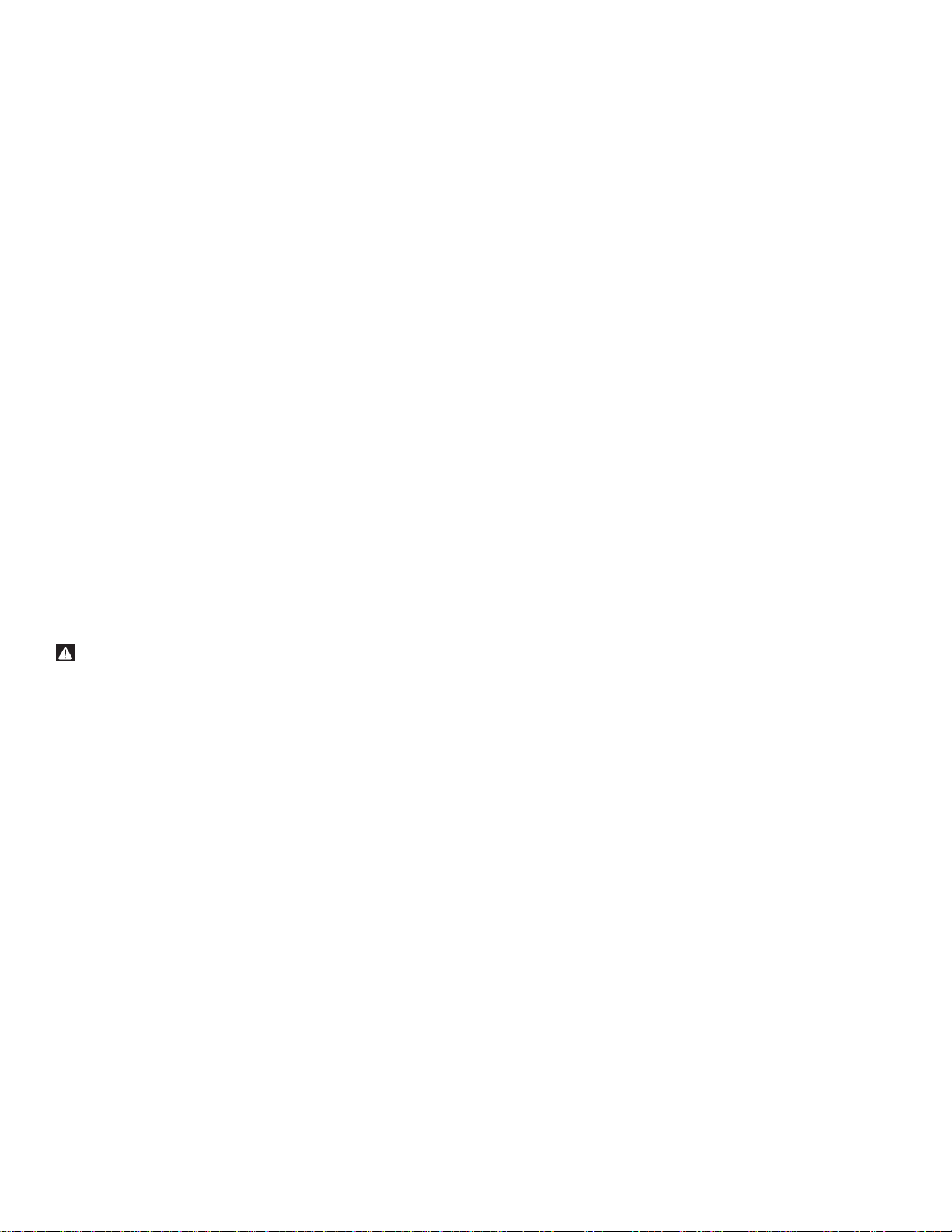
FIGURA 9 – SECUENCIA DE ENCENDIDO DE LA LUZ INDICADORA DE ATC
De dirección
derecha
ENCENDIDA
APAGADA
ENCENDIDA
APAGADA
De propulsor
Conductor
0,5
derecha
2,5
2,0
Aplicación
de energía
2,5
2,0
Derecha
adicional
3,0 (segundos)1,5
3,0 (segundos)1,5
Funcionamiento de la luz indicadora de ABS (verifi cación
de bombilla)
La ECU encenderá la luz indicadora de ABS durante aproximadamente
tres segundos cuando se aplica energía de encendido, luego se apagará
la luz si no hay códigos de diagnóstico de fallas detectados.
La ECU encenderá la luz indicadora de ABS cuando no esté disponible
el funcionamiento del ABS debido a un código de diagnóstico de falla.
En la mayoría de los casos aun está disponible el ABS parcial.
Funcionamiento de la luz de estado/indicadora de ATC/ESP
La ECU encenderá la luz ATC/ESP durante aproximadamente
2,5 segundos cuando se aplica la energía de encendido, luego se
apagará la luz si no hay códigos de diagnóstico de fallas detectados.
La ECU encenderá de manera continua la luz indicadora de ATC/
ESP cuando esté desactivado el ESP o ATC debido a un código de
diagnóstico de falla.
Durante una intervención de ESP o ATC, la luz parpadeará rápidamente
(2,5 veces por segundo). Cuando la ECU se coloca en el modo de ATC
para lodo/nieve (fuera de carretera), la luz parpadeará lentamente a una
velocidad de una vez cada 2,5 segundos).
6
De dirección
izquierda
FIGURA 10 – ORIENTACIÓN DEL VEHÍCULO (típica)
De propulsor
izquierda
Izquierda
adicional
Funcionamiento de la luz indicadora de ABS del remolque
La ECU controlará la luz indicadora de ABS del remolque cuando se
detecta una señal PLC (SAE J2497) de una ECU de ABS del remolque.
Prueba de confi guración de la ECU
Dentro de los dos segundos siguientes a la aplicación de la energía de
encendido, la ECU realizará una prueba para detectar la confi guración
del sistema con respecto a la cantidad de sensores de velocidad de la
rueda y las PMV. Esto se puede detectar de manera audible mediante
un ciclo rápido de las PMV.
(Nota: la ECU no realizará la prueba de confi guración cuando los
sensores de velocidad de la rueda muestren que el vehículo está en
movimiento).
Page 7

Prueba de modulación inicial de la válvula de modulador de
presión y válvula de control de tracción
Después de realizar la prueba de confi guración, el controlador EC-60™
realizará una prueba de modulación inicial, patentada por Bendix, para
la PMV y la TCV. La prueba de modulación inicial es una prueba eléctrica
y neumática de la PMV que ayuda al personal de mantenimiento en la
verifi cación del cableado e instalación apropiados de la PMV.
Cuando se aplica la energía de encendido, cada solenoide de modulador
recibe energía de manera breve. Si el sistema de aire está totalmente
cargado y el pedal del freno de servicio se pisa durante el encendido, el
modulador emite un solo sonido, agudo y audible, debido a la presión de
aire. Los moduladores se energizan siguiendo un patrón determinado,
como se indica a continuación: delantero derecho, delantero izquierdo,
posterior derecho, posterior izquierdo.
Esta prueba sólo se realiza cuando el vehículo está estacionado (si el
vehículo se desplaza no se realizará la prueba de modulación inicial).
El controlador EC-60
PMV en todos los moduladores instalados en el siguiente orden:
• PMV derecha del eje de dirección
• PMV izquierda del eje de dirección
• PMV derecha del eje propulsor
• PMV izquierda del eje propulsor
• PMV derecha del eje adicional
• PMV izquierda del eje adicional
• TCV del eje propulsor
El patrón se repetirá de nuevo.
Si está equipado con un controlador avanzado EC-60
completar la segunda ronda de pruebas de modulación inicial de las
PMV y TCV, el controlador (si está confi gurado para hacerlo) realizará
una prueba para realizar una verifi cación cruzada del funcionamiento de
la PMV del remolque con las luces de freno del vehículo. Si el circuito de
la PMV del remolque está mal cableado (lo cual incluye la TCV del eje
de dirección), la PMV aliviará una gran cantidad de aire o nada de aire.
AVISO: si hay códigos de diagnóstico de fallas activos, la parte de
verifi cación cruzada de las luces de freno de la prueba de modulación
inicial no se realizará hasta que se diagnostiquen todos los DTC
completamente y se realicen las reparaciones correspondientes con
éxito. El indicador de tablero de ESP/ATC también se encenderá cuando
hay DTC de ABS, ATC o ESP activos.
La ECU no realizará la prueba de modulación de la PMV cuando los
sensores de velocidad de la rueda muestren que el vehículo está en
movimiento.
™
realizará una prueba de modulación inicial de la
™
, luego de
Control del eje de dirección
Aunque ambas ruedas del eje de dirección cuentan con su propio
sensor de velocidad de la rueda y válvula de modulador de presión, el
controlador EC-60
™
combina la fuerza de frenado aplicada entre los
frenos de los dos ejes de dirección. El control de aplicación de frenos
patentado de Bendix, denominado regulación independiente modifi cada
(MIR), está diseñado para ayudar a reducir el desplazamiento hacia un
lado del volante durante un evento ABS en superfi cies de carreteras
con tracción pobre (o áreas de tracción pobre, es decir, superfi cies de
carreteras de asfalto con parches de hielo).
Control simple del eje propulsor (vehículo 4x2)
Para los vehículos con un solo eje propulsor posterior (4x2), el
controlador EC-60
según el comportamiento individual de las ruedas.
™
hace funcionar los frenos de manera independiente,
Control doble del eje propulsor (confi guración 4S/4M)
Para los vehículos con dos ejes propulsores (6x4) que usan la
confi guración 4S/4M, un modulador de ABS controla ambas ruedas
posteriores del lado derecho y el otro modulador controla ambas ruedas
posteriores del lado izquierdo. Ambas ruedas de cada lado reciben la
misma cantidad de presión de frenado durante una detención usando
ABS. Los sensores de velocidad de las ruedas posteriores deben
instalarse en el eje con la carga más liviana.
Control doblel de eje posterior (confi guración 6S/6M)
Para los vehículos con dos ejes posteriores (6x4, 6x2) que usan la
confi guración 6S/6M, las ruedas posteriores se controlan de manera
independiente. Por ende, la presión de aplicación de los frenos en cada
rueda se ajusta según el comportamiento individual de la rueda sobre
la superfi cie de la carretera.
Vehículos 6x2 con confi guraciones 6S/5M
Los vehículos 6x2 pueden utilizar la confi guración 6S/5M con un eje
adicional (eje trasero sin propulsión) con dos sensores, pero con una
sola válvula de modulador de presión. En este caso, la PMV controla
ambas ruedas en el eje adicional. Las ruedas del eje adicional
deben recibir la misma presión de frenado, según la rueda que esté
experimentando la mayor cantidad de deslizamiento.
Funcionamiento normal
Durante el frenado normal, la presión de frenado se proporciona
mediante la PMV del ABS y en la cámara de frenos. Si la ECU no detecta
el deslizamiento excesivo de las ruedas, no activará el control de ABS
y se aplica el frenando normal de servicio del vehículo.
FUNCIONAMIENTO DEL ABS
El ABS de Bendix® utiliza sensores de velocidad de las ruedas, válvulas
de modulador de presión ABS y una ECU para controlar cuatro o seis
ruedas del vehículo. El controlador EC-60™ vigila el movimiento de
giro de cada rueda de manera individual durante el frenado y ajusta o
modula la presión de frenado en el extremo de la rueda. Cuando se
detecta el deslizamiento excesivo o bloqueo de la rueda, el controlador
™
EC-60
activará las válvulas del modulador de presión para reducir
automáticamente la presión de frenado en uno o más extremos de la
rueda. Al realizar estas acciones, el sistema ABS ayuda a mantener la
estabilidad lateral y control del volante del vehículo durante la aplicación
fuerte de los frenos o durante el frenado en superfi cies resbaladizas.
7
Page 8
Control del sistema de freno de motor
En superfi cies de poca tracción, la aplicación del freno de motor puede
llevar a altos niveles de deslizamiento de las ruedas en las ruedas del
eje propulsor, que puede afectar de manera adversa la estabilidad del
vehículo.
Para evitar esto, el controlador EC-60
™
apaga el freno de motor tan
pronto se detecta un bloque en una (o más) de las ruedas del eje
propulsor.
Cuando la ECU se pone en modo de ABS fuera de carretera (en los
vehículos equipados con esta característica opcional), apagará el freno
de motor solamente cuando el ABS esté activo en la rueda del eje de
dirección y en la rueda del eje de propulsión.
Modo de ABS fuera de carretera opcional
En algunas condiciones de carretera, particularmente cuando la
superfi cie de conducción es suave, la distancia de detención con el ABS
convencional puede ser superior que sin el ABS. Esto puede suceder
cuando la rueda bloqueada en la superfi cie suave o grava suelta raspa
la superfi cie de la carretera frente al neumático, cambiando el valor de
fricción de rodado. Aunque la distancia de detención del vehículo con
una rueda bloqueada (sin la presencia del ABS) puede ser más corta
que la distancia de detención correspondiente con el control de ABS
convencional, se verán afectados el uso de la dirección y la estabilidad
del vehículo.
Los controladores avanzados EC-60
™
cuentan con un interruptor opcional
en el tablero que activa un modo de control de ABS modifi cado (conocido
también como “ABS fuera de carretera") que funciona de manera más
efectiva en estas condiciones de carretera suave y así acortar la distancia
de detención mientras mantiene el uso de la dirección y la estabilidad
óptimos del vehículo.
ADVERTENCIA: el modo de ABS fuera de carretera no se debe
utilizar en superfi cies normales y pavimentadas porque se puede
reducir la estabilidad y el control del volante. La luz indicadora de
ABS parpadeará lentamente para indicar al conductor que el modo
de ABS fuera de carretera está activo.
PRECAUCIÓN: cuando el modo de ABS fuera de carretera está
activo, las funciones de estabilidad se desactivan cuando la
velocidad es inferior a 40 kph (25 mph). La luz de tablero ATC/
ESP se encenderá para indicar al conductor que el sistema de
estabilidad está desactivado.
El fabricante del vehículo debe proporcionar la función de ABS fuera
de carretera opcional solamente para los vehículos que funcionan en
superfi cies sin pavimentar o que se usan en aplicaciones fuera de
carretera; además, el fabricante es responsable de asegurar que los
vehículos equipados con la función de ABS fuera de carretera cumplan
con todos los requisitos FMVSS-121 y que tengan las indicaciones e
instrucciones apropiadas para el conductor.
El conductor del vehículo activa la función fuera de carretera mediante
un interruptor en el tablero. Una luz indicadora de ABS que parpadea
indica al conductor que la función de ABS fuera de carretera está activa.
Para salir del modo de ABS fuera de carretera debe presionar y soltar
el interruptor. Un nuevo ciclo de encendido hará que la ECU salga del
modo de ABS fuera de carretera.
Vehículos con tracción en todas las ruedas (AWD)
Los vehículos AWD con un diferencial entre ejes activado (eje de
dirección a eje posterior)/caja de transferencia AWD pueden tener
8
efectos negativos en el rendimiento del ABS. El rendimiento óptimo
del ABS se logra cuando los diferenciales bloqueables se desactivan,
permitiendo el control individual de la rueda.Los controladores
™
avanzados EC-60
se pueden programar específi camente para que
esta confi guración controle el solenoide de bloqueo/desbloqueo del
diferencial en la caja de transferencia AWD. Cuando se programa para
hacerlo, la ECU desactivará el eje de interbloqueo/caja de transferencia
AWD para un evento de ABS y se reactivará cuando termine el evento
de ABS.
FUNCIONAMIENTO DEL ATC
Descripción general de la función del ATC
Al igual que el ABS mejora la estabilidad del vehículo durante el frenado,
el ATC mejora la estabilidad y la tracción durante la aceleración del
vehículo. La función ATC del controlador EC-60
™
utiliza la misma
información de la velocidad de la rueda y del control del modulador de
la función ABS. El controlador EC-60™ detecta la velocidad excesiva de
la rueda de propulsión, compara la velocidad de las ruedas frontales
sin propulsión y reacciona para ayudar a controlar el deslizamiento de
las ruedas. El controlador se puede confi gurar para usar la limitación
de la torsión del motor y/o el frenado diferencial para controlar el
deslizamiento de las ruedas. Para obtener un rendimiento óptimo del
ATC, se recomiendan ambos métodos.
Salida de luz ATC/ESP/entrada de interruptor de lodo/nieve
Las ECU avanzadas controlan la luz de tablero de ATC/ESP como se
describe a continuación.
La luz de tablero de ATC/ESP se enciende:
1. Durante el encendido (es decir, cuando el vehículo se enciende)
por aproximadamente 2,5 segundos y se apaga después de que
la autoprueba se termine, siempre que no hayan códigos de
diagnóstico de fallas.
2. Cuando se desactiva ESP o ATC por cualquier razón.
3. Durante un evento de ESP o ATC (la luz parpadeará rápidamente
a una velocidad de 2,5 veces por segundo).
4. Cuando la ECU se coloca en el modo de ATC fuera de carretera
(la luz parpadea de manera constante a una velocidad de una vez
cada 2,5 segundos). Esto notifi ca al conductor del vehículo que
está activo el modo ATC para lodo/nieve.
5. Cuando la ECU se pone en modo ABS fuera de carretera. Cuando
está en este modo, el ESP se desactiva por debajo de 40 kph (25
mph) y su estado inactivo se indica mediante una luz ATC/ESP que
se ilumina de manera constante.
Frenado diferencial
El frenado diferencial con ATC se activa automáticamente cuando la o
las ruedas de propulsión en un lado del vehículo comienzan a deslizarse
excesivamente, que generalmente sucede en superfi cies de carretera
con parches de hielo. El sistema de tracción aplicará levemente el
freno a la o las ruedas de propulsión que se deslizan excesivamente.
El diferencial del vehículo luego proporcionará propulsión a las ruedas
en el otro lado del vehículo.
El frenado diferencial (como parte de la funcionalidad ATC) está
disponible a velocidades de hasta 40 kph (25 mph).
Page 9

Desactivado del frenado diferencial ATC
El frenado diferencial ATC se desactiva en las siguientes condiciones:
1. Durante el encendido (es decir, cuando se enciende el vehículo),
hasta que la ECU detecta una aplicación del freno de servicio.
2. Si la ECU recibe un mensaje J1939 que indica que el vehículo está
estacionado.
3. Cuando el modo de prueba con dinamómetro está activo. El modo
de prueba con dinamómetro se activa usando el interruptor de
diagnóstico de códigos de parpadeo o utilizando la herramienta
de diagnóstico (tal como diagnósticos ACom
®
de Bendix®).
4. Como respuesta a una solicitud de comunicaciones en serie de
una herramienta de diagnóstico.
5. Si la función de frenado diferencial ATC se activa durante un largo
tiempo para evitar el sobrecalentamiento de los frenos. Lleva
aproximadamente 3 minutos continuos de activación para que
se agote el tiempo límite. Cuando se agota el tiempo límite, se
requieren aproximadamente 2 minutos de enfriamiento para que
se pueda volver a utilizar el frenado diferencial ATC.
6. Cuando se detectan ciertas condiciones de códigos de diagnóstico
de fallas.
Dispositivo limitador de la torsión del motor con control
de tracción Smart ATC
El controlador EC-60™ utiliza el dispositivo limitador de la torsión del
motor para controlar el deslizamiento de la rueda del eje propulsor.
Esto se comunica al módulo de control del motor (usando J1939) y
está disponible en todas las velocidades del vehículo.
Control de tracción Smart ATC™ de Bendix
El controlador EC-60™ cuenta con una función adicional que se conoce
como control de tracción Smart ATC™. El control de tracción Smart
ATC™ vigila la posición del pedal del acelerador (usando J1939) para
ayudar a proporcionar la tracción y estabilidad óptimas del vehículo.
Al determinar la entrada de aceleración del conductor y adaptando el
deslizamiento del objetivo de las ruedas de propulsión a la situación de
manejo, el control de tracción Smart ATC
de las ruedas cuando se presiona el pedal del acelerador más allá del
nivel preestablecido.
El deslizamiento de las ruedas permitido por el Smart ATC
al conducir en curva para mejorar la estabilidad.
™
®
™
permite mayor deslizamiento
™
disminuye
Desactivado del control del motor ATC y del control de
tracción Smart ATC
El control del motor ATC y el control de tracción Smart ATC™ se
desactivarán bajo las condiciones siguientes:
1. Como respuesta a una solicitud de comunicaciones en serie de
una herramienta fuera del sistema.
2. Durante el encendido hasta que la ECU detecte una aplicación de
los frenos de servicio.
3. Si la ECU recibe un mensaje J1939 que indica que el vehículo está
estacionado.
4. Si el modo de prueba con dinamómetro está activo. Esto se puede
lograr mediante una herramienta fuera del sistema o del interruptor
de diagnóstico de códigos de parpadeo.
5. Cuando se detectan ciertas condiciones de códigos de diagnóstico
de fallas.
™
Modo de ATC para lodo/nieve (fuera de carretera) opcional
En algunas condiciones de carretera, el conductor del vehículo puede
desear el deslizamiento adicional de las ruedas propulsoras cuando el
ATC está activo. El controlador avanzado EC-60™ cuenta con un modo
de control opcional para permitir este rendimiento adicional.
El conductor del vehículo puede activar la función de lodo/nieve mediante
un interruptor en el tablero. De modo alternativo, se puede utilizar un
mensaje J1939 para poner el vehículo en este modo. La luz indicadora
de ATC/ESP parpadeará de manera constante a una velocidad de una
vez cada 2,5 segundos para confi rmar que está activo el modo ATC
para lodo/nieve.
Para salir del modo de ATC para lodo/nieve debe presionar y soltar el
interruptor.
Descripción general del funcionamiento del control de
torsión de arrastre
Los controladores avanzados EC-60™ cuentan con una característica
que se denomina control de torsión de arrastre que reduce el
deslizamiento de la rueda en un eje propulsor debido a la inercia de
una línea de propulsión. Esta condición se soluciona aumentando la
torsión del motor para superar la inercia.
El control de torsión de arrastre aumenta la estabilidad del vehículo en
superfi cies de carreteras de poca tracción al cambiar a una velocidad
más baja de la caja o al usar el freno de motor.
9
Page 10

ABS AVANZADO CON CONTROL DE ESTABILIDAD
Un ejemplo real de cómo
funciona el sistema RSP:
La velocidad excesiva para las
condiciones de la carretera
crea fuerzas que exceden el
umbral en el cual es probable
que un vehículo se vuelque en
una superfi cie de mayor fricción.
El sistema reduce automáticamente la
torsión del motor y aplica los frenos de
servicio (según el riesgo proyectado
de vuelco) para reducir la velocidad del
vehículo, y así reducir la tendencia a
volcarse.
Un ejemplo real de cómo funciona el sistema el control de
derrape:
La velocidad excesiva excede el umbral, creando una situación en
la que es posible que el vehículo gire y provoque un incidente con
efecto tijera.
®
El sistema de control de derrape de Bendix
motor y aplica los frenos de manera selectiva para reducir la tendencia
de crear un efecto tijera.
reduce la aceleración del
FIGURA 11 – EJEMPLO DE RSP
Descripción general
El sistema de estabilidad ESP reduce el riesgo de vuelco, efecto tijera
y otros tipos de pérdida de control. Las características de ESP incluyen
el programa de estabilidad antivuelco (RSP) y control de derrape.
Durante el funcionamiento, la ECU del sistema ABS avanzado de Bendix
compara constantemente los modelos de rendimiento del movimiento
real del vehículo, mediante el uso de los sensores de velocidad de las
ruedas del sistema ABS, como también de los sensores laterales, de
derrape y de ángulo de dirección. Si el vehículo muestra una tendencia
a dejar la dirección apropiada de desplazamiento del vehículo o si los
valores de umbral crítico se aproximan, el sistema intervendrá para
ayudar al conductor.
Programa de estabilidad antivuelco
El RSP de Bendix, que es un elemento del sistema general ESP,
soluciona las condiciones de vuelco. En caso de un evento potencial de
vuelco, la ECU anulará la aceleración y aplicará rápidamente la presión
de frenado en todos los extremos de las ruedas para desacelerar el
vehículo. El nivel de aplicación de frenado durante un evento RSP será
proporcional al riesgo de vuelco.
Consulte la fi gura 11.
Estabilidad de derrape
La estabilidad de derrape contrarresta a la tendencia de un vehículo de
girar en su eje vertical. Durante el funcionamiento, si la fricción entre
la superfi cie de la carretera y los neumáticos no es sufi ciente para
hacer oposición a las fueras laterales, uno o más neumáticos pueden
deslizarse, haciendo que el camión/tractor gire. Estos eventos se
10
FIGURA 12 – EJEMPLO DE CONTROL DE DERRAPE
denominan una situación de “subviraje" (cuando hay falta de respuesta
a la entrada de dirección debido al deslizamiento de los neumáticos
en el eje de la dirección) o “sobreviraje” (cuando la parte posterior del
tractor se desliza debido al deslizamiento de los neumáticos del eje
posterior). Generalmente, los vehículos con distancia entre ejes más
cortas (por ejemplo, los tractores) tienen menor estabilidad de derrape
natural, mientras que los vehículos con distancia entre ejes más largas
(por ejemplo, los camiones rectos) cuentan con mayor estabilidad de
derrape natural. Los factores que infl uyen en la estabilidad de derrape
son: distancia entre ejes, suspensión, geometría de la dirección,
distribución del peso de la parte frontal a la parte posterior y el ancho
de tracción del vehículo.
Control de derrape
El control de derrape responde a una gama amplia de escenarios
de superfi cie de poca a mucha fricción, incluso vuelco, efecto tijera y
pérdida de control. Es el sistema recomendado para todos los vehículos
motorizados y es especialmente crítico para los tractores que llevan
remolques. En el caso de que el vehículo se deslice (situaciones de
subviraje o sobreviraje), el sistema reducirá la aceleración y luego
frenará una o más de las “cuatro esquinas” del vehículo (además
de potencialmente aplicar los frenos del remolque), aplicando así la
contrafuerza para alinear el vehículo de mejor manera con la trayectoria
correcta de desplazamiento.
Por ejemplo, en una situación de sobreviraje, el sistema aplica el freno
frontal de “afuera”; mientras que en una condición de subviraje se aplica
el freno posterior "interior". (Consulte la fi gura 12).
Page 11
INFORMACIÓN IMPORTANTE DE SEGURIDAD DEL SISTEMA
DE ESTABILIDAD ESP® DE BENDIX
®
El ESP puede reducir automáticamente la velocidad del
vehículo
El ESP puede hacer que el vehículo desacelere automáticamente. El
ESP puede reducir la velocidad del vehículo con o sin la necesidad
de que el conductor presione el pedal del freno y aun cuando el
conductor acelere.
Para minimizar la posibilidad de una desaceleración inesperada y reducir
el riesgo de una colisión, el conductor debe:
• Evitar las maniobras agresivas de conducción, como hacer giros
fuertes o cambiar de carril de manera abrupta a altas velocidades,
ya que esto puede activar el sistema de estabilidad.
• Conducir el vehículo siempre de manera segura y a la defensiva,
anticipar los obstáculos y prestar atención a la carretera,
condiciones meteorológicas y de tráfi co. Los sistemas de estabilidad
ABS, ATC y ESP no son sustitutos para la conducción prudente y
cuidadosa.
Remolcar doble o triple remolques puede reducir la
efectividad de los sistemas de estabilidad
El ESP está diseñado y optimizado para camiones y para tractores que
remolcan un solo remolque. Si el tractor que está equipado con ESP se
utiliza para remolcar varias combinaciones de remolques (conocidos
como “dobles” o “triples”), la efectividad del sistema ESP se verá
reducida en gran proporción. Se requiere de extremo cuidado en
la conducción al remolcar dobles o triples. Se debe evitar la velocidad
excesiva y las maniobras bruscas, como realizar giros fuertes,
repentinos en la dirección o abruptos cambios de carril.
cambios
Para maximizar la efectividad del ESP:
• Las cargas deben estar debidamente aseguradas en todo momento.
• Los conductores deben ejercer precaución extrema en todo
momento y evitar giros fuertes, cambios repentinos en la dirección
o abruptos cambios de carril a altas velocidades, sobre todo si:
› el vehículo remolca cargas que pueden desplazarse,
› el vehículo o la carga tiene un centro de gravedad (CG) alto
o fuera del centro cuando se carga o
› el vehículo remolca dobles o triples.
Modifi caciones del chasis del camión
Si se modifi can los componentes del chasis del vehículo (por ejemplo,
se hace una extensión o reducción de la distancia entre los ejes, adición
o eliminación de un eje de apoyo adicional, un cambio considerable del
chasis como la conversión de un tractor en un camión, o modifi cación
de un componente de eje, suspensión o sistema de dirección) se debe
desactivar el sistema ESP
reemplace la ECU avanzada EC-60 por una ECU EC-60 premium y fi je
el conector X4 que ya no será utilizado. La luz indicadora de ATC/ESP
seguirá funcionando como una luz indicadora de ATC y debe asignarse
como ATC solamente.
ADVERTENCIA: si no se desactiva el sistema ESP en un vehículo
modifi cado, pueden producirse problemas serios de frenado o
rendimiento, incluso intervenciones innecesarias del sistema ESP.
Esto puede producir una pérdida de control del vehículo. Además,
retire todos los avisos de la cabina (por ejemplo, las etiquetas del
visor, etc.) que se usan para indicar que se instaló el Bendix ESP y
haga cualquier anotación necesaria en el o los manuales del vehículo
para que el conductor no se equivoque con las opciones de ABS
que están instaladas en el vehículo.
®
de Bendix®. Haga que un mecánico capacitado
Limitaciones de los sistemas de estabilidad
La efectividad del sistema de estabilidad ESP puede verse reducida
en gran manera si:
• La carga se desplaza debido a la retención indebida, daños por
accidente o la naturaleza movediza e inherente de algunas cargas
(por ejemplo, carnes que cuelgan, animales vivos o cisternas
parcialmente cargadas).
• El vehículo tiene un centro de gravedad (CG) inusualmente alto o
fuera del centro.
• Un lado del vehículo se sale del pavimento a un ángulo que es
demasiado grande para que sea contrarrestado por la reducción
de velocidad.
• El vehículo se utiliza para remolcar combinaciones de remolques
dobles o triples.
• Se realizan maniobras muy rápidas de cambio de dirección a altas
velocidades.
• Hay problemas mecánicos con la nivelación de la suspensión del
tractor o remolque que resulten en cargas desequilibradas.
• El vehículo maniobra en una carretera con mucho peralte que crea
fuerzas laterales adicionales debido al peso (masa) del vehículo o
una desviación entre las tasas de derrape previstas y reales.
• Las ráfagas de viento son sufi cientemente fuertes para ocasionar
fuerzas laterales signifi cativas sobre el vehículo y cualquier vehículo
remolcado.
Modifi caciones de la ubicación del sensor
No se debe cambiar la ubicación y orientación del sensor de ángulo de
dirección y el sensor de la velocidad de derrape. Cuando se realice el
servicio, se deben usar componentes idénticos en la misma orientación
(utilizando los soportes y requisitos de torsión del fabricante de equipo
original). Durante la instalación, siga las normas de nivelación del
fabricante de equipo original.
Recalibración del sensor del ángulo de dirección
Cuando se realice mantenimiento o reparaciones al mecanismo de la
dirección, el varillaje, el engranaje de la dirección, ajuste de la pista de
la rueda o si se reemplaza el sensor del ángulo de dirección, se debe
realizar una recalibración del sensor del ángulo de dirección.
¡ADVERTENCIA! Si no se recalibra el sensor del ángulo de
dirección, es posible que el sistema de control de derrape no
funcione correctamente, lo que puede resultar en accidentes
que produzcan la pérdida de control del vehículo. Consulte la
página 15 de este documento para obtener más detalles sobre este
procedimiento.
11
Page 12

MODO DE PRUEBA CON DINAMÓMETRO
PRECAUCIÓN: se deben desactivar el ATC y ESP antes de realizar
la prueba con dinamómetro. Cuando se activa el modo de prueba con
dinamómetro, se apagan el control de freno ATC y el control del motor,
junto con el control de torsión de arrastre y ESP. Este modo de prueba
se usa para evitar la reducción o aumento de la torsión y la activación
del control de freno cuando el vehículo funciona con un dinamómetro
para realizar la prueba.
Se puede activar el modo de prueba con dinamómetro presionando y
liberando el interruptor de códigos de parpadeo de diagnóstico cinco
veces o usando una herramienta de diagnóstico manual o basada en PC.
Los controladores avanzados EC-60
el modo de prueba con dinamómetro, así se quite y vuelva a aplicar la
energía a la ECU. Para salir del modo de prueba, presione y suelte el
interruptor de códigos de parpadeo tres veces o use una herramienta
de diagnóstico manual o basada en PC.
™
permanecerán encendidos en
PRECAUCIÓN: la efectividad del sistema ESP depende de
la precisión de la velocidad del vehículo. Si hay un cambio
considerable en el cambio del tamaño del neumático como
que se debe cambiar el valor del odómetro, el valor del tamaño
de los neumáticos del controlador avanzado de ABS debe ser
reprogramado con estos nuevos valores al mismo tiempo por un
mecánico certifi cado.
IMPACTO DEL SISTEMA DURANTE CÓDIGOS DE FALLA
ACTIVOS
APAGADO PARCIAL DEL ABS
Según el componente donde se detecte el código de fallas, las funciones
ABS, ATC y ESP pueden estar total o parcialmente desactivadas.
Incluso con la luz indicadora de ABS encendida, el controlador EC-60
todavía puede proporcionar funciones de ABS en las ruedas que no
están afectadas. El controlador del sistema ABS debe ser reparado lo
más pronto posible.
™
CALIBRACIÓN AUTOMÁTICA DEL TAMAÑO DEL
NEUMÁTICO
La ECU requiere una proporción de circunferencia de rodado precisa
entre los neumáticos del eje de la dirección y el eje de propulsión para que
ABS, ATC y ESP funcionen de manera óptima. Por esta razón, se realiza
el proceso de control continuo en el que se calcula la proporción precisa.
Este valor calculado se almacena en la memoria de la ECU siempre que
se cumplan las siguiente condiciones:
1. La proporción de la circunferencia de rodado esté dentro del rango
permisible.
2. La velocidad del vehículo es superior a aproximadamente 19 kph
(12 mph).
3. No se lleva a cabo la aceleración o desaceleración.
4. No hay códigos de diagnóstico de fallas activos del sensor de
velocidad.
La ECU se proporciona con un valor de proporción de 1,00 como valor
preestablecido. Si la alineación automática del tamaño del neumático
calcula un valor diferente, esto se usa para sobrescribir el valor original
en la memoria. Este proceso adapta las funciones ABS y ATC al vehículo.
Tamaños aceptables de neumático
El cálculo de velocidad para un anillo activador con 100 dientes se basa
en el tamaño preestablecido del neumático de 510 revoluciones por
cada 1,61 km (1 milla). Este valor se basa en la circunferencia real de
rodamiento de los neumáticos, que varía según el tamaño, desgaste y
presión del neumático, la carga del vehículo, entre otros.
La sensibilidad de respuesta del ABS se reduce cuando la circunferencia
real de rodamiento es excesiva en todas las ruedas. Para un anillo
activador de 100 dientes, la cantidad mínima de revoluciones por 1,61 km
(1 milla) es de 426 y el máximo es de 567. La ECU fi jará códigos de
diagnóstico de falla si la cantidad de revoluciones está fuera de este rango.
Además, el tamaño de los neumáticos en el eje de dirección comparado
con los neumáticos en el eje propulsor también debe estar dentro de los
rangos de diseño del sistema ABS. Para evitar códigos de diagnóstico
de falla, la proporción de la circunferencia efectiva de rodamiento del eje
de dirección, dividida entre la circunferencia efectiva de rodamiento del
eje propulsor debe estar entre 0,85 y 1,15.
Código de diagnóstico de fallas del modulador de ABS del
eje de dirección
El ABS en la rueda afectada se desactiva. El ABS y ATC en todas las
demás ruedas permanecen activos. El ESP está desactivado.
Código de diagnóstico de fallas del modulador de ABS del
eje propulsor/eje adicional
El ATC está desactivado. El ABS en la rueda afectada se desactiva.
El ABS en todas las demás ruedas permanece activo. El ESP está
desactivado.
Código de diagnóstico de fallas del sensor de velocidad
del eje de dirección
La rueda con el código de diagnóstico de falla aún sigue siendo
controlada usando la entrada del sensor de velocidad de la rueda
restante en el eje de dirección. El ABS en las ruedas posteriores
permanece activo. El ATC y ESP se desactivan.
Código de diagnóstico de fallas del sensor de velocidad
del eje propulsor/eje adicional
El ATC y ESP se desactivan. En un sistema de cuatro sensores, el ABS
en la rueda afectada se desactiva, pero el ABS en las demás ruedas
permanece activo.
En un sistema de seis sensores, el ABS permanece activo usando la
entrada del sensor de ruedas posteriores restante en el mismo lado.
Código de diagnóstico de fallas del modulador de ATC
El ATC y ESP se desactivan. El ABS permanece activo.
Código de diagnóstico de fallas de comunicaciones J1939
El ATC y ESP se desactivan. El ABS permanece activo.
Códigos de diagnóstico de fallas de la ECU
El ABS, ATC y ESP se desactivan. El sistema regresa al frenado normal.
Códigos de diagnóstico de fallas de voltaje
Mientras el voltaje está fuera de rango, el ABS, ATC y ESP se desactivan.
El sistema regresa al frenado normal. Cuando se restablece el nivel
de voltaje correcto, estará disponible la función total de ABS y ATC. El
rango de voltaje de operación es de 9,0 a 17,0 VCC.
12
Page 13

Código de diagnóstico de falla del sensor del ángulo de
dirección
El ESP está desactivado. El ABS y ATC permanecen activos.
Código de diagnóstico de falla del sensor de velocidad de
derrape/aceleración lateral
El ESP está desactivado. El ABS y ATC permanecen activos.
Código de diagnóstico de falla del sensor de presión de
exigencia de frenado
El ESP está desactivado. El ABS y ATC permanecen activos.
Código de diagnóstico de falla del sensor de carga
El ESP está desactivado. El ABS y ATC permanecen activos.
Código de diagnóstico de falla de la TCV del eje de
dirección
El ESP está desactivado. El ABS y ATC permanecen activos.
Códigos de diagnóstico de falla de la PMV del remolque
El ESP está desactivado. El ABS y ATC permanecen activos.
RECONFIGURACIÓN DEL SISTEMA
El controlador EC-60™ está diseñado para permitir que el técnico cambie
los valores preestablecidos del sistema (seleccionado por el fabricante
de equipo original del vehículo) para proporcionar características
adicionales o personalizadas.
Según el modelo, las características personalizables incluyen los valores
de control del ABS, comunicaciones con el módulo del motor, etc.
Muchos de estos valores se pueden reconfi gurar usando un dispositivo
manual o software basado en PC, como el programa de diagnóstico
®
ACom
de Bendix®.
RECONFIGURACIÓN DE LA ECU
La reconfi guración del controlador EC-60™ se puede realizar utilizando
un interruptor de código de parpadeo o utilizando una herramienta de
diagnóstico manual o basada en PC.
Nota: durante el proceso de reconfi guración e independientemente
de cualquier reconfi guración que realice el técnico, la ECU verifi cará
automáticamente el enlace en serie J1939 y se comunicará con otros
módulos del vehículo. En específi co, si el vínculo en serie muestra que
el vehículo cuenta con un dispositivo de freno de motor, la ECU se
confi gurará a sí misma para comunicarse con el dispositivo de freno
de motor para mejorar el rendimiento del ABS. Por ejemplo, si la ECU
detecta la presencia de un relé de desactivación del freno de motor
durante una reconfi guración, se confi gurará a sí misma para controlar el
relé y desactivar el dispositivo de freno de motor, según sea necesario.
Reconfi guración mediante el interruptor de código de parpadeo
Presione el interruptor de código de parpadeo asegurándose de que
no haya energía de encendido en el controlador EC-60
activar la energía de encendido, presione y suelte el interruptor siete
veces para iniciar el evento de reconfi guración.
™
. Después de
Herramienta de diagnóstico
Se puede iniciar un evento de reconfi guración usando una herramienta
de diagnóstico manual o basada en PC para comunicarse con la ECU
mediante el enlace diagnóstico SAE J1587.
Confi guración 6S/5M
Los controladores avanzados EC-60™ configurarán para el
funcionamiento 6S/5M cuando se inicia un evento de reconfi guración
y la ECU detecta que una PMV de eje adicional se cablea como se
describe a continuación:
Conector de la PMV Conector de la ECU
Sujetar Sujeción del eje derecho adicional
Liberar Liberación del eje izquierdo adicional
Común Sujeción común del eje derecho
13
Page 14
Solución de problemas: generales
NORMAS GENERALES DE SEGURIDAD
¡ADVERTENCIA! LEA Y SIGA ESTAS INSTRUCCIONES
PARA EVITAR LESIONES PERSONALES O LA MUERTE:
Al trabajar en un vehículo o en sus alrededores, se deben tomar
las siguientes precauciones generales en todo momento:
1. Estacione el vehículo sobre una superfi cie nivelada, aplicando
el freno de estacionamiento y bloqueando siempre las ruedas.
Siempre use gafas de seguridad.
2. Detenga el motor y retire la llave de encendido cuando
trabaje debajo o alrededor del vehículo. Al trabajar en el
compartimiento del motor, éste se debe apagar y la llave de
encendido se debe retirar. Cuando las circunstancias exijan
que el motor esté funcionando, se debe ejercer EXTREMO
CUIDADO para evitar lesiones personales que podrían resultar
del contacto con componentes en movimiento, giratorios, que
presentan fugas, calientes o cargados eléctricamente.
3. No intente instalar, retirar, armar o desarmar un componente
hasta que haya leído y entendido completamente los
procedimientos recomendados. Use solamente las
herramientas adecuadas y observe todas las precauciones
pertinentes al uso de dichas herramientas.
4. Si el trabajo se está realizando en el sistema neumático de los
frenos del vehículo o en cualquier sistema neumático auxiliar
que esté presurizado, asegúrese de descargar la presión de
aire de todos los depósitos antes de empezar CUALQUIER
trabajo en el vehículo. Si el vehículo está equipado con un
sistema secador de aire AD-IS
depósito de secador, asegúrese de descargar el depósito de
purga.
5. Desactive el sistema eléctrico siguiendo los procedimientos
recomendados por el fabricante del vehículo, de tal manera
que se elimine con seguridad toda la energía eléctrica del
vehículo.
6. Nunca exceda las presiones recomendadas por el fabricante.
7. Nunca conecte ni desconecte una manguera o línea que tenga
presión; puede saltar con un movimiento de latigazo. Nunca
retire un componente o un tapón a menos que esté seguro
de que se ha descargado toda la presión del sistema.
8. Use solamente piezas de repuesto, componentes y juegos
marca Bendix
®
originales. Los herrajes, tubos, mangueras,
acoples, etc., de repuesto deben ser de tamaño, tipo y
resistencia equivalentes a los del equipo original y deben
estar diseñados específi camente para tales aplicaciones y
sistemas.
9. Los componentes con roscas desgastadas o con piezas
dañadas se deben reemplazar en lugar de repararlos. No
intente hacer reparaciones que requieran maquinado o
soldadura, a menos que esté específi camente establecido y
aprobado por el fabricante del componente y del vehículo.
®
de Bendix® o un módulo de
10. Antes de regresar el vehículo a servicio, asegúrese de que
todos los componentes y sistemas hayan sido restaurados a
su condición de funcionamiento correcta.
11. Para los vehículos que tienen control de tracción automático
(ATC, por su sigla en inglés), la función ATC se debe
deshabilitar (las luces indicadoras de ATC deben estar
encendidas) antes de realizar cualquier mantenimiento del
vehículo donde una o más ruedas de un eje propulsor se
levantan del piso y se mueven.
CÓMO QUITAR EL ENSAMBLAJE DEL CONTROLADOR
™
EC-60
1. Apague el vehículo.
2. Quite la mayor cantidad posible de contaminación antes de
desconectar las conexiones eléctricas.
3. Observe la posición de montaje del controlador EC-60
™
en el
vehículo.
4. Desconecte los conectores eléctricos del controlador EC-60
™
.
5. Quite y guarde los pernos de montaje que fi jan el controlador EC-
60™.
PRECAUCIÓN
El VIN (número de identifi cación del vehículo) se almacena en la
memoria interna de la ECU y se hace una verifi cación cruzada con
la ECU usando información obtenida de los otros controladores
del vehículo. Si el VIN almacenado en la ECU no concuerda con el
VIN obtenido del otro controlador del vehículo, la ECU generará un
DTC interno de falta de concordancia del VIN de la ECU.
En consecuencia, no cambie los controladores avanzados entre
un vehículo y otro.
CÓMO OBTENER UN NUEVO CONTROLADOR AVANZADO
™
EC-60
Si el controlador avanzado EC-60™ debe ser reemplazado, se deben
seguir ciertos pasos:
1. Registre el modelo del vehículo, VIN, año y fecha de fabricación
del vehículo.
2. Registre el número de pieza del controlador avanzado EC-60
™
.
3. Proporcione esta información a su departamento de servicio del
fabricante de equipo original local para obtener una ECU nueva. El
departamento de servicio del fabricante de equipo original instalará
el mismo juego de parámetros en el controlador nuevo que se
cargó en la ECU original en la planta ensambladora del fabricante
de equipo original.
INSTALACIÓN DE UN NUEVO CONTROLADOR AVANZADO
™
EC-60
¡PRECAUCIÓN! Al reemplazar el controlador EC-60™, verifi que con el
departamento de servicio del fabricante de equipo original del vehículo
que la unidad que va a instalar cuenta con el juego de parámetros
correcto. No hacer esto puede resultar en una pérdida de características
o rendimiento defectuoso del ESP.
14
Page 15
Para obtener información adicional, póngase en contacto con el
fabricante del vehículo, Bendix o su distribuidor autorizado de Bendix
local.
1. Posicione y fi je el controlador EC-60™ en la orientación de montaje
original utilizando los pernos de montaje que guardó después de
quitar la unidad. Utilice solamente la torsión necesaria para fi jar
fi rmemente la ECU en su posición. Si sobreaprieta los pernos de
montaje puede dañar el controlador EC-60
™
.
2. Vuelva a conectar los conectores eléctricos del controlador EC-60™.
3. Aplique la energía y vigile la secuencia de encendido del controlador
EC-60™ para verifi car el funcionamiento apropiado del sistema.
Consulte la sección Solución de problemas del cableado que empieza
en la página 41 para obtener más información sobre los arneses del
cableado.
ADVERTENCIA: el sistema de estabilidad ESP de Bendix está
validado para su uso con componentes Bendix
®
específi cos. Utilice
siempre piezas de repuesto Bendix® para evitar perjudicar el rendimiento
del sistema. Bendix no puede validar el uso seguro y confi able de
componentes sustitutos o alternativos que están disponibles de otros
fabricantes. Además, los suministradores de componentes ABS que no
son de Bendix® pueden realizar cambios de diseño en sus componentes
(sin el conocimiento o aprobación de Bendix) que pueden afectar de
manera negativa la confi abilidad del sistema antibloqueo y el rendimiento
del frenado.
CÓMO QUITAR EL SENSOR DE ÁNGULO DE DIRECCIÓN
Verifi caciones del servicio
1. Verifi que todo el cableado y los conectores. Algunas instalaciones
también incluyen un conector intermedio del sensor de ángulo de
dirección al arnés principal del cable del vehículo. Asegúrese de
que todas las conexiones estén libres de daños visibles.
2. Examine el sensor. Asegúrese de que el sensor, los tornillos de
montaje y la interfaz entre el concentrador y la columna de la
dirección no estén averiados.
Diagnósticos:
El sensor del ángulo de dirección solo funciona junto con la ECU
avanzada del ABS. No se pueden realizar diagnósticos independientes
en el sensor.
Retiro:
1. Quite el revestimiento de la columna de la dirección.
2. Según el fabricante, el sensor del ángulo de dirección puede estar
ubicado cerca del volante, lo que hace necesario quitar el volante,
o cerca de la junta en el mecanismo de dirección del vehículo, lo
que hace necesario desconectar este acople.
3. Desenchufe el ensamblaje del cable del sensor del cuerpo del
sensor. Apriete las lengüetas de montaje y tire suavemente en el
conector hasta que se libere.
4. Destornille los tres tornillos de montaje que sujetan el cuerpo del
sensor al cuerpo de la columna de la dirección.
5. Deslice el sensor sobre la columna para retirarlo. Observe si la
etiqueta del sensor está hacia arriba o hacia abajo.
Instalación:
1. Obtenga un sensor nuevo. El sensor no se puede reparar en el
campo.
2. Deslice el sensor sobre la columna. El concentrador central
del sensor se debe alinear con la muesca correspondiente en
la columna. Los diferentes fabricantes de columnas pueden
implementar esta alineación de concentrador de diferentes
maneras. La etiqueta del sensor debe estar en la misma dirección
que el sensor que se retiró.
3. Ensámblelo en la placa que no se mueve en la columna con los
tres tornillos de bloqueo automático.
4. Apriete los tornillos entre 65N y 100N.
5. Vuelva a conectar el conector. Asegúrese de que no habrá fuerza
aplicada al sensor debido a que el conector tira del cuerpo del
sensor.
6. Si el arnés de cableado que va al sensor se reemplaza, asegúrese
de que quede fi jo con amarres para que se logre el movimiento
completo de la columna de la dirección sin desmontar los
conectores.
7. Reinstale el revestimiento de la columna. El sensor no está
protegido contra tierra o agua, así que tenga cuidado de no
introducir estos elementos durante la instalación.
CALIBRACIÓN DEL SENSOR DEL ÁNGULO
DE DIRECCIÓN
La calibración del sensor de ángulo de dirección solamente se logra
cuando el sensor recibe energía del ECU avanzado de ABS. No se
puede hacer la calibración independiente del sensor. El procedimiento
de calibración se realiza usando el software ACom
de Bendix® o posterior. Consulte la sección “Solución de problemas de
los códigos de diagnóstico de fallas: sensor del ángulo de dirección
(sensor SAS-60)” para obtener el procedimiento de calibración para
esta herramienta. El sensor se debe recalibrar después de cualquiera
de estas situaciones:
• Reemplazo del sensor de ángulo de dirección
• Cualquier apertura del concentrador del conector del sensor de ángulo
de dirección a la columna de la dirección
• Cualquier trabajo de mantenimiento o reparación en el acople de la
dirección, engranaje de la dirección u otro mecanismo relacionado
• Ajuste de la alineación de la rueda o pista de la rueda
• Después de un accidente que haya producido daños al sensor del
ángulo de dirección o el ensamblaje
ADVERTENCIA: si no se recalibra el sensor del ángulo de
dirección según se requiere, puede que el sistema de control de
derrape no funcione correctamente, lo que puede resultar en la
pérdida de control del vehículo.
®
Diagnostic V4.0
15
Page 16

CÓMO QUITAR EL SENSOR DE VELOCIDAD
DE DERRAPE/ACELERACIÓN LATERAL
Verifi caciones del servicio:
1. Verifi que todo el cableado y los conectores. Asegúrese de que
todas las conexiones estén libres de daños visibles.
2. Examine el sensor. Asegúrese de que el sensor, los pernos de
montaje y el soporte de montaje no estén averiados.
3. Revise los agujeros de ventilación en la parte posterior del
alojamiento del sensor. Los agujeros de ventilación deben estar
libres de pintura y desperdicios en todo momento.
Diagnósticos:
El sensor de la velocidad de derrape sólo funciona junto con la ECU
avanzada del ABS. No se pueden realizar diagnósticos independientes
en el sensor.
Retiro:
1. Desenchufe el ensamblaje del cable del sensor del cuerpo del
sensor. Se debe girar y tirar del conector suavemente para liberarlo.
2. En algunas confi guraciones de montaje, el sensor se puede quitar
de manera independiente del soporte de montaje. De lo contrario,
quite todo el ensamblaje, luego saque el sensor del soporte.
3. Observe la dirección hacia la que apunta el conector.
Instalación:
1. Obtenga un sensor nuevo. El sensor no se puede reparar en el
campo.
5. Vuelva a conectar el conector. Asegúrese de que no habrá fuerza
aplicada al sensor debido a que el conector tira del cuerpo del
sensor.
PRECAUCIÓN: cuando retire o instale el sensor, se debe tomar
precaución para evitar daños. No golpee o palanquee el
sensor. No utilice una herramienta de impacto para instalar
los tornillos de montaje.
Modifi caciones de la ubicación del sensor
No se debe cambiar la ubicación y orientación del sensor de velocidad
de derrape. Cuando se realice el servicio, se deben usar componentes
idénticos en la misma orientación (utilizando los soportes y requisitos
de torsión del fabricante de equipo original). Durante las instalaciones,
siga las normas de nivelación del fabricante de equipo original.
Calibración del sensor de velocidad de derrape:
La calibración del sensor del velocidad solamente se puede lograr
mediante la ECU avanzada de ABS. El sensor se debe recalibrar
después de cualquiera de estas situaciones:
• Reemplazo del sensor
• Después de un accidente que haya producido daños al sensor de
velocidad de derrape
El procedimiento de calibración se realiza usando el software ACom
Diagnostic V4.0 de Bendix® o posterior.
Consulte la sección “Solución de problemas de los códigos de
diagnóstico de fallas: sensor de velocidad de derrape (YRS)” para
obtener el procedimiento de calibración.
®
ADVERTENCIA: NO SE DEBE ALTERAR la ubicación del
sensor de velocidad de derrape en el vehículo, la manera
de sujetar la unidad al vehículo y la orientación del sensor.
Cuando se realice el servicio, se deben usar componentes
idénticos en la misma orientación (utilizando los soportes
y requisitos de torsión del fabricante de equipo original).
Durante las instalaciones, siga las normas de nivelación
del fabricante de equipo original. Si no se sigue alguno de
estos requisitos, puede que el sistema de control avanzado
de ABS no funcione correctamente, lo que puede resultar en
accidentes que produzcan la pérdida de control del vehículo.
2. Ensamble el alojamiento del sensor de velocidad de derrape en el
soporte de montaje. El soporte debe ser del mismo diseño del que
se usa en la confi guración original del vehículo.
3. Para los sensores de velocidad de derrape Bendix
®
YAS-60™ de
Bendix®, los sujetadores correctos son tres pernos de tamaño M8
y se debe emplear una torsión de fi jación de 20Nm (±2 Nm). Para
los sensores de velocidad de derrape YAS-70X
™
de Bendix®, los
sujetadores correctos son dos pernos de tamaño M10 (con ángulo
de paso de 1,5 mm), o el herraje proporcionado por el fabricante
de equipo original y, se debe emplear una torsión de fi jación de
46Nm (±9 Nm). Observe que el sensor YAS-70X cuenta con dos
diseños alternativos; uno con un poste de alineación, vea la hoja de
instrucciones del juego para obtener más información. En todos los
casos, el conector debe estar en la misma dirección que el sensor
que se retiró. La unidad no se debe instalar boca abajo donde hay
un agujero de balanceo de presión.
4. El sensor debe estar lo más nivelado posible y paralelo a la
superfi cie de la carretera cuando se instala en el vehículo.
CALIBRACIÓN DEL SENSOR DE EXIGENCIA
DE FRENADO
La calibración se debe realizar en las siguientes condiciones:
• Después de reparar cualquier sensor de presión relacionado con
los DTC
• Reemplazo de cualquier sensor
El procedimiento de calibración se realiza usando el software ACom
Diagnostic V4.0 de Bendix® o posterior.
Consulte la sección “Solución de problemas de los códigos de
diagnóstico de fallas: sensores de exigencia de frenado/carga” para
obtener el procedimiento de calibración.
REQUISITOS DE INSTALACIÓN DEL SENSOR DE PRESIÓN
Verifi caciones del servicio:
1. Verifi que todo el cableado y los conectores. Asegúrese de que
todas las conexiones estén libres de daños visibles.
2. Examine el sensor. Asegúrese de que el sensor y su interfaz a la
ubicación de presión no estén averiados.
Diagnósticos:
El sensor de presión se puede diagnosticar de manera independiente
cuando cuenta con un suministro de cinco voltios a la ubicación B y
conexión a tierra a la ubicación A. La salida de la señal en la ubicación
C debe leer aproximadamente 0,5 V si no se aplica presión. La salida
de la señal debe aumentar de manera proporcional cuando se aplica
presión, hasta un máximo de 4,5 V a 150 psi.
®
16
Page 17

Retiro:
1. Desenchufe el ensamblaje del cable del sensor del cuerpo del
sensor. Tire suavemente de las lengüetas de montaje y el conector
hasta que se libere.
2. Quite el sensor del montaje de presión usando las herramientas
de acople de empuje de frenos de aire.
Instalación:
1. Obtenga un sensor nuevo. El sensor no se puede reparar en el
campo.
2. Introduzca el sensor en el acople de presión utilizando herramientas
aprobadas.
3. Vuelva a conectar el conector. Asegúrese de que no habrá fuerza
aplicada al sensor debido a que el conector tira del cuerpo del
sensor.
4. Si el arnés del cableado que va al sensor se reemplaza, asegúrese
de que esté fi jado debidamente con amarres.
Solución de problemas: modos de los códigos de
parpadeo y de diagnóstico
Calibración del sensor de presión:
No hay necesidad de calibrar el sensor de presión mientras la pieza
que se reemplaza sea idéntica a la pieza que se quita y un componente
aprobado para el uso con el sistema avanzado de ABS de Bendix. Sin
embargo, el reemplazo de los sensores de exigencia de frenado o el
borrado de los DTC del sensor de presión de exigencia requieren lo
siguiente:
1. Utilizar el software ACom V4 o posterior para borrar la falla activa
del sensor p.
2. Llevar a cabo el procedimiento de inicialización del sensor p de
exigencia que implica aplicar presión a los frenos de servicio de
90 psi o más durante 3 segundos (mientras está estacionado).
Una vez que se realiza el proceso con éxito, si no hay otros DTC activos,
el indicador ATC/ESP ya no se encenderá.
DIAGNÓSTICOS DE LA ECU
El controlador EC-60™ contiene un sistema de circuitos de diagnóstico
de autoprueba que verifi ca de manera continua el funcionamiento normal
de los componentes y circuitos internos, como también los componentes
y cableado externos del ABS.
Códigos activos de diagnóstico de fallas
Cuando se detecta una condición errónea en el sistema, el controlador
EC-60™:
1. Enciende la o las luces indicadora apropiadas y desactiva todas
o parte de las funciones ABS, ATC y ESP. (Consulte la sección
Apagado parcial del ABS en la página 12).
2. Pone la información del código de falla apropiado en la memoria
de la ECU.
3. Comunica la información del código de falla apropiado en el vínculo
de diagnóstico de comunicaciones en serie, según se requiera.
Las herramientas de diagnóstico manuales o basadas en PC se
conectan al conector de diagnóstico del vehículo, generalmente
ubicado en o debajo del tablero (consulte la fi gura 13).
Ubicado en
el tablero
FIGURA 13 – UBICACIONES TÍPICAS DEL CONECTOR DE DIAGNÓSTICO DEL
VEHÍCULO (J1708/J1587, J1939)
O
Ubicado debajo
del tablero
CÓDIGOS DE PARPADEO
Los códigos de parpadeo permiten al técnico solucionar los problemas
del ABS sin usar una herramienta de diagnóstico manual o basada
en PC. En cambio, la ECU comunica la información sobre el sistema
ABS mediante las luces indicadoras de ABS para mostrar secuencias
de parpadeo.
Nota: la ECU no ingresará al modo de diagnóstico de códigos de
parpadeo si los sensores de velocidad de rueda muestran que el
vehículo está en movimiento. Si la ECU está en el modo de diagnóstico
de códigos de parpadeo y luego se detecta movimiento del vehículo,
saldrá del modo de código de parpadeo.
Adicionalmente, al hacer funcionar el interruptor de código de parpadeo
como se describe a continuación, puede activarse uno de los varios
modos de diagnóstico. Consulte la sección Modos de diagnóstico a
continuación.
Activación del interruptor de código de parpadeo
Cuando se activa el interruptor de código de parpadeo:
1. Espere por lo menos dos segundos después de activar el encendido.
(Excepto al entrar en el Modo de reconfi guración: consulte la
sección acerca de la reconfi guración en la página 13).
2. Para que la ECU reconozca que el interruptor está encendido, el
técnico debe presionarlo durante por lo menos 0,1 segundo, pero
menos de 5 segundos. (Si el interruptor se mantiene presionado
por más de 5 segundos, la ECU registrará un interruptor con
funcionamiento defectuoso).
3. Las pausas al presionar el interruptor cuando se
requiere una secuencia (por ejemplo, al cambiar de
modo) no deben superar los 2 segundos.
4. Después de una pausa de 3,5 segundos, la ECU
comenzará a responder con parpadeos de información
de salida. Consulte la fi gura 14 para ver un ejemplo.
17
Page 18

FIGURA 14 - EJEMPLO DEL MENSAJE DEL CÓDIGO DE PARPADEO
Tiempo en segundos
Pausa inicial
de 3,5 segundos
Pausa de 2,5 segundos entre los mensajes
Activación
Pausa de 1,5 segundos entre los dígitos
La luz permanece encendida
durante 5 segundos para
mostrar el fin de los mensajes
1,0 2,0 3,0 4,0 5,0 6,0 7,0 8,0 9,0 10,0 11,0 12,0 13,0 14,0 15,0 16,0 17,0 18,0 19,0 20,0
Tiempo del código de parpadeo
La ECU responde con una secuencia de códigos de parpadeo. La
respuesta total de códigos de parpadeo de la ECU se denomina
el “mensaje”. Cada mensaje incluye, según el modo seleccionado
por el técnico, una secuencia de uno o más grupos de parpadeos.
Simplemente registre la cantidad de parpadeos para cada secuencia
y luego use el índice de solución de problemas en la página 23 para
códigos de falla activos o inactivos y, se le indicará la página que
proporciona la información de solución de problemas.
NOTA:
1. Las secuencias de parpadeo encienden la luz indicadora de ABS
durante medio segundo, con pausas de medio segundo entre cada
secuencia.
2. Las pausas entre los dígitos de los códigos de parpadeo son de
1,5 segundos.
3. Las pausas entre los mensajes de los códigos de parpadeo son de
2,5 segundos.
4. La luz permanece encendida durante 5 segundos al fi nal de los
mensajes.
Cuando la luz indicadora de ABS comienza a mostrar los códigos
de secuencia, continúa hasta que todos los mensajes de código de
parpadeo se muestran y luego regresa al modo de funcionamiento
normal. Durante este tiempo, la ECU ignorará cualquier activación
adicional del interruptor de código de parpadeo.
Todos los códigos de falla, excepto los códigos de falla de voltaje y
J1939, permanecerán activos durante el tiempo restante del ciclo de
encendido.
Los códigos de falla de voltaje se borrarán automáticamente cuando
el voltaje regrese a los límites requeridos. Todas las funciones de ABS
se reactivarán.
Los códigos de falla de J1939 se borrarán automáticamente cuando se
restablezcan las comunicaciones.
MODOS DE DIAGNÓSTICO
Para comunicarse con la ECU, el controlador cuenta con varios modos
que el técnico puede seleccionar, lo que permite recuperar información
o que se acceda a otras funciones de la ECU.
Modos de diagnóstico
Para entrar a los varios modos de diagnóstico:
Cantidad
de veces
que se
presiona el
interruptor
de códigos
de parpadeo
1
2
3
4
5
7*
* Para entrar en el modo de reconfi guración, el interruptor se
debe mantener presionado antes de aplicar la energía del
encendido. Cuando se suministre la energía, se puede liberar
el botón y luego presionarlo siete veces.
Modo del sistema que se activa
Recuperación de los códigos de diagnóstico de fallas
activos
Recuperación de los códigos de diagnóstico de fallas
inactivos
Eliminar los códigos de diagnóstico de fallas activos
Verifi cación de la confi guración del sistema
Modo de prueba con dinamómetro
Reconfi guración de la ECU
TABLA 2 – MODOS DE DIAGNÓSTICO
Modo de códigos de diagnóstico de fallas activos
Para solucionar problemas, generalmente se usan los modos de
recuperación de códigos de diagnóstico activos e inactivos. El técnico
presiona el interruptor de códigos de parpadeo una vez y la luz
indicadora de ABS parpadea un primer grupo de dos códigos y, si se
registran más códigos de falla, aparecerá un segundo juego de códigos,
etc. (Consulte la página 23 para obtener un directorio de estos códigos).
Todos los códigos de falla activos también se pueden recuperar usando
una herramienta de diagnóstico manual o basada en PC, como el
software de diagnóstico ACom
®
de Bendix®.
Para eliminar los códigos de diagnóstico de falla activos (al solucionar los
problemas), simplemente bórrelos (o autorepare) apagando y volviendo
a aplicar energía. La única excepción es para los códigos de falla del
sensor de velocidad de la rueda, que se eliminan cuando se apaga el
18
encendido, se vuelve a encender y la ECU detecta una velocidad de
rueda válida en todos los sensores de velocidad de rueda. De manera
Page 19
alternativa, se pueden eliminar los códigos presionando el interruptor
de códigos de diagnóstico de parpadeo tres veces (para entrar en
el modo para eliminar los códigos de diagnóstico de falla activos) o
usando una herramienta de diagnóstico manual o basada en PC.
Las herramientas de diagnóstico manuales o basadas en PC pueden
eliminar los códigos de falla del sensor de velocidad de la rueda sin
que se conduzca el vehículo.
Modo de códigos de diagnóstico de fallas inactivos
La ECU almacena los códigos y comentarios de diagnóstico de fallas
(como los cambios de confi guración) en la memoria. Este registro se
denomina comúnmente el “historial de eventos”. Cuando se elimina un
código de falla activo, la ECU lo almacena en la memoria del historial
de eventos como un código de falla inactivo.
Mediante el uso de códigos de parpadeo, el técnico puede revisar todos
los códigos de falla inactivos almacenados en la ECU. La luz indicadora
de ABS mostrará los códigos de diagnóstico de parpadeo inactivos
cuando se presiona y libera dos veces el interruptor de diagnóstico de
códigos de parpadeo. Consulte la página 20 para obtener un índice
que muestra los códigos de falla y la página de guía de solución de
problemas para leer y obtener ayuda.
Los códigos de falla inactivos y el historial de eventos se pueden
recuperar y eliminar usando una herramienta de diagnóstico manual
o basada en PC, como el software de diagnóstico Bendix
®
ACom® de
Bendix®.
Cómo eliminar los códigos de diagnóstico de fallas
activos
La ECU eliminara los códigos de diagnóstico de fallas activos cuando
se presiona y libera tres veces el interruptor de códigos de parpadeo.
Modo de verifi cación de la confi guración del sistema
La luz indicadora de ABS mostrará la información de la confi guración
del sistema cuando se presiona y libera cuatro veces el interruptor
de diagnóstico de códigos de parpadeo. La luz emitirá parpadeos
con códigos de información de la confi guración usando los siguientes
patrones. (Consulte la tabla 3).
En este modo, la ECU informa al técnico, mediante una serie de siete
códigos de parpadeo, el tipo de sistema ABS que ha sido confi gurado
en la ECU. Por ejemplo, si el cuarto código de parpadeo es un dos, el
técnico sabe que se ha fi jado la confi guración del sensor/modulador
6S/4M.
Modo de prueba con dinamómetro
El modo de prueba con dinamómetro se utiliza para desactivar ESP
y ATC cuando se requiera (por ejemplo, al realizar mantenimiento en
el vehículo cuando las ruedas se levantan del suelo y se mueven, lo
cual incluye la prueba con dinamómetro). Para los controladores
avanzados de ABS, este modo permanecerá encendido, así se
quite y vuelva a aplicar la energía a la ECU.
Para salir del modo de prueba con dinamómetro, presione y libere el
interruptor de códigos de parpadeo tres veces o, use una herramienta
de diagnóstico manual o basada en PC.
Primer
número
1
Segundo
número
4
6
Tercer
número
4
5
6
Cuarto
número
1
2
3
Quinto
número
2
3
4
5
Sexto
número
1
2
3
4
Séptimo
número
1
2
3
Energía del sistema
12 voltios
Sensores de velocidad de la rueda
4 sensores
6 sensores
Válvulas de modulador de presión
4 moduladores
5 moduladores
6 moduladores
Confi guración de ABS
4S/4M o 6S/6M
6S/4M
6S/5M
Confi guración del control de tracción
Sin ATC
Control de motor ATC solamente
Control de frenado ATC solamente
ATC completo (control de motor y control de frenado)
Confi guración para freno de motor
Sin freno de motor
J1939 para freno de motor
Relé para freno de motor
J1939 para freno de motor, relé para freno de motor
Confi guración de la estabilidad
Sin programa de estabilidad
Programa electrónico de estabilidad (ESP), que incluye RSP
Programa de estabilidad antivuelco (RSP) solamente
TABLA 3 – VERIFICACIÓN DE LA CONFIGURACIÓN DEL SISTEMA
Reconfi guración del modo ECU
La reconfiguración del controlador se realiza usando la
reconfi guración del modo ECU. (Consulte la página 13).
Nota: Para entrar en el modo de reconfi guración, el interruptor
de código de parpadeo se debe mantener presionado antes de
aplicar la energía de encendido. Cuando se suministre la energía,
se puede liberar el botón y luego presionarlo siete veces.
La eliminación de los códigos de diagnóstico de fallas y de
solución de problemas (como también la reconfi guración) también
se pueden realizar usando una herramienta de diagnóstico
manual o basada en PC, como la unidad de diagnóstico remoto
™
(RDU
) de Bendix®, el software de diagnóstico ACom® de Bendix®
o la herramienta ProLink.
19
Page 20

Solución de problemas: uso de herramientas de
diagnóstico manuales o basadas en PC
RDU™ (unidad de diagnóstico remoto) de Bendix
®
La herramienta RDU™ de Bendix® proporciona al técnico una indicación
visual de la información de los códigos de diagnóstico de fallas (DTC)
del sistema de freno antibloqueo (ABS). La herramienta RDU
™
está
diseñada específi camente para el uso con sistemas ABS de Bendix®
y Bendix no garantiza su funcionamiento o uso con sistemas de ABS
de otras marcas.
Las luces LED
encienden los
códigos de
diagnóstico
de fallas
(10 ubicaciones
en total)
FIGURA 15 – UNIDAD DE DIAGNÓSTICO REMOTO DE BENDIX®
Características de la herramienta RDU™ de Bendix
®
La herramienta RDU™ se acopla a un conector de diagnóstico de
9 patillas en la cabina del vehículo. Un cable adaptador (número de pieza
801872 de Bendix) está disponible para conectar la RDU a vehículos
con conectores de diagnóstico de 6 patillas.
La herramienta RDU
™
permite que el técnico:
• Resuelva los problemas de los componentes del sistema ABS usando
los códigos de diagnóstico de fallas mediante los LED.
• Restablezca los códigos de diagnóstico de fallas en las ECU del ABS
de Bendix
®
sujetando un imán sobre el centro de restablecimiento
de la herramienta RDU™ durante menos de 6 segundos.
• Introduzca el modo de autoconfi guración usado por las ECU del ABS
de Bendix® sujetando un imán sobre el área de restablecimiento por
más de 6 segundos pero durante menos de 30.
Cómo funciona la RDU
™
de Bendix
®
Cuando la herramienta RDU™ está enchufada al conector de diagnóstico,
se encienden todos los LED y, el LED verde parpadeará 4 veces para
indicar el establecimiento de las comunicaciones.
Si la ECU de ABS no tiene códigos de diagnóstico de fallas activos,
solamente permanecerá encendido el LED verde.
Si la ECU de ABS tiene por lo menos un código de diagnóstico de fallas
activo, la herramienta RDU
™
muestra el primer código de diagnóstico
de fallas al encender el LED rojo, que indica que el componente de
ABS no funciona y la ubicación en el vehículo. (consulte la fi gura 15).
Si hay varios códigos de diagnóstico de fallas en el sistema ABS, la
herramienta RDU
™
mostrará un código de diagnóstico de falla primero,
luego cuando se repare y elimine ese código, mostrará el siguiente.
Las combinaciones comunes de los códigos de diagnóstico
de fallas son:
• Sensor derecho de la dirección
• Sensor izquierdo
de la dirección
• Sensor propulsor derecho
• Sensor propulsor izquierdo
• Sensor derecho adicional
• Sensor izquierdo adicional
• Modulador derecho
de la dirección
• Modulador propulsor derecho
• Modulador propulsor izquierdo
• Modulador derecho adicional
• Modulador izquierdo adicional
• Modulador de tracción del eje
posterior
• ECU
• Comunicación en serie con el
motor
• Modulador izquierdo
de la dirección
• El LED rojo de MOD encendido muestra la conexión “Común” de
uno o más moduladores con corto a la batería o a tierra
• VLT (el parpadeo indica una condición de sobrevoltaje
o subvoltaje)
Para precisar el origen y para asegurar que el código de diagnóstico
de falla se corrija de manera correcta la primera vez, es probable que
se requiera solución de problemas adicional. Nota: la RDU no puede
diagnosticar los códigos de diagnóstico de fallas específi cos del ESP,
incluidos los sensores adicionales: sensores del ángulo de dirección,
sensores de derrape, sensores de presión o válvulas de modulador
(válvulas de modulación de presión del remolque o válvulas de control
de tracción del eje frontal).
CÓDIGOS DE DIAGNÓSTICO DE FALLAS DE LED
LFT - izquierda
RHT - derecha
DRV - eje propulsor
ADD - adicional
STR - eje de dirección
VLT - energía
Ejemplo: si el código de
diagnóstico de fallas es “sensor
derecho del eje de dirección”,
la unidad RDU
™
mostrará un
LED verde y tres rojos
FIGURA 16 - CÓDIGOS DE DIAGNÓSTICO DE FALLAS
ECU - controlador del ABS
SEN - sensor de velocidad de
la rueda
MOD - válvula de modulador
de presión
TRC - control de tracción
LED
Verde
VLT
Rojo
SEN
STR
RHT
20
Page 21

Función de restablecimiento de la RDU™ de Bendix
®
El interruptor magnético de restablecimiento se ubica en la parte
superior central de la herramienta RDU™. La activación requiere un
imán con potencia de 30 gauss como mínimo.
Las funciones de restablecimiento son:
1. Si el imán se sujeta sobre el interruptor durante menos de 6
segundos, se envía el comando "eliminar los códigos de diagnóstico
de fallas actuales".
2. Si el imán se sujeta sobre el interruptor durante más de 6 pero
menos de 30 segundos, se envía el comando “autoconfi guración”
del ABS de Bendix
®
.
Adicionalmente, se recomienda que al fi nal de cualquier inspección el
usuario desconecte y vuelva a conectar la energía a la ECU de ABS,
luego verifi que la operación de la luz indicadora de ABS y la herramienta
RDU™ para verifi car si indican algún código de diagnóstico de falla
restante.
Problemas de comunicación de la RDU
™
de Bendix
®
Si la ECU de ABS no responde a la solicitud de la herramienta RDU™
para emitir códigos de diagnóstico de fallas, la herramienta RDU
™
encenderá cada LED rojo utilizando un patrón en sentido horario. Este
patrón indica la pérdida de comunicación y continuará hasta que la ECU
de ABS responda y se restablezca la comunicación.
Entre las posibles fuentes de problemas de comunicación se encuentran:
1. Un problema con el enlace J1587 en el conector de diagnóstico
externo que está dentro de la cabina (9 ó 6 patillas).
2. La ECU no acepta el PID194.
3. No se suministra energía a la ECU y/o al conector de diagnóstico.
4. El bus J1587 bus se encuentra sobrecargado con información y la
RDU no puede arbitrar el acceso.
5. Una herramienta de RDU
™
que no funciona apropiadamente.
Tarjeta de aplicación Nexiq para Bendix
Nexiq proporciona una tarjeta de aplicación para Bendix para el uso
con la herramienta ProLink. También se puede utilizar para diagnosticar
controladores de ABS EC-30
™
, EC-17™, Gen 4™, Gen 5™ y MC-30™.
Para obtener más información sobre la tarjeta de aplicación para
Bendix, visite la página www.bendix.com, Nexiq en www.nexiq.com o
su distribuidor de piezas Bendix autorizado.
Software de diagnóstico ACom® de Bendix®
El software de diagnóstico ACom® de Bendix® es un programa basado en
PC y está diseñado para cumplir con las normas RP-1210 de la industria
desarrolladas por el Consejo de mantenimiento de camiones (TMC).
Este software proporciona al técnico acceso a toda la información de
diagnóstico y capacidad de confi guración de la ECU disponible, lo
cual incluye:
• Información de la ECU
• Códigos de diagnóstico de fallas e información de reparación
• Confi guración (ABS, ATC y más)
• Sensor de velocidad de la rueda
• Realiza pruebas de los componentes
• Guarda e imprime información
Pro-Link
FIGURA 17 – HERRAMIENTA NEXIQ (MPSI) PRO-LINK
Cartucho de
múltiples protocolos
de uso pesado
Tarjeta para PC MPSI
Número de pieza 805013
FIGURA 18 - SOFTWARE DE DIAGNÓSTICO ACOM® DE BENDIX®
®
Se requiere el software de diagnóstico ACom
V4.0 para calibrar el
sensor de ángulo de dirección, el sensor de velocidad de derrape/
aceleración lateral, sensores de exigencia de frenado y el sensor de
carga.
Al utilizar el software de diagnóstico ACom
®
V4.0 (o posterior) para
diagnosticar la ECU de ABS EC-60™, se debe conectar el puerto en serie
o paralelo de la computadora al conector de diagnóstico del vehículo.
Para obtener más información sobre el software de diagnóstico ACom
o la herramienta compatible RP1210, visite la página www.bendix.com
o su distribuidor autorizado local de piezas Bendix.
Consulte la página 46 para ver el apéndice A: códigos J1587 SID y FMI
y sus equivalentes en códigos de parpadeo de Bendix.
www.bendix.com
Para obtener la información más reciente y para descargar de manera
gratuita el software de diagnóstico y la guía de usuario ACom® de
®
Bendix
, visite la página web de Bendix en www.bendix.com.
Equipo de asistencia técnica de Bendix
Para obtener asistencia técnica en directo por teléfono, llame al equipo
de asistencia técnica Bendix al:
1-800-AIR-BRAKE (1-800-247-2725),
de lunes a viernes, entre las 8:00 A.M. y las 6:00 P.M. hora del este de
EE.UU. y siga las instrucciones en el mensaje grabado (sólo en inglés).
O puede enviar un mensaje de correo electrónico al equipo de asistencia
técnica de Bendix a: techteam@bendix.com.
®
21
Page 22

- NOTAS -
22
Page 23
Códigos de diagnóstico de fallas activos o inactivos:
ÍNDICE
Cómo interpretar el primer dígito de los mensajes recibidos cuando entra en el
modo de códigos de diagnóstico de fallas activos o inactivos.
1º
número
de código
de parpadeo
1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . No hay fallas (1,1)
2 . . . . . . . . . . . . . . . . . . . . . . Sensores de velocidad de la rueda - página 24
3 . . . . . . . . . . . . . . . . . . . . . . Sensores de velocidad de la rueda - página 24
4 . . . . . . . . . . . . . . . . . . . . . . Sensores de velocidad de la rueda - página 24
5 . . . . . . . . . . . . . . . . . . . . . . Sensores de velocidad de la rueda - página 24
6 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Suministro de energía – página 29
7 . . . . . . . . . . . . . . . . . . . . . . Válvulas de modulador de presión – página 26
8 . . . . . . . . . . . . . . . . . . . . . . Válvulas de modulador de presión – página 26
9 . . . . . . . . . . . . . . . . . . . . . . Válvulas de modulador de presión – página 26
10 . . . . . . . . . . . . . . . . . . . . . Válvulas de modulador de presión – página 26
11 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . J1939 - página 30
12 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .Misceláneos - páginas 32 a 33
13 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .ECU - página 31
14 . . . . . . . . . . . . . . . . . . . . .Sensores de velocidad de la rueda - página 24
15 . . . . . . . . . . . . . . . . . . . . .Sensores de velocidad de la rueda - página 24
16 . . . . . . . . . . . . . . . . . . . . . Válvulas de modulador de presión – página 26
17 . . . . . . . . . . . . . . . . . . . . . Válvulas de modulador de presión – página 26
18 . . . . . . . . . . . . . . Válvula de control de tracción del eje propulsor - página 28
19 . . . . . . . . . . . .Válvula de control de tracción del eje de dirección - página 26
20 . . . . . . . . . . . Válvula de modulador de presión del remolque – página 26
21 . . . . . . . . . . . . . . . . . . .Sensor del ángulo de dirección – páginas 34 a 35
22 . . . . . . . . . . . . . . . . . .Sensor de velocidad de derrape – páginas 36 a 37
23 . . . . . . . . . . . . . . . . . . . . . . . . .Sensor de aceleración lateral – página 38
24 . . . . . . . . . . . . . . . . Sensores de exigencia de frenado/carga – página 39
Vaya a la siguiente página para realizar pruebas
de solución de problemas
Ejemplo: Para la secuencia de mensaje:
3, 2 12, 4
Para la primera secuencia consulte la página 24 y
para la segunda secuencia consulte la página 32.
Consulte la página 46 para ver el apéndice A: Códigos J1587 SID y FMI y
sus equivalentes en códigos de parpadeo de Bendix.
23
Page 24
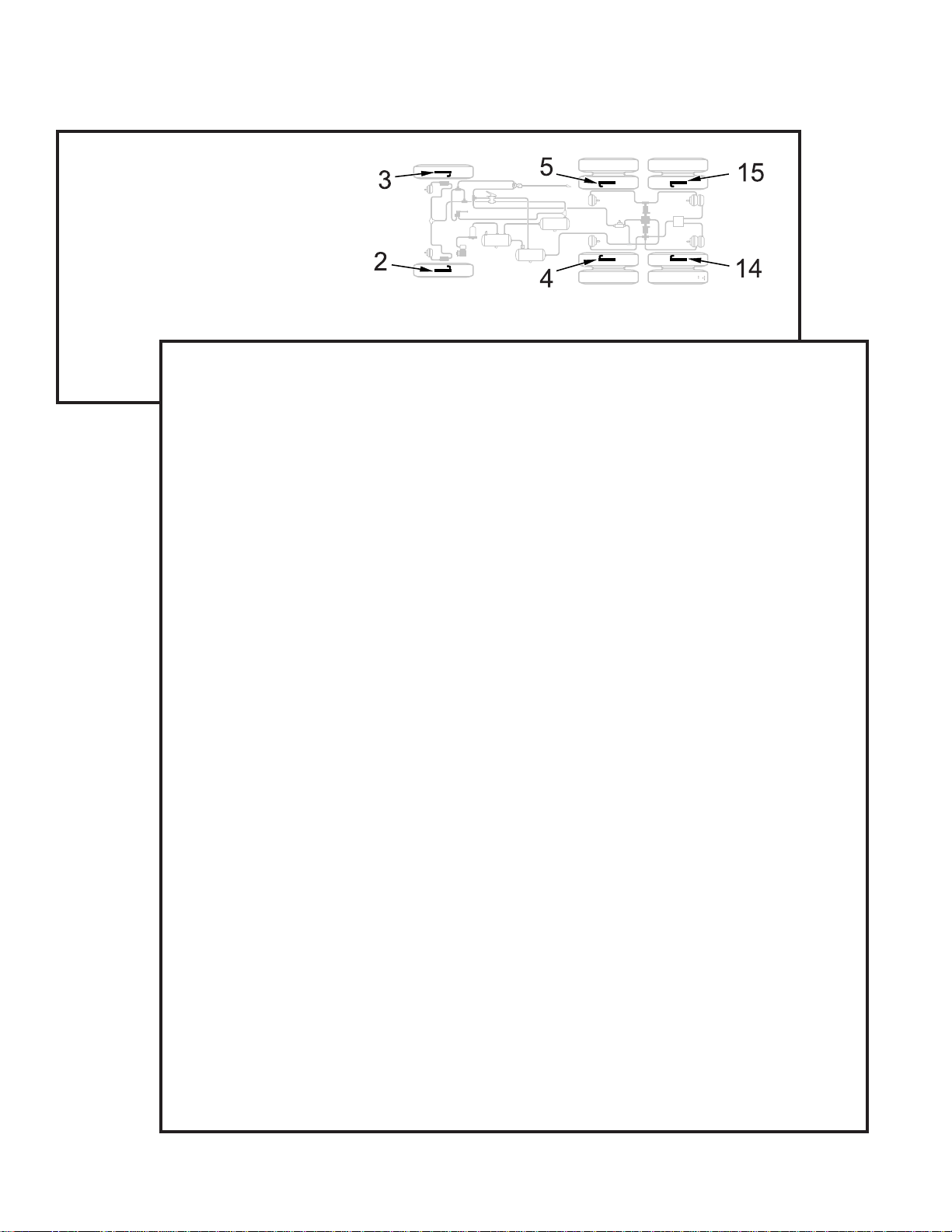
Solución de problemas de los códigos de diagnóstico de fallas:
Sensores de velocidad de la rueda
1º código de
parpadeo
Ubicación
2 Sensor izquierdo del eje de dirección
3 Sensor derecho del eje de dirección
4 Sensor izquierdo del eje propulsor
5 Sensor derecho del eje propulsor
14 Sensor izquierdo del eje adicional
15 Sensor derecho del eje adicional
2º Descripción
código del código de
de parpadeo diagnóstico de fallas
1 Espacio de
aire excesivo
2 Salida baja
en propulsión
Información de reparación
Ajuste el sensor al anillo activador de contacto.
0,25 VCA en el sensor de salida a ~ 0,5 RPS.
el montaje del anillo activador y la condición de los dientes.
del cojinete.
Verifi que la condición y retención de la camisa de sujeción. Verifi que el enrutamiento y
la sujeción del conductor del sensor.
Ajuste el sensor al anillo activador de contacto.
0,25 VCA en el sensor de salida a ~ 0,5 RPS.
el montaje del anillo activador y la condición de los dientes.
del cojinete.
Verifi que la condición y retención de la camisa de sujeción. Verifi que el enrutamiento y
la sujeción del conductor del sensor.
Haga girar la rueda y verifi que que haya un mínimo de
Verifi que la condición del cabezal del sensor. Verifi que
Haga girar la rueda y verifi que que haya un mínimo de
Verifi que la condición del cabezal del sensor. Verifi que
Verifi que el juego longitudinal apropiado
Verifi que el juego longitudinal apropiado
3 Abierta
o en corto
4 Pérdida de
señal del sensor
5 Extremo
de rueda
6 Señal de
sensor errática
7 Calibración
del tamaño
del neumático
10 Error de
confi guración
Verifi que el fl ujo de 1500 a 2500 ohmios a lo ancho de los cables del sensor.
continuidad entre los cables del sensor, la tierra o el voltaje.
los conductores del sensor y otros sensores.
Verifi que si el cableado o los conectores entre la ECU
Verifi que que no haya continuidad entre
Verifi que que no haya
y el sensor de velocidad de la ruedapresentan corrosión/daños.
Ajuste el sensor al anillo activador de contacto.
0,25 VCA en el sensor de salida a ~ 0,5 RPS.
el montaje del anillo activador y la condición de los dientes.
del cojinete.
la sujeción del conector del sensor.
Verifi que la condición y retención de la camisa de sujeción. Verifi que el enrutamiento y
Verifi que si el cableado o los conectores entre la ECU y el sensor
Haga girar la rueda y verifi que que haya un mínimo de
Verifi que la condición del cabezal del sensor. Verifi que
Verifi que el juego longitudinal apropiado
de velocidad de la rueda presentan corrosión/daños.
Verifi que el montaje del anillo activador y la condición de los dientes.
apropiado del cojinete.
enrutamiento y la sujeción del conector del sensor.
frenos.
Verifi que si hay líneas de aire dobladas o restringidas.
Ajuste el sensor al anillo activador de contacto.
0,25 VCA en el sensor de salida a ~ 0,5 RPS.
el montaje del anillo activador y la condición de los dientes.
del cojinete.
Verifi que la condición y retención de la camisa de sujeción. Verifi que el enrutamiento y
la sujeción del conector del sensor.
Verifi que la condición y retención de la camisa de sujeción. Verifi que el
Verifi que si el cableado o los conectores entre la ECU y el sensor
Verifi que el funcionamiento mecánico de los
Haga girar la rueda y verifi que que haya un mínimo de
Verifi que la condición del cabezal del sensor. Verifi que
Verifi que el juego longitudinal apropiado
Verifi que el juego longitudinal
de velocidad de la rueda presentan corrosión/daños.
Verifi que el tamaño correcto de los neumáticos, según se requiera.
los neumáticos.
Verifi que el número correcto de dientes del anillo activador.
Verifi que la presión correcta de
La ECU se confi gura para cuatro sensores, pero ha detectado la presencia de sensores adicionales.
Verifi que el cableado del sensor y la confi guración de la ECU.
24
Page 25
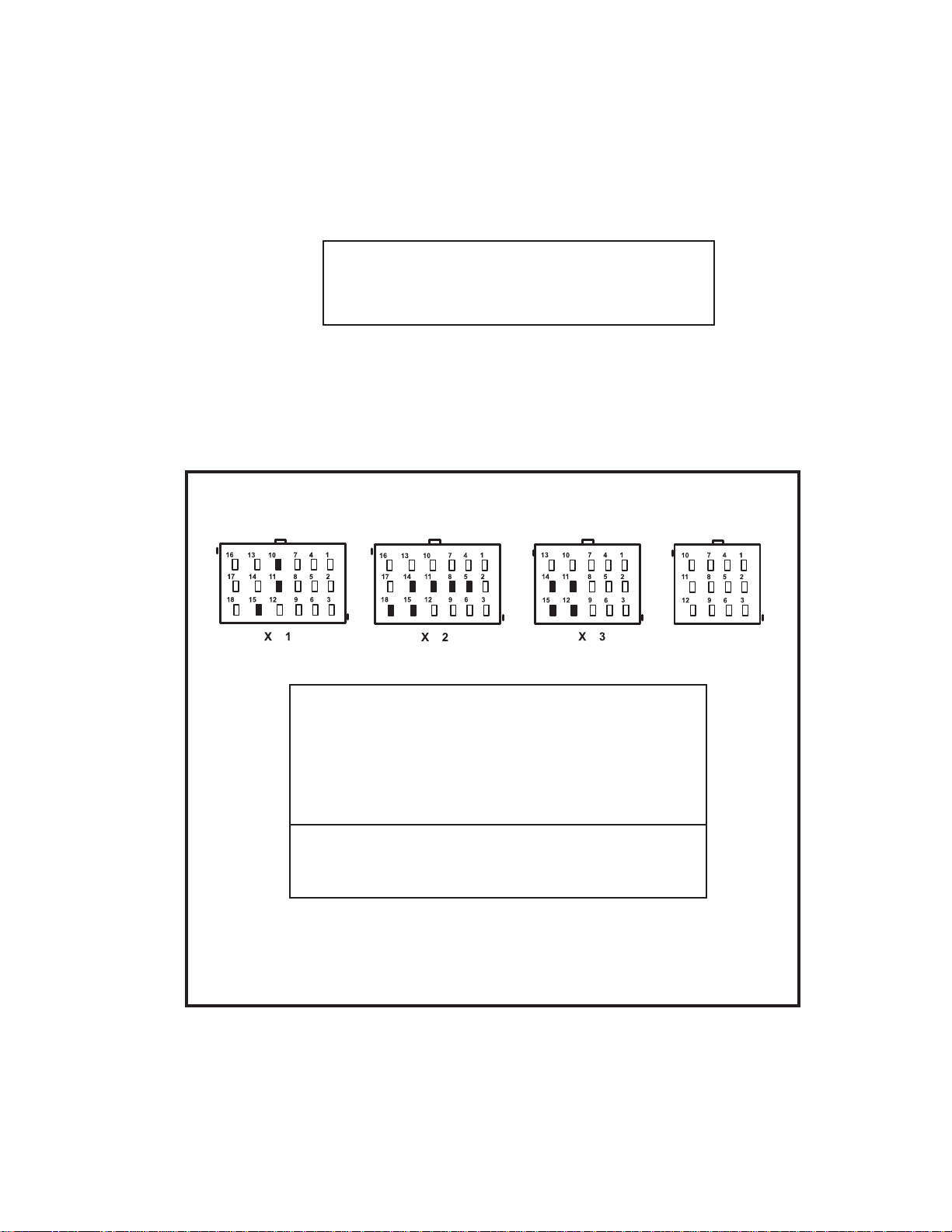
Pruebas de reparación del sensor de velocidad:
1. Realice todas las mediciones en las clavijas del conector del arnés de la ECU
para verifi car el arnés del cableado y el sensor. Sondee cuidadosamente el
conector para no averiar las terminales.
2. Las mediciones del sensor de velocidad de la rueda deben medir:
Ubicación Medición
Sensor 1500 a 2500 ohmios
Sensor a voltaje o tierra Circuito abierto (sin continuidad)
Voltaje de salida del sensor >0,25 de VCA de la salida del sensor
a ~ 0,5 revoluciones/segundo
3. Elimine el DTC después de corregir el problema. El DTC del sensor
permanecerá activo hasta que se realice un ciclo de energía a la ECU de ABS
y se conduzca el vehículo a más de 24 kph (15 mph) o se borre el DTC usando
ya sea el interruptor de diagnóstico de código de parpadeo o la herramienta de
diagnóstico.
ECU montada en la cabina: mirando hacia el conector del arnés
de los cables
Conector Clavija Ubicación del sensor de velocidad de la rueda
X1 10 Eje propulsor derecho (+)
18 vías 11 Eje propulsor derecho (-)
5 Eje de dirección izquierdo (+)
X2 8 Eje de dirección izquierdo (-)
18 vías 11 Eje de dirección derecho (+)
14 Eje de dirección derecho (-)
15 Eje propulsor izquierdo (+)
18 Eje propulsor izquierdo (-)
X3 11 Eje adicional izquierdo (+)
15 vías (si 14 Eje adicional izquierdo (-)
la ECU se confi gura 12 Eje adicional derecho (+)
con 6 sensores) 15 Eje adicional derecho (-)
X4
25
Page 26

Solución de problemas de los códigos de diagnóstico de fallas:
válvulas de modulador de presión
1º código de
parpadeo
Ubicación
7 Eje de dirección izquierdo
8 Eje de dirección derecho
9 Eje propulsor izquierdo
10 Eje propulsor derecho
16 Eje adicional izquierdo
17 Eje adicional derecho
20 PMV del remolque
2º Descripción
código de del código de
de parpadeo diagnóstico de fallas
1 Solenoide
de liberación
con corto
a tierra
2 Solenoide
de liberación
con corto
a voltaje
3 Solenoide
de liberación
con circuito
abierto
4 Solenoide
de retención
con corto
a tierra
5 Solenoide
de retención
con corto
a voltaje
6 Solenoide
de retención con
circuito abierto
7 CMN con
circuito abierto
Información de reparación
Verifi que que no haya continuidad entre los cables de la PMV y la tierra.
de REL a CMN y HLD a CMN y, 9,8 a 11 ohmios de REL a HLD. Revise el cableado o los conectores entre la
ECU y PMV para verifi car si están oxidados/dañados.
Verifi que que no haya continuidad entre los cables de la PMV y el voltaje.
de REL a CMN y HLD a CMN y, 9,8 a 11 ohmios de REL a HLD. Revise el cableado o los conectores entre la
ECU y PMV para verifi car si están oxidados/dañados.
Verifi que el fl ujo de 4,9 a 5,5 ohmios de REL a CMN y HLD a CMN y, 9,8 a 11 ohmios de REL a HLD.
el cableado o los conectores entre la ECU y PMV para verifi car si están oxidados/dañados.
Verifi que que no haya continuidad entre los cables de la PMV y la tierra.
de REL a CMN y HLD a CMN y, 9,8 a 11 ohmios de REL a HLD. Revise el cableado o los conectores entre la
ECU y PMV para verifi car si están oxidados/dañados.
Verifi que que no haya continuidad entre los cables de la PMV y el voltaje.
de REL a CMN y HLD a CMN y, 9,8 a 11 ohmios de REL a HLD. Revise el cableado o los conectores entre la
ECU y PMV para verifi car si están oxidados/dañados.
Verifi que el fl ujo de 4,9 a 5,5 ohmios de REL a CMN y HLD a CMN y, 9,8 a 11 ohmios de REL a HLD.
el cableado o los conectores entre la ECU y PMV para verifi car si están oxidados/dañados.
Verifi que el fl ujo de 4,9 a 5,5 ohmios de REL a CMN y HLD a CMNy, 9,8 a 11 ohmios de REL a HLD.
el cableado o los conectores entre la ECU y PMV para verifi car si están oxidados/dañados.
Verifi que el fl ujo de 4,9 a 5,5 ohmios
Verifi que el fl ujo de 4,9 a 5,5 ohmios
Revise
Verifi que el fl ujo de 4,9 a 5,5 ohmios
Verifi que el fl ujo de 4,9 a 5,5 ohmios
Revise
Revise
26
8 Error de
confi guración
Existe una falta de concordancia entre la confi guración de la ECU y la instalación y el cableado del modulador.
Verifi que el cableado e instalación de la PMV. Verifi que la confi guración de la ECU.
Page 27

Pruebas de reparación de la válvula de modulador de presión:
1. Realice todas las mediciones en las clavijas del conector del arnés
de la ECU para verifi car el arnés del cableado y la PMV. Sondee
cuidadosamente el conector para no averiar las terminales.
2. La resistencia del modulador de presión debe medir:
Ubicación Medición
Liberación a común 4,9 a 5,5 ohmios
Sujeción a común 4,9 a 5,5 ohmios
Liberación a retención 9,8 a 11,0 ohmios
Liberación, sujeción, común Circuito abierto (sin continuidad)
a voltaje o tierra
Precaución: cuando realice los procedimientos de solución de problemas de
los códigos de fallas del modulador, verifi que los códigos de fallas inactivos y
el historial de eventos para ver si hay códigos de falla de sobrevoltaje o ruido
excesivo. Si encuentra uno de estos códigos, identifíquelos y soluciónelos
primero antes que la PMV.
ECU montada en la cabina: Mirando hacia el
conector del arnés de los cables
Conector Clavija Ubicación de la PMV
1 Sujeción del eje de dirección izquierdo
2 Liberación del eje de dirección izquierdo
3 Común del eje de dirección izquierdo
X2 4 Sujeción del eje de dirección derecho
18 vías 6 Común del eje de dirección derecho
7 Liberación del eje de dirección derecho
9 Común del eje propulsor derecho
10 Sujeción del eje propulsor derecho
13 Liberación del eje propulsor derecho
12 Común del eje propulsor izquierdo
16 Sujeción del eje propulsor izquierdo
17 Liberación del eje propulsor izquierdo
4 Sujeción del eje adicional izquierdo
X3 6 Común del eje adicional izquierdo
15 vías (si la 7 Liberación del eje adicional izquierdo
ECU se confi gura 9 Común del eje adicional derecho
con 6 moduladores) 10 Sujeción del eje adicional derecho
13 Liberación del eje adicional derecho
X4 6 Sujeción de la PMV del remolque
12 vías 9 Liberación de la PMV del remolque
12 Común de la PMV del remolque
4
27
Page 28

Solución de problemas de los códigos de diagnóstico de fallas:
X4
válvulas de control de tracción
1º código de
parpadeo
Ubicación
18 Válvula de control de tracción
del eje propulsor
19 Válvula de control de tracción del eje de
dirección
2º Descripción
código del código de
de parpadeo diagnóstico de fallas
1 Solenoide
de TCV con
corto a tierra
2 Solenoide
de TCV con
corto a voltaje
3 Solenoide de TCV
con circuito abierto
Información de reparación
Verifi que el fl ujo de 7 a 19 ohmios entre TCV y común de TCV. Verifi que que no haya continuidad
entre los cables de la TCV y la tierra. Revise el cableado o los conectores entre la ECU y TCV
para verifi car si están oxidados/dañados.
Verifi que el fl ujo de 7 a 19 ohmios entre TCV y común de TCV. Verifi que que no haya continuidad
entre los cables de la TCV y el voltaje. Revise el cableado o los conectores entre la ECU y TCV
para verifi car si están oxidados/dañados.
Verifi que el fl ujo de 7 a 19 ohmios entre TCV y común de TCV. Revise el cableado o los conectores
entre la ECU y TCV para verifi car si están oxidados/dañados.
4 Error de
confi guración
de TCV
La ECU no se confi gura para ESP o ATC, pero ha detectado la presencia de la TCV. Verifi que
el cableado de la TCV. Verifi que la presencia de la TCV. Verifi que la confi guración de la ECU.
Pruebas de reparación de la válvula de control de tracción:
1. Realice todas las mediciones en las clavijas del conector del arnés de la ECU para verifi car el arnés del
cableado y la válvula de control de tracción. Sondee cuidadosamente el conector para no averiar las terminales.
2. Las mediciones de resistencia de la válvula de control del tractor deben ser:
Ubicación Medición
TCV a TCV común 7 a 19 ohmios
Liberación, sujeción, común Circuito abierto (sin continuidad)
a voltaje o tierra
ECU montada en la cabina:
Mirando hacia el conector del arnés de los cables
Conector Clavija Prueba de control de tracción
X1 4 Común de la válvula de control de tracción del eje propulsor
18 vías 5 Válvula de control de tracción del eje propulsor
28
Conector Clavija Prueba de control de tracción
X3 3 Común de válvula de control de tracción del eje de dirección
15 vías 5 Válvula de control de tracción del eje de dirección
Page 29

Solución de problemas de los códigos de diagnóstico de fallas:
X4
suministro de energía
1º código de
parpadeo
Ubicación
6 Suministro de energía
2º Descripción
código del código de
de parpadeo diagnóstico de fallas
1 Voltaje de batería
demasiado bajo
2 Voltaje de batería
demasiado alto
3 Voltaje de batería
demasiado bajo
durante ABS
4 Voltaje de batería
de circuito abierto
5 Voltaje de arranque
demasiado bajo
6 Voltaje de arranque
demasiado alto
Información de reparación
Mida el voltaje de la batería bajo carga. Verifi que la batería del vehículo y los componentes asociados. Verifi que
si el cableado está dañado. Revise si hay conectores y conexiones dañados u oxidados.
Mida el voltaje de la batería bajo carga. Asegúrese de que el voltaje de la batería sea el correcto para la ECU.
Verifi que la batería del vehículo y los componentes asociados. Verifi que si el cableado está dañado. Revise si
hay conectores y conexiones dañados u oxidados.
Mida el voltaje de la batería bajo carga. Verifi que la batería del vehículo y los componentes asociados. Verifi que
si el cableado está dañado. Revise si hay conectores y conexiones dañados u oxidados.
Mida el voltaje de la batería bajo carga. Verifi que la condición del fusible. Verifi que la batería del vehículo y los
componentes asociados. Verifi que si el cableado está dañado. Revise si hay conectores y conexiones dañados
u oxidados.
Mida el voltaje de arranque bajo carga. Verifi que la batería del vehículo y los componentes asociados. Verifi que
si el cableado está dañado. Revise si hay conectores y conexiones dañados u oxidados. Verifi que la condición
del fusible.
Mida el voltaje de arranque. Asegúrese de que el voltaje de arranque sea el correcto para la ECU. Verifi que la
batería del vehículo y los componentes asociados. Verifi que si el cableado está dañado. Revise si hay conectores
y conexiones dañados u oxidados.
7 Voltaje de arranque
demasiado bajo
durante ABS
8 Voltaje de entrada
tiene ruido
excesivo (temporal)
9 Voltaje de entrada
tiene ruido excesivo
Mida el voltaje de arranque bajo carga. Verifi que la batería del vehículo y los componentes asociados. Verifi que
si el cableado está dañado. Revise si hay conectores y conexiones dañados u oxidados.
Verifi que la salida del alternador para verifi car si hay ruido excesivo. Verifi que si hay otros dispositivos que
producen ruido excesivo.
Verifi que la salida del alternador para verifi car si hay ruido excesivo. Verifi que si hay otros dispositivos que
producen ruido excesivo.
Pruebas de suministro de energía:
1. Tome todas las medidas en el conector del arnés de la ECU.
2. Ponga carga (por ejemplo, bombillas de la luz de freno 1157) en
la batería o encendido y la conexión a tierra; mida el voltaje de
arranque y de la batería con la carga. Entre el encendido y la
tierra debe medir entre 9 y 17 VCC. Entre la batería y la tierra
también debe medir entre 9 y 17 VCC.
ECU montada en la cabina:
mirando hacia el conector
del arnés de los cables
Conector Clavija Prueba de suministro de energía
X1 1 Tierra
18 vías 3 Arranque
16 Batería
3. Revise el cableado para ver si está dañado o si hay conectores y
conexiones dañados u oxidados.
4. Verifi que la condición de la batería del vehículo y los
componentes asociados, y que la conexión a tierra esté bien y
fi r m e .
5. Verifi que la salida del alternador para verifi car si hay
ruido excesivo.
29
Page 30

Solución de problemas de los códigos de diagnóstico de fallas:
X4
comunicaciones en serie J1939
1º código de
parpadeo
Ubicación
11 J1939
2º Descripción
código del código de
de parpadeo diagnóstico de fallas
1 Enlace en serie J1939
2 Freno de motor J1939
3 Comunicaciones
con el motor J1939
4 Datos no válidos (freno
de motor) J1939
5 Presión de
suministro J1939
Información de reparación
Pérdida de comunicaciones entre el controlador EC-60
si hay daños o si el cableado J1939 está invertido. Verifi que si hay conectores dañados u oxidados. Verifi que la
confi guración de la ECU. Verifi que si hay otros dispositivos que impiden las comunicaciones J1939.
Pérdida de comunicaciones entre el controlador EC-60
si hay daños o si el cableado J1939 está invertido. Verifi que si hay conectores dañados u oxidados. Verifi que
la presencia del freno de motor en el enlace J1939. Verifi que la confi guración de la ECU. Verifi que si hay otros
dispositivos que impiden las comunicaciones J1939.
Pérdida de comunicaciones entre el controlador EC-60
hay daños o si el cableado J1939 está invertido. Verifi que si hay conectores dañados u oxidados. Verifi que la
presencia de la ECU del motor en el enlace J1939. Verifi que la confi guración de la ECU. Verifi que si hay otros
dispositivos que impiden las comunicaciones J1939.
Se recibieron datos no válidos del motor o freno de motor. Verifi que si hay daños o si el cableado J1939 está
invertido. Verifi que si hay conectores dañados u oxidados. Verifi que la presencia del motor y/o freno de motor
en el J1939. Verifi que la programación apropiada del motor y/o freno de motor. Verifi que si hay otros dispositivos
que impiden las comunicaciones J1939.
Se reciben señales de presión no válidas de un controlador del vehículo. Verifi que el funcionamiento apropiado
de los sensores de exigencia de frenado. Verifi que el cableado entre los sensores de exigencia de frenado y el
controlador del vehículo. Verifi que la programación apropiada del controlador del vehículo. Verifi que si hay daños
o si el cableado J1939 está invertido. Verifi que si hay conectores dañados u oxidados. Verifi que si hay otros
dispositivos que impiden las comunicaciones J1939.
™
y otros dispositivos conectados al enlace J1939. Verifi que
™
y otros dispositivos conectados al enlace J1939. Verifi que
™
y la ECU del motor en el enlace J1939. Verifi que si
6 Datos no válidos
de mensajes
ESP J1939
10 Datos no válidos
de la transmisión
J1939
Mensajes no válidos del ESP en el enlace J1939. Verifi que si hay daños o si el cableado J1939 está invertido.
Verifi que si hay conectores dañados u oxidados. Verifi que la presencia del motor y/o freno de motor en el J1939.
Verifi que la programación apropiada del motor y/o el freno de motor. Verifi que si hay otros dispositivos que impiden
las comunicaciones J1939.
Mensajes no válidos del ESP en el enlace J1939. Verifi que si hay daños o si el cableado J1939 está invertido.
Verifi que si hay conectores dañados u oxidados. Verifi que la presencia de la transmisión en J1939. Verifi que la
programación apropiada de la transmisión. Verifi que si hay otros dispositivos que impiden las comunicaciones
J1939.
Pruebas de solución de problemas J1939:
1. Tome todas las medidas en el conector del arnés
de la ECU
2. Verifi que si hay daños o si el cableado J1939 está
invertido
3. Verifique si hay problemas de conector de
cableado oxidado o dañado, como circuitos
abiertos o cortocircuitos de voltaje o a tierra.
4. Verifique si hay otros dispositivos J1939 que
entorpezcan (impidan) las comunicaciones J1939
ECU montada en la cabina:
Mirando hacia el conector del arnés de los cables
Conector Clavija J1939
X1 7 J1939 bajo
18 vías 8 J1939 alto
30
Page 31

Solución de problemas de los códigos de diagnóstico de fallas:
ECU
1º código de
parpadeo
13 ECU
Ubicación
2º Descripción
código del código de
de parpadeo diagnóstico de fallas
1 ECU (02)
2 ECU (10)
3 ECU (11)
4 ECU (12)
5 ECU (13)
6 ECU (14)
7 ECU (15)
8 ECU (16)
9 ECU (17)
10 ECU (18)
11 ECU (1A)
12 ECU (1B)
13 ECU (80)
14 ECU (04)
15 ECU (06)
16 ECU (0E)
17 ECU (0D)
18 ECU (19)
19 ECU (1C)
20 ECU (27)
21 ECU (1D)
22 ECU (1E)
23 ECU (28)
24 ECU (37)
25 Falta de concordancia del VIN interno en la ECU: el VIN almacenado internamente en la ECU no concuerda con el VIN
del vehículo. Asegúrese de que la ECU está instalada en el vehículo correcto. Verifi que la programación de la ECU.
Verifi que la programación del motor.
2-24: Verifi que si hay conectores dañados u oxidados. Verifi que si el cableado está dañado.
Elimine los códigos de fallas. Si vuelven a aparecer los códigos de diagnóstico de fallas,
reemplace la ECU.
Información de reparación
31
Page 32
Solución de problemas de los códigos de diagnóstico de fallas: Misceláneos
1º código de
parpadeo
Ubicación
12 Misceláneos
2º Descripción
código del código de
de parpadeo diagnóstico de fallas
1 No se detecta el
interruptor de luz
de freno
2 Interruptor de luz
de freno defectuoso
3 Modo de prueba
con dinamómetro
4 El relé del freno de
motor está abierto o
con corto conectado
a tierra
5 Circuito de relé de
freno de motor con
corto a voltaje
Información de reparación
La ECU no ha detectado la presencia del interruptor de la luz de freno desde que se aplicó la energía del encendido
(observe que la entrada del interruptor de la luz de freno se puede aplicar en el controlador EC-60
™
usando la entrada
del cableado o J1939). Aplique y libere el freno de servicio. Verifi que la entrada del interruptor de freno en la ECU
(consulte el dibujo del cableado del sistema). Con el freno de servicio liberado, verifi que la presencia de la bombilla
de la luz de freno. Con el freno de servicio aplicado, verifi que que el voltaje del sistema se encuentre en la entrada
del interruptor de la luz de freno de la ECU. Revise el cableado para ver si hay daños entre la ECU, el interruptor de
la luz de freno y la bombilla. Verifi que si hay conectores dañados u oxidados. Verifi que si hay daños o si el cableado
J1939 está invertido. Verifi que si hay conectores dañados u oxidados en el enlace J1939. Verifi que la presencia de
la ECU del motor en el enlace J1939. Verifi que la confi guración de la ECU.
Aplique y libere el freno de servicio. Verifi que la entrada del interruptor de freno en la ECU (consulte el dibujo del
cableado del sistema). Con el freno de servicio liberado, verifi que la presencia de la bombilla de la luz de freno.
Con el freno de servicio aplicado, verifi que que el voltaje del sistema se encuentre en la entrada del interruptor de
la luz de freno de la ECU. Revise el cableado para ver si hay daños entre la ECU, el interruptor de la luz de freno
y la bombilla. Verifi que si hay conectores dañados u oxidados. Verifi que si hay daños o si el cableado J1939 está
invertido. Verifi que si hay conectores dañados u oxidados en el enlace J1939. Verifi que la presencia de la ECU del
motor en el enlace J1939. Verifi que la confi guración de la ECU.
La ECU entró en el modo de prueba con dinamómetro porque se presionó el interruptor de diagnóstico de códigos
de parpadeo o se usó una herramienta de diagnóstico manual o basada en PC. El ATC está desactivado.
Verifi que que el vehículo cuente con un relé de freno de motor. Verifi que la confi guración de la ECU. Verifi que el
cableado entre la ECU y el freno de motor. Verifi que que no haya continuidad entre la salida de desactivación del
freno del motor del controlador EC-60
Verifi que el cableado entre la ECU y el freno de motor. Verifi que que no haya continuidad entre la salida de
desactivación del freno del motor del controlador EC-60
del freno de motor.
™
y la tierra. Verifi que la condición y el cableado del relé del freno de motor.
™
y el voltaje. Verifi que la condición y el cableado del relé
6 DTC del circuito de
la luz indicadora
de ABS
7 Común de PMV
con corto a tierra
8 Común de PMV
con corto a voltaje
9 ATC desactivada para
evitar la pérdida de
potencia de los frenos
10 Tamaño de neumático
fuera de rango
(frente a posterior)
11 Sensores de velocidad
de rueda invertidos
en un eje
12 Solenoide de bloqueo
diferencial con corto
a tierra o circuito
abierto
13 Solenoide de bloqueo
diferencial con corto
a voltaje
14 Error de voltaje de
suministro del CAN
del sensor
15 - 21 Reservado
22 Voltaje de sensor
ESP fuera de rango
Verifi que el funcionamiento del interruptor de diagnóstico de los códigos de parpadeo. Verifi que el cableado del
interruptor de diagnóstico del código de parpadeo y el WL del ABS. Verifi que la entrada a tierra WL del ABS.
Verifi que que no haya continuidad entre el CMN de todas las PMV, TCV y el solenoide del bloque diferencial y la
tierra. Revise el cableado o los conectores entre la ECU y CMN de todas las PMV, TVC y el solenoide del bloqueo
diferencial para verifi car si están oxidados/dañados.
Verifi que que no haya continuidad entre el CMN de todas las PMV, TCV, y el solenoide del bloque diferencial y el
voltaje. Revise el cableado o los conectores entre la ECU y CMN de todas las PMV, TVC y el solenoide del bloqueo
diferencial para verifi car si están oxidados/dañados.
ATC está desactivado temporalmente para evitar el calentamiento excesivo de los frenos de base.
Verifi que el tamaño correcto de los neumáticos. Verifi que la presión correcta de los neumáticos. Verifi que el número
correcto de dientes del anillo activador. Verifi que que la ECU tenga el tamaño correcto de los neumáticos.
Los sensores están invertidos (izquierda a derecha) en uno de los ejes. Verifi que la instalación, conexión y cableado
correctos de los sensores.
Verifi que que no haya continuidad entre el solenoide del bloqueo diferencial y la tierra. Revise el cableado o los
conectores entre la ECU y el solenoide del bloqueo diferencial para verifi car si están oxidados/dañados.
Verifi que que no haya continuidad entre el solenoide del bloqueo diferencial y el voltaje. Revise el cableado o los
conectores entre la ECU y el solenoide del bloqueo diferencial para verifi car si están oxidados/dañados.
El voltaje de suministro es incorrecto para el SAS-60 y el sensor de velocidad de derrape. Verifi que el voltaje
correcto de los conectores del sensor. Verifi que el cableado entre la ECU y los sensores. Verifi que el voltaje de
salida correcto de la ECU.
El voltaje de suministro es incorrecto para el SAS-60 y el sensor de velocidad de derrape. Verifi que el voltaje
correcto de los conectores del sensor. Verifi que el cableado entre la ECU y los sensores. Verifi que el voltaje de
salida correcto de la ECU.
32
Page 33
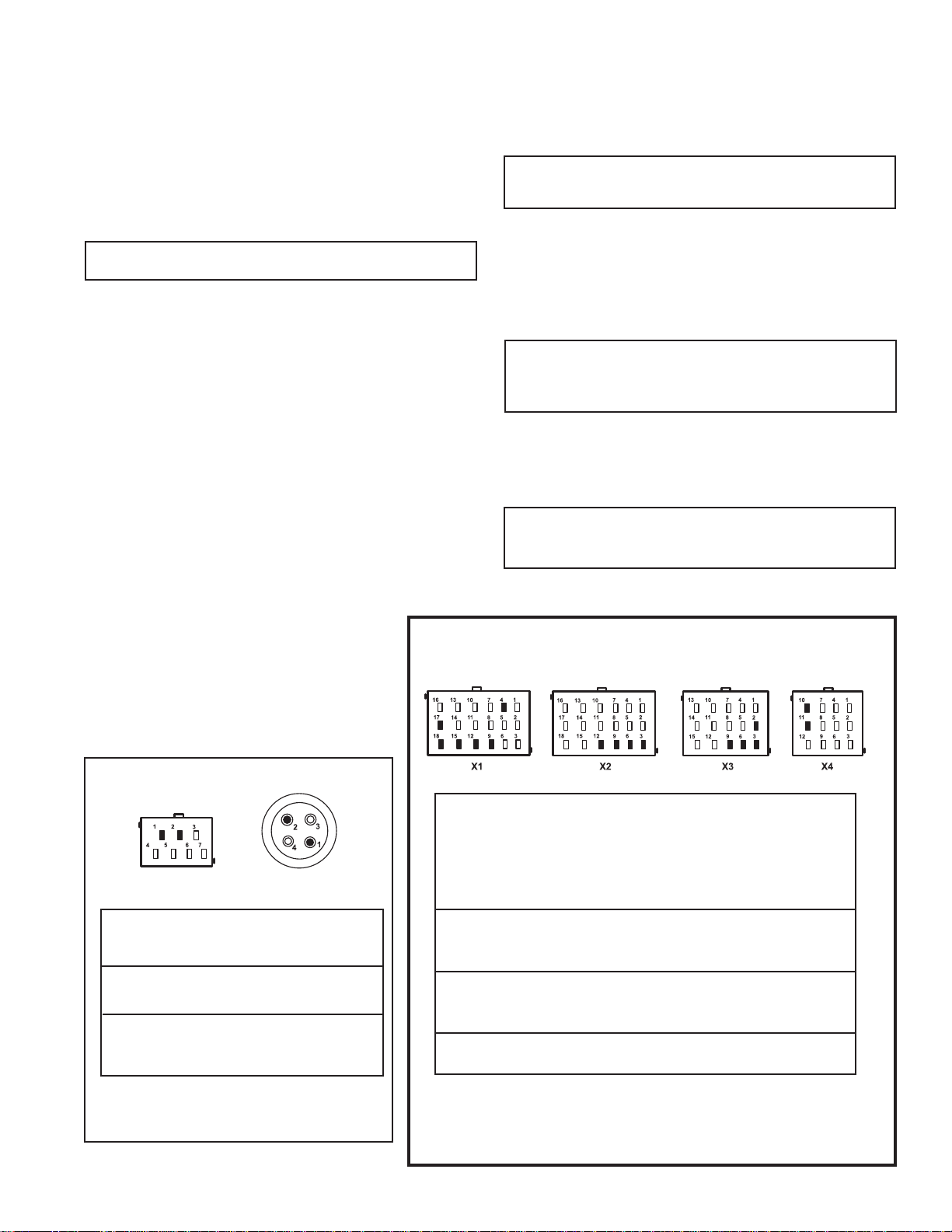
Soluciones de problemas misceláneos (continuación)
Para todas las pruebas a continuación, realice todas las
mediciones en las clavijas del conector del arnés de la ECU para
verifi car el arnés del cableado y el sensor. Sondee cuidadosamente
el conector para no averiar las terminales.
Prueba del interruptor de luz de freno
1. Con el freno de servicio aplicado, mida el voltaje del sistema (9 a
17 VCC) de la salida del interruptor de la luz de freno de la ECU.
Prueba Medición
Interruptor de luz de freno a tierra 9 a 17 VCC
2. Cuando se aplica y libera el freno de servicio, ¿se apaga la luz?
3. Verifi que que el interruptor de la luz de freno esté conectada a la
ECU mediante el cableado o J1939.
4. Con el freno de servicio liberado, verifi que la presencia de la
bombilla de la luz de freno.
Modo de prueba con dinamómetro (se enciende la luz indicadora
de ATC/ESP de manera continua)
1. Elimine el modo de prueba con dinamómetro presionando y
liberando el interruptor de códigos de parpadeo tres veces (o use
una herramienta de diagnóstico externa).
Luz indicadora de ABS
1. Verifi que que el interruptor de diagnóstico de los códigos de
parpadeo esté abierto cuando no se activa.
Relé para freno de motor
1. Mida la resistencia entre la salida de desactivación del freno del
motor del controlador EC-60
Prueba Medición
Desactivar freno de motor Circuito abierto (sin continuidad)
a voltaje o tierra
™
y el voltaje/tierra.
2. Verifi que que el vehículo cuente con un relé de freno de motor.
3. Verifi que que el cableado entre la ECU y el freno de motor sea el
adecuado.
Común de la PMV
1. Mida la resistencia entre cualquier común (PMV , TCV y Dif.)
y voltaje o tierra.
Prueba Medición
Cualquier PMV, TCV Circuito abierto (sin continuidad)
o Dif. común a
voltaje o tierra
Solenoide de bloqueo diferencial
1. Mida la resistencia entre el solenoide de bloqueo diferencial y el
voltaje o tierra.
Prueba Medición
Solenoide de bloqueo Circuito abierto (sin continuidad)
diferencial a voltaje o tierra
Sensor de ángulo de dirección y sensor de
velocidad de derrape/aceleración lateral
1. Verifi que la continuidad entre la ECU y SAS-60 y
el sensor de velocidad de derrape.
Mirando hacia el conector del arnés de los
cables
Conector SAS Conector de derrape
Conector Clavija Ubicación de la PMV
SAS 2 Entrada de voltaje
1 Entrada con conexión a tierra
YAS 1 Entrada de voltaje
2 Entrada con conexión a tierra
ECU
X4 11 Salida de voltaje
12 vías 10 Salida con conexión a tierra
ECU montada en la cabina: mirando hacia el conector
del arnés de los cables
Conector Clavija Ubicación de la PMV
4 Común TCV
X1 9 Interruptor de luz de freno
18 vías 12 Tierra WL del ABS
15 Interbloqueo WL del ABS
17 Freno de motor
18 WL del ABS
3 PMV de común del eje de dirección izquierdo
X2 6 PMV de común del eje de dirección derecho
18 vías 9 PMV de común del eje propulsor derecho
12 PMV de común del eje propulsor izquierdo
2 Solenoide de bloqueo diferencial
X3 3 Común de solenoide de bloqueo diferencial
15 vías 6 PMV de común del eje adicional izquierdo
9 PMV de común del eje adicional derecho
X4 11 Salida de voltaje del sensor SAS-60/velocidad de derrape
12 vías 10 Salida del sensor a tierra SAS-60/velocidad de derrape
33
Page 34
Solución de problemas de los códigos de diagnóstico de fallas:
™
sensor del ángulo de dirección (sensor SAS-60
)
1º código de
parpadeo
Ubicación
21 Sensor del ángulo de dirección
2º Descripción
código del código de
de parpadeo diagnóstico de fallas
1 SAS sin calibrar
2 Calibración SAS
en progreso
3 Señal SAS estática
4 Señal SAS
fuera de rango
5 Señal SAS
en reversa
6 Señal SAS
no válida
7 Error de gradiente
de SAS
Información de reparación
SAS no ha sido calibrado. Realice el procedimiento de calibración de SAS.
Se está realizando el procedimiento de calibración SAS.
Señal SAS incorrecta. Verifi que la instalación apropiada del SAS. Verifi que el cableado apropiado
entre la ECU y el SAS. Verifi que la salida del SAS.
Señal SAS incorrecta. Verifi que la instalación apropiada del SAS. Verifi que el cableado apropiado
entre la ECU y el SAS. Verifi que la salida del SAS. Realice el procedimiento de calibración del SAS.
Señal SAS invertida. Verifi que la instalación apropiada del SAS. Verifi que el cableado apropiado
entre la ECU y el SAS. Verifi que la salida del SAS.
Señal SAS no válida. Verifi que la instalación apropiada del SAS. Verifi que el cableado apropiado
entre la ECU y el SAS. Verifi que la salida del SAS. Verifi que que el SAS correcto esté en uso.
Señal SAS no válida. Verifi que la instalación apropiada del SAS. Verifi que el cableado apropiado
entre la ECU y el SAS. Verifi que la salida del SAS. Verifi que que el SAS correcto esté en uso.
8 Tiempo límite
de CAN de SAS
9 Error de calibración
a largo plazo de SAS
10 Verifi cación de
plausibilidad SAS
Pérdida de las comunicaciones de CAN entre la ECU y el SAS. Verifi que el cableado apropiado entre
la ECU y el SAS. Verifi que la salida del SAS.
Error de calibración del SAS. Verifi que la instalación apropiada del SAS. Verifi que el cableado
apropiado entre la ECU y el SAS. Verifi que la salida del SAS. Verifi que que el SAS correcto esté en
uso. Verifi que la programación correcta de la ECU. Realice el procedimiento de calibración del SAS.
La ECU ha detectado la señal SAS incorrecta al compararla con la señal del sensor de velocidad de
derrape. Verifi que la instalación apropiada del SAS. Verifi que el cableado apropiado entre la ECU y
el SAS. Verifi que la salida SAS. Verifi que que el SAS correcto esté en uso. Verifi que la programación
correcta de la ECU. Realice el procedimiento de calibración del SAS.
34
Page 35
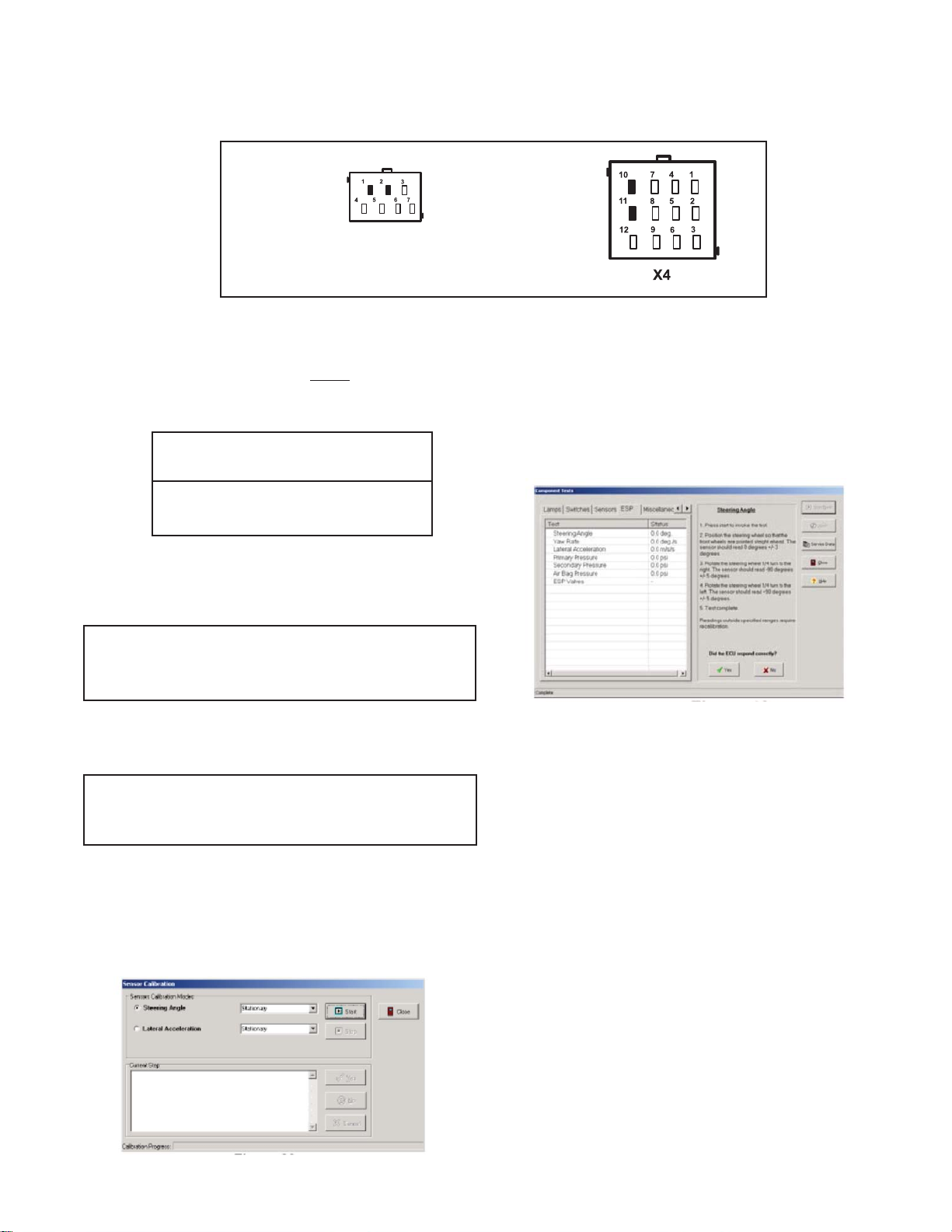
Solución de problemas de los códigos de diagnóstico de fallas:
™
sensor del ángulo de dirección (sensor SAS-60
Conector SAS
Mirando hacia el conector del arnés de los cables
) (continuación)
Pruebas del sensor del ángulo de dirección
1. Mida la resistencia entre el voltaje de entrada y la tierra en el
conector del arnés de cableado del sensor.
Verifi que la continuidad entre la ECU y SAS-60 y YAS-60
Conector Clavija Ubicación de la PMV
SAS 2 Entrada de voltaje
1 Entrada con conexión a tierra
ECU
X4 11 Energía
12 vías 10 Común
2. Verifi que el cableado entre el sensor del ángulo de dirección y la
ECU.
Terminal del arnés de Terminal del arnés de Medición
cableado del SAS Cableado de la ECU
4 7 Verifi que la continuidad
3 8 Verifi que la continuidad
3. Verifi que el cableado entre el sensor del ángulo de dirección y la
energía/conexión a tierra.
.
5. Siga las indicaciones y realice la calibración del sensor del ángulo
de dirección.
6. Para probar el sensor del ángulo dedirección se requiere el
programa ACom V4.0. En el programa ACom V4.0 o posterior
de Bendix, seleccione la opción “Component Test” (Prueba del
componente), luego la opción “ESP Test” (Prueba de ESP). Debe
aparecer la siguiente pantalla.
7. Siga las indicaciones para realizar la prueba del sensor del ángulo
de dirección.
Terminal del arnés de Medición
cableado del SAS
4 a voltaje y tierra Verifi que el circuito abierto (sin continuidad)
3 a voltaje y tierra Verifi que el circuito abierto (sin continuidad)
4. Para realizar el procedimiento de calibración del sensor del ángulo
de dirección se requiere el uso del programa de diagnóstico
®
ACom
V4.0 o posterior. En el programa, seleccione la opción
“Configuration” (Configuración), luego la opción “Calibrate”
(Calibrar). Debe aparecer la siguiente pantalla.
35
Page 36
Solución de problemas de los códigos de diagnóstico de fallas:
sensor de velocidad de derrape (YRS)
1º código de
parpadeo
Ubicación
22 Sensor de velocidad de derrape
2º Descripción
código del código de
de parpadeo diagnóstico de fallas
1 Señal YRS
fuera de rango
2 Señal invertida
del sensor YRS
3 Señal YRS no válida
4 Error de gradiente
de YRS
5 Tiempo límite
de CAN de YRS
6 Error de BITE
estático de YRS
7 Error de BITE
dinámico de YRS
Señal YRS incorrecta. Verifi que la instalación apropiada del YRS. Verifi que el cableado apropiado entre la ECU y
el YRS. Verifi que la salida del YRS. Realice el procedimiento de calibración del YRS.
Señal YRS invertida. Verifi que la instalación apropiada del YRS. Verifi que el cableado apropiado entre la ECU y
el YRS. Verifi que la salida del YRS.
Señal YRS no válida. Verifi que la instalación apropiada del YRS. Verifi que el cableado apropiado entre la ECU y
el YRS. Verifi que la salida del YRS. Verifi que que el YRS correcto esté en uso.
Señal YRS no válida. Verifi que la instalación apropiada del YRS. Verifi que el cableado apropiado entre la ECU y
el YRS. Verifi que la salida del YRS. Verifi que que el YRS correcto esté en uso.
Pérdida de las comunicaciones de CAN entre la ECU y el YRS. Verifi que el cableado apropiado entre la ECU y el
YRS. Verifi que la salida del YRS.
La señal YRS falla la autoprueba estática. Verifi que la instalación apropiada del YRS. Verifi que el cableado
apropiado entre la ECU y el YRS. Verifi que la salida YRS. Verifi que que el YRS correcto esté en uso. Verifi que la
programación correcta de la ECU. Realice el procedimiento de calibración del YRS.
La señal YRS falla la autoprueba realizada mientras el vehículo está en movimiento. Verifi que la instalación apropiada
del YRS. Verifi que el cableado apropiado entre la ECU y el YRS. Verifi que la salida del YRS. Verifi que que el YRS
correcto esté en uso. Verifi que la programación correcta de la ECU. Realice el procedimiento de calibración del YRS.
Información de reparación
8 Error de calibración
rápida de YRS
9 Error de calibración
estática de YRS
10 Error de calibración
normal de YRS
11 Error de calibración
de sensibilidad
de YRS
12 Verifi cación de
plausibilidad de YRS
(referencia de
velocidad
de derrape)
13 Error de plausibilidad
de YRS (límites
basados
en modelo interno)
14 Error de plausibilidad
de YRS (límites
basados
en modelo externo)
Error de calibración del YRS. Verifi que la instalación apropiada del YRS. Verifi que el cableado apropiado entre la
ECU y el YRS. Verifi que la salida del YRS. Verifi que que el YRS correcto esté en uso. Verifi que la programación
correcta de la ECU. Realice el procedimiento de calibración del YRS.
Error de calibración del YRS. Verifi que la instalación apropiada del YRS. Verifi que el cableado apropiado entre la
ECU y el YRS. Verifi que la salida del YRS. Verifi que que el YRS correcto esté en uso. Verifi que la programación
correcta de la ECU. Realice el procedimiento de calibración del YRS.
Error de calibración del YRS. Verifi que la instalación apropiada del YRS. Verifi que el cableado apropiado entre la
ECU y el YRS. Verifi que la salida del YRS. Verifi que que el YRS correcto esté en uso. Verifi que la programación
correcta de la ECU. Realice el procedimiento de calibración del YRS.
Error de calibración del YRS. Verifi que la instalación apropiada del YRS. Verifi que el cableado apropiado entre la
ECU y el YRS. Verifi que la salida del YRS. Verifi que que el YRS correcto esté en uso. Verifi que la programación
correcta de la ECU. Realice el procedimiento de calibración del YRS.
La ECU ha detectado una señal incorrecta del YRS. Verifi que la instalación apropiada del YRS. Verifi que el cableado
apropiado entre la ECU y el YRS. Verifi que la salida del YRS. Verifi que que el YRS correcto esté en uso. Verifi que
la programación correcta de la ECU. Realice el procedimiento de calibración del YRS.
La ECU ha detectado una señal incorrecta del YRS. Verifi que la instalación apropiada del YRS. Verifi que el cableado
apropiado entre la ECU y el YRS. Verifi que la salida del YRS. Verifi que que el YRS correcto esté en uso. Verifi que
la programación correcta de la ECU. Realice el procedimiento de calibración del YRS.
La ECU ha detectado una señal incorrecta del YRS. Verifi que la instalación apropiada del YRS. Verifi que el cableado
apropiado entre la ECU y el YRS. Verifi que la salida del YRS. Verifi que que el YRS correcto esté en uso. Verifi que
la programación correcta de la ECU. Realice el procedimiento de calibración del YRS.
15 Verifi cación cruzada
de señal YRS - SAS
incompleta
36
La ECU (si está confi gurada) debe confi rmar que las señales YRS y SAS concuerdan. El vehículo debe pasar por
la maniobra de conducción en S para que esta DTC se elimine de manera automática. Si la DTC no se elimina aun
después de realizar la maniobra de conducción en S, verifi que y corrija la orientación del YRS y repita la maniobra.
Page 37
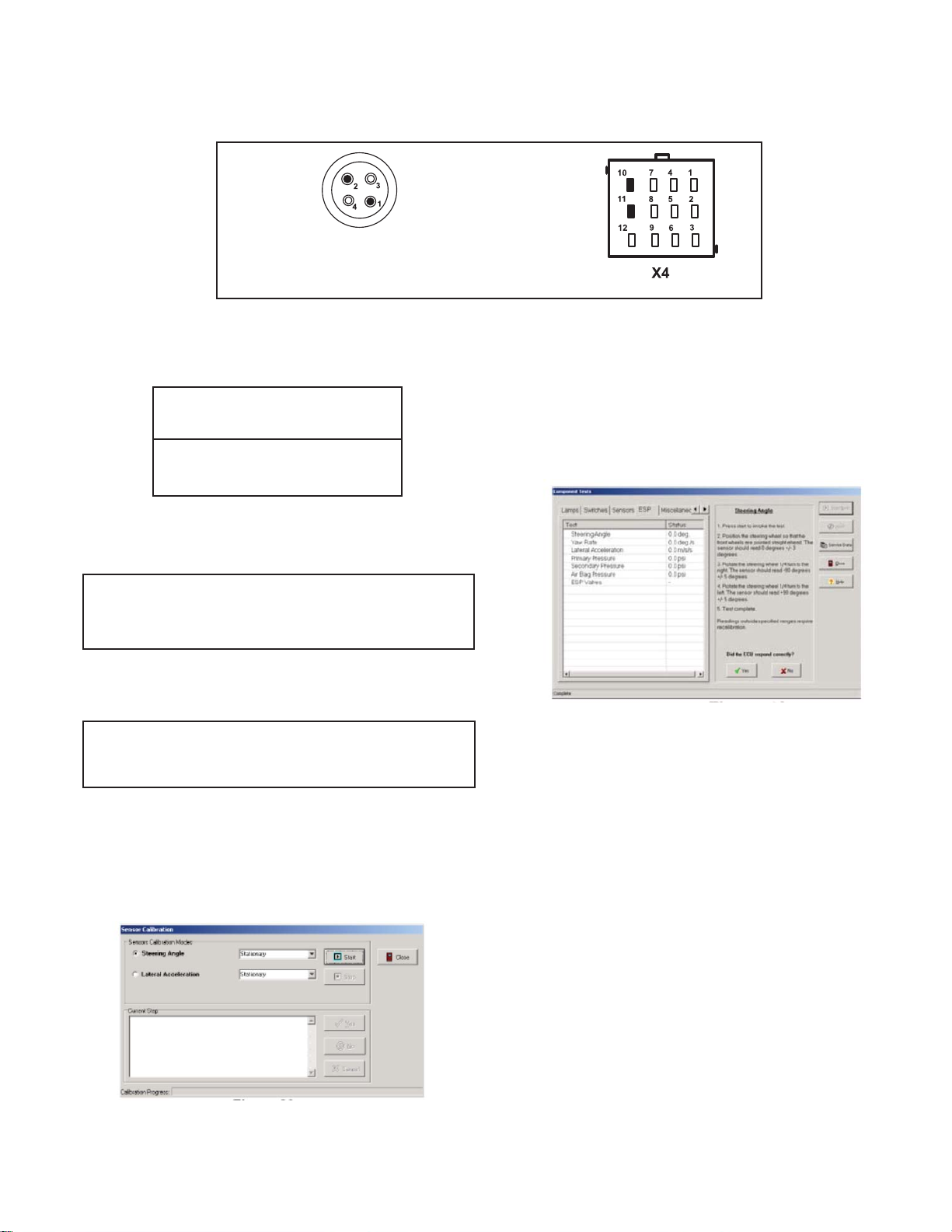
Solución de problemas de los códigos de diagnóstico de fallas:
sensor de velocidad de derrape (YRS)
Conector de derrape
Mirando hacia el conector del arnés de los cables
Pruebas del sensor de velocidad de derrape
1. Verifi que la continuidad entre la ECU y AS-60.
Conector Clavija Ubicación de la PMV
YAS 1 Energía
2 Tierra
ECU
X4 11 Energía
12 vías 10 Común
2. Verifi que el cableado entre el sensor velocidad de derrape y la ECU.
(continuación)
5. Siga las indicaciones y realice la calibración del sensor de
velocidad de derrape.
6. Para probar el sensor de velocidad de derrape se requiere el
programa ACom V4.0. En el programa ACom V4.0 o posterior
de Bendix, seleccione la opción “Component Test” (Prueba del
componente), luego la opción “ESP Test” (Prueba de ESP). Debe
aparecer la siguiente pantalla.
Terminal del arnés Terminal del arnés Medición
de cableado del SAS de cableado de la ECU
4 7 Verifi que la continuidad
3 8 Verifi que la continuidad
3. Verifi que el cableado entre el sensor de la velocidad de derrape y
la energía/tierra.
Terminal del arnés Medición
de cableado del SAS
4 a voltaje y tierra Verifi que el circuito abierto (sin continuidad)
3 a voltaje y tierra Verifi que el circuito abierto (sin continuidad)
4. Para realizar el procedimiento de calibración del sensor de velocidad
de derrape se requiere el uso del programa de diagnóstico
®
ACom
V4.0 o posterior. En el programa, seleccione la opción
“Configuration” (Configuración), luego la opción “Calibrate”
(Calibrar). Debe aparecer la siguiente pantalla.
7. Siga las indicaciones y realice una prueba del sensor de velocidad
de derrape.
37
Page 38
Solución de problemas de los códigos de diagnóstico de fallas:
sensor de aceleración lateral (LAS)
1º código de
parpadeo
23 Sensor de aceleración lateral
2º Descripción
código del código de
de parpadeo diagnóstico de fallas
1 Señal LAS
fuera de rango
2 Calibración LAS
en progreso
3 Error de calibración
estática de LAS
4 Error de calibración
a largo plazo
de LAS
5 Error de plausibilidad
LAS (límites
específi cos dentro
de la ECU)
6 Error de plausibilidad
LAS (límites
específi cos fuera
de la ECU)
Ubicación
Información de reparación
Señal LAS incorrecta. Verifi que la instalación apropiada del YRS/LAS. Verifi que el cableado apropiado entre
la ECU y el YRS/LAS. Verifi que la salida de YRS/LAS. Realice el procedimiento de calibración de LAS.
Se está realizando el procedimiento de calibración de LAS.
Error de calibración del LAS. Verifi que la instalación apropiada del YRS/LAS. Verifi que el cableado apropiado
entre la ECU y el YRS/LAS. Verifi que la salida del YRS/LAS. Verifi que que el YRS/LAS correcto esté en uso.
Verifi que la programación correcta de la ECU. Realice el procedimiento de calibración de LAS.
Error de calibración del LAS. Verifi que la instalación apropiada del YRS/LAS. Verifi que el cableado apropiado
entre la ECU y el YRS/LAS. Verifi que la salida del YRS/LAS. Verifi que que el YRS/LAS correcto esté en uso.
Verifi que la programación correcta de la ECU. Realice el procedimiento de calibración de LAS.
La ECU ha detectado una señal incorrecta del LAS. Verifi que la instalación apropiada del YRS/LAS. Verifi que
el cableado apropiado entre la ECU y el YRS/LAS. Verifi que la salida del YRS/LAS. Verifi que que el YRS/LAS
correcto esté en uso. Verifi que la programación correcta de la ECU. Realice el procedimiento de calibración
de LAS.
La ECU ha detectado una señal incorrecta del LAS. Verifi que la instalación apropiada del YRS/LAS. Verifi que
el cableado apropiado entre la ECU y el YRS/LAS. Verifi que la salida del YRS/LAS. Verifi que que el YRS/LAS
correcto esté en uso. Verifi que la programación correcta de la ECU. Realice el procedimiento de calibración
de LAS.
7 Señal de sensor
ESP errática
La ECU ha detectado una señal errática. Verifi que la instalación apropiada del YRS/LAS. Verifi que el cableado
apropiado entre la ECU y el YRS/LAS. Verifi que la salida del YRS/LAS. Verifi que que el YRS/LAS correcto
esté en uso. Verifi que la programación correcta de la ECU. Realice el procedimiento de calibración de LAS
1. Siga los pasos que aparecen en la sección de solución de problemas
del sensor de la velocidad de derrape para obtener la calibración y
solución de problemas de los sensores de aceleración lateral.
.
38
Page 39

Solución de problemas de los códigos de diagnóstico de fallas:
sensores de exigencia de frenado/carga
1º código de
parpadeo
24 Sensores de exigencia de frenado/carga
2º Descripción
código del código de
de parpadeo diagnóstico de fallas
1 PS1 abierta
o en corto
2 PS2 abierta
o en corto
3 PS3 abierta
o en corto
4 Error de plausibilidad
de PS1/2
5 Error de voltaje
de suministro de PS
6 PS sin calibrar
Ubicación
Verifi que el cableado entre el sensor de exigencia de frenado (circuito de frenado primario) y la ECU. Verifi que el
funcionamiento del sensor de presión.
Verifi que el cableado entre el sensor de exigencia de frenado (circuito de frenado secundario) y la ECU. Verifi que
el funcionamiento del sensor de presión.
Verifi que el cableado entre la sensor de carga y la ECU. Verifi que el funcionamiento del sensor de presión.
La ECU ha detectado una señal de sensor de presión no válida de uno de los sensores de exigencia de frenado.
Suministro de voltaje incorrecto para los sensores. Verifi que el voltaje correcto de los conectores del sensor. Verifi que
el cableado entre la ECU y los sensores. Verifi que el voltaje de salida correcto de la ECU.
Realice el procedimiento de calibración del sensor estático.
Información de reparación
3. Verifi que el cableado entre el sensor de carga y la energía/conexión
a tierra.
Terminal del arnés Medición
de sensor de carga
C a voltaje y tierra Verifi que el circuito abierto (sin continuidad)
Mirando hacia el conector del
arnés de los cables
Pruebas del sensor de exigencia de frenado/carga
1. Verifi que la continuidad entre la ECU y la energía del sensor de
presión y la conexión a tierra.
Prueba Medición
Entrada de energía y tierra X4 - 4 energía
B = entrada de energía X4 - 1 común
A = entrada con conexión a tierra
2. Verifi que el cableado entre el sensor de carga y la ECU.
Terminal del arnés de Terminal del arnés Medición
cableado del sensor de cableado de la ECU
de carga
C X4 – 2 sensor de exigencia Verifi que la continuidad
de frenado (circuito de
frenado primario)
X4 – 5 sensor de exigencia Verifi que la continuidad
de frenado (circuito de
frenado secundario)
X4 – 3 sensor de carga Verifi que la continuidad
4. Para realizar el procedimiento de calibración del sensor o los
sensores de exigencia de frenado, asegúrese de que el sistema
de aire esté totalmente cargado. Aplique energía de arranque y
espere 30 segundos. Realice una aplicación completa del freno
de servicio y manténgalo presionado durante 5 segundos. Libere
el freno de servicio.
5. Para probar el sensor de exigencia de frenado y/o el sensor de carga
se requiere el programa ACom V4.0 o posterior. En el programa,
seleccione la opción “Component Test” (Prueba de componente),
luego la opción “ESP Test” (Prueba de ESP). Debe aparecer la
siguiente pantalla.
6. Siga las indicaciones para probar el sensor o los sensores de
exigencia de frenado y/o el sensor de carga.
39
Page 40
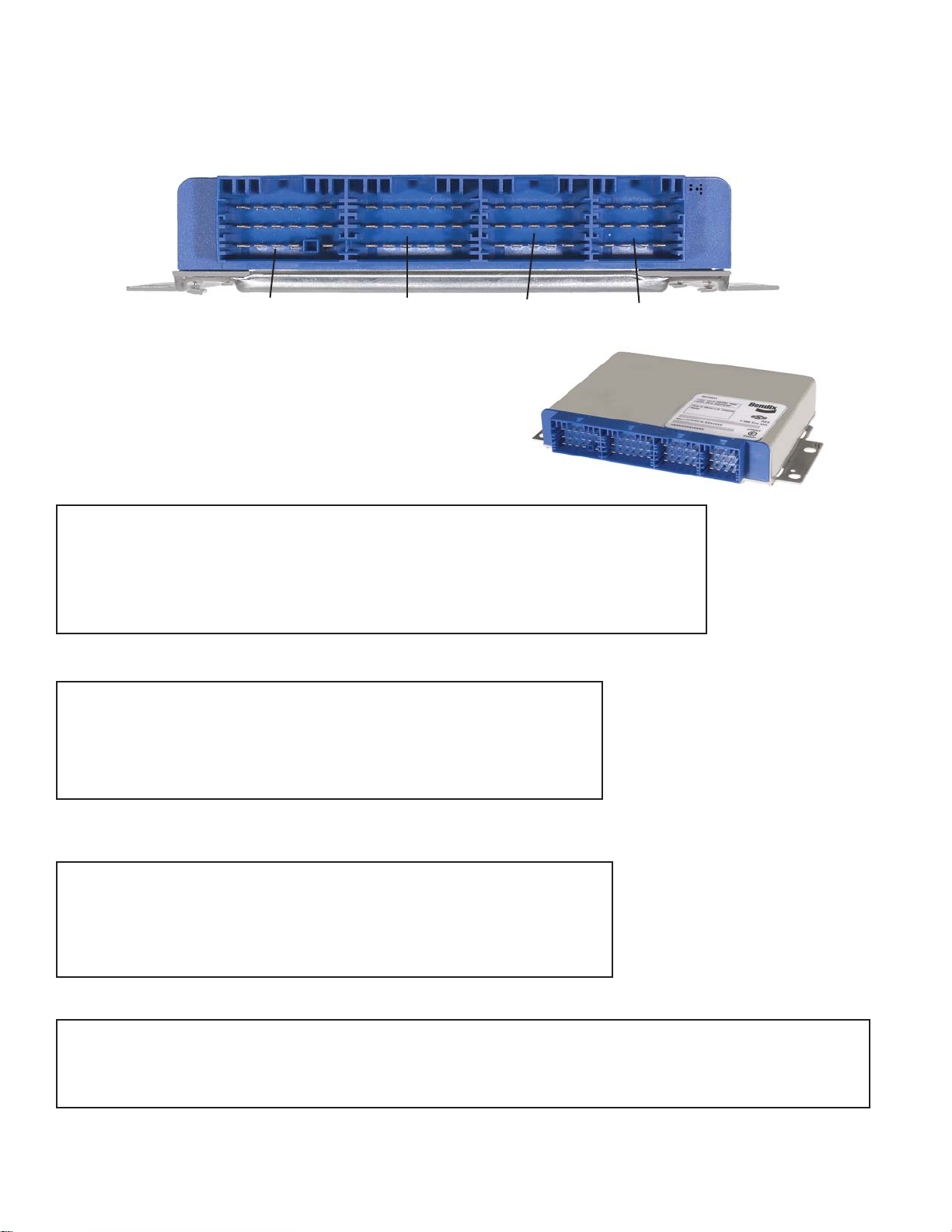
Solución de problemas: conectores
Números de pieza y asignación de clavijas del conector del arnés de
cableado del controlador EC-60
CABINA AVANZADA
™
:
CONECTOR
X1
Controlador avanzado de cabina EC-60
CONECTOR
X2
™
CONECTOR
X3
CONECTOR
X4
Los modelos de cabina avanzados utilizan cuatro conectores
AMP para conexiones de arnés de cableado.
Asignaciones de clavija del conector X1
Clavija Designación Clavija Designación Clavija Designación
1 Tierra 7 J1939 bajo 13 J1587 (B)
2 Indicador del ABS del remolque 8 J1939 alto 14 J1587 (A)
3 Encendido 9 Entrada de SLS 15 Interbloqueo de indicador de ABS
4 TCV CMN (DA) 10 WSS DA derecho (+) 16 Batería
5 TCV (DA) 11 WSS DA derecho (-) 17 Freno de motor
6 Indicador de ATC/ESP 12 Indicador de tierra del ABS 18 Indicador de tablero del ABS
y ORS de ATC
Asignaciones de clavija del conector X2
Clavija Designación Clavija Designación Clavija Designación
1 PMV SA izquierdo HLD 7 PMV SA derecho REL 13 PMV DA derecho REL
2 PMV SA izquierdo REL 8 WSS SA izquierdo (-) 14 WSS SA derecho (-)
3 PMV SA izquierdo CMN 9 PMV DA derecho CMN 15 WSS DA izquierdo (+)
4 PMV SA derecho HLD 10 PMV DA derecho HLD 16 PMV DA izquierdo HLD
5 WSS SA izquierdo (+) 11 WSS SA derecho (+) 17 PMV DA izquierdo REL
6 PMV SA derecho CMN 12 PMV DA izquierdo CMN 18 WSS DA izquierdo (-)
Asignaciones de clavija del conector X3
Clavija Designación Clavija Designación Clavija Designación
1 ORS de ABS 6 PMV AA izquierdo CMN 11 WSS AA izquierdo (+)
2 SOL
3 TCV CMN (SA) 8 Salida de la luz de freno 13 PMV AA derecho REL
4 PMV AA izquierdo HLD 9 PMV AA derecho CMN 14 WSS AA izquierdo (-)
5 TCV (SA) 10 PMV AA derecho HLD 15 WSS AA derecho (-)
1
de bloqueo diferencial 7 PMV AA izquierdo REL 12 WSS AA derecho (+)
Asignaciones de clavija del conector X4
Clavija Designación Clavija Designación Clavija Designación
1 CMN del sensor de presión 5 Señal de CKT secundario de exigencia de frenado 9 REL de PMV del remolque
2 Señal de CKT primario de exigencia de frenado 6 HLD de PMV del remolque 10 Sensor de común de CAN
3 Señal de sensor de carga 7 Sensor bajo de CAN 11 Suministro de sensor de CAN
4 Suministro del sensor de presión 8 Sensor alto de CAN 12 CMN de PMV del remolque
1Vehículos AWD solamente (caja de transferencia AWD).
40
Page 41

Solución de problemas: cableado
CABLEADO DE ABS/ATC
Conectores del arnés de cableado de la ECU
El controlador avanzado EC-60™ está diseñado para hacer interfaz con
los conectores AMP MCP 2.8, como se defi ne en la tabla 4. Siga los
requisitos AMP para reparar los arneses del cableado.
Todos los conectores del arnés del cableado deben estar debidamente
conectados. Se recomienda fi rmemente el uso de bloqueos secundarios.
PRECAUCIÓN: todos los conectores de la ECU no utilizados deben
cubrirse y recibir la protección apropiada contra el medio-ambiente.
Requisitos del cableado de ABS
Como una buena práctica y para asegurar la máxima resistencia del
sistema, siempre utilice el tamaño más grande de cable que acepten
los conectores del arnés del cableado para la batería, encendido,
tierra, PMV, TCV, bloqueo diferencial entre ejes y los circuitos de las
luces indicadoras.
Todos los sensores y circuitos de comunicaciones en serie (J1587 y
J1939) deben ser de cable par trenzado (una o dos trenzas por cada
2,54 cm [1 pulg.]). Consulte el documento apropiado de SAE para
obtener detalles adicionales.
PRECAUCIÓN: todos los cables se deben enrutar de manera cuidadosa
para evitar el contacto con los elementos que giran. El cableado se
debe fi jar de manera apropiada cada 15 a 30 cm (6 a 12 pulg.) usando
abrazaderas con UV estabilizado, no metálicas para mangueras o
amarres de cable con lazo para evitar el presionado, doblado o deshilado.
Se recomienda que todos los cables se enruten de manera recta hacia
fuera del conector por un mínimo de 7,6 cm (3 pulg.) de cable antes de
permitir el doblado del cable.
Los cables de la batería y de tierra se deben mantener a un largo mínimo.
Si se utiliza tubería enrollada, su identifi cación debe concordar con el
tamaño del grupo de cables lo más posible.
PRECAUCIÓN: se deben seleccionar los largos del arnés del cableado
para el vehículo de manera cuidadosa. Los largos excesivos de cableado
no deben enrollarse para formar bobinas; se debe reenrutar, reparar o
reemplazar el arnés del cableado para evitar la posible interferencia y
el daño al cableado. No intente estirar los arneses que son demasiado
cortos, ya que la fuerza mecánica puede resultar en cables rotos.
Sensores SAS-60™ y cableado de sensores YAS-60™ o
YAS-70X
Si es necesario reemplazar el cableado que conecta el SAS-60™ o el
sensor de velocidad de derrape a la ECU, es importante usar el mismo
cableado que utilice el fabricante de equipo original del vehículo.
™
41
Page 42

Componente de ABS Conector Terminal del cableado
Arnés del controlador
dentro de la cabina
AMP de 17 vías
MCP 2.8 (X1)
1718091-1
927768-9
1 - 2,5 mm
2
X1-12 y 18
Arnés del controlador
dentro de la cabina
AMP de 18 vías
MCP 2.8 (X2)
8-968974-1
Sello/tapón
del cableado
N/D
N/D N/D
Bloqueo terminal
967634
Tenaza engarzadora
de terminales
Arnés del controlador
dentro de la cabina
AMP de 15 vías
MCP 2.8 (X3)
Arnés del controlador
AMP de 12 vías
MCP 2.8 (X4)
Arnés del modulador
de ABS
Pieza giratoria de
sujeción de AMP
(Bayonet)
Arnés del modulador
de ATC
Pieza giratoria de
sujeción de AMP
(Bayonet)
Arnés del modulador
de ABS
Packard de 3 clavijas
Metri-Pack de 3 clavijas
Serie 280
8-968973-1
8-968972-1
1-967325-2
1-967325-3
12040977
968874
2,5 - 4 mm
968873
1,0 - 2,5 mm
929975-1
12077411
2
N/D N/D
539723-2
2
N/D N/D
N/D N/D
N/D N/D
539635-1
12015323
12034145
12155975
Conectores del sensor de velocidad de la rueda WS-24
Serie GT 150
de Packard
Serie Metripack
150.2 de Packard
Serie DTM06
de Deutsch
Serie Metripack
280 de Packard
(hembra)
Conectores de arnés de cableado de sensor de velocidad de derrape
(4 contactos):
Conector recto: Schlemmer 9800 351 (foto)
Conector AMP 2-967325-1
Conector ITT Cannon 121583-001
Conector de 90 grados: Schlemmer 9800 331
Sensor de exigencia de frenado/carga
Conectores del arnés de cableado:
Metri-Pack (Packard) 1206 5287
Clavijas de contacto:
Packard 1210 3881
TABLA 4 – CONECTORES DEL COMPONENTE DEL CONTROLADOR EC-60
42
™
™
Serie Metripack 280
de Packard (macho)
Terminales de clavija de contacto de arnés de cableado
de sensor de velocidad de derrape:
Schlemmer 7814 125
Conector AMP 0-962981-1
Conector ITT Cannon 31-8717-120
Conectores de sensor SAS-60
™
:
Robert Bosch 1 928 404 025,
Robert Bosch 1 928 498 001
Adaptador de un metro a conector:
Bendix 5015242 (mostrado)
Packard 12092162, clavijas 12064971
Serie DT04
de Deutsch
Redondo estándar
de dos clavijas
Page 43

Solución de problemas: cableado (continuación)
Espacio máximo
Bloque de montaje
del sensor de
velocidad
Bloque de
montaje
(Sensor a activador)
0,038 cm (0,015 pulg.)
Anillo activador del
sensor de velocidad
de 100 dientes
Sensor de velocidad
Nota: asegúrese de que el cableado del sensor
se enrute para evitar fricción entre las piezas
móviles (incluidos los rotores y componentes
de la dirección).
™
WS-24
Freno de aire de disco
Ensamblado del
concentrador
(común)
Tambor de freno
Sensor de velocidad
WS-24
Sensores de
velocidad de 90°
Camisa de sujeción
del sensor
™
Anillo activador
de 100 dientes
Sensores de velocidad
en tramos rectos
FIGURA 19 – INSTALACIÓN DEL SENSOR DE VELOCIDAD DE RUEDA WS-24™ (LEVA S Y FRENO DE AIRE DE DISCO)
Cableado del sensor de velocidad de la rueda
Enrute el cableado del sensor que sale del extremo de la rueda, lejos de
los componentes móviles de los frenos. El cableado del sensor se debe
fi jar en el eje para evitar tener un exceso de cable y daños al cableado.
Se requiere el uso de amarres de cable en el cableado del sensor a 76,2
mm (3 pulg.) del cabezal del sensor para proporcionar alivio de tensión.
Siguiendo el eje, los cables del sensor se deben conectar a lo largo de
las mangueras de los frenos de servicio, mediante el uso de amarres
para cable con protección contra rayos ultravioleta que se deben fi jar
cada 152 a 203 mm (6 a 8 pulg.). Se debe proporcionar sufi ciente largo
de cable, pero no excesivo, para permitir el desplazamiento completo
de la suspensión y el movimiento del eje de dirección. Instale los cables
para que no toquen los elementos giratorios, como ruedas, discos de
freno o ejes de propulsión. Puede ser necesario contar con protección
contra la radiación en el área de los discos de freno.
Bendix no recomienda el uso de bridas de cable estándar para fi jar
los arneses del cableado directamente a las líneas de aire de caucho.
Esto puede producir la falla temprana del cableado debido a la presión
que se ejerce sobre el cableado cuando se aplica presión de aire en
la línea de aire. Se prefi ere el uso de abrazaderas para manguera no
metálicas o bridas de cable de lazo.
El uso de ojales u otra protección adecuada se requiere cuando el cable
debe pasar a través de los miembros del marco de metal.
Todo el cableado de los sensores debe ser de par trenzado, con
aproximadamente una a dos vueltas por cada 2,54 cm (1 pulg.).
Se recomienda que todos los cables se enruten de manera recta hacia
fuera del conector por un mínimo de 7,6 cm (3 pulg.) de cable antes de
permitir el doblado del cable.
43
Page 44

VÁLVULA
DE CONTROL
DE TRACCIÓN
(TCV)
INTERRUPTOR
DE ATC
FUERA DE
CARRETERA
(ORS)
INDICADOR
DE TABLERO
ESP/ATC
(OPCIONAL)
RELÉ DEL
FRENO DE
MOTOR
INDICADOR DE
TABLERO DEL ABS
DEL REMOLQUE
INDICADOR
DE TABLERO
DEL ABS
WSS
DEL EJE
PROPULSOR
IZQUIERDO
PMV
DERECHA
DEL EJE
PROPULSOR
WSS
DEL EJE
PROPULSOR
DERECHO
PMV
IZQUIERDA
DEL EJE
PROPULSOR
PMV
DERECHA
DEL EJE DE
DIRECCIÓN
PMV
IZQUIERDA
DEL EJE DE
DIRECCIÓN
WSS DEL
EJE DE
DIRECCIÓN
DERECHO
WSS DEL
EJE DE
DIRECCIÓN
IZQUIERDO
RELÉ DE
LUZ DE
FRENO
CONECTORES DEL ARNÉS DE CABLEADO
NÚM.
REFERENCIA
NÚMERO DE
CONTACTOS
NÚMERO
DE PIEZA DEL
CONECTOR
AMP
17 POLOS
18 POLOS
15 POLOS
12 POLOS
+12 DE LA BATERÍA
+12V DEL ENCENDIDO
EJE PROPULSOR
EJE DE DIRECCIÓN
INTERRUPTOR DE LUZ DE FRENO (SLS)
LUZ DE
FRENO
SENSOR DE
PRESIÓN 2
(ENTREGA
SECUNDARIA)
SENSOR DE
PRESIÓN 3
(SUSPENSIÓN)
SENSOR DE
PRESIÓN 1
(ENTREGA
PRIMARIA)
PMV DEL
REMOLQUE
SENSOR DE
VELOCIDAD
DE DERRAPE
SENSOR DEL
ÁNGULO DE
DIRECCIÓN
SOLENOIDE
DE BLOQUEO
DE DIFERENCIAL
WSS
DEL EJE
ADICIONAL
DERECHO
WSS
DEL EJE
ADICIONAL
IZQUIERDO
PMV
DERECHA
DEL EJE
ADICIONAL
PMV
IZQUIERDA
DEL EJE
ADICIONAL
VÁLVULA
DE CONTROL
DE TRACCIÓN
EJE DE DIRECCIÓN
EJE ADICIONAL
INTERRUPTOR
DE ABS FUERA
DE CARRETERA
(ORS)
ESP/ATC IND.
TCV_DA
J1587 B
TCV_DA_CMN
J1587 A
J1939_LO
J1939_HI
BATERÍA
FRENO DE MOTOR
TIERRA
ENCENDIDO
ABS DEL REMOLQUE IND
ABS IND.
INTERBLOQUEO IND.
ABS IND. TIERRA
ENTRADA DE SLS
WSS_DR+
WSS_DR-
WSS_DL+
WSS_DL-
PMV_DR_HLD
PMV_DR_CMN
PMV_DR_REL
PMV_DL_HLD
PMV_DL_CMN
PMV_DL_REL
PMV_SR_HLD
PMV_SR_CMN
PMV_SR_REL
PMV_SL_HLD
PMV_SL_CMN
PMV_SL_REL
WSS_SR+
WSS_SR-
WSS_SL+
WSS_SL-
ABS ORS
SALIDA DE LA LUZ DE FRENO
DIFERENCIAL
WSS_AR+
WSS_AR-
WSS_AL+
WSS_AL-
PMV_SR_HLD
PMV_SR_CMN
PMV_SR_REL
PMV_AL_HLD
PMV_AL_CMN
PMV_AL_REL
TCV_SA
TCV_SA_CMN
CAN_SEN_LO
CAN_SEN_HI
CAN_SEN_CMN
CAN_SEN_SPL
PS_SIG 2
PS_CMN
PS_SPL
PS_SIG 3
PS_SIG 1
PMV_TR_HLD
PMV_TR_CMN
PMV_TR_REL
CO
O
O
O
O
É
O
S
2 DIAGNÓSTICOS SEGÚN SAE J1587.
3 INTERRUPTOR DE DIAGNÓSTICO DE CÓDIGOS DE PARPADEO (INTERRUPTOR MOMENTÁNEO).
4 CONTROL DE MOTOR DE ATC SEGÚN SAE 1939.
5 VÁLVULA MODULADORA DE PRESIÓN (PMV): M-32™/M-32QR™ DE BENDIX
®
.
6 CONECTOR PMV PIEZA GIRATORIA DE SUJECIÓN PACKARD
COMÚN (CMN) CLAVIJA 2 CLAVIJA B
RETENCIÓN (HLD) CLAVIJA 3 CLAVIJA C
LIBERACIÓN (REL) CLAVIJA 1 CLAVIJA A
7 SENSOR DE VELOCIDAD DE LA RUEDA (WSS): WS-24™ DE BENDIX
®
.
8 CABLEADO WSS - 1 MM CUADRADO (SE REQUIERE PAR TRENZADO).
9 VÁLVULA DE CONTROL DE TRACCIÓN (TCV).
10 COMUNICACIONES EN SERIE - 1 MM CUADRADO (SE REQUIERE PAR TRENZADO).
11 LÍNEAS CON PUNTOS: FUNCIONES ESPECIALES (OPCIONES).
12 BATERÍA Y TIERRA - 4 MM CUADRADOS.
13 VEHÍCULOS CON TRACCIÓN EN TODAS LA RUEDAS SOLAMENTE. REQUIERE ENTRADA DE LUZ DE FRENO (CONSULTE LA NOTA 18).
14. TODO CABLE TIENE UN CONDUCTOR DE SECCIÓN CRUZADA DE 1,5 MM CUADRADOS, A MENOS QUE SE ESPECIFIQUE
LO CONTRARIO.
15. ESPECIFICACIÓN DEL PRODUCTO: BW-275-PR.
16. ELIMINADO.
17 CUANDO SE DESCONECTA X1 DE LA ECU, EL INTERBLOQUEO HACE UN CORTO A TIERRA
EN EL CIRCUITO INDICADOR Y SE ILUMINA EL INDICADOR DE ABS.
18 LA ENTRADA DEL INTERRUPTOR DE LUZ DE FRENO SE REQUIERE PARA LOS VEHÍCULOS CON ATC Y TRACCIÓN
EN TODAS LAS RUEDAS. PUEDE PROPORCIONARSE MEDIANTE ENTRADA DE HARDWARE O COMUNICACIÓN J1939.
19 CABLEADO DEL SENSOR CAN - 1 MM CUADRADO (SE REQUIERE PAR TRENZADO CON CUATRO CONDUCTORES).
20 INTERRUPTOR MOMENTÁNEO
21 WSS Y PMV DE EJE ADICIONAL SE INSTALA SEGÚN LA CONFIGURACIÓN DEL CONTROLADOR EC-60™ DE BENDIX
®
(6S/4M, 6S/6M).
Solución de problemas: dibujo del cableado
AE J1939.
R MEDIANTE REL
T
DE M
L DE FREN
NTR
1.
FIGURA 20 – DIBUJO DEL CABLEADO ESTÁNDAR DE LA CABINA
44
Page 45

GLOSARIO
ABS: sistema de freno antibloqueo.
Anillo de tono: un anillo que generalmente se presiona en el concentrador de
la rueda que cuenta con una serie de dientes (generalmente 100) y proporciona
la activación para el sensor de velocidad. Observe que el desplazamiento
máximo es 0,008.
ASR: control automático de deslizamiento. Otra forma de denominar el control
de tracción.
ATC: control de tracción automático. Es una función adicional del ABS que
controla la torsión del motor y aplica los frenos de manera diferencial para
mejorar la tracción del vehículo.
Borrado de códigos: es el sistema que borra el historial de los códigos de
diagnóstico de fallas de la ECU, utilizando el interruptor de diagnóstico o una
herramienta manual para diagnóstico (solo se pueden borrar los códigos de
diagnóstico de fallas cuando se soluciona el problema).
Camisa de sujeción del sensor: una camisa de cobre al berilio que tiene unos
dedos cortados. Se presiona entre el sensor de ABS y el agujero de montaje
para sujetar el sensor en su sitio.
CAN: red de área del controlador. J1939 es una versión SAE del enlace CAN.
Canal: sitio controlado de las ruedas.
Código de diagnóstico de fallas: una condición que interfiere con la
generación o transmisión de señales de respuesta o control en el sistema
ABS del vehículo, lo que puede llevar a la inoperatividad parcial o total del
sistema ABS.
Códigos de diagnóstico de fallas almacenados: un código de diagnóstico
de fallas que se produjo.
Conector de diagnóstico: receptáculo de diagnóstico en la cabina del
vehículo para la conexión del equipo de prueba J1587 manual o basado en
PC. El probador puede iniciar las secuencias de prueba y también puede leer
los parámetros del sistema.
Confi guración: el objetivo principal es identifi car un juego “normal” de sensores
y moduladores para la unidad de control electrónico (ECU, por su sigla en inglés),
para que identifi que a futuro si faltan sensores y moduladores.
Distancia de aire: distancia entre el sensor y el anillo de tono.
ECU: unidad de control electrónico.
ESP: programa electrónico de estabilidad. Función de estabilidad total que
incluye subfunciones de RSP e YC.
Evento ABS: inminente situación de bloqueo de las ruedas que hace que el
controlador de ABS active la o las válvulas del modulador.
FMVSS-121: estándar de seguridad para vehículos con motor del gobierno
federal de los EE. UU. que regula los sistemas de freno de aire.
Frenado diferencial: aplicación de la fuerza de frenado a una rueda que gira
para que se aplique la torsión a las ruedas que no se están deslizando.
Interruptor de diagnóstico: un interruptor utilizado para activar los códigos
de parpadeo.
IR: regulación independiente. Un método de control que regula la rueda al punto
óptimo de deslizamiento, el punto en que se maximiza el frenado con el motor
y la estabilidad. La presión de frenado idónea para la rueda que se analiza se
dirige de manera individual a cada cámara de frenado.
J1587: estándar SAE de enlace de datos de diagnóstico de uso pesado.
J1708: un estándar SAE que defi ne el protocolo de hardware y software para
implementar los enlaces de datos de 9600 baudios para vehículos pesados.
Versión J1587 de un enlace de datos J1708.
J1939: un enlace de datos de alta velocidad de 250.000 baudios que se utiliza
para las comunicaciones entre el motor ECU del ABS, la transmisión y el freno
de motor.
LAS: sensor de aceleración lateral.
Luz ATC/ESP: una luz que indica que están activadas las funciones de
estabilidad, tales como control de tracción, programa de estabilidad antivuelco
o control de derrape.
Luz indicadora de ABS: una luz ámbar que indica el estado de funcionamiento
del sistema antibloqueo. Cuando la luz está encendida, el ABS está desactivado
y el vehículo regresa al funcionamiento normal de los frenos.
MIR: regulación independiente modifi cada. Un método de control de los lados
opuestos de un eje de viraje durante el funcionamiento del ABS para que se
minimicen el viraje de torsión y la distancia de detención.
PLC: transportador de línea de energía. El protocolo de comunicación en serie
que se utiliza para comunicar con el remolque utilizando el cable de energía
azul de tiempo completo.
PMV: válvula moduladora de presión. Una válvula de aire que se utiliza para
ventilar o bloquear el aire a las cámaras de frenado para limitar o reducir la
torsión de frenado.
QR: liberación rápida. Las válvulas de liberación rápida permiten la liberación
más rápida del aire en las cámaras de frenado después de la aplicación de los
frenos. Para balancear el sistema, las válvulas de liberación rápida contienen
resortes de retención que producen presiones de apertura más altas (cuando
las válvulas se abren).
Relé del freno de motor: un relé que se utiliza para desactivar el freno de
motor cuando se activa el ABS.
RSP: programa de estabilidad antivuelco. Una solución ABS para todos los
ejes que ayuda a reducir la velocidad del vehículo aplicando todos los frenos
del vehículo, según se requiere, reduciendo la tendencia al vuelco.
SAS: sensor del ángulo de dirección
TCS: sistema de control de tracción, otra denominación para ATC o ASR.
Válvula de relé: aumenta la velocidad de aplicación de los frenos de servicio.
Se instala cerca de los frenos con cámaras de aire más grandes (tipo 24 ó 30).
La válvula de freno activa la válvula de relé mediante una señal de aire. La
válvula de relé luego conecta su puerto de suministro a los puertos de entrega.
Tramos de manguera de aire del mismo largo deben conectar los puertos de
entrega de la válvula de relé a las cámaras de frenado.
YC: control de derrape. Ayuda a estabilizar la dinámica rotacional del vehículo.
YRS:
sensor de velocidad de derrape.
45
Page 46

APÉNDICE A: Códigos J1587 SID y FMI y sus equivalentes en códigos de parpadeo de Bendix
Equivalente(s) de los
SID (J1587) FMI (J1587) General
códigos de parapadeo
de Bendix
(1er dígito) (2do dígito)
- - Sin DTC 1 1 Sin DTC
1 1 DTC del sensor de velocidad de la rueda 2 1 Espacio de aire excesivo del WSS izquierdo de SA
2 1 DTC del sensor de velocidad de la rueda 3 1 Espacio de aire excesivo del WSS derecho de SA
3 1 DTC del sensor de velocidad de la rueda 4 1 Espacio de aire excesivo del WSS izquierdo de DA
4 1 DTC del sensor de velocidad de la rueda 5 1 Espacio de aire excesivo del WSS derecho de DA
5 1 DTC del sensor de velocidad de la rueda 14 1 Espacio de aire excesivo del WSS izquierdo de AA
6 1 DTC del sensor de velocidad de la rueda 15 1 Espacio de aire excesivo del WSS derecho de AA
1 14 DTC del sensor de velocidad de la rueda 2 2 Salida baja del WSS izquierdo de SA al comenzar a conducir
2 14 DTC del sensor de velocidad de la rueda 3 2 Salida baja del WSS derecho de SA al comenzar a conducir
3 14 DTC del sensor de velocidad de la rueda 4 2 Salida baja del WSS izquierdo de DA al comenzar a conducir
4 14 DTC del sensor de velocidad de la rueda 5 2 Salida baja del WSS derecho de DA al comenzar a conducir
5 14 DTC del sensor de velocidad de la rueda 14 2 Salida baja del WSS izquierdo de AA al comenzar a conducir
6 14 DTC del sensor de velocidad de la rueda 15 2 Salida baja del WSS derecho de AA al comenzar a conducir
1 2 DTC del sensor de velocidad de la rueda 2 3 WSS izquierdo de SA abierto o con corto
2 2 DTC del sensor de velocidad de la rueda 3 3 WSS derecho de SA abierto o con corto
3 2 DTC del sensor de velocidad de la rueda 4 3 WSS izquierdo de DA abierto o con corto
4 2 DTC del sensor de velocidad de la rueda 5 3 WSS derecho de DA abierto o con corto
5 2 DTC del sensor de velocidad de la rueda 14 3 WSS izquierdo de AA abierto o con corto
6 2 DTC del sensor de velocidad de la rueda 15 3 WSS derecho de AA abierto o con corto
1 10 DTC del sensor de velocidad de la rueda 2 4 Pérdida de señal del sensor del WSS izquierdo de SA
2 10 DTC del sensor de velocidad de la rueda 3 4 Pérdida de señal del sensor del WSS derecho de SA
3 10 DTC del sensor de velocidad de la rueda 4 4 Pérdida de señal del sensor del WSS izquierdo de DA
4 10 DTC del sensor de velocidad de la rueda 5 4 Pérdida de señal del sensor del WSS derecho de DA
5 10 DTC del sensor de velocidad de la rueda 14 4 Pérdida de señal del sensor del WSS izquierdo de AA
6 10 DTC del sensor de velocidad de la rueda 15 4 Pérdida de señal del sensor del WSS derecho de AA
1 7 DTC del sensor de velocidad de la rueda 2 5 Extremo de rueda del WSS izquierdo de SA
2 7 DTC del sensor de velocidad de la rueda 3 5 Extremo de rueda del WSS derecho de SA
3 7 DTC del sensor de velocidad de la rueda 4 5 Extremo de rueda del WSS izquierdo de DA
4 7 DTC del sensor de velocidad de la rueda 5 5 Extremo de rueda del WSS derecho de DA
5 7 DTC del sensor de velocidad de la rueda 14 5 Extremo de rueda del WSS izquierdo de AA
6 7 DTC del sensor de velocidad de la rueda 15 5 Extremo de rueda del WSS derecho de AA
1 8 DTC del sensor de velocidad de la rueda 2 6 Señal errática del sensor del WSS izquierdo de SA
2 8 DTC del sensor de velocidad de la rueda 3 6 Señal errática del sensor del WSS derecho de SA
3 8 DTC del sensor de velocidad de la rueda 4 6 Señal errática del sensor del WSS izquierdo de DA
4 8 DTC del sensor de velocidad de la rueda 5 6 Señal errática del sensor del WSS derecho de DA
5 8 DTC del sensor de velocidad de la rueda 14 6 Señal errática del sensor del WSS izquierdo de AA
6 8 DTC del sensor de velocidad de la rueda 15 6 Señal errática del sensor del WSS derecho de AA
1 13 DTC del sensor de velocidad de la rueda 2 7 Calibración del tamaño del neumático del WSS izquierdo de SA
2 13 DTC del sensor de velocidad de la rueda 3 7 Calibración del tamaño del neumático del WSS derecho de SA
3 13 DTC del sensor de velocidad de la rueda 4 7 Calibración del tamaño del neumático del WSS izquierdo de DA
4 13 DTC del sensor de velocidad de la rueda 5 7 Calibración del tamaño del neumático del WSS derecho de DA
5 13 DTC del sensor de velocidad de la rueda 14 7 Calibración del tamaño del neumático del WSS izquierdo de AA
Descripción del código de diagnóstico de fallas
46
Page 47

APÉNDICE A: Códigos J1587 SID y FMI y sus equivalentes en códigos de parpadeo de Bendix
Equivalente(s) de los
SID (J1587) FMI (J1587) General
códigos de parapadeo
de Bendix
(1er dígito) (2do dígito)
6 13 DTC del sensor de velocidad de la rueda 15 7 Calibración del tamaño del neumático del WSS derecho de AA
5 13 DTC del sensor de velocidad de la rueda 14 10 Error de confi guración del WSS izquierdo de AA
6 13 DTC del sensor de velocidad de la rueda 15 10 Error de confi guración del WSS derecho de AA
251 4 DTC de suministro de energía 6 1 Voltaje de batería demasiado bajo
251 3 DTC de suministro de energía 6 2 Voltaje de batería demasiado alto
251 4 DTC de suministro de energía 6 3 Voltaje de batería demasiado bajo durante ABS
251 5 DTC de suministro de energía 6 4 Entrada de voltaje de batería con circuito abierto
251 4 DTC de suministro de energía 6 5 Voltaje de arranque demasiado bajo
251 3 DTC de suministro de energía 6 6 Voltaje de arranque demasiado alto
251 4 DTC de suministro de energía 6 7 Voltaje de arranque demasiado bajo durante ABS
251 2 DTC de suministro de energía 6 8 Voltaje de entrada tiene ruido excesivo (temporal)
251 14 DTC de suministro de energía 6 9 Voltaje de entrada tiene ruido excesivo (bloqueado)
48 4 DTC de la válvula de modulador de presión 7 1 Solenoide REL de la PMV izquierda de SA con corto a tierra
49 4 DTC de la válvula de modulador de presión 8 1 Solenoide REL de la PMV derecha de SA con corto a tierra
50 4 DTC de la válvula de modulador de presión 9 1 Solenoide REL de la PMV izquierda de DA con corto a tierra
51 4 DTC de la válvula de modulador de presión 10 1 Solenoide REL de la PMV derecha de DA con corto a tierra
52 4 DTC de la válvula de modulador de presión 16 1 Solenoide REL de la PMV izquierda de AA con corto a tierra
53 4 DTC de la válvula de modulador de presión 17 1 Solenoide REL de la PMV derecha de AA con corto a tierra
66 4 DTC de la válvula de modulador de presión 20 1 Solenoide REL de la PMV del remolque con corto a tierra
48 3 DTC de la válvula de modulador de presión 7 2 Solenoide REL de la PMV izquierda de SA con corto a voltaje
49 3 DTC de la válvula de modulador de presión 8 2 Solenoide REL de la PMV derecha de SA con corto a voltaje
50 3 DTC de la válvula de modulador de presión 9 2 Solenoide REL de la PMV izquierda de DA con corto a voltaje
51 3 DTC de la válvula de modulador de presión 10 2 Solenoide REL de la PMV derecha de DA con corto a voltaje
52 3 DTC de la válvula de modulador de presión 16 2 Solenoide REL de la PMV izquierda de AA con corto a voltaje
53 3 DTC de la válvula de modulador de presión 17 2 Solenoide REL de la PMV derecha de AA con corto a voltaje
66 3 DTC de la válvula de modulador de presión 20 2 Solenoide REL de la PMV del remolque con corto a voltaje
48 5 DTC de la válvula de modulador de presión 7 3 Solenoide REL de la PMV izquierda de SA con circuito abierto
49 5 DTC de la válvula de modulador de presión 8 3 Solenoide REL de la PMV derecha de SA con circuito abierto
50 5 DTC de la válvula de modulador de presión 9 3 Solenoide REL de la PMV izquierda de DA con circuito abierto
51 5 DTC de la válvula de modulador de presión 10 3 Solenoide REL de la PMV derecha de DA con circuito abierto
52 5 DTC de la válvula de modulador de presión 16 3 Solenoide REL de la PMV izquierda de AA con circuito abierto
53 5 DTC de la válvula de modulador de presión 17 3 Solenoide REL de la PMV derecha de AA con circuito abierto
66 5 DTC de la válvula de modulador de presión 20 3 Solenoide REL de la PMV del remolque con circuito abierto
42 4 DTC de la válvula de modulador de presión 7 4 Solenoide HLD de la PMV izquierda de SA con corto a tierra
43 4 DTC de la válvula de modulador de presión 8 4 Solenoide HLD de la PMV derecha de SA con corto a tierra
44 4 DTC de la válvula de modulador de presión 9 4 Solenoide HLD de la PMV izquierda de DA con corto a tierra
45 4 DTC de la válvula de modulador de presión 10 4 Solenoide HLD de la PMV derecha de DA con corto a tierra
46 4 DTC de la válvula de modulador de presión 16 4 Solenoide HLD de la PMV izquierda de AA con corto a tierra
47 4 DTC de la válvula de modulador de presión 17 4 Solenoide HLD de la PMV derecha de AA con corto a tierra
66 4 DTC de la válvula de modulador de presión 20 4 Solenoide HLD de la PMV del remolque con corto a tierra
42 3 DTC de la válvula de modulador de presión 7 5 Solenoide HLD de la PMV izquierda de SA con corto a voltaje
43 3 DTC de la válvula de modulador de presión 8 5 Solenoide HLD de la PMV derecha de SA con corto a voltaje
Descripción del código de diagnóstico de fallas
47
Page 48

APÉNDICE A: Códigos J1587 SID y FMI y sus equivalentes en códigos de parpadeo de Bendix
Equivalente(s) de los
SID (J1587) FMI (J1587) General
códigos de parapadeo
de Bendix
(1er dígito) (2do dígito)
44 3 DTC de la válvula de modulador de presión 9 5 Solenoide HLD de la PMV izquierda de DA con corto a voltaje
45 3 DTC de la válvula de modulador de presión 10 5 Solenoide HLD de la PMV derecha de DA con corto a voltaje
46 3 DTC de la válvula de modulador de presión 16 5 Solenoide HLD de la PMV izquierda de AA con corto a voltaje
47 3 DTC de la válvula de modulador de presión 17 5 Solenoide HLD de la PMV derecha de AA con corto a voltaje
66 3 DTC de la válvula de modulador de presión 20 5 Solenoide HLD de la PMV del remolque con corto a voltaje
42 5 DTC de la válvula de modulador de presión 7 6 Solenoide HLD de la PMV izquierda de SA con circuito abierto
43 5 DTC de la válvula de modulador de presión 8 6 Solenoide HLD de la PMV derecha de SA con circuito abierto
44 5 DTC de la válvula de modulador de presión 9 6 Solenoide HLD de la PMV izquierda de DA con circuito abierto
45 5 DTC de la válvula de modulador de presión 10 6 Solenoide HLD de la PMV derecha de DA con circuito abierto
46 5 DTC de la válvula de modulador de presión 16 6 Solenoide HLD de la PMV izquierda de AA con circuito abierto
47 5 DTC de la válvula de modulador de presión 17 6 Solenoide HLD de la PMV derecha de AA con circuito abierto
66 5 DTC de la válvula de modulador de presión 20 6 Solenoide HLD de la PMV de remolque con circuito abierto
7 5 DTC de la válvula de modulador de presión 7 7 CMN de la PMV izquierda de SA con circuito abierto
8 5 DTC de la válvula de modulador de presión 8 7 CMN de la PMV derecha de SA con circuito abierto
9 5 DTC de la válvula de modulador de presión 9 7 CMN de la PMV izquierda de DA con circuito abierto
10 5 DTC de la válvula de modulador de presión 10 7 CMN de la PMV derecha de DA con circuito abierto
11 5 DTC de la válvula de modulador de presión 16 7 CMN de la PMV izquierda de AA con circuito abierto
12 5 DTC de la válvula de modulador de presión 17 7 CMN de la PMV derecha de AA con circuito abierto
66 5 DTC de la válvula de modulador de presión 20 7 CMN de la PMV del remolque con circuito abierto
7 13 DTC de la válvula de modulador de presión 7 8 Error de confi guración de la PMV izquierda de SA
8 13 DTC de la válvula de modulador de presión 8 8 Error de confi guración de la PMV derecha de SA
9 13 DTC de la válvula de modulador de presión 9 8 Error de confi guración de la PMV izquierda de DA
10 13 DTC de la válvula de modulador de presión 10 8 Error de confi guración de la PMV derecha de DA
11 13 DTC de la válvula de modulador de presión 16 8 Error de confi guración de la PMV izquierda de AA
12 13 DTC de la válvula de modulador de presión 17 8 Error de confi guración de la PMV derecha de AA
231 12 DTC de J1939 11 1 Enlace en serie J1939
231 14 DTC de J1939 11 2 Freno de motor para J1939
231 2 DTC de J1939 11 3 Comunicaciones con el motor J1939
231 2 DTC de J1939 11 10 Datos no válidos de la transmisión
231 2 DTC de J1939 11 4 Datos no válidos de J1939 (motor/freno de motor)
231 2 DTC de J1939 11 5 Presión de suministro para J1939
231 2 DTC de J1939 11 6 Datos no válidos de mensajes ESP J1939
231 2 DTC de J1939 11 10 Datos no válidos de la transmisión
55 7 DTC misceláneos 12 1 No se detecta el interruptor de luz de freno
55 2 DTC misceláneos 12 2 Interruptor de luz de freno defectuoso
17 14 DTC misceláneos 12 3 Modo de prueba con dinamómetro
13 2 DTC misceláneos 12 4 El relé del freno de motor con circuito abierto o corto a tierra
13 3 DTC misceláneos 12 5 Circuito de relé de freno de motor con corto a voltaje
23 2 DTC misceláneos 12 6 DTC del circuito de la luz del tablero de ABS
93 4 DTC misceláneos 12 7 Común de PMV con corto a tierra
93 3 DTC misceláneos 12 8 Común de PMV con corto a voltaje
17 14 DTC misceláneos 12 9 ATC desactivada para evitar desvanecimiento de los frenos
Descripción del código de diagnóstico de fallas
48
Page 49
APÉNDICE A: Códigos J1587 SID y FMI y sus equivalentes en códigos de parpadeo de Bendix
Equivalente(s) de los
SID (J1587) FMI (J1587) General
79 13 DTC misceláneos 12 10 Tamaño de neumático fuera de rango (frente a posterior)
22 7 DTC misceláneos 12 11 Sensores de velocidad de la rueda se invirtieron en un eje
102 5 DTC misceláneos 12 12
102 3 DTC misceláneos 12 13 Solenoide de bloqueo diferencial con corto a voltaje
103 2 DTC misceláneos 12 14 Error de voltaje de suministro del CAN del sensor
N/D N/D DTC misceláneos 12 15 Reservado
" " DTC misceláneos 12 16 Reservado
" " DTC misceláneos 12 17 Reservado
" " DTC misceláneos 12 18 Reservado
" " DTC misceláneos 12 19 Reservado
" " DTC misceláneos 12 20 Reservado
" " DTC misceláneos 12 21 Reservado
103 2 DTC misceláneos 12 22 Voltaje de sensor ESP fuera de rango
254 12 DTC de la ECU 13 1 ECU (02)
254 12 DTC de la ECU 13 2 ECU (10)
254 12 DTC de la ECU 13 3 ECU (11)
254 2 DTC de la ECU 13 4 ECU (12)
254 2 DTC de la ECU 13 5 ECU (13)
254 12 DTC de la ECU 13 6 ECU (14)
254 2 DTC de la ECU 13 7 ECU (15)
254 13 DTC de la ECU 13 8 ECU (16)
254 13 DTC de la ECU 13 9 ECU (17)
254 12 DTC de la ECU 13 10 ECU (18)
254 12 DTC de la ECU 13 11 ECU (1A)
254 12 DTC de la ECU 13 12 ECU (1B)
254 12 DTC de la ECU 13 13 ECU (80)
254 12 DTC de la ECU 13 14 ECU (04)
254 12 DTC de la ECU 13 15 ECU (06)
254 12 DTC de la ECU 13 16 ECU (0E)
254 2 DTC de la ECU 13 17 ECU (0D)
254 2 DTC de la ECU 13 18 ECU (19)
253 12 DTC de la ECU 13 19 ECU (1C)
253 12 DTC de la ECU 13 20 ECU (27)
253 13 DTC de la ECU 13 21 ECU (1D)
253 13 DTC de la ECU 13 22 ECU (1E)
253 13 DTC de la ECU 13 23 ECU (28)
254 12 DTC de la ECU 13 24 ECU (37)
254 12 DTC de la ECU 13 25 Falta de concordancia del VIN interno de la ECU
18 4 DTC de la TCV 18 1 Solenoide de DA de TCV con corto a tierra
18 3 DTC de la TCV 18 2 Solenoide de DA de TCV con corto a voltaje
18 5 DTC de la TCV 18 3 Solenoide de DA de TCV con circuito abierto
18 13 DTC de la TCV 18 4 Error de confi guración de DA de TCV
códigos de parapadeo
de Bendix
er
dígito) (2do dígito)
(1
Descripción del código de diagnóstico de fallas
Solenoide de bloqueo diferencial con corto a tierra o circuito
abierto
49
Page 50
APÉNDICE A: Códigos J1587 SID y FMI y sus equivalentes en códigos de parpadeo de Bendix
Equivalente(s) de los
SID (J1587) FMI (J1587) General
19 4 DTC de la TCV 19 1 Solenoide de SA de TCV con corto a tierra
19 3 DTC de la TCV 19 2 Solenoide de SA de TCV con corto a voltaje
19 5 DTC de la TCV 19 3 Solenoide de SA de TCV con circuito abierto
19 13 DTC de la TCV 19 4 Error de confi guración de SA de TCV
89 13 DTC del sensor del ángulo de dirección 21 1 SAS sin calibrar
89 13 DTC del sensor del ángulo de dirección 22 15 No terminó la verifi cación de la señal YRS
89 13 DTC del sensor del ángulo de dirección 21 2 Calibración SAS en progreso
89 2 DTC del sensor del ángulo de dirección 21 3 Señal SAS estática
89 2 DTC del sensor del ángulo de dirección 21 4 Señal SAS fuera de rango
89 2 DTC del sensor del ángulo de dirección 21 5 Señal SAS invertida
89 12 DTC del sensor del ángulo de dirección 21 6 Señal SAS no válida
89 2 DTC del sensor del ángulo de dirección 21 7 Error de gradiente SAS
89 9 DTC del sensor del ángulo de dirección 21 8 Tiempo límite de CAN de SAS
89 2 DTC del sensor del ángulo de dirección 21 9 Error de calibración a largo plazo de SAS
89 2 DTC del sensor del ángulo de dirección 21 10
103 2 DTC del sensor de velocidad de derrape 22 1 Señal YRS fuera de rango
103 2 DTC del sensor de velocidad de derrape 22 2 Señal invertida del sensor YRS
103 2 DTC del sensor de velocidad de derrape 22 3 Señal YRS no válida
103 2 DTC del sensor de velocidad de derrape 22 4 Error de gradiente YRS
103 9 DTC del sensor de velocidad de derrape 22 5 Tiempo límite de CAN de YRS
103 2 DTC del sensor de velocidad de derrape 22 6 Error BITE estático de YRS
103 2 DTC del sensor de velocidad de derrape 22 7 Error BITE dinámico de YRS
103 2 DTC del sensor de velocidad de derrape 22 8 Error de calibración rápida de YRS
103 2 DTC del sensor de velocidad de derrape 22 9 Error de calibración estática de YRS
103 2 DTC del sensor de velocidad de derrape 22 10 Error de calibración normal de YRS
103 2 DTC del sensor de velocidad de derrape 22 11 Error de calibración de sensibilidad de YRS
103 2 DTC del sensor de velocidad de derrape 22 12
103 2 DTC del sensor de velocidad de derrape 22 13 Error de plausibilidad YRS (límites específi cos dentro de la ECU)
103 2 DTC del sensor de velocidad de derrape 22 14 Error de plausibilidad YRS (límites específi cos fuera de la ECU)
99 2 DTC del sensor de aceleración lateral 23 1 Señal LAS fuera de rango
99 13 DTC del sensor de aceleración lateral 23 2 Calibración LAS en progreso
99 2 DTC del sensor de aceleración lateral 23 3 Error de calibración estática de LAS
99 2 DTC del sensor de aceleración lateral 23 4 Error de calibración a largo plazo de LAS
99 12 DTC del sensor de aceleración lateral 23 5 Error de plausibilidad LAS (límites específi cos dentro de la ECU)
99 12 DTC del sensor de aceleración lateral 23 6 Error de plausibilidad LAS (límites específi cos fuera de la ECU)
99 14 DTC del sensor de aceleración lateral 23 7 Señal de sensor ESP errática
códigos de parapadeo
de Bendix
er
(1
dígito) (2do dígito)
Descripción del código de diagnóstico de fallas
Verifi cación de plausibilidad SAS (referencia de velocidad
de derrape)
Verifi cación de plausibilidad YRS (referencia de velocidad
de derrape)
50
Page 51
APÉNDICE A: Códigos J1587 SID y FMI y sus equivalentes en códigos de parpadeo de Bendix
Equivalente(s) de los
SID (J1587) FMI (J1587) General
77 2 DTC del sensor de exigencia de frenado/carga 24 1 Señal de exigencia de frenado con corto (CKT primario) abierta
78 2 DTC del sensor de exigencia de frenado/carga 24 2 Señal de exigencia de frenado con corto (CKT secundario) abierta
69 2 DTC del sensor de exigencia de frenado/carga 24 3 Sensor de carga abierto o en corto
77 11 DTC del sensor de exigencia de frenado/carga 24 4 Sensor de exigencia de frenado con error de plausibilidad
77 2 DTC del sensor de exigencia de frenado/carga 24 5 Error de voltaje de suministro de PS
77 7 DTC del sensor de exigencia de frenado/carga 24 6 PS sin calibrar
89 13 Sensor de velocidad de derrape 22 15 Verifi cación incompleta
códigos de parapadeo
de Bendix
er
(1
dígito) (2do dígito)
Descripción del código de diagnóstico de fallas
51
Page 52

52
BW2429S © 2011 Bendix Commercial Vehicle Systems LLC • Todos los derechos reservados • 03/11
 Loading...
Loading...