

Page 1

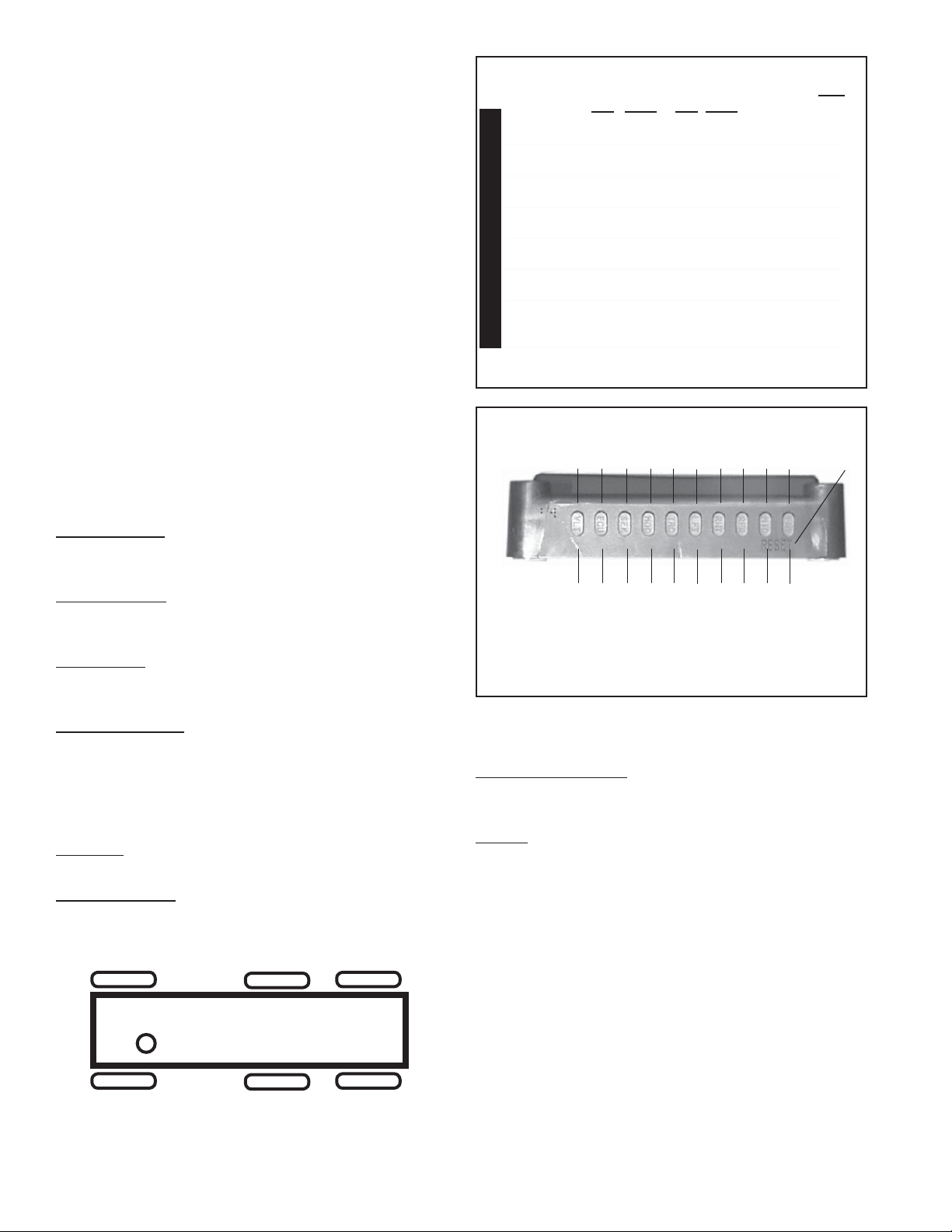
BENDIX® EC-17™ ANTILOCK - TRACTION CONTROLLER
MOUNTING
HOLES
(4)
™
EC-17N
WITHOUT LED DIAGNOSTICS
CONTROLLER
SD-13-4788
18 PIN
CONNECTOR
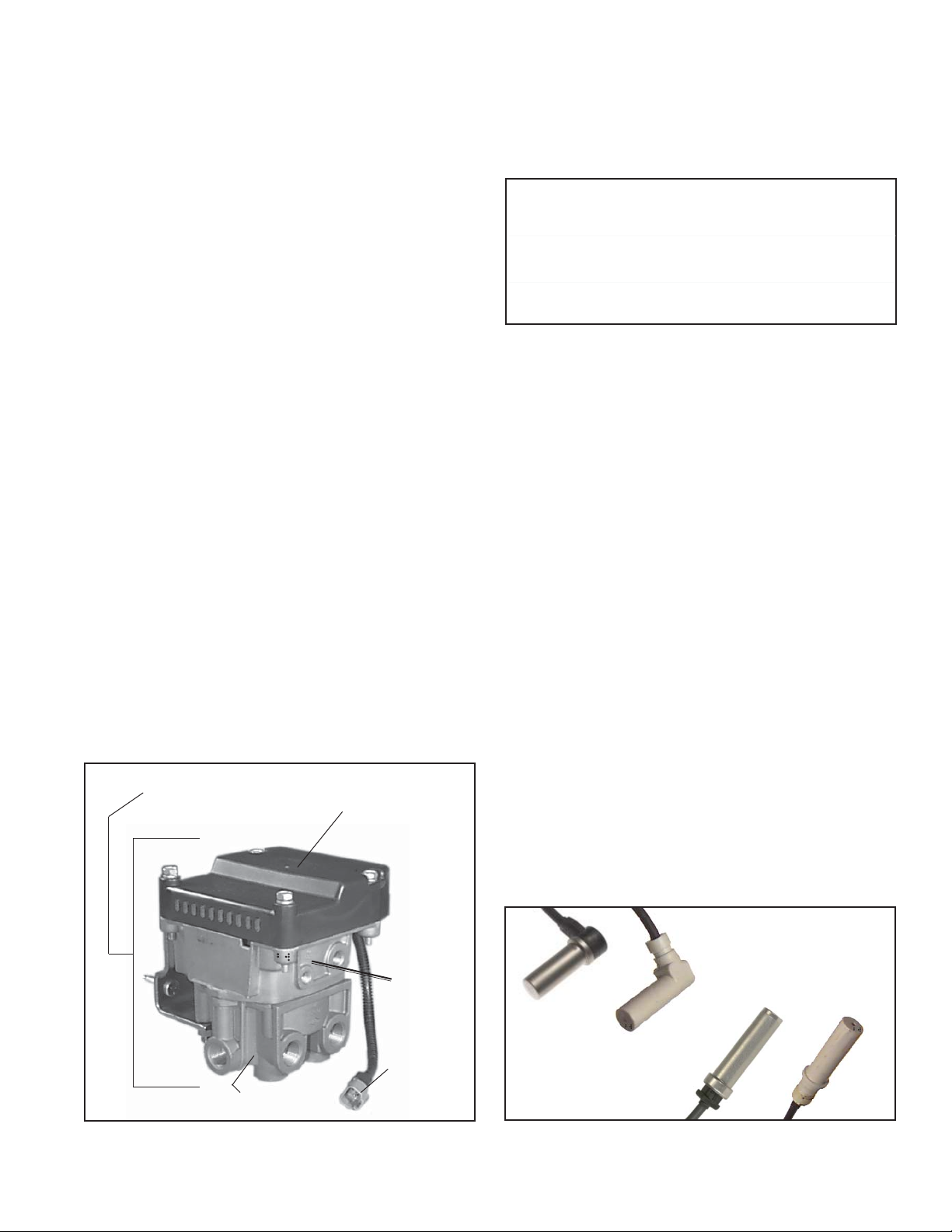
FIGURE 1 - EC-17
30 PIN
CONNECTOR
DIAGNOSTIC
DISPLAY
™
& EC-17N™ ANTILOCK TRACTION CONTROLLERS
DESCRIPTION
GENERAL
The EC-17™ is an electronic antilock controller. It is the
base component in a family of full vehicle wheel control
antilock systems for buses, trucks and truck tractors. In
addition to the antilock function, the EC-17™ controller can
be assembled and programmed to provide an optional
traction control feature. Figure 1 shows the basic EC-17™/
EC-17N™ controller confi gurations.
Designed to minimize the potential of brake lock up on all
wheels during aggressive braking, the EC-17™ controller
based antilock system provides the vehicle with a high
degree of stability and steerability during braking. In most
cases, vehicle stopping distance is also reduced. The
antilock portion of the EC-17
minimizes wheel skid during hard or aggressive braking. By
controlling wheel skid at all wheels on the vehicle, optimum
steering control and stopping distance is obtained.
Traction control, an optional feature in the full vehicle wheel
control antilock system, helps improve vehicle traction
during acceleration in adverse road conditions. Integrated
with antilock logic, traction control monitors wheel speed
™
controller based system
™
EC-17
WITH LED DIAGNOSTICS
CONTROLLER
information from the sensors during acceleration, as well
as braking. The system helps maintain vehicle stability on
hazardous road surfaces and improves driveability and
safety.
The EC-17
™
controller contains a self configuring or
learning feature that allows it to be confi gured by the user
when installed on the vehicle. Because of this feature, all
EC-17™ controllers contain all the features and options
available and will activate the specifi c features required
for the vehicle it is installed on. The EC-17™ controller can
be installed on vehicles with only antilock or vehicles using
the traction control feature. The procedure for activating the
self confi guring feature is contained in the section entitled
“Confi guring The EC-17™ Controller”.
In order to provide full vehicle wheel control antilock, the
EC-17™ controller is used in combination with the following
components:
- Four or six wheel speed sensors
- Four air pressure modulator valves
- One dash mounted antilock condition lamp
- One service brake relay valve
1
Page 2
™
OR M-22
™
MODULATORS
M-21
SPRING BRAKES
REAR AXLE SERVICE &
COMPUTER
DIAGNOSTIC
BATTERY
CONTROL MODULE
ENGINE ELECTRONIC
ANTILOCK
™
OR AT-2
™
TRACTION ASSEMBLY
AT-1
™
EC-17
CONTROLLER
SERVICE BRAKE VALVE
SENSOR
WHEEL SPEED
TANDEM REAR AXLE
EXCITER
TRACTION LAMP
RETARDER DISABLE SWITCH
QUICK
RELEASE VALVE
™
ANTILOCK LAMP
OR M-22
™
TRACTION ENABLE SWITCH
M-21
MODULATORS
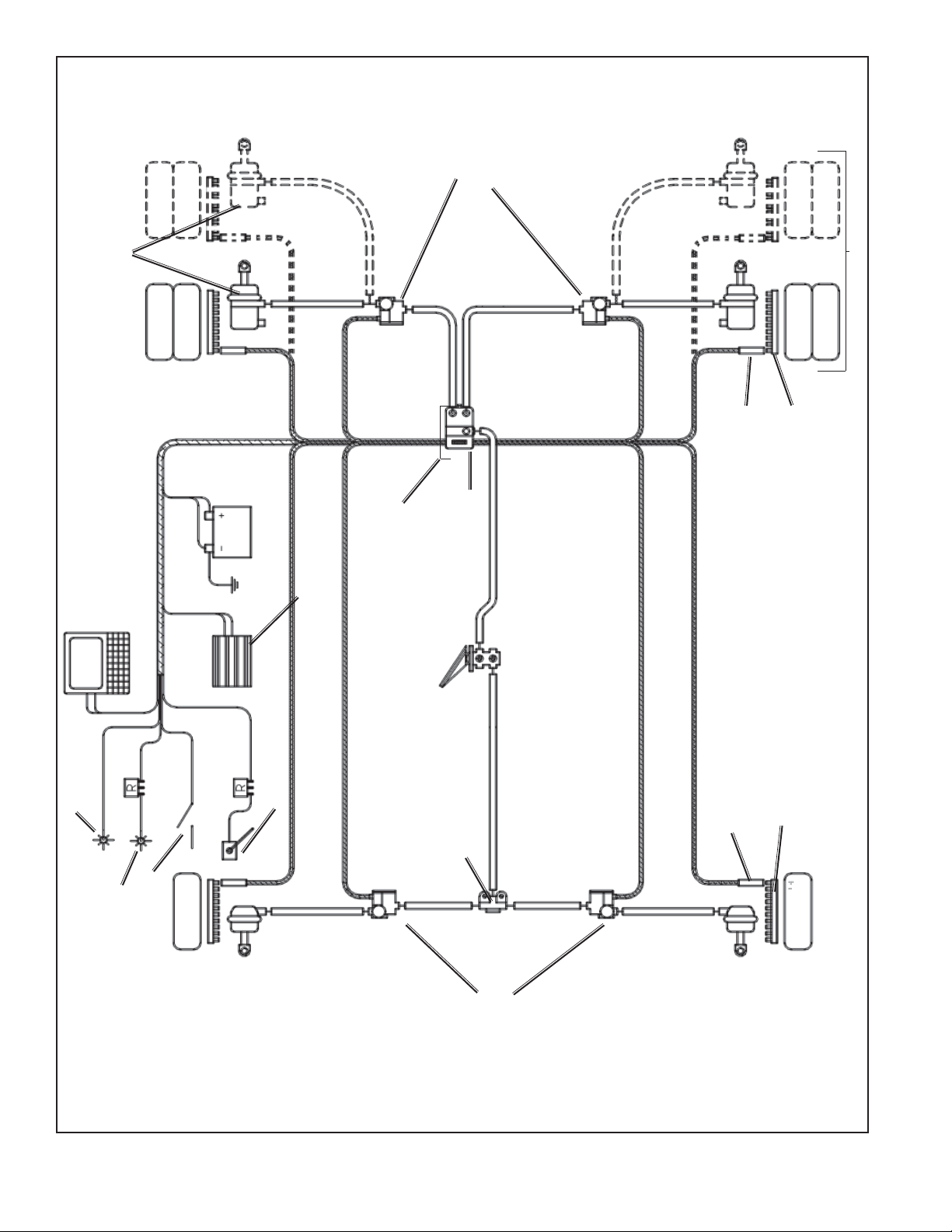
FIGURE 2 - EC-17™ ANTILOCK TRACTION CONTROLLER SYSTEM SCHEMATIC
2
SENSOR
WHEEL SPEED
EXCITER
Page 3
When programmed to provide traction control in addition
to antilock, the following components are added:
- One traction solenoid (incorporated into the relay valve)
- One dash mounted traction condition lamp
- Serial connection to engine control module (for vehicles
programmed for torque limiting feature)
- Traction disable wiring and switch
PHYSICAL
The EC-17™ controller electronics are contained in a nonmetallic housing and are environmentally protected by an
epoxy compound. The design of the digital electronics are
intended to provide a high degree of protection from radio,
electromagnetic and environmental interference.
The patented optional light emitting diode (LED) display
and magnetically actuated reset switch is incorporated in
the housing for troubleshooting and diagnostic purposes.
Two electrical connectors, located in the controller housing
opposite the diagnostic display (if so equipped), connect
the EC-17™ controller to antilock and traction system
components: one 30 pin and one 18 pin connector. The
optional traction solenoid is linked to the 18 pin connector
using a 2 pin Deutsch connector. The optional traction
solenoid is located in the upper portion of the antilock
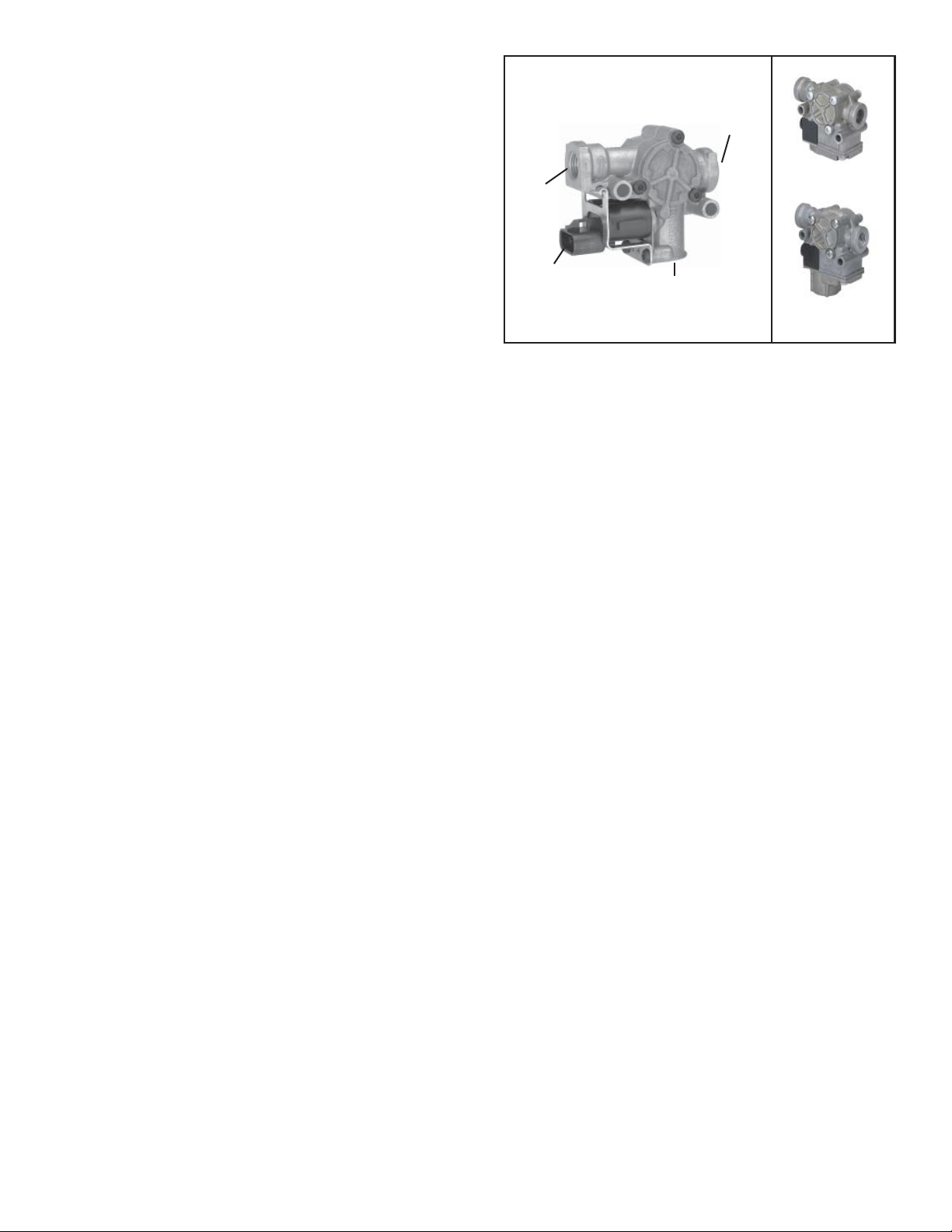
traction relay valve assembly. (See Figure 3.)
MOUNTING
The EC-17™ controller is available in two different mounting
styles. One model, shown in Figure 1, is a stand-alone. It
is intended for bracket mounting to a frame member and
is not attached to an antilock relay valve.
The other EC-17™ controller is designed to be mounted on
one of four different valves. All of the valves provide the
ANTILOCK TRACTION
ASSEMBLY
CONTROLLER
EC-17
™
relay function and replace the standard service relay on
antilock equipped vehicles. In some instances the valves
also provide specialized functions. When the EC-17
™
controller is mounted on any of these valves, the result is
a fi nal assembly with its own model designation. Refer to
the chart below and Figure 3.
AntiLock Added Function Vehicle Designation (Valve +
Valve Provided Application EC-17™ Controller)
AR-1™ None All CR-17™ Controller Relay
AR-2™ Bobtail Brake Tractors Only CR-18™ Controller Relay
Proportioning
ATR-1™ Traction All AT-1™ AntiLock Traction
ATR-2™ Traction & Bobtail Tractors Only AT-2™ AntiLock Traction
Brake Proportioning
EC-17™ CONTROLLER INFORMATIONAL
INPUTS AND COMMAND OUTPUTS
GENERAL
The EC-17™ controller receives information from several
components in the antilock system and, based on these
inputs, issues commands or delivers information. Some
portions of the EC-17™ controller both receive and deliver
commands and information. (See Figure 5.)
INPUTS
- Wheel speed information is provided to the EC-17
controller via a wiring harness from individual wheel speed
sensors at the vehicle wheels (See Figure 4). Working
with an exciter or tone ring, wheel speed sensors provide
information to the EC-17™ controller in the form of an AC
signal which varies in voltage and frequency as the speed of
the wheel increases or decreases. The EC-17™ controller is
designed to receive wheel speed information, from various
wheel speed sensor models, at the rate of 100 pulses (86
pulses if so confi gured) per wheel revolution. The EC-17
controller is able to simultaneously receive, and individually
interpret, speed signals from up to six wheel speed sensors.
Vehicle drive confi guration and whether the traction control
feature is in use determines the number of speed sensors
that must be used. A vehicle with a single rear axle drive
(4 x 2, 4 x 4 or 6 x 2) requires 4 speed sensors for both
antilock and traction operation. A vehicle with two rear
™
™
CONNECTOR
(TO TRACTION
TRACTION
RELAY
FIGURE 3 - EC-17™ CONTROLLER W/ANTILOCK
TRACTION RELAY VALVE
TRACTION
SOLENOID
(IN HOUSING)
2-PIN
SOLENOID)
™
WS-24
SENSOR
™
WS-20
SENSOR
90° SPEED
SENSORS
™
WS-24
SENSOR
FIGURE 4 - WS-20™ AND WS-24™ WHEEL SPEED
SENSORS
STRAIGHT SPEED
SENSORS
WS-20
SENSOR
™
3
Page 4

™
™
, or
™
or M-32QR
, M -22
™
™
and or M-32QR
modulators are
™
™
, M-32
™
and M-22
™
) may be replaced by M-32
™
shown in the diagrams in this document —
newer model M-30
Note: M -21
modulators are used on many vehicles.
Earlier modulators (M -21
modulators - except for front axle use where
M -30
or
™
modulators are permissible.
quick release valve) and then
™
®
modulators with earlier modulators.
™
there is not a quick release valve (e.g. a
M-32QR
Bendix QR-1
We do not recommend replacing M-32
only M-32QR
™
wheel
™
™
speed sensors are
shown in this document
— newer model WS-24
wheel speed sensors are
Note: WS-20
used on many vehicles.
™
wheel
™
wheel speed
sensors may be used to
WS-24
wheel speed
™
replace WS-20
sensors with WS-20
speed sensors. We do
wheel speed sensors.
not recommend replacing
WS-24
FIGURE 5 - EC-17™ ANTILOCK TRACTION CONTROLLER SYSTEM WIRING SCHEMATIC
4
Page 5
drive axles (6 x 4) requires 4 speed sensors for antilock
only operation, but have the option to use 6 speed sensors
for enhanced performance of both antilock and traction
operation.
- Vehicle power is supplied to the EC-17™ controller from
the ignition switch through a 30 amp fuse. The electrical
™
ground for the EC-17
controller is the vehicle chassis.
- A connection for a traction enable switch is provided,
and used when the optional traction feature is installed.
The switch allows traction to be turned on or off manually.
- ATC requires J1922/J1939 drivers requested torque.
This input is necessary to engage differential braking on
units built after mid-year 2000.
OUTPUTS
- Modulators - The Bendix® M-22™ modulator, is the means
by which the EC-17™ controller modifi es driver applied
air pressure to the service brakes. The modulator is an
electrically controlled air valve located near the service
actuator(s) it controls. It is the last valve that air passes
through on its way to the brake actuator. A wiring harness
connects the modulator to the EC-17™ antilock controller.
Solenoid valves contained in the modulator provide
the electrical interface between the EC-17™ controller
electronics and the air brake system. The EC-17™ controller
is able to simultaneously and independently control four
individual modulator assemblies. When vehicle power
is supplied to the EC-17™ controller, a modulator “chuff”
test is performed. When the brake pedal is depressed
and the ECU is powered via the ignition switch, the
patented modulator “Chuff” test is audible. A properly wired
modulator will exhaust air with a sharp (or crisp) audible
“Chuff”. On ECU’s manufactured prior to mid-year 2000, the
hold solenoid of a modulator is energized three times longer
than an exhaust solenoid while the “Chuff” test is being
executed. If the modulator hold and exhaust solenoid wires
are reversed the audible “Chuff” is not crisp because of the
extended exhaust energization. After mid-year 2000, the
hold solenoid of the modulator is energized twice while the
exhaust solenoid is energized once. If the modulator hold
and exhaust solenoid wires are reversed the modulator will
exhaust twice during a “Chuff”. The vehicle modulators will
“Chuff” in the sequence: right front, left front, right rear , left
rear. It will execute this exhaust sequence twice, for a total
of eight exhausts. Both patented audible “Chuff” tests help
the mechanic verify when the modulators are functional
and connected correctly without needing additional test
equipment. If an issue is detected with the modulators,
proceed with modulator troubleshooting or compare the
modulator wiring to the vehicle wiring schematic found in
Figure 5.
- An AntiLock dash light through an electrical relay is
connected to, and controlled by , the EC-17™ controller and
serves as a means of advising the driver of the condition
of the antilock system.
™
M-30
MODULATOR
SUPPLY
(PORT 1)
ELECTRICAL
CONNECTOR
FIGURE 6 - M-30™, M-32™, AND M-32QR™ MODULATORS
EXHAUST
(PORT 3)
DELIVERY
(PORT 2)
™
M-32QR
MODULATOR
™
M-32
MODULATOR
- Two control link connections to the engine or
transmission retarder and its relay are provided on the
EC-17™ controller. One control link or the other can be
utilized, but not both on the same vehicle. The hardware
for one control link conforms to S.A.E. standard 1708 and
the protocol, or coded language used, conforms to S.A.E.
standard J1922. The other control link conforms to S.A.E.
standard J1939. Use of a control link allows the EC-17
™
controller to temporarily disable the retarder during certain
modes of operation. Units built after mid-year 2000 have
improved retarder operation, allowing the retarder to reenable sooner following an ABS event. While the EC-17
™
controller is capable of this function, and connections
are provided, it is not always used. Use of the retarder
disable function is not essential but highly recommended
for vehicles equipped with a retarder.
Note: The EC-17™ controller can also disable the retarder
using the same S.A.E. J1922 or S.A.E. J1939
protocol it uses to control the traction control, engine
torque limiting feature. For this redundant retarder
disable to function, the EC-17™ controller must be
connected to the engine control module (as would
be the case if the EC-17™ controller is programmed
for the traction control, torque limiting feature).
- The diagnostic link enables the EC-17™ controller to
“report” its operating condition to an external computer
using the Bendix diagnostic communications interface
hardware in response to certain commands it receives
from software like Bendix ACom® for Windows*. The EC-
™
controller diagnostic link hardware conforms to S.A.E.
17
standard J1708. The protocol, or coded language used,
conforms to S.A.E. standard J1587. While connections
are provided for this function, it is not always used. The
use of the diagnostic link is essential for the servicing and
reconfi guration of the EC-17N
link is also used by the EC-17
™
controller. The diagnostic
™
controller to request
additional information and to assist diagnostics and
troubleshooting.
* Windows is a registered trademark of Microsoft Corporation.
5
Page 6

If the EC-17™ controller is programmed for traction control,
it contains the following outputs:
- A connection to the engine’ s electronic control module
allows the EC-17™ controller to reduce engine torque under
certain circumstances.
- A traction dash light is connected to and controlled by
™
the EC-17
controller and serves as a means of advising
the driver of the condition of the traction control system.
- A connection to the traction solenoid (located in the
upper portion of the antilock traction relay valve (see Figure
3) is provided via a 2 pin Deutsch connector.
OPERATION - ANTILOCK (ABS)
PHILOSOPHY
The Bendix® EC-17™ antilock system uses individual
sensors, modulators and an electronic controller to control
the four vehicle wheel ends. By monitoring the deceleration
rate during braking, and subsequently adjusting the brake
application pressure at each wheel, the EC-17™ controller
is able to improve braking between the vehicle tire and the
road surface it is on, while maintaining vehicle stability.
The rear axle brakes are controlled independently;
therefore brake application pressure at an individual wheel
is adjusted solely on the basis of its behavior on the road
surface on which it is traveling.
While each steering axle brake is under the control of an
individual modulator, the EC-17™ controller does not treat
these brakes independently . The EC-17™ controller uses a
modifi ed individual control philosophy for the steering axle
brakes. This is done in order to minimize “steering wheel
pull” in the event each wheel is traveling on a different road
surface (for example, ice close to the curb and a dry crown).
Essentially the EC-17™ controller controls the braking force
differences between the two brakes.
The wheel on dry pavement is initially given less braking
force and is brought up to optimum during the stop, while
the wheel on ice attempts to maintain optimum braking
during the entire stop.
In the case of vehicles equipped with tandem rear axles
(6x2, 6x4), the wheel speed sensors are installed at the
wheels on the axle that is most likely to lock fi rst. A single
modulator controls both curb side brakes on the tandem,
and another modulator controls both brakes on the driver’s
side of the tandem. With this arrangement of speed sensors
and modulators, both brakes on one side of the tandem are
treated as one since they will most likely be on the same
type of road surface.
NON ANTILOCK BRAKE APPLICATION
During normal braking, air pressure from the brake valve
enters the control port of the service relay valve. The
service relay delivers air to, and through, the antilock
modulator located near the braked wheel, and into the
brake actuator. The service brakes are thus applied. If
the wheel sensors do not detect an impending wheel lock
™
up, the EC-17
controller does not initiate any corrective
action and the vehicle comes to a stop in a normal fashion.
ANTILOCK BRAKE APPLICATION
If a service brake application is made and the wheel speed
sensors detect an impending wheel lockup, the EC-17
controller will immediately begin modifi cation of the brake
application using the antilock modulator(s) at the affected
wheel(s). Solenoid valves contained in the modulator
(hold and exhaust) are energized and de-energized by the
EC-17™ controller in order to modify the brake application.
When a solenoid coil is energized, its shuttle moves.
Depending upon the function of the specifi c solenoid, it
either opens or closes, thereby causing the exhaust or
reapplication of air pressure to the brake actuator. The
solenoids in each modulator are controlled independently
by the EC-17™ controller. By opening and closing the
solenoid valves in the appropriate modulator, the EC-17
controller is actually simulating what drivers do when they
“pump the brakes”. It must be remembered however that
unlike the driver, the EC-17™ controller is able to “pump”
each brake on the vehicle independently and with far
greater speed and accuracy.
™
™
OPERATION - TRACTION CONTROL (ATC)
PHILOSOPHY
Traction control is a natural extension of antilock. Just as
antilock helps vehicle control and stability during braking,
traction control helps during vehicle acceleration. The
wheel speed sensors not only detect rapid decreases in
wheel speed for antilock but also detect unreasonably
high increases for traction control. With traction control,
a spinning wheel is instantly detected and compared with
the other wheels on the vehicle, both front and rear. Two
methods are used to control wheel spin, torque limiting
and differential braking. Both methods could be confi gured
within the ECU independently or together. On units
manufactured after mid-year 2000, only torque limiting can
be confi gured independently. On units manufactured after
mid-year 2000 it will also be necessary that the J1922 or
J1939 serial link protocol communicate the vehicle throttle
position or the ATC will not function.
With traction control, a spinning wheel is instantly detected
and compared with the other wheels on the vehicle,
both front and rear. Two different methods are used to
control wheel spin; torque limiting and differential braking.
Depending upon vehicle type, speed and road (surface)
6
Page 7
condition, each method provides a unique and desirable
type of wheel spin control. Ideally both methods are used
to control vehicle traction. While all EC-17™ controllers are
capable of providing wheel control antilock and traction
control (utilizing both methods of control), not all systems
will be confi gured for both methods. Depending upon the
vehicle, either or both traction control methods will be
activated during the self confi guration procedure.
Torque Limiting - In order for the torque limiting control
feature to be used, the vehicle must be equipped with an
electronically controlled engine throttle. The torque limiting
™
feature allows the EC-17
controller to reduce engine
torque to a suitable level for the available traction. Torque
limiting helps to minimize the amount (or speed) of wheel
spin. It is especially useful in helping to minimizing a power
jackknife and when all drive wheels are on an equally
slippery surface.
Differential Braking - In order for the differential braking
control to be used, the vehicle must be equipped with an
antilock traction relay valve such as the Bendix® A TR-1™ or
ATR-2™. Additionally after mid-year 2000 the ECU requires
J1922/J1939 drivers torque request. The ATR-1™ and
ATR-2™ relay valves contain a solenoid assembly which
provides this feature. The differential braking feature
allows the EC-17™ controller to gently pump the brake
on the spinning wheel. Since the vehicle’s differential
tends to drive the wheel that presents the least resistance
(the wheel on the most slippery surface), a slight brake
application to this wheel only , forces the differential to drive
the stationary or slowly spinning wheel. Differential braking
can be activated only when vehicle speed is under 25 MPH
and one drive wheel is spinning faster than the other(s).
Traction Enable/Disable Switch - The traction control
enable/disable switch allows the operator to engage or
disengage the traction control system as necessary. The
switch may be used to either engage or disengage the
traction control system while the vehicle is in motion. It
must be noted however that while the traction control will
disengage while the vehicle is in motion it will not re-engage
(even with the switch in the engaged position) until the
vehicle comes to a complete stop.
TRACTION CONTROL AT VEHICLE SPEEDS OF
0 TO 25 MPH
When wheel spin is detected and the vehicle is stopped, or
moving at any speed up to 25 mph, the EC-17™ controller
simultaneously executes the following operations:
It instantly blinks the traction dash lamp to advise the driver
that a wheel spin is occurring.
If the torque limiting feature is active, the EC-17™ controller
uses its link to the engine control module and sends a
signal to reduce engine torque to a level suitable for the
available traction.
If the differential braking feature is confi gured into the
system, the EC-17™ controller energizes the solenoid in the
ATR valve which then applies air to each of the rear axle
modulators. Because the modulators are controlled by the
™
EC-17
controller, the solenoid valves in the appropriate
modulator are opened and closed to gently pump the brake
on the spinning wheel only. This gentle brake application
forces the differential to drive the stationary or slowly
spinning wheel.
Once wheel spin is eliminated, the dash lamp goes out and
the traction system disengages control.
In the event that extended periods of traction operation are
experienced, without vehicle motion being detected, the
ABS traction system will disable traction control to prevent
brake fade. The system will re-enable traction control after
a short period of time.
TRACTION CONTROL AT VEHICLE SPEEDS
ABOVE 25 MPH
If wheel spin occurs at any speed above 25 mph, the
EC-17™ controller will instantly blink the traction dash lamp
to advise the driver that a wheel spin is occurring.
If the torque limiting feature is programmed in, the EC-17
™
controller uses its link to the engine control module and
sends a signal to reduce engine torque to a level suitable
for the available traction.
NOTE: THE EC-17™ CONTROLLER WILL NOT SIGNAL
THE ATR™ VALVE TO APPLY THE BRAKES, EVEN
SLIGHTL Y, A T ANY SPEED ABOVE 25 MPH.
ANTILOCK AND TRACTION SYSTEM
OPERATION DURING COMPONENT FAILURE
The Bendix® EC-17™ controller handles equipment failure
using a conservative fail safe philosophy. Any single
electrical failure of a component devoted to antilock or
traction control results in simultaneous illumination of the
appropriate condition lamp on the dash, a disabling of
part or all of the antilock or traction system, and reversion
to standard braking on wheels no longer under EC-17
controller control.
Depending upon the type of failure and its position of
occurrence, the EC-17™ controller disables all or only a
portion of the antilock and traction system. A power or
controller failure, however, will result in complete disabling
of both systems and reversion to standard (non-antilock)
braking is still available on all wheels.
There are a variety of ways to clear diagnostic trouble
codes detected by the system. In most cases, the system
will reset the diagnostic trouble code condition when the
source of the original diagnostic trouble code has returned
to a normal state for a period of time. Isolated diagnostic
trouble codes are able to be reset by the system, but
repeated occurrence (and self-clearing) of some diagnostic
trouble codes will require a manual reset. This is done to
aid in the troubleshooting of intermittent diagnostic trouble
codes. The PC interface (or optional magnetic reset) is
used to manually clear diagnostic trouble codes.
™
7
Page 8
AUTO CALIBRATION
For optional ATC performance the ECU utilizes a feature
referred to as auto calibration. Auto calibration allows the
ECU to compensate for various tire sizes throughout the
life of the vehicle. As there are many conditions that can
result in the appearance of a change in the tire size, several
items must be satisfi ed before the auto calibration feature
is active. The auto calibration feature would automatically
change the ECUs imbedded tire sizes if the difference
exceeded approximately 8%. If issues occur with your A TC
due to tire size changes please contact 1-800-AIR-BRAKE
or 1-800-247-2725 for assistance.
SINGLE FAILURE
The following list and chart describes how the antilock and
traction systems respond to a specifi c component failure.
(Note: right and left; front, mid and rear are determined
from the driver’s seat. Left front is therefore the corner
closest to the driver.)
For example, if the right mid sensor (“RM Sensor” on the
chart) fails, front and rear antilock will still be operative.
Traction will be disabled. On those axles where antilock is
disabled the system reverts to standard air braking.
Front modulator - If a front modulator fails, antilock on that
wheel is disabled. Antilock and traction on all other wheels
remains active.
Rear modulator - A rear modulator failure disables the
traction system. Antilock on that wheel will also be disabled,
but antilock on all other wheels remains active.
Front sensor - The wheel is still modulated using input
from the opposite sensor on the front axle. The traction
system is disabled.
Mid or rear sensor - In a four sensor system, antilock on
that wheel(s) is disabled, but antilock on all other wheels
remains active. In a six sensor system, antilock remains
active using input from the remaining functional sensor.
In both the four and six sensor system traction control is
disabled.
Controller - Antilock and traction are disabled. The system
reverts to standard air braking.
Traction solenoid - Traction control is disabled. Antilock
remains active.
RIGHT FRONT
DRIVER
FRONT OF VEHICLE
LEFT FRONT
RIGHT MID
LEFT MID
RIGHT REAR
LEFT REAR
SYSTEM STILL OPERATING (YES/NO)
Failed ABS Front ABS Rear Traction Std.
Device Left Right Left Right Braking
RF Sensor YES YES YES YES NO YES
LF Sensor YES YES YES YES NO YES
RM Sensor YES YES YES YES NO YES
LM Sensor YES YES YES YES NO YES
RR Sensor YES YES YES NO
LR Sensor YES YES NO
RF Modulator YES NO YES YES YES YES
LF Modulator NO YES YES YES YES YES
RR Modulator YES YES YES NO NO YES
LR Modulator YES YES NO YES NO YES
Controller NO NO NO NO NO YES
Tract. Solenoid YES YES YES YES NO YES
Engine Control
Module
DIAGNOSTIC TROUBLE CODE LOCATION
Voltage2 NO NO NO NO NO YES
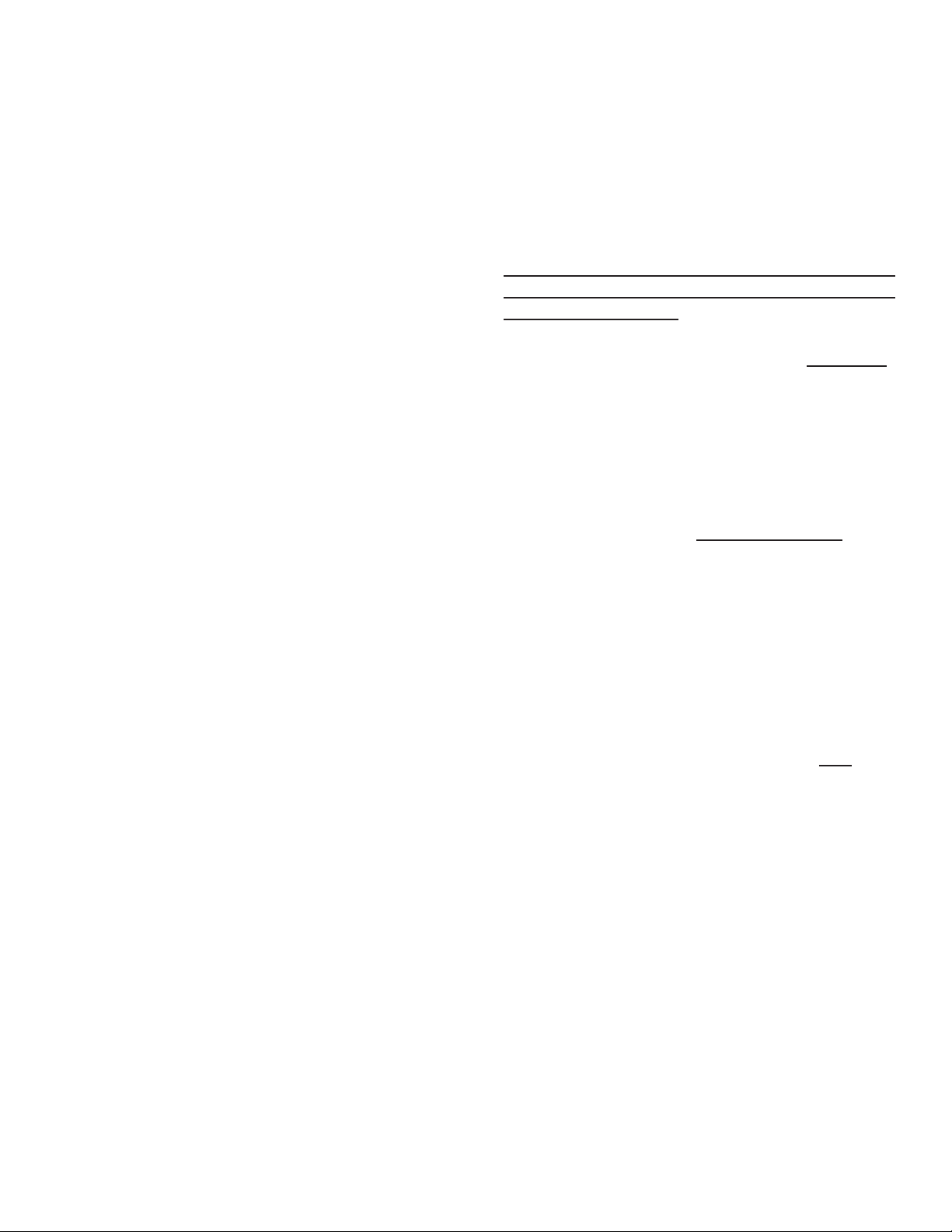
FIGURE 7 - EC-17™ CONTROLLER LED DIAGNOSTIC
DISPLAY
2
YES YES YES YES NO YES
1
ABS is still available in 6 sensors system if mid sensor is functional
2
When ECM wiring or voltage “corrects” itself, system is restored.
TRC
MOD
SEN
ECU
VLT
TRACTION
MODULATOR
SENSOR
ECU
VOLTAGE
1
NO YES
1
YES NO YES
FRT
MID
RER
RHT
LFT
FRONT
MIDDLE
REAR
RIGHT
LEFT
Engine Control Module - If the engine control module (ECM)
or the wiring from the EC-17™ controller to the ECM fails,
traction control is disabled. Antilock remains active.
Voltage - If system voltage is out of range, antilock and
traction are disabled. The system reverts to standard air
braking.
MULTIPLE FAILURES
In the event that multiple failures occur, the dash lamp
will react as it normally would during a single failure, and
the EC-17™ controller equipped with LEDs will show one
diagnostic trouble code at a time. When the fi rst diagnostic
trouble code is fi xed and the system is reset, the next
diagnostic trouble code area will appear at the LEDs.
This way, the driver or mechanic does not lose track of
diagnostic trouble code areas, and the system is not
REAR OF VEHICLE
restored until each and every error is corrected and the
EC-17™ controller is cleared of all diagnostic trouble codes.
SWITCH
RESET
8
Page 9
ANTILOCK AND TRACTION WIRING
GENERAL NOTES
The wires that carry information and power into and out of
the EC-17™ controller are generally grouped and terminate
at a connector. The wire groups or wire harnesses along
with the connectors are most often specified and/or
supplied by the vehicle manufacturer. The connectors used
on the EC-17
wiring harnesses and connectors are weather resistant
and the wires that enter the connector are sealed to the
connector. The wire gauge used in the wire harnesses is
specifi c to the task performed.
When diagnosing wiring in the antilock system the
following general rules apply and should be followed where
applicable:
1. It is generally advisable to replace a wire harness rather
than repair individual wires in the harness. If a splice
repair must be made, it is important that the splice be
properly soldered with a water based or thoroughly
cleaned rosin fl ux (not acid based) and made water
proof.
2. Do not pierce wire insulation when checking for
continuity. Check for power, ground or continuity by
disconnecting the connector and testing the individual
pins or sockets in the connector.
3. Do not spread or enlarge individual pins or sockets
during probing.
4. Always check the vehicle handbook for wire and
connector identifi cation. Individual wire identifi cation
will differ depending upon the type of connectors in use,
the vehicle manufacturer, and the system features in
use.
5. While the retarder disable, serial link, and traction on/off
connections are present on all EC-17™ controllers, they
are not always used.
™
controller are illustrated in Figure 5. The
PREVENTIVE MAINTENANCE
Every 3 months; 25,000 miles; or 900 operating hours;
1. Check all wiring and connectors to ensure they are
secure and free from visible damage.
2. Although the EC-17™ controller incorporates self
check diagnostics, the optional LED display should be
inspected to ensure that it is functional. With the vehicle
ignition on, a magnet (800 gauss; capable of picking up
3 ounces) held to the LED reset switch (indicated on the
housing) should cause all of the LEDs to illuminate. If
one or more of the LEDs DO NOT ILLUMINA TE and the
dash condition lamps indicate the system is functioning
properly, the non-illuminated LED(s) should be noted
for future reference. Although the diagnostic capabilities
will be limited, the system will continue to function as
designed.
3. Road test the vehicle by making an antilock stop
from a vehicle speed of 20 miles per hour. When an
antilock stop is made, the modulator solenoids pulsate
and an audible burst of air can be heard from outside
of the cab. The wheels should not enter a prolonged
“lock” condition. Also, make a traction acceleration by
accelerating on a road surface with reduced traction. As
with antilock, audible bursts of air can be heard when
the traction system is functioning.
™
4. EC-17
require the use of separate diagnostic tools capable of
using the S.A.E. J1587 diagnostic Link.
controllers not equipped with an LED display
WARNING! PLEASE READ AND FOLLOW
THESE INSTRUCTIONS TO A VOID PERSONAL
INJURY OR DEATH:
When working on or around a vehicle, the following
general precautions should be observed at all times.
1. Park the vehicle on a level surface, apply the
parking brakes, and always block the wheels.
Always wear safety glasses.
2. Stop the engine and remove ignition key when
working under or around the vehicle. When
working in the engine compartment, the engine
should be shut off and the ignition key should be
removed. Where circumstances require that the
engine be in operation, EXTREME CAUTION should
be used to prevent personal injury resulting from
contact with moving, rotating, leaking, heated or
electrically charged components.
3. Do not attempt to install, remove, disassemble
or assemble a component until you have read
and thoroughly understand the recommended
procedures. Use only the proper tools and observe
all precautions pertaining to use of those tools.
4. If the work is being performed on the vehicle’s
air brake system, or any auxiliary pressurized air
systems, make certain to drain the air pressure
from all reservoirs before beginning ANY work
on the vehicle. If the vehicle is equipped with an
AD-IS® air dryer system or a dryer reservoir
module, be sure to drain the purge reservoir.
5. Following the vehicle manufacturer’s recommended
procedures, deactivate the electrical system in a
manner that safely removes all electrical power
from the vehicle.
6. Never exceed manufacturer’s recommended
pressures.
7. Never connect or disconnect a hose or line
containing pressure; it may whip. Never remove
a component or plug unless you are certain all
system pressure has been depleted.
8. Use only genuine Bendix® replacement parts,
components and kits. Replacement hardware,
tubing, hose, fi ttings, etc. must be of equivalent
size, type and strength as original equipment and
be designed specifi cally for such applications and
systems.
9
Page 10

9. Components with stripped threads or damaged
parts should be replaced rather than repaired. Do
not attempt repairs requiring machining or welding
unless specifi cally stated and approved by the
vehicle and component manufacturer.
10. Prior to returning the vehicle to service, make
certain all components and systems are restored
to their proper operating condition.
11. For vehicles with Automatic Traction Control (A TC),
the ATC function must be disabled (ATC indicator
lamp should be ON) prior to performing any vehicle
maintenance where one or more wheels on a drive
axle are lifted off the ground and moving.
REMOVING THE EC-17™ CONTROLLER
EC-17™ CONTROLLER MOUNTED ON
ANTILOCK RELAY VALVE OR ANTILOCK
TRACTION RELAY VALVE
1. Remove as much contamination as possible from the
assembly’s exterior . Keep the contamination away from
the open ports and electrical connections.
2. Identify and remove all air lines connected to the unit.
3. Disconnect the electrical connector(s) from the EC-17
controller.
4. Note and mark the mounting position of the assembly
on the vehicle. Loosen, remove and save the nuts on
the mounting hardware that attaches the controller
relay assembly bracket to the vehicle. Remove the
relay valve and EC-17™ controller from the vehicle.
5. Note and mark the position of the EC-17™ controller
relative to the valve it is mounted on. Remove and
retain the four hex head bolts that secure the EC-17
controller to the valve. Then separate the EC-17
controller from the valve.
BRACKET MOUNTED EC-17™ CONTROLLER
1. Remove as much contamination as possible from the
assembly’s exterior . Keep the contamination away from
open air connections and electrical connections.
2. Disconnect the electrical connector(s) from the EC-17
controller.
3. Note and mark the mounting position of the EC-17
controller on the vehicle. Loosen, remove and save
the nuts on the mounting hardware that attaches the
EC-17™ controller bracket to the vehicle. Remove the
EC-17™ controller and bracket from the vehicle.
4. Remove and retain the four hex head bolts that secure
the EC-17™ controller to the bracket. Separate the
EC-17™ controller from the bracket.
™
™
™
™
™
INSTALLING THE EC-17™ CONTROLLER
EC-17™ CONTROLLER MOUNTED ON
ANTILOCK RELAY VALVE OR ANTILOCK
TRACTION RELAY VALVE
1. After noting the relationship of the positioning marks
made prior to disassembly, position and secure the
EC-17™ controller to the valve using the four hex head
bolts. Torque the hex head bolts to 98 Ibs. in. (Grade
5 bolts).
2. Mount the assembled EC-17™ controller and antilock
relay valve on the vehicle and orient it in the position
marked before removal.
3. Reconnect all air lines to the assembly.
4. Reconnect the electrical connector(s) to the EC-17
™
controller and torque the connector retaining screw
(“jack screw”) to 15-20 inch pounds.
5. T est the valve for operation and leakage prior to placing
the vehicle in service.
6. Perform the “Initial Start up Procedure” in the
TROUBLESHOOTING section to assure proper system
operation. (Appropriate for both EC-17™ & EC-17N
™
controllers).
BRACKET MOUNTED EC-17™ CONTROLLERS
1. Secure the EC-17™ controller to its bracket using the
four hex head bolts. T orque to 98 Ibs. in (Grade 5 bolts).
2. After noting the positioning marks, mount the EC-17
controller on the vehicle using the mounting hardware
retained during removal.
3. Reconnect the electrical connector(s) to the EC-17
controller and torque the connector retaining bolts to
15-20 inch pounds.
4. Perform the “Initial Start up Procedure” in the
TROUBLESHOOTING section to assure proper system
operation.
™
™
DIAGNOSING AND LOCATING A SYSTEM
DIAGNOSTIC TROUBLE CODE
GENERAL
The EC-17™ controller contains self test and diagnostic
circuitry that continuously checks for proper operation of the
entire antilock/traction system, including wiring continuity .
The EC-17™ & EC-17N™ controllers are programmed at the
factory to accommodate the needs of the vehicle and the
customer’s desires. Both the EC-17™ & EC-17N™ controller
can be reconfi gured by the end user to include traction
control (See the Important notice concerning the EC-17N
controller). A vehicle equipped with traction control can
generally be identifi ed by noting the presence of a dash
mounted condition lamp, a disable switch (for the traction
control system) and a traction solenoid located above the
relay valve.
™
10
Page 11

Separate dash lamps, controlled by the EC-17™/EC-17N
™
controller, advise the driver of the condition of the entire
antilock/traction system.
When the controller senses an erroneous condition, it
stores the condition in memory, illuminates the dash
mounted condition lamp and after certain criteria are met
it disables the antilock or traction control function. If so
™
equipped, the EC-17
controller illuminates the appropriate
diagnostic LEDs.
The diagnostic trouble code condition is truly stored and
is not cleared by loss of power to the antilock system.
The optional LEDs will illuminate when power is restored
and remain illuminated until the failure is corrected. After
the actual issue is corrected, maintenance personnel can
clear or reset the EC-17™ controller diagnostics through
the S.A.E. J1587 diagnostic link or the optional magnetic
RESET point in the diagnostics display. To clear or reset
an EC-17N™ controller (not equipped with LEDs) the S.A.E.
J1587 diagnostic link must be utilized.
VEHICLE DIAGNOSTIC
CONNECTOR (J1587)
IMPORTANT:
The balance of this manual deals with diagnostics and
controller self-confi guration using the optional LED
display on the EC-17™ controller (see Figure 1). Antilock
systems using the EC-17N™ controller (see Figure 1)
must use the Bendix, Diagnostic Communication
Interface or DCI for diagnostics or reconfi guration.
POWER AND
COMMUNICATION
J1587
DIAGNOSTIC
CONNECTOR
(CONNECTED
TO VEHICLE)
FIGURE 8 - DIAGNOSTIC COMMUNICATIONS INTERFACE
INDICATION LAMPS
DIAGNOSTIC
LAMPS
COMPUTER
SERIAL PORT
CONNECTOR
RESET
SWITCH
DIAGNOSTIC COMMUNICATION INTERFACE
The DCI (part # 5004893) is a dual level electronic diagnostic
tool for either the EC-17
can either be used as a “stand alone” diagnostic tool or with
Bendix’s ACom For Windows software (part # 5004892).
In order to use the DCI, the vehicle must be equipped with
a J1587 diagnostic link connector as illustrated in Figure 9.
This connector is generally located on the driver’s side, in
lower portion of the dash or under the dash panel.
MPSI Tool: Multi Protocol Cartridge (J38500-1500),
PCMCIA Card For Bendix (J38500-2400).
™
or EC-17N™ antilock controller. It
FIGURE 9 - VEHICLE DIAGNOSTIC CONNECTOR
LOCATION
Used with its Microsoft Windows* based software and a
personal computer, the DCI is able to provide the technician
with a high level of diagnostic information and antilock
diagnostic trouble code history. This is particularly useful
when attempting to determine the source of intermittent
diagnostic trouble code indication from the antilock dash
condition lamp.
For fi eld use or when a PC is not available, the DCI’s
integral LED display and switch provides the EC-17N
™
controller user with exactly the same information that is
available from the optional LED display on the EC-17
™
controller. When using the DCI’s LED display for system
diagnosis or controller self-confi guration the descriptions
LAP TOP
COMPUTER
TO VEHICLE
J1587
CONNECTOR
DCI
FIGURE 10 - DCI CONNECTED TO LAP TOP COMPUTER
* Windows is a registered trademark of Microsoft Corporation.
SERIAL
CABLE
11
Page 12

LAMP CONFIGURATION TABLE
Torque Limiting & Torque Limiting Differential
Differential Only Braking
Braking Only
ANTILOCK TRACTION
DASH DASH
LAMP LAMP
ANTILOCK TRACTION
DASH DASH
LAMP LAMP
ANTILOCK TRACTION
DASH DASH
LAMP LAMP
ON ON ON ON ON ON
OFF OFF OFF ON OFF OFF
ON ON ON ON ON ON
OFF OFF OFF OFF OFF ON
ON ON ON ON ON ON
OFF OFF OFF OFF OFF OFF
and procedures presented in this manual can be used.
When connected to a PC, use the instructions and
documentation packaged with the DCI to troubleshoot or
reconfi gure the EC-17™/EC-17N™ controller.
For more information on the Bendix Diagnostic
Communication Interface, see your local authorized Bendix
parts outlet or call 1-800-AIR-BRAKE (1-800-247-2725).
OPTIONAL DIAGNOSTIC LEDS & RESET
The condition of specific components is provided by
a series of labeled, light emitting diodes (LEDs) in the
EC-17™ controller housing. No special tools or equipment
are needed to read or interpret the EC-17™ controller
diagnostic display. It should be noted that the EC-17
controller diagnostics display is separate from the antilock
and traction condition lamps on the dash. With this
separation, the driver is aware of any issues that occur but
is not confused by diagnostic information. There are ten
LEDs plus a magnetically actuated reset switch. The fi rst
six LEDs locate an issue to a specifi c area of the vehicle,
and the next three indicate the component or its wiring.
The LEDs are software driven and are either ON or OFF
depending upon their monitor function. (Note: right and left,
front and rear are determined from the driver’s seat.) Note:
The non LED EC-17N™ controller is also not equipped with
a magnetic reset.
FRT Red LED
MID Red LED (See Note)
RER Red LED
12
™
Both the Antilock & Traction dash lamps are
ON during the system self test.
This is the fi rst blink occurrence of the
Antilock dash lamp. Compare and note the
traction lamp’s reaction to the Antilock lamp.
This is the second blink occurrence of the
Antilock dash lamp. Compare and note the
traction lamp’s reaction to the Antilock lamp.
Both dash lamps are OFF and remain OFF
at the end of the powerup sequence.
RHT Red LED
LFT Red LED
TRC Red LED
MOD Red LED
SEN Red LED
ECU Red LED
VLT Green LED
RESET + No LED
Note: The MID LED is used with some but not all vehicles.
When six speed sensors are not installed this LED
is not used in the diagnostic process. However, it
will light when a magnet is placed on the RESET
switch in the diagnostic display.
“FRT” (Front) LED
This Red LED illuminates in order to indicate the location
of a component or its wiring. It will light in conjunction with
either the RIGHT or LEFT LED and the MOD or SENS LED.
“MID” (Middle Axle) LED
This Red LED is not used in all installations. On those
vehicles that have six speed sensors installed, this Red
LED illuminates to indicate the location of a speed sensor
or its wiring. The “MID” LED should not illuminate with the
“MOD” LED.
Page 13

“RER” (Rear) LED
This Red LED illuminates in order to indicate the location
of a component or its wiring. It will light in conjunction with
either the RIGHT or LEFT LED and the MOD or SENS LED.
“RHT” (Right) LED
This Red LED illuminates in order to indicate the location
of a component or its wiring. It will light in conjunction with
either the FRONT or REAR LED and the MOD or SENS
LED.
“RESET”
Beneath the RESET area of the display is a magnetically
sensitive switch that is used to reset the diagnostic system.
The device will respond to a magnet which has strength
suffi cient to lift a three (3) ounce weight. Momentarily
holding a magnet against the RESET will cause ALL LEDs
to light during the time the magnet is against it. Holding
a magnet against the RESET longer than 20 seconds will
™
cause the EC-17
controller to initiate the self confi guration
feature.
“LFT” (Left) LED
This Red LED illuminates in order to indicate the location
of a component or its wiring. It will light in conjunction with
either the FRONT or REAR LED and the MOD or SENS LED.
“TRC” (Traction) LED
This Red LED illuminates to indicate a permanent
diagnostic trouble code in the traction control system. It
may be illuminated with the MOD LED or may illuminate by
itself. NOTE: If a problem may exist with the wiring to the
engine control module (ECM), this LED will go on.
“MOD” (Modulator) LED
This Red LED illuminates to indicate an open or short
circuit in the solenoids of one of the four modulators or
the wiring connecting them to the system. When indicating
a diagnostic trouble code with a modulator this LED will
be illuminated with two positioning LEDs (RHT/LFT +
FRT/RER). NOTE: The MID positioning LED should not
be illuminated with this LED. This LED is also used to
indicate a possible problem with an ATR-1
™
or ATR-2
™
valve, antilock traction relay, solenoid. When illuminated
for a traction system diagnostic trouble code the TRC LED
will also be on.
“SEN” (Speed Sensor) LED
This Red LED illuminates to indicate an open or short circuit
in one of the speed sensors or the wiring connecting them
to the system. The “SEN” LED will be illuminated with two
positioning LEDs (RHT/LFT + FRT/MID/RER).
“ECU” (Electronic Control Unit) LED
This Red LED, when illuminated, indicates that the
controller itself has failed. Before controller replacement is
considered, always check vehicle voltage to the controller.
“VLT” LED
This Green LED illuminates and remains ON during vehicle
operation to indicate that vehicle power is reaching the
controller. If vehicle power is out of range (below 10 VDC or
above 18.0 VDC) this LED will fl ash until power is brought
into range.
EC-17™ CONTROLLER CONFIGURATION
IMPORTANT GENERAL NOTE:
The following information and procedure applies to the
EC-17™ controller equipped with the optional LED diagnostic
display and magnetic RESET switch. Controllers without
this option (EC-17N™) must use the J1587 diagnostic
link and the DCI with its related computer programs to
reconfi gure the controller. See the documentation and
instructions packaged with the equipment for specifi cs.
EC-17™ CONTROLLER CONFIGURATION DISPLAY
1. Turn the ignition ON.
2. All LEDs will illuminate then go out.
3. The number of active sensors will be displayed by the
momentary illumination of the red SEN (sensor) LED
and two or more of the red locating LEDs. No other
LEDs will be on.
A. SEN + FRT (front) + RER (rear) = A four sensor
confi guration (all systems must have at least a 4
sensor confi guration)
B. SEN + FRT + MID (middle) + RER = A six sensor
confi guration
4. The red TRC LED will momentarily illuminate by itself
if traction control torque limiting is active, if not, then
the display will go to the condition described in #5.
5. The red TRC and MOD LEDs will momentarily illuminate
if traction control differential braking is active, if not, then
the display will go to the condition described in #6. No
other LEDs will be on.
6. The diagnostic display will return to its normal
operational status. Assuming no diagnostic trouble
codes exist in the antilock or traction system, all red
LEDs will be off and the single, green, VLT LED is
illuminated.
13
Page 14

EC-17™ CONTROLLER SELF CONFIGURING
PROCESS
Important General Information:
1. Three aspects of the antilock and traction system are
infl uenced by the self confi guring feature of the EC-17
controller.
A. Speed Sensors: The number of speed sensors
connected to the EC-17™ controller will be detected
during the self confi guration process. The EC-17
controller will check the MID SEN (mid axle speed
sensor) locations on its connector to determine if
a sensor is connected to it and will default to a six
sensor confi guration if it detects even one sensor
connected. If mid axle speed sensors are not
detected, the EC-17™ controller will default to a four
sensor confi guration. (Two front and two rear)
B. Electronic Engine Control: On units manufactured
prior to mid-year 2000, if the EC-17™ controller is
connected to the control module of an electronic
engine, the torque limiting and differential braking
feature of ATC will be activated when the traction
enable/disable switch is toggled prior to self
confi guration. After mid-year 2000, the electronic
engine must transmit the throttle position via the
J1922 or J1939 serial link for ATC to be activated
during wheel spin.
C. Antilock Traction Relay Valve: If the solenoid
assembly in the ATR™ valve is connected to the
EC-17™ controller, the differential braking feature
of traction control will be activated during the self
confi guring process.
D. Traction Disable Switch: The traction disable
switch must be toggled prior the self confi guration
process.
2. No method is available to disable the self confi guration
feature.
3. Due to the extended period of time the magnet must
be held on the RESET to initiate the self confi guration
process (20 seconds), it is unlikely that a self
confi guration would occur accidentally.
4. Basic, four speed sensor, antilock operation can not be
removed during the self confi guration process. This is
a minimum confi guration for all EC-17™ controllers.
5. If a speed sensor is connected to either wheel on the
mid axle, the EC-17™ controllers will confi gure for six
sensors. If no mid axle speed sensor is detected, the
EC-17™ controller will confi gure for four sensors. Any
disconnected speed sensor(s) will register as a failure
on the diagnostic display at the end of the EC-17
controller self test.
™
™
™
6. All or part of traction control can be lost during self
confi guration by;
A. Not connecting one of the wire harnesses (engine
control module for torque limiting and ATR
™
valve
solenoid for differential braking).
B. A missing or inoperative traction control enable
disable switch.
C. Not toggling the traction control enable/disable
switch in the “traction enabled” after power up,
but prior to the self confi guration. The operator
can tell that the traction features are lost by noting
the absence of the traction lamp fl ash upon power
up. The operator should note the fl ashing of the
antilock condition lamp, and the traction lamp if
traction equipped, upon every power up. Observing
the dash lamps is one method the operator has to
verify the system operation.
™
7. The EC-17
controller can be reprogrammed up to
10,000 times.
8. When a replacement EC-17™ controller is installed
on a vehicle that does not have one or more of the
preprogrammed features, a failure will be registered
on the dash lamp(s) and on the EC-17™ controller
diagnostic display. For this reason it is necessary to
perform the self confi guring procedure.
9. Some configuration information is available by
observing the reaction of the dash condition lamps on
vehicles confi gured with traction control and equipped
with the self confi guring EC-17™ controller. When the
ignition is switched ON, the EC-17™ controller self test
is begun. During the self test the dash lamps will fl ash
on and off together as indicated in the chart, depending
upon the type and amount of traction control confi gured
into the EC-17™ controller. Note: For more information
on this subject see the TROUBLESHOOTING section
of this document.
Self Confi guration Process
In order to successfully complete the self confi guring
process follow the steps presented.
1. Connect all antilock and traction control wire harnesses.
Refer to the schematic in Figure 5. Make certain that
all the speed sensors present on the vehicle are
connected (H2, H3, J1, J2 on the 30 pin connector
and E2, E3, F2, F3, B2, B3, C2, C3 on the 18 pin
connector). If the vehicle has an electronic engine
and traction control torque limiting is desired the
engine control module must be connected (B2 and
B3 on the 30 pin connector for J1922 or C3, D2,
and D3 on the 30 pin connector for J1939). If the
vehicle is equipped with either an ATR-1™ or ATR-2
™
valve, the solenoid connection must be made to the
EC-17™ controller (D2 and D3 on the 18 pin connector)
in order to obtain traction control differential braking.
14
Page 15

2. If the vehicle is to be confi gured with traction control, it
must have a traction control dash lamp and a traction
control enable/disable switch. Both the lamp and switch
must be functional.
3. Turn the ignition ON, toggle the traction control enable/
disable switch back and forth then hold a magnet
™
on the RESET position of the EC-17
controller
diagnostic display until the LEDs begin to fl ash then
remove the magnet. If the magnet is not removed
during the LED fl ashing a second self confi guration
may be initiated. The magnet may have to be held on
the RESET for as long as 20 seconds. When the self
confi guration process is complete the EC-17™ controller
will automatically go through a self test. During the
self test the diagnostic display will indicate the new
confi guration as described under the section entitled
EC-17™ Controller Confi guration Display. Note: If the
EC-17™ controller is being confi gured with traction
control (either torque limiting, differential braking or
both), the traction control condition dash lamp, will
be illuminated as well as the appropriate LEDs on the
EC-17™ controller diagnostic display. The traction
control dash lamp will be illuminated until the traction
control enable/disable switch is placed in the traction
control enabled position (traction control operative).
4. Place the traction control enable/disable switch in
the traction control enabled position (traction control
operative), the traction control dash lamp should be off.
5. Before placing the vehicle in service, verify the
configuration and the system condition by turning
the ignition OFF then ON while observing the EC17™ controller diagnostic display. The diagnostic
display should indicate the desired confi guration as
described under the section entitled EC-17™ Controller
Confi guration Display and no red LEDs should be
illuminated at the end of the self test.
6. If the confi guration appears correct but the diagnostic
LEDs indicate a failure somewhere in the system, refer
to the General Confi guration Information section and
use the Troubleshooting section of this manual to locate
and repair the diagnostic trouble code.
7. If the confi guration is incorrect, the process can be
repeated as required. One common error is performing
the self confi guration without toggling the traction
control enable/disable switch. This will prevent any
traction features from being activated. Note: The
traction switch must be toggled to confi gure traction,
but must be placed in the enable position to allow the
traction lamp to fl ash.
TROUBLESHOOTING
IMPORTANT BEFORE TROUBLESHOOTING:
1. Determine if the vehicle is equipped with traction
control. The presence of a traction condition lamp on
the dash can be used.
2. Some vehicles are equipped with a traction control
“disabling switch.” If so equipped, ENABLE THE
TRACTION SYSTEM BEFORE BEGINNING THE
TROUBLESHOOTING. THE TRACTION CONTROL
MUST BE DISABLED FOR DYNAMIC TESTING.
3. If the vehicle is equipped with traction control and is a
tandem axle unit, note the number of drive axles. The
“MID” diagnostic LED is used only on 6x4 vehicles.
GENERAL
While the EC-17™ controller diagnostic display locates a
specifi c diagnostic trouble code area, it is still necessary to
confi rm whether the problem may reside in the component
itself or the wiring. The following troubleshooting procedure
is devoted to narrowing the diagnostic trouble code to either
the wiring or a specifi c antilock or traction component. It
should be noted that ALL TROUBLESHOOTING BEGINS
BY OBSERVING THE ANTILOCK AND TRACTION
CONDITION LAMPS ON THE DASH. All troubleshooting
should begin by first performing the “Initial Start up
Procedure” and following the directions contained in it.
TROUBLESHOOTING TIPS
1. Begin by observing the dash condition lamp(s) and
performing the “Initial Start Up Procedure.”
2. The troubleshooting technician should record all fi ndings
and the action taken during the troubleshooting process.
3. No voltage or resistance tests are performed into the
EC-17™ controller. All voltage and resistance tests
are performed by beginning at the wire harness half
of the connector and moving AWAY from the EC-17
controller toward an antilock traction system component
(modulator, wheel speed sensor, etc.)
™
15
Page 16

NOTHING ON - GO
TO SECTION V
DIAGNOSTIC DISPLAY
QUICK REFERENCE
This index is presented for the benefi t of personnel experienced
in troubleshooting Bendix full-vehicle wheel control antilock with
traction control. It provides a quick reference to specifi c sections
that provide testing procedures and values.
GO TO
SECTION IV
ONE OR
MORE ON
ON
(NOT FLASHING)
FLASHING - GO
TO SECTION V
ONE FROM THIS
GROUP ON
ONE FROM THIS
GROUP ON
ON - GO TO SECTION VI A
ON (NOT FLASHING) - GO
TO SECTION II
ONE FROM THIS
GROUP ON
ONE FROM THIS
GROUP ON
ON - GO TO SECTION VII A
16
ON - GO TO
SECTION XI
ON - GO TO
SECTION XII
Page 17

ANTILOCK DASH LAMP DOES
NO
NOT BLINK, COMES ON AND
REMAINS ILLUMINATED
YES
INITIAL START-UP PROCEDURE
TURN IGNITION ON AND
START HERE
NO
OBSERVE DASH ANTILOCK
LAMP.
DID ANTILOCK DASH LAMP BLINK?
YES
GO TO SECTION II “INSPECTION
FOR ILLUMINATED LEDS”
ANTILOCK DASH LAMP DOES
NOT BLINK, DOES NOT COME
ON. GO TO SECTION I.
THE ANTILOCK SYSTEM IS
FUNCTIONING NORMALLY. MAKE
NOTE OF ANY PARTS REPLACED
OR REPAIRED.
™
If the EC-17
certain it is confi gured properly for the vehicle. If traction
control is part of the confi guration, the “enable - disable”
switch must be toggled after power has been applied to
the EC-17™ controller and before self confi guring process
(traction control operable).
controller has been recently replaced, make
IS ANTILOCK DASH LAMP
STILL ILLUMINATED?
NO
INCREASE VEHICLE SPEED TO ABOVE 7
MPH FOR AT LEAST 10 SECONDS AND
OBSERVE THE DASH LAMP.
DASH LAMP ILLUMINATES
NO
NO
IS VEHICLE EQUIPPED WITH
TRACTION CONTROL?
YES
TURN IGNITION OFF THEN
ON AND OBSERVE ONLY
THE TRACTION CONTROL
DASH LAMP. DID TRACTION
CONTROL LAMP BLINK
THEN GO OUT?
NO
MAKE CERTAIN TRACTION
IS ENABLED (WITH VEHICLE
STATIONARY, LOCATE & ACTIVATE
THE REMOTE TRACTION ENABLE
SWITCH). RETEST
DID TRACTION CONTROL
LAMP GO OUT?
NO
YES
YES
YES
GO TO SECTION
III “INSPECTION
FOR ILLUMINATED
LEDs”
YES
AFTER mid-year 2000 A
SERIAL COMMAND NEEDS TO
BE SEEN ON THE J1922 OR
J1939 LINK FOR TRACTION
TO FUNCTION
THE TRACTION SYSTEM IS
FUNCTIONING NORMALLY.
GO TO SECTION X
“TESTING THE TRACTION
DASH LAMP”
NO
IS TRACTION DASH
LAMP ILLUMINATED?
YES
GO TO SECTION XI
“TESTING TRACTION
CONTROL MODULATOR”
17
Page 18

START HERE
SECTION I - ANTILOCK DASH LAMP TESTING
DISCONNECT 30 PIN CONNECTOR FROM
™
EC-17
CONTROLLER AND OBSERVE THE
ANTILOCK DASH LAMP.
E3
TO DASH LAMP
RELAY
ANTILOCK DASH LAMP
ILLUMINATED?
NO
WITH IGNITION ON, MEASURE VOLTAGE BETWEEN
PINS E3 & A1, A2, A3. VOLTAGE SHOULD BE SAME
AS BATTERY VOLTAGE
A1
GROUND
A2
GROUND
A3
GROUND
IS VOLTAGE CORRECT?
YES
NO
CHECK WIRING HARNESS AND RELAY FOR
SHORTS TO GROUND. RECONNECT AND
CHECK/REPLACE THE FOLLOWING:
1. DASH LIGHT BULB
2. FUSE
3. RELAY POWER WIRE
4. RELAY
AFTER REPLACING EACH COMPONENT
TEST THE DASH LAMP.
YES
REPLACE THE
EC-17™ CONTROLLER
SECOND TIME TO
THIS POINT?
YES
REPAIR OR REPLACE
A1, A2, A3
GROUND
NO
REPLACE RELAY &
RETEST FOR BATTERY
WIRE HARNESS
E3
TO DASH LAMP
RELAY
VOLTAGE
DASH LAMP
RELAY
18
REPEAT THE “INITIAL
START-UP PROCEDURE”
VEHICLE POWER
(IGNITION)
DASH LAMP
Page 19

SECTION II - INSPECTION FOR ILLUMINATED LEDs
NO
ARE ANY RED LEDs
ILLUMINATED?
NOTE AND RECORD THE
CONDITION OF ALL RED
START HERE
YES
LEDs
INSPECT EC-17
CONTROLLER FOR PRESENCE
OF ILLUMINATED LEDS AND
RECORD
CHECK CLOSELY AND
NOTE IF GREEN, VLT
LED IS ILLUMINATED
YES (ON)
NO
IS GREEN LED FLASHING?
YES
GO TO SECTION V “TESTING
FOR POWER TO THE EC-17
CONTROLLER”.
™
NO (OFF)
ARE ANY RED LEDs
ILLUMINATED?
™
NO
YES
REPLACE THE
EC-17™ CONTROLLER
GO TO SECTION V
“TESTING FOR POWER
TO THE EC-17
™
CONTROLLER”
GO TO SECTION IV
“INSPECTION FOR
ILLUMINATED LEDs”
GO TO SECTION VIII “TESTING
FOR FALSE FAILURE INDICATION
- CAUSED BY DASH LAMP RELAY”
RED LEDs
GREEN VLT LED
™
CONTROLLER
EC-17
DIAGNOSTIC DISPLAY
19
Page 20

SECTION III - INSPECTION FOR ILLUMINATED LEDs
START HERE
GO TO SECTION V
“TESTING FOR
POWER TO THE
™
CONTROLLER”
EC-17
INSPECT THE EC-17
™
CONTROLLER
FOR PRESENCE OF ILLUMINATED
LEDS AND RECORD
IS GREEN VOLT LED ILLUMINATED?
YES
YES
IS GREEN LED FLASHING?
NO
ARE ANY RED LEDs ILLUMINATED?
YES
NOTE AND RECORD
THE CONDITION OF
ALL RED LEDs
NO
ARE ANY RED
LEDs
ILLUMINATED?
REPLACE THE EC-17
CONTROLLER
NO
GO TO SECTION IX “TESTING FOR
FALSE FAILURE INDICATION - CAUSED
BY WHEEL SPEED COMPONENTS”
YES
NO
“TESTING FOR POWER
TO THE EC-17
™
CONTROLLER”
™
GO TO SECTION V
GO TO SECTION IV “INSPECTION
FOR ILLUMINATED LEDs”
™
EC-17
CONTROLLER
DIAGNOSTIC DISPLAY
20
Page 21

SECTION IV - INSPECTION FOR ILLUMINATED LEDs
“ECU” LED ON?
EC-17™ CONTROLLER
DIAGNOSTIC DISPLAY
1 LED
FROM THIS GROUP
1 LED
FROM THIS GROUP
START HERE
NOTE RED “ECU” LED IN
EC-17™ CONTROLLER
DIAGNOSTICS WINDOW.
IS THIS LED ILLUMINATED?
NO
THERE SHOULD BE A MINIMUM OF
THREE RED LEDs ILLUMINATED AND
OF THE THREE THERE MUST BE A
“RHT” OR “LFT”, PLUS A “FRT”, “MID” OR
“RER”, PLUS A “MOD” OR “SES”.
DO THE ABOVE
CONDITIONS EXIST?
YES
NOTE THE THREE ILLUMINATED LEDs
NO
YES
GO TO SECTION V “TESTING
FOR POWER TO THE EC-17
™
CONTROLLER”
REPLACE THE EC-17™ CONTROLLER
AND REPEAT THE “INITIAL START-UP
PROCEDURE”
1 LED
FROM THIS GROUP
™
EC-17
CONTROLLER
DIAGNOSTIC DISPLAY
IS “MOD” LED ILLUMINATED
NO
THE “SEN” LED IS ILLUMINATED
USING THE TWO POSITIONING LEDs
(RIGHT/LEFT FRONT/REAR) GO TO
SECTION VII A “TESTING THE WHEEL
SPEED SENSOR” AND TEST THE
APPROPRIATE SPEED SENSOR.
YES
USING THE TWO POSITIONING
LEDs (RIGHT/LEFT FRONT/REAR)
GO TO SECTION VIA “TESTING
THE MODULATOR” AND TEST THE
APPROPRIATE MODULATOR.
21
Page 22

SECTION V - TESTING FOR POWER TO THE EC-17™ CONTROLLER
START HERE
TURN IGNITION OFF, DISCONNECT 30 PIN
CONNECTOR FROM EC-17™ CONTROLLER
TURN IGNITION ON AND MEASURE
VOLTAGE BETWEEN BATTERY PINS
B1, K2, K3 AND GROUND PINS A1, A2,
A3 ON WIRE HARNESS CONNECTOR
VOLTAGE SAME AS BATTERY
VOLTAGE. MUST BE
BETWEEN 11 AND 17 VOLTS.
YES
USING A LAMP (1157 STOP LAMP BULB)
PLACE A LOAD BETWEEN PINS B1 AND A1.
MEASURE THE VOLTAGE ACROSS THE
TWO BULB LEADS.
RECONNECT CONNECTOR TO EC-17
CONTROLLER. CHECK THE VEHICLE
WIRING FOR CONTINUITY. REFER TO
NO
THE VEHICLE SERVICE MANUAL AND
CHECK THE BATTERY VOLTAGE.
REPAIR OR REPLACE WIRING AS
NECESSARY AND RETEST .
™
TEST ACROSS BULB
LEADS AND READ 11
VOLTS OR MORE ON
VOLT/OHMMETER
K2
K3
30 PIN CONNECTOR
B1
IS VOLTAGE 11 VOLTS
OR GREATER?
REPLACE EC-17
CONTROLLER
1157 STOP
LAMP BULB
A1
A2
A3
YES
NO
ELECTRICAL SYSTEM (WIRING,
CONNECTORS ETC.) MAY BE
LIMITING CURRENT FLOW
™
REPEAT THE “INITIAL
START-UP PROCEDURE”
22
Page 23

SECTION VI A - TESTING THE MODULATOR
TURN IGNITION OFF. REFER TO
ILLUSTRATION, DISCONNECT WIRE
HARNESS CONNECTOR FROM
EC-17™ CONTROLLER.
PROBE CONNECTOR WITH VOLT/OHM METER AND NOTE
THAT PROPER RESISTANCE VALUES ARE OBTAINED FOR
MODULAT OR BEING TESTED.
RESISTANCE VALUES FOR BENDIX
®
M-21™ AND M -22
MODULATORS.
HOLD TO COMMON: READ 3.5 TO 5 OHMS
EXHAUST TO COMMON: READ 3.5 TO 5 OHMS
EXHAUST TO HOLD: READ 7 TO 10 OHMS
FOR BENDIX® M-32™ MODULATORS.
HOLD TO COMMON: READ 4.9 TO 7 OHMS
EXHAUST TO COMMON: READ 4.9 TO 7 OHMS
EXHAUST TO HOLD: READ 9.8 TO 14 OHMS
™
START HERE
18 PIN CONNECTOR 30 PIN CONNECTOR
1
2
3
F E D C B A
F1 LEFT REAR MOD. COMMON
D1 LEFT REAR MOD. EXHAUST
E1 LEFT REAR MOD. HOLD
A1 RIGHT REAR MOD. COMMON
C1 RIGHT REAR MOD. EXHAUST
B1 RIGHT REAR MOD. HOLD
K J H G F E D C B A
H1 LEFT FRONT MOD. COMMON
F1 LEFT FRONT MOD. EXHAUST
G1 LEFT FRONT MOD. HOLD
C1 RIGHT FRONT MOD. COMMON
E1 RIGHT FRONT MOD. EXHAUST
D1 RIGHT FRONT MOD. HOLD
1
2
3
PROBE CONNECTOR PINS WITH A MEGOHMMETER AND
VERIFY THAT NO CONTINUITY EXISTS.
COMMON TO GROUND: NO CONTINUITY
HOLD TO GROUND NO CONTINUITY
EXHAUST TO GROUND NO CONTINUITY
ARE RESISTANCE
VALUES CORRECT?
YES
INSPECT CONNECTOR AND RECONNECT
TO EC-17™ CONTROLLER. TURN IGNITION
ON AND PASS MAGNET OVER RESET ON
NO
GO TO SECTION VI B AND
CONTINUE TESTING
EC-17™ CONTROLLER. NOTE REACTION
OF RED LEDs.
NO
ARE ANY RED LEDs
ILLUMINATED?
YES
YES
SAME RED LEDs
REPLACE THE EC-17
ILLUMINATED?
REPEAT “INITIAL START-UP
PROCEDURE.” IF THIS TEST STEP
HAS REPEATED TWICE - REPLACE
THE EC-17™ CONTROLLER.
™
CONTROLLER.
NO
GO TO SECTION IV
“INSPECTION FOR
ILLUMINATED LEDs”
AND RETEST.
23
Page 24

SECTION VI B - TESTING THE MODULATOR
START HERE FROM
SECTION VI A
GO TO MODULATOR, INSPECT WIRING CONNECTOR.
DISCONNECT CONNECTOR AND TEST RESISTANCE
BETWEEN PINS ON MODULATOR.
®
RESISTANCE VALUES FOR BENDIX
M-21™ AND M-22
MODULATORS.
HOLD TO COMMON: READ 3.5 TO 5 OHMS
EXHAUST TO COMMON: READ 3.5 TO 5 OHMS
EXHAUST TO HOLD: READ 7 TO 10 OHMS
RESISTANCE VALUES FOR BENDIX® M-32
™
MODULATORS.
HOLD TO COMMON: READ 4.9 TO 7 OHMS
EXHAUST TO COMMON: READ 4.9 TO 7 OHMS
EXHAUST TO HOLD: READ 9.8 TO 14 OHMS
TEST EACH PIN TO VEHICLE GROUND WITH A MEGOHMMETER AND NOTE THAT NO CONTINUITY EXISTS.
RESISTANCE READINGS
NO
CORRECT?
YES
CONNECTOR ON M-21
MODULATOR.
™
EXHAUST COMMON HOLD
A B C
REPLACE THE MODULATOR.
™
OR M-22
™
RECONNECT CONNECTOR TO MODULATOR.
TURN IGNITION ON AND PASS MAGNET OVER
RESET ON EC-17™ CONTROLLER. NOTE
REACTION OF RED LEDs.
ARE ANY RED LEDs
NO
ILLUMINATED?
YES
SAME RED LEDs
YES
ILLUMINATED?
NO
GO TO SECTION IV “INSPECTION FOR
ILLUMINATED LEDs” AND RETEST.
REPEAT THE “INITIAL
START-UP PROCEDURE”
REPAIR OR REPLACE
MODULATOR WIRE HARNESS.
24
Page 25

SECTION VII A - TESTING THE WHEEL SPEED SENSOR
START HERE
TURN IGNITION OFF AND CHECK FOLLOWING:
REMOVE 18 AND 30 PIN CONNECTOR FROM EC-17™ CONTROLLER. SET VOLT/
OHMMETER TO AC SCALE AND GENTLY PROBE SPEED SENSOR “PIN PAIRS” WHILE
SPINNING WHEEL BY HAND (30 PIN CONNECTOR “PIN PAIRS” J1&2 H2&3) (18 PIN
CONNECTOR “PIN PAIRS” B2&3, C2&3, E2&3, F2&3).
VOLTAGE OUTPUT FOR WS-20™ SENSOR SHOULD BE ABOVE 0.8 VOLTS AC AT 1 RPS.
VOLTAGE OUTPUT FOR WS-24™ SENSOR SHOULD BE ABOVE 0.250 VOLTS AC AT 0.5 RPS.
IF VOLTAGE IS BELOW THE MINIMUM CHECK ITEMS BELOW
A. CHECK “GAP” BETWEEN SPEED SENSOR AND EXCITER OR TONE RING. (GAP FOR
B. IF SENSOR GAP IS CORRECT CHECK WHEEL BEARING FOR FREE PLAY TO VERIFY IT
C. MAKE CERTAIN EXCITER OR TONE RING IS IN PLACE AND INSPECT CONDITION. CHECK
D. CHECK WIRING HARNESS AND CONNECTORS THAT RUN TO SENSOR.
E. CHECK FOR DRAGGING BRAKES (OVER ADJUSTED, TRAPPED AIR IN ACTUATOR, OUT
RESET WITH A MAGNET, NOTE REACTION OF RED LEDs.
BENDIX® WS-20™ SENSOR, SPEED SENDER IS BETWEEN 0 - .015 INCHES) IF SENSOR
GAP MUST BE ADJUSTED, CHECK FOR LOOSE OR WORN WHEEL BEARINGS BEFORE
RE-GAPPING SENSOR. REFER TO VEHICLE MAINTENANCE MANUAL FOR WORN
BEARINGS. CHECK SENSOR OUTPUT VOLTAGE.
COMPLIES TO MANUFACTURER’S RECOMMENDATIONS.
FOR MISSING OR DAMAGED TEETH AND THAT IT RUNS TRUE AND PERPENDICULAR TO
SENSOR FACE.
OF ROUND DRUMS, MALFUNCTIONING RETURN SPRINGS, PARKING BRAKE SYSTEM
PROBLEMS, ETC.) AND CORRECT AND RETEST.
IGNITION ON, NOTE ILLUMINATED LED’s.
2nd TIME TO THIS POINT DURING TESTING?
NO
YES
ANY RED LEDs ON?
NO
YES
SAME RED LEDs ON?
YES
GO TO SECTION VII PART B
AND BEGIN TESTING
GO TO SECTION VII PART B
AND BEGIN TESTING
NO
GO TO SECTION IV.
RECONNECT CONNECTORS AT EC-17™ CONTROLLER AND SPEED SENSOR, DO MAGNETIC RESET.
NOTE RED LEDs.
ARE ANY RED LEDs ILLUMINATED?
NO
GO TO “INITIAL START-UP PROCEDURE”
YES
GO TO SECTION III “INSPECTION
FOR ILLUMINATED LEDs.”
25
Page 26

SECTION VII B - TESTING THE WHEEL SPEED SENSOR
START HERE FROM
SECTION VII A
30 PIN CONNECTOR
K J H G F E D C B A
J2 LEFT FRONT W. S. RTN
J1 LEFT FRONT W. S. SIGNAL
H3 RIGHT FRONT W. S. RTN
H2 RIGHT FRONT W. S. SIGNAL
A1,2,3 GROUND
B1,K2,3 POWER
18 PIN CONNECTOR
1
2
3
F E D C B A
C3 LEFT MID W.S. RTN.
C2 LEFT MID W.S. SIGNAL
F3 LEFT REAR W.S. RTN
F2 LEFT REAR W.S. SIGNAL
B3 RIGHT MID W.S. RTN.
B2 RIGHT MID W.S. SIGNAL
E3 RIGHT REAR W.S. RTN
E2 RIGHT REAR W.S. SIGNAL
NO
SAME LEDs ILLUMINATED?
YES
IGNITION OFF. REMOVE CONNECTOR FROM EC-17
CONTROLLER. MEASURE RESISTANCE BETWEEN THE
APPROPRIATE SPEED SIGNAL (+) AND SIGNAL RETURN
(-). RESISTANCE FOR BENDIX® SENSORS IS BETWEEN
1500-2500 OHMS. REFER TO VEHICLE MANUAL FOR THE
1
RESISTANCE VALUES IF OTHER THAN WS-20™ SENSOR IS
2
IN USE. CHECK CONTINUITY BETWEEN POWER (B1,K2,3)
3
AND SPEED SIGNAL THEN BETWEEN GROUND (A1,2,3)
AND SPEED SIGNAL. NO CONTINUITY PERMITTED.
YES
CORRECT RESISTANCE?
NO
DISCONNECT CONNECTOR AT SPEED SENSOR.
INSPECT THE CONNECTOR, THEN CHECK THE
RESISTANCE BETWEEN TWO PINS ON SENSOR.
RESISTANCE BETWEEN 1500-2500 OHMS FOR THE
®
BENDIX
SENSORS. NO CONTINUITY PERMITTED
BETWEEN GROUND (A1, 2, 3) AND SPEED SIGNAL.
YES
RECONNECT CONNECTOR AT SPEED
™
SENSOR AND EC-17
CONTROLLER
AND DO MAGNETIC RESET. NOTE IF
ANY RED LEDS ARE ILLUMINATED.
GO TO SECTION III “INSPECTION
FOR ILLUMINATED LEDs”
™
REPLACE THE EC-17
CONTROLLER.
NO
REPLACE THE SENSOR
™
26
ARE ANY LEDs ILLUMINATED?
YES
ARE SAME RED LEDs ILLUMINATED?
YES
REPAIR OR REPLACE SPEED
SENSOR WIRING HARNESS
NO
NO
REPEAT THE “INITIAL
START-UP PROCEDURE”.
GO TO SECTION III “INSPECTION
FOR ILLUMINATED LEDs”
Page 27

SECTION VIII - TESTING FOR FALSE INDICATION CAUSED BY DASH LIGHT RELAY
START HERE
E3 TO DASH
LAMP RELAY
K J H G F E D C B A
30 PIN CONNECTOR
E3
from 30 pin
™
EC-17
connector
Controller
Vehicle
Power
1
2
3
Relay
WITH IGNITION ON, HOLD MAGNET
ON EC-17
™
CONTROLLER RESET AND
NOTE ALL LEDs ARE ILLUMINATED.
ARE ALL LEDs ILLUMINATED?
YES
REMOVE THE MAGNET FROM THE EC-17
™
CONTROLLER, TURN IGNITION OFF AND
DISCONNECT THE 30 PIN CONNECTOR FROM
EC-17™ CONTROLLER. MANUALLY GROUND
PIN E3 OF THE 30 PIN CONNECTOR.
TURN THE IGNITION ON.
NO
IS THE ABS INDICAT OR
LAMP ILLUMINATED?
YES
CHECK PIN E3 FOR VEHICLE POWER.
IS POWER DETECTED?
NO
REPLACE THE EC-17
CONTROLLER
YES
RELAY INCORRECTLY
CONNECTED OR NOT
FUNCTIONING PROPERLY.
REPLACE THE EC-17
CONTROLLER
™
™
™
EC-17
Controller
Vehicle
Power
Here
AntiLock
Dash Lamp
AntiLock Dash
Lamp Relay
Wiring
Ground this
terminal or wire
on relay
AntiLock
Dash Lamp
Coil
Relay
NO
CHECK THE DASH AND VEHICLE
WIRING. CHECK FOR CONTINUITY
BETWEEN PIN E3 AND THE ABS
RELAY TERMINATION. REPAIR OR
REPLACE THE WIRE HARNESS.
CHECK FOR THE PRESENCE OF
THE ABS INDICATOR LAMP RELAY.
REPEAT THE INITIAL START UP
PROCEDURE.
AntiLock Dash
Lamp Relay
Wiring
27
Page 28

SECTION IX - TESTING FOR FALSE INDICATION CAUSED BY WHEEL SPEED COMPONENTS
All LEDs
Illuminated?
EC-17™ CONTROLLER
DIAGNOSTIC DISPLAY
START HERE
WITH IGNITION ON, HOLD A
MAGNET ON RESET OF EC-17
™
CONTROLLER AND NOTE LEDs
ARE ALL LEDs ILLUMINATED?
Magnet
here
YES
REMOVE MAGNET
TURN THE IGNITION OFF AND REMOVE 18 AND 30 PIN
CONNECTOR FROM EC-17™ CONTROLLER. SET VOLT/
OHMMETER TO AC SCALE AND GENTLY PROBE THE
APPROPRIATE SPEED SENSOR “PIN PAIR” WHILE SPINNING
WHEEL BY HAND (REFER TO FIGURE 5 FOR THE SPEED
SENSOR PIN PAIR LOCATION IN THE 18 OR 30 PIN
CONNECTOR).
VOLTAGE OUTPUT FOR BENDIX WS-20™ SENSOR
SHOULD BE ABOVE 0.8 VOLTS AC AT 1 RPS.
VOLTAGE OUTPUT FOR BENDIX WS-24™ SENSOR
SHOULD BE ABOVE 0.250 VOLTS AC AT 0.5 RPS.
IF VOLTAGE IS BELOW THE MINIMUM INSPECT APPROPRIATE
AXLE AND WHEEL FOR PRESENCE OF AN EXCITER OR TONE
RING AND SPEED SENSOR. CHECK SENSOR “GAP” (DISTANCE
BETWEEN SPEED SENSOR AND EXCITER RING) AND BEARING
END PLAY. RE-ADJUST AS NECESSARY.
NO
REPLACE EC-17
CONTROLLER
™
28
RUN VEHICLE AT 7 MPH OR MORE
FOR 10 SECONDS OR MORE. TURN
OFF IGNITION
REPEAT “INITIAL START-UP
PROCEDURE”
Page 29

SECTION X - TESTING TRACTION CONTROL DASH LAMP
START HERE
IS THIS THE SECOND TIME
TO THIS POINT?
YES
WITH IGNITION OFF, REMOVE 30 PIN
CONNECTOR FROM EC-17
TURN IGNITION ON AND CHECK FOR
VEHICLE VOLTAGE AT TERMINAL C2.
VEHICLE VOLTAGE
DETECTED?
™
CONTROLLER.
NO
YES
REPLACE TRACTION DASH LAMP WITH
KNOWN GOOD UNIT. REPEAT “INITIAL
START-UP PROCEDURE”
C2
1
2
3
K J H G F E D C B A
30 PIN CONNECTOR
REPLACE EC-17
CONTROLLER
™
NO
REPAIR OR REPLACE WIRE
HARNESS AND RETEST
NO
VEHICLE
OR ECU BUILT
AFTER
mid-year
2000
YES
ECU REQUIRES TORQUE REQUEST VIA
J1922 OR J1939 SERIAL LINK WITHIN 5
MINUTES OF IGNITION KEY ON OR THE
TRACK CONTROL LAMP WILL COME ON
29
Page 30

SECTION XI - TESTING TRACTION CONTROL MODULATOR
START HERE
GO TO SECTION XII “TESTING
ENGINE CONTROL MODULE
WIRE HARNESS”
CHECK CONDITION OF 18 PIN
CONNECTOR CLEAN, RECONNECT,
TURN IGNITION ON & PASS
MAGNET OVER EC-17
™
CONTROLLER RESET. REPEAT
“INITIAL START-UP PROCEDURE”
YES
WITH IGNITION ON, INSPECT EC-17
CONTROLLER FOR ILLUMINATED LEDs
IS “TRC” ONLY ON?
NO
ARE “TRC” AND “MOD”
LEDs ON?
YES
TURN IGNITION OFF AND REMOVE 18 PIN
CONNECTOR FROM EC-17™ CONTROLLER.
CHECK RESISTANCE BETWEEN PINS D2 &
D3. RESISTANCE SHOULD BE 10 - 12 OHMS.
REMOVE 30 PIN CONNECTOR AND CHECK
CONTINUITY BETWEEN GROUND (A1,2,3)
AND D2 & D3. NO CONTINUITY PERMITTED.
YES
RESISTANCE CORRECT & NO
CONTINUITY TO GROUND?
NO
™
These LEDs
Illuminated?
D2
D3
1
2
3
F E D C B A
18 PIN CONNECTOR
F E D C B A
REPLACE ANTILOCK
TRACTION RELAY
(MODULATOR)
DISCONNECT 2 PIN CONNECTOR AT MODULATOR &
CHECK RESISTANCE OF CONNECTOR HALF ATTACHED
TO ANTILOCK TRACTION RELAY. RESISTANCE
SHOULD BE 10 - 12 OHMS. THEN CHECK CONTINUITY
BETWEEN GROUND ON 30 PIN CONNECTOR (A1,2,3)
AND BOTH PINS ON THE 2 PIN CONNECTOR LEADING
TO THE MODULATOR. NO CONTINUITY PERMITTED.
NO
RESISTANCE CORRECT & NO
CONTINUITY TO GROUND?
YES
REPAIR OR REPLACE WIRE
HARNESS (FROM 18 PIN
CONNECTOR TO 2
PIN CONNECTOR)
1
2
3
D2
D3
2 pin Modulator
Connector
EC-17™ Controller and
AntiLock Traction Relay
(Modulator)
30 PIN CONNECTOR
K J H G F E D C B A
A1 GROUND
A2 GROUND
A3 GROUND
1
2
3
30
Page 31

SECTION XII - TESTING ENGINE CONTROL MODULE WIRE HARNESS
START HERE
Illuminated?
TRC ONLY RED LED ON?
NO
YES
TURN IGNITION OFF. DISCONNECT 30 PIN
CONNECTOR FROM EC-17™ CONTROLLER
& 2 or 3 PIN CONNECTOR AT ENGINE
ELECTRONIC CONTROL MODULE.
CHECK WIRE CONTINUITY BETWEEN 30 PIN
CONNECTOR A T EC-17™ CONTROLLER AND 2
or 3 PIN CONNECTOR AT ENGINE CONTROL
MODULE. PINS B2 & B3 ON 30 PIN CONNECTOR CORRESPOND TO THE WIRES LEADING
TO 2 PIN CONNECTOR AND PINS C2, D2 & D3
ON 30 PIN CONNECTOR CORRESPOND TO
THE WIRES LEADING TO 3 PIN CONNECTOR
AT ENGINE CONTROL MODULE.
PASS MAGNET OVER EC-17
CONTROLLER RESET & REPEAT
“INITIAL START-UP PROCEDURE”
3 PIN
CONNECTOR
D3 D2
K J H G F E D C B A
30 PIN CONNECTOR
™
C3
2 PIN
CONNECTOR
B3B2
1
2
3
WIRE CONTINUITY OK?
NO
REPAIR OR REPLACE VEHICLE
WIRE HARNESS
YES
TEST ENGINE CONTROL MODULE
USING ENGINE MANUFACTURER’S
PROCEDURE.
31
Page 32

32
BW1910 © 2010 Bendix Commercial Vehicle Systems LLC All rights reserved. 4/2010 Printed in U.S.A.
 Loading...
Loading...