

Page 1
Hardware Data Sheet Section III
ET1815 / ET1816
Slave Controller
IP Core for Xilinx® FPGAs
Release 3.00k
Section I – Technology
(Online at http://www.beckhoff.com)
Section II – Register Description
(Online at http://www.beckhoff.com)
Section III – Hardware Description
Installation, Configuration, Resource
consumption, Interface specification
Version 1.0
Date: 2015-01-20
Page 2

DOCUMENT ORGANIZATION
Trademarks
Beckhoff®, TwinCAT®, EtherCAT®, Safety over EtherCAT®, TwinSAFE® and XFC® are registered trademarks of and licensed by
Beckhoff Automation GmbH & Co. KG. Other designations used in this publication may be trademarks whose use by third
parties for their own purposes could violate the rights of the owners.
Patent Pending
The EtherCAT Technology is covered, including but not limited to the following German patent applications and patents:
DE10304637, DE102004044764, DE102005009224, DE102007017835 with corresponding applications or registrations in
various other countries.
Disclaimer
The documentation has been prepared with care. The products described are, however, constantly under development. For that
reason the documentation is not in every case checked for consistency with performance data, standards or other
characteristics. In the event that it contains technical or editorial errors, we retain the right to make alterations at any time and
without warning. No claims for the modification of products that have already been supplied may be made on the basis of the
data, diagrams and descriptions in this documentation.
Copyright
© Beckhoff Automation GmbH & Co. KG 01/2015.
The reproduction, distribution and utilization of this document as well as the communication of its contents to others without
express authorization are prohibited. Offenders will be held liable for the payment of damages. All rights reserved in the event of
the grant of a patent, utility model or design.
DOCUMENT ORGANIZATION
The Beckhoff EtherCAT Slave Controller (ESC) documentation covers the following Beckhoff ESCs:
ET1200
ET1100
EtherCAT IP Core for Altera® FPGAs
EtherCAT IP Core for Xilinx® FPGAs
ESC20
The documentation is organized in three sections. Section I and section II are common for all Beckhoff
ESCs, Section III is specific for each ESC variant.
The latest documentation is available at the Beckhoff homepage (http://www.beckhoff.com).
Section I – Technology (All ESCs)
Section I deals with the basic EtherCAT technology. Starting with the EtherCAT protocol itself, the
frame processing inside EtherCAT slaves is described. The features and interfaces of the physical
layer with its two alternatives Ethernet and EBUS are explained afterwards. Finally, the details of the
functional units of an ESC like FMMU, SyncManager, Distributed Clocks, Slave Information Interface,
Interrupts, Watchdogs, and so on, are described.
Since Section I is common for all Beckhoff ESCs, it might describe features which are not available in
a specific ESC. Refer to the feature details overview in Section III of a specific ESC to find out which
features are available.
Section II – Register Description (All ESCs)
Section II contains detailed information about all ESC registers. This section is also common for all
Beckhoff ESCs, thus registers, register bits, or features are described which might not be available in
a specific ESC. Refer to the register overview and to the feature details overview in Section III of a
specific ESC to find out which registers and features are available.
Section III – Hardware Description (Specific ESC)
Section III is ESC specific and contains detailed information about the ESC features, implemented
registers, configuration, interfaces, pinout, usage, electrical and mechanical specification, and so on.
Especially the Process Data Interfaces (PDI) supported by the ESC are part of this section.
Additional Documentation
Application notes and utilities can also be found at the Beckhoff homepage. Pinout configuration tools
for ET1100/ET1200 are available. Additional information on EtherCAT IP Cores with latest updates
regarding design flow compatibility, FPGA device support and known issues are also available.
III-II Slave Controller – IP Core for Xilinx FPGAs
Page 3

DOCUMENT HISTORY
Version
Comment
1.0
Initial release EtherCAT IP Core for Xilinx FPGAs v3.00k
DOCUMENT HISTORY
Slave Controller – IP Core for Xilinx FPGAs III-III
Page 4

CONTENTS
CONTENTS
1 Overview 1
1.1 Frame processing order 2
1.2 Scope of this document 3
1.3 Scope of Delivery 3
1.4 Target FPGAs 4
1.5 Designflow requirements 4
1.6 Tested FPGA/Designflow combinations 5
1.7 Release Notes 6
1.7.1 Major differences between V2.04x and V3.00x 9
1.7.2 Reading IP Core version from device 9
1.8 Design flow 10
1.9 IP Core Evaluation 11
1.10 Simulation 12
2 Features and Registers 13
2.1 Features 13
2.2 Registers 16
2.3 Extended ESC Features in User RAM 19
3 IP Core Installation 23
3.1 Installation on Windows PCs 23
3.1.1 System Requirements 23
3.1.2 Installation 23
3.2 Installation on Linux PCs 24
3.2.1 System Requirements 24
3.2.2 Installation 24
3.3 Files located in the lib folder 24
3.4 License File 25
3.5 IP Core Vendor ID Package 25
3.6 RSA Decryption Keys 26
3.7 Environment Variable 26
3.8 Integrating the EtherCAT IP Core into the Xilinx Designflow 27
3.8.1 Software Templates for example designs with Microblaze/ARM processor
(EDK) 27
3.8.2 Software Templates for example designs with ARM processor (Vivado) 27
3.9 EtherCAT Slave Information (ESI) / XML device description for example designs 27
4 IP Core Usage 28
4.1 IPCore_Config Tool 28
4.2 EDK designs with EtherCAT IP Core 29
4.3 Vivado designs with EtherCAT IP Core 33
5 IP Core Configuration 34
5.1.1 Product ID tab 35
III-IV Slave Controller – IP Core for Xilinx FPGAs
Page 5
CONTENTS
5.1.2 Physical Layer tab 36
5.1.3 Internal Functions tab 38
5.1.4 Feature Details tab 40
5.1.5 Register: Process Data Interface tab 42
6 Example Designs 49
6.1 Avnet Xilinx Spartan-6 LX150T Development Kit with Digital I/O 50
6.1.1 Configuration and resource consumption 50
6.1.2 Functionality 50
6.1.3 Implementation 50
6.1.4 SII EEPROM 51
6.1.5 Downloadable configuration file 51
6.2 Avnet Xilinx Spartan-6 LX150T Development Kit with AXI 52
6.2.1 Configuration and resource consumption 52
6.2.2 Functionality 52
6.2.3 Implementation 53
6.2.4 SII EEPROM 53
6.2.5 Downloadable configuration file 53
6.3 Xilinx Zynq ZC702 Development Kit with AXI (Vivado based) 54
6.3.1 Configuration and resource consumption 54
6.3.2 Functionality 54
6.3.3 Implementation 55
6.3.4 SII EEPROM 55
7 FPGA Resource Consumption 56
8 IP Core Signals 59
8.1 General Signals 59
8.1.1 Clock source example schematics 60
8.2 SII EEPROM Interface Signals 61
8.3 LED Signals 61
8.4 Distributed Clocks SYNC/LATCH Signals 62
8.5 Physical Layer Interface 63
8.5.1 MII Interface 64
8.5.2 RMII Interface 66
8.5.3 RGMII Interface 67
8.6 PDI Signals 70
8.6.1 General PDI Signals 70
8.6.2 Digital I/O Interface 70
8.6.3 SPI Slave Interface 71
8.6.4 Asynchronous 8/16 Bit µController Interface 71
8.6.5 PLB Processor Local Bus 73
8.6.6 AXI4 / AXI4 LITE On-Chip Bus 76
9 Ethernet Interface 78
Slave Controller – IP Core for Xilinx FPGAs III-V
Page 6

CONTENTS
9.1 PHY Management interface 78
9.1.1 PHY Management Interface Signals 78
9.1.2 PHY Address Configuration 78
9.1.3 Separate external MII management interfaces 79
9.1.4 MII management timing specifications 79
9.2 MII Interface 80
9.2.1 MII Interface Signals 81
9.2.2 TX Shift Compensation 82
9.2.3 MII Timing specifications 83
9.2.4 MII example schematic 84
9.3 RMII Interface 85
9.3.1 RMII Interface Signals 85
9.3.2 RMII example schematic 86
9.4 RGMII Interface 87
9.4.1 RGMII Interface Signals 87
9.4.2 RGMII example schematic 89
9.4.3 RGMII RX timing options 89
9.4.4 RGMII TX timing options 89
10 PDI Description 91
10.1 Digital I/O Interface 92
10.1.1 Interface 92
10.1.2 Configuration 93
10.1.3 Digital Inputs 93
10.1.4 Digital Outputs 93
10.1.5 Output Enable 94
10.1.6 SyncManager Watchdog 94
10.1.7 SOF 95
10.1.8 OUTVALID 95
10.1.9 Timing specifications 95
10.2 SPI Slave Interface 98
10.2.1 Interface 98
10.2.2 Configuration 98
10.2.3 SPI access 99
10.2.4 Address modes 99
10.2.5 Commands 100
10.2.6 Interrupt request register (AL Event register) 100
10.2.7 Write access 100
10.2.8 Read access 100
10.2.9 SPI access errors and SPI status flag 101
10.2.10 2 Byte and 4 Byte SPI Masters 102
10.2.11 Timing specifications 103
III-VI Slave Controller – IP Core for Xilinx FPGAs
Page 7

CONTENTS
10.3 Asynchronous 8/16 bit µController Interface 109
10.3.1 Interface 109
10.3.2 Configuration 109
10.3.3 µController access 110
10.3.4 Write access 110
10.3.5 Read access 110
10.3.6 µController access errors 111
10.3.7 Connection with 16 bit µControllers without byte addressing 111
10.3.8 Connection with 8 bit µControllers 112
10.3.9 Timing Specification 113
10.4 PLB Slave Interface 117
10.4.1 Interface 117
10.4.2 Configuration 118
10.4.3 Timing specifications 119
10.5 AXI4/AXI4 LITE On-Chip Bus 121
10.5.1 Interface 121
10.5.2 Configuration 123
10.5.3 Interrupts 123
10.5.4 Timing specifications 124
11 Distributed Clocks SYNC/LATCH Signals 126
11.1 Signals 126
11.2 Timing specifications 126
12 SII EEPROM Interface (I²C) 127
12.1 Signals 127
12.2 EEPROM Emulation 127
12.3 Timing specifications 127
13 Electrical Specifications 128
14 Synthesis Constraints 129
15 Appendix 132
15.1 Support and Service 132
15.1.1 Beckhoff’s branch offices and representatives 132
15.2 Beckhoff Headquarters 132
Slave Controller – IP Core for Xilinx FPGAs III-VII
Page 8

TABLES
TABLES
Table 1: IP Core Main Features .............................................................................................................. 1
Table 2: Frame Processing Order ........................................................................................................... 2
Table 3: Tested FPGA/Designflow combinations .................................................................................... 5
Table 4: Release notes ............................................................................................................................ 6
Table 5: Register Revision (0x0001) ....................................................................................................... 9
Table 6: Register Build (0x0002:0x0003) ................................................................................................ 9
Table 7: IP Core Feature Details ........................................................................................................... 13
Table 8: Legend ..................................................................................................................................... 15
Table 9: Register availability.................................................................................................................. 16
Table 10: Legend ................................................................................................................................... 18
Table 11: Extended ESC Features (Reset values of User RAM – 0x0F80:0x0FFF) ............................ 19
Table 12: Contents of lib folder.............................................................................................................. 24
Table 13: Resource consumption Avnet LX150T example design ....................................................... 50
Table 14: Resource consumption Avnet LX150T example design ....................................................... 52
Table 15: Resource consumption Xilinx Zynq ZC702 example design ................................................. 54
Table 16: Approximate resource requirements for main configurable functions ................................... 57
Table 17: EtherCAT IP Core resource consumption for typical EtherCAT Devices .............................. 58
Table 18: General Signals ..................................................................................................................... 59
Table 19: SII EEPROM Signals ............................................................................................................. 61
Table 20: LED Signals ........................................................................................................................... 61
Table 21: DC SYNC/LATCH signals ..................................................................................................... 62
Table 22: Physical Layer General ......................................................................................................... 63
Table 23: PHY Interface MII .................................................................................................................. 64
Table 24: PHY Interface RMII................................................................................................................ 66
Table 25: PHY Interface RGMII ............................................................................................................. 67
Table 26: General PDI Signals .............................................................................................................. 70
Table 27: Digital I/O PDI ........................................................................................................................ 70
Table 28: SPI PDI .................................................................................................................................. 71
Table 29: 8/16 Bit µC PDI ...................................................................................................................... 71
Table 30: 8 Bit µC PDI ........................................................................................................................... 72
Table 31: 16 Bit µC PDI ......................................................................................................................... 72
Table 32: PLB PDI ................................................................................................................................. 73
Table 33: PLB PDI additional signals of XPS/EDK pcores ................................................................... 75
Table 34: AXI4 / AXI4 LITE PDI ............................................................................................................ 76
Table 35: AXI4 / AXI4 LITE PDI additional signals of XPS/EDK pcores ............................................... 77
Table 36: PHY management Interface signals ...................................................................................... 78
Table 37: MII management timing characteristics ................................................................................. 79
Table 38: MII Interface signals .............................................................................................................. 81
Table 39: MII TX Timing characteristics ................................................................................................ 83
Table 40: MII timing characteristics ....................................................................................................... 83
Table 41: RMII Interface signals ............................................................................................................ 85
Table 42: RGMII Interface signals ......................................................................................................... 88
Table 43: Available PDIs for EtherCAT IP Core .................................................................................... 91
Table 44: IP core digital I/O signals ....................................................................................................... 92
Table 45: Input/Output byte reference ................................................................................................... 92
Table 46: Digital I/O timing characteristics IP Core ............................................................................... 95
Table 47: SPI signals ............................................................................................................................. 98
Table 48: Address modes ...................................................................................................................... 99
Table 49: SPI commands CMD0 and CMD1 ....................................................................................... 100
Table 50: Interrupt request register transmission ................................................................................ 100
Table 51: Write access for 2 and 4 Byte SPI Masters ......................................................................... 102
Table 52: SPI timing characteristics IP Core ....................................................................................... 103
Table 53: Read/Write timing diagram symbols .................................................................................... 104
Table 54: µController signals ............................................................................................................... 109
Table 55: 8 bit µController interface access types .............................................................................. 110
Table 56: 16 bit µController interface access types ............................................................................ 110
Table 57: µController timing characteristics IP Core ........................................................................... 113
Table 58: PLB signals .......................................................................................................................... 117
Table 59: PLB clock period values for synchronous clocking ............................................................. 118
Table 60: PLB timing characteristics ................................................................................................... 119
III-VIII Slave Controller – IP Core for Xilinx FPGAs
Page 9

TABLES
Table 61: AXI4 LITE signals ................................................................................................................ 121
Table 62: Additional AXI4 signals ........................................................................................................ 122
Table 63: AXI timing characteristics .................................................................................................... 124
Table 64: Distributed Clocks signals ................................................................................................... 126
Table 65: DC SYNC/LATCH timing characteristics IP Core ............................................................... 126
Table 66: I²C EEPROM signals ........................................................................................................... 127
Table 67: EEPROM timing characteristics IP Core ............................................................................. 127
Table 68: AC Characteristics ............................................................................................................... 128
Table 69: Forwarding Delays ............................................................................................................... 128
Table 70: EtherCAT IP Core constraints ............................................................................................. 129
Slave Controller – IP Core for Xilinx FPGAs III-IX
Page 10

FIGURES
FIGURES
Figure 1: EtherCAT IP Core Block Diagram ............................................................................................ 1
Figure 2: Frame Processing .................................................................................................................... 2
Figure 3: Design flow ............................................................................................................................. 10
Figure 4: Files installed with EtherCAT IP core setup ........................................................................... 23
Figure 5: IPCore_Config Open Menu .................................................................................................... 28
Figure 6: IP Core generation successful ............................................................................................... 28
Figure 7: EDK – Overview ..................................................................................................................... 30
Figure 8: EDK – Configuration of IP Core ............................................................................................. 30
Figure 9: EDK – Configuration Dialog ................................................................................................... 31
Figure 10: EDK – System Assembly View, Addresses tab ................................................................... 31
Figure 11: EDK – System Assembly View, Ports tab ............................................................................ 32
Figure 12: EtherCAT IP Core Configuration Interface ........................................................................... 34
Figure 13: Product ID tab ...................................................................................................................... 35
Figure 14: Physical Layer tab ................................................................................................................ 36
Figure 15: Internal Functions tab ........................................................................................................... 38
Figure 16: Feature Details tab ............................................................................................................... 40
Figure 17: Available PDI Interfaces ....................................................................................................... 42
Figure 18: Register Process Data Interface .......................................................................................... 43
Figure 19: Register PDI – Digital I/O Configuration............................................................................... 44
Figure 20: Register PDI – µC-Configuration.......................................................................................... 45
Figure 21: Register PDI – SPI Configuration ......................................................................................... 46
Figure 22: Register PDI – PLB Interface Configuration ........................................................................ 47
Figure 23: Register PDI – AXI4/AXI4 LITE Interface Configuration ...................................................... 48
Figure 24: EtherCAT IP Core clock source (MII) ................................................................................... 60
Figure 25: EtherCAT IP Core clock source (RMII) ................................................................................ 60
Figure 26: EtherCAT IP Core clock source (RGMII) ............................................................................. 60
Figure 27: PHY management Interface signals..................................................................................... 78
Figure 28: Example schematic with two individual MII management interfaces ................................... 79
Figure 29: MII Interface signals ............................................................................................................. 81
Figure 30: MII TX Timing Diagram ........................................................................................................ 82
Figure 31: MII timing RX signals............................................................................................................ 83
Figure 32: MII example schematic......................................................................................................... 84
Figure 33: RMII Interface signals........................................................................................................... 85
Figure 34: RMII example schematic ...................................................................................................... 86
Figure 35: RGMII Interface signals ........................................................................................................ 88
Figure 36: RGMII example schematic ................................................................................................... 89
Figure 37: IP core digital I/O signals ..................................................................................................... 92
Figure 38: Digital Output Principle Schematic ....................................................................................... 94
Figure 39: Digital Input: Input data sampled at SOF, I/O can be read in the same frame .................... 96
Figure 40: Digital Input: Input data sampled with LATCH_IN ................................................................ 96
Figure 41: Digital Input: Input data sampled with SYNC0/1 .................................................................. 96
Figure 42: Digital Output timing ............................................................................................................. 97
Figure 43: OUT_ENA timing .................................................................................................................. 97
Figure 44: SPI master and slave interconnection.................................................................................. 98
Figure 45: Basic SPI_DI/SPI_DO timing (*refer to timing diagram for relevant edges of SPI_CLK) .. 104
Figure 46: SPI read access (2 byte addressing, 1 byte read data) with Wait State byte .................... 105
Figure 47: SPI read access (2 byte addressing, 2 byte read data) with Wait State byte .................... 106
Figure 48: SPI write access (2 byte addressing, 1 byte write data) .................................................... 107
Figure 49: SPI write access (3 byte addressing, 1 byte write data) .................................................... 108
Figure 50: µController interconnection ................................................................................................ 109
Figure 51: Connection with 16 bit µControllers without byte addressing ............................................ 111
Figure 52: Connection with 8 bit µControllers (BHE and DATA[15:8] should not be left open) .......... 112
Figure 53: Read access (without preceding write access) .................................................................. 114
Figure 54: Write access (write after rising edge nWR, without preceding write access) .................... 115
Figure 55: Sequence of two write accesses and a read access ......................................................... 115
Figure 56: Write access (write after falling edge nWR) ....................................................................... 116
Figure 57: PLB signals ........................................................................................................................ 117
Figure 58: PLB Read Access .............................................................................................................. 120
Figure 59: PLB Write Access ............................................................................................................... 120
Figure 60: AXI4 signals ....................................................................................................................... 121
III-X Slave Controller – IP Core for Xilinx FPGAs
Page 11

FIGURES
Figure 61: AXI Read Access ............................................................................................................... 125
Figure 62: AXI Write Access ................................................................................................................ 125
Figure 63: Distributed Clocks signals .................................................................................................. 126
Figure 64: LatchSignal timing .............................................................................................................. 126
Figure 65: SyncSignal timing ............................................................................................................... 126
Figure 66: I²C EEPROM signals .......................................................................................................... 127
Slave Controller – IP Core for Xilinx FPGAs III-XI
Page 12

ABBREVIATIONS
µC
Microcontroller
ADR
Address
AL
Application Layer
AMBA®
Advanced Microcontroller Bus Architecture from ARM®
AXITM
Advanced eXtensible Interface Bus, an AMBA interconnect. Used as On-Chip-bus
BHE
Bus High Enable
BSP
Board Support Package
CMD
Command
CS
Chip Select
DC
Distributed Clock
DCM
Digital Clock Manager
DL
Data Link Layer
ECAT
EtherCAT
EDK
Embedded Development Kit (Xilinx software)
EOF
End of Frame
ESC
EtherCAT Slave Controller
ESI
EtherCAT Slave Information
FMMU
Fieldbus Memory Management Unit
FPGA
Field Programmable Gate Array
GPI
General Purpose Input
GPO
General Purpose Output
HDL
Hardware Description Language
IP
Intellectual Property
IRQ
Interrupt Request
ISE
Integrated Software Environment (Xilinx software)
LE
Logic Element
LC
Logic Cell
MAC
Media Access Controller
MDIO
Management Data Input / Output
MHS
Microprocessor Hardware Specification
MI
(PHY) Management Interface
MII
Media Independent Interface
MISO
Master In – Slave Out
MOSI
Master Out – Slave In
MPD
Microprocessor Peripheral Specification
OPB
On-Chip Peripheral Bus
PAO
Peripheral Analyze Order
PDI
Process Data Interface
PLB
Processor Local Bus
PLD
Programmable Logic Device
PLL
Phase Locked Loop
RBF
Raw Binary File
RD
Read
RMII
Reduced Media Independent Interface
SDK
Software Development Kit
SM
SyncManager
SoC
System on a Chip
SOF
Start of Frame
SOPC
System on a programmable Chip
SPI
Serial Peripheral Interface
VHDL
Very High Speed Integrated Circuit Hardware Description Language
WR
Write
ABBREVIATIONS
III-XII Slave Controller – IP Core for Xilinx FPGAs
Page 13
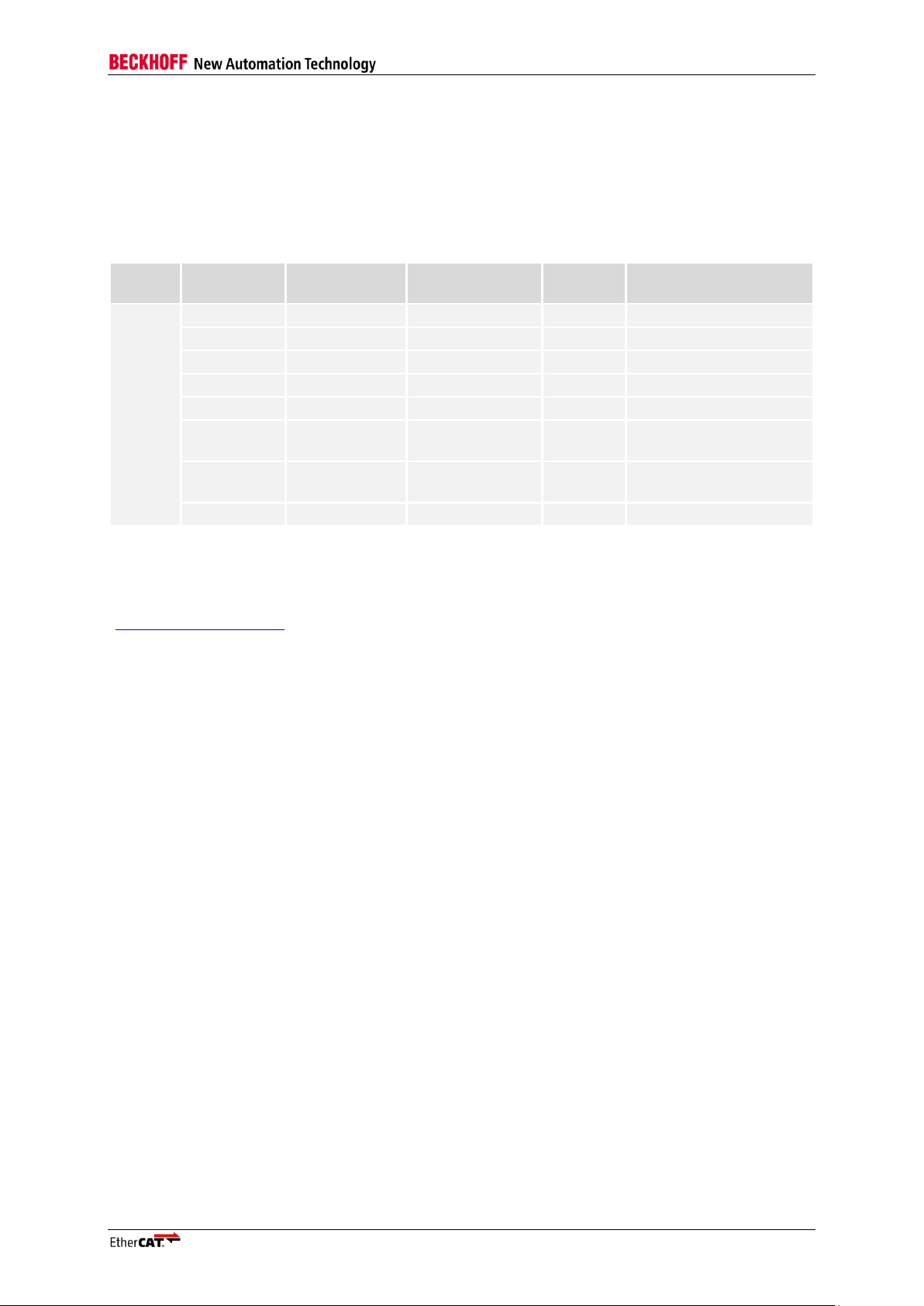
Overview
Feature
IP Core configurable features
Ports
1-3 MII ports or 1-3 RGMII ports 1-2 RMII ports
FMMUs
0-8
SyncManagers
0-8
RAM
0-60 KB
Distributed Clocks
Yes, 32 bit or 64 bit
Process Data Interfaces
32 Bit Digital I/O (unidirectional)
SPI Slave
8/16 bit asynchronous µController Interface
PLB v4.6 on-chip bus
AMBA® AXI4TM/AXI4 LITETM on-chip bus
Other features
Example designs for easy start up included
Slave applications can run on-chip if the appropriate FPGAs with
sufficient resources are used
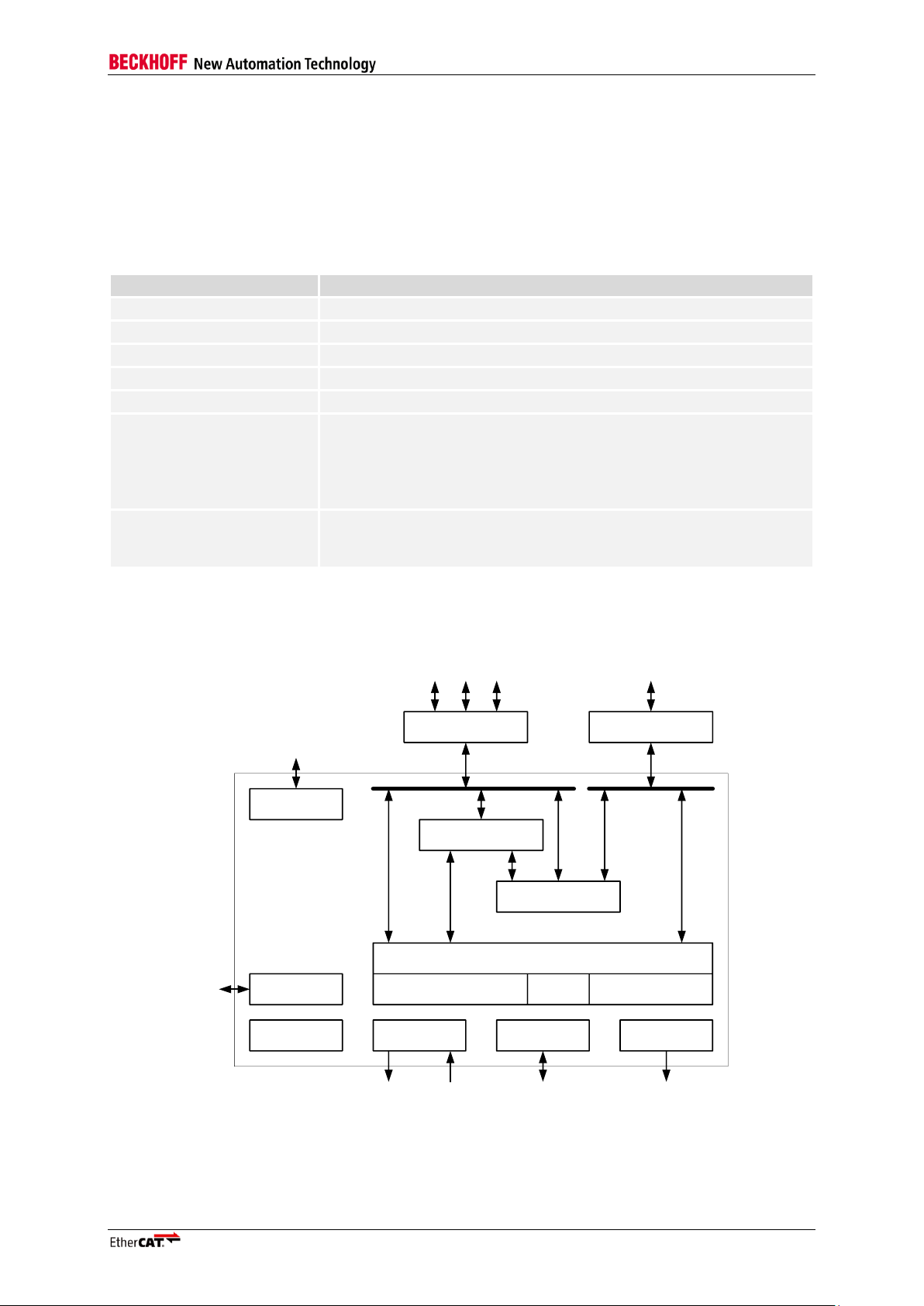
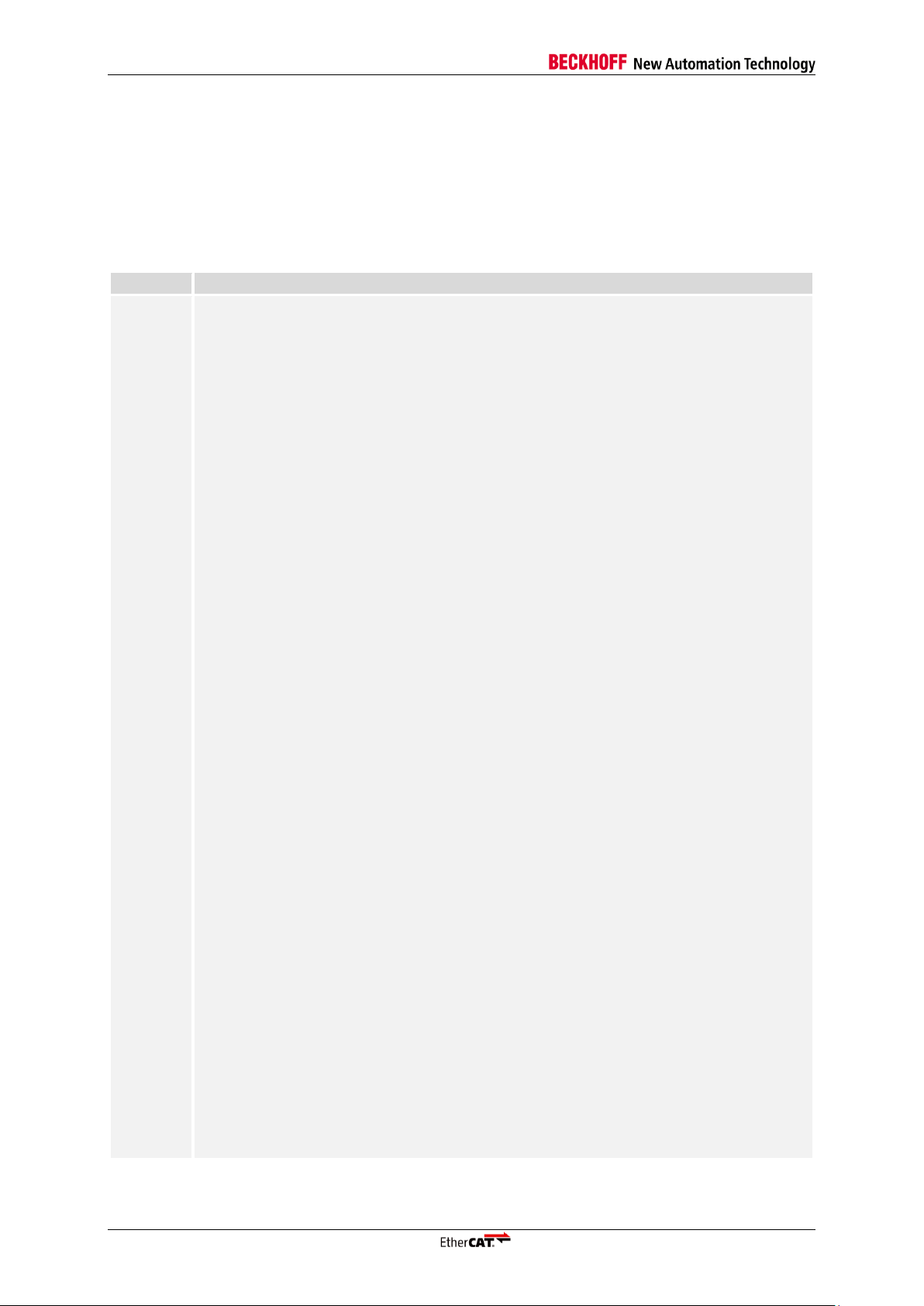
ECAT
Processing
Unit
AutoForwarder +
Loopback
SyncManager
FMMU
ESC address space
User RAMRegisters Process RAM
EEPROM
Distributed
Clocks
Monitoring Status
PHY
Management
SYNC LEDsI²C EEPROM
PHY MI
SPI / µC / Digital I/O /
PLB / AXI
0 2
Ethernet ports
LATCH
PDI
ECAT Interface PDI Interface
ResetReset
1
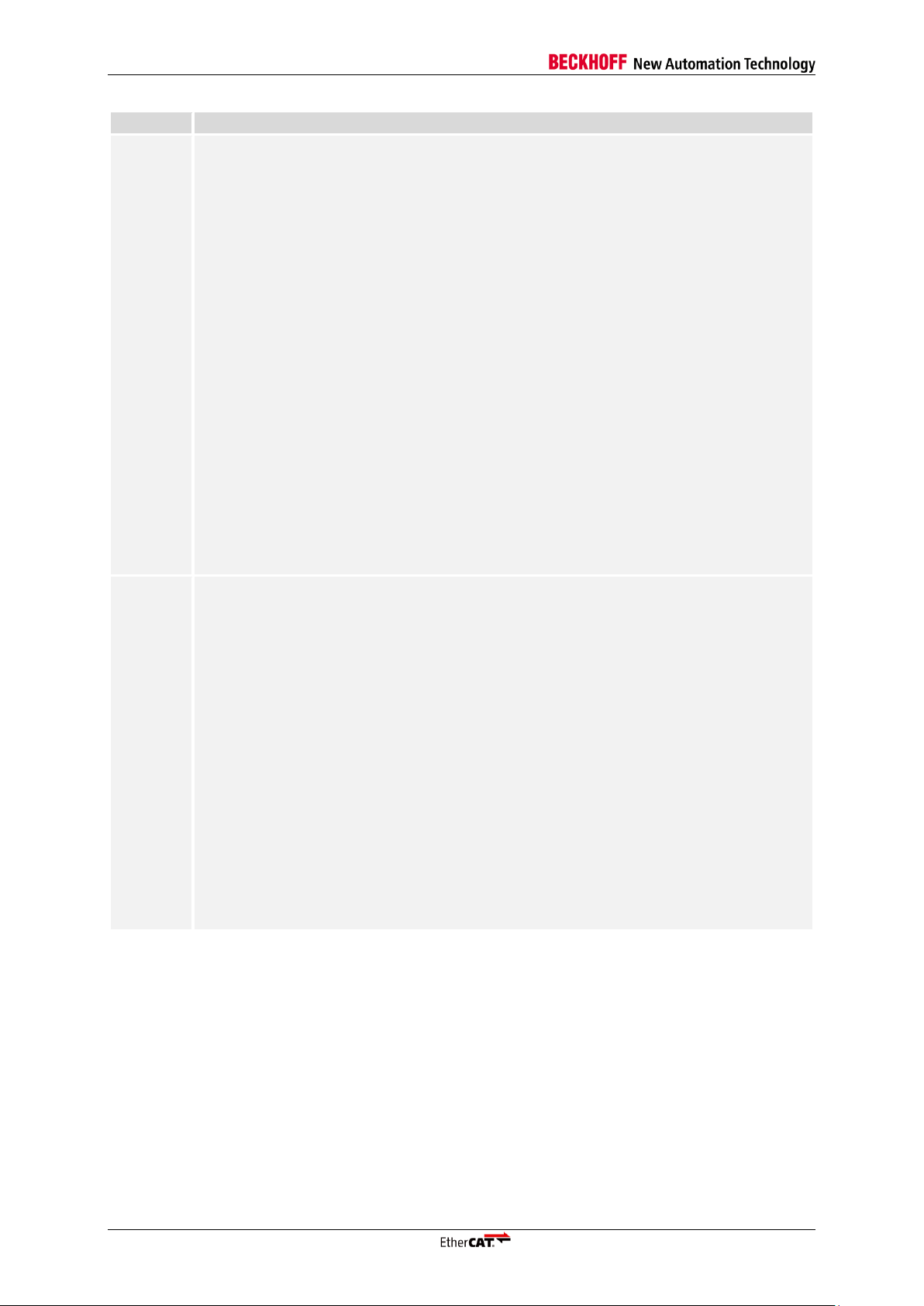
1 Overview
The EtherCAT IP Core is a configurable EtherCAT Slave Controller (ESC). It takes care of the
EtherCAT communication as an interface between the EtherCAT fieldbus and the slave application.
The EtherCAT IP Core is delivered as a configurable system so that the feature set fits the
requirements perfectly and brings costs down to an optimum.
Table 1: IP Core Main Features
The general functionality of the EtherCAT IP Core is shown in Figure 1:
Slave Controller – IP Core for Xilinx FPGAs III-1
Figure 1: EtherCAT IP Core Block Diagram
Page 14
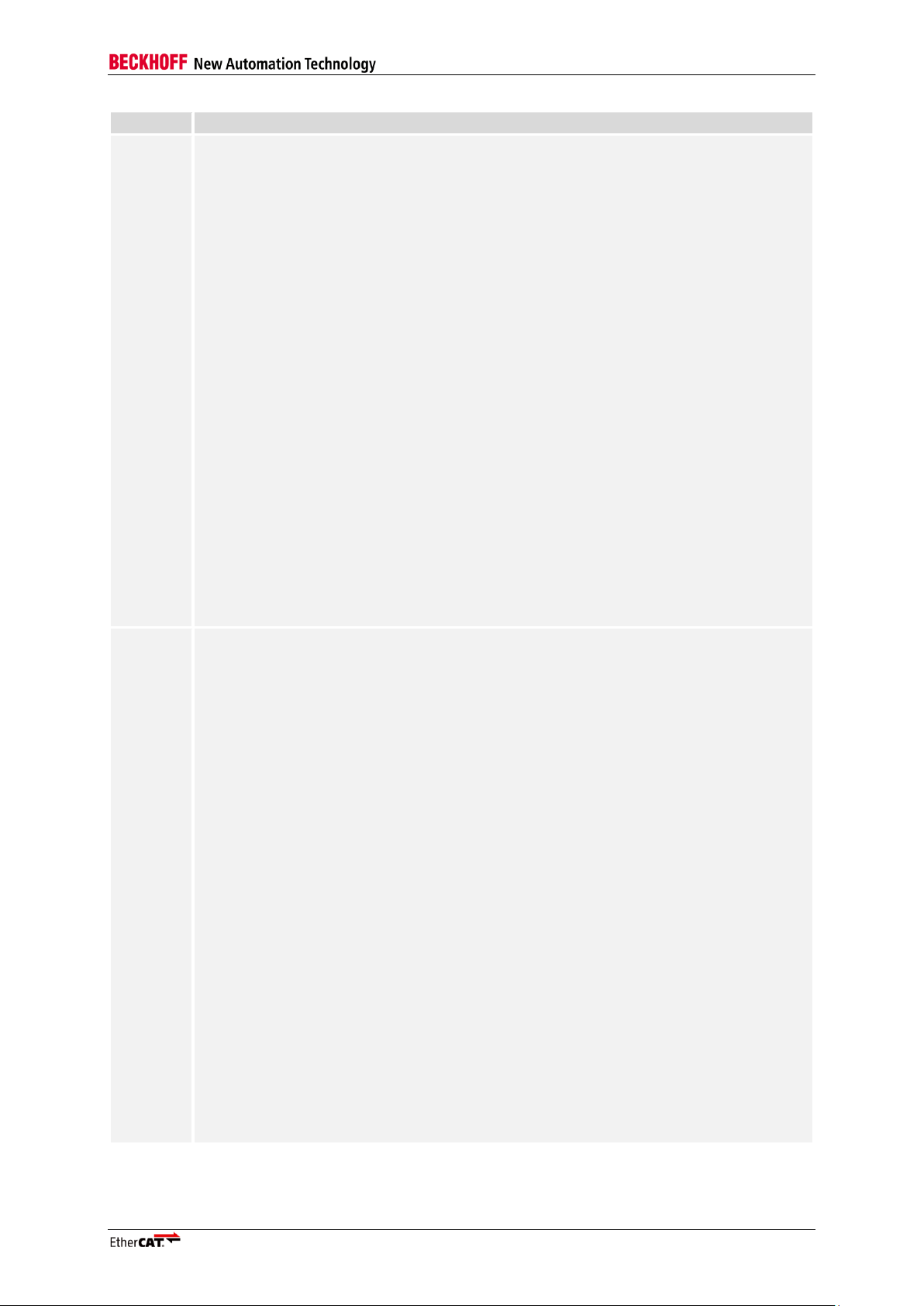
Overview
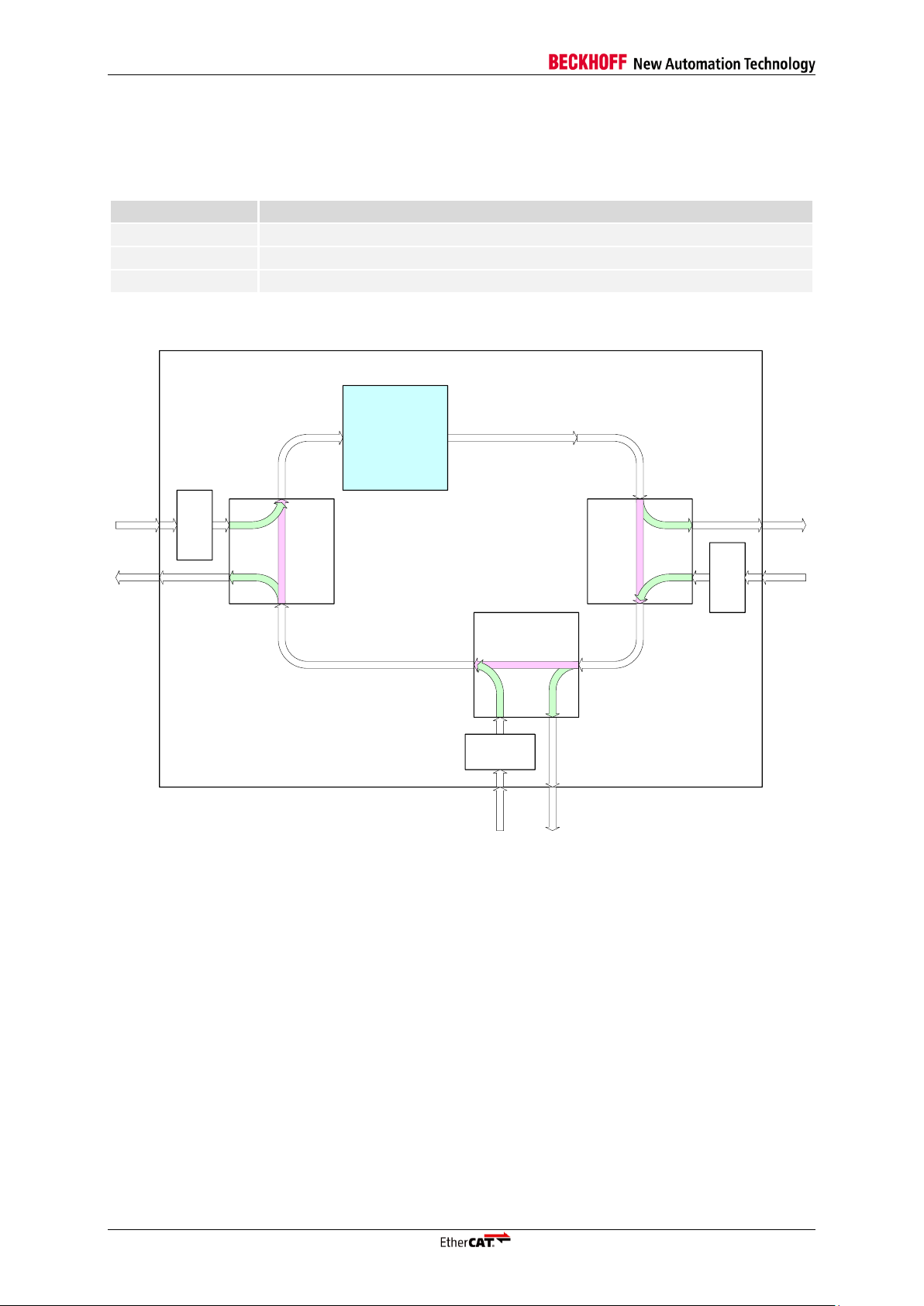
Number of Ports
Frame processing order
1
0→EtherCAT Processing Unit→0
2
0→EtherCAT Processing Unit→1 / 1→0
3
0→EtherCAT Processing Unit→1 / 1→2 / 2→0 (log. ports 0,1, and 2)
1
Port 1
Auto-
Forwarder
Port 0
Auto-
Forwarder
Loopback function
EtherCAT
Processing Unit
Loopback function
EtherCAT IP Core
port 1 closed
port 1 open
port 0 open
or all ports
closed
port 0 closed
Port 2
Auto-
Forwarder
Loopback function
port 2 closed
port 2 open
1.1 Frame processing order
The frame processing order of the EtherCAT IP Core is as follows (logical port numbers are used):
Table 2: Frame Processing Order
Figure 2 shows the frame processing in general:
Figure 2: Frame Processing
Frame Processing Example with Ports 0 and 1
A frame received at port 0 goes via the Auto-Forwarder and the Loopback function to the EtherCAT
Processing Unit which processes it. Then, the frame is sent to port 1. If port 1 is open, the frame is
sent out at port 1. If it is closed, the frame is forwarded by the Loopback function to port 2. Since port 2
is not configured, the Loopback function of port 2 forwards the frame to the Loopback function of port
0, and then it is sent out at port 0 – back to the master.
III-2 Slave Controller – IP Core for Xilinx FPGAs
Page 15
Overview
1.2 Scope of this document
Purpose of this document is to describe the installation and configuration of the EtherCAT IP Core for
Xilinx FPGAs. Furthermore, the signals and registers of the IP Core depending on the chosen
configuration are described.
This documentation was made with the assumption that the user is familiar with the handling of the
Xilinx Development Environment.
1.3 Scope of Delivery
The EtherCAT IP Core installation file includes:
EtherCAT IP Core (encrypted VHDL library)
Decryption keys for encrypted EtherCAT IP Core
IP Core Configuration Tool (IPCore_Config.exe)
Example designs
The following files which contain customer specific information are required to synthesize the IP Core.
They are delivered independently of the installation file.
License File to decrypt EtherCAT IP Core: iptb_ethercat_ipcore_<version>_flexlm.lic
Encrypted Vendor ID package: pk_ECAT_VENDORID_<company>_Xilinx_RSA.vhd
Slave Controller – IP Core for Xilinx FPGAs III-3
Page 16

Overview
1.4 Target FPGAs
The EtherCAT IP Core for Xilinx® FPGAs is targeted at these FPGA families:
Spartan®-6
Artix®-7, Artix-7 Low Voltage
KintexTM-7, Kintex-7 Low Voltage
Virtex®-6
Virtex®-7
Kintex® UltraScaleTM
Virtex® UltraScaleTM
Zynq®-7000
The EtherCAT IP Core is designed to support a wide range of FPGAs without modifications, because
it does not instantiate dedicated FPGA resources, or rely on device specific features. Thus, the IP
Core is easily portable to new FPGA families (e.g. Zynq UltraScale MPSoC).
The complexity of the IP Core is highly configurable, so its demands for logic resources, memory
blocks, and FPGA speed cover a wide range. Thus, it is not possible to run any IP Core configuration
on any target FPGA with any speed grade. I.e., there are IP Core configurations requiring a faster
speed grade, or a larger FPGA, or even a more powerful FPGA family.
It is necessary to run through the whole synthesis process – including timing checks –, to evaluate if
the selected FPGA is suitable for a certain IP Core configuration before making the decision for the
FPGA. Please consider a security margin for the logic resources to allow for minor enhancements and
bug fixes of the IP Core and the user logic.
1.5 Designflow requirements
For synthesis of the EtherCAT IP Core for Xilinx FPGAs, at least one of the following Xilinx design
tools is needed:
Xilinx Integrated Software Environment ISE 14.3 - 14.7
Xilinx Platform Studio 14.3 - 14.7
Xilinx PlanAhead 14.3 - 14.7
Xilinx Vivado 2013.1 - 2013.4, 2014.1 - 2014.3
Xilinx Vivado 2014.4 (Refer to the Hardware Data Sheet Section III Addendum for issues with the
Vivado example design)
Higher design tool versions are probably supported. Installation of the latest patches is recommended.
A free version (“WebPack”) is available from Xilinx (http://www.xilinx.com).
Optionally for using the EtherCAT IP Core with embedded processor designs, you will need
Xilinx SDK
Xilinx Vivado SDK
III-4 Slave Controller – IP Core for Xilinx FPGAs
Page 17
Overview
IP
Core
Family
Device
Designflow
Test
Used Example
Designs
3.00k
Spartan-6
XC6SLX150T
ISE 14.7
Hardware
LX150T AXI / DIGI
Artix-7
XC7A100T
ISE 14.7
Synthesis
Kintex-7
XC7K70T
ISE 14.7
Synthesis
Virtex-6
XC6VLX75T
ISE 14.7
Synthesis
Virtex-7
XC7VX485T
ISE 14.7
Synthesis
Kintex
UltraScale
XCKU035
Vivado 2014.3
Synthesis
Virtex
UltraScale
XCVU080
Vivado 2014.4
Synthesis
Zynq 7020
XC7Z020
Vivado 2014.3
Hardware
ZC702 AXI Vivado
1.6 Tested FPGA/Designflow combinations
The EtherCAT IP Core has been synthesized successfully with different ISE/EDK versions and FPGA
families. Table 3 lists combinations of FPGA devices and design tools versions which have been
synthesized or even tested in real hardware. This list does not claim to be complete, it just illustrates
that the EtherCAT IP Core is designed to comply with a broad spectrum of FPGAs.
Table 3: Tested FPGA/Designflow combinations
NOTE: Synthesis test means XST synthesis, implementation and programming file generation. Hardware test
means the design was operational on hardware.
Refer to the Hardware Data Sheet Section III Addendum available at the Beckhoff homepage
(http://www.beckhoff.com) for latest updates regarding device support, design flow compatibility, and
known issues.
Slave Controller – IP Core for Xilinx FPGAs III-5
Page 18
Overview
Version
Release notes
3.00c
(5/2013)
Update to ISE 14.3/14.4/14.5, Vivado 2013.1
Removed support for Spartan-3/-3E/-3A/-3AN/-3AN DSP, Virtex-4, and Virtex-5 due
to XST incompatibility
Removed OPB support
Removed small/medium/large register sets, added updated preset configurations
Enhancements:
Increased PDI performance
Support for 8/16/32/64 bit AXI4 and AXI4 Lite interface
Support for RGMII ports
Native support for FX PHYs
Support for individual PHY address configuration and reading out this configuration
Support for static or dynamic PHY address configuration
Support for 0 KB Process RAM, DC Sync/Latch signals individually configurable,
LED test added
Support for PDI SyncManager/IRQ acknowledge by Write command
Device emulation is now configured in the GUI statically.
MI link detection: relaxed checking of PHY register 9 (1000Base-T Master-Slave
Control register)
Restrictions of this version, which are removed in V3.00f:
The AXI PDI may occasionally write incorrect data if simultaneous read and write
accesses occur repeatedly.
RX FIFO size is not initialized by SII EEPROM
Restrictions of this version, which are removed in V3.00g:
The ERR LED does not allow overriding using the ERR LED Override register
0x0139 while AL Status register Error Indication bit 0x0130[4] is set
RMII is not supported because of wrong configuration by IPCore_Config tool
Restrictions of this version, which are removed in V3.00j:
The AXI PDI may not complete an access occasionally if overlapping read and write
accesses occur, causing the processor to wait endlessly.
The AXI PDI does not execute read accesses correctly if ARSIZE is smaller than
the AXI bus width.
Restrictions of this version, which are removed in V3.00k:
The last 4 Kbyte Process Data RAM (0xF000:0xFFFF) cannot be used in the 60
Kbyte RAM configuration.
The AXI PDI may write to wrong bytes if the write data is valid before the address,
which is typically true for AXI4LITE.
The AXI PDI may read additional bytes after the intended bytes.
The PLB PDI only supports peer-to-peer mode (C_SPLB_P2P=1), or a base
address of 0 (C_SPLB_BASEADDR=0x00000000).
The PLB PDI was generated with an invalid component declaration package.
1.7 Release Notes
EtherCAT IP Core updates deliver feature enhancements and removed restrictions. Feature
enhancements are not mandatory regarding conformance to the EtherCAT standard. Restrictions
have to be judged whether they are relevant in the user’s configuration or not, or if workarounds are
possible.
Table 4: Release notes
III-6 Slave Controller – IP Core for Xilinx FPGAs
Page 19
Overview
Version
Release notes
3.00f
(2/2014)
Restrictions of previous versions which are removed in this version:
The AXI PDI writes correct data if simultaneous read and write accesses occur
repeatedly.
RX FIFO size is properly initialized by SII EEPROM
Restrictions of this version, which are removed in V3.00g:
The ERR LED does not allow overriding using the ERR LED Override register
0x0139 while AL Status register Error Indication bit 0x0130[4] is set
RMII is not supported because of wrong configuration by IPCore_Config tool
Restrictions of this version, which are removed in V3.00j:
The AXI PDI may not complete an access occasionally if overlapping read and write
accesses occur, causing the processor to wait endlessly.
The AXI PDI does not execute read accesses correctly if ARSIZE is smaller than
the AXI bus width.
Restrictions of this version, which are removed in V3.00k:
The last 4 Kbyte Process Data RAM (0xF000:0xFFFF) cannot be used in the 60
Kbyte RAM configuration.
The AXI PDI may write to wrong bytes if the write data is valid before the address,
which is typically true for AXI4LITE.
The AXI PDI may read additional bytes after the intended bytes.
The PLB PDI only supports peer-to-peer mode (C_SPLB_P2P=1), or a base
address of 0 (C_SPLB_BASEADDR=0x00000000).
The PLB PDI was generated with an invalid component declaration package.
3.00g
(4/2014)
Enhancements:
The Sync/Latch PDI Configuration register 0x0151 shows the same value as
previous IP Core versions. The actual configuration is not affected, since it is fixed
by the IP Core configuration.
Added support for unaligned AXI burst transfers.
Internal license attribute encoding updated (issues with Vivado 2012.x)
Restrictions of previous versions which are removed in this version:
The ERR LED allows overriding using the ERR LED Override register 0x0139 while
AL Status register Error Indication bit 0x0130[4] is set. The override flag is now
cleared upon a rising edge of 0x0130[4], and it can be set again afterwards.
RMII is now configured correctly by IPCore_Config tool
Restrictions of this version, which are removed in V3.00j:
The AXI PDI may not complete an access occasionally if overlapping read and write
accesses occur, causing the processor to wait endlessly.
The AXI PDI does not execute read accesses correctly if ARSIZE is smaller than
the AXI bus width.
Restrictions of this version, which are removed in V3.00k:
The last 4 Kbyte Process Data RAM (0xF000:0xFFFF) cannot be used in the 60
Kbyte RAM configuration.
The AXI PDI may write to wrong bytes if the write data is valid before the address,
which is typically true for AXI4LITE.
The AXI PDI may read additional bytes after the intended bytes.
The PLB PDI only supports peer-to-peer mode (C_SPLB_P2P=1), or a base
address of 0 (C_SPLB_BASEADDR=0x00000000).
The PLB PDI was generated with an invalid component declaration package.
Slave Controller – IP Core for Xilinx FPGAs III-7
Page 20
Overview
Version
Release notes
3.00j
(9/2014)
Enhancements:
An example design for the Xilinx Zynq ZC702 development kit using Vivado has
been added. A Vivado SDK template for this example design is included
The example designs using ISMNET PHY boards have been extended to support
COL and CRS signals, which are required for proper PHY configuration.
The PDI watchdog status 0x0110[1] now shows value ‘1’ (watchdog reloaded) if the
PDI watchdog is configured to be not available.
The ESI XML device description does not use special data types anymore.
Restrictions of previous versions which are removed in this version:
The AXI PDI completes accesses if overlapping read and write accesses occur.
The AXI PDI executes read accesses correctly if ARSIZE is smaller than the AXI
bus width.
Restrictions of this version, which are removed in V3.00k:
The last 4 Kbyte Process Data RAM (0xF000:0xFFFF) cannot be used in the 60
Kbyte RAM configuration.
The AXI PDI may write to wrong bytes if the write data is valid before the address,
which is typically true for AXI4LITE.
The AXI PDI may read additional bytes after the intended bytes.
The PLB PDI only supports peer-to-peer mode (C_SPLB_P2P=1), or a base
address of 0 (C_SPLB_BASEADDR=0x00000000).
The PLB PDI was generated with an invalid component declaration package.
3.00k
(1/2015)
The PlanAhead-based Xilinx Zynq ZC702 example design has been removed, because
a Vivado based example design is available.
Enhancements:
For EEPROM Emulation, the CRC error bit 0x0502[11] can be written via PDI to
indicate CRC errors during a reload command.
The IPCore_Config tool optionally generates AXI/PLB configurations without the
XPS pcores folder structure (e.g. for Vivado).
The AXI4LITE PDI wrapper does no longer contain the unused REGION and QOS
signals.
Restrictions of previous versions which are removed in this version:
The last 4 Kbyte Process Data RAM (0xF000:0xFFFF) can be used in the 60 Kbyte
RAM configuration.
The AXI PDI does not write to wrong bytes if the write data is valid before the
address.
The AXI PDI does not read additional bytes after the intended bytes.
The PLB PDI supports any base address.
The PLB PDI is generated with a valid component declaration package.
III-8 Slave Controller – IP Core for Xilinx FPGAs
Page 21
Overview
Bit
Description
ECAT
PDI
Reset Value
7:0
IP Core major version X
r/-
r/-
IP Core dep.
Bit
Description
ECAT
PDI
Reset Value
3:0
IP Core maintenance version z
r/-
r/-
IP Core dep.
7:4
IP Core minor version Y
r/-
r/-
IP Core dep.
15:8
Patch level:
0x00: original release
0x01-0x0F: patch level of original release
r/-
r/-
IP Core dep.
1.7.1 Major differences between V2.04x and V3.00x
The EtherCAT IP Core V3.00x versions have these advantages compared with the V2.04x versions:
Increased PDI performance (average latency internally at least by a factor of 2 faster; worst case
latency even better)
Support for 8/16/32/64 bit AXI4TM and AXI4 LITETM interface
Support for RGMII ports
Native support for FX PHYs
Flexible PHY address configuration
Support for PDI SyncManager/IRQ acknowledge by Write command (required for wide on-chip-
busses)
More detailed configuration
The higher PDI performance increases the resource requirements of the V3.00x versions compared
with the V2.04x versions. New development is focused on the V3.00x versions.
1.7.2 Reading IP Core version from device
The IP Core version, denoted as X.Yz (e.g., 1.00a), consists of three values X, Y, and z. These values
can be read out in registers 0x0001 and 0x0002. Value z is encoded like this: a=0, b=1, c=2, etc. .
Table 5: Register Revision (0x0001)
Table 6: Register Build (0x0002:0x0003)
Slave Controller – IP Core for Xilinx FPGAs III-9
Page 22
Overview
IP Core
installation (eval)
Synthesis
User logic
Vendor ID package License file (full)
FPGA configuration file
Download
utility
FPGA
Buy-out license /
Quantity-based license
(license agreement)
grants permission
EvaluationDevelopment
Download
utility
MAC ID
Vendor
ID
bit-
stream
Application
specific ESC
sources
VHDL
Verilog
Schematic
Production
FPGA
FPGA
Download
utility
FPGA
encrypted
VHD
FPGA configuration file
bit-
stream
(timebomb)
FPGA
(timebomb)
IP Core
installation (full)
encrypted
VHDL
or
Customer
License file (eval)
MAC ID
or
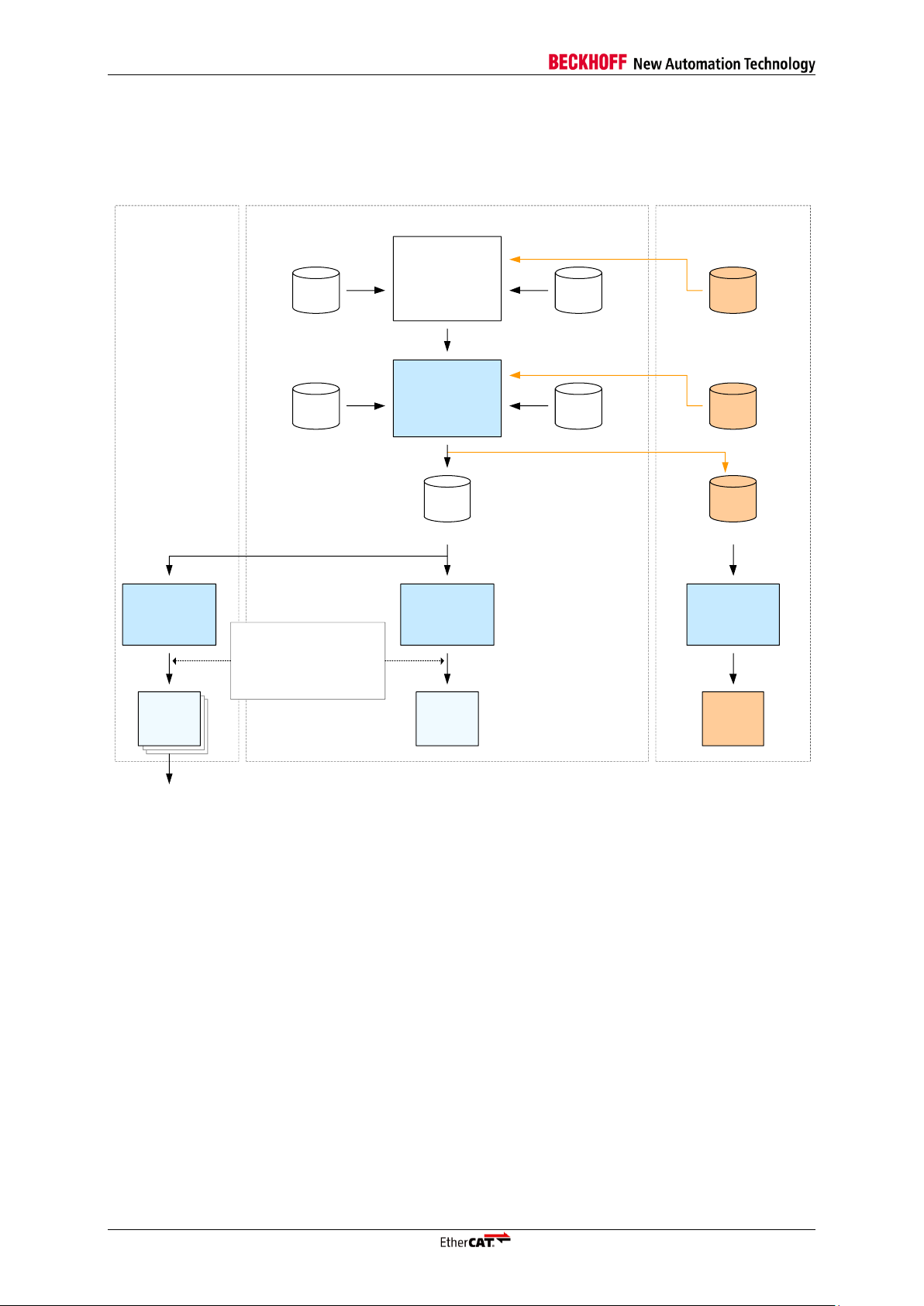
1.8 Design flow
The design flow for creating an EtherCAT Slave Controller based on the EtherCAT IP Core is shown
in the following picture:
Figure 3: Design flow
III-10 Slave Controller – IP Core for Xilinx FPGAs
Page 23

Overview
1.9 IP Core Evaluation
The EtherCAT IP Core for Xilinx FPGAs supports IP core evaluation. A dedicated setup file containing
the evaluation version of the IP Core is available, which also includes the decryption keys for the
evaluation IP Core. Additionally, a special evaluation license file is required for IP core evaluation.
A design with the evaluation version of the EtherCAT IP Core is subject to some restrictions:
The EtherCAT IP Core will discontinue its function after approximately one hour.
The evaluation version slightly increases the resource consumption of the IP Core.
The evaluation bitstream must not be distributed/sold.
A vendor ID package is required for both evaluation and full license. It is recommended to use an
evaluation vendor ID (package) for evaluation, and the original vendor ID for production. The
evaluation vendor ID is beginning with “0xE.......” and ends with the original vendor ID digits.
Evaluation vendor IDs cannot pass the EtherCAT conformance tests.
Selecting Full or Evaluation License
There are individual setup files for full and evaluation license. The evaluation version can be easily
upgraded to a full version just by running the EtherCAT IP Core setup for the full version.
For Linux, just install the full version over the evaluation license, the appropriate files will be
overwritten.
A design using an evaluation EtherCAT IP Core does not have to be changed when upgrading to a full
license (or vice-versa).
Four steps have to be performed to change the license type:
1. Acquire the intended license and set it up
2. Windows:
Start the appropriate EtherCAT IP Core setup. Alternatively, uninstall the EtherCAT IP Core and
install it again with the intended license version. The example designs are automatically updated
and the decryption keys are also installed.
Linux:
Unzip the setup files over the existing installation (you might want to delete the installation folder
<IPInst_dir> before). Copy the new decryption keys from the <IPInst_dir>/lib folder to your
$HOME/RSA folder.
3. Update your own projects with the EtherCAT_IPCore.vhd from the lib-folder. For EDK projects, it
is sufficient to generate the core again, because the IPCore_Config tool will integrate the current
IP Core from the lib folder.
4. Synthesize your designs again to generate unlimited bitstreams with the full license, and timebombed bitstreams with the evaluation license.
A txt-file is placed in the lib folder which indicates the currently installed IP core version (evaluation or
full).
Slave Controller – IP Core for Xilinx FPGAs III-11
Page 24

Overview
1.10 Simulation
A behavioral simulation model of the EtherCAT IP core is not available because of its size and
complexity. Thus, simulation of the entire EtherCAT IP Core is not supported. In most cases,
simulation of the EtherCAT IP Core is not necessary, as the IP Core was thoroughly tested and the
interfaces are standardized (Ethernet, PLB, AXI) or simple and well described. Problems at the
interface level can often be solved with a scope shot of the interface signals.
Nevertheless, customer designs using the PLB or AXI on-chip bus can easily be simulated using a
Bus Functional Model of the on-chip bus slave interface instead of a simulation model of the entire
EtherCAT IP Core.
From the processor’s view, the EtherCAT IP Core is a memory (or a bunch of registers). For processor
bus verification, the EtherCAT IP Core can be substituted by another IP core with PLB/AXI slave
interface which behaves like a memory as well. The EtherCAT IP Core can be replaced for simulation
by e.g.:
Xilinx XPS Block RAM (BRAM) Interface Controller with a Block RAM block
PLB Bus Functional models of the “IBM On-Chip Bus Model Toolkits”. This toolkit can be used for
complete verification of your PLB bus interfaces.
AXI slave Bus Functional models
III-12 Slave Controller – IP Core for Xilinx FPGAs
Page 25
Features and Registers
Feature
IP Core
Xilinx®
V3.00k
IP Core
Xilinx®
V3.00c-
3.00j
EtherCAT Ports
1-3
1-3
Permanent ports
1-3
1-3
Optional Bridge port 3 (EBUS or
MII)
-
-
EBUS ports
-
-
MII ports
0-3
0-3
RMII ports
0-2
0-2
RGMII ports
0-3
0-3
Port 0
x
x
Ports 0, 1
x x Ports 0, 1, 2
x
x
Ports 0, 1, 3
-
-
Ports 0, 1, 2, 3
-
-
EtherCAT mode
Direct
Direct
Slave Category
Full Slave
Full Slave
Position addressing
x x Node addressing
x
x
Logical addressing
x
x
Broadcast addressing
x
x
Physical Layer General Features
FIFO Size configurable
(0x0100[18:16])
x
x
FIFO Size default from SII
EEPROM
x
x
Auto-Forwarder checks CRC and
SOF
x
x
Forwarded RX Error indication,
detection and Counter
(0x0308:0x030B)
x
x
Lost Link Counter
(0x0310:0x0313)
c
c
Prevention of circulating frames
x
x
Fallback: Port 0 opens if all ports
are closed
x
x
VLAN Tag and IP/UDP support
x
x
Enhanced Link Detection per port
configurable
x
x
General Ethernet Features
(MII/RMII/RGMII)
MII Management Interface
(0x0510:0x051F)
c
c
Supported PHY Address Offsets
any
any
Individual port PHY addresses
x x Port PHY addresses readable
x x Link Polarity configurable
User logic
User logic
Enhanced Link Detection
supported
x
x
FX PHY support (native)
x
x
PHY reset out signals
x
x
Link detection using PHY signal
(LED)
x
x
MI link status and configuration
c
c
MI controllable by PDI
(0x0516:0x0517)
x
x
MI read error (0x0510.13)
x
x
MI PHY configuration update
status (0x0518.5)
x
x
MI preamble suppression
x x Additional MCLK
x
x
Gigabit PHY configuration
x
x
Gigabit PHY register 9 relaxed
check
x
x
FX PHY configuration
x x Transparent Mode
-
-
Feature
IP Core
Xilinx®
V3.00k
IP Core
Xilinx®
V3.00c-
3.00j
MII Features
CLK25OUT as PHY clock source
User logic
User logic
Bootstrap TX Shift settings
c
c
Automatic TX Shift setting (with
TX_CLK)
c
c
TX Shift not necessary (PHY
TX_CLK as clock source)
-
-
FIFO size reduction steps
2
2
PDI General Features
Increased PDI performance
x
x
Extended PDI Configuration
(0x0152:0x0153)
x
x
PDI Error Counter (0x030D)
c
c
PDI Error Code (0x030E)
c
c
CPU_CLK output (10, 20, 25
MHz)
User logic
User logic
SOF, EOF, WD_TRIG and
WD_STATE independent of PDI
x
x
Available PDIs and PDI features
depending on port configuration
-
-
PDI selection at run-time (SII
EEPROM)
-
-
PDI active immediately (SII
EEPROM settings ignored)
x
x
PDI function acknowledge by
write
c
c
PDI Information register
0x014E:0x014F
c
c
Digital I/O PDI
x
x
Digital I/O width [bits]
8/16/24/32
8/16/24/32
PDI Control register value
(0x0140:0x0141)
4
4
Control/Status signals:
7 7 LATCH_IN
x x SOF
x x OUTVALID
x x WD_TRIG
x x OE_CONF
- - OE_EXT
x
x
EEPROM_
Loaded
x
x
WD_STATE
x
x
EOF
x
x
Granularity of direction
configuration [bits]
8 8 Bidirectional mode
- (User
logic)
- (User
logic)
Output high-Z if WD expired
User logic
User logic
Output 0 if WD expired
x
x
Output with EOF
x
x
Output with DC SyncSignals
x
x
Input with SOF
x
x
Input with DC SyncSignals
x x SPI Slave PDI
x
x
Max. SPI clock [MHz]
30
30
SPI modes configurable
(0x0150[1:0])
x
x
SPI_IRQ driver configurable
(0x0150[3:2])
x
x
SPI_SEL polarity configurable
(0x0150.4)
x
x
Data out sample mode
configurable (0x0150.5)
x
x
Busy signaling
-
-
2 Features and Registers
2.1 Features
Table 7: IP Core Feature Details
Slave Controller – IP Core for Xilinx FPGAs III-13
Page 26
Features and Registers
Feature
IP Core
Xilinx®
V3.00k
IP Core
Xilinx®
V3.00c-
3.00j
Wait State byte(s)
x
x
Number of address extension
byte(s)
any
any
2/4 Byte SPI master support
x
x
Extended error detection (read
busy violation)
x
x
SPI_IRQ delay
x
x
Status indication
x
x
EEPROM_
Loaded signal
x
x
Asynchronous µController PDI
8/16 bit
8/16 bit
Extended µC configuration bits
0x0150[7:4], 0x0152:0x0153
x
x
ADR[15:13] available (000b if not
available)
x
x
EEPROM_Loaded signal
x
x
RD polarity configurable
(0x0150.7)
-
-
Read BUSY delay (0x0152.0)
x
x
Write after first edge (0x0152.2)
x
x
Synchronous µController PDI
-
-
On-Chip Bus PDI
x
x
Avalon®
-
-
OPB®
- - PLB v4.6®
x
x
AXI3TM
-
-
AXI4TM
x x AXI4 LITETM
x
x
Bus clock [MHz] (N=1,2,3,…)
any
any
Data bus width [bits]
8/16/32/64
8/16/32/64
Prefetch cycles
1
1
DC SyncSignals available directly
and as IRQ
x
x
Bus clock multiplier in register
0x0150[6:0]
x
x
EEPROM_
Loaded signal
x
x
EtherCAT Bridge (port 3, EBUS/MII)
-
-
General Purpose I/O
x
x
GPO bits
0/8/16/
32/64
0/8/16/
32/64
GPI bits
0/8/16/
32/64
0/8/16/
32/64
GPIO available independent of
PDI or port configuration
x
x
GPIO available without PDI
x
x
Concurrent access to GPO by
ECAT and PDI
x
x
ESC Information
Basic Information
(0x0000:0x0006)
x
x
Port Descriptor (0x0007)
x
x
ESC Features supported
(0x0008:0x0009)
x
x
Extended ESC Feature
Availability in User RAM (0x0F80
ff.)
x
x
Write Protection (0x0020:0x0031)
c
c
Data Link Layer Features
ECAT Reset (0x0040)
c c PDI Reset (0x0041)
c
c
ESC DL Control (0x0100:0x0103)
bytes
4
4
EtherCAT only mode (0x0100.0)
x
x
Temporary loop control
(0x0100.1)
x
x
FIFO Size configurable
(0x0100[18:16])
x
x
Configured Station Address
(0x0010:0x0011)
x
x
Configured Station Alias
(0x0100.24, 0x0012:0x0013)
x
x
Feature
IP Core
Xilinx®
V3.00k
IP Core
Xilinx®
V3.00c-
3.00j
Physical Read/Write Offset
(0x0108:0x0109)
c
c
Application Layer Features
Extended AL Control/Status bits
(0x0120[15:5], 0x0130[15:5])
x
x
AL Status Emulation (0x0140.8)
x
x
AL Status Code (0x0134:0x0135)
c c Interrupts
ECAT Event Mask
(0x0200:0x0201)
x
x
AL Event Mask (0x0204:0x0207)
c
c
ECAT Event Request
(0x0210:0x0211)
x
x
AL Event Request
(0x0220:0x0223)
x
x
SyncManager activation changed
(0x0220.4)
x
x
SyncManager watchdog
expiration (0x0220.6)
x
x
Error Counters
RX Error Counter
(0x0300:0x0307)
x
x
Forwarded RX Error Counter
(0x0308:0x030B)
x
x
ECAT Processing Unit Error
Counter (0x030C)
c
c
PDI Error Counter (0x030D)
c
c
Lost Link Counter
(0x0310:0x0313)
c
c
Watchdog
Watchdog Divider configurable
(0x0400:0x0401)
c
c
Watchdog Process Data
x x Watchdog PDI
x
x
Watchdog Counter Process Data
(0x0442)
x
x
Watchdog Counter PDI (0x0443)
x x SII EEPROM Interface (0x0500:0x050F)
EEPROM sizes supported
1 Kbyte-
4 Mbyte
1 Kbyte-
4 Mbyte
EEPROM size reflected in
0x0502.7
x
x
EEPROM controllable by PDI
x
x
EEPROM Emulation by PDI
c
c
EEPROM Emulation CRC error
0x0502[11] PDI writable
x
-
Read data bytes (0x0502.6)
4
4
Internal Pull-Ups for
EEPROM_CLK and
EEPROM_DATA
User logic
User logic
FMMUs
0-8
0-8
Bit-oriented operation
x
x
SyncManagers
0-8
0-8
Watchdog trigger generation for 1
Byte Mailbox configuration
independent of reading access
x
x
SyncManager Event Times
(+0x8[7:6])
c
c
Buffer state (+0x5[7:6])
x
x
Distributed Clocks
c
c
Width
32/64
32/64
Sync/Latch signals
4
(0-2 Sync-
Signals,
0- 2 Latch-
Signals)
4
(0-2 Sync-
Signals,
0- 2
Latch-
Signals)
SyncManager Event Times
(0x09F0:0x09FF)
c
c
DC Receive Times
c
c
DC Time Loop Control
controllable by PDI
c
c
DC activation by EEPROM
(0x0140[11:10])
-
-
III-14 Slave Controller – IP Core for Xilinx FPGAs
Page 27
Features and Registers
Feature
IP Core
Xilinx®
V3.00k
IP Core
Xilinx®
V3.00c-
3.00j
Propagation delay measurement
with traffic (BWR/FPWR 0x900
detected at each port)
x
x
LatchSignal state in Latch Status
register (0x09AE:0x09AF)
x
x
SyncSignal Auto-Activation
(0x0981.3)
x
x
SyncSignal 32 or 64 bit Start Time
(0x0981.4)
x
x
SyncSignal Late Activation
(0x0981[6:5])
x
x
SyncSignal debug pulse
(0x0981.7)
x
x
SyncSignal Activation State
0x0984)
x
x
Reset filters after writing filter
depth
x
x
ESC Specific Registers
(0x0E00:0x0EFF)
Product and Vendor ID
x
x
POR Values
-
-
FPGA Update (online)
-
-
Process RAM and User RAM
Process RAM (0x1000 ff.) [Kbyte]
0-60
0-60
User RAM (0x0F80:0x0FFF)
x
x
Extended ESC Feature
Availability in User RAM
x
x
Additional EEPROMs
1-2
1-2
SII EEPROM (I²C)
c
(EEPROM
of µC used)
c
(EEPROM
of µC
used)
FPGA configuration EEPROM
x
x
LED Signals
RUN LED
c c RUN LED override
c c Link/Activity(x) LED per port
x x PERR(x) LED per port
- - Device ERR LED
c c STATE_RUN LED
c
c
Optional LED states
RUN LED: Bootstrap
x
x
RUN LED: Booting
c
c
RUN LED: Device identification
c
c
RUN LED: loading SII EEPROM
c
c
Error LED: SII EEPROM loading
error
c
c
Error LED: Invalid hardware
configuration
-
-
Feature
IP Core
Xilinx®
V3.00k
IP Core
Xilinx®
V3.00c-
3.00j
Error LED: Process data
watchdog timeout
c
c
Error LED: PDI watchdog timeout
c
c
Link/Activity: local auto-
negotiation error
-
-
Link/Activity: remote auto-
negotiation error
-
-
Link/Activity: unknown PHY auto-
negotiation error
-
-
LED test
c
c
Clock supply
Crystal
- - Crystal oscillator
x
x
TX_CLK from PHY
x
x
25ppm clock source accuracy
x x Internal PLL
User logic
User logic
Power Supply Voltages
FPGA dep.
FPGA
dep.
I/O Voltage
FPGA dep.
FPGA
dep.
Core Voltage
FPGA dep.
FPGA
dep.
Internal LDOs
-
-
Package
FPGA dep.
FPGA
dep.
Original Release date
1/2015
5/2013
Configuration and Pinout calculator
(XLS)
-
-
Register Configuration
individual
individual
Complete IP Core evaluation
x
x
License device required
-
-
Example designs/
pre-synthesized time-limited evaluation
core included
3/3
4/3
LX150T Digital I/O
x/x
x/x
LX150T AXI
x/x
x/x
ZC702 AXI (PlanAhead)
-
x/x
ZC702 AXI (Vivado)
x/x
x/-
Symbol
Description
x
available
-
not available
c
configurable
User logic
Functionality can be added by user logic inside the FPGA
red
Feature changed in this version
Table 8: Legend
Slave Controller – IP Core for Xilinx FPGAs III-15
Page 28
Features and Registers
Address
Length
(Byte)
Description
IP Core
V3.00c-
V3.00k
0x0000
1
Type x 0x0001
1
Revision
x
0x0002:0x0003
2
Build
x
0x0004
1
FMMUs supported
x
0x0005
1
SyncManagers supported
x
0x0006
1
RAM Size
x
0x0007
1
Port Descriptor
x
0x0008:0x0009
2
ESC Features supported
x
0x0010:0x0011
2
Configured Station Address
x
0x0012:0x0013
2
Configured Station Alias
x
0x0020
1
Write Register Enable
c
0x0021
1
Write Register Protection
c
0x0030
1
ESC Write Enable
c
0x0031
1
ESC Write Protection
c
0x0040
1
ESC Reset ECAT
c
0x0041
1
ESC Reset PDI
c
0x0100:0x0101
2
ESC DL Control
x
0x0102:0x0103
2
Extended ESC DL Control
x
0x0108:0x0109
2
Physical Read/Write Offset
c
0x0110:0x0111
2
ESC DL Status
x
0x0120
5 bits
[4:0]
AL Control
x
0x0120:0x0121
2
AL Control
x
0x0130
5 bits
[4:0]
AL Status
x
0x0130:0x0131
2
AL Status
x
0x0134:0x0135
2
AL Status Code
c
0x0138
1
RUN LED Override
c
0x0139
1
ERR LED Override
c
0x0140
1
PDI Control
x
0x0141
1
ESC Configuration
x
0x014E:0x014F
2
PDI Information
c
0x0150
1
PDI Configuration
x
0x0151
1
DC Sync/Latch Configuration
x
0x0152:0x0153
2
Extended PDI Configuration
x
0x0200:0x0201
2
ECAT Event Mask
x
0x0204:0x0207
4
PDI0 AL Event Mask
r/c
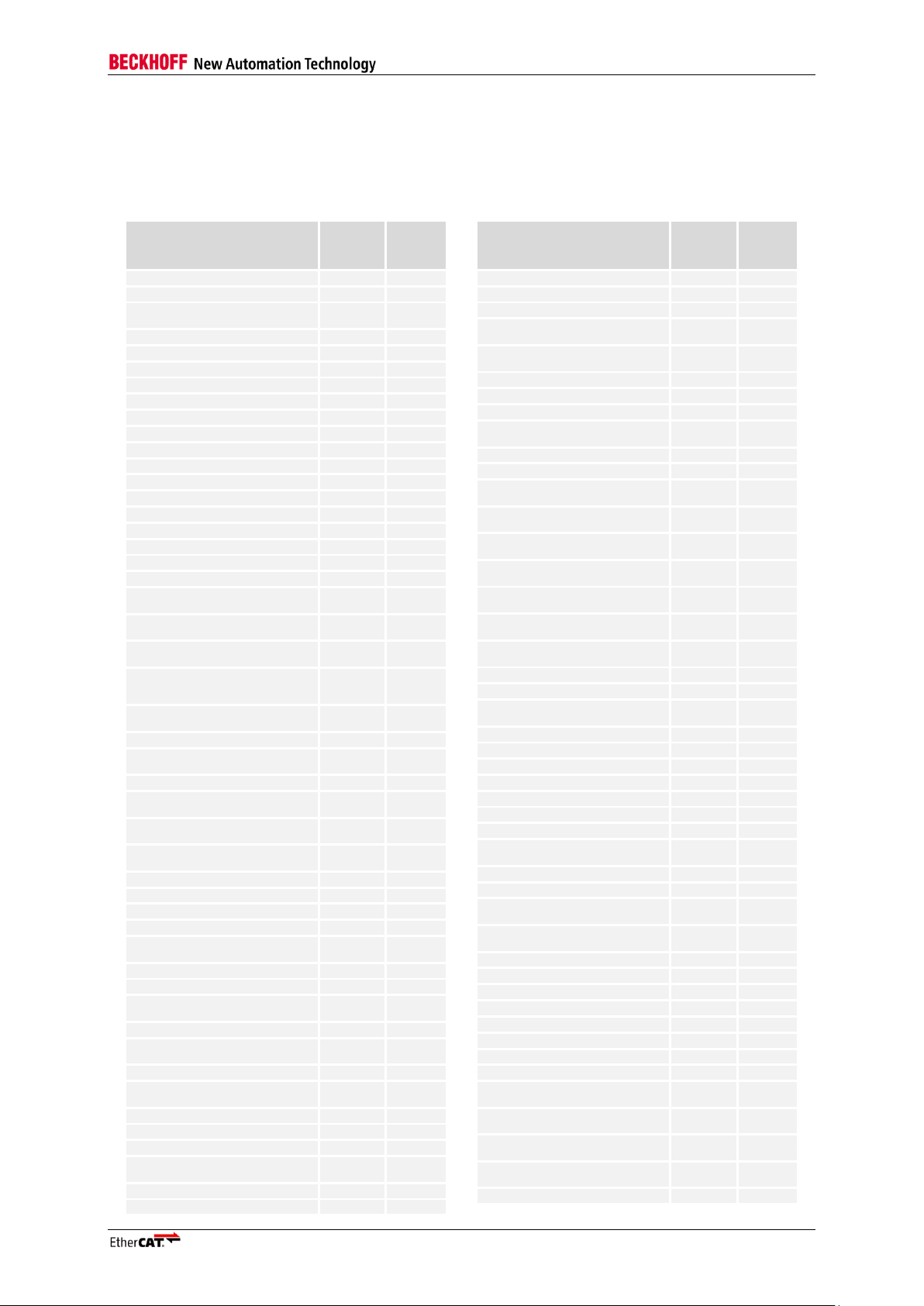
2.2 Registers
An EtherCAT Slave Controller (ESC) has an address space of 64KByte. The first block of 4KByte
(0x0000:0x0FFF) is dedicated for registers. The process data RAM starts at address 0x1000, its size
is configurable.
Some registers are implemented depending on the configuration.
Table 9 gives an overview of the available registers.
Table 9: Register availability
III-16 Slave Controller – IP Core for Xilinx FPGAs
Page 29
Features and Registers
Address
Length
(Byte)
Description
IP Core
V3.00c-
V3.00k
0x0210:0x0211
2
ECAT Event Request
x
0x0220:0x0223
4
AL Event Request
x
0x0300:0x0307
4x2
Rx Error Counter[3:0]
x
0x0308:0x030B
4x1
Forwarded Rx Error
counter[3:0]
x
0x030C
1
ECAT Processing Unit Error
Counter c 0x030D
1
PDI Error Counter
c
0x030E
1
PDI Error Code
c
0x0310:0x0313
4x1
Lost Link Counter[3:0]
c
0x0400:0x0401
2
Watchdog Divider
r/c
0x0410:0x0411
2
Watchdog Time PDI
c
0x0420:0x0421
2
Watchdog Time Process Data
x
0x0440:0x0441
2
Watchdog Status Process Data
x
0x0442
1
Watchdog Counter Process
Data c 0x0443
1
Watchdog Counter PDI
c
0x0500:0x050F
16
SII EEPROM Interface
x
0x0510:0x0515
6
MII Management Interface
c
0x0516:0x0517
2
MII Management Access State
c
0x0518:0x051B
4
PHY Port Status[3:0]
c
0x0600:0x06FC
16x13
FMMU[15:0]
0-8
0x0800:0x087F
16x8
SyncManager[15:0]
0-8
0x0900:0x090F
4x4
DC – Receive Times[3:0]
rt
0x0910:0x0917
8
DC – System Time
dc
0x0918:0x091F
8
DC – Receive Time EPU
dc
0x0920:0x0935
24
DC – Time Loop Control Unit
dc
0x0936
1
DC – Receive Time Latch
mode
0x0980
1
DC – Cyclic Unit Control
dc
0x0981
1
DC – Activation
dc
0x0982:0x0983
2
DC – Pulse length of
SyncSignals
dc
0x0984
1
DC – Activation Status
dc
0x098E:0x09A7
26
DC – SYNC Out Unit
dc
0x09A8
1
DC – Latch0 Control
dc
0x09A9
1
DC – Latch1 Control
dc
0x09AE
1
DC – Latch0 Status
dc
0x09B0:0x09B7
8
DC – Latch0 Positive Edge
dc
0x09B8:0x09BF
8
DC – Latch0 Negative Edge
dc
0x09C0:0x09C7
8
DC – Latch1 Positive Edge
dc
0x09C7:0x09CF
8
DC – Latch1 Negative Edge
dc
0x09F0:0x09F3
0x09F8:0x09FF
12
DC – SyncManager Event
Times
c
0x0E00:0x0E03
4
Power-On Values (Bits)
-
0x0E00:0x0E07
8
Product ID
x
Slave Controller – IP Core for Xilinx FPGAs III-17
Page 30

Features and Registers
Address
Length
(Byte)
Description
IP Core
V3.00c-
V3.00k
0x0E08:0x0E0F
8
Vendor ID
x
0x0F00:0x0F03
4
Digital I/O Output Data
io
0x0F10:0x0F17
8
General Purpose Outputs
[Byte]
0-8
0x0F18:0x0F1F
8
General Purpose Inputs [Byte]
0-8
0x0F80:0x0FFF
128
User RAM
x
0x1000:0x1003
4
Digital I/O Input Data
io
0x1000 ff.
Process Data RAM [Kbyte]
1-60
Symbol
Description
x
Available
-
Not available
r
Read only
c
Configurable
dc
Available if Distributed Clocks with all
Sync/Latch signals are enabled
rt
Available if Receive Times or Distributed Clocks
are enabled (always available for 3-4 ports)
io
Available if Digital I/O PDI is selected
red
Register changed in this version
Table 10: Legend
III-18 Slave Controller – IP Core for Xilinx FPGAs
Page 31

Features and Registers
Addr.
Bit
Feat.
Description
Reset Value
0F80
7:0
-
Number of extended feature bits
Depends on ESC
IP Core extended features:
Depends on ESC:
0: Not available
1: Available
c: Configurable
0F81
0
0
Extended DL Control Register (0x0102:0x0103)
1
1
1
AL Status Code Register (0x0134:0x0135)
c
2
2
ECAT Interrupt Mask (0x0200:0x0201)
1
3
3
Configured Station Alias (0x0012:0x0013)
1
4
4
General Purpose Inputs (0x0F18:0x0F1F)
c
5
5
General Purpose Outputs (0x0F10:0x0F17)
c
6
6
AL Event Mask (0x0204:0x0207)
c
7
7
Physical Read/Write Offset (0x0108:0x0109)
c
0F82
0
8
Watchdog divider writeable (0x0400:0x04001) and
Watchdog PDI (0x0410:0x0f11)
c
1
9
Watchdog counters (0x0442:0x0443)
c
2
10
Write Protection (0x0020:0x0031)
c
3
11
Reset (0x0040:0x0041)
c
4
12
Reserved
0
5
13
DC SyncManager Event Times (0x09F0:0x09FF)
c
6
14
ECAT Processing Unit/PDI Error Counter
(0x030C:0x030D)
c
7
15
EEPROM Size configurable (0x0502.7):
0: EEPROM Size fixed to sizes up to 16 Kbit
1: EEPROM Size configurable
1
0F83
0
16
Reserved
1
1
17
Reserved
0
2
18
Reserved
0
3
19
Lost Link Counter (0x0310:0x0313)
c
4
20
MII Management Interface (0x0510:0x0515)
c
5
21
Enhanced Link Detection MII
c
6
22
Enhanced Link Detection EBUS
0
7
23
Run LED (DEV_STATE LED)
c
0F84
0
24
Link/Activity LED
1
1
25
Reserved
0
2
26
Reserved
1
3
27
DC Latch In Unit
c
4
28
Reserved
0
5
29
DC Sync Out Unit
c
6
30
DC Time loop control assigned to PDI
c
7
31
Link detection and configuration by MI
c
2.3 Extended ESC Features in User RAM
Table 11: Extended ESC Features (Reset values of User RAM – 0x0F80:0x0FFF)
Slave Controller – IP Core for Xilinx FPGAs III-19
Page 32

Features and Registers
Addr.
Bit
Feat.
Description
Reset Value
0F85
0
32
MI control by PDI possible
1
1
33
Automatic TX shift
c
2
34
EEPROM emulation by µController
c
3
35
Reserved
0
4
36
Reserved
0
5
37
Disable Digital I/O register (0x0F00:0x0F03)
c
6
38
Reserved
0
7
39
Reserved
0
0F86
0
40
Reserved
0
1
41
Reserved
0
2
42
RUN/ERR LED Override (0x0138:0x0139)
c
3
43
Reserved
0
4
44
Reserved
1
5
45
Reserved
0
6
46
Reserved
0
7
47
Reserved
0
0F87
0
48
Reserved
0
1
49
Reserved
0
2
50
Reserved
0
3
51
DC Sync1 disable
c
4
52
Reserved
0
5
53
Reserved
0
6
54
DC Receive Times (0x0900:0x090F)
c
7
55
DC System Time (0x0910:0x0936)
c
0F88
0
56
DC 64 bit
c
1
57
Reserved
0
2
58
PDI clears error counter
0
3
59
Avalon PDI
0
4
60
Reserved
0
5
61
PLB PDI
c
6
62
Reserved
0
7
63
Reserved
0
0F89
0
64
Reserved
0
1
65
Reserved
0
2
66
Reserved
0
3
67
Reserved
0
4
68
Reserved
0
5
69
Reserved
0
6
70
Reserved
0
7
71
Direct RESET
0
III-20 Slave Controller – IP Core for Xilinx FPGAs
Page 33

Features and Registers
Addr.
Bit
Feat.
Description
Reset Value
0F8A
0
72
Reserved
0
1
73
Reserved
1
2
74
DC Latch1 disable
c
3
75
AXI PDI
c
4
76
Reserved
0
5
77
Reserved
0
6
78
PDI function acknowledge by PDI write
c
7
79
Reserved
0
0F8B
0
80
Reserved
1
1
81
Reserved
1
2
82
Reserved
0
3
83
LED test
c
4
84
Reserved
0
5
85
Reserved
0
6
86
Reserved
0
7
87
Reserved
0
0F8C
3:0
91:88
Reserved
0
7:4
95:92
Reserved
0
0F8D
3:0
99:96
Reserved
0
7:4
103:100
Reserved
0
0F8E
3:0
107:104
Reserved
0
4
108
Reserved
0
5
109
Reserved
0
7:6
111:110
Digital I/O PDI byte size
c
0F8F
0
112
Reserved
0
1
113
Reserved
0
2
114
Digital I/O PDI
c
3
115
SPI PDI
c
4
116
Asynchronous µC PDI
c
5
117
Reserved
0
6
118
Reserved
1
7
119
Reserved
1
0F90
0
120
Reserved
0
1
121
Reserved
0
2
122
Reserved
0
3
123
Reserved
0
4
124
Reserved
0
5
125
Reserved
0
6
126
Reserved
0
7
127
Reserved
0
Slave Controller – IP Core for Xilinx FPGAs III-21
Page 34

Features and Registers
Addr.
Bit
Feat.
Description
Reset Value
0F91
0
128
Reserved
0
1
129
Reserved
0
2
130
Reserved
0
3
131
Reserved
0
4
132
Reserved
0
5
133
Reserved
0
6
134
Reserved
0
7
135
Reserved
0
0F92
0
136
Reserved
0
1
137
Reserved
0
2
138
Reserved
0
3
139
Reserved
0
4
140
Reserved
0
5
141
Reserved
0
6
142
Reserved
0
7
143
Reserved
0
0F93
0
144
RGMII c 1
145
Individual PHY address read out (0x0510[7:3])
c
2
146
CLK_PDI_EXT is asynchronous
c
3
147
Reserved
0
4
148
Use RGMII GTX_CLK phase shifted clock input
1
5
149
RMII
c
6
150
Reserved
0
7
151
Reserved
0
III-22 Slave Controller – IP Core for Xilinx FPGAs
Page 35

IP Core Installation
IP Core Library and decryption keys
Example designs
XML Device Description
for Example Designs
Installation directory <IPInst_dir>
Documentation
Configuration Tool
Software templates for EDK
Software templates for Vivado
3 IP Core Installation
3.1 Installation on Windows PCs
3.1.1 System Requirements
The system requirements of the Xilinx Design tools are applicable. The EtherCAT IP Core
configuration tool has these additional requirements:
Microsoft .NET Framework 2.0 (available from Microsoft, http://www.microsoft.com)
3.1.2 Installation
For installation of the EtherCAT IP Core on your system run the setup program
“EtherCAT IP core for Xilinx FPGAs <version> Setup.exe”
and follow the instructions of the installation wizard.
The EtherCAT IP Core and documentation are typically installed in the directory
C:\BECKHOFF\ethercat_<version>
This folder is further referenced to as <IPInst_dir>.
Figure 4: Files installed with EtherCAT IP core setup
Slave Controller – IP Core for Xilinx FPGAs III-23
Page 36

IP Core Installation
File name
Description
EtherCAT_CLK.vhd
Example EtherCAT clock supply
EtherCAT_IPCore.vhd
Encrypted EtherCAT IP Core source code
EtherCAT_Reset.vhd
Example EtherCAT reset supply
pk_ECAT_VENDORID_<company>_Xilinx_RSA.vhd
Vendor ID package (added during
installation, not part of setup)
rsa_ethercat_base_pvt.pem
RSA decryption key for Vendor ID package
rsa_ethercat_ip_<version>_<type>_pvt.pem
RSA decryption key for EtherCAT IP Core
The full version of EtherCAT_IPCore.vhd was
installed.txt
or
The evaluation version of EtherCAT_IPCore.vhd
was installed.txt
Name of this empty text file indicates which
version of EtherCAT_IPCore.vhd is present
in this folder
1
3.2 Installation on Linux PCs
3.2.1 System Requirements
The system requirements of the Xilinx Design tools are applicable. The EtherCAT IP Core
configuration tool has these additional requirements1:
Mono 1.2.6 or higher (software for running Microsoft .NET Framework programs, available at
http://www.mono-project.com)
3.2.2 Installation
For installation of the EtherCAT IP Core extract the archive to any folder on your Linux PC (same
contents as on windows PCs):
1. Create installation directory, , e.g. /opt/beckkhoff/ :
# mkdir /opt/beckhoff
2. Change to installation directory
# cd /opt/beckhoff
3. Copy EtherCAT IP Core archive to installation folder
4. Extract the EtherCAT IP Core:
# tar –xf EtherCAT_IP_core_for_Xilinx_FPGAs_<version>_Linux_
<region>.tar.gz
5. Continue with the following installation chapters.
The folder
ethercat_<version>
created inside this directory is further referenced to as <IPInst_dir>.
3.3 Files located in the lib folder
Table 12: Contents of lib folder
Not all of these variants have been tested with the EtherCAT IP core.
III-24 Slave Controller – IP Core for Xilinx FPGAs
Page 37

IP Core Installation
3.4 License File
The license file for the EtherCAT IP Core (iptb_ethercat_ipcore_<version>_flexlm.lic) has to be made
available to the Xilinx tools. The EtherCAT IP Core can only be used with a license file.
There are two options:
1. In Xilinx ISE select “Help – Manage License…” from the menu, and press the “Copy License…”
button in the Manage Xilinx Licenses tab. Select the license file you have received from Beckhoff.
This will copy the license file to
C:\.Xilinx\
on Windows PCs (please note the dot before Xilinx\), or
<HOME directory>/.Xilinx/
on Linux PCs
2. Add the path of the license file to the LM_LICENSE_FILE environment variable (separated by a
semicolon). This variable can also be set from the Xilinx License Configuration Manager.
For further information regarding license setup, refer to the Xilinx IP licensing help
http://www.xilinx.com/ipcenter/ip_license/ip_licensing_help.htm.
NOTE: Take care that the local EtherCAT IP Core license occurs before any license servers, otherwise the
synthesis might be subject to extreme slow-down.
The license version for major updates to the EtherCAT IP Core will be changed, i.e., a new license
has to be requested from BECKHOFF to use the updates. Such a new license will not cover previous
IP Core versions, thus both old and new license have to be installed if old and new IP Core versions
are used in parallel.
3.5 IP Core Vendor ID Package
The Vendor ID Package (VHDL file) is part of the EtherCAT IP Core source code, and it contains your
company’s unique vendor ID. The vendor ID package is not part of the IP Core setup, it is delivered
separately.
Copy the IP Core Vendor ID package (pk_ECAT_VENDORID_<company>_Xilinx_RSA.vhd) to the lib
folder in the IP Core Directory.
<IPInst_dir>\lib
The IP Core Vendor ID package is also necessary for completion of the example designs. Execute
<IPInst_dir>\example_designs\addvendor.cmd (addvendor.sh for Linux PCs)
to copy the Vendor ID package into the example designs. Alternatively, you can rename your Vendor
ID package it to pk_ECAT_VENDORID.vhd and copy it into these folders:
<IPInst_dir>\example_designs\LX150T_DIGI
<IPInst_dir>\example_designs\LX150T_AXI\pcores\axi_ethercat_user_<version>\hdl\vhdl
<IPInst_dir>\example_designs\ZC702_AXI\ZC702_AXI.srcs\sources_1\edk\ZC702_EDK\pcores\a
xi_ethercat_user_v3_00_a\hdl\vhdl
The steps of integrating the IP Core Vendor ID package into the IP Core installation folder and into the
example designs can also be performed by the EtherCAT IP Core Setup program (Windows PCs
only). Just check the appropriate option and select the path to your
pk_ECAT_VENDORID_<company>_Xilinx_RSA.vhd
file, and the Setup program will perform all necessary steps.
A vendor ID package is required for both evaluation and full license. It is recommended to use an
evaluation vendor ID (package) for evaluation, and the original vendor ID for production. The
evaluation vendor ID is beginning with “0xE.......” and ends with the original vendor ID digits.
Evaluation vendor IDs cannot pass the EtherCAT conformance tests.
Slave Controller – IP Core for Xilinx FPGAs III-25
Page 38

IP Core Installation
2
3.6 RSA Decryption Keys
The Xilinx XST synthesis flow requires two decryption keys for decrypting the EtherCAT IP Core
during synthesis. These two keys can be found in the <IPInst_dir>\lib folder of the IP core installation:
rsa_ethercat_base_pvt.pem
rsa_ethercat_ip_<version>_eval_pvt.pem (Evaluation of the EtherCAT IP Core)
or
rsa_ethercat_ip_<version>_full_pvt.pem (Full version of the EtherCAT IP Core)
These keys have to be copied to the application folder of your user profile:
%APPDATA%\RSA\2 (Windows)
or
$HOME/.rsa/ (Linux)
or they can be copied into the design tool installation folders (available to all users):
ISE_DS\ISE\data (ISE)
ISE_DS\PlanAhead\tps\isl (PlanAhead)
Vivado\<version>\tps\isl (Vivado)
On Windows, all this is automatically performed during IP Core installation.
3.7 Environment Variable
If you use the EDK, the following environment variable should be set:
ETHERCAT_XIL_INST = <IPInst_dir>
Example:
ETHERCAT_XIL_INST = C:\BECKHOFF\ethercat-<version>
This allows the configuration tool to locate all necessary files for completing a user configured IP Core.
You can select to set the environment variable by EtherCAT IP Core Setup program (Windows PCs
only).
E.g., C:\users\<name>\AppData\Roaming\RSA (Windows 7 english) or
C:\Benutzer\<name>\AppData\Roaming\RSA (Windows 7 german) or
C:\Documents and Settings\<name>\Application Data\RSA (Windows XP english) or
C:\Dokumente und Einstellungen\<name>\Anwendungsdaten\RSA (Windows XP german)
III-26 Slave Controller – IP Core for Xilinx FPGAs
Page 39

IP Core Installation
3.8 Integrating the EtherCAT IP Core into the Xilinx Designflow
3.8.1 Software Templates for example designs with Microblaze/ARM processor (EDK)
Software example templates are available for EDK example designs with Microblaze/ARM processor.
The templates have to be copied to your EDK installation folder.
Copy everything inside the templates folder
<IPInst_Dir>\example_designs\SDK_application_templates
to your EDK installation folder
<Xilinx installation folder>\ISE_DS\EDK\sw\lib\sw_apps\
On Windows, the IP Core installation tries to identify EDK installations and integrates the templates
automatically.
For stand-alone SDK installations, copy the templates to your SDK installation folder:
<SDK installation folder>\sw\lib\sw_apps
3.8.2 Software Templates for example designs with ARM processor (Vivado)
Software example templates are available for Vivado example designs with ARM processor. The
templates have to be copied to your Vivado SDK installation folder.
Copy everything inside the templates folder
<IPInst_Dir>\example_designs\Vivado_SDK_application_templates
to your Vivado SDK installation folder
<Xilinx installation folder>\SDK\<Vivado version>\data\embeddedsw\lib\sw_apps\
3.9 EtherCAT Slave Information (ESI) / XML device description for example designs
If you want to use the example designs, add the ESI to your EtherCAT master/EtherCAT configuration
tool/network configurator.
The ESI is located at
<IPInst_dir>\example_designs\EtherCAT_Device_Description\BECKHOFF ET1815.xml
If you are using TwinCAT, add the ESI to the appropriate folder of your TwinCAT installation before
the System Manager is started:
TwinCAT 2: <TwinCAT installation folder>\Io\EtherCAT
TwinCAT 3: <TwinCAT installation folder>\<TwinCAT version>\Config\Io\EtherCAT
Slave Controller – IP Core for Xilinx FPGAs III-27
Page 40

IP Core Usage
a
b
4 IP Core Usage
4.1 IPCore_Config Tool
This chapter explains how to configure your own EtherCAT IP Core using the IPCore_Config tool. The
IPCore_Config tool is used for configuration of the EtherCAT IP Core. The output of the tool is a VHDL
wrapper for the EtherCAT IP Core library file. The wrapper file makes only those interfaces visible
which were selected by the user, and it configures the EtherCAT IP Core using generics as desired.
The EtherCAT IP Core library file contains the encrypted source code with the EtherCAT functionality.
A synthesizable EtherCAT IP Core consists of the user generated VHDL wrapper, the EtherCAT IP
Core library file, and the vendor ID package (pk_ECAT_VENDORID.vhd). These files, together with a
DCM or PLL, represent the minimum source set for a fully functional EtherCAT slave. Typically,
additional user logic is added inside the FPGA.
1. Configure your IP Core with IPCore_Config.exe
Start IPCore_Config.exe located in the directory <IPInst_dir>\IPCore_Config
On Linux PCs, Start the IP Core configuration tool using mono:
# mono IPCore_Config.exe
2. Enter a design name and folder, or browse for a folder and enter the new design name in the file
dialog.
3. Press "Continue"
Figure 5: IPCore_Config Open Menu
4. Configure the EtherCAT IP Core. See chapter 5 for configuration options.
5. Generate IP Core by pressing the Generate button if configuration is complete
Figure 6: IP Core generation successful
The tool will generate three files (unless PLB or AXI PDI are configured):
- The VHDL wrapper for the user configured IP core (<design name>.vhd)
III-28 Slave Controller – IP Core for Xilinx FPGAs
Page 41

IP Core Usage
- A VHDL package which contains the component declaration of the IP Core
(pk_<design name>_comp.vhd)
Add the component declaration inside this file to any VHDL architecture that instantiates the IP
Core wrapper, or directly include the package.
- A settings file with all the configurations from the IPCore_Config Tool (<design name>.eccnf).
This file can be opened by the IPCore_Config tool for changes and updates.
6. Open Xilinx ISE
7. Add the EtherCAT IP Core sources to your ISE project:
EtherCAT_IPCore.vhd EtherCAT IP Core Library
<design_name>.vhd Wrapper generated by IPCore_Config tool
pk_ECAT_VENDORID.vhd Your specific vendor ID package
8. Add a clock source, a reset controller, and constraints, as well as additional user logic.
9. Implement (synthesize) the design and download it to an FPGA. Use an EtherCAT master to
communicate with the EtherCAT slave. The EtherCAT slave requires an SII EEPROM (or another
non-volatile storage) which contains the EtherCAT Slave Information (ESI) for device
identification.
4.2 EDK designs with EtherCAT IP Core
The EtherCAT IP Core can also be integrated into a System on a Programmable Chip (SOPC) with a
processor inside the FPGA (e.g., Xilinx MicroBlaze processor). The EtherCAT IP Core and the
processor can communicate via a PLB or AXI on-chip bus system.
The Xilinx Environment Development Kit (EDK) is used for building an SOPC including the EtherCAT
IP Core.
1. Create an EDK project using Xilinx EDK.
2. Create a folder called pcores in the EDK project folder (next to system.xmp) if there is not already
one.
3. Start IPCore_Config.exe located in the directory <IPInst_dir>\IPCore_Config
4. Browse to the pcores folder and enter a new design name for your EtherCAT IP Core.
5. Configure the IP Core with a PLB or AXI PDI.
6. Generate IP Core by pressing the Generate button if configuration is complete.
The tool will generate an IP for the Xilinx EDK containing these files:
- <design name>.eccnf contains the configuration
- <design name>_<version> folder tree for the EDK with the following files in it:
- data\<design name>_v2_1_0.mpd is the SOPC IP core Microprocessor Peripheral Definition
- data\<design name>_v2_1_0.pao is the SOPC IP core Peripheral Analyze Order
- hdl\vhdl\<design name>.vhd is the VHDL wrapper for the user configured IP core
- doc\pk_<design name>_comp.vhd is the component declaration package of the IP Core
The tool will also copy some files from the EtherCAT IP installation folder to the folder tree:
- hdl\vhdl\EtherCAT_IPCore.vhd is the EtherCAT IP Core
- hdl\vhdl\pk_ECAT_VENDORID.vhd is your Vendor ID package
- other IP core documentation is copied to the doc folder
The last files can only be found and copied by the IPCore_Config tool if the
ETHERCAT_XIL_INST environment variable is set correctly to point to <IPInst_dir>, otherwise
these files have to be added manually. The IPCore_Config tool gives advice if this happens
7. In Xilinx EDK, rescan the user repositories (menu Project – Rescan User Repositories) after each
update of the EtherCAT IP Core.
Slave Controller – IP Core for Xilinx FPGAs III-29
Page 42

IP Core Usage
8. Now you can find your user configured EtherCAT IP Core in the IP Catalog for adding it to the
system:
Figure 7: EDK – Overview
9. You can optionally configure some of the IP Core features without IPCore_Config inside the EDK.
Select "Configure IP" in the context menu.
Figure 8: EDK – Configuration of IP Core
In the upcoming dialog you can configure all the functions, which are not directly related to the I/O
signals of the Core.
Note:
Changes made in this dialog will not be reflected in the .eccnf configuration file for
IPCore_Config, they are only saved in the .mpd file. Updating the IP configuration using
IPCore_Config will overwrite the .mpd file and you will lose changes made in this dialog. This
feature is only recommended for experienced users.
III-30 Slave Controller – IP Core for Xilinx FPGAs
Page 43

IP Core Usage
Figure 9: EDK – Configuration Dialog
10. Assign addresses to the EtherCAT IP Core. The tab "Addresses" in the "System Assembly View"
shows the internal addresses of the IP Cores. Press the Generate Addresses button to
automatically assign addresses.
Figure 10: EDK – System Assembly View, Addresses tab
Note:
If you have added a new IP Core, you can generate or set the internal addresses. The EtherCAT
IP core needs at least 64 Kbyte address space. Larger sizes will result in less address decoding
logic.
Slave Controller – IP Core for Xilinx FPGAs III-31
Page 44

IP Core Usage
11. The tab "Ports" in the "System Assembly View" shows the connection signals. Connect the
EtherCAT IP Core to other IP and external FPGA pins.
Figure 11: EDK – System Assembly View, Ports tab
III-32 Slave Controller – IP Core for Xilinx FPGAs
Page 45

IP Core Usage
12. Generate Bitstream
Result is the file "system.bit" in the implementation folder of the EDK project. This configuration file
only includes the hardware parts of the design, without software for the processor.
13. Create and build a software application (Export Design – Export & Launch SDK
14. Update Bitstream with software program information
(EDK – Device Configuration – Update Bitstream)
Result is the file “download.bit” (= “system.bit” + “<software application>.elf”) in the
implementation folder of the EDK project.
15. Download the design into your FPGA:
a) Download temporarily into the volatile configuration memory of the FPGA via JTAG-Interface:
EDK – Device Configuration – Download Bitstream
b) Download permanently into the non-volatile configuration SPI flash via JTAG-Interface and
indirect SPI flash configuration using Xilinx IMPACT.
4.3 Vivado designs with EtherCAT IP Core
There are two basic kinds of implementing the EtherCAT IP core using Vivado:
The first option is characterized by placing the EtherCAT IP core outside of a block design. All IPs are
connected inside the block design except for the EtherCAT IP. The AXI connection for the EtherCAT
IP is an external connection of the block design. The block design is instantiated on a top-level HDL
file, which also instantiates the EtherCAT IP Core.
NOTE: This kind of implementation is shown in the example designs.
The second option is to use the output files of the IPCore_Config tool as input sources for an
individual IP packed with the Xilinx IP Packager. In this case, the EtherCAT IP gets another wrapper
generated by the IP Packager. The packed IP is added to the block design and connected to other IP.
Slave Controller – IP Core for Xilinx FPGAs III-33
Page 46

IP Core Configuration
5 IP Core Configuration
Figure 12: EtherCAT IP Core Configuration Interface
Parameters pane (left)
The configuration options for the EtherCAT IP Core are available in the IP Core parameters pane on
the left side.
Presets pane (right)
Depending on the IP Core functionality that should be implemented and the available resources (LCs)
in the FPGA, the internal features can be chosen. Several common feature presets are available.
Based upon these presets, individual functions can be enabled/disabled in the parameter pane.
Message pane (bottom)
In the lower box additional information like warnings, errors, and EEPROM configuration
recommendations are displayed.
ETHERCAT_XIL_INST (status line)
The status line displays the current ETHERCAT_XIL_INST environment variable, which points to the
EtherCAT IP Core installation directory with the required source files.
III-34 Slave Controller – IP Core for Xilinx FPGAs
Page 47

IP Core Configuration
5.1.1 Product ID tab
Figure 13: Product ID tab
PRODUCT_ID input in decimal groups
The Product ID can be chosen freely and is for vendor issues. It can be read out in register
0x0E08:0x0E0F.
The PRODUCT_ID has to be entered in decimal format as a number between 0 and 65535 for each of
the four 16 bit fields (representing a 16 bit part of the 64 bit Product ID each).
The Product ID is meant to identify special configurations of the IP Core. It does not have to reflect the
EtherCAT slave product code, which is part of the EEPROM/XML device description.
Slave Controller – IP Core for Xilinx FPGAs III-35
Page 48

IP Core Configuration
5.1.2 Physical Layer tab
Figure 14: Physical Layer tab
Communication Ports
The number of communication ports by default is two. As PHY interface MII/RGMII (1, 2, or 3 ports) or
RMII (1 or 2 ports only) can be selected. It is recommended to use MII as for accuracy of the
distributed clocks is much better with MII.
Optical link (FX)
Each port can be configured to be an FX (fiber optic) port which has influence on Enhanced Link
Detection and MI link detection and configuration, since FX connections do not use Auto-negotiation.
Enhanced link detection
Enhanced MII link detection is a mechanism of informing link partners of receive errors.
TX Shift
Automatic or manual TX Shift is available if TX Shift is selected. TX Shift delays MII TX signals to
comply to Ethernet PHY setup and hold timing. Automatic TX Shift uses the TX_CLK signals of the
PHYs to detect appropriate TX Shift settings automatically. Manual TX Shift configuration allows for
delaying the MII TX signals by 0, 10, 20, or 30 ns.
PHY Management Interface
The PHY Management Interface function can be selected or deselected. If it deselected, the other MII
Configuration options are not available.
LINK state and PHY configuration through MI
MI link detection and configuration is available if checked. Ethernet PHYs are configured and link
status is polled via the MII Management Interface. Enhanced link detection has to be activated if MI
link detection and configuration is used and the nMII_LINK0/1/2 signals are not used.
Export PHY address as signals
Enable for dynamically changing PHY addresses (the PHY address configuration is exported as
signals), otherwise the PHY address configuration is static.
III-36 Slave Controller – IP Core for Xilinx FPGAs
Page 49

IP Core Configuration
Independent PHY addresses
Enable if the PHY addresses are not consecutive. If enabled, the PHY addresses of each port can be
configured individually.
PHY address offset
Configure the base PHY address (belonging to port 0) if the PHY addresses are consecutive.
PHY address
Configure the individual PHY address of each port
Tristate Driver inside core (EEPROM/MI)
If selected tri-state drivers of the core are used for access to EEPROM and PHY Management signals.
This function should not be enabled when the PLB/AXI Process Data Interface is used. This is also
marked in the output window at the bottom.
Slave Controller – IP Core for Xilinx FPGAs III-37
Page 50

IP Core Configuration
5.1.3 Internal Functions tab
Figure 15: Internal Functions tab
FMMUs
Number of FMMU instances. Between 0 and 8 FMMUs are possible.
SyncManager
Number of SyncManager instances. Between 0 and 8 SyncManagers are possible.
Process Data RAM
The size of the Process data memory can be determined in this dialog. Minimum memory size is
0 KByte, maximum memory size is 60 KByte.
Receive Times enabled
The Distributed Clocks receive time feature for propagation delay calculation can be enabled without
using all DC features. They will be automatically enabled for configurations with 3 ports.
Distributed Clocks enabled
The Distributed Clocks feature comprises synchronized distributed clocks, receive times, SyncSignal
generation, and LatchSignal time stamping.
DC SyncSignals
Select the number of SyncSignals.
DC LatchSignals
Select the number of LatchSignals.
Distributed Clocks Width
The width of the Distributed Clocks can be selected to be either 32 bit or 64 bit. DC with 64 bit require
more FPGA resources. DC with 32 bit and DC with 64 bit are interoperable.
Cyclic pulse length
Determines the length of SyncSignal output (register 0x0982:0x0983).
III-38 Slave Controller – IP Core for Xilinx FPGAs
Page 51

IP Core Configuration
Mapping to global IRQ
Sync0 and Sync1 can additionally be mapped internally to the global IRQ. This might be a good
solution if a microcontroller interface is short on IRQs. However, the sync signals will remain available
on Sync0 and Sync1 outputs.
Slave Controller – IP Core for Xilinx FPGAs III-39
Page 52

IP Core Configuration
5.1.4 Feature Details tab
Figure 16: Feature Details tab
Read/Write Offset
Physical Read/Write Offset (0x00108:0x0109) is available if checked.
Write Protection
Register write protection and ESC write protection (0x0020:0x0031) are available if checked.
AL Status Code Register
AL Status Code register (0x0134:0x0135) is available if checked.
Extended Watchdog
Watchdog Divider (0x0400:0x0401) is configurable and PDI Watchdog (0x0410:0x0411, and
0x0100.1) is available if checked.
AL Event Mask Register
AL Event Mask register (0x0204:0x0207) is available if checked.
Watchdog Counter
Watchdog Counters (0x0442:0x0443) are available if checked. Watchdog Counter PDI is only used if
Extended Watchdog feature is selected.
System Time PDI controlled
Distributed Clocks Time Loop Control Unit is controlled by PDI (µController) if selected. EtherCAT
access is not possible. Used for synchronization of secondary EtherCAT busses.
PDI information register
PDI information register 0x014E:0x014F is available. Required if PDI SM/IRQ acknowledge by WRITE
is selected.
III-40 Slave Controller – IP Core for Xilinx FPGAs
Page 53

IP Core Configuration
PDI SM/IRQ acknowledge by WRITE
Some ESC functions are triggered by reading from the PDI. Since PDI data bus widths are increasing
up to 64 bit and beyond, it is not possible to read individual bytes anymore because most µControllers
do not support byte enable signals for read commands. In order to prevent accidentally reading of
trigger addresses (like SyncManager buffer end or IRQ acknowledge registers), this option allows to
use write commands (with byte enables) to trigger the functions.
SyncManager Event Times
Distributed Clocks SyncManager Event Times (0x09F0:0x09FF) are available if checked. Used for
debugging SyncManager interactions.
EPU and PDI Error Counter
EtherCAT Processing Unit (EPU) and PDI Error counters (0x030C:0x030D) are available if checked.
Lost Link Counter
Lost Link Counters (0x0310:0x0313) are available if checked.
EEPROM Emulation by PDI
EEPROM is and has to be emulated by a µController with access to a NVRAM. I²C EEPROM is not
necessary if EEPROM Emulation is activated, I²C interface is deactivated. Only usable with PDIs for
µController connection.
RESET slave by ECAT/PDI
The reset registers (0x0040:0x0041) and the RESET_OUT signal is available if this feature is
checked.
RUN LED (Device State)
RUN LED output indicates AL Status (0x0130) if activated. Otherwise RUN LED has to be controlled
by a µController. Always activated if no PDI is selected or if Digital I/O PDI is selected.
Extended RUN/ERR LED
Support for ERR LED and STATE LED, direct control of RUN/ERR LED via RUN/ERR LED Override
register (0x0138:0x0139).
LED Test
A short LED flash after reset for all LED signals is enabled if this feature is selected.
Slave Controller – IP Core for Xilinx FPGAs III-41
Page 54

IP Core Configuration
EtherCAT
Logic
PDI
PDI
PDI
PDI
SPI
Digital I/O
µC 8 Bit
PLB/
AXI
EtherCAT IP Core
Microblaze
RAM
…..
µC 16 BitPDI
FPGA
PHY
PHY
PHY
General
Purpose I/O
5.1.5 Register: Process Data Interface tab
Several interfaces between ESC and the application are available:
Digital I/O
8 Bit asynchronous µController
16 Bit asynchronous µController
SPI slave
PLB v4.6 on-chip bus
AXI4/AXI4 LITE on-chip bus
General Purpose I/O
Figure 17: Available PDI Interfaces
The PDI can be selected from the pull down menu. After selection settings for the selected PDI are
shown and can be changed. If the EtherCAT IP Core is used in the EDK, only PLB and AXI on-chip
busses are selectable.
III-42 Slave Controller – IP Core for Xilinx FPGAs
Page 55

IP Core Configuration
5.1.5.1 No Interface and General Purpose I/O
If there is no interface selected no communication with the application is possible (except for general
purpose I/O).
Figure 18: Register Process Data Interface
General Purpose I/Os
General purpose I/O signals can be added to any selected PDI. The number of GPIO bytes is
configurable to 0, 1, 2, 4, or 8 Bytes. Both general purpose outputs and general purpose inputs of the
selected width are available.
Slave Controller – IP Core for Xilinx FPGAs III-43
Page 56

IP Core Configuration
5.1.5.2 Digital I/O Configuration
The Digital I/O PDI supports up to 4 Bytes of digital I/O signals. Each byte can be assigned as input or
output byte.
Figure 19: Register PDI – Digital I/O Configuration
Number of digital I/Os
Total number of I/Os. Possible values are 1, 2, 3 or 4 Bytes.
Port Configuration
Defining byte-wise if digital I/Os are used as input or output byte
Input Mode
Defines the latch signal which is used to take over input data.
Latch at SOF (Start of Frame)
The inputs are latched just before the data have to be written in the frame.
Latch with ext. signal
Connected to DIGI_LATCH_IN. Application controls latching
Latch at Dist-Sync0
Latch input data with distributed clock Sync0 signal
Latch at Dist-Sync1
Latch input data with distributed clock Sync1 signal
Output Mode
Defines the trigger signal for data output.
Output at EOF (End of Frame)
The outputs will be set if the frame containing the data is received complete and error free.
Output at Dist-Sync0
Outputs will be set with Sync0 signal if distributed clocks are enabled.
Output at Dist-Sync1
Outputs will be set with Sync1 signal if distributed clocks are enabled.
III-44 Slave Controller – IP Core for Xilinx FPGAs
Page 57

IP Core Configuration
5.1.5.3 µController Configuration (8/16Bit)
The 8/16 Bit µController interface is an asynchronous parallel interface for µControllers. The difference
between 8 and 16 bit interface is the extended data bus and the BHE signal which enables access to
the upper byte.
Figure 20: Register PDI – µC-Configuration
Device emulation
Enable Device emulation (0x0141[0]=1). This feature should be disabled in most use cases.
Busy Configuration
Electrical definition of the busy signal driver
Read BUSY delayed
Delay the output of the BUSY signal by ~20 ns (refer to register 0x00152.0).
Interrupt Configuration
Electrical definition of the interrupt signal driver
Write on falling edge
Start write access earlier with falling edge of nWR. Single write accesses will become slower, but
maximum write access time becomes faster.
Tristate driver for data bus inside core
If Tristate drivers for the data bus should be integrated into the IP Core already activate the check box.
Slave Controller – IP Core for Xilinx FPGAs III-45
Page 58

IP Core Configuration
5.1.5.4 SPI Configuration
The SPI interface is a serial slave interface for µControllers.
Figure 21: Register PDI – SPI Configuration
Device emulation
Enable Device emulation (0x0141[0]=1). This feature should be disabled in most use cases.
SPI Mode
The SPI mode determines the SPI timing. Refer to SPI PDI description for details. Mode 3 is
recommended for slave sample code.
Late Sample
The Late Sample configuration determines the SPI timing. Refer to SPI PDI description for details. It is
recommended to leave this unchecked for slave sample code.
Interrupt Configuration
SPI_IRQ output driver configuration.
Polarity of SPI_SEL
SPI_SEL signal polarity.
Tristate driver for SPI_DO inside core
Include tri-state driver for SPI Data Out. With tri-state driver, SPI_DO is either driven actively or high
impedance output.
III-46 Slave Controller – IP Core for Xilinx FPGAs
Page 59

IP Core Configuration
5.1.5.5 Processor Local Bus (PLB) Configuration
The PLB v4.6 PDI connects the IP Core with a PLB Master (e.g. Xilinx MicroBlazeTM). The data bus
with is 32 bit, and the address bus is also 32 bit wide.
Figure 22: Register PDI – PLB Interface Configuration
Device emulation
Enable Device emulation (0x0141[0]=1). This feature should be disabled in most use cases.
On-Chip Bus CLK is asynchronous to CLK25 core clock
Enable if the On-chip BUS CLK is asynchronous to CLK25. Additional synchronization stages are
added in this case.
Interrupt type
Select the usage type of the interrupt signal (level or edge). Since the main interrupt can have different
sources, a level based interrupt is typically required.
Generate pcore for XPS
Enable generation of an EtherCAT IP Core package for Xilinx XPS/EDK, i.e., a pcores folder structure
with source files and module definitions.
Slave Controller – IP Core for Xilinx FPGAs III-47
Page 60

IP Core Configuration
5.1.5.6 AXI4/AXI4 LITE Configuration
The AXI PDI connects the IP Core with an AXI Master. The data bus width is variable 8/16/32/64 bit.
Figure 23: Register PDI – AXI4/AXI4 LITE Interface Configuration
Device emulation
Enable Device emulation (0x0141[0]=1). This feature should be disabled in most use cases.
On-Chip Bus CLK is asynchronous to CLK25 core clock
Enable if the On-chip BUS CLK is asynchronous to CLK25. Additional synchronization stages are
added in this case.
Interrupt type
Select the usage type of the interrupt signal (level or edge). Since the main interrupt can have different
sources, a level based interrupt is typically required.
Implement Tristate drivers in XPS or export to higher level (XPS configuration option)
This additional option is offered in the “Configure IP” dialog of the EtherCAT IP Core instance inside
EDK. It allows to export the IN/OUT/ENA tristate to higher levels above the XPS, or implement the
tristate driver in the XPS.
Generate pcore for XPS
Enable generation of an EtherCAT IP Core package for Xilinx XPS/EDK, i.e., a pcores folder structure
with source files and module definitions.
III-48 Slave Controller – IP Core for Xilinx FPGAs
Page 61

Example Designs
6 Example Designs
Example designs are available for:
Avnet Xilinx Spartan-6 LX150T Development Kit with MII and Digital I/O PDI
Avnet Xilinx Spartan-6 LX150T Development Kit with MII, AXI PDI, and Microblaze processor
Xilinx Zynq ZC702 Development Kit with MII, AXI PDI, and ARM processor (Vivado based)
The EtherCAT master uses an XML file which describes the device and its features. The XML device
description file for all example designs and its schema can be found in the installation directory.
<IPInst_dir>\example_designs\EtherCAT_Device_Description\
Projects have to be compiled and then can be loaded to the SPI configuration EEPROM of the
evaluation board.
The EtherCAT IP core resource consumption figures are based on EtherCAT IP Core for Xilinx FPGAs
Version 3.00c and Xilinx ISE 14.5.
PHY strapping options on Xilinx ISMNET PHY board
Some Ethernet PHYs, and especially the PHYs on the Xilinx ISMNET PHY board use the
communication signals for strapping configuration signals. If these signals are not used by the FPGA
design, take care that the strapping values are not changed by default IO behaviour.
Due to this fact, the COL and CRS signals of the PHYs are declared as inputs in the example designs.
In this way, these two signals are not driven or pulled up/down by the FPGA, so the configuration
resistors on the ISMNET define the configuration.
Slave Controller – IP Core for Xilinx FPGAs III-49
Page 62

Example Designs
Configuration
Resources
XC6SLX150T
Physical layer
2x MII,
TX Shift, MIIM, Enhanced
Link Detection
Slice Registers
7,552
4 %
Internal Function
3x FMMU
4x SyncManager
1 KB RAM
Slice LUTs
8,969
9 %
Distributed clocks
32 bit,
2x Sync, 2x Latch
Occupied Slices
3,408
14 %
Feature details
Extended Watchdog,
Watchdog counter,
EPU and PDI Error
Counter,
Lost link counter,
RUN_LED,
Extended RUN/ERR LED
Block RAM
RAMB8BWER
RAMB16BWER
2
0
1 %
0 %
PDI
Digital I/O: 3 Byte IN, 1
Byte OUT
DCM
1
8 %
6.1 Avnet Xilinx Spartan-6 LX150T Development Kit with Digital I/O
6.1.1 Configuration and resource consumption
Table 13: Resource consumption Avnet LX150T example design
6.1.2 Functionality
Attach the FMC ISMNET module to FMC1 connector of LX150T base board. Populate jumper JP6
pins 1-2 (CARRIER_25MHz to CARRIER_25MHZ_S) on ISMNET, because the 25 MHz clock source
for the Ethernet PHYs is also used as the clock source for the whole system including EtherCAT IP
core in the Spartan-6 LX150T FPGA. Configure FMC IO voltage to 2.5V. You can optionally connect
the UART or the LX150T (JR1) to your PC (9600 baud, 8 bit data, 1 stop bit, no parity, no hardware
handshake). The LEDs D3 and D4 on the FMC ISMNET module are used as Link/Activity LEDs for the
two Ethernet ports.
Functionality of the Digital I/O example design:
Digital input data from push buttons SW3-SW5 on the LX150T are available in the Process Data
RAM 0x1000[2:0]
Digital input data from DIP switches SW6 on the LX150T are available in the Process Data RAM
0x1001
Digital input data from push buttons SW1-SW2 on the ISMNET module are available in the
Process Data RAM 0x1002[1:0]
Digital input data from DIP switches SW3 on the ISMNET module are available in the Process
Data RAM 0x1002[7:4]
Digital output data from Digital Output register (0x0F03) is visualized with LEDs D7-D14 on the
LX150T
DC LatchSignals are connected to push buttons SW1-SW2 on the ISMNET module
6.1.3 Implementation
1. Open Xilinx ISE
2. Open example design
<IPInst_dir>\example_designs\LX150T_DIGI.xise
3. Generate Programming File
4. Download bitstream to FPGA
III-50 Slave Controller – IP Core for Xilinx FPGAs
Page 63

Example Designs
6.1.4 SII EEPROM
Use this ESI for the SII EEPROM:
Beckhoff Automation GmbH (Evaluation)/
IP Core example designs ET1815 (Xilinx)/
ET1815 IP Core Avnet LX150T DIGI
6.1.5 Downloadable configuration file
An already synthesized time limited configuration file
LX150T_DIGI_Demo_V3_00c_time_limited.bit
based on this example design can be found in the
<IPInst_dir>\example_designs\LX150T_DIGI\
folder. After expiration of about 1 hour the design quits its operation. These files must only be used for
evaluation purposes, any distribution is not allowed.
Slave Controller – IP Core for Xilinx FPGAs III-51
Page 64

Example Designs
Configuration
Resources
XC6SLX150T
Physical layer
2x MII,
TX Shift, MIIM
Slice Registers
10,354
5 %
Internal Function
4x FMMU
4x SyncManager
1 KB RAM
Slice LUTs
13,935
16 %
Distributed clocks
32 bit,
2x Sync, 2x Latch
Occupied Slices
5,443
23 %
Feature details
AL Status Code register,
Extended Watchdog,
Watchdog counter,
AL Event Mask reg.
EPU and PDI Error
Counter,
Lost link counter,
RUN_LED,
LED Test
Block RAM
RAMB8BWER
RAMB16BWER
2
16
1 %
5 %
PDI
AXI4 LITE slave, 32 bit
PLL
1
16 %
6.2 Avnet Xilinx Spartan-6 LX150T Development Kit with AXI
6.2.1 Configuration and resource consumption
Table 14: Resource consumption Avnet LX150T example design
6.2.2 Functionality
Attach the FMC ISMNET module to FMC1 connector of LX150T base board. Populate jumper JP6
pins 1-2 (CARRIER_25MHz to CARRIER_25MHZ_S) on ISMNET, because the 25 MHz clock source
for the Ethernet PHYs is also used as the clock source for the whole system including EtherCAT IP
core in the Spartan-6 LX150T FPGA. Configure FMC IO voltage to 2.5V. You can optionally connect
the UART or the LX150T (JR1) to your PC (9600 baud, 8 bit data, 1 stop bit, no parity, no hardware
handshake). The LEDs D3 and D4 on the FMC ISMNET module are used as Link/Activity LEDs for the
two Ethernet ports. Push button SW2 on the LX150T is used as system reset input.
The Microblaze demo application performs the following tasks:
Accept any EtherCAT Slave State request (copying AL Control to AL Status register). Print state
changes via UART.
Copy output data from EtherCAT IP Core (0x1024) to GPIO for LEDs D7-D14 on the LX150T.
Copy output data from EtherCAT IP Core (0x1004) to GPIO for DIGILENT U15 on the ISMNET.
Print output data from the EtherCAT IP Core (0x1020-0x1023) via UART.
Copy input data from GPIO for push buttons SW3-SW5 on the LX150T to the EtherCAT IP Core
(0x1000).
Copy input data from GPIO for push buttons SW1-SW2 on the ISMNET module to the EtherCAT
IP Core (0x1002).
Copy input data from GPIO for DIP switches SW6 on the LX150T to the EtherCAT IP Core
(0x1001).
Copy input data from GPIO for DIP switches SW3 on the ISMNET module to the EtherCAT IP
Core (0x1003).
III-52 Slave Controller – IP Core for Xilinx FPGAs
Page 65

Example Designs
6.2.3 Implementation
1. Open Xilinx EDK
2. Open project:
<IPInst_dir>\ example_designs\LX150T_AXI\system.xmp
3. Generate Bitstream
4. Export Design
5. Launch SDK
6. In SDK, select menu File – New – Application Project
7. Enter a project name, and select project template “BECKHOFF EtherCAT LX150T AXI”
8. Select Next, then Finish.
9. Wait until the projects are built automatically, or select menu Project – Build All
10. Update Bitstream with application image and download to FPGA by selecting menu Xilinx Tools –
Program FPGA
Result is the file “download.bit” (= “system.bit” + “<application>.elf”) in the implementation
folder of the EDK project.
6.2.4 SII EEPROM
Use this ESI for the SII EEPROM:
Beckhoff Automation GmbH (Evaluation)/
IP Core example designs ET1815 (Xilinx)/
ET1815 IP Core Avnet LX150T
6.2.5 Downloadable configuration file
An already synthesized time limited configuration file
LX150T_AXI_Demo_V3_00c_time_limited.bit
based on this example design can be found in the
<IPInst_dir>\example_designs\LX150T_AXI\
folder. After expiration of about 1 hour the design quits its operation. These files must only be used for
evaluation purposes, any distribution is not allowed.
Slave Controller – IP Core for Xilinx FPGAs III-53
Page 66

Example Designs
Configuration
Resources
XZ7Z020
Physical layer
2x MII,
TX Shift, MIIM
Slice Registers
13,467
13 %
Internal Function
4x FMMU
4x SyncManager
1 KB RAM
Slice LUTs
16,360
31 %
Distributed clocks
32 bit,
2x Sync, 2x Latch
Occupied Slices
5,651
42 %
Feature details
AL Status Code register,
Extended Watchdog,
Watchdog counter,
AL Event Mask reg.
EPU and PDI Error
Counter,
Lost link counter,
RUN_LED,
LED Test
Block RAM
RAMB18E1
RAMB36E1
2
1
1 %
1 %
PDI
AXI4 LITE slave, 32 bit,
asynchronous
MMCME2_ADV
1
25 %
6.3 Xilinx Zynq ZC702 Development Kit with AXI (Vivado based)
6.3.1 Configuration and resource consumption
Table 15: Resource consumption Xilinx Zynq ZC702 example design
NOTE: These resource consumption figures are based on EtherCAT IP Core for Xilinx FPGAs Version 3.00j and
Vivado 2014.2 with AR61518 and the appropriate settings for this answer record.
6.3.2 Functionality
Attach the FMC ISMNET module to FMC1 connector of ZC702 base board. Populate jumper JP6 pins
1-2 (CARRIER_25MHz to CARRIER_25MHZ_S) on ISMNET, because the 25 MHz clock source for
the Ethernet PHYs is also used as the clock source for the EtherCAT IP core in the Zynq FPGA. You
can optionally connect the UART of the ZC702 (J17) to your PC (9600 baud, 8 bit data, 1 stop bit, no
parity, no hardware handshake). The LEDs D3 and D4 on the FMC ISMNET module are used as
Link/Activity LEDs for the two Ethernet ports. Push button SW2 on the ZC702 is used as system reset
input.
The EtherCAT IP Core and the ISMNET PHY ports are only powered and running if the processor
system is running.
The ARM demo application performs the following tasks:
Accept any EtherCAT Slave State request (copying AL Control to AL Status register). Print state
changes via UART.
Copy output data from EtherCAT IP Core (0x1024) to GPIO for LEDs DS15-DS22 on the ZC702.
Print output data from the EtherCAT IP Core (0x1020-0x1023) via UART.
Copy input data from GPIO for push buttons SW5/SW7 on the ZC702 to the EtherCAT IP Core
(0x1000).
Copy input data from GPIO for push buttons SW1-SW2 on the ISMNET module to the EtherCAT
IP Core (0x1002).
Copy input data from GPIO for DIP switches SW12 on the ZC702 to the EtherCAT IP Core
(0x1001).
Copy input data from GPIO for DIP switches SW3 on the ISMNET module to the EtherCAT IP
Core (0x1003).
Copy input data from GPIO for DIGILENT U15 on the ISMNET module to the EtherCAT IP Core
(0x1004).
III-54 Slave Controller – IP Core for Xilinx FPGAs
Page 67

Example Designs
6.3.3 Implementation
1. Open Xilinx Vivado
2. Open project:
<IPInst_dir>\example_designs\ZC702_AXI_VIVADO\ZC702_AXI_VIOVADO.xpr
3. Generate Bitstream
4. Select menu File – Export – Export hardware, and export the hardware description
5. Launch Vivado SDK
6. In SDK, select menu File – New – Application Project
7. Create a First Stage Boot Loader (FSBL) project for the Zynq
8. In SDK, select menu File – New – Application Project
9. Enter a project name, and select project template “BECKHOFF EtherCAT ZC702 AXI”
10. Select Next, then Finish.
11. Select menu Project – Build All
12. Select Xilinx Tools – Create Zynq Boot Image
13. Add First Stage Boot Loader ELF, FPGA bitstream, and Demo application ELF files
14. Place resulting .bin file in the root folder of the SD card, rename the file to BOOT.bin and configure
the ZC702 to boot from SD card.
6.3.4 SII EEPROM
Use this ESI for the SII EEPROM:
Beckhoff Automation GmbH (Evaluation)/
IP Core example designs ET1815 (Xilinx)/
ET1815 IP Core Xilinx ZC702
Slave Controller – IP Core for Xilinx FPGAs III-55
Page 68

FPGA Resource Consumption
7 FPGA Resource Consumption
The resource consumption figures shown in this chapter reflect results of example synthesis runs and
can only be used for rough resource estimations. The figures are subject to quite large variations
depending on design tools and version, FPGA type, constraints (e.g., area vs. speed), total FPGA
utilization (design tools typically stop optimization if the timing goal is reached), etc. No extra effort
was undertaken to achieve optimum results, i.e. by sophisticated constraining and design flow setting.
For accurate resource consumption figures, please use the evaluation license of the EtherCAT IP
Core and synthesize your individual configuration for the desired FPGA.
The figures of the following table do not imply that the individual features are operational in the
selected FPGA (i.e., that the resources are sufficient or that timing closure is achievable). The
synthesis runs where performed without timing constraints, without location constraints, and without
bitstream generation.
The EtherCAT IP core resource consumption overview figures are based on EtherCAT IP Core for
Xilinx FPGAs Version 3.00c, Xilinx ISE 14.5, and Xilinx Spartan-6 devices. One Spartan-6 slice
contains 4 lookup-tables (LUT6) and 4 flip-flops. The registers and logic LUT figures are subject to
variation as a result of optimization. Slice figures are not given any more since their variation is
extremely high.
III-56 Slave Controller – IP Core for Xilinx FPGAs
Page 69

FPGA Resource Consumption
Configurable Function
Reg.
LUT6
Details
Minimum Configuration
2,300
2,200
0 x SM, 0 x FMMU, no features, no DC, PDI:
32 Bit digital I/O, 1 kByte DPRAM, 1 port MII
Maximum Configuration
16,200
21,300
8 x SM, 8 x FMMU, all features except for
EEPROM Emulation and System Time PDI
controlled, DC 64 bit, PDI: SPI, GPIO, 60
kByte DPRAM, 3 ports MII
Additional port
700
650
all port features enabled (without DC Receive
time)
PHY features
500
550
All MII features: Management Interface, MI link
detection and configuration, TX Shift, and
enhanced link detection (3 ports)
SyncManager
400
800
per SyncManager
FMMU
400
450
per FMMU
DPRAM
50
200
60 KB
Distributed Clocks
100
50
Receive time per port
900
800
System time (32 bit)
1,000
1,400
SyncSignals (32 bit)
600
750
LatchSignals (32 bit)
1,200
1,100
System time (64 bit)
1,600
2,500
SyncSignals (64 bit)
1,200
1,200
LatchSignals (64 bit)
350
350
SyncManager Event Times
Feature details
550
800
all features except for EEPROM Emulation and
SyncManager Event Times
PDI
32 Bit Digital I/O
300
400
SPI
650
1,800
8 Bit µController
350
1,350
16 Bit µController
500
1,750
PLB
400
1,600
25 MHz, 32 Bit
AXI4 LITE
450
1,800
25 MHz, 32 Bit
AXI4
550
2,250
25 MHz, 32 Bit
GPIO
300
150
8 Byte
Table 16: Approximate resource requirements for main configurable functions
Slave Controller – IP Core for Xilinx FPGAs III-57
Page 70

FPGA Resource Consumption
EtherCAT Device
SM
FMMU
DPRAM
[kByte]
PDI
DC
Reg.
LUT6
IO 2 2
1
32 Bit Digital I/O
-
4,800
5,800
Frequency Inverter
4 4 1
SPI
-
7,000
10,000
Encoder
4 4 1
SPI
32
9,900
13,200
Fieldbus Gateway
4 4 4
16 Bit µC
-
6,600
9,900
Servo Drive
4 4 4
16 Bit µC
32
9,400
13,200
The EtherCAT IP core resource consumption figures for typical EtherCAT devices are based on
EtherCAT IP Core for Xilinx FPGAs Version 3.00c, Xilinx ISE 14.5, and Spartan-6 devices.
Table 17: EtherCAT IP Core resource consumption for typical EtherCAT Devices
NOTE: Register preset is standard. All devices have 2 MII ports including MII Management Interface, DC is 32 bit
wide (2 SyncSignals, 2 LatchSignals).
III-58 Slave Controller – IP Core for Xilinx FPGAs
Page 71

IP Core Signals
Condition
Name
Direction
Description
nRESET
INPUT
Resets all registers of the
IP Core, active low
Reset slave by
ECAT/PDI
RESET_OUT
OUTPUT
Reset by ECAT (reset
register 0x0040), active
high. RESET_OUT has to
trigger nRESET, which
clears RESET_OUT.
CLK25
INPUT
25 MHz clock signal from
PLL (rising edge
synchronous with rising
edge of CLK100)
CLK100
INPUT
100 MHz clock signal from
PLL
8 IP Core Signals
The available signals depend on the IP Core configuration.
8.1 General Signals
Table 18: General Signals
Slave Controller – IP Core for Xilinx FPGAs III-59
Page 72

IP Core Signals
CLK25
EtherCAT IP Core
Ethernet
PHY
MII
CLK25
PLL
CLK_IN CLK25
CLK100
CLK100
Ethernet
PHY
MII
CLK25
25 MHz
Ethernet
PHY
MII
CLK25
FPGA
CLK25
EtherCAT IP Core Ethernet
PHY
RMII
REF_CLK
PLL
CLK_IN CLK25
CLK100
CLK100
Ethernet
PHY
RMII
REF_CLK
50 MHz
CLK50
CLK50
FPGA
CLK25
EtherCAT IP Core
Ethernet
PHY
RGMII
REF_CLK
PLL
CLK_IN CLK25
CLK100
CLK100
Ethernet
PHY
RGMII
REF_CLK
25 MHz
Ethernet
PHY
RGMII
REF_CLK
FPGA
REF_CLK
CLK25_2NS
CLK25_2NS
8.1.1 Clock source example schematics
The EtherCAT IP Core and the Ethernet PHYs have to share the same clock source. The initial
accuracy of the EtherCAT IP clock source has to be 25ppm or better.
Typically, the clock inputs of the EtherCAT IP Core (CLK25, CLK100, and optionally CLK50 or
CLK25_2NS) are sourced by a PLL inside the FPGA. The PLL has to use a configuration which
guarantees a fixed phase relation between clock input and clock outputs, in order to enable TX shift
compensation for the MII TX signals.
Figure 24: EtherCAT IP Core clock source (MII)
Figure 25: EtherCAT IP Core clock source (RMII)
III-60 Slave Controller – IP Core for Xilinx FPGAs
Figure 26: EtherCAT IP Core clock source (RGMII)
Page 73

IP Core Signals
Condition
Name
Direction
Description
PROM_SIZE
INPUT
Sets EEPROM size:
0: up to 16 Kbit EEPROM
1: 32 Kbit-4 Mbit EEPROM
Tristate drivers inside
core (EEPROM/MI)
PROM_CLK
OUTPUT
EEPROM I²C Clock
(output values: 0 or Z)
External tristate drivers
for EEPROM/MI
PROM_CLK
OUTPUT
EEPROM I²C Clock
(output values: 0 or 1)
Tristate drivers inside
core (EEPROM/MI)
PROM_DATA
BIDIR
EEPROM I²C Data
External tristate drivers
for EEPROM/MI
PROM_DATA_IN
INPUT
EEPROM I²C Data:
EEPROM IP Core
PROM_DATA_OUT
OUTPUT
EEPROM I²C Data:
IP Core EEPROM
(always 0)
PROM_DATA_ENA
OUTPUT
0: disable output driver for
PROM_DATA_OUT
1: enable output driver for
PROM_DATA_OUT
PROM_LOADED
OUTPUT
0: EEPROM is not loaded
1: EEPROM is loaded
Condition
Name
Direction
Description
LED_LINK_ACT[0]
OUTPUT
Link/activity LED for
ethernet port 0
2 or 3 communication
ports
LED_LINK_ACT[1]
OUTPUT
Link/activity LED for
ethernet port 1
3 communication ports
LED_LINK_ACT[2]
OUTPUT
Link/activity LED for
Ethernet port 2
RUN_LED enabled
LED_RUN
OUTPUT
RUN LED for device
status.
Always 0 if RUN LED is
deactivated.
RUN_LED enabled and
Extended RUN/ERR
LED enabled
LED_ERR
OUTPUT
ERR LED for device
status.
LED_STATE_RUN
OUTPUT
Connect to RUN pin of
dual-color STATE LED,
connect LED_ERR to
ERR pin of STATE LED
8.2 SII EEPROM Interface Signals
Table 19: SII EEPROM Signals
8.3 LED Signals
Table 20 lists the signals used for the LEDs. The LED signals are active high. All LEDs should be
green.
Table 20: LED Signals
NOTE: The application ERR LED and STATE LED can alternatively be controlled by a µController if required.
Slave Controller – IP Core for Xilinx FPGAs III-61
Page 74

IP Core Signals
Condition
Name
Direction
Description
Distributed Clocks and
SYNC0 enabled
SYNC_OUT0
OUTPUT
DC sync output 0
Distributed Clocks and
SYNC0+1 enabled
SYNC_OUT1
OUTPUT
DC sync output 1
Distributed Clocks and
Latch0 enabled
LATCH_IN0
INPUT
DC latch input 0
Distributed Clocks and
Latch0+1 enabled
LATCH_IN1
INPUT
DC latch input 1
8.4 Distributed Clocks SYNC/LATCH Signals
Table 21 lists the signals used with Distributed Clocks.
Table 21: DC SYNC/LATCH signals
NOTE: SYNC_OUT0/1 are active high/push-pull outputs.
III-62 Slave Controller – IP Core for Xilinx FPGAs
Page 75

IP Core Signals
Condition
Name
Direction
Description
PHY Management
Interface enabled and
Export PHY address as
signals and
not(Independent PHY
addresses)
PHY_OFFSET_VEC[4:0]
INPUT
PHY address offset
PHY Management
Interface enabled and
Export PHY address as
signals and
Independent PHY
addresses
PHY_ADR_PORT0[4:0]
INPUT
PHY address port 0
PHY Management
Interface enabled and
Export PHY address as
signals and
Independent PHY
addresses and Port1
PHY_ADR_PORT1[4:0]
INPUT
PHY address port 1
PHY Management
Interface enabled and
Export PHY address as
signals and
Independent PHY
addresses and Port2
PHY_ADR_PORT2[4:0]
INPUT
PHY address port 2
Port0 enabled
nPHY_RESET_OUT0
OUTPUT
PHY reset port 0 (act. low)
Port1 enabled
nPHY_RESET_OUT1
OUTPUT
PHY reset port 1 (act. low)
Port2 enabled
nPHY_RESET_OUT2
OUTPUT
PHY reset port 2 (act. low)
PHY Management
Interface enabled
MCLK
OUTPUT
PHY management clock
PHY Management
Interface enabled,
Tristate drivers inside
core (EEPROM/MII)
MDIO
BIDIR
PHY management data
PHY Management
Interface enabled,
External tristate drivers
for EEPROM/MI
MDIO_DATA_IN
INPUT
PHY management data:
PHY IP Core
MDIO_DATA_OUT
OUTPUT
PHY management data:
IP Core PHY
MDIO_DATA_ENA
OUTPUT
0: disable output driver for
MDIO_DATA_OUT
1: enable output driver for
MDIO_DATA_OUT
8.5 Physical Layer Interface
The IP Core is connected with Ethernet PHYs using MII/RMII/RGMII interfaces.
Table 22 lists the general PHY interface signals.
Table 22: Physical Layer General
NOTE: MDIO must have a pull-up resistor (4.7kΩ recommended for ESCs).
Slave Controller – IP Core for Xilinx FPGAs III-63
Page 76

IP Core Signals
Condition
Name
Direction
Description
Port0 = MII
nMII_LINK0
INPUT
0: 100 Mbit/s (Full
Duplex) link at port 0
1: no link at port 0
MII_RX_CLK0
INPUT
Receive clock port 0
MII_RX_DV0
INPUT
Receive data valid port 0
MII_RX_DATA0[3:0]
INPUT
Receive data port 0
MII_RX_ERR0
INPUT
Receive error port 0
MII_TX_ENA0
OUTPUT
Transmit enable port 0
MII_TX_DATA0[3:0]
OUTPUT
Transmit data port 0
Port0 = MII and TX
Shift activated
MII_TX_CLK0
INPUT
Transmit clock port 0 for
automatic TX Shift
configuration. Set to 0 for
manual TX Shift
configuration.
MII_TX_SHIFT0[1:0]
INPUT
Manual TX shift
configuration port 0.
Additional TX signal delay:
00: 0 ns
01: 10 ns
10: 20 ns
11: 30 ns
Port1 = MII
nMII_LINK1
INPUT
0: 100 Mbit/s (Full
Duplex) link at port 1
1: no link at port 1
MII_RX_CLK1
INPUT
Receive clock port 1
MII_RX_DV1
INPUT
Receive data valid port 1
MII_RX_DATA1[3:0]
INPUT
Receive data port 1
MII_RX_ERR1
INPUT
Receive error port 1
MII_TX_ENA1
OUTPUT
Transmit enable port 1
MII_TX_DATA1[3:0]
OUTPUT
Transmit data port 1
Port1 = MII and TX
Shift activated
MII_TX_CLK1
INPUT
Transmit clock port 1 for
automatic TX Shift
configuration. Set to 0 for
manual TX Shift
configuration.
MII_TX_SHIFT1[1:0]
INPUT
Manual TX shift
configuration port 1.
Additional TX signal delay:
00: 0 ns
01: 10 ns
10: 20 ns
11: 30 ns
8.5.1 MII Interface
Table 23 lists the signals used with MII. The TX_CLK signals of the PHYs are not connected to the IP
Core unless TX Shift automatic configuration is enabled.
Table 23: PHY Interface MII
III-64 Slave Controller – IP Core for Xilinx FPGAs
Page 77

IP Core Signals
Condition
Name
Direction
Description
Port2 = MII
nMII_LINK2
INPUT
0: 100 Mbit/s (Full
Duplex) link at port 2
1: no link at port 2
MII_RX_CLK2
INPUT
Receive clock port 2
MII_RX_DV2
INPUT
Receive data valid port 2
MII_RX_DATA2[3:0]
INPUT
Receive data port 2
MII_RX_ERR2
INPUT
Receive error port 2
MII_TX_ENA2
OUTPUT
Transmit enable port 2
MII_TX_DATA2[3:0]
OUTPUT
Transmit data port 2
Port2 = MII and TX
Shift activated
MII_TX_CLK2
INPUT
Transmit clock port 2 for
automatic TX Shift
configuration. Set to 0 for
manual TX Shift
configuration.
MII_TX_SHIFT2[1:0]
INPUT
Manual TX shift
configuration port 2.
Additional TX signal delay:
00: 0 ns
01: 10 ns
10: 20 ns
11: 30 ns
Slave Controller – IP Core for Xilinx FPGAs III-65
Page 78
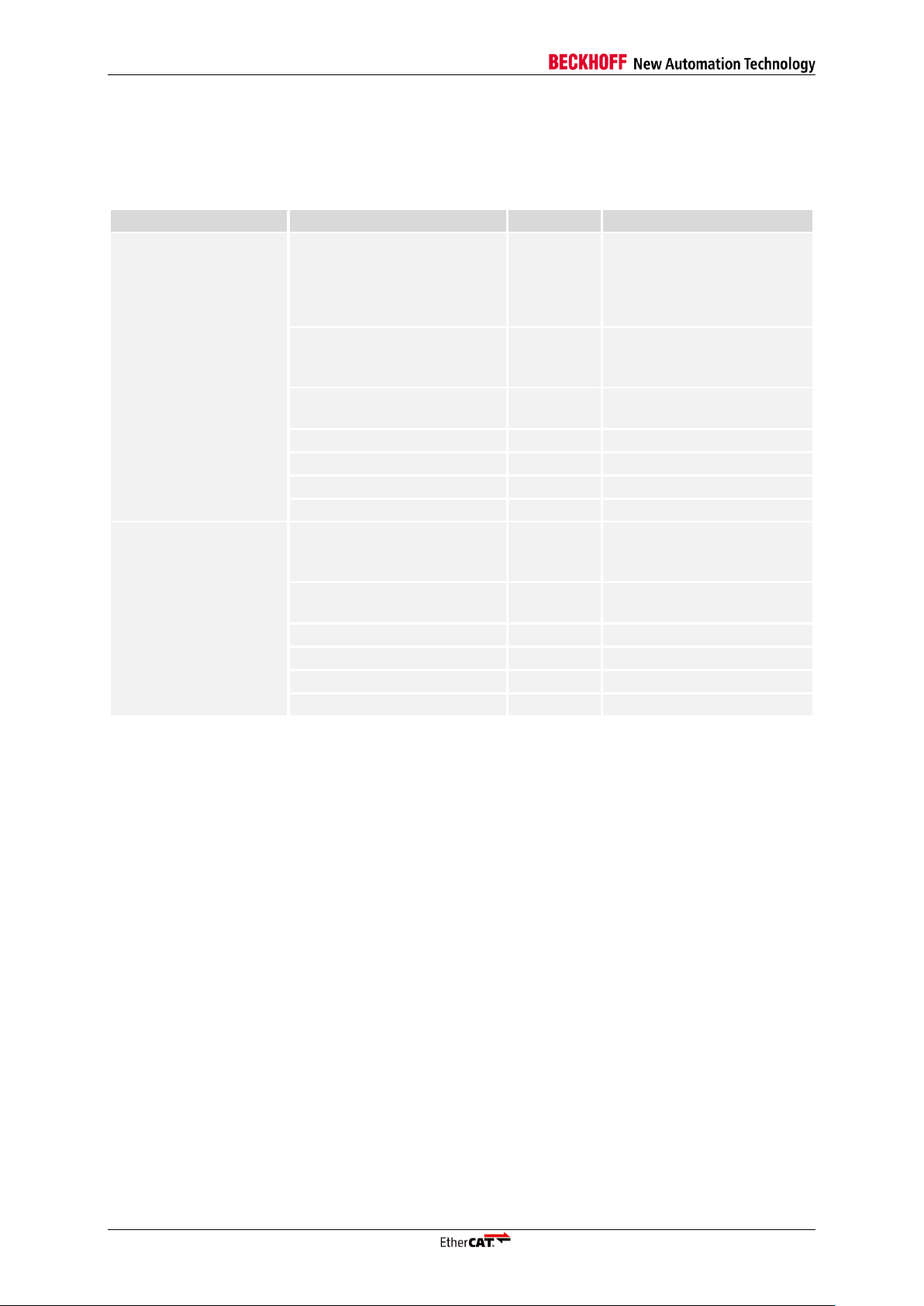
IP Core Signals
Condition
Name
Direction
Description
Selected
communication
interface Port0/Port1 =
RMII
CLK50
INPUT
50 MHz reference clock
signal from PLL (rising edge
synchronous with rising
edge of CLK100), also
connected to PHY
nRMII_LINK0
INPUT
0: 100 Mbit/s (Full
Duplex) link at port 0
1: no link at port 0
RMII_RX_DV0
INPUT
Carrier sense/receive data
valid port 0
RMII_RX_DATA0[1:0]
INPUT
Receive data port 0
RMII_RX_ERR0
INPUT
Receive error port 0
RMII_TX_ENA0
OUTPUT
Transmit enable port 0
RMII_TX_DATA0[1:0]
OUTPUT
Transmit data port 0
2 communication ports
and
selected
communication
interface Port1 = RMII
nRMII_LINK1
INPUT
0: 100 Mbit/s (Full
Duplex) link at port 1
1: no link at port 1
RMII_RX_DV1
INPUT
Carrier sense/receive data
valid port 1
RMII_RX_DATA1[1:0]
INPUT
Receive data port 1
RMII_RX_ERR1
INPUT
Receive error port 1
RMII_TX_ENA1
OUTPUT
Transmit enable port 1
RMII_TX_DATA1[1:0]
OUTPUT
Transmit data port 1
8.5.2 RMII Interface
Table 24 lists the signals used with RMII.
Table 24: PHY Interface RMII
III-66 Slave Controller – IP Core for Xilinx FPGAs
Page 79

IP Core Signals
Condition
Name
Direction
Description
Port0 =
RGMII
CLK25_2NS
INPUT
25 MHz clock signal from
PLL (rising edge 2 ns after
rising edge of CLK25),
used for RGMII GTX_CLK
nRGMII_LINK0
INPUT
0: 100 Mbit/s (Full
Duplex) link at port 0
1: no link at port 0
RGMII_RX_CLK0
INPUT
Receive clock port 0
RGMII_RX_CTL_DATA_DDR_CLK0
OUTPUT
Receive control/data DDR
input clock port 0
RGMII_RX_CTL_DATA_DDR_NRESET0
OUTPUT
Receive control/data DDR
input reset (act. low) port 0
RGMII_RX_CTL_DDR_L0
INPUT
Receive control DDR input
low port 0
RGMII_RX_CTL_DDR_H0
INPUT
Receive control DDR input
high port 0
RGMII_RX_DATA_DDR_L0
INPUT
Receive data DDR input
low port 0
RGMII_RX_DATA_DDR_H0
INPUT
Receive data DDR input
high port 0
RGMII_TX_CLK_DDR_CLK0
OUTPUT
Transmit clock DDR output
clock port 0
RGMII_TX_CLK_DDR_NRESET0
OUTPUT
Transmit clock DDR output
reset (port 0, act. low)
RGMII_TX_CLK_DDR_L0
OUTPUT
Transmit clock DDR output
low port 0
RGMII_TX_CLK_DDR_H0
OUTPUT
Transmit clock DDR output
high port 0
RGMII_TX_CTL_DATA_DDR_CLK0
OUTPUT
Transmit control/data DDR
output clock port 0
RGMII_TX_CTL_DATA_DDR_NRESET0
OUTPUT
Transmit control/data DDR
output reset (port 0, act.
low)
RGMII_TX_CTL_DDR_L0
OUTPUT
Transmit control DDR
output low port 0
RGMII_TX_CTL_DDR_H0
OUTPUT
Transmit control DDR
output high port 0
RGMII_TX_DATA_DDR_L0
OUTPUT
Transmit data DDR output
low port 0
8.5.3 RGMII Interface
Table 25 lists the signals used with RGMII.
Table 25: PHY Interface RGMII
Slave Controller – IP Core for Xilinx FPGAs III-67
Page 80

IP Core Signals
Condition
Name
Direction
Description
Port1 =
RGMII
nRGMII_LINK1
INPUT
0: 100 Mbit/s (Full
Duplex) link at port 1
1: no link at port 1
RGMII_RX_CLK1
INPUT
Receive clock port 1
RGMII_RX_CTL_DATA_DDR_CLK1
OUTPUT
Receive control/data DDR
input clock port 1
RGMII_RX_CTL_DATA_DDR_NRESET1
OUTPUT
Receive control/data DDR
input reset (port 1, act. low)
RGMII_RX_CTL_DDR_L1
INPUT
Receive control DDR input
low port 1
RGMII_RX_CTL_DDR_H1
INPUT
Receive control DDR input
high port 1
RGMII_RX_DATA_DDR_L1
INPUT
Receive data DDR input
low port 1
RGMII_RX_DATA_DDR_H1
INPUT
Receive data DDR input
high port 1
RGMII_TX_CLK_DDR_CLK1
OUTPUT
Transmit clock DDR output
clock port 1
RGMII_TX_CLK_DDR_NRESET1
OUTPUT
Transmit clock DDR output
reset (port 1, act. low)
RGMII_TX_CLK_DDR_L1
OUTPUT
Transmit clock DDR output
low port 1
RGMII_TX_CLK_DDR_H1
OUTPUT
Transmit clock DDR output
high port 1
RGMII_TX_CTL_DATA_DDR_CLK1
OUTPUT
Transmit control/data DDR
output clock port 1
RGMII_TX_CTL_DATA_DDR_NRESET1
OUTPUT
Transmit control/data DDR
output reset (port 1, act.
low)
RGMII_TX_CTL_DDR_L1
OUTPUT
Transmit control DDR
output low port 1
RGMII_TX_CTL_DDR_H1
OUTPUT
Transmit control DDR
output high port 1
RGMII_TX_DATA_DDR_L1
OUTPUT
Transmit data DDR output
low port 1
III-68 Slave Controller – IP Core for Xilinx FPGAs
Page 81

IP Core Signals
Condition
Name
Direction
Description
Port2 =
RGMII
nRGMII_LINK2
INPUT
0: 100 Mbit/s (Full
Duplex) link at port 2
1: no link at port 2
RGMII_RX_CLK2
INPUT
Receive clock port 2
RGMII_RX_CTL_DATA_DDR_CLK2
OUTPUT
Receive control/data DDR
input clock port 2
RGMII_RX_CTL_DATA_DDR_NRESET2
OUTPUT
Receive control/data DDR
input reset (port 2, act. low)
RGMII_RX_CTL_DDR_L2
INPUT
Receive control DDR input
low port 2
RGMII_RX_CTL_DDR_H2
INPUT
Receive control DDR input
high port 2
RGMII_RX_DATA_DDR_L2
INPUT
Receive data DDR input
low port 2
RGMII_RX_DATA_DDR_H2
INPUT
Receive data DDR input
high port 2
RGMII_TX_CLK_DDR_CLK2
OUTPUT
Transmit clock DDR output
clock port 2
RGMII_TX_CLK_DDR_NRESET2
OUTPUT
Transmit clock DDR output
reset (port 2, act. low)
RGMII_TX_CLK_DDR_L2
OUTPUT
Transmit clock DDR output
low port 2
RGMII_TX_CLK_DDR_H2
OUTPUT
Transmit clock DDR output
high port 2
RGMII_TX_CTL_DATA_DDR_CLK2
OUTPUT
Transmit control/data DDR
output clock port 2
RGMII_TX_CTL_DATA_DDR_NRESET2
OUTPUT
Transmit control/data DDR
output reset (port 2, act.
low)
RGMII_TX_CTL_DDR_L2
OUTPUT
Transmit control DDR
output low port 2
RGMII_TX_CTL_DDR_H2
OUTPUT
Transmit control DDR
output high port 2
RGMII_TX_DATA_DDR_L2
OUTPUT
Transmit data DDR output
low port 2
Slave Controller – IP Core for Xilinx FPGAs III-69
Page 82

IP Core Signals
Condition
Name
Direction
Description
PDI_SOF
OUTPUT
Ethernet Start-of-Frame if
1
PDI_EOF
OUTPUT
Ethernet End-of-Frame if 1
PDI_WD_TRIGGER
OUTPUT
Process Data Watchdog
trigger if 1
PDI_WD_STATE
OUTPUT
Process Data Watchdog
state
0: Expired
1: Not expired
GPIO Bytes > 0
PDI_GPI[8*Bytes-1:0]
INPUT
General purpose inputs
(width configurable, 1/2/4/8
Bytes)
GPIO Bytes > 0
PDI_GPO[8*Bytes-1:0]
OUTPUT
General purpose outputs
(width N:0 configurable,
1/2/4/8 Bytes)
Condition
Name
Direction
Description
Byte 0 is Output
PDI_DIGI_DATA_OUT0 [7:0]
OUTPUT
Digital output byte 0
Byte 0 is Input
PDI_DIGI_DATA_IN0 [7:0]
INPUT
Digital input byte 0
Byte 1 is Output
PDI_DIGI_DATA_OUT1[7:0]
OUTPUT
Digital output byte 1
Byte 1 is Input
PDI_DIGI_DATA_IN1[7:0]
INPUT
Digital input byte 1
Byte 2 is Output
PDI_DIGI_DATA_OUT2[7:0]
OUTPUT
Digital output byte 2
Byte 2 is Input
PDI_DIGI_DATA_IN2[7:0]
INPUT
Digital input byte 2
Byte 3 is Output
PDI_DIGI_DATA_OUT3 [7:0]
OUTPUT
Digital output byte 3
Byte 3 is Input
PDI_DIGI_DATA_IN3[7:0]
INPUT
Digital input byte 3
If both, digital input and
output selected
PDI_DIGI_DATA_ENA
OUTPUT
Digital output enable
any digital input
selected and Input
mode=Latch with ext.
signal
PDI_DIGI_LATCH_IN
INPUT
Latch digital input at rising
edge
any digital output
selected
PDI_DIGI_OE_EXT
INPUT
External output enable
PDI_DIGI_OUTVALID
OUTPUT
Output event: output valid
8.6 PDI Signals
8.6.1 General PDI Signals
Table 27 lists the signals available independent of the PDI configuration.
Table 26: General PDI Signals
8.6.2 Digital I/O Interface
Table 27 lists the signals used with the Digital I/O PDI.
Table 27: Digital I/O PDI
III-70 Slave Controller – IP Core for Xilinx FPGAs
Page 83

IP Core Signals
Condition
Name
Direction
Description
SPI PDI
PDI_SPI_CLK
INPUT
SPI clock
PDI_SPI_SEL
INPUT
SPI slave select
PDI_SPI_DI
INPUT
SPI slave data in (MOSI)
PDI_SPI_IRQ
OUTPUT
SPI interrupt
Tristate drivers inside
core (SPI
configuration)
PDI_SPI_DO
OUTPUT
SPI slave data out (MISO)
External tristate drivers
PDI_SPI_DO_OUT
OUTPUT
SPI slave data out:
IP Core µC
PDI_SPI_DO_ENA
OUTPUT
0: disable output driver for
PDI_SPI_DO_OUT
1: enable output driver for
PDI_SPI_DO_OUT
Condition
Name
Direction
Description
8/16 Bit µC
PDI_uC_ADR[15:0]
INPUT
µC address bus
PDI_uC_nBHE
INPUT
µC byte high enable
PDI_uC_nRD
INPUT
µC read access
PDI_uC_nWR
INPUT
µC write access
PDI_uC_nCS
INPUT
µC chip select
PDI_uC_IRQ
OUTPUT
Interrupt
PDI_uC_BUSY
OUTPUT
PDI busy
PDI_uC_DATA_ENA
OUTPUT
0: disable output driver for
PDI_uC_DATA_OUT
1: enable output driver for
PDI_uC_DATA_OUT
8.6.3 SPI Slave Interface
Table 28 used with an SPI PDI.
Table 28: SPI PDI
8.6.4 Asynchronous 8/16 Bit µController Interface
Table 29 lists the signals used with both, 8 Bit and 16 Bit asynchronous µController PDI.
Table 29: 8/16 Bit µC PDI
Slave Controller – IP Core for Xilinx FPGAs III-71
Page 84

IP Core Signals
Condition
Name
Direction
Description
Tristate drivers inside
core (µController
configuration)
PDI_uC_DATA[7:0]
BIDIR
µC data bus
External tristate drivers
PDI_uC_DATA_IN[7:0]
INPUT
µC data bus:
µC IP Core
PDI_uC_DATA_OUT[7:0]
OUTPUT
µC data bus :
IP Core µC
Condition
Name
Direction
Description
Tristate drivers inside
core (µController
configuration)
PDI_uC_DATA[15:0]
BIDIR
µC data bus
External tristate drivers
PDI_uC_DATA_IN[15:0]
INPUT
µC data bus:
µC IP Core
PDI_uC_DATA_OUT[15:0]
OUTPUT
µC data bus:
IP Core µC
8.6.4.1 8 Bit µController Interface
Table 30 lists the signals used with an 8 Bit µC PDI.
Table 30: 8 Bit µC PDI
8.6.4.2 16 Bit µController Interface
Table 31 lists the signals used with a 16 Bit µC PDI.
Table 31: 16 Bit µC PDI
III-72 Slave Controller – IP Core for Xilinx FPGAs
Page 85

IP Core Signals
Condition
Name
Direction
Description
PLB
C_SPLB_BASEADDR
GENERIC
PLB base address
C_SPLB_HIGHADDR
GENERIC
PLB end address
C_SPLB_DWIDTH
GENERIC
PLB data bus width (only 32
supported)
C_SPLB_CLK_PERIOD_PS
GENERIC
PLB bus clock period in ps (≤ 40,000)
C_SPLB_NUM_MASTERS
GENERIC
Number of masters
C_SPLB_MID_WIDTH
GENERIC
Width of master ID
C_SPLB_P2P
GENERIC
Peer-to-peer system
PDI_PLB_SPLB_Clk
INPUT
PLB bus clock
PDI_PLB_SPLB_Rst
INPUT
PLB bus reset (replaces nRESET)
PDI_PLB_ABus[0:31]
INPUT
PLB address bus
PDI_PLB_UABus[0:31]
INPUT
PLB upper address bus (not
supported)
PDI_PLB_PAValid
INPUT
PLB primary address valid
PDI_PLB_SAValid
INPUT
PLB secondary address valid
(ignored)
PDI_PLB_rdPrim
INPUT
PLB secondary to primary read
request (ignored)
PDI_PLB_wrPrim
INPUT
PLB secondary to primary write
request (ignored)
PDI_PLB_masterID
[0:C_SPLB_MID_WIDTH-1]
INPUT
PLB master ID
PDI_PLB_abort
INPUT
PLB abort bus (ignored)
PDI_PLB_busLock
INPUT
PLB bus lock (ignored)
PDI_PLB_RNW
INPUT
PLB read not write
PDI_PLB_BE
(0:(C_SPLB_DWIDTH/8)-1)
INPUT
PLB byte enables
PDI_PLB_MSize
INPUT
PLB master data bus size (ignored)
PDI_PLB_size
INPUT
PLB transfer size (must be 0000)
PDI_PLB_type
INPUT
PLB transfer type (must be 0)
PDI_PLB_lockErr
INPUT
PLB lock error (ignored)
PDI_PLB_wrDBus
(0:C_SPLB_DWIDTH-1)
INPUT
PLB write data bus
PDI_PLB_wrBurst
INPUT
PLB burst write transfer (ignored)
PDI_PLB_rdBurst
INPUT
PLB burst read transfer (ignored)
PDI_PLB_wrPendReq
INPUT
PLB pending write bus request
(ignored)
PDI_PLB_rdPendReq
INPUT
PLB pending read bus request
(ignored)
8.6.5 PLB Processor Local Bus
Table 32 lists the signals used with the PLB v4.6 PDI.
Table 32: PLB PDI
Slave Controller – IP Core for Xilinx FPGAs III-73
Page 86

IP Core Signals
Condition
Name
Direction
Description
PDI_PLB_wrPendPri(0:1)
INPUT
PLB pending write request priority
(ignored)
PDI_PLB_rdPendPri(0:1)
INPUT
PLB pending read request priority
(ignored)
PDI_PLB_reqPri(0:1)
INPUT
PLB current request priority (ignored)
PDI_PLB_TAttribute(0:15)
INPUT
PLB transfer attribute bus (must be
0x0000)
PDI_PLB_Sl_addrAck
OUTPUT
Slave address acknowledge
PDI_PLB_Sl_SSize(0:1)
OUTPUT
Slave data bus size (always 00)
PDI_PLB_Sl_wait
OUTPUT
Slave wait
PDI_PLB_Sl_rearbitrate
OUTPUT
Slave rearbitrate bus (always 0)
PDI_PLB_Sl_wrDAck
OUTPUT
Slave write data acknowledge
PDI_PLB_Sl_wrComp
OUTPUT
Slave write transfer complete
PDI_PLB_Sl_wrBTerm
OUTPUT
Slave terminate write burst transfer
(always 0)
PDI_PLB_Sl_rdDBus
(0:C_SPLB_DWIDTH-1)
OUTPUT
Slave read data bus
PDI_PLB_Sl_rdWdAddr(0:3)
OUTPUT
Slave read word address (always 0)
PDI_PLB_Sl_rdDAck
OUTPUT
Slave read data acknowledge
PDI_PLB_Sl_rdComp
OUTPUT
Slave read transfer complete
PDI_PLB_Sl_rdBTerm
OUTPUT
Slave terminate read burst transfer
(always 0)
PDI_PLB_Sl_MBusy
(0:C_SPLB_NUM_MASTERS-1)
OUTPUT
Slave busy
PDI_PLB_Sl_MWrErr
(0:C_SPLB_NUM_MASTERS-1)
OUTPUT
Slave write error (always 0)
PDI_PLB_Sl_MRdErr
(0:C_SPLB_NUM_MASTERS-1)
OUTPUT
Slave read error (always 0)
PDI_PLB_Sl_MIRQ
(0:C_SPLB_NUM_MASTERS-1)
OUTPUT
Slave interrupt (always 0)
PDI_PLB_IRQ_MAIN
OUTPUT
Interrupt
The address range of the EtherCAT IP core should span at least 64 Kbyte (e.g., C_BASEADDR =
0x00010000 and C_HIGHADDR=0x0001FFFF). A larger address range results in less address
decoding logic.
III-74 Slave Controller – IP Core for Xilinx FPGAs
Page 87

IP Core Signals
Condition
Name
Direction
Description
PLB
PRODUCT_ID0
GENERIC
Product ID value
PRODUCT_ID1
GENERIC
Product ID value
PRODUCT_ID2
GENERIC
Product ID value
PRODUCT_ID3
GENERIC
Product ID value
NUM_FMMU
GENERIC
Number of FMMUs (0-8)
NUM_SYNC
GENERIC
Numer of SyncManagers
(0-8)
SIZE_DPRAM
GENERIC
Size of Process Data RAM
(0/1/2/4/8/16/32/60)
PROM_CLK_O
OUTPUT
Equals
PROM_CLK
PROM_CLK_T
OUTPUT
0: enable output driver for
PROM_CLK_O
1: disable output driver for
PROM_CLK_O
PROM_DATA_I
INPUT
Equals
PROM_DATA_IN
PROM_DATA_O
OUTPUT
Equals
PROM_DATA_OUT
PROM_DATA_T
OUTPUT
Equals
NOT(PROM_DATA_ENA)
MDIO_I
INPUT
Equals
MDIO_DATA_IN
MDIO_O
OUTPUT
Equals
MDIO_DATA_OUT
MDIO_T
OUTPUT
Equals
NOT(MDIO_DATA_ENA)
Table 33: PLB PDI additional signals of XPS/EDK pcores
NOTE: The PROM_CLK/PROM_DATA/MDIO signals with suffix _I/_O/_T are duplicates of the general tristate
signals _IN/_OUT/_ENA of PROM_CLK/PROM_DATA/MDIO_DATA. They are introduced because XPS expects
the suffixes _I/_O/_T for tristate drivers. Use either all _IN/_OUT_ENA signals or all _I/_O/_T signals. Connect
unused inputs to ‘0’ (they have in internal logic OR).
Slave Controller – IP Core for Xilinx FPGAs III-75
Page 88

Condition
Name
Direction
Description
AXI4
or
AXI4 LITE
C_S_AXI_DATA_WIDTH
GENERIC
AXI data bus width
(8/16/32/64 bit)
C_S_AXI_ACLK_FREQ_HZ
GENERIC
AXI bus clock frequency in
Hz (>= 25,000)
C_S_AXI_ADDR_WIDTH
GENERIC
AXI address width (>= 16
bit, only 16 bit are used)
C_S_AXI_ID_WIDTH
GENERIC
AXI ID width
PDI_AXI_ACLK
INPUT
AXI bus clock
PDI_AXI_AWADDR[15:0]
INPUT
Write address
PDI_AXI_AWPROT[2:0]
INPUT
Write protection type
PDI_AXI_AWREGION[3:0]
INPUT
Write region identifier
PDI_AXI_AWQOS[3:0]
INPUT
Write QoS identifier
PDI_AXI_AWVALID
INPUT
Write address valid
PDI_AXI_AWREADY
OUTPUT
Write address ready
PDI_AXI_WDATA
[PDI_EXT_BUS_WIDTH-1:0]
INPUT
Write data
PDI_AXI_WSTRB
[PDI_EXT_BUS_WIDTH/8-1:0]
INPUT
Write data byte enable
PDI_AXI_WVALID
INPUT
Write data valid
PDI_AXI_WREADY
OUTPUT
Write data ready
PDI_AXI_BRESP[1:0]
OUTPUT
Write response
PDI_AXI_BVALID
OUTPUT
Write response valid
PDI_AXI_BREADY
INPUT
Write response ready
PDI_AXI_ARADDR[15:0]
INPUT
Read address
PDI_AXI_ARPROT[2:0]
INPUT
Read protection type
PDI_AXI_ARREGION[3:0]
INPUT
Read region identifier
PDI_AXI_ARQOS[3:0]
INPUT
Read QoS identifier
PDI_AXI_ARVALID
INPUT
Read address valid
PDI_AXI_ARREADY
OUTPUT
Read address ready
PDI_AXI_RDATA
[PDI_EXT_BUS_WIDTH-1:0]
OUTPUT
Read data
PDI_AXI_RRESP[1:0]
OUTPUT
Read response
PDI_AXI_RVALID
OUTPUT
Read data valid
PDI_AXI_RREADY
INPUT
Read data ready
PDI_AXI_IRQ_MAIN
OUTPUT
Interrupt
PDI_AXI_AWID
[PDI_BUS_ID_WIDTH-1:0]
INPUT
Write address ID
PDI_AXI_AWLEN[7:0]
INPUT
Write length
PDI_AXI_AWSIZE[2:0]
INPUT
Write size
PDI_AXI_AWBURST[1:0]
INPUT
Write burst type
PDI_AXI_AWLOCK
INPUT
Write lock
PDI_AXI_AWCACHE[3:0]
INPUT
Write cache type
PDI_AXI_WLAST
INPUT
Write data last
IP Core Signals
8.6.6 AXI4 / AXI4 LITE On-Chip Bus
Table 34 lists the signals used with the AXI4 and AXI4 LITE PDI.
Table 34: AXI4 / AXI4 LITE PDI
III-76 Slave Controller – IP Core for Xilinx FPGAs
Page 89

IP Core Signals
Condition
Name
Direction
Description
AXI4
PDI_AXI_BID[PDI_BUS_ID_WIDTH-1:0]
OUTPUT
Write response ID
PDI_AXI_ARID[PDI_BUS_ID_WIDTH-1:0]
INPUT
Read address ID
PDI_AXI_ARLEN[7:0]
INPUT
Read length
PDI_AXI_ARSIZE[2:0]
INPUT
Read size
PDI_AXI_ARBURST[1:0]
INPUT
Read burst type
PDI_AXI_ARLOCK
INPUT
Read lock
PDI_AXI_ARCACHE[3:0]
INPUT
Read cache type
PDI_AXI_RID
[PDI_BUS_ID_WIDTH-1:0]
OUTPUT
Read data ID
PDI_AXI_RLAST
OUTPUT
Read data last
Condition
Name
Direction
Description
AXI4
or
AXI4 LITE
PRODUCT_ID0
GENERIC
Product ID value
PRODUCT_ID1
GENERIC
Product ID value
PRODUCT_ID2
GENERIC
Product ID value
PRODUCT_ID3
GENERIC
Product ID value
NUM_FMMU
GENERIC
Number of FMMUs (0-8)
NUM_SYNC
GENERIC
Numer of SyncManagers
(0-8)
SIZE_DPRAM
GENERIC
Size of Process Data RAM
(0/1/2/4/8/16/32/60)
C_S_AXI_BASEADDR
GENERIC
Unused AXI base address
C_S_AXI_HIGHADDR
GENERIC
Unused AXI high address
PROM_CLK_O
OUTPUT
Equals
PROM_CLK
PROM_CLK_T
OUTPUT
0: enable output driver for
PROM_CLK_O
1: disable output driver for
PROM_CLK_O
PROM_DATA_I
INPUT
Equals
PROM_DATA_IN
PROM_DATA_O
OUTPUT
Equals
PROM_DATA_OUT
PROM_DATA_T
OUTPUT
Equals
NOT(PROM_DATA_ENA)
MDIO_I
INPUT
Equals
MDIO_DATA_IN
MDIO_O
OUTPUT
Equals
MDIO_DATA_OUT
MDIO_T
OUTPUT
Equals
NOT(MDIO_DATA_ENA)
Table 35: AXI4 / AXI4 LITE PDI additional signals of XPS/EDK pcores
NOTE: The PROM_CLK/PROM_DATA/MDIO signals with suffix _I/_O/_T are duplicates of the general tristate
signals _IN/_OUT/_ENA of PROM_CLK/PROM_DATA/MDIO_DATA. They are introduced because XPS expects
the suffixes _I/_O/_T for tristate drivers. Use either all _IN/_OUT_ENA signals or all _I/_O/_T signals. Connect
unused inputs to ‘0’ (they have in internal logic OR).
Slave Controller – IP Core for Xilinx FPGAs III-77
Page 90

Ethernet Interface
EtherCAT
device
MCLK
MDIO
PHY_OFFSET_VEC[4:0]
PHY_ADR_PORT0[4:0]
PHY_ADR_PORT1[4:0]
PHY_ADR_PORT2[4:0]
Signal
Direction
Description
MCLK
OUT
Management Interface clock (alias MCLK)
MDIO
BIDIR
Management Interface data (alias MDIO)
PHY_OFFSET_VEC[4:0]
INPUT
PHY address offset (consecutive PHY addresses,
address of port 0)
PHY_ADR_PORT0[4:0]
INPUT
PHY address port 0 (individual PHY addresses)
PHY_ADR_PORT1[4:0]
INPUT
PHY address port 1 (individual PHY addresses)
PHY_ADR_PORT2[4:0]
INPUT
PHY address port 2 (individual PHY addresses)
9 Ethernet Interface
The IP Core is connected with Ethernet PHYs using MII, RMII, or RGMII interfaces. MII is
recommended since the PHY delay (and delay jitter) is smaller in comparison to RMII and RGMII.
9.1 PHY Management interface
9.1.1 PHY Management Interface Signals
The PHY management interface of the IP Core has the following signals:
Figure 27: PHY management Interface signals
Table 36: PHY management Interface signals
MDIO must have a pull-up resistor (4.7 kΩ recommended for ESCs), either integrated into the ESC or
externally. MCLK is driven rail-to-rail, idle value is High.
9.1.2 PHY Address Configuration
The EtherCAT IP Core addresses Ethernet PHYs typically using logical port number plus PHY
address offset. Ideally, the Ethernet PHY addresses should correspond with the logical port number,
so PHY addresses 0-2 are used.
A PHY address offset of 0-31 can be applied which moves the PHY addresses to any consecutive
address range. The IP Core expects logical port 0 to have PHY address 0 plus PHY address offset
(and so on).
Alternatively, the PHY addresses can be configured individually for each port.
Since the PHY addresses are static in most cases, they are set in the MegaWizard Plugin. If the PHY
addresses are changing dynamically, their configuration can be done by signals (Export PHY address
signals feature enabled).
III-78 Slave Controller – IP Core for Xilinx FPGAs
Page 91

Ethernet Interface
EtherCAT IP Core
Ethernet PHY
MDIO_IN
MCLK
MDIO
MDC
4K7
V
CC I/O
Ethernet PHY
MDIO
MDC
4K7
V
CC I/O
MDIO_OUT
MDIO_ENA
&
FPGA
Parameter
Min
Typ
Max
Comment
PRELIMINARY TIMING
t
MI_startup
1.34 ms
Time between nPHY_RESET_OUT reset end and
the first access via management interface
t
Clk
400 ns
MI_CLK period
t
Write
~ 25.6 µs
MI Write access time
t
Read
~ 25.4 µs
MI Read access time
9.1.3 Separate external MII management interfaces
If two separate external MII management interfaces are to be connected to the single MII
management interface of the EtherCAT IP Core, some glue logic has to be added. Disable internal TriState drivers for the MII management bus and combine the signals according to the following figure.
Take care of proper PHY address configuration: the PHYs need different PHY addresses.
9.1.4 MII management timing specifications
For MII Management Interface timing diagrams refer to Section I.
Figure 28: Example schematic with two individual MII management interfaces
Table 37: MII management timing characteristics
Slave Controller – IP Core for Xilinx FPGAs III-79
Page 92

Ethernet Interface
9.2 MII Interface
The MII interface of the IP Core is optimized for low processing/forwarding delays by omitting a
transmit FIFO. To allow this, the IP Core has additional requirements to Ethernet PHYs, which are
easily accomplished by several PHY vendors.
Refer to “Section I – Technology” for Ethernet PHY requirements.
Additional information regarding the IP Core:
The clock source of the PHYs is the same as for the FPGA (25 MHz quartz oscillator)
The signal polarity of nMII_LINK is not configurable inside the IP Core, nMII_LINK is active low. If
necessary, the signal polarity must be swapped by user logic outside the IP Core.
The IP Core can be configured to use the MII management interface for link detection and link
configuration.
The IP Core supports arbitrary PHY addresses
For details about the ESC MII Interface refer to Section I.
III-80 Slave Controller – IP Core for Xilinx FPGAs
Page 93

Ethernet Interface
EtherCAT
device
MII_RX_CLK
nMII_LINK
MII_RX_DV
MII_RX_ERR
MII_RX_DATA[3:0]
MII_TX_ENA
MII_TX_DATA[3:0]
MII_TX_CLK
MII_TX_SHIFT[1:0]
NPHY_RESET_OUT
Signal
Direction
Description
nMII_LINK
IN
Input signal provided by the PHY if a 100 Mbit/s (Full
Duplex) link is established (alias LINK_MII)
MII_RX_CLK
IN
Receive Clock
MII_RX_DV
IN
Receive data valid
MII_RX_DATA[3:0]
IN
Receive data (alias RXD)
MII_RX_ERR
IN
Receive error (alias RX_ER)
MII_TX_ENA
OUT
Transmit enable (alias TX_EN)
MII_TX_DATA[3:0]
OUT
Transmit data (alias TXD)
MII_TX_CLK
IN
Transmit Clock for automatic TX Shift compensation
MII_TX_SHIFT[1:0]
IN
Manual TX Shift compensation with additional registers
NPHY_RESET_OUT
OUT
PHY reset (akt. low), resets PHY while ESC is in Reset
state, and, for FX PHYs, if Enhanced Link Detection
detects a lost link
9.2.1 MII Interface Signals
The MII interface of the IP Core has the following signals:
Figure 29: MII Interface signals
Table 38: MII Interface signals
NOTE: A pull-down resistor is typically required for NPHY_RESET_OUT to hold the PHY in reset state while the
FPGA is configured, since this pin is floating or even pulled up during that time.
Slave Controller – IP Core for Xilinx FPGAs III-81
Page 94

Ethernet Interface
CLK_IN
TX_CLK
MII_TX_ENA
MII_TX_DATA
MII_TX_ENA
MII_TX_DATA
MII_TX_ENA
MII_TX_DATA
MII_TX_ENA
MII_TX_DATA
MII_TX_ENA
MII_TX_DATA
MII_TX_ENA
MII_TX_DATA
MII_TX_ENA
MII_TX_DATA
MII_TX_ENA
MII_TX_DATA
MII_TX_ENA
MII_TX_DATA
MII_TX_ENA
MII_TX_DATA
MII_TX_ENA
MII_TX_DATA
MII_TX_ENA
MII_TX_DATA
MII_TX_ENA
MII_TX_DATA
MII_TX_ENA
MII_TX_DATA
MII_TX_ENA
MII_TX_DATA
MII_TX_ENA
MII_TX_DATA
t
CLK25
10 ns
20 ns
30 ns
t
TX_delay
t
PHY_TX_hold
t
PHY_TX_setup
Wrong: Setup/Hold Timing violated
Good: Setup/Hold Timing met
t
CLK25
t
PHY_TX_CLK
MII_TX_ENA, MII_TX_DATA
MII_TX_ENA, MII_TX_DATA
+10 ns additional delay
MII_TX_ENA, MII_TX_DATA
+20 ns additional delay
MII_TX_ENA, MII_TX_DATA
+30 ns additional delay
9.2.2 TX Shift Compensation
Since IP Core and the Ethernet PHYs share the same clock source, TX_CLK from the PHY has a
fixed phase relation to MII_TX_ENA/MII_TX_DATA from the IP Core. Thus, TX_CLK is not connected
and the delay of a TX FIFO inside the IP Core is saved.
In order to fulfill the setup/hold requirements of the PHY, the phase shift between TX_CLK and
MII_TX_ENA/MII_TX_DATA has to be controlled. There are several alternatives:
TX Shift Compensation by specifying/verifying minimum and maximum clock-to-output times for
MII_TX_ENA/MII_TX_DATA with respect to CLK_IN (PHY and PLL clock source).
TX Shift compensation with additional delays for MII_TX_ENA/MII_TX_DATA of 10, 20, or 30 ns.
Such delays can be added using the TX Shift feature and applying MII_TX_SHIFT[1:0].
MII_TX_SHIFT[1:0] determine the delay in multiples of 10 ns for each port. For guaranteed
timings, maximum clock-to-output times for MII_TX_ENA/MII_TX_DATA should be applied, too.
Set MII_TX_CLK to 0 if manual TX Shift compensation is used.
Automatic TX Shift compensation if the TX Shift feature is selected: connect MII_TX_CLK and the
automatic TX Shift compensation will determine correct shift settings. For guaranteed timings,
maximum clock-to-output times for MII_TX_ENA/MII_TX_DATA should be applied, too. Set
manual TX Shift compensation to 0 in this case.
MII_TX_ENA and MII_TX_DATA are generated synchronous to CLK25, although the source registers
are both CLK25 and CLK100 registers.
The PLL has to use a configuration which guarantees a fixed phase relation between clock input and
CLK25/CLK100 output, in order to enable TX shift compensation for the MII TX signals.
Figure 30: MII TX Timing Diagram
III-82 Slave Controller – IP Core for Xilinx FPGAs
Page 95

Ethernet Interface
Parameter
Comment
t
CLK25
25 MHz quartz oscillator (CLK_IN)
t
TX_delay
MII_TX_ENA/MII_TX_DATA[3:0] delay after rising edge of CLK_IN,
depends on synthesis results
t
PHY_TX_CLK
Delay between PHY clock source and TX_CLK output of the PHY,
PHY dependent
t
PHY_TX_setup
PHY setup requirement: TX_ENA/TX_DATA with respect to TX_CLK
(PHY dependent, IEEE802.3 limit is 15 ns)
t
PHY_TX_hold
PHY hold requirement: TX_ENA/TX_DATA with respect to TX_CLK
(PHY dependent, IEEE802.3 limit is 0 ns)
Parameter
Min
Typ
Max
Comment
t
RX_CLK
40 ns ± 100 ppm
RX_CLK period (100 ppm with maximum FIFO
Size only)
t
RX_setup
x3
RX_DV/RX_DATA/RX_D[3:0] valid before rising
edge of RX_CLK
t
RX_hold
x3
RX_DV/RX_DATA/RX_D[3:0] valid after rising
edge of RX_CLK
RX_DV
RX_D[3:0]
RX_ERR
RX_CLK
t
RX_setuptRX_hold
RX signals valid
t
RX_CLK
3
Table 39: MII TX Timing characteristics
If the phase shift between CLK25 and TX_CLK should not be constant for a some special PHYs,
additional FIFOs for MII_TX_ENA/MII_TX_DATA are necessary. The FIFO input uses CLK25, the
FIFO output TX_CLK[0] or TX_CLK[1] respectively.
NOTE: The phase shift can be adjusted by displaying TX_CLK of a PHY and MII_TX_ENA/MII_TX_DATA[3:0] on
an oscilloscope. MII_TX_ENA/MII_TX_DATA[3:0] is allowed to change between 0 ns and 25 ns after a rising
edge of TX_CLK (according to IEEE802.3 – check your PHY’s documentation). Setup phase shift so that
MII_TX_ENA/MII_TX_DATA[3:0] change near the middle of this range. MII_TX_ENA/MII_TX_DATA[3:0] signals
are generated at the same time.
9.2.3 MII Timing specifications
Table 40: MII timing characteristics
Figure 31: MII timing RX signals
EtherCAT IP Core: time depends on synthesis results
Slave Controller – IP Core for Xilinx FPGAs III-83
Page 96

Ethernet Interface
EtherCAT IP Core
Ethernet PHY
MII_RX_DV
MII_RX_DATA[3:0]
MII_RX_ERR
MII_TX_ENA
MII_TX_DATA[3:0]
MII_RX_CLK
RX_DV
RXD[3:0]
RX_ER
TX_EN
TXD[3:0]
RX_CLK
TX_CLK
CLK25
CRS
TX_ER
COL
nMII_LINK LINK_STATUS
!
!
! optional
CLK25
PLL
CLK_IN CLK25
CLK100
CLK100
25 MHz
MII_TX_CLK
! optional
MII_TX_SHIFT[1:0]
00/01/10/11
NPHY_RESET_OUT
NRESET
4K7
9.2.4 MII example schematic
Refer to chapter 8.5.1 for more information on special markings (!). Take care of proper compensation
of the TX_CLK phase shift.
Figure 32: MII example schematic
III-84 Slave Controller – IP Core for Xilinx FPGAs
Page 97
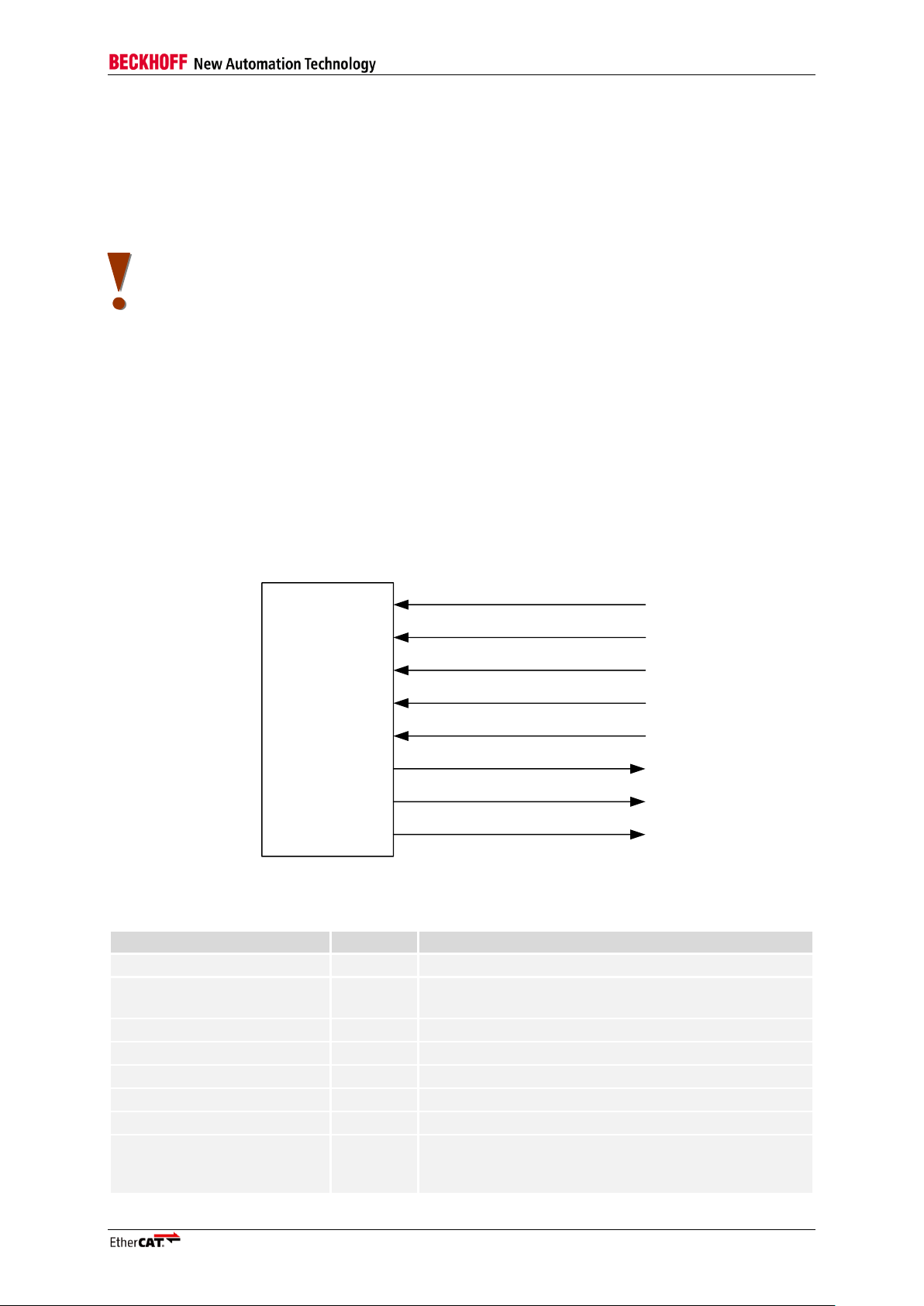
Ethernet Interface
EtherCAT
device
nRMII_LINK
CLK50
RMII_RX_DV
RMII_RX_ERR
RMII_RX_DATA[1:0]
RMII_TX_ENA
RMII_TX_DATA[1:0]
NPHY_RESET_OUT
Signal
Direction
Description
CLK50
IN
RMII RX/TX reference clock (50 MHz)
nRMII_LINK
IN
Input signal provided by the PHY if a 100 Mbit/s (Full
Duplex) link is established (alias LINK_MII)
RMII_RX_DV
IN
Carrier sense/receive data valid
RMII_RX_DATA[1:0]
IN
Receive data (alias RXD)
RMII_RX_ERR
IN
Receive error (alias RX_ER)
RMII_TX_ENA
OUT
Transmit enable (alias TX_EN)
RMII_TX_DATA[1:0]
OUT
Transmit data (alias TXD)
NPHY_RESET_OUT
OUT
PHY reset (akt. low), resets PHY while ESC is in Reset
state, and, for FX PHYs, if Enhanced Link Detection
detects a lost link
9.3 RMII Interface
The IP Core supports RMII with 2 communication ports. Nevertheless, MII is recommended since the
PHY delay (and delay jitter) is smaller in comparison to RMII.
The Beckhoff ESCs have additional requirements to Ethernet PHYs using RMII, which are easily
accomplished by several PHY vendors.
Refer to “Section I – Technology” for Ethernet PHY requirements.
Additional information regarding the IP Core:
The clock source of the PHYs is the same as for the FPGA (25 MHz quartz oscillator)
The signal polarity of nRMII_LINK is not configurable inside the IP Core, nRMII_LINK is active low.
If necessary, the signal polarity must be swapped outside the IP Core.
The IP Core can be configured to use the MII management interface for link detection and link
configuration.
The IP Core supports arbitrary PHY addresses.
For details about the ESC RMII Interface refer to Section I.
9.3.1 RMII Interface Signals
The RMII interface of the IP Core has the following signals:
Figure 33: RMII Interface signals
Table 41: RMII Interface signals
Slave Controller – IP Core for Xilinx FPGAs III-85
Page 98

Ethernet Interface
EtherCAT IP Core
Ethernet PHY
RMII_RX_DV
RMII_RX_DATA[1:0]
RMII_RX_ERR
RMII_TX_ENA
RMII_TX_DATA[1:0]
CRS_DV
RXD[1:0]
RX_ER
TX_EN
TXD[1:0]
REF_CLK
nRMII_LINK LINK_STATUS
!
CLK25
PLL
CLK_IN CLK25
CLK100
CLK100
50 MHz
CLK50
CLK50
NPHY_RESET_OUT
NRESET
4K7
NOTE: A pull-down resistor is typically required for NPHY_RESET_OUT to hold the PHY in reset state while the
FPGA is configured, since this pin is floating or even pulled up during that time.
9.3.2 RMII example schematic
Refer to chapter 8.5.2 for more information on special markings (!). Take care of proper PHY address
configuration.
Figure 34: RMII example schematic
III-86 Slave Controller – IP Core for Xilinx FPGAs
Page 99

Ethernet Interface
9.4 RGMII Interface
The IP Core supports RGMII with1-3 communication ports at 100 Mbit/s. Nevertheless, MII is
recommended since the PHY delay (and delay jitter) is smaller in comparison to RGMII.
The RGMII interface of the EtherCAT IP Core offers signals for attaching DDR input and output cells,
which have to be added by the IP Core user. This approach offers maximum flexibility for the
implementation, which is required because RGMII has tight timing requirements. Please refer to Xilinx
for implementation and constraining guidelines.
The Beckhoff ESCs have additional requirements to Ethernet PHYs using RGMII, which are easily
accomplished by several PHY vendors.
Refer to “Section I – Technology” for Ethernet PHY requirements.
Additional information regarding the IP Core:
The signal polarity of nRGMII_LINK is not configurable inside the IP Core, nRGMII_LINK is active
low. If necessary, the signal polarity must be swapped outside the IP Core.
The IP Core can be configured to use the MII management interface for link detection and link
configuration.
The IP Core supports arbitrary PHY addresses.
A Gigabit Ethernet PHY has to be restricted to establish only 100 Mbit/s links (e.g. by using MI link
detection and configuration).
For details about the ESC RGMII Interface refer to Section I.
9.4.1 RGMII Interface Signals
The RGMII interface of the IP Core has the following signals:
Slave Controller – IP Core for Xilinx FPGAs III-87
Page 100

Ethernet Interface
EtherCAT
device
nRGMII_LINK
CLK25_2NS
RGMII_RX_CLK
RGMII_RX_CTL_DATA_DDR_NRESET
RGMII_RX_CTL_DATA_DDR_CLK
RGMII_RX_CTL_DDR_L
RGMII_RX_CTL_DDR_H
NPHY_RESET_OUT
RGMII_RX_DATA_DDR_L[3:0]
RGMII_RX_DATA_DDR_H[3:0]
RGMII_TX_CLK_DDR_NRESET
RGMII_TX_CLK_DDR_CLK
RGMII_TX_CLK_DDR_L
RGMII_TX_CLK_DDR_H
RGMII_TX_CTL_DATA_DDR_NRESET
RGMII_TX_CTL_DATA_DDR_CLK
RGMII_TX_CTL_DDR_L
RGMII_TX_CTL_DDR_H
RGMII_TX_DATA_DDR_L[3:0]
RGMII_TX_DATA_DDR_H[3:0]
Signal
Dire
ction
Description
CLK25_2NS
IN
25 MHz clock signal from PLL (rising edge 2 ns
after rising edge of CLK25), used for RGMII
GTX_CLK
nRGMII_LINK
IN
Input signal provided by the PHY if a 100 Mbit/s
(Full Duplex) link is established (alias LINK_MII)
RGMII_RX_CLK
IN
Receive clock
RGMII_RX_CTL_DATA_DDR_CLK
OUT
Receive control/data DDR input clock
RGMII_RX_CTL_DATA_DDR_NRESET
OUT
Receive control/data DDR input reset (act. low)
RGMII_RX_CTL_DDR_L
IN
Receive control DDR input low
RGMII_RX_CTL_DDR_H
IN
Receive control DDR input high
RGMII_RX_DATA_DDR_L[3:0]
IN
Receive data DDR input low
RGMII_RX_DATA_DDR_H[3:0]
IN
Receive data DDR input high
RGMII_TX_CLK_DDR_CLK
OUT
Transmit clock DDR output clock
RGMII_TX_CLK_DDR_NRESET
OUT
Transmit clock DDR output reset (act. low)
RGMII_TX_CLK_DDR_L
OUT
Transmit clock DDR output low
RGMII_TX_CLK_DDR_H
OUT
Transmit clock DDR output high
RGMII_TX_CTL_DATA_DDR_CLK
OUT
Transmit control/data DDR output clock
RGMII_TX_CTL_DATA_DDR_NRESET
OUT
Transmit control/data DDR output reset (act.
low)
RGMII_TX_CTL_DDR_L
OUT
Transmit control DDR output low
RGMII_TX_CTL_DDR_H
OUT
Transmit control DDR output high
RGMII_TX_DATA_DDR_L[3:0]
OUT
Transmit data DDR output low
RGMII_TX_DATA_DDR_H[3:0]
OUT
Transmit data DDR output high
NPHY_RESET_OUT
OUT
PHY reset (akt. low), resets PHY while ESC is in
Reset state, and, for FX PHYs, if Enhanced Link
Detection detects a lost link
Figure 35: RGMII Interface signals
Table 42: RGMII Interface signals
NOTE: A pull-down resistor is typically required for NPHY_RESET_OUT to hold the PHY in reset state while the
FPGA is configured, since this pin is floating or even pulled up during that time.
III-88 Slave Controller – IP Core for Xilinx FPGAs
 Loading...
Loading...