

Page 1
X8
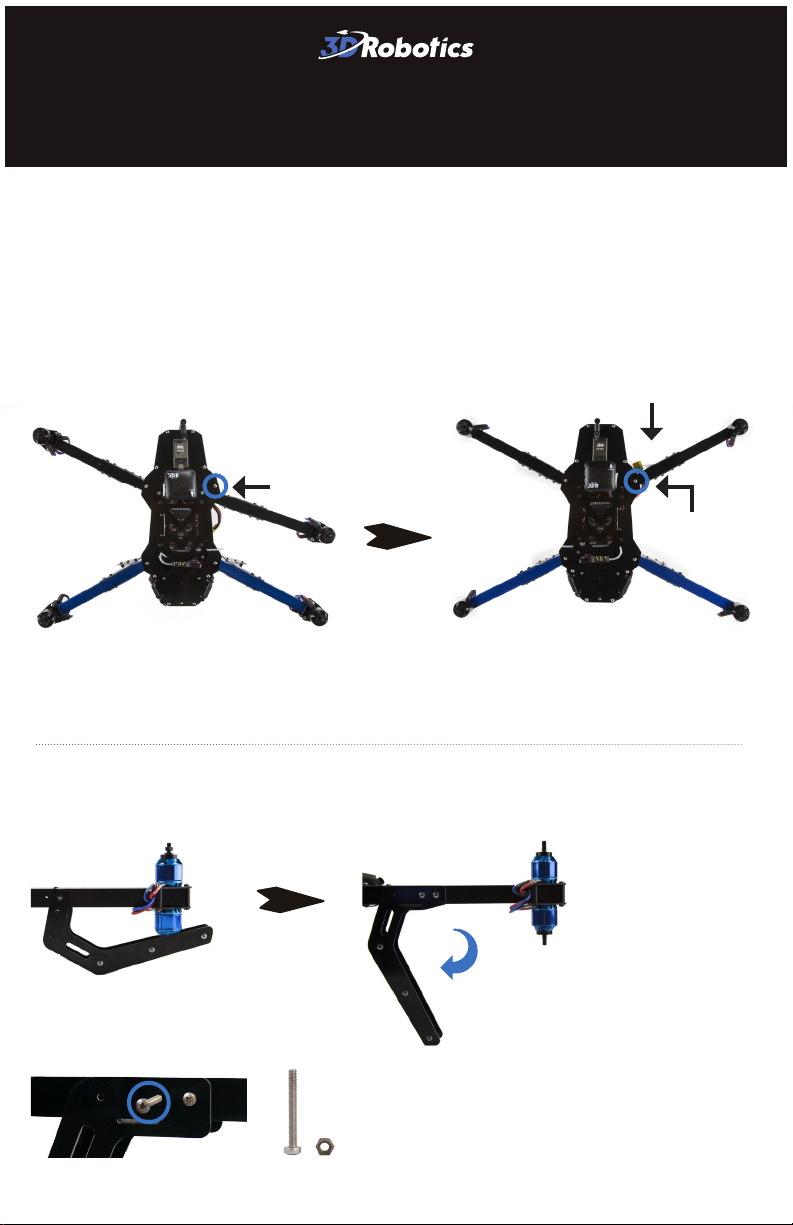
Unfold arms and legs
Remove the bolt and thumb nut outside the folded arm. Rotate the
arm into position, insert the bolt through the plate and the arm, and
secure the arm in place with the thumb nut.
rear arms
remove
travel position
(black)
front arms
(blue)
flight position
slide arm
into position
secure with
bolt
Rotate the legs into place and secure through the
inner hole with the provided bolt and nut.
flight positiontravel position
Page 2

Attach propellers
Remove the rings from the propeller
packages. Select the ring with the
smaller internal diameter, and insert
it into the back of the propeller hub.
Remove the nuts and washers from
the motors. Add SFP propellers to the
the front-left and back-right motors
and SF propellers to the front-right and
back-left motors with the writing on the
propellers facing towards the sky.
Place the washer over the propeller, and
secure the nut tightly on top. Always
ensure that the propellers are fastened
tightly to the motors before flying.
Charge battery
Connect the charger to the power
adapter cable and a wall outlet.
Connect the red cable to the + port
and the black cable to the - port.
SFP
SF
SF
SFP
+
SF
SFP
SFP
SF
red
black
–
Set the charger to LiPo and 3A.
LiPo 3A
Page 3
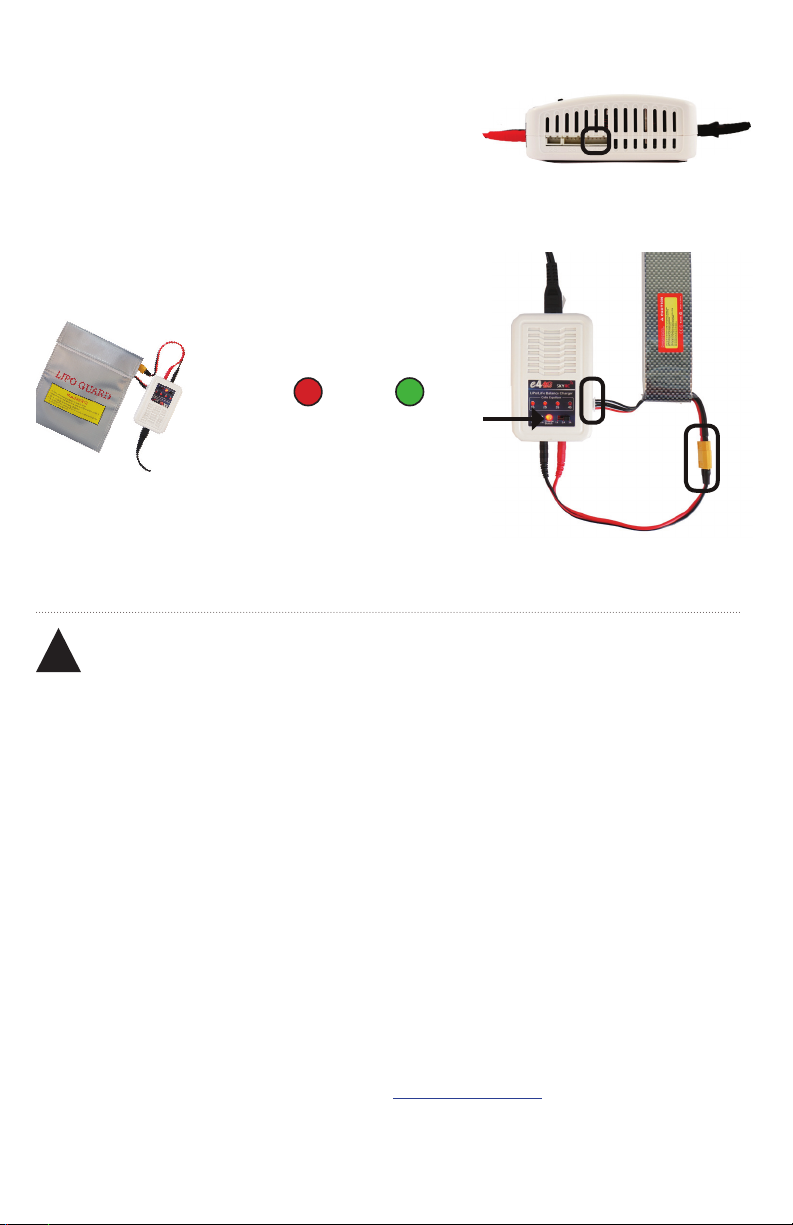
Connect the white connector to
the 4S port. Join the two yellow
connectors together.
Secure battery inside the guard
bag while charging. Charge until
the status indicator displays green.
red green
Charging Complete
guard bag
!
Battery safety
4S
Protect battery from extreme heat, extreme cold, puncturing,
and flammable surfaces. Always transport, charge, and store
battery in the guard bag.
Charge battery using a designated LiPo balance charger only.
Always monitor battery while charging.
Flying with a low battery is a safety risk and can render battery
unusable. Always discontinue use when you receive a low
battery notification, and always fly with a fully charged battery.
Inspect battery for damage before takeo and after landing.
If you observe any swelling of the package or battery ceases
to function, locate your local battery recycling center to dispose
of battery. In the US and Canada, visit call2recycle.org to
find a location. Do not dispose of battery in the trash.
Page 4
Flight modes
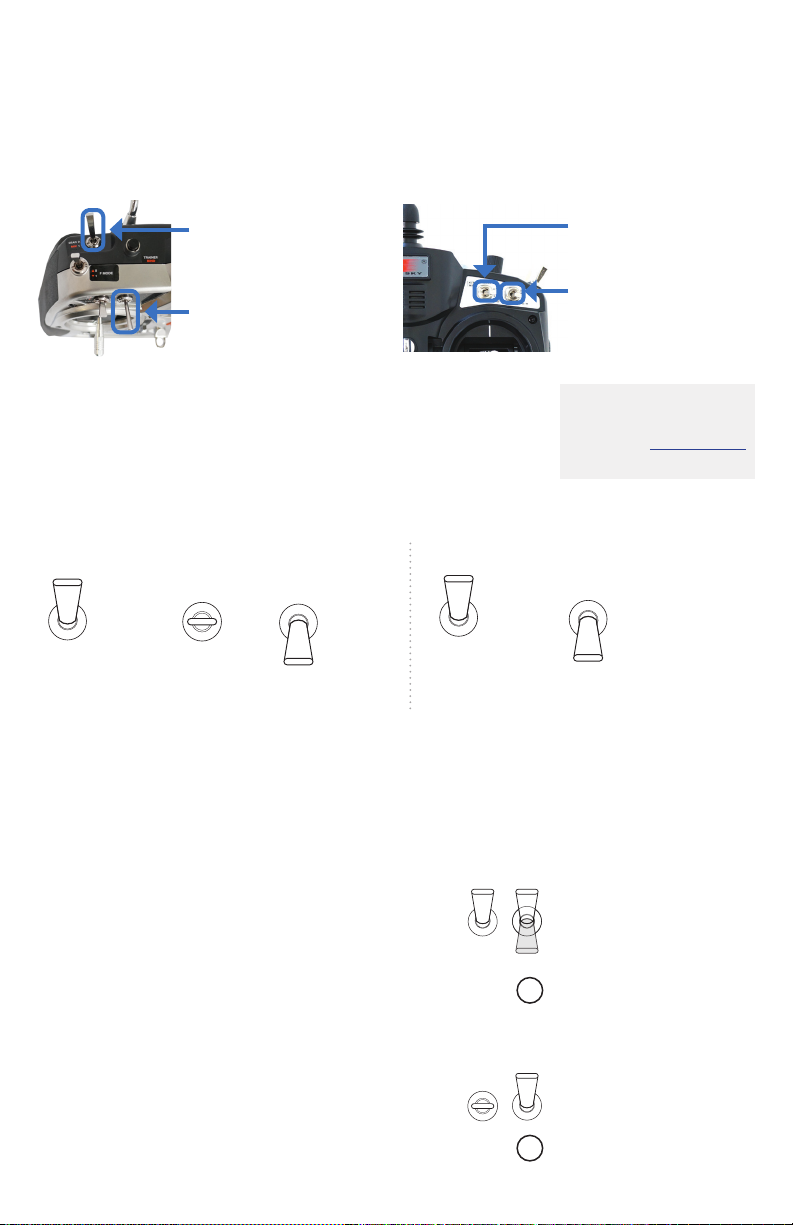
On 3DR transmitters, use the two-position switch and the
three-position switch shown below to select a flight mode.
Spektrum mode switches
two-position switch
marked GEAR/MIX
three-position switch
marked FLAP/GYRO
Both switches must be set to the correct position to
select a mode. The three-position switch can be set
forward (away from you), center, and back (towards
you). The two-position switch can be set forward and
FlySky mode switches
three-position switch
marked F MODE
two-position switch
marked AIL D/R
If you did not order an
RC transmitter with your
copter, visit 3dr.com/learn
for instructions.
back.
three-position mode switch
forward
(away from you)
center
back
(towards you)
two-position mode switch
forward
(away from you)
back
(towards you)
In this manual, the position of the three-position switch is specified
first and the position of the two-position switch is specified second.
For example, “center/back” requires the three-position switch set to
center and the two-position switch set to back.
Stabilize mode
Stabilize allows full manual control of
altitude, position, and orientation without
autopilot assistance. Use stabilize for
acrobatic flying and to recover your copter.
Loiter mode
With automatic autopilot control of
altitude, position, and orientation, loiter is the
easiest way to fly. Just release the sticks and the
copter will hover in place.
position of switch:
forward/forward
forward/back
GPS
no GPS lock required
X
position of switch:
center/forward
GPS lock required
GPS
before takeo
Page 5

Altitude hold mode
Set the left stick to center, and the copter will
automatically hover at the current altitude.
Adjust altitude and orientation with the left
stick, and navigate with the right stick.
position of switch:
center/back
GPS
no GPS lock required
X
Return to launch (RTL)
Command the copter to achieve a minimum
position of switch:
back/back
altitude of 15 meters, return to the launch
point, hover for five seconds, and land. Use
RTL to end your flight automatically.
Autonomous mode
Fly a fully autonomous mission using a
GPS lock required
GPS
before takeo
position of switch:
forward/back
computer or Android device as a ground
GPS lock required
station. For instructions on planning and
flying missions, visit 3dr.com/learn.
Flight safety
!
Your copter has powerful motors and high-speed propellers. Never place your hands near propellers
while the motors are armed or the safety button displays solid red. Always press and hold the safety
button until it displays blinking red before handling.
Always fly in an open area away from people and buildings; do not attempt to fly indoors or in a confined
space. Do not fly over people, near airports, or in any situation that could pose a hazard to those around
you. Always fly within your line of sight and in compliance with local regulations. Your copter will not
avoid obstacles on its own. As the operator, it is your job to recognize and avoid obstructions while
flying. Always follow the preflight and postflight steps in the order described in this manual and the
flight checklist, and remain attentive at all times while flying.
GPS
before takeo
Environmental factors, such as wind and GPS irregularities, can cause instability in flight. Your copter will
attempt to compensate for these factors by automatically landing if it detects an unsafe flying condition
due to loss of RC signal, loss of GPS signal, or low battery. To avoid potential hazards due to
environmental factors, identify the boundaries of your flying area before takeoff, and recover the copter
manually by switching into stabilize mode if it moves outside your designated flying area. If you observe
any inconsistent behavior, land, and consult the troubleshooting guide at 3dr.com/learn.
Always use an RC transmitter as a primary or backup control system when flying. Ensure that the
transmitter is turned on any time the copter is powered. If contact with the transmitter is lost during
flight, the copter will land and display a blinking yellow light. If the copter is more than 2 meters (6.5
feet) from the launch point, it will return to launch (RTL) before landing.
Autopilot-positioned flight modes (loiter, autonomous, and return-to-launch) require an active GPS
signal. If GPS signal is lost during flight, the copter will land and display a blinking blue and yellow light
with a high-high-high-low tone. Always choose an unobstructed flying area to improve signal strength.
When the battery reaches 25% of its remaining charge, the copter will land and display a blinking yellow
light with a quick repeating tone. If the copter reaches the low battery limit during a mission, it will return
to the launch point before landing.
Page 6

Flying
Select an open area for flying, away from people
and buildings, and remember to bring the flight
checklist and a fully charged battery. Follow these
steps every time you fly.
Turn on the transmitter. Set the left stick fully
1
down, and select a flight mode. Check that
the propellers are tight, the antennas are
vertical, the GPS mast is vertical, and all the
components are secure.
Attach the battery to the underside of the
2
copter using the velcro straps, and join the
yellow connectors.
Pixhawk LED
Safety Button
Preflight
1
» Antennas vertical
» Propellers tight
» Transmitter on
» Throttle down
» Mode set
» Components secure
Perform checks.
Check Pixhawk
LED for blinking
blue (no GPS) or
blinking green
(GPS lock).
Flight Checklist
Initializing, please wait
Autopilot ready, no GPS
Autopilot ready, GPS locked
Armed, ready to fly
Loss of RC signal, automatic landing
System error, see troubleshooting guide
Low battery, automatic landing
Loss of GPS signal, automatic landing
Inactive, safe to handle
Active, press and hold button before handling
Connect battery.
2
Place copter at
3
launch point
with the blue
arms facing
away from you.
Press safety button
54
until solid red.
Hold throttle
6
down/right
GPS
X
until motors
GPS
spin.
Determine the boundaries of your flying area
3
before takeoff, and select a level, unobstructed
space as a launch point. Place the copter at the
launch point with the blue arms facing away
from you, and stand back.
Check Pixhawk’s LED. If you plan to fly
4
only in stabilize or altitude-hold modes,
wait to see the blinking blue light.
If you plan to use loiter, autonomous,
return-to-launch, or other GPS-required
modes during your flight, wait to see the
blinking green light, indicating GPS lock,
before arming.
LED
Page 7

The safety button indicates when the
5
copter is safe to handle. When you’re
ready to fly, press and hold the safety
button until it displays solid red. This
indicates that the copter is now active.
To arm the motors, hold the left stick
6
down/right until the motors spin.
safety button
Control your copter in flight using the
7
transmitter’s left and right sticks. Use the
left stick to control throttle (power) and
yaw (rotation); use the right stick to
control roll (left and right movement) and
pitch (forward and backward movement).
Navigate by orienting the copter with the
blue arms facing forward.
After landing, disarm the motors by
8
holding the left stick down/left until
the motors stop.
Press the safety button until it displays blinking
9
red to make the copter safe to handle.
yaw
throttle
pitch
roll
Once the motors are disarmed, disconnect the
10
battery. Once the copter is powered off, turn off
the transmitter.
Page 8

Learning more
Visit 3dr.com/learn for more instructions on
flying, configuring, and using a ground station
with your copter.
Resources
To learn more about the APM:Copter platform,
including adding new flight modes and flying
autonomous missions, visit copter.ardupilot.com.
Support
For customer support, contact us at help@3dr.com
or call our support line at +1 (858) 225-1414
Monday through Friday, from 8 am to 5 pm, PST.
Happy flying!
X8 Operation Manual V2 | ©3D Robotics, Inc. | 10 March 2014
 Loading...
Loading...