


AUTOPILOT
QUICK START GUIDE
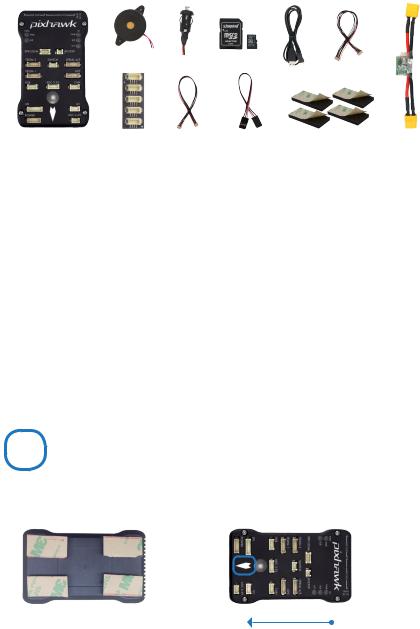
PARTS
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
11 |
1 Pixhawk |
7 Power module |
||
2 |
Buzzer |
8 |
I2C splitter module |
3 |
Safety switch |
9 |
Four-position I2C splitter cable |
4 Micro-SD card and adapter |
10 Three-wire servo cable |
||
5 Micro-USB cable |
11 Mounting foam |
||
6 Six-wire cable x2 |
|
|
|
GETTING STARTED
With the help of APM firmware, Pixhawk turns any RC plane, copter, or rover into a full-featured personal drone. Once you have a fully-assembled frame, follow this guide to install Pixhawk.
1Mount
2Connect
3Load firmware
4Calibrate
1 MOUNT
Use the provided foam to mount Pixhawk as close as possible to your vehicle’s center of gravity. Make sure to orient the board with the arrow pointing forward.
Attach the foam squares to the |
|
corners of the board. |
Vehicle front |
|

2 CONNECT
(Required) Connect the buzzer and safety switch.
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(Optional) Connect a 3DR |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
Radio to Pixhawk’s Telem |
|
|
|
|
|
(GPS or GPS+Compass required) |
|||||||||||||
port using the 6-wire cable |
|
|
|
|
|
Connect a 3DR GPS+Compass to |
|||||||||||||
provided with your 3DR Radio |
|
|
|
|
|
provide the autopilot with positioning |
|||||||||||||
Kit to receive data and |
|
|
|
|
|
data during flight. This kit includes a |
|||||||||||||
communicate with |
|
|
|
|
|
6-wire cable to connect the GPS ports. |
|||||||||||||
the autopilot in flight. |
|
|
|
|
|
Connect the MAG to the I2C port using |
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
the 4-wire cable provided with the 3DR |
||||||||
|
|
|
|
|
|
|
|
|
|
|
GPS+Compass. |
||||||||
(Required) Connect the 3DR |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
Power Module to the Power port |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
using the 6-wire cable to direct |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
power from your lithium polymer |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
(LiPo) battery to the autopilot. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(Optional) The I2C splitter expands the I2C port to allow up to four additional peripherals to connect to Pixhawk. Use the 4-wire cable to connect the I2C splitter and add a compass module, external LED, digital airspeed sensor, or other peripherals to your vehicle.

LOAD SD CARD INTO PIXHAWK
If the SD card is not preloaded into Pixhawk, insert the micro-SD card into the slot at the bottom end of the board.
CONNECT RADIO CONTROL
FOR PPM RC RECEIVERS AND FUTABA S.BUS RECEIVERS
Connect the ground (-), power (+), and signal (S) wires to the RC pins using the provided 3-wire servo cable.
FOR SPEKTRUM SATELLITE RECEIVERS
For a Spektrum DSM, DSM2, or DSM-X Satellite RC receiver, connect to the SPKT/DSM port.
For a complete list of RC systems compatible with Pixhawk, visit the APM wiki page here.
FOR PWM RECEIVERS
Purchase a PPM Encoder module to connect a PWM RC receiver to Pixhawk at store.3dr.com.

CONNECT OUTPUTS
FOR COPTERS
Connect each signal wire from the PDB to the main output signal (S) pins by motor number. Connect one wire for each motor to the corresponding pin.
Pin 1 = Motor 1 |
Pin 5 = Motor 5 |
Pin 2 = Motor 2 |
Pin 6 = Motor 6 |
Pin 3 = Motor 3 |
Pin 7 = Motor 7 |
Pin 4 = Motor 4 |
Pin 8 = Motor 8 |
FOR PLANES
For planes, connect the control channel wires to the main output signal pins. Pin 1 = Aileron
Pin 2 = Elevator
Pin 3 = Throttle
Pin 4 = Rudder
FOR ROVERS
For rovers, connect the throttle and steering wires to the main output signal pins.
Pin 3 = Throttle
Pin 4 = Steering
3 LOAD FIRMWARE
APM firmware is the brains of your autopilot operation and must be installed before using Pixhawk.
To load firmware onto Pixhawk, install a mission planner application on your ground station computer. Choose either Mission Planner (Windows) or APM Planner for (Windows, OS X, and Linux).
Both applications are available for free download from ardupilot.com.
firmware
Mission planner
 Loading...
Loading...