

Page 1

Parts
Tarot gimbal
GoPro HERO3 stabilization system
IRIS+ mounting screws
(2)
Configuration cable
Gimbals arrive preconfigured and ready
to fly. For information on changing
configuration and updating the
firmware, visit 3dr.com/learn.
Extra parts
servo cable
split-wire servo cable
GoPro not included
User Guide
1 Attach Camera
Important note: Make sure that the WiFi on your GoPro
!
is turned OFF at all times when in use with IRIS+.
Remove the two screws securing the blue face plate,
1
and remove the plate.
remove
Slide camera into housing with
2
the lens nearest the top-right
corner.
face plate
remove
rail mounting hooks (2)
X8/Y6/QUAD mounting hardware
(instructions included)
2 Connect
Follow these instructions to connect the gimbal to IRIS. This
will allow you to adjust the tilt of the camera in flight using the
controller. To enable automatic camera stabilization without
remote control, skip to the step 3: power.
Locate the black and white two-wire cable protruding
1
from the bottom of IRIS.
ground (black)
tilt (white)
Thread the cables through the interface plate. Locate the pins
2
on the Tarot board. Connect the black wire to a - (ground) pin
and the white wire to the T (tilt) pin.
Place the blue face plate over the camera, and secure from the
3
back with the two original screws.
tighten
Add face plate.
Attach white wire
to tilt (T).
Attach black wire
to ground (-).
Thread cables here.
1
Page 2
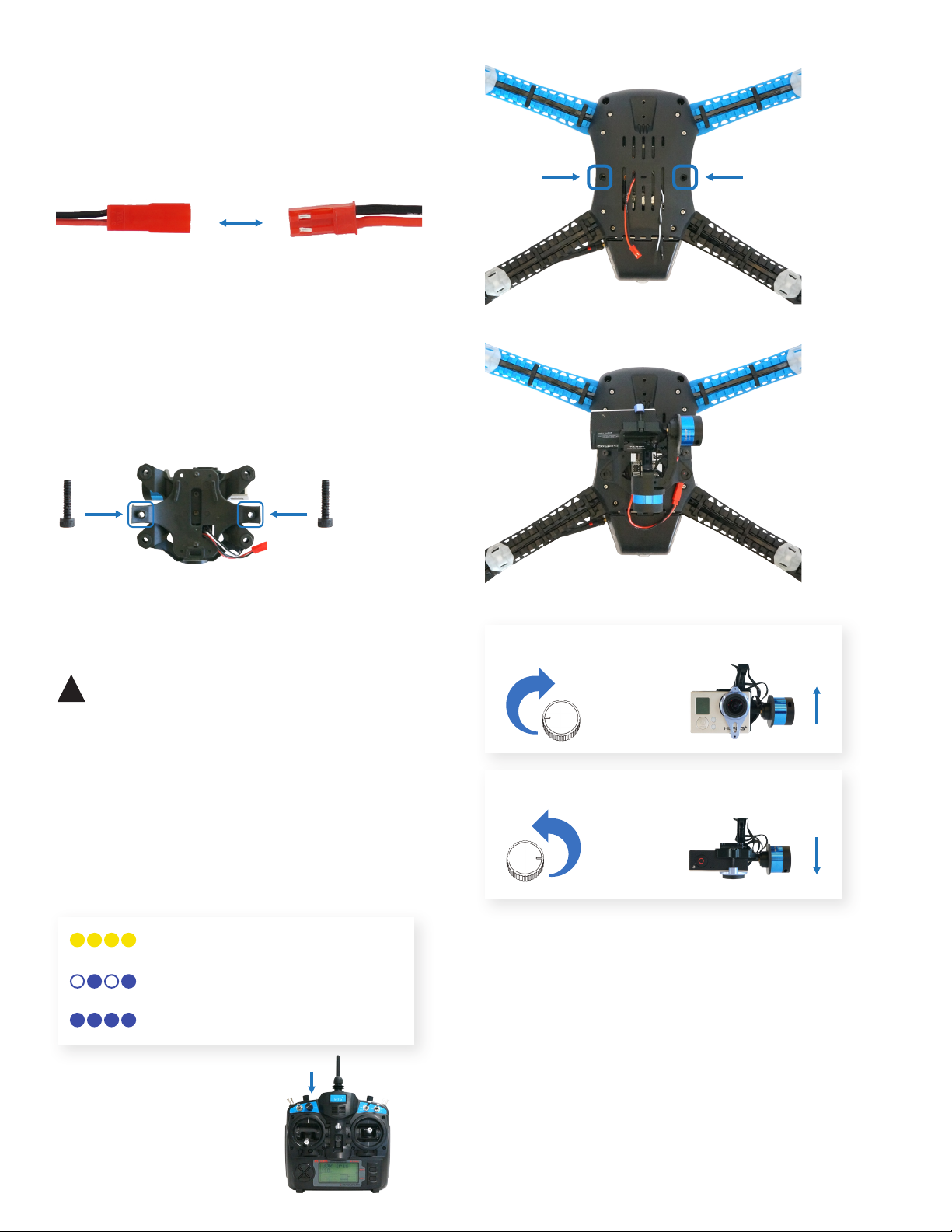
3 Power
Connect the gimbal power cable with the red connector to
the matching cable protruding from the bottom of IRIS.
4 Connect to IRIS
Using the mounting screws, attach the gimbal to IRIS through
the two holes in the interface plate and the two holes in the
bottom shell shown below.
Mount the gimbal
with the camera
facing forward.
Connect gimbal to
bottom shell here.
complete assembly
Operating the Gimbal
Important note: Flying with a gimbal will reduce your flight
!
time by as much as five minutes. Please plan your flights
accordingly.
Upon powering IRIS, the gimbal will display a solid yellow light
while it is starting and calibrating. Do not touch the gimbal while
it is starting up. When the gimbal displays a blinking blue light, it
is ready to fly.
If the gimbal is not connected to the autopilot, it will perform
automatic stabilization without remote control, indicated by a
solid blue light.
Calibrating, do not touch gimbal
Ready, connected to autopilot
Ready, not connected to autopilot
In flight, use the TILT knob on
the controller to adjust the angle
of the camera.
Rotate clockwise to level the camera.
Rotate counterclockwise to tilt the camera down.
Specs
• Supports GoPro HERO3 video auxiliary
output cable (sold separately)
• Support for remote devices : PPM/
PCM/2.4G
• Working voltage : DC 7.4V ~ 14.8V
(Recommended 12V)
• Working current : 200 mA-500 mA
• Working environment temperature:
-15°C ~ 65°C (5°F ~ 149°F)
• Dual 32-bit high-speed ARM core
processors
• Three axis MEMS gyroscope and MEMS
accelerometers
• Maximum angular rate : 2000 °/sec
• Control frequency: 2000 Hz
• Motor drive frequency: 20 kHz
• Control accuracy : 0.1 ° (Pixel Grade)
• Control angle range : -45 ° ~45 ° (roll),
-135 ° ~ 90 ° (tilt)
• Pose solver algorithms : PTZ dedicated
brushless motor decoupled EKF
algorithm
• Weight without camera : 200 g
• The Tarot gimbal should be powered by
a 2S or 3S LiPo battery only. If you plan
to use 4S, please use a voltage regulator
to ensure the voltage stays within safe
operating limits.
• Firmware version 1.5
2
Page 3
X8/Y6/QUAD Mounting Instructions
This kit includes hardware to mount the gimbal to a 2014 RTF
X8, Y6, or QUAD. To do this, you will need to disassemble the
gimbal, remove the IRIS interface plate, and attach the new
interface plate.
Parts
interface plate
1 three 8 mm screws
2 four 5 mm screws
3 two 6 mm standoffs
4 three 3 mm spacers
1 2 3 4
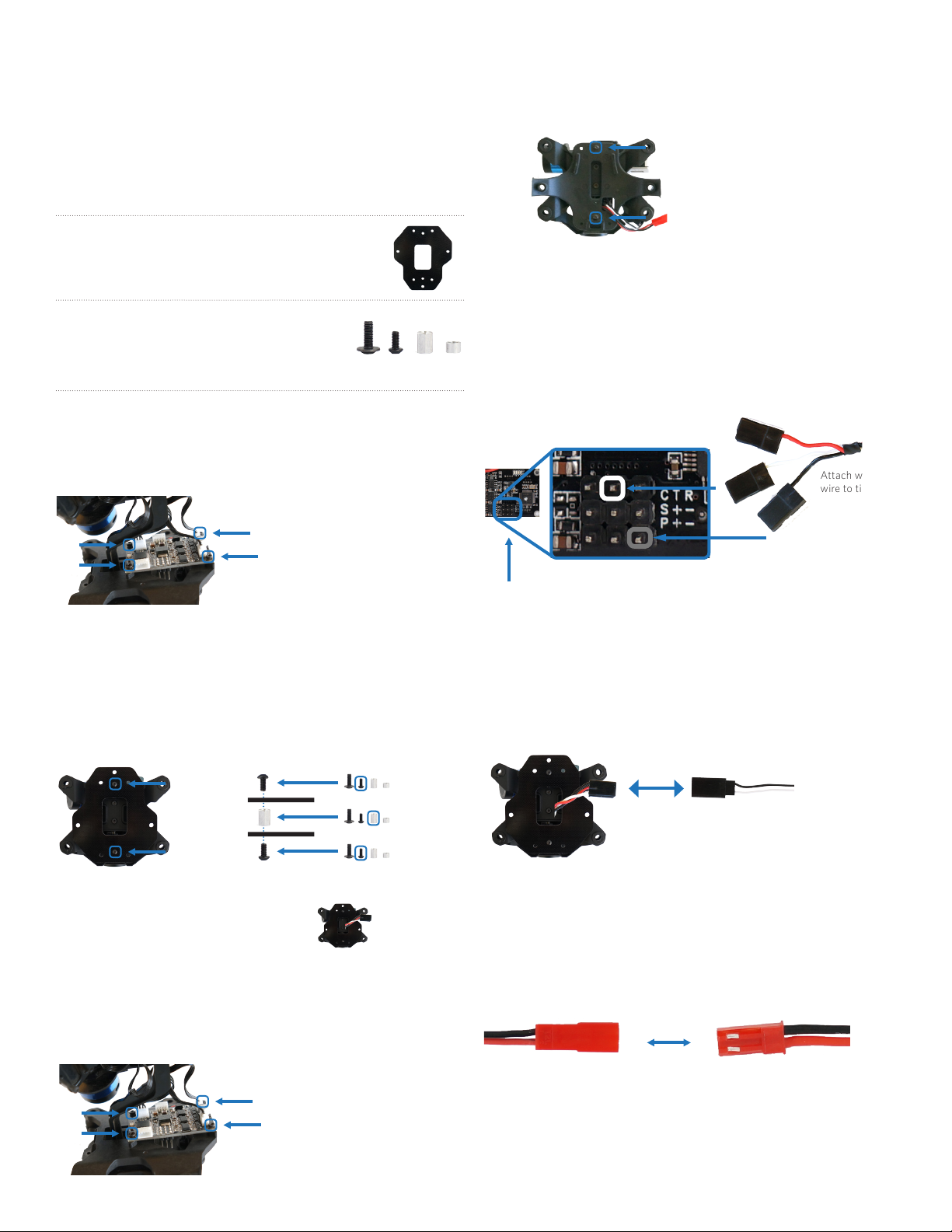
2 Remove IRIS Interface Plate
Use a 2 mm hex key to remove the two bolts and nuts attaching
the interface plate to the gimbal, and remove the plate.
3 Connect Cable to Gimbal
Locate the split-wire servo cable from the extra parts. Locate the
pins on the Tarot board. Connect the black-wire connector to the
rightmost column of pins shown below with the black wire itself
connected to the bottom-row - (ground) pin. Connect the whitewire connector to the center column of pins with the white wire
itself connected to the T (tilt) pin. Leave the red wire unattached.
1 Remove Controller Board
Use a 1.5 mm hex key to remove the four screws
at the corners of the controller board.
4 Attach X8/Y6/QUAD Interface Plate
Position the interface plate with the wider end at the rear end of
the gimbal. Attach the plate to the gimbal using the same two
holes as the IRIS interface plate. Place a 6 mm standoff between
each of the two holes in the gimbal body and the plate. Attach a
5 mm screw to both ends of the standoff using a 2 mm hex key.
interface plate
gimbal
5 mm screw
6 mm standoff
5 mm screw
Do not use red wire.
Attach white
wire to tilt (T).
Attach black wire to the
ground (-).
pins
controller
6 Connect to Copter
Connect the servo cable now protruding from the top of the
gimbal to the black and white two-wire cable protruding from the
bottom of the copter, ensuring that the black wire connects to
the black wire and the white wire connects to the white wire.
Thread the servo cable up through the
center space in the plate.
5 Replace Controller Board
Use a 1.5 mm hex key to replace the four screws
at the corners of the controller board.
7 Power
Connect the gimbal power cable with the red connector to
the matching cable protruding from the bottom of the copter.
3
Page 4

8 Mount to X8, Y6, or QUAD
9 Attach Camera
To mount the gimbal to your copter, add an 8 mm screw to each
of the three holes in the interface plate from below so that the
threads protrude from the top of the interface plate. Add a 3 mm
spacer to each screw above the interface plate, and attach the
screws to the three holes in the base plate of the copter indicated
below. The spacers should be between the gimbal interface plate
and the base plate.
connect to
interface plate
copter base plate
3 mm spacer
gimbal
interface plate
8 mm screw
Y6 base plate
Quad/X8 base plate
Important note: Make sure that the WiFi on your GoPro
!
is turned OFF at all times when in use with a copter.
Remove the two screws securing the blue face plate,
1
and remove the plate.
remove
face plate
Slide camera into housing with
2
the lens nearest the top-right
corner.
Place the blue face plate over the camera, and secure from the
3
back with the two original screws.
tighten
remove
Operating the Gimbal
Important note: Flying with a gimbal will reduce your flight
!
time by as much as five minutes. Please plan your flights
accordingly.
Upon powering the copter, the gimbal will display a solid yellow
light while it is starting and calibrating. Do not touch the gimbal
while it is starting up. When the gimbal displays a blinking blue
light, it is ready to fly.
If the gimbal is not connected to the autopilot, it will perform
automatic stabilization without remote control, indicated by a
solid blue light.
Calibrating, do not touch gimbal
Ready, connected to autopilot
Ready, not connected to autopilot
For 3DR controllers, use the
channel 6 knob to adjust
the angle of the camera.
SpektrumFlySky
Add face plate.
Rotate clockwise to level the camera.
Rotate counterclockwise to tilt the camera down.
For Non-3DR Transmitters
To calibrate a non-3DR transmitter to control the gimbal, you will
need to enable channel six for a knob on your transmitter during RC
calibration in Mission Planner or APM Planner. Once channel six is
enabled, the preconfigured Pixhawk settings will automatically
assign gimbal control to the selected control knob on the
transmitter.
If you are using a PPM encoder to connect to Pixhawk, you will need
to connect channel six from your RC receiver to the encoder before
calibration.
Tarot Gimbal User Manual vA | ©3D Robotics, Inc. | 2 September 2014
4
 Loading...
Loading...