

Page 1

DIY
KITS
QUAD
Thank you for purchasing a 3DR Quad DIY Kit!
These instructions will guide you through assembling and wiring
your new autonomous multicopter.
Page 2
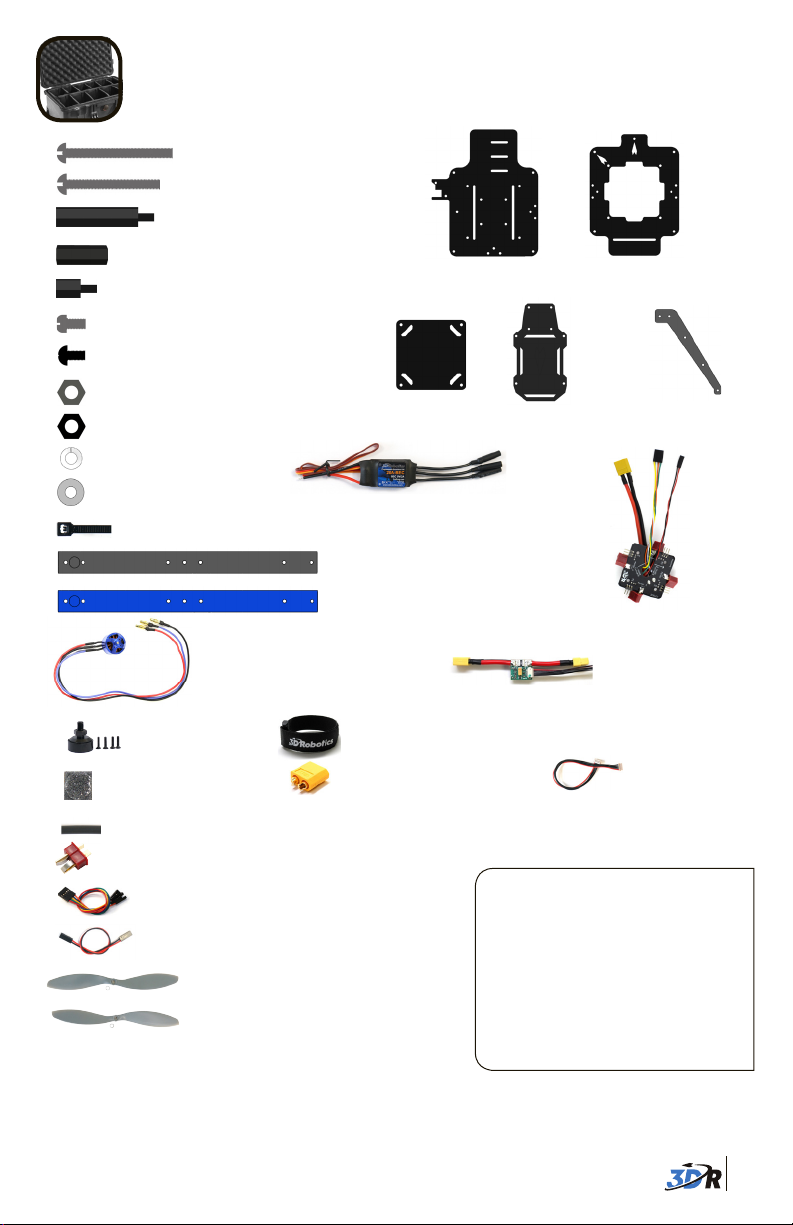
CONTENTS
30 mm steel bolts (4)
25 mm steel bolts (12)
30 mm threaded spacers (4)
Your 3DR Quad Kit contains:
18 mm threaded spacers (12)
8 mm threaded spacers (4 plus 4 spare)
5 mm steel bolts (8 plus 2 spare)
5 mm nylon bolts (28 plus 4 spare)
Metal nuts (16)
Nylon nuts (8 plus 8 spare)
Metal lock washers (8)
Rubber washers (4)
Zip ties (8)
850 kV motors with
bullet connectors (4)
Motor collets (4)
Double-adhesive
mounting foam
Heat shrink tubing
Deans connectors - male (4)
Five-wire RC receiver cable
Two-wire RC receiver cable
10 x 4.7 SFP (pusher) propellers (2)
10 x 4.7 SF (normal) propellers (2)
Threadlocking compound
Bottom plate
APM plate
Electronic speed
controllers (4)
Black arm (3)
Blue arm (2)
Battery strap
XT60 connector - male
Top plate
Landing gear
Accessory
plate
Power module with XT60
connectors
These instructions require some minor
soldering. If you’re unfamiliar with
soldering, our friends at Sparkfun have
some great tutorials that can get you
started, including this comic:
learn.sparkfun.com/curriculum/42.
For an example of exactly what you’ll
be doing for this assembly (soldering
Deans connectors to ESCs), check out
this video: youtu.be/3LJIQeKuLLU.
pieces (8)
Power distribution board
6-position power
module cable
You will also need:
» Phillips screwdriver (small)
» 5.5 mm (7/32) wrench
» Double-sided foam mounting tape
» 2 mm (5/64) hex wrench
» Soldering equipment
1
Page 3
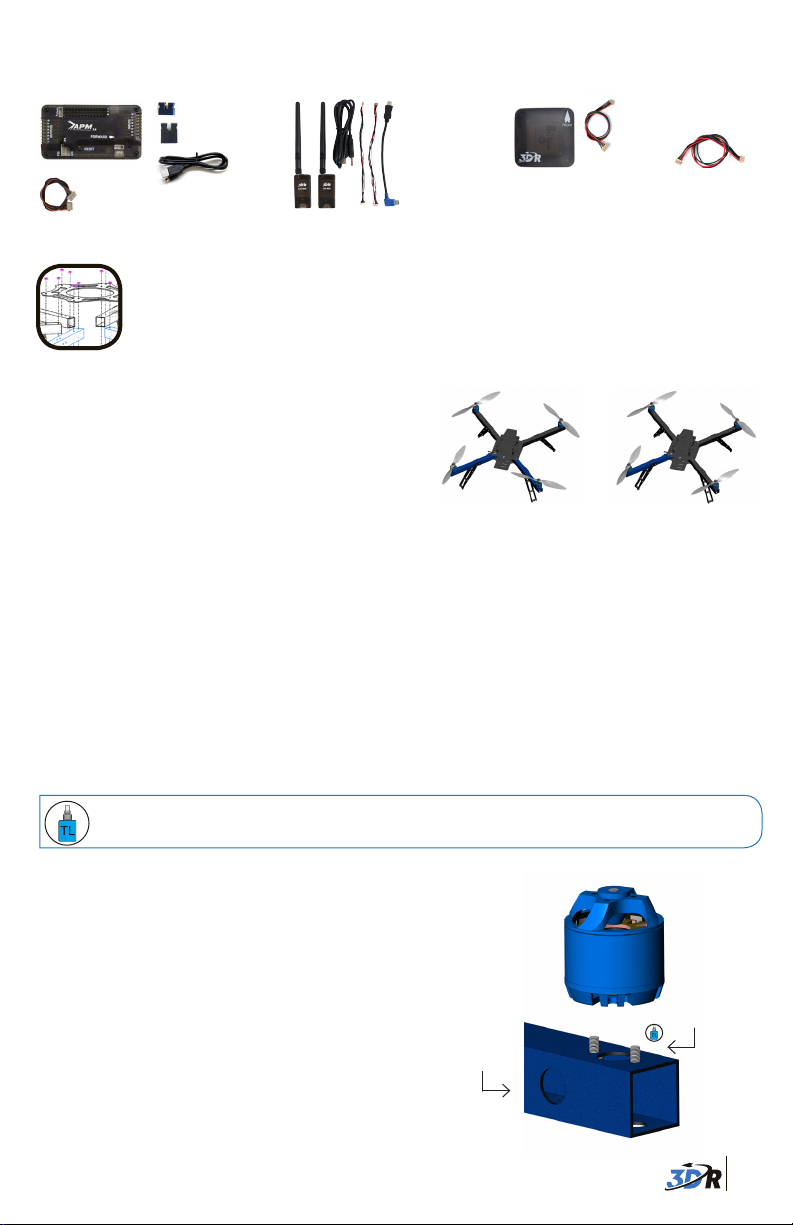
You may have opted to also receive:
3DR APM 2.6:
3DR APM 2.6
Telemetry adapter
cable
4 mm JP1
jumper connector
6 mm PPM
jumper connector
Micro USB cable
3DR Radio:
Radios (2)
Antennas (2)
Micro-USB cable
Android OTG cable
Autopilot connectors
3DR uBlox GPS+Compass:
6-position to
5-position GPS
cable
3DR uBlox GPS
board with compass
4-position compass
cable
FRAME ASSEMBLY
1 Choose + or x
Your 3DR Quad can be flown in both + (plus)
and x (cross) configurations. A plus-configured
copter flies with one arm forward, while a
cross-configured copter flies with two arms
forward. While both configurations provide
excellent performance, cross is standard and
x (cross) configuration
recommended for new fliers. For plus, use three
black arms and one blue arm when assembling your copter, and remember to specify plus
when choosing your frame orientation during software configuration. These instructions will
continue assembling a Quad in cross orientation.
+ (plus) configuration
2 Attach motors to arms
Each arm of your Quad will have a motor attached to the top of the arm using two 5 mm steel
bolts and two metal lock washers. To ensure motors are securely bolted to arms, apply a
small amount of threadlock to each bolt before fastening.
Threadlocking compound is an important component to ensure your motors remain
firmly attached! For application tips, check out this video: goo.gl/bM3MA.
Position holes in the bottom of the motor over the
two small holes on either side of the larger hole in
top in the of the arm. Secure with two 5 mm steel
bolts (with a metal lock washer on each bolt) by
accessing through the two large holes in the bottom
of the arm. Thread the motor cables through the arm
using the hole in the side of the arm. Repeat for all
four arms.
Thread
cables
5 mm bolts
and lock
washers
2
Page 4
Install motor collets
3
Attach a threaded collet to the top of each motor using the
four small screws included with collets. Apply threadlock to
each screw before fastening. Repeat for all four motors.
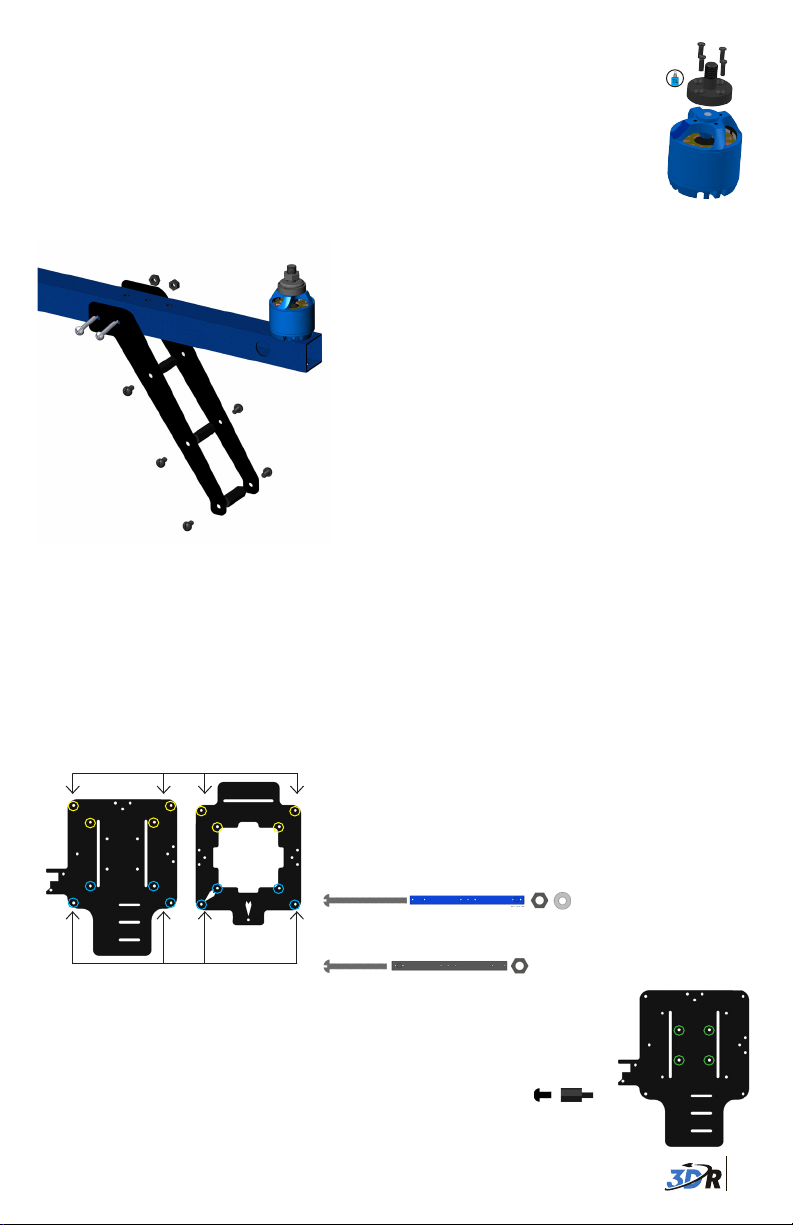
4 Assemble legs
Motor collet assembly
Metal nuts
Your Quad has four legs, each comprised of two
landing gear pieces. To assemble each leg, align
two landing gear pieces and attach through the
three bottom holes using three 18 mm spacers
25 mm bolts
and six 5 mm nylon bolts.
For each hole, position spacer between holes,
5 mm
nylon
bolts
and secure from each side with nylon bolts.
Repeat for all four legs.
Attach legs to arms with leg pointing toward
motors. Align the two top holes in the leg with
the two holes in the center of the arm. Insert
two 25 mm bolts and secure with metal nuts.
Leg assembly
18 mm
spacers
5 Attach top and bottom plates
The top and bottom plates will form the main frame by attaching to your copter’s arms. Align
plates in the orientation show below, and attach two blue arms to one end and two black arms
to the other using the four pairs of holes as shown.
Place the arm between the two plates so the two holes
Top plateBottom plate
Attach black arms here
in the arm align with the holes in the plates. Insert a bolt
into each hole and secure with nuts. For inner holes use
30 mm bolts and metal nuts; for outer holes use 25 mm
bolts and metal nuts. Add a rubber washer on top of the
nut on the inner holes.
For plus configuration: Attach a blue arm to only the
position on the plate marked with an arrow.
Inner holes use:
30 mm bolt + arm + metal nut + rubber washer
Outer holes use:
Attach blue arms here
25 mm bolt + arm + metal nut
Next add the spacers that will hold the power distribution board in place.
Using the four holes in the bottom plate shown across, align four 8 mm
spacers, and secure from the bottom using four 5 mm nylon bolts.
5 mm nylon bolt + 8 mm spacer
Slide the battery strap through the two slots in the bottom plate.
Bottom plate
3
Page 5

POWER WIRING
Place power distribution board
1
The power distribution board (PDB) allocates power to your copter’s motors. Place the PDB
in the center of your copter through the hole in the top plate. Align the PDB so the four 8 mm
spacers insert into the four holes in the PDB. Secure with four nylon nuts.
2 Solder connectors to electronic speed controllers
Electronic speed controllers (ESCs) regulate how much power is applied to each motor. To
connect the four ESCs to the PDB, you will need to solder the provided Deans connectors to
the ESCs’ black and red wires.
Solder Deans connectors to ESCs:
Add a half-inch length of heat shrink tubing onto
each ESC red wire and black wire. Solder the
positive Deans connector plug to the red wire
and the negative Deans connector plug to the
black wire. Shrink tubing over connections.
Deans to ESC:
Negative = Black
+
-
Positive = Red
3 Connect ESCs to motors and PDB
Connect motor cable bullet connectors to ESC bullet connectors.
Each ESC should connect to only one motor.
Add heat shrink and align wires to correct plugs.
Soldered connectors
The diagram below indicates the number of each motor. Starting
with the motor labeled 1 , connect the ESC three-wire cable to the
corresponding position on the PDB pins (M1 for motor 1, M4 for
motor 4, etc) with the orange wire positioned farthest from the
adjacent Deans connector. Connect ESC Deans connector to PDB
Deans connector for that motor. Repeat for all motors and ESCs.
Blue arms
CW
3
2
CCW
Don’t secure the ESCs to the frame until you have confirmed that each motor spins
in the direction specified in the diagram above (see motor setup instructions at
copter.ardupilot.com).
APM
CCW
1
4
CW
Quad motor order
Motor #
labels
Motor connected to ESC
Deans
Pins
ESC connected to PDB
4
Page 6

4 Connect power module to PDB
Connect power module 6-position cable to the power module 6-position port. Place power
module in the center of your copter near the PDB. Connect PDB red and black cable (with yellow XT60 connector) to power module XT60 connector.
Power module with 6-wire cable
PDB
INSTALL APM
1 Mount APM
Place the APM 2.6 in the center of the APM plate
with the arrow on the case facing as shown.
Use the mounting foam to secure the APM
to the plate.
Ensure mounting tape is firmly attached so the position of the APM doesn’t shift during flight.
For APM 2.5: Mount the APM to the top of the accessory plate.
For plus configuration: Mount the APM with arrow pointing toward blue arm.
Ensure arrow on APM
points forward!
3DR APM 2.6
APM plate
2 Connect APM to power module and PDB
Connect the power module six-position cable (red and black) to the APM PM port. Connect the
PDB four-wire cable (multicolored) to the APM Outputs signal pins (top row). Ensure that the
wire originating in the position on the PDB pins labeled M1 connects to the APM Output signal
pin labeled 1, the M4 wire connects to position 4, etc.
PDB to APM wiring
APM output
pin positions
PDB wire
positions
Power module
5
Page 7

3 Mount GPS
Accessory plate
Place the GPS module onto the square end of the accessory
plate with the arrow pointing towards the center of the plate.
Use double-sided foam tape to secure case to plate.
Ensure arrow on
GPS points forward!
4 Wire additional components to APM
3DR uBlox GPS with Compass:
Connect the 6-position to 5-position cable to the GPS
6-position port and to the APM GPS port (use top-entry
port not side-entry port). Connect the 4-position cable to
the GPS 4-position port and to the APM I2C port.
3DR Radio air module:
Attach antenna to 3DR Radio air module.
Connect telemetry cable to the air module
and to the APM Telem port.
Radio control (RC) receiver:
To connect an RC receiver to APM, use the five-wire and two-wire cables provided with your
copter.
Note: APM also supports one-wire PPM connection with supported receivers.
See copter.ardupilot.com for instructions.
Use the five-wire cable to connect the receiver’s signal pins to APM’s input signal pins. Use
the two-wire cable to connect power and ground pins between APM and the receiver.
APM input pin numbers
Connect five-wire cable to signal pins (top row, “S”).
Connect red wire to power pin (center row, “+”) and
APM inputs wiring
After connecting to APM, connect the five-wire cable to the receiver’s signal pins (usually
marked “S”, see channel diagram below), connect the two-wire cable red wire to a power pin
(usually marked “5V” or “+“) on the receiver, and connect the two-wire cable black wire to a
ground pin (usually marked “-“) on the receiver.
APM Input Signal Pins
6 AUX 2 (OPTIONAL)
5 AUX 1 (MODE SWITCH)
4 YAW / RUDDER
3 THROTTLE
2 PITCH / ELEVATOR
1 ROLL / AILERON
black wire to ground pin (bottom row, “-”).
Match the correct control channel signal pin on the
receiver with its corresponding APM input signal pin.
6
Page 8

5 Attach APM plate to top plate
Locate the PDB four-wire cable (multicolored) and the power module six-position cable (red
and black); thread these cables up through the slots in the APM plate where they can connect
to the APM.
Now we’ll attach the APM plate to the top plate. The APM plate
connects to the ends of the four 30 mm bolts securing the inside
holes of the arms. Place the four holes in the APM plate over the
exposed 30 mm bolts on the top plate and secure with 30 mm
threaded spacers.
30 mm bolt + 30 mm spacer
APM plate
6 Attach accessory plate to APM plate
Place accessory plate on top of APM plate, and align the four 30
mm spacers with the four holes in the accessory plate. Secure
accessory plate to spacers using four 5 mm nylon bolts.
30 mm spacer + nylon nut
APM plate
Accessory plate
Complete plate assembly
Your Quad assembly is now complete! The following
steps will get you started configuring your copter.
INSTALL SOFTWARE
Mission Planner is free, open-source software providing multiplatform configuration and fullfeatured waypoint mission scripting for autonomous vehicles.
To install Mission Planner on your ground station computer (Windows only), visit ardupilot.
com/downloads, select Mission Planner, and select sort by date (short link: goo.gl/Si5grC).
Select the MissionPlanner - MSI (Microsoft installer package). For the same features as
Mission Planner for Mac, download APM Planner from ardupilot.com.
Mission Planner Downloads Screen
Mission Planner « Downloads
Sort by: Title | Hits | Date
■ MissionPlanner - MSI - 1.2.62
Select MSI to download
most recent version.
7
Page 9

After selecting the MSI, read the safety
information and select Download:
Open the downloaded file to run the Mission Planner Setup Wizard. Select the option to
proceed if prompted with a security warning.
Device Driver Installation Wizard Mission Planner Setup Wizard
Download
Mission Planner Setup Wizard will
automatically install the correct device
drivers.
Mission Planner will notify you when an update is available;
please always run the most current version of Mission Planner.
Mission Planner: Update Message
Mission Planner: Flight Data Screen
Launch Mission Planner to explore
the capabilities of your autonomous
vehicle!
Before flying, complete Mission Planner’s configuration utilities,
including RC (shown on the next page), compass, accelerometer,
frame type, and flight mode calibrations. Visit planner.ardupilot.com
for complete Mission Planner instructions.
8
Page 10

CALIBRATION
Mission Planner’s mandatory hardware calibration steps allow you to
program and configure the APM autopilot for your copter.
Connect APM to your computer using the provided micro-USB cable.
Windows will automatically install the correct drivers for APM.
Select Initial Setup, Install Firmware, and Quad to install flight code firmware onto APM.
Now you can connect APM to Mission Planner.
1
2
3
Connect APM to Mission Planner:
1 Select Arduino Mega.
2 Select 115200.
3 Select Connect.
APM USB port
On the left side of the Initial Setup screen, select Mandatory Hardware. You will need to
perform each of the calibration procedures listed under this menu.
Frame Type: Select your configuration: Plus or X (cross).
Compass: Select the options to enable the compass, to allow automatic declination, and
to select your autopilot type. Select Live Calibration to launch the wizard, and follow the
prompts.
Accel Calibration: Check the box for AC 3.0+, select Calibrate, and follow the prompts to cali-
brate the autopilot’s accelerometer. Make sure to wait a couple of seconds before and after
changing the positions of the copter.
Radio Calibration: Turn on your RC transmitter, select Calibrate Radio, and move all sticks and
switches to their extreme positions. Select Click when Done once the red bars are set for all
available channels.
9
Page 11

!
CW
CCW
CW
Flight Modes: Move each switch on your transmitter to its available positions. Mission Plan-
ner will indicate the currently selected position with green highlighting. Select a mode for
each switch position, and select Saves Modes to assign.
Failsafes: Failsafes are advanced safety precautions that can be very useful for your copter.
Consult the online documentation at copter.ardupilot.com to learn more about configuring
and testing failsafes.
Show me! Watch videos demonstrating live calibration techniques at 3DRobotics.com/learn.
Complete all configuration procedures as described at copter.ardupilot.com
before attempting your first flight.
MOTORS & PROPELLERS
The diagram across shows the correct rotation
directions for your Quad’s four motors: motors one
and two should rotate counterclockwise, motors three
and four should rotate clockwise.
The rotation direction for each motor is determined by
the connections between the motor and the ESC. To
reverse the rotation direction for a motor, switch two
of the three wires connecting the motor and the ESC.
1. Connection between motor and ESC
2. Switch two wires to reverse motor rotation.
Your copter includes puller propellers (unmarked or marked “SF”) and pusher propellers
(marked “SFP” or “P“). The direction of each motor is shown above: add pusher propellers
to motors marked clockwise, add puller propellers to motors marked counterclockwise.
CCW
COUNTERCLOCKWISE ROTATION:
!
USE PULLER PROPELLER
pusher
CW
!
Blue arms
CW
3
APM
2
CCW
Quad motor order
CLOCKWISE ROTATION:
USE PUSHER PROPELLER
CCW
1
puller
pusherpuller
4
CW
10
Page 12

Remove plastic rings from propeller package, select the one with the smaller internal
diameter, and insert it into the back of the propeller hub.
Add propeller to motor collet with writing facing up in
relation to the sky. Add the washer and prop nut above
the propeller; tightly fasten prop nut to threaded collet.
Collet
Safety Check! Ensure writing on props faces up.
Prop nut
Washer
Propeller
Motor
SECURE WIRING
Before flying, use zip ties to secure ESCs to the frame. Ensure that
all wires are secured so they will not become entangled in spinning
propellers, are not too tight around corners (no hard 90-180 degree
bends), and do not pull on the APM
or other components. Always
complete the pre-flight checklist
before takeoff
(copter.ardupilot.com/wiki/checklist).
ESCs and wiring secured with zip ties
Visit copter.ardupilot.com to learn about multicopter safety,
hardware and software configuration, using autonomous flight
modes, tuning, designing missions with waypoints and events,
troubleshooting, and more. Happy flying!
SUPPORT
For more information about software, firmware, and flight behaviors, visit
the APM Copter community documentation project at copter.ardupilot.com.
For customer support, contact us at help@3drobotics.com or call our
support line at +1 (858) 225-1414 Monday through Friday, 8 am to 5 pm.
For more assembly instructions and information about building and
configuring your copter, visit 3drobotics.com/learn.
11
 Loading...
Loading...