

Page 1
3DR Plane
INSTRUCTIONS
Thank you for purchasing a 3DR Plane!
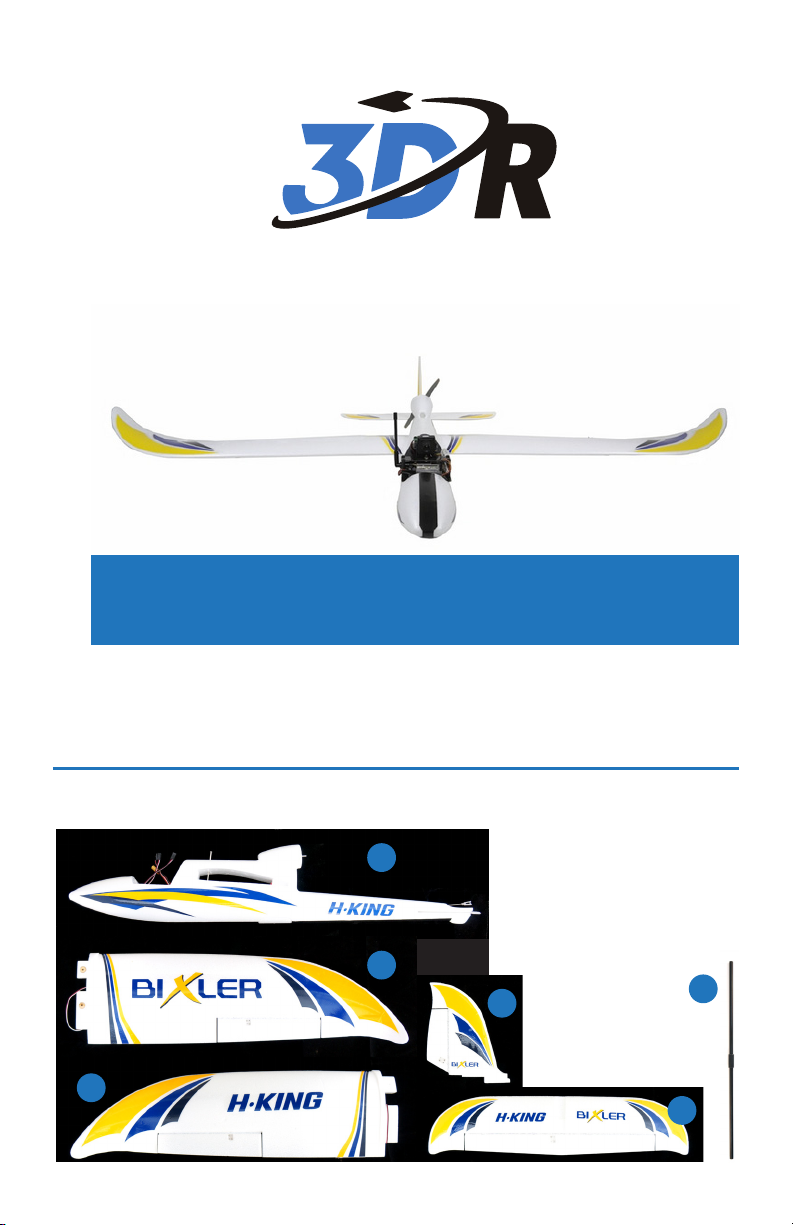
CONTENTS
3
1 Fuselage
2 Right wing
1
2
3 Left wing
4 Horizontal stabilizer
5 Vertical stabilizer
6 Carbon fiber bar
5
6
4
Page 2
5
1
2
3
9
10
1 Audio/video (AV) cable
2 AV receiver power cable
3 AV receiver antenna
4 AV receiver
5 AV transmitter battery (air)
6 AV receiver battery (ground)
7 Telemetry module (ground)
8 Telemetry antenna (ground)
11
4
3
4
13
12
14
9 Propeller
10 Servo horn screws
11 Ailerons Y cable
12 Micro-USB cable
13 USB extension cable
14 Wing screws
15 Main battery
16 Adhesive Velcro squares
15
16
5
6
7 8
1
2
10
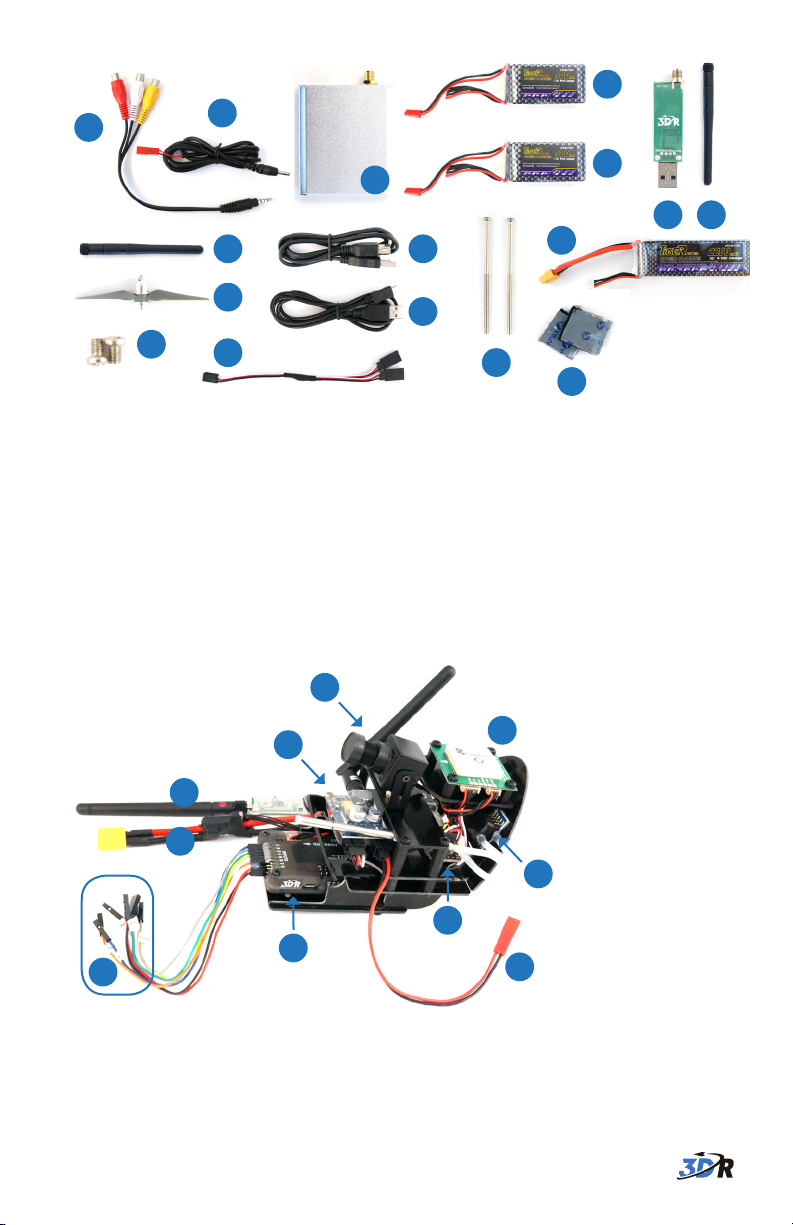
1 Telemetry (air)
2 Power module
3 AV transmitter
4 Camera
5 GPS module
6
8
9
7
6 Air speed sensor
7 AV transmitter power connector
8 On-screen display board
9 APM
10 Input connectors
Page 3
Bixler Assembly Manual
Please refer to the assembly manual included with your
plane to install main wings, stabilizers, and other parts of
the plane’s frame. Use the Y-cable to connect the aileron
cables from the left and right wings.
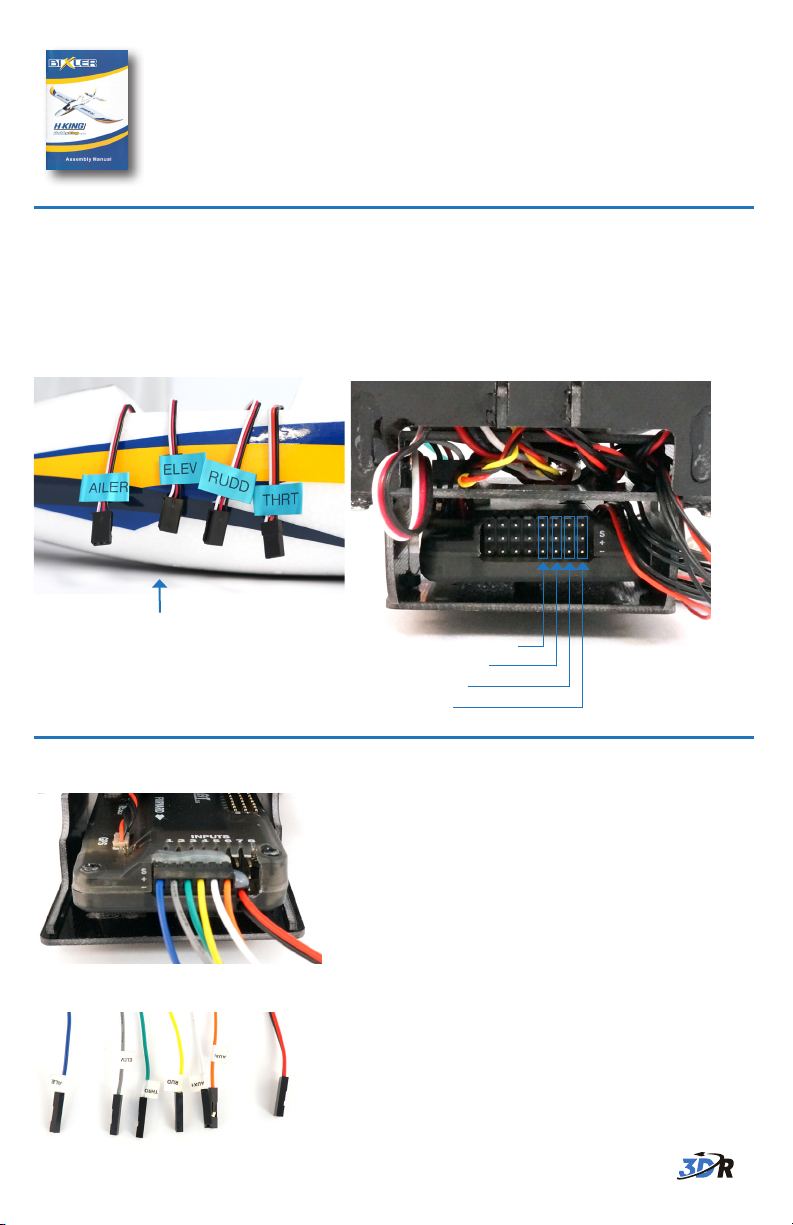
WIRING APM OUTPUTS
Connect the servo and electronic speed controller (ESC) wires to APM’s
outputs pins in the order indicated below. Connect the white wire to the
S pin (top row), the red wire to the + pin (center row), and the black wire
to the - pin (bottom row).
Servo cables are labelled by type.
Connect them to APM’s output
pins as shown.
Ailerons
Rudder
Throttle
Elevator
CONNECT RC RECEIVER
Connect the wires from the APM inputs to
the signal pins on your RC receiver. The
wires are labeled with the channel they
should connect to.
Connect the black wire to a ground pin on
APM inputs wires
Connect inputs wires to RC receiver
the receiver, and connect the red wire to a
power (five volts) pin on the receiver.
Page 4

POWER WIRING
Motor power
connector
Power module and
transmitter power connector
Connect the power module’s yellow
XT60 connectors to the motor and
main battery connectors. Connect
the AV transmitter battery to the
red connector on the transmitter.
BALANCING THE PLANE
Main battery
AV transmitter battery
Your plane’s center of gravity should
be 71 mm from the leading edge.
Please balance the plane
at this point before flying,
and move the main battery
as necessary to achieve the correct center of gravity,
MOUNT TELEMETRY AIR MODULE
Use the adhesive Velcro squares to mount
the telemetry radio air module to the side
of the fuselage where it has a clear view
of the sky.
Your plane is now fully assembled.
For software downloads and flying
instructions, please visit
plane.ardupilot.com. Happy flying!
Page 5

INSTALL SOFTWARE
Mission Planner is free, open-source software providing multiplatform
configuration and full-featured waypoint mission scripting for
autonomous vehicles.
To install Mission Planner on your ground station computer (Windows
only), visit ardupilot.com/downloads, select Mission Planner, and select
sort by date (short link: goo.gl/Si5grC). Select the most recent (top)
MissionPlanner - MSI (Microsoft installer package).
Mission Planner Downloads Screen
Mission Planner (6) « Downloads
Sort by: Title | Hits | Date
■ MissionPlanner - ZIP - 1.2.62
■ MissionPlanner - MSI - 1.2.62
■ MissionPlanner - ZIP - 1.2.60
■ MissionPlanner - MSI - 1.2.60
■ MissionPlanner - ZIP - 1.2.61
■ MissionPlanner - MSI - 1.2.61
After selecting the most recent MSI, read
Sort by date.
Select top MSI to
download most
recent version.
Download
the safety information and select Download:
Open the downloaded file to run the Mission Planner Setup Wizard.
Select the option to proceed if prompted with a security warning.
Device Driver Installation Wizard
Mission Planner
Setup Wizard will
automatically install
the correct device
drivers.
Page 6

Mission Planner Setup Wizard
Mission Planner: Flight Data Screen
Launch Mission
Planner to explore
the capabilities of
your autonomous
vehicle!
Mission Planner will
notify you when an
update is available;
please always run
the most current
version of Mission
Planner.
For more information on using Mission Planner or troubleshooting
your installation, please visit planner.ardupilot.com.
CALIBRATE RADIO CONTROL
Mission Planner’s RC calibration utility teaches APM to work with your
RC transmitter.
Page 7

Open Mission Planner. Connect APM to your
computer using the provided micro-USB cable.
Windows will automatically install the correct
drivers for APM. In Mission Planner, select the
COM port for Arduino Mega, set the Baud rate
to 115200, and select Connect.
APM USB port
1 2
Turn on your transmitter, and ensure it is set to airplane mode (not
helicopter mode). In Mission Planner, navigate to Initial Setup,
Mandatory Hardware, and Radio Calibration. Select Calibrate Radio.
Move the transmitter’s sticks and mode switches to all available
positions until the red bars are set at the extremes for each control.
Select Click when Done to complete RC calibration.
Mission Planner: Radio Calibration Screen
Connect APM to Mission Planner:
1 Select Arduino Mega.
3
2 Select 115200.
3 Select Connect.
1
2
3
5
Left Stick:
Right Stick:
4
6
1 Select Hardware.
2 Select Mandatory Hardware.
3 Select Radio Calibration.
To learn about utilizing your plane’s autonomous flight modes,
designing missions, troubleshooting, multicopter safety, and
more, please visit plane.ardupilot.com.
4 Select Calibrate Radio.
5 Move transmitter sticks and switches to all positions.
6 Select Click when Done.
 Loading...
Loading...