

Page 1
Deconstruct frame
1
First deconstruct your Hexa’s frame to allow us to alter the conguration
of the motors and arms.
Remove legs
Remove the two bolts securing leg to the arm. Repeat for all three legs.
3DR Hexa-to-Y6 Conversion Kit
ASSEMBLY INSTRUCTIONS
Introducing the 3DR Y6 – an exciting new option in the 3D
Robotics product lineup. With its lightweight and compact
design, the Y6 provides enhanced agility and stability in all
conditions, an open-view camera platform, and operational
redundancy to withstand in-ight motor failure. This manual
will guide you through the process of transforming your 3DR
Hexa into a Y6.
Remove propellers
Unscrew nut; remove spacer and propeller. Repeat for all six propellers.
Separate stack-ups, APM, and mounting plate
Unscrew the top four bolts of the stack.
Remove top plate. Disconnect any cables
connected to your APM.
Unscrew spacers; remove bottom stack-up
plate (with APM).
Remove remaining spacers and thumbnuts
to detach mounting plate.
Stack-ups
Disconnect ESCs
Disconnect electronic speed controller (ESC) three-wire cables from power
distribution board (PDB) signal pins. Disconnect ESC Deans connectors from
Deans connectors on PDB.
Disconnect ESC bullet connectors from motor cables; cut zip ties attaching ESC
to arm. Repeat for all six ESCs.
Note: If you soldered ESCs directly to motor cables, you’ll need to cut the cables
between ESCs and motors attached to arms we will remove in the next step.
Wait to resolder until you’ve veried motor spin direction.
Disconnect motors
Remove two bolts attaching motor to arm. Repeat for all six motors.
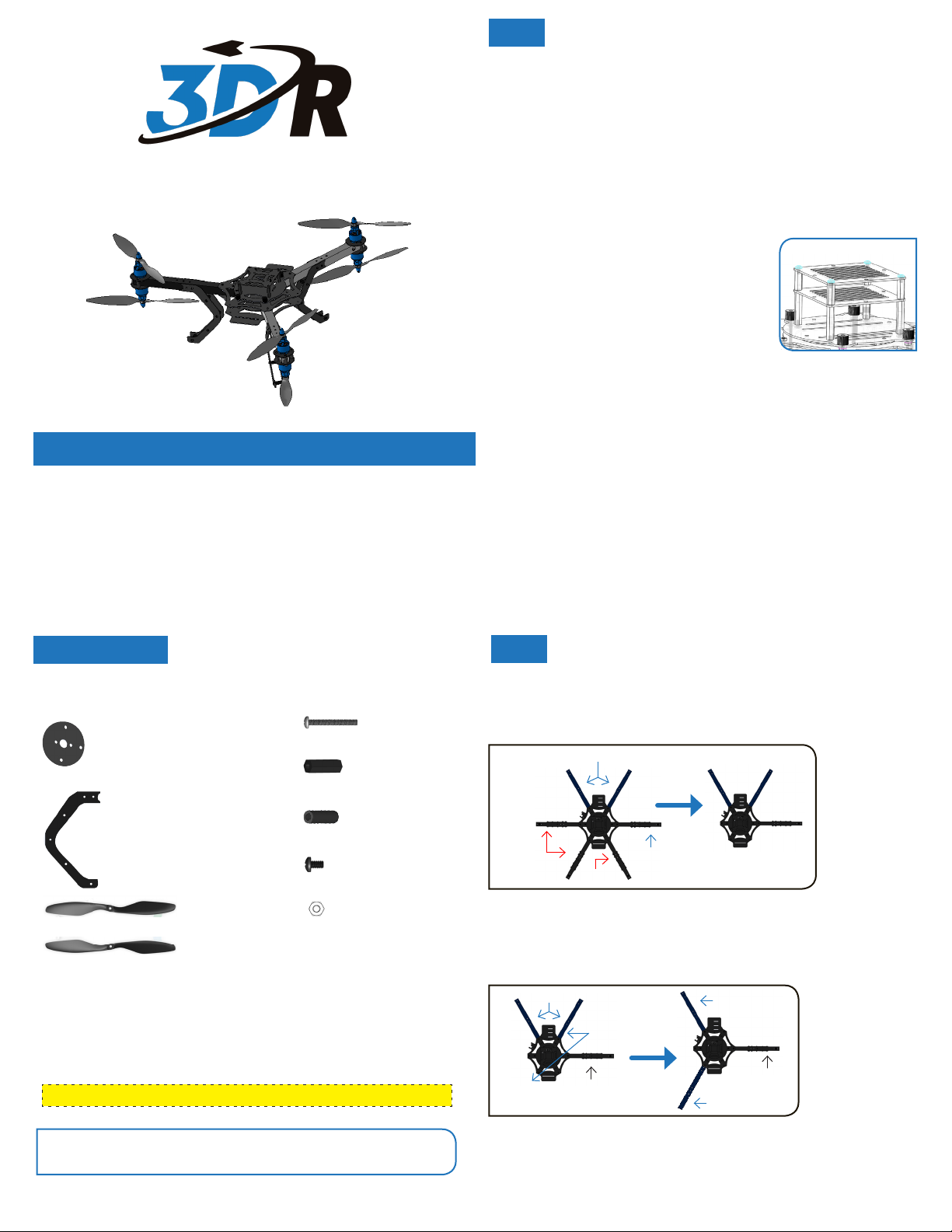
CONTENTS
Thank you for purchasing a 3DR Y6 conversion package!
This kit contains:
25 mm stainless steel bolt
x6
Co-axial motor mounting plate
18 mm threaded hex spacer
19 mm hollow spacer
x6
C-type landing gear
11 x 4.7 normal propeller
11 x 4.7 pusher propeller
You will also need:
» A fully assembled 3DR Hexa-C or Hexa-B
» Phillips screwdriver (small)
» 5.5 mm (7/32) wrench
» Threadlock compound
x2
x1 (+1 spare)
Safety Check! Disconnect battery before modifying your copter.
5 mm black nylon bolt
Metal hex nut
x12
x12
x12
x24
x12
Create the Y
2
Detach extra arms
Remove three black arms, leaving one black arm directly to the right of the
blue arms.
Blue arms: keep!
Remove
extra black
arms
For each extra arm, remove the two bolts securing arm to frame. Remove
motors completely from detached arms.
Remove
Keep!
Move blue arm
Blue arms
Move to position
directly across
Black arm
Blue arm
Black arm
Blue arm
Make sure to save your parts during the following steps. We’ll
reuse them later in the conversion process.
©2013 3D Robotics
Detach the blue arm adjacent to remaining black arm. Move to position
directly across frame. Reattach to frame in new position using the same two
bolts. Your copter’s arms should now form an evenly spaced Y.
Page 2
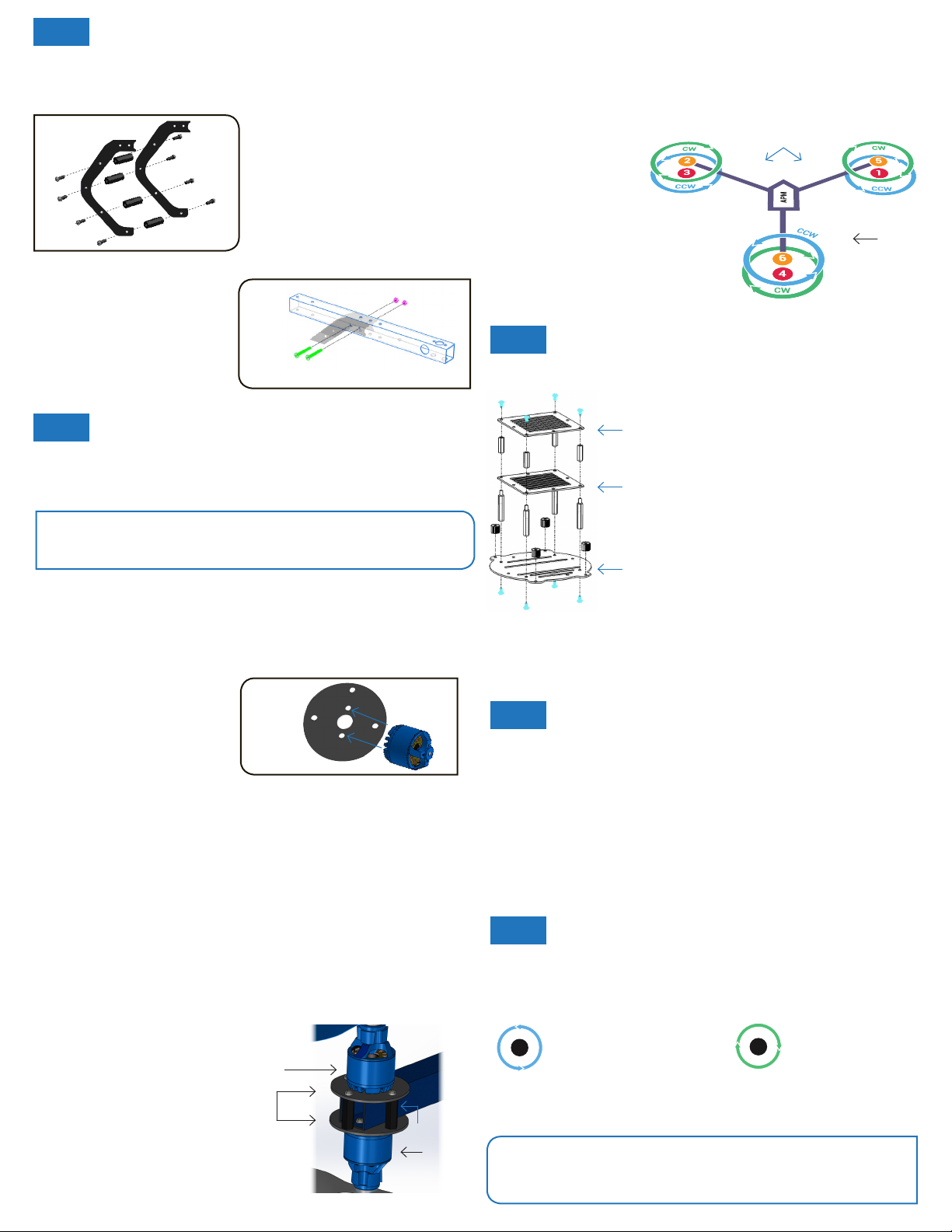
Attach legs
!
CW
3
Your Y6 has three legs, each comprised of two C-type landing gear pieces. To
assemble each leg, align the two pieces and attach through four bottom holes
using four 18 mm threaded hex spacers and eight 5 mm nylon bolts.
Reconnect motors to ESCs and PDB
Thread top and bottom motor cables through opening in end of arm.
Connect motor cable bullet connectors to ESC bullet connectors.
Connect ESC Deans connectors to PDB Deans connectors. (Order doesn’t
matter; this is just to provide power to the motors.) Repeat for all three arms.
For each hole, position spacer between
holes; secure from each side with bolts.
Repeat for all four holes. Repeat for all
three legs.
Leg assembly I
Attach legs to arms
Attach legs to arms with C-shape
facing outwards using two 25 mm
steel bolts and two metal nuts.
(You should have bolts and nuts
from when we detached the legs
from the Hexa.)
Attach motors
4
Each arm of your Y6 will have a top motor and a bottom motor attached to the
arm using a motor mounting plate. To ensure motors are securely bolted to
arms, apply a small amount of threadlock to each bolt before fastening.
Threadlocking compound is an important component to ensure your motors
remain rmly attached! For more information, check out this helpful video:
http://goo.gl/bM3MA
Leg assembly II
Attach mounting plates to bottom motors
First we’ll attach the mounting plates to the bottom motors using two 5 mm
bolts (you should have these from when we disconnected the motors from the
arms) and one motor mounting plate (from conversion kit).
Bottom motor
assembly
Position motor onto plate as shown.
Fasten plate to motor using two
bolts. Repeat for three motors.
Attach
motor
here
Insert mounting plate between top motor and arm
Now we’ll attach the top motors to the arms. Insert mounting plate between
top motor and arm. Make sure motor cables protrude in the direction of the
end of the arm.
Fasten motor and plate to arm using two 5 mm bolts by accessing through
the two large holes in the bottom of the arm.
Repeat for all three arms.
Attach top and bottom mounting plates
Place mounting plate (with bottom motor attached) on underside of arm so
that three outer holes align. Insert 19 mm hollow spacer between top and
bottom hole; thread 25 mm steel bolt through spacer and plates. Secure
with nut. Repeat for all three holes on mounting plates.
Repeat for all three arms.
Note: Bottom motor
does not connect
directly to arm.
©2013 3D Robotics
Top and bottom motors attached
to arm with mounting plates
Top motor
Mounting
plates
Spacer
Bottom
motor
Connect ESC three-wire
cables to signal pins on
PDB according to motor
number. Motor numbers
are congured as shown.
PDB signal pins are labelled M1 through
M6. Connect motors to their respective
signal pins with white wire positioned
upward.
Reassemble stack-ups and APM
5
Now that your copter is congured into a Y6, we’ll reattach the stack-ups and
reconnect the hardware.
Top stack-up
Attach mounting plate to frame with
thumbnuts. Attach stack-ups to mounting
Bottom
stack-up
Mounting
plate
Reconnect GPS cable, power module cable, cables from PDB into output pins,
cables from receiver into input pins, 3DR Radio into telemetry port, and any
other cables that were disconnected from your APM during step 1.
Test motor spin directions
6
Connect battery to your Y6. Test motors to ensure that propellers will spin in
the correct directions as specied in the diagram above. CW (green) signies
clockwise rotation; CCW (blue) signies counterclockwise rotation.
If motor spins in the incorrect direction, switch two of the three cables
joining the motor and ESC. Once correct spin directions are conrmed,
secure ESCs to arms using zip ties.
Note: If your motor and ESC cables were originally soldered, resolder cables
here once motors are conrmed to spin in correct directions.
Attach propellers
7
Attach 10-inch propellers to top motors and 11-inch propellers to bottom
motors according to the conguration shown above. Pusher propellers are
marked “4.7P”; normal propellers are marked “4.7”. If using metal spacers,
place metal spacer on top of propeller before adding prop nut.
CCW
COUNTERCLOCKWISE ROTATION:
!
USE NORMAL PROPELLER
Regardless of motor orientation, all propellers must face up (markings on
top). This means that you’ll need to attach propellers to bottom motors
upside down.
plate using original spacers and bolts as
shown.
Make sure your APM is facing forward,
between the two blue arms as shown in
the diagram above.
If necessary rotate the APM and/or stack-
up plate to achieve this.
Blue arms
CW
CLOCKWISE ROTATION:
!
USE PUSHER PROPELLER
Black
arm
Your Y6 conversion is complete! For pre-ight conguration, Y6
rmware download, and additional setup instructions, please visit:
www.copter.ardupilot.com/apmcopter. Happy ying!
 Loading...
Loading...