

Page 1

3B SCIENTIFIC
Stabpendel mit Winkelaufnehmer U8404275
Bedienungsanleitung
10/07 ELWE/ALF
®
PHYSICS
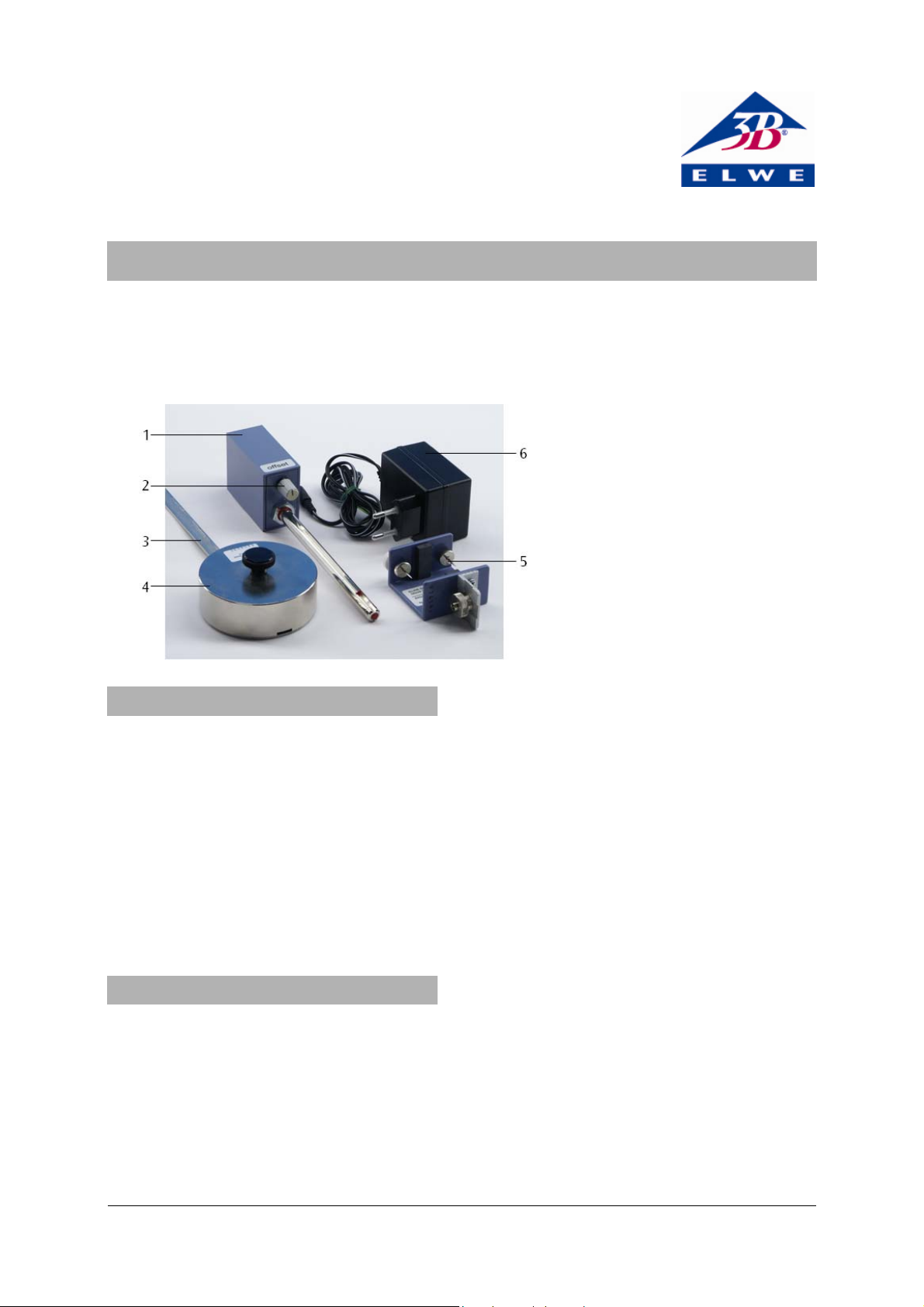
1 Winkelaufnehmer
2 Offset-Regler
3 Pendelstab
4 Pendelmasse
5 Spitzenlager
6 Steckernetzgerät
1. Sicherheitshinweise
Vorsicht! Das Pendel ist mit zwei spitzen Nadeln
zur Lagerung bestückt. Verletzungsgefahr!
• Beim Aufbau des Pendels ist darauf zu
achten, dass beide Nadeln korrekt in der
Nut stehen.
• Für sicheren und festen Stand des Pendels
sorgen.
• Die Pendelmasse muss mittels der Rändel-
schraube immer gegen Herunterfallen gesichert sein.
2. Beschreibung
Das Stabpendel mit Winkelaufnehmer dient zur
Untersuchung harmonischer Schwingungen, der
Dämpfung durch Luftreibung, gekoppelter Schwingungen* und Lissajous - Figuren* (*Zweites Stab-
pendel mit Winkelaufnehmer erforderlich).
Mit dem Winkelaufnehmer kann der Auslenkwin-
kel, z.B. eines Schwerependels, in ein elektrisches
Signal gewandelt werden. Der Aufnehmer liefert für
kleine Auslenkungen eine winkelproportionale
Spannung. Er besteht aus einem vernickelten Messingrohr mit angeschraubter Elektronikbaugruppe.
Das Messingrohr dient zur Befestigung mit einer
Kreuzmuffe an einem Stativstab und enthält am
vorderen Ende eine V-förmige Nut zur Lagerung
des Pendels. Die beiden Auflagepunkte für die
Spitzen des Pendels sind durch Ringmarken gekennzeichnet. Zwischen diesen beiden Markierungen sitzt ein Hallsensor. Er ist so ausgerichtet, dass
die Feldlinien in der Pendelruhelage in der Ebene
des Chips verlaufen und keine Hallspannung bewirken.
Wird das Pendel um den Winkel δ aus der vertikalen Lage ausgelenkt, tritt eine horizontale Feldkomponente auf, die je nach Richtung der Auslenkung eine positive oder negative Ausgangsspannung bewirkt.
Der Winkelaufnehmer ist auf das Magnetpaar der
Spitzenlagerung abgestimmt, so dass in exakt eingerichteter Einbaulage und Ruhestellung des Pendels die Ausgangsspannung an der BNC-Buchse
etwa Null ist. Eine Feinabstimmung kann mit dem
Offsetregler erfolgen.
Hinweis: Die Zuordnung von Spitzenlager und
1
Page 2

Winkelaufnehmer ist durch eine Zahl gekennzeichnet. Bei Verwendung von nicht zugeordneten
Komponenten kann, bedingt durch Exemplarstreuung der Magnete, eine höhere Offsetspannung
auftreten.
Der Pendelstab kann sowohl in Magnetrichtung (für
Schwerependel) wie auch senkrecht dazu (bei Federpendelversuchen) befestigt werden. Als Masse
beim Schwerependel dient die scheibenförmige
Pendelmasse.
Die Spannungsversorgung erfolgt über ein im Lieferumfang enthaltenes 12 V AC Steckernetzgerät.
Das Stabpendel U8404275-115 ist für eine Netz-
spannung von 115 V (±10 %) ausgelegt, U8404275230 für 230 V (±10 %).
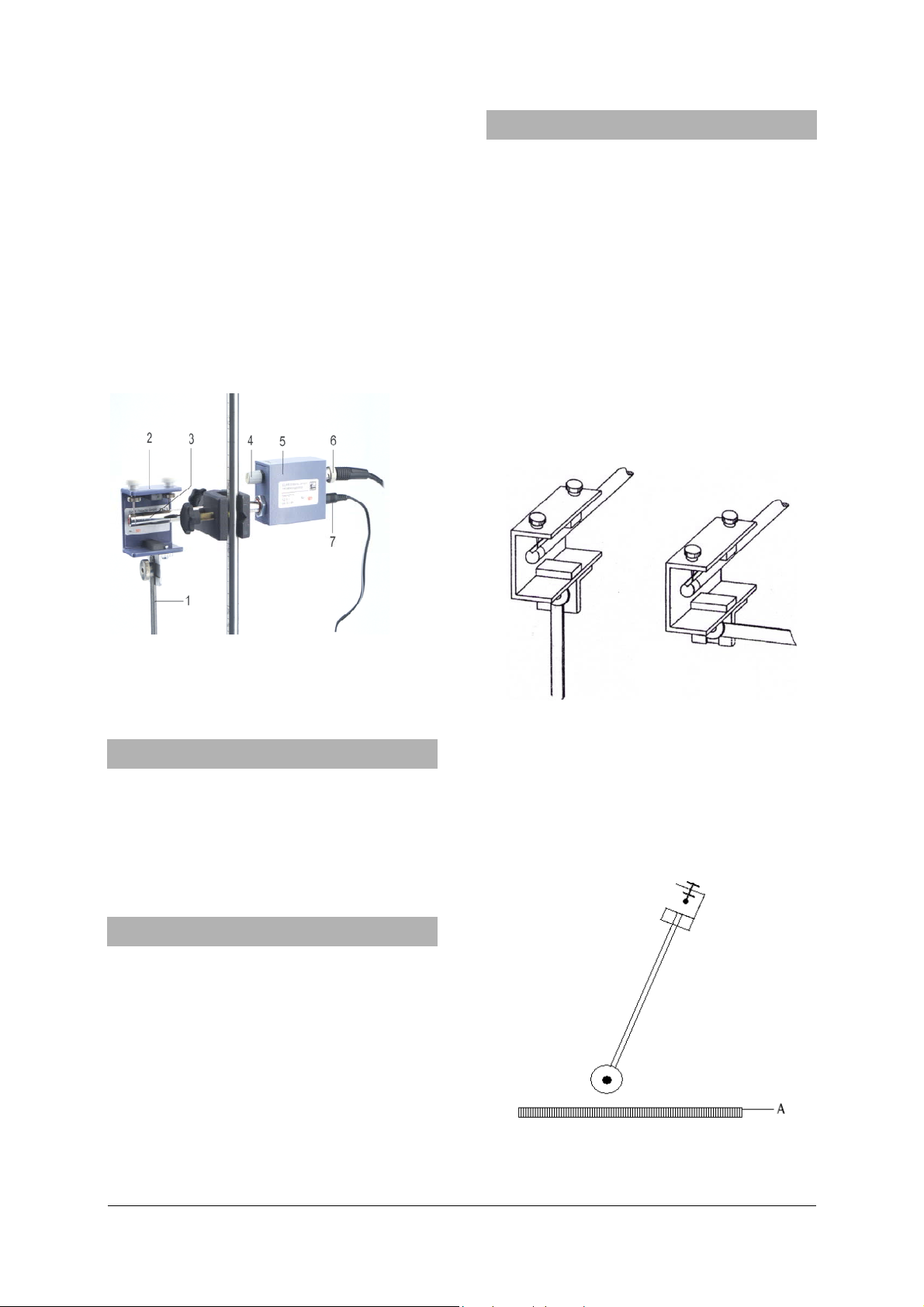
5. Versuchsbeispiele
5.1 Hinweise zum Versuchsaufbau
Je nach Art der Montage des Pendelstabes (Fig. 2, 3)
kann der Winkelaufnehmer sowohl bei Schwerependeln als auch bei Federpendeln verwendet
werden.
Beim Aufbau eines Schwerependels gemäß Fig. 2 ist
auf Standfestigkeit zu achten. Am besten wird der
vertikal aufgebaute Stativstab mit einer Tischklemme befestigt. Nötigenfalls muss der Aufbau
durch weitere Verstrebungen stabilisiert werden.
Befindet sich der Stab des Winkelaufnehmers nicht
in horizontaler Richtung, kann das Pendel mittels
der verstellbaren Spitzen lotrecht justiert werden.
Tritt in Ruhelage des Pendels eine von Null abweichende Ausgangsspannung auf, so kann diese mit
dem Offset-Regler kompensiert werden.
Fig. 1 Lagerung des Stabpendels
1 Pendelstab, 2 Spitzenlager, 3 Stativstab des Winkelaufnehmers, 4 Offset-Regler, 5 Winkelaufnehmer, 6 BNCBuchse, 7 Verbindungsleitung vom Steckernetzgerät
3. Lieferumfang
1 Pendelstab
1 Pendelmasse
1 Winkelaufnehmer
1 Spitzenlager
1 Steckernetzgerät 12
V AC
4. Technische Daten
Betriebsspannung: 12 V AC
Ausgangsspannung: ±
5 V
Ausgangswiderstand: 500 Ohm
Pendellänge: 1 m
Pendelmasse: 1 kg
Masse Winkelaufnehmer: ca. 0,3 kg
Durchmesser Ms-Rohr: 10 mm
Fig 2 Fig 3
5.2 Bestimmung der Ausgangsspannung als
Funktion das Auslenkwinkels
Zur quantitativen Auswertung von Versuchen ist es
erforderlich, den genauen Zusammenhang von
Ausgangsspannung und Auslenkwinkel zu kennen.
Dieser kann nach Fig. 4 bestimmt werden.
Fig 4 A Maßstab
2
Page 3
5.3 Schwerependel
Mit dem mechanischen Aufbau nach Fig. 2 können
Schwingungen von Schwerependeln untersucht
werden.
Zur Registrierung eignen sich ein x-t- (bzw. x-y-t-)
Schreiber, ein Speicheroszilloskop oder ein computergestütztes Messsystem.
Bei der quantitativen Auswertung des Zusammenhangs von Frequenz und Pendellänge ist bei kurzen
Pendellängen (Abstand Drehpunkt – Pendelmasse
< 50 cm) die Beschreibung durch die Beziehung
glT /2π= nicht mehr hinreichend genau.
Für eine exakte mathematische Beschreibung sind
die Trägheitsmomente des Pendelstabes, der Pendelmasse und der Pendelaufhängung zu berücksichtigen.
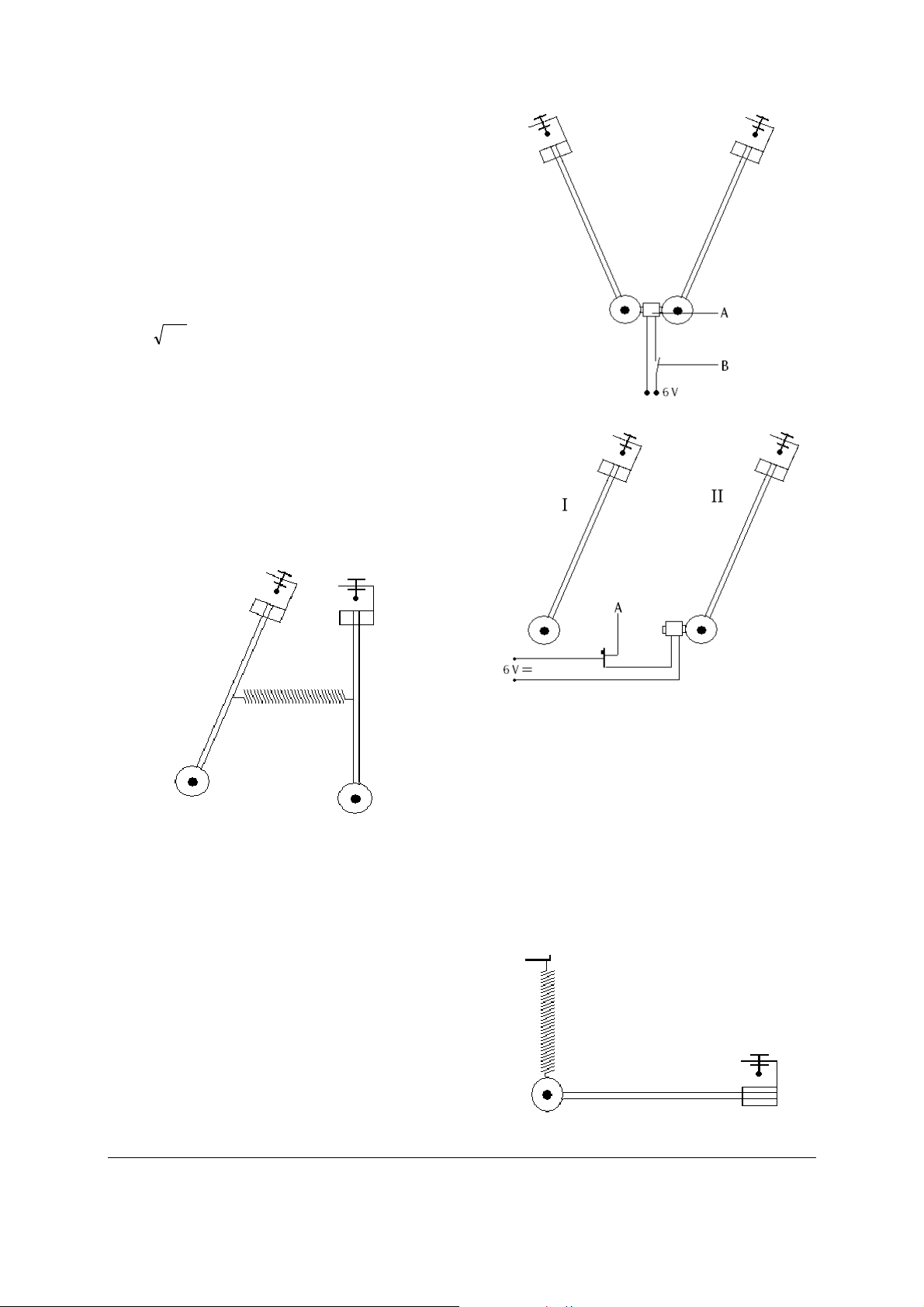
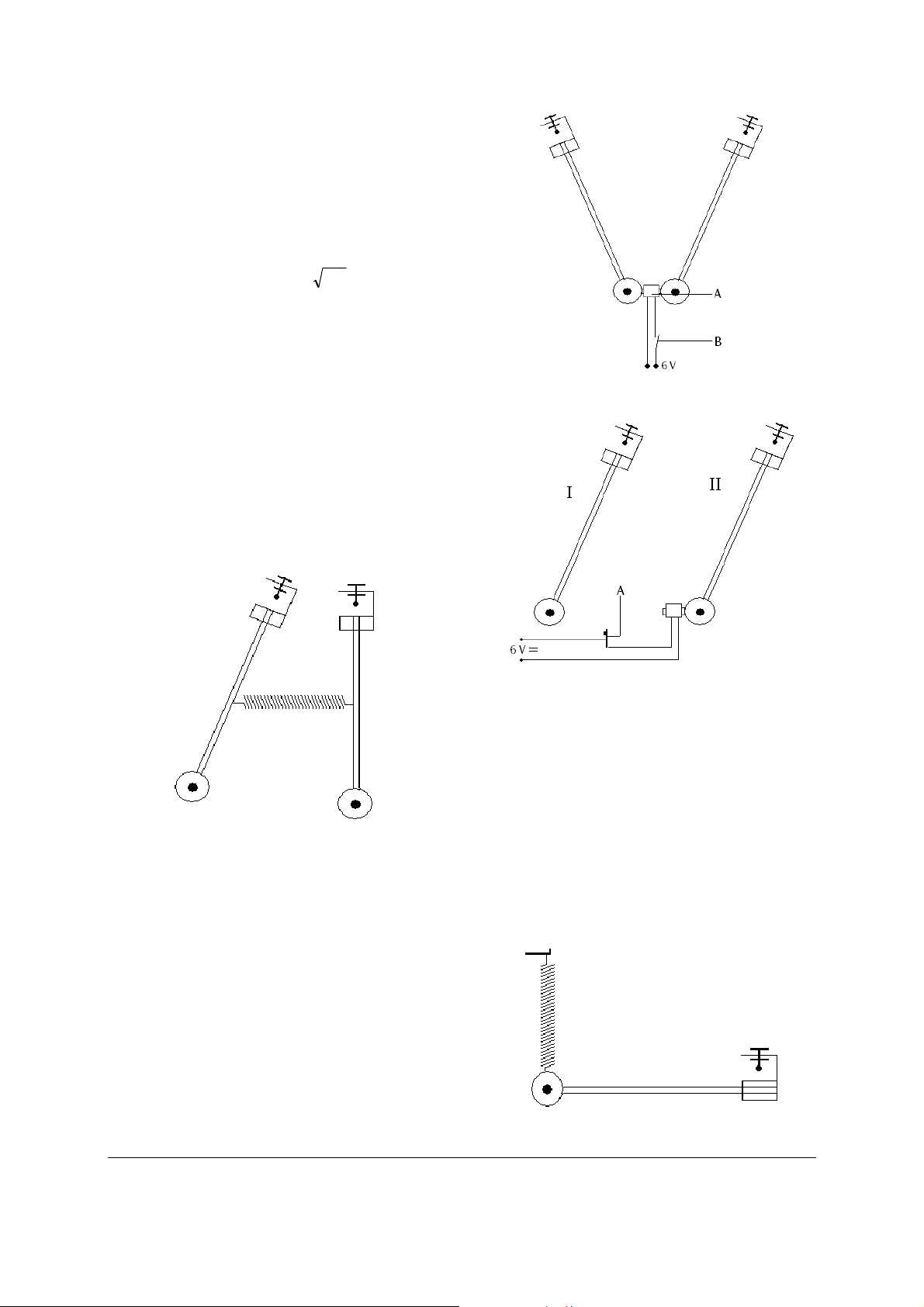
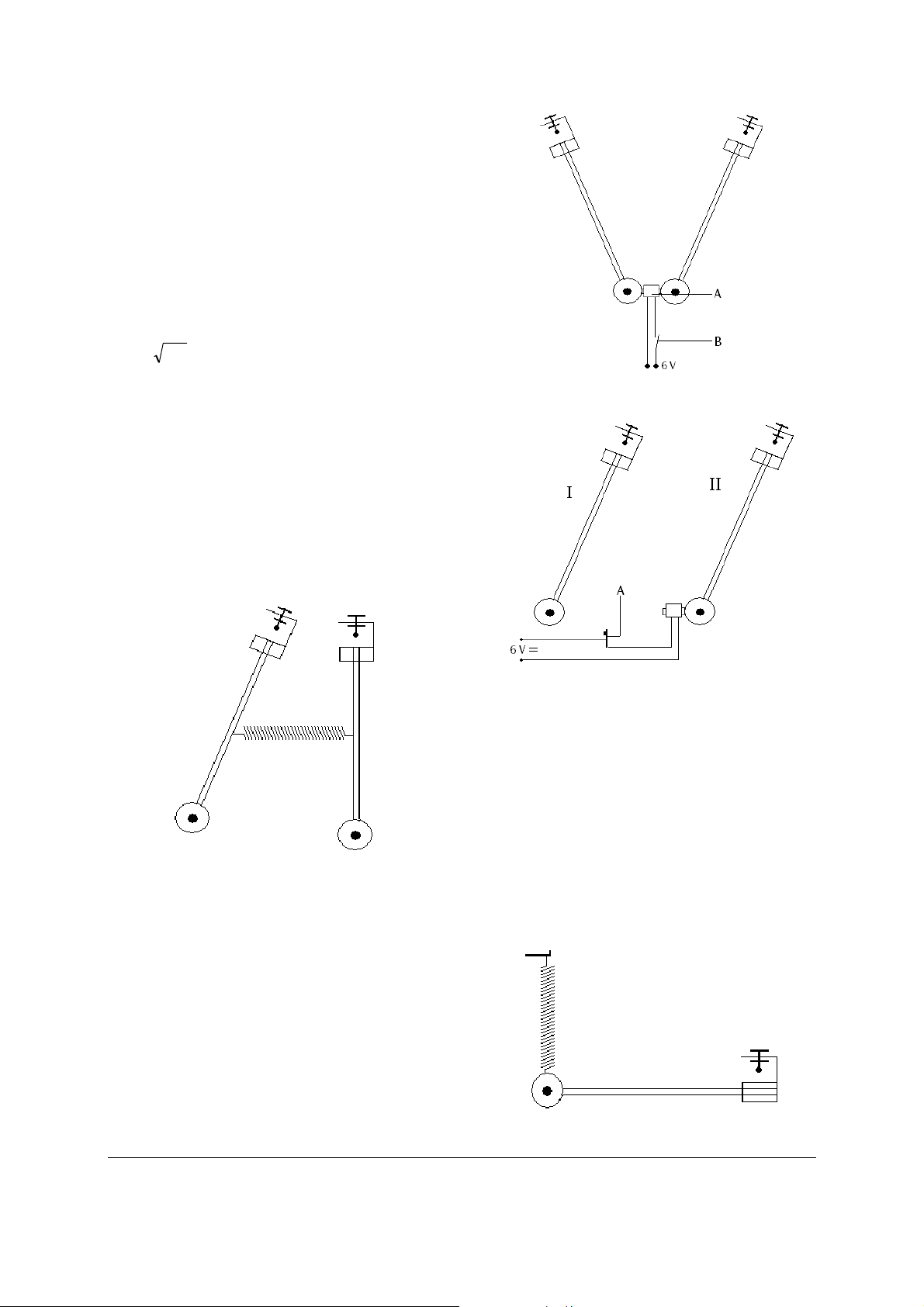
5.4 Gekoppelte Schwerependel
Mit 2 Winkelaufnehmern können gekoppelte Pendelschwingungen realisiert werden (Fig. 5).
Die Pendel werden durch eine Schraubenfeder
(Schraubenfeder 3 N/m U15027) gekoppelt, die in
die Bohrungen der Pendelstäbe eingehängt wird.
Fig 6 A Spule mit Eisenkern, B Schalter
Fig 5
5.5 Lissajous- Figuren
Die Ausgangsspannungen der beiden Winkelaufnehmer werden an den x- bzw. y-Eingang eines
Koordinatenschreibers (alternativ an ein Speicheroszilloskop oder ein computergestütztes Messsystem) angeschlossen. Definierte Phasenverschiebungen zwischen den beiden Schwingungen können
mit Haltemagneten und Freigabekontakten vorgegeben werden (Fig. 6 und Fig 7).
Bei der Schaltung nach Fig. 7 wird durch das Pendel I die Kontaktplatte im tiefsten Punkt geöffnet.
Dadurch wird das Pendel II um 90 ° verzögert freigegeben.
Fig 7 A Kontaktplatte
Sind die beiden Pendel unterschiedlich lang, treten
Lissajous-Figuren auf, die nicht deckungsgleich
verlaufen. Für Lissajous-Figuren mit einem Frequenzverhältnis von 1:2 muss einer der Pendelstäbe 1 m durch einen Flachstab 25 cm ausgewechselt
werden. Der Feinabgleich des Frequenzverhältnisses auf 1:2 wird durch Verschieben der Pendelmasse auf dem kurzen Pendelstab vorgenommen.
5.6 Federpendel
Zur Untersuchung an Federpendeln wird der Pendelstab gemäß Fig. 8 befestigt.
Fig. 8
Elwe Didactic GmbH • Steinfelsstr. 6 • 08248 Klingenthal • Deutschland • www.elwedidactic.com
3B Scientific GmbH • Rudorffweg 8 • 21031 Hamburg • Deutschland • www.3bscientific.com
Technische Änderungen vorbehalten
© Copyright 2007 3B Scientific GmbH
Page 4

Page 5

3B SCIENTIFIC
Pendulum Rod with Angle Sensor U8404275
Instruction sheet
10/07 ELWE/ALF
®
PHYSICS
1 Angle sensor
2 Offset adjuster
3 Pendulum rod
4 Pendulum weight
5 Needle bearing
6 Plug-in power supply
1. Safety instructions
Caution: The pendulum pivots on two sharp needles that can cause injury.
• When setting up the pendulum, make sure
that both needle bearings are properly in
the groove.
• Make sure the pendulum is resting safely
and securely.
• The pendulum bob must always be secu-
red by the knurled screw to stop it from
falling down.
2. Description
The pendulum rod with angle sensor is used to
study simple harmonic oscillations, damping by the
air resistance, coupled oscillations*, and Lissajous
figures*. (*requires two pendulum rods with angle
sensor).
The angle sensor allows the deflection of a weighted pendulum, for example, to be converted into
an electrical signal. For small deflections, the sensor outputs a voltage that is proportional to the
angle of deflection. It consists of a nickel-plated
brass tube with a housing for its electronic components screwed on. The brass rod is for securing to a
cross sleeve on a retort stand and has a V-shaped
groove at its front end in which the pendulum can
pivot.
The positions of the two bearings at the top end of
the pendulum are indicated by ring markings.
Between these two marks there is a Hall sensor,
which is orientated in such a way that when the
pendulum is in the rest position, the magnetic field
lines run along the plane of the sensor chip and no
Hall voltage is generated. When the pendulum is
deflected through an angle δ from the vertical
position, the sensor experiences a horizontal field
component, which causes a positive or negative
output voltage depending on the direction of the
deflection. The angle sensor is matched to the
magnet pair in the support at the top of the pendulum, so that when the alignment is precisely adjusted with the pendulum in the rest position, the
output voltage at the BNC socket is close to zero. A
fine adjustment can then be achieved using the
offset adjuster.
Note: the matching of the pendulum support with
the corresponding angle sensor is indicated by a
1
Page 6
number. If components that are not matched to
each other are used, statistical variations between
individual magnets can require a greater offset
voltage.
The pendulum rod can be fixed either in the direction of the magnet axis (for a gravity pendulum) or
perpendicular to it (for spring pendulum experiments). In the case of the gravity pendulum the
disc-shaped pendulum bob serves as the weight.
The voltage supply is derived from a 12V AC plug-in
power supply, which is included in the kit.
The pendulum U8404275-115 is for operation with
a mains voltage of 115 V (±10%), and U8404275-230
is for operation with a mains voltage of 230 V
(±10%).
5. Example experiments
5.1 Instructions for experiment set-up
Depending on how the pendulum rod is mounted
(Fig. 2, 3) the angle sensor can be used for both
weighted and spring pendulums.
In setting a weighted pendulum according to Fig. 2,
make sure the pendulum has a secure base. Ideally, the vertical stand rod should be secured by
means of a table clamp. If necessary, the set-up
may need to be held firm by additional supports.
If the supporting rod for the angle sensor is not
exactly horizontal, the pendulum can be restored
to a vertical position by means of the adjusting
screws.
If the output voltage differs from when the pendulum is in its rest position zero, this can be compensated for by the offset adjuster.
Fig. 1 . Support arrangement for pendulum rod
1 Pendulum rod, 2 Needle bearing, 3 Supporting rod for
angle sensor, 4 Offset adjuster, 5 Angle sensor, 6 BNC
socket, 7 Connecting lead from plug-in power supply
3. Scope of delivery
1 Pendulum rod
1 Pendulum weight
1 Angle sensor
1 Needle bearing
1 Plug-in power supply 12
V AC
4. Technical data
Operating voltage: 12 V AC
Output voltage: ±
5 V
Output resistance: 500 Ohm
Length of pendulum: 1 m
Pendulum weight: 1 kg
Weight of angle sensor: 0.3 kg approx.
Diameter of tube: 10 mm
Fig 2 Fig 3
5.2 Determining the output voltage as a function of the angle of deflection
To evaluate experiments quantitatively it is necessary to know the precise relationship between the
output voltage and the angle of deflection. This can
be determined as in Fig. 4.
Fig 4 A Ruler
2
Page 7
5.3 Weighted pendulum
It is possible to investigate oscillations of weighted
pendulums using the set-up shown in Fig. 2.
An x-t (or x-y-t) plotter, a storage oscilloscope or a
computer-based data recording system are all applicable for recording the results.
For quantitative investigation of the relationship
between the frequency and the length of the pen-
dulum, the relationship
glT /2π= is no longer
accurate enough for short pendulum lengths (when
the distance between the fulcrum and the weight
of the pendulum is less than 50 cm).
Precise mathematical treatment requires consi
eration of the moment of inertia of the pendulum
rod, the weight and the pivot mechanism of the
pendulum.
5.4 Coupled weighted pendulums
With two angle sensors investigations can be made
of coupled weighted pendulums (Fig. 5).
The pendulums are linked via a coil spring (Helical
spring 3 N/m, U15027) that can be suspended from
the holes in the pendulum rods.
Fig 6 A Coil with iron core, B Switch
Fig 5
5.6 Lissajous figures
The outputs of the two angle sensors are connected
to the x and y inputs of a coordinate plotter (alte
natively a storage oscilloscope or a computer-based
data recording system). Phase differences between
the two oscillations can be controlled with the aid
of holding magnets and release contacts (Fig. 6, 7).
For the circuit in Fig. 6, pendulum I’s contact plate
is opened at its lowest point. Pendulum II is thus
released with a 90° delay.
Fig 7 A Contact plate
If the two pendulums are of differing lengths, Lissajous figures are recorded that are not coincident.
To obtain Lissajous figures with a frequency ratio of
1:2, one of the 1-m pendulum rods must be replaced with a 25-cm rod. Fine calibration of the
frequency ratio to precisely 1:2 can be achieved by
carefully adjusting the position of the weight on
the short pendulum rod.
5.6 Spring pendulum
To investigate spring pendulums, the pendulum
rod is secured as in Fig. 8.
Fig. 8
Elwe Didactic GmbH • Steinfelsstr. 6 • 08248 Klingenthal • Germany • www.elwedidactic.com
3B Scientific GmbH • Rudorffweg 8 • 21031 Hamburg • Germany • www.3bscientific.com
Subject to technical amendments
© Copyright 2007 3B Scientific GmbH
Page 8

Page 9

3B SCIENTIFIC
Pendule avec capteur de déplacement U8404275
Manuel d’utilisation
10/07 ELWE/ALF
®
PHYSICS
1 Capteur de déplacement
2 Régulateur offset
3 Barre du pendule
4 Masse du pendule
5 Logement sur aiguilles
6 Alimentation à fiche
1. Consignes de sécurité
Prudence ! Le pendule est doté de deux aiguilles
pointues. Risque de blessure !
• Lorsque vous montez le pendule, veillez à
ce que les deux aiguilles soient correctement placées dans la rainure.
• Le pendule doit être placé sur un support
sûr et stable.
• Fixez toujours la masse du pendule à
l’aide de la vis moletée pour éviter qu’il ne
tombe.
2. Description
Le pendule avec capteur de déplacement permet
d'étudier les oscillations harmoniques, l'amortissement par le frottement de l'air, les oscillations
couplées* et les figures de Lissajous*. (*Second
pendule à capteur de déplacement nécessaire).
Le capteur de déplacement permet de transformer
l’angle de déviation, par ex. d’un pendule pesant,
en signal électrique. En cas de faibles déviations, il
fournit une tension proportionnelle à l’angle. Il est
constitué d’un tube en laiton nickelé avec un petit
boîtier vissé renfermant les composants électroniques. Le tube permet d’être fixé à une barre de
support à l’aide d’un manchon en croix et présente
à son extrémité avant une rainure en V pour loger
le pendule. Les deux points d'appui pour les poin-
tes du pendule sont marqués par des repères annulaires. Un capteur Hall est placé entre les deux
repères. Il est orienté de telle manière que, lorsque
le pendule est au repos, les lignes de champ se
situent sur le même plan que la puce et n'entraînent aucune tension de Hall.
La déviation du pendule de sa position verticale
dans un angle δ génère une composante de champ
horizontale qui, selon le sens de la déviation, entraîne une tension de sortie positive ou négative.
Le capteur angulaire est adapté à la paire d'aimants de la suspension à pivot, de sorte que, si le
pendule est en position de repos et parfaitement
monté, la tension de sortie à la borne BNC est à
peu près nulle. Le régulateur offset permet un
ajustage fin.
Note : L'assignation de la suspension à pivot et du
capteur angulaire est caractérisée par un indice. En
cas d'emploi de composants qui ne sont pas assi-
1
Page 10

gnés, la dispersion exemplaire des aimants risque
d'entraîner une tension offset supérieure.
La barre de pendule peut être fixée dans le sens de
l'aimant (pendule pesant), mais aussi dans l'axe
vertical (pour les expériences sur le pendule à ressort). La masse pendulaire en forme de disque sert
de masse au pendule pesant.
L'alimentation en tension est assurée par l'alimentation secteur 12 V CA fournie.
Le pendule U8404275-115 est prévue pour une
tension secteur de 115 V (±10 %) et l'alimentation
U8404275-230 pour une tension secteur de 230 V
(±10 %).
5. Exemples d’expériences
5.1 Remarques sur le montage des expériences
Selon le type de montage de la barre du pendule
(fig. 2,3), le capteur de déplacement peut être utilisé tant pour les pendules pesants que pour les
pendules à ressort.
Lors du montage d’un pendule pesant (voir fig. 2),
sa bonne stabilité doit être garantie. Fixez la barre
de support verticale de préférence avec une bride
de fixation. Au besoin, stabilisez le montage avec
des renforcements supplémentaires.
Si la barre du capteur angulaire n'est pas à l'horizontale, vous pouvez orienter le pendule à la verticale avec les pointes réglables.
Si la tension de sortie diverge de zéro lorsque le
pendule est en position de repos, compensez-la
avec le régulateur offset.
Fig. 1 Logement du pendule droit
1 Barre du pendule, 2 Logement sur aiguilles, 3 Barre de
support du capteur angulaire, 4 Régulateur offset, 5
Capteur de déplacement, 6 Borne BNC, 7 Câble de liaison
de l'alimentation secteur
3. Matériel fourni
1 barre du pendule
1 masse du pendule
1 capteur de déplacement
1 logement sur aiguilles
1 Alimentation à fiche 12V CA
4. Caractéristiques techniques
Tension d’alimentation : 12 V CA
Tension de sortie : ±5 V
Résistance à la sortie : 500 Ohm
Longueur de pendule : 1 m
Masse du pendule : 1 kg
Masse du capteur : env. 0,3 kg
Diamètre de tube : 10 mm
Fig 2 Fig 3
5.2 Détermination de la tension de sortie comme fonction de l’angle de déviation
Pour obtenir une évaluation quantitative des expériences, il est nécessaire de connaître le rapport
exact entre la tension de sortie et l’angle de déviation, qui peut être déterminé d’après la fig. 4.
Fig 4 A Echelle
2
Page 11
5.3 Pendule pesant
Le montage mécanique de la fig. 2 permet
d’étudier les oscillations de pendules pesants.
Pour l’enregistrement, vous pouvez vous servir d’un
traceur x-t (ou x-y-t), d’un oscilloscope à mémoire
ou d’un système de saisie de données assisté par
ordinateur.
Pour l'évaluation quantitative du rapport entre la
fréquence et la longueur du pendule, la description
pour de courtes longueurs de pendule (écart entre
point d'appui et masse de pendule < 50 cm) par
l'équation
glT /2π= n'est plus assez précise.
Pour garantir un calcul mathématique précis, vous
devrez tenir compte des moments d’inertie de la
barre du pendule, de la masse du pendule et de la
suspension du pendule.
5.4 Pendules pesants couplés
Deux capteurs de déplacement permettent
d’effectuer des oscillations pendulaires couplées
(fig. 5).
Les pendules sont reliés entre eux par un ressort à
boudin (ressort cylindrique 3,0 N/m U15027) accroché dans les alésages des barres du pendule.
Fig 6 A Bobine avec noyau en fer, B Interrupteur
Fig 5
5.5 Figures de Lissajous
Les tensions de sortie des deux capteurs sont branchées à l’entrée x ou y d’un traceur de courbes
(variante : oscilloscope à mémoire ou système de
saisie de données assisté par odinateur). Des déphasages définis entre les deux oscillations peuvent
être préréglés avec des aimants de maintien et des
contacts de libération (fig. 6, 7).
Dans le montage de la fig. 6, la plaque de contact
est ouverte par le pendule I au point le plus bas.
Ainsi le pendule II est-il libéré avec une temporisation de 90°.
Fig 7 A Plaque de contact
Si les deux pendules n’ont pas la même longueur, il
apparaît des figures de Lissajous qui ne se recouvrent pas. Pour obtenir des figures de Lissajous
d’un rapport de fréquence 1:2, l’une des barres de
1 m doit être remplacée par une barre plate de 25
cm. Pour obtenir un réglage fin du rapport de
fréquence à 1:2, déplacez la masse du pendule sur
la barre plate courte.
5.6 Pendule à ressort
Pour étudier un pendule à ressort, fixez la barre du
pendule comme le montre la fig.8.
Fig. 8
Elwe Didactic GmbH • Steinfelsstr. 6 • 08248 Klingenthal • Allemagne • www.elwedidactic.com
3B Scientific GmbH • Rudorffweg 8 • 21031 Hamburg • Allemagne • www.3bscientific.com
Sous réserve de modifications techniques
© Copyright 2007 3B Scientific GmbH
Page 12

Page 13

3B SCIENTIFIC
Pendolo ad asta con rivelatore d’angolo U8404275
Istruzioni per l’uso
10/07 ELWE/ALF
®
PHYSICS
1 Rivelatore d’angolo
2 Regolatore di offset
3 Asta del pendolo
4 Peso del pendolo
5 Elemento di sospensione su
punte
6 Alimentatore a spina
1. Norme di sicurezza
Attenzione! Il pendolo è dotato di due punte per la
sospensione. Pericolo di lesioni!
• Durante il montaggio del pendolo, assicu-
rarsi che entrambe le punte siano correttamente posizionate nella scanalatura.
• Garantire un posizionamento saldo e sicu-
ro del pendolo.
• Il peso del pendolo deve essere sempre
fissato mediante la vite a testa zigrinata
per evitarne la caduta.
2. Descrizione
Il pendolo ad asta con rivelatore d’angolo serve per
l’analisi delle oscillazioni armoniche, dello smorzamento causato dall’attrito dell’aria, delle oscillazioni accoppiate* e delle figure di Lissajous* (*è
necessario un secondo pendolo ad asta con rivelatore ad angolo).
Con il rivelatore d’angolo è possibile trasformare
l’angolo di deviazione, ad es. di un pendolo pesante, in un segnale elettrico. Il rivelatore fornisce una
tensione angolare proporzionale per le piccole
deviazioni. Esso è costituito da un tubo di ottone
(nichelato) con un piccolo alloggiamento avvitato
per i componenti elettronici. Il tubo di ottone serve
per il fissaggio ad un supporto stativo con un manicotto a croce ed è dotato sull’estremità anteriore
di una scanalatura a V per la sospensione del pendolo.
I due punti di appoggio delle punte del pendolo
sono evidenziati da contrassegni ad anello. Tra
questi due contrassegni è collocato un sensore di
Hall, orientato in modo che le linee di forza nella
posizione di riposo del pendolo attraversino il
piano del chip e non provochino una tensione di
Hall.
Se il pendolo viene deviato dell’angolo δ•rispetto
alla posizione verticale, si instaura una componente di campo orizzontale che provoca, a seconda
della direzione della deviazione, una tensione di
uscita positiva o negativa.
Il rivelatore d’angolo è regolato rispetto alla coppia
di magneti della sospensione su punte in modo
che, nella posizione di montaggio esatta e nella
posizione di riposo del pendolo, la tensione di
uscita sul jack BNC sia all’incirca pari a zero. Con il
regolatore di offset è possibile effettuare una regolazione fine.
Nota: L’associazione tra sospensione su punte e
1
Page 14

rivelatore d’angolo è contrassegnata da un numero. In caso di impiego di componenti non correlati,
per via della dispersione esemplare dei magneti è
possibile che si verifichi una tensione di offset più
elevata.
L’asta del pendolo può essere fissata sia in direzione del magnete (nei pendoli gravitazionali), sia in
posizione verticale (negli esperimenti con pendolo
a molla). Nel pendolo gravitazionale, come peso
viene usato il peso a forma di disco del pendolo.
L’alimentazione di tensione è effettuata mediante
un alimentatore a spina 12 V CA compreso nella
fornitura.
Il pendolo ad asta U8404275-115 è progettato per
una tensione di rete di 115 V (±10 %), U8404275230 per 230 V (±10 %).
5. Esempi di esperimenti
5.1 Indicazioni per la struttura dell’esperimento
A seconda del tipo di montaggio dell’asta del pendolo (Fig. 2, 3), è possibile utilizzare il rivelatore
d’angolo sia con pendoli pesanti che con pendoli a
molla.
Durante il montaggio di un pendolo pesante come
illustrato nella Fig. 2, è necessario fare attenzione
alla stabilità. La soluzione migliore consiste nel
fissare il supporto stativo montato in verticale con
un morsetto da tavolo. In caso di necessità, è opportuno stabilizzare la struttura con ulteriori controventature.
Se l’asta del rivelatore d’angolo si trova in posizione orizzontale il pendolo può essere regolato a
piombo mediante le punte regolabili.
Se con il pendolo in posizione di riposo si instaura
una tensione di uscita diversa da zero, essa può
essere compensata con il regolatore di offset.
Fig. 1 Sospensione del pendolo ad asta
1 Asta del pendolo, 2 Elemento di sospensione su punte,
3 Asta stativa del rivelatore d’angolo, 4 Regolatore di
offset, 5 Rivelatore d’angolo, 6 Jack BNC, 7 Cavo di collegamento dell’alimentatore a spina
3. Fornitura
1 asta del pendolo
1 peso del pendolo
1 rivelatore d’angolo
1 elemento di sospensione su punte
1 Alimentatore a spina 12
V CA
4. Dati tecnici
Tensione d’esercizio: 12 V CA
Tensione di uscita: ±
5 V
Resistenza in uscita: 500 Ohm
Lunghezza del pendolo: 1 m
Peso del pendolo: 1 kg
Peso del rivelatore d’angolo: ca. 0,3 kg
Diametro del tubo di ottone: 10 mm
Fig 2 Fig 3
5.2 Determinazione della tensione di uscita in
funzione dell’angolo di deviazione
Per la valutazione quantitativa degli esperimenti è
necessario conoscere l’esatto rapporto tra tensione
di uscita e angolo deviazione. Tale rapporto può
essere determinato come illustrato nella Fig. 4.
Fig 4 A Scala
2
Page 15

5.3 Pendoli pesanti
Con la struttura meccanica illustrata nella Fig. 1 è
possibile esaminare le oscillazioni dei pendoli
pesanti.
Per la registrazione, è indicato l’uso di un registratore x-t- (o x-y-t), un oscilloscopio con memoria o
un sistema di rilevamento dati supportato da computer.
Nella valutazione quantitativa del rapporto tra la
frequenza e la lunghezza del pendolo, con pendoli
corti (distanza centro di rotazione – peso del pen-
dolo < 50 cm) la relazione
glT /2π= non è più
sufficientemente accurata.
Per un trattamento matematico esatto, è necessa-
rio considerare i momenti di inerzia dell’asta del
pendolo, del peso del pendolo e della sospensione
del pendolo.
5.4 Pendoli pesanti accoppiati
Con 2 rivelatori d’angolo è possibile eseguire oscillazioni pendolari accoppiate (Fig. 5).
I pendoli vengono accoppiati mediante una molla
ad elica (Molle ad elica 3,0 N/m U15027) che viene
agganciata nei fori delle aste dei pendoli.
Fig 6 A Bobina con anima in ferro B Interruttore
Fig 5
5.5 Figure di Lissajous
Le tensioni di uscita dei due rivelatori d’angolo
vengono collegate all’ingresso x e/o y di un registratore di coordinate (in alternativa ad un oscilloscopio con memoria o ad un sistema di rilevamento
dati supportato da computer. È possibile preimpostare spostamenti di fase definiti tra le due oscillazioni utilizzando i magneti di chiusura e i contatti
di scatto (Fig. 6, 7).
In caso di collegamento come da Fig. 7, la piastra
di contatto viene aperta nel punto più profondo
dal pendolo I. In questo modo, il pendolo II viene
rilasciato in modo ritardato di 90°.
Fig 7 A Piastra di contatto
Se i due pendoli sono di lunghezza diversa, si creano figure di Lissajous con andamento non congruente.
Per le figure di Lissajous con rapporto di frequenza
1:2, è necessario sostituire una delle aste piatte dei
pendoli da 1 m con un’asta piatta da 25 cm. La
regolazione di precisione del rapporto di frequenza
su 1:2 avviene mediante lo spostamento del piede
a barilotto sull’asta piatta corta del pendolo.
5.6 Pendoli a molla
Per l’analisi su pendoli a molla l’asta piatta del
pendolo viene fissata come illustrato nella Fig. 8.
Fig. 8
Elwe Didactic GmbH • Steinfelsstr. 6 • 08248 Klingenthal • Germania • www.elwedidactic.com
3B Scientific GmbH • Rudorffweg 8 • 21031 Amburgo • Germania • www.3bscientific.com
Con riserva di modifiche tecniche
© Copyright 2007 3B Scientific GmbH
Page 16

Page 17

3B SCIENTIFIC
Péndulo de barra con sensor angular U8404275
Instrucciones de uso
10/07 ELWE/ALF
®
PHYSICS
1 Sensor de ángulo
2 Compensador de Offset
3 Barra pendular
4 Masa pendular
5 Suspención de puntas
6 Fuente de alimentación en-
chufable
1. Advertencias de seguridad
¡Cuidado! El péndulo está dotado de dos espigas
puntiagudas para la suspensión, peligro de
lesiones!
• Al montar el péndulo es necesario tener
en cuenta que ambas espigas queden
asentadas correctamente en la ranura.
• Es necesario buscar un lugar seguro y
estable para el péndulo.
• La masa del péndulo se debe asegurar
bien con el tornillo moleteado para evitar
que se deslice y se salga.
2. Descripción
El péndulo de barra con captor de ángulo sirve
para el estudio de oscilaciones armónicas, de la
amortiguación por la fricción del aire, de
oscilaciones acopladas* y de las figuras de
Lissajous* (*Se requiere un segundo péndulo de
barra con sensor de ángulo).
Con el sensor de ángulo se puede convertir en una
señal eléctrica el ángulo de desviación, p.ej.: de un
péndulo físico. Para desviaciones pequeñas el
sensor de ángulo entrega una tensión proporcional
al ángulo de desviación. El sensor se compone de
un tubo de latón niquelado con una carcasa
pequeña al extremo acoplada con tornillos que
lleva las componentes electrónicas. El tubo de
latón sirve para la fijación en una barra soporte
por medio de una nuez en cruz y lleva en la parte
delantera una ranura en forma de V para la
suspensión del péndulo. Los dos puntos de apoyo
para las puntas del péndulo están señalados por
marcas anulares. Entre estas dos demarcaciones se
encuentra un sensor de Hall. Este mismo se
encuentra a su vez orientado de tal forma que
cuando el péndulo se encuentra en la posición de
reposo el curso de las líneas de campo es paralelo
a la superficie del chip y no se genera una tensión
de Hall.
Si el péndulo se desvía de la posición vertical en un
ángulo δ, aparece una componente horizontal de
campo, la cual genera una tensión de salida
positiva o negativa dependiendo de la dirección de
desviación del péndulo.
El captor de ángulao está adaptado al par de
imanes del apoyo puntual, así que en la posición
de montaje bien orientada y en la posición de
reposo del pendulo, la tensión de salida en el
casquillo de BNC es aproximadamente igual a cero.
Un ajuste fino se puede realizar por medio del
compensador de offset.
Observación: La asignación del apoyo puntual y del
captor de angular está caracterizada por medio de
1
Page 18

una cifra. Al utilizar componentes no asignadas se
puede generar una tensión de offset mayor, debida
a la dispersión en la intensidad en los ejemplares
de imanes.
La barra del péndulo se puede fijar en dirección
del iman (para péndulo físico) o perpendicular a
ella (para experimentos de péndulo de muelle).
Como masa del péndulo físico se aplica la masa
pendular en forma de disco.
El suministro de tensión se realiza por medio de la
fuente de tensión enchufable de 12 V CA, incluida
en el volumen de suministro.
El péndulo de barra U8404275-115 está
dimensionada para una tensión de red de 115 V
(±10 %) resp. U8404275-230 para 230 V (±10 %).
5. Ejemplo de experimento
5.1 Advertencias para el montaje experimental
Según la clase de montaje de la barra del péndulo
(Fig. 2, 3) el sensor de ángulo se utiliza en péndulos
físicos o también en péndulos de muelle.
En el montaje de un péndulo físico según la Fig. 2,
es conveniente tener en cuenta la estabilidad. En lo
posible se fija el montaje vertical con una pinza de
mesa. Si es necesario se estabiliza el sistema con
unos esfuerzos adicionales.
Si la barra del captor de ángulo no se en-cuentra
en la dirección horizontal, el péndulo se puede
ajustar en la perpendicular por me-dio de las puntas desplazables.
Si en la posición de reposo del péndulo se tie-ne
una tensión de salida diferente de cero, és ta se
puede compensar a cero por medio del compensador de offset.
Fig. 1 Colocación del péndulo de barra
1 Barra pendular, 2 Suspención de puntas, 3 Varilla
soporte del sensor de ángulo, 4 Compensador de offset, 5
Sensor de ángulo, 6 Casquillo BNC, 7 Cable de conexión
de la fuente de tensión enchufable.
3. Volumen de suministro
1 Barra pendular
1 Masa pendular
1 Sensor de ángulo
1 Suspención de puntas
1 Fuente de alimentación enchufable 12 V CA
4. Datos técnicos
Tensión de trabajo: 12 V CA
Tensión de salida: ±
5 V
Resistencia de salida: 500 Ohm
Longitud del péndulo: 1 m
Masa del péndulo: 1 kg
Masa del sensor de ángulo: aprox. 0,3 kg
Diámetro del tubo de latón: 10 mm
Fig 2 Fig 3
5.2 Determinación de la tensión de salida en
función del ángulo de desviación
Para la evaluación cuantitativa de los experimentos
es necesario conocer la relación entre la tensión de
salida y el ángulo de desviación. Ésta se puede
determinar según la Fig. 4.
Fig 4 A Escala
2
Page 19

5.3 Péndulo físico
Con el montaje mecánico de la Fig. 1 se pueden
estudiar oscilaciones de péndulos físicos.
Para el registro es apropiado ya sea un registrador
xt (resp. x-y-t), un osciloscopio de memoria o un
sistema de toma de datos asistido por PC.
En la evaluación cuantitativa de la relación entre la
frecuencia y la longitud del péndulo, en caso de
longitudes de péndulo cortas ( Distancia entre el
punto de rotación y la masa del péndulo < 50 cm)
la descripción por medio de la relación
glT /2π= no es lo suficientemente exacta.
Para un estudio matemático exacto del sistema es
necesario tener en cuenta los momentos de inercia
de la barra del péndulo, del masa pendular y de la
suspensión del péndulo.
5.4 Péndulos físicos acoplados
Con dos péndulos de barra dotados de sendos
sensores de ángulo se pueden realizar oscilaciones
de péndulos (Fig. 5).
Los péndulos se acoplan entre sí por medio de un
muelle helicoidal (Resorte helicoidal 3 N/m
U15027), que se cuelga en los agujeros de las
barras de los péndulos.
Fig 5
5.5 Figuras de Lissajous
Las tensiones de salida de ambos sensores de
ángulo se conectan a las entradas x e y de un
registrador de coordenadas (alternativamente a un
osciloscopio de memoria o a un sistema de toma
de datos asistido por PC). Desplazamientos de fase
definidos entre las dos oscilaciones se pueden
prefijar con imanes de sujeción y contactos de
liberación (Fig. 6, 7).
En el circuito de la Fig. 7 el péndulo I abre la placa
de contacto en el punto más bajo. En esta forma se
libera el péndulo II con un retardo de 90°.
Fig 6 A Bobina con núcleo de hierro, B Interruptor
Fig 7 A Placa de contacto
Si los 2 péndulos tienen longitudes diferentes, se
originan figuras de Lissajous de cursos no
congruentes. Para realizar figuras de Lissajous de
una relación de frecuencias de 1:2 una de las
barras de 1 m se debe cambiar por una de 25 cm.
El ajuste fino de la relación de frecuencia de 1:2 se
realiza desplazando el masa pendular a lo largo de
la barra de péndulo corta.
5.6 Péndulo de muelle
Para el estudio con péndulos de muelle se fija la
barra de péndulo como se indica en la Fig. 8.
Fig. 8
Elwe Didactic GmbH • Steinfelsstr. 6 • 08248 Klingenthal • Alemania • www.elwedidactic.com
3B Scientific GmbH • Rudorffweg 8 • 21031 Hamburgo • Alemania • www.3bscientific.com
Se reservan las modificaciones técnicas
© Copyright 2007 3B Scientific GmbH
Page 20

Page 21
3B SCIENTIFIC
Pêndulo de vara com registrador de ângulo U8404275
Manual de instruções
10/07 ELWE/ALF
®
PHYSICS
1 Registrador de ângulo
2 Regulador de offset
3 Vara do pêndulo
4 Massa do pêndulo
5 Apoio de pontas
6 Aparelho fonte de alimentação
elétrica
1. Indicações de segurança
Cuidado! O pêndulo possui duas pontas de agulha
para o apoio. Risco de ferimento!
• Ao montar o pêndulo deve-se prestar
atenção para que ambas agulhas se
encontrem colocadas corretamente nas
entalhas.
• Deve-se sempre garantir a boa
estabilidade do pêndulo.
• A massa do pêndulo deve sempre estar
garantida contra queda por meio do
parafuso de arestas.
2. Descrição
O pêndulo de vara com registrador de ângulo serve
para a pesquisa de oscilações harmônicas, para o
amortecimento por atrito com o ar, oscilações
acopladas* e figuras de Lissajous* (*Um segundo
pêndulo de vara com registrador de ângulo é
necessário).
Com o registrador de ângulos, o ângulo de
oscilação de um pêndulo de gravitacional, por
exemplo, pode ser transformado num sinal
elétrico. O registrador fornece uma tensão
proporcional no caso de pequenas oscilações. Ele
consiste num tubo (niquelado) de latão com uma
pequena caixa para os elementos eletrônicos. O
tubo de latão serve para a fixação de uma manga
em cruz num pé de apoio e contém na ponta
anterior uma entalha em V para o apoio do
pêndulo. Os dois pontos de apoio para as pontas
do pêndulo estão marcados por anéis. Entre estas
duas marcas encontra-se um sensor Hall. Ele está
posicionado de modo que as linhas de campo no
estado de repouso do pêndulo percorrem o plano
do chip e não produzem tensão Hall.
Se o pêndulo é balançado em um ângulo de δ com
a vertical, surge um componente horizontal que
conforme a direção do balanço produz tensão de
saída positiva ou negativa.
O registrador de ângulos está ajustado em função
do par de ímãs de modo que no caso de uma
montagem exata e estado de repouso do pêndulo a
tensão de saída no conector BNC é praticamente
nula. Um ajuste fino pode ser realizado com o
regulador offset.
Indicação: a distribuição do apoio da ponta e do
registrador de ângulos é designado por um
número. Em caso de utilização de componentes
sem essa distribuição pode ocorrer uma tensão
1
Page 22

offset mais alta determinada pela propagação
exemplar dos ímãs.
A vara do pêndulo pode ser fixada para um
movimento em direção do ímã (para pêndulos
gravitacionais) como também na perpendicular
(em caso de experiências com pêndulo de mola). A
massa de pêndulo em disco serve de como massa
no pêndulo gravitacional.
A alimentação em tensão ocorre por meio de um
aparelho fonte de alimentação elétrica de 12 V AC
incluído no fornecimento.
O pêndulo de vara U8404275-115 está equipado
para trabalhar com uma tensão de rede de 115 V
(±10 %) U8404275-230 para 230 V (±10 %).
5. Exemplos de experiência
5.1 Indicações para a montagem da experiência
Conforme o tipo de montagem da vara de pêndulo
(fig. 2, 3), o registrador de ângulo ser utilizado
tanto com o pêndulo gravitacional como com o
pêndulo de mola.
Na montagem de um pêndulo gravitacional
conforme a fig. 2 deve-se garantir uma boa
estabilidade. De preferência, deve-se fixar a haste
de apoio vertical com uma pinça mesa de fixação.
Caso necessário, a montagem deve ser estabilizada
por outros meios.
Caso a vara do registrador de ângulos não se encontrar na posição horizontal, o pêndulo pode ser
ajustado no prumo por meio das pontas móveis.
Se uma tensão fora de zero ocorre com o pêndulo
em estado de repouso, esta pode ser compensada
com o regulador offset.
Fig. 1 Apoio do pêndulo
1 Vara do pêndulo, 2 Apoio de pontas, 3 Vara de apoio
do registrador de ângulos, 4 Regulador offset, 5 Registrador de ângulo, 6 Conector BNC, 7 Cabo de conexão com o
aparelho fonte de alimentação elétrica
3. Fornecimento
1 vara do pêndulo
1 massa do pêndulo
1 registrador de ângulo
1 apoio de pontas
1 aparelho fonte de alimentação elétrica 12 V AC
4. Dados técnicos
Tensão operativa: 12 V AC
Tensão de saída: ±5 V
Resistência de saída: 500 Ohm
Comprimento do pêndulo: 1 m
Massa do pêndulo: 1 kg
Massa do reg. de ângulo: aprox. 0,3 kg
Diâmetro do tubo de latão: 10 mm
Fig 2 Fig 3
5.2 Determinação da tensão de saída em função
do ângulo de oscilação
Para a análise quantitativa das experiências é
preciso conhecer a relação exata entre a tensão e o
ângulo de oscilação. Este pode ser determinado
conforme a fig. 4.
Fig 4 A régua de medir
2
Page 23

5.3 Pêndulo gravitacional
Com a montagem mecânica conforme a fig. 2
podese pesquisar a oscilação de pêndulos
gravitacionais.
Para o registro de dados pode ser utilizado um
registrador x-t (ou x-y-t), um osciloscópio de
memória ou um sistema de coleta de dados
computadorizado.
Na análise quantitativa da relação entre freqüência
e comprimento do pêndulo, em caso de comprimentos reduzidos de pêndulo (distância entre
ponto de rotação e a massa <50 cm), a descrição
através da relação
glT /2π= não oferece pre-
cisão suficiente.
Para um tratamento matemático exato, devem ser
levados em conta o momento de inércia da vara de
pêndulo, do massa do pêndulo e do sistema de
sustentação do pêndulo.
5.4 Pêndulos gravitacionais associados
Com dois registradores de ângulo podem ser
executadas oscilações pendulares associadas (fig.
5).
Os pêndulos são associados por meio de uma mola
em espiral (mola helicoidais 3,0 N/m U15027), que
é enganchada nas perfurações das varas dos
pêndulos.
Fig 5
5.5 Figuras de Lissajous
As tensões de saída de ambos registradores de
ângulo são conectadas à entrada x ou y de um
registrador de coordenadas (alternativamente a um
osciloscópio de memória ou a um sistema de coleta
de dados computadorizado). Desvios definidos de
fase entre as duas oscilações podem ser prédefinidos por meio de um ímã de fixação e
contatos de ativação (fig. 6, 7).
Numa conexão conforme à fig. 7, a placa de
contato é aberta no ponto mais baixo pelo
pêndulo I. Por isso, o pêndulo II é liberado com
uns 90° de atraso.
Fig 6 A bobina com núcleo de ferro, B interruptor
Fig 7 A placa de contato
Se os pêndulos possuem comprimentos diferentes,
aparecem figuras de Lissajous que não coincidem
no seu percurso. Para figuras de Lissajous com
relação de freqüência 1:2, deve ser substituída a
vara de pêndulo de 1 m por uma vara plana de 25
cm. O ajuste fino da relação de freqüência em 1:2 é
obtida por meio do deslocamento do massa do
pêndulo na vara de pêndulo mais curta.
5.6 Pêndulo de mola
Para a pesquisa com pêndulos de mola, a vara de
pêndulo plana é fixada como indicado na fig. 8.
Fig. 8
Elwe Didactic GmbH • Steinfelsstr. 6 • 08248 Klingenthal • Alemanha • www.elwedidactic.com
3B Scientific GmbH • Rudorffweg 8 • 21031 Hamburgo • Alemanha • www.3bscientific.com
Sob reserva de alterações técnicas
© Copyright 2007 3B Scientific GmbH
Page 24

 Loading...
Loading...