

Page 1

Ċ㋏߫SGDH
,1'(;(5ᑨ⫼ഫ
⫼᠋ݠ
ൟো˖-86316
䌘᭭㓪ো6,&3&$
Page 2

版权所有 © 2003 株式会社 安川电机
未经本公司的书面许可
禁止转载或复制本书的一部分或全部内容
Page 3

本手册的概要
本手册以装有 INDEXER 应用模块 ( 以下简称为 NS600 ) 的 Σ-ΙΙ 系列 SGM!H/SGDH
型伺服驱动器的用户为对象
NS600 的安装 配线方法
NS600 的试运行方法
数字输入输出的操作方法
串行通信规格与通信方法
手提式数字操作器的使用方法
用户参数与程序表的设定方法
异常诊断的方法
本手册的读者
本手册的读者包括以下客户
Σ-ΙΙ 系列伺服驱动器的程序设计及详细设计工作者
Σ-ΙΙ 系列伺服驱动器的盘组装及配线工作者
Σ-ΙΙ 系列伺服驱动器的试运行及伺服调整工作者
就下列内容进行说明
Σ-ΙΙ 系列伺服驱动器的维护及检查工作者
基本用语的意义
除非事先说明
NS600 JUSP-NS600
伺服电机
SERVOPACK( 伺服单元 )
伺服驱动器 一组伺服电机与伺服单元
伺服系统 由伺服驱动器与指令控制器以及外围机器配套而成的
一组完整的伺服控制系统
反信号名的书写
在本手册的正文内
书写实例
S-ON /S-ON
RGRT
本手册中的下述用语的意义如下所示
Σ-ΙΙ 系列的 SGMAH
反信号名 ( L 时有效的信号 ) 通过在信号名前加 来表示
/RGRT
SGMPH SGMGH SGMSH 型伺服电机
Σ-ΙΙ 系列的 SGDH 型伺服单元
iii
Page 4

复合输入信号名称的书写
本手册的正文中书写的复合输入信号名称带有
符号
的左面为模式 0, 右面为模式 1 的信号名称 模式 0 与模式 1
通过 /MODE0/1 信号进行切换
书写实例
START-STOP HOME /START-STOP /HOME
在上述情况下
模式 0 时为 /START-STOP 模式1时为/HOME
图标的说明
为使读者了解说明内容的区分
标
以助读者理解
本书中设计了如下图标 并在必要的地方使用这些图
表示需要熟记的重要事项
同时也表示发出警报 但还不至于造成装置损坏的注意事项
表示补充事项或记住后会便于使用的功能
表示具体的实例
表示对难于理解的用语进行解释 并对事先没有说明而后出现的用语进行说明
iv
Page 5

相关手册
相关手册包括下表所示的内容 请根据需要进行阅读
请在充分理解产品规格 使用限制等条件的基础上 灵活运用本产品
资料名称 资料编号 内容
Σ-ΙΙ 系列
SGM!H/SGDH
用户手册
Σ-ΙΙ 系列
SGDM-!!!DA/
SGDH-!!!E
伺服单元补充资料
对应于软件版本 32 以上
Linear Σ-ΙΙ 系列
SGL!!/SGDH
用户手册
设计
维护篇
SICPS80000005 本手册详细地说明了Σ-ΙΙ系列伺服机型
容量的选定方法 安装 配线 试运行
各功能的使用方法以及维护 检查方面
的内容
SIJZS80000012 就对应于 Σ-ΙΙ 系列软件版本 32 以上的伺
服单元的规格与选型进行详细说明
SIZ-S800-39.2 对 Σ-ΙΙ 系列线性伺服电机的规格与使用
方法进行详细说明
v
Page 6

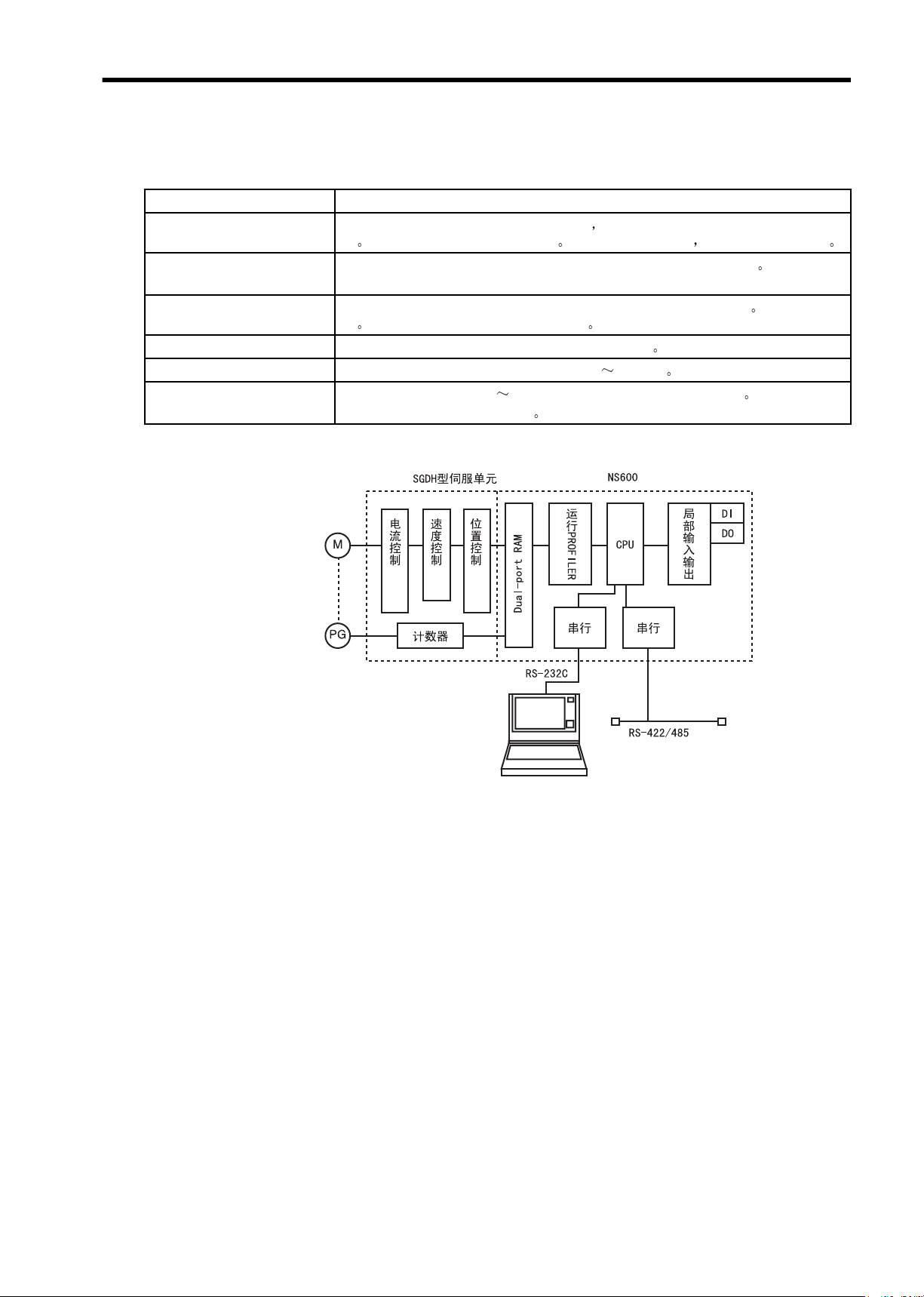
产品概要
INDEXER 应用模块 NS600 是具有程序表运行功能的单轴定位装置 使用时安装在伺服
单元的侧面
INDEXER 包括数字 I/O 与串行命令 2 种指令方法
数字 I/O 由程序表 ( 模式 0) 与原点复位 /JOG 速度表 ( 模式 1) 构成 如果使用程序
表 ( 模式 0)
速度表 ( 模式 1)
则可执行通过输入信号模式 (2 进制数格式 ) 选择的程序表 如果使用
则可执行通过输入信号模式 (2 进制数格式 ) 选择的 JOG 速度
串行命令通过 RS232/422/485 传送 NS600 对传送过来的 ASCII 命令字符串立即进行
解释并执行
支持软件 SigmaWin+ 可简单地进行程序表与用户参数的设定 监视等
利用数字操作器或者串行命令均可进行同等的操作
Σ-ΙΙ
系列 SGDH 型伺服单元 ( 安装 NS600 时 )
vi
Page 7
NS600 的功能
功能 说明
数字 I/O 程序表
( 模式 0)
数字 I/O 原点复位 /JOG 速度表
使用程序步选择输入信号 (2 进制数格式 )
据 NS600 最多可保存 128 个程序步 通过相互链接程序步 可做出更复杂的动作
可进行使用增量型编码器时的原点复位与最大 16 档的 JOG 速度表运行
从存储在 NS600 中的程序表中选择定位数
( 模式 1)
串行命令 通过经由 RS232/RS422/RS485 传送的 ASCII 命令字符串发出定位指令 最多可连接 16
轴
也可利用 ASCII 命令进行程序表运行
外部定位 程序表与串行命令都具有外部定位功能 ( 外部定位 )
可编程输出信号 可指定输出状态的输出信号有 5 个 (/POUT0 /POUT4)
ZONE 信号与 ZONE 表 可编程输出信号 (/POUT0 /POUT4) 可用作 ZONE 信号 ( 区域信号 )
ZONE 表中最多可指定 32 个 ZONE
框图
vii
Page 8
固件版本 Ver.3 与 Ver.4 之间的差异
Ver.3 与 Ver.4 之间的差异如下表所示
Ver.4 在 Ver.3 的基础上追加了一些功能 具有向上兼容性
SigmaWin+ 请使用 INDEXER 元件 Version 2.1x 以上
SigmaWin+ INDEXER 元件 Version 2.0x 以前以及 SigmaIndexer 不对应于 Ver.4 ( 不能进行程
序表的编辑 下载 )
程序表设定项目 POS: 目标位置
SPD: 定位速度
RDST: 外部定位距离
RSPD: 外部定位速度
POUT: 可编程输出信号
EVENT: 定位完成判定
LOOP: 执行次数
NEXT: 接下来执行的 PGMSTEP
ZONE 信号指定
( 用户参数 Pn835)
间隙补偿
( 用户参数 Pn836)
绝对值编码器原点设定
( 辅助功能 Fn809)
使用 1 圈型绝对值编码器时的旋转圈数
上限值 ( 用户参数 Pn205) 的自动设定
固件版本显示
串行命令 VER
数字操作器 Fn800
SigmaWin+ 产品信息画面
Ver.3 Ver.4
POS: 目标位置
SPD: 定位速度
RDST: 外部定位距离
RSPD: 外部定位速度
ACC: 加速度
DEC: 减速度
POUT: 可编程输出信号
EVENT: 定位完成判定
LOOP: 执行次数
NEXT: 接下来执行的 PGMSTEP
无 有
无 有
无 有
无 有
0003 0004
铭牌标识
可通过位于产品侧面的铭牌 VER. 的后两位辨别固件版本
VER. 0 4 0 0 4
viii
Page 9

有关安全标识
本手册中有关安全的内容 使用如下标识
有关作业安全标识的叙述 其内容十分重要 请务必遵守
表示如果进行错误操作 将会导致危险情况的发生 造成死亡或重伤
表示如果进行错误操作 将会导致危险情况的发生 可能会造成中等程度的受伤或轻
伤以及物品损失
另外 即使是 标识中所述事项 有时也可能会造成严重的后果
表示禁止 ( 绝对不能做的事 ) 例如严禁烟火时 则表示为
表示强制 ( 必须要做的事 ) 例如接地时 则表示为
ix
Page 10
安全注意事项
本节就产品到货时的确认 安装 配线 运行 维护与检查等用户必须遵守的事项予
以说明
确认到货产品时的注意事项
伺服电机与伺服单元请使用指定的配套产品
否则会导致火灾或故障
安装注意事项
请勿将该产品安装在会溅到水的场所或易发生腐蚀的环境中 请勿在易燃性气体及可燃物的附近使
用该产品
否则可能会导致触电或火灾
配线注意事项
伺服单元的接地端子 必须接地 (D 种接地 )
否则可能会导致触电或火灾
请勿在伺服单元的输出端子 U V W 上连接三相电源
否则 可能会导致受伤或火灾
请务必切实将电源端子 电机输出端子拧紧
否则可能会导致火灾
x
Page 11

运行注意事项
在电机运行时 请绝对不要触摸其旋转部位
否则可能会导致受伤
在试运行时 为防止意外事故的发生 请对伺服电机进行单体 ( 不与传动轴连接的状态 ) 试运行
否则可能会导致受伤
安装在配套机械上开始运行时 请预先设定与该机械相符的用户参数
如果不进行参数设定而开始运行 则可能会导致机械失控或发生故障
安装在配套机械上开始运行时 请事先将电机置于可随时紧急停止的状态
否则可能会导致受伤
电机运行时 请勿触摸散热片部位
否则会因高温而导致烫伤
不能使用内置式面板操作器 请勿操作
维护与检查注意事项
请绝对不要触摸伺服单元内部
否则可能会导致触电
在通电状态下 请务必盖好外罩
否则可能会导致触电
在电源 OFF 后的 5 分钟内 请勿触摸端子
否则会因残留电压而导致触电
请勿拆卸伺服电机
否则可能会导致触电或受伤
请勿在通电状态下改变配线
否则可能会导致触电或受伤
xi
Page 12
一般注意事项
请在使用时予以注意
为了进行详细说明 本手册中的部分插图在描绘时去掉了外罩或安全保护体 在实际运行时 请
务必按规定将外罩或安全保护体安装到原来的位置
本手册中的插图为代表性图例 可能会与您收到的产品有所不同
由于产品改良 规格变更以及为提高本手册的使用便利性 我们将会适时对本手册进行变更
变更后 本手册的资料编号将进行更新 并作为改订版发行
因破损或遗失而需订购本手册时 请与本公司代理店或封底记载的最近的本公司销售处联系 联
系时请告知封面的资料编号
对于客户自行改造的产品 本公司不对质量提供任何保证 对于因改造产品所造成的伤害及损失
本公司概不负责
再根据本手册的说明进行运行
xii
Page 13

目录
本手册的概要- - - - - - - - - - - - - - - - - - - - - - - - - iii
相关手册- - - - - - - - - - - - - - - - - - - - - - - - - - - - v
产品概要- - - - - - - - - - - - - - - - - - - - - - - - - - - vi
固件版本
有关安全标识- - - - - - - - - - - - - - - - - - - - - - - - - ix
安全注意事项- - - - - - - - - - - - - - - - - - - - - - - - - - x
第 1 章 产品的确认与各部分名称
1.1 产品到货时的确认 - - - - - - - - - - - - - - - - - - 1-2
1.1.1 外观与铭牌实例 - - - - - - - - - - - - - - - - - - - - - - - 1-2
1.1.2 型号的判别方法 - - - - - - - - - - - - - - - - - - - - - - - 1-3
1.1.3 版本的判别方法 - - - - - - - - - - - - - - - - - - - - - - - 1-3
1.2 产品的各部分名称 - - - - - - - - - - - - - - - - - - 1-4
Ver.3 与 Ver.4 之间的差异 - - - - - - - - - - viii
1.3 应用模块的安装方法 - - - - - - - - - - - - - - - - - 1-6
第 2 章 安装
2.1 保管条件 - - - - - - - - - - - - - - - - - - - - - - 2-2
2.2 安装场所 - - - - - - - - - - - - - - - - - - - - - - 2-3
2.3 安装方向 - - - - - - - - - - - - - - - - - - - - - - 2-4
2.4 安装标准 - - - - - - - - - - - - - - - - - - - - - - 2-5
第 3 章 连接器的连接
3.1 输入输出信号 - - - - - - - - - - - - - - - - - - - - 3-2
3.1.1 输入输出信号用连接器 (CN1 CN4) 的连接实例 - - - - - - - - - 3-2
3.1.2 输入输出信号用连接器 (CN1
3.1.3 输入输出信号名称及其功能 - - - - - - - - - - - - - - - - - - 3-6
3.1.4 接口电路 - - - - - - - - - - - - - - - - - - - - - - - - - - 3-8
3.2 CN6 串行命令通信用连接器 - - - - - - - - - - - - - 3-10
3.2.1 通信规格 - - - - - - - - - - - - - - - - - - - - - - - - - 3-10
3.2.2 通信连接器 - - - - - - - - - - - - - - - - - - - - - - - - 3-11
3.2.3 连接器信号名称 - - - - - - - - - - - - - - - - - - - - - - 3-11
3.2.4 连接实例 - - - - - - - - - - - - - - - - - - - - - - - - - 3-12
3.2.5 RS422/485 接口 - - - - - - - - - - - - - - - - - - - - - - 3-13
CN4) 的端子排列一览 - - - - - - - 3-4
3.3 CN7 数字操作器 / 支持软件连接用连接器 - - - - - - - 3-14
3.3.1 通信规格 - - - - - - - - - - - - - - - - - - - - - - - - - 3-14
3.3.2 通信连接器 - - - - - - - - - - - - - - - - - - - - - - - - 3-15
3.3.3 连接器信号名称 - - - - - - - - - - - - - - - - - - - - - - 3-15
3.3.4 连接实例 - - - - - - - - - - - - - - - - - - - - - - - - - 3-16
3.3.5 RS422 接口 - - - - - - - - - - - - - - - - - - - - - - - - 3-17
3.4 NS600 的功率损耗- - - - - - - - - - - - - - - - - - 3-18
xiii
Page 14

第 4 章 试运行
4.1 两步试运行 - - - - - - - - - - - - - - - - - - - - 4-2
4.2 步骤 1
4.3 步骤 2
伺服电机单体的试运行 - - - - - - - - - - - - 4-3
机械与伺服电机的配套试运行 - - - - - - - - - 4-9
第 5 章 参数设定与功能说明
5.1 SGDH 型伺服单元的用户参数设定限制 - - - - - - - - - 5-4
5.2 顺序用输入输出信号 - - - - - - - - - - - - - - - - 5-6
5.2.1 伺服 ON/OFF 输入信号 (/S-ON) - - - - - - - - - - - - - - - - 5-8
5.2.2 伺服警报输出 警报代码输出信号 (ALM ALO1 ALO3) - - - - - 5-9
5.2.3 制动器释放联锁输出信号 (/BK) - - - - - - - - - - - - - - - - 5-10
5.2.4 伺服准备就绪输出信号 (/S-RDY) - - - - - - - - - - - - - - - 5-14
5.2.5 错误 / 警告输出信号 (/WARN) - - - - - - - - - - - - - - - - - 5-15
5.2.6 定位完成输出信号 (/INPOSITION) - - - - - - - - - - - - - - - 5-16
5.2.7 可编程输出信号 (/POUT0
5.2.8 编码器信号输出 - - - - - - - - - - - - - - - - - - - - - - - 5-18
5.3 绝对值编码器 - - - - - - - - - - - - - - - - - - - 5-21
5.3.1 接口电路 - - - - - - - - - - - - - - - - - - - - - - - - - - 5-22
5.3.2 绝对值编码器的选择 - - - - - - - - - - - - - - - - - - - - - 5-22
5.3.3 电池的使用方法 - - - - - - - - - - - - - - - - - - - - - - - 5-22
5.3.4 绝对值编码器的设置 ( 初始化 ) - - - - - - - - - - - - - - - -5-23
5.3.5 旋转圈数上限值设定 - - - - - - - - - - - - - - - - - - - - - 5-24
5.3.6 绝对值编码器原点设定 - - - - - - - - - - - - - - - - - - - - 5-26
/POUT4) - - - - - - - - - - - - - 5-17
5.4 根据机械所进行的设定 - - - - - - - - - - - - - - - 5-27
5.4.1 电机旋转方向的切换 - - - - - - - - - - - - - - - - - - - - - 5-27
5.4.2 超程设定 - - - - - - - - - - - - - - - - - - - - - - - - - - 5-28
5.4.3 指令单位的设定 - - - - - - - - - - - - - - - - - - - - - - - 5-31
5.4.4 移动方法与座标设定 - - - - - - - - - - - - - - - - - - - - - 5-36
5.4.5 间隙补偿 - - - - - - - - - - - - - - - - - - - - - - - - - - 5-38
5.4.6 扭矩限制 - - - - - - - - - - - - - - - - - - - - - - - - - - 5-39
5.5 程序表 - - - - - - - - - - - - - - - - - - - - - - 5-40
5.5.1 模式切换信号 (/MODE 0/1) - - - - - - - - - - - - - - - - - - 5-40
5.5.2 程序表运行输入信号 - - - - - - - - - - - - - - - - - - - - - 5-40
5.5.3 程序表的程序步选择 - - - - - - - - - - - - - - - - - - - - - 5-42
5.5.4 程序表设定 - - - - - - - - - - - - - - - - - - - - - - - - 5-43
5.5.5 EVENT 设定实例 - - - - - - - - - - - - - - - - - - - - - - - 5-46
5.5.6 程序表运行操作 - - - - - - - - - - - - - - - - - - - - - - - 5-47
5.5.7 程序表运行的状态变迁 - - - - - - - - - - - - - - - - - - - - 5-48
5.5.8 程序表输入信号定时规格 - - - - - - - - - - - - - - - - - - - 5-49
5.5.9 /START-STOP 信号 ON 时起的反应时间 - - - - - - - - - - - - - 5-50
5.5.10 程序表实例 - - - - - - - - - - - - - - - - - - - - - - - - - 5-51
xiv
Page 15

5.6 外部定位 - - - - - - - - - - - - - - - - - - - - - 5-56
5.6.1 外部定位定时规格 - - - - - - - - - - - - - - - - - - - - - 5-56
5.6.2 外部定位输入设定 - - - - - - - - - - - - - - - - - - - - - 5-56
5.6.3 外部定位运行 - - - - - - - - - - - - - - - - - - - - - - - 5-57
5.7 ZONE 表设定 - - - - - - - - - - - - - - - - - - - - 5-59
5.8 原点复位 /JOG 速度表 - - - - - - - - - - - - - - - - 5-61
5.8.1 模式切换输入信号 - - - - - - - - - - - - - - - - - - - - - 5-61
5.8.2 原点复位 /JOG 速度表运行输入信号 - - - - - - - - - - - - - 5-61
5.8.3 有关原点复位的用户参数 - - - - - - - - - - - - - - - - - - 5-62
5.9 原点复位运行操作 - - - - - - - - - - - - - - - - - 5-63
5.10 JOG 速度表运行操作 - - - - - - - - - - - - - - - - 5-64
5.10.1 JOG 速度表运行实例- - - - - - - - - - - - - - - - - - - - 5-64
5.10.2 JOG 速度表- - - - - - - - - - - - - - - - - - - - - - - - 5-65
5.10.3 原点复位与 JOG 速度表运行的输入条件 - - - - - - - - - - - 5-66
5.10.4 原点复位与 JOG 速度表输入信号的定时规格 - - - - - - - - - 5-67
第 6 章 串行命令通信
6.1 CN6 的规格- - - - - - - - - - - - - - - - - - - - - - 6-2
6.2 设定 - - - - - - - - - - - - - - - - - - - - - - - - 6-3
6.2.1 示意图 - - - - - - - - - - - - - - - - - - - - - - - - - - - 6-3
6.2.2 轴地址设定 - - - - - - - - - - - - - - - - - - - - - - - - 6-3
6.2.3 有关串行通信的用户参数 - - - - - - - - - - - - - - - - - - 6-4
6.2.4 有关串行通信的监视 - - - - - - - - - - - - - - - - - - - - - 6-4
6.3 命令 / 应答的格式 - - - - - - - - - - - - - - - - - 6-5
6.4 全局命令 - - - - - - - - - - - - - - - - - - - - - - 6-6
6.5 回送校验应答时间 - - - - - - - - - - - - - - - - - - 6-7
6.6 应答的详细说明 - - - - - - - - - - - - - - - - - - - 6-8
6.6.1 肯定应答 - - - - - - - - - - - - - - - - - - - - - - - - - - 6-8
6.6.2 否定应答 - - - - - - - - - - - - - - - - - - - - - - - - - - 6-8
6.7 串行命令 - - - - - - - - - - - - - - - - - - - - - - 6-9
6.7.1 基本操作命令 - - - - - - - - - - - - - - - - - - - - - - - - 6-9
6.7.2 控制命令 - - - - - - - - - - - - - - - - - - - - - - - - - 6-10
6.7.3 用户参数编辑命令 - - - - - - - - - - - - - - - - - - - - - 6-24
6.7.4 程序表设置命令 - - - - - - - - - - - - - - - - - - - - - - 6-26
6.7.5 程序表操作命令 - - - - - - - - - - - - - - - - - - - - - - 6-30
6.7.6 ZONE 表设置命令 - - - - - - - - - - - - - - - - - - - - - 6-31
6.7.7 JOG 速度表设置命令 - - - - - - - - - - - - - - - - - - - - 6-32
6.7.8 监视与辅助功能命令 - - - - - - - - - - - - - - - - - - - - 6-33
第 7 章 数字操作器的使用方法
7.1 数字操作器的连接 - - - - - - - - - - - - - - - - - - 7-3
7.2 数字操作器的功能 - - - - - - - - - - - - - - - - - - 7-4
7.3 状态显示画面 - - - - - - - - - - - - - - - - - - - - 7-5
xv
Page 16

7.4 基本画面的切换 - - - - - - - - - - - - - - - - - - 7-6
7.5 用户参数编辑画面中的操作 - - - - - - - - - - - - - 7-7
7.6 监视画面中的操作 - - - - - - - - - - - - - - - - - 7-9
Un000 电机速度 - - - - - - - - - - - - - - - - - - - - - - - - - 7-10
Un002
Un003 旋转脉冲数 - - - - - - - - - - - - - - - - - - - - - - - - 7-10
Un004
Un005
Un006
Un007
Un008
Un009
Un00A
Un00B
Un00C
Un00D
Un010
Un011
Un800
Un801 NS600 侧输入信号 (CN4) - - - - - - - - - - - - - - - - - - - 7-13
Un802
Un803
Un804
Un805
Un806
Un807
Un808
Un809
Un80A
Un80B
Un80C
Un80D
Un80E
Un80F 串行通信接收错误字符数 - - - - - - - - - - - - - - - - - - - 7-16
Un810
Un811
扭矩 - - - - - - - - - - - - - - - - - - - - - - - - - - - 7-10
电气角 - - - - - - - - - - - - - - - - - - - - - - - - - - 7-10
伺服单元侧输入信号 (CN1) - - - - - - - - - - - - - - - - - 7-10
伺服单元侧输出信号 (CN1) - - - - - - - - - - - - - - - - - 7-10
指令速度 - - - - - - - - - - - - - - - - - - - - - - - - - 7-11
位置偏移 - - - - - - - - - - - - - - - - - - - - - - - - - 7-11
累积负载率 - - - - - - - - - - - - - - - - - - - - - - - - 7-11
再生负载率 - - - - - - - - - - - - - - - - - - - - - - - - 7-11
DB 负载率 - - - - - - - - - - - - - - - - - - - - - - - - - 7-11
位置指令计数器 - - - - - - - - - - - - - - - - - - - - - - - 7-11
编码器脉冲计数器 - - - - - - - - - - - - - - - - - - - - - - 7-12
线性电机最大速度或者最大分频脉冲数 - - - - - - - - - - - - - 7-12
线性电机用霍尔传感器 - - - - - - - - - - - - - - - - - - - - 7-12
错误 - - - - - - - - - - - - - - - - - - - - - - - - - - - 7-12
NS600 侧输出信号 (CN4) - - - - - - - - - - - - - - - - - - - 7-13
状态标志 - - - - - - - - - - - - - - - - - - - - - - - - - 7-13
位置指令当前位置 - - - - - - - - - - - - - - - - - - - - - - 7-13
电机当前位置 - - - - - - - - - - - - - - - - - - - - - - - 7-14
定位目标位置 - - - - - - - - - - - - - - - - - - - - - - - - 7-14
定位距离 - - - - - - - - - - - - - - - - - - - - - - - - - 7-14
外部定位目标位置 - - - - - - - - - - - - - - - - - - - - - 7-14
外部定位距离 - - - - - - - - - - - - - - - - - - - - - - - 7-14
程序步 - - - - - - - - - - - - - - - - - - - - - - - - - - - 7-14
EVENT 的时间经过状况 - - - - - - - - - - - - - - - - - - - - 7-15
LOOP 的执行经过状况 - - - - - - - - - - - - - - - - - - - - 7-15
串行通信接收字符跟踪 - - - - - - - - - - - - - - - - - - - - 7-15
串行通信接收字符数 - - - - - - - - - - - - - - - - - - - - - 7-15
串行通信发送字符跟踪 - - - - - - - - - - - - - - - - - - - - 7-16
串行通信发送字符数 - - - - - - - - - - - - - - - - - - - - - 7-16
7.7 辅助功能执行画面中的操作 - - - - - - - - - - - - - 7-17
Fn000 显示警报追踪备份数据 - - - - - - - - - - - - - - - - - - - 7-19
Fn001
Fn002
Fn003
Fn005
Fn006
Fn007
Fn008
Fn00C
Fn00D 对模拟量监视输出进行手动增益调整 - - - - - - - - - - - - - 7-31
设定在线自动调谐时的刚性 - - - - - - - - - - - - - - - - - 7-20
微动 (JOG) 运行 - - - - - - - - - - - - - - - - - - - - - - 7-21
原点检索 - - - - - - - - - - - - - - - - - - - - - - - - - 7-23
对用户参数设定值进行初始化 - - - - - - - - - - - - - - - - 7-25
清除警报追踪备份数据 - - - - - - - - - - - - - - - - - - - 7-26
保存转动惯量比 - - - - - - - - - - - - - - - - - - - - - - 7-27
使绝对值编码器复位 - - - - - - - - - - - - - - - - - - - - 7-28
对模拟量监视输出进行手动零调整 - - - - - - - - - - - - - - 7-30
xvi
Page 17

Fn00E 自动调整电机电流检测信号的偏移量 - - - - - - - - - - - - 7-32
Fn00F
Fn010
Fn011
Fn012
Fn013
Fn800
Fn801
Fn802
Fn803
Fn804
Fn805
Fn806
Fn807
Fn808
Fn809
手动调整电机电流检测信号的偏移量 - - - - - - - - - - - - 7-33
设定写保护 - - - - - - - - - - - - - - - - - - - - - - - 7-34
确认电机机型 - - - - - - - - - - - - - - - - - - - - - - 7-35
显示伺服单元的固件版本 - - - - - - - - - - - - - - - - - 7-36
变更旋转圈数上限值的设定 - - - - - - - - - - - - - - - - 7-37
显示 NS600 的固件版本 - - - - - - - - - - - - - - - - - - 7-39
确认 NS600 的机型 - - - - - - - - - - - - - - - - - - - - 7-39
显示 NS600 特殊规格号码 - - - - - - - - - - - - - - - - - 7-39
保存程序表 - - - - - - - - - - - - - - - - - - - - - - - 7-40
保存 ZONE 表 - - - - - - - - - - - - - - - - - - - - - - - 7-41
保存 JOG 速度表 - - - - - - - - - - - - - - - - - - - - - 7-42
对程序表进行初始化 - - - - - - - - - - - - - - - - - - - 7-43
对 ZONE 表进行初始化 - - - - - - - - - - - - - - - - - - - 7-44
对 JOG 速度表进行初始化 - - - - - - - - - - - - - - - - - 7-45
绝对值编码器原点设定 - - - - - - - - - - - - - - - - - - 7-46
7.8 程序表编辑画面中的操作 - - - - - - - - - - - - - - 7-49
7.9 ZONE 表编辑画面中的操作 - - - - - - - - - - - - - - 7-58
7.10 JOG 速度表编辑画面中的操作 - - - - - - - - - - - - 7-60
第 8 章 外形图
8.1 NS600 的外形图- - - - - - - - - - - - - - - - - - - - 8-2
第 9 章 异常诊断与处理措施
9.1 伺服驱动器的异常诊断与处理措施 - - - - - - - - - - - 9-2
9.1.1 警报显示一览 - - - - - - - - - - - - - - - - - - - - - - - - 9-2
9.1.2 警告显示一览 - - - - - - - - - - - - - - - - - - - - - - - - 9-4
9.1.3 其他不良状况与处理措施 - - - - - - - - - - - - - - - - - - - 9-5
9.2 NS600 的异常诊断与处理措施 - - - - - - - - - - - - - 9-6
9.2.1 状态显示 - - - - - - - - - - - - - - - - - - - - - - - - - - 9-6
9.2.2 警报显示一览 - - - - - - - - - - - - - - - - - - - - - - - - 9-8
9.2.3 错误显示一览 - - - - - - - - - - - - - - - - - - - - - - - 9-10
9.2.4 警告显示一览 - - - - - - - - - - - - - - - - - - - - - - - 9-14
9.2.5 正常显示一览 - - - - - - - - - - - - - - - - - - - - - - - 9-14
9.3 STS 状态 LED - - - - - - - - - - - - - - - - - - - - 9-15
附录 A 用户参数一览
A.1 NS600 的用户参数- - - - - - - - - - - - - - - - - - - A-2
A.2 伺服单元用户参数一览 - - - - - - - - - - - - - - - - A-6
A.3 伺服单元线性电机专用用户参数一览 - - - - - - - - - A-10
A.4 伺服单元开关一览 - - - - - - - - - - - - - - - - - A-11
xvii
Page 18

附录 B 监视模式与功能
B.1 监视模式一览 - - - - - - - - - - - - - - - - - - - B-2
B.2 辅助功能一览 - - - - - - - - - - - - - - - - - - - B-4
附录 C 串行命令一览
C.1 按字母顺序排列的串行命令一览 - - - - - - - - - - - C-2
索引
xviii
Page 19

第 1 章
产品的确认与各部分名称
本章就 NS600 到货时的产品确认与产品各部分名称以及 NS600 的安装方
法进行说明
1.1 产品到货时的确认 - - - - - - - - - - - - - - - - - - 1-2
1.1.1 外观与铭牌实例 - - - - - - - - - - - - - - - - - - - - - - - 1-2
1.1.2 型号的判别方法 - - - - - - - - - - - - - - - - - - - - - - - 1-3
1.1.3 版本的判别方法 - - - - - - - - - - - - - - - - - - - - - - - 1-3
1.2 产品的各部分名称 - - - - - - - - - - - - - - - - - - 1-4
1.3 应用模块的安装方法 - - - - - - - - - - - - - - - - - 1-6
1
1-1
Page 20

第 1 章 产品的确认与各部分名称
1.1.1 外观与铭牌实例
1.1 产品到货时的确认
下面就产品到货时的确认事项进行说明
产品到货后 请就以下项目进行确认
确认项目 备注
到货产品是否与您订购的产品型号相符请按照 NS600 铭牌中的 型号栏 进行确认 ( 请
参照下页 )
是否有损坏的地方
所用 SERVOPACK( 伺服单元 ) 是否可安装
NS600?
请查看整个外表 检查是否有因运输等引起的损
伤
请按照伺服单元铭牌中的 型号栏 进行确认
伺服单元型号
-!!!E-!
SGDH
部分应为 SGDH
部分应为 E
在以上各项的确认中 , 如发现有不妥之处 , 请及时与所购地的销售店或本公司的销售处
联系
1.1.1 外观与铭牌实例
图 1.1 NS600 的外观 图 1.2 铭牌
1-2
Page 21

1.1.2 型号的判别方法
NS600
1.1.3 版本的判别方法
VER.04004
1.1 产品到货时的确认
JUSP NS60 0
1
VER. 04 0 04
( 注 ) 本手册只从上述内容中取出固件版本并记载为 Ver.!
1-3
Page 22

第 1 章 产品的确认与各部分名称
1.2 产品的各部分名称
下图所示为产品的各部分名称
( 注 ) 有关项目 a e 部分的名称 请参照表1.1
表 1.1 配备型号
部件 配备型号
a NS600 JUSP-NS600
INDEXER
b CN4 输入输出电缆 ( 单侧散拉电缆 )
CN4 输入输出电缆 ( 单侧散拉电缆 ) 36 针 2.0m DE9404859-2
输
入
输
出
电
缆
CN4 输入输出电缆 ( 单侧散拉电缆 ) 36 针 3.0m DE9404859-3
CN4 输入输出电缆 ( 带单侧接线板 ) 36 针 0.5m JUSP-TA36P
c CN1 输入输出电缆 ( 单侧散拉电缆 ) 50 针 1.0m JZSP-CKI01-1
CN1 输入输出电缆 ( 单侧散拉电缆 ) 50 针 2.0m JZSP-CKI01-2
CN1 输入输出电缆 ( 单侧散拉电缆 ) 50 针 3.0m JZSP-CKI01-3
CN1 输入输出电缆 ( 带单侧接线板 ) 50 针 0.5m JUSP-TA50P
36 针 1.0m DE9404859
1-4
Page 23

表 1.1 配备型号 ( 续 )
部件 配备型号
d CN6 RS422/RS485 用 请客户准备
串
形
通
信
电
缆
附
件
数
字
操
作
器
CN6 DOS/V PC 用 (RS232C D-sub 9 针 ) 2.0m JZSP-CMS02
CN7 RS422 用 请客户准备
CN7 DOS/V PC 用 (RS232C D-sub 9 针 )2.0m JZSP-CMS02
b CN4 配套连接器 ( 带外壳 )
c CN1配套连接器 ( 带外壳 ) 50 针 JZSP-CKI9
e 数字操作器 ( 带1m 电缆 ) JUSP-OP02A-2
数字操作器用电缆
数字操作器用电缆
数字操作器用电缆
1m JZSP-CMS00-1
1.5m JZSP-CMS00-2
2m JZSP-CMS00-3
36 针 DP9420007
1.2 产品的各部分名称
1
支
持
软
件
( 注 ) 有关伺服电机 伺服单元 电源电缆 编码器电缆以及附件方
SigmaWin+ 日文版 / 英文版 JZSP-WP001
面的追加信息与部件号 请参照
手册 ( 资料编号
SICPS80000005)
Σ-ΙΙ
系列 SGM!H/SGDH 用户
1-5
Page 24
第 1 章 产品的确认与各部分名称
1.3 应用模块的安装方法
请按下述步骤将 NS600 安装到 SGDH 型伺服单元上 另外还准备了下表所示的地线连
接螺丝
伺服单元型号 螺丝 备注
SGDH-A3
SGDH-A3
SGDH-15 50AE
SGDH-05
SGDH-60 1EAE
SGDH-60
SGDH-A3 02BE-R
SGDH-A3
SGDH-05
( 搁架型 )
02BE
10AE
50DE
1EDE
50AE-R
50DE-R
M3×10 盆头螺丝
( 开口锁
M4×10 盆头螺丝
( 开口锁
M4×8 盆头螺丝
( 开口锁
M4×6 盆头螺丝
( 开口锁
平垫圈 )
平垫圈 )
平垫圈 )
平垫圈 )
NS600 附带
NS600 附带
请使用正面面板的固定螺丝
NS600 附带
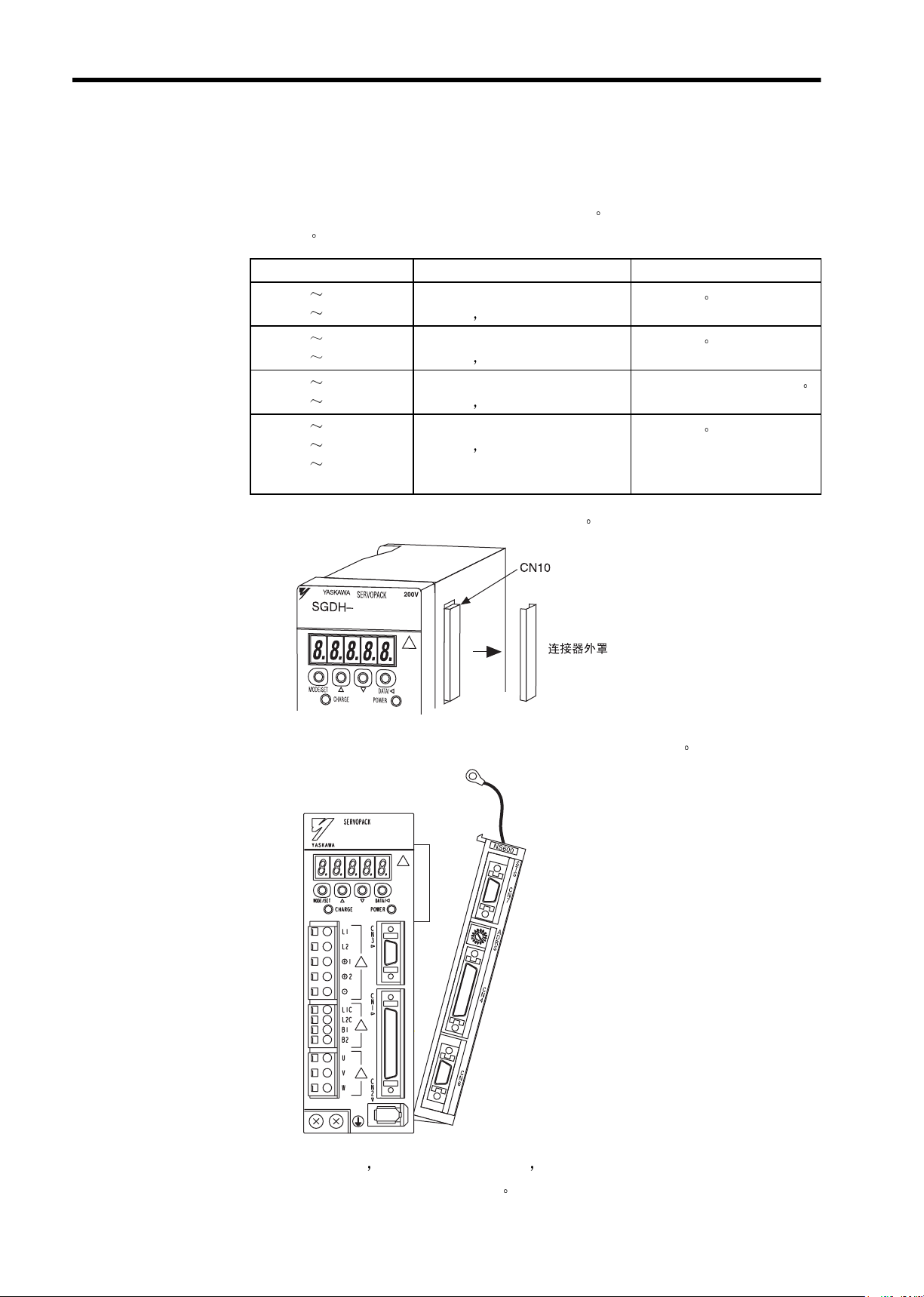
1. 拆下安装在伺服单元的 CN10 上的连接器外罩
2. 将下侧 2 个设置缺口插入到位于伺服单元右下侧的设置孔中
SGDH-
3. 如上图所示 向箭头方向按压 NS600 将 NS600 上侧的 2 个设置缺口插入到位于
伺服单元右侧的右上侧设置孔中
1-6
Page 25

1.3 应用模块的安装方法
4. 作为接地处理 将 NS600 的地线连接到伺服单元的 G 符号部分上并拧紧螺丝
1
1-7
Page 26
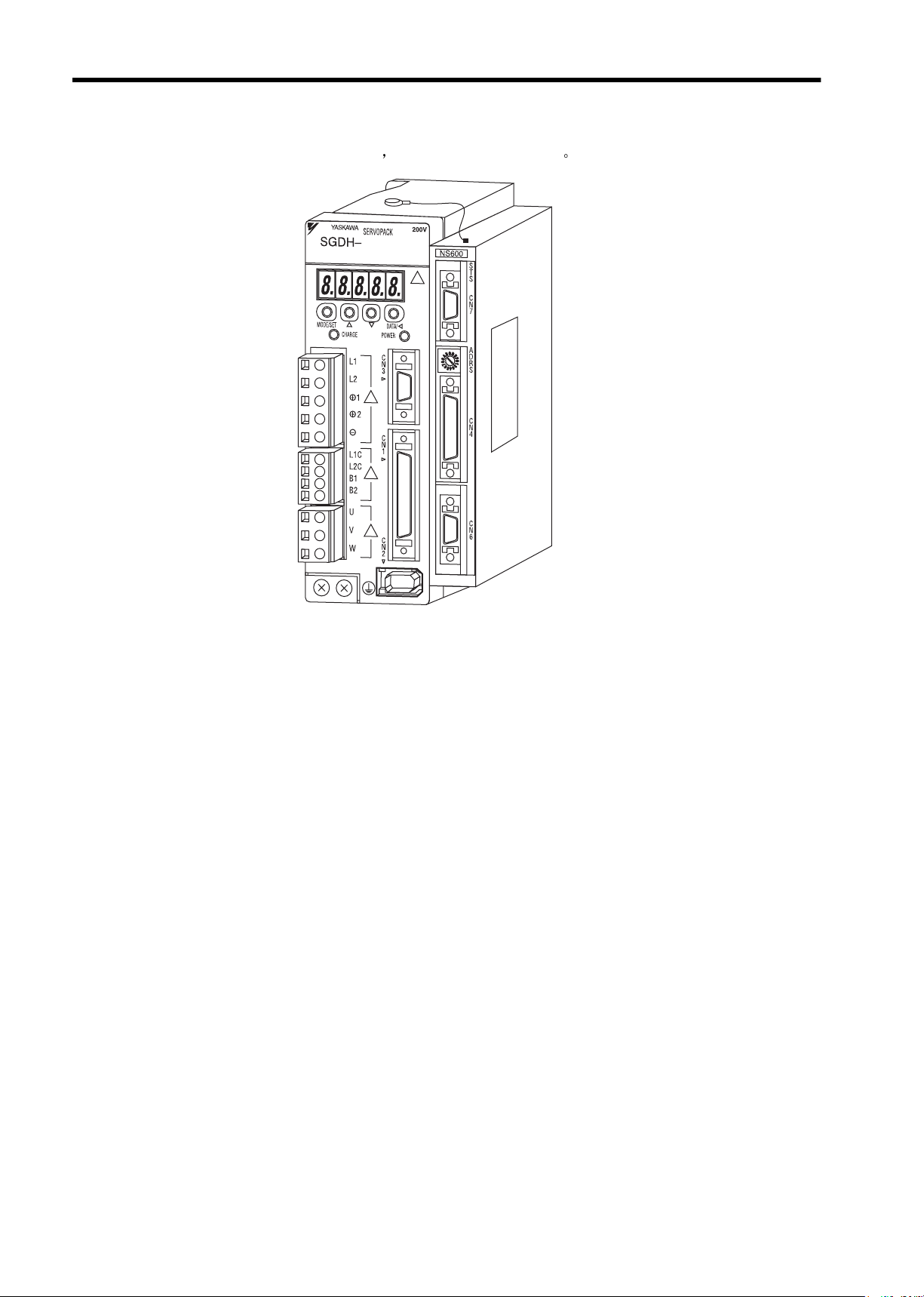
第 1 章 产品的确认与各部分名称
如果安装正确 则变成如下图所示的形状
1-8
Page 27

第 2 章
安装
本章对 Σ-ΙΙ 系列产品安装方面的注意事项进行说明
SGDH 型 SERVOPACK( 伺服单元 ) 是基座型伺服放大器
如果安装方法错误 则会发生故障 因此请根据下述注意事项进行正确
安装
2.1 保管条件 - - - - - - - - - - - - - - - - - - - - - - 2-2
2.2 安装场所 - - - - - - - - - - - - - - - - - - - - - - 2-3
2.3 安装方向 - - - - - - - - - - - - - - - - - - - - - - 2-4
2.4 安装标准 - - - - - - - - - - - - - - - - - - - - - - 2-5
2
2-1
Page 28

第 2 章 安装
2.1 保管条件
在未通电的状态下保管伺服单元时 请在下述温度范围内进行保管
-20 +85 的温度范围
2-2
Page 29

2.2 安装场所
有关安装场所的注意事项如下所示
2.2 安装场所
设置条件 安装注意事项
安装在控制盘内时 对控制盘的大小
使伺服单元的周边部分温度处在 55
安装在发热体附近时 为使伺服单元周围的温度保持在 55 以下 请控制因发热体的
热辐射或对流而造成的升温
安装在振动源附近时 请在伺服单元的安装面上时安装防振器具 以防止振动传递至
伺服单元
安装在有腐蚀性气体的场所时请设法防止腐蚀性气体的侵入 虽然不会即时产生影响 但是
会导致电子部件以及与接触器相关设备的故障
其他 请不要安装在高温 潮湿 的场所 不要安装在灰尘 铁粉多的
环境下
伺服单元的配置以及冷却方法进行设计 以
以下
2
2-3
Page 30

第 2 章 安装
2.3 安装方向
如下图所示 安装方向应与墙壁方向垂直
使用自然对流方式或者风扇对伺服单元进行冷却 请务必遵守该安装方向的要求
使用 2 处 4 处 ( 安装孔数因容量而异 ) 安装孔 将伺服单元牢固地固定在安装面上
2-4
Page 31

2.4 安装标准
请务必遵守下图所示的控制盘内的安装标准 该标准适用于将多个伺服单元并排安装在
控制盘内的场合 ( 以下简称
2.4 安装标准
并排安装时 )
2
伺服单元的取向
安装时 请使伺服单元的正面 ( 操作器的实际安装面 ) 面向操作人员 并使其垂直于
墙壁
冷却
为保证能够通过风扇以及自然对流的方式进行冷却 请参照上图 在伺服单元的周围
留出足够的空间
并排安装时
如上图所示 在横向两侧各留 10mm 以上 在纵向两侧各留 50mm 以上的空间 另外
请在伺服单元的上部安装冷却用风扇 为了不使伺服单元的环境温度出现局部过高的
现象
需使控制盘内的温度保持均匀
控制盘内的环境条件
伺服单元的环境温度 0 55
湿度 90%RH( 相对湿度 ) 以下
振动 4.9 m/s
应注意避免发生冻结 结露等现象
为了保证长期使用的可靠性 请在低于 45 的环境温度条件下使用
2
2-5
Page 32

Page 33

第 3 章
连接器的连接
本章对已装上 NS600 的 SGDH 型 SERVOPACK( 伺服单元 ) 连接器的连接方
法进行说明
3.1 输入输出信号 - - - - - - - - - - - - - - - - - - - - 3-2
3.1.1 输入输出信号用连接器 (CN1 CN4) 的连接实例 - - - - - - - - - 3-2
3.1.2 输入输出信号用连接器 (CN1
3.1.3 输入输出信号名称及其功能 - - - - - - - - - - - - - - - - - - 3-6
3.1.4 接口电路 - - - - - - - - - - - - - - - - - - - - - - - - - - 3-8
3.2 CN6 串行命令通信用连接器 - - - - - - - - - - - - - - 3-10
3.2.1 通信规格 - - - - - - - - - - - - - - - - - - - - - - - - - 3-10
3.2.2 通信连接器 - - - - - - - - - - - - - - - - - - - - - - - - 3-11
3.2.3 连接器信号名称 - - - - - - - - - - - - - - - - - - - - - - 3-11
3.2.4 连接实例 - - - - - - - - - - - - - - - - - - - - - - - - - 3-12
3.2.5 RS422/485 接口 - - - - - - - - - - - - - - - - - - - - - - 3-13
3.3 CN7 数字操作器 / 支持软件用于连接的连接器 - - - - - - 3-14
3.3.1 通信规格 - - - - - - - - - - - - - - - - - - - - - - - - - 3-14
3.3.2 通信连接器 - - - - - - - - - - - - - - - - - - - - - - - - 3-15
3.3.3 连接器信号名称 - - - - - - - - - - - - - - - - - - - - - - 3-15
3.3.4 连接实例 - - - - - - - - - - - - - - - - - - - - - - - - - 3-16
3.3.5 RS422 接口 - - - - - - - - - - - - - - - - - - - - - - - - 3-17
CN4) 的端子排列一览 - - - - - - - 3-4
3
3.4 NS600 的功率损耗 - - - - - - - - - - - - - - - - - - 3-18
3-1
Page 34

第 3 章 连接器的连接
3.1.1 输入输出信号用连接器 (CN1
3.1 输入输出信号
下面就已装上 NS600 的 SGDH 型伺服单元的输入输出信号进行说明
3.1.1 输入输出信号用连接器 (CN1 CN4) 的连接实例
CN4) 的连接实例
输入输出信号的典型连接实例如下所示
* 1. 表示多股绞合线
* 2. 仅在使用绝对值编码器的情况下并且 CN8 未连接电池时连接
图 3.1 输入输出信号用连接器 CN1 的连接实例
3-2
Page 35

3.1 输入输出信号
3
( 注 )/START-STOP /PGMRES /SEL0 /SEL1 /SEL2 /SEL3
/SEL4 是模式 0 时的信号名称
/HOME /JOGP /JOGN /JOG0 /JOG1 /JOG2 /JOG3 是模式 1
时的信号名称
图 3.2 输入输出信号用连接器 CN4 的连接实例
3-3
Page 36

第 3 章 连接器的连接
3.1.2 输入输出信号用连接器 (CN1
3.1.2 输入输出信号用连接器 (CN1 CN4) 的端子排列一览
CN4) 的端子排列一览
CN1与CN4 的端子排列以及规格如下所示
CN1 的端子排列
2
SG GND
4
--
6
SG GND
8
--
10
SG GND
12
--
14
--
16
--
18
--
20
/PCO PG 分频输出
C 相
1
SG GND
3
--
5
--
7
--
9
--
11
--
13
--
15
--
17
--
19
PCO PG 分频输出
C 相
21
BAT(+) 电池 (+)
27
/BK+ 制动器联锁输
出
29
/S-RDY+ 伺服准备就绪
输出
31
ALM+ 警报输出
33
PAO PG 分频输出
A 相
35
PBO PG 分频输出
B 相
37
ALO1警报
代码输出
39
ALO3
41
/SEL5 程序表
选择信号 5
43
N-OT 反转侧超程输
入
45
/SEL6 程序表
选择信号 6
26
/WARN- 伺服警告
输出
28
/BK- 制动器联锁输
出
30
/S-RDY- 伺服准备就绪
输出
32
ALM- 伺服
警报输出
34
/PAO PG 分频输出
A 相
36
/PBO PG 分频输出
B 相
38
ALO2 警报代码输出
40
/S-ON 伺服 ON
输入
42
P-OT 正转侧超程输
入
44
/DEC 原点复位减速
限位
开关输入
46
/RGRT 外部定位闭锁
22
BAT(-) 电池 (-)
24
--
47
23
--
49
25
/WARN+ 错误 / 警告输
出
( 注 )1. 空置的端子 请勿用作中继
2. 请将输入输出信号用电缆的屏蔽线接到连接器壳体上
用伺服单元侧连接器连接到 FG( 框架地线 ) 上
CN1 的规格
伺服单元内部
使用连接器规格
10250-52A2JL 的等同品
直角 50P
10150-3000VE 10350-52A0-008 住友 3M 制
3-4
+24VIN 顺序
信号用电源
/PSO S 相输出
适用插座型号
焊接型 壳体生产厂家名称
48
PSO S 相输出
50
--
Page 37

CN4 的端子排列
3.1 输入输出信号
1
24V/COM 顺序
3
/MODE
0/1
5
/STARTSTOP;/
HOME
7
/PGMRES;
/JOGP
9
/SEL0;/
JOGN
11
/SEL1;/
JOG0
13
/SEL2;/
JOG1
15
/SEL3;/
JOG2
17
/SEL4;/
JOG3
信号用电源
模式选择
输入
起动 - 停止 /
原点复位开始
程序复位 /JOG
正转输入
程序
选择 0/JOG
反转输入
程序
选择 1/JOG
选择 0 输入
程序
选择 2/JOG
选择 1输入
程序
选择 3/JOG
选择 2 输入
程序
选择 4/JOG
选择 3 输入
2
--
4
--
6
--
8
--
10
--
12
--
14
--
16
--
18
--
19
/INPOSITION+
21
/POUT0+ 可编程输出 0
23
/POUT1+ 可编程输出 1
25
/POUT2+ 可编程输出 2
27
/POUT3+ 可编程输出 3
29
/POUT4+ 可编程输出 4
31
--
33
--
35
--
定位完成输出
20
/INPOSITION-
22
/POUT0- 可编程输出 0
24
/POUT1- 可编程输出 1
26
/POUT2- 可编程输出 2
28
/POUT3- 可编程输出 3
30
/POUT4- 可编程输出 4
32
--
34
--
36
--
定位完成输出
3
CN4 的规格
伺服单元内部
使用连接器规格
10236-52A2JL 等同品
直角 36P
适用插座型号
焊接型 壳体生产厂家名称
10136-3000VE 10336-52A0-008 住友 3M 制
3-5
Page 38

第 3 章 连接器的连接
3.1.3 输入输出信号名称及其功能
3.1.3 输入输出信号名称及其功能
信号名称 针号功能
通用 /S-ON
P-OT
N-OT
/DEC
/RGRT
+24VIN
BAT(+)
BAT(-)
/SEL5
/SEL6
伺服单元的输入输出信号的名称及其功能如下所示
CN1 输入信号
40
42
43
44
46
47
21
22
41
45
伺服 ON
ON 时电机通电
OFF 时电机为非通电状态
禁止正转驱动
禁止反转驱动
原点复位减速限位开关
连接原点复位时的减速限位开关
外部定位闭锁
是用于外部定位的闭锁信号
是顺序信号用电源
电压范围 +11V +25V
绝对值编码器的备用电池连接针
请连接到 CN8 或者 CN1-21 22 中的某一个上
模式 0 时的程序表选择 5
模式 0 时的程序表选择 6
超程防止
当机械的可 动部分超出可移动范围时 停止电机的驱动
CN1 输出信号
信号名称 针号功能
通用 ALM+
ALM-
/WARN+
/WARN-
/BK+
/BK-
/S-RDY+
/S-RDY-
ALO1
ALO2
ALO3
FG
( 注 )( ) 内的针号表示信号地线
31
32
25
26
27
28
29
30
37
38
39(1)
壳体
伺服警报
错误 / 警告 发生错误时 置为 ON 的时间为 2 秒钟
制动器联锁 是控制制动器的输出
制动器释放时 置为 ON
伺服准备就绪
在控制 / 主电路电源置为 ON 的条件下 如果没有发生伺服警报则置为 ON
警报代码输出
输出 3 位警报代码
集电极开路最大额定值 30V 20mA
框架接地
检测出异常则 OFF
发生警告时 继续保持 ON 状态
3-6
Page 39

3.1 输入输出信号
CN4 输入信号
信号名称 针号功能
11
13
15
17
1
是顺序信号用电源 电压范围 +11V +25V
3
切换模式 0 与模式 1
ON 模式 0( 程序表运行 )
OFF 模式 1(JOG 速度表运行与原点复位 )
5
模式 0
模式 1 置为 ON 时开始或者重新开始原点复位
7
模式 0 如果正在程序表运行中断过程中置为 ON 则使程序表运行复位
模式 1 置为 ON 时进行 JOG 正转运行
9
模式 0 程序表 0
模式 1
模式 0 程序表选择 1
模式 1
模式 0 程序表选择 2
模式 1
模式 0 程序表选择 3
模式 1
模式 0 程序表选择 4
模式 1
置为 ON 时开始或者重新开始程序表运行 开始时请参照 /SEL0 /
SEL6
置为 OFF 时中断程序表运行
置为 OFF 时中断原点复位
置为 OFF 时停止
进行 JOG 反转运行
置为 OFF 时停止
JOG 速度表选择 0
JOG 速度表选择 1
JOG 速度表选择 2
JOG 速度表选择 3
+24V/COM
/MODE0/1
/START-STOP;
/HOME
/PGMRES;/JOGP
/SEL0 /JOGN
/SEL1;/JOG0
/SEL2;/JOG1
/SEL3;/JOG2
/SEL4;/JOG3
3
CN4 输出信号
信号名称 针号功能
/INPOSITION+
/INPOSITION-
/POUT0+
/POUT0-
/POUT1+
/POUT1-
/POUT2+
/POUT2-
/POUT3+
/POUT3-
/POUT4+
/POUT4-
19
20
21
22
23
24
25
26
27
28
29
30
定位完成
可编程输出
3-7
Page 40

第 3 章 连接器的连接
3.1.4 接口电路
3.1.4 接口电路
伺服单元的输入输出信号及其与指令控制器的连接实例如下所示
与顺序输入电路的接口
通过继电器或者集电极开路的三极管电路进行连接 使用继电器连接时 请选定微小
电流用继电器
如果不使用微小电流用继电器 则会造成接触不良
3-8
Page 41

3.1 输入输出信号
与输出电路的接口
伺服单元的信号输出电路有以下 3 种类型 请根据各自的输出电路构成指令控制器侧
的输入电路
与集电极开路输出电路的连接
警报代码输出信号是集电极开路的晶体管输出电路
使用光电耦合器 继电器 总线接收电路连接
3
与光电耦合器输出电路的连接
使用继电器
总线接收电路连接
3-9
Page 42

第 3 章 连接器的连接
3.2.1 通信规格
3.2 CN6 串行命令通信用连接器
通过串行命令可执行定位 用户参数与程序表等的设定 监视 辅助功能等
RS422/RS485/RS232
3.2.1 通信规格
CN6 的通信规格如下所示
接口
最大连接轴数 16 轴
电缆总长度 RS422/RS485
位速率 9600 19200 38400bps
同步类型 起止同步
格式 起始
信息流控制 无
移位控制 无
项目 规格
全双工配线 (RS422/RS485/RS232C*) 半双工配线 (RS485)
通过用户参数 Pn800 进行选择
最大 50m
RS232C
通过用户参数 Pn801 进行选择
数据
奇偶校验
停止
* 从 NS600 输出的 /TXD 信号的电压为 TTL 电平 (5V 以下 )
最大 3m
出厂时的设定为 9600baud
1位
7 位 ASCII 代码
1位 偶数
1位
3-10
Page 43

3.2.2 通信连接器
端子排列
3.2 CN6 串行命令通信用连接器
1
TXD
3
RXD
5
GND*
7
RT( 终端电阻 )
2
/TXD
4
/RXD
6
/RXD
10
12
14
8
TXD
9
/TXD
RXD
11
13
GND
型号
NS600 侧
连接器型号
10214-52A2JL
14P
焊接型 壳体生产厂家名称
10114-3000VE 10314-52A0-008 住友 3M 制
适用插座型号
3.2.3 连接器信号名称
针号 信号名称 信号电路名称 信号方向
1
TXD 发送数据 ( 非反转 ) 指令控制器 ← NS600
2
/TXD 发送数据 ( 反转 )PC← 伺服单元
3
RXD 接收数据 ( 非反转 )PC→ 伺服单元
4
/RXD 接收数据 ( 反转 )PC→ 伺服单元
5
GND* 框架地线 (0V)
6
/RXD 接收数据 ( 反转 )
10
11
12
13
14
7
RT 如果短接 RT 与 /RXD
8
TXD 传送数据 ( 非反转 )PC← 伺服单元
9
/TXD 传送数据 ( 反转 )PC← 伺服单元
RXD 接收数据 ( 非反转 )PC→ 伺服单元
预约 预约针
预约 预约针
预约 预约针
GND 框架地线 (0V)
则内置的终端电阻 (120Ω) 便进入 RXD-/RXD 之间
3
*5号针的 GND 实际安装在硬件版本 04 以上的环境中 在硬件版本 03 以下的环境中变为开路
硬件版本可通过位于产品侧面的铭牌 VER. 的前 2 位辨别
VER. 0 4 0 0 4
3-11
Page 44

第 3 章 连接器的连接
3.2.4 连接实例
3.2.4 连接实例
全双工配线时
NS600
OV
FG
( 注 ) 电缆长度 最大 50m
将最后轴上的 RT 与 /RXD 短接
图 3.3 全双工配线时
半双工配线时
NS600
14
GND
FG
( 注 ) 将最后轴上的 RT 与 /RXD 短接
图 3.4 半双工配线时
3-12
14 GND
FG
Page 45

RS232C 时
( 注 ) 电缆长度 最大 3m
3.2 CN6 串行命令通信用连接器
NS600
FG
图 3.5 RS232C 时
3.2.5 RS422/485 接口
RS422/485 电缆总长度最大为 50m 请使用最低必要长度
NS600 的通信电路未进行绝缘 因干扰而发生通信错误时 请使用屏蔽电缆与铁氧体
磁芯等以衰减干扰
在全双工配线的情况下 请在指令控制器的接收电路与位于终端位置上的 NS600 的接收
电路中放入终端电阻
便进入 RXD-/RXD 之间
在半双工配线的情况下 请在通信电缆的两端放入终端电阻 NS600内置有终端电阻
如果短接 RT 与 /RXD 则终端电阻 (120Ω) 便进入 RXD-/RXD 之间
除发送时间之外 NS600 的发送电路一直为高阻抗
请对指令控制器的接收电路进行上拉 / 下拉
3
NS600 内置有终端电阻 如果短接RT 与 /RXD 则终端电阻(120Ω)
3-13
Page 46

第 3 章 连接器的连接
3.3.1 通信规格
3.3 CN7 数字操作器 / 支持软件连接用连接器
使用数字操作器或者支持软件 可执行用户参数与程序表等的设定 监视 辅助功能
RS422/RS232C
3.3.1 通信规格
CN7 的通信规格如下所示
接口
最大连接轴数 16 轴
电缆总长度 RS422
位速率 9600bps
同步类型 起止同步
格式 起始
信息流控制 无
移位控制 无
项目 规格
全双工 (RS422/RS232C*)
最大 50m
RS232C
数据
奇偶校验
停止
* 从 NS600 输出的 /TXD 信号的电压为 TTL 电平 (5V 以下 )
最大 3m
1位
7 位 ASCII 代码
1位 偶数
1位
3-14
Page 47

3.3.2 通信连接器
端子排列
3.3 CN7 数字操作器 / 支持软件连接用连接器
1
TXD
3
RXD
5
预约
7
RT( 终端电阻 )
型号
NS600 侧
连接器型号
10214-52A2JL
14P
3.3.3 连接器信号名称
8
TXD
2
/TXD
10
RXD
4
/RXD
12
预约
6
/RXD
14
GND
适用插座型号
焊接型 壳体生产厂家名称
10114-3000VE 10314-52A0-008 住友 3M 制
11
13
9
/TXD
预约
预约
3
针号 信号名称 信号电路名称 信号方向
1
TXD 发送数据 ( 非反转 )PC ← NS600
2
/TXD 发送数据 ( 反转 )PC ← 伺服单元
3
RXD 接收数据 ( 非反转 )PC → 伺服单元
4
/RXD 接收数据 ( 反转 )PC → 伺服单元
5
预约 预约针
6
/RXD 接收数据 ( 反转 )
10
11
12
13
14
7
RT 如果短接 RT 与 /RXD
8
TXD 传送数据 ( 非反转 )PC ← 伺服单元
9
/TXD 传送数据 ( 反转 )PC ← 伺服单元
RXD 接收数据 ( 非反转 )PC → 伺服单元
预约 预约针
预约 预约针
预约 预约针
GND 框架地线 (0V)
则内置的终端电阻 (120Ω) 便进入 RXD-/RXD 之间
3-15
Page 48

第 3 章 连接器的连接
3.3.4 连接实例
3.3.4 连接实例
使用 RS422 电缆时
NS600
OV
FG
( 注 ) 电缆长度 最大 50m
将最后轴上的 RT 与 /RXD 短接
图 3.6 使用 RS422 电缆时
使用 RS232C 电缆时
NS600
14
GND
FG
( 注 ) 电缆长度 最大 3m
图 3.7 使用 RS232C 电缆时
3-16
FG
Page 49

3.3.5 RS422 接口
RS422 电缆总长度最大为 50m 请使用最低必要长度
NS600 的通信电路未进行绝缘 因干扰而发生通信错误时 请使用屏蔽电缆与铁氧体
磁芯等以衰减干扰
在使用 RS422 电缆的情况下 请在指令控制器的接收电路与位于终端位置上的 NS600
的接收电路中放入终端电阻
电阻 (120Ω) 便进入 RXD-/RXD 之间
除发送时间之外 NS600 的发送电路一直为高阻抗
请对指令控制器的接收电路进行上拉 / 下拉
3.3 CN7 数字操作器 / 支持软件连接用连接器
NS600 内置有终端电阻 如果短接 RT 与 /RXD 则终端
3
3-17
Page 50

第 3 章 连接器的连接
3.4 NS600 的功率损耗
有关额定输出时的伺服单元功率损耗 请参照 Σ-ΙΙ 系列 SGM!H/SGDH 用户手册 ( 资料编
号
NS600 的电源由伺服单元供给
SICPS80000005) 4.4 伺服单元的电源容量与功率损耗
表 3.1 NS600 的规格
项目 规格
最小动作电压 5.05V
最大动作电压 5.25V
最大动作电流 500mA
最大功率损耗 2.6W
3-18
Page 51

第 4 章
试运行
本章将试运行分为两个步骤进行说明 请在充分进行步骤 1 的试运行后
再进入步骤 2
4.1 两步试运行 - - - - - - - - - - - - - - - - - - - - - 4-2
4.2 步骤 1
4.3 步骤 2
伺服电机单体的试运行 - - - - - - - - - - - - 4-3
机械与伺服电机的配套试运行 - - - - - - - - - 4-9
4
4-1
Page 52

第 4 章 试运行
4.1 两步试运行
请在配线结束后 进行试运行
请按照以下两个步骤 ( 步骤 1 和步骤 2) 的顺序进行试运行 可以进行安全 切实的试运
行
详细内容请参照第 4.2 章 第 4.3 章
4-2
Page 53

4.2 步骤 1 伺服电机单体的试运行
请不要在连接机械的状态下运行伺服电机
为了避免意想不到的事故 在步骤 1 中进行伺服电机的无负载 ( 分开联轴节或皮带等伺服电机单体
的状态 ) 试运行
在步骤 1中 请务必确认是否正确地进行如下配线 在伺服驱动器的试运行中 伺服电
机不能正常运行的原因几乎都是由于配线错误造成的
确认电源电路配线
确认伺服电机配线
确认输入输出信号配线 (CN1与CN4)( 仅在使用时 )
确认串行命令配线 (CN6)( 仅在使用时 )
4.2 步骤 1 伺服电机单体的试运行
与指令控制器之间的调整尽可能在该步骤 1( 将伺服电机安装在机械上以前 ) 中实施
4
请按照下页以后的项目顺序进行伺服电机单体试运行
另外 使用带制动器的伺服电机的客户 请参照 5.2.3 制动器释放联锁输出信号 (/BK)
4-3
Page 54

第 4 章 试运行
1. 请将伺服电机固定牢靠
请将伺服电机的安装面固定在机械上以防止在运行时伺服电机发生翻倒事故
2. 请确认配线情况
拆下 CN1 CN4 连接器后 请确认电源电路和伺服电机的配线情况 这里不使用
CN1
CN4 输入输出信号以及 CN6 串行命令信号 因此请将数字操作器连接到 CN7
上
3. 请接通电源
接通伺服单元的电源 正常供电之后 数字操作器的显示如上图所示
如果出现警报显示 则是电源电路 伺服电机配线或者编码器配线等出现了问
题
请将电源置为 OFF 后 检查问题原因所在 并进行纠正处理 请参照 9 章
异常诊断与处理措施
使用绝对值编码器时 要对编码器进行设置 请参照 5.3.4 绝对值编码器的设置(初始化)
4-4
Page 55

4. 用数字操作器进行运行操作
用数字操作器进行伺服电机的试运行 请确认伺服电机是否正常运行
用数字操作器进行运行的步骤如下所示
有关详细内容 请参照 7 章数字操作器的使用方法
a) 请按下 DSPL/SET 键 选择辅助功能执行模式的 Fn002
4.2 步骤 1 伺服电机单体的试运行
b) 请按下 DATA/ENTER 键 进入数字操作器运行模式 在此状态下 可用数字操
作器进行运行
c) 请按下 SVON 键 进入伺服 ON( 电机通电 ) 状态
d) 请按下 UP 键或 DOWN 键 在按键期间 电机转动
e) 请按下 DATA/ENTER 键 返回到 Fn002 显示 此时为伺服 OFF( 电机非通电 ) 状
态
按下 SVON 键也能使伺服 OFF
4
至此 使用数字操作器进行的运行模式结束
4-5
Page 56

第 4 章 试运行
用数字操作器运行电机时 可通过用户参数变更电机转速 其条件如下所示
用户参数 信号 设定
Pn304
( 线性电机时 Pn383)
Pn305 微动 (JOG) 运行软起动加速时间初始设定
Pn306 微动 (JOG) 运行软起动减速时间初始设定 0ms
伺服电机的旋转方向取决于用户参数 Pn000.0 的 旋转方向的选择 上例所示为 Pn000.0 0
的出厂设定时的情况
微动 (JOG) 运行速度
初始设定 500min
( 线性电机时 50mm/s)
-1
0ms
5. 请连接信号线
请按以下步骤连接 CN1 CN4 与 CN6 连接器 ( 仅在使用时 )
数字操作器可以保持连接状态
a) 请将电源置为 OFF
b) 请连接 CN1 CN4 与 CN6 连接器
c) 请再次将电源置为 ON
6. 请确认 CN1 输入信号 ( 使用 CN1 输入信号时 )
利用数字操作器的 Un005 检查输入信号的配线
有关操作方法 请参照 7 章数
字操作器的使用方法
对连接好的各信号线进行 ON/OFF 并确认面板上的 7 段 LED 的监视显示进行如下
所示的变化
4-6
Page 57

4.2 步骤 1 伺服电机单体的试运行
P-OT
N-OT
/DEC
/SEL6
/RGRT
/SEL5
/S-ON
输入信号的状态 7 段 LED 的显示
OFF( H 电平 ) 时 上侧的 LED 置为 ON
ON( L 电平 ) 时 下侧的 LED 置为 ON
如果没有对下述信号线进行正确配线 则会导致伺服电机不能运行 请切实地进行配线 不使
用信号线时
择功能 ( 用户参数
请根据需要进行短路处理 想要省略外部的短路配线时 也可以使用输入信号选
Pn803 Pn80F) 进行设定
信号符号 连接器针号说明
-
OT CN1-42
P
置为 ON 时
伺服电机可进行正转
置为 OFF 则进入正转侧超程状态
N-OT CN1-43
置为 ON 时 伺服电机可进行反转
置为 OFF 则进入反转侧超程状态
/S-ON CN1-40
+24VIN
CN1
-
47
置为 ON 时电机通电
是顺序信号用控制电源供给端子
因此请置为 OFF
4
7. 请确认 CN4 输入信号 ( 使用 CN4 输入信号时 )
利用数字操作器的 Un801 检查输入信号的配线
有关操作方法 请参照 7 章数
字操作器的使用方法
对连接好的各信号线进行 ON/OFF 并确认面板上的 7 段 LED 的监视显示进行如下
所示的变化
PGMRES;/JOGP
/SEL0;/JOGN
/SEL1;/JOG0
/SEL2;/JOG1
/SEL3;/JOG2
/SEL4;/JOG3
/START-STOP;/HOME
/MODE0/1
4-7
Page 58

第 4 章 试运行
输入信号的状态 7 段 LED 的显示
OFF( H 电平 ) 时 上侧的 LED 置为 ON
ON( L 电平 ) 时 下侧的 LED 置为 ON
CN1与CN4输入信号也可以利用串行命令 IN1与IN2 通过CN6 进行监视 有关串行命令的说明 请
参照章 6
串行命令通信
8. 请确认 CN6 串行命令通信 ( 使用 CN6 输入信号时 )
请利用数字操作器的 Un80D
章数字操作器的使用方法
信协议与位速率
请根据需要变更设定 设定已变更时 请重新启动电源
Un811 确认串行通信 有关操作方法 请参照 7
另外 请利用用户参数 Pn800 与 Pn801 确认串行通
有关用户参数的编辑步骤 请参照 7 章数字操作器的使用方法
另外 确定串行通信之后 也可以通过串行通信进行用户参数的编辑 监视等
9. 请将伺服置为 ON
请将 /S-ON 置为 ON 或者发送串行命令 SVON
如果正常 则伺服电机通电 数字操作器的显示如上图所示 如果出现警报显
示
请则参照 9 章异常诊断与处理措施 进行处理
4-8
Page 59

4.3 步骤 2 机械与伺服电机的配套试运行
请按照指示进行步骤 2 的操作
在伺服电机和机械连接的状态下 如果发生操作错误 则不仅会造成机 械损坏 有时还可能导致人
身伤害事故
进入步骤 2 之前 在用户参数设定 配线等最接近最终状态的条件下 反复进行步骤 1( 伺
服电机单体试运行 ) 的试运行
在步骤 1 结束后 将伺服电机与机械连接 进入步骤 2 的试运行 步骤 2 的目的是根据
机械的特性对伺服单元进行调整
通过自动调谐操作以使伺服单元与机械的特性相符
使旋转方向 速度等与机械的规格保持一致
确认最终控制形态
4.3 步骤 2 机械与伺服电机的配套试运行
4
请按以下步骤进行试运行
1. 请将电源置为 OFF
2. 请将伺服电机连接到机械上
有关与伺服电机的连接 请参照 Σ-ΙΙ 系列 SGM!H/SGDH 用户手册 ( 资料编号
SICPS80000005)3.8 伺服电机的机械规格 进行安装
3. 请根据机械的特性对伺服单元进行自动调谐
有关自动调谐 请参照Σ-ΙΙ系列SGM!H/SGDH用户手册(资料编号 SICPS80000005)
9.1.2(1)
4. 请通过数字输入输出或者串行模式操作运行伺服电机 请参照第 5 章 参数设定
与功能说明
5. 请设定并记录用户参数
请根据需要设定用户参数 为了维护保养上的需要 请预先将设定后的 用户 参数
全部记录下来
至此 试运行全部结束
试运行时 与机械的磨合还不充分 在试运行结束后 请进行充分的磨合运行
自动调谐功能
与第 6 章 串行命令通信
4-9
Page 60

Page 61

第 5 章
参数设定与功能说明
本章对根据目的而进行的参数设定方法以及功能的使用方法进行说明
5.1 SGDH 型伺服单元的用户参数设定限制 - - - - - - - - - 5-4
5.2 顺序用输入输出信号 - - - - - - - - - - - - - - - - - 5-6
5.2.1 伺服 ON/OFF 输入信号 (/S-ON) - - - - - - - - - - - - - - - - - 5-8
5.2.2 伺服警报输出
5.2.3 制动器释放联锁输出信号 (/BK) - - - - - - - - - - - - - - - 5-10
5.2.4 伺服准备就绪输出信号 (/S-RDY) - - - - - - - - - - - - - - - 5-14
5.2.5 错误 / 警告输出信号 (/WARN) - - - - - - - - - - - - - - - - 5-15
5.2.6 定位完成输出信号 (/INPOSITION) - - - - - - - - - - - - - - 5-16
5.2.7 可编程输出信号 (/POUT0
5.2.8 编码器信号输出 - - - - - - - - - - - - - - - - - - - - - - 5-18
警报代码输出信号 (ALM ALO1 ALO3) - - - - - - 5-9
/POUT4) - - - - - - - - - - - - - 5-17
5
5.3 绝对值编码器 - - - - - - - - - - - - - - - - - - - - 5-21
5.3.1 接口电路 - - - - - - - - - - - - - - - - - - - - - - - - - 5-22
5.3.2 绝对值编码器的选择 - - - - - - - - - - - - - - - - - - - - 5-22
5.3.3 电池的使用方法 - - - - - - - - - - - - - - - - - - - - - - 5-22
5.3.4 绝对值编码器的设置 ( 初始化 ) - - - - - - - - - - - - - - - 5-23
5.3.5 旋转圈数上限值设定 - - - - - - - - - - - - - - - - - - - - 5-24
5.3.6 绝对值编码器原点设定 - - - - - - - - - - - - - - - - - - - 5-26
5.4 根据机械所进行的设定 - - - - - - - - - - - - - - - - 5-27
5.4.1 电机旋转方向的切换 - - - - - - - - - - - - - - - - - - - - 5-27
5.4.2 超程设定 - - - - - - - - - - - - - - - - - - - - - - - - - 5-28
5.4.3 指令单位的设定 - - - - - - - - - - - - - - - - - - - - - - 5-31
5.4.4 移动方法与座标设定 - - - - - - - - - - - - - - - - - - - - 5-36
5.4.5 间隙补偿 - - - - - - - - - - - - - - - - - - - - - - - - - 5-38
5.4.6 扭矩限制 - - - - - - - - - - - - - - - - - - - - - - - - - 5-39
5-1
Page 62

第 5 章 参数设定与功能说明
5.5 程序表 - - - - - - - - - - - - - - - - - - - - - - 5-40
5.5.1 模式切换信号 (/MODE 0/1) - - - - - - - - - - - - - - - - - 5-40
5.5.2 程序表运行输入信号 - - - - - - - - - - - - - - - - - - - - 5-40
5.5.3 程序表的程序步选择 - - - - - - - - - - - - - - - - - - - - 5-42
5.5.4 程序表设定 - - - - - - - - - - - - - - - - - - - - - - - - 5-43
5.5.5 EVENT 设定实例 - - - - - - - - - - - - - - - - - - - - - - 5-46
5.5.6 程序表运行操作 - - - - - - - - - - - - - - - - - - - - - - 5-47
5.5.7 程序表运行的状态变迁 - - - - - - - - - - - - - - - - - - - 5-48
5.5.8 程序表输入信号定时规格 - - - - - - - - - - - - - - - - - - 5-49
5.5.9 /START-STOP 信号 ON 时起的反应时间 - - - - - - - - - - - - - 5-50
5.5.10 程序表实例 - - - - - - - - - - - - - - - - - - - - - - - 5-51
5.6 外部定位 - - - - - - - - - - - - - - - - - - - - - 5-56
5.6.1 外部定位定时规格 - - - - - - - - - - - - - - - - - - - - - 5-56
5.6.2 外部定位输入设定 - - - - - - - - - - - - - - - - - - - - - 5-56
5.6.3 外部定位运行 - - - - - - - - - - - - - - - - - - - - - - - 5-57
5.7 ZONE 表设定 - - - - - - - - - - - - - - - - - - - - 5-59
5.8 原点复位 /JOG 速度表 - - - - - - - - - - - - - - - - 5-61
5.8.1 模式切换输入信号 - - - - - - - - - - - - - - - - - - - - - 5-61
5.8.2 原点复位 /JOG 速度表运行输入信号 - - - - - - - - - - - - - 5-61
5.8.3 有关原点复位的用户参数 - - - - - - - - - - - - - - - - - - 5-62
5.9 原点复位运行操作 - - - - - - - - - - - - - - - - - 5-63
5.10 JOG 速度表运行操作 - - - - - - - - - - - - - - - - 5-64
5.10.1 JOG 速度表运行实例 - - - - - - - - - - - - - - - - - - - - 5-64
5.10.2 JOG 速度表 - - - - - - - - - - - - - - - - - - - - - - - - 5-65
5.10.3 原点复位与 JOG 速度表运行的输入条件 - - - - - - - - - - - 5-66
5.10.4 原点复位与 JOG 速度表输入信号的定时规格 - - - - - - - - - 5-67
5-2
Page 63

阅读本章时
本章根据使用目的对 SERVOPACK( 伺服单元 )(SGDH 型 ) 与 NS600 的输入输出信号 (CN1
与 CN4 连接器 ) 及与之相关的用户参数的使用方法进行说明
有关本章的参考内容如下所示
输入输出信号 (CN1与CN4 连接器 ) 一览 3.1.3 输入输出信号名称及其功能
输入输出信号 (CN1与CN4 连接器 ) 端子排列 3.1.2 输入输出信号用连接器
(CN1
CN4) 的端子排列一览
用户参数一览 附录 A 用户参数一览
用户参数的构成
用户参数由以下种类构成 用户参数一览表请参照附录 A
种类 用户参数号码 概要
功能选择开关 Pn000
Pn819
伺服增益等参数 Pn100 Pn123 对速度环增益 位置环增 益等的数值 进行设
位置控制类参数 Pn200 Pn208 对 S 形曲线等位置控制类用户参数进行设定
速度控制类参数 Pn308 对速度反馈滤波器等速度控制类 用户参数进
扭矩控制类参数 Pn401 Pn409 对扭矩限值等扭矩控制类用户参数进行设定
顺序类参数 Pn500 Pn509
Pn803
定位类参数 Pn81A Pn822 对定位类用户参数进行设定
原点复位类参数 Pn823 Pn828 对原点复位类用户参数进行设定
其他 Pn600 Pn601 对其他用户参数进行设定
串行通信类参数 Pn800 Pn802 对串行通信类 (CN6) 用户参数进行设定
设置信息类参数 Pn829 Pn834 请勿变更
Pn005
Pn818
进行控制方式的选择以及发生警报时的停止
方法等基本功能 应用功能的选择
定
行设定
对顺序输入输出信号进行设定
使用支持软件
5
5-3
Page 64

第 5 章 参数设定与功能说明
5.1 SGDH 型伺服单元的用户参数设定限制
如果将 NS600 安装到 SGDH 型伺服单元上 则自动地对以下参数进行设定 由于这些用户
参数是系统预约参数
不必设定有关速度
另外 在安装 NS600 的情况下 会在初次接通电源时自动地进行设定 因此起动时最多
需要 10 秒钟的时间
因此请勿变更 另外 将 SGDH 型伺服单元设定为位置控制 由于
扭矩的用户参数 因此请勿变更
用户
参数号码
Pn000
Pn002
Pn004
Pn005
Pn200
Pn205 旋转圈数上限值设定
Pn207
Pn50A
Pn50B
Pn50C
Pn50D
Pn50E
位 用户参数名称 设定值 设定内容
1
控制方式
2
轴地址
0
T-REF 分配 ( 扭矩限制 /
扭矩前馈 )
3
全封闭回路的用途
1
预约
0
预约
2
位置偏移清除
0
位置指令滤波器选择
1
基于 V-REF 的前馈
0
输入信号分配
1
/S-ON
2
/P-CON
3
/P-OT
0
/N-OT
1
/ALM-RST
2
/P-CL
3
/N-CL
0
/SPD-D
1
/SPD-A
2
/SPD-B
3
/C-SEL
0
/Z-CLAMP
1
/INHIBIT
2
/G-SEL
3
预约
0
/COIN
1
/V-CMP
2
/TGON
3
/S-RDY
1
0
0
0
0
0
0
0
1
0
1
8
8
8
8
8
8
8
8
8
8
8
8
8
8
8
0
0
0
3
位置控制
F
拷贝 NS600 的旋转开关的值
不能使用基于模拟量电压的限制 / 扭矩前馈
不能使用全封闭回路
未使用
未使用
在伺服 OFF 期间清除位置偏移
所用编码器为 1 圈型绝对值编码器并且 Pn002.2=0 时 被
自动地设定为 0
*1. 仅 Ver.4 以上才可自动地设定本功能 在
Ver.3 以下的情况下
S 形曲线
不能使用基于模拟量电压的速度前馈
分配有效
未使用 (/S-ON 通过 NS600 检测出 SI0
未使用
未使用 (P-ON 通过 NS600 检测出 SI2
未使用 (N-ON 通过 NS600 检测出 SI3
未使用
未使用
未使用
未使用
未使用
未使用
未使用
未使用
未使用
未使用
未使用
未使用
未使用
未使用
固定为 SO3
请手动进行设定
)
)
)
5-4
Page 65

5.1
SGDH 型伺服单元的用户参数设定限制
用户
参数号码
Pn50F
Pn510
Pn512
位 用户参数名称 设定值 设定内容
0
1
2
3
0
1
2
3
0
1
2
3
/CLT
/VLT
/BK
/WARN
/NEAR
预约
未使用
未使用
SO1反转
SO2 反转
SO3 反转
未使用
0
0
2
1
0
0
0
0
0 或1
0 或1
0 或1
0
未使用
未使用
固定为 SO2
固定为 SO1
未使用
未使用
未使用
未使用
NS600 设定符合 Pn816 的值
NS600 设定符合 Pn817 的值
NS600 设定符合 Pn818 的值
未使用
5
5-5
Page 66

第 5 章 参数设定与功能说明
5.2 顺序用输入输出信号
是控制伺服单元与 NS600 动作的顺序输入输出信号 请根据需要进行连接
输入信号的连接
请如下连接顺序用输入信号线
CN1
CN4
0V
+ 24 V
+ 24 V
+24VIN
/S-ON
/SEL5
P-OT
N-OT
/DEC
/SEL6
/RGRT
+ 24 V /COM
CN1
CN1-47
CN1-40
CN1-41
CN1-42
CN1-43
CN1-44
CN1-45
CN1-46
CN4
CN4-1
3.3 k
NS600
3.3 k
0V
/MODE 0/1
/START-STOP; /HOME
/PGMRES; /JOGP
/SEL 0; /JOGN
/SEL 1; /JOG0
/SEL 2; /JOG1
/SEL 3; /JOG2
/SEL 4; /JOG3
CN4-3
CN4-5
CN4-7
CN4-9
CN4-11
CN4-13
CN4-15
CN4-17
5-6
Page 67

5.2
顺序用输入输出信号
请在外部准备 24V 使用电源 伺服单元与 NS600 没有内置 24V 电源
建议与输出电路使用同一电源 并且 顺序用输入电路的可动作 +24V 电源电压范围处在 +11V
+25V 之间 也可以使用 +12V 电源 但在继电器等机械接点的情况下 容易发生微小电流接
触不良
请务必在确认继电器等特性后再使用
输入信号的规格 (CN1 CN4)
项目 规格
信号名称 CN1 /S-ON P-OT N-OT /DEC /RGRT
/MODE0/1 /START-STOP /HOME /PGMRES /JOGP /SEL0
CN4
/JOGN /SEL1 /JOG0 /SEL2 /JOG1 /SEL3 /JOG2
/SEL4 /JOG3
输入形式 吸收或者供给
绝缘 光电耦合器
动作电压 DC11V 25V
输入阻抗 3.3kΩ
ON 电流 最大分别为 8mA
OFF 电流 最大分别为1mA(OFF 电压 =1.0V)
输出信号的连接
请如下连接顺序用输出信号
CN1
CN1
CN1
25
26
28
29
30
39
31
32
27
37
38
1
5
+24 V 0 V
ALM+
ALM -
/WARN+
/WARN-
/BK+
/BK-
/S-RDY+
/S-RDY-
ALO1
ALO2
ALO3
SG
0V
5-7
Page 68

第 5 章 参数设定与功能说明
5.2.1 伺服 ON/OFF 输入信号 (/S-ON)
CN4
请在外部准备 24V 使用电源 伺服单元与 NS600 没有内置 24V 电源 建议与输入电路使用同一电
源
5.2.1 伺服 ON/OFF 输入信号 (/S-ON)
+24 V
0V
+24 VIN
/S-ON
→ 输入 /S-ON CN1-40 进行伺服 ON
切换电机的通电状态与非通电状态
信号 状态 动作
/S-ON 光电耦合器 ON 电机通电
光电耦合器 OFF 电机为非通电状态
CN1-47 3.3k
CN1-40
除紧急停止以外 请勿在电机旋转时进行
伺服 OFF
可通过下述用户参数变更 /S-ON 信号的设定
用户参数 信号 针号设定出厂时
Pn80B /S-ON CN1-40 0
5-8
光电耦合器 ON= 伺服 ON
光电耦合器 OFF= 伺服 ON
1
2
常时伺服 ON
常时伺服 OFF
3
的设定
0
Page 69

5.2.2 伺服警报输出 警报代码输出信号 (ALM ALO1 ALO3)
有关警报的 输出信号 的基本连接方法如下所示
CN1-31
ALM+
CN1-32
ALM -
CN1-37
ALO1
ALO2
CN1-38
ALO3
CN1-39
SG
CN1-1
0V
5.2
顺序用输入输出信号
+24 V
0V
0V
请在外部另外准备 24V 使用电源 伺服单元没有内置 24V 电源
光电耦合器输出信号 ALM 的使用方法如下所示
输出 → ALM+ CN1-31 伺服警报输出
输出 → ALM- CN1-32 伺服警报输出用信号地线
在检测出伺服单元发生异常时输出
所构成的外部电路必须在该警报输出时使通向伺服单元的主电路电源置为 OFF
ON 状态 CN1-31
CN1-31为 L 电平
OFF 状态 CN1-31
CN1-31为 H 电平
32 间为 闭
32 间为 开
正常状态
警报状态
5
5-9
Page 70

第 5 章 参数设定与功能说明
5.2.3 制动器释放联锁输出信号 (/BK)
另外 警报代码输出 ALO1 ALO2 ALO3 可用于辨别警报种类 集电极开路输出信
号
输出表示伺服单元检测的警报种类的警报代码
要在指令控制器显示警报内容等情况下使用
有关 警报显示 和上述的 警报代码输出 之间的 ON/OFF 的关系
NS600 时 请参照 9.1.1 警报显示一览 伺服单元时请参照 9.2.2 警报显示一
览
5.2.3 制动器释放联锁输出信号 (/BK)
ALO1 ALO2 ALO3 的使用方法如下所示
输出 → ALO1 CN1-37 警报代码输出
输出 → ALO2 CN1-38 警报代码输出
输出 → ALO3 CN1-39 警报代码输出
输出 → SG CN1-1 警报代码输出用信号地线
在用伺服驱动器控制垂直轴等情况下使用 也就是说 系统电源置为 OFF 时 使
用
带制动器的伺服电机 以保持可动部不因重力而移动
带制动器的 SGM!H 型伺服电机 内置的制动器为 无励磁动作型 的保持专用制动器 不能
用于制动
矩
仅用于使停止的电机保持停止状态 该 制动器扭矩 大约为伺服电机 额定扭
的120% 以上
5-10
Page 71

5.2
顺序用输入输出信号
连接实例
伺服单元的顺序输出信号 /BK 和 制动器电源 构成了制动器的 ON/OFF 电路
标准的连接实例如下所示
A(1)
B (2)
C (3)
D (4)
E(5)
F (6)
M
BK
PG
+24V
BK-RY
BK-RY
L1
L2
L3
L1C
L2C
CN1-27
/BK+
CN2-28
/BK-
AC DC
U
V
W
CN2
BK-R Y
输出 → /BK 制动器联锁输出
是使用带制动器的电机时 控制制动器的输出 使用不带制动器的电机时不要连接
ON 状态 光电耦合器 ON 释放制动器
OFF 状态 光电耦合器 OFF 使用制动器
可通过下述用户参数变更 /BK 信号的设定
5
用户参数 信号 针号设定出厂时
Pn817 /BK CN1-27 28 0 光电耦合器 ON= 释放制动器
1 光电耦合器 OFF= 释放制动器
相关的用户参数
Pn506 从制动指令到伺服 OFF 为止的延迟时间
Pn507 电机旋转时输出制动器指令的速度值
Pn508 电机旋转时输出制动器指令的定时
的设定
0
5-11
Page 72

第 5 章 参数设定与功能说明
5.2.3 制动器释放联锁输出信号 (/BK)
制动器 ON 定时
由于制动器 ON 定时 机械因重力等原因发生微量移动时 请用下面的 用户参数
调整定时
Pn506
从制动指令到伺服
OFF 为止的延迟时间
单位
10ms
设定范围
0
50
出厂时的设定
0
对使用带制动器的伺服电机时的制动器控制输出信号
/BK 与伺服 OFF 动作 ( 电机输出停止 ) 定时进行设定
标准设定为与 /BK 输出 ( 制动器动作 ) 同时进行伺服 OFF 此时 由于机械的构成及
制动器的特性
机械有时会因重力而产生微量移动现象 在这种情况下 可通过使用
此用户参数延迟伺服 OFF 动作以消除移动
这里进行的设定是电机停止状态下的定时
在 Pn507 508 中设定电机旋转时的制动器动作
发生警报时 电机迅速变为非通电状态 由于重力等原因 机械有时会在制动器动作之前的时
间内产生移动
5-12
Page 73

5.2
顺序用输入输出信号
保持制动器的设定
使用下述用户参数调整定时以使保持制动器在停止正在旋转的伺服电机时起动
Pn507
Pn508
电机旋转时输出制动器
指令的速度电平
电机旋转时输出制动器
指令的定时
单位
min
单位
10ms
-1
设定范围
0
10000
设定范围
100
0
出厂时的设定
100
出厂时的设定
50
在使用带制动器的伺服电机的情况下 对电机旋转时因输入信号
/S-ON (CN1-40) 或者发生警报而置为伺服 OFF 时的制动器定时进行设定
由于伺服电机的制动器设计用于保持 因此当电机停止时 必须在恰当的定时起动制
动器
一边察看机械的动作 一边调整该用户参数
5
电机旋转时的 /BK 信号输出条件
具备下述任何条件时 信号输出均置为 ON
1
伺服 OFF 后
2
伺服 OFF 后 Pn508 的设定时间经过时
即使在 Pn507 中设定 MAX 速度以上的速度 实际设定值仍为 MAX 速度
电机转速低于 Pn507 的设定值时
5-13
Page 74

第 5 章 参数设定与功能说明
5.2.4 伺服准备就绪输出信号 (/S-RDY)
5.2.4 伺服准备就绪输出信号 (/S-RDY)
光电耦合器输出信号 使用伺服准备就绪 /S-RDY 时的基本连接方法与使用方法如
下所示
伺服准备就绪是指主电路电源置为 ON 时没有发生伺服警报的状态 也就是可进行伺服
ON 的状态
+24 0VV
CN1-29
CN1-30
/S-RDY+
/S-RDY-
输出 → /S-RDY CN1-29 30 伺服准备就绪输出
表示伺服单元已经准备好接收伺服 ON 信号
ON 状态 关 或者 L 电平 伺服准备就绪状态
OFF 状态 开 或者 H 电平 伺服未准备就绪
可通过下述用户参数的设定变更 /S-RDY 信号的设定
用户参数 信号 针号设定出厂时
Pn818 /S-RDY CN1-29
30 0 输出关 = 伺服准备就绪
输出开 = 伺服准备就绪
1
的设定
0
5-14
Page 75

5.2.5 错误 / 警告输出信号 (/WARN)
光电耦合器输出信号 使用警告 /WARN 时的基本连接方法与使用方法如下所示
该警告输出由下述信号构成
/WARN 信号 NS600 错误 过载警告 再生过载警告 电池电压过低警告
5.2
顺序用输入输出信号
+24 V
0V
CN1-25
CN1-26
输出 /WARN CN1-25,26 错误 / 警告输出
该输出信号表示错误或警告
OFF 状态
ON 状态 关 或者 L 电平 对异常进行警告的状态
开 或者 H 电平 正常时
错误仅输出2秒钟时间 警告在消除原因之前保持输出
/WARN+
/WARN-
( 过载
NS600 错误 )
再生过载 电池电压不足
可通过下述用户参数设定 /WARN 输出状态
用户参数 信号 针号设定出厂时
的设定
Pn816 /WARN CN1-25
26 0 输出关 = 异常警告
输出开 = 异常警告
1
当警告内容由警报代码输出时 对下述用户参数进行设定
Pn001.3
警告代码输出的选择 出厂时的设定
0
5
0
Pn001.3 的设定 内容
0
1
在警报代码输出 (ALO1 ALO2 ALO3) 的情况下 仅输出警报代码
在警报代码输出 (ALO1
及警告代码两者 发生警报时 输出警报代码
5-15
ALO2 ALO3) 的情况下 则输出警报代码以
Page 76

第 5 章 参数设定与功能说明
5.2.6 定位完成输出信号 (/INPOSITION)
警告代码用下述的 3 位进行输出
5.2.6 定位完成输出信号 (/INPOSITION)
警告显示 警告代码输出 警告的内容
ALO1 ALO2 ALO3
A.91
A.92
A.93
过载
再生过载
电池电压不足
( 注 ) 表示 ON( L ) 信号 表示 OFF( H ) 信号
NS600
+24 V
0V
/INPOSITION+
/INPOSITION-
输出 /INPOSITION
CN4-19
20
CN4-19
CN4-20
定位完成输出
该信号表示定位完成
另外 即使定位被中断并且没有到达目标位置 但如果电机停止 也进行输出
Pn821
/INPOSITION
ON 状态 CN4-19
OFF 状态 CN4-19 20 间为 开 定位没有完成
20 间为 闭 定位完成
( 位置偏移在设定值以下 )
( 位置偏移在设定值以上 )
通过在下述用户参数中设定 INPOSITION 宽度 可以对输出 定位完成输出 的定时
进行调整
Pn821
/INPOSITION 宽度单位
指令单位
设定范围
99999
0
出厂时的设定
1
电机定位完成 设定输出定位完成信号 (/INPOSITION) 的定时
设定值以指令为单位设定位置偏移
此 定位完成宽度 的设定不会对最终的定位精度造成影响
5-16
Page 77

5.2.7 可编程输出信号 (/POUT0 /POUT4)
使用可编程输出 (/POUT0 /POUT4) 时的基本连接方法与使用方法如下所示
可编程输出信号是用户通过程序表的 POUT 或者串行命令的 POUT 命令指定 5 位状态的
输出信号
NS600
5.2
顺序用输入输出信号
输出 /POUT0+ CN4-21 可编程输出 0
输出 /POUT0- CN4-22
输出 /POUT1+ CN4-23 可编程输出 1
输出 /POUT1- CN4-24
输出 /POUT2+ CN4-25 可编程输出 2
输出 /POUT2- CN4-26
输出 /POUT3+ CN4-27 可编程输出 3
输出 /POUT3- CN4-28
输出 /POUT4+ CN4-29 可编程输出 4
输出 /POUT4- CN4-30
/POUT0
ON 输出
OFF 输出 开 或者 H 电平
/POUT4 的
状态
状态
关 或者 L 电平
5
5-17
Page 78

第 5 章 参数设定与功能说明
5.2.8 编码器信号输出
下述用户参数用于设定 /POUT0 /POUT4 的输出状态
用户参数 信号 针号设定出厂时
的设定
Pn811 /POUT0 CN4-21
Pn812 /POUT1 CN4-23
Pn813 /POUT2 CN4-25 26
Pn814 /POUT3 CN4-27
Pn815 /POUT4 CN4-29
22 0 输出关 = 激活
1
24
28
30
输出开 = 激活
0
可编程输出信号 (/POUT0 /POUT4) 的初始状态设定
可通过下述用户参数将可编程输出信号 (/POUT0 /POUT4) 的初始状态 ( 控制电源 ON
或者复位时的状态 ) 选为不激活或者选为 ZONE 信号
本功能在 Ver.4 以上的环境中配备 在 Ver.3 以下的环境中不激活
用户参数 名称 单位 设定 出厂时
Pn835
ZONE
信号指定
5.2.8 编码器信号输出
如果 使用编码器信号 则可 监视电机的速度与位置 但由于电机的速度与位置由
NS600 管理
PG
因此指令控制器通常不必使用该信号
−
CN2 CN1
0: 控制电源 ON 或者复位时
激活
1: 控制电源 ON 或者复位时
ZONE 信号
/POUT0 4 信号不
/POUT0 4 信号为
的设定
0
5-18
Page 79

输出电路为总线驱动器输出 请参考以下电路进行连接
5.2
顺序用输入输出信号
CN1-33
CN1-34
CN1-35
CN1-36
CN1-19
CN1-20
CN1-1
OV
PAO
/PAO
PBO
/PBO
PCO
/PCO
输入输出信号
输入输出信号的详细内容如下所示
R
P
P
P
2
1
R
6
7
10
R
9
8COV16
+5V
3
5
11
+
-
+5V
0V
5
输出 PAO CN1-33 编码器输出 A 相
输出 /PAO CN1-34 编码器输出 /A 相
输出 PBO CN1-35 编码器输出 B 相
输出 /PBO CN1-36 编码器输出 /B 相
输出 PCO CN1-19 编码器输出 C 相
输出 /PCO CN1-20 编码器输出 /C 相
输出 SG CN1-1 信号地线
输出位相形态
90
t
90
t
5-19
Page 80

第 5 章 参数设定与功能说明
5.2.8 编码器信号输出
分频脉冲数的设定
用下述用户参数设定分频脉冲数
Pn201
分频脉冲数单位
P/R
设定范围
16
16384
出厂时的设定
16384
设定值为电机旋转1圈的脉冲数
设定范围因使用的编码器而异
PAO
PBO
电机型号
编码器规格
A 13 2048P/R 16 2048
B 116 16384P/R 16 16384
2 17
C
分辩率
( 位 )
编码器脉冲数
(P/R)
设定范围
脉冲有 PAO 与 PBO 这 2 相 并且 2 相都输出分频脉冲数 因此 如果对 PAO 与 PBO 的
脉冲沿全部计数
则可得到分频脉冲数 4 倍增的分辨率
比如 分频比为16 脉冲时 可得到 64 脉冲沿
1. 变更该用户参数后 请将电源 OFF 后再次 ON
2. 在13 位编码器的情况下 将 Pn201 设定为 2049 以上的值时 变为 2048
5-20
Page 81

5.3 绝对值编码器
如果使用带绝对值编码器的伺服电机 则可在重新运行时不必进行原点复位
电机 SGM!H-!!!1! 带16 位绝对值编码器
SGM!H-!!!2!
带17 位绝对值编码器
5.3
绝对值编码器
-II 系列绝对值检测系统的多旋转数据的输出范围与原系统 (15 位编码器 12 位编码器 ) 不同
特别是原系统的 无限长定位系统 由 -II 系列构成时 请务必实施下述系统变更
绝对值编码器种类 多旋转数据的
输出范围
以往产品
15 位 )
(12
Σ-ΙΙ 系列
(16 17 位 )
∗ 变更旋转圈数上限值设定 (Pn205) 时
设定
-99999
+ 99999
-32768
+ 32767
超出正转方向的上限值 (+99999) 时 多旋
转数据变为 0
超出反转方向的下限值 (99999) 时 多旋转
数据变为 0
超出正转方向的上限值 (+32767) 时 多旋
转数据变为 -32768
超出反转方向的下限值 (32768) 时 多旋转
数据变为 +32767
动作不同 请参照 5.3.5 旋转圈数上限值
超出限值时的动作
∗
∗
5
5-21
Page 82

第 5 章 参数设定与功能说明
5.3.1 接口电路
5.3.1 接口电路
安装在伺服电机上的 绝对值编码器 的标准连接如下所示
5.3.2 绝对值编码器的选择
根据下述用户参数选择 绝对值编码器的使用方法
Pn002.2
绝对值编码器的使用方法 出厂时的设定
要使绝对值编码器生效 请将下述内容设定为 0
Pn002.2 的设定 内容
0
1
( 注 ) 该用户参数变更后 请先将电源置为 OFF 然后再置为 ON
5.3.3 电池的使用方法
即使电源 OFF 时 也必须用电池进行备份以使 绝对值编码器 保存位置信息
请准备下述推荐电池
电池置于指令控制器一侧时 (CN1-21 22)
0
将绝对值编码器用作绝对值编码器
将绝对值编码器用作增量型编码器
锂电池 东芝电池制 ER6VC3 型 3.6V 2000mAh
5-22
Page 83

电池安装在伺服单元上时 (CN8)
锂电池 型号 JZSP-BA01( 带电池主体和连接器 )
电池主体 东芝电池制 ER3V 3.6V 1000mAh
5.3
绝对值编码器
请将电池设置在 CN1-21 22 或者 CN8 上 如果同时在两侧设置 电池之间则会形成回路 非常危险
5.3.4 绝对值编码器的设置 ( 初始化 )
请在下述情况下 进行绝对值编码器的设置
最初起动机械时
发生 编码器备份警报 时
伺服单元电源 OFF 并拆下编码器电缆时
绝对值编码器的设置可通过支持软件或者数字操作器的Fn008 或者串行命令ABSPGRES
执行
请参照附录 B.2 辅助功能一览
绝对值编码器的设置操作仅可在伺服 OFF 的状态下进行 另外 在进行设置处理后 请重新起
动电源
5
5-23
Page 84

第 5 章 参数设定与功能说明
5.3.5 旋转圈数上限值设定
5.3.5 旋转圈数上限值设定
在使用圆台等旋转型绝对值编码器时 请设定旋转圈数上限值
1
使用下述用户参数在伺服单元中设定旋转圈数上限值
Pn205
旋转圈数上限值设定 单位
rev
设定范围
65535
0
出厂时的设定
65535
电机旋转 m 圈时机械旋转 n 圈 时 请在 Pn205 中设定 m-1 值
但需 m-1 65534
旋转圈数上限值设定为 65535 ( 出厂时的设定 ) 的情况下 多旋转数据在 -32768
+32767 的范 围内变 化 在除此之外的设定的情况下 多旋转数据 在 0
+(Pn205 的设定值 ) 的范围内变化
旋转圈数上限值设定值为出厂设定 (= 65535) 时的多旋转数据变化
+32767
0
-32768
将旋转圈数上限值设定值变更为出厂设定 (= 65535) 以外的值时的多旋转数据变化
0
如果伺服电机从 0 向负方向旋转
服电机从 Pn205 的设定值向正方向旋转
则多旋转数据变为 Pn205 的设定值 另外 如果伺
则多旋转数据变为 0 请在 Pn205 中设定 (m-
1) 值
变更用户参数 Pn002.2 以及 Pn205 后 请 OFF 电源 然后再次 ON
1
旋转圈数上限值
是多匝 ( 多旋转 ) 数据的上限值
设定 ) 的范围内变化
Pn002.2 = 0 时 多匝数据在 0 Pn205( 旋转圈数上限值
5-24
Page 85

5.3
绝对值编码器
编码器内部的旋转圈数上限值与伺服单元相同 在出厂时被设定为 65535 如果使用
Pn205 变更伺服单元的旋转圈数上限值并对伺服单元的电源进行 OFF
ON 则会发生
下述警报
警报名称 旋转圈数上限值不一致
警报
显示
A.CC
( 注 ) 表示 ON( L ) 信号 表示 OFF( H ) 信号
ALO1 ALO2 ALO3
警报代码输出 警报内容
编码器和 伺服单元的旋 转 圈 数上
限值不一致
接下来 需要变更编码器内部的旋转圈数上限值 该设定变更可通过支持软件或者数
字操作器的 Fn013 或者串行命令 MLTLIMSET 执行
编码器内部旋转圈数上限值的设定变更操作仅可在发生 旋转圈数上限值不一致 警报期间
进行
另外 在变更后 请将电源 OFF 然后再将电源 ON
5
5-25
Page 86

第 5 章 参数设定与功能说明
5.3.6 绝对值编码器原点设定
5.3.6 绝对值编码器原点设定
在用户参数Pn81D 中设定指令座标与绝对值编码器位置之差 ( 绝对值编码器偏移量 )
Pn81D
绝对值编码器偏移量 指令单位 设定范围
-99999999
+99999999
出厂时的设定
0
通过执行支持软件的 绝对值编码器原点设定 串行命令 ZSET 或者辅助功能
Fn809 中的某一项或者在 Pn81D 中设定按下述方法求出的值
支持软件的 绝对值编码器原点设定 与辅助功能 Fn809 在 Ver.4 以上的环境中配备
用户参数 Pn81D 变更之后 请将电源 OFF 然后再将电源 ON
变更用户参数 Pn202 Pn203 Pn205 Pn81A Pn81D 中的某一设定时 请重新起动电源以使设
定生效
Pn81D 由下式求出
Pn81D = 当前 Pn81D 设定值 + nnnnnnnn - Un804
Pn81D
nnnnnnnn
Un804
绝对值编码器偏移量
希望位置 ( 在较多的情况下 希望位置为 0)
指令当前位置监视
在直线型 (Pn81A=0) 的情况下
请在 Pn81D 中直接设定求出的值
在旋转方式 (Pn81A 0) 的情况下 请进行下述处理 形成 Pn81C Pn81D Pn81B
的关系
求出的值小于 Pn81C( 旋转座标的起点 ) 时
在求出的值中加上座标的宽度 (Pn81B-Pn81C + 1 的值 )
求出的值大于 Pn81B( 旋转座标的终点 ) 时
从求出的值中减去座标的宽度 (Pn81B-Pn81C + 1 的值 )
通过上述计算
机械的当前位置变成 nnnnnnnn
5-26
Page 87

5.4 根据机械所进行的设定
下面就结合适用机械的尺寸和性能对用户参数的设定方法进行说明
5.4.1 电机旋转方向的切换
伺服单元装备有不必变更伺服电机配线就能使伺服电机旋转方向反转的 反转模
式
标准设定时的 正转方向 从伺服电机的负载侧观看为 逆时针旋转
反转模式 仅使电机的旋转方向反转 此时 该轴的移动方向 (+ -) 反转 此外不
发生任何变化
正转指令
5.4
根据机械所进行的设定
标准设定 反转模式
反转指令
反转模式 的设定方法
使用用户参数 Pn000.0
Pn000.0
通过以下设定选择电机的旋转方向
选择旋转方向 出厂时的设定
设定 内容
0
1
从电机的负载侧看
从电机的负载侧看
5
0
CCW 方向为正转 ( 标准设定 )
CW 方向为正转 ( 反转模式 )
5-27
Page 88

第 5 章 参数设定与功能说明
5.4.2 超程设定
5.4.2 超程设定
所谓超程是指机械的可动部超越可移动范围时实施强制停止的功能
超程功能的使用
要使用超程功能 请将下述超程限位开关的输入信号与相对应的伺服单元 CN1 连接器
的针编号正确连接
输入 P-OT CN1-42 禁止正转驱动
( 正转侧超程 )
输入 N-OT CN1-43 禁止反转驱动
( 反转侧超程 )
在直线驱动等情况下 请务必按下图所示连接限位开关以防止机械损坏
P-OT
CN1-42
N-OT
CN1-43
输入信号 ON/OFF 时的驱动状态如下表所示
P-OT ON
( 输入光电耦合器 ON)
OFF
( 输入光电耦合器 OFF)
N-OT ON
( 输入光电耦合器 ON)
OFF
( 输入光电耦合器 OFF)
通常运行状态 ( 向两个方向旋转 )
禁止正转驱动状态 ( 向反转方向旋转 )
通常运行状态
禁止反转驱动状态 ( 向正转方向旋转 )
( 向两个方向旋转 )
5-28
Page 89

5.4
根据机械所进行的设定
输入信号设定的变更
可通过下述用户参数变更超程用输入信号的设定
用户参数 信号 针号设定出厂时
Pn80C P-OT CN1-42 0
Pn80D N-OT CN1-43 0
光电耦合器 OFF 禁止正转驱动状态
光电耦合器 ON 禁止正转驱动状态
1
常时禁止正转驱动状态
2
3
常时允许正转驱动状态 ( 不使用 P-OT)
光电耦合器 OFF 禁止反转驱动状态
光电耦合器 ON 禁止反转驱动状态
1
常时禁止反转驱动状态
2
3
常时允许反转驱动状态 ( 不使用 N-OT)
使用超程时电机停止方法的选择
当设定为 使用 超程时 请根据电机的停止方法 设定下述 用户参数
的设定
0
0
Pn819
用户
参数
Pn819 超程时的停止方
超程时的停止方法 出厂时的设定
Pn819 = 1
Pn819 = 2
名称 设定 说明
法
Pn820 设定减速停止时的减速度
0
0
按照与伺服 OFF 时相同的方法 ( 通过 Pn001.0)
停止
1
紧急停止并进行伺服锁定
2
减速停止并进行伺服锁定
减速度设定 用户参数 Pn820
5
Pn820
减速度 单位
1000
指令单
位 /
min/ms
5-29
设定范围
99999999
1
出厂时的
设定
1000
在 Pn819 = 2 时
有效
Page 90

第 5 章 参数设定与功能说明
5.4.2 超程设定
如果由于超程而变成伺服OFF 状态 那么 即使解除超程也不能进行伺服 ON 要进行伺服 ON 请
重新将 /S-ON 信号从 OFF 置为 ON 或者发送串行命令 SVON
S-ON 信号设定为常时 ON 时
请将电源置为 OFF 然后再置为 ON
另外 通过用户参数 Pn80B=2 将 /
伺服 OFF 时电机停止方法的选择
SGDH 型伺服单元在下述情况时变为伺服 OFF
/S-ON 信号 OFF 或者发出基于 SVOFF 命令的伺服 OFF 指令时
发生警报时
主电源 OFF 时
以下就电机旋转时下述状态的停止方法进行选择
Pn001.0
选择伺服 OFF 时的电机停止方法
出厂时的设定
0
0
1
Pn001.0 = 2
用户参数 设定 说明
Pn001.0
( 出厂时的设定 )
0
用动态制动器停止
动态制动器停止后 保持动态制动器状态
1
用动态制动器停止
动态制动器停止后 解除动态制动器状态 进入
惯性运行状态
2
进行惯性运行停止
电机处于非通电状态 通过机械摩擦停止运行
( 注 )上述设定为 0 的 动态制动器停止后的动态制动器状态 在
电机静止或者以极低速度旋转时
与惯性运行状态相同 不产生
制动力
5-30
Page 91

5.4.3 指令单位的设定
指令单位是指令控制器与 NS600 之间使用的位置与距离的单位 最小定位单位是 1 指
令单位
电子齿轮对指令单位与编码器脉冲进行转换
5.4
根据机械所进行的设定
µ
µ
µ
指令单位的设定方法
请按以下步骤 1. 6. 计算 电子齿数比 (B/A) 并在用户参数 Pn202,Pn203
中设定该值
1. 确认机械规格
与电子齿轮相关的要素如下所示
减速比
滚珠丝杠节距
滑轮直径等
2. 确认编码器脉冲数
电机型号
编码器规格
A
B 16 位16384
C 17 位 32768
1
2 17 位 32768
3
增量型编码器
绝对值编码器
1 圈旋转型绝对值编码器
编码器的种类 编码器脉冲数
(P/R)
13 位 2048
16 位16384
20 位 262144
5
5-31
Page 92

第 5 章 参数设定与功能说明
5.4.3 指令单位的设定
3. 决定指令单位
0.01mm 0.001mm 0.1 0.01 英寸
输入 1 脉冲的指令
移动 1 指令单位
指令单位为 1µm 时
如果输入 50000 脉冲的指令
则移动 50000 1µm=50mm
4. 用指令单位求出负载轴旋转1圈的负载移动量
负载轴旋转1圈的移动量 ( 指令单位 )=
滚珠丝杠节距 5mm 指令单位 0.001mm 时
5
------------- 5000=
0.001
滚珠丝杠圆台皮带+ 滑轮
5. 电子齿数比 如下计算
将电机轴和负载轴的减速比设为 则
( 指令单位 )
B
----
A
使负载轴旋转1圈所移动的量
指令单位
360
n
---m
( 电机旋转 m 圈
此时请确认是否满足以下条件
0.01
超出范围时 伺服单元不能正常动作 请变更机械结构或者指令单位
负载轴旋转 n 圈时 )
B
100
A
5-32
Page 93

5.4
根据机械所进行的设定
6. 设定为用户参数
B
电子齿数比 的值约分后 把 A B 都选为小于 65535 的整数值 并设定
----
A
为用户参数
B
A
Pn202
Pn203
至此 电子齿数比的设定结束
Pn202
Pn203
电子齿数比 ( 分子 ) 单位无设定范围
65535
1
电子齿数比 ( 分母 ) 单位无设定范围
1
65535
出厂时的设
定 4
出厂时的设
定1
设定电子齿轮的齿数比 请按照机械的规格进行设定
B
Pn 202
----
电子齿数比
A
----------------=
Pn 203
B = [( 伺服单元的编码器信号输出脉冲数 ) 4] [ 电机轴转速 ]
A = [ 指令单位 ( 负载轴旋转1圈时的负载移动量 )] [ 负载轴转速 ]
变更用户参数 Pn202 以及 Pn203 后 将电源置为 OFF 然后再置为 ON
电子齿轮的设定实例
5
有关各种负载机构的设定实例如下
滚珠丝杠
B
A
=
设定值
Pn202 8192
Pn203 6000
5-33
Page 94

第 5 章 参数设定与功能说明
5.4.3 指令单位的设定
圆台
皮带 + 滑轮
设定速度
计算定位速度
指令单位 = 0.01 mm
将定位速度设为 15m/min 时
设定值
设定值
Pn202 24576
Pn203 3600
Pn202 32768
Pn203 3925
15 000 mm/min
0.01 mm
= 1,500,000 指令单位 /min
定位速度指定 = 1,500[ 1000 指令单位 /min]
在程序表中
将定位速度与外部定位速度指定为 SPD 与 RSPD
在 JOG 速度表中 将 JOG 速度指定为 JSPD
在串行命令中 利用 SPD 与 RSPD 命令指定定位速度与外部定位速度
SPD 或者 RSPD 命令可省略 省略时 采用下述用户参数的设定值
用户参数 名称 设定 出厂时的设
Pn81E 定位 / 外部定位速度
5-34
99999999
1
( 1000 指令单位 /min)
1000
定
Page 95

加速度 / 减速度 S 形时间的设定
计算加速度 / 减速度
指令单位 = 0.01 mm
将 0[m/min]
15 000[mm/min]
= 1,500,000[ 指令单位 /min]
0.01mm
15[m/min] 的加速时间设为 100[ms]
5.4
根据机械所进行的设定
1,500,000[ 指令单位 /min]
100[ms]
加速度指定 =15[
1000 指令单位 /min/ms]
使用以下用户参数设定加速度与减速度
用户参数 名称 设定 出厂时的
Pn81F 加速度 1
Pn820 减速度 1
Pn208 S 形时间 0 6400 (0.01ms)
V
= 15,000[ 指令单位 /min/ms]
S 形时间
99999999
( 1000 指令单位 /min/ms)
99999999
( 1000 指令单位 /min/ms)
t1
t2 t5
V
[ms]
t3
t6
t4
设定
1000
1000
0
5
5-35
V
[ms]
Page 96

第 5 章 参数设定与功能说明
5.4.4 移动方法与座标设定
5.4.4 移动方法与座标设定
用户参数 名称 单位 设定范围 出厂时的设定
Pn81A
Pn81B
请用以下用户参数设定移动方法与坐标
移动方法
直线型 (Pn81A
软限值正转侧 (P-LS)
0) 时
-
指令单位
0: 直线型
1: 旋转型 ( 最短通路 )
2: 旋转型 ( 常时正转 )
3: 旋转型 ( 常时反转 )
-99999999
+99999999
0
+99999999
Pn81C
Pn81D
旋转型 (Pn81A
旋转座标的终点
直线型 (Pn81A=0) 时
软限值反转侧 (N-LS)
旋转型 (Pn81A
旋转座标的起点
增量型编码器时
原点位置 ( 原点复位结束时 当前停
止位置顶替本设置 )
绝对值编码器时
请参照绝对值编码器偏移量
( 5.3.6 绝对值编码器原点设定 )
0) 时
0) 时
指令单位
指令单位
-99999999
-99999999
+99999999
+99999999
-99999999
0
直线型时
在滚珠丝杠等直线型的情况下 设定为 Pn81A=0 并在 Pn81B 中设定软限值的正转侧
(P-LS)
定位目标位置超过软限值时 产生错误
在程序表的目标位置指定 (POS) 中指定 +/-INFINITE 时也会产生错误
如果电机在发送 JOG 命令或者进行 JOG 速度表运行时达到软限值 电机则以 Pn820 设
定的减速度进行停止
在 Pn81C 中设定软限值的反转侧 (N-LS)
如果设定为 Pn81B=0 并且 Pn81C=0 则软限值功能变为无效
软限值功能在原点复位完成后生效 但在设定为 Pn823=0( 无原点复位 ) 的情况下
则从控制电源置为 ON 时起生效 另外 如果执行串行命令 ZSET 则从执行之时起生
效
5-36
Page 97

5.4
根据机械所进行的设定
旋转型时
在圆台等旋转型的情况下 将 Pn81A 设定为 1( 最短通路 ) 或者 2( 常时正转 ) 或者
3( 常时反转 )
软限值功能变为无效
在 Pn81A=1( 最短通路 ) 的情况下 如果用绝对位置指定定位位置 则向离正转或者
反转最近的方向进行旋转
在 Pn81A=2( 常时正转 ) 的情况下 如果用绝对位置指定定位位置 则 常时向正转方
向旋转
在 Pn81A=3( 常时反转 ) 的情况下 如果用绝对位置指定定位位置 则 常时向反转方
向旋转
不论是哪一种情况 如果用相对位置指定定位位置 则向指定的方向旋转
Pn81B=+3599 Pn81C=0 时 Pn81B=+4999 Pn81C=-5000 时
并在 Pn81B 中设定旋转座标的终点 在 Pn81C 中设定旋转座标的起点
在使用旋转型绝对值编码器时 请设定旋转圈数上限值 (Pn205)
请参照 5.3.5 旋转圈数上限值设定
5
5-37
Page 98

第 5 章 参数设定与功能说明
5.4.5 间隙补偿
5.4.5 间隙补偿
通过设定下述用户参数 可利用齿轮的间隙补偿定位时的偏移
本功能在 Ver.4 以上的环境中配备
正转方向的
定位
Pn836
间隙补偿 指令单位 设定范围
-1000
+1000
出厂时的设定
0
用符号指定进行补偿的方向 用数字设定补偿量
在符号为正号的情况下 在正转方向定位时进行补偿
在符号为负号的情况下 在反转方向定位时进行补偿
变更设定时 从下次定位开始生效
使用增量型编码器时 多半是将原点复位时最后移动的方向作为基准方向 与此相反
的方向为进行间隙补偿的方向
使用绝对值编码器时 多半是将原点复位时最初移动的方向作为基准方向 与此相反
的方向为进行间隙补偿的方向
即使进行补偿时 目标位置监视等的任何监视都不会表示补偿量 仅在实际的电机位
置上表示
Pn836 0 时 Pn836 0 时
→←
→←
反转方向的
定位
5-38
→←
→←
Page 99

5.4.6 扭矩限制
SGDH 型伺服单元可限制最大输出扭矩以保护机械
通过下述用户参数设定的值限制最大扭矩
设定单位为相对于额定扭矩的 %
5.4
根据机械所进行的设定
Pn402
Pn403
1. 如果设定为电机的 MAX 扭矩以上 则被限制在 MAX 扭矩
2. 装有 NS600 的 SGDH 型伺服单元不能使用外部扭矩限制 (/P-CL /N-CL)
正转扭矩限制 单位%设定范围
0
800
反转扭矩限制 单位%设定范围
800
0
出厂时的设定
800
出厂时的设定
800
5
5-39
Page 100

第 5 章 参数设定与功能说明
5.5.1 模式切换信号 (/MODE 0/1)
5.5 程序表
5.5.1 模式切换信号 (/MODE 0/1)
如果激活 /MODE 0/1 输入信号 则变为模式 0( 程序表运行模式 ) 信号的 ON/OFF 与
激活 / 不激活之间的关系由下述用户参数设定
用户参数 信号 针号设定出厂时
的设定
Pn803 /MODE
0/1
CN4-3 0 光电耦合器 ON = 模式 0
1
光电耦合器 OFF = 模式 0
常时模式 0
2
常时模式 1
3
0
Pn803 = 0
NS600
DC +24 V
Pn803 = 1
DC +24 V
5.5.2 程序表运行输入信号
用下述用户参数进行设定
用户参数 信号 针号设定出厂时
Pn804 /START
- STOP
Pn805 /PGMRES CN4-7 0 光电耦合器 OFF→ON = 程序取消
CN4-5 0
NS600
光电耦合器 ON = 程序表运行开始 光
电耦合器 OFF = 程序表运行中断
光电耦合器 OFF = 程序表运行开始 光
1
电耦合器 OFF = 程序运行中断
2 或 3
1 光电耦合器 ON→OFF = 程序取消
2 或 3 程序不取消
程序不开始
的设定
0
0
5-40
 Loading...
Loading...