

Page 1
For GPD 515/G5
j
ustable Frequency Drives
Ad
Spindle Orientation Software
FLASH Memory Software Option (114740)
Part Number: GPD515C-ZZZZ-CS104
Software Revised: 07/21/00
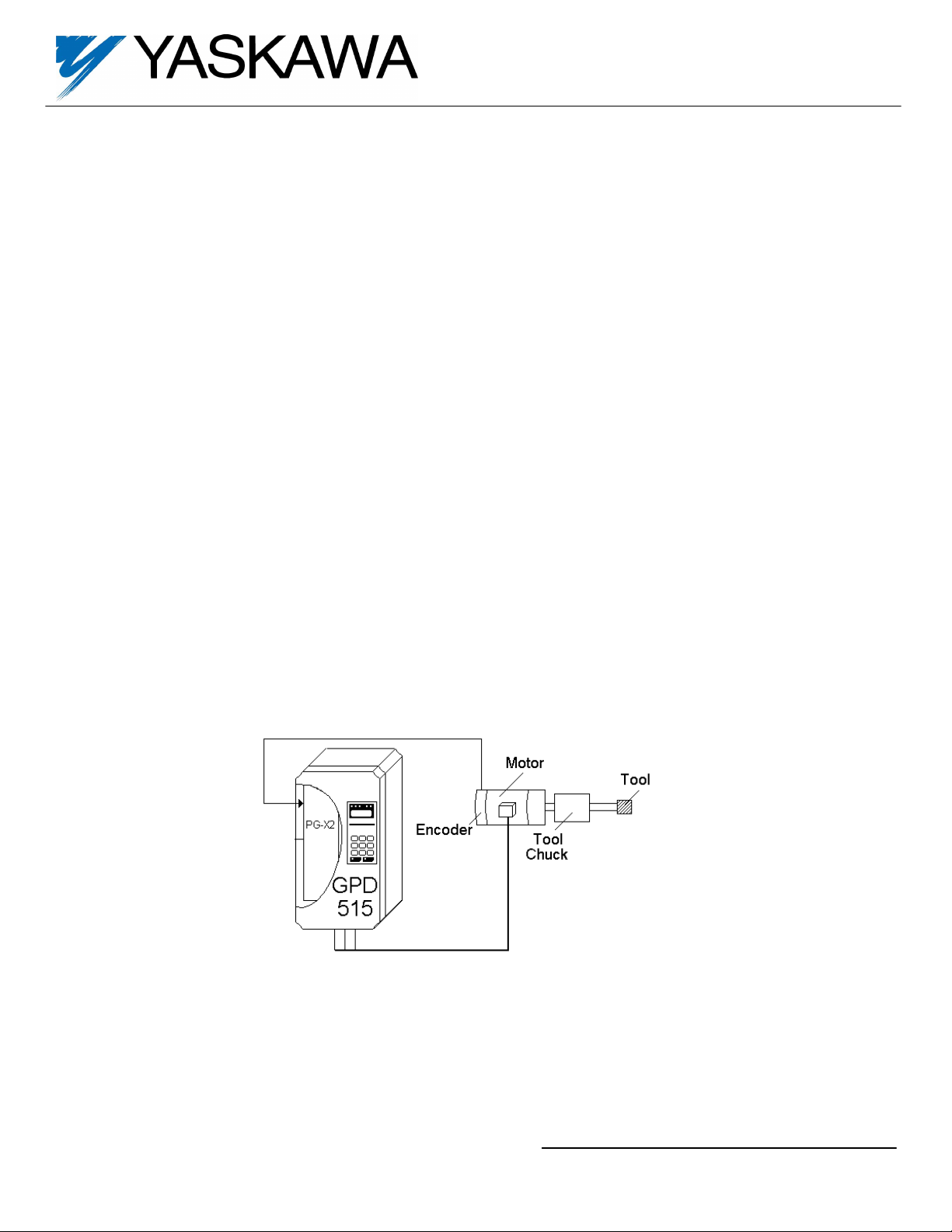
This software enhances a GPD515 AC drive with the ability to control the stopped position of the motor’s shaft; the
targeted application is for spindle equipment with automatic tool changers. Orientation is achieved by processing feedback
from a quadrature encoder connected to the spindle shaft. The positioning is based on a defined zero point which may be
the marker pulse from the encoder or a switch.
The enhancements provided include:
Open Loop Vector Operation
The drive may be used without an encoder attached to the motor, the feedback encoder can be used on the spindle.
Closed Loop Vector Operation
The drive may be used with an encoder attached for better low speed control and positioning characteristics. This provides
for better control when using the gearing option. If the motor is not directly coupled to the spindle shaft or gearing is used a
feedback encoder on the spindle is required.
Gearing Ratio
The spindle to motor ratio may be adjusted between 1:10 to 10:1. This option may be used with open loop control,
although closed loop control provides better performance.
Orient Command Input
This input initiates the orientation process and will stop the shaft in the desired position.
Marker Pulse Input
This input is provided through the PG option card. The marker or Z pulse from the encoder may be used to identify actual
position. An external switch may also use this input.
Marker Offset Parameter
This parameter contains the actual stopping position and is measured in the number of counts since the marker pulse.
Oriented Output
This output indicates that the spindle shaft is oriented.
(1)
Two monitors are provided to indicate relative position to the marker and the angle relative to the orient position.
(1) ZZZZ refers to the base Model Number of the drive in which the software is installed.
This document is an addendum to the Technical Manual TM4515, listing the effect of this software on the parameters
in the drive and the function descriptions in the manual.
Yaskawa Electric America Inc-www.drives.com
02Y00025-0526 Sheet 1 of 9
Date: 09/19/00
Page 2
j
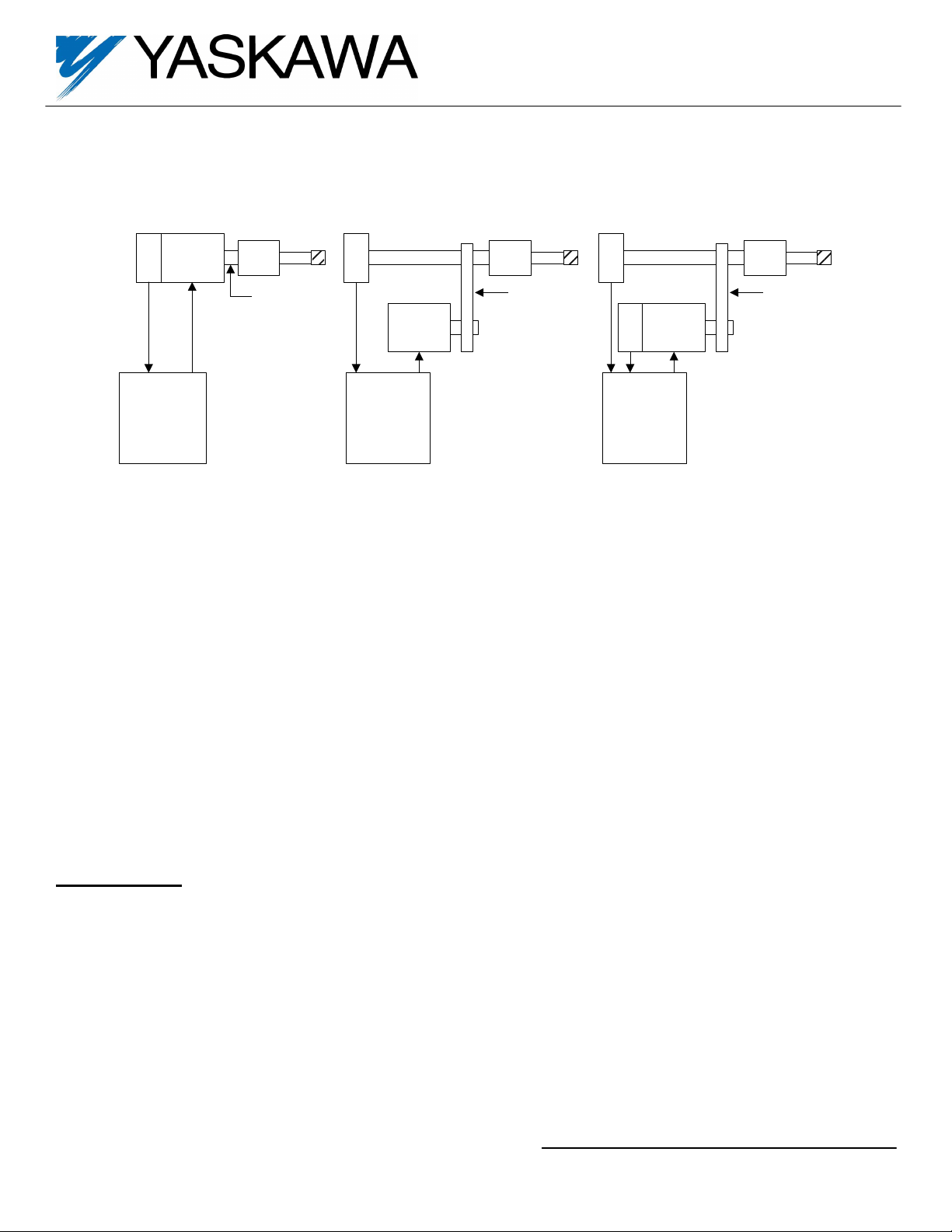
Example Applications
Example 1 Example 2 Example 3
For GPD 515/G5
ustable Frequency Drives
Ad
Encoder
GPD515
Controller
with
PG-X2
Option Card
Motor
Tool
Chuck
Spindle Shaft
Tool
Spindle Shaft
Encoder
GPD515
Controller
with
PG-X2
Option Card
Motor
Tool
Chuck
Belt or Gear
(Gear Ratio)
Tool
Spindle Shaft
Encoder
Encoder
GPD515
Controller
with
PG-W2
Option Card
Motor
Tool
Chuck
Belt or Gear
(Gear Ratio)
Tool
These examples show typical applications. In these examples the encoder Z or Marker pulse is used to indicate the zero
position. An external switch may be used as the Marker pulse to indicate the zero position.
Example 1
This is a direct drive system where the encoder, motor and spindle shafts are directly coupled. This system can use the
encoder for positioning and closed loop vector operation to provide the best performance.
Example 2
This is an indirect drive system where the motor to spindle shaft connection may change. This method also provides for
gearing. The encoder is coupled to the spindle shaft to eliminate possible positioning errors. This method must use open
loop vector speed control and will not provide the performance of a closed loop system.
Example 3
This is an indirect drive system where the motor to spindle shaft connection may change. This method also provides for
gearing. The encoder is coupled to the spindle shaft to eliminate possible positioning errors. The encoder on the motor
allows for closed loop vector speed control. This method will provide the best indirect positioning performance.
NOTE: This software requires a PG-X2 – Speed Control Card (MagneTek part # DS003) be installed on the drive for
examples 1 and 2. For example 3 a PG-W2 – Dual Encoder Feedback Option Board (MagneTek part # DS014) is
required.
1.0 Wiring
Wire the incoming power, motor, accessories and control wiring as specified in the GPD515 Technical Manual TM4515.
Wire the encoder(s) to the PG-X2 or the PG-W 2 according to the instruction sheets 02Y00025-0398 or 02Y00025-0397
respectively.
NOTE: The +12V supply on the PG-W2 card is capable of only 200mA, be sure not to overload it.
Yaskawa Electric America Inc-www.drives.com
02Y00025-0526 Sheet 2 of 9
Date: 09/19/00
Page 3
j
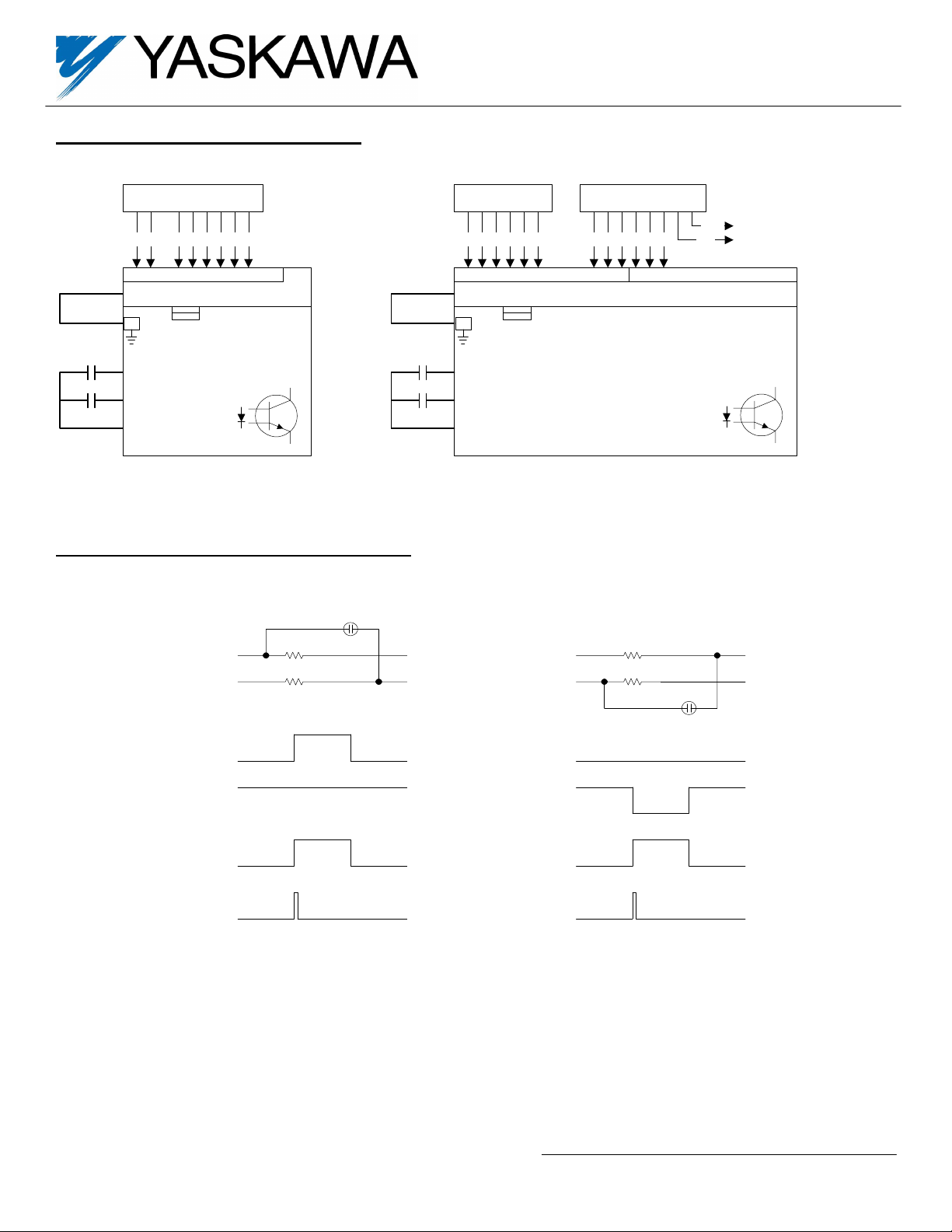
1.1 Encoder Wiring Examples
For GPD 515/G5
ustable Frequency Drives
Channel 1 Channel 2Channel 1
Ad
Run
Orient
Spindle Encoder
+12Com A+ A- B+ B-1Z+ Z-
2453 678910
E
PG-X2
12
4CN
1
7
11 Common
(48v 50ma Max.) (48v 50ma Max.)
TA1
25
26
Run
Orient
Oriented
Motor Encoder
+12 C A+ A- B+ B-
1
2453 678910
TP1
12
1
7
11 Common
J1
4CN
Spindle Encoder
Com
External
+12A+ A- B+ B- Z+ Z-
11 12 13 14 15 16 17 18 21 22 23 24
PG-W2
Power
2019
J2
GPD515GPD515
25
Oriented
26
The diagrams shown indicate the default setup that will result from an initialize. The multifunction inputs and outputs may
be redefined within the limits of the GPD515 to accommodate the application.
1.2 Marker Pulse Wiring Examples
If a proximity switch is going to be used as the marker pulse this is the recommended wiring.
Sinking Proximity SwitchSourcing Proximity Switch
Switch
+Z Input
-Z Input +12 vdc
1K 1/8 W
1K 1/8 W
- Com
+Z Input
-Z Input
1K 1/8 W
1K 1/8 W
- Com
+12 vdc
Switch
+Z Input
-Z Input -Z Input
Switch
Marker
Pulse
+Z Input
Switch
Marker
Pulse
The diagrams show how either a sourcing or sinking proximity switch may be used to trigger the marker pulse. It is
recommended that an external power supply be used to power the switching device.
Yaskawa Electric America Inc-www.drives.com
02Y00025-0526 Sheet 3 of 9
Date: 09/19/00
Page 4

For GPD 515/G5
j
ustable Frequency Drives
Ad
2.0 I/O Definitions
2.1 New Multi-Function Digital Input Settings
For constants H1-01 through H1-06.
Setting Display Description
80 Orient Cmd Command the drive to orient the spindle shaft
2.2 New Multi-Function Digital Output Settings
For constants F5-01 and F5-02, and H2-01 through H2-03.
Setting Display Description
40 Orient Complete Turns on when the orientation command is complete.
2.3 New Multi-Function Analog Input Settings
For constants H3-05 through H3-09.
None
2.4 New Multi-Function Analog Output Settings
For constants F4-01, F4-03, H4-01, and H4-04.
None
3.0 Startup Procedure
The following startup guide is for example one, in which the drive is to be in closed loop vector and the motor and the
spindle are directly coupled.
1. Perform the flux vector start-up procedure in Section 2.2b of the GPD515 Technical manual.
2. Select the encoder channel for spindle only (P1-01 = 1).
3. Set the spindle encoder’s Pulses Per Revolution (PPR) into parameter P1-02.
4. Set the Position Speed (P1-04). When an orient is commanded, the drive will decelerate down to the value set into
parameter P1-04. A low value in parameter P1-04 will increase orient time, a higher value will be more likely to
overshoot.
5. Verify that one of the function terminals (H1-01 through H1-06) is set to Orient Cmd (80) (Typically H1-05,
Terminal 7).
Yaskawa Electric America Inc-www.drives.com
02Y00025-0526 Sheet 4 of 9
Date: 09/19/00
Page 5

For GPD 515/G5
j
ustable Frequency Drives
6. Set the Orient Offset (P1-03), which is the distance after the marker at which the motor will stop. The desired
value may be found by running the drive and initiating the Orient command. When the drive stops remove the run
input. Determine how far the spindle is from it’s desired position. Change the value in P1-03. (A value equal to
the pulses per revolution of the spindle encoder will result in ¼ revolution of the spindle). Repeat step 6 until
desired stopping position is found.
7. To control the stop response use parameters P1-06 and P1-07.
8. Done.
NOTE: the following factory default parameters/terminal assignments have changed:
C2-01 = 0.00 S curve set to zero (formerly 0.2).
C2-02 = 0.00 S curve set to zero (formerly 0.2).
C2-03 = 0.00 S curve set to zero (formerly 0.2).
H1-05 = 80 Terminal 7 is set to be the orientation command (formerly “Jog”).
H2-02 = 40 Terminal 25 Orientation complete (formerly “Zero Speed”).
Ad
4.0 Custom Software Parameters
4.1 New Program Group
Group P
Spindle Orient
4.2 New Program Function
Function P1
Orient Settings
Yaskawa Electric America Inc-www.drives.com
02Y00025-0526 Sheet 5 of 9
Date: 09/19/00
Page 6

j
4.3 New Program Parameters
PG Channel
For GPD 515/G5
ustable Frequency Drives
Ad
P1-01= 1
P2-01 PG Channel
Setting Range 1 or 2
Factory Default: 1
Either channel 1 or 2 may be used for positioning. Set this for the channel that is connected to the positioning encoder.
When a PG-X2 option card is used this setting must be 1. Channel 2 is only available with a PG-W2 option card.
Q Q Q Q
Spindle PPR
P1-02= 1024 PPR
P1-02 Spindle Encoder PPR
Setting Range: 1 to 32767 Pulses per revolution
Factory Default: 1024 Pulses per revolution
Enter the pulses per revolution rating of the positioning encoder here.
Q Q Q Q
Orient Offset
P1-03= 0
P1-03 Orient offset distance
Setting Range: 0 to 32767
Factory Default: 0
This parameter contains the number of quadrature counts offset past the marker that the shaft will travel before stopping.
This is the Orient position. When this value is 0 the shaft will stop at the marker. The desired value may be found by
running the drive and initiating the Orient command. When the drive stops remove the run input. The shaft should turn
freely. Rotate the shaft to the desired position. Read the value of U1-50 (Marker Offset) and enter it here.
The value of U1-50 is a rolling counter ranging from 0 to the number of quadrature counts per revolution. The direction of
rotation is irrelevant. The value indicates a relative position to the marker and is the same in either direction.
This value may also be used to add counts to the positioning algorithm. Adding the number of positioning encoder
quadrature counts per revolution increases the stopping distance by one revolution.
Q Q Q Q
Yaskawa Electric America Inc-www.drives.com
02Y00025-0526 Sheet 6 of 9
Date: 09/19/00
Page 7

For GPD 515/G5
j
ustable Frequency Drives
Ad
Position Speed
P1-04= 0.10 HZ
P1-04 Position Speed
Setting Range: 0.00 to 10.00 Hertz
Factory Default: 0.10
This parameter sets the minimum speed that may be used during positioning. This speed is also used when the shaft is
within the number of quadrature counts set in P1-05 (Position Count). If this speed is set to high the drive will oscillate
when trying to hold the orient position. The positioning algorithm will decrease the speed until zero speed is reached at the
orient position or this speed is reached and maintained until the orient position.
Q Q Q Q
Position Count
P1-05= 0
P1-05 Position Count
Setting Range: 0 to 4096
Factory Default: 0
This parameter sets the number of quadrature counts before the orient position that the drive will hold the speed set in P1-
04 (Position Speed). This may be used to prevent overshooting the orient position. If this count is set to high the drive will
slow down to soon and cause extended positioning times.
Q Q Q Q
Stop Count
P1-06= 0
P1-06 Stop Count
Setting Range: 0 to 100
Factory Default: 0
This parameter sets the number of quadrature counts before and after the actual orient position that will not result in a
correction. This creates a stop range that prevents oscillation while the drive is in zero servo. The effect of this is
dependent on the encoder resolution.
Q Q Q Q
Yaskawa Electric America Inc-www.drives.com
02Y00025-0526 Sheet 7 of 9
Date: 09/19/00
Page 8

For GPD 515/G5
j
ustable Frequency Drives
Ad
Stop Spd Gain
P1-07= 0
P1-07 Stop Speed Gain
Setting Range: 0 to 10
Factory Default: 0
This parameter sets the frequency threshold where the positioning algorithm takes control of stopping the drive. It is
based on a minimum threshold of 4.096 Hz with a 1 setting. The minimum threshold is multiplied by this value to achieve
a maximum threshold of 40.96 Hz. This value also controls the rate of deceleration. The positioning algorithm will bring
the drive to a stop in the orient position within 2 revolutions after initiated.
Q Q Q Q
Spindle Ratio Num
P1-08= 1
P1-08 Spindle Ratio Numerator
Setting Range: 1 to 10
Factory Default: 1
This parameter and P1-09 (Spindle Ratio Div) must be set to the proper spindle to motor ratio. This ratio is required for
the positioning to function properly.
Q Q Q Q
Spindle Ratio Div
P1-09= 1
P1-09 Spindle Ratio Divisor
Setting Range: 1 to 10
Factory Default: 1
This parameter and P1-08 (Spindle Ratio Num) must be set to the proper spindle to motor ratio. This ratio is required for
the positioning to function properly.
Q Q Q Q
Yaskawa Electric America Inc-www.drives.com
02Y00025-0526 Sheet 8 of 9
Date: 09/19/00
Page 9

j
5.0 New Monitors
Shaft Angle
For GPD 515/G5
ustable Frequency Drives
Ad
U1-36 103.4°
U1-36 Shaft Angle
Displays the angle between the shaft position and the orient position. The display will indicate +/- 180 degrees.
Marker Offset
U1-50 2303 cts
U1-50 Marker Offset
Displays the number of quadrature encoder counts the shaft is past the marker pulse. This is a rolling count and always
indicates the relative position with respect to the marker. The counter values are controlled by the quadrature counts of
the encoder used. A 1024 PPR encoder has a quadrature count of 1024 X 4 or 4096. Using this encoder this value will
increment from 0 to 4095 in the forward direction. It will decrement from 4095 to 0 in the reverse direction. The 0 position
indicated the marker.
6.0 New Alarm and Fault Codes
None
Yaskawa Electric America Inc-www.drives.com
02Y00025-0526 Sheet 9 of 9
Date: 09/19/00
 Loading...
Loading...