

Page 1

Magne
Tek
GPD 503
Technical Manual
Page 2

GPD 503 SIMPLIFIED START-UP PROCEDURE
This procedure will quickly get you up and running by Digital Operator keypad or user supplied
remote operator control. It assumes that the GPD 503 and motor are correctly wired (see pages
1-8 thru 1-15), and start-up is to be performed without any changes to factory set constants.
Detailed information on the many other features of this drive will be found in later sections of this
manual.
INSTALLATION
1. Be certain your input voltage source, motor, and drive name plates are all marked either 230V,
460V, or 575V. Other voltages can be used, but require additional programming, see Section
2.
2. Mount drive on a vertical surface with adequate space for air circulation.
3. Remove front cover, fit conduit to bottom plate, and connect power and ground wires as
shown.
CAUTION
Be certain you connect input power to terminals L1, L2, and L3 only, or serious damage
will result. Connect motor to terminals T1, T2, and T3 only.
KEYPAD OPERATION
1. Replace cover and apply input power - keypad display shows "
STOP lampS are on. Press and hold JOG key, noting direction of motor rotation. If it is
incorrect, remove power, wait for “CHARGE” light to go out, then switch wires between
terminals T1, and T2. Replace cover, and apply input power.
2. Run, Stop, and Frequency (Speed) - Here, the terms frequency and speed are used
interchangeably. A value of 60.00 (Hz) in the “
for common motors. Press RUN key; RUN lamp lights, STOP lamp flashes (to indicate drive is
running at zero speed). Note flashing "0" in “
to increase display frequency value to 10.00. Press DATA/ENTER key to enter speed data,
noting that motor shaft begins to turn. Repeat this procedure using “up arrow”, “down arrow”
and “right arrow” (RESET) keys to introduce various speeds, noting that the drive responds to
each new value only after the DATA/ENTER key is pressed. The “
the frequency command the drive is looking at, whether it is running or not.
3. Reversing - can be selected while stopped, or while running. With the drive stopped, press
FWD/REV key and note the REV lamp lights and FWD lamp goes out. If drive is running
when this key is pressed, the drive will decelerate the motor to 0 Hz, then accelerate the
motor to the same speed in the opposite direction. You can try this while running, provided
your machine can be operated in reverse direction without damage.
4. Displays - With drive stopped, each time the DISPL (display) key is pressed, a different
function appears. The first function on power up is the “
Press DISPL and “
recognized as the only display without alpha characters. The next is
this display is output amps. For other display information, refer to Section 3.
0.00
” appears; this is a display of output frequency (speed) and is
F00.00
F00.00
” display equals full speed (frequency)
” display. Press “up arrow” key one time
F00.00
F00.00
” display, discussed above.
"; DRIVE, FWD, and
F00.00
” display indicates
“
0.0A
”; the “A” indicates
5. Faults - If an unacceptable operating condition such as code Ou (over voltage), Uu (under
voltage), OC (over current), etc. occurs, the drive will trip, and the motor will coast to a stop.
The appropriate fault code will be displayed. Examine fault code; consult Sections 6 & 7 for
fault correction procedure.
- i -
Page 3

INSTALLATION OF EXTERNAL RUN/STOP SWITCH AND SPEED POTENTIOMETERS
IMPORTANT: Complete the INSTALLATION and KEYPAD OPERATION instructions before
attempting external control.
1. Disconnect power, remove cover, and wait for “CHARGE” light to go out.
2. Refer to the diagram below and connect a switch to terminals 1 and 11 using two conductor
shielded wire. This circuit is 24Vdc, very low current; use a quality rotary or toggle switch
(all wire should be 14-18AWG). Connect the shield to terminal 12 on the drive end only.
3. Install a single conductor “jumper” wire between drive terminals 5 and 11.
4. Connect a manual speed potentiometer rated 2000-3000 ohms, 1 watt minimum, using
three conductor shielded wire, with shield connected at terminal 12. Connect wires to the
potentiometer as shown, viewing potentiometer from the back. Trace wire shown closest to
the top in diagram (right side of potentiometer) and connect to terminal 17. Trace center
wire of potentiometer through and connect to terminal 16. The remaining wire will be
connected to the trim pot in step 5.
5. Connect a trim potentiometer rated 2000-3000 ohms, 1 watt minimum, as close to the drive
terminals as possible. Viewing the potentiometer from the back, connect a single conductor
wire from the left terminal to terminal 15 of the drive. Connect a short jumper wire between
the center and left terminals. Connect remaining wire from manual speed pot as shown.
1RH
MANUAL SPEED
POTENTIOMETER
(REAR VIEW)
STOP
S1
RUN
SHIELD
WIRES
1R
Trim Pot
11 12 13 14 15 16 17 25 26 27
1 2 3 4 5 6 7 8 21 22
"Jumper
wire"
Shield wire
termination
GPD 503
Control Board
terminals
- ii -
Page 4

IMPORTANT: Programming is required to set up the drive for operation from external
terminals.
6. Replace cover, make sure remote switch S1 is in “Stop” position, then apply power. Note that
the DRIVE lamp is on. Press DRIVE/PROGRAM key, noting the DRIVE lamp goes out,
indicating drive is in the “Program mode”. The display will show “
(address). Press the “up arrow” (RESET) key three times to change constant to “
Press the DATA/ENTER key; the display will show “
Using the same procedure used in setting the speed in “KEYPAD OPERATION”, move to the
first 1 and change it to 0; then move to the remaining 1 and also change it to 0. The display
should now read “
Sn-04 to this new value. Display will momentarily show
7. Press DRIVE/PROGRAM key, noting DRIVE lamp turns on; you have returned to the “Drive
mode”.
8. Calibrate manual speed pot for maximum speed at maximum rotation. With switch S1 in the
“Stop” position, press DISPL key repeatedly, stopping at the “
will be indicating the combined setting of the trim, and manual speed pots. Turn manual
speed pot (as viewed from the front) to the right (maximum) setting. Turn trim pot slowly
until “
9. Press DISPL key to move to output frequency display, turn switch S1 to “Run”, and adjust
motor speed with manual speed pot.
F59.00
0000
”. Press the DATA/ENTER key to change the contents of constant
” is displayed, then advance just enough to display “
0011
”, and the left 0 will be flashing.
"
End
Sn-01
".
FXX.XX
F60.00
”, which is a constant
Sn-04
” display. The display
”.
”.
- iii -
Page 5
QUICK REFERENCE FOR GPD 503 CONSTANTS (FACTORY SET)
CONSTANT FACTORY USER CONSTANT FACTORY USER CONSTANT FACTORY USER
NUMBER SETTING SETTING NUMBER SETTING SETTING NUMBER SETTING SETTING
An-01 0.00
An-02 0.00
An-03 0.00
An-04 0.00
An-05 0.00
An-06 0.00
An-07 0.00
An-08 0.00
An-09 6.00
bn-01 10.0
bn-02 10.0
bn-03 10.0
bn-04 10.0
bn-05 100.0
bn-06 0
bn-07 1.0
bn-08 0.0
bn-09 80
bn-10 1
bn-11 1.00
bn-12 0.50
Sn-01
Sn-02 01
Sn-03 0000
Sn-04 0011
Sn-05 0000
Sn-06 0000
Sn-07 0000
Sn-08 0100
Sn-09 0000
Sn-10 0000
Sn-11 0000
Sn-12 0100
Sn-13 0100
Sn-14 0000
Sn-15 03
Sn-16 04
Sn-17 06
Sn-18 08
Sn-19 00
Sn-20 00
Sn-21 01
(1)
Sn-22 02
Sn-23 00
Sn-24 00
Sn-25 0000
Sn-26 0000
Sn-27 0010
Sn-28 0100
Cn-01 230.0
Cn-02
Cn-03
Cn-04
Cn-05
Cn-06
Cn-07
Cn-08
Cn-09
Cn-10 1.5
Cn-11 50
Cn-12 0.0
Cn-13 0.0
Cn-14 100
Cn-15 0
Cn-16 0.0
Cn-17 0.0
Cn-18 0.0
Cn-19 1.0
Cn-20 0
Cn-21 0.0
Cn-22 2.0
Cn-23
Cn-24
Cn-25 00
Cn-26 160
Cn-27 0.1
Cn-28 170
(230V)
or 460.0
(460V)
or 575.0
(575V)
(2)
(2)
(2)
(2)
(2)
(2)
(2)
(1)
(2)
(4)
(4)
Cn-29 50
Cn-30 160
Cn-31
Cn-32
Cn-33
Cn-34 30
Cn-35 2.0
Cn-36 0
Cn-37
Cn-38 150
Cn-39 2.0
Cn-40
Cn-41 100
Cn-42 0.3
Un-01 N/A N/A
Un-02 N/A N/A
Un-03 N/A N/A
Un-04 N/A N/A
Un-05 N/A N/A
Un-06 N/A N/A
Un-07 N/A N/A
Un-08 N/A N/A
Un-09 N/A N/A
Un-10 N/A N/A
(4)
(4)
(4)
(3)
(4)
(4)
(4)
(1)
Setting depends on GPD 503 rating. See Table A3-1.
(2)
Initial value is related to V/f curve selected by Sn-02 setting.
(3)
Motor rated current (Cn-09) is set at 100% level. Setting range: 10
to 200% of GPD 503 rated capacity.
(4)
Initial value differs depending on GPD 503 capacity.
- iv -
Page 6

Horsepower Range
RATED
INPUT
2 10 15 DS309
3 15 20 DS310
0 20 25 DS311
V 25 30 DS322
4 15 20 DS318
6 20 25 DS326
0 25 30 DS325
V 30 40 DS330
5 20 20 DS5022
7 25 25 DS5027
5 30 30 DS5032
V 40 40 DS5043
CT (150% OL) VT (125% OL)
HORSEPOWER
1 1 DS305
2 2 DS302
3 3 DS306
5 5 DS307
7.5 7.5/10 DS308
30 40 DS323
40 50 DS2040
40/50 50 GPD503-2L40
50 60 DS2050
60 60 GPD503-2L50
60 75 DS2060
60 75 GPD503-2L60
75 100 DS2075
75 100 GPD503-2L75
100 150 DS2100
100 125 GPD503-2L100
1 1 DS313
2 2 DS304
3 3 DS314
5 5 DS315
7.5 7.5/10 DS316
10 15 DS317
40 50 DS340
50 60 DS350
60 75 DS360
75 100 DS075
75/100 100 GPD503-4L75
100 150 DS100
100 150 GPD503-4L100
150 200 DS150
150 200 GPD503-4L150
200 250 DS200
200 250 GPD503-4L200
250 300 DS250
300 400 DS303
400 500 DS400
2 3 DS5003
3 3 DS5004
5 5 DS5006
7.5 7.5 DS5009
10 10 DS5012
15 15 DS5017
50 50 DS5054
60 60 DS5064
75 75 DS5081
100 100 DS5112
125 150 DS5130
150 200 DS5172
200 200 DS5202
MODEL
NO.
-v-
( "L" ) (04/27/95)
Page 7

WARNING
Do not touch circuit components until main input power has been turned off and
“CHARGE” lamp is extinguished. The capacitors are still charged and can be
quite dangerous.
Do not connect or disconnect wires and connectors while power is applied to the
circuit.
CAUTION
Know your application before using either Initialization function of Sn-03. This
constant must be set to 0000 for Drive mode operation. (See paragraph 2.25 for
additional information.)
1110 = Factory 2-Wire Control Initialization (Maintained RUN Contact)
1111 = Factory 3-Wire Control Initialization (Momentary START/STOP Contact)
Entering either Initialization code resets all constants EXCEPT Sn-01 AND Sn-02 to
factory settings, and automatically returns Sn-03 setting to 0000. If the GPD 503 is
connected for 3-Wire control and this constant is set to 1110 (2-Wire Control
Initialization), the motor may run in reverse direction WITHOUT A RUN COMMAND
APPLIED. Equipment damage or personal injury may result.
IMPORTANT
Always ground the GPD 503 using ground terminal G ( E ). See paragraph 1.4.3,
"Grounding".
Never connect main circuit output terminals T1, T2, and T3 to AC main circuit power
supply.
All constants have been factory set. Do not change their settings unnecessarily.
Do not perform a “HIPOT” voltage test on any part of the GPD 503. Equipment uses semi-
conductors and is vulnerable to high voltage.
The Control PCB employs CMOS ICs which are easily damaged by static electricity. Use
proper electrostatic discharge (ESD) procedures when handling the Control PCB.
-vi-
Page 8

CONTENTS
SUBJECT PAGE
GPD 503 SIMPLIFIED START-UP PROCEDURE ...................... i
HORSEPOWER RANGE ........................................................... v
WARNING/CAUTION STATEMENTS ....................................... vi
1 INSTALLATION ...................................................................... 1-1
1.1 General .................................................................................. 1-1
1.2 Receiving ................................................................................ 1-1
1.3 Physical Installation ............................................................... 1-1
1.4 Electrical Installation ............................................................. 1-2
1.4.1 Main Circuit Input/Output ................................................. 1-2
1.4.2 Control Circuit ................................................................... 1-4
1.4.3 Grounding .......................................................................... 1-6
1.4.4 Auxiliary Input and Output Power Option Devices .............. 1-7
Figure 1-3. 230V or 450V Interconnections - 2-Wire Control .. 1-9
Figure 1-4. 230V or 460V Interconnections - 3-Wire Control . 1-11
Figure 1-5. 575V Interconnections - 2-Wire Control .............. 1-13
Figure 1-6. 575V Interconnections - 3-Wire Control .............. 1-15
2 PROGRAMMABLE FEATURES .............................................. 2-1
2.1 General .................................................................................. 2-1
2.2 Accel/Decel Time ................................................................... 2-3
2.3 Auto Reference Characteristics ............................................... 2-4
2.4 Auto Reference - Loss Detection ............................................. 2-5
2.5 Auto-restart ........................................................................... 2-7
2.7 Critical Frequency Rejection ................................................... 2-8
2.8 DC Injection Braking .............................................................. 2-9
2.9 Digital Display Selection ........................................................ 2-12
2.10 Display - Monitor (at Power-up) Selection .............................. 2-13
2.11 Energy Saving Operation ....................................................... 2-14
2.12 External Fault Terminal ........................................................ 2-15
2.13 Frequency (Auto) Command Bias/Gain ................................. 2-17
2.14 Frequency Command Upper & Lower Limits .......................... 2-18
2.15 Jog Reference ........................................................................ 2-19
2.16 Momentary Power Loss Ride-thru ......................................... 2-20.2
2.17 Monitor Display (Digital Operator) ......................................... 2-21
2.18 Multi-function Analog Input (Term. 16) .................................. 2-22
2.19 Multi-function Input Terminals (Term. 5-8) ........................... 2-24
2.20 Multi-function Analog Monitor Output (Term. 21 & 22) .......... 2-29
2.21 Multi-function Output Terminals (Term. 9 & 10; 25-27) ........ 2-30
2.22 Overtorque Detection ............................................................. 2-31
2.23 Speed Coincidence ................................................................ 2-34
2.24 Remote/Local and Reference Selection .................................. 2-35
2.25 Reset Codes (2-Wire, 3-Wire Initialization) ............................. 2-40
2.26 Slip Compensation ................................................................ 2-41
2.27 Soft Start (S-Curve) Characteristics ....................................... 2-42
2.28 Speed Search ........................................................................ 2-42
2.29 Stall Prevention ..................................................................... 2-44
Revision Date 12/01/94
-vii-
Page 9

-viii-
(THIS PAGE INTENTIONALLY BLANK)
Page 10

CONTENTS - Continued
SUBJECT PAGE
2.30 Thermal Motor Overload Protection ....................................... 2-46
2.31 Torque Compensation .......................................................... 2-46.2
2.32 V/f Pattern - Standard ......................................................... 2-46.2
2.33 V/f Pattern - Custom ............................................................. 2-48
2.34 Up/Down Frequency Setting ................................................. 2-50
2.35 Slip Compensation Primary Time Delay ................................. 2-51
2.36 Carrier Frequency ................................................................. 2-52
3 DIGITAL OPERATOR ............................................................. 3-1
3.1 General .................................................................................. 3-1
3.2 Display and Keypad ................................................................ 3-1
3.3 Comparison of Program Mode and Drive Mode ........................ 3-4
3.4 Program Mode Operation ........................................................ 3-5
3.5 Drive Mode Operation ............................................................. 3-7
4 INITIAL START-UP (“LOCAL” CONTROL) ............................. 4-1
4.1 Pre-power Checks ................................................................... 4-1
4.2 Test Run Using Digital Operator ("Local" Control) ................... 4-2
4.3 Pre-operation Considerations ................................................. 4-4
4.4 Storage Function .................................................................... 4-4
5 OPERATION AT LOAD ........................................................... 5-1
6 FAILURE INDICATION AND DETAILS ................................... 6-1
6.1 General .................................................................................. 6-1
6.2 Displaying Fault Sequence ..................................................... 6-4
7 TROUBLESHOOTING ............................................................ 7-1
App. 1 LISTING OF CONSTANTS...................................................... A1-1
Frequency Reference Memory Settings (An-XX) ...................... A1-1
Run Operative Settings (bn-XX) ............................................. A1-2
System Constants (Sn-XX) .................................................... A1-3
Control Constants (Cn-XX) ................................................... A1-11
Monitor Displays (Un-XX) ..................................................... A1-15
App. 2 SPECIFICATIONS ................................................................. A2-1
App. 3 GPD 503 CAPACITY (Sn-01) ................................................. A3-1
App. 4 DIODE AND TRANSISTOR MODULE RESISTANCE TEST .... A4-1
App. 5 DIMENSIONS ........................................................................ A5-1
App. 6 SPARES ................................................................................ A6-1
App. 7 DYNAMIC BRAKING CONNECTIONS ................................... A7-1
- ix -
Page 11

INSTALLATION REFERENCE SHEET
• Drive Information: • Motor Nameplate Information:
Model Number ______________ Full Load Amps ______________
Specification ______________ Voltage ______________
Voltage ______________ Horsepower ______________
kW ______________ Poles ______________
Number ______________ RPM ______________
Location ______________ Service Factor ______________
Drive Rated Amps NEMA Design ______________
Variable Torque – 125% OL ______ Insulation Class ______________
Constant Torque – 150% OL ______ TEFC ___ or TENV ___
EPROMs ______________ Disconnect at Motor _______
I/O Boards ______________ Single/Multiple Motor _________
V/Hz Pattern ______________ Pulse Generator ______________
Speed/Torque Regulation _______ Location ______________
Pulse Generator Input __________ Number ______________
Thermal Motor Overload
Protection – Sn-14 ______
Motor Rated Current – Cn-09 _______
• Load / Machine: • Control:
Torque Requirements as % of Controlled Variable (Pressure, Flow, Temp,
Full Load Torque: Level, etc.) ______________
Breakaway ______ Sensor ______________
Running ______ Location ______________
Peak ______ Number ______________
Speed Range ______________ Output ______________
Gear/Pulley Ratio _____________ Run/Stop:
Speed/Torque Controlled ________ 2-Wire ___ or 3-Wire ___ Contro
Accuracy Required _____________ Location(s) ______________
Inertia ______________ Numbers ______________
Location ______________ Speed Reference: 0-10 Vdc ___
Number ______________ or 4-20 mA ___
• Power Supply: • Auxiliary Devices:
Circuit Breaker / Amps __________ Reactors
Disconnect / Fused __________ Input _______
Location _______________ Outptu _______
Number _______________ Filters
Source _______________ Input _______
Voltage _______________ Output _______
Frequency _______________ Bypass _______
Quality _______________
- x -
Page 12
TROUBLESHOOTING / MAINTENANCE REFERENCE SHEET
• Fault Code History:
Date Fault Cause Solution
_______ _________ ____________________ ___________________________
_______ _________ ____________________ ___________________________
_______ _________ ____________________ ___________________________
_______ _________ ____________________ ___________________________
_______ _________ ____________________ ___________________________
_______ _________ ____________________ ___________________________
_______ _________ ____________________ ___________________________
_______ _________ ____________________ ___________________________
_______ _________ ____________________ ___________________________
_______ _________ ____________________ ___________________________
_______ _________ ____________________ ___________________________
_______ _________ ____________________ ___________________________
_______ _________ ____________________ ___________________________
_______ _________ ____________________ ___________________________
_______ _________ ____________________ ___________________________
• Preventive Maintenance Log:
Date Action Person
_______ _____________________________ ___________________________
_______ _____________________________ ___________________________
_______ _____________________________ ___________________________
_______ _____________________________ ___________________________
_______ _____________________________ ___________________________
_______ _____________________________ ___________________________
_______ _____________________________ ___________________________
_______ _____________________________ ___________________________
_______ _____________________________ ___________________________
- xi -
Page 13
Section 1. INSTALLATION
1.1 GENERAL
The GPD 503 is a high performance sine-coded pulse width modulated AC motor drive
which generates an adjustable voltage/frequency three phase output for complete speed
control of any conventional squirrel cage induction motor. Automatic stall prevention and
voltage boost prevents nuisance tripping during load or line side transient conditions. The
GPD 503 will not induce any voltage line notching distortion back to the utility line and
maintains a displacement power factor of not less than 0.95 throughout its speed range.
When properly installed, operated and maintained, the GPD 503 will provide a lifetime of
service. It is mandatory that the person who operates, inspects, or maintains this
equipment thoroughly read and understand this manual before proceeding.
This manual primarily describes the GPD 503, but contains basic information for the
operator control station as well. For details of the operation of other units in the drive
system, refer to their respective manuals.
1.2 RECEIVING
The GPD 503 is thoroughly tested at the factory. After unpacking, verify the part numbers
with the purchase order (invoice). Any damages or shortages evident when the equipment
is received must be reported immediately to the commercial carrier who transported the
equipment. Assistance, if required, is available from your sales representative.
1.3 PHYSICAL INSTALLATION
Location of the GPD 503 is important to achieve proper performance and normal operating
life. The unit should be installed in an area where it will be protected from:
• Direct sunlight, rain or moisture.
• Corrosive gases or liquids.
• Vibration, airborne dust or metallic particles.
For effective cooling as well as proper maintenance, a wall mount style GPD 503 must be
installed vertically to the ground using four mounting screws. There MUST be a MINIMUM
6 in. clearance above and below the GPD 503. A MINIMUM 2 in. clearance is required on
each side on the GPD 503.
A free-standing style GPD 503 must be installed with enough clearance for opening the
door of the cabinet; this will ensure sufficient air space for cooling.
1-1
Page 14

1.4 ELECTRICAL INSTALLATION
All basic interconnections (using the Digital Operator) are shown in Figures 1-3
through 1-6.
1.4.1 Main Circuit Input/Output
Complete wiring interconnections for the main circuit according to Tables 1-1 and 1-2,
while observing the following:
CAUTION
Use only factory supplied instructions to install dynamic braking
resistors. Failure to do so may cause equipment damage or
personal injury.
• Use 600 V vinyl-sheathed wire or equivalent. Wire size should be determined
considering voltage drop of leads.
• NEVER connect AC main power to output terminals T1 ( U ), T2 ( V ), and T3 ( W ).
• NEVER allow wire leads to contact the GPD 503 enclosure. Short-circuit may result.
• NEVER connect power factor correction capacitors or noise filter to GPD 503 output.
• SIZE OF WIRE MUST BE SUITABLE FOR CLASS I CIRCUITS.
• Use UL listed closed loop connectors or CSA certified ring connectors sized for the
selected wire gauge. The connectors are to be installed using the correct crimp tool
recommended by the connector manufacturer.
WIRE SIZE
AWG mm
20 0.5 M3.5 1.25 - 3.5 7.8 0.9 7.0 0.8
18 0.75 M4 1.25 - 4 13.0 1.5 10.4 1.2
16 1.25 M4 1.25 - 4 13.0 1.5 10.4 1.2
14 2
12 3.5
10 5.5
88
6 14 M6 14 - 6 40.9 34.8 4.8 4.1
4 22 M8 22 - 8 100.0 82.6 11.7 10.7
238
1/0 60 M10 60 - 10 182.6 156.5 21.4 18.4
3/0 80 M10 80 - 10 182.6 156.5 21.4 18.4
4/0 100
MCM300 150 M12 150 - 12 313.0 191.3 36.7 23.1
MCM400 200 M12 200 - 12 313.0 191.3 36.7 23.1
MCM650 325 M12 325 - 12 313.0 191.3 36.7 23.1
2 SCREW CONNECTOR
TERMINAL CLOSED-LOOP
M4 2 - 4 13.0 1.5 10.4 1.2
M5 2 - 5 26.1 20.9 3.1 2.4
M4 3.5 - 4 13.0 1.5 10.4 1.2
M5 3.5 - 5 26.1 20.9 3.1 2.4
M4 5.5 - 4 13.0 1.5 10.4 1.2
M5 5.5 - 5 26.1 20.9 3.1 2.4
M5 8 - 5 26.1 20.9 3.1 2.4
M6 8 - 6 40.9 34.8 4.8 4.1
M8 38 - 8 100.0 82.6 11.7 10.7
M10 38 - 10 182.6 156.5 21.4 18.4
M10 100 - 10 182.6 156.5 21.4 18.4
M12 100 - 12 313.0 191.3 36.7 23.1
CLAMPING TORQUE
STEEL COPPER
lb-in N-m lb-in N-m
1-2
Page 15
Table 1-1. Wire Sizing For Main Circuit
SECTION A. 230V
DRIVE TERMINAL
HP TERMINAL WIRE SIZE
MODEL NO.
RATING TERMINAL SYMBOL SCREW AWG MM2
DS305 L1 (R),L2 (S),L3 (T),–, B1/+, B2, T1 (U), T2 (V),T3 (W),G (E) M4 14 - 10 2 - 5.5
DS302, L1 (R), L2 (S), L3 (T),–,B1/+, B2, T1 (U), T2 (V), T3 (W) M4 14 - 10 2 - 5.5
DS306 G (E) M4 12 - 10 3.5 - 5.5
DS307 L1 (R),L2 (S),L3 (T),–, B1/+, B2, T1 (U), T2 (V),T3 (W),G (E) M4 10 5.5
DS308, L1 (R), L2 (S), L3 (T), –, B1/+, B2, T1 (U), T2 (V), T3 (W) M5 8 8
DS309 G (E) M5 10 5.5
DS310 L1 (R), L2 (S), L3 (T), B0/–, B1/+, T1 (U), T2 (V), T3 (W) M6 4 22
DS311 L1 (R), L2 (S), L3 (T), B0/–, B1/+, T1 (U), T2 (V), T3 (W) M8 3 - 1/0 30 - 60
DS322 L1 (R), L2 (S), L3 (T), B0/–, B1/–, B1/+, T1 (U), T2 (V), T3 (W) M8 2 - 1/0 38 - 60
DS323 L1 (R), L2 (S), L3 (T), B0/–, B1/+, T1 (U), T2 (V), T3 (W) M8 1/0 60
DS2040 L1 (R), L2 (S), L3 (T), –, +1, +3, T1 (U), T2 (V), T3 (W) M10 2 - 4/0 38 - 100
GPD503-2L40
DS2050 L1 (R), L2 (S), L3 (T), –, +1, +3, T1 (U), T2 (V), T3 (W) M10 2 - 4/0 38 - 100
GPD503-2L50
DS2060 L1 (R), L2 (S), L3 (T), –, +1, +3, T1 (U), T2 (V), T3 (W) M10 2 - 4/0 38 - 100
GPD503-2L60
DS2075 L1 (R), L2 (S), L3 (T),–,+1, +3, T1 (U), T2 (V), T3 (W) M10 2 - 4/0 38 - 100
GPD503-2L75
DS2100 L1 (R), L2 (S), L3 (T),–,+1, +3, T1 (U), T2 (V), T3 (W) M12 4/0 -
GPD503-2L100
TERMINAL SYMBOL
G (E)
l
1 (r), l2 (s) M4 14 - 10 2 - 5.5
G (E)
l
1 (r), l2 (s) M4 14 - 10 2 - 5.5
G (E)
l
1 (r), l2 (s) M4 14 - 10 2 - 5.5
G (E)
l
1 (r), l2 (s) M4 14 - 10 2 - 5.5
G (E)
l
1 (r), l2 (s) M4 20 - 14 0.5 - 2
L1 (R), L2 (S), L3 (T), – (N), +3 (P3), T1 (U), T2 (V), T3 (W) M10 2 - 4/0 38 - 100
G (E)
l
1 (r), l2 (s) M4 20 - 14 0.5 - 2
G (E)
l
1 (r), l2 (s) M4 20 - 14 0.5 - 2
L1 (R), L2 (S), L3 (T), – (N), +3 (P3), T1 (U), T2 (V), T3 (W) M10 2 - 4/0 38 - 100
G (E)
l
1 (r), l2 (s) M4 20 - 14 0.5 - 2
G (E)
l
1 (r), l2 (s) M4 20 - 14 0.5 - 2
L1 (R), L2 (S), L3 (T), – (N), +3 (P3), T1 (U), T2 (V), T3 (W) M10 2 - 4/0 38 - 100
G (E) 4 - 2 22 - 38
l
1 (r), l2 (s) M4 20 - 14 0.5 - 2
G (E)
l
1 (r), l2 (s) M4 20 - 14 0.5 - 2
L1 (R), L2 (S), L3 (T), – (N), +3 (P3), T1 (U), T2 (V), T3 (W) M10 2 - 4/0 38 - 100
G (E)
l
1 (r), l2 (s) M4 20 - 14 0.5 - 2
G (E)
l
1 (r), l2 (s) M4 20 - 14 0.5 - 2
L1 (R), L2 (S), L3 (T), – (N), +3 (P3), T1 (U), T2 (V), T3 (W) M12 4/0 G (E)
l
1 (r), l2 (s) M4 20 - 14 0.5 - 2
SCREW AWG mm
8 - 2 8 - 38
8 - 2 8 - 38
6 - 2 14 - 38
6 - 2 14 - 38
4 - 2 22 - 38
4 - 2 22 - 38
4 - 2 22 - 38
4 - 2 22 - 38
4 - 2 22 - 38
3 - 2 30 - 38
4 - 2 22 - 38
1 - 2/0 50 - 67
1 - 2/0 50 - 67
WIRE SIZE
MCM400
MCM400
100 - 200
100 - 200
2
indicates terminal uses a pressure lug.
1-2.1
( "L" ) (06/22/95)
Page 16
Table 1-1. Wire Sizing For Main Circuit - Continued
Section B. 460V
DRIVE TERMINAL
DRIVE TERMINAL WIRE SIZE
MODEL NO.
MODEL NO. TERMINAL SYMBOL SCREW AWG mm
DS313, DS304,
TERMINAL SYMBOL
SCREW AWG mm
L1 (R), L2 (S), L3 (T), –, B1/+, B2, T1 (U), T2 (V), T3 (W), G (E) M4 14 - 10 2 - 5.5
DS314
DS315 L1 (R), L2 (S), L3 (T), –, B1/+, B2, T1 (U), T2 (V), T3 (W) M4 14 - 10 2 - 5.5
G (E) M5 12 - 10 3.5 - 5.5
DS316 L1 (R), L2 (S), L3 (T), –, B1/+, B2, T1 (U), T2 (V), T3 (W) M4 12 - 10 3.5 - 5.5
G (E) M5 12 - 10 3.5 - 5.5
DS317 L1 (R), L2 (S), L3 (T), –, B1/+, B2, T1 (U), T2 (V), T3 (W) M4 10 5.5
G (E) M5 10 5.5
DS318, L1 (R), L2 (S), L3 (T), –, B1/+, B2, T1 (U), T2 (V), T3 (W) M5 8 8
DS326 G (E) 10 - 2 5.5 - 38
l
1 (r), l2 (s) M4 14 - 10 2 - 5.5
DS325 L1 (R), L2 (S), L3 (T), B0/–, B1/+, T1 (U), T2 (V), T3 (W) M6 6 - 4 14 - 22
G (E) 8 - 2 8 - 38
l
1 (r), l2 (s) M4 14 - 10 2 - 5.5
DS330 L1 (R), L2 (S), L3 (T), B0/–, B1/+, T1 (U), T2 (V), T3 (W) M6 4 22
G (E) 8 - 2 8 - 38
l
1 (r), l2 (s) M4 14 - 10 2 - 5.5
DS340 L1 (R), L2 (S), L3 (T), B0/–, B1/+, T1 (U), T2 (V), T3 (W) M8 3 - 1/0 30 - 60
G (E) 8 - 2 8 - 38
l
1 (r), l2 (s) M4 14 - 10 2 - 5.5
DS350 L1 (R), L2 (S), L3 (T), B0/–, B1/+, T1 (U), T2 (V), T3 (W) M8 2 - 1/0 38 - 60
G (E) 6 - 2 14 - 38
l
1 (r), l2 (s) M4 14 - 10 2 - 5.5
DS360 L1 (R), L2 (S), L3 (T), B0/–, B1/+, T1 (U), T2 (V), T3 (W) M8 1/0 60
G (E) 6 - 2 14 - 38
l
1 (r), l2 (s) M4 14 - 10 2 - 5.5
DS075, L1 (R), L2 (S), L3 (T), –, B1/+, B2, +3, T1 (U), T2 (V), T3 (W) M10 2 - 4/0 38 - 100
DS100 G (E) 4 - 2 22 - 38
l
1 (r), l2 200 (s200), l2 400 (s400), x, y M4 20 - 14 0.5 - 2
GPD503-4L75,
GPD503-4L100
L1 (R), L2 (S), L3 (T), – (N), +3 (P3), T1 (U), T2 (V), T3 (W) M10 2 - 4/0 38 - 100
G (E) 4 - 2 22 - 38
l
1 (r), l2 200 (s200), l2 400 (s400), x, y M4 20 - 14 0.5 - 2
DS150 L1 (R), L2 (S), L3 (T), –, B1/+, B2, +3, T1 (U), T2 (V), T3 (W) M10 2 - 4/0 38 - 100
G (E) 3 - 2 30 - 38
l
1 (r), l2 200 (s200), l2 400 (s400), x, y M4 20 - 14 0.5 - 2
GPD503-4L150
L1 (R), L2 (S), L3 (T), –, B1/+, B2, +3, T1 (U), T2 (V), T3 (W) M10 2 - 4/0 38 - 100
G (E) 3 - 2 30 - 38
l
1 (r), l2 200 (s200), l2 400 (s400), x, y M4 20 - 14 0.5 - 2
DS200 L1 (R), L2 (S), L3 (T), –, B1/+, B2, +3, T1 (U), T2 (V), T3 (W) M12 4/0-
G (E) 1 - 2/0 50 - 67
l
1 (r), l2 200 (s200), l2 400 (s400), x, y M4 20 - 14 0.5 - 2
GPD503-4L200
L1 (R), L2 (S), L3 (T), – (N), +3 (P3), T1 (U), T2 (V), T3 (W) M12 4/0 G (E) 1 - 2/0 50 - 67
l
1 (r), l2 200 (s200), l2 400 (s400), x, y M4 20 - 14 0.5 - 2
DS250, L1 (R), L2 (S), L3 (T), –, +1, +3, T1 (U), T2 (V), T3 (W) M12
MCM
DS303 G (E) 1/0 - 2/0 54 - 67
l
1 (r), l2 (s), x, y M4 20 - 14 0.5 - 2
DS400 L1 (R), L2 (S), L3 (T), –, +1, +3, T1 (U), T2 (V), T3 (W) M12
MCM
G (E) 2/0 67
l
1 (r), l2 (s), x, y M4 20 - 14 0.5 - 2
WIRE SIZE
MCM
400 100 - 200
MCM
400 100 - 200
650x2P325 x 2
650x2P325 x
2
2
P
2P
( "L" ) (04/27/95)
indicates terminal uses a pressure lug.
1-2.2
Page 17
Table 1-1. Wire Sizing For Main Circuit - Continued
Section C. 575V
DRIVE TERMINAL
DRIVE TERMINAL WIRE SIZE
MODEL NO.
MODEL NO. TERMINAL SYMBOL SCREW AWG mm
TERMINAL SYMBOL
SCREW AWG mm
DS5003, L1 (R), L2 (S), L3 (T), –, B1/+, B2, T1 (U), T2 (V), T3 (W) M4 14 - 10 2 - 5.5
DS5004 G (E) M4 14 - 10 2 - 5.5
DS5006 L1 (R), L2 (S), L3 (T), –, B1/+, B2, T1 (U), T2 (V), T3 (W) M4 14 - 10 2 - 5.5
G (E) M5 14 - 10 2 - 5.5
DS5009, L1 (R), L2 (S), L3 (T), –, B1/+, B2, T1 (U), T2 (V), T3 (W) M4 12 - 10 3.5 - 5.5
DS5012 G (E) M5 12 - 10 3.5 - 5.5
DS5017 L1 (R), L2 (S), L3 (T), –, B1/+, B2, T1 (U), T2 (V), T3 (W) M5 10 - 8 5.5 - 8
G (E) 12 - 2 3.5 - 30
l
1 (r), l2 (s) M4 14 - 10 2 - 5.5
DS5022 L1 (R), L2 (S), L3 (T), –, B1/+, B2, T1 (U), T2 (V), T3 (W) M6 8 - 6 8 - 14
G (E) 12 - 2 3.5 - 30
l
1 (r), l2 (s) M4 14 - 10 2 - 5.5
DS5027 L1 (R), L2 (S), L3 (T), –, B1/+, B2, T1 (U), T2 (V), T3 (W) M6 8 - 6 8 - 14
G (E) 10 - 2 5.5 - 30
l
1 (r), l2 (s) M4 14 - 10 2 - 5.5
DS5032 L1 (R), L2 (S), L3 (T), B0/–, B1/+, B2, T1 (U), T2 (V), T3 (W) M6 8 - 6 8 - 14
G (E) 10 - 2 5.5 - 30
l
1 (r), l2 (s) M4 14 - 10 2 - 5.5
DS5043 L1 (R), L2 (S), L3 (T), B0/–, B1/+, T1 (U), T2 (V), T3 (W) M8 6 - 1 14 - 38
G (E) 10 - 2 5.5 - 30
l
1 (r), l2 (s), x, y M4 14 - 10 2 - 5.5
DS5054 L1 (R), L2 (S), L3 (T), B0/–, B1/+, T1 (U), T2 (V), T3 (W) M8 4 - 1 22 - 38
G (E) 8 - 2 8 - 30
l
1 (r), l2 (s), x, y M4 14 - 10 2 - 5.5
DS5064 L1 (R), L2 (S), L3 (T), B0/–, B1/+, T1 (U), T2 (V), T3 (W) M8 3 - 1/0 27 - 50
G (E) 8 - 2 8 - 30
l
1 (r), l2 (s), x, y M4 14 - 10 2 - 5.5
DS5081 L1 (R), L2 (S), L3 (T), B0/–, B1/+, T1 (U), T2 (V), T3 (W) M8 1 - 2/0 38 - 60
G (E) 8 - 2 8 - 30
l
1 (r), l2 (s), x, y M4 14 - 10 2 - 5.5
DS5112 L1 (R), L2 (S), L3 (T), B0/–, B1/+, T1 (U), T2 (V), T3 (W) M8 2/0 - 3/0 60 - 80
G (E) 6 - 2/0 14 - 60
l
1 (r), l2 (s), x, y M4 14 - 10 2 - 5.5
DS5130 L1 (R), L2 (S), L3 (T), B0/–, B1/+, T1 (U), T2 (V), T3 (W) M10 3/0 - 300 80 - 150
G (E) 6 - 2/0 14 - 60
l
1 (r), l2 (s), x, y M4 14 - 10 2 - 5.5
DS5172 L1 (R), L2 (S), L3 (T), –, B1/+, B2, +3, T1 (U), T2 (V), T3 (W) M12 3000 - 400 150 - 200
G (E) 4 - 2/0 22 - 60
l
1 (r), l2 (s), x, y M4 14 - 10 2 - 5.5
DS5202 L1 (R), L2 (S), L3 (T), –, B1/+, B2, +3, T1 (U), T2 (V), T3 (W) M12 300 - 400 177 - 200
G (E) 4 - 2/0 22 - 60
l
1 (r), l2 (s), x, y M4 14 - 10 2 - 5.5
WIRE SIZE
2
2
indicates terminal uses a pressure lug.
1-2.3
Page 18

Table 1-2. Terminal Functions and Voltages of Main Circuit
SECTION A. 230V
SECTION A. 230V
TERMINAL FUNCTION
TERMINAL
1 - 10HP (CT) 15 - 30HP (CT) 40 - 100HP (CT)
1 HP 3 TO 40 HP
FUNCTION
L1 (R)
L2 (S)
L3 (T)
T1 (U)
T2 (V)
T3 (W)
l
1 (r) Power for heat sink fan
l
2 (s)
B0/–
B1/+ DB Unit terminals (B1/+ & B2) * DC bus terminals – – – – – –
B2
– [ – (N) ]** DC bus terminals (B1/+ & –)
+3 (P3) DB Unit terminals (+1 & –)
+1 (P1) [ (+3 & –) ]**
x Power supply output for
y
G (E) Ground terminal (100 ohms or less)
TERMINAL
TERMINAL FUNCTION 1 TO 60 HP
L1 (R)
L2 (S)
L3 (T)
– – – – – –
– – – – – –
1 - 10HP (CT) 15 - 20HP (CT) 25 - 60HP (CT) 75 - 400HP (CT)
Three phase Main circuit input power supply
200 / 208 / 220V at 50 Hz; 200 / 208 / 220 / 230V at 60 Hz
Three phase AC output to motor
0V to max. input voltage level
200-230 Vac, single phase – two lines from input power
DB Unit terminals *
– – – – – –
– – – – – –
– – – – – –
SECTION B. 460V
SECTION B. 460V
FUNCTION
Three phase Main circuit input power supply
380 / 400 / 415 / 460V at 50/60 Hz
DC bus terminals (+1 & –)
[ (+3 & – ) ]**
options (220 Vac, 30 VA)
T1 (U)
T2 (V)
T3 (W)
l
2 (s) Power for heat sink fan
l
1 (r)
l
2 200 (s200)
l
2 400 (s400)
B0/–
B1/+ DB Unit terminals DB Unit terminals DC bus terminals – – – – –
B2 (B1/+ & B2) * (B1/+ & B2)
– [ – (N) ]**
+3 (P3) DC bus terminals
+1 (P1)
x Power supply output for
y
G (E) Ground terminal (100 ohms or less)
( "L" ) (04/27/95)
– – – – –
DC bus terminals DC bus terminals
(B1/+ & –) (B1/+ & B0/–) (+1 & –) * [ (+3 & –) ]**
– – – – – indicates that terminals are not present.
* For installation of DB (Dynamic Braking) Units, see Appendix 7.
** indicates terminal marking or connection difference for units with "L" in Model No.
Three phase AC output to motor
0V to max. input voltage level
– – – – –
230 Vac single phase Power for heat sink fan:
l
1 to l2 200: 230 Vac
l
1 to l2 400: 460 Vac
DB Unit Terminals
(+1 & –) [ (+3 & –) ]**
options (220 Vac, 30 VA)
– – – – –
– – – – –
DB Unit Terminals *
– – – – –
– – – – –
– – – – –
1-2.4
Page 19
Table 1-2. Terminal Functions and Voltages of Main Circuit - Continued
SECTION C. 575V
SECTION C. 575V
FUNCTION
TERMINAL
TERMINAL FUNCTION 1 HP 3 TO 40 HP
L1 (R) Three phase Main circuit
L2 (S) input power supply
L3 (T) 500 / 575 / 600V at 50/60 Hz
2-10HP (CT) 15 - 30HP (CT) 40 - 200HP
(CT)
T1 (U)
T2 (V)
T3 (W)
l
1 (r) Power for heat sink fan
l
2 (s)
B0/–
B1/+ DB Unit (B1/+ & –) DB Unit terminals (B1/+ & B2) DC bus terminals
B2 DB Resistor (B1/+ & B2) DC bus terminals (B1/+ * –)
–
+3 (P3)
+1 (P1)
x Power supply output for options
y
G (E) Ground terminal (100 ohms or less)
– – – – – indicates that terminals are not present.
* For installation of DB (Dynamic Braking) Units, see Appendix 7.
Three phase AC output to motor
0V to max. input voltage level
– – – – –
– – – – –
– – – – –
230 Vac, single phase
DB Unit terminals *
– – – – –
(220 Vac, 30 VA)
1-3
Page 20

1.4 ELECTRICAL INSTALLATION Continued
WRAP BOTH ENDS
OF SHEATH WITH
INSULATING TAPE
CRIMP
CONNECTION
OUTER JACKET
DO NOT
CONNECT
TO
EXTERNAL
CIRCUIT
1.4.2 Control Circuit
All basic control circuit (signal) interconnections are shown in the appropriate diagram:
• Interconnections for external two-wire control in combination with the Digital
Operator are shown in Figure 1-3 (for 230V or 460V rated drives) and Figure
1-5 (for 575V rated drives).
• Interconnections for external three-wire control in combination with the Digital
Operator are shown in Figure 1-4 (for 230V or 460V rated drives) and Figure
1-6 (for 575V rated drives).
Make wiring connections according to Figures 1-1 thru 1-4 and Table 1-3, observing the
following :
• Signal Leads : Terminals 1-8, 11-17, and 21-27.
• Control Leads : Terminals 9 & 10 and 18-20.
• Power Leads : Input Terminals L1 (R), L2 (S), and L3 (T), and Output Terminals
T1 (U), T2 (V), and T3 (W).
• Use twisted shielded or twisted-pair shielded wire (20-14 AWG (0.5-2mm
1-60HP (CT); 18-14 AWG (0.75-2mm
2
)for 75-400HP (CT) ) for control and signal
2
)for
circuit leads. When using shielded wire, the shield sheath MUST be connected
at the GPD 503 ONLY (terminal 12). The other end should be dressed neatly and
left unconnected (floating). See Figure 1-1.
• Lead length should NOT EXCEED 164 feet (50 meters). Wire sizes should be
determined considering the voltage drop.
SHIELD SHEATH
TO GPD 503
SIGNAL
TERMINALS
TO SHIELD
SHEATH
TERMINAL
(TERM. 12)
Figure 1-1. Shielded Sheath Termination
1-4
Page 21
Table 1-3. Terminal Functions and Signals of Control Circuit
TERMINAL FUNCTIONS LEVELS
TERMINAL FUNCTIONS LEVELS
1 2-WIRE CONTROL: Forward Run / Stop signal Run at closed, stop at open (See NOTE 2)
(See NOTE 1)
3-WIRE CONTROL: Run signal Run at closed (See NOTE 2)
2 2-WIRE CONTROL: Reverse Run / Stop signal Run at closed, stop at open (See NOTE 2)
(See NOTE 1)
3-WIRE CONTROL: Stop signal Stop at open (See NOTE 2)
3 External fault input Fault at closed (see NOTE 2). When the External
Fault input is applied, the GPD 503’s Fault relay
trips (shutdown) and the motor coasts to a stop.
EF3
The Digital Operator displays “
4 Fault Reset input (external) Fault Reset at closed (see NOTE 2). The Fault
Reset input will reset the Fault relay, if the
GPD 503 is in “stopped” condition. Both Forward
Run/Stop signal and Reverse Run/Stop signal
must be OPEN.
5 - 8 External signal inputs (see NOTE 2); functions as defined by settings of system constants Sn-15 thru Sn-18.
See MULTI-FUNCTION INPUT TERMINALS in the PROGRAMMABLE FEATURES section of this manual.
” failure.
9, 10 Multi-function contact output. Contact capacity:
One of 18 functions are available, by setting 250 Vac at 1A or below
of system constant Sn-20. (N.O.) 30 Vdc at 1A or below
11 Sequence control input common Sequence control input 0 V
for terminals (1 - 8).
12 Connection for shield sheath of signal leads – – – –
13 0 to +10V (20K ohms)
Auto frequency reference input
14 4-20 mA (250 ohms)
15 Manual frequency reference power supply +15V (Control power supply for frequency setting:
max 20 mA)
16 Multi-function analog input; function of input signal 0 to +10V/100% (20K ohms)
is selected by setting of system constant Sn-19
17 Multi-function analog input common 0 V
18 Closed at fault
Fault contact output
19 (N.O./N.C.) Open at fault 250 Vac at 1A or below
20 Common
Contact capacity:
30 Vdc at 1A or below
1-5
Page 22
Table 1-3. Terminal Functions and Signals of Control Circuit - Continued
TERMINAL FUNCTIONS LEVELS
TERMINAL FUNCTIONS LEVELS
21 Multi-function analog monitor (+) Output current or Type of analog signal (operating parameter) to be
output frequency output is selected by setting of constant bn-13.
22 Multi-function analog monitor (-) is selectable Monitor output: 0 to +11V; 2 mA maximum
25 Multi-function open One of 18 functions Photocoupler insulation output: +48V, 50mA
collector output 1 are available, by or less
setting of system
26 Multi-function open constants Sn-21
collector output 2 and Sn-22.
27 Multi-function open collector output common 0V
NOTES:
1. When Forward Run and Reverse Run inputs are both closed for more than 500 ms, the Digital
Operator flashes “
condition is not stored by the GPD 503 (on Digital Operator, red lamp at STOP key does not light);
IF ONE OF THE INPUTS IS OPENED, THE MOTOR WILL IMMEDIATELY START UP
AGAIN.
2. Terminals 1-8 source +24 Vdc and operate in a Low = True (ON) configuration when connected to
terminal 11.
When using relays for input to terminals 1-8, use relays with highly reliable contacts (for very small
current) with a capacity of 30 Vdc or more and rated current of 100mA or higher. When using
transistor (open collector) input, use transistors with rated voltage of 35 Vdc or more and rated
current of 100mA or more.
EF
” and the motor (if rotating) is decelerated by the GPD 503 to a stop. This stop
1.4.3 Grounding
• The GPD 503 must be solidly grounded using main circuit ground terminal G (E).
Ground resistance should be 100 ohms or less. Select lead size suitable for size
of terminal screw. Make the length as short as possible.
• NEVER ground the GPD 503 in common with welding machines, motors, or
other large-current electrical equipment.
• Where several GPD 503s are used, ground each directly or daisy-chain to the
ground pole(s). DO NOT FORM A LOOP WITH THE GROUND LEADS.
•• •
•• •
•• •
•
CORRECT CORRECT NOT
ACCEPTABLE
1-6
Page 23

1.4 ELECTRICAL INSTALLATION Continued
INPUT
RFI FILTER
L1
X3X2X1
B2
A1(L1)
(L3)C2
(L2)B2
(L1)A2
L
I
N
E
L
O
A
D
EARTH GROUND
SEE NOTE 2
(G)
L2
L1T3T2
T1
INPUT
OUTPUT
MagneTek Drive
EARTH GROUND
SEE NOTE 1
SEE NOTES 3, 4
OUTPUT
RFI FILTER
TO CASE
EARTH
GROUND
SEE NOTE 2
SEE NOTES 3, 4
SEE NOTES 3, 4
A.C. MOTOR
12345
6
OUT
T3T2T1C1B1A1C2B2A2
EARTH GROUND
SEE NOTE 2
SEE NOTE 6
1.4.4 Auxiliary Input and Output Power Option Devices
Figure 1-2 is a factory guideline for proper wiring practices and relative locations within
the electrical path from the line to the load. It does not imply what devices are needed for
a particular application, nor does it show what devices were shipped with a particular
order. Therefore, disregard those items in the diagram which are not being used in your
installation.
Mount all power option devices as close to the drive, and keep electrical connections as
short as possible.
DO NOT run input and output wiring in the same conduit.
CUSTOMER'S
3Ø A.C. LINE
POWER
SUPPLY
L3
L2
NOTES
1. Connect drive ground terminal or panel to
earth ground. Always use low impedance
paths and connections.
2. Mount input and output RFI filters
physically
close to the drive as possible (on the same
panel, if possible). Filters should have a solid
connection from filter case or ground terminal
to drive panel or ground terminal (conduit with
good bare metal to bare metal connections
may serve as the path). If multiple input or
output RFI filters are used, they must be wired
in parallel.
3. Shield conductors with metallic conduit.
4. Connect output conduit in a manner that
allows it to act as an unbroken shield from the
drive panel to the motor casing.
5. RF noise filter (different from RFI filter) part
no. 05P00325-0023 is a delta wye capacitor
network which is wired in parallel with the
drive input terminals. On the smaller drives
with die cast chassis, it must be mounted
externally. On the larger drives with sheet
metal chassis, it may be mounted inside the
area where the input power wiring enters the
drive. On units equipped with bypass, it may
be wired to the primary side of the circuit
breaker and mounted to the bypass panel or
sidewall.
6. Connection points:
Drive w/o Bypass Drive w/ Bypass
Input
Output
L1, L2, L3
T1, T2, T3
Ckt BrkrL1, L2, L3
Unwired side of
Overload relay
ISOLATION
TRANSFORMER
H3
H2
H1
as
REACTOR
C1
B1
A1
RF NOISE
FILTER
INPUT
OUTPUT
REACTOR
C2
A2
SEE NOTE 5
GND
C1(L3)
B1(L2)
SEE NOTE 3
L3
IN
Figure 1-2. Customer Connection Diagram For Isolation Transformers,
Input Reactors, Input RFI Filters, Output Reactors and Output RFI FIlters
1-7
Page 24

NOTES FOR FIGURE 1-3
✱ – Indicates components not supplied.
■ – Indicates customer connection terminal. Wire only to terminals shown.
( ) – Indicates alternate terminal marking, i.e., (R) and L1.
▲ – Function labels shown for these terminals are determined by factory settings of System Constants
Sn–15 through Sn-18.
● – Function labels shown for these terminals are determined by factory settings of System Constants
Sn–20 through Sn-22.
■ – Function labels shown for these terminals are determined by factory setting of System Constant
Sn-05 ( X X X X ).
– Function label shown for this terminal is determined by factory setting of System Constant Sn-19.
1. If only a remote Manual Speed pot (1RH) is used, 3SS is not needed; in that case, a jumper must be
added between terminals 5 and 11. This jumper will override both the Auto and Digital Operator
frequency references, regardless of the programming of Sn-04 X X X X. If you are using a remote speed
command or the Digital Operator, DO NOT install this jumper.
2. The GPD 503 Electronic Thermal Overload function (Sn-17, Cn-09) meets standards set by UL and CSA
for motor thermal overload protection. If local code requires separate mechanical overload protection,
an overload relay should be installed, interlocked with the GPD 503 as shown. It should be the manual
reset type to prevent automatic restart following a motor fault and subsequent contact reclosure after
cool down.
3. Insulated twisted shielded wire is required.
2-conductor #18 GA. (Beldon #8760 or equivalent).
3-conductor #18 GA. (Beldon #8770 of equivalent).
Connect shield ONLY AT GPD 503 END. Stub and isolate other end.
4. Digital Operator is standard on every GPD 503. Remote operators, as shown, may not be required.
5. Customer to connect terminal G (E) to earth ground.
6. Wire only one Auto Reference input.
7. If the Dynamic Braking (DB) option is used, wire per Appendix 7 instructions.
1-8
Page 25

L1 L2 L3
1516171214
13
V/HZ PROFILE
+15Vdc
(20mA MAX)
FWD
▲
▲
▲
●
FWD
RUN/STOP
COM
SHIELD
4-20mA
(250
DIGITAL
OPERATOR
PRGM
DRIVE
0 TO 10Vdc
(20K
SEE
NOTE 4
REMOTE
DRIVE FWD REV SEQ REF
DSPL
4-20mA
0-10V
EXT. FAULT ✱
SEE
NOTE 3
JOG
MAN SPEED
AUTO
MAN
SEE
NOTE 1
7
REV
AUTO/MAN
MULTI-STEP FREQ
SELECT
FAULT
CONTACTS
RY2
19
20
ANALOG
OUTPUT
(0-10 Vdc)
OPEN
COLLECTOR
CIRCUIT
25
26
RESET
FWD
REV
RUN
RY CONTACTS
CAPACITY:
1A AT 250Vac
1A AT 30Vdc
MULTI-FUNCTION
MONITOR OUTPUT
0 - +10V
2mA MAX.
MULTIFUNCTION
OPEN
COLLECTOR
OUTPUTS
CAPACITY:
50mA AT 48Vdc MAX.
(T2)
(T1) (T3)
200V 380V 440V
220/ 400/ 460V
230V 415V
VOLTAGE SELECTOR
(460V, 15HP (CT) AND ABOVE)
FACTORY SET FOR 460V
EARTH
GROUND
SEE NOTE 5
1OL ✱
SEE NOTE 2
(R) (S) (T)
(E)
(U) (V) (W)
2SS ✱
REV
RUN/STOP
■
B1 or
B0/–
B2 or
B1/+
1
2
COOLING
FAN
POWER
(15HP (CT) AND ABOVE)
1RH ✱
2K / 2.5K
SEE NOTE 1
1R ✱
3ø POWER SUPPLY (SEE NAMEPLATE DATA)
L1 L2 L3
1CB ✱
2K
▲
1SS ✱
1
MAN REF. IN
(0 TO 10Vdc)
VOLTAGE
OUTPUT
(%)
GPD 503
OUTPUT FREQUENCY
(HZ)
EXT. FAULT
FAULT RESET
▲
▲
2
3
4
5
6
TO
TERM. 12
EXT. FAULT RESET
1PB ✱
3SS ✱
1OL ✱
SEE
NOTE 2
ISOLATED
AUTO
REFERENCE ✱
SEE NOTE 6
FOR WIRING
DYNAMIC
BRAKING
OPTION
SEE NOTE 7
FOR UNITS
WITH "L" IN
MODEL NO.
– (N)
+3
(P3)
STOP
DATA
ENTER
COAST STOP
(BASE BLOCK)
RUN CONTACT
OPEN
COLLECTOR
CIRCUIT
JOG
SPEED
0 VOLTS
RY1
RY2
8
11
●
9
10
TERMINALS 1-8:
IF INPUT FROM RELAY CONTACTS:
RATED 30Vdc OR MORE,
100mA OR MORE
IF OPEN COLLECTOR INPUT:
RATED 35Vdc OR MORE,
100mA OR MORE
18
21
22
●
27
G
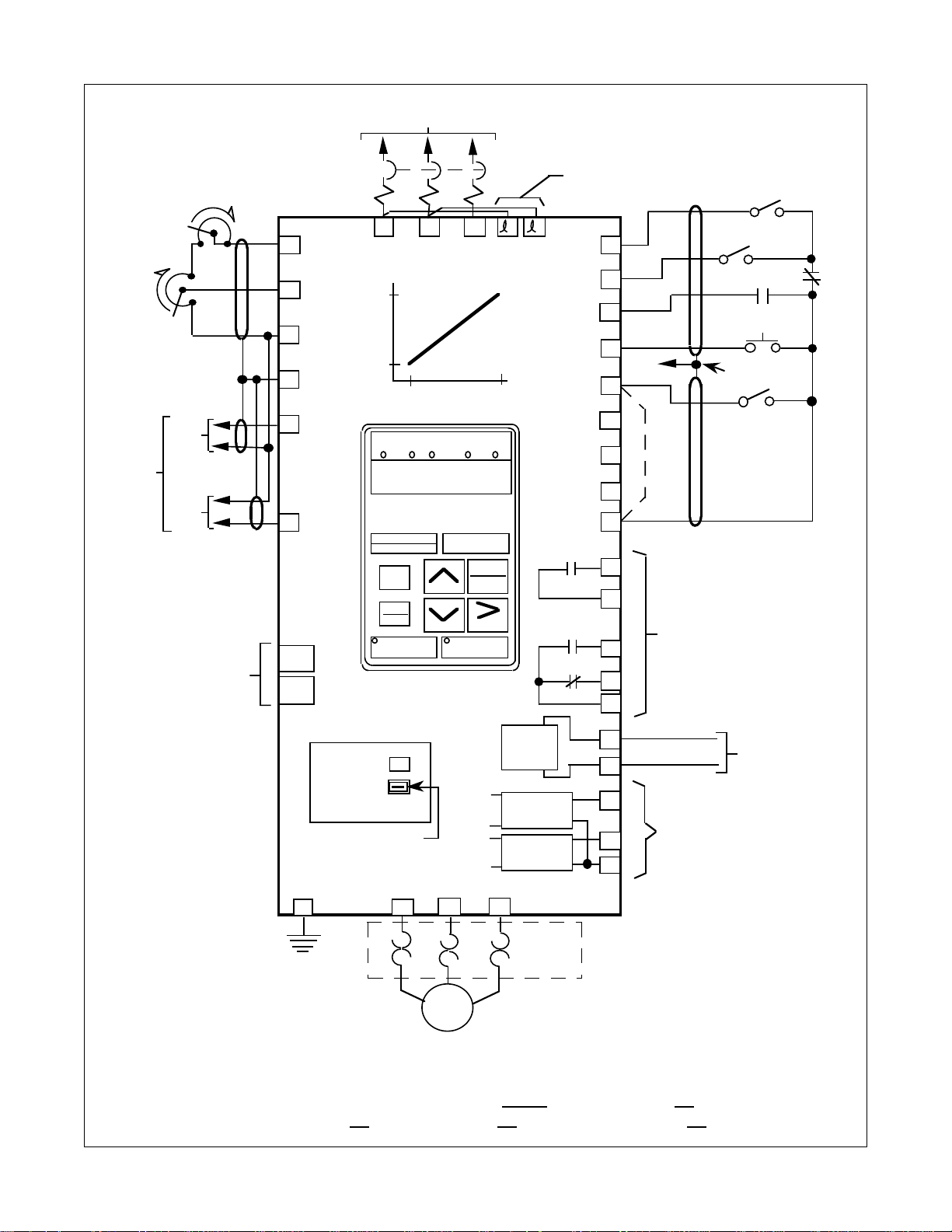
Figure 1-3. 230V or 460V Interconnections - 2-Wire Control
GPD 503 BASIC INTERCONNECT DIAGRAM FOR 2-WIRE CONTROL
T1 T2 T3
AC MOTOR ✱
(with constant Sn-04 set to 0000, Sn-15 set to 03,
Sn-16 set to 04, Sn-17 set to 06, and Sn-18 set to 08 )
1-9
( "L" ) (04/27/95)
Page 26
NOTES FOR FIGURE 1-4
✱ – Indicates components not supplied.
■ – Indicates customer connection terminal. Wire only to terminals shown.
( ) – Indicates alternate terminal marking, i.e., (R) and L1.
▲ – Function labels shown for these terminals are determined by 3-Wire Control settings of System
Constants Sn-16 through Sn-18: Sn-16 =
03
, Sn-17 = 04, Sn-18 = 06.
● – Function labels shown for these terminals are determined by factory settings of System Constants
Sn–20 through Sn-22.
■ – Function labels shown for these terminals are determined by factory setting of System Constant
Sn-05 ( X X X X ).
– Function label shown for this terminal is determined by factory setting of System Constant Sn-19.
1. If only a remote Manual Speed pot (1RH) is used, 2SS is not needed; in that case, a jumper must be
added between terminals 6 and 11. This jumper will override both the Auto and Digital Operator
frequency references, regardless of the programming of Sn-04 X X X X. If you are using a remote speed
command or the Digital Operator, DO NOT install this jumper.
2. The GPD 503 Electronic Thermal Overload function (Sn-17, Cn-09) meets standards set by UL and CSA
for motor thermal overload protection. If local code requires separate mechanical overload protection,
an overload relay should be installed, interlocked with the GPD 503 as shown. It should be the manual
reset type to prevent automatic restart following a motor fault and subsequent contact reclosure after
cool down.
3. Insulated twisted shielded wire is required.
2-conductor #18 GA. (Beldon #8760 or equivalent).
3-conductor #18 GA. (Beldon #8770 or equivalent).
Connect shield ONLY AT GPD 503 END. Stub and isolate other end.
4. Digital Operator is standard on every GPD 503. Remote operators, as shown, may not be required.
5. Customer to connect terminal G (E) to earth ground.
6. Wire only one Auto Reference input.
7. If the Dynamic Braking (DB) option is used, wire per Appendix 7 instructions.
CAUTION
Before running, Sn-03 must be set to "0000".
Resetting drive constant Sn-03 to "1110" may cause
the motor to run in the reverse direction WITHOUT A
RUN COMMAND, and possibly result in damage to the
equipment or personal injury.
1-10
Page 27

GPD 503
15
16
MAN REF. IN
(0 TO 10Vdc)
RUN
▲
SEE
NOTE 4
2PB ✱
MAN SPEED
1RH ✱
2K / 2.5K
AUTO
MAN
1SS ✱
SEE
NOTE 1
1
MULTI-STEP
FREQ
SELECT
MULTIFUNCTION
OPEN
COLLECTOR
OUTPUTS
CAPACITY:
50mA AT 48Vdc MAX.
AC MOTOR ✱
(T2)
(T1) (T3)
G
220/ 400/ 460V
230V 415V
VOLTAGE SELECTOR
GPD 503 BASIC INTERCONNECT DIAGRAM FOR 3-WIRE CONTROL
TERMINALS 1-8:
IF INPUT FROM RELAY CONTACTS:
RATED 30Vdc OR MORE,
100mA OR MORE;
IF OPEN COLLECTOR INPUT:
RATED 35Vdc OR MORE,
100mA OR MORE
SEE NOTE 1
ISOLATED
AUTO
REFERENCE ✱
SEE NOTE 6
1R ✱
4-20mA
0-10V
FOR WIRING
DYNAMIC
BRAKING
OPTION
SEE NOTE 7
FOR UNITS
WITH "L" IN
MODEL NO.
– (N)
+3
(P3)
3ø POWER SUPPLY (SEE NAMEPLATE DATA)
L1 L2 L3
1CB ✱
2K
+15Vdc
(20mA MAX)
17
COM
SHIELD
12
4-20mA
14
(250
0 TO 10Vdc
13
(20K
B1 or
L1 L2 L3
(R) (S) (T)
V/HZ PROFILE
OUTPUT
VOLTAGE
(%)
OUTPUT FREQUENCY
REMOTE
DRIVE FWD REV SEQ REF
PRGM
DRIVE
JOG
FWD
REV
RUN
(HZ)
DIGITAL
OPERATOR
DSPL
DATA
ENTER
RESET
STOP
1
COOLING
FAN
POWER
B0/–
B2 or
B1/+
(460V, 15HP (CT) AND ABOVE)
FACTORY SET FOR 460V
200V 380V 440V
ANALOG
OUTPUT
(0-10 Vdc)
(15HP (CT) AND ABOVE)
2
STOP
EXT. FAULT
FAULT RESET
FWD/REV
AUTO/MAN
JOG
SPEED
0 VOLTS
RUN CONTACT
RY1
FAULT
CONTACTS
RY2
RY2
▲
▲
▲
▲
2
3
4
5
6
7
8
11
●
9
10
18
19
20
■
21
22
TO
TERM. 12
STOP
EXT. FAULT RESET
RY CONTACTS
CAPACITY:
1A AT 250Vac
1A AT 30Vdc
RUN
1PB ✱
1OL ✱
EXT. FAULT ✱
3PB ✱
SEE
NOTE 3
FWD
REV
2SS ✱
MULTI-FUNCTION
MONITOR OUTPUT
0 - +10V
2mA MAX.
SEE
NOTE 2
●
(E)
(U) (V) (W)
T1 T2 T3
OPEN
COLLECTOR
CIRCUIT
OPEN
COLLECTOR
CIRCUIT
25
●
26
27
EARTH
GROUND
SEE NOTE 5
Figure 1-4. 230V or 460V Interconnections - 3-Wire Control
(with constant Sn-04 set to 0000, Sn-15 set to 00,
Sn-16 set to 03, Sn-17 set to 04, and Sn-18 set to 06 )
1-11
1OL ✱
SEE NOTE 2
( "L" ) (04/27/95)
Page 28
NOTES FOR FIGURE 1-5
✱ – Indicates components not supplied.
■ – Indicates customer connection terminal. Wire only to terminals shown.
( ) – Indicates alternate terminal marking, i.e., (R) and L1.
▲ – Function labels shown for these terminals are determined by factory settings of System Constants
Sn–15 through Sn-18.
● – Function labels shown for these terminals are determined by factory settings of System Constants
Sn–20 through Sn-22.
■ – Function labels shown for these terminals are determined by factory setting of System Constant
Sn-05 ( X X X X ).
– Function label shown for this terminal is determined by factory setting of System Constant Sn-19.
1. If only a remote Manual Speed pot (1RH) is used, 3SS is not needed; in that case, a jumper must be
added between terminals 5 and 11. This jumper will override both the Auto and Digital Operator
frequency references, regardless of the programming of Sn-04 X X X X. If you are using a remote speed
command or the Digital Operator, DO NOT install this jumper.
2. The GPD 503 Electronic Thermal Overload function (Sn-17, Cn-09) meets standards set by UL and CSA
for motor thermal overload protection. If local code requires separate mechanical overload protection,
an overload relay should be installed, interlocked with the GPD 503 as shown. It should be the manual
reset type to prevent automatic restart following a motor fault and subsequent contact reclosure after
cool down.
3. Insulated twisted shielded wire is required.
2-conductor #18 GA. (Beldon #8760 or equivalent).
3-conductor #18 GA. (Beldon #8770 of equivalent).
Connect shield ONLY AT GPD 503 END. Stub and isolate other end.
4. Digital Operator is standard on every GPD 503. Remote operators, as shown, may not be required.
5. Customer to connect terminal G (E) to earth ground.
6. Wire only one Auto Reference input.
7. If the Dynamic Braking (DB) option is used, wire per Appendix 7 instructions.
1-12
Page 29
L1 L2 L3
+15Vdc
(20mA MAX)
MAN REF. IN
(0 TO 10Vdc)
FWD
▲▲▲
OUTPUT
VOLTAGE
(%)
SHIELD
4-20mA
(250
OUTPUT FREQUENCY
(HZ)
4-20mA
1OL ✱
EXT. FAULT ✱
EXT. FAULT RESET
1PB ✱
SEE
NOTE 3
TO
TERM. 12
JOG
1R ✱
SEE NOTE 1
AUTO
MAN
3SS ✱
1SS ✱
6
7
FAULT RESET
AUTO/MAN
FAULT
CONTACTS
RY2
OPEN
COLLECTOR
CIRCUIT
212225
26
RUN
RY CONTACTS
CAPACITY:
1A AT 250Vac
1A AT 30Vdc
MULTIFUNCTION
OPEN
COLLECTOR
OUTPUTS
CAPACITY:
50mA AT 48Vdc MAX.
5000V
575/600V
VOLTAGE SELECTOR
(15HP AND ABOVE)
FACTORY SET FOR 575/600V
(R) (S) (T)
REV
RUN/STOP
TERMINALS 1-8:
IF INPUT FROM RELAY CONTACTS:
RATED 30Vdc OR MORE,
100mA OR MORE
IF OPEN COLLECTOR INPUT:
RATED 35Vdc OR MORE,
100mA OR MORE
FOR WIRING
DYNAMIC
BRAKING
OPTION
SEE NOTE 7
3ø POWER SUPPLY (SEE NAMEPLATE DATA)
L1 L2 L3
1CB ✱
(15HP AND ABOVE)
FWD
RUN/STOP
MAN SPEED
1RH ✱
2K / 2.5K
ISOLATED
AUTO
REFERENCE ✱
SEE NOTE 6
0-10V
2K
15
GPD 503
V/HZ PROFILE
17
16
COM
12
COOLING
FAN
POWER
REV
EXT. FAULT
▲
1
▲
2
3
2SS ✱
SEE
NOTE 2
4
SELECT
JOG
SPEED
0 VOLTS
RY1
RY2
▲
5
SEE
NOTE 1
8
11
●
9
10
18
19
20
■
MULTI-FUNCTION
MONITOR OUTPUT
0 - +10V
2mA MAX.
12
14
13
B1 or
B0/–
B2 or
B1/+
SEE
NOTE 4
0 TO 10Vdc
(20K
REMOTE
DRIVE FWD REV SEQ REF
DIGITAL
OPERATOR
PRGM
DRIVE
FWD
REV
DSPL
STOP
DATA
ENTER
RESET
MULTI-STEP FREQ
COAST STOP
(BASE BLOCK)
RUN CONTACT
ANALOG
OUTPUT
(0-10 Vdc)
●
OPEN
COLLECTOR
CIRCUIT
●
27
(E)
G
EARTH
GROUND
SEE NOTE 5
Figure 1-5. 575V Interconnections - 2-Wire Control
GPD 503 BASIC INTERCONNECT DIAGRAM FOR 2-WIRE CONTROL
(U) (V) (W)
T1 T2 T3
(T2)
(T1) (T3)
AC MOTOR ✱
1OL ✱
SEE NOTE 2
(with constant Sn-04 set to 0000, Sn-15 set to 03,
Sn-16 set to 04, Sn-17 set to 06, and Sn-18 set to 08 )
1-13
Page 30

NOTES FOR FIGURE 1-6
✱ – Indicates components not supplied.
■ – Indicates customer connection terminal. Wire only to terminals shown.
( ) – Indicates alternate terminal marking, i.e., (R) and L1.
▲ – Function labels shown for these terminals are determined by 3-Wire Control settings of System
Constants Sn-16 through Sn-18: Sn-16 =
03
, Sn-17 = 04, Sn-18 = 06.
● – Function labels shown for these terminals are determined by factory settings of System Constants
Sn–20 through Sn-22.
■ – Function labels shown for these terminals are determined by factory setting of System Constant
Sn-05 ( X X X X ).
– Function label shown for this terminal is determined by factory setting of System Constant Sn-19.
1. If only a remote Manual Speed pot (1RH) is used, 2SS is not needed; in that case, a jumper must be
added between terminals 6 and 11. This jumper will override both the Auto and Digital Operator
frequency references, regardless of the programming of Sn-04 X X X X. If you are using a remote speed
command or the Digital Operator, DO NOT install this jumper.
2. The GPD 503 Electronic Thermal Overload function (Sn-17, Cn-09) meets standards set by UL and CSA
for motor thermal overload protection. If local code requires separate mechanical overload protection,
an overload relay should be installed, interlocked with the GPD 503 as shown. It should be the manual
reset type to prevent automatic restart following a motor fault and subsequent contact reclosure after
cool down.
3. Insulated twisted shielded wire is required.
2-conductor #18 GA. (Beldon #8760 or equivalent).
3-conductor #18 GA. (Beldon #8770 or equivalent).
Connect shield ONLY AT GPD 503 END. Stub and isolate other end.
4. Digital Operator is standard on every GPD 503. Remote operators, as shown, may not be required.
5. Customer to connect terminal G (E) to earth ground.
6. Wire only one Auto Reference input.
7. If the Dynamic Braking (DB) option is used, wire per Appendix 7 instructions.
CAUTION
Before running, Sn-03 must be set to "0000".
Resetting drive constant Sn-03 to "1110" may cause
the motor to run in the reverse direction WITHOUT A
RUN COMMAND, and possibly result in damage to the
equipment or personal injury.
1-14
Page 31

GPD 503
●
PRGM
DRIVE
REMOTE
DRIVE FWD REV SEQ REF
4-20mA
ISOLATED
AUTO
REFERENCE ✱
SEE NOTE 6
EXT. FAULT ✱
JOG
MAN SPEED
1RH ✱
2K / 2.5K
SEE NOTE 1
SEE
NOTE 1
2
STOP
MULTI-STEP
FREQ
SELECT
ANALOG
OUTPUT
(0-10 Vdc)
OPEN
COLLECTOR
CIRCUIT
MULTI-FUNCTION
MONITOR OUTPUT
0 - +10V
2mA MAX.
(T2)
(T1) (T3)
500V
575/600V
VOLTAGE SELECTOR
0-10V
FOR WIRING
DYNAMIC
BRAKING
OPTION
SEE NOTE 7
1R ✱
3ø POWER SUPPLY (SEE NAMEPLATE DATA)
L1 L2 L3
1CB ✱
2K
+15Vdc
15
(20mA MAX)
MAN REF. IN
16
(0 TO 10Vdc)
17
COM
SHIELD
12
4-20mA
14
(250
0 TO 10Vdc
13
(20K
NOTE 4
B1 or
L1 L2 L3
(R) (S) (T)
OUTPUT
VOLTAGE
(%)
SEE
FWD
REV
V/HZ PROFILE
OUTPUT FREQUENCY
(HZ)
RUN
STOP
DIGITAL
OPERATOR
DSPL
DATA
ENTER
RESET
1
COOLING
FAN
POWER
B0/–
B2 or
B1/+
(15HP AND ABOVE)
FACTORY SET FOR 575/600V
(15HP AND ABOVE)
2
RUN
EXT. FAULT
FAULT RESET
FWD/REV
AUTO/MAN
JOG
SPEED
0 VOLTS
RUN CONTACT
RY1
FAULT
CONTACTS
RY2
RY2
▲
▲
▲
▲
1
▲
3
4
5
6
7
8
11
●
9
10
18
19
20
■
21
STOP
2PB ✱
EXT. FAULT RESET
TO
TERM. 12
TERMINALS 1-8:
IF INPUT FROM RELAY CONTACTS:
RATED 30Vdc OR MORE,
100mA OR MORE;
IF OPEN COLLECTOR INPUT:
RATED 35Vdc OR MORE,
100mA OR MORE
RY CONTACTS
CAPACITY:
1A AT 250Vac
1A AT 30Vdc
SEE
NOTE 3
1SS ✱
2SS ✱
RUN
1PB ✱
3PB ✱
1OL ✱
FWD
REV
AUTO
MAN
SEE
NOTE 2
22
25
●
OPEN
COLLECTOR
CIRCUIT
(E)
G
EARTH
GROUND
SEE NOTE 5
Figure 1-6. 575V Interconnections - 3-Wire Control
GPD 503 BASIC INTERCONNECT DIAGRAM FOR 3-WIRE CONTROL
(U) (V) (W)
T1 T2 T3
AC MOTOR ✱
1OL ✱
SEE NOTE 2
26
27
MULTIFUNCTION
OPEN
COLLECTOR
OUTPUTS
CAPACITY:
50mA AT 48Vdc MAX.
(with constant Sn-04 set to 0000, Sn-15 set to 00,
Sn-16 set to 03, Sn-17 set to 04, and Sn-18 set to 06 )
1-15
Page 32

Section 2. PROGRAMMABLE FEATURES
2.1 GENERAL
This section describes features of the GPD 503 which are defined by programmed settings
in the various constants in memory. Since most features use more than one constant,
the descriptions appear in alphabetical order by the function name. In Table 2-1, the
functions are grouped into operational categories. To cross reference a particular
constant to the features to which it applies, see the listings in Appendix 1.
Table 2-1. List of Features Defined By Constants
FUNCTION
SET-UP
Initialization (Reset), 2-Wire or 3-Wire 2.25 Sn-03
Drive Size (HP), Defining Table A3-1 Sn-01
Volts/Hertz Patterns, Standard 2.32 Sn-02
Output Voltage Regulator 2.33 Cn-01
Volts/Hertz Pattern, Custom 2.33 Cn-02 thru Cn-08
Thermal Motor Overload Protection 2.30 Sn-14, Cn-09
Display Mode, Choice on Power-Up 2.10 bn-10
Digital Display, Re-scaling 2.9 Cn-20
STARTING
Accel Time 2.2 bn-01, bn-03
Soft Start Characteristics 2.27 Sn-06
DC Injection Braking at Start 2.8B Cn-10, -11, -13
STOPPING
Decel Time 2.2 bn-02, bn-04
DC Injection Braking at Stop 2.8A Sn-04, Cn-12
PARAGRAPH
REFERENCE
CONSTANT(S)
REVERSE
Reverse Run Disabled Table A1-3 Sn-05
SPEED CONTROL
Frequency Command, Upper & Lower Limits 2.14 Cn-14, -15
Jog Reference 2.15 An-09
Multi-step Speed 2.24.2 An-01 thru An-08, Sn-04,
Sn-15 thru Sn-18, Sn-19
Up/Down Frequency Setting 2.34 Sn-15 thru Sn-18
Speed Reference Selection (Local/Remote) 2.24.1 Sn-04
2-1
Page 33

Table 2-1. List of Features Defined By Constants - Continued
FUNCTION
RUNNING
Critical Frequency Rejection 2.7 Cn-16 thru Cn-19
Speed Coincidence 2.23 Cn-21, Cn-22
Carrier Frequency 2.37 Cn-23, -24, -25
Speed Search 2.28 Sn-15, -16, -17
Energy saving 2.11 bn-09
RUNNING IMPROVEMENTS
Slip Compensation 2.26 bn-08
Torque Compensation 2.31 bn-07
Stall Prevention 2.29 Sn-10, Cn-28, -29, -30
PROTECTIVE FEATURES
Momentary Power Loss Ride-thru 2.16 Sn-11
Auto Restart 2.5 Cn-36, Sn-11
Auto Reference Loss Detection 2.4 Sn-06
Overtorque Detection 2.22 Sn-07, Cn-26, -27
DRIVE CONTROLS, INPUT
Multi-function Input Terminals 2.19 Sn-15 thru Sn-18
External Fault Terminals 2.12 Sn-12, Sn-15 thru Sn-18
Multi-function Analog Input 2.18 Sn-19
Auto Reference Characteristics 2.3 Sn-06
Auto Reference Bias and Gain 2.13 bn-05, bn-06
PARAGRAPH
REFERENCE
CONSTANT(S)
DRIVE OUTPUT
Multi-function Output Terminals 2.21 Sn-20, -21, -22
Analog Monitor Output 2.20 Sn-05, Sn-09, bn-11
MONITOR DISPLAY
Monitor Display Selection 2.9 Cn-20
Monitor Display Information 2.17 Un-01 thru Un-10
2-2
Page 34

2.2 ACCEL/DECEL TIME
A. bn-01: Accel Time 1 Factory setting (each):
bn-02: Decel Time 1
Range (each): 0.0 to 6000.0 seconds
10.0
bn-03: Accel Time 2
bn-04: Decel Time 2
The GPD 503 incorporates two sets of individually programmable acceleration and
deceleration times.
B. Sn-15 thru Sn-18: Multi- Data
07
: Accel/Decel Time Selection
function Inputs (Term. 5 thru 8)
By programming data 07 into one of the multifunction system constants (Sn-15 thru Sn-18),
one of the multi-function input terminals (5 thru
8) becomes a time selection input. When the
input terminal (i.e. external contact) is open,
TIME 1 o
oo
TIME 2
GPD 503
7
Time 1 (bn-01/bn-02) is selected. When the
input terminal is closed, Time 2 (bn-03/bn-04)
is selected.
11
0V
seconds
C. Sn-19: Multi-function Analog Data
Input (Term. 16)
The multi-function analog input at terminal 16
may be configured to allow analog control of the
Accel/Decel time. The input voltage, in the
range of 1 to 10V, determines the coefficient by
which the Accel/Decel time is reduced:
Actual Accel/ =Accel/Decel Time
Decel Time Coefficient
EXAMPLE:
Accel/Decel Time = 10 sec *
Voltage Ref. at Term. 16 = 5V
Actual Accel/
=
10 sec
= 2 sec
Decel Time 5 (coefficient)
* bn-01 or bn-03 setting
06
: Accel/Decel Time Coefficient
ACCEL/
DECEL
COEFFICIENT
COEFFICIENT
1R
10
5
1
01510
GPD 503
15 +15V
16 0-10V (20K )
17
C
VOLTAGE
2-3
Page 35

2.3 AUTO REFERENCE CHARACTERISTICS
Sn-06: Operation Mode Digit 3 [ X X X X ] : Auto Reference
Select 3 Characteristics
Factory setting: X
0
X X (0 - 100%)
The setting of this digit determines how the frequency command varies with respect to
changes in the Auto Reference command input signal.
GPD 503
Auto Reference inputs:
13
terminals 13 & 17 — 0-10 VDC
terminals 14 & 17 — 4-20 mA
= X 0 X X
= X 1 X X
AUTO
REFERENCE
0-10V (20K )
14
4-20 mA (250
17
C
= X 0 X X
= X 1 X X
FREQ
CMD
100%
0%
0V 10V
INPUT VOLTAGE (TERM. 13)
100%
FREQ
CMD
0%
4mA 20mA
INPUT CURRENT (TERM. 14)
2-4
Page 36

2.4 AUTO REFERENCE - LOSS DETECTION
Sn-06: Operation Mode Digit 4 [ X X X X ] : Auto Reference
Select 3 Loss Detection
Factory setting:
0
X X X (disabled)
The reference loss detection function is either enabled or disabled, based on the setting of
Sn-06 X X X X. When enabled (
1
X X X ), the reference loss detection compares the
change in reference with respect to time (0.4 seconds). If longer than 0.4 seconds, the
GPD 503 will decelerate to the set reference; if shorter than 0.4 seconds, the GPD 503 will
continue to operate at 80% of the output frequency. To regain control of output
frequency, either exceed the set reference (80% of reference) or initiate a STOP command.
(If Auto Reference is less than Fmax (Cn-02) x .05, then this function is not performed.)
FWD RUN
COMMAND
80%
REF
AUTO
REFERENCE
10%
0.4 SEC 0.4 SEC
GPD 503
OUTPUT
FREQUENCY
80%
FREQ.
Time Chart
2-5
Page 37

2-6
(THIS PAGE INTENTIONALLY BLANK)
Page 38

2.5 AUTO-RESTART
A. Cn-36: Number of Auto-Restart Attempts Factory setting:
00
Range: 00 - 10
When a fault occurs during operation, the GPD 503 can be programmed for an autorestart operation to automatically reset the fault. Auto-restart operation will use the
number of reset attempts set in this constant, up to the maximum of 10. When set to
no auto-restarts will be attempted.
• The following faults can be automatically reset:
oC: Overcurrent oL3: Overtorque
ou: Overvoltage (OV) oH: Overheat
oL2: Inverter overload Uu1: Undervoltage (Power UV)
• The following conditions WILL NOT initiate auto-restart:
1. oL1, EF
, FU or CPF fault.
2. When OC or UV occurs during deceleration.
3. When Sn-11, digit 3 ( X 0 X X ) is programmed to stop during momentary power
failure. (See para. 2.16, MOMENTARY POWER LOSS RIDE-THRU.)
• The number of restart attempts available will be reset to the Cn-36 setting when:
1. 10 minutes has elapsed without a fault occurring.
2. The RESET key, or external Fault Reset push button, is pressed.
00
,
B. Sn-11: Protective Characteristics Digit 2 [ X X X X ]: Fault Contact
Select 2 Status During Auto-Restart
This digit controls how the fault contact responds to a GPD 503 fault during the autorestart operation.
0: Fault contact will not actuate during auto-restart attempts
1: Fault contact actuates during auto-restart attempts
FAULT DETECTION
Sn-11 = X X 1 X
Sn-11 = X X 0 X
FAULT CONTACT
OUTPUT FREQUENCY
Time from fault detection
to reset attempt, or time
between reset attempts
100 ms
AUTOMATIC FAULT RESET
MOTOR RPM
Auto-Restart Operation Timing
2.6 Intentionally Deleted
2-7
Page 39

2.7 CRITICAL FREQUENCY REJECTION
A. Cn-16: Prohibited Frequency 1
Factory setting (each):
0.0
Cn-17: Prohibited Frequency 2
Cn-18: Prohibited Frequency 3
Range (each): 0.0 to 400.0 Hz
These three constants allow programming of up to three prohibited frequency points for
eliminating problems with resonant vibration of the motor/machine. This feature does not
actually eliminate the selected frequency values, but will accelerate and decelerate the
motor through the prohibited bandwidth.
B. Cn-19: Prohibited Frequency Deadband Factory setting:
1.0
Range: 0.0 to 25.5 Hz
This constant determines the width of the deadband around each selected prohibited
frequency point. The factory setting is
1.0
, which establishes a deadband of ±1.0 Hz.
EXAMPLE:
Vibration encountered between 30.0 and 36.0 Hz.
33.0
SOLUTION: Set Cn-16 to
. This is the center of the problem
frequency band.
Set Cn-19 to
3.0
. This will cause the GPD 503 to reject all
frequency command values between 30.0 and 36.0 Hz.
A frequency command in the deadband will be converted to the bottom
value of the deadband, e.g. a command of 33 Hz would result in a run
frequency of 30 Hz.
FREQ. CMD
36 Hz
33 Hz
30 Hz
Total Deadband = 6.0 Hz
± Cn-19 (3.0 Hz)
0
OUTPUT FREQUENCY (Hz)
2-8
Page 40

2.8 DC INJECTION BRAKING
A. Sn-04: Operation Mode Select 1 Digits 3 & 4 [ X X X X ] : Motor
Stopping Method Selection
Factory setting:
Cn-12: DC Injection Time at Stop Factory setting:
0 0
0.0
X X
sec
Range: 0.0 - 25.5 sec
1 0
When full range DC injection braking stop is enabled (Sn-04 =
X X), DC injection
braking is used to stop a motor more quickly than normal coast to stop, without the need
for braking resistors. When a STOP command is issued, there is a 0.5 second time delay
to apply DC to two phases of the motor’s stator winding. Then DC injection current is
applied. The duration of DC braking is a time period proportional to Cn-12 (at 10% output
frequency) and the level of output frequency at the time the STOP command is issued.
Braking torque is 50-70% of full load motor torque.
EXAMPLE:
Cn-12 = 0.5 sec (at 10% output)
Braking time at Fmax (100% output frequency) = 10 x 0.5 = 5 sec
STOP
Cn-12 x 10
RUN CMD
OUTPUT
FREQUENCY
COASTING
0.5 sec
DC BRAKING TIME
DC INJECTION
BRAKING
TIME Cn-12
0 10% 100%
OUTPUT FREQUENCY
AT TIME OF STOP COMMAND
Full Range DC Injection Braking Stop Sequence
2-9
Page 41

2.8 DC INJECTION BRAKING Continued
B. Cn-10: DC Inj. Braking Start Frequency Range: 0.0 to 10.0 Hz
Cn-11: DC Inj.Braking Current Factory setting:
(% of Drive Rated Current)
Range: 0 to 100 %
Cn-13: DC Injection Time at Start Factory setting:
50
0.5
%
sec
Range: 0.0 to 25.5 sec
DC injection can be used to stop a motor whose rotational direction is uncertain at startup. For this operation, application of DC injection braking current is controlled by a
multi-function input (see paragraph 2.8.D).
With ramp to stop enabled (Sn-04 =
0 0
X X), after a STOP command is received the
GPD 503 controls motor deceleration according to the Decel Time setting, until output
frequency reaches the DC Injection Braking Start Frequency (Cn-10 setting). Then the
GPD 503 output is turned off and DC injection current is applied to the motor. The
effective DC injection time and current should be set to provide adequate stopping without
excessive motor heating. The DC injection voltage is determined by the DC injection
braking current and motor impedance.
STOP
RUN COMMAND
OUTPUT FREQUENCY
DC INJECTION TIME AT
START (Cn-13)
DC DC
DC INJ. BRK. START
FREQUENCY (Cn-10)
DC INJECTION TIME AT
STOP (Cn-12)
DC Braking Sequence
RAMP TO STOP
2-10
Page 42

2.8 DC INJECTION BRAKING Continued
C. Sn-19: Multi-function Analog Data
07
: DC Injection Braking
Input (Term. 16) Current Adjust
The multi-function analog input at terminal 16 may be configured to allow analog control
of the amount of DC injection braking current (from 0% to 100% of the current level set in
Cn-11), which directly controls the amount of DC injection voltage applied to the motor.
1R
BRAKING
CURRENT
ADJUST
D. Sn-15 thru Sn-18: Multi-function Data
GPD 503
15
+15V
16
0-10V (20K )
17
C
BRAKING
CURRENT
(%)
(Cn-11)
100
010
ANALOG VOLTAGE
60
: DC Injection Braking
Inputs (Term. 5 thru 8) Command
Any multi-function input terminal can be
utilized to control DC injection braking. When
used, DC injection current will be applied until
the input is removed, provided that the GPD
503 output frequency is below the DC Braking
o
oo
GPD 503
8
DC INJ. BRK.
COMMAND
Start Frequency (Cn-10).
11
EXAMPLE:
Sn-18 =
60
0V
Contact input at Terminal 8 is
the DC Injection Braking Command
RUN COMMAND
DC INJECTION
BRAKING COMMAND
OUTPUT FREQUENCY
STOP
DC DC
DC INJ. BRK. START
FREQUENCY (Cn-10)
DC Braking Sequence
2-11
RAMP TO STOP
Page 43

2.9 DIGITAL DISPLAY SELECTION
Cn-20: Operator Display Mode Factory setting:
Reference and Indication
This constant designates what Drive parameter will be displayed on the Digital Operator
when the GPD 503 is in the Drive mode. It will be displayed where "OUTPUT
FREQUENCY" was previously displayed.
DATA PARAMETER DISPLAY
DATA PARAMETER DISPLAY
0
(factory 0.1 Hz.
setting)
1
2
to
39
(no. of motor in increments of 1 RPM
poles) (39999 max).
Output frequency, in increments of
Same as
Motor synchronous speed (NS =
NOTE: When motor synchronous
0
speed exceeds 39999 RPM,
display holds at
Range: 0 to 39999
120F
)
P
39999
.
0
00040
to must be 5 digits.
Line speed or other parameter. Setting
39999
X X X X X
EXAMPLE:
To display Line Speed, based on
54.32 FPM at 60 Hz:
Cn-20 setting =
Parameter value at maximum frequency (include
leading zeroes if necessary)
Location of decimal point:
0
= X X X X
1
= X X X . X
2
= X X . X X
3
= X . X X X
(See CAUTION on next page)
25432
2-12
Page 44
2.9 DIGITAL DISPLAY SELECTION Continued
CAUTION
When setting a 5 digit value in Cn-20, the decimal point
position selected will also automatically affect all of the
Frequency Reference Memory Settings (An-XX constants;
see Table A1-1).
EXAMPLE:
Cn-20 factory setting: 00000
An-09 (Jog) factory setting: 006.00 (6 Hz)
Cn-20 changed to 1
An-09 setting becomes 0060.
Therefore An-09 must be reprogrammed
to 0006.0 for 6 Hz Jog frequency.
2.10 DISPLAY - MONITOR (AT POWER-UP) SELECTION
bn-10: Monitor Number After Power-up Factory setting:
This constant determines which monitor display will appear on the Digital Operator when
the GPD 503 is powered up. The number programmed into bn-10 corresponds to the
appropriate Un constant, Un-XX (01-03), which determines monitor status.
bn-10
bn-10
Setting Monitor Selection
Setting Monitor Selection
1
Un-01 — Frequency Reference
0600
Decimal point
at X X X.X
0
Range: 1 to 3
1
2
3
Un-02 — Output Frequency
Un-03 — Output Current
2-13
Page 45

2.11 ENERGY SAVING OPERATION
bn-09: Energy Saving Gain Factory setting:
80
%
Range: 0 to 200 %
This constant sets, in increments of 1%, the level to which the output voltage is reduced
during the energy-saving operation.
V/f
CONVERSION
TORQUE
COMPENSATION
ENERGYSAVING GAIN
O O
O
ENERGY-SAVING ENABLED
VOLTAGE COMMAND
CLOSE AT SET
FREQUENCY AND
Output Voltage During Energy-Saving Operation
63
Sn-15 thru Sn-18: Multi-function Data
: Energy Saving Operation
Inputs (Term. 5 thru 8)
A multi-function input may be utilized to
command energy saving operation.
When the external Energy-Saving Operation
command is closed at set frequency, the energysaving operation shown below is enabled. In the
energy saving operation, the output voltage is
the value of the energy saving gain (bn-09;
factory set at 80%) multiplied by the V constants
defined by Cn-03, -06 and -08.
NOTE
If energy saving operation is enabled before accel
time is complete, output V/Hz is not affected until
set frequency is reached; then output voltage is
reduced by energy-saving gain (bn-09) setting.
RUN COMMAND
ENERGY-SAVING COMMAND
EXTERNAL
CONTACTS
GPD 503
5
Sn-15
6
Sn-16 MULTI-
> FUNCTION
7
Sn-17 INPUT
8
Sn-18
11
0V
OUTPUT VOLTAGE
V (of Cn-03, -06 & -08) x
ENERGY-SAVING GAIN (bn-09)
Energy-Saving Run Timing
2-14
Page 46
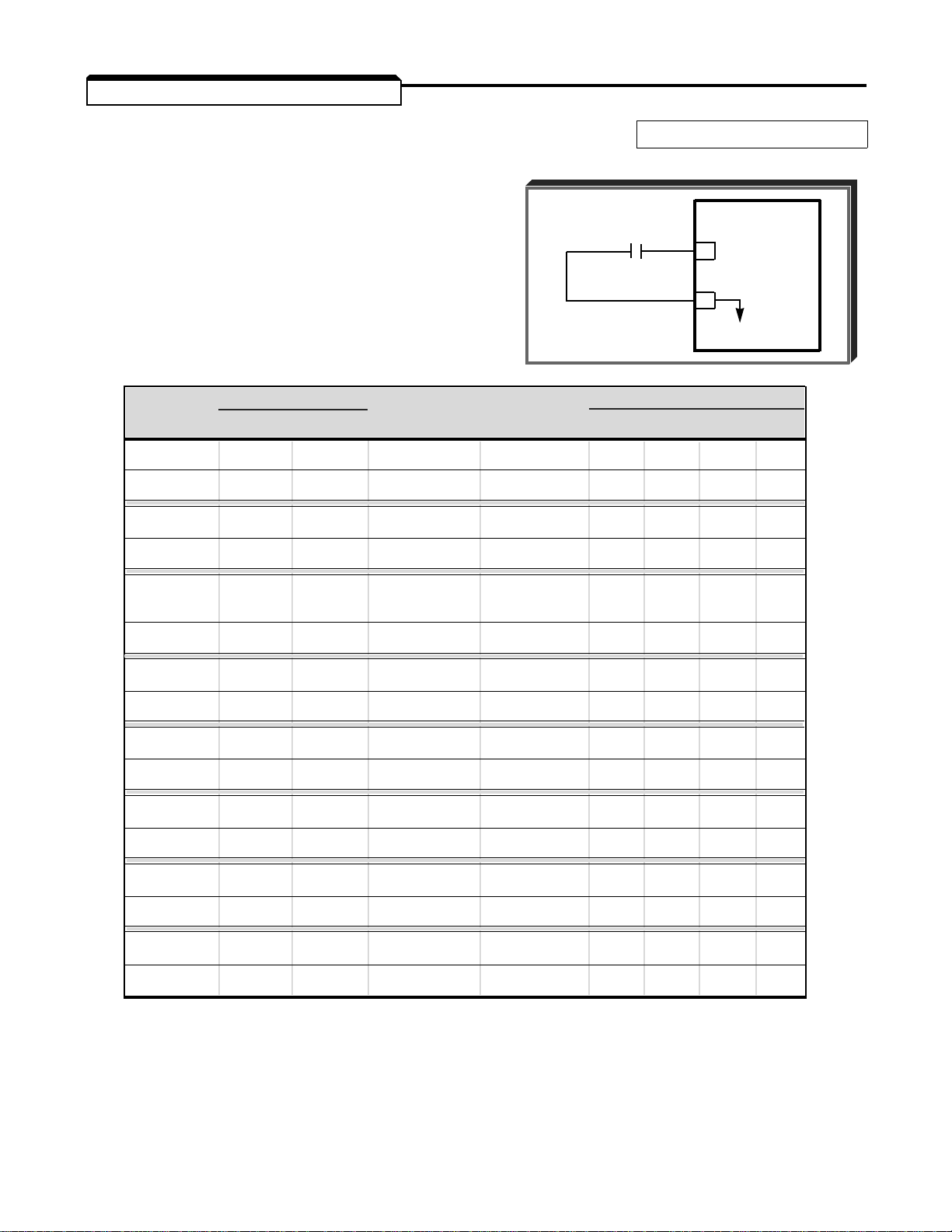
2.12 EXTERNAL FAULT INPUTS
A. Sn-12: External Fault Signal Input Factory setting:
(Terminal 3)
This constant determines how the GPD 503
responds to an external fault contact input on
terminal 3. The chart below lists the possible
settings, and indicates how the GPD 503 will
EXTERNAL
FAULT
CONTACT
GPD 503
3
interpret the input signal.
11
0V
Sn-12 Term. 3 (Note 1) Always During Mode (Note 2)
Sn-12 Term. 3 (Note 1) Always During Mode (Note 2)
Data
Data
0000
0001
0010
0011
N.O. N.C.
N.O. N.C.
XX X
XX X
XXX
XXX
Detected Operation
Detected Operation
0123
0123
0100
0100
(Factory Set)
0101
0110
0111
1000
1001
1010
1011
1100
1101
1110
1111
NOTES
XX X
XX X
XXX
XXX
XX X
XX X
XXX
XXX
XX X
XX X
XXX
XX X
1. N.O. = normally open contact; N.C. = normally closed contact.
2. Mode 0 = Ramp to Stop (bn-02); Mode 1 = Coast to Stop;
Mode 2 = Emergency Stop (bn-04);
Mode 3 = Continue operation (minor fault).
2-15
Page 47

2.12 EXTERNAL FAULT INPUTS Continued
B. Sn-15 thru Sn-18: Multi-function Data
Inputs (Term. 5 thru 8) Data
The multi-function input terminals can be used to monitor external fault contacts. When
the External Fault 1-4 signals are inputted,
Operator (steady for a major fault situation, blinking for a minor fault situation). The
second digit of the Sn-15 thru Sn-18 setting is entered as a hexadecimal value; when
converted to its binary equivalent, it defines what type of external fault contact is used and
how the GPD 503 will react to the fault input.
Binary — 0 0 0 0
0 = N.O. contact
1 = N.C. contact
EF5
Data
Data
to
20 - 2F
30 - 3F
40 - 4F
50 - 5F
EF8
: External Fault 1 (terminal 5)
: External Fault 2 (terminal 6)
: External Fault 3 (terminal 7)
: External Fault 4 (terminal 8)
are displayed on the Digital
BINARY TO HEX CONVERSION
BINARY HEX
0 0 0 0 0
0 = always detected
1 = during operation
00 = ramp to stop
01 = coast to stop
10 = emergency stop
11 = continue operation
(minor fault)
EXAMPLE:
To program External Fault 1 (terminal 5)
for a N.C. contact, always detected, and
GPD 503 to continue operation, solve
for X:
Sn-15 data =
X = 1 1 0 1
2
X
N.C. contact
0 0 0 1 1
0 0 1 0 2
0 0 1 1 3
0 1 0 0 4
0 1 0 1 5
0 1 1 0 6
0 1 1 1 7
1 0 0 0 8
1 0 0 1 9
1 0 1 0 A
1 0 1 1 B *
1 1 0 0 C
1 1 0 1 D **
1 1 1 0 E
1 1 1 1 F
always detected
* Appears as " b" on Digital Operator.
continue operation
= 1 1 0 1 (binary) = D (hex)
Sn-15 data =
For the same type of input at External Fault 2 (terminal 6):
Sn-16 data =
2d
3d
** Appears as " d" on Digital Operator.
2-16
Page 48

2.13 FREQUENCY (AUTO) COMMAND BIAS/GAIN
10V
FREQ. REF.
INPUT
FREQ.
CMD
(%)
0
FREQ.
CMD
(%)
0
(+)
(+)
(–)
100%
100%
0V
10V
BIAS
GAIN
(+)
(–)
(+)
(–)
110
110
100
1008080
bn-05: Frequency Command Gain Factory setting:
Range: 0.0 to 1000.0 %
Sets the auto-speed frequency command gain,
in increments of 0.1%.
bn-06: Frequency Command Bias Factory setting:
Range: -100 to 100 %
Sets the auto-speed frequency command bias,
in increments of 1%.
100% 100%
0V
(–)
FREQ. REF.
INPUT
100.0
0
%
%
BIAS
ADJUSTMENT PROCEDURE:
A. For 0-10 Vdc input (term. 13)
1. With no input, adjust Bias (bn-06 setting) until an output of
0.00 Hz is obtained.
2. With full scale input, adjust Gain (bn-05 setting) until an output
of 60.00 Hz (or other desired max. output frequency) is obtained.
B. For 4-20mA input (term. 14)
1. With 4mA input, adjust Bias (bn-06 setting) until an output of
0.00 Hz is obtained.
2. With 20mA input, adjust Gain (bn-05 setting) until an output
of 60.00 Hz (or other desired max. output frequency) is obtained.
Follow the same adjustment procedure for other
desired frequency setpoints.
GAIN
NOTE
2-17
Page 49

2.14 FREQUENCY COMMAND UPPER & LOWER LIMITS
Cn-14: Frequency Command Upper Limit Factory setting:
Range: 0 to 109 %
Cn-15: Frequency Command Lower Limit Factory setting:
Range: 0 to 109 %
These two constants set the range for the frequency command signal. Each is set, in
increments of 1%, as a percentage of maximum frequency (Fmax) as established by either
the selected standard V/f pattern or custom V/f pattern.
NOTE: All references are affected by the upper and lower limit points.
EXAMPLE:
60
Cn-02 =
Cn-14 =
Cn-15 = 10% = 6Hz – Min. speed
Hz (100%)
80
% = 48Hz – Max. speed
100
0
%
%
OUTPUT
FREQ.
( % )
100%
Cn-14 80%
Cn-15 10%
2.5%
t
2-18
Page 50

2.15 JOG REFERENCE
An-09: Jog Reference Factory setting:
6.00
Hz
Range: 0.00 to 400.00 Hz
When jog operation is selected (either by the Digital Operator JOG key, or by external Jog
and Run signals), the GPD 503 output will ramp to the output level set by this constant.
When the Digital Operator is used, Jog can only be initiated from the stopped condition.
When the drive is running, the JOG key will have no effect on GPD 503 output.
When an external Jog signal is present, it will override the existing operation mode and
the GPD 503 will ramp to the level set by this constant.
EXAMPLES:
OPERATION FROM DIGITAL OPERATOR
Press and Release
Hold JOG JOG
FREQ. CMD
An-09 JOG
REF.
0
FREQ. CMD
An-09 JOG
REF.
0
Press Press and Release Press
RUN Hold JOG JOG STOP
2-19
Page 51

2.15 JOG REFERENCE Continued
EXAMPLES: (Continued)
OPERATION BY REMOTE SIGNAL INPUT (RUN & JOG)
RUN *
JOG1
FREQ. CMD
An-09 JOG
REF.
0
RUN *
JOG1
FREQ. CMD
An-09 JOG
REF.
FWD
COMMAND
(EXTERNAL)
JOG2
(FWD OR REV)
FREQ. CMD
0
* Or FWD
JOG2 – 2-WIRE CONFIGURATION
Sn-04 =
0000
(Remote Control)
An-09 JOG
REF.
0
2-20
Page 52

2.15 JOG REFERENCE Continued
EXAMPLES: (Continued)
JOG2 – 3-WIRE CONFIGURATION
RUN *
COMMAND
(EXTERNAL)
JOG2
(FWD OR REV)
FREQ. CMD
An-09 JOG
REF.
Sn-04 =
0000
(Remote Control)
**
0
* Momentary contact.
** When JOG2 command is released, a STOP command
is issued.
NOTES:
1. Use of external Jog input is selected by setting data
06 , 12 , or13
in one of the constants Sn-15 thru Sn-18.
• The factory configuration for 2-wire control is Sn-17 =
06
,
for JOG1 input at terminal 7.
• The factory configuration for 3-wire control is Sn-18 =
06
,
for JOG1 input at terminal 8.
• To select JOG2 - FWD, set data
To select JOG2 - REV, set data
12
into one of these constants.
13
into one of these constants.
JOG2 does not require an active RUN command to allow Jog
operation.
2. JOG2 (FWD or REV) has priority over FWD and REV Run
in 2-wire control configuration, and priority over RUN, STOP, and
FWD/REV commands in 3-wire control configuration.
3. JOG2 - FWD and JOG2 - REV can be selected independently.
4. Sn-05 =
XX1X
(Reverse Run disabled) will override JOG2 - REV.
Also see descriptions of MULTI-FUNCTION INPUT TERMINALS and RESET CODES.
2-20.1
Page 53

2.16 MOMENTARY POWER LOSS RIDE-THRU
Sn-11: Protective Characteristics Digit 3 [ X X X X ] : Power Loss
Select 2 Ride-thru Protection
X
0
X X = Disabled (Factory
setting)
X
1
X X = Enabled
The setting of this digit either enables or disables the ride-thru feature of the GPD 503. If
disabled, the unit will stop immediately whenever a power loss occurs. If enabled, the GPD
503 will continue to operate during a momentary power loss of up to 80%, under the
following conditions:
If the loss exceeds the identified time period, the GPD 503 will stop.
— 230/460V/575V units 5HP and above - max “ride-thru”: 2 seconds
— 230/460V units less than 5HP - “ride-thru”: 1 second (as standard)
The ride-thru capacity of the 230/460V units less than 5HP can be extended to 2 seconds
(2000 msec) with the addition of an optional external capacitor unit.
Cn-37: Power Loss Ride-Thru Deactivation Time Range: 0.0 to 2.0 seconds
If the loss exceeds the length of time identified by Cn-37, the GPD 503 will stop. The
factory setting of this constant, in 0.1 second increments, is related to the GPD 503’s HP
rating, as set by Sn-01.
2-20.2
Page 54

2.17 MONITOR DISPLAY (DIGITAL OPERATOR)
While in the Drive mode, different information will appear on the Digital Operator display
when each of the Un constants is selected (see page 3-7).
CONSTANT DISPLAY
CONSTANT DISPLAY
Un- MONITORED ITEM EXAMPLE
Un- MONITORED ITEM EXAMPLE
01 Frequency reference
02 Output frequency
03 Output current
04 AC voltage reference
60.0
60.0
12.5A
230 v
Actual display appearance:
*
Term. 1 input OPEN
Term. 2 input CLOSED
Term. 3 input OPEN
Term. 4 input CLOSED
05 DC Bus voltage (VPN)
Pn270
06 Output power (kW) (±)
07 Input terminal status
08 Output signals status
09 LED lamp check
10 Control Section PROM
CI I I I
o I I
8.8.8.8.8.
16142
(last 5 digits of PROM
Part No. :
NSG 6XXXXX
12.5
**
*
Term. 5 input OPEN
Term. 6 input CLOSED
Term. 7 input OPEN
Term. 8 input CLOSED
"C" indicates display is Input Terminal Status
Actual display appearance:
**
"At Speed" output ON
"Zero Speed" output OFF
"Run" status output ON
"o" indicates display is Output Signals Status
2-21
Page 55

2.18 MULTI-FUNCTION ANALOG INPUT (Term. 16)
Sn-19: Multi-function Analog Input
(Term. 16)
1R
GPD 503
Programming Sn-19 per the chart below configures terminal 16 for analog control. The
figures on the next page show how each setting
configures the analog input.
SET
SET
VALUE FUNCTION REMARKS
VALUE FUNCTION REMARKS
00
01
Manual reference External reference input
Frequency reference gain Total gain = Internal gain (bn-05) x FGAINE
(FGAINE)
02
Frequency reference bias 1 Total bias = Internal bias (bn-06) + FBIAS1
(FBIAS1) *
03
Frequency reference bias 2 Total bias = Internal bias (bn-06) + FBIAS2
(FBIAS2) (+/-) *
04
Overtorque detection Internal overtorque detection level
level (Cn-26) disabled
15
16
17
+15V
0-10V
(20K )
C
05
06
07
08
09
0A
0b- FF
VBIAS ** VBIAS addition after V/f conversion
Accel/decel time Accel/decel time varied by analog input
coefficient
DC injection braking DC injection braking current varied by
current adjust analog input (10V/drive rated current);
internal setting (Cn-11) ineffective
Stall prevention level Stall prevention level (Cn-30 = 100% level)
during running varied by analog input
Frequency reference Frequency reference lower limit is set by
lower limit analog input. Either Cn-15 setting value
or analog input, whichever is greater,
becomes effective.
Setting prohibited Analog input sets a fourth prohibited
frequency 4 frequency, in addition to those set by Cn-16
thru Cn-18.
Not Used
* FBIAS1 and FBIAS2 are based on Fmax (Cn-02).
** DC boost adjust on V/Hz curve.
2-22
Page 56

2.18 MULTI-FUNCTION ANALOG INPUT (Term. 16) Continued
Sn-19 = 00
100%
FREQUENCY
REF.
0%
MULTI-FUNCTION ANALOG INPUT
Sn-19 = 02
10%
FBIAS1
0%
MULTI-FUNCTION ANALOG INPUT
Sn-19 = 04
OVER- 200%
TORQUE
DETECTION
LEVEL
0%
MULTI-FUNCTION ANALOG INPUT
0V 10V
0V 10V
0V 10V
Sn-19 = 01
2.00
FGAINE 1.00
0V 5V 10V
MULTI-FUNCTION ANALOG INPUT
Sn-19 = 03
10%
FBIAS2
0%
- 10%
0V 5V 10V
MULTI-FUNCTION ANALOG INPUT
Sn-19 = 05
100V
VBIAS
Sn-19 = 06
10
REDUCTION
COEFFICIENT 1
0V 1V 10V
MULTI-FUNCTION ANALOG INPUT
Actual Accel or decel time =
Sn-19 = 08
STALL 200%
LEVEL
DURING 100%
RUNNING
(PERCENT OF
Cn-30 SETTING)
30%
0 1.5V 5V 10V
MULTI-FUNCTION ANALOG INPUT
Accel or decel time
Coefficient
Sn-19 = 0A
(Cn-02)
SETTING
PROHIBITED
FREQUENCY 4
0V 10V
MULTI-FUNCTION ANALOG INPUT
Sn-19 = 07
100%
DC INJECTION
BRAKING
CURRENT 0%
0V 10V
MULTI-FUNCTION ANALOG INPUT
Sn-19 = 09
MAX. OUTPUT FREQUENCY
(Cn-02)
FREQUENCY
REFERENCE
LOWER
LIMIT
0V 10V
MULTI-FUNCTION ANALOG INPUT
MAX. OUTPUT FREQUENCY
0V 10V
MULTI-FUNCTION ANALOG INPUT
2-23
Page 57
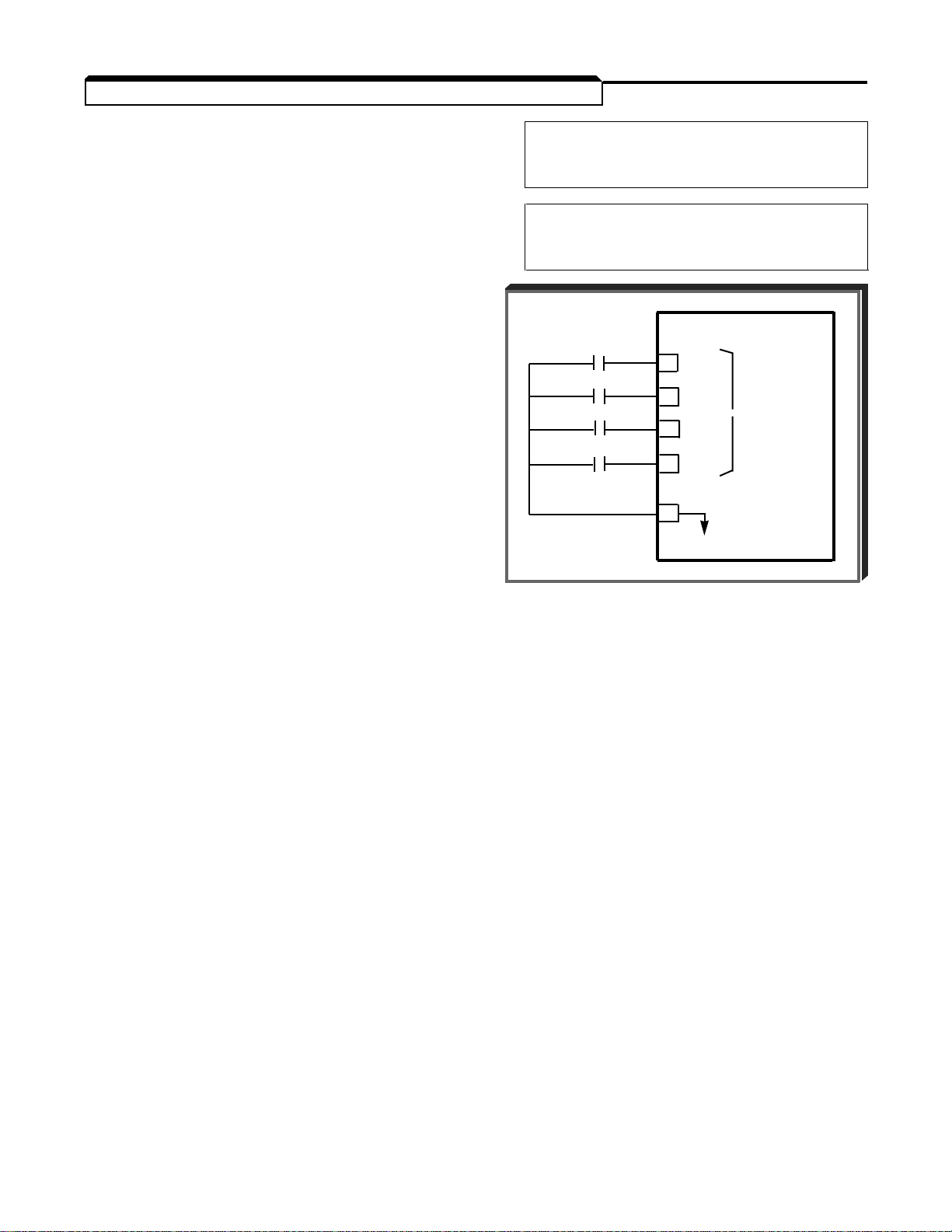
2.19 MULTI-FUNCTION INPUT TERMINALS (Term. 5-8)
Sn-15: Terminal 5 Function Factory settings (for 2-wire control):
Sn-16: Terminal 6 Function Sn-15 =
Sn-17: Terminal 7 Function Sn-16 =
03
04
Sn-17 =
Sn-18 =
Sn-18: Terminal 8 Function
3-wire control defaults:
Sn-15 =
Sn-16 =
00
03
Sn-17 =
Sn-18 =
06
08
04
06
These four constants select the input signal
functions for terminals 5 thru 8. Although
these constants can be independently set,
NOT selecting values
00
thru 03, inclusive,
establishes that GPD 503 operation will be
controlled by the Auto Reference input.
System constant settings are checked
whenever power is applied to the GPD 503,
EXTERNAL
CONTACTS
•
•
•
GPD 503
5
Sn-15
6
Sn-16 MULTI-
> FUNCTION
7
Sn-17 INPUT
8
Sn-18
or each time GPD 503 operation is switched
from Program mode to Drive mode. A constant
set value failure (
oPE03
) will occur if any of
11
0V
the following conditions are detected among
these four system constants:
(1) Set values are not arranged in sequence, with the smallest value in
Sn-15 and the largest value in Sn-18.
(2) Both speed search functions (values
61
and 62) have been selected.
(3) When the UP and DOWN functions are not selected simultaneously.
Table 2-2 lists the possible data setting values for these constants, with the function and a
brief description for each one.
For a few of the data settings, a more detailed description is given on the following pages;
for others, the description is given in other PROGRAMMABLE FEATURES paragraphs.
2-24
Page 58

2.19 MULTI-FUNCTION INPUT TERMINALS (Term. 5-8) Continued
Table 2-2. Sn-15 thru Sn-18 Data Settings
DESCRIPTION
DATA FUNCTION Signal Levels: 0 = state; 1 = pulse
DATA FUNCTION
Signal Levels: 0 = maintained; 1 = momentary
DESCRIPTION
00
01
02
03
04
05
06
07
08
FWD/REV selection (for MUST BE SET IN Sn-15. Redefines terminals:
3-wire control) 1 = Run; 2 = Stop;
5 = FWD/REV select
Operation signal selection Open 0 = Operates according to setting of
(Remote/Local) Sn-04, digits 1 & 2 [ X X
Closed 0 = Operates from keys of the
Digital Operator
See Data description following this table
Option/GPD 503 reference Open 0 = Operates from installed option
selection Closed 0 = Operates from Digital Operator and/or
external terminals
Multi-step speed ref. 1
Multi-step speed ref. 2 See paragraph 2.24
Multi-step speed ref. 3
JOG1 selection Closed 0 = Jog selected See paragraph 2.15
Accel/decel time Open 0 = Accel/decel by bn-01/bn-02
Closed 0 = Accel/decel by bn-03/bn-04
See paragraph 2.2
External base block Closed 0 = Shuts off GPD 503 output
(N.O. contact input) (frequency command is held)
See Data description following this table
0 0
]
0D
09
0A
0b
0C
to
10
11
12
13
0F
External base block Open 0 = Shuts off GPD 503 output
(N.C. contact input) (frequency reference is held)
See Data description following this table
Accel/decel speed prohibit See Data description following this table
(HOLD command)
External overheat Closed 0 =
Multi-function analog input Closed 0 = Analog input (term. 16) is enabled
selection Open 0 = Analog input (term. 16) is disabled
Not Used
UP function
DOWN function
JOG2 - FWD
JOG2 - REV
See paragraph 2.34
See paragraph 2.15
oH2
blinks on the Digital Operator, and
operation continues (minor fault)
2-25
Page 59
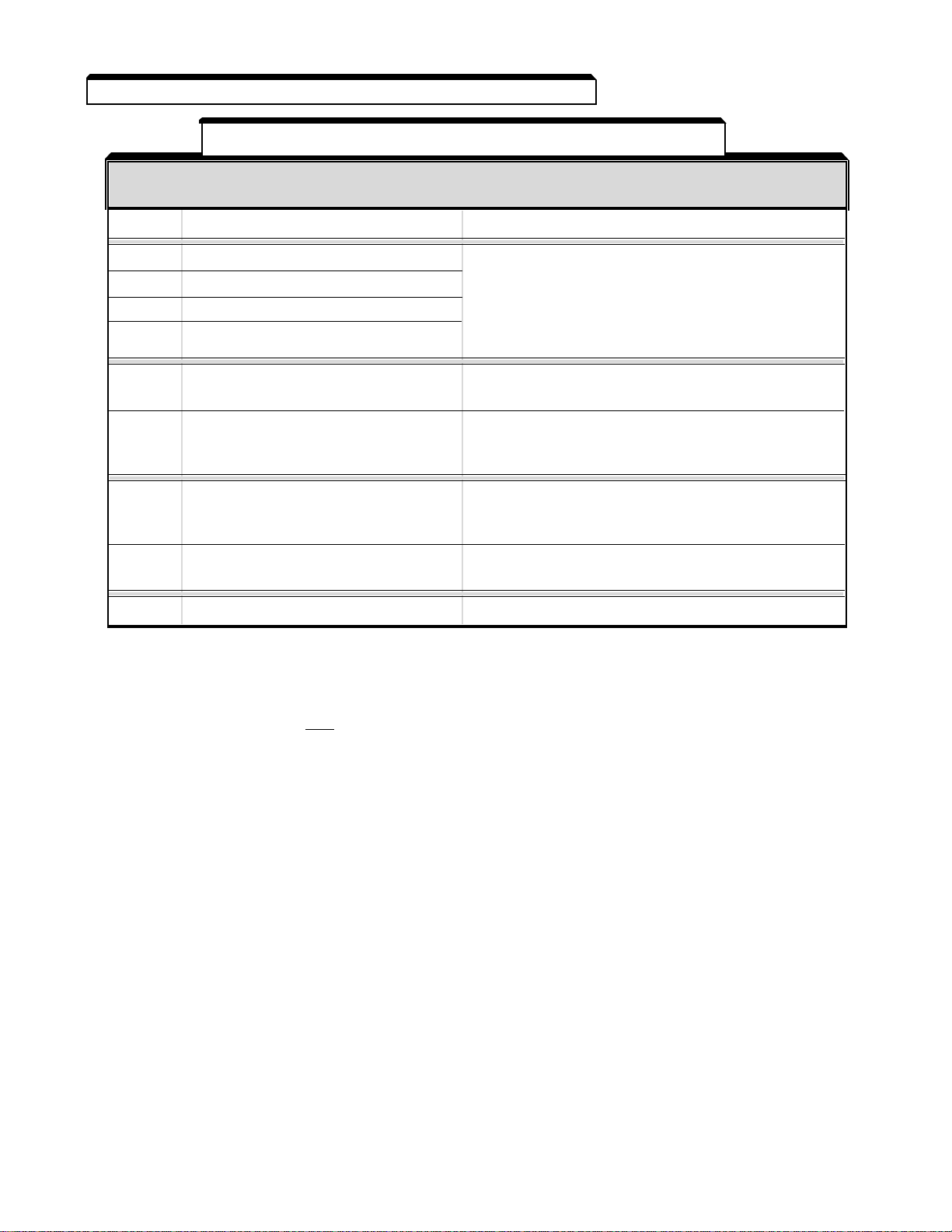
2.19 MULTI-FUNCTION INPUT TERMINALS (Term. 5-8) Continued
Table 2-2. Sn-15 thru Sn-18 Data Settings - Continued
DESCRIPTION
DESCRIPTION
DATA FUNCTION Signal Levels: 0 = state; 1 = pulse
DATA FUNCTION
14
to
20
30
40
50
to
to
to
to
1F
2F
3F
4F
5F
Not Used
External fault 1 Second digit of setting is a hexadecimal
External fault 2
External fault 3 is used and how the GPD 503 will react
External fault 4
Signal Levels: 0 = maintained; 1 = momentary
value; its four-place binary equivalent
defines what type of external contact
when the signal input is active
See paragraph 2.12
64
60
61
62
63
to
FF
Data
DC injection braking command Closed 0 = DC injection braking active
(RUN and JOG have priority) See paragraph 2.8
Speed Search 1 Closed 1 = Speed Search operation from
maximum frequency
See paragraph 2.28
Speed Search 2 Closed 1 = Speed Search operation from
set frequency
See paragraph 2.28
Energy-saving operation Closed 0 = Energy saving
See paragraph 2.11
Not Used
01
: Remote/Local
Set digits of Sn-04 to X X 0 0 to select external inputs as the source for frequency
reference and operation commands. The use of a Remote/Local command input allows
switching between the Digital Operator control and the external terminal input signals,
without the need of re-programming Sn-04. If the status of the Remote/Local command
input is changed while the drive is running, the Remote/Local operation selection is not
completed until the next time the GPD 503 is stopped.
Closed = Controlled locally (Digital Operator)
Open = Controlled remotely (external terminal inputs, and Auto reference)
NOTE: If manual speed is selected
– by the external Auto/Manual switch (3SS [2-wire] or 2SS [3-wire] ),
– by jumper from term. 5 to 11 (2-wire control),
or
– by jumper from term. 6 to 11 (3-wire control),
the GPD 503 speed reference will be controlled by manual speed reference
regardless of the state of the Remote/Local input.
2-26
Page 60
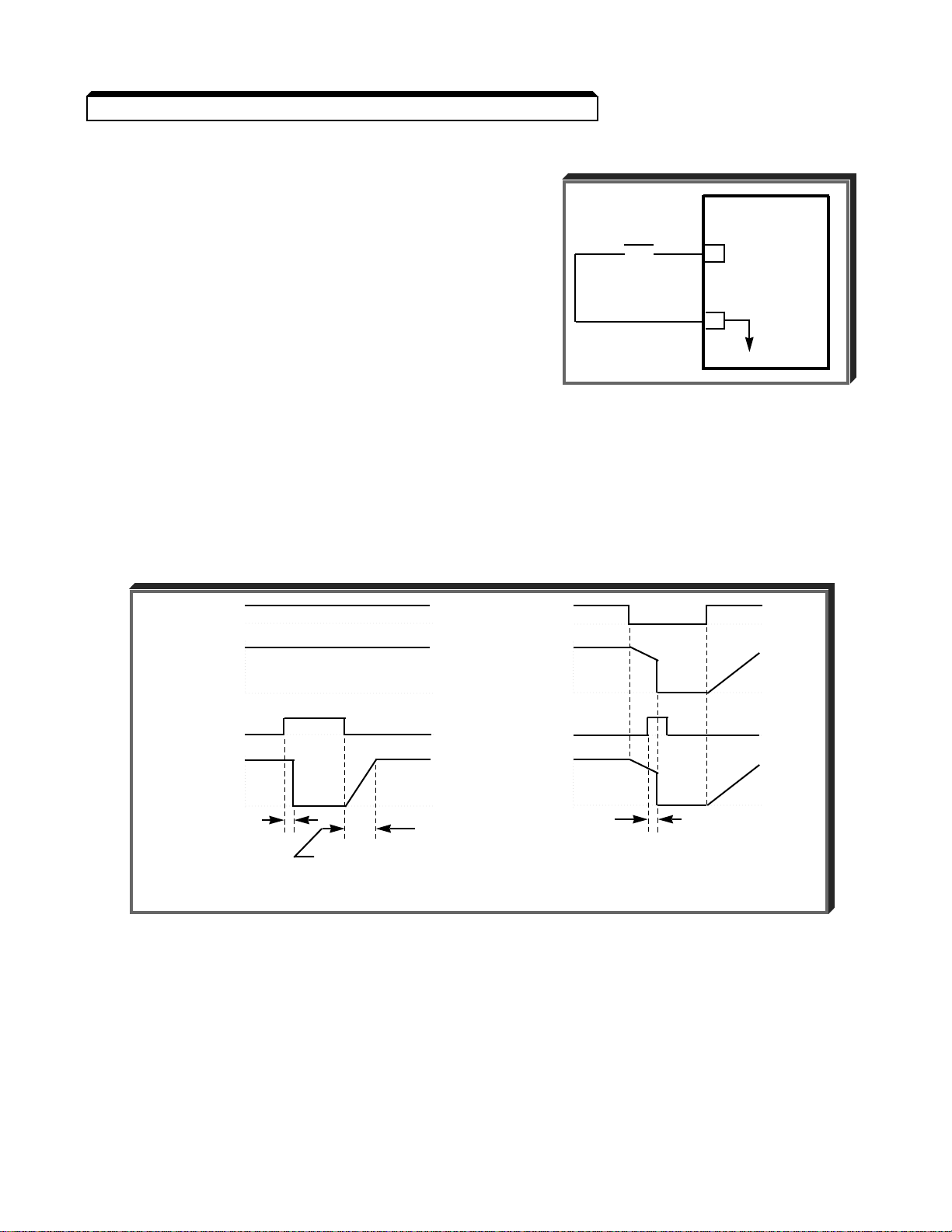
2.19 MULTI-FUNCTION INPUT TERMINALS (Term. 5-8) Continued
Data
08
: External Base Block by N.O. Contact
• When either the Forward Run command or
Reverse Run command is closed, and the
external Base Block command is also active
(i.e. contact closed), coast stop is accom-
EXTERNAL
BASE BLOCK
o o
8
plished (after a 20 msec delay), while the
frequency command is maintained.
When the Base Block command is removed,
the drive will recover in a manner similar
11
to that of Speed Search operation.
• When both the Forward Run command and
Reverse Run command are open, and the
external Base Block command is active (i.e. contact closed), coast stop is accomplished and after a 20 msec delay the frequency command is changed to 0Hz.
When the Base Block command is removed, the drive will remain in stopped
condition until Forward Run command or Reverse Run command is again closed.
GPD 503
0V
• When external Base Block command is active, a blinking "
on the Digital Operator.
RUN RUN
Freq. Cmd Freq. Cmd
00
Base Block Base Block
V out V out
00
20msec 20msec
t = Cn-42 setting
(A) Base Block With Run Active (B) Base Block After Stop Command
09
Data
: External Base Block by N.C. Contact
b b
" will be displayed
Base block operation is the same as described above, except that the Base Block contact
must be open to be recognized as active.
2-27
Page 61

2.19 MULTI-FUNCTION INPUT TERMINALS (Term. 5-8) Continued
Data
0A
: Accel/Decel Speed Prohibit (HOLD Command)
As long as the HOLD command is present, accel and decel are in a prohibit state, and the
output frequency is held at the level it was at the time the HOLD command was input.
When the HOLD command is removed while the system is still in Run condition, accel or
decel will again become active to allow output to reach set frequency. If Stop is initiated
while the HOLD command is present, the prohibit state is cancelled and the system enters
stop operation.
FWD RUN
HOLD CMD
FREQ. REF.
OUTPUT FREQUENCY
HOLD Function Timing
2-28
Page 62

2.20 MULTI-FUNCTION ANALOG MONITOR OUTPUT (Term. 21 & 22)
Sn-05: Operation Mode Select 2 Digit 4 [ X X X X ] : Multi-function
Analog Output
Factory setting: 0 X X X
Sn-09: Analog Monitor Selection Digit 2 [ X X X X ] : Multi-function
Analog Output
Factory setting: X X 0 X
The monitor output provides a 0-10 Vdc signal
proportional to either output frequency, output
current, output voltage reference, or output power
between terminals 21 & 22:
Sn-05 Sn-09
0 X X X X X 0 X = 0-10 Vdc proportional
to output frequency
GPD 503
Analog
output
(0-10 Vdc)
FREQUENCY/CURRENT
METER
(1mA FULL SCALE)
+ –
21
22
1 X X X X X 0 X = 0-10 Vdc proportional
to output current
0 X X X X X 1 X = 0-10 Vdc proportional
to output voltage reference
MULTIFUNCTION
MONITOR
OUTPUT
1 X X X X X 1 X = 0-10 Vdc proportional
to output power.
bn-11: Analog Monitor Channel 1 Gain Factory Setting:
1.00
Range: 0.01 to 2.55
This constant is used to calibrate, in increments of 0.01, either the frequency or current
meter connected to terminals 21 & 22. This function is also used to calibrate Channel 1 of
one of the analog output options.
NOTE: When an analog output option is connected, bn-11 setting affects
both terminals 21 & 22 and the option terminals for Channel 1.
2-29
Page 63

2.21 MULTI-FUNCTION OUTPUT TERMINALS (Term. 9 & 10; 25-27)
Sn-20: Contact Output (external
terminals 9 & 10)
Sn-21: Open Collector Output
(external terminals 25 & 27)
Sn-22: Open Collector Output
(external terminals 26 & 27)
A contact, or two different open collector
outputs, can be programmed to change
states during any of the conditions indicated
in Table 2-3.
If an open collector output is applied to a
DC relay, the relay MUST be diode
protected, as shown in the recommended
configuration.
Table 2-3. Multi-function Output Terminals
GPD 503
o o
MULTI-FUNCTION
CONTACT OUTPUT
250Vac 1A OR LESS
9
30Vdc 1A OR LESS
(FACTORY SETTING
10
IS FOR SIGNAL
DURING OPERATION)
25
26
27
MULTIFUNCTION
OPEN
COLLECTOR
OUTPUTS
48Vdc AT
50mA MAX.
Set
Set
Value
Value Condition
00
01
02
03
04
05
06
07
08
09
0A
0b
0C
0d
0E
0F
Name Signal Level
During operation Closed = GPD 503 is operating
Zero speed Closed = GPD 503 output is at 0Hz
Speed at set frequency Closed = Freq. Ref. - Cn-22 ) output freq ) Freq.Ref + Cn-22
Speed coincidence Closed = Speed at set frequency and
Frequency detection - low Closed = Output frequency ) Cn-21
Frequency detection - high Closed = Output frequency * Cn-21
Operation ready Closed = GPD 503 is ready for operation
During undervoltage detection Closed = Undervoltage detected
During coast to stop Closed = GPD 503 output base block is active; motor is coasting
Frequency reference mode Open = Cmd by ext. input; Closed = Cmd by Digital Operator
Run reference mode Open = Run by ext. input; Closed = Run by Digital Operator
Overtorque detection Closed = Overtorque detected
Frequency reference missing Closed = Frequency reference is missing
Braking resistor fault Closed = Braking resistor is overheating or has faulted
Fault Closed = GPD 503 fault has occurred (except CPF00, CPF01)
Not Used
Description
Description
Signal Level
Cn-21 - Cn-22 ) output freq. ) Cn-21 + Cn-22
2-30
Page 64

2.21 MULTI-FUNCTION OUTPUT TERMINALS (Term. 9 & 10; 25-27) Continued
25
48Vdc MAX. *
Recommended
Configuration for
DC Relays
•
26
27
C
DIODE
▲
*
*
DC
RELAY
* Customer
supplied
2.22 OVERTORQUE DETECTION
Overtorque detection is used to compare GPD 503 rated output current with the
overtorque detection level. When the output current is equal to or greater than the defined
level, an overtorque condition exists. This will be indicated as an
oL3
fault on the Digital
Operator. This feature can be selected to operate over a wide range of conditions. (Refer to
Appendix 3, Table A3-1.)
Cn-26: Overtorque Detection Level Factory setting:
160
%
Range: 30 to 200 %
Overtorque detection level determines the point at which the GPD 503 determines that an
overtorque condition exists.
Cn-27: Overtorque Detection Time Factory setting:
0.1
sec.
Range: 0.0 to 25.5 seconds
Overtorque detection time determines how long an overtorque condition must exist before
another event will occur, e.g. coast to stop, or continue operation when overtorque is
detected.
Sn-07: Overtorque Detection X X X
Mode Select X X X
0
= Overtorque detection disabled
1
= Overtorque detection is enabled
The setting of this digit either enables or disables overtorque detection.
X
X
0X 1
1X 1
= Operation continues
= Coast stop
Once overtorque detection is selected, the setting of this digit determines GPD 503
operation after the overtorque condition is recognized. The GPD 503 either continues to
operate, or coasts to stop when overtorque is detected.
X X
0 1
= Overtorque detection at set frequency
X X
1 1
= Overtorque detection always detected
The setting of this digit selects when overtorque condition is considered, either only at set
frequency, or always detected (except during stopping and Dynamic Braking).
2-31
Page 65

2.22 OVERTORQUE DETECTION Continued
Sn-19: Multi-function Analog Data
04
: External Overtorque
Input (Term. 16) Detection Level Adjustment
The multi-function analog input at terminal 16 may be configured to allow analog control
of the overtorque detection level. When this function is programmed into Sn-19, the
internal overtorque detection level (Cn-26) is disabled.
1R
OVERTORQUE
DETECTION
LEVEL
200%
OVERTORQUE
DETECTION
LEVEL
GPD 503
15 +15V
16 0-10V (20 K )
17
C
0%
0V 10V
VOLTAGE REFERENCE
Sn-20: Multi-function Output 1 – Contact Data
0b
: Overtorque
(terminals 9 & 10) Detection
Sn-21: Multi-function Output 2 – Open Collector
(terminals 25 & 27)
Sn-22: Multi-function Output 3 – Open Collector
(terminals 26 & 27)
A contact, or two open collector outputs, can be programmed to change states during an
overtorque detection condition.
2-32
Page 66

2.22 OVERTORQUE DETECTION Continued
EXAMPLE OF OVERTORQUE DETECTION
Sn-07 setting:
Sn-19 setting:
Sn-20 setting:
Cn-26 setting:
Cn-27 setting:
OUTPUT 100% (Cn-27)
CURRENT
MOTOR stop
SPEED
0101
110
1.0
110% time
0
100% Coast
— Overtorque enabled, and only at set frequency
00
— Cn-26 value is overtorque detection level
0b
— Output contact programmed for overtorque
detection
% — Level at which overtorque is sensed
s — Time delay before overtorque event occurs
Detection
RUN
SIGNAL
STOP
SIGNAL
CONTACT
OUTPUT
(OVERTORQUE
DETECTION)
TERM. 9 & 10
0
Overtorque Detection Timing Diagram
2-33
Page 67
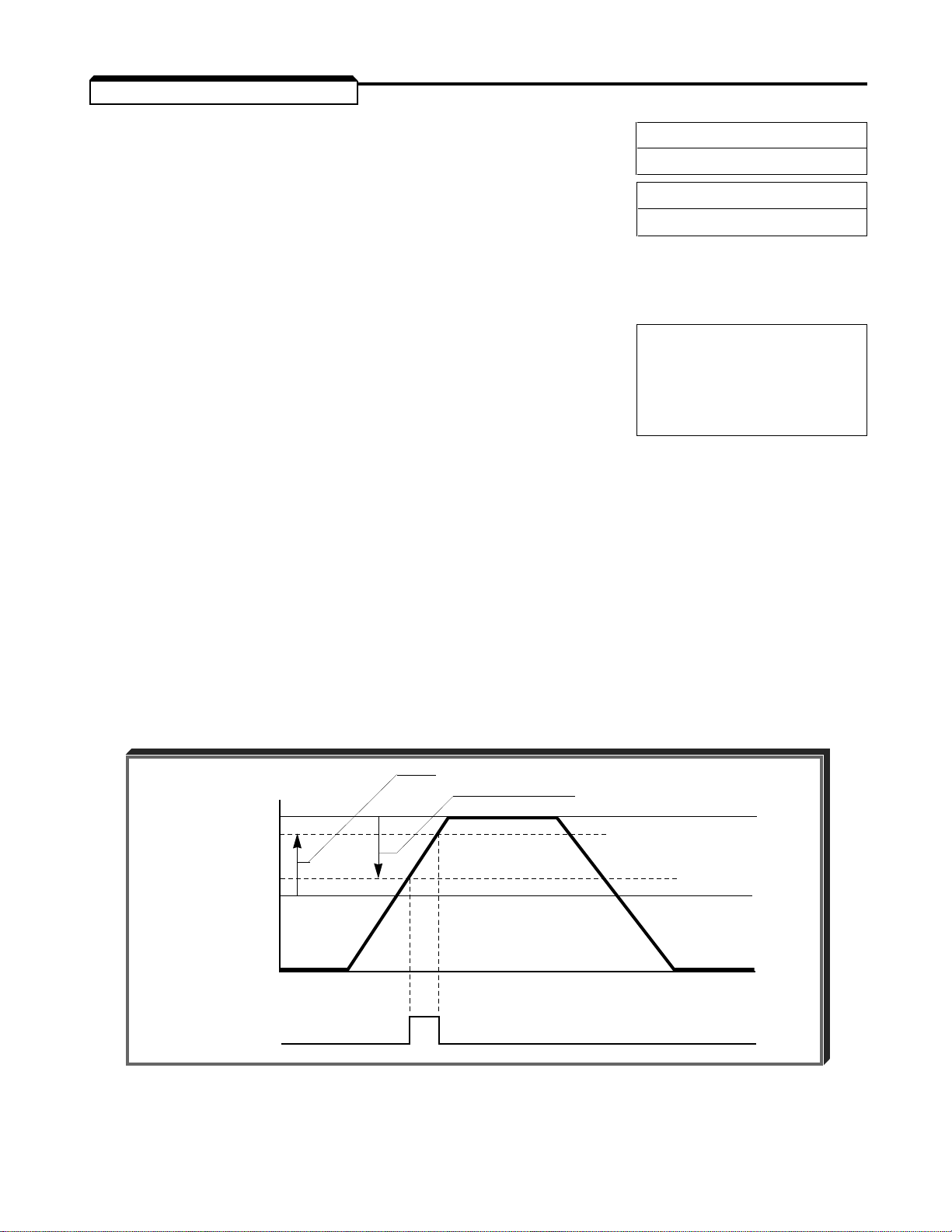
2.23 SPEED COINCIDENCE
Cn-21: Speed Coincidence Frequency Factory setting:
Range: 0.0 to 400.0 Hz
Cn-22: Speed Coincidence Bandwidth Factory setting:
Range: 0.0 to 25.5 Hz
Speed coincidence is used to control an output contact at terminals 9 & 10, or one of the
open collector outputs at terminals 25 & 26 (with respect to terminal 27), when selected
by Sn-20 thru Sn-24.
Sn-20: Multi-function Output 1 – Contact Data 02, 03, 04 or 05
(terminals 9 & 10) (See paragraph 2.21,
Sn-21: Multi-function Output 2 – Open Collector MULTI-FUNCTION
(terminals 25 & 27) OUTPUT TERMINALS
Sn-22: Multi-function Output 3 – Open Collector (Term. 9 & 10; 25-27) )
(terminals 26 & 27)
The output contact will close, or the open collector output will go low, when acceleration or
deceleration is completed, and output frequency is within the detection width shown in the
figure below.
EXAMPLE:
0.0
2.0
Hz
Hz
If Cn-21 =
terminals 9 & 10 will be closed from 25 Hz to 35 Hz.
Freq. Cn-21 + Cn-22
Ref. Ref. – Cn-22
40 Hz
20 Hz
(Cn-21)
Contact
Closure
20
Hz, Cn-22 =
0
15.0
Hz and Sn-20 = 03, then the contact at
2-34
Page 68

2.24 REMOTE/LOCAL AND REFERENCE SELECTION
An-01: Memory 1 An-02: Memory 2 An-03: Memory 3
An-04: Memory 4 An-05: Memory 5 An-06: Memory 6
An-07: Memory 7 An-08: Memory 8 An-09: Jog Reference
(See paragraph 2.15)
Sn-19: Multi-function Analog Input (Term. 16) (see paragraph 2.18)
Sn-04: Operation Mode Select 1
Sn-15 thru Sn-18: Multi-function Input Terminals; data
respectively, for Reference Select 1, 2, 3 and Jog [or Multi-function
Analog Input at Term. 16] (see paragraph 2.19).
For Remote/Local select, see paragraph 2.19, Data
Sn-08: Option Reference Select (See separate Option Instruction Sheet)
The GPD 503 allows selection of one of twelve references. Two are analog inputs, nine are
stored in memory, and one can be from an option card, either analog or digital. In most
configurations either the local reference (An-01) or the remote AUTO reference will be
utilized.
2.24.1 Local Reference Selection
03, 04, 05
01
description.
and 06[or 0C],
Sn-04: Operation Mode Select 1 Data: X X X
By programming Sn-04 to X X X
Sn-04 is programmed to X X X
command.
An-01 will change each time the operator enters a new frequency
command from the Digital Operator's "
to think about this is that when the GPD 503 is first powered up, the
Digital Operator displays frequency reference: "
displayed is the current setting of An-01. If the operator changes the
display, then An-01 will also be changed.
0
, the external Auto reference input will be used. If
1
, the value in An-01 will be used as a frequency
IMPORTANT
0
= Remote (Auto) speed reference
X X X
F
X X X. X " prompt. Another way
1
= Local (manual) frequency ref.
F
X X X. X ". The value
2-35
Page 69

2.24 REMOTE/LOCAL AND REFERENCE SELECTION Continued
t
OUTPUT
SPEED
RUN
Auto
Speed
Ref. (ext.)
OR
Speed
Ref. 1
(An-01)
An-04
An-05
An-06
An-07
An-08
Jog
Speed
(An-09)
Multi-step
Select 1
(Term. 5)
Multi-step
Select 2
(Term. 6)
Multi-step
Select 3
(Term. 7)
Multi-step
Select 4
(Term. 8)
CLOSED
CLOSED
CLOSED
CLOSED
2.24.2 Multiple Speed Reference Configuration [Multi-step Speed Operation]
In a multiple reference configuration, five modes may be selected.
NOTE
In the descriptions of Mode 1 thru Mode 4, the external terminal listings differ depending
on whether the drive is set for 2-wire or 3-wire control. For 3-wire control, terminal 5 is
dedicated to the FWD/REV selection; therefore, multiple reference operation will use fewer
of the memory settings and is a more limited function.
Depending on the control wiring configuration and the multi-step mode chosen, the motor
can be operated at up to nine different speeds.
Manual
Speed
Ref. (ext.)
OR
Speed
Ref. 2
(An-02)
CLOSED
An-03
Typical Multi-step Speed Operation
2-36
Page 70

2.24 REMOTE/LOCAL AND REFERENCE SELECTION Continued
Mode 1 (Memory Data Only) uses only memory locations An-01 thru An-09.
The input commands at terminals 5 thru 8 are
binary coded to select the appropriate reference
command, where An-01 is selected by binary zero
and An-09 (Jog) is selected by binary 8. For
example, if the value in An-04 is the desired
5
(Sn-15)
frequency reference, enter 0011 at terminals 5
6
thru 8. As a standard, the right-most bit and
(Sn-16)
terminal 5 are the.least significant bit (LSB).
7
(Sn-17)
Sn-04 = local operation.
8
Sn-15 = frequency reference select 1 at
(Sn-18)
terminal 5.
Sn-16 = frequency reference select 2 at
terminal 6.
Sn 17 = frequency reference select 3 at
terminal 7.
Sn-18 = JOG reference select at terminal 8.
Sn-19 = manual reference at terminal 16.
GPD 503
F000.0
2-WIRE CONTROL
Sn-04 = X X X
Sn-15 =
Sn-16 =
Sn-17 =
Sn-18 =
03
04
05
06
1
3-WIRE CONTROL
Sn-04 = X X X
Sn-15 =
Sn-16 =
Sn-17 =
Sn-18 =
00
03
04
06
1
Sn-19 = 00* Sn-19 = 00*
External Terminal
External Terminal
Freq.
Freq.
Ref.
Ref.
An-01 0000
An-02 * 0001
An-03 0010
An-04 0011
An-05 0100
An-06 0101
An-07 0110
An-08 0111
An-09 1 X X X
External Terminal
8765
8765
Freq.
Freq.
Ref.
Ref.
An-01 0 0 0 ■
An-02 * 0 0 1 ■
An-03 0 1 0 ■
An-04 0 1 1 ■
An-09 1 X X ■
1 = Closed; 0 = Open;
X = No effect; ■ = FWD/REV
* Sn-19 selects the function of the multi-function analog input. If data value
External Terminal
8765
8765
00
entered, the analog input represents manual reference. If An-02 is to be utilized,
then Sn-19 MUST NOT be set to
00
.
is
2-36.1
Page 71

2.24 REMOTE/LOCAL AND REFERENCE SELECTION Continued
Mode 2 (Memory, Auto, Manual) uses Auto, Manual and An-03 thru An-09.
The input commands at terminals 5 thru 8 are
binary coded to select the appropriate reference
command, where Auto is selected by binary zero
and An-09 (Jog) is selected by binary 8. For
5
example, if the value in An-04 is the desired
(Sn-15)
frequency reference, enter 0011 at terminals 5
6
thru 8. As a standard, the right-most bit and
(Sn-16)
terminal 5 are the LSB.
7
(Sn-17)
Sn-04 = remote operation.
8
Sn-15 = frequency reference select 1 at
(Sn-18)
terminal 5 (Auto/Manual).
Sn-16 = frequency reference select 2 at
terminal 6.
Sn 17 = frequency reference select 3 at
terminal 7.
Sn-18 = JOG reference select at terminal 8.
Sn-19 = manual reference at terminal 16.
GPD 503
F000.0
2-WIRE CONTROL
Sn-04 = X X X
Sn-15 =
Sn-16 =
Sn-17 =
Sn-18 =
Sn-19 =
Freq.
Freq.
Ref.
Ref.
Auto 0000
Manual 0001
(Multi-func.)
An-03 0010
An-04 0011
An-05 0100
An-06 0101
An-07 0110
An-08 0111
An-09 1 X X X
03
04
05
06
00
External Terminal
External Terminal
8765
8765
0
3-WIRE CONTROL
Sn-04 = X X X
Sn-15 =
Sn-16 =
Sn-17 =
Sn-18 =
Sn-19 =
Freq.
Freq.
Ref.
Ref.
Auto 0 0 0 ■
Manual 0 0 1 ■
(Multi-func.)
An-03 0 1 0 ■
An-04 0 1 1 ■
An-09 1 X X ■
8765
8765
1 = Closed; 0 = Open;
X = No effect; ■ = FWD/REV
00
03
04
06
00
External Terminal
External Terminal
0
2-36.2
Page 72
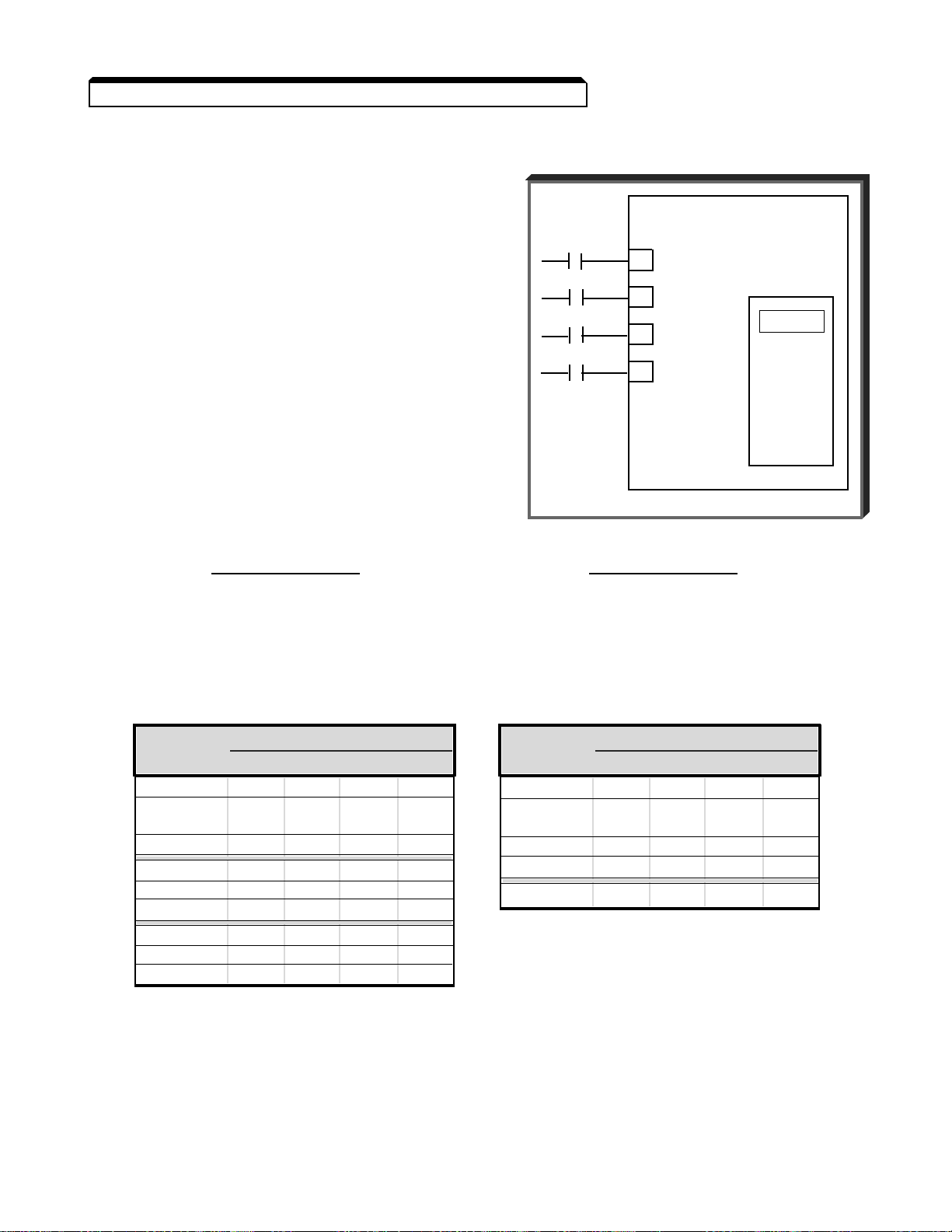
2.24 REMOTE/LOCAL AND REFERENCE SELECTION Continued
Mode 3 (An-01, Manual, An-03 thru An-09) uses An-01, Manual and An-03 thru
An-09.
The input commands at terminals 5 thru 8 are
binary coded to select the appropriate reference
command, where An-01 is selected by binary zero
GPD 503
and An-09 (Jog) is selected by binary 8. For
5
example, if the value in An-04 is the desired
(Sn-15)
frequency reference, enter 0011 at terminals 5
6
thru 8. As a standard, the right-most bit and
terminal 5 are the LSB.
(Sn-16)
7
(Sn-17)
Sn-04 = local operation.
8
Sn-15 = frequency reference select 1 at
(Sn-18)
terminal 5 (Auto/Manual).
Sn-16 = frequency reference select 2 at
terminal 6.
Sn 17 = frequency reference select 3 at
terminal 7.
Sn-18 = JOG reference select at terminal 8.
Sn-19 = manual reference at terminal 16.
F000.0
2-WIRE CONTROL
Sn-04 = X X X
Sn-15 =
Sn-16 =
Sn-17 =
Sn-18 =
Sn-19 =
Freq.
Freq.
Ref.
Ref.
An-01 0000
Manual 0001
(Multi-func.)
An-03 0010
An-04 0011
An-05 0100
An-06 0101
An-07 0110
An-08 0111
An-09 1 X X X
03
04
05
06
00
External Terminal
External Terminal
8765
8765
1
3-WIRE CONTROL
Sn-04 = X X X
Sn-15 =
Sn-16 =
Sn-17 =
Sn-18 =
Sn-19 =
Freq.
Freq.
Ref.
Ref.
An-01 0 0 0 ■
Manual 0 0 1 ■
(Multi-func.)
An-03 0 1 0 ■
An-04 0 1 1 ■
An-09 1 X X ■
8765
8765
1 = Closed; 0 = Open;
X = No effect; ■ = FWD/REV
00
03
04
06
00
External Terminal
External Terminal
1
2-37
Page 73

2.24 REMOTE/LOCAL AND REFERENCE SELECTION Continued
Mode 4 uses An-01 thru An-08 and Analog Manual.
The input commands at terminals 5 thru 8 are
binary coded to select the appropriate reference
command, where An-01 is selected by binary zero
and Analog Manual is selected by binary 8. For
5
example, if the value in An-04 is the desired
(Sn-15)
frequency reference, enter 0011 at terminals 5
6
thru 8. As a standard, the right-most bit and
terminal 5 are the LSB.
(Sn-16)
7
(Sn-17)
Sn-04 = remote operation.
8
Sn-15 = frequency reference select 1 at
(Sn-18)
terminal 5 (Auto/Manual).
Sn-16 = frequency reference select 2 at
terminal 6.
Sn 17 = frequency reference select 3 at
terminal 7.
Sn-18 = the multi-function analog input
reference select at terminal 8.
Sn-19 = manual reference at terminal 16.
GPD 503
F000.0
2-WIRE CONTROL
Sn-04 = X X X
Sn-15 =
Sn-16 =
Sn-17 =
Sn-18 =
03
04
05
0C
0
Sn-19 = 00* Sn-19 = 00*
External Terminal
Freq.
Freq.
Ref.
Ref.
An-01 0000
An-02 * 0001
An-03 0010
An-04 0011
An-05 0100
An-06 0101
An-07 0110
An-08 0111
Analog - 1 X X X
Manual
External Terminal
8765
8765
3-WIRE CONTROL
Sn-04 = X X X
Sn-15 =
Sn-16 =
Sn-17 =
Sn-18 =
Freq.
Freq.
Ref.
Ref.
An-01 0 0 0 ■
An-02 * 0 0 1 ■
An-03 0 1 0 ■
An-04 0 1 1 ■
Analog - 1 X X ■
Manual
8765
8765
1 = Closed; 0 = Open;
X = No effect; ■ = FWD/REV
00
03
04
0C
External Terminal
External Terminal
0
* Sn-19 selects the function of the multi-function analog input. If data value
00
entered, the analog input represents manual reference. If An-02 is to be utilized,
then Sn-19 MUST NOT be set to
00
.
2-38
is
Page 74
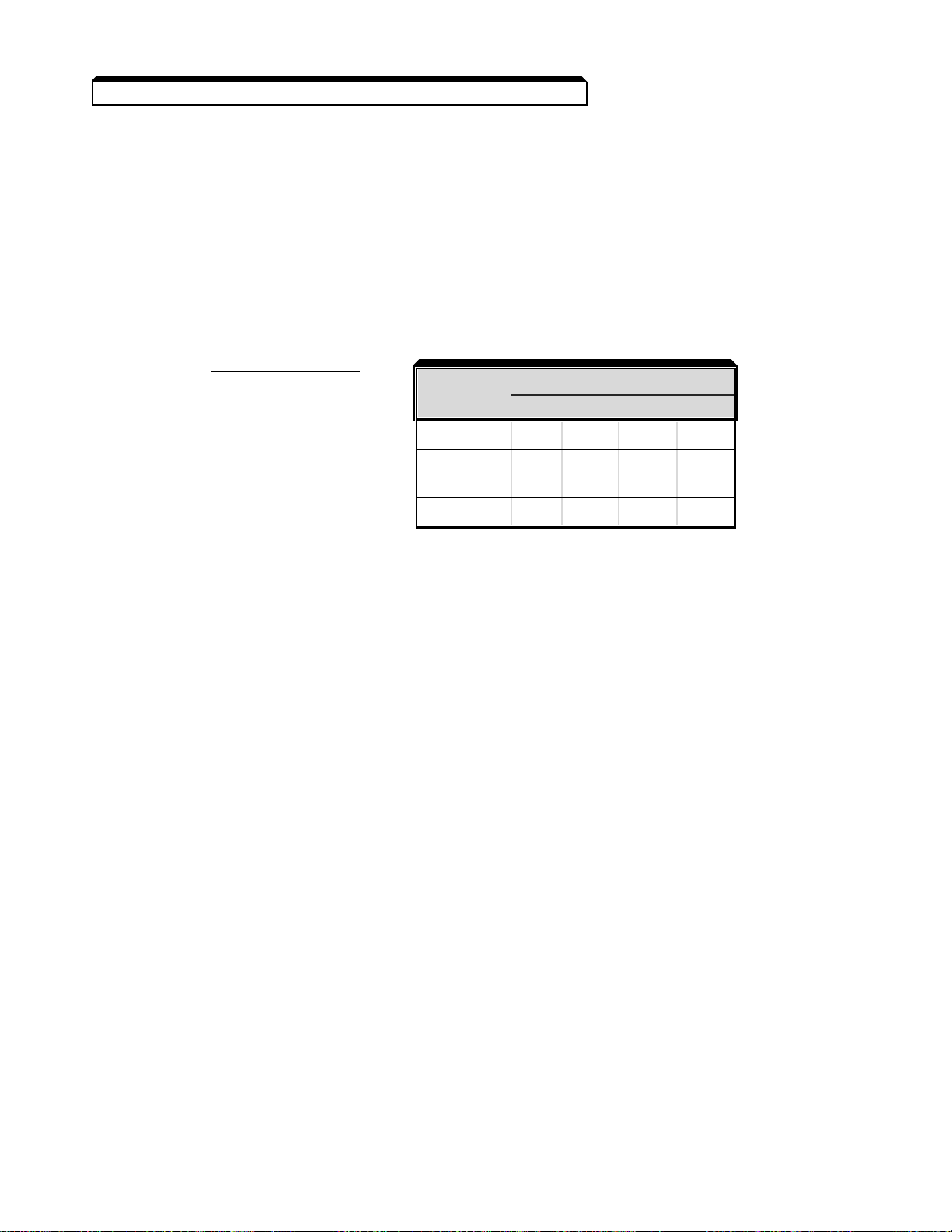
2.24 REMOTE/LOCAL AND REFERENCE SELECTION Continued
Mode 5
The final consideration for multiple frequency command configuration modes is that any
combination of binary weighted values may be configured for operation. As an example, if
only three speed references are required, then the following example will work.
Sn-04 = local operation.
Sn-15 = frequency reference select 1 at terminal 5.
Sn-16 = frequency reference select 2 at terminal 6.
Sn-19 = manual reference at terminal 16.
2-WIRE CONTROL
External Terminal
Sn-04 = X X X
Sn-15 =
Sn-16 =
Sn-19 =
03
04
00
1
Freq.
Freq.
Ref.
Ref. 8765
An-01 0000
Manual 0001
(Multi-func.)
An-03 0010
External Terminal
8765
2-39
Page 75

2.25 RESET CODES: 2-WIRE, 3-WIRE INITIALIZATION Sn-03: Operator Status Data:
By entering either code into this constant, a reset to factory configuration (constant
initialization) is accomplished. The constants which are NOT affected are:
Sn-01: GPD 503 Capacity
Sn-02: V/f
Factory configuration for 2-wire control: Factory configuration for 3-wire control:
Sn-15 =
Sn-16 =
Sn-17 =
Sn-18 =
03
— Reference Select 1 Sn-15 = 00— FWD/REV Select
04
— Reference Select 2 Sn-16 = 03— Reference Select 1
06
— JOG Sn-17 = 04— Reference Select 2
08
— Coast to Stop/Base Block Sn-18 = 06— JOG
1110
= Factory 2-Wire Control
Initialization
1111
= Factory 3-Wire Control
Initialization
CAUTION
Know your application before using either Initialization function of Sn-03. This
constant must be set to 0000 for Drive mode operation.
1110 = Factory 2-Wire Control Initialization (Maintained RUN Contact)
1111 = Factory 3-Wire Control Initialization (Momentary START/STOP Contact)
Entering either Initialization code resets all constants EXCEPT Sn-01 AND Sn-02
to factory settings, and automatically returns Sn-03 setting to 0000. If the
GPD 503 is connected for 3-Wire control and this constant is set to 1110 (2-Wire
Control Initialization), the motor may run in reverse direction WITHOUT A RUN
COMMAND APPLIED. Equipment damage or personal injury may result.
2-40
Page 76

2.26 SLIP COMPENSATION
bn-08: Slip Compensation Gain Factory setting:
0.0
Range: 0.0 to 9.9 %
This constant sets the slip compensation gain, in increments of 0.1%. When the gain is
1.0, the output frequency is increased by 1% of the Cn-04 setting at rated current. A
setting of 0.0 results in no slip compensation.
Fref
CURRENT
DETECTOR
Cn-14
Cn-15
400 Hz
+
+
10% LIMITATION
+
–
K
bn-08
SOFT STARTER
SFS
INTERNAL
FREQUENCY
REFERENCE
%
20%
NOTE: When Fref is less than Cn-07 setting, this function is disabled.
Slip Compensation Block Diagram
EXAMPLE:
Desired frequency is 45 Hz
Motor slip = 3% at full load
(bn-08 =
Actual output frequency at
full load = 46.35 Hz
3.0
46.35 Hz actual output
3% frequency
45 Hz command
)
boost
corresponding
voltage boost
V
f
2-41
Page 77

2.27 SOFT START (S-CURVE) CHARACTERISTICS
Sn-06: Operation Mode Digits 1 & 2 [ X X X X ] : Soft Start
Select 3 Characteristics
Setting of these two digits
determines the S-curve
RUN
(starting) characteristics
of the acceleration ramp.
OUTPUT
X X
XX
XX
XX
0 0
= S-curve time
of 0.2 seconds
0 1
= S-curve
disabled
1 0
= S-curve time
of 0.5 seconds
1 1
= S-curve time
of 1.0 seconds
FREQ
COMMAND
0
FREQUENCY
Accel ramp per
selected Accel Time
(bn-01 or bn-03)
S-Curve Characteristics
Time (TSC)
TIME
2.28 SPEED SEARCH A. Sn-15 thru Sn-18: Multi- Data
function Input Terminals Data
61
: Speed Search From Max Frequency
62
: Speed Search From Set Frequency
A multi-function input terminal is utilized to activate speed search. When the external
speed search command is closed, the base is blocked for 0.5 second, then the speed
search is made. The operation depends on the set value.
IMPORTANT
Set values
61
and 62CANNOT be selected in combination.
• When 61is set, the speed search begins with the maximum
frequency.
• When
62
is set, the speed search begins with the frequency
command that has been set after the search command was
received.
2-42
Page 78

2.28 SPEED SEARCH Continued
RUN
SIGNAL
SPEED SEARCH
MAX FREQ., OR FREQ.
REF. WHEN SPEED
SEARCH IS INPUTTED
OUTPUT FREQUENCY
WITHIN 0.5 SEC
SPEED COINCIDENCE
POINT
0.5 SEC
BASE
BLOCK
VOLTAGE AT
SPEED SEARCH
OUTPUT VOLTAGE
NOTE: When continuous operation mode at momentary stop function is selected,
the Speed Search command must be enabled.
SPEED SEARCH
OPERATION
Speed Search Operation Timing
RETURN TO
NORMAL V/f
OUTPUT
2-42.1
Page 79

2.28 SPEED SEARCH Continued
B. Cn-38: Speed Search Deactivation Current Level Factory setting:
150
%
Range: 0 to 200 %
After power recovery, if the GPD 503 output current is larger than the set value of Cn-38,
speed search is started. When GPD 503 output current is lower than the set value of
Cn-38, speed search is complete and acceleration or deceleration is continued to set
frequency.
C. Cn-39: Speed Search Decel Time Factory setting:
2.0
sec.
Range: 0.0 to 25.5 sec.
This constant sets deceleration time during speed search, in units of 0.1 second. A setting
of 0.0 seconds disables speed search.
D. Cn-40: Minimum Baseblock Time Factory setting: GPD 503
rating dependent
Range: 0.0 to 25.5 sec.
When a momentary power loss is detected, the GPD 503 output transistors are disabled for
a period of time determined by the setting of Cn-40. The Cn-40 setting should represent
the time required for the motor residual voltage to go to zero.
When the time of the momentary power loss time exceeds the minimum baseblock time,
the speed search operation is started immediately after power recovery.
WHEN MIN. BASEBLOCK TIME IS LONGER THAN MOMENTARY POWER LOSS TIME
MOMENTARY POWER
LOSS TIME
MIN.
BASEBLOCK TIME
GPD 503
BASEBLOCK TIME
WHEN MIN. BASEBLOCK TIME IS SHORTER THAN MOMENTARY POWER LOSS TIME
MOMENTARY POWER
LOSS TIME
MIN.
BASEBLOCK TIME
GPD 503
BASEBLOCK TIME
2-42.2
Page 80

2.28 SPEED SEARCH Continued
E. Cn-41: V/f During Speed Search Factory setting:
Range: 0 to 100 %
To prevent a fault such as OC from occurring during the speed search operation, V/f must
be set to a value lower than that required during normal operation.
V/f during speed search = V/f at normal operation x Cn-41
F. Cn-42: Voltage Recovery Time Factory setting:
Range: 0.1 to 2.0 sec.
Sets the amount of time the drive needs to recover from zero to rated output voltage after
speed search.
100
0.3
%
sec.
2-43
Page 81

2.29 STALL PREVENTION
Sn-10: Protective Characteristics Data: — X X X
Select 1 (Stall Prevention) during acceleration
— X X X
The stall prevention characteristics during acceleration
determine whether stall prevention is
enabled or disabled during the various
operating modes, as well as selecting
the decel rate during stall prevention.
Cn-28: Stall Prevention Level During Factory setting:
Acceleration (Constant Torque Region)
— X X
— X X
— X
— X
—
0
—
1
0
= Stall prevention enabled
1
= Stall prevention disabled
0
X = Stall prevention enabled
during deceleration
1
X = Stall prevention disabled
during deceleration
0
X X = Stall prevention enabled
during operation at
set frequency
1
X X = Stall prevention disabled
during operation at
set frequency
X X X = Decel time during stall
prevention set by bn-02
X X X = Decel time during stall
prevention set by bn-04
170
Range: 30 to 200 %
%
Cn-29: Stall Prevention Limit During Factory setting:
Acceleration (Constant HP Region)
The stall prevention during acceleration extends the acceleration rate according to the
load status with respect to the level programmed into Cn-28 or Cn-29 (based on GPD 503
rated current; see Table A3-1) and protects the motor from stalling during acceleration.
Cn-30: Stall Prevention Level During Operation Factory setting:
at Set Frequency
During operation while the speed is constant, if the GPD 503 output current exceeds the
stall prevention level set into Cn-30, the output frequency is reduced to a level to prevent
motor stalling. If the output current returns to a value lower than Cn-30, the output
frequency returns to its previous level.
Range: 30 to 200 %
Range: 30 to 200 %
50
160
%
%
2-44
Page 82

2.29 STALL PREVENTION Continued
Cn-30
OUTPUT
CURRENT 100 ms
OUTPUT
FREQUENCY
Stall Prevention Sequence at Set Frequency
t
t
Sn-10 = 0 0 X X — Decel Time by bn-02 set value
Sn-10 = 1 0 X X — Decel Time by bn-04 set value
Sn-19: Multi-function Analog Data
09
: Stall Prevention Level
Input (Term. 16) During Running
The multi-function analog input at terminal 16 may be configured to allow analog control
of the stall prevention level for operation at set frequency (from 0% to 100% of the level set
in Cn-30).
1R
STALL
PREV. LEVEL
ADJUST
GPD 503
15
+15V
16
0-10V (20K )
17
C
100
STALL
PREVENTION
LEVEL
(%)
(Cn-30)
010
ANALOG VOLTAGE
2-45
Page 83

2.30 THERMAL MOTOR OVERLOAD PROTECTION
Sn-14: Protective Characteristics Select 5 Factory Setting :
(Motor Protection)
The GPD 503 Electronic Thermal Overload function meets standards set by UL and CSA
for thermal motor overload protection.
Data:— X X X
— X X X
— X X
— X X
— X
— X
— 0X X X = Drive protection (
{
*
—
1
The motor protection characteristics determine whether electronic thermal motor
protection is enabled or disabled, what type of load it is for, and how the GPD 503 will
react after motor overload is detected. The thermal overload trip point is the motor rated
current value in Cn-09; see Table A3-1 for factory setting.
0
= Electronic thermal motor protection enabled
1
= Electronic thermal motor protection disabled
0
X = Electronic thermal protection for variable torque
1
X = Electronic thermal protection for constant torque
0
X X = Short time rating disabled
1
X X = Electronic thermal protection - short time rating enabled
oL2
) operates at 150% for one minute
X X X = Drive protection (
oL2
) operates at 125% for one minute
0000
Electronic thermal overload is a software routine which monitors and protects the motor
from an overtemperature condition over time.
The two considerations of the electronic overload routine are drive output current and
time. Thus, the electronic overload trip curve is as shown at right.
There are in fact two overload fault conditions which the GPD 503 can detect, electronic
thermal overload (OL1) and output overload (OL2). In reality, the GPD 503 will never
output more than 200% rated output current without the output overload (OL2) tripping.
* Only selected versions make adjustment with this digit:
230V 40HP (CT) and above
460V 75HP (CT) and above
575V 30HP (CT) and above
2-46
Page 84

2.30 THERMAL MOTOR OVERLOAD PROTECTION Continued
050100
150
200
2
TIME (MIN.)
40 Hz
60 Hz
60 Hz
IM
IM100
(%)
Sn-14 = 0000 Upper Curve
Sn-14 = 0100 Lower Curve
20 Hz
10 Hz
0 Hz
10 Hz
0 Hz
20 Hz
200
100
TIME (MIN.)
5.6-60 Hz
0 Hz
IM = ACTUAL MOTOR CURRENT
IM100 = MOTOR BASE CURRENT (Cn-09)
200
0 Hz
100
50
20
10
5.6-60 Hz
5
2
0 50 100 150 200
IM
(%)
IM100
Sn-14 = 0010 Upper Curve
Sn-14 = 0110 Lower Curve
Electronic Motor Thermal
Protection Characteristics
For Constant Torque Motor
50
20
40 Hz
10
5
IM = ACTUAL MOTOR CURRENT
IM100 = MOTOR BASE CURRENT (Cn-09)
Electronic Motor Thermal
Protection Characteristics
For Variable Torque Motor
2-46.1
Page 85

2.31 TORQUE COMPENSATION
OUTPUT FREQUENCY
( HZ )
OUTPUT VOLTAGE
( VAC )
460
345
230
115
14 V
0
0
1.5 HZ
30 60
PROGRAMMED V/F PATTERN
(NO LOAD)
AUTO TORQUE BOOST
V/F PATTERN
bn-07: Torque Compensation Gain (K
T) Factory setting:
Sets the torque compensation, in increments of
0.1. When the motor has the same capacity as
that of the GPD 503, the gain is 1.0. When a
smaller motor is used, the gain should be set to
1.5 (typical).
This constant, in conjunction with Cn-31
(Motor-to-Motor Cable Resistance) and Cn-32
(Torque Compensation Iron Loss), is used by
the drive’s automatic torque boost function to
match the drive’s output voltage boost to the
motor load. Except for the most demanding of
high starting torque applications, the factory
settings of these constants will be adequate.
The factory settings are programmed to match
the performance characteristics of typical AC
motors.
The calculation of compensated torque uses
the following formula:
1.0
Range: 0.0 to 2.0
Example of Torque Compensation
Operation
2.32 V/f PATTERN - STANDARD
This system constant is factory preset to
one of which may be better suited for your specific application and load characteristics.
However, if none of these patterns are suitable, this constant can be set to
pattern - custom). The exact pattern is then defined by the settings of Cn-02 thru Cn-08,
described in paragraph 2.33.
( 33
Compensated Value 5
• Vac • Iac • Cos ) – WI – Rcable
Where
WI = Cn-32
Rcable = Cn-31
Kt = bn-07
= Power Factor (calculated by the GPD 503)
Sn-02: V/f Pattern
01
. Table 2-4 describes 14 other preset patterns,
Frequency
0F
x K
(V/f
T
2-46.2
Page 86

Table 2-4. Standard (Preset) V/f Patterns
APPLI- Sn-02 V/f PATTERN APPLI- Sn-02 V/f
APPLI- Sn-02 V/f PATTERN APPLI- Sn-02 V/f PATTERN
PATTERN
CATION SPECIFICATION DATA (NOTE 3) CATION SPECIFICATION DATA (NOTE 3)
G P
E U
N R
E P
R O
AS
LE
(V)
230
50Hz 00 50Hz Torque 08
H T
I O
G R
Starting
Low
H Q
17.2
11.5
0 1.3 2.5 50
(Hz)
U
SE
T
A
Starting
Torque 09
High
(V)
230
09
26.4
20.7
16.1
13.8
08
0 1.3 2.5 50
R
60Hz Starting
60Hz Satura- 01 60Hz Torque 0A
tion Low
50Hz Starting
Satura- 02 Torque 0b
tion High
(V)
230
02
01
17.2
11.5
0 1.5 3 50 60
T
I
N
G
(Hz)
(V)
230
0b
26.4
20.7
14.9
0 1.5 3 60
0A
(Hz)
(Hz)
V T
A O
R R
I Q
A U
BE
L
E
❋
(V)
230
72Hz 03 90Hz 0C
C O
O P
N E
S R
17.2
11.5
0 1.8 3.6 60 72
(Hz)
T A
A T
N I
T O
Starting
50Hz Torque 04 120Hz 0d
230
(V)
Low
05
57.5
Starting
Torque 05
High
40.2
11.5
9.2
0 1.3 25 50
04
(Hz)
N
H
O
R
S
E
P
O
W
Starting
60Hz Torque 06 180Hz 0E
Low
Starting
Torque 07
High
(V)
230
57.5
40.2
11.5
07
06
9.2
0 1.5 30 60
(Hz)
E
R
(V)
230
17.2
11.5
0 2.3 4.5 60 90
(V)
230
40.2
20.7
0 3 6 60 120
(V)
230
34.5
28.9
0 4.5 6 60
(Hz)
(Hz)
(Hz)
180
NOTES:
✵ Consult MagneTek for assistance when these settings are desired.
1. The following conditions must be considered when selecting a V/f pattern:
2. V/f pattern for high starting torque should be selected for:
3. Patterns shown are for 230V input; for other input, multiply all (V) values by (V
– Pattern matches the voltage-frequency characteristics of the motor.
– Maximum motor speed.
– Wiring distance.
– Large voltage drop at start.
– AC reactor connected to GPD 503 input or output.
– Use of motor rated below GPD 503 max. output.
i.e., for 460V input, multiply by 460/230 = 2; for 575v input, multiply by 575/230 = 2.5.
2-47
/230).
IN
Page 87

2.33 V/f PATTERN - CUSTOM
A. Cn-01: Output Voltage Regulator Factory Setting:
230/460/575
Range: 0.0 to 255.0 (230V)
0.0 to 510.0 (460V)
0.0 to 733.1 (575V)
This constant sets the output voltage to be regulated. If Sn-02 is set to a value in the
range
00
to 0E, then changing Cn-01 will automatically effect the voltage constants
(Cn-03, Cn-06 and Cn-08; see section B of this feature description) proportionally. If
Sn-02 is
0F
, then Cn-01 has no effect on the voltage constants, and the output voltage
would be determined by the voltages programmed into Cn-03, Cn-06 and Cn-08.
NOTE: Before changing Cn-01, refer to the examples below.
EXAMPLES:
230V Drive
V
IN VOUT Cn-01
230 230
230 208
208 208
230
208
208
Factory Setting
460V Drive
V
V
IN VOUT Cn-01
460 460
460 400
380 380
460 380
* For this condition, Custom V/Hz Pattern should be used (Sn-02 = 0F), and Cn-01 set to Input Voltage.
460
400
380
460
Factory Setting
*
For 460V units only:
• If Cn-01 400, then overvoltage trip point = 800 Vdc
• If Cn-01 400, then overvoltage trip point = 700 Vdc.
575V Drive
V
IN VOUT Cn-01
575 575
500 500
575 500
* For this condition, Custom V/Hz Pattern should be used (Sn-02 = 0F), and Cn-01 set to Input Voltage.
575
500
575
Factory Setting
*
For 575V units only:
• If Cn-01 500, then overvoltage trip point = 1040 Vdc
• If Cn-01 500, then overvoltage trip point = 910 Vdc.
2-48
Page 88

2.33 V/f PATTERN - CUSTOM Continued Initial Voltage Values *
When Sn-02 = 01 When Sn-02 = 0F
B. Cn-02: Frequency – Max. (Fmax)
Cn-03: Voltage – Max. (Vmax) . . . . . . . . . . . . .
Cn-04: Frequency – Max. Voltage point (F
Cn-05: Frequency – Midpoint (F
Cn-06: Voltage – Midpoint (V
B)
C) . . . . . . . . . . . . .
A)
230.0
17.2
V
V
200.0
15.0
V
V
Cn-07: Frequency – Min. (Fmin)
Cn-08: Voltage – Min. (Vmin) . . . . . . . . . . . . .
* Double indicated values for 460V units;
2.5 times indicated values for 575V units.
11.5
V
10.0
V
These seven control constants define the custom V/f pattern, only if Sn-02 is set to 0F.
The illustration below shows how these constants relate to each other in establishing the
custom V/f pattern.
Vmax
(03)
OUTPUT
VOLTAGE VC
(06)
Vmin
(08)
Fmin FB FA Fmax
(07) (05) (04) (02)
OUTPUT FREQUENCY
[ Parenthesized values indicate control constant numbers. ]
V/f Characteristics Set by Cn-02 thru Cn-08
NOTE: To establish a V/f pattern with a straight line from Fmin to FA, set
F
B = Fmin. The setting of VC is then disregarded and does not affect the
V/f pattern.
IMPORTANT
The constant settings are checked whenever power is applied to
the GPD 503, or each time the DATA/ENTER key is pressed while in
the Program (PRGM) mode. A constant set value failure (
oPE
) will
occur if any part of the following relationships among Cn-02 thru
Cn-08 is not TRUE:
(a) Fmax * F
A * FB * Fmin
(b) Vmax > V
C * Vmin
2-49
Page 89

2.34 UP/DOWN FREQUENCY SETTING
Sn-15 thru Sn-18: Multi-function Input Data
Terminals (Term. 5-8) Data
Programming data
10
and
11
for two of the four multi-function input terminals allows the
10
11
inputs to be used for UP/DOWN frequency setting.
NOTES:
1.
oPE03
fault will occur if UP function and DOWN function data settings are
not used together.
2. JOG has priority over UP/DOWN.
3. UP/DOWN has priority over Multi-step Speed inputs.
4. UP/DOWN is ineffective when operation is from the Digital Operator.
5. Upper and lower limit speeds set by Cn-02, Cn-14 and Cn-15.
EXAMPLE:
Sn-17 Data
Sn-18 Data
10
: UP function
11
: DOWN function
UP
o o
DOWN
o o
: UP function
: DOWN function
GPD 503
7
UP
8
DOWN
11
INPUT SIGNAL
UP DOWN
Open Open HOLD
Closed Open UP (Frequency command approaches frequency
Open Closed DOWN (Frequency command approaches minimum
Closed Closed HOLD
FUNCTION
command upper limit)
output frequency or frequency command lower limit,
whichever is larger)
0V
2-50
Page 90

2.34 UP/DOWN FREQUENCY SETTING Continued
FWD RUN
UP
COMMAND
DOWN
COMMAND
UPPER
LIMIT SPEED
LOWER
LIMIT SPEED
OUTPUT
FREQUENCY*
"SPEED AT SET
FREQUENCY"
SIGNAL
D1 D D DHHHHHH HU1UU
* U= UP (Accel) status; D= DOWN (Decel) status; H= HOLD (constant speed) status;
U1
= At Upper Limit Speed; D1= At Lower Limit Speed
D1 D1
U
Up/Down Frequency Setting Timing
2.35 SLIP COMPENSATION DELAY TIME
Cn-35: Slip Compensation Delay Time Factory Setting:
2.0
seconds
Range: 0.0 to 25.5 seconds
Set in increments of 0.1 second. When the output current of the drive becomes equal to
the motor rated current (Cn-09), the output frequency of the drive is compensated for by
the motor rated slip. The amount of frequency compensation is determined by the
following formula. If frequency reference is equal to or smaller than minimum output
frequency (Cn-07), slip compensation is not performed.
Amount of output freq. comp. = ––––––––––––––––– x (Output current – Cn-34)
bn-08
Cn-09 – Cn-34
Where:
Cn-09 = Motor Rated Current
Cn-34 = Motor No-load Slip
bn-08 = Motor Rated Slip
2-51
Page 91

2.36 CARRIER FREQUENCY
Cn-23: Carrier Frequency Upper Limit Factory Setting: See Table 2-5
Cn-24: Carrier Frequency Lower Limit
Range (Each): 0.4 to 15.0 kHz
Cn-25: Frequency Proportion Gain Factory setting: See Table 2-5
Range: 0 to 99
The relationship between output frequency and carrier frequency is determined from the
set values of Cn-23 to Cn-25.
(a) For constant carrier frequency (set value of Cn-23):
Set Cn-25 to 0, and set the same value in both Cn-23 and Cn-24.
(b) For synchronous mode (only with proportional section):
Set Cn-25 to 12, 24, 36 or 48. These setting values establish carrier frequencies of
12f, 24f, 36f, or 48f, respectively.
CARRIER
FREQUENCY
NOTE: Fault code
detected:
1. Cn-25 > 6 kHz, and Cn-24 > Cn-23
2. Cn-23 > 5 kHz, and Cn-24 ) 5 kHz.
Cn-23
Cn-24
oPE I I
PROPORTIONAL
SECTION
0
OUTPUT FREQUENCY
is displayed if either of the following conditions is
Changed
2-52
Page 92
2.36 CARRIER FREQUENCY Continued
Table 2-5. Factory Settings of Carrier Frequency Constants
Drive Drive
CT Model Cn-23 Cn-24 Cn-25 CT Model Cn-23 Cn-24 Cn-25
HP No. HP No.
2 3 0 V
1 DS305 15.0 15.0 0 40 DS2040 2.0 0.4 36
2 DS302 15.0 15.0 0 40/50
3 DS306 15.0 15.0 0 50 DS2050 2.0 0.4 36
5 DS307 15.0 15.0 0 60
7.5 DS308 15.0 15.0 0 60 DS2060 2.5 1.0 36
10 DS309 15.0 15.0 0 60
15 DS310 15.0 15.0 0 75 DS2075 2.5 1.0 36
20 DS311 15.0 15.0 0 75
25 DS322 15.0 15.0 0 100 DS2100 2.5 1.0 36
30 DS323 15.0 15.0 0 100
4 6 0 V
1 DS313 15.0 15.0 0 60 DS360 10.0 10.0 0
2 DS304 15.0 15.0 0 75 DS075 2.5 1.0 36
3 DS314 15.0 15.0 0 75/100
5 DS315 15.0 15.0 0 100 DS100 2.5 1.0 36
7.5 DS316 15.0 15.0 0 100
10 DS317 15.0 15.0 0 150 DS150 2.5 1.0 36
15 DS318 15.0 15.0 0 150
20 DS326 15.0 15.0 0 200 DS200 2.5 1.0 36
25 DS325 15.0 15.0 0 200
30 DS330 15.0 15.0 0 250 DS250 2.5 1.0 36
40 DS340 15.0 15.0 0 300 DS303 2.5 1.0 36
50 DS350 10.0 10.0 0 400 DS400 2.5 1.0 36
GPD503-2L40
GPD503-2L50
GPD503-2L60
GPD503-2L75
GPD503-2L100
GPD503-4L75
GPD503-4L100
GPD503-4L150
GPD503-4L200
10.0 10.0 0
10.0 10.0 0
10.0 10.0 0
10.0 10.0 0
10.0 10.0 0
10.0 10.0 0
10.0 10.0 0
10.0 10.0 0
10.0 10.0 0
5 7 5 V
2 DS5003 15.0 15.0 0 40 DS5043 10.0 10.0 0
3 DS5004 15.0 15.0 0 50 DS5054 10.0 10.0 0
5 DS5006 15.0 15.0 0 60 DS5064 10.0 10.0 0
7.5 DS5009 15.0 15.0 0 75 DS5081 10.0 10.0 0
10 DS5012 15.0 15.0 0 100 DS5112 2.0 1.0 36
15 DS5017 15.0 15.0 0 125 DS5130 2.0 1.0 36
20 DS5022 10.0 10.0 0 150 DS5172 2.0 1.0 36
25 DS5027 10.0 10.0 0 200 DS5202 2.0 1.0 36
30 DS5032 10.0 10.0 0
2-53
( "L" ) (04/27/95)
Page 93

Section 3. DIGITAL OPERATOR
DIGITAL
OPERATOR
E
DSPL
RESET
FWD
REV
RUN
STOP
3.1 GENERAL
The Digital Operator enables the GPD 503 to be
operated in either the Drive (DRIVE) mode or the
Program (PRGM) mode. The Program mode enables
the operator to enter information into the
GPD 503's memory to configure the GPD 503 to the
application. In the Drive mode, the GPD 503
controls motor operation. Switching between the
two modes can only be done when the GPD 503 is
in a stopped condition.
3.2 DISPLAY AND KEYPAD
The Digital Operator has a 5 digit LED display.
Both numeric and alphanumeric data can appear
on the display, but because 7-segment LEDs are
used, the number of alphabetic characters is
limited.
Indicator lamps and keys on the Digital Operator
are described in Table 3-1.
REMOT
DRIVE FWD REV SEQ REF
PRGM
DRIVE
JOG
DATA
ENTER
Figure 3-1. Digital Operator
Table 3-1. Digital Operator Controls
A. INDICATOR LAMPS
A. INDICATOR LAMPS
NAME FUNCTION
NAME FUNCTION
DRIVE Lights when the GPD 503 is in the Drive mode of operation.
FWD Lights when Forward motor run has been selected.
REV Lights when Reverse motor run has been selected.
REMOTE Lights when the GPD 503 is programmed to operate from external RUN
SEQ and STOP signals.
REMOTE Lights when the GPD 503 is programmed to operate by an external
REF frequency reference signal.
RUN Off when GPD 503 is in stopped condition; lights steadily when Run signal
is active; blinks after Stop signal has been received and GPD 503 output
is ramping down. (See Figure 3-2.)
STOP Lights steadily at initial power-up; blinks after Run signal becomes active
but frequency reference is zero; off when GPD 503 output is controlling
motor speed. (See Figure 3-2.)
3-1
Page 94

Table 3-1. Digital Operator Controls - Continued
B. KEYPAD KEYS
B. KEYPAD KEYS
LABEL FUNCTION
LABEL FUNCTION
PRGM Pressing this key toggles between the Drive and Program modes of
DRIVE operation. Active only when the GPD 503 is in stopped condition.
JOG IN DRIVE MODE: Pressing and holding this key will initiate Jog function:
GPD 503 output goes to programmed Jog Frequency to check motor
operation, or to position machine. When key is released, output returns
to zero and motor stops. If the motor is already running, pressing this key
will have no effect.
NOTE: Disabled if the GPD 503 is programmed
to use an external JOG input.
FWD IN DRIVE MODE: Each press of this key will toggle between Forward and
REV Reverse motor run direction. The selected direction is indicated by the
FWD or REV lamp being lit. If the selection is made while the GPD 503
is stopped, it determines the direction the motor will run when started.
If the selection is changed during running, the GPD 503 will ramp the
motor to zero speed and then ramp it up to set speed in the opposite
(i.e. newly selected) direction.
RUN IN DRIVE MODE: If the GPD 503 is not programmed to operate by
external RUN and STOP signals (as indicated by REMOTE SEQ lamp
being lighted), pressing this key will produce a Run command to initiate
GPD 503 output to the motor. However, output frequency will be zero if
the frequency reference is zero at the time this key is pressed.
STOP IN DRIVE MODE: Pressing this key will produce a Stop command.
The GPD 503 will decelerate the motor in the programmed stopping
manner, then GPD 503 output will be disconnected from the motor.
DSPL IN DRIVE MODE: Each press of this key will change the display to the
next displayable parameter type available for the Drive mode. (Also see
description of
>
key.)
IN PROGRAM MODE: Each press of this key will change the display to
first
the
available constant number in the
next
list of constants
(An-, bn-, Sn- or Cn-).
DATA IN DRIVE MODE OR PROGRAM MODE: When a constant number is
ENTER being displayed, pressing this key will display the constant's set value
presently in the GPD 503 memory.
IN PROGRAM MODE ONLY: After the displayed set value has
been changed as desired, pressing this key will write the new set value
into GPD 503 memory to replace the old value.
3-2
Page 95
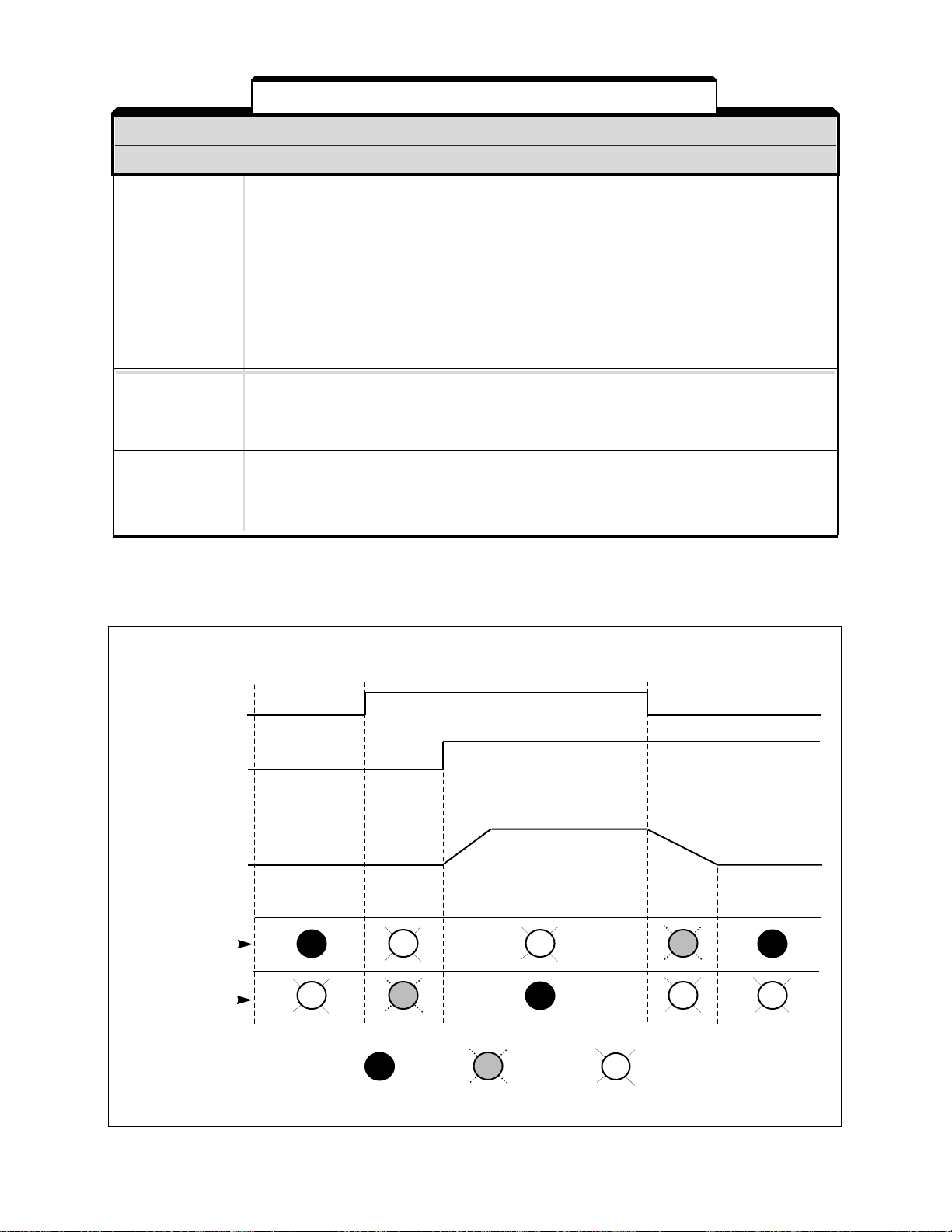
Table 3-1. Digital Operator Controls - Continued
B. KEYPAD KEYS - Continued
B. KEYPAD KEYS - Continued
LABEL FUNCTION
LABEL FUNCTION
>
IN DRIVE MODE OR PROGRAM MODE: When a changeable constant
RESET setting value is being displayed, pressing this key moves the blinking
(i.e. "changeable") position to the next digit to the right. If at the right-most
position, this will wrap-around to the first "changeable" position on the
left side of the display.
IN DRIVE MODE ONLY: When a GPD 503 fault has occurred, pressing
this key will reset the fault circuit in the GPD 503. Pressing this key along
with the DSPL key will allow access to the Sn- and Cn- constants lists (for
READING ONLY of the constant settings).
^
IN DRIVE MODE OR PROGRAM MODE: Pressing this key will increase
the value of the blinking digit in the display by 1. Increasing stops at the
value of
v
IN DRIVE MODE OR PROGRAM MODE: Pressing this key will decrease
9
, or F. Pressing this key will scroll up by 1 within a constants list.
the value of the blinking digit in the display by 1. Decreasing stops at the
value of
0
. Pressing this key will scroll down by 1 within a constants list.
RUN
COMMAND
FREQUENCY
REFERENCE
OUTPUT
FREQUENCY
RUN
LAMP
STOP
LAMP
POWER PRESS PRESS
ON RUN KEY STOP KEY
= Off = Blinking = Lighted Steady
Figure 3-2. Functioning of RUN and STOP Lamps
3-3
Page 96

3.3 COMPARISON OF PROGRAM MODE AND DRIVE MODE
Displays that appear on the Digital Operator differ according to the selected mode of
operation. The PRGM (Program) mode is used to change constant settings in the Drive's
memory to configure it to the requirements of the application. The DRIVE mode is used
primarily to control (i.e. start and stop) Drive output for motor/machine operation. The
only constants that can be changed while in the DRIVE mode (An- or bn- settings, or Undisplay selection) are those that will not have a critical effect on operating characteristics.
The constant group to be displayed, in either mode, is selected by pressing the DSPL key.
POWER ON
See section
3.4 for details
For a complete listing of
*
constants, see Appendix 1.
A n - X X
b n - X X
S n - X X
C n - X X
Display of last (i.e. most recent)
fault recorded in fault register
(in NV-RAM memory), if any, for
approx. 5 seconds
DRIVE MODE
Mode Select (only when stopped)
PRESS
PRGM
DRIVE
*
Freq. Reference value display
Output Freq. monitor display
*
Output Current monitor display
*
Fault Register contents
display (faults recorded
*
before power down)
U n - X X
A n - X X
b n - X X
monitor selection
reading/setting
reading/setting
See paragraph 6.2 B for
fault sequence examination
procedure
See section
DRIVE MODEPRGM MODE
3.5 for details
If a fault occurs
during operation,
Fault relay will
initiate shutdown,
and a fault code
will be displayed.
See paragraph
6.2 A for fault
sequence examination procedure.
Sn-XX and
Cn-XX constant
values can be
*
read
while in the
DRIVE mode. To
*
access these
constants, press
>
*
the same time.
but not set
and DSPL at
3-4
Page 97

3.4 PROGRAM MODE OPERATION
A. Changing Display With DSPL Key:
ACTION
Apply Power DRIVE lamp is on.
Press
to Select Program Memory Settings constant number.
Mode (See next page for changing settings.)
Press DSPL Key Display changes to first Run Oper-
Press DSPL Key Display changes to first System Con-
PRGM
DRIVE changes to first Frequency Reference
Key
DESCRIPTION DISPLAY
— If the GPD 503 fault circuit detects
a fault, a blinking Fault code will be
displayed for 5 seconds.
— Then the Frequency Reference (An-01)
setting display appears.
DRIVE lamp turns off. Display
ative Settings constant number.
(See next page for changing settings.)
stants number.
(See next page for changing settings.)
F0 0.0 0
A n - 0 1
b n - 0 1
S n - 0 1
Press DSPL Key Display changes to first Control Con-
stants number.
(See next page for changing settings.)
Press DSPL Key Cycle begins again with first Frequency
Reference Memory Settings constant
number.
After All Pro- DRIVE lamp lights. Display shows the
gramming is Frequency Reference (An-01) setting.
Completed,
Press
to Return to
Drive Mode
PRGM
DRIVE
Key
C n - 0 1
F0 0.0 0
3-5
Page 98

3.4 PROGRAM MODE OPERATION Continued
B. Procedure For Changing a Setting:
ACTION
Press ^and Value of
v
Keys as down by 1 each time one of these keys
Necessary is pressed.
Until Display EXAMPLE: Select bn-03, Accel. Time 2.
Shows Desired
Constant No.
Press
Key to Display setting for bn-03 is
Current Setting
Press
and
as Necessary or decreases when keys are pressed.
Until Display EXAMPLE: Set bn-03 to
Shows Desired
Setting
Press
to Store New Then setting is displayed again, with one
Setting digit blinking.
DATA Display shows the value currently stored in
ENTER memory for the constant. NOTE: Factory
>
,
^
v
Keys left. Value of blinking digit increases
DATA Display lights steady for a short time,
ENTER then
DESCRIPTION DISPLAY
bn-XX
Blinking position of display shifts to the
End
is displayed for approx. 1 sec.
digits scrolls up or
10.0
sec.
16.0
sec.
b n - 0 3
1 0.0
1 6.0
1 6.0
NOTE: If the setting being entered is
not within acceptable range for the
selected constant, the fault indication
"
Err
" will appear instead of "
(the new setting was not written into
EPROM memory); then the display
again shows the value currently
stored in memory.
Press DSPL Key Display returns to beginning of cycle
to Return to for selection of setting number to be proSetting Number grammed (see preceding page).
Selection
End
"
E n d
1 6.0
b n - 0 3
3-6
Page 99

3.5 DRIVE MODE OPERATION
A. Changing Display With DSPL Key:
ACTION
Apply Power DRIVE lamp is on.
Press DSPL Display changes to present Output
Key Frequency value.
Press DSPL Display changes to present Output
Key Current value.
Press DSPL Display changes to last Fault code.
Key (If no fault has occurred, cycle
DESCRIPTION DISPLAY
— If the GPD 503 fault circuit detects
a fault, a blinking Fault code will be
displayed for 5 seconds.
— Then the Frequency Reference (An-01)
value appears.
skips to next display). EXAMPLE:
F0 0.0 0
0.0 0
0.0 A
U1Uu1
Main Circuit
UV Trip
Press DSPL Display changes to first Monitor
Key Displays number.
Press DSPL Display changes to first Frequency
Key Reference Memory Settings constant
number.
Press DSPL Display changes to first Run OperKey ative Settings constant number.
Press DSPL Cycle begins again with Frequency
Key Reference display.
Use ^key to step through the list of constants, and
*
DATA key to display An- or bn- set value, or information
called for by Un- constant.
U n - 0 1
A n - 0 1
b n - 0 1
*
*
*
3-7
Page 100

3.5 DRIVE MODE OPERATION Continued
B. Drive Operation From Digital Operator (Using Factory Settings):
ACTION
Apply Power DRIVE lamp is on.
Use
>
, ^, Blinking position of display shifts to the
and
v
Keys left. Value of blinking digit increases
as Necessary or decreases when keys are pressed.
Until Display
Shows Desired
Run Frequency
Press
To Write New blinking.
Value Into
Memory
DATA
ENTER imately 2 seconds, then digit resumes
Key
DESCRIPTION DISPLAY
The Frequency Reference (An-01) set
value appears.
Displayed value stops blinking for approx-
F0 0.0 0
F6 0.0 0
F6 0.0 0
F6 0.0 0
Press
To Select Desired motor will rotate when GPD 503 is started.
Direction of EXAMPLE:
Motor Rotation FWD Run
Press DSPL Key Present Output Frequency is
Press and Hold Check motor operation at programmed
JOG Key Jog Frequency operating speed.
Release JOG GPD 503 output increases to Frequency
Key; Press Reference level, at programmed Accel Rate.
RUN Key Motor speed increases accordingly.
Press STOP Key Motor speed decreases under GPD 503
FWD
Key
REV Digital Operator to see which direction
Observe FWD and REV indicator lamps on FWD REV
selected
displayed.
0.0 0
6.0 0
6 0.0 0
control, at preset deceleration rate, to zero.
Motor remains stopped.
0.0 0
3-8
 Loading...
Loading...