

Preliminary W741C20X
4-BIT MICROCONTROLLER
Publication Release Date: March 1998
- 1 - Revision A3
Table of Contents--
GENERAL DESCRIPTION..............................................................................................................................2
FEATURES......................................................................................................................................................2
PIN CONFIGURATION....................................................................................................................................3
PIN DESCRIPTION..........................................................................................................................................4
BLOCK DIAGRAM...........................................................................................................................................5
FUNCTIONAL DESCRIPTION ........................................................................................................................6
ABSOLUTE MAXIMUM RATINGS................................................................................................................27
DC CHARACTERISTICS...............................................................................................................................28
AC CHARACTERISTICS...............................................................................................................................29
PAD ASSIGNMENT & POSITIONS...............................................................................................................30
TYPICAL APPLICATION CIRCUIT................................................................................................................31
INSTRUCTION SET TABLE..........................................................................................................................32
PACKAGE DIMENSIONS..............................................................................................................................79
Preliminary W741C20X
- 2 -
GENERAL DESCRIPTION
The W741C20X is a high-performance 4-bit microcontroller (µC) that operates on very low current.
The device contains a 4-bit ALU, two 8-bit timers, a divider, a serial port, and five 4-bit I/O ports
(including 3 output ports for LED driving). There are also seven interrupt sources and 8-level
subroutine nesting for interrupt applications. The W741C20X has two power reduction modes, hold
mode and stop mode, which help to minimize power dissipation.
The W741C20X is suitable for remote controllers, toy controllers, keyboard controllers, speech
synthesis LSI controllers, and other products.
FEATURES
• Operating voltage: 2.2V to 5.5V
• Crystal or RC oscillation circuit can be selected by the code option
− Crystal/Ceramic oscillator: up to 4 MHz
− RC oscillator: up to 4 MHz
• Both in crystal or RC oscillator operation mode, high-frequency (400 KHz to 4 MHz) or low-
frequency (32.768 KHz) oscillation must be determined by the code option
• Memory
− 2048 x 16 bit program ROM (including 2K x 4 bit look-up table)
− 128 x 4 bit data RAM (including 16 working registers)
• 21 input/output pins
− Input/output ports: 4 ports/16 pins
− Serial input/output port: 1 port /4 pins (high sink current for LED driving)
− MFP output pin: 1 pin (MFP)
• Power-down mode
− Hold function: no operation (except for oscillator)
− Stop function: no operation (including oscillator)
• Seven types of interrupts
− Five internal interrupts (Divider 0, Timer 0, Timer 1, and Serial I/O)
− Two external interrupts (Port RC and
INT
pin)
• MFP output pin
− Output is software selectable as modulating or nonmodulating frequency
− Works as frequency output specified by Timer 1
• Built-in 14-bit clock frequency divider circuit
• Two built-in 8-bit programmable countdown timers
− Timer 0: One of two internal clock frequencies (FOSC/4 or FOSC/1024) can be selected
− Timer 1: Offers auto-reload function, and one of two internal clock frequencies (FOSC or
FOSC/64) can be selected, or falling edge of pin RC.0 can be selected (output through MFP pin)
• Built-in 18/14-bit watchdog timer selectable for system reset
Preliminary W741C20X
Publication Release Date: March 1998
- 3 - Revision A3
• Powerful instruction set: 118 instructions
• 8-level subroutine (include interrupt) nesting
• One serial transmission/receiver port specified by software
• Up to 1 µS instruction cycle (with 4 MHz operating frequency)
• Packaged in 18-pin, 20-pin, 28-pin PDIP and 20-pin, 28-pin SOP
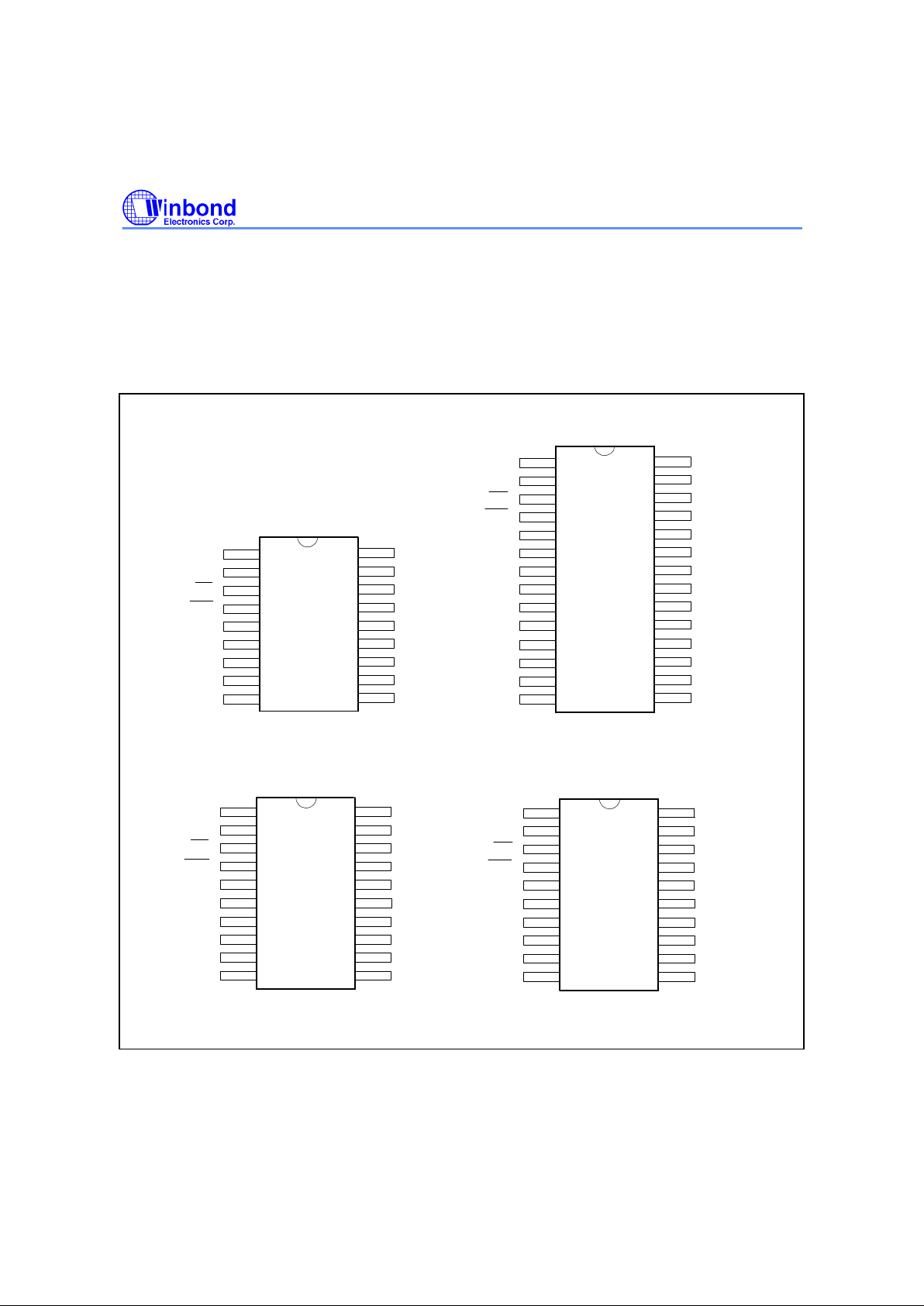
PIN CONFIGURATION
10
11
12
13
14
15
16
17
18
1
2
3
4
5
6
7
8
9
RB3
RB2
RB1
RA1
RA0
XIN
XOUT
RC3
RC2
RC1
RES
INT
RA3
RA2
RB0
RC0
20
21
22
23
24
25
26
27
28
1
2
3
4
5
6
7
8
9
RE3
RE2
RE1
RA1
RA0
XIN
XOUT
RD3
RD2
RD1
RES
INT
RA3
RA2
RE0
RD0
19
10
RB0
RC3
16
17
18
11
12
13
RB3
RB2
RB1
RC2
RC1
RC0
15
14
NC
MFP
W741C201
W741C202/C205
18-PDIP(300 mil)
28 SKINNY(300 mil), 28 SOP
V
SS
V
DD
V
SS
V
DD
10
11
12
13
15
16
17
18
1
2
3
4
5
6
7
8
9
RB3
RB2
RB1
RA1
RA0
XIN
XOUT
RC3
RC2
RC1
RA3
RA2
RB0
RC0
W741C203
20-PDIP(300 mil)
14
19
20
10 11
12
13
15
16
17
18
1
2
3
4
5
6
7
8
9
RB3
RB2
RB1
RA1
RA0
XIN
XOUT
RC3
RC2
RC1
RES
INT
RA3
RA2
RB0
RC0
W741C204
20 SOP
14
19
20
INT
RES
V
SS
V
SS
V
DD
V
DD
V
SS
V
SS
V
DD
V
DD
Preliminary W741C20X
- 4 -
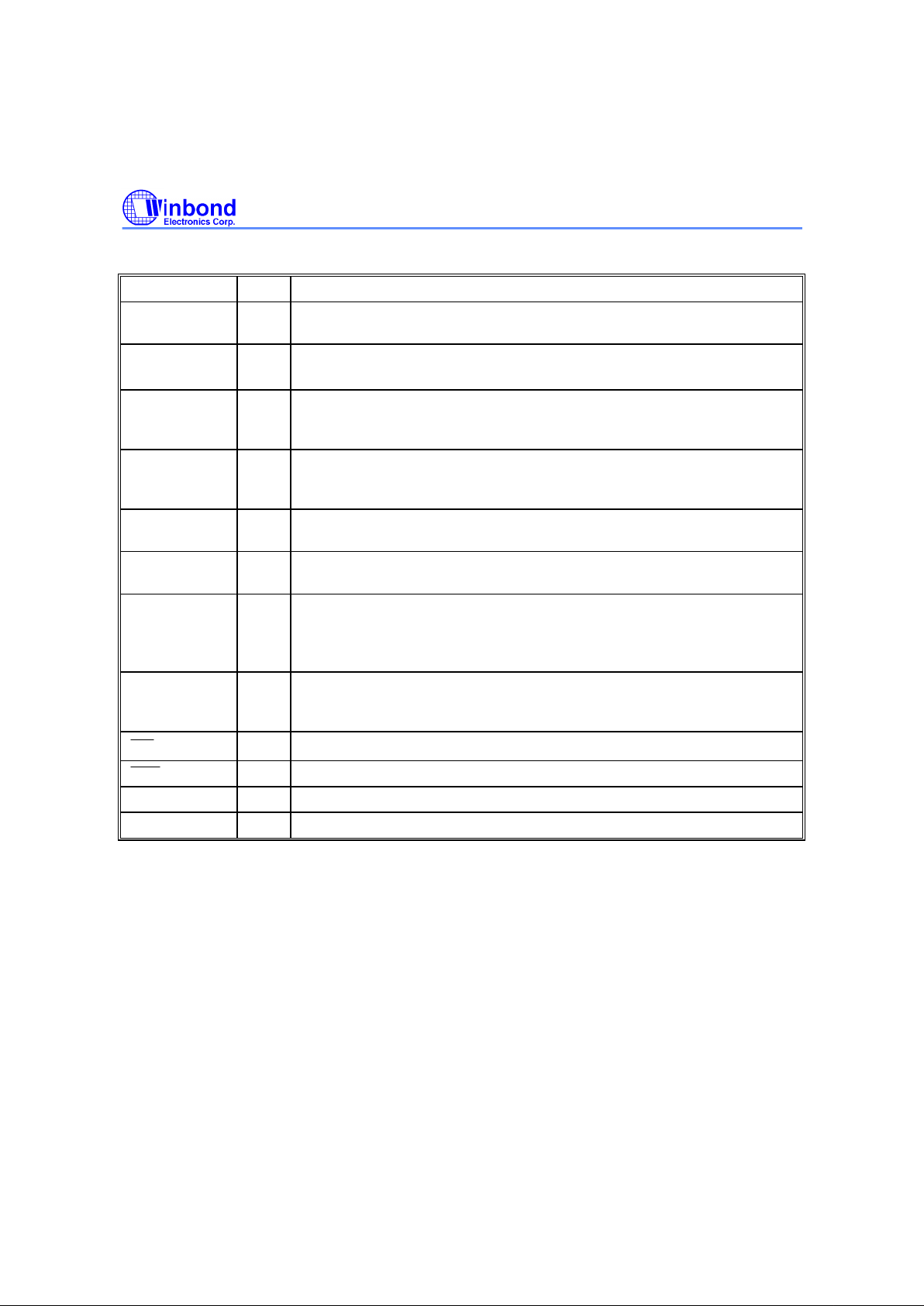
PIN DESCRIPTION
SYMBOL I/O FUNCTION
XIN I Input pin for oscillator.
Connected to crystal or resistor to generate system clock by code option.
XOUT O Output pin for oscillator.
Connected to crystal or resistor to generate system clock by code option.
RA0−RA3
I/O Input/Output port. Input/output mode specified by port mode 1 register
(PM1). When used as output port, can provide high sink current for
driving LED.
RB0−RB3
I/O Input/Output port. Input/output mode specified by port mode 2 register
(PM2). When used as output port, can provide high sink current for
driving LED.
RC0−RC3
I/O Input/Output port. Input/output mode specified by port mode 4 register
(PM4). Each pin has an independent interrupt capability in input mode.
RD0−RD3
I/O Input/Output port. Input/output mode specified by port mode 5 register
(PM5).
RE0/DOUT
RE1/CLKO
RE2/DIN
RE3/CLKI
I/O
Special input/output port.
This port can be configured by software to act as the output of internal
port RT or the serial I/O port. When used as output port, can provide high
sink current for driving LED.
MFP O Output pin only.
This pin can output modulating or nonmodulating frequency, or Timer 1
clock output specified by mode register 1 (MR1).
INT
I External interrupt pin with pull-high resistor.
RES
I
System reset pin with pull-high resistor.
VDD I Positive power supply (+).
VSS I Negative power supply (-).
Preliminary W741C20X
Publication Release Date: March 1998
- 5 - Revision A3
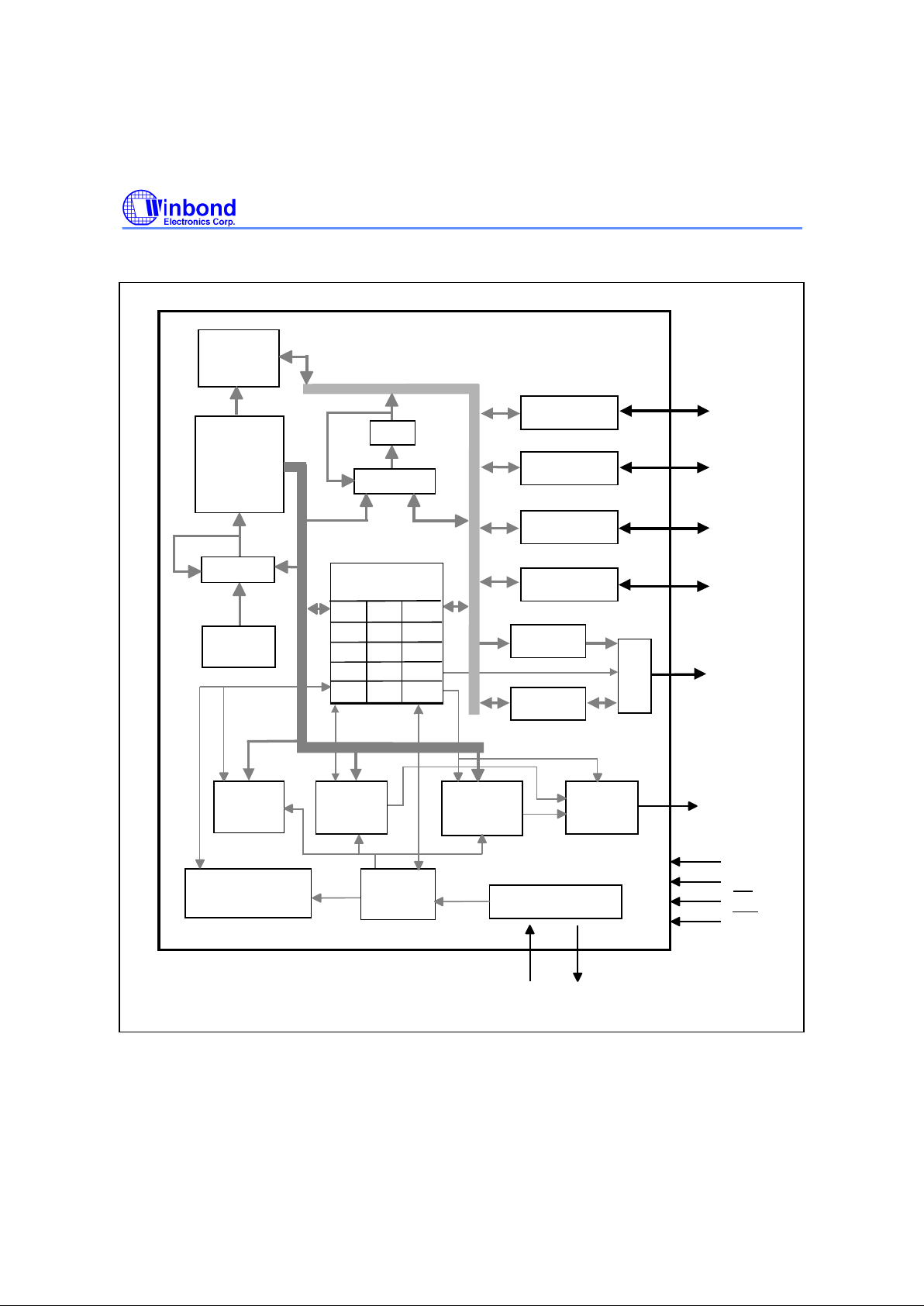
BLOCK DIAGRAM
XIN XOUT
PC
STACK
(8 Levels)
RAM
(128*4)
ALU
Timer 0
(8-bit)
Timing Generator
PORT RA
PORT RB
Modulation
Frequency
Pulse
RA0 to 3
RB0 to 3
RE0 to 3
MFP
VDD
VSS
ROM
(2048*16)
(look_up table
2K*4)
Timer 1
(8-bit)
ACC
RES
INT
Divider 0
(14-bit)
Watchdog Timer
(4-bit)
HCF
PEFHEFIEF
Central Control
Unit
EVF SEF
PSR0
. .
MUX
SEL
+1(+2)
.
PORT RC
RC0 to 3
PORT RD
RD0 to 3
PR
PM0MR0
PSR1 PSR2
PORT RT
Serial I/O
MUX
(RE0/DOUT,
RE1/CLKO,
RE2/DIN,
RE3/CLKI)
SEL
Preliminary W741C20X
- 6 -
FUNCTIONAL DESCRIPTION
Program Counter (PC)
Organized as an 11-bit binary counter (PC0 to PC10), the program counter generates the addresses
of the 2048 × 16 on-chip ROM containing the program instruction words. When jump or subroutine
call instructions or interrupt, or initial reset conditions are to be executed, the address corresponding
to the instruction will be loaded into the program counter. The format used is shown below.
ITEM ADDRESS INTERRUPT
PRIORITY
Initial Reset 000H INT 0 (Divider) 004H 1st
INT 1 (Timer 0) 008H 2nd
INT 2 (Port RC) 00CH 3rd
INT 3 (
INT
pin) 014H 4th
INT 4 (Serial Port Input) 018H 5th
INT 5 (Serial Port Output) 01CH 6th
INT 6 (Timer 1) 020H 7th
JMP Instruction XXXH Subroutine Call XXXH -
Stack Register (STACK)
The stack register is organized as 11 bits x 8 levels (first-in, last-out). When either a call subroutine or
an interrupt is executed, the program counter will be pushed onto the stack register automatically. At
the end of a call subroutine or an interrupt service subroutine, the RTN instruction must be executed
to pop the contents of the stack register into the program counter. When the stack register is pushed
over the eighth level, the contents of the first level will be lost. In other words, the stack register is
always eight levels deep.
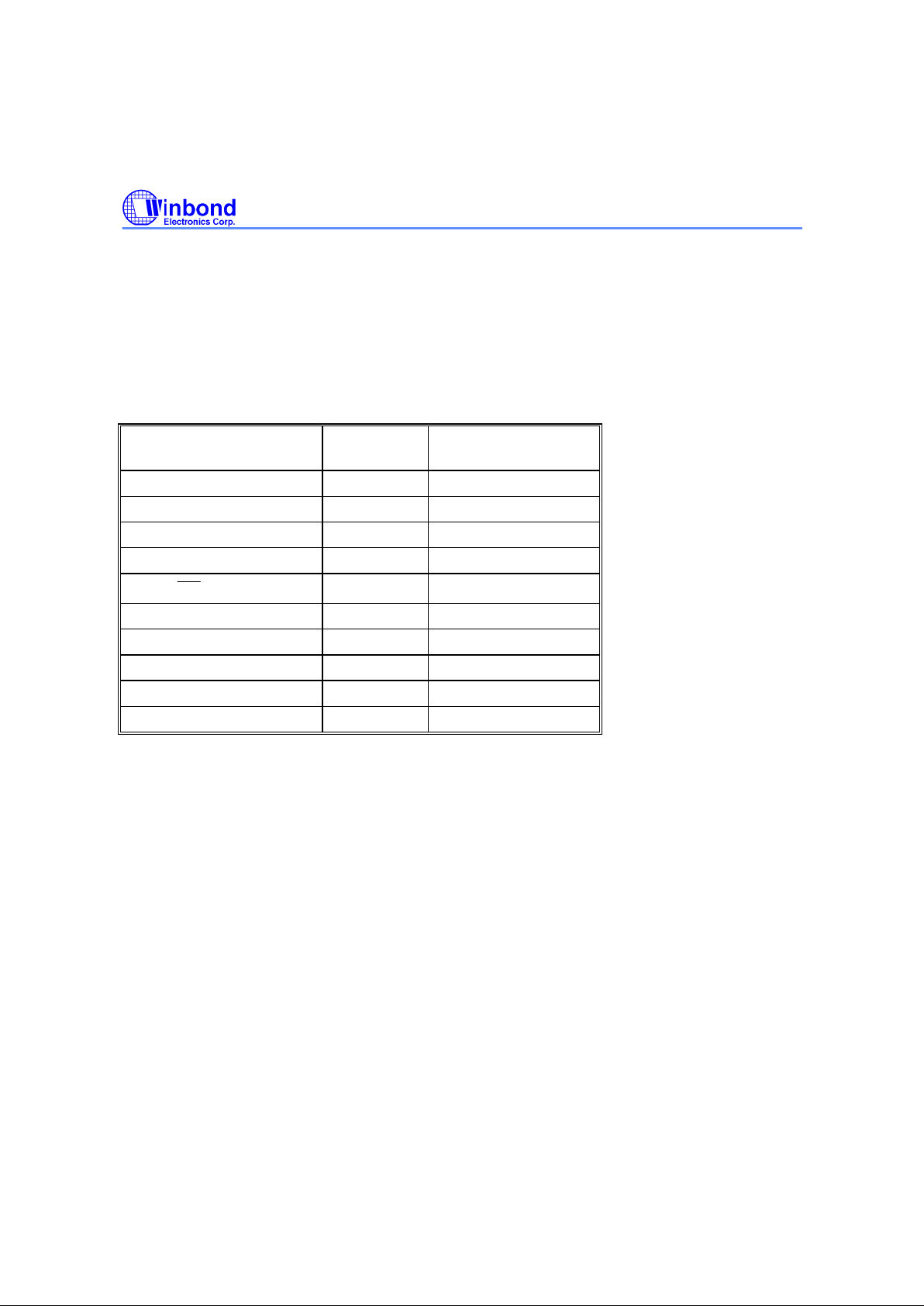
Program Memory (ROM)
The read-only memory (ROM) is used to store program codes; the look-up table is arranged as 2048
× 4 bits. The first three quarters of ROM (000H to 5FFH) are used to store instruction codes only, but
the last quarter (600H to 7FFH) can store both instruction codes and the look-up table. Each look-up
table element is composed of 4 bits, so the look-up table can be addressed up to 2048 elements.
Instruction MOVC R is used to read the look-up table and transfer table data to the RAM. The
organization of the program memory is shown in Figure 1.
Preliminary W741C20X
Publication Release Date: March 1998
- 7 - Revision A3
3 2 1 0
7FFH
600H
2048
address
000H
16 bits
2048 x 16-bit
ACCTABLTABH
ROM address = 600H + Offset/4
Offset
0 1 1 x x x x x x x x x
- x x x x x x x x x y y
Each element (4 bits) of the look-up table
This area can be used to store both instruction code
and look-up table
Figure 1. Program Memory Organization
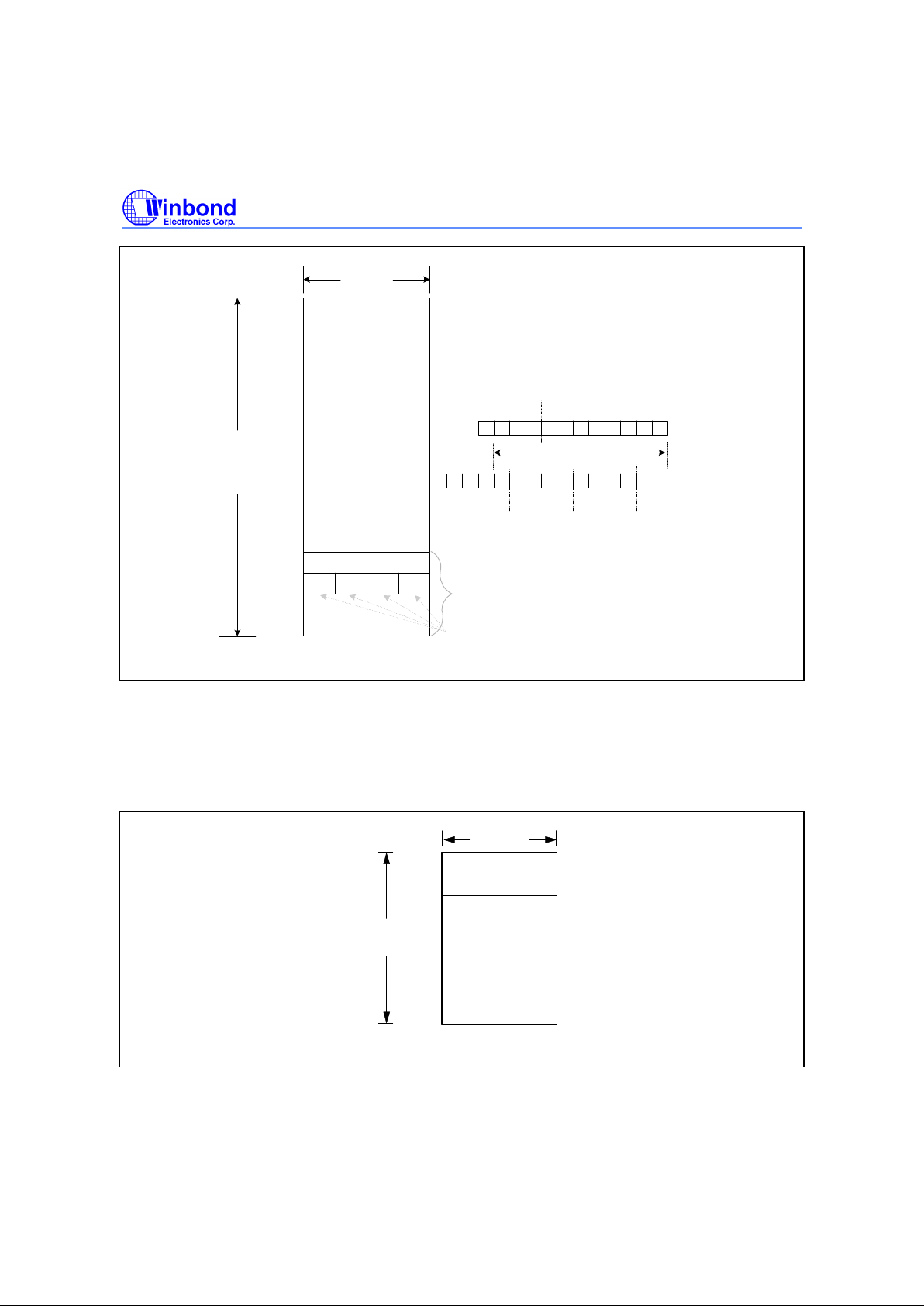
Data Memory (RAM)
1. Architecture
The static data memory (RAM) used to store data is arranged as 128 × 4 bits. The data memory can
be addressed directly or indirectly. The organization of the data memory is shown in Figure 2.
Working Register
128
address
00H
4 bits
128 x 4-bit
7FH
:
0FH
Figure 2. Data Memory Organization
Preliminary W741C20X
- 8 -
The first sixteen addresses (00H to 0FH) in the data memory are known as the working registers
(WR). The other data memory is used as general memory and cannot operate directly with immediate
data. The relationship between data memory locations and the page register (PAGE) in indirect
addressing mode is described in the next section.
2. Page Register (PAGE)
The page register is organized as a 4-bit binary register. The bit descriptions are as follows:
R/W R/W R/W
0123
PAGE
Note: R/W means read/write available.
Bit 3 is reserved.
Bit 2, Bit 1, Bit 0 Indirect addressing mode preselect bits:
000 = Page 0 (00H - 0FH)
001 = Page 1 (10H - 1FH)
010 = Page 2 (20H - 2FH)
011 = Page 3 (30H - 3FH)
100 = Page 4 (40H - 4FH)
101 = Page 5 (50H - 5FH)
110 = Page 6 (60H - 6FH)
111 = Page 7 (70H - 7FH)
Accumulator (ACC)
The accumulator (ACC) is a 4-bit register used to hold results from the ALU and transfer data
between the memory, I/O ports, and registers.
Arithmetic and Logic Unit (ALU)
This is a circuit which performs arithmetic and logic operations. The ALU provides the following
functions:
• Logic operations: ANL, XRL, ORL
• Branch decisions: JB0, JB1, JB2, JB3, JNZ, JZ, JC, JNC, DSKZ, DSKNZ, SKB0, SKB1, SKB2,
SKB3
• Shift operations: SHRC, RRC, SHLC, RLC
• Binary additions/subtractions: ADC, SBC, ADD, SUB, ADU, DEC, INC
After any of the above instructions are executed, the status of the carry flag (CF) and zero flag (ZF) is
stored in the internal registers. CF can be read out by executing MOVA R, CF.
Preliminary W741C20X
Publication Release Date: March 1998
- 9 - Revision A3
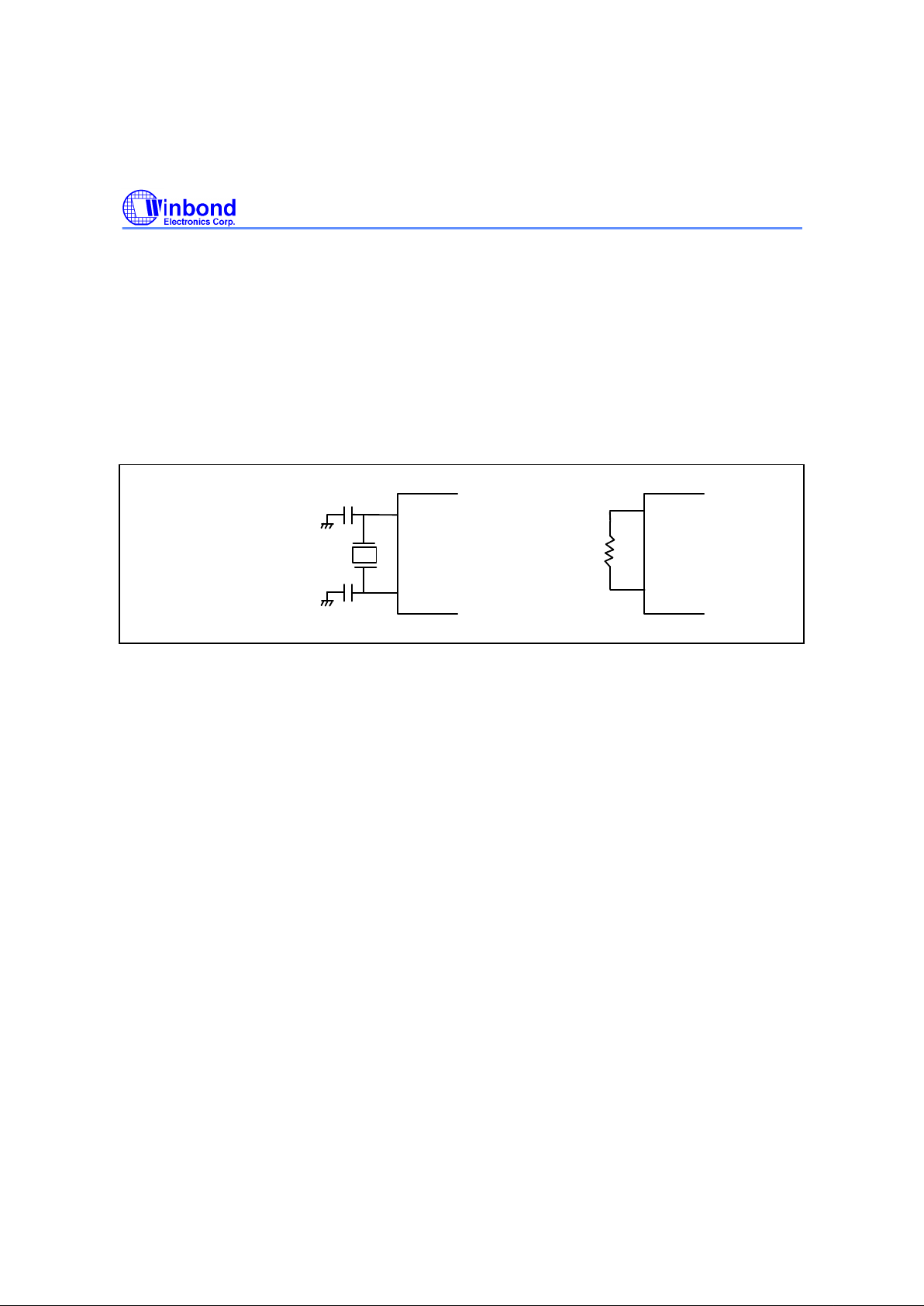
Clock Generator
The W741C20X provides a crystal or RC oscillation circuit selected by option codes to generate the
system clock through external connections. If a crystal oscillator is used, a crystal or a ceramic
resonator must be connected to XIN and XOUT, and the capacitor must be connected if an accurate
frequency is needed. When a crystal oscillator is used, a high-frequency clock (400 KHz to 4 MHz) or
low-frequency clock (32 KHz) can be selected for the system clock by means of option codes. If the
RC oscillator is used, a resistor in the range of 20 KΩ to 1.6 MΩ must be connected to XIN and
XOUT, as shown in Figure 3. The system clock frequency range is from 32 KHz to 4 MHz. One
machine cycle consists of a four-phase system clock sequence and can run up to 1 µS with a 4 MHz
system clock.
XIN
XOUT
XIN
XOUT
or
Crystal
Resistor
32 KHz or
400K to 4MHz
Figure 3. Oscillator Configuration
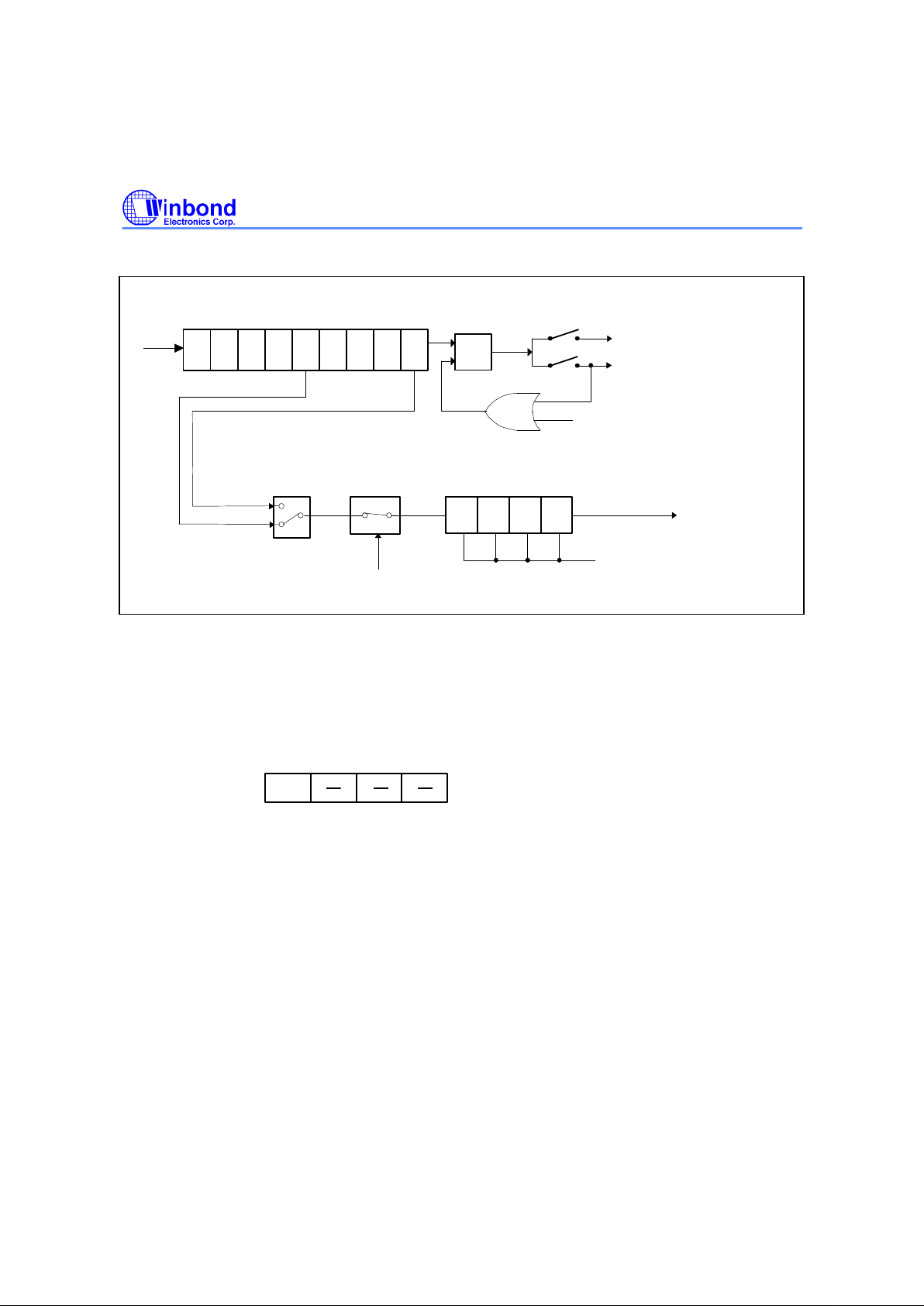
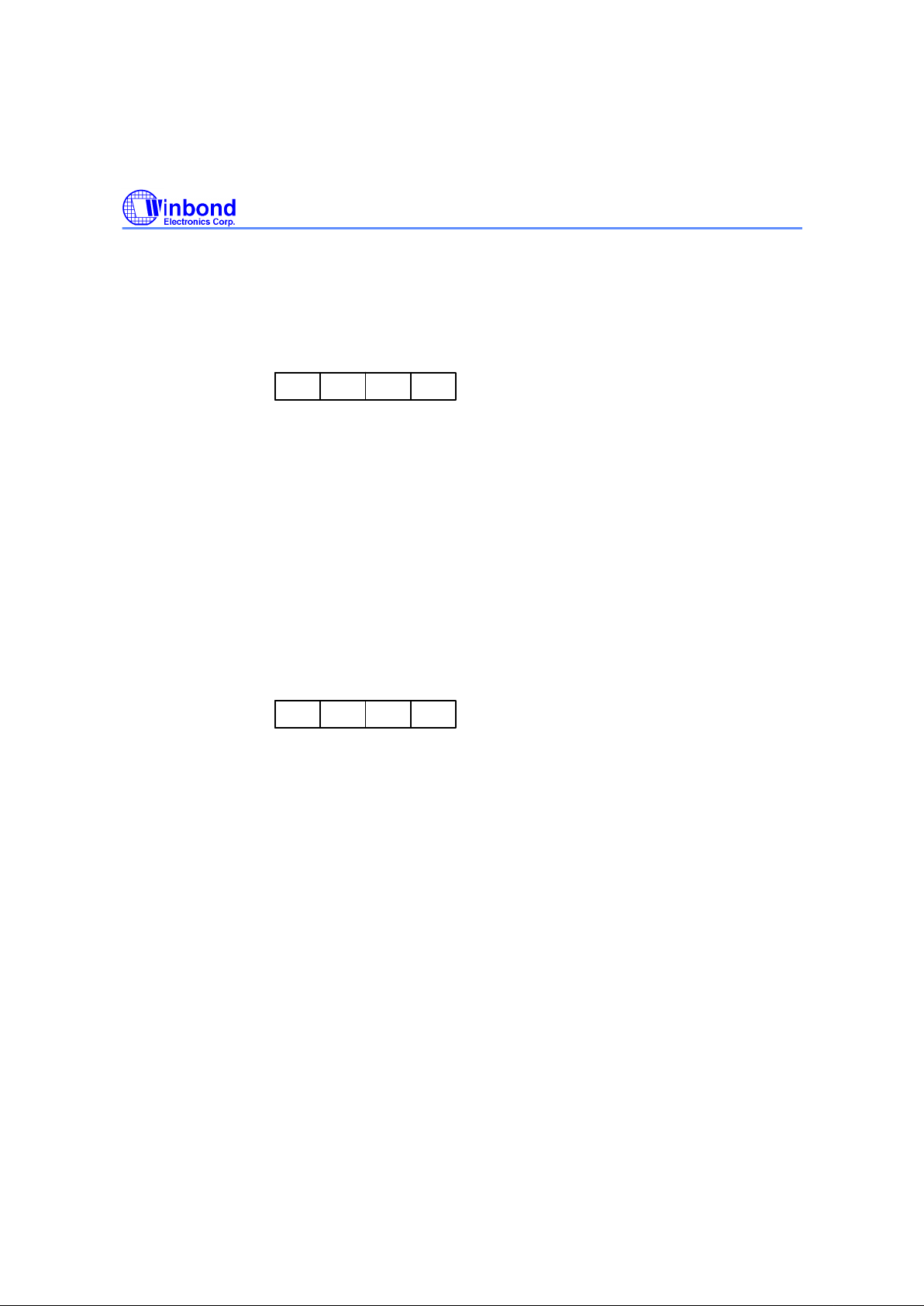
Divider 0
Divider 0 is organized as a 14-bit binary up-counter designed to generate periodic interrupts, as
shown in Figure 4. When the system starts, the divider is incremented by each system clock (FOSC).
When an overflow occurs, the divider event flag is set to 1 (EVF.0 = 1). Then, if the divider interrupt
enable flag has been set (IEF.0 = 1), the interrupt is executed, while if the hold release enable flag
has been set (HEF.0 = 1), the hold state is terminated. The last 4-stage of the Divider 0 can be reset
by executing CLR DIVR0 instruction. If the oscillator is connected to the 32768 Hz crystal, the EVF.0
will be set to 1 periodically at each 500 mS interval.
Watchdog Timer (WDT)
The watchdog timer (WDT) is organized as a 4-bit up counter and is designed to protect the program
from unknown errors. The WDT is enable when the corresponding option code bit of the WDT is set
to 1. If the WDT overflows, the chip will be reset. At initial reset, the input clock of the WDT is
FOSC/1024. The input clock of the WDT can be switched to FOSC/16384 (or FOSC/1024) by executing
the SET PMF, #08H (or CLR PMF, #08H) instruction. The contents of the WDT can be reset by the
instruction CLR WDT. In normal operation, the application program must reset WDT before it
overflows. A WDT overflow indicates that the operation is not under control and the chip will be reset.
The WDT minimun overflow period is 468.75 mS when the system clock (FOSC) is 32 KHz and WDT
clock input is FOSC/1024. When the corresponding option code bit of the WDT is set to 0, the WDT
function is disabled. The organization of the Divider0 and watchdog timer is shown in Figure 4.
Preliminary W741C20X
- 10 -
Q1 Q2 Q9 Q10 Q11 Q12
Q14
Q13
Fosc
S
R
Q
HEF.0
IEF.0
1. Reset
2. CLR EVF, #01H
EVF.0
Hold mode release (HCF.0)
Divider0 interrupt (INT0)
...
Overflow signal
WDT
Enable
/Disable
PMF.3
Fosc/1024
Fosc/16384
Mask Option
Qw1 Qw2
Qw4
Qw3
R R R R
Divider0
System Reset
1. Reset
2. CLR WDT
3. CLR DIVR0
RRRR
Figure 4. Organization of Divider and Watchdog Timer
Parameter Flag (PMF)
The parameter flag is organized as a 4-bit binary register (PMF.0 to PMF.3). The PMF is controlled
by the SET PMF, #I or CLR PMF, #I instruction. The bit descriptions are as follows:
W
0123
PMF
Note: W means write only.
Bit 0, Bit 1 & Bit 2 are reserved.
Bit 3 = 0 The fundamental frequency of the watch dog timer is FOSC/1024.
= 1 The fundamental frequency of the watch dog timer is FOSC/16384.
At initial reset, bit 3 of PMF is set to "0".
Preliminary W741C20X
Publication Release Date: March 1998
- 11 - Revision A3
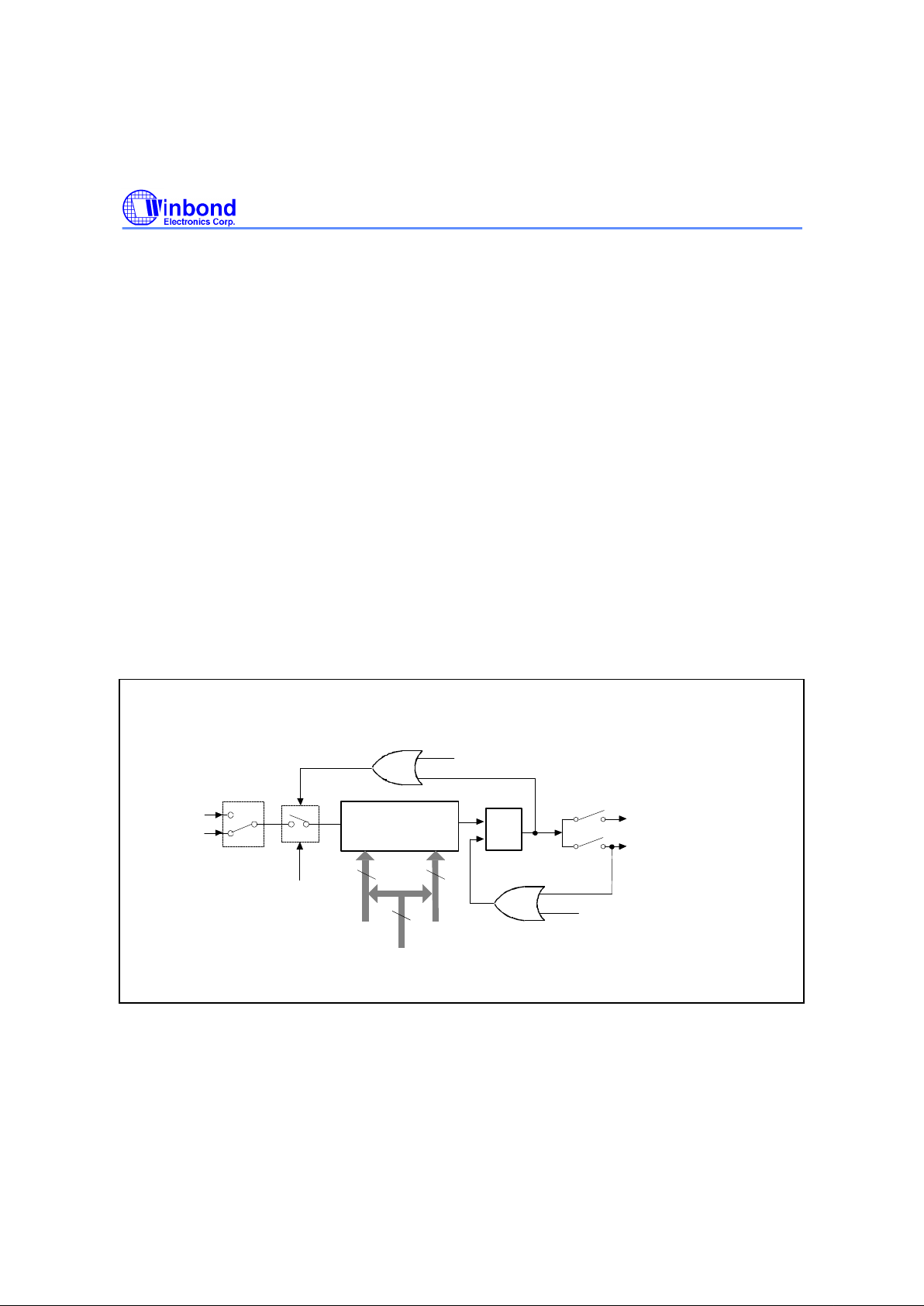
Timer/Counter
Timer 0 (TM0)
Timer 0 (TM0) is a programmable 8-bit binary down-counter. The specified value can be loaded into
TM0 by executing the MOV TM0L (TM0H), R or MOV TM0, #I instruction. When the MOV TM0L
(TM0H), R instructions are executed, the TM0 will stop down-counting (if the TM0 is down-counting),
the MR0.3 will be reset to 0, and the specified value is loaded into TM0. If MR0.3 is set to 1, the
event flag 1 (EVF.1) is reset and the TM0 starts to count. When it decrements to FFH, Timer 0 stops
operating and generates an underflow (EVF.1 = 1). The interrupt is executed if the Timer 0 interrupt
enable flag has been set (IEF.1 = 1); and the hold state is terminated if the hold release enable flag 1
has been set (HEF.1 = 1). The Timer 0 clock input can be set as FOSC/1024 or FOSC/4 by setting
MR0.0 to 1 or by resetting MR0.0 to 0. The default timer value is FOSC/4. The organization of Timer 0
is shown in Figure 5.
If the Timer 0 clock input is FOSC/4, then:
Desired time 0 interval = (preset value +1) × 4 × 1/FOSC
If the Timer 0 clock input is FOSC/1024, then:
Desired time 0 interval = (preset value +1) × 1024 × 1/FOSC
Preset value: Decimal number of Timer 0 preset value
FOSC: Clock oscillation frequency
Fosc/4
Fosc/1024
Enable
Disable
1. Reset
2. CLR EVF, #02H
8-bit Binary
Down Counter
S
R
Q
HEF.1
IEF.1
Hold mode release (HCF.1)
Timer 0 interrupt (INT1)
1. Reset
2. CLR EVF, #02H
EVF.1
MR0.0
(Timer 0)
1. Set MR0.3 to 1
2. MOV TM0, #I
3. Reset MR0.3 to 0
3. Set MR0.3 to 1
4. MOV TM0, #I
4
4
MOV TM0H, R
MOV TM0L, R
4. MOV TM0L, R or MOV TM0H, R
8
MOV TM0, #I
Figure 5. Organization of Timer 0
Preliminary W741C20X
- 12 -
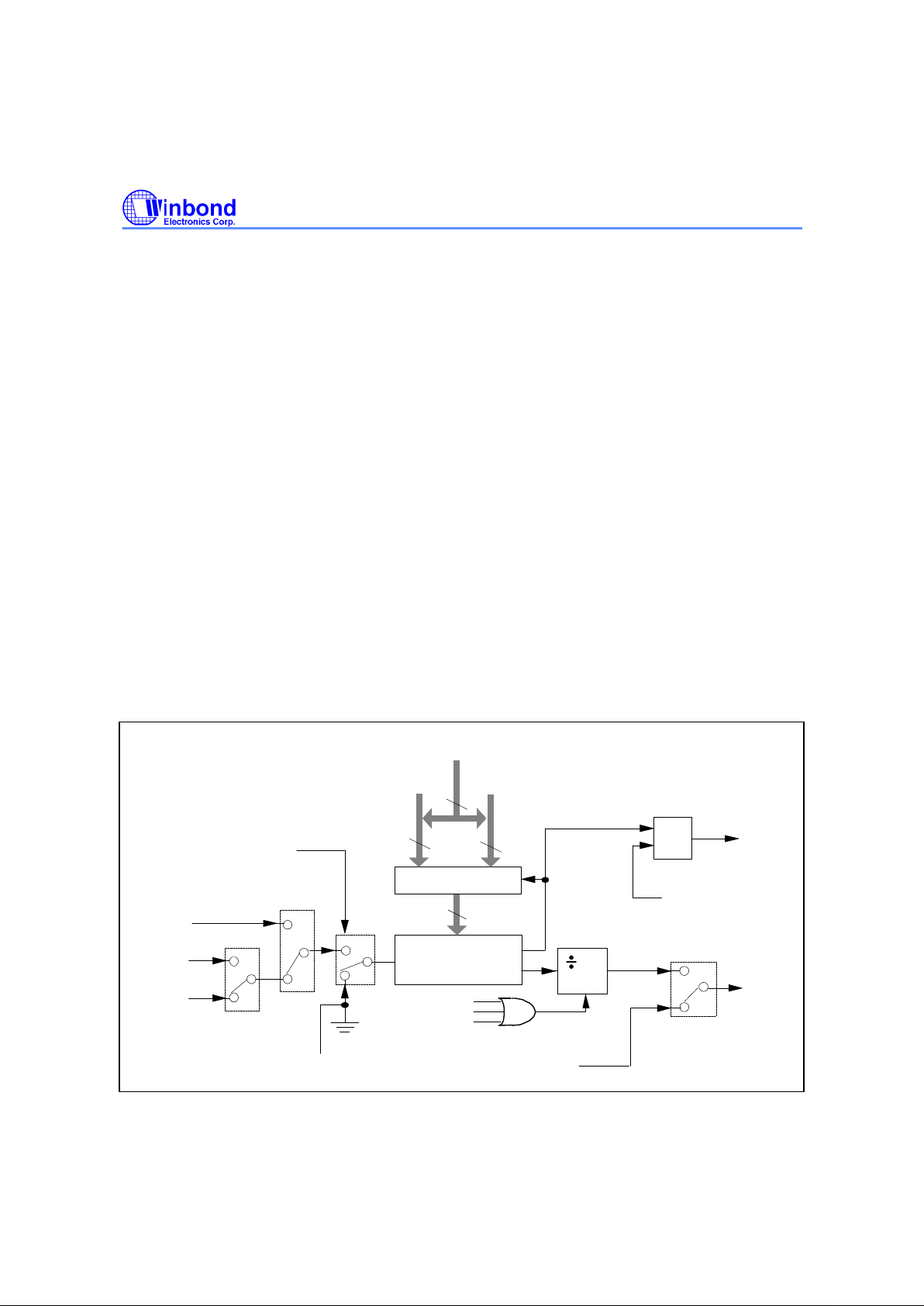
Timer 1 (TM1)
Timer 1 (TM1) is also a programmable 8-bit binary down counter, as shown in Figure 6. Timer 1 can
be used as a counter to count external events or to output an arbitrary frequency to the MFP pin. The
input clock of Timer 1 can be one of three sources: Fosc/64, Fosc, or an external clock from the RC.0
input pin. The source can be selected by setting bit 0 and bit 1 of mode register 1 (MR1). At initial
reset, the Timer 1 clock input is Fosc. If an external clock is selected as the clock source of Timer 1,
the content of Timer 1 is decreased by 1 at the falling edge of RC.0. When the MOV TM1L, R or
MOV TM1H,R instruction is executed, the specified data are loaded into the auto-reload buffer and
the TM1 down-counting will be disabled (i.e. MR1.3 is reset to 0). If the bit 3 of MR1 is set (MR1.3 =
1), the contents of the auto-reload buffer will be loaded into the TM1 down counter, Timer 1 starts to
down count, and the event flag 7 is reset (EVF.7 = 0). When the MOV TM1, #I instruction is executed,
the event flag 7 (EVF.7) and MR1.3 are reset and the specified value is loaded into auto-reload buffer
and TM1 by the internal hardware, then the MR1.3 is set, that is the TM1 starts to count by the
hardware. When the timer decrements to FFH, it will generate an underflow (EVF.7 = 1) and be
auto-reloaded with the specified data, after which it will continue to count down. An interrupt is
executed if the interrupt enable flag 7 has been set to 1 (IEF.7 = 1), and the hold state is terminated if
the hold mode release enable flag 7 is set to 1 (HEF.7 = 1). The specified frequency of Timer 1 can
be delivered to the MFP output pin by programming bit 2 of MR1. Bit 3 of MR1 can be used to make
Timer 1 stop or start counting.
If the Timer 1 clock input is FT, then:
Desired Timer 1 interval = (preset value +1) / FT
Desired frequency for MFP output pin = FT ÷ (preset value + 1) ÷ 2 (Hz)
Preset value: Decimal number of Timer 1 preset value, and
FOSC: Clock oscillation frequency
Auto-reload buffer
8 bits
MR1.1
External clock
via RC.0
1. MR1.3 = 1
2. MOV TM1, #I
Underflow
signal
EVF.7
MFP
MFP signal
MR1.2
output pin
8-bit Binary
Down Counter
2
circuit
Reset
Reset
Disable
Enable
Fosc/64
Fosc
MR1.0
(Timer 1)
S
R
Q
1. Reset
2. INT 7 accept
3. CLR EVF, #80H
T
F
1. MR1.3 = 0
4. Set MR1.3 to 1
4
4
MOV TM1H, R
MOV TM1L, R
Set MR1.3 to 1
MOV TM1, #I
5. MOV TM1, #I
8
MOV TM1, #I
Figure 6. Organization of Timer 1
Preliminary W741C20X
Publication Release Date: March 1998
- 13 - Revision A3
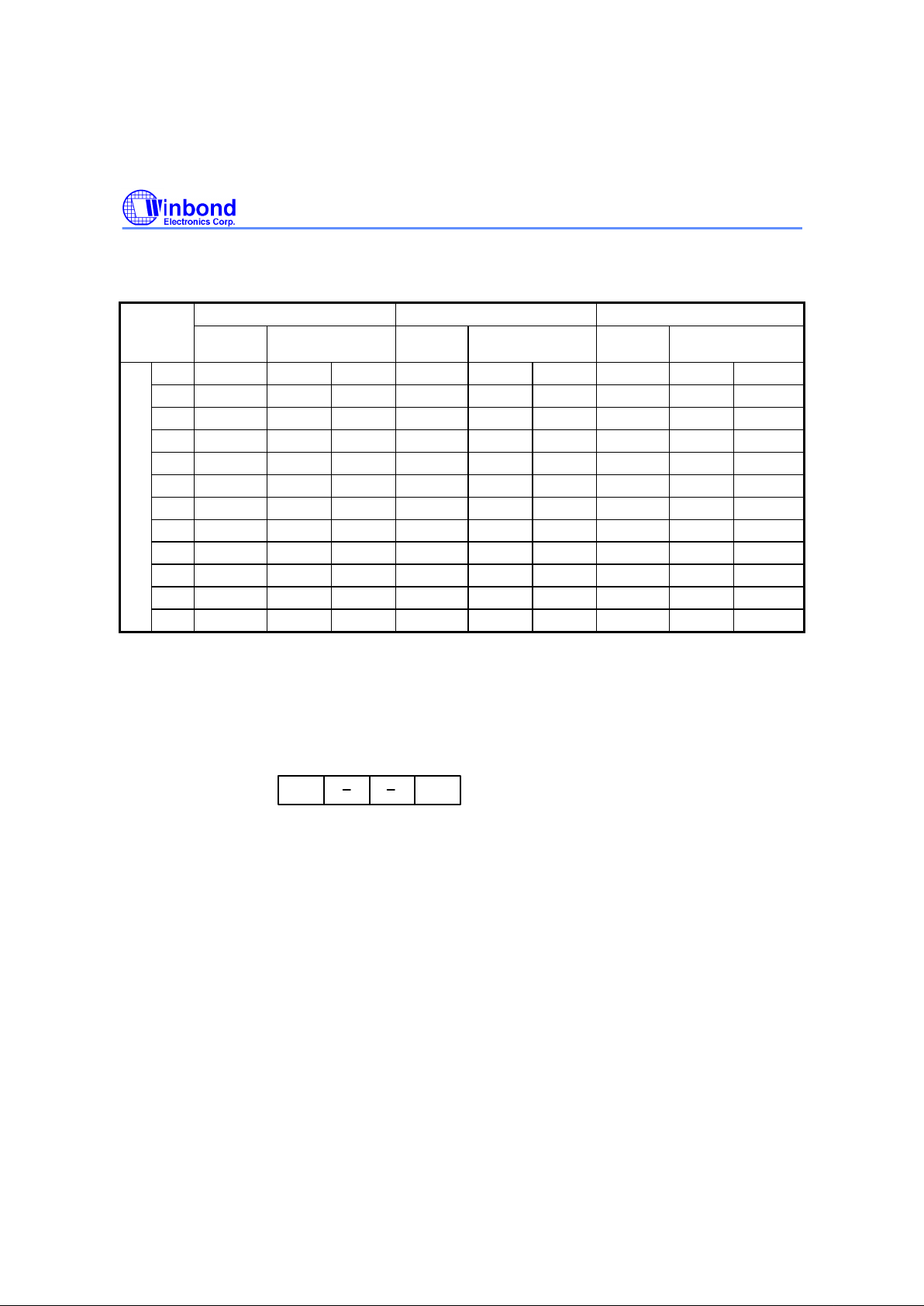
For example, when FT equals 32768 Hz, depending on the preset value of TM1, the MFP pin will
output a single tone signal in the tone frequency range from 64 Hz to 16384 Hz. The relation between
the tone frequency and the preset value of TM1 is shown in the table below.
3rd octave 4th octave 5th octave
Tone
frequency
TM1 preset value &
MFP frequency
Tone
frequency
TM1 preset value &
MFP frequency
Tone
frequency
TM1 preset value &
MFP frequency
C 130.81 7CH 131.07 261.63 3EH 260.06 523.25 1EH 528.51
C# 138.59 75H 138.84 277.18 3AH 277.69 554.37 1CH 564.96
T D 146.83 6FH 146.28 293.66 37H 292.57 587.33 1BH 585.14
D# 155.56 68H 156.03 311.13 34H 309.13 622.25 19H 630.15
O E 164.81 62H 165.49 329.63 31H 327.68 659.26 18H 655.36
F 174.61 5DH 174.30 349.23 2EH 372.36 698.46 16H 712.34
N F# 185.00 58H 184.09 369.99 2BH 390.09 739.99 15H 744.72
G 196.00 53H 195.04 392.00 29H 420.10 783.99 14H 780.19
E G# 207.65 4EH 207.39 415.30 26H 443.81 830.61 13H 819.20
A 220.00 49H 221.40 440.00 24H 442.81 880.00 12H 862.84
A# 233.08 45H 234.05 466.16 22H 468.11 932.23 11H 910.22
B 246.94 41H 248.24 493.88 20H 496.48 987.77 10H 963.76
Note: Central tone is A4 (440 Hz).
Mode Register 0 (MR0)
Mode Register 0 is organized as a 4-bit binary register (MR0.0 to MR0.3). MR0 can be used to control
the operation of Timer 0. The bit descriptions are as follows:
W W
0123
MR0
Note: W means write only.
Bit 0 = 0 The fundamental frequency of Timer 0 is FOSC/4.
= 1 The fundamental frequency of Timer 0 is FOSC/1024.
Bit 1 & Bit 2 are reserved
Bit 3 = 0 Timer 0 stops down-counting.
= 1 Timer 0 starts down-counting.
Preliminary W741C20X
- 14 -
Mode Register 1 (MR1)
Mode Register 1 is organized as a 4-bit binary register (MR1.0 to MR1.3). MR1 can be used to control
the operation of Timer 1. The bit descriptions are as follows:
WW W W
0123
MR1
Note: W means write only.
Bit 0 = 0 The internal fundamental frequency of Timer 1 is FOSC.
= 1 The internal fundamental frequency of Timer 1 is FOSC/64.
Bit 1 = 0 The fundamental frequency source of Timer 1 is the internal clock.
= 1 The fundamental frequency source of Timer 1 is the external clock from RC.0 input pin.
Bit 2 = 0 The specified waveform of the MFP generator is delivered at the MFP output pin.
= 1 The specified frequency of Timer 1 is delivered at the MFP output pin.
Bit 3 = 0 Timer 1 stops down-counting.
= 1 Timer 1 starts down-counting.
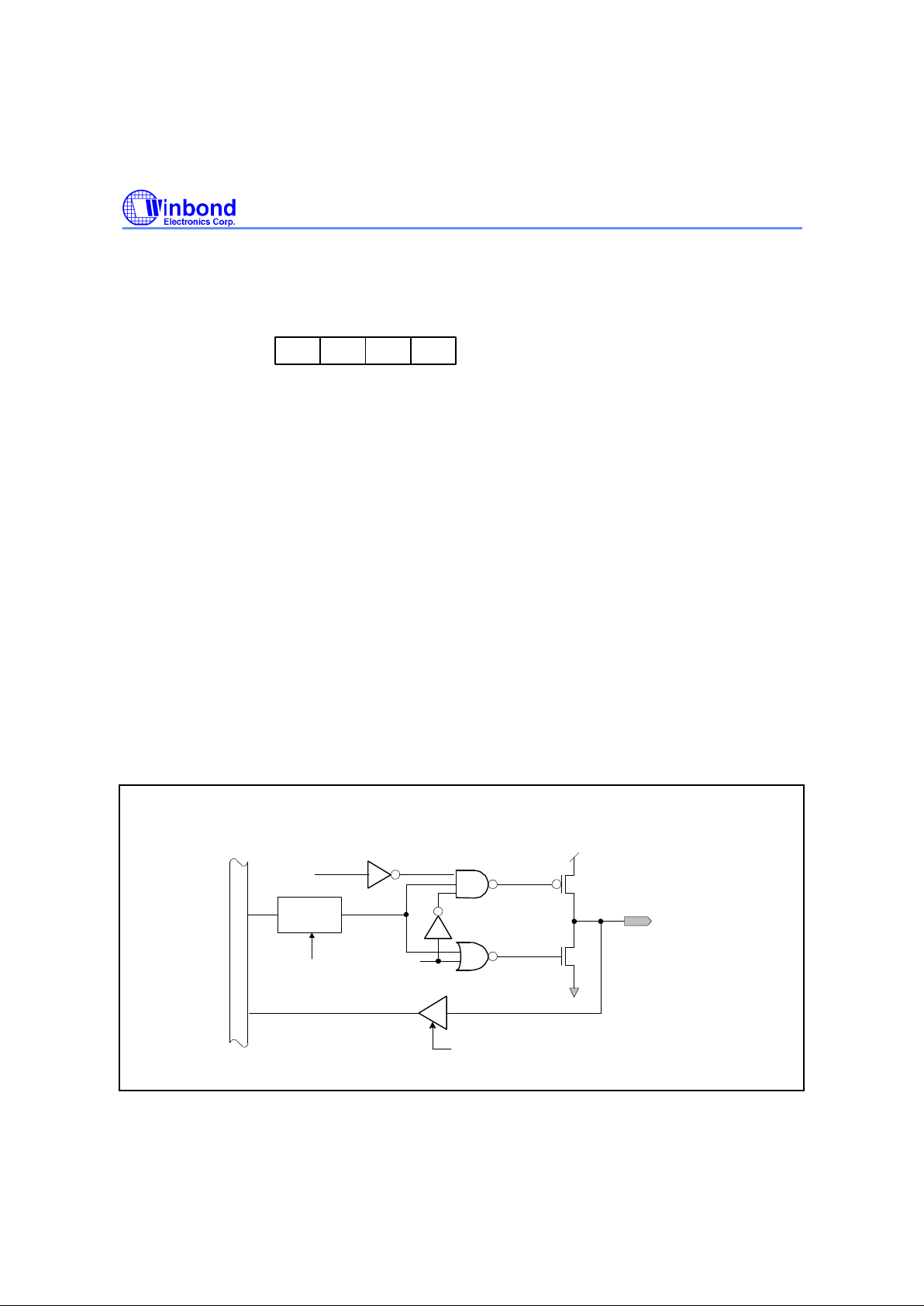
Input/Output Ports RA, RB
Port RA consists of pins RA.0 to RA.3 and Port RB consists of pins RB.0 to RB.3. At initial reset,
input/output ports RA and RB are both in input mode. When RA and RB are used as output ports,
CMOS or NMOS open drain output type can be selected by the PM0 register. Each pin of port RA or
RB can be specified as input or output mode independently by the PM1 and PM2 registers. The
MOVA R, RA or MOVA R, RB instructions operate the input functions and the MOV RA, R or MOV
RB, R operate the output functions. For more details, refer to the instruction table and Figure 7.
I/O PIN
RA.n(RB.n)
DATA
BUS
Buffer
Output
PM0.0 (or PM0.1)
PM1.n
(or PM2.n)
MOVA R, RA
(or MOVA R, RB)
instruction
MOV RA, R
(or MOV RB, R)
Instruction
Enable
Enable
VDD
Input/Output Pin of the RA(RB)
Figure 7. Architecture of RA & RB Input/Output Pins
Preliminary W741C20X
Publication Release Date: March 1998
- 15 - Revision A3
Port Mode 0 Register (PM0)
The port mode 0 register is organized as 4-bit binary register (PM0.0 to PM0.3). PM0 can be used to
determine the structure of the input/output ports; it is controlled by the MOV PM0, #I instruction. The
bit descriptions are as follows:
PM0 w
012
w
3
Note: W means write only.
Bit 0 = 0 RA port is CMOS output type. Bit 0 = 1 RA port is NMOS open drain output type.
Bit 1 = 0 RB port is CMOS output type. Bit 0 = 1 RB port is NMOS open drain output type.
Bit 2 & Bit 3 are reserved.
Port Mode 1 Register (PM1)
The port mode 1 register is organized as 4-bit binary register (PM1.0 to PM1.3). PM1 can be used to
control the input/output mode of port RA. PM1 is controlled by the MOV PM1, #I instruction. The bit
descriptions are as follows:
PM1 w w w
012
w
3
Note: W means write only.
Bit 0 = 0 RA.0 works as output pin; Bit 0 = 1 RA.0 works as input pin
Bit 1 = 0 RA.1 works as output pin; Bit 1 = 1 RA.1 works as input pin
Bit 2 = 0 RA.2 works as output pin; Bit 2 = 1 RA.2 works as input pin
Bit 3 = 0 RA.3 works as output pin; Bit 3 = 1 RA.3 works as input pin
At initial reset, port RA is input mode (PM1 = 1111B).
Port Mode 2 Register (PM2)
The port mode 2 register is organized as 4-bit binary register (PM2.0 to PM2.3). PM2 can be used to
control the input/output mode of port RB. PM2 is controlled by the MOV PM2, #I instruction. The bit
descriptions are as follows:
PM2 w w w
012
w
3
Note: W means write only.
Preliminary W741C20X
- 16 -
Bit 0 = 0 RB.0 works as output pin; Bit 0 = 1 RB.0 works as input pin
Bit 1 = 0 RB.1 works as output pin; Bit 1 = 1 RB.1 works as input pin
Bit 2 = 0 RB.2 works as output pin; Bit 2 = 1 RB.2 works as input pin
Bit 3 = 0 RB.3 works as output pin; Bit 3 = 1 RB.3 works as input pin
At initial reset, the port RB is input mode (PM2 = 1111B).
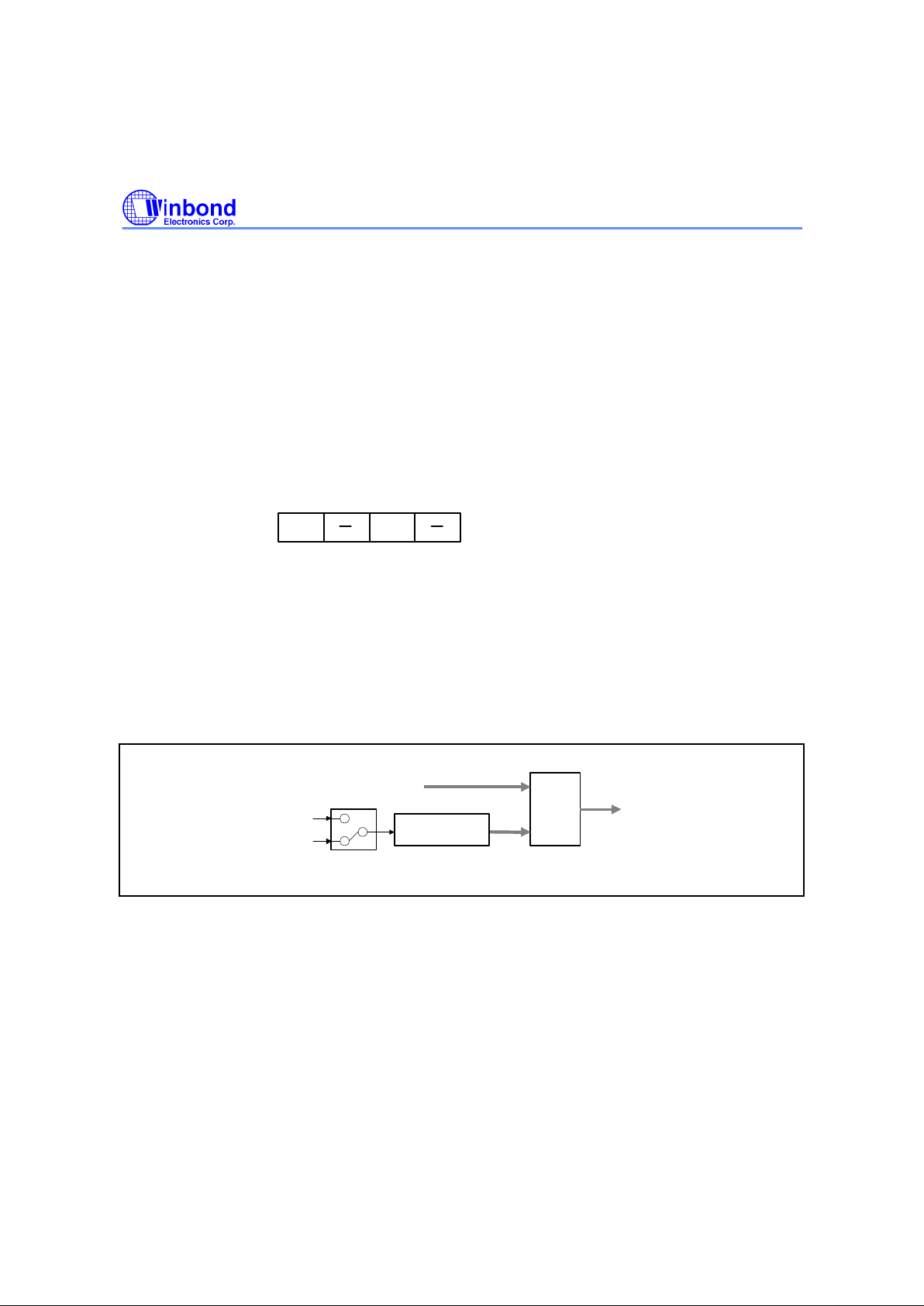
Port Mode 3 register (PM3)
Port Mode 3 Register is organized as a 4-bit binary register (PM3.0 to PM3.3). PM3 can be used to
determine the operating mode of the output port RE and the clock rate of the serial I/O function. The
PM3 control diagram is shown in Figure 8. The bit descriptions are as follows:
W
W
0123
PM3
Note: W means write only.
Bit 0 is reserved.
Bit 1 = 0 The output of the port RE is the output of the internal parallel port RT.
= 1 The port RE works as the serial input/output port.
Bit 2 is reserved.
Bit 3 = 0 Serial Tx rate = FOSC/2
= 1 Serial Tx rate = FOSC/256
PM3.1
MUX.
Internal parallel port RT
Port RE
Fosc/2
PM3.3
Fosc/256
Serial I/O port
Figure 8. PM3 Control Diagram
Preliminary W741C20X
Publication Release Date: March 1998
- 17 - Revision A3
Port Mode 4 Register (PM4)
The port mode 4 register is organized as 4-bit binary register (PM4.0 to PM4.3). PM4 can be used to
control the input/output mode of port RC. PM4 is controlled by the MOV PM4, #I instruction. The bit
descriptions are as follows:
PM4 w w w
012
w
3
Note: W means write only.
Bit 0 = 0 RC.0 works as output pin; Bit 0 = 1 RC.0 works as input pin
Bit 1 = 0 RC.1 works as output pin; Bit 1 = 1 RC.1 works as input pin
Bit 2 = 0 RC.2 works as output pin; Bit 2 = 1 RC.2 works as input pin
Bit 3 = 0 RC.3 works as output pin; Bit 3 = 1 RC.3 works as input pin
At initial reset, port RC is input mode (PM4 = 1111B).
Port Mode 5 Register (PM5)
The port mode 5 register is organized as 4-bit binary register (PM5.0 to PM5.3). PM5 can be used to
control the input/output mode of port RD. PM5 is controlled by the MOV PM5, #I instruction. The bit
descriptions are as follows:
PM5 w w w
012
w
3
Note: W means write only.
Bit 0 = 0 RD.0 works as output pin; Bit 0 = 1 RD.0 works as input pin
Bit 1 = 0 RD.1 works as output pin; Bit 1 = 1 RD.1 works as input pin
Bit 2 = 0 RD.2 works as output pin; Bit 2 = 1 RD.2 works as input pin
Bit 3 = 0 RD.3 works as output pin; Bit 3 = 1 RD.3 works as input pin
At initial reset, the port RB is input mode (PM2 = 1111B).
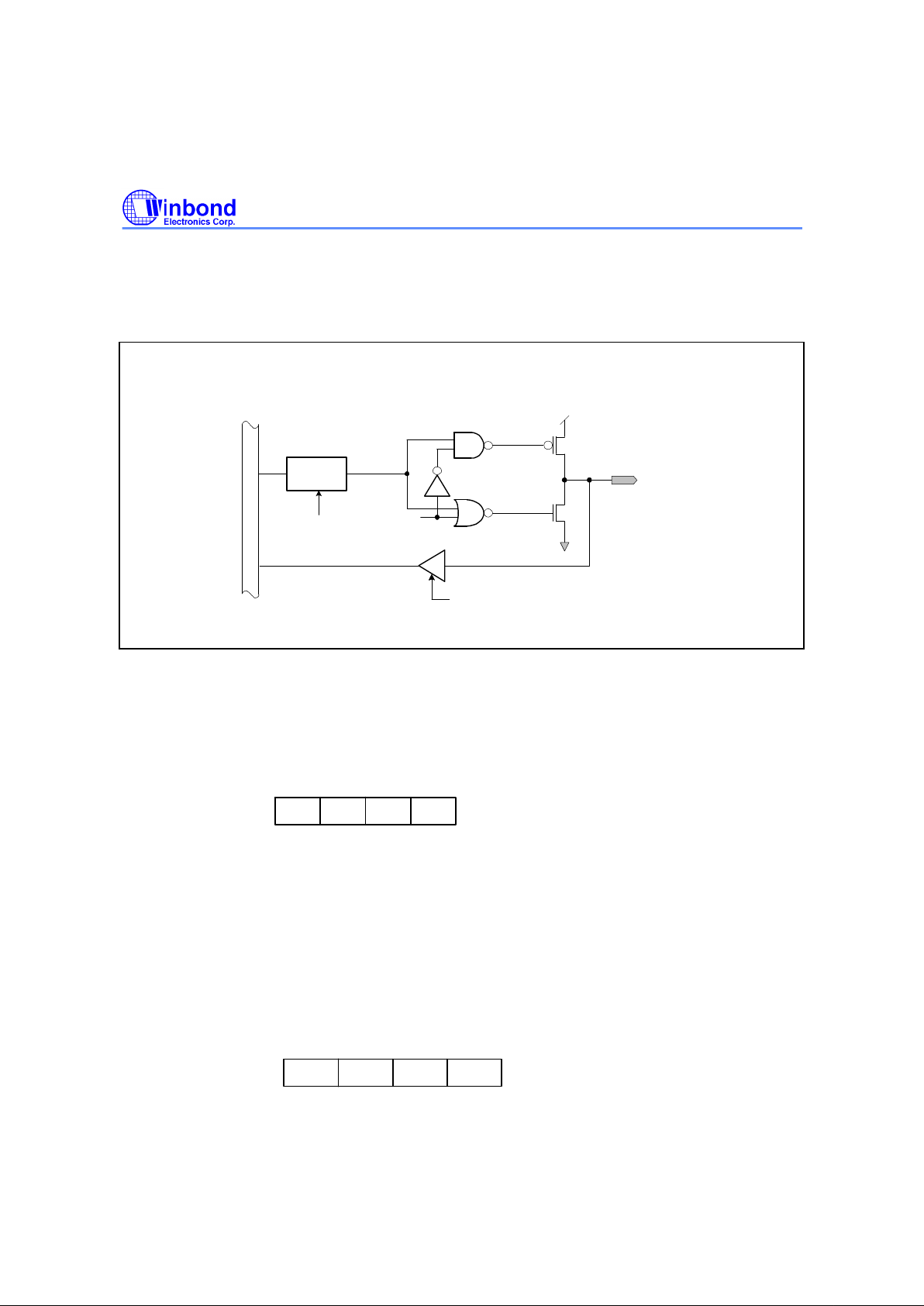
Input/Output Ports RC, RD
Port RC consists of pins RC.0 to RC.3, and port RD consists of pins RD.0 to RD.3. At initial reset,
input/output ports RC and RD are both in input mode. When RC and RD are used as output ports, the
CMOS type is the only ouput driving type. Each pin of port RC or RD can be specified as input or
output mode independently by the PM4 and PM5 registers. The MOVA R, RC or MOVA R, RD
instructions operate the input functions and the MOV RC, R or MOV RD, R operate the output
functions. When the PEF, HEF, and IEF corresponding to the RC port are set, a signal change at the
specified pins of port RC will execute the hold mode release or interrupt subroutine. Port status
register 0 (PSR0) records the status of port RC, and that can be read out and cleared by the MOV R,
PSR0, and CLR PSR0 instructions. Before the port mode of the RC port is changed from output
mode to input mode in the hold mode release and interrupt application, the output value must be
preset to the same as the system status to prevent the undesired signal change being accepted.
Preliminary W741C20X
- 18 -
When the interrupt of RC port is accepted, the corresponding event flag (EVF.2) will be reset, but the
content of PSR0 should not be changed except the CLR PSR0 or MOV PEF, #I instruction being
executed or performing the reset function. In addition, the falling edge signal on the pin of port RC
specified by the instruction MOV SEF, #I will cause the device to exit the stop mode. The RD port is
used as the I/O port only. Refer to Figure 9, Figure 10 and the instruction table for more details.
I/O PIN
RC.n(RD.n)
DATA
BUS
Buffer
Output
PM4.n
(or PM5.n)
MOVA R, RC
(or MOVA R, RD)
instruction
MOV RC, R
(or MOV RD, R)
Instruction
Enable
Enable
Vdd
Input/Output Pin of the RC(RD)
Figure 9. Architecture of RC & RD Input/Output Pins
Port Enable Flag (PEF)
The port enable flag is organized as 4-bit binary register (PEF.0 to PEF.3). Before port RC may be
used to release the hold mode or preform interrupt function, the content of the PEF must be set first.
The PEF is controlled by the MOV PEF, #I instruction. The bit descriptions are as follows:
PEF w w w
012
w
3
Note: W means write only.
PEF.0: Enable/disable the signal change at pin RC.0 to release hold mode or perform interrupt.
PEF.1: Enable/disable the signal change at pin RC.1 to release hold mode or perform interrupt.
PEF.2: Enable/disable the signal change at pin RC.2 to release hold mode or perform interrupt.
PEF.3: Enable/disable the signal change at pin RC.3 to release hold mode or perform interrupt.
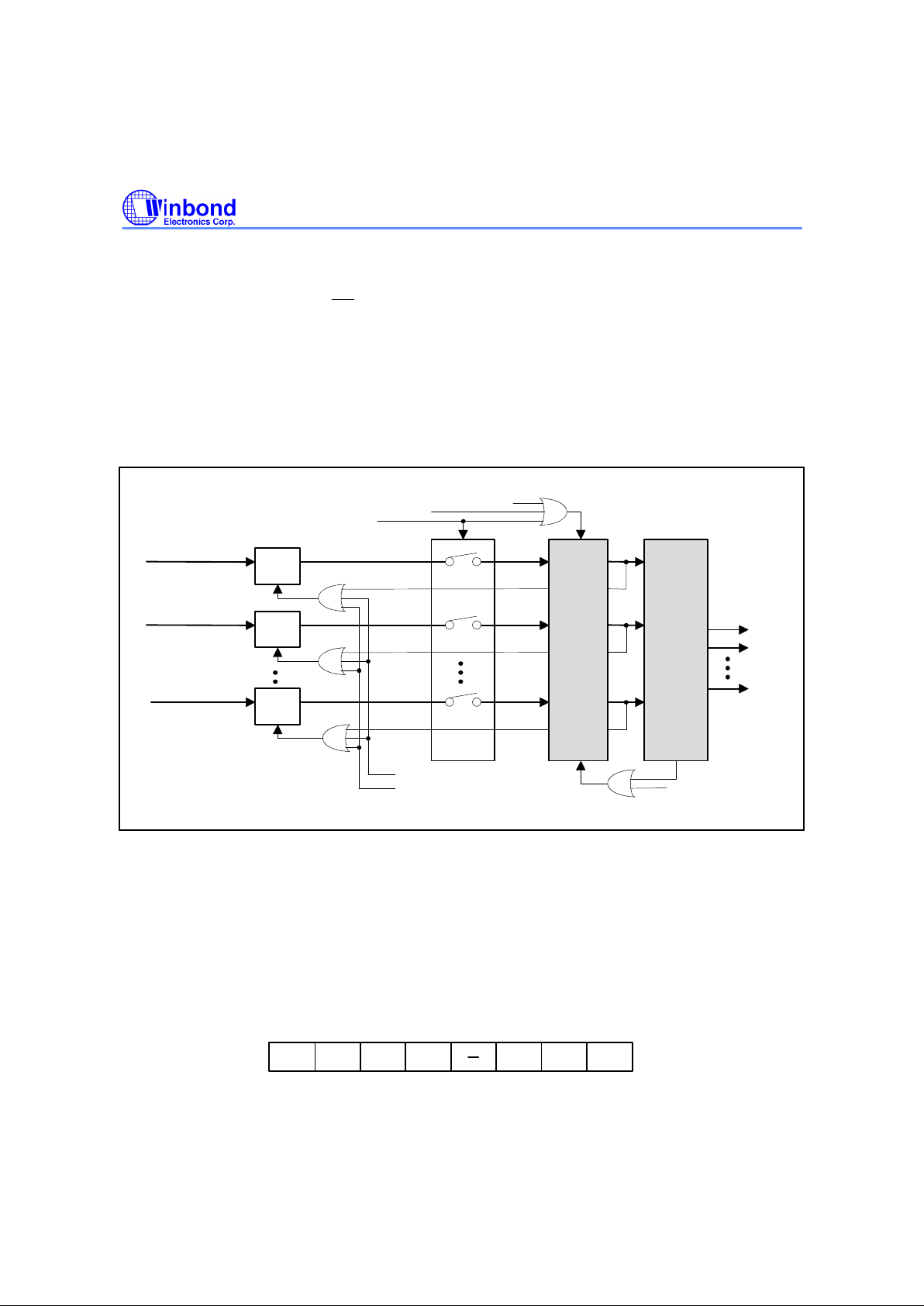
Port Status Register 0 (PSR0)
Port status register 0 is organized as 4-bit binary register (PSR0.0 to PSR0.3). PSR0 can be read or
cleared by the MOVA R, PSR0, and CLR PSR0 instructions. The bit descriptions are as follows:
RR R R
0123
PSR0
Note: R means read only.
Preliminary W741C20X
Publication Release Date: March 1998
- 19 - Revision A3
Bit 0 = 1 Signal change at RC.0
Bit 1 = 1 Signal change at RC.1
Bit 2 = 1 Signal change at RC.2
Bit 3 = 1 Signal change at RC.3
Reset
CLR PSR0
HCF.2
INT 2
Reset
CLR EVF, #I
EVF.2
HEF.2
IEF.2
MOV PEF, #I
Signal
change
detector
PEF.0
DATA BUS
PEF.3
Signal
change
detector
PEF.1
Signal
change
detector
PEF.2
Signal
change
detector
DckQ
R
PSR0.0
DckQ
R
PSR0.1
DckQ
R
PSR0.2
DckQ
R
PSR0.3
DckQ
R
RC.3
RC.2
RC.1
RC.0
SEF.0
SEF.3
SEF.1
SEF.2
Falling
edge
detector
Falling
edge
detector
Falling
edge
detector
Falling
edge
detector
Wake up from STOP mode
PM4.3
PM4.2
PM4.1
PM4.0
PM4.3
PM4.2
PM4.1
PM4.0
MOVA R, RC
Figure 10. Input Architecture of Ports RC
Output Port RE
Output port RE can be used as an output of the internal RT port, or as a serial input/output port. The
control flow is shown in Figure 8. When bit 1 of port mode 3 register (PM3) equals to 0, port RE works
as an output of internal port RT. When the MOV RE, R instruction is executed, the data in the RAM
will be output to port RT through port RE. When RE works as a parallel output port, it provides a high
sink current to drive LEDs. When bit 1 of PM3 equals to 1, the RE port works as a serial input/output
port, and RE.0 to RE.3 are used as DOUT, CLKO, DIN, and CLKI, respectively. In this case, the DIN
pin will has a built-in pull-high resistor. The serial I/O functions are controlled by the instructions SOP
R and SIP R. The functions of the two instructions are described below:
Preliminary W741C20X
- 20 -
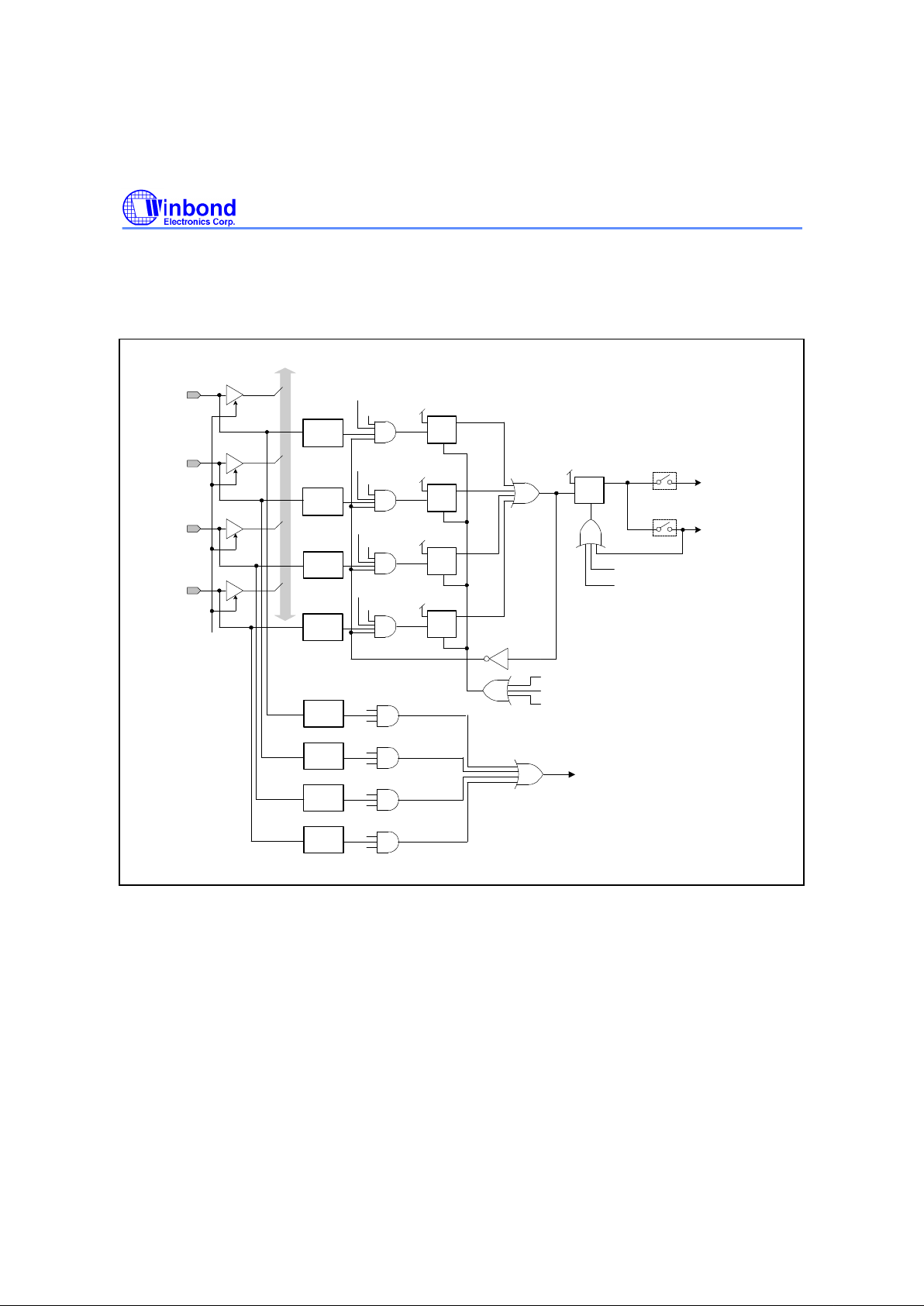
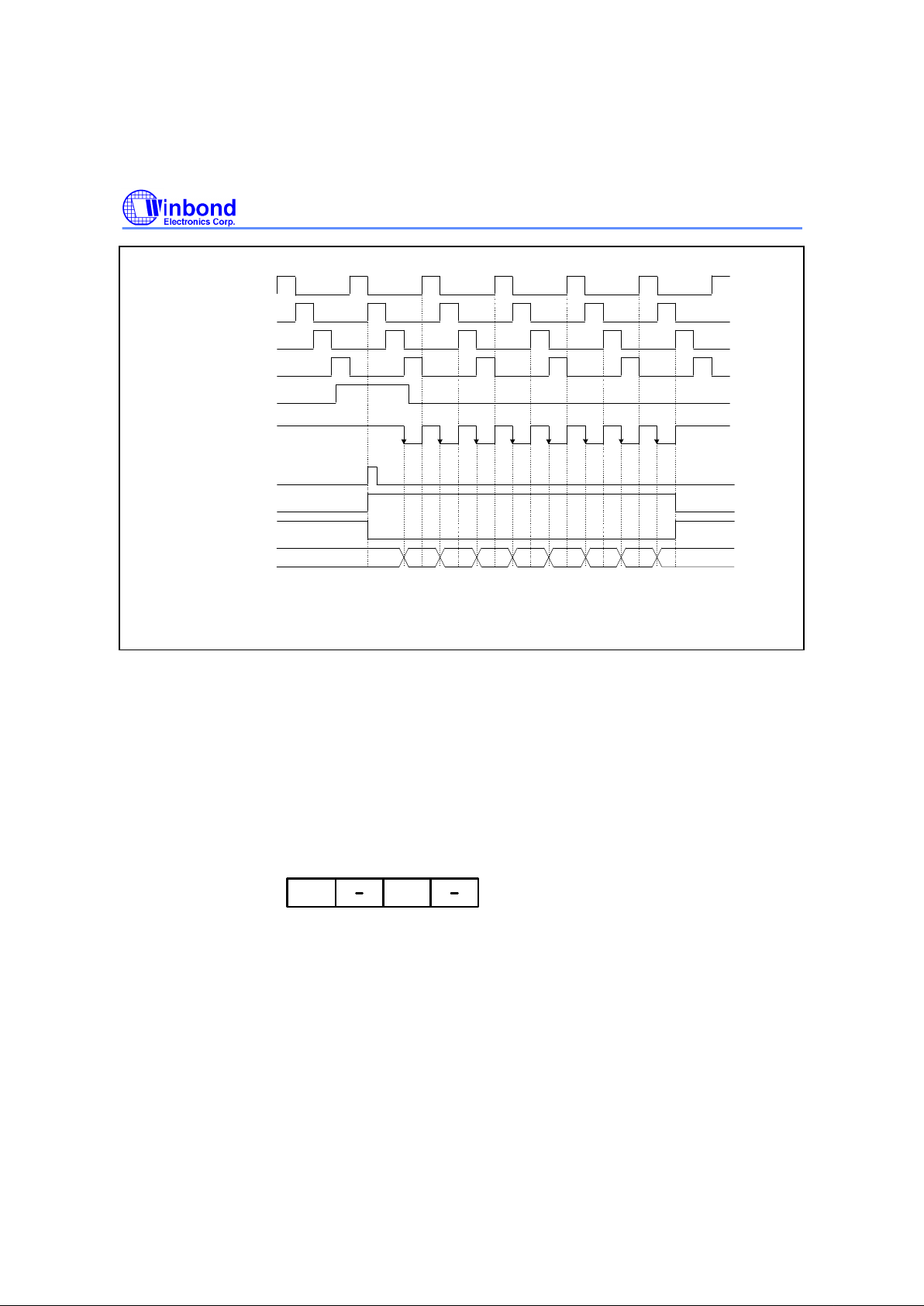
(1)When the SIP R instruction is executed, the data will be loaded from the serial input buffer to
the ACC and RAM first, and bit 1 of port status register 2 will automatically be set to "1" (BUSYI
= 1). Then the CLKI pin will send out 8 clocks and the data from the DIN pin will be loaded to
SIB at the rising edge of the CLKI pin. After the 8 clocks have been sent, BUSYI will be reset to
"0" and EVF.5 will be set to "1." At this time, if IEF.5 has been set (IEF.5 = 1), an interrupt is
executed; if HEF.5 has been set (HEF.5 = 1), the hold state is terminated. Users can check the
status of PSR2.1 (BUSYI) to know whether the serial input process is completed or not. If a
serial input process is not completed, and the SIP R instruction is executed again, the data will
be lost. The timing is shown in Figure 11.
T1
T2
T3
T4
CLKI
(RE3)
Data latch
BUSYI
(PSR2.1)
EVF5
Ins.
DIN
(RE2)
SIP R
1 2 3
4
5 6 7 8
Notes : 1. These clocks at the CLKI pin are internal clock and its frequency is Fosc/2.
2. When the internal signal of the data latch equals to "1,"
then the data in SIB will be loaded into RAM and ACC.
Figure 11. Timing of the Serial Input Function (SIP R)
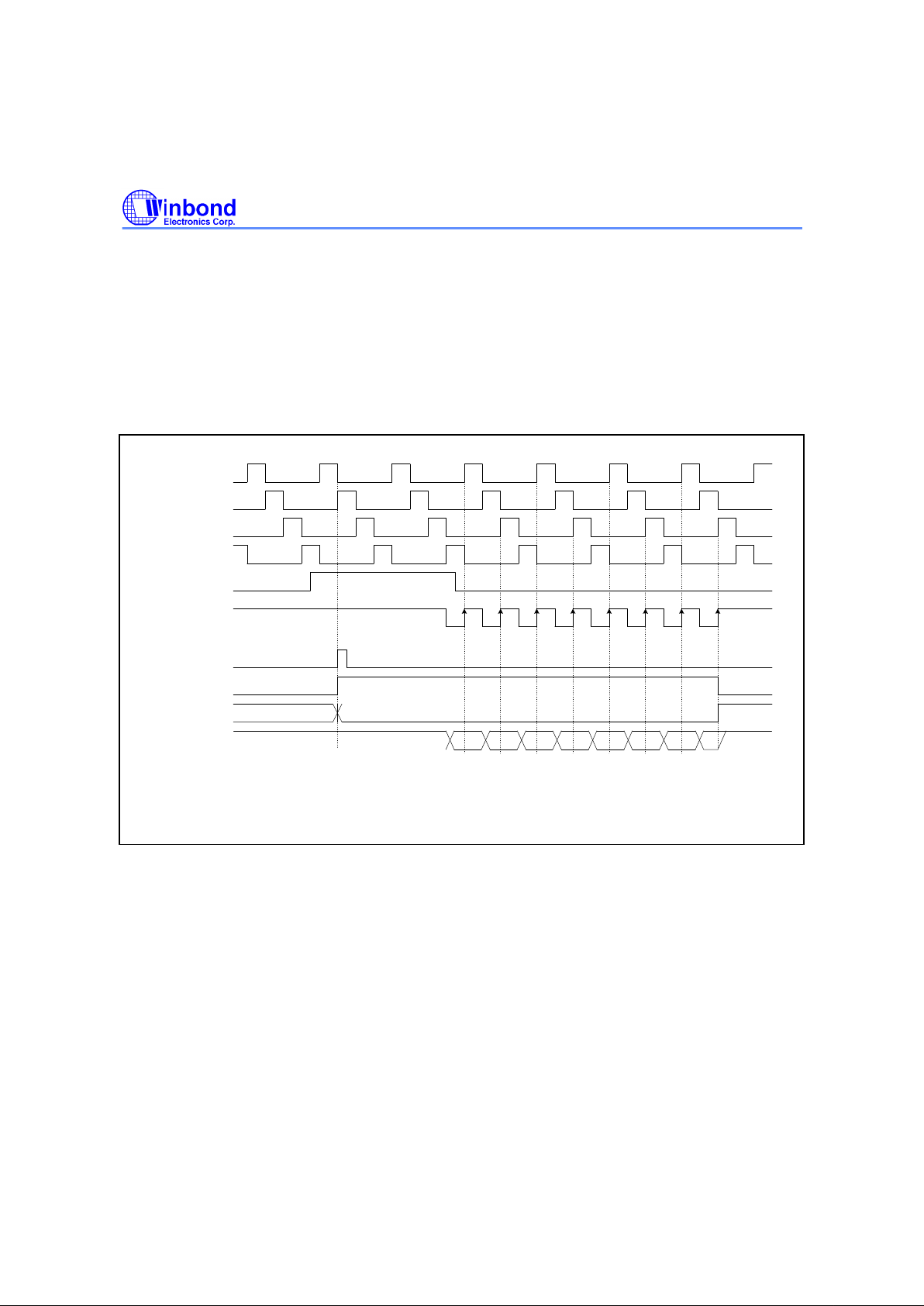
(2)When the SOP R instruction is executed, the data will be loaded to the serial output buffer
(SOB) and bit 3 of port status register 2 will be set to "1" (BUSYO = 1). Then the CLKO pin will
send out 8 clocks and the data in SOB will be sent out at the falling edge of the CLKO pin.
After the 8 clocks have been sent, BUSYO will be reset to "0" and EVF.6 will be set to "1." At
this time, if IEF.6 has been set (IEF.6 = 1), an interrupt is executed; if HEF.6 has been set
(HEF.6 = 1), the hold state is terminated. Users can check the status of PSR2.3 (BUSYO) to
know whether the serial output process is completed or not. If a serial output process is not
completed, and the SOP R instruction is executed again, the data will be lost. The timing is
shown in Figure 12.
Preliminary W741C20X
Publication Release Date: March 1998
- 21 - Revision A3
T1
T2
T3
T4
CLKO
(RE1)
Data
latch
BUSYO
(PSR2.3)
EVF6
Ins.
DOUT
(RE0)
SOP R
1 2 3
4
5 6 7 8
Notes : 1. These clocks at the CLKO pin are internal clock and its frequency is Fosc/2.
2. When the internal signal of the data latch equals to "1,"
then the data of the RAM and ACC be loaded to SOB.
Figure 12. Timing of the Serial Output Function (SOP R)
In the above description, the low nibble location of the serial input/output register is contributed to the
ACC, and the high nibble is to R. The port status register 2 (PSR2) including BUSYI, and BUSYO can
be read out or cleared by the MOVA R, PSR2, or CLR PSR2 instruction.
Port Status Register 2 (PSR2)
Port status register 2 is organized as 4-bit binary register (PSR2.0 to PSR2.3). PSR2 is controlled by
the MOVA R, PSR2, and CLR PSR2 instructions. The bit descriptions are as follows:
R
R
0123
PSR2
Note: R means read only.
Bit 0 is reserved.
Bit 1 (BUSYI): Serial port input busy flag.
Bit 2 is reserved.
Bit 3 (BUSYO): Serial port output busy flag.
Preliminary W741C20X
- 22 -
MFP Output Pin (MFP)
The MFP output pin can output the Timer 1 clock or the modulation frequency; the output of the pin is
determined by mode register 1 (MR1). The organization of MR1 is shown in Figure 6. When bit 2 of
MR1 is reset to "0," the MFP output can deliver a modulation output in any combination of one signal
from among DC, 4096Hz, 2048Hz, and one or more signals from among 128 Hz, 64 Hz, 8 Hz, 4 Hz, 2
Hz, or 1 Hz (when using a 32.768 KHz crystal). The MOV MFP, #I instruction is used to specify the
modulation output combination. The data specified by the 8-bit operand and the MFP output pin are
shown as below.
(FOSC = 32.768 KHz)
R7 R6 R5 R4 R3 R2 R1 R0 FUNCTION
0 0 0 0 0 0 Low level
0 0 0 0 0 1 128 Hz
0 0 0 0 1 0 64 Hz
0 0 0 0 0 1 0 0 8 Hz
0 0 1 0 0 0 4 Hz
0 1 0 0 0 0 2 Hz
1 0 0 0 0 0 1 Hz
0 0 0 0 0 0 High level
0 0 0 0 0 1 128 Hz
0 0 0 0 1 0 64 Hz
0 1 0 0 0 1 0 0 8 Hz
0 0 1 0 0 0 4 Hz
0 1 0 0 0 0 2 Hz
1 0 0 0 0 0 1 Hz
0 0 0 0 0 0 2048 Hz
0 0 0 0 0 1 2048 Hz * 128 Hz
0 0 0 0 1 0 2048 Hz * 64 Hz
1 0 0 0 0 1 0 0 2048 Hz * 8 Hz
0 0 1 0 0 0 2048 Hz * 4 Hz
0 1 0 0 0 0 2048 Hz * 2 Hz
1 0 0 0 0 0 2048 Hz * 1 Hz
0 0 0 0 0 0 4096 Hz
0 0 0 0 0 1 4096 Hz * 128 Hz
0 0 0 0 1 0 4096 Hz * 64 Hz
1 1 0 0 0 1 0 0 4096 Hz * 8 Hz
0 0 1 0 0 0 4096 Hz * 4 Hz
0 1 0 0 0 0 4096 Hz * 2 Hz
1 0 0 0 0 0 4096 Hz * 1 Hz
Preliminary W741C20X
Publication Release Date: March 1998
- 23 - Revision A3
Interrupts
The W741C20X provides five internal interrupt sources (Divider 0, Timer 0, Timer 1, serial I/O) and
two external interrupt sources (
INT
, port RC). Vector addresses for each of the interrupts are located
in the range of program memory (ROM) addresses 004H to 020H. The flags IEF, PEF, and EVF are
used to control the interrupts. When EVF is set to "1" by hardware and the corresponding bits of IEF
and PEF have been set by software, an interrupt is generated. When an interrupt occurs, all of the
interrupts are inhibited until the EN INT or MOV IEF, #I instruction is invoked. The interrupts can also
be disabled by executing the DIS INT instruction. When an interrupt is generated in hold mode, the
hold mode will be released momentarily and interrupt subroutine will be executed. After the RTN
instruction is executed in an interrupt subroutine, the µC will enter hold mode again. The operation
flow chart is shown in Figure 14. The control diagram is shown below.
SRQ
SRQ
SRQ
IEF.0
IEF.1
Interrupt
Process
Circuit
Interrupt
Vector
Generator
004H
008H
020H
IEF.7
Initial Reset
CLR EVF,#I instruction
DIS INT instruction
Initial Reset
MOV IEF,#I
Enable
EN INT
EVF.1
EVF.0
EVF.7
Disable
Divider 0
overflow signal
Timer 0
underflow signal
Timer 1
underflow signal
Figure 13. Interrupt event control diagram
Interrupt Enable Flag (IEF)
The interrupt enable flag is organized as an 8-bit binary register (IEF.0 to IEF.7). These bits are used
to control the interrupt conditions. It is controlled by the MOV IEF, #I instruction. When one of these
interrupts is accepted, the corresponding bit of the event flag will be reset, but the other bits are
unaffected. In interrupt subroutine, these interrupts will be disabled till the instruction MOV IEF, #I or
EN INT is executed again. To enable these interrupts, the instructions MOV IEF, #I or EN INT must
be executed again. Otherwise, these interrupts can be disabled by executing DIS INT instruction. The
bit descriptions are as follows:
w w w
123
IEF
4
w w
56 0
ww
7
Note: W means write only.
Preliminary W741C20X
- 24 -
IEF.0 = 1 Interrupt 0 is accepted by overflow from the Divider 0.
IEF.1 = 1 Interrupt 1 is accepted by underflow from the Timer 0.
IEF.2 = 1 Interrupt 2 is accepted by a signal change at port RC.
IEF.3 is reserved.
IEF.4 = 1 Interrupt 4 is accepted by a falling edge signal at the
INT
pin.
IEF.5 = 1 Interrupt 5 is accepted by the serial port received completely.
IEF.6 = 1 Interrupt 6 is accepted by the serial port transmitted completely.
IEF.7 = 1 Interrupt 7 is accepted by underflow from Timer 1.
External INT
The external interrupt
INT
pin contains a pull-up resistor. When the HEF.4 or IEF.4 flag is set, the
falling edge of the
INT
pin will execute the hold mode release or interrupt subroutine. A low level on
the
INT
pin will release the stop mode.
Stop Mode Operation
In stop mode, all operations of the µC cease (including the operation of the oscillator). The µC enters
stop mode when the STOP instruction is executed and exits stop mode when an external trigger is
activated (by a low level on the
INT
pin or a falling signal on the RC port). When the designated
signal is accepted, the µC awakens and warms up, and then executes the next instruction.
Stop Mode Wake-up Enable Flag for Ports RC (SEF)
The stop mode wake-up flag for ports RC is organized as a 4-bit binary register (SEF.0 to SEF.3).
Before port RC may be used to make the device exit the stop mode, the content of the SEF must be
set first. The SEF is controlled by the MOV SEF, #I instruction. The bit descriptions are as follows:
SEF w w w
012
w
3
Note: W means write only.
SEF 0 = 1 Device will exit stop mode when falling edge signal is applied to pin RC.0
SEF 1 = 1 Device will exit stop mode when falling edge signal is applied to pin RC.1
SEF 2 = 1 Device will exit stop mode when falling edge signal is applied to pin RC.2
SEF 3 = 1 Device will exit stop mode when falling edge signal is applied to pin RC.3
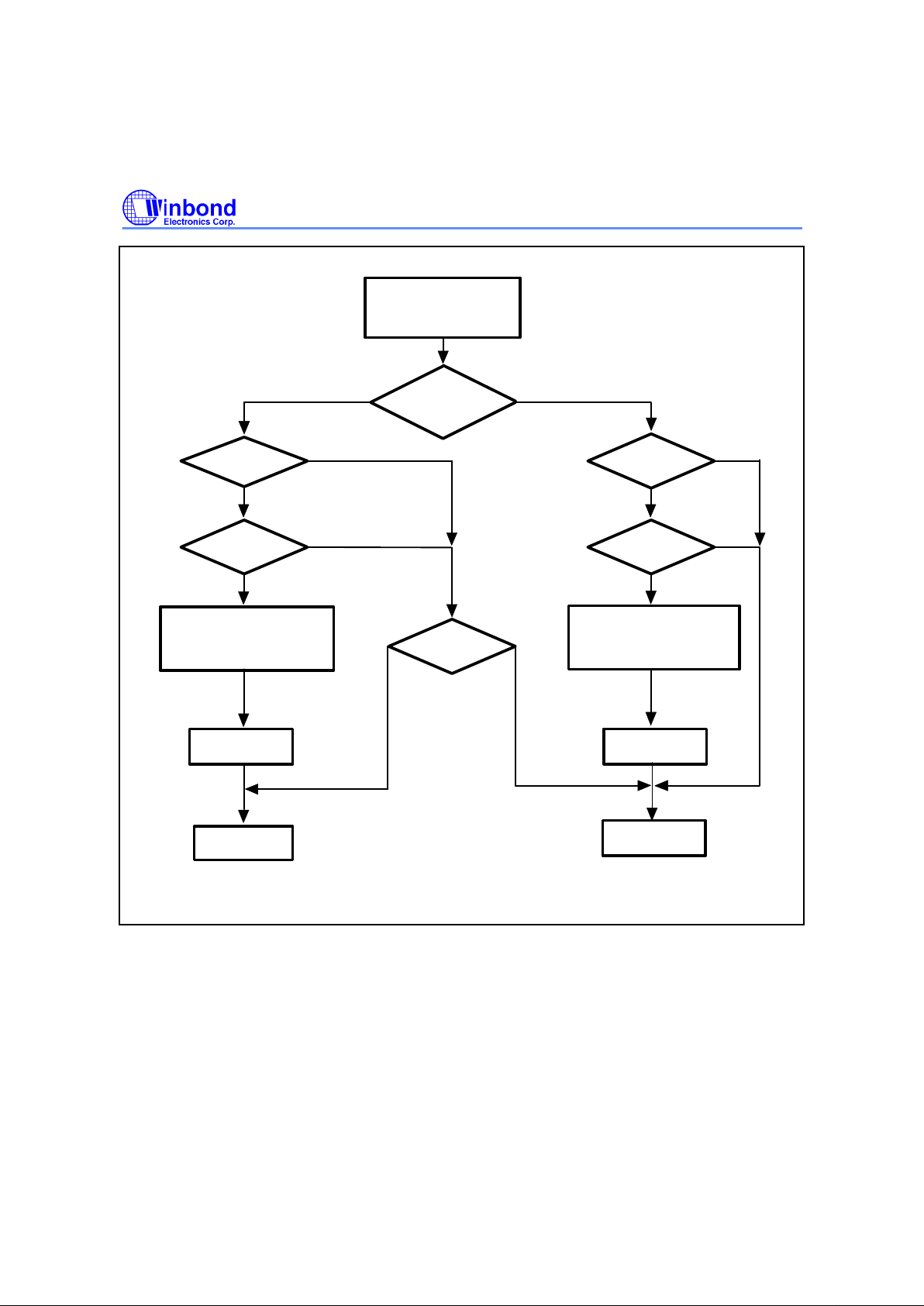
Hold Mode Operation
In hold mode, all operations of the µC cease, except for the operation of the oscillator and timer. The
µC enters hold mode when the HOLD instruction is executed. The hold mode can be released in one
of five ways: by the action of timer 0, timer 1, the divider, the
INT
pin, the RC port. Before the device
enters the hold mode, the HEF, PEF, and IEF flags must be set to define the hold mode release
conditions. For more details, refer to the instruction-set table and the following flow chart.
Preliminary W741C20X
Publication Release Date: March 1998
- 25 - Revision A3
Divider 0, /INT, Timer 0,
Timer 1, Serial I/O and
signal Change at RC Port
In
HOLD
Mode?
IEF
Flag Set?
PC <- (PC+1)
IEF
Flag Set?
No
Yes
NoYes
Yes
No
YesNo
HOLD
HEF
Flag Set?
Reset EVF Flag
Execute
Interrupt Service Routine
Reset EVF Flag
Execute
Interrupt Service Routine
Interrupt
Enable?
Interrupt
Enable?
Yes
Yes
NoNo
Disable interrupt
Disable interrupt
(Note)
(Note)
Note: The bit of EVF corresponding to the interrupt signal will be reset.
Figure 14. Hold Mode and Interrupt Operation Flow Chart
Preliminary W741C20X
- 26 -
Hold Mode Release Enable Flag (HEF)
The hold mode release enable flag is organized as an 8-bit binary register (HEF.0 to HEF.7). The
HEF is used to control the hold mode release conditions. It is controlled by the MOV HEF, #I
instruction. The bit descriptions are as follows:
w
012
HEF w w w w
34567
w w
Note: W means write only.
HEF.0 = 1 Overflow from the Divider 0 causes Hold mode to be released.
HEF.1 = 1 Underflow from Timer 0 causes Hold mode to be released.
HEF.2 = 1 Signal change at port RC causes Hold mode to be released.
HEF.3 is reserved.
HEF.4 = 1 Falling edge signal at the
INT
pin causes Hold mode to be released.
HEF.5 = 1 The serial port received completely causes Hold mode to be released.
HEF.6 = 1 The serial port transmitted completely causes Hold mode to be released.
HEF.7 = 1 Underflow from Timer 1 causes Hold mode to be released.
Hold Mode Release Condition Flag (HCF)
The hold mode release condition flag is organized as a 8-bit binary register (HCF0 to HCF7). It
indicates by which interrupt source the hold mode has been released, and is loaded by hardware. The
HCF can be read out by the MOVA R, HCFL and MOVA R, HCFH instructions. When any of the HCF
bits is "1," the hold mode will be released and the HOLD instruction is invalid. The HCF can be reset
by the CLR EVF or MOV HEF,#I (HEF = 0) instructions. When EVF and HEF have been reset, the
corresponding bit of HCF is reset simultaneously. The bit descriptions are as follows:
R R R RHCF
012345
R R R
67
Note: R means read only.
HCF.0 = 1 Hold mode was released by overflow from the Divider 0
HCF.1 = 1 Hold mode was released by underflow from the timer 0
HCF.2 = 1 Hold mode was released by a signal change at port RC
HCF.3 is reserved.
HCF.4 = 1 Hold mode was released by a falling edge signal at the
INT
pin
HCF.5 = 1 Hold mode was released by underflow from the timer 1
HCF.6 = 1 Hold mode was released by the serial port received completely.
HCF.7 = 1 Hold mode was released by the serial port transmitted completely.

Preliminary W741C20X
Publication Release Date: March 1998
- 27 - Revision A3
Event Flag (EVF)
The event flag is organized as a 8-bit binary register (EVF0 to EVF7). It is set by hardware and reset
by CLR EVF,#I instruction or the occurrence of an interrupt. The bit descriptions are as follows:
R R R REVF
012345
RR R
67
Note: R means read only.
EVF.0 = 1 Overflow from Divider 0 occurred.
EVF.1 = 1 Underflow from Timer 0 occurred.
EVF.2 = 1 Signal change at port RC occurred.
EVF.3 is reserved.
EVF.4 = 1 Falling edge signal at the
INT
pin occurred.
EVF.5 = 1 The serial port received completely.
EVF.6 = 1 The serial port transmitted completely.
EVF.7 = 1 Underflow from Timer 1 occurred.
Reset Function
The W741C20X is reset either by a power-on reset or by using the external
RES
pin. The initial state
of the W741C20X after the reset function is executed is described below.
Program Counter (PC) 000H
TM0, TM1 Reset
MR0, MR1, PAGE registers Reset
PSR0, PSR2, PM3 registers Reset
IEF, HEF, HCF, PEF, EVF, SEF
flags
Reset
Timer 0 input clock FOSC/4
Timer 1 input clock FOSC
MFP output Low
Input/output ports RA, RB Input mode
Input/output ports RC, RD Input mode
Output port RE High
RA and RB ports output type CMOS type
Input clock of the watchdog timer FOSC/1024

Preliminary W741C20X
- 28 -
ABSOLUTE MAXIMUM RATINGS
PARAMETER RATING UNIT
Supply Voltage to Ground Potential -0.3 to +7.0 V
Applied Input/Output Voltage -0.3 to +7.0 V
Power Dissipation 120 mW
Ambient Operating Temperature 0 to +70
°C
Storage Temperature -55 to +150
°C
Note: Exposure to conditions beyond those listed under Absolute Maximum Ratings may adversely affect the life and reliability of the
device.
DC CHARACTERISTICS
(VDD-VSS = 3.0V, Fosc. = 32.768 KHz, Ta = 25° C; unless otherwise specified)
PARAMETER SYM. CONDITIONS MIN. TYP. MAX. UNIT
Op. Voltage VDD - 2.2 - 5.5 V
Op. Current (Crystal type) IOP1 No load (Ext-V) - 8 20
µA
Op. Current (RC type) IOP2 No load (Ext-V) - 35 65
µA
Hold Current (Crystal type) IHM1 Hold mode No
load (Ext-V)
- 4 6
µA
Hold Current (RC type) IHM2 Hold mode No
load (Ext-V)
- 16 40
µA
Stop Current (Crystal type) ISM1 Stop mode No
load (Ext-V)
- 0.1 2
µA
Stop Current (RC type) ISM2 Stop mode
No load (Ext-V)
- 0.1 2
µA
Input Low Voltage VIL - VSS - 0.3 VDD V
Input High Voltage VIH - 0.7 VDD - VDD V
MFP Output Low Voltage VML IOL = 3.5 mA - - 0.4 V
MFP Output High Voltage VMH IOH = -3.5 mA 2.4 - - V
Port RA, RB Sink Current IABL VOL = 0.9V 9 - - mA
Port RA, RB Source Current IABH VOH = 2.4V 0.4 1.2 - mA
Port RC, RD Output Low Voltage VCDL IOL = 2.0 mA - - 0.4 V
Port RC, RD Output High Voltage VCDH IOH = -2.0 mA 2.4 - - V
Port RE Sink Current IEL VOL = 0.9V 9 - - mA
Port RE Source Current IEH VOH = 2.4V 0.4 1.2 - mA

Preliminary W741C20X
Publication Release Date: March 1998
- 29 - Revision A3
DC Characteristics, continued
PARAMETER SYM. CONDITIONS MIN. TYP. MAX. UNIT
INT
Pull-up Resistor
RINT - 50 250 1000
KΩ
DIN Pin Pull-up Resistor RDIN RE.2 used as
serial input pin
50 250 1000
KΩ
RES
Pull-up Resistor
RRES - 20 100 500
KΩ
AC CHARACTERISTICS
(VDD-VSS = 3.0 V, Ta = 25° C; unless otherwise specified)
PARAMETER SYM. CONDITIONS MIN. TYP. MAX. UNIT
RC type - - 4000
Op. Frequency FOSC
Crystal type 1 (Option
low speed type)
- 32.768 - KHz
Crystal type 2 (Option
high speed type)
400 - 4190
Frequency Deviation by
Voltage drop for RC
Oscillator
∆f
f
f(3V) - f(2.4V)
f(3V)
- - 10 %
Instruction Cycle Time TI One machine cycle - 4/FOSC - S
Serial Port Data Ready
Time
TDR - 200 - - nS
Serial Port Data Hold
Time
TDH - 200 - - nS
Reset Active Width TRAW FOSC = 32.768 KHz 1 - -
µS
Interrupt Active Width TIAW FOSC = 32.768 KHz 1 - -
µS

Preliminary W741C20X
- 30 -
PAD ASSIGNMENT & POSITIONS
4
5
6
7
8
9
2580 m
2280 m
µ
µ
13 2
10
12 13 15
16
(0,0)
X
Y
11
14
29 28 27
17
18
26
25
24
23
22
21
20
19
Note: The chip substrate must be connected to system ground (VSS).
PAD NO. PAD NAME X Y PAD NO. PAD NAME X Y
1 RA2 -576.30 943.70 16 RC0 215.10 -965.00
2 RA3 -819.50 943.70 17 RC1 476.30 -965.00
3
INT
-1063.00 943.70 18 RC2 722.30 -965.00
4
RES
-1115.00 671.70 19 RC3 1113.90 -959.30
5 VSS -1115.00 464.20 20 VDD 1113.90 -749.30
6 RE0 -1115.00 207.00 21 RD0 1113.90 -492.10
7 RE1 -1115.00 -21.00 22 RD1 1113.90 -264.10
8 RE2 -1115.00 -264.20 23 RD2 1113.90 -20.90
9 RE3 -1115.00 -492.20 24 RD3 1113.90 207.10
10 VSS -1115.00 -749.40 25 VDD 1113.90 464.30
11 RB0 -1115.00 -965.00 26 XOUT 1113.90 738.00
12 RB1 -813.30 -965.00 27 XIN 1061.30 943.70
13 RB2 -552.10 -965.00 28 RA0 752.20 943.70
14 RB3 -302.10 -965.00 29 RA1 509.00 943.70
15 MFP -40.90 -965.00

Preliminary W741C20X
Publication Release Date: March 1998
- 31 - Revision A3
TYPICAL APPLICATION CIRCUIT
MFP
INT
RES
XOUT
XIN
RC2
RC3
RA0
RA3
Output Signal
RB0
RB1
RB2
RB3
RC0
RC1
RD0
RD1
RD2
RD3
or
RE0
RE1
RE2
RE3
Vcc
Vcc
Vcc
V
DD
V
SS
Vcc
Vcc

Preliminary W741C20X
- 32 -
INSTRUCTION SET TABLE
Symbol Description
ACC: Accumulator
ACC.n: Accumulator bit n
WR: Working Register
PAGE: Page Register
MR0: Mode Register 0
MR1: Mode Register 1
PM0: Port Mode 0
PM1: Port Mode 1
PM2: Port Mode 2
PM3: Port Mode 3
PM4: Port Mode 4
PM5: Port Mode 5
PSR0: Port Status Register 0
PSR2: Port Status Register 2
R: Memory (RAM) of address R
R.n: Memory bit n of address R
I: Constant parameter
L: Branch or jump address
CF: Carry Flag
ZF: Zero Flag
PC: Program Counter
TM0L: Low nibble of the Timer 0 counter
TM0H: High nibble of the Timer 0 counter
TM1L: Low nibble of the Timer 1 counter
TM1H: High nibble of the Timer 1 counter
TABL: Low nibble of the look-up table address buffer
TABH: High nibble of the look-up table address buffer
IEF.n: Interrupt Enable Flag n
HCF.n: HOLD mode release Condition Flag n
HEF.n: HOLD mode release Enable Flag n
SEF.n: STOP mode wake-up Enable Flag n
PEF.n: Port Enable Flag n

Preliminary W741C20X
Publication Release Date: March 1998
- 33 - Revision A3
Continued
EVF.n: Event Flag n
! =: Not equal
&: AND
^: OR
EX: Exclusive OR
←:
Transfer direction, result
[PAGE*10H+()]: Contents of address PAGE(bit2, bit1, bit0)*10H+()
[P()]: Contents of port P
INSTRUCTION SET TABLE 1
Mnemonic Function Flag Affected Cycle
Arithmetic
ADD R, ACC
ACC←(R) + (ACC)
ZF, CF 1
ADD WR, #I
ACC←(WR) + I
ZF, CF 1
ADDR R, ACC
ACC, R←(R) + (ACC)
ZF, CF 1
ADDR WR, #I
ACC, WR←(WR) + I
ZF, CF 1
ADC R, ACC
ACC←(R) + (ACC) + (CF)
ZF, CF 1
ADC WR, #I
ACC←(WR) + I + (CF)
ZF, CF 1
ADCR R, ACC
ACC, R←(R) + (ACC) + (CF)
ZF, CF 1
ADCR WR, #I
ACC, WR←(WR) + I + (CF)
ZF, CF 1
ADU R, ACC
ACC←(R) + (ACC)
ZF 1
ADU WR, #I
ACC←(WR) + I
ZF 1
ADUR R, ACC
ACC, R←(R) + (ACC)
ZF 1
ADUR WR, #I
ACC, W R←(WR) + I
ZF 1
SUB R, ACC
ACC←(R) - (ACC)
ZF, CF 1
SUB WR, #I
ACC←(WR) - I
ZF, CF 1
SUBR R, ACC
ACC, R←(R) - (ACC)
ZF, CF 1
SUBR WR, #I
ACC, WR←(WR) - I
ZF, CF 1
SBC R, ACC
ACC←(R) - (ACC) - (CF)
ZF, CF 1
SBC WR, #I
ACC←(WR) - I - (CF)
ZF, CF 1
SBCR R, ACC
ACC, R←(R) - (ACC) - (CF)
ZF, CF 1
SBCR WR, #I
ACC, WR←(WR) - I - (CF)
ZF, CF 1

Preliminary W741C20X
- 34 -
Instruction Set Table 1, continued
Mnemonic Function Flag Affected Cycle
INC R
ACC, R←(R) + 1
ZF, CF 1
DEC R
ACC, R←(R) - 1
ZF, CF 1
Logic Operations
ANL R, ACC
ACC←(R) & (ACC)
ZF 1
ANL WR, #I
ACC←(WR) & I
ZF 1
ANLR R, ACC
ACC, R←(R) & (ACC)
ZF 1
ANLR W, R #I
ACC, WR←(WR) & I
ZF 1
ORL R, ACC
ACC←(R) ∧ (ACC)
ZF 1
ORL WR, #I
ACC←(WR) ∧ I
ZF 1
ORLR R, ACC
ACC, R←(R) ∧ (ACC)
ZF 1
ORLR WR, #I
ACC, WR←(WR) ∧ I
ZF 1
XRL R, ACC
ACC←(R) EX (ACC)
ZF 1
XRL WR, #I
ACC←(WR) EX I
ZF 1
XRLR R, ACC
ACC, R←(R) EX (ACC)
ZF 1
XRLR WR, #I
ACC, WR←(WR) EX I
ZF 1
Branch
JMP L
PC10~PC0←L10~L0
1
JB0 L
PC10~PC0←L10~L0; if ACC.0 = "1"
1
JB1 L
PC10~PC0←L10~L0; if ACC.1 = "1"
1
JB2 L
PC10~PC0←L10~L0; if ACC.2 = "1"
1
JB3 L
PC10~PC0←L10~L0; if ACC.3 = "1"
1
JZ L
PC10~PC0←L10~L0; if ACC = 0
1
JNZ L
PC10~PC0←L10~L0; if ACC ! = 0
1
JC L
PC10~PC0←L10~L0; if CF = "1"
1
JNC L
PC10~PC0←L10~L0; if CF != "1"
1
DSKZ R
ACC, R←(R) - 1; skip if ACC = 0
ZF, CF 1
DSKNZ R
ACC, R←(R) - 1; skip if ACC != 0
ZF, CF 1
SKB0 R Skip if R.0 = "1" 1
SKB1 R Skip if R.1 = "1" 1
SKB2 R Skip if R.2 = "1" 1
SKB3 R Skip if R.3 = "1" 1

Preliminary W741C20X
Publication Release Date: March 1998
- 35 - Revision A3
Instruction Set Table 1, continued
Mnemonic Function Flag Affected Cycle
Data Move
MOV WR, R
WR←(R)
1
MOV R, WR
R←(WR)
1
MOVA WR, R
ACC, WR←(R)
ZF 1
MOVA R, WR
ACC, R←(WR)
ZF 1
MOV R, ACC
R←(ACC)
1
MOV ACC, R
ACC←(R)
ZF 1
MOV R, #I
R←I
1
MOV WR, @R
WR←[PR(bit2, bit1, bit0)x10H +(R)]
2
MOV @R, WR
[PR(bit2, bit1, bit0)x10H +(R)]←WR
2
MOV TABL, R
TABL←(R)
1
MOV TABH, R
TABH←(R)
1
MOVC R
R←[TAB × 10H + (ACC)]
2
MOVC WR, #I
WR←[(I6 ~ I0) × 10H + (ACC)]
2
Input & Output
MOVA R, RA
ACC, R←[RA]
ZF 1
MOVA R, RB
ACC, R←[RB]
ZF 1
MOVA R, RC
ACC, R←[RC]
ZF 1
MOVA R, RD
ACC, R←[RD]
ZF 1
MOV RA, R
[RA]←(R)
1
MOV RB, R
[RB]←(R)
1
MOV RC, R
[RC]←(R)
1
MOV RD, R
[RD]←(R)
1
MOV RE, R
[RE]←(R)
1
SOP R
RE0←(R), (ACC); RE1←CLK
1
SIP R
R, ACC ←SIB; RE3←CLK
2
MOV MFP, #I
[MFP]← I
1
Flag & Register
MOVA R, PAGE
ACC, R←PAGE (Page Register)
ZF 1
MOV PAGE, R
PAGE←(R)
1
MOV MR0, #I
MR0←I
1
MOV MR1, #I
MR1←I
1

Preliminary W741C20X
- 36 -
Instruction Set Table 1, continued
Mnemonic Function Flag Affected Cycle
MOV PAGE, #I
PAGE←I
1
MOVA R, CF
ACC.0, R.0←CF
ZF 1
MOV CF, R
CF←(R.0)
CF 1
MOVA R, HCFL
ACC, R←HCF0~HCF3
ZF 1
MOVA R, HCFH
ACC, R←HCF4~HCF7
ZF 1
CLR PMF, #I Clear Parameter Flag if In = 1 1
SET PMF, #I Set Parameter Flag if In = 1 1
MOV PM0, #I
Port Mode 0← I
1
MOV PM1, #I
Port Mode 1← I
1
MOV PM2, #I
Port Mode 2← I
1
MOV PM3, #I
Port Mode 3← I
1
MOV PM4, #I
Port Mode 4← I
1
MOV PM5, #I
Port Mode 5← I
1
CLR EVF, #I Clear Event Flag if In = 1 1
MOV PEF, #I Set/Reset Port Enable Flag 1
MOV IEF, #I Set/Reset Interrupt Enable Flag 1
MOV HEF, #I Set/Reset HOLD mode release
Enable Flag
1
MOV SEF, #I Set/Reset STOP mode wake-up
Enable Flag for RC port
1
MOVA R, PSR0
ACC, R←Port Status Register 0
ZF 1
CLR PSR0 Clear Port Status Register 0 1
MOVA R, PSR2
ACC, R←Port Status Register 2
ZF 1
CLR PSR2 Clear Port Status Register 2 1
SET CF Set Carry Flag CF 1
CLR CF Clear Carry Flag CF 1
CLR DIVR0 Clear the last 4-bit of the Divider 0 1
CLR WDT Clear WatchDog Timer 1

Preliminary W741C20X
Publication Release Date: March 1998
- 37 - Revision A3
Instruction Set Table 1, continued
Mnemonic Function Flag Affected Cycle
Shift & Rotate
SHRC R
ACC.n, R.n←(R.n+1);
ACC.3, R.3←0; CF←R.0
ZF, CF 1
RRC R
ACC.n, R.n←(R.n+1);
ACC.3, R.3←CF; CF←R.0
ZF, CF 1
SHLC R
ACC.n, R.n←(R.n-1);
ACC.0, R.0←0; CF←R.3
ZF, CF 1
RLC R
ACC.n, R.n←(R.n-1);
ACC.0, R.0←CF; CF←R.3
ZF, CF 1
Timer
MOV TM0L, R
TM0L←(R)
1
MOV TM0H, R
TM0H←(R)
1
MOV TM0, #I Timer 0 set 1
MOV TM1L, R
TM1L←(R)
1
MOV TM1H, R
TM1H←(R)
1
MOV TM1, #I Timer 1 set 1
Subroutine
CALL L
STACK←(PC)+1;
PC10 ~ PC0←L10 ~ L0
1
RTN
(PC)←STACK
1
Other
HOLD Enter Hold mode 1
STOP Enter Stop mode 1
NOP No Operation 1
EN INT Enable Interrupt Function 1
DIS INT Disable Interrupt Function 1

Preliminary W741C20X
- 38 -
INSTRUCTION SET TABLE 2
ADC R, ACC Add R to ACC with CF
Machine Code:
Machine Cycle:
Operation:
Description:
Flag Affected:
0 0 0 1 0 0 0 0
R6
R5 R4 R3 R2 R1 R0
0
1
ACC ← (R) + (ACC) + (CF)
The contents of the data memory location addressed by R6 to R0, ACC,
and CF are binary added and the result is loaded into the ACC.
CF & ZF
ADC WR, #I Add immediate data to WR with CF
Machine Code:
Machine Cycle:
Operation:
Description:
Flag Affected:
0 0 0 0 1 1 0 0 I3 I2 I1 I0 W3 W2 W1 W0
1
ACC ← (WR) + I + (CF)
The contents of the Working Register (WR), I and CF are binary added and
the result is loaded into the ACC.
CF & ZF
ADCR R, ACC Add R to ACC with CF
Machine Code:
Machine Cycle:
Operation:
Description:
Flag Affected:
0 0 0 1 0 0 1 0 R6 R5 R4 R3 R2 R1 R0
0
1
ACC, R ← (R) + (ACC) + (CF)
The contents of the data memory location addressed by R6 to R0, ACC,
and CF are binary added and the result is placed in the ACC and the data
memory.
CF & ZF

Preliminary W741C20X
Publication Release Date: March 1998
- 39 - Revision A3
Instruction Set Table 2, continued
ADCR WR, #I Add immediate data to WR with CF
Machine Code:
Machine Cycle:
Operation:
Description:
Flag Affected:
0 0 0 0 1 1 0 1 I3 I2 I1 I0 W3 W2 W1 W0
1
ACC, WR ← (WR) + I + (CF)
The contents of the Working Register (WR), I, CF are binary added and the
result is placed in the ACC and the WR.
CF & ZF
ADD R, ACC Add R to ACC
Machine Code:
Machine Cycle:
Operation:
Description:
Flag Affected:
0 0 1 1 0
0
0 0 R6 R5 R4 R3 R2 R1 R0
0
1
ACC ← (R) + (ACC)
The contents of the data memory location addressed by R6 to R0 and ACC
are binary added and the result is loaded into the ACC.
CF & ZF
ADD WR, #I Add immediate data to WR
Machine Code:
Machine Cycle:
Operation:
Description:
Flag Affected:
0 0 0 1 1 1 0 0 I3 I2 I1 I0 W3 W2 W1 W0
1
ACC ← (WR) + I
The contents of the Working Register (WR) and the immediate data I are
binary added and the result is loaded into the ACC.
CF & ZF

Preliminary W741C20X
- 40 -
Instruction Set Table 2, continued
ADDR R, ACC Add R to ACC
Machine Code:
Machine Cycle:
Operation:
Description:
Flag Affected:
0 0 1 1 0 0 1 0 R6 R5 R4 R3 R2 R1 R0
0
1
ACC, R ← (R) + (ACC)
The contents of the data memory location addressed by R6 to R0 and ACC
are binary added and the result is placed in the ACC and the data memory.
CF & ZF
ADDR WR, #I Add immediate data to WR
Machine Code:
Machine Cycle:
Operation:
Description:
Flag Affected:
0 0 0 1 1 1 0 1 I3 I2 I1 I0
W3
W2 W1 W0
1
ACC, WR ← (WR) + I
The contents of the Working Register (WR) and the immediate data I are
binary added and the result is placed in the ACC and the WR.
CF & ZF
ADU R, ACC Add R to ACC and Carry Flag unchange
Machine Code:
Machine Cycle:
Operation:
Description:
Flag Affected:
0 0 1 0 1 0 0 0 0 R6 R5 R4 R3 R2 R1 R0
1
ACC ← (R) + (ACC)
The contents of the data memory location addressed by R6 to R0 and ACC
are binary added and the result is loaded into the ACC.
ZF

Preliminary W741C20X
Publication Release Date: March 1998
- 41 - Revision A3
Instruction Set Table 2, continued
ADU WR, #I Add immediate data to WR and Carry Flag unchange
Machine Code:
Machine Cycle:
Operation:
Description:
Flag Affected:
0 0 1 0 1 1 0 0 I3 I2 I1 I0 W3 W2 W1 W0
1
ACC ← (WR) + I
The contents of the Working Register (WR) and the immediate data I are
binary added and the result is loaded into the ACC.
ZF
ADUR R, ACC Add R to ACC and Carry Flag unchange
Machine Code:
Machine Cycle:
Operation:
Description:
Flag Affected:
0 0 1 0 1 0 0 1 0 R6 R5 R4 R3 R2 R1 R0
1
ACC, R ← (R) + (ACC)
The contents of the data memory location addressed by R6 to R0 and ACC
are binary added and the result is placed in the ACC and the data memory.
ZF
ADUR WR, #I Add immediate data to WR and Carry Flag unchange
Machine Code:
Machine Cycle:
Operation:
Description:
Flag Affected:
0 0 1 0 1 1 0 1 I3 I2 I1 I0 W3 W2 W1 W0
1
ACC, WR ← (WR) + I
The contents of the Working Register (WR) and the immediate data I are
binary added and the result is placed in the WR and the ACC.
ZF

Preliminary W741C20X
- 42 -
Instruction Set Table 2, continued
ANL R, ACC And R to ACC
Machine Code:
Machine Cycle:
Operation:
Description:
Flag Affected:
0 0 1 0 1 0 1 0 0 R6 R5 R4 R3 R2 R1 R0
1
ACC ← (R) & (ACC)
The contents of the data memory location addressed by R6 to R0 and the
ACC are ANDed and the result is loaded into the ACC.
ZF
ANL WR, #I And immediate data to WR
Machine Code:
Machine Cycle:
Operation:
Description:
Flag Affected:
0 0 1 0 1 1 1 0 I3 I2 I1 I0 W3 W2 W1 W0
1
ACC ← (WR) & I
The contents of the Working Register (WR) and the immediate data I are
ANDed and the result is loaded into the ACC.
ZF
ANLR R, ACC And R to ACC
Machine Code:
Machine Cycle:
Operation:
Description:
Flag Affected:
0 0 1 0 1 0 1 1 0 R6 R5 R4 R3 R2 R1 R0
1
ACC, R ← (R) & (ACC)
The contents of the data memory location addressed by R6 to R0 and the
ACC are ANDed and the result is placed in the data memory and the ACC.
ZF

Preliminary W741C20X
Publication Release Date: March 1998
- 43 - Revision A3
Instruction set table 2, continued
ANLR WR, #I And immediate data to WR
Machine Code:
Machine Cycle:
Operation:
Description:
Flag Affected:
0 0 1 0 1 1 1 1 I3 I2 I1 I0 W3 W2 W1 W0
1
ACC, WR ← (WR) & I
The contents of the Working Register (WR) and the immediate data I are
ANDed and the result is placed in the WR and the ACC.
ZF
CALL L Call subroutine
Machine Code:
Machine Cycle:
Operation:
Description:
0 1 1 0 0 L10 L9 L8 L7 L6 L5 L4 L3 L2 L1 L0
1
STACK ← (PC)+1;
PC10 ~ PC0 ← L10 ~ L0
The next program counter (PC10 to PC0) is saved in the STACK and then
the direct address (L10 to L0) is loaded into the program counter.
A subroutine is called.
CLR CF Clear CF
Machine Code:
Machine Cycle:
Operation:
Description:
Flag Affected:
0 1 0 1 0 0 0 0 0 0 0 0 0 0 0 0
1
Clear CF
Clear Carry Flag to 0.
CF

Preliminary W741C20X
- 44 -
Instruction Set Table 2, continued
CLR DIVR0 Reset the last 4 bits of the DIVideR 0
Machine Code:
Machine Cycle:
Operation:
Description:
0 0 0 1 0 1 1 1 0 0 0 0 0 0 0 0
1
Reset the last 4 bits of the divider 0
When this instruction is executed, the last 4 bits of the divider 0 (14 bits)
are
reset.
CLR EVF, #I Clear EVent Flag
Machine Code:
Machine Cycle:
Operation:
Description:
0 1 0 0 0 0 0 0 I7 I6 I5 I4 I3 I2 I1 I0
1
Clear event flag
The condition corresponding to the data specified by I7 to I0 is controlled.
I0~I7 Mode after execution of instruction
I0 = 1 EVF0 caused by overflow from the divider 0 is reset.
I1 = 1
I2 = 1
I7 = 1
EVF1 caused by underflow from the timer 0 is reset.
EVF2 caused by the signal change at port RC is reset.
EVF4 caused by the falling edge signal on INT pin is reset.I4 = 1
EVF7 caused by underflow from the timer 1 is reset.
I3
Reserved
I5 = 1
I6 = 1
EVF5 caused by the serial port received completely.
EVF6 caused by the serial port transmitted completely.

Preliminary W741C20X
Publication Release Date: March 1998
- 45 - Revision A3
Instruction Set Table 2, continued
CLR PMF, #I Clear ParaMeter Flag
Machine Code:
Machine Cycle:
Operation:
Description:
0 0 0 1 0 1 1 0 1 0 0 0 I3 I2 I1 I0
1
Clear Parameter Flag
Description of each flag:
I0, I1, I2 : Reserved
I3 = 1 : The input clock of the watchdog timer is Fosc/1024.
CLR PSR0 Clear Port Status Register 0 (RC port signal change flag)
Machine Code:
Machine Cycle:
Operation:
Description:
0 1 0 0 0 0 1 0 0 0 0 0 0 0 0 0
1
Clear Port Status Register 0 (RC port signal change flag)
When this instruction is executed, the RC port signal change flag (PSR0) is
cleared.
CLR PSR2 Clear Port Status Register 2 (serial port status flags)
Machine Code:
Machine Cycle:
Operation:
Description:
0 1 0 1 0 1 0 1 0 0 0 0 0 0 0 0
1
Clear Port Status Register 2 (serial port status flags)
When this instruction is executed, the serial port status flags (PSR2) are
cleared.
CLR WDT Reset the last 4 bits of the Watchdog Timer
Machine Code:
Machine Cycle:
Operation:
Description:
0 0 0 1 0 1 1 1 1 0 0 0 0 0 0 0
1
Reset the last 4 bits of the watchdog timer
When this instruction is executed, the last 4 bits of the watchdog timer are
reset.

Preliminary W741C20X
- 46 -
Instruction Set Table 2, continued
DEC R Decrement R content
Machine Code:
Machine Cycle:
Operation:
Description:
Flag Affected:
0 1 0 0 1 0 1 0 1 R6 R5 R4 R3 R2 R1 R0
1
ACC, R ← (R) - 1
Decrement the data memory content and load result into the ACC and the
data memory.
CF & ZF
DIS INT Disable Interrupt function
Machine Code:
Machine Cycle:
Operation:
Description:
0 1 0 1 0 0 0 0 1 0 0 0 0 0 0 0
1
Disable interrupt function
Interrupt function is inhibited by executing this instruction.
DSKNZ R Decrement R content then skip if ACC ! = 0
Machine Code:
Machine Cycle:
Operation:
Description:
Flag Affected:
0 1 0 0 1 0 0 0 1 R6 R5 R4 R3 R2 R1 R0
1
ACC, R ← (R) - 1;
PC ← (PC) + 2 if ACC ! = 0
Decrement the data memory content and load result into the ACC and the
data memory. If ACC ! = 0, the program counter is incremented by 2 and
produces a skip.
CF & ZF

Preliminary W741C20X
Publication Release Date: March 1998
- 47 - Revision A3
Instruction Set Table 2, continued
DSKZ R Decrement R content then skip if ACC is zero
Machine Code:
Machine Cycle:
Operation:
Description:
Flag Affected:
0 1 0 0 1 0 0 0 0 R6 R5 R4 R3 R2 R1 R0
1
ACC, R ← (R) - 1;
PC ← (PC) + 2 if ACC = 0
Decrement the data memory content and load result into the ACC and the
data memory. If ACC = 0, the program counter is incremented by 2 and
produces a skip.
CF & ZF
EN INT Enable Interrupt function
Machine Code:
Machine Cycle:
Operation:
Description:
0 1 0 1 0 0 0 0 1 1 0 0 0 0 0 0
1
Enable interrupt function
This instruction enables the interrupt function.
HOLD Enter the HOLD mode
Machine Code:
Machine Cycle:
Operation:
Description:
0 0 0 0 0 0 0 0 1 0 0 0 0 0 0 0
1
Enter the HOLD mode
The following two conditions cause the HOLD mode to be released.
(1) An interrupt is accepted.
(2) The HOLD release condition specified by the HEF is met.
In HOLD mode, when an interrupt is accepted the HOLD mode will be
released and the interrupt service routine will be executed. After
completing the interrupt service routine by executing the RTN instruction,
the µC will enter HOLD mode again.

Preliminary W741C20X
- 48 -
Instruction Set Table 2, continued
INC R Increment R content
Machine Code:
Machine Cycle:
Operation:
Description:
Flag Affected:
0 1 0 0 1 0 1 0 0 R6 R5 R4 R3 R2 R1
R0
1
ACC, R ← (R) + 1
Increment the data memory content and load the result into the ACC and
the data memory.
CF & ZF
JB0 L Jump when bit 0 of ACC is "1"
Machine Code:
Machine Cycle:
Operation:
Description:
1 0 0 0 0 L10 L9 L8 L7 L6 L5 L4 L3 L2 L1 L0
1
PC10 ~ PC0 ← L10 ~ L0; if ACC.0 = "1"
If bit 0 of the ACC is "1," PC10 to PC0 of the program counter are replaced
with the data specified by L10 to L0 and a jump occurs. If bit 0 of the ACC
is "0," the program counter (PC) is incremented.
JB1 L Jump when bit 1 of ACC is "1"
Machine Code:
Machine Cycle:
Operation:
Description:
1 0 0 1 0 L10 L9 L8 L7 L6 L5 L4 L3 L2 L1 L0
1
PC10 ~ PC0 ← L10 ~ L0; if ACC.1 = "1"
If bit 1 of the ACC is "1," PC10 to PC0 of the program counter are replaced
with the data specified by L10 to L0 and a jump occurs. If bit 1 of the ACC
is "0," the program counter (PC) is incremented.
JB2 L Jump when bit 2 of ACC is "1"
Machine Code:
Machine Cycle:
Operation:
Description:
1 0 1 0 0 L10 L9 L8 L7 L6 L5 L4 L3 L2 L1 L0
1
PC10 ~ PC0 ← L10 ~ L0; if ACC.2="1"
If bit 2 of the ACC is "1," PC10 to PC0 of the program counter are replaced
with the data specified by L10 to L0 and a jump occurs. If bit 2 of the ACC
is "0," the program counter (PC) is incremented.

Preliminary W741C20X
Publication Release Date: March 1998
- 49 - Revision A3
Instruction Set Table 2, continued
JB3 L Jump when bit 3 of ACC is "1"
Machine Code:
Machine Cycle:
Operation:
Description:
1 0 1 1 0 L10 L9 L8 L7 L6 L5 L4 L3 L2 L1 L0
1
PC10 ~ PC0 ← L10 ~ L0; if ACC.3 = "1"
If bit 3 of the ACC is "1," PC10 to PC0 of the program counter are replaced
with the data specified by L10 to L0 and a jump occurs. If bit 3 of the ACC
is "0," the program counter (PC) is incremented.
JC L Jump when CF is "1"
Machine Code:
Machine Cycle:
Operation:
Description:
1 1 1 1 0 L10 L9 L8 L7 L6 L5 L4 L3 L2 L1 L0
1
PC10 ~ PC0 ← L10 ~ L0; if CF = "1"
If CF is "1," PC10 to PC0 of the program counter are replaced with the data
specified by L10 to L0 and a jump occurs. If the CF is "0," the program
counter (PC) is incremented.
JMP L Jump absolutely
Machine Code:
Machine Cycle:
Operation:
Description:
0 1 1 1 0 L10 L9 L8 L7 L6 L5 L4 L3 L2 L1 L0
1
PC10 ~ PC0 ← L10 ~ L0
PC10 to PC0 of the program counter are replaced with the data specified
by L10 to L0 and an unconditional jump occurs.

Preliminary W741C20X
- 50 -
Instruction Set Table 2, continued
JNC L Jump when CF is not "1"
Machine Code:
Machine Cycle:
Operation:
Description:
1 1 0 1 0 L10 L9 L8 L7 L6 L5 L4 L3 L2 L1 L0
1
PC10 ~ PC0 ← L10 ~ L0; if CF = "0"
If CF is "0," PC10 to PC0 of the program counter are replaced with the data
specified by L10 to L0 and a jump occurs. If CF is "1," the program counter
(PC) is incremented.
JNZ L Jump when ACC is not zero
Machine Code:
Machine Cycle:
Operation:
Description:
1 1 0 0 0 L10 L9 L8 L7 L6 L5 L4 L3 L2 L1 L0
1
PC10 ~ PC0 ← L10 ~ L0; if ACC ! = 0
If the ACC is not zero, PC10 to PC0 of the program counter are replaced
with the data specified by L10 to L0 and a jump occurs. If the ACC is zero,
the program counter (PC) is incremented.
JZ L Jump when ACC is zero
Machine Code:
Machine Cycle:
Operation:
Description:
1 1 1 0 0 L10 L9 L8 L7 L6 L5 L4 L3 L2 L1 L0
1
PC10 ~ PC0 ← L10 ~ L0; if ACC = 0
If the ACC is zero, PC10 to PC0 of the program counter are replaced with
the data specified by L10 to L0 and a jump occurs. If the ACC is not zero,
the program counter (PC) is incremented.

Preliminary W741C20X
Publication Release Date: March 1998
- 51 - Revision A3
Instruction Set Table 2, continued
MOV ACC, R Move R content to ACC
Machine Code:
Machine Cycle:
Operation:
Description:
0 1 0 0 1 1 1 0 1 R6 R5 R4 R3 R2 R1 R0
1
ACC ← (R)
The contents of the data memory location addressed by R6 to R0 are
loaded into the ACC.
ZF
MOV CF, R Move R.0 content to CF
Machine Code:
Machine Cycle:
Operation:
Description:
Flag Affected:
0 1 0 1 1 0 0 0 0 R6 R5 R4 R3 R2 R1 R0
1
CF ← (R.0)
The bit 0 content of the data memory location addressed by R6 to R0 is
loaded into CF.
CF

Preliminary W741C20X
- 52 -
Instruction Set Table 2, continued
MOV HEF, #I Set/Reset Hold mode release Enable Flag
Machine Code:
Machine Cycle:
Operation:
Description:
0 1 0 0 0 0 0 1 I7 I6 I5 I4 I3 I2 I1 I0
1
Hold mode release enable flag control
I0~I7
Operation
I0 = 1
I1 = 1
I2 = 1
I4 = 1
I5 = 1
The HEF2 is set so that signal change at port RC caused
the HOLD mode to be released.
The HEF0 is set so that overflow from the divider 0 caused
the HOLD mode to be released.
The HEF1 is set so that underflow from the Timer 0 caused
the HOLD mode to be released.
I7 = 1
The HEF4 is set so that the falling edge signal at the INT pin
caused the HOLD mode to be released.
The HEF7 is set so that underflow from the Timer 1 caused
the HOLD mode to be released.
I3
Reserved
I6 = 1
The HEF6 is set so that the serial port transmitted completely
caused the HOLD mode to be released.
The HEF5 is set so that the serial port received completely
caused the HOLD mode to be released.

Preliminary W741C20X
Publication Release Date: March 1998
- 53 - Revision A3
Instruction Set Table 2, continued
MOV IEF, #I Set/Reset Interrupt Enable Flag
Machine Code:
Machine Cycle:
Operation:
Description:
0 1 0 1 0 0 0 1 I7 I6 I5 I4 I3 I2 I1 I0
1
Interrupt Enable flag Control
The interrupt enable flag corresponding to the data specified by I7 - I0 is
controlled:
I0~I7
Operation
I0 = 1
I1 = 1
I2 = 1
I4 = 1
I5 = 1
The IEF0 is set so that interrupt 0 (overflow from the
divider 0) is accepted.
The IEF1 is set so that interrupt 1 (underflow from the
Timer 0) is accepted.
The IEF2 is set so that interrupt 2 (signal change at port
RC) is accepted.
The IEF4 is set so that interrupt 4 (falling edge signal
at the INT pin) is accepted.
I7 = 1
The IEF5 is set so that interrupt 5 (the serial port received
completely) is accepted.
The IEF7 is set so that interrupt 7 (underflow from the
Timer 1) is accepted.
I3
Reserved
The IEF6 is set so that interrupt 6 (the serial port
transmitted completely) is accepted.
I6 = 1

Preliminary W741C20X
- 54 -
Instruction Set Table 2, continued
MOV MFP, #I Modulation Frequency Pulse generator
Machine Code:
Machine Cycle:
Operation:
Description:
0 0 0 1 0 0 1 I7 I6 I5 I4 I3 I2 I1 I0
0
1
[MFP] ← I
If the bit 2 of MR1 is "0," the waveform specified by I7 to I0 is delivered at
the MFP output pin (MFP). The relation between the waveform and
immediate data I is shown as follows:
I5~I0 I0 = 1 I1 = 1 I2 = 1 I3 = 1 I4 = 1 I5 = 1
Signal
Fosc
256
Fosc
512
Fosc
4096
Fosc
8192
Fosc
16384
Fosc
32768
I7 I6 Signal
0
0
1
1
0
1
0
1
Low
High
Fosc/16
Fosc/8
MOV MR0, #I Load immediate data to Mode Register 0 (MR0)
Machine Code:
Machine Cycle:
Operation:
Description:
0 0 0 1 0 0 1 1 1 0 0 0 I3 I2 I1 I0
1
MR0 ← I
The immediate data I are loaded to the MR0.
MR0 bits description:
bit 0
= 0 Timer 0 stop down-counting
= 1 Timer 0 start down-counting
= 0 The fundamental frequency of Timer 0 is Fosc/4
= 1 The fundamental frequency of Timer 0 is Fosc/1024
Reserved
bit 1
bit 2
bit 3
Reserved

Preliminary W741C20X
Publication Release Date: March 1998
- 55 - Revision A3
Instruction Set Table 2, continued
MOV MR1, #I Load immediate data to Mode Register 1 (MR1)
Machine Code:
Machine Cycle:
Operation:
Description:
0 0 0 1 0 0 1 1 0 0 0 0 I3 I2 I1 I0
1
MR1 ← I
The immediate data I are loaded to the MR1.
MR1 bit description:
bit0
= 1 The internal fundamental frequency of Timer 1 is Fosc/64
= 0 The internal fundamental frequency of Timer 1 is Fosc
= 0 The fundamental frequency source of Timer 1 is
internal clock
= 1 The fundamental frequency source of Timer 1 is
external clock via RC.0 input pin
= 0 The specified waveform of the MFP generator is
delivered at the MFP output pin
= 1 The specified frequency of the Timer 1 is delivered at
the MFP output pin
bit1
bit2
bit3
= 0 Timer 1 stop down-counting
= 1 Timer 1 start down-counting

Preliminary W741C20X
- 56 -
Instruction Set Table 2, continued
MOV PAGE, #I Load immediate data to Page Register
Machine Code:
Machine Cycle:
Operation:
Description:
0 1 0 1 0 1 1 0 1 0 0 0 I3 I2 I1 I0
1
Page Register ← I
The immediate data I are loaded to the PR.
Bit 3 is reserved.
Bit 0, bit 1, and bit 2 indirect addressing mode preselect bits:
bit1
bit0
0
0
1
1
0
1
0
1
= Page 0 (00H~0FH)
= Page 1 (10H~1FH)
= Page 2 (20H~2FH)
= Page 3 (30H~3FH)
bit2
0
0
0
0
0
0
1
1
0
1
0
1
= Page 4 (40H~4FH)
= Page 5 (50H~5FH)
= Page 6 (60H~6FH)
= Page 7 (70H~7FH)
1
1
1
1
MOV PEF, #I Set/Reset Port Enable Flag
Machine Code:
Machine Cycle:
Operation:
Description:
0 1 0 0 0 0 1 1 0 0 0 0 I3 I2 I1 I0
1
Port enable flag control
The data specified by I can cause HOLD mode to be released or an
interrupt to occur. The signal change on port RC is specified.
I0~I7
I0 = 1
I1 = 1
I2 = 1
I3 = 1
Signal change at port RC
RC0
RC1
RC2
RC3

Preliminary W741C20X
Publication Release Date: March 1998
- 57 - Revision A3
Instruction Set Table 2, continued
MOV PM0, #I Set/Reset Port Mode 0 register
Machine Code:
Machine Cycle:
Operation:
Description:
0 1 0 1 0 0 1 1 0 0 0 0 I2 I1 I0
I3
1
Set/Reset Port mode 0 register
I0 = 0: RA port is CMOS type; I0 = 1: RA port is NMOS type.
I1 = 0: RB port is CMOS type; I1 = 1: RB port is NMOS type.
I2 = 0: RC port pull-high resistor is disabled;
I2 = 1: RC port pull-high resistor is enabled.
I3 = 0: RD port pull-high resistor is disabled;
I3 = 1: RD port pull-high resistor is enabled.
MOV PM1, #I RA port independent Input/Output control
Machine Code:
Machine Cycle:
Operation:
Description:
0 1 0 1 0 1 1 1 0 0 0 0 I3 I2 I1 I0
1
RA port 4 pins input/output control is independent.
I0 = 0: RA.0 is output pin; I0 = 1: RA.0 is input pin.
I1 = 0: RA.1 is output pin; I1 = 1: RA.1 is input pin.
I2 = 0: RA.2 is output pin; I2 = 1: RA.2 is input pin.
I3 = 0: RA.3 is output pin; I3 = 1: RA.3 is input pin.
Default condition RA port is input mode (PM = 1111B).
MOV PM2, #I RB port independent Input/Output control
Machine Code:
Machine Cycle:
Operation:
Description:
0 1 0 1 0 1 1 1 1 0 0 0 I3 I2 I1 I0
1
RB port 4 pins input/output control is independent.
I0 = 0: RB.0 is output pin; I0 = 1: RB.0 is input pin.
I1 = 0: RB.1 is output pin; I1 = 1: RB.1 is input pin.
I2 = 0: RB.2 is output pin; I2 = 1: RB.2 is input pin.
I3 = 0: RB.3 is output pin; I3 = 1: RB.3 is input pin.
Default condition RB port is input mode (PM2 = 1111B).

Preliminary W741C20X
- 58 -
Instruction Set Table 2, continued
MOV PM3, #I Set/Reset Port Mode 3 register
Machine Code:
Machine Cycle:
Operation:
Description:
0 1 0 1 0 1 1 0 0 0 0 0 I2 I1 I0
I3
1
Set/Reset Port mode 3 register
I0 is reserved.
I1 = 0: The port RE is used as the output of the internal parallel port RT.
I1 = 1: The port RE works as the serial input/output port.
I2 is reserved.
I3 = 0: Serial Tx rate = FOSC/2
I3 = 1: Serial Tx rate = FOSC/256
MOV PM4, #I RC port independent Input/Output control
Machine Code:
Machine Cycle:
Operation:
Description:
0 0 1 1 0 1 1 1 0 0 0 0 I3 I2 I1 I0
1
RC port 4 pins input/output control is independent.
I0 = 0: RC.0 is output pin; I0 = 1: RC.0 is input pin.
I1 = 0: RC.1 is output pin; I1 = 1: RC.1 is input pin.
I2 = 0: RC.2 is output pin; I2 = 1: RC.2 is input pin.
I3 = 0: RC.3 is output pin; I3 = 1: RC.3 is input pin.
Default condition RC port is input mode (PM4 = 1111B).
MOV PM5, #I RD port independent Input/Output control
Machine Code:
Machine Cycle:
Operation:
Description:
0 0 1 1 0 1 1 1 1 0 0 0 I3 I2 I1 I0
1
RD port 4 pins input/output control is independent.
I0 = 0: RD.0 is output pin; I0 = 1: RD.0 is input pin.
I1 = 0: RD.1 is output pin; I1 = 1: RD.1 is input pin.
I2 = 0: RD.2 is output pin; I2 = 1: RD.2 is input pin.
I3 = 0: RD.3 is output pin; I3 = 1: RD.3 is input pin.
Default condition RD port is input mode (PM5 = 1111B).

Preliminary W741C20X
Publication Release Date: March 1998
- 59 - Revision A3
Instruction Set Table 2, continued
MOV R, ACC Move ACC content to R
Machine Code:
Machine Cycle:
Operation:
Description:
0 1 0 1 1 0 0 1 1 R6 R5 R4 R3 R2 R1 R0
1
R ← (ACC)
The contents of the ACC are loaded to the data memory location
addressed by R6 to R0.
MOVA R, RA Input RA port data to ACC & R
Machine Code:
Machine Cycle:
Operation:
Description:
Flag Affected:
0 1 0 1 1 0 1 1 0 R6 R5 R4 R3 R2 R1 R0
1
ACC , R ← [RA]
The data on port RA are loaded into the data memory location addressed
by R6 to R0 and the ACC.
ZF
MOVA R, RB Input RB port data to ACC & R
Machine Code:
Machine Cycle:
Operation:
Description:
Flag Affected:
0 1 0 1 1 0 1 1 1 R6 R5 R4 R3 R2 R1 R0
1
ACC , R ← [RB]
The data on port RB are loaded into the data memory location addressed
by R6 to R0 and the ACC.
ZF

Preliminary W741C20X
- 60 -
Instruction Set Table 2, continued
MOVA R, RC Input RC port data to ACC & R
Machine Code:
Machine Cycle:
Operation:
Description:
Flag Affected:
0 1 0 0 1 0 1 1 0 R6 R5 R4 R3 R2 R1 R0
1
ACC , R ← [RC]
The input data on the input port RC are loaded into the data memory
location addressed by R6 to R0 and the ACC.
ZF
MOVA R, RD Input RD port data to ACC & R
Machine Code:
Machine Cycle:
Operation:
Description:
Flag Affected:
0 1 0 0 1 0 1 1 1 R6 R5 R4 R3 R2 R1 R0
1
ACC , R ← [RD]
The input data on the input port RD are loaded into the data memory
location addressed by R6 to R0 and the ACC.
ZF
MOV R, WR Move WR content to R
Machine Code:
Machine Cycle:
Operation:
Description:
1 1 1 1 1 W3 W2 W1 W0 R6 R5 R4 R3 R2 R1 R0
1
R ← (WR)
The contents of the WR are loaded to the data memory location addressed
by R6 to R0.

Preliminary W741C20X
Publication Release Date: March 1998
- 61 - Revision A3
Instruction Set Table 2, continued
MOV R, #I Load immediate data to R
Machine Code:
Machine Cycle:
Operation:
Description:
1 0 1 1 1 I3 I2 I1 I0 R6 R5 R4 R3 R2 R1 R0
1
R ← I
The immediate data I are loaded to the data memory location addressed by
R6 to R0.
MOV RA, R Output R content to RA port
Machine Code:
Machine Cycle:
Operation:
Description:
0 1 0 1 1 0 1 0 0 R6 R5 R4 R3 R2 R1 R0
1
[RA] ← (R)
The data in the data memory location addressed by R6 to R0 are output to
the port RA.
MOV RB, R Output R content to RB port
Machine Code:
Machine Cycle:
Operation:
Description:
0 1 0 1 1 0 1 0 1 R6 R5 R4 R3 R2 R1 R0
1
[RB] ← (R)
The contents of the data memory location addressed by R6 to R0 are
output to the port RB.
MOV RC, R Output R content to RC port
Machine Code:
Machine Cycle:
Operation:
Description:
1 0 0 0 1 1 0 0 0 R6 R5 R4 R3 R2 R1 R0
1
[RC] ← (R)
The data in the data memory location addressed by R6 to R0 are output to
the port RC.

Preliminary W741C20X
- 62 -
Instruction Set Table 2, continued
MOV RD, R Output R content to RD port
Machine Code:
Machine Cycle:
Operation:
Description:
1 0 0 0 1 1 0 0 1 R6 R5 R4 R3 R2 R1 R0
1
[RD] ← (R)
The contents of the data memory location addressed by R6 to R0 are
output to the port RD.
MOV RE, R Output R content to port RE
Machine Code:
Machine Cycle:
Operation:
Description:
0 1 0 1 1 1 1 0 0 R6 R5 R4 R3 R2 R1 R0
1
[RE] ← (R)
The contents of the data memory location addressed by R6 to R0 are
output to port RE.
MOV SEF, #I Set/Reset STOP mode waked-up Enable Flag for port RC
Machine Code:
Machine Cycle:
Operation:
Description:
0 1 0 1 0 0 1 0 0 0 0 0 I3 I2 I1 I0
1
Set/reset STOP mode wake-up enable flag for port RC
The data specified by I cause a wake-up from the STOP mode. The fallingedge signal on port RC can be specified independently.
I0~I7
I0 = 1
I1 = 1
I2 = 1
I3 = 1
Falling edge signal at port RC
RC0
RC1
RC2
RC3

Preliminary W741C20X
Publication Release Date: March 1998
- 63 - Revision A3
Instruction Set Table 2, continued
MOV TM0, #I Timer 0 set
Machine Code:
Machine Cycle:
Operation:
Description:
0 0 0 1 0 0 0 0 I7 I6 I5 I4 I3 I2 I1 I0
1
Timer 0 set
The data specified by I7 to I0 is loaded to the Timer 0 to start the timer.
MOV TM0L, R Move R content to TM0L
Machine Code:
Machine Cycle:
Operation:
Description:
0 0 0 1 0 1 0 0 0 R6 R5 R4 R3 R2 R1 R0
1
TM0L ← (R)
The content of the data memory location addressed by R6 to R0 are loaded
into the TM0L.
MOV TM0H, R Move R content to TM0H
Machine code:
Machine Cycle:
Operation:
Description:
0 0 0 1 0 1 0 0 1 R6 R5 R4 R3 R2 R1 R0
1
TM0H ← (R)
The content of the data memory location addressed by R6 to R0 are loaded
into the TM0H.
MOV TM1, #I Timer 1 set
Machine Code:
Machine Cycle:
Operation:
Description:
0 0 0 1 0 0 0 1 I7 I6 I5 I4 I3 I2 I1 I0
1
Timer 1 set
The data specified by I7 to I0 is loaded to the Timer 1 to start the timer.

Preliminary W741C20X
- 64 -
Instruction Set Table 2, continued
MOV TM1L, R Move R content to TM1L
Machine Code:
Machine Cycle:
Operation:
Description:
0 0 0 1 0 1 0 1 0 R6 R5 R4 R3 R2 R1 R0
1
TM1L ← (R)
The content of the data memory location addressed by R6 to R0 are loaded
into the TM1L.
MOV TM1H, R Move R content to TM1H
Machine code:
Machine Cycle:
Operation:
Description:
0 0 0 1 0 1 0 1 1 R6 R5 R4 R3 R2 R1 R0
1
TM1H ← (R)
The content of the data memory location addressed by R6 to R0 are loaded
into the TM1H.
MOV WR, R Move R content to WR
Machine Code:
Machine Cycle:
Operation:
Description:
1 1 1 0 1 W3 W2 W1 W0 R6 R5 R4 R3 R2 R1 R0
1
WR ← (R)
The contents of the data memory location addressed by R6 to R0 are
loaded to the WR.
MOV WR, @R Indirect load from R to WR
Machine Code:
Machine Cycle:
Operation:
Description:
1 1 0 0 1 W3 W2 W1 W0 R6 R5 R4 R3 R2 R1 R0
2
WR ← [PR (bit2, bit1, bit0) × 10H + (R)]
The data memory contents of address [PR (bit2, bit1, bit0) × 10H + (R)] are
loaded to the WR.

Preliminary W741C20X
Publication Release Date: March 1998
- 65 - Revision A3
Instruction Set Table 2, continued
MOV @R, WR Indirect load from WR to R
Machine Code:
Machine Cycle:
Operation:
Description:
1 1 0 1 1 W3 W2 W1 W0 R6 R5 R4 R3 R2 R1 R0
2
[PR (bit2, bit1, bit0) × 10H + (R)] ← WR
The contents of the WR are loaded to the data memory location addressed
by [PR (bit2, bit1, bit0) × 10H + (R)] .
MOV PAGE, R Move R content to Page Register
Machine Code:
Machine Cycle:
Operation:
Description:
0 1 0 1 1 1 1 0 1 R6 R5 R4 R3 R2 R1 R0
1
PR ← (R)
The contents of the data memory location addressed by R6 to R0 are
loaded to the PR.
MOVA R, CF Move CF content to ACC.0 & R.0
Machine Code:
Machine Cycle:
Operation:
Description:
Flag Affected:
0 1 0 1 1 0 0 1 0 R6 R5 R4 R3 R2 R1 R0
1
ACC.0, R.0 ← (CF)
The content of CF is loaded to bit 0 of the data memory location addressed
by R6 to R0 and the ACC. The other bits of the data memory and ACC are
reset to "0."
ZF

Preliminary W741C20X
- 66 -
Instruction Set Table 2, continued
MOVA R, HCFH Move HCF4~7 to ACC & R
Machine Code:
Machine Cycle:
Operation:
Description:
Flag Affected:
0 1 0 0 1 0 0 1 1 R6 R5 R4 R3 R2 R1 R0
1
ACC, R ← HCF4~7
The contents of HCF bit 4 to bit 7 (HCF4 to HCF7) are loaded to the data
memory location addressed by R6 to R0 and the ACC. The ACC contents
and the meaning of the bits after execution of this instruction are as
follows:
Bit 0
Bit 1
Bit 3
Bit 2
HCF4: "1" when the HOLD mode is released by the falling edge signal at the
INT pin.
HCF5: "1" when the HOLD mode is released by underflow from Timer 1.
HCF6: "1" when the HOLD mode is released by the serial port receiving completely.
HCF7: "1" when the HOLD mode is released by the serial port transmitting
completely.
ZF
MOVA R, HCFL Move HCF0~3 to ACC & R
Machine Code:
Machine Cycle:
Operation:
Description:
Flag Affected:
0 1 0 0 1 0 0 1 0 R6 R5 R4 R3 R2 R1 R0
1
ACC, R ← HCF0~3
The contents of HCF bit 0 to bit 3 (HCF0 to HCF3) are loaded to the data
memory location addressed by R6 to R0 and the ACC. The ACC contents
and the meaning of the bits after execution of this instruction are as
follows:
Bit 0
Bit 1
Bit 3
Bit 2
HCF0: "1" when the HOLD mode is released by
overflow from the Divider 0.
HCF2: "1" when the HOLD mode is released by
a signal change on port RC.
HCF1: "1" when the HOLD mode is released by
underflow from Timer 0.
Reserved.
ZF

Preliminary W741C20X
Publication Release Date: March 1998
- 67 - Revision A3
Instruction Set Table 2, continued
MOVA R, PAGE Move Page Register content to ACC & R
Machine Code:
Machine Cycle:
Operation:
Description:
Flag Affected:
0 1 0 1 1 1 1 1 1 R6 R5 R4 R3 R2 R1 R0
1
ACC , R ← (Page Register)
The contents of the Page Register (PR) are loaded to the data memory
location addressed by R6 to R0 and the ACC.
ZF
MOVA R, PSR0 Move Port Status Register 0 content to ACC & R
Machine Code:
Machine Cycle:
Operation:
Description:
Flag Affected:
0 1 0 0 1 1 1 1 0 R6 R5 R4 R3 R2 R1 R0
1
ACC, R ← RC port signal change flag (PSR0)
The contents of the RC port signal change flag (PSR0) are loaded to the
data memory location addressed by R6 to R0 and the ACC. When the
signal changes on any pin of the RC port, the corresponding signal change
flag should be set to 1. Otherwise, it should be 0.
ZF
MOVA R, PSR2 Move Port Status Register 0 content to ACC & R
Machine Code:
Machine Cycle:
Operation:
Description:
Flag Affected:
0 1 0 1 1 1 1 1 0 R6 R5 R4 R3 R2 R1 R0
1
ACC, R ← Serial I/O port status flags (PSR2)
The contents of the serial I/O port status flags (PSR2) are loaded to the
data memory location addressed by R6 to R0 and the ACC.
ZF

Preliminary W741C20X
- 68 -
Instruction Set Table 2, continued
MOVA R, WR Move WR content to ACC & R
Machine Code:
Machine Cycle:
Operation:
Description:
Flag Affected:
0 1 1 1 1 W3 W2 W1 W0 R6 R5 R4 R3 R2 R1 R0
1
ACC, R ← (WR)
The contents of the WR are loaded to the ACC and the data memory
location addressed by R6 to R0.
ZF
MOVA WR, R Move R content to ACC & WR
Machine Code:
Machine Cycle:
Operation:
Description:
Flag Affected:
0 1 1 0 1 W3 W2 W1 W0 R6 R5 R4 R3 R2 R1 R0
1
ACC, WR ← (R)
The contents of the data memory location addressed by R6 to R0 are
loaded to the WR and the ACC.
ZF
MOV TABL, R Move R content to TABL
Machine Code:
Machine Cycle:
Operation:
Description:
1 0 0 1 1 0 0 0 0 R6 R5 R4 R3 R2 R1 R0
1
TABL ← (R)
The content of the data memory location addressed by R6 to R0 are loaded
into the TABL.
MOV TABH, R Move R content to TABH
Machine code:
Machine Cycle:
Operation:
Description:
1 0 0 1 1 0 0 0 1 R6 R5 R4 R3 R2 R1 R0
1
TABH ← (R)
The content of the data memory location addressed by R6 to R0 are loaded
into the TABH.

Preliminary W741C20X
Publication Release Date: March 1998
- 69 - Revision A3
Instruction Set Table 2, continued
MOVC R Move look-up table ROM addressed by TABL and TABH to R
Machine code:
Machine Cycle:
Operation:
Description:
1 0 0 1 1 0 0 1 0 R6 R5 R4 R3 R2 R1 R0
2
WR ← [(TABH) × 10H + (TABL)]
The contents of the look-up table ROM location addressed by TABH and
TABL are loaded to R.
NOP No Operation
Machine Code:
Machine Cycle:
Operation:
0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0
1
No Operation
ORL R, ACC OR R to ACC
Machine Code:
Machine Cycle:
Operation:
Description:
Flag Affected:
0 0 1 1 1 0 1 0 0 R6 R5 R4 R3 R2 R1 R0
1
ACC ← (R) ∧ (ACC)
The contents of the data memory location addressed by R6 to R0 and the
ACC are ORed and the result is loaded into the ACC.
ZF
ORL WR , #I OR immediate data to WR
Machine Code:
Machine Cycle:
Operation:
Description:
Flag Affected:
0 0 1 1 1 1 1 0 I3 I2 I1 I0 W3 W2 W1 W0
1
ACC ← (WR) ∧ I
The contents of the Working Register (WR) and the immediate data I are
ORed and the result is loaded into the ACC.
ZF

Preliminary W741C20X
- 70 -
Instruction Set Table 2, continued
ORLR R, ACC OR R to ACC
Machine Code:
Machine Cycle:
Operation:
Description:
Flag Affected:
0 0 1 1 1 0 1 1 0 R6 R5 R4 R3 R2 R1 R0
1
ACC, R ← (R) ∧ (ACC)
The contents of the data memory location addressed by R6 to R0 and the
ACC are ORed and the result is placed in the data memory and the ACC.
ZF
ORLR WR , #I OR immediate data to WR
Machine Code:
Machine Cycle:
Operation:
Description:
Flag Affected:
0 0 1 1 1 1 1 1 I3 I2 I1 I0 W3 W2 W1 W0
1
ACC, WR ← (WR) ∧ I
The contents of the Working Register(WR) and the immediate data I are
ORed and the result is placed in the WR and the ACC.
ZF
RLC R Rotate Left R with CF
Machine Code:
Machine Cycle:
Operation:
Description:
Flag Affected:
0 1 0 0 1 1 0 0 1 R6 R5 R4 R3 R2 R1 R0
1
ACC.n, R.n ← (R.n-1); ACC.0, R.0 ← CF; CF ← R.3
The contents of the ACC and the data memory location addressed by R6 to
R0 are rotated left one bit, bit 3 is rotated into CF, and CF rotated into bit 0
(LSB). The same contents are loaded into the ACC.
CF & ZF

Preliminary W741C20X
Publication Release Date: March 1998
- 71 - Revision A3
Instruction Set Table 2, continued
RRC R Rotate Right R with CF
Machine Code:
Machine Cycle:
Operation:
Description:
Flag Affected:
0 1 0 0 1 1 0 1 1 R6 R5 R4 R3 R2 R1 R0
1
ACC.n, R.n ← (R.n+1); ACC.3, R.3 ← CF; CF ← R.0
The contents of the ACC and the data memory location addressed by R6 to
R0 are rotated right one bit, bit 0 is rotated into CF, and CF is rotated into
bit 3 (MSB). The same contents are loaded into the ACC.
CF & ZF
RTN Return from subroutine
Machine Code:
Machine Cycle:
Operation:
Description:
0 0 0 0 0 0 0 1 0 0 0 0 0 0 0 0
1
(PC) ← STACK
The program counter (PC10 to PC0) is restored from the stack. A return
from a subroutine occurs.
SBC R, ACC Subtract ACC from R with Borrow
Machine Code:
Machine Cycle:
Operation:
Description:
Flag Affected:
0 0 0 1 0 1 0 0 R6 R5 R4 R3 R2 R1 R0
0
1
ACC ← (R) - (ACC) - (CF)
The contents of the ACC and CF are binary subtracted from the contents of
the data memory location addressed by R6 to R0 and the result is loaded
into the ACC.
CF & ZF

Preliminary W741C20X
- 72 -
Instruction Set Table 2, continued
SBC WR, #I Subtract immediate data from WR with Borrow
Machine Code:
Machine Cycle:
Operation:
Description:
Flag Affected:
0 0 0 0 1 1 1 0 I3 I2 I1 I0 W3 W2 W1 W0
1
ACC ← (WR) - I - (CF)
The immediate data I and CF are binary subtracted from the contents of
the WR and the result is loaded into the ACC.
CF & ZF
SBCR R, ACC Subtract ACC from R with Borrow
Machine Code:
Machine Cycle:
Operation:
Description:
Flag Affected:
0 0 0 1 0 1 1 0
R6
R5 R4 R3 R2 R1 R0
0
1
ACC, R ← (R) - (ACC) - (CF)
The contents of the ACC and CF are binary subtracted from the contents of
the data memory location addressed by R6 to R0 and the result is placed in
the ACC and the data memory.
CF & ZF
SBCR WR, #I Subtract immediate data from WR with Borrow
Machine Code:
Machine Cycle:
Operation:
Description:
Flag Affected:
0 0 0 0 1 1 1 1 I3 I2 I1 I0 W3 W2 W1 W0
1
ACC, R ← (WR) - I - (CF)
The immediate data I and CF are binary subtracted from the contents of
the WR and the result is placed in the ACC and the WR.
CF & ZF

Preliminary W741C20X
Publication Release Date: March 1998
- 73 - Revision A3
Instruction Set Table 2, continued
SET CF Set CF
Machine Code:
Machine Cycle:
Operation:
Description:
Flag Affected:
0 1 0 1 0 0 0 0 0 1 0 0 0 0 0 0
1
Set CF
Set Carry Flag to 1.
CF
SET PMF, #I Set ParaMeter Flag
Machine Code:
Machine Cycle:
Operation:
Description:
0 0 0 1 0 1 1 0 0 0 0 0 I3 I2 I1 I0
1
Set Parameter Flag
Description of each flag:
I0, I1, I2 : Reserved
I3 = 1 : The input clock of the watchdog timer is Fosc/16384.
SHLC R SHift Left R with CF and LSB = 0
Machine Code:
Machine Cycle:
Operation:
Description:
Flag Affected:
0 1 0 0 1 1 0 0 0 R6 R5 R4 R3 R2 R1 R0
1
ACC.n, R.n ← (R.n-1); ACC.0, R.0 ← 0; CF ← R.3
The contents of the ACC and the data memory location addressed by R6 to
R0 are shifted left one bit, but bit 3 is shifted into CF, and bit 0 (LSB) is
replaced with "0." The same contents are loaded into the ACC.
CF & ZF

Preliminary W741C20X
- 74 -
Instruction Set Table 2, continued
SHRC R SHift Right R with CF and MSB = 0
Machine Code:
Machine Cycle:
Operation:
Description:
Flag Affected:
0 1 0 0 1 1 0 1 0 R6 R5 R4 R3 R2 R1 R0
1
ACC.n, R.n ← (R.n+1); ACC.3, R.3 ← 0; CF ← R.0
The contents of the ACC and the data memory location addressed by R6 to
R0 are shifted right one bit, but bit 0 is shifted into CF, and bit 3 (MSB) is
replaced with "0." The same contents are loaded into the ACC.
CF & ZF
SKB0 R If bit 0 of R is equal to 1 then skip
Machine Code:
Machine Cycle:
Operation:
Description:
1 0 0 0 1 0 0 0 0 R6 R5 R4 R3 R2 R1 R0
1
PC ← (PC) + 2; if R.0 = 1“1”
If bit 0 of R is equal to 1, the program counter is incremented by 2 and a
skip is produced. If bit 0 of R is not equal to 1, the program counter (PC) is
incremented.
SKB1 R If bit 1 of R is equal to 1 then skip
Machine Code:
Machine Cycle:
Operation:
Description:
1 0 0 0 1 0 0 0 1 R6 R5 R4 R3 R2 R1 R0
1
PC ← (PC) + 2; if R.1 = 1“1”
If bit 1 of R is equal to 1, the program counter is incremented by 2 and a
skip is produced. If bit 1 of R is not equal to 1, the program counter (PC) is
incremented.

Preliminary W741C20X
Publication Release Date: March 1998
- 75 - Revision A3
Instruction Set Table 2, continued
SKB2 R If bit 2 of R is equal to 1 then skip
Machine Code:
Machine Cycle:
Operation:
Description:
1 0 0 0 1 0 1 0 0 R6 R5 R4 R3 R2 R1 R0
1
PC ← (PC) + 2; if R.2 = 1“1”
If bit 2 of R is equal to 1, the program counter is incremented by 2 and a
skip is produced. If bit 2 of R is not equal to 1. The program counter (PC) is
incremented.
SKB3 R If bit 3 of R is equal to 1 then skip
Machine Code:
Machine Cycle:
Operation:
Description:
1 0 0 0 1 0 1 0 1 R6 R5 R4 R3 R2 R1 R0
1
PC ← (PC) + 2; if R.3 = 1“1”
If bit 3 of R is equal to 1, the program counter is incremented by 2 and a
skip is produced. If bit 3 of R is not equal to 1, the program counter (PC) is
incremented.
STOP Enter the STOP mode
Machine Code:
Machine Cycle:
Operation:
Description:
0 0 0 0 0 0 0 0 1 1 0 0 0 0 0 0
1
STOP oscillator
Device enters STOP mode. When the falling edge signal of RC port is
accepted, the µC will wake up and execute the next instruction.

Preliminary W741C20X
- 76 -
Instruction Set Table 2, continued
SUB R, ACC Subtract ACC from R
Machine Code:
Machine Cycle:
Operation:
Description:
Flag Affected:
0 0 1 1 0 1 0 0 R6 R5 R4 R3 R2 R1 R0
0
1
ACC ← (R) - (ACC)
The contents of the ACC are binary subtracted from the contents of the
data memory location addressed by R6 to R0 and the result is loaded into
the ACC.
CF & ZF
SUB WR , #I Subtract immediate data from WR
Machine Code:
Machine Cycle:
Operation:
Description:
Flag Affected:
0 0 0 1 1 1 1 0 I3 I2 I1 I0 W3 W2 W1 W0
1
ACC ← (WR) - I
The immediate data I are binary subtracted from the contents of the WR
and the result is loaded into the ACC.
CF & ZF
SUBR R, ACC Subtract ACC from R
Machine Code:
Machine Cycle:
Operation:
Description:
Flag Affected:
0 0 1 1 0 1 1 0 R6 R5 R4 R3 R2 R1 R0
0
1
ACC, R ← (R) - (ACC)
The contents of the ACC are binary subtracted from the contents of the
data memory location addressed by R6 to R0 and the result is placed in the
ACC and the data memory.
CF & ZF

Preliminary W741C20X
Publication Release Date: March 1998
- 77 - Revision A3
Instruction Set Table 2, continued
SUBR WR, #I Subtract immediate data from WR
Machine Code:
Machine Cycle:
Operation:
Description:
Flag Affected:
0 0 0 1 1 1 1 1 I3 I2 I1 I0 W3 W2 W1 W0
1
ACC, WR ← (WR) - I
The immediate data I are binary subtracted from the contents of the WR
and the result is placed in the ACC and the WR.
CF & ZF
XRL R, ACC Exclusive OR R to ACC
Machine Code:
Machine Cycle:
Operation:
Description:
Flag Affected:
0 0 1 1 1 0 0 0 0 R6 R5 R4 R3 R2 R1 R0
1
ACC ← (R) EX (ACC)
The contents of the data memory location addressed by R6 to R0 and the
ACC are exclusive-ORed and the result is loaded into the ACC.
ZF
XRL WR, #I Exclusive OR immediate data to WR
Machine Code:
Machine Cycle:
Operation:
Description:
Flag Affected:
0 0 1 1 1 1 0 0 I3 I2 I1 I0 W3 W2 W1 W0
1
ACC ← (WR) EX I
The contents of the Working Register (WR) and the immediate data I are
exclusive-ORed and the result is loaded into the ACC.
ZF

Preliminary W741C20X
- 78 -
Instruction Set Table 2, continued
XRLR R, ACC Exclusive OR R to ACC
Machine Code:
Machine Cycle:
Operation:
Description:
Flag Affected:
0 0 1 1 1 0 0 1 0 R6 R5 R4 R3 R2 R1 R0
1
ACC, R ← (R) EX (ACC)
The contents of the data memory location addressed by R6 to R0 and the
ACC are exclusive-ORed and the result is placed in the data memory and
the ACC.
ZF
XRLR WR, #I Exclusive OR immediate data to WR
Machine Code:
Machine Cycle:
Operation:
Description:
Flag Affected:
0 0 1 1 1 1 0 1 I3 I2 I1 I0 W3 W2 W1 W0
1
ACC, WR ← (WR) EX I
The contents of the Working Register(WR) and the immediate data I are
exclusive-ORed and the result is placed in the WR and the ACC.
ZF

Preliminary W741C20X
Publication Release Date: March 1998
- 79 - Revision A3
PACKAGE DIMENSIONS
18L PDIP-300mil
1.631.47
0.0640.058
Symbol
Min.
Nom
Max. Max.
Nom
Min.
Dimension in inches
Dimension in mm
A
B
c
D
e
A
L
S
A
A
1
2
E
0.060 1.52
0.175
4.45
0.010
0.125
0.016
0.130
0.018
0.135
0.022
3.18
0.41
0.25
3.30
0.46
3.43
0.56
0.008
0.120
0.375
0.010
0.130
0.014
0.140
0.20
3.05
0.25
3.30
0.36
3.56
0.255
0.250
0.245
6.486.356.22
9.53
7.62
7.37
7.87
0.3000.290
0.310
2.29 2.54 2.790.090 0.100
0.110
B
1
1
e
E1
0.900 0.910
22.86 23.11
0 15
0.055
1.40
0.355
0.335 8.51
9.02
150
Seating Plane
A
e
2
A
c
E
Base Plane
1
A
1
e
L
A
S
1
E
D
1
B
B
18 10
1
9
£\
£\

Preliminary W741C20X
- 80 -
20L PDIP
1.631.47
0.0640.058
Symbol
Min. Nom Max. Max.NomMin.
Dimension in inches
Dimension in mm
A
B
c
D
e
A
L
S
A
A
1
2
E
0.060 1.52
0.175
4.45
0.010
0.125
0.016
0.130
0.018
0.135
0.022
3.18
0.41
0.25
3.30
0.46
3.43
0.56
0.008
0.120
0.375
0.010
0.130
0.014
0.140
0.20
3.05
0.25
3.30
0.36
3.56
0.255
0.250
0.245
6.486.35
6.22
9.53
7.62
7.37
7.87
0.3000.290
0.310
2.29 2.54 2.790.090 0.100
0.110
B
1
1
e
E
1
1.026 1.040
20.06 26.42
0 15
0.075
1.91
0.355
0.335 8.51
9.02
150
Seating Plane
A
e
2
A
c
E
Base Plane
1
A
1
e
L
A
S
1
E
D
1
B
B
20
1 10
11
£\
£\

Preliminary W741C20X
Publication Release Date: March 1998
- 81 - Revision A3
28-Lead P-DIP Skinny
1.631.47
0.0640.058
Symbol
Min. Nom Max. Max.NomMin.
Dimension in Inches
Dimension in mm
A
B
c
D
e
A
L
S
A
A
1
2
E
0.060 1.52
0.175
4.45
0.010
0.125
0.016
0.130
0.018
0.135
0.022
3.18
0.41
0.25
3.30
0.46
3.43
0.56
0.008
0.120
0.370
0.010
0.130
0.014
0.140
0.20
3.05
0.25
3.30
0.36
3.56
0.293
0.2880.283
7.447.32
7.19
9.40
7.87
7.62
8.13
0.3100.300 0.320
2.29 2.54 2.790.090 0.100
0.110
B
1
1
e
E
1
a
1.388 1.400
35.26
35.56
0
°
15
°
0.055
1.40
0.3500.330 8.38 8.89
15
°
0
°
e
A
a
c
E
1
E
D
28
15
1 14
A
Base Plane
Mounting Plane
1
A
1
e
L
A
S
1
B
B
2

Preliminary W741C20X
- 82 -
20L SOP-300mil
L
O
c
E
H
A1
A
e
b
D
SEATING PLANE
Y
0.25
GAUGE PLANE
E
1
20
11
10
7.60
0.32
0.51
0.30
E
c
b
A1
7.40
0.23
0.33
0.10
0.299
0.013
0.020
0.012
0.291
0.009
0.013
0.004
Max.
Dimension in mm
2.65
A
Symbol
Min.
2.35
Dimension in inches
0.104
Min.
0.093
Max.
Control demensions are in milmeters .
1.27
0.10
10.65
L
q
Y
H
0 8
0.40
10.00
e
1.27 BSC
0.050
0.004
0.419
0
0.016
0.394
8
0.050 BSC
E
D
12.60
13.00
0.496
0.512

Preliminary W741C20X
Publication Release Date: March 1998
- 83 - Revision A3
28L SOP-300mil
L
O
c
E
H
A1
A
e
b
D
SEATING PLANE
Y
0.25
GAUGE PLANE
E
1
28
15
14
7.60
0.32
0.51
0.30
E
c
b
A1
7.40
0.23
0.33
0.10
0.299
0.013
0.020
0.012
0.291
0.009
0.013
0.004
Max.
Dimension in mm
2.65
A
Symbol
Min.
2.35
Dimension in inches
0.104
Min.
0.093
Max.
Control demensions are in milmeters .
1.27
0.10
10.65
L
q
Y
H
0 8
0.40
10.00
e
1.27 BSC
0.050
0.004
0.419
0
0.016
0.394
8
0.050 BSC
E
D
17.70
18.10 0.697
0.713

Preliminary W741C20X
- 84 -
NOTES:
Headquarters
No. 4, Creation Rd. III,
Science-Based Industrial Park,
Hsinchu, Taiwan
TEL: 886-3-5770066
FAX: 886-3-5792766
http://www.winbond.com.tw/
Voice & Fax-on-demand: 886-2-27197006
Taipei Office
11F, No. 115, Sec. 3, Min-Sheng East Rd.,
Taipei, Taiwan
TEL: 886-2-27190505
FAX: 886-2-27197502
Winbond Electronics (H.K.) Ltd.
Rm. 803, World Trade Square, Tower II,
123 Hoi Bun Rd., Kwun Tong,
Kowloon, Hong Kong
TEL: 852-27513100
FAX: 852-27552064
Winbond Electronics North America Corp.
Winbond Memory Lab.
Winbond Microelectronics Corp.
Winbond Systems Lab.
2727 N. First Street, San Jose,
CA 95134, U.S.A.
TEL: 408-9436666
FAX: 408-5441798
Note: All data and specifications are subject to change without notice.
 Loading...
Loading...