

Page 1

АППАРАТУРА
ГЕОДЕЗИЧЕСКАЯ СПУТНИКОВАЯ ДВУХЧАСТОТНАЯ
GPS/ГЛОНАСС
Приемник Legacy-E
фирмы «Топкон Позишионинг Системс», США
(Руководство пользователя)
Декабрь 2001 г.
Page 2

2
Содержание
1. Назначение ............................................................................................................................................ 3
2. Описание работы приемника. .............................................................................................................. 4
3. Технические характеристики ............................................................................................................... 7
3.1 Техническая спецификация. ........................................................................................................ 7
Основные технические характеристики ............................................................................................. 7
При работе по сигналам GPS или по сигналам GPS и ГЛОНАСС ................................................... 7
Маркеры ................................................................................................................................................ 7
Общие .................................................................................................................................................... 8
3.2 Описание приемника и дополнительного оборудования .......................................................... 9
Приемник ....................................................................................................................................... 9
Антенна ........................................................................................................................................ 10
Радиомодем ................................................................................................................................. 11
Полевой Контроллер .................................................................................................................. 11
Источники питания и зарядные устройства ............................................................................. 11
Кабели .......................................................................................................................................... 12
3.3 Устройство комплекта ................................................................................................................ 12
4. Указания мер безопасности ............................................................................................................... 14
5. Работа с прибором .............................................................................................................................. 14
5.1 Подготовка прибора к работе .................................................................................................... 14
5.2 Порядок работы .......................................................................................................................... 15
6. Техническое обслуживание, поверка ................................................................................................ 15
7. Хранение. Транспортирование .......................................................................................................... 16
8. Возможные неисправности. Методы их устранения. ...................................................................... 16
Page 3
3
1. Назначение
Аппаратура геодезическая спутниковая двухчастотная GPS/ГЛОНАСС при-
емник модели Legacy-E фирмы «Топкон Позишионинг Системс», США (далее по
тексту: приемник) использует системы глобального определения местоположения
американской Global Position System (GPS) и российской Глобальной Навигацион-
ной Спутниковой Системы (ГЛОНАСС) для целей геодезии и навигации. Она
предназначена для выполнения геодезических измерений в опорных и съемочных
сетях, производства землеустроительных и геофизических работ, точных измерений в строительстве и горных разработках, в геодинамических исследованиях, деформометрии и других видах абсолютных и относительных определений положе-
ния объектов. Внешний вид приемника показан на рис.1.1.
Рис. 1.1. Внешний вид приемника Legacy-E
Приемник способен обрабатывать одновременно до 40-ка спутниковых сигна-
лов в четырех диапазонах частот: 1575.42 МГц (L1), 1227.6 МГц (L2) для GPS и
1602.56 - 1615.5 МГц (F1), 1246.44 – 1256.5 МГц (F2) для ГЛОНАСС. Приемник
способен работать как по сигналам пониженной точности (ПТ), так и по сигналам
высокой точности (ВТ) обeих навигационных систем. Приемник обеспечивает
определение координат и скорости в реальном масштабе времени фазового центра
антенны, а также самого времени.
С использованием выбранной навигацонной системы GPS и/или ГЛОНАСС
приемник обеспечивает следующие режимы измерений:
Режим абсолютного местоопределения (Stand Alone Positioning);
Режим относительного местоопределения пары приемников с использованием
накопленных кодовых и фазовых измерений и последующей послесеансной (каме-
ральной) обработки накопленных данных (Postprocessing);
Page 4

4
Режим дифференциального местоопределения Подвижной станции (Ровер) с
использованием Базовой станции и радиомодема в реальном времени при исполь-
зовании кодовых измерений (Code Differential или RTK Code);
Режим дифференциального местоопределения Подвижной станции (Ровер) с использованием Базовой станции и радиомодема в реальном времени при использо-
вании фазовых измерений (Real Time Kinematic или RTK Phase).
При относительных измерениях используются два приемника, установленных
на конечных точках измеряемого базового вектора. (Вектор – прямое расстояние
между измеряемыми пунктами). Относительное местоопределение Postprocessing
реализуется для трех моделей движения приемника:
Режим Статика;
Режим Стой-иди (stop-and-go);
Режим Кинематика.
Оценка координат приемников производится по фазовым и кодовым измерениям с
использованием выбранной навигационной системы GPS и/или ГЛОНАСС. Во
время работы на пунктах приемники могут накапливать данные в собственной
внутренней памяти или в памяти устройства управления. Наблюдения, накапливаемые во внутренней памяти, пересылаются на внешнее регистрирующее устройство
(в частности, на устройство управления) через последовательный и/или параллель-
ный порты ввода/вывода.
При дифференциальных измерениях один из приемников работает как Базовая
станция (База), другой – как Подвижная (Ровер). В дифференциальном режиме для
передачи поправок используется радиопередающий модем на Базе и радиоприемный модем на Ровере. (Их часто называют радиомодемами, модемами или просто
радио). Для передачи/приема поправок применяется стандарт, позволяющий выполнять дифференциальные измерения в комплекте с приемниками иного типа,
использующими тот же стандарт передачи/приема поправок.
2. Описание работы приемника.
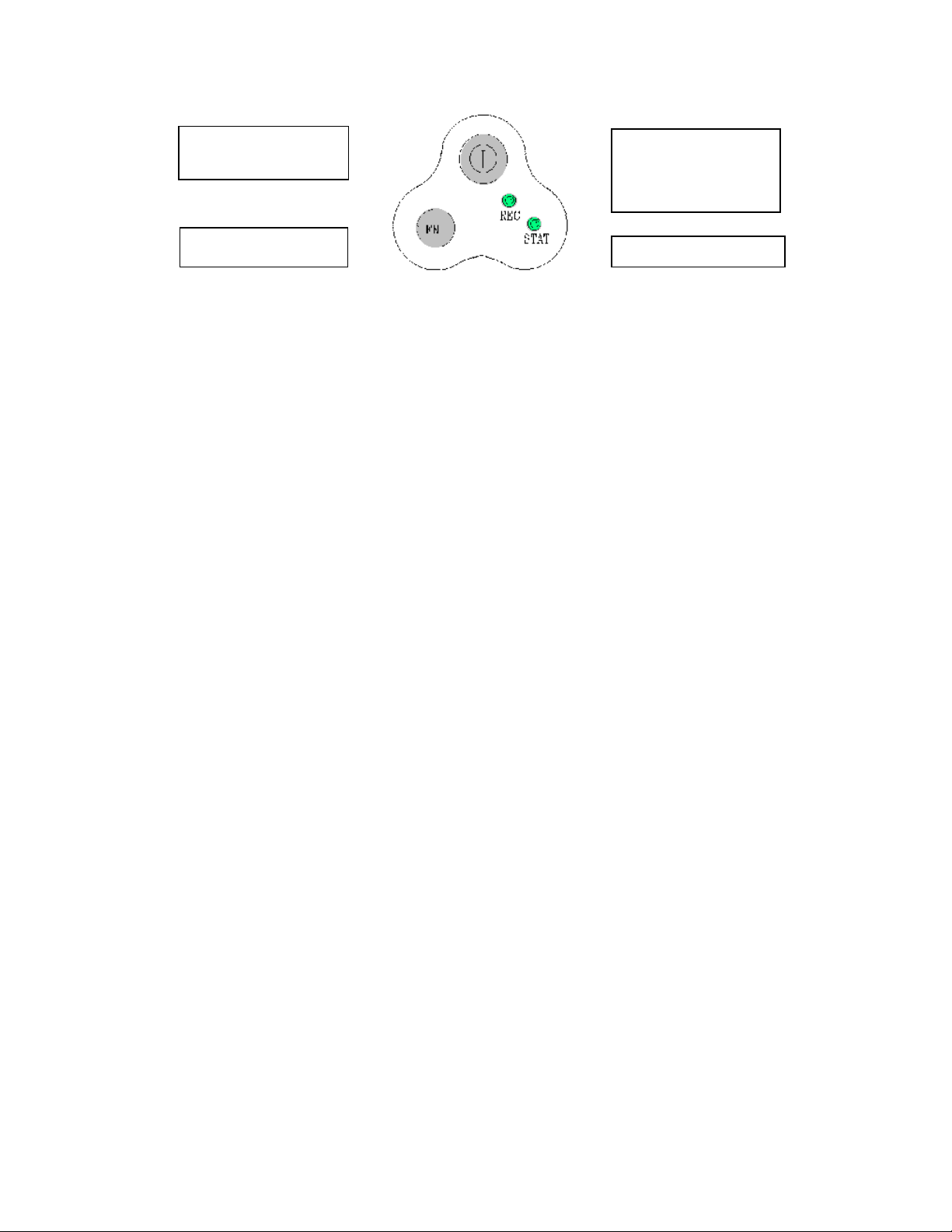
Приемник снабжен минимальной панелью управления (Minimal Interface –
“MINTER” (Минтер), содержащей две кнопки (первая – с изображением буквы “I”,
заключенной в круг, вторая - с маркировкой “FN”) и два трехцветных светодиодных индикатора (первый - с маркировкой “STAT”-статус, второй - “REC”- запись)
(см. ниже раздел 3.2. Описание приемника и дополнительного оборудования. Па-
нель управления.).
Page 5
5
Индикатор “REC”, отоб-
ражает наличие записи в
файл приемника.
Кнопка с изображением
буквы «I», заключенной
в круг
Индикатор “STAT”
Кнопка
с маркировкой “FN”
Рис. 2.1. Внешний вид минимальной панели управления “MINTER”
1. Кнопка “I” - Включение/Выключение приемника.
Включение приемника производится нажатием кнопки с изображением буквы
“I”. Для выключения приемника кнопку “I” надо держать нажатой до тех пор,
пока не погаснут светодиодные индикаторы. Эта задержка порядка одной секунды вводится программно, чтобы исключить случайное выключение прием-
ника.
2. Кнопка “FN” - Включение/Выключение режима записи.
Включение/Выключение режима записи измерений во внутреннюю память
осуществляется нажатием второй кнопки с маркировкой “FN” (см. рис. 2.1).
Файлы организуются автоматически. В таком варианте все установки приемника производятся перед началом работ через персональный компьютер програм-
мой PC-CDU. По окончании работ аналогичным образом производится считы-
вание файлов из приемника в компьютер для последующей обработки.
3. Индикаторный светодиод состояния приемника “STAT”.
Светодиод индицирует состояние приемника и загорается после включения.
Вспышки красного цвета говорят о том, что приемник находится в режиме поиска спутниковых сигналов. Вспышки зеленого цвета говорят о том, что отслеживаются сигналы спутников системы GPS. Число зеленых вспышек после
красной говорит о числе отслеживаемых GPS спутников. Вспышки желто-
оранжевого цвета соответственно говорят о числе отслеживаемых спутников
системы ГЛОНАСС.
4. Индикаторный светодиод записи измерений “REC”.
Светодиод является индикатором процесса записи измерений во внутреннюю
память приемника. Зеленые вспышки указывают на то, что запись происходит
успешно, частота вспышек соответствует периодичности записи измерений.
Красные вспышки, чередующиеся с зелеными, указывают на сбои в процессе
записи. Красный свет горит постоянно, если внутренняя память приемника пе-
реполнена. Желто-оранжевый свет индикатора появляется во время инициали-
зации памяти, то есть при первом включении приемника или после замены
внутренней карты памяти.
Значительно больше возможностей предоставляется пользователю при под-
ключении к приемнику полевого контроллера с программой Field Face или Survey
Pro. Это позволяет полностью контролировать измерительный процесс в полевых
условиях и гарантировать качество выполняемой работы.
Page 6

6
После самотестирования приемник инициализирует все свои 40 каналов на по-
иск сигналов навигационных спутников, которые находятся в поле зрения антенны.
Приемник способен следить за сигналами всех видимых спутников как системы
ГЛОНАСС, так и системы GPS. После обнаружения сигнала спутника определяется
время и считывается эфемеридная информация об его орбите, а так же альманах,
который содержит информацию об орбитах всех других спутников системы. Прак-
тическое количество видимых спутников не превышает 20-ти.
Каждому спутнику присваивается отдельный канал, который и осуществляет непрерывное слежение за спутниковым сигналом. Каждый спутник передает эфеме-
ридную информацию с 30-ти секундным интервалом, а приемник принимает и записывает эту информацию в энергонезависимое ОЗУ.
Интерфейс приемника состоит из (см. рис. 1.1, рис. 3.1 и рис. 3.2) высокоча-
стотного разъема антенного кабеля (маркировка “Antenna”), высокочастотного
разъема подключения внешней опорной частоты (маркировка “FRQ”) и низкочастотных разъемов, к которым относятся последовательные двусторонние RS-232
порты (маркировка “А”, “B”, “C”, “D”), два порта “Pwr”. Эти порты предназначены
для обмена информацией с внешними устройствами. Некоторые из них поставля-
ются опционально.
Высокочастотная часть приемника принимает спутниковый сигнал от антенны,
сопряженной с малошумящим усилителем МШУ через коаксиальный кабель. Далее
сигнал преобразуется, выделяется информационная составляющая о спутнике, распределяется по каналам слежения. Управление слежением осуществляется процессором. После захвата канала спутника производится демодуляция принимаемого
сигнала с целью выделения из него модулирующего сообщения о фазе кода, фазе
несущей, показаний часов спутника, навигационного сообщения. На основании
этой информации приемник производит первичную обработку результатов измерений, которая заключается в определении времени прохождения сигнала от спутника до приемника (т.е. можно определить расстояние), поправку за различие показаний часов. Экстраполяция измерений от четырех спутников на общий момент времени по координатам этих спутников позволяет вычислительному комплексу при-
емника определить координаты фазового центра антенны приемника по закону
пространственной линейной засечки. Вся эта информация регистрируется в памяти
приемника в виде файла первичной «сырой» обработки, которая через интерфейсный порт связи может быть передан на внешний компьютер для последующей
обработки. При работе в режиме реального времени запись информации в файл не
является обязательной, но желательна, т.к. в режиме постобработки возможно смоделировать более благоприятные варианты вычислений координат, чем те которые
выбрал приемник, а сам файл считаться архивным для будущих работ.
Потребляемая мощность приемника с подключенной антенной и МШУ составляет
около 3.3 Вт.
Page 7

7
3. Технические характеристики
Основные технические характеристики
40 каналов GPS/ГЛОНАСС, код и фаза несущей на частоте L1
20 каналов GPS/ГЛОНАСС, код и фаза несущей на частоте L1 + L2
При работе по сигналам GPS или по сигналам GPS и ГЛОНАСС
На частотах L1, L2
На частоте L1
Postprocessing:
20 мм + 1.5 ppm∗d
30 мм + 1.5 ppm∗d
Code Differential:
по высоте
1.0 м
1.0 м
Real Time Kinematic:
по высоте
15 мм + 1.5 ppm∗d
20 мм + 1.5 ppm∗d
Маркеры
Маркер события:
маркера по шкале приемника:
Cигнал 1pps:
шкалой приемника:
3.1 Техническая спецификация.
Таблица 3.1
СКО определения координат (при d<10 км
и PDOP<2):
Статика
в плане
по высоте
Кинематика
в плане
по высоте
СКО определения координат (при d<10 км
и PDOP<2):
в плане
СКО определения координат (при d<10 км
и PDOP<2):
в плане
5 мм + 1 ppm∗d
10 мм + 1.5 ppm∗d
10 мм + 1.5 ppm∗d
0.6 м
10 мм + 1.5 ppm∗d
10 мм + 1 ppm∗d
15 мм + 1.5 ppm∗d
15 мм + 1.5 ppm∗d
0.6 м
15мм+1.5 ppm∗d**
Погрешность оценки времени прихода
Погрешность синхронизации меток PPS со
± 12.5 нс
± 12.5 нс
Page 8

8
Общие
Напряжение питания
Любой внешний источник питания
на 6 - 28 В (постоянный ток)
Время холодного старта,
теплого старта,
повторного захвата созвездия
60 сек
1 сек
Диапазон рабочих температур
от -40° Ц до +55° Ц
Температура хранения
от -40° Ц до +75° Ц
Влажность
до 100 %
Влаго и пыли защита
Защищен от водяных брызг и пыли
Возможность работы приемника от внеш-
него источника опорной частоты
5 МГц, 10 МГц, 20 МГц
Возможность формирования и передачи
2.2
Сообщения 1, 2, 3, 6, 9, 16, 18,19, 31
Возможность приема дифпоправок в стан-
дарте RTCM SC104, v. 2.2
Сообщения 1, 2, 3, 6, 9, 16, 18,19, 31
Возможность формирования и передачи
дифпоправок в стандарте CMR2 (RTK)
Сообщения 0, 1, 2
Возможность приема дифпоправок в стан-
дарте CMR2 (RTK)
Сообщения 0, 1, 2
Поддержка формата NMEA 0183, v. 2.3.
Возможность подавления помех до 60 дБ.
Фильтры типа: многолучевость,
антиджамминг.
Объем внутренней памяти хранения дан-
ных.
До 96 Мбайт, зависит от типа применяемой
карты памяти.
Интерфейсы.
Минимальный интерфейс - Минтер: две
МГц, 20 МГц./ 20 МГц
Потребляемая мощность
3.3 Вт ±10 %
Габаритные размеры (без упаковки)
240 мм х 110 мм х 35 мм
Масса
0.66 кг
дифпоправок в стандарте RTCM SC104, v.
10 сек
ко-оп трекинг,
* СКО – средняя квадратическая ошибка,
** ppm = 1∗10-6, где d – расстояние между Базовой и Подвижной станциями.
кнопки и два трехцветных светодиода.
Четыре RS-232 порта.
Антенный порт.
Вход временных событий (маркеров) и выход временных сигналов (1 pps).
Вход/Выход опорной частоты: 5 МГц, 10
Page 9

9
3.2 Описание приемника и дополнительного оборудования
№
Устройство
Функция
1
Кнопка “I”
Включение и выключение питания приемника
2
Кнопка “FN”
Включение и выключение режима записи во внут-
реннюю память файла измерений
3
Светодиод
Является индикатором режима поиск-слежение, а в
живаемых спутников
4
Светодиод “REC”
Является индикатором процесса записи файла изме-
рений во внутреннюю память приемника
№
Маркировка
Назначение
1
“Antenna”
Разъем для подключения ГЛОНАСС/GPS антенны, 50
антенне соответствующими фильтрами
2
“Serial A”
Разъем последовательного интерфейса - канал А. Пол-
ютером или с иным компьютером.
3
“Serial B”
Разъем последовательного интерфейса – канал В. Пол-
Разъем устанавливается опционально.
4
“Serial C”
Разъем последовательного интерфейса – канал С. Пол-
ный RS-232 порт предназначен для двустороннего об-
Эта глава содержит детальное описание приемника и дополнительного оборудова-
ния, используемого совместно с приемником.
Приемник
Панель управления:
Таблица 3.2 Панель управления приемника:
“STAT”
режиме слежения – индикатором количества отсле-
Панель подсоединения внешних устройств:
Таблица 3.3 Панель подсоединения внешних устройств приемника:
ом, высокочастотный, типа TNC - предназначен для
подключения высокочастотного кабеля, соединяющего
приемник с антенной. На центральный вывод разъема
поступает напряжение +5 В, предназначенное для питания МШУ встроенного в антенну. Ограничение выходного тока наступает примерно с 200 мА. Напряжение
питания МШУ и высокочастотный сигнал от антенны
идут по одному кабелю и разделяются в приемнике и
ный RS-232 порт предназначен для двустороннего об-
мена приемника с управляющим персональным компь-
ный RS-232 порт предназначен для двустороннего об-
мена приемника с управляющим контроллером, персо-
нальным или иным компьютером.
Page 10

10
мена приемника с управляющим персональным компь-
ютером или иным компьютером.
вышать 1А.
5
“Power”
Разъем соединения приемника с внешним источником
“Power”.
6
“FRQ”
Разъем для присоединения источника внешней опорной
Разъем устанавливается опционально.
7
“1PPS”
Выход сигнала временной метки 1pps c амплитудой 3В,
Разъем устанавливается опционально.
8
“EVENT”
Вход сигнала внешних событий.
Разъем устанавливается опционально.
Этот разъем специально предназначен для подключения
внешнего модема и имеет контакт, на который выводит-
ся напряжение питания внешнего модема.
Ток по цепи, питающей внешний модем, не должен пре-
питания напряжением +6 --+28 В.
Если предполагается использование внешнего модема,
питаемого через контакты разъема “Serial C”, то номи-
нал питающего напряжения должен быть совместим с
требованиями модема по питанию.
Разъем имеет контакт, предназначенный для дистанционного включения и выключения приемника.
Возможно комплектование приемника двумя разъемами
частоты: высокочастотный, 50 Ом, байонетный, типа
BNC – предназначен для соединения приемника с
внешним высокостабильным источником опорной ча-
стоты 5.0, 10.0 или 20.0 МГц.
Для подключения источника внешней опорной частоты
используется высокочастотный кабель.
Уровень входгого сигнала должен быть не менее 0.5 В
(размах).
Программно порт может быть настроен на выдачу сигнала внутреннего опорного генератора приемника ча-
стотой 20.0 МГц.
с программируемыми длительностью и полярностью.
Антенна
В качестве антенны должна использоваться антенна, способная принимать
спутниковые сигналы систем ГЛОНАСС и GPS в частотных диапазонах L1 и L2, F1
и F2. Этим условиям удовлетворяют антенны разных фирм. Топкон Позишионинг
Систем представляет серию антенн: Регант (Regant), Легант (Legant) и Марант (Ma-
rant).
Регант имеет значительно большие габариты и вес, чем Легант (3.0 кг и 0.86 кг
соответственно), но обеспечивает значительно лучшее подавление паразитных сигналов, принимаемых в области задней полусферы диаграммы направленности, и
Page 11

11
меньшее смещение фазового центра от оси при разных углах восхождения принимаемых спутников. Антенна предназначена для высокоточных геодезических работ
и на постоянно действующих Базовых станциях.
Легант (Матант) антенна может быть установлена на штативе, на переносной
штанге, на автомобиле или другом движущемся средстве.
Антенну необходимо располагать так, чтобы обеспечить максимальный обзор
небесной полусферы, избегая возможного затенения спутников деревьями, высо-
кими зданиями и т.п. предметами.
Внимание: Избегайте располагать антенну вблизи металлических предметов и со-
оружений - они могут быть причиной ошибок, связанных с многолучевостью. Вы-
сокое расположение антенны над подстилающей поверхностью обычно снижает
уровень многолучевости.
Радиомодем
Радиомодем необходим при работе приемника в дифференциальном режиме,
для передачи/приема дифференциальных поправок. На Базовой станции
устанавливается передатчик цифровых данных, а на Роверной станции – приемник.
Выбор типа радиомодема не принципиален, важно чтобы он поддерживал формат
дифференциальных поправок, принятый в приемнике. Опционально предлагается
PDL фирмы Pacific Crest, USA.
PDL-передатчик позволяет передавать поправки на частоте 450 – 470 МГц по
16 каналам. Мощность передатчика 35 Вт/2 Вт либо 15 Вт/2 Вт. Передатчик может
работать в режиме приемника. Скорость передачи данных до 19.2 кБод.
Напряжение питания 12 В. Сила тока до 10 А в импульсе.
PDL-приемник принимает сигналы передатчика. Приемник имеет встроенную
аккумуляторную батарею, что позволяет работать независимо от питания приемни-
ка. Поставляется совместно с зарядным устройством.
Полевой Контроллер
Полевой контроллер позволяет полностью контролировать измерительный процесс
приемника, управлять всеми его функциями и оперативно вносить изменения в зависимости от реально изменяющейся обстановки. Для этого подойдет любой карманный компьютер, на который устанавливается полевая программа управления
приемником: Field Face или Survey Pro. Опционально предлагается Psion фирмы
Epoch и Ranger фирмы TDS. Ranger выпускается в полевом ударопрочном, влаго-
защищенном варианте. Скорость процессора выше, но и стоимость значительно
больше, чем у Psion`а. Контроллер поставляется вместе с зарядным устройством.
Источники питания и зарядные устройства
В качестве источников питания применяются аккумуляторные батареи типа dryfeet,
напряжением 12 В, емкостью 2.3 А*ч, Соединитель P-Clip. Полностью заряженного аккумулятора хватает для непрерывно работающего приемника на 7– 8 часов.
Приемник может комплектоваться двумя портами “Pwr”, что позволяет одновре-
Page 12

12
менно подключить две аккумкляторные батареи и продлить время репрерывной
работы до 14-16 часов.
Кабели
В зависимости от вида выполняемых работ в приемнике прописывается соответствующая опция. От этого зависит выбор соответствующего основного и дополнительного оборудования, которое поставляется в комплекте приемника. Кабели являются связующим звеном приемника с остальным оборудованием. Но следует
помнить, что если дополнительную опцию можно прописать в приемник позже,
получив ее через электронную почту, то кабели и дополнительное оборудование
вам могут быть доставлены только традиционным способом.
3.3 Устройство комплекта
Для правильного соединения приемника с дополнительным внешним оборудо-
ванием (смотри рисунок 3.1.) необходимо выполнить следующие действия:
Рис. 3.1. Типовое подключение приемника Ровер к внешним устройствам:
1 - приемник, 2 - антенна, 3 - модем (используется в дифференциальном режиме),
4 - управляющий контроллер (может не использоваться), 5 – источник питания.
Page 13

13
Рис. 3.2 Типовое подключение Базовой станции к внешним устройствам
1 – приемник, 2 – антенна, 3 – модем-передатчик (2 Вт, 15 Вт, 35 Вт), 4 – источник
питания передатчика, 5 – источник питания приемника.
1. Соединить высокочастотным кабелем разъем приемника с маркировкой “An-
tenna“ с антенной.
2. Соединить кабелем питания разъем приемника с маркировкой “Pwr“ с источни-
ком питания постоянного тока (2) +6 …+28 В (с выходной мощностью не ме-
нее 4 Вт). Если приемник работает с внешним модемом, питаемым от общего
источника питания, то выходная мощность источника должна на 4 Вт превы-
шать максимальную мощность, потребляемую модемом, но в любом случае ток
питания не должен превышать 1А.
3. Соединить 5-ти проводным RS-232 кабелем разьем приемника “A” с внешним
контроллером, если предполагается работа с внешним контроллером. В каче-
стве внешнего контроллера могут использоваться: в стационарном варианте –
персональный компьютер, в полевом варианте - переносной персональный
компьютер с автономным питанием (notebook) малогабаритный компъютер ти-
па “PSION”, “iPAQ” (penbook), пылевлагозащищенный “RANGER” (handheld)
cо специальным программным обеспечением ”Field Face”.
4. Присоединить специализированным кабелем к разъему “С” приемника внеш-
ний модем, если предполагается работа в дифференциальном режиме с исполь-
зованием внешнего модема.
5. Если предполагается работа от внешнего источника опорной частоты, то по-
следний подключается радиочастотным кабелем к разъему “FRQ” приемника.
Page 14

14
После подключения необходимых дополнительных внешних устройств включают
приемник нажатием кнопки “I” на панели минимального интерфейса приемника
“MINTER”, см. раздел 2 рисунок 2.1.
Если в качестве контроллера используется персональный компьютер с программ-
ным обеспечением РС-СDU, необходимо пользоваться руководством пользователя
для этого компьютера и описанием программного обеспечения РС-СDU.
Если в качестве контроллера используется малогабаритный компъютер типа
“RANGER” с программным обеспечением Field Face, необходимо пользоваться ру-
ководством пользователя для этого компьютера и описанием программного обес-
печения Field Face.
Типовое подключение приемников, указанное на рисунках 3.1, 3.2 может отличаться от того, которое необходимо конкретному пользователю. Это зависит от кон-
кретного оборудования и типа выполняемых работ.
4. Указания мер безопасности
Так как в приемнике отсутствуют высокие напряжения, а сам корпус изготовлен из
литого алюминиевого сплава, покрытого пластикой, то никакой опасности и вреда
оператору и окружающей среде приемник причинить не может. В некоторых случаях, таких как длительная установка на металлической штанге на крыше, для сня-
тия статического заряда (из-за постоянно дующего ветра) можно порекомендовать
произвести заземление штанги и то при условии, что это действительно качествен-
ное заземление.
5. Работа с прибором
5.1 Подготовка прибора к работе
Чтобы не возникало сбоев в организации работ на объекте, всю подготовительную
работу с прибором рекомендуется производить в «комфортных» условиях перед
выходом на объект, но это не обязательно. Ниже даны общие рекомендации, кото-
рые могут значительно отличаться в зависимости от вида выполняемых работ.
1. Подключить радиомодем передатчик к компьютеру и фирменной програм-
мой установить требуемые параметры радиомодема.
2. Собрать комплект Базовая станция (например в соответствии с рис. 3.2)
3. Включить приемник. Если приемник находится очень далеко от своего ме-
стоположения, когда он включался в последний раз, то ему надо дать возможность набрать свежий альманах о положении спутников (около 12 мин).
По количеству миганий индикатора “STAT” можно определить количество
захваченных спутников, их должно быть не меньше пяти (для дифференци-
альных измерений).
Page 15

15
4. Включить контроллер (порт А). Установить параметры Базы для конкретно-
го вида выполняемых работ.
5. Убедиться, что модем-передатчик передает поправку в эфир. Если поправки
нет проверить скорость порта С (д.б. 38400 Бод).
Внимание. Без подключенной антенны передатчик в режим передачи включать
нельзя.
6. Подключить радиомодем приемник к компьютеру и фирменной программой
установить требуемые параметры радиомодема.
7. Собрать комплект Роверная станция.
8. Включить приемник и перейти к пункту 3.
9. Включить контроллер (порт А). Установить параметры Ровера для конкрет-
ного вида выполняемых работ.
10. Убедиться, что модем-приемник получает поправку из эфира. Если поправ-
ки нет проверить скорость порта С (д.б. 38400 Бод) и формат приема по-
правки (д.б. такой же как у Базы).
11. Наблюдать за показаниями контроллера. Через некоторое время (10 - 30 сек)
приемник должен решить задачу позиционирования и дать координаты ме-
стоположения антенны и тип решения.
5.2 Порядок работы
1. Выполнить все действия перечисленные в подразделе 5.1 за исключением
настройки радиомодемов, т.к. предполагается что они уже настроены.
2. Открыть файл приемника, если это необходимо, и начать запись (кнопка
“FN”, либо контроллер).
3. В зависимости от вида работ либо переместиться на новую точку, либо за-
крыть файл. Для постобработки переписать файлы приемника в компьютер.
4. По окончании работ выключить приемник, разобрать комплект, если необ-
ходимо привести в транспортируемое состояние.
6. Техническое обслуживание, поверка
Специального периодического технического обслуживания не требуется. Рекомендуется содержать приемник в естественной чистоте и не путать разъемы при под-
ключении, т.к. они не взаимозаменяемые.
Поверка производится в соответствии с МИ 2408-97. “Аппаратура пользователей
космических навигационных систем геодезическая. Методика поверки”
Поверочное оборудование - эталонный стенд ИМВП ГП ВНИИФТРИ, фазовый
светодальномер СП-2, рулетка 3ПК3-20 БУП-1 (в соответствии с МИ 2408-97).
Межповерочный интервал - 1 год.
Page 16

16
7. Хранение. Транспортирование
Специальных мер для хранения не требуется. Транспортирование производится в
удародемпфирующих картонных коробках с поролоновыми прокладками под обо-
рудование.
8. Возможные неисправности. Методы их устранения.
В случае неисправности комплекта попытаться локализовать причину. Как правило, это «не учет или забывчивость оператора» при установке тех или иных пара-
метров. Ниже перечислены наиболее характерные из них.
1. Питание: Низкое напряжение питания. Разрядились аккумуляторные бата-
реи. Недопустимо низкая температура работы аккумулятора.
2. Радиомодем: Слабая аккумуляторная батарея питания радиопередатчика.
Несоответствие форматов передачи и приема по радиоканалу и скорости по
каналу связи. Не выключена чувствительность приема в передатчике. Не
включена соответствующая чувствительность приемника в приемнике. Не
до конца вставлен разъем в порт связи модема.
3. Приемник: Выбран неверный статус приемника. Малое число спутников. Не
до конца вставлен разъем в порт “A”. Закрыта или просрочена опция, на ко-
торой пытается работать оператор. Переполнена память приемника, куда за-
писываются сырые данные.
В случае предположительного отказа приемника Вы можете:
произвести стандартную предустановку приемника (Set all parameters to
default);
очистить NVRAM;
дать команду Reset (Команду Reset можно вызвать с помощью интерфейса
Minter, для этого при выключенном питании надо нажать кнопку ‘FN’ и
удерживая ее включить питание “I”, продолжать удерживать кнопки ‘FN’ и
“I” до тех пор, пока оба светодиодных индикатора не начнут мигать, отпу-
стить кнопки “I” и ‘FN’.
Если эти операции не привели к желаемому резкльтату, Вам необходимо
обратиться в компанию за помощью специалистов;
4. Антенна: Слишком закрытое место. Обрыв антенного кабеля.
Внимание. Все механические виды ремонта, регулировка, настройка, электроре-
монт должны производиться в специальных мастерских приспособленных для ра-
бот с аппаратурой этого класса.
 Loading...
Loading...