

Page 1
User's Guide
SLOU476–August 2017
DRV10987 Evaluation Module User's Guide
This user's guide provides complete details of the customer evaluation module (EVM) for the DRV10987
device including hardware implementation, jumper configuration, and operating procedure to run 3-phase
BLDC motors. This EVM user's guide is intended to be used with the DRV10987 Tuning Guide to
optimally tune a user motor.
Contents
1 DRV10987 EVM Kit Contents.............................................................................................. 3
2 Introduction ................................................................................................................... 3
3 DRV10987 EVM Board ..................................................................................................... 4
3.1 Power and Motor Connectors P1................................................................................. 4
3.2 Test Point Connector P2........................................................................................... 4
3.3 Control Input Connectors J3....................................................................................... 4
3.4 Jumper J1 (Direction) .............................................................................................. 5
3.5 Jumper J2 (Speed Input) .......................................................................................... 5
3.6 FG Test Pin.......................................................................................................... 5
4 DRV10987 GUI .............................................................................................................. 6
4.1 Overview............................................................................................................. 6
4.2 Basic Settings ....................................................................................................... 6
5 Out-of-the-Box Quick-Start Guide........................................................................................ 10
6 Power-On Sequence and Connection With User Specific Motor .................................................... 15
7 Schematic and Bill of Materials........................................................................................... 15
7.1 Schematic .......................................................................................................... 15
7.2 Bill of Materials (BOM)............................................................................................ 17
Appendix A GUI Installation and Overview................................................................................... 18
Appendix B GUI to DRV10987 Register Cross Reference................................................................. 36
1 DRV10987 EVM ............................................................................................................. 3
2 DRV10987 GUI Basic Settings ............................................................................................ 6
3 Example Dropdown Menu.................................................................................................. 7
4 Example Checkbox.......................................................................................................... 7
5 Example Text Box ........................................................................................................... 7
6 DRV10987 GUI Advanced Settings ....................................................................................... 8
7 DRV10987 GUI Display Settings .......................................................................................... 9
8 Initial GUI Screen .......................................................................................................... 10
9 Initial GUI Screen .......................................................................................................... 11
10 GUI in Demo Mode ........................................................................................................ 11
11 Enable Configure........................................................................................................... 12
12 Fault Code Information .................................................................................................... 13
13 Disabled Motor Operation Selected ..................................................................................... 14
14 OverRide Selected ......................................................................................................... 15
15 DRV10987 Schematic ..................................................................................................... 16
16 Setup_DRV109xx_EVM.exe from the Volume Folder................................................................. 18
17 GUI Installation Initialization .............................................................................................. 19
SLOU476–August 2017
Submit Documentation Feedback
List of Figures
DRV10987 Evaluation Module User's Guide
Copyright © 2017, Texas Instruments Incorporated
1
Page 2

www.ti.com
18 License Agreement ........................................................................................................ 19
19 GUI Destination Directory................................................................................................. 20
20 GUI Start Installation....................................................................................................... 20
21 GUI Installation in Progress............................................................................................... 21
22 Python Installation Complete ............................................................................................. 21
23 USB2ANY Installation Initialization ...................................................................................... 22
24 USB2ANY License Agreement........................................................................................... 22
25 USB2ANY Destination Directory ......................................................................................... 23
26 USB2ANY Start Installation............................................................................................... 23
27 USB2ANY Installation Complete......................................................................................... 24
28 Basic Settings Page ....................................................................................................... 25
29 Confirmation on Voltage Level ........................................................................................... 26
30 Help Icon .................................................................................................................... 27
31 Advanced Settings ......................................................................................................... 27
32 Display....................................................................................................................... 28
33 About Page.................................................................................................................. 29
34 File Menu.................................................................................................................... 30
35 Script Menu ................................................................................................................. 31
36 Launch Macro............................................................................................................... 31
37 Start Recording............................................................................................................. 32
38 Stop Recording ............................................................................................................. 33
39 Run Macro .................................................................................................................. 34
40 Debug Menu ................................................................................................................ 35
1 P1 Terminal Assignments .................................................................................................. 4
2 P2 Terminal Assignments .................................................................................................. 4
3 J3 Terminal Assignments................................................................................................... 4
4 DIR PIN Setting.............................................................................................................. 5
5 SPEED Pin Setting .......................................................................................................... 5
6 DRV10987 Bill of Materials .............................................................................................. 17
7 GUI to DRV10987 Register Cross Reference.......................................................................... 36
Trademarks
All trademarks are the property of their respective owners.
List of Tables
2
DRV10987 Evaluation Module User's Guide
Copyright © 2017, Texas Instruments Incorporated
Submit Documentation Feedback
SLOU476–August 2017
Page 3
www.ti.com
1 DRV10987 EVM Kit Contents
The DRV10987 evaluation kit contains the following:
• DRV10987 EVM board
• USB2ANY communication board for I2C GUI interaction
• USB cable
• 10-pin ribbon cable to connect the USB2ANY and DRV10987 EVM
• DRV10987 EVM GUI
The DRV10987 EVM boards and GUI are designed to work together to evaluate the device features.
2 Introduction
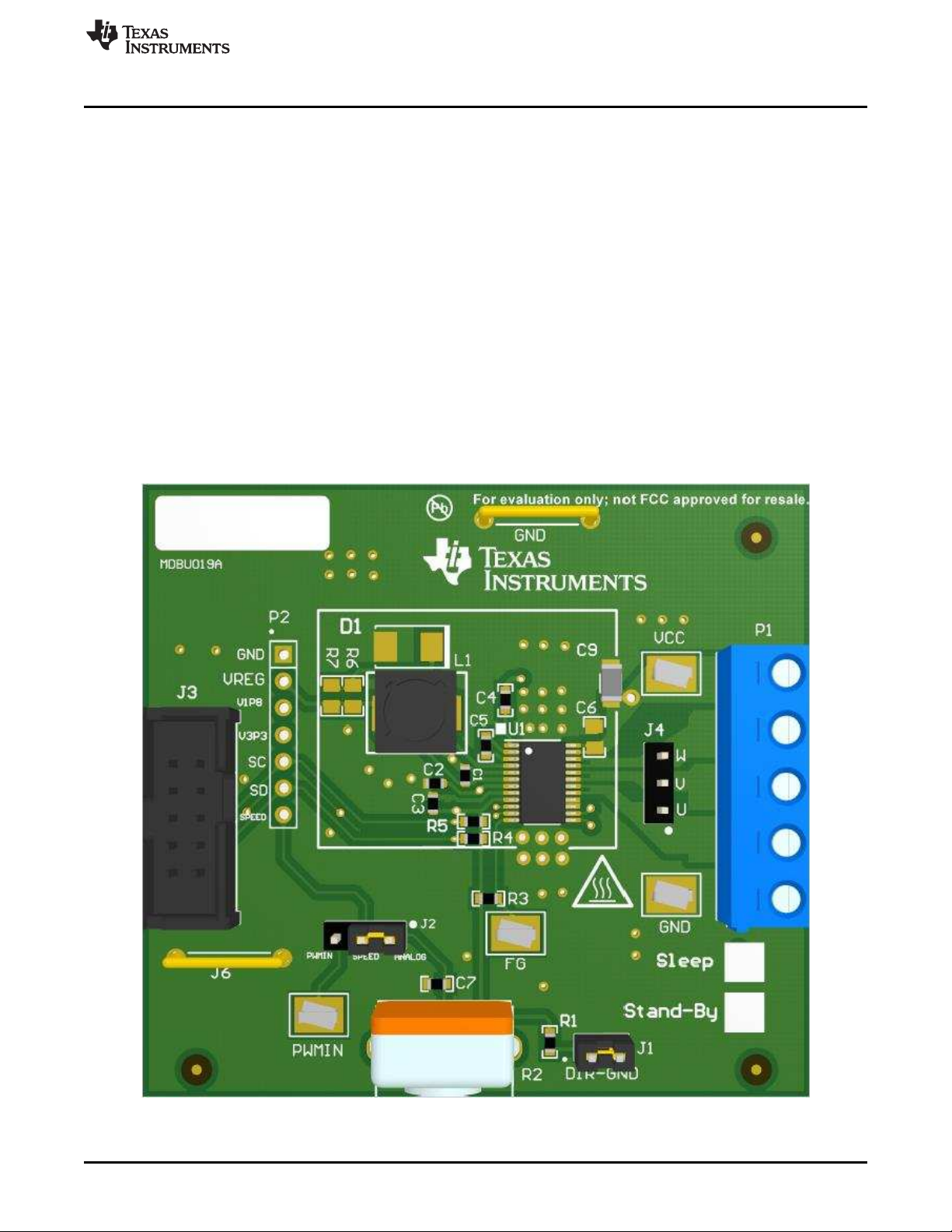
The DRV10987 EVM is a complete solution for evaluating the DRV10987 12-V or 24-V, three-phase
sensorless BLDC motor drivers. Device evaluation and configuration for specific applications is possible
with the provided DRV10987 EVM GUI. This document describes the kit details and explains the functions
and locations of test points, jumpers, and connectors present on the kit. This document is also a quickstart guide for using the GUI to tune a motor for application. For detailed information about the operating
modes of the DRV10987 device, refer to the DRV10987 12- to 24-V, Three-Phase, Sensorless BLDC
Motor Driver data sheet.
DRV10987 EVM Kit Contents
SLOU476–August 2017
Submit Documentation Feedback
Figure 1. DRV10987 EVM
DRV10987 Evaluation Module User's Guide
Copyright © 2017, Texas Instruments Incorporated
3
Page 4
DRV10987 EVM Board
3 DRV10987 EVM Board
3.1 Power and Motor Connectors P1
The DRV10987 EVM shares terminal P1 for power supply and motor-phase output. Use a single powersupply rail between 6.2 V to 28 V to operate the EVM. Table 1 lists the pin assignment of terminal P1.
Table 1. P1 Terminal Assignments
Pin Description
1 VCC
2 W
3 V
4 U
5 GND
3.2 Test Point Connector P2
The P2 connector can be used to measure signals from the DRV10987 device. P2 is not
populated.Table 2 lists the pin assignment of terminal P2.
Table 2. P2 Terminal Assignments
Pin Description
1 GND
2 VREG
3 V1P8
4 V3P3
5 SC from J3 (connects to SCL of device)
6 SD from J3 (connects to SDA of device)
7 SPEED input from PWMIN or ANALOG (R2)
www.ti.com
3.3 Control Input Connectors J3
The J3 connector is used for the I2C interconnection with the GUI. Table 3 lists the pin assignment of
terminal J3.
Table 3. J3 Terminal Assignments
Pin Description
6 GND
9 SD (connects to SDA of device)
10 SC (connects to SCL of device)
4
DRV10987 Evaluation Module User's Guide
Copyright © 2017, Texas Instruments Incorporated
Submit Documentation Feedback
SLOU476–August 2017
Page 5

www.ti.com
3.4 Jumper J1 (Direction)
To control the spin direction of the motor, the DRV10987 EVM is equipped with a direction jumper.
Depending if 3V3 or GND is supplied to the DRV10987 direction input, the motor spins either in forward or
reverse direction.
J1 Connection Description
3.5 Jumper J2 (Speed Input)
The motor speed input source is configured with J2. If J2 pins 2-3 is populated, supply a PWM to the
PWMIN test pin to control the motor speed. If J2 pins 1-2 is populated, the motor speed is controlled with
the analog potentiometer R2 equipped on the EVM.
J2 Connection Description
DRV10987 EVM Board
Table 4. DIR PIN Setting
Unconnected DIR is set to 3.3 V
Connected DIR is set to GND (shown)
Table 5. SPEED Pin Setting
1-2 Analog Pot R2 (shown)
NOTE: The motor operation can be unpredictable if the internal register setting the DRV10987
device does not match the J2 selection.
3.6 FG Test Pin
The frequency generator (FG) test pin outputs the motor speed, depending on the internal DRV10987
divider setting and the number of motor poles.
2-3 PWMIN digital input
SLOU476–August 2017
Submit Documentation Feedback
DRV10987 Evaluation Module User's Guide
Copyright © 2017, Texas Instruments Incorporated
5
Page 6

DRV10987 GUI
4 DRV10987 GUI
4.1 Overview
The DRV10987 EVM is provided with a GUI to configure the device and tune the application. See
Appendix A for instructions to download and install the GUI application. The GUI is structured into three
tabs (Basic Settings, Advanced Settings, and Display) allowing configuration of the register settings and
tuning of the device parameters for the target application. For details about the settings, refer to the
DRV10987 12- to 24-V, Three-Phase, Sensorless BLDC Motor Driver data sheet.
The following sections include DRV10987 GUI images to explain the various features of the GUI.
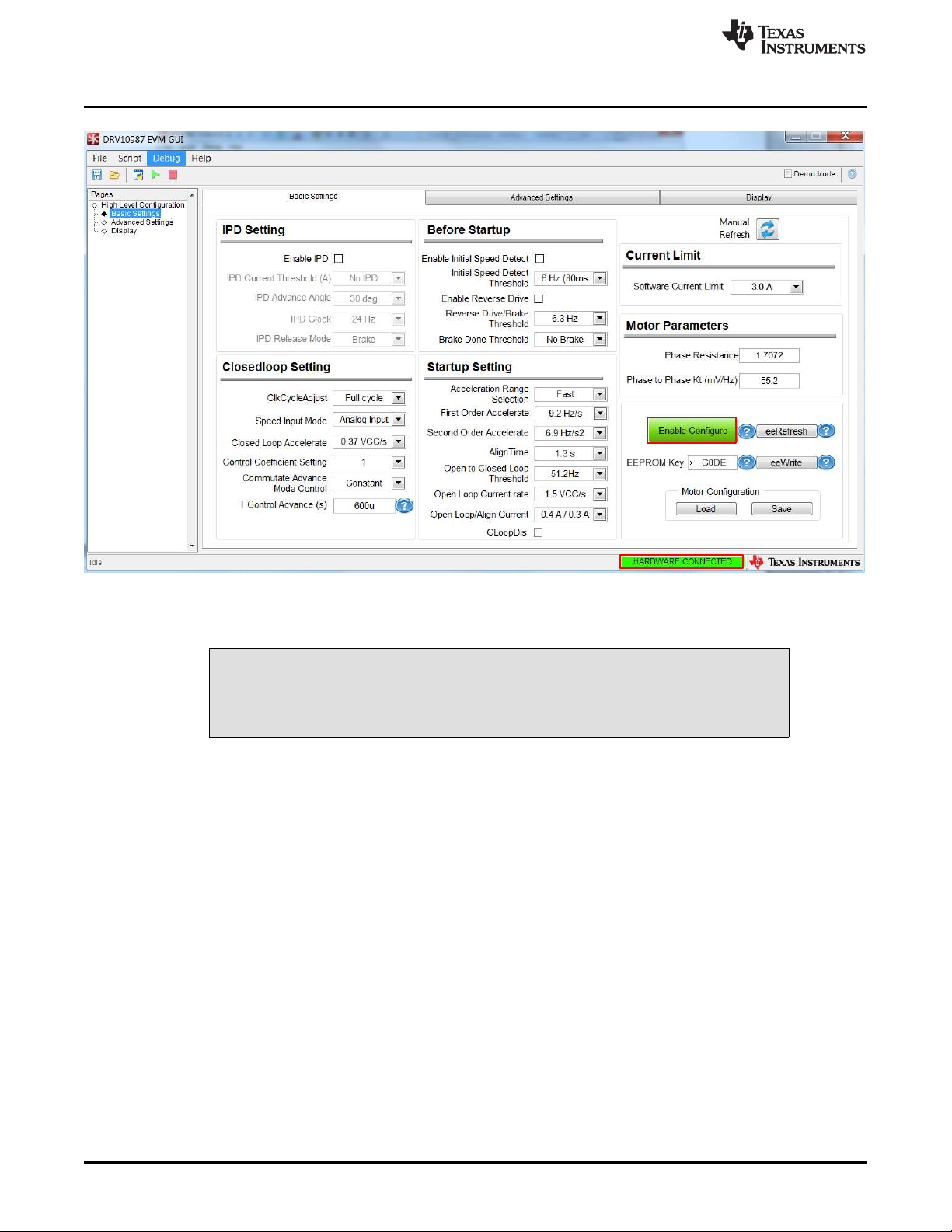
4.2 Basic Settings
The Basic Settings tab is the landing screen after launching the GUI on the computer. The tab sets the
motor parameters, startup parameters, initial speed detection prior to startup, and current limits. This tab
can also load and save motor parameters and program the EEPROM with optimized settings.
www.ti.com
Figure 2. DRV10987 GUI Basic Settings
4.2.1 Communication
The GUI is designed to work with and without the hardware connected, allowing evaluation of the
available settings. Click the Demo Mode checkbox in the top right to work offline when the box is checked.
When the EVM is connected to the GUI, this box should be unchecked and the status bar in the bottom
right displays Connected. If the GUI cannot connect to the hardware, check that the hardware is powered
and the I2C communication is correctly established.
4.2.2 Register Access – Enable Configure
To access the register settings, click the Enable Configure button (see Figure 2). When selected, the
button changes from the default gray to green, and the settings can be changed.
6
DRV10987 Evaluation Module User's Guide
Copyright © 2017, Texas Instruments Incorporated
Submit Documentation Feedback
SLOU476–August 2017
Page 7
www.ti.com
4.2.3 Changing Register Settings
The GUI supports three different input types to set the register values which are defined as follows:
Dropdown menu — This menu provides a list to select a predefined setting as shown in Figure 3.
Checkbox — Select this checkbox to set single bit values. Figure 4 shows the checkbox enabled.
Text box — The text box allows users to input data that might be changed by the device because of the
data type conversations. In Figure 5, a value of 1.5 was entered and the nearest value, 1.552, was
selected.
DRV10987 GUI
Figure 3. Example Dropdown Menu
Figure 4. Example Checkbox
4.2.4 Work With EEPROM
The settings are saved and loaded using the Save and Load buttons on the Basic Settings tab. When
saved, the file is written as a .csv file that can be loaded at a later time.
To program the DRV10987 devices and change the default EEPROM settings, follow the instructions
listed in the DRV10987 12- to 24-V, Three-Phase, Sensorless BLDC Motor Driver data sheet.
Figure 5. Example Text Box
SLOU476–August 2017
Submit Documentation Feedback
DRV10987 Evaluation Module User's Guide
Copyright © 2017, Texas Instruments Incorporated
7
Page 8
DRV10987 GUI
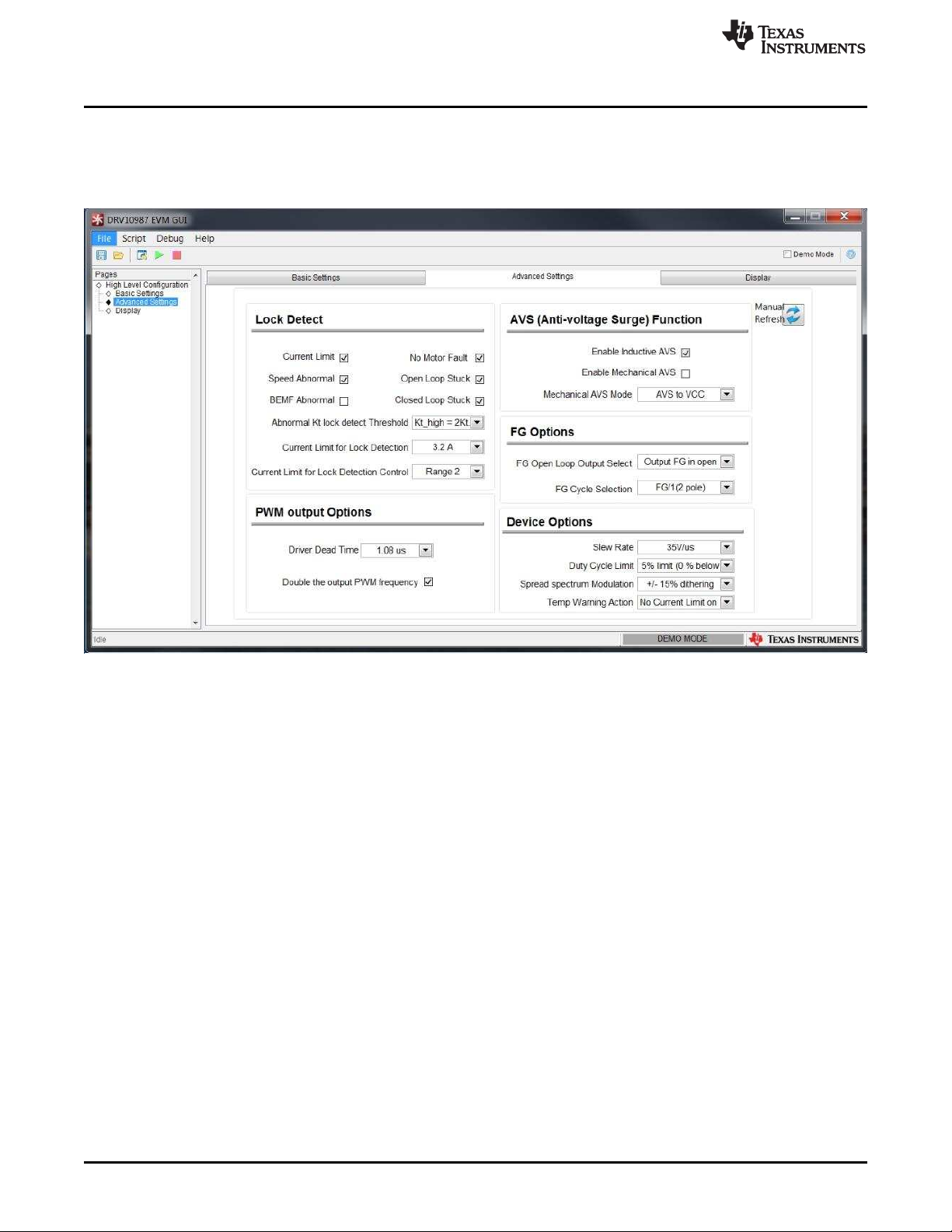
4.2.4.1 Advanced Settings
The Advance Settings tab controls functions such as lock detection, anti-voltage surge (AVS), dead time,
PWM frequency, Current Limit for Lock Detection, slew rate, Duty Cycle Limit, spread-spectrum
modulation, and Temp Warning Action.
www.ti.com
Figure 6. DRV10987 GUI Advanced Settings
8
DRV10987 Evaluation Module User's Guide
Copyright © 2017, Texas Instruments Incorporated
Submit Documentation Feedback
SLOU476–August 2017
Page 9
www.ti.com
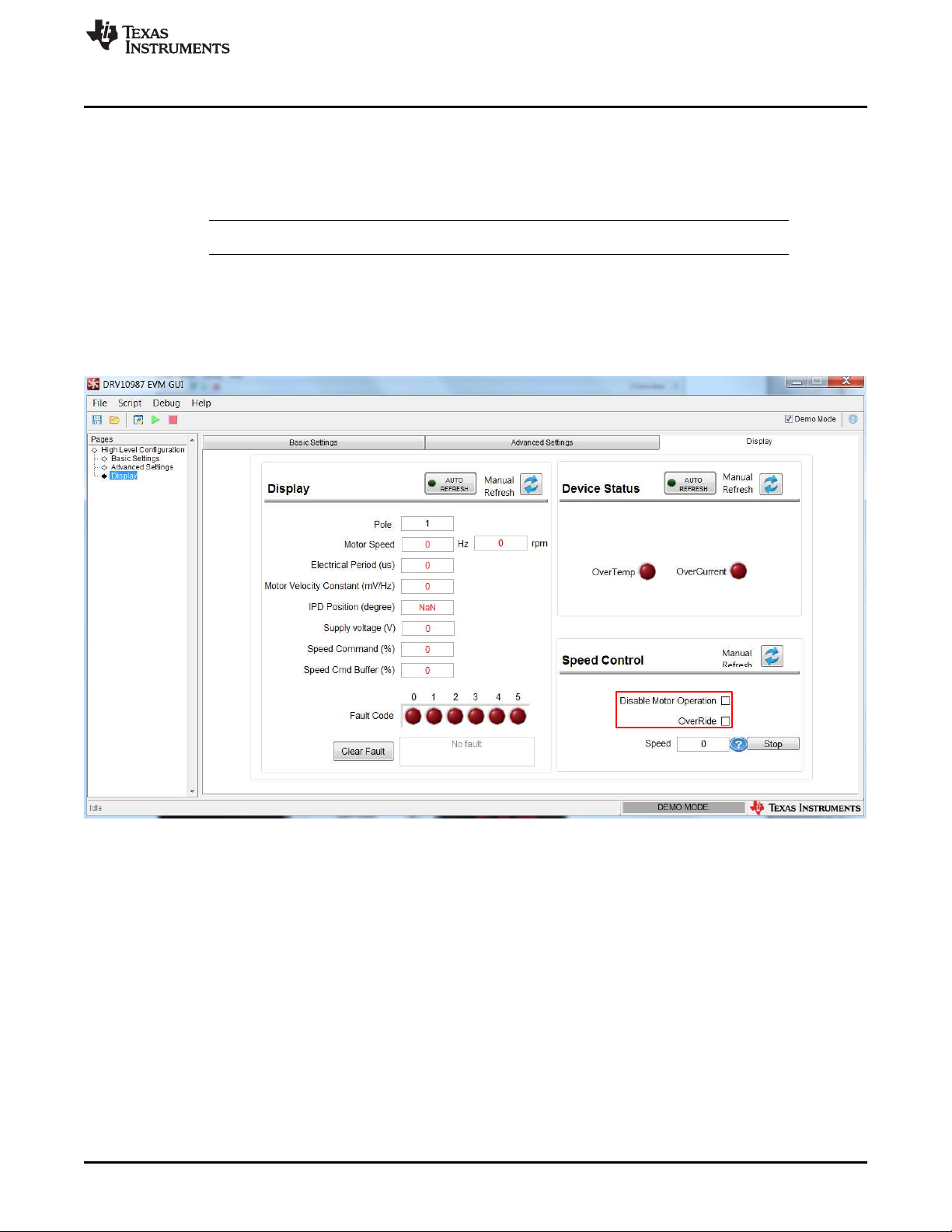
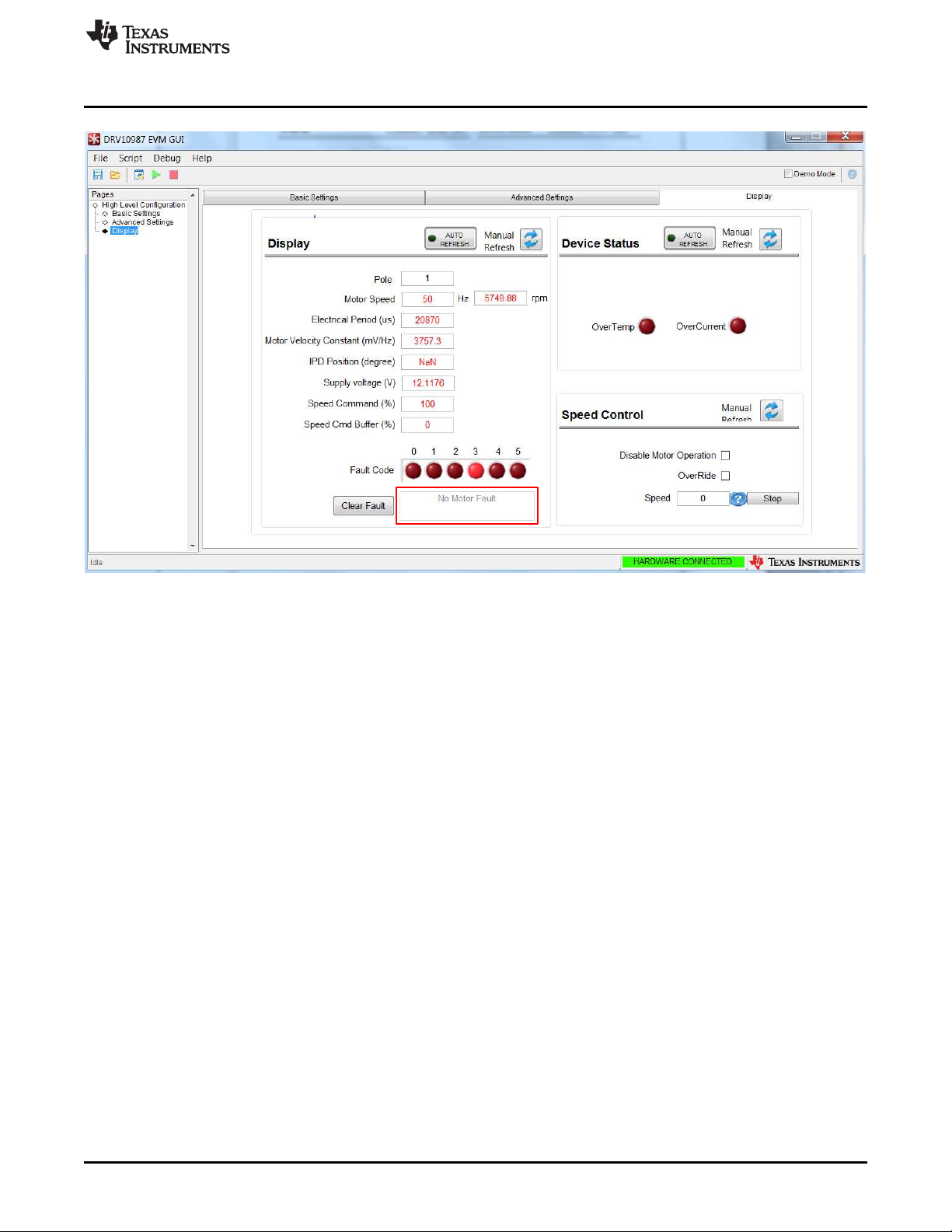
4.2.4.2 Display
The Display tab monitors the device status and motor parameters.
The left section of the Display tab (also called Display) shows all motor parameters. The parameters can
be refreshed manually, or automatically every second.
NOTE: Auto refresh may slow communication with the device.
The right section of the Display tab shows the device status. An active fault condition lights the red
indication.
Control the motor speed from the GUI with the speed control options in the bottom section of the Display
tab. To control the motor speed using the GUI, check the OverRide bit and set the motor speed from 0 to
511 decimal. To disable Motor Operation, check the Disable Motor Operation bit.
DRV10987 GUI
SLOU476–August 2017
Submit Documentation Feedback
Figure 7. DRV10987 GUI Display Settings
DRV10987 Evaluation Module User's Guide
Copyright © 2017, Texas Instruments Incorporated
9
Page 10
Out-of-the-Box Quick-Start Guide
5 Out-of-the-Box Quick-Start Guide
This section assumes that the user has already downloaded the DRV10987 application GUI as mentioned
in Appendix A.
Perform the following procedure to confirm proper operation of the EVM kit:
Step 1. Do not connect the motor phases and ensure that jumper J2 is set to Analog.
Step 2. Set the speed input to 0 by rotating the potentiometer R2 fully counterclockwise.
Step 3. Connect the motor phases of the user motor to connector P1. Phase sequence is not
important as it only determines the direction of rotation.
Step 4. Connect the USB2ANY board to the computer using the supplied USB cable.
Step 5. Connect the 10-pin ribbon cable header to J4 on the USB2ANY board and J3 on the
DRV10987 EVMs.
Step 6. Connect a power supply to VCC (pin1) and GND (pin 5) of connector P1.
Caution Hot surface. Contact may cause burns. Do not touch.
www.ti.com
WARNING
Step 7. Power on the EVM VCC by applying 12 V to 24 V depending on the application..
CAUTION
With VCC, never exceed 28 V on the DRV10987 EVMs during motor operation.
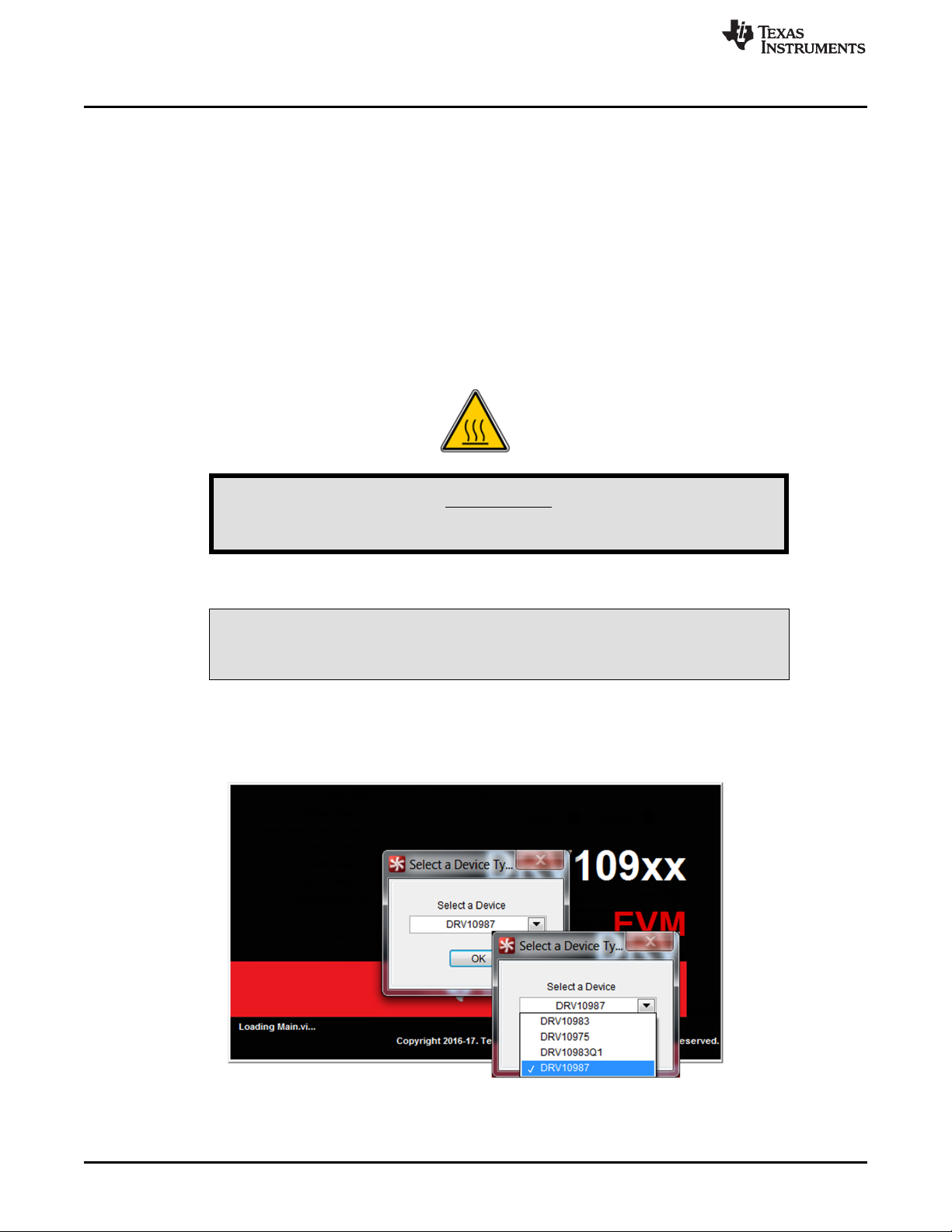
Step 8. Launch the DRV109XXEVM.exe application on the computer (see Appendix A).
Step 9. Select the appropriate device configuration as shown in Figure 8.
Step 10. Click the OK button.
10
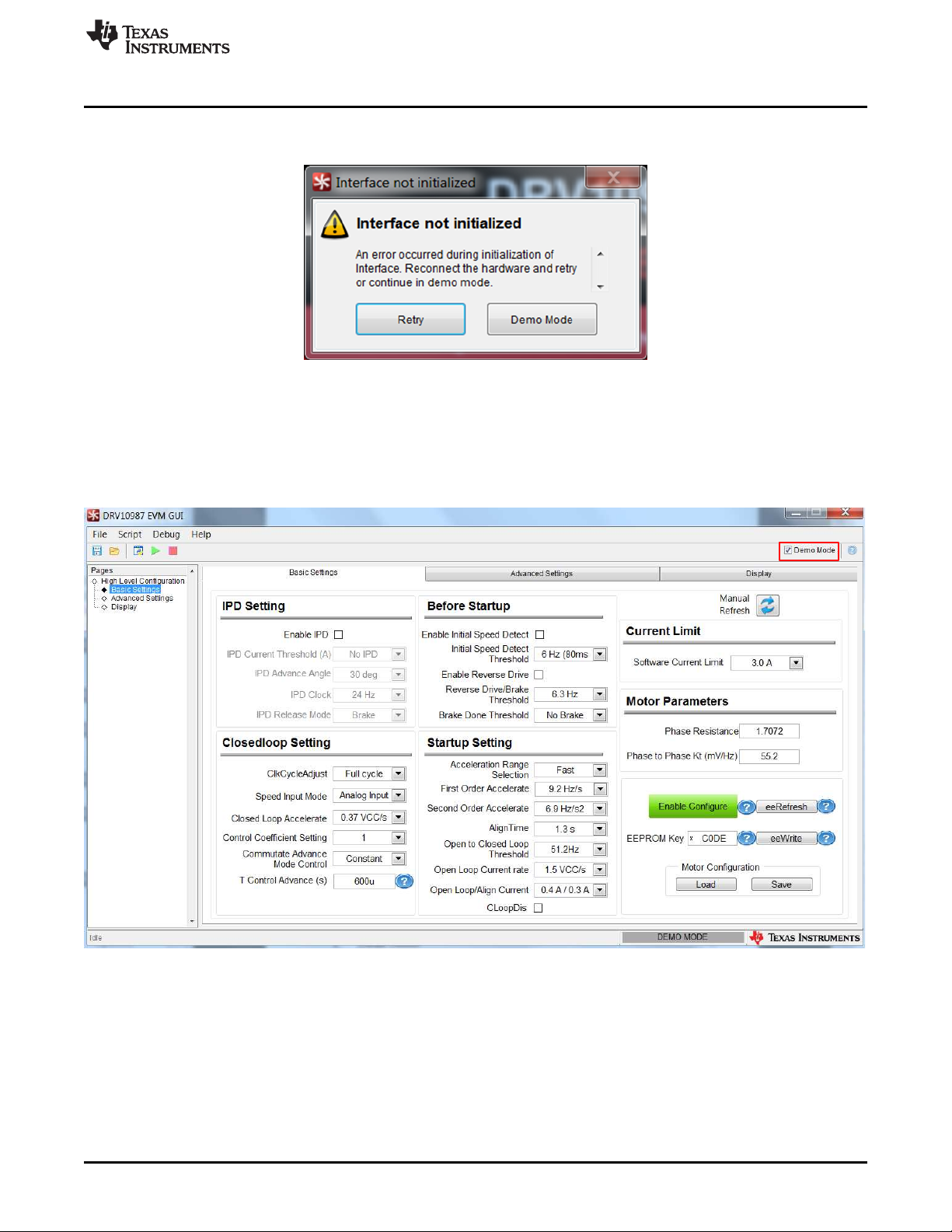
• If no hardware is connected, or if a hardware connection problem occurs, the GUI
DRV10987 Evaluation Module User's Guide
Copyright © 2017, Texas Instruments Incorporated
Figure 8. Initial GUI Screen
SLOU476–August 2017
Submit Documentation Feedback
Page 11
www.ti.com
Out-of-the-Box Quick-Start Guide
displays the error message as shown in Figure 9. Confirm the hardware connection.
Retry the initialization or click the Demo Mode button to operate in demo mode.
Figure 9. Initial GUI Screen
• If the Demo Mode button was clicked, the GUI displays the Basic Settings as shown in
Figure 10. Click the Demo Mode checkbox to deselect the demo mode communication
and proceed to step 11.
• If the Retry button was selected, the GUI displays the screen as shown in Figure 11
directly after step 10.
Step 11. The status bar displays HARDWARE CONNECTED and the bar turns green, indicating that
the GUI is communicating with the device. Click the Enable Configure to change this button
from the red to green (see Figure 11).
SLOU476–August 2017
Submit Documentation Feedback
Figure 10. GUI in Demo Mode
DRV10987 Evaluation Module User's Guide
Copyright © 2017, Texas Instruments Incorporated
11
Page 12
Out-of-the-Box Quick-Start Guide
www.ti.com
Figure 11. Enable Configure
Step 12. The Display tab provides fault code information.
CAUTION
Do not short motor phases to VCC at connector P1, specifically P1-2 (Wphase)
to P1-1(VCC) because EVM is in power-on condition.
12
DRV10987 Evaluation Module User's Guide
Copyright © 2017, Texas Instruments Incorporated
Submit Documentation Feedback
SLOU476–August 2017
Page 13
www.ti.com
Out-of-the-Box Quick-Start Guide
Figure 12. Fault Code Information
In PWM input mode, the motor speed increase as increasing PWM duty cycle, and the motor speed
decrease as decreasing PWM duty cycle. In analog input mode, the motor speed increases as the pot
R2 is turned clockwise, and decreases as the pot R2 is turned counter clockwise. For DRV10987
Sleep mode device, check the Disable Motor Operation bit, connect the motor phases of the user
motor to connector P1, load, or change desired parameter information, then uncheck the Disable Motor
Operation bit.
SLOU476–August 2017
Submit Documentation Feedback
DRV10987 Evaluation Module User's Guide
Copyright © 2017, Texas Instruments Incorporated
13
Page 14

Out-of-the-Box Quick-Start Guide
www.ti.com
Figure 13. Disabled Motor Operation Selected
Step 13. Change the motor direction by connecting or removing jumper J1.
Step 14. Switch to the Display tab and select the OverRide checkbox to override the PWM speed
control.
14
DRV10987 Evaluation Module User's Guide
Copyright © 2017, Texas Instruments Incorporated
Submit Documentation Feedback
SLOU476–August 2017
Page 15

www.ti.com
Power-On Sequence and Connection With User Specific Motor
Figure 14. OverRide Selected
Step 15. Enter values from 0 (stopped) to 511 (full speed) in the Speed text box to control the speed.
Step 16. When complete, enter a value of 0 in the Speed text box and deselect the OverRide
checkbox.
6 Power-On Sequence and Connection With User Specific Motor
When the supplied motor is evaluated, a user motor can be evaluated. The DRV10987 EVMs are shipped
with default EEPROM settings for all registers, which may or may not be suitable to operate the target
motor. To connect the user motor to the EVM, follow the steps listed in Section 5 to avoid any damage to
the EVM.
To successfully tune a user motor, refer to the DRV10987 Tuning Guide.
7 Schematic and Bill of Materials
This section contains the DRV10987 schematic and bill of materials (BOM).
7.1 Schematic
Figure 15 shows the DRV10987 schematic.
SLOU476–August 2017
Submit Documentation Feedback
DRV10987 Evaluation Module User's Guide
Copyright © 2017, Texas Instruments Incorporated
15
Page 16

DRV10983-Q1, DRV10983H, DRV10983, DRV10975 EVM
U
V
W
GND
V1P8
SPEED
SCL
SDA
GND
VCC
GND
VREG
VCC
FGSDA
V3P3
SCL
DIR
V3P3 GND
SDASCL
GND
5
4
1
2
3
6
7
P2
DNP
GND strap for connecting probes
4.75k
R5
10k
R1
4.75k
R3
4.75k
R4
GND
1
2
J1
Analog Digital Speed Control Direction Control
I2C Interface
Main Connector Grounds and Pullups
Header holes available for test points
V3P3
TP2
TP1
1 2
3 4
5 6
7 8
9 10
J3
1
2
3
J4
3 pin fan
header
J5
1
2
3
4
5
P1
TP3
FG
V3P3 V3P3
Vin
Range :
4.5 V - 45 V
SPEED
123
J2
PWMIN
V3P3
TP4
25k ohm
R2
0.1µF
C7
GND
GND
GND
J6
U
V
W
SPEED
VCP
CPP
SW
VREG
V3P3
V1P8
DIR
SDA
SCL
GNDFG
Optional Diode -- DNP
GND
VCC
0.1µF
C4
4.7µF
C6
DNP
0.01µF
C5
1µF
C3
1µF
C2
GND
GND
78.7
R7
DNP
78.7
R6
DNP
47uH
L1
10µF
C1
GND
D1
DNP
GND
CPP
2
CPN
3
SW
4
SWGND
5
VREG
6
V1P8
7
GND
8
V3P3
9
SCL
10
SDA
11
FG
12
SPEED
13
DIR
14
PGND
15
PGND
16
U
17
U
18
V
19
V
20
VCP
1
W
21
W
22
VCC
23
VCC
24
PAD
25
U1
DRV10987PWPR
GND
10µF
C9
CPN
Copyright © 2016, Texas Instruments Incorporated
Schematic and Bill of Materials
www.ti.com
16
DRV10987 Evaluation Module User's Guide
Figure 15. DRV10987 Schematic
Copyright © 2017, Texas Instruments Incorporated
Submit Documentation Feedback
SLOU476–August 2017
Page 17

www.ti.com
Schematic and Bill of Materials
7.2 Bill of Materials (BOM)
Table 6 lists the DRV10987 EVM bill of materials.
Table 6. DRV10987 Bill of Materials
Designator Description Manufacturer Part Number Quantity
(1)
!PCB
C1 CAP, CERM, 10uF, 10V, +/-20%, X5R, 0603 TDK C1608X5R1A106M 1
C2, C3 CAP, CERM, 1uF, 25V, +/-10%, X5R, 0603 TDK C1608X5R1E105K080AC 2
C4, C7 CAP, CERM, 0.1uF, 50V, +/-10%, X7R, 0603 AVX 06035C104KAT2A 2
C5 CAP CERM, 10000PF, 50V X7R 0603 AVX 06035C103KAT2A 1
C9 CAP, CERM, 10uF, 50V, +/-10%, X5R, 1206 TDK C2012X5R1H475K125AB 1
H9, H10, H11,
H12
J1 Header, 100mil, 2x1, Tin plated, TH Molex 90120-0122 1
J2, J4 Header, 100mil, 3x1, Tin plated, TH Sullins Connector Solutions PEC03SAAN 2
J3 Header (shrouded), 100mil, 5x2, Gold, TH TE Connectivity 5103308-1 1
J5, J6
L1
P1 Terminal Block, 5.08 mm, 5x1, Brass, TH On-Shore Technology ED120/5DS 1
R3, R4, R5 RES, 4.75k ohm, 1%, 0.1W, 0603 Vishay-Dale CRCW06034K75FKEA 3
R2 Trimmer, 25k ohm, 0.15W, TH CTS Electrocomponents 296XD253B1N 1
R1 RES, 10k ohm, 5%, 0.1W, 0603 Vishay-Dale CRCW060310K0JNEA 1
SH-J1, SH-J2 Shunt, 100mil, Gold plated, Black 3M 969102-0000-DA 2
TP1, TP2, TP4 Test Point, Compact, SMT Keystone 5016 3
TP3 Test Point, Compact, SMT Keystone 5016 1
U1
(1)
U1 part number is DRV10987.
Printed Circuit Board TI DRV10987 1
Bumpon, Hemisphere, 0.44 X 0.20, Clear 3M SJ-5303 (CLEAR) 4
1mm Uninsulated Shorting Plug, 10.16mm
spacing, TH
Inductor, Shielded Drum Core, Ferrite, 47uH,
1.15A, 0.216 ohm, SMD
12- to 24-V, Three-Phase, Sensorless BLDC
Motor Driver, PWP0024B (TSSOP-24)
Harwin D3082-05 1
Coiltronics DR74-470-R 1
Texas Instruments DRV10987SPWPR 1
SLOU476–August 2017
Submit Documentation Feedback
DRV10987 Evaluation Module User's Guide
Copyright © 2017, Texas Instruments Incorporated
17
Page 18

This appendix section explains the location and the procedure for installing the software.
NOTE: Ensure that no USB connections are made to the EVM until the installation is completed.
A.1 System Requirements
The system requirements are as follows:
• Supported OS: Microsoft® Windows® XP, Windows 7 (32 bit, 64 bit)
• Recommended RAM memory: 4GB or higher
• Recommended CPU operating speed: 3.3 GHz or higher
A.2 Installation Procedure
The following procedure describes how to install the DRV109xxEVM GUI. The installer also installs Python
2.7, USB2ANY SDK along with the GUI installation.
1. Double click on the Setup_DRV109xx_EVM.exe from the DRV109xx folder as shown in Figure 16.
Appendix A
SLOU476–August 2017
GUI Installation and Overview
18
Figure 16. Setup_DRV109xx_EVM.exe from the Volume Folder
GUI Installation and Overview
Copyright © 2017, Texas Instruments Incorporated
Submit Documentation Feedback
SLOU476–August 2017
Page 19

www.ti.com
2. The Setup window is displayed as shown in Figure 17. Click the Next > button to begin the setup
Installation Procedure
wizard.
Figure 17. GUI Installation Initialization
3. The license agreement is displayed next as shown in Figure 18. Read through the agreement carefully
and select the I accept the agreement radio button and then click the Next > button to proceed to the
next step.
Figure 18. License Agreement
SLOU476–August 2017
Submit Documentation Feedback
Copyright © 2017, Texas Instruments Incorporated
GUI Installation and Overview
19
Page 20

Installation Procedure
4. Set the destination directories for the GUI installation and click the Next > as shown in Figure 19. TI
recommends to keep the default values as provided in the installer.
www.ti.com
Figure 19. GUI Destination Directory
5. The Ready to Install window appears next as shown in Figure 20. Click the Next > to begin installation.
20
GUI Installation and Overview
Figure 20. GUI Start Installation
Copyright © 2017, Texas Instruments Incorporated
Submit Documentation Feedback
SLOU476–August 2017
Page 21

www.ti.com
6. The installer begins self-extraction and proceeds with the installation as shown in Figure 21.
Installation Procedure
Figure 21. GUI Installation in Progress
7. After the installation of the GUI, the Python installation initiates. When Python is installed, a the window
shown in Figure 22 is displayed. Click the Finish button to proceed with the USB2ANY installation.
SLOU476–August 2017
Submit Documentation Feedback
Figure 22. Python Installation Complete
Copyright © 2017, Texas Instruments Incorporated
GUI Installation and Overview
21
Page 22

Installation Procedure
8. The setup window for the USB2ANY installation is displayed as shown in Figure 23. Click the Next >
button to proceed with the initialization.
www.ti.com
Figure 23. USB2ANY Installation Initialization
9. The license agreement is displayed next as shown in Figure 24. Read through the agreement carefully
and select the I accept the agreement radio button and then click the Next > button to proceed.
22
GUI Installation and Overview
Figure 24. USB2ANY License Agreement
Copyright © 2017, Texas Instruments Incorporated
Submit Documentation Feedback
SLOU476–August 2017
Page 23

www.ti.com
10. Set the destination directories for the USB2ANY installation and click the Next > as shown in
Installation Procedure
Figure 25.
Figure 25. USB2ANY Destination Directory
11. The Ready to Install window is displayed next as shown in Figure 26. Click the Install button to begin
the USB2ANY installation.
SLOU476–August 2017
Submit Documentation Feedback
Figure 26. USB2ANY Start Installation
Copyright © 2017, Texas Instruments Incorporated
GUI Installation and Overview
23
Page 24

GUI Overview
12. The installer begins self-extraction and proceeds with the installation.
13. When the USB2ANY installation is complete, the window show in Figure 27 is displayed, indicating the
completion of the USB2ANY installation. Click the Finish button.
www.ti.com
Figure 27. USB2ANY Installation Complete
NOTE: The DRV10987 GUI requires the LabVIEW Run-Time Engine 2010 to be installed before the
GUI is executed.
The DRV10987 GUI installer does not include the LabVIEW Run-Time Engine. Go to
http://www.ni.com/download/labview-run-time-engine-2014/4887/en/ to download the National Instruments
LabVIEW Run-Time Engine.
A.3 GUI Overview
The DRV10987 GUI was developed to communicate with the device to configure different registers within
the device, and to understand the response based on the configurations. The following sections describe
some of the specific features of the GUI, but do not explain the configurations of the controls and
indicators.
Screen captures of the DRV10987 GUI are provided to explain the various features of the GUI. The same
images apply to the DRV10975 devices unless otherwise specified.
A.3.1 Components of the GUI
The device GUI contains three pages (or tabs):
• Basic Settings
• Advanced Settings
• Display
24
GUI Installation and Overview
Copyright © 2017, Texas Instruments Incorporated
Submit Documentation Feedback
SLOU476–August 2017
Page 25

www.ti.com
A.3.1.1 Basic Settings
Figure 28 shows the Basic Settings tab of the GUI.
GUI Overview
A.3.1.1.1 Enable Configure
The controls in the Basic Settings tab and Advanced Settings tab are only enabled if the Enable Configure
button is selected. This button specifies the data use between the registers and EEPROM. Click on the
button to select the data use. If the Enable Configure button is enabled (the control turns green in color),
the register data is used, or else (the control turns red) the EEPROM data is used.
A.3.1.1.2 Enable IPD
Clicking the Enable IPD checkbox enables and disables the controls related to IPD settings. If this control
is disabled, a value 0 is written to the IPD current threshold. If the control is enabled, a value 1 is written to
IPD current threshold field.
A.3.1.1.3 eeWrite
The eeWrite button programs to the EEPROM. When this control is clicked, a prompt message asks for
confirmation of the voltage level (see Figure 29). The eeWrite field is written only if the EEPROM Key field
is set to C0DE, and the power supply voltage level is confirmed.
Figure 28. Basic Settings Page
SLOU476–August 2017
Submit Documentation Feedback
Copyright © 2017, Texas Instruments Incorporated
GUI Installation and Overview
25
Page 26

GUI Overview
www.ti.com
Figure 29. Confirmation on Voltage Level
A.3.1.1.4 eeRefresh
The eeRefresh button refreshes the controls in the Basic Settings tab, which reads the latest value of the
corresponding fields from the registers and updates the controls.
A.3.1.1.5 Manual Refresh
The Manual Refresh button refreshes the controls in the Motor Parameters section, which reads the latest
value of the corresponding fields from the registers and updates the controls. The function of this button is
same in every section.
A.3.1.1.6 Save Motor Configuration
The Save Motor Configuration button saves the current motor configuration to a file that is later loaded into
the GUI using the Load button. The button saves the last read values of the registers. Perform a manual
refresh operation before saving the configurations into a file.
A.3.1.1.7 Load Motor Configuration
The Load Motor Configuration button loads the configuration file saved earlier, to bring the device to a
known state.
A.3.1.1.8 Help Icon
Move the mouse over the blue help icon to display a brief description for the control, as shown in
Figure 30.
26
GUI Installation and Overview
Copyright © 2017, Texas Instruments Incorporated
Submit Documentation Feedback
SLOU476–August 2017
Page 27

www.ti.com
A.3.1.2 Advanced Settings
The Advanced Settings tab contains controls to handle the frequency overflow, Current Limit for Lock
Detection, FG motor pole option, and so forth (see Figure 31).
GUI Overview
Figure 30. Help Icon
SLOU476–August 2017
Submit Documentation Feedback
Figure 31. Advanced Settings
Copyright © 2017, Texas Instruments Incorporated
GUI Installation and Overview
27
Page 28

GUI Overview
A.3.1.3 Display
The Display tab (see Figure 32) contains controls to handle the motor speed, indicates the status of the
device, and displays the value of motor attributes such as motor speed, current, and IPD position.
www.ti.com
A.3.1.3.1 Auto Refresh
The Auto Refresh button periodically refreshes the controls of the motor parameters, which read the latest
value of the corresponding fields from the registers and update the controls. The rate of auto refresh is
specified in the configuration file found parallel to the application. The function of this button is same in
every section.
A.3.1.3.2 Pole
The number entered into the Pole text field is used to calculate the RPM in the Display section, given by
the formula in Equation 1.
If motor speed (Hz) ≥ 2, motor speed (rpm) = (1 000 000 / electrical period [µs]) × 120/pole. Else, motor speed (rpm) =
motor speed (Hz) × 120/pole.
The default value of this control is 1. (1)
A.3.1.3.3 Stop
The Stop button writes the speed control with a value of 0.
Figure 32. Display
28
GUI Installation and Overview
Copyright © 2017, Texas Instruments Incorporated
Submit Documentation Feedback
SLOU476–August 2017
Page 29

www.ti.com
A.3.1.3.4 About
The About window provides the details like the GUI version, supported OS, and the firmware version of
the USB2ANY.
GUI Overview
Figure 33. About Page
SLOU476–August 2017
Submit Documentation Feedback
Copyright © 2017, Texas Instruments Incorporated
GUI Installation and Overview
29
Page 30

GUI Overview
A.3.2 Menu Options
A.3.2.1 File
The File menu contains the Exit option as shown in Figure 34. The Exit option stops the execution of the
DRV10987 EVM GUI.
A.3.2.2 Script
Scripting automates the device operations and reduces the time consumption in repeating similar
operations.
Scripting is helpful in situations where performing a particular device function requires setting 10 to 15
registers on the device to a particular value. In these circumstances, scripts can be recorded and run
whenever needed.
In DRV10987 EVM GUI, the scripting occurs using Python.
www.ti.com
Figure 34. File Menu
A.3.2.2.1 Recording and Running Scripts
Use the following steps to record and run the scripts:
Step 1. Go to the Script menu in the DRV10987 EVM GUI and select the Launch Script option to
start recording or click the Launch Script Window button as shown in Figure 35.
30
GUI Installation and Overview
Copyright © 2017, Texas Instruments Incorporated
Submit Documentation Feedback
SLOU476–August 2017
Page 31

www.ti.com
GUI Overview
Figure 35. Script Menu
An untitled, empty Python window opens in the Idle IDE (see Figure 36).
When the Idle IDE Python window appears, the Start Recording option is enabled under the Script
menu. The Start Recording button is also available as shown in Figure 37.
SLOU476–August 2017
Submit Documentation Feedback
Figure 36. Launch Macro
Copyright © 2017, Texas Instruments Incorporated
GUI Installation and Overview
31
Page 32

GUI Overview
Step 2. Select the Launch Script Window option again to open another untitled window. The window
Step 3. In the GUI window, go to the Scripts menu and select the Start Recording option from the
All actions performed on the GUI are recorded in the Idle IDE Python window. The recording function is
indicated in the untitled Idle IDE Python window when the window flashes green, while the window is
recording as shown in Figure 37.
www.ti.com
that was last opened is the active window.
menu.
32
Figure 37. Start Recording
The Idle IDE Python window captures predefined actions only. While recording, no action, such as moving
the cursor or entering data, has to be performed in the Idle IDE Python window. To stop recording, go to
the Script menu in the DRV10987 EVM GUI and select the Stop Recording option from the menu or click
the Stop Recording button as shown in Figure 38.
GUI Installation and Overview
Copyright © 2017, Texas Instruments Incorporated
Submit Documentation Feedback
SLOU476–August 2017
Page 33

www.ti.com
GUI Overview
Figure 38. Stop Recording
The Launch Script Window remains open after the recording has been stopped as shown in Figure 38.
This window can be closed with or without saving. To save the script, it must be saved with extension .py
under the script folder.
To run the script, go to the Run menu and select the Run Modeul option in the untitled Idle IDE Python
window as shown in Figure 39.
SLOU476–August 2017
Submit Documentation Feedback
Copyright © 2017, Texas Instruments Incorporated
GUI Installation and Overview
33
Page 34

GUI Overview
www.ti.com
The script runs and displays the following message in the Idle IDE Python window: Script completed
successfully.
To run a saved script, go to the File menu and select the Open option in the Idle IDE Python window.
Select the file from the Scripts folder.
A.3.2.2.2 Debug
The debug option is used for the following operations:
Simulation — Selecting the Demo menu option runs the GUI in demo mode. Unselecting Demo mode
runes the GUI in connected mode.
Debugging — The Debug Log menu option logs all user activities. If not selected, only the high-level
operations are logged.
File logging — The Log to File menu option logs the GUI activities to a specified log file.
Figure 39. Run Macro
34
GUI Installation and Overview
Copyright © 2017, Texas Instruments Incorporated
Submit Documentation Feedback
SLOU476–August 2017
Page 35

www.ti.com
GUI Overview
Figure 40. Debug Menu
SLOU476–August 2017
Submit Documentation Feedback
Copyright © 2017, Texas Instruments Incorporated
GUI Installation and Overview
35
Page 36

Appendix B
SLOU476–August 2017
GUI to DRV10987 Register Cross Reference
The DRV10987 register names and GUI names do not always match. Table 7 provides a cross reference
between the different names. The tab and section location of the register values in the GUI is also
provided.
Table 7. GUI to DRV10987 Register Cross Reference
Registers GUI
Register
Name
CONFIG1 0x90
CONFIG2 0x91
CONFIG3 0x92
CONFIG4 0x93
CONFIG5 0x94
Address Register Map Tab Section GUI Name
SSMConfig[1:0] Advance DeviceOptions Spread spectrum Modulation
FGOLSel[1:0] Advance FG Options FG Open Loop Output Select
FGCycle[3:0] Advance FG Options FG Cycle Selection
ClkCycleAdjust Basic Closedloop Setting ClkCycleAdjust
RMShift[2:0] RMValue[3:0] Basic Motor Parameters Phase Resistance
KtShift[2:0]KtValue[3:0] Basic Motor Parameters Phase to Phase Kt (mV/Hz)
CommAdvMode Basic ClosedloopSetting
TCtrlAdvShift[2:0]TCtrlAdvValue[
3:0]
ISDThr[1:0] Basic Before Startup InitialSpeed Detect Threshold
ISDEn Basic Before Startup Enable Initial Speed Detect
RvsDrEn Basic Before Startup Enable Reserve Drive
RvsDrThr[1:0] Basic Before Startup ReserveDrive/Brake Threshold
OpenLCurr[1:0] Basic StartupSetting Open Loop / Align Current
OpLCurrRt[2:0] Basic Startup Setting Open Loop Current rate
BrkDoneThr[2:0] Basic Before Startup Break Done Threshold
AccelRangeSel Basic Startup Setting Acceleration Range Selection
StAccel2[2:0] Basic Startup Setting Second Order Accelerate
StAccel[2:0] Basic Startup Setting First Order Accelerate
Op2ClsThr[4:0] Basic Startup Setting Open to Closed Loop Threshold
AlignTime[2:0] Basic Startup Setting Align Time
OTWarning_ILimit[1:0] Advanced Device Options Temp Warning Action
LockEn5 Advanced Lock Detect Closed Loop Stuck
LockEn4 Advanced Lock Detect Open Loop Stuck
LockEn3 Advanced Lock Detect No Motor Fault
LockEn2 Advanced Lock Detect BEMF Abnormal
LockEn1 Advanced Lock Detect Speed Abnormal
LockEn0 Advanced Lock Detect Current Limit
SwILimit[3:0] Basic Current lLimit Software Current Limit
HwILimit[2:0] Advanced Lock Detect Current Limit for Lock Detection
IPDasHwILimit Advanced Lock Detect HW Limit Control
Basic Closedloop setting T Control Advanced (s)
Commutate Advanced Mode
Control
36
GUI to DRV10987 Register Cross Reference
Submit Documentation Feedback
SLOU476–August 2017
Copyright © 2017, Texas Instruments Incorporated
Page 37

www.ti.com
Appendix B
Table 7. GUI to DRV10987 Register Cross Reference (continued)
Registers GUI
Register
Name
CONFIG6 0x95
CONFIG7 0x96
EEPROM
Programming5
EEPROM
Programming1
SpeedCtrl 0x30
MTD_TEST1 0x60 SCORE_DIS Display Speed Control Disable Motor Operation
Address Register Map Tab Section GUI Name
SpdCtlrMd Basic Closedloop Setting Speed Input Mode
PWMFreq Advanced PWM output Options Double the output PWM frequency
KtLckThr[1:0] Advanced Lock Detect Abnormal Kt lock detect Threshold
AvSIndEn Advanced AVS (Anti-voltage Surge) Function Enable Inductive AVS
AVSMEn Advanced AVS (Anti-voltage Surge) Function Enable Mechanical AVS
AVSMMd Advanced AVS (Anti-voltage Surge) Function Mechanical AVS Mode
IPDRIsMd Basic IPD Setting IPD Release Mode
CLoopDis Basic Startup Setting CLoopDis
ClsLpAccel[2:0] Basic Closedloop Setting Closed loop Accelerate
DutyCycleLimit[1:0] Advanced Device Options Duty Cycle Limit
SlewRate[1:0] Advanced Device Options Slew Rate
IPDAdvcAg[1:0] Basic IPD Setting IPD Advanced Angle
IPDCurrThr[3:0] Basic IPD Setting IPD Current Threshold (A)
IPDClk[1:0] Basic IPD Setting IPD Clock
CtrlCoef[1:0] Basic Closedloop Setting Control Coefficient Setting
DeadTime[4:0] Advanced PWM output Options Driver Dead Time
ShadowRegEn Basic Enable Configure
0x35
0x31 ENPROGKEY[15:0] Basic EEPROM Key
eeWRnEn Basic eeWrite
eeRefresh Basic eeRefresh
OverRide Display Speed Control OverRide
SpeedCtrl[8:0] Display Speed Control Speed
SLOU476–August 2017
Submit Documentation Feedback
GUI to DRV10987 Register Cross Reference
Copyright © 2017, Texas Instruments Incorporated
37
Page 38

STANDARD TERMS FOR EVALUATION MODULES
1. Delivery: TI delivers TI evaluation boards, kits, or modules, including any accompanying demonstration software, components, and/or
documentation which may be provided together or separately (collectively, an “EVM” or “EVMs”) to the User (“User”) in accordance
with the terms set forth herein. User's acceptance of the EVM is expressly subject to the following terms.
1.1 EVMs are intended solely for product or software developers for use in a research and development setting to facilitate feasibility
evaluation, experimentation, or scientific analysis of TI semiconductors products. EVMs have no direct function and are not
finished products. EVMs shall not be directly or indirectly assembled as a part or subassembly in any finished product. For
clarification, any software or software tools provided with the EVM (“Software”) shall not be subject to the terms and conditions
set forth herein but rather shall be subject to the applicable terms that accompany such Software
1.2 EVMs are not intended for consumer or household use. EVMs may not be sold, sublicensed, leased, rented, loaned, assigned,
or otherwise distributed for commercial purposes by Users, in whole or in part, or used in any finished product or production
system.
2 Limited Warranty and Related Remedies/Disclaimers:
2.1 These terms do not apply to Software. The warranty, if any, for Software is covered in the applicable Software License
Agreement.
2.2 TI warrants that the TI EVM will conform to TI's published specifications for ninety (90) days after the date TI delivers such EVM
to User. Notwithstanding the foregoing, TI shall not be liable for a nonconforming EVM if (a) the nonconformity was caused by
neglect, misuse or mistreatment by an entity other than TI, including improper installation or testing, or for any EVMs that have
been altered or modified in any way by an entity other than TI, (b) the nonconformity resulted from User's design, specifications
or instructions for such EVMs or improper system design, or (c) User has not paid on time. Testing and other quality control
techniques are used to the extent TI deems necessary. TI does not test all parameters of each EVM.
User's claims against TI under this Section 2 are void if User fails to notify TI of any apparent defects in the EVMs within ten (10)
business days after delivery, or of any hidden defects with ten (10) business days after the defect has been detected.
2.3 TI's sole liability shall be at its option to repair or replace EVMs that fail to conform to the warranty set forth above, or credit
User's account for such EVM. TI's liability under this warranty shall be limited to EVMs that are returned during the warranty
period to the address designated by TI and that are determined by TI not to conform to such warranty. If TI elects to repair or
replace such EVM, TI shall have a reasonable time to repair such EVM or provide replacements. Repaired EVMs shall be
warranted for the remainder of the original warranty period. Replaced EVMs shall be warranted for a new full ninety (90) day
warranty period.
3 Regulatory Notices:
3.1 United States
3.1.1 Notice applicable to EVMs not FCC-Approved:
FCC NOTICE: This kit is designed to allow product developers to evaluate electronic components, circuitry, or software
associated with the kit to determine whether to incorporate such items in a finished product and software developers to write
software applications for use with the end product. This kit is not a finished product and when assembled may not be resold or
otherwise marketed unless all required FCC equipment authorizations are first obtained. Operation is subject to the condition
that this product not cause harmful interference to licensed radio stations and that this product accept harmful interference.
Unless the assembled kit is designed to operate under part 15, part 18 or part 95 of this chapter, the operator of the kit must
operate under the authority of an FCC license holder or must secure an experimental authorization under part 5 of this chapter.
3.1.2 For EVMs annotated as FCC – FEDERAL COMMUNICATIONS COMMISSION Part 15 Compliant:
CAUTION
This device complies with part 15 of the FCC Rules. Operation is subject to the following two conditions: (1) This device may not
cause harmful interference, and (2) this device must accept any interference received, including interference that may cause
undesired operation.
Changes or modifications not expressly approved by the party responsible for compliance could void the user's authority to
operate the equipment.
FCC Interference Statement for Class A EVM devices
NOTE: This equipment has been tested and found to comply with the limits for a Class A digital device, pursuant to part 15 of
the FCC Rules. These limits are designed to provide reasonable protection against harmful interference when the equipment is
operated in a commercial environment. This equipment generates, uses, and can radiate radio frequency energy and, if not
installed and used in accordance with the instruction manual, may cause harmful interference to radio communications.
Operation of this equipment in a residential area is likely to cause harmful interference in which case the user will be required to
correct the interference at his own expense.
Page 39

FCC Interference Statement for Class B EVM devices
NOTE: This equipment has been tested and found to comply with the limits for a Class B digital device, pursuant to part 15 of
the FCC Rules. These limits are designed to provide reasonable protection against harmful interference in a residential
installation. This equipment generates, uses and can radiate radio frequency energy and, if not installed and used in accordance
with the instructions, may cause harmful interference to radio communications. However, there is no guarantee that interference
will not occur in a particular installation. If this equipment does cause harmful interference to radio or television reception, which
can be determined by turning the equipment off and on, the user is encouraged to try to correct the interference by one or more
of the following measures:
• Reorient or relocate the receiving antenna.
• Increase the separation between the equipment and receiver.
• Connect the equipment into an outlet on a circuit different from that to which the receiver is connected.
• Consult the dealer or an experienced radio/TV technician for help.
3.2 Canada
3.2.1 For EVMs issued with an Industry Canada Certificate of Conformance to RSS-210 or RSS-247
Concerning EVMs Including Radio Transmitters:
This device complies with Industry Canada license-exempt RSSs. Operation is subject to the following two conditions:
(1) this device may not cause interference, and (2) this device must accept any interference, including interference that may
cause undesired operation of the device.
Concernant les EVMs avec appareils radio:
Le présent appareil est conforme aux CNR d'Industrie Canada applicables aux appareils radio exempts de licence. L'exploitation
est autorisée aux deux conditions suivantes: (1) l'appareil ne doit pas produire de brouillage, et (2) l'utilisateur de l'appareil doit
accepter tout brouillage radioélectrique subi, même si le brouillage est susceptible d'en compromettre le fonctionnement.
Concerning EVMs Including Detachable Antennas:
Under Industry Canada regulations, this radio transmitter may only operate using an antenna of a type and maximum (or lesser)
gain approved for the transmitter by Industry Canada. To reduce potential radio interference to other users, the antenna type
and its gain should be so chosen that the equivalent isotropically radiated power (e.i.r.p.) is not more than that necessary for
successful communication. This radio transmitter has been approved by Industry Canada to operate with the antenna types
listed in the user guide with the maximum permissible gain and required antenna impedance for each antenna type indicated.
Antenna types not included in this list, having a gain greater than the maximum gain indicated for that type, are strictly prohibited
for use with this device.
Concernant les EVMs avec antennes détachables
Conformément à la réglementation d'Industrie Canada, le présent émetteur radio peut fonctionner avec une antenne d'un type et
d'un gain maximal (ou inférieur) approuvé pour l'émetteur par Industrie Canada. Dans le but de réduire les risques de brouillage
radioélectrique à l'intention des autres utilisateurs, il faut choisir le type d'antenne et son gain de sorte que la puissance isotrope
rayonnée équivalente (p.i.r.e.) ne dépasse pas l'intensité nécessaire à l'établissement d'une communication satisfaisante. Le
présent émetteur radio a été approuvé par Industrie Canada pour fonctionner avec les types d'antenne énumérés dans le
manuel d’usage et ayant un gain admissible maximal et l'impédance requise pour chaque type d'antenne. Les types d'antenne
non inclus dans cette liste, ou dont le gain est supérieur au gain maximal indiqué, sont strictement interdits pour l'exploitation de
l'émetteur
3.3 Japan
3.3.1 Notice for EVMs delivered in Japan: Please see http://www.tij.co.jp/lsds/ti_ja/general/eStore/notice_01.page 日本国内に
輸入される評価用キット、ボードについては、次のところをご覧ください。
http://www.tij.co.jp/lsds/ti_ja/general/eStore/notice_01.page
3.3.2 Notice for Users of EVMs Considered “Radio Frequency Products” in Japan: EVMs entering Japan may not be certified
by TI as conforming to Technical Regulations of Radio Law of Japan.
If User uses EVMs in Japan, not certified to Technical Regulations of Radio Law of Japan, User is required to follow the
instructions set forth by Radio Law of Japan, which includes, but is not limited to, the instructions below with respect to EVMs
(which for the avoidance of doubt are stated strictly for convenience and should be verified by User):
1. Use EVMs in a shielded room or any other test facility as defined in the notification #173 issued by Ministry of Internal
Affairs and Communications on March 28, 2006, based on Sub-section 1.1 of Article 6 of the Ministry’s Rule for
Enforcement of Radio Law of Japan,
2. Use EVMs only after User obtains the license of Test Radio Station as provided in Radio Law of Japan with respect to
EVMs, or
3. Use of EVMs only after User obtains the Technical Regulations Conformity Certification as provided in Radio Law of Japan
with respect to EVMs. Also, do not transfer EVMs, unless User gives the same notice above to the transferee. Please note
that if User does not follow the instructions above, User will be subject to penalties of Radio Law of Japan.
Page 40

【無線電波を送信する製品の開発キットをお使いになる際の注意事項】 開発キットの中には技術基準適合証明を受けて
いないものがあります。 技術適合証明を受けていないもののご使用に際しては、電波法遵守のため、以下のいずれかの
措置を取っていただく必要がありますのでご注意ください。
1. 電波法施行規則第6条第1項第1号に基づく平成18年3月28日総務省告示第173号で定められた電波暗室等の試験設備でご使用
いただく。
2. 実験局の免許を取得後ご使用いただく。
3. 技術基準適合証明を取得後ご使用いただく。
なお、本製品は、上記の「ご使用にあたっての注意」を譲渡先、移転先に通知しない限り、譲渡、移転できないものとします。
上記を遵守頂けない場合は、電波法の罰則が適用される可能性があることをご留意ください。 日本テキサス・イ
ンスツルメンツ株式会社
東京都新宿区西新宿6丁目24番1号
西新宿三井ビル
3.3.3 Notice for EVMs for Power Line Communication: Please see http://www.tij.co.jp/lsds/ti_ja/general/eStore/notice_02.page
電力線搬送波通信についての開発キットをお使いになる際の注意事項については、次のところをご覧ください。http:/
/www.tij.co.jp/lsds/ti_ja/general/eStore/notice_02.page
3.4 European Union
3.4.1 For EVMs subject to EU Directive 2014/30/EU (Electromagnetic Compatibility Directive):
This is a class A product intended for use in environments other than domestic environments that are connected to a
low-voltage power-supply network that supplies buildings used for domestic purposes. In a domestic environment this
product may cause radio interference in which case the user may be required to take adequate measures.
4 EVM Use Restrictions and Warnings:
4.1 EVMS ARE NOT FOR USE IN FUNCTIONAL SAFETY AND/OR SAFETY CRITICAL EVALUATIONS, INCLUDING BUT NOT
LIMITED TO EVALUATIONS OF LIFE SUPPORT APPLICATIONS.
4.2 User must read and apply the user guide and other available documentation provided by TI regarding the EVM prior to handling
or using the EVM, including without limitation any warning or restriction notices. The notices contain important safety information
related to, for example, temperatures and voltages.
4.3 Safety-Related Warnings and Restrictions:
4.3.1 User shall operate the EVM within TI’s recommended specifications and environmental considerations stated in the user
guide, other available documentation provided by TI, and any other applicable requirements and employ reasonable and
customary safeguards. Exceeding the specified performance ratings and specifications (including but not limited to input
and output voltage, current, power, and environmental ranges) for the EVM may cause personal injury or death, or
property damage. If there are questions concerning performance ratings and specifications, User should contact a TI
field representative prior to connecting interface electronics including input power and intended loads. Any loads applied
outside of the specified output range may also result in unintended and/or inaccurate operation and/or possible
permanent damage to the EVM and/or interface electronics. Please consult the EVM user guide prior to connecting any
load to the EVM output. If there is uncertainty as to the load specification, please contact a TI field representative.
During normal operation, even with the inputs and outputs kept within the specified allowable ranges, some circuit
components may have elevated case temperatures. These components include but are not limited to linear regulators,
switching transistors, pass transistors, current sense resistors, and heat sinks, which can be identified using the
information in the associated documentation. When working with the EVM, please be aware that the EVM may become
very warm.
4.3.2 EVMs are intended solely for use by technically qualified, professional electronics experts who are familiar with the
dangers and application risks associated with handling electrical mechanical components, systems, and subsystems.
User assumes all responsibility and liability for proper and safe handling and use of the EVM by User or its employees,
affiliates, contractors or designees. User assumes all responsibility and liability to ensure that any interfaces (electronic
and/or mechanical) between the EVM and any human body are designed with suitable isolation and means to safely
limit accessible leakage currents to minimize the risk of electrical shock hazard. User assumes all responsibility and
liability for any improper or unsafe handling or use of the EVM by User or its employees, affiliates, contractors or
designees.
4.4 User assumes all responsibility and liability to determine whether the EVM is subject to any applicable international, federal,
state, or local laws and regulations related to User’s handling and use of the EVM and, if applicable, User assumes all
responsibility and liability for compliance in all respects with such laws and regulations. User assumes all responsibility and
liability for proper disposal and recycling of the EVM consistent with all applicable international, federal, state, and local
requirements.
5. Accuracy of Information: To the extent TI provides information on the availability and function of EVMs, TI attempts to be as accurate
as possible. However, TI does not warrant the accuracy of EVM descriptions, EVM availability or other information on its websites as
accurate, complete, reliable, current, or error-free.
Page 41

6. Disclaimers:
6.1 EXCEPT AS SET FORTH ABOVE, EVMS AND ANY MATERIALS PROVIDED WITH THE EVM (INCLUDING, BUT NOT
LIMITED TO, REFERENCE DESIGNS AND THE DESIGN OF THE EVM ITSELF) ARE PROVIDED "AS IS" AND "WITH ALL
FAULTS." TI DISCLAIMS ALL OTHER WARRANTIES, EXPRESS OR IMPLIED, REGARDING SUCH ITEMS, INCLUDING BUT
NOT LIMITED TO ANY EPIDEMIC FAILURE WARRANTY OR IMPLIED WARRANTIES OF MERCHANTABILITY OR FITNESS
FOR A PARTICULAR PURPOSE OR NON-INFRINGEMENT OF ANY THIRD PARTY PATENTS, COPYRIGHTS, TRADE
SECRETS OR OTHER INTELLECTUAL PROPERTY RIGHTS.
6.2 EXCEPT FOR THE LIMITED RIGHT TO USE THE EVM SET FORTH HEREIN, NOTHING IN THESE TERMS SHALL BE
CONSTRUED AS GRANTING OR CONFERRING ANY RIGHTS BY LICENSE, PATENT, OR ANY OTHER INDUSTRIAL OR
INTELLECTUAL PROPERTY RIGHT OF TI, ITS SUPPLIERS/LICENSORS OR ANY OTHER THIRD PARTY, TO USE THE
EVM IN ANY FINISHED END-USER OR READY-TO-USE FINAL PRODUCT, OR FOR ANY INVENTION, DISCOVERY OR
IMPROVEMENT, REGARDLESS OF WHEN MADE, CONCEIVED OR ACQUIRED.
7. USER'S INDEMNITY OBLIGATIONS AND REPRESENTATIONS. USER WILL DEFEND, INDEMNIFY AND HOLD TI, ITS
LICENSORS AND THEIR REPRESENTATIVES HARMLESS FROM AND AGAINST ANY AND ALL CLAIMS, DAMAGES, LOSSES,
EXPENSES, COSTS AND LIABILITIES (COLLECTIVELY, "CLAIMS") ARISING OUT OF OR IN CONNECTION WITH ANY
HANDLING OR USE OF THE EVM THAT IS NOT IN ACCORDANCE WITH THESE TERMS. THIS OBLIGATION SHALL APPLY
WHETHER CLAIMS ARISE UNDER STATUTE, REGULATION, OR THE LAW OF TORT, CONTRACT OR ANY OTHER LEGAL
THEORY, AND EVEN IF THE EVM FAILS TO PERFORM AS DESCRIBED OR EXPECTED.
8. Limitations on Damages and Liability:
8.1 General Limitations. IN NO EVENT SHALL TI BE LIABLE FOR ANY SPECIAL, COLLATERAL, INDIRECT, PUNITIVE,
INCIDENTAL, CONSEQUENTIAL, OR EXEMPLARY DAMAGES IN CONNECTION WITH OR ARISING OUT OF THESE
TERMS OR THE USE OF THE EVMS , REGARDLESS OF WHETHER TI HAS BEEN ADVISED OF THE POSSIBILITY OF
SUCH DAMAGES. EXCLUDED DAMAGES INCLUDE, BUT ARE NOT LIMITED TO, COST OF REMOVAL OR
REINSTALLATION, ANCILLARY COSTS TO THE PROCUREMENT OF SUBSTITUTE GOODS OR SERVICES, RETESTING,
OUTSIDE COMPUTER TIME, LABOR COSTS, LOSS OF GOODWILL, LOSS OF PROFITS, LOSS OF SAVINGS, LOSS OF
USE, LOSS OF DATA, OR BUSINESS INTERRUPTION. NO CLAIM, SUIT OR ACTION SHALL BE BROUGHT AGAINST TI
MORE THAN TWELVE (12) MONTHS AFTER THE EVENT THAT GAVE RISE TO THE CAUSE OF ACTION HAS
OCCURRED.
8.2 Specific Limitations. IN NO EVENT SHALL TI'S AGGREGATE LIABILITY FROM ANY USE OF AN EVM PROVIDED
HEREUNDER, INCLUDING FROM ANY WARRANTY, INDEMITY OR OTHER OBLIGATION ARISING OUT OF OR IN
CONNECTION WITH THESE TERMS, , EXCEED THE TOTAL AMOUNT PAID TO TI BY USER FOR THE PARTICULAR
EVM(S) AT ISSUE DURING THE PRIOR TWELVE (12) MONTHS WITH RESPECT TO WHICH LOSSES OR DAMAGES ARE
CLAIMED. THE EXISTENCE OF MORE THAN ONE CLAIM SHALL NOT ENLARGE OR EXTEND THIS LIMIT.
9. Return Policy. Except as otherwise provided, TI does not offer any refunds, returns, or exchanges. Furthermore, no return of EVM(s)
will be accepted if the package has been opened and no return of the EVM(s) will be accepted if they are damaged or otherwise not in
a resalable condition. If User feels it has been incorrectly charged for the EVM(s) it ordered or that delivery violates the applicable
order, User should contact TI. All refunds will be made in full within thirty (30) working days from the return of the components(s),
excluding any postage or packaging costs.
10. Governing Law: These terms and conditions shall be governed by and interpreted in accordance with the laws of the State of Texas,
without reference to conflict-of-laws principles. User agrees that non-exclusive jurisdiction for any dispute arising out of or relating to
these terms and conditions lies within courts located in the State of Texas and consents to venue in Dallas County, Texas.
Notwithstanding the foregoing, any judgment may be enforced in any United States or foreign court, and TI may seek injunctive relief
in any United States or foreign court.
Mailing Address: Texas Instruments, Post Office Box 655303, Dallas, Texas 75265
Copyright © 2017, Texas Instruments Incorporated
Page 42

IMPORTANT NOTICE FOR TI DESIGN INFORMATION AND RESOURCES
Texas Instruments Incorporated (‘TI”) technical, application or other design advice, services or information, including, but not limited to,
reference designs and materials relating to evaluation modules, (collectively, “TI Resources”) are intended to assist designers who are
developing applications that incorporate TI products; by downloading, accessing or using any particular TI Resource in any way, you
(individually or, if you are acting on behalf of a company, your company) agree to use it solely for this purpose and subject to the terms of
this Notice.
TI’s provision of TI Resources does not expand or otherwise alter TI’s applicable published warranties or warranty disclaimers for TI
products, and no additional obligations or liabilities arise from TI providing such TI Resources. TI reserves the right to make corrections,
enhancements, improvements and other changes to its TI Resources.
You understand and agree that you remain responsible for using your independent analysis, evaluation and judgment in designing your
applications and that you have full and exclusive responsibility to assure the safety of your applications and compliance of your applications
(and of all TI products used in or for your applications) with all applicable regulations, laws and other applicable requirements. You
represent that, with respect to your applications, you have all the necessary expertise to create and implement safeguards that (1)
anticipate dangerous consequences of failures, (2) monitor failures and their consequences, and (3) lessen the likelihood of failures that
might cause harm and take appropriate actions. You agree that prior to using or distributing any applications that include TI products, you
will thoroughly test such applications and the functionality of such TI products as used in such applications. TI has not conducted any
testing other than that specifically described in the published documentation for a particular TI Resource.
You are authorized to use, copy and modify any individual TI Resource only in connection with the development of applications that include
the TI product(s) identified in such TI Resource. NO OTHER LICENSE, EXPRESS OR IMPLIED, BY ESTOPPEL OR OTHERWISE TO
ANY OTHER TI INTELLECTUAL PROPERTY RIGHT, AND NO LICENSE TO ANY TECHNOLOGY OR INTELLECTUAL PROPERTY
RIGHT OF TI OR ANY THIRD PARTY IS GRANTED HEREIN, including but not limited to any patent right, copyright, mask work right, or
other intellectual property right relating to any combination, machine, or process in which TI products or services are used. Information
regarding or referencing third-party products or services does not constitute a license to use such products or services, or a warranty or
endorsement thereof. Use of TI Resources may require a license from a third party under the patents or other intellectual property of the
third party, or a license from TI under the patents or other intellectual property of TI.
TI RESOURCES ARE PROVIDED “AS IS” AND WITH ALL FAULTS. TI DISCLAIMS ALL OTHER WARRANTIES OR
REPRESENTATIONS, EXPRESS OR IMPLIED, REGARDING TI RESOURCES OR USE THEREOF, INCLUDING BUT NOT LIMITED TO
ACCURACY OR COMPLETENESS, TITLE, ANY EPIDEMIC FAILURE WARRANTY AND ANY IMPLIED WARRANTIES OF
MERCHANTABILITY, FITNESS FOR A PARTICULAR PURPOSE, AND NON-INFRINGEMENT OF ANY THIRD PARTY INTELLECTUAL
PROPERTY RIGHTS.
TI SHALL NOT BE LIABLE FOR AND SHALL NOT DEFEND OR INDEMNIFY YOU AGAINST ANY CLAIM, INCLUDING BUT NOT
LIMITED TO ANY INFRINGEMENT CLAIM THAT RELATES TO OR IS BASED ON ANY COMBINATION OF PRODUCTS EVEN IF
DESCRIBED IN TI RESOURCES OR OTHERWISE. IN NO EVENT SHALL TI BE LIABLE FOR ANY ACTUAL, DIRECT, SPECIAL,
COLLATERAL, INDIRECT, PUNITIVE, INCIDENTAL, CONSEQUENTIAL OR EXEMPLARY DAMAGES IN CONNECTION WITH OR
ARISING OUT OF TI RESOURCES OR USE THEREOF, AND REGARDLESS OF WHETHER TI HAS BEEN ADVISED OF THE
POSSIBILITY OF SUCH DAMAGES.
You agree to fully indemnify TI and its representatives against any damages, costs, losses, and/or liabilities arising out of your noncompliance with the terms and provisions of this Notice.
This Notice applies to TI Resources. Additional terms apply to the use and purchase of certain types of materials, TI products and services.
These include; without limitation, TI’s standard terms for semiconductor products http://www.ti.com/sc/docs/stdterms.htm), evaluation
modules, and samples (http://www.ti.com/sc/docs/sampterms.htm).
Mailing Address: Texas Instruments, Post Office Box 655303, Dallas, Texas 75265
Copyright © 2017, Texas Instruments Incorporated
Page 43

Mouser Electronics
Authorized Distributor
Click to View Pricing, Inventory, Delivery & Lifecycle Information:
Texas Instruments:
DRV10987EVM
 Loading...
Loading...