

Page 1

C500
Microcontroller Family
Architecture and Instruction Set
User's Manual 09.97
http://www.siemens.de/
Semiconductor/
Page 2
C500 Architecture and Instruction User’s Manual
Revision History : 09.97 Original Version
Previous Releases: 07.96, 01.97
Page Subjects (changes since last revision)
4-88 Table 4-4: Mnemonics for Opcode 83
H
, 86
and 87
H
corrected
H
Page Subjects (changes from 07.96 to 01.97)
Table of
Reference to pages of each instruction added
content
4-89
Edition 09.97
Published by Siemens AG,
Bereich Halbleiter, MarketingKommunikation, Balanstraße 73,
81541 München
Siemens AG 1997.
©
All Rights Reserved.
Attention please!
As far as patents or other rights of third parties are concerned, liability is only assumed for components, not for applications, processes
and circuits implemented within components or assemblies.
The information describes the type of component and shall not be considered as assured characteristics.
Terms of delivery and rights to change design reserved.
For questions on technology, delivery and prices please contact the Semiconductor Group Offices in Germany or the Siemens Companies
and Representatives worldwide (see address list).
Due to technical requirements components may contain dangerous substances. For information on the types in question please contact
your nearest Siemens Office, Semiconductor Group.
Siemens AG is an approved CECC manufacturer.
Packing
Please use the recycling operators known to you. We can also help you – get in touch with your nearest sales office. By agreement we will
take packing material back, if it is sorted. You must bear the costs of transport.
For packing material that is returned to us unsorted or which we are not obliged to accept, we shall have to invoice you for any costs incurred.
Components used in life-support devices or systems must be expressly authorized for such purpose!
Critical components
written approval of the Semiconductor Group of Siemens AG.
1 A critical component is a component used in a life-support device or system whose failure can reasonably be expected to cause the
failure of that life-support device or system, or to affect its safety or effectiveness of that device or system.
2 Life support devices or systems are intended (a) to be implanted in the human body, or (b) to support and/or maintain and sustain hu-
man life. If they fail, it is reasonable to assume that the health of the user may be endangered.
Table header corrected
1
of the Semiconductor Group of Siemens AG, may only be used in life-support devices or systems
2
with the express
Page 3

C500
Table of Contents Page
1 Fundamental Structure . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1-1
1.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1-1
1.2 Memory Organization . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1-2
1.2.1 Program Memory . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1-2
1.2.2 Data Memory . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1-3
1.2.2.1 Internal Data Memory . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1-3
1.2.2.2 Internal Data Memory XRAM . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1-5
1.2.2.3 External Data Memory . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1-6
1.2.3 Special Function Register Area . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1-6
2 CPU Architecture . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-1
2.1 Accumulator . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-2
2.2 B Register . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-2
2.3 Program Status Word . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-2
2.4 Stack Pointer . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-3
2.5 Data Pointer . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-4
2.5.1 The Importance of Additional Datapointers . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-5
2.5.2 How the eight Datapointers of the C500 are realized . . . . . . . . . . . . . . . . . . . . . . . . . 2-5
2.5.3 Advantages of Multiple Datapointers . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-6
2.5.4 Application Example and Performance Analysis . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-6
2.6 Enhanced Hooks Emulation Concept . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-9
2.7 Basic Interrupt Handling . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-10
2.8 Interrupt Response Time . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-12
3 CPU Timing . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-1
3.1 Basic Timing . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-1
3.2 Accessing External Memory . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-3
3.2.1 Accessing External Program Memory . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-3
3.2.2 Accessing External Data Memory . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-4
4 Instruction Set . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-1
4.1 Addressing Modes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-1
4.2 Introduction to the Instruction Set . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-3
4.2.1 Data Transfer Instructions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-3
4.2.2 Arithmetic Instructions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-4
4.2.3 Logic Instructions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-5
4.2.4 Control Transfer Instructions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-5
4.3 Instruction Definitions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-7
ACALL addr11 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-9
ADD A, <src-byte> . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-10
ADDC A, < src-byte> . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-12
AJMP addr11 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-14
ANL <dest-byte>, <src-byte> . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-15
ANL direct, #data . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-17
ANL C, <src-bit> . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-18
CJNE <dest-byte >, < src-byte >, rel . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-19
CJNE @Ri, #data, rel . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-21
CLR A . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-22
CLR bit . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-23
Semiconductor Group I-1 1997-09-01
Page 4

C500
Table of Contents Page
CPL A . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-24
CPL bit . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-25
DA A . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-26
DEC byte . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-28
DIV AB . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-30
DJNZ <byte>, <rel-addr> . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-31
INC <byte> . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-33
INC DPTR . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-35
JB bit,rel . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-36
JBC bit,rel . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-37
JC rel . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-38
JMP @A + DPTR . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-39
JNB bit,rel . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-40
JNC rel . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-41
JNZ rel . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-42
JZ rel . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-43
LCALL addr16 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-44
LJMP addr16 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-45
MOV <dest-byte>, <src-byte> . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-46
MOV <dest-bit>, <src-bit> . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-51
MOV DPTR, #data16 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-52
MOVC A, @A + <base-reg> . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-53
MOVX <dest-byte>, <src-byte> . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-55
MUL AB . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-57
NOP . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-58
ORL <dest-byte>, <src-byte> . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-59
ORL C, <src-bit> . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-62
POP direct . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-63
PUSH direct . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-64
RET . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-65
RETI . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-66
RL A . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-67
RLC A . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-68
RR A . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-69
RRC A . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-70
SETB <bit> . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-71
SJMP rel . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-72
SUBB A, <src-byte> . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-73
SWAP A . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-75
XCH A, <byte> . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-76
XCHD A,@Ri . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-78
XRL <dest-byte>, <src-byte> . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-79
4.4 Instruction Set Summary Tables . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-82
4.4.1 Functional Groups of Instructions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-82
4.4.2 Hexadecimal Ordered Instructions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-87
Semiconductor Group I-2 1997-09-01
Page 5

C500
Table of Contents Page
5 Package Information . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5-1
5.1 P-DIP Package . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5-1
5.2 PLCC Packages . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5-2
5.3 MQFP Packages . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5-5
Semiconductor Group I-3 1997-09-01
Page 6

Fundamental Structure
C500 Family
1 Fundamental Structure
1.1 Introduction
The members of the C500 Siemens microcontroller family are basically fully compatible in
architecture and software to the standard 8051 microcontroller family. Especially, they are
functionally upward compatible to the SAB 80C52/80C32 microcontroller. While maintaining all
architectural and operational characteristics of the SAB 80C52/80C32, the C500 microcontrollers
differ in number and complexity of their peripheral units which have been adapted to the specific
application areas.
The goal of this “Architecture and Instruction Set Manual“ is to summarize the basic architecture
and functional characteristics of all members of the C500 microcontroller family. This includes the
description of the architecture and the description of the complete instruction set. Detailed
information about the different versions of the C500 microcontrollers are given in the specific User
Manuals.
Semiconductor Group 1-1 1997-09-01
Page 7
Fundamental Structure
C500 Family
1.2 Memory Organization
The memory resources of the C500 family microcontrollers are organized in different types of
memories (data and program memory), which further can be located internally on the
microcontroller chip or outside of the microcontroller. The memory partitioning of the C500
microcontrollers is typical for a Harvard architecture where data and program areas are held in
separate memory areas. The on-chip peripheral units are accessed using an internal special
function register memory area.
The available memory areas have different sizes and are located in the following five address
spaces:
Table 1-1
C500 Address Spaces
Type of Memory Location Size
Program Memory External max. 64 KByte
Internal (ROM, EEPROM) Depending on C500 version
2K up to 64KByte
Data Memory External max. 64 KByte
Internal XRAM Depending on C500 version
256 Byte up to 3 KByte
Internal 128 or 256 Byte
Special Function Register Internal 128/256 Bytes
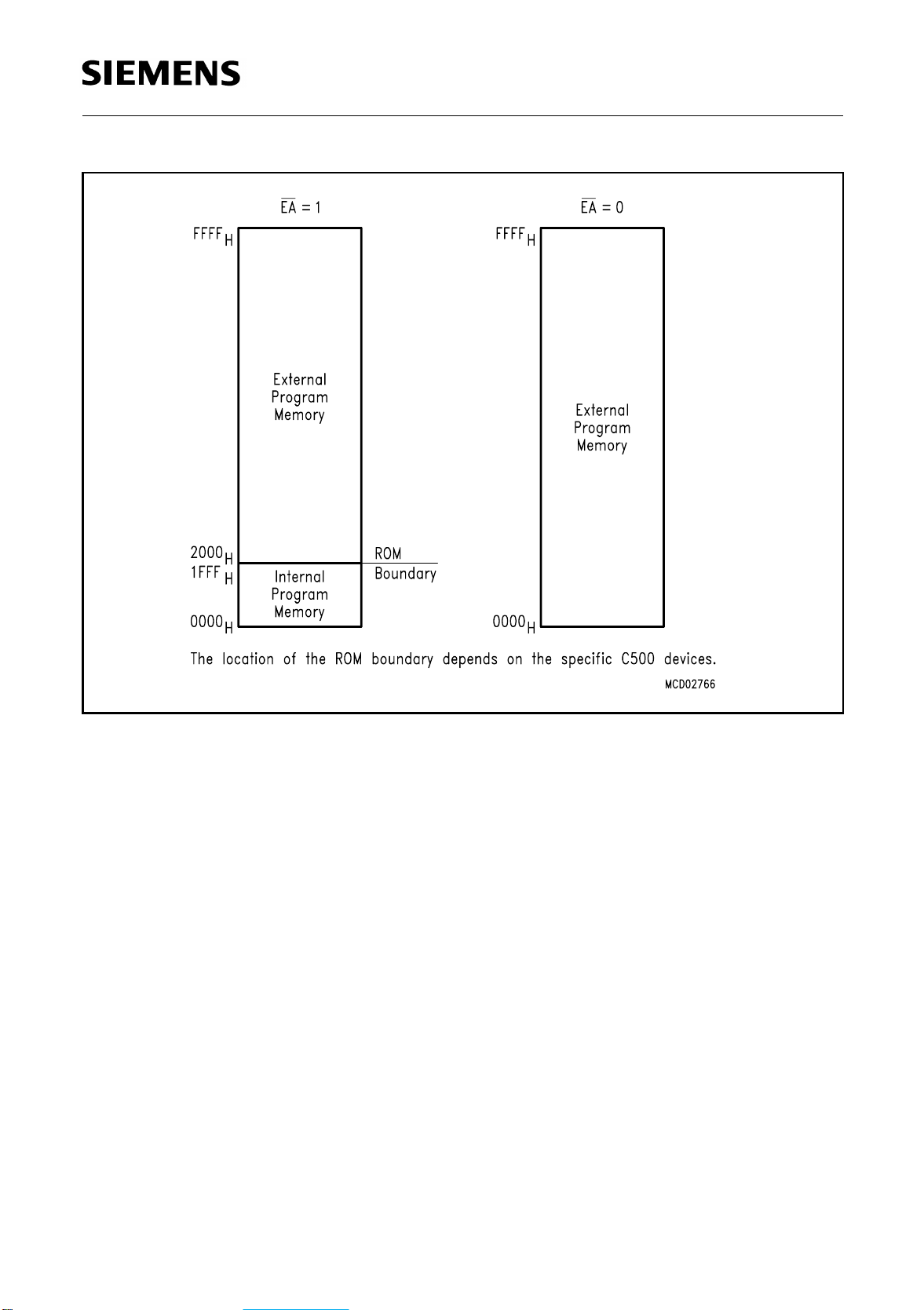
1.2.1 Program Memory
The program memory of the C500 family microcontrollers can be composed of either completely
external program memory, of only internal program memory (on-chip ROM / EEPROM), or of a
mixture of internal and external program memory. lf the EA
level, the C500 microcontrollers execute the program code always out of the external program
memory. Romless C500 derivatives can use this type of program memory only. C500 derivatives
with on-chip program memory typically use their internal program memory only. If the internal
program memory is used the EA
executes instructions internally unless the address exceeds the upper limit of the internal program
memory. If the program counter is set to an address (e.g. by a jump instruction) which is higher than
the internal program memory, instructions are executed out of an external program memory. When
the instruction address again is below the internal program memory size limit, internal program
memory is accessed again.
pin must be put to high level. With EA high, the microcontroller
pin (EA= E xternal A ccess) is held at low
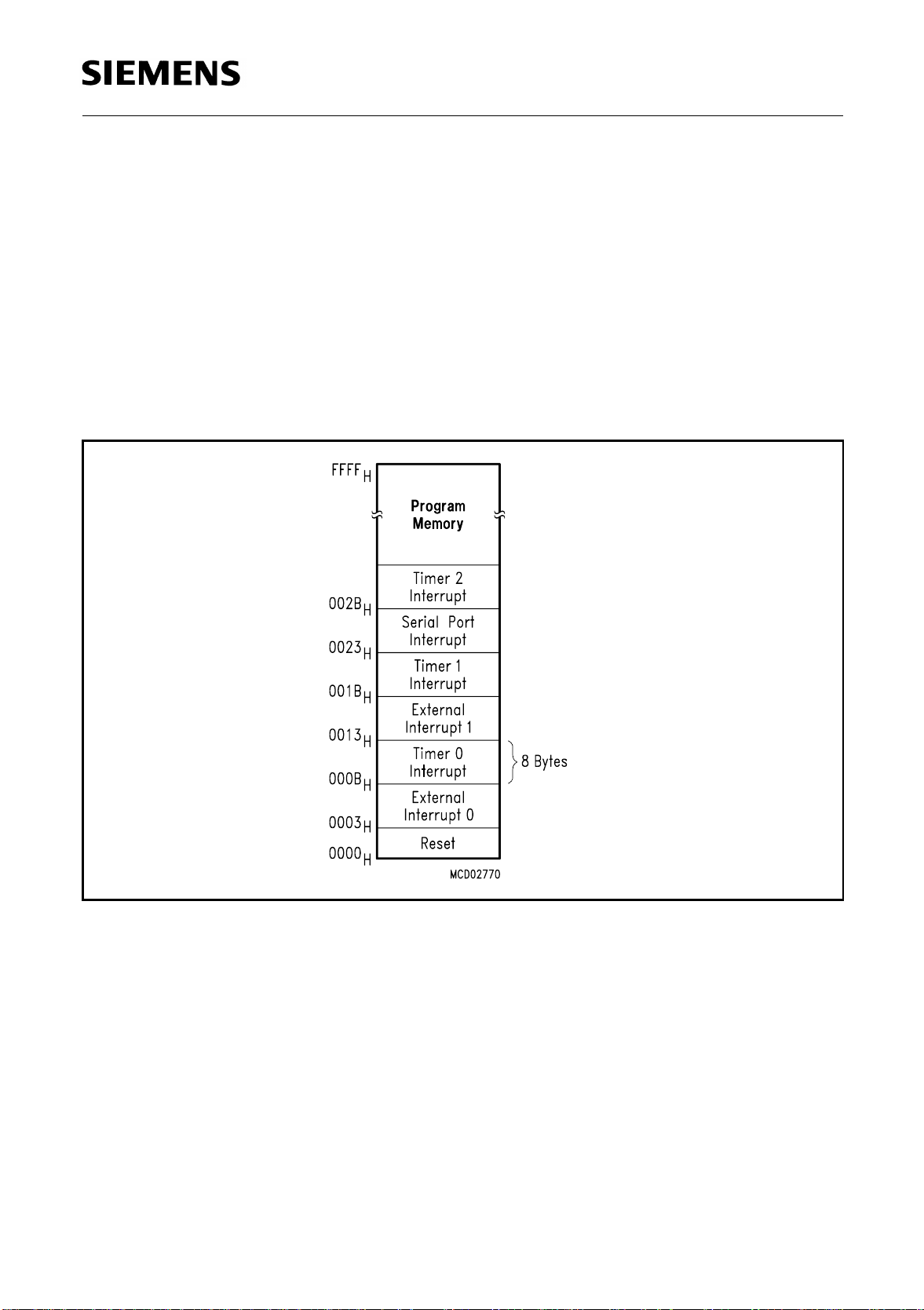
Figure 1-1 shows the typical C500 family microcontroller program memory configuration for the two
cases EA=0 and EA=1. The ROM boundary shown in figure 1-1 , applies to the C501 which has 8K
byte of internal ROM. Other C500 family microcontrollers with different ROM size have different
ROM boundaries.
Semiconductor Group 1-2 1997-09-01
Page 8
Fundamental Structure
C500 Family
Figure 1-1
Program Memory Configuration (Example of the C501)
1.2.2 Data Memory
The data memory area of the C500 family microcontrollers consists of internal and external data
memory portions. The internal data memory area is addressed using 8-bit addresses. The external
data memory and the internal XRAM data memory are addressed by 8-bit or16-bit addresses.
The content of the internal data memory (also XRAM) is not affected by a reset operation. After
power-up the content is undefined, while it remains unchanged during and after a reset as long as
the power supply is not turned off. The XRAM content is also maintained when the C500
microcontrollers are in power saving modes.
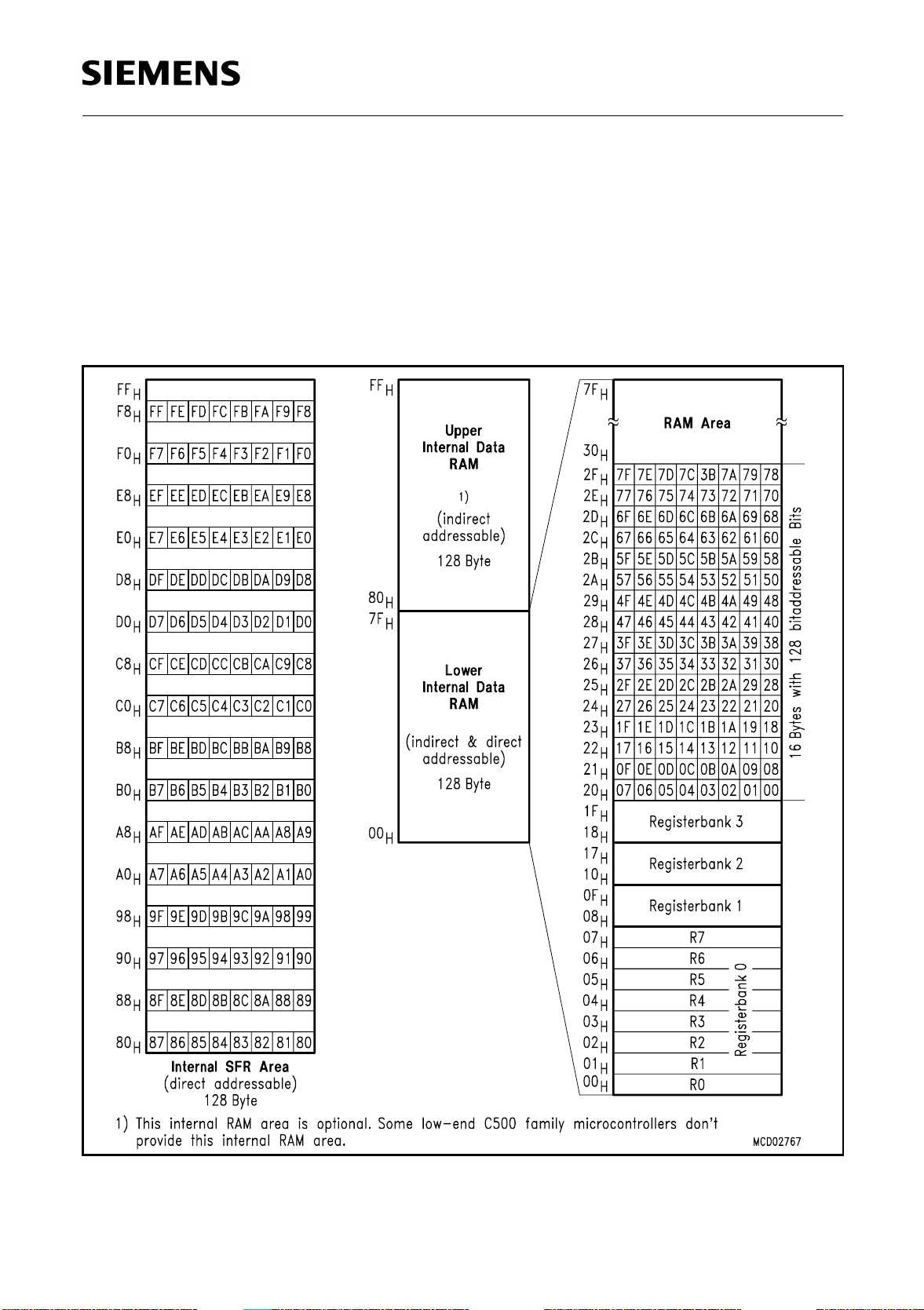
1.2.2.1 Internal Data Memory
The internal data memory address space is divided into three basic, physically separate and distinct
blocks: the lower 128 byte of internal data RAM, the upper 128 byte of internal data RAM, and the
128 byte special function register (SFR) area. The lower internal data RAM and the SFR area
further include 128 bit locations each. These bits can be handled by specific bit manipulation
instructions.
Semiconductor Group 1-3 1997-09-01
Page 9
Fundamental Structure
C500 Family
Figure 1-2 shows the configuration of the three basic internal RAM areas. The lower data RAM is
located in the address range 00H - 7FH and can be addressed directly (e.g. MOV A,direct) or
indirectly (e.g. MOV A,@R0 with address in R0). A bit-addressable area of 128 free programmable,
direct addressable bits is located at byte addresses 20H - 2FH of the lower data RAM. Bit 0 of the
internal data byte at 20H has the bit address 00H while bit 7 of the internal data byte at 2FH has the
bit address 7FH. The lower 32 locations of the internal lower data RAM are assigned to four banks
with eight general purpose registers (GPRs) each. Only one of these banks can be enabled at a
time to be used as general purpose registers.
Figure 1-2
Internal Data Memory Organization
Semiconductor Group 1-4 1997-09-01
Page 10
Fundamental Structure
C500 Family
While the SFR area and the upper internal RAM area share the same address locations (80H FFH), they must be accessed through different addressing modes. The upper internal RAM can
only be accessed through indirect addressing while the special function registers (SFRs) are
accessible only by direct addressing instructions. The SFRs which are located at addresses with
address bit 0-2 equal 0 (addresses 80H, 88H, 90H, ....F0H, FFH) are bitaddressable SFRs.
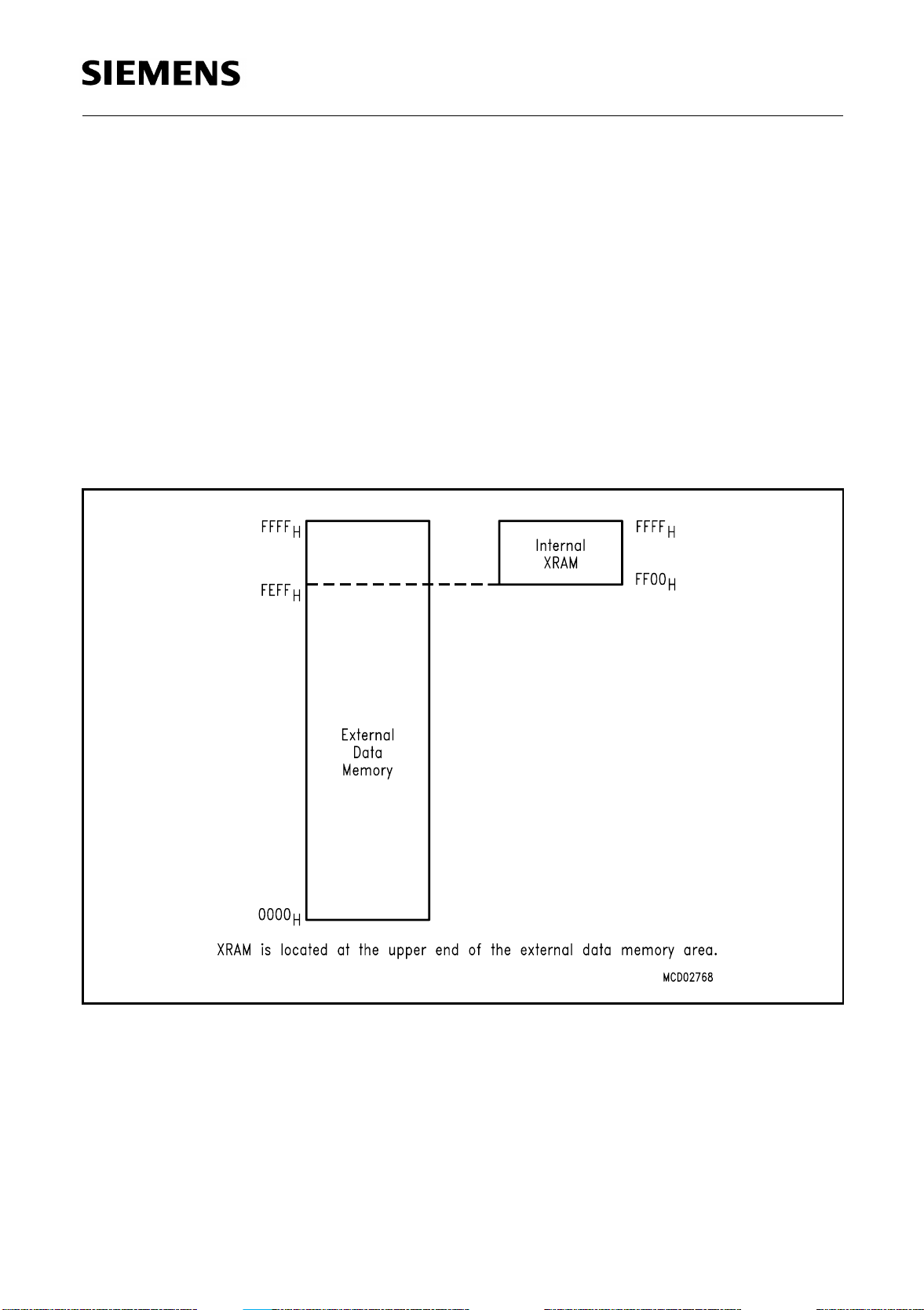
1.2.2.2 Internal Data Memory XRAM
Some members of the C500 family microcontrollers provide an additional internal data memory
area, called the XRAM. This data memory area is logically located at the upper end of the external
data memory space (except C502), but it is integrated on the chip. Because the XRAM is used in
the same way as external data memory the same instruction types must be used for accessing the
XRAM.
Figure 1-3 shows a typical 256 byte XRAM address mapping of the C500 microcontrollers.
Figure 1-3
XRAM Memory Mapping (256 Byte)
Depending on the C500 derivative, the size of the XRAM area differs from 128 upto 3K byte.
Further, the XRAM can be enabled or disabled. If an internal XRAM area is disabled, external data
memory can be accessed in the address range of the internal XRAM.
Semiconductor Group 1-5 1997-09-01
Page 11
Fundamental Structure
C500 Family
1.2.2.3 External Data Memory
The 64 Kbyte external data memory can be addressed by instructions that use 8-bit or 16-bit indirect
addressing. A 16-bit external memory addressing mode is supported by the MOVX instructions
using the 16-bit datapointer DPTR for addressing. For 8-bit addressing MOVX instructions with the
general purpose registers R0/R1 are used.
1.2.3 Special Function Register Area
The registers of a C500 microcontroller, except the program counter and the four general purpose
register banks, reside in the special function register (SFR) area. The special function register area
typically provides 128 bytes of direct addressable SFRs. The SFRs which are located at addresses
with address bit 0-2 equal 0 (addresses 80H, 88H, 90H, ....F0H, FFH) are bitaddressable SFRs (see
also figure 1-1). For example, the SFR with byte address 80H provides the bit locations with bit
addresses 80H to 87H. The bit addresses of the SFR bits reach from 80H to FFH.
Due to the limited number of 128 standard SFRs, some derivatives of the C500 microcontroller
family provide an additional 128 byte SFR area, called the mapped SFR area. The mapped SFR
area provides the same addressing capabilities (direct addresses, bit addressing) as the standard
SFR area.
Special Function Register SYSCON (Address B1H)
Bit No. MSB LSB
76543210
B1
H
Bit Function
RMAP Special function register map bit
––
The functions of the shaded bits are not described in this section.
RMAP = 0 : The access to the non-mapped (standard) special function
RMAP = 1 : The access to the mapped special function register area is
– RMAP –
register area is enabled (default after reset).
enabled.
––
–
SYSCON
As long as bit RMAP is set, mapped special function registers can be accessed. This bit is not
cleared by hardware automatically. Thus, when non-mapped/mapped registers are to be accessed,
the bit RMAP must be cleared/set by software, respectively each. Some registers (e.g. ACC) are
accessed independently of bit RMAP.
Two bits in the program status word, RS0 (PSW.3) and RS1 (PSW.4), select the active register
bank. This allows fast context switching, which is useful when entering subroutines or interrupt
service routines. The 8 general purpose registers of the selected register bank may be accessed
by register addressing. For indirect addressing modes, the registers R0 and R1 are used as pointer
or index register to address internal or external memory (e.g. MOV @R0).
Semiconductor Group 1-6 1997-09-01
Page 12

CPU Functions
C500 Family
2 CPU Architecture
The typical architecture of a C500 family microcontroller is shown in figure 2-1 . This block diagram
includes all main functional blocks of the C500 microcontrollers. The shaded blocks are basic
functional units which are mandatory for each C500 microcontroller. The other functional blocks
such as XRAM, peripheral units, and ROM/RAM sizes are specific to each C500 microcontroller
derivative.
Figure 2-1
C500 Microcontroller Architecture Block Diagram
The core block represents the CPU (Central Processing Unit) of the C500 family microcontrollers.
The CPU consists of the instruction decoder, the arithmetic section, the CPU registers, and the
program control section. The housekeeper unit generates internal signals for controlling the
functions of the individual internal units within the microcontroller. Port 0 and port 2 are required for
accessing external code and data memory and for emulation purposes. The external control signals
and the clock generation are handled in the external control block. The access control unit is
responsible for the selection of the on-chip memory resources. The IRAM provides the internal RAM
which includes the general purpose registers. The interrupt requests from the peripheral units are
handled by an interrupt controller unit.
C500 device specific is the configuration of the on-chip peripheral units. Serial interfaces, timers,
capture/compare units, A/D converters, watchdog units, or a multiply/divide unit are typical
examples for on-chip peripheral units. The external signals of these peripheral units are available
at multifunctional parallel I/O ports or at dedicated pins.
Semiconductor Group 2-1 1997-09-01
Page 13

CPU Functions
C500 Family
The arithmetic section of the core performs extensive data manipulation and is comprised of the
arithmetic/logic unit (ALU), an A register, B register and PSW register. Further, it has extensive
facilities for binary and BCD arithmetic and excels in its bit-handling capabilities. Efficient use of
program memory results from an instruction set consisting of 44% one-byte, 41% two-byte, and
15% three-byte instructions. The ALU accepts 8-bit data words from one or two sources and
generates an 8-bit result under the control of the instruction decoder. The ALU performs the
arithmetic operations add, substract, multiply, divide, increment, decrement, BDC-decimal-addadjust and compare, and the logic operations AND, OR, Exclusive OR, complement and rotate
(right, left or swap nibble (left four)). Also included is a Boolean processor performing the bit
operations as set, clear, complement, jump-if-not-set, jump-if-set-and-clear and move to/from carry.
Between any addressable bit (or its complement) and the carry flag, it can perform the bit operations
of logical AND or logical OR with the result returned to the carry flag.
The program control section of the core controls the sequence in which the instructions stored in
program memory are executed. The 16-bit program counter (PC) holds the address of the next
instruction to be executed. The conditional branch logic enables internal and external events to the
processor to cause a change in the program execution sequence.
2.1 Accumulator
ACC is the symbol for the accumulator register. The mnemonics for accumulator-specific
instructions, however, refer to the accumulator simply as A.
2.2 B Register
The B register is used during multiply and divide and serves as both source and destination. For
other instructions it can be treated as another scratch pad register.
2.3 Program Status Word
The Program Status Word (PSW) contains several status bits that reflect the current state of the
CPU. The bits of the PSW are used for different functions which are: two register bank selection bits,
two carry flags and an overflow flag for arithmetic instructions, a parity bit for the content of the ACC,
and two general purpose flags.
The bit definitions of the PSW are shown on the next page.
Semiconductor Group 2-2 1997-09-01
Page 14
CPU Functions
C500 Family
Special Function Register PSW (Address D0H) Reset Value : 00
Bit No.
D0
H
Bit Function
CY Carry Flag
Used by arithmetic and conditional branch instruction.
AC Auxiliary Carry Flag
Used by instructions which execute BCD operations.
F0 General Purpose Flag
RS1
RS0
Register Bank select control bits
These bits are used to select one of the four register banks.
RS1 RS0 Function
LSBMSB
01234567
PF1OVRS0RS1F0ACCY
PSW
H
0 0 Registerbank 0 at data address 00H-07H selected
0 1 Registerbank 1 at data address 08H-0FH selected
1 0 Registerbank 2 at data address 10H-17H selected
1 1 Registerbank 3 at data address 18H-1FH selected
OV Overflow Flag
Used by arithmetic instruction.
F1 General Purpose Flag
P Parity Flag
Always set/cleared by hardware to indicate an odd/even number of "one"
bits in the accumulator, i.e. even parity.
2.4 Stack Pointer
The stack pointer (SP) register is 8 bits wide. It is incremented before data is stored during PUSH
and CALL executions and decremented after data is popped during a POP and RET (RETI)
execution, i.e. it always points to the last valid stack byte. While the stack may reside anywhere in
the on-chip RAM, the stack pointer is initialized to 07H after a reset. This causes the stack to begin
a location = 08H above register bank zero. The SP can be read or written under software control.
Semiconductor Group 2-3 1997-09-01
Page 15
CPU Functions
C500 Family
2.5 Data Pointer
8-bit accesses to the internal XRAM data memory or the external data memory are executed using
the data pointer DPTR as an 16-bit address register. Normally, the C500 family microcontrollers
have one data pointer. But some members of the C500 family provide eight data pointers. The
availability of eight data pointers especially supports the programming in high level languages which
have a demand to store data in large external data memory portions.
Special Function Register DPL (Address 82H) Reset Value : 00
Special Function Register DPH (Address 83H) Reset Value : 00
Special Function Register DPSEL (Address D0H) Reset Value : 00
LSBMSB
Bit No.
82
H
H
H
Bit Function
– Reserved bits for future use
01234567
LSB.1.2.3.4.5.6.7
.0.1.2.3.4.5.6MSB83
.0.1.2–––––92
DPL
DPH
DPSEL
H
H
H
DPSEL.2 - 0 Data pointer select bits
DPSEL.2-0 defines the number of the actual active data pointer.DPTR0-7.
DPSEL2 DPSEL1 DPSEL0 Function
0 0 0 Data pointer 0 selected
0 0 1 Data pointer 1 selected
0 1 0 Data pointer 2 selected
0 1 1 Data pointer 3 selected
1 0 0 Data pointer 4 selected
1 0 1 Data pointer 5 selected
1 1 0 Data pointer 6 selected
1 1 1 Data pointer 7 selected
Semiconductor Group 2-4 1997-09-01
Page 16

CPU Functions
C500 Family
2.5.1 The Importance of Additional Datapointers
The standard 8051 architecture provides just one 16-bit pointer for indirect addressing of external
devices (memories, peripherals, latches, etc.). Except for a 16-bit "move immediate" to this
datapointer and an increment instruction, any other pointer handling is to be done byte by byte. For
complex applications with peripherals located in the external data memory space (e.g. CAN
controller) or extended data storage capacity this turned out to be a "bottle neck" for the 8051’s
communication to the external world. Especially programming in high-level languages (PLM51,
C51, PASCAL51) requires extended RAM capacity and at the same time a fast access to this
additional RAM because of the reduced code efficiency of these languages.
2.5.2 How the eight Datapointers of the C500 are realized
Simply adding more datapointers is not suitable because of the need to keep up 100% compatibility
to the 8051 instruction set. This instruction set, however, allows the handling of only one single 16bit datapointer (DPTR, consisting of the two 8-bit SFRs DPH and DPL).
To meet both of the above requirements (speed up external accesses, 100% compatibility to 8051
architecture) the C500 contains a set of eight 16-bit registers from which the actual datapointer can
be selected.
This means that the user’s program may keep up to eight 16-bit addresses resident in these
registers, but only one register at a time is selected to be the datapointer. Thus the datapointer in
turn is accessed (or selected) via indirect addressing. This indirect addressing is done through a
special function register called DPSEL (data pointer select register). All instructions of the C500
which handle the datapointer therefore affect only one of the eight pointers which is addressed by
DPSEL at that very moment.
Figure 5-1 illustrates the addressing mechanism: a 3-bit field in register DPSEL points to the
currently used DPTRx. Any standard 8051 instruction (e.g. MOVX @DPTR, A - transfer a byte from
accumulator to an external location addressed by DPTR) now uses this activated DPTRx.
Semiconductor Group 2-5 1997-09-01
Page 17

CPU Functions
C500 Family
Datapointer
DPTR 0000
.0.1.2
DPTR7
DPTR0
DPH(83 ) DPL(82 )
HH
DPSEL(92 )
DPSEL Selected
.2 .1 .0
0 0 1 DPTR 1
0 1 0 DPTR 2
0 1 1 DPTR 3
1 0 0 DPTR 4
1 0 1 DPTR 5
1 1 0 DPTR 6
1 1 1 DPTR 7
H
-----
Figure 2-2
Accessing of External Data Memory via Multiple Datapointers
External Data Memory
MCD00779
2.5.3 Advantages of Multiple Datapointers
Using the above addressing mechanism for external data memory results in less code and faster
execution of external accesses. Whenever the contents of the datapointer must be altered between
two or more 16-bit addresses, one single instruction, which selects a new datapointer, does this job.
lf the program uses just one datapointer, then it has to save the old value (with two 8-bit instructions)
and load the new address, byte by byte. This not only takes more time, it also requires additional
space in the internal RAM.
2.5.4 Application Example and Performance Analysis
The following example shall demonstrate the involvement of multiple data pointers in a table
transfer from the code memory to external data memory.
Start address of ROM source table: 1FFF
Start address of table in external RAM: 2FA0
H
H
Semiconductor Group 2-6 1997-09-01
Page 18

CPU Functions
C500 Family
Example 1 : Using only One Datapointer (Code for a C501)
Initialization Routine
MOV LOW(SRC_PTR), #0FFH ;Initialize shadow_variables with source_pointer
MOV HIGH(SRC_PTR), #1FH
MOV LOW(DES_PTR), #0A0H ;Initialize shadow_variables with destination_pointer
MOV HIGH(DES_PTR), #2FH
Table Look-up Routine under Real Time Conditions
; Number of cycles
PUSH DPL ;Save old datapointer 2
PUSH DPH ; 2
MOV DPL, LOW(SRC_PTR) ;Load Source Pointer 2
MOV DPH, HIGH(SRC_PTR) ; 2
;INC DPTR Increment and check for end of table (execution time
;CJNE … not relevant for this consideration) –
MOVC A,@DPTR ;Fetch source data byte from ROM table 2
MOV LOW(SRC_PTR), DPL ;Save source_pointer and 2
MOV HIGH(SRC_PTR), DPH ;load destination_pointer 2
MOV DPL, LOW(DES_PTR) ; 2
MOV DPH, HIGH(DES_PTR) ; 2
INC DPTR ;Increment destination_pointer
;(ex. time not relevant) –
MOVX @DPTR, A ;Transfer byte to destination address 2
MOV LOW(DES_PTR), DPL ;Save destination_pointer 2
MOV HIGH(DES_PTR),DPH ; 2
POP DPH ;Restore old datapointer 2
POP DPL ; 2
; Total execution time (machine cycles) : 28
Semiconductor Group 2-7 1997-09-01
Page 19

CPU Functions
C500 Family
Example 2 : Using Two Datapointers (Code for a C509)
Initialization Routine
MOV DPSEL, #06H ;Initialize DPTR6 with source pointer
MOV DPTR, #1FFFH
MOV DPSEL, #07H ;Initialize DPTR7 with destination pointer
MOV DPTR, #2FA0H
Table Look-up Routine under Real Time Conditions
; Number of cycles
PUSH DPSEL ;Save old source pointer 2
MOV DPSEL, #06H ;Load source pointer 2
;INC DPTR Increment and check for end of table (execution time
;CJNE … not relevant for this consideration) –
MOVC A,@DPTR ;Fetch source data byte from ROM table 2
MOV DPSEL, #07H ;Save source_pointer and
;load destination_pointer 2
MOVX @DPTR, A ;Transfer byte to destination address 2
POP DPSEL ;Save destination pointer and
;restore old datapointer 2
; Total execution time (machine cycles) : 12
The above example shows that utilization of the C500’s multiple datapointers can make external
bus accesses two times as fast as with a standard 8051 or 8051 derivative. Here, four data variables
in the internal RAM and two additional stack bytes were spared, too. This means for some
applications where all eight datapointers are employed that an C500 program has up to 24 byte (16
variables and 8 stack bytes) of the internal RAM free for other use.
Semiconductor Group 2-8 1997-09-01
Page 20

CPU Functions
C500 Family
2.6 Enhanced Hooks Emulation Concept
The Enhanced Hooks Emulation Concept of the C500 microcontroller family is a new, innovative
way to control the execution of C500 MCUs and to gain extensive information on the internal
operation of the controllers. Emulation of on-chip ROM based programs is possible, too.
Each production chip has built-in logic for the support of the Enhanced Hooks Emulation Concept.
Therefore, no costly bond-out chips are necessary for emulation. This also ensure that emulation
and production chips are identical.
The Enhanced Hooks Technology
together with an EH-IC to function similar to a bond-out chip. This simplifies the design and reduces
costs of an ICE-system. ICE-systems using an EH-IC and a compatible C500 are able to emulate
all operating modes of the different versions of the C500. This includes emulation of ROM, ROM
with code rollover and ROMless modes of operation. It is also able to operate in single step mode
and to read the SFRs after a break.
TM
, which requires embedded logic in the C500, allows the C500
SYSCON
PCON
TCON
Optional
I/O Ports
ICE-System Interface
to Emulation Hardware
RESET
EA
ALE
PSEN
C500
MCU Interface Circuit
Port 3 Port 1
Port 0
Port 2
Target System Interface
RSYSCON
RPCON
RTCON
Enhanced Hooks
RPort 0RPort 2
EH-IC
TEA TALE TPSEN
MCS02647
Figure 2-3
Basic C500 MCU Enhanced Hooks Concept Configuration
Port 0, port 2 and some of the control lines of the C500 based MCU are used by Enhanced Hooks
Emulation Concept to control the operation of the device during emulation and to transfer
informations about the program execution and data transfer between the external emulation
hardware (ICE-system) and the C500 MCU.
Semiconductor Group 2-9 1997-09-01
Page 21
CPU Functions
C500 Family
2.7 Basic Interrupt Handling
Each member of the C500 microcontroller family provides several interrupt sources. These
interrupts are generated typically by external events or by the internal peripheral units. If an interrupt
is accepted by the CPU, the microcontroller interrupts a running program and proceeds the program
execution at an interrupt source specific vector address where the interrupt service routine is
located. After the execution of a RETI (return from interrupt) instruction the program is continued at
the point where it has been interrupted. Figure 2-4 shows an example for the interrupt vector
addresses of a C500 microcontroller (C501). Generally, interrupt vector addresses are located in
the code memory area starting at address 0003H. The minimum distance between two consecutive
vector addresses is always 8 bytes. Therefore, interrupt vectors can be assigned to the following
addresses: 0003H, 000BH, 0013H, 001BH, 0023H, 002BH, 0033H ...... 00FBH.
Figure 2-4
Interrupt Vector Addresses (Example of the C501)
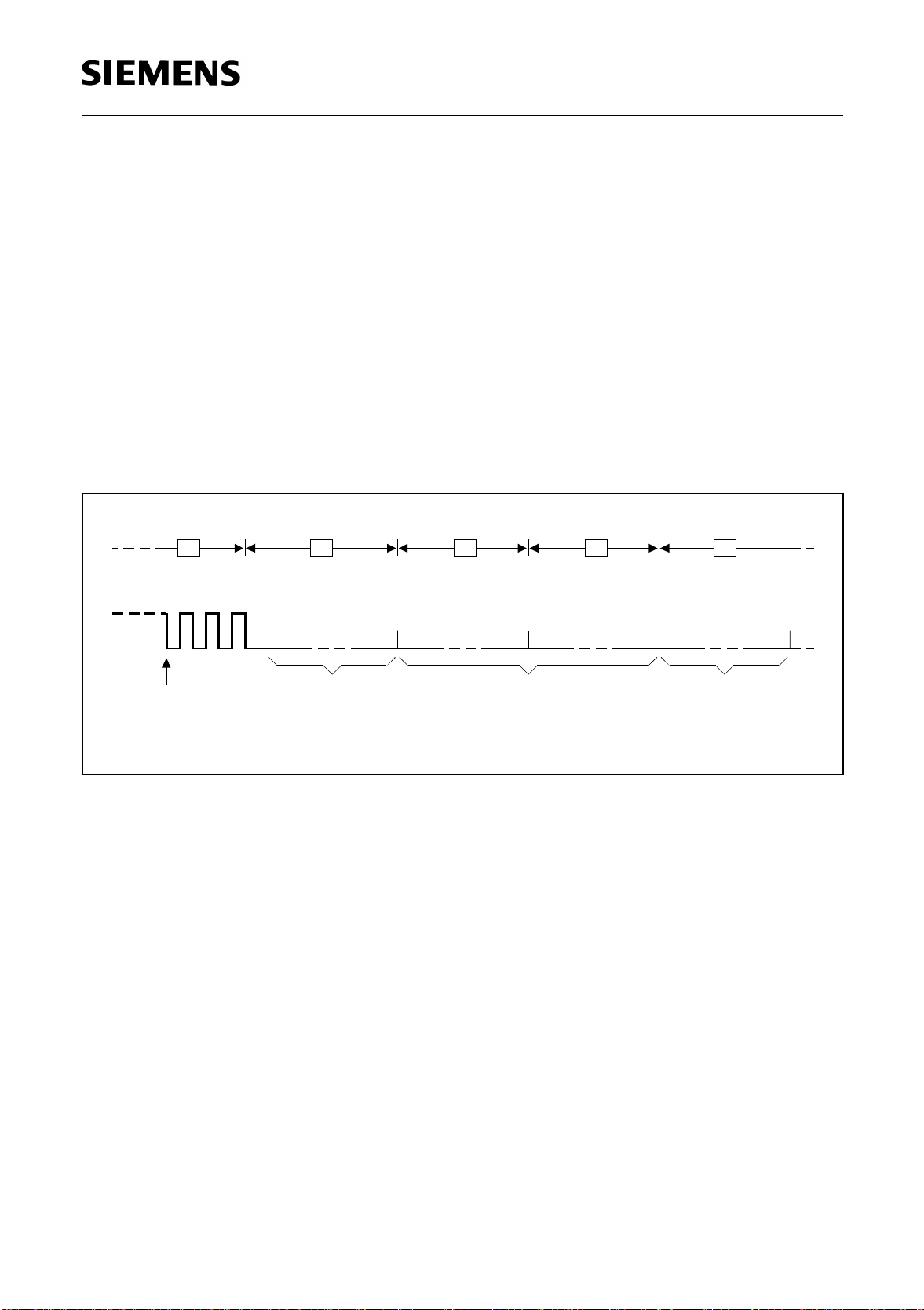
An interrupt source indicates to the interrupt controller an interrupt condition by setting an interrupt
request flag. The interrupt request flags are sampled in each machine cycle. The sampled flags are
polled during the following machine cycle. If one of the flags was in a set condition in the preceeding
cycle, the polling cycle will find it and the interrupt controller will cause the CPU to branch to the
vector address of the appropriate service routine by generating an internal LCALL. This hardwaregenerated LCALL is blocked by any of the following conditions:
1. An interrupt of equal or higher priority is already in progress.
2. The current (polling) cycle is not in the final cycle of the instruction in progress.
3. The instruction in progress is RETI or any write access to interrupt enable or priority registers.
Semiconductor Group 2-10 1997-09-01
Page 22
CPU Functions
C500 Family
Any of these three conditions will block the generation of the LCALL to the interrupt service routine.
Condition 2 ensures that the instruction in progress is completed before vectoring to any service
routine. Condition 3 ensures that if the instruction in progress is RETI or any write access to interrupt
enable or interrupt priority registers, then at least one more instruction will be executed before any
interrupt is vectored too; this delay guarantees that changes of the interrupt status can be observed
by the interrupt controller.
The polling cycle is repeated with each machine cycle, and the values polled are the values that
were present at the previous machine cycle. Note that if any interrupt flag is active but not being
responded to for one of the conditions already mentioned, or if the flag is no longer active when the
blocking condition is removed, the denied interrupt will not be serviced. In other words, the fact that
the interrupt flag was once active but not serviced is not remembered. Every polling cycle
interrogates only the pending interrupt requests.
The polling cycle/LCALL sequence is illustrated in figure 2-1.
C2C1 C3 C4 C5
S5P2
Interrupt
is latched
Interrupts
are polled
Long Call to Interrupt
Vector Address
Interrupt
Routine
MCT01859
Figure 2-5
Interrupt Detection/Entry Diagram
Note that if an interrupt of a higher priority level goes active prior to S5P2 in the machine cycle
labeled C3 in figure 2-5 then, in accordance with the above rules, it will be vectored to during C5
and C6 without any instruction for the lower priority routine to be executed.
Thus, the processor acknowledges an interrupt request by executing a hardware-generated LCALL
to the appropriate servicing routine. In some cases it also clears the flag that generated the
interrupt, while in other cases it does not; then this has to be done by the user's software.
The program execution proceeds from that location until the RETI instruction is encountered. The
RETI instruction informs the processor that the interrupt routine is no longer in progress, then pops
the two top bytes from the stack and reloads the program counter. Execution of the interrupted
program continues from the point where it was stopped. Note that the RETI instruction is very
important because it informs the processor that the program left the current interrupt priority level.
A simple RET instruction would also have returned execution to the interrupted program, but it
would have left the interrupt control system thinking an interrupt was still in progress. In this case no
interrupt of the same or lower priority level would be acknowledged.
Semiconductor Group 2-11 1997-09-01
Page 23

CPU Functions
C500 Family
2.8 Interrupt Response Time
If an external interrupt is recognized, its corresponding request flag is set at S5P2 in every machine
cycle. The value is not polled by the circuitry until the next machine cycle. If the request is active and
conditions are right for it to be acknowledged, a hardware subroutine call to the requested service
routine will be next instruction to be executed. The call itself takes two cycles. Thus a minimum of
three complete machine cycles will elapse between activation and external interrupt request and the
beginning of execution of the first instruction of the service routine.
A longer response time would be obtained if the request was blocked by one of the three previously
listed conditions. If an interrupt of equal or higher priority is already in progress, the additional wait
time obviously depends on the nature of the other interrupt's service routine. If the instruction in
progress is not in its final cycle, the additional wait time cannot be more than 3 cycles since the
longest instructions (MUL and DIV) are only 4 cycles long; and, if the instruction in progress is RETI
or a write access to interrupt enable or interrupt priority registers the additional wait time cannot be
more than 5 cycles (a maximum of one more cycle to complete the instruction in progress, plus 4
cycles to complete the next instruction, if the instruction is MUL or DIV).
Thus a single interrupt system, the response time is always more than 3 cycles and less than
9 cycles.
Semiconductor Group 2-12 1997-09-01
Page 24

CPU Timing
C500 Family
3 CPU Timing
3.1 Basic Timing
A machine cycle consists of 6 states. Each state is divided into a phase 1 half, during which the
phase 1 clock is active, and a phase 2 half, during which the phase 2 clock is active. Thus, a
machine cycle consists of the states S1P1 (state 1, phase 1) through S6P2 (state 6, phase 2).
Depending on the C500 type of microcontroller, each state lasts either one or two periods of the
oscillator clock. Typically, arithmetic and logical operations take place during phase 1 and internal
register-to-register transfers take place during phase 2.
The diagrams in figure 3-1 show the fetch/execute timing related to the internal states and phases.
Since these internal clock signals are not user-accessible, the ALE (address latch enable) signal is
shown for external reference. ALE is normally activated twice during each machine cycle: once
during S1P2 and S2P1, and again during S4P2 and S5P1.
The execution of a one-cycle instruction begins at S1P2, when the opcode is latched into the
instruction register. If it is a two-byte instruction, the second reading takes place during S4 of the
same machine cycle. If it is a one-byte instruction, there is still a fetch at S4, but the byte read (which
would be the next op-code) is ignored (discarded fetch), and the program counter is not
incremented. In any case, execution is completed at the end of S6P2.
Figures 3-1 (a) and (b) show the timing of a 1-byte, 1-cycle instruction and for a 2-byte, 1-cycle
instruction.
Most C500 instructions are executed in one cycle. MUL (multiply) and DIV (divide) are the only
instructions that take more than two cycles to complete; they take four cycles. Normally two code
bytes are fetched from the program memory during every machine cycle. The only exception to this
is when a MOVX instruction is executed. MOVX is a one-byte, 2-cycle instruction that accesses
external data memory. During a MOVX, the two fetches in the second cycle are skipped while the
external data memory is being addressed and strobed. Figure 3-1 (c) and (d) show the timing for
a normal 1-byte, 2-cycle instruction and for a MOVX instruction.
Semiconductor Group 3-1 1997-09-01
Page 25

CPU Timing
C500 Family
Figure 3-1
Fetch Execute Sequence
Semiconductor Group 3-2 1997-09-01
Page 26

CPU Timing
C500 Family
3.2 Accessing External Memory
There are two types of external memory accesses: accesses to external program memory and
accesses to external data memory. Accesses to external program memory use the signal PSEN
(program store enable) as the read strobe. Accesses to external data memory use the RD or WR
(alternate functions of P3.7 and P3.6) to access the memory.
Fetches from external program memory always use a 16-bit address. Accesses to external data
memory can use either a 16-bit address (MOVX @DPTR) or an 8-bit address (MOVX @Ri).
Whenever a 16-bit address is used, the high byte of the address comes out on port 2, where it is
held for the duration of the read, write, or code fetch cycle.
If an 8-bit address is being used (MOVX @Ri), the contents of the port 2 SFR remain at the port 2
pins throughout the whole external memory cycle. In this case, port 2 pins can be used to page the
external data memory.
In either case, the low byte of the address is time-multiplexed with the data byte on port 0. The
ADDRESS/DATA signal drives both FETS in the port 0 output buffers. Thus, in external bus mode
the port 0 pins are not open-drain outputs and do not require external pullups. The ALE (address
latch enable) signal should be used to latch the address byte into an external latch. The address
byte is valid at the negative transition of ALE. Then, in a write cycle, the data byte to be written
appears on port 0 just before WR is activated, and remains there until WR is deactivated. In a read
cycle, the incoming byte is accepted at port 0 just before the read strobe (RD) is deactivated.
During any access to external memory, the CPU writes FFH to the port 0 latch (the special function
register), thus obliterating the information in the port 0 SFR. Also, a MOV P0 instruction must not
take place during external memory accesses. If the user writes to port 0 during an external memory
fetch, the incoming code byte may be corrupted. Therefore, do not write to port 0 if external memory
is used.
3.2.1 Accessing External Program Memory
External program memory is accessed under two conditions:
1. Whenever signal EA is active (low), or
2. Whenever signal EA
than the internal ROM size (e.g. 1FFFFH for an 8K internal ROM or 3FFFH for an 16K internal
ROM).
This requires that the ROMless versions have always EA wired to Vss to enable the lower 8K, 16K,
or 32K program bytes to be fetched from external memory.
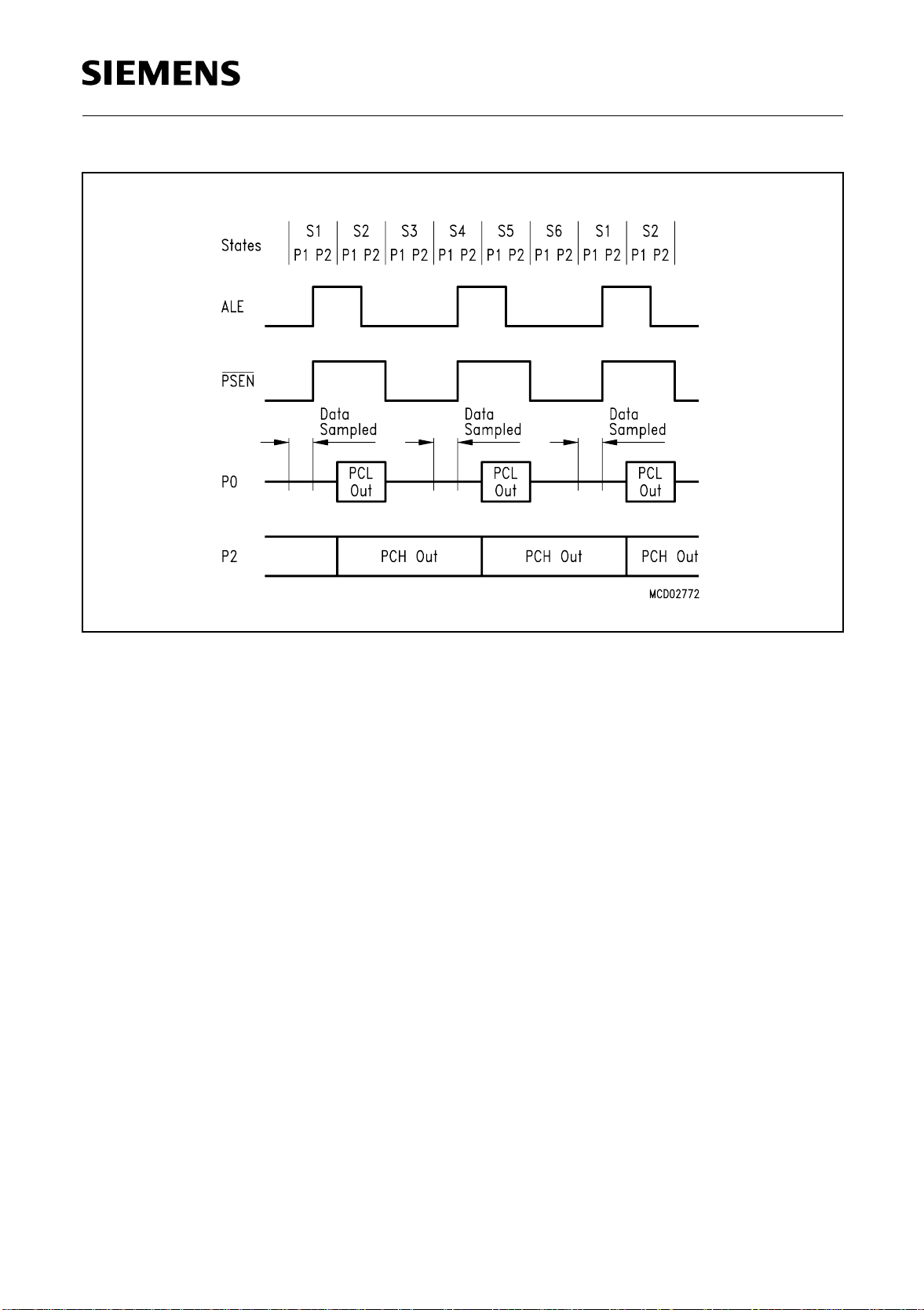
When the CPU is executing out from external program memory (see timing diagram in figure 3-2),
all 8 bits of port 2 are dedicated to an output function and may not be used for general purpose I/O.
During external program fetches they output the high byte of the PC with the port 2 drivers using the
strong pullups to emit bits that are 1´s.
is inactive (high) and the program counter (PC) contains an address greater
Semiconductor Group 3-3 1997-09-01
Page 27
CPU Timing
C500 Family
Figure 3-2
External Program Memory Fetches
3.2.2 Accessing External Data Memory
The port 2 drivers use the strong pullups during the entire time that they are emitting address bits
that are 1´s. This occurs when the MOVX @DPTR instruction is executed and when external
program fetches are executed. During this time the port 2 latch (the special function register) does
not have to contain 1´s, and the contents of the port 2 SFR are not modified. If the external memory
cycle is not immediately followed by another external memory cycle, the undisturbed contents of the
port 2 SFR will reappear in the next cycle.
Figure 3-3 and 3-4 show in detail the timings of the external data memory read and write cycles.
Semiconductor Group 3-4 1997-09-01
Page 28

CPU Timing
C500 Family
Figure 3-3
External Data Memory Read Cycle
Figure 3-4
External Data Memory Write Cycle
Semiconductor Group 3-5 1997-09-01
Page 29

Instruction Set
C500 Family
4 Instruction Set
The C500 8-bit microcontroller family instruction set includes 111 instructions, 49 of which are
single-byte, 45 two-byte and 17 three-byte instructions. The instruction opcode format consists of a
function mnemonic followed by a ”destination, source” operand field. This field specifies the data
type and addressing method(s) to be used.
Like all other members of the 8051-family, the C500 microcontrollers can be programmed with the
same instruction set common to the basic member, the SAB 8051.
Thus, the C500 family microcontrollers are 100% software compatible to the SAB 8051 and may be
programmed with 8051 assembler or high-level languages.
4.1 Addressing Modes
The C500 uses five addressing modes:
– register
– direct
– immediate
– register indirect
– base register plus index-register indirect
Table 4-1 summarizes the memory spaces which may be accessed by each of the addressing
modes.
Register Addressing
Register addressing accesses the eight working registers (R0 - R7) of the selected register bank.
The least significant bit of the instruction opcode indicates which register is to be used. ACC, B,
DPTR and CY, the Boolean processor accumulator, can also be addressed as registers.
Direct Addressing
Direct addressing is the only method of accessing the special function registers. The lower
128 bytes of internal RAM are also directly addressable.
Immediate Addressing
Immediate addressing allows constants to be part of the instruction in program memory.
Semiconductor Group 4-1 1997-09-01
Page 30
Instruction Set
C500 Family
Table 4-1
Addressing Modes and Associated Memory Spaces
Addressing Modes Associated Memory Spaces
Register addressing R0 through R7 of selected register bank, ACC,
B, CY (Bit), DPTR
Direct addressing Lower 128 bytes of internal RAM, special
function registers
Immediate addressing Program memory
Register indirect addressing Internal RAM (@R1, @R0, SP), external data
memory (@R1, @R0, @DPTR)
Base register plus index register addressing Program memory (@A + DPTR, @A + PC)
Register Indirect Addressing
Register indirect addressing uses the contents of either R0 or R1 (in the selected register bank) as
a pointer to locations in a 256-byte block: the 256 bytes of internal RAM or the lower 256 bytes of
external data memory. Note that the special function registers are not accessible by this method.
The upper half of the internal RAM can be accessed by indirect addressing only. Access to the full
64 Kbytes of external data memory address space is accomplished by using the 16-bit data pointer.
Execution of PUSH and POP instructions also uses register indirect addressing. The stack may
reside anywhere in the internal RAM.
Base Register plus Index Register Addressing
Base register plus index register addressing allows a byte to be accessed from program memory
via an indirect move from the location whose address is the sum of a base register (DPTR or PC)
and index register, ACC. This mode facilitates look-up table accesses.
Boolean Processor
The Boolean processor is a bit processor integrated into the C500 family microcontrollers. It has its
own instruction set, accumulator (the carry flag), bit-addressable RAM and l/O.
The bit manipulation instructions allow:
– set bit
– clear bit
– complement bit
– jump if bit is set
– jump if bit is not set
– jump if bit is set and clear bit
– move bit from / to carry
Addressable bits, or their complements, may be logically AND-ed or OR-ed with the contents of the
carry flag. The result is returned to the carry register.
Semiconductor Group 4-2 1997-09-01
Page 31

Instruction Set
C500 Family
4.2 Introduction to the Instruction Set
The instruction set is divided into four functional groups:
– data transfer
– arithmetic
– logic
– control transfer
4.2.1 Data Transfer Instructions
Data transfer operations are divided into three classes:
– general-purpose
– accumulator-specific
– address-object
None of these operations affects the PSW flag settings except a POP or MOV directly to the PSW.
General-Purpose Transfers
– MOV performs a bit or byte transfer from the source operand to the destination operand.
– PUSH increments the SP register and then transfers a byte from the source operand to the
stack location currently addressed by SP.
– POP transfers a byte operand from the stack location addressed by the SP to the destination
operand and then decrements SP.
Accumulator-Specific Transfers
– XCH exchanges the byte source operand with register A (accumulator).
– XCHD exchanges the low-order nibble of the source operand byte with the low-order nibble
of A.
– MOVX performs a byte move between the external data memory and the accumulator. The
external address can be specified by the DPTR register (16 bit) or the R1 or R0 register (8 bit).
– MOVC moves a byte from program memory to the accumulator. The operand in A is used as
an index into a 256-byte table pointed to by the base register (DPTR or PC). The byte operand
accessed is transferred to the accumulator.
Address-Object Transfer
– MOV DPTR, #data loads 16 bits of immediate data into a pair of destination registers, DPH
and DPL.
Semiconductor Group 4-3 1997-09-01
Page 32

Instruction Set
C500 Family
4.2.2 Arithmetic Instructions
The C500 family microcontrollers have four basic mathematical operations. Only 8-bit operations
using unsigned arithmetic are supported directly. The overflow flag, however, permits the addition
and subtraction operation to serve for both unsigned and signed binary integers. Arithmetic can also
be performed directly on packed BCD representations.
Addition
– INC (increment) adds one to the source operand and puts the result in the operand (flags in
PSW are not affected).
– ADD adds A to the source operand and returns the result to A.
– ADDC (add with carry) adds A and the source operand, then adds one (1) if CY is set, and
puts the result in A.
– DA (decimal-add-adjust for BCD addition) corrects the sum which results from the binary
addition of two-digit decimal operands. The packed decimal sum formed by DA is returned to
A. CY is set if the BCD result is greater than 99; otherwise, it is cleared.
Subtraction
– SUBB (subtract with borrow) subtracts the second source operand from the first operand (the
accumulator), subtracts one (1) if CY is set and returns the result to A.
– DEC (decrement) subtracts one (1) from the source operand and returns the result to the
operand (flags in PSW are not affected).
Multiplication
– MUL performs an unsigned multiplication of the A register by the B register, returning a double
byte result. A receives the low-order byte, B receives the high-order byte. OV is cleared if the
top half of the result is zero and is set if it is not zero. CY is cleared. AC is unaffected.
Division
– DIV performs an unsigned division of the A register by the B register; it returns the integer
quotient to the A register and returns the fractional remainder to the B register. Division by
zero leaves indeterminate data in registers A and B and sets OV; otherwise, OV is cleared.
CY is cleared. AC remains unaffected.
Flags
Unless otherwise stated in the previous descriptions, the flags of PSW are affected as follows:
– CY is set if the operation causes a carry to or a borrow from the resulting high-order bit;
otherwise CY is cleared.
– AC is set if the operation results in a carry from the low-order four bits of the result (during
addition), or a borrow from the high-order bits to the low-order bits (during subtraction);
otherwise AC is cleared.
– OV is set if the operation results in a carry to the high-order bit of the result but not a carry
from the bit, or vice versa; otherwise OV is cleared. OV is used in two’s-complement
arithmetic, because it is set when the signal result cannot be represented in 8 bits.
– P is set if the modulo-2 sum of the eight bits in the accumulator is 1 (odd parity); otherwise P
is cleared (even parity). When a value is written to the PSW register, the P bit remains
unchanged, as it always reflects the parity of A.
Semiconductor Group 4-4 1997-09-01
Page 33

Instruction Set
C500 Family
4.2.3 Logic Instructions
The C500 family microcontrollers perform basic logic operations on both bit and byte operands.
Single-Operand Operations
– CLR sets A or any directly addressable bit to zero (0).
– SETB sets any directly bit-addressable bit to one (1).
– CPL is used to complement the contents of the A register without affecting any flag, or any
directly addressable bit location.
– RL, RLC, RR, RRC, SWAP are the five operations that can be performed on A. RL, rotate left,
RR, rotate right, RLC, rotate left through carry, RRC, rotate right through carry, and SWAP,
rotate left four. For RLC and RRC the CY flag becomes equal to the last bit rotated out. SWAP
rotates A left four places to exchange bits 3 through 0 with bits 7 through 4.
Two-Operand Operations
– ANL performs bitwise logical AND of two operands (for both bit and byte operands) and
returns the result to the location of the first operand.
– ORL performs bitwise logical OR of two source operands (for both bit and byte operands) and
returns the result to the location of the first operand.
– XRL performs logical Exclusive OR of two source operands (byte operands) and returns the
result to the location of the first operand.
4.2.4 Control Transfer Instructions
There are three classes of control transfer operations: unconditional calls, returns, jumps,
conditional jumps, and interrupts. All control transfer operations, some upon a specific condition,
cause the program execution to continue a non-sequential location in program memory.
Semiconductor Group 4-5 1997-09-01
Page 34

Instruction Set
C500 Family
Unconditional Calls, Returns and Jumps
Unconditional calls, returns and jumps transfer control from the current value of the program
counter to the target address. Both direct and indirect transfers are supported.
– ACALL and LCALL push the address of the next instruction onto the stack and then transfer
control to the target address. ACALL is a 2-byte instruction used when the target address is
in the current 2K page. LCALL is a 3-byte instruction that addresses the full 64K program
space. In ACALL, immediate data (i.e. an 11-bit address field) is concatenated to the five most
significant bits of the PC (which is pointing to the next instruction). If ACALL is in the last 2
bytes of a 2K page then the call will be made to the next page since the PC will have been
incremented to the next instruction prior to execution.
– RET transfers control to the return address saved on the stack by a previous call operation
and decrements the SP register by two (2) to adjust the SP for the popped address.
– AJMP, LJMP and SJMP transfer control to the target operand. The operation of AJMP and
LJMP are analogous to ACALL and LCALL. The SJMP (short jump) instruction provides for
transfers within a 256-byte range centered about the starting address of the next instruction
(– 128 to + 127).
– JMP @A + DPTR performs a jump relative to the DPTR register. The operand in A is used as
the offset (0 - 255) to the address in the DPTR register. Thus, the effective destination for a
jump can be anywhere in the program memory space.
Conditional Jumps
Conditional jumps perform a jump contingent upon a specific condition. The destination will be
within a 256-byte range centered about the starting address of the next instruction (– 128 to + 127).
– JZ performs a jump if the accumulator is zero.
– JNZ performs a jump if the accumulator is not zero.
– JC performs a jump if the carry flag is set.
– JNC performs a jump if the carry flag is not set.
– JB performs a jump if the directly addressed bit is set.
– JNB performs a jump if the directly addressed bit is not set.
– JBC performs a jump if the directly addressed bit is set and then clears the directly addressed
bit.
– CJNE compares the first operand to the second operand and performs a jump if they are not
equal. CY is set if the first operand is less than the second operand; otherwise it is cleared.
Comparisons can be made between A and directly addressable bytes in internal data memory
or an immediate value and either A, a register in the selected register bank, or a register
indirectly addressable byte of the internal RAM.
– DJNZ decrements the source operand and returns the result to the operand. A jump is
performed if the result is not zero. The source operand of the DJNZ instruction may be any
directly addressable byte in the internal data memory. Either direct or register addressing may
be used to address the source operand.
Interrupt Returns
– RETI transfers control as RET does, but additionally enables interrupts of the current priority
level.
Semiconductor Group 4-6 1997-09-01
Page 35

Instruction Set
C500 Family
4.3 Instruction Definitions
All 111 instructions of the C500 family microcontrollers can essentially be condensed to 53 basic
operations, in the following alphabetically ordered according to the operation mnemonic section.
Table 4-2
PSW Flag Modification (CY,OV,AC)
Instruction Flag Instruction Flag
CY OV AC CY OV AC
ADD X X X SETB C 1
ADDC X X X CLR C 0
SUBB X X X CPL C X
MUL 0 X ANL C,bit X
DIV 0 X ANL C,/bit X
DA X ORL C,bit X
RRC X ORL C,/bit X
RLC X MOV C,bit X
CJNE X
A brief example of how the instruction might be used is given as well as its effect on the PSW flags.
The number of bytes and machine cycles required, the binary machine language encoding, and a
symbolic description or restatement of the function is also provided.
Note:
Only the carry, auxiliary carry, and overflow flags are discussed. The parity bit is always computed
from the actual content of the accumulator.
Similarly, instructions which alter directly addressed registers could affect the other status flags if
the instruction is applied to the PSW. Status flags can also be modified by bit manipulation.
Semiconductor Group 4-7 1997-09-01
Page 36

Instruction Set
C500 Family
Notes on Data Addressing Modes:
Rn - Working register R0-R7
direct - 128 internal RAM locations, any l/O port, control or status register
@Ri - Indirect internal or external RAM location addressed by register R0 or R1
#data - 8-bit constant included in instruction
#data 16 - 16-bit constant included as bytes 2 and 3 of instruction
bit - 128 software flags, any bit-addressable l/O pin, control or status bit
A - Accumulator
Notes on Program Addressing Modes:
addr16 - Destination address for LCALL and LJMP may be anywhere within the 64-Kbyte
program memory address space.
addr11 - Destination address for ACALL and AJMP will be within the same 2-Kbyte page of
program memory as the first byte of the following instruction.
rel - SJMP and all conditional jumps include an 8-bit offset byte. Range is + 127/– 128
bytes relative to the first byte of the following instruction.
All mnemonics copyrighted: Intel Corporation 1980
Semiconductor Group 4-8 1997-09-01
Page 37

Instruction Set
C500 Family
ACALL addr11
Function: Absolute call
Description: ACALL unconditionally calls a subroutine located at the indicated address. The
instruction increments the PC twice to obtain the address of the following
instruction, then pushes the 16-bit result onto the stack (low-order byte first) and
increments the stack pointer twice. The destination address is obtained by
successively concatenating the five high-order bits of the incremented PC, op code
bits 7-5, and the second byte of the instruction. The subroutine called must
therefore start within the same 2K block of program memory as the first byte of the
instruction following ACALL. No flags are affected.
Example: Initially SP equals 07H. The label ”SUBRTN” is at program memory location 0345H.
After executing the instruction
ACALL SUBRTN
at location 0123H, SP will contain 09H, internal RAM location 08H and 09H will
contain 25H and 01H, respectively, and the PC will contain 0345H.
Operation: ACALL
(PC) ← (PC) + 2
(SP) ← (SP) + 1
((SP)) ← (PC7-0)
(SP) ← (SP) + 1
((SP)) ← (PC15-8)
(PC10-0) ← page address
Encoding: a10 a9 a8 1 0 0 0 1 a7 a6 a5 a4 a3 a2 a1 a0
Bytes: 2
Cycles: 2
Semiconductor Group 4-9 1997-09-01
Page 38

Instruction Set
C500 Family
ADD A, <src-byte>
Function: Add
Description: ADD adds the byte variable indicated to the accumulator, leaving the result in the
accumulator. The carry and auxiliary carry flags are set, respectively, if there is a
carry out of bit 7 or bit 3, and cleared otherwise. When adding unsigned integers,
the carry flag indicates an overflow occurred.
OV is set if there is a carry out of bit 6 but not out of bit 7, or a carry out of bit 7 but
not out of bit 6; otherwise OV is cleared. When adding signed integers, OV indicates
a negative number produced as the sum of two positive operands, or a positive sum
from two negative operands.
Four source operand addressing modes are allowed: register, direct, registerindirect, or immediate.
Example: The accumulator holds 0C3H (11000011B) and register 0 holds 0AAH
(10101010B).
The instruction
ADD A,R0
will leave 6DH (01101101B) in the accumulator with the AC flag cleared and both
the carry flag and OV set to 1.
ADD A,Rn
Operation: ADD
(A) ← (A) + (Rn)
Encoding: 0 0 1 0 1 r r r
Bytes: 1
Cycles: 1
ADD A,direct
Operation: ADD
(A) ← (A) + (direct)
Encoding: 0 0 1 0 0 1 0 1 direct address
Bytes: 2
Cycles: 1
Semiconductor Group 4-10 1997-09-01
Page 39

ADD A, @Ri
Operation: ADD
(A) ← (A) + ((Ri))
Encoding: 0 0 1 0 0 1 1 i
Bytes: 1
Cycles: 1
ADD A, #data
Operation: ADD
(A) ← (A) + #data
Encoding: 0 0 1 0 0 1 0 0 immediate data
Instruction Set
C500 Family
Bytes: 2
Cycles: 1
Semiconductor Group 4-11 1997-09-01
Page 40

Instruction Set
C500 Family
ADDC A, < src-byte>
Function: Add with carry
Description: ADDC simultaneously adds the byte variable indicated, the carry flag and the
accumulator contents, leaving the result in the accumulator. The carry and auxiliary
carry flags are set, respectively, if there is a carry out of bit 7 or bit 3, and cleared
otherwise. When adding unsigned integers, the carry flag indicates an overflow
occurred.
OV is set if there is a carry out of bit 6 but not out of bit 7, or a carry out of bit 7 but
not out of bit 6; otherwise OV is cleared. When adding signed integers, OV indicates
a negative number produced as the sum of two positive operands or a positive sum
from two negative operands.
Four source operand addressing modes are allowed: register, direct, registerindirect, or immediate.
Example: The accumulator holds 0C3H (11000011B) and register 0 holds 0AAH (10101010B)
with the carry flag set. The instruction
ADDC A,R0
will leave 6EH (01101110B) in the accumulator with AC cleared and both the carry
flag and OV set to 1.
ADDC A,Rn
Operation: ADDC
(A) ← (A) + (C) + (Rn)
Encoding: 0 0 1 1 1 r r r
Bytes: 1
Cycles: 1
ADDC A,direct
Operation: ADDC
(A) ← (A) + (C) + (direct)
Encoding: 0 0 1 1 0 1 0 1 direct address
Bytes: 2
Cycles: 1
Semiconductor Group 4-12 1997-09-01
Page 41

ADDC A, @Ri
Operation: ADDC
(A) ← (A) + (C) + ((Ri))
Encoding: 0 0 1 1 0 1 1 i
Bytes: 1
Cycles: 1
ADDC A, #data
Operation: ADDC
(A) ← (A) + (C) + #data
Encoding: 0 0 1 1 0 1 0 0 immediate data
Instruction Set
C500 Family
Bytes: 2
Cycles: 1
Semiconductor Group 4-13 1997-09-01
Page 42
Instruction Set
C500 Family
AJMP addr11
Function: Absolute jump
Description: AJMP transfers program execution to the indicated address, which is formed at run-
time by concatenating the high-order five bits of the PC (
twice), op code bits 7-5, and the second byte of the instruction. The destination must
therefore be within the same 2K block of program memory as the first byte of the
instruction following AJMP.
Example: The label ”JMPADR” is at program memory location 0123H. The instruction
AJMP JMPADR
is at location 0345H and will load the PC with 0123H.
Operation: AJM P
(PC) ← (PC) + 2
(PC10-0) ← page address
after
incrementing the PC
Encoding: a10 a9 a8 0 0 0 0 1 a7 a6 a5 a4 a3 a2 a1 a0
Bytes: 2
Cycles: 2
Semiconductor Group 4-14 1997-09-01
Page 43
Instruction Set
C500 Family
ANL <dest-byte>, <src-byte>
Function: Logical AND for byte variables
Description: ANL performs the bitwise logical AND operation between the variables indicated
and stores the results in the destination variable. No flags are affected.
The two operands allow six addressing mode combinations. When the destination
is a accumulator, the source can use register, direct, register-indirect, or immediate
addressing; when the destination is a direct address, the source can be the
accumulator or immediate data.
Note:
When this instruction is used to modify an output port, the value used as the original
port data will be read from the output data latch, not the input pins.
Example: If the accumulator holds 0C3H (11000011B) and register 0 holds 0AAH
(10101010B) then the instruction
ANL A,R0
will leave 81H (10000001B) in the accumulator.
When the destination is a directly addressed byte, this instruction will clear
combinations of bits in any RAM location or hardware register. The mask byte
determining the pattern of bits to be cleared would either be a constant contained
in the instruction or a value computed in the accumulator at run-time.
The instruction
ANL P1, #01110011
will clear bits 7, 3, and 2 of output port 1.
ANL A,Rn
Operation: ANL
(A) ← (A) ∧ (Rn)
Encoding: 0 1 0 1 1 r r r
Bytes: 1
Cycles: 1
B
ANL A,direct
Operation: ANL
(A) ← (A) ∧ (direct)
Encoding: 0 1 0 1 0 1 0 1 direct address
Bytes: 2
Cycles: 1
Semiconductor Group 4-15 1997-09-01
Page 44
ANL A, @Ri
Operation: ANL
(A) ← (A) ∧ ((Ri))
Encoding: 0 1 0 1 0 1 1 i
Bytes: 1
Cycles: 1
ANL A, #data
Operation: ANL
(A) ← (A) ∧ #data
Encoding: 0 1 0 1 0 1 0 0 immediate data
Instruction Set
C500 Family
Bytes: 2
Cycles: 1
ANL direct,A
Operation: ANL
(direct) ← (direct) ∧ (A)
Encoding: 0 1 0 1 0 1 0 1 direct address
Bytes: 2
Cycles: 1
Semiconductor Group 4-16 1997-09-01
Page 45
Instruction Set
C500 Family
ANL direct, #data
Operation: ANL
(direct) ← (direct) ∧ #data
Encoding: 0 1 0 1 0 0 1 1 direct address immediate data
Bytes: 3
Cycles: 2
Semiconductor Group 4-17 1997-09-01
Page 46

Instruction Set
C500 Family
ANL C, <src-bit>
Function: Logical AND for bit variables
Description: If the Boolean value of the source bit is a logic 0 then clear the carry flag; otherwise
leave the carry flag in its current state. A slash (”/” preceding the operand in the
assembly language indicates that the logical complement of the addressed bit is
used as the source value,
affected.
Only direct bit addressing is allowed for the source operand.
Example: Set the carry flag if, and only if, P1.0 = 1, ACC.7 = 1, and OV = 0:
MOV C,P1.0 ; Load carry with input pin state
ANL C,ACC.7 ; AND carry with accumulator bit 7
ANL C,/OV ; AND with inverse of overflow flag
ANL C,bit
but the source bit itself is not affected
. No other flags are
Operation: ANL
(C) ← (C) ∧ (bit)
Encoding: 1 0 0 0 0 0 1 0 bit address
Bytes: 2
Cycles: 2
ANL C,/bit
Operation: ANL
(C) ← (C) ∧ / (bit)
Encoding: 1 0 1 1 0 0 0 0 bit address
Bytes: 2
Cycles: 2
Semiconductor Group 4-18 1997-09-01
Page 47

Instruction Set
C500 Family
CJNE <dest-byte >, < src-byte >, rel
Function: Compare and jump if not equal
Description: CJNE compares the magnitudes of the tirst two operands, and branches if their
values are not equal. The branch destination is computed by adding the signed
relative displacement in the last instruction byte to the PC, after incrementing the
PC to the start of the next instruction. The carry flag is set if the unsigned integer
value of <dest-byte> is less than the unsigned integer value of <src-byte>;
otherwise, the carry is cleared. Neither operand is affected.
The first two operands allow four addressing mode combinations: the accumulator
may be compared with any directly addressed byte or immediate data, and any
indirect RAM location or working register can be compared with an immediate
constant.
Example: The accumulator contains 34H. Register 7 contains 56H. The first instruction in the
sequence
CJNE R7, # 60H, NOT_EQ
; . . . . . . . . ; R7 = 60
NOT_EQ JC REQ_LOW ; If R7 < 60
; . . . . . . . . ; R7 > 60
sets the carry flag and branches to the instruction at label NOT_EQ. By testing the
carry flag, this instruction determines whether R7 is greater or less than 60H.
If the data being presented to port 1 is also 34H, then the instruction
WAIT: CJNE A,P1,WAIT
clears the carry flag and continues with the next instruction in sequence, since the
accumulator does equal the data read from P1. (If some other value was input on
P1, the program will loop at this point until the P1 data changes to 34H).
H
H
H
Semiconductor Group 4-19 1997-09-01
Page 48

Instruction Set
C500 Family
CJNE A,direct,rel
Operation: (PC) ← (PC) + 3
if (A) < > (direct)
then (PC) ← (PC) + relative offset
if (A) < (direct)
then (C) ←1
else (C) ← 0
Encoding: 1 0 1 1 0 1 0 1 direct address rel. address
Bytes: 3
Cycles: 2
CJNE A, #data,rel
Operation: (PC) ← (PC) + 3
if (A) < > data
then (PC) ← (PC) + relative offset
if (A) ← data
then (C) ←1
else (C) ← 0
Encoding: 1 0 1 1 0 1 0 0 immediate data rel. address
Bytes: 3
Cycles: 2
CJNE RN, #data, rel
Operation: (PC) ← (PC) + 3
if (Rn) < > data
then (PC) ← (PC) + relative offset
if (Rn) < data
then (C) ← 1
else (C) ← 0
Encoding: 1 0 1 1 1 r r r immediate data rel. address
Bytes: 3
Cycles: 2
Semiconductor Group 4-20 1997-09-01
Page 49

Instruction Set
C500 Family
CJNE @Ri, #data, rel
Operation: (PC) ← (PC) + 3
if ((Ri)) < > data
then (PC) ← (PC) + relative offset
if ((Ri)) < data
then (C) ← 1
else (C) ← 0
Encoding: 1 0 1 1 0 1 1 i immediate data rel. address
Bytes: 3
Cycles: 2
Semiconductor Group 4-21 1997-09-01
Page 50

Instruction Set
C500 Family
CLR A
Function: Clear accumulator
Description: The accumulator is cleared (all bits set to zero). No flags are affected.
Example: The accumulator contains 5CH (01011100B). The instruction
CLR A
will leave the accumulator set to 00H (00000000B).
Operation: CLR
(A) ← 0
Encoding: 1 1 1 0 0 1 0 0
Bytes: 1
Cycles: 1
Semiconductor Group 4-22 1997-09-01
Page 51

Instruction Set
C500 Family
CLR bit
Function: Clear bit
Description: The indicated bit is cleared (reset to zero). No other flags are affected. CLR can
operate on the carry flag or any directly addressable bit.
Example: Port 1 has previously been written with 5DH (01011101B). The instruction
CLR P1.2
will leave the port set to 59H (01011001B).
CLR C
Operation: CLR
(C) ← 0
Encoding: 1 1 0 0 0 0 1 1
Bytes: 1
Cycles: 1
CLR bit
Operation: CLR
(bit) ← 0
Encoding: 1 1 0 0 0 0 1 0 bit address
Bytes: 2
Cycles: 1
Semiconductor Group 4-23 1997-09-01
Page 52

Instruction Set
C500 Family
CPL A
Function: Complement accumulator
Description: Each bit of the accumulator is logically complemented (one’s complement). Bits
which previously contained a one are changed to zero and vice versa. No flags are
affected.
Example: The accumulator contains 5CH (01011100B). The instruction
CPL A
will leave the accumulator set to 0A3H (10100011B).
Operation: CPL
(A) ← / (A)
Encoding: 1 1 1 1 0 1 0 0
Bytes: 1
Cycles: 1
Semiconductor Group 4-24 1997-09-01
Page 53

Instruction Set
C500 Family
CPL bit
Function: Complement bit
Description: The bit variable specified is complemented. A bit which had been a one is changed
to zero and vice versa. No other flags are affected. CPL can operate on the carry or
any directly addressable bit.
Note:
When this instruction is used to modify an output pin, the value used as the original
data will be read from the output data latch, not the input pin.
Example: Port 1 has previously been written with 5DH (01011101B). The instruction
sequence
CPL P1.1
CPL P1.2
will leave the port set to 5BH (01011011B).
CPL C
Operation: CPL
(bit) ← / (C)
Encoding: 1 0 1 1 0 0 1 1
Bytes: 1
Cycles: 1
CPL bit
Operation: CPL
(C) ← (bit)
Encoding: 1 0 1 1 0 0 1 0 bit address
Bytes: 2
Cycles: 1
Semiconductor Group 4-25 1997-09-01
Page 54

Instruction Set
C500 Family
DA A
Function: Decimal adjust accumulator for addition
Description: DA A adjusts the eight-bit value in the accumulator resulting from the earlier
addition of two variables (each in packed BCD format), producing two four-bit digits.
Any ADD or ADDC instruction may have been used to perform the addition.
If accumulator bits 3-0 are greater than nine (xxxx1010-xxxx1111), or if the AC flag
is one, six is added to the accumulator producing the proper BCD digit in the loworder nibble. This internal addition would set the carry flag if a carry-out of the loworder four-bit field propagated through all high-order bits, but it would not clear the
carry flag otherwise.
If the carry flag is now set, or if the four high-order bits now exceed nine (1010xxxx1111xxxx), these high-order bits are incremented by six, producing the proper BCD
digit in the high-order nibble. Again, this would set the carry flag if there was a carryout of the high-order bits, but wouldn’t clear the carry. The carry flag thus indicates
if the sum of the original two BCD variables is greater than 100, allowing multiple
precision decimal addition. OV is not affected.
All of this occurs during the one instruction cycle. Essentially; this instruction
performs the decimal conversion by adding 00H, 06H, 60H, or 66H to the
accumulator, depending on initial accumulator and PSW conditions.
Note:
DA A
cannot
notation, nor does DA A apply to decimal subtraction.
Example: The accumulator holds the value 56H (01010110B) representing the packed BCD
digits of the decimal number 56. Register 3 contains the value 67H (01100111B)
representing the packed BCD digits of the decimal number 67. The carry flag is set.
The instruction sequence
ADDC A,R3
DA A
will first perform a standard two’s-complement binary addition, resulting in the value
0BEH (10111110B) in the accumulator. The carry and auxiliary carry flags will be
cleared.
The decimal adjust instruction will then alter the accumulator to the value 24H
(00100100B), indicating the packed BCD digits of the decimal number 24, the loworder two digits of the decimal sum of 56, 67, and the carry-in. The carry flag will be
set by the decimal adjust instruction, indicating that a decimal overflow occurred.
The true sum 56, 67, and 1 is 124.
simply convert a hexadecimal number in the accumulator to BCD
Semiconductor Group 4-26 1997-09-01
Page 55

BCD variables can be incremented or decremented by adding 01H or 99H. If the
accumulator initially holds 30H (representing the digits of 30 decimal), then the
instruction sequence
ADD A, #99H
DA A
will leave the carry set and 29H in the accumulator, since 30 + 99 = 129. The loworder byte of the sum can be interpreted to mean 30 – 1 = 29.
Operation: DA
contents of accumulator are BCD
if [[(A3-0) > 9] ∨ [(AC) = 1]]
then (A3-0) ← (A3-0) + 6
and
if [[(A7-4) > 9] ∨ [(C) = 1]]
then (A7-4) ← (A7-4) + 6
Instruction Set
C500 Family
Encoding: 1 1 0 1 0 1 0 0
Bytes: 1
Cycles: 1
Semiconductor Group 4-27 1997-09-01
Page 56

Instruction Set
C500 Family
DEC byte
Function: Decrement
Description: The variable indicated is decremented by 1. An original value of 00H will underflow
to 0FFH. No flags are affected. Four operand addressing modes are allowed:
accumulator, register, direct, or register-indirect.
Note:
When this instruction is used to modify an output port, the value used as the original
port data will be read from the output data latch,
Example: Register 0 contains 7FH (01111111B). Internal RAM locations 7EH and 7FH
contain 00H and 40H, respectively. The instruction sequence
DEC @R0
DEC R0
DEC @R0
not
the input pins.
will leave register 0 set to 7EH and internal RAM locations 7EH and 7FH set to
0FFH and 3FH.
DEC A
Operation: DEC
(A) ← (A) – 1
Encoding: 0 0 0 1 0 1 0 0
Bytes: 1
Cycles: 1
DEC Rn
Operation: DEC
(Rn) ← (Rn) – 1
Encoding: 0 0 0 1 1 r r r
Bytes: 1
Cycles: 1
Semiconductor Group 4-28 1997-09-01
Page 57

DEC direct
Operation: DEC
(direct) ← (direct) – 1
Encoding: 0 0 0 1 0 1 0 1 direct address
Bytes: 2
Cycles: 1
DEC @Ri
Operation: DEC
((Ri)) ← ((Ri)) – 1
Encoding: 0 0 0 1 0 1 1 i
Instruction Set
C500 Family
Bytes: 1
Cycles: 1
Semiconductor Group 4-29 1997-09-01
Page 58

Instruction Set
C500 Family
DIV AB
Function: Divide
Description: DIV AB divides the unsigned eight-bit integer in the accumulator by the unsigned
eight-bit integer in register B. The accumulator receives the integer part of the
quotient; register B receives the integer remainder. The carry and OV flags will be
cleared.
Exception:
and B register will be undefined and the overflow flag will be set. The carry flag is
cleared in any case.
Example: The accumulator contains 251 (0FBH or 11111011B) and B contains 18 (12H or
00010010B). The instruction
DIV AB
will leave 13 in the accumulator (0DH or 00001101B) and the value 17 (11H or
00010001B) in B, since 251 = (13x18) + 17. Carry and OV will both be cleared.
Operation: DIV
(A15-8)
(B7-0)
Encoding: 1 0 0 0 0 1 0 0
Bytes: 1
Cycles: 4
If B had originally contained 00H, the values returned in the accumulator
← (A) / (B)
Semiconductor Group 4-30 1997-09-01
Page 59

Instruction Set
C500 Family
DJNZ <byte>, <rel-addr>
Function: Decrement and jump if not zero
Description: DJNZ decrements the location indicated by 1, and branches to the address
indicated by the second operand if the resulting value is not zero. An original value
of 00H will underflow to 0FFH. No flags are affected. The branch destination would
be computed by adding the signed relative-displacement value in the last instruction
byte to the PC, after incrementing the PC to the first byte of the following instruction.
The location decremented may be a register or directly addressed byte.
Note:
When this instruction is used to modify an output port, the value used as the original
port data will be read from the output data latch, not the input pins.
Example: Internal RAM locations 40H, 50H, and 60H contain the values, 01H, 70H, and 15H,
respectively. The instruction sequence
DJNZ 40H,LABEL_1
DJNZ 50H,LABEL_2
DJNZ 60H,LABEL_3
will cause a jump to the instruction at label LABEL_2 with the values 00H, 6FH, and
15H in the three RAM locations. The first jump was
zero.
This instruction provides a simple way of executing a program loop a given number
of times, or for adding a moderate time delay (from 2 to 512 machine cycles) with a
single instruction. The instruction sequence
MOV R2, #8
TOGGLE: CPL P1.7
DJNZ R2,TOGGLE
will toggle P1.7 eight times, causing four output pulses to appear at bit 7 of output
port 1. Each pulse will last three machine cycles; two for DJNZ and one to alter the
pin.
not
taken because the result was
Semiconductor Group 4-31 1997-09-01
Page 60

DJNZ Rn,rel
Operation: DJNZ
(PC) ← (PC) + 2
(Rn) ← (Rn) – 1
if (Rn) > 0 or (Rn) < 0
then (PC) ← (PC) + rel
Encoding: 1 1 0 1 1 r r r rel. address
Bytes: 2
Cycles: 2
DJNZ direct,rel
Operation: DJNZ
(PC) ← (PC) + 2
(direct) ← (direct) – 1
if (direct) > 0 or (direct) < 0
then (PC) ← (PC) + rel
Instruction Set
C500 Family
Encoding: 1 1 0 1 0 1 0 1 direct address rel. address
Bytes: 3
Cycles: 2
Semiconductor Group 4-32 1997-09-01
Page 61

Instruction Set
C500 Family
INC <byte>
Function: Increment
Description: INC increments the indicated variable by 1. An original value of 0FFH will overflow
to 00H. No flags are affected. Three addressing modes are allowed: register, direct,
or register-indirect.
Note:
When this instruction is used to modify an output port, the value used as the original
port data will be read from the output data latch,
Example: Register 0 contains 7EH (01111110B). Internal RAM locations 7EH and 7FH
contain 0FFH and 40H, respectively. The instruction sequence
INC @R0
INC R0
INC @R0
not
the input pins.
will leave register 0 set to 7FH and internal RAM locations 7EH and 7FH holding
(respectively) 00H and 41H.
INC A
Operation: INC
(A) ← (A) + 1
Encoding: 0 0 0 0 0 1 0 0
Bytes: 1
Cycles: 1
INC Rn
Operation: INC
(Rn) ← (Rn) + 1
Encoding: 0 0 0 0 1 r r r
Bytes: 1
Cycles: 1
Semiconductor Group 4-33 1997-09-01
Page 62
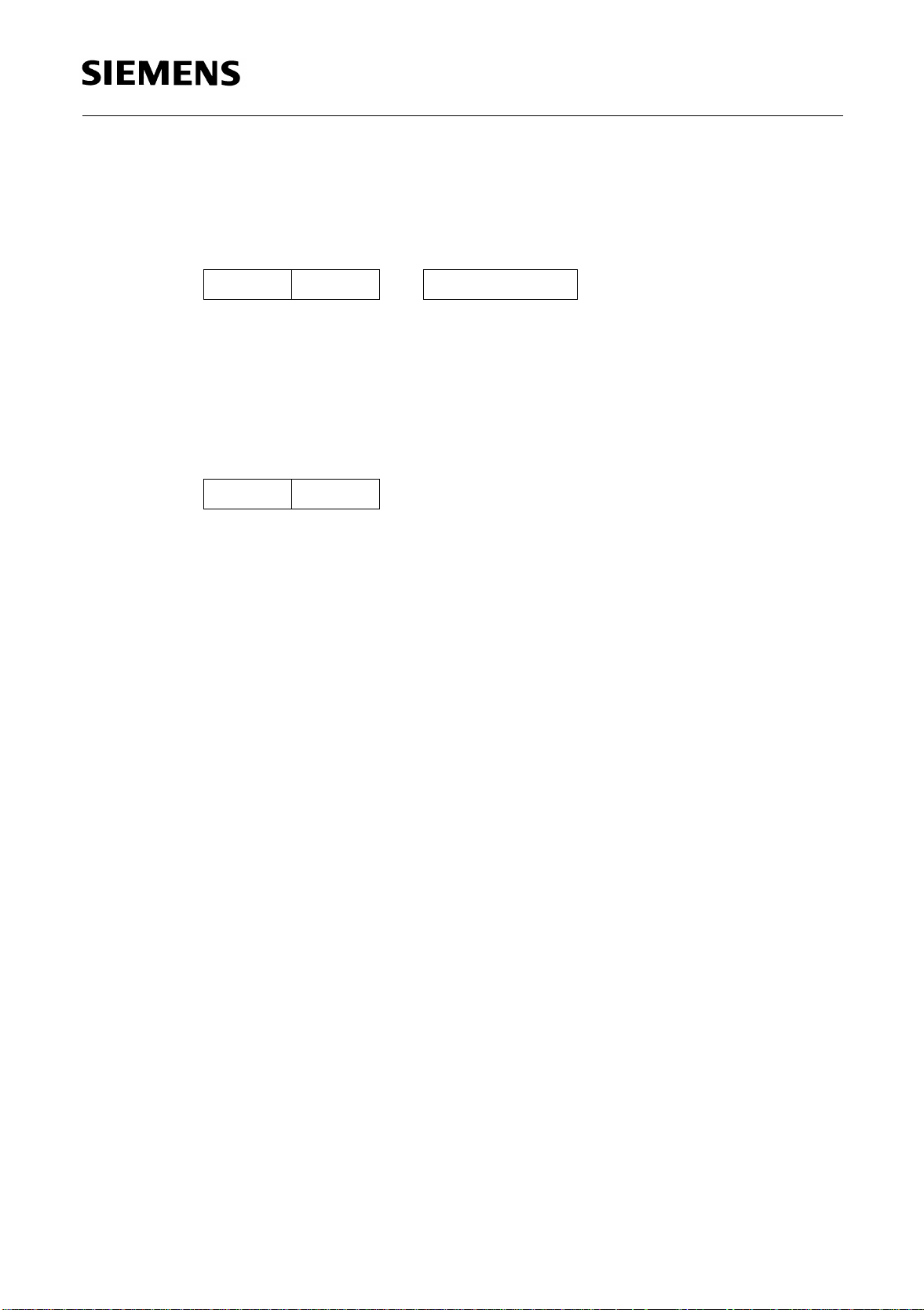
INC direct
Operation: INC
(direct) ← (direct) + 1
Encoding: 0 0 0 0 0 1 0 1 direct address
Bytes: 2
Cycles: 1
INC @Ri
Operation: INC
((Ri)) ← ((Ri)) + 1
Encoding: 0 0 0 0 0 1 1 i
Instruction Set
C500 Family
Bytes: 1
Cycles: 1
Semiconductor Group 4-34 1997-09-01
Page 63

Instruction Set
C500 Family
INC DPTR
Function: Increment data pointer
Description: Increment the 16-bit data pointer by 1. A 16-bit increment (modulo 216) is performed;
an overflow of the low-order byte of the data pointer (DPL) from 0FFH to 00H will
increment the high-order byte (DPH). No flags are affected.
This is the only 16-bit register which can be incremented.
Example: Registers DPH and DPL contain 12H and 0FEH, respectively. The instruction
sequence
INC DPTR
INC DPTR
INC DPTR
will change DPH and DPL to 13H and 01H.
Operation: INC
(DPTR) ← (DPTR) + 1
Encoding: 1 0 1 0 0 0 1 1
Bytes: 1
Cycles: 2
Semiconductor Group 4-35 1997-09-01
Page 64

Instruction Set
C500 Family
JB bit,rel
Function: Jump if bit is set
Description: If the indicated bit is a one, jump to the address indicated; otherwise proceed with
the next instruction. The branch destination is computed by adding the signed
relative-displacement in the third instruction byte to the PC, after incrementing the
PC to the first byte of the next instruction. The bit tested is not modified. No flags
are affected.
Example: The data present at input port 1 is 11001010B. The accumulator holds 56
(01010110B). The instruction sequence
JB P1.2,LABEL1
JB ACC.2,LABEL2
will cause program execution to branch to the instruction at label LABEL2.
Operation: JB
(PC) ← (PC) + 3
if (bit) = 1
then (PC) ← (PC) + rel
Encoding: 0 0 1 0 0 0 0 0 bit address rel. address
Bytes: 3
Cycles: 2
Semiconductor Group 4-36 1997-09-01
Page 65

Instruction Set
C500 Family
JBC bit,rel
Function: Jump if bit is set and clear bit
Description: If the indicated bit is one, branch to the address indicated; otherwise proceed with
the next instruction.
is computed by adding the signed relative displacement in the third instruction byte
to the PC, after incrementing the PC to the first byte of the next instruction. No flags
are affected.
Note:
When this instruction is used to test an output pin, the value used as the original
data will be read from the output data latch, not the input pin.
Example: The accumulator holds 56H (01010110B). The instruction sequence
JBC ACC.3,LABEL1
JBC ACC.2,LABEL2
In either case, clear the designated bit.
The branch destination
will cause program execution to continue at the instruction identified by the label
LABEL2, with the accumulator modified to 52H (01010010B).
Operation: JBC
(PC) ← (PC) + 3
if (bit) = 1
then (bit) ← 0
(PC) ← (PC) + rel
Encoding: 0 0 0 1 0 0 0 0 bit address rel. address
Bytes: 3
Cycles: 2
Semiconductor Group 4-37 1997-09-01
Page 66

Instruction Set
C500 Family
JC rel
Function: Jump if carry is set
Description: If the carry flag is set, branch to the address indicated; otherwise proceed with the
next instruction. The branch destination is computed by adding the signed relativedisplacement in the second instruction byte to the PC, after incrementing the PC
twice. No flags are affected.
Example: The carry flag is cleared. The instruction sequence
JC LABEL1
CPL C
JC LABEL2
will set the carry and cause program execution to continue at the instruction
identified by the label LABEL2.
Operation: JC
(PC) ← (PC) + 2
if (C) = 1
then (PC) ← (PC) + rel
Encoding: 0 1 0 0 0 0 0 0 rel. address
Bytes: 2
Cycles: 2
Semiconductor Group 4-38 1997-09-01
Page 67

Instruction Set
C500 Family
JMP @A + DPTR
Function: Jump indirect
Description: Add the eight-bit unsigned contents of the accumulator with the sixteen-bit data
pointer, and load the resulting sum to the program counter. This will be the address
for subsequent instruction fetches. Sixteen-bit addition is performed (modulo 216): a
carry-out from the low-order eight bits propagates through the higher-order bits.
Neither the accumulator nor the data pointer is altered. No flags are affected.
Example: An even number from 0 to 6 is in the accumulator. The following sequence of
instructions will branch to one of four AJMP instructions in a jump table starting at
JMP_TBL:
MOV DPTR, #JMP_TBL
JMP @A + DPTR
JMP_TBL: AJMP LABEL0
AJMP LABEL1
AJMP LABEL2
AJMP LABEL3
If the accumulator equals 04H when starting this sequence, execution will jump to
label LABEL2. Remember that AJMP is a two-byte instruction, so the jump
instructions start at every other address.
Operation: JMP
(PC) ← (A) + (DPTR)
Encoding: 0 1 1 1 0 0 1 1
Bytes: 1
Cycles: 2
Semiconductor Group 4-39 1997-09-01
Page 68

Instruction Set
C500 Family
JNB bit,rel
Function: Jump if bit is not set
Description: If the indicated bit is a zero, branch to the indicated address; otherwise proceed with
the next instruction. The branch destination is computed by adding the signed
relative-displacement in the third instruction byte to the PC, after incrementing the
PC to the first byte of the next instruction.
are affected.
Example: The data present at input port 1 is 11001010B. The accumulator holds 56H
(01010110B). The instruction sequence
JNB P1.3,LABEL1
JNB ACC.3,LABEL2
will cause program execution to continue at the instruction at label LABEL2.
Operation: JNB
(PC) ← (PC) + 3
if (bit) = 0
then (PC) ← (PC) + rel.
The bit tested is not modified.
No flags
Encoding: 0 0 1 1 0 0 0 0 bit address rel. address
Bytes: 3
Cycles: 2
Semiconductor Group 4-40 1997-09-01
Page 69

Instruction Set
C500 Family
JNC rel
Function: Jump if carry is not set
Description: If the carry flag is a zero, branch to the address indicated; otherwise proceed with
the next instruction. The branch destination is computed by adding the signed
relative-displacement in the second instruction byte to the PC, after incrementing
the PC twice to point to the next instruction. The carry flag is not modified.
Example: The carry flag is set. The instruction sequence
JNC LABEL1
CPL C
JNC LABEL2
will clear the carry and cause program execution to continue at the instruction
identified by the label LABEL2.
Operation: JNC
(PC) ← (PC) + 2
if (C) = 0
then (PC) ← (PC) + rel
Encoding: 0 1 0 1 0 0 0 0 rel. address
Bytes: 2
Cycles: 2
Semiconductor Group 4-41 1997-09-01
Page 70

Instruction Set
C500 Family
JNZ rel
Function: Jump if accumulator is not zero
Description: If any bit of the accumulator is a one, branch to the indicated address; otherwise
proceed with the next instruction. The branch destination is computed by adding the
signed relative-displacement in the second instruction byte to the PC, after
incrementing the PC twice. The accumulator is not modified. No flags are affected.
Example: The accumulator originally holds 00H. The instruction sequence
JNZ LABEL1
INC A
JNZ LABEL2
will set the accumulator to 01H and continue at label LABEL2.
Operation: JNZ
(PC) ← (PC) + 2
if (A) ≠ 0
then (PC) ← (PC) + rel.
Encoding: 0 1 1 1 0 0 0 0 rel. address
Bytes: 2
Cycles: 2
Semiconductor Group 4-42 1997-09-01
Page 71

Instruction Set
C500 Family
JZ rel
Function: Jump if accumulator is zero
Description: If all bits of the accumulator are zero, branch to the address indicated; otherwise
proceed with the next instruction. The branch destination is computed by adding the
signed relative-displacement in the second instruction byte to the PC, after
incrementing the PC twice. The accumulator is not modified. No flags are affected.
Example: The accumulator originally contains 01H. The instruction sequence
JZ LABEL1
DEC A
JZ LABEL2
will change the accumulator to 00H and cause program execution to continue at the
instruction identified by the label LABEL2.
Operation: JZ
(PC) ← (PC) + 2
if (A) = 0
then (PC) ← (PC) + rel
Encoding: 0 1 1 0 0 0 0 0 rel. address
Bytes: 2
Cycles: 2
Semiconductor Group 4-43 1997-09-01
Page 72

Instruction Set
C500 Family
LCALL addr16
Function: Long call
Description: LCALL calls a subroutine located at the indicated address. The instruction adds
three to the program counter to generate the address of the next instruction and
then pushes the 16-bit result onto the stack (low byte first), incrementing the stack
pointer by two. The high-order and low-order bytes of the PC are then loaded,
respectively, with the second and third bytes of the LCALL instruction. Program
execution continues with the instruction at this address. The subroutine may
therefore begin anywhere in the full 64 Kbyte program memory address space. No
flags are affected.
Example: Initially the stack pointer equals 07H. The label “SUBRTN” is assigned to program
memory location 1234H. After executing the instruction
LCALL SUBRTN
at location 0123H, the stack pointer will contain 09H, internal RAM locations 08H
and 09H will contain 26H and 01H, and the PC will contain 1234H.
Operation: LCALL
(PC) ← (PC) + 3
(SP) ← (SP) + 1
((SP)) ← (PC7-0)
(SP) ← (SP) + 1
((SP)) ← (PC15-8)
(PC) ← addr15-0
Encoding: 0 0 0 1 0 0 1 0 addr15 . . addr8 addr7 . . addr0
Bytes: 3
Cycles: 2
Semiconductor Group 4-44 1997-09-01
Page 73

Instruction Set
C500 Family
LJMP addr16
Function: Long jump
Description: LJMP causes an unconditional branch to the indicated address, by loading the high-
order and low-order bytes of the PC (respectively) with the second and third
instruction bytes. The destination may therefore be anywhere in the full 64K
program memory address space. No flags are affected.
Example: The label “JMPADR” is assigned to the instruction at program memory location
1234H. The instruction
LJMP JMPADR
at location 0123H will load the program counter with 1234H.
Operation: LJMP
(PC) ← addr15-0
Encoding: 0 0 0 0 0 0 1 0 addr15 . . . addr8 addr7 . . . addr0
Bytes: 3
Cycles: 2
Semiconductor Group 4-45 1997-09-01
Page 74
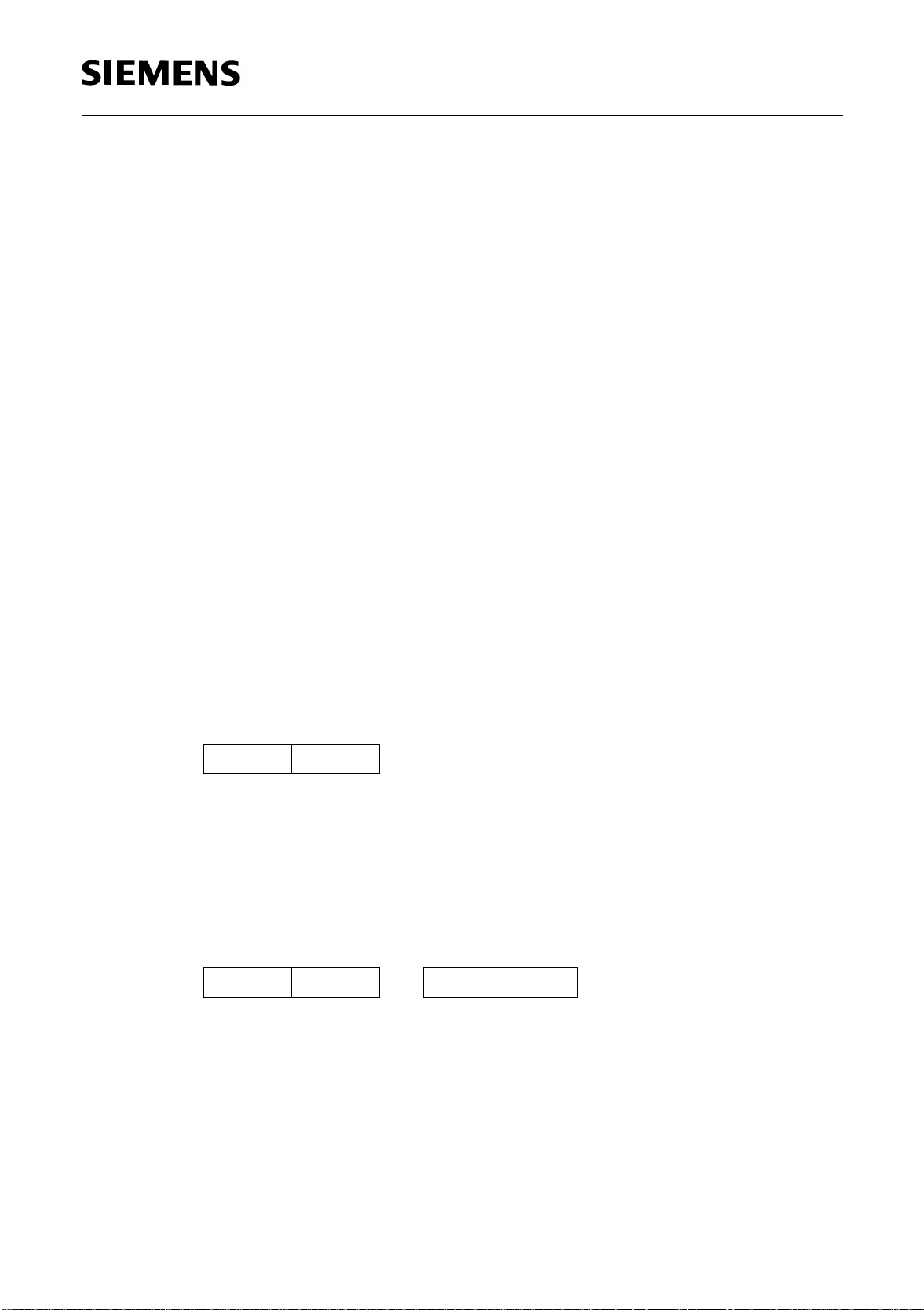
Instruction Set
C500 Family
MOV <dest-byte>, <src-byte>
Function: Move byte variable
Description: The byte variable indicated by the second operand is copied into the location
specified by the first operand. The source byte is not affected. No other register or
flag is affected.
This is by far the most flexible operation. Fifteen combinations of source and
destination addressing modes are allowed.
Example: Internal RAM location 30H holds 40H. The value of RAM location 40H is 10H. The
data present at input port 1 is 11001010B (0CAH).
MOV R0, #30H ; R0 < = 30H
MOV A, @R0 ; A < = 40H
MOV R1,A ; R1 < = 40H
MOV B, @R1 ; B < = 10
MOV @R1,P1 ; RAM (40H) < = 0CAH
MOV P2,P1 ; P2 < = 0CAH
H
leaves the value 30H in register 0, 40H in both the accumulator and register 1, 10H
in register B, and 0CAH (11001010B) both in RAM location 40H and output on
port 2.
MOV A,Rn
Operation: MOV
(A) ← (Rn)
Encoding: 1 1 1 0 1 r r r
Bytes: 1
Cycles: 1
MOV A,direct *)
Operation: MOV
(A) ← (direct)
Encoding: 1 1 1 0 0 1 0 1 direct address
Bytes: 2
Cycles: 1
*) MOV A,ACC is not a valid instruction. The content of the accumulator after the execution of this
instruction is undefined.
Semiconductor Group 4-46 1997-09-01
Page 75

MOV A,@Ri
Operation: MOV
(A) ← ((Ri))
Encoding: 1 1 1 0 0 1 1 i
Bytes: 1
Cycles: 1
MOV A, #data
Operation: MOV
(A) ← #data
Encoding: 0 1 1 1 0 1 0 0 immediate data
Instruction Set
C500 Family
Bytes: 2
Cycles: 1
MOV Rn,A
Operation: MOV
(Rn) ← (A)
Encoding: 1 1 1 1 1 r r r
Bytes: 1
Cycles: 1
MOV Rn,direct
Operation: MOV
(Rn) ← (direct)
Encoding: 1 0 1 0 1 r r r direct address
Bytes: 2
Cycles: 2
Semiconductor Group 4-47 1997-09-01
Page 76
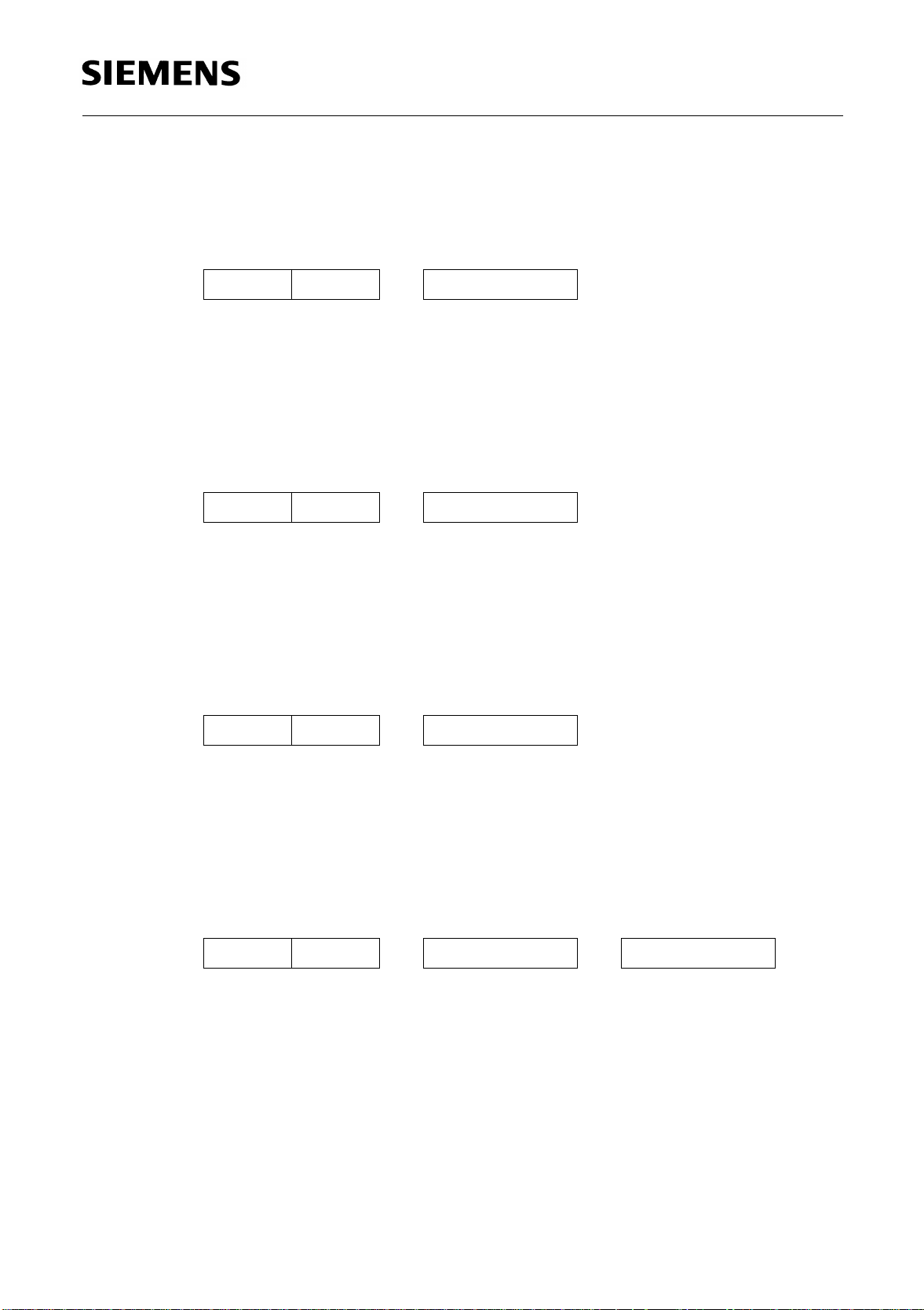
MOV Rn, #data
Operation: MOV
(Rn) ← #data
Encoding: 0 1 1 1 1 r r r immediate data
Bytes: 2
Cycles: 1
MOV direct,A
Operation: MOV
(direct) ← (A)
Encoding: 1 1 1 1 0 1 0 1 direct address
Instruction Set
C500 Family
Bytes: 2
Cycles: 1
MOV direct,Rn
Operation: MOV
(direct) ← (Rn)
Encoding: 1 0 0 0 1 r r r direct address
Bytes: 2
Cycles: 2
MOV direct,direct
Operation: MOV
(direct) ← (direct)
Encoding: 1 0 0 0 0 1 0 1 dir.addr. (src) dir.addr. (dest)
Bytes: 3
Cycles: 2
Semiconductor Group 4-48 1997-09-01
Page 77

Instruction Set
C500 Family
MOV direct, @ Ri
Operation: MOV
(direct) ← ((Ri))
Encoding: 1 0 0 0 0 1 1 i direct address
Bytes: 2
Cycles: 2
MOV direct, #data
Operation: MOV
(direct) ← #data
Encoding: 0 1 1 1 0 1 0 1 direct address immediate data
Bytes: 3
Cycles: 2
MOV @ Ri,A
Operation: MOV
((Ri)) ← (A)
Encoding: 1 1 1 1 0 1 1 i
Bytes: 1
Cycles: 1
MOV @ Ri,direct
Ooeration: MOV
((Ri)) ← (direct)
Encoding: 1 0 1 0 0 1 1 i direct address
Bytes: 2
Cycles: 2
Semiconductor Group 4-49 1997-09-01
Page 78
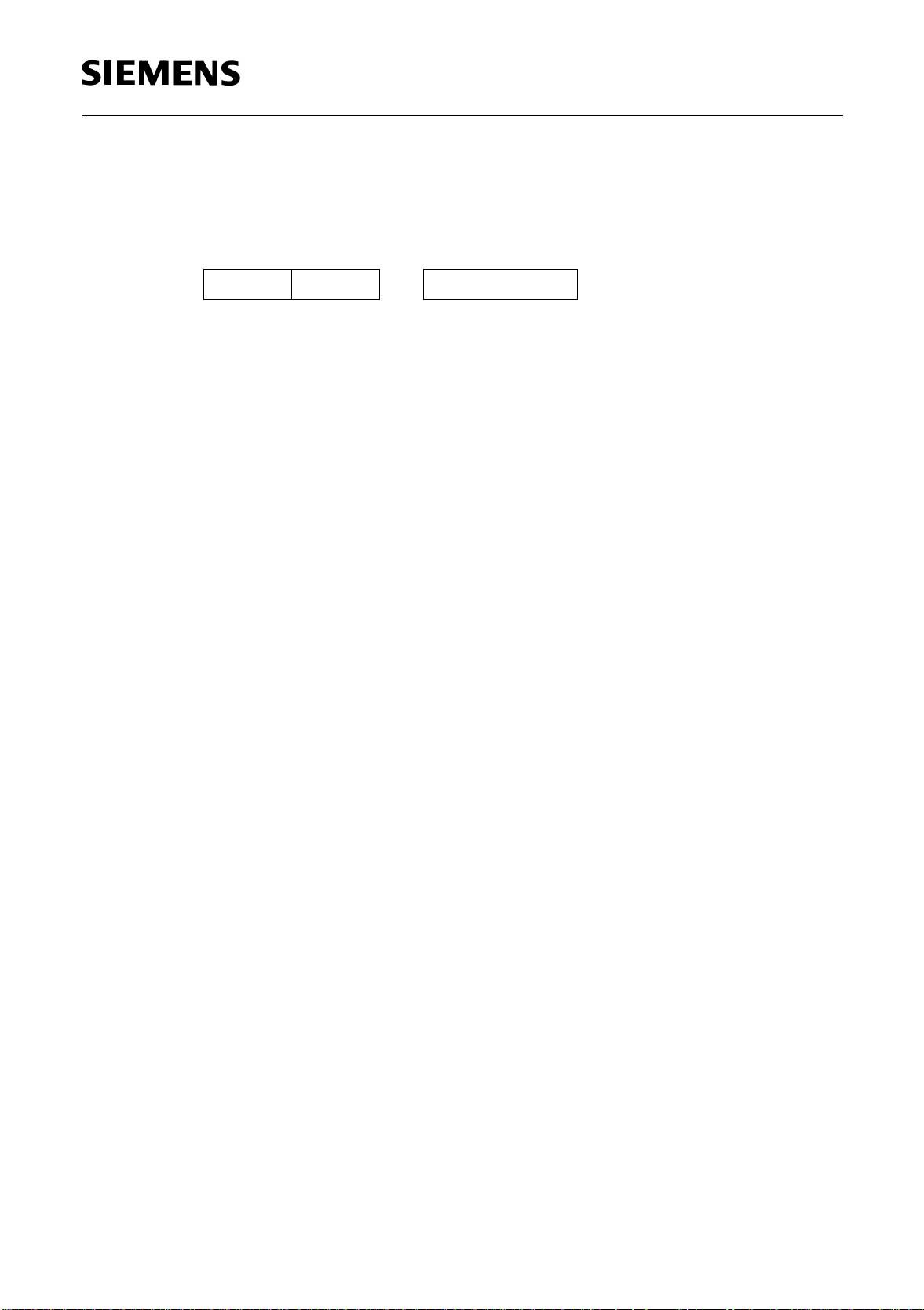
MOV @ Ri,#data
Operation: MOV
((Ri)) ← #data
Encoding: 0 1 1 1 0 1 1 i immediate data
Bytes: 2
Cycles: 1
Instruction Set
C500 Family
Semiconductor Group 4-50 1997-09-01
Page 79

Instruction Set
C500 Family
MOV <dest-bit>, <src-bit>
Function: Move bit data
Description: The Boolean variable indicated by the second operand is copied into the location
specified by the first operand. One of the operands must be the carry flag; the other
may be any directly addressable bit. No other register or flag is affected.
Example: The carry flag is originally set. The data present at input port 3 is 11000101B. The
data previously written to output port 1 is 35H (00110101B).
MOV P1.3,C
MOV C,P3.3
MOV P1.2,C
will leave the carry cleared and change port 1 to 39H (00111001B).
MOV C,bit
Operation: MOV
(C) ← (bit)
Encoding: 1 0 1 0 0 0 1 0 bit address
Bytes: 2
Cycles: 1
MOV bit,C
Operation: MOV
(bit) ← (C)
Encoding: 1 0 0 1 0 0 1 0 bit address
Bytes: 2
Cycles: 2
Semiconductor Group 4-51 1997-09-01
Page 80

Instruction Set
C500 Family
MOV DPTR, #data16
Function: Load data pointer with a 16-bit constant
Description: The data pointer is loaded with the 16-bit constant indicated. The 16 bit constant is
loaded into the second and third bytes of the instruction. The second byte (DPH) is
the high-order byte, while the third byte (DPL) holds the low-order byte. No flags are
affected.
This is the only instruction which moves 16 bits of data at once.
Example: The instruction
MOV DPTR, #1234H
will load the value 1234H into the data pointer: DPH will hold 12H and DPL will hold
34H.
Operation: MOV
(DPTR) ← #data15-0
DPH DPL ← #data15-8 #data7-0
Encoding: 1 0 0 1 0 0 0 0 immed. data 15 . . . 8 immed. data 7 . . . 0
Bytes: 3
Cycles: 2
Semiconductor Group 4-52 1997-09-01
Page 81

Instruction Set
C500 Family
MOVC A, @A + <base-reg>
Function: Move code byte
Description: The MOVC instructions load the accumulator with a code byte, or constant from
program memory. The address of the byte fetched is the sum of the original
unsigned eight-bit accumulator contents and the contents of a sixteen-bit base
register, which may be either the data pointer or the PC. In the latter case, the PC
is incremented to the address of the following instruction before being added to the
accumulator; otherwise the base register is not altered. Sixteen-bit addition is
performed so a carry-out from the low-order eight bits may propagate through
higher-order bits. No flags are affected.
Example: A value between 0 and 3 is in the accumulator. The following instructions will
translate the value in the accumulator to one of four values defined by the DB
(define byte) directive.
REL_PC: INC A
MOVC A, @A + PC
RET
DB 66H
DB 77H
DB 88H
DB 99H
If the subroutine is called with the accumulator equal to 01H, it will return with 77H
in the accumulator. The INC A before the MOVC instruction is needed to “get
around” the RET instruction above the table. If several bytes of code separated the
MOVC from the table, the corresponding number would be added to the
accumulator instead.
MOVC A, @A + DPTR
Operation: MOVC
(A) ← ((A) + (DPTR))
Encoding: 1 0 0 1 0 0 1 1
Bytes: 1
Cycles: 2
Semiconductor Group 4-53 1997-09-01
Page 82

MOVC A, @A + PC
Operation: MOVC
(PC) ← (PC) + 1
(A) ← ((A) + (PC))
Encoding: 1 0 0 0 0 0 1 1
Bytes: 1
Cycles: 2
Instruction Set
C500 Family
Semiconductor Group 4-54 1997-09-01
Page 83

Instruction Set
C500 Family
MOVX <dest-byte>, <src-byte>
Function: Move external
Description: The MOVX instructions transfer data between the accumulator and a byte of
external data memory, hence the “X” appended to MOV. There are two types of
instructions, differing in whether they provide an eight bit or sixteen-bit indirect
address to the external data RAM.
In the first type, the contents of R0 or R1 in the current register bank provide an
eight-bit address multiplexed with data on P0. Eight bits are sufficient for external
l/O expansion decoding or a relatively small RAM array. For somewhat larger
arrays, any output port pins can be used to output higher-order address bits. These
pins would be controlled by an output instruction preceding the MOVX.
In the second type of MOVX instructions, the data pointer generates a sixteen-bit
address. P2 outputs the high-order eight address bits (the contents of DPH) while
P0 multiplexes the low-order eight bits (DPL) with data. The P2 special function
register retains its previous contents while the P2 output buffers are emining the
contents of DPH. This form is faster and more efficient when accessing very large
data arrays (up to 64 Kbyte), since no additional instructions are needed to set up
the output ports.
It is possible in some situations to mix the two MOVX types. A large RAM array with
its high-order address lines driven by P2 can be addressed via the data pointer, or
with code to output high-order address bits to P2 followed by a MOVX instruction
using R0 or R1.
Example: An external 256-byte RAM using multiplexed address/data lines is connected to the
C500 port 0. Port 3 provides control lines for the external RAM. Ports 1 and 2 are
used for normal l/O. Registers 0 and 1 contain 12H and 34H. Location 34H of the
external RAM holds the value 56H. The instruction sequence
MOVX A, @R1
MOVX @R0,A
copies the value 56H into both the accumulator and external RAM location 12H.
Semiconductor Group 4-55 1997-09-01
Page 84

MOVX A,@Ri
Operation: MOVX
(A) ← ((Ri))
Encoding: 1 1 1 0 0 0 1 i
Bytes: 1
Cycles: 2
MOVX A,@DPTR
Operation: MOVX
(A) ← ((DPTR))
Encoding: 1 1 1 0 0 0 0 0
Instruction Set
C500 Family
Bytes: 1
Cycles: 2
MOVX @Ri,A
Operation: MOVX
((Ri)) ← (A)
Encoding: 1 1 1 1 0 0 1 i
Bytes: 1
Cycles: 2
MOVX @DPTR,A
Operation: MOVX
((DPTR)) (A)
Encoding: 1 1 1 1 0 0 0 0
Bytes: 1
Cycles: 2
Semiconductor Group 4-56 1997-09-01
Page 85

Instruction Set
C500 Family
MUL AB
Function: Multiply
Description: MUL AB multiplies the unsigned eight-bit integers in the accumulator and register
B. The low-order byte of the sixteen-bit product is left in the accumulator, and the
high-order byte in B. If the product is greater than 255 (0FFH) the overflow flag is
set; otherwise it is cleared. The carry flag is always cleared.
Example: Originally the accumulator holds the value 80 (50H). Register B holds the value 160
(0A0H). The instruction
MUL AB
will give the product 12,800 (3200H), so B is changed to 32H (00110010B) and the
accumulator is cleared. The overflow flag is set, carry is cleared.
Operation: MUL
(A7-0)
(B15-8)
Encoding: 1 0 1 0 0 1 0 0
Bytes: 1
Cycles: 4
← (A) x (B)
Semiconductor Group 4-57 1997-09-01
Page 86

Instruction Set
C500 Family
NOP
Function: No operation
Description: Execution continues at the following instruction. Other than the PC, no registers or
flags are affected.
Example: It is desired to produce a low-going output pulse on bit 7 of port 2 lasting exactly
5 cycles. A simple SETB/CLR sequence would generate a one-cycle pulse, so four
additional cycles must be inserted. This may be done (assuming no interrupts are
enabled) with the instruction sequence
CLR P2.7
NOP
NOP
NOP
NOP
SETB P2.7
Operation: NOP
Encoding: 0 0 0 0 0 0 0 0
Bytes: 1
Cycles: 1
Semiconductor Group 4-58 1997-09-01
Page 87

Instruction Set
C500 Family
ORL <dest-byte>, <src-byte>
Function: Logical OR for byte variables
Description: ORL performs the bitwise logical OR operation between the indicated variables,
storing the results in the destination byte. No flags are affected.
The two operands allow six addressing mode combinations. When the destination
is the accumulator, the source can use register, direct, register-indirect, or
immediate addressing; when the destination is a direct address, the source can be
the accumulator or immediate data.
Note:
When this instruction is used to modify an output port, the value used as the original
port data will be read from the output data latch,
Example: If the accumulator holds 0C3H (11000011B) and R0 holds 55H (01010101B) then
the instruction
not
the input pins.
ORL A,R0
will leave the accumulator holding the value 0D7H (11010111B).
When the destination is a directly addressed byte, the instruction can set
combinations of bits in any RAM location or hardware register. The pattern of bits
to be set is determined by a mask byte, which may be either a constant data value
in the instruction or a variable computed in the accumulator at run-time. The
instruction
ORL P1,#00110010
will set bits 5, 4, and 1 of output port 1.
ORL A,Rn
Operation: ORL
(A) ← (A) ∨ (Rn)
Encoding: 0 1 0 0 1 r r r
Bytes: 1
Cycles: 1
B
Semiconductor Group 4-59 1997-09-01
Page 88

ORL A,direct
Operation: ORL
(A) ← (A) ∨ (direct)
Encoding: 0 1 0 0 0 1 0 1 direct address
Bytes: 2
Cycles: 1
ORL A,@Ri
Operation: ORL
(A) ← (A) ∨ ((Ri))
Encoding: 0 1 0 0 0 1 1 i
Instruction Set
C500 Family
Bytes: 1
Cycles: 1
ORL A,#data
Operation: ORL
(A) ← (A) ∨ #data
Encoding: 0 1 0 0 0 1 0 0 immediate data
Bytes: 2
Cycles: 1
ORL direct,A
Operation: ORL
(direct) ← (direct) ∨ (A)
Encoding: 0 1 0 0 0 0 1 0 direct address
Bytes: 2
Cycles: 1
Semiconductor Group 4-60 1997-09-01
Page 89

Instruction Set
C500 Family
ORL direct, #data
Operation: ORL
(direct) ← (direct) ∨ #data
Encoding: 0 1 0 0 0 0 1 1 direct address immediate data
Bytes: 3
Cycles: 2
Semiconductor Group 4-61 1997-09-01
Page 90

Instruction Set
C500 Family
ORL C, <src-bit>
Function: Logical OR for bit variables
Description: Set the carry flag if the Boolean value is a logic 1; leave the carry in its current state
otherwise. A slash (”/”) preceding the operand in the assembly language indicates
that the logical complement of the addressed bit is used as the source value, but
the source bit itself is not affected. No other flags are affected.
Example: Set the carry flag if, and only if, P1.0 = 1, ACC.7 = 1, or OV = 0:
MOV C,P1.0 ; Load carry with input pin P1.0
ORL C,ACC.7 ; OR carry with the accumulator bit 7
ORL C,/OV ; OR carry with the inverse of OV
ORL C,bit
Operation: ORL
(C) ← (C) ∨ (bit)
Encoding: 0 1 1 1 0 0 1 0 bit address
Bytes: 2
Cycles: 2
ORL C,/bit
Operation: ORL
(C) ← (C) ∨ / (bit)
Encoding: 1 0 1 0 0 0 0 0 bit address
Bytes: 2
Cycles: 2
Semiconductor Group 4-62 1997-09-01
Page 91

Instruction Set
C500 Family
POP direct
Function: Pop from stack
Description: The contents of the internal RAM location addressed by the stack pointer is read,
and the stack pointer is decremented by one. The value read is the transfer to the
directly addressed byte indicated. No flags are affected.
Example: The stack pointer originally contains the value 32H, and internal RAM locations 30H
through 32H contain the values 20H, 23H, and 01H, respectively. The instruction
sequence
POP DPH
POP DPL
will leave the stack pointer equal to the value 30H and the data pointer set to 0123H.
At this point the instruction
POP SP
will leave the stack pointer set to 20H. Note that in this special case the stack pointer
was decremented to 2FH before being loaded with the value popped (20H).
Operation: POP
(direct) ← ((SP))
(SP) ← (SP) – 1
Encoding: 1 1 0 1 0 0 0 0 direct address
Bytes: 2
Cycles: 2
Semiconductor Group 4-63 1997-09-01
Page 92

Instruction Set
C500 Family
PUSH direct
Function: Push onto stack
Description: The stack pointer is incremented by one. The contents of the indicated variable is
then copied into the internal RAM location addressed by the stack pointer.
Otherwise no flags are affected.
Example: On entering an interrupt routine the stack pointer contains 09H. The data pointer
holds the value 0123H. The instruction sequence
PUSH DPL
PUSH DPH
will leave the stack pointer set to 0BH and store 23H and 01H in internal RAM
locations 0AH and 0BH, respectively.
Operation: PUSH
(SP) ← (SP) + 1
((SP)) ← (direct)
Encoding: 1 1 0 0 0 0 0 0 direct address
Bytes: 2
Cycles: 2
Semiconductor Group 4-64 1997-09-01
Page 93

Instruction Set
C500 Family
RET
Function: Return from subroutine
Description: RET pops the high and low-order bytes of the PC successively from the stack,
decrementing the stack pointer by two. Program execution continues at the
resulting address, generally the instruction immediately following an ACALL or
LCALL. No flags are affected.
Example: The stack pointer originally contains the value 0BH. Internal RAM locations 0AH
and 0BH contain the values 23H and 01H, respectively. The instruction
RET
will leave the stack pointer equal to the value 09H. Program execution will continue
at location 0123H.
Operation: RET
(PC15-8) ← ((SP))
(SP) ← (SP) – 1
(PC7-0) ← ((SP))
(SP) ← (SP) – 1
Encoding: 0 0 1 0 0 0 1 0
Bytes: 1
Cycles: 2
Semiconductor Group 4-65 1997-09-01
Page 94

Instruction Set
C500 Family
RETI
Function: Return from interrupt
Description: RETI pops the high and low-order bytes of the PC successively from the stack, and
restores the interrupt logic to accept additional interrupts at the same priority level
as the one just processed. The stack pointer is left decremented by two. No other
registers are affected; the PSW is
status. Program execution continues at the resulting address, which is generally the
instruction immediately after the point at which the interrupt request was detected.
If a lower or same-level interrupt is pending when the RETI instruction is executed,
that one instruction will be executed before the pending interrupt is processed.
Example: The stack pointer originally contains the value 0BH. An interrupt was detected
during the instruction ending at location 0122H. Internal RAM locations 0AH and
0BH contain the values 23H and 01H, respectively. The instruction
RETI
not
automatically restored to its pre-interrupt
will leave the stack pointer equal to 09H and return program execution to location
0123H.
Operation: RETI
(PC15-8) ← ((SP))
(SP) ← (SP) – 1
(PC7-0) ← ((SP))
(SP) ← (SP) – 1
Encoding: 0 0 1 1 0 0 1 0
Bytes: 1
Cycles: 2
Semiconductor Group 4-66 1997-09-01
Page 95

Instruction Set
C500 Family
RL A
Function: Rotate accumulator left
Description: The eight bits in the accumulator are rotated one bit to the left. Bit 7 is rotated into
the bit 0 position. No flags are affected.
Example: The accumulator holds the value 0C5H (11000101B). The instruction
RL A
leaves the accumulator holding the value 8BH (10001011B) with the carry
unaffected.
Operation: RL
(An + 1) ← (An) n = 0-6
(A0) ← (A7)
Encoding: 0 0 1 0 0 0 1 1
Bytes: 1
Cycles: 1
Semiconductor Group 4-67 1997-09-01
Page 96

Instruction Set
C500 Family
RLC A
Function: Rotate accumulator left through carry flag
Description: The eight bits in the accumulator and the carry flag are together rotated one bit to
the left. Bit 7 moves into the carry flag; the original state of the carry flag moves into
the bit 0 position. No other flags are affected.
Example: The accumulator holds the value 0C5H (11000101B), and the carry is zero. The
instruction
RLC A
leaves the accumulator holding the value 8AH (10001010B) with the carry set.
Operation: RLC
(An + 1) ← (An) n = 0-6
(A0) ← (C)
(C) ← (A7)
Encoding: 0 0 1 1 0 0 1 1
Bytes: 1
Cycles: 1
Semiconductor Group 4-68 1997-09-01
Page 97

Instruction Set
C500 Family
RR A
Function: Rotate accumulator right
Description: The eight bits in the accumulator are rotated one bit to the right. Bit 0 is rotated into
the bit 7 position. No flags are affected.
Example: The accumulator holds the value 0C5H (11000101B). The instruction
RR A
leaves the accumulator holding the value 0E2H (11100010B) with the carry
unaffected.
Operation: RR
(An) ← (An + 1) n = 0-6
(A7) ← (A0)
Encoding: 0 0 0 0 0 0 1 1
Bytes: 1
Cycles: 1
Semiconductor Group 4-69 1997-09-01
Page 98

Instruction Set
C500 Family
RRC A
Function: Rotate accumulator right through carry flag
Description: The eight bits in the accumulator and the carry flag are together rotated one bit to
the right. Bit 0 moves into the carry flag; the original value of the carry flag moves
into the bit 7 position. No other flags are affected.
Example: The accumulator holds the value 0C5H (11000101B), the carry is zero. The
instruction
RRC A
leaves the accumulator holding the value 62H (01100010B) with the carry set.
Operation: RRC
(An) ← (An + 1) n=0-6
(A7) ← (C)
(C) ← (A0)
Encoding: 0 0 0 1 0 0 1 1
Bytes: 1
Cycles: 1
Semiconductor Group 4-70 1997-09-01
Page 99

Instruction Set
C500 Family
SETB <bit>
Function: Set bit
Description: SETB sets the indicated bit to one. SETB can operate on the carry flag or any
directiy addressable bit. No other flags are affected.
Example: The carry flag is cleared. Output port 1 has been written with the value 34H
(00110100B). The instructions
SETB C
SETB P1.0
will leave the carry flag set to 1 and change the data output on port 1 to 35H
(00110101B).
SETB C
Operation: SETB
(C) ← 1
Encoding: 1 1 0 1 0 0 1 1
Bytes: 1
Cycles: 1
SETB bit
Operation: SETB
(bit) ← 1
Encoding: 1 1 0 1 0 0 1 0 bit address
Bytes: 2
Cycles: 1
Semiconductor Group 4-71 1997-09-01
Page 100

Instruction Set
C500 Family
SJMP rel
Function: Short jump
Description: Program control branches unconditionally to the address indicated. The branch
destination is computed by adding the signed displacement in the second
instruction byte to the PC, after incrementing the PC twice. Therefore, the range of
destinations allowed is from 128 bytes preceding this instruction to 127 bytes
following it.
Example: The label ”RELADR” is assigned to an instruction at program memory location
0123H. The instruction
SJMP RELADR
will assemble into location 0100H. After the instruction is executed, the PC will
contain the value 0123H.
Note:
Under the above conditions the instruction following SJMP will be at 102H.
Therefore, the displacement byte of the instruction will be the relative offset (0123H0102H) = 21H. In other words, an SJMP with a displacement of 0FEH would be a
one-instruction infinite loop.
Operation: SJMP
(PC) ← (PC) + 2
(PC) ← (PC) + rel
Encoding: 1 0 0 0 0 0 0 0 rel. address
Bytes: 2
Cycles: 2
Semiconductor Group 4-72 1997-09-01
 Loading...
Loading...