

Rockwell Automation Kinetix 5300 Installation Manual
Installation Instructions
Original Instructions
Kinetix 5300 Single-axis EtherNet/IP Servo Drives
Catalog Numbers 2198-C1004-ERS, 2198-C1007-ERS, 2198-C1015-ERS, 2198-C1020-ERS, 2198-C2030-ERS, 2198-C2055-ERS,
2198-C2075-ERS, 2198-C4004-ERS, 2198-C4007-ERS, 2198-C4015-ERS, 2198-C4020-ERS, 2198-C4030-ERS, 2198-C4055-ERS,
2198-C4075-ERS
Top ic Pa ge
About the Kinetix 5300 Drives 1
Before You Begin 2
Mount the Kinetix 5300 Drive 2
Connector Data 4
Wiring Requirements 6
Attach the Motor Cable Shield Clamp 8
Circuit Breaker/Fuse Selection 9
Motor Overload Protection 11
Additional Resources 11
About the Kinetix 5300 Drives
Kinetix 5300 servo drives provide an Integrated Motion over the EtherNet/IP network solution for applications with continuous 3-phase output power and current
requirements in the range of 0.72…14.7 kW and 2.3…67.5 A 0-pk, respectively.
See the Kinetix 5300 Servo Drives User Manual, publication 2198 -UM005
ControlLogix® 5570, ControlLogix 5580, CompactLogix™ 5370, or CompactLogix 5380 controllers, and Studio 5000 Logix Designer® application.
, for detailed information on wiring, applying power, troubleshooting, and integration with
Catalog Number Explanation
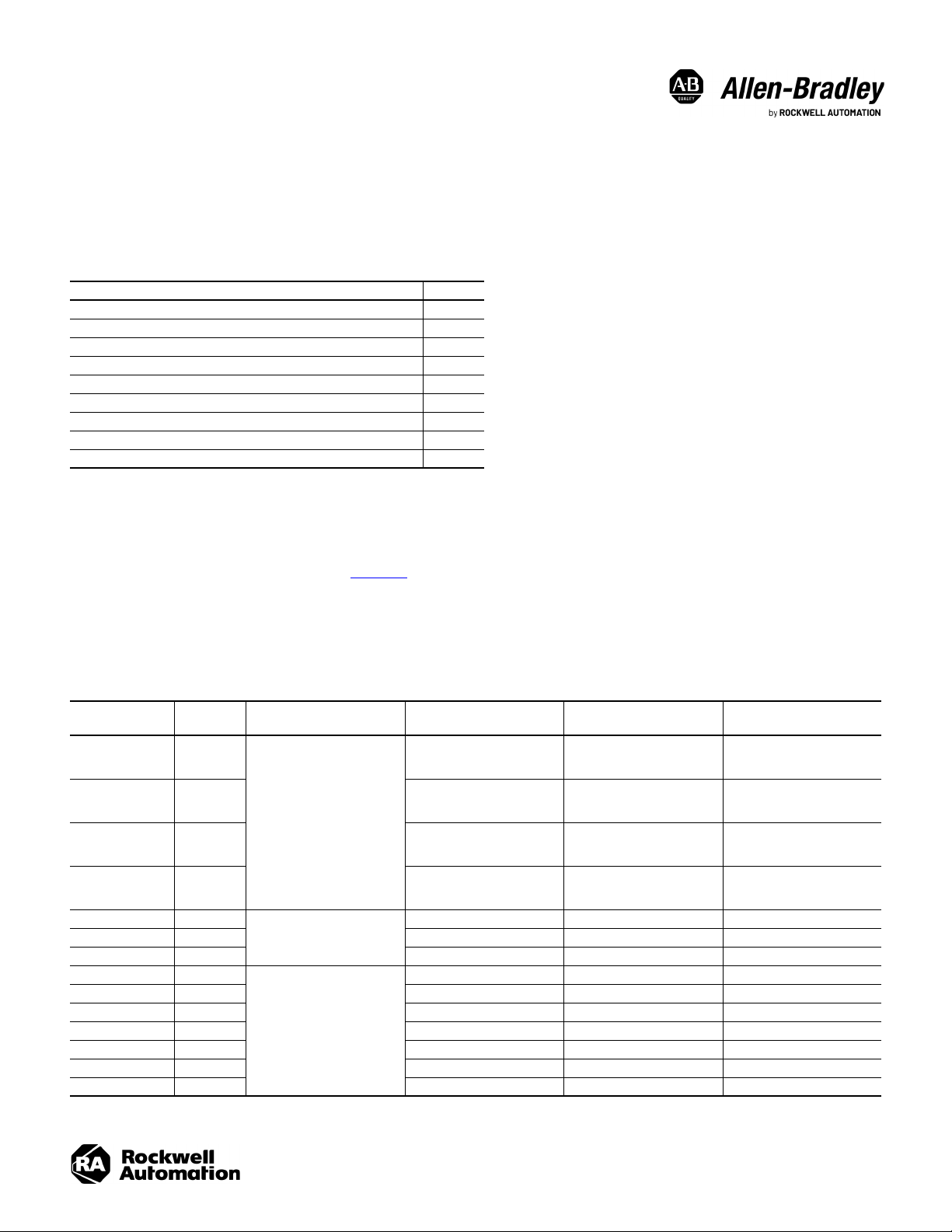
This publication applies to the following Kinetix 5300 servo drives.
Kinetix 5300 Drive Catalog Numbers
Cat. No. Frame Size
2198-C1004-ERS 1
2198-C1007-ERS 1
2198-C1015-ERS 2
2198-C1020-ERS 2
2198 -C203 0-ER S 2
2198-C2055-ERS 3 10.30 40.2 56.9
2198-C2075-ERS 3 12.22 47.7 67.5
2198-C4004-ERS 1
2198-C4007-ERS 1 1.55 2.9 4.1
2198-C4015-ERS 2 2.78 5.2 7.4
2198-C4020-ERS 2 3.90 7.3 10.3
2198-C4030-ERS 2 6.25 11.7 16.5
2198-C4055-ERS 3 12.08 22.6 32.0
2198-C4075-ERS 3 14.70 27.5 38.9
(1) Nominal input voltage rating (110, 230, or 480V rms) is required to achieve full power.
Input Voltage
85…132V rms single-phase
170…253V rms single-phase
170…253V rms three-phase
170…253V rms three-phase
342…528V rms three-phase
(1)
Continuous Output Power
kW
0.22
0.46
0.72
0.36
0.76
1.18
0.67
1.41
2.18
0.97
2.02
3.13
5.02 19.6 27.7
0.86 1.6 2.3
Continuous Output Current
A (rms)
2.8 4.0
4.6 6.5
8.5 12.0
12.2 17.3
Continuous Output Current
A (0-pk)

Kinetix 5300 Single-axis EtherNet/IP Servo Drives Installation Instructions
MBRK
W
V
U
1
10
1
2
Clearance right of the
drive is not required.
Clearance left of the
drive is not required.
Kinetix 5300
Servo Drive
40 mm (1.57 in.) clearance below
drive for airflow
40 mm (1.57 in.) clearance above
drive for airflow
Refer to the Kinetix Servo Drives
Technical Data, publication KNX-TD003
,
for Kinetix 5300 drive dimensions.
MBRK
W
V
U
1
10
1
2
MFB
MBRK
W
V
U
1
10
1
2
MFB
MBRK
W
V
U
1
10
1
2
MFB
Zero-st ack Tab and
Cutout Aligned
Mount drives in descending order, left to
right, according to frame size.
The optional 24V shared-bus connection
system is not shown for clarity.
Before You Begin
Remove all packing material, wedges, and braces from within and around the components. After unpacking, check the item nameplate catalog number against the purchase
order.
The Kinetix 5300 servo drives include the following:
• Wiring-plug connector set for AC input power, 24V control input power, digital inputs/auxiliary feedback, motor power, motor brake, shunt (installed and wired to
the internal shunt), and safe torque-off (STO) connector. Spare shunt wiring plug for optional external shunt.
• Clamp spacer for motor shield clamp
• The frame 3 clamping plate, for cables too large to fit within the standard shield clamp
• These installation instructions, publication 2198-IN021
Replacement connector sets are also available. See the Kinetix Servo Drives Specifications Technical Data, publication KNX-TD003, for more
information.
Mount the Kinetix 5300 Drive
Follow these steps to mount the drive in single-axis configurations.
1. Observe these clearance requirements when mounting a single drive to the panel:
• Additional clearance is required for cables and wires connected to the top of the drive.
• Additional clearance is required if other devices are installed above and/or below the drive and have clearance requirements of their own.
• Additional clearance left and right of the drive is required when mounted adjacent to noise sensitive equipment or clean wire ways.
• The recommended minimum cabinet depth is 300 mm (11.81 in.).
IMPORTANT
Mount the drive in an upright position as shown to provide proper air flow. Do not mount the drive on its side. Mount drives in descending
order, left to right, according to frame size.
Drives can be spaced by aligning the zero-stack tab and cutout. For the zero-stack feature to engage properly (when more than one frame size exists in the drive
system) frame 3 drives must mount left of frame 1 or 2 drives, and frame 2 drives must mount left of frame 1 drives. For additional mounting and 24V shared-bus
information, refer to the Kinetix 5300 Servo Drives User Manual, publication 2198-UM00 5
Rockwell Automation Publication 2198-IN021A-EN-P - June 2020 2
2. Mount the Kinetix 5300 drive to the cabinet subpanel with M4 (#8-32) steel machine screws torqued to 2.0 N•m (17.7 lb•in) max.
2
1
10
U
1
V
W
MBRK
MFB
.
2
2
1
1
10
MBRK
MFB
2
2
1
1
10
U
V
W
MBRK
MFB
1
1
1
1
10
10
U
V
W
MFB
U
U
V
V
W
W
MBRK
MBRK
Kinetix 5300 Single-axis EtherNet/IP Servo Drives Installation Instructions
MBRK
W
V
U
1
10
1
2
MFB
F
0.0
0.0
G
52.50
34.00
Ø M4 (#8-32)
Dimensions are in mm
2198-C1004-ERS
Drive is Shown
Applies to
Only
Frame 3
Hole spacing is measured in millimeters
and not converted to inches to avoid
errors due to rounding.
65.0
(2.56)
E
A
3.0
(0.12)
B
D
265
(10.43)
65.0
(2.56)
MBRK
W
V
U
1
10
1
2
C
Dimensions are in mm (in.)
Frame 1 Servo Drive
2198-K53CK-D15M
Feedback Connector Kit
Mounted on Frame 1 Drive
2198 -K53C K-D15 M
Feedback Connector Kit
Mounted on a Frame 2 or 3 Drive
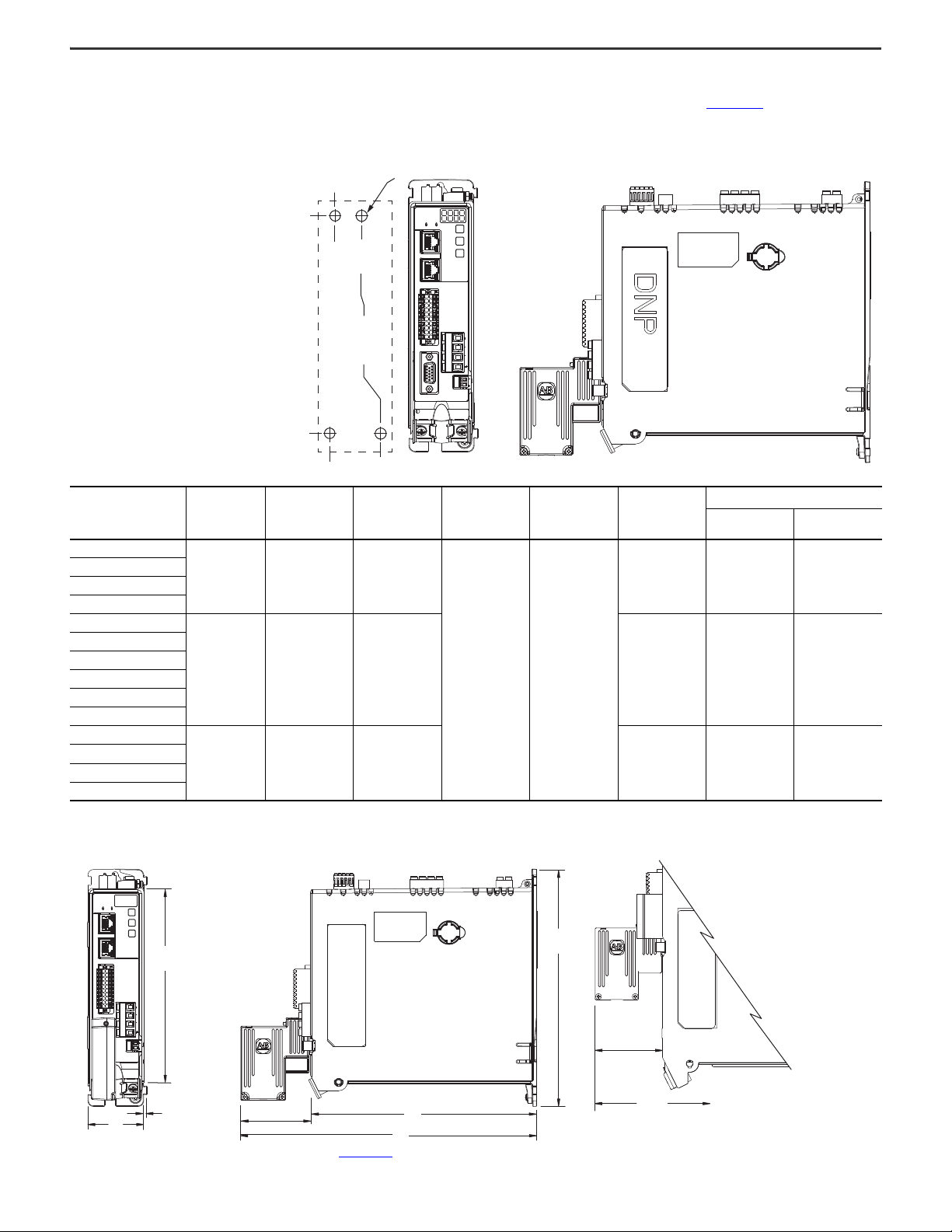
Product Dimensions
Included in this figure are the drill hole patterns for standalone drives. Refer to the Kinetix 5300 Servo Drives User Manual, publication 2198 -UM00 5, for multi-axis drill-hole
patterns.
Kinetix 5300 Drives with 2198-K53CK-D15M Connector Kit
Kinetix 5300 Drive
Cat. No.
Frame
A
mm (in.)
B
mm (in.)
2198-C1004-ERS
2198-C1007-ERS
2198-C4004-ERS
1 50 (1.97) 175 (6.89)
2198-C4007-ERS
2198-C1015-ERS
2198-C1020-ERS
2198 -C203 0-ER S
2198-C4015-ERS
2 55 (2.16) 225 (8.86) 265 (10.43) 243.84 5.00
2198-C4020-ERS
2198-C4030-ERS
2198-C2055-ERS
2198-C2075-ERS
2198 -C405 5-ER S
3 85.2 (3.35) 250 (9.84) 294 (11.57) 273.70 0.0
2198-C4075-ERS
(1) Hole spacing is measured in millimeters and not converted to inches to avoid errors due to rounding.
Kinetix 5300 Drives with 2198-K53CK-D15M Connector Kit
C
mm (in.)
D
mm (in.)
204 (8.03) 265 (10.43)
E
mm (in.)
215 (8.46) 193.68 4.51
Drill Hole Patterns
F
mm
(1)
mm
G
Refer to Kinetix Servo Drives Technical Data, publication KNX-TD003, for motor/actuator compatibility with the 2198-K53CK-D15M connector kit and product dimensions.
Rockwell Automation Publication 2198-IN021A-EN-P - June 2020 3
Kinetix 5300 Single-axis EtherNet/IP Servo Drives Installation Instructions
18
17
16
15
L3
L2
L1
1
8
2
3
11
4
5
9
10
14
6
7
13
12
L3L2
L1
24+
DC+ SH
24-
SB+
SB-
S1
SC
S2
7
2
1
2
1
MOD NET
MBRK
W
V
U
1
10
1
2
MFB
SELECT
BACK
NEXT
KINETIX
5300
DANGER
Electric shock
risk. Power
off and wait
5 minutes.
U
V
W
SB+
SB-
S1
SC
S2
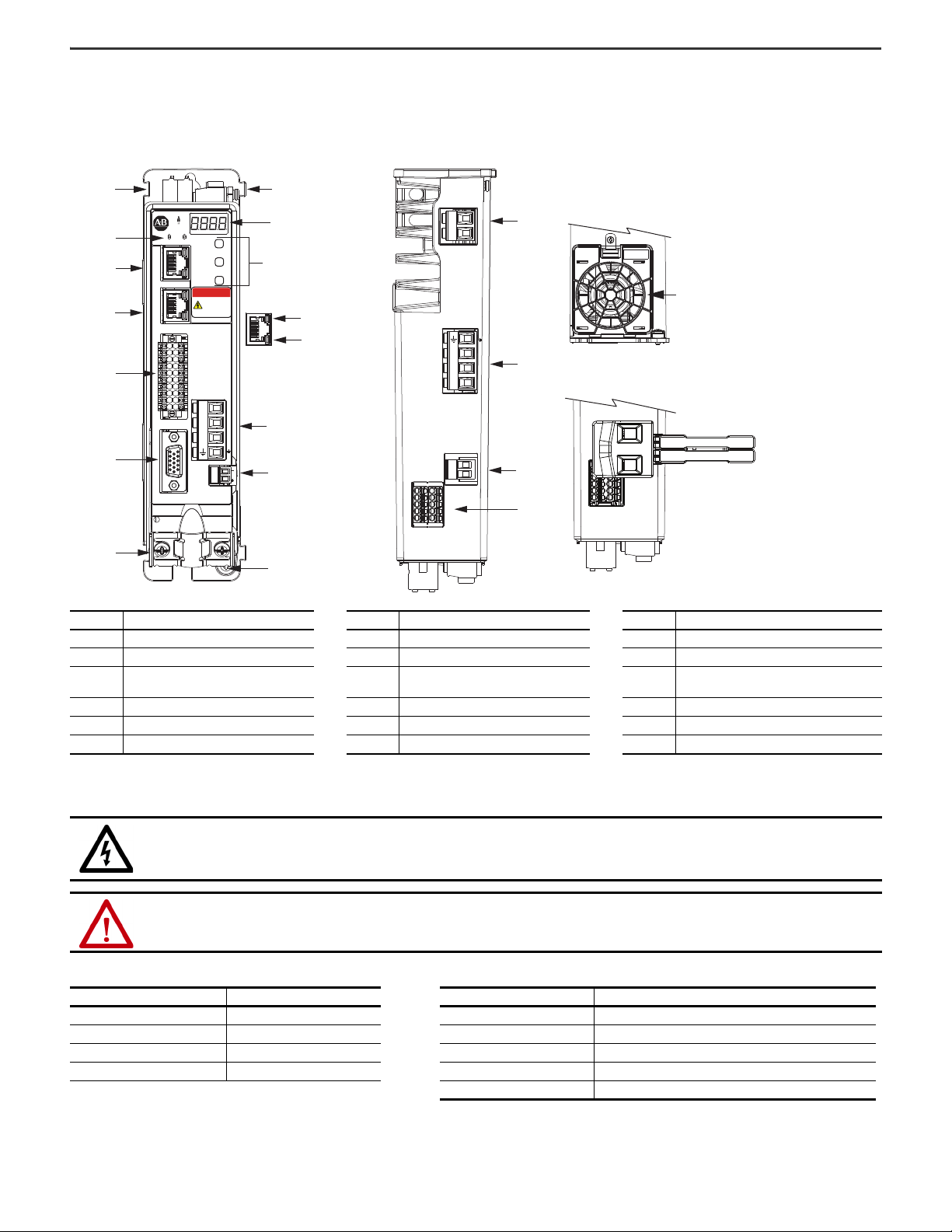
Kinetix 5300 Drive, Front View
(2198-C1004-ERS drive is shown)
Kinetix 5300, Top View
(2198-C1004-ERS drive is shown)
Shared-bus 24V Input
Wiring Connector
Kinetix 5300, Bottom View
(frame 2 and 3 drives only)
Cooling Fan
Connector Data
Use these illustrations to identify the Kinetix 5300 drive features and indicators.
Kinetix 5300 Drive Features and Indicators
Item Description Item Description Item Description
1 Motor cable shield clamp 7 Zero-stack mounting tab/cutout 13 Motor brake connector
2 Motor feedback (MFB) connector 8 Four-character status display 14 Ground terminal
Digital inputs and auxiliary feedback
3
connector
9 Navigation pushbuttons 15 Shunt resistor connector
4 Ethernet (PORT1) RJ45 connector 10 Link speed status indicators 16 AC input power connector
5 Ethernet (PORT2) RJ45 connector 11 Link/Activity status indicators 17 24V control input power connector
6 Module and Network status indicators 12 Motor power connector 18 Safe torque-off (STO) connector
These procedures assume that you have prepared your panel and understand how to bond your system. For installation instructions regarding equipment and accessories
not included here, refer to the instructions that came with those products.
Kinetix 5300 Drive Connectors
Description Connector Description Connector
AC input power 4-position plug, terminal screws Motor feedback (MFB) 15-position plug
24V control input power 2-position plug, terminal screws Brake power (MBRK) 2-position plug, terminal screws
Shunt power 2-position plug, terminal screws Digital inputs / Auxiliary feedback 20-position plug, spring terminals
Motor power 4-position plug, terminal screws Safe torque-off (STO) 10-position plugs, spring terminals, 2x (2 rows of 5 pins)
SHOCK HAZARD: To avoid hazard of electrical shock, perform all mounting and wiring of the Kinetix 5300 drive prior to applying power. Once power is
applied, connector terminals can have voltage present even when not in use.
ATTENTION: Plan the installation of your system so that you can perform all cutting, drilling, tapping, and welding with the system removed from the
enclosure. Because the system is of the open type construction, be careful to keep any metal debris from falling into it. Metal debris or other foreign
matter can become lodged in the circuitry and result in damage to components.
Ethernet communication ports RJ45 Ethernet
4 Rockwell Automation Publication 2198-IN021A-EN-P - June 2020
 Loading...
Loading...