

Rockwell Automation Kinetix 5100, 2198-E1004-ERS, 2198-E1007-ERS, 2198-E1015-ERS, 2198-E1020-ERS Design Guide
...Page 1
Design Guide
2
1
I/0
AUX
5100
NET
MOD
CHARGE
5100
2
1
NET
MOD
CHARGE
I/0
AUX
U
V
W
DC+
ISH
ESH
P1
P2
DC–
L1
L2
L3
L1C
L2C
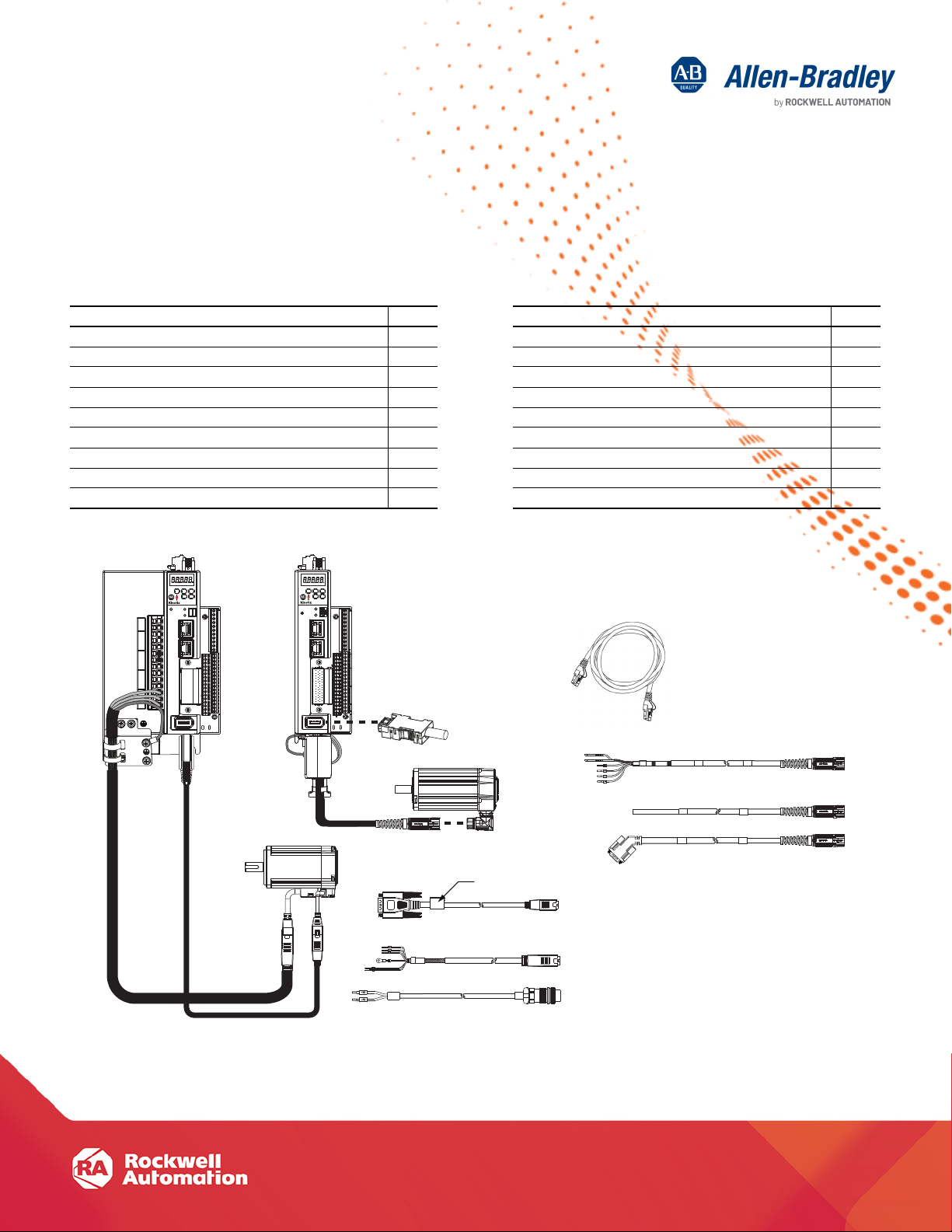
Kinetix 5100
Servo Drives
Kinetix TLP
Servo Motors
Kinetix MPL
Servo Motors
2090-CxxM7Dx Motor Power/Brake
and Feedback Cables
2090-CTxx-MxDx Motor Power,
Brake, and Feedback Cables
2198-KTBT Feedback Battery Box
2198-TBIO I/O Terminal
Expansion Block
2198-AUXKIT Auxiliary
Feedback Connector Kit
Interface Cables
and Other Drive Accessories
2198 -K51C K-D15 M
Feedback Connector Kit
Original Instructions
Kinetix 5100 Drive Systems
Catalog Numbers 2198-E1004-ERS, 2198-E1007-ERS, 2198-E1015-ERS, 2198-E1020-ERS, 2198-E2030-ERS, 2198-E2055-ERS,
2198-E2075-ERS, 2198-E2150-ERS, 2198-E4004-ERS, 2198-E4007-ERS, 2198-E4015-ERS, 2198-E4020-ERS, 2198-E4030-ERS,
2198-E4055-ERS, 2198-E4075-ERS, 2198-E4150-ERS
Topic Page Topic (continued) Page
Summary of Changes 2 Kinetix MPL (400V-class) Low-inertia Servo Motors 30
Introduction 2 Kinetix MPM (200V-class) Medium-inertia Servo Motors 38
Hardwired Safety Configuration 3 Kinetix MPM (400V-class) Medium-inertia Servo Motors 41
Determine What You Need 3 Kinetix MPF (200V-class) Food-grade Servo Motors 48
2090-Series Kinetix TLP Motor Cables Overview 9 Kinetix MPF (400V-class) Food-grade Servo Motors 51
2090-Series Motor Power/Brake and Feedback Cables Overview 11 Kinetix MPS (200V-class) Stainless-steel Servo Motors 53
Kinetix TLP (200V-class) Multi-purpose Servo Motors 13 Kinetix MPS (400V-class) Stainless-steel Servo Motors 54
Kinetix TLP (400V-class) Multi-purpose Servo Motors 19 Kinetix TLY (200V-class) Compact Servo Motors 56
Kinetix MPL (200V-class) Low-inertia Servo Motors 24 Kinetix TL (200V-class) Compact Servo Motors 62
Page 2

Kinetix 5100 Drive Systems Design Guide
Summary of Changes
This manual contains new and updated information as indicated in the following table.
Top ic Page
Added performance specifications for Kinetix TLP (400V-class) multi-purpose servo motors with Kinetix 5100 drives. 19
Added performance specifications for Kinetix MPL (400V-class) low-inertia servo motors with Kinetix 5100 drives. 30
Added performance specifications for Kinetix MPM (400V-class) medium-inertia servo motors with Kinetix 5100 drives. 41
Added performance specifications for Kinetix MPF (400V-class) food-grade servo motors with Kinetix 5100 drives. 51
Added performance specifications for Kinetix MPS (400V-class) stainless-steel servo motors with Kinetix 5100 drives. 54
Added performance specifications for Kinetix TLY (200V-class) compact servo motors with Kinetix 5100 drives. 56
Added performance specifications for Kinetix TL (200V-class) compact servo motors with Kinetix 5100 drives. 62
Introduction
Use this publication if your application includes the Kinetix® 5100 drive family and Kinetix TLP servo motors or any of the other compatible
Allen-Bradley® motors. The 2198-K51CK-D15M feedback connector kit is available for use when Kinetix MPL, MPM, MPF, MPS or Kinetix TL and
TLY servo motors are used with flying-lead cables. For more Kinetix drive and motor information, see the Kinetix Motion Control Selection
Guide, publication KNX-SG001
, or Motion Analyzer software.
The purpose of this publication is to assist you in identifying the drive system components and accessory items that
you need for your
Kinetix 5100 drive and motor combination. Diagrams in this publication illustrate how many of the common drive accessory items are used in
a typical system. See the Kinetix Servo Drives Specifications Technical Data, publication KNX-TD003
, for detailed accessory descriptions and
specifications.
Drive/motor system combinations also include the following:
• Motor/cable combinations table
• Drive and motor performance specifications table
• Torque/speed curves with each motor matched to the drive that provides optimum performance
Performance specification data and curves reflect nominal system performance of a typical system with motor and drive at the rated
ambient temperature and line voltage. For additional information on ambients, line conditions, and valid combinations that are not shown in
this publication, refer to the Motion Analyzer system sizing and selection tool.
IMPORTANT These system combinations do not include all possible motor/drive combinations. See the Motion Analyzer system
sizing and selection tool to verify compatibility. Access Motion Analyzer at
https://motionanalyzer.rockwellautomation.com.
2 Rockwell Automation Publication KNX-RM011C-EN-P - January 2021
Page 3
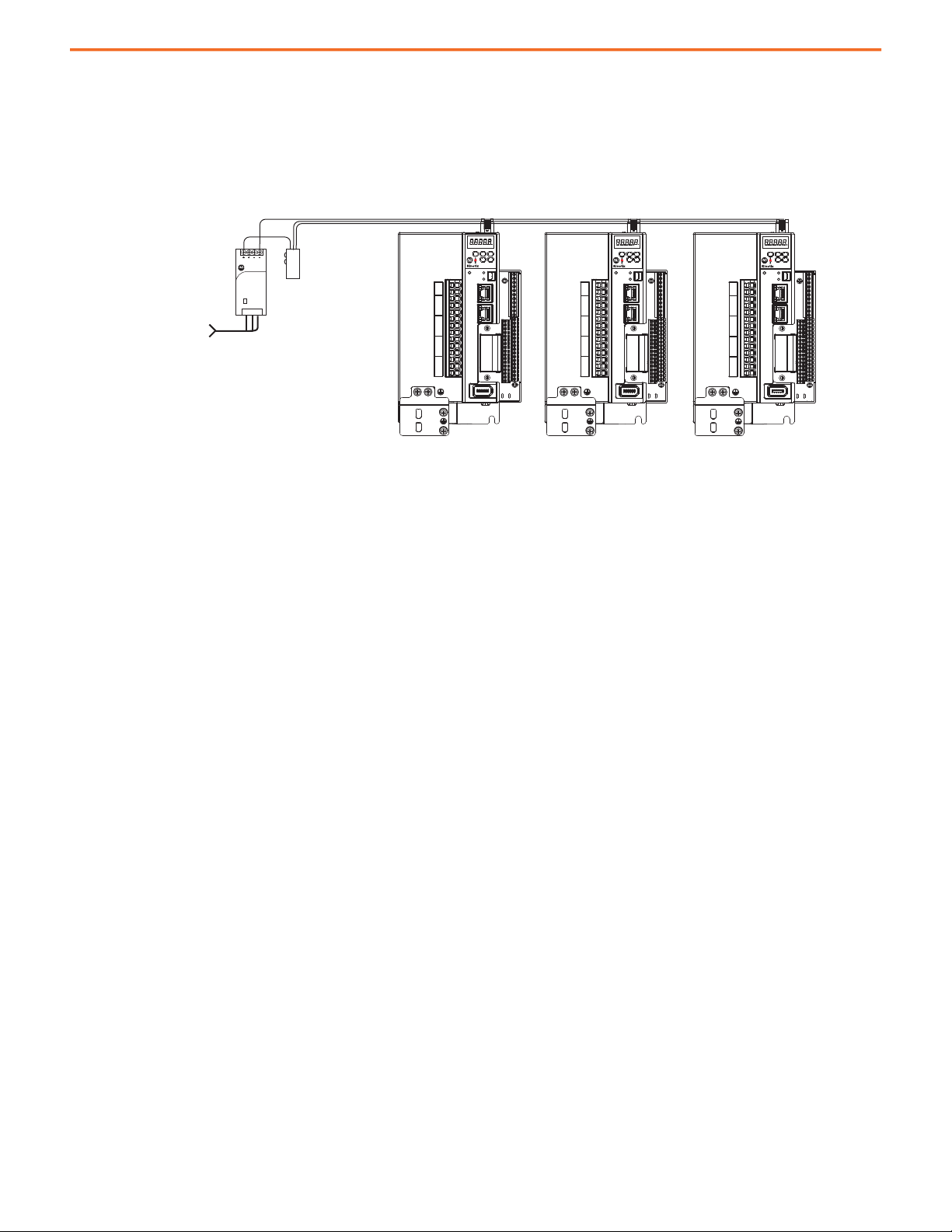
Hardwired Safety Configuration
5100
2
1
NET
MOD
CHARGE
I/0
AUX
U
V
W
DC+
ISH
ESH
P1
P2
DC–
L1
L2
L3
L1C
L2C
5100
2
1
NET
MOD
CHARGE
I/0
AUX
U
V
W
DC+
ISH
ESH
P1
P2
DC–
L1
L2
L3
L1C
L2C
5100
2
1
NET
MOD
CHARGE
I/0
AUX
U
V
W
DC+
ISH
ESH
P1
P2
DC–
L1
L2
L3
L1C
L2C
1606-XL
Power Supply
Input
Allen-Bradley
AC Input Power
Safety
Device
1606-XLxxx
24V DC Functional Safety Power
(customer-supplied)
Safe Torque-off (STO) Connectors
Kinetix 5100 Servo Drives
(2198-E1020-ERS drives are shown)
Hardwired Safety Configuration
Kinetix 5100 servo drives are capable of safe torque-off (STO) safety functions via hardwired connections. In this example, the safe torqueoff (STO) connectors are wired to external safety devices with cascading hardwired safety-connections from one drive to another.
Hardwired Safe Torque-off
Determine What You Need
For each Kinetix 5100 drive system, the drive and servo motor catalog numbers are required to determine the motor power and feedback
cable catalog numbers. A 24V DC power supply is also required for digital I/O circuitry, motor brake circuitry, and control power on
2198-E4xxx-ERS (400V-class) drives.
• For applications with Kinetix TLP servo motors, use 2090-CTFB-MxDD feedback cables with drive-end (D-sub) connector for direct
connection to the Kinetix 5100 drive. If you build your own flying-lead cables, 2198-K51CK-D15M feedback connector kits are available.
• For applications with Kinetix MPL, MPM, MPF, and MPS servo motors, use 2090-CFBM7DD feedback cables with drive-end (D-sub)
connector for direct connection to the Kinetix 5100 drive. Use 2198-K51CK-D15M connector kits with 2090-CFBM7DF flying-lead
feedback cables.
• For applications with Kinetix TLY servo motors, use 2090-CFBM6DD feedback cables with drive-end (D-sub) connector for direct
connection to the Kinetix 5100 drive when battery backup is not required. When battery backup is required, use 2198-K51CK-D15M
connector kits with 2090-CFBM6DF flying-lead feedback cables.
• For applications with Kinetix TL servo motors, use 2090-DANFCT-Sxx feedback cables and remove the drive-end connector. Use
2198-K51CK-D15M connector kits for making feedback connections and include a customer-supplied battery when battery-backup of
position data is required.
• 2198-TBIO I/O terminal block
• 2198-USBC USB cable and 2198-USBF USB filter
Optional equipment includes the following:
• Bulletin 2198 AC line filters
• 2198-AUXKIT auxiliary feedback connector kit
• Bulletin 2097 or 2198 shunt resistors
Rockwell Automation Publication KNX-RM011C-EN-P - January 2021 3
• 1585J-M8CBJM-x (shielded) Ethernet cable
Example diagrams of the required and optional equipment are provided.
Page 4
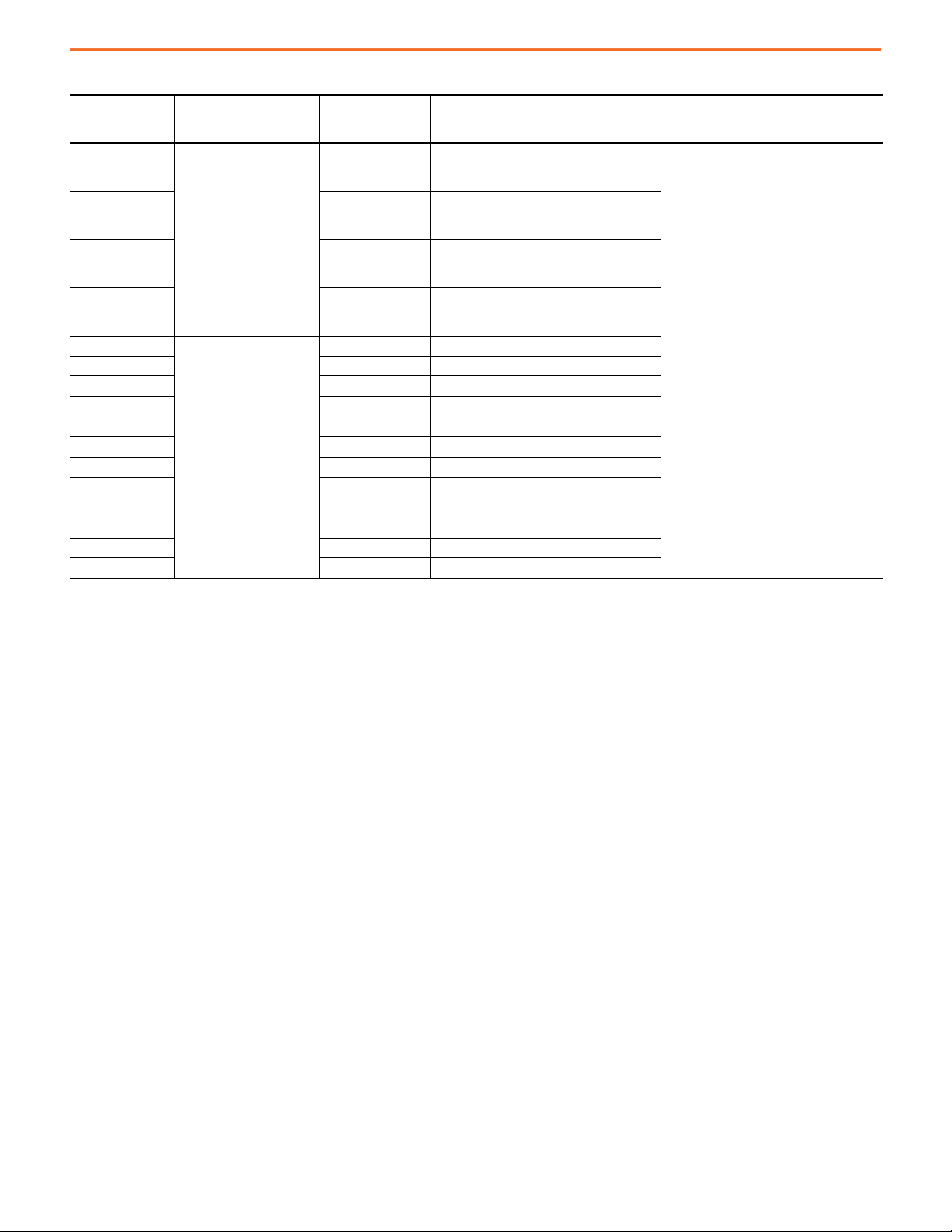
Determine What You Need
Kinetix 5100 EtherNet/IP Indexing Servo Drives
Drive Cat. No. Input Voltage
2198-E1004-ERS
2198-E1007-ERS
2198-E1015-ERS
2198-E1020-ERS
2198-E2030-ERS
2198-E2055-ERS 5.50 41.3 91.4
2198-E2075-ERS 7.50 49.0 127.5
2198 -E2150-E RS 15.0 0 78.0 16 2.0
2198-E4004-ERS
2198-E4007-ERS 0.75 3.19 8.0
2198-E4015-ERS 1.50 6.05 15.11
2198-E4020-ERS 2.00 7.42 20.78
2198-E4030-ERS 3.00 13.95 26.08
2198-E4055-ERS 5.50 24.8 37.65
2198-E4075-ERS 7.50 31.0 53.32
2198-E4150-ERS 15.0 41.26 70.14
95…132V rms single-phase
170…253V rms single-phase
170…253V rms three-phase
170…253V rms three-phase
342…528V rms three-phase
Continuous Output
Power
kW
0.20
0.40
0.40
0.375
0.75
0.75
0.75
1.50
1.50
1.00
2.00
2.00
3.00 17.9 55.95
0.40 1.60 5.4
Continuous Output
Current
A (rms)
2.60 6.50
5.10 15.4
7.9 0 2 3.7
13.4 40.6
Peak Output Current
A (rms)
Feature s
• Designed for optimum performance with
Kinetix TLP servo motors
• EtherNet/IP™ Indexing
• Standalone (pulse train, Digital I/O, and
analog I/O control)
• Safe torque-off
4 Rockwell Automation Publication KNX-RM011C-EN-P - January 2021
Page 5
Determine What You Need
P1
P2
DC–
L1
L2
L3
L1C
L2C
DC+
ESH
U
V
W
NET
MOD
CHARGE
5100
I/O
AUX
MFB
AUX
MFB
MBRK+
MBRK-
AUX
MFB
AUX
MFB
AUX
MFB
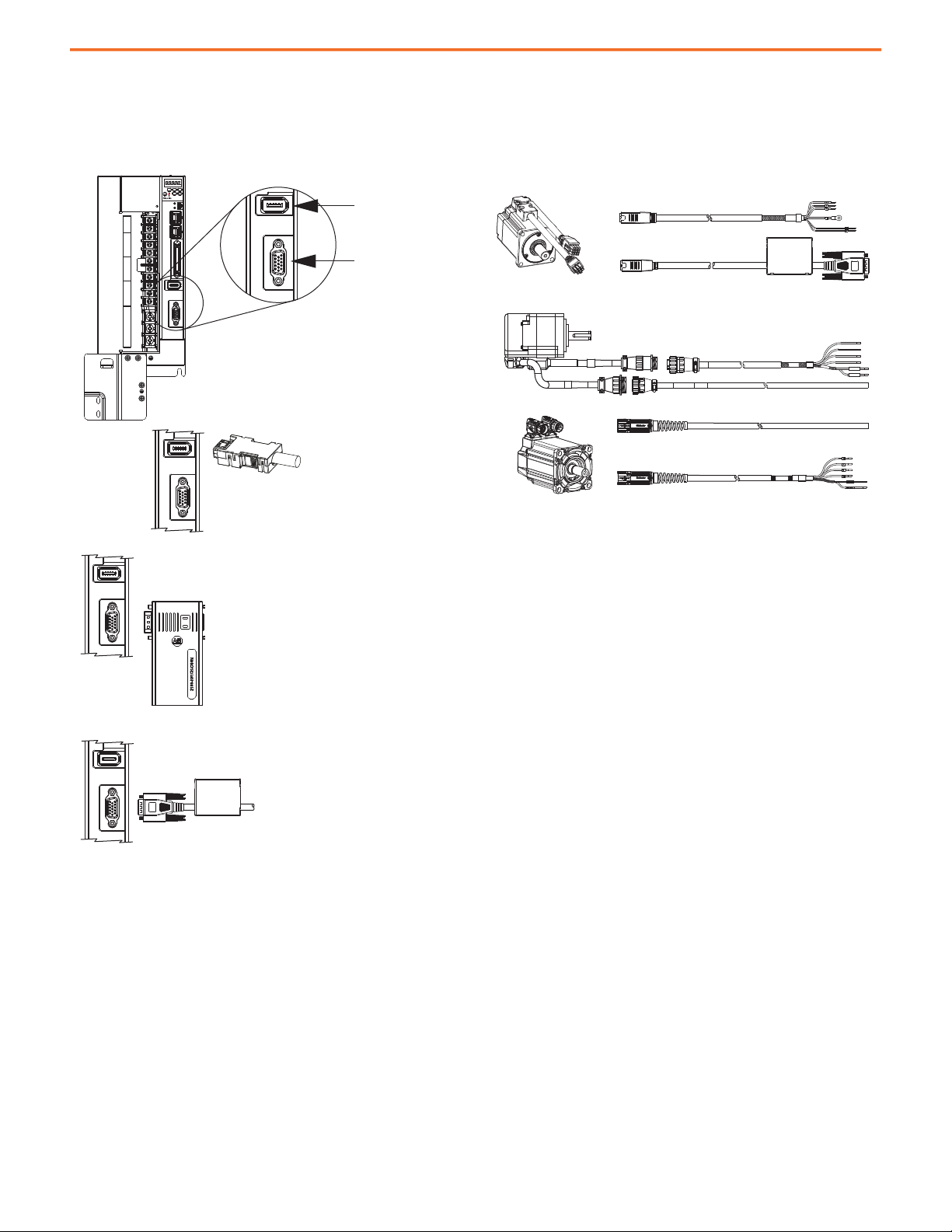
2198-AUXKIT Auxiliary Feedback Connector Kit
Accepts Digital AqB incremental encoder feedback (TTL).
Application uses:
• Load feedback (PT mode, dual loop)
• Master feedback (PR mode, used as E-CAM command source)
10-pin Auxiliary Feedback
(AUX) Connector
15-pin Motor Feedback
(MFB) Connector
2198-K51CK-D15M Motor Feedback Connector Kit
Accepts multiple encoder feedback types and provides battery-backup for multi-turn position data:
• Hiperface high-resolution absolute multi-turn and single-turn encoders
– Kinetix MPL-A/Bxxx-S/M, MPM-A/Bxxx-S/M, MPF-A/Bxxx-S/M, MPS-A/Bxxx-S/M servo motors
– Kinetix MPL-A/Bxxx-E/V servo motors
• Nikon (24-bit) high-resolution serial encoder
– Kinetix TLP-Axxx-xxx-D servo motors
• Tamagawa (17-bit) high-resolution serial encoder
– Kinetix TL-AxxxP-B servo motors
– Kinetix TLY-AxxxP-B servo motors
Kinetix 5100 Servo Drive
(2198-E2055-ERS drive is shown)
2090-CFBM7Dx and 2090-CPxM7DF
Motor Feedback and Power Cables
Kinetix MP Motors and Actuators
(MPL-Bxxxx motor is shown)
2090-CTFB-MxDD and 2090-CTPx-MxDF
Motor Feedback and Power Cables
2090-CFBM6Dx and 2090-CPxM6DF
Motor Feedback and Power Cables
Kinetix TLP Motors
(TLP-A100 motor is shown)
Kinetix TL/TLY Motors
(TLY-A110 motor is shown)
2090-CTFB-MxDD Feedback Cable
Provides battery-backup for multi-turn position data:
• Nikon (24-bit) high-resolution serial encoder
–Kinetix TLP-A/Bxxx-xxx-D servo motors
Battery
Box
• Digital AqB (TTL) encoders with UVW (incremental)
–MPL-A/B15xxx-H, MPL-A/B2xxx-H, MPL-A/B3xxx-H,
MPL-A/B4xxx-H, MPL-A/B45xxx-H rotary motors
–Kinetix TLY-Axxxx-H servo motors
Motor feedback connections are made at the 15-pin motor feedback (MFB) connector. These examples illustrate how you can use the
2198-K51CK-D15M connector kit for making these connections. Auxiliary feedback connections are made at the 10-pin auxiliary feedback
connector (AUX) with the 2198-AUXKIT auxiliary feedback connector kit. This port supports incremental encoder types only.
Feedback Configuration Examples
Rockwell Automation Publication KNX-RM011C-EN-P - January 2021 5
Page 6
Determine What You Need
1606-XL
Power Supply
Input
Allen-Bradley
2
1
I/0
AUX
5100
NET
MOD
CHARGE
Single-phase or Three-phase
AC Input Power
1606-XLxxx power supply for
24V DC Digital I/O, motor brake circuitry, and
control power on 2198-E4xxx-ERS (400V-class) drives.
AC Input Power
2198-USBC Drive Configuration Cable
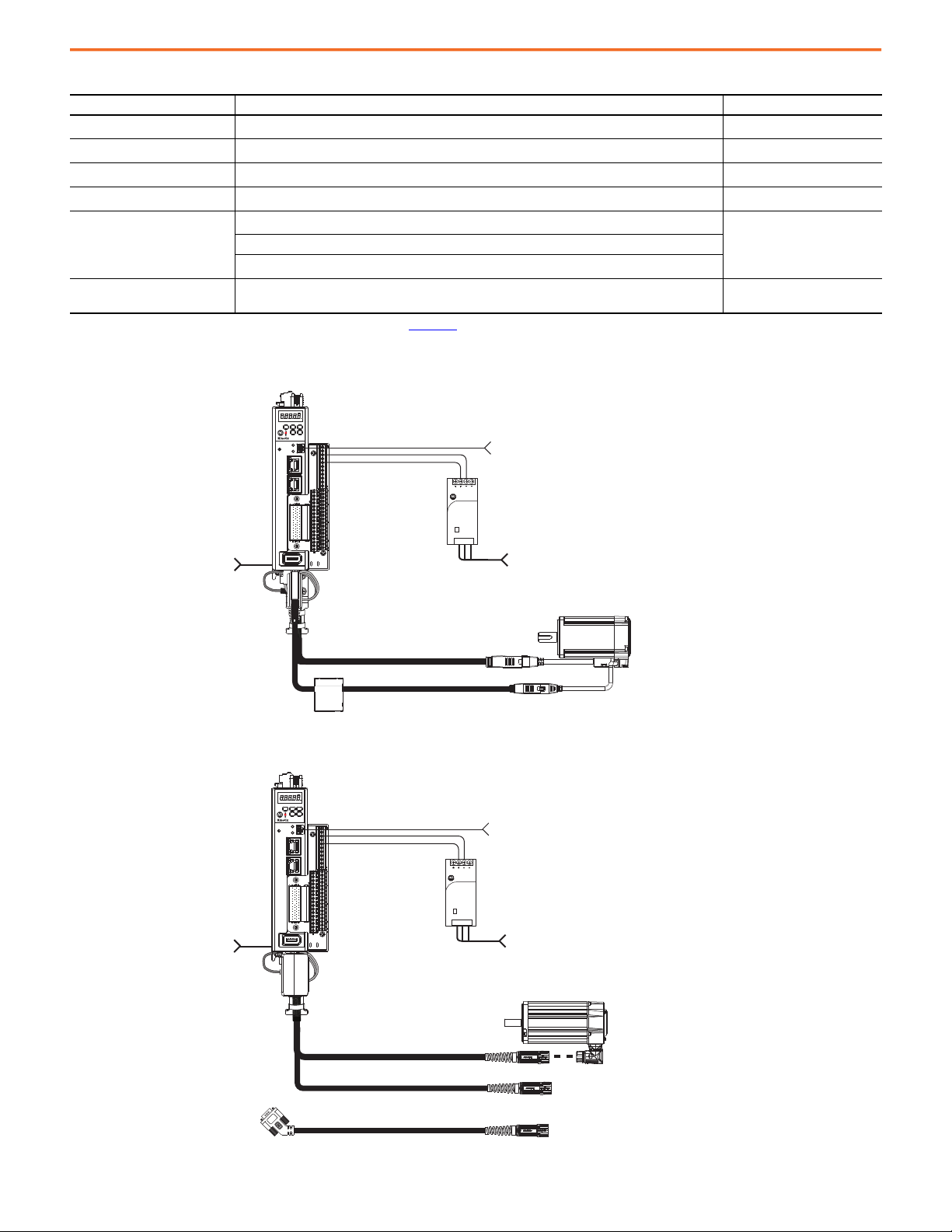
Kinetix TLP Servo Motors
(TLP-A046-005 servo motor is shown)
2090-CTxx-MxDx Motor Power,
Brake, and (drive-end connector)
Feedback Cables
2198-TBIO Terminal
Expansion Block
2198 -Exxxx-ERS
Kinetix 5100 Servo Drive
Battery Box (battery backup is optional)
1606-XLxxx power supply for
24V DC Digital I/O, motor brake circuitry, and
control power on 2198-E4xxx-ERS (400V-class) drives.
AC Input Power
Single-phase or Three-phase
AC Input Power
2198 -Exxxx-ERS
Kinetix 5100 Servo Drive
Kinetix MPL Servo Motor
2198-USBC Drive Configuration Cable
2090-CPBM7DF Motor Power/Brake Cable
2198-TBIO Terminal
Expansion Block
2090-CFBM7DD (drive-end connector) Motor Feedback Cable
2198-K51CK-D15M
Feedback Connector Kit
2090-CPBM7DF (drive-end flying-lead) Motor Feedback Cable
Required Drive Accessories
Drive Accessory Description Cat. No.
Motor feedback connector kit Motor feedback connector kit (required for flying-lead feedback cable).
I/O terminal expansion block Provides termination points for 50-pin I/O connector.
USB cable For connection to PC with KNX5100C software to configure the drive.
USB filter To reduce interference and maintain a reliable connection to the PC.
(2)
Kinetix TLP servo motors with high-resolution absolute encoder.
Motor cables
Kinetix MPL, MPM, MPF, and MPS servo motors with high-resolution absolute or incremental encoders.
Kinetix TL and TLY servo motors with high-resolution absolute or incremental encoders.
24V power supply
(1) Refer to the Kinetix Servo Drives Specifications Technical Data, publication KNX-TD003, for detailed descriptions and specifications for these drive accessories.
(2) battery backup required with high-resolution absolute encoders for position retention during a power loss.
24V DC for digital I/O circuitry, motor brake circuitry, and control power on 2198-E4xxx-ERS
(400V-class) drives.
(2)
2198 -K51C K-D15 M
2198 -TBIO
2198 -USBC
2198 -USBF
Refer to the specific drive/
motor combination for the
motor cables required for your
system.
1606-XLxxx
Kinetix 5100 Drive with Kinetix TLP Servo Motor
(1)
(1)
(1)
(1)
Kinetix 5100 Drive with Kinetix MPL, MPM, MPF, and MPS Servo Motor
5100
MOD
NET
CHARGE
2
1
I/0
AUX
6 Rockwell Automation Publication KNX-RM011C-EN-P - January 2021
Allen-Bradley
1606-XL
Power Supply
Input
Page 7
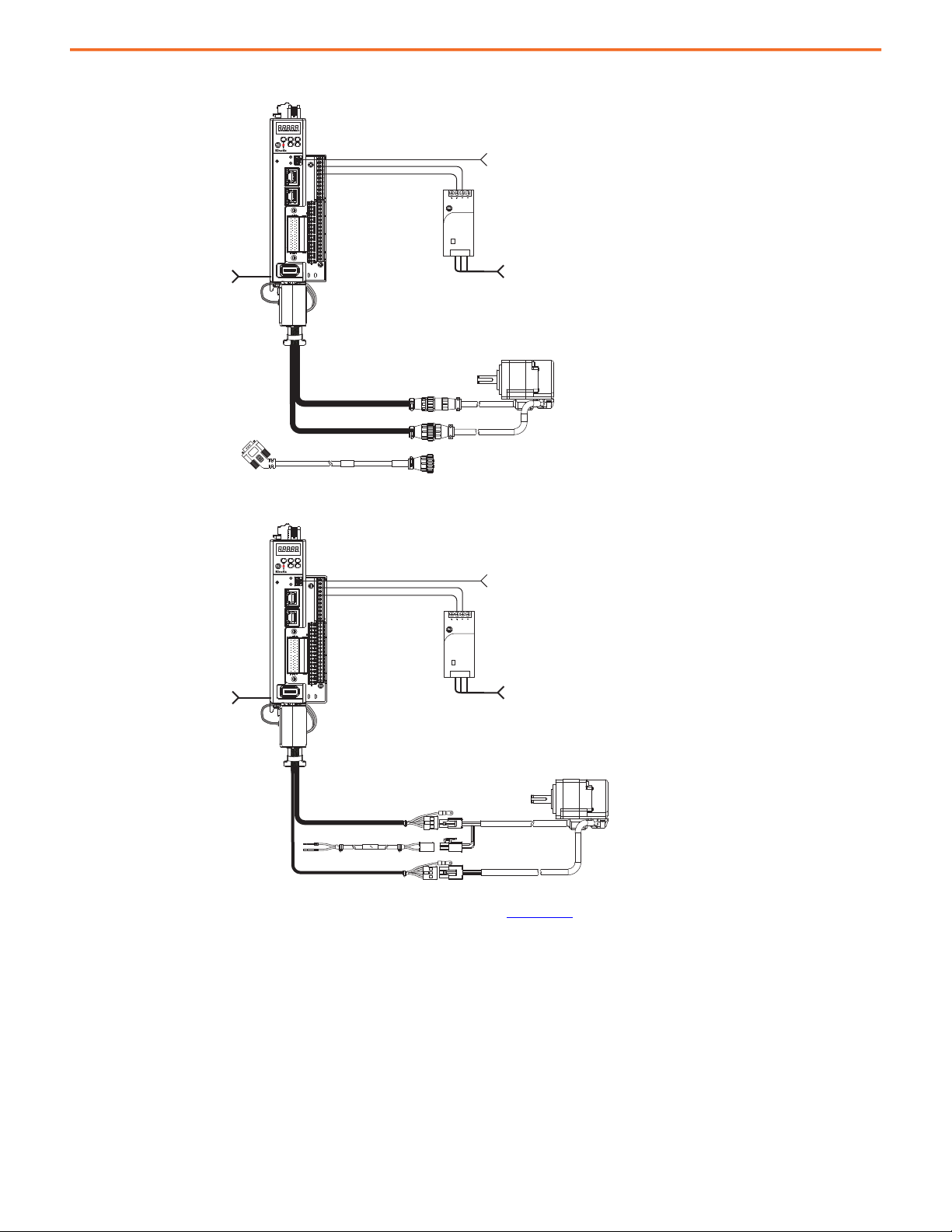
Kinetix 5100 Drive with Kinetix TLY Servo Motors
1606-XL
Power Supply
Input
Allen-Bradley
2
1
I/0
AUX
5100
NET
MOD
CHARGE
1606-XLxxx power supply for
24V DC Digital I/O, motor brake circuitry, and
control power on 2198-E4xxx-ERS (400V-class) drives.
AC Input Power
Single-phase or Three-phase
AC Input Power
2198-K51CK-D15M
Feedback Connector Kit
(battery backup is optional)
2198 -Exxxx-ERS
Kinetix 5100 Servo Drive
Kinetix TLY Servo Motor
2198-USBC Drive Configuration Cable
2090-CxxM6DF Motor Power/Brake
and (drive-end flying-lead)
Feedback Cables
2198-TBIO Terminal
Expansion Block
2090-CFBM6DD Motor Feedback Cable
(drive-end connector, no battery backup)
2090-DANFCT-Sxx
Motor Feedback Cable
(connector removed)
2090-DANBT-18Sxx
Motor Brake Cable
(optional)
2090-DANPT-16Sxx
Motor Power Cable
2198 -K51C K-D15 M
Feedback Connector Kit
(battery backup is optional)
1606-XLxxx power supply for
24V DC Digital I/O, motor brake circuitry, and
control power on 2198-E4xxx-ERS (400V-class) drives.
AC Input Power
Single-phase or Three-phase
AC Input Power
2198 -Exxxx-ERS
Kinetix 5100 Servo Drive
Kinetix TL Servo Motor
2198-USBC Drive Configuration Cable
2198-TBIO Terminal
Expansion Block
Determine What You Need
Kinetix 5100 Drive with Kinetix TL Servo Motors
5100
MOD
NET
CHARGE
2
1
I/0
AUX
Refer to the Kinetix Servo Drives Specifications Technical Data, publication KNX-TD003, for detailed descriptions and additional
specifications for the Kinetix 5100 drive family.
Rockwell Automation Publication KNX-RM011C-EN-P - January 2021 7
Allen-Bradley
1606-XL
Power Supply
Input
Page 8
Determine What You Need
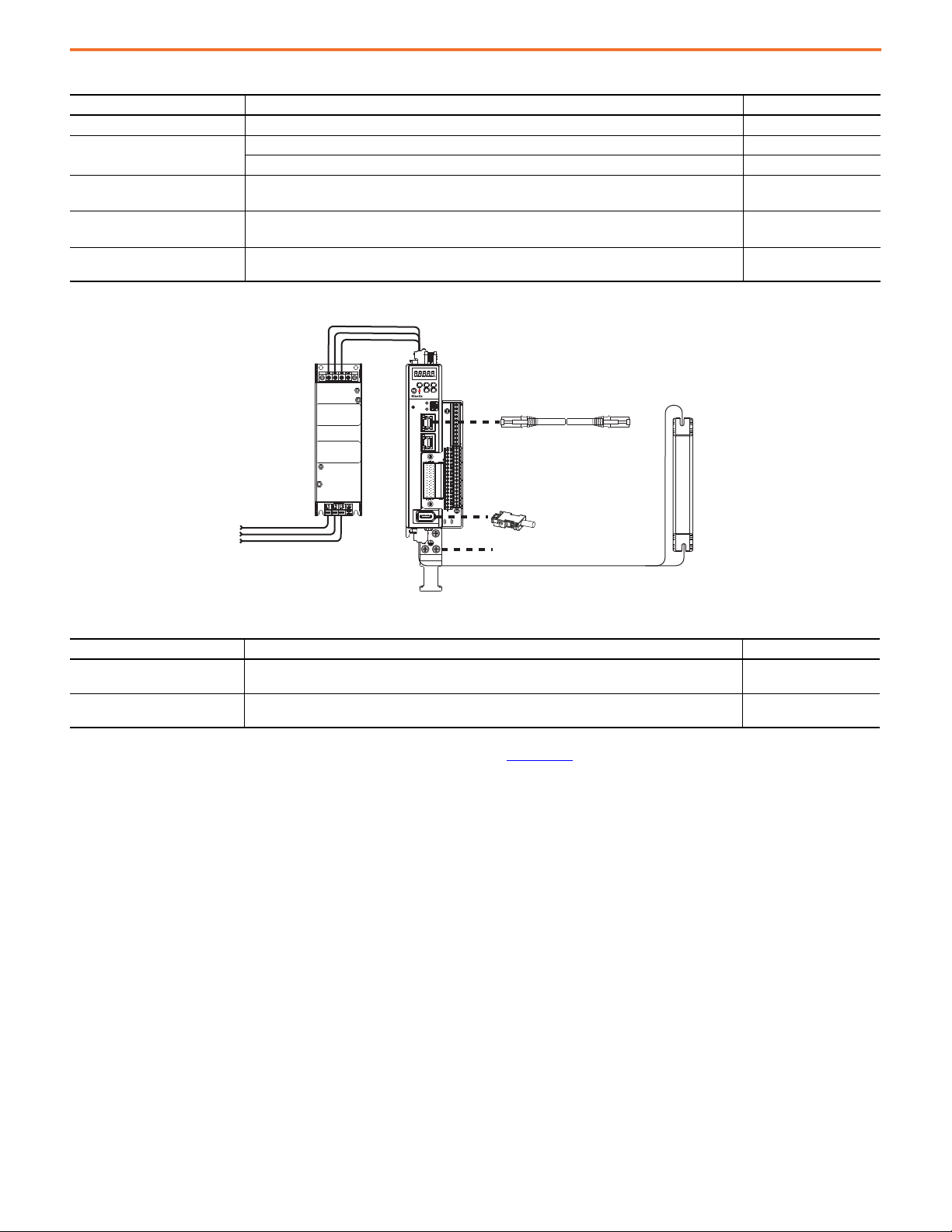
Single-phase or Three-phase
AC Input Power
2097-Rx or
2198 -Rxxxx Shunt Resistor
2198 -DBxx-F or
2198 -DBRxx-F AC Line Filter
(required for CE)
2198-AUXKIT Auxiliary
Feedback Connector Kit
2198 -Exxxx-ERS
Kinetix 5100 Servo Drive
2198 -GPFR Mx Ground Plate
1585J-M8xBJM-x
Ethernet (shielded) Cable
Optional Drive Accessories
Drive Accessory Description Cat. No.
Auxiliary feedback connector kit Provides termination points for the auxiliary feedback (AUX) connector. 2198-AUXKIT
Ethernet network cables
AC line filters AC line filter for CE compliance.
Bulletin 2097 and 2198
shunt resistors
Ground plate
Double-ended, non-flex, shielded. 1585J-M8CBJM-x
Double-ended, high-flex, shielded. 1585J-M8UBJM-x
•2198-DBRxx-F
•2198-DBxx-F
Panel-mount shunt resistor.
Ground plate provides termination points for motor power ground and cable shield for better EMC
performance and is included with each drive. Replacement ground plates are also available.
•2097-Rx
•2198-Rxxxx
2198-GPFRMx
Kinetix 5100 Optional Accessories
5100
MOD
NET
CHARGE
2
1
I/0
AUX
Replacement Drive Accessories
Drive Accessory Description Cat. No.
Connector set
Connector set (STO only)
Replacement input power, motor power, shunt, and STO wiring plugs (included with 2198-E1004-ERS,
2198-E1007-ERS, 2198-E1015-ERS drives).
Replacement STO wiring plug (included with 2198-E1020-ERS, 2198-E2030-ERS, 2198-E2055-ERS,
2198-E2075-ERS, 2198-E2150-ERS, and all 2198-E4xxx-ERS drives).
2198 -CONKIT-P KG
2198 -CONKIT-S TO
Refer to the Kinetix Servo Drives Specifications Technical Data, publication KNX-TD003, for detailed descriptions and additional
specifications for the Kinetix 5100 drive accessories.
8 Rockwell Automation Publication KNX-RM011C-EN-P - January 2021
Page 9
2090-Series Kinetix TLP Motor Cables Overview
2090-Series Kinetix TLP Motor Cables Overview
These cables apply to Kinetix TLP servo motors. For maximum motor-cable lengths with Kinetix 5100 drives, see the Kinetix 5100 EtherNet/IP
Indexing Servo Drives User Manual, publication 2198-UM004
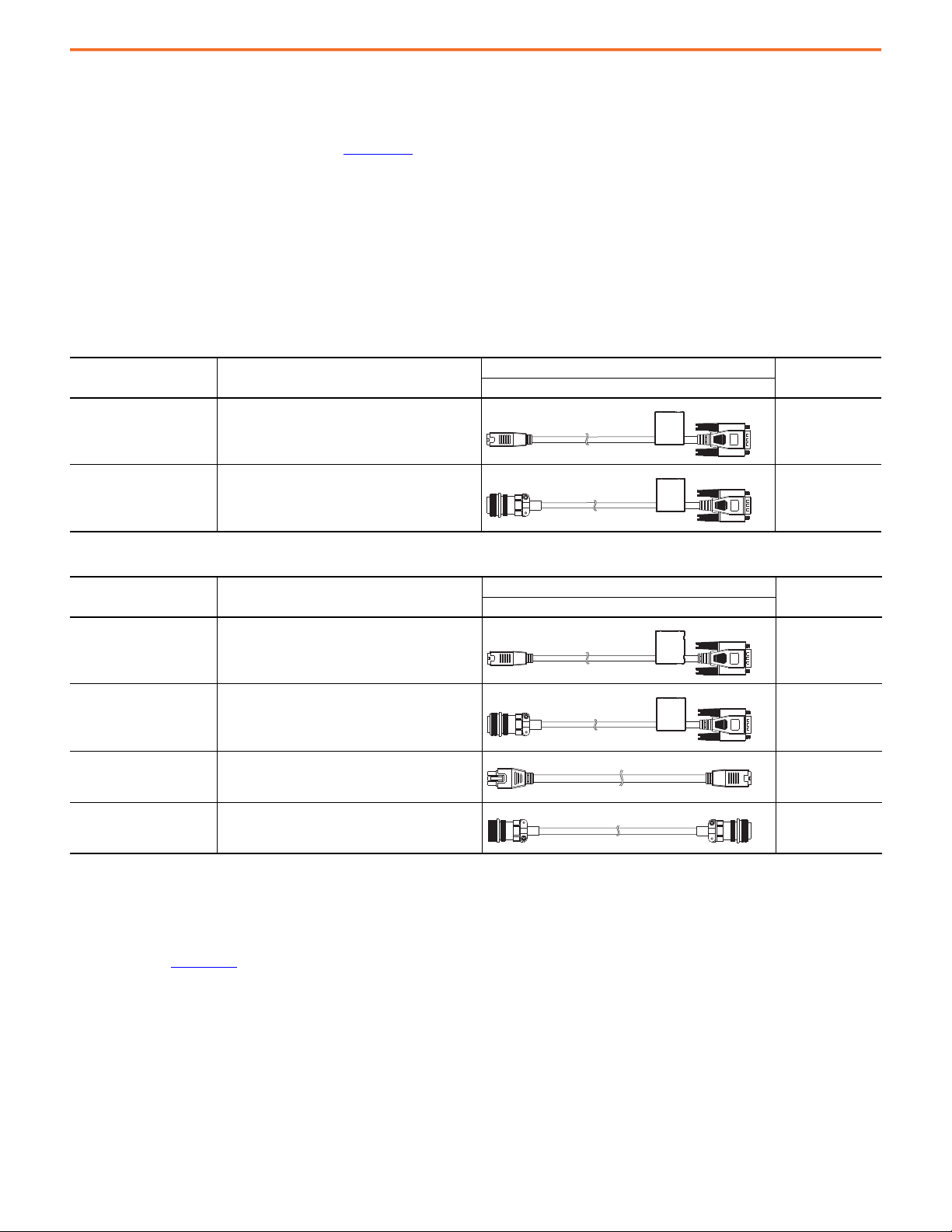
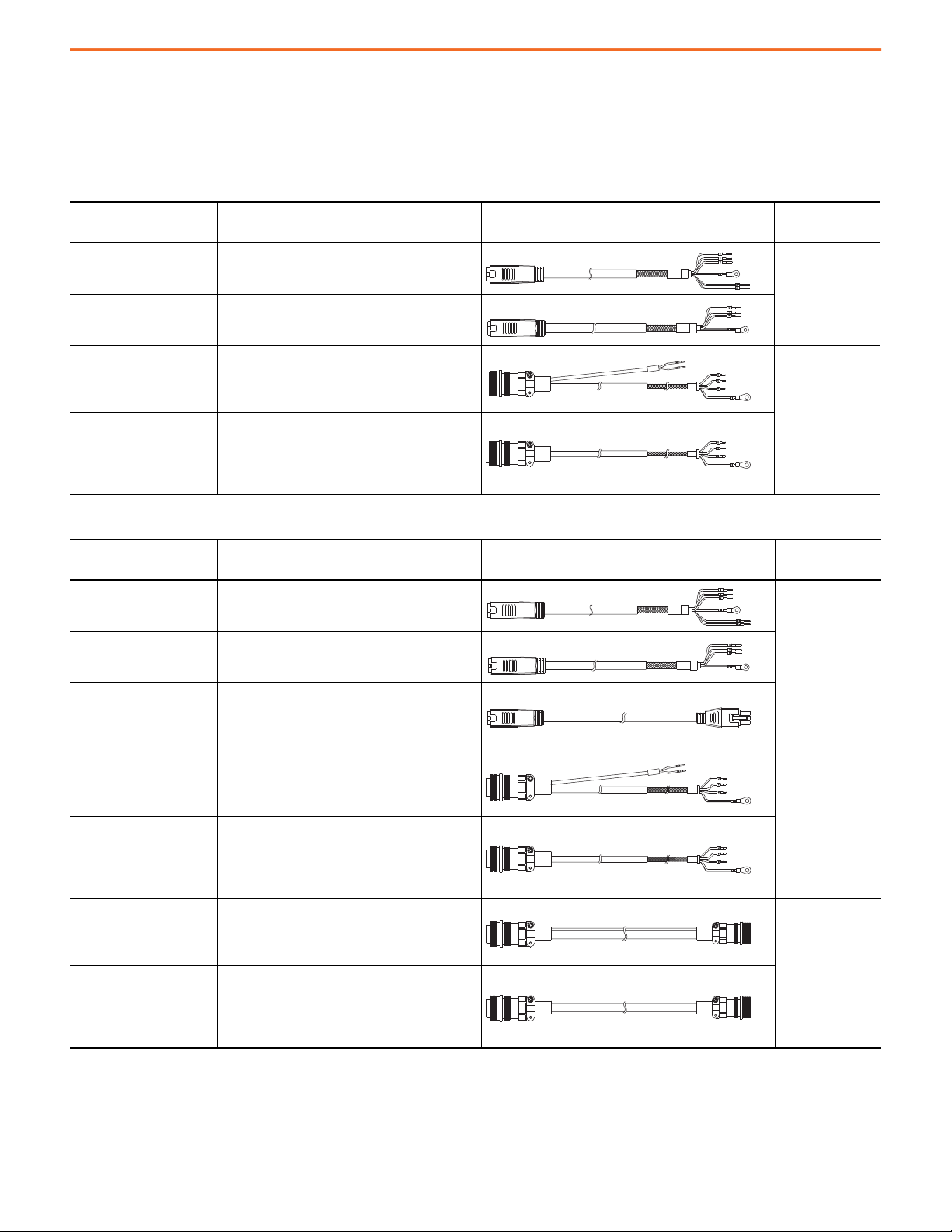
2090-CTFB-MxxD Feedback Cables
Feedback cables include the battery box wired and attached to the cable. Replacement 2198-KTBT battery boxes are also available.
2090-CTFB-MADD cables attach to on-motor rectangular motor connectors. 2090-CTFB-MFDD cables attach to military-style motor
connectors.
Feedback Cable Descriptions (standard, non-flex)
.
Standard Cable
Cat. No.
2090-CTFB-MADD-CFAxx
2090-CTFB-MFDD-CFAxx
Description
• Applies to TLP-x046…TLP-x100 motors (MA)
• Drive-end 15-pin connector (DD)
• With battery box attached
• Feedback wires (FB)
• Applies to TLP-A/B115…TLP-A/B235 motors (MF)
• Drive-end 15-pin connector (DD)
• With battery box attached
• Feedback wires (FB)
Feedback Cable Descriptions (continuous-flex)
Continuous-flex Cable
Cat. No.
2090-CTFB-MADD-CFFxx
2090-CTFB-MFDD-CFFxx
2090-CTFB-MAET-CFFxx
2090-CTFB-MFET-CFFxx
Description
• Applies to TLP-x046…TLP-x100 motors (MA)
• Drive-end 15-pin connector (DD)
• With battery box attached
• Feedback wires (FB)
• Applies to TLP-A/B115…TLP-A/B235 motors (MF)
• Drive-end 15-pin connector (DD)
• With battery box attached
• Feedback wires (FB)
• Applies to TLP-x046…TLP-x100 motors (MA)
• Drive-end (male) connector, extension (ET)
• Feedback wires (FB)
• Applies to TLP-A/B115…TLP-A/B235 motors (MF)
• Drive-end (male) connector, extension (ET)
• Feedback wires (FB)
Cable Configuration
Motor End Drive End
Cable Configuration
Motor End Drive End
Motor Connector
Rectangular
Military style
Motor Connector
Rectangular
Military style
Rectangular
Military style
2090-CTFB-MxET extension cables provide continuous-flex cable technology between your standard (non-flex) cable and the continuous-flex
application.
Motor-end cable connector kits for use when building your own cables are also available. Refer to the Kinetix Motion Accessories Technical
Data, publication KNX-TD004
, for more information.
Rockwell Automation Publication KNX-RM011C-EN-P - January 2021 9
Page 10
2090-Series Kinetix TLP Motor Cables Overview
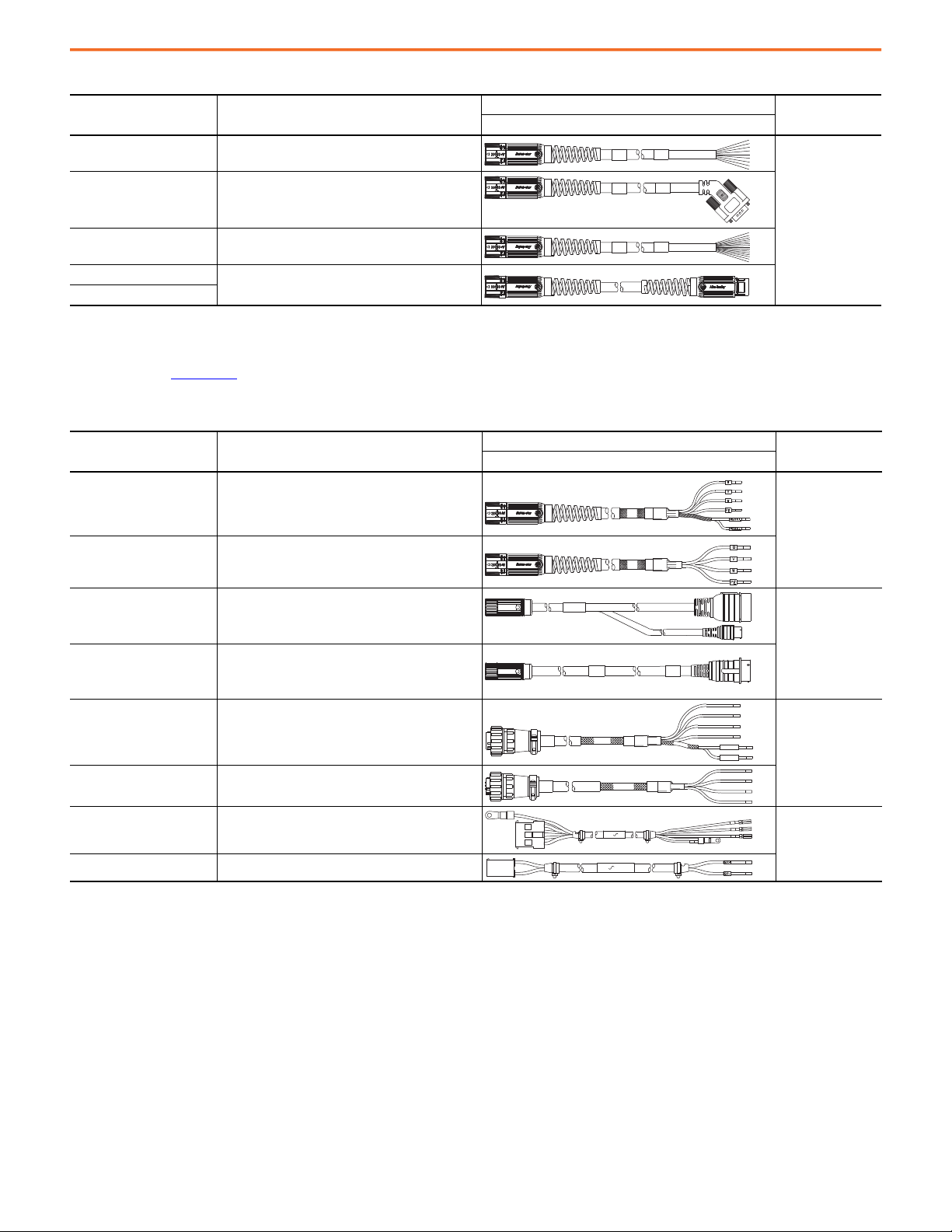
2090-CTPx-Mxxx Power/Brake Cables
2090-CTPx-MADF cables attach to the on-motor cable. 2090-CTPx-MC/D/E cables attach to the motor connector. Drive-end flying leads are
prepared specifically for Kinetix TLP servo motors.
Power/Brake Cable Descriptions (standard, non-flex)
Standard Cable
Cat. No.
2090-CTPB-MADF-xxAxx
2090-CTPW-MADF-xxAxx
2090-CTPB-MCDF-xxAxx
2090-CTPB-MDDF-xxAxx
2090-CTPW-MCDF-xxAxx
2090-CTPW-MDDF-xxAxx
2090-CTPW-MEDF-xxAxx
Description
• Applies to TLP-x046…TLP-x100 motors (MA)
• Drive-end flying-leads (DF)
• Power/brake wires (PB)
• Applies to TLP-x046…TLP-x100 motors (MA)
• Drive-end flying-leads (DF)
• Power wires only (PW)
• Applies to TLP-A/B115…TLP-A/B145 motors (MC)
• Applies to TLP-A/B200 (MD)
• Drive-end flying-leads (DF)
• Power/brake wires (PB)
• Applies to TLP-A/B115…TLP-A/B145 motors (MC)
• Applies to TLP-A/B200 motors (MD)
• Applies to TLP-A/B200…TLP-A/B235 motors (ME)
• Drive-end flying-leads (DF)
• Power wires only (PW)
Power/Brake Cable Descriptions (continuous-flex)
Continuous-flex Cable
Cat. No.
2090-CTPB-MADF-xxFxx
2090-CTPW-MADF-xxFxx
2090-CTPB-MAET-xxFxx
2090-CTPW-MAET-xxFxx
2090-CTPB-MCDF-xxFxx
2090-CTPB-MDDF-xxFxx
2090-CTPW-MCDF-xxFxx
2090-CTPW-MDDF-xxFxx
2090-CTPW-MEDF-xxFxx
2090-CTPB-MCET-xxFxx
2090-CTPB-MDET-xxFxx
2090-CTPW-MCET-xxFxx
2090-CTPW-MDET-xxFxx
2090-CTPW-MEET-xxFxx
Description
• Applies to TLP-x046…TLP-x100 motors (MA)
• Drive-end flying-leads (DF)
• Power/brake wires (PB)
• Applies to TLP-x046…TLP-x100 motors (MA)
• Drive-end flying-leads (DF)
• Power wires only (PW)
• Applies to TLP-x046…TLP-x100 motors (MA)
• Drive-end (male) connector, extension (ET)
• Power/brake wires (PB)
• Power wires only (PW)
• Applies to TLP-A/B115…TLP-A/B145 motors (MC)
• Applies to TLP-A/B200 motors (MD)
• Drive-end flying-leads (DF)
• Power/brake wires (PB)
• Applies to TLP-A/B115…TLP-A/B145 motors (MC)
• Applies to TLP-A/B200 motors (MD)
• Applies to TLP-A/B200 motors (ME)
• Drive-end flying-leads (DF)
• Power wires only (PW)
• Applies to TLP-A/B115…TLP-A/B145 motors (MC)
• Applies to TLP-A/B200 (MD)
• Drive-end (male) connector, extension (ET)
• Power/brake wires (PB)
• Applies to TLP-A/B115…TLP-A/B145 motors (MC)
• Applies to TLP-A/B200 motors (MD)
• Applies to TLP-A/B200…TLP-A/B235 motors (ME)
• Drive-end (male) connector, extension (ET)
• Power wires only (PW)
Cable Configuration
Motor End Drive End
Cable Configuration
Motor End Drive End
Motor Connector
Rectangular
Military style
Motor Connector
Rectangular
Military style
Military style
2090-CTPx-MxET extension cables provide continuous-flex cable technology between your standard (non-flex) cable and the continuous-flex
application.
10 Rockwell Automation Publication KNX-RM011C-EN-P - January 2021
Page 11
2090-Series Motor Power/Brake and Feedback Cables Overview
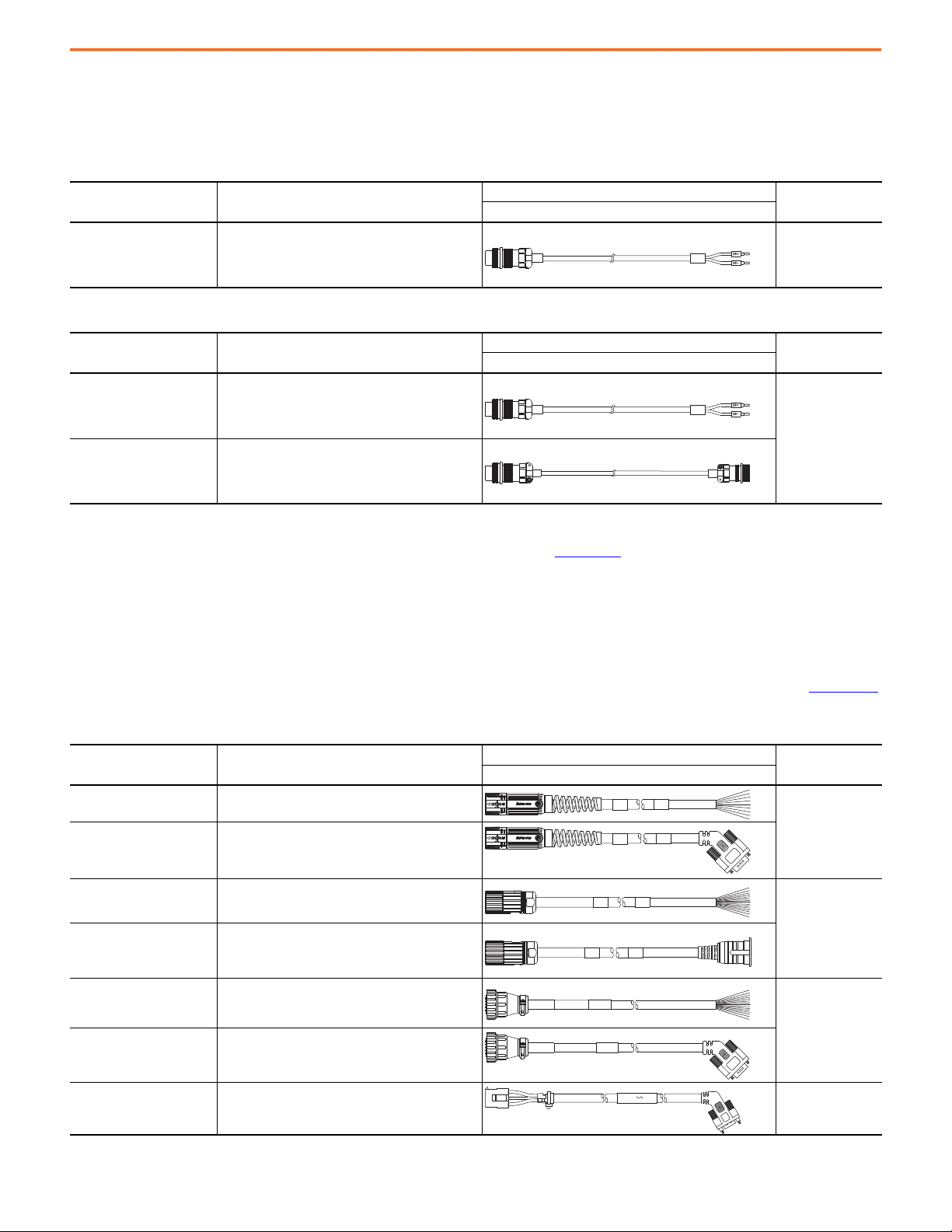
2090-CTBK-MBxx Brake Cables
Brake wires for TLP-A/B200-550, TLP-A/B200-750, and TLP-A/B235-xxx servo motors are in a separate cable.
Brake Cable Descriptions (standard, non-flex)
Standard Cable
Cat. No.
2090-CTBK-MBDF-20Axx
Description
• Applies to TLP-A/B200-550, TLP-A/B200-750, and
TLP-A/B235-xxx motors (MB)
• Drive-end flying-leads (DF)
• Brake wires (BK)
Motor End Drive End
Cable Configuration
Motor Connector
Military style
Brake Cable Descriptions (continuous-flex)
Continuous-flex Cable
Cat. No.
2090-CTBK-MBDF-20Fxx
2090-CTBK-MBET-20Fxx
Description
• Applies to TLP-A/B200-550, TLP-A/B200-750, and
TLP-A/B235-xxx motors (MB)
• Drive-end flying-leads (DF)
• Brake wires (BK)
• Applies to TLP-A/B200-550, TLP-A/B200-750, and
TLP-A/B235-xxx motors (MB)
• Drive-end (male) connector, extension (ET)
• Brake wires (BK)
Motor End Drive End
Cable Configuration
Motor Connector
Military style
2090-CTBK-MBET extension cables provide continuous-flex cable technology between your standard (non-flex) cable and the continuousflex application. Refer to the Kinetix Motion Accessories Technical Data, publication KNX-TD004
, for cable specifications.
2090-Series Motor Power/Brake and Feedback Cables Overview
These cables apply to Kinetix MPL, MPM, MPF, MPS and Kinetix TL and TLY motors with high-resolution absolute encoders. For maximum
motor-cable lengths with Kinetix 5100 drives, see the Kinetix 5100 Single-axis EtherNet/IP Servo Drives User Manual, publication 2198-UM004
Feedback Cable Descriptions (standard, non-flex)
Standard Cable
Cat. No.
2090-CFBM7DF-CEAAxx
2090-CFBM7DD-CEAAxx
2090-XXNFMF-Sxx
2090-CFBM4E2-CATR
2090-CFBM6DF-CBAAxx
2090-CFBM6DD-CCAAxx
2090-DANFCT-Sxx
Description
• Drive-end flying-leads (DF)
• High-resolution or resolver applications (CE)
• Drive-end 15-pin connector (DD)
• High-resolution or resolver applications (CE)
• Drive-end flying-leads
• High-resolution or incremental applications
• Drive-end bayonet (E2), transition (TR) cable
• Motor-end threaded DIN (M4)
• All feedback types (CA)
• Drive-end flying-leads (DF)
• High-resolution, battery backup or Incremental
applications (CB)
• Drive-end 15-pin connector (DD)
• Incremental applications only (CC)
• Drive-end 20-pin connector
• High-resolution applications
(1)
Motor End Drive End
Cable Configuration
Motor/Actuator
Connector
SpeedTec DIN
(M7)
Threaded DIN
(M4)
Circular Plastic
(M6)
Rectangular Plastic
.
(1) Threaded DIN connector (motor end) and bayonet connector for 2090-XXNFMP-Sxx cable.
Rockwell Automation Publication KNX-RM011C-EN-P - January 2021 11
Page 12
2090-Series Motor Power/Brake and Feedback Cables Overview
Feedback Cable Descriptions (continuous-flex)
Continuous-flex Cable
Cat. No.
2090-CFBM7DF-CEAFxx
2090-CFBM7DD-CEAFxx
2090-CFBM7DF-CDAFxx
2090-CFBM7E7-CDAFxx
2090-CFBM7E7-CEAFxx
(1) SpeedTec DIN connector (motor end) and male connector for extending SpeedTec or threaded DIN cable.
Description
• Drive-end flying-leads (DF)
• High-resolution applications (CE)
• Drive-end 15-pin connector (DD)
• High-resolution applications (CE)
• Drive-end flying-leads (DF)
• High-resolution or incremental applications (CD)
• Drive-end (male) connector, extension (E7)
(1)
• Motor-end SpeedTec DIN cable plug (M7)
Motor End Drive End
Cable Configuration
Motor/Actuator
Connector
SpeedTec DIN
(M7)
Motor-end cable connector kits, for use when building your own cables are also available. Refer to the Kinetix Motion Accessories Technical
Data, publication KNX-TD004
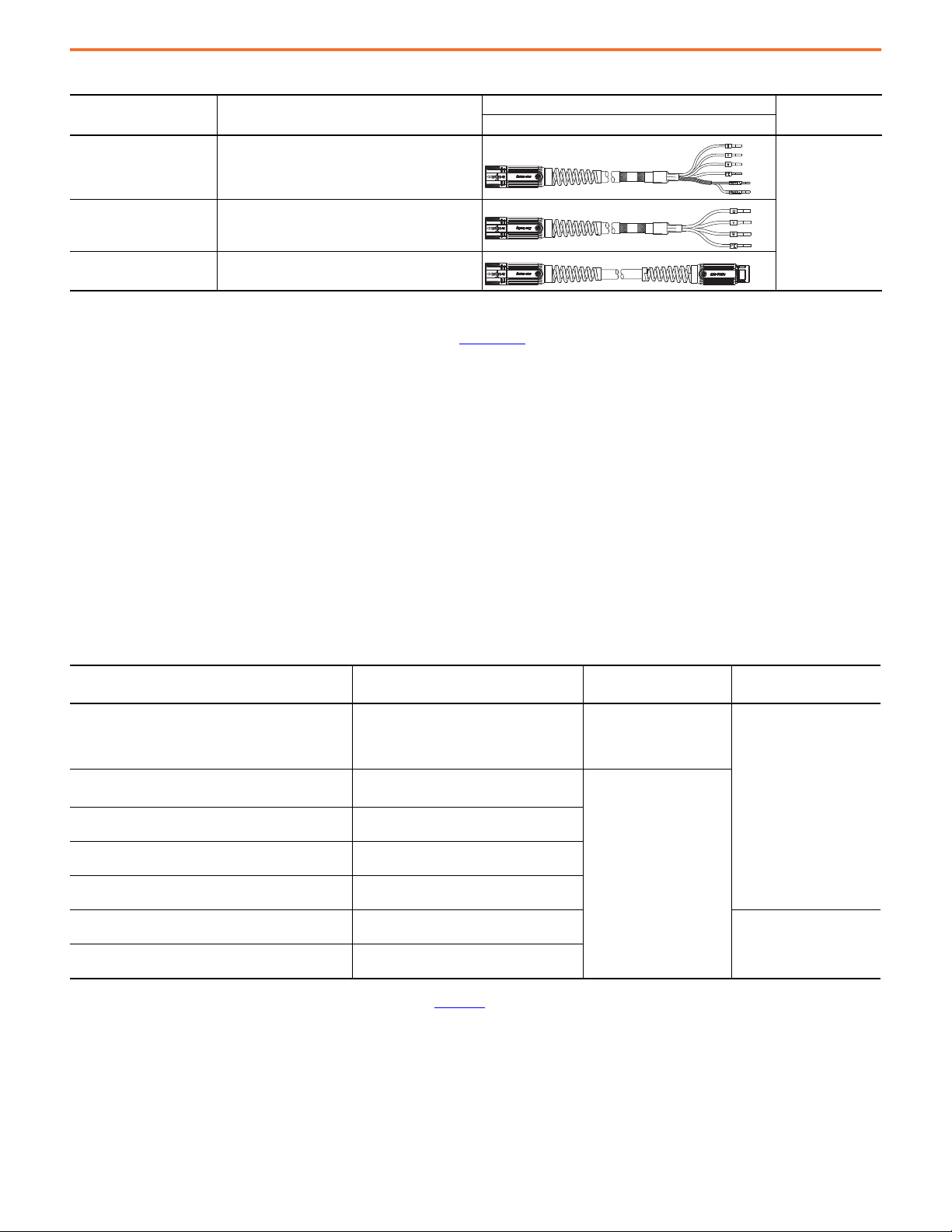
Power/Brake Cable Descriptions (standard, non-flex)
Standard Cable
Cat. No.
2090-CPBM7DF-xxAAxx
2090-CPWM7DF-xxAAxx
, for more information.
Description
• Drive-end flying-leads (DF)
• Power/brake wires (PB)
• Drive-end flying-leads (DF)
•Power wires only (PW)
Cable Configuration
Motor End Drive End
Motor/Actuator
Connector
SpeedTec DIN
(M7)
(1)
2090-CPBM4E2-xxTR
• Drive-end bayonet (E2), transition (TR) cable
• Motor-end threaded DIN (M4)
• Power/brake wires (PB)
(1)
2090-CPWM4E2-xxTR
• Drive-end bayonet (E2), transition (TR) cable
• Motor-end threaded DIN (M4)
•Power wires only (PW)
2090-CPBM6DF-16AAxx
2090-CPWM6DF-16AAxx
2090-DANPT-16Sxx
• Drive-end flying-leads (DF)
•Power/brake wires (PB)
• Drive-end flying-leads (DF)
•Power wires only (PW)
• Drive-end flying-leads
•Power wires only
2090-DANBT-18Sxx Drive-end flying-lead brake wires
(1) Threaded DIN connector (motor end) and bayonet connector for 2090-XXNFMP-Sxx cable.
Threaded DIN
(M4)
MBRK+
MBRK-
Circular Plastic
(M6)
Rectangular Plastic
12 Rockwell Automation Publication KNX-RM011C-EN-P - January 2021
Page 13
Power/Brake Cable Descriptions (continuous-flex)
Kinetix 5100 (200V-class) Drives with Kinetix TLP Servo Motors
Continuous-flex Cable
Cat. No.
2090-CPBM7DF-xxAFxx
2090-CPWM7DF-xxAFxx
2090-CPBM7E7-xxAFxx
(1) SpeedTec DIN connector (motor end) and male connector for extending SpeedTec or threaded DIN cable.
Description
• Drive-end flying-leads (DF)
• Power/brake wires (PB)
• Drive-end flying-leads (DF)
•Power wires only (PW)
• Drive-end (male) connector, extension (E7)
• Motor-end SpeedTec DIN cable plug (M7)
Motor End Drive End
(1)
Cable Configuration
Motor/Actuator
Connector
SpeedTec DIN
(M7)
Refer to the Kinetix Motion Accessories Technical Data, publication KNX-TD004, for cable specifications.
Kinetix 5100 (200V-class) Drives with Kinetix TLP Servo Motors
This section provides system combination information for the Kinetix 5100 drives (with 230V, nominal input) when matched with Kinetix TLP
(200V-class) multi-purpose servo motors. Included are motor power/brake and feedback cable catalog numbers, system performance
specifications, and optimum torque/speed curves.
These system performance tables and torque/speed curves reflect single-phase and three-phase drive operation (with 230V, nominal input)
with 200V-class motors; however, only 2198-E1004-ERS, 2198-E1007-ERS, 2198-E1015-ERS, and 2198-E1020-ERS drives are capable of singlephase operation.
Kinetix TLP Motor and Cable Combinations
Rotary Motor (200V-class)
Cat. No.
TLP-A046-xxx,
TLP-A070-xxx,
TLP-A090-xxx,
TLP-A100-xxx
TLP-A115-100,
TLP-A145-050, TLP-A145-100
TLP-A115-200,
TLP-A145-090, TLP-A145-150, TLP-A145-250
TLP-A200-200, TLP-A200-300, TLP-A200-350
TLP-A200-450
TLP-A200-550, TLP-A200-750, TLP-A235-11K
TLP-A235-15K
(1) The TLP-A046…TLP-A100 frame on-motor cables include 18 AWG conductors that are compatible with 2090-CTPx-MADF-18xxx cable conductors.
(2) Refer to the Kinetix Motion Accessories Specifications Technical Data, publication KNX-TD004, for cable specifications.
(3) For TLP-A090-xxx motors, use 2090-CTPx-MADF-16xxx motor power/brake cable to comply with NFPA 79 requirements.
(4) For TLP-A115-100 motors, use 2090-CTPx-MCDF-12xxx motor power/brake cable to comply with NFPA 79 requirements.
(5) For TLP-A200-350 motors, use 2090-CTPx-MDDF-08xxx motor power/brake cable to comply with NFPA 79 requirements.
(6) For TLP-A235-11K motors, use 2090-CTPx-MEDF-04xxx motor power cable to comply with NFPA 79 requirements.
(7) Only these motors have separate brake connectors and brake cables. All other motors have brake wires included with the motor power/brake connector.
(8) For TLP-A235-15K motors, you must build your own motor power cable to comply with NFPA 79 requirements.
(3)
(4)
(8) (7)
(1)
(5)
(6) (7)
Motor Power/Brake Cable
2090-CTPx-MADF-18Axx (standard) or
2090-CTPx-MADF-18Fxx (continuous-flex)
2090-CTPx-MCDF-16Axx (standard) or
2090-CTPx-MCDF-16Fxx (continuous-flex)
2090-CTPx-MCDF-12Axx (standard) or
2090-CTPx-MCDF-12Fxx (continuous-flex)
2090-CTPx-MDDF-12Axx (standard) or
2090-CTPx-MDDF-12Fxx (continuous-flex)
2090-CTPx-MDDF-08Axx (standard) or
2090-CTPx-MDDF-08Fxx (continuous-flex)
2090-CTPW-MEDF-06Axx (standard) or
2090-CTPW-MEDF-06Fxx (continuous-flex)
2090-CTPW-MEDF-04Axx (standard) or
2090-CTPW-MEDF-04Fxx (continuous-flex)
(2)
Feedback Cable Cat. No.
2090-CTFB-MADD-CFAxx
(standard) or
2090-CTFB-MADD-CFFxx
(continuous-flex)
2090-CTFB-MFDD-CFAxx
(standard) or
2090-CTFB-MFDD-CFFxx
(continuous-flex)
(2)
Brake Cat. No.
Not applicable. Brake
conductors are included in
the power cable.
2090-CTBK-MBDF-20Axx
(standard) or
2090-CTBK-MBDF-20Fxx
(continuous-flex)
(2)
Rockwell Automation Publication KNX-RM011C-EN-P - January 2021 13
Page 14
Kinetix 5100 (200V-class) Drives with Kinetix TLP Servo Motors
Kinetix TLP Motor Performance Specifications with Kinetix 5100 (200V-class) Drives
Rotary Motor
Cat. No.
TLP-A046-005 3000 6000 0.70 0.16 (1.42) 2.286 0.447 (3.96) 0.05 (0.067) 2198-E1004-ERS
TLP-A046-010 3000 6000 0.96 0.32 (2.83) 3.370 1.034 (9.15) 0.10 (0.134) 2198-E1004-ERS
TLP-A070-020 3000 6000 1.65 0.64 (5.66) 5.500 2.160 (19.12) 0.20 (0.268) 2198-E1004-ERS
TLP-A070-040 3000 6000
TLP-A090-075 3000 6000 4.50 2.39 (21.2) 15.41 7.505 (66.42) 0.75 (1.005) 2198-E1007-ERS
TLP-A100-100 3000 3000 4.31 3.18 (28.2) 12.37 8.740 (77.36) 1.0 (1.34)
TLP-A115-100 3000 5000 7.45 3.18 (28.2) 23.70 8.455 (74.83) 1.0 (1.34) 2198-E1015-ERS
TLP-A115-200 3000 5000 12.50 6.37 (56.4) 40.58 17.48 (154.7) 2.0 (2.68) 2198-E1020-ERS
TLP-A145-050 2000 3000 3.26 2.39 (21.6) 9.180 6.81 (60.27) 0.50 (0.670) 2198-E1007-ERS
TLP-A145-090 1000 2000
TLP-A145-100 2000 3000 6.11 4.77 (42.2) 19.73 13.30 (117.7) 1.0 (1.34) 2198-E1015-ERS
TLP-A145-150 2000 3000
TLP-A145-250 3000 4500 15.32 7.96 (70.5) 55.95 24.51 (216.9) 2.5 (3.35) 2198-E2030-ERS
TLP-A200-200 2000 3000 12.30 9.55 (84.3) 33.66 21.85 (193.4) 2.0 (2.68) 2198-E1020-ERS
TLP-A200-300 1500 2500
TLP-A200-350 2000 3000 22.16 16.71 (147.9) 65.40 43.23 (382.6) 3.5 (4.69) 2198-E2055-ERS
TLP-A200-450 1500 3000 37.07 28.65 (253.6) 91.40 64.04 (566.8) 4.5 (6.03) 2198-E2055-ERS
TLP-A200-550 1500 3000 41.13 35.01 (309.9)
TLP-A200-750 1500 2500
TLP-A235-11K 1500 2000 57.72 70.0 (619.6) 129.5 144.30 (1277) 11.0 (14.7) 2198-E2150-ERS
TLP-A235-15K 1500 2000 75.40 95.40 (844.4) 162.0 184.57 (1634) 15.0 (20.1) 2198-E2150-ERS
Rated Speed
rpm
Speed, max
rpm
System Continuous
Stall Current
A rms
2.60 1.22 (10.8) 6.500 2.91 (25.80) 0.38 (0.509) 2198-E1004-ERS
2.70 1.27 (11.2) 9.500 4.275 (37.84) 0.40 (0.536) 2198-E1007-ERS
7.90 8.30 (73.5)
8.12 8.59 (76.0) 0.90 (1.206) 2198-E1020-ERS
7.90 6.22 (55.1) 23.70 15.92 (140.9) 1.3 (1.74) 2198-E1015-ERS
8.80 7.16 (63.4) 29.13 19.66 (174.0) 1.5 (2.01) 2198-E1020-ERS
17.90 16.81 (148.8) 55.95 45.62 (403.7) 2.6 (3.49) 2198-E2030-ERS
20.25 19.10 (169.1) 57.50 47.03 (416.3) 3.0 (4.02) 2198-E2055-ERS
49.0 45.36 (401.4)
49.80 47.74 (422.5) 7.5 (10.1) 2198-E2150-ERS
System Continuous
Stall Torque
N•m (lb•in)
System Peak
Stall Current
A rms
21.80 20.52 (181. 6)
91.40 67.67 (598.9)
108.0 79.96 (707.7) 2198-E2075-ERS
127.5 104.30 (923.1)
System Peak
Stall Torque
N•m (lb•in)
Motor Rated
Output
kW (Hp)
0.87 (1.167) 2198-E1015-ERS
5.5 (7.37)
7.1 (9.52) 2198-E2075-ERS
Kinetix 5100 Drives
(230V AC input)
2198-E1007-ERS
2198-E1015-ERS
2198-E2055-ERS
Performance specification data and curves reflect nominal system performance of a typical system with motor ambient at 40 °C (104 °F), drive ambient at 50 °C (122 °F), and rated line voltage.
For additional information on ambient and line conditions, refer to Motion Analyzer software.
14 Rockwell Automation Publication KNX-RM011C-EN-P - January 2021
Page 15
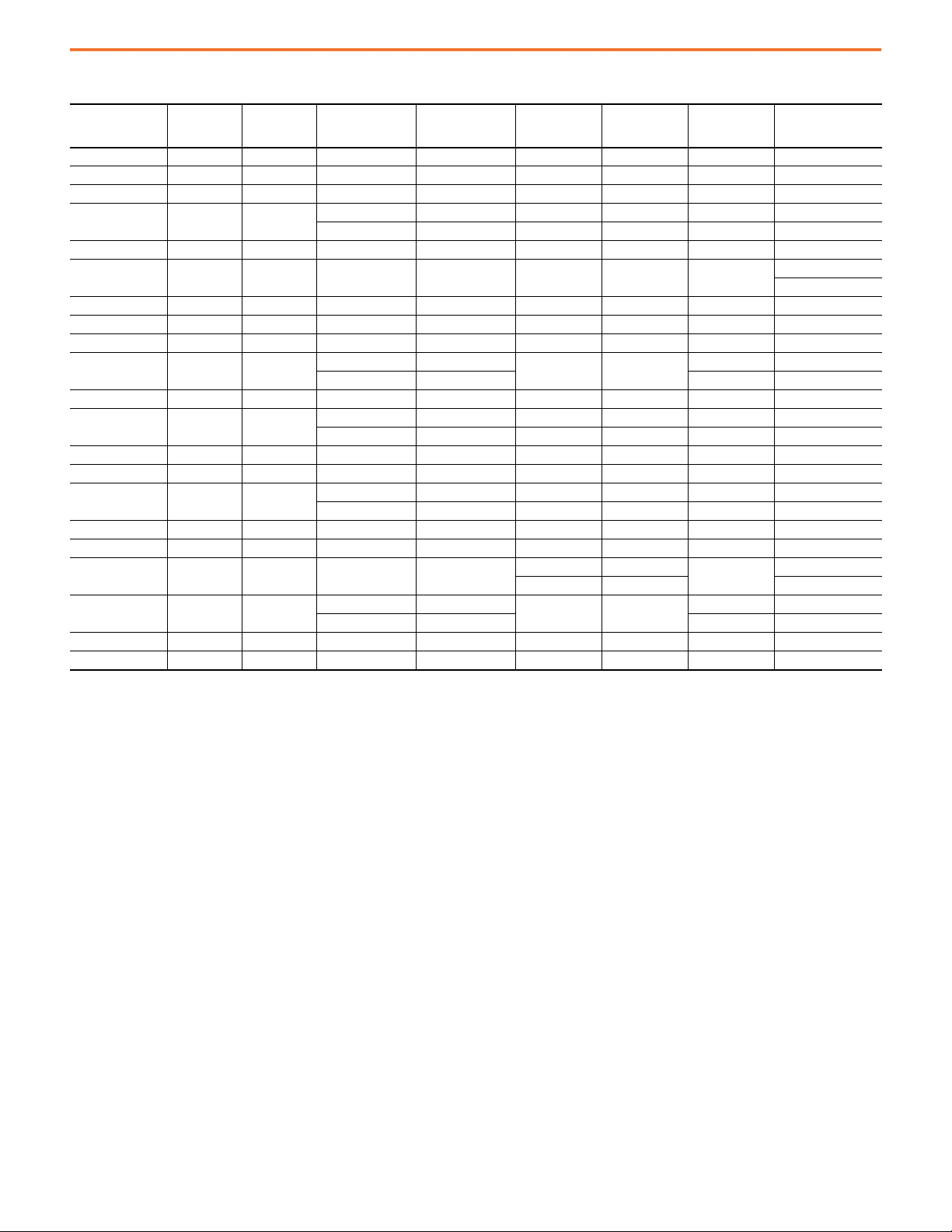
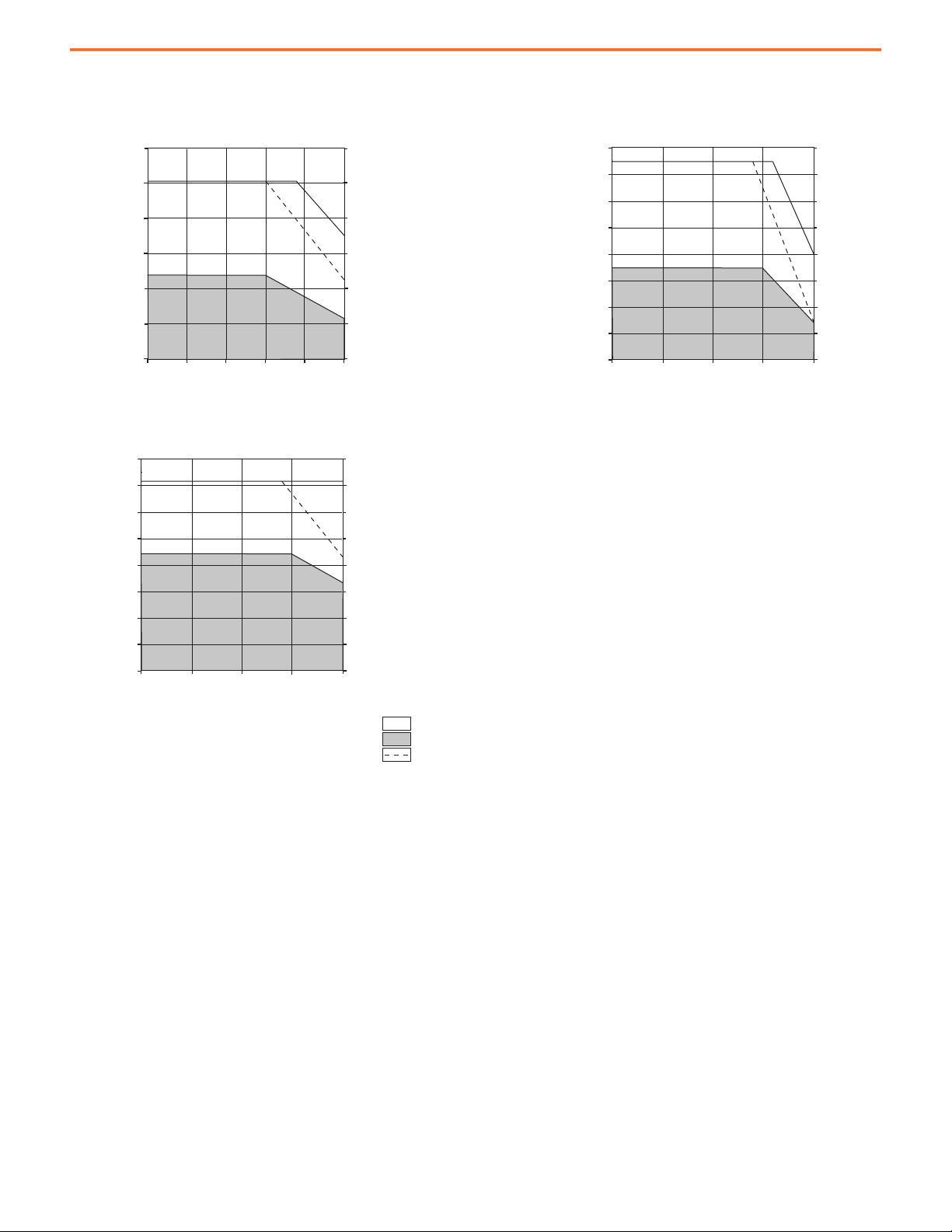
Kinetix 5100 (200V-class) Drives with Kinetix TLP Servo Motors
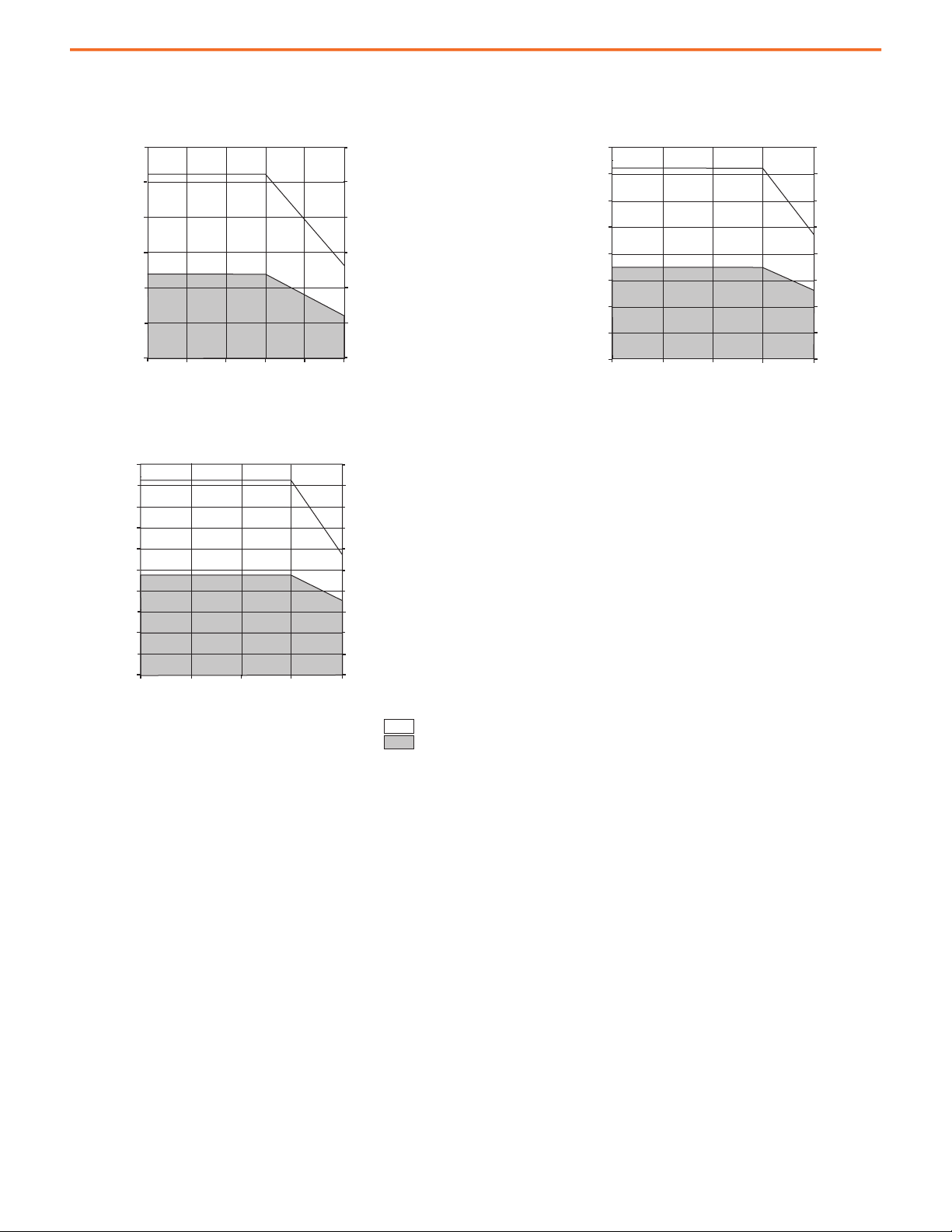
Torque
(N•m)
Torque
(lb•in)
0
0
0.1
0.2
0.3
0.5
0.4
0.88
1.77
2.65
3.54
4.42
2198-E1004-ERS and TLP-A046-005
Speed (rpm)
0
3000
5000
4000
1000
2000
6000
Torque
(N•m)
Torque
(lb•in)
0
0
0.5
1.0
1.5
2.5
2.0
4.42
8.85
13.3
17.7
22.1
2198-E1004-ERS and TLP-A070-020
Speed (rpm)
0
3000
5000
4000
1000
2000
6000
Torque
(N•m)
Torque
(lb•in)
0
0
1.0
2.0
3.0
5.0
4.0
8.85
17.7
26.6
35.4
44.2
2198-E1007-ERS and TLP-A070-040
Speed (rpm)
0
3000
5000
4000
1000
2000
6000
Torque
(N•m)
Torque
(lb•in)
Speed (rpm)
2000 4000 600050000
2198-E1007-ERS and TLP-A090-075
8.0
7.0
6.0
5.0
4.0
3.0
2.0
1.0
0
70.8
62.0
53.1
44.2
35.4
26.6
17.7
8.85
0
1000
3000
= Intermittent operating region
= Continuous operating region
Kinetix 5100 (200V-class) Drives/Kinetix TLP Servo Motor Curves
2198-E1004-ERS and TLP-A046-010
1.4
Torque
(N•m)
1.2
12.4
10.6
Torque
(lb•in)
0.8
0.6
0.4
0.2
1.0
0
1000
2000
3000 400005000
Speed (rpm)
8.9
7.1
5.3
3.5
1.8
0
6000
2198-E1015-ERS and TLP-A100-100
10.0
Torque
(N•m)
8.0
6.0
4.0
2.0
Rockwell Automation Publication KNX-RM011C-EN-P - January 2021 15
0
0
500
1000
Speed (rpm)
1500
2000
2500
3000
88.5
70.8
53.1
35.4
17.7
0
Torque
(lb•in)
Page 16
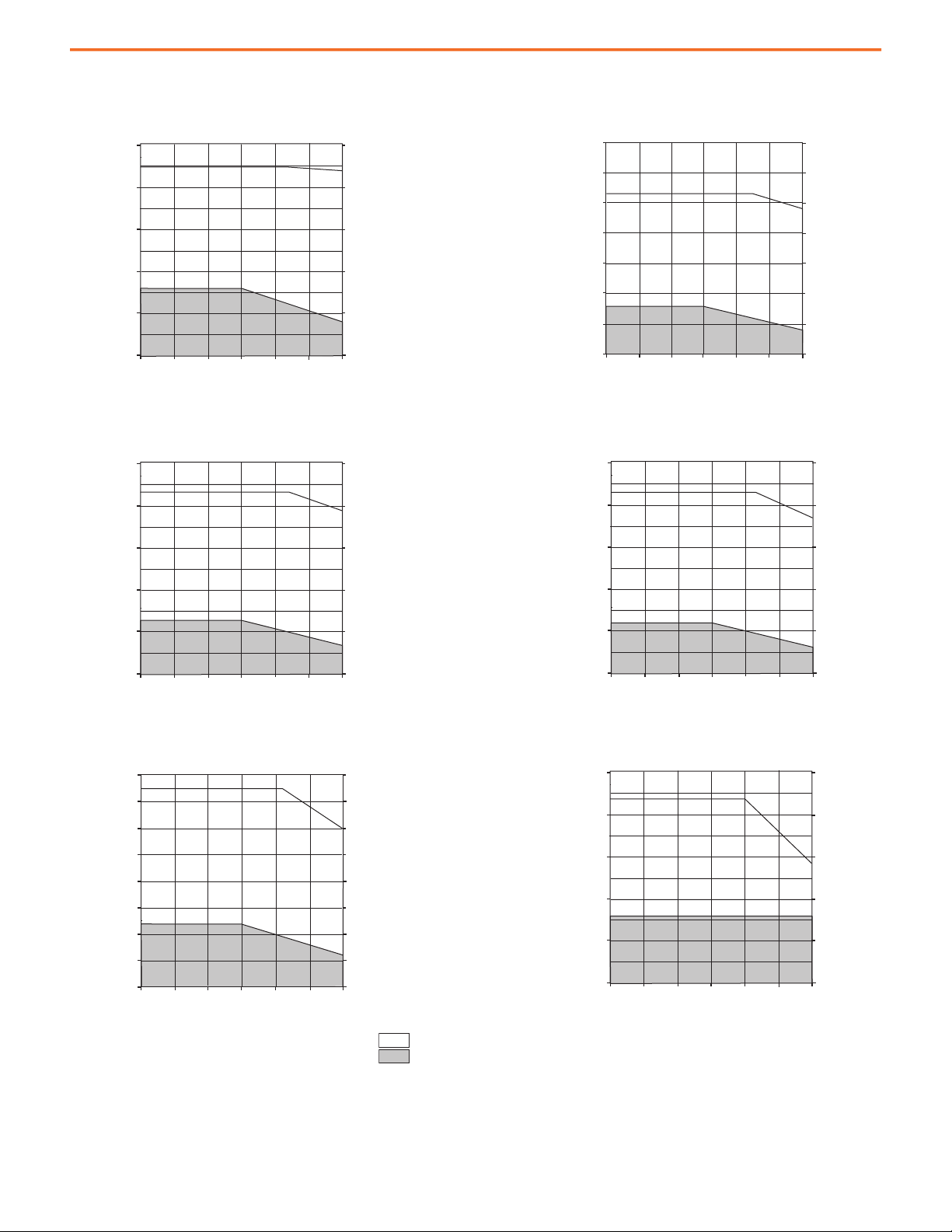
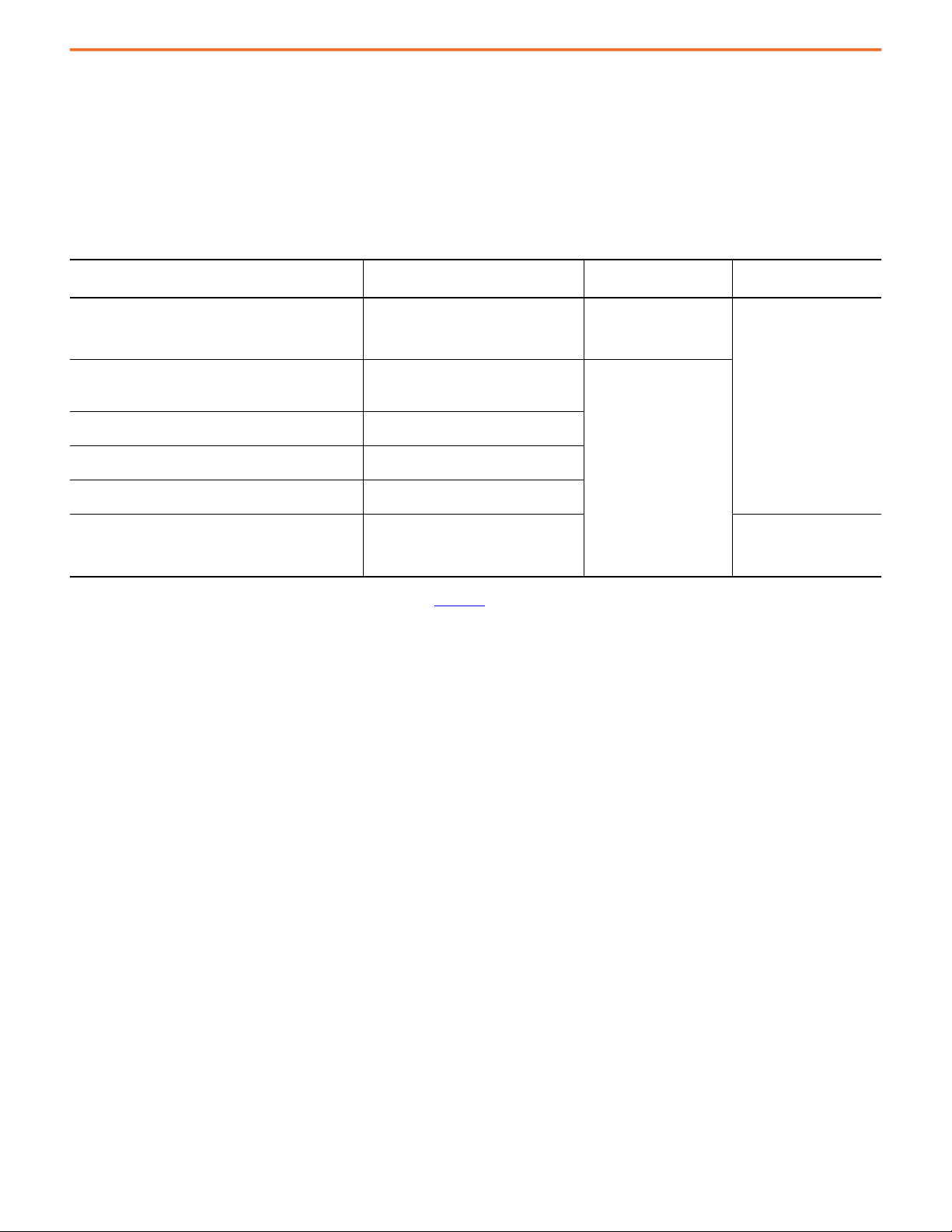
Kinetix 5100 (200V-class) Drives with Kinetix TLP Servo Motors
Torque
(N•m)
Torque
(lb•in)
0
0
2.0
4.0
6.0
10.0
8.0
17.7
35.4
53.1
70.8
88.5
2198-E1015-ERS and TLP-A115-100
Speed (rpm)
0
2000
4000
3000
1000
5000
Torque
(N•m)
Torque
(lb•in)
Speed (rpm)
1000 2000 300025000
2198-E1007-ERS and TLP-A145-050
8.0
7.0
6.0
5.0
4.0
3.0
2.0
1.0
0
70.8
62.0
53.1
44.2
35.4
26.6
17.7
8.85
0
500
1500
Torque
(N•m)
Torque
(lb•in)
2198-E1015-ERS and TLP-A145-100
14.0
12.0
10.0
8.0
6.0
4.0
2.0
0
124
106
88.5
70.8
53.1
34.5
17.7
0
Speed (rpm)
500
1000
1500 200002500
3000
Torque
(N•m)
Torque
(lb•in)
0
0
5.0
10.0
15.0
25.0
20.0
44.2
88.5
133
177
221
2198-E1020-ERS and TLP-A145-150
Speed (rpm)
0
1000
1500
500
3000
2000
2500
= Intermittent operating region
= Continuous operating region
Kinetix 5100 (200V-class) Drives/Kinetix TLP Servo Motor Curves (continued)
2198-E1020-ERS and TLP-A115-200
20.0
Torque
(N•m)
16.0
177
142
Torque
(lb•in)
Torque
(N•m)
12.0
25.0
20.0
15.0
10.0
8.0
5.0
4.0
0
0
0
0
2000
1000
Speed (rpm)
2198-E1020-ERS and TLP-A145-090
500
Speed (rpm)
1000
3000
1500
4000
5000
2000
106
70.8
35.4
0
221
177
133
88.5
44.2
0
Torque
(lb•in)
16 Rockwell Automation Publication KNX-RM011C-EN-P - January 2021
Page 17
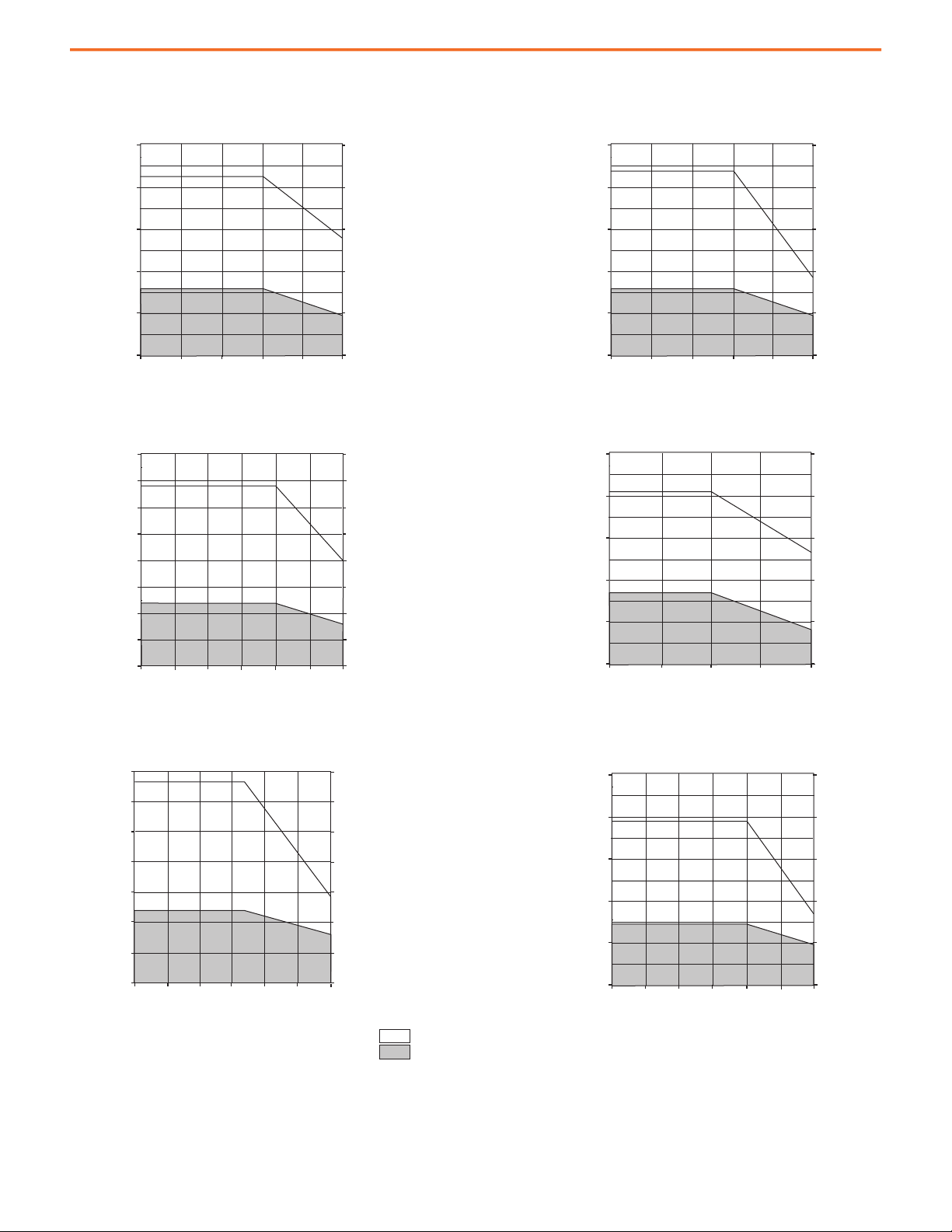
Kinetix 5100 (200V-class) Drives with Kinetix TLP Servo Motors
Torque
(N•m)
Torque
(lb•in)
0
0
5.0
10.0
15.0
25.0
20.0
44.2
88.5
133
177
221
2198-E1020-ERS and TLP-A200-200
Speed (rpm)
0
1000
1500
500
3000
2000
2500
Torque
(N•m)
Torque
(lb•in)
0
0
5.0
10.0
15.0
25.0
20.0
44.2
88.5
133
177
221
2198-E2030-ERS and TLP-A145-250
Speed (rpm)
0
1000
2000
5000
3000
4000
Torque
(N•m)
Torque
(lb•in)
0
0
2198-E2055-ERS and TLP-A200-350
Speed (rpm)
0
1000
1500
500
3000
2000
2500
10.0
20.0
30.0
50.0
40.0
88.5
177
266
354
442
Torque
(N•m)
Torque
(lb•in)
0
0
10.0
20.0
30.0
50.0
40.0
88.5
177
266
354
442
2198-E2055-ERS and TLP-A200-300
Speed (rpm)
0
500
1000
2500
1500
2000
Torque
(N•m)
Torque
(lb•in)
0
0
20.0
40.0
60.0
100.0
80.0
177
354
531
708
885
2198-E2075-ERS and TLP-A200-550
Speed (rpm)
0
1000
1500
500
3000
2000
2500
= Intermittent operating region
= Continuous operating region
Torque
(N•m)
Torque
(lb•in)
2198-E2055-ERS and TLP-A200-450
70.0
60.0
50.0
40.0
30.0
20.0
10.0
0
619
531
442
354
266
177
88.5
0
Speed (rpm)
500
1000
1500 200002500
3000
Kinetix 5100 (200V-class) Drives/Kinetix TLP Servo Motor Curves (continued)
Rockwell Automation Publication KNX-RM011C-EN-P - January 2021 17
Page 18
Kinetix 5100 (200V-class) Drives with Kinetix TLP Servo Motors
Torque
(N•m)
Torque
(lb•in)
2198-E2150-ERS and TLP-A200-750
Speed (rpm)
0
1000
2000
1500500
2500
120
100
80
60
40
20
0
1062
885
708
531
354
177
0
Torque
(N•m)
Torque
(lb•in)
Speed (rpm)
1500 20000
2198-E2150-ERS and TLP-A235-11K
160
140
120
100
80
60
40
20
0
1416
1239
1062
885
708
531
354
177
0
500
1000
Torque
(N•m)
Torque
(lb•in)
0
0
120
140
160
200
180
1062
1239
1416
1593
1770
2198-E2150-ERS and TLP-A235-15K
Speed (rpm)
0
500
1000
2000
1500
20
40
60
100
80
177
354
531
708
885
= Intermittent operating region
= Continuous operating region
Kinetix 5100 (200V-class) Drives/Kinetix TLP Servo Motor Curves (continued)
18 Rockwell Automation Publication KNX-RM011C-EN-P - January 2021
Page 19
Kinetix 5100 (400V-class) Drives with Kinetix TLP Servo Motors
Kinetix 5100 (400V-class) Drives with Kinetix TLP Servo Motors
This section provides system combination information for the Kinetix 5100 drives (with 380 or 480V, nominal input) when matched with
Kinetix TLP (400V-class) multi-purpose servo motors. Included are motor power/brake and feedback cable catalog numbers, system
performance specifications, and optimum torque/speed curves.
Kinetix TLP Motor and Cable Combinations
Rotary Motor (400V-class)
Cat. No.
TLP-B070-040
TLP-B090-075
TLP-B115-100, TLP-B115-200
TLP-B145-050, TLP-B145-100
TLP-B145-150, TLP-B145-200
TLP-B145-250
TLP-B200-300, TLP-B200-450
TLP-B200-550, TLP-B200-750
TLP-B235-11K, TLP-B235-14K
(1) The TLP-B070-040 and TLP-B090-075 frame on-motor cables include 18 AWG conductors that are compatible with 2090-CTPx-MADF-18xxx cable conductors.
(2) Refer to the Kinetix Motion Accessories Specifications Technical Data, publication KNX-TD004, for cable specifications.
(3) For TLP-B115-200 motors, use 2090-CTPx-MCDF-12xxx motor power/brake cable to comply with NFPA 79 requirements.
(4) Only these motors have separate brake connectors and brake cables. All other motors have brake wires included with the motor power/brake connector.
(1)
(3)
(4)
Motor Power/Brake Cable
2090-CTPx-MADF-18Axx (standard) or
2090-CTPx-MADF-18Fxx (continuous-flex)
2090-CTPx-MCDF-16Axx (standard) or
2090-CTPx-MCDF-16Fxx (continuous-flex)
2090-CTPx-MCDF-12Axx (standard) or
2090-CTPx-MCDF-12Fxx (continuous-flex)
2090-CTPx-MDDF-12Axx (standard) or
2090-CTPx-MDDF-12Fxx (continuous-flex)
2090-CTPx-MDDF-08Axx (standard) or
2090-CTPx-MDDF-08Fxx (continuous-flex)
2090-CTPW-MEDF-06Axx (standard) or
2090-CTPW-MEDF-06Fxx (continuous-flex)
(2)
Feedback Cable Cat. No.
2090-CTFB-MADD-CFAxx
(standard) or
2090-CTFB-MADD-CFFxx
(continuous-flex)
2090-CTFB-MFDD-CFAxx
(standard) or
2090-CTFB-MFDD-CFFxx
(continuous-flex)
(2)
Brake Cat. No.
Not applicable. Brake
conductors are included in
the power cable.
2090-CTBK-MBDF-20Axx
(standard) or
2090-CTBK-MBDF-20Fxx
(continuous-flex)
(2)
Rockwell Automation Publication KNX-RM011C-EN-P - January 2021 19
Page 20
Kinetix 5100 (400V-class) Drives with Kinetix TLP Servo Motors
Kinetix TLP Motor Performance Specifications with Kinetix 5100 (400V-class) Drives
Rotary Motor
Cat. No.
TLP-B070-040 3000 6000 1.47 1.27 (11.2) 5.30 4.25 (37.6) 0.40 (0.54) 2198-E4004-ERS
TLP-B090-075 3000 6000 2.99 2.39 (21.2)
TLP-B115-100 3000 5000 4.30 3.18 (28.1) 15.11 9.34 (82.7) 1.0 (1.34) 2198-E4015-ERS
TLP-B115-200 3000 5000 7.0 6.37 (56.4)
TLP-B145-050 2000 3000 1.89 2.39 (21.2) 5.49 6.93 (61.3) 0.50 (0.67) 2198-E4007-ERS
TLP-B145-100 2000 3000 3.54 4.77 (42.2) 12.29 13.03 (115.3) 1.0 (1.34) 2198-E4015-ERS
TLP-B145-150 2000 3000 5.20 7.16 (63.4)
TLP-B145-200 2000 3000 6.85 9.55 (84.5)
TLP-B145-250 3000 4500 8.60 7.96 (70.4)
TLP-B200-300 1500 2500 11.65 19.1 (169.0)
TLP-B200-450 1500 3000 21.18 28.7 (254.0)
TLP-B200-550 1500 3000 23.62 35.0 (309.8)
TLP-B200-750 1500 2500 28.90 47.7 (422.1)
TLP-B235-11K 1500 2000 29.60 70.0 (620.0) 70.0 158.5 (1403) 11.0 (14.75) 2198-E4150-ERS
TLP-B235-14K 1500 2000 40.30 89.1 (789.0) 70.0 143.6 (1271) 14.0 (18.77) 2198-E4150-ERS
Rated Speed
rpm
Speed, max
rpm
System Continuous
Stall Current
A rms
System Continuous
Stall Torque
N•m (lb•in)
System Peak
Stall Current
A rms
8.0 5.94 (52.5)
10.85 8.05 (71.2) 2198-E4015-ERS
20.78 15.63 (138.3)
25.40 19.10 (169.0) 2198-E4030-ERS
15.11 16.92 (149.8)
18.34 20.54 (181.8) 2198-E4020-ERS
20.78 23.74 (210.2)
21.35 24.40 (215.9) 2198-E4030-ERS
26.08 20.54 (181.7)
33.40 26.30 (232.8) 2198-E4055-ERS
26.08 36.56 (323.5)
34.10 47.8 (423.0) 2198-E4055-ERS
37.65 43.6 (385.6)
53.32 61.7 (546.1) 2198-E4075-ERS
58.41 67.6 (598.3) 2198-E4150-ERS
37.65 47.4 (419.3)
53.32 67.1 (546.1) 2198-E4075-ERS
66.60 83.8 (741.6) 2198-E4150-ERS
53.32 77.2 (682.9)
70.0 101.3 (896.5) 2198-E4150-ERS
System Peak
Stall Torque
N•m (lb•in)
Motor Rated
Output
kW (Hp)
0.75 (1.01)
2.0 (2.68)
1.5 (2.01)
2.0 (2.68)
2.5 (3.35)
3.0 (4.02)
4.5 (6.03)
5.5 (7.38)
7.5 (10.06)
Kinetix 5100 Drives
(380/480V AC input)
2198-E4007-ERS
2198 -E402 0-ER S
2198-E4015-ERS
2198 -E402 0-ER S
2198-E4030-ERS
2198-E4030-ERS
2198-E4055-ERS
2198-E4055-ERS
2198-E4075-ERS
Performance specification data and curves reflect nominal system performance of a typical system with motor ambient at 40 °C (104 °F), drive ambient at 50 °C (122 °F), and rated line voltage.
For additional information on ambient and line conditions, refer to Motion Analyzer software.
20 Rockwell Automation Publication KNX-RM011C-EN-P - January 2021
Page 21
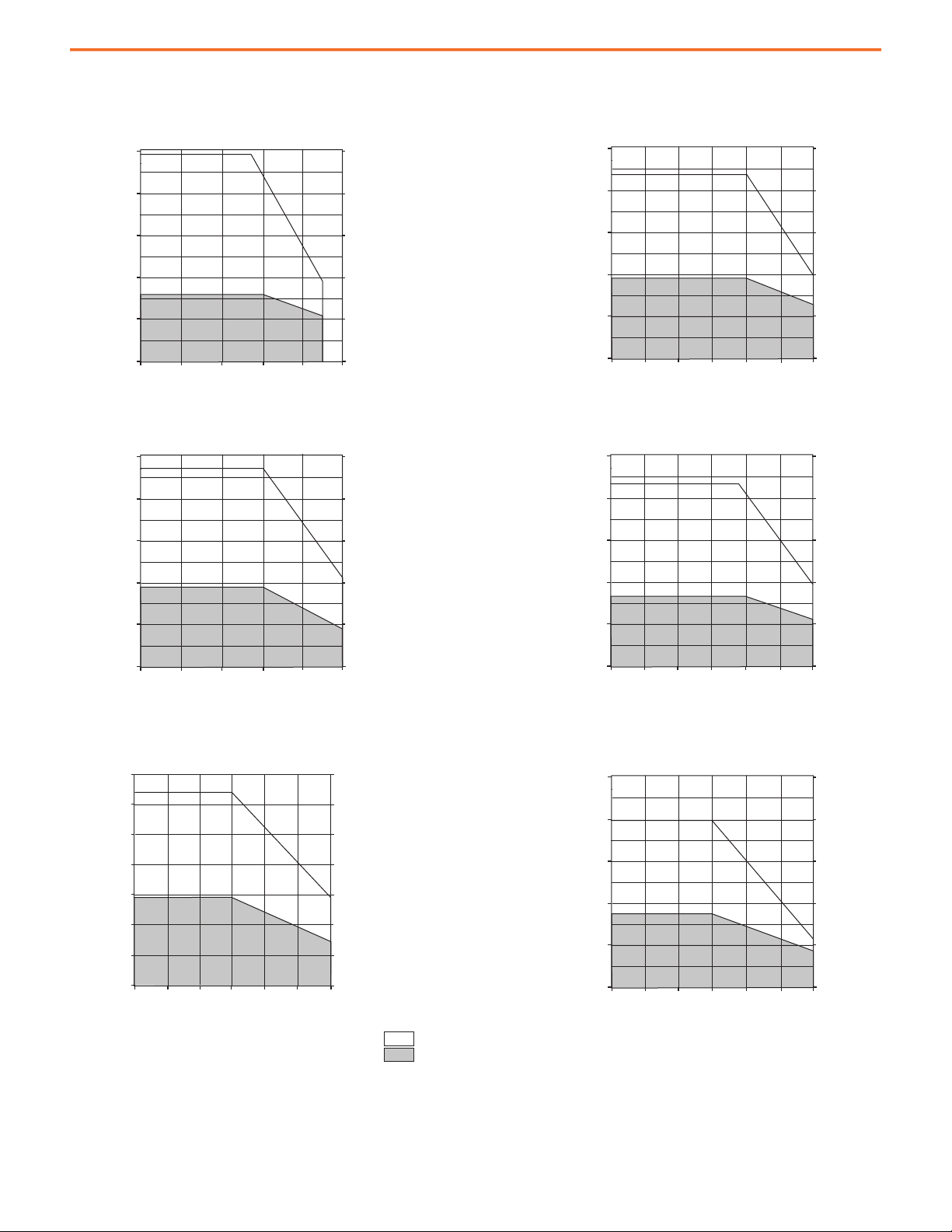
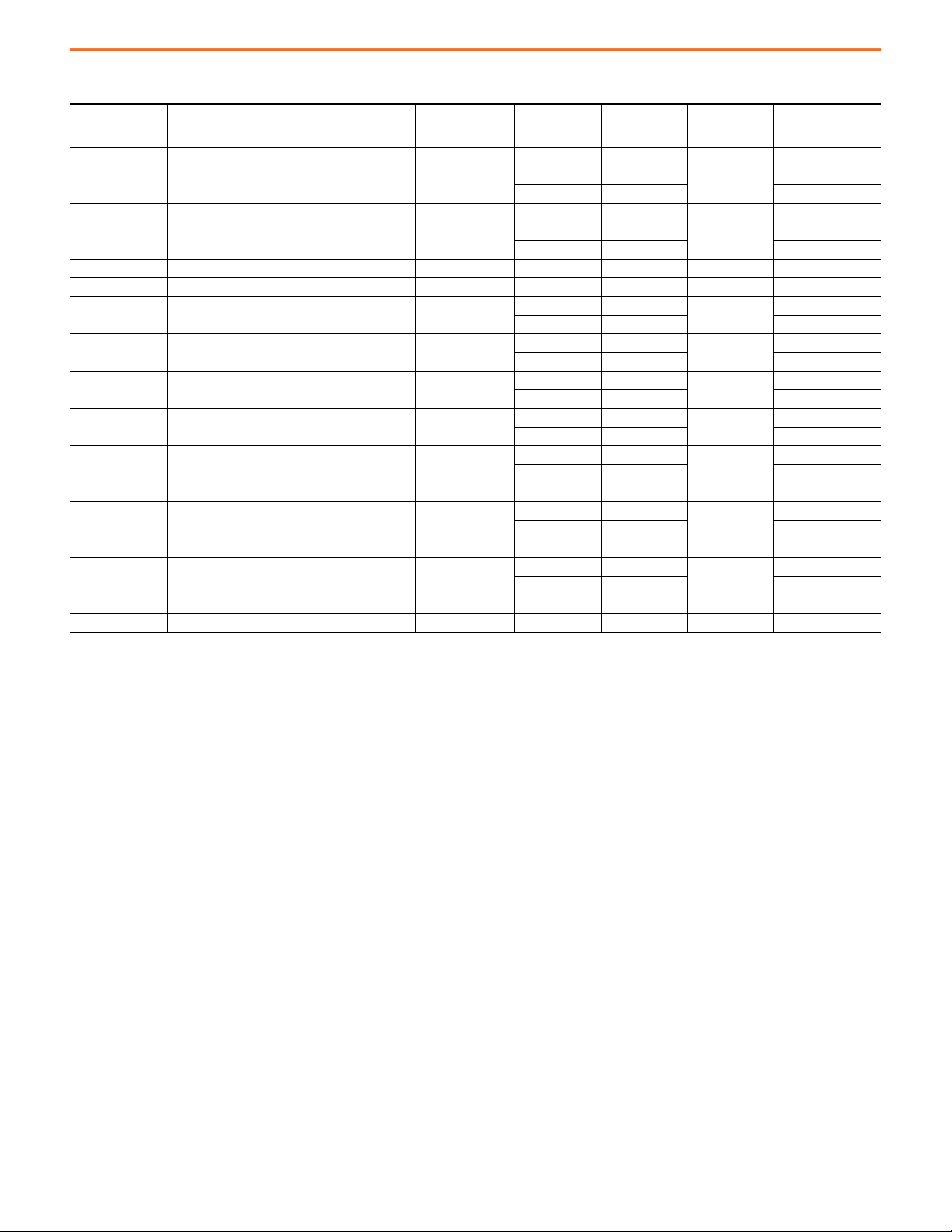
Kinetix 5100 (400V-class) Drives with Kinetix TLP Servo Motors
Torque
(N•m)
Torque
(lb•in)
0
0
1.0
2.0
3.0
5.0
4.0
8.85
17.7
26.6
35.4
44.2
2198-E4004-ERS and TLP-B070-040
Speed (rpm)
0
3000
5000
4000
1000
2000
6000
Torque
(N•m)
Torque
(lb•in)
0
0
2.0
4.0
6.0
10.0
8.0
17.7
35.4
53.1
70.8
88.5
2198-E4015-ERS and TLP-B090-075
Speed (rpm)
0
3000
5000
4000
1000
2000
6000
Torque
(N•m)
Torque
(lb•in)
0
0
2.0
4.0
6.0
10.0
8.0
17.7
35.4
53.1
70.8
88.5
2198-E4015-ERS and TLP-B115-100
Speed (rpm)
0
2000
4000
3000
1000
5000
Torque
(N•m)
Torque
(lb•in)
0
0
4.0
8.0
12.0
20.0
16.0
35.4
70.8
106
142
177
2198-E4030-ERS and TLP-B115-200
Speed (rpm)
0
2000
4000
3000
1000
5000
Torque
(N•m)
Torque
(lb•in)
Speed (rpm)
1000 2000 300025000
2198-E4007-ERS and TLP-B145-050
8.0
7.0
6.0
5.0
4.0
3.0
2.0
1.0
0
70.8
62.0
53.1
44.2
35.4
26.6
17.7
8.85
0
500
1500
= Intermittent operating region
= Continuous operating region
= Drive operation with 380V AC rms input voltage
Torque
(N•m)
Torque
(lb•in)
2198-E4015-ERS and TLP-B145-100
14.0
12.0
10.0
8.0
6.0
4.0
2.0
0
124
106
88.5
70.8
53.1
34.5
17.7
0
Speed (rpm)
500
1000
1500 200002500
3000
Kinetix 5100 (400V-class) Drives/Kinetix TLP Servo Motor Curves
Rockwell Automation Publication KNX-RM011C-EN-P - January 2021 21
Page 22

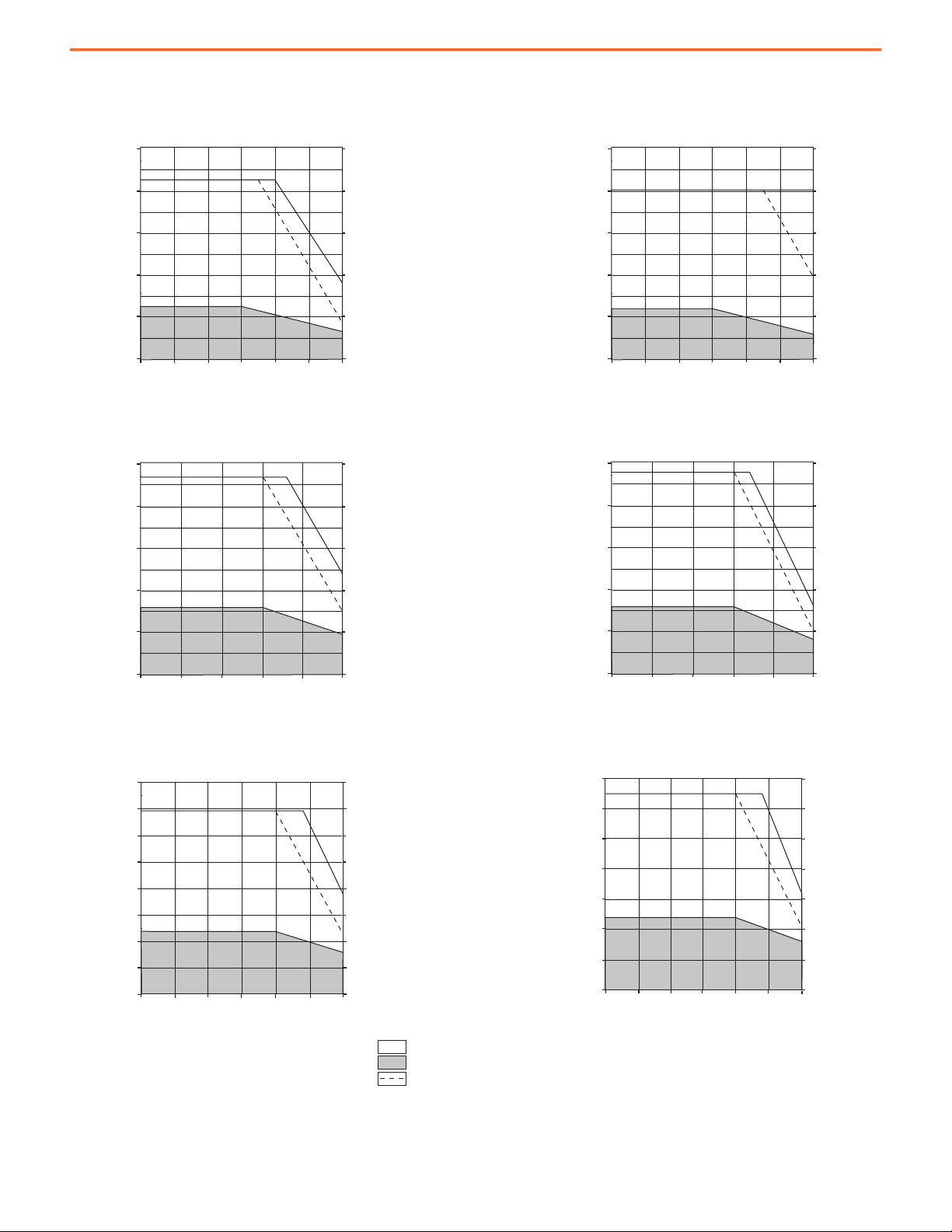
Kinetix 5100 (400V-class) Drives with Kinetix TLP Servo Motors
Torque
(N•m)
Torque
(lb•in)
0
0
5.0
10.0
15.0
25.0
20.0
44.2
88.5
133
177
221
2198-E4020-ERS and TLP-B145-150
Speed (rpm)
0
1000
1500
500
3000
2000
2500
Torque
(N•m)
Torque
(lb•in)
0
0
5.0
10.0
15.0
25.0
20.0
44.2
88.5
133
177
221
2198-E4030-ERS and TLP-B145-200
Speed (rpm)
0
1000
1500
500
3000
2000
2500
Torque
(N•m)
Torque
(lb•in)
2198-E4055-ERS and TLP-B145-250
Speed (rpm)
0
2000
4000
30001000
5000
30.0
25.0
20.0
15.0
10.0
5.0
0
266
221
177
133
88.5
44.2
0
Torque
(N•m)
Torque
(lb•in)
0
0
10.0
20.0
30.0
50.0
40.0
88.5
177
266
354
442
2198-E4055-ERS and TLP-B200-300
Speed (rpm)
0
500
1000
2500
1500
2000
Torque
(N•m)
Torque
(lb•in)
2198-E4150-ERS and TLP-B200-450
70.0
60.0
50.0
40.0
30.0
20.0
10.0
0
619
531
442
354
266
177
88.5
0
Speed (rpm)
500
1000
1500 200002500
3000
= Intermittent operating region
= Continuous operating region
= Drive operation with 380V AC rms input voltage
Torque
(N•m)
Torque
(lb•in)
0
0
20.0
40.0
60.0
100.0
80.0
177
354
531
708
885
2198-E4150-ERS and TLP-B200-550
Speed (rpm)
0
1000
1500
500
3000
2000
2500
Kinetix 5100 (400V-class) Drives/Kinetix TLP Servo Motor Curves (continued)
22 Rockwell Automation Publication KNX-RM011C-EN-P - January 2021
Page 23
Kinetix 5100 (400V-class) Drives with Kinetix TLP Servo Motors
Torque
(N•m)
Torque
(lb•in)
2198-E4150-ERS and TLP-B200-750
Speed (rpm)
0
1000
2000
1500500
2500
120
100
80
60
40
20
0
1062
885
708
531
354
177
0
Torque
(N•m)
Torque
(lb•in)
Speed (rpm)
1500 20000
2198-E4150-ERS and TLP-B235-11K
160
140
120
100
80
60
40
20
0
500
1000
1416
1239
1062
885
708
531
354
177
0
Torque
(N•m)
Torque
(lb•in)
Speed (rpm)
1500 20000
2198-E4150-ERS and TLP-B235-14K
160
140
120
100
80
60
40
20
0
500
1000
1416
1239
1062
885
708
531
354
177
0
= Intermittent operating region
= Continuous operating region
= Drive operation with 380V AC rms input voltage
Kinetix 5100 (400V-class) Drives/Kinetix TLP Servo Motor Curves (continued)
Rockwell Automation Publication KNX-RM011C-EN-P - January 2021 23
Page 24

Kinetix 5100 (200V-class) Drives with Kinetix MPL Motors
Kinetix 5100 (200V-class) Drives with Kinetix MPL Motors
This section provides system combination information for the Kinetix 5100 drives (with 230V, nominal input) when matched with Kinetix MPL
(200V-class) low-inertia servo motors with absolute high-resolution encoders or TTL incremental encoders. Included are motor power/brake
and feedback cable catalog numbers, system performance specifications, and the optimum torque/speed curves.
These system performance tables and torque/speed curves reflect single-phase and three-phase drive operation with 200V-class motors;
however, only 2198-E1004-ERS, 2198-E1007-ERS, 2198-E1015-ERS, and 2198-E1020-ERS drives are capable of single-phase operation.
IMPORTANT The Kinetix MPL low-inertia motors on this page are equipped with DIN connectors (specified by 7, for example,
MPL-A310P-xx7xAA) and are not compatible with cables designed for motors equipped with bayonet connectors
(specified by 2, for example, MPL-A310P-xx2xAA). The motors with bayonet connectors are discontinued and require
2090-XXNxMP (bayonet) cables. For help with migration or to select bayonet transition cables, contact your Rockwell
Automation sales representative.
Kinetix MPL Motor and Cable Combinations
Rotary Motor (200V-class)
Cat. No.
MPL-A1510V-xx7xAA, MPL-A1520U-xx7xAA, MPL-A1530U-xx7xAA
MPL-A210V-xx7xAA, MPL-A220T-xx7xAA, MPL-A230P-xx7xAA
MPL-A310F-xx7xAA, MPL-A310P-xx7xAA,
MPL-A320H-xx7xAA, MPL-A320P-xx7xAA, MPL-A330P-xx7xAA
MPL-A420P-xx7xAA, MPL-A430H-xx7xAA
MPL-A4530F-xx7xAA, MPL-A4540C-xx7xAA
MPL-A430P-xx7xAA
MPL-A4530K-xx7xAA, MPL-A4540F-xx7xAA
MPL-A4560F-xx7xAA
MPL-A520K-xx7xAA
MPL-A540K-xx7xAA, MPL-A560F-xx7xAA
(1) Use the 2198-K51CK-D15M feedback connector kit with flying-lead cables on the drive end. Refer to Required Drive Accessories on page 6.
(2) Applies to Kinetix 5100 drives and MPL-A3xxx-M/S…MPL-A5xxx-M/S motors with absolute high-resolution feedback.
(3) Applies to Kinetix 5100 drives and MPL-A15xxx-V/E…MPL-A2xxx-V/E motors with absolute high-resolution feedback.
(4) Applies to Kinetix 5100 drives and MPL-A15xxx-H…MPL-A45xxx-H motors with incremental feedback.
For cable configuration illustrations and feature descriptions, by catalog number, refer to 2090-Series Motor Power/Brake and Feedback Cables Overview beginning on page 11.
Motor-end connector kits are available for motor power/brake and feedback cables. Refer to the Kinetix Motion Accessories Technical Data, publication KNX-TD004
Cable length xx is in meters. Refer to the Kinetix Motion Accessories Technical Data, publication KNX-TD004, for standard cable lengths.
Motor Power/Brake Cable
2090-CPxM7DF-16AAxx (standard, non-flex)
2090-CPxM7DF-16AFxx (continuous-flex)
2090-CPxM7DF-14AAxx (standard, non-flex)
2090-CPxM7DF-14AFxx (continuous-flex)
2090-CPxM7DF-12AAxx (standard, non-flex)
2090-CPxM7DF-10AAxx (standard, non-flex)
2090-CPxM7DF-10AFxx (continuous-flex)
2090-CPxM7DF-08AAxx (standard, non-flex)
2090-CPxM7DF-08AFxx (continuous-flex)
Motor Feedback Cable
2090-CFBM7DF-CEAAxx or
2090-CFBM7DD-CEAAxx (standard, non-flex)
2090-CFBM7DF-CEAFxx or
2090-CFBM7DD-CEAFxx (continuous-flex)
Absolute High-resolution Feedback
2090-XXNFMF-Sxx (standard, non-flex)
2090-CFBM7DF-CDAFxx (continuous-flex)
Incremental Feedback
(1)
(2) (3)
, for more information.
(4)
24 Rockwell Automation Publication KNX-RM011C-EN-P - January 2021
Page 25
Kinetix 5100 (200V-class) Drives with Kinetix MPL Motors
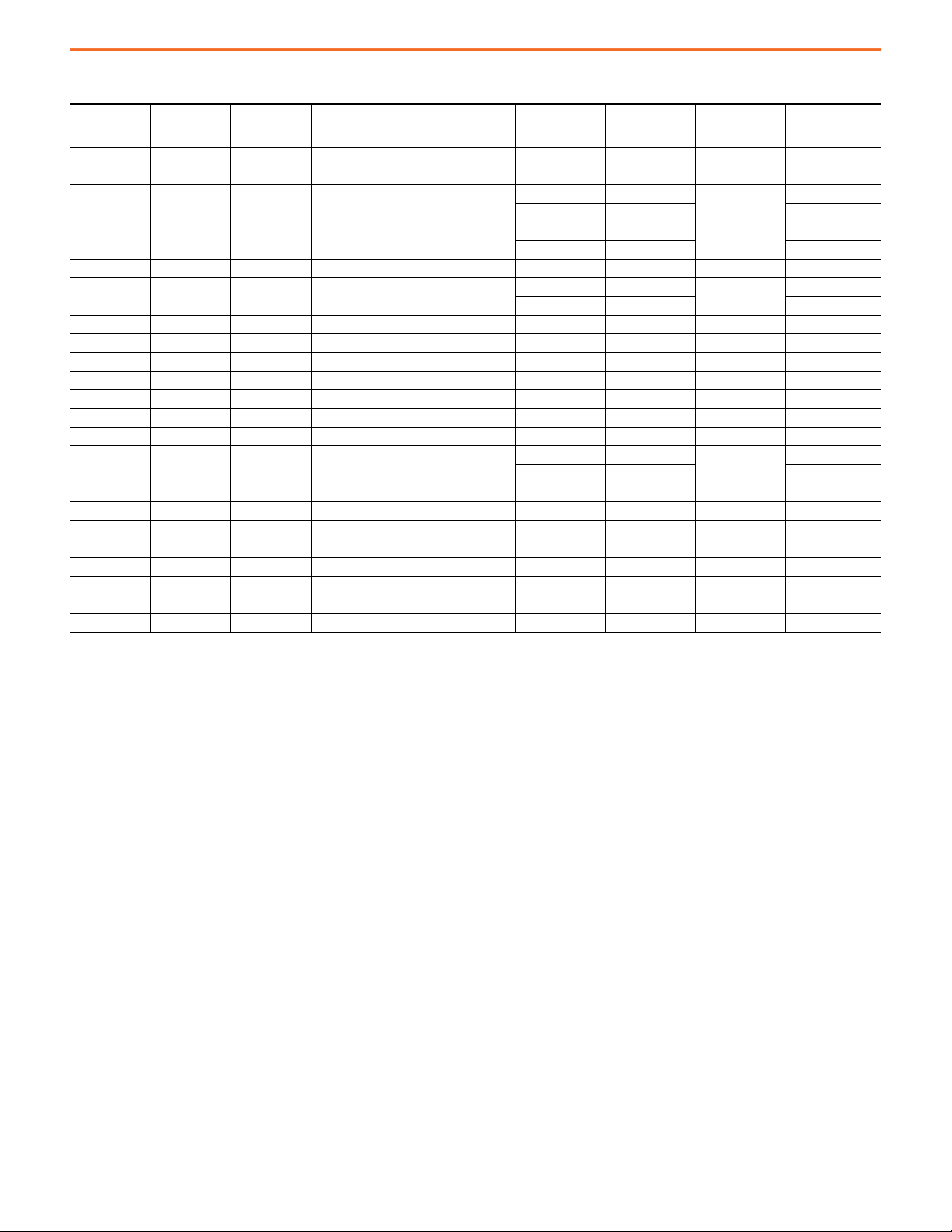
Kinetix MPL Motor Performance Specifications with Kinetix 5100 (200V-class) Drives
Rotary Motor
Cat. No.
MPL-A1510V 8000 8000 1.05 0.26 (2.3) 3.40 0.77 (6.8) 0.16 2198-E1004-ERS
MPL-A1520U 7000 7000 1.80 0.49 (4.3) 6.10 1.58 (13.9) 0.27 2198-E1004-ERS
MPL-A1530U 7000 7000 2.82 0.90 (8.0)
MPL-A210V 8000 8000 3.09 0.55 (4.8)
MPL-A220T 6000 6000 4.54 1.61 (14.2) 15.5 4.74 (41.9) 0.62 2198-E1007-ERS
MPL-A230P 5000 5000 5.40 2.10 (18.6)
MPL-A310F 3000 3000 3.20 1.58 (14.0) 9.19 3.61 (31.9) 0.46 2198-E1004-ERS
MPL-A310P 5000 5000 4.85 1.58 (14.0) 14.0 3.61 (31.9) 0.73 2198-E1007-ERS
MPL-A320H 3500 3500 6.10 3.05 (27.0) 19.3 7.91 (70.0) 1.0 2198-E1007-ERS
MPL-A320P 5000 5000 9.00 3.05 (27.0) 29.5 7.91 (70.0) 1.3 2198-E1015-ERS
MPL-A330P 5000 5000 12.0 4.18 (37.0) 38.0 11.1 (98.2) 1.8 2198-E1020-ERS
MPL-A420P 5000 5000 12.7 4.79 (42.3) 46.0 13.5 (120) 2.0 2198-E1020-ERS
MPL-A430H 3500 3500 12.2 6.21 (55.0) 45.0 19.8 (175) 1.8 2198-E1020-ERS
MPL-A430P 5000 5000 16.80 5.99 (52.9)
MPL-A4530F 2800 2800 13.40 8.36 (74.0) 42.0 20.3 (179) 1.9 2198-E1020-ERS
MPL-A4530K 4000 4000 19.50 8.13 (71.9) 62.0 20.3 (179) 2.5 2198-E2030-ERS
MPL-A4540C 1500 1500 9.40 10.30 (91.1) 29.0 27.1 (239) 1.5 2198-E1015-ERS
MPL-A4540F 3000 3000 18.40 10.19 (90.1) 57.39 27.1 (239) 2.6 2198-E1020-ERS
MPL-A4560F 3000 3000 22.0 14.1 (125) 66.0 34.4 (305) 3.0 2198-E2030-ERS
MPL-A520K 4000 4000 23.0 10.77 (95.2) 65.0 24.3 (215) 3.5 2198-E2030-ERS
MPL-A540K 4000 4000 41.5 19.42 (171) 120.0 48.6 (430) 5.5 2198-E2055-ERS
MPL-A560F 3000 3000 42.0 27.39 (242) 120.0 61.0 (540) 5.3 2198-E2055-ERS
Rated Speed
rpm
Speed, max
rpm
System Continuous
Stall Current
A 0-pk
System Continuous
Stall Torque
N•m (lb•in)
System Peak
Stall Current
A 0-pk
9.19 2.57 (22.7)
10.1 2.82 (24.9) 2198-E1007-ERS
9.19 1.37 (12.1)
10.2 1.52 (13.4) 2198-E1007-ERS
21.79 7.77 (68.8)
23.0 8.2 (73.0) 2198-E1015-ERS
57.39 16.96 (150)
67.0 19.8 (175) 2198-E2030-ERS
System Peak
Stall Torque
N•m (lb•in)
Motor Rated
Output
kW
0.39
0.37
0.86
2.2
Kinetix 5100 Drives
(230V AC input)
2198-E1004-ERS
2198-E1004-ERS
2198-E1007-ERS
2198-E1020-ERS
Performance specification data and curves reflect nominal system performance of a typical system with motor ambient at 40 °C (104 °F), drive ambient at 50 °C (122 °F), and rated line voltage.
For additional information on ambient and line conditions, refer to Motion Analyzer software.
Rockwell Automation Publication KNX-RM011C-EN-P - January 2021 25
Page 26

Kinetix 5100 (200V-class) Drives with Kinetix MPL Motors
Torque
(N•m)
Torque
(lb•in)
Speed (rpm)
2000 4000 6000 80000
2198-E1004-ERS and MPL-A1510V
0.800
0.700
0.600
0.500
0.400
0.300
0.200
0.100
0
7.08
6.19
5.31
4.42
3.54
2.65
1.77
0.88
0
Torque
(N•m)
Torque
(lb•in)
Speed (rpm)
2000 4000 6000 80000
2198-E1004-ERS and MPL-A1520U
1.600
1.400
1.200
1.000
0.800
0.600
0.400
0.200
0
14.1
12.4
10.6
8.85
7.08
5.31
3.54
1.77
0
Torque
(N•m)
Torque
(lb•in)
Speed (rpm)
2000 4000 6000 80000
2198-E1007-ERS and MPL-A1530U
4.00
3.50
3.00
2.50
2.00
1.50
1.00
0.50
0
35.4
30.9
26.5
22.1
17.7
13.3
8.84
4.42
0
Torque
(N•m)
Torque
(lb•in)
Speed (rpm)
2000 4000 6000 80000
2198-E1007-ERS and MPL-A210V
1.600
1.400
1.200
1.000
0.800
0.600
0.400
0.200
0
14.1
12.4
10.6
8.85
7.08
5.31
3.54
1.77
0
Torque
(N•m)
Torque
(lb•in)
0
0
1.0
2.0
3.0
5.0
4.0
8.85
17.7
26.5
35.4
44.2
2198-E1007-ERS and MPL-A220T
Speed (rpm)
1000
2000 3000 40000 5000
6000
Torque
(N•m)
Torque
(lb•in)
2198-E1015-ERS and MPL-A230P
0
0
2.0
4.0
6.0
35.4
53.1
70.8
8.0
88.5
Speed (rpm)
0
3000
5000
4000
1000
2000
10.0
1.77
= Intermittent operating region
= Continuous operating region
Kinetix 5100 (200V-class) Drives/Kinetix MPL Servo Motor Curves
26 Rockwell Automation Publication KNX-RM011C-EN-P - January 2021
Page 27

Kinetix 5100 (200V-class) Drives with Kinetix MPL Motors
Torque
(N•m)
Torque
(lb•in)
2198-E1004-ERS and MPL-A310F
35.4
26.5
17.7
8.85
0
4.0
3.0
2.0
1.0
0
Speed (rpm)
30001000
2000
0
Torque
(N•m)
Torque
(lb•in)
2198-E1007-ERS and MPL-A310P
35.4
26.5
17.7
8.85
0
4.0
3.0
2.0
1.0
0
Speed (rpm)
0
2000
4000
30001000
5000
Torque
(N•m)
Torque
(lb•in)
Speed (rpm)
2198-E1007-ERS and MPL-A320H
70.8
53.1
35.4
17.7
0
0
2000
4000
8.0
6.0
4.0
2.0
0
30001000
Torque
(N•m)
Torque
(lb•in)
Speed (rpm)
2198-E1015-ERS and MPL-A320P
0
2000
4000
30001000
5000
0
17.7
70.8
35.4
53.1
8.85
26.5
44.2
61.9
0
2.0
4.0
6.0
8.0
1.0
3.0
5.0
7.0
Torque
(N•m)
Torque
(lb•in)
2198-E1020-ERS and MPL-A330P
Speed (rpm)
0
2000
4000
30001000
5000
12.0
10.0
8.0
6.0
4.0
2.0
0
106
88.5
70.8
53.1
35.4
17.7
0
Torque
(N•m)
Torque
(lb•in)
141
106
70.8
35.4
0
16.0
12.0
8.0
4.0
0
2198-E1020-ERS and MPL-A420P
Speed (rpm)
0
2000
4000
30001000
5000
= Intermittent operating region
= Continuous operating region
Kinetix 5100 (200V-class) Drives/Kinetix MPL Servo Motor Curves (continued)
Rockwell Automation Publication KNX-RM011C-EN-P - January 2021 27
Page 28

Kinetix 5100 (200V-class) Drives with Kinetix MPL Motors
Torque
(N•m)
Torque
(lb•in)
0
0
5
10
15
25
20
44.2
88.5
133
177
221
Speed (rpm)
0
2000
4000
30001000
2198-E1020-ERS and MPL-A430H
Torque
(N•m)
Torque
(lb•in)
0
0
5
10
15
25
20
44.2
88.5
133
177
221
2198-E2030-ERS and MPL-A430P
Speed (rpm)
0
2000
4000
30001000
5000
Torque
(N•m)
Torque
(lb•in)
0
0
5
10
15
25
20
44.2
88.5
133
177
221
Speed (rpm)
30001000
2000
0
2198-E1020-ERS and MPL-A4530F
Torque
(N•m)
Torque
(lb•in)
2198-E1015-ERS and MPL-A4540C
30
25
20
15
10
5
0
265
221
177
133
88.5
44.2
0
Speed (rpm)
0 15001000500 1250750250
Torque
(N•m)
Torque
(lb•in)
2198-E1020-ERS and MPL-A4540F
30
25
20
15
10
5
0
265
221
177
133
88.5
44.2
0
Speed (rpm)
0 300020001000
= Intermittent operating region
= Continuous operating region
Kinetix 5100 (200V-class) Drives/Kinetix MPL Servo Motor Curves (continued)
2198-E2030-ERS and MPL-A4530K
25
Torque
(N•m)
20
221
177
Torque
(lb•in)
15
10
5
0
0
2000
Speed (rpm)
30001000
133
88.5
44.2
0
4000
28 Rockwell Automation Publication KNX-RM011C-EN-P - January 2021
Page 29

Kinetix 5100 (200V-class) Drives with Kinetix MPL Motors
Torque
(N•m)
Torque
(lb•in)
0
0
10
20
30
50
40
88.5
177
265
354
443
Speed (rpm)
0 300020001000
2198-E2030-ERS and MPL-A4560F
Torque
(N•m)
Torque
(lb•in)
2198-E2030-ERS and MPL-A520K
30
25
20
15
10
5
0
265
221
177
133
88.5
44.2
0
Speed (rpm)
0
2000
4000
30001000
Torque
(N•m)
Torque
(lb•in)
Speed (rpm)
2198-E2055-ERS and MPL-A540K
0
2000
4000
32
24
16
8
0
30001000
283
212
141
70.8
0
Torque
(N•m)
Torque
(lb•in)
0
0
10
20
30
50
40
88.5
177
265
354
443
Speed (rpm)
0 300020001000
2198-E2055-ERS and MPL-A560F
= Intermittent operating region
= Continuous operating region
Kinetix 5100 (200V-class) Drives/Kinetix MPL Servo Motor Curves (continued)
Rockwell Automation Publication KNX-RM011C-EN-P - January 2021 29
Page 30

Kinetix 5100 (400V-class) Drives with Kinetix MPL Servo Motors
Kinetix 5100 (400V-class) Drives with Kinetix MPL Servo Motors
This section provides system combination information for the Kinetix 5100 drives (with 400 and 480V, nominal input) when matched with
Kinetix MPL (400V-class) low-inertia motors with absolute high-resolution encoders. Included are motor power/brake and feedback cable
catalog numbers, system performance specifications, and the optimum torque/speed curves.
IMPORTANT The Kinetix MPL motors on this page are equipped with DIN connectors (specified by 7, for example,
MPL-A310P-xx7xAA) and are not compatible with cables designed for motors equipped with bayonet connectors
(specified by 2, for example, MPL-A310P-xx2xAA). The motors with bayonet connectors are discontinued and require
2090-XXNxMP (bayonet) cables. For help with migration or to select bayonet transition cables, contact your Rockwell
Automation sales representative.
Kinetix MPL Motor Cable Combinations
Rotary Motor (400V-class)
Cat. No.
MPL-B1510V-xx7xAA, MPL-B1520U-xx7xAA, MPL-B1530U-xx7xAA
MPL-B210V-xx7xAA, MPL-B220T-xx7xAA, MPL-B230P-xx7xAA
MPL-B310P-xx7xAA, MPL-B320P-xx7xAA, MPL-B330P-xx7xAA
MPL-B420P-xx7xAA, MPL-B430P-xx7xAA
MPL-B4530F-xx7xAA, MPL-B4530K-xx7xAA,
MPL-B4540F-xx7xAA, MPL-B4560F-xx7xAA
MPL-B520K-xx7xAA
MPL-B540D-xx7xAA, MPL-B540K-xx7xAA, MPL-B560F-xx7xAA
MPL-B580F-xx7xAA, MPL-B580J-xx7xAA,
MPL-B640F-xx7xAA
MPL-B660F-xx7xAA, MPL-B680D-xx7xAA
MPL-B960B-xx7xAA, MPL-B980B-xx7xAA
MPL-B680F-xx7xAA, MPL-B680H-xx7xAA,
MPL-B860D-xx7xAA, MPL-B880C-xx7xAA
MPL-B960C-xx7xAA
MPL-B880D-xx7xAA
MPL-B980C-xx7xAA
(1) Use the 2198-K51CK-D15M feedback connector kit with flying-lead cables on the drive end. Refer to Required Drive Accessories on page 6.
(2) Applies to Kinetix 5100 drives and MPL-B3xxx-M/S…MPL-B9xxx-M/S motors with absolute high-resolution feedback.
(3) Applies to Kinetix 5100 drives and MPL-B15xxx-V/E…MPL-B2xxx-V/E motors with absolute high-resolution feedback.
(4) Applies to Kinetix 5100 drives and MPL-B15xxx-H…MPL-B45xxx-H motors with incremental feedback.
For cable configuration illustrations and feature descriptions, by catalog number, refer to 2090-Series Motor Power/Brake and Feedback Cables Overview beginning on page 11.
Motor-end connector kits are available for motor power/brake and feedback cables. Refer to the Kinetix Motion Accessories Technical Data, publication KNX-TD004, for more information.
Cable length xx is in meters. Refer to the Kinetix Motion Accessories Technical Data, publication KNX-TD004
Motor Power/Brake Cable
2090-CPxM7DF-16AAxx (standard, non-flex)
2090-CPxM7DF-16AFxx (continuous-flex)
2090-CPxM7DF-14AAxx (standard, non-flex)
2090-CPxM7DF-14AFxx (continuous-flex)
2090-CPxM7DF-10AAxx (standard, non-flex)
xM7DF-10AFxx (continuous-flex)
2090-CP
2090-CPxM7DF-08AAxx (standard, non-flex)
2090-CPxM7DF-08AAxx (continuous-flex)
2090-CPxM7DF-06AAxx (standard, non-flex)
2090-CPxM7DF-06AAxx (continuous-flex)
2090-CPxM7DF-04AAxx (standard, non-flex)
2090-CPxM7DF-04AAxx (continuous-flex)
, for standard cable lengths.
Motor Feedback Cable
2090-CFBM7DF-CEAAxx or
2090-CFBM7DD-CEAAxx (standard, non-flex)
2090-CFBM7DF-CEAFxx or
2090-CFBM7DD-CEAFxx (continuous-flex)
Absolute High-resolution Feedback
2090-XXNFMF-Sxx (standard, non-flex)
2090-CFBM7DF-CDAFxx (continuous-flex)
Incremental Feedback
(1)
(2) (3)
(4)
30 Rockwell Automation Publication KNX-RM011C-EN-P - January 2021
Page 31

Kinetix 5100 (400V-class) Drives with Kinetix MPL Servo Motors
Kinetix MPL Motor Performance Specifications with Kinetix 5100 (400V-class) Drives
Rotary Motor
Cat. No.
MPL-B1510V 8000 8000 0.95 0.26 (2.3) 3.10 0.77 (6.8) 0.16 2198-E4004-ERS
MPL-B1520U 7000 7000 1.80 0.49 (4.3) 6.10 1.58 (13.9) 0.27 2198-E4004-ERS
MPL-B1530U 7000 7000 2.0 0.90 (8.0) 7.20 2.82 (24.9) 0.39 2198-E4004-ERS
MPL-B210V 8000 8000 1.75 0.55 (4.9) 5.80 1.52 (13.4) 0.37 2198-E4004-ERS
MPL-B220T 6000 6000 3.30 1.61 (14.2) 11.3 4.74 (41.9) 0.62 2198-E4007-ERS
MPL-B230P 5000 5000 2.60 2.10 (18.6) 11.3 8.20 (73.0) 0.86 2198-E4007-ERS
MPL-B310P 5000 5000 2.4 1.6 (14.1) 7.10 3.6 (32.0) 0.77 2198-E4007-ERS
MPL-B320P 5000 5000 4.5 3.10 (27)
MPL-B330P 5000 5000 6.1 4.18 (37) 19.0 11.1 (98.2) 1.8 2198-E4015-ERS
MPL-B420P 5000 5000 6.4 4.74 (42)
MPL-B430P 5000 5000 9.2 6.55 (58)
MPL-B4530F 3000 3000 7.0 8.25 (73) 21.0 20.3 (180) 2.1 2198-E4015-ERS
MPL-B4530K 4000 4000 11.0 8.25 (73) 31.0 20.3 (179) 2.6 2198-E4030-ERS
MPL-B4540F 3000 3000 9.1 10.20 (90) 29.0 27.1 (240) 2.6 2198-E4020-ERS
MPL-B4560F 3000 3000 11.8 14.0 (124) 36.0 34.4 (304) 3.2 2198-E4030-ERS
MPL-B520K 3500 4000 11.5 10.7 (95) 33.0 23.2 (205) 3.5 2198-E4030-ERS
MPL-B540D 2000 2000 10.5 19.4 (172) 23.0 41.0 (362) 3.4 2198-E4020-ERS
MPL-B540K 4000 4000 20.5 19.4 (172)
MPL-B560F 3000 3000 20.6 26.8 (237)
MPL-B580F 3000 3000 26.0 34.0 (301)
MPL-B580J 3800 3800 32.0 34.0 (301)
MPL-B640F 2000 3000 32.1 36.7 (325)
MPL-B660F 2000 3000 38.5 48.0 (425)
MPL-B680D 2000 2000 34.0 62.8 (556)
MPL-B680F 2000 3000 48.0 60.0 (531) 96.0 108.5 (960) 7.5 2198-E4150-ERS
MPL-B680H 2000 3500 51.0 60.0 (531) 140 146.9 (1300) 7.5 2198-E4150-ERS
MPL-B860D 2000 2000 47.5 83.0 (735) 95.5 152.5 (1350) 12.5 2198-E4150-ERS
MPL-B880C 1500 1500 47.5 110 (973) 97.5 203 (1797) 12.6 2198-E4150-ERS
MPL-B880D 2000 2000 67.0 110 (973) 96.0 147 (1301) 12.6 2198-E4150-ERS
MPL-B960B1200120042.5 130 (1150)
MPL-B960C 1500 1500 55.0 124.3 (1100) 125 226 (2000) 14.8 2198-E4150-ERS
MPL-B980B 1000 1000 40.0 162.7 (1444)
MPL-B980C 1500 1500 68.2 158.2 (1400) 140 271.2 (2400) 16.8 2198-E4150-ERS
Rated
Speed
rpm
Maximum
Speed
rpm
System Continuous
Stall Current
A 0-pk
System Continuous
Stall Torque
N•m (lb•in)
System Peak
Stall Current
A 0-pk
11.3 6.6 (58.4)
14.0 8.2 (72.5) 2198-E4015-ERS
21.4 13.1 (116)
22.0 13.5 (119) 2198-E4020-ERS
29.4 18.2 (161)
32.0 19.8 (175) 2198-E4030-ERS
53.2 43.1 (381)
60.0 48.6 (430) 2198-E4075-ERS
53.2 53.0 (469)
68.0 67.8 (600) 2198-E4075-ERS
53.2 49.2 (435)
94.0 87.0 (770) 2198-E4150-ERS
53.2 45.8 (405)
94.0 81.0 (717) 2198-E4150-ERS
53.2 59.2 (524)
65.0 72.3 (640) 2198-E4075-ERS
75.4 79.4 (703)
96.0 101.1 (895) 2198-E4150-ERS
53.2 87.3 (772)
94.0 154.2 (1365) 2198-E4150-ERS
75.4 185 (1640)
94.0 231 (2044) 2198-E4150-ERS
75.4 223 (1973)
94.0 278 (2460) 2198-E4150-ERS
System Peak
Stall Torque
N•m (lb•in)
Motor Rated
Output
kW
1.5
1.9
2.2
5.4
5.5
7.1
7.9
6.1
6.1
9.3
12.7
15.2
Kinetix 5100 Drives
(480V AC input)
2198-E4007-ERS
2198-E4015-ERS
2198-E4020-ERS
2198-E4055-ERS
2198-E4055-ERS
2198-E4055-ERS
2198-E4055-ERS
2198-E4055-ERS
2198-E4075-ERS
2198-E4055-ERS
2198-E4075-ERS
2198-E4075-ERS
Performance specification data and curves reflect nominal system performance of a typical system with motor ambient at 40 °C (104 °F), drive ambient at 50 °C (122 °F), and rated line voltage.
For additional information on ambient and line conditions, refer to Motion Analyzer software.
Rockwell Automation Publication KNX-RM011C-EN-P - January 2021 31
Page 32

Kinetix 5100 (400V-class) Drives with Kinetix MPL Servo Motors
Torque
(N•m)
Torque
(lb•in)
Speed (rpm)
2000 4000 6000 80000
2198-E4004-ERS and MPL-B1510V
0.800
0.700
0.600
0.500
0.400
0.300
0.200
0.100
0
7.08
6.19
5.31
4.42
3.54
2.65
1.77
0.88
0
Peak curve represents
480V and 400V inputs
Torque
(N•m)
Torque
(lb•in)
Speed (rpm)
2000 4000 6000 80000
2198-E4004-ERS and MPL-B1520U
1.600
1.400
1.200
1.000
0.800
0.600
0.400
0.200
0
14.1
12.4
10.6
8.85
7.08
5.31
3.54
1.77
0
Peak curve represents
480V and 400V inputs
Torque
(N•m)
Torque
(lb•in)
Speed (rpm)
2000 4000 6000 80000
2198-E4004-ERS and MPL-B1530U
4.00
3.50
3.00
2.50
2.00
1.50
1.00
0.50
0
35.4
30.9
26.5
22.1
17.7
13.3
8.84
4.42
0
Torque
(N•m)
Torque
(lb•in)
Speed (rpm)
2000 4000 6000 80000
2198-E4004-ERS and MPL-B210V
1.600
1.400
1.200
1.000
0.800
0.600
0.400
0.200
0
14.1
12.4
10.6
8.85
7.08
5.31
3.54
1.77
0
Peak curve represents
480V and 400V inputs
Torque
(N•m)
Torque
(lb•in)
0
0
1.0
2.0
3.0
5.0
4.0
8.85
17.7
26.5
35.4
44.2
2198-E4007-ERS and MPL-B220T
Speed (rpm)
1000
2000 3000 40000 5000
6000
Peak curve represents
480V and 400V inputs
Torque
(N•m)
Torque
(lb•in)
0
0
2.0
4.0
6.0
35.4
53.1
70.8
8.0
88.5
Speed (rpm)
0
3000
5000
4000
1000
2000
10.0
1.77
2198-E4007-ERS and MPL-B230P
= Intermittent operating region
= Continuous operating region
= Drive operation with 400V AC rms input voltage
Kinetix 5100 (400V-class) Drives/Kinetix MPL Servo Motor Curves
32 Rockwell Automation Publication KNX-RM011C-EN-P - January 2021
Page 33

Kinetix 5100 (400V-class) Drives with Kinetix MPL Servo Motors
1000 2000 3000 4000
0
0
0
17.7
35.4
0.5
1.0
1.5
2.0
2.5
3.0
3.5
4.0
4.42
8.85
13.3
22.1
26.5
31.0
5000
Torque
(N•m)
Torque
(lb•in)
Speed (rpm)
2198-E4007-ERS and MPL-B310P
Torque
(N•m)
Torque
(lb•in)
Speed (rpm)
1000 2000 3000 4000
0
0
0
17.7
70.8
2.0
4.0
5000
6.0
8.0
35.4
53.1
1.0
3.0
5.0
7.0
8.85
26.5
44.2
61.9
2198-E4015-ERS and MPL-B320P
Torque
(N•m)
Torque
(lb•in)
Speed (rpm)
0
2000
4000
30001000
5000
12.0
10.0
8.0
6.0
4.0
2.0
0
106
88.5
70.8
53.1
35.4
17.7
0
2198-E4015-ERS and MPL-B330P
Torque
(N•m)
Torque
(lb•in)
16
12
8
4
0
141
106
70.8
35.4
0
2198-E4020-ERS and MPL-B420P
Speed (rpm)
0
2000
4000
30001000
5000
Torque
(N•m)
Torque
(lb•in)
2198-E4030-ERS and MPL-B430P
0
0
5
10
15
44
88
133
20
177
Speed (rpm)
0
3000
5000
4000
1000
2000
Torque
(N•m)
Torque
(lb•in)
0
0
5
10
15
25
20
44.2
88.5
133
177
221
2198-E4015-ERS and MPL-B4530F
Speed (rpm)
500
1000 1500 20000 2500
3000
= Intermittent operating region
= Continuous operating region
= Drive operation with 400V AC rms input voltage
Kinetix 5100 (400V-class) Drives/Kinetix MPL Servo Motor Curves (continued)
Rockwell Automation Publication KNX-RM011C-EN-P - January 2021 33
Page 34

Kinetix 5100 (400V-class) Drives with Kinetix MPL Servo Motors
Torque
(N•m)
Torque
(lb•in)
0
0
5
10
15
25
20
44.2
88.5
133
177
221
2198-E4030-ERS and MPL-B4530K
Speed (rpm)
0
2000
4000
30001000
Torque
(N•m)
Torque
(lb•in)
2198-E4030-ERS and MPL-B4560F
0
0
10
20
30
88.5
177
265
40
354
Speed (rpm)
500
1000 1500 20000 2500
3000
Torque
(N•m)
Torque
(lb•in)
0
0
5
10
15
25
20
44.2
88.5
133
177
221
2198-E4030-ERS and MPL-B520K
Speed (rpm)
0
2000
4000
30001000
= Intermittent operating region
= Continuous operating region
= Drive operation with 400V AC rms input voltage
Torque
(N•m)
Torque
(lb•in)
0
0
10
20
30
50
40
88.5
177
265
354
2198-E4020-ERS and MPL-B540D
442
Speed (rpm)
0
1000
2000
1500500
Torque
(N•m)
Torque
(lb•in)
0
0
10
20
30
50
40
88.5
177
265
354
2198-E4075-ERS and MPL-B540K
442
Speed (rpm)
0
2000
4000
30001000
Kinetix 5100 (400V-class) Drives/Kinetix MPL Servo Motor Curves (continued)
2198-E4020-ERS and MPL-B4540F
30
Torque
(N•m)
25
265
221
Torque
(lb•in)
20
15
10
5
0
2500
0
500 1500
1000
Speed (rpm)
2000
177
133
88.5
44.2
0
3000
34 Rockwell Automation Publication KNX-RM011C-EN-P - January 2021
Page 35

Kinetix 5100 (400V-class) Drives with Kinetix MPL Servo Motors
Torque
(N•m)
Torque
(lb•in)
2198-E4075-ERS and MPL-B560F
70
60
50
40
30
20
10
0
619
531
442
354
265
177
88.5
0
Speed (rpm)
500
1000
1500 200002500
3000
Torque
(N•m)
Torque
(lb•in)
0
0
20
40
60
100
80
177
354
531
708
885
2198-E4150-ERS and MPL-B580F
Speed (rpm)
500 1000 1500 20000 2500 3000
Torque
(N•m)
Torque
(lb•in)
Speed (rpm)
1000
2000
0
0
0
3000
20
40
60
100
80
4000
177
354
531
708
885
2198-E4150-ERS and MPL-B580J
Torque
(N•m)
Torque
(lb•in)
Speed (rpm)
0
0
20
40
60
80
177
354
531
708
500 1000 1500 20000 2500 3000
2198-E4075-ERS and MPL-B640F
100
885
Torque
(N•m)
Torque
(lb•in)
120
100
80
60
40
20
0
1062
885
708
531
354
177
0
Speed (rpm)
0
2000
3000
1000
500 1500
2500
2198-E4150-ERS and MPL-B660F
Torque
(N•m)
Torque
(lb•in)
Speed (rpm)
0 20001000500 1500
160
0 0
20
177
40
354
60
531
80
708
1416
140 1239
120 1062
100 885
2198-E4150-ERS and MPL-B680D
= Intermittent operating region
= Continuous operating region
= Drive operation with 400V AC rms input voltage
Kinetix 5100 (400V-class) Drives/Kinetix MPL Servo Motor Curves (continued)
Rockwell Automation Publication KNX-RM011C-EN-P - January 2021 35
Page 36

Kinetix 5100 (400V-class) Drives with Kinetix MPL Servo Motors
Torque
(N•m)
Torque
(lb•in)
120
100
80
60
40
20
0
1062
885
708
531
354
177
0
Speed (rpm)
0
2000
3000
1000
500 1500
2500
2198-E4150-ERS and MPL-B680F
Torque
(N•m)
Torque
(lb•in)
Speed (rpm)
0 20001000500 1500
160
0 0
20
177
40
354
60
531
80
708
1416
140 1239
120 1062
100 885
2198-E4150-ERS and MPL-B860D
Torque
(N•m)
Torque
(lb•in)
0
2198-E4150-ERS and MPL-B880C
442
885
1328
1770
2213
0
50
100
150
200
250
Speed (rpm)
0 15001000500 1250750250
Torque
(N•m)
Torque
(lb•in)
Speed (rpm)
0 20001000500 1500
160
0 0
20
177
40
354
60
531
80
708
1416
140 1239
120 1062
100 885
2198-E4150-ERS and MPL-B880D
Torque
(N•m)
Torque
(lb•in)
Speed (rpm)
0
300
600
0
900
2198-E4150-ERS and MPL-B960B
1200
442
885
1328
1770
2213
0
0
50
100
150
200
250
= Intermittent operating region
= Continuous operating region
= Drive operation with 400V AC rms input voltage
Kinetix 5100 (400V-class) Drives/Kinetix MPL Servo Motor Curves (continued)
2198-E4150-ERS and MPL-B680H
160
Torque
(N•m)
140 1239
120 1062
100 885
80
1416
708
Torque
(lb•in)
60
40
20
0 0
0 400020001000 3000
Speed (rpm)
531
354
177
36 Rockwell Automation Publication KNX-RM011C-EN-P - January 2021
Page 37

Kinetix 5100 (400V-class) Drives with Kinetix MPL Servo Motors
Torque
(N•m)
Torque
(lb•in)
0
2198-E4150-ERS and MPL-B960C
442
885
1328
1770
2213
0
50
100
150
200
250
Speed (rpm)
0 15001000500 1250750250
Torque
(N•m)
Torque
(lb•in)
0
0
50
100
150
200
442
885
1328
1770
2213
250
2198-E4150-ERS and MPL-B980C
300
2655
Speed (rpm)
250
500
750
0 1250
1000
1500
= Intermittent operating region
= Continuous operating region
= Drive operation with 400V AC rms input voltage
Kinetix 5100 (400V-class) Drives/Kinetix MPL Servo Motor Curves (continued)
2198-E4150-ERS and MPL-B980B
300
Torque
(N•m)
250
2655
2213
Torque
(lb•in)
200
150
100
50
0
200
400
Speed (rpm)
600
800
0 1000
1770
1328
885
442
0
Rockwell Automation Publication KNX-RM011C-EN-P - January 2021 37
Page 38

Kinetix 5100 (200V-class) Drives with Kinetix MPM Servo Motors
Kinetix 5100 (200V-class) Drives with Kinetix MPM Servo Motors
This section provides system combination information for the Kinetix 5100 drives (with 230V, nominal input) when matched with Kinetix MPM
(200V-class) medium-inertia servo motors with absolute high-resolution encoders. Included are motor power/brake and feedback cable
catalog numbers, system performance specifications, and the optimum torque/speed curves.
These system performance tables and torque/speed curves reflect single-phase and three-phase drive operation with 200V-class motors;
however, only 2198-E1004-ERS, 2198-E1007-ERS, 2198-E1015-ERS, and 2198-E1020-ERS drives are capable of single-phase operation.
Kinetix MPM Motor Cable Combinations
Rotary Motor (200V-class)
Cat. No.
MPM-A1151M, MPM-A1152F, MPM-A1153F
MPM-A1302F
Motor Power/Brake Cable
2090-CPxM7DF-16AAxx (standard, non-flex)
2090-CPxM7DF-16AFxx (continuous-flex)
2090-CPxM7DF-14AAxx (standard, non-flex)
2090-CPxM7DF-14AFxx (continuous-flex)
MPM-A1304F 2090-CPxM7DF-12AAxx (standard, non-flex)
MPM-A1651F
MPM-A1652F, MPM-A1653F
2090-CPxM7DF-10AAxx (standard, non-flex)
2090-CPxM7DF-10AFxx (continuous-flex)
2090-CPxM7DF-08AAxx (standard, non-flex)
2090-CPxM7DF-08AFxx (continuous-flex)
Motor Feedback Cable
2090-CFBM7DF-CEAAxx or
2090-CFBM7DD-CEAAxx (standard, non-flex)
2090-CFBM7DF-CEAFxx or
2090-CFBM7DD-CEAFxx (continuous-flex)
Absolute High-resolution Feedback
(1)
MPM-A2152F, MPM-A2153F, MPM-A2154C, MPM-A2154E 2090-CPBM7DF-06AAxx (standard, non-flex)
(1) Use the 2198-K51CK-D15M feedback connector kit with flying-lead cables on the drive end. Refer to Required Drive Accessories on page 6.
For cable configuration illustrations and feature descriptions, by catalog number, refer to 2090-Series Motor Power/Brake and Feedback Cables Overview beginning on page 11.
Motor-end connector kits are available for motor power/brake and feedback cables. Refer to the Kinetix Motion Accessories Technical Data, publication KNX-TD004, for more information.
Cable length xx is in meters. Refer to the Kinetix Motion Accessories Technical Data, publication KNX-TD004
, for standard cable lengths.
Kinetix MPM Motor Performance Specifications with Kinetix 5100 (200V-class) Drives
Rotary Motor
Cat. No.
MPM-A1151M 4500 5000 6000 7.65 2.18 (19.3) 30.5 6.6 (58.4) 0.90 2198-E1015-ERS
MPM-A1152F 3000 4000 5000 11.93 4.7 (41.6) 44.8 13.5 (119) 1.40 2198-E1020-ERS
MPM-A1153F 3000 4000 5000 16.18 6.5 (57.5)
MPM-A1302F 3000 4000 4500 17.28 5.99 (53.0) 50.28 13.5 (119) 1.65 2198-E1020-ERS
MPM-A1304F 3000 3500 4000 19.65 9.3 (82.0) 48.39 19.3 (171) 2.20 2198-E2030-ERS
MPM-A1651F 3000 3000 5000 30.96 10.7 (94.7) 73.8 20.5 (181) 2.50 2198-E2055-ERS
MPM-A1652F 3000 3500 4000 33.54 13.5 (119) 103.2 36.0 (319) 4.03 2198-E2055-ERS
MPM-A1653F 3000 3000 4000 42.4 18.6 (165) 119.1 42.0 (372) 5.10 2198-E2055-ERS
MPM-A2152F 3000 2000 4000 58.4 27.0 (239) 125.8 56.0 (495) 5.20 2198-E2055-ERS
MPM-A2153F 3000 2000 3600 59.65 34.0 (301) 120.4 58.0 (513) 5.80 2198-E2075-ERS
MPM-A2154C 1500 1750 2000 58.68 55.0 (487) 127.3 106 (938) 6.50 2198-E2075-ERS
MPM-A2154E 2250 2000 3000 59.67 44.0 (389) 128.2 84.0 (743) 7.00 2198-E2075-ERS
Base Speed
rpm
Rated Speed
rpm
Speed, max
rpm
System Continuous
Stall Current
A 0-pk
System Continuous
Stall Torque
N•m (lb•in)
System Peak
Stall Current
A 0-pk
57.4 17.61 (156)
64.5 19.8 (175) 2198-E2030-ERS
System Peak
Stall Torque
N•m (lb•in)
Motor Rated
Output
kW
1.45
Kinetix 5100 Drives
(230V AC input)
2198-E1020-ERS
Performance specification data and curves reflect nominal system performance of a typical system with motor ambient at 40 °C (104 °F), drive ambient at 50 °C (122 °F), and rated line voltage.
For additional information on ambient and line conditions, refer to Motion Analyzer software.
38 Rockwell Automation Publication KNX-RM011C-EN-P - January 2021
Page 39

Kinetix 5100 (200V-class) Drives with Kinetix MPM Servo Motors
Torque
(N•m)
Torque
(lb•in)
Speed (rpm)
2198-E1015-ERS and MPM-A1151M
1000
40003000
0
6000
5000
2000
8.85
17.7
26.5
35.4
44.2
53.1
0
1.0
2.0
3.0
4.0
5.0
6.0
7.0
61.9
0
Torque
(N•m)
Torque
(lb•in)
Speed (rpm)
2198-E1020-ERS and MPM-A1152F
17.7
35.4
53.1
70.8
88.5
106
0
2.0
4.0
6.0
8.0
10.0
12.0
14.0
124
0
0
3000
5000
40001000
2000
Torque
(N•m)
Torque
(lb•in)
Speed (rpm)
2198-E2030-ERS and MPM-A1153F
26.5
53.1
79.6
106
133
159
0
3.0
6.0
9.0
12.0
15.0
18.0
21.0
186
0
0
3000
5000
40001000
2000
Torque
(N•m)
Torque
(lb•in)
Speed (rpm)
2198-E2030-ERS and MPM-A1304F
26.5
53.1
79.6
106
133
159
0
3.0
6.0
9.0
12.0
15.0
18.0
21.0
186
0
0
3000
40001000
2000
= Intermittent operating region
= Continuous operating region
Kinetix 5100 (200V-class) Drives/Kinetix MPM Servo Motor Curves
Torque
(N•m)
Torque
(N•m)
14.0
12.0
10.0
8.0
6.0
4.0
2.0
28.0
24.0
20.0
16.0
2198-E1020-ERS and MPM-A1302F
0
0
2000
2198-E2055-ERS and MPM-A1651F
3000
Speed (rpm)
124
Torque
(lb•in)
106
88.5
70.8
53.1
35.4
17.7
0
5000
40001000
248
Torque
(lb•in)
212
177
142
12.0
8.0
Rockwell Automation Publication KNX-RM011C-EN-P - January 2021 39
4.0
0
0
2000
Speed (rpm)
3000
40001000
106
70.8
35.4
0
5000
Page 40

Kinetix 5100 (200V-class) Drives with Kinetix MPM Servo Motors
Torque
(N•m)
Torque
(lb•in)
Speed (rpm)
2198-E2055-ERS and MPM-A1652F
35.4
70.8
106
142
177
212
0
4.0
8.0
12.0
16.0
20.0
24.0
28.0
248
0
4000
3000
1000
2000
0
Torque
(N•m)
Torque
(lb•in)
Speed (rpm)
2198-E2055-ERS and MPM-A1653F
44.2
88.5
133
177
221
265
0
5.0
10.0
15.0
20.0
25.0
30.0
35.0
310
0
4000
3000
1000
2000
0
Torque
(N•m)
Torque
(lb•in)
Speed (rpm)
2198-E2055-ERS and MPM-A2152F
88.5
177
265
354
442
531
0
10.0
20.0
30.0
40.0
50.0
60.0
70.0
619
0
0
3000
40001000
2000
= Intermittent operating region
= Continuous operating region
Torque
(N•m)
Torque
(lb•in)
0
0
25
50
75
125
100
88.5
177
265
354
442
2198-E2075-ERS and MPM-A2154C
Speed (rpm)
2000
1500
500
1000
0
Torque
(N•m)
Torque
(lb•in)
0
0
20
40
60
100
80
177
354
531
708
885
2198-E2075-ERS and MPM-A2154E
Speed (rpm)
500
1000 1500 20000 2500
3000
Kinetix 5100 (200V-class) Drives/Kinetix MPM Servo Motor Curves (continued)
Torque
(N•m)
70.0
60.0
50.0
40.0
30.0
20.0
10.0
2198-E2075-ERS and MPM-A2153F
0
0
2000
Speed (rpm)
3000
619
Torque
(lb•in)
531
442
354
265
177
88.5
0
40001000
40 Rockwell Automation Publication KNX-RM011C-EN-P - January 2021
Page 41

Kinetix 5100 (400V-class) Drives with Kinetix MPM Servo Motors
Kinetix 5100 (400V-class) Drives with Kinetix MPM Servo Motors
This section provides system combination information for the Kinetix 5100 drives (with 400 and 480V, nominal input) when matched with
Kinetix MPM (400V-class) medium-inertia motors with absolute high-resolution encoders. Included are motor power/brake and feedback
cable catalog numbers, system performance specifications, and the optimum torque/speed curves.
Kinetix MPM Motor Cable Combinations
Rotary Motor (400V-class)
Cat. No.
Motor Power/Brake Cable
Motor Feedback Cable
(1)
MPM-B1151x, MPM-B1152x, MPM-B1153E, MPM-B1153F
MPM-B1302F, MPM-B1302M, MPM-B1304C, MPM-B1304E
2090-CPxM7DF-16AAxx (standard, non-flex)
2090-CPxM7DF-16AFxx (continuous-flex)
MPM-B1651C, MPM-B1652C
MPM-B1153T
MPM-B1302T, MPM-B1304M
2090-CPxM7DF-14AAxx (standard, non-flex)
2090-CPxM7DF-14AFxx (continuous-flex)
MPM-B1651F, MPM-B1653C
MPM-B1651M, MPM-B1652E, MPM-B1652F, MPM-B1653E
MPM-B2152C, MPM-B2153B
MPM-B1653F
MPM-B2152F, MPM-B2152M, MPM-B2153E, MPM-B2153F
MPM-B2154B, MPM-B2154E, MPM-B2154F
(1) Use the 2198-K51CK-D15M feedback connector kit with flying-lead cables on the drive end. Refer to Required Drive Accessories on page 6.
(2) Applies to Kinetix 5100 drives and MPM-B1xxxx-M/S through MPM-B2xxxx-M/S motors with absolute high-resolution feedback.
For cable configuration illustrations and feature descriptions, by catalog number, refer to 2090-Series Motor Power/Brake and Feedback Cables Overview beginning on page 11.
Motor-end connector kits are available for motor power/brake and feedback cables. Refer to the Kinetix Motion Accessories Technical Data, publication KNX-TD004
Cable length xx is in meters. Refer to the Kinetix Motion Accessories Technical Data, publication KNX-TD004, for standard cable lengths.
2090-CPxM7DF-10AAxx (standard, non-flex)
2090-CPxM7DF-10AFxx (continuous-flex)
2090-CPxM7DF-08AAxx (standard, non-flex)
2090-CPxM7DF-08AFxx (continuous-flex)
2090-CFBM7DF-CEAAxx or
2090-CFBM7DD-CEAAxx (standard, non-flex)
2090-CFBM7DF-CEAFxx or
2090-CFBM7DD-CEAFxx (continuous-flex)
Absolute High-resolution Feedback
(2)
, for more information.
Kinetix MPM Motor Performance with Kinetix 5100 (400V-class) Drives
Rotary Motor
Cat. No.
MPM-B1151F 3000 4000 5000 2.71 2.3 (20.3) 9.91 6.6 (58.0) 0.75 2198-E4007-ERS
MPM-B1151T 6000 5000 7000 5.62 2.3 (20.3) 20.53 5.9 (52.2) 0.90 2198-E4015-ERS
MPM-B1152C 1500 2500 3000 3.61 5.0 (44.2)
MPM-B1152F 3000 4000 5200 6.17 5.0 (44.2) 21.19 13.5 (119) 1.40 2198-E4015-ERS
MPM-B1152T 6000 4000 7000 11.02 5.0 (44.2)
MPM-B1153E 2250 3000 3500 6.21 6.5 (57.5) 21.61 19.8 (175) 1.40 2198-E4015-ERS
MPM-B1153F 3000 4000 5500 9.20 6.5 (57.5)
MPM-B1153T 6000 4000 7000 15.95 6.5 (57.5)
MPM-B1302F 3000 4000 4500 8.57 6.6 (58.4)
MPM-B1302M 4500 4000 6000 12.57 6.6 (58.4) 32.44 13.5 (119) 1.65 2198-E4030-ERS
MPM-B1302T 6000 4000 7000 16.83 6.7 (59.3)
MPM-B1304C 1500 1870 2750 7.00 10.3 (91.1)
MPM-B1304E 2250 3500 4000
MPM-B1304M 4500 3500 6000 19.02 10.4 (92.0)
Base Speed
rpm
Rated Speed
rpm
Speed, max
rpm
System Continuous
Stall Current
A 0-pk
10.49 9.9 (87.6) 29.40 23.3 (206)
10.75 10.2 (90.3) 34.25 27.1 (240) 2198-E4030-ERS
System Continuous
Stall Torque
N•m (lb•in)
System Peak
Stall Current
A 0-pk
11.30 12.3 (109)
12.42 13.5 (119) 2198-E4015-ERS
36.90 13.1 (116)
37.90 13.5 (119) 2198-E4055-ERS
29.40 18.19 (161)
32.0 19.8 (175) 2198-E4030-ERS
36.90 11.0 (97.1)
55.47 16.5(146) 2198-E4075-ERS
21.40 13.1 (116)
22.12 13.5 (119) 2198-E4020-ERS
36.90 11.5 (102)
43.44 13.5 (119) 2198-E4055-ERS
21.40 26.0 (230)
22.30 27.1 (240) 2198-E4020-ERS
36.90 16.5 (146)
60.60 27.1 (240) 2198-E4075-ERS
System Peak
Stall Torque
N•m (lb•in)
Motor Rated
Output
kW
1.20
1.40
1.40
1.45
1.65
1.65
2.00
2.20
2.20
Kinetix 5100 Drives
(480V AC input)
2198-E4007-ERS
2198-E4030-ERS
2198 -E402 0-ER S
2198-E4030-ERS
2198-E4015-ERS
2198-E4030-ERS
2198-E4015-ERS
2198 -E402 0-ER S
2198-E4030-ERS
Rockwell Automation Publication KNX-RM011C-EN-P - January 2021 41
Page 42

Kinetix 5100 (400V-class) Drives with Kinetix MPM Servo Motors
Kinetix MPM Motor Performance with Kinetix 5100 (400V-class) Drives (continued)
Rotary Motor
Cat. No.
MPM-B1651C 1500 3000 3500 10.21 11.4 (101) 29.29 23.2 (205) 2.50 2198-E4020-ERS
MPM-B1651F 3000 3000 5000 17.75 11.4 (101)
MPM-B1651M 4500 3000 5000 22.46 11.4 (101)
MPM-B1652C 1500 2500 2500 11.51 16.0 (142) 33.63 40.0 (354) 3.80 2198-E4030-ERS
MPM-B1652E 2250 3500 3500 20.94 21.1 (187)
MPM-B1652F 3000 3500 4500 28.74 21.1 (187)
MPM-B1653C 1500 2000 2500 20.05 26.7 (236)
MPM-B1653E 2250 3000 3500 27.00 26.8 (237)
MPM-B1653F 3000 3000 4000 34.94 31.0 (274)
MPM-B2152C 1500 2000 2500 27.40 36.7 (325)
MPM-B2152F 3000 2500 4500 43.54 34.1 (302) 98.06 72.2 (639) 5.90 2198-E4150-ERS
MPM-B2152M 4500 2500 5000 44.58 34.1 (302) 76.37 50.0 (442) 5.90 2198-E4150-ERS
MPM-B2153B 1250 1750 2000 24.06 48.0 (425)
MPM-B2153E 2250 2000 3000 39.63 47.9 (424)
MPM-B2153F 3000 2000 3800 43.86 45.6 (403) 98.4 98.9 (875) 7.20 2198-E4150-ERS
MPM-B2154B 1250 1750 2000 35.46 62.7 (555)
MPM-B2154E 2250 2000 3000 43.68 55.9 (495) 98.37 112 (991) 7.50 2198-E4150-ERS
MPM-B2154F 3000 2000 3300 44.40 56.2 (497) 83.86 87.9 (778) 7.50 2198-E4150-ERS
Performance specification data and curves reflect nominal system performance of a typical system with motor ambient at 40 °C (104 °F), drive ambient at 50 °C (122 °F), and rated line voltage.
For additional information on ambient and line conditions, refer to Motion Analyzer software.
Base Speed
rpm
Rated Speed
rpm
Speed, max
rpm
System Continuous
Stall Current
A 0-pk
System Continuous
Stall Torque
N•m (lb•in)
System Peak
Stall Current
A 0-pk
36.90 16.8 (149)
50.93 23.2 (205) 2198-E4055-ERS
36.90 15.0 (133)
56.89 23.2 (205) 2198-E4075-ERS
53.20 42.2 (374)
60.53 48.0 (425) 2198-E4075-ERS
75.39 43.02 (381)
84.12 48.0 (425) 2198-E4150-ERS
36.90 42.2 (374)
59.26 67.8 (600) 2198-E4075-ERS
53.20 45.2 (400)
72.97 62.0 (549) 2198-E4075-ERS
53.20 31.6 (280)
94.36 56.1 (496) 2198-E4150-ERS
53.20 69.3 (613)
55.49 72.3 (640) 2198-E4075-ERS
53.20 89.6 (793)
60.0 101.1 (895) 2198-E4075-ERS
75.40 77.4 (685)
98.43 101 (895) 2198-E4150-ERS
75.40 118 (1048)
98.02 154 (1363) 2198-E4150-ERS
System Peak
Stall Torque
N•m (lb•in)
Motor Rated
Output
kW
2.50
2.50
4.30
4.30
4.60
5.10
5.10
5.60
6.80
7.2 0
6.90
Kinetix 5100 Drives
(480V AC input)
2198-E4030-ERS
2198 -E405 5-ER S
2198 -E405 5-ER S
2198 -E407 5-ERS
2198-E4030-ERS
2198 -E405 5-ER S
2198 -E405 5-ER S
2198 -E405 5-ER S
2198 -E405 5-ER S
2198 -E407 5-ERS
2198 -E407 5-ERS
42 Rockwell Automation Publication KNX-RM011C-EN-P - January 2021
Page 43

Kinetix 5100 (400V-class) Drives with Kinetix MPM Servo Motors
Torque
(N•m)
Torque
(lb•in)
Speed (rpm)
2198-E4007-ERS and MPM-B1151F
8.85
17.7
26.5
35.4
44.2
53.1
1.0
2.0
3.0
4.0
5.0
6.0
7.0
61.9
0
0
3000
5000
40001000
2000
0
Torque
(N•m)
Torque
(lb•in)
Speed (rpm)
2198-E4015-ERS and MPM-B1151T
0
6000
80002000
4000
8.85
17.7
26.5
35.4
44.2
53.1
0
1.0
2.0
3.0
4.0
5.0
6.0
7.0
61.9
0
Torque
(N•m)
Torque
(lb•in)
Speed (rpm)
2198-E4015-ERS and MPM-B1152C
500
20001500
0
3000
2500
1000
17.7
35.4
53.1
70.8
88.5
106
0
2.0
4.0
6.0
8.0
10.0
12.0
14.0
124
0
Torque
(N•m)
Torque
(lb•in)
Speed (rpm)
2198-E4015-ERS and MPM-B1152F
1000
40003000
0
6000
5000
2000
17.7
35.4
53.1
70.8
88.5
106
0
2.0
4.0
6.0
8.0
10.0
12.0
14.0
124
0
Torque
(N•m)
Torque
(lb•in)
Speed (rpm)
2198-E4055-ERS and MPM-B1152T
17.7
35.4
53.1
70.8
88.5
106
0
2.0
4.0
6.0
8.0
10.0
12.0
14.0
124
0
0
6000
80002000
4000
Torque
(N•m)
Torque
(lb•in)
Speed (rpm)
2198-E4015-ERS and MPM-B1153E
26.5
53.1
79.6
106
133
159
0
3.0
6.0
9.0
12.0
15.0
18.0
21.0
186
0
0
3000
40001000
2000
= Intermittent operating region
= Continuous operating region
= Drive operation with 400V AC rms input voltage
Kinetix 5100 (400V-class) Drives/Kinetix MPM Servo Motor Curves
Rockwell Automation Publication KNX-RM011C-EN-P - January 2021 43
Page 44

Kinetix 5100 (400V-class) Drives with Kinetix MPM Servo Motors
Torque
(N•m)
Torque
(lb•in)
Speed (rpm)
2198-E4020-ERS and MPM-B1153F
26.5
53.1
79.6
106
133
159
0
3.0
6.0
9.0
12.0
15.0
18.0
21.0
186
0
1000
40003000
0
6000
5000
2000
Torque
(N•m)
Torque
(lb•in)
Speed (rpm)
2198-E4075-ERS and MPM-B1153T
26.5
53.1
79.6
106
133
159
0
3.0
6.0
9.0
12.0
15.0
18.0
21.0
186
0
0
6000
80002000
4000
Torque
(N•m)
Torque
(lb•in)
Speed (rpm)
2198-E4020-ERS and MPM-B1302F
17.7
35.4
53.1
70.8
88.5
106
0
2.0
4.0
6.0
8.0
10.0
12.0
14.0
124
0
0
3000
5000
40001000
2000
Torque
(N•m)
Torque
(lb•in)
Speed (rpm)
2198-E4030-ERS and MPM-B1302M
1000
40003000
0
6000
5000
2000
17.7
35.4
53.1
70.8
88.5
106
0
2.0
4.0
6.0
8.0
10.0
12.0
14.0
124
0
= Intermittent operating region
= Continuous operating region
= Drive operation with 400V AC rms input voltage
Torque
(N•m)
Torque
(lb•in)
Speed (rpm)
2198-E4055-ERS and MPM-B1302T
17.7
35.4
53.1
70.8
88.5
106
0
2.0
4.0
6.0
8.0
10.0
12.0
14.0
124
0
0
6000
80002000
4000
Torque
(N•m)
Torque
(lb•in)
Speed (rpm)
2198-E4020-ERS and MPM-B1304C
35.4
70.8
106
142
177
212
0
4.0
8.0
12.0
16.0
20.0
24.0
28.0
248
0
500
20001500
0
3000
2500
1000
Kinetix 5100 (400V-class) Drives/Kinetix
MPM Servo Motor
Curves (continued)
44 Rockwell Automation Publication KNX-RM011C-EN-P - January 2021
Page 45

Kinetix 5100 (400V-class) Drives with Kinetix MPM Servo Motors
Torque
(N•m)
Torque
(lb•in)
Speed (rpm)
35.4
70.8
106
142
177
212
0
4.0
8.0
12.0
16.0
20.0
24.0
28.0
248
0
4000
3000
1000
2000
0
2198-E4030-ERS and MPM-B1304E
Torque
(N•m)
Torque
(lb•in)
Speed (rpm)
2198-E4075-ERS and MPM-B1304M
35.4
70.8
106
142
177
212
0
4.0
8.0
12.0
16.0
20.0
24.0
28.0
248
0
1000
40003000
0
6000
5000
2000
Torque
(N•m)
Torque
(lb•in)
Speed (rpm)
35.4
70.8
106
142
177
212
0
4.0
8.0
12.0
16.0
20.0
24.0
28.0
248
0
4000
3000
1000
2000
0
2198-E4020-ERS and MPM-B1651C
Torque
(N•m)
Torque
(lb•in)
Speed (rpm)
2198-E4055-ERS and MPM-B1651F
35.4
70.8
106
142
177
212
0
4.0
8.0
12.0
16.0
20.0
24.0
28.0
248
0
0
3000
5000
40001000
2000
= Intermittent operating region
= Continuous operating region
= Drive operation with 400V AC rms input voltage
Torque
(N•m)
Torque
(lb•in)
Speed (rpm)
2198-E4075-ERS and MPM-B1651M
35.4
70.8
106
142
177
212
0
4.0
8.0
12.0
16.0
20.0
24.0
28.0
248
0
0
3000
5000
40001000
2000
Torque
(N•m)
Torque
(lb•in)
0
0
10
20
30
50
40
88.5
177
265
354
442
2198-E4030-ERS and MPM-B1652C
Speed (rpm)
500
1000 1500 20000 2500
3000
Kinetix 5100 (400V-class) Drives/Kinetix
MPM Servo Motor
Curves (continued)
Rockwell Automation Publication KNX-RM011C-EN-P - January 2021 45
Page 46

Kinetix 5100 (400V-class) Drives with Kinetix MPM Servo Motors
Torque
(N•m)
Torque
(lb•in)
0
0
10
20
30
50
40
88.5
177
265
354
442
2198-E4075-ERS and MPM-B1652E
Speed (rpm)
4000
3000
1000
2000
0
Torque
(N•m)
Torque
(lb•in)
0
0
10
20
30
50
40
88.5
177
265
354
442
2198-E4075-ERS and MPM-B1652F
Speed (rpm)
0
3000
5000
40001000
2000
Torque
(N•m)
Torque
(lb•in)
Speed (rpm)
2198-E4075-ERS and MPM-B1653C
88.5
177
265
354
442
531
0
10.0
20.0
30.0
40.0
50.0
60.0
70.0
619
0
0
1500
2000500
1000
2500
3000
Torque
(N•m)
Torque
(lb•in)
Speed (rpm)
2198-E4075-ERS and MPM-B1653E
88.5
177
265
354
442
531
0
10.0
20.0
30.0
40.0
50.0
60.0
70.0
619
0
4000
3000
1000
2000
0
Torque
(N•m)
Torque
(lb•in)
0
0
20
40
60
100
80
177
354
531
708
885
2198-E4075-ERS and MPM-B2152C
Speed (rpm)
500
1000 1500 20000 2500
3000
Torque
(N•m)
Torque
(lb•in)
Speed (rpm)
2198-E4150-ERS and MPM-B1653F
88.5
177
265
354
442
531
0
10.0
20.0
30.0
40.0
50.0
60.0
70.0
619
0
4000
3000
1000
2000
0
= Intermittent operating region
= Continuous operating region
= Drive operation with 400V AC rms input voltage
Kinetix 5100 (400V-class) Drives/Kinetix
MPM Servo Motor
Curves (continued)
46 Rockwell Automation Publication KNX-RM011C-EN-P - January 2021
Page 47

Kinetix 5100 (400V-class) Drives with Kinetix MPM Servo Motors
Torque
(N•m)
Torque
(lb•in)
0
0
20
40
60
100
80
177
354
531
708
885
2198-E4150-ERS and MPM-B2152F
Speed (rpm)
0
3000
5000
40001000
2000
Torque
(N•m)
Torque
(lb•in)
Speed (rpm)
2198-E4150-ERS and MPM-B2152M
88.5
177
265
354
442
531
0
10.0
20.0
30.0
40.0
50.0
60.0
70.0
619
0
0
3000
5000
40001000
2000
Torque
(N•m)
Torque
(lb•in)
Speed (rpm)
133
265
398
531
664
796
0
15
30
45
60
75
90
105
929
0
2000
1500
500
1000
0
2198-E4055-ERS and MPM-B2153B
Torque
(N•m)
Torque
(lb•in)
2198-E4150-ERS and MPM-B2153E
Speed (rpm)
500
1000 1500 2000 2500
3000
133
265
398
531
664
796
0
15
30
45
60
75
90
105
929
0
0
Torque
(N•m)
Torque
(lb•in)
Speed (rpm)
0 20001000500 1500
160
0 0
20
177
40
354
60
531
80
708
1416
140 1239
120 1062
100 885
2198-E4150-ERS and MPM-B2154B
Torque
(N•m)
Torque
(lb•in)
0
0
20
40
60
100
80
177
354
531
708
885
2198-E4150-ERS and MPM-B2153F
Speed (rpm)
4000
3000
1000
2000
0
= Intermittent operating region
= Continuous operating region
= Drive operation with 400V AC rms input voltage
Kinetix 5100 (400V-class) Drives/Kinetix
MPM Servo Motor
Curves (continued)
Rockwell Automation Publication KNX-RM011C-EN-P - January 2021 47
Page 48

Kinetix 5100 (200V-class) Drives with Kinetix MPF Servo Motors
Torque
(N•m)
Torque
(lb•in)
120
100
80
60
40
20
0
1062
885
708
531
354
177
0
Speed (rpm)
0
2000
3000
1000
500 1500
2500
2198-E4150-ERS and MPM-B2154E
Torque
(N•m)
Torque
(lb•in)
0
0
20
40
60
100
80
177
354
531
708
885
2198-E4150-ERS and MPM-B2154F
Speed (rpm)
4000
3000
1000
2000
0
= Intermittent operating region
= Continuous operating region
= Drive operation with 400V AC rms input voltage
Kinetix 5100 (400V-class) Drives/Kinetix
MPM Servo Motor
Curves (continued)
Kinetix 5100 (200V-class) Drives with Kinetix MPF Servo Motors
This section provides system combination information for the Kinetix 5100 drives (with 230V, nominal input) when matched with Kinetix MPF
(200V-class) servo motors. Included are motor power/brake and feedback cable catalog numbers, system performance specifications, and
the optimum torque/speed curves.
These system performance tables and torque/speed curves reflect single-phase and three-phase drive operation with 200V-class motors;
however, only 2198-E1004-ERS, 2198-E1007-ERS, 2198-E1015-ERS, and 2198-E1020-ERS drives are capable of single-phase operation.
Kinetix MPF Servo Motor and Cable Combinations
Rotary Motor (200V-class)
Cat. No.
MPF-A310P, MPF-A320H, MPF-A320P, MPF-A330P
MPF-A430H
MPF-A430P
MPF-A4540F, MPF-A4530K
MPF-A540K
(1) Use the 2198-K51CK-D15M feedback connector kit with flying-lead cables on the drive end. Refer to Required Drive Accessories on page 6.
For cable configuration illustrations and feature descriptions, by catalog number, refer to 2090-Series Motor Power/Brake and Feedback Cables Overview beginning on page 11.
Motor-end connector kits are available for motor power/brake and feedback cables. Refer to the Kinetix Motion Accessories Technical Data, publication KNX-TD004, for more information.
Cable length xx is in meters. Refer to the Kinetix Motion Accessories Technical Data, publication KNX-TD004
Motor Power/Brake Cable
2090-CPxM7DF-16AAxx (standard, non-flex)
2090-CPxM7DF-16AFxx (continuous-flex)
2090-CPxM7DF-14AAxx (standard, non-flex)
2090-CPxM7DF-14AFxx (continuous-flex)
2090-CPxM7DF-08AAxx (standard, non-flex)
2090-CPxM7DF-08AFxx (continuous-flex)
, for standard cable lengths.
Motor Feedback Cable
2090-CFBM7DF-CEAAxx or
2090-CFBM7DD-CEAAxx (standard, non-flex)
2090-CFBM7DF-CEAFxx or
2090-CFBM7DD-CEAFxx (continuous-flex)
Absolute High-resolution Feedback
(1)
48 Rockwell Automation Publication KNX-RM011C-EN-P - January 2021
Page 49

Kinetix 5100 (200V-class) Drives with Kinetix MPF Servo Motors
Torque
(N•m)
Torque
(lb•in)
Speed (rpm)
2198-E1007-ERS and MPF-A310P
35.4
26.5
17.7
8.85
0
0
3000
5000
4.0
3.0
2.0
1.0
0
40001000
2000
Torque
(N•m)
Torque
(lb•in)
Speed (rpm)
2198-E1007-ERS and MPF-A320H
70.8
53.1
35.4
17.7
0
0
2000
4000
8.0
6.0
4.0
2.0
0
30001000
Torque
(N•m)
Torque
(lb•in)
Speed (rpm)
2198-E1015-ERS and MPF-A320P
70.8
53.1
35.4
17.7
0
8.0
6.0
4.0
2.0
0
0
3000
5000
40001000
2000
Torque
(N•m)
Torque
(lb•in)
2198-E1020-ERS and MPF-A330P
Speed (rpm)
0
2000
4000
30001000
5000
12.0
10.0
8.0
6.0
4.0
2.0
0
106
88.5
70.8
53.1
35.4
17.7
0
= Intermittent operating region
= Continuous operating region
Kinetix MPF Motor Performance Specifications with Kinetix 5100 (200V-class) Drives
Rotary Motor
Cat. No.
MPF-A310P 4750 5000 4.85 1.58 (14.0) 14.0 3.61 (31.9) 0.73 2198-E1007-ERS
MPF-A320H 3350 3500 6.10 3.05 (27.0) 19.3 7.91 (70.0) 1.0 2198-E1007-ERS
MPF-A320P 4750 5000 9.00 3.05 (27.0) 29.5 7.91 (70.0) 1.3 2198-E1015-ERS
MPF-A330P 5000 5000 12.0 4.18 (37.0) 38.0 11.10 (98.2) 1.6 2198-E1020-ERS
MPF-A430H 3500 3500 12.2 6.21 (55.0) 45.0 19.80 (175) 1.8 2198-E1020-ERS
MPF-A430P5000500016.80 5.99 (53.0)
MPF-A4530K 4000 4000 19.50 8.13 (71.9) 62.0 20.30 (179) 2.3 2198-E2030-ERS
MPF-A4540F 3000 3000 18.40 10.20 (90.3) 57.4 27.10 (239) 2.5 2198-E1020-ERS
MPF-A540K 4000 4000 41.50 19.40 (172) 120.0 48.60 (430) 4.1 2198-E2055-ERS
Performance specification data and curves reflect nominal system performance of a typical system with motor ambient at 40 °C (104 °F), drive ambient at 50 °C (122 °F), and rated line voltage.
For additional information on ambient and line conditions, refer to Motion Analyzer software.
Rated Speed
rpm
Speed, max
rpm
System Continuous
Stall Current
A 0-pk
System Continuous
Stall Torque
N•m (lb•in)
System Peak
Stall Current
A 0-pk
57.4 16.96 (150)
67.0 19.80 (175) 2198-E2030-ERS
System Peak
Stall Torque
N•m (lb•in)
Motor Rated
Output
kW
1.9
Kinetix 5100 Drives
(230V AC input)
2198-E1020-ERS
Kinetix 5100 (200V-class) Drives/Kinetix MPF Servo Motor Curves
Rockwell Automation Publication KNX-RM011C-EN-P - January 2021 49
Page 50

Kinetix 5100 (200V-class) Drives with Kinetix MPF Servo Motors
Torque
(N•m)
Torque
(lb•in)
0
0
5
10
15
25
20
44.2
88.5
133
177
221
Speed (rpm)
0
2000
4000
30001000
2198-E1020-ERS and MPF-A430H
Torque
(N•m)
Torque
(lb•in)
0
0
5
10
15
25
20
44.2
88.5
133
177
221
2198-E2030-ERS and MPF-A430P
Speed (rpm)
0
2000
4000
30001000
5000
Torque
(N•m)
Torque
(lb•in)
0
0
5
10
15
25
20
44.2
88.5
133
177
221
Speed (rpm)
0
2000
4000
30001000
2198-E2030-ERS and MPF-A4530K
Torque
(N•m)
Torque
(lb•in)
2198-E1020-ERS and MPF-A4540F
30
25
20
15
10
5
0
265
221
177
133
88.5
44.2
0
Speed (rpm)
0 300020001000
Torque
(N•m)
Torque
(lb•in)
Speed (rpm)
2198-E2055-ERS and MPF-A540K
0
2000
4000
60
50
40
30
20
10
0
30001000
530
442
354
266
176
88
0
= Intermittent operating region
= Continuous operating region
Kinetix 5100 (200V-class) Drives/Kinetix MPF Servo Motor Curves (continued)
50 Rockwell Automation Publication KNX-RM011C-EN-P - January 2021
Page 51

Kinetix 5100 (400V-class) Drives with Kinetix MPF Servo Motors
Kinetix 5100 (400V-class) Drives with Kinetix MPF Servo Motors
This section provides system combination information for the Kinetix 5100 drives (with 400 and 480V, nominal input) when matched with
Kinetix MPF (400V-class) food-grade motors. Included are motor power/brake and feedback cable catalog numbers, system performance
specifications, and the optimum torque/speed curves.
Kinetix MPF Motor Cable Combinations
Rotary Motor (400V-class)
Cat. No.
MPF-B310P, MPF-B320P, MPF-B330P
MPF-B430P
MPF-B4530K, MPF-B4540F
MPF-B540K
(1) Use the 2198-K51CK-D15M feedback connector kit with flying-lead cables on the drive end. Refer to Required Drive Accessories on page 6.
For cable configuration illustrations and feature descriptions, by catalog number, refer to 2090-Series Motor Power/Brake and Feedback Cables Overview beginning on page 11.
Motor-end connector kits are available for motor power/brake and feedback cables. Refer to the Kinetix Motion Accessories Technical Data, publication KNX-TD004, for more information.
Cable length xx is in meters. Refer to the Kinetix Motion Accessories Technical Data, publication KNX-TD004
Motor Power/Brake Cable
2090-CPxM7DF-16AAxx (standard, non-flex)
2090-CPxM7DF-16AFxx (continuous-flex)
2090-CPxM7DF-10AAxx (standard, non-flex)
2090-CPxM7DF-10AFxx (continuous-flex)
, for standard cable lengths.
Motor Feedback Cable
2090-CFBM7DF-CEAAxx or
2090-CFBM7DD-CEAAxx (standard, non-flex)
2090-CFBM7DF-CEAFxx or
2090-CFBM7DD-CEAFxx (continuous-flex)
Absolute High-resolution Feedback
(1)
Kinetix MPF Motor Performance Specifications with Kinetix 5100 (400V-class) Drives
Rotary Motor
Cat. No.
MPF-B310P 5000 5000 2.40 1.60 (14.2) 7.10 3.6 (31.9) 0.77 2198-E4007-ERS
MPF-B320P 5000 5000 4.50 3.10 (27.4)
MPF-B330P 5000 5000 6.10 4.18 (37.0) 19.0 11.1 (98.2) 1.6 2198-E4015-ERS
MPF-B430P 5000 5000 9.20 6.55 (58.0)
MPF-B4530K 4000 4000 11.0 8.25 (73.0)
MPF-B4540F 3000 3000 9.10 10.20 (90.3) 29.0 27.1 (240) 2.5 2198-E4020-ERS
MPF-B540K 4000 4000 20.5 19.4 (171)
Rated Speed
rpm
Speed, max
rpm
System Continuous
Stall Current
A 0-pk
System Continuous
Stall Torque
N•m (lb•in)
System Peak
Stall Current
A 0-pk
11.3 6.3 (55.7)
14.0 7.8 (69.0) 2198-E4015-ERS
29.4 18.2 (161)
32.0 19.8 (175) 2198-E4030-ERS
29.4 19.2 (170)
31.0 20.3 (179) 2198-E4030-ERS
53.2 43.1 (381)
60.0 48.6 (430) 2198-E4075-ERS
System Peak
Stall Torque
N•m (lb•in)
Motor Rated
Output
kW
1.5
2.0
2.4
4.1
Kinetix 5100 Drives
(480V AC input)
2198-E4007-ERS
2198 -E402 0-ER S
2198 -E402 0-ER S
2198 -E405 5-ER S
Performance specification data and curves reflect nominal system performance of a typical system with motor ambient at 40 °C (104 °F), drive ambient at 50 °C (122 °F), and rated line voltage.
For additional information on ambient and line conditions, refer to Motion Analyzer software.
Rockwell Automation Publication KNX-RM011C-EN-P - January 2021 51
Page 52

Kinetix 5100 (400V-class) Drives with Kinetix MPF Servo Motors
1000 2000 3000 4000
0
0
0
17.7
35.4
0.5
1.0
1.5
2.0
2.5
3.0
3.5
4.0
4.42
8.85
13.3
22.1
26.5
31.0
5000
Torque
(N•m)
2198-E4004-ERS and MPF-B310P
Torque
(lb•in)
Speed (rpm)
Torque
(N•m)
Torque
(lb•in)
Speed (rpm)
1000 2000 3000 4000
0
0
0
17.7
70.8
2.0
4.0
5000
6.0
8.0
35.4
53.1
1.0
3.0
5.0
7.0
8.85
26.5
44.2
61.9
2198-E4015-ERS and MPF-B320P
Torque
(N•m)
Torque
(lb•in)
Speed (rpm)
0
2000
4000
30001000
5000
12.0
10.0
8.0
6.0
4.0
2.0
0
106
88.5
70.8
53.1
35.4
17.7
0
2198-E4015-ERS and MPF-B330P
Torque
(N•m)
Torque
(lb•in)
2198-E4020-ERS and MPF-B430P
0
0
5
10
15
44
88
133
20
177
Speed (rpm)
0
3000
5000
4000
1000
2000
Torque
(N•m)
Torque
(lb•in)
30
25
20
15
10
5
0
265
221
177
133
88.5
44.2
0
Speed (rpm)
0
2000
3000
1000
500 1500
2500
2198-E4020-ERS and MPF-B4540F
Torque
(N•m)
Torque
(lb•in)
0
0
5
10
15
25
20
44.2
88.5
133
177
221
2198-E4020-ERS and MPF-B4530K
Speed (rpm)
0
2000
4000
30001000
= Intermittent operating region
= Continuous operating region
= Drive operation with 400V AC rms input voltage
Kinetix 5100 (400V-class) Drives/Kinetix MPF Servo Motor Curves
52 Rockwell Automation Publication KNX-RM011C-EN-P - January 2021
Page 53

Kinetix 5100 (200V-class) Drives with Kinetix MPS Stainless Steel Motors
Torque
(N•m)
Torque
(lb•in)
Speed (rpm)
0
2000
4000
30001000
2198-E4075-ERS and MPF-B540K
60
50
40
30
20
10
0
531
442
354
265
177
88.5
0
= Intermittent operating region
= Continuous operating region
= Drive operation with 400V AC rms input voltage
Kinetix 5100 (400V-class) Drives/Kinetix
MPF Servo Motor
Curves (continued)
Kinetix 5100 (200V-class) Drives with Kinetix MPS Stainless Steel Motors
This section provides system combination information for the Kinetix 5100 drives (with 230V, nominal input) when matched with Kinetix MPS
(200V-class) servo motors. Included are motor power/brake and feedback cable catalog numbers, system performance specifications, and
the optimum torque/speed curves.
These system performance tables and torque/speed curves reflect single-phase and three-phase drive operation with 200V-class motors;
however, only 2198-E1004-ERS, 2198-E1007-ERS, 2198-E1015-ERS, and 2198-E1020-ERS drives are capable of single-phase operation.
Kinetix MPS Motor Cable Combinations
Rotary Motor (200V-class)
Cat. No.
MPS-A330P
MPS-A4540F
(1) Use the 2198-K51CK-D15M feedback connector kit with flying-lead cables on the drive end. Refer to Required Drive Accessories on page 6.
For cable configuration illustrations and feature descriptions, by catalog number, refer to 2090-Series Motor Power/Brake and Feedback Cables Overview beginning on page 11.
Motor-end connector kits are available for motor power/brake and feedback cables. Refer to the Kinetix Motion Accessories Technical Data, publication KNX-TD004
Cable length xx is in meters. Refer to the Kinetix Motion Accessories Technical Data, publication KNX-TD004, for standard cable lengths.
Motor Power/Brake Cable
2090-CPxM7DF-16AAxx (standard, non-flex)
2090-CPxM7DF-16AFxx (continuous-flex)
Motor Feedback Cable
2090-CFBM7DF-CEAAxx or
2090-CFBM7DD-CEAAxx (standard, non-flex)
2090-CFBM7DF-CEAFxx or
2090-CFBM7DD-CEAFxx (continuous-flex)
Absolute High-resolution Feedback
(1)
, for more information.
Rockwell Automation Publication KNX-RM011C-EN-P - January 2021 53
Page 54

Kinetix 5100 (400V-class) Drives with Kinetix MPS Servo Motor Motors
Torque
(N•m)
Torque
(lb•in)
2198-E1020-ERS and MPS-A330P
Speed (rpm)
0
2000
4000
30001000
5000
12.0
10.0
8.0
6.0
4.0
2.0
0
106
88.5
70.8
53.1
35.4
17.7
0
Torque
(N•m)
Torque
(lb•in)
2198-E1020-ERS and MPS-A4540F
30
25
20
15
10
5
0
265
221
177
133
88.5
44.2
0
Speed (rpm)
0 300020001000
= Intermittent operating region
= Continuous operating region
Kinetix MPS Motor Performance Specifications with Kinetix 5100 (200V-class) Drives
Rotary Motor
Cat. No.
MPS-A330P 5000 5000 9.80 3.60 (32.0)
MPS-A4540F 3000 3000 14.4 8.1 (72) 56.0 27.1 (240) 1.4 2198-E1020-ERS
Performance specification data and curves reflect nominal system performance of a typical system with motor ambient at 40 °C (104 °F), drive ambient at 50 °C (122 °F), and rated line voltage.
For additional information on ambient and line conditions, refer to Motion Analyzer software.
Rated Speed
rpm
Speed, max
rpm
System Continuous
Stall Current
A 0-pk
System Continuous
Stall Torque
N•m (lb•in)
System Peak
Stall Current
A 0-pk
33.5 9.79 (86.6)
38.0 11.10 (98.2) 2198-E1020-ERS
System Peak
Stall Torque
N•m (lb•in)
Motor Rated
Output
kW
1.3
Kinetix 5100 Drives
(230V AC input)
2198-E1015-ERS
Kinetix 5100 (200V-class) Drives/Kinetix MPS Servo Motor Curves
Kinetix 5100 (400V-class) Drives with Kinetix MPS Servo Motors
This section provides system combination information for the Kinetix 5100 drives (with 400 and 480V, nominal input) when matched with
Kinetix MPS (400V-class) stainless-steel motors. Included are motor power/brake and feedback cable catalog numbers, system performance
specifications, and the optimum torque/speed curves.
Kinetix MPS Motor Cable Combinations
Rotary Motor (400V-class)
Cat. No.
MPS-B330P
MPS-B4540F
MPS-B560F
(1) Use the 2198-K51CK-D15M feedback connector kit with flying-lead cables on the drive end. Refer to Required Drive Accessories on page 6.
For cable configuration illustrations and feature descriptions, by catalog number, refer to 2090-Series Motor Power/Brake and Feedback Cables Overview beginning on page 11.
Motor-end connector kits are available for motor power/brake and feedback cables. Refer to the Kinetix Motion Accessories Technical Data, publication KNX-TD004
Cable length xx is in meters. Refer to the Kinetix Motion Accessories Technical Data, publication KNX-TD004
Motor Power Cable
2090-CPxM7DF-16AAxx (standard, non-flex)
2090-CPxM7DF-16AFxx (continuous-flex)
2090-CPxM7DF-14AAxx (standard, non-flex)
2090-CPxM7DF-14AFxx (continuous-flex)
, for standard cable lengths.
Motor Feedback Cable
2090-CFBM7DF-CEAAxx or
2090-CFBM7DD-CEAAxx (standard, non-flex)
2090-CFBM7DF-CEAFxx or
2090-CFBM7DD-CEAFxx (continuous-flex)
Absolute High-resolution Feedback
(1)
, for more information.
54 Rockwell Automation Publication KNX-RM011C-EN-P - January 2021
Page 55

Kinetix 5100 (400V-class) Drives with Kinetix MPS Servo Motor Motors
Torque
(N•m)
Torque
(lb•in)
Speed (rpm)
0
2000
4000
30001000
5000
12.0
10.0
8.0
6.0
4.0
2.0
0
106
88.5
70.8
53.1
35.4
17.7
0
2198-E4015-ERS and MPS-B330P
Torque
(N•m)
Torque
(lb•in)
30
25
20
15
10
5
0
265
221
177
133
88.5
44.2
0
Speed (rpm)
0
2000
3000
1000
500 1500
2500
2198-E4020-ERS and MPS-B4540F
Torque
(N•m)
Torque
(lb•in)
2198-E4075-ERS and MPS-B560F
70
60
50
40
30
20
10
0
619
531
442
354
265
177
88.5
0
Speed (rpm)
500
1000
1500 200002500
3000
= Intermittent operating region
= Continuous operating region
= Drive operation with 400V AC rms input voltage
Kinetix MPS Motor Performance Specifications with Kinetix 5100 (400V-class) Drives
Rotary Motor
Cat. No.
MPS-B330P 5000 5000 4.9 3.60 (32) 19.0 11.0 (97.2) 1.3 2198-E4015-ERS
MPS-B4540F 3000 3000 7.1 8.1 (72)
MPS-B560F 3000 3000 17.0 21.5 (190)
Performance specification data and curves reflect nominal system performance of a typical system with motor ambient at 40 °C (104 °F), drive ambient at 50 °C (122 °F), and rated line voltage.
For additional information on ambient and line conditions, refer to Motion Analyzer software.
Rated Speed
rpm
Speed, max
rpm
System Continuous
Stall Current
A 0-pk
System Continuous
Stall Torque
N•m (lb•in)
System Peak
Stall Current
A 0-pk
21.4 22.3 (197)
26.0 27.1 (240) 2198-E4020-ERS
36.9 36.8 (326)
68.0 67.8 (600) 2198-E4075-ERS
System Peak
Stall Torque
N•m (lb•in)
Motor Rated
Output
kW
1.4
3.5
Kinetix 5100 Drives
(480V AC input)
2198-E4015-ERS
2198-E4030-ERS
Kinetix 5100 (400V-class) Drives/Kinetix MPS Servo Motor Curves
Rockwell Automation Publication KNX-RM011C-EN-P - January 2021 55
Page 56

Kinetix 5100 (200V-class) Drives with Kinetix TLY Servo Motors
Kinetix 5100 (200V-class) Drives with Kinetix TLY Servo Motors
This section provides system combination information for the Kinetix 5100 drives when matched with Kinetix TLY compact servo motors.
Compatible Kinetix TLY motors are equipped with absolute high-resolution or incremental encoder feedback. Included are motor power/
brake and feedback cable catalog numbers, system performance specifications, and the optimum torque/speed curves.
Kinetix TLY Motor Cable Combinations
Motor Cat. No. (200V-class) Motor Power/Brake Cable
TLY-A110x, TLY-A120x, TLY-A130x
TLY-A220x, TLY-A230x
TLY-A2530P, TLY-A2540P
TLY-A310M
(1) For TLY-Axxxx-H motors with incremental encoder feedback, use 2090-CFBM6DF-CBAAxx flying-lead cables and 2198-K51CK-D15M connector kit (battery not required) or use 2090-CFBM6DD-
CCAAxx (15-pin connector) cable on the drive end. Refer to Required Drive Accessories on page 6 for more information.
The TLY-Axxxx-B motors with 17-bit high-resolution encoder feedback require the 2090-CFBM6DF-CBAAxx flying-lead feedback cable and 219 8-K51 CK-D15M connector kit (battery required).
Kinetix TLY motors are characterized as having 1000 mm (39.4 in.) cable extensions with circular plastic connectors and TLY-Axxx catalog numbers.
For cable configuration illustrations and feature descriptions, by catalog number, refer to 2090-Series Kinetix TLP Motor Cables Overview beginning on page 9.
Motor-end connector kits, and panel-mounted breakout components (drive end), are available for motor power/brake and feedback cables. Refer to Optional Drive Accessories on page 8.
Cable length xx is in meters. Refer to the Kinetix Motion Accessories Technical Data, publication KNX-TD004
2090-CPWM6DF-16AAxx (standard, non-flex)
(without brake)
2090-CPBM6DF-16AAxx (standard, non-flex)
(with brake)
, for standard cable lengths.
Motor Feedback Cable
2090-CFBM6DF-CBAAxx or
2090-CFBM6DD-CCAAxx (standard, non-flex)
Absolute High-resolution or
Incremental Feedback
(1)
Kinetix TLY (non-brake) Motor Performance Specifications with Kinetix 5100 Drives
Performance Specifications (non-brake) with Kinetix 5100 (200V-class) Drives
Rotary Motor
Cat. No.
TLY-A110x 5000
TLY-A120x 5000 1.03 0.181 (1.60) 2.50 0.36 (3.20) 0.086 2198-E1004
TLY-A130x 5000 1.85 0.325 (2.88) 4.90 0.76 (6.70) 0.14 2198-E1004
TLY-A220x 5000 3.50 0.836 (7.40) 7.90 1.48 (13.1) 0.35 2198-E1004
TLY-A230x 5000 5.50 1.30 (11.5) 15.5 3.05 (27.0) 0.44 2198-E1007
TLY-A2530P 4400
TLY-A2540P 4575 10.0 2.94 (26.0) 24.8 7.10 (63.0) 0.86 2198-E1015
TLY-A310M 4000 4500 10.0 3.61 (31.9) 30.0 9.0 (79.6) 0.95 2198-E1015
(1) Applies to TLY-AxxxT-H motors with incremental feedback. The TLY-AxxxT-B motors with absolute high-resolution encoders are rated for 5000 rpm.
Performance specification data and curves reflect nominal system performance of a typical system with motor ambient at 40 °C (104 °F), drive ambient at 50 °C (122 °F), and rated line voltage.
For additional information on ambient and line conditions, refer to Motion Analyzer software.
Rated Speed
rpm
Speed, max
rpm
(1)
6000
5000
System Continuous
Stall Current
A 0-pk
0.55 0.096 (0.85) 1.30 0.20 (1.75) 0.041 2198-E1004
10.0 2.60 (23.0) 21.0 5.20 (46.0) 0.69 2198-E1015
System Continuous
Stall Torque
N•m (lb•in)
System Peak
Stall Current
A 0-pk
System Peak
Stall Torque
N•m (lb•in)
Motor Rated
Output
kW
Kinetix 5100 Drives
(230V AC input)
56 Rockwell Automation Publication KNX-RM011C-EN-P - January 2021
Page 57

Kinetix 5100 (200V-class) Drives with Kinetix TLY Servo Motors
Torque
(N•m)
Torque
(lb•in)
Speed (rpm)
2198-E1004-ERS and TLY-A110P-B
0
3000
5000
0.250
0.200
0.150
0.100
0.050
0
40001000
2000
2.21
1.77
1.33
0.88
0.44
0
Intermittent curve represents
three-phase or single-phase inputs.
Torque
(N•m)
Torque
(lb•in)
Speed (rpm)
2198-E1004-ERS and TLY-A120P-B
0
3000
5000
0.400
0.350
0.300
0.250
0.200
0.150
0.100
0.050
0
40001000
2000
3.54
3.10
2.65
2.21
1.77
1.33
0.88
0.44
0
Intermittent curve represents
three-phase or single-phase inputs.
= Intermittent operating region
= Continuous operating region
= Drive operation (single-phase input)
Kinetix TLY (brake) Motor Performance Specifications with Kinetix 5100 Servo Drives
Performance Specifications (brake) with Kinetix 5100 (200V-class) Drives
Rotary Motor
Cat. No.
TLY-A110x 5000
TLY-A120x 5000 0.93 0.163 (1.44) 2.50 0.36 (3.20) 0.077 2198-E1004
TLY-A130x 5000 1.67 0.293 (2.59) 4.90 0.76 (6.70) 0.13 2198-E1004
TLY-A220x 5000 3.15 0.757 (6.70) 7.90 1.48 (13.1) 0.24 2198-E1004
TLY-A230x 4250 4.95 1.16 (10.3) 15.5 3.05 (27.0) 0.32 2198-E1007
TLY-A2530P 3650
TLY-A2540P 3750 10.0 2.94 (26.0) 24.8 7.10 (63.0) 0.66 2198-E1015
TLY-A310M 3900 4500 10.0 3.61 (31.9) 30.0 9.0 (79.6) 0.90 2198-E1015
(1) Applies to TLY-AxxxT-H motors with incremental feedback. The TLY-AxxxT-B motors with absolute high-resolution encoders are rated for 5000 rpm.
Performance specification data and curves reflect nominal system performance of a typical system with motor ambient at 40 °C (104 °F), drive ambient at 50 °C (122 °F), and rated line voltage.
For additional information on ambient and line conditions, refer to Motion Analyzer software.
Rated Speed
rpm
Speed, max
rpm
(1)
6000
5000
System Continuous
Stall Current
A 0-pk
0.50 0.086 (0.76) 1.30 0.20 (1.75) 0.037 2198-E1004
10.0 2.60 (23.0) 21.0 5.20 (46.0) 0.55 2198-E1015
System Continuous
Stall Torque
N•m (lb•in)
System Peak
Stall Current
A 0-pk
System Peak
Stall Torque
N•m (lb•in)
Motor Rated
Output
kW
Kinetix 5100 Drives
(230V AC input)
Kinetix 5100 (200V-class) Drives/TLY-AxxxP-B (absolute high-resolution) Motor Curves
2198-E1004-ERS and TLY-A110P-B (brake)
Torque
(N•m)
0.250
0.200
0.150
Intermittent curve represents
three-phase or single-phase inputs.
2.21
1.77
1.33
Torque
(lb•in)
0.100
0.050
0
0
2198-E1004-ERS and TLY-A120P-B (brake)
0.400
Torque
(N•m)
0.350
0.300
0.250
0.200
0.150
Rockwell Automation Publication KNX-RM011C-EN-P - January 2021 57
0.100
0.050
0
Intermittent curve represents
three-phase or single-phase inputs.
0
2000
Speed (rpm)
2000
Speed (rpm)
3000
3000
40001000
40001000
5000
5000
0.88
0.44
0
3.54
3.10
2.65
2.21
1.77
1.33
0.88
0.44
0
Torque
(lb•in)
Page 58

Kinetix 5100 (200V-class) Drives with Kinetix TLY Servo Motors
Torque
(N•m)
Torque
(lb•in)
Speed (rpm)
2198-E1004-ERS and TLY-A130P-B
0
3000
5000
0.800
0.700
0.600
0.500
0.400
0.300
0.200
0.100
0
40001000
2000
7.08
6.19
5.31
4.42
3.54
2.65
1.77
0.88
0
Intermittent curve represents
three-phase or single-phase inputs.
Torque
(N•m)
Torque
(lb•in)
Speed (rpm)
2198-E1004-ERS and TLY-A220P-B
0
3000
5000
1.600
1.400
1.200
1.000
0.800
0.600
0.400
0.200
0
40001000
2000
14.1
12.4
10.6
8.85
7.08
5.31
3.54
1.77
0
Torque
(N•m)
Torque
(lb•in)
Speed (rpm)
2198-E1007-ERS and TLY-A230P-B
0
3000
5000
4.00
3.50
3.00
2.50
2.00
1.50
1.00
0.50
0
40001000
2000
35.4
31.0
26.5
22.1
17.7
13.3
8.85
4.42
0
Intermittent curve represents
three-phase and single-phase inputs.
= Intermittent operating region
= Continuous operating region
= Drive operation (single-phase input)
Kinetix 5100 (200V-class) Drives/TLY-A
xxx
P-B (absolute high-resolution) Motor Curves (continued)
2198-E1004-ERS and TLY-A130P-B (brake)
0.800
Torque
(N•m)
0.700
Torque
(N•m)
0.600
0.500
0.400
0.300
0.200
0.100
0
0
1.600
1.400
1.200
1.000
0.800
0.600
0.400
0.200
0
0
Intermittent curve represents
three-phase or single-phase inputs.
3000
2000
Speed (rpm)
2198-E1004-ERS and TLY-A220P-B (brake)
2000
Speed (rpm)
3000
40001000
40001000
5000
5000
7.08
6.19
5.31
4.42
3.54
2.65
1.77
0.88
0
14.1
12.4
10.6
8.85
7.08
5.31
3.54
1.77
0
Torque
(lb•in)
Torque
(lb•in)
Torque
(N•m)
58 Rockwell Automation Publication KNX-RM011C-EN-P - January 2021
2198-E1007-ERS and TLY-A230P-B (brake)
4.00
3.50
3.00
2.50
2.00
1.50
1.00
0.50
0
Intermittent curve represents
three-phase and single-phase inputs.
0
2000
Speed (rpm)
3000
35.4
Torque
(lb•in)
31.0
26.5
22.1
17.7
13.3
8.85
4.42
0
5000
40001000
Page 59

Kinetix 5100 (200V-class) Drives with Kinetix TLY Servo Motors
Torque
(N•m)
Torque
(lb•in)
Speed (rpm)
2198-E1004-ERS and TLY-A110T-H
0
3000
5000
0.250
0.200
0.150
0.100
0.050
0
40001000
2000
2.21
1.77
1.33
0.88
0.44
0
6000
0
3000
5000
40001000
2000
6000
Torque
(N•m)
Torque
(lb•in)
Speed (rpm)
2198-E1004-ERS and TLY-A120T-H
0.400
0.350
0.300
0.250
0.200
0.150
0.100
0.050
0
3.54
3.10
2.65
2.21
1.77
1.33
0.88
0.44
0
Intermittent curve represents
three-phase or single-phase inputs.
Torque
(N•m)
Torque
(lb•in)
Speed (rpm)
2198-E1004-ERS and TLY-A130T-H
0.800
0.700
0.600
0.500
0.400
0.300
0.200
0.100
0
7.08
6.19
5.31
4.42
3.54
2.65
1.77
0.88
0
0
3000
5000
40001000
2000
6000
Intermittent curve represents
three-phase or single-phase inputs.
= Intermittent operating region
= Continuous operating region
= Drive operation (single-phase input)
Kinetix 5100 (200V-class) Drives/TLY-AxxxT-H (incremental) Motor Curves
2198-E1004-ERS and TLY-A110T-H (brake)
0.250
Torque
(N•m)
0.200
2.21
1.77
Torque
(lb•in)
Torque
(N•m)
0.150
0.100
0.050
0
0
0.400
0.350
0.300
0.250
0.200
0.150
0.100
0.050
0
0
2000
Speed (rpm)
2198-E1004-ERS and TLY-A120T-H (brake)
Intermittent curve represents
three-phase or single-phase inputs.
2000
Speed (rpm)
3000
3000
1.33
0.88
0.44
0
5000
5000
6000
6000
3.54
3.10
2.65
2.21
1.77
1.33
0.88
0.44
0
Torque
(lb•in)
40001000
40001000
2198-E1004-ERS and TLY-A130T-H (brake)
0.800
Torque
(N•m)
0.700
0.600
0.500
0.400
0.300
0.200
0.100
Rockwell Automation Publication KNX-RM011C-EN-P - January 2021 59
0
Intermittent curve represents
three-phase or single-phase inputs.
0
2000
Speed (rpm)
3000
5000
40001000
6000
7.08
6.19
5.31
4.42
3.54
2.65
1.77
0.88
0
Torque
(lb•in)
Page 60

Kinetix 5100 (200V-class) Drives with Kinetix TLY Servo Motors
Torque
(N•m)
Torque
(lb•in)
Speed (rpm)
2198-E1004-ERS and TLY-A220T-H
1.600
1.400
1.200
1.000
0.800
0.600
0.400
0.200
0
14.1
12.4
10.6
8.85
7.08
5.31
3.54
1.77
0
0
3000
5000
40001000
2000
6000
Torque
(N•m)
Torque
(lb•in)
Speed (rpm)
2198-E1007-ERS and TLY-A230T-H
4.00
3.50
3.00
2.50
2.00
1.50
1.00
0.50
0
35.4
31.0
26.5
22.1
17.7
13.3
8.85
4.42
0
0
3000
5000
40001000
2000
6000
Intermittent curve represents
three-phase and single-phase inputs.
= Intermittent operating region
= Continuous operating region
= Drive operation (single-phase input)
Kinetix 5100 (200V-class) Drives/TLY-A
xxx
T-H (incremental) Motor Curves (continued)
2198-E1004-ERS and TLY-A220T-H (brake)
1.600
Torque
(N•m)
1.400
1.200
1.000
0.800
0.600
0.400
0.200
0
3000
2000
Speed (rpm)
Intermittent curve represents
3000
2000
Speed (rpm)
Torque
(N•m)
0
2198-E1007-ERS and TLY-A230T-H (brake)
4.00
3.50
3.00
2.50
2.00
1.50
1.00
0.50
three-phase and single-phase inputs.
0
0
14.1
Torque
(lb•in)
12.4
10.6
8.85
7.08
5.31
3.54
1.77
0
5000
5000
6000
6000
35.4
31.0
26.5
22.1
17.7
13.3
8.85
4.42
0
Torque
(lb•in)
40001000
40001000
60 Rockwell Automation Publication KNX-RM011C-EN-P - January 2021
Page 61

Kinetix 5100 (200V-class) Drives with Kinetix TLY Servo Motors
Torque
(N•m)
Torque
(lb•in)
Speed (rpm)
2198-E1015-ERS and TLY-A2530P-x
0
3000
5000
6.00
5.00
4.00
3.00
2.00
1.00
0
40001000
2000
53.1
44.2
35.4
26.5
17.7
8.85
0
Torque
(N•m)
Torque
(lb•in)
Speed (rpm)
2198-E1015-ERS and TLY-A2540P-x
0
3000
5000
8.00
7.00
6.00
5.00
4.00
3.00
2.00
1.00
0
40001000
2000
70.8
61.9
53.1
44.2
35.4
26.5
17.7
88.5
0
Torque
(N•m)
Torque
(lb•in)
2198-E1015-ERS and TLY-A310M-x
Speed (rpm)
0
2000
4000
30001000
5000
12.0
10.0
8.0
6.0
4.0
2.0
0
106
88.5
70.8
53.1
35.4
17.7
0
= Intermittent operating region
= Continuous operating region
= Drive operation (single-phase input)
Kinetix 5100 (200V-class) Drives/TLY-Axxxx-x Motor Curves
Torque
6.00
(N•m)
5.00
2198-E1015-ERS and TLY-A2530P-x (brake)
53.1
44.2
Torque
(lb•in)
Torque
(N•m)
4.00
3.00
2.00
1.00
0
0
2198-E1015-ERS and TLY-A2540P-x (brake)
8.00
7.00
6.00
5.00
4.00
3.00
2.00
1.00
0
0
2000
Speed (rpm)
2000
Speed (rpm)
3000
3000
35.4
26.5
17.7
8.85
0
5000
40001000
70.8
Torque
(lb•in)
61.9
53.1
44.2
35.4
26.5
17.7
88.5
0
5000
40001000
2198-E1015-ERS and TLY-A310M-x (brake)
Torque
12.0
(N•m)
10.0
8.0
6.0
4.0
Rockwell Automation Publication KNX-RM011C-EN-P - January 2021 61
2.0
0
0
2000
30001000
4000
5000
Speed (rpm)
106
88.5
70.8
53.1
35.4
17.7
0
Torque
(lb•in)
Page 62

Kinetix 5100 (200V-class) Drives with Kinetix TL Servo Motors
Kinetix 5100 (200V-class) Drives with Kinetix TL Servo Motors
This section provides system combination information for the Kinetix 5100 servo drives when matched with Kinetix TL compact servo
motors. Compatible Kinetix TL motors are equipped with absolute high-resolution encoder feedback. Included in this section are motor
power, feedback, and brake cable catalog numbers, system performance specifications, and the optimum torque/speed curves.
Kinetix TL Motor Cable Combinations
Motor Cat. No. Motor Power Cable
Motor Feedback Cable
(1) (2)
Motor Brake Cable
TL-A110P, TL-A120P, TL-A130P
TL-A220P, TL-A230P
TL-A2530P, TL-A2540P
2090-DANPT-16Sxx
2090-DANFCT-Sxx
Absolute High-resolution
2090-DANBT-18Sxx
TL-A410M
(1) For applications where battery backup is required use 2090-DANFCT-Sxx cable, but remove the drive-end connector and prepare flying leads for termination in the 2198-K51CK-D15M
connector kit (with customer-supplied battery).
(2) For applications where battery backup is not required use 2090-DANFCT-Sxx cable and plug the drive-end connector into the 15-pin motor feedback connector.
Kinetix TL-Axxxx-B motors are characterized as having 300 mm (11.8 in.) cable extensions with rectangular connectors.
For cable configuration illustrations and feature descriptions, by catalog number, refer to 2090-Series Motor Power/Brake and Feedback Cables Overview beginning on page 11.
Cable length xx is in meters. Refer to the Kinetix Motion Accessories Technical Data, publication KNX-TD004, for standard cable lengths.
Kinetix TL (non-brake) Performance Specifications with Kinetix 5100 (200V-class) Drives
Rotary Motor
TL-A110P
TL-A120P 1.03 0.181 (1.60) 2.50 0.36 (3.20) 0.086 2198-E1004
TL-A130P 1.85 0.325 (2.88) 4.90 0.76 (6.70) 0.14 2198-E1004
TL-A220P 3.50 0.836 (7.40) 7.90 1.48 (13.1) 0.35 2198-E1004
TL-A230P 5.50 1.30 (11.5) 15.5 3.05 (27.0) 0.44 2198-E1007
TL-A2530P 4400 10.0 2.60 (23.0) 21.0 5.20 (46.0) 0.69 2198-E1015
TL-A2540P 4575
TL-A410M 4500 15.5 5.42 (48.0) 43.4 13.0 (115.0) 2.0 2198-E1020
Rated
Speed
rpm
5000
Maximum
Speed
rpm
5000
4500
System Continuous
Stall Current
A 0-pk
0.55 0.096 (0.85) 1.30 0.20 (1.75) 0.041 2198-E1004
10.0 2.94 (26.0) 24.8 7.10 (63.0) 0.86 2198-E1015
System Continuous
Stall Torque
N•m (lb•in)
System Peak
Stall Current
A 0-pk
System Peak
Stall Torque
N•m (lb•in)
Motor Rated OutputkWKinetix 5100 Drives
(230V AC input)
Performance specification data and curves reflect nominal system performance of a typical system with motor ambient at 40 °C (104 °F), drive ambient at 50 °C (122 °F), and rated line voltage.
For additional information on ambient and line conditions, refer to Motion Analyzer software.
Kinetix TL (brake) Performance Specifications with Kinetix 5100 (200V-class) Drives
Rotary Motor
TL-A110P
TL-A120P 0.93 0.163 (1.44) 2.50 0.36 (3.20) 0.077 2198-E1004
TL-A130P 1.67 0.293 (2.59) 4.90 0.76 (6.70) 0.13 2198-E1004
TL-A220P 3.15 0.757 (6.70) 7.90 1.48 (13.10) 0.24 2198-E1004
TL-A230P 4.95 1.160 (10.30) 15.5 3.05 (27.0) 0.32 2198-E1007
TL-A2530P 3650 10.0 2.60 (23.0) 21.0 5.20 (46.0) 0.55 2198-E1015
TL-A2540P 3750 10.0 2.940 (26.00) 24.8 7.10 (63.0) 0.66 2198-E1015
TL-A410M 4500 4500 14.0 4.860 (43.0) 43.4 13.0 (115.0) 1.80 2198-E1020
Performance specification data and curves reflect nominal system performance of a typical system with motor ambient at 40 °C (104 °F), drive ambient at 50 °C (122 °F), and rated line voltage.
For additional information on ambient and line conditions, refer to Motion Analyzer software.
Rated
Speed
rpm
5000
62 Rockwell Automation Publication KNX-RM011C-EN-P - January 2021
Maximum
Speed
rpm
5000
System Continuous
Stall Current
A 0-pk
0.50 0.086 (0.76) 1.30 0.20 (1.75) 0.037 2198-E1004
System Continuous
Stall Torque
N•m (lb•in)
System Peak
Stall Current
A 0-pk
System Peak
Stall Torque
N•m (lb•in)
Motor Rated OutputkWKinetix 5100 Drives
(230V AC input)
Page 63

Kinetix 5100 (200V-class) Drives with Kinetix TL Servo Motors
Torque
(N•m)
Torque
(lb•in)
Speed (rpm)
2198-E1004-ERS and TL-A110P-B
0
3000
5000
0.250
0.200
0.150
0.100
0.050
0
40001000
2000
2.21
1.77
1.33
0.88
0.44
0
Intermittent curve represents
single-phase input.
Torque
(N•m)
Torque
(lb•in)
Speed (rpm)
2198-E1004-ERS and TL-A110P-B (Brake)
0
3000
5000
0.250
0.200
0.150
0.100
0.050
0
40001000
2000
2.21
1.77
1.33
0.88
0.44
0
Intermittent curve represents
single-phase input.
Torque
(N•m)
Torque
(lb•in)
Speed (rpm)
2198-E1004-ERS and TL-A120P-B
0
3000
5000
0.400
0.350
0.300
0.250
0.200
0.150
0.100
0.050
0
40001000
2000
Intermittent curve represents
single-phase input.
3.54
3.09
2.65
2.21
1.77
1.33
0.88
0.44
0
Torque
(N•m)
Torque
(lb•in)
Speed (rpm)
2198-E1004-ERS and TL-A120P-B (Brake)
0
3000
5000
0.400
0.350
0.300
0.250
0.200
0.150
0.100
0.050
0
40001000
2000
Intermittent curve represents
single-phase input.
3.54
3.09
2.65
2.21
1.77
1.33
0.88
0.44
0
Torque
(N•m)
Torque
(lb•in)
Speed (rpm)
2198-E1004-ERS and TL-A130P-B
0
3000
5000
0.800
0.700
0.600
0.500
0.400
0.300
0.200
0.100
0
40001000
2000
Intermittent curve represents
single-phase input.
7.07
6.19
5.31
4.42
3.54
2.65
1.77
0.88
0
Torque
(N•m)
Torque
(lb•in)
Speed (rpm)
2198-E1004-ERS and TL-A130P-B (Brake)
0
3000
5000
0.800
0.700
0.600
0.500
0.400
0.300
0.200
0.100
0
40001000
2000
Intermittent curve represents
single-phase input.
7.07
6.19
5.31
4.42
3.54
2.65
1.77
0.88
0
= Intermittent operating region
= Continuous operating region
Kinetix 5100 (200V-class) Drives/TL-Axxxx-B (absolute high-resolution) Motor Curves
Rockwell Automation Publication KNX-RM011C-EN-P - January 2021 63
Page 64

Kinetix 5100 (200V-class) Drives with Kinetix TL Servo Motors
Torque
(N•m)
Torque
(lb•in)
Speed (rpm)
2198-E1004-ERS and TL-A220P-B
0
3000
5000
1.600
1.400
1.200
1.000
0.800
0.600
0.400
0.200
0
40001000
2000
14.1
12.4
10.6
8.84
7.07
5.31
3.54
1.77
0
Intermittent curve represents
single-phase input.
Torque
(N•m)
Torque
(lb•in)
Speed (rpm)
2198-E1007-ERS and TL-A230P-B
0
3000
5000
4.00
3.50
3.00
2.50
2.00
1.50
1.00
0.50
0
40001000
2000
Intermittent curve represents
single-phase input.
35.4
30.9
26.5
22.1
17.7
13.3
8.84
4.42
0
Torque
(N•m)
Torque
(lb•in)
Speed (rpm)
2198-E1007-ERS and TL-A230P-B (Brake)
0
3000
5000
4.00
3.50
3.00
2.50
2.00
1.50
1.00
0.50
0
40001000
2000
Intermittent curve represents
single-phase input.
35.4
30.9
26.5
22.1
17.7
13.3
8.84
4.42
0
Torque
(N•m)
Torque
(lb•in)
Speed (rpm)
2198-E1015-ERS and TL-A2530P-B
0
3000
5000
6.00
5.00
4.00
3.00
2.00
1.00
0
40001000
2000
Intermittent curve represents
three-phase input.
53.1
44.2
35.4
26.5
17.7
8.84
0
= Intermittent operating region
= Continuous operating region
Kinetix 5100 (200V-class) Drives/TL-A
xxxx
-B (absolute high-resolution) Motor Curves (continued)
2198-E1004-ERS and TL-A220P-B (Brake)
1.600
Torque
(N•m)
1.400
1.200
1.000
0.800
0.600
0.400
0.200
0
Intermittent curve represents
single-phase input.
0
2000
Speed (rpm)
3000
40001000
5000
14.1
12.4
10.6
8.84
7.07
5.31
3.54
1.77
0
Torque
(lb•in)
Torque
64 Rockwell Automation Publication KNX-RM011C-EN-P - January 2021
(N•m)
2198-E1015-ERS and TL-A2530P-B (Brake)
6.00
5.00
4.00
3.00
2.00
1.00
0
Intermittent curve represents
three-phase input.
0
2000
Speed (rpm)
3000
53.1
Torque
(lb•in)
44.2
35.4
26.5
17.7
8.84
0
5000
40001000
Page 65

Kinetix 5100 (200V-class) Drives with Kinetix TL Servo Motors
Torque
(N•m)
Torque
(lb•in)
Speed (rpm)
2198-E1015-ERS and TL-A2540P-B
0
3000
5000
8.00
7.00
6.00
5.00
4.00
3.00
2.00
1.00
0
40001000
2000
Intermittent curve represents
single-phase and three-phase inputs.
70.7
61.9
53.1
44.2
35.4
26.5
17.7
88.4
0
Torque
(N•m)
Torque
(lb•in)
Speed (rpm)
2198-E1020-ERS and TL-A410M-B
0
3000
5000
16.0
14.0
12.0
10.0
8.0
6.0
4.0
2.0
0
40001000
2000
141
124
106
88.4
70.7
35.4
26.5
17.7
0
Intermittent curve represents
three-phase input.
Torque
(N•m)
Torque
(lb•in)
Speed (rpm)
2198-E1020-ERS and TL-A410M-B (Brake)
0
3000
5000
16.0
14.0
12.0
10.0
8.0
6.0
4.0
2.0
0
40001000
2000
Intermittent curve represents
three-phase input.
141
124
106
88.4
70.7
35.4
26.5
17.7
0
= Intermittent operating region
= Continuous operating region
Kinetix 5100 (200V-class) Drives/TL-A
xxxx
-B (absolute high-resolution) Motor Curves (continued)
2198-E1015-ERS and TL-A2540P-B (Brake)
(N•m)
8.00
7.00
6.00
5.00
4.00
3.00
2.00
1.00
Intermittent curve represents
single-phase and three-phase input.
0
0
2000
Speed (rpm)
3000
40001000
Torque
5000
70.7
61.9
53.1
44.2
35.4
26.5
17.7
88.4
0
Torque
(lb•in)
Rockwell Automation Publication KNX-RM011C-EN-P - January 2021 65
Page 66

Kinetix 5100 (200V-class) Drives with Kinetix TL Servo Motors
Notes:
66 Rockwell Automation Publication KNX-RM011C-EN-P - January 2021
Page 67

Kinetix 5100 Drive Systems Design Guide
Additional Resources
These documents contain additional information concerning related products from Rockwell Automation.
Resource Description
Kinetix Rotary Motion Specifications, publication KNX-TD001
Kinetix Servo Drives Specifications, publication KNX-TD003
Kinetix Motion Accessories Specifications, publication KNX-TD004
Kinetix 5100 Single-axis EtherNet/IP Servo Drives User Manual,
publication 2198-U M004
Kinetix 5700 Drive Systems, publication KNX-RM010 System design guide to determine and select the required (drive specific) drive module,
Kinetix 5500 Drive Systems, publication KNX-RM009
Kinetix 5300 Drive Systems, publication KNX-RM012
Kinetix Motion Control Selection Guide, publication KNX-SG001
System Design for Control of Electrical Noise Reference Manual,
publication GMC-RM001
Servo Drive Installation Best Practices Application Technique
publication MOTION-AT004
MicroLogix™ 1100 Programmable Controllers User Manual,
publication 1763-UM001
MicroLogix 1400 Programmable Controllers User Manual, publication 1766-UM001
Micro810® Programmable Controllers User Manual, publication 2080-UM001
Micro820™ Programmable Controllers User Manual, publication 2080-UM005
Micro830®, Micro850®, Micro870™, Programmable Controllers User Manual,
publication 2080-UM002
GuardLogix 5570 Controllers User Manual, publication 1756-UM022
GuardLogix 5580 Controllers User Manual, publication 1756-UM543
Compact GuardLogix 5370 Controllers User Manual, publication 1769-UM022
Compact GuardLogix 5380 Controllers User Manual, publication 5069-UM001
GuardLogix 5570 and Compact GuardLogix 5370 Controller Systems Safety
Reference Manual, publication 1756-RM099
GuardLogix 5580 and Compact GuardLogix 5380 Controller Systems Safety
Reference Manual, publication 1756-RM012
Industrial Ethernet Media Brochure, publication 1585-BR001
Rockwell Automation Product Selection website, rok.auto/systemtools
Motion Analyzer System Sizing and Selection Tool
website https://motionanalyzer.rockwellautomation.com/
Product Certifications website, rok.auto/certifications
Rockwell Automation Industrial Automation Glossary, publication AG-7.1
Product specifications for Kinetix TLP, Kinetix MPL, MPM, MPF, and MPS, and Kinetix TL
and TLY rotary servo motors.
Product specifications for Kinetix Integrated Motion over the EtherNet/IP network,
Integrated Motion over Sercos interface, EtherNet/IP networking, and component servo
drive families.
Product specifications for Bulletin 2090 motor and interface cables, low-profile
connector kits, drive power components, and other servo drive accessory items.
Information on installing, configuring, startup, troubleshooting, and applications for
your Kinetix servo drive system.
power accessory, connector kit, motor cable, and interface cable catalog numbers for
your drive and motor/actuator motion control system. Included are system
performance specifications and torque/speed curves (rotary motion) and force/
velocity curves (linear motion) for your motion application.
Overview of Kinetix servo drives, motors, actuators, and motion accessories designed
to help make initial decisions for the motion control products best suited for your
system requirements.
Information, examples, and techniques designed to minimize system failures caused
by electrical noise.
Best practice examples to help reduce the number of potential noise or
electromagnetic interference (EMI) sources in your system and to make sure that the
noise sensitive components are not affected by the remaining noise.
Provides information on how to install, wire, and troubleshoot the MicroLogix
programmable controllers.MicroLogix 1200 Programmable Controllers User Manual, publication 1762-UM001
Provides information on how to install, wire, and troubleshoot the Micro800
programmable controllers.
Provides information on how to install, configure, program, and use ControlLogix®
controllers and GuardLogix® controllers in Studio 5000 Logix Designer® projects.
Provides information on how to install, configure, program, and use CompactLogix™
and Compact GuardLogix controllers.
Provides information on how to achieve and maintain Safety Integrity Level (SIL) and
Performance Level (PL) safety application requirements for GuardLogix and Compact
GuardLogix controllers.
Information to determine which Bulletin 1585 Ethernet cable fits your application and
the product specifications to help select the appropriate components.
Online product selection and system configuration tools, including AutoCAD (DXF)
drawings.
Comprehensive motion application sizing tool used for analysis, optimization,
selection, and validation of your Kinetix Motion Control system.
Provides declarations of conformity, certificates, and other certification details.
A glossary of industrial automation terms and abbreviations.
You can view or download publications at rok.auto/literature
Rockwell Automation Publication KNX-RM011C-EN-P - January 2021 67
.
Page 68

Rockwell Automation Support
Use these resources to access support information.
Technical Support Center Find help with how-to videos, FAQs, chat, user forums, and product notification updates. rok.auto/support
Knowledgebase Access Knowledgebase articles. rok.auto/knowledgebase
Local Technical Support Phone Numbers Locate the telephone number for your country. rok.auto/phonesupport
Literature Library Find installation instructions, manuals, brochures, and technical data publications. rok.auto/literature
Product Compatibility and Download Center
(PCDC)
Download firmware, associated files (such as AOP, EDS, and DTM), and access product
release notes.
rok.auto/pcdc
Documentation Feedback
Your comments help us serve your documentation needs better. If you have any suggestions on how to improve our content, complete the
form at rok.auto/docfeedback
.
Allen-Bradley, CompactLogix, ControlLogix, expanding human possibility, Kinetix, LDC-Series, LDL-Series, Logix 5000, Rockwell Automation, and Studio 5000 Logix Designer are trademarks of
Rockwell Automation, Inc.
EtherNet/IP is a trademark of ODVA, Inc.
Trademarks not belonging to Rockwell Automation are property of their respective companies.
Rockwell Automation maintains current product environmental compliance information on its website at rok.auto/pec.
Rockwell Otomasyon Ticaret A.Ş. Kar Plaza İş Merkezi E Blok Kat:6 34752, İçerenköy, İstanbul, Tel: +90 (216) 5698400 EEE Yönetmeliğine Uygundur
Publication KNX-RM011C-EN-P - January 2021
Supersedes Publication KNX-RM011B-EN-P - November 2020 Copyright © 2021 Rockwell Automation, Inc. All rights reserved. Printed in the U.S.A.
 Loading...
Loading...