

Page 1
AEC
Absolute Encoder
Converter
(Cat. No. 4100-5.2)
Installation and Setup Manual
Page 2
Important User Information
Because of the variety of uses for the products described in this
publication, those responsible for the application and use of this
control equipment must satisfy themselves that all necessary steps
have been taken to assure that each application and use meets all
performance and safety requirements, including any applicable laws,
regulations, codes and standards.
The illustrations, charts, sample programs and layout examples shown
in this guide are intended solely for purposes of example. Since there
are many variables and requirements associated with any particular
installation, Allen-Bradley does not assume responsibility or liability
(to include intellectual property liability) for actual use based upon
the examples shown in this publication.
Allen-Bradley publication SGI-1.1, Safety Guidelines for the
Application, Installation and Maintenance of Solid-State Control
(available from your local Allen-Bradley office), describes some
important differences between solid-state equipment and
electromechanical devices that should be taken into consideration
when applying products such as those described in this publication.
Reproduction of the contents of this copyrighted publication, in whole
or part, without written permission of Rockwell Automation, is
prohibited.
Throughout this manual we use notes to make you aware of safety
considerations:
ATTENTION
Identifies information about practices or
circumstances that can lead to personal injury or
death, property damage or economic loss
!
Attention statements help you to:
•
identify a hazard
•
avoid a hazard
•
recognize the consequences
IMPORTANT
Allen-Bradley is a trademark of Rockwell Automation
Identifies information that is critical for successful
application and understanding of the product.
Page 3

European Communities (EC) Directive Compliance
If this product has the CE mark it is approved for installation within
the European Union and EEA regions. It has been designed and
tested to meet the following directives.
EMC Directive
This product is tested to meet the Council Directive 89/336/EC
Electromagnetic Compatibility (EMC) by applying the following
standards, in whole or in part, documented in a technical
construction file:
•
EN 50081-2 EMC — Generic Emission Standard, Part 2 —
Industrial Environment
•
EN 50082-2 EMC — Generic Immunity Standard, Part 2 —
Industrial Environment
This product is intended for use in an industrial environment.
Low Voltage Directive
This product is tested to meet Council Directive 73/23/EEC Low
Voltage, by applying the safety requirements of EN 61131-2
Programmable Controllers, Part 2 - Equipment Requirements and
Tests. For specific information required by EN 61131-2, see the
appropriate sections in this publication, as well as the Allen-Bradley
publication Industrial Automation Wiring and Grounding Guidelines
For Noise Immunity, publication 1770-4.1.
This equipment is classified as open equipment and must be
mounted in an enclosure during operation to provide safety
protection.
Page 4

Page 5

Table of Contents
Preface
Chapter 1
Read This Manual
Read This Manual . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
Who Should Use this Manual. . . . . . . . . . . . . . . . . . . . . . . . . 1
Purpose of this Manual . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
Safety Precautions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2
Contents of this Manual . . . . . . . . . . . . . . . . . . . . . . . . . . 3
Related Documentation . . . . . . . . . . . . . . . . . . . . . . . . . . 3
Terminology . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
Common Techniques Used in this Manual . . . . . . . . . . . . . . . 4
AEC Product Receiving and Storage Responsibility . . . . . . . . . 5
Allen-Bradley Support . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
Local Product Support . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
Technical Product Assistance . . . . . . . . . . . . . . . . . . . . . . 6
On the Web . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
Overview
AEC Description . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
AEC Features . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
AEC Mechanical Specifications. . . . . . . . . . . . . . . . . . . . . . . . 8
Chapter 2
i Publication 4100-UM052B-EN-P - October 2001
Installation & Hook-Up
Chapter Objectives . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
Installing the AEC . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
Complying with European Union Directives. . . . . . . . . . . . . 11
EMC Directive . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
Mounting the AEC. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
Connecting the AEC . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
Connecting the AEC to the 1394 . . . . . . . . . . . . . . . . . . . 16
Connecting the AEC to the Compact. . . . . . . . . . . . . . . . 17
Connecting the AEC to the 1756-MO2AE. . . . . . . . . . . . . 19
Wiring the AEC . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
Wiring Cable Flying Leads to the Plugs . . . . . . . . . . . . . . 21
The SSI Connector . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22
Page 6

ii
The Control Connector. . . . . . . . . . . . . . . . . . . . . . . . . . 24
Fault Relay 24
Analog Servo Command Pass Through (For Compact Only) . . . . 26
Power Supply Connector . . . . . . . . . . . . . . . . . . . . . . . . 27
Chapter 3
Chapter 4
Setup
Chapter Objectives . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
Setting the Rotary Switches . . . . . . . . . . . . . . . . . . . . . . . . . 29
Configuration Switch Tables . . . . . . . . . . . . . . . . . . . . . . . . 30
Configuration Switch A . . . . . . . . . . . . . . . . . . . . . . . . . 30
Configuration Switch B . . . . . . . . . . . . . . . . . . . . . . . . . 31
Powering the AEC. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32
AEC With GML Commander . . . . . . . . . . . . . . . . . . . . . . . . 32
Adding AEC to your Commander Diagram . . . . . . . . . . . 32
Setting the Transducer Resolution. . . . . . . . . . . . . . . . . . . . . . . . . 33
Selecting Homing Procedure . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33
Aligning Absolute Encoder . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34
Operation
Chapter Objectives . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35
Absolute Position Update . . . . . . . . . . . . . . . . . . . . . . . . . . 35
Incremental Position Output . . . . . . . . . . . . . . . . . . . . . . . . 35
Position at Start-up . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 36
Chapter 5
Appendix A
Publication 4100-UM052B-EN-P - October 2001
Fault Indication & Control Status
Chapter Objectives . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37
Transducer Faults. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38
Encoder Faults. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38
Internal Faults . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 39
No Faults. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 39
Specifications
Equivalent Circuit Diagrams. . . . . . . . . . . . . . . . . . . . . . . . . 44
Page 7

iii
Appendix B
Index
Strobe Position For Applications Not Using the 1394 or Compact
Absolute Strobe Cycle . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 47
Absolute Strobe Timing . . . . . . . . . . . . . . . . . . . . . . . . . . . . 48
Incremental Strobe Period . . . . . . . . . . . . . . . . . . . . . . . . . . 49
Publication 4100-UM052B-EN-P - October 2001
Page 8

iv
Publication 4100-UM052B-EN-P - October 2001
Page 9

Preface
Read This Manual
Who Should Use this Manual
Read and understand this instruction manual. It provides the
necessary information to let you install, connect, and set up the AEC
for safe, reliable operation. This preface covers the following topics:
•
Who should use this manual
•
The purpose of this manual
•
Terms
•
Common techniques used in this manual
•
Allen-Bradley support
You should read this manual if you are responsible for the installation,
set up or operation of the AEC (Absolute Encoder Converter).
If you do not have a basic understanding of the products listed below,
contact your local Allen-Bradley representative for information on
available training courses before using this product.
•
S Class Compact motion controller
•
1394 GMC System module
•
GML (Graphic Motion Language) Commander software
Purpose of this Manual
This manual is an installation and set up guide for the AEC and
describes the procedures necessary to properly install and configure it
into your motion control system.
1 Publication 4100-UM052B-EN-P - October 2001
Page 10
Preface 2
Safety Precautions
The following general precautions apply to the AEC:
ATTENTION
!
Electric shock can kill. Make sure the AEC is safely
installed in accordance with the Installation and
Set-up chapters of this manual. Avoid contact with
electrical wires and cabling while power is on.
Only trained service personnel should open the
electrical cabinet.
This product contains stored energy devices. To
avoid hazard of electrical shock, verify that all
voltage on the capacitors has been discharged
before attempting to service, repair, or remove this
unit. You should only attempt the procedures in
this manual if you are qualified to do so and
familiar with solid-state control equipment and the
safety procedures in publication NFPA 70E and
BS-EN60204.
The system integrator is responsible for local safety
and electrical codes.
ATTENTION
!
An incorrectly applied or installed product can result
in component damage or a reduction in product life.
Wiring or application errors, such as undersizing or
inadequate DC supply, or excessive ambient
temperatures can result in a malfunction.
The AEC contains ESD (Electrostatic Discharge)
sensitive parts and assemblies. Static control
precautions are required when installing, testing,
servicing, or repairing this assembly. Component
damage can result if ESD control procedures are not
followed. If you are not familiar with static control
procedures, refer to Allen-Bradley publication
8000-4.5.2, Guarding Against Electrostatic Damage or
any other applicable ESD Protection Handbook.
Publication 4100-UM052B-EN-P - October 2001
Page 11
Preface 3
Contents of this Manual
Chapter Title Contents
Preface Describes the purpose, background, and scope of this manual. Also specifies
the audience for whom this manual is intended.
1 Overview Provides a general description of the AEC, its features and mechanical
specifications.
2 Installation Provides the steps needed to successfully mount and wire the AEC to an SSI
device and the S Class Compact Motion Controller or the 1394 GMC system.
3 Set-Up Provides the guidelines for setting up and configuring the AEC.
4 Operation Provides information on Absolute and Incremental Position.
5 Fault Indication &
Control Status
Appendix A Specifications Provides physical, electrical, environmental, and functional specifications for
Appendix B Strobe Position Contains additional information about setting the strobe for those users
Provides information on fault and status indicators and types of faults.
the AEC.
connecting their AEC to a controller other than the S Class Compact Motion
Controller or the 1394 GMC system.
Related Documentation
The following documents contain additional information concerning
related Allen-Bradley products. To obtain a copy, contact your local
Allen-Bradley office or distributor.
For Read This Document Document Number
Programming Allen-Bradley motion controller with GML GML Commander Reference Manual GMLC-5.2
Instructions for installation and set-up for the 1394 GMC
system
Instructions for installation and set-up for the S Class
Compact motion controller
An article on wire sizes and types for grounding electrical
equipment (North American standards)
An article on wire sizes and types for grounding electrical
equipment (European standards).
A complete listing of current Allen-Bradley documentation,
including ordering instructions. Also indicates whether the
documents are available on CD-ROM or in multi-languages
A glossary of industrial automation terms and abbreviations Allen-Bradley Industrial Automation Glossary AG-7.1
1394 Digital, AC, Multi-Axis Motion Control
System User Manual
IMC S Class Compact Motion Controller
Installation and Set-up Manual
National Electrical Code Published by the
BS-EN 60204 Electrical Equipment of
Machines
Allen-Bradley Publication Index SD499
1394-5.0
999-122
National Fire
Protection
Association of
Boston, MA.
Published by British
Standards Institute
Publication 4100-UM052B-EN-P - October 2001
Page 12
Preface 4
Terminology
Common Techniques Used in this Manual
In order to avoid confusion, we have used the following general terms
in a specific manner within this manual. We define them as follows:
Transducer - the SSI device is considered a transducer for the
purposes of this manual.
Encoder - Refers to the AEC connector that goes to the 1394 GMC
System or the S Class Compact motion controller. The cable from the
controller attaches to the AEC at the Encoder connector.
For specific definitions of other terms used in industrial automation,
see the Allen-Bradley Industrial Automation Glossary (publication
number AG-7.1).
The following conventions are used throughout this manual:
•
Bulleted lists such as this one provide information, not
procedural steps.
•
Numbered lists provide sequential steps or hierarchical
information.
•
Words that you type or select appear in bold.
•
When we refer you to another location, the section name
appears in italics.
Publication 4100-UM052B-EN-P - October 2001
ATTENTION
!
IMPORTANT
The exclamation point inside of a triangle, followed
by the word “ATTENT ION” indicate circumstances
that can lead to personal injury, death, property
damage or economic loss.
Identifies information that is critical for successful
application and understanding of the product.
Page 13

Preface 5
AEC Product Receiving and Storage Responsibility
You, the customer, are responsible for thoroughly inspecting the
equipment before accepting the shipment from the freight company.
Check the item(s) you receive against your purchase order. If any
items are obviously damaged, it is your responsibility to refuse
delivery until the freight agent has noted the damage on the freight
bill. Should you discover any concealed damage during unpacking,
you are responsible for notifying the freight agent. Leave the shipping
container intact and request that the freight agent make a visual
inspection of the equipment.
Leave the product in its shipping container prior to installation. If you
are not going to use the equipment for a period of time, store it:
•
in a clean, dry location
•
within an ambient temperature range of 0 to 85° C (32 to 185° F)
•
within a relative humidity range of 5% to 95%, non-condensing
•
in an area where it cannot be exposed to a corrosive
atmosphere
•
in a non-construction area
Allen-Bradley Support
Allen-Bradley offers support services worldwide, with over 75 Sales/
Support Offices, 512 authorized Distributors and 260 authorized
Systems Integrators located throughout the United States alone, plus
Allen-Bradley representatives in every major country in the world.
Local Product Support
Contact your local Allen-Bradley representative for:
•
sales and order support
•
product technical training
•
warranty support
•
support service agreements
Publication 4100-UM052B-EN-P - October 2001
Page 14
Preface 6
Technical Product Assistance
If you need to contact Allen-Bradley for technical assistance, please
review the information in this manual first. Then call your local
Allen-Bradley representative. For the quickest possible response, we
recommend that you have the catalog numbers of your products
available when you call. See the Related Documentation section of
this chapter for the publication numbers of other manuals that can
help with this product.
The Rockwell Automation Technical Support number is:
1-603-443-5419
On the Web
For information about Allen-Bradley, visit the following World Wide
Web s ite :
http://www.ab.com/
Publication 4100-UM052B-EN-P - October 2001
Page 15

Overview
Chapter
1
AEC Description
The AEC is an absolute encoder converter. It receives the absolute
position sent by the SSI transducer and changes it to an incremental
quadrature signal that the 1394 GMC System module and the S Class
Compact motion controller can use.
The AEC is designed to accept outputs from absolute encoders, linear
displacement transducers, or any other measuring device, which
transmits its measured values over an SSI. Several devices are
supported with various combinations of counts per turn and number
of turns. These are defined in the Setup chapter of this manual.
Parallel output devices are not supported.
The AEC provides two independent channels from absolute to
incremental quadrature conversion. The resolution of each channel is
set via rotary switches and each one can operate with a transducer
using a different supply voltage. (Although the supply voltages may
be different, they are not isolated. The grounds must be of equal
potential.) Each channel can be individually strobed to obtain new
absolute or incremental position information.
7 Publication 4100-UM052B-EN-P - October 2001
Page 16

8 Overview
AEC Features
The AEC has the following features:
•
Two fully independent axes capable of absolute to incremental
quadrature conversion.
•
Each channel can support independent absolute transducer
input.
•
User selectable resolution.
•
Fixed transducer acquisition speed of 400 kHz.
•
Each axis provides one differential quadrature output.
•
Fixed quadrature output frequency of 800 kHz.
•
Independent +5 V DC, + 15 V DC, and +24 V DC transducer
voltages.
•
Selectable for incremental strobes or internal 1ms timebase.
•
Interfaces directly to Allen-Bradley 1394 GMC System and S
Class Compact motion controllers.
•
Normally open and normally closed status outputs for each axis.
•
Bicolor LED status indication for each axis.
•
An on-board reset switch that resets both axes.
•
Absolute Home request remotely clears corrected faults and
resets system on a per axis basis.
•
Single 18-36 V DC input voltage power requirement.
•
A rugged steel case for greater protection. The case has
pre-drilled mounting tabs.
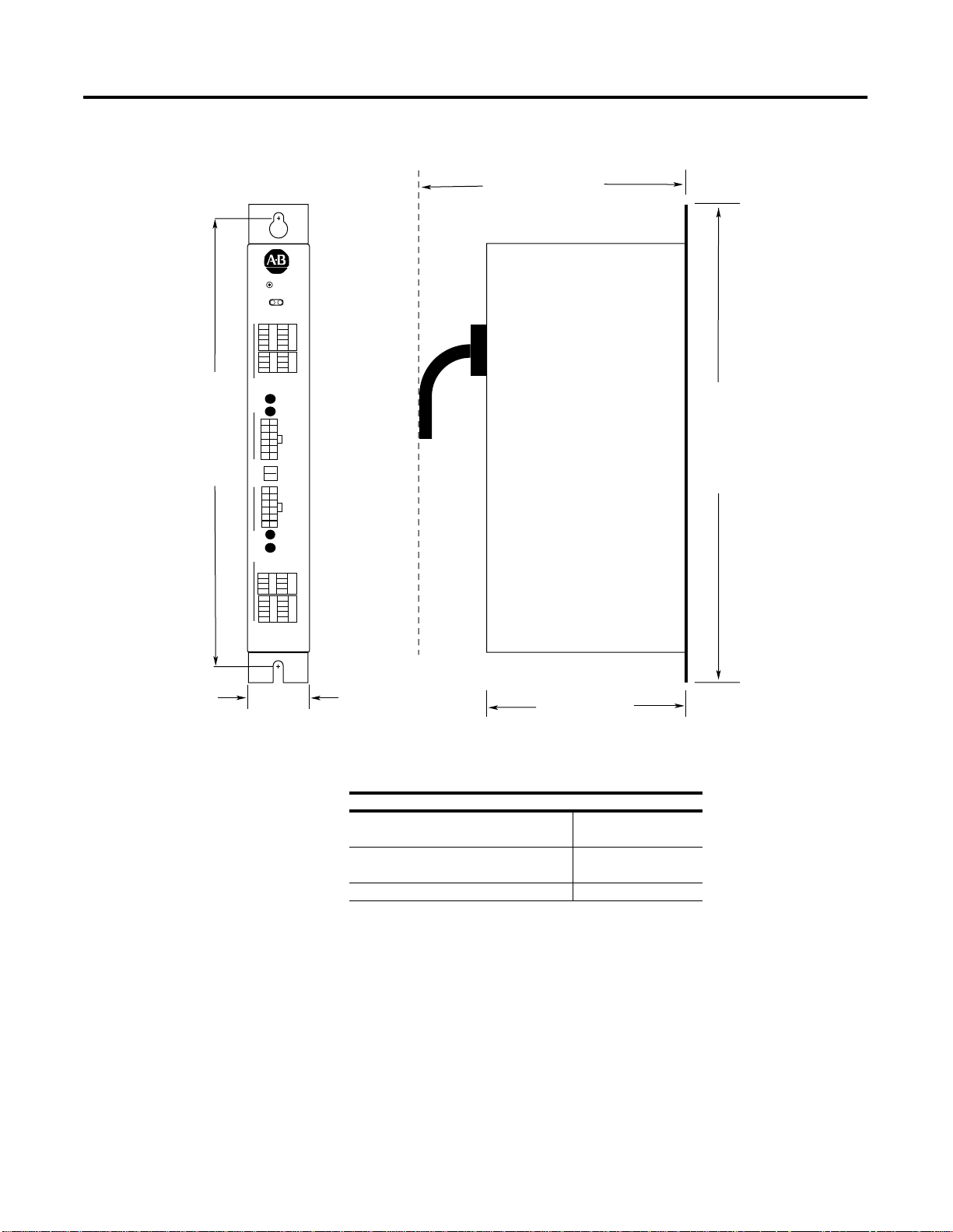
AEC Mechanical Specifications
The following figure shows the placement and labeling of major items
on the AEC front panel.
Publication 4100-UM052B-EN-P - October 2001
Page 17
Reset
Axis 0 Axis 1
AB
5
10
4
9
3
8
2
7
1
6
4
8
3
7
2
6
1
5
A
Axis 0
B
Overview 9
Figure 1 AEC front panel
203.2 mm (8.0 in.) with
cable clearance
Use 1/4 -20 or M6
bolt (typical 2 places)
SSIControl
ConfigurationConfiguration
330.2 mm (13.0 in.)
2
1
A
B
Axis 1
8
7
6
5
10
9
8
7
6
AB
AEC
Encoder EncoderPower
4
3
2
1
5
4
3
2
1
Switches Switches
SSI Control
44.45 mm (1.75 in.)
152.4 mm (6.0 in.)
Package Specifications
Package size
mm and (in.)
Product weight
kg and (lbs.)
342.9 x 152.4 x 44.45
(13.5 x 6.0 x 1.75)
2.27
(5.0)
Material Painted Steel
342.9 mm (13.5 in.)
Publication 4100-UM052B-EN-P - October 2001
Page 18

10 Overview
Publication 4100-UM052B-EN-P - October 2001
Page 19

Installation & Hook-Up
Chapter
2
Chapter Objectives
Installing the AEC
Read this entire chapter before beginning to mount, connect, or wire
any of the components to the AEC. It is the responsibility of the
installer to see that the installation conforms to the directions in this
manual and local codes and procedures. This chapter covers the
following topics.
•
European Union Compliance
•
Mounting the AEC
•
Connecting the AEC to the 1394 GMC system
•
Connecting the AEC to the Compact motion controller
•
Connecting the AEC to the 1746-MO2AE
•
Wiring the SSI transducer to the AEC
•
Wiring the Control connector
•
An example of a Fault relay
•
Wiring the Power connector
The AEC is designed to mount in an electrical cabinet using the
flanges on its back panel. This installation method should be observed
for all applications. Before powering the AEC, make sure it has been
configured correctly and that the transducer(s) and control devices
(controller) are connected to it correctly.
Complying with European Union Directives
11 Publication 4100-UM052B-EN-P - October 2001
The information contained in this document pertains to the Absolute
Encoder Converter (AEC), an Allen-Bradley product. If the AEC is
installed within the European Union or EEA regions and has the CE
mark, the following regulations apply.
Page 20

12 Installation & Hook-Up
EMC Directive
The AEC is tested to meet Council Directive 89/336 Electromagnetic
Compatibility (EMC) in accordance with Article 10 (1). The following
directives apply:
•
EN 50081-2 EMC-Generic Emission Standard, Part 2-Industrial
Environment.
•
EN 50082-2 EMC-Generic Immunity Standard, Part 2-Industrial
Environment.
The AEC, as described in this document, is intended for use in an
industrial environment and is not intended for use in a residential,
commercial, or light industrial environment.
To meet CE requirements, the following are required:
•
The AEC must be mounted in an IP 54 rated metal enclosure on
a metal panel.
•
All equipment must be bonded.
•
You must use the specified Allen-Bradley cables.
•
The AEC is designed to function without maintenance when
operated in the environment specified in this manual.
•
Under normal conditions, the AEC should not require any
periodic maintenance. However, if conditions are less than ideal
and any superficial dust has accumulated on the controller over
time, remove the dust carefully. Also, it is recommended to
periodically inspect all cables for abrasion and all connectors for
proper seating.
Mounting the AEC
Publication 4100-UM052B-EN-P - October 2001
Before mounting the AEC, verify that the 1394 GMC System or the S
Class Compact motion controller is installed correctly. Refer to the
1394 Digital AC Multi-Axis Motion Control System User Manual
(publication 1395-5.0) or the IMC 23/x Installation and Set-up Manual
(publication 999-122) for installation instructions.
The AEC must be properly grounded to the metal enclosure panel.
The following diagram shows how to ground the AEC to the panel.
Page 21

Figure 2 Mounting and Grounding Diagram
#10 AWG to
Ground Bus
AEC Mounting Tab
Ground
Lug
Installation & Hook-Up 13
Internal Star Washers
Scrape paint off panel to insure
electrical connection between
chassis and grounded metal plate.
Mount the AEC next to a 1394 GMC system or an S Class Compact
motion controller on a metal enclosure panel using two 1/4 -20 or M6
bolts. Refer to the Mechanical Specifications in the Overview chapter
of this manual for mounting dimensions. Figures 3 and 4 in this
chapter show where to mount the AEC.
Size 1/4 - 20 or M6
Hardware
Tapped Hole
(Minimum of 3 Threads)
Metal Panel
(Must be connected to
earth ground.)
ATTENTION
!
To avoid a shock hazard, remove all power to the
system panel before mounting the AEC.
The 1394 contains stored energy devices. To avoid the
hazard of electrical shock, verify tha t all voltages are
zero (0.00) before proceeding.
Publication 4100-UM052B-EN-P - October 2001
Page 22

14 Installation & Hook-Up
Optional
Second
AEC for
Axis 2 and
Axis 3
Figure 3 Mounting the AEC next to a 1394 GMC on a system panel
Wireway
1394
AEC
Reset
Axis 0 Axis 1
AB
10
9
8
7
6
8
7
6
5
A
Axis 0
B
2
1
A
B
Axis 1
8
7
6
5
10
9
8
7
6
AB
AEC
5
4
3
SSIControl
2
1
4
3
2
1
ConfigurationConfiguration
Encoder EncoderPower
Switches Switches
4
3
2
1
5
4
3
2
SSI Control
1
GMC System
Publication 4100-UM052B-EN-P - October 2001
IMPORTANT
The AEC can only be mounted on the left side (when
look ing directly at th e mounted 1394) of the 1394 GMC
System. This is due to cable specifications and module
expansion of the 1394.
Page 23

The AEC
can also
be placed
to the left
of the
Compact
Installation & Hook-Up 15
Figure 4 Mounting the AEC next to an S Class Compact motion controller.
S Class
Compact
Allen –Bradley IMC S Class
Axis 0
Axis 1
Servo &
Servo &
Feedback
Feedback
Wireway
AEC
Reset
Axis 0 Axis 1
AB
10
9
8
7
6
8
7
6
5
Axis 0
2
1
Axis 1
8
7
6
5
10
9
8
7
6
AB
5
4
3
SSIControl
2
1
4
3
2
1
Optional
A
B
ConfigurationConfiguration
Second
AEC for
Axis 2
and
Axis 3
Encoder EncoderPower
A
B
Switches Switches
4
3
2
1
5
4
3
2
SSI Control
1
AEC
Connecting the AEC
IMPORTANT
The AEC can be mounted on either side of the S Class
Compact motion controller on the system panel.
The following section details how to connect the AEC encoder
connectors to the 1394 GMC System and the S Class Compact motion
controller.
ATTENTION
Do not attempt to make any electrical connections to the
AEC while power is applied. Doing so risks damage to
the AEC, peripheral equipment, and your health and
safety.
!
Publication 4100-UM052B-EN-P - October 2001
Page 24

16 Installation & Hook-Up
ATTENTION
The AEC does not support the r emoval or the i nsertion of
any connectors when under power. The power
disturbance can result in unintended machine motion,
loss of proc es s co n t rol, o r a n el ect ri cal arc that can ca use
an explosion in a hazardous environment.
!
Connecting the AEC to the 1394
Connect the AEC to a 1394 GMC System using the encoder cable
(catalog number 1394-GR04) for each axis. This is a four foot cable
that connects Axis 0 Encoder or Axis 1 Encoder connector on the AEC
to the J3, J4, J5, or J10 encoder feedback connector on the 1394.
IMPORTANT
This cable is polarity sensitive.
IMPORTANT
The 1394 interface circuitry requires 0.325A to operate. Any additional
devices connected to the 1394, such as incremental encoders, can
require an additional 0.2A per device (check your device for the
precise requirements).
To connect the encoder cables:
1. Insert the 12-pin plug labeled “REC/AEC” in the Axis 0 Encoder
or Axis 1 Encoder connector on the AEC.
2. Insert the 12-pin plug labeled “1394” in the J3, J4, J5, or J10
encoder feedback connector on the 1394.
3. Wire the remaining auxiliary power labeled “ENC. PWR” to the
5V DC power supply. The red wire is +5V and the black is a +5
common.
The AEC does not require power from the 1394 to
operate nor doe s it provide power to the 1394. However,
the 1394 requires a separate 5V power supply to run its
interface circuitry.
Publication 4100-UM052B-EN-P - October 2001
Page 25

Installation & Hook-Up 17
Axis 0 Encoder Connector
Axis 1 Encoder Connector
5V DC
Power
Supply
IMPORTANT
When using multiple Encoder devices, we recommend
you wi re all o f the au xi liary power cabl e s to the same 5 V
DC power supply.
Figure 5 Connecting the Encoder Cables and the 5V Power Supply to the 1394
Wireway
1394
GMC System
AEC
Reset
Axis 0 Axis 1
AB
5
10
4
9
3
8
SSIControl
2
7
1
6
4
8
3
7
6
5
Axis 0
2
1
Axis 1
8
7
6
5
10
9
8
7
6
AB
2
1
A
B
ConfigurationConfiguration
Encoder EncoderPower
A
B
4
3
2
1
5
4
3
2
1
AEC
1394-GR04
Switches Switches
SSI Control
IMPORTANT
Anchor the c able so that no more than 2 feet of cable is
left unsupported. The excessi ve weight of an unanchored
cable could pull the plug out of the connector
Connecting the AEC to the Compact
To connect the AEC to the S Class Compact motion controller, use the
encoder cable (catalog number 4100-RCS3T) for each axis. This three
foot cable connects the Axis 0 Encoder or the Axis 1 Encoder
connector on the AEC to the Axis 0, 1, 2, or 3 servo and feedback
connector on the Compact. The Compact sends the drive servo output
Publication 4100-UM052B-EN-P - October 2001
Page 26

18 Installation & Hook-Up
signal through the 4100-RCS3T cable. The following figure shows
where to connect the encoder cable to the AEC and the Compact.
IMPORTANT
This cable is NOT polarity sensitive.
To connect the Encoder cable:
1. Insert one 12-pin plug in the Axis 0 Encoder or Axis 1 Encoder
connector on the AEC.
2. Insert the remaining 12-pin plug in the Axis 0, 1, 2, or 3 servo
and feedback connector on the Compact.
Figure 6 Connecting the Encoder Cables to the Compact
S-Class
Compact
Allen –Bradley IMC S Class
Wireway
4100-RCS3T
AEC
Reset
Axis 0 Axis 1
AB
10
9
8
7
6
8
7
6
5
A
Axis 0
B
5
4
3
2
1
4
3
2
1
ConfigurationConfiguration
SSIControl
Axis 0
Servo &
Feedback
IMPORTANT
2
1
Encoder EncoderPower
A
B
Switches Switches
Axis 1
4
8
3
7
2
6
1
5
5
10
4
9
3
8
2
7
Axis 1
Servo &
Feedback
Axis 2
Servo &
Feedback
Axis 3
Servo &
Feedback
6
AB
AEC
SSI Control
1
Anchor the cable so that no more than 2 feet of cable is
left unsupported. The excessi ve weight of an unanchored
cable could pull the plug out of the connector.
Publication 4100-UM052B-EN-P - October 2001
Page 27

Connecting the AEC to the 1756-MO2AE
Installation & Hook-Up 19
TIP
See Application Note, publication number 4100-2.7 for
more detailed information regarding using the AE C with
the 1756-MO2AE.
To connect the AEC to the 1756-MO2AE, use the pre-made encoder
cable (4100-CCS15F) for each axis. This 15 foot cable connects the
Axis 0 Encoder or Axis 1 Encoder connector on the AEC to the
1756-MO2AE. The 4100-CCS15F is a 15 foot cable with a 12-pin plug
on one end and the flying leads on the other end.
IMPORTANT
This cable is NOT polarity sensitive.
To connect the 4100-CCS15F Encoder cable:
1. Insert the end with the 12-pin plug to either the Axis 0 Encoder
or Axis 1 Encoder connector on the AEC.
2. Connect the flying leads to the appropriate pin locations on the
1756-MO2AE using the pin locations as shown in the following
diagram.
1756-MO2AE Pins for Connecting AEC
Pin Number Pin Value Wire Color
1 V REF+ Red
3 V REF- Black
11 Chassis Black
25 A+ White
27 A- Black
29 B+ Green
31 B- Black
33 Z+ Blue
35 Z- Black
Publication 4100-UM052B-EN-P - October 2001
Page 28

20 Installation & Hook-Up
AEC
The wires for Strobe+ and Strobe- must be run through the DC Output
card. The pin locations are designated in the following table.
DC Output 1756-OB16I/A Pins for Connecting the AEC Strobe
Pin Number Pin Value Wire Color
2 Strobe + Yellow
1 Strobe - Black
The following diagram shows the 4100-CCS15F cable connecting the
AEC to the 1756-MO2AE.
Figure 7 Connecting the Encoder Cable to the 1756-MO2AE and DC Output
DC Output Module
(1756-OB16I/A)
1756-MO2AE
2
4
6
8
10
12
14
16
18
20
22
+OK
24
26
28
30
32
34
36
2
4
6
8
10
12
14
16
18
20
22
24
26
28
30
32
34
36
1
+OUT-1
3
-OUT-1
5
+ENABLE-1
7
-ENABLE-1
9
DRVFLT-1
11
CHASSIS
13
IN_COM
15
HOME-1
17
REG24V-1
19
REG5V-1
21
-OK
23
CHASSIS
25
+CHA-1
27
-CHA-1
29
+CHB-1
31
-CHB-1
33
+CHZ-1
35
-CHZ-1
Strobe+
(Yellow)
1
3
5
7
9
11
13
15
17
19
21
23
25
27
29
31
33
35
+OUT-0
-OUT-0
+ENABLE-0
-ENABLE-0
DRVFLT-0
CHASSIS
IN_COM
HOME-0
REG24V-0
REG5V-0
CHASSIS
+CHA-0
-CHA-0
+CHB-0
-CHB-0
+CHZ-0
-CHZ-0
4100-CCS15F
Axis 0 Encoder Connector
Strobe(Black)
AEC
Reset
Axis 0 Axis 1
AB
5
10
4
9
3
8
2
7
1
6
4
8
3
7
2
6
1
5
A
Axis 0
B
2
1
A
B
Axis 1
4
8
3
7
2
6
1
5
5
10
4
9
3
8
2
7
1
6
AB
AEC
SSIControl
ConfigurationConfiguration
Encoder EncoderPower
Switches Switches
SSI Control
Publication 4100-UM052B-EN-P - October 2001
Page 29

Installation & Hook-Up 21
Wiring the AEC
There are several connectors on the front of the AEC. All are
duplicated for each axis except the power input connector. Each axis
has two five-pin plugs for connecting the SSI transducer and two
four-pin plugs for connecting a control. In the center is a 2-pin plug
for the power cable. The flying leads wire directly to the screw
terminals on the plugs.
Wiring Cable Flying Leads to the Plugs
To wire the cable leads to the plug:
1. Look at the plug to make sure the terminal is open. The
following figure shows both an open and a closed terminal.
Figure 8 Terminal diagram
Terminal open
Clamping screws
Terminal closed
2.
Terminal Steps
If the terminals are: Do this:
Not open Go to step 3
Open Go to step 4
3. Using a small, flat-head screwdriver, turn the clamping screw
counter-clockwise several times.
4. Using a proper stripping tool, strip the wire insulation back on
the cable lead.
IMPORTANT
All terminals accommodate a maximum of 14 gauge
wire.
5. Trim the cable lead so that 0.275 inches of metal wire is
exposed.
6. Insert the cable lead in the appropriate terminal. Refer to the
proper figures for their locations.
Publication 4100-UM052B-EN-P - October 2001
Page 30

22 Installation & Hook-Up
7. Use the screwdriver to tighten the clamping screw to the proper
torque (0.25 N-m/2.2 in-lb.).
8. Verify that the cable lead does not pull out of the terminal.
9.
Cable Leads
If the cable lead: Do this:
Pulls out of the terminal Repeat steps 3 through 9
again
Does not pull out of the
terminal
Repeat steps 3 through 9 for
the next terminal
The function of these connectors, their pinouts, and names are
defined in the following sections.
The SSI Connector
The SSI connectors are used to connect the absolute transducer to the
AEC. The pin layout and functionality for this connector are as
follows.
SSI Connector Pin Functions
SSI Input
Pin Number Pin Function
1 Transducer Power +24V DC
2 Transducer Power +15V DC
Publication 4100-UM052B-EN-P - October 2001
3 Transducer Power +5V DC
4 Data -
5Clock -
6Shield
7 Transducer Power Return
8Shield
9 Data +
10 Clock +
Page 31

Installation & Hook-Up 23
The following is the connector pin numbering scheme for the SSI
connector as viewed with the AEC mounted in its normal position.
SSI Connector Pin Numbering
AB
10 5
94
83
72
61
ATTENTION
!
IMPORTANT
Wiring t he connec tor f or the wro ng tra nsducer power can
result in imp ro p er operation o r dama ge to the position
transducer.
Pins 1 through 3 are reserved for transducer power
output. Only one of these can be in use at a time. It is
your responsibility to determine the power requirement
of the tr ansducer you are connecting to the AEC and to
use the pin that corresponds to that requirem ent.
Publication 4100-UM052B-EN-P - October 2001
Page 32

24 Installation & Hook-Up
Plug A
10
9
8
7
6
Plug B
5
4
3
2
1
Figure 9 Wiring Diagram for SSI Connector
Clock +
Data +
Return
Shield
Clock Data +5V DC
+15V DC
+24V DC
IMPORTANT
IMPORTANT
Maximum cable length between SSI Device and the
AEC is 100 feet.
Anchor the cable so that no more than 2 feet of cable is
left unsupported. The excessi ve weight of an unanchored
cable can pull the plug out of the connector.
The Control Connector
The control connectors let you connect the AEC to an application fault
string to indicate an AEC related fault condition to the controlling
hardware. The connector also has an analog command pass through
signal pair for connecting a servo amplifier.
Fault Relay
To provide safe operation (opening the fault string if a fault occurs or
power to the AEC is lost) the control status relay outputs must be
Publication 4100-UM052B-EN-P - October 2001
Page 33

24V DC
Installation & Hook-Up 25
connected appropriately. The control status relay N/O contact is held
energized when the AEC has not detected a fault.
There is one control status relay per axis. Each relay provides one
normally open and one normally closed pair that is voltage free and
isolated from each other and the ground.
Figure 10 An example of a Normally Open Fault status contact
DC
AEC Fault contact
located at Axis 0,1
Control connector
Common
Start/Stop String
Fault String
Start
Stop
7
3
CR1
CR1
ATTENTION
The Fault Contacts are NOT intended to be used for an
emergency stop string. They are intended for fault
indication only.
!
The diagram shows an example of connecting the AEC fault contact
into a system fault string. Since the status relay is energized when the
AEC is indicating no faults, the contact is closed.
A typical fault detection scheme may require additional circuitry when
used in applications where the AEC fault contacts do not have
sufficient capacity to drive a fault detection circuit directly.
Publication 4100-UM052B-EN-P - October 2001
Page 34

26 Installation & Hook-Up
The pin layout and functionality for the Control connector is as
follows:
Control Connector Pin Functions
Control
Pin Number
1Shield
2 Fault N/C Relay Contact
3 Fault N/O Relay Contact
4 Reference -
5Shield
6 N/C Relay Common Contact
7 N/O Relay Common Contact
8 Reference +
Pin Function
The following table displays the connector pin numbering scheme, as
seen with the AEC mounted in its normal position.
Control Connector Pin Numbering
AB
84
73
62
51
Analog Servo Command Pass Through (For Compact Only)
There is one analog command pass through signal pair (Reference +
and Reference -) per axis. The 4100-RCS3T encoder cable between the
AEC and the Compact (see Connecting the AEC to a Compact section
of this chapter) passes the analog command signal from the Compact,
through the AEC, and out to the servo amplifier, if connected.
Publication 4100-UM052B-EN-P - October 2001
Page 35

Plug A
8
7
6
5
Plug B
4
3
2
Reference +
Shield
Reference -
Installation & Hook-Up 27
Figure 11 Wiring diagram for connecting a Servo Amplifier
to the Control Connector
To Servo Amplifier
1
IMPORTANT
Anchor the c able so that no more than 2 feet of cable is
left unsupported. The excessi ve weight of an unanchored
cable could pull the plug out of the connector.
Power Supply Connector
The power supply connector is used to connect power to the AEC.
There is one power input connector for the AEC. The input power is
used to operate the AEC and attached transducers.
The AEC operates within the voltage range of 18-36V DC. The power
source must be able to supply 21W of power continuously.
Publication 4100-UM052B-EN-P - October 2001
Page 36

28 Installation & Hook-Up
The pin layout and functionality for this connector are shown in the
following table.
Power Supply Pin Functions
Power Supply
Pin Number Pin Function
1 Supply Common
2 Supply +
The following table shows the power supply connector pin
numbering, as seen with the AEC mounted in its normal position.
Power Supply Pin Numbering
Power
2
1
The following diagram illustrates the power connections for the AEC.
Figure 12 Wiring diagram for connecting the power cable to the connector
2
1
Supply +
Supply Return
IMPORTANT
To 18-36V DC
Power Supply
Anchor the cable so that no more than 2 feet of cable is
left unsupported. The excessi ve weight of an unanchored
cable could pull the plug out of the connector.
Publication 4100-UM052B-EN-P - October 2001
Page 37

Setup
Chapter
3
Chapter Objectives
Setting the Rotary Switches
The AEC is used in conjunction with the 1394 GMC System or the S
Class Compact motion controller and SSI transducers. It is not a
stand-alone product and must be configured to work with the
hardware connected to it. This involves specific steps that are
determined by the make and model of the hardware connected to the
AEC. This manual assumes that the GML Commander v4.01 or higher
software is used.
This chapter covers :
•
Explanation of the Rotary switch settings
•
Powering the AEC
•
Configuring the AEC with the GML Commander software
•
Homing Procedure
•
Aligning Absolute Device
Setting the rotary switches located on the front panel, configures the
AEC.
Before you apply power to the AEC you must configure each axis to
suit the transducer connected to it. A total of four parameters per axis
must be configured. For each axis, determine the following:
1. Transducer resolution in counts/turn (this is in counts/stroke for
linear displacement transducers). Parameter 1 is set by
configuration switch “A”. The table “Configuration Switch A” lists
all the options supported by the AEC. Use this table to select the
switch setting that matches the value for your transducer.
IMPORTANT
2. Whether the transducer is a single or multi turn device.
3. Whether Grey or Binary is used for transducer data.
4. The operation mode. Locked or free running.
29 Publication 4100-UM052B-EN-P - October 2001
Configuration switc h “B” is used for setting the next
three parameter s. You must find the sett ing that meets the
combination of values for all thr ee parameters.
Page 38

30 Setup
Configuration Switch Tables
ATTENTION
The Compact and 1394 motion controllers must use the
LOCKED mode of operation.
!
Configuration Switch A
Transducer Resolutions
Transducer Resolution
Switch Setting Counts/Turn Bits/Turn
0128
1256
2512
31024
42048
54096
68192
7 16384
8 32768
9 65536
A 131072
B 262144
C 2097152
D 4194304
E 16777216
F 33554432
7
2
8
2
9
2
10
2
11
2
12
2
13
2
14
2
15
2
16
2
17
2
18
2
21
2
22
2
24
2
25
2
Publication 4100-UM052B-EN-P - October 2001
IMPORTANT
All Allen-Bradley 842A Encoders must have
Configuration Switch A set to E.
Page 39

Configuration Switch B
Transducer Turns, Data Format, & Operation Mode
Transducer Turns, Data Format, & Operation Mode
Switch Setting Turns Data Code Operation Mode
0SingleGreyLocked
1 Reserved for future use
2 Single Grey Free Run
3 Reserved for future use
4 Single Binary Locked
5 Reserved for future use
6 Single Binary Free Run
7 Reserved for future use
8 Multi Grey Locked
9 Reserved for future use
Setup 31
A Multi Grey Free Run
B Reserved for future use
C Multi Binary Locked
D Reserved for future use
E Multi Binary Free Run
F Reserved for future use
IMPORTANT
ATTENTION
All Allen-Bradley 842A Encoders set for grey output
must have Configuration Switch B set to 0. All
Allen-Bradley 842A Encoders set for binary output
must have Configuration Switch B set to 4.
The Compact and 1394 motion controllers must use the
LOCKED mode of operation.
!
Publication 4100-UM052B-EN-P - October 2001
Page 40

32 Setup
Powering the AEC
The AEC has reverse polarity protection. However, always take care to
observe correct polarity when you connect the power to your unit. If
power is connected with the wrong polarity, no damage is done. The
AEC simply does not function until the polarity is corrected. There is
no warning or indication of an incorrect polarity connection.
The AEC also has over current protection provided by a fuse on the
printed circuit board. The fuse is a 2 amp/250V, 5mm radial. A spare
fuse is located on the lower left portion of the printed circuit board
and is clearly marked “Spare Fuse”. If the fuse blows, always
determine and correct the reason it blew before installing the new
fuse.
ATTENTION
Never replace the fuse with the unit under power. When
replacing the fuse, make sur e it is of the proper rating.
!
AEC With GML Commander
IMPORTANT
The AEC can only be used with GML Commander version 4.01 or
higher. There are several steps that must be taken in GML Commander
before the AEC can be used within a GML Commander diagram. This
section outlines the necessary steps. For more detail about individual
steps, see the GML Commander Reference Manual (publication
number GMLC-5.2), the “Configuring Axis Use” chapter, “Defining
Feedback” section.
Before powering the AEC, make sure that it has been
properly installe d and configured according to the
instructions contained in this manual.
Adding AEC to your Commander Diagram
To add the AEC to your GML Commander diagrams go to GML
Commander and do the following:
1. Select the Configure menu option from the opening GML
Commander screen.
Publication 4100-UM052B-EN-P - October 2001
Page 41

2. Select Axis Use from the Configure pull-down menu.
3. Select the axis to configure for the AEC from the Axis Use
pull-down. The Configure Axis Use screen displays.
4. At the General screen, select the Axis Type.
5. Go to the Position Mode field select either rotary or linear.
6. Select the Feedback Tab from the Configure Axis Use screen.
7. Select AEC for the Transducer Type field.
8. Check the Transducer Loss Detection box.
Setting the Transducer Resolution
Setup 33
1. Enter the Transducer Resolution Conversion Constant.
2. Enter a value for the External Conversion Constant. (1394 series
only.)
3. Enter the value for the Unwind Constant (rotary axis only).
4. Enter the Unwind Reference (rotary axis only). This defines the
point where the Unwind returns at each cycle.
For more information about the above fields, see the GML
Commander Reference Manual (publication number GMLC-5.2).
Selecting Homing Procedure
The AEC only uses the Absolute Serial procedure for Homing the axis.
1. Select the Homing tab from the Configure Axis Use screen.
2. Select Absolute Serial from the pull down list of the Procedure
option box.
For more information on Homing procedures, refer to the GML
Commander Reference Manual (publication number GMLC-5.2), the
“Configuring Axis Use” chapter, “Defining Homing” section.
Publication 4100-UM052B-EN-P - October 2001
Page 42

34 Setup
ATTENTION
!
Aligning Absolute Encoder
Once the hardware is wired and the configuration steps have been
taken, it is important to align the Absolute Encoder. The alignment
process aligns the absolute device to the zero position of the axis, and
updates both the working and power-up home position values. It also
changes the Position setting in the Homing page of the Configure Axis
Use dialog box. This is done from the Hookups section of the
Configure Axis Use screen in GML Commander.
To align the devices:
1. Make sure all external components are connected.
When executing the Homing or Alignment procedure on
a servo axis, feedback is momentarily disabled and then
re-enabled (if the error checking fe atur es do not detect an
error) in the motion controller. If the axis has stored
energy or the ability to move during the time feedback is
disabled, you have to apply a breaking mechanism to the
axis before you execute the procedure.
2. Make sure All Configured Axis Use information is entered. (Refer
to previous steps in this chapter.)
3. Download the Configured Axis information.
4. Select the Hookups tab from the Configure Axis Use screen.
5. Click on the Align Absolute Device button.
6. In response to the Commander message box, move the axis to
its minimum travel position and click on OK.
7. The alignment procedure runs.
For more information about alignment, see the GML Commander
Reference Manual (publication number GMLC-5.2), the “Configuring
Axis Use” chapter, “Verifying Hookups” section.
Publication 4100-UM052B-EN-P - October 2001
Page 43

Operation
Chapter
4
Chapter Objectives
Absolute Position Update
This chapter provides an overview of how the AEC determines
position. This chapter covers the following topics:
•
Absolute Position Update
•
Incremental Position Output
•
Position at Start-up
Absolute position information can be requested from the transducer
via the AEC at any time. When the AEC interprets the strobe pulse
train to be an absolute update request from the controlling hardware,
it interrogates the transducer’s absolute position and incrementally
streams the position to the awaiting controller.
IMPORTANT
During an absolute position update, the quadrature
encoder output stream is always positive: A leads B. S ee
the Incremental Position Output section of this manual
for more details.
Incremental Position
Output
35 Publication 4100-UM052B-EN-P - October 2001
The AEC checks for the transducer position periodically. In the
Locked mode of operation, this process is triggered and synchronized
by the strobe input. In the Free-running mode of operation, the
th
position is sampled, calculated, and transmitted every 1/1000
second, based on the internal time of the AEC. The AEC compares the
newly sampled absolute position against the last. It calculates the
difference between the new and the old positions and transmits the
difference through the encoder port in an incremental fashion.
The position and direction information is encoded and sent using the
industry standard (A and B) channels in quadrature (90 degree
phasing). Each channel is driven differentially for improved noise
immunity. When moving in the positive direction, the phase of the
quadrature pulse train is A leading B. When moving in the negative
direction, the phase of the quadrature pulse train is B leading A. The
output frequency of both channels is fixed at 800kHz. One transducer
position count is represented by one edge transition (either positive or
negative) of the quadrature pulse train. This encoding scheme is
defined as 4X. Your position controller must support the 4X decode of
the AEC encoder output.
of a
Page 44

36 Operation
Position at Start-up
In locked mode, the AEC sends incremental position after receiving
incremental strobe pulses. The AEC, when configured for free-running
mode for controlling hardware other than the Compact or 1394, sends
the incremental position at start-up. In this mode, the AEC behaves
like an incremental encoder. Neither mode requires an absolute
update to begin transmitting positional information.
Publication 4100-UM052B-EN-P - October 2001
Page 45

Fault Indication & Control Status
Chapter
5
Chapter Objectives
This chapter covers the AEC operation status. Fault states are
separated into four basic categories:
•
Transducer
•
Encoder
•
Internal
•
No Fault
Faults can be attributed to:
•
Improper installation
•
Improper AEC switch configuration
•
Faulty hardware (i.e. broken cable)
•
Improper application
It is the responsibility of the user to make sure that the application is
safe. Understanding the capabilities of the AEC can help you achieve
this goal.
The AEC provides bicolor LED fault indication for each axis. The color
and pattern of these LEDs provide “at-a-glance” indication of the
status of each axis.
Although the AEC is equipped with a Reset button, it is not a
recommended form of fault resolution. If the non-offending axis is
running fine, pressing the reset button could result in a hazardous
situation.
ATTENTION
Pressing the Re set Button or Powering Off the AE C
results in both axes being reset. This can cause problems
if one axis is running in a no-faul t condition and either of
these procedures is followed to correct a fault on the
other axis.
!
37 Publication 4100-UM052B-EN-P - October 2001
Page 46

38 Fault Indication & Control Status
Transducer Faults
Transducer faults detected by the AEC are indicated by a flashing RED
LED for the offending axis. In a fault condition, the quadrature output
is inhibited and the fault relay is de-energized. The following table
displays a list of probable causes to investigate.
Transducer Faults
Transducer Faults and Causes
Fault Possible Cause
Configuration error Configuration switches are set to an
illegal combination.
SSI Line Break AEC detected loss of data signal. This is
the normal state for an unused SSI.
SSI Time-out Transducer position not received after
100ms.
Encoder Faults
Encoder faults are strobe cycle errors. The strobe is an input to the
AEC through the Encoder connector. When detected by the AEC, the
offending axis’s LED alternately flashes RED-GREEN. This causes the
quadrature output to default to free-running mode and the fault relay
is de-energized. The following table lists faults and possible causes
when Encoder faults are indicated.
Encoder Faults
Encoder Faults & Causes
Fault Possible Cause
Incremental Strobe Loss The AEC is in locked mode & stopped
receiving incremental strobe pulses.
Absolute Strobe Loss AEC did not receive the second
absolute strobe pulse in time.
Strobe Timing Violations Incremental or Absolute strobe
update timing has been violated.
In the case of an incremental strobe loss or move error, sending an
Absolute Home command may reset the fault.
Publication 4100-UM052B-EN-P - October 2001
Page 47

Fault Indication & Control Status 39
Internal Faults
Internal faults are internal hardware errors detected by the AEC. For
both axes, indication is solid RED, quadrature output is inhibited, and
the fault relay is de-energized. In the case of a Global Hardware fault,
where both LEDs are solid red, Call Allen-Bradley Technical Support.
No Faults
In this state, the AEC has detected no errors. The indication per axis is
either flashing or solid GREEN. FLASHING GREEN indicates that the
AEC has not yet detected a strobe. When configured for locked mode,
the AEC is waiting for either an absolute strobe cycle or incremental
strobe. When configured for free-running mode, the AEC is waiting
for an absolute strobe cycle. Regardless of the selected mode, the AEC
is operating in free-running mode. When the LEDs are SOLID GREEN,
the AEC has received a strobe and is operating in its program mode.
There is no fault action and the relay is energized.
Publication 4100-UM052B-EN-P - October 2001
Page 48

40 Fault Indication & Control Status
Publication 4100-UM052B-EN-P - October 2001
Page 49

AEC
Specifications
Appendix
A
Figure 13
AEC Front
Panel
Reset
Axis 0 Axis 1
AB
5
10
4
9
3
8
2
7
1
6
4
8
3
7
2
6
1
5
A
Axis 0
B
ConfigurationConfiguration
2
1
SSIControl
Figure A.1 shows the connector locations for the AEC. The following
tables provide the pin numbers and their respective descriptions.
SSI Connector
Plug A Plug B
10 = Clock + 5 = Clock -
9 = Data + 4 = Data -
8 = Shield 3 = Transducer Power +5V DC
7 = Transducer Power Return 2 = Transducer Power +15V DC
6 = Shield 1 = Transducer Power +24V DC
Control Connector
Plug A Plug B
8 = Reference + 4 = Reference -
7 = N/O Fault Relay Contact 3 = N/O Fault Relay Contact
6 = N/C Fault Relay Contact 2 = N/C Fault Relay Contact
5 = Shield 1 = Shield
Encoder Connector
Plug A Plug B
12 = Z - 6 = Z + (Blue)
11 = B - 5 = B + (Green)
10 = A - 4 = A + (White)
9 = Strobe - 3 = No Connection
8 = Reference Shield Input 2 = Strobe +
A
B
Axis 1
8
7
6
5
10
9
8
7
6
AB
Encoder EncoderPower
4
3
2
1
5
4
3
2
1
Switches Switches
SSI Control
7 = Reference - Input 1 = Reference + Input
AEC
41 Publication 4100-UM052B-EN-P - October 2001
Page 50

42 Specifications
Power Connector
2 = Supply +
1 = Supply -
Mechanical Specifications
Specification Description
Enclosure Type Steel case with integral mounting tabs
Enclosure Size 295 x 343 x 43 mm (11.6 x 13.5 x 1.7 in)
Environmental Specification
Specification Description
Operating Temperature 0 to 60 o C
o
Storage Temperature -40 to 85
C
Humidity 95% non condensing @ 60
Supported Devices
Manufacturer Model
Allen-Bradley All series 842A Encoders
Stegmann: AG661, AG626
Heidenhain: ROC424 & 417
BEI: MT40 Multi-Turn,
BEI RAS25 Single Turn
Temposonics III: Model PA and Model RH
IVO: GM 400, GM 401
o
C
Publication 4100-UM052B-EN-P - October 2001
Page 51

Specification Description
Number of Axes 2
Specifications 43
Module Specifications
Transducer Resolution
Counts/Turn
Number of Turns
Transducer Interface
Protocol
Acquisition Frequency
Data Format
Line Driver (Clock)
Line Receiver (Data)
Minimum Data Voltage
Maximum Rate of Position Change
(Delta Count)
Input
Isolation
Voltage Range
Power
Fuse
Transducer Output Power
Isolation
Voltage
Current
7
- 218 and 221 - 225
2
25
1 - 2
except 219, 220, 223
SSI
400 kHz
Binary or Gray Code
RS-422 (IC 26LS31)
RS-422 (IC 26LS33)
+/- 3.0V measured from Data+ to
DataMust be lesser of:
1/2 (Counts/Turn) per 1/1000
th
second
or
2048 counts per 1/1000
th
second
Chassis Common
18 to 36 V
21 Watts maximum
2 A/250V, 5mm Radial
Wickmann # 19372-057-K, ABLeb.#
515-038
Chassis Common
5, or 15, or 24V DC
300mA maximum
Fault Contact Outputs
Ty pe
Isolation
Coil-Contact
Open Contact
Rating
AC
DC
Encoder Ouputs
Channel Frequency
Driver Type
Strobe Inputs:
Type
Source Impedance
Maximum active Voltage
Minimum Inactive Voltage
NO/NC contact set per axis
1000V AC
750 V AC
AC/DC
125V AC @ 10mA - 0.6A
110V DC @ 10mA - 0.6A
30V DC @ 10mA - 2.0A
4X quadrature encoding
800kHz fixed (3.2 Meg cnts/sec)
RS-422 (IC26LS31)
Current Sourcing Active Low
10k Ohm
0.6V DC
2.2V DC
Publication 4100-UM052B-EN-P - October 2001
Page 52

44 Specifications
Equivalent Circuit Diagrams
Encoder
The following diagrams detail the equivalent circuits for the Strobe
Input, Transducer Data Input, the SSI Clock Output, and the Encoder
Output.
Figure 14 Strobe Input Equivalent Circuit
+5V DC
22 k
Strobe +
Strobe -
2
SN74F14
9
Figure 15 Transducer Data Input Equivalent Circuit
Data+
9
SSI 500* Ω
Data -
4
*Impedance includes loss detection circuit
Figure 16 SSI Clock Output Equivalent Circuit
DS26LS31CN
Clock
220 Ω
k Ω
kΩ
µ F
180pF
180pF
10
5
+
-
SSI
Data
Publication 4100-UM052B-EN-P - October 2001
Page 53

QUAD A
QUAD B
Figure 17 Encoder Output Equivalent Circuit
DS26LS31CN
DS26LS31CN
Encoder
10
5
10
Specifications 45
5
DS26LS31CN
Z
IMPORTANT
Do not wire to the Z signals. The Z channel is not
supported at this time. Allen-Bradley reser ves the right to
10
5
use this signal for futur e purposes.
Publication 4100-UM052B-EN-P - October 2001
Page 54

46 Specifications
Publication 4100-UM052B-EN-P - October 2001
Page 55

Appendix
B
Strobe Position For Applications Not Using the 1394 or Compact
Absolute Strobe Cycle
When the AEC is connected to controlling hardware other than the
1394 or Compact, the setup must be capable of generating Absolute
Strobe pulses as outlined in this appendix. An Absolute Strobe cycle
is required to obtain the absolute position from the transducer.
The absolute position is transmitted to the controller as a stream of
incremental quadrature pulses on the rising edge of an Absolute
Strobe pulse. The absolute position is transmitted in a two strobe
pulse train sequence. This lets the controller determine the position
of the controlled hardware.
The phase of the encoder output pulses for an absolute strobe is
always positive as defined by A leading B. The absolute position is
transmitted with a sequence of two encoder pulse streams. With the
first absolute strobe (Strobe 1), the lower 16 bits of the transducer
position is transmitted. On the second absolute strobe (Strobe 2), the
9 most significant bits of the transducer position is transmitted (9 bits
of actual data transmitted since only 25 bits are supported). After
completing an absolute update cycle, the position can be calculated
by summing the least significant count with the most significant count
multiplied by 65536 (2
counts which can be transmitted is 33554431
25
- 1).
(2
16
). The total maximum number of transducer
IMPORTANT
ATTENTION
!
47 Publication 4100-UM052B-EN-P - October 2001
Regardless of the n umber of transduc er bit s, two abso lute
strobe pulses must be sent to the AEC to complete an
absolute position update.
Issuing an Absolute Strobe causes the AEC to stream
position inf ormation from the transducer. During this
time, if servo action is enabled by the controlling
hardware, m otion can occur. Place your system in a safe
state and disable servo action before performing an
Absolute position update.
Page 56

48 Strobe Position For Applications Not Using the 1394 or Compact
Absolute Strobe Timing
This section defines the timing requirements for the two-strobe pulse
train required for absolute position updates. The AEC must receive
two strobe pulses to initiate and complete an absolute position update
transfer. These are referred to as Ts1 and Ts2 in the data transfer
protocol diagram. The following diagram and table outline the
parametric requirements for an absolute position update cycle.
Figure 18 Absolute Position Transfer Protocol
Absolute Position Transfer Timing
Parameter Locked Mode Free-Running Mode
Min Max Min Max
Tabs (absolute update cycle) = (Ts1s2 + Ts2 + Ts2hpe) 3001ms
Ts1 (Strobe1 active pulse width) 100ms 1000ms 100ms 1000ms
Ts2 (Strobe2 active pulse width) 5ms 1000ms 5ms 1000ms
Ts1s2 (time from Strobe1 inactive to strobe2 active) Ts1+Ts1hpe+2 2000ms Ts1+Ts1hpe+2 2000ms
Tph (time from Strobe1 inactive edge to encoder state hold) 30ms 30ms
Ts1hpe (time from Strobe1 inactive to end of encoder stream) 0 25ms 0 25ms
Ts2hpe (time from Strobe2 inactive to end of encoder stream) 0 1ms 0 1ms
Tpei (*time from MSW pulse train end to incremental updating) 0 indefinite N/A N/A
Thold N/A N/A 500ms 500ms
*Operation mode dependent: Locked or Free-Running
An absolute position request is an asynchronous event initiated by
the controlling hardware. The first strobe starts the absolute position
update cycle. The first strobe (Ts1) must be active for a minimum of
100ms, but for less than 1000ms to be valid. A strobe is sourcing
Publication 4100-UM052B-EN-P - October 2001
Page 57

Strobe Position For Applications Not Using the 1394 or Compact 49
input on the AEC. Internally the AEC, holds it high when inactive and
to activate, it must be connected and pulled low. Within 30ms (tph)
of the strobe going active, the encoder output A and B signals are
held at their current state (any incremental updating is prohibited).
On Ts1 going inactive, the lower 16 bits of the absolute position is
transmitted. Anywhere from 0 to 65535 counts can be transmitted. It
can take up to 25ms (Ts1hpe) to transmit the least significant word
(LSW) of the transducer position. After the LSW has been transmitted,
the second strobe (Ts1s2) is brought active.
When the second strobe goes inactive (ts2), it triggers the
transmission of the most significant word (MSW). Anywhere from 0 to
511 counts can be transmitted. This completes an absolute position
update cycle. Once the MSW has been sent(Tpei), the AEC begins
sending incremental changes (Free-Running) or the Encoder output
remains inactive as the AEC waits for an incremental strobe pulse
(Locked).
Incremental Strobe Period
Strobe
Quadrature
Pulse T rain
When using controlling hardware other than the 1394 or Compact, it is
recommended that you set the Configuration Switch B for Free Run
operation (see Chapter 3, Setup). In this mode position, changes from
th
the transducer are sent every 1/1000
second by the AEC via the
encoder port (see Chapter 4, Operation at Startup). If synchronization
of incremental position updates is required by your application, the
controller hardware must be capable of generating periodic strobe
pulses as described in this section. The following diagram and table
outline the parametric requirements for an incremental strobe period.
Figure 19 Incremental Strobe Period Protocol
Tinc
Ts1
Ts1s1
Ts1pe
Position Increment
Delta Counts
Publication 4100-UM052B-EN-P - October 2001
Page 58

50 Strobe Position For Applications Not Using the 1394 or Compact
Incremental Strobe Timing Period
Parameter Min Max
Tinc (Incremental strobe period = Ts1 + Ts1s1) 1ms 60ms
Ts1 (Strobe1 active pulse width) 0.005ms 10ms
Ts1s1 (Time from Strobe inactive to next active strobe) Ts1pe 30000 - Ts1
Ts1pe (Time from Strobe inactive edge to end of position increments) *Maximum Delta Count
* Position increment must not exceed the maximum Delta Count rate during Ts1s1.
The count rate is equal to the encoder channel frequency times four (4X encode).
The Strobe (Ts1) must be active for a minimum of 5µs, but less than
5ms to be a valid incremental strobe. When the strobe goes inactive,
the AEC interrogates the transducer position and sends any
incremental change from the previous sample. The time (Ts1pe) to
transmit the incremental position is dependent on the size of the
position increment. The position increment must not exceed the
maximum delta count allowed between consecutive incremental
strobe pulses (Tinc). The period (Tinc) of the strobe must be greater
than 1ms, but less than 10ms. This period is constrained by the
incremental strobe active time (Ts1) and the time to send the position
(Ts1pe).
Publication 4100-UM052B-EN-P - October 2001
Page 59

Index
A
Absolute Position Update,
Absolute Strobe Cycle,
Absolute Strobe Timing,
AEC Product Receiving and Storage Responsibility
Allen-Bradley Support
35
47
48
5
C
CE requirements,
Common Techniques Used in this Manual
Configuration
GML Commander
Adding to a Commander Diagram, 32
Aligning Absolute Encoder, 34
Selecting Homing Procedure, 33
Setting the Transducer Resolution, 33
Configuration Switch Tables
Connecting the AEC
to the 1394,
to the 1756-MO2AE,
to the Compact,
Contents of this Manua
12
4
30
16
19
17
3
D
Definitions
encoder,
transducer,
Description,
4
4
7
E
European Union Directives
EMC Directive,
12
F
Fault Indication
Encoder Faults,
Internal Faults,
No Faults,
Transducer Faults,
Features,
Fuse,
8
32
38
39
39
38
I
Incremental Position Output,
Incremental Strobe Period,
35
49
5
M
Mounting the AEC
next to a 1394,
next to a Compact,
14
15
P
Pin Functions
Control Connector,
Power Supply,
SSI Connector,
Pin Numbering
Control Connector,
Power Supply,
SSI Connector,
Position at Start-up,
Powering the AEC,
Purpose of this Manual
26
28
22
26
28
23
36
34
1
R
Read This Manual
Related Documentation
Rotary Switches
Setting,
Switch A,
Switch B,
1
3
29
30
31
S
Safety Precautions
Specifications
Connector Locations
Control, 41
Encoder, 41
Power, 42
SSI, 41
Environmental,
Mechanical,
Mechanical,
Module,
Package,
Pin Numbers,
Strobe Position
Absolute Position Transfer Protocol,
Incremental Strobe Period Protocol,
Incremental Strobe Timing Period,
Support
Allen-Bradley,
2
42
42
43
9
41
5
48
49
50
Publication 4100-UM052B-EN-P - October 2001
Page 60

52
local product,
technical product assistance,
support
On the Web
5
6
T
Terminology
4
6
W
Who Should Use this Manual
Wiring
Cable Flying Leads,
Control Connector
Analog Servo, 26
Fault Relay 24
Power Supply,
SSI Connector,
World Wide Web site
21
27
22
6
1
Publication 4100-UM052B-EN-P - October 2001
Page 61

For more information refer to our web site: www.ab.com/motion
Publication 4100-UM052B-EN-P – October 2001 PN 999-129
Supersedes Publi cation 4100-5.2 – March 2000 © 2001 Rockwell Automation Corporati on. All rights reserved. Printed in USA.
 Loading...
Loading...