

Page 1
LPM15
Liquid-Cooled
Adjustable Frequency
AC Drive
FRN 2.xxx
User Manual
Page 2
Important User Information
Solid state equipment has operational characteristics differing from those of
electromechanical equipment. Safety Guidelines for the Application,
Installation and Maintenance of Solid State Controls (Publication SGI-1.1
available from your local Rockwell Automation sales office or online at http://
www.rockwellautomation.com/literature) describes some important differences
between solid state equipment and hard-wired electromechanical devices.
Because of this difference, and also because of the wide variety of uses for solid
state equipment, all persons responsible for applying this equipment must
satisfy themselves that each intended application of this equipment is
acceptable.
In no event will Rockwell Automation, Inc. be responsible or liable for indirect
or consequential damages resulting from the use or application of this
equipment.
The examples and diagrams in this manual are included solely for illustrative
purposes. Because of the many variables and requirements associated with any
particular installation, Rockwell Automation, Inc. cannot assume responsibility
or liability for actual use based on the examples and diagrams.
No patent liability is assumed by Rockwell Automation, Inc. with respect to use
of information, circuits, equipment, or software described in this manual.
Reproduction of the contents of this manual, in whole or in part, without
written permission of Rockwell Automation, Inc. is prohibited.
Throughout this manual, when necessary we use notes to make you aware of
safety considerations.
WARNING: Identifies information about practices or
circumstances that can cause an explosion in a hazardous
!
environment, which may lead to personal injury or death, property
damage, or economic loss.
Important: Identifies information that is critical for successful application and
understanding of the product.
ATT E NT I ON : Identifies information about practices or
circumstances that can lead to personal injury or death, property
!
damage, or economic loss. Attentions help you identify a hazard,
avoid the hazard, and recognize the consequences.
Shock Hazard labels may be located on or inside the equipment
(e.g., drive or motor) to alert people that dangerous voltage may be
present.
Burn Hazard labels may be located on or inside the equipment
(e.g., drive or motor) to alert people that surfaces may be at
dangerous temperatures.
Allen-Bradley, PLC, DriveExplorer, DriveExecutive, and SCANport are either registered trademarks or trademarks of
Rockwell Automation, Inc.
Page 3
Summary of Changes
The information below summarizes the changes made to this manual since
its last release (September 2005):
Description of Changes Page
Since the LPM15 drive has no encoder feedback option, removed all encoder
information and references.
Changed Table 4.F columns and information, and deleted Table 4.G and Table 4.H. 4-16
The information below summarizes the changes made to this manual since
its last release (January 2005):
Description of Changes Page
Added CE Low Voltage Directive instructions in the new “CE Conformity” section. 1-30
Throughout
Manual
Page 4
soc-ii
Page 5

Preface Overview
Who Should Use this Manual? . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . P-1
Reference Materials . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . P-1
Manual Conventions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . P-2
General Precautions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . P-2
Catalog Number Explanation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . P-4
Chapter 1 Installation/Wiring
Power Ratings . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1-1
Enclosure Ratings . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1-2
B-Frame LPM15 Drive Component Locations. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1-2
C-Frame LPM15 Drive Component Locations. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1-4
D-Frame LPM15 Drive Component Locations. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1-6
AC Supply Source Considerations . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1-12
Fuses and Circuit Breakers . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1-13
Mounting the Drive, Determining Wire Routing, and Grounding . . . . . . . . . . . . . . . . . 1-13
Coolant Considerations . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1-16
Installing Input Power Wiring . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1-19
Installing Output Power Wiring . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1-22
Power Wiring. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1-23
Using Input/Output Contactors . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1-24
I/O Wiring . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1-24
Reference Control . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1-28
Auto/Manual Examples. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1-29
CE Compliance . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1-30
Table of Contents
Chapter 2 Start Up
Prepare For Drive Start-Up . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-1
Status Indicators . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-2
Start-Up Routines . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-3
Running S.M.A.R.T. Start. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-4
Running an Assisted Start Up . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-4
Chapter 3 Programming and Parameters
About Parameters . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-1
How Parameters are Organized . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-2
Monitor File . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-6
Motor Control File . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-7
Speed Command File . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-10
Dynamic Control File . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-15
Utility File . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-19
Communication File . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-25
Inputs & Outputs File . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-28
Parameter Cross Reference – by Name . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-32
Parameter Cross Reference – by Number . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-33
Page 6

ii Table of Contents
Chapter 4 Troubleshooting
Faults and Alarms . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-1
Drive Status . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-2
Manually Clearing Faults . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-3
Fault Descriptions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-3
Clearing Alarms . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-6
Alarm Descriptions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-6
Common Symptoms and Corrective Actions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-8
Testpoint Codes and Functions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-10
Test Equipment Needed To Troubleshoot . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-11
Verifying That DC Bus Capacitors Are Discharged . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-11
Checking the Power Modules with Input Power Off. . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-15
Replacement Parts . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-16
Appendix A Supplemental Drive Information
Specifications. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . A-1
Communication Configurations. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . A-3
Appendix B Technical Specifications
Appendix C HIM Overview
Remote HIM Connection. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . C-1
LCD Display Elements . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . C-2
ALT Functions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . C-2
Menu Structure . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . C-3
Viewing and Editing Parameters . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . C-5
Removing/Installing the HIM . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . C-6
Appendix D Application Notes
Minimum Speed. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . D-1
Motor Control Technology . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . D-1
Motor Overload . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . D-2
Overspeed . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . D-4
Power Loss Ride Through . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . D-4
Process PI . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . D-6
Reverse Speed Limit . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . D-8
Skip Frequency . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . D-9
Sleep Wake Mode . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . D-10
Start At PowerUp. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . D-11
Stop Mode . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . D-12
Voltage Tolerance. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . D-14
Page 7

Appendix E B-Frame LPM15 Drive Wiring Diagram
Appendix F C-Frame LPM15 Drive Wiring Diagram
Appendix G D-Frame LPM15 Drive Wiring Diagram
Index
Table of Contents iii
Page 8

iv Table of Contents
Page 9
Preface
Overview
The purpose of this manual is to provide you with the basic information
needed to install, start-up, and troubleshoot the LPM15 Liquid-Cooled
Adjustable Frequency AC Drive.
For information on… See page…
Who Should Use this Manual?
Reference Materials P-1
Manual Conventions P-2
General Precautions P-2
Catalog Number Explanation P-4
P-1
Who Should Use this
Manual?
Reference Materials
This manual is intended for qualified personnel. You must be able to
program and operate Adjustable Frequency AC Drive devices. In addition,
you must have an understanding of the parameter settings and functions.
The User Manual is designed to provide only basic start-up information.
The following manuals are recommended for general drive information:
Title Publication
Wiring and Grounding Guidelines for Pulse Width Modulated (PWM) AC Drives DRIVES-IN001…
Preventive Maintenance of Industrial Control and Drive System Equipment DRIVES-TD001…
Safety Guidelines for the Application, Installation and Maintenance of Solid State
Control
A Global Reference Guide for Reading Schematic Diagrams 0100-2.10
Guarding Against Electrostatic Damage 8000-4.5.2
Publications can be obtained at
http://www.rockwellautomation.com/literature
.
SGI-1.1
Page 10
P-2 Overview
Manual Conventions
General Precautions
• In this manual we refer to the LPM15 Adjustable Frequency AC Drive
as; drive, LPM15 or LPM15 Drive.
• To help differentiate parameter names and LCD display text from other
text, the following conventions will be used:
– Parameter Names will appear in [brackets].
For example: [DC Bus Voltage].
– Display Text will appear in “quotes.” For example: “Enabled.”
• The following words are used throughout the manual to describe an
action:
Word Me aning
Can Possible, able to do something
Cannot Not possible, not able to do something
May Permitted, allowed
Must Unavoidable, you must do this
Shall Required and necessary
Should Recommended
Should Not Not recommended
ATTENTION: This drive contains ESD (Electrostatic
!
Discharge) sensitive parts and assemblies. Static control
precautions are required when installing, testing, servicing or
repairing this assembly. Component damage may result if ESD
control procedures are not followed. If you are not familiar with
static control procedures, refer to Allen-Bradley publication
8000-4.5.2, “Guarding Against Electrostatic Damage” or any
other applicable ESD protection handbook.
ATTENTION: An incorrectly applied or installed drive can
!
!
!
result in component damage or a reduction in product life.
Wiring or application errors, such as, undersizing the motor,
incorrect or inadequate AC supply, or excessive ambient
temperatures may result in malfunction of the system.
ATTENTION: Only qualified personnel familiar with
adjustable frequency AC drives and associated machinery
should plan or implement the installation, start-up, and
subsequent maintenance of the system. Failure to comply may
result in personal injury and/or equipment damage.
ATTENTION: To avoid an electric shock hazard, verify that
the voltage on the bus capacitors has discharged before
performing any work on the drive. After removing power to the
drive, wait 5 minutes for the bus capacitors to discharge.
Measure the DC bus voltage at the locations shown in
Figure 4.2
, Figure 4.3 or Figure 4.4. The voltage must be zero.
Page 11
Overview P-3
ATTENTION: Risk of injury or equipment damage exists.
!
!
DPI or SCANport host products must not be directly connected
together via 1202 cables. Unpredictable behavior can result if
two or more devices are connected in this manner.
ATTENTION: The “adjust freq” portion of the bus regulator
function is extremely useful for preventing nuisance overvoltage
faults resulting from aggressive decelerations, overhauling
loads, and eccentric loads. It forces the output frequency to be
greater than commanded frequency while the drive's bus voltage
is increasing towards levels that would otherwise cause a fault.
However, it can also cause either of the following two
conditions to occur.
1. Fast positive changes in input voltage (more than a 10%
increase within 6 minutes) can cause uncommanded positive
speed changes. However an “OverSpeed Limit” fault will
occur if the speed reaches [Max Speed] + [Overspeed Limit].
If this condition is unacceptable, action should be taken to 1)
limit supply voltages within the specification of the drive
and, 2) limit fast positive input voltage changes to less than
10%. Without taking such actions, if this operation is
unacceptable, the “adjust freq” portion of the bus regulator
function must be disabled (see parameters 161 and 162).
2. Actual deceleration times can be longer than commanded
deceleration times. However, a “Decel Inhibit” fault is
generated if the drive stops decelerating altogether. If this
condition is unacceptable, the “adjust freq” portion of the
bus regulator must be disabled (see parameters 161 and 162).
In addition, installing a properly sized dynamic brake
resistor will provide equal or better performance in most
cases.
Important: These faults are not instantaneous. Test results
have shown that they can take between 2-12
seconds to occur.
Page 12
P-4 Overview
Catalog Number Explanation
The LPM15 catalog numbering scheme is shown below.
I / O Cat. Code
24V DC A
120V AC B
I / O & FEEDBACK
RATING Cat. Code
Not Filtered N
EMISSION CLASS
NO I / O N
C NET-COAX C
DeviceNET D
RIO R
VERSION Cat. Code
COM SLOT 1
RS485, DF-1 S
C NET-FIBER Q
RS485 HVAC H
PROFIBUS DPV1 P
BRAKING DEVICE Cat. Code
BRAKING DEVICE
INTERBUS I
LONWORKS L
ETHERNET E
N/A N
TYPE Cat. Code
DOCUMENTATION
User Man. A
N
NEMA IP Type Cat.Code
ENCLOSURE AND PACKAGING
Open
Chassis
No Manual N
BRAKE IGBT Cat. Code
BRAKE IGBT
No N
No N
LPM15 PRODUCT CATALOG NUMBER EXPLANATION
Voltage + Current selects PWR Parts,
Cat.
Code
Version
SA / CB
sets frame size w/ emission type
RATING
414 414 350
500 500 450
643 643 600
AMPS Cat. Code HP (REF.)
OUTPUT CURRENT @ 480 VAC IN
1200 1K2 1000
12345678910111213141516
20MD NNA NNN 0
Product Cat. Code
PRODUCT
LPM15 20M
CONTROL/FLASH PARTS-
1. Drawing, SW Build
2. SW Build & Flash
3. Control Board Ass'y
VERSION & VOLTAGE RATING
Voltage Phase
480 VAC 3 PH. SA D
Stand Alone ONLY (SA)
Page 13
Chapter 1
Installation/Wiring
This chapter provides information on mounting and wiring the LPM15 Drive.
For information on… See page…
Powe r R at in gs
Enclosure Ratings 1-2
B-Frame LPM15 Drive Component Locations 1-2
C-Frame LPM15 Drive Component Locations 1-4
D-Frame LPM15 Drive Component Locations 1-6
AC Supply Source Considerations 1-12
Fuses and Circuit Breakers 1-13
Mounting the Drive, Determining Wire Routing, and Grounding 1-13
Coolant Considerations 1-16
Installing Input Power Wiring 1-19
Installing Output Power Wiring 1-22
Powe r W ir ing 1-23
Using Input/Output Contactors 1-24
I/O Wiring 1-24
Reference Control 1-28
Auto/Manual Examples 1-29
CE Compliance 1-30
1-1
Most start-up difficulties are the result of incorrect wiring. Every precaution
must be taken to assure that the wiring is done as instructed. All items must
be read and understood before the actual installation begins.
ATTENTION: The following information is merely a guide
!
for proper installation. The Allen-Bradley Company cannot
assume responsibility for the compliance or the noncompliance
to any code, national, local or otherwise for the proper
installation of this drive or associated equipment. A hazard of
personal injury and/or equipment damage exists if codes are
ignored during installation.
Power Ratings
Catalog Number
(positions 1-7 only)
20MD414 B-Frame 344 414 414 350 4600/1100
20MD500 C-Frame 398 500 500 450 5500/1500
20MD643 C-Frame 512 643 643 600 7000/2000
20MD1K2 D-Frame 956 1200 1200 1000 11700/4000
(1)
110% output current capability for one minute, 150% output current capability for 5 seconds.
(2)
Note that LPM15 drives are rated for use with water at specified temperatures and pressures as the coolant. Some coolant fluids may allow an increased output rating
while others may require the output to be derated. LPM15 drives are also capable of running at 3 kHz or 4 kHz at reduced output.
Frame Size
LPM15 Drives have power ratings as described in Tabl e 1.A below:
Table 1.A Power Ratings
Input
Power (KVA)
Input
Current (Amps)
(1)
Output Current
at 2 kHz
(2)
(Amps)
HP Ratings
Full Load Power Loss Watts
Fluid/Air
Page 14
1-2 Installation/Wiring
Enclosure Ratings
B-Frame LPM15 Drive Component Locations
LPM15 drives have the following enclosure rating:
• Open-Chassis Style: Intended to be installed in an enclosure.
LPM15 drives must be placed in an enclosure.
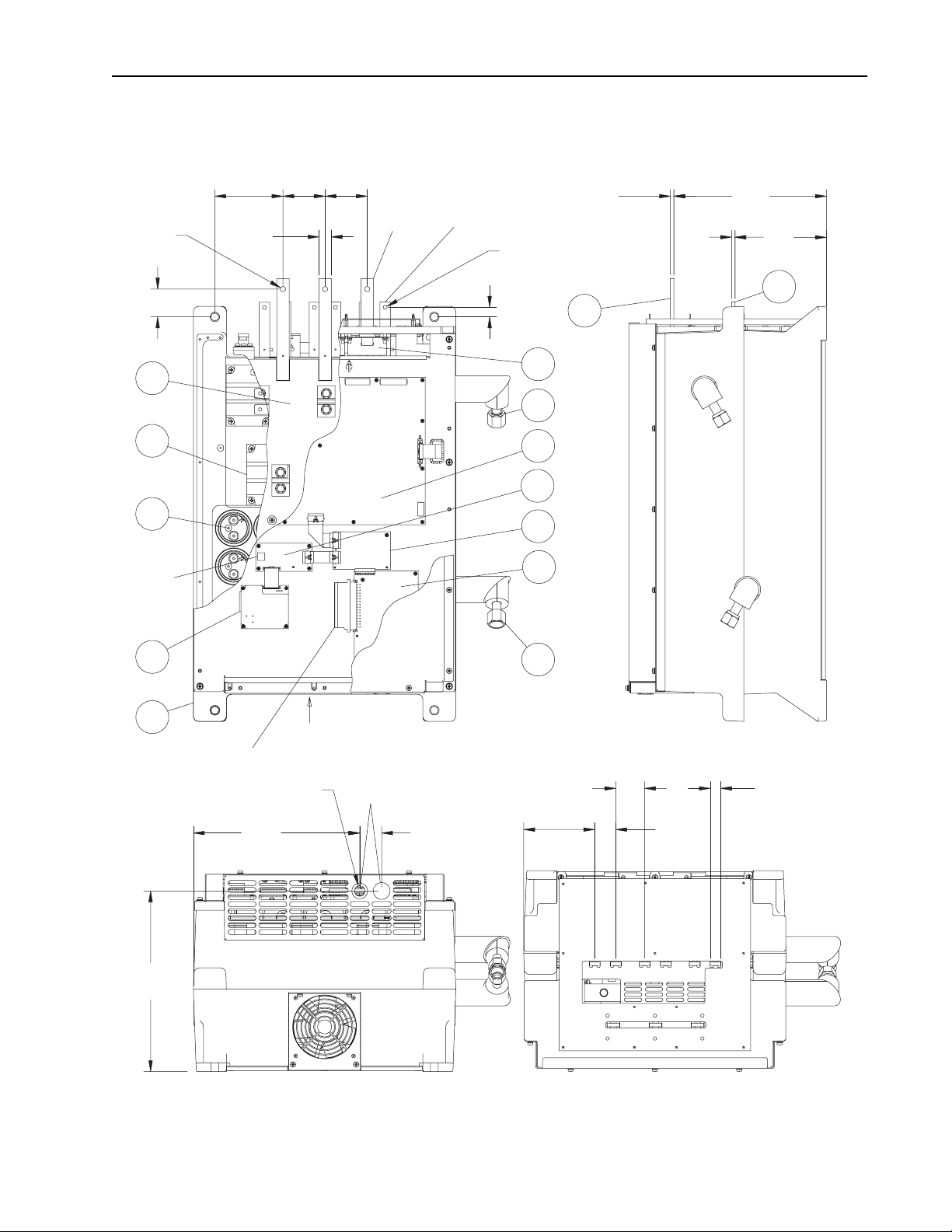
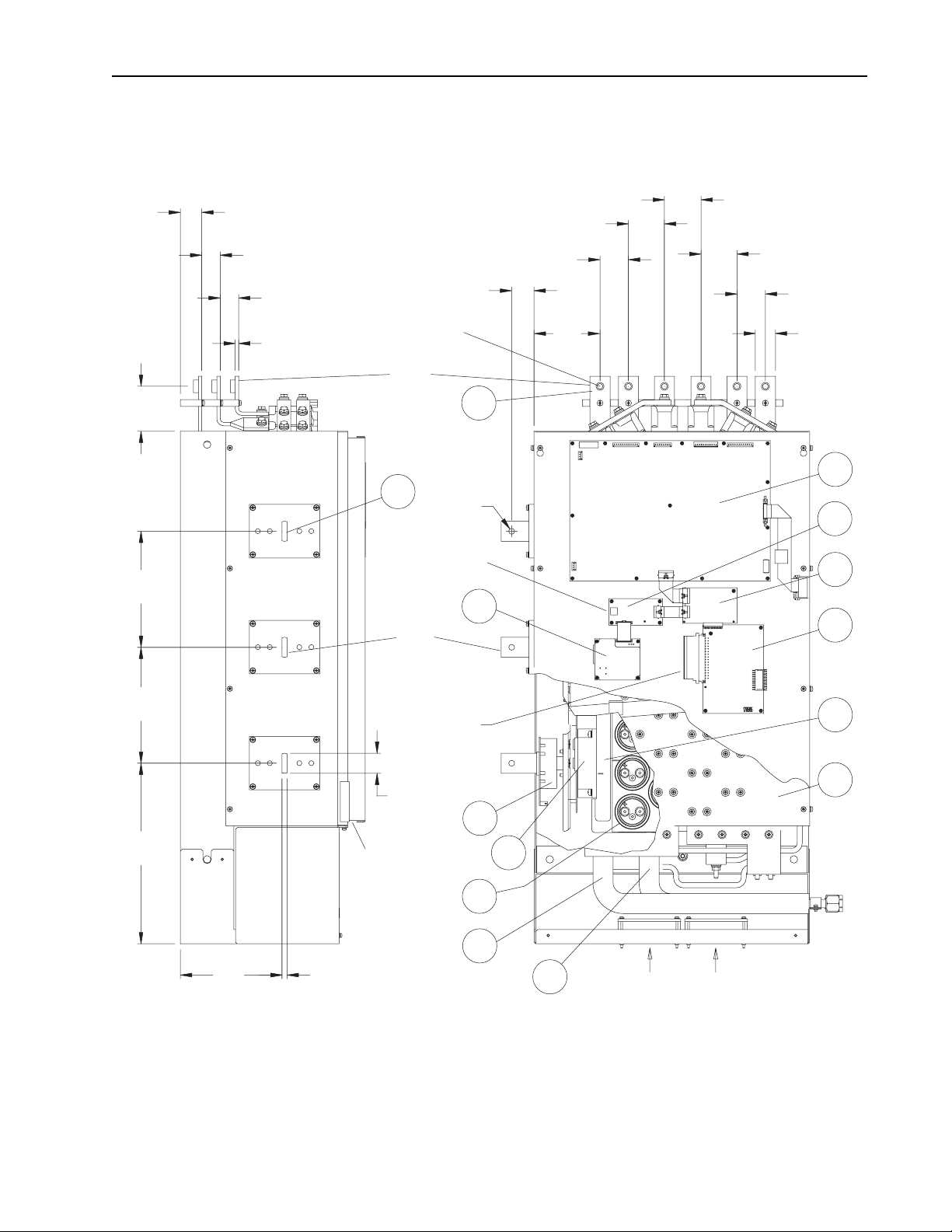
The B-Frame LPM15 drives have the following main components. The
numbered items listed below correspond to the numbers used in Figure 1.1
Replacement parts are listed in Chapter
1. AC Input Bus Bars (6)
2. AC Output Bus Bars (6)
3. IGBT Modules
4. Output Laminated Bus
5. Capacitors
6. Chassis (Heatsink)
7. Inlet Coolant Connection
8. Outlet Coolant Connection
9. Power Interface Control (PIC) PCB
10. Inverter Control PCB
11. Communication Interface PCB
12. Standard I/O PCB (Optional)
13. Communication Board (Optional)
14. Current Feedback Devices (3)
4.
.
Page 15
Installation/Wiring 1-3
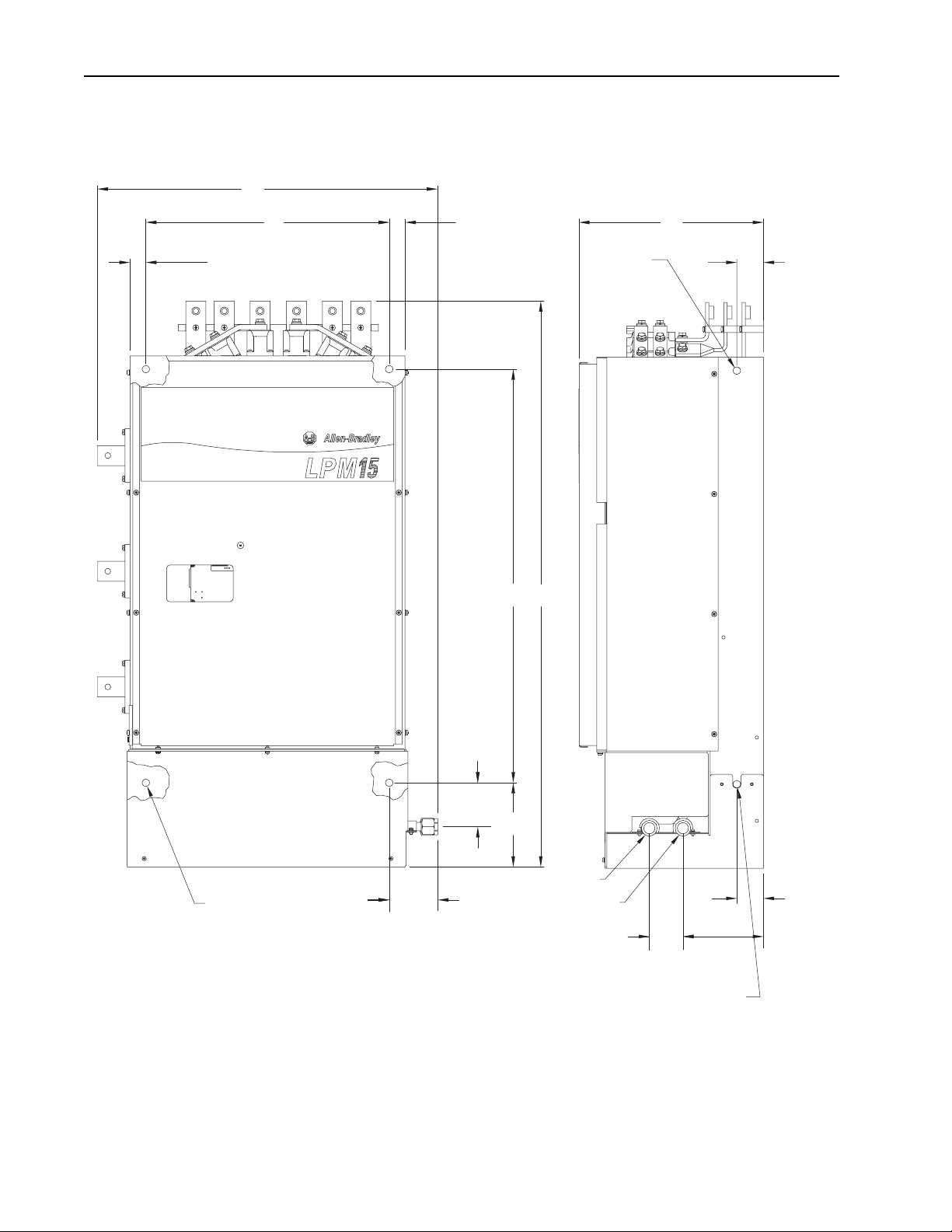
Figure 1.1 B-Frame LPM15 Drive Component, Wiring, Mounting and
Coolant Locations
Ø9.5
[Ø0.37]
(3) Pl.
50.4
[1.98]
4
3
5
DPI
Comm.
Port
123.1
[4.85]
22.2
[0.88]
(3) Pl.
76.2
[3.00]
UV
76.2
[3.00]
Drive
Output
Wiring
(3) Pl.
W
Drive
Input
Wiring
(6) Pl.
Ø7.1
[Ø0.28]
(6) Pl.
17.4
[0.69]
(6) Pl.
14
8
9
11
10
12
6.4
[0.25]
(3) Pl.
2
6.4
[0.25]
(6) Pl.
275.5
[10.85]
165.0
[6.50]
1
13
6
User Connections
326.6
[12.8
300.8
[11.84]
Air Flow
Ø19.1
[Ø0.75]
Typ.
User Control
Wiring Openings
39.7
[1.56]
Dimensions in millimeters and [inches]
7
52.3
[2.06]
(2) Pl.
128.3
[5.05]
L1 L4 L2 L5 L3 L6
19.1
[0.75]
(6) Pl.
38.1
[1.50]
(3) Pl.
TOP VIEW
Page 16
1-4 Installation/Wiring
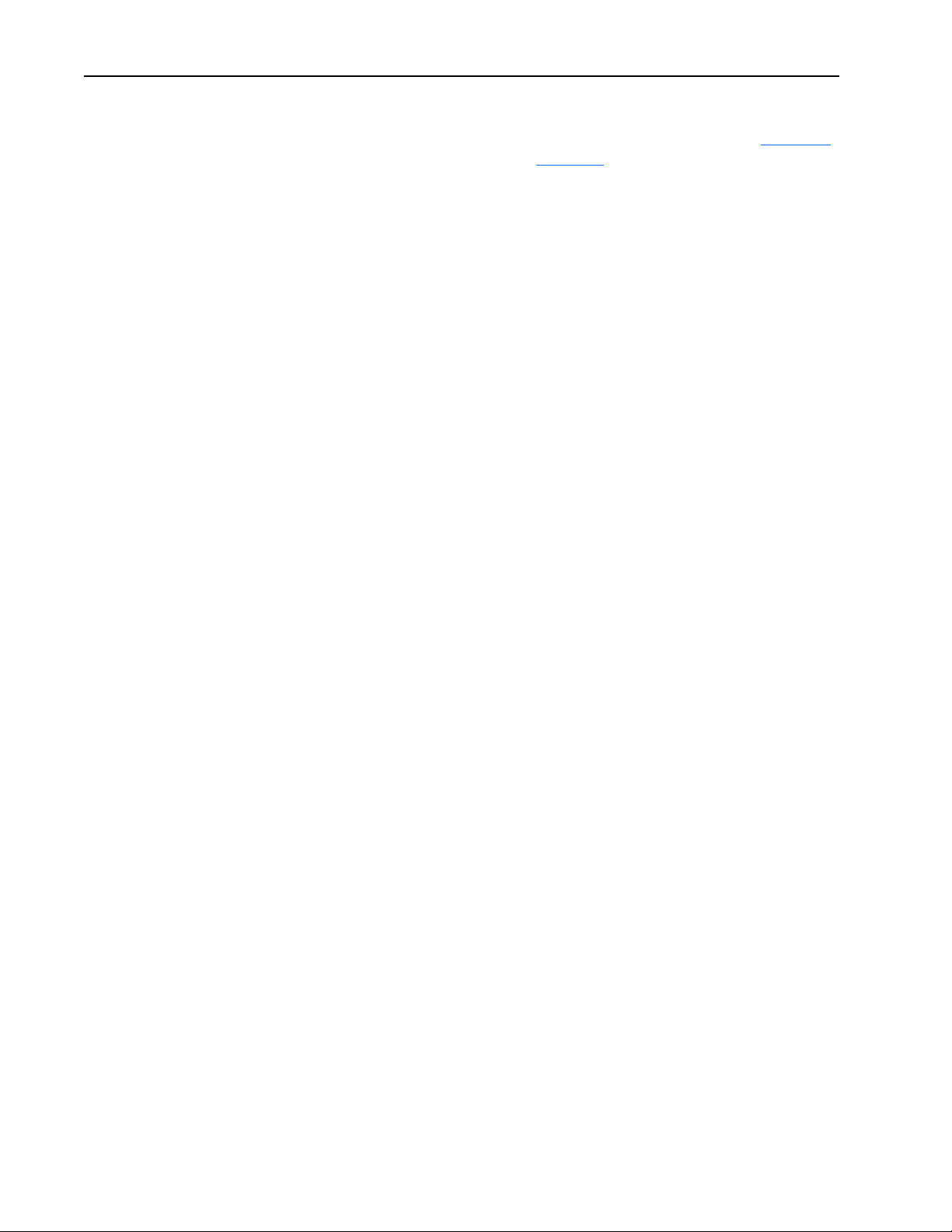
C-Frame LPM15 Drive Component Locations
The C-Frame LPM15 drives have the following main components. The
numbered items listed below correspond to the numbers used in Figure 1.2
Replacement parts are listed in Chapter
1. AC Input Bus Bars (6)
2. AC Output Bus Bars (3)
3. SCR Bridge (AC to DC Converter)
4. Laminated Assembly
5. Capacitors
6. Heatsink
7. Inlet Coolant Connection
8. Outlet Coolant Connection
9. Power Interface Control (PIC) PCB
10. Inverter Control PCB
11. Communication Interface PCB
12. Standard I/O PCB (Optional)
13. Communication Board (Optional)
14. Current Feedback Devices (3)
4.
.
Page 17
Installation/Wiring 1-5
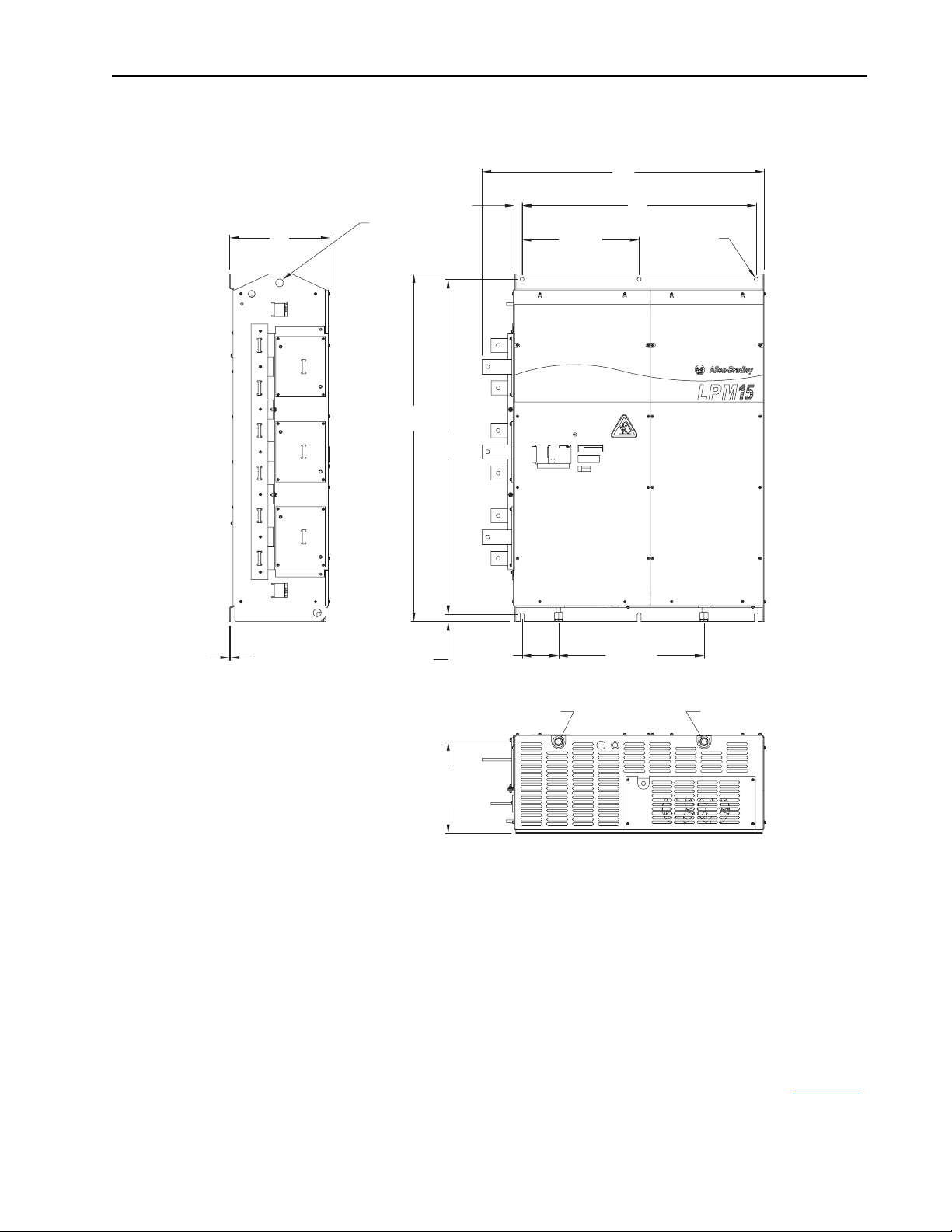
Figure 1.2 C-Frame LPM15 Drive Component, Wiring, Mounting and
Coolant Locations
85.3
[3.36]
220.3
[8.67]
40.7
[1.60]
[1.38]
34.9
[0.25]
34.9
[1.38]
6.4
Dimensions in millimeters and [inches]
42.4
[1.67]
1/2-13 Nut
(6) Pl.
Drive
Input
Wiring
(6) Pl.
2
Drive
Output
Wiring
(3) Pl.
Ø11.1
Ø0.44]
[
(3) Pl.
DPI Comm. Port
1
U
13
V
125.4
[4.94]
69.4
[2.73]
68.3
[2.69]
54.0
[2.13]
L1
L2 L3 L6 L5
68.3
[2.69]
54.0
[2.13]
38.1
[1.50]
L4
9
11
10
12
220.1
[8.67]
342.7
[13.49]
193.1
[7.60]
9.5
[0.37]
Connections
38.1
[1.50]
User Control
Wiring Opening
User
14
6
W
3
5
8
7
Air Flow
4
Page 18
1-6 Installation/Wiring
D-Frame LPM15 Drive Component Locations
The D-Frame LPM15 drives have the following main components. The
numbered items listed below correspond to the numbers used in Figure 1.3
Replacement parts are listed in Chapter
1. AC Input Bus Bars (6)
2. AC Output Bus Bars (3)
3. IGBT Modules
4. Laminated Assembly
5. Capacitors
6. Heatsink
7. Inlet Coolant Connection
8. Outlet Coolant Connection
9. Power Interface Control (PIC) PCB
10. Inverter Control PCB
11. Communication Interface PCB
12. Standard I/O PCB (Optional)
13. Communication Board (Optional)
14. Current Feedback Devices (3)
4.
.
Page 19
Installation/Wiring 1-7
Figure 1.3 D-Frame LPM15 Drive Component, Wiring, Mounting and
Coolant Locations
236.5
[9.31]
152.4
[6.00]
152.4
[6.00]
152.4
[6.00]
152.4
[6.00]
152.4
[6.00]
Drive
Input
Wiring
(6) Pl.
Drive
Output
Wiring
(3) Pl.
Grounding Stud
M10 x 1.5 x 27.1 [1.07]
Long
Ø14.3
Ø0.56]
[
312.7
[12.31]
304.7
[12.00]
304.7
[12.00]
50.8 [2.00]
(6) Pl.
Ø14.3
Ø0.56]
[
(3) Pl.
DPI
Comm.
Port
User
Connections
50.8 [2.00]
94.6
[3.72]
57.1
[2.25]
L1
U
L4
L2
V
L5
2
L3
W
L6
1
11
9
10
12
4
5
6
102.6
[4.04]
14
9.5
[0.37]
(6) Pl.
260.8
[10.27]
Dimensions in millimeters and [inches]
9.5
[0.37]
(3) Pl.
13
311.0
[12.24]
8
User Control
Wiring Openings
37
50.8
[2.00]
Air Flow
Ø19.1
Ø0.75]
[
Typ.
Page 20

1-8 Installation/Wiring
DPI Communication Port
The Communication Interface PCB contains an eight-position, female,
locking mini-DIN connector that is used as a DPI communication port. This
port (DPI Port 3 shown in Figure 1.4
between the LPM15 drive and another DPI device (for example, a HIM).
Figure 1.4 DPI Communication Interface Board
DPI Port 3
below) provides communication
Rockwell Automation
INV. STATUS
LPM15 Drive
Catalog Number
(positions 1-7 only)
20MD414 B 573 mm
20MD500 C 648 mm
20MD643 C 648 mm
20MD1K2 D 1010 mm
Frame Dim. A Dim. B Dim. C Dim. D Dim. E Dim. F Dim. G Weight
22.54 in
25.53 in
25.53 in
39.75 in
For more information regarding operating LPM15 drives with a HIM, refer
to Appendix
C.
Determining Total Area Required Based on Drive Dimensions
Drive dimensions and weights are listed in Table 1 .B. Overall drive
dimensions are illustrated in Figure 1.5
in calculating the total area required by the LPM15 drives.
Table 1.B Drive Dimensions and Weights
800 mm
31.52 in
1078 mm
42.44 in
1078 mm
42.44 in
1245 mm
49.00 in
357 mm
14.06 in
352 mm
13.86 in
352 mm
13.86 in
360 mm
14.16 in
397 mm
15.63 in
464 mm
18.25 in
464 mm
18.25 in
838 mm
33.00 in
, Figure 1.6, and Figure 1.7 as an aid
711 mm
28.00 in
787 mm
31.00 in
787 mm
31.00 in
1200 mm
47.25 in
39 mm
1.53 in
28 mm
1.09 in
28 mm
1.09 in
29 mm
1.12 in
20 mm
0.79 in
160 mm
6.31 in
160 mm
6.31 in
25 mm
1.00 in
125 kg
275 lb
171 kg
378 lb
171 kg
378 lb
386 kg
850 lb
Page 21
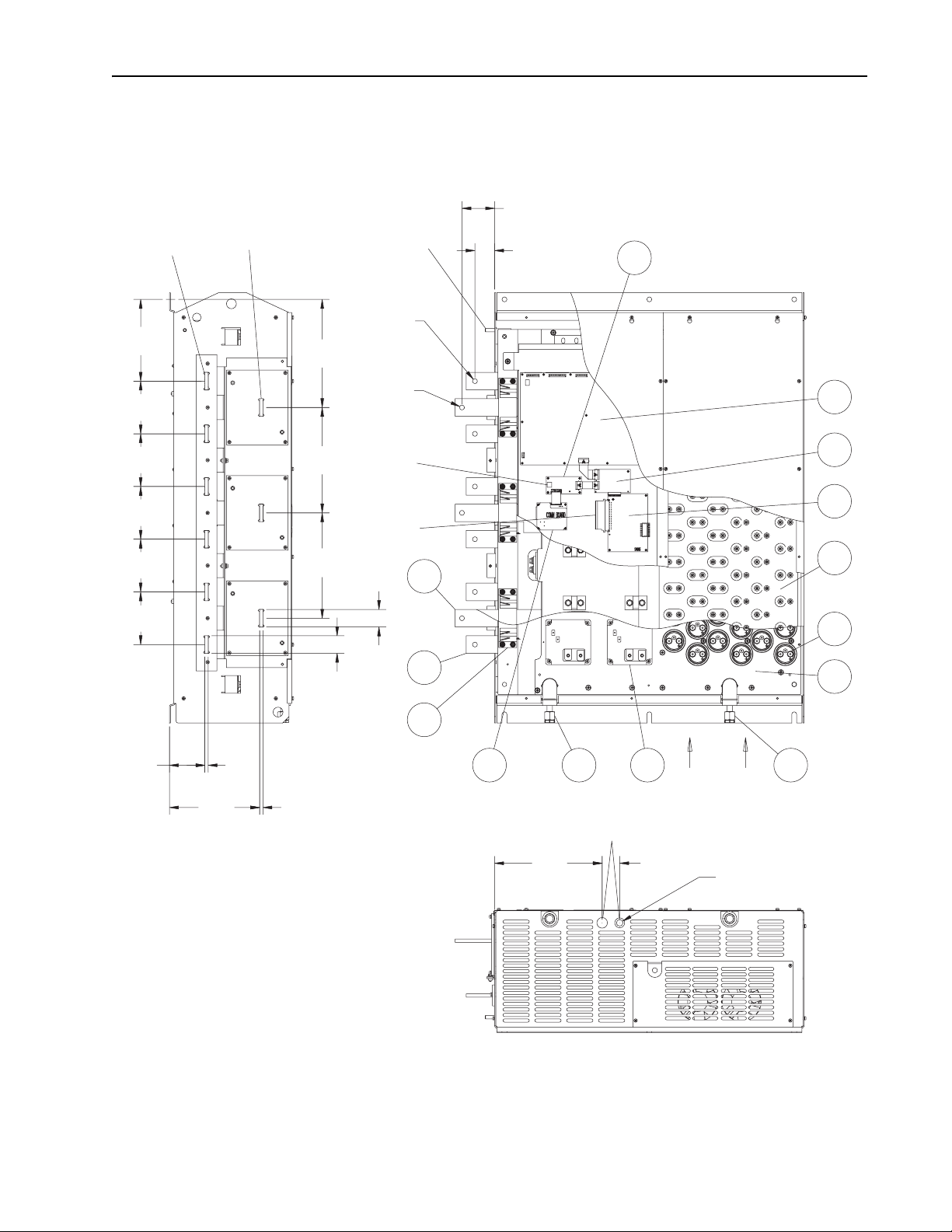
Figure 1.5 B-Frame Drive Dimensions
Installation/Wiring 1-9
C
A
DF
30˚
Outlet
B
E
Inlet
184.0
[7.25]
15.9
[0.62]
Thick
362.4
[14.27]
∅
14.3
[
∅
0.56]
(4) Pl.
113.8
[4.48]
Ty p.
Dimensions in millimeters and [inches]
G
30˚
154.8
[6.09]
15.9
[0.62]
Thick
179.3
[7.06]
Page 22
1-10 Installation/Wiring
Figure 1.6 C-Frame Drive Dimensions
A
30.0
[1.18]
DF
∅
14.3
[
∅
0.56]
Lifting
(2) Pl.
EGB
C
50.8
[2.00]
∅
14.3
[
∅
0.56]
(4) Pl.
83.8
[3.30]
92.5
[3.64]
Dimension in millimeters and [inches]
Outlet
Inlet
64.0
[2.52]
153.4
[6.04]
∅
14.3
[
∅
0.56]
Lifting
(2) Pl.
50.8
[2.00]
Page 23
Installation/Wiring 1-11
Figure 1.7 D-Frame Drive Dimensions
A
∅
28.6
[
∅
1.13]
C
Lifting
(4) Pl.
B
F
419.1
[16.50]
E
D
∅
14.3
[
∅
0.56]
(6) Pl.
3.0
[0.12]
Thick
Dimensions are in
millimeters and [inches]
Verifying the Site Provides for Recommended Air Flow Clearances
Be sure there is adequate clearance for air circulation around the
user-supplied enclosure. A 6-inch minimum clearance is required wherever
vents are located in the cabinet.
Verifying Power Module Input Ratings Match Supplied Power
G
329.5
[12.97]
130.8
[5.15]
Outlet
520.6
[20.50]
Inlet
It is important to verify that plant power will meet the input power
requirements of the LPM15 drive’s Power Module circuitry. See Ta ble 1 . A
for input power rating specifications. Be sure input power to the drive
corresponds to the drive nameplate voltage and frequency.
Page 24
1-12 Installation/Wiring
AC Supply Source Considerations
LPM15 drives are suitable for use on a circuit capable of delivering up to a
maximum of 85,000 rms symmetrical amperes, and a maximum of 480
volts. A circuit breaker with the appropriate KAIC rating needs to be used
upstream of the drive.
ATTENTION: To guard against personal injury and/or
!
Unbalanced or Ungrounded Distribution Systems
LPM15 drives should not be used with a supply system that is ungrounded
and when the phase-to-phase voltage exceeds 125% of normal line-to-line
voltage.
!
equipment damage caused by improper fusing or circuit breaker
selection, use only the recommended line fuses/circuit breakers
specified in Tab le 1 . C
ATTENTION: LPM15 drives contain protective MOVs on the
drive’s printed circuit boards. The MOVs are referenced to
ground. The MOVs cannot be disconnected. The LPM15 drives
do not contain common mode capacitors.
.
Input Power Conditioning
Certain events on the power system supplying a drive can cause component
damage or shortened product life. They are:
• The power system has power factor correction capacitors switched in and
out of the system, either by the user or by the power company.
• The power source has intermittent voltage spikes in excess of 6000 volts.
These spikes could be caused by other equipment on the line or by events
such as lightning strikes.
• The power source has frequent interruptions.
Wiring Requirements for the Drive
Certain drive requirements should be checked before continuing with the
drive installation. Wire sizes, branch circuit protection, and E-stop wiring
are all areas that need to be evaluated.
Page 25
Installation/Wiring 1-13
Selecting Input Line Branch Circuit Fuses
ATTENTION: Most codes require that upstream branch circuit
!
Input line branch circuit protection fuses must be used to protect the input
power lines. See Figure 1.9
connection diagrams. Recommended fuse values are shown in Tab le 1. C
The listed input fuse ratings are applicable for one drive per branch circuit.
No other load may be applied to that fused circuit.
Table 1.C AC Input Line Fuse and Circuit Breaker Selection Values
protection be provided to protect input power wiring. Install the
fuses recommended in Tabl e 1.C
ratings. Failure to observe this precaution could result in
damage to, or destruction of, the equipment.
and Figure 1.10 for typical AC input/output
. Do not exceed the fuse
.
Fuses and Circuit Breakers
LPM15 Drive
Catalog Number
(positions 1-7 only)
20MD414 380-480 VAC 600 A
20MD500 380-480 VAC 750 A
20MD643 380-480 VAC 1000 A
20MD1K2 380-480 VAC 1600 A
(1)
Recommended fuse type: UL Class J, 600 V, time-delay, or equivalent.
(2)
Recommended fuse type: UL Class L, 600 V, time-delay, or equivalent.
The LPM15 can be installed with either input fuses or an input circuit
breaker. National and local industrial safety regulations and/or electrical
codes may determine additional requirements for these installations. Refer
to Tabl e 1.C
!
Input Voltage
(+/-10%)
for recommended fuses/circuit breakers.
ATTENTION: The LPM15 does not provide branch short
circuit protection. Specifications for the recommended fuse or
circuit breaker to provide protection against short circuits are
provided in Tab le 1.C
Fuse Rating
(1)
(2)
(1)
(2)
.
Motor Circuit Protector
or Circuit Breaker
600 A
800 A
1000 A
1500 A
Mounting the Drive, Determining Wire Routing, and Grounding
This chapter shows how to mount the drive and properly ground it. Also
described is the wiring to be routed in and out of the drive.
Lifting and Mounting the Drive
Use the following procedure to lift the LPM15 drive and mount it in the
required enclosure:
Page 26

1-14 Installation/Wiring
1. For Cat. # 20MD414, install two clevis clamps into the drive to serve as
lifting points. Two 9/16-inch through holes are machined into the casting
protrusions.
For Cat. # 20MD500 or 20MD643, install two eyebolts into the drive to
serve as lifting points. Two 3/4-inch nuts are welded to the drive’s
baseplate. Screw two eyebolts (2-inch eye I.D., 6-inch long shank) into
the nuts.
For Cat. # 20MD1K2, install two clevis pins into the drive to serve as
lifting points. Two 1-inch through holes are provided in the sheet metal
chassis.
2. For Cat. # 20MD414, 20MD500 or 20MD643, connect 18 inches
(nominal) of chain between the eyebolts or attached clevis clamps and
secure them with a clevis clamp.
For Cat. # 20MD1K2, connect 50 inches (nominal) of chain between the
eyebolts or attached clevis clamps and secure them with a clevis clamp.
3. Using an overhead or portable hoist (minimum 1/2-ton rated capacity),
attach a free-fall chain to the chain secured to the drive. Take up any
vertical slack in the chain.
4. Using the hoist, lift the drive from the horizontal shipping pallet.
5. Position the drive in the enclosure.
6. For Cat. # 20MD414, 20MD500 or 20MD643, attach the drive to the
vertical surface selected using the four (4) mounting holes provided.
For Cat. # 20MD1K2, attach the drive to the vertical surface using the
six (6) mounting holes provided.
In order to maintain a flat mounting surface and to ensure that bolt
tightness is maintained, use flat washers and split-ring lock washers
under the bolt heads. Refer to Tabl e 1.B
Figure 1.7
7. For Cat. # 20MD500 or 20MD643, remove the eyebolts and the chain
between them.
For Cat. # 20MD414 or 20MD1K2, remove the clevis clamps and chain
between them.
Verifying the Drive’s Watts Loss Rating
for drive mounting dimensions.
and Figure 1.5, Figure 1.6 or
When mounting the drive inside of an enclosure, you should determine the
watts loss rating of the drive from Tabl e 1.A
load power loss watts value at 2 kHz (rated carrier frequency). Ensure that
the enclosure is adequately ventilated with 0
the drive’s watts loss rating.
. This table lists the typical full
° to 40° C ambient air based on
Page 27
Installation/Wiring 1-15
Determining Input, Motor Output, Ground, and Control Wire Routing for the Drive
All wiring should be installed in conformance with the applicable local,
national, and international codes (e.g., NEC/CEC). Signal wiring, control
wiring, and power wiring must be routed in separate conduits to prevent
interference with drive operation. Use grommets, when hubs are not
provided, to guard against wire chafing. Figure 1.1
Figure 1.3
strips of the B-frame, C-frame, and D-frame LPM15 drives.
Do not route more than three sets of motor leads through a single conduit.
This will minimize cross-talk that could reduce the effectiveness of noise
reduction methods. If more than three drive/motor connections per conduit
are required, shielded cable must be used. If possible, each conduit should
contain only one set of motor leads.
show the wire routing, grounding terminal, and power terminal
ATTENTION: Do not route signal and control wiring with
!
power wiring in the same conduit. This can cause interference
with drive operation. Failure to observe this precaution could
result in damage to, or destruction of, the equipment.
, Figure 1.2, and
ATTENTION: Unused wires in conduit must be grounded at
!
Grounding the Drive
!
Use the following steps to ground the drive:
1. Open the door of the enclosure.
2. Run a suitable equipment grounding conductor unbroken from the drive
to the motor’s ground terminal and then to earth ground. For B- and
C-frame drives, use one of the bolts that pass through the drive baseplate
and are used to fasten the drive to the wall or cabinet. For D-frame
drives, use the ground stud provided. See Figure 1.1
Figure 1.3
shown in Tab le 1.E
both ends to avoid a possible shock hazard caused by induced
voltages. Also, if a drive sharing a conduit is being serviced or
installed, all drives using this conduit should be disabled to
eliminate the possible shock hazard from cross-coupled motor
leads. Failure to observe these precautions could result in bodily
injury.
ATTENTION: The user is responsible for conforming with all
applicable local, national, and international codes. Failure to
observe this precaution could result in damage to, or destruction
of, the equipment.
, Figure 1.2 or
. Tighten these grounding connections to the proper torque as
.
Page 28
1-16 Installation/Wiring
3. Connect a suitable grounding conductor to the motor frame and the
remote control station (if used). Run each conductor unbroken to earth
ground. When adding more than one grounding conductor wire to a
single chassis ground, twist the conductors together. Tighten these
grounding connections to the proper torque as shown in Table 1.E
4. Close the door of the enclosure.
.
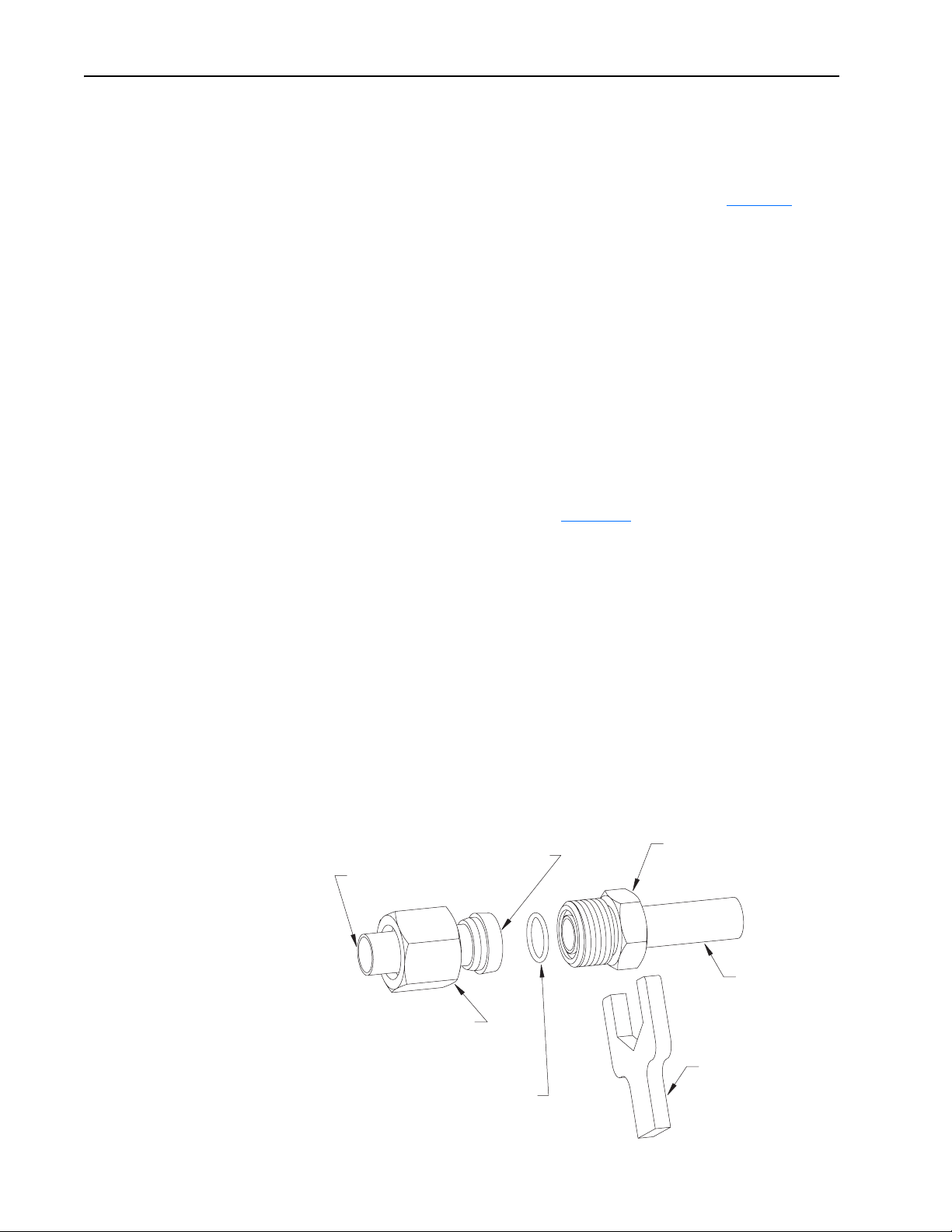
Coolant Considerations
LPM15 drives use o-ring face seal fittings for connection to the coolant
supply. The coolant is typically clean water with a corrosion inhibitor as
described in this section.
Considerations Affecting all Frame Sizes
LPM15 drive coolant connections are made with o-ring face seal fittings.
The copper tube running from the heatsink to the o-ring fittings is covered
with closed cell foam insulation.
The mating connection is shown in Figure 1.8
the following steps:
1. Coat the o-ring with the o-ring lubricant. The goal is a thin film covering
the entire o-ring surface. Avoid excess globs of lubricant.
2. Insert the o-ring into the o-ring groove in the external thread-side fitting
on the user side. Avoid any twisting of the o-ring.
3. Assemble the fittings and tighten to a torque of 37 to 45 N-m (or 27 to 33
lb.-ft.). Use a backup wrench on the user side fitting to avoid twisting the
drive side tubing.
. The mating process includes
Figure 1.8 Mating Connection
DRIVE SIDE CONNECTION
ORFS Braze Sleeve
5/8-inch O.D.
Copper Tube
(Parker p/n 10-BL-B)
(Parker p/n 2-016-CO873-70)
(Parker p/n 884-2GRAMS-LUBE)
(Parker p/n 10-TL-B)
ORFS Nut
O-Ring, Neoprene
O-Ring Lubricant
USER SIDE CONNECTION
ORFS Braze Adapter
(Parker p/n 10-LOHB3-B)
5/8-inch O.D.
Copper Tube
Backup Wrench
(Use to prevent twisting
during nut tightening.)
Page 29
Installation/Wiring 1-17
Other recommendations include:
1. The allowable coolant temperature range is 4°C to 40°C (40°F to 105°F).
When using coolant at a temperature below the dew point of the
surrounding air, condensation could accumulate on the drive heatsink
and/or circuit boards and damage the drive. In this situation, install a
coolant flow regulating device and tube/hose insulation. A flow
regulating device modulates the coolant flow rate to a level that permits
the drive heatsink temperature to rise above the dew point. Insulation for
customer side tube or hose may be closed-cell foam insulation with
minimum 1/2-inch wall thickness.
2. Install a flow switch after the coolant outlet connection to shutoff the
drive if coolant flow drops below 4 gpm.
3. Circulate water through the drive only when the drive is also powered.
Failure to do this may result in condensation accumulating on the drive
heatsink and/or circuit boards, which could damage the drive.
4. For applications requiring a closed loop coolant system, ensure the
system is vented to remove air that would otherwise degrade the
performance of the drive heatsink.
B-Frame Coolant Connections
B-frame LPM15 drives have inlet and outlet connections as shown in
Figure 1.1
protruding from the heatsink.
Supply and return lines should be sized for 9 gpm/120 psi service with a
maximum operating temperature of 40°C (104°F). Actual operating flow
rate through the drive is 8 gpm with a pressure drop of 10 psi.
C-Frame Coolant Connections
C-frame LPM15 drives have inlet and outlet connections as shown in
Figure 1.2
protruding from the heatsink.
Supply and return lines should be sized for 5 gpm/120 psi service with a
maximum operating temperature of 40°C (104°F). Actual operating flow
rate through the drive is 5 gpm with a pressure drop of 30 psi.
D-Frame Coolant Connections
. O-ring fittings and copper tube are brazed to copper tubes
O-ring fittings and copper tube are brazed to copper tubes
D-frame LPM15 drives have inlet and outlet connections as shown in
Figure 1.3
two-bolt-hole flange and compressed fiber gasket.
. O-ring fittings and copper tube are bolted to the heatsink via a
Page 30
1-18 Installation/Wiring
Supply and return lines should be sized for 8 gpm/120 psi service with a
maximum operating temperature of 40°C (104°F). Actual operating flow
rate through the drive is 8 gpm with a pressure drop of 10 psi.
The D-frame drive inlet pressure must not exceed 50 psi. A pressure
regulator, pressure switch, or pressure relief device is required to limit drive
inlet pressure below 50 psi under all normal and abnormal operating
conditions.
ATTENTION: Operating the D-Frame drive at a pressure
!
Coolant Requirements
LPM15 drives are rated for use with coolant consisting of clean water with a
corrosion inhibitor. Deionized water is prohibited. Use distilled water or
water with the following concentrations:
greater than 50 psi will permanently damage the equipment.
• Less than 50 ppm of sulfate and chloride.
• Less than 50 ppm of hard water ions such as Mg++ and Ca++.
Coolant must be properly strained and/or filtered to ensure it is free of
contamination.
The coolant must be compatible with the following materials: Copper,
brass, aluminum, and neoprene. For the D-frame drive only, the coolant
must be compatible with Loctite 587 Ultra Blue
Ultra Blue is a registered trademark of Loctite Corporation.
Corrosion Inhibitor
A corrosion inhibitor is required. The following two options are approved
sources:
1. Chemtool, Inc. (www.chemtool.com) Watertool 4435-C. The
recommended concentration of the inhibitor is 8 to 10% by volume.
2. Dow Chemical (www.dow.com) Dowtherm
glycol. The recommended concentration of the inhibitor is 25% by
volume.
®
RTC silicone rubber.
®
SR-1 inhibited ethylene
Dowtherm is a registered trademark of the Dow Chemical Company.
ATTENTION: Ethylene glycol must be inhibited and silicate
!
free. Use of common silicate-containing, automotive-type
ethylene glycol solutions is prohibited as they may damage the
drive and cooling module equipment.
Page 31

Installation/Wiring 1-19
If ethylene glycol is used, the recommended coolant flow rates should be
according to Table 1.D
Table 1.D Recommended Coolant Flow Rates with 25% Ethylene Glycol
.
Installing Input Power Wiring
Frame Flowrate (GPM)
B11 25
C8 70
D11 25
Biocide
A biocide may be needed to control biological growth. Use of a biocide is
permitted. For specific recommendations, consult a reputable water
treatment company.
This section describes incoming line components and how to install them.
Installing Transformers and Reactors (Optional)
The LPM15 AC drive may be used on distribution systems with 85,000
amps or less symmetrical fault current capacity. Line reactors are not
needed for safe operation of the drive but may be required to reduce line
harmonics.
Input isolation transformers might be needed to help eliminate:
• Damaging line voltage transients from reaching the drive.
• Line noise from the drive back to the incoming power source.
• Damaging currents that could develop if a point inside the drive becomes
grounded.
Pressure Drop From Drive
Inlet to Drive Outlet (PSIG)
Observe the following guidelines when installing an isolation transformer:
• A power-disconnecting device must be installed between the power line
and the primary of the transformer.
• If the power-disconnecting device is a circuit breaker, the circuit breaker
trip rating must be coordinated with the in-rush current (10 to 12 times
full load current) of the transformer.
Installing Fuses for Branch Circuit Protection
Install the required, user-supplied branch circuit protection fuses according
to the applicable local, national, and international codes (e.g., NEC/CEC).
The fuses must be installed in the line before the drive input terminals. See
Figure 1.9
or Figure 1.10. Fuse value selections are provided in Tabl e 1.C .
ATTENTION: Most codes require that upstream branch
!
protection be provided to protect input power wiring. Failure to
observe this precaution could result in severe bodily injury or
loss of life.
Page 32

1-20 Installation/Wiring
Figure 1.9 Typical AC Input/Output Electrical Connections (6-Pulse Rectifier,
All Frames)
3-Phase AC Input Voltage
380/480 V
L1 L2 L3 GND
Manual
User-Supplied
User-Supplied
Disconnect
Fuse
L1 L2 L3
Motor Overload Relay
(optional if electronic
overload is used)
L6 L5 L4
LPM15
Power
Module
UVW
GND
(PE)
GND
Figure 1.10 Typical AC Input/Output Electrical Connections (12-Pulse Rectifier,
B- and C-Frames Only)
3-Phase AC Input Voltage
380/480 V
181 182 183 GND
Manual
User-Supplied
User-Supplied
Disconnect
Fuse
Transformer
L1 L2 L3
Motor Overload Relay
(optional if electronic
overload is used)
L6 L5 L4
LPM15
Power
Module
UVW
GND
(PE)
GND
Page 33

Installation/Wiring 1-21
Installing a Required External/Separate Input Disconnect
An input disconnect must be installed in the line before the drive input
terminals in accordance with local, national, and international codes (e.g.,
NEC/CEC). The disconnect should be sized according to the in-rush current
as well as any additional loads the disconnect might supply. The trip rating
for the inrush current (10-12 times full load current) should be coordinated
with that of the input isolation transformer, if used. Refer to Installing
Transformers and Reactors (Optional) on page 1-19 for additional
information.
Installing Power Wiring from the AC Input Line to the Drive’s Power Terminals
Use the following steps to connect AC input power to the drive:
1. Wire the AC input power leads by routing them as shown in Figure 1.1
Figure 1.2
!
2. Connect the three-phase AC input power leads (three-wire 380-480
VAC) to the appropriate terminals.
On 6-pulse rectifier drives, connect the AC input power leads to the L1,
L2, and L3 terminals. See Figure 1.9
On 12-pulse rectifier drives, connect the AC input power leads to the L1,
L2, L3, L4, L5, and L6 terminals. See Figure 1.10
3. Tighten the AC input power terminals to the proper torque as shown in
Table 1.E
Table 1.E Terminal Tightening Torques
Drive Type Terminals Hardware Type
B-Frame
C-Frame
D-Frame
or Figure 1.3.
ATTENTION: Do not route signal and control wiring with
power wiring in the same conduit. This can cause interference
with drive operation. Failure to observe this precaution could
result in damage to, or destruction of, the equipment.
.
.
.
Maximum Tightening Torque
10%)
(+
L1 to L6 1/4-20, Gr. 5 13 N-m (10 lb.-ft.)
U, V, W 5/16-18, Gr. 5 24 N-m (18 lb.-ft.)
GND, PE 5/16 Hex 31 N-m (23 lb.-ft.)
L1 to L6 1/2-13; Gr. 5 100 N-m (75 lb.-ft.)
U, V, W 3/8-16, Gr. 5 42 N-m (31 lb.-ft.)
GND, PE 5/16 Hex 31 N-m (23 lb.-ft.)
L1 to L6 1/2-13; Gr. 5 100 N-m (75 lb.-ft.)
U, V, W 1/2-13; Gr. 5 100 N-m (75 lb.-ft.)
GND, PE 1/2 Hex 58 N-m (42 lb.-ft.)
,
Page 34

1-22 Installation/Wiring
Installing Output Power Wiring
This section provides instructions on wiring output contactors, motor
overload protection, and output wiring to the motor.
Installing Mechanical Motor Overload Protection (Optional)
To provide the motor with overload protection, local, national, and
international codes (e.g., NEC/CEC) may require one of the following:
• a motor thermostat be installed internal to the motor.
• a mechanical thermal motor overload relay, sized to protect the motor, be
installed between the motor and the drive’s output terminals.
In multiple motor applications (V/Hz regulation only), each motor must
have its own user-supplied overload and branch circuit protection.
Installing Output Wiring from the Drive Output Terminals to the Motor
Important: The total motor lead length must not exceed 76 meters (250
feet).
Use the following steps to connect the AC output power wiring from the
drive to the motor:
1. Wire the three-phase AC output power motor leads by routing them as
shown in Figure 1.1
Do not route more than three sets of motor leads through a single
conduit. This will minimize cross-talk that could reduce the effectiveness
of noise reduction methods. If more than three drive/motor connections
per conduit are required, shielded cable must be used. If possible, each
conduit should contain only one set of motor leads.
ATTENTION: Do not route signal and control wiring with
!
!
power wiring in the same conduit. This can cause interference
with drive operation. Failure to observe these precautions could
result in damage to, or destruction of, the equipment
ATTENTION: Unused wires in conduit must be grounded at
both ends to avoid a possible shock hazard caused by induced
voltages. Also, if a drive sharing a conduit is being serviced or
installed, all drives using this conduit should be disabled to
eliminate the possible shock hazard from cross-coupled motor
leads. Failure to observe these precautions could result in bodily
injury.
, Figure 1.2 or Figure 1.3.
Page 35

Power Wiring
Installation/Wiring 1-23
2. Connect the three-phase AC power motor leads to the appropriate output
terminals. Figure 1.1
output power terminals.
3. Tighten the three-phase AC output power terminals to the proper torque
as shown in Tab le 1. E
ATTENTION: National Codes and standards (NEC, VDE,
!
Cable Types Acceptable for 200-600 Volt Installations
A variety of cable types are acceptable for drive installations. For many
installations, unshielded cable is adequate, provided it can be separated
from sensitive circuits. As an approximate guide, allow a spacing of 0.3
meters (1 foot) for every 10 meters (32.8 feet) of length. In all cases, long
parallel runs must be avoided. Do not use cable with an insulation thickness
less than or equal to 15 mils (0.4mm/0.015 in.). Use Copper wire only. Wire
gauge requirements and recommendations are based on 75 degrees C. Do
not reduce wire gauge when using higher temperature wire.
BSI etc.) and local codes outline provisions for safely installing
electrical equipment. Installation must comply with
specifications regarding wire types, conductor sizes, branch
circuit protection, and disconnect devices. Failure to do so may
result in personal injury and/or equipment damage.
, Figure 1.2, or Figure 1.3 show the locations of the
.
Unshielded
THHN, THWN or similar wire is acceptable for drive installation in dry
environments provided adequate free air space and/or conduit fill rates
limits are provided. Do not use THHN or similarly coated wire in wet
areas. Any wire chosen must have a minimum insulation thickness of 15
mils and should not have large variations in insulation concentricity.
ATTENTION: To avoid a possible shock hazard caused by
!
induced voltages, unused wires in the conduit must be grounded
at both ends. For the same reason, if a drive sharing a conduit is
being serviced or installed, all drives using this conduit should
be disabled. This will help minimize the possible shock hazard
from “cross coupled” motor leads.
Page 36

1-24 Installation/Wiring
Using Input/Output Contactors
Input Contactor Precautions
ATTENTION: A contactor or other device that routinely
!
!
Output Contactor Precaution
!
disconnects and reapplies the AC line to the drive to start and
stop the motor can cause drive hardware damage. The drive is
designed to use control input signals that will start and stop the
motor. If an input device is used, operation must not exceed one
cycle per minute or drive damage will occur.
ATTENTION: The drive start/stop/enable control circuitry
includes solid state components. If hazards due to accidental
contact with moving machinery or unintentional flow of liquid,
gas or solids exist, an additional hardwired stop circuit may be
required to remove the AC line to the drive. An auxiliary
braking method may be required.
ATTENTION: To guard against drive damage when using
output contactors, the following information must be read and
understood. One or more output contactors may be installed
between the drive and motor(s) for the purpose of disconnecting
or isolating certain motors/loads. If a contactor is opened while
the drive is operating, power will be removed from the
respective motor, but the drive will continue to produce voltage
at the output terminals. In addition, reconnecting a motor to an
active drive (by closing the contactor) could produce excessive
current that may cause the drive to fault. If any of these
conditions are determined to be undesirable or unsafe, an
auxiliary contact on the output contactor should be wired to a
drive digital input that is programmed as “Enable.” This will
cause the drive to execute a coast-to-stop (cease output)
whenever an output contactor is opened.
I/O Wiring
Important points to remember about I/O wiring:
• Use Copper wire only. Wire gauge requirements and recommendations
are based on 75 degrees C. Do not reduce wire gauge when using higher
temperature wire.
• Wire with an insulation rating of 600V or greater is recommended.
• Control and signal wires should be separated from power wires by at
least 0.3 meters (1 foot).
Page 37

Installation/Wiring 1-25
Important: I/O terminals labeled “(–)” or “Common” are not referenced to
earth ground and are designed to greatly reduce common mode
interference. Grounding these terminals can cause signal noise.
ATTENTION: Configuring an analog input for 0-20mA
!
!
Signal and Control Wire Types
Table 1.F Recommended Signal Wire
operation and driving it from a voltage source could cause
component damage. Verify proper configuration prior to
applying input signals.
ATTENTION: Hazard of personal injury or equipment
damage exists when using bipolar input sources. Noise and drift
in sensitive input circuits can cause unpredictable changes in
motor speed and direction. Use speed command parameters to
help reduce input source sensitivity.
Signal Type/
Where Used Wire Type(s) Description
Standard Analog I/O Belden 8760/9460 (or equiv.) 0.750 mm2(18AWG), twisted
pair, 100% shield with drain
Remote Pot Belden 8770(or equivalent) 0.750 mm
(1)
If the wires are short and contained within a cabinet which has no sensitive circuits, the use of shielded wire may not be
necessary, but is always recommended.
Table 1.G Recommended Control Wire for Digital I/O
Type Wire Type(s) Description
Unshielded Per US NEC or applicable national or local code — 300V,
Shielded Multi-conductor shielded cable such as Belden
8770(or equivalent)
shielded
2
(18AWG), 3 cond.,
0.750 mm
3 conductor, shielded.
2
(18AWG),
(1)
Minimum
Insulation Rating
300V,
75-90°C
(167-194°F)
Minimum
Insulation Rating
60°C
(140°F)
Page 38

1-26 Installation/Wiring
I/O Terminal Blocks
Table 1.H I/O Terminal Block Specifications
Name Description
I/O Terminal
Block
(1)
Maximum/minimum that the terminal block will accept - these are not recommendations.
Signal and control
connections
Wire Size Range
Maximum Minimum Maximum Recommended
2
2.1 mm
(14 AWG)
Figure 1.11 Control Option I/O Terminal Designations
(1)
0.30 mm
(22 AWG)
2
0.6 N-m
(5.2 lb.-in.)
Torque
0.6 N-m
(5.2 lb.-in.)
Standard
Control
Option
1
16
32
(1)
Contacts in unpowered state. Any relay programmed as Fault or Alarm will energize (pick up) when power is applied to drive and deenergize (drop out) when a fault
or alarm exists. Relays selected for other functions will energize only when that condition exists and will deenergize when condition is removed.
(2)
These inputs/outputs are dependant on a number of parameters. See “Related Parameters.”
(3)
Differential Isolation - External source must be maintained at less than 160V with respect to PE. Input provides high common mode immunity.
(4)
Differential Isolation - External source must be less than 10V with respect to PE.
(5)
150 mA maximum Load. Not present on 115V versions.
No. Signal
1 Anlg Volts In 1 (–)
2 Anlg Volts In 1 (+)
3 Anlg Volts In 2 (–)
4 Anlg Volts In 2 (+)
5 Pot Common — For (+) and (–) 10V pot references.
6 Anlg Volts Out 1 (–)
7 Anlg Volts Out 1 (+)
8 Anlg Current Out 1 (–)
9 Anlg Current Out 1 (+)
10
11 Digital Out 1 – N.C.
12 Digital Out 1 Common
13 Digital Out 1 – N.O.
14 Digital Out 2 – N.C.
15 Digital Out 2 Common
16 Digital Out 2 – N.O.
17 Anlg Current In 1 (–)
18 Anlg Current In 1 (+)
19 Anlg Current In 2 (–)
20 Anlg Current In 2 (+)
21 –10V Pot Reference — 2k ohm minimum.
22 +10V Pot Reference —
23
24 +24VDC
25 Digital In Common —
26 24V Common
27 Digital In 1 Stop - CF 115V AC, 50/60 Hz
28 Digital In 2 Start
29 Digital In 3 Jog
30 Digital In 4 Speed Sel 1
31 Digital In 5 Speed Sel 2
32 Digital In 6 Speed Sel 3
Reserved for Future Use
Reserved for Future Use
(5)
(5)
Factory
Default
(2)
(2)
(2)
(2)
(1)
Fault Max. Resistive Load: 240V AC/30V DC – 1200VA, 150W
(1)
NOT Fault
(1)
NOT Run
(1)
Run
(2)
(2)
— Drive supplied logic input power.
— Common for internal power supply.
Description
(3)
Isolated
impedance.
Isolated
impedance.
Bipolar, ±10V, 11 bit & sign, 2k ohm minimum load. 340 - 344
4-20 mA, 11 bit & sign, 400 ohm maximum load.
Max. Current: 5A, Min. Load: 10 mA
Max. Inductive Load: 240V AC/30V DC – 840VA, 105W
Max. Current: 3.5A, Min. Load: 10mA
Isolated
Isolated
High State: greater than 100V AC
24V AC/DC, 50/60 Hz
High State: greater than 20V AC/DC, 11.2 mA DC
, bipolar, differential, ± 10V, 11 bit & sign, 88k ohm input
(4)
, bipolar, differential, ±10V, 11 bit & sign, 88k ohm input
(3)
,
4-20 mA
, 11 bit & sign, 124 ohm input
(4)
, 4-20 mA, 11 bit & sign, 124 ohm input impedance.
(5)
- Opto isolated Low State: less than 30V AC
-Opto isolated Low State: less than 5V AC/DC
impedance.
Related
Param.
320 - 327
380 - 387
320 - 327
361 - 366
Page 39

Installation/Wiring 1-27
/
I/O Wiring Examples
Input/Output Connection Example Required Parameter Changes
Potentiometer Unipolar
Speed Reference
10k Ohm pot. recommended
(2k Ohm minimum)
(1)
3
4
5
• Adjust Scaling:
Parameters 91/92 and 325/326
• View Results:
Parameter 00 2
22
Joystick Bipolar Speed
Reference
± 10V Input
Analog Input Bipolar Speed
Reference
± 10V Input
Analog Voltage Input
Unipolar Speed Reference
0 to +10V Input
Analog Current Input
Unipolar Speed Reference
4-20 mA Input
Analog Output
± 10V, 4-20 mA Bipolar
+ 10V Unipolar (shown)
4-20 mA Unipolar
(use terminals 8 and 9)
(1)
3
5
Common
Common
+–
• Set Direction Mode:
Parameter 190 = “1, Bipolar”
• Adjust Scaling:
21
22
3
4
+
3
4
+
19
Common
20
+
6
7
Parameters 91/92 and 325/326
• View Results:
Parameter 00 2
• Set Direction Mode:
Parameter 190 = “1, Bipolar”
• Adjust Scaling:
Parameters 91/92 and 325/326
• View Results:
Parameter 00 2
• Configure Input with Parameter
320
• Adjust Scaling:
Parameters 91/92 and 325/326
• View results:
Parameter 00 2
• Configure Input for Current:
Parameter 320, Bit 1 = “1,
Current”
• Adjust Scaling:
Parameters 91/92 and 325/326
• View Results:
Parameter 00 2
• Configure with Parameter 340
• Select Source Value:
Parameter 384, [Digital Out1
Sel]
• Adjust Scaling:
Parameters 343/344
2-Wire Control
Non-Reversing
24V DC internal supply
(2)
2-Wire Control
Reversing
External supply
(I/O Board dependent)
(1)
(2)
(2)
Refer to the Attention statement on page 1-25 for important bipolar wiring information.
Important: Programming inputs for 2 wire control deactivates all HIM Start buttons.
24
25
26
28
Stop-Run
Neutral/
Common
25
Run Fwd.
27
28
Run Rev.
115V
+24V
• Disable Digital Input:#1:
Parameter 361 = “0, Unused”
• Set Digital Input #2:
Parameter 362 = “7, Run”
• Set Direction Mode:
Parameter 190 = “0, Unipolar”
• Set Digital Input:#1:
Parameter 361 = “8, Run
Forward”
• Set Digital Input #2:
Parameter 362 = “9, Run
Reverse”
Page 40

1-28 Installation/Wiring
/
I/O Wiring Examples (continued)
Input/Output Connection Example Required Parameter Changes
3-Wire Control
Internal supply
3-Wire Control
External supply
(I/O Board dependent).
Requires 3-wire
functions only ([Digital
In1 Sel]). Using 2-wire
selections will cause a
type 2 alarm.
Digital Output
Relays shown in
powered state with drive
faulted. See page 1-26
Power Source
or
.
11
12
13
14
15
16
24
25
26
Stop
27
28
Start
Neutral/
Common
25
27
28
Stop
Start
115V
+24V
Fault
NOT Fault
NOT Run
Run
• No Changes Required
• No Changes Required
• Select Source to Activate:
Parameters 380/384
Reference Control
Enable Input • Set Parameter P366 to “1” (Enable).
32
“Auto” Speed Sources
The drive speed command can be obtained from a number of different
sources. The source is determined by drive programming and the condition
of the Speed Select digital inputs, Auto/Manual digital inputs, or reference
select bits of a command word.
The default source for a command reference (all speed select inputs open or
not programmed) is the selection programmed in [Speed Ref A Sel]. If any
of the speed select inputs are closed, the drive will use other parameters as
the speed command source.
“Manual” Speed Sources
The manual source for speed command to the drive is either the HIM
requesting manual control (see ALT Functions
terminal block (analog input) if a digital input is programmed to “Auto/
Manual.”
on page C-2) or the control
Page 41

Installation/Wiring 1-29
e
e
Changing Speed Sources
The selection of the active Speed Reference can be made through digital
inputs, DPI command, jog button, or Auto/Manual HIM operation.
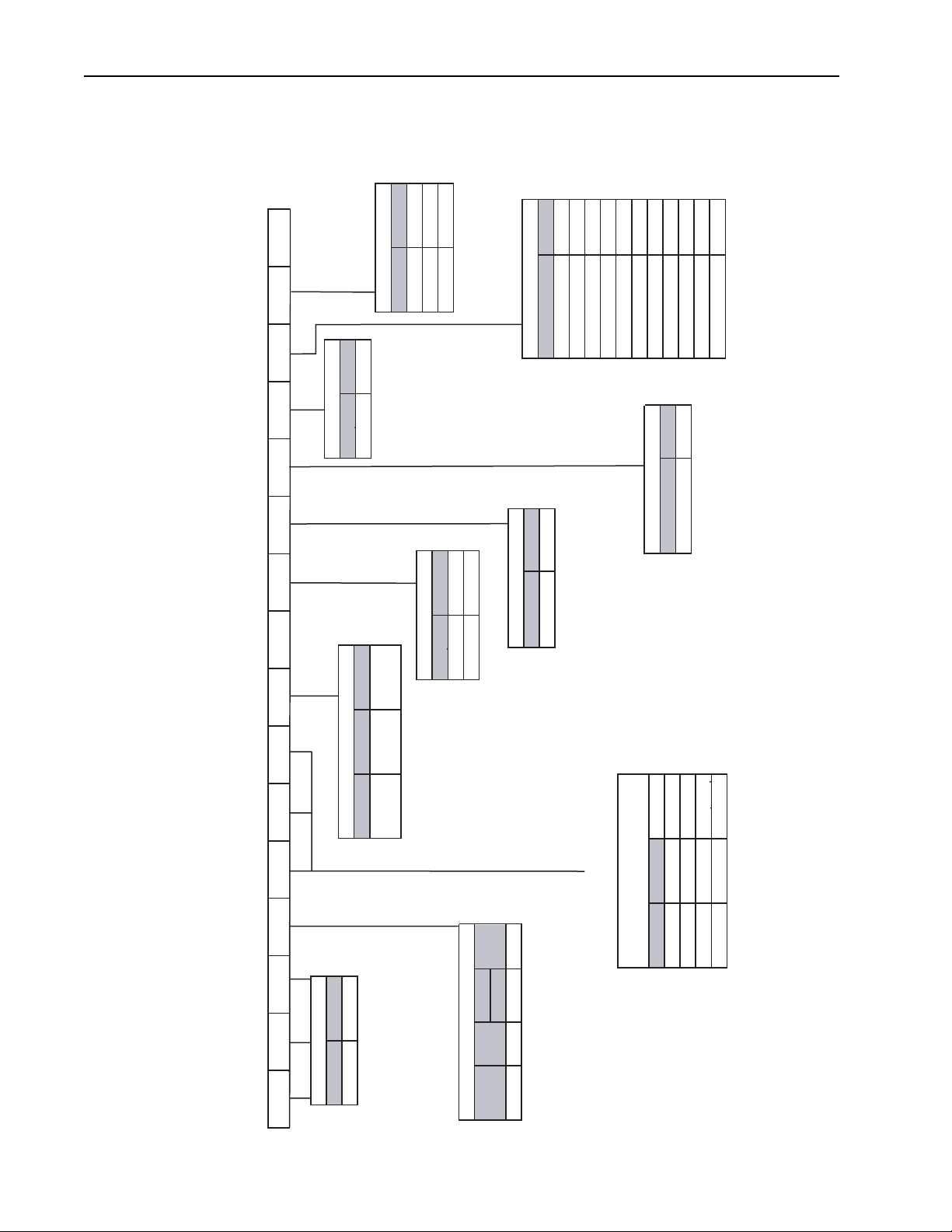
Auto/Manual Examples
Figure 1.12 Speed Reference Selection Chart
= Default
Auto Speed Ref Options
Speed Ref A Sel, Parameter 090
Speed Ref B Sel, Parameter 093
Preset Speed 2, Parameter 102
Preset Speed 3, Parameter 103
Preset Speed 4, Parameter 104
Preset Speed 5, Parameter 105
Preset Speed 6, Parameter 106
Preset Speed 7, Parameter 107
DPI Port Ref 1-6, See Parameter 209 DPI Command
Manual Speed Ref Options
HIM Requesting Auto/Manual
TB Man Ref Sel, Parameter 096
Jog Speed, Parameter 100
Speed Adders
PI Output 2 "Process Pi"
Slip Compensation
None
Tr im
[Digital Inx Select]:
Speed Sel
Digital Input
Jog Command
[Speed Mode]:
1 "Slip Comp"
0 "Open Loop"
321
000
001
010
011
100
101
110
111
PI Exclusive Mode
[PI Configuration]:
Bit 0, Excl Mode = 0
Auto
Man
PLC = Auto, HIM = Manual
(1)
and
Pure Reference
to follower drive for
Frequency Referenc
Post Ramp
to follower drive for
Frequency Referenc
Drive Ref Rslt
Mod Functions
(Skip, Clamp,
Direction, etc.)
Min/Max Speed
Commanded
Frequency
Acc/Dec Ramp
S Curve
Output Frequency
A process is run by a PLC when in Auto mode and requires manual control
from the HIM during set-up. The Auto speed reference is issued by the PLC
through a communications module installed in the drive. Since the internal
communications is designated as Port 5, [Speed Ref A Sel] is set to “DPI
Port 5” with the drive running from the Auto source.
Attain Manual Control
• Press ALT then Auto/Man on the HIM.
When the HIM attains manual control, the drive speed command comes
from the HIM speed control keys or analog potentiometer.
Release to Auto Control
• Press ALT then Auto/Man on the HIM again.
When the HIM releases manual control, the drive speed command
returns to the PLC.
PLC = Auto, Terminal Block = Manual
A process is run by a PLC when in Auto mode and requires manual control
from an analog potentiometer wired to the drive terminal block. The auto
(1)
To access Preset Speed 1, set Parameter 090 or 093 to “Preset Speed 1.”
Page 42

1-30 Installation/Wiring
speed reference is issued by the PLC through a communications module
installed in the drive. Since the internal communications is designated as
Port 5, [Speed Ref A Sel] is set to “DPI Port 5” with the drive running from
the Auto source. Since the Manual speed reference is issued by an analog
input (“Analog In 1 or 2”), [TB Man Ref Sel] is set to the same input. To
switch between Auto and Manual, [Digital In4 Sel] is set to “Auto/
Manual.”
Attain Manual Control
• Close the digital input.
With the input closed, the speed command comes from the
potentiometer.
Release to Auto Control
• Open the digital input.
With the input open, the speed command returns to the PLC.
CE Compliance
Auto/Manual Notes
1. Manual control is exclusive. If a HIM or Terminal Block takes manual
control, no other device can take manual control until the controlling
device releases manual control.
2. If a HIM has manual control and power is removed from the drive, the
drive will return to Auto mode when power is reapplied.
Low Voltage Compliance
The LPM15 drive is compliant with the essential requirements of the Low
Voltage Directive 73/23/EEC when installed according to this user manual
including the Notes and Requirements of this section. Compliance with the
Low Voltage Directive has been demonstrated using the harmonized
European standard EN 50178.
EMC Compliance
The LPM15 drive as supplied by Rockwell Automation does not satisfy the
essential requirements of the EMC Directive 89/336/EEC. Compliance with
the EMC Directive is the responsibility of the machine builder incorporating
the LPM15 into an overall machine. The LPM15 produces conducted and
radiated electromagnetic emissions which can interfere with other
equipment, and the machine builder must provide appropriate mitigation to
insure that the LPM15 does not disturb other equipment.
Page 43

Installation/Wiring 1-31
General Notes
• Without external mitigation, LPM15 drives are not intended to be used
on a low-voltage public network which supplies residential or office
premises; low frequency and radio frequency interference is expected if
used in such an environment.
• The drive motor cable should be kept as short as possible in order to
minimize capacitive currents which are a source of high frequency
conducted emissions.
• Use of line filters in unearthed supply systems is not recommended.
Requirements for CE Compliance
1. Compliance with all warnings in this manual relating to electrical shock
and thermal considerations in the installation.
2. In general, machines in the industrial environment must meet the high
frequency emission requirements of EN 61000-6-4. Machines in the
residential, commercial, and light industrial environment must meet the
high frequency emission requirements of EN 61000-6-3.
3. Suitable high frequency line filter to mitigate conducted high frequency
emissions.
4. Suitable line inductors for mitigation of harmonic current emissions if
necessary for the application (public low voltage supply system).
5. Suitable enclosure which provides adequate mitigation of high frequency
radiated emissions.
6. Grounding as described in Grounding the Drive
7. Output power wiring to the motor and all control/signal wiring must use
braided, shielded cable with a shield coverage of 75% or greater, or
metal conduit.
8. The shields of all shielded cables must be terminated with the proper
connectors to chassis/earth.
on page 1-15.
Page 44

1-32 Installation/Wiring
Notes:
Page 45

Chapter 2
Start Up
This chapter describes how you start up the LPM15. Refer to Appendix C
for a brief description of the LCD HIM (Human Interface Module).
For information on… See page…
Prepare For Drive Start-Up
Status Indicators 2-2
Start-Up Routines 2-3
Running S.M.A.R.T. Start 2-4
Running an Assisted Start Up 2-4
ATTENTION: Power must be applied to the drive to perform
!
the following start-up procedure. Some of the voltages present
are at incoming line potential. To avoid electric shock hazard or
damage to equipment, only qualified service personnel should
perform the following procedure. Thoroughly read and
understand the procedure before beginning. If an event does not
occur while performing this procedure, Do Not Proceed.
Remove Power including user-supplied control voltages. User
supplied voltages may exist even when main AC power is not
applied to the drive. Correct the malfunction before continuing.
2-1
Prepare For Drive Start-Up
Before Applying Power to the Drive
❏ 1. Confirm that all inputs are connected to the correct terminals and are
secure.
❏ 2. Verify that AC line power at the disconnect device is within the rated
value of the drive.
❏ 3. Verify that control power voltage is correct.
The remainder of this procedure requires that a HIM be installed. If an
operator interface is not available, remote devices should be used to start
up the drive.
Page 46

2-2 Star t Up
Applying Power to the Drive
❏ 4. Apply AC power and control voltages to the drive.
If any of the six digital inputs are configured to “Stop – CF” (CF = Clear
Fault) or “Enable,” verify that signals are present or reconfigure [Digital
Inx Sel]. If an I/O option is not installed (i.e. no I/O terminal block),
verify that [Digital Inx Sel] is not configured to “Stop – CF” or “Enable.”
If this is not done, the drive will not start. Refer to Alarm Descriptions
page 4-6 for a list of potential digital input conflicts. If a fault code
appears, refer to Chapter
If the STATUS LED is not flashing green at this point, refer to LED
Status Definitions in Tab le 2. A
❏ 5. Proceed to Start-Up Routines.
4.
.
on
Status Indicators
Figure 2.1 Drive Status Indicator
Inverter
Status LED
Control Panel
Table 2.A Ready LED Status Indications
Color State Description
Green Flashing Drive ready, but not running and no faults are present.
Steady Drive running, no faults are present.
Ye l l o w
See page 4-2
Red
See page 4-3
Flashing The drive is not ready. Check parameter 214 [Start Inhibits].
.
Steady An alarm condition exists. Check parameters 211 [Drive Alarm 1]
and 212 [Drive Alarm 2].
Flashing A fault has occurred.
.
Steady A non-resettable fault has occurred.
Page 47

Start Up 2-3
/
Start-Up Routines
The LPM15 is designed so that start up is simple and efficient. If you have
an LCD HIM, two start-up methods are provided, allowing the user to select
the desired level needed for the application.
• S.M.A.R.T. Start
This routine allows you to quickly set up the drive by programming
values for the most commonly used functions. See page 2-4
• Assisted Start Up
This routine prompts you for information that is needed to start up a
drive for most applications, such as line and motor data, commonly
adjusted parameters and I/O. See page 2-4
Figure 2.2 Standard Control Option Start Up Menu
Main Menu:
Start-Up
and
(1)
Speed Limits
Set Min/Max
Direction Control
Speed and
Input Voltage
Configure for
Alternate Input
Voltage
(1)
During Motor Tests and tuning procedures, the drive may modify certain parameter values for proper Start Up operation.
These values are then reset to their original values when Start Up is complete. The affected parameters are: 053, 080,
276, 278, and 361-366. If power is removed from the drive during the tests without aborting the auto-tune procedure,
these parameters may not be reset to their original value. If this situation occurs, reset the drive to factory defaults and
repeat the Start Up procedure.
Motor Data and
Ramp Times
Enter Motor NP
Data, Stop Mode,
Accel/Decel
Ramp Times
Motor Tests
Optimize Torque
Verify Direction
.
Speed Control Start/Stop/I/O
Configure
Source, Value
and Scale for
Speed References
.
Configure
Control Method
(2 Wire/3 Wire), I/O,
Digital Inputs/Outputs
and Analog Outputs
Done
Exit
Important Information
Power must be applied to the drive when viewing or changing parameters.
Previous programming may affect the drive status and operation when
power is applied.
Page 48

2-4 Star t Up
Running S.M.A.R.T. Start
Running an Assisted Start Up
During a Start Up, the majority of applications require changes to only a
few parameters. The LCD HIM on a LPM15 drive offers S.M.A.R.T. start,
which displays the most commonly changed parameters. With these
parameters, you can set the following functions:
S - Start Mode and Stop Mode
M - Minimum and Maximum Speed
A - Accel Time 1 and Decel Time 1
R - Reference Source
T - Thermal Motor Overload
To run a S.M.A.R.T. start routine:
Step Key(s) Example LCD Displays
1. Press ALT and then Esc (S.M.A.R.T).
The S.M.A.R.T. start screen appears.
2. View and change parameter values as
desired. For HIM information, see
Appendix C.
3. Press Esc to exit the S.M.A.R.T. start.
Important: This start-up routine requires an LCD HIM.
The Assisted start-up routine asks simple yes or no questions and prompts
you to input required information. Access Assisted Start Up by selecting
“Start Up” from the Main Menu.
ALT
Esc
Esc
F-> Stopped Auto
SMART List:
Main Menu:
Digital In2 Sel
Diagnostics
Stop Mode A
Parameter
Minimum Speed
0.0
Hz
To perform an Assisted Start-Up:
Step Key(s) Example LCD Displays
1. In the Main Menu, press the Up Arrow
or Down Arrow to scroll to “Start Up”.
2. Press Enter.
F-> Stopped Auto
Hz
0.0
Main Menu:
Memory Storage
Start Up
Preferences
Page 49

Chapter 3
Programming and Parameters
Chapter 3 provides a complete listing and description of the LPM15
parameters. The parameters can be programmed (viewed/edited) using an
LCD HIM (Human Interface Module). As an alternative, programming can
also be performed using DriveExplorer™ or DriveExecutive™ software and
a personal computer. Refer to Appendix
LCD HIM.
For information on… See page…
About Parameters
How Parameters are Organized 3-2
Monitor File 3-6
Motor Control File 3-7
Speed Command File 3-10
Dynamic Control File 3-15
Utility File 3-19
Communication File 3-25
Inputs & Outputs File 3-28
Parameter Cross Reference – by Name 3-32
Parameter Cross Reference – by Number 3-33
C for a brief description of the
3-1
About Parameters
To configure a drive to operate in a specific way, drive parameters may have
to be set. Three types of parameters exist:
• ENUM Parameters
ENUM parameters allow a selection from 2 or more items. The LCD
HIM will display a text message for each item.
• Bit Parameters
Bit parameters have individual bits associated with features or
conditions. If the bit is 0, the feature is off or the condition is false. If the
bit is 1, the feature is on or the condition is true.
• Numeric Parameters
These parameters have a single numerical value (i.e. 0.1 Volts).
The example on the following page shows how each parameter type is
presented in this manual.
Page 50

3-2 Programming and Parameters
➊➌➋➏➎➍
Parameter Name & Description Values
File
Group
No.
198 Load Frm Usr Set]
Loads a previously saved set of parameter
values from a selected user set location in
drive nonvolatile memory to active drive
Drive . . .
memory.
216 [Dig In Status]
UTILITY
No. Description
➊
➋
➌
Status of the digital
inputs.
Diagnostics
File – Lists the major parameter file category.
Group – Lists the parameter group within a file.
No. – Parameter number. = Parameter value cannot be changed until drive is stopped.
Bit #
32
= 32 bit parameter in the Standard Control option.
Default:
Options:00
Digital In5
Digital In6
10 01234567891112131415
1
2
3
Digital In2
Digital In3
Digital In4
000000xxxxxxxxxx
“Ready”
“Ready”
“User Set 1”
“User Set 2”
“User Set 3”
Digital In1
1 =Input Present
0 =Input Not Present
x =Reserved
Related
199
How Parameters are Organized
Parameter Name & Description – Parameter name as it appears on an LCD HIM, with a brief
➍
description of the parameters function.
Val ues – Defines the various operating characteristics of the parameter. Three types exist.
➎
ENUM Default:
Options:
Bit Bit: Lists the bit place holder and definition for each bit.
Numeric Default:
Min/Max:
Units:
Important: Some parameters will have two unit values. Analog inputs can be set for
current or voltage with [Anlg In Config], parameter 320.
Important: When sending values through DPI ports, simply remove the decimal
point to arrive at the correct value (i.e. to send “5.00 Hz,” use “500”).
Related – Lists parameters (if any) that interact with the selected parameter. The symbol “ ”
➏
indicates that additional parameter information is available in Appendix
The LCD HIM displays parameters in a File-Group-Parameter or Numbered
List view order. To switch display mode, access the Main Menu, press ALT,
then Sel while cursor is on the parameter selection. In addition to using
[Param Access Lvl]
commonly used parameters, or diagnostic parameters.
Lists the value assigned at the factory. “Read Only” = no default.
Displays the programming selections available.
Lists the value assigned at the factory. “Read Only” = no default.
The range (lowest and highest setting) possible for the parameter.
Unit of measure and resolution as shown on the LCD HIM.
D.
, the user has the option to display all parameters,
File-Group-Parameter Order
This simplifies programming by grouping parameters that are used for
similar functions. The parameters are organized into 6 files in Basic
Parameter view or 7 files in Advanced Parameter view. Each file is divided
into groups, and each parameter is an element in a group. By default, the
LCD HIM displays parameters by File-Group-Parameter view.
Page 51

Programming and Parameters 3-3
Numbered List View
All parameters are in numerical order.
Basic Parameter View
Parameter 196 [Param Access Lvl] set to option 0 “Basic.”
File Group Parameters
Monitor Metering Output Freq 001
M
onitor
Commanded Freq 002
Output Current 003
DC Bus Voltage 012
Motor Control Motor Data Motor NP Volts 041
Motor Control
Torq Attributes Torque Perf Mode 053
Speed
Command
Speed Command
Dynamic
Control
Dynamic Control
Utility Direction Config Direction Mode 190
Utility
Inputs &
Outputs
Inputs & Outputs
Spd Mode & Limits Minimum Speed 081
Speed References Speed Ref A Sel 090
Discrete Speeds Jo g Speed 100
Ramp Rates Accel Time 1 140
Load Limits Current Lmt Sel 147
Stop/Brake Modes Stop Mode A 155
Restart Modes Start At PowerUp 168 Auto Rstrt Tries 174 Auto Rstrt Delay 175
Power Loss Power Loss Mode 184 Power Loss Time 185
Drive Memory Param Access Lvl 196
Faults Fault Config 1 238
Analog Inputs Anlg In Config 320
Analog Outputs Analog Out1 Sel 342
Digital Inputs Digital In1-6 Sel 361-366
Digital Outputs Digital Out1 Sel 380
Motor NP FLA 042
Motor NP Hertz 043
Maximum Voltage 054
Maximum Speed 082
Speed Ref B Sel 093
Speed Ref A Hi 091
Preset Speed 1-7 101-107
Accel Time 2 141
Current Lmt Val 148
Stop Mode B 156
Reset To Defalts 197
Load Frm Usr Set 198
Analog In1 Hi 322
Analog In2 Hi 325
Analog Out1 Hi 343
Analog Out1 Lo 344
Digital Out2 Sel 384
Motor NP RPM 044
Motor NP Power 045
Mtr NP Pwr Units 046
Maximum Freq 055
Autot une 061
Speed Ref B Hi 094
Speed Ref A Lo 092
Speed Ref B Lo 095
Decel Time 1 142
Decel Time 2 143
DC Brk Lvl Sel 157
DC Brake Level 158
DC Brake Time 159
Save To User Set 199
Language 201
Analog In1 Lo 323
Analog In2 Lo 326
Dig Out1 Level 381
Dig Out2 Level 385
Motor OL Hertz 047
TB Man Ref Sel 096
TB Man Ref Hi 097
TB Man Ref Lo 098
S-Curve % 146
Bus Reg Mode A 161
Bus Reg Mode B 162
DB Resistor Type 163
Page 52

3-4 Programming and Parameters
Advanced Parameter View
Parameter 196 [Param Access Lvl] set to option 1 “Advanced.”
File Group Parameters
Monitor Metering Output Freq 001
Monitor
Drive Data Rated kW 026
Motor Control M otor Data Motor Type 040
Motor Control
Torq Attributes Torque Perf Mode 053
Volts per Hertz Start/Ac c Boost 0 69
Speed
Command
Speed Command
Dynamic
Control
Dynamic Control
Spd Mode & Limits Speed Mode 08 0
Speed References Speed Ref A Sel 090
Discrete Speeds Jog Speed 100
Speed Trim Trim In Select 117
Slip Comp Slip RPM @ FLA 121
Process PI PI Configuration 124
Ramp Rates Accel Time 1 14 0
Load Limits Current Lmt Sel 147
Stop/Brake Modes Stop Mode A 155
Restart Modes Start At PowerUp 168
Power Loss Power Loss Mode 184
Commanded Freq 002
Output Current 003
Torque Current 004
Flux Current 005
Rated Volts 027
Motor NP Volts 041
Motor NP FLA 042
Motor NP Hertz 043
Maximum Voltage 054
Maximum Freq 055
Compensation 05 6
Run Boost 070
Minimum Speed 081
Maximum Speed 082
Speed Ref A Hi 091
Speed Ref A Lo 092
Preset Speed 1-7 101-107
Trim Out Select 118
Slip Comp Gain 122
PI Control 125
PI Reference Sel 126
PI Setpoint 127
PI Feedback Sel 128
Accel Time 2 141
Current Lmt Val 148
Current Lmt Gain 149
Stop Mode B 156
DC Brake Lvl Sel 157
DC Brake Level 158
Flying Start En 169
Flying StartGain 170
Auto Rstrt Tries 174
Power Loss Time 185
Power Loss Level 186
Output Voltage 006
Output Power 007
Output Powr Fctr 008
Elapsed MWh 009
Elapsed Run Time 010
Rated Amps 028
Control SW Ver 029
Motor NP RPM 044
Motor NP Power 045
Mtr NP Pwr Units 046
Motor OL Hertz 047
Flux Up Mode 057
Flux Up Time 058
SV Boost Filter 059
Autotune 061
Break Voltage 071
Break Frequency 072
Overspeed Limit 083
Skip Frequency 1 084
Skip Frequency 2 085
Speed Ref B Sel 093
Speed Ref B Hi 094
Speed Ref B Lo 095
Trim Hi 119
Trim Lo 120
Slip RPM Meter 123
PI Integral Time 129
PI Prop Gain 130
PI Lower Limit 131
PI Upper Limit 132
PI Preload 133
Decel Time 1 142
Decel Time 2 143
Drive OL Mode 150
PWM Frequency 151
DC Brake Time 159
Bus Reg Ki 160
Bus Reg Mode A 161
Bus Reg Mode B 162
Auto Rstrt Delay 175
Sleep Wake-Mode 178
Sleep-Wake Ref 179
Wake Level 180
MOP Frequency 011
DC Bus Voltage 012
DC Bus Memory 013
Analog In1 Value 016
Analog In2 Value 017
Motor OL Factor 048
IR Voltage Drop 062
Flux Current Ref 063
IXo Voltage Drop 064
Skip Frequency 3 086
Skip Freq Band 087
TB Man Ref Sel 096
TB Man Ref Hi 097
TB Man Ref Lo 09 8
PI Status 134
PI Ref Meter 135
PI Fdback Meter 136
PI Error Meter 137
PI Output Meter 138
S Curve % 146
DB Resistor Type 163
Bus Reg Kp 164
Bus Reg Kd 165
Wake T ime 1 81
Sleep Level 182
Sleep Time 183
Page 53

File Group Parameters
Utility Direction Config Direction Mode 190
Utility
Communication Comm Control DPI Baud Rate 270
Communication
Inputs &
Outputs
Inputs & Outputs
HIM Ref Config Save HIM Ref 192
MOP Config Save MOP Ref 194
Drive Memory Param Access Lvl 196
Diagnostics Drive Status 1 209
Faults Fault Config 1 238
Alarms Alarm Config 1 259
Masks & Owners Logic Mask 276
Datalinks Data In A1-D2 300-307
Analog Inputs Anlg In Config 320
Analog Outputs Anlg Out Config 340
Digital Inputs Digital In1-6 Sel 361-366
Digital Outputs Digital Out1 Sel 380
Man Ref Preload 193
MOP Rate 195
Reset To Defalts 197
Load Frm Usr Set 198
Drive Status 2 210
Drive Alarm 1 211
Drive Alarm 2 212
Speed Ref Source 213
Start Inhibits 214
Last Stop Source 215
Dig In Status 216
Fault Clear 240
Alarm Clear 261
Drive Logic Rslt 271
Start Mask 277
Jog Mask 278
Direction Mask 279
Reference Mask 280
Accel Mask 281
Decel Mask 282
Data Out A1-D2 310-317
Anlg In Sqr Root 321
Analog In 1 Hi 322
Anlg Out Absolut 341
Analog Out1 Sel 342
Digital Out2 Sel 384
Dig Out1 Level 381
Programming and Parameters 3-5
Save To User Set 199
Reset Meters 200
Language 201
Dig Out Status 217
Drive Temp 218
Drive OL Count 219
Motor OL Count 220
Fault Speed 224
Fault Amps 225
Fault Bus Volts 226
Status 1 @ Fault 227
Fault Clear Mode 241
Power Up Marker 242
Alarm1-8 Code 262-269
Drive Ref Rslt 272
Drive Ramp Rslt 273
Fault Clr Mask 283
MOP Mask 284
Local Mask 285
Stop Owner 288
Start Owner 289
Jog Owner 290
Direction Owner 291
Analog In 2 Hi 325
Analog In 1 Lo 323
Analog In 2 Lo 326
Analog Out1 Hi 343
Analog Out1 Lo 344
Dig Out2 Level 385
Dig Out1 OnTime 382
Dig Out2 OnTime 386
Voltage Class 202
Drive Checksum 203
Status 2 @ Fault 228
Alarm 1 @ Fault 229
Alarm 2 @ Fault 230
Testpoint 1 Sel 234
Testpoint 1 Data 235
Testpoint 2 Sel 236
Testpoint 2 Data 237
Fault 1-8 Code 243-257
Fault 1-8 Time 244-258
Reference Owner 292
Accel Owner 293
Decel Owner 294
Fault Clr Owner 295
MOP Owner 296
Local Owner 297
Anlg In 1 Loss 324
Anlg In 2 Loss 327
Dig Out1 OffTime 383
Dig Out2 OffTime 387
Page 54

3-6 Programming and Parameters
Monitor File
File
Group
No.
001 [Output Freq]
002 [Commanded Freq]
003 [Output Current]
004 [Torque Current]
005 [Flux Current]
006 [Output Voltage]
007 [Output Power]
008 [Output Powr Fctr]
Metering
009 [Elapsed MWh]
32
010 [Elapsed Run Time]
32
MONITOR
011 [MOP Frequency]
012 [DC Bus Voltage]
013 [DC Bus Memory]
016
017
026 [Rated kW]
32
027 [Rated Volts]
028 [Rated Amps]
Drive Data
029 [Control SW Ver]
Parameter Name & Description
See page 3-2 for symbol descriptions
Output frequency present at T1, T2 & T3 (U, V & W).
Value of the active frequency command.
The total output current present at T1, T2 & T3 (U, V & W).
Based on the motor, the amount of current that is in phase with the
fundamental voltage component.
Amount of current that is out of phase with the fundamental voltage
component.
Output voltage present at terminals T1, T2 & T3 (U, V & W).
Output power present at T1, T2 & T3 (U, V & W).
Output power factor.
Accumulated output energy of the drive.
Accumulated time drive is outputting power.
Value of the signal at MOP (Motor Operated Potentiometer).
Present DC bus voltage level.
6 minute average of DC bus voltage level.
[Analog In1 Value]
[Analog In2 Value]
Value of the signal at the analog inputs.
Drive power rating.
The drive input voltage class (208, 240, 400, etc.).
The drive rated output current.
Main Control Board software version.
Values Related
Default:
Min/Max:
Units:
Default:
Min/Max:
Units:
Default:
Min/Max:
Units:
Default:
Min/Max:
Units:
Default:
Min/Max:
Units:
Default:
Min/Max:
Units:
Default:
Min/Max:
Units:
Default:
Min/Max:
Units:
Default:
Min/Max:
Units:
Default:
Min/Max:
Units:
Default:
Min/Max:
Units:
Default:
Min/Max:
Units:
Default:
Min/Max:
Units:
Default:
Min/Max:
Units:
Default:
Min/Max:
Units:
Default:
Min/Max:
Units:
Default:
Min/Max:
Units:
Default:
Min/Max:
Units:
Read Only
–/+[Maximum Freq]
0.1 Hz
Read Only
–/+[Maximum Speed]
0.1 Hz
Read Only
0.0/Drive Rated Amps × 2
0.1 Amps
Read Only
Drive Rating × –2/+2
0.1 Amps
Read Only
Drive Rating × –2/+2
0.1 Amps
Read Only
0.0/Drive Rated Volts
0.1 VAC
Read Only
0.0/Drive Rated kW × 2
0.1 kW
Read Only
0.00/1.00
0.01
Read Only
0.0/214748364.0 MWh
0.1 MWh
Read Only
0.0/429496729.5 Hrs
0.1 Hrs
Read Only
–/+[Maximum Freq]
0.1 Hz
Read Only
0.0/Based on Drive Rating
0.1 VDC
Read Only
0.0/Based on Drive Rating
0.1 VDC
Read Only
0.000/20.000 mA
–/+10.000V
0.001 mA
0.001 Volt
Read Only
0.00/3000.00 kW
0.01 kW
Read Only
0.0/6553.5 VAC
0.1 VAC
Read Only
0.0/6553.5 Amps
0.1 Amps
Read Only
0.000/256.256
0.001
196
Page 55

Programming and Parameters 3-7
Motor Control File
Parameter Name & Description
File
MOTOR CONTROL
See page 3-2 for symbol descriptions
Group
No.
040 [Motor Type]
Set to match the type of motor connected.
(1)
Important: Selecting option 1 or 2 also requires selection of “Custom
V/Hz,” option 2 in parameter 53.
041 [Motor NP Volts]
Set to the motor nameplate rated volts.
042 [Motor NP FLA]
Set to the motor nameplate rated full load amps.
043 [Motor NP Hertz]
Set to the motor nameplate rated frequency.
044 [Motor NP RPM]
Set to the motor nameplate rated RPM.
Motor Data
045 [Motor NP Power]
Set to the motor nameplate rated power.
32
046 [Mtr NP Pwr Units]
Selects the motor power units to be used.
047 [Motor OL Hertz]
Selects the output frequency below which the motor operating current is
derated. The motor thermal overload will generate a fault at lower levels
of current.
048 [Motor OL Factor]
Sets the operating level for the motor overload.
Motor FLA x OL Factor = Operating Level
053 [Torque Perf Mode]
Sets the method of motor torque production.
054 [Maximum Voltage]
Sets the highest voltage the drive will output.
055 [Maximum Freq]
Sets the highest frequency the drive will output. Refer to parameter 083
[Overspeed Limit].
056 [Compensation]
Enables/disables correction options.
Torq Attributes
Val ues Re lated
Default:
Options:00
Default:
Min/Max:
Units:
Default:
Min/Max:
Units:
Default:
Min/Max:
Units:
Default:
Min/Max:
Units:
Default:
Min/Max:
Units:
Default:
Options:01
Default:
Min/Max:
Units:
Default:
Min/Max:
Units:
Default:
Options:00
Default:
Min/Max:
Units:
Default:
Min/Max:
Units:
“Induction”
“Induction”
1
“Synchr Reluc”
2
“Synchr PM”
Based on Drive Rating
0.0/[Rated Volts]
0.1 VAC
Based on Drive Rating
0.0/[Rated Amps] × 2
0.1 Amps
Based on Drive Cat. No.
5.0/400.0 Hz
0.1 Hz
1750 RPM
60/2400 RPM
1 RPM
Based on Drive Rating
0.00/100.00
0.01 kW/HP
See [Mtr NP Pwr Units]
Drive Rating Based
“Horsepower”
“kiloWatts”
Motor NP Hz/3
0.0/Motor NP Hz
0.1 Hz
1.00
0.20/2.00
0.01
“Sensrls Vect”
“Sensrls Vect”
1
“SV Economize”
2
“Custom V/Hz”
3
“Fan/Pmp V/Hz”
Drive Rated Volts
Rated Volts x 0.25/Rated Volts
0.1 VAC
110.0 or 130.0 Hz
5.0/420.0 Hz
0.1 Hz
(1)
(1)
053
047, 048
046
042, 220
042, 220
083
10 1234567891112131415
Bit #
Factory Default Bit Values
Reflected Wave
Enable Jerk
Ixo AutoCalc
0
10xxxxxxxxxxxxx
0
1 = Enabled
0 = Disabled
x =Reserved
Page 56

3-8 Programming and Parameters
Parameter Name & Description
File
MOTOR CONTROL
See page 3-2 for symbol descriptions
Group
No.
057 [Flux Up Mode]
Automatic = Flux is established for a calculated time period based on
motor nameplate data. [Flux Up Time] is not used.
Manual = Flux is established for [Flux Up Time] before acceleration.
058 [Flux Up Time]
Sets the amount of time the drive will use to try and achieve full motor
stator flux. When a Start command is issued, DC current at current limit
level is used to build stator flux before accelerating.
059 [SV Boost Filter]
Sets the amount of filtering used to boost voltage during Sensorless
Vector operation.
061 [Autotune]
Provides a manual or automatic method for setting [IR Voltage Drop],
[Flux Current Ref], and [Ixo Voltage Drop]. Valid only when parameter 53
is set to “Sensrls Vect” or “SV Economize.”
“Ready” (0) = Parameter returns to this setting following a “Static Tune” or “Rotate Tune.” It also permits manually setting
[IR Voltage Drop], [Ixo Voltage Drop], and [Flux Current Ref].
“Static Tune” (1) = A temporary command that initiates a non-rotational motor stator resistance test for the best possible
automatic setting of [IR Voltage Drop]. A start command is required following initiation of this setting. The parameter
returns to “Ready” (0) following the test, at which time another start transition is required to operate the drive in normal
mode. Used when motor cannot be rotated.
“Rotate Tune” (2) = A temporary command that initiates a “Static Tune” followed by a rotational test for the best possible
Torq Attributes
automatic setting of [Flux Current Ref]. A star t command is required following initiation of this setting. The parameter
returns to “Ready” (0) following the test, at which time another start transition is required to operate the drive in normal
mode. Important: Used when motor is uncoupled from the load. Results may not be valid if a load is coupled to the
motor during this procedure.
Val ues Re lated
Default:
Options:00
Default:
Min/Max:
Units:
Default:
Min/Max:
Units:
Default:
Options:30
“Manual”
“Manual”
1
“Automatic”
0.00 Secs
0.00/5.00 Secs
0.01 Secs
500
0/32767
1
“Calculate”
“Ready”
1
“Static Tune”
2
“Rotate Tune”
3
“Calculate”
053, 058
053, 058
053, 062
ATTENTION: Rotation of the motor in an undesired direction can occur during this procedure. To
guard against possible injury and/or equipment damage, it is recommended that the motor be
disconnected from the load before proceeding.
!
“Calculate” (3) = This setting uses motor nameplate data to automatically set [IR Voltage Drop], [Ixo Voltage Drop], [Flux
Current Ref], and [Slip RPM @ FLA].
062 [IR Voltage Drop]
Value of voltage drop across the resistance of the motor stator at rated
motor current. Used only when parameter 53 is set to “Sensrls Vect” or
“SV Economize.”
063 [Flux Current Ref]
32
Value of amps for full motor flux. Used only when parameter 53 is set to
“Sensrls Vect” or “SV Economize.”
064 [Ixo Voltage Drop]
Value of voltage drop across the leakage inductance of the motor at rated
motor current. Used only when parameter 53 is set to “Sensrls Vect” or
“SV Economize.”
Default:
Min/Max:
Units:
Default:
Min/Max:
Units:
Default:
Min/Max:
Units:
Based on Drive Rating
0.0/[Motor NP Volts]× 0.25
0.1 VAC
Based on Drive Rating
0.00/[Motor NP FLA]
0.01 Amps
Based on Drive Rating
0.0/230.0, 480.0, 575 VAC
0.1 VAC
053, 061
053, 061
Page 57

Programming and Parameters 3-9
Parameter Name & Description
File
MOTOR CONTROL
See page 3-2 for symbol descriptions
Group
No.
069 [Start/Acc Boost]
Sets the voltage boost level for starting and acceleration when “Custom
V/Hz” mode is selected. Refer to parameter 083 [Overspeed Limit].
070 [Run Boost]
Sets the boost level for steady state or deceleration when “Fan/Pmp
V/Hz” or “Custom V/Hz” modes are selected. See parameter 083
[Overspeed Limit].
071 [Break Voltage]
Vol t s p e r H e r t z
Sets the voltage the drive will output at [Break Frequency]. Refer to
parameter 083 [Overspeed Limit].
072 [Break Frequency]
Sets the frequency the drive will output at [Break Voltage]. Refer to
parameter 083.
Val ues Re lated
Default:
Min/Max:
Units:
Default:
Min/Max:
Units:
Default:
Min/Max:
Units:
Default:
Min/Max:
Units:
Based on Drive Rating
0.0/[Motor NP Volts] × 0.25
0.1 VAC
Based on Drive Rating
0.0/[Motor NP Volts] × 0.25
0.1 VAC
[Motor NP Volts] × 0.25
0.0/[Motor NP Volts]
0.1 VAC
[Motor NP Hz] × 0.25
0.0/[Maximum Freq]
0.1 Hz
053, 070
053, 069
053, 072
053, 071
Page 58

3-10 Programming and Parameters
Speed Command File
Parameter Name & Description
File
SPEED COMMAND
See page 3-2 for symbol descriptions
Group
No.
080 [Speed Mode]
Sets the method of speed regulation.
081 [Minimum Speed]
Sets the low limit for speed reference after scaling is applied. Refer to
parameter 083 [Overspeed Limit].
082 [Maximum Speed]
Sets the high limit for speed reference after scaling is applied. Refer to
parameter 083 [Overspeed Limit].
083 [Overspeed Limit]
Sets the incremental amount of the output frequency (above [Maximum
Speed]) allowable for functions such as slip compensation.
[Maximum Speed] + [Overspeed Limit] must be <
Spd Mode & Limits
[Skip Frequency 1]
084
[Skip Frequency 2]
085
[Skip Frequency 3]
086
Sets a frequency at which the drive will not operate. [Skip Frequency 1-3]
and [Skip Frequency Band] must not equal 0.
087 [Skip Freq Band]
Determines the bandwidth around a skip frequency. [Skip Freq Band] is
split, applying 1/2 above and 1/2 below the actual skip frequency. The
same bandwidth applies to all skip frequencies.
Max Volts
Motor Volts
Voltage
Break Volts
Start Boost
Run
0 Min
Allowable Reference Frequency Range
Frequency Trim due to
Speed Control Mode
Speed
[Maximum Freq]
Allowable Output Frequency Range
Bus Regulation or Current Limit
Allowable Output Frequency Range
Normal Operation
Overspeed
Break
Frequency
Motor
Hz
Frequency
Limit
Speed
Max
Val ues Re lated
Default:
Options:00
Default:
Min/Max:
Units:
Default:
Min/Max:
Units:
Default:
Min/Max:
Units:
Output
Freq Limit
Default:
Default:
Default:
Min/Max:
Units:
Default:
Min/Max:
Units:
Max
Freq
“Open Loop”
“Open Loop”
1
“Slip Comp”
2
“Process PI”
0.0
0.0/[Maximum Speed]
0.1 Hz
50.0 or 60.0 Hz (volt class)
[Motor NP RPM]
5.0/400.0 Hz
0.1 Hz
10.0 Hz
0.0/20.0 Hz
0.1 Hz
0.0 Hz
0.0 Hz
0.0 Hz
–/+[Maximum Speed]
0.1 Hz
0.0 Hz
0.0/30.0 Hz
0.1 Hz
124 thru 138
083, 092,
095
055, 083,
091
, 094,
202
055, 082
087
084, 085,
086
Page 59

Programming and Parameters 3-11
Parameter Name & Description
File
SPEED COMMAND
See page 3-2 for symbol descriptions
Group
No.
090 [Speed Ref A Sel]
Selects the source of the speed reference to the drive unless [Speed Ref
B Sel] or [Preset Speed 1-7] is selected.
(1)
091 [Speed Ref A Hi]
Scales the upper value of the [Speed Ref A Sel] selection when the
source is an analog input.
092 [Speed Ref A Lo]
Scales the lower value of the [Speed Ref A Sel] selection when the
source is an analog input.
093 [Speed Ref B Sel]
See [Speed Ref A Sel].
094 [Speed Ref B Hi]
Scales the upper value of the [Speed Ref B Sel] selection when the
Speed Reference
source is an analog input.
095 [Speed Ref B Lo]
Scales the lower value of the [Speed Ref B Sel] selection when the
source is an analog input.
096 [TB Man Ref Sel]
Sets the manual speed reference source when a digital input is
configured for “Auto/Manual.”
(1)
097 [TB Man Ref Hi]
Scales the upper value of the [TB Man Ref Sel] selection when the
source is an analog input.
098 [TB Man Ref Lo]
Scales the lower value of the [TB Man Ref Sel] selection when the source
is an analog input.
See Figure 1.4 on page 1-8 for DPI Port 3 location.
“Analog In 2” is not a valid selection if it was selected for any of the
following:
- [Trim In Select]
- [PI Feedback Sel]
- [PI Reference Sel]
- [Current Lmt Sel]
- [Sleep-Wake Ref]
Val ues Re lated
Default:
Options:21
Default:
Min/Max:
Units:
Default:
Min/Max:
Units:
Default:
Options:
Default:
Min/Max:
Units:
Default:
Min/Max:
Units:
Default:
Options:11
Default:
Min/Max:
Units:
Default:
Min/Max:
Units:
“Analog In 2”
“Analog In 1”
“Analog In 2”
2
“Reserved”
3-8
“MOP Level”
9
“Reserved”
10
“Preset Spd1”
11
“Preset Spd2”
12
“Preset Spd3”
13
“Preset Spd4”
14
“Preset Spd5”
15
“Preset Spd6”
16
“Preset Spd7”
17
“DPI Port 1”
18
19
“DPI Port 2”
20
“DPI Port 3”
21
“DPI Port 4”
22
“DPI Port 5”
[Maximum Speed]
–/+[Maximum Speed]
0.1 Hz
0.0
–/+[Maximum Speed]
0.1 Hz
11 “Preset Spd1”
See [Speed Ref A Sel]
[Maximum Speed]
–/+[Maximum Speed]
0.1 Hz
0.0
–/+[Maximum Speed]
0.1 Hz
“Analog In 1”
“Analog In 1”
2
“Analog In 2”
3-8
“Reserved”
9
“MOP Level”
[Maximum Speed]
–/+[Maximum Speed]
0.1 Hz
0.0
–/+[Maximum Speed]
0.1 Hz
002
091 thru 093
101 thru 107
117 thru 120
192 thru 194
213
272
273
320
(1)
(1)
(1)
(1)
(1)
(1)
361 thru 366
082
081
090
093
090, 093
, 098
097
096
096
Page 60

3-12 Programming and Parameters
Parameter Name & Description
File
SPEED COMMAND
See page 3-2 for symbol descriptions
Group
No.
100 [Jog Speed]
Sets the output frequency when a jog command is issued.
[Preset Speed 1]
101
[Preset Speed 2]
102
[Preset Speed 3]
103
[Preset Speed 4]
104
[Preset Speed 5]
105
[Preset Speed 6]
106
Discrete Speeds
[Preset Speed 7]
107
Provides an internal fixed speed command value. In bipolar mode
direction is commanded by the sign of the reference.
117 [Trim In Select]
Specifies which analog input signal is being used as a trim input.
118 [Trim Out Select]
Specifies which speed references are to be trimmed.
Speed Trim
Factory Default Bit Values
119 [Trim Hi]
Scales the upper value of the [Trim In Select] selection when the source
is an analog input.
120 [Trim Lo]
Scales the lower value of the [Trim In Select] selection when the source is
an analog input.
Bit #
Val ues Re lated
Default:
Min/Max:
Units:
Default:
Min/Max:
Units:
Default:
Options:
Trim Ref A
Trim Ref B
1 = Trimmed
0xx 0xxxxxxxxxxxx
10 01234567891112131415
0 = Not Trimmed
x =Reserved
Default:
Min/Max:
Units:
Default:
Min/Max:
Units:
10.0 Hz
–/+[Maximum Speed]
0.1 Hz
5.0 Hz
10.0 Hz
20.0 Hz
30.0 Hz
40.0 Hz
50.0 Hz
60.0 Hz
–/+[Maximum Speed]
0.1 Hz
2 “Analog In 2”
See [Speed Ref A Sel]
60.0 Hz
–/+[Maximum Speed]
0.1 Hz
0.0 Hz
–/+[Maximum Speed]
0.1 Hz
090
, 093
090, 093
117, 119,
120
082, 117
117
Important: Parameters in the Slip Comp Group are used to enable and tune the Slip Compensation Regulator. In order
to allow the Slip Compensation Regulator to control drive operation, parameter 080 [Speed Mode] must be set to 1 “Slip
Comp”.
121 [Slip RPM @ FLA]
Sets the amount of compensation to drive output at motor FLA.
If the value of parameter 061 [Autotune] = 3 “Calculate,” changes made to
this parameter will not be accepted.
Slip Comp
122 [Slip Comp Gain]
Sets the response time of slip compensation.
123 [Slip RPM Meter]
Displays the present amount of adjustment being applied as slip
compensation.
Default:
Min/Max:
Units:
Default:
Min/Max:
Units:
Default:
Min/Max:
Units:
Based on [Motor NP RPM]
0.0/1200.0 RPM
0.1 RPM
40.0
1.0/100.0
0.1
Read Only
0.0/300.0 RPM
0.1 RPM
061, 080,
122
, 123
080, 121,
122
080, 121,
122
Page 61

Programming and Parameters 3-13
Parameter Name & Description
File
SPEED COMMAND
See page 3-2 for symbol descriptions
Group
No.
Important: Parameters in the Process PI Group are used to enable and tune the PI Loop. In order to allow the PI Loop
to control drive operation, parameter 080 [Speed Mode] must be set to 2 “Process PI”.
124 [PI Configuration]
Sets configuration of the PI regulator.
Bit #
Factory Default Bit Values
125 [PI Control]
Controls the PI regulator.
Bit #
Factory Default Bit Values
126 [PI Reference Sel]
Selects the source of the PI reference.
Process PI
127 [PI Setpoint]
Provides an internal fixed value for process setpoint when [PI Reference
Sel] is set to “PI Setpoint.”
128 [PI Feedback Sel]
Selects the source of the PI feedback.
129 [PI Integral Time]
Time required for the integral component to reach 100% of [PI Error
Meter]. Not functional when the PI Hold bit of [PI Control] = “1” (enabled).
130 [PI Prop Gain]
Sets the value for the PI proportional component.
PI Error x PI Prop Gain = PI Output
131 [PI Lower Limit]
Sets the lower limit of the PI output.
132 [PI Upper Limit]
Sets the upper limit of the PI output.
Val ues Re lated
124 thru 138
Feedbak Sqrt
Anti-Wind Up
Zero Clamp
Stop Mode
10 01234567891112131415
10 01234567891112131415
Invert Error
Preload Mode
Ramp Ref
00000000xxxxxxxx
PI Hold
PI Reset
00x 0xxxxxxxxxxxx
Excl Mode
1 = Enabled
0 = Disabled
x =Reserved
PI Enable
1 = Enabled
0 = Disabled
x =Reserved
Default:
Options:00
Default:
Min/Max:
Units:
Default:
Options:
Default:
Min/Max:
Units:
Default:
Min/Max:
Units:
Default:
Min/Max:
Units:
Default:
Min/Max:
Units:
“PI Setpoint”
“PI Setpoint”
“Analog In 1”
1
“Analog In 2”
2
“Reserved”
3-8
“MOP Level”
9
“Master Ref”
10
“Preset Spd1-7”
11-17
“DPI Port 1-5”
18-22
50.00%
–/+100.00% of Max. Process Value
0.01%
2 “Analog In 2”
See [PI Reference Sel]
2.0 Secs
0.00/100.00 Secs
0.01 Secs
1.0
0.00/100.00
0.01
–[Maximum Freq]
–/+400.0 Hz
0.1 Hz
+[Maximum Freq]
–/+400.0 Hz
0.1 Hz
.
080
124
thru 138
124 thru 138
124
thru 138
124 thru 138
124 thru 138
124 thru 138
124 thru 138
Page 62

3-14 Programming and Parameters
Parameter Name & Description
File
SPEED COMMAND
See page 3-2 for symbol descriptions
Group
No.
133 [PI Preload]
Sets the value used to preload the integral component on start or enable.
134 [PI Status]
Status of the Process PI regulator.
Bit #
135 [PI Ref Meter]
Process PI
Present value of the PI reference signal.
136 [PI Fdback Meter]
Present value of the PI feedback signal.
137 [PI Error Meter]
Present value of the PI error.
138 [PI Output Meter]
Present value of the PI output.
Val ues Re lated
Default:
Min/Max:
Units:
PI Enabled
PI Hold
PI InLimit
PI Reset
1 = Condition True
0000xxxxxxxxxxxx
10 01234567891112131415
0 = Condition False
x =Reserved
Default:
Min/Max:
Units:
Default:
Min/Max:
Units:
Default:
Min/Max:
Units:
Default:
Min/Max:
Units:
0.0 Hz
–/+400.0 Hz
0.1 Hz
Read Only 124 thru 138
Read Only
–/+100.0%
0.1%
Read Only
–/+100.0%
0.1%
Read Only
–/+100.0%
0.1%
Read Only
–/+100.0 Hz
0.1 Hz
124 thru 138
124 thru 138
124 thru 138
124 thru 138
124 thru 138
Page 63

Dynamic Control File
Programming and Parameters 3-15
Parameter Name & Description
File
DYNAMIC CONTROL
See page 3-2 for symbol descriptions
Group
No.
140
[Accel Time 1]
141
[Accel Time 2]
Sets the rate of accel for all speed increases.
Max Speed
Accel Time
142
[Decel Time 1]
143
[Decel Time 2]
Sets the rate of decel for all speed decreases.
Ramp Rates
Load Limits
Max Speed
Decel Time
146 [S Curve %]
Sets the percentage of accel or decel time that is applied to the ramp as
S Curve. Time is added, 1/2 at the beginning and 1/2 at the end of the
ramp.
147 [Current Lmt Sel]
Selects the source for the adjustment of current limit (i.e. parameter,
analog input, etc.).
148 [Current Lmt Val]
Defines the current limit value when [Current Lmt Sel] = “Cur Lim Val.”
149 [Current Lmt Gain]
Sets the responsiveness of the current limit.
150 [Drive OL Mode]
Selects the drive’s response to increasing drive temperature.
151 [PWM Frequency]
Sets the carrier frequency for the PWM output.
155
[Stop Mode A]
156
[Stop Mode B]
Active stop mode. [Stop Mode A] is active unless [Stop Mode B] is
selected by inputs.
(1)
When using options 1 or 2, read this Attention statement.
Val ues Re lated
Accel Rate
=
Decel Rate
=
Default:
Min/Max:
Units:
Default:
Min/Max:
Units:
Default:
Min/Max:
Units:
Default:
Options:00
Default:
Min/Max:
Units:
Default:
Min/Max:
Units:
Default:
Options:30
Default:
Min/Max:
Units:
Default:
Default:
Options:
10.0 Secs
10.0 Secs
0.1/3600.0 Secs
0.1 Secs
10.0 Secs
10.0 Secs
0.1/3600.0 Secs
0.1 Secs
0%
0/100%
1%
1
2
[Rated Amps] × 1.5
(Equation yields approximate default
value.)
Based on Drive Rating
0.1 Amps
250
0/5000
1
1
2
3
4 kHz
2/4 kHz
1 kHz
1
0
0
1
2
3
ATTENTION: If a hazard of injury due to movement of equipment or material exists, an auxiliary
mechanical braking device must be used.
!
“Cur Lim Val”
“Cur Lim Val”
“Analog In 1”
“Analog In 2”
“Both–PWM 1st”
“Disabled”
“Reduce CLim”
“Reduce PWM”
“Both–PWM 1st”
“Ramp”
“Coast”
“Coast”
(1)
“Ramp”
“Ramp to Hold”
“DC Brake”
142, 143,
146
, 361
140, 141,
146
, 361
140 thru 143
146, 149
147, 149
147, 148
219
157
, 158,
159
(1)
157 [DC Brake Lvl Sel]
Not available.
Stop/Brake Modes
158 [DC Brake Level]
Not available.
159 [DC Brake Time]
Not available.
160 [Bus Reg Ki]
Sets the responsiveness of the bus regulator.
Default:
Min/Max:
Units:
450
0/5000
1
161, 162
Page 64

3-16 Programming and Parameters
Parameter Name & Description
File
DYNAMIC CONTROL
See page 3-2 for symbol descriptions
Group
No.
161
[Bus Reg Mode A]
162
[Bus Reg Mode B]
Sets the method and sequence of the DC bus regulator voltage. Choices
are dynamic brake, frequency adjust, or both. Sequence is determined by
programming or digital input to the terminal block.
Dynamic Brake Setup
If a dynamic brake resistor is connected to the drive, both of these
parameters must be set to either option 2, 3 or 4.
Refer to the Attention statement on page P-3
bus regulation.
Stop/Brake Modes
163 [DB Resistor Type]
Not available.
164 [Bus Reg Kp]
Proportional gain for the bus regulator. Used to adjust regulator
response.
165 [Bus Reg Kd]
Derivative gain for the bus regulator. Used to control regulator overshoot.
168 [Start At PowerUp]
Enables/disables a feature to issue a Start or Run command and
automatically resume running at commanded speed after drive input
power is restored. Requires a digital input configured for Run or Start and
a valid start contact.
Val ues Re lated
Default:
Options:
for important information on
ATTENTION: The drive does not offer protection for externally mounted brake resistors. A risk of fire
exists if external braking resistors are not protected. External resistor packages must be self-protected
from over temperature or a protective circuit must be supplied.
!
Default:
Min/Max:
Units:
Default:
Min/Max:
Units:
Default:
Options:00
1
4
0
1
2
3
4
1500
0/10000
1
1000
0/10000
1
1
“Adjust Freq”
“Both-Frq 1st”
“Disabled”
“Adjust Freq”
“Dynamic Brak”
“Both-DB 1st”
“Both-Frq 1st”
“Disabled”
“Disabled”
“Enabled”
160
, 163
ATTENTION: Equipment damage and/or personal injury may result if this parameter is used in an
inappropriate application. Do not use this function without considering applicable local, national, and
international codes, standards, regulations or industry guidelines.
!
169 [Flying Start En]
Enables/disables the function which reconnects to a spinning motor at
actual RPM when a start command is issued.
170 [Flying StartGain]
Sets the response of the flying start function.
Restart Modes
174 [Auto Rstrt Tries]
Sets the maximum number of times the drive attempts to reset a fault and
restart.
175 [Auto Rstrt Delay]
Sets the time between restart attempts when [Auto Rstrt Tries] is set to a
value other than zero.
ATTENTION: Equipment damage and/or personal injury may result if this parameter is used in an
inappropriate application. Do not use this function without considering applicable local, national, and
international codes, standards, regulations or industry guidelines.
!
Default:
Options:00
Default:
Min/Max:
Units:
Default:
Min/Max:
Units:
Default:
Min/Max:
Units:
“Disabled”
“Disabled”
1
“Enabled”
4000
20/32767
1
0
0/9
1
1.0 Secs
0.5/30.0 Secs
0.1 Secs
170
169
175
174
Page 65

Programming and Parameters 3-17
Parameter Name & Description
File
DYNAMANIC CONTROL
See page 3-2 for symbol descriptions
Group
No.
178 [Sleep-Wake Mode]
Enables/disables the Sleep/Wake function. Important: When enabled,
the following conditions must be met:
• A proper minimum value must be programmed for [Sleep Level].
• A speed reference must be selected in [Speed Ref A Sel].
• At least one of the following must be programmed (and input closed) in
[Digital Inx Sel]; “Enable,” “Stop=CF,” “Run,” “Run Forward,” “Run
Reverse.”
Conditions Required to Start Drive
Input After Power-Up
Stop Stop Closed
Enable Enable Closed
Run
Run Forward
Run Reverse
(1)
When power is cycled, if all conditions are present after power is restored, restart will occur.
(2)
Restart Modes
179 [Sleep-Wake Ref]
180 [Wake Level]
181 [Wake Time]
182 [Sleep Level]
183 [Sleep Time]
If all conditions are present when [Sleep-Wake Mode] is “enabled,” the drive will start.
(3)
The active speed reference is determined as explained in Reference Control on page 1-28. The Sleep/Wake
function and the speed reference may be assigned to the same input.
(4)
Command must be issued from HIM, TB or network.
(5)
Run Command must be cycled.
Selects the source of the input controlling the Sleep-Wake function.
Defines the analog input level that will start the drive.
Defines the amount of time at or above [Wake Level] before a Start is
issued.
Defines the analog input level that will stop the drive.
Defines the amount of time at or below [Sleep Level] before a Stop is
issued.
Val ues Re lated
Default:
Options:00
ATTENTION: Enabling the Sleep-Wake function can cause unexpected machine operation during the
Wake mode. Equipment damage and/or personal injury may result if this parameter is used in an
inappropriate application. Do not use this function without considering applicable local, national, and
!
international codes, standards, regulations or industry guidelines.
(1) (2) (3)
After a Drive Fault After a Stop Command
Wake Signal
Wake Signal
Run Closed
Wake Signal
Reset by Stop-CF, HIM or TB Reset by Clear Faults (TB) HIM or TB
Stop Closed
Wake Signal
New Start or Run Cmd.
Enable Closed
(4)
Wake Signal
New Start or Run Cmd.
New Run Cmd.
Wake Signal
(5)
(4)
(4)
Stop Closed
Wake Signal
Enable Closed
Wake Signal
Run Closed
Wake Signal
Stop Closed
Analog Sig. > Sleep Level
New Start or Run Cmd.
Enable Closed
Analog Sig. > Sleep Level
New Start or Run Cmd.
New Run Cmd.
Wake Signal
1
“Disabled”
“Disabled”
“Direct” (Enabled)
(5)
Default:
Options:21
Default:
Min/Max:
Units:
Default:
Min/Max:
Units:
Default:
Min/Max:
Units:
Default:
Min/Max:
Units:
“Analog In 2”
“Analog In 1”
2
“Analog In 2”
6.000 mA, 6.000 Volts
[Sleep Level]/20.000 mA
[Sleep Level]/10.000 Volts
0.001 mA
0.001 Volts
1.0 Secs
0.0/30.0 Secs
0.1 Secs
5.000 mA, 5.000 Volts
4.000 mA/[Wake Level]
0.000 Volts/[Wake Level]
0.001 mA
0.001 Volts
1.0 Secs
0.0/30.0 Secs
0.1 Secs
(6)
(4)
(6)
(4)
181
180
183
182
Page 66

3-18 Programming and Parameters
Parameter Name & Description
File
DYNAMANIC CONTROL
See page 3-2 for symbol descriptions
Group
No.
184 [Power Loss Mode]
Sets the reaction to a loss of input power. Power loss is recognized when:
• DC bus voltage is <
is set to “Coast.”
• DC bus voltage is <
is set to “Decel.”
185 [Power Loss Time]
Sets the time that the drive will remain in power loss mode before a fault
is issued.
186 [Power Loss Level]
Sets the level at which the [Power Loss Mode] selection will occur.
The drive can use the percentages referenced in [Power Loss Mode] or a trigger point can be set for line loss
detection as follows:
Power Loss
A digital input (programmed to “29, Pwr Loss Lvl”) is used to toggle between fixed percentages and the detection
level.
Val ues Re lated
Default:
Options:00
73% of [DC Bus Memory] and [Power Loss Mode]
82% of [DC Bus Memory] and [Power Loss Mode]
Default:
Min/Max:
Units:
Default:
Min/Max:
Units:
= [DC Bus Memory] – [Power Loss Level]
V
trigger
ATTENTION: Drive damage can occur if proper input impedance is not provided as explained below.
If the value for [Power Loss Level] is greater than 18% of [DC Bus Memory], the user must provide a
!
minimum line impedance to limit inrush current when the power line recovers. The input impedance
should be equal to or greater than the equivalent of a 5% transformer with a VA rating 5 times the
drives input VA rating.
“Coast”
“Coast”
“Decel”
1
“Continue”
2
“Coast Input”
3
“Decel Input”
4
0.5 Secs
0.0/60.0 Secs
0.1 Secs
Drive Rated Volts
0.0/999.9 VDC
0.1 VDC
013
184
, 185
Page 67

Utility File
Programming and Parameters 3-19
Parameter Name & Description
File
See page 3-2 for symbol descriptions
Group
No.
190 [Direction Mode]
Selects the method for changing drive direction.
Mode Direction Change
Unipolar Drive Logic
Bipolar Sign of Reference
Direction Config
HIM Ref Config
Reverse Dis Not Changeable
192 [Save HIM Ref]
Enables a feature to save the present frequency reference value issued by the HIM to Drive memory on power loss.
Value is restored to the HIM on power up.
Bit #
Factory Default Bit Values
193 [Man Ref Preload]
Enables/disables a feature to automatically load the present “Auto”
frequency reference value into the HIM when “Manual” is selected. Allows
smooth speed transition from “Auto” to “Manual.”
194 [Save MOP Ref]
Enables/disables the feature that saves the present MOP frequency reference at power down or at stop.
Values Related
Default:
Options:00
At Powr Down
1 = Save at Power Down
xxx 1xxxxxxxxxxxx
10 01234567891112131415
0 = Do Not Save
x =Reserved
Default:
Options:00
1
2
1
“Unipolar”
“Unipolar”
“Bipolar”
“Reverse Dis”
“Disabled”
“Disabled”
“Enabled”
320 thru 327
361 thru 366
UTILITY
MOP Config
Drive Memory
Bit #
Factory Default Bit Values
195 [MOP Rate]
Sets rate of change of the MOP reference in response to a digital input.
196 [Param Access Lvl]
Selects the parameter display level.
Basic = Reduced parameter set
Advanced = Full parameter set
197 [Reset To Defaults]
Resets parameters to factory defaults except [Language], [Param Access
Lvl], and [Voltage Class] (params. 196, 201, and 202).
• Option 1 resets parameters to factory defaults based on [Voltage
Class].
• Options 2 and 3 will reset parameters to factory defaults and set
[Voltage Class] to low or high voltage settings.
198 [Load Frm Usr Set]
Loads a previously saved set of parameter values from a selected user
set location in drive nonvolatile memory to active drive memory.
199 [Save To User Set]
Saves the parameter values in active drive memory to a user set in drive
nonvolatile memory.
At Powr Down
At Stop
1 = Save at Power Down
0xx 0xxxxxxxxxxxx
10 01234567891112131415
0 = Do Not Save
x =Reserved
Default:
Min/Max:
Units:
Default:
Options:00
Default:
Options:00
Default:
Options:00
Default:
Options:00
1.0 Hz/s
0.2/[Maximum Freq]
0.1 Hz/s
“Basic”
“Basic”
1
“Advanced”
2
“Reserved”
“Ready”
“Ready”
1
“Factory”
2
“Low Voltage”
3
“High Voltage”
“Ready”
“Ready”
1
“User Set 1”
2
“User Set 2”
3
“User Set 3”
“Ready”
“Ready”
1
“User Set 1”
2
“User Set 2”
3
“User Set 3”
041 thru 047
054, 063,
069
thru 072
082, 148,
158
199
198
Page 68

3-20 Programming and Parameters
Parameter Name & Description
File
See page 3-2 for symbol descriptions
Group
No.
200 [Reset Meters]
Resets selected meters to zero.
201 [Language]
Selects the display language when using an LCD HIM. This parameter is
not functional with an LED HIM.
Options 6, 8, and 9 are “Reserved.”
Drive Memory
202 [Voltage Class]
Configures the drive current rating and associates it with the selected
voltage (i.e. 400 or 480V). Normally used when downloading parameter
sets. Options 2 and 3 indicate status only.
203 [Drive Checksum]
Provides a checksum value that indicates whether or not a change in
drive programming has occurred.
209 [Drive Status 1]
Present operating condition of the drive.
Values Related
Default:
Options:00
Default:
Options:00
Default:
Options: 2
Default:
Min/Max:
Units:
(2)
(2)
(2)
(2)
(1)
(1)
(1)
“Ready”
“Ready”
1
“MWh”
2
“Elapsed Time”
“Not Selected”
“Not Selected”
“English”
1
“Francais”
2
“Español”
3
“Italiano”
4
“Deutsch”
5
“Português”
7
“Nederlands”
10
Based on Drive Cat. No.
“Low Voltage”
3
“High Voltage”
Read Only
0/65535
1
Read Only 210
041 thru 047
054, 055,
062
069
082, 148,
158
, 063,
thru 072
UTILITY
Diagnostics
210 [Drive Status 2]
Bit #
Bits
0
0
0
0
0
0
0
0
1
1
1
1
1
1
1
1
(2)
0
0
0
0
1
1
1
1
0
0
0
0
1
1
1
1
Spd Ref ID 0
Spd Ref ID 1
Spd Ref ID 2
Spd Ref ID 3
Description
0
0
Ref A Auto
0
1
Ref B Auto
1
0
Preset 2 Auto
1
1
Preset 3 Auto
0
0
Preset 4 Auto
0
1
Preset 5 Auto
1
0
Preset 6 Auto
1
1
Preset 7 Auto
0
0
TB Manual
0
1
Port 1 Manual
1
0
Port 2 Manual
1
1
Port 3 Manual
0
0
Port 4 Manual
0
1
Port 5 Manual
1
0
Port 6 Manual
1
1
Jog Ref
Local ID 1
Local ID 2
Local ID 0
10 01234567891112131415
Faulted
At Speed
Accelerating
Decelerating
Alarm
(1)
Bits
0
0
0
0
0
1
0
1
1
0
1
0
1
1
1
1
Actual Dir
Present operating condition of the drive.
Jogging
DC Braking
Stopping
AutoTuning
AutoRst Act
AutoRst Ctdn
Curr Limit
Motor Overld
Bus Freq Reg
DPI at 500 k
10 01234567891112131415
Bit #
Ready
Active
Command Dir
0110000001110000
Description15 14 13 12 11 10 9
0
Port 0 (TB)
1
Por t 1
0
Por t 2
1
Por t 3
0
Por t 4
1
Por t 5
0
Por t 6
1
No Local Control
Ready
Active
Running
0000000x000000xx
1 = Condition True
0 = Condition False
x =Reserved
1 = Condition True
0 = Condition False
x =Reserved
Read Only 209
Page 69

Programming and Parameters 3-21
Parameter Name & Description
File
See page 3-2 for symbol descriptions
Group
No.
211 [Drive Alarm 1]
Alarm conditions that currently exist in the drive.
Bit #
212 [Drive Alarm 2]
Alarm conditions that currently exist in the drive.
Bit #
213 [Speed Ref Source]
Displays the source of the speed reference to the drive.
UTILITY
Diagnostics
214 [Start Inhibits]
Displays the inputs currently preventing the drive from starting.
Decel Inhibt
Waking
10 01234567891112131415
FlxAmps Rang
SpdRef Cflct
Sleep Config
Ixo Vlt Rang
10 01234567891112131415
IntDBRes OH
Drv OL Lvl 2
Drv OL Lvl 1
IR Vlts Rang
VHz NegSlope
NP Hz Cflct
MaxFrq Cflct
Anlg in Loss
UnderVoltage
Str At PwrUp
Power Loss
000000x0000xxxxx
MtrTyp Cflct
DigIn CflctB
Bipolr Cflct
DigIn CflctC
0000000000000xxx
Prechrg Actv
1 = Condition True
0 = Condition False
x =Reserved
DigIn CflctA
1 = Condition True
0 = Condition False
x = Reserved
Values Related
Read Only 212
Read Only 211
Default:
Options: 0
Read Only
“PI Output”
“Analog In 1”
1
“Analog In 2”
2
“Reserved”
3-8
“MOP Level”
9
“Jog Speed”
10
“Preset Spd1”
11
“Preset Spd2”
12
“Preset Spd3”
13
“Preset Spd4”
14
“Preset Spd5”
15
“Preset Spd6”
16
“Preset Spd7”
17
“DPI Port 1”
18
“DPI Port 2”
19
“DPI Port 3”
20
“DPI Port 4”
21
“DPI Port 5”
22
“Reserved”
23
Read Only
090
096
, 093,
, 101
DPI Port 4
DPI Port 3
DPI Port 5
Bit #
215 [Last Stop Source]
10 01234567891112131415
DPI Port 1
DPI Port 2
Startup Actv
Digital In
Params Reset
Stop Assertd
DC Bus Pchrg
Enable
0000100x100000xx
Fault
Type 2 Alarm
1 = Inhibit True
0 = Inhibit False
x =Reserved
Displays the source that initiated the most recent stop sequence. It will be
cleared (set to 0) during the next start sequence.
Default:
Options: 0
1-5
6
7
8
9
10
11
Read Only
“Pwr Removed”
“DPI Port 1-5”
“Reserved”
“Digital In”
“Fault”
“Not Enabled”
“Sleep”
“Jog”
361
363
365
, 362,
, 364,
, 366
Page 70

3-22 Programming and Parameters
Parameter Name & Description
File
See page 3-2 for symbol descriptions
Group
No.
216 [Dig In Status]
Status of the digital inputs.
Bit #
217 [Dig Out Status]
Status of the digital outputs.
Bit #
218 [Drive Temp]
Present operating temperature of the drive power section.
219 [Drive OL Count]
Accumulated percentage of drive overload. Continuously operating the
drive over 100% of its rating will increase this value to 100% and cause a
drive fault or foldback depending on the setting of [Drive OL Mode].
220 [Motor OL Count]
Accumulated percentage of motor overload. Continuously operating the
motor over 100% of the motor overload setting will increase this value to
UTILITY
100% and cause a drive fault.
224 [Fault Frequency]
Diagnostics
Captures and displays the output speed of the drive at the time of the last
fault.
225 [Fault Amps]
Captures and displays motor amps at the time of the last fault.
226 [Fault Bus Volts]
Captures and displays the DC bus voltage of the drive at the time of the
last fault.
227 [Status 1 @ Fault]
Captures and displays [Drive Status 1] bit pattern at the time of the last fault.
Values Related
Read Only 361 thru 366
Digital In1
Digital In2
Digital In4
Digital In3
Digital In6
Digital In5
10 01234567891112131415
10 01234567891112131415
1 = Input Present
000000xxxxxxxxxx
0 = Input Not Present
x =Reserved
Digital Out1
Digital Out2
1 = Output Energized
0xx 0xxxxxxxxxxxx
0 = Output De-energized
x =Reserved
Default:
Min/Max:
Units:
Default:
Min/Max:
Units:
Default:
Min/Max:
Units:
Default:
Min/Max:
Units:
Default:
Min/Max:
Units:
Default:
Min/Max:
Units:
Read Only 380 thru 384
Read Only
0.0/100.0%
0.1%
Read Only
0.0/100.0%
0.1%
Read Only
0.0/100.0%
0.1%
Read Only
0.0/+[Maximum Freq]
0.1 Hz
Read Only
0.0/[Rated Amps] × 2
0.1 Amps
Read Only
0.0/Max Bus Volts
0.1 VDC
Read Only 209,
150
047, 048
225 thru 230
224 thru 230
224 thru 230
224
thru 230
Ready
Spd Ref ID 3
Spd Ref ID 0
Spd Ref ID 2
Spd Ref ID 1
Bit #
228 [Status 2 @ Fault]
Local ID 0
Local ID 1
Local ID 2
10 01234567891112131415
At Speed
Faulted
Alarm
Decelerating
Active
Actual Dir
Command Dir
Accelerating
0110000101110000
1 = Condition True
0 = Condition False
x =Reserved
Captures and displays [Drive Status 2] bit pattern at the time of the last fault.
Ready
Active
Jogging
Running
DC Braking
Stopping
AutoTuning
AutoRst Act
AutoRst Ctdn
Curr Limit
Motor Overld
Bus Freq Reg
DPI at 500 k
10 01234567891112131415
Bit #
0000000x000000xx
1 = Condition True
0 = Condition False
x =Reserved
Read Only 210,
224
thru 230
Page 71

Programming and Parameters 3-23
Parameter Name & Description
File
UTILITY
See page 3-2 for symbol descriptions
Group
No.
229 [Alarm 1 @ Fault]
Captures and displays [Drive Alarm 1] at the time of the last fault.
Bit #
230 [Alarm 2 @ Fault]
Captures and displays [Drive Alarm 2] at the time of the last fault.
Diagnostics
Bit #
234
[Testpoint 1 Sel]
236
[Testpoint 2 Sel]
Selects the function whose value is displayed value in [Testpoint x Data].
These are internal values that are not accessible through parameters.
See Testpoint Codes and Functions
codes and functions.
235
[Testpoint 1 Data]
237
[Testpoint 2 Data]
32
The present value of the function selected in [Testpoint x Sel].
238 [Fault Config 1]
Enables/disables annunciation of the listed faults.
Waking
10 01234567891112131415
SpdRef Cflct
Sleep Config
Ixo Vlt Rang
10 01234567891112131415
Decel Inhibt
Drv OL Lvl 2
Drv OL Lvl 1
MaxFrq Cflct
FlxAmps Rang
IR Vlts Rang
VHz NegSlope
UnderVoltage
Prechrg Actv
Str At PwrUp
Power Loss
IntDBRes OH
Anlg in Loss
Bipolr Cflct
NP Hz Cflct
MtrTyp Cflct
on page 4-10 for a listing of available
1 = Condition True
000000x0000xxxxx
0 = Condition False
x =Reserved
DigIn CflctA
DigIn CflctB
DigIn CflctC
1 = Condition True
0000000000000xxx
0 = Condition False
x =Reserved
Values Related
Default:
Min/Max:
Units:
Default:
Min/Max:
Units:
Read Only 211,
Read Only 212,
499
0/65535
1
Read Only
0/4294967295
1
224
224
thru 230
thru 230
Decel Inhibt
10 01234567891112131415
Bit #
Factory Default Bit Values
240 [Fault Clear]
Resets a fault and clears the fault queue.
Faults
241 [Fault Clear Mode]
Enables/disables a fault reset (clear faults) attempt from any source. This
does not apply to fault codes which are cleared indirectly via other
actions.
242 [Power Up Marker]
32
Elapsed hours since initial drive power up. This value will rollover to 0
after the drive has been powered on for more than the max value shown.
For relevance to most recent power up, see [Fault x Time].
1x10001xxxxxxxxx
1 = Enabled
0 = Disabled
x =Reserved
Power Loss
UnderVoltage
Motor OverLd
AutRst Tries
Shear Pin
Default:
Options:00
Default:
Options:10
Default:
Min/Max:
Units:
“Ready”
“Ready”
1
“Clear Faults”
2
“Clr Flt Que”
“Enabled”
“Disabled”
1
“Enabled”
Read Only
0.0000/429496.7295 Hr
0.0001 Hr
244, 246,
248
, 250,
252
, 254,
256
, 258
Page 72

3-24 Programming and Parameters
Parameter Name & Description
File
UTILITY
See page 3-2 for symbol descriptions
Group
No.
[Fault 1 Code]
243
[Fault 2 Code]
245
[Fault 3 Code]
247
[Fault 4 Code]
249
[Fault 5 Code]
251
[Fault 6 Code]
253
[Fault 7 Code]
255
[Fault 8 Code]
257
A code that represents the fault that tripped the drive. The codes will
appear in these parameters in the order they occur ([Fault 1 Code] = the
most recent fault).
[Fault 1 Time]
244
[Fault 2 Time]
246
[Fault 3 Time]
248
Faults
[Fault 4 Time]
250
[Fault 5 Time]
252
[Fault 6 Time]
254
[Fault 7 Time]
256
[Fault 8 Time]
258
32
The time between initial drive power up and the occurrence of the
associated trip fault. Can be compared to [Power Up Marker] for the time
from the most recent power up.
A negative value indicates fault occurred before most recent power up. A
positive value indicates fault occurred after most recent power up.
259 [Alarm Config 1]
Enables/disables alarm conditions that will initiate an active drive alarm.
[Fault x Time] - [Power Up Marker] = Time Difference to Most Recent Power Up
Values Related
Default:
Min/Max:
Units:
Default:
Min/Max:
Units:
Read Only
0/65535
0
Read Only
0.0000/429496.7295 Hr
0.0000/214748.3647 Hr
0.0001 Hr
242
Waking
Drv OL Lvl 2
Decel Inhibt
10 01234567891112131415
Bit #
Factory Default Bit Values
261 [Alarm Clear]
Resets all [Alarm 1-8 Code] parameters to zero.
Alarms
[Alarm 1 Code]
262
[Alarm 2 Code]
263
[Alarm 3 Code]
264
[Alarm 4 Code]
265
[Alarm 5 Code]
266
[Alarm 6 Code]
267
[Alarm 7 Code]
268
[Alarm 8 Code]
269
A code that represents a drive alarm. The codes will appear in the order
they occur (first 4 alarms in – first 4 out alarm queue). A time stamp is not
available with alarms.
Anlg in Loss
IntDBRes OH
Drv OL Lvl 1
Prechrg Actv
UnderVoltage
Power Loss
Str At PwrUp
111111x1111xxxxx
1 = Enabled
0 = Disabled
x =Reserved
Default:
Options:00
Default:
Min/Max:
Units:
“Ready”
“Ready”
1
“Clr Alrm Que”
Read Only
0/65535
1
262 thru 269
261
Page 73

Communication File
Programming and Parameters 3-25
Parameter Name & Description
File
See page 3-2 for symbol descriptions
Group
No.
270 [DPI Data Rate]
Sets the baud rate for attached drive peripherals. When changing this
value the drive must be reset for the change to take affect.
271 [Drive Logic Rslt]
The final logic command resulting from the combination of all DPI and discrete
inputs. This parameter has the same structure as the product-specific logic
command received via DPI and is used in peer-to-peer communications.
Bit #
Bits
0
Comm Control
0
0
0
1
1
1
1
272 [Drive Ref Rslt]
Present frequency reference scaled as a DPI reference for peer-to-peer
communications. The value shown is the value prior to the accel/decel
ramp and the corrections supplied by slip comp, PI, etc.
273 [Drive Ramp Rslt]
Present frequency reference scaled as a DPI reference for peer-to-peer
communications. The value shown is the value after the accel/decel ramp,
COMMUNICATION
but prior to any corrections supplied by slip comp, PI, etc.
276 [Logic Mask]
Determines which adapters can control the drive. If the bit for an adapter is set to “0,” the adapter will have no control
functions except for stop.
(1)
Spd Ref ID 1
Spd Ref ID 2
MOP Dec
Spd Ref ID 0
(1)
Description14 13 12
0
0
No Command - Man. Mode
0
1
Ref A Auto
1
0
Ref B Auto
1
1
Preset 3 Auto
0
0
Preset 4 Auto
0
1
Preset 5 Auto
1
0
Preset 6 Auto
1
1
Preset 7 Auto
(1)
(1)
Decel 1
Decel 2
10 01234567891112131415
Accel 1
Accel 2
Reverse
Local Contrl
Mop Inc
Forward
Clear Fault
Jog
0110000101110000
Stop
Start
1 = Condition True
0 = Condition False
x =Reserved
Val ues Re lated
Default:
Options:10
Default:
Min/Max:
Units:
Default:
Min/Max:
Units:
“500 kbps”
“125 kbps”
1
“500 kbps”
Read Only
Read Only
–/+32767
1
Read Only
–/+32767
1
288 thru 297
Digital In
DPI Port 1
DPI Port 2
DPI Port 3
DPI Port 5
Bit #
Factory Default Bit Values
277 [Start Mask]
DPI Port 4
10 01234567891112131415
1 = Control Permitted
111111xxxxxxxxxx
0 = Control Masked
x =Reserved
Controls which adapters can issue start commands.
278 [Jog Mask]
Controls which adapters can issue jog commands.
Masks & Owners
279 [Direction Mask]
Controls which adapters can issue forward/reverse direction commands.
280 [Reference Mask]
Controls which adapters can select an alternate reference; [Speed Ref A,
B Sel] or [Preset Speed 1-7].
281 [Accel Mask]
Controls which adapters can select [Accel Time 1, 2].
282 [Decel Mask]
Controls which adapters can select [Decel Time 1, 2].
See [Logic Mask]. 288 thru 297
See [Logic Mask]. 288 thru 297
See [Logic Mask]. 288 thru 297
See [Logic Mask]. 288 thru 297
See [Logic Mask]. 288 thru 297
See [Logic Mask]. 288 thru 297
Page 74

3-26 Programming and Parameters
Parameter Name & Description
File
COMMUNICATION
See page 3-2 for symbol descriptions
Group
No.
283 [Fault Clr Mask]
Controls which adapters can clear a fault.
284 [MOP Mask]
Controls which adapters can issue MOP commands to the drive.
285 [Local Mask]
Controls which adapters are allowed to take exclusive control of drive
logic commands (except stop). Exclusive “local” control can only be taken
while the drive is stopped.
288 [Stop Owner]
Adapters that are presently issuing a valid stop command.
Bit #
289 [Start Owner]
Adapters that are presently issuing a valid start command.
290 [Jog Owner]
Adapters that are presently issuing a valid jog command.
291 [Direction Owner]
Masks & Owners
Adapter that currently has exclusive control of direction changes.
292 [Reference Owner]
Adapter that has the exclusive control of the command frequency source
selection.
293 [Accel Owner]
Adapter that has exclusive control of selecting [Accel Time 1, 2].
294 [Decel Owner]
Adapter that has exclusive control of selecting [Decel Time 1, 2].
295 [Fault Clr Owner]
Adapter that is presently clearing a fault.
296 [MOP Owner]
Adapters that are currently issuing increases or decreases in MOP
command frequency.
297 [Local Owner]
Adapter that has requested exclusive control of all drive logic functions. If
an adapter is in local lockout, all other functions (except stop) on all other
adapters are locked out and non-functional. Local control can only be
obtained when the drive is not running.
Val ues Re lated
See [Logic Mask]. 288 thru 297
See [Logic Mask]. 288 thru 297
See [Logic Mask]. 288 thru 297
Read Only 276 thru 285
Digital In
DPI Port 1
DPI Port 3
DPI Port 2
DPI Port 5
DPI Port 4
10 01234567891112131415
1 = Issuing Command
000100xxxxxxxxxx
0 = No Command
x =Reserved
See [Stop Owner]. 276 thru 285
See [Stop Owner]. 276 thru 285
See [Stop Owner]. 276 thru 285
See [Stop Owner]. 276 thru 285
See [Stop Owner]. 140,
See [Stop Owner]. 142,
See [Stop Owner]. 276 thru 285
See [Stop Owner]. 276 thru 285
See [Stop Owner]. 276 thru 285
276
276
thru 285
thru 285
Page 75

Programming and Parameters 3-27
Parameter Name & Description
File
COMMUNICATION
See page 3-2 for symbol descriptions
Group
No.
300
[Data In A1] - Link A Word 1
301
[Data In A2] - Link A Word 2
Parameter number whose value will be written from a communications
device data table.
Parameters that can only be changed while drive is stopped cannot be
used as Datalink inputs. Entering a parameter of this type will “Disable”
the link.
302
[Data In B1] - Link B Word 1
303
[Data In B2] - Link B Word 2
304
[Data In C1] - Link C Word 1
305
[Data In C2] - Link C Word 2
306
[Data In D1] - Link D Word 1
Datalinks
307
[Data In D2] - Link D Word 2
310
[Data Out A1] - Link A Word 1
311
[Data Out A2] - Link A Word 2
Parameter number whose value will be written to a communications
device data table.
312
[Data Out B1] - Link B Word 1
313
[Data Out B2] - Link B Word 2
314
[Data Out C1] - Link C Word 1
315
[Data Out C2] - Link C Word 2
316
[Data Out D1] - Link D Word 1
317
[Data Out D2] - Link D Word 2
Val ues Re lated
Default:
Min/Max:
Units:
See [Data In A1] - Link A Word 1 [Data In A2] -
Link A Word 2.
See [Data In A1] - Link A Word 1 [Data In A2] -
Link A Word 2.
See [Data In A1] - Link A Word 1 [Data In A2] -
Link A Word 2.
Default:
Min/Max:
Units:
See [Data Out A1] - Link A Word 1 [Data Out A2] -
Link A Word 2.
See [Data Out A1] - Link A Word 1 [Data Out A2] -
Link A Word 2.
See [Data Out A1] - Link A Word 1 [Data Out A2] -
Link A Word 2.
0 (0 = “Disabled”)
0/387
1
0 (0 = “Disabled”)
0/387
1
Page 76

3-28 Programming and Parameters
Inputs & Outputs File
Parameter Name & Description
File
INPUTS & OUTPUTS
See page 3-2 for symbol descriptions
Group
No.
320 [Anlg In Config]
Selects the mode for the analog inputs.
Bit #
Factory Default Bit Values
321 [Anlg In Sqr Root]
Enables/disables the square root function for each input.
Bit #
Factory Default Bit Values
322
[Analog In 1 Hi]
325
[Analog In 2 Hi]
Sets the highest input value to the analog input x scaling block.
[Anlg In Config]
mA.
323
[Analog In 1 Lo]
Analog Inputs
326
[Analog In 2 Lo]
Sets the lowest input value to the analog input x scaling block.
[Anlg In Config]
mA.
324
[Analog In 1 Loss]
327
[Analog In 2 Loss]
Selects drive action when an analog signal loss is detected. Signal loss is
defined as an analog signal less than 1V or 2mA. The signal loss event
ends and normal operation resumes when the input signal level is greater
than or equal to 1.5V or 3mA.
340 [Anlg Out Config]
Selects the mode for the analog outputs.
Analog In 1
Analog In 2
1 = Current
0xx 0xxxxxxxxxxxx
10 01234567891112131415
10 01234567891112131415
, parameter 320 defines if this input will be –/+10V or 4-20
, parameter 320 defines if this input will be –/+10V or 4-20
0 = Voltage
x =Reserved
Analog In 1
Analog In 2
1 =Enable
0xx 0xxxxxxxxxxxx
0 = Disable
x =Reserved
Val ues Re lated
322, 323
Default:
Min/Max:
Units:
Default:
Min/Max:
Units:
Default:
Options:
10.000 Volt
10.000 Volt
4.000/20.000mA
–/+10.000V
0.000/10.000V
0.001 mA
0.001 Volt
0.000 Volt
0.000 Volt
4.000/20.000mA
–/+10.000V
0.000/10.000V
0.001 mA
0.001 Volt
“Disabled”
0
“Disabled”
0
“Disabled”
0
“Fault”
1
“Hold Input”
2
“Set Input Lo”
3
“Set Input Hi”
4
“Goto Preset1”
5
“Hold OutFreq”
6
091
091
091
, 092
, 092
, 092
10 01234567891112131415
Bit #
Factory Default Bit Values
xxx 1xxxxxxxxxxxx
Analog Out1
1 = Current
0 = Voltage
x =Reserved
Page 77

Programming and Parameters 3-29
Parameter Name & Description
File
See page 3-2 for symbol descriptions
Group
No.
341 [Anlg Out Absolut]
Selects whether the signed value or absolute value of a parameter is used before being scaled to drive the analog
output.
Bit #
Factory Default Bit Values
342 [Analog Out1 Sel]
Selects the source of the value that drives the analog output.
Options
0
1
2
3
4
5
Analog Outputs
INPUTS & OUTPUTS
6
7
8
9
10
11
12
13
“Output Freq”
“Command Freq”
“Output Amps”
“Torque Amps”
“Flux Amps”
“Output Power”
“Output Volts”
“DC Bus Volts”
“PI Reference”
“PI Feedback”
“PI Error”
“PI Output”
“%Motor OL”
“%Drive OL”
Analog Out1
0 Hz
0 Hz
0 Amps
0 Amps
0 Amps
0 kW
0 Volts
0 Volts
0%
0%
0%
0%
0%
0%
1 = Absolute
0 = Signed
x =Reserved
10 01234567891112131415
Param. 341 = Signed Param. 341 = Absolute
–[Maximum Speed]
–[Maximum Speed]
0 Amps
–200% Rated
0 Amps
0 kW
0 Volts
0 Volts
–100%
–100%
–100%
–100%
0%
0%
xxx 1xxxxxxxxxxxx
[Analog Out1 Lo] Value
Val ues Re lated
Default:
Options:
[Analog Out1 Hi] Value
+[Maximum Speed]
+[Maximum Speed]
200% Rated
200% Rated
200% Rated
200% Rated
120% Rated Input Volts
200% Rated Input Volts
100%
100%
100%
100%
100%
100%
0 “Output Freq”
See Table
001, 002,
003
, 004,
005
, 006,
007
, 012,
135
, 136,
137
, 138,
220
, 219
343 [Analog Out1 Hi]
Sets the analog output value when the source value is at maximum.
344 [Analog Out1 Lo]
Sets the analog output value when the source value is at minimum.
Default:
Min/Max:
Units:
Default:
Min/Max:
Units:
20.000 mA, 10.000 Volts
4.000/20.000mA
–/+10.000V
0.000/10.000V
0.001 mA
0.001 Volt
0.000 mA, 0.000 Volts
4.000/20.000mA
–/+10.000V
0.000/10.000V
0.001 mA
0.001 Volt
340, 342
340, 342
Page 78

3-30 Programming and Parameters
Parameter Name & Description
File
See page 3-2 for symbol descriptions
Group
No.
[Digital In1 Sel]
361
[Digital In2 Sel]
362
[Digital In3 Sel]
363
[Digital In4 Sel]
364
[Digital In5 Sel]
365
[Digital In6 Sel]
366
Selects the function for the digital inputs.
(1)
Speed Select Inputs.
3 2 1 Auto Reference Source
0
0
0
0
1
1
1
1
To access Preset Speed 1, set [Speed Ref x Sel] to “Preset Speed 1.”
Type 2 Alarms - Some digital input programming may cause conflicts
Digital Inputs
INPUTS & OUTPUTS
that will result in a Type 2 alarm. Example: [Digital In1 Sel] set to
option 5 “Start” in 3-wire control and [Digital In2 Sel] set to option 7
“Run” in 2-wire.
Refer to Tab l e 4 . C for information on resolving this type of conflict.
(2)
When [Digital Inx Sel] is set to option 2 “Clear Faults,” the Stop button
cannot be used to clear a fault condition.
(3)
Typical 3-Wire Inputs - Requires that only 3-wire functions are chosen.
Including 2-wire selections will cause a Type 2 alarm.
(4)
Typical 2-Wire Inputs - Requires that only 2-wire functions are chosen. Including 3-wire selections will cause a Type
2 alarm. See Table 4.C for conflicts.
(5)
Auto/Manual - Refer to page 1-29 for details.
(6)
Opening an “Enable” input will cause the motor to coast-to-stop, ignoring any programmed Stop modes.
(7)
A “Dig In ConflictB” alarm will occur if a “Star t” input is programmed without a “Stop” input.
(8)
Refer to the Sleep-Wake Mode Attention statement on page 3-17.
0
0
1
1
0
0
1
1
0
Reference A
1
Reference B
0
Preset Speed 2
1
Preset Speed 3
0
Preset Speed 4
1
Preset Speed 5
0
Preset Speed 6
1
Preset Speed 7
Val ues Re lated
“Stop – CF”
Default:
Default:
Default:
Default:
Default:
Default:
Options:
4
“Start”
5
“Auto/ Manual”
18
“Speed Sel 1”
15
“Speed Sel 2”
16
“Speed Sel 3”
17
“Not Used”
0
“Enable”
1
2
“Clear Faults” (CF)
3
“Aux Fault”
4
“Stop – CF”
5
“Start”
6
“Fwd/ Reverse”
7
“Run”
8
“Run Forward”
9
“Run Reverse”
10
“Jog”
11
“Jog Forward”
12
“Jog Reverse”
13
“Stop Mode B”
14
“Bus Reg Md B”
15-17
“Speed Sel 1-3”
18
“Auto/ Manual”
19
“Local”
20
“Acc2 & Dec2”
21
“Accel 2”
22
“Decel 2”
23
“MOP Inc”
24
“MOP Dec”
25
“Excl Link”
26
“PI Enable”
27
“PI Hold”
28
“PI Reset”
29
“Pwr Loss Lvl”
30
“Precharge En”
(3) (7)
(4) (8)
(3)
(6) (8)
(2)
(8)
(3)
(4)
(4)
(4)
(4)
(1)
(5)
100
156
162
096
140
194
380
124
Page 79

Programming and Parameters 3-31
Parameter Name & Description
File
INPUTS & OUTPUTS
See page 3-2 for symbol descriptions
Group
No.
380
[Digital Out1 Sel]
384
[Digital Out2 Sel]
Selects the drive status that will energize a (CRx) output relay.
(1)
Any relay programmed as Fault or Alarm will energize (pick up) when
power is applied to drive and deenergize (drop out) when a fault or
alarm exists. Relays selected for other functions will energize only
when that condition exists and will deenergize when condition is
removed. Refer to page 1-26
(2)
Activation level is defined in [Dig Outx Level] below.
Digital Outputs
381
[Dig Out1 Level]
385
[Dig Out2 Level]
Sets the relay activation level for options 10 – 15 in [Digital Outx Sel].
Units are assumed to match the above selection (i.e. “At Freq” = Hz, “At
Torque” = Amps).
382
[Dig Out1 OnTime]
386
[Dig Out2 OnTime]
Sets the “ON Delay” time for the digital outputs. This is the time between
the occurrence of a condition and activation of the relay.
383
[Dig Out1 OffTime]
387
[Dig Out2 OffTime]
Sets the “OFF Delay” time for the digital outputs. This is the time between
the disappearance of a condition and de-activation of the relay.
Val ues Re lated
Default:
Options:
.
Default:
Min/Max:
Units:
Default:
Min/Max:
Units:
Default:
Min/Max:
Units:
“Fault”
1
“Run”
4
“Run”
4
“Fault”
1
2
“Alarm”
3
“Ready”
4
“Run”
5
“Forward Run”
6
“Reverse Run”
7
“Auto Restart”
8
“Powerup Run”
9
“At Speed”
10
“At Freq”
11
“At Current”
12
“At Torque”
13
“At Temp”
14
“At Bus Volts”
15
“At PI Error”
16
“DC Braking”
17
“Curr Limit”
18
“Economize”
19
“Motor Overld”
20
“Power Loss”
21-26
“Input 1-6 Link”
0.0
0.0
0.0/819.2
0.1
0.00 Secs
0.00 Secs
0.00/600.00 Secs
0.01 Secs
0.00 Secs
0.00 Secs
0.00/600.00 Secs
0.01 Secs
(1)
(1)
(2)
(2)
(2)
(2)
(2)
(2)
381
382
383
002
001
003
004
218
012
137
157
147
053
048
184
380
380
380
Page 80

3-32 Programming and Parameters
Parameter Cross Reference –
by Name
Parameter Name Number Group Page
Accel Mask 281 Masks & Owners 3-25
Accel Owner 293 Masks & Owners 3-26
Accel Time X 140, 141 Ramp Rates 3-15
Alarm Clear 261 Alarms 3-24
Alarm Config 1 259 Alarms 3-24
Alarm X @ Fault 229, 230 Diagnostics 3-23
Alarm X Code 262-269 Alarms 3-24
Analog In X Hi 322, 325 Analog Inputs 3-28
Analog In X Lo 323 , 326 Analog Inputs 3-28
Analog In X Loss 324, 327 Analog Inpu ts 3-28
Analog In1 Value 16 Me tering 3-6
Analog In2 Value 17 Me tering 3-6
Analog OutX Hi 343 Analog Outputs 3-29
Analog OutX Lo 344 Analog Outputs 3-29
Analog OutX Sel 342 Analog Outputs 3-29
Anlg In Config 320 Analog Inputs 3-28
Anlg In Sqr Root 321 Analog Inputs 3-28
Anlg Out Absolut 341 Analog Outputs 3-29
Anlg Out Config 340 Analog Outputs 3-28
Auto Rstrt Delay 175 Restart Modes 3-16
Auto Rstrt Tries 174 Restart Modes 3-16
Autotune 61 Tor q Attributes 3-8
Break Frequency 72 Volts per Hertz 3-9
Break Voltage 71 Volts per Hertz 3- 9
Bus Reg Kd 165 Stop/Brake Modes 3-16
Bus Reg Ki 160 Stop/Brake Modes 3-15
Bus Reg Kp 164 Stop/Brake Modes 3-16
Bus Reg Mode X 161, 162 Stop/Brake Modes 3-16
Commanded Freq 2 Metering 3-6
Commanded Speed 2 Metering 3-6
Compensation 56 Torq Attributes 3-7
Control SW Ver 29 Drive Data 3-6
Current Lmt Gain 149 Load Limits 3-15
Current Lmt Sel 147 Load Limits 3-15
Current Lmt Val 148 Load Limits 3-15
Data In XX 300-307 Datalinks 3-27
Data Out XX 310-317 Datalinks 3-27
DB Resistor Type 163 Stop/Brake Modes 3-16
DC Brake Level 158 Stop/Brake Modes 3-15
DC Brake Time 159 Stop/Brake Modes 3- 15
DC Brk Lvl Sel 157 Stop/Brake Modes 3-15
DC Bus Memory 13 Metering 3-6
DC Bus Voltage 12 Metering 3-6
Decel Mask 282 Masks & Owners 3- 25
Decel Owner 294 Masks & Owners 3-26
Decel Time X 142, 143 Ra mp Rates 3-15
Dig In Status 216 Diagnostics 3-22
Dig Out Status 217 Diagnostics 3-22
Dig OutX Level 381, 385 Digital Outputs 3- 31
Dig OutX OffTime 383, 387 Digital Outputs 3-31
Dig OutX OnTime 382, 386 Digital Outputs 3-31
Digital InX Sel 361-366 Digital Inputs 3-30
Digital OutX Sel 380, 384 Di gital Outputs 3-31
Direction Mask 279 Masks & Owners 3-25
Direction Mode 190 Direction Config 3-19
Direction Owner 291 Masks & Owners 3-26
DPI Baud Rate 270 Comm Control 3-25
DPI Data Rate 270 Comm Control 3-25
Drive Alarm X 211, 212 Diag nostics 3-21
Drive Checksum 203 Drive Memory 3-20
Drive Logic Rslt 271 Comm Control 3- 25
Drive OL Count 219 Diagnostics 3-22
Drive OL Mode 150 Load Limits 3-15
Drive Ramp Rslt 273 Comm Control 3-25
Drive Ref Rslt 272 Comm Control 3-25
Drive Status X 209, 210 Diagnostics 3-20
Drive Temp 218 Diagnostics 3-22
Elapsed MWh 9 Metering 3-6
Elapsed Run Time 10 Metering 3-6
Fault 1 Code 243 Faults 3-24
Fault 1 Time 244 Faults 3-24
Fault 2 Code 245 Faults 3-24
Parameter Name Number Group Page
Fault 2 Time 246 Faults 3-24
Fault 3 Code 247 Faults 3-24
Fault 3 Time 248 Faults 3-24
Fault 4 Code 249 Faults 3-24
Fault 4 Time 250 Faults 3-24
Fault 5 Code 251 Faults 3-24
Fault 5 Time 252 Faults 3-24
Fault 6 Code 253 Faults 3-24
Fault 6 Time 254 Faults 3-24
Fault 7 Code 255 Faults 3-24
Fault 7 Time 256 Faults 3-24
Fault 8 Code 257 Faults 3-24
Fault 8 Time 258 Faults 3-24
Fault Amps 225 Diagnostics 3-22
Fault Bus Volts 226 Diagnostics 3-2 2
Fault Clear 240 Faults 3-23
Fault Clear Mode 241 Faults 3-23
Fault Clr Mask 283 Masks & Owners 3-26
Fault Clr Owner 295 Masks & Owners 3-26
Fault Config 1 238 Faults 3-23
Fault Frequency 224 Diagnostics 3-22
Fault Speed 224 Diagnostics 3-22
Feedback Select 80 Spd Mode & Limits 3-10
Flux Current 5 Metering 3-6
Flux Current Ref 63 Torq Attributes 3-8
Flux Up Mode 57 Torq Attributes 3-8
Flux Up Time 58 Torq Attributes 3-8
Flying Start En 169 Restart Modes 3-16
Flying StartGain 170 Restart Modes 3-16
IR Voltage Drop 62 Torq Attributes 3-8
Ixo Voltage Drop 6 4 Torq Attributes 3-8
Jog Mask 278 Masks & Owners 3-25
Jog Owner 2 90 Masks & Owners 3-26
Jog Speed 100 Discrete Speeds 3-12
Jog Speed 1 100 Discrete Speeds 3-12
Language 201 Drive Memory 3-20
Last Stop Source 215 Diagnostics 3-21
Load Frm Usr Set 198 Drive Memory 3-19
Local Mask 285 Masks & Owners 3-2 6
Local Owner 297 Masks & Owners 3-2 6
Logic Mask 276 Masks & Owners 3-25
Man Ref Preload 193 HIM Ref Config 3-19
Maximum Freq 55 Torq Attributes 3-7
Maximum Speed 82 Spd Mode & Limits 3-10
Maximum Voltage 54 Torq Attributes 3-7
Minimum Speed 81 Spd Mode & Limits 3-10
MOP Frequency 11 Metering 3-6
MOP Mask 284 Masks & Owners 3-26
MOP Owner 296 Masks & Owners 3-26
MOP Rate 195 MOP Config 3-19
MOP Reference 11 Metering 3-6
Motor Cntl Sel 53 Torq Attributes 3-7
Motor NP FLA 42 Motor Data 3-7
Motor NP Hertz 43 Motor Data 3-7
Motor NP Power 45 Motor Data 3-7
Motor NP RPM 44 Motor Dat a 3-7
Motor NP Volts 41 M otor Data 3-7
Motor OL Count 2 20 Diagnostics 3-22
Motor OL Factor 48 Motor Data 3-7
Motor OL Hertz 47 Motor Data 3-7
Motor Type 40 Mo tor Data 3-7
Mtr NP Pwr Units 46 Motor Data 3-7
Output Current 3 Metering 3-6
Output Freq 1 Metering 3-6
Output Power 7 Metering 3-6
Output Powr Fctr 8 Meter ing 3-6
Output Voltage 6 Meter ing 3-6
Overspeed Limit 83 Spd Mode & Limits 3-10
Param Access Lvl 1 96 Drive Memory 3-19
PI Configuration 124 Process PI 3-13
PI Control 125 Process PI 3-13
PI Error Meter 137 Process PI 3-14
PI Fdback Meter 136 Process PI 3-1 4
PI Feedback Sel 128 Process PI 3-1 3
PI Integral Time 129 Process PI 3-13
PI Lower Limit 131 Process PI 3-13
PI Output Meter 138 Process PI 3-1 4
Parameter Name Number Group Page
PI Preload 133 Process PI 3-14
PI Prop Gain 130 Process PI 3-13
PI Ref Meter 135 Process PI 3-14
PI Reference Sel 126 Process PI 3-13
PI Setpoint 127 Process PI 3-13
PI Status 134 Process PI 3-14
PI Upper Limit 132 Process PI 3-13
Power Loss Level 186 Power Loss 3-18
Power Loss Mode 184 Power Loss 3-18
Power Loss Time 185 Power Loss 3-18
Power Up Marker 242 Faults 3-23
Preset Speed X 10 1-107 Discrete Speeds 3-12
PWM Frequency 151 Load Limits 3-15
Rated Amps 28 Drive Data 3-6
Rated kW 26 Drive Data 3-6
Rated Volts 27 Drive Data 3-6
Reference Mask 280 Masks & Owners 3-25
Reference Owner 292 Masks & Owners 3-26
Reset Meters 200 Drive Memory 3-20
Reset To Defalts 197 Drive Memory 3-19
Run Boost 70 Volts per Hertz 3-9
S Curve % 146 Ramp Rates 3-15
Save HIM Ref 192 HIM Ref Config 3-19
Save MOP Ref 194 MOP Config 3-19
Save To User Set 199 Drive Memory 3-19
Skip Freq Band 87 Spd Mode & Limits 3-10
Skip Frequency X 84-86 Spd Mode & Limits 3-10
Sleep Level 182 Restart Mo des 3-17
Sleep Time 183 Restart Modes 3-17
Sleep-Wake Mode 178 Restart Modes 3-17
Sleep-Wake Ref 179 Restart Modes 3-17
Slip Comp Gain 122 Slip Comp 3-12
Slip RPM @ FLA 121 Slip Comp 3-12
Slip RPM Meter123 Slip Comp 3-12
Speed Mode 80 Spd Mode & Limits 3-10
Speed Ref Source 213 Diagnostics 3-21
Speed Ref X Hi 91, 94 Speed Reference 3-11
Speed Ref X Lo 92, 95 Speed Reference 3-11
Speed Ref X Sel 90, 93 Speed Reference 3-11
Start At PowerUp 168 Restart Modes 3-16
Start Inhibits 214 Diagnostics 3-21
Start Mask 277 Masks & Owners 3-25
Start Owner 28 9 Masks & Owners 3-26
Start/Acc Boost 69 Volts per Hertz 3-9
Status X @ Fault 227, 228 Diagnostics 3-22
Stop Mode X 155, 156 Stop/Brake Modes 3-15
Stop Owner 288 Masks & Owners 3-26
Stop/BRK Mode X 155, 15 6 Stop/Brake Modes 3-15
SV Boost Filter 59 Torq Attributes 3-8
TB Man Ref Hi 97 Speed Reference 3-11
TB Man Ref Lo 98 Speed Reference 3-11
TB Man Ref Sel 96 Speed Reference 3-11
Testpoint X Data 23 5, 237 Diagnostics 3-23
Testpoint X Sel 234, 236 Diagnostics 3-23
Torque Current 4 Metering 3-6
Torque Perf Mode 53 Torq Attributes 3-7
Trim Hi 119 Speed Trim 3-12
Trim In Select 117 Speed Trim 3-12
Trim Lo 12 0 Speed Trim 3-12
Trim Out Select 118 Speed Trim 3-12
Voltage Class 202 Drive Memory 3-20
Wake Level 18 0 Restart Modes 3-17
Wake Time 181 Restart Mo des 3-17
Page 81

Programming and Parameters 3-33
Parameter Cross Reference –
by Number
Number Parameter Name Group Pag e
1 Output Freq Meter ing 3- 6
2 Commanded Freq Metering 3-6
Commanded Speed Metering
3 Output Current Metering 3-6
4 Torque Current Met ering 3-6
5 Flux Current Metering 3-6
6 Output Voltage Metering 3-6
7 Output Power Metering 3-6
8 Output Powr Fctr Metering 3-6
9 Elapsed MWh Metering 3-6
10 Elapsed Run Time Metering 3-6
11 MOP Frequency Meter ing 3-6
MOP Reference Metering
12 DC Bus Voltage M etering 3-6
13 DC Bus Me mory Metering 3-6
16 Analog In1 Value Metering 3-6
17 Analog In2 Value Metering 3-6
26 Rated kW Dr ive Data 3-6
27 Rated Volts Drive Data 3- 6
28 Rated Amps Drive Data 3-6
29 Control SW Ver Drive Data 3-6
40 Motor Type Motor Data 3-7
41 Motor NP Volts Motor Data 3-7
42 Motor NP FLA Motor Data 3-7
43 Motor NP Her tz Motor Data 3-7
44 Motor NP RPM Motor Data 3-7
45 Motor NP Power Motor Data 3-7
46 Mtr NP Pwr Units Motor Data 3-7
47 Motor OL Her tz Motor Data 3-7
48 Motor OL Factor Motor Data 3-7
53 Torque Perf Mode Torq Attributes 3-7
54 Maximum Voltage Torq Attributes 3-7
55 Maximum Freq Torq Attributes 3-7
56 Compensation Torq Attributes 3-7
57 Flux Up Mode Torq Attributes 3-8
58 Flux Up Time Torq Attributes 3-8
59 SV Boost Filter Torq Attributes 3-8
61 Autotune Torq Attributes 3-8
62 IR Voltage Drop Torq Attributes 3-8
63 Flux Current Ref Torq Attributes 3-8
64 Ixo Voltage Drop Torq Attributes 3-8
69 Start/ Acc Boost Volts per Hertz 3-9
70 Run Boost Volts per Hertz 3-9
71 Break Voltage Volts per Hertz 3-9
72 Break Frequency Volts per Hertz 3-9
80 Feedback Select Spd Mode & Limits 3-10
Speed Mode Spd Mode & Limit s
81 Minimum Speed Spd Mode & Limits 3-10
82 Maximum Speed Spd Mode & Limits 3-10
83 Overspeed Limit Sp d Mode & Limits 3-10
84-86 Skip Frequency X Spd Mo de & Limits 3-10
87 Skip Freq Band Spd Mode & Limits 3-10
90, 93 Spee d Ref X Sel Speed Reference 3-11
91, 94 Spee d Ref X Hi Sp eed Reference 3-11
92, 95 Spee d Ref X Lo Speed Reference 3-11
96 TB Man Ref Sel Speed Reference 3-11
97 TB Man Ref Hi Speed Reference 3-11
98 TB Man Ref Lo Speed Reference 3-11
100 Jog Speed Discrete Spe eds 3-12
Jog Speed 1 Discrete Speeds
101-107 Preset Speed X Discret e Speeds 3-12
117 Trim In Select Speed Trim 3-12
118 Trim Out Select Speed Trim 3- 12
119 Trim Hi Speed Trim 3-12
120 Trim Lo Speed Trim 3-12
121 Slip RPM @ FLA Slip Comp 3-12
122 Slip Comp Gain Slip Comp 3-12
123 Slip RPM Meter Slip Comp 3-12
124 PI Configuration Process PI 3-13
125 PI Control Process PI 3-13
126 PI Reference Sel Process PI 3-13
127 PI Setpoint Process PI 3-13
Number Parameter Name Group Page
128 PI Feedback Sel Process PI 3-13
129 PI Integral Time Proces s PI 3-13
130 PI Prop Gain Process PI 3-13
131 PI Lower Limit Proces s PI 3-13
132 PI Upper Limit Pro cess PI 3-13
133 PI Preload Process PI 3-14
134 PI Status Process PI 3-14
135 PI Ref Meter Process PI 3-14
136 PI Fdback Meter Process PI 3-14
137 PI Error Meter Process PI 3-14
138 PI Output Meter Proces s PI 3-14
140, 141 Accel Time X Ramp Rates 3-15
142, 143 Decel Time X Ramp Rates 3-15
146 S Curve % Ramp Rates 3-15
147 Current Lmt Sel Load Limits 3-15
148 Current Lmt Val Load Limits 3-15
149 Current Lmt Gain Load Limits 3-15
150 Drive OL Mode Loa d Limits 3-15
151 PWM Frequency Load Limits 3-15
155, 156 Stop Mode X Stop/Brake Modes 3-15
Stop/BRK Mode X Stop/Brake Modes
157 DC Brk Lvl Sel Stop/Brake Modes 3-15
158 DC Brake Level Stop/Brake Modes 3-15
159 DC Brake Time Stop/Brake Modes 3-15
160 Bus Reg Ki Stop/Brake Modes 3-15
161, 162 Bus Reg Mode X Stop/Brake Modes 3-16
163 DB Resistor Type Stop/Brake Modes 3-16
164 Bus Reg Kp Stop/Brake Modes 3-16
165 Bus Reg Kd Stop/Brake Modes 3-16
168 Start At PowerUp Restart Modes 3-16
169 Flying Start En Restart Modes 3-16
170 Flying StartGain Restart Modes 3-16
174 Auto Rstrt Tries Restar t Modes 3-16
175 Auto Rstrt Delay Restart Modes 3-16
178 Sleep-Wake Mode Restar t Modes 3-17
179 Sleep-Wake Ref Restart Modes 3-17
180 Wake Level Restart Modes 3-17
181 Wake Time Restart Modes 3-17
182 Sleep Level Restart Modes 3-17
183 Sleep Time Restart Modes 3-17
184 Power Loss Mode Power Loss 3-18
185 Power Loss Time Power Loss 3-18
186 Power Loss Level Power Loss 3-18
190 Direction Mode Direction Config 3-19
192 Save HIM Ref HIM Ref Config 3-19
193 Man Ref Preload HIM Ref Config 3-19
194 Save MOP Ref MOP Config 3-19
195 MOP Rate MOP Config 3-19
196 Param Access Lvl Drive Memory 3-19
197 Reset To Defalts Drive Memory 3-19
198 Load Frm Usr Set Drive Memor y 3-19
199 Save To User Set Dr ive Memory 3-19
200 Reset Meters Drive Memory 3-20
201 Language Drive Memory 3-20
202 Voltage Class Drive Memory 3-20
203 Drive Checksum Drive Memory 3-20
209, 210 Drive Status X D iagnostics 3-20
211, 212 Drive Alarm X Dia gnostics 3-21
213 Speed Ref Source Dia gnostics 3-21
214 Start Inhibits Diagnostics 3-21
215 Last Stop Source Diagnostics 3-21
216 Dig In Status Diagnostics 3-22
217 Dig Out Status Diagnostics 3-22
218 Drive Temp Diagnostics 3-22
219 Drive OL Count Diagno stics 3-22
220 Motor OL Count Diagnostics 3-22
224 Fault Frequency Diagnostics 3-22
225 Fault Amps Diagnostics 3-22
226 Fault Bus Volts Diagnostics 3-22
227, 228 Status X @ Fault Diagnostics 3-22
229, 230 Alarm X @ Fault Diagnostics 3-23
234, 236 Testpoint X Sel Diagnostics 3-23
235, 237 Testpoint X Data Dia gnostics 3-23
238 Fault Config 1 Faults 3-23
240 Fault Clear Faults 3-23
241 Fault Clear Mode Faults 3-23
242 Power Up Marker Faults 3-23
Number Parameter Name Group Page
243 Fault 1 Code Faults 3-24
244 Fault 1 Time Faults 3-24
245 Fault 2 Code Faults 3-24
246 Fault 2 Time Faults 3-24
247 Fault 3 Code Faults 3-24
248 Fault 3 Time Faults 3-24
249 Fault 4 Code Faults 3-24
250 Fault 4 Time Faults 3-24
251 Fault 5 Code Faults 3-24
252 Fault 5 Time Faults 3-24
253 Fault 6 Code Faults 3-24
254 Fault 6 Time Faults 3-24
255 Fault 7 Code Faults 3-24
256 Fault 7 Time Faults 3-24
257 Fault 8 Code Faults 3-24
258 Fault 8 Time Faults 3-24
259 Alarm Config 1 Alarms 3-24
261 Alarm Clear Alarms 3-24
262-269 Alarm X Code Alarms 3-24
270 DPI Baud Rate Comm Control 3-25
271 Drive Logic Rslt Comm Control 3-25
272 Drive Ref Rslt Comm Control 3-25
273 Drive Ramp Rslt Comm Control 3-25
276 Logic Mask Masks & Owners 3-25
277 Start Mask Masks & Owners 3-25
278 Jog Mask Ma sks & Owners 3-25
279 Direction Mask Masks & Owners 3-25
280 Reference Mask Masks & Owners 3-25
281 Accel Mask Masks & Owner s 3-25
282 Decel Mask Masks & Owners 3-25
283 Fault Clr Mask Masks & Owners 3-26
284 MOP Mask Masks & Owners 3-26
285 Local Mask Masks & Owners 3-26
288 Stop Owner Masks & Owners 3-26
289 Start Owner Masks & Owners 3-26
290 Jog Owner Masks & Owners 3-26
291 Direction Owner Masks & Owners 3-26
292 Reference Owner Masks & Owners 3-26
293 Accel Owner Masks & Owners 3-26
294 Decel Owner Masks & Owners 3-26
295 Fault Clr Owner Masks & Owners 3-26
296 MOP Owner Masks & Owners 3-26
297 Local Owner M asks & Owners 3-26
300-307 Data In XX Da talinks 3-27
310-317 Data Out XX Datalinks 3-27
320 Anlg In Config Analog Inputs 3-28
321 Anlg In Sqr Root Analog Inputs 3-28
322, 325 Analog In X Hi Analog Inpu ts 3-28
323, 326 Analog In X Lo Analog Inpu ts 3-28
324, 327 Analog In X Loss Analog Inputs 3-28
340 Anlg Out Config Analog Outputs 3-28
341 Anlg Out Absolut Analog Outputs 3-29
342, 345 Analog OutX Sel Analog Outputs 3-29
343, 346 Analog OutX Hi Analog Outputs 3-29
344, 347 Analog OutX Lo Analog Outputs 3-29
361-366 Digital InX Sel Digital Inputs 3-30
380, 384 Digital OutX Sel Digital Outputs 3-31
381, 385 Dig OutX Level Digital Outputs 3-31
382, 386 Dig OutX OnTime Digital Outputs 3-31
383, 387 Dig OutX OffTime Digital Outputs 3-31
Page 82

3-34 Programming and Parameters
Notes:
Page 83

Chapter 4
Troubleshooting
Chapter 4 provides information to guide you in troubleshooting the LPM15.
Included is a listing and description of drive faults (with possible solutions,
when applicable) and alarms.
For information on… See page…
Faults and Alarms
Drive Status 4-2
Manually Clearing Faults 4-3
Fault Descriptions 4-3
Clearing Alarms 4-6
Alarm Descriptions 4-6
Common Symptoms and Corrective Actions 4-8
Testpoint Codes and Functions 4-10
Test Equipment Needed To Troubleshoot 4-11
Verifying That DC Bus Capacitors Are Discharged 4-11
Checking the Power Modules with Input Power Off 4-15
Replacement Parts 4-16
4-1
Faults and Alarms
A fault is a condition that stops the drive. There are three fault types.
Type Fault Description
Auto-Reset Run When this type of fault occurs, and [Auto Rstrt Tries] (see page 3-16) is
➀
Non-Resettable This type of fault normally requires drive or motor repair. The cause of
➁
User Configurable These faults can be enabled/disabled to annunciate or ignore a fault
➂
An alarm is a condition that, if left untreated, may stop the drive. There are
two alarm types.
Type Alarm Description
User Configurable These alarms can be enabled or disabled through [Alarm Config 1] on
➀
Non-Configurable These alarms are always enabled.
➁
set to a value greater than “0,” a user-configurable timer, [Auto Rstrt
Delay] (see page 3-16) begins. When the timer reaches zero, the drive
attempts to automatically reset the fault. If the condition that caused the
fault is no longer present, the fault will be reset and the drive will be
restarted.
the fault must be corrected before the fault can be cleared. The fault will
be reset on power up after repair.
condition.
page 3-24
.
Page 84

4-2 Troubleshooting
Drive Status
The condition or state of your drive is constantly monitored. Any changes
will be indicated by the INV. STATUS LED on the DPI Communication
Interface Board and/or the HIM (if present).
Front Panel LED Indications
Figure 4.1 Typical Inv. Status LED Indications
Rockwell Automation
DPI Port 3
I N V. S TATU S
Color State Description
Green Flashing Drive ready, but not running & no faults are present.
Steady Drive running, no faults are present.
Yellow Flashing A Type 2 (non-configurable) alarm condition exists, drive continues to run.
Steady A Type 1 (user configurable) alarm condition exists, but drive continues to run.
Red Flashing A fault has occurred. Check [Fault x Code] or Fault Queue.
Steady A non-resettable fault has occurred.
HIM Indication
The LCD HIM also provides visual notification of a fault or alarm condition.
Condition Display
Drive is indicating a fault.
The LCD HIM immediately reports the fault condition by displaying the
following:
•“Faulted” appears in the status line
•Fault number
•Fault name
•Time that has passed since fault occurred
Press Esc to regain HIM control.
Drive is indicating an alarm.
The LCD HIM immediately reports the alarm condition by displaying
the following:
•Alarm name (Type 2 alarms only)
•Alarm bell graphic
F-> Faulted Auto
Hz
0.0
— Fault — F 5
Main Menu:
OverVoltage
Diagnostics
Time Since Fault
0000:23:52
Parameter
F-> Power Loss Auto
Hz
0.0
Main Menu:
Diagnostics
Parameter
Device Select
Page 85

Troubleshooting 4-3
Manually Clearing Faults
Fault Descriptions
Table 4.A Fault Types, Descriptions and Actions
Fault No. Type
Analog In Loss 29
Anlg Cal Chksum 108 The checksum read from the analog calibration data
Auto Rstrt Tries 33
➀ ➂
➂
AutoTune Aborted 80 Autotune function was canceled by the user or a fault
Auxiliary Input 2
DB Resistance 69 Resistance of the internal DB resistor is out of range. Replace resistor.
Decel Inhibit 24
Drive OverLoad 64 Drive rating of 110% for 1 minute or 150% for 3
Drive Powerup 49 No fault displayed. Used as a Power Up Marker in the Fault Queue indicating that the drive power has been
Excessive Load 79 Motor did not come up to speed in the allotted time
➀
➂
Faults Cleared 52 No fault displayed. Used as a marker in the Fault Queue indicating that the fault clear function was
Flt QueueCleared 51 No fault displayed. Used as a marker in the Fault Queue indicating that the clear queue function was
FluxAmpsRef Rang 78 The value for flux amps determined by the Autotune
Gate Kill 68 Gate Kill contacts open. Verify Gate Kill. Contacts are closed.
Ground Fault 13
Hardware Fault 93 Hardware enable is disabled (jumpered high) but
➀
Step Key(s)
1. Press Esc to acknowledge the fault. The fault information will be removed so that
you can use the HIM.
2. Address the condition that caused the fault.
The cause must be corrected before the fault can be cleared.
3. After corrective action has been taken, clear the fault by one
•Press Stop
•Cycle drive power
•Set parameter 240 [Fault Clear] to “1.”
•“Clear Faults” on the HIM Diagnostic menu.
(1)
Description Action
An analog input is configured to fault on signal loss. A
signal loss has occurred.
Configure with [Anlg In 1, 2 Loss] on page 3-28
does not match the checksum calculated.
Drive unsuccessfully attempted to reset a fault and
resume running for the programmed number of [Flt
RstRun Tries]. Enable/Disable with [Fault Config 1] on
page 3-23
occurred.
Auxiliary input interlock is open. Check remote wiring.
The drive is not following a commanded deceleration
because it is attempting to limit bus voltage.
seconds has been exceeded.
cycled.
during autotune.
performed.
performed.
procedure exceeds the programmed [Motor NP FLA].
A current path to earth ground greater than 25% of
drive rating.
logic pin is still low.
.
1. Check parameters.
2. Check for broken/loose connections at inputs.
.
Replace drive.
Correct the cause of the fault and manually clear.
Restart procedure.
1. Verify input voltage is within drive specified limits.
2. Verify system ground impedance follows proper
grounding techniques.
3. Disable bus regulation and/or add dynamic brake
resistor and/or extend deceleration time.
Reduce load or extend Accel Time.
1. Uncouple load from motor.
2. Repeat Autotune.
1. Reprogram [Motor NP FLA] with the correct motor
nameplate value.
2. Repeat Autotune.
Check the motor and external wiring to the drive
output terminals for a grounded condition.
1. Check jumper.
2. Replace Main Control Board.
Esc
of these methods:
Page 86

4-4 Troubleshooting
Table 4.A Fault Types, Descriptions and Actions (Continued)
➀
➀
➁
➀ ➂
➀
➀
➁
(1)
Description Action
2. Replace Main Control Board.
2. Replace Main Control Board.
Heatsink temperature exceeds 100% of [Drive Temp]. 1. Verify that maximum ambient temperature has not
been exceeded.
2. Check fan.
3. Check for excess load.
The drive output current has exceeded the hardware
current limit.
Drive rating information stored on the power board is
incompatible with the main control board.
Board.
I/O Board is separate in Standard Control.
determined by the autotune procedure for IR Drop
Volts is not in the range of acceptable values.
exceeds 25% of [Motor NP Volts].
Internal electronic overload trip. Enable/Disable with
[Fault Config 1] on page 3-23
Functions such as Slip Compensation or Bus
Regulation have attempted to add an output
frequency adjustment greater than that programmed
in [Overspeed Limit].
DC bus voltage exceeded maximum value. Monitor the AC line for high line voltage or transient
The checksum read from the board does not match
the checksum calculated.
EEPROM.
the drive and motor in this phase.
two output terminals.
.
Check programming. Check for excess load, improper
DC boost setting, DC brake volts set too high or other
causes of excess current.
Load compatible version files into drive.
Check connector. Check for induced noise. Replace
I/O board or Main Control Board.
Replace I/O Board (Standard Control).
Re-enter motor nameplate data.
1. Check for proper motor sizing.
2. Check for correct programming of [Motor NP Volts],
parameter 41.
3. Additional output impedance may be required.
An excessive motor load exists. Reduce load so drive
output current does not exceed the current set by
[Motor NP FLA].
2. Replace Main Control Board.
2. Replace Main Control Board.
Remove excessive load or overhauling conditions or
increase [Overspeed Limit].
conditions. Bus overvoltage can also be caused by
motor regeneration. Extend the decel time or install
dynamic brake option.
1. Restore defaults.
2. Reload User Set if used.
1. Clear the fault or cycle power to the drive.
2. Program the drive parameters as needed.
1. Check the wiring between the drive and motor.
2. Check motor for grounded phase.
3. Replace drive.
1. Check the motor and drive output terminal wiring
for a shorted condition.
2. Replace drive.
Fault No. Type
Hardware Fault 130 Gate array load error. 1. Cycle power.
Hardware Fault 131 Dual port failure. 1. Cycle power.
Heatsink OvrTemp 8
HW OverCurrent 12
Incompat MCB-PB 106
I/O Comm Loss 121 I/O Board lost communications with the Main Control
I/O Failure 122 I/O was detected, but failed the powerup sequence.
IR Volts Range 77 “Calculate” is the autotune default and the value
IXo VoltageRange 87 Voltage calculated for motor inductive impedance
Motor Overload 7
NVS I/O Checksum 109 EEprom checksum error. 1. Cycle power and repeat function.
NVS I/O Failure 110 EEprom I/O error. 1. Cycle power and repeat function.
OverSpeed Limit 25
OverVoltage 5
Parameter Chksum 100
Params Defaulted 48 The drive was commanded to write default values to
Phase U to Grnd 38 A phase to ground fault has been detected between
Phase V to Grnd 39
Phase W to Grnd 40
Phase UV Short 41 Excessive current has been detected between these
Phase VW Short 42
Phase UW Short 43
Page 87

Table 4.A Fault Types, Descriptions and Actions (Continued)
➀ ➂
➁
➁
➂
➀
➀
➀ ➂
➁
➁
➁
(1)
Description Action
DPI port stopped communicating.
A SCANport device was connected to a drive
operating DPI devices at 500k baud.
The communications card has a fault. Check DPI device event queue and corresponding
DC bus voltage remained below 85% of nominal for
longer than [Power Loss Time]. Enable/Disable with
[Fault Config 1] on page 3-23.
match the checksum calculated from the EEPROM
data.
The checksum read from the board does not match
the checksum calculated.
Main Control Board was replaced and parameters
were not programmed.
Programmed [Current Lmt Val] has been exceeded.
Enable/Disable with [Fault Config 1] on page 3-23
Drive output current has exceeded the 1ms current
rating. This rating is greater than the 3 second current
rating and less than the hardware overcurrent fault
level. It is typically 200- 250% of the drive continuous
rating
Output transistors have exceeded their maximum
operating temperature.
DC bus voltage fell below the minimum value of 407V
DC at 400/480V input or 204V DC at 200/240V input.
Enable/Disable with [Fault Config 1] (page 3-23).
The checksum read from the user set does not match
the checksum calculated.
1. If adapter was not intentionally disconnected,
check wiring to the port. Replace wiring, port
expander, adapters, Main Control Board or
complete drive as required.
2. Check HIM connection.
3. If an adapter was intentionally disconnected and
the [Logic Mask] bit for that adapter is set to “1”,
this fault will occur. To disable this fault, set the
[Logic Mask] bit for the adapter to “0.”
fault information for the device.
Monitor the incoming AC line for low voltage or line
power interruption.
Clear the fault or cycle power to the drive.
1. Cycle power to the drive.
2. If problem persists, replace drive.
1. Restore defaults.
2. Reprogram parameters.
Check load requirements and [Current Lmt Val]
.
setting.
Check for excess load, improper DC boost setting. DC
brake volts set too high.
1. Verify that maximum ambient temperature has not
been exceeded.
2. Check fan.
3. Check for excess load.
Monitor the incoming AC line for low voltage or power
interruption.
Re-save user set.
Fault No. Type
Port 1-5 DPI Loss 81-
85
Port 1-5 Adapter 71-
75
Power Loss 3
Pwr Brd Chksum1 104 The checksum read from the EEPROM does not
Pwr Brd Chksum2 105
Replaced MCB-PB 107
Shear Pin 63
Software Fault 88 Microprocessor handshake error. Replace Main Control Board.
Software Fault 89 Microprocessor handshake error. Replace Main Control Board.
SW OverCurrent 36
Trnsistr OvrTemp 9
UnderVoltage 4
UserSet1 Chksum 101
UserSet2 Chksum 102
UserSet3 Chksum 103
(1)
See page 4-1 for a description of fault types.
Troubleshooting 4-5
Page 88

4-6 Troubleshooting
Table 4.B Fault Cross Reference – by Number
(1)
No.
Fault No.
2 Auxiliary Input 41 Phase UV Short 81- 85 Port 1-5 DPI Loss
3 Power Loss 42 Phase VW Short 87 IXo VoltageRange
4 UnderVoltage 43 Phase UW Short 88 Software Fault
5 OverVoltage 48 Params Defaulted 89 Software Fault
7 Motor Overload 49 Drive Powerup 93 Hardware Fault
8 Heatsink OvrTemp 51 Flt QueueCleared 100 Parameter Chksum
9 Trnsistr OvrTemp 52 Faults Cleared 101-103 UserSet Chksum
12 HW OverCurrent 55 Cntl Bd Overtemp 104 Pwr Brd Chksum1
13 Ground Fault 63 Shear Pin 105 Pwr Brd Chksum2
24 Decel Inhibit 64 Drive OverLoad 106 Incompat MCB-PB
25 OverSpeed Limit 68 Gate Kill 107 Replaced MCB-PB
29 Analog In Loss 69 DB Resistance 108 Anlg Cal Chksum
33 Auto Rstrt Tries 71- 75 Port 1-5 Adapter 120 I/O Mismatch
36 SW OverCurrent 77 IR Volts Range 121 I/O Comm Loss
38 Phase U to Grnd 78 FluxAmpsRef Rang 122 I/O Failure
39 Phase V to Grnd 79 Excessive Load 130 Hardware Fault
40 Phase W to Grnd 80 AutoTune Aborted 131 Hardware Fault
(1)
Fault numbers not listed are reserved for future use.
(1)
Fault No.
(1)
Fault
Clearing Alarms
Alarm Descriptions
Alarms are automatically cleared when the condition that caused the alarm
is no longer present.
Table 4.C Alarm Descriptions and Actions
Alarm No. Type
Analog In Loss 5
Bipolar Conflict 20
Decel Inhibt 10
Dig In ConflictA 17
(1)
Description
An analog input is configured for “Alarm” on signal loss and signal
➀
loss has occurred.
Parameter 190 [Direction Mode] is set to “Bipolar” or “Reverse Dis”
➁
and one or more of the following digital input functions is configured:
“Fwd/Reverse,” “Run Forward,” “Run Reverse,” “Jog Forward” or
“Jog Reverse.”
Drive is being inhibited from decelerating.
➀
Digital input functions are in conflict. Combinations marked with a
➁
“ ” will cause an alarm.
Acc2/Dec2 Accel 2 Decel 2 Jog
Acc2 / Dec2
Accel 2
Decel 2
Jog*
Jog Fwd
Jog Rev
Fwd/Rev
Jog
Fwd
Jog
Rev
Fwd/
Rev
Page 89

Table 4.C Alarm Descriptions and Actions (Continued)
➁
(1)
Description
A digital Start input has been configured without a Stop input or
other functions are in conflict. Combinations that conflict are marked
with a “ ” and will cause an alarm.
Start
Stop-CF
Run
Run Fwd
Run Rev
Jog*
Jog Fwd
Jog Rev
Fwd/Rev
Start
Stop-
CF
Run
Run
Fwd
Alarm No. Type
Dig In ConflictB 18
Troubleshooting 4-7
Run
Rev
Jog
Jog
Fwd
Jog Rev
Fwd/
Rev
Dig In ConflictC 19
Drive OL Level 1 8
Drive OL Level 2 9
FluxAmpsRef
Rang
IntDBRes
OvrHeat
IR Volts Range 25
Ixo Vlt Rang 28
MaxFreq Conflict 23
Motor Type Cflct 21
NP Hz Conflict 22
Power Loss 3
Precharge Active 1
Sleep Config 29
Speed Ref Cflct 27
Start At PowerUp 4
UnderVoltage 2
26
6
➁
➀
➀
➁
➀
➁
➁
➁
➁
➁
➀
➀
➁
➁
➀
➀
More than one physical input has been configured to the same input
function. Multiple configurations are not allowed for the following
input functions:
Forward/Reverse Run Reverse Bus Regulation Mode B
Speed Select 1 Jog Forward Acc2 / Dec2
Speed Select 2 Jog Reverse Accel 2
Speed Select 3 Run Decel 2
Run Forward Stop Mode B
The calculated IGBT temperature requires a reduction in PWM
frequency. If [Drive OL Mode] is disabled and the load is not
reduced, an overload fault will eventually occur.
The calculated IGBT temperature requires a reduction in Current
Limit. If [Drive OL Mode] is disabled and the load is not reduced, an
overload fault will eventually occur.
The calculated or measured Flux Amps value is not within the
expected range. Verify motor data and rerun motor tests.
The drive has temporarily disabled the DB regulator because the
resistor temperature has exceeded a predetermined value.
The drive auto tuning default is “Calculate” and the value calculated
for IR Drop Volts is not in the range of acceptable values. This alarm
should clear when all motor nameplate data is properly entered.
Motor leakage inductance is out of range.
The sum of [Maximum Speed] and [Overspeed Limit] exceeds
[Maximum Freq]. Raise [Maximum Freq] or lower [Maximum Speed]
and/or [Overspeed Limit] so that the sum is less than or equal to
[Maximum Freq].
[Motor Type] has been set to “Synchr Reluc” or “Synchr PM” and
one or more of the following exist:
•[Torque Perf Mode] = “Sensrls Vect,” “SV Economize” or “Fan/Pmp V/Hz.”
•[Flux Up Time] is greater than 0.0 Secs.
•[Speed Mode] is set to “Slip Comp.”
•[Autotune] = “Static Tune” or “Rotate Tune.”
Fan/pump mode is selected in [Torq Perf Mode] and the ratio of
[Motor NP Hertz] to [Maximum Freq] is greater than 26.
Drive has sensed a power line loss.
Drive is in the initial DC bus precharge state.
Sleep/Wake configuration error. With [Sleep-Wake Mode] = “Direct,”
possible causes include: drive is stopped and [Wake Level] < [Sleep
Level].“Stop = CF,” “Run,” “Run Forward,” or “Run Reverse” is not
configured in [Digital Inx Sel].
[Speed Ref x Sel] or [PI Reference Sel] is set to “Reserved”.
[Start At PowerUp] is enabled. Drive may start at any time within 10
seconds of drive powerup.
The bus voltage has dropped below a predetermined value.
Page 90

4-8 Troubleshooting
Table 4.C Alarm Descriptions and Actions (Continued)
Alarm No. Type
VHz Neg Slope
Waking 11
(1)
See page 4-1 for a description of alarm types.
Table 4.D Alarm Cross Reference – by Number
(1)
No.
Alarm No.
1 Precharge Active 10 Decel Inhibt 23 MaxFreq Conflict
2 UnderVoltage 11 Waking 24 VHz Neg Slope
3 Power Loss 17 Dig In ConflictA 25 IR Volts Range
4 Start At PowerUp 18 Dig In ConflictB 26 FluxAmpsRef Rang
5 Analog in Loss 19 Dig In ConflictC 27 Speed Ref Cflct
6 IntDBRes OvrHeat 20 Bipolar Conflict 28 Ixo Vlt Rang
8 Drive OL Level 1 21 Motor Type Cflct 29 Sleep Config
9 Drive OL Level 2 22 NP Hz Conflict
(1)
Alarm numbers not listed are reserved for future use.
24
(1)
Description
[Torq Perf Mode] = “Custom V/Hz” & the V/Hz slope is negative.
➁
The Wake timer is counting toward a value that will start the drive.
➀
(1)
Alarm No.
(1)
Alarm
Common Symptoms and Corrective Actions
Drive does not Start from Start or Run Inputs wired to the terminal block.
Cause(s) Indication Corrective Action
Drive is faulted. Flashing red
status light
Incorrect input wiring. See pages
1-27
and 1-28 for wiring examples.
• 2 wire control requires Run, Run
Forward, Run Reverse or Jog input.
• 3 wire control requires Start and Stop
inputs.
• Jumper from terminal 25 to 26 is
required.
Incorrect digital input programming.
• Mutually exclusive choices have
been made (i.e., Jog and Jog
Forward).
• 2 wire and 3 wire programming may
be conflicting.
• Exclusive functions (i.e, direction
control) may have multiple inputs
configured.
• Stop is factory default and is not
wired.
None Wire inputs correctly and/or install jumper.
None Program [Digital Inx Sel] for correct inputs.
Flashing yellow
status light and
“DigIn CflctB”
indication on
LCD HIM.
[Drive Status 2]
shows type 2
alarm(s).
Clear fault.
• Press Stop
• Cycle power
• Set [Fault Clear] to 1 (See page 3-23)
• “Clear Faults” on the HIM Diagnostic menu.
(See page 3-30)
Start or Run programming may be missing.
Program [Digital Inx Sel] to resolve conflicts.
(See page 3-30)
Remove multiple selections for the same
function.
Install stop button to apply a signal at stop
terminal.
Drive does not Start from HIM.
Cause(s) Indication Corrective Action
Drive is programmed for 2 wire
control. HIM Start button is disabled
for 2 wire control.
None If 2 wire control is required, no action needed.
If 3 wire control is required, program [Digital
Inx Sel] for correct inputs. (See page 3-30)
Page 91

Troubleshooting 4-9
Drive does not respond to changes in speed command.
Cause(s) Indication Corrective Action
No value is coming from the source
of the command.
Incorrect reference source has been
programmed.
Incorrect Reference source is being
selected via remote device or digital
inputs.
Motor and/or drive will not accelerate to commanded speed.
Cause(s) Indication Corrective Action
Acceleration time is excessive. None Reprogram [Accel Time x]. (See page 3-15)
Excess load or short acceleration
times force the drive into current
limit, slowing or stopping
acceleration.
Speed command source or value is
not as expected.
Programming is preventing the drive
output from exceeding limiting
values.
LCD HIM
Status Line
indicates “At
Speed” and
output is 0 Hz.
None 1. Check [Speed Ref Source] for the source of
None 1. Check [Drive Status 1], page 3-20, bits 12
None 1. Check [Drive Status 2], bit 10 to see if the
None Check for the proper Speed Command using
None Check [Maximum Speed] (See page 3-10)
1. If the source is an analog input, check
wiring and use a meter to check for
presence of signal.
2. Check [Commanded Freq] for correct
source. (See page 3-6)
the speed reference. (See page 3-21)
2. Reprogram [Speed Ref A Sel] for correct
source. (See page 3-11)
and 13 for unexpected source selections.
2. Check [Dig In Status], page 3-2
inputs are selecting an alternate source.
3. Reprogram digital inputs to correct “Speed
Sel x” option. (See page 3-30)
drive is in Current Limit. (See page 3-20)
2. Remove excess load or reprogram [Accel
Time x]. (See page 3-15)
Steps 1 through 7 above.
[Maximum Freq] (See page 3-7)
speed is not limited by programming.
to see if
to assure that
and
Motor operation is unstable.
Cause(s) Indication Corrective Action
Motor data was incorrectly entered
or Autotune was not performed.
Drive will not reverse motor direction.
Cause(s) Indication Corrective Action
Digital input is not selected for
reversing control.
Digital input is incorrectly wired. None Check input wiring. (See page 1-25)
Direction mode parameter is
incorrectly programmed.
Motor wiring is improperly phased
for reverse.
A bipolar analog speed command
input is incorrectly wired or signal is
absent.
None 1. Correctly enter motor nameplate data.
2. Perform “Static” or “Rotate” Autotune
procedure. (Param #
None Check [Digital Inx Sel], page 3-30
correct input and program for reversing mode.
None Reprogram [Direction Mode], page 3-19 for
analog “Bipolar” or digital “Unipolar” control.
None Switch two motor leads.
None 1. Use meter to check that an analog input
voltage is present.
2. Check wiring. (See page 1-25)
Positive voltage commands forward direction.
Negative voltage commands reverse direction.
061, page 3-8)
. Choose
Page 92

4-10 Troubleshooting
Stopping the drive results in a Decel Inhibit fault.
Cause(s) Indication Corrective Action
The bus regulation feature is
enabled and is halting deceleration
due to excessive bus voltage.
Excess bus voltage is normally due
to excessive regenerated energy or
unstable AC line input voltages.
Internal timer has halted drive
operation.
Decel Inhibit
fault screen.
LCD Status Line
indicates
“Faulted.”
1. See Attention statement on page P-3
2. Reprogram parameters 161/162 to eliminate
any “Adjust Freq” selection.
3. Disable bus regulation (parameters 161 &
162) and add a dynamic brake.
4. Correct AC input line instability or add an
isolation transformer.
5. Reset drive.
.
Testpoint Codes and Functions
Select testpoint with [Testpoint x Sel], parameters 234/236. Values can be
viewed with [Testpoint x Data], parameters 235/237.
(1)
No.
01 DPI Error Status 1 0 255 0
02 Heatsink Temp 0.1 degC –100.0 100.0 0
03 Active Cur Limit 1 0 32767 0
04 Active PWM Freq 1 Hz 2 10 4
05 Life MegaWatt Hr
06 Life Run Time 0.0001 Hrs 0 429496.7295 0
07 Life Pwr Up Time 0.0001 Hrs 0 429496.7295 0
08 Life Pwr Cycles 1 0 429496729.5 0
09 Life MW-HR Fract
10 MW-HR Frac Unit
12 Raw Analog In 1 1 0 0
13 Raw Analog In 2 1 0 0
16 CS Msg Rx Cnt 1 0 65535 0
17 CS Msg Tx Cnt 1 0 65535 0
18 CS Timeout Cnt 1 0 255 0
19 CS Msg Bad Cnt 1 0 255 0
22 PC Msg Rx Cnt 1 0 65535 0
23 PC Msg Tx Cnt 1 0 65535 0
24-29 PC1-6 Timeout Cnt 1 0 255 0
30 CAN BusOff Cnt 1 0 65535 0
31 No. of Analog Inputs 1 0 0
32 Raw Temperature 1 0 0
33 MTO Norm Mtr Amp 0.1 Amps 0 65535 0
34 DTO-Cmd DC Hold 1 0 32767 0
(1)
(2)
Description Units
(2)
(2)
(2)
Enter in [Testpoint x Sel].
Use the equation below to calculate total Lifetime MegaWatt Hours.
0.1 MWh 0 429496729.5 0
1 0 4294967295 0
1 0 4294967295 0
Minimum Maximum Default
Val ues
Value of Code 9
⎛⎞
---------------------------------
⎝⎠
Value of Code 10
0.1×
Value of Code 5+ Total Lifetime MegaWatt Hours=
Page 93

Troubleshooting 4-11
Test Equipment Needed To Troubleshoot
Verifying That DC Bus Capacitors Are Discharged
An isolated multimeter will be needed to measure DC bus voltage and to
make resistance checks. Note that dedicated troubleshooting test points are
not provided.
ATTENTION: DC bus capacitors retain hazardous voltages
!
The LPM15 drive’s DC bus capacitors retain hazardous voltages after input
power has been disconnected. Perform the following steps before touching
any internal components:
1. Turn off and lock out input power. Wait five minutes.
2. Verify that there is no voltage at the drive’s input power terminals.
3. Measure the DC bus potential with a voltmeter while standing on a
non-conductive surface and wearing insulated gloves (1000 V).
Measure the DC bus potential at the test points on the Power Interface
Control (PIC) board. See Figure 4.2
C-Frame drives, and Figure 4.4
wiring information, refer to Appendix
after input power has been disconnected. After disconnecting
input power, wait five (5) minutes for the DC bus capacitors to
discharge and then check the voltage with a voltmeter to ensure
the DC bus capacitors are discharged before touching any
internal components. Failure to observe this precaution could
result in severe bodily injury or loss of life.
for B-Frame drives, Figure 4.3 for
for D-Frame drives. For additional
E, Appendix F, or Appendix G.
4. Once the drive has been serviced, reapply input power.
Page 94

4-12 Troubleshooting
Initial DC Bus
Measurement
Points
TP1 TP2
Figure 4.2 DC Bus Voltage Measurement Points for B-Frame Drives
POS
(+)
NEG
(-)
Page 95

Troubleshooting 4-13
Figure 4.3 DC Bus Voltage Measurement Points for C-Frame Drives
Initial DC Bus
Measurement
Points
TP6 TP5
Page 96

4-14 Troubleshooting
TP1 TP2
Figure 4.4 DC Bus Voltage Measurement Points for D-Frame Drives
Initial DC Bus
Measurement Points
Page 97

Troubleshooting 4-15
Checking the Power Modules with Input Power Off
Use the following procedure to check the drive’s Power Module circuitry
with power off:
ATTENTION: DC bus capacitors retain hazardous voltages
!
1. Turn off and lock out input power. Wait five minutes.
2. Verify that there is no voltage at the drive’s input power terminals.
3. Check the DC bus potential with a voltmeter as described on page 4-11
to ensure that the DC bus capacitors are discharged.
4. Disconnect the motor from the drive.
5. Check all AC line and DC bus fuses.
6. If a fuse is open, use a multimeter to check the input diodes and output
IGBTs. See Tabl e 4.E
7. Reconnect the motor to the drive.
after input power has been disconnected. After disconnecting
input power, wait five (5) minutes for the DC bus capacitors to
discharge and then check the voltage with a voltmeter to ensure
the DC bus capacitors are discharged before touching any
internal components. Failure to observe this precaution could
result in severe bodily injury or loss of life.
.
8. Reapply input power.
Table 4.E Resistance Checks
Input
Diode No.
1 * L1 10 < R < 1 megohm Continuity (short circuit) or open when the
2*L2
3*L3
4*L4
5*L5
6*L6
7L1**
8L2**
9L3**
10 L4 **
11 L5 **
12 L6 **
1 * W/T3 10 < R < 1 megohm Continuity (short circuit) or open when the
2*V/T2
3*U/T1
4W/T3 **
5V/T2 **
6U/T1 **
* (+) DC Bus Volts power terminal
** (-) DC Bus Volts power terminal
Meter Connection
(+) (-)
Component is OK if
Resistance (R) is:
Component is Defective if:
meter is connected with reversed polarity.
meter is connected with reversed polarity.
Page 98

4-16 Troubleshooting
Replacement Parts
Table 4.F lists the replacement parts that are available from Allen-Bradley.
For printed circuit board (PCB) locations, see Figure 1.1
Figure 1.3
Table 4.F Drive Replacement Parts
Voltage
Class
480VAC All ratings Inverter Control PCB SK-P1-INVCB-A1 1
480VAC All ratings Communication Interface PCB SK-P1-COMCB-A1 1
480VAC 500A only 450 HP Power Interface Control (PIC) PCB SK-P1-PICB1-D500 1
480VAC 643A only 600 HP Power Interface Control (PIC) PCB SK-P1-PICB1-D643 1
480VAC 1200A only 1000 HP Power Interface Control (PIC) PCB SK-P1-PICB1-D1200 1
.
Drive Current
Rating
Description Catalog Number
, Figure 1.2, and
Qty.
per
Drive
Page 99

Supplemental Drive Information
For information on… See page…
Specifications
Communication Configurations A-3
A-1
Appendix A
Specifications
Category Specification
Agency
Certification
(1)
Applied noise impulses may be counted in addition to the standard pulse train causing erroneously high [Pulse Freq]
readings.
Category Specification
Protection Drive 480V
Environment Altitude: 1000 m (3300 ft) max. without derating
U
c
®
The drive is also designed to meet the following specifications:
NFPA 70 - US National Electrical Code
NEMA ICS 3.1 - Safety standards for Construction and Guide for Selection, Installation and
IEC 146 - International Electrical Code
AC Input Overvoltage Trip: 570VAC
AC Input Undervoltage Trip: 280VAC
Bus Overvoltage Trip: 810V DC
Bus Undervoltage Shutoff/Fault: 305V DC
Nominal Bus Voltage: 648VDC
All Drives
Heat Sink Thermistor: Monitored by microprocessor overtemp trip
Drive Overcurrent Trip
Software Overcurrent Trip:
Hardware Overcurrent Trip:
Line Transients: up to 6000 volts peak per IEEE C62.41-1991
Control Logic Noise Immunity: Showering arc transients up to 1500V peak
Power Ride-Thru: 15 milliseconds at full load
Logic Control Ride-Thru: 0.5 seconds minimum, 2 seconds typical
Ground Fault Trip: Phase-to-ground on drive output
Short Circuit Trip: Phase-to-phase on drive output
Maximum Surrounding Air Temperature
without Derating:
IP20, NEMA Type 1: 0 to 40°C (32 to 104°F)
Storage Temperature (all constructions): –40 to 70°C (–40 to 158°F)
Listed to UL508C and CAN/CSA-C2.2 No. 14-M91.
L
US
Marked for all applicable European Directives
EMC Directive (89/336/EEC)
EN 61800-3 Adjustable Speed electrical power drive systems
Low Voltage Directive (73/23/EEC)
EN 50178 Electronic Equipment for use in Power Installations
Operation of Adjustable Speed Drive Systems
200% of rated current (typical)
220-300% of rated current (dependent on drive rating)
(1)
:
Page 100

A-2 Supplemental Drive Information
Category Specification
Environment
(continued)
Electrical Voltage Tolerance: See page D-14
Control Method: Sine coded PWM with programmable carrier
Atmosphere: Important: Drive must not be installed in an area
Relative Humidity: 5 to 95% non-condensing
Shock: 15G peak for 11ms duration (± 1.0 ms)
Vibration: 0.152 mm (0.006 in.) displacement, 1G peak
Frequency Tolerance: 47-63 Hz.
Input Phases: Three-phase input provides full rating for all drives.
Displacement Power Factor: 0.98 across entire speed range
Efficiency: 97.5% at rated amps, nominal line volts
Maximum Short Circuit Rating: 85,000 Amps symmetrical
Actual Short Circuit Rating: Determined by AIC rating of installed fuse/circuit
Carrier Frequency: 2, 3 or 4 kHz. Drive rating based on 2 kHz.
Output Voltage Range: 0 to rated motor voltage
Output Frequency Range: Standard Control – 0 to 400 Hz.
Frequency Accuracy
Digital Input:
Analog Input:
Frequency Control: Speed Regulation - w/Slip Compensation
Selectable Motor Control: Sensorless Vector with full tuning. Standard V/Hz with
Stop Modes: Multiple programmable stop modes including Ramp,
Accel/Decel: Two independently programmable accel and decel
Intermittent Overload: 110% Overload capability for up to 1 minute.
Current Limit Capability: Proactive Current Limit programmable from 20 to
Electronic Motor Overload Protection: Class 10 protection with speed sensitive response.
where the ambient atmosphere contains volatile or
corrosive gas, vapors or dust. If the drive is not going
to be installed for a period of time, it must be stored in
an area where it will not be exposed to a corrosive
atmosphere.
for full power and operating range.
Single-phase operation provides 50% of rated current.
breaker.
frequency. Ratings apply to all drives (refer to the
Derating Guidelines in the PowerFlex Reference
Manual). The drive can be supplied as 6 pulse or 12
pulse in a configured package.
Within ± 0.01% of set output frequency.
Within ± 0.4% of maximum output frequency.
(Volts per Hertz Mode)
0.5% of base speed across 40:1 speed range
40:1 operating range
10 rad/sec bandwidth
Speed Regulation - w/Slip Compensation
(Sensorless Vector Mode)
0.5% of base speed across 80:1 speed range
80:1 operating range
20 rad/sec bandwidth
full custom capability.
Coast, DC-Brake, Ramp-to-Hold, and S-curve.
times. Each time may be programmed from 0 - 3600
seconds in 0.1 second increments.
150% Overload capability for up to 3 seconds.
160% of rated output current. Independently
programmable proportional and integral gain.
Investigated by U.L. to comply with N.E.C. Article 430.
U.L. File E59272, volume 12.
 Loading...
Loading...