

Page 1

MIC 1167/1807/1407
VALVE MOTOR DRIVER (VMD) CONTROLLERS
OPERATORS
MANUAL
FORM 3719
EDITION 1
© SEPT. 1996
PRICE $10.00
Brand
Page 2

Information in this installation, wiring, and operation manual is subject to change
without notice. One manual is provided with each instrument at the time of shipment. Extra copies are available at the price published on the front cover.
Copyright © Sept. 1996, The Partlow Corporation, all rights reserved. No part of
this publication may be reproduced, transmitted, transcribed or stored in a retrieval
system, or translated into any language in any form by any means without the
written permission of the Partlow Corporation.
This is the First Edition of the MIC 1167/1807/1407 manual. It was written and
produced entirely on a desk-top-publishing system. Disk versions are available by
written request to the Partlow Publications Department.
We are glad you decided to open this manual. It is written so that you can take full
advantage of the features of your new MIC 1167/1807/1407 Valve Motor Drive
controller.
NOTE:
It is strongly recommended that Partlow equipped
applications incorporate a high or low limit protective device
which will shut down the equipment at a preset process
condition in order to preclude possible damage to property
or products.
!
THE INTERNATIONAL HAZARD SYMBOL IS INSCRIBED ADJACENT TO
THE REAR CONNECTION TERMINALS. IT IS IMPOR TANT T O READ
THIS MANUAL BEFORE INSTALLING OR COMMISSIONING THE UNIT.
MIC 1167/1807/1407 Manual Edition 12
Page 3

Table of Contents
Section 1 - General Page
1.1 Product Description 5
Section 2 - Installation & Wiring
2.1 Installation & Wiring 8
2.2 Preparations for Wiring 12
2.3 Input Connections 19
2.4 Output Connections 23
Section 3 - Configuration & Operation
3.1 Operation 27
3.2 Configuration 33
3.3 Pre-Tune Mode 39
3.4 Auto-T une Mode 40
3.5 Manual T uning Method 41
Section 4 - Control Capability
4.1 Control Capability 43
4.2 Setpoint Adjustments 43
Appendices
A - Glossary of Terms 44
B - Board Layout - Jumper positioning 54
Figure B-1 PCB Positions 54
Figure B-2 Output 2/Output 3 Removal - 1/16 DIN 55
Figure B-3 Output 2/Output 3 Removal - 1/8 DIN 56
Figure B-4 Output 2/Output 3 Removal - 1/4 DIN 57
Figure B-5 CPU PWA 58
Figure B-6 Option PWA Output 3 59
C - Hardware Definition Code 60
D - Input Range Codes 62
E - Specifications 64
F - Model Number Hardware Matrix 70
G - Software Reference Sheet 71
3
MIC 1167/1407/1807 ManualEdition 1
Page 4

Figures & Tables
Figure 1-1 Controller Display Illustration 6,7
Figure 2-1 Panel Cut-Out Dimensions 8,9
Figure 2-2 Main Dimensions 10,11
Figure 2-3 Panel Mounting the controller 12
Figure 2-4 Noise Suppression 14
Figure 2-5 Noise Suppression 15
Figure 2-6 Wiring Label 16, 17, 18
Figure 2-7 Main Power Supply 19
Figure 2-7A 24V Nominal AC/DC Supply 20
Figure 2-8 Thermocouple Input 21
Figure 2-9 RTD Input 21
Figure 2-10 Volt, mV mADC Input 22
Figure 2-11 Remote Digital Connections 22
Figure 2-12 Dual Setpoint Selection 23
Figure 2-13 Relay Output 1 & 2 23
Figure 2-14 Valve Relay 24
Figure 2-15 Relay Output 3 25
Figure 2-16 SSR Driver Output 3 25
Figure 2-17 mADC Output 3 25
Figure 2-18 24V DC Transmitter Power Supply 26
Figure 3-1 Manual Tuning Technique 42
Table 3-1 Enable Mode Configuration Procedures 33
Table 3-2 Program Mode Configuration Procedures 34
Table 3-3 Tune Mode Configuration Procedures 36
MIC 1167/1807/1407 Manual Edition 14
Page 5

Product Description 1.1
1.1.1 GENERAL
This instrument is a microprocessor based process controller for use in
open loop valve motor drive (VMD) applications. Its standard features
include:
• Dual four-digit LED display
• Universal sensor input (thermocouple, 3 wire RTD or
DC Linear -mA, mV, V)
• Pre-Tune and Auto-T une
• 90 to 264V AC Power
• Designed to comply with EN50081 Part 2 (Emission) and EN50082
Part 2 (Immunity) EMC specifications
• Auto/Manual control - user selectable
• Setpoint Ramping
Some optional features:
• 24V AC/DC line voltage
• One alarm output or retransmission output
• RS-485 Communications
• 24V DC T ransmitter Power Supply
• Dual Setpoint
1.1.2 DISPLAYS
Each instrument is provided with dual displays and status indicators as
shown in Figure 1-1. The upper display displays the value of the process
variable. The lower display displays the setpoint value. Status indication is
as shown, see Figure 1-1, page 6 & 7.
1.1.3 CONTROL
The instrument can be programmed for motor drive control only, with fully
programmable PID parameters.
1.1.4 ALARMS
Alarm indication is standard on all instruments. One alarm output is possible. Alarm type may be set as Process Direct or Reverse (high or low),
Deviation Direct or Reverse (above or below setpoint), Deviation Band Type
(closed or open within band), or Loop Reverse or Direct. Alarm status is
indicated by LED.
5
MIC 1167/1407/1807 ManualEdition 1
Page 6

FIGURE 1-1
Keys and Indicators
MIC 1167/1807/1407 Manual Edition 16
Page 7

1.1.5 PROCESS VARIABLE/SETPOINT VALUE
RETRANSMISSION OUTPUT
If the instrument is specified with this option, this output may be scaled over
any desired range and retransmitted.
7
MIC 1167/1407/1807 ManualEdition 1
Page 8
Installation and Wiring 2.1
Electrical code requirements and safety standards should be observed and
installation performed by qualified personnel.
The electronic components of the instrument may be removed from the
housing during installation. To remove the components, grip the side edges
of the front panel and pull the instrument forward. During reinstallation, the
vertically mounted circuit boards should be properly aligned in the housing.
Ensure that the instrument is correctly orientated. A stop will operate if an
attempt is made to insert the instrument incorrectly.
Recommended panel opening sizes are illustrated in Figure 2-1. After the
opening is properly cut, insert the instrument into the panel opening. Ensure that the panel gasket is not distorted and that the instrument is positioned squarely against the panel. Slide the mounting clamp into place on
the instrument (see Figure 2-3, page 11) and push it forward until it is
firmly in contact with the rear face of the mounting panel.
Note: The mounting clamp tongues may engage either on the
sides or the top/bottom of the instrument housing. Therefore, when
installing several instruments side-by-side in one cut out, use the
ratchets on the top/bottom faces.
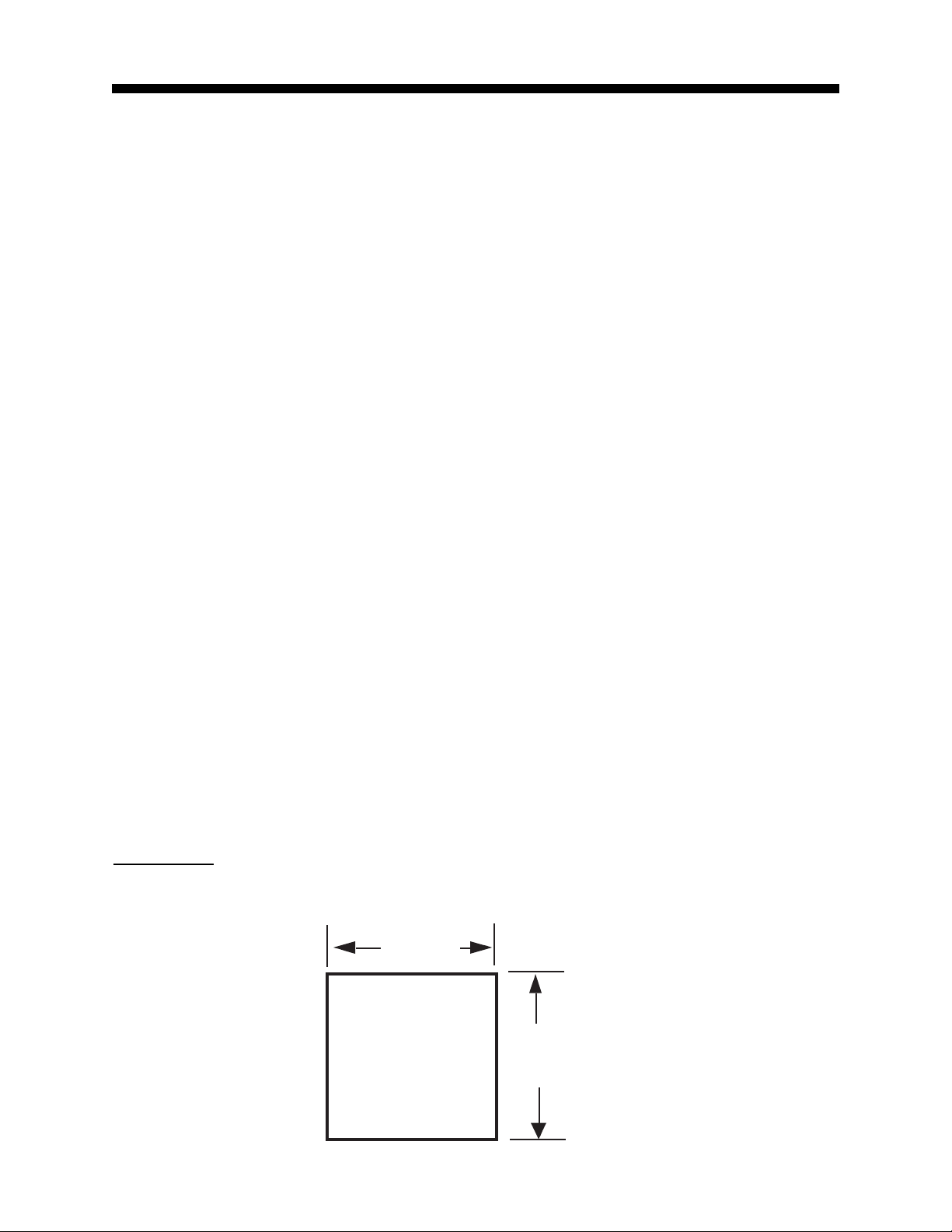
FIGURE 2-1
Panel Cut-Out Dimensions
1/16 DIN
45 mm +0.5 - 0.00
(1.77”+.020 - .000)
PANEL
CUTOUT
45 mm +0.5 - 0.00
(1.77”+.020 - .000)
SIZE
MIC 1167/1807/1407 Manual Edition 18
Page 9
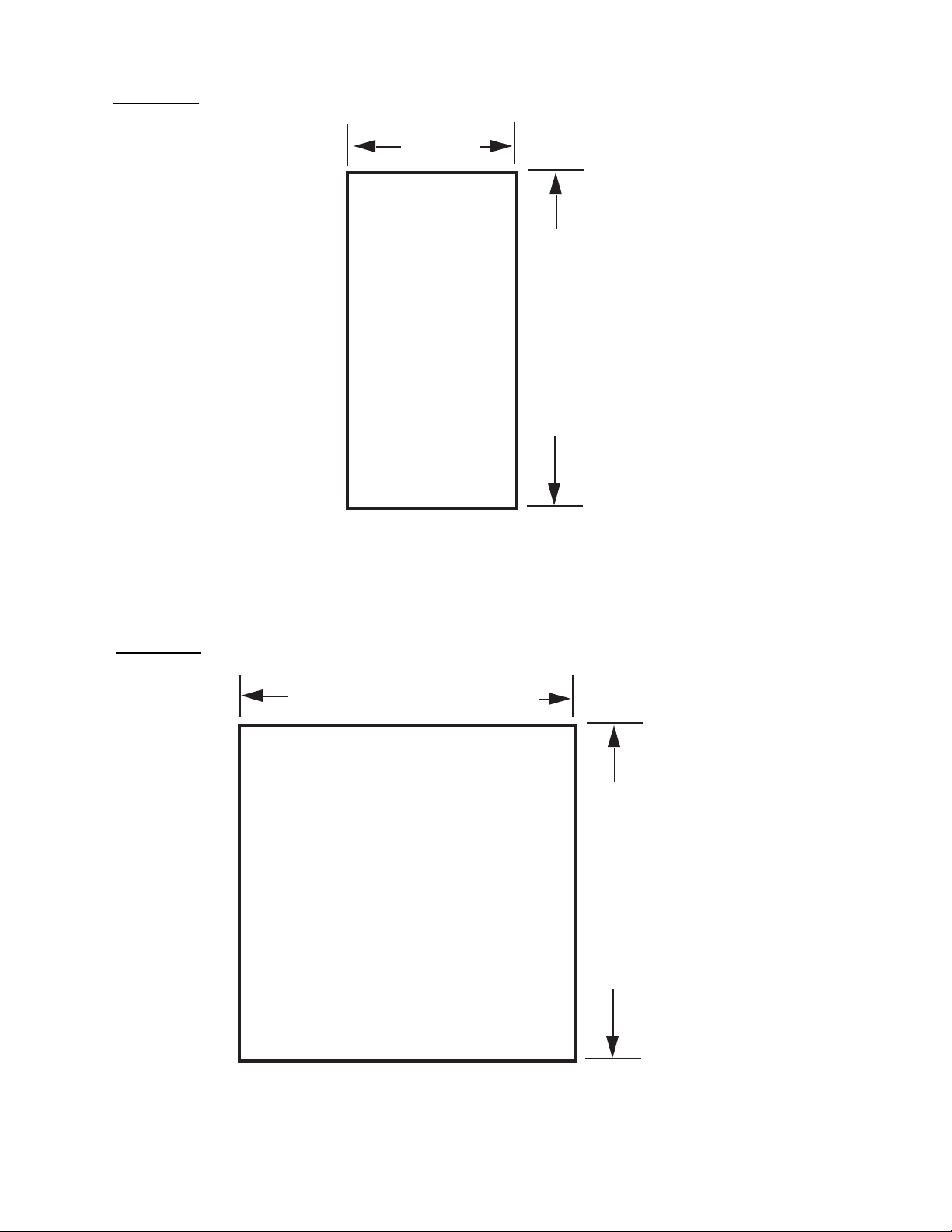
1/8 DIN
45 mm +0.5 - 0.00
(1.77”+.020 - .000)
1/4 DIN
PANEL
CUTOUT
SIZE
92 mm +0.5 - 0.00
(3.62”+.020 - .000)
92 mm + 0.5 - 0.0
(3.62” + .020 - .000)
PANEL
CUTOUT
SIZE
92 mm + 0.5 - 0.0
(3.62” + .020 - .000)
9
MIC 1167/1407/1807 ManualEdition 1
Page 10
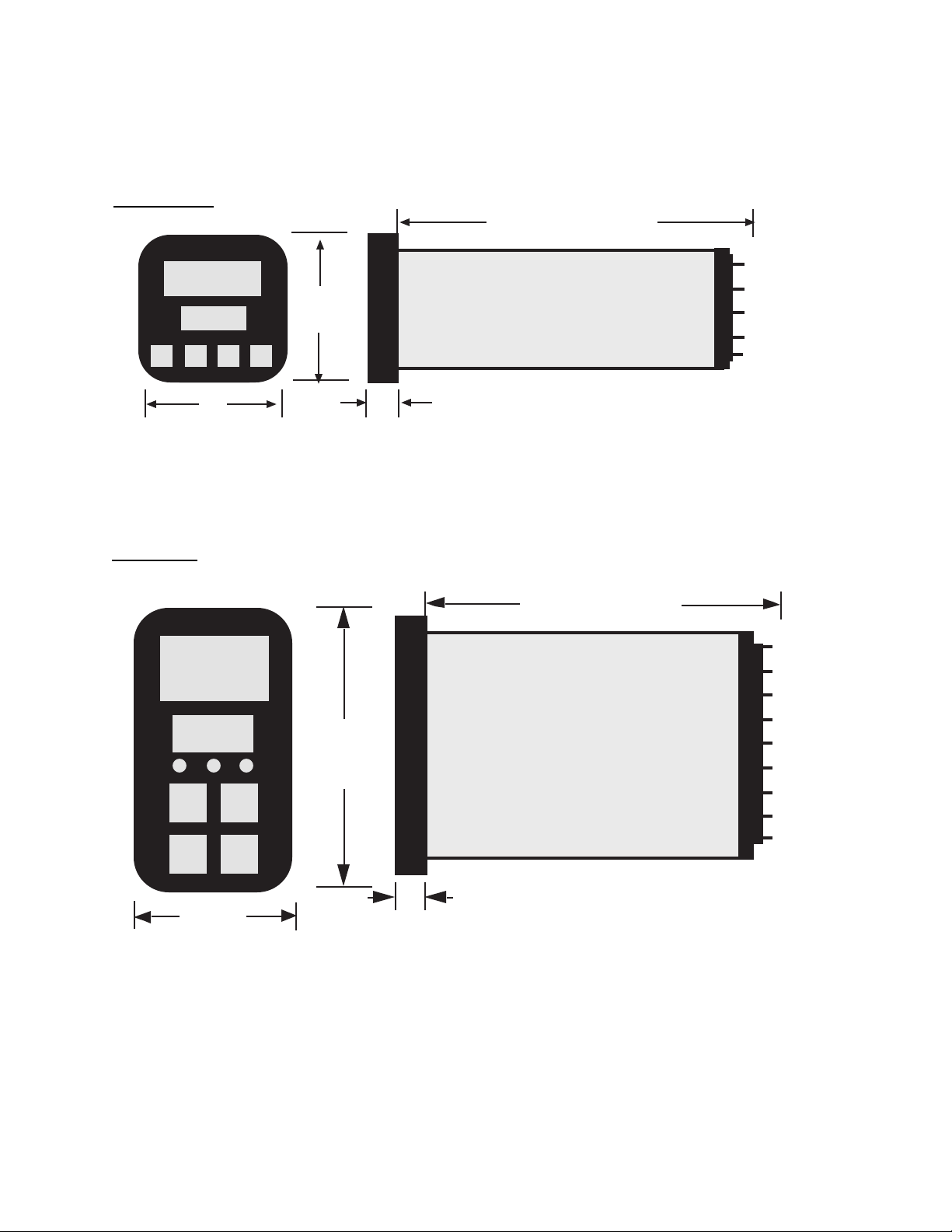
FIGURE 2-2
Main Dimensions
1/16 DIN
48 mm
(1.89 in.)
48 mm
(1.89 in.)
110 mm (4.33 in.)
Side View
10 mm (0.39 in.)
Note: Max. panel thickness 6.0 mm (.25 in.)
1/8 DIN
48 mm
(1.89 in.)
100 mm (3.94 in.)
96 mm
(3.78 in)
Side View
10 mm (0.39 in.)
Note: Max. panel thickness 6.0 mm (.25 in)
MIC 1167/1807/1407 Manual Edition 110
Page 11
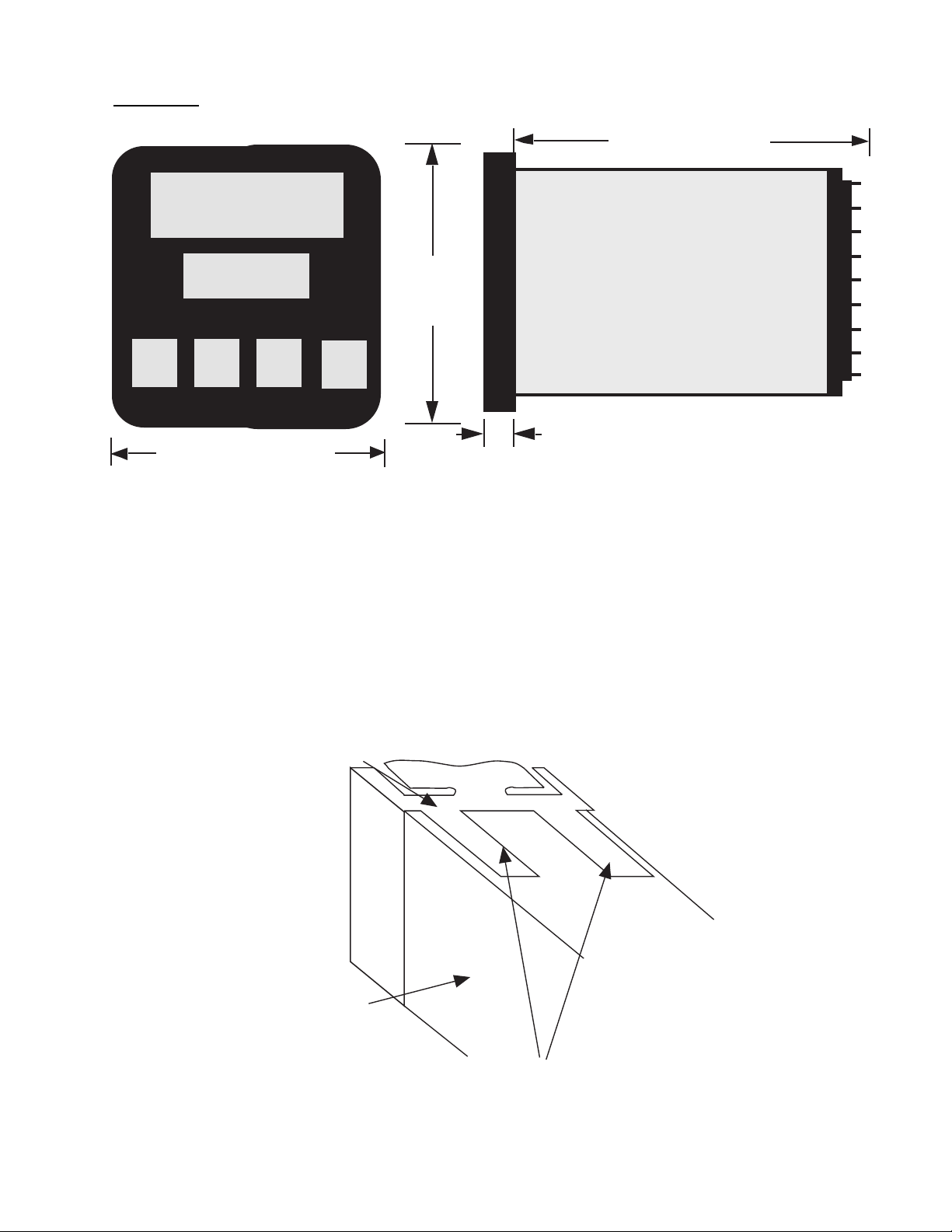
1/4 DIN
96 mm
(3.78 in.)
96 mm
(3.78 in)
100 mm (3.94 in.)
Side View
10 mm (0.39 in.)
Max. panel thickness
6.0 mm (.25 in.)
FIGURE 2-3
Panel Mounting the Controller
Mounting Clamp
Controller Housing
Tongues on mounting clamp engage in
ratchet slots on controller housing
11
MIC 1167/1407/1807 ManualEdition 1
Page 12

Preparation for Wiring 2.2
2.2.1 WIRING GUIDELINES
Electrical noise is a phenomenon typical of industrial environments. The
following are guidelines that must be followed to minimize the effect of
noise upon any instrumentation.
2.2.1.1 INST ALLA TION CONSIDERATIONS
Listed below are some of the common sources of electrical noise in the
industrial environment:
• Ignition Transformers
• Arc Welders
• Mechanical contact relay(s)
• Solenoids
Before using any instrument near the device listed, the instructions below
should be followed:
1. If the instrument is to be mounted in the same panel as any of the
listed devices, separate them by the largest distance possible. For
maximum electrical noise reduction, the noise generating devices
should be mounted in a separate enclosure.
2. If possible, eliminate mechanical contact relay(s) and replace with
solid state relays. If a mechanical relay being powered by an
instrument output device cannot be replaced, a solid state relay can
be used to isolate the instrument.
3. A separate isolation transformer to feed only instrumentation should
be considered. The transformer can isolate the instrument from noise
found on the AC power input.
4. If the instrument is being installed on existing equipment, the wiring in
the area should be checked to insure that good wiring practices have
been followed.
MIC 1167/1807/1407 Manual Edition 112
Page 13

2.2.1.2 AC POWER WIRING
Neutral (For 115 VAC)
It is good practice to assure that the AC neutral is at or near ground potential. To verify this, a voltmeter check between neutral and ground should be
done. On the AC range, the reading should not be more than 50 millivolts.
If it is greater than this amount, the secondary of this AC transformer supplying the instrument should be checked by an electrician. A proper neutral
will help ensure maximum performance from the instrument.
2.2.1.3 WIRE ISOLATION
Four voltage levels of input and output wiring may be used with the unit:
• Analog input or output (i.e. thermocouple, RTD, VDC, mVDC, or mADC)
• SPDT Relays
• SSR driver outputs
• AC power
The only wires that should run together are those of the same category. If
they need to be run parallel with any of the other lines, maintain a minimum
6 inch space between the wires. If wires must cross each other, do so at
90 degrees. This will minimize the contact with each other and reduces
“cross talk”. “Cross Talk” is due to the EMF (Electro Magnetic Flux) emitted
by a wire as current passes through it. This EMF can be picked up by
other wires running in the same bundle or conduit.
In applications where a High Voltage Transformer is used (i.e. ignition systems) the secondary of the transformer should be isolated from all other
cables.
This instrument has been designed to operate in noisy environments, however, in some cases even with proper wiring it may be necessary to suppress the noise at its source.
2.2.1.4 USE OF SHIELDED CABLE
Shielded cable helps eliminate electrical noise being induced on the wires.
All analog signals should be run with shielded cable. Connection lead
length should be kept as short as possible, keeping the wires protected by
the shielding. The shield should be grounded at one end only. The preferred grounding location is the sensor, transmitter or transducer.
13
MIC 1167/1407/1807 ManualEdition 1
Page 14
2.2.1.5 NOISE SUPPRESSION AT THE SOURCE
Usually when good wiring practices are followed no further noise protection
is necessary. Sometimes in severe electrical environments, the amount of
noise is so great that it has to be suppressed at the source. Many manufacturers of relays, contactors, etc. supply “surge suppressors” which mount
on the noise source.
For those devices that do not have surge suppressors supplied, RC (resistance-capacitance) networks and/or MOV (metal oxide varistors) may be
added.
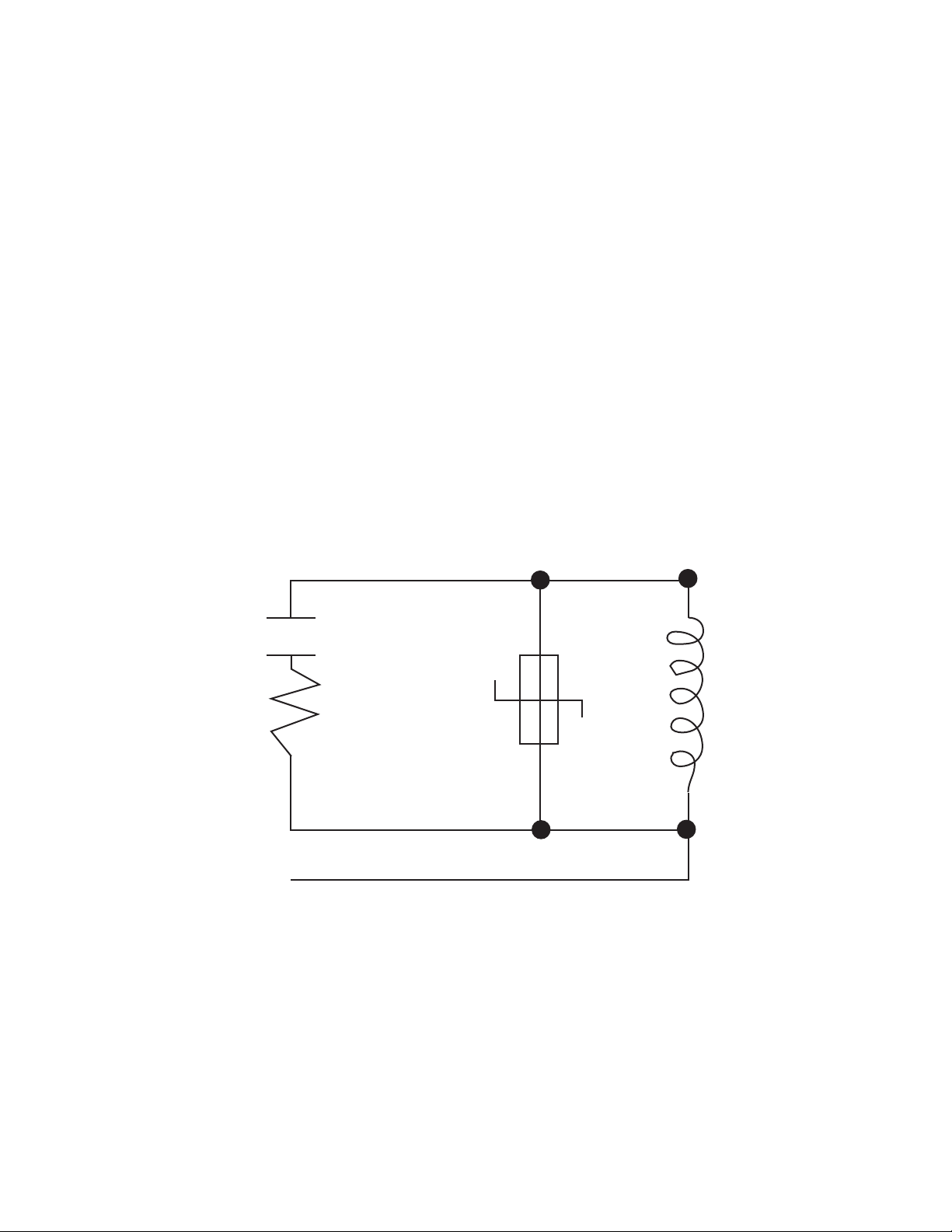
Inductive Coils - MOV’s are recommended for transient suppression in
inductive coils connected in parallel and as close as possible to the coil.
See Figure 2-4. Additional protection may be provided by adding an RC
network across the MOV.
FIGURE 2-4
0.5
mfd
1000V
220
ohms
115V 1/4W
230V 1W
Coil
MIC 1167/1807/1407 Manual Edition 114
Page 15
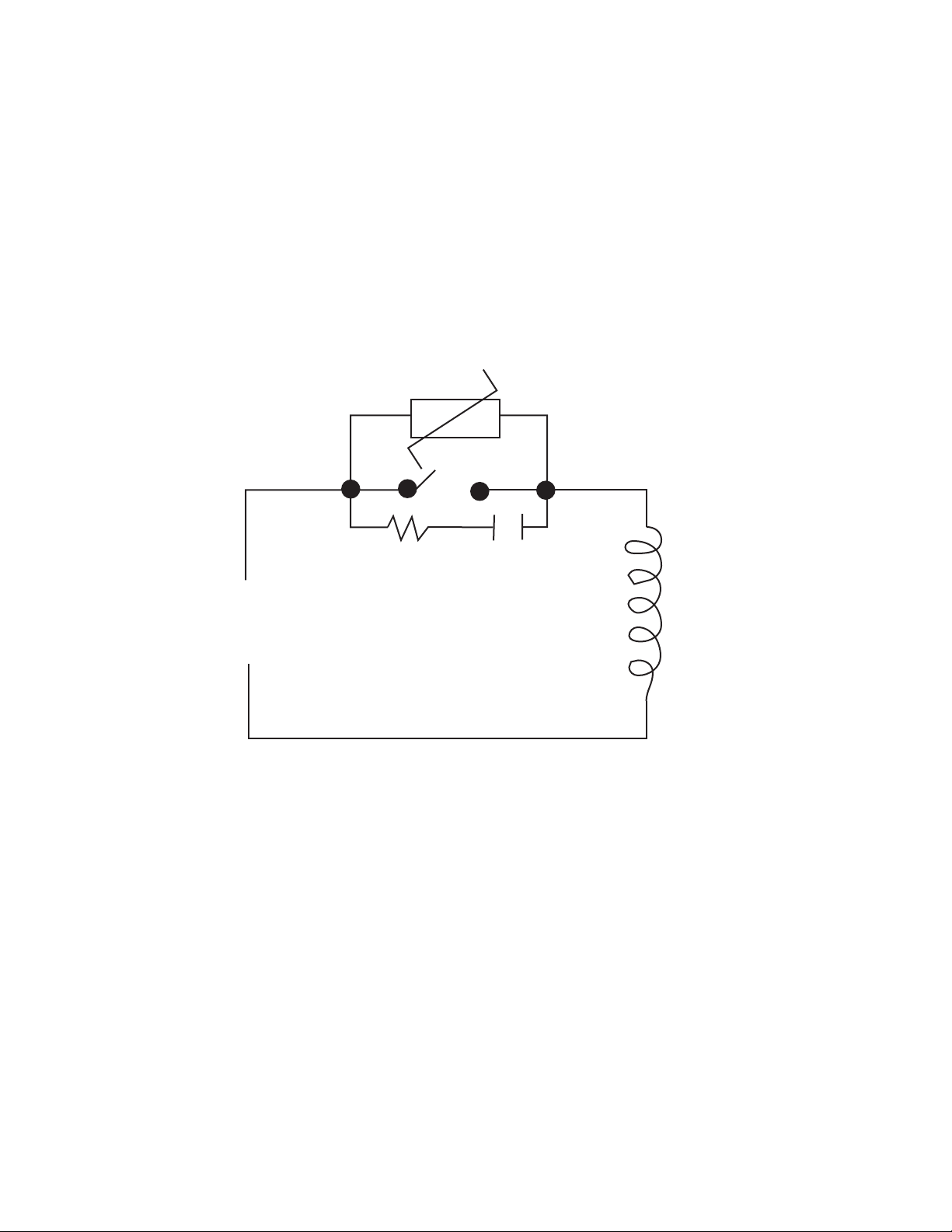
Contacts - Arcing may occur across contacts when the contact opens and
closes. This results in electrical noise as well as damage to the contacts.
Connecting a RC network properly sized can eliminate this arc.
For circuits up to 3 amps, a combination of a 47 ohm resistor and 0.1
microfarad capacitor (1000 volts) is recommended. For circuits from 3 to 5
amps, connect 2 of these in parallel. See Figure 2-5, page 12.
FIGURE 2-5
MOV
R C
Inductive
Coil
2.2.2 SENSOR PLACEMENT (Thermocouple or RTD)
Two wire RTD’s should be used only with lead lengths less than 10 feet.
If the temperature probe is to be subjected to corrosive or abrasive condi-
tions, it should be protected by the appropriate thermowell. The probe
should be positioned to reflect true process temperature:
In liquid media - the most agitated area
In air - the best circulated area
15
MIC 1167/1407/1807 ManualEdition 1
Page 16
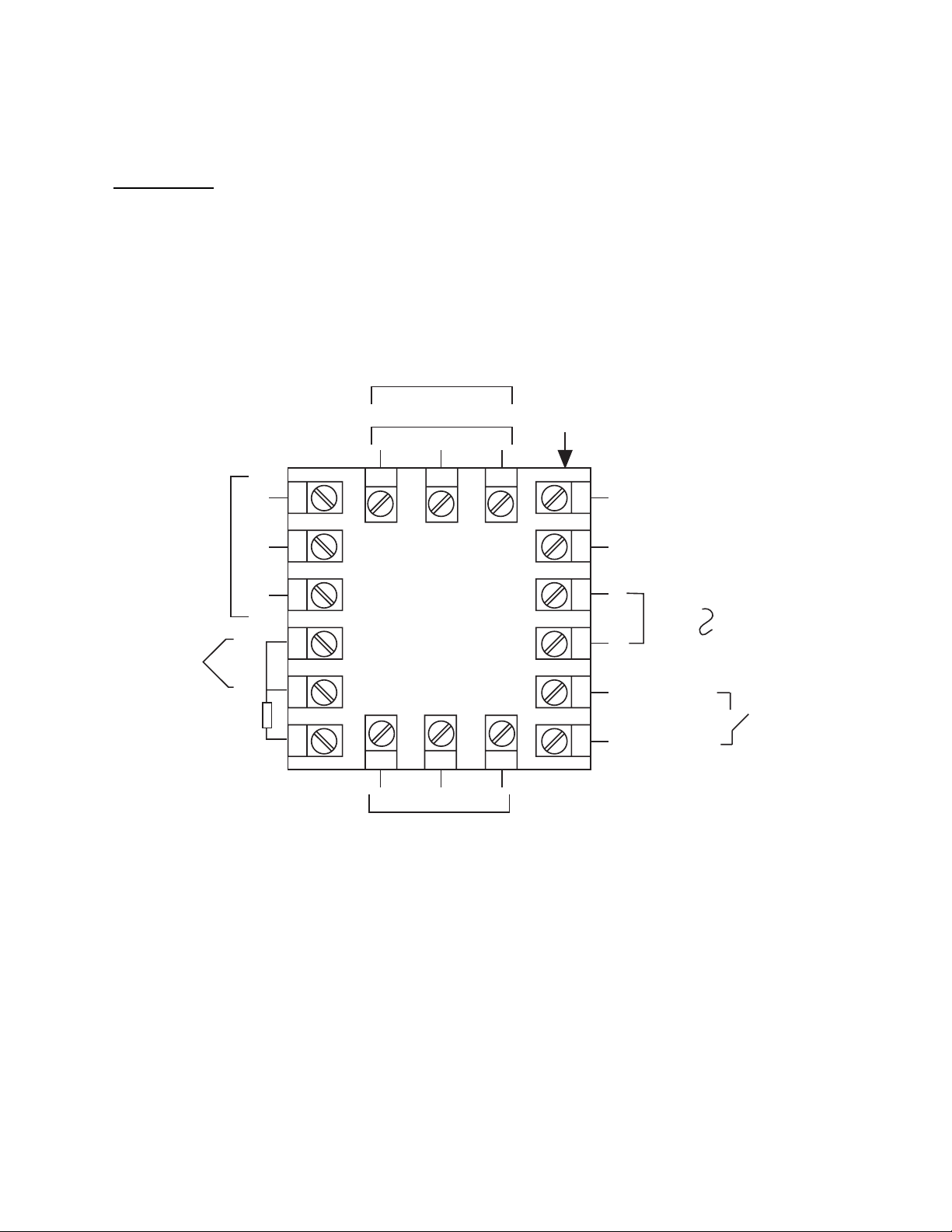
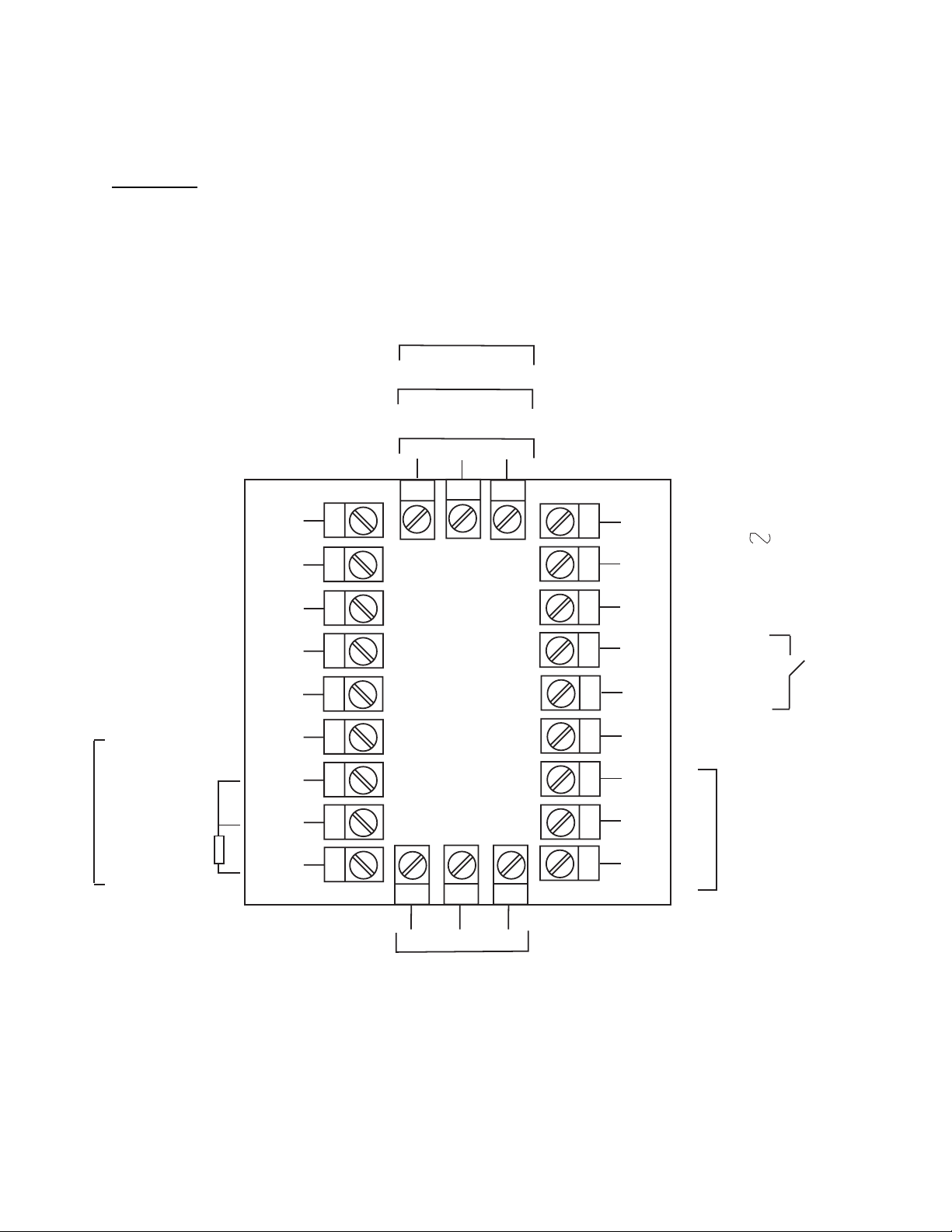
FIGURE 2-6
Wiring Label
1/16 DIN
Output 3 is used either as
Alarm 1 Output (Relay or SSRD only)
or Retransmission Output (DC only)
OUTPUT 3
Relay
SSR/DC
-
16 17 18
OUTPUT 1
N/O
C
Relay
N/C
1
2
3
N/OCN/C
Top of controller
+
No external
7
connections
to be made
8
to these
terminals
L
9
-
+
INPUT
Linear (mA)
-
+
+
Linear (V/mV)
Thermocouple
RTD
4
5
6
-
-
Output 1 is normally used
as the "Open Valve" output.
Output 2 is normally used
as the "Close Valve" output.
13 14 15
N/O
C
Relay
OUTPUT 2
N/C
10
11
12
N
A
RS485
SERIAL
COMMS.
B
MAINS
(LINE)
SUPPLY
+
24V AC
-
+
SUPPLY
24V DC
SUPPLY
DUAL
SETPOINT
SELECTION
MIC 1167/1807/1407 Manual Edition 116
Page 17
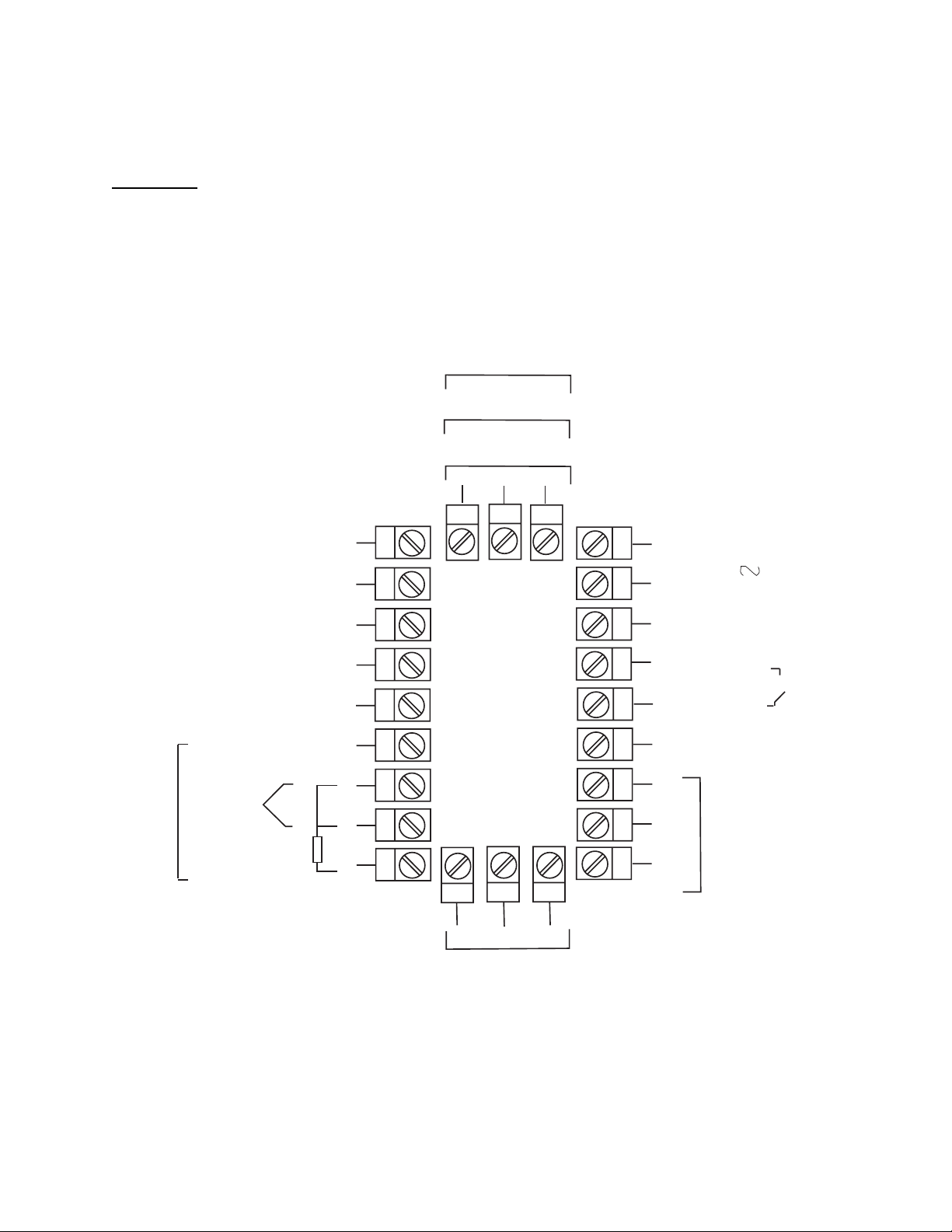
1/8 DIN
Output 3 is used either as
Alarm 1 Output (Relay or SSRD only)
or Retransmission Output (DC only),
or T ransmitter Power Supply
OUTPUT 3
Transmitter Power Supply
-
N/C
-
Relay
SSR/DC
11
+
N/OC
+
1210
+
-
+
+
Linear (mA)
UNIVERSAL
INPUT
-
Linear (V/mV)
Thermocouple
Output 1 is normally used
as the "Open Valve" output.
RTD
9
8
7
6
5
4
3
2
1
24
23 22
N/O
C
Relay
OUTPUT 2
N/C
13
14
15
16
17
18
19
20
21
L
N
B
A
COM
N/C
C
N/O
MAINS
(LINE)
SUPPL Y
.
RS485
SERIAL
COMMS
Relay
-
+
24V AC
SUPPLY
24V DC
SUPPLY
+
-
DUAL
SETPOINT
SELECTION
OUTPUT 1
Output 2 is normally used
as the "Close Valve" output.
17
MIC 1167/1407/1807 ManualEdition 1
Page 18
1/4 DIN
Output 3 is used either as
Alarm 1 Output (Relay or SSRD only)
or Retransmission Output (DC only),
or T ransmitter Power Supply
Transmitter Power Supply
OUTPUT 3
-
Relay
+
+
INPUT
Linear (mA)
-
No external
connections
to be made
to these
terminals
-
+
+
RTD
Linear (V/mV)
Thermocouple
11
N/OC
+
1210
13
L
-
N/C
SSR/DC
-
9
+
8
7
6
5
4
3
2
1
24
23 22
14
15
16
17
18
19
20
21
N
MAINS
B
RS485
SERIAL
COMMS.
A
COM
N/C
C
N/O
(LINE)
SUPPLY
+
-
Relay
OUTPUT 1
24V AC
SUPPLY
DUAL
SETPOINT
SELECTION
24V DC
SUPPLY
N/O
C
Relay
OUTPUT 2
Output 1 is normally used
as the "Open Valve" output.
Output 2 is normally used
as the "Close V alve" output.
MIC 1167/1807/1407 Manual Edition 118
N/C
Page 19
Input Connections 2.3
In general, all wiring connections are made to the instrument after it is
installed. Avoid Electrical Shock. AC power wiring must not be connected
to the source distribution panel until all wiring connection procedures are
completed.
Caution: This equipment is designed for installation in an enclosure
which provide adequate protection against electric shock. Local
regulations regarding electrical installation should be rigidly observed. Consideration should be given to prevention of access to the
power terminations by unauthorized personnel. Power should be
connected via a two pole isolating switch (preferably situated near the
equipment) and a 1 A fuse, as shown in Figure 2-7, below.
FIGURE 2-7
Main Supply
The instrument will operate on 90-264V AC 50/60 Hz mains (line) supply.
The power consumption is approximately 4 VA. If the instrument has relay
outputs in which the contacts are to carry mains (line) voltage, it is recommended that the relay contact mains (line) supply should be switched and
fused in a similar manner but should be separate from the instrument
mains (line) supply .
1/8 & 1/4 DIN
1/16 DIN
13
14
9
10
L
N
L
N
19
Line
Neutral
Line
Neutral
MIC 1167/1407/1807 ManualEdition 1
Page 20
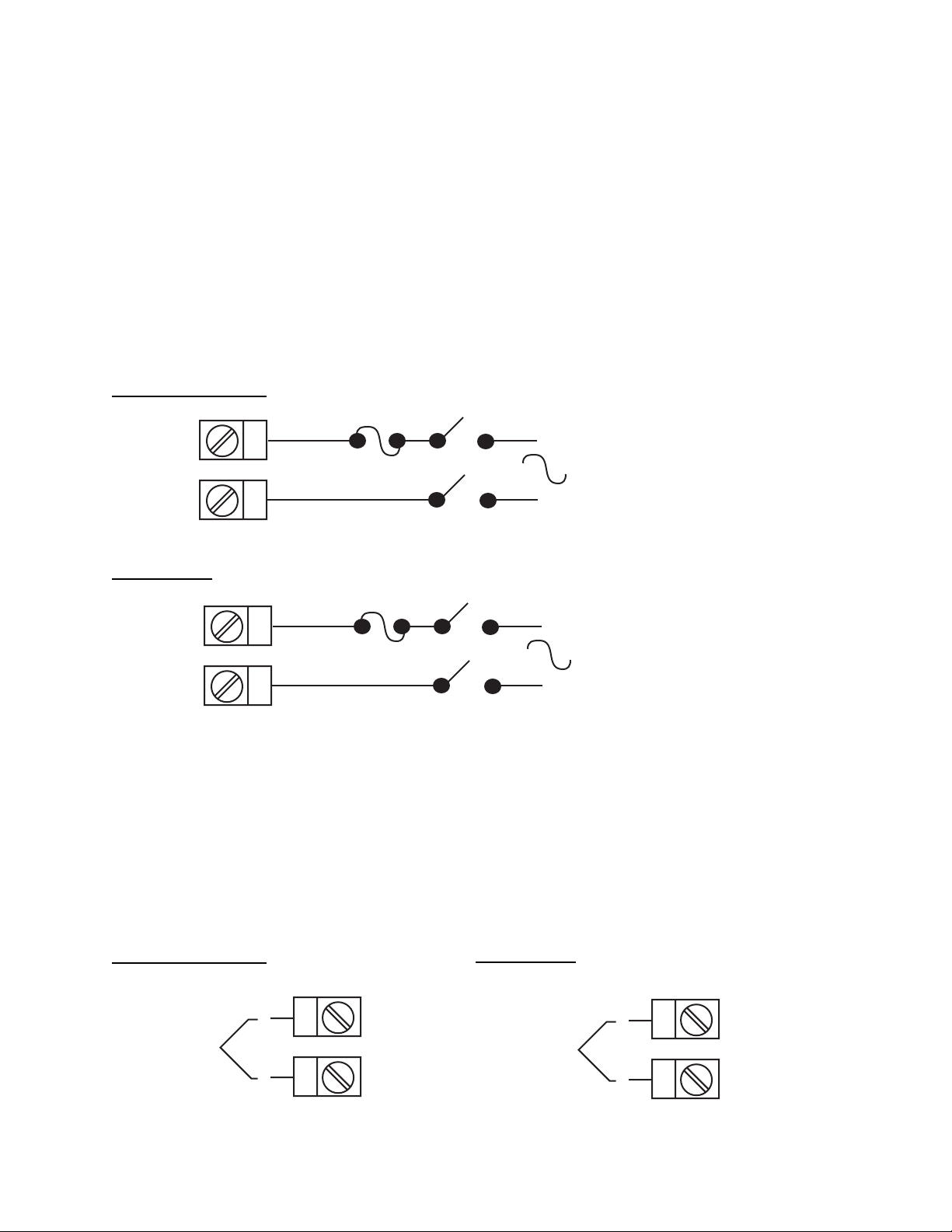
FIGURE 2-7A
4
5
-
+
Thermocouple
24V Nominal AC/DC Supply
The supply connection for the 24V AC/DC option of the instrument are as
shown below . Power should be connected via a two pole isolating switch
and a 315 mA slow-blow (anti-surge Type T) fuse. With the 24V AC/DC
supply option fitted, these terminals will accept the following supply voltage
ranges:
24V (nominal) AC 50/60 Hz - 20-50V
24V (nominal) DC - 22-65V
1/8 & 1/4 DIN
L
13
14
N
24V AC
50/60Hz
-
24V DC
+
1/16 DIN
L
9
24V AC
N
10
FIGURE 2-8
Thermocouple (T/C) Input
Make thermocouple connections as illustrated below. Connect the positive
leg of the thermocouple to terminal 2 (1/8 & 1/4 DIN) or terminal 5 (1/16
DIN) and the negative leg to terminal 3 (1/8 & 1/4 DIN) or terminal 4 (1/16
DIN).
1/8 & 1/4 DIN
-
3
1/16 DIN
50/60Hz
-
24V DC
+
MIC 1167/1807/1407 Manual Edition 120
+
Thermocouple
2
Page 21
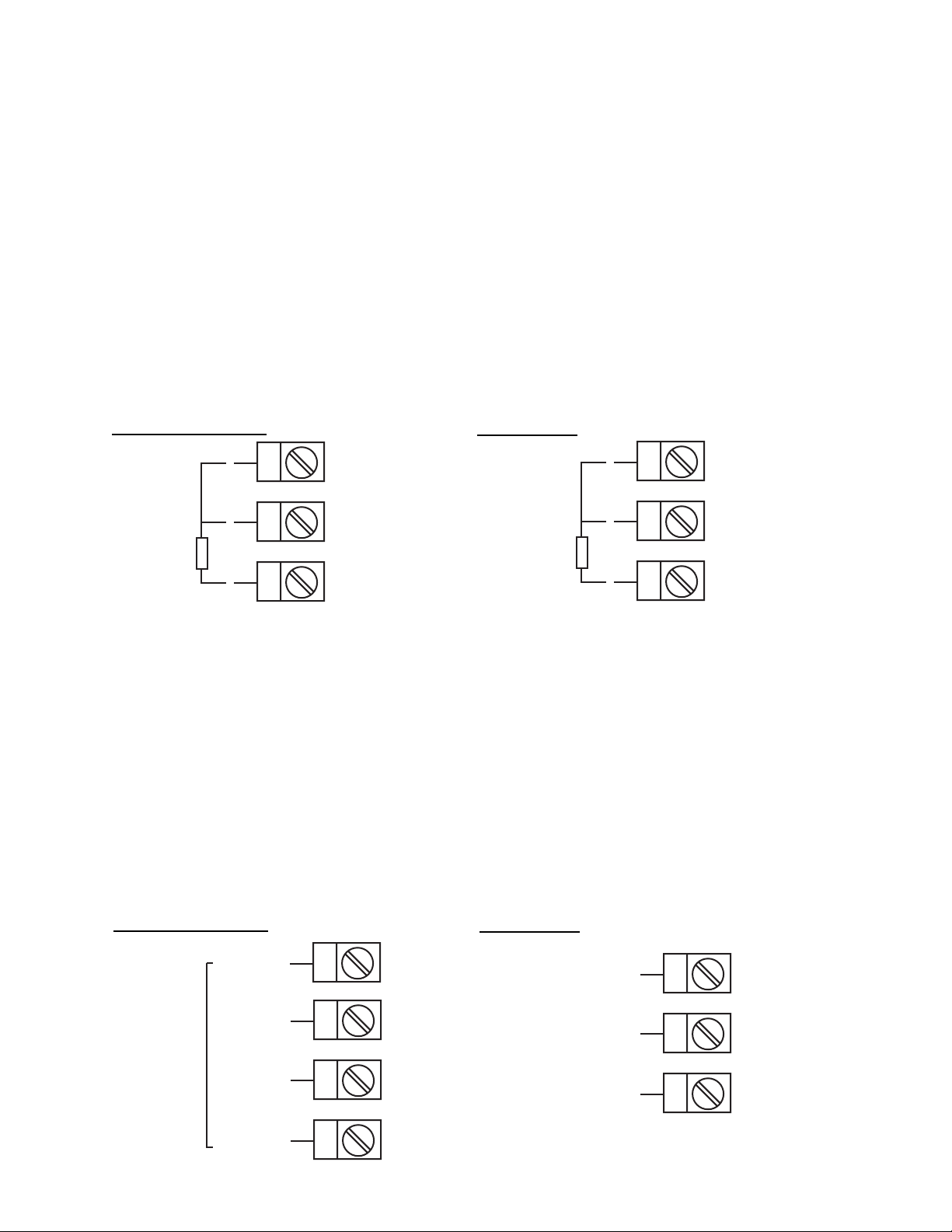
FIGURE 2-9
RTD Input
Make RTD connections as illustrated below . For a three wire RTD, connect
the resistive leg of the RTD to terminal 1 (1/8 & 1/4 DIN) or terminal 6 (1/16
DIN) and the common legs to terminals 2 and 3 (1/8 & 1/4 DIN) or terminals 4 and 5 (1/16 DIN). For a two wire RTD, connect one leg to terminal 2
(1/8 & 1/4 DIN) or terminal 5 (1/16 DIN) and the other leg to terminal 1 (1/8
& 1/4 DIN) or terminal 6 (1/16 DIN) as shown below. A jumper wire supplied by the customer must be installed between terminals 2 and 3 (1/8 & 1/
4 DIN) or terminals 4 and 5 (1/16 DIN). Input conditioning jumper must be
positioned correctly (see Appendix B) and Hardware Definition Code must
be correct (see Appendix C).
1/8 & 1/4 DIN
3
2
RTD
1
FIGURE 2-10
V olt, mV Input
Make volt and millivolt connections as shown below. Input conditioning
jumper must be positioned correctly (see Appendix B) and Hardware Definition Code must be correct (see Appendix C).
mADC Input
Make mADC connections as shown below. Input conditioning jumper must
be positioned correctly (see Appendix B) and Hardware Definition Code
must be correct (see Appendix C).
1/16 DIN
4
5
RTD
6
1/8 & 1/4 DIN
+
Linear (mA)
-
Linear (V/mV)
+
1/16 DIN
4
+
-
3
2
1
21
Linear (mA)
-
-
+
Linear (V/mV)
MIC 1167/1407/1807 ManualEdition 1
4
5
6
Page 22
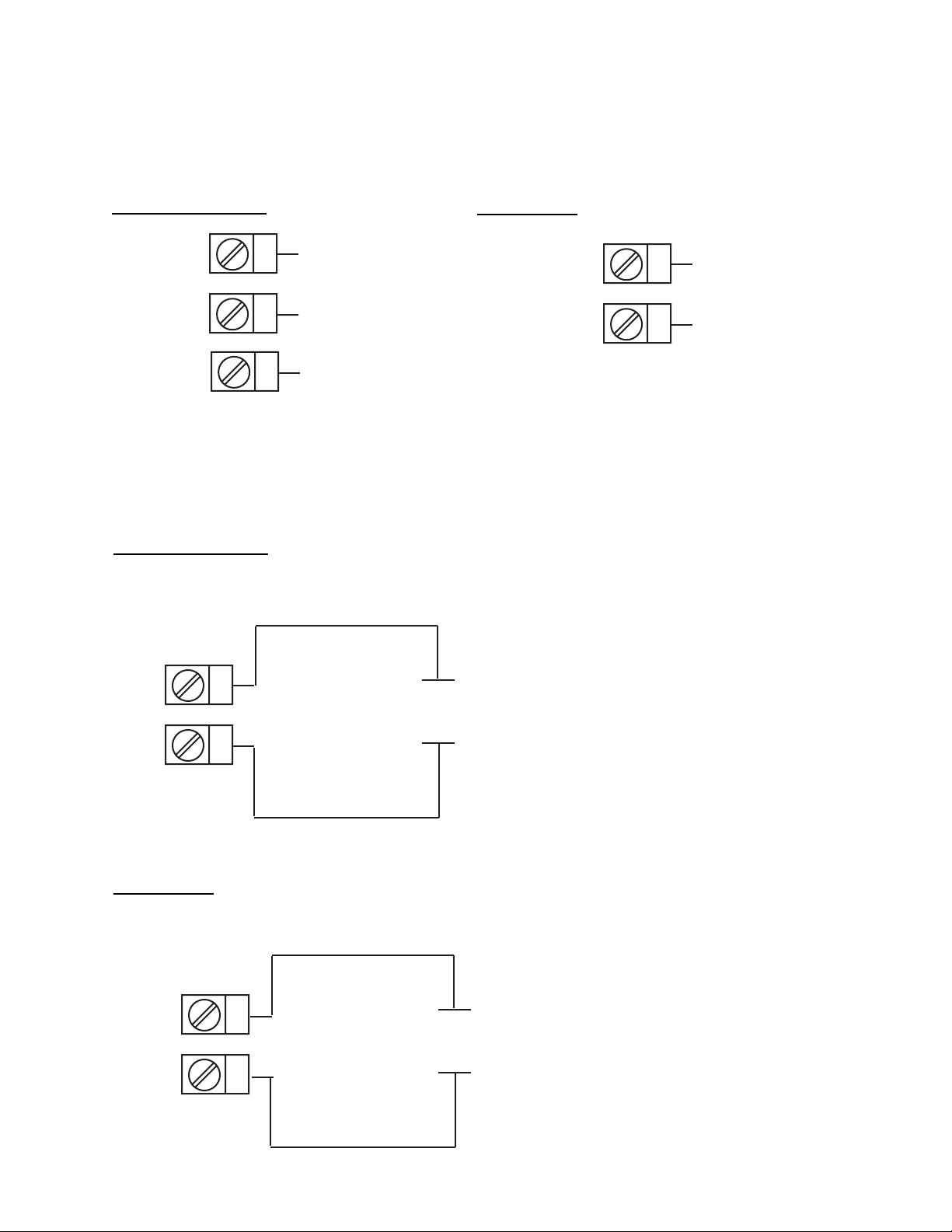
FIGURE 2-11
Remote Digital Communications - RS485
Make digital communication connections as illustrated below .
1/8 & 1/4 DIN
16
17
18
B
A
COM
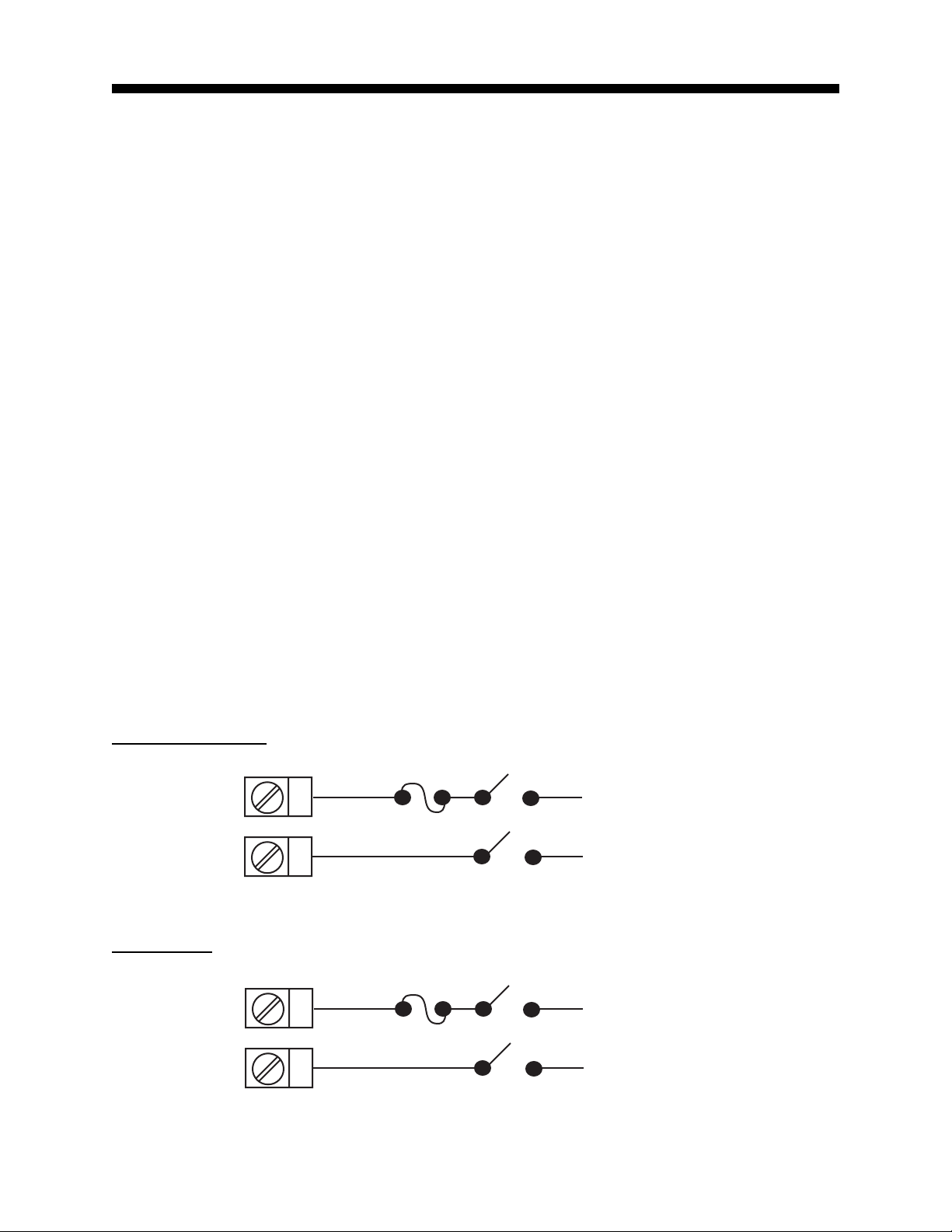
FIGURE 2-12
Dual Setpoint Selection
1/8 & 1/4 DIN
1/16 DIN
11
12
A
B
Contacts Open - Setpoint 1
Contacts Closed - Setpoint 2
1/16 DIN
16
17
Dry
Contact
Contacts Open - Setpoint 1
Contacts Closed - Setpoint 2
11
Dry
Contact
12
MIC 1167/1807/1407 Manual Edition 122
Page 23
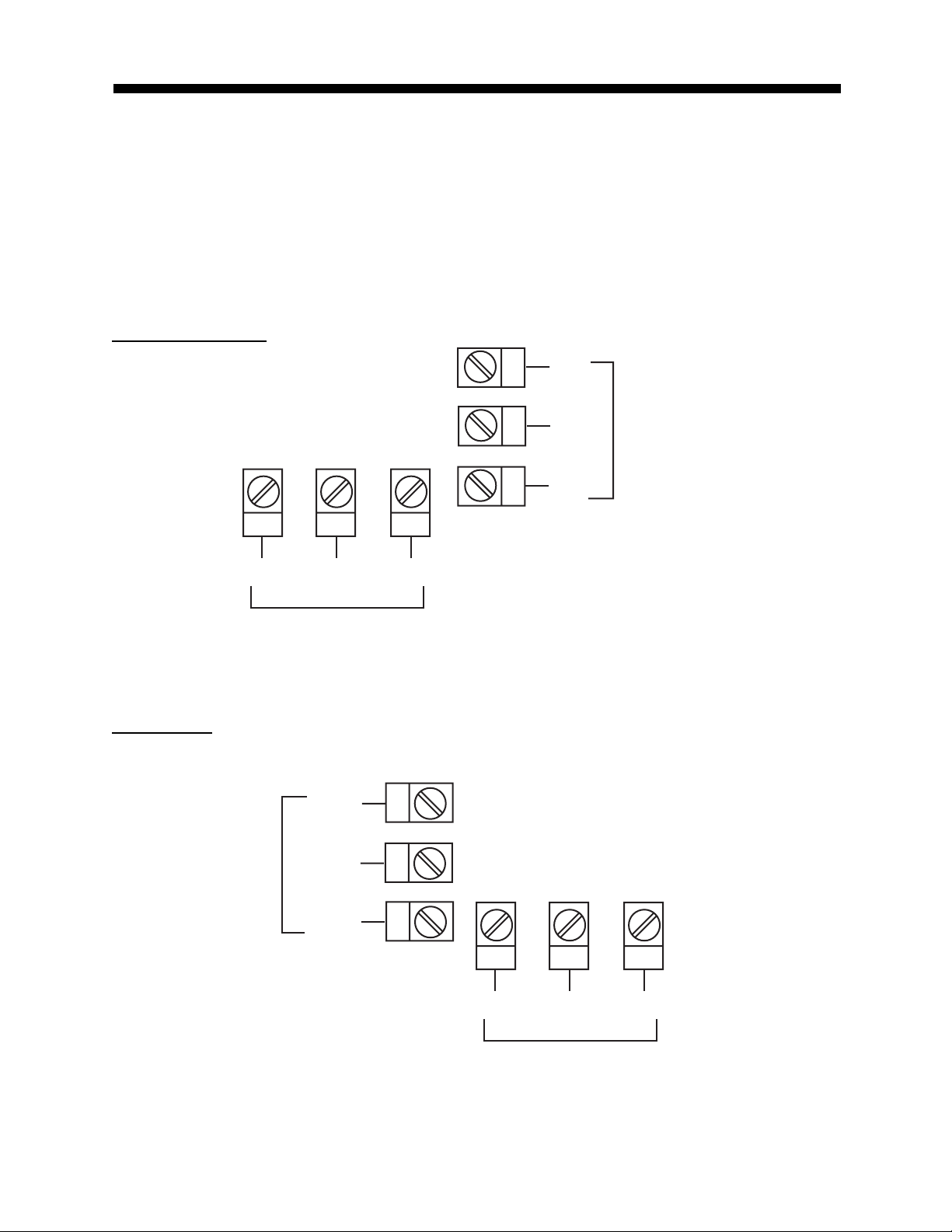
Output Connections 2.4
FIGURE 2-13
Relay Outputs 1 & 2
The contacts are rated at 2A resistive at 120V (motor drive) or 2A at 240V
AC (resistive or independent contactor drive). Connections are made as
shown below.
1/8 & 1/4 DIN
1/16 DIN
24 23 22
N/O
C
N/C
Relay
Output 2
N/O
1
19
20
21
N/C
C
Relay
Output 1
N/O
Output 1 is normally used
as the "Open Valve" output.
Output 2 is normally used
as the "Close Valve" output.
Relay
Output 1
C
N/C
2
3
13 14 15
N/O
23
C
Relay
Output 2
N/C
MIC 1167/1407/1807 ManualEdition 1
Page 24

FIGURE 2-14
The controller is designed to switch on either Output 1 or Output 2 (to open
or close the valve). However, under fault conditions, both Output 1 and
Output 2 relays could be switched ON simultaneously. For safety purposes,
an interlock can be included which connects the supply to the motor via the
"normally closed" relay contacts on the Output 1 and Output 2 relays (see
Figure 2-14)
1/8 & 1/4 DIN
Motor
Supply
1/16 DIN
Close
Open
Common
N/O
19
20
N/C
C
"Open
V alve"
Relay
21
N/O
24 23 22
N/O
C
N/C
"Close V alve" Relay
1
Open
"Open V alve"
C
2
Relay
N/C
3
13 14 15
N/O
"Close V alve" Relay
MIC 1167/1807/1407 Manual Edition 124
C
Close
Motor
Supply
N/C
Page 25

FIGURE 2-15
Relay Output 3
Connections are made to Output 3 relay as illustrated below. The contacts
are rated at 2 amp resistive, 120/240 V AC.
1/8 & 1/4 DIN
Relay
N/OCN/C
10 11 12
FIGURE 2-16
SSR Driver Output 3
Connections are made to Output 3 SSR Driver as illustrated below. The
solid state relay driver is a non-isolated 0-4 VDC nominal signal. Output
impedance is 250 ohms.
1/8 & 1/4 DIN
SSR
1/16 DIN
Relay
N/OCN/C
16 17 18
1/16 DIN
SSR
-
10 11 12
FIGURE 2-17
mADC Output 3 (Recorder Output Only)
Make connections for DC output 3 as illustrated below.
1/8 & 1/4 DIN
DC
-
10 11 12
+
1/16 DIN
+
-
16 17 18
-
16 17 18
+
DC
+
25
MIC 1167/1407/1807 ManualEdition 1
Page 26

FIGURE 2-18
Transmitter Power Supply
Make connections for 24V DC transmitter power supply as illustrated below.
1/8 & 1/4 DIN (1/16 DIN not available)
24V DC Transmitter Power Supply
-
10 11 12
+
MIC 1167/1807/1407 Manual Edition 126
Page 27

Operation 3.1
3.1.1 POWER UP PROCEDURE
Verify all electrical connections have been properly made before applying
power to the instrument.
If the instrument is being powered for the first time, it may be desirable to
disconnect the controller output connections. The instrument will be into
control following the power up sequence and the output(s) may turn ON.
During power up, a self-test procedure is initiated during which all LED
segments in the two front panel displays appear and all LED indicators are
ON. When the self-test procedure is complete, the instrument reverts to
normal operation.
Note: A delay of about 3 seconds, when power is first applied, will be
seen before the displays light up.
3.1.2 KEYPAD OPERATION
AUTO/MANUAL KEY
This key is used to:
1. Enter the Auto/Manual mode and vice versa.
2. Used to activate the Auto Tune mode.
3. Used to confirm a change in the Program mode.
SCROLL KEY
This key is used to:
1. Select adjustment of the ramping setpoint, if enabled.
2. Select a parameter to be viewed or adjusted.
3. Display enabled modes of operation.
4. Display a mode parameter value.
5. Advance display from a parameter value to the next parameter code.
6. Activate the Pre-tune mode.
7. With the DOWN key to view the current Hardware Definition Code
setting.
27
MIC 1167/1407/1807 ManualEdition 1
Page 28

UP KEY
This key is used to:
1. Increase the displayed parameter value.
2. Increase setpoint.
3. With the DOWN key to enter Pre and Auto Tune mode.
DOWN KEY
This key is used to:
1. Decrease the displayed parameter value.
2. Decrease setpoint.
3. With the UP key to enter the Pre and Auto Tune mode.
4. With the SCROLL key to view the current Hardware Definition Code
setting.
3.1.3 DISPLAYS
During configuration the upper display shows the parameter setting. The
lower display shows the parameter code for the currently selected parameter. During operation, the upper display shows the value of the process
variable. The lower display shows the setpoint value.
3.1.3.1 ALARM STATUS DISPLAY*
The user may view the status of the instrument's alarm(s) by depressing
the SCROLL key until the lower display shows the legend "ALSt" and the
upper display shows the alarm status in the following format:
Loop Alarm Status
L = Energized
Blank = De-energized
Alarm 1 Status
1 = Energized
Blank = De-energized
Alarm 2 Status
2 = Energized
Blank = De-energized
*This display is available only if one or more of the alarms is/are energized.
When "ALSt" is seen in the lower display , to enter the Program or Tune
modes, press the UP key with "ALSt" displayed, then the SCROLL key to
Program or T une.
MIC 1167/1807/1407 Manual Edition 128
Page 29

3.1.3.2 OVER-RANGE/UNDER-RANGE DISPLA Y
If the process variable attains a value higher than the input scale maximum
limit, the upper display will show:
If the process variable attains a value lower than the input scale minimum,
the upper display will show:
If a break is detected in the sensor circuit, the upper display will show:
3.1.4 FRONT PANEL INDICATORS
+ Indicates the state of the Output 1 relay . When the indicator is ON
the relay is energized.
- Indicates the state of the Output 2 relay. When the indicator is ON
the relay is energized.
ALM When flashing, indicates an Alarm condition.
MAN Flashes when the Manual mode has been entered
AT Indicates when the Pre-Tune mode or Auto-Tune mode has been
selected; flashing for Pre-Tune and continuously ON for Auto-Tune.
3.1.5 SETPOINT ADJUSTMENT
3.1.5.1 SINGLE SETPOINT
To adjust the instrument setpoint, when single setpoint is specified, proceed
as follows:
29
MIC 1167/1407/1807 ManualEdition 1
Page 30

To adjust the Setpoint, press the UP or DOWN key as applicable.
Momentary depression will increment or decrement (as appropriate) the
setpoint by one unit in the least significant digit. If the key is held for longer
than 1 second, the least significant digit will change at the rate of 25 units
per second. If the key is held for longer than 10 seconds, the second least
significant digit will change at the rate of 25 units per second. If the key is
held for more than 10 seconds, the third least significant digit will change at
the rate of 25 units per second.
3.1.5.2 DUAL SETPOINT
To adjust the instrument setpoint when dual setpoint is specified and selected, proceed as follows:
To adjust the ACTIVE Setpoint, press the UP or DOWN key as applicable.
Momentary depression will increment or decrement (as appropriate) the
setpoint by one unit in the least significant digit. If the key is held for longer
than 1 second, the least significant digit will change at the rate of 25 units
per seconds. If the key is held for longer than 10 seconds, the second least
significant digit will change at the rate of 25 units per second. If the key is
held for more than 10 seconds, the third least significant digit will change at
the rate of 25 units per second.
If Dual Setpoint has been selected, the "normal" display will be as follows:
Upper Display = Process Variable value
Lower Display = Active Setpoint value (adjustable)
Press the SCROLL key to change the display to:
Upper Display = Blank
Lower Display = the legend SP1
Press the SCROLL key again to change the display to:
Upper Display = Setpoint 1 value (adjustable)
Lower Display = the legend SP1
Press the SCROLL key again to change the display to:
Upper Display = Blank
Lower Display = the legend SP2
Press the SCROLL key again to change the display to:
Upper Display = Setpoint 2 value (adjustable)
Lower Display = the legend SP2
MIC 1167/1807/1407 Manual Edition 130
Page 31

NOTE: The lower display uses the left-most character to distinguish between the ACTIVE and INACTIVE setpoints in the following manner:
_SP2 SP2
ACTIVE SETPOINT INACTIVE SETPOINT
3.1.5.3 RAMPING SETPOINT
A selectable Ramp Rate function in the range of 1 to 9999 units per hour
can be used to limit the rate at which the setpoint used by the control algorithm will change. This feature will also establish a soft start up. Upon
power up, the instrument will take the initial process value as the setpoint.
A setpoint ramp rate will be calculated to increase the setpoint from the
initial process value to the setpoint selected. The setpoint ramp feature
disables the Pre-Tune facility. The Auto-T une facility, if selected, will commence only after the setpoint has completed the ramp.
Sudden changes in the setpoint value entered via the keypad can be inhibited from effecting the control outputs by use of this feature. The internal
setpoint used to control the process will ramp to the setpoint value entered
at the rate of change selected.
To view the Ramping Setpoint value while in the Control mode and "ESPr"
in the T une mode is disabled, press the SCROLL key until "SPrP" is displayed in the lower display. This is the code for the ramping setpoint value.
Press the SCROLL key one more time and the lower display shows "SPrP"
and the upper display will show the current ramping setpoint.
SPRr not OFF and ESPr equal to 0
PV BLANK Ramping SP PV
*SP SPrP SPrP *SP
If ESPr is enabled, the display sequence changes to:
PV BLANK Ramping SP BLANK *Ramp Rate PV
*SP SPrP SPrP SPrr SPrr *SP
*Adjustable
31
MIC 1167/1407/1807 ManualEdition 1
Page 32

To enter the Program or Tune mode when setpoint ramping is selected,
press the SCROLL key until the lower display shows "SPrP" or "SPrr" and
the upper display is blank. With "SPrP" or "SPrr" display in the lower display, press the UP key once and "CtrL should be displayed in the lower
display. With "CtrL" displayed, press the SCROLL key until "Prog" or "tunE"
is displayed in the lower display.
Setpoint Ramp
205
204
Setpoint
in
Degrees
203
202
201
200
0
Time in Hours
5
10
3.1.6 MANUAL CONTROL
Manual Control is not applicable if the Auto/Manual selection in Tune mode
is disabled.
To enter the Manual mode, press the AUTO/MANUAL key. The Manual
mode status LED will begin to flash indicating that the Manual mode is in
use. Shifting from the Control to the Manual mode is bumpless.
The valve position may then be adjusted with the UP/DOWN keys.
To exit from the Manual mode, press the Auto/Manual key. Shifting to the
Control mode is bumpless.
MIC 1167/1807/1407 Manual Edition 132
Page 33

Configuration 3.2
All configurable parameters are provided in Tables 3-1 through 3-3 on the
following pages. These tables illustrate the display sequence, parameter
adjustment and factory setting for each step.
Depression of the SCROLL key will cycle the display if Setpoint Ramp Rate
is not enabled (top display is blank, lower display shows the parameter
code) through all enabled modes as follows:
CONTROL ---- PROGRAM ---- TUNE
(Ctrl) (Prog) (tunE)
If a mode is not enabled it will be skipped over by the routine.
3.2.1 ENABLE MODE
The Enable mode provides a means of enabling or disabling access to the
Program and Tune modes. If a mode has been disabled, then that mode
will not be displayed or available to the user in the Control mode. See
Table 3-1 (page 24-25) for the Enable Mode procedure.
3.2.2 PROGRAM MODE
The Program mode is used to configure or re-configure the instrument.
The input and output selections are made in the Program mode. All possible parameters are illustrated in Table 3-2 (page 34). Only those parameters that are applicable to the hardware options chosen will be displayed.
3.2.3 TUNE MODE
The Tune mode is used to adjust the tuning parameters, alarm settings,
setpoint limits, and retransmit scaling needed for proper operation of the
instrument. See Table 3-3 (page 36) for T une mode. Only those parameters that are applicable will be displayed.
TABLE 3-1 ENABLE MODE
To enter the Enable mode, press and hold the UP and DOWN keys. After 5
seconds (the AT LED should have flashed once), the display returns to
normal. After 5 more seconds, "EnAb" will be displayed. Release the keys,
the display should show "EPro". Pressing the DOWN key will display the
Enable mode codes in the following sequence:
EPro - - Etun - - ESPC
33
MIC 1167/1407/1807 ManualEdition 1
Page 34

Pressing the SCROLL key will display the Enable mode codes with the
upper display blank. The next depression of the SCROLL key will add the
Enable code status (ON or OFF) to the upper display. With the Enable
code status displayed, use the UP key to change the status to ON and the
DOWN key to change the status to OFF.
To exit the Enable mode, press the UP key with the Enable code displayed
in the lower display and the upper display blank.
DISPLAY AVAILABLE FACTORY
STEP DESCRIPTION CODE SETTINGS SETTING
1 Program Mode EPro ON/OFF ON
2 Tune Mode Etun ON/OFF ON
3 Setpoint ESPC ON/OFF ON
Changes
TABLE 3-2 PROGRAM MODE
To enter the Program mode, press and release the SCROLL key until
"Prog" is displayed. Use the DOWN key to enter the Program mode. Depress and release the SCROLL key to sequence through the parameters
and their values, alternately showing the parameter code in the lower display with the upper display blank, then the parameter code with the parameter value displayed. Use the UP and DOWN keys to adjust the parameter
values. After adjusting a parameter, the upper display will flash, indicating
that the new setting has yet to be confirmed. When the setting is as required, it may be confirmed by pressing the AUTO/MANUAL key and the
upper display stops flashing. After confirming a change, press the
SCROLL key to proceed to the next parameter. Use the DOWN key to
advance to the next parameter when a parameter code is showing in the
lower display and the upper display is blank.
To exit the Program mode, press the UP key whenever a parameter code is
displayed in the lower display and the upper display is blank.
DEFAULT PARAMETER INDICATION
If a parameter value, such as Input Select, was changed while in the Program mode, when returning to the Control mode, a decimal point after each
digit will be lit. This display indicates all Tune mode parameters have been
set to their default condition. To clear this condition, enter the Tune mode
and make a parameter value change and review each parameter for its
proper setting.
MIC 1167/1807/1407 Manual Edition 134
Page 35

DISPLAY AVAILABLE FACTORY
STEP DESCRIPTION CODE SETTINGS SETTING
1 Input Select inPS See App. D* 1420
2 Output 1 Action Out1 Reverse REV
Direct
3 Alarm 1 Type ALA1 P_hi =Proc High P_hi
nonE=No Alarm
bAnd=Band
dE =Deviation
P_Lo=Proc Low
4 Alarm 2 Type ALA2 Same selection as nonE
ALA1
5 Alarm Inhibit** nonE=No alarms inhibited
ALA1=Alarm 1 inhibited
ALA2=Alarm 2 inhibited
both=Both alarms inhibited
6 Output 3 Usage USE3 Al_d =Alm Dir Al_d
rEcP =Rcdr Out P.V.
rEcS =Rcdr Out S.P.
LP_r =Loop Reverse
LP_d=Loop Direct
Ad_r =Rev Logic AND
Ad_d=Dir Logic AND
Or_r =Rev Logic OR
Or_d=Dir Logic OR
Al_r =Alm Rev
7 Com Bit Rate CbS 1200, 2400, 4800, 4800
9600
8 Com Address CAd 1 - 32 1
9 CJC Enable CJC EnAb EnAb
diSA
35
MIC 1167/1407/1807 ManualEdition 1
Page 36

* The Hardware Definition Code and input jumper configuration may need
to be changed. See Appendix B and C.
** On power-up, an "alarm" condition may occur, based on the alarm value,
the process variable value and, if appropriate to the alarm type, the (active)
setpoint value. This would normally activate an alarm; however, if the pertinent alarm is inhibited, the alarm indication is suppressed and the alarm
will remain inactive. This will prevail until the "alarm" condition returns to
the "inactive" state, whereafter the alarm will operate normally.
Also, during dual setpoint operation, whenever there is switching from
Setpoint 1 to Setpoint 2 (or vice versa), similar alarm suppression will occur, if the pertinent alarm is inhibited.
TABLE 3-3 TUNE MODE
To enter the T une mode, press and release the SCROLL key until tunE is
displayed. Use the DOWN key to enter the Tune mode. Depress and
release the SCROLL key to sequence through the parameters and their
values, alternately showing the parameter code in the lower display with the
upper display blank, then the parameter code with the parameter value
displayed. Use the UP and DOWN keys to adjust the parameter values.
After adjusting a parameter, depress the SCROLL key to proceed to the
next parameter. Use the DOWN key to advance to the next parameter
when a parameter code is showing in the lower display and the upper display is blank.
To exit the T une mode, press the UP key whenever a parameter code is
displayed in the lower display and the upper display is blank.
DISPLAY AVAILABLE FACTORY
STEP DESCRIPTION CODE SETTINGS SETTING
1 Ramping SPrP ± Setpoint Limits Read Only
Setpoint Value
2 Setpoint Ramp SPrr 1 to 9999 units/hour OFF
Rate and OFF
3 Input Filter Filt 0.0 to 100.0 2.0
seconds in .5 sec.
increments
MIC 1167/1807/1407 Manual Edition 136
Page 37

DISPLAY AVAILABLE FACTORY
STEP DESCRIPTION CODE SETTINGS SETTING
4 Input Correct iCor ± Span 0
5 1st Output Pb1 0.5 to 999.9% 5.0
Prop. Band of Input Span
6 Automatic ArSt 0.01 secs to 99.59
Reset 99 mins 59 secs
7 Rate rAtE 0 sec to 99 mins. 0 secs.
59 secs.
8 Setpoint SPuL Span Max. Span Max.
Upper Limit
9 Setpoint SPLL Span Min. Span Min.
Lower Limit
10 Process Pou -1999 to 9999 Span Max.
Output Upper
11 Process PoL -1999 to 9999 Span. Min.
Output Lower
12 Motor Travel tr 5 secs to 5 minutes 1 min
Time
13 Minimum tOn 0.0 sec to Motor 1 sec
Motor On Time Travel Time ÷ 10
14 Process High PHA1 ± Span Span Max.
Alarm 1
15 Process Low PLA1 ± Span Span Min.
Alarm 1
16 Band Alarm 1 bAL1 0 to Span 5
37
MIC 1167/1407/1807 ManualEdition 1
Page 38

DISPLAY AVAILABLE FACTORY
STEP DESCRIPTION CODE SETTINGS SETTING
17 Deviation dAL1 ± Span 5
Alarm 1
18 Process High PHA2 ± Span Span Max.
Alarm 2
19 Process Low PLA2 ± Span Span Min.
Alarm 2
20 Band Alarm 2 bAL2 0 to Span 5
21 Deviation dAL2 ± Span 5
Alarm 2
22 Loop Alarm LAEn 0=Disable 0
Enable 1=Enable
23 Decimal dPoS 0, 1, 2, 3 1
Position (Linear Input Only)
24 Engineering Euu -1999 to 9999 1000
Units Upper
25 Engineering EuL -1999 to 9999 0
Units Lower
26 *Enable Pre EPtn 0=Disable 0
Tune 1=Enable
27 Enable Manual ESby 0=Disable 0
Control 1=Enable
28 **Setpoint Ramp ESPr 0=Disable 0
Rate Enable 1=Enable
29 Comm. Enable CCon 0=Disable 1
1=Enable
MIC 1167/1807/1407 Manual Edition 138
Page 39

* Activates Pre-Tune on power-up when enabled.
** When enabled, allows user to change ramp rate without having to enter
Tune mode.
Pre-Tune Mode 3.3
The Pre-Tune mode may be used to set the instrument's PID parameters to
values which are approximately correct, in order to provide a base from
which the Auto Tune mode may optimize tuning.
To engage the Pre-Tune mode, with the instrument in Control mode, press
and hold the UP and DOWN keys for approximately 5 seconds (the display
will flash during this period) until the AT LED flashes once. Release the UP
and DOWN keys. Press and hold the SCROLL key for approximately 3
seconds until the AT LED flashes.
To disengage the Pre-Tune mode, press and hold the UP and DOWN keys
until the AT LED flashes once. Release the UP and DOWN keys. Press
and hold the SCROLL key for approximately 3 seconds until the AT LED is
continuously OFF.
Note: Since the Pre-Tune mode is a single-shot operation, it will automatically disengage itself once the operation is complete. If the Enable Pre-Tune parameter in the T une mode is enabled, then upon a
power interruption, the unit will first engage the Pre-Tune mode prior
to engaging the Auto-Tune mode when power is restored.
Also note: The Pre-Tune mode will not engage during setpoint ramping. Additionally, if the process variable is within 5% of input span
from the setpoint, or if an incorrect key sequence is used, the PreTune mode will not be engaged.
39
MIC 1167/1407/1807 ManualEdition 1
Page 40

Auto-Tune Mode 3.4
The Auto-Tune mode is used to optimize tuning while the instrument is
operating. While Auto-Tune is active, the instrument operates in PI mode.
Manual adjustment of the PID terms provides all the normal benefits of our
Open Loop VMD control. Auto-Tune now improves on this in two ways:
a) Auto-Tune selects optimal values for the Proportional Band and
Integral Time Constant (Auto Reset).
b) Auto-Tune interacts with the control software to provide even
tighter control than is possible under manual tuning conditions, while
still keeping valve activity to a minimum.
Notes
1. When Auto-Tune is disengaged, all the benefits of tighter control are
retained while the PID terms are left unchanged. Once any manual adjustments are made to Proportional Band, Integral Time Constant (Auto Reset),
or Derivative T ime Constant (Rate), the instrument reverts to conventional
Open Loop VMD control.
2. If Minimum Motor ON time (display code "tON") is set equal to 00 seconds, the valve activity minimization strategy will not operate.
To engage the Auto-Tune mode, with the instrument in Control mode, press
and hold the UP and DOWN keys for approximately 5 seconds (the display
will flash during this period) until the AT LED flashes once. Release the UP
and DOWN keys. Press and hold the AUTO/MAN key for approximately 3
seconds until the A T LED lights continuously.
Note: If the Enable Pre-Tune parameter in the Tune mode is enabled,
then on power-up, the unit will automatically engage the Pre-Tune
mode prior to engaging the Auto-Tune mode when power is restored.
To disengage the Auto-Tune mode, press and hold the UP and DOWN keys
until the AT LED flashes once. Release the UP and DOWN keys. Press
and hold the AUTO/MAN key for approximately 3 seconds until the AT LED
is continuously OFF.
MIC 1167/1807/1407 Manual Edition 140
Page 41

Manual Tuning Method 3.5
Before starting to tune the instrument to the load, check that the Setpoint
Upper and Lower Limits (SPuL and SPLL) are set to safe levels.
The following technique is used to determine values of Proportional Band
(Pb) and Integral Time Constant (ArSt). It is recommended that the Derivative Time Constant (rAtE) is always set to 0 seconds, in order to avoid excessive valve activity .
Note: This technique is only suitable for processes which will not be
harmed by large fluctuations in the process variable. It provides acceptable
values, from which to start fine tuning, for a wide range of processes.
1. Adjust the setpoint to the normal operating value (or to a lower value, if
overshoot beyond this point is likely to cause damage).
2. Set the Proportional Band (Pb) to 0.5%.
3. Set the Integral Time Constant (ArSt) to 99mins 59secs.
4. Set the Derivative Time Constant (rAtE) to 0 seconds.
5. Set the Motor Travel Time (tr) to the time required for the valve to travel
from "fully closed" to "fully open" (or vice versa).
6. Set the Minimum Motor ON Time (tOn) to the minimum motor travel
required.
7. Ensure that the valve is positioned away from its end stops; manual
control may be used to set the valve position.
8. Follow the instructions in Figure 3-1. At each stage, allow sufficient
settling time before moving on the next stage.
Note: After setting up the parameters, set the instrument to Control mode
to prevent unauthorized adjustment to the values.
41
MIC 1167/1407/1807 ManualEdition 1
Page 42

FIGURE 3-1
Manual Tuning Technique
START
Apply power
to the load
Does
the PV
continuously
oscillate?
Yes
Process V ariable
T
Time
b
Process V ariable
No
Note the time
interval T
Set = 0.8%
Set = T
rSEt
T
a
a
Pb
a
Time
Are the
oscillations
decaying to
zero?
No
Increase
Pb
a factor of 1.5
Yes
Note the period
of the decaying
oscillations (T )
Increase
Pb
a factor of 1.5.
Set =T
rSEt
END
The controller is now
approximately tuned
b
b
2
MIC 1167/1807/1407 Manual Edition 142
Page 43

Control Capability 4.1
A variety of user programmable control features and capabilities are available including:
• Auto Tune
• Alarm Functions
• Auto/Manual Switching
• Process Retransmission
• Setpoint Retransmission
• Setpoint Ramp Rate
The capabilities available in a specific unit are dependent upon the hardware options specified when the instrument is ordered. Refer to Appendix
F for the decoding of the instrument model number.
Setpoint Adjustment 4.2
To adjust the setpoint with the instrument in the Control mode, press the
UP key to raise the setpoint and the DOWN key to lower the setpoint.
Depressing the SCROLL key, if setpoint ramping is enabled and if ramp
rate is not OFF will change the displays to:
Upper Display = Ramping Setpoint Value (Read Only)
Lower Display = SPrP
Edition 1 MIC 1167/1807/1407 Manual43
Page 44

Appendix A
Glossary of Terms
Input Filter Time Constant
This parameter is used to filter out any extraneous impulses on the process
variable. This filtered PV is used for all PV-dependent functions (control,
alarm, etc). The time constant is adjustable from 0.0 seconds (of f) to 100.0
seconds, in 0.5 second increments. Default value is 2.0 seconds. Display
code is FiLt.
Input Correction
This parameter is used to modify the actual process variable and is adjustable in the range ± input span. Default value is 0. Display code is iCor.
Proportional Band
This parameter is the portion of the input span over which the valve movement is proportional to changes in the displayed process variable value. It
may be adjusted in the range 0.5% to 999.9%. Default value is 5.0%. Display code is Pb1.
Automatic Reset (Integral)
This parameter is used to bias the proportional output to compensate for
process load variations. It is adjustable in the range 1 second to 99 minutes 59 seconds per repeat. Decreasing the time increases the Reset.
Default value is 99min 59sec. Display code is ArSt.
Rate (Derivative)
This parameter is adjustable in the range 00 seconds to 99 minutes 59
seconds and specifies how the control action responds to the rate of
change in the process variable. Default value is 0.0. Display code is rAtE.
Setpoint Upper Limit
This parameter is the maximum limit for setpoint adjustment. It should be
set to a value which prevents the setpoint being given a value which will
cause damage to the process. The range of adjustment is to Maximum
Input Range. Default value is Range Maximum. Display code is SPuL.
MIC 1167/1807/1407 Manual
44
Edition 1
Page 45

Setpoint Lower Limit
This parameter is the minimum limit for setpoint adjustment. It should be
set to a value which prevents the setpoint being given a value which will
cause damage to the process. The range of adjustment is to Minimum
Input Range. Default value is Range Minimum. Display code is SPLL.
Process Output Upper Value
This parameter defines the value of the retransmitted output (process variable or setpoint , whichever is applicable) at its maximum value; for example, for a 0-5V output, this value corresponds to 5V. It may be adjusted
within the range -1999 to 9999. The decimal position is always the same
as that for the process variable input. Default value is Input Range Maximum. Display code is Pou.
Note: If this parameter is set to a value less than that for the Process Output Lower Value, the relationship between the process variable/setpoint
value and the retransmission output is reversed.
Process Output Lower V alue
This parameter defines the value of the retransmitted output (process variable or setpoint, whichever is applicable) at its minimum value; for example, for a 0-5V output, this value corresponds to 0 V. It may be adjusted
within the range -1999 to 9999. The decimal position is always the same
as that for the process variable input. Default value is Input Range Minimum. Display code is PoL.
Note: If this parameter is set to a value greater than that for the Process
Output Upper Value, the relationship between the process variable/setpoint
value and the retransmission output is reversed.
Motor T ravel Time
This parameter is used to select the time taken for the valve to travel from
one physical end stop to the other. It is important that this time reflects the
physical travel limits of the valve. It may be adjusted within the range of 5
seconds to 5 minutes in 1 second increments. Display code is tr and the
default is 1 minute.
Edition 1 MIC 1167/1807/1407 Manual45
Page 46

Minimum Motor ON Time
This parameter defines the minimum drive effort allowed to initiate valve
movement, if the valve was previously stationary. This parameter is used
primarily to ensure that valve frictional and inertial effects do not cause
controller drive to be ignored by the valve.
If Auto-Tune is OFF, this parameter can be used to influence valve activity.
Larger values reduce valve activity but increase the risk of the process
variable oscillating about the setpoint. Auto-Tune monitors on-control valve
activity and will minimize it automatically. Too large a value of Minimum
Motor ON T ime can impair the ef fectiveness of the Auto-Tune facility. If
process variable oscillations persist while Auto-Tune is running, it may be
for this reason. Default value is 1 second. Adjustment is in the range of 0.0
seconds to Motor Travel Time (in seconds) divided by 10. Example: Motor
Travel Time set to 4 minutes; Maximum Minimum Motor ON Time equals
240/10 or 24 seconds. Display code is tOn.
Process High Alarm 1 Value
This parameter, applicable only when Alarm 1 is selected to be a Process
High alarm, defines the process variable value at or above which Alarm 1
will be active. Its value may be adjusted between Input Range Maximum
and Input Range Minimum. Its default value is Input Range Maximum.
Display code is PHA1.
Process Low Alarm 1 Value
This parameter, applicable only when Alarm 1 is selected to be a Process
Low alarm, defines the process variable value at or below which Alarm 1
will be active. Its value may be adjusted between Input Range Maximum
and Input Range Minimum. Its default value is Input Range Minimum.
Display code is PLA1.
Band Alarm 1 Value
This parameter, applicable only if Alarm 1 is selected to be a Band Alarm,
defines a band of process variable values, centered on the setpoint value.
If the process variable value is outside this band, the alarm will be active.
This parameter may be adjusted from 0 to span from the setpoint. The
default value is 5. The display code is bAL1.
MIC 1167/1807/1407 Manual
46
Edition 1
Page 47

Deviation Alarm 1 Value
This parameter, applicable only if Alarm 1 is selected to be a Deviation
High/Low Alarm, defines a value above (positive value - Deviation High
Alarm) or below (negative value - Deviation Low Alarm) the setpoint; if the
process variable deviates from the setpoint by a margin greater than that
defined by this parameter , Alarm 1 goes active. This parameter may be
adjusted in the range ± span from setpoint. The default value is 5. Display
code is dAL1.
Process High Alarm 2 Value
This parameter, applicable only when Alarm 2 is selected to be a Process
High Alarm, defines the process variable value at or above which Alarm 2
will be active. Its value may be adjusted between Input Range Maximum
and Input Range Minimum. Its default value is Input Range Maximum.
Display code is PHA2.
Process Low Alarm 2 Value
This parameter, applicable only when Alarm 2 is selected to be a Process
Low Alarm, defines the process variable value at or below which Alarm 2
will be active. Its value may be adjusted between Input Range Maximum
and Input Range Minimum. Its default value is Input Range Minimum.
Display code is PLA2.
Band Alarm 2 Value
This parameter, applicable only if Alarm 2 is selected to be a Band Alarm,
defines a band of process variable values, centered on the setpoint value.
If the process variable is outside this band, the alarm will be active. This
parameter may be adjusted from 0 to span from the setpoint. The default
value is 5. Display code is bAL2.
Deviation Alarm 2 Value
This parameter, applicable only if Alarm 2 is selected to be a Deviation
High/Low Alarm, defines a value above (positive value - Deviation High
Alarm) or below (negative value - Deviation Low Alarm) the setpoint; if the
process variable deviates from the setpoint by a margin greater than that
defined by this parameter, Alarm 2 goes active. This parameter may be
adjusted in the range ± span from setpoint. The default value is 5. Display
code is dAL2.
Edition 1 MIC 1167/1807/1407 Manual47
Page 48

Process High Alarm
direct-acting
"ALM" Off
Relay Off
"ALM" flashes
Relay On
PV
ALARM POINT
Process High Alarm
reverse-acting
Process Low Alarm
direct-acting
Process Low Alarm
reverse-acting
Band Alarm
direct-acting
open within band
"ALM" Off
Relay On
"ALM" flashes
Relay On
"ALM" flashes
Relay Off
"ALM" flashes
Relay On
"ALM" flashes
ALARM POINT
ALARM POINT
ALARM POINT
ALARM VALUE
"ALM" Off
Relay Off
Relay Off
PV
"ALM" Off
Relay Off
PV
"ALM" Off
Relay On
PV
"ALM" flashes
Relay On
Band Alarm
reverse-acting
"ALM" flashes
closed within band
MIC 1167/1807/1407 Manual
Relay Off
SP
ALARM VALUE
"ALM" Off
Relay On
SP
48
PV
"ALM" flashes
Relay Off
PV
Edition 1
Page 49

Deviation High Alarm
direct-acting
(positive value)
Deviation Low Alarm
direct-acting
(negative value)
"ALM" Off
Relay Off
"ALM" flashes
Relay On
SP
"ALM" flashes
Relay On
PV
ALARM
POINT
"ALM" Off
Relay Off
PV
Deviation High Alarm
reverse-acting
(positive value)
Deviation Low Alarm
reverse-acting
(negative value)
"ALM" Off
Relay Off
"ALM" flashes
Relay On
ALARM
POINT
ALARM
POINT
SP
SP
"ALM" flashes
Relay Off
PV
ALARM
POINT
"ALM" Off
Relay Off
PV
SP
Edition 1 MIC 1167/1807/1407 Manual49
Page 50

Loop Alarm Enable
This parameter is the means by which the user can enable or disable the
Loop Alarm. The Loop Alarm is a special alarm which detects faults in the
control feedback loop by continuously monitoring process variable response to the control output(s).
The Loop Alarm, when enabled, repeatedly checks an estimated valve
position for saturation (i.e. the valve having been driven in one direction for
a time greater than the Motor Travel Time). If the valve is found to be in
saturation, the Loop Alarm facility starts a timer; thereafter, if the saturated
valve has not caused the process variable to be corrected by a pre-determined amount V after a time T has elapsed, the Loop Alarm goes active.
Subsequently, the Loop Alarm facility repeatedly checks the process variable and the valve. When the process varaible starts to change value in the
correct sense or when the valve comes out of saturation, the Loop Alarm is
de-activated.
The Loop Alarm Time T is always set to twice the value of the Auto Reset
parameter.
The value of V is dependent upon the input type:
Deg C: 2°C or 2.0°C
Deg F: 3°F or 3.0°F
Linear Range: 10 least significant display units
Notes:
1. Correct operation of the Loop Alarm depends upon reasonably accurate
PID tuning.
2. The Loop Alarm is automatically disabled during Manual Control mode
and during execution of the Pre-Tune mode. Upon exit from Manual mode
or after completion of the Pre-Tune routine, the Loop Alarm is automatically
re-enabled.
MIC 1167/1807/1407 Manual
50
Edition 1
Page 51

Logical Combination of Alarms
Two alarms may be combined logically to create an AND/OR situation.
They may be configured for Reverse-acting or Direct-acting. Only Output 3
may be assigned as Logical Output.
Example:
Logical OR of Alarm 1 with Alarm 2
Direct-Acting Reverse-Acting
AL1 OFF, Al2 OFF: Relay OFF AL1 OFF, Al2 OFF: Relay ON
AL1 ON, Al2 OFF: Relay ON AL1 ON, Al2 OFF: Relay OFF
AL1 OFF, Al2 ON: Relay ON AL1 OFF, Al2 ON: Relay OFF
AL1 ON, Al2 ON: Relay ON AL1 ON, Al2 ON: Relay OFF
Logical AND of Alarm 1 with Alarm 2
Direct-Acting Reverse-Acting
AL1 OFF, Al2 OFF: Relay OFF AL1 OFF, Al2 OFF: Relay ON
AL1 ON, Al2 OFF: Relay OFF AL1 ON, Al2 OFF: Relay ON
AL1 OFF, Al2 ON: Relay OFF AL1 OFF, Al2 ON: Relay ON
AL1 ON, Al2 ON: Relay ON AL1 ON, Al2 ON: Relay OFF
Edition 1 MIC 1167/1807/1407 Manual51
Page 52

Direct Logic OR
ASYMMETRICAL BAND ALARM
ALARM 1
VALUE
ALARM 2
VALUE
"ALM" flashes
Relay On
ALARM 1 TYPE - Deviation
ALARM 2 TYPE - Deviation
Reverse Logic OR
"ALM" flashes
Relay Off
ALARM 1 TYPE - Deviation
ALARM 2 TYPE - Deviation
"ALM" Off
Relay Off
ALARM 2
VALUE
"ALM" Off
Relay On
"ALM" flashes
Relay On
PV
SP
ALARM 1
VALUE
"ALM" flashes
Relay Off
PV
SP
Decimal Point
This parameter, applicable only if a linear input is specified, defines the
position of the decimal point in values for the process variable, setpoint,
alarm levels and retransmission outputs as follows:
Value Decimal Point Position
0 XXXX
1 XXX.X
2 XX.XX
3 X.XXX
The default value is 0. Display code is dPoS.
MIC 1167/1807/1407 Manual
52
Edition 1
Page 53

Engineering Units Upper
This parameter, applicable only if a linear input is specified, defines the
scaled input value when the process variable input is at its maximum value.
It is adjustable between -1999 to 9999. The default value is 1000. This
parameter can be set to a value less than (but not equal to) Engineering
Units Lower, in which case the sense of the input is reversed. Display code
is Euu.
Engineering Units Lower
This parameter, applicable only if a linear input is specified, defines the
scaled input value when the process variable input is at its minimum value.
It is adjustable between -1999 and 9999. The default value is 0. This parameter can be set to a value greater than (but not equal to) Engineering
Units Upper, in which case the sense of the input is reversed. Display code
is EuL.
Pre-T une Enable/Disable
This parameter determines whether or not the instrument Pre-Tune mode is
activated on power up or not (0=disabled, 1=enabled). Default is 0. Display code is EPtn.
Manual Mode Enable/Disable
This parameter determines whether operator selection of manual control is
enabled or disabled (0=disabled, 1=enabled). The default setting is 0.
Display code is ESby.
Setpoint Ramp Enable/Disable
This parameter enables/disables use of the Setpoint Ramp feature (0=disabled, 1=enabled). The default setting is 0. Display code is ESPr.
Communications Enable
This parameter enables/disables the changing of parameter values via the
RS485 communications link, if the Communications option is specified.
Settings are 0=disabled and 1=enabled. Default setting is 0. Display code
is CCon.
Edition 1 MIC 1167/1807/1407 Manual53
Page 54

Appendix B
Board Layout - Jumper Positioning
FIGURE B-1 PCB POSITIONS - 1/16, 1/8, & 1/4 DIN
Front Panel (top edge)
Power Supply PCB
Output 3 Option PCB
(Relay, SSR or DC Output)
Output 3 Jumpers
(DC Output only)
RS485 Serial Communications
Option PCB or Dual Setpoint
Option PCB
CPU PCB
Output 2 Option PCB
(Relay Output)
MIC 1167/1807/1407 Manual
54
Edition 1
Page 55

FIGURE B-2 OUTPUT 2, OUTPUT 3 REMOVAL - 1/16 DIN
Top of
Front Panel
Output 3 Option PCB
CPU PCB
Tongues
become
dis-engaged
Power Supply PCB
Output 2 PCB
REAR VIEW OF
UNHOUSED
CONTROLLER
Edition 1 MIC 1167/1807/1407 Manual55
Page 56

FIGURE B-3 OUTPUT 2, OUTPUT 3 REMOVAL - 1/8 DIN
Top of
Front Panel
Output 3 Option PCB
Power Supply PCB
CPU PCB
Output 2 PCB
REAR VIEW OF
UNHOUSED
CONTROLLER
Tongues
become
dis-engaged
MIC 1167/1807/1407 Manual
56
Edition 1
Page 57

FIGURE B-4 OUTPUT 2, OUTPUT 3 REMOVAL - 1/4 DIN
Top of
Front Panel
Output 3 Option PCB
CPU PCB
Tongues
become
dis-engaged
Power Supply PCB
Output 2 PCB
REAR VIEW OF
UNHOUSED
CONTROLLER
Edition 1 MIC 1167/1807/1407 Manual57
Page 58

FIGURE B-5 CPU PWA - 1/16, 1/8, & 1/4 DIN
LJ3
LJ2
LJ1
Input Type
RTD, DC (mV)
T/C
DC (mA)
DC (V)
LJ1, LJ2, LJ3
Jumper Position
None (parked)
LJ3
LJ2
LJ1
MIC 1167/1807/1407 Manual
58
Edition 1
Page 59

FIGURE B-6 OPTION PWA DC OUTPUT 3 - 1/16, 1/8, & 1/4 DIN
LJ9
LJ8
Output Type
DC (0-10V)
DC (0-20mA)
LJ8, LJ9
Jumper Position
LJ8
LJ9
DC (0-5V)
DC (4-20mA)
Edition 1 MIC 1167/1807/1407 Manual59
LJ8
LJ9
Page 60

Appendix C
Hardware Definition Code
The Hardware Definition Code is used to represent the hardware installed
(input type, Output 1 type, Output 2 type and Output 3 type); this must be
compatible with the hardware actually installed. It can be accessed, with
the instrument in Program mode, by simultaneously depressing the DOWN
and SCROLL keys. The displays will show "XXXX" (where X represents
any number) in the upper display and "dEFn" in the lower display, where:
the first (left-most) digit is input type:
1=RTD/Linear mV
2=Thermocouple
3=Linear DC mA
4=Linear DC V
the second digit is Output 1 type:
1=Relay
the third digit is Output 2 type:
1=Relay
the fourth digit is Output 3 type:
0=Output 3 not installed
1=Relay (alarm only)
2=SSR (alarm only)
3=DC 0-10V (retransmit only)
4=DC 0-20mA (retransmit only)
5=DC 0-5V (retransmit only)
7=DC 4-20mA (retransmit only)
The displayed code may be incremented/decremented using the UP/
DOWN keys as required. The maximum setting available is 4117. For
example, the code for a thermocouple input and relay Output 3 would be
2111. When the code is first altered, the code display will flash, until the
desired value is displayed and confirmed by pressing the Auto/Manual key.
MIC 1167/1807/1407 Manual
60
Edition 1
Page 61

While the Hardware Definition Code is displayed, depressing the SCROLL
key will cause the display to change to:
nonE or r485 or duAL
OPtn OPtn OPtn
Where nonE indicates the absence of the communications option, r485
indicates the presence of the communications option, or duAL, indicates
the presence of the dual setpoint option.
NOTE: It is essential that this code is changed whenever there is a change
to the instrument's hardware configuration (change of input/output type,
alarm/retransmit output added/removed etc.). The instrument's software
depends upon this code to ensure that the instrument operates correctly.
This code may be viewed as a READ ONL Y display in Control mode by
simultaneously depressing the DOWN and SCROLL keys.
To exit from the Hardware Definition Code display, depress the DOWN and
SCROLL keys simultaneously.
Edition 1 MIC 1167/1807/1407 Manual61
Page 62

Appendix D
Input Range Codes
The input ranges available (selectable via the front panel) are:
For Thermocouple Inputs
INPUT DISPLAYED INPUT DISPLAYED
TYPE RANGE CODE TYPE RANGE CODE
R 0 - 1650°C 1127 K 0 - 760°C 1719
R 32 - 3002°F 1128 K 32 - 1400°F 1720
S 0 - 1649°C 1227 K 0 - 1373°C 1723
S 32 - 3000°F 1228 K 32 - 2503°F 1724
J 0.0 - 205.4°C 1415 L 0.0 - 205.7°C 1815
J 32.0 - 401.7°F 1416 L 32.0 - 402.3°F 1816
J 0 - 450°C 1417 L 0 - 450°C 1817
J 32 - 842°F 1418 L 32 - 842°F 1818
J 0 - 761°C 1419 L 0 - 762°C 1819
J 32 - 1402°F 1420 L 32 - 1404°F 1820
T -200 - 262°C 1525 B 212 - 3315°F 1934
T -328 - 504°F 1526 B 100 - 1824°C 1938
T 0.0 - 260.6°C 1541
T 32.0 - 501.1°F 1542
For RTD Inputs
Note: Input conditioning jumper JU1 needs to be changed, see Appendix B.
INPUT DISPLAYED INPUT DISPLAYED
RANGE CODE RANGE CODE
0 - 600°C 2221 0.0 - 100.9°C 2295
32 - 1112°F 2222 32.0 - 213.6°F 2296
32 - 572°F 2229 -200 - 206°C 2297
-101.0 - 100.0°C 2230 -328 - 403°F 2298
-149.8 - 212.0°F 2231 -101.0 - 300.5°C 7201
0 - 300°C 2251 -149.8 - 572.9°F 7202
MIC 1167/1807/1407 Manual
62
Edition 1
Page 63

For DC Inputs
Note: Input conditioning jumper JU1 needs to be changed, see Appendix B.
Also, the Hardware Definition Code for the input type must also be changed,
see Appendix C.
INPUT DISPLAYED INPUT DISPLAYED
RANGE CODE RANGE CODE
0 - 20mA 3413 0 - 5V 4445
4-20mA 3414 1 - 5V 4434
0 - 50mV 4443 0 - 10V 4446
10 - 50mV 4499 2 - 10V 4450
Edition 1 MIC 1167/1807/1407 Manual63
Page 64

Appendix E
Specifications
INPUT SPECIFICATIONS
General
Input Sample Rate: Four per second
Input Resolution: 14 bits approximately
Input Impedance: Greater than 100M ohm resistive
(except for DC mA and V inputs)
Isolation: Universal input isolated from all outputs
except SSR at 240 V AC.
Thermocouple
Types: R, S, J, T, K, L, B and N
Calibration: Complies with BS4937, NBS125 and IEC584.
Sensor Break Protection: Break detected within 2 seconds. "Close
Valve" output set to ON; alarms operate as
if the process variable has gone over-range.
RTD and DC mV
Type and Connection: Three-wire Pt100
Calibration: Complies with BS1904 and DIN43760.
Lead Compensation: Automatic
RTD Current: 150uA (approximately)
Sensor Break Protection: Break detected within 2 seconds. "Close
Valve" output set to ON; alarms operate as
if the process variable has gone over-range.
DC mA and DC V
Scale Range Maximum: -1999 to 9999
Scale Range Minimum: -1999 to 9999
Minimum Span: 1 display LSD
Sensor Break Protection: Applicable to 4-20mA, 1-5V, and 2-10V
ranges only. Break detected within 2
seconds. "Close Valve" output set to ON;
alarms operate as if the process variable has
gone under-range.
MIC 1167/1807/1407 Manual
64
Edition 1
Page 65

Dual Setpoint Selection Input
T ype: Voltage-free or TTL compatiable
Voltage Free Operation: Connections of contacts of external switch or
relay; contacts open equal Setpoint 1
selected (minimum contact resistance=5K
ohms), contacts closed equal Setpoint 2
selected (maximum contact resistance=50
ohms)
TTL Levels: To select Setpoint 1: -0.6V to 0.8V
To select Setpoint 2: 2.0V to 24.0V
Maximum Input Delay: 1 second
(Off-On)
Minimum Input Delay: 1 second
(On-Off)
OUTPUT SPECIFICATIONS
Outputs 1 & 2
General
Types Available: Relay Only (Output 1 - Open Valve, Output 2 - Close
V alve)
Contact Type: SPDT
Rating: 2A at 120V AC (Motor Drive)
2A at 240V AC (resistive or independent contactor
drive)
Lifetime: >500,000 operations at rated voltage/current
Isolation: Inherent
Output 3
General
Types Available: Relay , SSR Driver DC linear (retransmission
only) and Transmitter Power Supply
Relay
Contact Type: SPDT
Rating: 2A resistive at 120/240V AC
Lifetime: > 500,000 operations at rated voltage/current
Isolation: Inherent
SSR Drive/TTL
Drive Capability: SSR>4.2V DC into 1K ohm minimum
Isolation: Not isolated from input
Edition 1 MIC 1167/1807/1407 Manual65
Page 66

DC
Resolution: Eight bits in 250mS (10 bits in 1 second typical, >10
bits in >1 second typical).
Update Rate: Four times per second
Ranges: *0-20mA, 4-20mA, 0-10V, and 0-5V
Load Impedance: 0-20mA: 500 ohm maximum
4-20mA: 500 ohm maximum
0-10V: 500 ohm minimum
0-5V: 500 ohm minimum
Isolation: Isolated from all other inputs and outputs.
* Changes between V and mA ranges also require JU movement.
Transmitter Power Supply
Output: 20-28V DC (24V DC nominal)
Minimum Load
Impedance: 910 ohm (22mA @ 20VDC)
CONTROL SPECIFICATIONS
Control Types: PID
Auto Tune Types: Pre-Tune and Auto-Tune
Proportional Band: 0.5% to 999.9% of input span @ 0.1% increments
Auto Reset: 1s to 99min 59s/repeat
Rate: 0 (OFF) to 99min 59s
Auto/Manual Control: User-selectable with "bumpless" transfer into and
out of Manual control.
Setpoint Range: Limited by Setpoint Upper and Setpoint Lower limits
Setpoint Maximum: Limited by Setpoint and Range Upper Limits
Setpoint Minimum: Limited by Range and Setpoint Lower Limits
Setpoint Ramp: Ramp rate selectable 1 to 9999 LSDs per Hour and
OFF. Number displayed is decimal point aligned
with selected range.
Alarms
Maximum Number: Two "soft" alarms plus Loop Alarm*
Maximum # Outputs: One output can be used for alarm purposes
Combination Alarms: Logical OR or AND of alarms to an individual
hardware output is available.
*Loop Alarm: Detects faults in the control feedback loop by
monitoring process variable response to the control
output
MIC 1167/1807/1407 Manual
66
Edition 1
Page 67

PERFORMANCE
Reference Conditions
Ambient T emperature: 20°C ± 2°C
Relative Humidity: 60-70%
Supply V oltage: 90-264V AC 50Hz ±1%
Source Resistance: <10 ohm for T/C input
Lead Resistance: <0.1 ohm/lead balanced (Pt100)
Performance under Reference Conditions
Common Mode
Rejection: >120dB at 50/60Hz giving negligible effect at up to
264V 50/60Hz
Series Mode
Rejection: >500% of span (at 50/60Hz) causes negligible effect
DC Linear Inputs
Measurement
Accuracy: ± 0.25% of span ± -1 LSD
Thermocouple Inputs
Measurement
Accuracy: ± 0.25% of span ± -1 LSD
Note: Reduced performance with Type B T/C
between 100-600 °C (212 - 1112 °F)
Linearization
Accuracy: Better than ± 0.2°C any point, any 0.1°C range
(± 0.05°C typical). Better than ± 0.5°C any point,
any 1°C range.
Cold Junction
Compensation: Better than ± 0.7°C
RTD Inputs
Measurement
Accuracy: ± 0.25% of span ± 1 LSD
Linearization
Accuracy: Better than ± 0.2°C any point, any 0.1°C range
(± 0.05°C typical). Better than ± 0.5°C any point,
any 1°C range.
Edition 1 MIC 1167/1807/1407 Manual67
Page 68

DC Output
Output 3 Accuracy: mA: 0-20mA ± 0.25% of span (20mA) @ 250 ohm
(Recorder Output) 4-20mA ± 0.25% of span (16mA) @ 250 ohm
V: 0-10V ± 0.25% of span (10V) @ 2K ohm
0-5V ± 0.25% of span (5V) @ 2K ohm
OPERATING CONDITIONS
Ambient Operating 0° to 55°C
Temperature:
Ambient Storage -20° to 80°C
Temperature:
Relative Humidity: 20% - 95% non-condensing
Supply Voltage: 90 - 264V AC 50/60Hz (standard)
20 - 50 VAC 50/60Hz or 22 to 65VDC (optional)
Source Resistance: 1000Ω maximum (thermocouple)
Lead Resistance: 50Ω per lead maximum balanced (Pt100)
Performance Under Operating Conditions
Temp. Stability: 0.01% of span/°C change in ambient temperature
Cold Junction Comp.: Better than ± 1°C
(thermocouple only)
Supply V oltage
Influence: Negligible
Relative Humidity
Influence: Negligible
Sensor Resistance
Influence: Thermocouple 100 ohm: <0.1% of span error
Thermocouple 1000 ohm: <0.5% of span error
RTD Pt 100 50 ohm/lead: <0.5% of span error
MIC 1167/1807/1407 Manual
68
Edition 1
Page 69

ENVIRONMENTAL
EMI Susceptibility: Designed to meet EN50082 Part 2
EMI Emissions: Designed to meet EN50081 Part 2
Safety Considerations: Designed to comply with IEC1010-1 in as far as it is
applicable
Supply Voltage: 90-264V AC 50/60 Hz (standard)
20-50V AC 50/60 Hz or 22-65V DC (optional)
Power Consumption: 4 watts (approximately)
Front Panel Sealing: NEMA4
Agency Approvals: UL Recognized (pending)
cUL Certified for use in Canada (pending)
PHYSICAL
Dimensions:
1/16 DIN: Front Panel 48mm x 48 mm (1.89" x 1.89")
110mm (4.33") deep
1/8 DIN: Front Panel 48mm x 96mm (1.89" x 3.78")
100mm (3.94") deep
1/4 DIN: Front Panel 96mm x 96mm (3.78" x 3.78")
100mm (3.94") deep
Mounting:
Panel Cut Out:
1/16 DIN: 45mm x 45mm (1.77" x 1.77")
1/8 DIN: 45mm x 92mm (1.77" x 3.62")
1/4 DIN: 92mm x 92mm (3.62" x 3.62")
Terminals: Screw type (combination head)
Weight:
1/16 DIN: 8 ounces max.
1/8 DIN: 8 ounces max.
1/4 DIN: 16 ounces max.
Display Character:
1/16 DIN: Top: .39"; Bottom: .28"
1/8 DIN: Top: .39"; Bottom: .28"
1/4 DIN: Top: .53"; Bottom: .39"
Edition 1 MIC 1167/1807/1407 Manual69
Page 70

Appendix F
Order Matrix
MODEL
16 1/16 DIN
40 1/4 DIN
80 1/8 DIN
OUTPUT 1
1 Relay
OUTPUT 2
1 Relay
1 7 1 1
OUTPUT 3
0 None
1 Relay
2 SSRD
3 4-20mA*
4 T ransmitter Power Supply**
OPTIONS
0 None
1 RS-485
3 Dual Setpoint
SUFFIX
(Blank) None
02 Line Voltage 24V AC/DC
* Retransmission output only
** Not available for 1167
MIC 1167/1807/1407 Manual
70
Edition 1
Page 71

Appendix G
Software Reference Sheet
HDW DEF
OPTION
Program Mode Your Setting
inPS
Out1
ALA1
ALA2
Inhi
USE3
CbS
CAd
CJC
Enable Mode Your Setting
EPro
EtuN
ESPC
Edition 1 MIC 1167/1807/1407 Manual71
Page 72

Tune Mode Your Setting
SPrP
SPrr
Filt
iCor
Pb1
ArSt
rAtE
SPuL
SPLL
Pou
PoL
tr
tOn
PHA1
PLA1
bAL1
dAL1
PHA2
PLA2
bAL2
dAL2
(Continued on next page)
MIC 1167/1807/1407 Manual
72
Edition 1
Page 73

Tune Mode Your Setting
LAEn
dPoS
Euu
EuL
EPtn
ESby
ESPr
CCon
Edition 1 MIC 1167/1807/1407 Manual73
Page 74

Warranty and Return Statement
These products are sold by The Partlow Corporation (Partlow) under the warranties set forth in the following paragraphs. Such warranties are extended only with respect to a purchase of these products, as new merchandise,
directly from Partlow or from a Partlow distributor, representative or reseller, and are extended only to the first buyer
thereof who purchases them other than for the purpose of resale.
Warranty
These products are warranted to be free from functional defects in materials and workmanship at the time the
products leave the Partlow factory and to conform at that time to the specifications set forth in the relevant Partlow
instruction manual or manuals, sheet or sheets, for such products for a period of two years.
THERE ARE NO EXPRESSED OR IMPLIED WARRANTIES WHICH EXTEND BEYOND THE WARRANTIES
HEREIN AND ABOVE SET FORTH. PARTLOW MAKES NO WARRANTY OF MERCHANTABILITY OR FITNESS
FOR A PARTICULAR PURPOSE WITH RESPECT TO THE PRODUCTS.
Limitations
Partlow shall not be liable for any incidental damages, consequential damages, special damages, or any other
damages, costs or expenses excepting only the cost or expense of repair or replacement as described above.
Products must be installed and maintained in accordance with Partlow instructions. Users are responsible for the
suitability of the products to their application. There is no warranty against damage resulting from corrosion, misapplication, improper specifications or other operating condition beyond our control. Claims against carriers for damage in
transit must be filed by the buyer.
This warranty is void if the purchaser uses non-factory approved replacement parts and supplies or if the purchaser
attempts to repair the product themselves or through a third party without Partlow authorization.
Returns
Partlow’s sole and exclusive obligation and buyer’s sole and exclusive remedy under the above warranty is limited to
repairing or replacing (at Partlow’s option), free of charge, the products which are reported in writing to Partlow at its
main office indicated below.
Partlow is to be advised of return requests during normal business hours and such returns are to include a statement
of the observed deficiency. The buyer shall pre-pay shipping charges for products returned and Partlow or its
representative shall pay for the return of the products to the buyer.
Approved returns should be sent to: P ARTLOW CORPORATION
2 CAMPION ROAD
NEW HARTFORD, NY 13413 USA
MIC 1167/1807/1407 Manual
74
Edition 1
Page 75

THE PARTLOW-WEST COMPANY
2 CAMPION ROAD • NEW HARTFORD, NY 13413 USA
1-800-866-6659 • 315-797-2222 • FAX 315-797-0403
 Loading...
Loading...