

Page 1
SYSĆ35ĆE1Ć2A
SYSMAC
CQM1
AUTOMATE PROGRAMMABLE
MANUEL DE PROGRAMMATION
Page 2

Table des matières
Chapitre 1
Configuration de l’API et caractéristiques afférentes 1. . .
1-1 Configuration de l’API 2. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1-2 Fonctionnement fondamental du CQM1 et processus d’Entrée/Sortie 8
1-3 Sélection et utilisation des fonctions de sortie d’impulsion 12. . . . . . . . . . . . . . . . . . . . . . .
1-4 Sélection et utilisation des fonction d’interruption 25. . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1-5 Fonction de communication 58. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Chapitre 2
Caractéristiques des API CQM1 69. . . . . . . . . . . . . . . . . . .
2-1 Instructions étendues 70. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2-2 Instructions d’E/S étendues 72. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2-3 Fonction Macro 83. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2-4 Surveillance de changement d’état d’un bit 84. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2-5 Sélections analogiques (CQM1-CPU42-E uniquement) 85. . . . . . . . . . . . . . . . . . . . . . . . . .
Chapitre 3
Zone de mémoire 87. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3-1 Fonctions de la zone mémoire 88. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3-2 Attribution des bits d’E/S 92. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3-3 Stockage des DM et de l’UM dans les cartouches mémoire 93. . . . . . . . . . . . . . . . . . . . . . .
Chapitre 4
Programmation en schéma à relais 99. . . . . . . . . . . . . . . . .
4-1 Procédure fondamentale 100. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4-2 Terminologie des instructions 100. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4-3 Les bases du schéma à relais 101. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4-4 Contrôle de l’état des bits 120. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4-5 Bits de travail (relais internes) 122. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4-6 Précautions de programmation 125. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4-7 Execution du programme 126. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Chapitre 5
Instructions 129. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5-1 Notation 133. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5-2 Format 133. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5-3 Zones de données, données d’opérande et drapeaux 133. . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5-4 Instructions sur changement d’état 135. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5-5 Codage des instructions de droite 136. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5-6 Tableaux d’instructions 139. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5-7 Instructions en schéma à relais 143. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5-8 Instructions de contrôle de bit 144. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5-9 NO OPERATION – NOP(00) 148. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5-10 END – END(01) 148. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5-11 INTERLOCK et INTERLOCK CLEAR – IL(02) et ILC(03) 149. . . . . . . . . . . . . . . . . . . . . .
5-12 JUMP et JUMP END – JMP(04) et JME(05) 151. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5-13 Instructions d’erreur utilisateur :
FAILURE ALARM AND RESET – FAL(06) et
SEVERE FAILURE ALARM – FALS(07) 152. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5-14 Instructions d’étape :
STEP DEFINE et STEP START–STEP(08)/SNXT(09) 153. . . . . . . . . . . . . . . . . . . . . . . . . .
5-15 Instructions de temporisation/compteur 155. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
i
Page 3

TABLE DES MATIERES
5-16 Registre à décalage 171. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5-17 Instructions de déplacement de données 180. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5-18 Instructions de comparaison 191. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5-19 Instructions de conversion 202. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5-20 Instructions de calcul BCD 229. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5-21 Instructions de calcul binaire 240. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5-22 Instructions mathématiques spéciales 251. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5-23 Instructions logiques 260. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5-24 Instructions d’incrémentation/décrémentation 264. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5-25 Instructions de sous-programme 265. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5-26 Instructions spéciales 267. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5-27 Instructions de communication 292. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5-28 Instructions d’E/S étendues 295. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Chapitre 6
Commandes de liaison à l’ordinateur 299. . . . . . . . . . . . . . .
6-1 Procédure de communication 300. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6-2 Formats de commande et de réponse 302. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6-3 Commandes de liaison à l’ordinateur 305. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Chapitre 7
Fonctionnement et temps de traitement du CQM1 329. . . .
7-1 Fonctionnement du CQM1 330. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
7-2 Temps de scrutation et temps de réponse des E/S 331. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Chapitre 8
En cas de problème 351. . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
8-1 Introduction 352. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
8-2 Erreurs de fonctionnement de la console de programmation 352. . . . . . . . . . . . . . . . . . . . . .
8-3 Erreurs de programmation 353. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
8-4 Erreurs définies par l’utilisateur 354. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
8-5 Erreurs de fonctionnement 355. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
8-6 Stockage des erreurs 357. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
8-7 Erreurs de liaison à l’ordinateur 357. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
8-8 Diagrammes de résolution des problèmes 359. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Annexes
ARéférences 367. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
B Instructions de programmation 371. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
C Fonctionnement des drapeaux d’erreur et arithmétiques 377. . . . . . . . . . . . . . . . . . . . . . . . . . . .
D Zones mémoire 381. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
E Configuration API 391. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
F Durée de vie de la pile 397. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
G Utilisation de la fonction horloge 399. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
H Feuille d’attribution des E/S 401. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
I Feuille de codage des programmes 403. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
J Liste des numéros FAL 407. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
K Codes ASCII étendus 409. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
ii
Page 4

Chapitre 1
Configuration de l’API et caractéristiques afférentes
Ce chapitre traite de la configuration de l’API et des caractéristiques afférentes, y compris les fonctions d’interruption et de
communication. La configuration peut être utilisée pour contrôler les paramètres de l’API ; pour la modifier, reportez-vous au
manuel d’utilisation du CQM1 concernant la console de programmation et au manuel LSS pour la procédure de ce logiciel.
Si vous ne connaissez pas très bien les API OMRON ou la programmation en schéma à relais, vous pouvez lire le chapitre 1–1,
mais il faudra probablement compléter cette lecture par les chapitres 3, 4 et 5 en cours de route.
1-1 Configuration de l’API 2. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1-2 Fonctionnement fondamental du CQM1 et processus d’Entrée/Sortie 8. . . . . . . . . . . . . . . .
1-3 Sélection et utilisation des fonctions de sortie d’impulsion 12. . . . . . . . . . . . . . . . . . . . . . . . .
1-3-1 Types de sorties par impulsion 12. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1-3-2 Sortie d’impulsion standard à partir d’un point de sortie 13
1-3-3 Sortie d’impulsion standard à partir des ports 1 et 2 15. . . . . . . . . . . . . . . . . . . . . . .
1-3-4 Rapport cyclique des impulsions à partir des ports 1 et 2 24. . . . . . . . . . . . . . . . . . .
1-3-5 Etat des ports 1 et 2 25. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1-4 Sélection et utilisation des fonctions d’interruption 25. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1-4-1 T ypes d’interruption 25. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1-4-2 Interruption d’entrées 29. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1-4-3 Comment masquer la totalité des interruptions 34. . . . . . . . . . . . . . . . . . . . . . . . . . .
1-4-4 Interruptions par temporisation cyclique 34. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1-4-5 Gamme/comptage non respectés pour le compteur rapide 0 37. . . . . . . . . . . . . . . . .
1-4-6 Dépassements ou insuffisances du compteur rapide 0 43. . . . . . . . . . . . . . . . . . . . . .
1-4-7 Interruptions des compteurs rapide 1 et 2 (CQM1-CPU43-E) 45. . . . . . . . . . . . . . .
1-4-8 Interruptions absolues de compteur rapide (CQM1-CPU44-E) 52. . . . . . . . . . . . . .
1-5 Fonction de communication 58. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1-5-1 Configuration de l’API 59. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1-5-2 Câblage du port 62. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1-5-3 Communications à l’ordinateur 62. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1-5-4 Communications RS-232C 64. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1-5-5 Communication point par point 66. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1
Page 5
Configuration de l’API Chapitre 1–1
1-1 Configuration de l’API
La configuration de l’API comprend plusieurs paramètres qui contrôlent le fonctionnement de l’automate. Pour tirer le bénéfice optimal du CQM1 lors de l’utilisation des fonctions d’interruption et de communication, la configuration de
l’API doit être effectuée en fonction des conditions de fonctionnement de l’API.
Des valeurs par défaut sont proposées d’origine et le CQM1 peut être utilisé
sans les modifier, mais il vaut mieux effectuer une vérification de ces valeurs
avant de faire fonctionner l’automate.
Valeurs par défaut Pour la configuration de l’automate, les valeurs proposées sont égales à 0000
pour tous les mots. Elles peuvent être remises à zéro à tout moment en plaçant
SR 25210 à ON.
Rem.: lorsque la zone de mémoire de données (DM) est effacée d’un appareil de pro-
grammation, les sélections de configuration de l’API sont toutes remises à zéro
également.
Modification de la configuration
Les changements de configuration sont effectifs et affectent le fonctionnement
de l’API à différents moments selon la sélection concernée :
DM 6600 à DM 6614: lorsque l’alimentation du CQM1 est branchée
DM 6615 à DM 6644: lorsque le programme commence son exécution
DM 6645 à DM 6655: à tout moment où le CQM1 est sous tension.
Rem.: les modifications de configuration ne sont effectives qu’aux moments ci-des-
sus. Veillez à prendre les mesures qui s’imposent pour que les changements
soient effectifs avant de poursuivre.
Bien que la configuration de l’API soit stockée dans les DM 6600 à DM 6655, les
sélections peuvent être effectuées et m odifiées seulement à partir d’un appareil
de programmation (par ex. LSS ou console de programmation). Les DM 6600 à
DM 6644 ne peuvent être sélectionnés ou modifiés qu’en mode PROGRAM.
Les DM 6645 à DM 6655 peuvent être sélectionnés ou modifiés en mode PROGRAM ou MONITOR.
Rem.: la configuration de l’API peut être lue à partir du programme utilisateur mais on
ne peut y effectuer d’écriture ; elle n’est possible qu’à partir d’un appareil de programmation.
Si la configuration de l’API n’est pas correcte, une erreur non fatale (code erreur
9B) est générée à la lecture du CQM1 et le bit adéquat entre AR 2400 et AR 2402
passe à ON (la sélection erronée est lue comme valeur par défaut).
Les sélections suivantes peuvent être effectuées en mode PROGRAM à partir
du menu LSS.Toutes les autres sélections peuvent être effectuées en utilisant la
sélection hexadécimale.
Mode lancement (DM 6600)
Etat du bit de maintien d’E/S et du bit de maintien d’état forcé (DM 6601)
Temps réel du cycle automate (DM 6618)
Temps de scrutation (DM 6619)
Paramétrage du port RS-232C (DM 6645 à DM 6649)
Contenu de la configuration La configuration se divise en quatre phases : 1) Sélections relatives aux proces-
sus d’E/S et au fonctionnement fondamental du CQM1 2) Sélections relatives
aux fonctions de sortie par impulsion 3) Sélections relatives aux interruptions
4) Sélections relatives aux communications. Ce chapitre se fonde sur ces catégories pour expliquer le fonctionnement des sélections.
La table suivante montre les diverses sélections par ordre dans la zone DM.
Reportez-vous aux pages indiquées pour de plus amples détails.
2
Page 6
Configuration de l’API Chapitre 1–1
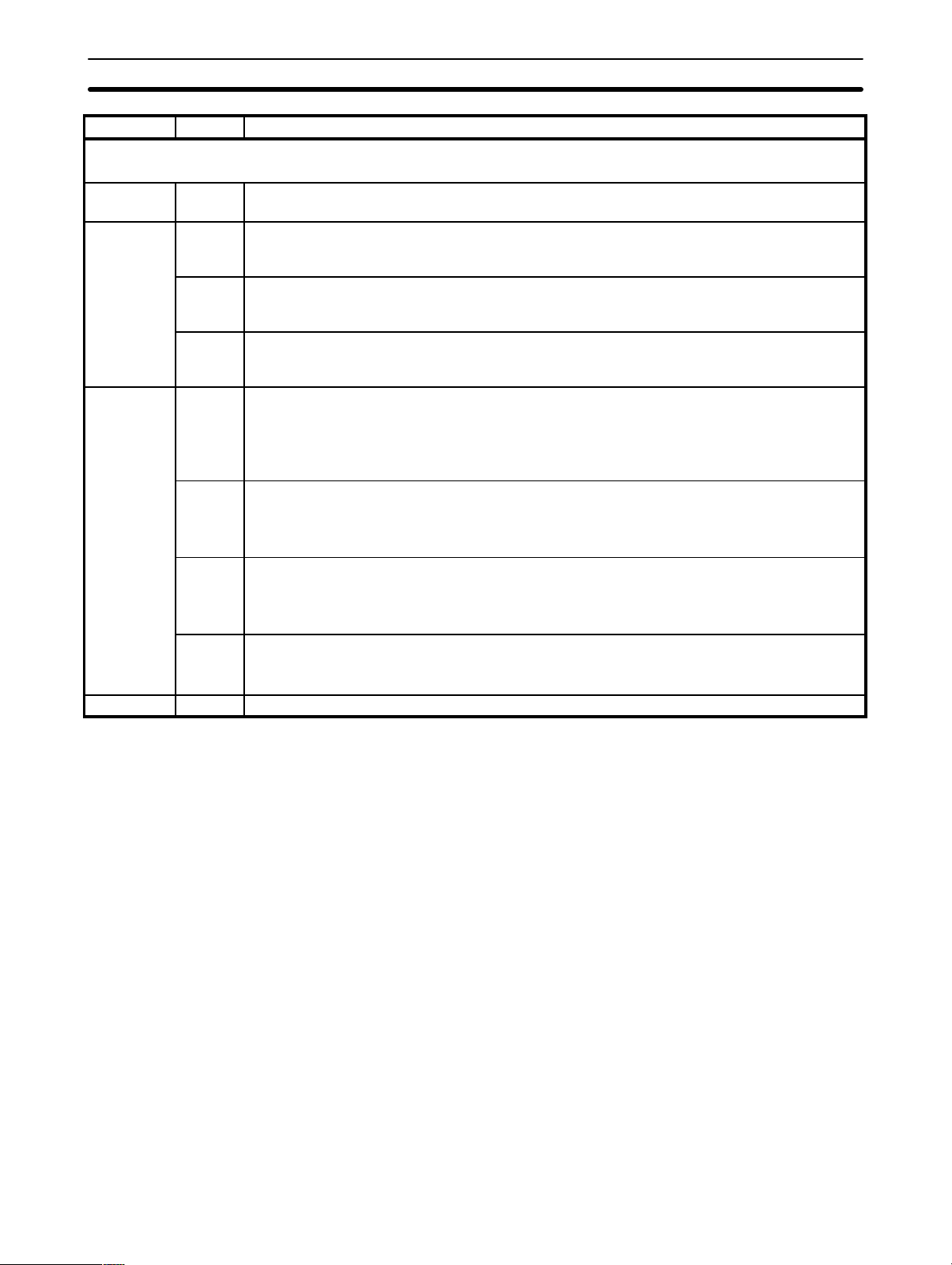
Canaux Bit(s) Fonction
Lancement (DM 6600 à DM 6614)
Les sélections suivantes sont effectives après transfert vers l’API et uniquement après un redémarrage de l’API.
DM 6600
DM 6601
DM 6602 à
DM 6610
DM 6611 00 à 15 CQM1-CPU43-E: sél. de mode pour les ports 1 et 2
DM 6612 00 à 15 CQM1-CPU44-E: sélection de compensation d’origine pour le port 2 (4 chiffres BCD)
Sélection du temps de scrutation et de la sortie d’impulsion (DM 6615 à DM 6619)
Les sélections suivantes sont effectives après transfert vers l’API et après un redémarrage de l’API.
DM 6615
DM 6616
DM 6617
DM 6618
DM 6619 00 à 15 Temps de structation
Processus d’interruption (DM 6620 à DM 6639)
Les sélections suivantes sont effectives après transfert ver l’API et après un redémarrage de l’API.
DM 6620
DM 6621
00 à 07 Mode de lancement (effectif lorsque les bits 08 à 15 sont à 02).
00: PROGRAM; 01: MONITOR 02: RUN
08 à 15 Désignation du mode démarrage automate
00: console de programmation (mode de la console de programmation)
01: dernier mode de fonctionnement avant coupure de tension
02: sélection dans les bits 00 à 07
00 à 07 Réservé (sélectionné à 00).
08 à 11 Etat des bits de maintien IOM (SR 25212)
0: RAZ ; 1: Maintien
12 à 15 Etat des bits de maintien d’état forcé (SR 25211)
0: RAZ ; 1: Maintien
00 à 15 Réservés
0000: mode du compteur rapide ; 0001: mode de sortie par impulsion
CQM1-CPU44-E: sél. de compensation d’origine pour le port 1 (4 chiffres BCD)
00 à 07 Canaux pour la sortie impulsion.
00: IR 100; 01: IR101; 02: IR 102... 15: IR 115
08 à 15 Réservé (sélectionné à 00).
00 à 07 Temps de service du port RS-232C (effectif lorsque les bits 08 à 15 sont sélectionnés à 01)
00 à 99 (BCD): pourcentage du temps de cycle utilisé pour le service du port RS-232C.
08 à 15 Activation de la sélection de service du port RS-232C
00: ne pas sélectionner de temps de service
01: utiliser le temps des bits 00 à 07.
00 à 07 Temps de service du port périphérique (effectif lorsque les bits 08 à 15 sont à 01)
00 à 99 (BCD): pourcentage de temps de cycle utilisé pour le service des périphériques.
08 à 15 Activation de la sélection du service de port périphérique.
00: ne pas sélectionner de temps de service
01: utiliser le temps des bits 00 à 07.
00 à 07 Temps de surveillance du cycle (effectif lorsque les bits 08 à 15 sont à 01, 02, ou 03)
00 à 99 (BCD): sélection (voir 08 à 15)
08 à 15 Activation de la surveillance de cycle (sélection dans les bits 00 à 07 x unité; 99 s max.)
00: 120 ms (sélection dans les bits 00 à 07 désactivée)
01: unité de sélection : 10 ms
02: unité de sélection : 100 ms
03: unité de sélection : 1 s
0000: variable (pas de minimum)
0001 à 9999 (BCD): temps min. en ms
00 à 03 Constante d’entrée pour IR 00000 à IR 00007
00: 8 ms; 01: 1 ms; 02: 2 ms; 03: 4 ms; 04: 8 ms; 05: 16 ms; 06: 32 ms; 07: 64 ms; 08: 128 ms
04 à 07 Constante d’entrée pour IR 00008 à IR 00015 (sél. identique aux bits 00 à 03)
08 à 15 Constante d’entrée pour IR 001 (sél. identique aux bits 00 à 03)
00 à 07 Constante d’entrée pour IR 002 (sél. identique aux bits 00 à 03 de DM 6620)
08 à 15 Constante d’entrée pour IR 003 (sél. identique aux bits 00 à 03 de DM 6620)
3
Page 7
Configuration de l’API Chapitre 1–1
Canaux FonctionBit(s)
DM 6622
DM 6623
DM 6624
DM 6625
00 à 07 Constante d’entrée pour IR 004 (sél. identique aux bits 00 à 03 de DM 6620)
08 à 15 Constante d’entrée pour IR 005 (sél. identique aux bits 00 à 03 de DM 6620)
00 à 07 Constante d’entrée pour IR 006 (sél. identique aux bits 00 à 03 de DM 6620)
08 à 15 Constante d’entrée pour IR 007 (sél. identique aux bits 00 à 03 de DM 6620)
00 à 07 Constante d’entrée pour IR 008 (sél. identique aux bits 00 à 03 de DM 6620)
08 à 15 Constante d’entrée pour IR 009 (sél.identique aux bits 00 à 03 de DM 6620)
00 à 07 Constante d’entrée pour IR 010 (sél. identique aux bits 00 à 03 de DM 6620)
08 à 15 Constante d’entrée pour IR 011 (sél. identique aux bits 00 à 03 de DM 6620)
DM 6626 à
DM 6627
DM 6628
DM 6629
DM 6630
DM 6631
DM 6632
DM 6633
DM 6634
DM 6635
DM 6636
DM 6637
DM 6638
DM 6639
00 à 15 Réservés
00 à 03 Activation d’interruption pour IR 00000 (0: entrée normale ; 1: entrée interrompue)
04 à 07 Activation d’interruption pour IR 00001 (0: entrée normale ; 1: entrée interrompue)
08 à 11 Activation d’interruption pour IR 00002 (0: entrée normale ; 1: entrée interrompue)
12 à 15 Activation d’interruption pour IR 00003 (0: entrée normale ; 1: entrée interrompue)
00 à 07 Nombre de temporisations rapides pour le rafraîchissement d’interruption
00 à 15 (BCD; par ex., sél. 15 pour 00 à 14)
08 à 15 Activation du rafraîchissement des tempo. rapides
00: 16 tempo. (sél. dans les bits 00 à 07 désactivée)
01: utiliser la sélection des bits 00 à 07
00 à 07 1er canal de rafraîchissement d’entrée pour l’interruption d’E/S 0: 00 à 11 (BCD)
08 à 15 Nombre de canaux de rafraîchiss. d’entrée pour l’interruption d’E/S 0: 00 à 12 (BCD)
00 à 07 1er canal de rafraîchissement d’entrée pour l’interruption d’E/S 1: 00 à 11 (BCD)
08 à 15 Nombre de canaux de rafraîchiss. d’entrée pour l’interruption d’E/S 1: 00 à 12 (BCD)
00 à 07 1er canal de rafraîchissement d’entrée pour l’interruption d’E/S 2: 00 à 11 (BCD)
08 à 15 Nombre de canaux de rafraîchiss. d’entrée pour l’interruption d’E/S 2: 00 à 12 (BCD)
00 à 07 1er canal de rafraîchissement d’entrée pour l’interruption d’E/S 3: 00 à 11 (BCD)
08 à 15 Nombre de canaux de rafraîchiss. d’entrée pour l’interruption d’E/S 3: 00 à 12 (BCD)
00 à 07 1er canal de rafraîchiss.d’entrée pour le compteur rapide 1: 00 à 11 (BCD)
08 à 15 Nombre de canaux de rafraîchiss. d’entrée pour le compteur rapide 1: 00 à 12 (BCD)
00 à 07 1er canal de rafraîchiss.d’entrée pour le compteur rapide 1: 00 à 11 (BCD)
08 à 15 Nombre de canaux de rafraîchiss. d’entrée pour le compteur rapide 1: 00 à 12 (BCD)
00 à 07 1er canal de rafraîchiss. d’entrée pour la tempo. cyclique 0: 00 à 07 (BCD)
08 à 15 Nombre de canaux de rafraîchiss. d’entrée pour la tempo. cyclique 0: 00 à 08 (BCD)
00 à 07 1er canal de rafraîchiss. d’entrée pour la tempo. cyclique 1: 00 à 07 (BCD)
08 à 15 Nombre de canaux de rafraîchiss. d’entrée pour la tempo. cyclique 1: 00 à 08 (BCD)
00 à 07 1er canal de rafraîchiss. d’entrée pour la tempo. cyclique 2 (également utilisé pour le compteur
rapide 0): 00 à 07 (BCD)
08 à 15 Nombre de canaux de rafraîchiss. d’entrée pour la tempo. cyclique 2 (également utilisé pour le
compteur rapide 0): 00 à 08 (BCD)
00 à 07 Mode de rafraîchissement de sortie
00: Cyclique; 01: Direct
08 à 15 Nombre de chiffres pour l’instruction DIGITAL SWITCH (DSW)
00: 4 chiffres; 01: 8 chiffres
4
Page 8
Configuration de l’API Chapitre 1–1
Canaux FonctionBit(s)
Sélections du compteur rapide (DM 6640 à DM 6644)
Les sélections suivantes sont effectives après transfert vers l’API et après un redémarrage de l’API.
DM 6640 à
DM 6641
DM 6642
DM 6643
DM 6644 00 à 15 Sélections du port 2 (identiques à celles du port 1 dans le DM 6643)
00 à 15 Réservés
00 à 03 Mode du compteur rapide 0
0: mode du compteur incrémental/décrémental (bidirectionnel) 5 kHz
4: mode du compteur incremental (unidirectionnel) 2,5 kHz
04 à 07 Mode de remise à zéro du compteur rapide
0: RAZ de la phase Z et RAZ par programme
1: RAZ par programme uniquement
08 à 15 Activation du compteur rapide 0
00: ne pas utiliser le compteur rapide
01: utiliser le compteur rapide avec sélections dans les bits 00 à 07
00 à 03 CQM1-CPU43-E: sélection d’entrée à zéro du port 1
0: entrée en phase différentielle ; 1: entrée impulsion/direction ;
2 : entrée incrémentation/décrémentation
CQM1-CPU44-E: sélection d’entrée du port 1 (résolution des bits)
0: entrée 8 bits; 1: entrée 10 bits; 2: entrée 12 bit s
04 à 07 CQM1-CPU43-E: entrée de RAZ du port 1
0: RAZ de la phase Z er RAZ par programme
1: RAZ par programme uniquement
CQM1-CPU44-E: non utilisé ; sélection à 0
08 à 11 CQM1-CPU43-E: sélection du mode de comptage du port 1
0: mode linéaire ; 1: mode anneau
CQM1-CPU44-E: sélection de mode du port 1
0: BCD mode; 1: mode 360°
12 à 15 CQM1-CPU43-E: sélection du type d’impulsion du port 1
0: sortie d’impulsion standard (rapport cyclique 0,5); 1: sortie d’impulsion à rapport cyclique
CQM1-CPU44-E: non utilisé ; sélection à 0.
5
Page 9
Configuration de l’API Chapitre 1–1
Canaux FonctionBit(s)
Sélections du port RS-232C
Les sélections suivantes sont effectives après transfert vers l’API et après un redémarrage de l’API.
DM 6645
DM 6646
DM 6647 00 à 15 Temps de transmission (liaison à l’ordinateur)
DM 6648
DM 6649
00 à 07 Sélections du port (standard)
00: Standard (1 bit de départ, donnée 7 bits, parité paire;2 bits d’arrêt, 9 600 bps)
01: Sélections dans le DM 6646
08 à 11 Canaux de liaison pour la liaison 1:1
0: LR 00 à LR 63; 1: LR 00 à LR 31; 2: LR 00 à LR 15
12 à 15 Mode de communication
0: liaison à l’ordinateur ; 1: RS-232C (pas de protocole); 2: 1:1 esclave de liaison de données 3:
1:1 maître de liaison de données 1:1
00 à 07 Vitesse
00: 1,2 Kb ; 01: 2,4 Kb ; 02: 4,8 Kb ; 03: 9,6 Kb ; 04: 19,2 Kb
08 à 15 Format de trame
Départ Longueur Arrêt Parité
00: 1 bit 7 bits 1 bit Paire
01: 1 bit 7 bits 1 bit Impaire
02: 1 bit 7 bits 1 bit Aucune
03: 1 bit 7 bits 2 bits Paire
04: 1 bit 7 bits 2 bits Impaire
05: 1 bit 7 bits 2 bits Aucune
06: 1 bit 8 bits 1 bit Paire
07: 1 bit 8 bits 1 bit Impaire
08: 1 bit 8 bits 1 bit Aucune
09: 1 bit 8 bits 2 bits Paire
10: 1 bit 8 bits 2 bits Impaire
11: 1 bit 8 bits 2 bits Aucune
0000 à 9999 (BCD): sélection par unité de 10 ms, ex., sélection de 0001 = 10 ms
00 à 07 Numéro de l’API (liaison à l’ordinateur)
00 à 31 (BCD)
08 à 11 Activation du code de départ (RS-232C)
0: inhibé ; 1: sélectionné
12 à 15 Activation du code de fin (RS-232C)
0: inhibé (nombre d’octets reçus)
1: sélectionné (code fin spécifié)
2: CR, LF
00 à 07 Code de départ (RS-232C)
00 à FF (binaire)
08 à 15 12 à 15 du DM 6648 sélectionnés à 0:
Nombre d’octets reçus
00: sélection par défaut (256 octets)
01 à FF: 1 à 255 octets
12 à 15 de DM 6648 sélectionnés à 1:
Code fin (RS-232C)
00 à FF (binaire)
6
Page 10
Configuration de l’API Chapitre 1–1
Canaux FonctionBit(s)
Sélections du port périphérique
Les sélections suivantes sont effectives après transfert vers l’API.
DM 6650
DM 6651
DM 6652 00 à 15 Temps de transmission (liaison à l’ordinateur)
DM 6653
DM 6654
00 à 07 Sélections de port
00: Standard (1 bit de départ, donnée à 7 bits, parité paire; 2 bits d’arrêt, 9 600 bps)
01: Sélections dans le DM 6651
08 à 11 Réservés
12 à 15 Mode de communication
0: liaison à l’ordinateur ; 1: RS-232C
00 à 07 Vitesse
00: 1,2Kb, 01: 2,4Kb, 02: 4,8Kb, 03: 9,6Kb, 04: 19,2Kb
08 à 15 Format de trame
Départ Longueur Arrêt Parité
00: 1 bit 7 bits 1 bit Paire
01: 1 bit 7 bits 1 bit Impaire
02: 1 bit 7 bits 1 bit Aucune
03: 1 bit 7 bits 2 bits Paire
04: 1 bit 7 bits 2 bits Impaire
05: 1 bit 7 bits 2 bits Aucune
06: 1 bit 8 bits 1 bit Paire
07: 1 bit 8 bits 1 bit Impaire
08: 1 bit 8 bits 1 bit Aucune
09: 1 bit 8 bits 2 bits Paire
10: 1 bit 8 bits 2 bits Impaire
11: 1 bit 8 bits 2 bits Aucune
0000 à 9999: en ms.
00 à 07 Numéro d’API (liaison à l’ordinateur)
00 à 31 (BCD)
08 à 11 Activation du code de départ (RS-232C)
0: inhibé; 1: sélectionné
12 à 15 Activation du code de fin (RS-232C)
0: inhibé (nombre d’octets reçus)
1: sélectionné (code fin spécifié)
2: CR, LF
00 à 07 Code de départ (RS-232C)
00 à FF (binaire)
08 à 15 12 à 15 de DM 6653 sélectionnés à 0:
Nombre d’octets reçus
00: sélection par défaut (256 octets)
01 à FF: 1 à 255 octets
12 à 15 de DM 6653 sélectionnés à 1:
Code fin (RS-232C)
00 à FF (binaire)
7
Page 11
Fonctionnement fondamental CQM1 et processus d’E/S
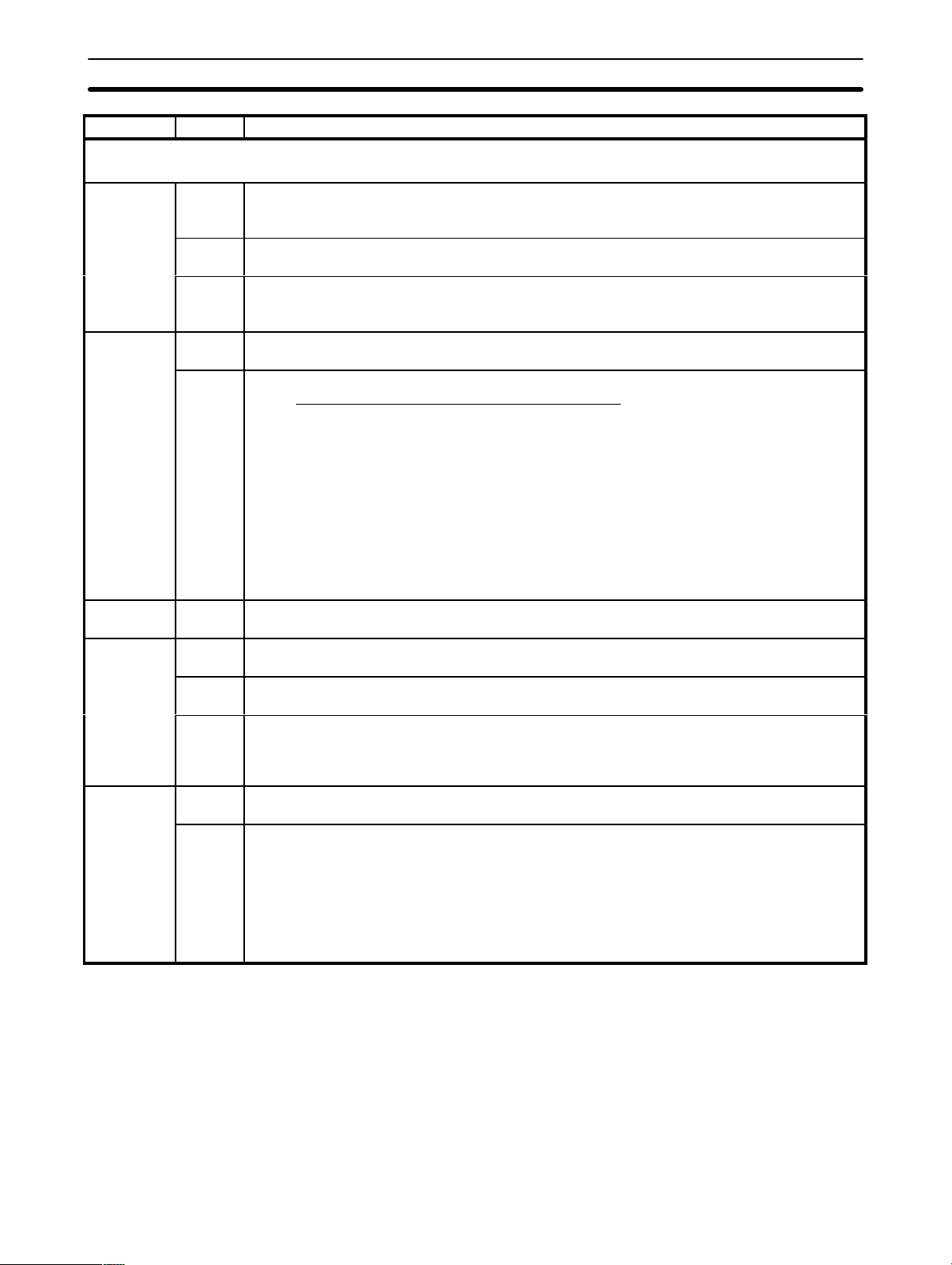
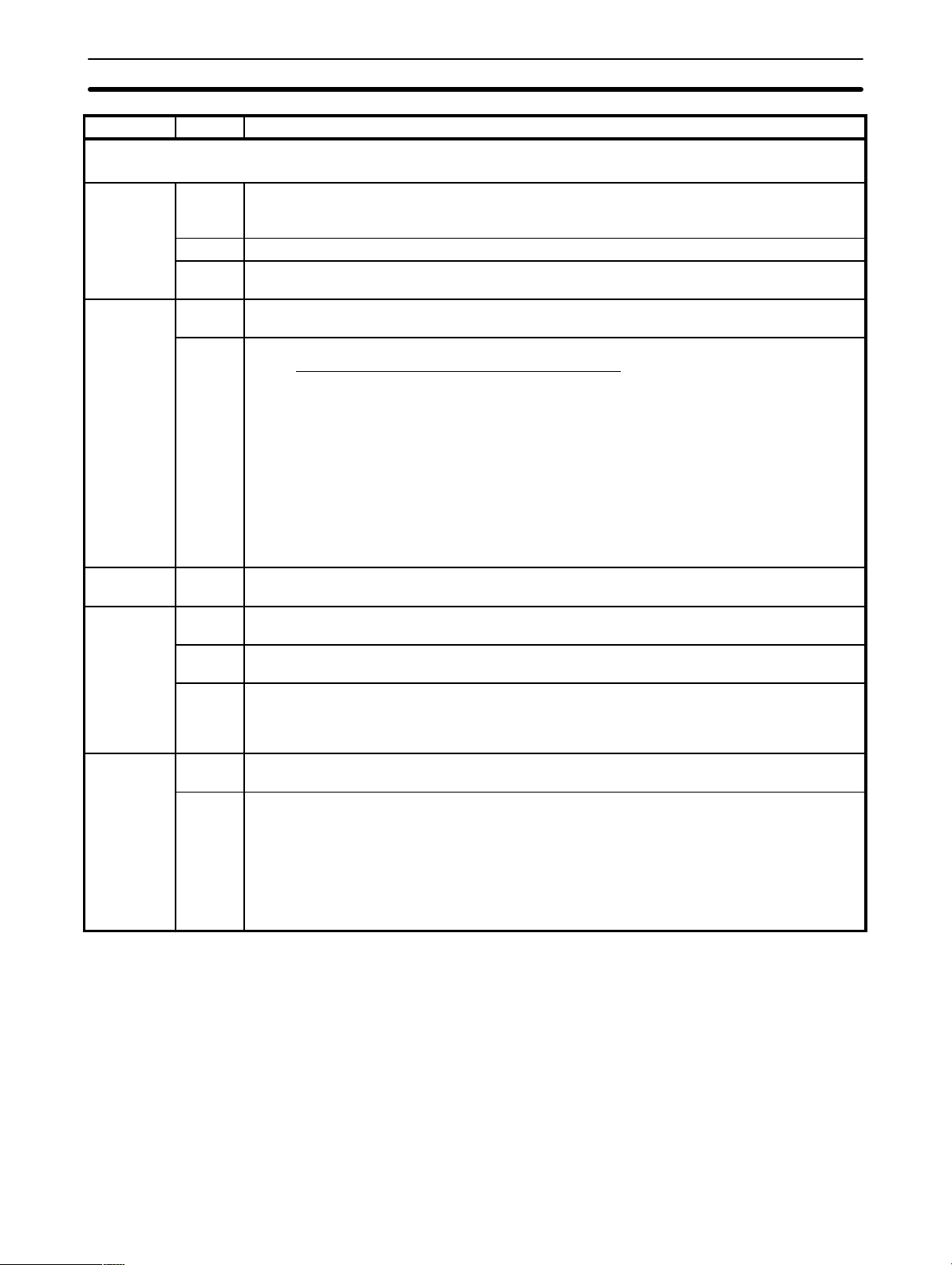
Canaux FonctionBit(s)
Sélections de l’enregistrement des erreurs (DM 6655)
Les sélections suivantes sont effectives après transfert vers l’API.
DM 6655
00 à 03 Style
0: décalage après 10 enregistrements d’erreurs
1: stockage des 10 enregistrements seulement (pas de décalage)
2 à F: pas d’enregistrement des erreurs
04 à 07 Réservés
08 à 11 Activation de la surveillance de temps de cycle
0: détection de cycles longs comme erreur non fatale
1: pas de détection des cycles longs
12 à 15 Activation de l’erreur pile défaillante
0: détection de défaillance de pile comme erreur non fatale
1: pas de détection de la défaillance de pile
Chapitre 1–2
1-2 Fonctionnement fondamental CQM1 et processus d’E/S
Ce chapitre détaille les sélections de configuration de l’API afférentes au fonc-
tionnement fondamental de l’API et aux processus d’E/S.
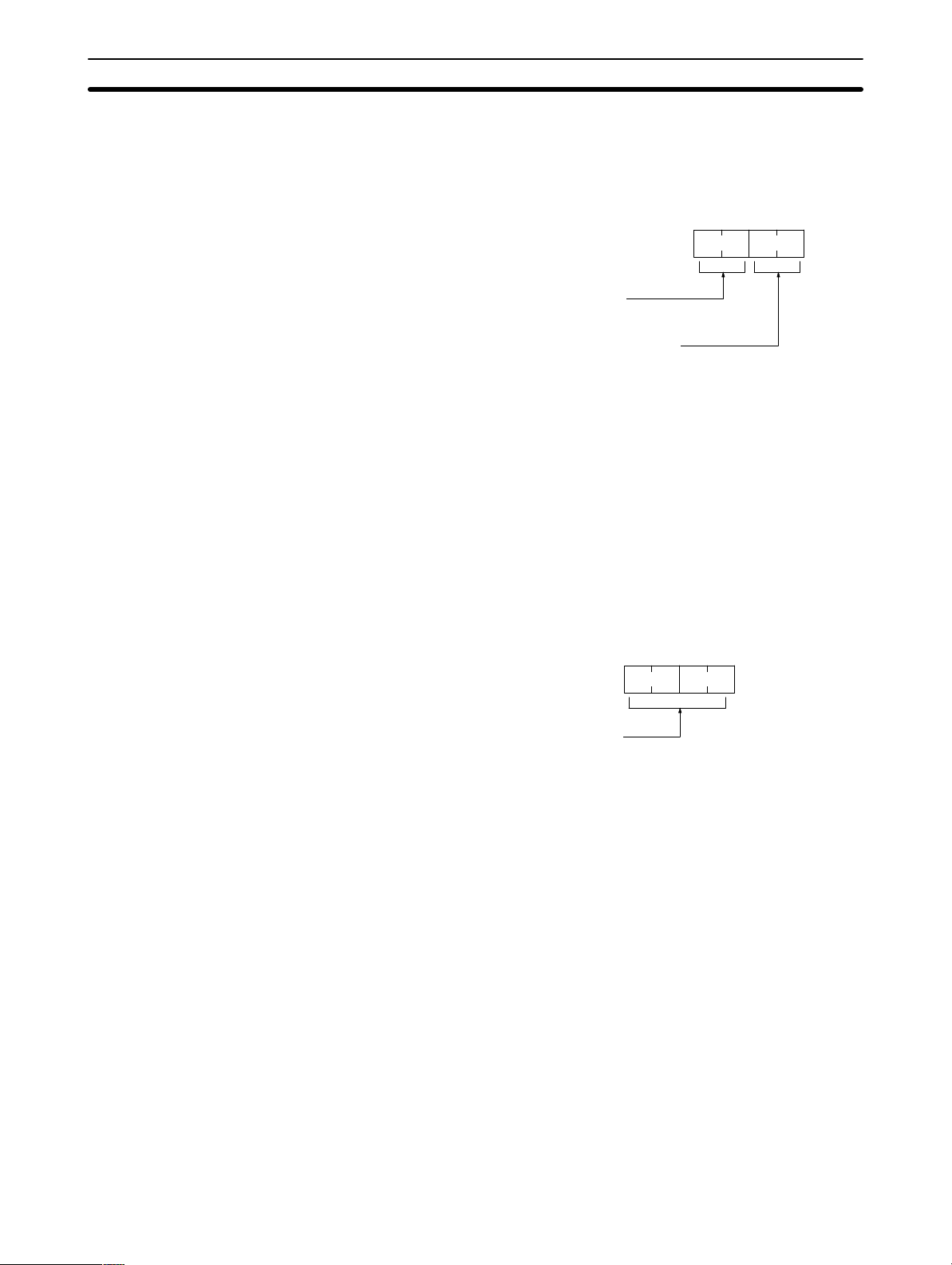
Mode lancement (DM 6600) Le premier mode de fonctionnement du CQM1 à la mise sous tension peut être
sélectionné de la façon suivante.
Mode de lancement (bits 08 à 15: valide si les bits 00 à 07 sont à 02)
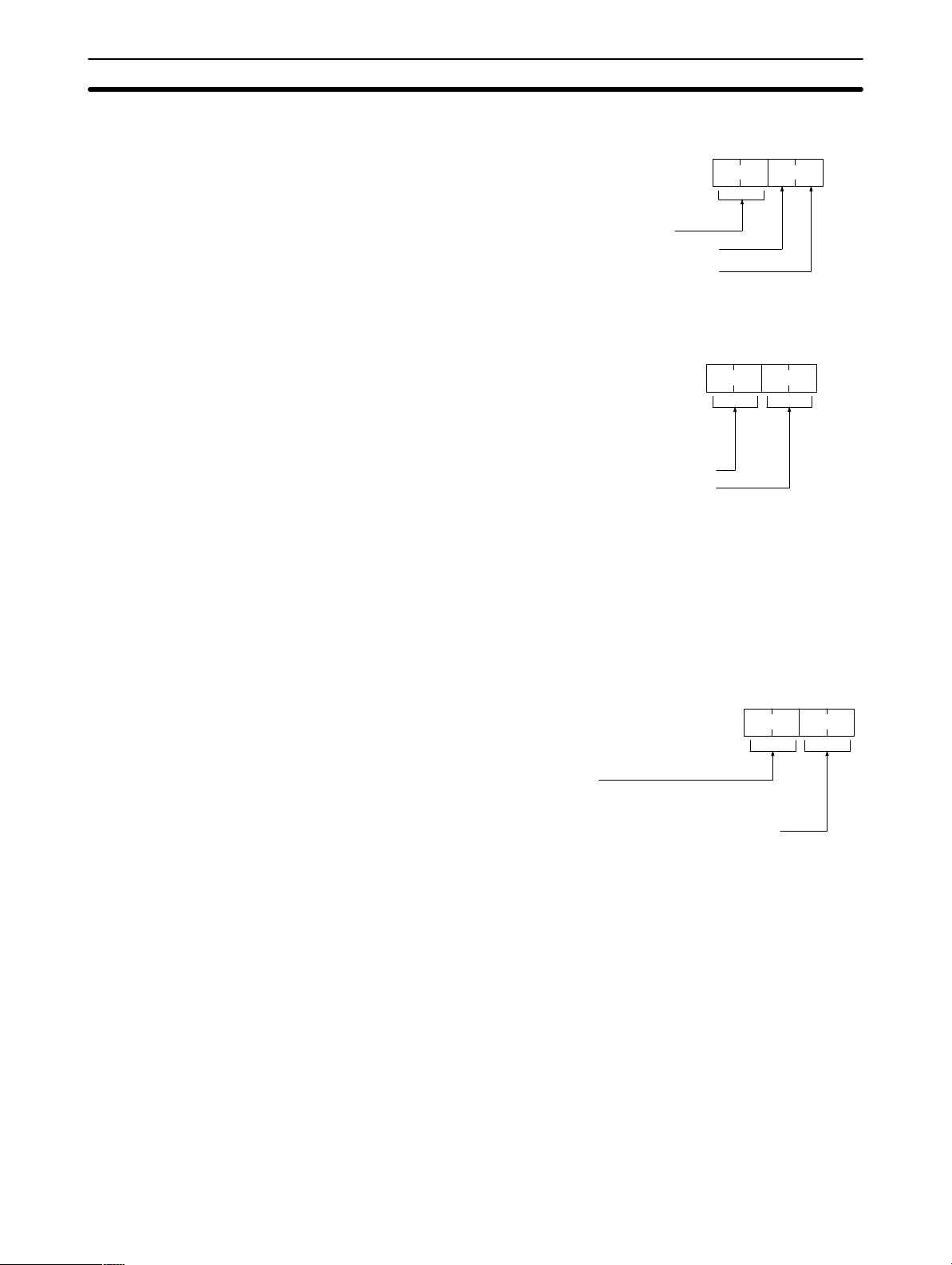
Etat du bit de maintien (DM 6601)
Effectuez les sélections ci-dessous afin de déterminer si les bits de maintien d’é-
tat forcé (SR 25211) et/ou les bits de maintien IOM (SR 25212) doivent retenir
l’état effectif des bits à la coupure de tension ou si cet état doit être effacé.
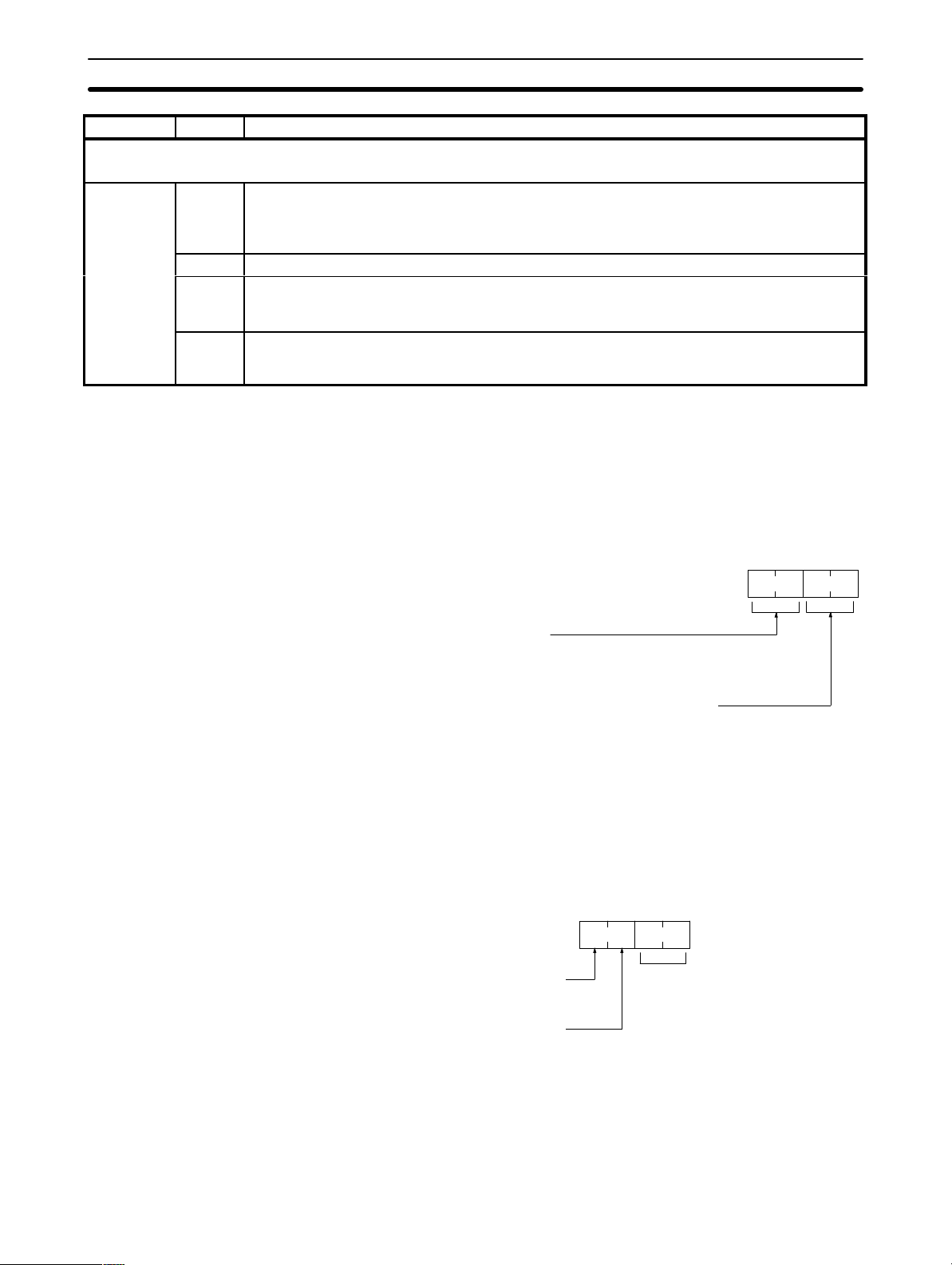
Bit
15
DM6600
Désignation du mode lancement
00: sélecteur du mode console de prog. (non connectée : mode RUN)
01: dernier mode avant coupure de tension
02: mode sélectionné dans les bits 00 à 07
00: mode PROGRAM
01: mode MONITOR
02: mode RUN
Défaut: sélecteur du mode console de prog. ou mode RUN si la console n’est pas
connectée
Bit
15 0
DM6601
Sél. SR 25211
0: effacement
1: maintien
Sél. SR 25212
0: effacement
1: maintien
00
Constamment
à 00
0
Défaut: effacement
des 2 états
Le bit de maintien d’état forcé (SR 25211) détermine si l’état forcé de sélection/
remise à zéro est maintenu lors du passage du mode PROGRAM en mode
MONITOR.
8
Page 12
Fonctionnement fondamental CQM1 et processus d’E/S
Le bit de maintien IOM (SR 25212) détermine si l’état des bits IR et LR est maintenu lorsque le CQM1 est arrêté et remis sous tension.
Chapitre 1–2
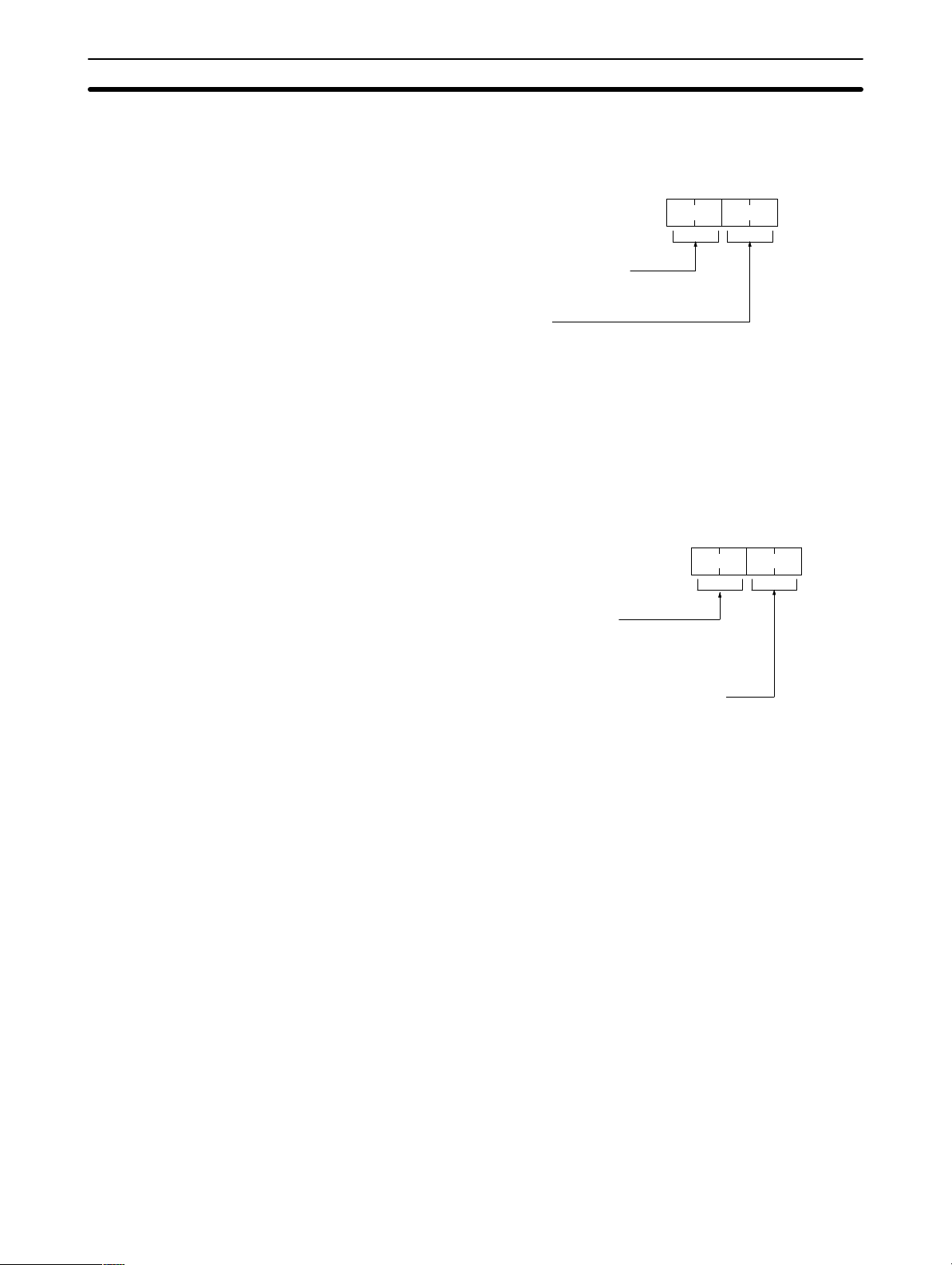
Temps de service des ports
RS-232C et périphériques
(DM 6616 et DM 6617)
Les sélections suivantes s’utilisent pour déterminer le pourcentage du cycle de
temps dévolu au service des ports RS-232C et périphériques.
Bit
15 0
Port RS-232C : DM 6616
Port périphérique :
DM 6617
Activation de la sél. du temps de service
00: désactivé (5% utilisés)
01: activée (sél. dans bits 00 à 07)
Temps de service (%, valide si les bits 08 à 15
sont à 01)
00 à 99 (BCD, deux chiffres)
Défaut: 5% du temps de scrutation
DM6616, DM6617
Exemple: si le DM 6616 est à 0 110, le port RS-232C est en service pendant une
période équivalente à 10% du temps de cycle. Si le DM 6617 est à 0115, le port
périphérique est en service pendant une période équivalente à 15 % du temps
de cycle.
Le temps de service est de 0,34 ms minimum.
Le temps de service n’est utilisé en entier qui si une demande de traitement a été
effectuée.
Temps de scrutation (DM 6619)Effectuez les sélections suivantes pour standardiser le temps de scrutation et
éliminer les variations du temps de réponse des E/S par sélection d’un temps de
cycle min.
Constantes du temps
d’entrée (filtrage)
(DM 6620 à DM 6625)
Bit
15 0
DM6619
Temps de scrutation (4 chiffres BCD)
0000:temps de scrutation variable
0001 à 9999:temps de scrutation min.
(unité: 1 ms)
Défaut: temps de scrutation variable
Si le véritable temps de scrutation est inférieur au temps de scrutation minimum,
l’exécution est suspendue jusqu’à expiration du temps minimum. Si le véritable
temps de scrutation est supérieur au temps de scrutation minimum, le fonctionnement s’effectue en fonction du véritable temps de scrutation. AR 2405 passe
à ON si le temps de scrutation est dépassé.
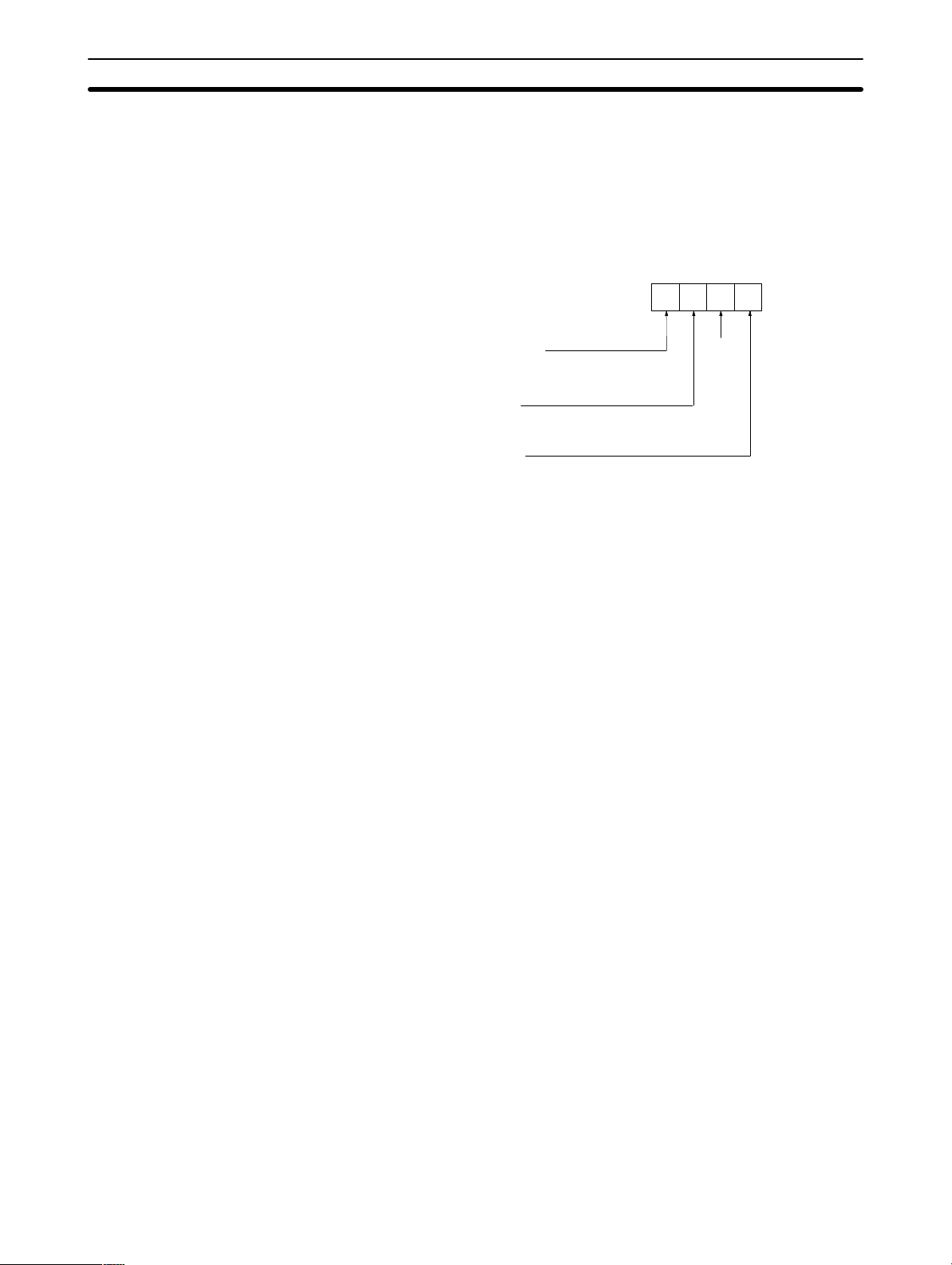
Effectuez les sélections ci-dessous pour choisir le temps qui s’écoule entre le
moment où les véritables entrées provenant de la carte d’entrée c.c. passent à
ON ou à OFF et le moment où les bits d’entrée correspondants sont remis à jour
(c’est-à-dire jusqu’au changement d’état ON/OFF). Effectuez ces sélections
lorsque vous voulez régler le temps de stabilisation de l’entrée.
9
Page 13
Fonctionnement fondamental CQM1 et processus d’E/S
Constantes du filtrage d’entrée IR 000 et IR 001
Constante de temps d’IR 001 (2 chiffres BCD ; cf infra)
Constante de temps d’IR 00008 à 00015 (1 chiffre BCD ; cf infra)
Constante de temps d’IR 00000 à 00007 (1 chiffre BCD ; cf infra)
Défaut: 8 ms chacune
Constantes de filtrage d’entrée pour IR 002 à IR 011
DM 6621 : IR 002 et IR 003
DM 6622 : IR 004 et IR 005
DM 6623 : IR 006 et IR 007
DM 6624 : IR 008 et IR 009
DM 6625 : IR 010 et IR 011
Constante pour IR 003, IR 005, IR 007, IR 009 et IR 011
Constante pour IR 002, IR 004, IR 006, IR 008 et IR 010
Défaut: 8 ms chacune
Bit
DM6620
Bit
DM6621 à 6623
Chapitre 1–2
15 0
15 0
Tempo. rapide (DM 6629)
Voici les neufs sélections possibles pour la constante de temps d’entrée. Sélectionnez uniquement le chiffre d’extrême droite pour IR 000.
00: 8 ms 01: 1 ms 02: 2 ms 03: 4 ms 04: 8 ms
05: 16 ms 06: 32 ms 07: 64 ms 08: 128 ms
Effectuez les sélections suivantes pour choisir le nombre de tempo. rapides
créées avec TIMH(15) et utilisant un traitement par interruption.
Bit
15 0
DM6629
Activation de la sél. d’interruption de tempo. rapide
00: désactivée (interruption pour toute tempo. rapide TIM 000 à TIM 015)
01: activée (utilisez la sél. des bits 00 à 07)
Nombre de tempo. rapides pour les interruptions
(valide lorsque les bits 08 à 15 sont à 01)
00 à 15 (2 chiffres BCD)
Défaut: traitement par interruption pour toutes les tempo. rapides
TIM 000 à TIM 015.
La sélection indique le nombre de tempo. utilisant un processus d’interruption
commençant par TIM 000. Par exemple, si “0108” est spécifié, huit tempo.,
TIM 000 à TIM 007 utilisent un processus d’interruption.
Rem.: les tempo. rapides ne peuvent être précises sans processus d’interruption,
sauf le temps de cycle est de 10 ms maximum.
Le temps de réponse pour les autres interruptions est amélioré si le processus
d’interruption est sélectionné à 00 alors que le traitement par tempo. rapide n’a
pas été demendé. Cela est valable pour tout temps de cycle inférieur à 10 ms.
Rem.: si l’on utilise l’instruction SPED(––) et que les impulsions sont sorties à une
fréquence de 500 Hz au moins, choisissez alors un nombre de tempo. rapides à
interruption égale à 4 maximum. Pour de plus amples détails, reportez-vous à
l’instruction SPED(––).
10
Page 14
Fonctionnement fondamental CQM1 et processus d’E/S
Chapitre 1–2
Chiffres d’entrée de DSW et
méthode de
rafraîchissement des
sorties (DM 6639)
Effectuez les sélections ci-dessous pour choisir le nombre de chiffres d’entrée
de l’instruction DSW et pour sélectionner la méthode de rafraîchissement des
sorties.
Reportez-vous au chapitre 3 pour les détails concernant l’instruction DSW et au
chapitre 6 pour la méthode de rafraîchissement des E/S.
Sélection de l’enregistrement des erreurs
Détection et stockage des erreurs :
Temps de surveillance de cycle (DM 6618)
Bit
15 0
DM 6639
Nombre de chiffres d’entrée de DSW
00: 4 chiffres
01: 8 chiffres
Méthode de rafraîchissement des sorties
00: Cyclique
01: Directe
Défaut:nombre de chiffres d’entrée de DSW : “4” ; méthode
rafraîchissement des sorties : cyclique
Bit
15 0
DM6618
Activation du temps de surveillance de cycle et unité
00: désactivé (120 ms, fixe)
01: sél. dans les bits 00 à 07 activée ; unité:10 ms
02: sél. dans les bits 00 à 07 activée ; unité:100 ms
03: sél. dans les bits 00 à 07 activée ; unité:1 s
Sél. du temps de surveillance de cycle
(lorsque les bits 08 à 15 ne sont pas à 00)
00 à 99 (2 chiffres BCD; unité sélectionnée dans les bits 08 à
15.)
Défaut: 120 ms
Le temps de surveillance de cycle s’utilise pour vérifier les temps de scrutation
très longs, comme ceux que l’on peut rencontrer en cas de programme en
boucle infinie. Si le temps de scrutation dépasse la valeur de sélection de sur-
veillance, une erreur fatale (FALS 9F) est générée.
Rem.: 1. L’unité de temps utilisée pour le temps de cycle en cours et maximum enre-
gistrée dans les canaux AR 26 et AR 27 change selon l’unité sélectionnée
pour le temps de surveillance de cycle.
Bits 08 à15 sélectionnés à 00 ou 01: 0,1 ms
Bits 08 à15 sélectionnés à 02: 1 ms
Bits 08 à15 sélectionnés à 03: 10 ms
2. Même si le temps de cycle est supérieur ou égal à 1 s, le temps de cycle lu à
partir des appareils de programmation ne dépasse pas 999,9 ms. L’unique
temps de cycle en cours et maximum correct est enregistré dans les canaux
AR 26 et AR 27.
Exemple
Si 0230 est sélectionné dans le DM 6618, une erreur FALS 9F n’apparaît que si
le temps de cycle dépasse 3 s. Si le temps réel est de 2,59 s, le contenu de
AR 27 est égal à 2590 (ms), mais le temps de cycle lu à partir des appareils de
programmation est de 999,9 ms.
11
Page 15
Sélection et utilisation des fonctions de sortie d’impulsion
Une erreur ”cycle time over” (non fatale) est générée lorsque le temps de cycle
dépasse 100 ms, sauf si la détection de temps de cycle long est inhibée à l’aide
de la sélecion du mot DM 6655.
Détection et stockage des erreurs (DM 6655)
Effectuez les sélections ci-dessus de façon à générer ou non une erreur non
fatale si le t emps de cycle dépasse 100 ms ou si la tension de la pile intégrée est
défaillante et de façon à sélectionner la méthode d’enregistrement des erreurs.
Bit
DM6655
Chapitre 1–3
15 0
0
Détection de pile défaillante
0: Détection
1: Non–détection
Détection de temps de scrutation
dépassé
0: Détection
1: Non–détection
Méthode stockage des erreurs
0: stockage des 10 dernières erreurs (erreurs antérieures effacées)
1: stockage des 10 premières erreurs uniquement (et non des suivantes)
2 à F: pas d’enregistrement des erreurs
Défaut: erreurs de pile défaillante et de temps de scrutation dépassé détectées et
10 dernières erreurs stockées.
Constamment
à 0
Les erreurs de pile de temps de cycle dépassé sont des erreurs non fatales.
Pour de plus amples détails concernant le stockage des erreurs, reportez-vous
au chapitre 7.
1-3 Sélection et utilisation des fonctions de sortie
d’impulsion
Reportez-vous au manuel d’utiisation du CQM1 pour de plus amples détails
concernant les connexions du matériel aux ports et points de sortie du CQM1.
1-3-1 Types de sortie par impulsion
Tous les CQM1 peuvent produire des impulsions standard à partir d’un bit de
sortie ; la CQM1-CPU43-E peut également produire des impulsions standard ou
à rapport cyclique à partir des ports 1 et 2. Les impulsions standard ont un rapport cyclique de (t
rapport cyclique peut être sélectionné entre 1 et 99 % par incréments de 1 %.
/T) de 50%. Le rapport cyclique des sorties par impulsion à
on
Rem. : avec la CQM1-CPU43-E, les sorties par impulsion décrites ci-après peuvent
Sortie par impulsion
standard à partir d’un point
de sortie
Sortie par impulsion
standard à partir des ports
1 et 2
12
être produites à partir de 3 ports à la fois. En outre, 2 ports peuvent être utilisés
pour les entrées par compteur indépendantes de la sortie par impulsion.
Les impulsions standard (rapport cyclique = 50%) peuvent être produites à partir
d’un point de sortie à une fréquence de 20 Hz à 1 kHz. Le canal d’E/S est spécifié
dans la configuration de l’API et le bit est spécifié dans l’instruction de sortie par
l’impulsion elle-même (cf. chapitre 1–3–2).
Avec la CQM1-CPU43-E, les impulsions standard (rapport cyclique = 50%)
peuvent être produites à partir des ports 1 et/ou 2 à une fréquence de
10 à 50 kHz (20 kHz max. pour un moteur pas à pas). La sortie par impulsion
peut être effectuée en sens horaire ou anti-horaire et les modifications de fréquence peuvent être introduites en souplesse.
Page 16
Sélection et utilisation des fonctions de sortie d’impulsion
PLS2(––) et le mode 0 de ACC(––) ne peuvent être utilisés lorsque la configuration de l’API (DM 6611) est positionnée en mode compteur rapide.
CTBL (--) ne peut être utilisée avec les ports 1 et 2 lorsque la configuration de
l’API (DM 6611) est positionnée en mode de sortie par impulsion. Reportez-vous
au chapitre 1–3–3.
Sortie par impulsion à
rapport cyclique à partir
des ports 1 et 2
Avec la CQM1-CPU43-E, les impulsions à rapport cyclique peuvent être pro-
duites (rapport cyclique = 0 à 99%) à partir des ports 1 et/ou 2 à des fréquences
de 91,6 Hz, 1,5 kHz ou 5,9 kHz. Un seul sens de sortie est possible et la sortie
par impulsion se poursuit jusqu’à ce qu’elle soit arrêtée par INI(--).
Reportez-vous au chapitre 1–3–4.
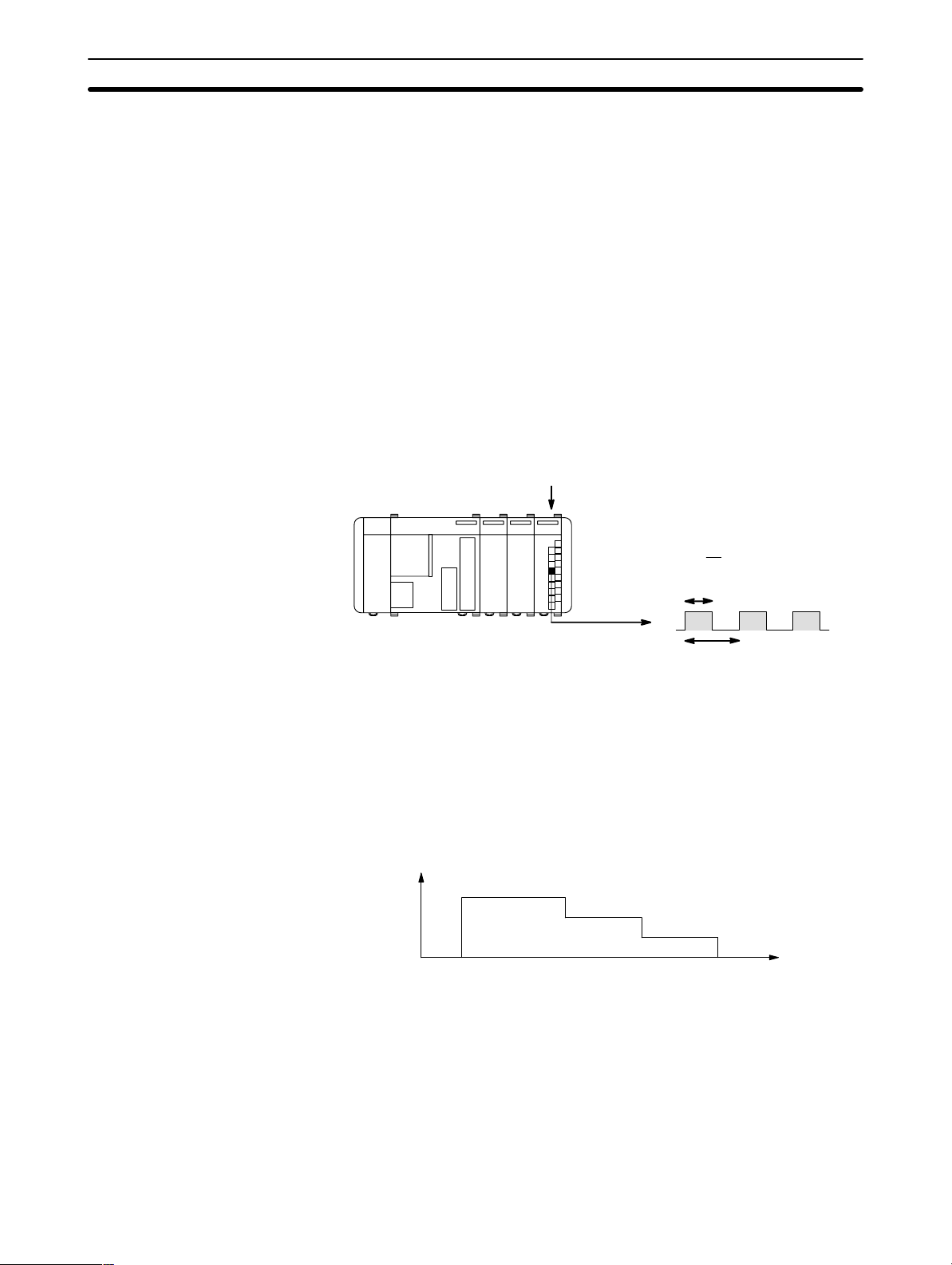
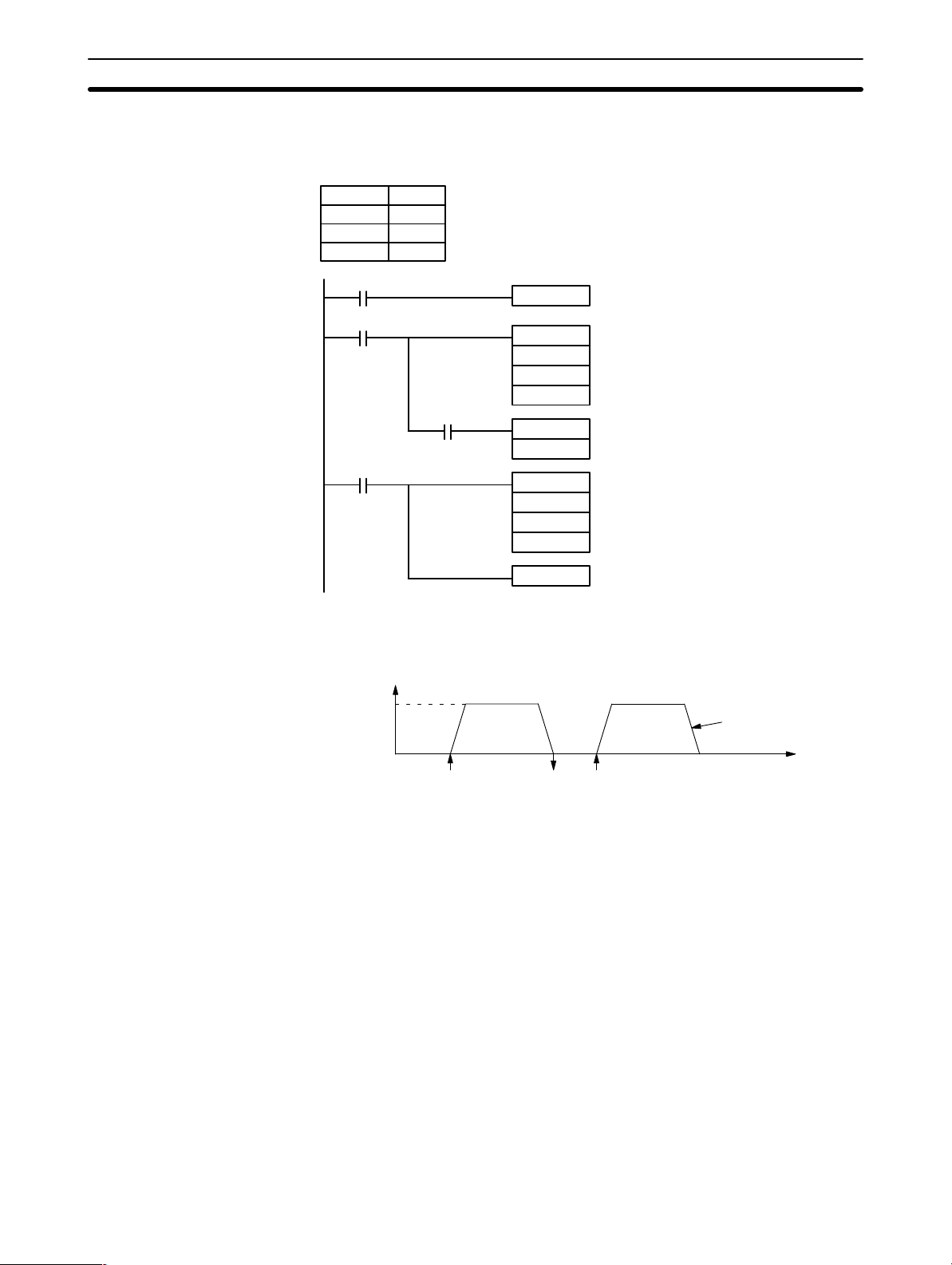
1-3-2 Sortie d’impulsion standard à partir d’un point de sortie
Les impulsions peuvent être produites à partir d’un bit de sortie spécifié à l’aide
de SPED(––). Les impulsions peuvent être produites à partir d’un seul bit à la
fois. Le schéma suivant illustre les impulsions produites à partir du point de sor-
tie de la carte de sortie transistor. Le rapport cyclique de la sortie par impulsion
est de 50% et la fréquence peut être sélectionnée entre 20 Hz et 1 kHz.
Carte de sortie transistor
Chapitre 1–3
t
on
+50% (0.5)
T
t
on
T
Rem.: 1. La carte de sortie transistor est indispensable pour cette application.
2. Les impulsions ne peuvent être produites lorsque la tempo. cyclique 0
fonctionne.
3. Lorsqu’une sortie par impulsion supérieure à 500 Hz est produite, sélection-
nez le nombre de tempo. rapides avec interruption à 4, par positionnement
des DM 6629 à 0104.
Lors de la production d’impulsions à partir d’un point de sortie, la fréquence peut
être modifiée par étapes en exécutant SPED(––) à nouveau à différentes fréquences, comme ci-après :
Fréquence
Temps
Il y a deux façons d’arrêter la sortie d’une impulsion :
1, 2, 3... 1. Après exécution de SPED(––), la sortie par impulsion s’arrête si INI(––) est
exécutée avec C=003 ou si SPED(––) est exécutée à nouveau avec une
fréquence égale à 0.
2. Le nombre total d’impulsions à sortir peut être sélectionné à l’aide de
PULS(––) avant l’exécution de SPED(––). Dans ce cas, SPED(––) doit être
exécutée en mode indépendant. La sortie d’impulsions s’arrête automatiquement lorsque le nombre d’impulsions sélectionné par PULS(––) a été
atteint.
13
Page 17
Sélection et utilisation des fonctions de sortie d’impulsion
Rem.: pour de plus amples détails, reportez-vous aux chapitres concernant les instuc-
tions SPED(––) et PULS(––).
Sélections de la configuration API
Avant l’exécution de SPED(––) pour la sortie d’impulsions à partir d’une carte de
sortie, placez l’API en mode PROGRAM et effectuez les sélections suivantes e n
configuration :
Dans le DM 6615, spécifiez le mot de sortie utilisé pour la sortie d’impulsions
SPED(––) vers les cartes de sortie (le bit est spécifié dans la première opérande
de SPED(––)).
Le contenu des DM 6615 (0000 à 0011) spécifie les canaux de sortie IR 100 à
IR 111. Par exemple, si le DM 6615 est sélectionné à 0002, les impulsions seront sorties dans IR 102.
Bit
DM6615
Chapitre 1–3
15 0
00
Canal de sortie (2 chiffres d’extrême droite, BCD):
00 à 11
Défaut: impulsion sortie dans IR 100 (canal 100).
Constamment à 00
Avec les UC CQM1-CPU11/21-E, sélectionnez le rafraîchissement de sortie
direct dans le DM 6639, comme ci–dessous (avec les UC CQM1-CPU4j-E, le
mode de rafraîchissement de sortie peut être direct ou cyclique.
Bit
15 0
DM 6639
Mode de rafraîchis–
sement de sortie
01: Direct
Défaut: mode de rafraîchissement cyclique
01
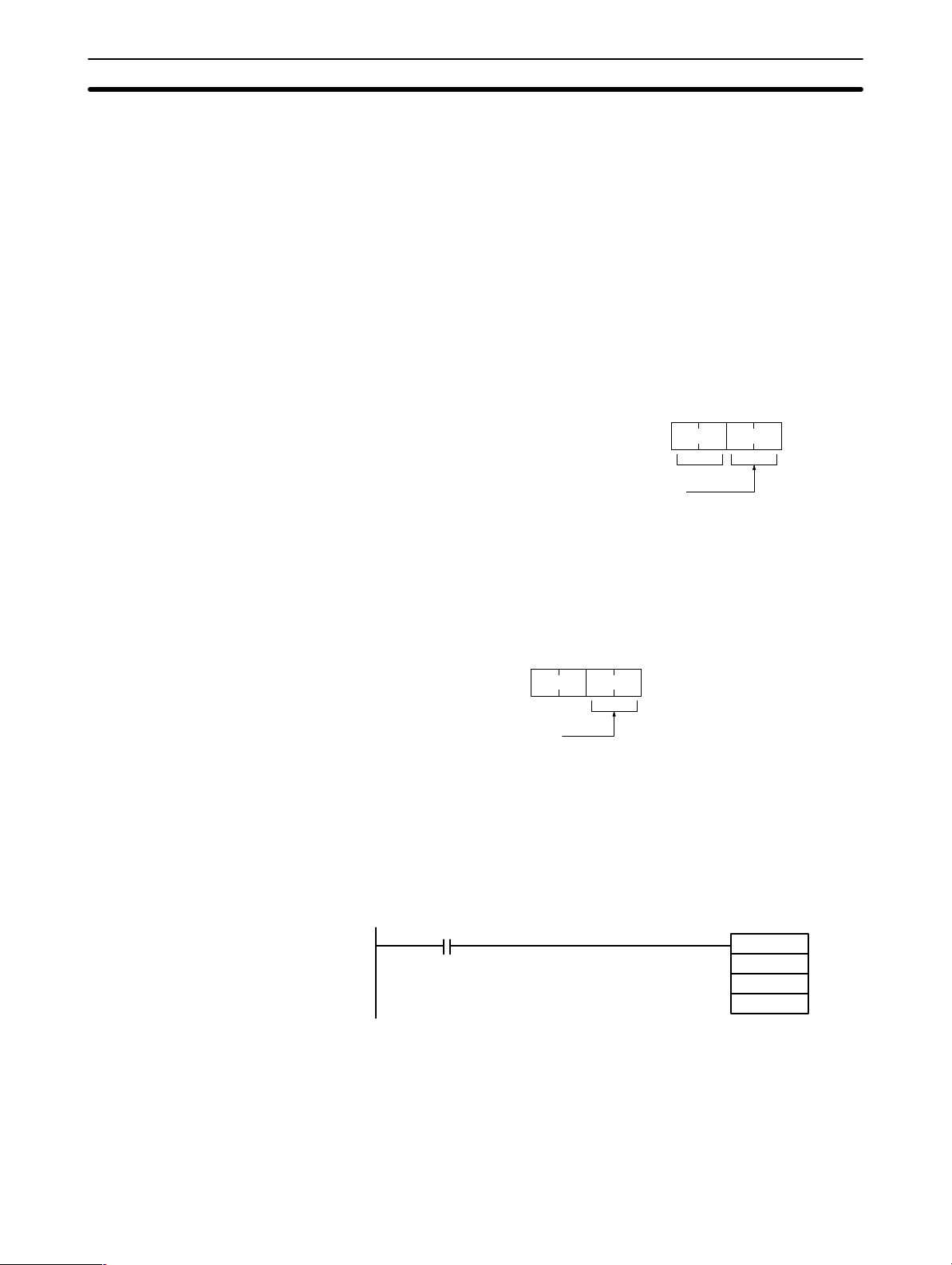
Sortie d’impulsions continuesLes impulsions commencent à être sorties sur le bit de sortie spécifié lorsque
SPED(––) est exécutée. Positionnez le bit de sortie entre 00 et 15 (D=000 à 150)
et la fréquence entre 20 Hz et 1000 Hz (F=0002 à 0100). Choisissez le mode
continu (M=001).
Condition d’exécution
@SPED(––)
D
M
F
La sortie d’impulsions peut être arrêtée en exécutant INI(––) avec C=003 ou en
ré–exécutant SPED(––), la fréquence étant à 0. La fréquence peut être modifiée
en ré–exécutant SPED(––) avec un fréquence différente.
Sélection du nombre d’impulsions
Le nombre total d’impulsions peut être sélectionné à l’aide de PULS(––) avant
l’exécution de SPED(––) en mode indépendant. La sortie des impulsions
14
Page 18
Sélection et utilisation des fonctions de sortie d’impulsion
s’arrête automatiquement lorsque le nombre d’impulsions sélectionné par
PULS(––) a été atteint.
Chapitre 1–3
Condition d’exécution
@PULS(––)
000
000
P1
PULS(––) sélectionne le nombre d’impulsions (8 chiffres) P1+1, P1. Ces impulsions vont de 00000001 à 16777215. On accède au nombre d’impulsions sélectionné avec PULS(––) lorsque SPED(––) est exécutée en mode indépendant (le
nombre d’impulsions ne peut pas être modifié pour les impulsions en cours de
sortie).
Condition d’exécution
@SPED(––)
D
M
F
Lorsque SPED(––) est exécutée, les impulsions commencent à être sorties sur
le bit de sortie spécifié (D=000 à 150: bit 00 à 15) à la fréquence spécifiée
(F=0002 à 0100: 20 Hz à 1000 Hz). Choisissez le mode indépendant (M=001)
pour sortir le nombre d’impulsions sélectionné à l’aide de PULS(––). La fré-
quence peut être modifiée en ré–exécutant SPED(––) avec une fréquence diffé-
rente.
Changement de fréquence La fréquence de la sortie d’impulsion peut être modifiée en ré–exécutant
SPED(––) à une fréquence différente. Utilisez les mêmes sélections de bit de
sortie (P) et de mode (M) utilisées pour le début de sortie des impulsions. La
nouvelle fréquence doit être située entre 20 Hz et 1000 Hz (F=0002 à 0100).
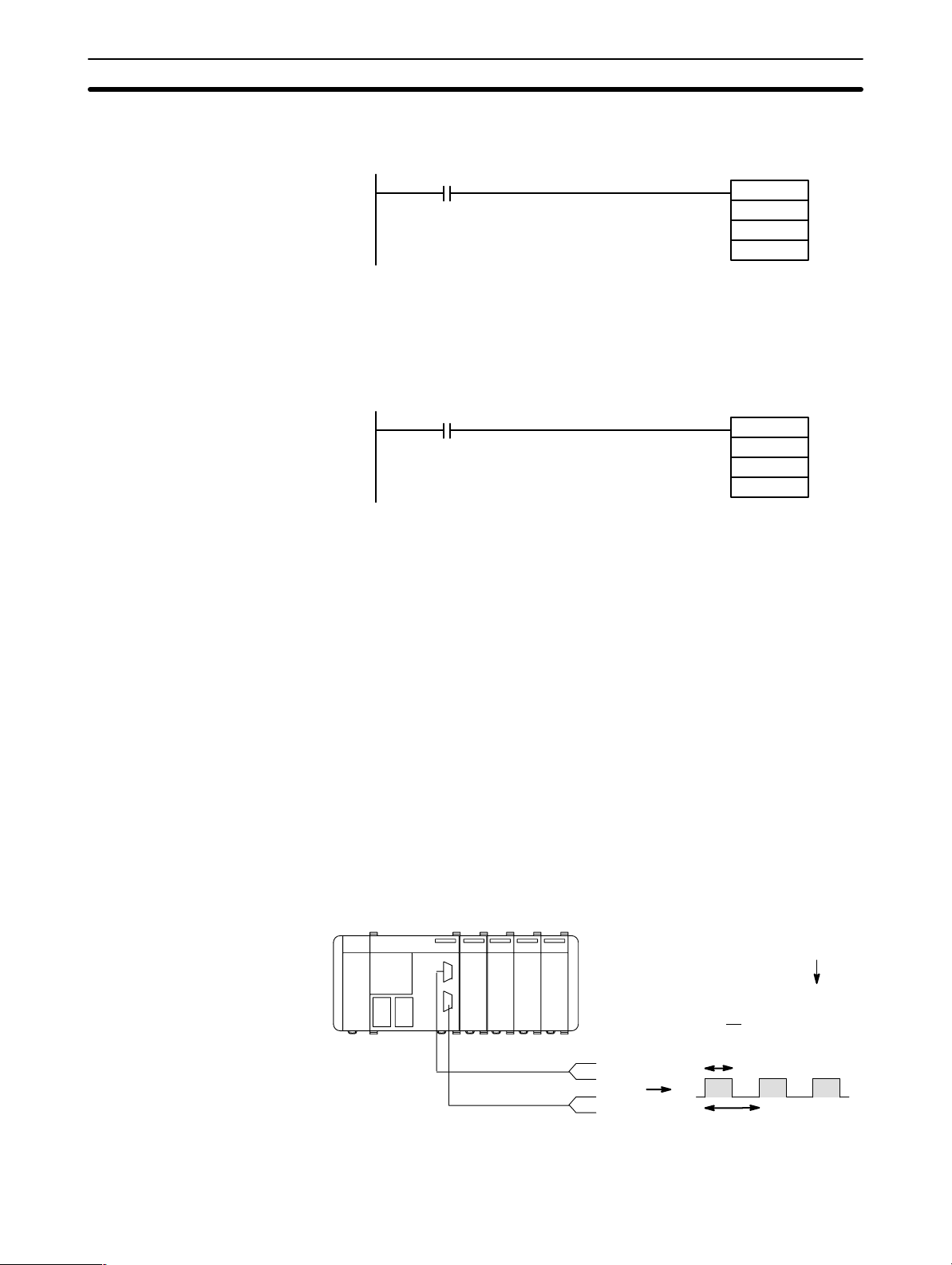
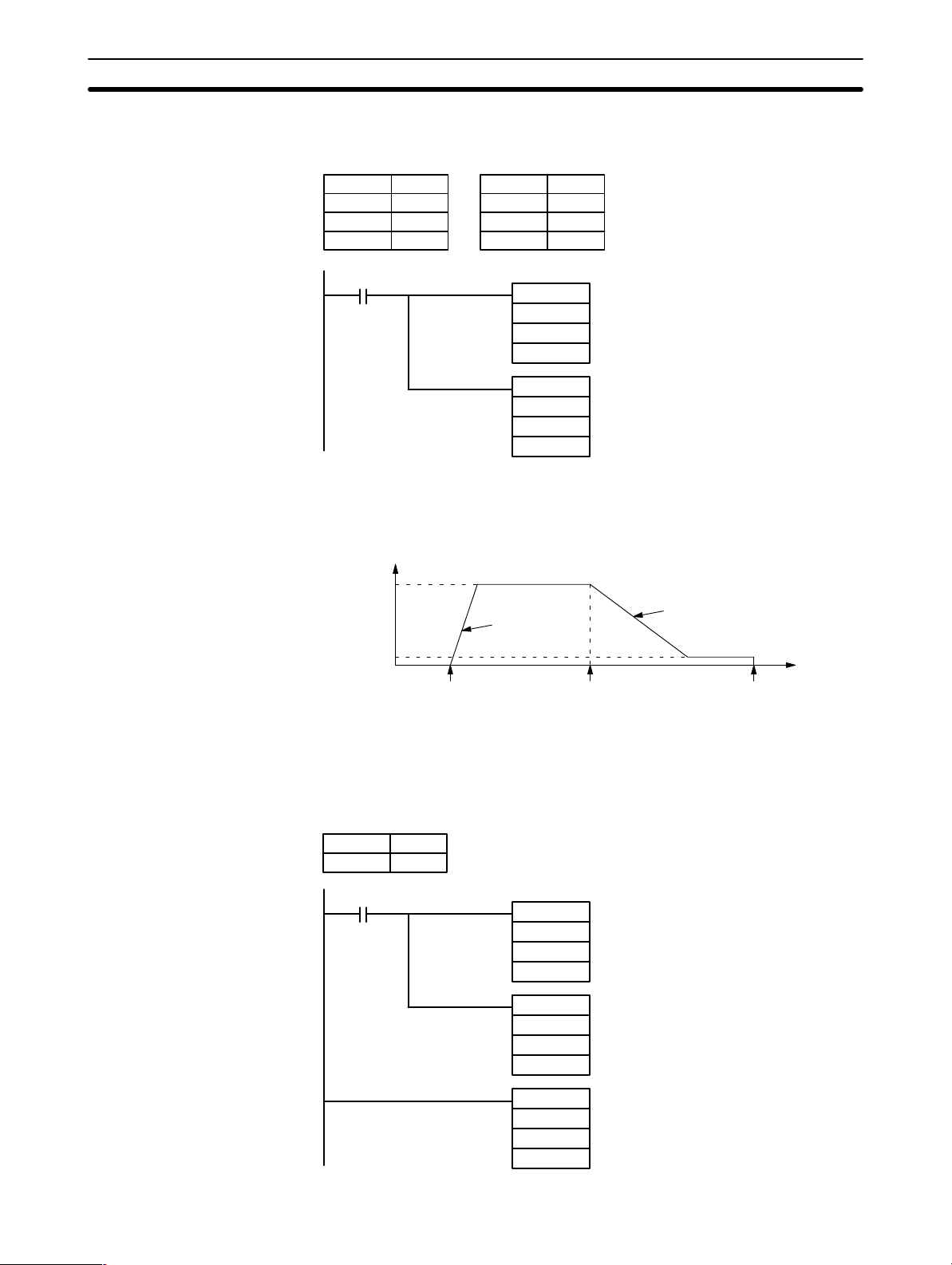
1-3-3 Sortie d’impulsion standard à partir des ports 1 et 2
Avec l’UC CQM1-CPU43-E, on peut sortir des impulsions standard à partir des
ports 1 et 2 à l’aide de SPED(––), PLS2(––) ou ACC(––). La fréquence par
impulsions doit être sélectionnée entre10 Hz et 50 kHz (20 kHz max. pour un
moteur pas à pas). La sortie d’impulsion peut se faire en sens horaire (CW) ou
anti–horaire (CCW) et les modifications de fréquence peuvent être effectuées
en douceur.
UC
t
on
+50% (0.5)
T
t
Port 1
Port 2
CW
CCW
CW
CCW
on
T
Rem. : seule l’UC CQM1-CPU43-E peut sortir des impulsions à partir des ports 1 et 2.
15
Page 19
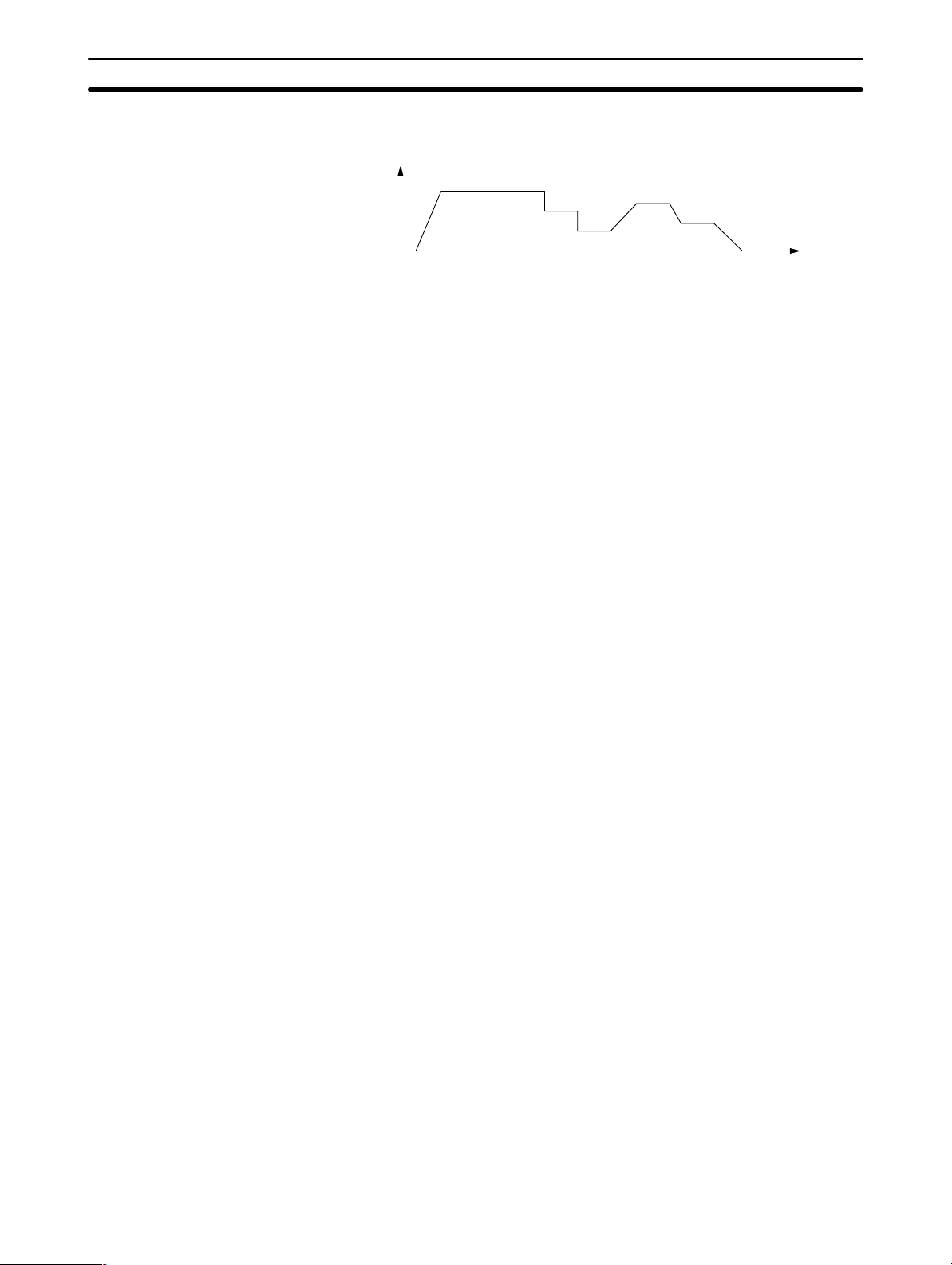
Sélection et utilisation des fonctions de sortie d’impulsion
Lors de la sortie d’impulsions à partir d’un port, la fréquence peut être modifiée
en douceur ou par étapes avec SPED(––), PLS2(––) et ACC(––) :
Fréquence
Il y a deux façons d’arrêter la sortie d’impulsions :
1, 2, 3... 1. Après l’exécution de SPED(––), la sortie par impulsion s’arrête si INI(––) est
exécutée avec C=003 ou si SPED(––) est ré–exécutée avec une fréquence
sélectionnée à 0.
2. Le nombre total d’impulsions sorties peut être sélectionné avec PULS(––)
avant l’exécution de SPED(––). Dans ce cas, SPED(––) doit être exécutée
en mode indépendant. La sortie d’impulsions s’arrête automatiquement
lorsque le nombre d’impulsions sélectionné par PULS(––) a été atteint.
Chapitre 1–3
Temps
16
Page 20
(
)
(Mode 0)
q
( )
+
( )
Sélection et utilisation des fonctions de sortie d’impulsion
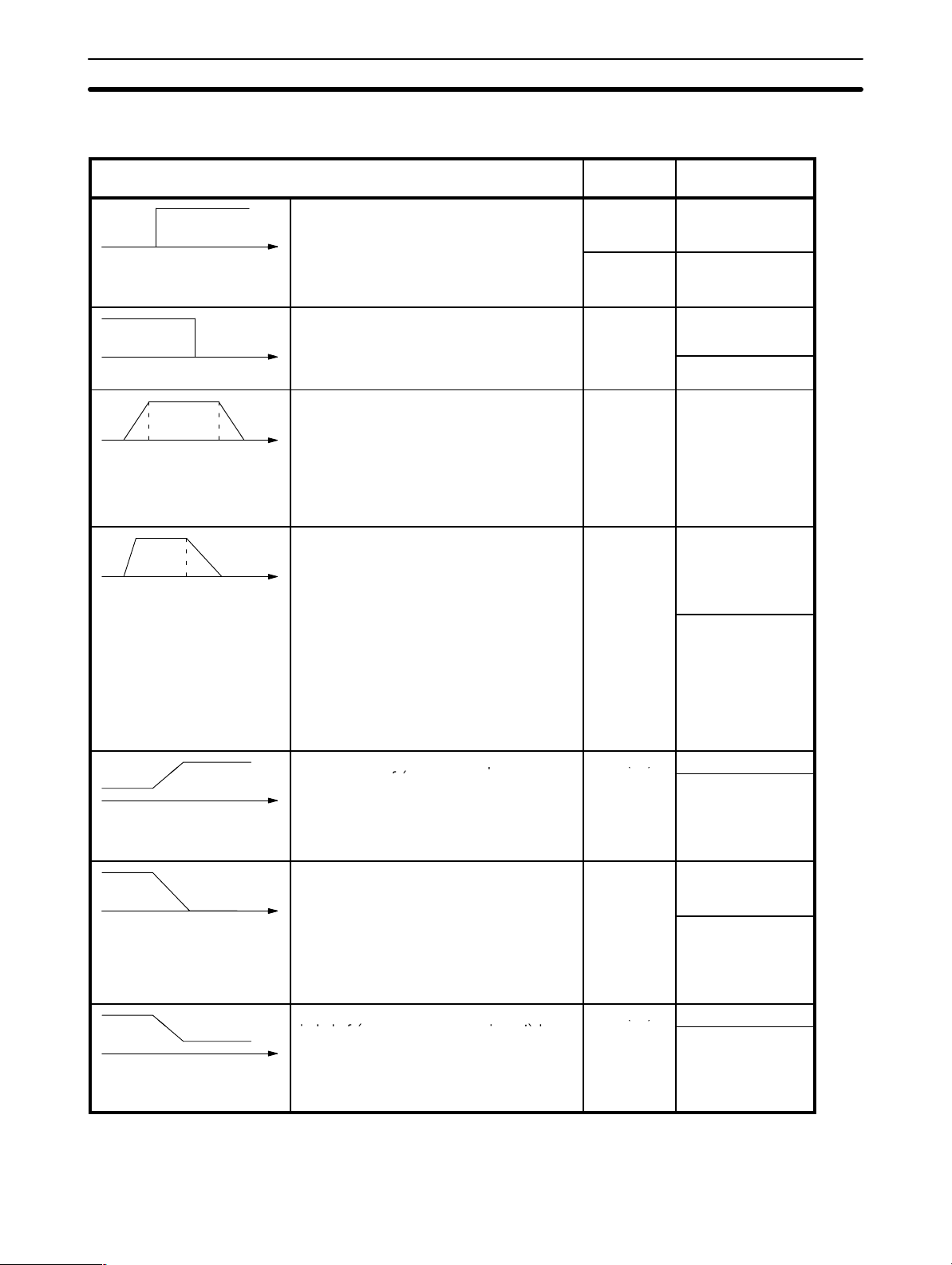
Changements de fréquence pouvant être effectués en combinant PULS(65),
SPED(64), INI(61), PLS2(––) et ACC(––) :
Changements de fréquence Instruction Sélection
Fréquence et sens des impulsions à
générer. Génère une quantité d’impulsions
déterminée ou indéterminée.
(Exécutez PULS(––) puis SPED(––).)
Arrêt de la sortie d’impulsions par instruc-
tion.
é
(Exécutez SPED(––) ou INI(––).) INI(––)
S
d’opérande
PULS(––) CW/CCW
(Nombre d’impulsions)
SPED(––) Port
Mode
Fréquence
SPED(––)
ou
Port
Fréquence= 0
Mot de contrôle=0
Chapitre 1–3
Génère une rampe suivant un nombre d’impulsions, une accélération, une décélération, à une fréquence et dans un sens défini
(non permis en mode compage rapide)
Génère un nombre d’impulsions
prédéterminé.
Détermine l’accélération et la décélération
é
(Exécutez PULS(––) puis ACC(––).)
Accélération à partir d’une fréquence et
vers une autre fréquence
La sortie d’impulsions continue.
(Exécutez PULS(––) puis ACC(––).)
Décélération à partir d’une fréquence et
vers une autre fréquence. Génère le
nombre d’impulsions prédéterminé.
La sortie d’impulsions s’arrête lorsque le
nombre d’impulsions spécifié est atteint.
(Exécutez PULS(––) puis ACC(––).)
Décélération de la sortie d’impulsions à partir de la fréquence en cours et jusqu’à la
fréquence spécifiée, à la vitesse spécifiée.
La sortie d’impulsions continue.
(Exécutez PULS(––) puis ACC(––).)
S
p
PLS2(––)
PULS(––)
+
ACC(––)
Mode 0
PULS(––)
ACC(––)
(Mode 1)
PULS(––)
+
ACC(––)
(Mode 2)
PULS(––)
+
ACC(––)
(Mode 3)
Port sens
CW/CCW
Vitesse d’accélération
Fréquence spécifiée
Nombre d’impulsions
Sens CW/CCW
Nombre d’impulsions
Point de décélération
Port
Taux d’accélération
Fréquence spécifiée1
Vitesse de décé-
lération
Fréquence spécifiée 2
CW/CCW
Port
Vitesse d’accélération
Fréquence spécifiée
CW/CCW
Nombre d’impulsions
Port
Vitesse de décé-
lération
Fréquence spécifiée
CW/CCW
Port
Vitesse de décé-
lération
Fréquence spécifiée
La CPU43 permet de gérer 2 axes en boucle ouverte ou fermée suivant le
DM 6611. Les ports 1 et 2 peuvent compter des impulsions et générer des impul-
sions pour piloter un moteur pas à pas à l’aide des instructions PULS–SPED.
17
Page 21
Sélection et utilisation des fonctions de sortie d’impulsion
Chapitre 1–3
PULS2 et ACC en mode 0 ne peuvent être utilisées. En mode sortie ”pulse”
(DM 6611 = 0001), les ports 1 et 2 génèrent des rampes programmées sans
possibilité de comptage puisque l’instruction CTBL n’est plus disponible.
Sélections de configuration Avant d e produire des impulsions à partir des ports 1 et 2, placez l’API en mode
PROGRAM et effectuez les sélections suivantes en configuration :
Dans le DM 6611, spécifiez la sélection de mode pour les ports 1 et 2 :
Bit
15 0
DM 6611
Sélection de mode
pour les ports 1 et 2
0000: mode compteur rapide
0001: mode sortie par impulsion
Défaut: mode compteur rapide
01
Certaines instructions peuvent être utilisées ou non selon la sélection dans le
DM 6611.
Sélection DM 6611 Instructions affectées
Mode compteur rapide (0000) PLS2(––) et le mode 0 de ACC(––) ne peuvent
être utilisés.
Mode de sortie par impulsion
(0001)
CTBL(––) ne peut être utilisée avec les ports 1
et 2.
0 : impulsion standard
1 : rapport cyclique
0 : comptage linéaire
1 : comptage en anneau
La sélection du DM 6611 ne peut être lue que lorsque le CQM1 est en fonction-
nement. Si cette sélection est modifiée, coupez et remettez l’API sous tension
pour que la nouvelle sélection soit prise en compte.
Spécifiez les sorties par impulsion standard dans les DM 6643 (port 1) et/ou
DM 6644 (port 2).
0000
0 : différence de phase
1 : mode impulsion/direct
2 : mode incrémental/décrémental
0 : RAZ soft + phase Z
1 : RAZ soft
Bit
15 0
M 6643
0
Sél. du type d’impulsion pour le
port 1
0: Sortie par impulsion standard
Défaut: Sortie par impulsion
standard
Bit
DM 6644
15 0
0
Sél. du type d’impulsion pour le
port 2
0: Sortie par impulsion standard
Défaut: Sortie par impulsion
standard
Exemple 1:
Démarrage de sortie par
impulsion avec PULS(––) et
SPED(––)
18
Le rapport cyclique des impulsions ne peut être sorti à partir d’un port qui aurait
été sélectionné pour une sortie par impulsion standard dans les DM 6643 ou
DM 6644.
L’exemple suivant montre l’utilisation de PULS(––) et SPED(––) dans le
contrôle d’impulsion à partir du port 1. Le nombre d’impulsions spécifié dans
Page 22
Sélection et utilisation des fonctions de sortie d’impulsion
PULS(––) (10 000) est sorti lors du changement de fréquence par l’exécution de
SPED(––) avec une sélection de fréquence différente.
Avant l’exécution du programme, assurez–vous que le DM6611 soit placé à
0000 (sélection d’impulsion standard pour le port 1).
Chapitre 1–3
05000
00000
00001
00002
@PULS(––)
001
000
DM 0000
@SPED(––)
001
000
#0100
@SPED(––)
001
000
#0150
@SPED(––)
001
000
#0100
@SPED(––)
001
000
#0050
Lorsque 05000 passe à ON, PULS(––) place le port 1 à
10 000 impulsions en sens horaire.
Début de la sortie par impulsion à partir du port 1 à 1 kHz
en mode indépendant
Lorsque 00000 passe à ON, la fréquence du port 1
passe à 1,5 kHz.
Lorsque 00001 passe à ON, la fréquence du port 1
passe à 1 kHz.
Lorsque 00002 passe à ON, la fréquence du port 1
passe à 500 Hz.
Rem. : veillez à ce que la fréquence d’impulsion soit comprise dans la gamme de fréquences
Exemple 2: arrêt de sortie
d’impulsion par SPED(––)
Le schéma suivant montre la fréquence des sorties par impulsion à partir du
port 1, selon l’exécution du programme :
Fréquence
1,5 kHz
1,0 kHz
0,5 kHz
Temps
05000
à ON
00000
à ON
00001
à ON
00002
à ON
10 000
impulsions
compatible avec la vitesse maximum du moteur.
Attention : la synchronisation du contrôle de vitesse est très précise lorsque les modifi-
cations de fréquence sont effectuées en tant que traitements par interruption
d’entrée.
L’exemple suivant montre l’utilisation de PULS(––) et SPED(––) pour le contrôle
d’une sortie d’impulsion à partir du port 1. La fréquence est modifiée par l’exécu-
19
Page 23
Sélection et utilisation des fonctions de sortie d’impulsion
tion de SPED(––) avec des sélections de fréquence différentes, puis arrêtée
avec une sélection de fréquence égale à 0.
Chapitre 1–3
05000
00005
00006
00007
@PULS(––)
001
004
000
@SPED(––)
001
001
#0100
@SPED(––)
001
001
#0150
@SPED(––)
001
001
#0100
@SPED(––)
001
001
#0000
Lorsque 05000 passe à ON, PULS(––) sélectionne le
port 1 pour la sortie d’impulsions en sens horaire (CW).
Aucun nombre n’est spécifié pour la sélection d’impul-
sions.
Début de la sortie d’impulsions à partir du port 1 à 1 kHz
en mode continu.
Lorsque 00005 passe à ON, la fréquence du port 1
passe à 1,5 kHz.
Lorsque 00006 passe à ON, la fréquence du port 1
passe à 1 kHz.
Lorsque 00007 passe à ON, la sortie d’impulsions à partir du port 1 s’arrête si la fréquence est sélectionnée à
0 Hz.
Exemple 3: PLS2(––)
Le schéma suivant montre la fréquence des sorties d’impulsions à partir du port
1 pendant l’exécution du programme :
Fréquence
1,5 kHz
1,0 kHz
Temps
05000
à ON
00005
à ON
00006
à ON
00007
à ON
Attention : veillez à ce que la fréquence d’impulsion soit comprise dans la gamme de fré-
quences compatible avec la vitesse maximum du moteur.
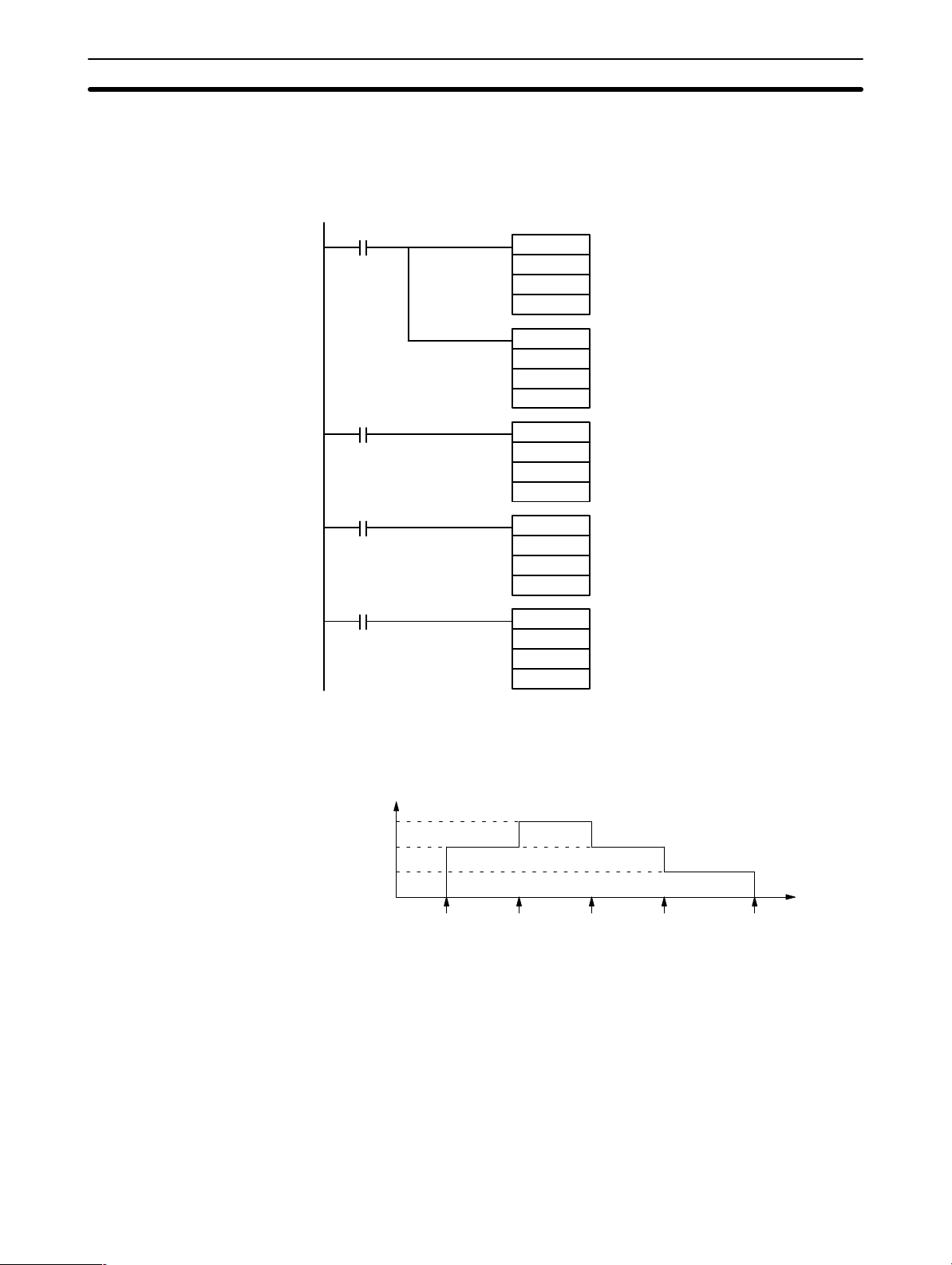
L’exemple suivant montre PLS2(––) utilisées pour sortir 100 000 impulsions en
sens horaire à partir du port 1. La fréquence s’accélère jusqu’à 10 kHz au rythme
de 500 Hz/4 ms environ et la décélération s’effectue à la même vitesse.
20
Page 24
Sélection et utilisation des fonctions de sortie d’impulsion
Cinq secondes après la sortie des impulsions en sens horaire (CW), une nou-
velle instruction PLS2(––) sort 100 000 impulsions en sens anti–horaire (CCW)
avec les mêmes sélections.
DM 0000 0050
DM 0001 1000
DM 0002 0000
DM 0003 0010
Chapitre 1–3
00000
05000
AR 0514
TIM 000
SET 05000
@PLS2(––)
001
000
DM 0000
TIM 000
#0050
@PLS2(––)
001
001
DM 0000
RSET 05000 05000 passe à OFF lorsque TIM 000 est écoulée.
05000 passe à ON en même temps que 00000.
Lorsque 05000 passe à ON, PLS2(––) démarre la sortie
d’impulsions en sens horaire (CW) à partir du port 1.
Accélération : 500 Hz/4 ms env.
Fréquence spécifiée : 10 kHz
Nombre d’impulsions : 100 000
Une tempo. de 5s démarre lorsque AR 0514 (drapeau de
sortie d’impulsion terminée) passe à ON.
Lorsque le temps de TIM 000 est écoulé, PLS2(––)
démarre la sortie d’impulsions en sens anti–horaire
(CCW) à partir du port 1.
Accélération : 500 Hz/4 ms
Fréquence spécifiée : 10 kHz
Nombre d’impulsions: 100 000
Le schéma suivant montre la fréquence des sorties d’impulsions à partir du port
1 pendant l’exécution du programme :
Fréquence
10 kHz
Sortie
d’impulsions CW
Sortie d’impulsions
CCW
500 Hz/4 ms env.
Exemple 4: ACC(––) mode 0
Temps
05000
à ON
AR 0514
à ON
5 s
après
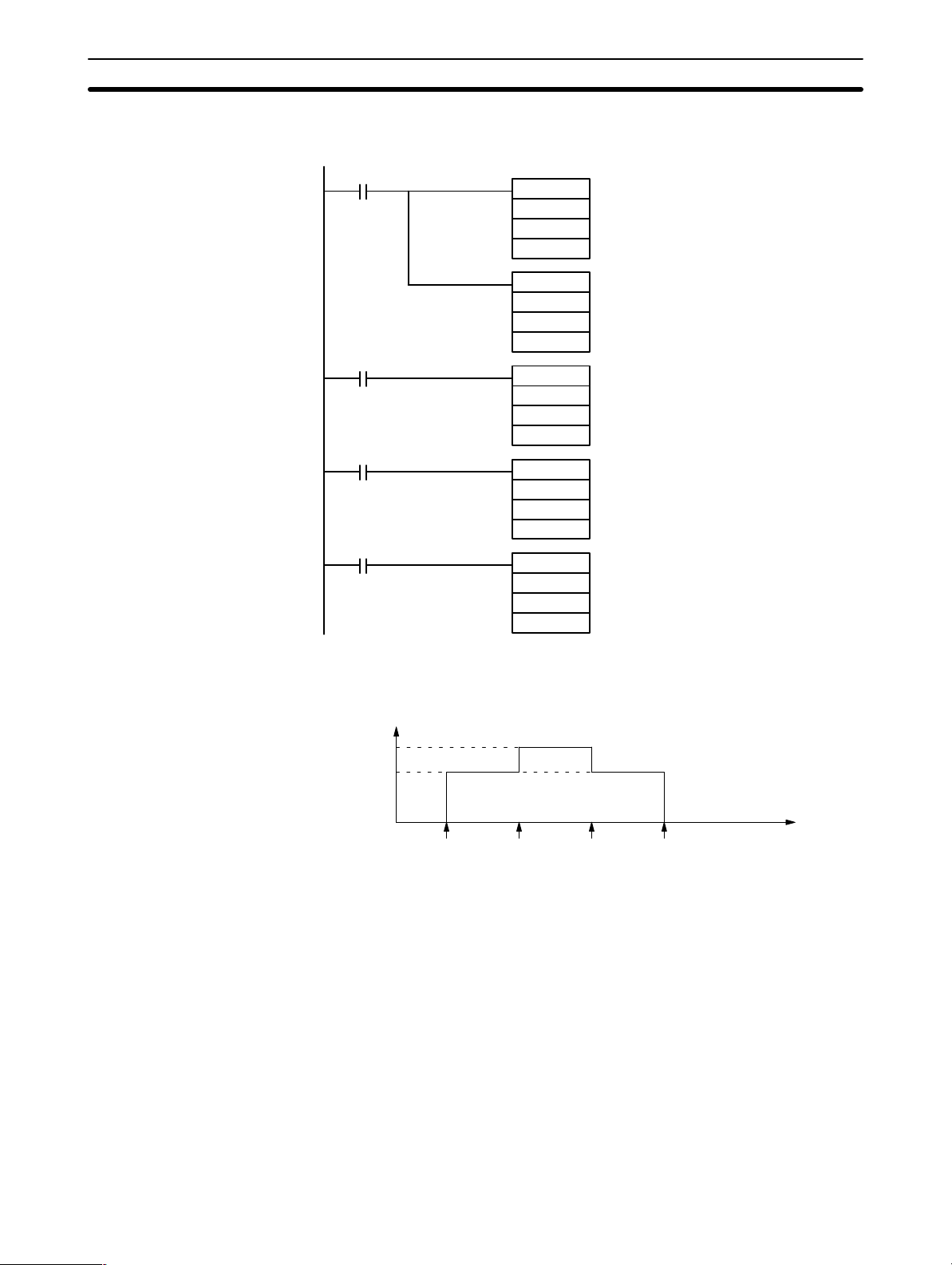
L’exemple suivant illustre le mode 0 de ACC(––), utilisé pour la sortie de 10 000
impulsions en sens horaire à partir du port 1. La fréquence s’accélère jusqu’à
21
Page 25
Sélection et utilisation des fonctions de sortie d’impulsion
10 kHz à 1 kHz/4 ms env. et décélère jusqu’à 1 kHz à 250 Hz/4 ms env. La décé-
lération commence après la sortie de 9 100 impulsions.
Chapitre 1–3
DM 0000 0000
DM 0001 0001
DM 0002 9100
DM 0003 0000
00000
DM 0004 0100
DM 0005 1000
DM 0006 0025
DM 0007 0050
@PULS(––)
001
002
DM 0000
@ACC(––)
001
000
DM 0004
Lorsque 00000 passe à ON, PULS(––) place le port 1 en
sortie d’impulsions en sens horaire. Le nombre total d’im-
pulsions est sélectionné à 10 000 et le point de décé-
lération est sélectionné à 9 100 impulsions.
Début de la sortie d’impulsions en sens horaire (CW) à
partir du port 1.
Accélération : 1000 Hz/4 ms env.
Fréquence après accélération : 10 kHz
Décélération : 250 Hz/4 ms env.
Fréquence après décélération: 1 kHz
Le schéma suivant montre la fréquence des sorties d’impulsions à partir du port
1 pendant l’exécution du programme :
Fréquence
10 kHz
1 kHz/4 ms env.
250 Hz/4 ms env.
Exemple 5: ACC(––) mode 1
1 kHz
00000
à ON
9 100
impulsions
10 000
impulsions
Temps
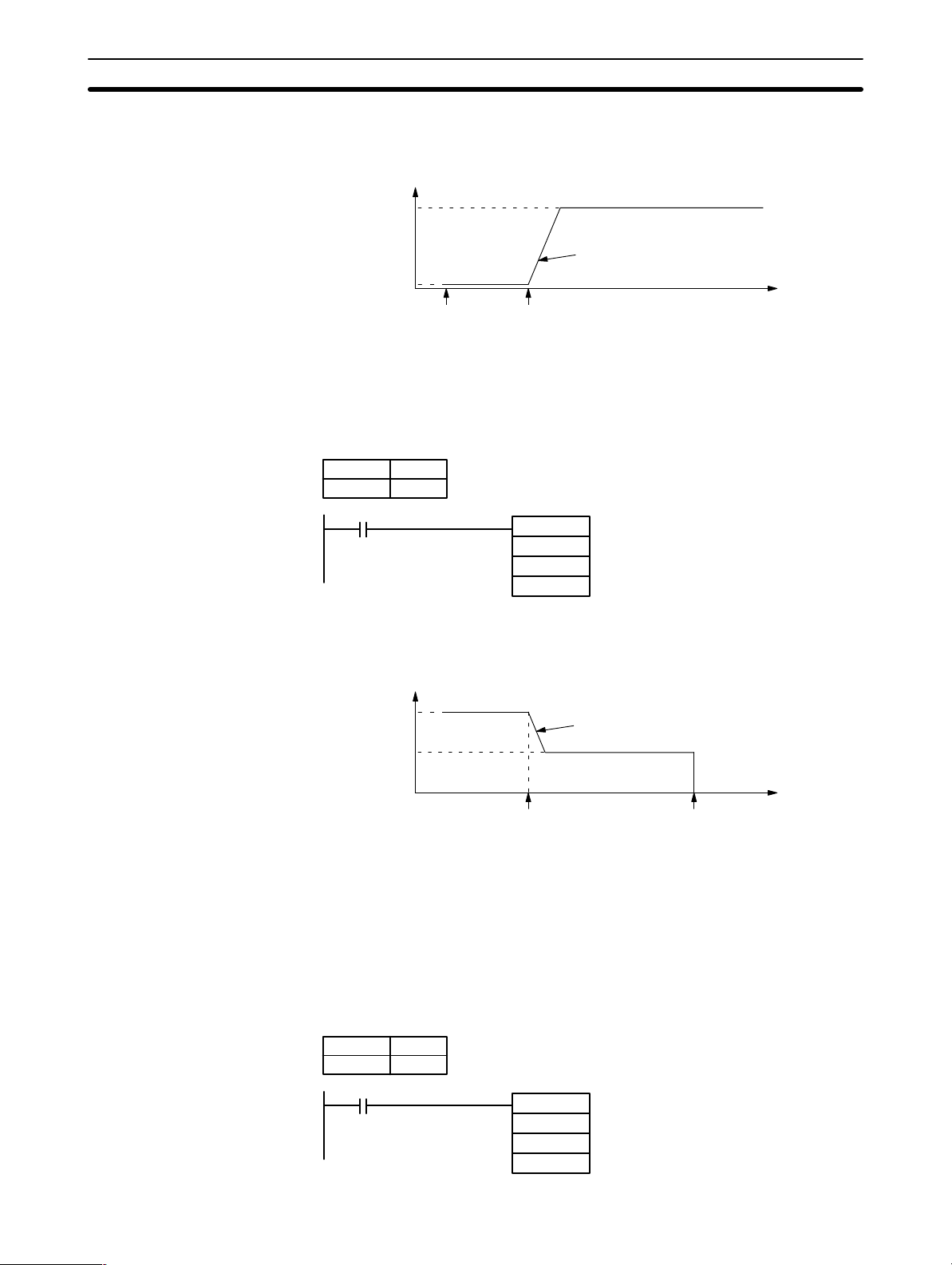
L’exemple suivant illustre le mode 1 de ACC(––), utilisé pour augmenter la fréquence d’une sortie d’impulsions à partir du port 1. La fréquence s’accélère à
partir de 1 kHz jusqu’à 20 kHz à 500 Hz/4 ms env.
DM 0000 0050
DM 0001 2000
00000
@PULS(––)
002
005
000
@SPED(––)
002
001
#0100
@ACC(––)
002
001
DM 0000
Lorsque 00000 passe à ON, PULS(––) sélectionne le
port 2 pour la sortie d’impulsions en sens anti–horaire
(CCW). Aucun nombre d’impulsions n’est sélectionné.
Début de la sortie d’impulsions de 1 kHz à partir du port
2 en mode continu.
Lorsque 00001 passe à ON, ACC(––) commence l’accé-
lération de la sortie d’impulsions du port 2 à 500 Hz/4 ms
env. jusqu’à atteindre la fréquence spécifiée de 20 kHz.
22
Page 26
Sélection et utilisation des fonctions de sortie d’impulsion
Le schéma suivant montre la fréquence des sorties d’impulsions à partir du port
2 pendant l’exécution du programme :
Fréquence
20 kHz
Chapitre 1–3
500 Hz/4 ms env.
Exemple 6: ACC(––) mode 2
1 kHz
00000 à ON
00001
à ON
Temps
L’exemple suivant illustre le mode 2 de ACC(––), utilisé pour diminuer la fréquence de la sortie d’impulsions à partir du port 1. La sortie d’impulsions de 2
kHz est déjà en cours en mode indépendant et s’arrête automatiquement lors-
que le nombre d’impulsions a été atteint.
DM 0000 0050
DM 0001 0001
00000
@ACC(––)
001
002
DM 0000
Lorsque 00000 passe à ON, ACC(––) commence la
décélération de la sortie d’impulsions à partir du port 1 à
500 Hz/4 ms env. jusqu’à la fréquence spécifiée de
10 Hz.
Le schéma suivant illustre la fréquence des sorties d’impulsions à partir du port 1
pendant l’exécution du programme :
Fréquence
2 kHz
500 Hz/4 ms env.
Attention : la so rtie d’impulsions peut être arrêtée par l’exécution de ACC(––) en mode
Exemple 7: ACC(––) mode 3
1 kHz
Temps
00000
passe à ON
Nombre spécifié
d’impulsions
2 avec une fréquence spécifiée de 0, mais la sortie d’impulsions ne peut être
vraiment arrêtée à un nombre précis d’impulsions ; cette méthode doit donc être
réservée aux cas d’urgence.
L’exemple suivant illustre le mode 3 de ACC(––), utilisé pour diminuer la fréquence d’une sortie d’impulsion à partir du port 1. La sortie d’impulsion de
20 kHz est déjà en cours en mode continu :
DM 0000 0100
DM 0001 0500
00000
@ACC(––)
001
003
DM 0000
Lorsque 00000 passe à ON, ACC(––) commence la
décélération de la sortie d’impulsions du port 1 à
1 kHz/4 ms env. jusqu’à la fréquence spécifiée de 5 kHz.
23
Page 27

Sélection et utilisation des fonctions de sortie d’impulsion
Le schéma suivant illustre la fréquence les sorties d’impulsions à partir du port 1
pendant l’exécution du programme :
Fréquence
20 kHz
1 kHz/4 ms
5 kHz
00000
à ON
1-3-4 Rapport cyclique des impulsions à partir des ports 1 et 2
Avec la CQM1-CPU43-E, les rapports cycliques peuvent être sortis à partir des
ports 1 et/ou 2 à l’aide de PWM(––). La fréquence d’impulsion peut être sélectionnée à 91,6 Hz, 1,5 kHz ou 5,9 kHz. Cette fonction peut être utilisée pour différentes sorties de contrôle comme les sorties d’intensité de lumière ou de
contrôle de vitesse pour un variateur de fréquence.
UC
Chapitre 1–3
Temps
Fréquence = 91,6 Hz,
1,5 kHz,
5,9 kHz
t
on
+1% à 99%
T
t
on
Port 1
Port 2
T
Attention : seule l’UC CQM1-CPU43-E peut produire des impulsions à partir des ports
1 et 2.
Configuration des paramètresAvant d ’utiliser le rapport cyclique à partir des ports 1 ou 2, placez l’API en mode
PROGRAM et e ffectuez les sélections suivantes dans la configuration de l’API :
Spécifiez le rapport cyclique d’impulsion dans les DM 6643 (port 1) et/ou DM
6644 (port 2).
Bit
DM 6643
15 0
1
Sél. du type d’impulsion du port 1
1: imp. à rapport cyclique
Défaut: imp. standard
Bit
DM 6644
15 0
1
Sél. du type d’impulsion du port 2
1: imp. à rapport cyclique
Défaut: imp. standard
Les impulsions standard ne peuvent être produites à partir d’un port s’il a été
sélectionné pour le rapport cyclique d’impulsion dans les DM 6643 ou DM 6644.
Début de sortie d’impulsions Les impulsions commencent à être sorties à partir du port spécifié lorsque
PWM(––) est exécuté. Spécifiez les ports 1 ou 2 (P=001 à 002). Sélectionnez la
24
Page 28
Sélection et utilisation des fonctions de sortie d’impulsion
Chapitre 1–3
fréquence à 5,9 kHz, 1,5 kHz ou 91,6 Hz (F=000, 001 ou 002). Sélectionnez le
rapport cyclique entre 1 et 99 % (D=0001 à 0099, BCD).
Condition d’exécution
@PWM(––)
P
F
D
La sortie d’impulsion continue à la fréquence spécifiée et au rapport cyclique
spécifié jusqu’à ce que PWM(––) soit ré–exécutée avec des sélections différentes ou que INI(––) soit exécutée pour arrêter la sortie d’impulsions à partir du
port spécifié.
Arrêt de sortie d’impulsions La sortie d’impulsions à partir d’un port peut être arrêtée en exécutant INI(––)
avec C=003. Spécifiez le port 1 ou 2 (P=001 à 002).
Condition d’exécution
@INI(––)
P
003
000
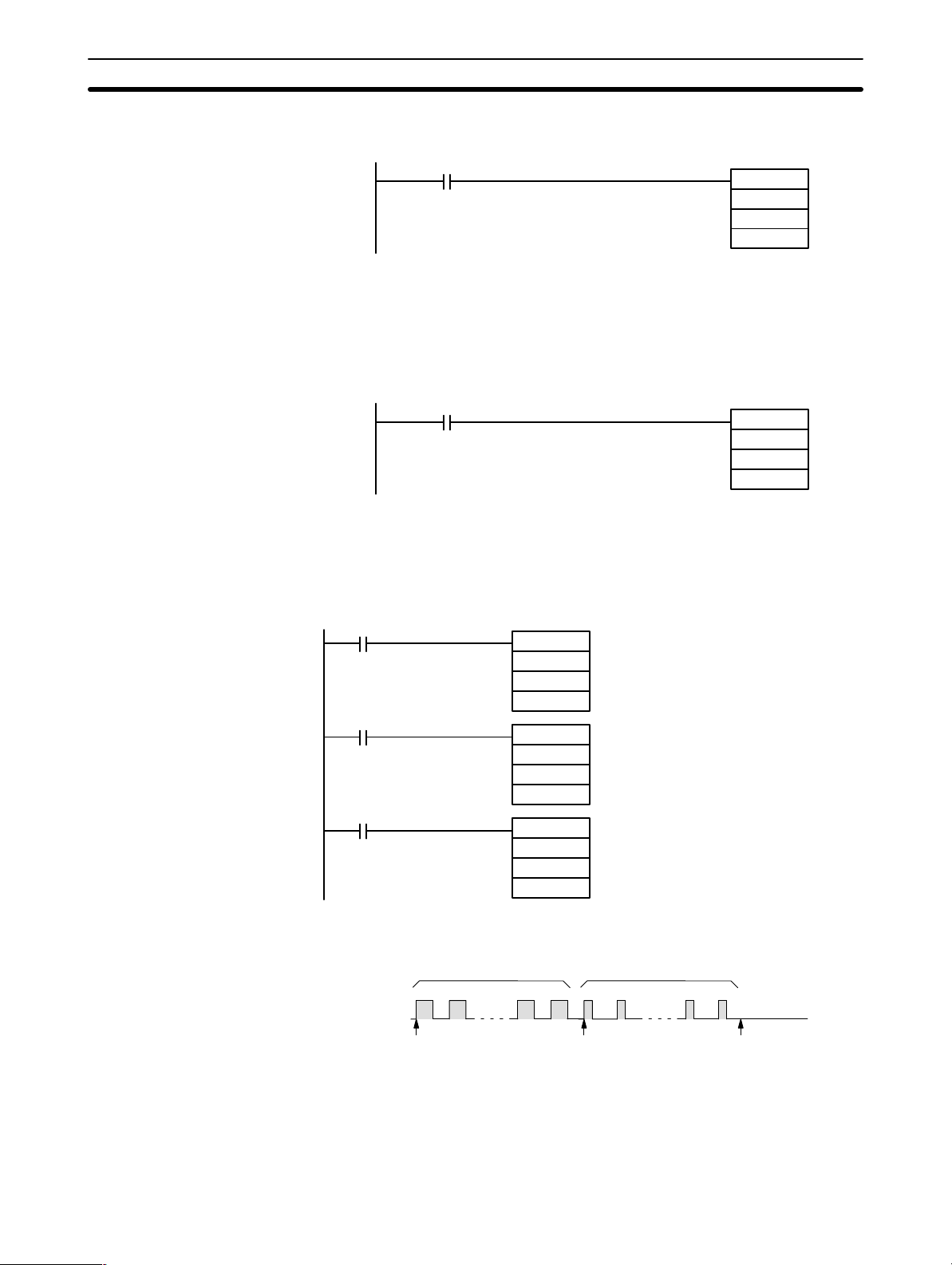
Exemple: avec PWM(––)
L’exemple suivant montre l’utilisation de PWM(––) pour le début d’une sortie
d’impulsion à 1,5 kHz à parti du port 1 et pour la modification du rapport cyclique
de 50 à 25 %. La sortie d’impulsion est alors arrêtée avec INI(––).
Avant l’exécution du programme, vérifiez que le DM 6643 soit à 1000 (rapport
cyclique d’impulsion du port 1).
00000
00001
00002
@PWM(––)
001
001
#0050
@PWM(––)
001
001
#0025
@INI(––)
001
003
000
Lorsque 00000 passe à ON, un signal de 1,5 kHz est
émis à partir du port 1 avec un rapport cyclique de 50%.
Lorsque 00001 passe à ON, le rapport cyclique passe à
25 %.
Lorsque 00002 passe à ON, INI––) interrompt la sortie
d’impulsions à partir du port 1.
Le schéma suivant illustre le rapport cyclique de la sortie d’impulsion du port 1
pendant l’exécution du programme.
Taux de service : 50% Taux de service : 25%
1-3-5 Etat des ports 1 et 2
L’état des sorties d’impulsion (impulsions standard ou à rapport cyclique) des
ports 1 et 2 peut être déterminé par la lecture de l’état des drapeaux correspon-
dants dans les zones SR et AR ou par l’exécution de PRV(––).
00000
à ON
00001
à ON
00002
à ON
25
Page 29
Sélection et utilisation des fonctions de sortie d’impulsion
Chapitre 1–3
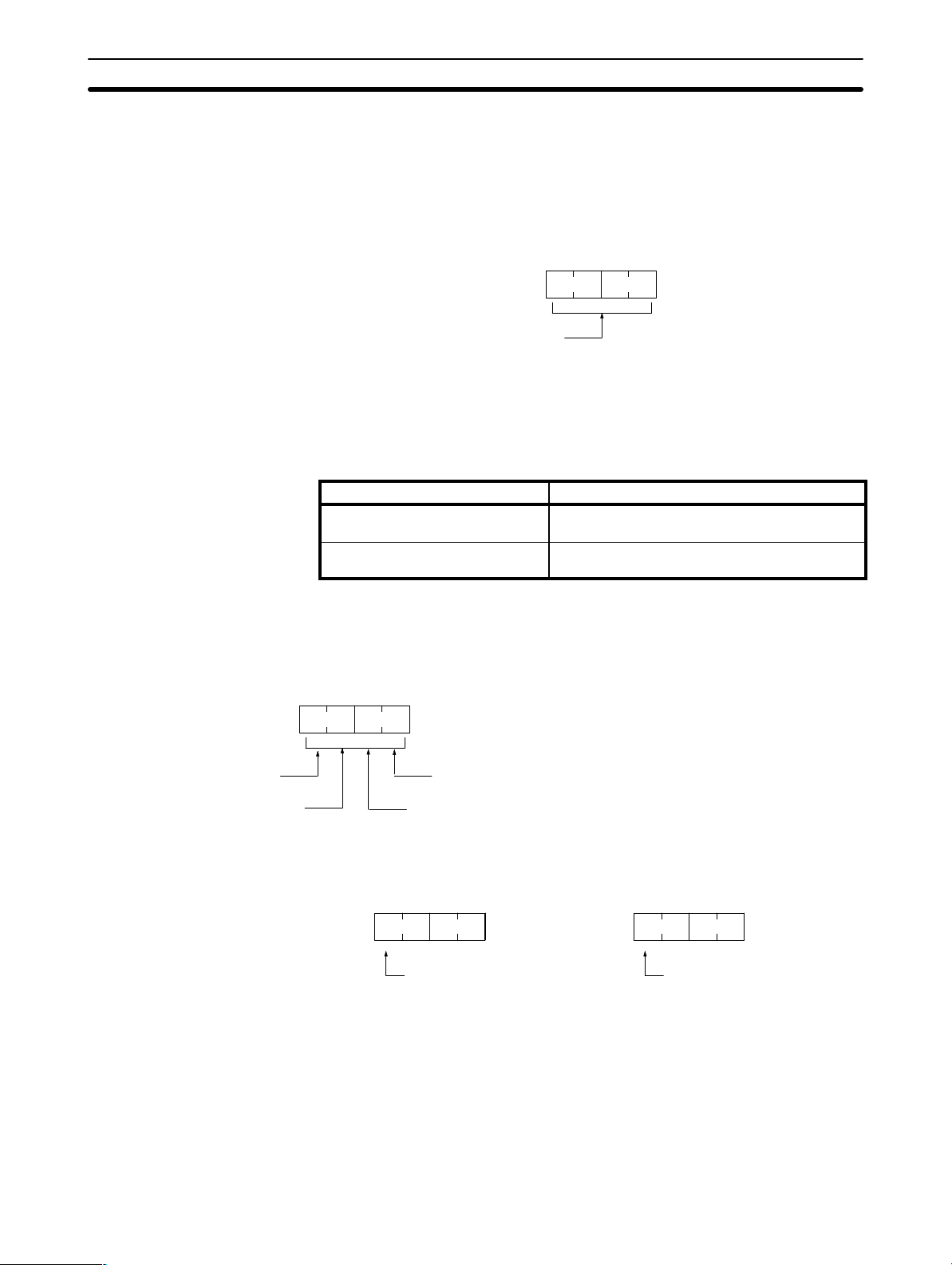
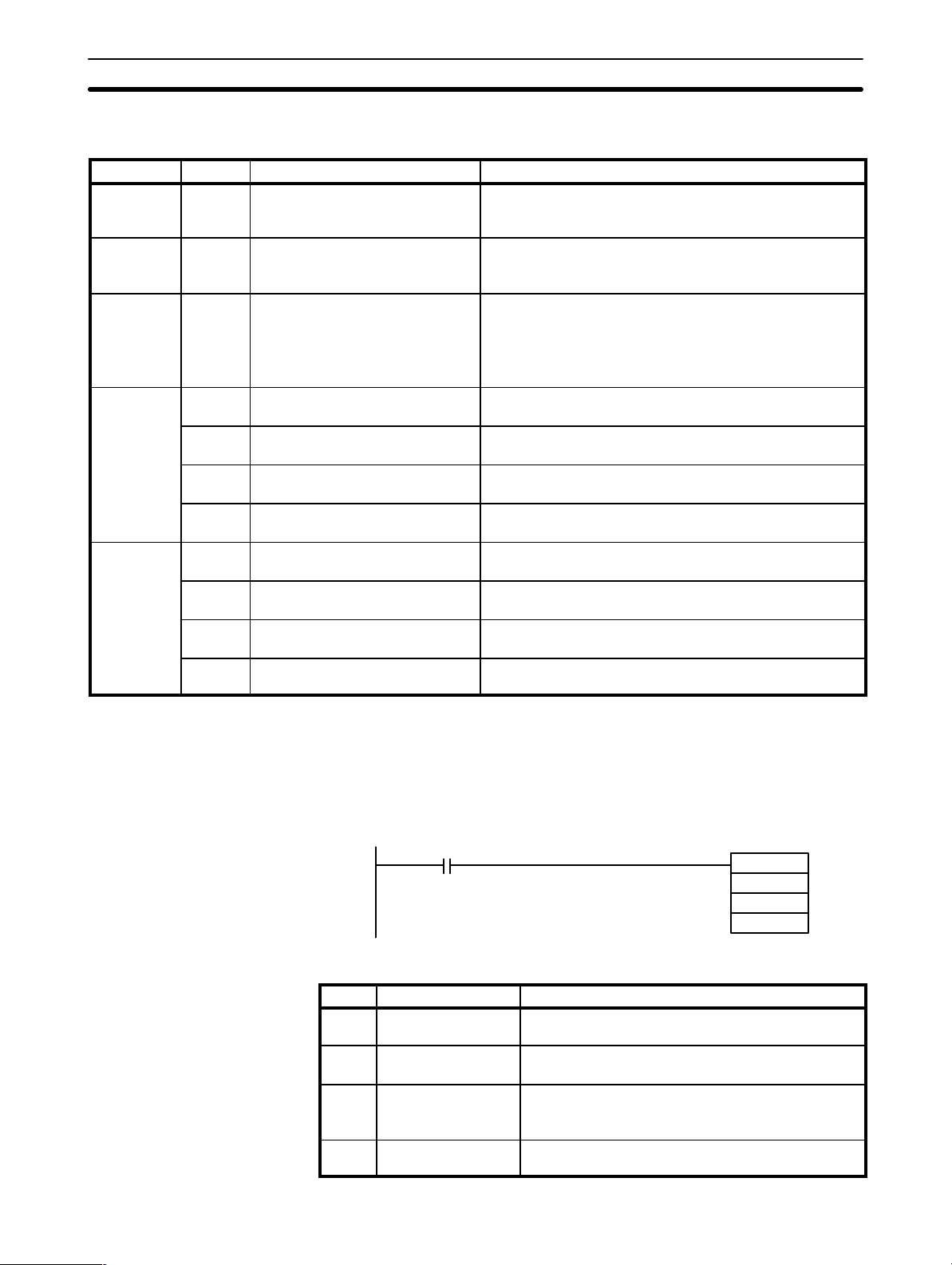
Lecture de l’état du drapeau L’état des sorties d’impulsions peut être déterminé par la lecture du contenu des
canaux et drapeaux de la table suivante :
Canaux Bit(s) Fonction Description
SR 236 et
SR 237
SR 238 et
SR 239
AR 04 08 à 15 Etat de la sortie d’impulsions Indique l’état de la sortie d’impulsions
AR 05 12 Drapeau de décélération du port 1 Indique la décélération.
AR 06 12 Drapeau de décélération du port 2 Indique la décélération
00 à 15 Port 1 : PV (valeur en cours) Indique la valeur en cours à 8 chiffres du nombre d’impul-
sions sorties du port 1 ; les quatre chiffres les plus importants sont dans SR 237.
00 à 15 Port 2 : PV (valeur en cours) Indique la valeur en cours à 8 chiffres du nombre d’impul-
sions sorties du port 2 ; les quatre chiffres les plus importants sont dans SR 239.
00: normal
01 ou 02: erreur système
03: erreur de configuration API
04: arrêt pendant la sortie d’impulsions
(0: non spécifiée ; 1: spécifiée)
13 Drapeau de nombre d’impulsions
du port 1
14 Drapeau de sortie d’impulsions
terminée du port 1
15 Drapeau d’état de la sortie d’im-
pulsions du port 1
13 Drapeau de nombre d’impulsions
du port 2
14 Drapeau de sortie d’impulsions
terminée du port 2
15 Drapeau d’état de la sortie d’im-
pulsions du port 2
Indique la sélection du nombre d’impulsions
(0: non spécifié ; 1: spécifié)
Indique l’état de la sortie d’impulsions
(0: non terminée ; 1: terminée)
Indique la sortie d’impulsions
(0: pas de sortie ; 1: sortie en cours)
(0: non spécifiée ; 1: spécifiée)
Indique la sélection du nombre d’impulsions
(0: non spécifié ; 1: spécifié)
Indique l’état de la sortie d’impulsions
(0: non terminée ; 1: terminée)
Indique la sortie d’impulsions
(0: pas de sortie ; 1: sortie en cours)
Exécution de PRV(––) L’état des sorties d’impulsions peut être déterminé par l’exécution de PRV(––).
Spécifiez le port 1 ou 2 (P=001 à 002) et le canal de destination D. L’information
concernant l’état du port est inscrite dans les bits 04 à 07 de D et les bits 00 à 03
et 08 à 15 sont placés à 0.
Lorsque l’on utilise PRV(––) pour lire l’état du port, c’est l’information la plus
récente qui est lue et le temps de scrutation de l’API n’entre donc pas en compte.
Condition d’exécution
@PRV(––)
P
001
D
Les bits 04 à 07 de D contiennent l’information concernant l’état du port.
Bit Fonction Description
04 Drapeau de décé-
lération
05 Drapeau du nombre
d’impulsions
06 Drapeau de sortie
d’impulsions terminée
07 Drapeau d’état de la
sortie d’impulsions
Indique la décélération
(0: pas de décélération ; 1: décélération)
Indique la spécification du nombre total d’impulsions
(0: non spécifiée ; 1: spécifiée)
Indique l’état de la sortie d’impulsions
(0: non terminée; 1: terminée)
Indique la sortie d’impulsions
(0: pas de sortie ; 1: sortie en cours)
26
Page 30

Sélection et utilisation des fonctions d’interruption
Chapitre 1–4
1-4 Sélection et utilisation des fonctions d’interruption
1-4-1 Types d’interruption
Il existe trois types de traitement d’interruption pour le CQM1 :
Interruption d’entrée :
L’interruption est exécutée lorsqu’une entrée provenant d’une source externe
place à ON l’un des bits UC 00000 à 00003.
Interruption par temporisation cyclique :
L’interruption est exécutée par une temporisation cyclique avec une précision
de 0,1 ms.
Interruption par compteur rapide :
L’interruption est exécutée selon la valeur en cours (PV) d’un compteur rapide
intégré. Toutes les UC du CQM1 sont équipées d’un compteur rapide numéro 0
qui compte les entrées d’impulsion dans l’une des entrées UC 00004 à 00006.
Les impulsions à deux phases juqu’à 2,5 kHz peuvent être comptées.
Les UC CQM1-CPU43/44-E peuvent également compter les entrées à partir
des ports 1 et 2.
CQM1-CPU43-E: les compteurs rapides 1 et 2 comptent les entrées d’im-
pulsions rapides sur les ports 1 et 2. Les impulsions à deux phases jusqu’à
25 kHz ou 50 kHz unidirectionnelles peuvent être comptées.
CQM1-CPU44-E: les compteurs rapides 1 et 2 comptent les entrées de
code des codeurs rotatifs absolus sur les ports 1 et 2 (1 kHz).
Processus d’interruption Lorsqu’une interruption est générée, le sous–programme d’interruption spécifié
est exécutée. Les interruptions sont traitées selon les priorités suivantes ( l’inter-
ruption d’entrée 0 est traitée en priorité et l’interruption de compteur rapide
numéro 0 est traitée en dernier) :
1, 2, 3... 1. Interruption d’entrée 0 >Interruption d’entrée 1 > Interruption d’entrée 2 >
Interruption d’entrée 3
2. Interruption de compteur rapide 1 > Interruption de compteur rapide 2
3. Interruption de tempo. cyclique 0 > Interruption de tempo. cyclique 1 > Interruption de tempo. cyclique 2 (l’interruption de tempo. cyclique 2 est égale à
l’interruption de compteur rapide numéro 0.
Lorsqu’une interruption supérieure en priorité est reçue au cours d’une processus d’interuption, le processus en cours est arrêté et la nouvelle interruption e s t
traitée en lieu et place. Après exécution de ce sous–programme, l’interruption
précédemment arrêtée est reprise.
Lorsqu’une interruption inférieure ou égale en priorité est reçue pendant un processus d’interruption, elle est traitée dès que le sous–programme en cours est
terminé.
Comme pour les sous–programmes ordinaires, les processus d’interruption
sont définis à l’aide de SBN(92) et de RET(93) à la fin du programme principal.
Lorsque des sous–programmes d’interruption sont exécutés, une gamme de
bits d’entrée spécifiée peut être rafraîchie.
Lorsqu’un sous–programme d’interruption est défini, un message “no SBS error” (”pas d’erreur SBS”) est généré pendant la vérification du programme mais
l’exécution continue normalement. Si cette erreur se produit, vérifiez tous les
sous–programmes normaux pour vous assurer que SBS(91) a bien été programmée auparavant.
Instructions de sortie
d’impulsions et
interruptions
Avec les UC CQM1-CPU43/44-E, les instructions suivantes ne peuvent être
exécutées dans un sous–programme d’interruption pendant l’exécution d’une
27
Page 31

Sélection et utilisation des fonctions d’interruption
Chapitre 1–4
instruction contrôlant les E/S d’impulsions ou les compteurs rapides dans le programme principal (25503 passe à ON) :
INI(––), PRV(––), CTBL(––), SPED(––), PULS(––), PWM(––), PLS2(––) et
ACC(––)
Voici plusieurs façons de contourner ces limites :
1 Toutes les interruptions peuvent être masquées pendant l’exécution de
l’instruction :
@INT(––)
100
000
000
@PLS2(––)
001
000
DM 0010
@INT(––)
200
000
000
2 Ré–exécutez l’instruction dans le programme principal.
Partie concernée dans le programme principal :
@PRV(––)
001
002
DM 0000
@CTBL(––)
001
000
DM 0000
RSET LR 0000
Partie concernée dans le sous–programme d’interruption :
SBN(92) 000
25313
@CTBL(––)
001
000
DM 0000
28
25313
LR
0000
Page 32

Sélection et utilisation des fonctions d’interruption
Chapitre 1–4
1-4-2 Interruption d’entrée
Les entrées de l’UC IR 00000 à IR 00003 peuvent être utilisées pour les interruptions provenant de sources extérieures. Les interruptions d’entrée 0 à 3 correspondent respectivement à ces bits et sont toujours utilisées pour appeler les
sous–programmes 000 à 003. Lorsque les interruptions d’entrée ne sont pas utilisées, les sous–programmes 000 à 003 peuvent être utilisés comme sous–programmes ordinaires.
Processus Il existe deux mode d’interruption d’entrée : le mode d’interruption d’entrée, pour
lequel l’interruption correspond à une entrée externe et le mode compteur pour
lequel des signaux provenant d’une source extérieure sont comptés à grande
vitesse, l’interruption étant effectuée à chaque fois qu’un certain nombre de sig-
naux est atteint.
En mode d’interruption d’entrée, des signaux d’une longueur de 100 s mini-
mum peuvent être détectés. En mode compteur, on peut compter les signaux
allant jusqu’à 1 kHz.
Paramètres de configuration Avant d’exécuter le programme, effectuez les sélections suivantes dans la con-
figuration de l’API en mode PROGRAM :
Sélections d’entrée d’interruption (DM 6628)
Sans ces sélections, les interruptions ne pourront être exécutées dans le programme :
Bit
15 0
DM6628
Sél. d’interruption d’entrée 3
Sél. d’interruption d’entrée 2
Sél. d’interruption d’entrée 2
Sél. d’interruption d’entrée 0
0: entrée normale
1: entrée interruptive
Défaut: toutes les entrées
sont normales.
Sélection du canal de rafraîchissement d’entrée (DM 6630 à DM 6633)
Effectuez ces sélections lorsqu’il est nécessaire de rafraîchir les entrées :
Bit
15 0
DM 6630: Interrupt. 0
DM 6631: Interrupt. 1
DM 6632: Interrupt. 2
DM 6633: Interrupt. 3
Nombre de canaux (2 chiffres BCD) 00 à 08
Canal de départ (2 chiffres BCD) 00 à 07
DM6630 à DM6633
Défaut: pas de rafraîchissement d’entrée
Exemple: si le DM 6630 est à 0100, IR 000 est rafraîchi à la réception d’un signal
pour l’interruption 0.
Rem. : si le rafraîchissement d’entrée n’est pas utilisé, l’état du signal d’entrée dans le
sous–programme d’interruption n’est plus fiable, ni même l’état du bit d’entrée
d’interruption qui a activé l’interruption. Par ex., IR 00000 ne serait pas à ON
dans le sous–programme d’interruption pour l’interruption d’entrée 0 si cette
29
Page 33

Sélection et utilisation des fonctions d’interruption
Chapitre 1–4
entrée n’était pas rafraîchie (dans ce cas, le drapeau constamment à ON pourrait être utilisé à la place de IR 00000).
Mode interruption d’entrée Utilisez les instructions suivantes pour programmer les interruptions d’entrée en
mode interruption d’entrée :
Interruptions masquées
Avec l’instruction INT(––), sélectionnez ou effacez les masques d’interruption
d’entrée selon vos besoins.
(@)INT
000
000
Effectuez les sélections avec les bits D 0 à 3 correspondant
aux interruptions d’entrée 0 à 3 :
0: masque effacé (interruption d’entrée permise)
1: masque sélectionné (interruption d’entrée non permise)
D
Au début, toutes les interrruptions d’entrée sont masquées.
Effacement des interruptions masquées
Si le bit correspondant à une interruption d’entrée passe à ON alors qu’il est
masqué, cette interruption est sauvegardée en mémoire et sera exécutée dès
que le masque sera effacé. Pour que cette interruption ne soit pas exécutée au
moment où le masque est effacé, l’interruption doit être effacée de la mémoire.
Un seul signal d’interruption est sauvegardé en mémoire pour chaque numéro
d’interruption.
Avec l’instruction INT(––), effacez l’interruption d’entrée de la mémoire.
(@)INT
001
000
Si les bits D 0 à 3 correspondant aux interruptions d’entrée 0
à 3 sont placés sur ”1”, alors les interruptions d’entrée sont effa-
cées de la mémoire.
D
0: interruptions d’entrée retenues
1: interruptions d’entrée effacées
Lecture de l’état du masque
Avec l’instruction INT, lisez l’état du masque d’interruption d’entrée.
(@)INT
002
000
L’état du chiffre d’extrême droite de la donnée stockée dans le
canal D (bits 0 à 3) révèle l’état du masque.
0: masque effacé (interruption permise)
1: masque sélectionné (interruption non permise)
D
Mode compteur Voici la programmation d’interruption d’entrée en mode compteur :
Rem. : les canaux SR utilisés en mode compteur (SR 244 à SR 251) contiennent tous
des données binaires (hexadécimales et non BCD).
1, 2, 3... 1. Ecrivez les valeurs sélectionnées pour le fonctionnement par compteur
dans les canaux SR correspondant aux interruptions 0 à 3. Ces valeurs
sélectionnées sont écrites entre 0000 et FFFF (0 à 65535). La valeur 0000
inhibe l’opération de comptage jusqu’à la sélection d’une nouvelle valeur et
l’étape 2 (ci–dessous) est répétée.
Rem. : ces bits SR sont effacés en début d’opération et doivent être ré–
écrits à partir du programme.
Le signal d’entrée max. pouvant être compté est de 1 kHz.
Interruption Canal
Entrée d’interruption 0 SR 244
Entrée d’interruption 1 SR 245
Entrée d’interruption 2 SR 246
Entrée d’interruption 3 SR 247
30
Page 34

Sélection et utilisation des fonctions d’interruption
Si l’on n’utilise pas le mode compteur, ces bits SR peuvent être utilisés
comme bits de travail.
2. Avec l’instruction INT(––), rafraîchissez les valeurs sélectionnées pour le
mode compteur et activez les interruptions.
Chapitre 1–4
(@)INT
Si les bits D 0 à 3 correspondant aux interruptions d’entrée
0 à 3 sont placés à “0,” les valeurs sélectionnées sont
003
rafraîchies et les entrées sont permises.
000
D
0: valeurs du mode compteur rafraîchies et masque
effacé
1: aucune action (placez les bits de toutes les interruptions qui n’ont pas été modifiées à ”1”.)
L’interruption d ’entrée pour laquelle la valeur sélectionnée est rafraîchie est acti-
vée en mode compteur. Lorsque le compteur atteint la valeur sélectionnée, une
interruption se produit, le compteur est remis à zéro, les interruptions et le comp-
tage continuent jusqu’à l’arrêt du compteur.
Attention : 1. S i l ’instruction INT(––) est utilisée pendant le comptage, la valeur en cours
(PV) revient à la valeur sélectionnée (SV). On doit donc absolument utiliser
la forme impulsionnelle de l’instruction pour obtenir une interruption.
2. La valeur sélectionnée est choisie pendant l’exécution de l’instruction
INT(––). Si les interruptions sont déjà en cours, la valeur sélectionnée ne
sera pas modifiée par le simple changement des contenus de SR 244 à SR
247 ; c’est–à–dire que si les contenus sont modifiés, la valeur sélectionnée
doit être rafraîchie par la ré–exécution de l’instruction INT(––).
Les interruptions peuvent être masquées par le même processus que celui du
mode d’interruption d’entrée, mais si les masques sont également effacés par
ce processus, le mode compteur n’est pas maintenu ; le mode interruption d’entrée est alors utilisé en lieu et place. Les signaux d’interruption reçus pour les
interruptions masquées peuvent également être effacés par le même processus que celui du mode d’interruption d’entrée.
Valeur sélectionnée (PV) en mode compteur
Lorsque les interruptions d’entrée sont utilisées en mode compteur, la valeur
sélectionnée du compteur est stockée dans le canal SR correspondant aux
interruptions d’entrée 0 à 3. Les valeurs sont comprises entre 0000 et FFFE (0 à
65 534) et sont égales à la valeur sélectionnée du compteur moins 1.
Interruption Canal
Interruption d’entrée 0 SR 248
Interruption d’entrée 1 SR 249
Interruption d’entrée 2 SR 250
Interruption d’entrée 3 SR 251
Exemple: la valeur en cours d’une interruption dont la valeur sélectionnée est
égale à 000A est enregistrée sous la forme de 0009 tout de suite après l’exécu-
tion de INT(––).
Attention : même si les interruptions d’entrée ne sont pas effectuées en mode comp-
teur, les canaux SR ne peuvent être utilisés comme bits de travail.
Exemple d’application Dans cet exemple, l’interruption d’entrée 0 est utilisée en mode interruption
d’entrée et l’interruption d’entrée 1 en mode compteur. Avant l’exécution du programme, vérifiez bien la configuration de l’API.
31
Page 35

Sélection et utilisation des fonctions d’interruption
Configuration de l’API : DM 6628: 0011 (IR 00000 et IR 00001 utilisés pour les
interruptions d’entrée). Les sélections par défaut sont utilisées pour tous les
autres paramètres de la configuration (les entrées ne sont pas rafraîchies au
moment de l’interruption).
25315 (ON pendant 1 tour de scrutation)
00100
MOV(21)
(@)INT
#000A
245
001
000
#0003
Sélection de 10 comme valeur présélectionnée du mode comp-
teur pour l’entrée d’interruption 1
Lorsque IR 00100 passe à ON :
les interruptions masquées des interruptions d’entrée 0 et 1
sont effacées.
Chapitre 1–4
00100
25313 (constamment à ON)
(@)INT
#000E
(@)INT
#000D
BCD (24)
D0000
INC(38)
D0000
(@)INT
#000F
SBN(92) 000
ADB(50)
245
#000A
245
INT
003
000
#000D
Les interruptions sont inhibées en mode interruption d’entrée
pour l’interruption 0.
000
000
Les interruptions sont inhibées en mode compteur pour
l’interruption 1 (SV: 10 ).
003
000
249
Le contenu de SR 249 (PV – 1) est converti en BCD et
stocké dans le DM 0000.
Le contenu de DM 0000 est incrémenté vers l’API.
000
Lorsque IR 00100 passe à OFF, les interruptions d’entrée 0
000
et 1 sont masquées et les interruptions sont interdites.
Lorsque l’interruption d’entrée est exécutée pour l’inter-
ruption 0, le sous–programme 000 est appelé et le mode
compteur est rafraîchi avec la SV de l’interruption d’en-
trée 1, après un ajout de 10 (SV = 20).
32
RET(93)
SBN(92) 001
RET(93)
Lorsque la valeur de comptage est atteinte pour le
compteur d’interruption d’entrée 1, l e sous–programme
001 est appelé et l’interruption est exécutée.
Page 36

Sélection et utilisation des fonctions d’interruption
Lorsque le programme est exécuté, le fonctionnement est le suivant :
00000
Chapitre 1–4
Sous–
programme
000
Sous–
programme
001
00001
00100
10 pas de
comptage
10 pas de
comptage
(cf Rem. 1) (cf Rem. 1)
20 pas de
comptage
(cf Rem. 2)
Remarque : 1. Le compteur continue de fonctionner pendant l’exécution du sous–pro-
gramme d’interruption.
2. L’interruption d’entrée reste masquée.
1-4-3 Comment masquer la totalité des interruptions
Toutes les interruptions, y compris celles d’entrée d’interruption, de temporisa-
tion cyclique et de compteur rapide peuvent être masquées et démasquées en
groupe, grâce à l’instruction INT(––). Sur les interruptions individuelles, le
masque s’ajoute aux autres masques. L’effacement de la totalité des interrup-
tions n’efface donc pas les masques individuels, mais restaure les conditions
masquées qui existaient avant l’exécution d’INT(––) pour masquer les interruptions en groupe.
N’utilisez pas INT(––) pour masquer les interruptions, sauf en cas de nécessité
de masquer temporairement toutes les interruptions. Pour cela, utilisez toujours
les instructions INT(––) en paire ; la première instruction INT(––) sert à masquer
les interruptions et la seconde à ôter le masque.
INT(––) ne peut être utilisée pour masquer toutes les interruptions et supprimer
le masque depuis l’intérieur des sous–programmes d’interruption.
Comment masquer Utilisez l’instruction INT pour désactiver toutes les interruptions :
(@)INT
Si une interruption est générée pendant que l’on masque les interruptions, le
processus d’interruption n’est pas exécuté mais l’interruption est enregistrée
pour l’entrée, la tempo. cyclique ou le compteur rapide. Les interruptions sont
ensuite mises en service dès que les masques sont supprimés.
Comment supprimer les masques
Utilisez l’instruction INT(––) de la façon suivante :
(@)INT
1-4-4 Interruptions par temporisation cyclique
Des interruptions par temporisation rapide et à haute précision
peuvent être effectuées par les temporisations cycliques. Le CQM1 est équipé
de trois temporisations cycliques, numérotées de 0 à 2.
100
000
000
200
000
000
33
Page 37

Sélection et utilisation des fonctions d’interruption
Chapitre 1–4
Rem. : 1. La temporisation cyclique 0 ne peut être utilisée lorsque des impulsions sont
sorties vers des cartes de sortie par l’instruction SPED(––).
2. La temporisation cyclique 2 ne peut être utilisée en même temps que le
compteur rapide.
Processus Il existe deux modes de fonctionnement de la temporisation cyclique : le mode à
une impulsion, dans lequel une seule interruption a été exécutée lorsque le
temps s’est écoulé et le mode d’interruption programmée, dans lequel l’interrup-
tion est répétée à intervalle fixe.
Configuration de l’API Lors de l’utilisation d’interruptions par tempo. cyclique, effectuez les sélections
suivantes pour la configuration de l’API en mode PROGRAM avant
l’exécution du programme.
Sélection des canaux de rafraîchissement d’entrée (DM 6636 à DM 6638)
Effectuez les sélections suivantes lorsqu’il est nécessaire de rafraîchir les
entrées :
Bit
15 0
DM 6636: tempo. 0
DM 6637: tempo. 1
DM 6638: tempo. 2
Nombre de canaux (2 chiffres BCD) 00 à 12
o
du canal de début (2 chiffres BCD) 00 à
N
11
DM6636 à DM6638
Défaut: pas de rafraîchissement d’entrée
Sélections du compteur rapide (DM 6642)
Lorsque vous utilisez la tempo. cyclique 2, vérifiez avant le début du fonctionnement que le compteur (configuration API : DM 6642) soit bien en sélection par
défaut (0000: compteur rapide non utilisé).
Fonctionnement Utilisez l’instruction suivante pour activer et contrôler la tempo. cyclique :
Démarrage en mode à une impulsion
Utilisez l’instruction STIM(––) pour démarrer la tempo. cyclique en mode à une
impulsion.
(@)STIM
C
: valeur de sélection du compteur décrémental (4 chiffres BCD): 0000 à 9999
2
+ 1 : intervalle de décrémentation (4 chiffres BCD; unité: 0,1 ms) :
C
2
C1: no de tempo. cyclique
C
1
C
2
C
3
C2: valeur de sélection de la tempo. (1ère adresse
de canal)
C3: no de sous–programme (4 chiffres BCD):
0000 à 0255
tempo. cyclique 0 : 000
tempo. cyclique 1 : 001
tempo. cyclique 2 : 002
0005 à 0320 (0,5 ms à 32 ms)
A chaque fois que le temps spécifié dans le canal C
est décrémenté de 1. Lorsque cette valeur est égale à 0, le sous–pro-
de C
2
+ 1 est écoulé, le contenu
2
gramme désigné est appelé une seule fois et la tempo. s’arrête.
Le temps séparant le départ de l’instruction STIM et l’exécution du sous–pro-
gramme est calculé comme suit :
(contenu du canal C
Si une constante a été sélectionnée pour C
) x (contenu du canal C2 + 1) x 0,1 ms = (0,5 à 319 968 ms)
2
, la valeur sélectionnée du compteur
2
décrémental prend alors cette valeur et l’intervalle de décrémentation est égal à
10 (1 ms). La valeur sélectionnée est exprimée en ms.
34
Page 38

Sélection et utilisation des fonctions d’interruption
Départ en mode d’interruption cyclique
Utilisez l’instruction STIM(––) pour lancer la temporisation cyclique en mode
d’interruption programmée.
Chapitre 1–4
(@)STIM
C1: no de tempo. cyclique + 3
C
1
C
2
C
3
C
C
à 0255
tempo. cyclique 0 : 003
tempo. cyclique 1 : 004
tempo. cyclique 2 : 005
: valeur de sélection de la tempo. (no du 1er canal)
2
: no de sous–programme (4 chiffres BCD) : 0000
3
C2: valeur de sélection du compteur décrémental (4 chiffres BCD): 0001 à 9999
+ 1 : cycle de décrémentation (4 chiffres BCD ; unité : 0,1 ms) :
C
2
0005 à 0320 (0,5 ms à 32 ms)
La signification des sélections est identique à celle du mode à une impulsion,
mais en mode programmé, la valeur en cours est replacée à la valeur sélection-
née ; la décrémentation recommence après l’appel du sous–programme. En
mode programmé, les interruptions continuent à être répétées à intervalle fixe
jusqu’à la fin.
Rem. : les UC CQM1-CPU11-E/CPU21-E sont équipées des sous–programmes 0000
à 0127 seulement.
Lecture du temps écoulé de la temporisation
Utilisez l’instruction STIM(––) pour lire le temps écoulé.
(@)STIM
C1: no de tempo. cyclique + 6
C
1
C
2
C
3
C
C
tempo. cyclique 0 : 006
tempo. cyclique 1 : 007
tempo. cyclique 2 : 008
: 1er canal du paramètre 1
2
: paramètre 2
3
C2: nombre de décrémentations appliquées au compteur décrémental
(4 chiffres BCD)
+ 1: intervalle de temps du compteur décrémental (4 chiffres BCD ;
C
2
unité: 0,1 ms)
: temps écoulé à partir de la décrémentaiton précédente (4 chiffres BCD ;
C
3
unité : 0,1 ms)
Le temps écoulé entre le lancement de la tempo. cyclique et l’exécution de cette
instruction se calcule comme suit :
{(contenu du canal C2) x (contenu du canal C2 + 1) + (contenu du canal C3)} x 0,1 ms
En cas d’arrêt de la tempo. cyclique spécifiée, la valeur “0000” est stockée.
Arrêt de temporisation
Utilisez l’instruction STIM(––) pour arrêter la tempo. cyclique spécifiée :
(@)STIM
C
1
C1: no de tempo. cyclique + 10
000
000
tempo. cyclique 0 : 010
tempo. cyclique 1 : 011
tempo. cyclique 2 : 012
35
Page 39

Sélection et utilisation des fonctions d’interruption
Chapitre 1–4
Exemple d’application Cette interruption est exécutée toutes les 2,4 ms (0,6 ms x 4) par la tempo. cycli-
que 1. La configuration API a été effectuée selon les sélections par défaut (les
entrées ne sont pas rafraîchies pendant l’interruption).
Drapeau de 1ère scrutation 25315
à ON pendant 1 scrutation
00100
00100
MOV(21)
#0004
DM 0010
MOV(21)
#0006
DM 0011
@STIM
004
DM 0010
#0023
@STIM
011
000
000
SBN(92) 023
RET(93)
Valeurs de sélection de la
tempo. cyclique :
Sélection de 4 pour le compteur décré-
mental
Sélection de 0,6 ms pour l’intervalle de décré-
mentation.
La tempo. cyclique 1 est lancée lorsque
IR 00100 passe à ON.
La tempo. cyclique 1 s’arrête lorsque
IR 00100 passe à OFF.
La valeur de comptage est atteinte toutes les
2,4 ms pour la tempo. cyclique 1 et le sous–pro-
gramme 023 est appelé.
Lorsque le programme est exécuté, le sous–programme 023 est exécuté toutes
les 2,4 ms, tandis que IR 00100 est à ON.
IR 00100
Sous–programme 023
2,4 ms 2,4 ms 2,4 ms
1-4-5 Interruptions du compteur rapide 0
Les signaux d’impulsion provenant d’un codeur d’impulsions et envoyés vers
les bits UC 00004 à 00006 peuvent être comptés à grande vitesse et l’interruption peut être exécutée en fonction du comptage.
Processus Types de signaux d’entrée et modes compteur
Deux types de signaux peuvent être produits à partir d’un codeur d’impulsions.
Le mode utilisé pour le compteur rapide 0 dépend du type de signal.
Mode incrémental/décrémental:
une différence de phase égale à 4 x le signal à deux
phases (phases A et B) et une phase Z sont utilisées pour
les entrées. Le comptage est incrémenté ou décrémenté
selon les différences des signaux à 2 phases.
Mode incrémental :
un signal d’impulsion à une phase et un signal de remise à
36
Page 40

Sélection et utilisation des fonctions d’interruption
zéro du comptage sont utilisés pour les entrées. le comptage est in c r émenté en fonction du signal à phase unique.
Mode incrémental/décrémental
Phase A
Phase B
Comptage
1234567876543210–1 –2
Incrémentation Décrémentation
Rem. : il faut obligatoirement utiliser une des méthodes suivantes pour remettre à zéro
le compteur lorsqu’on le relance. Il est automatiquement remis à zéro au départ
ou à l’arrêt de l’exécution du programme.
Les transitions de signaux suivantes sont traitées comme des impulsions d’incrémentation : front montant de phase A vers front montant de phase B vers
front descendant de phase A vers front descendant de phase B. Les transitions
de signaux suivantes sont traitées comme des impulsions de décrémentation :
front montant de phase B vers front montant de phase A vers front descendant
de phase B vers front montant de phase A.
La gamme de comptage s’étend de – 32 767 à 32 767 pour le mode incrémental/
décrémental et de 0 à 65 535 pour le mode incrémental. Les signaux d’impulsion
peuvent être comptés jusqu’à 2,5 kHz en mode incrémental/décrémental et jus-
qu’à 5 kHz en mode incrémental.
Le mode incrémental/décrémental utilise toujours une entrée égale à 4 x la dif-
férence de phase. Le nombre de comptages pour chaque tour de codeur est
égal à 4 fois la résolution du compteur. Sélectionnez le codeur en fonction des
gammes de comptage possibles.
Modes de remise à zéro
L’une des deux méthodes suivantes doit être utlisée pour la remise à zéro de la
valeur en cours du compteur (c’est–à–dire que la sélection sera égale à 0) :
Signal de phase Z + RAZ à partir du programme :
RAZ à partir du programme :
la valeur en cours est remise à zéro lorsque le bit de remise à
zéro du compteur rapide 0 (SR 25200) passe à ON.
Chapitre 1–4
Mode incrémental
Entrée
d’impulsion
1 2 3 4
Comptage
Incrémentation uniquement
la valeur en cours est remise à zéro lorsque
le signal de phase Z (entrée de RAZ) passe
à ON après passage à ON du bit de RAZ du
compteur rapide 0 (bit SR 25200).
Phase Z
(entrée de
RAZ)
SR25200
1 scrutation min.
RAZ par
interruption
Signal phase Z + RAZ programme
1 scrutation min.
En 1
scrutation
RAZ par
scrutation
Pas de
RAZ
SR25200
RAZ logiciel
1 scrutation min.
En 1
scrutation
RAZ par scrutation
37
Page 41

Sélection et utilisation des fonctions d’interruption
Rem. : le bit de RAZ du compteur rapide 0 (SR 25200) est rafraîchi une fois par scruta-
tion ; pour en faire une lecture fiable, il doit être à ON pendant au moins une
scrutation.
Le ”Z” de la phase Z est l’abréviation de ”zéro”. Ce signal montre que le codeur a
terminé une scrutation.
Comptage d’interruptions du compteur rapide
Pour les interruptions du compteur rapide 0, une table comparative est utilisée.
La vérification du comptage peut être effectuée par l’une des deux méthodes
suivantes. Dans la table, les conditions de comparaison (comparaison des valeurs en cours) et les combinaisons de sous–programmes d’interruption sont sauvegardées.
Valeur spécifiée : un maximum de 16 conditions de comparaison
Comparaison de gamme: Huit conditions de comparaison (limites haute et
Chapitre 1–4
(valeurs spécifiées et sens de comptage) et de
combinaisons de sous–programmes sont sauvegardés dans la table de comparaison. Lorsque la
valeur en cours du compteur et le sens de comptage correspondent aux conditions de comparaison, le sous–programme d’interruption spécifié est
exécuté.
basse) et combinaisons de sous–programmes
d’interruption sont sauvegardées dans la table.
Lorsque la valeur en cours est supérieure ou égale
à la limite basse et inférieure ou égale à la limite
haute, le sous–programme d’interruption spécifié
est alors exécuté.
Câblage En fonction du mode de comptage, les signaux d’entrée provenant du codeur et
envoyés vers le terminal d’entrée de la carte UC sont les suivants :
No du terminal Mode incrémental/
décrémental
4 Phase A du codeur Entrée de comptage des
impulsions
5 Phase B du codeur --6 Phase Z du codeur Entrée RAZ
Mode
incrémental
Si vous désirez utiliser uniquement la remise à zéro programme, l’entrée 6 peut
être utilisée comme une entrée ordinaire. En mode incrémental, l’entrée 5 peut
être utilisée comme une entrée ordinaire.
Configuration API Lorsque vous utilisez les interruptions par compteur rapide 0, effectuez les
sélections suivantes en mode PROGRAM avant l’exécution du programme.
Sélection du canal de rafraîchissement d’entrée (DM 6638)
Effectuez les sélections suivantes pour rafraîchir les entrées. La sélection est
identique à celle de la tempo. cyclique 2.
Bit
15 0
DM6638
Nombre de canaux (2 chiffres BCD)
00 à 12
No du canal de début (2 chiffres BCD)
00 à 11
38
Défaut:pas de rafraîchissement d’entrée
Page 42

Sélection et utilisation des fonctions d’interruption
Sélections du compteur rapide 0 (DM 6642)
Si ces sélections ne sont pas effectuées, le compteur rapide 0 ne pourra être
utilisé dans le programme :
DM6642
Compteur rapide 0 utilisé.
Méthode RAZ
0: RAZ phase Z et programme
1: RAZ programme
Mode de comptage
0: incrément./décrément.
4: incrémental
Défaut: compteur rapide 0 non utilisé
Les changements de sélection du DM6642 ne sont effectifs que lors de la mise
sous tension ou au départ de l’exécution du programme.
Programmation Programmation du compteur rapide 0 :
Le compteur rapide 0 commence à fonctionner lorsque les sélections de la configuration API ont été correctement effectuées mais les comparaisons avec la
table de comparaison ne sont pas faites et les interruptions ne sont pas géné-
rées si l’instruction CTBL(––) n’est pas exécutée.
Le compteur rapide 0 est remis à 0 à la mise sous tension, au début du fonctionnement de l’appareil et à la fin de son fonctionnement.
La valeur en cours du compteur rapide 0 est maintenue dans SR 230 et SR 231.
Contrôle des interruptions du compteur rapide 0
Bit
15 0
01
Chapitre 1–4
1, 2, 3... 1. Utilisez l’instruction CTBL(––) pour sauvegarder la table de comparaison
dans le CQM1 et pour commencer les opérations de comparaison.
(@)CTBL
C: (3 chiffres BCD)
P
000: table sélectionnée et comparaison lancée
C
001: table de gammes sél. et comparaison lancée
TB
002: table sélectionnée
003: table de gammes sélectionnée
TB: canal de début de la table de comparaison
Si C est à 000, les comparaisons sont alors effectuées par la méthode de
comparaison des valeurs spécifiées ; si C est à 001, elles sont ef fectuées par la
méthode de co m paraison des gammes. La table est sauvegardée et à la fin de la
sauvegarde, les comparaisons commencent. Pendant l’exécution des
comparaisons, les interruptions rapides sont effectuées selon la table. Pour
tous détails sur le contenu des tables sauvegardées, reportez–vous aux
explications concernant CTBL(––) dans le chapitre 5.
Rem. : le résultat des comparaisons est normalement stocké dans AR 1100 à AR 1107
pendant la comparaison par gamme.
Si C est à 002, les comparaisons sont effectuées par la méthode de comparai-
son des valeurs spécifiées ; si C est à 003, elles sont effectuées par la méthode
de comparaison des gammes. Pour ces deux sélections, la table est sauvegardée mais la comparaison ne commence qu’avec l’exécution de l’instruction
INI(––).
39
Page 43

Sélection et utilisation des fonctions d’interruption
2. Pour arrêter les comparaisons, exécutez l’instruction INI(––) comme suit :
Pour reprendre les comparaisons, placez la seconde opérande à ”000” (exécu-
tion de la comparaison) et exécutez l’instruction INI(––).
Une table sauvegardée est retenue dans l’API pendant son fonctionnement
(pendant l’exécution du programme) jusqu’à la prochaine sauvegarde de table.
Lecture de la valeur en cours
Il y a deux façons de lire la valeur en cours. La première est la lecture de SR 230
et SR 231 et la seconde est l’instruction PRV(––).
Lecture de SR 230 et SR 231
La valeur en cours du compteur rapide 0 est stockée dans SR 230 et SR 231
comme suit. Le bit d’extrême gauche est égal à F pour les valeurs négatives.
Chapitre 1–4
(@)INI
000
001
000
4 chiffres d’extrême
gauche
SR 231 SR 230 F0032767 à 00032767
4 chiffres d’extrême
droite
Mode incrémental/
décrémental
(– 32767)
Rem. : ces canaux sont rafraîchis une fois par scrutation ; il se peut donc qu’il existe une
différence entre ces valeurs et la valeur en cours.
Lorsque le compteur rapide 0 n’est pas utilisé, les bits de ce canal peuvent être
utlisés comme bits de travail.
Utilisation de l’instruction PRV(––)
Lisez la valeur en cours du compteur rapide 0 à l’aide de l’instruction PRV(––).
(@)PRV
000
000
P1: canal de début de la valeur en cours
P1
La valeur sélectionnée du compteur rapide 0 est stockée de la façon suivante.
Le bit d’extrême gauche est égal à F pour les valeurs négatives.
4 chiffres d’extême
gauche
P1+1 P1 F0032767 à 00032767
4 chiffres d’extrême
droite
Mode incrémental/
décrémental
(–32767)
Mode incrémental
00000000 à 00065535
Mode incrémental
00000000 à 00065535
40
La valeur sélectionnée est lue lorsque l’instruction PRV(––) est en cours d’ex-
écution.
Changement de la valeur sélectionnée
Il y a deux façons de modifier la valeur sélectionnée du compteur rapide 0. La
première méthode consiste à remettre la valeur à zéro par les dif férents modes
de RAZ ; la deuxième utilise l’instruction INI(––).
Voici l a méthode utilisant l’instruction INI. Pour la méthode RAZ, reportez–vous
au début de la description du compteur rapide 0.
Page 44

Sélection et utilisation des fonctions d’interruption
Modifiez la valeur sélectionnée par l’instruction INI(––) comme suit :
Chapitre 1–4
(@)INI
4 chiffres d’extrême
gauche
D+1 D F0032767 à 00032767 00000000 à 00065535
4 chiffres d’extrême
droite
Mode incrémental/
décrémental
D: canal de début de stockage pour les
modifications de valeur sélectionnée
000
002
D
Mode incrémental
Pour spécifier un nombre négatif, sélectionnez F comme chiffre d’extrême
gauche.
Exemple de fonctionnement Voici un exemple de programme d’utilisation du compteur rapide 0 en mode
incrémental, en e f fectuant des comparaisons par la méthode de rapprochement
des valeurs spécifiées et en changeant la fréquence des sorties d’impulsion
selon la valeur sélectionnée du compteur. Avant d’exécuter le programme,
effectuez les sélections suivantes dans la configuration de l’API :
DM 6642: 0114 (compteur rapide 0 utilisé avec la RAZ programme et le mode
incrémental). Pour toutes les autres sélections en configuration API, utilisez les
sélections par défaut (les entrées ne sont pas rafraîchies au moment de l’interruption et les sorties d’impulsion sont exécutées IR 100).
Les données suivantes sont stockées :
DM 0000 0002 Nombe de conditions de comparaison : 2
DM 0001 1000 Valeur spécifiée 1 : 1000
DM 0002 0000
o
DM 0003 0101 N
de sous–programme de l’interruption
de comparaison 1 : 101
DM 0004 2000 Valeur spécifiée 1 : 2000
DM 0005 0000
41
Page 45

Sélection et utilisation des fonctions d’interruption
DM 0006 0102 No de sous–programme de l’interruption de comparaison 2: 102
Chapitre 1–4
25315 (ON pendant 1 scrutation)
25313 (constamment à ON)
25313 (constamment à ON)
CTBL
000
000
DM 0000
SPED
020
001
#0050
SBN(92) 101
SPED
020
001
#0020
RET(93)
SBN(92) 102
SPED
020
001
#0000
RET(93)
Sauvegarde la table de comparaison en format de correspondance des valeurs spécifiées et commence la
comparaison.
Commence la sortie d’impulsions continues vers
IR10002 à 500 Hz.
Lorsque la valeur du compteur rapide atteint 1000, le sous–pro-
gramme 101 est appelé et la fréquence de sortie d’impulsions
passe à 200 Hz.
Lorsque la valeur du compteur rapide atteint 2000, le sous–pro-
gramme 102 est appelé et la sortie d’impulsion s’arrête par sélec-
tion de la fréquence à 0.
Fonctionnement pendant l’exécution du programme :
Fréquence d’impulsion (Hz)
500
200
02 7
Temps écoulé (s)
1-4-6 Gamme de comptage non respectée pour le compteur rapide 0
Si la gamme de comptage admissible du compteur rapide 0 n’est pas respectée,
un état de ”gamme de comptage non respectée” est produit et la valeur sélectionnée du compteur reste à 0FFF FFFF pour les dépassements et à FFFF
FFFF pour les valeurs insuffisantes, et ce jusqu’à ce que l’état de gamme non
respectée soit effacé par remise à zéro du compteur.
Voici les gammes admissibles :
Mode incrémental/décrémental :F003 2767 à 0003 2767
Mode incrémental : 0000 0000 à 0006 5535
Rem. : 1. Les valeurs ci–dessus sont théoriques et supposent un temps de scrutation
raisonnablement court. Les valeurs sont en fait celles du cycle précédent le
non–respect de la gamme.
e
2. Les 6
et 7e chiffres de la valeur sélectionnée du compteur rapide 0 sont nor-
malement égales à 00, mais elles peuvent être utilisées comme drapeaux
42
Page 46

Sélection et utilisation des fonctions d’interruption
de ”non–respect de la gamme” par détection des valeurs inférieures aux
gammes de comptage admissibles.
Le compteur rapide 0 peut être remis à zéro comme indiqué au chapitre
précédent ou de façon automatique par re–démarrage de l’exécution du programme. Le compteur rapide 0 ne peut fonctionner normalement avant effacement de l ’état de non respect de la gamme. Pendant le maintien de l’état de non–
respect de la gamme, le fonctionnement est le suivant :
• La table de comparaison ne fonctionne plus.
• La table de comparaison n’est pas effacée.
• Les sous–programmes d’interruption du compteur rapide ne sont pas exécu-
tés.
• L’instruction CTBL(––) peut être utilisée pour enregistrer la table de comparai-
son seulement. Si l’on essaie de faire débuter le fonctionnement de la table de
comparaison, celui–ci n’est pas exécuté et la table n’est pas enregistrée.
• L’instruction INI(––) ne peut être utilisée pour faire débuter ou arrêter le fonc-
tionnement de la table de comparaison ni pour modifier la valeur en cours.
• La lecture des valeurs en cours par l’instruction PRV(––) ne donne que
0FFF FFFF ou FFFF FFFF comme résultat.
Sortie de l’état de non–respect
Utilisez la procédure suivante pour sortir de l’état de non–respect de la gamme :
Si les tables de comparaison sont enregistrées :
Chapitre 1–4
1, 2, 3... 1. Remise à zéro du compteur
2. Choix de la valeur sélectionnée par PRV(––) si nécessaire
3. Sélection de la table de comparaison par CTBL(––) si nécessaire
4. Début du fonctionnement du table de comparaison par INI(––)
Si les tables de comparaison ne sont pas enregistrées :
1, 2, 3... 1. Remise à zéro du compteur
2. Choix de la valeur sélectionnée par PRV(––) si nécessaire
3. Sélection de la table de comparaison et début du fonctionnement par
CTBL(––) et INI(––)
Rem. : les résultats de la comparaison de gammes de AR 11 sont maintenus même
après sortie de l’état de non–respect de la gamme. Le sous–programme d’interruption d’une condition d’interruption rencontré immédiatement après la sortie
de cet état de non–respect ne sera pas exécuté si la condition a déjà été rencontrée avant le passage à cet état. Si l’exécution d’un sous–programme d’interruption est nécessaire, effacez AR 11 avant de continuer.
Remise à zéro Lorsque le compteur rapide 0 est remis à zéro, la PV est remise à zéro. Le comp-
tage commence à partir de zéro. La table de comparaison, l’état d’exécution et
les résultats de l’exécution sont maintenus.
Etat de lancement du compteur
Lors du lance m e n t d u c ompteur rapide 0, le mode compteur de la configuration
API est lu, puis utilisé ; la valeur sélectionnée est remise à 0 ; l’état de non–re-
spect de la gamme de comptage est effacé, l’enregistrement et l’état d’exécu-
tion de la ta b l e d e comparaison sont ef facés et les résultats de l’exécution de la
gamme sont également effacés (ces résultats sont toujours effacés au début du
fonctionnement ou lorsque la table de comparaison est enregistrée).
Etat d’arrêt du compteur Lorsque le compteur rapide 0 s’arrête, la valeur sélectionnée est maintenue,
l’enregistrement et l’état d’exécution de la table de comparaison sont effacés et
les résultats d’exécution de la gamme sont maintenus.
43
Page 47

Sélection et utilisation des fonctions d’interruption
Chapitre 1–4
1-4-7 Interruption des compteurs rapides 1 et 2 (CQM1-CPU43-E)
Les signaux d’impulsion provenant d’un codeur incrémental et envoyés vers le
ports 1 et 2 du CQM1-CPU43-E peuvent être comptés à grande vitesse et les
interruptions peuvent être exécutées en fonction du comptage.
Les 2 ports peuvent fonctionner séparément. Le compteur du port 1 est appellé
compteur rapide 1 et le compteur du port 2 compteur rapide 2. Ce chapitre décrit
l’utilisation des compteurs rapides 1 et 2. Reportez–vous au manuel d’utilisation
du CQM1 pour de plus amples détails sur le matériel et le câblage.
Rem. : 1. Les compteurs rapides 1 et 2 peuvent être utilisés avec l’UC CQM1-CPU43-E
uniquement.
2. Certaines instructions ne peuvent être utilisées lorsque la configuration API
(DM 6611) est en mode compteur rapide.
Sélection du DM 6611 Instructions affectées
Mode compteur rapide
(0000)
Mode de sortie par impulsion (0001)
Processus Signaux d’entrée et modes de comptage
Trois types de signaux peuvent être envoyés vers les ports 1 et 2. Les modes de
comptage utilisés pour les compteurs rapides 1 et 2 sont sélectionnés dans les
DM 6643 et DM 6644 respectivement.
1, 2, 3... 1. Mode de phase différentielle (vitesse de comptage = 25 kHz):
Une différence de phase de 4 x le signal à deux phases (phase A et phase B)
et un signal de phase Z sont utilisés pour les entrées. Le comptage est incré-
menté ou décrémenté selon les différences des signaux à 2 phases. Ce
mode est identique à au mode incrémental/décrémental du compteur
rapide 0.
2. Mode impulsion/sens (vitesse de comptage = 50 kHz) :
La phase A représente le signal de sens et la phase B l’impulsion de comp-
tage. Le compteur incrémente lorsque le signal de phase A est à OFF et
incrémente lorsqu’il est à ON.
3. Mode incrémental/décrémental (vitesse de comptage = 50 kHz) :
La phase A représente le signal de décrémentation et la phase B le signal
d’incrémentation. Le compteur décrémente lorsqu’une impulsion de phase
A est détectée et incrémente lorsqu’un signal de phase B est détecté.
Phase A
Phase B
Comptage
Mode d’entrée
différentielle
12345678765432
Incrémen–
tation
Décrémen–
tation
Phase A
(sens)
Phase B
(impulsion)
Comptage
Mode impulsion/sens Mode incrémental/
12
Incrémen–
tation
PLS2(––) et le mode 0 de ACC(––) ne peuvent
être utilisés.
CTBL(––) ne peut être utilisée avec les ports 1 et
2.
Phase
(décrémentation)
Phase B
(incrémentation)
3 2 1 123 2 1
Décrémen–
tation
Comptage
décrémental
Incrémen–
tation
Décrémen–
tation
44
Modes de comptage
Les modes de comptage (en anneau ou linéaire) pour les compteurs rapides 1
et 2 sont spécifiés dans les DM 6643 et DM 6644 respectivement.
1, 2, 3... 1. Mode en anneau :
La valeur de comptage maximum +1 est sélectionnée dans CTBL(––). Le
Page 48

Sélection et utilisation des fonctions d’interruption
compteur passe de la valeur de comptage maximum à 0 lors de l’incré-
mentation et de 0 à la valeur de comptage maximum lors de la décrémenta-
tion. Il n’y a pas de valeurs négatives.
Le nombre de points de l’anneau (valeur de comptage maximum +1) peut
être sélectionné de 1 à 65 000.
2. Mode linéaire :
La gamme de comptage s’étend de – 8 388 607 à 8 388 607. Si le niveau de
comptage admissible des compteurs rapides 1 et 2 est dépassé, un état de
niveau non respecté apparaît et la valeur en cours du compteur est maintenue à 0838 8607 pour les dépassements et à F838 8607 en cas de valeur
insuffisante. Le comptage et les comparaisons s’arrêtent et
AR 0509 (port 1) ou AR 0609 (port 2) passent à ON.
Chapitre 1–4
Valeur max. de
comptage
Décrémen–
tation
Mode en anneau
0
Incrémentation
Valeur insuffisante Dépassement
Mode linéaire
0–8 388 607 8 388 607
Rem. : 1. Il faut toujours remettre le compteur à zéro lorsque l’on désire le relancer et
utiliser l’une de ces deux méthodes. Le compteur se remet automatique-
ment à zéro au début ou à l’arrêt de l’exécution du programme.
2. Les transitions de signaux suivantes sont traitées comme impulsions d’incré-
mentation : front montant d’entrée A vers front montant d’entrée B vers front
descendant d’entrée A vers front descendant d’entrée B. Les transitions de
signaux suivantes sont traitées comme impulsions de décrémentation :
front montant d’entrée B vers front montant d’entrée A vers front descendant d’entrée B vers front descendant d’entrée A.
Méthodes de remise à zéro
Pour remettre à zéro la valeur en cours de comptage, on peut utiliser le signal
de phase Z + la RAZ programme ou la RAZ programme. Ce sont des méthodes
identiques à celles du compteur rapide 0.
Rem. : 1. Les bits de remise à zéro des compteurs rapides 1 et 2 (SR 25201 et SR
25202) un fois par scrutation. Assurez–vous qu’un bit de remise à zéro est à
ON pendant au moins un cycle complet afin d’en assurer une lecture fiable.
2. La table de comparaison, l’état d’exécution et les résultats de comparaison
de gamme seront retenus grâce à une remise à zéro (les comparaisons se
poursuivent après RAZ).
Comptage d’interruptions du compteur rapide
Les tables de comparaison des compteurs rapides 1 et 2 sont identiques à celles
du compteur rapide 0.
Configuration API Lorsque vous utilisez les interruptions des compteurs rapides 1 et/ou 2, effec-
tuez les sélections en mode PROGRAM avant l’exécution du programme.
Sélection de mode des ports 1 et 2 (DM 6611)
Spécifiez le mode compteur rapide pour les ports 1 et 2. Si ce mode n’est pas
spécifié, CTBL(––) ne peut être utilisée pour les comparaisons de comptage.
45
Page 49

Sélection et utilisation des fonctions d’interruption
La lecture de cette sélection s’effecute à la mise sous tension de l’API. En cas de
modification, l’API doit être débranché puis remis sous tension avant l’exécution
du programme.
Sél. de mode des ports 1 et 2
0000:mode compteur rapide
Défaut: mode compteur rapide
Rem. : si le DM 6611 est en mode par impulsion, une instruction de comparaison sup-
plémentaire comme BCMP(––) peut être utilisée pour comparer la valeur en
cours des compteurs rapides 1 et 2.
Sélection des canaux de rafraîchissement d’entrée
(DM 6634 et DM 6635)
Le DM 6634 contient les sélections du canal de rafraîchissement d’entrée du
compteur rapide 1 et le DM 6635 contient celles du compteur rapide 2. Effectuez
ces sélections lorsqu’il est nécessaire de rafraîchir les entrées.
Bit
DM 6611
Chapitre 1–4
15 0
0000
Bit
15 0
DM 6634/DM 6635
Nombre de canaux (2 chiffres BCD) 00 à 12
No du canal de départ (2 chiffres BCD) 00 à 11
Défaut: pas de rafraîchissement d’entrée
Sélections des compteurs rapides 1 et 2 (DM 6643 et DM 6644)
Le DM 6643 contient les sélections du compteur rapide 1 et le
DM 6644 celles du compteur rapide 2. Ces sélections déterminent les
paramètres de fonctionnement de ces compteurs rapides.
Bit
15 0
DM6643/DM 6644
Mode de comptage
0: linéaire
1: en anneau
Mode de RAZ
0: phase Z + programme
1: RAZ programme
Mode de comptage
0: différence de phase
1: impulsion/direct
2: incrémental/décrémental
–
Défaut: linéaire ; phase Z + programme ; différence de phase
Programmation Programmation des compteurs rapides 1 et 2 :
Les compteurs rapides 1 et 2 commencent leur comptage lorsque les sélections
de configuration API ont été correctement effectuées ; si l’instruction CTBL(––)
46
Page 50

Sélection et utilisation des fonctions d’interruption
n’est pas exécutée, les comparaisons à l’aide des tables ne sont pas exécutées
et les interruptions ne sont pas générées.
Les compteurs rapides 1 et 2 sont remis à zéro à la mise sous tension, à chaque
début de fonctionnement de l’appareil et lorsqu’il s’arrête.
La valeur en cours du compteur rapide 1 est maintenue dans SR 232 et SR 233
et la valeur en cours du compteur rapide 2 est maintenue dans SR 234 et
SR 235.
Contrôle des interruptions des compteurs rapides 1 et 2
1, 2, 3... 1. Utilisez l’instruction CTBL(––) pour sauvegarder la table de comparaison
dans l’automate et commencez l’exécution des comparaisons :
(@)CTBL
P
C
TB
Chapitre 1–4
P: Port
001: Port 1
002: Port 2
C: (3 chiffres BCD)
000: table spécifiée sélectionnée et comparaison lancée
001: table de gammes sélectionnée et comp. lancée
002: table spécifiée sélectionnée
003: table de gammes sélectionnée
TB: canal de départ de la table de comparaison
Si C est à 000, les comparaisons sont effectuées par la méthode de
comparaison des valeurs spécifiées, si C est à 001, elles sont effectuées
par la méthode de comparaison des gammes. La table de comparaison est
sauvegardée et ensuite, les comparaisons commencent. Pendant leur
exécution, les interruptions rapides sont effectuées en fonction de la table
de comparaison. Pour de plus amples détails, reportez–vous à l’instruction
CTBL(––) au chapitre 5.
Rem. : les résultats des comparaisons sont normalement stockés dans les
AR 1100 à 1107 pendant la comparaison par gamme.
Si C est égal à 002, les comparaisons sont alors effectuées par la méthode
comparaison des valeurs spécifiées. Si C est égal à 3, elles sont effectuées
par la méthode de comparaison de gammes. Pour ces deux sélections, la
table de comparaison est sauvegardée mais la comparaison ne commence
qu’avec l’exécution de l’instruction INI(––).
2. Pour arrêter la comparaison, exécutez l’instruction INI(––) de la façon suivante : spécifiez le port 1 ou 2 dans P (P=001 ou 002).
(@)INI
P
001
000
Pour relancer les comparaisons, sélectionnez ”000” pour la deuxième
opérande (exécution de comparaison) et exécutez l’instruction IN(––).
Une table sauvegardée peut être maintenue dans l’automate pendant
l’exécution du programme jusqu’à la prochaine sauvegarde de table.
Lecture de la valeur en cours
Il existe deux façons de la lire : à partir de SR 232 et SR 233 (port 1) ou SR 234 et
SR 235 (port 2), ou bien par l’utilisation de PRV(––).
47
Page 51

Sélection et utilisation des fonctions d’interruption
Lecture de SR 232 et SR 233 ou SR 234 et SR 235
La valeur en cours du compteur rapide 1 est stockée dans SR 232 et SR 233 et la
valeur en cours du compteur rapide 2 dans SR 234 et SR 235. En mode linéaire,
le chiffre d’extrême gauche est égal à F pour les valeurs négatives.
Chapitre 1–4
4 chiffres d’extrême-
gauche
SR 233 SR 232 F8388607 à 08388607
SR 235 SR 234Port 2:
4 chiffres d’extrême
droite
Mode linéaire Mode en
anneau
00000000 à 0006499Port 1:
(–8388607 à 8388607)
Rem. : ces mots ne sont rafraîchis qu’une fois par cycle et il peut donc y avoir une diffé–
rence entre eux et la valeur en cours réelle.
Utilisation de l’instruction PRV(––)
Lisez la valeur en cours du compteur rapide 0 en utilisant l’instruction PRV(––).
Spécifiez le compteur rapide 1 ou 2 dans P (P=001 ou 002).
(@)PRV
000
P: Port (001: port 1; 002: port 2)
P
P1: canal de début de la valeur en cours
P1
La valeur en cours du compteur rapide spécifié est stockée comme suit. En
mode linéaire, le bit d’extrême gauche est égal à F pour les valeurs négatives.
4 chiffres d’extrême
gauche
D+1 D F8388607 à 08388607
4 chiffres
d’extrême droite
Mode linéaire Mode en
anneau
00000000 à 0006499
(–8388607 à 8388607)
La valeur en cours est lue lorsque l’instruction PRV(––) est vraiment exécutée.
Modification de la valeur en cours
Il y a deux façons de modifier la valeur en cours des compteurs rapides 1 et 2 : o n
peut la remettre à zéro en utilisant les diverses méthodes de RAZ ou utiliser
l’instruction INI(––).
Voici l a méthode utilisant l’instruction INI(––) ; les méthodes de RAZ sont expli-
quées au début de la description des compteurs rapides 1 et 2.
Modification de la valeur en cours par l’instruction INI(––) :
48
(@)INI
4 chiffres
d’extrême gauche
D+1 D F8388607 à 08388607
4 chiffres
d’extrême droite
P: Port (001: port 1; 002: port 2)
P
D: canal de départ pour le stockage des don-
002
nées de modification de la valeur en cours
D
Mode linéaire Mode en
(–8388607 à 8388607)
anneau
00000000 à 0006499
Pour spécifier un nombre négatif en mode linéaire, sélectionnez F comme
chiffre d’extrême gauche.
Page 52

Sélection et utilisation des fonctions d’interruption
Chapitre 1–4
Etat du compteur rapide L’état des compteurs rapides 1 et 2 peut être déterminé en lisant l’état des dra-
peaux correspondant dans la zone AR ou en exécutant PRV(––). Voici les drapeaux de zone AR et leurs différentes fonctions :
Canal Bit(s) Fonction
AR 04 08 à15Indique l’état du compteur rapide
00: normal
01 ou 02: erreur du matériel
03: erreur de configuration API
AR 05 00 à07Drapeau de résultat de la comparaison du compteur rapide 1
pour les gammes 1 à 8
(0: hors de la gamme ; 1: dans la gamme)
08 Drapeau de comparaison du compteur rapide 1
(0: arrêt ; 1: comparaison)
09 Drapeau de non–respect de la gamme du compteur rapide 1
(0: normal ; 1: gamme non respectée)
AR 06 00 à07Drapeau de résultat de la comparaison du compteur rapide 2
pour les gammes 1 à 8
(0: hors de la gamme ; 1: dans la gamme)
08 Drapeau de comparaison du compteur rapide 2
(0: arrêt ; 1: comparaison)
09 Drapeau de non–respect de la gamme du compteur rapide 2
(0: normal ; 1: gamme non respectée)
L’état des compteurs rapides 1 et 2 peut également être déterminé par l’exécu-
tion de PRV(––). Spécifiez les compteurs rapides 1 ou 2 (P=001 à 002) et le
canal de destination D. L’information concernant l’état est écrite dans les bits 00
et 01 de D. Les bits 02 à 15 sont à 0.
Condition d’exécution
@PRV(––)
P
001
D
Les bits 00 et 01 de D contiennent l’état du compteur rapide spécifié.
Bit Fonction
00 Drapeau de comparaison (0: arrêt ; 1: comparaison)
01 Drapeau de non–respect de la gamme
(0: normal ; 1: gamme non respectée)
Exemple de fonctionnement Cet exemple montre un programme émettant des impulsions standard à partir
du port 1 et comptant les impulsions à partir du compteur rapide 1. Le compteur
rapide fonctionne en mode incrémental/décrémental ; les impulsions en sens
horaire incrémentent le compteur (entrée de phase B) et les impulsions en sens
anti–horaire le décrémentent (entrée de phase A). Avant l’exécution du programme, sélectionnez la configuration de l’API comme suit et relancez l’API :
DM 6611: 0000 (mode compteur rapide)
DM 6643: 0002 (port 1 : sortie d’impulsions standard, mode de comptage
linéaire, signal de phase Z + programme et mode incrémental/décrémental).
Les autres sélections de configuration utilisent les sélections par défaut (les
entrées ne sont pas rafraîchies au moment de l’interruption).
En outre, les données suivantes sont stockées pour la table de comparaison :
49
Page 53

Sélection et utilisation des fonctions d’interruption
DM 0000 0003 nombre de conditions de comparaison : 3
DM 0001 2500 valeur spécifiée 1 : 2500
DM 0002 0000
DM 0003 0100 n
DM 0004 7500 valeur spécifiée 2: 7500
DM 0005 0000
DM 0006 0101 n
DM 0007 0000 valeur spécifiée 2 : 10000
DM 0008 0001
DM 0009 0102 n
o
de sous–programme d’interruption de
la comparaison 1 : 100
o
de sous–programme d’interruption de
la comparaison 2 : 101
o
de sous–programme d’interruption de
la comparaison 3 : 102
Chapitre 1–4
50
Page 54

Sélection et utilisation des fonctions d’interruption
00000
@CTBL
001
000
DM 0000
Chapitre 1–4
Spécifie le port 1, sauvegarde la table de
comparaison dans le format spécifié et
commence la comparaison.
25313 (constamment à ON)
25313 (constamment à ON)
@PULS
001
004
000
@SPED
001
001
#0001
@ACC
001
001
DM 0010
SBN(92) 100
10000
RET(93)
SBN(92) 101
@ACC
001
003
DM 0012
RET(93)
Sélectionne les impulsions en sens
horaire pour le port 1 (nombre d’impul-
sion non sélectionné).
Lance la sortie d’impulsions continues à
partir du port 1 à 10 Hz.
Le mode 1 de ACC(––) accélère la fré-
quence jusqu’à 25 kHz à 500 Hz/4 ms
env.
DM 0010: 0050
DM 0011: 2500
10000 passe à ON.
Le mode 3 de ACC(––) décélère la fré-
quence jusqu’à 500 Hz à 500 Hz/4 ms
env.
DM 0012: 0050
DM 0013: 0050
25313 (constamment à ON)
SBN(92) 102
SPED
001
001
#0000
RET(93)
La sortie d’impulsion à partir du port 1 est
arrêtée par la sélection de la fréquence
à 0.
1-4-8 Interruptions de compteur rapide absolu (CQM1-CPU44-E)
Les signaux à code binaire provenant d’un codeur absolu peuvent être envoyés
vers les ports 1 et 2 de la CQM1-CPU44-E et comptés à 1 kHz. Le traitement des
interruptions peut être exécuté selon le comptage.
Les 2 ports peuvent fonctionner séparément. Le compteur du port 1 est le compteur rapide absolu 1 et le compteur du port 2 est le compteur rapide absolu 2. Ce
chapitre traite du fonctionnement des compteurs rapides absolus 1 et 2. Reportez–vous au manuel d’utilisation du CQM1 pour les questions de matériel telles
que le câblage et l’équipement.
51
Page 55

S lecti
Sélection et utilisation des fonctions d’interruption
Processus Signaux de comptage et modes de comptage
On peut utiliser 2 modes de comptage avec les compteurs rapides absolus 1 et
2. Le mode de comptage et les sélections de résolution sont spécifiés dans la
configuration API (DM 6643 et DM 6644).
1, 2, 3... 1. Mode BCD :
Le code binaire du codeur absolu est d’abord converti en donnée binaire
normale puis en BCD.
2. Mode 360° :
Le code binaire du codeur absolu est converti en valeur angulaire
(0° à 359°) en fonction de la sélection de résolution (les sélections de
CTBL(––) se font par unités de 5°).
V aleurs en cours du compteur en mode BCD et 360° pour chaque sélection de
résolution :
Chapitre 1–4
Résolution
Mode BCD Mode 360°
8 bits 0 à 255
10 bits 0 à 1023
12 bits 0 à 4095
Valeurs en cours possibles
Sortie de la valeur en cours : 0° à 359°
é
(unités de 1°)
Sé
ons de la table de comparaison :
0° à 355° (unités de 5°)
p
Comptage d’interruptions du compteur rapide absolu
La valeur en cours du compteur peut être comparée à 16 valeurs spécifiées
maximum ou à 8 gammes. Pour de plus amples détails sur les tables de
comparaison utilisées avec les compteurs rapides absolus 1 et 2 reportez–vous
au chapitre concernant l’enregistrement du table de comparaison de CTBL(––).
Configuration API Lors de l’utilisation des compteurs rapides absolus 1 et/ou 2, effectuez les sélec-
tions en mode PROGRAM comme indiqué ci–dessous avant d’exécuter le pro-
gramme.
Sélections du canal de rafraîchissement des entrées
(DM 6634 et DM 6635)
DM 6634 contient les sélections du canal de rafraîchissement des entrées du
compteur rapide absolu 1 et DM 6635 celles du compteur rapide absolu 2. Effectuez ces sélections lorsqu’il est nécessaire de rafraîchir les entrées.
Bit
15 0
DM 6634/DM 6635
52
Nombre de canaux (2 chiffres BCD) 00 à 12
o
N
du canal de début (2 chiffres BCD)
00 à 11
Défaut: pas de rafraîchissement d’entrée
Page 56

Sélection et utilisation des fonctions d’interruption
Chapitre 1–4
Sélections du compteur rapide absolu (DM 6643 et DM 6644)
DM 6643 contient les sélections du compteur rapide absolu 1 et
DM 6644 celles du compteur rapide absolu 2. Ces canaux
déterminent les modes de comptage et les sélections de résolution.
Bit
15 0
DM6643/DM 6644
Mode de comptage
00: BCD
01: 360°
Sél. de résolution
00: 8 bits
01: 10 bits
02: 12 bits
Défaut: BCD, 8 bits
Compensation d’origine On peut compenser les décalages entre l’origine d’un codeur absolu et l’origine
réelle. ce réglage peut être effectué séparément pour les ports 1 et 2.
Suivez la procédure suivante pour sélectionner la compensation d’origine ; une
fois qu’elle a été sélectionnée, les données provenant du codeur seront ajus-
tées avant d’être sorties comme valeurs en cours.
1, 2, 3... 1. Sélectionnez la position d’origine du codeur absolu.
2. Assurez–vous que la broche 1 de l’interrupteur DIP de l’UC est à
OFF(activation des périphériques pour la ré–écriture des DM 6614 à 6655)
et passez l’API en mode PROGRAM.
3. Sélectionnez la résolution dans DM 6643 ou DM 6644.
4. Assurez–vous qu’une erreur fatale ou un FALS 9C ne sont pas survenus.
5. Lisez la valeur en cours du compteur rapide dans IR 232 et IR 233 (port 1) ou
IR 234 et IR 235 (port 2) pour déterminer la valeur en cours avant com-
pensation d’origine.
6. Placez le drapeau de compensation d’origine du port 1 (SR 25201) ou le
drapeau de compensation d’origine du port 2 (SR 25202) à ON à partir d’un
périphérique.
La valeur de compensation sera écrite sur le DM 6611 (port 1) ou sur le
DM 6612 (port 2) et le drapeau de compensation d’origine sera automati-
quement pla c é à OFF. La valeur de compensation sera enregistrée en BCD
entre 0000 et 4095, en fonction du mode compteur (BCD ou 360°).
7. Lisez la valeur en cours du compteur rapide pour déterminer la valeur en
cours après compensation d’origine ; elle doit alors être égale à 0000.
La valeur de compensation est valide jusqu’à ce qu’elle soit modifiée par la procédure précédente.
Programmation Voici comment programmer les compteurs rapides absolus 1 et 2 :
Les compteurs rapides absolus 1 et 2 commencent à compter lorsque leurs
sélections de para m ètres API ont été effectuées, mais si l’instruction CTBL(––)
n’est pas exécutée, les tables de comparaison ne sont pas effectuées et les
interruptions ne sont pas générées.
La valeur en cours du compteur rapide absolu 1 est maintenue dans IR 232 et
IR 233 et la v a l eur en cours du compteur rapide absolu 2 est maintenue dans IR
234 et IR 235.
53
Page 57

Sélection et utilisation des fonctions d’interruption
Contrôle des interruptions des compteurs rapides absolus
1, 2, 3... 1. Utilisez l’instruction CTBL(––) pour sauvegarder la table de comparaison
dans l’API et commencer les comparaisons.
Chapitre 1–4
(@)CTBL
P: spécification du port (001 : port 1 ; 002 : port 2)
C: (3 chiffres BCD)
P
000: table spécifiée et comparaison lancée
C
001: table de gammes sélectionnée et comp. lancée
TB
002: table spécifiée
003: table de gammes spécifiée
TB : premier canal de la table de comparaison
P sert à spécifier le port. Placez P à 001 pour spécifier le compteur rapide
absolu 1 ou à 002 pour le compteur rapide absolu 2.
Si C est à 000, les comparaisons sont effectuées par la méthode de
comparaison des valeurs spécifiées ; si C est à 001, elles sont effectuées
par la méthode de comparaison des gammes. Les tables de comparaison
sont sauvegardées et lorsque la sauvegarde est terminée, les comparai-
sons commencent. Lorsqu’elles ont été exécutées, les interruptions rapides
sont effectuées en fonction de la table de comparaison. Pour de plus
amples détails sur la structure des tables de comparaison, reportez–vous à
l’instruction CTBL(––).
Rem. : les résultats des comparaisons sont normalement stockés dans
AR 0500 à 0507 (port 1) et dans AR 0600 à 0607 (port 2) pendant
l’exécution de la comparaison des gammes.
Si C est à 002, les comparaisons sont effectuées par la méthode de
comparaison des valeurs spécifiées ; si C est à 003, elles sont effectuées
par la méthode de comparaison des gammes. Pour ces deux sélections, la
table de comparaison est sauvegardée mais les comparaisons ne com-
mencent qu’avec l’exécution de l’instruction INI(––).
2. Pour arrêter les comparaisons, exécutez l’instruction INI(––) comme suit.
Spécifiez le port 1 ou 2 dans P (P=001 ou 002).
(@)INI
P
001
000
Pour reprendre les comparaisons, placez la deuxième opérande à “000”
(exécution de comparaison) et exécutez l’instruction INI(––).
Après sauvegarde d’une table, celle–ci est retenue dans l’API pendant
l’exécution du programme et jusqu’à la prochaine sauvegarde.
Lecture de la valeur en cours
Il y a deux façons de lire la valeur en cours : la première consiste à la lire dans
IR 232 et IR 233 (port 1) ou dans IR 234 et IR 235 (port 2) et la deuxième à utiliser
l’instruction PRV(––).
Lecture de IR 232 et IR 233 ou de IR 234 et IR 235
La valeur en cours du compteur rapide absolu 1 est stockée dans
IR 232 et IR 233 et la valeur en cours du compteur rapide absolu 2 est stockée
dans IR 234 et IR 235 :
4 chiffres d’extrême
gauche
Port 1:
IR 233 IR 232
IR 235 IR 234Port 2:
4 chiffres d’extrême
droite
0000 0000 à 0000 4095 0000 0000 à 0000 0359
Mode BCD
Mode 360_
54
Page 58

Sélection et utilisation des fonctions d’interruption
Rem. : ces canaux sont rafraîchis une fois par scrutation ; il peut donc exister une
différence par rapport à la valeur en cours réelle.
Utilisation de l’instruction PRV(––)
Lisez la valeur en cours du compteur rapide absolu par l’instruction PRV(––).
Spécifiez le compteur rapide absolu 1 ou 2 dans P (P=001 ou 002).
Chapitre 1–4
Lecture de l’état du
compteur rapide absolu
(@)PRV
000
P: Port (001: port 1 ; 002: port 2)
P
P1: canal de départ de la valeur en cours
P1
Stockage de la valeur en cours du compteur rapide absolu :
4 chiffres d’extrême
gauche
D+1 D
4 chiffres d’extrême
droite
0000 0000 à 0000 4095 0000 0000 à 0000 0359
Mode BCD
Mode 360_
La valeur en cours est lue au moment de l’exécution de l’instruction PRV(––).
L’état des compteurs rapides absolus 1 et 2 peut être déterminé par la lecture
des drapeaux correspondant dans la zone AR ou par l’exécution de PRV(––).
Table des drapeaux de zone AR et de leurs fonctions :
Canal Bit(s) Fonction
AR 04 08 à15Indique l’état du compteur rapide absolu
00: normal
01 ou 02: erreur matériel
03: erreur de configuration API
AR 05 00 à07Drapeaux de résultat de comparaison du compteur 1 pour les
gammes 1 à 8
(0: gamme non respectée ; 1: gamme respectée )
08 Drapeau de comparaison du compteur 1
(0: arrêt ; 1: comparaison)
AR 06 00 à07Drapeaux de résultat de comparaison du compteur 1 pour les
gammes 1 à 8
(0: gamme non respectée ; 1: gamme respectée)
08 Drapeau de comparaison du compteur 2
(0: arrêt ; 1: comparaison)
L’état du drapeau de comparaison des compteurs rapides absolus 1 et 2 peut
également être déterminé par l’exécution de PRV(––). Spécifiez le compteur
rapide absolu 1 ou 2 (P=001 à 002) et le canal de destination D. L’état du dra-
peau (0 : arrêt ; 1: comparaison) est écrit dans le bit 00 de D. Les bits 01 à 15
sont placés à 0.
Condition d’exécution
@PRV(––)
P
001
D
Exemple de fonctionnement Cet exemple montre un programme recevant un signal d’entrée provenant d’un
codeur rotatif absolu du port 1 et qui utilise cette entrée pour contrôler les sorties
IR 10000 à 10003. Le compteur rapide absolu 1 est placé en résolution à 8 bits
et en mode 360° ; les comparaisons se font par gammes. Avant
l’exécution du programme, sélectionnez les DM 6643 à 0100 (port 1 : 360°,
résolution : 8 bits).
55
Page 59

Sélection et utilisation des fonctions d’interruption
Les autres sélections de la configuration API sont celles de défaut (les entrées
ne sont pas rafraîchies au moment de l’interruption).
Les données suivantes sont en outre stockées dans la table de comparaison :
DM 0000 0000 Limite basse #1 (0°)
DM 0001 0085 Limite haute #1 (85°)
DM 0002 0100 N
DM 0003 0090 Limite basse #2 (90°)
DM 0004 0175 Limite haute #2 (175°)
DM 0005 0101 N
DM 0006 0180 Limite basse #3 (180°)
DM 0007 0265 Limite haute #3 (265°)
DM 0008 0102 N
DM 0009 0270 Limite basse #4 (270°)
DM 0010 0355 Limite haute #4 (355°)
DM 0011 0103 N
DM 0012 0000 Limite basse #1 (0°)
DM 0013 0000 Limite haute #1 (0°)
DM 0014 FFFF Pas de n
DM 0015 0000 Limite basse #1 (0°)
DM 0016 0000 Limite haute #1 (0°)
DM 0017 FFFF Pas de n
DM 0018 0000 Limite basse #1 (0°)
DM 0019 0000 Limite haute #1 (0°)
DM 0020 FFFF Pas de n
DM 0021 0000 Limite basse #1 (0°)
DM 0022 0000 Limite haute #1 (0°)
DM 0023 FFFF Pas de n
o
de sous–progr. 100
o
de sous–progr. 101
o
de ss–prog. 102
o
de ss–prog. 103
o
de ss–prog.
o
de ss–prog.
o
de ss–prog.
o
de ss–prog.
Chapitre 1–4
Sélection 1re gamme (0° à 85°)
Sélection 2e gamme (90° à 175°)
Sélection 3e gamme (180° à 265°)
Sélection 4e gamme (270° à 355°)
Sélection 5e gamme (non utilisée)
Sélection 6e gamme (non utilisée)
Sélection 7e gamme (non utilisée)
Sélection 8e gamme (non utilisée)
56
Page 60

Fonction de communication
00000
25313 (constamment à ON)
25313 (constamment à ON)
25313 (constamment à ON)
@CTBL
001
001
DM 0000
SBN(92) 100
MOV(21)
#0001
100
RET(93)
SBN(92) 101
MOV(21)
#0002
100
RET(93)
SBN(92) 102
MOV(21)
#0004
100
Chapitre 1–5
Spécifie le port 1, sauvegarde la table de
comparaison en format de comparaison
de gammes et lance la comparaison.
Place 10000 à ON. Place les autres bits
de IR 100 à OFF.
Place 10001 à ON. Place les autres bits
de IR 100 à OFF.
Place 10002 à ON. Places les autres bits
de IR 100 à OFF.
RET(93)
SBN(92) 103
25313 (constamment à ON)
MOV(21)
#0008
100
RET(93)
Place 10003 à ON. Places les autres bits
de IR 100 à OFF.
Le schéma suivant illustre le lien existant entre la valeur en cours du compteur
rapide absolu 1 et les drapeaux de résultat de la comparaison par gammes AR
0500 à 0507 pendant l’exécution du programme ci–dessus :
AR 0500
AR 0501
AR 0502
AR 0503
AR 0504 à AR 0507
PV=0 85 90 175 180 265 270
1-5 Fonction de communication
Différents types de communications possibles avec les ports du CQM1 :
355 360
57
Page 61

Fonction de communication
Communication avec un ordinateur (SYSMAC–WAY)
RS-232C avec ordinateur ou autre (E/S bidirectionnelles ASCII)
Communication point par point avec un autre CQM1 (inter–automates)
Rem. : ces types de communication ne peuvent être effectués avec une UC
CQM1-CPU11-E, qui n’est équipée que d’un port périphérique.
Voici les configurations API et les méthodes d’utilisation de ces types de com-
munication.
1-5-1 Configuration API
Les paramètres de configuration API des DM 6645 à 6654 sont utilisés pour la
sélection des ports de communication. Les paramètres du port RS-232C dans
les DM 6645 à 6649 peuvent être sélectionnés à partir du menu par le LSS.
Rem. : si la broche 5 de l’interrupteur DIP de l’API est à ON, les paramètres de commu-
nication de la configuration API sont ignorés et ce sont les paramètres suivants
qui sont utilisés :
Les sélections des DM 6645 et 6650 déterminent les paramètres de commu-
nication principaux de la façon suivante :
Chapitre 1–5
Mode: communication à l’ordinateur
o
de noeud: 00
N
Bits de départ: 1 bit
Longueur de donnée: 7 bits
Bits d’arrêt : 1 bit
Parité: paire
Vitesse: 2 400 bps
Délai de transmission : aucun
Bit
15 0
DM 6645: port RS-232C
DM 6650: port
périphérique
Mode de communication
0: comm. à l’ordin. SYSMAC–WAY
1: RS-232C ASCII bidirectionnelle
2: liaison esclave point par point
3: liaison maître point par point
Canaux de liaison point par
point
0: LR 00 à LR 63
1: LR 00 à LR 31
2: LR 00 à LR 16
Sélections du port
00: conditions de communication standard
01: en fonction des sélections dans les DM 6646 et 6651
Liaisons point par point
Liaison inter–automates/CQM1 (2 CQM1 maximum en liaison) : pour utiliser
une liaison 1:1, les seules sélections nécessaires sont le mode de communication et les canaux de liaison. Choisissez 1:1 maître comme mode de communication d’un des API et 1:1 esclave pour l’autre ; sélectionnez ensuite les
canaux de liaison dans l’API désigné comme maître. Les bits 08 à 11 ne sont
valides que pour le maître de la liaison point par point.
Rem. : les communications en liaison point par point ne sont possibles que pour le port
RS-232C. La sélection n’est pas possible pour le port périphérique.
No d’API en liaison à l’ordinateur
Un numéro d’API doit être sélectionné pour les communications en liaison à l’or-
dinateur pour différencier les API e, réseau RS–422 lors de leur utilisation dans
58
Défaut: liaison à l’ordinateur par les paramètres standard
Page 62

Fonction de communication
les diverses communications. Ces sélections ne sont nécessaires que pour la
liaison à l’ordinateur ; pour utiliser ce type de communication, la liaison doit être
spécifiée dans le mode de communication et les paramètres de communication
doivent être sélectionnés (cf chapitre suivant).
Bit
15 0
DM 6648: port RS-232C
DM 6653: port
périphérique
No d’API
(2 chiffres BCD): 00 à 31
Défaut: 00
00
Choisissez 00 comme numéro d’API, sauf si plusieurs API se trouvent connectés en réseau.
Codes de fin, de départ et de réception de données RS-232C (ASCII)
Les codes de fin et de départ ou de quantité de données à recevoir peuvent être
sélectionnés comme sur le schéma suivant, si nécessaire. Ces sélections ne
sont obligatoires que pour la communication RS-232C. Pour utiliser la communication RS–232C, celle–ci doit être spécifiée comme mode de communication ;
la sélection des paramètres de communication est obligatoire (cf chapitre
suviant).
Activation des codes de départ et de fin
Chapitre 1–5
Bit
DM 6648: port RS-232C
DM 6653: port
périphérique
Code de fin
0: non sélectionné (quantité de données reçues
spécifiée)
1: sélectionné (code de fin spécifié)
2: CR/LF
Code de départ
0: non sélectionné
1: sélectionné (code de départ spécifié)
Défaut: pas de code de départ ; fin de réception de données à
256 octets.
15 0
00
Spécifiez la nécessité de sélectionner ou non un code de départ au début de la
donnée et un code de fin à la fin de la donnée. A la place d’un code de fin, il est
possible de spécifier un nombre d’octets à recevoir avant la fin de l’opération de
réception. le code de fin et le nombre d’octets à recevoir sont placés dans les
DM 6649 ou 6654.
Sélection du code de départ, de fin et de la quantité de données à recevoir
Bit
DM 6649: port RS-232C
DM 6654: port
périphérique
Code fin ou nombre d’octets à recevoir
Code fin : (00 à FF)
Quantité de données : 2 chiffres hexadécimaux, 00 à FF (00: 256 octets)
Code de départ
00 à FF
15 0
Défaut: pas de code de départ ; réception de données terminée à
256 octets .
59
Page 63

Fonction de communication
Chapitre 1–5
Liaison à l’ordinateur et paramètres de communication RS-232C
Sélectionnez la communication à l’ordinateur ou RS-232C, puis les paramètres
de communication de façon à faire correspondre les conditions de communication aux sélections de l’appareil avec lequel la communication s’effectue.
Communications standard Si les sélections suivantes sont satisfaisantes pour les conditions de commu-
nication, placez alors les deux chiffres d’extrême droite à 00. Les sélections des
DM 6646 et 6651 sont ignorées pour cette sélection.
Bits de départ : 1 bit
Longueur de données : 7 bits
Bits d’arrêt : 2 bits
Partié : paire
Vitesse : 9 600 bps
Sélection des conditions de communication
Bit
DM 6646:port RS-232C
DM 6651:port
périphérique
Format de la trame de transmission
(cf table ci–dessous)
Vitesse
(cf table ci–dessous)
Défaut: conditions de communication standard
15 0
Format de la trame de transmission
Sélection Bits de
départ
00 1 7 1 Paire
01 1 7 1 Impaire
02 1 7 1 Aucune
03 1 7 2 Paire
04 1 7 2 Impaire
05 1 7 2 Aucune
06 1 8 1 Paire
07 1 8 1 Impaire
08 1 8 1 Aucune
09 1 8 2 Paire
10 1 8 2 Impaire
11 1 8 2 Aucune
Longueur de
donnée
Bits d’arrêt Parité
Vitesse
Sélection Vitesse
00 1 200 bps
01 2 400 bps
02 4 800 bps
03 9 600 bps
04 19 200 bps
60
Page 64

Fonction de communication
Chapitre 1–5
Retard à la transmission Selon les appareils connectés au port RS-232, il peut être nécessaire de prévoir
un temps de transmission.
Bit
15 0
DM 6647:port RS-232C
DM 6652:port
périphérique
Retard à la transmission
(4 chiffres BCD ; unité : 10 ms)
Défaut : pas de retard
1-5-2 Câblage du port
Reportez–vous au manuel d’utilisation du CQM1.
1-5-3 Communication à l’ordinateur
Ces types de communication ont été développpés par OMRON pour la con–
nexion d’un ordinateur et d’un ou plusieurs API par câble RS-232C (avec interface RS–422) et pour le contrôle des communications API à partir de l’ordinateur. E n temps normal, l’ordinateur envoie une commande à l’API et celui–ci renvoie automatiquement une réponse. Les communications sont ainsi effectuées
sans que les API soient activement impliqués, mais les API ont également la
capacité de commencer la transmission de données lorsqu’un engagement
direct est nécessaire.
En général, il y a deux façons de mettre en oeuvre la communication à l’ordinateur. L’une repose sur les commandes en mode C et l’autr e su r l es commandes
FINS (mode CV). Le CQM1 permet d’effectuer uniquement des commandes en
mode C. Pour de plus amples détails, reportez–vous au chapitre 6.
Procédure de communication Ce chapitre explique l’utilisation des communications à l’ordinateur pour
l’exécution des transmissions de données à partir du CQM1. L’utilisation de
cette méthode permet la transmission automatique de données à partir du
CQM1 lorsque la donnée est modifiée et simplifie donc la communication en éliminant la nécessité d’une surveillance constante de l’ordinateur.
1, 2, 3... 1. Vérifiez que AR 0805 (drapeau de transmission RS-232C prête) est à ON.
2. Utilisez l’instruction TXD(––) pour la transmission des données.
(@)TXD
S: no du canal de départ de transmission des données
S
C: données de contrôle
C
N
N: nombre d’octets à envoyer (4 chiffres BCD)
Bits 00 à 03
0: octets d’extrême gauche d’abord
1: octets d’extrême droite d’abord
Bits 12 à 15
0: port RS-232C
1: port périphérique
0000 à 0256
De l’exécution de l’instruction à la fin de la transmission des données, AR 0805
(ou AR 0813 pour le port périphérique) reste à OFF. Il repasse à ON au moment
où la transmission des données est terminée. L’instruction TXD(––) ne fournit
pas de réponse ; pour recevoir confirmation de la réception des données par
l’ordinateur, le programme de celui–ci doit être écrit de façon à confirmer l’écriture de données venant du CQM1.
61
Page 65

Fonction de communication
@ EX
x 10
0
1
x 10
Chapitre 1–5
La trame des données est la suivante pour les données transmises en mode
RS–232C par l’instruction TXD(––).
r
*
o
N
d’API
Code en–tête
( “EX” obligatoirement)
Données (jusqu’à 122 caractères) FCS
Position
terminale
Pour remettre à zéro le port RS-232C (c’est–à–dire revenir à l’état initial), placez
SR 25209 à ON. Pour remettre à zéro le port périphérique, placez SR 25208 à
ON. Ces bits se placeront automatiquement à OFF après la remise à zéro.
Si l’instruction TXD(––) est exécutée alors que le CQM1 est en train de répondre
à une commande provenant de l’ordinateur, la réponse est transmise avant
l’exécution de l’instruction TXD(––). Dans tous les autres cas, la transmission
par l’instruction TXD(––) est prioritaire.
Exemple d’application Cet exemple montre un programme d’utilisation du port RS-232C en mode
RS–232C, soit 5 DM pour la transmission de 10 octets de données
(DM 0000 à 0004) vers l’ordinateur. On part du principe que les valeurs par
défaut sont sélectionnées pour toutes les configurations API (c’est–à–dire que
le port RS-232C est utilisé en mode RS–232C, que le numéro d’API est 00 et
que les conditions de communication sont standard).
Du DM 0000 au DM 0004, “1234” est stocké dans chaque mot. A partir de l’ordinateur, exécutez un programme de réception des données du CQM1 avec les
conditions de communication standard.
00100 AR0805
@TXD
DM 0000
#0000
#0010
Si AR 0805 (drapeau de transmission prête)
est à ON lorsque IR 00100 passe à ON, les
dix octets de données (DM 0000 à 0004) sont
transmis.
62
Le type de programme suivant doit être programmé dans l’ordinateur afin de
recevoir les données. Ce programme permet à l’ordinateur de lire et d’afficher
les données reçues en provenance de l’API tandis qu’une commande de lecture
est exécutée afin de pouvoir lire les données venant de l’API.
Page 66

Fonction de communication
10 ’CQM1 SAMPLE PROGRAM FOR EXCEPTION
20 CLOSE 1
30 CLS
40 OPEN “COM:E73” AS #1
50 *KEYIN
60 INPUT “DATA ––––––––”,S$
70 IF S$=” ” THEN GOTO 190
80 PRINT “SEND DATA = ”;S$
90 ST$=S$
100 INPUT “SEND OK? Y or N?=”,B$
110 IF B$=”Y” THEN GOTO 130 ELSE GOTO *KEYIN
120 S$=ST$
130 PRINT #1,S$ ’Envoi de la commande vers l’API
140 INPUT #1,R$ ’Réception de la réponse de l’API
150 PRINT “RECV DATA = ”;R$
160 IF MID$(R$,4,2)=”EX” THEN GOTO 210 ’Identification de la commande
170 IF RIGHT$(R$,1)<>”*” THEN S$=” ”:GOTO 130
180 GOTO *KEYIN
190 CLOSE 1
200 END
210 PRINT “EXCEPTION!! DATA”
220 GOTO 140
Chapitre 1–5
venant de l’API
La donnée reçue par l’ordinateur est la suivante (FCS est égal à “59.”) :
“@00EX1234123412341234123459*CR
1-5-4 Communications RS–232C
Par la communication RS-232C, les données peuvent être imprimées sur une
imprimante ou lues grâce à un lecteur de code barre. La fonction ON/OFF
(”handshaking”) n’est pas disponible en communication RS-232C.
Procédure de communication
Transmission
1, 2, 3... 1. Vérifiez que AR 0805 (drapeau de transmission du port RS-232C prête) est
à ON.
2. Utilisez l’instruction TXD(––) pour la transmission des données :
(@)TXD
”
S: no du canal de départ des données à transmettre
S
C
N
C: données de contrôle
N: nombre d’octets à transmettre (4 chiffres BCD), 0000 à 0256
De l’exécution de cette instruction jusqu’à la fin de la transmission des données,
AR 0805 (ou AR0813 pour le port périphérique) reste à OFF (il repasse à ON à la
fin de la transmission des données).
Les codes de début et de fin ne sont pas compris lorsque le nombre d’octets à
transmettre est spécifié. La transmission la plus importante qui peut être émise
avec ou sans code de début est de 256 octets. N est égal à 254 ou à 256 au
maximum selon les désignations des codes de début et de fin. Si le nombre d’oc-
63
Page 67

Fonction de communication
1, 2, 3... 1. Vérifiez que AR 0806 (drapeau de réception RS-232C terminée) ou que
Chapitre 1–5
tets à envoyer est sélectionné à 0000, seuls les codes de début et de fin seront
envoyés.
256 octets max.
Code de début Données Code de fin
Pour remettre à zéro le port RS-232C (c’est–à–dire pour revenir à l’état initial),
placez SR 25209 à ON. Pour remettre à zéro le port périphérique, placez
SR 25208 à ON. Ces bits repassent à OFF automatiquement après la remise à
zéro.
Réception
AR 0814 (drapeau de réception de périphérique terminée) est à ON.
2. Utilisez l’instruction RXD(––) pour recevoir les données.
(@)RXD
D: no du canal de début pour le stockage des données de
D
réception
C
C: données de contrôle
N
N: Nombre d’octets stockés (4 chiffres BCD), 0000 à 0256
Bits 00 à 03
0: octets d’extrême gauche d’abord
1: octets d’extrême droite d’abord
Bits 12 à 15
0: port RS-232C
1: port périphérique
3. Les résultats de la lecture de données reçues sont stockés dans la zone AR.
Vérifiez que les opérations ont été correctement terminées. Le contenu de
ces bits est remis à zéro à chaque exécution de l’instruction RXD(––).
Port
RS-232C
AR 0800 à
AR 0803
AR 0804 AR0812 Erreur de communication
AR 0807 AR0815 Drapeau de dépassement de réception (à la fin de la
AR 09 AR10 Nombre d’octets reçus
Port
périphéri-
que
AR 0808 à
AR 0811
Erreur
Code d’erreur du port RS-232C (1 chiffre BCD)
0 : fin normale ; 1: erreur de parité ;
2 : erreur de trame ; 3 : erreur de dépassement
réception, les données suivantes ont été reçues
avant d’être lues par l’instruction RXD.)
Pour remettre à zéro le port RS-232C (c’est–à–dire pour revenir à l’état initial),
placez SR 25209 à ON. Pour remettre à zéro le port périphérique, placez
SR 25208 à ON. Ces bits passent automatiquement à OFF après la remise à
zéro.
Les codes de départ et de fin ne sont pas compris dans AR 09 ni dans AR 10
(nombre d’octets reçus).
Exemple d’application Cet exemple montre un programme d’utilisation du port RS-232C en mode
RS-232C pour la transmission de 10 octets de données (DM 0100 à 0104) vers
l’ordinateur et le stockage de données en provenance de l’ordinateur dans la
zone DM commençant par DM 0200. Avant l’exécution du programme, la con-
figuration suivante doit être réalisée :
64
Page 68

Fonction de communication
Chapitre 1–5
DM 6645: 1000 (port RS-232C en mode RS-232C ; conditions de communica-
tion standard)
DM 6648: 2000 (pas de code de départ ; code de fin CR/LF)
On part du principe que les valeurs par défaut sont sélectionnées pour toutes les
autres configurations API. Du DM 0100 au DM 0104, ”3132” est stocké dans
chaque mot. A partir de l’ordinateur, exécutez un programme pour recevoir les
données du CQM1 avec les conditions de communication standard.
00100
00101 AR0805
AR0806
Les données sont les suivantes :
“31323132313231323132CR
DIFU(13) 00101
@TXD
DM 0100
#0000
#0010
@RXD
DM 0200
#0000
AR09
LF”
Si AR 0805 (drapeau de transmission prête) est
à ON lorsque IR 00100 passe à ON, les dix
octets de données (DM 0100 à DM 0104) sont
transmis en commençant par les octets
d’extrême gauche.
Lorsque AR 0806 (drapeau de réception terminée) est à ON, le nombre d’octets de données
spécifié dans AR 09 est lu à partir de la
mémoire tampon de réception du CQM1 et
stocké en mémoire à partir du DM 0200 en
commençant par les octets d’extrême gauche.
1-5-5 Communication en liaison point par point (inter–automates,
2 CQM1 maximum)
Si deux CQM1 sont reliés en liaison point par point par la connexion de leurs
ports RS-232C, ils peuvent partager la même zone LR. L’un sert de maître et
l’autre d’esclave.
Rem. : le port périphérique ne peut être utilisé pour les liaisons 1:1.
Liaison point par point La liaison point par point permet à deux CQM1 de partager les données de leurs
zones LR. Comme le montre le schéma suivant, lorsqu’une donnée est inscrite
dans un canal de la zone LR d’une des cartes de liaison, elle est automatiquement ré–écrite à l’identique dans le canal correspondant de l’autre carte. Cha-
que API a des canaux spécifiés dans lesquels il peut écrire et d’autres canaux
spécifiés dans lesquels l’autre API peut écrire. On peut lire mais non ré–écrire
les canaux qui ont déjà été écrits par l’autre API.
Maître Esclave
Zone maître
Zone esclave
“1” écrit Zone maître
automatiquement écrit
11
Les canaux utilisés par chaque ordinateur sont ceux de la table suivante, en
fonction des sélections du maître, de l’esclave et des canaux de liaison.
1
Ecriture
Zone esclave
Sélections du
LR 00 à LR 63 LR 00 à LR 31 LR 00 à LR 15
DM 6645
Canaux maîtres LR00 à LR31 LR00 à LR15 LR00 à LR07
Canaux esclaves LR32 à LR63 LR16 à LR31 LR08 à LR15
Procédure de communication Si les sélections des maître et esclave sont effectuées correctement, la liaison
point par point commence alors automatiquement en alimentant simplement les
deux CQM1. Le fonctionnement est indépendant des modes de chaque API.
65
Page 69

Fonction de communication
Chapitre 1–5
Exemple d’application Cet exemple montre un programme de vérification des conditions par l’exécu-
tion d’une liaison point par point grâce aux ports RS-232C. Avant l’exécution du
programme, effectuez les sélections suivantes dans la configuration API :
Maître : DM 6645: 3200 (maître de liaison point par point ;
zone utilisée : LR 00 à LR 15)
Esclave : DM 6645: 2000 (esclave de liaison point par point)
On part du principe que les valeurs par défaut sont sélectionnées pour toutes les
autres configurations API. Canaux utilisés pour la liaison point par point :
LR00
LR07
LR08
LR15
Maître
Zone d’écriture
Zone de lecture
Esclave
Zone d’écriture
Zone de lecture
LR00
LR07
LR08
LR15
Lorsque le programme est utilisé dans le maître et dans l’esclave, l’état de
IR 001 dans chaque carte est reflété dans le canal IR 100 de l’autre carte. De la
même façon, l’état du canal IR 001 de l’autre carte est reflété dans le canal
IR 100 de chaque carte. IR 001 est le canal d’entrée et IR 100 le canal de sortie.
Maître
25313 (constamment à ON)
MOV(21)
001
LR00
MOV(21)
LR08
100
Esclave
25313 (constamment à ON)
MOV(21)
001
LR08
MOV(21)
LR00
100
66
Page 70

Chapitre 2
Caractéristiques des API CQM1
Ce chapitre présente les nouvelles caractéristiques du CQM1, y compris les nouvelles instructions disponibles grâce aux
instructions étendues, une nouvelle caractéristique de surveillance de changement d’état d’un bit et la fonction de sélection
analogique du CQM1-CPU42-E.
Si vous ne connaissez pas bien les API OMRON ni la programmation en schéma à relais, il vous faudra lire le chapitre 3 avant
celui–ci. Les détails concernant les instructions de programmation du CQM1 se trouvent dans le chapitre 5.
2-1 Instructions étendues 70. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2-2 Instructions d’E/S étendues 72. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2-2-1 TEN-KEY INPUT – TKY(––)73. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2-2-2 HEXADECIMAL KEY INPUT – HKY(––)75. . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2-2-3 DIGITAL SWITCH INPUT – DSW(––)77. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2-2-4 7-SEGMENT DISPLAY OUTPUT – 7SEG(––)80. . . . . . . . . . . . . . . . . . . . . . . . . .
2-2-5 Bits d’E/S alternés82. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2-3 Fonction macro 83. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2-4 Surveillance de changement d’état d’un bit 84. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2-5 Sélections analogiques (CQM1-CPU42-E uniquement) 85. . . . . . . . . . . . . . . . . . . . . . . . . . .
67
Page 71

Instructions étendues Chapitre 2–1
2-1 Instructions étendues
Les instructions étendues du CQM1 répondent à certains besoins de pro-
grammation. Des codes de fonction peuvent être assignés à 18 instructions de
fonction maximum pour permettre leur utilisation dans les programmes. Cela
permet à l’utilisateur de choisir les instructions utiles à chaque programme du
CQM1 et d’utiliser de façon plus efficace les codes de fonction pour l’entrée des
fonctions .
Les abréviations des instructions sont suivies de “(––)”, indiquant par là que l’uti-
lisateur doit ajouter le code de fonction dans le tableau des instructions avant
l’utilisation en programmation.
Exemple
Code de fonction 61
Code de fonction 64
Code de fonction 65
A l’origine, les codes de fonction sont ceux
cités ci–dessus (dans cet exemple, les
instructions sont toutes liées à des sorties
d’impulsion).
INI
SPED
PULS
MAX
MIN
SUM
Les 18 codes de fonction suivants peuvent être utilisés pour les instructions
d’extension 17, 18, 19, 47, 48, 60, 61, 62, 63, 64, 65, 66, 67, 68, 69, 87, 88 et 89.
Les instructions d’extension peuvent être utilisées comme ci–dessous avec les
codes de fonction par défaut attribués à l’origine. Les instructions suivies d’une
astérisque ”*” ne sont valables qu’avec les UC CQM1-CPU4j-E.
Code de fonction 61
Code de fonction 64
Code de fonction 65
Si l’on n’utilise pas de sorties d’impulsion et s i
l’on a besoin de valeurs max., de valeurs min.
et de sommes, la sélection d’instructions peut
être utilisée comme ci–dessus pour ré–
attribuer les instructions dans le tableau.
INI
SPED
PULS
MAX
MIN
SUM
68
Page 72

Instructions étendues Chapitre 2–1
Instruction Code de
fonction
ASFT 17
TKY 18
MCMP 19
RXD 47
TXD 48
CMPL 60
INI 61
PRV 62
CTBL 63
SPED 64
PULS 65
SCL 66
BCNT 67
BCMP 68
STIM 69
DSW 87
7SEG 88
Instruction Code de
fonction
INT 89
HKY --FPD --SRCH --MAX --MIN --APR --LINE --COLM --SEC --HMS --SUM --FCS --HEX --AVG --PWM* --PID* ---
Instruction Code de
fonction
ADBL* --SBBL* --MBS* ---
69
Page 73

Instructions d’E/S étendues
Instruction Code de
DBS* --MBSL* --DBSL* --CPS* --CPSL* --NEG* --NEGL* --ZCP* --ZCPL* --XFRB* --PLS2* --ACC* --SCL2* --SCL3* ---
Avant de pouvoir être utilisés en programmation, les codes de fonction non
attribués devront être attribués dans le tableau d’instructions que l’appareil de
programmation et l’API utilisent. Les attributions des instructions étendues
modifient la signification des instructions et opérandes ; veillez à bien effectuer
les sélections du tableau avant de programmer et de transférer le tableau vers le
CQM1 et avant l’exécution du programme.
Les tableaux d’instruction peuvent également être stockés sur cartouche
mémoire lorsqu’ils sont utilisés. Soyez vigilants lors de l’utilisation d’une car–
touche ayant déjà été utilisée avec un autre CQM1 et assurez–vous que le bon
tableau soit présent.
Chapitre 2–2
fonction
Attention : si la broche numéro 4 de l’interrupteur DIP du CQM1 est à OFF, seules les
instructions d’extension du tableau par défaut peuvent être utilisées ; le tableau
créé par l’utilisateur sera ignoré. Le tableau d’instructions par défaut sera égale-
ment sélectionné lorsque l’alimentation sera branchée et effacera les éven-
tuelles sélections antérieures.
Assurez–vous que la broche 4 de l’interrupteur DIP de l’UC est à ON lors de la
lecture de programme à partir d’une cartouche mémoire ayant un tableau
d’instructions étendues. Si cette broche 4 est à OFF, le tableau d’instructions par
défaut sera utilisé pour les instructions d’étendues dans les programmes lus à
partir d’une cartouche mémoire (dans ce cas, le programme lu à partir de la car-
touche et le programme réellement contenu dans la cartouche diffèrent lors de
l’opération de comparaison).
2-2 Instructions d’E/S étendues
Les instructions d’E/S avancées permettent de contrôler, avec un seule instruction, les opérations auparavant complexes et qui impliquent l’usage d’appareils
d’E/S externes (interrupteurs digitaux, affichages à 7 segments, etc.). Ce chapitre présente les instructions d’E/S avancées, également traitées à la fin du
chapitre 5.
Il existe quatre instructions d’E/S avancées, comme le montre le tableau suivant. Toutes sont des instructions d’extension et on doit leur attribuer des codes
de fonction avant de les utiliser.
70
Page 74

Instructions d’E/S étendues
Chapitre 2–2
Dénomination Abréviation Fonction
TEN-KEY INPUT TKY(––) Entrée BCD à partir d’un clavier
à 10 touches
HEXADECIMAL KEY INPUT HKY(––) Entrée hexadécimale à partir
d’un clavier à 16 touches
DIGITAL SWITCH INPUT DSW(––) Entrée de la valeur sélectionnée
à partir d’un interrupteur digital
7-SEGMENT DISPLAY OUTPUT 7SEG(––) Sortie BCD vers un affichage à
7 segments
2-2-1 TEN-KEY INPUT (entrée 10 touches) – TKY(––)
Cette instruction permet d’entrer 8 chiffres BCD à partir d’un clavier à 10 touches
et utilise 10 points d’entrée.
Matériel Préparez un clavier à 10 touches et connectez–le de façon à ce que les
interrupteurs des touches numériques 0 à 9 soient entrés sur les points 0 à 9
comme sur le schéma suivant. On peut utiliser les bornes d’entrée de l’UC ou les
entrées d’une carte d’entrée c.c. à 16 points d’entrée minimum.
ID212
1
3
5
7
9
11
13
15
COM
0
2
4
6
8
10
12
14
COM
0 V
0
9
10
touches
Utilisation de l’instruction
Carte d’entrée
c.c.
TKY
IW: canal d’entrée
IW
D1: 1er canal d’enregistrement
D
1
D
D
2
2
: canal d’entrée de touche
71
Page 75

Instructions d’E/S étendues
IW
00
01
02
to
09
D
2
00
Chapitre 2–2
Si le canal d’entrée pour la connexion du clavier à 10 touches est spécifié pour
IW, le fonctionnement se poursuit comme ci–dessous lorsque le programme est
exécuté (on part du principe que plusieurs nombres ont déjà été entrés).
Entrée à partir des
10 touches
Avant
exécution
(1)
(2)
D1+1 D
3 5 0 1 2 4 3 8
5
0 1 2 4 3 8 1
0
1 2 4 3 8 1 0
1
01
02
to
09
10
(1) (2) (3) (4)
Drapeaux correspondant aux entrées
des 10 touches (le
drapeau reste à ON
jusqu’à l’entrée sui-
vante).
ON en cas d’usage
d’une touche
(3)
(4)
1
2 4 3 8 1 0 2
2
4 3 8 1 0 2 9
Rem. : 1. Pendant l’utilisation d’une touche, les autres entrées de touches ne sont pas
acceptées.
2. Si l’on entre plus de 8 chif fres, les chiffres sont effacés en commençant par
l’extrême gauche.
3. Les bits d’entrée non utilisés ici peuvent l’être comme bits d’entrée
ordinaires.
Exemple d’application Dans cet exemple, un programme d’entrée de nombres à partir du clavier à 10
touches est illustré. Le clavier est ici connecté à IR 000.
25313 (constamment à ON)
TKY
000
DM1000
DM1002
00015
@XFER(70)
#0002
DM1000
DM 0000
72
L’information à 10 touches entrée sur IR 000 avec TKY(––) est convertie en BCD
et stockée dans les DM 1000 et 1001. L’information clé est stockée dans le DM
1002.
IR 00015 est utilisé comme touche “ENTER” et lorsque IR 00015 passe à ON, la
donnée stockée dans les DM 1000 et 1001 est transférée vers les DM 0000 et
0001.
Page 76

Instructions d’E/S étendues
Chapitre 2–2
2-2-2 HEXADECIMAL KEY INPUT (entrée de touches hexadécimales) –
HKY(––)
Cette instruction permet d’entrer 8 chiffres hexadécimaux à partir d’un clavier
hexadécimal. On utilise 5 bits de sortie et 4 bits d’entrée.
Matériel Préparez le clavier hexadécimal et connectez les touches numériques 0 à F
comme ci–dessous, pour les points d’entrée 0 à 3 et les points de sortie 0 à 3. Le
point de sortie 4 passe à ON à l’occasion de toute utilisation de touche mais il
n’est pas nécessaire de le connecter.
ID212
0
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
COM
COM
Carte
d’entrée
C
D
E
F
9
8
4
0
A
B
5
6
7
1
3
2
OD212
1
3
5
7
9
11
13
15
–
0
2
4
6
8
10
12
14
+
Carte de
sortie
Utilisation de l’instruction
Les entrées peuvent être connectées aux bornes d’entrée de l’UC ou à une
carte d’entrée c.c. ayant 8 points d’entrée minimum ; les sorties peuvent être
connectées à partir d’une carte de sortie transistor ayant 8 points minimum.
HKY
IW
0W
IW: canal d’entrée
OW: canal de sortie du signal de
contrôle
D
D: 1er canal d’enregistrement
Si le canal d’entrée de connexion du clavier hexadécimal est spécifié pour IW et
que le canal de sortie est spécifié pour OW, le fonctionnement se poursuit
73
Page 77

Instructions d’E/S étendues
IW
00
01
02
03
16 touches
0
à
9
à
F
D+2
00
à
09
à
15
OW
04
12345678
1 fois toutes les 12
scrutations
D+1
230F
D
0A01
Chapitre 2–2
comme ci–dessous lors de l’exécution du programme (on considère que plu-
sieurs nombres ont déjà été entrés).
Contrôle des
signaux de
sélection des 16
touches
Etat des 16
touches
Drapeaux corres–
pondant aux
touches d’entrée
(les drapeaux restent à ON jusqu’à
l’entrée suivante.)
ON en cas
d’utilisation
9101112
A012
D+1
30FF
D
0123
D+1
0FF9
D
d’une touche
SR 25408 passe à ON pendant l’exécution de HKY(––).
Rem. : 1. N’utilisez pas HKY(––) plus d’une fois dans le même programme.
2. Lors de l’utilisation de HKY(––), sélectionnez le filtre d’entrée du canal d’entrée correspondant de façon à ce qu’il soit inférieur au temps de scrutation
(les filtres d’entrée peuvent être changés à partir du
DM 6620).
3. Pendant l’utilisation d’une touche, les autres entrées de touches ne sont pas
acceptées.
4. Si l’on entre plus de 8 chiffres, les chiffres sont effacés en commençant par
l’extrême gauche.
5. Les bits d’entrée et de sortie non utilisés ici peuvent l’être comme bits d’entrée
et de sortie ordinaires.
Avec cette instruction, une entrée de touche peut être lue en 3 à 12 scrutations. Il
faut plus d’un cycle car les touches ON ne peuvent être déterminées que lorsque
les sorties passent à ON.
Exemple d’application Cet exemple illustre un programme d’entrée de nombres à partir d’un clavier
hexadécimal. On suppose que le clavier hexadécimal est connecté à IR 000
(entrée) et à IR 100 (sortie).
25313 (constamment à ON)
HKY
000
100
DM1000
00015
@XFER(70)
#0002
DM1000
DM0000
74
Page 78

Instructions d’E/S étendues
Chapitre 2–2
L’information hexadécimale clé entrée sur IR 000 par HKY(––) est convertie en
code hexadécimal et stockée dans les mots DM1000 et DM1001.
IR 00015 est utilisé comme touche “ENTER” et lorsque IR 00015 passe à ON,
les nombres stockés dans les DM 1000 et DM 1001 sont transférés vers les
DM 0000 et 0001.
2-2-3 DIGITAL SWITCH INPUT (entrée roue codeuse)– DSW(––)
A l’aide de cette instruction, les valeurs sélectionnées à 4 ou 8 chiffres BCD sont
lues à partir d’une roue codeuse. DSW(––) utilise 5 bits de sortie et 4 ou 8 bits
d’entrée (pour 4 ou 8 chiffres).
Matériel Connectez la roue codeuse et les cartes d’entrée et de sortie comme sur le
schéma ci–dessous. Une entrée à 8 chiffres est illustrée ici ; si vous utilisez une
entrée à 4 chi f fres, connectez D0 à D3 entre la roue codeuse et les points d’entrée 0 à 3. Dans les deux cas, le point d’entrée 5 passe à ON lorsqu’un tour de
données a été lu mais il n’est pas nécessaire de connecter le point de sortie 5,
sauf si l’application l’exige.
ID212
1
3
5
7
9
11
13
15
COM
OD212
1
3
5
7
9
11
13
15
COM
0
2
4
6
8
10
12
14
COM
0
2
4
6
8
10
12
14
COM
Carte d’entrée
Carte de sortie
D
D
D
D
D
D
D
D
CS
CS
CS
CS
RD
0
1
2
3
0
1
2
3
0
1
2
3
D
CS
CS
CS
CS
RD
0
D
1
D
2
D
3
D
0
D
1
D
2
D
3
Chiffres d’extrême droite de la ligne de données A7E
Chiffres
0
d’extrême
1
gauche A7E
2
3
Vers la sélection de mémoire A7E
Chiffres d’extrême
gauche
Interface
Vers le terminal RD (lecture) A7E
Rem. : une interface de conversion des signaux 5 V en
24 V est nécessaire pour la connexion de
la roue codeuse A7E.
A7E
Chiffres d’extrême
droite
75
Page 79

Instructions d’E/S étendues
Chapitre 2–2
L’exemple suivant illustre les connexions d’une roue codeuse A7B.
ID212
1
3
5
7
9
11
13
15
COM
0
2
4
6
8
10
12
14
COM
Carte
d’entrée
Interrupteur 8
Roue codeuse
1248
76 5 4 32 1C
Carte de sortie
A7B
OD212
1
3
5
7
9
11
13
15
COM
0
2
4
6
8
10
12
14
c.c.
Rem. : le signal de lecture de donnée n’est pas nécessaire
dans cet exemple.
Les entrées peuvent être connectées aux bornes d’entrée de l’UC ou à une
carte d’entrée c.c. ayant 8 points d’entrée max. ; les sorties peuvent être con-
nectées à partir d’une carte de sortie transistor ayant 8 points de sortie max.
Préparatifs Avec DSW(––), effectuez les sélections suivantes dans la configuration API en
mode PROGRAM avant l’exécution du programme.
Sélections de la roue codeuse (configuration API)
Bit
15 0
DM6639
Nombre de chiffres à lire
00: 4 chiffres
01: 8 chiffres
––
Défaut : 4 chiffres
N’effectuez aucun changement dans les bits 0 à 7 ; ils ne sont pas liés à
l’instruction DSW(––).
Utilisation de l’instruction
DSW
IW
IW: canal d’entrée
OW
OW: canal de sortie
R: 1er canal d’enregistrement
R
76
Page 80

Instructions d’E/S étendues
IW
4 chiffres : 00 à 03
8 chiffres : 00 à 03, 04 à 07
Canal 0
00
01
02
03
Chapitre 2–2
Si le canal d’entrée de la roue codeuse est spécifié pour IW et que le canal de
sortie est spécifié pour OW , le fonctionnement est le suivant lors de l’exécution
du programme :
10
0
10
1
10
2
10
3
Donnée d’entrée
4 chiffres de
gauche
D+1 D
Lorsque 4 chiffres seulement sont lus, seul le canal
D est utilisé.
Signal CS
4 chiffres
de droite
04
05
12345678910111213141516
16 cycles à effectuer pour 1 tour d’exécution
Signal RD (lecture)
Drapeau 1 tour
SR 25410 passe à ON pendant l’exécution de DSW(––).
Rem. : 1. N’utilisez pas DSW(––) plus d’une fois dans le même programme.
2. Lors de l’utilisation de DSW(––), sélectionnez le filtre d’entrée du canal d’entrée correspondant pour une valeur inférieure au temps de scrutation (les
filtres d’entrée peuvent être modifiées à partir de
DM 6620). Les caractéristiques de la roue codeuse doivent également être
considérées lors de la conception du système et du programme.
3. Les bits d’entrée et de sortie non utilisés ici peuvent l’être comme bits d’entrée
et de sortie ordinaires.
Avec cette instruction, les valeurs sélectionnées à 4 ou 8 chiffres peuvent être
lues en 16 cycles.
Exemple d’application Cet exemple montre un programme de lecture de 4 chiffres BCD à partir de la
roue codeuse. On suppose que la roue codeuse est connectée à IR 000 (entrée)
et à IR 100 (sortie) et que les sélections par défaut sont valables pour toute la
configuration API (4 chiffres à lire).
00015 10005
05000
05000
10005
05000
DSW
000
100
HR51
@MOV(21)
HR51
DM0000
77
Page 81

Instructions d’E/S étendues
Chapitre 2–2
Lorsque IR 00015 passe à ON, IR 05000 se maintient lui–même à ON jusqu’à ce
que le drapeau ”1 tour” (IR 10005) passe à ON à la fin du premier tour de lecture
accompli par DSW(––).
Les données sélectionnées à partir de la roue codeuse digitale par DSW(––)
sont stockées dans HR 51.
Lorsque le drapeau ”1 tour” passe à ON (10005) à la fin de la lecture, le nombre
stocké dans HR 51 est transféré vers DM 0000.
2-2-4 7-SEGMENT DISPLAY OUTPUT (affichage 7 segments) – 7SEG(––)
Cette instruction permet de sortir des données de canal sur un af ficheur à 7 segments. On utilise 8 bits de sortie (pour 4 chiffres) ou 12 bits de sortie (pour 8
chiffres).
Matériel L’afficheur à 7 segments est connecté à une carte de sortie comme sur le
schéma ci–dessous. Pour l’affichage de 4 chiffres, les données de sortie (D0 à
D3) sont connectées aux points 0 à 3 et les sorties verrouillées (CS0 à CS3) sont
connectées aux points de sortie 4 à 7. Le point de sortie 12 (affichage de 8
chiffres) ou l e point de sortie 8 (af fichage de 4 chiffres) passe à ON lorsqu’un tour
de données est affiché, mais il n’est pas nécessaire de les connecter, sauf si
l’application l’exige.
D
0
D
1
D
2
D
3
LE3 LE2 LE1 LE0
Rem. : 1. Les sorties des cartes de sortie fonctionnent normalement en logique néga-
V
(+)
V
(0)
DD
SS
V
DD
(+)
V
SS
(0)
LE3 LE2 LE1 LE0
D
0
D
1
D
2
D
3
OD212
0
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
c.c.
COM
Les sorties peuvent être connectées à partir d’une carte de sortie à transistor
ayant 8 points d’entrée min. (4 chiffres) ou 16 points d’entrée min. (8 chiffres).
tive (seul le type de sortie PNP fonctionne en logique positive).
2. L ’afficheur à 7 segments peut exiger une logique positive ou négative, selon le
modèle.
Utilisation de l’instruction
78
7SEG
S: 1er canal source
O: canal de sortie
S
C: donnée de contrôle
O
C
Page 82

()
q
()
q
Instructions d’E/S étendues
Chapitre 2–2
Si le premier canal maintenant les données à afficher est spécifié en S, que le
canal de sortie est spécifié en O et que la valeur de sélection venant du tableau
ci–dessous est spécifiée en C, le fonctionnement est le suivant pendant l’exécu-
tion du programme :
Format de stockage des données
4 chiffres d’extrême
gauche
Si 4 chiffres sont affichés, seul le canal S est utilisé.
Valeurs sélectionnées pour la logique et le nombre de chiffres (C)
Nombre de chiffres affichés Logique de l’entrée de
données sur l’afficheur et de
la carte de sortie
4 chiffres (4 chiffres, 1 bloc) Identique
Différente
8 chiffres (4 chiffres, 2 blocs) Identique
Différente
Rem. : ne pas attribuer à C de valeur qui ne soit comprise entre 000 et 007.
Fonction
Bit(s) en O
(4 chiffres
/1 bloc)
(4 chiffres
/2 blocs)
(la logique des donnnées et du verrouillage dépend de C)
4 chiffres d’extrême
droite
S+1 S
Logique de l’entrée
verrouillée de l’afficheur et
de la carte de sortie
Identique 000
Différente 001
Identique 002
Différente 003
Identique 004
Différente 005
Identique 006
Différente 007
Etat de sortie
é
Donnée de
sélection C
é
Sortie de
données
Sortie de
verrouillage 0
Sortie de
verrouillage 1
Sortie de
verrouillage 2
Sortie de
verrouillage 3
Drapeau
”1 tour”
00 à 03
04
05
06
07
08
00 à 03
04 à 07
08
09
10
11
12
0
10
1234567891011121
12 cycles à effectuer pour 1 tour
10
1
10
2
10
3
Rem. : 0 à 3 : sortie de données pour
le canal S
4 à 7: sortie de données pour le
canal S+1
SR 25409 passe à ON pendant l’exécution de 7SEG(––).
Rem. : 1. N’utilisez pas 7SEG(––) plus d’une fois dans le même programme.
2. Le temps de scrutation et les caractéristiques de l’afficheur à 7 segments
doivent être considérés lors de la conception du système.
3. Les bits de sortie non utilisés ici peuvent l’être comme bits de sortie
ordinaires.
Avec cette instruction, 4 ou 8 chiffres peuvent être affichés en 12 cycles.
Le fonctionnement commence à partir de la première exécution, quel que soit
l’état précédent.
79
Page 83

Instructions d’E/S étendues
Chapitre 2–2
Exemple d’application Cet exemple illustre un programme d’affichage de nombres BCD à 8 chiffres du
CQM1 sur l’af ficheur à 7 segments. On suppose que l’afficheur à 7 segments est
connecté au canal de sortie IR 100, que la carte de sortie utilise une logique
négative et que la logique de l’afficheur est également négative pour les signaux
de données et de verrouillage.
25313 (constamment à ON)
7SEG
DM0120
100
004
Les données BCD à 8 chiffres du DM 0120 (4 chiffres d’extrême droite) et du
DM 0121 (4 chiffres d’extrême gauche) sont toujours affichées par 7SEG(––).
Lorsque le contenu des DM 0120 et 0121 change, l’affichage est également
modifié.
2-2-5 Bits d’E/S alternés
Bien que les instructions d’E/S avancées utilisent généralement des bits d’E/S à
partir du bit 00 des canaux spécifiés, elles peuvent être programmées par le
biais de canaux intermédiaires pour utiliser d’autres bits d’E/S. L’exemple suivant illustre le moyen d’y parvenir par HKY(––).
Exemple Les exemples de programmation et de câblage suivants montrent comment uti-
liser les bits d’entrée IR 00004 à IR 00007 et les bits de sortie IR 10004 à
IR 10007 pour entrer les valeurs à l’aide d’un clavier hexadécimal.
Schéma de câblage (partiel)
C
D
E
ID212
0
1
2
3
4
5
6
7
Bornes d’entrée
IR 000
F
9
8
4
0
A
B
5
6
7
1
3
2
Rem. : les lignes de puissances ne figurent
pas.
OD212
1
3
5
7
9
Carte de
sortie
IR 100
0
2
4
6
8
80
Page 84

Fonction macro
Chapitre 2–3
Programme
IR 000
DM 0000
25313 (constamment à ON)
MOVD(83)
000
#0001
DM0000
HKY
DM0000
DM0100
DM1000
MOVD (83)
DM0100
#0100
100
Exécution de HKY
Entrée
Les bits 04 à 07 de IR 000 sont
transférés vers le bits 00 à 03 du
DM 0000.
HKY est codé en utilisant DM 0000
comme canal d’entrée et DM 0100
comme canal de sortie. Les résultats
de l’exécution sont placés dans les
DM 1000 à 1002.
Les bits 00 à 03 du DM 0100 sont
transférés vers le bits 04 à 07 de
IR 100.
Sortie
DM 0100
IR 100
015015
2-3 Fonction macro
La fonction macro permet d’utiliser un seul sous–programme (schéma de programmation) en changeant simplement les numéro de canal d’E/S. Un certain
nombre de parties de programme similaires peuvent être gérées avec un seul
sous–programme, cela permettant de réduire considérablement le nombre d’étapes et de clarifier le programme.
Utilisation des macros Pour utiliser une macro, appelez un sous–programme par l’instruction MACRO
MCRO(99) comme ci–dessous à la place de SBS(91) (SUBROUTINE ENTRY).
MCRO(99)
No ss–programme
1er canal d’entrée
er
canal de sortie
1
Lors de l’exécution de MCRO(99), la procédure est la suivante :
1, 2, 3... 1. Le contenu des 4 canaux consécutifs commençant par le premier canal
d’entrée est transféré vers les IR 096 à 099. Le contenu des 4 canaux consécutifs commençant par le premier canal de sortie est transféré vers les
IR 196 à 199.
2. Le sous–programme spécifié est exécuté jusqu’à l’exécution de RET(93)
(retour de sous–programme).
3. Le contenu des IR 196 à 199 est transféré vers les 4 canaux consécutifs
commençant par le premier canal de sortie.
4. L’instruction MCRO(99) est alors terminée.
Lorsque MCRO(99) est exécutée, le même schéma d’instruction peut être uti-
lisé selon les besoins en modifiant simplement le premier canal d’entrée ou de
sortie.
81
Page 85

Surveillance de changement d’état d’un bit
Chapitre 2–4
Les restrictions suivantes s’appliquent lors de l’utilisation d’une fonction macro.
• Les seuls canaux à pouvoir être utilisés pour chaque exécution de macro sont
les 4 canaux consécutifs commençant par le premier numéro de canal d’entrée (pour l’entrée) et les 4 canaux consécutifs commençant par le premier
canal de sortie (pour la sortie).
• Les entrées et sorties spécifiées doivent bien correspondre aux canaux utili-
sés dans le sous–programme.
• Même lorsque le mode de sortie direct est utilisé pour les sorties, les résultats
du sous–programme seront réellement reflétés dans les canaux de sortie spécifiés uniquement à la fin du sous–programme (étape 3 ci–dessus).
Rem. : si MCRO(99) n’est pas utilisée, les bits IR 096 à 099 et IR 196 à 199 peuvent être
utilisés comme bits de travail.
Les premiers canaux d’entrée et de sortie peuvent être spécifiés non pas à l’aide
des bits d’E/S, mais également avec d’autres bits (HR, bits de travail, etc.) ou à
l’aide de canaux DM.
Les sous–programmes appelés par MCRO(99) sont définis par SBN(92) et
RET(93), comme de simples sous–programmes.
Exemple d’application Lorsqu’une macro est utilisée, le programme peut être simplifié comme suit :
Macro non utilisée Macro utilisée
00000 10001
10000
00001
00200 10501
10500
00201 00202
00500 12001
12000
00501 00502
00002
10000
10001
10500
10501
12000
12001
25313 (constamment à ON)
MCRO(99)
090
000
100
MCRO(99)
090
002
105
MCRO(99)
090
005
120
MCRO(99)
090
010
150
SBN(92) 090
01000 15001
15000
01001 01002
15000
15001
Sous–programme
utilisé pour
09600 19601
19600
09601
19602
définir la
macro
2-4 Surveillance de changement d’état d’un bit
Le CQM1 permet la surveillance sur changement d’état de la console de programmation ou du LSS. On peut détecter la transition OFF à ON ou ON à OFF
82
19600
19601
RET(93)
Page 86

Sélections analogiques (CQM1-CPU42-E uniquement)
dans un bit spécifié. Lorsque la transition spécifiée a lieu, elle est affichée et un
signal sonore se met en route.
Reportez–vous au manuel d’utilisation du CQM1 pour de plus amples détails
concernant la procédure de surveillance d’état d’un bit par console de pro-
grammation et au manuel d’utilisation du LSS pour la précédure LSS.
Chapitre 2–5
2-5 Sélections analogiques (CQM1-CPU42-E uniquement)
Avec l’UC CQM1-CPU42-E, la fonction de sélection analogique transfère automatiquement les sélections des potentiomètres de l’UC vers les IR 220 à 223.
Cette fonction est très utile lorsque les valeurs sélectionnées doivent être préci-
sément réglées en fonctionnement. Ces valeurs peuvent être modifiées en tour-
nant simplement les potentiomètres de l’UC.
Rem. : avec des UC autres que la CQM1-CPU42-E, les IR 220 à 223 ne sont d’aucun
usage spécial. Ils peuvent être utilisés comme des canaux de travail dans le pro-
gramme.
Le schéma suivant illustre les potentiomètres et indique les canaux IR corres-
pondants contenant les potentiomètres.
Sélection du potentiomètre 0 dans IR 220.
Sélection du potentiomètre 1 dans IR 221.
Sélection du potentiomètre 2 dans IR 222.
Sélection du potentiomètre 3 dans IR 223.
Les sélections sont stockées en BCD et les seuils de fonctionnement sont com-
pris entre 0000 et 0200. Utilisez un tournevis cruciforme pour les réglages (tournez en sens horaire pour augmenter).
Attention : la CQM1-CPU42-E rafraîchit continuellement les IR 220 à 223 pour les sélections
des potentiomètres aussi longtemps que l’appareil est sous tension. Ne ré–écrivez pas le contenu de ces canaux à partir du programme ou d’un périphérique.
83
Page 87

Page 88

Chapitre 3
Zones de mémoire
Ce chapitre décrit la structure des zones de mémoire du CQM1 et explique leur utilisation. Il décrit également le fonctionnement de la cartouche mémoire utilisée pour transférer les données entre le CQM1 et cette cartouche.
3-1 Fonctions de la zone mémoire 88. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3-1-1 Structure de la zone mémoire 88. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3-1-2 Fonctions des bits 89. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3-2 Attribution des bits d’E/S 92. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3-3 Stockage des DM et de l’UM dans les cartouches mémoire 93. . . . . . . . . . . . . . . . . . . . . . . .
3-3-1 Cartouches mémoire et contenu 93. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3-3-2 Capacité des cartouches mémoire et taille de la zone UM 94. . . . . . . . . . . . . . . . . .
3-3-3 Ecriture de la cartouche mémoire 95. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3-3-4 Lecture sur la cartouche mémoire 96. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3-3-5 Comparaison du contenu de la cartouche mémoire 96. . . . . . . . . . . . . . . . . . . . . . . .
85
Page 89

int
)
2
lib
l’inst
bit
Fonctions de la zone mémoire Chapitre 3–1
3-1 Fonctions de la zone mémoire
3-1-1 Structure de la zone mémoire
Zones mémoire pouvant être utilisées dans le CQM1 :
Zone de données Taille Canaux Bits Fonction
Zone
1
IR
Zone
d’opérandeMACRO
Zone de valeur
sélectionnée
analogique
V aleur en cours du
compteur rapide 0
Valeurs en cours des
sorties d’impulsion des
ports 1 et 2
Valeurs présélectionnées des compteurs
rapides 1 et 2
Zones d’extension
Zone SR 184
Zone TR 8 bits --- TR 0 à TR 7 Ces bits sont utilisés pour stocker tempo–
1
Zone d’entrée
Zone de
sortie
Zones de
travail (bits
ernes
Zone d’entrée
Zone de
sortie
1
1
1
128 ou
192
bits
2 720
bits
min.
64 bits IR 096 à IR 099 IR 09600 à IR 09915
64 bits IR 196 à IR 199 IR 19600 à IR 19915
64 bits IR 220 à IR 223 IR 22000 à IR 22315 CQM1-CPU42-E:
32 bits IR 230 à IR 231 IR 23000 à IR 23115 Utilisés pour stocker les valeurs en cours
1
64 bits IR 236 à IR 239 IR 23600 à IR 23915 CQM1-CPU43-E:
64 bits IR 232 à IR 235 IR 23200 à IR 23515 CQM1-CPU43/44-E:
1
320
bits
bits
IR 000 à IR 015 IR 00000 à IR 01515
IR 100 à IR 115 IR 10000 à IR 11515
IR 016 à IR 095 IR 01600 à IR 09515
IR 116 à IR 195 IR 11600 à IR 19515
2
IR 216 à IR 219 IR 21600 à IR 21915
IR 224 à IR 229 IR 22400 à IR 22915
IR 200 à IR 215
IR 240 à IR 243
SR 244 à
SR 255
IR 20000 à IR 21515
IR 24000 à IR 24315
SR 24400 à
SR 25507
CQM1-CPU11/21-E: 8 canaux max. (7 + 1)
(128 bits) peuvent être utilisés pour les bits
d’E/S.
CQM1-CPU4j-E: 12 canaux max. (11 +
1) (192 bits) peuvent être utilisés pour les
bits d’E/S.
Les bits de travail n’ont pas de fonction
spécifique et peuvent être utilisés
rement dans le programme.
Utilisés lors de l’usage de l’instruction
macro, MCRO(99). Si l’on n’utilise pas
’
ruction macro, ces
utilisés comme bits de travail.
Utilisés pour stocker les valeurs
sélectionnées analogiques (inutilisables
comme bits de travail).
Utilisables comme bits de travail avec
d’autres UC.
du compteur rapide 0.
Utilisé pour stocker les valeurs en cours
des sorties d’impulsion des ports 1 et 2
(inutilisables comme bits de travail).
CQM1-CPU44-E:
Utilisé par le système
(inutilisables comme bits de travail)
Utilisables comme bits de travail avec
d’autres UC.
Utilisée pour stocker les valeurs en cours
des compteurs rapides 1 et 2 pour les
ports 1 et 2 (inutilisables comme bits de
travail).
Utilisables comme bits de travail avec
d’autres UC.
Ces bits sont en attente d’utilisation pour
des fonctions d’extension futures.
Ces bits servent à des fonctions spécifi-
ques comme les drapeaux et bits de
contrôle.
Utilisables comme bits de travail
rairement l’état ON/OFF des branches du
programme.
p
p
s peuvent être
ê
86
Page 90

Fonctions de la zone mémoire Chapitre 3–1
Zone de données FonctionBitsCanauxTaille
Zone HR 1 600
bits
Zone AR 448
bits
Zone LR
Zone de tempo./
compteur
Zone
DM
Zone de programme
utilisateur (zone UM)
1
3
Lecture/
écriture
Lecture
seule
Zone
d’historique
des erreurs
Configuration API
1 024
bits
512
bits
1 024
ca–
naux
5 120
ca–
naux
5
425 ca
–naux
31 ca–
naux
5
56 ca–
5
naux
3 200
ou
7 200
ca–
naux
HR 00 à HR 99 HR 0000 à HR 9915 Ces bits stockent les données et retien-
nent leur état ON/OFF lorsque la tension
est coupée.
AR 00 à AR 27 AR 0000 à AR 2715 Ces bits servent à des fonctions spécifi-
ques comme les drapeaux et bits de
contrôle.
LR 00 à LR 63 LR 0000 à LR 6315 Utilisés pour la liaison de données 1:1 par
le port RS-232.
TC 000 à TC 511
os
des tempo./compteurs)
(n
DM 0000 à
DM 1023
DM 1024 à
DM 6143
DM 6144 à
DM 6568
DM 6569 à
DM 6599
DM 6600 à
DM 6655
--- Utilisés pour stocker le programme ;
--- On peut accéder aux données de la zone
--- Uniquement avec les UC
--- Ré–écriture à partir du programme impos-
--- Utilisés pour stocker l’heure de l’occur-
--- Utilisés pour stocker les divers paramètres
Les mêmes numéros servent aux tempo.
et aux compteurs ; TC 000 à 002 servent
pour les tempo. cycliques.
DM par unités de mot seulement. Les
valeurs des mots sont retenues lorsque
l’alimentation est coupée.
CQM1-CPU4j-E
sible
rence et de code des erreurs.
de contrôle de l’API.
retenus en cas de coupure de
l’alimentation.
CQM1-CPU11/21-E: 3 200 canaux
CQM1-CPU4j-E: 7 200 canaux
4
Rem. : 1. Les bits IR et LR qui ne sont pas utilisés pour les fonctions qui leur sont
attribuées peuvent être utilisés comme bits de travail.
2. Au moins 2 720 bits peuvent être utilisés comme bits de travail. Le nombre
total de bits pouvant être utilisés dépend de la configuration API.
3. Lors de l’accès à une valeur en cours, les numéros de TC sont utilisés comme
données de canaux ; lors de l’accès à des drapeaux de fin, ils sont utilisés
comme données de bits.
4. Bien que les CQM1-CPU11-E et CQM1-CPU21-E ne possèdent pas de
DM 1024 à 6143, il n’y a pas d’erreur dans le cas où on adresse ces mots.
Toute tentative d’écriture ou de lecture donne cependant uniquement des
zéros.
5. Les données des DM 6144 et 6655 ne peuvent être ré–écrites à partir du
programme.
3-1-2 Fonctions des bits
Fonctions des diverses zones :
Zone IR Les bits de la zone IR sont attribués à des bornes sur les cartes d’entrée et de
sortie. Ils reflètent l’état ON ou OFF des signaux d’entrée et de sortie. Les bits
d’entrée commencent à IR 00000 et ceux de sortie à IR 10000. Avec le CQM1,
seuls les bits IR 00000 à 01515 peuvent être utilisés comme bits d’entrée et
seuls les bits IR 10000 à 11515 peuvent être utilisés comme bits de sortie.
Pour de plus amples renseignements sur l’attribution des bits d’entrée et de sortie, reportez–vous ci–après.
87
Page 91

Fonctions de la zone mémoire Chapitre 3–1
Rem. : les bits d’entrée ne peuvent être utilisés dans des instructions de sortie. N’utili-
sez pas le même bit de sortie dans plusieurs instructions OUT et/ou OUT NOT
car le programme ne pourrait pas fonctionner correctement.
Zone de bit de travail Avec les UC CQM1-CPU11/21/41-E, n’importe quel bit situé entre IR 001 et 243
et non utilisé pour une fonction spécifique peut être utilisé comme bit de travail.
Les quelques exceptions des UC CQM1-CPU42/43/43-E sont les suivantes :
UC Bits ne pouvant être utilisés comme bits de travail
CQM1-CPU42-E IR 22000 à IR 22315
CQM1-CPU43/44-E IR 23200 à IR 23915
Les bits de travail peuvent être utilisés librement dans le programme, mais ils ne
peuvent l’être que dans le programme et non pour les E/S externes directement.
Les bits de travail sont remis à zéro (OFF) lorsque l’alimentation du CQM1 est
coupée ou lorsque l’appareil entre en fonctionnement ou s’arrête.
Les bits des gammes suivantes ont des fonctions spécifiques mais peuvent être
utilisés comme bits de travail si leurs fonctions spécifiques ne sont pas
employées :
Gamme Fonction
IR 001 à IR 015 Attribués à des cartes d’entrée, ces bits servent de bits d’en-
trée.
IR 096 à IR 099 Avec l’instruction macro, ces bits servent de bits d’entrée d’o-
pérande.
IR 100 à IR 115 Attribués à des cartes de sortie, ces bits servent de bits de sor-
tie.
IR 196 à IR 199 Avec l’instruction macro, ces bits servent de bits de sortie d’o-
pérande.
IR 220 à IR 223 Avec l’UC CQM1-CPU42-E, ces bits servent à stocker les
valeurs sélectionnées analogiques ; ils peuvent être utilisés
comme bits de travail avec d’autres UC.
IR 230 à IR 231 Avec le compteur rapide 0, on utilise ces bits pour stocker la
valeur en cours.
IR 232 à IR 235 Avec l’UC CQM1-CPU43/44-E, ces bits servent à stocker les
valeurs en cours des compteurs rapides 1 et 2 ; ils peuvent être
utilisés comme bits de travail avec d’autres UC.
IR 236 à IR 239 Avec l’UC CQM1-CPU43-E, ces bits servent à stocker les
valeurs en cours des sorties d’impulsion des ports 1 et 2. Avec
l’UC CQM1-CPU44-E, ils sont utilisés par le système ; ils
peuvent être utilisés comme bits de travail avec d’autres UC.
Les IR 200 à 215 et les IR 240 à 243 seront utilisés plus tard mais peuvent être
utilisés pour le moment comme bits de travail.
Les bits LR 00 à 63 sont utilisés comme bits de liaison mais peuvent également
être utilisés comme bits de travail lorsqu’ils ne sont pas reliés à un autre CQM1.
Zone SR Ces bits servent principalement de drapeaux pour les opérations du CQM1.
Pour de plus amples détails sur les fonctions des bits, reportez–vous à l’annexe
D de ce manuel.
Les bits SR 244 à 247 peuvent également être utilisés comme bits de travail,
lorsque les interruptions d’entrée ne sont pas utilisées en mode compteur.
Zone TR Lorsqu’un schéma à relais complexe ne peut être programmé en mnémonique
tel quel, on utilise ces bits pour stocker temporairement les conditions d’exécution ON/OFF d’une équation logique du programme. Ils ne sont utilisés que pour
les codes mnémoniques. Lors d’une programmation directe en schéma à relais
avec le LSS, les bits TR sont automatiquement traités.
88
Page 92

Fonctions de la zone mémoire Chapitre 3–1
On ne peut utiliser plus d’une fois les bits TR dans le même bloc d’instruction
mais on peut les utiliser dans différents blocs. L’état ON/OFF des bits TR (8 TR
max. 0 à 7) ne peut être surveillé à partir d’un appareil périphérique.
Zone HR Ces bits retiennent leur état ON/OFF même après coupure de l’alimentation du
CQM1 ou en d ébut et fin fonctionnement. Ils s’utilisent de la même façon que les
bits de travail.
Attention : n’utilisez jamais de bit d’entrée dans une condition NF pour la remise à zéro
(RAZ) de KEEP(11) lorsque l’appareil d’entrée utilise une alimentation c.a. (cf
schéma ci–dessous). Le retard à la fermeture de l’alimentation c.c. de l’API
reliée à l’alimentaiton c.a. de l’appareil d’entrée peut provoquer une désignation
du bit de KEEP(11) à la remise à zéro.
A
c.a.
Carte d’entrée
B
A
Sélection
RAZ
KEEP
HR0000
Zone AR Ces bits servent principalement de drapeaux relatifs au fonctionnement du
CQM1. Pour de plus amples détails sur les différentes fonctions de bits, repor-
tez–vous aux chapitres correspondants dans ce manuel .
Zone LR Lorsque deux CQM1 sont reliés point par point, ces bits sont utilisés pour le par-
tage des données. Pour de plus amples détails, reportez–vous au chapitre des
LR.
Les bits LR peuvent être utilisés comme bits de travail lorsqu’ils ne sont pas utilisés comme bits de liaison.
Zone de tempo./compteurs Cette zone sert à la gestion des tempo./compteurs créés à l’aide de TIM,
TIMH(15), CNT et CNTR(12). Les mêmes numéros sont utilisés pour les
tempo./compteurs et chaque numéro peut être utilisé une seule fois dans le pro-
gramme utilisateur. N’utilisez pas le même numéro de TC plusieurs fois, même
pour des instructions différentes.
Les numéros de TC servent à la création de tempo./compteurs, à l’accès des
drapeaux de fin et des valeurs en cours. Si on désigne un numéro de TC comme
donnée de canal, on a alors accès à la valeur en cours ; si on l’utilise comme
donnée de bit, on a accès au drapeau de fin de la tempo. ou du compteur.
La drapeau de fin passe à ON lorsque la valeur en cours de la tempo./ ou du
compteur utilisée passe à 0.
Rem. 1. Les numéros de TC 000 à 015 et les procédures d’interruption doivent être
utilisées pour TIMH(15) à chaque fois que le temps de cycle dépasse 10 ms.
L’utilisation d’autres numéros de TC ou le défaut d’utilisation des procédures d’interruption entraîne un fonctionnement imprécis des tempo.
rapides. La procédure d’interruption peut être sélectionnée dans le DM
6629 de la configuration API.
2. Lorsque la condition d’entrée passe à OFF pour TIM ou TIMH(15), la valeur
en cours est remise à zéro et retourne à la valeur présélectionnée. La valeur
en cours est également remise à zéro au début de l’exécution du pro-
gramme ou lorsque la condition de branchement secondaire passe à OFF
dans une partie de programme secondaire (IL–ILC). La valeur en cours de
CNT ou CNTR(12) n’est pas remise à zéro comme celle d’une instruction
tempo. mais lorsque l’entrée de remise à zéro passe à ON.
89
Page 93

Attribution des bits d’E/S
Chapitre 3–2
Zone DM On accède aux données par unités de mots. Comme sur le schéma ci–dessous,
la zone DM contient une zone qui peut être librement utilisée et des zones ayant
des fonctions spécifiques.
DM0000
Cette zone n’a pas de fonction spécifique et peut être
DM1024
DM6144
DM6569
DM6600
DM6655
(cf Rem. 1)
DM fixe
(cf Rem. 2)
Stockage
d’erreurs
Configuration API
(cf Rem. 2)
utilisée librement. La lecture et l’écriture sont
possibles à partir du programme.
L’écriture de cette zone est impossible à partir du programme. Elle est utilisée pour le stockage d’informa-
tions qui n e s e r o n t pas modifiées. L’écriture ne peut être
effectuée que par un périphérique.
Cette zone permet de stocker les erreurs. L’utilisateur
peut seulement lire cette zone et ne peut y écrire.
Cette zone stocke les informations relatives au fonctionnement du CQM1. Les sélections sont effectuées par des
périphériques.
Rem. : 1. Les CQM1-CPU11-E et CQM1-CPU21-E ne possèdent pas de DM 1024 à
6143.
2. Le passage à ON de la borne 1 de l’interrupteur DIP de l’UC protège contre
l’écriture, même à partir de périphériques.
On peut sauvegarder la configuration API, le programme utilisateur et le tableau
d’instructions sur une cassette mémoire et les charger à partir de cette cassette
tous ensemble. Reportez–vous au chapitre 3–3 pour de plus amples détails.
Attention : bien que les CQM1-CPU11-E et CQM1-CPU21-E n’aient pas de DM 1024 à 6143
il n’y aura pas d’erreur en cas d’attribution d’adresse. Toute tentative d’écriture
sur ces mots n’aura aucun effet et la lecture donnera une suite de zéros.
Zone UM La zone UM permet de stocker le programme utilisateur. On peut lire et écrire le
contenu de la zone UM uniquement comme donnée de programme et non
comme canal. La tableau suivant montre la taille de la zone UM dans les UC du
CQM1.
UC Taille de la
zone UM
CQM1-CPU11/21-E 3,2 KW
CQM1-CPU4j-E
7,2 KW
3-2 Attribution des bits d’E/S
Les canaux d’E/S sont attribués par ordre à partir de la gauche, en commençant
par IR 001 pour la carte d’entrée et IR100 pour la carte de sortie. Les points d’entrée de l’UC sont attribués à IR 000 (ce canal est fixe). Même en cas de montage
aléatoire des cartes d’entrée et de sortie, les canaux d’entrée et de sortie af fectés à 2 zones IR distinctes ne peuvent se mélanger.
On attribue un canal même pour les cartes d’E/S à 8 po in t s. Voici l’utilisation des
bits pour les cartes d’E/S à 8 points :
90
Carte Bits 0 à 7 Bits 8 à 15
Carte d’entrée Bits d’entrée Constamment à OFF (0)
Carte de sortie Bits de sortie Bits de travail
Page 94

Stockage des DM et de l’UM dans les cartouches mémoire
Le nombre de bits d’E/S pouvant être attribués dépend de l’UC du CQM1 :
UC Nombre de bits d’E/S
CQM1-CPU11/21-E 128 bits max. (8 canaux) peuvent être utilisés pour les
bits d’E/S (7 + 1)
192 bits max. (12 canaux) peuvent être utilisés pour les
bits d’E/S (11 + 1)
I
O O I O O
I
U
N
T
16N8
16
On peut attribuer jusqu’à128 bits d’E/S (8 canaux) pour le CQM1. Une carte
d’E/S à 16 points se voit attribuer un demi canal et doit représenter 16 points
pour le calcul total et une carte 32 points prend 2 canaux de 16 bits.
Exemple d’attribution de canaux
CQM1-CPU4j-E
Alim.
15 8 7 0 15 8 7 0
IR 000
IR 001
IR 002
UC
U
T
16N16
Chapitre 3–3
Alim. : carte d’alimentation
UC : UC
U
T
8
IN: carte d’entrée
U
T
OUT: carte de sortie
8
Inutilisable
Bits de travail
IR 100
IR 101
IR 102
IR 103
Tous les bits se trouvant dans des canaux situés au–delà du dernier canal d’entrée et du dernier canal de sortie attribués peuvent être utilisés comme bits de
travail.
De façon à clarifier l’attribution des canaux et à éliminer les problèmes d’interfé–
rence, il est conseillé de monter toutes les cartes d’entrée directement à la suite
de l’UC. Pour l’exemple ci–dessus, voici la disposition conseillée :
Alim. : carte d’alimentation
UC : UC
IN: carte d’entrée
U
OUT: carte de sortie
T
8
Alim.
UC
I
I
N
16N8N16
I O O O O
U
U
U
T
T
T
16
16
8
Le nombre de canaux d’entrée attribués est stocké en BCD dans les bits
AR 2200 à 2207 ; le nombre de canaux de sortie attribués est stocké en BCD
dans les bits AR 2208 à 2215. Le CQM1 n’utilise pas de tableau d’E/S.
Attention : à chaque mise sous tension, ce canal est réactualisé.
Un programme de la table des E/S précédentes est donc nécessaire si l’on veut
connaître l’ancienne configuration du CQM1 en nombre de cartes d’entrées et
de sorties.
3-3 Stockage des DM et de l’UM dans les cartouches mémoire
En cas d’utilisation d’une cartouche mémoire optionnelle, la configuration API,
le programme utilisateur, les DM fixes et les instructions du tableau peuvent être
placées en ROM. Cela empêche les modifications intempestives. En outre, lors
de modifications de process de contrôle, les sélections et programmes peuvent
facilement être changés en remplaçant la cartouche mémoire.
Ce chapitre décrit la lecture, l’écriture et la comparaison des informations provenant de la cartouche mémoire et destinées à celle–ci.
3-3-1 Cartouches mémoire et contenu
Cartouches mémoire Les six types de cartouches mémoires sont les suivants :
91
Page 95

Stockage des DM et de l’UM dans les cartouches mémoire
Référence Remarques
CQM1-ME04K EEPROM (sans horloge) 4 Koctets
CQM1-ME04R EEPROM (avec horloge) 4 Koctets
CQM1-MP08K EPROM (sans horloge) 8 Koctets
CQM1-MP08R EPROM (avec horloge) 8 Koctets
CQM1-ME08K EEPROM (sans horloge) 8 Koctets
CQM1-ME08R EEPROM (avec horloge) 8 Koctets
Les EEPROM suivantes (vendues séparément) sont nécessaires pour les cartouches mémoire de type EPROM :
Référence Version ROM Capacité Vitesse d’accès
ROM-ID-B 27128 ou équivalent 8 Koctets 150 ns
ROM-JD-B 27256 ou équivalent 16 Koctets 150 ns
ROM-KD-B 27512 ou équivalent 32 Koctets 150 ns
Sur les UC CQM1, on peut écrire 8 Koctets max. d’informations sur une car-
touche mémoire. N’importe laquelle des EPROM citées ci–dessus possède
donc la capacité nécessaire et son choix sera uniquement basé sur la facilité
d’achat.
Pour de plus amples instructions sur l’utilisation des cartouches mémoires,
reportez–vous au manuel d’utilisation du CQM1.
Contenu Informations pouvant être écrites sur une cartouche mémoire :
Chapitre 3–3
Information Contenu
DM fixes On ne peut écrire sur les DM fixes à partir du programme.
Configuration API La configuration API permet de sélectionner les paramètres
Tableau
d’instructions
Mémoire de
programme
utilisateur (UM)
La gamme s’étend du DM 6144 au DM 6568. Ces mots
sont disponibles pour l’utilisateur.
de fonctionnement du CQM1 ; elle est stockée dans les
DM 6600 à 6655.
Le tableau des instructions attribue des instructions d’extension aux codes de fonction de façon à permettre leur utilisation en programmation.
La zone UM maintient le programme utilisateur.
Les informations ci–dessus ne peuvent être lues, écrites ou comparées individuellement et doivent être traitées en groupe.
3-3-2 Capacité de la cartouche mémoire et taille de la zone UM (FAL90)
Une erreur non fatale se produit si l’on essaie de transférer un programme de
taille trop importante. Il y a deux cas dans lesquels cela peut se produire :
1, 2, 3... 1. Lorsqu’une cartouche EEPROM de 4 KW est installée sur une UC
CQM1-CPU4j-E avec une zone UM de 7,2 KW, les programmes de
3,2 KW peuvent être écrits sur la cartouche. Une erreur non fatale se produit
si l’on essaie d’écrire un programme plus important que 3,2 KW sur la
cartouche.
Programme
supérieur à
3,2 KW
Zone UM (7,2 KW)
X
Cartouche mémoire
(4 KW)
92
Page 96

oce
Stockage des DM et de l’UM dans les cartouches mémoire
2. Lorsqu’une cartouche de 8 KW au moins est installée sur une UC
CQM1-CPU11/21-E ayant une zone UM de 3,2 KW, on peut lire des programmes de 3,2 KW min. sur la cartouche. Une erreur non fatale se produit
si l’on essaie de lire un programme supérieur à 3,2 KW à partir de la
cartouche mémoire.
Chapitre 3–3
Zone UM (3,2 KW)
X
Cartouche mémoire (8 KW)
Programme
supérieur à
3,2 KW
Rem. : les deux transferts ci–dessus serait normalement portés à leur terme si les
programmes ne dépassaient pas 3,2 KW.
Voici les tailles approximatives des programmes en zone UM et des cartouches
mémoire, qui peuvent être déterminées par le contenu de AR 15 :
Emplace-
ment
du pro-
gramme
Cartouche
mémoire AR 1507
Zone UM
Bits Con-
AR 1500
à
AR 1508
à
AR 1515
00 Aucune cartouche mémoire installée ou aucune
04 Le programme est inférieur à 3,2 KW et ne peut
08 Le programme est inférieur à 7,2 KW et ne peut
04 Le programme est inférieur à 3,2 KW et ne peut
08 Le programme est inférieur à 7,2 KW et ne peut
Signification
tenu
sauvegarde de programme dans la cartouche.
être lu à partir de n’importe quelle UC CQM1.
être lu qu’à partir des UC CQM1-CPU4j-E.
être écrit sur n’importe quelle cartouche mémoire.
être écrit que sur une cassette de 8 KW min.
Pour les UC CQM1-CPU11/21-E, le contenu des AR 1508 à 1515 est normalement égal à 04, ainsi que celui des AR 1500 à 1507, lorsqu’une cartouche
mémoire de 4 KW a été installée.
La taille du programme indiqué dans AR 15 ne comprend pas les instructions
NOP(00) se trouvant après END(01), mais toutes les autres instructions. Veillez
à effacer toutes les instructions qui ne sont pas nécessaires après END(01) afin
d’obtenir une évaluation précise de la taille du programme.
3-3-3 Ecriture sur la cartouche mémoire
L’écriture sur une cartouche de type EPROM s’ef fectue à l’aide du LSS et d’un
programmateur d’EPROM. Pour de plus amples détails concernant le LSS,
reportez–vous à son manuel d’utilisation.
Voici la procédure à suivre pour l’écriture :
1, 2, 3... 1. Vérifiez que l’interrupteur de protection contre l’écriture soit bien OFF sur la
cartouche (c’est–à–dire désactivé). S’il est en position ON, (écriture impossible), coupez l’alimentation du CQM1 et démontez la cartouche avant de
changer la position de l’interrupteur.
2. Vérifiez que le CQM1 est en mode PROGRAM. S’il est en mode RUN ou
MONITOR, utilisez le LSS pour changer de mode.
3. Placez le bit AR 1400 à ON avec le LSS.
L’information sera écrite du CQM1 vers la cartouche mémoire. A la fin de
l’opération, le bit AR 1400 passe automatiquement à OFF.
93
Page 97

Stockage des DM et de l’UM dans les cartouches mémoire
Attention : les données ne peuvent être inscrites sur la cartouche mémoire si une erreur
mémoire s’est produite.
Rem. : si une erreur se produit lors de la transmission des données, une erreur non
fatale (FAL 9D ) e s t g énérée et le bit AR approprié (AR 1412 à 1415) passe à ON
OFF. Dans ce cas, reportez–vous au chapitre 8 et effectuez les corrections
nécessaires.
3-3-4 Lecture de la cartouche mémoire
Il existe deux méthodes de lecture des données de la cartouche mémoire sur le
CQM1 : en utilisant un périphérique (par ex. le LSS) ou par lecture automatique
du contenu au démarrage du CQM1.
Si le programme de la cartouche mémoire possède des instructions d’extension
ayant des codes de fonction différents des sélections par défaut, assurez–vous
que l’interrupteur DIP 4 de l’UC est à ON (indication des codes de fonction
attribués par l’utilisateur).
Rem. : lorsque la donnée est lue de la cartouche mémoire sur le CQM1, l’interrupteur
DIP 1 du CQM1 doit être à OFF (c’est–à–dire que l’écriture des DM doit être possible). Coupez l’alimentation du CQM1 avant de placer cette borne à OFF.
La lecture de la cartouche peut être exécutée quelle que soit le type de cartouche.
Si une erreur se produit pendant la transmission des données, une erreur non
fatale (FAL 9D) est générée et le bit AR approprié (AR 1412 à AR 1415) passe à
ON ou OFF (dans ce cas, reportez–vous au chapitre 8 et effectuez les corrections nécessaire).
Chapitre 3–3
Fonctionnement des périphériques
Procédure de lecture de la cartouche à partir d’un périphérique :
1, 2, 3... 1. Vérifiez que le CQM1 est en mode PROGRAM. S’il est en mode RUN ou
MONITOR, utilisez le périphérique ou LSS pour changer de mode.
2. Utilisez le périphérique ou LSS pour placer le bit AR 1401 à ON.
L’information est lue à partir de la cartouche sur le CQM1. Lorsque l’opération
est terminée, AR 1401 passe automatiquement à OFF.
Lecture automatique Si l’interrupteur DIP 2 du CQM1 est à ON (lancement automatique), les données
sont automatiquement lues à partir de la cartouche mémoire à la mise sous tension du CQM1. Ce fonctionnement est impossible si une erreur survient pendant
le transfert de données entre la cartouche mémoire et la mémoire du CQM1.
Attention : veillez à ce que l’alimentation soit bien coupée avant de changer les sélections
des interrupteurs DIP sur le CQM1.
3-3-5 Comparaison du contenu de la cartouche mémoire
Le contenu de la cartouche mémoire peut être comparé à celui de la mémoire du
CQM1 pour vérifier leur égalité ; cette opération peut être effectuée quelle que
soit la cartouche. Utilisez la procédure suivante :
1, 2, 3... 1. Vérifiez que le CQM1 est en mode PROGRAM. S’il est en mode RUN ou
MONITOR, utilisez un périphérique pour passer en mode PROGRAM.
2. Placez AR 1402 à ON à partir du périphérique. Le contenu de la cartouche
mémoire peut être comparé à celui de la mémoire du CQM1. Le bit AR 1402
passe automatiquement à OFF à la fin de la comparaison.
94
Page 98

Stockage des DM et de l’UM dans les cartouches mémoire
3. Vérifiez l’état du bit AR 1403 pour obtenir le résultat de la comparaison. Il est
à ON si les contenus sont différents ou si la comparaison est impossible (si
le CQM1 n’est pas en mode PROGRAM). Si le bit AR 1403 est à OFF, la
comparaison a été effectuée et les contenus sont identiques.
Le bit AR 1403 ne peut être contrôlé à partir du programme ou d’un périphéri-
que. Il ne peut être contrôlé que par le résultat de la comparaison.
Si l’on tente une comparaison avec le CQM1 dans un mode autre que le mode
PROGRAM, une erreur non fatale se produit (F AL 9D) et le bit AR 1412 passe à
ON. Bien que le bit AR 1403 passe également à ON, aucune comparaison n’a
été effectuée. Le bit AR 1403 passe également à ON si l’on essaie d’effectuer
une comparaison sans installer de cartouche mémoire sur le CQM1.
Chapitre 3–3
95
Page 99

Page 100

Chapitre 4
Programmation en schéma à relais
Ce chapitre décrit les étapes et concepts principaux de l’écriture en schéma à relais. Il présente les instructions qui sont
utilisées pour construire la structure fondamentale du schéma à relais et pour contrôler son exécution. L’ensemble des
instructions utilisées dans la programmation est décrite dans le chapitre 5.
4-1 Procédure fondamentale 100. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4-2 Terminologie des instructions 100. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4-3 Les bases du schéma à relais 101. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4-3-1 Terminologie fondamentale 101. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4-3-2 Codes mnémoniques 102. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4-3-3 Instructions 104. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4-3-4 OUTPUT et OUTPUT NOT 106. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4-3-5 L’instruction END 106. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4-3-6 Les instructions en bloc logique 107. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4-3-7 Codage des instructions multiples de droite 114. . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4-3-8 Lignes secondaires 115. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4-3-9 Sauts 119. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4-4 Contrôle de l’état des bits 120. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4-4-1 SET et RESET 121. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4-4-2 DIFFERENTIATE UP et DIFFERENTIATE DOWN 121. . . . . . . . . . . . . . . . . . . . .
4-4-3 KEEP 121. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4-4-4 Bits de maintien automatique (”Seal”) 122. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4-5 Bits de travail (relais internes) 122. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4-6 Précautions de programmation 125. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4-7 Exécution du programme 126. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
97
 Loading...
Loading...