


Pilot 3380
A U T O P I L O T
w w w . n a v m a n . c o m
Tracker 5505/5605
C H A R T P L O T T E R
Installations- und
Bedienungs-Handbuch

TRACKER 5505/5505i/5605 Installations- und Bedienungs-Handbuch
2
NAVMAN
FCC Statement
Hinweis: Diese Anlage wurde getestet und die Übereinstimmung festgestellt mit
den Begrenzungen für ein Klasse B Digital-Gerät, gemäß Part 15 der FCC-Regularien.
Diese Grenzen wurden entwickelt, um einen ausreichenden Schutz gegen schädliche
Interferenzen in einer normalen Installation sicher zu stellen. Diese Anlage erzeugt
und nutz t Radiofrequenz-Energien und kann sie abstrahlen. Erfolgt keine Installation
und Nutzung in Übereinstimmung mit den Instruk tionen, können schädliche
Störungen bei Radio-Kommunikations-Anlagen auf treten. Zumindest ist es nicht
vollständig auszuschließen, dass bei einzelnen Installationen Störungen auftreten
könnten. Sollten Störungen im Radio- oder Fernseh-Empfang bemerkbar werden,
ist durch Ein - und Ausschalten des Trackers zu klären, ob diese Anlage die Störungen
verursacht. Zur Abstellung der Störungen sind folgende Möglichkeiten gegeben:
Aufstellungsor t oder Ausrichtung der Empfangsantenne verändern.
Den Abstand zwischen Tracker-Bauteilen und Funk-Empfänger vergrößern.
Den Spannungsanschluss für die Anlage an einer anderen Schalttafel als die für
den Empfänger genutzte durchführen.
Den Händler oder einen erfahrenen Techniker konsultieren.
Für den Anschluss peripherer Geräte sind ab geschirmte Kabel zu verwenden.
Industry Canada
Der Betrieb ist folgenden z wei Bedingungen unterworfen: (1) dieses Gerät darf
keine Inter ferenzen verursachen, und (2) dieses Gerät muss jegliche Interferenzen
akzeptieren, inkl. Störungen, die zu unerwünschten Betriebs funktionen der Anlage
führen könnten.
WICHTIGE SICHERHEITS-INFORMATION
Diese vor Installation und Nutzung sorgfältig lesen.
CAUTION
!
!
DANGER
WARNING
Die ses ist das Sicher heits -Alar msymbol. Es weis t auf
potenzielle Gefahrenzustände hin. Die diesem Symbol
folgenden Informationen sind unbedingt zu beachten,
um mögliche Unfälle mit schwerwiegenden Folgen zu
vermeiden.
CAUTION
!
!
WARNING
WARNUNG weist auf gefährliche Situationen hin, die bei
Nichtbeachtung zu schweren Unfällen führen können.
CAUTION
!
ACHTUNG weist auf kritische Situationen hin, die bei
Nichtbeachtung zu Schäden oder Verletzungen führen
können.
CAUTION
!
!
CAUTION
DANGER
WARNING
VOR SICHT ohne das Alar m-Symbol, weis t bei Nichtbeachtung auf Situationen hin, die zu Beschädigungen
führen können.
TRACKER 5505/5505i/5605 Installations- und Bedienungs-Handbuch
3
NAVMAN
Der Eigentümer ist allein verantwortlich für den korrek ten Einbau, die ordnungsgemäße
Anwendung einer Navman Anlage in einer Weise, dass Unfälle, Verlet zungen und Defek te
vermieden werden. Jederzeit auf eine sichere Bootsführung achtgeben.
Eine optimale Platzierung und eine sorgfältige Installation von Instrument, GPS-Antenne u.
Geber sind Vorbedingung für gute Betriebsergebnisse. Den Anweisungen in diesem Handbuch
sorgfältig folgen. In Zweifelsfällen, einen Navman Fachhändler konsultieren.
Bohrungen und Ausschnitte müssen an sicheren Positionen er folgen und dürfen nicht die
Boots-Struktur schwächen. Im Zweifelsfall, einen qualifizierten Bootsbauer konsultieren.
Globales Positions-System: Das globale Positions-System (GPS) wird durch die US-Regierung
betrieben. Sie allein ist verantwortlich für den Betrieb, die Genauigkeit und die War tung. Es
können jederzeit GPS-Betriebsdaten geändert werden, wovon Genauigkeit und Zuverlässigkeit
sämtlicher GPS-Empfänger beeinflusst werden, wie auch beim TRACKER und TRACKFISH.
Um das Risiko von Fehlbedienungen und falscher Anzeigen-Interpretationen am TRACKER
bzw. TRACKFISH zu minimieren, muss das Handbuch sorgfältig gelesen werden, um alle
Aspek te der Installation und Bedienung zu verstehen. Wir empfehlen weiterhin, zuerst die
Betriebsfunktionen im Simulationsmodus zu erlernen, bevor der TRACKER bz w. TRACKFISH in
der Praxis genutzt wird.
Elektronische Karten: Die im TRACKER bzw. TRACKFISH verwendeten elektronischen
Seekar ten dienen nur als Hilfsmittel zur Navigation. Sie sind als Ergänzung zu den off iziellen
Behörden-Seekarten gedacht, dürfen diese jedoch nicht ersetzen. Nur offizielle BehördenKarten, mit hinzugefügten Ergänzungen für den Navigator, enthalten alle Informationen, die
eine sichere und gesetzeskonforme Navigation gewährleisten. Immer die vom TRACKER bzw.
TRACKFISH erhaltenen Informationen mit anderen Quellen vergleichen, wie Kompass- und
Echolot-Anzeigen, Radar und eigene Beobachtungen. Sollten die Informationen nicht
übereinstimme n, sind ent sprechende Diskrepanzen erst zu klären, bevor fortgefahren
werde n kann.
Brennstoff-Computer: Bezüglich des an Bord vorhandenen Brennstoffes, sich niemals nur auf
den Brennstoff- Computer als einzige Informationsquelle verlassen. Der Brennstoffverbrauch ist
stark abhängig von Bootsbeladung, Trimm und Seegang. Die Computerinformationen immer
durch optisch/manuelle Kontrollen ergänzen. Das ist erforderlich, weil eventuell beim Tanken
vergessen wurde, die Inhaltsanzeige auf Null zu setzen, die Restmenge zu berücksichtigen,
den Computer einzuschalten, oder weil andere Fehlb edienungen erfolgt sind. Es muss immer
sicher gestellt sein, dass für geplante Reisen ausreichend Brennstof f an Bord ist, inklusive
Reserven für unvorhergesehene Zwischenfälle.
Nichtbeachtung dieser Warnungen kann schwerwiegende und lebensgefährdende
Konsequenzen haben. Navman lehnt jede Verantwortlichkeit für Schäden und Unfälle ab,
die im Zusammenhang mit der Installation und Nutzung dieses Produktes stehen, wie auch
für gesetzwidrige Anwendungen.
Da Navman kontinuierlich Produk tverbesserungen durchführt, wird das Recht vorbehalten,
zu jeder Zeit Produk tänderungen durchzuführen, die dann nicht in dieser Handbuch-Version
wiedergegeben sind. Für weitergehende Unterstützung steht Ihr Navman Fachhändler vor Ort
zur Verfügung.
Verwendete Textsprache: Dieses Statement, sämtliche Instruktions-Bücher,
Bedienungsanweisungen und sonstige Informationen zu diesem Produkt sind in eine oder aus
einer anderen Sprache übersetzt. Sollten irgendwelche Differenzen zwischen den Versionen
bestehen, gilt die englische Version als offizielle Original-Dokumentation.
Copyright © 2005 Navman New Zealand. Alle Rechte vorbehalten. Navman ist eine registrierte
Handelsmarke von Navman New Zealand.
Der TRACKER hat vorgewählte Maßeinheiten. Ändern der Einheiten, siehe Abschn. 14-8.
Wichtig

TRACKER 5505/5505i/5605 Installations- und Bedienungs-Handbuch
4
NAVMAN
Inhalt
1 Einführung ............................................................................................................................................8
1-1 Übersicht . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
8
1-2 Reinigung und Wartung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
1-3 Steckkarten-Module . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .8
1-4 Das Display-Gerät abnehmen und wieder ansetzen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
9
2 Basis-Bedienung ..................................................................................................................................
10
2-1 Tastenbenutzung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
10
2-2 Menus verwenden . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
2-3 Auto-Einschaltung ein- und ausschalten . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .11
2-4 Beleuchtung und Nachtmodus . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
12
2-5 Mann-über-Bord Funktion (MOB) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .12
2-6 Alarme . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
13
2-7 Simulations-Modus . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .14
2-8 Die Hauptanzeigen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .14
3 Navigation: Karte ................................................................................................................................
18
3-1 Navigations-Übersicht . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
18
3-2 Karten-Anzeige . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .20
3-3 Distanz- und Peil-Kalkulator . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
22
3-4 Kurs-Vorauslinie . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .24
3-5 Plottstrecken-Funktionen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
24
4 Navigation: Rollbahn-Darstellung .......................................................................................................
25
5 Navigation: Wegpunkte .......................................................................................................................
25
5-1 Wegpunkt-Anzeige . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
26
5-2 Mit Wegpunkten arbeiten . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .26
6 Navigation: Routen ..............................................................................................................................
28
6-1 Routen-Liste . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
29
6-2 Mit Routen arbeiten . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .29
7 Satelliten .............................................................................................................................................
32
7-1 Satelliten-Anzeige . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
33
8 Messgeräte-Anzeigen ..........................................................................................................................
33
9 Daten-Anzeigen ...................................................................................................................................
34

TRACKER 5505/5505i/5605 Installations- und Bedienungs-Handbuch
5
NAVMAN
10 Brennstoff-Funktionen und Anzeigen ................................................................................................ 35
10-1 Wie der Brennstoff-Computer arbeitet . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
35
10-2 Brennstoff-Anzeige . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .35
10-3 Wenn Brennstoff entnommen oder hinzugefügt wird . . . . . . . . . . . . . . . . . . . . . . . . . .37
10-4 Alarm Tankinhalt-niedrig . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
37
10-5 Boot-Geschwindigkeitssensoren . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
38
10-6 Brennstoff-Verbrauchskurve . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
40
10-7 Kalibrierung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .42
11 Tiden Anzeigen ..................................................................................................................................
43
12 Anwendermodul-Anzeige ...................................................................................................................4 4
13 Info-Anzeige ......................................................................................................................................
45
14 TRACKER-Einstellungen .....................................................................................................................
46
14-1 Setup > System . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
46
14-2 Setup > Karte . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .48
14-3 Setup > GPS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .52
14-4 Setup > Brennstoff . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
53
14-5 Setup > Plottstrecken . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
54
14-6 Setup > Logs . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
55
14-7 Setup > Alarme . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .56
14-8 Setup > Einheiten . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .57
14-9 Setup > Datenaustausch . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
57
14-10 Setup > Zeit . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
58
14-11Setup > Simulation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
58
15 Installation ........................................................................................................................................
59
15-1 Installation: TRACKER-Lieferumfang . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
59
15-2 Installation: Optionen und Zubehör . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .59
15-3 Installation: Die Display-Einheit . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
61
15-4 Installation: Netz/Daten-Kabel . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .62
15-5 Installation: GPS Antenne . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
63
15-6 Installation: Navman Benzin-Sensoren . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .63
15-7 Installation: Navman Diesel Sensoren . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .64
15-8 Installation: SmartCraft . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
64
15-9 Installation: Andere NavBus Instrumente . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .64
15-10 Installation: Andere NMEA-Instrumente. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
65
15-11 Installation: Setup und Test . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .66

TRACKER 5505/5505i/5605 Installations- und Bedienungs-Handbuch
6
NAVMAN
Anhang A - Spezifikationen ..................................................................................................................... 67
Anhang B - Fehlersuche ..........................................................................................................................
69
Anhang C - Glossar und Navigationsdaten ...............................................................................................
72
TRACKER 5505/5505i/5605 Installations- und Bedienungs-Handbuch
7
NAVMAN
Kurzanleitung
Merkmale Funktionen Siehe erfordert
GENERELL Nutzung von Tasten und Anzeigen 2
Fehlersuche Anhang B
Simulations-Modus 2-7
Glossar spezieller Bezeichnungen Anhang C
Spezif ikationen Anhang A
MOB Mann-über-Bord Taste 2-5
Navigation Übersicht der Navigationsfunktionen 3-1 GPS Fix
Bootsposition in der Karte finden 3-2
Einen beliebigen Punkt oder einen Wegpunkt
ansteuern
3-1
Auf einer Route navigieren 3-1
Vorauskurs-Linie: eine angenäher te
Vorausberechnung
3-4
Plottstrecken: Aufzeichnung zurückgelegter
Strecken
3-5
GPS-Empfänger Status
7
Speichern und Laden von Daten mittels
Anwender-Steckmodul
12 Anwendermodul
Karten-Daten Karten-Merkmale (eingebaute Weltkarte) 3-2
Karten-Details 3-2-4 & 5 C-MAP™ Karte
Tiden bei einem Hafen 11 C-MAP™ Karte
Alarme Vorhandene Alarme 2-6
SmartCraft Maschinen-Alarme 1-1 SmartCraft
Boots-Daten Daten am oberen Displayrand der Haupt-
Anzeigen
2-8-2
Kompass-Anzeige oben in den Hauptanzeigen 2-8-3
Zusammengestellte Datenanzeigen
9
Brennstoff Brennstoff Computer, Benzin-Motoren 10 Brennstoff
Sensoren
Brennstoff Computer, SmartCraft Motoren 10 SmartCraft
Brennstoff Computer, Diesel Motoren
10-1 Diesel-Sensoren
Was ist zu tun, wenn Brennstoff zugefügt oder
entnommen wird
10-3
TRACKER 5505/5505i/5605 Installations- und Bedienungs-Handbuch
8
NAVMAN
1-2 Reinigung und War tung
Das TRACKER -Display ist mit einer für Navman
entwickelten speziellen Anti-Reflexionsschicht
versehen. Um Schäden zu vermeiden, das
Display nur mit einem feuchten Tuch und
milden Reinigungsmitteln von Schmut z
und Seesalz säubern. Keine schmirgelnden
Mittel und kein Benzin oder andere Lösungen
verwenden. Ist ein Steckmodul verschmutzt
oder nass, nur mit einem weichen Tuch und
milden Reinigungsmitteln säubern.
Kabel und Stecker vor mechanischen Stoß- und
Quetsch-Einwirkungen schützen.
Wird der TRACKER nicht b enutzt, die
Schutzkappe auf das Gerät setzen.
Der Navman TRACKER 5380 ist ein kompakter,
system-integrierender Seekartenplotter. Er ist
einfach zu bedienen und hat ein leicht lesbares
Farb-Display. Mit wenigen Tastenbefehlen sind
komplexe Funktionen durchführbar, welche die
aufwendige Navigationsarbeit leicht machen.
Dieses Handbuch beinhaltet:
TRACKER 5505/5605
Farb-Display, externe GPS Antenne.
TRACKER 5505i
Graustufen-Display, interne GPS Antenne.
Die verfügbaren Funktionen, Anzeigen
und Setup -Menus sind abhängig von den
installierten, optionalen Sensoren und
Instrumenten.
Brennstof f-Funktionen erfordern
eine Installation und Basiseinstellung
von optionalen Benzin-, Diesel- oder
SmartCraft-Brennstoffsensoren.
1-1 Übersicht
SmartCraft-Motorenfunktionen erfordern
ein installiertes SmartCraft-System.
Informationen zur SmartCraft Nutzung
sind im Handbuch Smar tCraft Gateway
Installation und Bedienung enthalten.
Der TRACKER kann Daten an andere
Instrumente senden, z.B. an einen
Autopiloten, oder Daten von anderen
Instrumenten empfangen.
Informationen zu Installations-Optionen, siehe
Abschn. 15-2.
Dieses Handbuch beschreibt, wie der TRACKER
zu installieren und zu bedienen ist. Spezielle
Begrif fe sind im Anhang C beschrieben.
Um eine maximale Nut zung des Systems zu
erzielen, ist dieses Handbuch vor dem Einbau
und der Verwendung sorgfältig zu lesen.
Weitere Informationen zu diesem System und
anderen Navman-Produkten sind von unserer
Website abrufbar,
www.navman.com.
1-3 Steckkarten-Module
Es können z wei Arten Steckmodule verwendet
werden:
C-MAP™ Kartenmodule mit detaillierten
Seekar ten für die Navigation in bestimmten
Regionen. Sobald das Kar tenmodul
gesteck t ist, erscheinen die detaillierten
Darstellungen automatisch im TRACKERDisplay.
Im TR ACKER können NT, NT+ und NT-MAX
Steckmodule verwendet werden.
C-MAP™ Anwendermodule werden
benutzt, um Navigationsdaten zu
speichern. Jedes Anwendermodul erweitert
den TRACKER-Speicher und ermöglicht
eine einfache Datenübertragung zu einem
anderen TRACKER-System (siehe Abschn.
14).
Hinweis: Die älteren 5-Volt Anwendermodule
können nicht verwendet werden.
1 Einführung

TRACKER 5505/5505i/5605 Installations- und Bedienungs-Handbuch
9
NAVMAN
4
3
1
2
1-4 Das Display-Gerät abnehmen und wieder anset zen
Ist das Gerät an einer Halterung befestigt, kann
das Gerät einfach entfernt werden, um es bei
Nichtgebrauch zu sichern.
Display-Gerät abnehmen:
1 Das Gerät ausschalten (siehe Abschn. 2-3)
und die Abdeckung aufsetzen.
2 Den Drehknopf an der Halterung lösen und
das Gerät abnehmen.
3 Die Über wurfringe der Stecker gegen die
Uhrzeiger-Richtung lösen und die Stecker
abziehen. Die beigefügten Schutzkappen
über die Stecker schieben.
4 Das Display-Gerät an einem trockenen
Ort lagern, am besten in der Navman
Tragetasche.
Das Display-Gerät wieder ansetzen
1 Die Schut zkappen von den Steckern
entfernen. Die Stecker an der GeräteRückseite aufsetzen.
Dabei auf gleiche Farbmarkierungen
achten.
Die Über wurfringe in Uhrzeiger-Richtung
drehen, bis die Stecker eindeutig fest
sitzen.
Es passiert nichts, wenn ein Stecker
versehentlich auf den falschen Platz
gesetzt wird.
2 Das Gerät auf die Halterung setzen. Das
Display auf beste Ablesbarkeit drehen,
und dann den Befestigungsknopf handfest
anschrauben. Die Schutzkappe ent fernen.
Kartenmodul
Halter
Goldkontakte hier unten
Knopf
Montage
Konsole
Den TRACKER ausschalten (siehe Abschn. 2-2).
Den Modulhalter vom TRACKER abziehen und
das vorhandene Kar tenmodul herausnehmen.
Das Kartenmodul in eine Schutzhülle stecken.
Die neue Karte in den Halter setzen. Darauf
achten, dass die Goldkontakte nach außen und
nach unten zeigen (siehe oben).
Die Modul-Schutzhülle aufbewahren.
Den Modulhalter fest in den TRACKER-Schlitz
hinein schieben.
Warnung: Steckmodule mit Sorgfalt behandeln. Die Module in ihren Schutzhüllen
aufbewahren, wenn sie nicht im TRACKER gesteckt sind.
Warnung: Die Modulhalter am TRACKER immer aufgesetzt lassen, um das Eindringen von
Feuchtigkeit im Modulfach zu verhindern.
Steckmod ule wechseln
CAUTION
!
!
CAUTION
DANGER
WARNING

TRACKER 5505/5505i/5605 Installations- und Bedienungs-Handbuch
10
NAVMAN
2 Basis-Bedienung
Tastenüber sicht
1) Zurück zu einer vorhergehenden Anzeige. Alle gemachten
Änderungen werden ignoriert. Im Kartenmodus erfolgt die Zentrierung auf die Bootsposition.
2) Zeigt ein Menu der Haupt-Anzeigen. Zum Aufruf einer Anzeige,
diese im Menu anwählen (siehe Abschn. 2-8).
3) Tasten zur Cursor-Verschiebung oder Markierung einer Auswahl.
4) Zeigt ein Menu der Optionen für die aktuelle Anzeige.
erneut drücken, um das Setup Menu zu öffnen.
5) Eine Aktion star ten oder eine Änderung akzeptieren.
6) Ein- oder Auszoomen, um unterschiedliche Gebiete und Details in
der Karte zu zeigen.
7) Create an instant waypoint at the Boots-Position (siehe section
5-2-1).
8) Mann über Bord (MOB, siehe Abschn. 2-5).
9) TRACKER ein- und ausschalten (siehe Abschn. 2-3); die Beleuch
-
tung regeln (siehe Abschn. 2-4).
2-1 Tas tenbenutzung
In diesem Buch bedeutet:
Drücken, die jeweilige Taste kürzer als eine Sekunde lang drücken.
Halten, die jeweilige Taste gedrück t halten.
Der interne Pieper ertönt, wenn eine Taste gedrückt wird (das Piep en aktivieren, bzw. deaktivieren,
siehe Abschn. 14-1).
1)
2)
3)
4)
5)
6)
7)
8)
9)
TRACKER 5505/5505i/5605 Installations- und Bedienungs-Handbuch
11
NAVMAN
c) Eine Bezeichnung oder Nummer ändern:
1
drücken, um Bezeichnung oder
Nummer zu zeigen.
2 Mit
oder ein zu änderndes Zeichen
markieren. Mit
oder das Zeichen
ändern.
Dieses wiederholen, um weitere Buchstaben
oder Ziffern zu ändern.
3 Mit
die neuen Eingaben bestätigen.
Oder mit
die Änderungen rückgängig
machen.
d) Einen Schieberegler-Wert ändern
Mit
die Einstellung verkleinern, oder mit
die Einstellung vergrößern.
TRACKER-Einstellungen erfolgen durch Auswahl
von Menu-Einzelheiten. Menu-Einzelheiten
können Untermenus, Befehle oder Daten sein.
Ein Untermenu wählen
Ein
hinter einem Menu-Punkt weist auf ein
Untermenu hin, z.B.
Karte . oder
drücken, um das Untermenu zu markieren, dann
drücken.
Einen Befehl aktivieren
oder drücken, um den entsprechenden
Befehl zu markieren, zum Beispiel ‘Go to Cursor’,
dann
drücken.
Daten ändern
Erst
oder drücken, um die zu ändernden
Daten zu markieren, dann:
a) Wechsel in der Häkchenbox
bedeutet ‘Ein’ oder ‘Ja’.
bedeutet ‘Aus’ oder ‘Nein’.
Zum Wechsel in der Häkchenbox,
oder
drücken.
b) Eine Option auswählen.
1
drücken, um das Options-Menu zu
öffnen.
2 oder drücken, um die gewünschte
Option zu markieren, dann
drücken.
2-3 Auto-Einschaltung ein- und au sschalten
Manuell einschalten
Ist der TR ACKER nicht für Auto-Einschaltung
verdrahtet, das Gerät mit der Taste
einschalten. Falls erforderlich, das Display auf
gute Ablesbarkeit einstellen (siehe Abschn.
2-4).
Hinweis: Ist der TRACKER nicht für AutoEinschaltung verdrahtet, kann es keine
Motor-Betriebsstunden und eventuell keine
korrekten Brennstoffdaten ermitteln (siehe
Abschn.15-4).
Manuell ausschalten
Ist der TR ACKER nicht für Auto-Einschaltung
verdrahtet, oder der Zündschalter steht auf
‘Aus’, die Taste
festhalten, bis das Gerät
ausschaltet.
Auto-Einschaltung
Ist der TRACKER für Auto-Einschaltung verdrahtet
(siehe Abschn. 15-4) dann:
schaltet der TRACKER automatisch ein, wenn der
Zündschalter eingeschaltet wird.
kann der TRACKER nicht ausgeschaltet werden,
solange der Zündschalter eingeschaltet ist.
Falls ‘Einschalt-Automatik Aus’
(siehe Abschn. 14-1) markiert ist
, schaltet
der TRACKER automatisch aus, wenn der
Zündschalter ausgeschaltet wird.
Falls ‘Einschalt-Automatik Aus’
(siehe Abschn. 14-1) nicht markiert ist
, bleibt der TRACKER eingeschaltet, wenn der
Zündschalter ausgeschaltet wird. Dann kann der
TRACKER für sich manuell ausgeschaltet werden.
2-2 Menus verwende n
TRACKER 5505/5505i/5605 Installations- und Bedienungs-Handbuch
12
NAVMAN
Die MOB-Funktion speichert die aktuelle
Bootsposition und aktiviert die NavigationsAnzeigen dorthin.
1
drücken.
Der TRACKER speicher t die Boots-Position
als MOB-Wegpunkt.
2 Der TRACKER wechselt zur Karten-
Anzeige mit dem MOB-Wegpunk t im
Kartenzentrum.
Es erfolgt ein Einzoomen für die genaue
Ansteuerung. Kann die Karte nicht
den erforderlichen kleinen Maßstab
zeigen, wechselt der TRACKER in
einen Plot termodus (ein weißes Bild
mit Koordinaten-Linien aber ohne
Kartendetails, siehe Abschn. 14-2)
3 Der TRACKER setzt den MOB-Wegpunkt als
anzusteuernden Zielort.
Ist der NMEA-Ausgang (Autopilot)
ausgeschaltet (siehe Abschn. 14-9),
die TRACKER-Anzeige für die manuelle
Ansteuerung der MOB Position nutzen
(siehe Abschn. 3-1-1 und 3-1-2).
Ist der NMEA-Ausgang zum Autopiloten
aktiviert und der Autopilot eingeschaltet,
fragt der TRACKER: Wählen:
’Nein’: dann die TR ACKER-Anzeige
für die manuelle Ansteuerung der MOB
Position nut zen (siehe Abschn. 3-1-1 und
3-1-2).
‘Ja’: dann fragt der TR ACKER ob das Boot
zur MOB- Position steuern soll.
Wählen:
‘Ja’: Damit steuert der Autopilot
unverzüglich auf den MOB-Ort zu.
‘Nein’: Den Autopiloten abschalten
und die TRACKER-Anzeige für die
manuelle Ansteuerung der MOB Position
nutzen (siehe Abschn. 3-1-1 und 3-1-2).
Die MOB-Funktion abbrechen oder einen
anderen MOB-Ort setzen
1
erneut drücken, es erscheint ein
Menu.
2 Aus diesem Menu eine Option wählen.
Die MOB-Funktion arbeitet nicht, wenn
keine GPS-Position vorhanden ist.
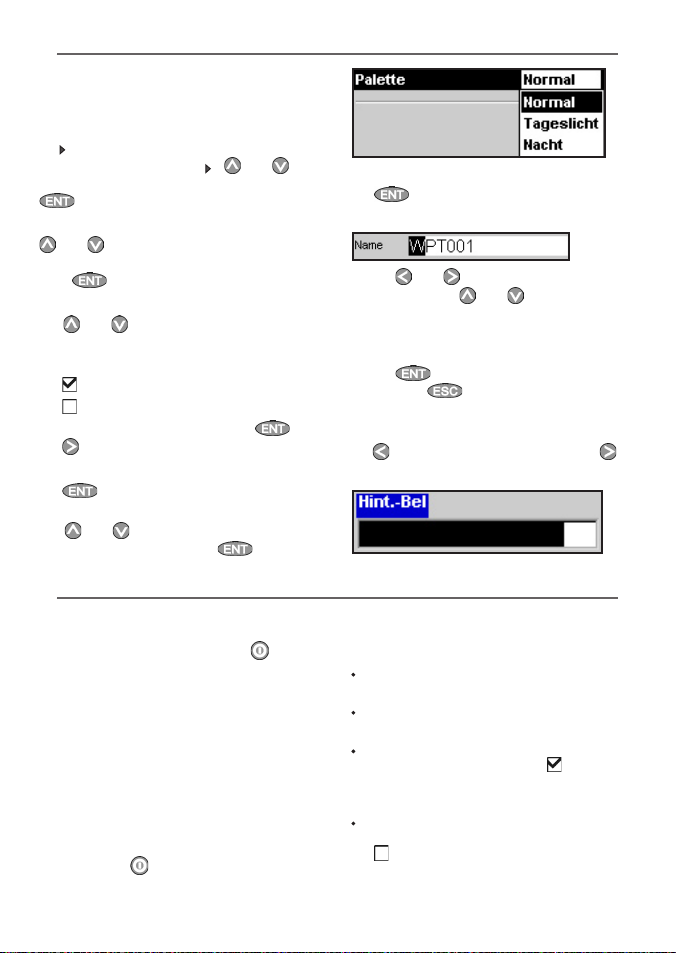
2-4 Beleuchtung und Nachtmod us
Um die Beleuchtungs-Anzeige zu öffnen, kurz
drücken. Nach Beendigung, drücken.
Hinterleuchtung
Display und Tasten sind hinterleuchtet. Um
die Beleuchtungs- Einstellung zu ändern,
‘Hintergr.Beleuchtg’ wählen, dann
zum Abdunkeln,
drücken oder für mehr
Helligkeit,
drücken.
Hinweis: Zweimal drücken schaltet
die größte Helligkeit mit ausgeschaltetem
Nacht-Modus.
Nacht-Modus
Im ‘Nachtmodus’ werden die Farbpaletten für
sämtliche Anzeigen gesetzt.
Normal-Palette, für Tageslicht
Eine für die Dunkelheit optimier te
Farbpalet te
Um den Modus zu ändern, ‘Nachtmodus’
wählen und
drücken. Nur die Farbpalette für
die Kartenanzeige ändern, siehe Abschn.14-2.
2-5 Mann-über-Bord Funk tion (MOB)
CAUTION
!
!
WARNING
Es kann eventuell eine plötzliche und
kritische Boots-Drehung erfolgen.
CAUTION
!
!
WARNING
Hinweis: Der MOB-Wegpunk t bleibt in der Karte erhalten, auch nach Abbruch der MOB-Aktion.
Löschen des MOB-Wegpunktes, siehe Abschn. 5-2-5.
TRACKER 5505/5505i/5605 Installations- und Bedienungs-Handbuch
13
NAVMAN
2-6 Alarme
Stellt der TRACKER einen Alarm-Zustand fest,
zeigt er eine Warnmeldung im Display, der
interne Pieper ertönt und ex terne Alarmmittel
werden angesteuert.
Mit
den Alarm nullsetzen. Der Alarm
wird erneut aktiviert, wenn der Alarm-Zustand
wieder auftritt.
Der TRACKER hat vom Anwender aktivierbare
Alarmfunktionen, plus eine feste Funktion für
GPS-Positionsverlust (siehe Abschn.14-7).

TRACKER 5505/5505i/5605 Installations- und Bedienungs-Handbuch
14
NAVMAN
Niemals den Simulations-Modus während
einer Fahrt aktivieren.
2-7 Simulations-Modus
Im Simulations-Modus ignoriert der TRACKER
Daten von der GPS-Antenne sowie von
anderen Sensoren und generiert eigene Daten.
Ansonsten arbeitet der TRACKER mit normalen
Funktionen.
Es gibt zwei Simulations-Modi:
Normal: Ermöglicht es dem Anwender,
sich mit dem TRACKER ver traut zu machen,
ohne fahren zu müssen.
D emo: Simulier t eine Bootsfahrt entlang
einer Route und demonstriert automatisch
verschiedene TRACKER-Funktionen.
Start und Stopp der Simulations-Modi und
weitere Informationen hierzu, siehe Abschn.
14-11. Im Simulations-Modus erscheinen am
unteren Displayrand blinkend die Hinweise,
‘Simulieren’ oder ‘D emo’.
SmartCraft Menu und Anzeigen
Die SmartCraft Anzeige erfordert die
Installation eines SmartCraft-Systems.
Informationen zur SmartCraft Nutzung sind im
Handbuch SmartCraft Gateway Installation und
Bedienung enthalten.
Um eine Anzeige aufzurufen,
drücken,
dann
oder , um den Anzeigent yp
aufzurufen. Dann mit
oder , Optionen
für die Anzeige wählen. Abschließend
drücken.
2-8 Die Hauptanzeigen
Karten-Menu und Anzeigen
Die Anzeige-Möglichkeiten sind abhängig von
den optionalen Sensoren und angeschlossenen
Instrumenten (siehe Abschn. 1-1).
CAUTION
!
!
WARNING

TRACKER 5505/5505i/5605 Installations- und Bedienungs-Handbuch
15
NAVMAN
Andere Menus und Anzeigen
Hinweis: Mit aus anderen Anzeigen
zur zulet zt gewählten Kar ten-Darstellung
wechseln.
TRACKER 5505/5505i/5605 Installations- und Bedienungs-Handbuch
16
NAVMAN
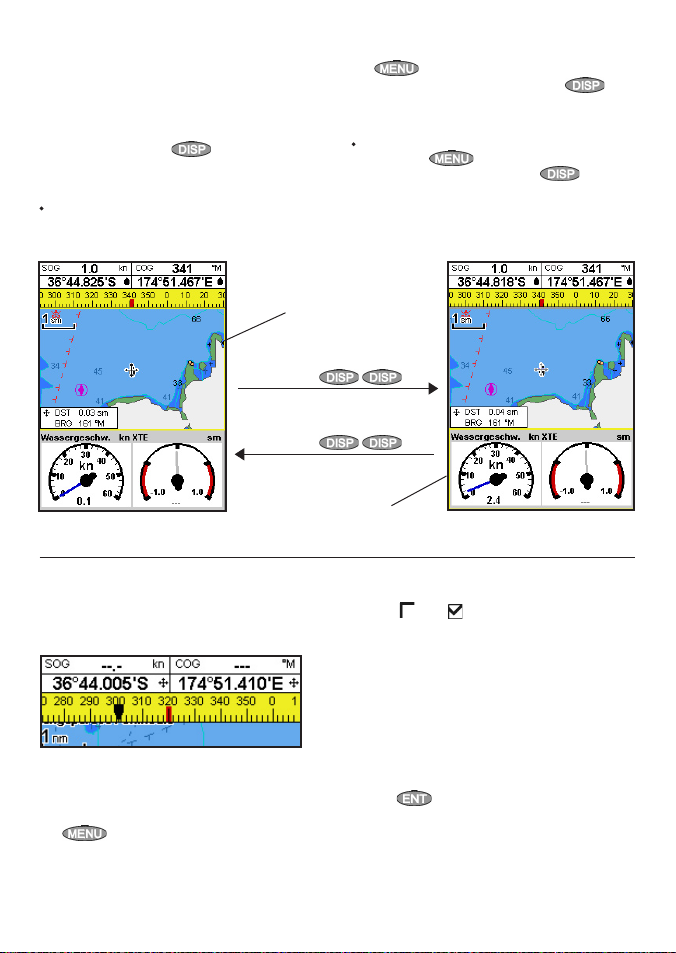
Der TRACKER kann zwei Darstellungen parallel
zeigen, z. B. die Kar te und Mess-Instrumente.
Eines der Anzeigen ist immer aktiv und wird mit
einem gelben Rahmen markiert. Diese ist vom
Benutzer bedienbar. Um die ak tive Anzeige
zu wechseln, zweimal drücken (Die
Rollbahn-Anzeige kann nicht aktiv geschaltet
werden). Zum Beispiel:
Ist das Kar tenbild die aktive Anzeige,
drücken um die Optionen zum
Kartenbild auf zurufen; zweimal
drücken, um die Messgeräte-Anzeige zur
aktiven Anzeige zu machen.
Ist die Messgeräte-Darstellung die aktive
Anzeige,
drücken, um hierfür die
Optionen aufzurufen, dann
zweimal
drücken, um das Kartenbild als aktive
Anzeige zu wählen.
Kartenbild ist
aktiv
Instrumentenbild
ist nicht aktiv
Gelber Rahmen
Drücke
Drücke
Gelber Rahmen
Karten-Anzeige ist
nicht aktiv
Instrumenten-Anzeige
ist aktiv
In die Kar ten- und Rollbahn -Anzeigen können
am oberen Bildrand Datenanzeigen eingefügt
werden.
Diese Kopfdaten können für jede Anzeige
unterschiedlich gewählt werden. Die
Kopfdaten-Anzeigen ändern:
1 Die entsprechende Anzeige aufrufen,
drücken und ‘Datenzeile’
wählen.
2 Die Kopfdaten aus oder ein-schalten :
i ‘Daten’ wählen
ii
oder wählen.
3 Zeichengröße wählen:
i ‘Größe’ wählen.
ii Klein, Mittel oder Groß wählen.
4 Um gezeigte Daten zu wechseln:
i ‘Daten-Setup’ wählen.
ii Ein Datenfeld ändern:
a Mit den Cursor-Tasten das
entsprechende Feld markieren.
b drücken, um eine Liste mit
möglichen Daten auf zurufen.
c Eine der vorhandenen
Dateninformationen wählen, oder
‘Keine’, um das entsprechende Feld
frei zu lassen.
2-8-2 Kopfdaten
2-8-1 Dual-Anzeigen

TRACKER 5505/5505i/5605 Installations- und Bedienungs-Handbuch
17
NAVMAN
In der Kar ten- und der Rollbahn-Anzeige kann
am oberen Bildrand eine Kompass-Anzeige
aktiviert werden.
Der Kompass zeigt immer den Bootskurs über
Grund (COG), ein rotes Symbol in der Mitte. Bei
der Zielort-Ansteuerung zeigt der Kompass
auch die Peilung (BRG) dorthin, ein schwarzes
Symbol.
In diesem Beispiel ist BRG [300]° und COG
[320]°.
Die Kompass-Anzeige ein- oder ausschalten:
1 drücken und ‘Datenzeile’ wählen.
2 Kompass auf oder setzen.
2-8-3 Kompass
iii Für weitere Datenwechsel, die vorhergehenden Vorgänge wiederholen und drücken.
Tipp : Werden weniger Datenzeilen verwendet als möglich, beanspruchen die Daten weniger
Display-Raum.
5 Mit
zur Hauptanzeige zurück kehren.
TRACKER 5505/5505i/5605 Installations- und Bedienungs-Handbuch
18
NAVMAN
Ein Wegpunk t ist eine Position, die in die
TRACKER-Karte gesetzt wird, z.B. ein Fischplat z
oder ein Punkt in einer Route (Siehe Abschn. 5).
Einen Wegpunkt in der Karte wählen und
ansteuern
1 Die Kartenanzeige aufrufen.
2 Den Wegpunkt mit den Cursor-Tasten oder
mit der Funk tion ‘Finden’ markieren (siehe
Abschn. 3-2-5).
3 drücken und ‘Goto’ wählen.
3-1-2 Zu einem Wegpunkt oder einem Kar tenort gehen
Einen Wegpunkt in der Wegpunkt-Liste
wählen und ansteuern
1 Die Wegpunkt-Liste aufrufen.
2 Mit
oder den gewünschten
Wegpunkt markieren.
3 drücken und ‘Goto’ wählen.
Einen beliebigen Punkt in der Karte wählen
und ansteuern
1 Die Karten-Anzeige aktivieren.
2 Mit dem Cursor den gewünschten Or t
markieren oder in der Funktion ‘Suchen’,
3-1-1 Einen Punkt ansteuern
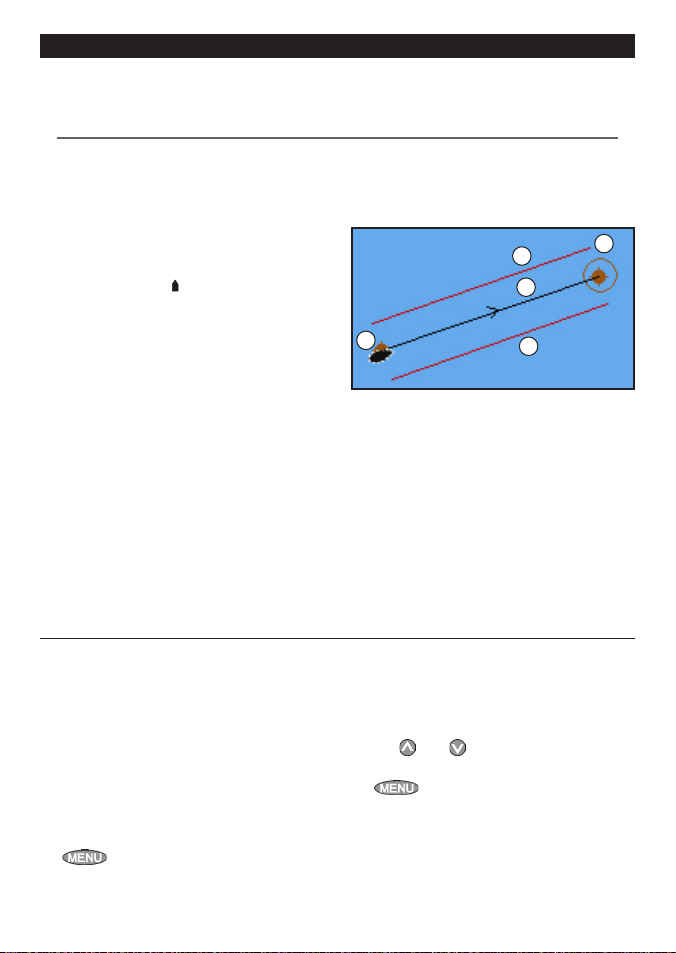
Wenn der TRACKER einen Punkt ansteuert,
erscheinen entsprechende Navigationsdaten in
der Karten- und der Rollbahn-Anzeige.
A Die Bootsposition
.
B Der Zielor t, durch einen Kreis markiert.
C Die Sollkurslinie zu diesem Zielort.
D Zwei CDI-Linien, welche die maximal
erlaubte Versetzung zur Sollkurs-Linie
begrenzen.
Weitere Informationen hierzu, siehe Anhang C.
Ist der TR ACKER mit einem Autopiloten
verbunden, wird er Navigationsdaten senden,
nach denen der Autopilot zum Zielort steuert.
Den Autopiloten einschalten, bevor die
Navigation zu einem Ort aktivier t wird.
Ist kein Autopilot vorhanden, das Boot
entsprechend der TRACKER- Informationen
manuell steuern.
a Die in der Karte oder Rollbahn-Darstellung
gezeigte Boots- und die Zielposition
nutzen oder
b die in der Kopfzeile gezeigten Navigations-
Daten (siehe Abschn. 2-8-2), oder
c die COG- und BRG-Anzeigen in der
Kompass-Darstellung (siehe Abschn. 2-8-3).
Hinweis:
1 Ist die XTE-Überwachung aktiviert, erfolgt
ein Alarm, wenn das Boot über den
eingestellten Wert hinweg versetz t wird
(siehe Abschn. 14-7).
2 Ist die Ankunfts-Über wachung aktiviert,
erfolgt ein Alarm, wenn das Boot den
eingestellten Distanz-Alarmradius erreicht
(siehe Abschn. 14-7).
A
C
D
D
B
3 Navigation: Karte
3-1 Navigations-Übersicht
In der Kar ten-Anzeige erscheinen die Seekarte, die Boots- Position, der Kurs und weitere
Navigations-Daten.
Der TRACKER hat zwei Möglichkeiten der Navigation, direkt einen Punkt ansteuern oder einer Route
folgen.
TRACKER 5505/5505i/5605 Installations- und Bedienungs-Handbuch
19
NAVMAN
Darauf achten, dass der Kurs nicht über
Land oder durch kritische Gewässer führt.
Vorbereitung
Eine Route besteht aus einer Aneinanderreihung
von Wegpunkten, denen das Boot folgen kann
(siehe Abschn. 6).
Das Erstellen von Wegpunkten, die für eine
Route erforderlich sind, wird in Abschn. 5-2-1
beschrieben.
Das Erstellen einer Route erfolgt in Abschn.
6-2-1.
Eine Route in der Kartenanzeige starten:
1 Die Kartenanzeige aufrufen.
2.
drücken und ‘Route starten’
wählen.
3.
oder drücken, um die benötigte Route
zu markieren.
drücken.
4. Der TRACKER fragt in welche Richtung die
Route gefahren werden soll.
‘Hin’ (die Richtung in welche die Route
erstellt wurde) oder ‘Zurück’ wählen.
5. Der TRACKER zeigt den Kartenausschnitt mit
der markierten Route und beginnt mit der
Navigation vom Start-Wegpunkt der Route.
Starten einer Route aus der Routenanzeige:
1 Die Routen-Anzeige aufrufen.
2 Mit
oder die benötigte Route
markieren.
drücken und ‘Start’
wählen.
3 Der TRACKER fragt in welche Richtung die
Route gefahren werden soll.
‘Hin’ wählen (die Richtung in welche die
Route erstellt wurde) oder ‘Zurück’.
3-1-3 Einer Route folgen
4 Der TRACKER zeigt den Kartenausschnitt mit
der markierten Route und beginnt mit der
Navigation vom Start-Wegpunkt der Route.
Navigieren
Der TRACKER steuert jeden Wegpunkt auf der
Route nacheinander an.
Der TRACKER beendet die Navigation
zum Wegpunkt am Ende vom aktuellen
Routensegment und startet die Navigation auf
dem folgenden Segment der Route:
a Wenn das Boot sich dem Wegpunkt bis auf
0,025 NM genähert hat
b oder wenn es den Wegpunkt passiert
c oder wenn der Wegpunkt ausgelassen wird.
Wegpunkt übergehen
Um einen Wegpunkt zu übergehen, die
Karten-Anzeige wählen,
drücken und
‘Übergehen’ wählen. Damit startet der TRACKER
die Navigation direkt auf den dann folgenden
Wegpunkt der Route hin.
Tipp: Vor dem Starten, Wegpunkte an Positionen von Interesse erstellen. Einen Wegpunkt auf den
Startpunkt einer Reise setzen, um dorthin zurück navigieren zu können (siehe Abschn. 5-2-1).
eine Option wählen (siehe Abschn. 3-2-5).
3 drückenund ‘Gehe zum Cursor’
wählen.
Navigieren
Der TRACKER navigiert zu einem Punkt, wie in
Abschn. 3-1-1 beschrieben.
Navigation abbrechen
Die Karten-Anzeige aufrufen,
drücken
und ‘Goto Abbrechen’ wählen.
CAUTION
!
!
WARNING
Warnung: Der Befehl zum Übergehen
eines Wegpunktes kann im
Autopilotbetrieb dazu führen, dass eine
plötzliche Kursänderung erfolgt.
CAUTION
!
!
WARNING
Routenfahrt abbrechen
Hat das Boot den Zielwegpunkt erreicht, oder
soll die Routenfahrt abgebrochen werden, kann
die Routennavigation jederzeit abgebrochen
werden. Die Kartenanzeige öffnen,
drücken und ‘Route abbrechen’ drücken.
TRACKER 5505/5505i/5605 Installations- und Bedienungs-Handbuch
20
NAVMAN
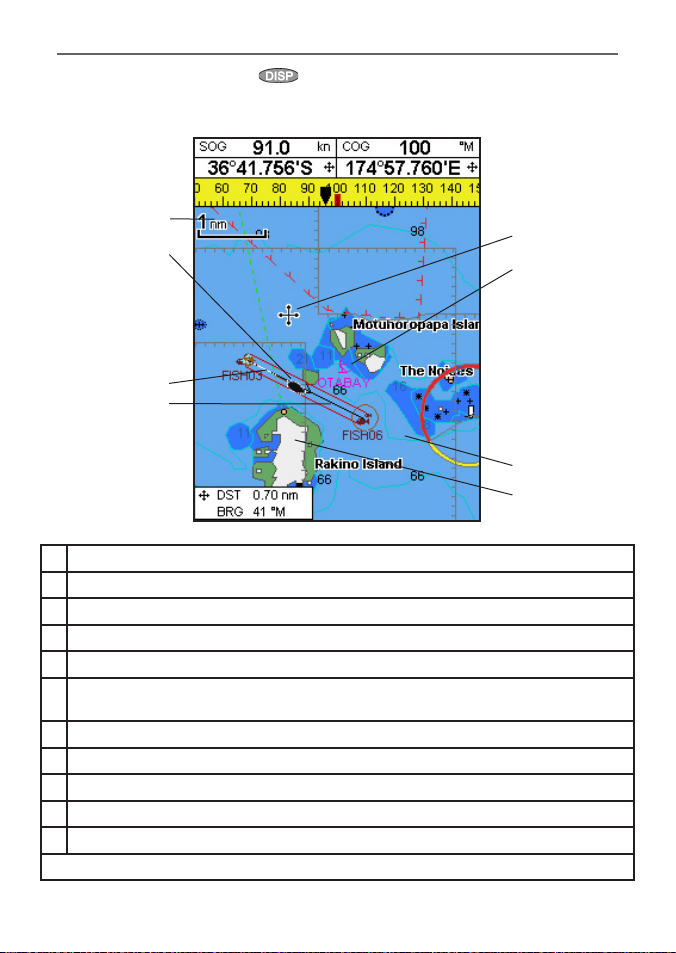
Ein typisches Kartenbild zeigt:
3-2 Karten-Anzeige
Zum Öffnen der Karten-Darstellung, drücken, ‘Kar te’ wählen, dann ‘Karte’ wählen.
A Kopfdaten Ein-, Ausschalten sowie ändern der aktiven Daten-Anzeigen, siehe Abschn. 2-8-2.
B Kompass (siehe Abschn. 2- 8-3)
C Karten-Maßstab (siehe Abschn. 3-2-3)
D Boots-Position (siehe Abschn. 3-2-1)
E Plottstrecke (siehe Abschn. 3-5)
F Bootskurs und CDI-Linien (siehe Anhang C, CDI) Das Boot steuer t einen mit FISH 06
bezeichnetenWegpunkt an.
G Distanz und Peilung vom Boot zum Cursor
H Land
I See
J Der Cursor (siehe Abschn. 3-2-1)
K Ein typischer Wegpunkt (siehe Abschn. 5)
Hinweis: Ändern von Informations-Arten in der Karten-Anzeige, siehe Abschn. 17-2.
A
D
E
B
F
J
H
I
G
K
C
TRACKER 5505/5505i/5605 Installations- und Bedienungs-Handbuch
21
NAVMAN
Beim Kontrollieren der Bootsposition
darauf achten, dass nicht die
Cursorposition angezeigt wird.
Der Karten-Maßstab erscheint oben link s in
der Karte.
Breitengrad und Längengrad können in den
Kopfdaten gezeigt werden. Die Anzeige
erfolgt in Grad und Minuten mit bis zu drei
Dezimal -Stellen, eine Auflösung von ca.
2m. Normalerweise ist die gezeigte Position
die Bootsposition, und den Breiten- und
Längenangaben ist ein Bootssymbol angefügt,
um das zu zeigen
36° 29,637’ N oder S Breite
175° 09,165’ E oder W Länge
Wurde der Cursor innerhalb der letzten 10
Sekunden bewegt, dann ist die gezeigte
Die Karte hat zwei Zeige-Modi:
Bootszentrier-Modus
Um den Boot szentrier-Modus in der Kar te
zu aktivieren,
drücken. Das Boot
erscheint in der Kartenbild-Mitte. So wie das
Boot sich bewegt, erfolgt eine automatische
Kartenverschiebung, die das Boot im Zentrum
hält. Der Kursor (siehe unten) ist deaktiviert.
Cursor-Modus
Die Tasten
, , und werden
Cursor-Tasten genannt. Der Cursor-Modus
ist in dem Moment aktivier t, wenn eine der
Cursor-Tasten gedrückt wird. Der Cursor
erscheint und bewegt sich vom Boot weg.
Die Cursor-Taste drücken, deren Pfeil in die
gewünschte Richtung zeigt, z. B. drücken,
um den Cursor nach unten zu bewegen.
Ein Drücken zwischen zwei Pfeilen
verschiebt den Cursor diagonal.
Festhalten der Tasten bewegt den Cursor
gleichmäßig durch die Anzeige.
Im Cursor-Modus:
erscheinen Distanz (
DST) und Peilung
( BRG) als Messungen vom Boot zum
Cursor, links unten im Display.
wird die Karte nicht durch die
Bootsbewegung verschoben.
wird die Karte verschoben, wenn der Cursor
den Bildrand erreicht.
Wird zum Beispiel mit der Taste
der
Cursor nach rechts gegen den Rand
bewegt, verschiebt sich die Karte von dort
nach links.
Position die des Cursors. Entsprechend ist
den Koordinatenwer ten ein Cursor-Symbol
angefügt.
36° 29,841’ N oder S Breite
175° 09,012’ E oder W Länge
Mit
einzoomen, um einen kleineren
Kartenbereich mit mehr Einzelheiten zu
erhalten. Mit auszoomen, um einen
größeren Kartenbereich mit weniger
Einzelheiten zu erhalten.
CAUTION
!
!
WARNING
3-2-1 Karten-Modus
3-2-2 Breite und Länge
3-2-3 Karten-Maßstab

TRACKER 5505/5505i/5605 Installations- und Bedienungs-Handbuch
22
NAVMAN
3-3 Distanz- und Peil-Kalkulator
Der Distanz- und Peil-Kalkulator kann Länge
und Kurslage von einem oder mehreren
Distanz-Segmenten aufzeichnen und
Peil- und Distanz-Wert von jedem Segment,
wie auch die G esamt-Distanz anzeigen. Die
gesamte Auf zeichnung kann in eine Route
umgewandelt werden.
Den Distanz- und Peil-Kalkulator benutzen:
1 drücken, bis das Kartenbild
erscheint.
drücken und ‘Distanz’
wählen.
2 Den Cursor auf den Star tpunkt vom ersten
Segment setzen. Es ist unwichtig, ob das
ein Wegpunkt ist oder nicht.
drücken.
3 Den Cursor auf den Endpunkt dieses
Segments setzen. Es ist unwichtig, ob das
ein Wegpunkt ist oder nicht. Es erscheinen
die Werte für die Kurslage und Länge des
Segments, wie auch die Gesamtlänge bei
mehreren Segmenten.
drücken.
4 Soll das letzte Se gment wieder gelöscht
werden,
drücken und ‘Entfern.’
wählen.
5 Mit dem Cursor wie vorhergehend, den
folgenden Segment-Endpunkt set zen und
entsprechend for tfahren.
Um ein Symbol in der Kar te zu finden und
anzuzeigen:
1 drücken und ‘Suche’ wählen.
2 Den Symbol-Typ wählen: Wegpunkt, Route,
Häfen mit Namen, Hafen & Service oder
Tidenstationen.
3 Für Häfen & Service, die benötigte Service-
Art wählen.
Für Hafen-Namen: Mit
, , oder ,
den Namen oder enthaltene Buchstaben
eingeben, dann drücken .
4 Es erscheint eine Liste mit Einzelheiten.
Sind mehr Einzelheiten vorhanden, als
im Display zeigbar, mit
oder die
Seiten durchwählen.
Bei Hafennamen: um nach einem
differierenden Hafennamen zu suchen,
drücken. Den Namen ändern und
drücken
.
5 Das gewünschte Detail auswählen und
drücken. Das Kartenbild wechselt,
um den gesuchten Punkt in der DisplayMitte anzuzeigen.
Um gespeicherte Informationen zu diesem
Punkt zu erhalten,
drücken (Siehe
Abschn. 3-2-4).
3-2-6 Perspektivische Ansicht
Die perspektivische Ansicht zeigt das
Kartenbild aus einem schrägen Winkel anstatt
direkt von oben. Um die perspektivische
Ansicht ein - oder auszuschalten,
drücken und ‘Perspektiv ’ auf
oder
setzen.
3-2-5 Ein Karten-Symbol f inden
Die Karte enthält Zeichen, wie Wegpunk te und
Karten-Symbole (z.B. Bojen, Baken, Wracks und
Marinas). Wird der Cursor für mindestens z wei
Sekunden auf ein Zeichen gesetzt, öffnet unten
links ein Fenster mit Informationen zu diesem
Zeichen.
Um gespeicherte Informationen zu einem
Punkt in der Karte (z.B. einem Karten-Symbol)
zu erhalten:
1 Den Cursor auf den Kartenpunkt set zen.
2
drücken und ‘Karteninfo’ wählen.
3 Es erscheint ein Menu von Objekten
i Ein Objek t wählen, um es anzuzeigen.
ii Mit
zum Menu zurückkehren.
Andere Objekte wählen.
iii Abschließend
drücken, um zur Karte
zu wechseln.
3-2-4 Karten-Symbole und Informationen

TRACKER 5505/5505i/5605 Installations- und Bedienungs-Handbuch
23
NAVMAN
6 Um diese Linienfolge als Route zu
speichern,
drücken und ‘Speichern’
wählen. Damit werden auch sämtliche
neu geset zten Punkte als Wegpunkte
mit einem Basisnamen gespeichert. Falls
erforderlich, die Route anschließend
editieren (siehe Abschn. 6-2-2), wie auch die
neuen Wegpunkte (siehe Abschn. 5-2-3).
7 Abschließend
drücken, um wieder
zur Kartenanzeige zu wechseln.

TRACKER 5505/5505i/5605 Installations- und Bedienungs-Handbuch
24
NAVMAN
Die Plottfunk tion setzt in regelmäßigen
Abständen einen Punkt für die jeweils
anliegende Position in die Kar te. Wählbar sind:
Zeit-Intervalle oder
Distanz-Inter valle
Die aufgezeichneten Plottpunkte können als
zurückgelegte Strecke in der Karte gezeigt
werden. Der TRACKER kann eine Plottstrecke
zeigen und parallel eine neue aufzeichnen.
Arbeiten mit der Plot t-Funktionen, siehe
Abschn.14-5.
Der TRACKER kann fünf Plottstrecken
speichern.
Plott 1 kann bis zu 200 0 Punkte enthalten
und ist für die normale, aktuelle Fahrt
bestimmt.
Die Plottstrecken 2, 3, 4 und 5 können
bis zu 500 Punkte speichern und sind für
Abschnit te gedacht, denen exakt wieder
gefolgt werden soll, z.B. in engen Revieren.
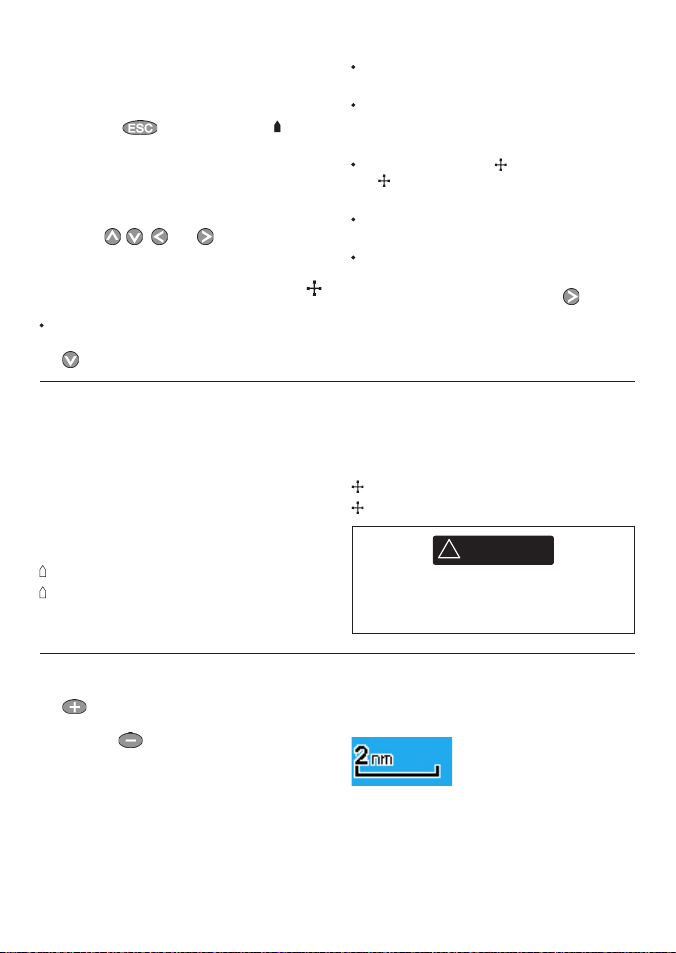
Tipp: Plottstrecken bei guten
Umfeldbedingungen aufzeichnen.
Ist die Plot tfunktion ak tiv und der Plottspeicher
voll, wird das Plotten weiter geführt. Es werden
dann die ältesten Punk te dieser Strecke
3-5 Plottst recken-Funktionen
überschrieben. Die maximale Länge einer
Plottstrecke ist abhängig vom gewählten
Plott-Intervall: ein kurzes Intervall ergibt eine
kürzere aber detaillier tere Strecke, ein längeres
Intervall ergibt eine längere aber grobere
Streckenaufzeichnung, wie in diesen Beispielen
gezeigt:
Die Längen der Plot tstrecken entsprechen den
aktuell gewählten Maßeinheiten.
Ist die Funk tion ‘Vorauslinie’ eingeschaltet,
zeigt der TRACKER eine Vorausposition,
basierend auf dem ak tuellen Kurs über Grund
(COG) und einer spezifier ten Voraus-Zeit.
Ein- und Ausschalten der Funktion ‘Vorauslinie’,
sowie Set zen der Vorauszeit, siehe Abschn.14-2.
A Vorausposition
B Kurs-Vorauslinie
C Boots-Position
3-4 Kurs-Vorauslinie
Zeitinter valle
Intervall Plott 1 Plott 2, 3, 4
oder 5
1 Sek. 33 Minuten 8 Minuten
10 Sek. 5,5
Stunden
1,4 Stunden
1 Minute 33 Stunden 8 Stunden
Distanz-Inter valle
Intervall Plott 1 Plott 2, 3, 4
oder 5
0.01 20
5
1 2,000 500
10 20,000 5,00 0
A
C
B
TRACKER 5505/5505i/5605 Installations- und Bedienungs-Handbuch
25
NAVMAN
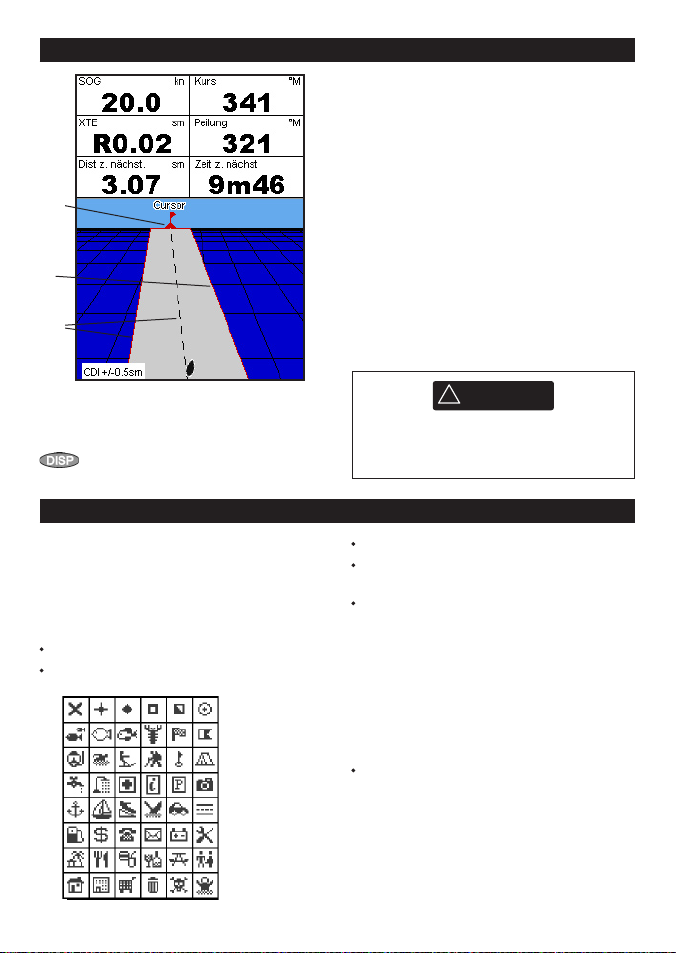
Die Rollbahn-Darstellung zeigt
keinerlei Karten-Einzelheiten, wie Land,
Gefahrengebiete oder Seezeichen.
4 Navigation: Rollbahn-Darstellung
Die Rollbahn-Darstellung zeigt den Bootskurs
zu einem Zielort aus der Vogel-Perspektive.
Zur Aktivierung der Rollbahn-Darstellung,
drücken, ‘A ndere’ wählen und dann
‘Rollbahn-Anzeige’
A
C
D
B
E
G
F
5 Navigation: Wegpunkte
Ein Wegpunk t ist eine Position, die in die
TRACKER-Karte gesetzt werden kann, z.B. ein
Fischplat z oder ein Routenpunkt. Der TRACKER
kann bis zu 3000 Wegpunkte speichern.
Ein Wegpunk t kann erstellt, geänder t oder
gelöscht werden. Ein Wegpunkt hat:
eine Bezeichnung ( bis zu acht Zeichen)
ein Symbol, welches die Wegpunkt-Art
kennzeichnet Die wählbaren Symbole sind:
eine Position
eine Farbe in der Karte für Wegpunk t-
Symbol und - Name
einen Typ:
Normal: Ein normaler Wegpunk t
lässt sich ansteuern, bzw. in eine Route
integrieren.
Gefahr: Ein Gefahren-Wegpunkt ist
eine Position, die zu meiden ist. Nähert
sich das Boot dieser Position, er folgt
ein Alarm bei Unterschreitung einer
einstellbaren Distanz (siehe Abschn. 14-7).
Eine Zeige-Option:
Bestimmt, wie ein Wegpunkt in der Karte
gezeigt werden soll, wenn die WegpunktSetup Option auf ‘Gewählt’ gesetzt ist
(siehe Abschn.14-2):
Aus: Der Wegpunkt wird nicht
gezeigt.
CAUTION
!
!
WARNING
Die Rollbahn-Darstellung zeigt:
A Optionale Datenzeilen (siehe Abschn.
2-8-3)
B Optionale Kompass-Anzeige (siehe
Abschn. 2-8-4)
C Ziel-Wegpunk t
D Boots-Sollkurs zum Zielort
E CDI-Linien, parallel zur Sollkurslinie (siehe
Anhang C, CDI). Die CDI-Linien entsprechen
den Randstreifen einer Rollbahn auf dem
Wasser, innerhalb denen sich das Boot
bewegen soll.
F CDI-Maß
G Die Bootsposition befindet sich in der Mitte
am unteren Bildrand.

TRACKER 5505/5505i/5605 Installations- und Bedienungs-Handbuch
26
NAVMAN
Keine Ansteuerungs-Wegpunkte an Land
oder in Gefahren-Gewässer set zen.
5-1 Wegpunkt-Anzeige
Zum Aufruf der Wegpunk t-Anzeige,
drücken, ‘Andere’ wählen und dann
‘Wegepunkte’. Es öf fnet die Wegpunkt-Liste,
mit sämtlichen eingegebenen Wegpunkten,
mit Wegpunkt-Symbol, Bezeichnung, Breite
und Länge, Distanz und Peilung vom Boot, Typ
und Darstellungs-Option.
Sind mehr Wegpunkte vorhanden, als im
Display zeigbar, mit
oder weitere
Seiten anwählen.
5-2 Mit Wegpunkten arbeiten
Einen neuen Wegpunkt in der WegpunktListe erstellen
drücken. An der Bootsposition wird ein
neuer Wegpunkt mit Basis-Bezeichnung und
Daten gesetzt. Ändern der Basisdaten, siehe
Abschn. 5-2-3.
Einen neuen Wegpunkt in der KartenAnzeige setzen und editieren
1 Um einen neuen Wegpunkt an der
Bootsposition zu setzen, ESC drücken, um
die Karte auf das Boot zu zentrieren.
Um einen Wegpunkt auf eine andere
Position zu setzen, den Cursor auf die
entsprechende Kartenposition setzen.
2 drücken.
3 Damit ist ein neuer Wegpunkt mit einer
Basis-Bezeichnung und mit Daten erstellt.
4 Falls erforderlich, die Wegpunkt-Daten
ändern (siehe Abschn. 5-2-7). ‘Speichern’
wählen
Einen neuen Wegpunkt in der WegpunktListe erstellen
1 In der Wegpunkt-Liste,
drücken und
‘Erstellen’ wählen.
2 Damit ist in der Bootsposition ein neuer
Wegpunkt mit einer Basis-Bezeichnung
und mit Daten erstellt.
3 Falls erforderlich, Wegpunk tdaten ändern
(siehe Abschn. 5-2-7). ‘Speichern’ wählen
Hinweis: Wegpunkte können auch bei der
Routenerstellung gesetzt werden (siehe Abschn.
6-2-1).
CAUTION
!
!
WARNING
5-2-1 Einen neuen Wegpunkt erstellen
Icon: Das Wegpunkt-Symbol wird
gezeigt.
I+N (Icon und Name):
Wegpunkt-Name und -Symbol werden
gezeigt.
Sind viele Wegepunkte vorhanden, diese
Funktion für die Auswahl verwenden,
welche Wegpunkte gezeigt werden sollen.
Hinweis: Die anderen Optionen sind ‘All.ausbld’
(alle ausblenden) und ‘Alle zeigen’ (siehe
Abschn.14-2).
TRACKER 5505/5505i/5605 Installations- und Bedienungs-Handbuch
27
NAVMAN
Wird ein Wegpunkt in einer Route gelöscht,
anschließend prüfen, ob die geänder te
Route nicht über Land oder durch
Gefahrengebiete führt.
5-2-4 Einen Wegpunkt in der Karte finden
5-2-5 Einen Wegpunkt löschen
CAUTION
!
!
WARNING
Ein Wegpunk t lässt sich nicht löschen, wenn
er zur Ansteuerung genutzt wird, oder wenn
er in mehr als einer Route enthalten ist. Ein
Wegpunkt, der nur in einer Route verwendet
wird, lässt sich löschen.
Einen Wegpunkt in der Karten-Anzeige
löschen
1 Den Cursor im Kartenbild auf den zu
löschenden Wegpunkt setzen.
2 drücken und ‘Löschen’ wählen.
3 Zur Bestätigung ‘
Ja’ wählen.
Einen Wegpunkt in der Wegpunktliste löschen.
1 In der Wegpunktliste, mit
oder den
zu löschenden Punkt markieren.
drücken und dann ‘Löschen’ wählen.
2 ‘
Ja’ zu Bestätigung wählen.
5-2-3 Einen Wegpunkt editieren
Einen Wegpunkt in der Kartenanzeige
editieren
1 In der Kar tenanzeige den Cursor auf den
entsprechenden Wegpunkt setzen.
2 drücken und ‘Editieren’ wählen.
3 Die Wegpunkt-Daten ändern (siehe
Abschn. 5-2-7). ‘Speichern’ wählen.
Einen Wegpunkt in der Wegpunkt-Liste
editieren
1 In der Wegpunktliste
oder drücken,
um den entsprechenden Wegpunkt
zu markieren. drücken und
‘Editieren’ wählen.
2 Die Wegpunkt-Daten ändern (siehe
Abschn. 5-2-7). ‘Speichern’ wählen.
Dieses ruft das Kartengebiet auf, bei dem der
Wegpunkt in der Kar tenmitte erscheint.
1 In der Wegpunkt-Liste, mit
oder ,
den zu suchenden Wegpunkt markieren.
drücken und ‘Zeige’ wählen.
Oder im Kartenbild
drücken,
‘Suchen’ wählen und dann ‘Wegepunkte’.
Den Wegpunkt in der Liste markieren.
2 Der TRACKER schaltet zum Kartenbild, mit
dem gewählten Wegpunkt in der Mitte.
5-2-2 Einen Wegpunkt verschieben
Einen Wegpunkt in der Kartenanzeige
verschieben
1 In der Kar te den Cursor auf den
entsprechenden Wegpunkt setzen.
2
drücken und ‘Bewege’ wählen.
3 Den Cursor auf die neue Position setzen
und
drücken.
Einen Wegpunkt aus der Wegpunkt-Liste
verschieben
Um einen Wegpunkt aus der Wegpunkt-Liste
zu verschieben, diesen editieren (siehe Abschn.
5-2-3) und die Werte für Breite und Länge
ändern.

TRACKER 5505/5505i/5605 Installations- und Bedienungs-Handbuch
28
NAVMAN
Sicherstellen, dass die Route keine
Landgebiete und keine Gefahrengebiete
kreuzt.
5-2-9 Einen Wegpunk t ansteuern
5-2-8 Wegpunkte sortieren
6 Navigation: Routen
Eine Route besteht aus einer Reihe von
Wegpunkten, die nacheinander angesteuert
werden können. Routen können erstellt,
geänder t und gelöscht werden.
Der TRACKER kann bis zu 25 Routen speichern.
Jede Route kann bis zu 50 Wegpunkte
enthalten.
Eine Route;
kann am selben Wegpunkt beginnen und
enden.
muss mehr als einen Wegpunkt enthalten.
Der TRACKER kann auf der Route in beide
Richtungen navigieren. Innerhalb der Route
können Wegpunkte ausgelassen werden.
Routen sind besonders wertvoll, wenn der
TRACKER mit einem Autopiloten verbunden ist.
Damit ist ein vollautomatisches Durchfahren
der gesamten Route möglich.
CAUTION
!
!
WARNING
5-2-7 Wegpunktdaten ändern
Wegpunktdaten ändern, wenn diese in einem
Fenster gezeigt werden:
1 Die zu ändernden Daten markieren.
drücken.
Mit den Cursor tasten die Daten ändern.
drücken.
2 Sollen weitere Daten geänder t werden, die
vorgenannten Schritte wiederholen.
3 ‘Speichern’ wählen.
Die Sortierar t der Wegpunktliste ändern :
1 drücken und ‘Sor tieren mit’ wählen.
2 Wählen, nach welchem Kriterium sortiert
werden soll.
Na me: nach Namen in alphabetischer
Folge.
Icon: in Symbolgruppen.
Distanz: Nach Entfernung zum Boot
geordnet.
Ein Pfeil an einem Spaltenbeginn zeigt in
welcher Art die Wegpunkte sortiert sind.
Siehe Abschn. 3-1-2.
1 In der Wegpunktliste
drücken und dann ‘Alles löschen’ wählen.
2 Zur Bestätigung, ‘Ja’ wählen.
5-2-6 Sämtliche Wegpunk te löschen
TRACKER 5505/5505i/5605 Installations- und Bedienungs-Handbuch
29
NAVMAN
Nach Erstellung oder Änderung einer
Route, diese in die Kar te einblenden und
kontrollieren, dass sie nicht Land berührt
oder Gefahrengebiete kreuzt.
Es kann kein Gefahren-Wegpunkt für eine
Route benutzt werden.
1 In der Karten-Anzeige,
drücken und
‘Neue Route’ wählen.
2 Die Route erhält eine Basis-Bezeichnung:
i wenn erforderlich, diesen Namen
ändern.
ii ‘
OK’ wählen.
3 Zur Eingabe von Routen-Segmenten:
i Den Cursor auf die Startposition der
Route setzen und drücken.
ii Ein Wegpunkt erhält eine
Basisbezeichnung. Um diesen Wegpunkt
zu speichern, drücken, - den
Wegpunkt editieren, siehe Abschn. 5-2-7.
iii Drücken von
erzeugt eine
punktierte Linie vom Cursor zum
vorhergehenden Wegpunkt.
iv Den Cursor auf den Endpunkt vom
ersten Routen-Segment setzen und
drücken.
v i bis iv wiederholen, bis der letzte
Routen-Wegpunkt gesetzt und
gespeichert ist.
vi Mit
, die Route komplettieren.
Menu-Optionen während der Routenerstellung
1 Um einen Wegpunkt an die Route
anzuhängen:
i drücken und ‘Zufügen’ wählen.
6-2 Mit Routen arbeiten
6-2-1 Eine neue Route erstellen
A. Eine neue Route in der Kartenanzeige
erstellen
Für die Routen-Erstellung:
oder drücken, um den KartenBereich zu ändern. Den Cursor an den
Bildrand setzen, wodurch die Karte aus
dieser Richtung zur Bildmitte verschoben
wird.
Eine Datenbox links oben im Bild zeigt den
Routen-Namen und die Gesamt-Distanz.
Nähert sich der Cursor einem RoutenSegment, erscheinen hierzu die SegmentLänge und die Segment-Peilung.
Die Segmente einer Route müssen bei
Wegpunkten beginnen und enden. Falls
ein Segment nicht bei einem bestehenden
Wegpunkt beginnt oder endet, wird
automatisch dort ein neuer Wegpunkt
erstellt (Editierung hierzu , siehe Abschn.
5-2-7).
CAUTION
!
!
WARNING
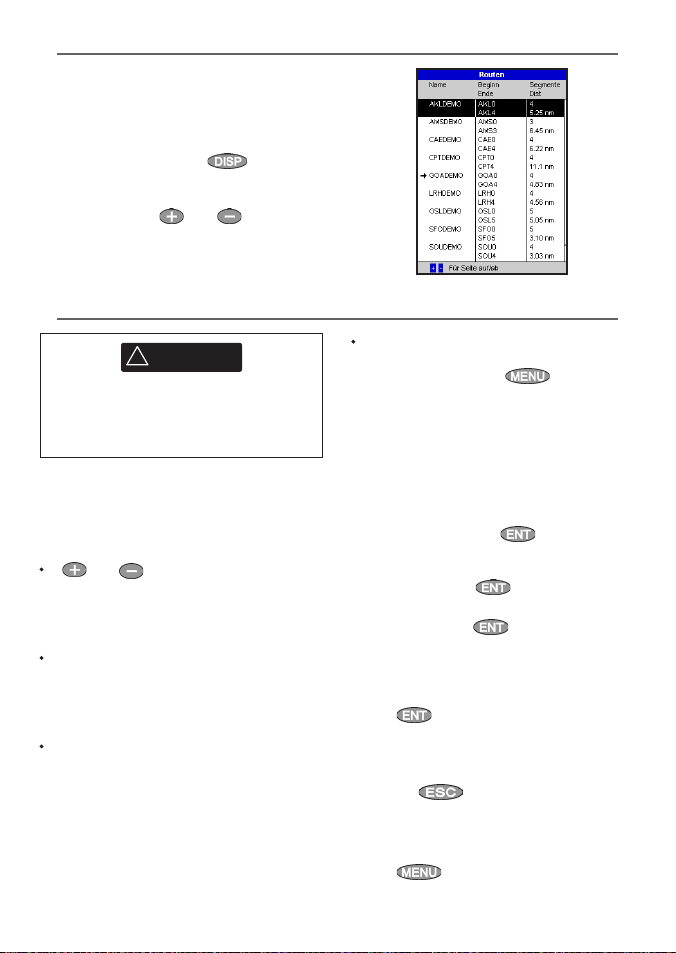
6-1 Routen-Liste
In der Routenliste sind sämtliche Routen
aufgeführt, die erstellt wurden; jede
mit der Routen-Bezeichnung, Star t- und
Ziel-Wegpunkt, Anzahl der Segmente und
Gesamt-Distanz.
Zum Aufruf der Routenliste,
drücken,
‘Andere’ wählen und dann ‘Routen’.
Sind mehr Routen vorhanden als im
Display zeigbar, mit
oder die Liste
durchwählen.

TRACKER 5505/5505i/5605 Installations- und Bedienungs-Handbuch
30
NAVMAN
2 Einen Wegpunkt in die Route einfügen,
durch Segment-Teilung:
i Den Cursor auf das zu teilende Segment
setzen.
ii drücken und ‘Einfügen’
wählen.
iii Den Cursor auf die neue Wegpunkt-
Position schieben.
iv drücken.
3 Einen Wegpunkt in der Route verschieben:
i Den Cursor auf den Wegpunkt setzen,
der verschoben werden soll.
ii
drücken und ‘Bewege’ wählen.
iii Den Cursor auf die neue Wegpunkt-
Position schieben.
iv drücken.
4 Einen Wegpunkt aus der Route entfernen:
i Den Cursor auf den Wegpunkt setzen,
der entfernt werden soll.
ii drücken und ‘Entfern.’
wählen. Der Wegpunkt ist damit aus der
Route entfernt, trotzdem als Wegpunkt
nicht gelöscht.
5 Eine Routen-Navigation starten
i drücken und dann ‘Start’
wählen.
6 Eine Routen-Erstellung beenden
i drücken und ‘Ende’ wählen.
7 Eine Route löschen
i drücken und ‘Lösche’ wählen.
ii Zur Bestätigung, ‘
Ja’ wählen.
Tipp: Auch der Distanz- und Peil-Kalkulator
kann für die Kurs-Eingabe benutzt werden, um
dann das Ergebnis als Route zu speichern (siehe
Abschn. 3-3).
B. Eine neue Route in der Routen-Liste erstellen
1 In der Routen-Liste,
drücken und
‘Erstell.’ wählen.
2 Es erscheint eine neue Route mit einer
Basis-Bezeichnung und ohne Wegepunkte.
3 Die Routen-Bezeichnung ändern:
i Oben in der Anzeige, die Routen-
Bezeichnung markieren und
drücken.
ii Den Namen nach Bedarf ändern.
iii drücken.
4 Einen Wegpunkt eingeben:
i Wählen, wo der Wegpunkt gesetzt
werden soll:
Um den ersten Wegpunkt einer
Route zu setzen, Segment 1 wählen.
Um einen Wegpunkt am Ende
einer neuen Route zu setzen, das
unbenut zte Segment am Ende der
Liste - Wegpunkte wählen.
Oder, den Wegpunkt markieren, vor
dem ein neuer Wegpunkt gesetzt
werden soll.
ii drücken. Eine Liste der
Wegpunkte erscheint. Den benötigten
Wegpunkt wählen.
Werden Wegpunkte eingefügt,
erscheinen automatisch die Distanz- und
Peilwerte für das entsprechende
Segment. Enthält die Route mehr
Wegpunkte als im Display zeigbar, diese
mit
oder
aufrufen.
5 Einen Wegpunkt aus der Route entfernen:
i Den zu entfernenden Wegpunkt
anwählen.
ii drücken und ‘Entfern.’
wählen.
6 Die vorhergehenden Prozesse fortführen, bis
die Route fertig erstellt ist.
7 drücken.
8 Die Route im Kartenbild aufrufen (siehe
Abschn. 6-2-3) und kontrollieren, dass sie
kein Land berührt und keine GefahrenGebiete kreuzt.
Siehe Abschn. 3-1-3.
TRACKER 5505/5505i/5605 Installations- und Bedienungs-Handbuch
31
NAVMAN
6-2-3 Eine Route in der Karte zeige n
6-2-4 Eine Route löschen
Um die Route in der Display-Mit te
zu zeigen :
1 In der Routenliste, mit oder die
gewünschte Route mark ieren.
drücken und ‘Zeige’ wählen.
Oder, in der Kartenanzeige
drücken, ‘Suchen’ wählen und dann
‘Route’. Eine Route aus der Liste wählen.
2 Der TRACKER zeigt die gewählte Route im
Kartenbild.
1 In der Routenliste, mit
oder die zu löschende Route markieren. drücken und dann
‘Löschen’ wählen.
2 ‘Ja’ zu Bestätigung wählen.
6-2-2 Eine Route bearbeiten
Eine Route in der Karte bearbeiten
1 In der Routenliste, die zu editierende Route
wählen.
drücken und ‘In der
Karte editieren’ wählen.
2 Die gewählte Route erscheint in der Karte
und der erste Wegpunkt ist mit einem Kreis
markiert.
3 Die Route editieren, wie in Abschn. 6-2-1 A
beschrieben, startend bei Schritt 4.
Eine Route in der Routen-Liste bearbeiten
1 In der Routenliste
oder drücken,
um die gewünschte Route zu editieren.
drücken und ‘Editieren’ wählen.
2 Die gewählte Route erscheint mit
Routen-Bezeichnung und einer Liste der
Wegpunkte.
3 Die Route editieren, wie in Abschn. 6-2-1 B
beschrieben, startend bei Schritt 3.v
TRACKER 5505/5505i/5605 Installations- und Bedienungs-Handbuch
32
NAVMAN
Das GPS-System wird von der US-R egierung
betriebe n. 24 Satelliten umkreisen die Erde
und üb ermitteln Posi tions- und Zeit-Daten .
Die Positio nen der Satelliten verändern sich
laufend. D er GPS-Empfä nger analysier t die
Signale der nächsten Satelliten und k alkulier t
daraus exakt die eigene Position. Diese wird
als GPS-Position be zeichnet.
Die Genauigkeit einer GPS-Position ist typisch
besser als 10m (33 Fuß) in 95% der Zeit. Eine
GPS- Antenne kann praktisch an jedem Or t der
Erde Signal e von GPS-S atelliten empfangen.
DGPS
Ein DG PS-System b enutzt Korrektur-Signale,
um die Genauigkeit de r GPS-Position noch zu
verbesser n. DGPS System:
WAAS und EGNOS DGPS
WAAS und EGNOS sind zwei auf
Satelliten gestützte DGPS Systeme. Die
Korrektur-Signale werden über Satelliten
gesendet und von der TRACKER StandardGPS-Antenne empfangen. Die Genauigkeit
der korrigierten GPS-Position liegt typisch
innerhalb von 5m (15Fuß) in 95% der Zeit.
WAA S deckt die ges amte USA und den
größten Teil K anadas ab. EGNOS wird den
größten Teil Westeuropas abdecken, wenn
es in B etrieb geht.
7 Satelliten
Differential-Baken DGPS
Di fferenti al-Baken sind landgestütz te
Funksender, die Korrektur-Signa le senden.
Diese werden von einem speziellen
Empfänger an Bo rd aufgear beitet.
Differential -Baken we rden gewöhnlich
in der Nähe von Hä fen und an wichti gen
Schifffahr tswegen installiert. Jede Bake
hat nur einen begrenzten Sendebereich .
Die Genauigkeit einer ent sprechend
korri gierten GPS- Position ist typisch
besser als 2 bis 5m.
GPS Em pfänger
Navman GPS -Systeme haben einen sensiblen
12-Kanal Empf änger, der die Signale
sämtlicher über Horizont sichtbaren Sate lliten
aufz eichnet un d die Ergebnisse von allen
Satelliten, die höher als 5° über Horizont
stehen, für ein e Positions-Berechnung nutz t.
Ein GPS-Empfänger benötigt nach Einschalten
cirka 50 Sekunden für die Ermit tlung der
ersten Position . Unter bestimmten Ums tänden
kann es bis zu 2 Minuten oder länger dauern.
1 In der Routenliste
drücken und ‘Alle löschen’ wählen
2 ‘J
a’ zu Bestätigung wählen.
6-2-5 Sämtliche Ro uten löschen
6-2-6 Auf einer Route navigieren
Siehe Abschn. 3-1-3.
GPS we ltweite Navig ation
TRACKER 5505/5505i/5605 Installations- und Bedienungs-Handbuch
33
NAVMAN
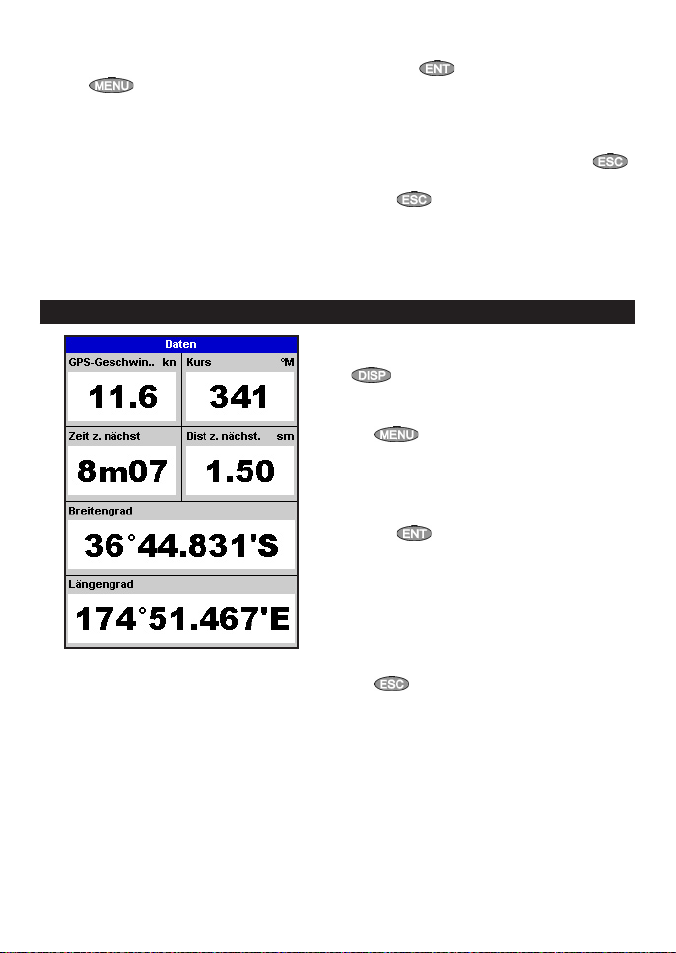
8 Messgeräte-Anzeigen
Die Messgeräte- Darstellung zeigt Daten, wie
z.B. Geschwindigkeit durchs Wasser in analoger
oder digitaler Form.
Um die Messgeräte-Darstellung zu aktivieren,
drücken, ‘Karte’ und dann
‘Karte +M essgeräte’ wählen.
Falls erforderlich,
zweimal drücken,
um zur Messgeräte-Anzeige zu schalten (siehe
Abschn. 2-8-1).
Vor Nutzung der Messgeräte-Anzeige,
Werte für Speed- Bereich, Max UpM and Max
Brennstoff-Fluss eingeb en (siehe Abschn. 14-3
und 14-4).
Karte
Messgeräte
Die Satelliten-Anzeige enthält Informationen zu
den GPS-Satelliten und die GPS-Position.
Zum Aufruf der Satelliten-Anzeige,
drücken, ‘Andere’ und dann ‘Satelliten’
wählen.
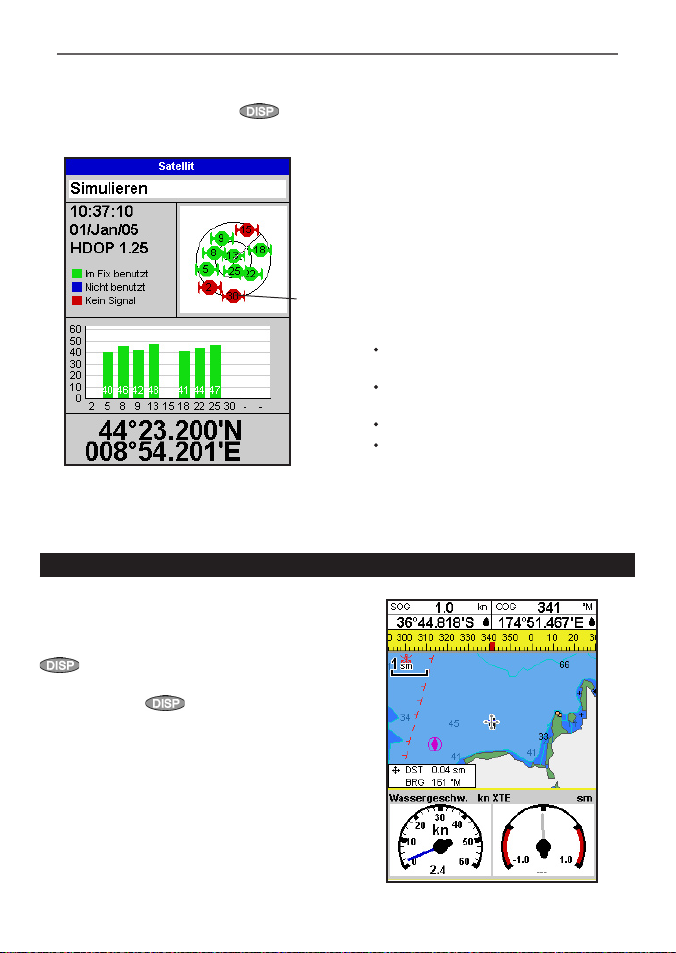
7-1 Satelliten-Anzeige
A
C
D
B
E
G
F
Die Satelliten-Anzeige enthält:
A Status des GPS-Empfangs, z.B. Acquiring
(rechnet), GPS-fix, Kein GPS. Ist der
Simulations-Modus geschaltet, erscheint der
Hinweis ‘Simulation’ (siehe Abschn. 2-7).
B Zeit und Datum von den GPS-Satelliten.
Die Zeit ist Ortszeit (UTC [GMT] plus örtliche
Verschiebung, siehe Abschn. 14-10).
C HDOP: Ein möglicher GPS-Positionsfehler,
verursacht durch die aktuelle SatellitenGeometrie. Ein kleiner Wert weist auf eine
präzisere und ein großer Wert auf eine
ungenauere Position hin.
D Signalstärke von bis zu 12 sichtbaren
GPS-Satelliten. Je höher der Balken, um so
kräftiger das Signal.
E Bootsposition
F Positionen der sichtbaren Satelliten:
Der äußere Kreis entspricht dem
Horizont.
Der innere Kreis entspricht einem Winkel
von 45° über dem Horizont.
Das Zentrum liegt direkt über dem Boot.
Nord befindet sich oben in der Anzeige
G Fährt das Boot, erscheint der COG-Wert als
Linie, im Zentrum beginnend.
TRACKER 5505/5505i/5605 Installations- und Bedienungs-Handbuch
34
NAVMAN
1 Die Instrumenten-Anzeige aktiv schalten
und drücken.
2 Den Mess-Typ wählen:
i ‘Messgerät-Typ’ wählen.
ii ‘Analog’ (rund) oder ‘Digital’ (Ziffern)
wählen.
3 Um gezeigte Daten zu wechseln:
i ‘Messgeräte-Setup’ wählen.
ii Eine Daten-Art ändern :
a) Mit den Cursor-Tasten die zu ändernde
Anzeige markieren.
9 Daten-Anzeigen
Das Daten- Display zeigt große numerische
Datenfelder. Um das Daten-Display zu öffnen,
drücken, dann ‘Andere’ wählen und
‘Daten’.
Zur Auswahl, welche Daten erscheinen sollen:
1 drücken und Datensetup
wählen.
2 Ein Datenfeld ändern:
i Mit den Cursortasten das Feld
markieren.
ii drücken, um eine Liste der
Möglichkeiten zu öf fnen.
iii Eine der Dateninformationen
auswählen oder ‘Keine’ markieren,
um das entsprechende Feld leer zu
lassen.
3 Vorhergehende Schritte wiederholen, um
andere Datenfelder zu ändern.
4 drücken.
Die Messgeräte-Da rstellung ändern
b Mit eine Liste der Möglichkeiten
aufrufen.
c) Eine der vorhandenen
Datenmöglichkeiten wählen.
iii Vorhergehende Schritte wiederholen,
um andere Anzeigen zu ändern.
drücken.
4 Mit
zur Instrumenten-Anzeige
zurück kehren.

TRACKER 5505/5505i/5605 Installations- und Bedienungs-Handbuch
35
NAVMAN
Um korrek te Brennstoffdaten zu erhalten:
Wenn Brennstoff entnommen oder
hinzugefügt wird, entspre chend den
TRACKER korrigieren (siehe Abschnitt
10-3)
Sind Benzin-Sensoren eingebaut,
diese nach der Installation oder wenn
Anzeigen nicht korrekt erscheinen,
kalibrieren (siehe Abschnitt 10-7).
Den passenden Speed-Sensor
auswählen, wenn ÖkonomieEinstellung, Reichweite und Brennstof fVerbrauchskurven erfasst werden
sollen (siehe Abschn. 10-5)
Wird ein Paddelrad-Sensor für die
Geschwindigkeits-Messung genut zt,
diesen nach Installation oder falls
Anzeigen nicht korrekt erscheinen,
kalibrieren.
10 Brennstoff-Funktionen und Anzeigen
Brennstoff-Funktionen erfordern die Installation und Voreinstellung von optionalen Benzin-,
Diesel- oder SmartCraft-Brennstoffsensoren
An jedem Motor ist ein Brennstof fsensor
installiert, um den jeweiligen Brennstoff-Fluss
zu messen.
Der TRACKER nutzt diese Messung in
Verbindung mit der Boots-Geschwindigkeit
und, falls erfassbar, der Motordrehzahl UpM,
um Daten für Brennstof f-Verbrauch, mögliche
Reichweite und Brennstoff- Ökonomie zu
errechnen. Diese Daten erscheinen dann in der
Brennstoff-Anzeige (siehe Abschnitt 10-2).
Damit ist folgendes möglich :
Anzeige des Brennstoff-Verbrauchs
während einer Reise
(siehe Abschn. 10-2)
Alarmwert setzen für Tankinhalt-niedrig
(siehe Abschn. 10-4)
Brennstoff-Verbrauchskurven erstellen in
Verbindung mit der Boots-Geschwindigkeit
und der Motoren-UpM, um LeistungsDaten zu überwachen und zu optimieren
(siehe Abschn.10-6).
10-2 Brennstof f-Anzeige
Um die Brennstoff-Anzeige zu öffnen,
drücken, ‘Andere’ und dann ‘Brennstoff ’
wählen.
Die Anzeige differieren entsprechend
der Anzahl von Motoren und Tanks. Ist
die Motoren-UpM abrufbar und falls
Verbrauchskurven erstellt wurden (siehe
Abschn. 10-6), kann durch Drücken
von zwischen Summendaten und
Brennstoffkurven-Anzeige gewechselt werden.
Die Brenn stoff-Darstel lung zeigt
Geschwindigkeit
Auswahl eines Speed-Sensors, siehe Abschn.
10-5-1.
10-1 Wie der Brennsto ff-Computer arbeitet
UpM (falls vorhanden)
Sind keine UpM-Daten vorhanden, wird die
Tiefe gezeigt.
Verbleibend
Der noch in den Tanks vorhandene Brennstof f
erscheint als vertikale Balken-Anzeige rechts
im Bild. Die Höhe des (der) gelben Balken weist
auf den noch vorhandenen Brennstoff hin. Falls
ein Tankinhalt-niedrig Alarm gesetzt wurde
(siehe Abschn. 10-4), weist die Höhe einer
roten Balkenanzeige auf den Alarm-Punkt hin.
Sind zwei Tanks vorhanden, weist der linke
Balken auf den BB-Tank und der rechte auf den
StB-Tank hin.
CAUTION
!
!
WARNING

TRACKER 5505/5505i/5605 Installations- und Bedienungs-Handbuch
36
NAVMAN
Verbraucht
Der Brennstoff-Verbrauch nach letztem
Nullset zen. Bei Doppelmotoren erscheinen die
Daten für den BB-Motor links in der Anzeige.
Um den Brennstoff-Verbrauch für eine Reise zu
erfassen, die Brennstof f-Anzeige aufrufen.
Bei einer Einmotoren-Anlage,
drücken und ‘Verbraucht löschen’
wählen.
Bei Doppelmotoren werden die Verbräuche
je Motor sowie der Gesamtverbrauch
gezeigt.
drücken, Verbraucht
löschen wählen, -
Back bord oder Steuerbord wählen,
um den Verbrauch für jeweils einen Motor
zu löschen, oder
Beide wählen, um den Gesamtverbrauch zu
löschen.
Brennstoff-Fluss
Der Brennstoff- Durchfluss je Motor. Bei Doppelmotoren erscheinen die Daten für den BB -Motor
links in der Anzeige. Mit der Durchfluss-Anzeige die Belastung je der Maschine kontrollieren.
Bereich
Die errechnete Reichweite für den aktuellen Verbrauch. Der Wert kann durch den Speed-Sensortyp
beeinf lusst werden (siehe Abschn. 10-5).
Sparmodus
Die per Brennstof f-Einheit zurück legbare Distanz. Der Wert kann durch den Speed-Sensortyp
beeinf lusst werden (siehe Abschn. 10-5). Je größer der Wert, um so besser die BrennstoffÖkonomie. Fahrhebel und Bootstrimm auf möglichst optimale Ökonomie-Einstellung bringen.
Brennstoff Verbrauchskurve
Eine Graf ik aus Brennstoff-Verbrauch und Bootsgeschwindigkeit in Relation zur Motor-Drehzahl.
Diese Kur ve nutzen, um die Fahrleistungen zu kontrollieren und zu verbessern (siehe Abschn. 10-6).

TRACKER 5505/5505i/5605 Installations- und Bedienungs-Handbuch
37
NAVMAN
Um den Grenzwert für den Tankinhalt-niedrig
Alarm zu setzen:
1 ein- oder mehr fach drücken,
um das Setup Menu zu öffnen, dann
‘Brennstoff’ und ‘Setup Tanks’
wählen.
2 Bei mehreren Tanks, den jeweiligen Tank
wählen.
10-4 Alarm Tankinhalt-niedrig
3 ‘Brennstoff-Alarm’ wählen und das
Tank-Niveau eingeben, b ei dem ein Alarm
erfolgen soll, oder Null eingeben, falls kein
Alarm erfolgen soll.
Ist ein ‘Tankinhalt-niedrig’ Alarm
gesetzt, erscheint das Alarmwert-Niveau als
rote Balkenlänge in der Brennstoffanzeige.
Der Alarm lässt sich auch über das Alarm
Setup-Menu eingeben (siehe Abschn. 14-7).
10-3 Wenn Brennstoff entnommen oder hinzugefügt wird
Wenn Brennstoff entnommen oder
hinzugefügt wird, muss dieses dem TRACKER
mitgeteilt werden, sonst sind die gezeigten
Daten sinnlos.
A Einen Tank komplett auffüllen
1 Die Brennstoff-Anzeige öffnen und
drücken.
Dann:
Bei einem Tank, Tank voll wählen.
Sind mehrere Tanks vorhanden, Tank voll
wählen, dann den befüllten Tank wählen.
Hinweis: Aufgrund von Lufttaschen bei
Bodentanks ist es oft schwierig, diese jedesmal
mit der gleichen Menge zu füllen.
Bei Bodentanks:
Jedesmal bei einer Vollbefüllung, das Boot
auf die selbe Winkellage trimmen.
Meistens gemäß Prozedur B den Tank
befüllen, jedoch zumindest jedes zehnte
Mal gemäß Prozedur A ver fahren.
B Einen Tank zum Teil befüllen
1 Brennstoff in einen Tank füllen, dann die
zugeführte Menge notieren.
2 In der Brennstoff-Anzeige,
drücken
and Brennstoff zufügen wählen.
3 Sind mehrere Tanks vorhanden, den Tank
anwählen, der befüllt wurde.
4 Den Wert der Inhaltsanzeige um die
zugefügte Menge erhöhen.
Hinweis: Da die Verbrauchsmessung auch
bei sorgfältiger Kalibrierung immer einen
geringen Fehlwert aufweist, erfolgt eine
allmähliche Fehlwert-Vergrößerung. Um diese
auszugleichen, sollte zumindest jedes zehnt
e
Mal der Tank gemäß Prozedur A gefüllt werden.
C Wenn Brennstoff entnommen wird
1. Vor einer Brennstof fentnahme, die
Brennstoff-Anzeige aufrufen,
drücken und Restinh alt einstell
.
wählen.
2. Bei mehreren Tanks, den anwählen, aus
dem Brennstoff entnommen werden soll.
3. Den in ‘Verbleibend’ gezeigten Wert
notieren. Das ist die zur Zeit vorhandene
Menge
4. Brennstoff aus dem Tank entnehmen und
die entsprechende Menge notieren.
5. Die notierte entnommene Menge von der
vorher notierten Menge abziehen, was die
neu vorhandene Menge ergibt.
6. Nun den in ‘Verbleibend’ gezeigten Wert
auf den neu errechneten Wert ändern.
7. Drücke
Hinweis: Diese Prozedur ist entsprechend
auch anwendbar, wenn dem Tank Teilmengen
hinzugefügt werden. In diesem Fall wäre die
neu zugeführte Menge zum vorhandenen Wert
zu addieren.

TRACKER 5505/5505i/5605 Installations- und Bedienungs-Handbuch
38
NAVMAN
Für die Verbrauchskalkulation kann
die Geschwindigkeit vom GPS, einem
Paddelradgeber oder einem Pitot-Sensor
gemessen werden.
Paddelrad- und Pitot-Sensor messen
die Geschwindigkeit durchs Wasser;
GPS jedoch über Grund. Es können
sich damit unterschiedliche Werte für
Reichweite, Ökonomie und die Brennstof fVerbrauchskurve ergeben (siehe Abschn.
10-5-2)
Ein Pitot-Sensor ist bei höheren
Geschwindigkeiten genauer als ein
Paddelrad-Geber, jedoch bei langsamen
ungenauer. Ein Paddelrad-Geber ist bei
langsamer Geschwindigkeit genauer.
10-5 Boot-Geschwindigkeitssensoren
Eine optionale Geschwindigkeitsquelle
wählen
1 ein- oder mehr fach drücken,
bis das Setup-Menu erscheint. Dann
‘Brennstoff’ und ‘Geschw.Quelle’
wählen.
2 Um einen Paddelrad - oder Pitot-Sensor zu
nutzen, ‘Wassergeschwind.’ wählen, für
die Messung über Grund, ‘GPS-Geschwind.’
wählen.
3 Wird Wassergeschwindigkeit gewählt und
es sind Paddelrad- wie auch Pitot-Sensor
vorhanden:
i drücken, ‘Smartcraft’ und dann
‘Speed-G eber typ’ wählen
ii ‘Paddelrad’ oder ‘Pitot’ wählen.
Tipp: Der Speed-Sensor kann während der Fahrt
gewechselt werden.
10-5-1 Boots-Geschwindigkeitssensor wähl en
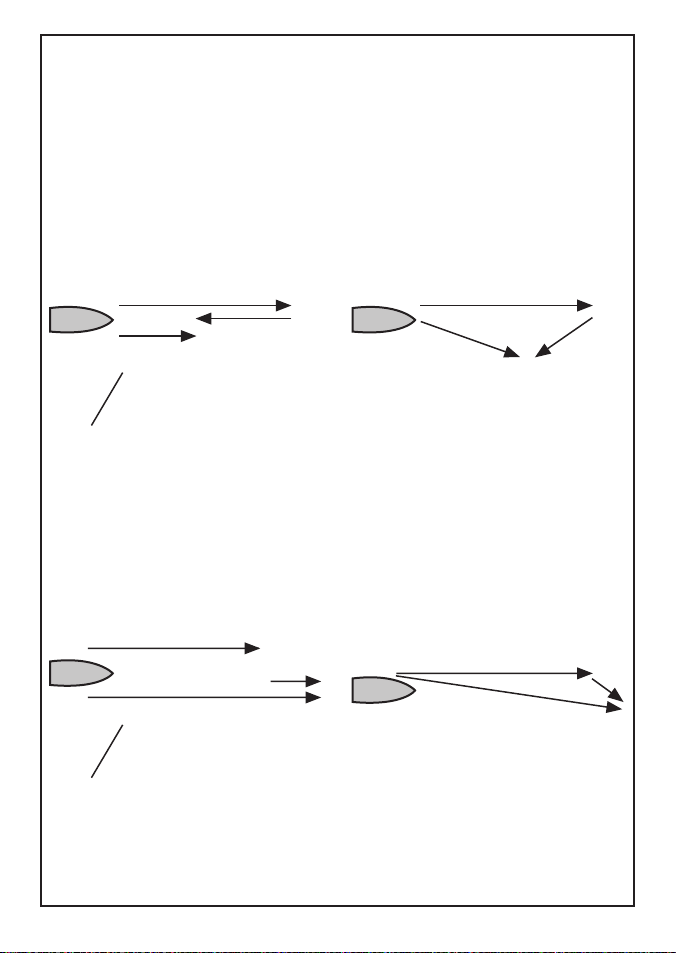
TRACKER 5505/5505i/5605 Installations- und Bedienungs-Handbuch
39
NAVMAN
Wassergeschwindigkeit 10 Knoten
Strömung 4 Knoten
Ergibt eine Strömung über Grund von 6
Knoten
10-5-2 Geschwindigkeit durchs Wasser und über Grund
Paddelrad- und Pitot-Sensoren
messen Wassergeschwindigkeit, - die
Bootsgeschwindigkeit durch das Wasser
Ein GPS misst die Geschwindigkeit über
Grund, - die Bootsgeschwindigkeit über
dem Meeresboden. Ist eine Wasserströmung
vorhanden, sind diese Geschwindigkeiten
unterschiedlich, wie auch die entsprechenden
Bei einer Strömung von vorne, ist di e Geschwindigkeit über Grund geringer als die
Geschwindigkeit durchs Wasse r.
Für dieses Beispiel :
Falls das Boot eine Stunde lang fähr t, 3 Gallonen pro Stunde verbraucht und noch 50 Gallonen
vorhanden sind:
Geschw Log Sparm odus Reichweite
Messung Wassergeschw: 10 kn 10 nm 3.3 nm / gal 165 nm
Messung über Grund: 6 kn 6 nm 2.0 nm / gal 100 nm
Wassergeschwindigkeit 10 Knoten
Ergibt eine Geschwindigkeit
über Grund
von ca. 8 Knoten Strömung 4 Knoten
aus 45º
Bei einer Strömung von hinten, is t die Geschwind igkeit über Grund höhe r als die
Geschwindigkeit durchs Wasse r.
Wassergeschw. 10 kn
Strömung
4 kn
Ergibt eine Geschwindigkeit über Grund
von 14kn
Für dieses Beispiel :
Falls das Boot eine Stunde lang fähr t, 3 Gallonen pro Stunde verbraucht und noch 50 Gallonen
vorhanden sind:
Geschw Log Sparm odus Reichweite
Messung Wassergeschw: 10 kn 10 nm 3.3 nm / gal 165 nm
Messung über Grund: 14 kn 14 nm 4.7 nm / gal 235 nm
Strömung 4
kn mit 45º
Ergibt eine Geschwindigkeit über Grund
von ca. 13kn
Wassergeschwindigkeit 10
Knoten
Anzeigen für Distanz, Teil-Distanz, Ökonomie
und Reichweite.
Wassergeschwindigkeit ergibt bessere
Boots- Leistungsdaten, die Geschwindigkeit
über Grund ist korrekter für die Zielortfahrt,
da hierbei die Strömung in die Rechnung
mit einbezogen wird. Auswahl einer
Geschwindigkeitsquelle, siehe Abschn.
10-5-1.

TRACKER 5505/5505i/5605 Installations- und Bedienungs-Handbuch
40
NAVMAN
6 Danach fragt der TRACKER nach der
Minimum-Drehzahl. Den Fahrhebel
auf langsamste Fahrt stellen. Bei
Doppelmotoren die Drehzahlen gleich
einstellen.
Danach nicht mehr die Motoren-Drehzahl
ändern. Cirka 60 Sekunden abwarten,
damit sich die Fahrt stabilisieren kann,
dann
drücken. Abwarten, damit der
Brennstoffcomputer die Daten aufzeichnen
kann.
7 Dann erfolgt der Hinweis, den Fahrhebel
auf eine höhere Soll-Drehzahl zu stellen.
Bei Doppelmotoren, für beide die gleiche
Einstellung wählen. Sobald die Motoren
die eingestellte Drehzahlen erreicht haben,
erscheint die Solldrehzahl-Box grün.
Danach nicht mehr die Motoren-Drehzahl
ändern. Cirka 60 Sekunden warten, dass
sich die Fahrt stabilisieren kann. Darauf
achten, das die UpM-Box grün bleibt.
Dann drücken. Abwarten, damit der
Brennstoffcomputer die Daten aufzeichnen
kann.
Um eine Brennstoff-Verbrauchskurve zu
erstellen, muss das Boot im gesamten
Drehzahlbereich cirka 15 Minuten lang
geradeaus fahren. Für die erste Kurve ruhiges
Wetter, ruhige See und geringe Strömung
wählen, mit bootstypischer Beladung und
einem frisch gereinigten Rumpf. Später können
Verbrauchskurven bei verschiedenen Boots-,
Wetter- und See-Bedingungen aufgezeichnet
werden. Diese dann mit der ersten Kurve
vergleichen, um zu erkennen, wie sich der
Wirkungsgrad unter den unterschiedlichen
Bedingungen ändert.
Eine Kur ve erstellen
1 Das Boot auf einen geraden Kurs bringen.
2 Für diese Kur ve eine
Geschwindigkeitsquelle wählen
(siehe Abschn. 10-5-1). Um korrekte
Leistungsdaten fürs Boot zu erhalten, die
Geschwindigkeit durchs Wasser messen.
3 ein- oder mehr fach drücken
bis das Setup Menu erscheint, dann
‘Brennstoff’ wählen.
4 ‘Brennstoff Verbrauchskurve’ wählen, und
dann ‘Neu’.
5 Die für das Boot bekannte, passende
maximale UpM eingeben, nicht den vom
Hersteller angegebenen Wert.
10-6 Brenn stoff-Verbrauchs kurve
Eine Brennstoff-Verbrauchskurve zeigt eine Grafik aus Brennstoff-Verbrauch und
Bootsgeschwindigkeit in Relation zur Motor-Drehzahl. Brennstoff-Verbrauchskurven er fordern
Motor-Drehzahlen, wofür SmartCraft oder Diesel-Sensoren installiert sein müssen. BrennstoffVerbrauchskurven sind sehr hilfreich, um die Fahrleistungen unter verschiedenen Konditionen
zu kontrollieren und um unter den jeweiligen Umständen eine möglichst ökonomische
Geschwindigkeit zu fahren.
10-6-1 Eine Brennstoff-Verbrauchs kurve erstellen
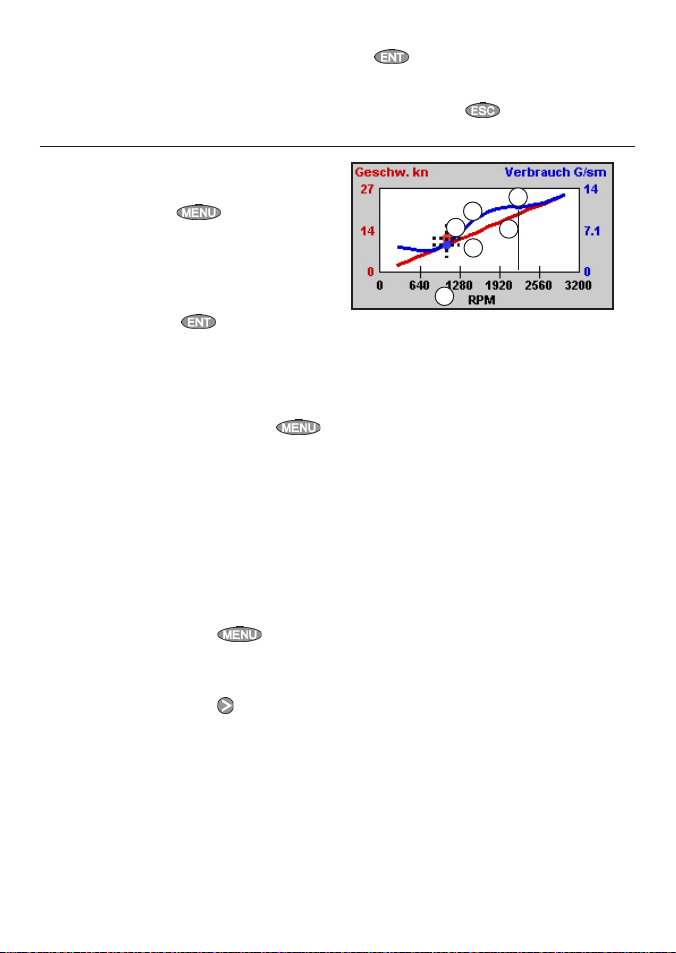
TRACKER 5505/5505i/5605 Installations- und Bedienungs-Handbuch
41
NAVMAN
8 Der TRACKER wiederholt die vorgenannten
Schritte, um Daten aufzuzeichnen, bis zur
maximalen Drehzahl hin. Danach fragt der
TRACKER, ob die Kurve gespeichert werden
soll. ‘Ja’ wählen. Der TR ACKFISH fragt
nach einer Bezeichnung für die Kurve. Falls
erforderlich, die Bezeichnung ändern. Dann
drücken. Der TRACKER speichert die
neue Kurve.
Hinweis: Um die Kur venaufzeichnung zu jeder
Zeit abzubrechen,
drücken.
10-6-2 Mit Verbrauchskurven arbeiten.
Eine Kurve umbenennen
1 Ein- oder mehrfach
drücken, bis das
Setup-Menu erscheint, dann ‘Brennstoff’
wählen.
2 Brennstoff-Verbrauchskurve wählen.
Name
aufrufen und den Namen der Kurve wählen,
der zu ändern ist.
3 Ändern wählen und
drücken. Den
Namen ändern.
10-6-3 Brennstoff-Verbrauchskurve n
nutzen
Eine Kurve löschen
1 Ein- oder mehrfach drücken, bis das
Setup-Menu erscheint, dann ‘Brennstoff’
wählen.
2 Brennstoff-Verbrauchskurve wählen.
Name
wählen und den Namen der Kurve wählen,
die zu löschen ist.
3 Löschen wählen.
Eine Kurve wählen
1 Erst muss eine Verbrauchskurve erstellt
werden, bevor sie benutzt werden kann
(siehe Abschn. 10-6-1).
2 In der Brennstoff-Anzeige,
drücken,
‘Brennstoff Verbrauchskurve’ und
dann den Namen der benötigten Kurve
wählen.
3 In der Brennstoff-Anzeige,
drücken, um
direkt die vorher gewählte Brennstoff-Kurve
aufzurufen.
Hinweise
a Bei Zweimotoren-Anlagen, die Drehzahlen
beider Motoren möglichst gleich halten.
b Die Kurvenform kann unterschiedlich sein,
abhängig davon, welcher Speed-Sensor
für die Aufzeichnung benutzt wurde (siehe
Abschn 10-5-1 und 10-5).
c Mehr Informationen zu Brennstoff-
Verbrauchskurven sind enthalten im
Navman Handbuch Dieselfluss-Sensoren
- Installation und Bedienung.
Eine Kur ve nutzen
Nun den Boots-Wirkungsgrad mit den
aktuellen Drehzahlen, mit der früher
aufgezeichneten Verbrauchskurve vergleichen.
Ein Vergleich kann nun mit Kurven er folgen,
die bei idealen Bedingungen aufgezeichnet
wurden oder mit Kurven, die bei Bedingungen
ähnlich den aktuell vorhandenen
aufgenommen wurden.
Inform ationen einer Kurvengrafik
A Anliegende Motordrehzahl Bei
Doppelmotoren entspricht die Anzeige dem
Mittelwert beider Drehzahlen.
B Rote Kurve: Bootsgeschwindigkeit bei
unterschiedlichen Drehzahlen, als die Kurve
aufgenommen wurde.
C Rote Markierung: Die anliegende
Bootsgeschwindigkeit. Diese Markierung
liegt unterhalb der roten Kurve. Sie
zeigt, dass nun die Geschwindigkeit bei
gleicher Drehzahl geringer ist, als bei der
Aufzeichnungsfahrt.
D Blaue Kurve: Brennstoff-Verbrauch bei
unterschiedlichen Drehzahlen, als die Kurve
aufgenommen wurde.
C
D
E
F
A
B

TRACKER 5505/5505i/5605 Installations- und Bedienungs-Handbuch
42
NAVMAN
E Blaue Markierung: der momentane
Brennstoff-Verbrauch. Diese Markierung
liegt unter der blauen Kurve und zeigt
damit, dass der Brennstoff-Verbrauch bei
dieser UpM nun geringer ist als bei der
Kurven-Erstellung.
F Falls die blaue Kurve eine Einknickung
enthält, dann zeigt dieses den optimalen
Bereich für Brennstoffökonomie an.
Benzin-Sensoren nach Installation kalibrieren,
oder wenn die Verbrauchsanzeige fehlerhaft
erscheint und andere Fehlerkontrollen
ergebnislos sind (siehe Anhang B Fehlersuche).
Hinweise
SmartCraft Brennstoff-Sensoren und
Navman Diesel-Sensoren sind im Werk
kalibriert und sollten nie nachkalibrier t
werden.
Bei Doppelmotoren, beide Sensoren
kalibrieren. Dieses kann gleichzeitig
erfolgen, mit separatem, tragbaren Tank
für jeden Motor oder nacheinander mit nur
einem Tank.
Die Sensor-Kalibrierung erfordert eine
exakte Messung der verbrauchten
Brennstoffmenge.
Dieses lässt sich am besten mit einem
kleinen, tragbaren Tank durchführen. Es
sollten mindestens 15 Liter Brennstoff
verbraucht werden, um eine sichere
Kalibrierung zu erhalten.
Bei Bodentanks ist es oft schwierig, diese
aufgrund von Luft taschen, jedesmal
gleich voll zu bekommen. Daher wird
eine Kalibrierung um so exakter, je mehr
Brennstoff verbraucht wird.
10-7 Kalibrierung
Zur Sensor-Kalibrierung:
1 Die exak te Brennstoffmenge in den
portablen Tanks notieren.
2 Den por tablen Tank vor dem Brennstoff-
Sensor an die Brennstoffleitung ansetzen.
3 Den Motor bei normaler
Reisegeschwindigkeit arbeiten lassen, bis
mindestens 15 Liter Brennstoff pro Motor
verbraucht sind.
4 Dann den portablen Tank auf den vorher
ermittelten Stand auffüllen und die dafür
an der Zapfsäule entnommene Menge
notieren.
5 ein- oder mehr fach drücken, bis das
Setup-Menu erscheint, dann Brennstoff
und Setup Motoren wählen.
6 Bei einer Einmotoren-Anlage,
Kalibrierung wählen, den angezeigten
Wert auf die Menge ändern, die an der
Tanksäule nachgefüllt wurde, dann
drücken.
Bei einer Doppelmotorenanlage, den
jeweiligen Motor wählen. Kalibrierung
wählen, den angezeigten Wer t auf die
Menge ändern, die an der Tanksäule
nachgefüllt wurde, dann drücken.
Den Vorgang für den anderen Motor
wiederholen
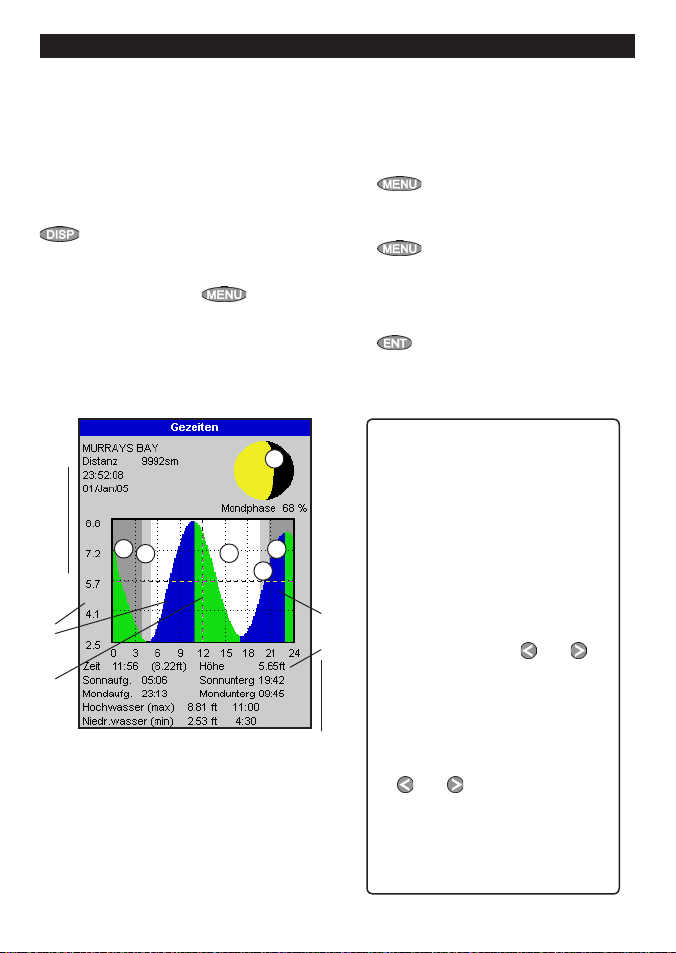
TRACKER 5505/5505i/5605 Installations- und Bedienungs-Handbuch
43
NAVMAN
A
C
B
I
H
J
K
D
E
G
D
F
N
L
M
11 Tiden Anzeigen
Die Tiden-Anzeigen sind in C-MAP Karten
enthalten. In der Tiden-Anzeige erscheinen
Gezeiten-Informationen einer Tiden-Station für
das jeweils gewählte Datum.
Hinweis: Tiden-Anzeigen benötigen die
Eingabe der Orts-Zeitversetzung,
um korrek t zu arbeiten (siehe Abschn. 14-10).
Um Tidenanzeigen von der dem Boot am
nächsten gelegenen Tiden-Station aufzurufen,
drücken, dann ‘Andere’ und ‘Gezeiten’
wählen.
Um eine andere Tidenstation aufzurufen:
1 In der Kar ten-Anzeige
drücken
und ‘Suche’ wählen.
2 ‘Gezeiten-Stationen’ wählen
3 Es erscheint eine Liste aller enthaltenen
Tidenstationen. Die gewünschte
Tidenstation wählen. Damit wird die Karte
erneuert und auf die gewählte Tidenstation
zentrier t.
4
drücken und Karten-Info wählen.
5 Tidenhöhen wählen.
Datum fü r die Tidenkar te wählen
1
drücken.
2 Heute, Nächster Tag oder Vorheriger Tag
wählen.
Um ein anderes Datum aufzurufen, ‘Datum
setzen’ wählen, das Datum eingeben und
drücken.
A Tidenstations-Name und Distanz
vom Boot
B Aktuelle Zeit und für die Anzeige
gewähltes Datum
C Tiden- Karte
D Nacht
E Morgen-Dämmerung
F Tag
G Abend-Dämmerung
H Tidenhöhe
I Zeit- Cursor, eine vertikale,
punktierte Linie Mit
oder
den Cursor seitwärts verschieben.
J Cursor-Zeit und Tidenhöhe zu
dieser Zeit
K Daten zum gewählten Datum
L Tidenhöhen-Cursor, eine
horizontale, punktier te Linie Mit
oder den Cursor auf- und
abwärt s bewegen.
M Cursor-Höhenwert in der
Tidengrafik
N Darstellung der Mondphase zum
gewählten Datum
Die Tiden-Anzeige enthält Daten für das gewählte Datum

TRACKER 5505/5505i/5605 Installations- und Bedienungs-Handbuch
44
NAVMAN
12 Anwendermodul-Anzeige
Ein C-MAP™ Anwendermodul ist ein optionales
Steckmodul, das Dateien speichern kann
(siehe Abschn.1-3). Es sind drei Datei-Typen
vorhanden: Wegpunkte, Routen und
Plottstrecken.
Zum Aufruf der Anwendermodul-Anzeige,
drücken, ‘Andere’ und dann ‘Anwender-
Modul’ wählen.
Hinweis:
1 Vor Nutzung des Anwender-Moduls,
jedes andere Steckmodul ent fernen
und dann das Anwender-Modul
einsetzen. Nach Beendigung der Arbeit
mit dem Anwender-Modul, diesen
entfernen und wieder das KartenModul einsetzen (siehe Abschn. 1-3).
2 Die älteren 5Volt-Kar ten sind nicht
verwendbar.
Die Anwendermodul-Anzeige enthält:
Dateien-Liste
Eine Liste sämtlicher gespeicherter TRACKERDateien. Sind mehr Routen vorhanden, als im
Display zeigbar, mit
oder , die Liste
durchwählen.
Wegpunkte, Routen
Die aktuell im TRACKER enthaltenen
Wegpunkte und Routen.
Plott 1 bis Plott 5
Die Anzahl an Punkten in den Plottstrecken 1
bis 5, die aktuell im TRACKER enthalten sind.
Hinweis:
1 Um TRACKER-Daten auf dem
Anwendermodul zu sp eichern, den
‘Speich’-Befehl verwenden (siehe unten).
2 Im Anwendermodul gespeicherte und in
der Dateien-Liste gezeigte Daten sind nicht
vom TRACKER nutzbar. Sie müssen erst
durch den Befehl ‘Laden’ in den TRACKER
übertragen werden.
Daten im Anwendermodul speichern
Es werden sämtliche TRACKER Wegpunkte,
Routen oder eine der im TRACKER
enthaltenen Plottstrecken in eine Datei vom
Anwendermodul kopiert.
1
drücken und ‘Speich’ wählen.
2 Wegpunkte, Routen oder Plottstrecken
wählen
3 für Plottstrecken, die zu speichernde
Plott-Nummer wählen.
4 Die neue Datei ist erstellt. Falls erforderlich,
die Bezeichnung ändern. Die neue Datei
erscheint in der
Datei-Liste.
Daten vom Anwendermodul in den TRACKER
laden
So werden Dateien vom Anwendermodul in
den TRACKER geladen:
Eine Wegpunkt-Datei: Neue Wegpunkte
werden den vorhandenen Wegpunkten im
TRACKER hinzugefügt. Falls ein Wegpunkt
eine Bezeichnung hat, die bereits im
TRACKER existier t, jedoch differierende
Daten hat, werden beide Wegpunk te im
TRACKER gezeigt. Wählen:

TRACKER 5505/5505i/5605 Installations- und Bedienungs-Handbuch
45
NAVMAN
13 Info-Anzeige
Zum Aufruf der Info-Anzeige, drücken,
‘Andere’ und dann ‘Info’ wählen.
Die Info-Anzeige zeigt:
Die Software -Version und das Datum.
Die Weltkarten-Version.
Jedes eingesetzte Kar tenmodul.
die im TRACKER enthaltene Anzahl von
Wegepunk ten, Routen und Plot tstrecken.
Verdrahtungs-Informationen für die
TRACKER-Anschlüsse.
Sollte einmal ein Service-Kontakt zu einem
Navman Händler erforderlich sein, vorher dafür
die Software -Version mit Datum notieren.
Ü bergehen: Den neuen Wegpunkt
nicht laden.
Ersetzen: Den vorhandenen
Wegpunkt durch den neuen ersetzen.
Übergeh alle: Keinen
der Wegpunkte laden, die den
selben Namen haben, wie bereits
vorhandene.
Ersetz alle: Sämtliche
Wegpunkte laden, die den selben
Namen von bereits vorhandenen
Wegpunkten haben. Damit werden
die vorhandenen durch die neuen
Wegpunkte ersetzt.
Eine Routen-Datei: Die neue Routen-Datei
wird sämtlichen existierenden Routen
hinzugefügt. Besteht eine Route mit
gleicher Bezeichnung, jedoch mit
differenten Daten, fragt der TRACKER ,
welche Route bestehen bleiben soll.
Eine Plottstrecken-Datei: Die neue
Plottstrecke wird die im TRACKER
existierende Plottstrecke ersetzen.
Eine Datei in den TRACKER laden:
1 Die zu ladende Datei wählen.
2 drücken und ‘Laden’ wählen.
Eine Datei aus dem Anwendermodul löschen
1 Die zu löschende Datei wählen.
2
drücken und ‘Löschen’ wählen.
3 Zur Bestätigung, ‘Ja’ wählen
Datei-Informationen lesen
Hier können Datei-Namen aus dem
Anwendermodul aufgerufen werden. Die
Anzeigen veranlassen kein Dateiladen in den
TRACKER.
1
drücken und ‘Kartmodul’ wählen.
2 ‘Lesen’ wählen.
Das Anwendermodul formatieren
Ein Formatieren präpariert das Anwendermodul
für die Nutzung. Formatieren durchführen, wenn
eine Fehleranzeige meldet, dass das Modul nicht
formatiert ist. Es werden damit sämtliche Dateien
auf dem Modul gelöscht.
1
drücken und ‘Kartmodul’ wählen.
2 ‘Formatieren’ wählen.
3 Zur Bestätigung, ‘Ja’ wählen.
Dateinamen sortieren
Hier werden gezeigte Dateinamen sortiert.
1.
drücken und ‘Sort’ wählen.
2 Sortierart wählen als Name, Typ oder Zeit.

TRACKER 5505/5505i/5605 Installations- und Bedienungs-Handbuch
46
NAVMAN
Ein- oder mehrfach drücken, bis das
Menu Setup erscheint, dann System wählen :
Sprache
Die Display-Sprache wählen. Die Optionen
sind: englisch, italienisch, französisch,
deutsch, spanisch, holländisch, schwedisch,
portugiesisch, finnisch und griechisch.
Tipp: Sollte die aktuelle Menu-Sprache nicht
verstanden werden, - die Sprachauswahl ist der
erste Menu-Punkt im System-Menu.
14-1 Setup > System
14 TRACKER-Einstellungen
Der TRACKER verfügt über eine Reihe
hervorragender Merkmale, die über das
Setup-Menu den Bedürfnissen angepasst
werden können. Navman empfiehlt, anfangs
mit den gegebenen Werkseinstellungen zu
arbeiten, um mit der Bedienung des TRACKERs
vertraut zu werden.
Um das Setup -Menu zu öffnen, ein- oder
mehrmals
drücken, dann eine
benötigte Option auswählen.
Hinweis:
1 Die Beschreibung der Setup -Möglichkeiten
erfolgt in den anschließenden Kapiteln.
2 Abschnit t 2-1 beschreibt, wie Daten in
den Setup -Menus gesetzt oder geänder t
werden.
3 Welche Setup-Möglichkeiten gegeben
sind, hängt auch von den installierten
Sensoren und Instrumenten ab.
Hintergrund-Beleuchtung
Die Beleuchtung für Display und Tasten
einstellen (siehe Abschn. 2-4).
Nachtmodus
Nachtmodus aktiviert die Nacht-Farbpalette für
sämtliche Anzeigen.
Normal Palet te für Tageslicht.
Sämtliche Anzeigen haben eine optimierte
Farb-Zusammenstellung für die Dunkelheit.
Siehe auch Abschn. 2-4. Die SeekartenFarbpalet te ist separat änderbar, siehe Abschn.
14-2.
Tastenpiep
Aktiviert oder deaktiviert einen Piep bei jedem
Tastenbefehl.
Einschalt-Autom. Aus
Siehe Abschn. 2-3.

TRACKER 5505/5505i/5605 Installations- und Bedienungs-Handbuch
47
NAVMAN
SmartCraft
(siehe Handbuch
SmartCraft Gateway
Installation und
Bedienung)
Setup-Menu Inhalte
Es werden die Werkseinstellungen gezeigt. Welche Setup -Möglichkeiten gegeben sind, hängt auch
von den installier ten Sensoren und Instrumenten ab.
System
(siehe 14-1)
Karte
(siehe 14-2)
Zeit
(siehe 14-10)
Einheiten
(siehe 14-8)
Alarme
(siehe 14-7)
Datenaustausch
(siehe 14-9)
Simulation
(siehe 14-11)
GPS
(siehe 14-3)
Logs
(siehe 14-6)
Plottstrecke
(siehe Abschn. 14-5)
Wasser (14-2)
Andere (14-2)
Land
Brennstoff
(siehe 14-4)
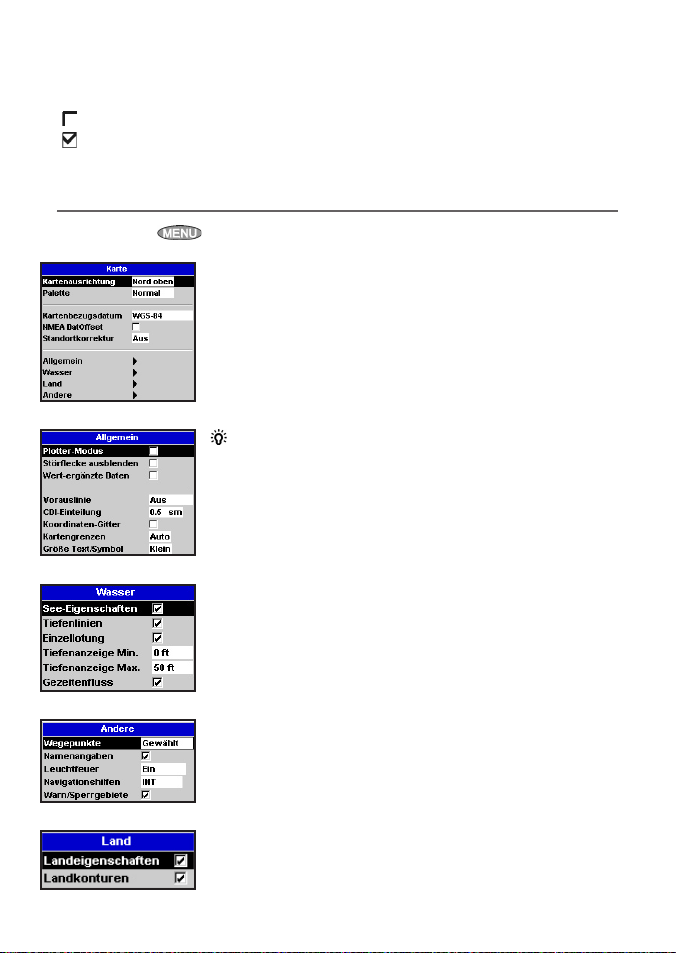
TRACKER 5505/5505i/5605 Installations- und Bedienungs-Handbuch
48
NAVMAN
Kartenausrichtung
Optionen für die Kartenausrichtung sind:
‘Nord oben’: Kar te in der Normallage, mit Nord-Ausrichtung
nach oben.
‘Vorauskurs oben’: Die Karte wird derart gedreht, dass
der Vorauskurs immer nach oben zeigt. Diese Option ist hilfreich,
wenn in engen Gewässern, Häfen oder Flüssen navigiert wird. Der
TRACKER fragt nach einer Kursabweichung; das heißt, bei welcher
veränderten Kurslage eine Neuausrichtung der Karte er folgen soll.
Hinweis: Erfolgt eine Neuausrichtung zu häufig, den
Kursabweichwert erhöhen.
‘Kurs oben’: Diese Option ist nur wählbar, wenn eine
Wegpunkt-Navigation aktiviert ist. Die Karte wird so gedreht, dass
die Sollkurslinie zum Wegpunkt senkrecht nach oben weist.
Palette
Auswahl einer Farbzusammenstellung für die Display-Anzeigen. Die
Optionen sind:
Normal
‘Sonnschein’: Brillantere Farben, im Sonnenlicht lesbarer.
‘Nacht’ Farbumkehr für die Dunkelheit, um ein Blenden zu
minimieren.
Kartenbezugsdatum
Die TRACKER GPS Positionen basieren auf einem weltweiten
Bezugssystem (datum), bek annt als WGS 84. Die meisten PapierSeekar ten basieren auf WGS 84. Es gibt aber auch Karten, die
ein anderes Bezugs-System haben. In solchen Fällen differieren
die Koordinaten eines Objektes im TRACKER Kartenbild zu den
Koordinaten vom selben Objek t in der Papierkar te. Diese Differenz
ist dann bei allen Kartenobjekten, wie das eigene Boot, Wegpunk te,
Plottstrecken, kartografische Objekte und Tiefenlinien vorhanden.
14-2 Setup > Karte
Ein- oder mehrfach drücken, bis das Setup-Menu erscheint, dann Karte wählen.
Werksrückstellung
Diese Option setzt sämtliche TRACKER Einstellungen auf Werkseinstellungen zurück (außer der Sprache,
Wegpunkte und Routen)
SmartCraft
Smart Craft Gateway nicht installiert. SmartCraft Funktionen abschalten.
Normaler SmartCraft Betrieb
Siehe Abschn. 15-8.

TRACKER 5505/5505i/5605 Installations- und Bedienungs-Handbuch
49
NAVMAN
Dann im TRACKER , das gleiche Bezugssystem
(datum) wählen, auf dem die Papierkar te
basiert. Damit werden die Koordinaten
von im TRACKER gezeigten Objek ten in
Übereinstimmung mit der Papierkarte
gebracht.
Kartenbezugssystem wählen
1 Im Karten Setup-Menu, ‘Bezugssystem’
wählen.
2 In der gezeigten Liste, das in der
Papierkarte genutzte System (datum)
wählen.
3 Wird ein anderes als das WGS 84 Datum
gewählt, erfolgt eine Frage, ob das Of fset
dann den NMEA-Werten hinzugefügt
werden soll.
NMEA Datum-Offset
Wird ein anderes als das WGS 84 Datum
gewählt, kann die entsprechende KoordinatenVerschiebung auch den TRACKER NMEA
Ausgangdaten hinzugefügt werden:
In anderen NMEA-Instrumenten
stimmen die gezeigten Längen- und
Breitenwerte nicht mit den Koordinaten
im TRACKER überein. Von einer NME AUKW-Funkanlage gesendete Längen- und
Breitenwerte entsprechen denen einer
WGS 84 Kar te.
In anderen NMEA-Instrumenten
stimmen die gezeigten Längen- und
Breitenwerte mit den Koordinaten im
TRACKER überein. Von einer NMEA-UKWFunkanlage gesendete Längen- und
Breitenwerte werden jedoch leichte
Abweichungen gegenüber einer WGS 84
Karte enthalten.
Standortkorrektur
Einige Karten haben einen festen, zusätzlichen
Fehlerwert. Um diesen auszugleichen, eine
entsprechende Korrektur durchführen. Nach
einer Korrektur :
Die Positionen von kar tografischen
Objekten (wie Land, Bojen und
Tiefenlinien) werden in der TRACKER- Karte
dorthin verschoben, wo sie sein sollten.
Die Bootsposition, Wegpunk te,
Plottstrecken, sowie Breiten- und
Längenlinien verbleiben in der TRACKER-
Karte ungeändert.
Eine Positionskorrektur durchführen.
1 Das Boot auf eine in der Karte bekannte
Position legen, z.B. der Liegeplatz in einer
Marina.
2 Im Karten Setup-Menu ‘Standor t-Korrektur’
anwählen.
3 Dann den Cursor exak t auf die
Kartenposition setzen, auf der sich das Boot
befindet.
4
drücken und ‘Setze’ wählen.
5 drücken, um die Korrek tur zu
aktivieren. Das Boot wird nun in der
tatsächlichen Karten-Position gezeigt.
Standortkorrektur nullsetzen
Diese Funk tion löscht einen im TRACKER
gespeicherten Korrekturwer t.
1 Im Karten-Setup Menu, ‘Standortkorrek tur’
anwählen.
2 drücken und dann ‘ Löschen’
wählen.
3 drücken.
CAUTION
!
!
WARNING
Wird anschließend eine Kar te mit
einem anderen Datum verwendet, auch
entsprechend das TRACKER Karten- Datum
wechseln.
Die Standortkorrektur soll nur geringe
Fehler ausgleichen. Sie soll nicht benutzt
werden, wenn ein korrektes Datum
wählbar ist. Die Standortkorrektur mit
Vorsicht ver wenden. Eine fehlerhafte
Anwendung ergibt eine falsche
Bootsposition.
CAUTION
!
!
WARNING
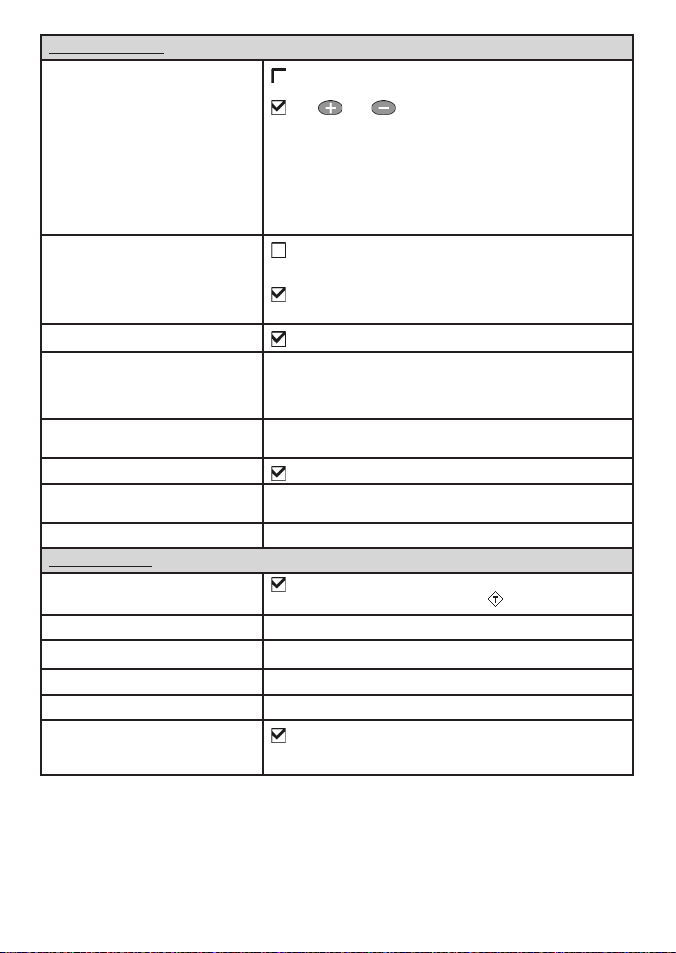
Untermenu - Generell
Plotter-Modus
Normal: Es kann nur die in der gewählten Karte enthaltene
Skalierung gezeigt werden.
Wird oder gedrüc kt, um eine nicht v orhandene
Karte n-Skalierun g zu wählen, er folgt die entsp rechende
Aktiv ierung. Kar tenanzeigen si nd dann jedoch au sgeblendet .
Es ersch einen nur die Bo otsposition u nd die Plottauf zeichnung
(wenn ak tiviert). Die sonstige Anzeige erscheint weiß mit schwarzen
Gitterlinien, ohne Karteninformationen. Dieses kann für ein starkes
Zoomen wichtig sein, wenn kleine Bootsbewegungen erkennbar sein
sollen, oder wenn für das entsprechende Gebiet keine Detailkarte
vorhanden ist.
Überdeckungs-Unterdrückung
(Anticlutter)
Namen un d Symbole werden g ezeigt. Hinweis: Dieses ist
unabhängig von Detail-Änderungen bei unterschiedliche
Zoom-Ebenen.
Blende t einige wenige r wichtige Beze ichnungen und Sym bole
aus, um die K arte lesbare r zu machen.
Hinzugefügte Daten
Es ersch einen zugefü gte, nicht offizie lle Daten.
Vorauslinie
Der TRACKER kann für eine vorgegebene Zeit den Vorauskurs und die
vermutliche Position dort anzeigen, basierend auf aktuelle Kurs- und
Fahrt-Daten (siehe Abschn. 3-4). Einstellbar sind 2 Minuten, 10 Minuten,
30 Minuten, 1 Stunde, 2 Stunden oder Aus.
CDI Einteilung Siehe Anhang C. Einstellbar sind: 0.05, 0.1, 0.2, 0.5, 1.0, 2.0, 4.0 und 10,0
Distanz-Einheiten.
Koordinaten-Gitter
Zeigt Bre itengrad- un d Längengrad -Gittern etz
Kartengrenzen Markie rt Gebiete in d er Karte, für di e detaillier tere Einzelka rten
wählba r sind. Auto zeigt di e nächsten 4 Deta ilstufen; Ein z eigt alle.
Text/Symbol-Größe Wahl der Zei chengröße für Tex t und Symbole.
Untermenu Wasser
See Eigenschaften
Anzeige von Seeboden-Hinweisen und Tiden-Stations-Symbolen (M
zeigt z.B.Gebiete mit weichem Untergrund).
Tiefenlinien Anzeigen von Linien gleicher Tiefen von minimum bis max.
Einzellotung Einzeln e Tiefenanze igen zwische n den Linien glei cher Tiefen.
Tiefenanzeige min. Einstel lung der Minimal tiefe, ab der ein e Angabe erfo lgt
Tiefenanzeige max. Die maxi male Tiefe, bi s zur der Tiefena nzeigen erf olgen.
Gezeiten-Fluss
Tidens tromanzeige i n der Karte: un terschiedli ch große Pfeile
zeigen R ichtung und Größ e von Tidenstr ömen an (erfor dert
GPS- Ort und ein NT-M AX Steckmodu l).

TRACKER 5505/5505i/5605 Installations- und Bedienungs-Handbuch
51
NAVMAN
Untermenu Andere
Wegepunkte Anzeige von Wegp unkten: ‘Alle aus blenden’ - zeig t nur Wegpunkte
einer au fgerufenen Ro ute; ‘Gewählt ’ - zeigt Wegpun kte gemäß
gewählt er Option, Symbo l oder I+N (Symb ol und Name) (sie he
Abschn. 5 ).
Namenangaben
Zeigt Or tsnamen
Leuchtfeuer Zeigt Leuchtfeuer: ‘Kein Sekt’ blendet alle Lichtsektoren aus; ‘Ein’
zeigt alle Informationen
Seezeichen u. Nav.hilfen Zeigt Nav-Symb ole (Nebel, R adar, Funkstati onen) und Seeze ichen.
Int und US wählen das entsprechende SymbolFormat; Smpl zeigt vereinfachte Symbole
Warn/Sperrgebiete
Zeigt Gre nzen von Gefah rengebieten u nd Information s-Symbole
; Warngeb iete sind z.B. G ebiete mit Anker verboten od er
Flachwas ser.
Untermenu Land
Landeigenschaften
Zeigt Inf ormationen zu w esentlichen L andmerkmale n, wie
Flüsse, Str aßen, Eisenba hnen, Flughäfe n usw.
Land-Höhen
Anzeig e unterschiedl icher Landhö hen durch Schatt ierung
(erfo rdert NT Max Mo dule).
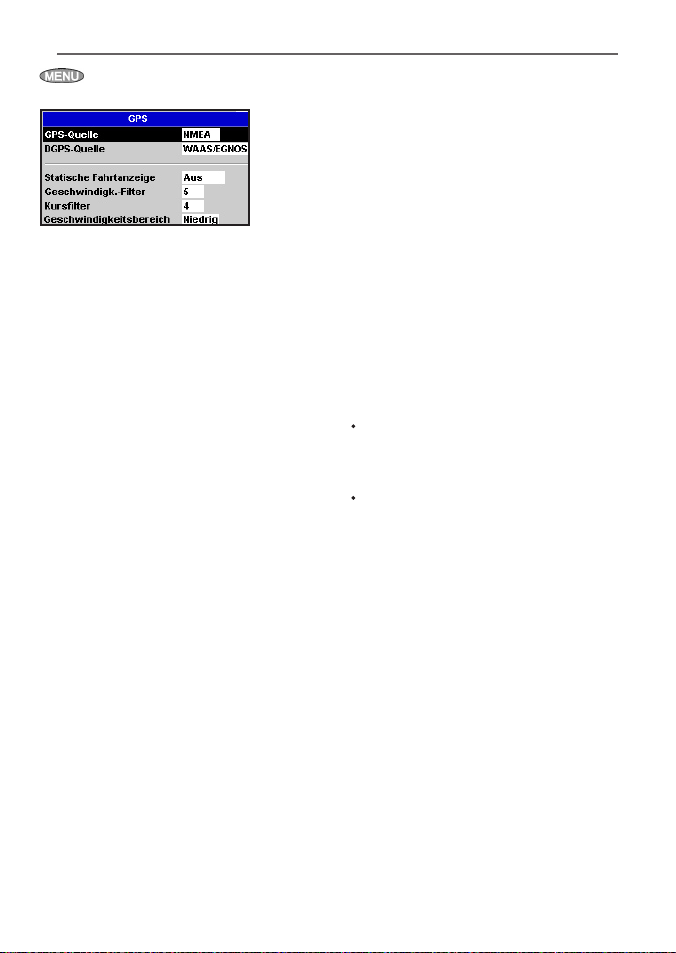
TRACKER 5505/5505i/5605 Installations- und Bedienungs-Handbuch
52
NAVMAN
ein- oder mehrfach drücken, bis das
Setup-Menu erscheint. Dann GPS wählen.
GPS-Quelle
• Intern: Die interne GPS-Antenne
(TRACKER 5380i) oder die gelieferte
externe Antenne (TRACKER 5380)
benutzen (siehe Abschn. 15-5).
• NMEA: Eine externe GPS- oder DGPS-
Quelle über NMEA nutzen (siehe Abschn.
15-10).
• NavBus:Eine externe GPS- oder DGPS-
Quelle über den NavBus-Eingang nutzen
(siehe Abschn. 15-9).
DGPS-Quelle
Aktiviert oder unterdrückt die
satellitengestützte DGPS-Korrektur (siehe
Abschn. 7) Die Optionen sind ‘Keine’ oder
Waas/EGNOS. WAAS/EGNOS nicht außerhalb
ihrer Abdeckungs-Bereiche aktivieren. Die
Positions-Genauigkeit könnte herab gesetz t
werden.
WAAS deck t die gesamte USA und den größten
Teil Kanadas ab. Um WAAS zu nutzen, muss die
GPS Antenne freien Sichtkontak t zum Himmel
in Richtung Äquator hab en. EGNOS wird den
größten Teil Westeuropas abdecken, wenn es
in Betrieb geht.
GPS Neustart
Führt einen Neustart für den internen
GPS-Empfänger durch (für Servicezwecke
oder Fehlerbehebung). Der GPS- Empfänger
benötigt bis zu drei Minuten für einen Neustart.
Das Satellitenbild zeigt den jeweiligen Status
des GPS- Empfängers (siehe Abschn. 7). Einen
Neustart durchführen, wenn der Empfänger
über einen längeren Zeitraum nicht benutzt
wurde und viel Zeit für einen GPS-Ort benötigt.
14-3 Setup > GPS
Statische Fahrtanzeige
Liegt das Boot fest oder bewegt sich nur
sehr langsam, können fehlerhafte GPS
Geschwindigkeits- und Kurs-Daten gezeigt
werden. Die statische Fahrtmessung ist
als dimensionslose Nummer gesetzt. Die
Möglichkeiten sind:
• 0,01 bis 99,9: Ist die Bootsbewegung
geringer als die gesetzte Zahl, wird die
Geschwindigkeit mit Null gezeigt und der
Kurs bleibt unverändert.
• 0(Aus): Die kalkulierten Fahrt- und
Kurs-Werte werden immer genutzt.
Fahrt- und Kurs-Filter
Wind und Wellen verursachen leichte
Schwankungen vo n Boots- Geschwindigkeit
und Kurs. Um stabile Anzeigen z u erhalten,
benutzt der TRACKER mehrere Messungen für
eine Mittelwertre chnung.
Ein kleiner Mittelungswert ergibt eine
Rechnung über eine kürzere Zeitperiode.
Das ergibt exaktere Werte mit jedoch
häufigeren Änderungen.
Ein größerer Mittelungswer t ergibt eine
Rechnung über eine längere Zeitperiode.
Das ergibt stabilere Werte. Kur zzeitige
echte Änderungen der Geschwindigkeit
werden dabei jedoch nicht er fasst.
Die Fahrt- und Kurs-Filter auf einen möglichst
niedrigen Wert setzen, der noch stabile
Anzeigen ergibt. Jeder Filter ist von 1 bis 60
Sekunden oder auf Aus (0) einstellbar.
Speed-Bereich
Die maximale Anzeige auf einem LogMessgerät (siehe Abschn. 8) Einen für das Boot
passenden Bereich wählen.

TRACKER 5505/5505i/5605 Installations- und Bedienungs-Handbuch
53
NAVMAN
Die Brennstoff- Funktionen erfordern die
Installation von optionalen BrennstoffSensoren. Ein- oder mehrfach
drücken, bis das Menu ‘Setup’ erscheint, dann
‘Brennstoff ’ wählen:
Quelle
Den benötigten Brennstoff-Sensor wählen,
falls das Boot mehr als einen Sensor hat.
Normalerweise Auto wählen.
Anzahl Motoren
Die Anzahl der Motoren eingeben, oder
0 wählen, um Brennstoff-Funktionen zu
unterdrücken. Bei z wei Motoren sind diese mit
Backbord und Steuerbord bezeichnet.
Anzahl Tanks
Die Anzahl der Brennstoff-Tanks eingeben
Bei zwei Tanks sind diese mit Backbord und
Steuerbord bezeichnet.
Setup Motoren
Ist mehr als ein Motor vorhanden, diese
nacheinander anwählen.
Für den gewählten Motor ist folgendes
einzugeben:
Vom Tank: Der an den Motor angeschlossene
Tank.
14-4 Setup > Brennsto ff
Durchflussdämpfung: Die meisten Motoren
entnehmen dem Tank den Brennstoff nicht in
gleichmäßiger Rate Um eine stabile DurchflussAnzeige zu erhalten, kalkuliert der TRACKER
den Brennstoff- Fluss aus mehreren Messungen
und mittelt dann die Werte. Im Menu
‘Durchf lussdämpfung’ eine Zeit setzen über die
hinweg die Anzeige gemittelt wird.
Die Durchflussdämpfung k ann von 0 bis 30
Sekunden eingestellt werden. Den kleinsten
Wert wählen, der noch eine stabile Anzeige
ergibt. Für Zweitakt-Vergasermotoren ergibt
gewöhnlich ein Wert von 5 bis 10 Sekunden
zufriedenstellende Ergebnisse . Brennstof fEinsprit z- oder Viertakt-Motoren können einen
größeren Wert erfordern.
Diese Einstellungen können die ‘BrennstoffFluss’- und die ‘Brennstoffspar’-Anzeigen
beeinf lussen, nicht jedoch die Anzeige für
Brennstoff-Verbrauch.
Tank-Setup
Ist mehr als ein Tank vorhanden, diese
nacheinander anwählen.
Für den gewählten Tank ist folgendes
einzugeben:
Tankgröße: Die Tankkapazität Falls nicht
exakt bekannt, empfiehlt Navman den Tank
völlig zu entleeren und dann randvoll zu
tanken. Anschließend den Messwert an der
Zapfsäule entnehmen. Darauf achten, dass
keine Luf ttaschen entstehen können, speziell
bei Bodentanks.
Brennstoff-Alarm: siehe Abschn. 10-4.
Diesel-Sensoren
Hat das Boot mehr als einen Dieselmotor, und
sind Navman Diesel-Sensoren vorhanden, dann
für diese ein Setup durchführen.
1 Im Brennstoff-Setup Menu, Diesel-
Sensoren wählen. Im Display werden
Verbrauchswerte und Drehzahlen für die
Motoren gezeigt.
2 Die Anzeige identifizieren, in der Daten der
gewählten Maschine erscheinen. Hierfür
die Drehz ahl eines Motors ändern und den
anderen stoppen.
Der Brennstoff-Verbrauch kann sich
drastisch ändern, abhängig von der
Bootstrimmung und den Seebedingungen.
Für eine Reise immer ausreichend
Brennstoff vorhalten, plus eine deutliche
Reserve.
CAUTION
!
!
WARNING

TRACKER 5505/5505i/5605 Installations- und Bedienungs-Handbuch
54
NAVMAN
14-5 Setup > Plot tstrecken
ein- oder mehrmals drücken, bis das
Setup-Menu erscheint, dann ‘Plottstrecke’ wählen.
Es wird dabei der zurückgelegte Kurs in die
Karte eingezeichnet (siehe Abschn. 3-5). Es
können 5 Plottstrecken gespeicher t werden:
Plott 1 speichert bis zu 200 0 Punkte und die
Plottspeicher 2, 3, 4 und 5 bis zu 500 Punkte je.
Aufzeichnen
Aus: Der TRACKER stoppt die
Plottaufzeichnung.
1 bis 5 (eine Nummer wählen): Der
TRACKER startet die Plottaufzeichnung in
den gewählten Speicher.
Anzeige
Aus: Es wird keine Plottstrecke in der
Kar te gezeigt.
1 bis 5 (eine Nummer wählen): Es wird
die gewählte Plottstrecke in der Karte
gezeigt.
Plott-Intervall
Die Optionen sind Distanz oder Zeit.
Distanz
Es sind folgende Distanz-Intervalle wählbar:
0.01, 0.05, 0.1, 0.5, 1.0, 2.0, 5.0 oder 10,0
Distanz-Einheiten.
Zeit
Es sind folgende Zeit-Intervalle wählbar: 1, 5, 10
oder 30 Sekunden oder 1 Minute.
Speicher benutzt
Die benutzte Speichergröße der ak tuellen
Speicherstrecke in Prozent.
Tipp: Das Anwendermodul verwenden, um
die Anzahl der aufgezeichneten Plottpunkte in
jedem Plott zu prüfen (siehe Abschn. 12).
Plottstrecken senden
Diese Option ist für die Kompatibilität mit
älteren Geräten eingefügt. Informationen
hierzu sind beim Navman-Händler erhältlich.
Plottstrecken löschen
Löschen der gewählten Plottaufzeichnung
(siehe oben).
3
oder drücken, um die Zeile mit
den Daten der gewählten Maschine zu
markieren.
drücken, die gewählte
Maschine markieren und
drücken.
4 Vorhergehende Schritte für die nächste
Maschine wiederholen.
5
drücken.
Brennstoff Verbrauchskurve
Siehe Abschn. 10-6.
Geschwindigkeits-Quelle
Sind Geschwindigkeit durchs Wasser wie auch
über Grund vorhanden, die Quelle wählen,
die für die Brennstof f-Kalkulation wichtiger ist
(siehe Abschnitt 10-5-1).
Max. Brennstoff-Fluss
Die maximal mögliche Durchfluss-Menge, die auf der analogen Messanzeige als Maximalwert
erscheinen kann (siehe Abschn. 8)
Max UpM
Die maximal mögliche Motorendrehzahl, die auf der analogen UpM-Anzeige als Maximalwert
erscheinen kann. Nur erforderlich, wenn Navman Brennstoff-Sensoren installiert sind. Einen in
der Praxis erreichbaren Maximal-Wert eingeben, nicht den vom Hersteller genannten Wert (siehe
Abschn. 8).
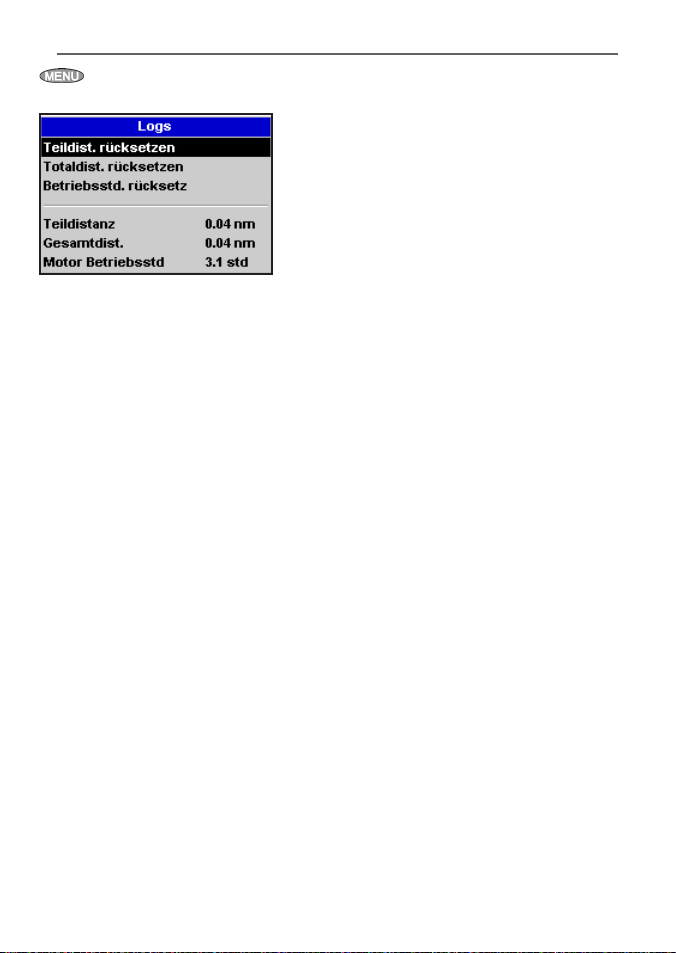
TRACKER 5505/5505i/5605 Installations- und Bedienungs-Handbuch
55
NAVMAN
14-6 Setup > Logs
ein- oder mehrfach drücken, bis das
Menu Setup erscheint, dann ‘Logs’ wählen:
Die Werte sind unabhängig voneinander
änderbar. Die Log-Wer te bleiben beim
Ausschalten der Anlage gespeichert.
Teildist. rücksetzen
Dieses setzt die Teildistanz auf Null.
Totaldist. rücksetzen
Diese Option setzt die Gesamt-Distanz auf Null.
Betriebsstd. rücksetz
Mit dieser Option, die MaschinenBetriebsstunden auf
Null setzen. Dieses kann nach einem MotorenService nützlich sein, um Betriebsstunden
zwischen den Ser vice-Intervallen zu zählen.
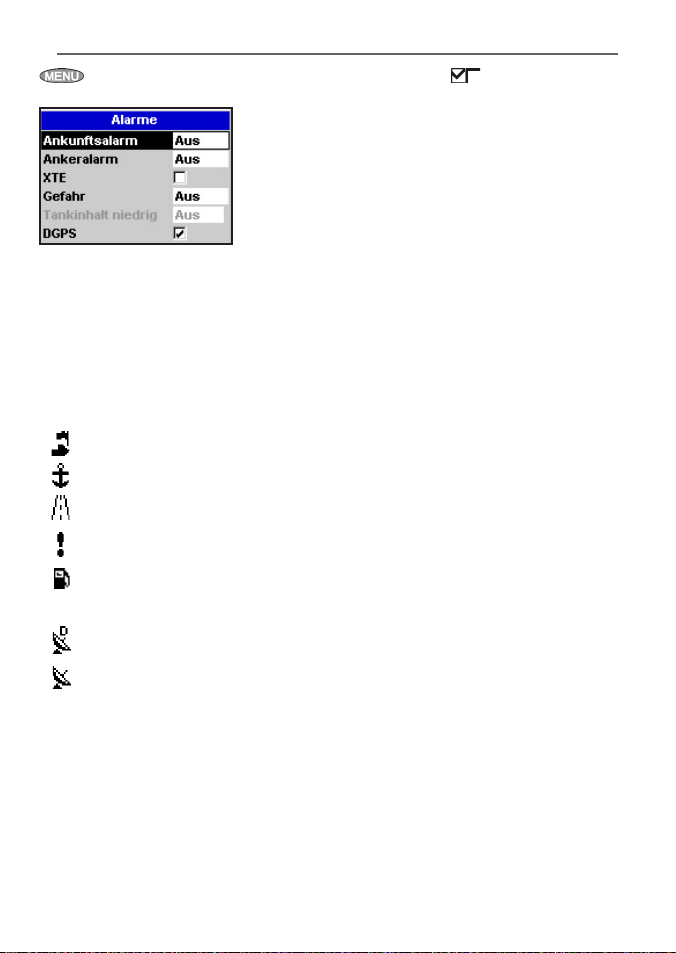
TRACKER 5505/5505i/5605 Installations- und Bedienungs-Handbuch
56
NAVMAN
14-7 Setup > Alarme
ein- oder mehrfach drücken, bis das
Menu Setup erscheint, dann ‘Alarme’ wählen.
Außer der Alarm für GPS-Signalverlust, können
sämtliche Alarm- Überwachungen aktiviert
oder deaktiviert werden.
Die Über wachungen für
XTE und DGPS-
Signalverlust mit einschalten und
mit ausschalten. Bei allen anderen
Alarmen muss ein Grenzwert gesetzt
werden, um die Überwachung zu aktivieren.
Eine Alarmauslösung erfolgt, wenn ein
Grenzwert erreicht wird. Zum Beispiel
erfolgt der Gefahren-Alarm, wenn das Boot
von außen den Grenzwert-Radius zu einem
Gefahren-Wegpunkt erreicht. Ein Anker-Alarm
erfolgt, wenn das Boot den gesetzten
Grenzwert-Radius von innen erreicht. Um
eine Alarmüberwachung auszuschalten, den
Grenzwert auf ‘0’ setzen.
Aktivierte Alarmüber wachungen können als
Symbol im Datenkopf gezeigt werden (siehe
Abschn. 2-8-2). Ein Alarm-Symbol wird im
Ruhezustand schwarz gezeigt und wechselt auf
rot, wenn ein entsprechender Alarm ausgelöst
wird.
Symbol, Alarm Alarm erfolgt, wenn er aktiviert ist und das:
Ankunft Boot näher am Wegpunkt ist
radius als der Alarm-Grenzwert
Anker-Alarm Boot vertreibt über den Alarm-Grenzwert hinweg.
XTE Boot wird über die CDI-Distanz hinweg vom Kurs versetzt.
(siehe Abschn.14-2)
Gefahr Boot den Grenzwert-Radius zu
einem Gefahren-Wegpunkt überfährt.
Tankinhalt niedrig Der Füllstand sinkt auf das eingestellte Alarmniveau; Sind mehrere
Tanks vorhanden, kann der Alarm für jeden separat eingestellt werden
(siehe Abschnitt 10-4)
DGPS Fix TRACKER empfängt keine DGPS-Signale mehr.
Verlust (von Bake, WAAS oder EGNOS)
GPS Fix TRACKER empfängt keine GPS-Singnale mehr
Verlust (Diese Alarmüberwachung ist immer aktiviert).

TRACKER 5505/5505i/5605 Installations- und Bedienungs-Handbuch
57
NAVMAN
14-8 Setup > Einheiten
Ein- oder mehrfach drücken, bis das Menu
Setup erscheint, dann Einheiten wählen:
Die voreingestellten Einheiten sind oben
gezeigt.
Distanz
nm (Nautische Meilen), mi (Meilen) oder km
(Kilometer)
Geschw.
kn (Knoten), mph (Meilen pro Stunde) oder kph
(Kilometer pro Stunde)
Tiefe
ft (Fuß), m (Meter) oder fa (Faden)
Brennstoff
Liter, USGAL (US Gallonen) oder ImpGal
(Imperial Gallonen)
Kompass
°T (Rechtw. Nord) oder °M (Magnetisch Nord)
Temperatur
°F (Fahrenheit) oder °C (Celsius)
Wind (optional)
Erfordert ein Windinstrument: Wahr oder ‘Schn’
(scheinbar)
Hinweis: Die Einheiten für WindGeschwindigkeit entsprechen den Log Einheiten.
Druck
Erfordert Smar tCraft: kPa oder psi
Baro (Barometer-Druck)
Erfordert einen Navman UKW-Seefunk
Empfänger, angeschlossen über NavBus: Hg
oder mB.
Dieses Funk tion verwenden, wenn der
TRACKER mit anderen Navman-Instrumenten
über NavBus oder mit anderen kompatiblen
NMEA-Instrumenten verbunden ist.
Ein- oder mehrmals drücken, bis das Menu
SETUP erscheint, dann Datenaustausch wählen
NMEA-Ausgang
NMEA wird generell bei Instrumenten anderer
Fabrikate verwendet (siehe Abschn. 15-10).
Dieses wählen, um NMEA-Daten zu senden, z.B.
zu einem Autopiloten.
14-9 Setup > Datenaustausch
NMEA-Daten
Hier spezifizieren, welche NMEA-Sequenzen
gesendet werden sollen (siehe Abschn.15-10
und Anhang A).
Breite/ Länge Dezimalstellen
Die Anzahl an genut zten Dezimalstellen
wählen,
mit denen L at/Lon-Daten als NMEA-Daten
gesendet werden sollen.
NavBus
NavBus ist bevorzugt zu verwenden, um den
TRACKER mit anderen Navman Instrumenten
zu verbinden. NavBus wählen, wenn
Instrumente entsprechend angeschlossen sind.
NavBus Gruppe
Diese Funk tion verwenden, wenn mehrere
Navman Instrumente per NavBus verbunden
sind und als eine Gruppe für die Beleuchtungs-
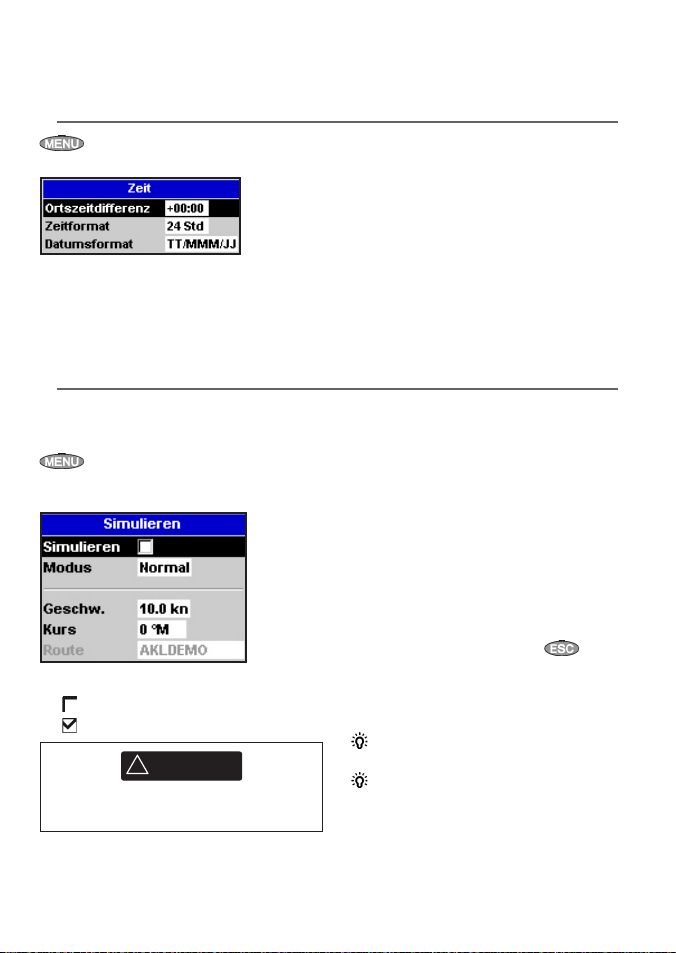
TRACKER 5505/5505i/5605 Installations- und Bedienungs-Handbuch
58
NAVMAN
Der Simulations-Modus bietet die Möglichkeit,
sich mit dem TRACKER ver traut zu machen
(siehe Abschn. 2-7).
ein- oder mehrmals drücken, bis
das Menu Setup erscheint, dann’Simulation’
wählen:
Simulation
Simulations-Modus ausschalten
Simulations-Modus einschalten
ein- oder mehrmals drücken, bis das
Menu Setup erscheint, dann ‘Zeit’ wählen:
Ortszeitdif ferenz
Die Dif ferenz zwischen der Orts-Zeit und UTC
(GMT). Die Ortszeitdifferenz ändern, wenn die
Sommerzeit beginnt und wieder endet. Der
Bereich ist 0 bis ± 13 Stunden in 30 MinutenSchritten.
Zeitfo rmat
Die Optionen sind 24 oder 12 Stunden.
Datumsformat
Die Optionen sind: TT/MMM/JJ, MMM/T T/JJ,
TT/MM/JJ oder MM/T T, JJ.
14-10 Setup > Zeit
14-11Setu p > Simulation
Niemals den Simulations-Modus während
einer Navigationsfahrt aktivieren.
CAUTION
!
!
WARNING
Modus
Es sind zwei Möglichkeiten für den Modus
vorhanden:
Regelung bestimmt werden soll. Wird dann an
einem beliebigen Instrument dieser Gruppe
die Beleuchtung eingestellt, erfolgt dieses
parallel für sämtliche Instrumente der Gruppe.
Wenn nicht gewollt, 0 wählen. Siehe Abschn.
15-9.
1 Normal
Simulier t eine Fahrt von einem gewählten
Startpunkt bei vorgewählten Fahrt- und
Kurs-Daten. Die er forderlichen Einstellungen
für ‘Normal’ sind:
Geschwindigkeit: Eine simulierte
Bootsgeschwindigkeit
Kurs: Ein simulierter Steuerkurs, dem das
Boot folgen soll.
Hinweis: Um eine Startposition zu wählen, die
Kartenanzeige aufrufen, bevor die Simulation
gestar tet wird. Dann:
• Um die Simulation von der aktuellen
Bootsposition aus zu starten,
drücken,
um auf den Bootsmodus zu zentrieren.
• Um die Simulation von einer anderen
Position aus zu starten, mit dem Cursor
diesen Punkt markieren.
Tipp: Den Bootskurs mit dem Cursor planen
(siehe Abschn. 3-3).
Tipp: Wenn das Boot fährt, den Kurs
variieren um eine Kursversetzung zu
simulieren.
2 Demo
Simulier t eine Bootsfahrt entlang einer
Route und zeigt automatisch verschiedene
TRACKER-Funktionen.
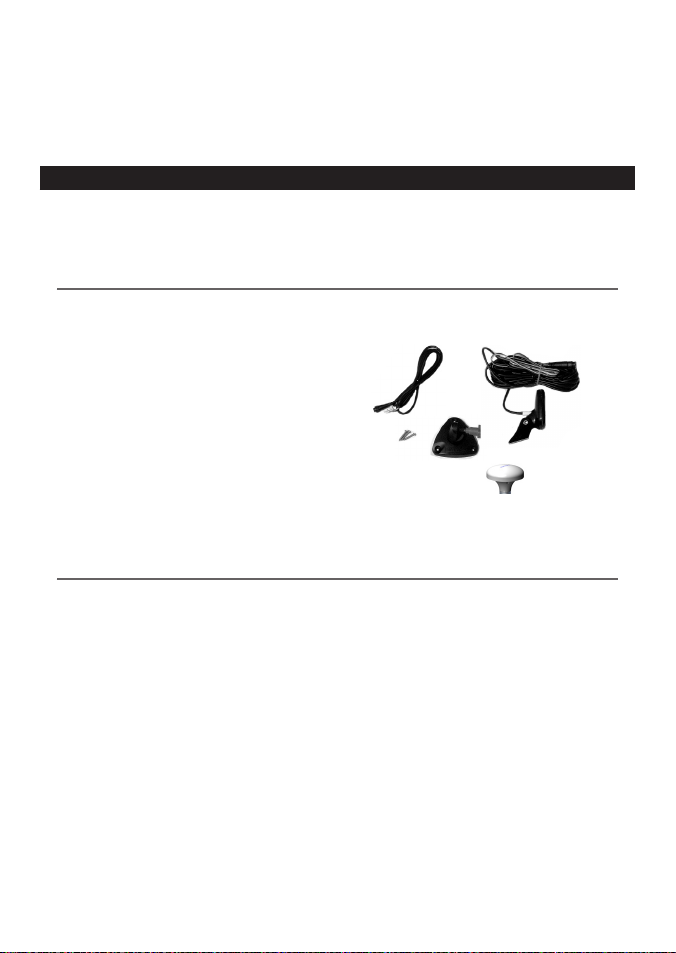
TRACKER 5505/5505i/5605 Installations- und Bedienungs-Handbuch
59
NAVMAN
• C-MAP™ NT-MAX, NT+ oder NT Kar ten-Module.
• C-MAP™ Anwender Steckmodule (3 V) zum Speichern von Daten. (Die älteren 5 Volt Kartenmodule
sind nicht verwendbar)
• Navman Tragetasche
• Navman NavBus Anschluss- Boxen vereinfachen die Verdrahtung, besonders wenn mehrere
Instrumente verbunden werden. Weitere Informationen, siehe NavBus Installations-Handbuch.
• TR ACKER Display-Einheit
•
Schutzabdeckung für die Display-Einheit
•
Abschlusskappen für nicht benutzte
Steck-Verbinder
• Netz-Kabel
• Montage-Bügel (inkl. Schrauben)
• Einbau-Montagesatz
• NAVMAN 1330 GPS Antenne nur für TRACKER
5505 und TRACKER 5605; der TRACKER 5505i
hat eine eingebaute GPS Antenne.
• Garantie-Karte
• Dieses Handbuch
Um einwandfreie Betriebs- Funktionen zu erhalten, ist die Montage sehr sorgfältig durchzuführen.
Vor dem Einbau sind unbedingt die in diesem Buch enthaltenen Installations-Anweisungen, wie
auch die entsprechenden Dokumentationen für die Antenne und weitere Einheiten zu lesen.
15 Installation
15-1 Installation: TR ACKER-Lieferumfang
15-2 Installation : Optionen und Zubehör
Die für eine Demo erforderlichen
Einstellungen sind:
Geschwind igkeit: Eine simulierte
Bootsgeschwindigkeit.
Route: Eine Route nach der gesteuert
werden soll.

TRACKER 5505/5505i/5605 Installations- und Bedienungs-Handbuch
60
NAVMAN
Schwarz
Weiß
Optiona le Sensoren und Ins trumente
Brennstoff-Sensoren: Diese optionalen
Brennstofff luss-Sensoren sind für bis zu z wei
Motoren einsetzbar.
• Navman Brennstof f-Sensoren (siehe
Abschn. 15-6)
Nut zbare Motor-Arten:
Außenborder Zweitakt-Vergaser- und
EFI Benzin-Motoren: 50 bis 300 PS.
Außenborder Viertakt Benzin-Motoren:
90 bis 300 PS.
Innenbord Benzin- Motoren: 70 bis 400
PS.
Fluss-Rate (pro Motor):
Minimum: 5 Liter pro Stunde (1.3 U.S.
Gallonen pro Stunde).
Maximum: 130 Liter pro Stunde (34 U.S.
Gallonen pro Stunde).
• Navman Diesel-Sensoren (siehe Abschn.
15-7) Fluss-Rate (pro Motor):
Minimum: 25 Liter pro Stunde (6.5 U.S.
Gallonen pro Stunde).
Maximum: 400 Liter pro Stunde (104
U.S. Gallonen pro Stunde).
• Smart Craft Brennstof f-Sensoren (siehe
Abschn. 15-8 )
Anschlüsse
GPS Antenne (TRACKER 5505, 5605, 15-5)
Spannung (15-4)
Externe Alarme (15-4)
NavBus Instrumente (15-9)
NMEA Ausg. zu Instrumenten (15-10)
Benzin-Sensoren(15-6),
NMEA Eing. (15-9)
Diesel Sensoren (15-7)
Display-Einheit
(15-3)
Netz/Daten-Kabel
Pinn Ader Funktion
1 Schwarz Masse: - Spannung Eing., NMEA Masse. (Das Kabel enthält zwei schwarze
Adern, die intern miteinander verbunden sind; somit ist unwichtig, welche
schwarze Ader verwendet wird.
2 Braun Spannung-Ausgang, 9V DC (unbenutzt)
3 Weiß NMEA-Ausgang
4 Blau NavBus-
5 Rot +Eing.-Spannung, 10,5 bis 32V DC
6 Orange NavBus+
7 Gelb Eing. Auto-Einschaltg
8 Grün Externer Alarmanschluss, 30V DC, 200mA maximum.

TRACKER 5505/5505i/5605 Installations- und Bedienungs-Handbuch
61
NAVMAN
2 Konsolen -Montage
Erfordert eine Tisch- oder Wandf läche für
die Konsolen-Anbringung. Sicherstellen,
dass die Montagefläche fest und eben und
keinen starken Vibrationen ausgesetzt ist. Die
Display-Einheit kann in der Konsole gedreht
und geneigt werden. Die Display-Einheit kann
bei Nichtb enutzung entfernt werden.
1 Die Konsole auf ihren Platz halten und die
Schraubenlöcher markieren.
2 Die Löcher bohren und die Konsole
anschrauben. Die Schrauben nicht
übermäßig anziehen.
3 Die Display-Einheit an die Konsole halten.
Den Schraubknopf aufsetzen und handfest
andrehen.
Einen Aufstellungsplatz für die Display-Einheit
wählen:
• Mindestens 100mm entfernt vom Kompass,
mindesten 300mm entfernt von einem
Funksender und mindestens 1,2m entfernt
von einer Sendeantenne.
• Leicht lesbar und bedienbar. Wenn
möglich, das Display direkt vor oder rechts
vor dem Navigator anbringen. Das Display
ist in diesen Positionen besser lesbar.
• Nicht direkter Sonnenlicht- und
Wasser-Einwirkung aussetzen und
vor mechanischen BeschädigungsMöglichkeiten bei rauher See schützen.
Es sind zwei Montagemöglichkeiten gegeben:
1 Pult-Einbau
Erfordert eine solide, ebene Montagefläche
mit Zugang von hinten für die Kabelanschlüsse
und Gerätebefestigung. Nach der EinbauMontage k ann das Gerät nicht mehr gedreht
oder gekippt werden, um störende Ref lexionen
im Display abzustellen Daher vor der
Installation sehr sorgfältig einen entsprechend
bestmöglichen Ort auswählen. Generell wird
dieses in einem Schat tenbereich sein.
1 Für den Pultausschnit t die beigefügte
Montageschablone benut zen.
2 Mittels der Schablone die vier Löcher für
die Gewindestangen bohren.
3 Die vier Gewindestangen in die
Messingeinlässe auf der Display-Rückseite
einschrauben.
4 Das Display in den Pultausschnit t setzen,
von hinten die Unterleg -Scheiben
aufschieben und das Gerät mit den vier
Muttern festschrauben.
• Problemlose Kabelführung für die
12/24VDC Spannungsversorgung und
Sensoren.
Bei dem TR ACKER mit interner GPS-Antenne :
Die Display-Einheit muss weitgehend freien
Sichtkontakt zum Himmel bis zum Horizont
haben. Die Sicht sollte nicht durch größere
Decksaufbauten behindert werden.
Das Gerät kann von Glas, Plexiglas,
Fiberglas und ähnlichem überdeckt sein,
jedoch nicht von Holz oder Metall.
Das Gerät nicht näher als 3m zu einer
Sendeantenne, oder 0,5m innerhalb
der Abstrahlebene einer Radarantenne
anbringen.
15-3 Installation: Die Display-Einheit
Knopf
Montage
Konsole
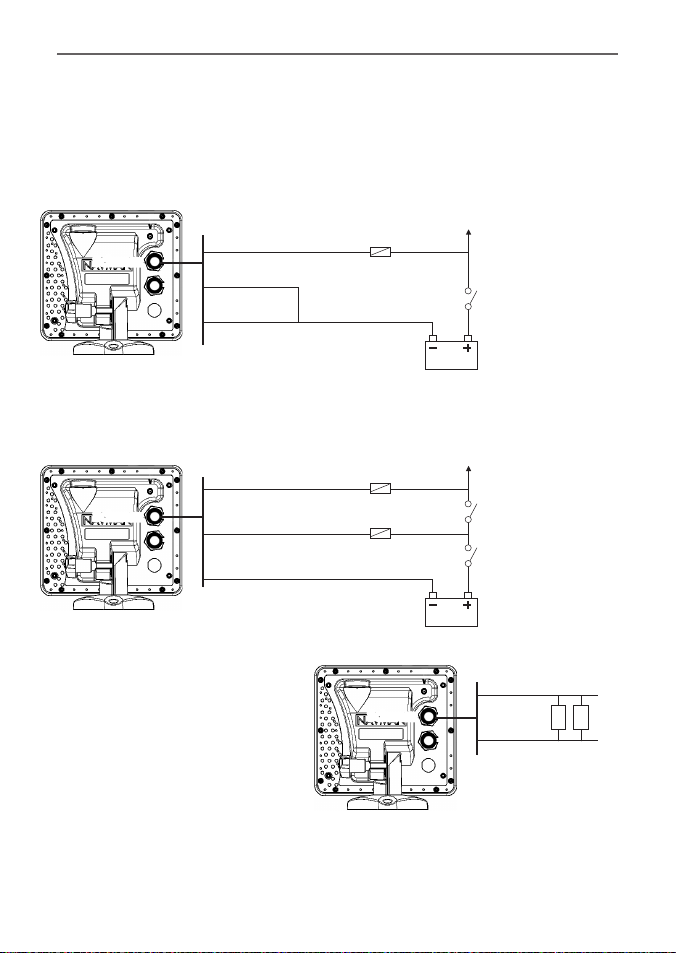
TRACKER 5505/5505i/5605 Installations- und Bedienungs-Handbuch
62
NAVMAN
Schwarz
Netz/Daten-Kabel
Rot
Gelb
Schwarz
Externe Alarmmittel
Hauptschalter
12 /24V DC
Sicherung 2A
Das Netz /Daten-Kabel hat einen schwarz markier ten Steckverbinder und am anderen Ende offene
Adern.
1 Den TRACKER für Auto-Einschaltung verdrahten, um ihn mit der Zündschalter zu aktivieren,
damit Betriebsstunden und Brennstof fverbrauch korrekt aufgezeichnet werden. Anderenfalls
für Basis-Spannungs-Versorgung verdrahten (Weitere Informationen, siehe Abschn. 2-2).
Netz/Daten-Kabel
Gelb
Rot
Schwarz
Zündung
Zündschalter
Hauptschalter
12/24 V DC
Sicherung 2A
Netz/Daten-Kabel
Rot
Grün
2 Vorhandene externe Alarmmittel
verdrahten. Der Alarm-Ausgang schaltet
bei Alarm-Auslösung gegen Masse. Wird
die Stromaufnahme größer als 200mA,
ein Relais zwischenfügen.
3 Das Netz /Daten-Kabel auf den
schwarzen Display-Anschluss setzen und
mit dem Überwur f-Ring festsetzen.
Schwarz
Schwarz
15-4 Installation: Netz/Daten-Kabel
Basis-Versorgung
Auto-Einschaltung
Bei der Inbetriebnahme, die Einschalt-Automatik einstellen (siehe Abschnitt 2-2 Ein- /Ausschalten
und 14-1 Setup System)
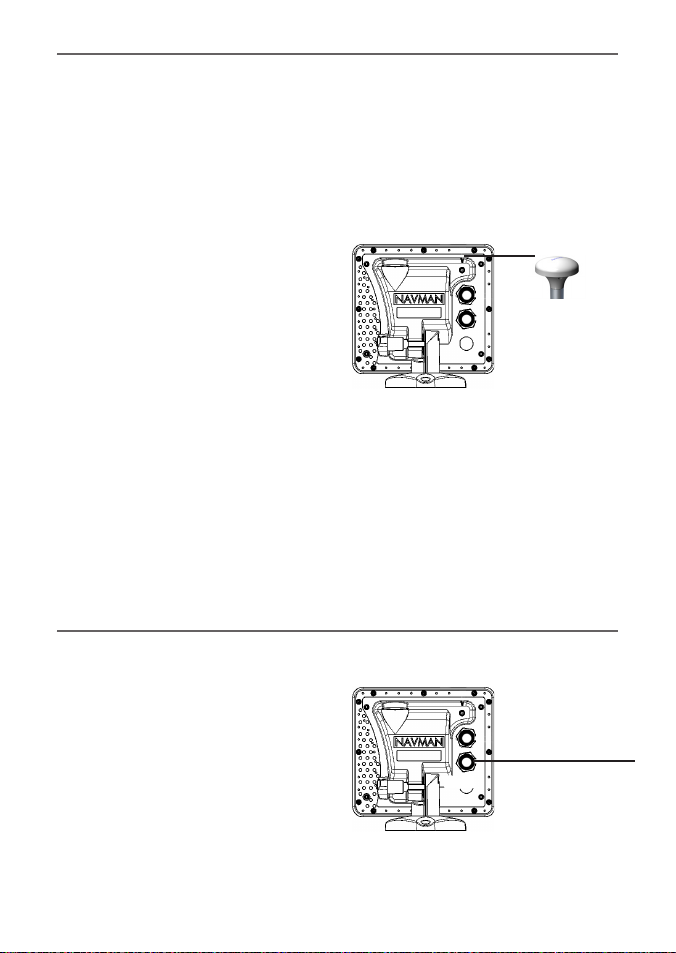
TRACKER 5505/5505i/5605 Installations- und Bedienungs-Handbuch
63
NAVMAN
Eine Antenne wählen
Eine dieser GPS-Antennen ver wenden:
• Normalereweise die interne GPS Antenne
nutzen ( TRACKER5505i) oder die
mitgelieferte GPS Antenne ( TRACKER 5505,
TRACKER 5605).
• Eine optionale Dif ferential-Baken DGPS -
Antenne, um eine verbesserte Genauigkeit
im Bereich von landgestützen DifferentialSendern zu erhalten, wo WAAS oder
EGNOS nicht vorhanden ist. Eine solche
DGPS-Antenne enthält beides, einen GPSsowie einen Differentialsignal-Empfänger
und fügt die Differential-Korrektur der
GPS-Position hinzu.
• Ein kompatibles GPS oder DGPS- Instrument
(oder Antenne), per NavBus (siehe Abschn.
15-9) oder per NMEA (siehe Abschn. 15-10)
angeschlossen. In diesen Fällen benötigt
der TRACKER keine eigene Antenne.
Hinweis:
• Der TRACKER kann jeder GPS-Antenne
die WAAS und EGNOS DGPS -Korrekturen
hinzufügen.
• Konfiguration des TRACKERs für
unterschiedliche Antennen-Optionen,
siehe Abschn. 14-3.
Weitere Informationen hierzu sind beim
Navman Händler erhältlich.
Antennen-Montage
Ist eine externe Antenne vorhanden, diese
montieren und das Kabel zur Rückseite der
Display-Einheit verlegen. Den Einbau gemäß
dem der Antenne beigefügten Handbuch
durchführen. Falls er forderlich, ein optionales
Navman Verlängerungskabel hinzufügen.
Die externe Antenne an den goldenen
TRACKER-Verbinder ansetzen.
Beim Setup, den TRACKER für die benutz te
Antenne konfigurieren, (siehe Abschn. 14-3).
Den optionalen Brennstoff-Bausatz gemäß
beigefügten Instruktionen montieren.
Hinweis:
• Je Motor einen Bausatz installieren (max. 2).
• Smar tCraft hat eigene Brennstoff-Sensoren,
daher sind dann keine Navman Sensoren
erforderlich.
• Für AUTO-Spannungsversorgung
verdrahten (siehe Abschn. 15-4).
Bei der Inbetriebnahme die Brennstof fSetupdaten eingeben
(siehe Abschn. 14-4).
BrennstoffsensorKabel
Weiß
15-5 Installation: GPS Antenne
15-6 Installation: Nav man Benzin-Sensoren
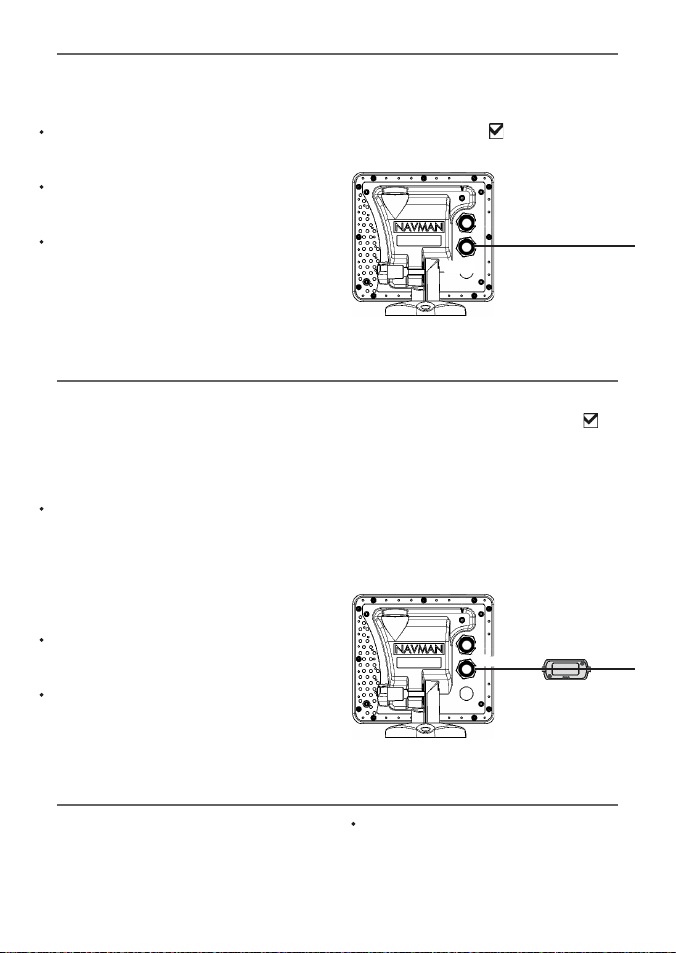
TRACKER 5505/5505i/5605 Installations- und Bedienungs-Handbuch
64
NAVMAN
Abschn. 14-4).
b NavBus und Smar tCraft auf setzen
(siehe Abschn. 14-1).
c Smartcraf t Setup-Daten eingeben(siehe
SmartCra ft Gateways Installa tions- und
Bedienu ngs-Handbuch).
Informationen über Installation, Setup und
Nutzung von SmartCraft, sind im Handbuch
SmartCra ft Installation und B edienung
enthalten.
15-7 Installation: Navman Diesel Sensoren
Den optionalen Diesel Brennstoff-Satz gemäß
beigefügten Instruktionen einfügen.
Hinweis:
Einen Bausatz pro Motor installieren,
max. für 2 Motoren. Die zwei Diesel
Brennstoffsensor-Kabel parallel verdrahten.
SmartCraft hat eigene Brennstoff-Sensoren,
daher sind dann keine Navman Sensoren
erforderlich.
Normalerweise soll die
Versorgungsspannung für die Diesel
Sensoren mit der Zündung zugeschaltet
werden. Dann braucht der TRACKER nicht
für Auto-Einschaltung verdrahtet werden
(siehe Abschn. 14-4).
Diesel Sensor-Kabel
Weiß
Der TRACKER kann an bis zu zwei SmartCraft
geeigneten MERCURY Benzin-Motoren
angeschlossen werden. Der TRACKER kann
Motorendaten anzeigen sowie Trimm und
Schleppgeschwindigkeit steuern.
Hinweis:
Den TR ACKER über ein Navman SmartCraft
Gateway mit den SmartCraft Motoren
verbinden.
i Für Einzel-Motoren, ein Einfach -
Gateway einfügen.
ii Für Doppel-Motoren, Ein Zweifach -
Gateway einfügen.
SmartCraft hat eigene Brennstoff-Sensoren,
daher sind dann keine Navman Sensoren
erforderlich.
Das Gerät für AUTO-Spannungsversorgung
verdrahten (siehe Abschn. 15-4).
Beim Setup
a Brennstoff Setup-Daten eingeben (siehe
Smart Craft
Gateway
15-8 Installation: SmartCraft
Weiß
NavBus ist ein Navman-Verbindungssystem von
Instrumenten, für die gemeinsame Nutzung von
Daten und Gebern. Wenn Instrumente über
NavBus miteinander verbunden sind:
15-9 Installation: Andere NavBus Instrumente
Werden an einem Instrument Einheiten,
Alarme oder sonstige Einstellungen
geändert, erfolgen diese Änderungen
automatisch an allen Instrumenten vom
gleichen Typ.
Beim Setup
a Brennstoff Setup Daten eingeben (siehe
Abschn. 14-4)
b NavBus auf setzen (siehe Abschnitt 14-1
Setup System)

TRACKER 5505/5505i/5605 Installations- und Bedienungs-Handbuch
65
NAVMAN
Baro: Barometer-Druck
Baro history: grafischer Druckverlauf
Wetter: eine Grob-Vorhersage, basierend
auf dem Druckänderungs-Verlauf
Fisch-Vermutung: eine Aussage, basierend
auf dem Druckänderungs-Verlauf
Daten von optionalen GPS oder GPS/DGPS-
Quellen verarbeiten.
Daten an ein optionales Navman-Instrument
, z.B. an ein Tochter-Instrument senden.
Während des Setup für NavBus-Instrumente,
NavBus auf setzen und dem Instrument
eine NavBus Gruppen-Nummer geben(siehe
Abschn. 14-9).
Jedes Instrument kann einer bestimmten
Instrumenten-Gruppe zugeordnet werden.
Wird die Beleuchtung an einem Instrument
der Gruppen 1, 2, 3 oder 4 geändert, erfolgt
automatisch die Änderung auch an allen
anderen Instrumenten der selben Gruppe.
Wird die Beleuchtung an einem Instrument
der Gruppe 0 geändert, ist davon kein
anderes Instrument betroffen.
Ertönt ein Alarm, kann dieser an jedem
Instrument nullgesetzt werden, welches den
Alarm zeigt.
NavBus und der TRACKER
Der TRACKER kann:
Wind-Geschwindigkeit und -Richtung
von einem angeschlossenen Navman
Windinstrument zeigen.
Tiefenwerte von einem angeschlossenen
Navman-Echolot zeigen.
Geschwindigkeit und Wassertemperatur
von einem angeschlossenen Navman-Log
zeigen.
Barometer-Werte von einem
angeschlossenen Navman UKW-
Seefunkgerät zeigen. Der TRACKER kann
zeigen:
Schwarz
Netz/Daten-Kabel
Orange
Blau
NavBus Verdrahtung
zu anderen NavBus Instrumenten
Informationen über die Anbindung von
NMEA-Daten an den TRACKER sind vom
Navman- Händler erhältlich.
NMEA ist ein Industrie-Standard für die
Zusammenschaltung von Instrumenten. Er
ist nicht so f lexibel und nicht so leicht zu
installieren wie NavBus. Der TRACKER kann:
Windgeschwindigkeit und Richtung
von einem optionalen, kompatiblen
Windinstrument empfangen und anzeigen.
Wassertiefe, Paddelrad-
Bootsgeschwindigkeiten und
Wassertemperatur von einem optionalen,
kompatiblen Instrument empfangen und
anzeigen.
Daten von einer optionalen, kompatiblen
GPS oder DGPS-Quelle empfangen.
GPS-Position und andere Navigations-
Daten an einen Autopiloten oder andere
Instrumente senden. Ein Autopilot benötigt
APB, APA und VTG-Sequenzen (siehe
Abschn. 14-9).
Schwarz
Netz/Daten-Kabel
Weiß
Weiß NMEA Ausg.
Schwarz NMEA Masse
Weiß NMEA Eing.
15-10 Installation: Andere NMEA-Instrumente.
Beim Setup für an andere Instrumente zu
sendende NMEA- Daten, NMEA-Ausg. auf
setzen und dann die zu sendenden NM EA-
Daten spezifizieren (siehe Abschn. 14-9).

TRACKER 5505/5505i/5605 Installations- und Bedienungs-Handbuch
66
NAVMAN
Setup und Test
1 Auf jeden nicht besetzten Steckplatz
der Geräte-Rückseite, eine der freien
Schutzkappen aufsetzen. Darauf achten,
dass sämtliche Verbinder am Display korrekt
angesetzt sind und das Display gut befestigt
ist.
2 Wird die Konsolenhalterung verwendet, das
Display für optimale Ablesbarkeit verdrehen
und den Gewindeknopf handfest anziehen.
3 Das benötigte C-MAP Kartenmodul
einsetzen (siehe Abschn. 1-3).
4 Das Instrument einschalten (siehe Abschn.
2-3). Wird der TRACKER zum ersten Mal
eingeschaltet, zeigt es ein Installations-
Menu
i Die benötigte Sprache wählen.
ii Setup-Daten ändern, falls erforderlich
(siehe Abschn.2-1).
iii Sind die Setup-Daten korrekt,
drücken.
Diese Daten lassen sich auch später ändern
(siehe Abschn. 14).
5 Setup-Daten ändern, um den TRACKER den
eigenen Bedürfnissen anzupassen, und
um optionale Sensoren und Instrumente
einzugliedern (siehe Abschn. 14).
6 In der Satelliten-Anzeige kontrollieren,
ob GPS-Satellitensignale erkannt werden.
Abwarten, bis der GPS-Empfänger die
Datenkalkulation beendet hat und die
Anzeige von ‘GPS sucht’ auf ‘GPS Fix’
wechselt. Das sollte weniger als zwei
Minuten dauern (siehe Abschn. 7)
7 Einen Testbetrieb durchführen und prüfen,
ob die Navigations-Systeme korrekt
arbeiten, besonders wenn Funk- und
Radar-Anlagen betrieben werden.
15-11 Installation: Setup und Test
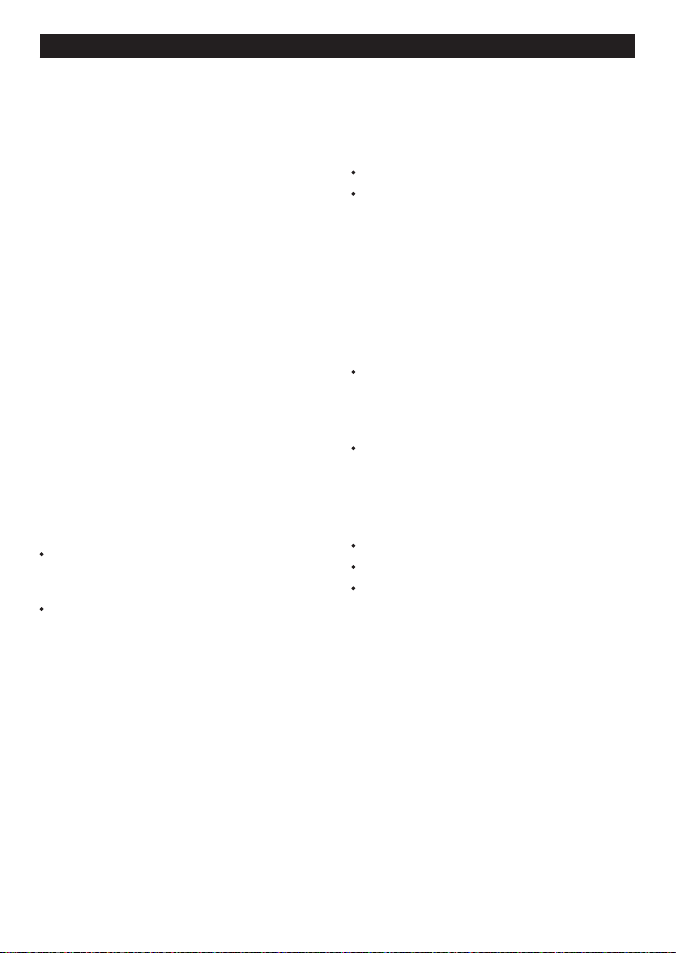
TRACKER 5505/5505i/5605 Installations- und Bedienungs-Handbuch
67
NAVMAN
GENERELL
Größe:
TRACKER 5505/5505i:
150mm H x 164mm L x 65mm B
(5.9” x 6.5” x 2.6”)
TRACKER 5605i
179,5mm H x 195mm L x 54mm B
(7.1” x 7.6” x 2.1”)
Display:
TRACKER 5505, 5505i: 5” diagonal, Farb-TFT,
234 x 320 Pixel
TRACKER 5605: 6.4” diagonal, Farb-TFT
(234 x 320 Pixel).
Hinterleuchtung: Display und Tasten
Versorgungs-Spannung
10,5 bis 32 V DC.
Stromaufnahme: bei 13,8 V
300 mA min - ohne Beleuchtung
550 mA max - volle Beleuchtung
Externe Alarmmittel: gegen Masse schaltend,
30 V DC, 200 mA maximum.
Betriebs-Temperatur
0° bis 50°C (32° bis 122°F)
ALARME:
Vom Benutzer setzbar: Ankunft-Radius,
Anker, XTE, Gefahr, Brennstoff-Mangel,
DGPS-Ort ausgefallen
Feste Alarme: GPS-Datenausfall
GPS NAVIGATION
Seekarten-Module: C-MAP™ NT-MAX, NT+
oder NT
Anwender Module: 3.3 V C-MAP™
Wegpunkte:
bis zu 3000, mit BasisKennzeichnung oder vom Anwender
definierte alphanumerische Namen mit bis
zu acht Zeichen.
Routen: 25 Routen mit bis zu je 50 Punkten
Plottstrecken: zeit- oder distanz-abhängig, ein
Plott mit max. 2000 und 5 Plotts mit je 500
Punkten.
Karten-Bezugssysteme:
121 Karten-Datums (siehe nächste Seite)
Eine vom Benutzer definierte Karten-
Versetzung
Karte n-Skalierun g: 0,05 bis 4096 nm für
Karten (kartenabhängig) bis abwärts auf
0,01nm im Plotter-Modus
Datenaustausch
NavBus
Verbindung zu anderen Navman Instrumenten.
NMEA
NMEA 0183 ver 2, 4800 Baud
• Eingänge von kompatiblen Instrumenten:
DBT, DPT (bevorzugt), GGA, GLL, GSA, GSV,
MTW, MWV, RMC, VHW, VTG
Ausgänge für kompatible Instrumente: APA,
APB, BWR, GGA, GLL, GSA, GSV, RMB, RMC,
VTG, XTE
STANDARDS Übereinstimmung
EMC:
USA: FCC Part 15 Class B.
Europa: (CE) EN301843-1:2004-06.
Neuseeland und Australien: (C Tick)
EN60945 9.2 & 9.3.
Schutzart: IPx6/IPx7/CFR46 (mit eingesetztem
Kartenhalter und fest angesetzten
Verbindern).
Anhang A - Spezifikationen
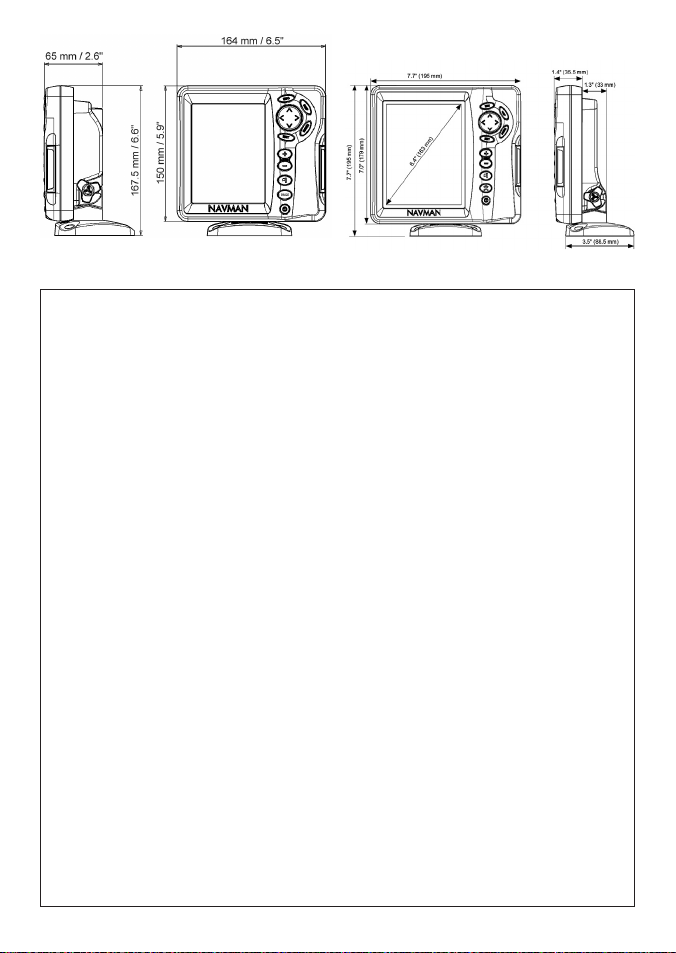
TRACKER 5505/5505i/5605 Installations- und Bedienungs-Handbuch
68
NAVMAN
Liste der Kartenbezugs-Systeme (datums)
Adindan Afgooye AIN EL ABD 1970
American Samoa 1962 Anna 1 Astro 1965 Antigua Island Astro 1943
ARC 1950 ARC 1960 Ascension Island 1958
Astro Beacon ‘E’ 1945 Astro DOS 71/4 Astro Station 1952
Astro Tern Island (Frig) 1961 Australian Geodetic 1966 Australian Geodetic 1984
Ayabelle Lighthouse Bellevue (IGN) Bermuda 1957
Bissau Bogota Observatory Bukit Rimpah
Camp Area Astro Campo Inchauspe 1969 Canton Astro 1966
Cape Cape Canaveral Carthage
Chatham Island Astro 1971 Chua Astro Co-ord. Sys.1937 Estonia
Corrego Alegre Dabola Deception Island
Djakarta (Batavia) DOS 1968 Easter Island 1967
European 1950 European 1979 Fort Thomas 1955
Gan 1970 Geodetic Datum 1949 Graciosa Base Sw 1948
Guam 1963 Gunung Segara GUX 1 Astro
Herat North Hermannskogel Hjorsey 1955
Hong Kong 1963 Hu-Tzu-Shan Indian
Indian 1954 Indian 1960 Indian 1975
Indonesian 1974 Ireland 1965 ISTS 061 Astro 1968
ISTS 073 Astro 1969 Johnston Island 1961 Kandawala
Kerguelen Island 1949 Kertau 1948 Kusaie Astro 1951
L. C. 5 Astro 1961 Leigon Liberia 1964
Luzon M’Poraloko Mahe 1971
Massawa Merchich Midway Astro 1961
Minna Montserrat Island Astro 1958 Nahrwan Masirah Is. Oman
Nahrwan United Arab Emirates Nahrwan Saudi Arabia Naparima, BWI
North American 1927 North American 1983 North Sahara 1959
Observatorio Meteorolog. 1939 Old Egyptian 1907 Old Hawaiian
Oman Ord. Survey Great Britain 1936 Pico de las Nieves
Pitcairn Astro 1967 Point 58 Pointe Noire 1948
Porto Santo 1936 Provis. South American 1956 Provis. South Chilean 1963
Puerto Rico Pulkovo 1942 Qatar National
Qornoq Reunion Rome 1940
S-42 (Pulkovo 1942) Santo (DOS) 1965 Sao Braz
Sapper Hill 1943 Schwarzeck Selvagem Grande 1938
Sierra Leone 1960 S-JTSK South American 1969
South Asia Tananarive Observatory 1925 Timbalai 1948
Tokyo Tristan Astro 1968 Viti Levu 1916
Voirol 1874 Voirol 1960 Wake Island Astro 1952
Wake-Eniwetok 1960 WGS 84 Yacare
Zanderij
TRACKER 5505, TRACKER 5505i TRACKER 5605
TRACKER 5505/5505i/5605 Installations- und Bedienungs-Handbuch
69
NAVMAN
1-1 Der Tracker lässt sich nicht einschalten
a Der TRACKER ist für den Anschluss an ein
12/24Volt Batteriesystem bestimmt, wobei
die Spannung zwischen 10,5 und 32 Volt
variieren darf. Bei
zu hoher Spannung wird eine Sicherung
auslösen und damit die Anlage ausschalten.
Sicherung prüfen
b Den Netzkabel-Anschluss auf der
Geräte-Rück seite prüfen, dass auch der
Überwurf-Ring korrekt festgesetzt ist. Der
Überwurf-Ring muss fest sitzen, um die
Wasserdichtigkeit zu gewährleisten.
c Die Batterie-Spannung unter Belastung
messen. - Dafür einige an die Bat terie
angeschlossene Verbraucher einschalten.
Falls die Spannung dann geringer als 10
Volt ist:
- Batterie-Klemmen und Kabelverbinder
können korrodiert sein.
- Die Batterie wird eventuell nicht richtig
geladen oder sie ist zu erneuern.
d Das Versorgungskabel vom Anfang bis
zum Ende auf Schäden untersuchen, wie
zum Beispiel Quetschungen, Brüche usw.
e Sicherstellen, dass die rote Ader an den
Plus-Pol und die schwarze Ader an den
Minus-Pol der Batterie angeschlossen ist.
Diese Fehlersuch-Anleitung ist unter der
Annahme geschrieben, dass der Benutzer die
relevanten Abschnitte im Buch gelesen und
verstanden hat.
In vielen Fällen wird es möglich sein, Probleme
zu beseitigen, ohne dafür einen NavmanService zu beauf tragen. Bitte, erst diesen
Fehlersuch-Anweisungen folgen, bevor ein
Navman-Service kontaktiert wird.
Es können keine Bauteile vom Anwender
repariert werden. Es sind spezielle
Methoden und Testgeräte für Reparatur und
wasserdichtes Zusammensetzen der Geräte
erforderlich. Wird von nicht autorisierten
Personen versucht, Geräte zu reparieren,
erlischt jeder Garantie-Anspruch.
Reparaturen an den Produkten dürfen nur von
durch Navman autorisierten Firmen erfolgen.
Muss ein Gerät eingeschickt werden, ist es
wichtig, auch die Geber beizufügen.
Weitere Informationen sind auf unserer
Web-Seite zu finden: ww w.navman.com.
Falls für die Einschalt Automatik verdrahtet,
darauf achten, dass der gelbe Draht an den
Zündkreis der Maschine angeschlossen ist.
Weiterhin den Hauptverteiler des Bootes
kontrollieren (siehe Abschn. 15- 4).
f Den Anschluss-Stecker auf Korrosion
untersuchen und falls erforderlich,
erneuen.
g Sicherungen überprüfen, die in die
Zuleitung eingefügt sind. Eine Sicherung
kann defekt sein, auch wenn sie heil
erscheint oder sie k ann korrodiert sein.
Die Sicherung prüfen, oder durch eine
eindeutig heile Sicherung ersetzen.
1-2 Der TRACKER lässt sich nicht abschalten:
Der TRACKER ist eventuell für Einschalt-
Automatik verdrahtet. In dem Fall kann
eine Abschaltung nicht erfolgen, solange
die Zündung noch eingeschaltet ist (siehe
Abschn. 2-3).
1-3 Der TRACKER piept beim Einschalten,
doch es erscheint keine Anzeige:
Der TRACKER dürfte arbeiten, nur wird die
Beleuchtung zu dunkel gesetzt sein. (siehe
Abschn. 2- 4).
1-4 Die falsche Sprache wird gezeigt:
Siehe Abschn. 14-1.
Anhang B - Fehlersuche
B-1 Generelle Probleme

TRACKER 5505/5505i/5605 Installations- und Bedienungs-Handbuch
70
NAVMAN
2-1 Kein GPS-Ort oder lange Zeitdauer bis
zum ersten Fix
a Kann vorkommen, wenn die Antenne keine
freie Sicht zum Himmel hat. SatellitenPositionen ändern sich laufend.
b Antennenkabel nicht mit dem Display-
Gerät verbunden.
c Einen GPS-Neustart durchführen (siehe
Abschn. 14-3).
2-2 Differenz zwischen Tracker GPS-Position
und tatsächlicher Position von mehr als 10m:
a TRACKER im Simulations-Modus. Den
Simulations-Modus abschalten (siehe
Abschn. 14-11).
b Die Abweichung der GPS- Position kann
für cirka 5% der Gesamtzeit größer als 10m
sein.
c Unter speziellen Umständen kann
durch das US-Verteidigungsministerium
absichtlich eine Verfälschung der GPSPosition von bis zu 300m erfolgen.
2-3 Die TRACKER-Position differiert zur
selben Position in der regionalen Karte:
a TRACKER im Simulations-Modus. Den
Simulations-Modus abschalten (siehe
Abschn. 14-11).
b Falsches Kartendatum. Das richtige
Kartendatum wählen (siehe Abschn. 14-2).
c Es ist eine fehlerhaf te Standortkorrektur
erfolgt. Diese löschen und falls erforderlich,
neu hinzufügen (siehe Abschn.14-2).
2-4 Die eigene Position erscheint nicht in der
Karte:
drücken, um die Kar te auf den
Bootsmodus zu zentrieren (siehe Abschn.32-1).
2-5 Zeit oder Datum ist im Satelliten-Bild
verkehrt oder fehlt.
a Keine GPS-Rechnung.
b Der Simulations-Modus ist aktiviert. Den
Simulations-Modus abschalten (siehe
Abschn. 14-11).
c Or tszeit-Verschiebung ist verkehrt (siehe
Abschn.14-10). Die Ortszeit-Verschiebung
ist zu änden, wenn die Sommerzeit star tet
oder endet.
2-6 Autopilot reagiert nicht auf den
TRACKER; kein NMEA-Ausgang:
a Der NMEA-Ausgang ist deaktiviert oder die
benötigten NMEA-Sequenzen sind nicht
aktiviert. Die NMEA- Einstellungen prüfen
(siehe Abschn.14-9).
b Prüfen, ob die Anschlüsse korrekt erfolgt
sind.
2-7 Kein DGPS-Wert oder DGPS-Signal
verloren:
a Um DGPS -Werte zu empfangen, muss
WAAS/EGNOS aktiviert oder eine optionale
DGPS-Antenne installier t sein (siehe
Abschn.7).
b Mit WAAS/EGNOS: Boot bef indet sich
außerhalb vom Abdeckungsbereich (siehe
Abschn. 7).
c Mit WAAS: GPS Antenne hat keinen klaren
Horizont-Kontak t in Richtung Äquator.
b Mit Baken-DGPS: Boot befindet sich
außerhalb vom Baken-DGPS Bereich.
B-2 GPS Navigations-Probleme
TRACKER 5505/5505i/5605 Installations- und Bedienungs-Handbuch
71
NAVMAN
3-1 Motoren- oder Tank-Anzahl ist verkehrt
Die entsprechenden Eingaben prüfen und
korrigieren (siehe Abschnit t 14 -4).
3-2 Brennstoff Fluss scheint nicht korrekt zu
sein:
a Brennstoff Setupdaten auf Richtigkeit
kontrollieren (siehe Abschn. 14- 4).
b Steck verbinder der Brennstoffkabel
auf festen Sitz überprüfen. Das
Brennstoffkabel auf Defekte und
Knickungen untersuchen.
c A Brennstoff-Sensor könnte blockiert sein.
Gemäß Brennstoffgeber-Installationsbuch,
muss zwischen Brennstoffgeber und Tank
ein Filter eingefügt sein.
Anderenfalls wird keine Garantie gegeben.
d Die Brennstoffgeber nachkalibrieren (siehe
Abschn. 10-7).
e Prüfen, ob der Brennstoff-Filter sauber ist.
b In rauher See kann Brennstoff vor- und
rückwärts durch den Brennstoff-Sensor
gesogen werden, was falsche Messungen
ergeben kann. Um diese Möglichkeit
abzustellen, kann ein Einweg-Ventil
zwischen Tank und Sensor eingefügt
werden.
g Benzin-Sensoren sollten nach jeweils
5000 Liter Brennstoff-Durchfluss erneuert
werden.
3-3 Brennstoff Verbrauch wird nicht korrekt
gezeigt:
a Der TR ACKER ist nicht für Auto-
Einschaltung verdrahtet (siehe Abschn.
15-4).
b Es wurde Brennstoff hinzugefügt
bzw. entnommen, ohne am TRACKER
entsprechende Änderungen einzugeben
(siehe Abschnitt 10-3).
c Aufgrund von Lufttaschen ist der Tank
eventuell nicht immer mit der gleichen
Menge voll betank t. Dieses ist speziell bei
Bodentanks ein Problem.
3-4 Unregelmäßige Durchfluss-Anzeigen
a Die Einstellung der Durchf luss-Dämpfung
ist für den Motor nicht passend. Prüfen,
ob der Wert nicht auf Null gesetzt ist.
Dann den Wer t allmählich erhöhen, bis
eine stetige Flussrate gezeigt wird (siehe
Abschn.14-4).
b Der Brennstoffgeber ist eventuell zu
nahe an der Brennstof fpumpe platziert
oder starken Vibrationen ausgesetzt.
Siehe Hinweise im BrennstoffgeberInstallationsbuch.
c Die Brennstoffleitungen und die
Rückf lussleitung zum Tank auf Leckagen
untersuchen.
3-5 Es wird keine Brennstoff-Ökonomie
gezeigt:
a Das Boot muss Fahrt durchs Wasser
machen, um eine Anzeige zu erhalten.
b Ist ein Paddelrad-Sensor gewählt (siehe
Abschnit t 10 -5-1), prüfen, dass sich das
Paddelrad frei drehen kann.
B-3 Brennstoffverbrauchs-Probleme
TRACKER 5505/5505i/5605 Installations- und Bedienungs-Handbuch
72
NAVMAN
Warn/Sperrge biet - Ein kritisches Seegebiet
in einer Karte, z. B. mit Ankerverboten oder
Untiefen (siehe Abschn.14-2).
Ti efenl inie n - Eine Tie fenko ntur- Lini e in
de r Ka rte.
Karte nmodul - Ein Steckmodul mit
gespeicherten Karten für ein bestimmtes
Gebiet (siehe Abschn.1-3).
C-MAP™ Kartenmodul - Siehe Kartenmodul
C-MAP™ Anwender-Modul - Siehe Anwender-
Modul.
Cursor - Ein Symbol im Display siehe Abschn.
3-2).
DGPS - Differential Globales Positioni erungs
System. Ein Navigations-Zusatz zum GPS,
das die Positionsrechnung verbessert (siehe
Abschn. 7).
Goto - Ein Direktaufruf für die Navigation zu
einem Wegpunkt oder zu der Cursorposition
(siehe Abschn. 3-1).
GPS - Globales Positionierungs System. Ein
auf Satellitenbasis arbeitendes NavigationsWerkzeug (siehe Abschn. 7).
Segment - Die direkte Verbindungslinie
von zwei Wegpunkten in einer Route. Eine
Route mit vier Wegpunkten besteht aus drei
Segmenten.
MOB - Mann-über-Bo rd
MOB- Funktion - Star tet die Navigation zurück
zu dem Ort, wo der MOB-Befehl ausgelöst
wurde (siehe Abschn.2-5).
NavBus - Ein Datenleitung, über die Navman Instrumente ihre Daten austauschen
(siehe Abschn.15-9).
NMEA - National Marine Elec tronics
Association.
NMEA 0183 - Ein Standard-Datenformat
zur Daten-Übermittlung zwischen MarineInstrumenten (siehe Abschn. 15-10).
Route : Zwei oder mehrere Wegpunkte, die in
Folge miteinander durch Kurslinien verbunden
sind (siehe Abschn. 6).
Anwende r-Modul - Ein Steckmodul, in das
Wegepunk te, Routen und Plottstrecken
gespeichert werden können (siehe Abschn. 12).
UTC - Universal Time Coordinated, als Standard
Weltzeit, früher mit Greenwich Mean Time
(GMT) bezeichnet.
Wegpunk t - Eine Position, die in der Karte
markiert wird und zur Ansteuerung genutzt
werden soll (siehe Abschn. 5).
Glossar
Anhang C - Glossar und Navigationsdaten

TRACKER 5505/5505i/5605 Installations- und Bedienungs-Handbuch
73
NAVMAN
Das Boot fährt vom Start- zu einem Zielort und ist dabei von der Sollkurslinie versetzt worden.
BRG Peilung zum Zielort: Peilung vom Boot aus zum Zielort.
BRG Peilung zum Cursor: Peilung vom Boot aus zur Cursor-Position (Cursor-Modus, siehe Abschn.
3-2).
CDI Kursabweich-Indikator: In der Karte und in der Rollbahn-Anzeige an beiden Seiten von der Sol
lkurslinie verlaufende Parallel-Linien mit bestimmbarer Distanz. Diese beiden Linien werden als
CDI-Linien bezeichnet. Die Distanz vom Sollkurs zu einer CDI-Linie ist das CDI-Maß.
Dieses CDI-Maß (siehe Abschn. 14-2) auf eine Distanz setzen, innerhalb der ein Abweichen von
der Sollkurslinie erlaubt sein soll. Die CDI-Anzeige erscheint im Kartenbild und in der RollbahnAnzeige, bei der sich das Boot wie auf einer Startbahn bewegt. Das Bild zeigt, wie weit das Boot
von der Sollkurslinie abweicht und sich der CDI-Linie nähert. Ist der XTE-Alarm aktiviert (siehe
Abschn. 14-7) erfolgt ein Alarm, wenn das Boot eine CDI-Linie erreicht.
COG Kurs über Grund: die Richtung, in der sich das Boot über Grund bewegt.
CTS Zu steuernder Kurs: optimaler Steuerkurs, um zur Sollkurs-Linie zurück zu kehren.
DTG Distanz zum Zielort: die Distanz vom Boot zum Zielort.
ETA Vermutliche Ankunftszeit: die Ankunftszeit am Zielort, vorausgesetzt SOG und COG verbleiben
konstant.
RNG Distanz zum Cursor: die Distanz vom Boot zur Cursor-Position (Cursor-Modus, siehe Abschn. 3-
2).
SOG Geschwindigkeit über Grund: die aktuelle Geschwindigkeit, mit der sich das Boot über Grund
bewegt. Diese muss nicht mit der Geschwindigkeit durchs Wasser und auch nicht mit der An
näherungs-Geschwindigkeit zum Zielort hin übereinstimmen.
STR Korrektur-Kurs: die Differenz zwischen COG und CTS.
TTG Zeit zum Zielort: die vermutliche Zeitdauer bis zum Zielort (bei gleichbleibender Annäherungs-
Geschwindigkeit).
XTE Versetzungs-Fehler: die Distanz vom Boot zum nächstgelegenen Punkt der Sollkurslinie. XTE kann
mit einem Buchstaben versehen sein: R bedeutet, nach rechts zu steuern, um zur Sollkurslinie
zurück zu kehren; L bedeutet, entsprechend nach links zu steuern.
VMG Gutgemachte Geschwindigkeit: die Geschwindigkeit, mit der sich das Boot dem Zielort nähert.
CTS
SOG
(Gesc hwindigke it)
VMG
(Geschwindigkeit)
BRG
COG
Zielort
Boots-Position
Beginn
STR
DTG (Distanz zum Ziel)
CDI
Einteilung
(Distanz)
Geplotteter
Kurs
Beginn
Zielort
XTE
(Distanz)
Boot
Position
CDI
Einteilung
(Distanz)
CDI Linie
Geplotteter
Kurs
CDI Linie
Navigatio ns Daten
Lon 174° 44.535’E
Lat 36° 48.404’S
Made in New Zealand
MN000520A-6
Tr ac k er 5 50 5/ 56 05
 Loading...
Loading...