

Page 1
Pilot 3380
A U T O P I L O T S Y S T E M
Installation Manual
Deutsch
w w w . n a v m a n . c o m
NAVMAN
w w w . n a v m a n . c o m
Page 2

Inhalt
1 Einführung .......................................................................................................................................... 65
1-1 Eine typische G-PILOT 3380 System-Installation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .65
1-2 Andere Instrumente in das G-PILOT 3380 System integrieren . . . . . . . . . . . . . . . . . . . .66
1-2-1 Andere Instrumente nutzen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 66
1-2-2 NavBus . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .66
1-2-3 NMEA . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 66
2 G-PILOT 3380 System Bauteile .............................................................................................................. 68
2-1 Lieferumfang des G-PILOT 3380 Systems . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .68
2-2 Andere erforderliche Teile . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .68
3 Installation .......................................................................................................................................... 69
3-1 Installations-Ablauf . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .69
3-2 Installations-Anweisungen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .70
3-2-1 Einbau-Orte . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 70
3-2-2 Verkabelung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .70
3-3 Die Zentraleinheit (MCU600) installieren . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .71
3-4 Die Spannungsversorgung und den Antrieb installieren . . . . . . . . . . . . . . . . . . . . . . . . .72
3-4-1 Die Spannungsversorgung installieren. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .72
3-4-2 Den Ruderantrieb installieren . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .73
3-5 Den Ruderrückmelder (RFU) installieren . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .77
3-6 Den Kompass installieren . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .80
3-7 Gyro montieren . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .82
3-8 Das G-PILOT 3380 Bedien-Display und andere Instrumente einbauen. . . . . . . . . . . .83
4 Inbetriebnahme nach Installation ....................................................................................................... 87
4-1 Inbetriebnahme-Setup . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .87
4-2 Ruderrückmelder kalibrieren . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .87
5 See-Erprobung ....................................................................................................................................88
5-1 Kompass-Kalibrierung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .88
5-2 Nulleinstellung für Kompass und Ruder . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .88
5-2-1 Kompass ausrichten (Kurs-Anzeige) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .88
5-2-2 Das Ruder nullstellen (Ruder-Mitte) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 88
Anhang A - Spezifikationen - MCU600 .....................................................................................................89
Anhang B - Spezifikationen - AP3380 Bedien-Display ..............................................................................90
Anhang C - Anwender - Einstellwerte ......................................................................................................91
64 NAVMAN G-PILOT 33 80 System - In stallati on
Page 3
Wichtig
Der Eigentümer ist allein verantwortlich für den korrekten Einbau, die ordnungsgemäße
Anwendung und die betriebliche Sicherheit, in einer Weise, dass Unfälle, Verletzungen
und Defekte verhindert werden. Der Benutzer ist allein verantwortlich für eine sichere
Bootsführung.
Die Auswahl der passenden Bauteile, deren bestmöglichen Einbauorte und sorgfältige
Installation ist von großer Bedeutung. Ist die Installation nicht entsprechend sorgfältig erfolgt,
können die vorhandenen Eigenschaften nicht optimal zur Wirkung kommen. Im Zweifelsfall
ist ein Navman Fachhändler zu konsultieren. Darauf achten, dass Bohrungen und Ausschnitte
an sicherer Position er folgen und nicht die Bootsstruktur schwächen. Im Zweifelsfall, einen
qualifizierten Boots-Fachmann hinzu ziehen.
Mit dem G-PILOT 3380 System arbeiten.
Der G-PILOT 3380 ist als Navigationshilfe gedacht und soll bei längeren Seereisen den
Rudergänger ersetzen, auf keinen Fall jedoch ausschließlich als Hauptsteuerung dienen.
Der G-PILOT 3380 darf nicht bei extremer Wetterlage, in Gefahrengebieten, in Landnähe, im
Revier und in direkter Nähe anderer Verkehrsteilnehmer benutzt werden.
Das G-PILOT 3380 System kann ein Boot nicht besser steuern als ein Rudergänger. Unter
widrigen Bedingungen, das Boot manuell steuern.
Niemals das Ruder unbeaufsichtigt lassen. Immer die Fahr t beaufsichtigen. Der Rudergänger
sollte immer den Bootskurs und das G-PILOT 3380 System überwachen und immer in der
Lage sein, die Steuerung per Hand zu übernehmen.
Die Betriebsfunktionen des G-PILOT 3380 Systems können durch Bauteilfehler, UmfeldBedingungen, nicht fachgerechte Installation oder fehlerhafte Anwendung beeinflusst
werden,
NAVMAN NZ.LTD IST NICHT VERANTWORTLICH FÜR SCHÄDEN UND UNFÄLLLE, DIE DURCH
MÖGLICHE FEHLFUNKTIONEN DIESES PRODUKTES ENTSTEHEN, SOWIE AUCH NICHT FÜR
GESETZESWIDRIGE ANWENDUNGEN.
Navman ent wickelt kontinuierlich seine Produkte weiter und behält sich daher das Recht vor,
ohne Vorankündigungen, Veränderungen durchzuführen, die dann nicht in diesem Handbuch
wiedergegeben werden. Für weitere Fragen steht ein umfangreiches Navman-Fachhändlernetz
zur Verfügung.
Nationalsprache: Diese Erk lärung, Installations- und Bedienungsanleitungen, sowie andere
Informationen, die im Zusammenhang mit dem Produkt stehen, sind eventuell in eine andere
oder aus einer anderen Sprache übersetzt worden. Sollten irgendwelche Differenzen zwischen
den Versionen bestehen, gilt die englische Version als offizielle Original- Dokumentation.
Copyright © 2005 Navman NZ Limited, New Zealand. Alle Rechte vorbehalten. Navman ist eine
registrierte Handelsmarke von Navman NZ Limited.
G-PILOT 33 80 System - In stallati on NAVMAN 65
Page 4
1 Einführung
Dieses Handbuch anwenden
Dieses Buch beschreibt den Einbau und
die Inbetriebnahme für das G-PILOT 3380
System. Siehe auch das separate Buch
G-PILOT 3380 - Be dienung mit ausführlichen
Betriebsanweisungen der Anlage.
Die Installation eines G-PILOT 3380
Systems besteht aus der Montage, einer
Inbetriebnahme und erforderlichen
Justierungen während einer Probefahrt (siehe
Abschn. 3, 4 und 5).
Eine erneute Inbetriebnahme wäre
erforderlich, wenn Bauteile ausgetauscht
werden oder bei Betriebsproblemen, die
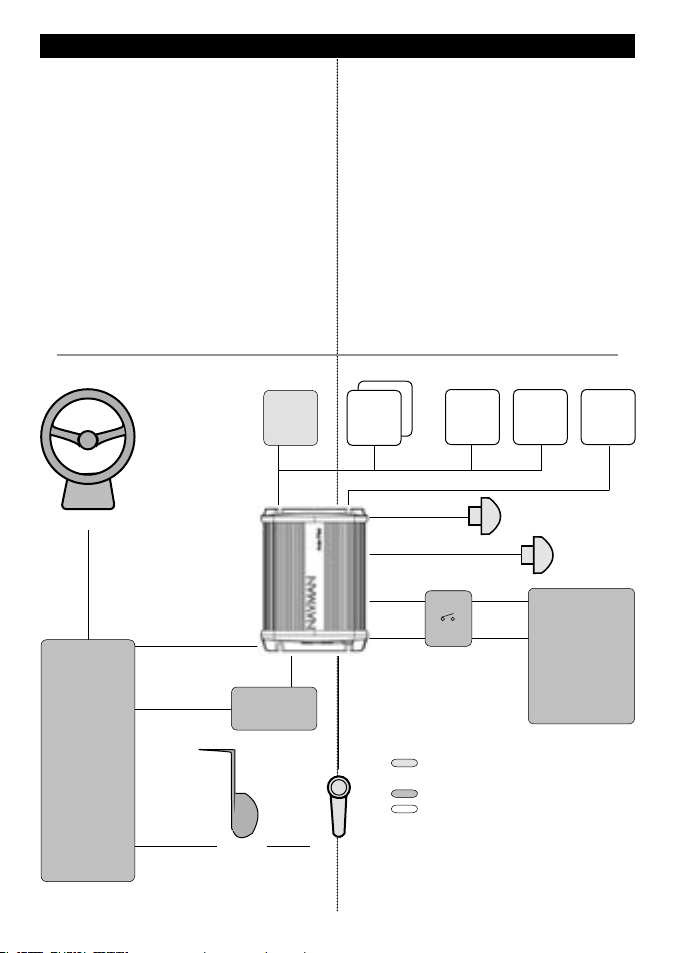
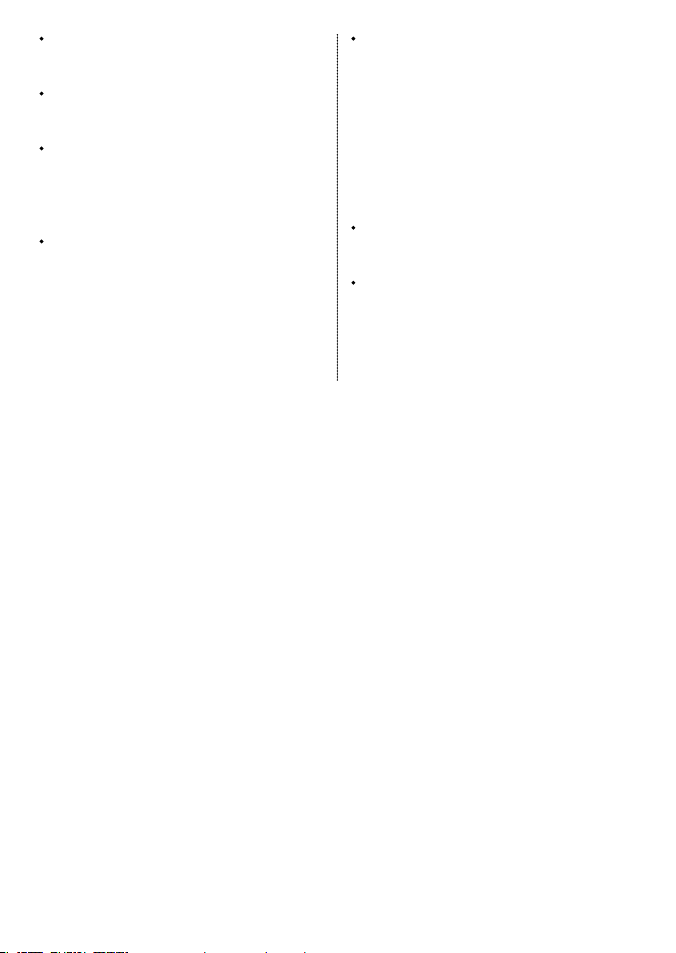
1-1 Eine typische G-PILOT 3380 System-Installation
Display
Einheit
NavBus
Steuer-An-
trieb
MCU600
Ruder-
Rückgeber
Manuelles Ruder
Ruder
Steuerung
Antriebskupplung
(optional)
Ruder
anders nicht lösbar sind
(siehe Abschn. 4 und 5).
Um sicher zu stellen, dass die G- PILOT 3380
Anlage einwandfrei arbeitet, ist eine
See-Erprobung erforderlich (siehe Abschn. 5).
Reinigung und Wartung
Bauteile des G-PILOT 3380 Systems mit einem
feuchten Tuch und milden Reinigungsmitteln
säubern. Keine schmirgelnden Mittel und kein
Benzin oder andere Lösungen verwenden.
Keine G- PILOT 3380 Bauteile mit Farbe
versehen, außer die Kabel.
Optionale Instrumente
Weitere
Display-
Einheiten
Leistungs-Schalter oder
Schalter und
Sicherungsschutz
Differenzierung
Im Lieferumfang des G-PILOT 3380
System enthalten
Weitere erforderliche Teile
Optionale Teile
Hinweis: Hier wird nur eine typische
Installation gezeigt. Weitere
Informationen sind der jeweiligen
Antriebseinheit beigefügt.
WIND
Geschw.
Kompass
SchwachstromVersorgung
HochstromVersorgung
12 V DC
SpannungsVersorgung
GPS
NMEA
Gyro
66 NAVMAN G-PILOT 33 80 System - In stallati on
Page 5
1-2 Andere Instrumente in das G -PILOT 3380 System integriere n
1-2-1 Andere Instru mente nutzen
Das G-PILOT 3380 System kann Daten von
folgenden Instrumenten nut zen:
GPS: Damit der G-PILOT 3380 den GPSModus nutzen kann, muss ein GPS oder ein
Kartenplotter, wie z.B. eines der Navman
TRACKER 5000 Serie angeschlossen sein
(siehe das Buch G-PILOT 3380-Bedienung) .
H inweis: GPS muss über d en NMEA
Eingan g kommen.
WIND: Um den G- PILOT 3380 im WIND
Modus betreiben zu können, muss ein
Windinstrument angeschlossen sein, z .B.
eines aus der Navman WIND-Serie (siehe
das Buch G -PILOT 3380 Bedienung).
Geschwindigkeit: Um das Steuerverhalten
zu verbessern, kann ein Speed-Instrument,
wie z.B. ein:
Navman SPEED mit einem Paddelrad -
Geber
oder ein GPS bzw. Kar tenplotter
wie zB. eines aus den Serien
Navman TRACKER 5000 oder
TRACKFISH 6600 angeschlossen
werden.
H inweis: Ein Paddelrad misst die
Geschwindigkeit, mi t der sich das Boot
durch da s Wasser be wegt. Ein GPS
misst di e Geschwindig keit über Grund.
Ist eine Strömung vorhand en, sind die
zwei Ge schwindigkeiten dif ferent.
Wird das G -PILOT 3380 Syste m mit
einem Pa ddelrad- und mit einem
GPS- Instrument ve rbunden, benutzt
der G- PILOT automatisch die Daten vom
Paddelrad-I nstrument.
1-2-2 NavBu s
NavBus ist ein für Navman gesetzlich
geschütztes System, mit dem es möglich ist,
ein System aus einer Vielzahl von Instrumenten
aufzubauen, bei dem nur ein Gebersatz
benötigt wird. Merkmale eines per NavBus
verbundenen Systems:
Werden an einem Instrument
Maßeinheiten, Alarm- oder
Justiereinstellungen geändert, erfolgen
diese Einstellungen gleichzeitig in allen
anderen Instrumenten vom gleichen Typ.
Jedes Instrument kann einer bestimmten
Gruppe von Instrumenten, als NavBusGruppe bezeichnet, zugeordnet werden
(siehe NavBus-Gruppe im Menu Setup >
Datenausta usch, im Handbuch G -PILOT
3380 - Bedien ung). Wird die Beleuchtung
in einem Instrument der Gruppen 1, 2, 3
oder 4 geändert, erfolgt diese Änderung
automatisch auch in den anderen
Instrumenten der selben Gruppe. Wird
die Beleuchtung in einem Instrument
der Gruppe 0 geändert, wirkt sich das an
keinem anderen Instrument aus.
Ertönt ein Alarm, kann dieser an jedem
Instrument gelöscht werden, das diesen
Alarm zeigt.
Weitere Informationen hierzu sind in dem Buch
NavBus Instal lation und Bedien ung enthalten.
Hinweis: Ein GPS muss über den NME A-Eingang
angeschloss en werden.
NavBus und das G-PILOT 3380 System
Das G-PILOT 3380 System kann mit
zusätzlichen G-PILOT 3380- oder G- PILOT
3100-Bedien-Displays betrieben werden.
Das G-PILOT 3380 System kann über
NavBus Winddaten von einem Navman
WIND empfangen.
Das G-PILOT 3380 System kann über
NavBus Geschwindigkeits-Daten von einem
Navman SPEED empfangen.
1-2-3 NMEA
NMEA ist ein Industriestandard, der nicht so
flexibel einsetzbar ist wie NavBus, da es einzeln
zugeordnete Verbindungen zwischen den
Instrumenten erfordert. Das G-PILOT 3380
System hat einen festen NMEA-Eingang und
einen weiteren Anschluss, der als Ein- oder als
Ausgang konfigurierbar ist (siehe Buch G-PILOT
3380 - Bedien ung).
G-PILOT 3380 System - NMEA Eingänge
GPS: Das G-PILOT 3380 System kann NMEA GPS
Daten von einem kompatiblen GPS oder einem
Kartenplotter, wie z.B. einem der Navman
TRACKER 5000 - Serie, empfangen.
G-PILOT 33 80 System In stallati on NAVMAN 67
Page 6
Um im G-PILOT 3380 System den G PS
Modus zu nutzen, sind XTE-Werte (aus APA,
APB oder XTE-Folgen) erforderlich.
Weitere Funktions-Verbesserungen werden
durch BRG (aus APA-Folgen) und BOD (Aus
APA oder APB-Folgen) erreicht.
COG (aus VTG -Folgen) ist optional und
kann angezeigt werden.
WIND: Das G-PILOT 3380 System kann über
NMEA Winddaten von einem kompatiblen
Wind-Instrument empfangen.
Um im G-PILOT 3380 System den
Wind- Modus zu nutzen, sind wahre
oder scheinbare Windrichtungen (aus
MWV-Folgen) er forderlich.
SPEED : Das G-PILOT 3380 System kann über
NMEA Geschwindigkeits-Daten von einem
kompatiblen Paddelrad- oder GPS-Instrument
empfangen.
SOG (aus V TG-Folgen) ist optional und
verbessert die Funk tionsfähigkeit.
Hinweis: Wird das G-PILOT 3380 System mit
Navman Wind- oder Geschwindigkeits-Instrumenten
über NavBus verbunden, erfolgt der Empfang
von Wind- und Speed-Daten automatisch. Eine
NMEA-Verbindung wird dann nicht benötigt.
G-PILOT 3380 System - NMEA Ausgänge
Der NMEA 2 - Anschluss ist als Daten- Eingang
oder Ausgang konfigurierbar:
entweder für Kurs- (HDG & HDT) und
Ruderwinkel- Daten (RS), einmal pro
Sekunde
oder nur für Kurs-Daten (HDG), zehnmal
pro Sekunde
(siehe NM EA-Modus im Menu Setup >
Datenausta usch, siehe Handbuch G-PILOT 3380
- Bedienu ng).
68 NAVMAN G-PILOT 33 80 System - In stallati on
Page 7

2 G-PILOT 3380 System Bauteile
2-1 Lieferumfang des G -PILOT 3380 Systems
MCU600 (Zentrale Steuereinheit)
Kompass, mit 10 m
(33 ft) angesetztem
Kabel
Drehraten-Geber (Gyro)
mit 10 m
(33Fuß) angesetztem Kabel
NAVMAN
Schutzkappe für das
Bedien-Gerät
2 mm (#14) ZweiaderKabel für die Antriebs-
Versorgung
2-2 Andere erforderlic he Teile
Spannungs-Verso rgung: Das G-PILOT
3380 System benötigt zwei SpannungsVersorgungen mit nominal 12V DC.
Eine Hochstrom-Versorgung für den
Ruderantrieb
Eine Schwachstrom-Versorgung für die
G-PILOT 3380 System-Elektronik und das
Bedien -Display. Außerdem kann es ein
zusätzliches Bedien-Display und weitere
Instrumente versorgen.
RFU - Ruderlagen-Rückmelder
Dokumentation
• Garantie
• Bedien-Display Montage-Schablone
• Dieses Installations-Handbuch
• Bedienungs-Handbuch
Weitere B auteile
• Montage-Teile
• Kabel -Abdeckung
• Kabel -Entlastung
• Ersatz-Sicherungen
Für die Spannungsversorgung sind ein oder
zwei Schalter und Sicherungen oder LeistungsTrennschalter erforderlich (siehe Abschn. 3-4).
Ruder-Antrie b:Das G-PILOT 3380 System
kann eines der folgenden Antriebe schalten:
richtungswechselnde Hydraulik-Pumpe,
konstant laufende Hydraulik-Pumpe,
hydraulischer Linear-Antrieb oder
mechanischer Getriebe-Motor, mit 12V DC und
bis zu 20A Aufnahme.
Rückge ber-Verbindung : Die RückgeberMontage an das Ruder wird in Abschn. 3-5
beschrieben.
G-PILOT 3380 Bedien-
Display
G-PILOT 33 80 System - In stallati on NAVMAN 69
Page 8
Auswahl der Kabel, siehe Draht-Tabelle in Abschn.
3-4-2.
Exte rne Alarmmitt el (optional) : Der externe
Anschluss wird gegen Masse geschaltet, 30V
DC und 250mA maximal. Falls die externen
Alarmmit tel mehr als gesamt 250mA
benötigen, ein Relais einfügen.
Andere Marine-Instrumente (optional):
Anschließbar sind Log-, Wind- und GPSInstrumente (siehe Abschn.1-2).
Weitere Instrumente: Für den Anschluss von
mehreren Instrumenten sind zusätzliche
3 Installation
Warnung : Eine sorgfältige Installation ist
die Basis, um optimale Betriebsfunktionen
zu erhalten. Es ist äußerst wichtig, dieses
Handbuch und weitere, anderen Bauteilen
beigefügte Dokumentationen, sorgfältig vor
der Installation zu lesen.
Warnung:
Die Zentraleinheit MCU600 ist nicht
wassergeschütz t. Die Einheit an einem
trockenen Ort montieren.
3-1 Installations-Ablauf
Für die Installation wird folgender Ablauf
empfohlen:
1 Dieses Handbuch und den Bauteilen
beigefügte Dokumentationen sorgfältig
lesen.
2 Den Einbau vorplanen und Einbauplätze
sowie Kabelführung sorgfältig auswählen
(siehe Abschn. 3-2).
3 Die Zentral-Einheit (MCU600) einbauen
(siehe Abschn. 3-3).
4 Den Ruderantrieb einbauen und die
Hochstrom- sowie Steuer-Kabel verlegen
(siehe Abschn. 3-4).
5 Den Ruderrückmelder montieren (siehe
Abschn. 3-5).
6 Den Kompass montieren
(siehe Abschn.3-6).
Verbinder erforderlich. Navman VerbindungsBoxen können die Verdrahtung mehrerer
Instrumente miteinander vereinfachen (siehe
Abschn. 1-2 oder das Handbuch NavBus
Installatio n und Bedienung.
Für die Kabel-Verlängerung von
Rudergeber, Kompass oder Gyro sind 10m
Verlängerungskabel und Kupplungsverbinder
verfügbar. Nicht mehr als ein
Verlängerungskabel pro Einheit verwenden.
Weitere Informationen hierzu sind beim
Navman- Händler erhältlich.
Das G-PILOT 3380 Bedien-Display ist
wasserdicht.
Kompass, Gyro und Rudergeber sind
vollständig wasserdicht.
Warnung : Am Rumpf durchgeführte
Bohrungen und Ausschnitte dürfen nicht
dessen Struktur schwächen. Im Zweifelsfall,
einen qualifizierten Bootsbauer konsultieren.
7 Den Gyro montieren (siehe Abschn. 3-7).
8 Das Bedien-Display und die weiteren
Instrumente montieren, die für das G-PILOT
3380 System benötigt werden (siehe
Abschn. 3-8).
9 Die Erst-Inbetriebnahme durchführen
(siehe Abschn. 4).
10 Eine See-Erprobung durchführen (siehe
Abschn. 5).
Ist nicht sicher, ob ein Montageor t passend
oder störungsfrei ist, die entsprechenden
Bauteile provisorisch ansetzen und verkabeln,
ohne Rumpf-Bohrungen durchzuführen. Den
endgültigen Einbau erst nach erfolgreicher
See-Erprobung durchführen.
70 NAVMAN G-PILOT 33 80 System - In stallati on
Page 9
3-2 Installations-Anweisungen
Hier folgen generelle Anweisungen für die Platzierung und Verdrahtung des G-PILOT 3380 System.
Müssen Besonderheiten bei einzelnen Bauteilen beachtet werden, wird in dort beigefügten
Anweisungen darauf hingewiesen.
3-2-1 Ein bau-Orte
Keine Teile so montieren, dass sie zum
Festhalten benutzt werden können, die
Boots- Handhabung behindern oder von
Wasser überflutet werden können.
Keine Bauteile so ansetzen, dass sie
beschädigt werden können, wenn das Boot
ins Wasser gelassen oder an Land gesetzt
wird.
Keine Bauteile näher als 0,5m im
horizontalen Abstrahl-Bereich einer
Radarantenne montieren.
Kompass und Gyro montieren:
Mindestens 1m Abstand zu elektrischen
Störquellen, wie Bat terien, HochstromKabel, andere Bootskabel, Maschinen,
Leuchtstoffröhren, LeistungsUmformer, Funk- und Radar-Sendern
und -Antennen.
Mindestens 1m Abstand zu Geräten mit
Magneten, wie z.B. Lautsprecher oder
ein Kompass.
G-PILOT 33 80 System In stallati on NAVMAN 71
3-2-2 Verkabelung
Für das G-PILOT 3380 System sind Kabel
mit zwei verschiedenen Querschnit ten
erforderlich:
Die Leistungs-Versorgung und der
Ruderantrieb erfordern üblicher weise
Hochstromkabel.
Den erforderlichen Drahtquerschnitt aus
der Drahtgrößen-Tabelle entnehmen (siehe
Abschn. 3-4-2).
Hochstromkabel mindestens 1m entfernt
von anderen elektronischen Geräten
verlegen.
Die Kabellängen möglichst kurz halten.
Falls ausreichend, kann das mitgelieferte
2 x 2mm (#14) Kabel für den Leistungs-
Anschluss verwendet werden.
Die weiteren Kabel sind Steuer-Kabel für kleine
Ströme.
Steuerkabel mit einem Mindestabstand von
1m Abstand zu elektrischen Störquellen
wie Hochstrom-Kabel, andere Bootskabel,
Maschinen, Leuchtstoffröhren, Leistungs-
Umformer, Funk- und Radar-Sendern und
-Antennen verlegen.
Sind die Kabel für Ruderrückmelder,
Kompass oder Gyro zu lang, diese nicht
kürzen, sondern in der Nähe der Zentral-
Einheit aufrollen.
Kabel für Ruderrückmelder, Kompass
oder Gyro können mit einem 10m
Zusatzkabel mit Kupplungs-Verbindern
verlängert werden. Nicht mehr als
ein Verlängerungskabel pro Bauteil
verwenden.
Bei der Kabelverlegung:
Nicht die Kabel quetschen, stark knicken
oder ziehen.
Die Kabel in regulären Abständen
befestigen.
Darauf achten, dass sich keine Stecker
oder offene Kabelverbindungen im
Bilgenbereich befinden.
Page 10
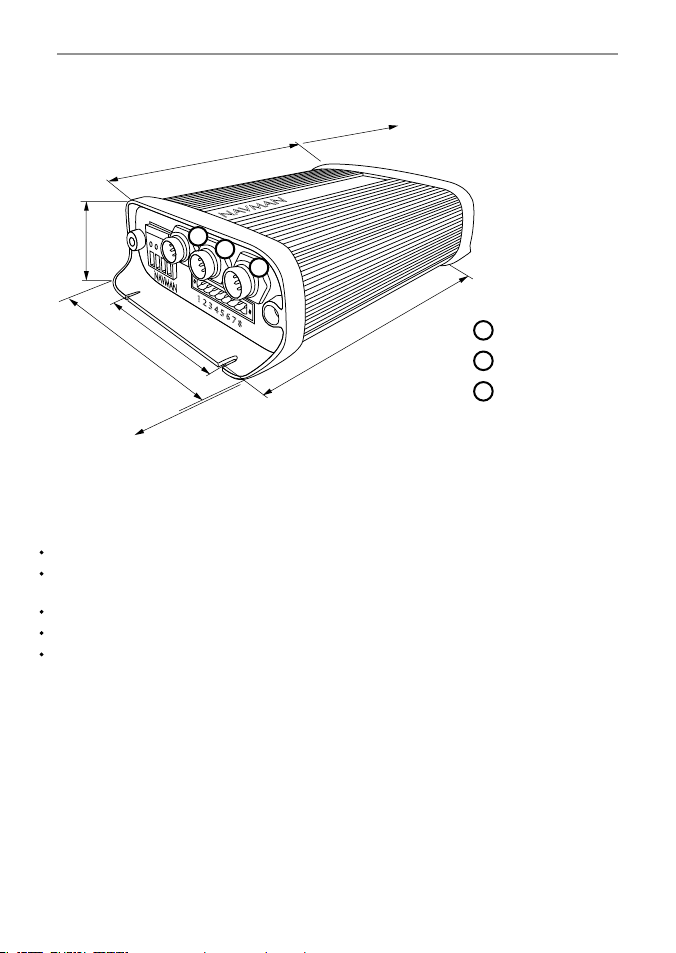
3-3 Die Zentraleinheit (MCU600) installieren
Physicalisch
Wichtig: 200 mm
200 mm (7,87”)
200 mm (7,87”)
1
(2,16”)
55 mm
Schraub en 90 mm (3,54” ) auseinander
2
3
140 mm (5,10”)
184 mm (7,24”) auseinander
Schraubenlöcher
60 mm (2,36”)
Wichtig: 60 mm (2,36”) Abstand
für die Kabel erforderlich
Installation
Einen geeigneten Einbauplat z aussuchen:
An einem trockenen, kühlen Or t; wenn möglich nicht im Motoren -Raum.
In der Nähe von Versorgungs-Batterien und Ruderantrieb, um die Länge des
Hochstromkabels kurz zu halten.
Zugänglich für Montage und Service.
Wenn möglich, in vertikaler Lage und vibrationsfrei.
Die Hinweise für den Einbau- Ort beachten (siehe Abschn. 3-2-1).
Die Einheit so montieren, dass die Kabelanschlüsse nach unten oder seitwärts zeigen. Die beigefügten
Schrauben verwenden.
Nicht die Einheit mit den Kabelanschlüssen nach oben montieren, um den Eintritt von Staub und
Feuchtigkeit zu vermeiden.
(7,87”) Freiraum für die
Gehäuse-Abnahme
erforderlich.
RFU-Rückgeber
1
Gyro
2
Kompass /
3
Kurssensor
72 NAVMAN G-PILOT 33 80 System - In stallati on
Page 11
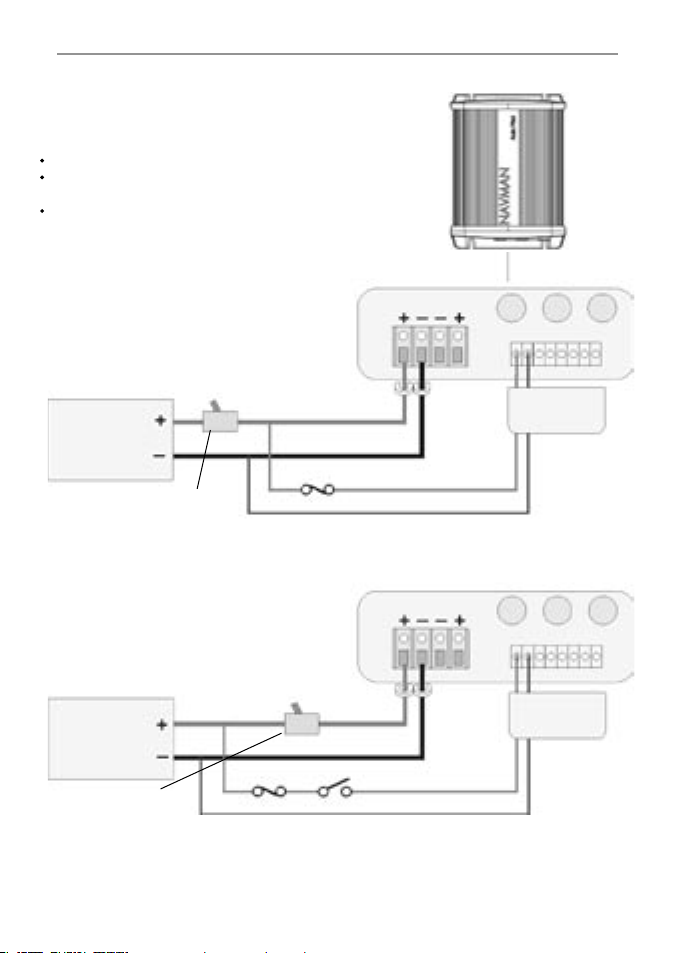
3-4 Die Spannungsversorg ung und den Antrieb installieren
3-4-1 Die Spannungsversorgung installieren.
MCU600
Die MCU- Einheit benötigt eine Steuerspannungs- und eine
Hochstrom-Versorgung, beides 12Volt DC.
Hinweise:
Sämtliche Verbindungen so kurz wie möglich halten.
Die Drahtstärke für die Leistungs-Versorgung aus der Tabelle in
Abschn. 3-4-2 wählen.
Den Verkabelungsanweisungen folgen (siehe Abschn. 3-2-2)
Spannungs-Versorgung: Ein-Schalter
Konfiguration
Diese Konfiguration wählen, um das G-PILOT 3380
System und sämtliche anderen Instrumente mit einem
1 2 3 4 5 6 7 8
Schalter ein- oder auszuschalten.
12 V DC Spannungs-Versorgung,
passend groß
für den Antrieb
Leistungs-Schalter oder
Sicherung plus Schalter,
ausreichend für die Antrieb-
sleistung
Kabel-Entlastung setzen
Sicherung 1 A
HochstromVersorgung
Anschluss-Ab-
deckung
Steuerspannungs-Versorgung
Spannungs-Versorgung: Zwei-Schalter
Konfiguration
Diese Konfiguration wählen, um den Ruder-Antrieb
ausschalten zu können und dabei sämtliche Instru-
1 2 3 4 5 6 7 8
mente aktiviert zu lassen .
12 V DC Versorgungs-Spannung
für
die Antriebseinheit
Leistungsschalter oder
Sicherung und Schalter
passender Stärke zum
Antriebs-Motor
Kabelentlastung ansetzen
Sicherung 1A
Schalter
LeistungsVersorgung
Anschluss-
Abdeckung
SteuerstromVersorgung
Hinweis: Werden mehr als drei Bedien-Displays oder sonstige Instrumente angeschlossen, ist ein
zusätzlicher Schalter mit Sicherung für diese Extra-Instrumente einzusetzen.
G-PILOT 33 80 System - In stallati on NAVMAN 73
Page 12

3-4-2 Den Ruderantrieb installieren
Den Ruderantrieb gemäß der Zeichnungen auf den nächsten Seiten verkabeln.
Hinweise
Sämtliche Kabel möglichst kurz halten.
Den Drahtquerschnitt nach folgender Tabelle ermitteln.
Die Verkabelungs-Hinweise gemäß Abschn. 3-2-2 beachten.
Drähte mit einem größerem Querschnitt als für #10 lassen sich nicht direkt in die Vierfach-Klemmen
einführen. Der Querschnitt darf direkt an den Klemmen entsprechend reduziert werden.
Werden mehrere Drähte parallel verwendet, diese in passender Form miteinander verbinden.
Draht-Größen Tabelle
Um die passende Kabelstärke zu wählen:
1 Die benötigte Gesamt-Kabellänge von der Haupt-Schalttafel bis hin zur Antriebs-Einheit messen.
2 Die Spalte mit der nächst größeren Kabellänge und die Zeile mit der für den Antrieb erforderlichen
Stromstärke wählen. Aus dem Schnittpunkt der beiden Reihen die erforderliche Mindest-Kabel-
stärke entnehmen (für weniger als 3% Spannungs-Abfall in einem 12V-System).
Kabellänge (von der Hauptschalttafel bis zum Antrieb)
Strom
1 amp
2 amp
3 amp
4 amp
5 amp
6 amp
7 amp
8 amp
9 amp
10 amp
15 amp
20 amp
2,5 ft
0,7 m
#18
0,75 mm
#18
0,75 mm
#18
0,75 mm
#18
0,75 mm
#18
0,75 mm
#18
0,75 mm
#18
0,75 mm
#18
0,75 mm
#18
0,75 mm
#18
0,75 mm
#16
1,5 mm
#14
2,5 mm
5 ft
1,5 m
#18
0,75 mm
#18
0,75 mm
#18
0,75 mm
#18
0,75 mm
#16
1,5 mm
#16
1,5 mm
#16
1,5 mm
#16
1,5 mm
#16
1,5 mm
#14
2,5 mm
#12
4 mm
#12
4 mm
7,5 ft
2,2 m
0,75 mm
0,75 mm
0,75 mm
1,5 mm
1,5 mm
1,5 mm
2,5 mm
2,5 mm
2,5 mm
4 mm
4 mm
6 mm#810 mm#810 mm#616 mm#616 mm#616 mm
#18
#18
#18
#16
#16
#16
#14
#14
#14
#12
#12
#10
10 ft
3 m
#18
0,75 mm
#18
0,75 mm
#16
1,5 mm
#16
1,5 mm
#14
2,5 mm
#14
2,5 mm
#14
2,5 mm
#12
4 mm
#12
4 mm
#12
4 mm
#10
6 mm
12,5 ft
3,7 m
0,75 mm
0,75 mm
1,5 mm
2,5 mm
2,5 mm
4 mm
4 mm
4 mm
4 mm
6 mm
6 mm#810 mm#810 mm#616 mm
#18
#18
#16
#14
#14
#12
#12
#12
#12
#10
#10
15 ft
4,5 m
#18
0,75 mm
#16
1,5 mm
#16
1,5 mm
#14
2,5 mm
#12
4 mm
#12
4 mm
#12
4 mm
#10
6 mm
#10
6 mm
#10
6 mm
17,5 ft
5,2 m
0,75 mm
1,5 mm
2,5 mm
2,5 mm
4 mm
4 mm
6 mm
6 mm
6 mm
6 mm#810 mm
#18
#16
#14
#14
#12
#12
#10
#10
#10
#10
20 ft
0,75 mm
1,5 mm
2,5 mm
4 mm
4 mm
6 mm
6 mm
6 mm
6 mm
6 m
#18
#16
#14
#12
#12
#10
#10
#10
#10
74 NAVMAN G-PILOT 33 80 System - In stallati on
Page 13

Beispiel einer hydraulischen Steuerung mit hydraulischer Hilfspumpe
Die Menus Setup > Schiff > Antriebsart anwählen (siehe Buch G-PILOT 3380 - Bedienung) und Motor
aktivieren.
MCU600
Entlastungsschellen anbringen.
Leistungsstrom-Versorgung
(siehe Abschn. 3-4-1)
Motor
Die Anschluss-Polarität
hat keine Bedeutung.
Kein Anschluss
Beispiel einer mechanischen Steuerung mit hydraulischem Linear-Antrieb für ein
Segelboot
Die Menus Setup> Schiff > Antriebsart anwählen (siehe Buch G-PILOT 3380 - Bedienung) und Motor
aktivieren.
MCU600
Hinweis: Der Strom für die KupplungsSpule muss geringer als 300mA sein.
Kabelentlastung vorsehen
Leistungsstrom-Versorgung
(siehe Abschn. 3-4-1)
Polarität hat keine
Bedeutung
Motor
Kupplungs-
Relaisspule
G-PILOT 33 80 System - In stallati on NAVMAN 75
1N4002 Diode oder äquivalent
Nahe zur Relaisspule setzen
Anschluss-Ab-
deckung
Page 14

Installation mit einem Elektromotor-Antrieb und einem Kupplungs-Relais
Die MenusSetup > Schiff > Antriebsart anwählen (siehe Buch G-PILOT 3380 - Bedienung) und Motor
aktivieren.
MCU600
Kabelentlastung vorsehen
Leistungsstrom-Versorgung
1N4002 Diode oder äquivalent
(siehe Abschn. 3-4-1)
Nahe zur Relais-Spule setzen
Kup-
plungsspule
Motor
Relais-Kontakte
Polarität hat keine
Bedeutung
Hinweis: Bei einem Kupplungs-Strom
größer als 300mA, ist ein Relais
erforderlich.
Anschluss-Ab-
deckung
Relaisspule
1N4002 Diode oder äquivalent.
Nahe zur Relaisspule setzen
Installation mit einem Dauerläufer und Magnet-Ventilen
Die Menus Setup > Schiff > Antriebsart anwählen (siehe Buch G-PILOT 3380 - Bedienung) und Spulenmasse aktivieren.
Hinweis: Für Maschinen
PTO-Systeme ist kein
Motor erforderlich.
Kabelentlastung vorsehen
Leistungsstrom-Versorgung
(siehe Abschn. 3-4-1)
Motor
Steuerbord
Relais-Kontakte
Polarität hat keine
Bedeutung
Backbord
MCU600
Anschluss-Ab-
deckung
Relaisspule
1N4002 Diode oder äquivalent
Nahe zur Relaisspule setzen
Hinweis: Bei einem KupplungsStrom größer als 300mA, ist ein
Relais erforderlich.
76 NAVMAN G-PILOT 33 80 System - In stallati on
Page 15

Magnetventil- oder Relais-Installation mit Jog- oder anderer elektrischer Steuerung
Die Menus Setup > Schiff > Antriebsart anwählen (siehe Buch G-PILOT 3380 - Bedienung) und Spulenmasse
aktivieren.
MCU600
Kabelentlastung vorsehen
Leistungsstrom-Versorgung
(siehe Abschn. 3-4-1)
Kein Anschluss
Steuerbord
Backbord
Jog/Steuer Kontrolle
G-PILOT 33 80 System - In stallati on NAVMAN 77
Page 16

3-5 Den Ruderr ückmelder (RFU) inst allieren
Physikalisch
90 mm
(3.5”)
220 mm
(8.7”)
Gestänge
zum Ruder
Ruder
Schaft
Verbindungsstange mit
Schnelllöse-Kupplungen
und Sicherungs-Muttern an
beiden Enden
Basis
10 m (33 ft) Kabel
Der Arm kann
Arm
um die Basis frei
rotieren.
Die Verbindungsstange
wird in einer der
Bohrungen befestigt.
LT8-Verbinder
Montage -Erforderni sse
Diese zwei
Distanzen
müssen
gleich sein.
Falls erforderlich, die Position der Verbindungsstange
auf dem Arm anpassen.
Die Basis muss so zum
Ruderschaft angesetzt
sein, dass es einen 90°Winkel ergibt.
Falls erforderlich, die
Verbindungsstange
kürzen.
Gewinde = M5
Diese zwei
Distanzen
müssen
gleich sein.
Der Ruderschaft
muss parallel
zum Geberschaft
verlaufen.
Rudergestänge und
Geberarm müssen
sich auf der selben
Ebene bewegen.
Hinweise
Der Rückgeber ist vollständig wasserdicht, sollte jedoch nicht überflutet werden können.
Die Einheit auf einer vibrationsfreien Konsole montieren.
Für den Montage-Ort, die Hinweise in Abschn. 3-2-1 berücksichtigen..
78 NAVMAN G-PILOT 33 80 System - In stallati on
Page 17

Ausrichtung
Der Arm ist frei auf der Basis drehbar. In der Ruder-Nulllage muss der Pfeil auf dem Arm mit der Richtung
der Zentrier-Linie auf der Basis übereinstimmen.
Zentrier-Linie
Basis
Zentrier-Linie
Die Basis kann also in zwei um 180° versetzte Positionen montiert werden. Empfohlen wird eine Montage,
bei der das Kabel auf der Gegenseite vom Verbindungs-Gestänge geführt ist.
Die Linien
zeigen die zwei
linearen Bereiche
des Gebers
Empfohlen
( Ruder mittschiffs)
Nicht empfohlen, das Kabel
kann das Gestänge berühren.
Anordnungen
Empfohlen: U-förmige Anordnung mit dem Arm in Längsrichtung des Bootes.
Bootsbug
Korrekt: U-förmige Anordnung mit dem
Arm nicht in Boots-Längsrichtung zeigend,
zum Beispiel:
Boots-
bug
G-PILOT 33 80 System - In stallati on NAVMAN 79
Nicht empfohlen: Z-förmige Anordnung,
zum Beispiel:
Wird das Ruder zu weit ausgelenkt, könnte das Gestänge
eventuell nicht in die Z-Form zurück kehren.
Page 18

Installation
1 Einen passenden Montage-Ort mit problemloser Gestänge-Anordnung gemäß vorheriger
Beschreibung festlegen.
2 Ein passendes Verbindungs-Gestänge wählen und installieren.
3 Die Einheit wie nachfolgend gezeigt anbringen:
Das Ruder
mitschiffs
stellen.
Falls notwendig, die
Verbindungsstange auf
diesem Ende kürzen, dann
die Kupplung wieder
ansetzen und mit der Mutter sichern.
4 Das Kabel gemäß Verkabelungs-Anweisungen (siehe Abschn. 3-2-2) zur MCU-Einheit verlegen.
Falls erforderlich, die
Basis auf einen Block
montieren, um die
Höhe anzupassen.
Die Verbindungsstange auf
dem Ruderarm
festsetzen.
Die Basis so drehen, dass der
Pfeil auf dem Arm mit den
Zentrier-Linien auf der Basis
übereinstimmt. Die Basis mit
zwei in den Schlitzmitten
anzuordnenden Schrauben lose
ansetzen.
Das andere Ende in die
korrekte Bohrung vom
Rückgeber-Arm setzen.
Durchführungs-Bohrungen
müssen mindestens einen
Durchmesser von 18,5 mm
(0,73”) haben.
Die Basis verdrehen , bis
Arm-Pfeil und ZentrierLinien exakt übereinander
liegen. Die dritte Schraube
einsetzen und sämtliche
Schrauben sorgfältig festdrehen.
Sich er st el le n,
dass das Rude r
mittschiffs liegt.
MCU600
Den Stecker an den Rückgeber (RFU)
ansetzen.
80 NAVMAN G-PILOT 33 80 System - In stallati on
Page 19

3-6 Den Kompass installiere n
Physikalisch
Montagelöcher für
Schrauben
101 mm, (4”)
71 mm, (2.8”)
97 mm, (3.8”)
LT8-Verbinder
Aufstellungs- Ort
Den Kompass montieren
Mindestens 1 m (3 ft) entfernt von stäh
lernen Bootsteilen, wie:
ein(e) Stahl-Rumpf, -Deck, -Kabine oder
Stahlverstärkungen in Ferro-ZementRümpfen.
stählerne Geräte, wie Motoren und
Kochvorrichtungen.
Orte, wo Stahlbauteile gelagert werden,
wie z.B. Ankerkasten oder sonstige
Store-Behälter.
Zumindest 2m entfernt von magnetischen
Geräten und Anlagen, die ein elektro
magnetisches Feld erzeugen, z.B. ein
Kompass, eine Batterie, Hochstrom-Kabel,
Fiberglass oder Holz-Rumpf und -Kabine:
10 m (32,8 ft)
ein elektrischer Motor und ein Funk- oder
Radarsender bzw. deren Antennen.
-
So nahe wie möglich im Drehzentrum des
Bootes, um die beim Rollen und Stampfen
entstehenden Beschleunigungs-Momente
am Kompass zu minimieren. Ist es nicht
möglich, den Kompass entsprechend im
Bewegungszentrum zu montieren, sollte er
so niedrig wie möglich oberhalb vom Deck
montiert werden.
Vibrationsfrei in senkrechter Lage.
Die Einheit ist komplett wasserdicht, sollte
jedoch nicht überflutet werden können. Der
-
Kompass wird nicht durch andere Metalle
beeinf lusst, wie Edelstahl, Kupfer oder Messing.
Den Einbau-Or t gemäß Hinweisen in Abschn.
3-2-1 wählen.
Den Kompass im Bewegungs-Zentrum montieren
(bei Gleitern liegt dieses Zentrum gewöhnlich in der Nähe vom Heckbereich).
Stahlrumpf, nicht stählerne Kabine:
pass 1m über dem Rumpf montieren.
Den Kom-
Stahlrumpf und Stahlkabine:
auf ein Rohr montieren, mit einem Mindestab
stand zum Rumpf und zur Kabine von 1m (3 ft).
1 m (3 ft)
1 m (3 ft)
Mindestens 1 m (3 ft)
Den Kompass
-
G-PILOT 33 80 System - In stallati on NAVMAN 81
Page 20

Installation
1 Einen passenden Montageort gemäß vorhergehenden Hinweisen wählen.
2 Die Einheit mit den drei beigefügten Schrauben befestigen. Darauf achten, dass die Einheit
innerhalb von 10° vertikal angebracht wird.
Weniger als
10° 10°
Weniger als
10° 10°
3 Das Kabel zur MCU600-Einheit verlegen und dabei die Hinweise in Abschn. 3-2-2 beachten.
MCU600
Rumpfbohrungen sollten
einen Mindest-Durchmesser
von 18,5 mm (0,73 in)
haben.
Den Verbinder auf den Kompass/HS Steckplatz setzen.
Hinweis
Wird der Kompass in Bezug zum Gyro bewegt, wenn das System eingeschaltet ist, warten, bis sich die
Kursanzeige stabilisiert hat
82 NAVMAN G-PILOT 33 80 System - In stallati on
Page 21

3-7 Gyro montieren
Physikalisch
101 mm, (4”)
71 mm, (2.8”)
Montagelöcher für
die Schrauben
LT8 Verbinder
10 m (32,8 ft)
97 mm, (3.8”)
Montage -Ort
Den Gyro möglichst in das Bewegungs-Zentrum des Bootes setzen, um BeschleunigungsBewegungen beim Stampfen und Rollen des Bootes zu minimieren.
Den Gyro an einer vibrationsfreien Fläche montieren.
Die Einheit ist vollständig wasserdicht, sollte aber trotzdem nicht überflutet werden können. Die
Anweisungen für den Aufstellungsort beachten (siehe Abschn. 3-2-1).
Der ideale Einbauort ist das Bewegungszentrum des Bootes (bei Gleitern liegt dieses üblicherweise in
Hecknähe).
G-PILOT 33 80 System - In stallati on NAVMAN 83
Page 22

Installation
1 Einen passenden Montageort gemäß vorhergehenden Hinweisen wählen.
2 Die Einheit mit den drei beigefügten Schrauben befestigen. Darauf achten, dass die Einheit
innerhalb von 10° vertikal angebracht wird.
Weniger als
10° 10°
3 Das Kabel zur MCU600-Einheit verlegen und dabei die Hinweise in Abschn. 3-2-2 beachten.
Weniger als
10° 10°
Rumpfbohrungen sollten
einen Mindest-Durchmesser
von 18,5 mm (0,73 in) haben.
Den Verbinder auf den Gyro-Steckplatz setzen.
MCU600
Hinweis
Wird der Kompass in Bezug zum Gyro bewegt, wenn das System eingeschaltet ist, warten, bis sich die
Kursanzeige stabilisiert hat
3-8 Das G-PILOT 3380 Bedien-Dis play und andere Instrumente e inbauen.
Es sind zwei Montage-Anordnungen
vorhanden:
Einbau -Montage, er fordert eine feste
Montagewand mit Zugang von hinten für die
Schrauben-Montage und die Verdrahtung.
Bei der Einbau-Montage lässt sich das Display
nicht kippen oder verdrehen, um störendes
Spiegeln oder Ref lexionen zu reduzieren. Vor
84 NAVMAN G-PILOT 33 80 System - In stallati on
der Montage, sorgf ältig eine bestmögliche
Ableseposition auswählen. Generell wird das in
einem abgeschatteten Bereich sein.
Einbau -Hinweise
1 Mittels der Montage-Schablone die
Einbau- Öffnung bestimmen und danach
ausschneiden.
2 Entsprechend die vier Löcher für die
Montage -Bolzen markieren und bohren.
Page 23

3 Die Bolzen in die Messing-Einlässe auf der
Rückseite der Bedieneinheit einschrauben.
4 Das Bedien-Display einsetzen, von hinten
Scheiben aufset zen und mit den Muttern
festschrauben.
Bügel -Montage, er fordert eine Fläche, auf
der die Bügel-Konsole befestigt werden kann.
Sicherstellen, das die Befestigungsfläche eben
und keinen kritischen Vibrationen ausgesetz t
ist. Die Bügelkonsole kann gekippt werden
und das Display lässt sich nach der Benutzung
entfernen.
Eine Position auswählen, an der das Display:
• mindestens 100mm Distanz zu einem
Kompass hat
• mindestens 300mm Abstand zu einem
Funksender hat
• mindestens 1,2 m Abstand zu Sende -
Antennen hat
• leicht abzulesen und zu bedienen ist
Wenn möglich, die Display-Einheit vor
dem Navigator oder nach rechts versetzt
montieren, da das LCD- Bild in diesen
Positionen am besten lesbar ist.
• nicht direkter Sonnen- oder Wasser-
Einwirkung ausgesetzt ist
• geschützt ist vor mechanischen
Einwirkungen unter
rauhen Seebedingungen
• problemlos mit der Stromversorgung
verbunden werden kann
• problemlos mit Geberkabeln verbunden
werden kann
Montag e-Hinweise für den
Befestigung sbügel
1 Den Befestigungsbügel mit den vier
Edelstahl-Schrauben anschrauben.
2 Das Bedien-Display in den Bügel einsetzen.
Die Schraubknöpfe in das Bedien-Display
einsetzen und lose anschraub en.
3 Das Bedien-Display auf optimale
Ablesbarkeit einstellen, und dann die
Schraubknöpfe handfest anziehen.
G-PILOT 33 80 System - In stallati on NAVMAN 85
Page 24

Bedien-Display verdrahten
Das Versorgungskabel auf den schwarzen
Bedien-
Steckplatz der Rückseite vom G-PILOT 3380
Display
MCU600
Kupplungs-Relais Ausg: 8
12 V Spannung +, Rot: 1
NMEA 2: 7
NMEA ein 1: 6
NMEA gemeinsam: 5
NavBus -, Blau: 4
NavBus +, Orange: 3
Masse, schwarz: 2
Anschluss-Abdeckung
8-fach-Klemmenleiste
Grün
Hinweis
Die Spannungs-Versorgung für das Bedien-Display (rote und schwarze Ader) an die Anschlüsse 1 und
2 der 8-fach Klemmenleiste der Zentral-Einheit anschließen, um sicher zu stellen, dass beide Geräte
von der selben Spannungsquelle versorgt werden.
• Die Verdraht ungs-Hinweise in A bschn.3-2-2 beachten.
Bedien -Display setzen.
Bedien-Display Kabel, erfordert 18 mm (0.7”) Wanddurchbohrung.
Gelb (isolieren, nicht abschneiden)
Weiß (isolieren, nicht abschneiden)
Schwachstrom-Versorgung
(siehe Abschn. 3-4-1)
Optionale externe Alarmmittel
Erfordern die externen Alarmmittel
mehr als 250mA, ein zusätzliches
Relais einfügen.
86 NAVMAN G-PILOT 33 80 System - In stallati on
Page 25

Andere Instrumente verdrahten
Zusätzliche G-PILOT
3380 oder G-PILOT
Bedien-Displays
3100
Instrumente
anderer Serien
Ein GPS, wie
z.B. ein
Navman
TRACKER 5600
Bedien-
Displays
Instrumente
GPS
MCU600
NMEA
ein & aus
Netz,
NMEA ein
Kupplung, optional
Kupplungs-Relais:
NMEA 2: 7
NMEA ein 1: 6
NMEA gemeinsam: 5
NavBus -, Blau: 4
NavBus +, Orange: 3
Masse, Schwarz: 2
12 V Spannung +, Rot: 1
Stecker-Schutzkappe
Grün (nur von einem
Instrument)
GrünGrün
(siehe Abschn. 3-4-2)
NMEA ein/aus
GPS NMEA aus
GPS NMEA gemeinsam
Elektronik-Versorgung
(siehe Abschn. 3-4-1)
Alarmmittel (siehe
vorherige Seite)
Hinweis:
Weitere Hinweise zur Verdrahtung sind in den Installations-Büchern der Instrumente enthalten.
Werden mehr als drei Bedien-Displays oder sonstige Instrumente angeschlossen, ist ein zusätzlicher
Schalter mit Sicherung für diese Extra-Instrumente einzusetzen (siehe Abschn.3-4 oder die Bücher der
Instrumente) .
Der externe Alarmausgang (grüne Ader) der Navman Instrumente und 5000er Kar tenplotter können
miteinander verbunden werden, um externe Alarmmittel anzusteuern.
In Systemen mit mehreren Instrumenten wird empfohlen, NavBus-Verbindungsboxen einzusetzen, um
die Verdrahtung zu vereinfachen (siehe NavBus Installations- und Bedienungs-Handbuch).
• Die Verkabelungs-Anweisungen im Abschn. 3-2-2 beachten.
G-PILOT 33 80 System - In stallati on NAVMAN 87
Page 26

4 Inbetriebnahme nach Installation
Einen Inbetriebnahme-Setup durchführen:
nach Installation des G-PILOT 3380 Systems (siehe Abschn. 3).
nach Austausch eines Bauteiles, oder wenn System-Probleme vermutet werden.
Nach einem System-Setup, immer eine See-Erprobung durchführen (siehe Abschn. 5).
4-1 Inbetriebnahme-Setup
1 Das G-PILOT 3380 System einschalten (siehe G-PILOT 3380 - Bedienung). Falls sich das Ruder bewegt,
sofort wieder ausschalten.
Wird auf AUTO geschaltet und der Ruder-Rückmelder ist noch nicht kalibriert, zeigt das G-PILOT 3380
System eine Fehlermeldung.
2 Wurde das G-PILOT 3380 System bereits vorher ver wendet, sämtliche Anwender-Daten auf
Werkseinstellung zurücksetzen Das geschieht über die Menus Setu p System > Werksrü ckstellung
> Beide (siehe das Buch Pi ILOT 3380 - Bedien ung).
3 Die eingestellten Daten und Werte in die im Anhang vorhandene Anwenderdaten-Tabelle eintragen
(im Buch G-PILOT 3380 - Bedienung sind die Bedeutungen der einzelnen Punkte und die Weise der
Eintragungen beschrieben). Neben jedem Punkt sind die neu eingestellten Werte einzutragen.
Warnung:Es ist keine Ruderlagen-Begrenzung vorhanden, solange der Rudergeber nicht kalibriert ist
(siehe Abschn. 4-2). Der Anwender muss sicherstellen, dass das Ruder nicht durch einen elektrischen
Steuerbefehl gegen die Hartlage gefahren werden kann (siehe BuchG-PILOT 3380 - Bedienung).
4-2 Ruderrüc kmelder kalibrieren
Diese Prozedur passt den Ruder-Rückmelder an die Ruderbewegungen an.
Hinweise
Zum sofortigen Abbruch der Kalibrierung ESC drücken.
Wird das Ruder nicht gemäß Aufforderung bewegt, oder falls der Rückgeber nicht richtig arbeitet, kann
das G-PILOT 3380 System nicht die Kalibrierung abschließen. Das G-PILOT 3380 System wird einen
Fehler anzeigen. ESC drücken, das Problem beseitigen und die Kalibrierung wiederholen.
Im normalen Betrieb wird das G-PILOT 3380 System das Ruder nicht näher als 3° zur Endlage bewegen.
Um den Rückmelder zu kalibrieren, folgende Menus anwählen: Setup > Ca librate > Rudder. Den
Bildschirm-Anweisungen zur Kalibrierung folgen (siehe Handbuch G-PILOT 3380 - Bed ienung).
88 NAVMAN G-PILOT 33 80 System - In stallati on
Page 27

5 See-Erprobung
Die See-Erprobung durchführen:
nach Durchführung des Inbetriebnahme
Setup (siehe Abschn. 4).
um die Steuereigenschaften des
G-PILOT 3380 Systems zu prüfen.
5-1 Kompass-Kalibrierung
Hinweise
Die Kalibrierung kann jederzeit durch Drücken von ESC abgebrochen werden.
Falls das Boot nicht gemäß Display-Anweisung gedreht wird, oder der Kompass nicht arbeitet, lässt sich
eine Kalibrierung nicht abschließen. Das G-PILOT 3380 System wird eine Fehlermeldung zeigen. ESC
drücken, das Problem beheben und die Kalibrierung wiederholen.
Der Kompass kann durch lokale Störungen im Magnetfeld beeinflusst werden. Die Kalibrierung muss in
deutlichem Abstand zu großen eisenhaltigen Strukturen durchgeführt werden, wie in Marinas oder bei
großen Schiffen vorhanden.
Sicherstellen, dass beide Quellen auf die gleiche Nord-Referenz eingestellt sind (wahr oder magnetisch).
Ist der magnetische Hauptkompass nicht kalibriert, kann eine andere Quelle für den Bootskurs benutzt
werden. Wird der Schiffs-Kompass benutzt, muss die dazu gehörende Deviations-Tabelle für den Vergleich mit dem AutoG-PILOT-Kompass mit herangezogen werden.
Um die Kompass-Einheit zu kalibrieren, folgende Menus durchwählen: Setup > Kalibrieren >
Kompass. Den im Display erscheinenden Kalibrier-Anweisungen folgen, (siehe Buch G-PILOT 3380
- Bedienu ng).
5-2 Nulleinstellung für Kompass und Ruder
Kompass und Ruder können separat ausgerichtet werden.
5-2-1 Kompass ausrichten (Kurs-Anzeige)
Hiermit wird der G-PILOT 3380 System-Kompass ausgerichtet, um den korrekten Kurs zu zeigen
Der Kompass kann nach einem Referenz-Kompass oder nach einer am G-PILOT 3380 System angeschlos-
senen GPS-Anzeige ausgerichtet werden. Sicherstellen dass keine Seitenströmung oder kein Seitenwind
vorhanden ist.
Die Kompass-Ausrichtung erfolgt über die Menus Se tup > Calibrate > Kompass-N ulljustierung. Für die
Kalibrierung, den entsprechend im Display erscheinenden Anweisungen folgen (siehe Buch G-PI LOT
3380 - Bedien ung).
5-2-2 Das Ruder nullstellen (Ruder-Mitte)
Hiermit wird das Ruder so eingestellt, dass ein gerader Kurs gesteuert wird. Sicherstellen dass keine
Seitenströmung oder kein Seitenwind vorhanden ist.
Die Ruder-Nulleinstellung erfolgt über die Menus Setup > Ka librieren > Rudernu llstellung. Für
die Kalibrierung, den entsprechend im Display erscheinenden Anweisungen folgen (siehe Buch
G-PILOT 3380 - Bedienung).
Für die See-Erprobung in ein offenes Gewässer
steuern, wo andere Verkehrsteilnehmer nicht
behindert werden können. Die See sollte ruhig
sein, der Wind möglichst schwach, und es sollte
keine Strömung vorhanden sein.
G-PILOT 33 80 System In stallati on NAVMAN 89
Page 28

Anhang A - Spezifikationen - MCU600
Elektrisch:
Antriebs-Versorgung: 10,5 bis 16,5 V DC, 20 A
maximum
8-Klemmen-Versorgung: 10,5 to 16,5 V DC,
300 mA.
Andere optionale Instrumente: siehe
entsprechendes Handbuch.
Schnittstellen
NavBus: Verbindung zu anderen Navman
Instrumenten und zum G-PILOT 3380
Bedien -Display.
NMEA 0183 Anschlüsse: NMEA 1: Eingang;
NMEA 2: programmierbar als Ein- oder als
Ausgang
NMEA 0183 Ausgangs-Daten: HDG, HDT, RSA;
NMEA 0183 Eingangs- : APA, APB, BOD, BWC,
MWD, MWV, RMA, RMB, RMC, VHW, VTG, XTE
Standard Übereinstimmung
EMC Übereinstimmung
USA (FCC): Par t 15 Class B
Europa (CE): EN301 843-1
Neu Seeland und Australien (C Tick):
AS-NZS 3548.
Schutzklasse:
Kompass: IPx6 und IPx7 - komplett
wasserdicht.
Gyro: IP x6 und IPx7 - komplet t wasserdicht.
Ruder- Rückgeber: IPx6 und IPx7 - komplett
wasserdicht.
MCU600 Zentraleinheit : nicht wasserdicht
- erfordert einen kühlen, trockenen und
sauberen Montageplatz.
MCU600 Zentraleinheit - Leistungs-
Anschlüsse:
Klemme Signal
1 Hochstrom-Versorgung - positiv,
10,5 bis 16,5 V DC
2 Hochstrom-Versorgung - negativ
3 Ausgang Antriebs-Einheit negativ
4 Ausgang Antriebs-Einheit positiv
MCU600 Zentraleinheit - AchtfachAnschlussleiste:
Klemme Signal
1 Schwachstrom-Versorgung
- positiv, 10,5 bis 16,5 V DC
2 Schwachstrom-Versorgung
- minus
3 NavBus+
4 NavBus -
5 NMEA gemeinsam (-)
6 NMEA Eing. 1
7 NMEA Eing. 2
8 Kupplungs-Relais Ausgang, 30
V DC, 300 mA maximum, gegen
Masse schaltend (um das Relais
einzuschalten)
MCU600 - interne Sicherungen:
2 gleich große Sicherungen
Typ: ATC - KFZ-Blatt
Größe: 20A
90 NAVMAN G-PILOT 33 80 System - In stallati on
Page 29

Anhang B - Spezifikationen - AP3380 Bedien-Display
Elektrisch
Versorgungsspannung: 10,5 bis 30,5 V DC.
Stromaufnahme (bei 13,8 V): 180 mA ohne
Beleuchtung, 225 mA mit voller Beleuchtung
Andere optionalen Instrumente: siehe
entsprechendes Handbuch.
Schnittstellen
NavBus: Verbindung zur Zentraleinheit und zu
anderen Navman-Instrumenten.
AP3380 Display Netz/Daten-Kabel Verdrahtung:
Schwarzer Verbinder - Netz und MCU
Pinn Aderfarbe Signal
5 Rot Plus-Spannung, 10,5 bis 30,5 V DC
1 Schwarz Minus-Spannung
6 Orange NavBus +
4 Blau NavBus -
7 Gelb Werksnutzung (iso lieren, nicht abschneiden)
3 Weiß Werksnutzung (iso lieren, nicht abschneiden)
8 Grün Externer Alarm, gegen Masse schaltend, 30 V DC und 250 mA max.
2 Braun +9V Ausg.
Grüner Verbinder - NavBus Erweiterung
Pinn Aderfarbe Signal
5 Rot Werksnutzung (isolieren, nicht abschneiden)
1 Schwarz Minus-Spannung
6 Orange NavBus+
4 Blau NavBus -
7 Gelb Werksnutzung (isolieren, nicht abschneiden)
3 Weiß Werksnutzung (isolieren, nicht abschneiden)
8 Grün Werksnutzung (isolieren, nicht abschneiden)
2 Braun +9V Ausg.
Standard Übereinstimmung
EMC Übereinstimmung
USA (FCC): Par t 15 Class B
Europa (CE):EN301 843-1
Neuseeland und Australien (C Tick):
AS-NZS 3548.
Schutzklasse:
IPx6 und IPx7 - komplett wasserdicht.
G-PILOT 33 80 System - In stallati on NAVMAN 91
Page 30

Anhang C - Anwender - Einstellwerte
Anwender Daten-Tabelle (zur Eintragung der Installations-Setup- Einstellungen)
Menu > Setup > SYSTEM Menu
Sprache
Nachtmodus
Tastenpiep
Einschalt-Autom. Aus
SmartCraft
Menu > Setup > OPTIONS Menu
Ausweichwinkel
Wende-Modus
Wendewinkel
Halsen Modus
Halsenwinkel
Wendeverzögerung
Drehrate
Menu > Setup > SCHIFFS Menu
Schiffstyp
Antriebsart
gewählte Windmerkmale
Menu > Setup > ALARM Menu
Kursfehler
XTE
Wegpunkt bestät.
Windänderung
(nur segeln)
Batt.-Spanng. niedr.
Hoher Motorstrom
92 NAVMAN G-PILOT 33 80 System - In stallati on
Page 31

Menu > Setup > Einheiten Menu
Distanz
Kompass
Missweisung
Wind
Menu > Setup > DATENÜBERTR. Menu
NMEA-Modus
NavBus- Gruppe
Menu > Setup > PROFILE Menu
Profile (user 1)
Parameter
Adaptiv
Empfindlichkeit
Rudermenge
Erweitert
Trimm
Stützruder
GPS-Verstärkung
Windwinkelverstärkung
Profile (user 2)
Parameter
Adaptiv
Empfindlichkeit
Rudermenge
Erweitert
Trimm
Stützruder
GPS-Verstärkung
Windwinkelverstärkung
G-PILOT 33 80 System - In stallati on NAVMAN 93
Page 32

Profile (user 3)
Parameter
Adaptiv
Empfindlichkeit
Rudermenge
Erweitert
Trimm
Stützruder
GPS-Verstärkung
Windwinkelverstärkung
Profile (user 4)
Parameter
Adaptiv
Empfindlichkeit
Rudermenge
Erweitert
Trimm
Stützruder
GPS-Verstärkung
Windwinkelverstärkung
Profile (user 5)
Parameter
Adaptiv
Empfindlichkeit
Rudermenge
Erweitert
Trimm
Stützruder
GPS-Verstärkung
Windwinkelverstärkung
94 NAVMAN G-PILOT 33 80 System - In stallati on
Page 33

How to contact us www.n avman.com
NORTH AMERICA
BNT - Marine Electronics
30 Sudbury Rd, Acton, MA 01720.
Toll Free: +1 866 628 6261
Fax: +1 978 897 8264
e-mail: sales@navmanusa.com
web: www.navman.com
OCEANIA
Australia
Navman Australia Pty. Limited
Suite 2, 408 Victoria Road
Gladesville, NSW 2111, Australia.
Ph: +61 2 9879 9000
Fax: +61 2 9879 9001
e-mail: sales@navman.com.au
web: www.navman.com
New Zealand
Absolute Marine Ltd.
Unit B, 138 Harris Road,
East Tamaki, Auckland.
Ph: +64 9 273 9273
Fax: +64 9 273 9099
e-mail: navman@absolutemarine.co.nz
Papua New Guinea
Lohberger Engineering,
Lawes Road, Konedobu.
PO Box 810, Port Moresby.
Ph: +675 321 2122
Fax: +675 321 2704
e-mail: loheng@online.net.pg
web: www.lohberger.com.pg
LATIN AMERICA
Argentina
Costanera Uno S.A.
Av Pte Ramón S. Castillo y Calle 13
Zip 1425 Buenos Aires, Argentina.
Ph: +54 11 4312 4545
Fax +54 11 4312 5258
e-mail: purchase@costanerauno.com.ar
web: www.costanerauno.ar
Brazil
Equinautic Com Imp Exp de Equip
Nauticos Ltda.
Rua Ernesto Paiva, 139
Clube dos Jangadeiros
Porto Alegre - RS - Brasil
CEP: 91900-200.
Ph: +55 51 3268 6675
+55 51 3269 2975
Fax: +55 51 3268 1034
e-mail: equinautic@equinautic.com.br
web: www.equinautic.com.br
REALMARINE
Av Inf Dom Henrique s/nº - Loja 12
Marina da Glória - Rio de Janeiro - R.J.
Brasil
Cep: 2021-140
Ph: +55 21 3235-6222
Fax: +55 21 3235-6228
e-mail: vendas@realmarine.com.br
website: www.realmarine.com.br
Chile
Equimar
Manuel Rodrigurez 27
Santiago, Chile.
Ph: +56 2 698 0055
Fax +56 2 698 3765
e-mail: mmontecinos@equimar.cl
Mera Vennik
Colon 1148, Talcahuano,
4262798, Chile.
Ph: +56 41 541 752
Fax +56 41 543 489
e-mail: meravennik@entel.chile.net
Mexico
Mercury Marine de Mexico
Anastacio Bustamente #76
Interior 6 C olonia Fr ancisco Z arabia,
Zapapan, Jalisco, C.P. 45236 Mexico.
Ph: +52 33 3283 1030
Fax: +52 33 3283 1034
web: www.equinautic.com.br
Uruguay
Alvaro Burmudez , Nautica
Puerto del Buceo
11300 Montevid eo, Uruguay.
Phone & Fax +59 82 628 6562
e-mail : alvaro@ nautica.com.uy
web: www.nauti ca.com.uy
ASIA
China
Peaceful Marine Electronics Co. Ltd.
Guangzhou, Hong Kong, Dalian,
Qingdao, Shanghai
1701 Yanjiang Building
195 Yan Jiang Zhong Rd. 510115
Guangzhou, China.
Ph: +86 20 3869 8839
Fax: +86 20 3869 8780
e-mail: sales@peaceful-marine.com
web: www.peaceful-marine.com
India
Access India Overseas Pvt. Ltd.
A-98, Sector 21,
Noida - 201 301, India.
Ph: +91 120 244 2697
TeleFax: +91 120 253 7881
Mobile: +91 98115 04557
e-mail: vkapil@del3.vsnl.net.in
Esmario Export Enterprises
Block No. F-1, 3rd Floor, Surya Towers
Sardar Patel Rd, Secunderbad 500 003.
Ph: +91 40 2784 5163
Fax: +91 40 2784 0595
e-mail: gjfeee@hd1.vsnl.net.in
web: www.esmario.com
Korea
Kumhomarine Technology Co. Ltd.
#604-842, 2F, 1118-15, Janglim1-Dong,
Saha-Gu, Busan, Korea.
Ph: +82 51 293 8589
Fax: +82 51 265 8984
e-mail: info@kumhomarine.com
web: www.kumhomarine.com
Japan
PlusGain Inc.
1-A 324-3 Matunoki-Tyou
Takayama-City, Gifu-Ken, Japan
Ph: +81 577 36-1263
Fax: +81 577 36-1296
email: info@plusgain.co.jp
web: www.plusgain.co.jp
Maldives
Maizan Electronics Pte. Ltd.
Henveyru, 08 Sosunmagu.
Male', Maldives.
Mobile: +960 78 24 44
Ph: +960 32 32 11
Fax: +960 32 57 07
e-mail: ahmed@maizan.com.mv
Singapore an d Malaysia, Brunei
and Indonesi a
RIQ PTE Ltd.
Blk 3007, 81 Ubi Road 1, #02-440,
Singapore 408701.
Ph: +65 6741 3723
Fax : +65 6741 3746
e-mail: email@riq.com.sg
web: www.riq.com.sg
Taiwan
Seafirst International Corporation
No. 281, Hou-An Road, Chien-Chen
Dist. Kaohsiung, Taiwan R.O.C.
Ph: +886 7 831 2688
Fax: +886 7 831 5001
e-mail: seafirst@seed.net.tw
web: www.seafirst.com.tw
Thailand
Thong Electronics (Thailand) Co. Ltd.
923/588 Ta Prong Road, Mahachai,
Muang, Samutsakhon 74000, Thailand.
Ph: +66 34 411 919
Fax: +66 34 422 919
e-mail: sales@thongelectronics.com
admins@thongelectronics.com
web: www.thongelectronics.com
Vietnam
HaiDang Co. Ltd.
763 Le Hong Phong St. Ward 12
District 10, Hochiminh City, Vietnam
Ph: +84 8 863 2159
Fax: +84 8 863 2524
e-mail: haidang-co@hcm.vnn.vn
web: www.haidangvn.com
MIDDLE EAST
United Arab Emira tes
Kuwait, Oman , Saudi Arabia, Ba hrain
and Qatar
Abdullah Moh’d Ibrahim Trading, opp
Creak Rd. Baniyas Road, Dubai.
Ph: +971 4 229 1195
Fax: +971 4 229 1198
e-mail: sales@amitdubai.com
Egypt
18 Abou El-Ataheya St., via Abbas
Al-Akkad St.,
Nasr City, Cairo Egypt
Ph: +202 274 2911
+202 272 8493
Fax: +202 274 5219
e-mail: seet@internetegypt.com
Lebanon
Balco Stores
Balco Building, Moutran Street,
Tripoli (via Beirut). - Lebanon
P.O. Box: 622.
Ph: +961 6 624 512
Fax: +961 6 628 211
e-mail: balco@cyberia.net.lb
AFRICA
South Africa
Pertec (Pty) Ltd (Coastal Division)
16 Paarden Eiland Road.
Paarden Eiland, 7405
PO Box 527,
Paarden Eiland, 7420
Cape Town, South Afric a.
Ph: +27 2 1 508 4707
Fax: +27 21 508 4888
e-mail: info@kfa.c o.za
web: www.pertec.co.za
EUROPE
Plastimo International
15, rue Ingénieur Verrière,
BP435,
56325 Lorient Cedex.
Ph: +33 2 97 87 36 36
Fax: +33 2 97 87 36 49
e-mail: plastimo@plastimo.fr
web: www.plastimo.fr
OTHER COUNTRIE S IN EUROPE
Norway
ProNav AS
Fiskarvik Maritime Senter,
Hovlandsveien 52,
N-4370 Egersund, Norway.
Ph: +47 51 494 300
Fax: +47 51 492 100
e-mail: mail@pronav.no
web: www.pronav.no
Finland
Vator Oy
Puuskarinne 8,
00850 Helsinki, Finland.
Ph: +35 8 040 300 7212
Fax: +35 8 040 300 7200
e-mail: info@vator.com
web: www.vator.com
Croatia
Meridian Projekt d.o.o.
Savska 58,
Ph: +38 5 1 617 6364
Fax: +38 5 1 617 6365
e-mail: navman@meridianprojekt.com
web: www.meridianprojekt.com
HEADQUARTER S
Navman NZ Limited
7-21 Kawana St.
Northcote.
P.O. Box 68 155,
Newton,
Auckland,
New Zealand.
Ph: +64 9 481 0500
Fax: +64 9 481 0590
e-mail: marine.sales@navman.com
web: www.navman.com
Page 34

Made in New Zealand
MN000272A
P IL OT 3 38 0
Lon 174° 44.535’E
Lat 36° 48.404’S
NAVMAN
 Loading...
Loading...