

Page 1
Pilot 3380
A U T O P I L O T S Y S T E M
Installation Manual
Français
w w w . n a v m a n . c o m
NAVMAN
w w w . n a v m a n . c o m
Page 2

Sommaire
1 Introduction ........................................................................................................................................5
1-1 Exemple d’installation d’un G-PILOT 3380 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
1-2 Utilisation du G-PILOT 3380 avec d’autres instruments . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
1-2-1 Utilisation avec d’autres instruments . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
1-2-2 NavBus . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
1-2-3 NMEA . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
2 Eléments du G-PILOT 3380 ......................................................................................................................7
2-1 Matériel livré avec votre G-PILOT 3380 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
2-2 Autre matériel nécessaire . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
3 Installation ............................................................................................................................................8
3-1 Procédure d’installation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
3-2 Guide d’installation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
3-2-1 Emplacement de montage . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
3-2-2 Câblage . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
3-3 Installation du calculateur MCU600 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .10
3-4 Installation de l’alimentation et de l’unité de puissance . . . . . . . . . . . . . . . . . . . . . . . . . . 11
3-4-1 Installation de l’alimentation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .11
3-4-2 Installation de l’unité de puissance . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
3-5 Installation du capteur d’angle de barre . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .16
3-6 Installation du compas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .19
3-7 Installation du gyromètre . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .21
3-8 Installation du boîtier du G-PILOT 3380 et des autres instruments . . . . . . . . . . . . . . .22
4 Réglages à quai ....................................................................................................................................26
4-1 Initialisation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .26
4-2 Etalonnage du capteur d’angle de barre . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .26
5 Essais en mer ....................................................................................................................................... 27
5-1 Etalonnage du compas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .27
5-2 Alignement du compas et de la barre . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .27
5-2-1 Alignement du compas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
5-2-2 Alignement de la barre . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
Appendice A - Caractéristiques techniques du calculateur MCU600 ..........................................................28
Appendice B - Caractéristiques techniques du boîtier du G-PILOT 3380 ....................................................29
Appendice C - Données utilisateur ........................................................................................................... 30
G-PILOT 33 80 Notice d ’install ation NAVMAN 3
Page 3
Important
Il incombe au propriétaire de veiller à ce que l’instrument et le(s) capteur(s) soient installés et
utilisés de telle sor te qu’ils ne causent pas d’accidents, de dommages corporels ou matériels.
L’utilisateur de ce produit est seul responsable du respect des règles de sécurité en matière de
navigation.
Le choix, l’emplacement et le montage des dif férents éléments d’un système de G- PILOTage
automatique sont déterminants. Si leur installation n’est pas correcte, le G-PILOTe automatique
ne pourra pas fonctionner de manière optimale. En cas de doute, contactez votre revendeur
Navman. Veillez à ce que les trous de montage soient percés à des endroits appropriés et qu’ils
n’affaiblissent pas la structure du bateau. En cas de doute, adressez-vous à un chantier naval.
Utilisation du G-PILOT 3380
Le G-PILOT 3380 est destiné à éviter au barreur de longues périodes de barre. Il ne doit pas
devenir le principal moyen de G- PILOTage du bateau.
Le G-PILOT 3380 n’est pas conçu pour une utilisation dans des conditions météorologiques
extrêmes ou des conditions défavorables, dans des zones de navigation fréquentées ou
dangereuses ni pour une utilisation à terre.
Les performances du G-PILOT 3380 en terme de conduite du bateau ne sont pas supérieures
à celles d’un barreur. En cas de conditions défavorables, reprenez le contrôle de la barre.
Ne laissez jamais la barre sans sur veillance. Soyez toujours très vigilant. Le barreur doit
contrôler en permanence la course du bateau et le G-PILOT 3380 et être prêt à reprendre la
barre à tout moment.
Les performances du G-PILOT 3380 peuvent être affectées par le dysfonctionnement d’une
pièce, les conditions de navigation, une installation ou une utilisation incorrecte.
NAVMAN NZ LIMITED DECLINE TOUTE RESPONSABILITE EN CAS D’ACCIDENT, DOMMAGE
MATERIEL OU INFRACTION A L A LOI OCCASIONNES PAR UNE MAUVAISE UTILISATION DU
PRODUIT.
Navman se réserve le droit de faire évoluer le produit et d ’en modifier les caractéristiques à
tout moment et sans préavis. Ces changements peuvent ne pas figurer dans cette version de la
notice. Veuillez contac ter votre distributeur Navman le plus proche pour tout renseignement
complémentaire.
Langue de référence : la documentation du produit (incluant toutes les notices de montage
et d’utilisation et l’ensemble des documents ayant trait au produit) peut être ou a été
traduite. En cas de litige relatif à l’interprétation de la documentation, la version anglaise de la
documentation prévaudra.
Copyright © 2005 Navman NZ Limited, Nouvelle -Zélande. Tous droits réservés. Navman est une
marque déposée de Navman NZ Limited.
4 NAVMAN G-PILOT 33 80 Notice d ’install ation
Page 4
1 Introduction
Utilisation de la notice
Cette notice décrit les procédures de montage
et de paramétrage du G -PILOT 3380. Veuillez
vous reporter à la notice d’utilisation du
G-PILOT 3380 pour obtenir des informations
sur le fonc tionnement du G- PILOT 3380.
Pour installer le G-PILOT 3380, procéder tout
d’abord au montage du système, puis aux
réglages à quai et aux essais en mer (voir
sections 3, 4 et 5).
Pour reparamétrer le système après le
changement d’une pièce ou en cas de
détection d’un problème, procéder à de
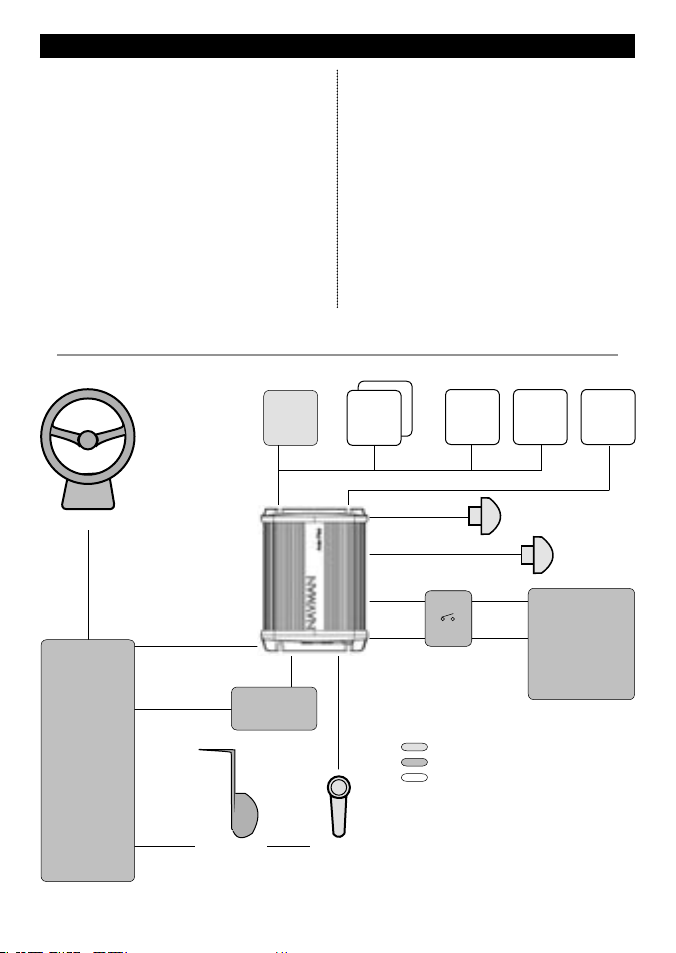
1-1 Exemple d’installation d’un G-PILOT 3380
Boîtier
NavBus
Calculateur
MCU600
Barre
nouveaux réglages à quai et en mer
(voir sections 4 et 5).
Pour vérif ier le bon fonctionnement du
système, tester le G-PILOT 3380 en mer (voir
section 5).
Nettoyage et entretien
Nettoyer les différents éléments du G-PILOT
3380 à l’aide d’un chiffon humide ou imprégné
d’un détergent doux. N’utilisez pas de produits
abrasifs, d’essence ou autres solvants.
Ne peindre aucun élément du système
(excepté les câbles).
Instruments optionnels
Boîtiers
supplé-
mentaires
WIND
SPEED
Compas
GPS
NMEA
Gyromètre
Embrayage
(option)
Interrupteur(s) et
fusibles ou coupe-circuits
Unité de
puissance
Commande de
barre
Gouvernail
G-PILOT 33 80 Notice d ’install ation NAVMAN 5
Capteur
d’angle de
barre
Eléments livrés avec le G-PILOT 3380
Autres éléments nécessaires
Eléments optionnels
Remarque : l’installation ci-dessus est
donnée à titre d’exemple uniquement. Pour
plus d’informations, veuillez consulter la
documentation fournie avec votre unité de
puissance.
Courant faible
Courant fort
Alimentation
12 V CC
Page 5
1-2 Utilisation du G-PILOT 3380 avec d’autres instruments
1-2-1 Utilisati on avec d’autres instru ments
Le G-PILOT 3380 peut utiliser les données
fournies par les instruments suivants :
GPS : le G-PILOT 3380 doit être connecté
à un instrument GPS ou à un traceur de
cartes (ex. Navman TRACKER série 5000)
pour fonctionner en mode GPS (voir notice
d’utilisation du G-PILOT 3380).
Remarque : la connexion s’effectue via
l’interface NMEA.
VENT : le G-PILOT 3380 doit être connecté
à une girouette anémomètre (ex. Navman
WIND série 3000) pour fonc tionner en
mode VENT (voir notice d ’utilisation du
G-PILOT 3380).
VITESSE : pour un G-PILOTage encore plus
précis, le G-PILOT 3380 peut être connecté
à un instrument mesurant la vitesse du
bateau. Par exemple :
Speedomètre Navman SPEED, avec
capteur de vitesse à roue à aubes.
GPS ou traceur de car tes (Navman
TRACKER série 5000, TRACKFISH 6600).
Re marque : la vitesse fo urnie par un capteur
à roue à aubes co rrespond à la vitesse du
bateau par ra pport à la surface. L a vitesse
calculée pa r un GPS correspond en revanc he
à la vitesse du ba teau sur le fond. S’il y a
du courant, ces de ux vitesses seront donc
différ entes. Si le G-PILOT 3380 est con necté à
la fois à un spe edomètre et à un instrum ent
GPS, il utili sera automatiquement l es données
de vitesse fou rnies par le speedom ètre.
1-2-2 NavBus
Le système NavBus est un système propriétaire
Navman qui permet de créer des systèmes
intégrant plusieurs instruments connectés à un
seul jeu de capteurs. Lorsque des instruments
sont connectés au NavBus :
Si vous modifiez les unités, les valeurs
d’alarme ou l ’étalonnage d’un instrument,
ces changements s’appliqueront
automatiquement à l’ensemble des
instruments du même type.
Chaque instrument peut être af fecté
à un groupe d ’instruments, appelé
groupe NavBus (voir notice d’utilisation
du G-PILOT 3380, menu Paramé trage >
Transfert donné es > Groupe NavBus). Si le
réglage du rétro- éclairage est modifié sur
un instrument du groupe 1, 2, 3 ou 4, il est
automatiquement modifié sur tous les
autres instruments du groupe. En revanche,
lorsque le réglage du rétro-éclairage est
modifié sur un instrument du groupe 0,
ce changement n’affec te aucun autre
instrument du système.
En cas de déclenchement d’une alarme,
vous pouvez mettre l ’alarme en veille
à partir de n’impor te quel instrument
possédant cette alarme.
Pour plus d’informations, se reporter à la notice
du NavBus.
Remarque : la co nnexion à un GPS s’effectu e via
l’entrée NME A.
Système NavBus et G-PILOT 3380
Lorsqu’il est connecté au NavBus, le GPILOT 3380 communique automatiquement
avec les boîtiers supplémentaires G-PILOT
3380 ou G-PILOT 3100.
Il peut recevoir les données vent d’un
Navman WIND via le NavBus.
Il peut recevoir les données vitesse d’un
Navman SPEED via le NavBus.
1-2-3 NMEA
Le protocole NMEA est une norme de
l’industrie. Il n’est pas aussi souple que le
système NavBus car il nécessite des connexions
dédiées entre les instruments. Le G-PILOT 3380
possède un port d’entrée NMEA et un second
port d’entrée ou de sortie paramétrable (voir
notice d’utilisation du G-PILOT 3380).
Entrées NME A du G-PILOT 3380
GPS : le G-PILOT 3380 peut recevoir de
tout instrument GPS ou traceur de cartes
compatible (ex. Navman TRACKER série 500 0)
les données NMEA suivantes :
XTE (phrases APA, APB ou X TE) :
pour pouvoir utiliser le mode GPS
du G-PILOT 3380.
6 NAVMAN G-PILOT 33 80 Notice d ’install ation
Page 6
BRG (phrases APA) et BOD (phrases APA
ou APB) : pour optimiser le G-PILOTage du
bateau.
COG (phrases VTG) : pour afficher le cap
fond du bateau.
VENT : le G-PILOT 3380 peut recevoir de toute
girouet te anémomètre compatible les données
NMEA suivantes :
Direction du vent vrai ou apparent (phrases
MWV) : pour pouvoir utiliser le mode ve nt
du G-PILOT 3380.
VITESSE : le G-PILOT 3380 peut recevoir de tout
speedomètre ou instrument GPS compatible
les données NMEA suivantes :
SOG (phrases VTG) : pour optimiser le
G-PILOTage du bateau.
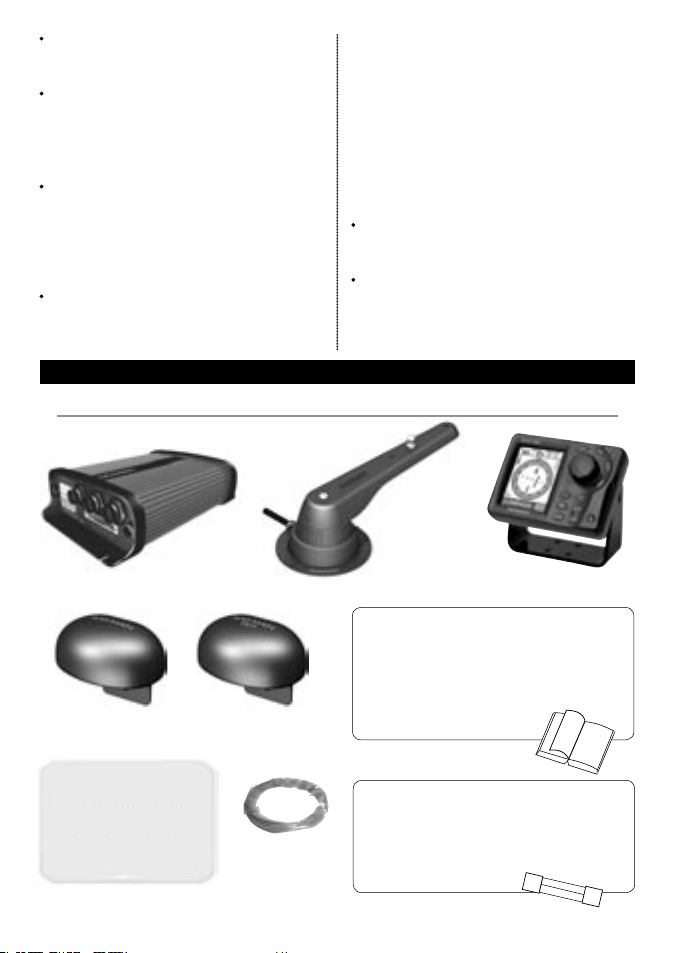
2 Eléments du G-PILOT 3380
2-1 Matériel livré avec votre G-PILOT 3380
Remarque : si le G-PILOT 3380 est connecté à
un speedomètre, à un GPS ou à une girouette
anémomètre Navman via le NavBus, il recevra et
utilisera automatiquement les données vitesse et vent
de ces instruments. Les données r eçues via NMEA
ne seront pas ut ilisées.
Sorties NMEA du G-PILOT 3380
Le port NMEA 2 peut être paramétré pour
recevoir des données NMEA ou pour envoyer
les données NMEA suivantes :
cap du bateau (HDG & HDT) et angle de
barre (RSA) - émission des données toutes
les secondes, ou
cap du bateau (HDG) - émission des
données 10 fois par seconde
(voir notice d’utilisation du G-PILOT 3380, menu
Paramétrage > Transfer t données > Mode NME A).
Calculateur (MCU600)
Compas (câble 10 m
inclus)
NAVMAN
Capot de protection du boîtier
G-PILOT 33 80 Notice d ’install ation NAVMAN 7
Capteur d’angle de barre
Gyromètre
(câble 10 m inclus)
Câble 2 brins
(2,5 mm²) pour
courant fort
Documentation
• Garantie
• Gabarit de montage du boîtier
• Notice d’installation du G-PILOT 3380
• Notice d’utilisation du G-PILOT 3380
Autre matériel f ourni
• Kit de montage
• Protection de prises
• Serre -câbles
• Fusibles de rechange
Boîtier
Page 7
2-2 Autre matériel né cessaire
Alimentation : le G-PILOT 3380 utilise deux
types d’alimentation, toutes deux 12 V CC
nominal :
Une alimentation de puissance pour l’unité
de puissance.
Une alimentation de faible puissance
pour les composants électroniques et le
boîtier du G-PILOT 3380 ainsi que pour
les éventuels boîtiers supplémentaires du
G-PILOT 3380 et autres instruments à bord.
Installer un ou deux interrupteurs et des
fusibles ou coupe-circuits sur les circuits
d’alimentation (voir section 3-4).
Unité de puissan ce : le G-PILOT 3380 peut
commander une pompe hydraulique, une
pompe hydraulique à débit continu, un
ensemble linéaire hydraulique ou un système
mécanique fonctionnant sous 12 V CC et
consommant 20 A maximum.
Bras de mè che : cet élément ser t à relier la
barre au capteur d’angle de barre
(voir section 3-5).
Pour le câblage, voir le tableau des sections de
fil (section 3- 4-2).
3 Installation
Impor tant : le fonctionnement optimal
de l’appareil dépend de la qualité de son
installation. Il est impératif de lire cet te notice
ainsi que l’ensemble de la documentation
fournie avec les autres éléments du système
avant de procéder au montage.
Feux et bu zzers externes (option) : la sortie
alarmes externes (30 V CC, 250 mA maxi) est
branchée à la masse. Si les buzzers et feux
externes nécessitent un ampérage total
supérieur à 250 mA, installer un relais.
Autres instruments d’électronique marine
(option) : un GPS ainsi que des instruments de
mesure du vent et de la vitesse peuvent être
connectés au G-PILOT 3380 (voir sec tion 1-2).
Autre matériel : pour les systèmes intégrant
plusieurs instruments, prévoir des câbles et
connecteurs supplémentaires. Les boîtiers de
connexion NavBus permettent de simplifier le
câblage entre plusieurs instruments Navman
(voir section 1-2 ou notice du NavBus).
Des adaptateurs et des câbles d’extension
10 m sont disponibles pour rallonger les câbles
du capteur d ’angle de barre, du compas et
du gyromètre. Ne pas utiliser plus d’un câble
d’extension par appareil.
Pour plus d’informations, contactez votre
revendeur Navman.
Avertissement
Le calculateur MCU600 n’est pas étanche.
Installez-le dans un endroit sec.
Le boîtier du G-PILOT 3380 est étanche.
Le compas, le gyromètre et le capteur
d’angle de barre sont totalement étanches.
Impor tant : veillez à ce que les trous de
montage n’affaiblissent pas la structure du
bateau. En cas de doute, adressez-vous à un
chantier naval.
3-1 Procédure d’installation
Nous vous recommandons d’installer votre
G-PILOT 3380 en respec tant la procédure
suivante :
1 Lire la notice et l’ensemble des documents
fournis avec les différents éléments du
système.
8 NAVMAN G-PILOT 33 80 Notice d ’install ation
2 Préparer l’installation : sélectionner
l’emplacement des éléments et des câbles
(voir section 3-2).
3 Installer le calculateur MCU60 0
(voir section 3-3).
Page 8
4 Installer l’unité de puissance, brancher
l’alimentation de puissance et
l’alimentation de faible puissance
(voir section 3-4).
5 Installer le capteur d’angle de barre
(voir section 3-5).
6 Installer le compas (voir section 3-6).
7 Installer le gyromètre (voir section 3-7).
8 Installer le boîtier et les autres instruments
de navigation qui seront connectés au
système du G-PILOT 3380 (voir section 3-8 ).
9 Procéder aux réglages à quai
(voir section 4).
10 Procéder aux essais en mer (voir section 5).
Si vous n’êtes pas sûr de l’emplacement
de montage d’un élément, installez-le et
connectez-le provisoirement, sans percer de
trou dans la structure. Installez-le de manière
définitive une fois les essais en mer terminés.
3-2 Guide d’installation
Cette par tie contient les instructions générales de montage et de câblage des éléments du G-PILOT
3380. Pour l’installation de certains éléments, ces instructions pourront être complétées par des
recommandations plus spécif iques.
3-2-1 Emplacement de montage
N’installer aucun élément à un endroit où
il pourrait servir d’appui ou de prise, à un
endroit où il gênerait les manœuvres ni à
un endroit submersible.
N’installer aucun élément à un endroit où il
gênerait la mise à l’eau ou le remorquage
du bateau.
Installer les éléments à plus de 0,5 m du
plan horizontal d’une antenne radar.
Installer le compas et le gyromètre :
à plus de 1 m de toute source de
signaux ou interférences électriques,
telle qu’une batterie, un câble courant
fort ou autre, un moteur, une lampe
fluo, un inverseur, un émetteur/
récepteur radio ou radar, une antenne.
à plus de 1 m de tout élément contenant
un aimant, tel qu’un compas ou un
haut-parleur.
3-2-2 Câblage
Le G-PILOT 3380 utilise deux types de câbles :
L’alimentation de puissance et l’unité
de puissance nécessitent généralement
l’utilisation de câbles courant fort :
Utiliser une section de fil adaptée à votre
installation (voir tableau des sections de fil,
section 3-4 -2).
Installer les câbles courant fort à plus de
G-PILOT 33 80 Notice d ’install ation NAVMAN 9
1 m des autres équipements électroniques
du bateau.
Veiller à ce que le câblage soit le plus court
possible.
Le câble 2 brins (2,5 mm²) fourni avec le
G-PILOT 3380 peut être utilisé comme câble
courant fort si la section des fils est adaptée
à votre installation.
Tous les autres éléments du système utilisent
des câbles courant faible :
Installer les câbles courant faible à plus
de 1 m de toute source de signaux ou
interférences électriques, telle qu’un câble
courant fort ou autre, un moteur, une
lampe fluo, un inverseur, un émetteur/
récepteur radio ou radar, une antenne.
Si le câble du capteur d’angle de barre, du
compas ou du gyromètre est trop long,
ne pas couper le câble mais l’enrouler au
niveau du calculateur.
Il est possible de rallonger le câble du
capteur d’angle de barre, du compas ou du
gyromètre à l’aide d’un câble d’extension
10 m et d’un connecteur. Ne pas utiliser
plus d’un câble d’extension par appareil.
Lors de l’installation de tout câble :
Ne pas écraser, plier ou tendre le câble.
Fixer le câble à inter valles réguliers.
Veiller à ce qu’il n’y ait pas de connecteur
ou de prise non protégée en fond de cale.
Page 9
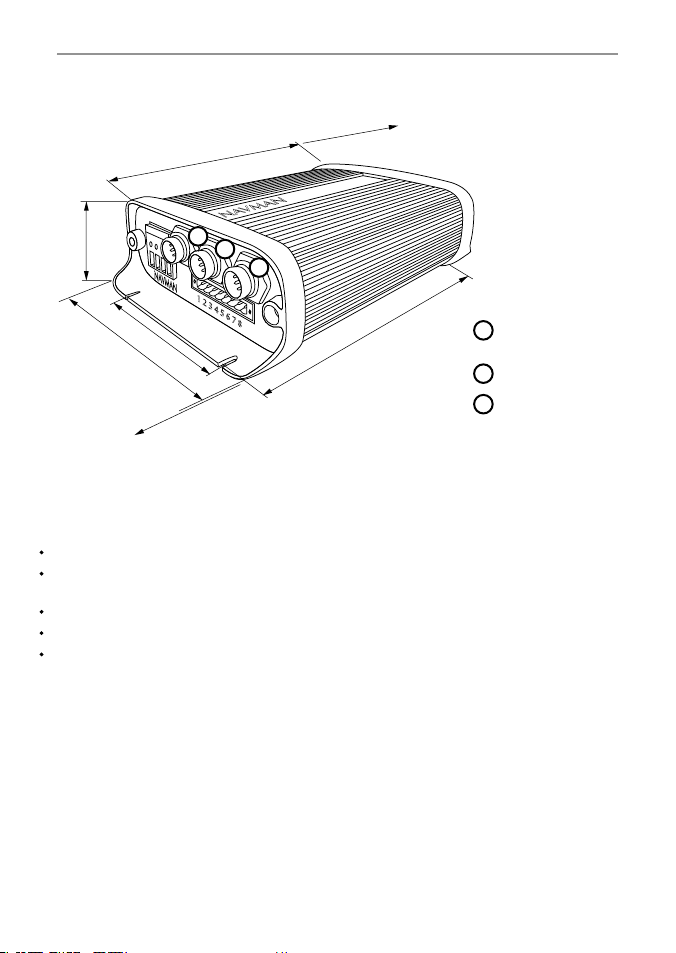
3-3 Installation du calculateur MCU600
Matériel
200 mm
1
55 mm
2
3
200 mm
IMPORTANT : laisser un dégagement de 20 cm minimum pour le
retrait du capot.
90 mm entre l es deux vis
140 mm
84 mm entre les deux vis
1
Capteur d’angle
1
de barre
Gyromètre
2
3
Compas
60 mm
IMPORTANT : laisser un dégagement minimum de 60 mm
pour le branchement des câbles.
Installation
Choisir un emplacement de montage adapté :
Dans un endroit sec et bien ventilé, si possible hors du compartiment moteur.
A proximité de l’alimentation de puissance et de l’unité de puissance af in de raccourcir au
maximum la longueur du câblage courant fort.
Facilement accessible pour l’installation et l’entretien de l’appareil.
Si possible sur une surface plane et verticale qui ne vibre pas .
Suivre les instruc tions du guide d’installation sur l’emplacement de montage (voir section 3-2-1).
A l’aide des vis fournies, installer le calculateur de sorte que les prises soient en bas de l’appareil ou sur
l’un de ses côtés, et non en haut afin d’éviter tout risque d’infiltration d’humidité ou de poussière.
10 NAVMAN G-PILOT 33 80 Notice d ’install ation
Page 10
3-4 Installation de l’alimentation et de l ’unité de puissance
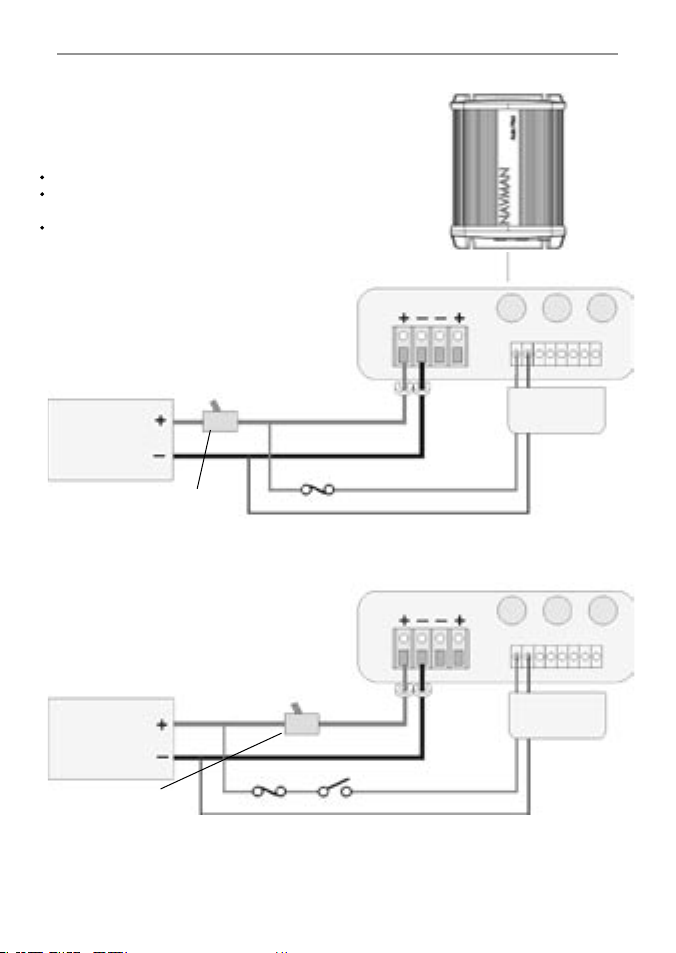
3-4-1 Installation de l’alimentation
Le calculateur MCU600 utilise deux types d’alimentation
électrique : une alimentation de puissance et une alimentation
de faible puissance, toutes deux 12 V CC.
Important
Veiller à ce que le câblage soit le plus court possible.
Pour l’alimentation de puissance, utiliser une section de fil adaptée à
votre installation (voir tableau des sections de fil, section 3-4-2).
Suivre les instructions de câblage du guide d’installation
(voir section 3-2-2).
Alimentation : circuit avec un seul interrupteur
Choisissez cette configuration si vous souhaitez
allumer et éteindre le G-PILOT 3380 et les autres
instruments à bord simultanément.
Alimentation
12 V CC, intensité
suivant
l’unité de
puissance
Interrupteur + fusible ou
coupe-circuit, ampérage
suivant l’unité de puissance
Alimentation : circuit avec deux interrupteurs
Choisissez cette configuration si vous souh aitez
pouvoir éteindre l’unité de puissance tout en laissant
les autres instruments allumés.
Installer des serre-câbles.
Fusible 1 A
MCU600
Courant fort
1 2 3 4 5 6 7 8
Protection de
prises
Courant faible
1 2 3 4 5 6 7 8
Alimentation
12 V CC, intensité
suivant
l’unité de
puissance
Interrupteur + fusible
ou coupe-circuit, am-
pérage suivant l’unité
de puissance
Installer des serre-câbles.
Fusible 1 A
Courant fort
Interrupteur
Protection de
prises
Courant
faible
Remarque : si votre système comporte plus de quatre boîtiers G-PILOT ou d’autres instruments de navigation, installez un interrupteur et un fusible supplémentaires sur le circuit d’alimentation de ces appareils.
G-PILOT 33 80 Notice d ’install ation NAVMAN 11
Page 11

3-4-2 Instal lation de l’unité de puissance
Connecter l’unité de puissance en suivant l’un des schémas proposés (voir pages suivantes).
Important
Veiller à ce que le câblage soit le plus court possible.
Utiliser une section de fil adaptée à votre installation (voir tableau ci-dessous).
Suivre les instructions de câblage du guide d’installation (voir section 3-2-2).
Les fils de section supérieure à 6 mm² ne peuvent pas être connectés directement au boîtier de
raccordement 4 bornes. Installer des férules ou bien terminer les fils avec un fil de section 6 mm².
Si vous deviez connecter plus d’un fil sur une même borne du boîtier de raccordement, couplez les fils
avec soin.
Tableau des sections de fil
Pour déterminer la section de fil adaptée à votre installation :
1 Mesurez la longueur de câble nécessaire, c’est-à-dire la distance entre le calculateur et
l’alimentation de puissance ou l’unité de puissance.
2 Sélectionnez la colonne correspondant à la longueur de câble nécessaire et la ligne
correspon-dant à l’intensité du courant d’alimentation. L’intersection des deux vous donne la
section de fil minimum recommandée pour des chutes de tension < 3 % dans un circuit 12 V.
Longueur du câble (du calculateur à l’alimentation ou à l’unité de puissance)
Intensité
1 amp
2 amp
3 amp
4 amp
5 amp
6 amp
7 amp
8 amp
9 amp
10 amp
15 amp
20 amp
2,5 ft
0,7 m
#18
0,75 mm
#18
0,75 mm
#18
0,75 mm
#18
0,75 mm
#18
0,75 mm
#18
0,75 mm
#18
0,75 mm
#18
0,75 mm
#18
0,75 mm
#18
0,75 mm
#16
1,5 mm
#14
2,5 mm
5 ft
1,5 m
#18
0,75 mm
#18
0,75 mm
#18
0,75 mm
#18
0,75 mm
#16
1,5 mm
#16
1,5 mm
#16
1,5 mm
#16
1,5 mm
#16
1,5 mm
#14
2,5 mm
#12
4 mm
#12
4 mm
7,5 ft
2,2 m
0,75 mm
0,75 mm
0,75 mm
1,5 mm
1,5 mm
1,5 mm
2,5 mm
2,5 mm
2,5 mm
4 mm
4 mm
6 mm#810 mm#810 mm#616 mm#616 mm#616 mm
#18
#18
#18
#16
#16
#16
#14
#14
#14
#12
#12
#10
10 ft
3 m
#18
0,75 mm
#18
0,75 mm
#16
1,5 mm
#16
1,5 mm
#14
2,5 mm
#14
2,5 mm
#14
2,5 mm
#12
4 mm
#12
4 mm
#12
4 mm
#10
6 mm
12,5 ft
3,7 m
0,75 mm
0,75 mm
1,5 mm
2,5 mm
2,5 mm
4 mm
4 mm
4 mm
4 mm
6 mm
6 mm#810 mm#810 mm#616 mm
#18
#18
#16
#14
#14
#12
#12
#12
#12
#10
#10
15 ft
4,5 m
#18
0,75 mm
#16
1,5 mm
#16
1,5 mm
#14
2,5 mm
#12
4 mm
#12
4 mm
#12
4 mm
#10
6 mm
#10
6 mm
#10
6 mm
17,5 ft
5,2 m
#18
0,75 mm
0,75 mm
#16
1,5 mm
2,5 mm
2,5 mm
1,5 mm
#14
2,5 mm
#14
4 mm
#12
4 mm
4 mm
6 mm
6 mm
6 mm
6 mm#810 mm
#12
#10
#10
#10
#10
4 mm
6 mm
6 mm
6 mm
6 mm
20 ft
6 m
#18
#16
#14
#12
#12
#10
#10
#10
#10
12 NAVMAN G-PILOT 33 80 Notice d ’install ation
Page 12

Exemple d’un système de direction hydraulique avec pompe hydraulique
Dans le menu Paramétrage > Bateau (voir notice d’utilisation du G-PILOT 3380), régler la fonction Type
unité puis. sur Moteur.
Calculateur MCU600
Installer des serre-câbles.
Courant fort (voir section 3-4-1)
Moteur
La polarité des câbles
n’a pas d’importance.
Pas de connexion
Exemple d’un système de direction mécanique avec ensemble linéaire
hydraulique (voiliers)
Dans le menu Paramétrage > Bateau (voir notice d’utilisation du G-PILOT 3380), régler la fonction Type
unité puis. sur Moteur.
Calculateur MCU600
Important : la bobine d’embrayage ne
doit pas consommer plus de 300 mA.
Installer des serre-câbles.
Courant fort (voir section 3-4-1)
La polarité des câbles
n’a pas d’importance.
Moteur
Bobine
d’embrayage
G-PILOT 33 80 Notice d ’install ation NAVMAN 13
Diode 1N4002 ou équivalent,
à installer près de la bobine.
Protection de
prises
Page 13

Montage d’un moteur électrique avec embrayage
Dans le menu Paramétrage > Bateau (voir notice d’utilisation du G-PILOT 3380), régler la fonction Type
unité puis. sur Moteur.
Calculateur MCU600
Installer des serre-câbles.
Courant fort (voir section 3-4-1)
Diode 1N4002 ou équivalent,
à installer près de la bobine.
Bobine
d’embrayage
Moteur
Contacts relais
La polarité des câbles
n’a pas d’importance.
Diode 1N4002 ou équivalent, à
installer près de la bobine.
Remarque : installer un relais si le circuit
d’embrayage nécessite un ampérage
supérieur à 300 mA.
Protection de
prises
Bobine relais
Montage d’une pompe à débit continu et d’électrovannes
Dans le menu Paramétrage > Bateau (voir notice d’utilisation du G-PILOT 3380), régler la fonction Type
unité puis. sur Bobine masse.
Courant fort (voir section 3-4-1)
Remarque : les systèmes
de prise de puissance
mécanique fonctionnent
sans moteur.
Installer des serre-câbles.
Contacts relais
Moteur
câbles n’a pas d’importance.
La polarité des
Tribord
Bâbord
Calculateur MCU600
Protection de
prises
Bobine relais
Diode 1N4002 ou équivalent,
à installer près de la bobine.
Remarque : installer un relais
si le circuit d’embrayage nécessite un ampérage supérieur à
300 mA.
14 NAVMAN G-PILOT 33 80 Notice d ’install ation
Page 14

Montage d’électrovannes ou de relais à commande électrique
Dans le menu Paramétrage > Bateau (voir notice d’utilisation du G-PILOT 3380), régler la fonction Type
unité puis. sur Bobine masse.
Calculateur MCU600
Installer des serre-câbles.
Courant fort (voir section 3-4-1)
Pas de connexion
Tribord
Bâbord
Commandes électriques
G-PILOT 33 80 Notice d ’install ation NAVMAN 15
Page 15

3-5 Installation du capteur d’angle de barre
Matériel
90 mm
220 mm
Bras de
mèche
Mèche de
gouvernail
Tige filetée avec à chaque
extrémité embout et
contre-écrou facilement
démontables
Base
Connecteur LT8
Le bras du capteur
Bras du
doit pouvoir
capteur
pivoter librement
autour de la base.
Embout de la tige
filetée inséré dans un
des trous du bras
Câble 10 m
Instruc tions de montage
Ces deux
distances
doivent être
égales.
Ajuster la position de la tige
sur le bras du capteur si
nécessaire.
Installer la base de sorte
que cet angle soit égal
à 90°.
Couper la tige si
nécessaire.
Filetage = M5
Ces deux
distances
doivent être
égales.
La mèche de
gouvernail doit être
parallèle à l’axe de
la base.
Le bras de mèche et
le bras du capteur
doivent se déplacer
sur un même plan
horizontal.
Important
Bien que le capteur d’angle de barre soit totalement étanche, il ne doit pas être immergé.
Installer le capteur d’angle de barre sur une surface plane qui ne vibre pas.
Suivre les instructions du guide d’installation sur l’emplacement de montage (voir section 3-2-1).
16 NAVMAN G-PILOT 33 80 Notice d ’install ation
Page 16

Alignement
Le bras du capteur d’angle de barre doit pouvoir pivoter librement autour de la base. Lorsque la barre est
au centre, la flèche sur le bras du capteur doit pointer vers l’une des lignes de centrage de la base.
Ligne de centrage
Base
Ligne de centrage
La base du capteur peut donc être installée de deux façons différentes. Il est toutefois recommandé de
placer la base de sorte que le câble du capteur ne se trouve pas du côté de la tige filetée.
Marquagesreprésentant
les deux échelles linéaires
du capteur
Conseillé
(barre au centre).
Déconseillé, le câble pouvant
s’enrouler autour du bras de mèche.
Exemples d’installation
Conseillé : disposition en U, le bras du capteur parallèle à l’axe longitudinal du bateau. Exemples :
Proue
Acceptable : disposition en U, le bras du
capteur non parallèle à l’axe longitudinal
du bateau. Exemple :
Proue
G-PILOT 33 80 Notice d ’install ation NAVMAN 17
Déconseillé : disposition en Z.
Exemple :
Si la barre effectue une rotation trop importante, le
capteur d’angle de barre risque de ne pas revenir à sa
position initiale.
Page 17

Installation
1 Choisir un emplacement et une disposition de montage adaptés au capteur
(voir pages précédentes).
2 Choisir, assembler et installer un bras de mèche adapté au capteur.
3 Installer le capteur d’angle de barre comme suit :
Mettre la
barre au
centre.
Si nécessaire, couper la tige
filetée à cette extrémité,
puis replacer le raccord de
couplage et le contre-écrou
sur la tige.
4 Connecter le câble du capteur au calculateur MCU600 en suivant les instructions de câblage du
guide d’installation (voir section 3-2-2).
Si nécessaire,
rehausser la base à
l’aide d’une cale.
Fixer le raccord de
couplage de la tige
au bras de mèche.
Faire pivoter la base de sorte
que la flèche sur le bras du
capteur pointe vers la ligne de
centrage. Introduire les deux vis
fournies au milieu des fentes de
la base et les visser sans forcer.
Introduire l’embout
de la tige dans le trou
correspondant.
Ajuster la position de la base
de sorte que la flèche sur
le bras du capteur pointe
exactement vers la ligne
de centrage. Installer la
troisième vis, puis serrer les
trois vis.
Vérifier que la
barre est au
centre.
Les trous percés dans les
cloisons doivent avoir un
diamètre minimum de
18,5 mm.
Insérer le connecteur dans la prise
correspondante (voir section 3-3).
MCU600
18 NAVMAN G-PILOT 33 80 Notice d ’install ation
Page 18

3-6 Insta llation du compas
Matériel
Trous de montage
des vis
101 mm
71 mm
97 mm
Connecteur LT8
Emplacement de mont age
Installer le compas :
à plus de 1 m de tout élément en acier ou en
fer, tel que :
une coque, un pont ou une cabine en
acier, l’armature en acier d’une coque en
ferrociment.
un équipement en acier (moteur,
appareil de cuisson, ...).
un local de stockage d’objets en acier
(coffre des ancres, caisson de range
ment, ...).
à plus de 2 m de tout équipement contenant
un aimant ou de tout appareil créant des
champs électromagnétiques tel qu’un
compas, une batterie, un câble courant fort,
un moteur électrique, un émetteur/récep
10 m
le plus près possible du centre de gravité
du bateau afin de réduire au maximum les
mouvements du compas lorsque le bateau
tangue ou roule. Si le compas ne peut pas
être installé à cet endroit, nous vous conseil
lons de le monter le plus bas possible sur le
bateau.
sur une surface plane et verticale qui ne
vibre pas.
Bien que le compas soit totalement étanche,
-
il ne doit pas être immergé. Les autres
métaux comme l’inox, le cuivre ou le laiton ne
perturbent pas le fonctionnement du compas.
Suivre les instructions du guide d’installation
sur l’emplacement de montage (voir section
3-2-1).
-
teur radio ou radar, une antenne.
Coque et cabine en fibre de verre ou en bois :
installer le compas au niveau du centre de gravité du
bateau (sur les coques planantes, le centre de gravité se situe généralement près de la poupe) :
Coque en acier et cabine sans acier :
le compas 1 m au-dessus de la coque :
installer
Coque et cabine en acier :
sur un mât, 1 m au-dessus de la coque et à 1 m
installer le compas
minimum de la cabine :
1 m
1 m minimum
1 m
-
G-PILOT 33 80 Notice d ’install ation NAVMAN 19
Page 19

Installation
1 Choisir un emplacement de montage adapté au compas (voir page précécente).
2 Fixer le compas à l’aide des trois vis fournies. S’assurer que le compas est à la verticale (+/- 10°) à
l’aide d’un niveau.
Maximum
10° 10°
Maximum
10° 10°
3 Connecter le câble du compas au calculateur MCU600 en suivant les instructions de câblage du
guide d’installation (voir section 3-2-2).
Les trous percés dans les
cloisons doivent avoir un
diamètre minimum de
18,5 mm.
Insérer le connecteur dans la prise
correspondante (voir section 3-3).
Important
Si vous deviez déplacer votre compas alors que le G-PILOT 3380 est sous tension, attendez que le cap
compas se stabilise avant de poursuivre votre route.
20 NAVMAN G-PILOT 33 80 Notice d ’install ation
Page 20

3-7 Installatio n du gyromètre
Matériel
101 mm
71 mm
Trous de montage
des vis
Connecteur LT8
10 m
97 mm
Emplacement de mont age
Installer le gyromètre le plus près possible du centre de gravité du bateau afin de réduire au
maximum les mouvements du gyromètre lorsque le bateau tangue ou roule.
Fixer le gyromètre sur une surface plane et verticale qui ne vibre pas.
Bien que le gyromètre soit totalement étanche, il ne doit pas être immergé. Suivre les instructions
du guide d’installation sur l’emplacement de montage (voir section 3-2-1).
Le centre de gravité du bateau est l’emplacement de montage idéal (sur les coques planantes, le centre
de gravité se situe en général près de la poupe).
G-PILOT 33 80 Notice d ’install ation NAVMAN 21
Page 21

Installation
1 Choisir un emplacement de montage adapté au gyromètre (voir page précédente).
2 Fixer le gyromètre à l’aide des trois vis fournies. S’assurer que le gyromètre est à la verticale
(+/- 10°) à l’aide d’un niveau.
Maximum
10° 10°
3 Connecter le câble du gyromètre au calculateur MCU600 en suivant les instructions de câblage du
guide d’installation (voir section 3-2-2).
Les trous percés dans les
cloisons doivent avoir un
diamètre minimum de
18,5 mm.
Insérer le connecteur dans la prise
correspondante (voir section 3-3).
Important
Si vous deviez déplacer votre gyromètre alors que le G-PILOT 3380 est sous tension, attendez que le cap
compas se stabilise avant de poursuivre votre route.
Maximum
10° 10°
3-8 Installation du boîtier du G-PILOT 3380 et des autres instruments
Le boîtier du G-PILOT 3380 peut être installé de
deux manières :
Montag e encastré : la sur face de montage du
boîtier doit être plane, robuste et accessible
de l’arrière pour le branchement des câbles
et l’installation des vis. Une fois encastré, le
boîtier ne peut pas être déplacé ou incliné
pour atténuer les reflets ou la réverbération sur
l’écran. Avant d’installer le boîtier, sélectionner
22 NAVMAN G-PILOT 33 80 Notice d ’install ation
l’emplacement de montage offrant la meilleure
lisibilité (généralement à un endroit abrité du
soleil).
Instructions de montage
1 Percer dans la cloison le trou de montage
du boîtier en utilisant le gabarit de
montage.
2 Percer les quatre trous des vis comme
indiqué sur le gabarit.
Page 22

3 Visser les quatre vis dans les inserts en
cuivre à l’arrière du boîtier.
4 Insérer le boîtier dans le trou de montage,
placer les rondelles en caoutchouc sur les
vis, puis visser les écrous.
Montag e sur étrier : la sur face de montage
de l’étrier doit être plane et rigide et ne doit
pas être exposée à des vibrations excessives.
Une fois installé, le boîtier peut pivoter et être
démonté après chaque utilisation.
Choisir un emplacement de montage où le boîtier
sera :
• à plus de 10 cm d’un compas.
• à plus de 30 cm d’un émetteur/récepteur
radio.
• à plus de 1,20 m d’une antenne.
• bien lisible et facile à utiliser. Pour une
lisibilité optimale de l’écran, installer si
possible le boîtier face au barreur ou à sa
droite.
• protégé de la lumière directe du soleil et
des projections d’eau.
• protégé de tout risque de choc en cas de
mer forte.
• facile à connecter à l’alimentation.
• bien placé pour le passage des câbles.
Instructions de montage
1 Fixer l’étrier sur la surface de montage à
l’aide des quatre vis en inox.
2 Installer le boîtier sur l’étrier et le maintenir
en place. Insérer les molettes de l’étrier
de chaque côté du boîtier, puis visser les
molettes sans forcer.
3 Ajuster l’inclinaison du boîtier pour obtenir
une lisibilité optimale, puis serrer à la main
les molettes de l’étrier.
G-PILOT 33 80 Notice d ’install ation NAVMAN 23
Page 23

Branchement du boîtier
Brancher le câble d’alimentation dans la
Boîtier
prise noire située à l’arrière du boîtier du
Calculateur
MCU600
Sortie relais d’embrayage : 8
Borne + alim. 12 V, rouge : 1
NMEA 2 : 7
Entrée NMEA 1 : 6
NMEA commun : 5
NavBus -, bleu : 4
NavBus +, orange : 3
Masse, noir : 2
Boîtier de raccordement 8 bornes
Protection de prises
Vert
Important
Connecter les fils d’alimentation du boîtier (fils rouge et noir) aux bornes 1 et 2 du boîtier de raccorde-
ment afin que le calculateur et le boîtier soient alimentés par le même courant de faible intensité.
• Suivre le s instructions de câ blage du guide d’i nstallation (voir se ction 3-2-2).
G-PILOT 3380.
Câble du boîtier : percer un trou de 18 mm
minimum de diamètre dans la cloison.
Jaune (isoler, ne pas couper)
Blanc (isoler, ne pas couper)
Courant faible
(voir section 3-4-1)
Feux et buzzers externes optionnels. Si ces alarmes externes nécessitent un ampérage total supérieur
à 250 mA, installer un relais.
24 NAVMAN G-PILOT 33 80 Notice d ’install ation
Page 24

Branchement d’autres instruments
Boîtiers G-PILOT 3380
ou 3100
supplémentaires
Boîtiers
Autres
instruments de
navigation
Boîtiers
GPS (ex. traceur
de cartes Navman
TRACKER 5600)
GPS
Calculateur
MCU600
Alimentation,
entrée NMEA
Embrayage, en
option (voir
section 3-4-2)
Entrée ou sortie
NMEA
Sortie NMEA GPS
NMEA GPS commun
Courant faible
(voir section 3-4-1)
Feux et buzzers externes
(voir page précédente)
Sortie relais d’embrayage : 8
NMEA 2 : 7
Entrée NMEA 1 : 6
NMEA commun : 5
NavBus -, bleu : 4
NavBus +, orange : 3
Masse, noir : 2
Borne + alim. 12 V, rouge : 1
Vert (connexion à un seul boîtier)
Entrée &
sortie
NMEA
Protection de prises
VertVert
Important
Se repor ter à la notice des instruments pour plus d’informations sur les branchements électriques.
Si votre système comprend plus de quatre boîtiers G-PILOT ou d’autres instruments de navigation,
connectez ces appareils à une batterie annexe de faible puissance (voir section 3-4 ou notices
des instruments).
Les sorties alarmes externes (fil vert) des instruments de navigation Navman et des traceurs de cartes
Navman série 5000 peuvent être connectées entre elles pour le déclenchement des feux et buzzers
externes.
Pour les systèmes intégrant plusieurs instruments, il est conseillé d’utiliser des boîtiers de connexion
NavBus pour simplifier le câblage entre les instruments (voir notice du NavBus).
• Suivre les instructions de câblage du guide d’installation (voir section 3-2-2).
G-PILOT 33 80 Notice d ’install ation NAVMAN 25
Page 25

4 Réglages à quai
Procéder aux réglages à quai :
après avoir installé les différents éléments du G-PILOT 3380 (voir section 3).
après avoir changé une pièce du système ou lorsqu’un problème a été détecté.
Une fois les réglages à quai effectués, procéder aux essais en mer (voir section 5).
4-1 Initialisation
1 Mettre le G-PILOT 3380 sous tension (voir notice d’utilisation du G-PILOT 3380). Si la barre bouge,
éteindre immédiatement l’appareil.
Si vous activez le mode AUTO alors que le capteur d’angle de barre et le compas n’ont pas été
étalonnés, le G-PILOT 3380 affichera un message d’erreur.
2 Si le G-PILOT 3380 a déjà été utilisé, ef facer toutes les données utilisateur et rétablir les valeurs
par défaut du fabricant. Sélectionner la fonc tion Retour param. dé faut > Les deux dans le menu
Paramétrage > Systè me (voir notice d’utilisation du G-PILOT 3380).
3 Entrer les données utilisateur figurant dans le tableau de l’appendice C (se reporter à la notice
d’utilisation du G-PILOT 3380 pour plus d’informations sur les données utilisateur et leur para-
métrage). En face de chaque donnée, inscrire la valeur de réglage sélectionnée.
Attention : tant que le capteur d’angle de barre n’a pas été étalonné (voir section 4-2), le G-PILOTe
automatique n’a pas de limite de barre. Lorsque vous G-PILOTez le bateau à l’aide de la commande de
barre à distance (voir notice d’utilisation du G-PILOT 3380), veillez à ne pas amener la barre en butée.
4-2 Etalonnage du capte ur d’angle de barre
Cette procédure permet d’aligner le capteur d’angle de barre sur la barre.
Important
Pour quitter l’opération d’étalonnage à tout moment, appuyer sur la touche ESC.
Si vous ne déplacez la barre comme indiqué ou si le capteur d’angle de barre ne fonctionne pas, le
G-PILOT 3380 stoppera l’opération d’étalonnage et un message d’erreur s’affichera à l’écran. Appuyer sur
la touche ESC, résoudre le problème puis recommencer l’opération d’étalonnage.
Une fois le G-PILOT 3380 opérationnel, celui-ci déplacera la barre au maximum à 3° de la butée bâbord
ou tribord.
Pour étalonner le capteur d’angle de barre, sélectionner la fonction B arre dans le menu
Paramétrage > Etal onnage. Suivre les instructions affichées à l’écran par l’assistant d ’étalonnage
(voir notice d’utilisation du G-PILOT 3380).
26 NAVMAN G-PILOT 33 80 Notice d ’install ation
Page 26

5 Essais en mer
Procéder aux essais en mer :
après avoir effectué les réglages à quai
(voir section 4).
pour vérifier le fonctionnement du
G-PILOT 3380.
5-1 Etalonnage du compas
Important
Pour quitter l’opération d’étalonnage à tout moment, appuyer sur la touche ESC.
Si vous ne manœuvrez pas le bateau comme indiqué ou si le compas ne fonctionne pas, le G-PILOT
3380 stoppera l’opération d’étalonnage et affichera un message d’erreur. Appuyer sur la touche ESC,
résoudre le problème puis recommencer l’opération d’étalonnage.
Les variations magnétiques locales peuvent perturber le fonctionnement du compas. Il incombe à
l’utilisateur de veiller à étalonner le compas loin de masses métalliques importantes telles qu’une
marina, un cargo, etc.
Vérifier que les deux sources compas indiquent le même nord (vrai ou magnétique). Si le compas
magné-tique du bateau n’a pas été étalonné, utiliser un autre instrument pour mesurer le cap. Sinon,
veiller à appliquer les tables de déviation lors de la vérification des données du compas du G-PILOTe
automatique.
Pour étalonner le compas du G-PILOT 3380, sélectionner la fonction Compa s dans le menu
Paramétrage > Etal onnage. Suivre les instructions affichées à l’écran par l’assistant d ’étalonnage
(voir notice d’utilisation du G-PILOT 3380).
5-2 Alignement du compas et de la barre
L’alignement du compas et l’alignement de la barre sont deux opérations indépendantes l’une
de l’autre.
5-2-1 Alignement du compas
Cette procédure permet d’aligner le compas du G-PILOT 3380 afin que celui-ci affiche le cap réel.
Le compas peut être aligné soit sur un compas de référence, soit sur un GPS connecté au G-PILOT 3380.
Pendant l’opération d’alignement, veiller à ce qu’il n’y ait ni courant ni vent de travers.
Pour aligner le compas, sélectionner la fonction Aligner l e compas dans le menu Paramé trage >
Etalonnage. Suivre les instructions affichées à l’écran par l’assistant d’étalonnage (voir notice
d’utilisation du G- PILOT 3380).
5-2-2 Alignement de la barre
Cette procédure définit le réglage de la barre permettant au bateau de naviguer en ligne droite.
Pendant l’opération d’alignement, veiller à ce qu’il n’y ait ni courant ni vent de travers.
Pour aligner la barre, sélectionner la fonction Centrer la bar re dans le menu Paramétrage >
Etalonnage. Suivre les instructions affichées à l’écran par l’assistant d’étalonnage (voir notice
d’utilisation du G- PILOT 3380).
Effectuer ces essais au large, dans une zone de
navigation non fréquentée et sans obstacle. La mer
doit être plate, le vent aussi faible que possible et
les courants nuls.
G-PILOT 33 80 Notice d ’install ation NAVMAN 27
Page 27

Appendice A - Caractéristiques techniques du calculateur MCU600
Caractéristiques électriques
Alimentation de l’unité de puissance : 10,5 à
16,5 V CC, 20 A maxi.
Alimentation du boî tier de raccordement 8
bornes : 10,5 à 16,5 V CC, 300 mA.
Autres instruments optionnels : se repor ter à la
notice des instruments.
Interfaces
NavBus : connexion à d’autres instruments
Navman et aux boîtiers supplémentaires du
G-PILOT 3380.
Ports NMEA 0183 : NMEA 1 : entrée ; NMEA 2 :
entrée ou sortie, paramétrable par l’utilisateur.
Données de sortie NMEA 0183 : HDG, HDT,
RSA.
Données d’entrée NMEA 0183 : APA, APB,
BOD, BWC, MWD, MW V, RMA, RMB, RMC, VHW,
VTG, XTE.
Conformité aux normes
EMC :
Etats-Unis (FCC) : Par t 15 Class B.
Europe (CE) : EN301 843-1.
Nouvelle-Zélande et Australie (C Tick) : AS-NZS
3548.
Etanchéité
Compas : IPx6 et IPx7 - totalement étanche.
Gyromètre : IPx6 et IPx7 - totalement étanche.
Capteur d ’angle de barre : IPx6 et IPx7 -
totalement étanche.
Calculateur MCU600 : non étanche - à installer
dans un endroit sec et bien ventilé, à l’abri de
la poussière.
Connexions unité de puissance
du calculateur MCU600
Borne Signal
1 Borne positive de l’alimentation
de puissance, 10,5 à 16,5 V CC
2 Borne négative de l’alimentation
de puissance
3 Sortie unité de puissance négative
4 Sortie unité de puissance positive
Connexions du boîtier 8 bornes du
calculateur MCU600
Borne Signal
1 Borne positive de l’alimentation
de faible puissance, 10,5 à 16,5
V CC
2 Alimentation de faible puissance
commune
3 Navbus +
4 NavBus -
5 NMEA commun
6 NMEA 1 (Entrée)
7 NMEA 2 (Entrée/Sortie)
8 Sortie relais d’embrayage,
branchement à la masse pour la
mise sous tension, 30 V CC, 30 0
mA
Protection électrique
2 fusibles identiques type.
Type : fusible à lames ATC.
Ampérage : 20 A.
28 NAVMAN G-PILOT 33 80 Notice d ’install ation
Page 28

Appendice B - Caractéristiques techniques du boîtier du G-PILOT 3380
Caractéristiques électriques
Tension d’alimentation : 10,5 à 30,5 V CC.
Consommation (@ 13,8 V) : 160 mA sans rétro -
éclairage, 410 mA avec rétro-éclairage maxi.
Autres instruments optionnels : se repor ter à la
notice des instruments.
Interfaces
NavBus : connexion au calculateur et à d’autres
instruments Navman.
Câble d’alimentation et de données du G-PILOT 3380
Connecteur noir - Alimentation et calculateur MCU600
Broche Couleur
du fil
5 Rouge Borne positive de la batterie, 10,5 à 30,5 V CC
1 Noir Borne négative de la b atterie
6 Orange Navbus +
4 Bleu NavBus -
7 Jaune Usage fab rication uniquement (isoler, ne pas couper)
3 Blanc Usage fab rication uniquement (isoler, ne pas couper)
8 Vert Alarmes externes, branchement à la masse, 30 V CC et 250 mA maxi
2 Marron Sor tie +9 V
Broche Couleur
du fil
5 Rouge Usage fab rication uniquement (isoler, ne pas couper)
1 Noir Borne négative de la b atterie
6 Orange Navbus +
4 Bleu NavBus -
7 Jaune Usage fab rication uniquement (isoler, ne pas couper)
3 Blanc Usage fab rication uniquement (isoler, ne pas couper)
8 Vert Usage fabrication uniquement (isoler, ne pas couper)
2 Marron Sor tie +9 V
Signal
Connecteur vert - Extension NavBus
Signal
Conformité aux normes
EMC :
Etats-Unis (FCC) : Par t 15 Class B.
Europe (CE) : EN301 843-1.
Nouvelle-Zélande et Australie (C Tick) :
AS-NZS 3548.
Etanchéité
IPx6 et IP x7 - totalement étanche.
G-PILOT 33 80 Notice d ’install ation NAVMAN 29
Page 29

Appendice C - Données utilisateur
Tableau des données utilisateur (mémo des données de paramétrage)
Menu > Paramétrage > SYSTEME
Langue
Mode nuit
Bip
Extinction auto
SmartCraft
Menu > Paramétrage > OPTIONS
Angle évitemt
Mode viremt
Angle viremt
Mode empan.
Angle empan.
Délai viremt
Vitesse viremt
Menu > Paramétrage > BATEAU
Type bateau
Type unité puis.
Fonctions vent
Menu > Paramétrage > ALARMES
Erreur de cap
XTE
Arrivée waypoint
Changemt vent
(voiliers
uniquement)
Alim. faible
Conso. élevée
30 NAVMAN G-PILOT 33 80 Notice d ’install ation
Page 30

Menu > Paramétrage > UNITES
Distance
Compas
Variation
magnétique
Vent
Menu > Paramétrage > TRANSFERT DONNEES
Mode NMEA
Groupe NavBus
Menu > Paramétrage > PROFILS
Profil (user 1)
Paramètres :
Adaptatif
Réponse
Gain barre
Avancé :
Trim
Contre barre
Gain GPS
Gain vent
Profil (user 2)
Paramètres :
Adaptatif
Réponse
Gain barre
Avancé :
Trim
Contre barre
Gain GPS
Gain vent
G-PILOT 33 80 Notice d ’install ation NAVMAN 31
Page 31

Profil (user 3)
Paramètres :
Adaptatif
Réponse
Gain barre
Avancé :
Trim
Contre barre
Gain GPS
Gain vent
Profil (user 4)
Paramètres :
Adaptatif
Réponse
Gain barre
Avancé :
Trim
Contre barre
Gain GPS
Gain vent
Profil (user 5)
Paramètres :
Adaptatif
Réponse
Gain barre
Avancé :
Trim
Contre barre
Gain GPS
Gain vent
32 NAVMAN G-PILOT 33 80 Notice d ’install ation
Page 32

Made in New Zealand
MN000272A
P IL OT 3 38 0
Lon 174° 44.535’E
Lat 36° 48.404’S
NAVMAN
 Loading...
Loading...