

Page 1
Pilot 3380
A U T O P I L O T S Y S T E M
Installation Manual
Svenska
w w w . n a v m a n . c o m
NAVMAN
w w w . n a v m a n . c o m
Page 2

Innehåll
1 Introduktion ........................................................................................................................................36
1-1 En typisk PILOT 3380-systeminstallation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .36
1-2 Använda PILOT 3380-systemet tillsammans med andra instrument . . . . . . . . . . . . . .37
1-2-1 Använda andra instrument . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37
1-2-2 NavBus . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .37
1-2-3 NMEA . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37
2 PILOT 3380-systemets maskinvara .......................................................................................................38
2-1 Vad levereras med ditt PILOT 3380-system? . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .38
2-2 Övriga delar som behövs . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .39
3 Installation .......................................................................................................................................... 39
3-1 Installationsförfarande . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .39
3-2 Installation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .40
3-2-1 Placering . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .40
3-2-2 Kabeldragning . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 40
3-3 Installation av MCU600 (Huvudkontrollenhet) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .41
3-4 Installation av strömförsörjning och styrservo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .42
3-4-1 Installation av strömförsörjningen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 42
3-4-2 Installera styrservot . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .43
3-5 Installation av RFU (rodrets feedbackenhet) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .47
3-6 Installera kompassen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .50
3-7 Installera gyrot . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .52
3-8 Installera bildskärmen för PILOT 3380 och övriga instrument . . . . . . . . . . . . . . . . . . . .53
4 Hamninstallation ................................................................................................................................ 57
4-1 Starta hamninstallationen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .57
4-2 Kalibrering av rodrets feedbackenhet . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .57
5 Tester till sjöss .....................................................................................................................................58
5-1 Kalibrera kompassen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .58
5-2 Rikta in kompass och roder . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .58
5-2-1 Rikta in kompassen (Rikta in kurs) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .58
5-2-2 Rikta in rodret (Centrera roder) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 58
Bilaga A - Tekniska data - MCU600 ........................................................................................................... 59
Bilaga B - Tekniska data - AP3380-skärmen ............................................................................................. 60
Bilaga C - Användarinformation ..............................................................................................................61
34 NAVMAN PILOT 3380 -system ets inst allation shandbok
Page 3
Viktigt!
Det åligger enbar t ägaren att installera och använda instrumentet och givaren/givarna på ett
sätt som inte orsak ar olyckor, personskador eller skador på egendom. Användaren av produkten
är ensam ansvarig för säker båtpraxis.
Val, placering och installation av alla komponenter i ett autopilotsystem är kritiskt. Om
installationen inte utförs korrekt, kan enheten inte prestera allt som den konstruerats för.
Kontakta din Navman-åter försäljare om du är t veksam. Se till at t eventuella hål som skärs
ut utförs på en säker plats och att de inte försvagar båtens skrov. Konsultera en kvalificerad
båtbyggare om du är tveksam.
Så här använder man PILOT 3380-systemet :
PILOT 3380-s ystemet är avsett som ett stöd, så att rorsmannen inte ska behöva st yra under
längre perioder, men är inte avsett som båtens huvudst yrning.
PILOT 3380-s ystemet är inte avset t för användning vid extrem väderlek, svåra förhållanden,
nära andra båtar, i farliga vatten eller nära land.
PILOT 3380-s ystemet kan inte st yra båten bättre än en rorsman. Styr båten manuellt under
svåra förhållanden.
Lämna aldrig rodret obevakat. Håll utkik hela tiden. Rorsmannen bör alltid övervaka båtens
kurs och PILOT 3380-systemet, och vara redo att ta över båtens st yrning manuellt.
PILOT 3380-s ystemets funktion kan påverkas av en söndrig detalj, miljömässiga
förhållanden, felaktig installation och användning.
NAVMAN NZ LIMITED AVSÄGER SIG ALLT ANSVAR FÖR ALL ANVÄNDNING AV DENNA PRODUKT
PÅ ETT SÄTT SOM SKULLE KUNNA ORSAKA OLYCKOR, SKADOR ELLER VARA OLAGLIG .
Eftersom Navman kontinuerligt förbättrar denna produkt, förbehåller vi oss rät ten att vid varje
tillfälle ändra produkten, vilket kanske inte återspeglas i denna version av bruksanvisningen.
Kontakta ditt närmaste Navman-kontor om du behöver yt terligare assistans.
Gällande språk: Detta meddelande, alla instruk tionsmanualer, användarguider och annan
information om produkten (dokumentationen) kan översättas till, eller har översat ts, från
ett annat språk (översättningen). Om tvist skulle uppstå beträffande någon översättning av
dokumentationen, är den engelska versionen av dokumentationen att betrakta som den
officiella versionen.
Copyright © 2005 Navman NZ Limited, Nya Zeeland. Alla rät tigheter förbehållna. Navman är ett
registrerat varumärke som tillhör Navman NZ Limited.
PILOT 3380 -system ets inst allation shandbok NAVMAN 35
Page 4
1 Introduktion
Så här används denna b ruksanvisni ng
Denna bruksanvisning beskriver hur man
installerar och ställer in systemet PILOT
3380. Referera till den separata PILOT 3380
Bruksanv isning, för information om hur man
använder PILOT 3380:s bildskärm.
För att installera ett PILOT 3380 -system, måste
du genomföra installation, hamninställning
och tester till sjöss (se avsnitten 3, 4 och 5).
För att ställa in ett PILOT 3380-system helt
efter at t någon del har ändrats, eller om man
misstänker problem, ska hamninställning och
tester till sjöss utföras igen (se avsnitten 4
och 5).
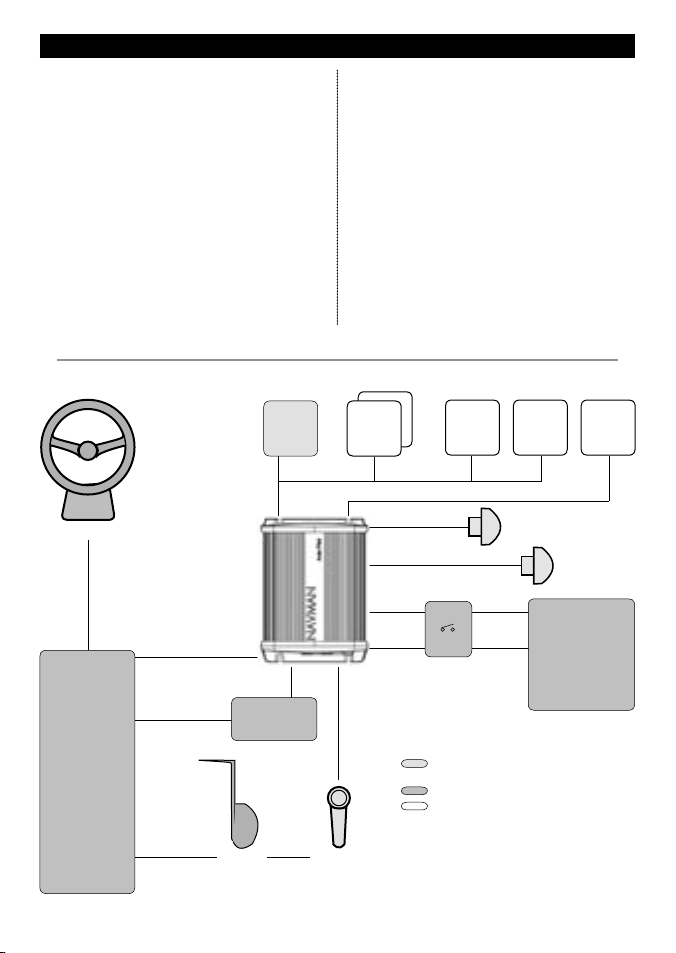
1-1 En typisk PILOT 3380-systemins tallation
Visa
enhet
NavBus
Manuellt roder
MCU600
För att kontrollera så att PILOT 3380 -systemet
fungerar som det ska, utför man tester till sjöss
(se avsnitt 5).
Rengöring och sköt sel
Rengör de olika delarna av PILOT
3380-systemet med en fuk tig trasa eller
milt rengöringsme del. Undvik frätande
rengöringsmedel, bensin och andra
lösningsmedel.
Måla inga delar av PILOT 3380 -systemet,
förutom kablaget.
Tillvalsinstrument
Fler bildskärmar
WIND
(VIND)
SPEED
(HAS-
TIGHET)
Kompass
Gyro
GPS
NMEA
Kopplingsservo
(tillval)
Strömbrytare eller
brytare och
strömskydd
Svagström
Starkström
12 V likström
Strömförsörjning
Styrservo
Nyckel
Roder-
kontroll
Roder
Rodrets
feedbackenhet
Delar som medföljer PILOT
3380-systemet
Övriga delar som behövs
Tillvalsdetaljer
Obs! Ovan visas enbart en typisk installation.
Referera till den information som medföljde
ditt servo för mer information.
36 NAVMAN PILOT 3380 -system ets inst allation shandbok
Page 5
1-2 Använda PILOT 3380-systemet tillsammans med andra instrument
1-2-1 Använda andra in strument
PILOT 3380-s ystemet kan använda information
från dessa instrument:
GPS: En GPS eller kartplotter, t ex Navmans
TRACKER 5000-serie, måste vara ansluten
till PILOT 3380-systemet för att PILOT
ska fungera i GPS-läge (se PILOT 3380
Bruksanvisning).
O bs! GPS måste anslutas i NM EA-ingång.
VIND: Ett vindinstrument, t ex Navmans
WIND-serie, måste anslutas till PILOT
3380-systemet för att PILOT ska fungera i
WIND -läget (se PILOT 3380 Bruks anvisning).
HASTIG HET: Ett hastighetsinstrument
som t ex:
Navmans SPEED med en
skovelhjulsgivare
eller en GPS eller kartplotter, t
ex Navmans TRACKER 5000 eller
TRACKFISH 6600-serie, kan anslutas
till PILOT 3380-systemet för att öka
styrningens noggrannhet.
O bs! Hastigheten f rån en skovelhjulsgivare
är den hastig het som båten rör sig geno m
vattnet me d. Hastigheten från en GPS ä r
hastighete n över marken. Om vattne t är
strömt komme r dessa två hastigheter a tt vara
olika. Om PI LOT 338 0-systemet är ansl utet till
ett instru ment med en skovelhjulsg ivare och
till en GPS, a nvänder PILOT 3380-systeme t
automatisk t hastigheten från instr umentet
med skovelhju lsgivaren.
1-2-2 NavBus
NavBus är et t patentskyddat Navman-system
som gör det möjligt at t bygga system av flera
instruments med hjälp av ett antal givare. När
instrument är anslutna med NavBus:
Om du ändrar enhet, larm eller k alibrering
på ett instrument, kommer värdena
automatiskt att ändras på alla andra
instrument av den typen.
Varje instrument kan vara en del av en
grupp av instrument, kallad NavBus-grupp
(se NavBus- grupp i menyn Setup >
Comms i PILOT 3380 Bruksa nvisning). Om
du ändrar bakgrundsbelysningen för
ett instrument i instrumentgrupp 1, 2, 3
eller 4, kommer bakgrundsbelysningen
automatiskt att ändras för samtliga
instrument i den gruppen. Om du ändrar
bakgrundsbelysningen för ett instrument i
grupp 0, kommer inga andra instrument att
påverkas.
Om ett larm ljuder kan du stänga av ljudet
för det på alla instrument som kan visa det
larmet.
För mer information, se NavBus
installatio nsmanual och bruksa nvisning.
Obs! GPS måste anslutas i N MEA-ingång.
NavBus och PILOT 3380-systemet
PILOT 3380-s ystemet fungerar automatiskt
tillsammans med ex tra PILOT 3380-skärmar
eller PILOT 3100-skärmar.
PILOT 3380-s ystemet kan ta emot
vindinformation från Navmans WIND via sin
NavBus.
PILOT 3380-s ystemet kan ta emot
hastighetsinformation från Navmans SPEED
via sin NavBus.
1-2-3 NME A
NMEA är en branschstandard, men är inte
lika flexibel som NavBus eftersom den kräver
egna anslutningar mellan instrument. PILOT
3380-systemet har en NMEA-ingång och en
kontakt som kan konfigureras till ingång eller
utgång (se PI LOT 3380 Bruksanvi sning).
PILOT 3380-syste mets NMEA-ingångar
GPS: PILOT 3380-systemet kan ta emot NMEA
GPS-information från en kompatibel GPS eller
kartplotter, t ex Navmans kar tplotter i TRACKER
5000-serien:
XTE (från APA-, APB- eller XTE- meningar)
krävs för att PILOT 3380-systemet ska
kunna använda GPS-läge
BRG (från APA-meningar) och BOD (från
APA- eller APB- meningar) är valfria och
förbättrar prestandan
COG (från V TG-meningar) är valfria och kan
visas.
PILOT 3380 -system ets inst allation shandbok NAVMAN 37
Page 6
VIND: PILOT 3380-systemet kan ta emot
NMEA-vindinformation från ett kompatibelt
vindinstrument:
Sann eller skenbar vindriktning (från
MWV-meningar) krävs för att PILOT 3380-
systemet ska kunna använda Wind-läget.
SPEED : PILOT 3380-systemet kan ta emot
NMEA-hastighetsinformation från ett
kompatibelt skovelhjuls- eller GPS-instrument:
SOG (från VTG-meningar) är valfri och
förbättrar prestandan.
Obs! Om PILOT 3380-systemet är anslutet
till ett vind- eller hastighetsinstrument från
2 PILOT 3380-systemets maskinvara
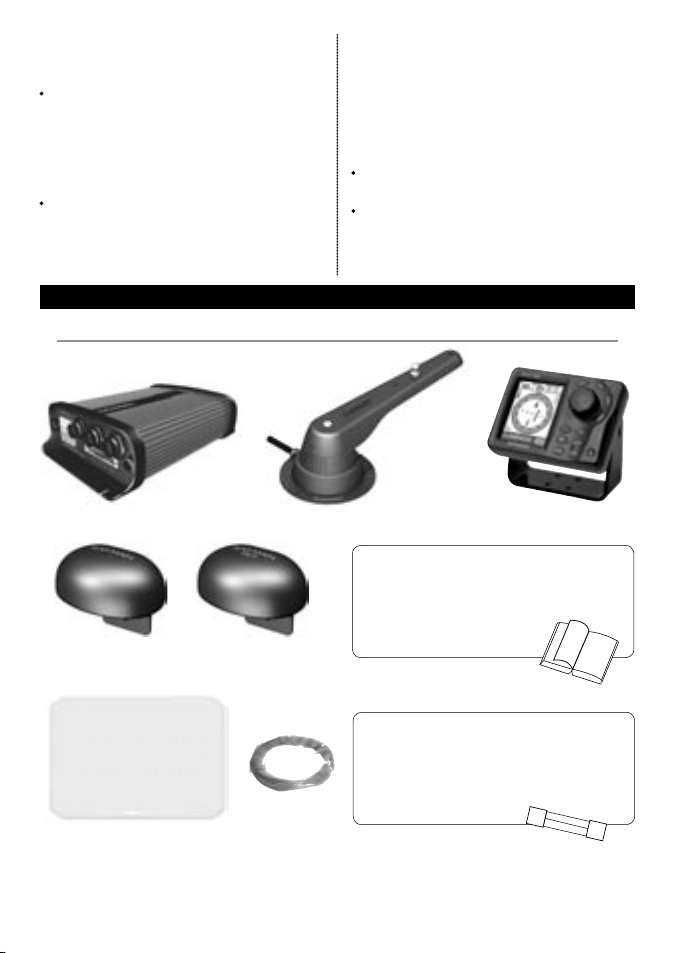
2-1 Vad levereras med ditt PILOT 3380-system?
Navman- serien via NavBus, kommer PILOT
3380-sys temet automatiskt ta emot vind- eller
hastighetsinformation, och NMEA-anslutningen
behöver inte kopplas.
PILOT 3380-syste mets NMEA-utgånga r
NMEA 2-kontakten kan konfigureras som både
ingång och utgång:
antingen kurs (HDG & HDT) och rodervinkel
(RSA) en gång per sekund
eller kurs (HDG) tio gånger per sekund
(se NMEA- läge i menyn Setup > Com ms i PILOT
3380 Bruksan visning).
MCU600 (Huvudkontrollenhet)
Kompass, med 5 m
fast kabel
NAVMAN
Skyddsfodral till bild-
skärmen
RFU - Rodrets feedbackenhet
Gyro, med 5 m
fast kabel
2 mm (#14) dubbel
spunnen kabel för
starkströmsdragning
Dokumentati on
• Garanti
• Monteringsmall för bildskärm
• Denna installationshandbok
• Bruksanvisning
Extra maski nvara
• Monteringsmaterial
• Kabelskydd
• Spänningsavlastning
• Reser vsäkringar
PILOT 3380 Bildskärm
38 NAVMAN PILOT 3380 -system ets inst allation shandbok
Page 7
2-2 Övriga delar s om behövs
Strömf örsörjning: PILOT 3380-systemet
kräver två strömförsörjningar, båda med
nominell likströmsspänning på 12 V:
En starkströmsledning till styrservot
En svagströmsledning till PILOT 3380-
systemets elek tronik och bildskärm; denna
ledning försörjer också eventuella extra
bildskärmar och andra instrument.
Strömförsörjningarna kräver en eller två
brytare och säkringar eller kretsbr ytare (se
avsnitt 3-4).
Styrs ervo: PILOT 3380-s ystemet kan driva en
hydraulisk pump, löpande pumpuppsättningar,
hydrauliskt linjär t servo eller et t mekaniskt
servo klassat för 12 V likström och upp till 20 A.
Roderkopplin g: För att koppla ihop rodret
med rodrets feedbackenhet (se avsnitt 3-5).
För kabeldragning, se Välj kabeltabel l i avsnitt
3-4-2.
3 Installation
Varning ! Korrekt installation är av y ttersta
vikt för enhetens funktion. Det är nödvändigt
att läsa denna bruk sanvisning och
dokumentationen som medföljer övriga delar,
innan installationen påbörjas.
Varning!
MCU600 är inte vattentät. Montera enheten
på en torr plats.
PILOT 3380-systemets bildskärm är
vattentät.
Kompassen, gyrot och rodrets
feedbackenhet är helt vattentäta.
Exte rna ljudsignaler eller lampor (tillval):
Den externa utgången är jordad, 30 V likström
och max 250 mA . Om ljudsignalerna och
lamporna kräver mer än 250 mA totalt, ska ett
relä monteras.
Övriga marininstrument (tillval): Vind-,
hastighets- eller GPS-instrument kan anslutas
(se avsnitt 1-2).
Övriga delar: För system med flera instrument,
krävs kab eldragning och kontakter. Navmans
kopplingsdosor kan förenk la kabeldragningen
när flera Navman-instrument ska kopplas ihop
(se avsnitt 1-2 eller NavBus Ins tallationsmanual
och bruksa nvisning).
Kopplingskontak ter och 10 m (33 fot)
förlängningskablar finns tillgängliga
för förlängning av kablarna till rodrets
feedbackenhet, kompassen eller gyrot. Använd
inte fler än en förlängningsk abel per enhet.
För mer information, kontakta din
Navman-återförsäljare.
Varning ! Se till att eventuella hål du skär ut
inte försvagar båtens skrov. Konsultera en
kvalificerad båtbyggare om du är tveksam.
3-1 Installationsför farande
Rekommenderat installationsför farande är:
1 Läs denna bruksanvisning och den
dokumentation som medföljer övriga delar.
2 Planera installationen: bestäm var
utrustningen och kablarna ska monteras (se
avsnitt 3-2).
3 Montera MCU600 (se avsnitt 3-3).
PILOT 3380 -system ets inst allation shandbok NAVMAN 39
4 Montera styrservot och dra svag- och
starkströmskablarna (se avsnitt 3-4).
5 Montera rodrets feedbackenhet (se
avsnitt 3-5).
6 Montera kompassen (se avsnitt 3-6).
7 Montera gyrot (se avsnitt 3-7).
Page 8
8 Montera bildskärmen och övriga
marininstrument som ska användas
tillsammans med PILOT 3380 -systemet (se
avsnitt 3-8).
9 Genomför hamninstallationen (se
avsnitt 4).
10 Genomför testerna till sjöss (se avsnitt 5).
Om du är osäker på var en del ska installeras,
montera den då temporärt utan att skära några
hål i båten. Montera detaljen ordentligt och dra
kablarna efter att testerna till sjöss genomförts.
3-2 Installation
Detta är en allmän handledning för lokalisering och inkoppling av PILOT 3380-systemets olika delar.
Instruk tionerna för en specifik del kan innebära flera krav.
3-2-1 Placering
Montera inga delar där de kan användas
som handtag, där de stör manövreringen av
båten eller där de kan bli dränk ta i vatten.
Montera inga delar där de stör
sjösättningen eller upptagningen av
båten.
Montera inga delar inom 0,5 m (20 tum)
från en radarantenns plan.
Montera kompass och gyro:
Minst 1 m (3 fot) från elektriska
signalkällor eller brus, t ex batterier,
starkströmskablar, övriga båtkablar,
motorer, fluorescerande lampor,
strömadapters, radio- eller
radarsändare och antenner.
Minst 1 m (3 fot) från magnetisk
utrustning, t ex en kompass eller
högtalare.
3-2-2 Kabeldragning
PILOT 3380-s ystemet har två typer av kablar:
Den krävande strömförsörjningen och
styrservot k räver oftast starkströmskablar:
Välj korrekt kabel i kabeltabellen (se avsnitt
3-4-2).
Montera starkströmskablar minst 1 m (3 fot)
från annan elektronisk utrustning i
båten.
Använd så korta kablar som möjligt.
Dubbel 2 mm (#14) kabel medföljer PILOT
3380-systemet och kan användas som
starkströmskabel om dess diameter passar.
Alla andra kablar är s vagströmskablar:
Montera svagströmskablar minst 1 m
(3 fot) från elektriska signalkällor eller
brus, t ex starkströmskablarna, övriga
båtkablar, motorer, fluorescerande lampor,
strömadapters, radio- eller radarsändare
och antenner.
Om kabeln till rodrets feedbackenhet,
kompassen eller gyrot är för lång ska kabeln
inte kortas av. Rulla istället upp kabeln i
närheten av huvudkontrollenheten.
Kabeln till rodrets feedbackenhet,
kompassen eller gyrot kan förlängas med
en 10 m (33 fot) förlängningskabel och en
anslutningskoppling. Använd inte fler än en
förlängningskabel per enhet.
Vid montering av samtliga kabeltyper:
Krossa eller kläm inte kabeln och sträck inte
i den.
Fäst kabeln med jämna mellanrum.
Se till att inga anslutningar eller
exponerade kontakter ligger i slagvattnet.
40 NAVMAN PILOT 3380 -system ets inst allation shandbok
Page 9
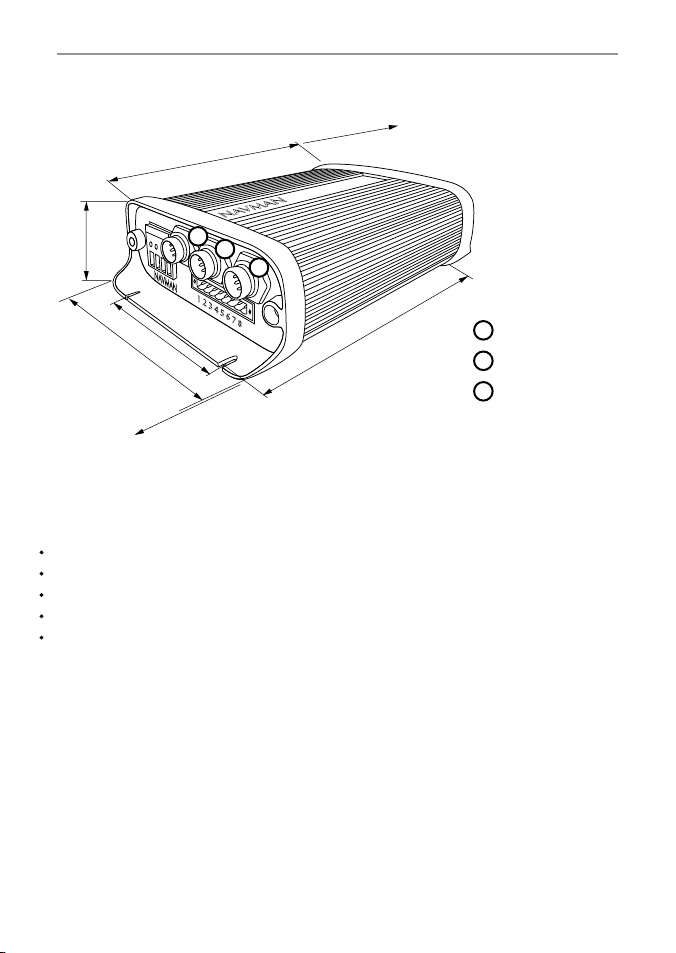
3-3 Installation av MCU600 (Huvudkontrollenhet)
Fysiska egenskaper
200 mm (7,87 tum)
200 mm (7,87 tum)
VIKTIGT! 200 mm (7,87 tum)
mellanrum krävs för att
kåpan ska kunna tas bort.
tum)
55 mm (2,16
Skruva r 90 mm (3,54 tum) is är
140 mm (5,10 tum)
1
2
3
RFU
1
Gyro
hål 184 mm (7,24 tum) isär
Skruv
2
Kompass/
3
Riktningsgivare
60 mm (2,36 tum)
VIKTIGT! 60 mm (2,36 tum)
mellanrum behövs för kablarna
Installation
Hitta en passande plats för enheten:
På en torr, sval plats, helst inte i motorutrymmet.
Nära starkströmsmatningen och styrservo, för att reducera starkströmskabelns längd.
Lättillgänglig för installation och service.
Om möjligt på en vertikal yta som inte vibrerar.
Följ placeringsvägledningen (se avsnitt 3-2-1).
Montera enheten med kabelkontakterna längst ner eller åt ena sidan, med de medföljande skruvarna.
Montera inte enheten med kontakterna uppåt, eftersom det då är lättare för smuts och fukt att tränga
in i enheten.
PILOT 3380 -system ets inst allation shandbok NAVMAN 41
Page 10
3-4 Installation av strömfö rsörjning och s tyrservo
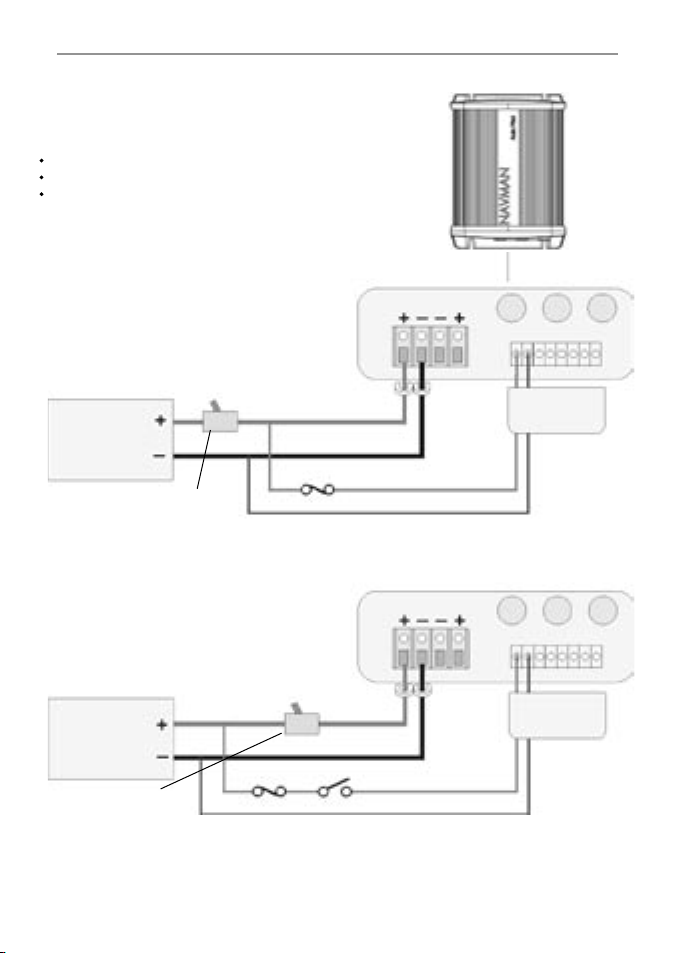
3-4-1 Installation av strömförsörjningen
MCU 600 -systemet kräver en svag och en stark strömsledning, båda
12 V likström.
Obs!
Använd så korta kablar som möjligt.
Använd den starkströmskabel som tabellen anger (se avsnitt 3-4-2).
Följ handledningen för kabeldragning (se avsnitt 3-2-2).
Strömförsörjning: konfiguration med en brytare
Välj denna konfiguration för att ha en brytare som
startar och stänger av PILOT 3380-systemet och de
övriga instrumenten.
Montera dragavlastning
12 V likströmsmatning, ström
som
passar servo
Kretsbrytare eller säkring
och brytare, ström som pas-
sar styrservo
Strömförsörjning:
konfiguration med två brytare
Välj denna konfiguration för att kunna stänga av
servot, men ha den andra instrumenten påslagna.
Säkring 1 A
Starkström
MCU600
1 2 3 4 5 6 7 8
Kontaktskydd
Svagström
1 2 3 4 5 6 7 8
12 V likströmsmatning, ström
som
passar servo
Kretsbrytare eller
säkring och brytare,
ström som passar
styrservo
Montera dragavlastning
Säkring 1 A
Starkström
Brytare
Kontaktskydd
Svagström
Obs! Om fler än tre extra bildskärmar eller andra instrument ska drivas, monteras ytterligare en brytare och
en säkring för svagströmsförsörjningen till dessa extra instrument
42 NAVMAN PILOT 3380 -system ets inst allation shandbok
Page 11

3-4-2 Instal lera styrservot
Installera styrservot i enlighet med ett av diagrammen på följande sidor.
Obs!
Använd så korta kablar som möjligt.
Använd den kabelstorlek som anges i tabellen nedan.
Följ handledningen för kabeldragning (se avsnitt 3-2-2).
Kabel med tjocklek #10 passar inte direkt i fyrvägsplinten. Montera skarvhylsa eller koppla om
ledningen med kabel av tjocklek #10.
Om fler än en kabel ansluts till en kontakt i fyrvägsplinten, ska kablarna förenas på lämpligt sätt.
Kabeltabell
Så här väljer man kabelstorlek för en installation:
1 Mät längden för den dubbla kabel som behövs, dvs. avståndet från huvudkontrollenheten till
starkströmsledningen eller till servot.
2 Välj kolumnen med kabelns längd och raden med kretsens ström. Där raden och kolumnen mäts
ges rekommenderad (minsta) kabelstorlek för mindre än 3 % spänningsfall i ett 12 V system.
Kabellängd (från huvudkontrollenheten till strömförsörjningen eller servot)
Ström
1 amp
2 amp
3 amp
4 amp
5 amp
6 amp
7 amp
8 amp
9 amp
10 amp
15 amp
20 amp
2,5 fot
0,7 m
0,75 mm
0,75 mm
0,75 mm
0,75 mm
0,75 mm
0,75 mm
0,75 mm
0,75 mm
0,75 mm
0,75 mm
1,5 mm
2,5 mm
#18
#18
#18
#18
#18
#18
#18
#18
#18
#18
#16
#14
5 fot
1,5 m
#18
0,75 mm
#18
0,75 mm
#18
0,75 mm
#18
0,75 mm
#16
1,5 mm
#16
1,5 mm
#16
1,5 mm
#16
1,5 mm
#16
1,5 mm
#14
2,5 mm
#12
4 mm
#12
4 mm
7,5 fot
2,2 m
0,75 mm
0,75 mm
0,75 mm
1,5 mm
1,5 mm
1,5 mm
2,5 mm
2,5 mm
2,5 mm
4 mm
4 mm
6 mm#810 mm#810 mm#616 mm#616 mm#616 mm
#18
#18
#18
#16
#16
#16
#14
#14
#14
#12
#12
#10
10 fot
3 m
#18
0,75 mm
#18
0,75 mm
#16
1,5 mm
#16
1,5 mm
#14
2,5 mm
#14
2,5 mm
#14
2,5 mm
#12
4 mm
#12
4 mm
#12
4 mm
#10
6 mm
12,5 fot
3,7 m
0,75 mm
0,75 mm
1,5 mm
2,5 mm
2,5 mm
4 mm
4 mm
4 mm
4 mm
6 mm
6 mm#810 mm#810 mm#616 mm
#18
#18
#16
#14
#14
#12
#12
#12
#12
#10
#10
15 fot
4,5 m
#18
0,75 mm
#16
1,5 mm
#16
1,5 mm
#14
2,5 mm
#12
4 mm
#12
4 mm
#12
4 mm
#10
6 mm
#10
6 mm
#10
6 mm
17,5 fot
5,2 m
0,75 mm
1,5 mm
2,5 mm
2,5 mm
4 mm
4 mm
6 mm
6 mm
6 mm
6 mm#810 mm
#18
#16
#14
#14
#12
#12
#10
#10
#10
#10
20 fo t
0,75 mm
1,5 mm
2,5 mm
4 mm
4 mm
6 mm
6 mm
6 mm
6 mm
6 m
#18
#16
#14
#12
#12
#10
#10
#10
#10
PILOT 3380 -system ets inst allation shandbok NAVMAN 43
Page 12

Exempel på hydraulisk styrning med hydraulisk hjälppump.
I menyn Setup > Vessel (se PILOT 3380 Bruksanvisning) håller du in Drive Type på Motor.
MCU600
Montera dragavlastning
Starkström (se avsnitt
3-4-1)
Motor
Kablarnas polaritet
är utan betydelse.
Ingen anslutning
Exempel på mekaniskt styrda båtar med hydraulisk linjär drivning för segelbåt
I menyn Setup > Vessel (se PILOT 3380 Bruksanvisning) ställer du in Drive Type på Motor.
MCU600
Obs! Magnetventilen får dra maximalt
300 mA, annars måste ett relä monteras
(se sid 14; Elektrisk drivenhet)
Montera dragavlastning
Starkström
(se avsnitt 3-4-1)
Motor
Magnetventil/
Bypasskoppling
Kablarnas polaritet
är utan betydelse.
1N4002-diod eller motsvarande
Monteras nära Magnetventilen
Kontaktskydd
44 NAVMAN PILOT 3380 -system ets inst allation shandbok
Page 13

Installation av en elektrisk drivenhet med kopplingsrelä
I menyn Setup > Vessel (se PILOT 3380-systemets bruksanvisning) ställer du in Drive Type på Motor.
MCU600
Montera dragavlastning
Starkström (se avsnitt 3-4-1)
1N4002-diod eller motsvarande
Monteras nära bypasskopplingen
Bypasskop-
pling
Motor
Reläkontakter
Kablarnas polaritet
är utan betydelse.
Obs! Relä behövs om bypasskopplingen
drar mer än 300 mA.
Kontaktskydd
Reläspole
1N4002-diod eller motsvarande
Monteras nära reläspolen
Installation av en kontinuerligt gående pump med solenoidventiler.
I menyn Setup > Vessel (se PILOT 3380-systemets bruksanvisning) ställer du in Drive Type på
Spool ground.
Obs! Motor behövs inte
för system som kopplas i
kraftuttaget.
Montera dragavlastning
Starkström (se avsnitt 3-4-1)
Motor
Reläkontakter
Kablarnas polaritet
är utan betydelse.
Styrbord
MCU600
Kontaktskydd
Reläspole
1N4002-diod eller motsvarande
Monteras nära reläspolen
Babord
PILOT 3380 -system ets inst allation shandbok NAVMAN 45
Page 14

Installation av solenoidventiler eller reläer med elektrisk styrning
I menyn Setup > Vessel (se PILOT 3380 Bruksanvisning) ställer du in Drive Type på Spool ground.
MCU600
Montera spänningsavlastning
Starkström (se avsnitt
3-4-1)
Ingen anslutning
Styrbord
Babord
Spak/styrningsreglage
46 NAVMAN PILOT 3380 -system ets inst allation shandbok
Page 15

3-5 Installation av RFU (rodrets feedbackenhet)
Fysiska egenskaper
Roder-
axel
90 mm
(3,5 tum)
220 mm
(8,7 tum)
Koppling
till rodret
Anslutningsstag med
snabbkopplingar och
låsmuttrar i båda ändar
Bas
10 m (33 fots) kabel
Armen snurrar fritt
Arm
runt basen.
Änden på anslutningsstaget snäpper
på plats i armens hål.
LT8-kontakt
Monteringskrav
Dessa två
avstånd ska
vara lika långa
Justera stagets position på
armen vid behov.
Basen ska vara rakt motstående rodrets axel, så
att denna vinkel blir 90°
Kapa anslutningsstaget vid
behov.
Gänga = M5
Dessa två
avstånd ska
vara lika långa
Rodrets axel ska
vara parallell med
axeln i basen.
Rodrets koppling
och arm ska röra sig
i samma plan
Obs!
Enheten är helt vattentät, men bör inte dränkas.
Montera enheten på en panel som inte vibrerar.
Följ placeringsvägledningen (se avsnitt 3-2-1).
PILOT 3380 -system ets inst allation shandbok NAVMAN 47
Page 16

Inriktning
Armen kan rotera fritt runt basen. När rodret är midskepps måste pilen på armen peka mot en av
centrumlinjerna på basen.
Centrumlinje
Bas
Centrumlinje
Därför kan basen roteras till två lägen i en installation. Vi rekommenderar den position som har kabeln
på motstående sida om anslutningsstaget.
Linjeinställningar
visar enhetens två
linjära intervall.
Rekommenderas
(rodret midskepps).
Rekommenderas inte då kabeln
kan hindra roderkopplingen.
Anordning
Rekommenderad: U-formad anordning med armen parallell med båtens längd:
Båtens
för
Tillfredställande: U-formad anordning
där armen inte är parallell med båtens
längd, t ex:
Båtens
för
Rekommenderas inte: Z-formad anordning,
t ex:
Om rodret vrids för långt kanske inte enheten återgår
till Z-form.
48 NAVMAN PILOT 3380 -system ets inst allation shandbok
Page 17

Installation
1 Hitta en passande plats och anordning för enheten enligt beskrivningen ovan.
2 Välj, montera och ställ in en passande roderkoppling.
3 Montera enheten enligt nedan:
Ställ in
rodret midskepps.
Montera enheten
på ett block vid
behov, för att ställa
in höjden.
Rotera basen så att pilen på
armen pekar i närheten av centrumlinjen på basen. Montera
de två medföljande skruvarna
löst i mitten av spåren.
Rotera basen så att pilen på
armen pekar på centrumlinjen på basen. Montera den
tredje medföljande skruven
och dra åt alla skruvarna.
Kontrollera
att rodret är
midskepps.
Förena kopplingen
Kapa vid behov ans-
med roderkopplingen.
Snäpp fast änden i
korrekt hål i armen.
lutningsstaget i denna ände,
och sätt tillbaka kopplingen och
låsmuttern.
4 Dra kabeln tillbaka till MCU600 enligt handledningen för kabeldragning (se avsnitt 3-2-2).
Hålen i skiljeväggarna måste
MCU600
vara minst 18,5 mm (0,73
tum) i diameter.
Plugga in kontakten i RFU-uttaget
PILOT 3380 -system ets inst allation shandbok NAVMAN 49
Page 18

3-6 Insta llera kompassen
Fysiska egenskaper
Monteringshål för
skruvar
101 mm, (4 tum)
97 mm,
(3,8 tum)
71 mm, (2,8 tum)
LT8-kontakt
10 m (32,8 fot)
Placering
Montera kompassen:
Minst 1 m (3 fot) från båtens eventuella delar
i stål eller järn, t ex:
ett stålskrov, däck, hytt eller stålförstär
kning i ferrocementskrov
stålutrustning som t ex motorer och
matlagningsutrustning
platser där stålobjekt för varas, t ex
ankarskåp och förvaringsskåp
Minst 2 m (6 fot) från utrustning med en
magnet och utrustning som genererar
elektromagnetiska fält, t ex en kompass, ett
batteri, starkströmsledning, en elmotor och
en radio eller radarsändare eller antenn.
Skrov och hytt av glasfiber eller trä:
rörelsecentrum vanligtvis i närheten av aktern):
Stålskrov, hytt av icke stål:
sen 1 m, (3 fot) ovan skrovet:
1 m (3 fot)
montera kompassen i rörelsecentrum (för planande skrov finns
montera kompas
Så nära båtens rörelsecentrum som möjligt,
för att minimera kompassens rörelse när
båten gungar och lutar. Om kompassen
inte kan monteras i rörelsecentrum, är det
-
-
vanligtvis bra att montera kompassen så lågt
som möjligt.
På en vertikal yta som inte vibrerar.
Enheten är helt vattentät, men bör inte
dränkas. Kompassen påverkas inte av andra
metaller som t ex rostfrit t stål, koppar eller
mässing. Följ placeringsvägledningen (se
avsnitt 3-2-1).
Stålskrov och stålhytt:
en stolpe 1 m (3 fot) ovan skrovet och minst 1 m
(3 fot) från hytten:
1 m (3 fot)
montera kompassen på
Minst 1 m (3 fot)
50 NAVMAN PILOT 3380 -system ets inst allation shandbok
Page 19

Installation
1 Hitta en passande plats för enheten enligt beskrivningen ovan.
2 Montera enheten med de tre medföljande skruvarna. Använd ett vattenpass så att enheten sitter
vertikalt inom 10°.
Mindre än 10° 10°
Mindre än 10° 10°
3 Dra kabeln tillbaka till MCU600 enligt handledningen för kabeldragning (se avsnitt 3-2-2).
Hålen i skiljeväggarna
måste vara minst 18,5 mm
(0,73 tum) i diameter.
Plugga in kontakten i Kompass/HS-uttaget
MCU600
Obs!
Om du flyttar kompassen i förhållande till gyrot medan strömmen är påslagen, vänta då tills
kursen stabiliseras.
PILOT 3380 -system ets inst allation shandbok NAVMAN 51
Page 20

3-7 Installera g yrot
Fysiska egenskaper
Monteringshål för
skruvar
101 mm, (4 tum)
97 mm,
(3,8 tum)
71 mm, (2,8 tum)
LT8-kontakt
10 m (32,8 fot)
Placering
Montera gyrot så nära båtens rörelsecentrum som möjligt, för at t minimera gyrots rörelse när båten
gungar och lutar.
Montera gyrot på en panel som inte vibrerar.
Enheten är helt vattentät, men bör inte dränkas. Följ placeringsvägledningen (se avsnit t 3-2-1).
Den idealiska platsen är rörelsecentrum (för planande skrov finns rörelsecentrum normalt i närheten
av aktern).
52 NAVMAN PILOT 3380 -system ets inst allation shandbok
Page 21

Installation
1 Hitta en passande plats för enheten enligt beskrivningen ovan.
2 Montera enheten med de tre medföljande skruvarna. Använd ett vattenpass så att enheten
sitter vertikalt inom 10°.
Mindre än 10° 10°
3 Dra kabeln tillbaka till MCU600 enligt handledningen för kabeldragning (se avsnitt 3-2-2).
Mindre än 10° 10°
Hålen i skiljeväggarna måste
vara minst 18,5 mm (0,73
tum) i diameter.
Plugga in kontakten i Gyro-uttaget
MCU600
Obs!
Om du flyttar gyrot i förhållande till kompassen medan strömmen är påslagen, vänta då tills
kursen stabiliseras.
3-8 Installera bildskärmen för PILOT 3380 och övriga ins trument
Det finns två monteringsförfaranden:
Skottmontering kräver en massiv panel
med ledigt utrymme bakom för kablage och
montageskruvar. Efter en skot tmontering kan
inte bildsk ärmen lutas eller f lyttas, t ex för att
reducera oönskat blänk eller reflektioner. Välj
noga ut den bästa platsen före montering.
Detta bör vanligtvis f innas i skuggan.
PILOT 3380 -system ets inst allation shandbok NAVMAN 53
Anvisningar för rak montering
1 Skär ett hål i skiljeväggen för bildskärmen
med mallen för skottmontering som hjälp.
2 Borra f yra hål för montagestiften med
mallen för skottmontering som hjälp.
3 Skruva i de fyra stiften i
mässingsinfästningarna på bildskärmens
baksida.
4 Sätt bildskärmen på plats och montera
brickorna och muttrarna på stiften.
Page 22

Konsolm ontering kräver en panel att montera
konsolen på. Se till at t panelen inte verkar
kunna svikta och att den inte vibrerar för
mycket. Konsolen kan lutas och skärmen kan
tas bort efter varje användning.
Välj en plats där skärmen sitter:
• Minst 4 tum (100 mm) från kompassen.
• Minst 12 tum (300 mm) från eventuell
radiosändare.
• Minst 4 fot (1,2 m) från eventuell antenn.
• Enkelt för at t läsa och sköta. Montera
om möjligt skärmen framför navigatorn
eller till höger om navigatorn, eftersom
LCD-skärmen kan läsas bättre i dessa lägen.
• Utan att vara exponerad för direkt solljus
eller vat ten.
• Skyddad mot fysisk skada vid
hård sjö.
• Enkelt för anslutning av likströmskällan.
• Bekvämt för dragning av givarnas kablar.
Anvisningar för konsolmontering
1 Fixera monteringskonsolen på båten med
de fyra rostfria skruvarna.
2 Håll bildskärmen på plats i
monteringskonsolen. Montera konsolens
vred på bildskärmen och dra åt dem löst.
3 Justera skärmens vinkel för bästa visning
och dra sedan åt vreden på konsolen för
hand.
54 NAVMAN PILOT 3380 -system ets inst allation shandbok
Page 23

Inkoppling av bildskärmen
Bildskärm
MCU600
Kopplingsrelä ut: 8
NMEA 2: 7
NMEA in 1: 6
NMEA jord: 5
NavBus -, Blå: 4
NavBus +, Orange: 3
Jord, Svart: 2
12 V ström +, Röd: 1
Kontaktskydd
8-vägsplint
Grön
Obs!
Dra bildskärmens strömkablar (röda och svarta kablar) till åttavägsplintens kontakter 1 och 2, så att
bildskärmen och huvudenheten matas med samma svagström.
• Följ hand ledningen för ka beldragning (se avsn itt 3-2-2).
Plugga in strömkabeln i det
svarta uttaget på bak sidan av
PILOT 3380-skärmen.
Bildskärmskabel, kräver 18 mm (0,7 tum) hål genom
skiljevägg.
Gul (isolera, kapa inte)
Vit (isolera, kapa inte)
Svagström
(se avsnitt 3-4-1)
Valfria extra ljudsignaler och lampor
för det externa larmet. Om ljudsignalerna och lamporna kräver mer
än 250 mA, ska ett relä monteras.
PILOT 3380 -system ets inst allation shandbok NAVMAN 55
Page 24

Inkoppling av övriga instrument
Övriga instrument
i serien
Enheter
NMEA
in & ut
E GPS, som t ex en
Navman TRACKER
5600
GPS
Ström, NMEA-ingång
MCU600
Extra PILOT 3380 eller
PILOT 3100
bildskärmsenheter
Bild-
skärmsen-
heter
Koppling, tillval (se
Kopplingsrelä ut: 8
NMEA 2: 7
NMEA in 1: 6
NMEA jord: 5
NavBus -, Blå: 4
NavBus +, Orange: 3
Jord, Svart: 2
12 V ström +, Röd: 1
Kontaktskydd
Grön (endast från en
bildskärmsenhet)
GrönGrön
avsnitt 3-4-2)
NMEA in/ut
GPS NMEA-utgång
GPS NMEA jord
Svagström
(se avsnitt 3-4-1)
Ljudsignaler och lampor
(se föregående sida)
Obs!
• Referera till instrumentets installationshandbok för mer information om inkoppling.
• Om fler än tre bildskärmar eller instrument från andra serier monteras, ska en separat svagströmskälla
monteras för dessa extra instrument (se avsnitt 3-4 eller instrumentets installationshandbok.
• De externa larmutgångarna (grön kabel) på Navmanseriens instrument och 5000-seriens kartplotters
kan anslutas tillsammans för att styra de externa ljudsignalerna och lamporna.
• I system med flera andra instrument, rekommenderar vi att man använder kopplingsdosan NavBus för
att förenkla kabeldragningen (se NavBus installationsmanual och bruksanvisning).
• Följ handledningen för kabeldragning (se avsnitt 3-2-2).
56 NAVMAN PILOT 3380 -system ets inst allation shandbok
Page 25

4 Hamninstallation
Genomför hamninstallationen:
efter att PILOT 3380-systemet installerats (se avsnitt 3)
efter att någon del ändrats eller om ett problem misstänks
Efter hamninstallationen ska testerna till sjöss genomföras (se avsnitt 5 ).
4-1 Starta hamninstallationen
1 Starta PILOT 3380-systemet (se PILOT 3380 Bruksanvisning). Om rodret rör sig ska strömmen genast
stängas av.
Om du försöker gå till AUTO-läget innan rodrets feedbackenhet eller kompassen kalibrerats, kommer
PILOT 3380-systemet att visa ett fel.
2 Om PILOT 3380-systemet har använts tidigare, ska all användarinformation nollställas
till fabriksinställningarna. Gå till Factor y reset > Both i menyn Set up System (se PILOT 3380
Bruksanv isning).
3 Ange den användarinformation som finns uppställd i tabellen Användarinformation nedan (se PILOT
3380 Bruksanvisning för att hitta vad respektive informationspost betyder och hur informationen
ska anges). Intill varje post skrivs värdet för den användarinformation du anger.
Varning! Det finns ingen gräns för rodrets rörelse innan rodrets feedbackenhet kalibrerats (se avsnitt
4-2). Användaren måste se till att inte rodret körs till ett ändläge när spakkommandot används (se
PILOT 3380 Bruksanvisning).
4-2 Kalibrering av rodrets feedbacken het
Detta förfarande matchar rodrets feedbackenhet med rodret.
Obs!
För att när som helst avbryta kalibreringen trycker du på ESC.
Om du inte flyttar rodret på det sätt som du blir ombedd att göra, eller om rodrets feedbackenhet inte
fungerar, kan inte PILOT 3380-systemet slutföra kalibreringen. PILOT 3380-systemet visar ett fel. Tr yck
på ESC, fixa problemet och upprepa kalibreringen.
Under normal drift vrider inte PILOT 3380-systemet rodret närmare än 3° från ett ändläge.
För att kalibrera rodrets feedbackenhet går du till Roder i menyn Setup > Ca librate. Följ
instruk tionerna på skärmen som presenteras av kalibreringshjälpen (se PI LOT 3380 Bruksanvi sning).
PILOT 3380 -system ets inst allation shandbok NAVMAN 57
Page 26

5 Tester till sjöss
Genomför testerna till sjöss:
Efter att hamninstallationen genomförts (se
avsnitt 4).
För att kontrollera
PILOT 3380-systemets funktion.
5-1 Kalibrera kompassen
Obs!
För att när som helst avbryta kalibreringen trycker du på ESC.
Om båten inte svänger som instruerat eller om kompassen inte fungerar, kan kalibreringen inte
slutföras. PILOT 3380-systemet visar ett fel. Tryck på ESC, fixa problemet och upprepa kalibreringen.
Lokala störningar i magnetfältet kan påverka kompassen. Kalibrering måste utföras där det inte finns
några stora metallkonstruktioner som t ex hamnar, större fartyg etc.. Detta är användarens ansvar.
Se till att båda källorna refererar till samma norr (geografiskt eller magnetiskt). Om din magnetiska
kompass inte kalibrerats, kan du använda en annan källa för riktning. Om fartygets kompass används
ska avvikelsetabellerna tillämpas för kontroll av autopilotens kompass.
För att kalibrera kompassen går du till Comp ass i menyn Setup > Calibra te. Följ instruktionerna på
skärmen som presenteras av kalibreringshjälpen (se PILOT 3380 Bruk sanvisning).
5-2 Rikta in kom pass och roder
Kompassen eller rodret kan riktas in var och en för sig.
5-2-1 Rikta in kompassen (Rikta in kurs)
Detta riktar in PILOT 3380-systemets kompass så att den visar korrekt kurs.
Kompassen kan riktas in med en referenskompass eller med en GPS ansluten till PILOT 3380-systemet.
Se till att det inte finns några korsande vindar eller strömmar.
För att kalibrera kompassen går du till Ali gn heading i menyn Set up > Calibrate. Följ instruktionerna
på skärmen som presenteras av kalibreringshjälp en (se PILOT 3380 Bruksanvisning ).
5-2-2 Rikta in rodret (Centrera roder)
Detta ställer in rodret för en rak kurs. Se till att det inte finns några korsande vindar eller strömmar.
För att rik ta in rodret går du till Centre rudder i menyn Setu p > Calibrate. Följ instruktionerna på
skärmen som presenteras av kalibreringshjälpen (se PILOT 3380 Bruksanvisning).
Under testerna till sjöss ska man segla på en öppen
plats där det inte finns några andra fartyg eller
hinder. Havet ska vara lugnt, vindhastigheten så
låg som möjligt och det bör inte vara strömt.
58 NAVMAN PILOT 3380 -system ets inst allation shandbok
Page 27

Bilaga A - Tekniska data - MCU600
Elsystem:
Styrservots strömförsörjning: 10,5 till 16,5 V
likström, max 20 A
Strömförsörjning till 8-vägsplinten: 10,5 till 16,5
V likström, 300 mA .
Andra tillvalsinstrument: referera till
instrumentets handbok.
Gränssnitt:
NavBus: anslutning till andra Navmaninstrument och PILOT 3380 -bildskärmen.
NMEA 0183-kontakte r: NMEA 1: Ingång; NMEA
2: Kan programmeras som ingång eller utgång
NMEA 0183-utgångens meddelanden : HDG,
HDT, RSA;
NMEA 0183-ingångens meddelanden : APA ,
APB, BOD, BWC, MWD, MWV, RMA, RMB, RMC,
VHW, VTG, X TE
Standard överensstämmelse
I enlighet med EMC
USA (FCC): Del 15 Klass B
Europa (CE): EN301 843-1
Nya Zeeland och Australien (C Tick): AS-NZS
3548.
Miljö:
Kompass: IPx6 och IPx7 - helt vattentät.
Gyro: IP x6 och IPx7 - helt vattentät.
Rodrets feedbackenhet: IPx6 och IPx7 - helt
vattentät.
MCU600 Huvudenhet: Inte vattentät - kräver
en sval, torr och ren miljö.
MCU600 Huvudenhetens servo-
anslutningar:
Kontakt Signal
1 Positiv starkström, 10,5 till 16,5 V
likström
2 Negativ stark ström
3 Negativ utgång för styrservo
4 Positiv utgång för styrservo
MCU600 Huvudenhetens 8-vägsplints
anslutningar:
Kontakt Signal
1 Positiv svagström, 10,5 till 16,5 V
likström
2 Negativ (Jord) svagströmsledning
3 NavBus +
4 NavBus —
5 NMEA jord
6 NMEA in 1
7 NMEA in 2
8 Utgång för drivenhetens
bypasskoppling. Slår om till jord
för att dra relät, max belastning
300 mA, 30 V
MCU600 Intern säkring:
2x säkring - båda säkringarna lika
Typ: ATC - Bladsäkring för fordon
Märkström: 20A
PILOT 3380 -system ets inst allation shandbok NAVMAN 59
Page 28

Bilaga B - Tekniska data - AP3380-skärmen
Elsystem:
Matningsspänning: 10,5 till 30,5 V likström.
Matningsström (vid 13,8 V): 180 mA utan
bakgrundsbelysning, 225 mA med full
bakgrundsbelysning.
Andra tillvalsinstrument: referera till
instrumentets handbok.
Gränssnitt
NavBus: anslutning till MCU och andra
Navman- instrument.
AP3380 Ström-/datakablar till bildskärmen:
Svart kontakt - Ström och MCU
Stift K abelns
färg
5 Röd Positiv, 10,5 till 30,5 V likström.
1 Svart Negativ
6 Orange NavBus +
4 Blå NavBus -
7 Gul Fabriksanvänd (isolera, klipp inte)
3 Vit Fabriksanvänd (isolera, klipp inte)
8 Grön Externt larm, kopplat till jord, 30 V likström och max 250 mA.
2 Brun +9V ut
Stift Kabelns
färg
5 Röd Fabriksanvänd (isolera, klipp inte)
1 Svar t Negativ
6 Orange NavBus +
4 Blå NavBus -
7 Gul Fabriksanvänd (isolera, klipp inte)
3 Vit Fabriksanvänd (isolera, klipp inte)
8 Grö n Fabriksanvänd (isolera, klipp inte)
2 Brun +9V ut
Signal
Grön kontakt - NavBus-expansion
Signal
Standard överensstämmelse
I enlighet med EMC :
USA (FCC): Del 15 Klass B
Europa (CE): EN301 843-1
Nya Zeeland och Australien (C Tick):
AS-NZS 3548.
Miljö:
IPx6 och IPx7 - helt vattentät.
60 NAVMAN PILOT 3380 -system ets inst allation shandbok
Page 29

Bilaga C - Användarinformation
Tabell för användarinformation (för att registrera informationen från installationen)
Menu > Setup > SYSTEM
Språk
Nattläge
Knappljud
Autoavstängning
SmartCraft
Menu > Setup > ALTERNATIV
Undanmanövervinkel
Slagläge
Slagvinkel
Gippläge
Gippvinkel
Slagfördröjning
Girhastighet
Menu > Setup > VESSEL
Fartygstyp
Driftstyp
Valda vindfunktioner
Menu > Setup > ALARMS
Kursfel
XTE
Verifiera girpunkt
Vindskiftning
(endast segling)
Låg batterispänning
Stark ström
PILOT 3380 -system ets inst allation shandbok NAVMAN 61
Page 30

Menu > Setup > UNITS
Distans
Kompass
Magnetisk variation
Vind
Menu > Setup > COMMS
NMEA-läge
NavBus group
Menu > Setup > PROFILES
Profil (user 1)
Parametrar:
Adaptiv
Respons
Ratio
Avancerat:
Trimning
Motroder
GPS-förstärkning
Vindförstärk ning
Profil (user 2)
Parametrar:
Adaptiv
Respons
Ratio
Avancerat:
Trimning
Motroder
GPS-förstärkning
Vindförstärk ning
62 NAVMAN PILOT 3380 -system ets inst allation shandbok
Page 31

Profil (user 3)
Parametrar:
Adaptiv
Respons
Ratio
Avancerat:
Trimning
Motroder
GPS-förstärkning
Vindförstärk ning
Profil (user 4)
Parametrar:
Adaptiv
Respons
Ratio
Avancerat:
Trimning
Motroder
GPS-förstärkning
Vindförstärk ning
Profil (user 5)
Parametrar:
Adaptiv
Respons
Ratio
Avancerat:
Trimning
Motroder
GPS-förstärkning
Vindförstärk ning
PILOT 3380 -system ets inst allation shandbok NAVMAN 63
Page 32

Made in New Zealand
MN000272A
P IL OT 3 38 0
Lon 174° 44.535’E
Lat 36° 48.404’S
NAVMAN
 Loading...
Loading...