


G-PILOT 3100
AUTOPILOT
Instalation Manual
Français............2
Deutsch ..........32
Nederlands.....61
www.navman.com
NAV MAN

Inhalt
Wichtig..................................................................................................33
1 Einführung ........................................................................................34
1-1 Eine typische Installation..........................................................................34
1-2 Den G-PILOT 3100 mit anderen Instrumenten vernetzen..........35
1-2-1 Andere Instrumente integrieren.............................................................35
1-2-2 NavBus .................................................................................................35
1-2-3 NMEA....................................................................................................35
2 G-PILOT 3100 Lieferumfang............................................................36
2-1 G-PILOT 3100 Standard-Lieferung..........................................................36
2-2 Weitere erforderliche Bauteile..................................................................37
3 Montage.............................................................................................37
3-1 Installations-Ablauf...................................................................................37
3-2 Installations-Führer ..................................................................................38
3-2-1 Eingrenzung der Montageorte...........................................................38
3-2-2 Hinweise zur Verdrahtung.................................................................38
3-3 Einbau der Zentraleinheit.........................................................................39
3-4 Spannungsversorgung für Zentraleinheit und Antriebe............................40
3-4-1 Anschluss der Zentraleinheit.............................................................41
3-4-2 Anschluss der Ruderantriebe............................................................42
3-5 Ruderwinkelgeber montieren...................................................................45
3-6 Kursgeber montieren................................................................................48
3-7 Kreiselgeber montieren............................................................................50
3-8 Bedieneinheit und andere Instrumente montieren...................................52
4 Basisinbetriebnahme nach Einbau.................................................54
4-1 Vorbereitung der Justierung.....................................................................54
4-2 Ruderwinkelgeber justieren......................................................................55
5 See-Erprobung..................................................................................56
5-1 Kursgeber justieren..................................................................................56
6 Nulleinstellung für Kurs- und Ruderwinkel-Geber........................57
6-1 Kursgeber ausrichten...............................................................................57
6-2 Ruderwinkel ausrichten............................................................................57
Anhang A - Spezifi kationen................................................................58
Anhang B - Alarme und Warn-Anzeigen............................................58
Anhang C - Fehlersuche.....................................................................60
Anhang D - Kontakt-Adressen ...........................................................91
32
NAVMAN
G-PILOT 3100 Installations- und Bedienungsanleitung
Wichtig
Der Eigentümer ist allein verantwortlich für den korrekten Einbau, die ordnungsgemäße
Anwendung und die betriebliche Sicherheit. Der Benutzer ist allein verantwortlich für eine
sichere Bootsführung. Jedes Instrument ist nur ein Hilfsmittel.
Die richtige Auswahl der Komponenten und ihrer Einbauorte ist für ein Autopilot-System von
entscheidender Bedeutung. Fehler hierbei führen zu unbefriedigenden Steuer-Ergebnissen oder
sogar zu vollständigen Ausfällen. Für die Einbauplanung sollte ein Navman-Fachmann hinzu
gezogen werden. Bohrungen oder Ausschnitte am Bootskörper dürfen nicht die Bootsstruktur
schwächen. Im Zweifelsfall einen Bootsbau-Fachmann hinzu ziehen.
Warnhinweise zur Nutzung des G-PILOT 3100:
Der G-PILOT 3100 soll bei längeren Seereisen den Rudergänger ersetzen, auf keinen Fall
jedoch ausschließlich als Hauptsteuerung dienen.
Der G-PILOT 3100 darf nicht bei extremer Wetterlage, in Gefahrengebieten, in Landnähe
und im Revier, in direkter Nähe anderer Verkehrsteilnehmer benutzt werden.
Bei normaler Wetterlage kann der G-PILOT 3100 ein Boot über längere Zeiträume besser
auf Kurs halten als ein Rudergänger. Unter widrigen Seebedingungen sollte jedoch per
Hand gesteuert werden.
Auch wenn der G-PILOT 3100 das Boot steuert, muss immer jemand die Steuerung und
den Kurs überwachen. Er muss jederzeit in der Lage sein, unverzüglich die Steuerung
manuell zu übernehmen.
Einfl üsse von außen, eine nicht sorgfältig ausgeführte Installation, oder Defekte an
Bauteilen können zum Ausfall der Steuerung führen.
NAVMAN NZ L TD IST NICHT VERANTWORTLICH FÜR SCHÄDEN UND UNFÄLLE, DIE DURCH
MÖGLICHE FEHLFUNKTIONEN DIESES PRODUKTES ENTSTEHEN, SOWIE AUCH NICHT
FÜR GESETZESWIDRIGE ANWENDUNGEN.
Navman entwickelt kontinuierlich seine Produkte weiter und behält sich daher das Recht vor,
ohne Vorankündigungen, Veränderungen durchzuführen. Für Fragen steht das umfangreiche
Fachhändler-Servicenetz zur Verfügung.
Nationalsprache: Diese Erklärung, Bedienungsanleitungen und andere Informationen, die im
Zusammenhang mit dem Produkt stehen, sind eventuell in eine andere oder aus einer anderen
Sprache übersetzt worden. Sollten dabei irgendwelche Differenzen zwischen den Versionen
bestehen, gilt die englische Version als offi zielle Originaldokumentation.
Copyright(©) 2003 Navman NZ Limited, New Zealand, Alle Rechte vorbehalten. Navman ist ein
registriertes Handelszeichen von Navman NZ Limited.
G-PILOT 3100 Installations- und Bedienungsanleitung
NAVMAN
33

1 Einführung
Dieses Handbuch sinnvoll nutzen
Dieses Handbuch beschreibt die Installation
und die Inbetriebnahme des G-PILOT 3100.
Hierfür ist auch das separate Handbuch für
die Bedienung des G-PILOT 3100 mit heran
zu ziehen.
Zu der Installation gehören auch die BasisEinstellungen sowie erforderliche Justierungen
aufgrund einer Probefahrt dazu.
Um Funktionsprobleme zu erkennen und
nach Austausch von Bauteilen sind eine
erneute Basisjustierung sowie eine Probefahrt
erforderlich (siehe Abschn. 4 und 5).
Um ein einwandfreies Funktionieren des
G-PILOT 3100 sicher zu stellen, ist eine
Probefahrt erforderlich (siehe Abschn. 5).
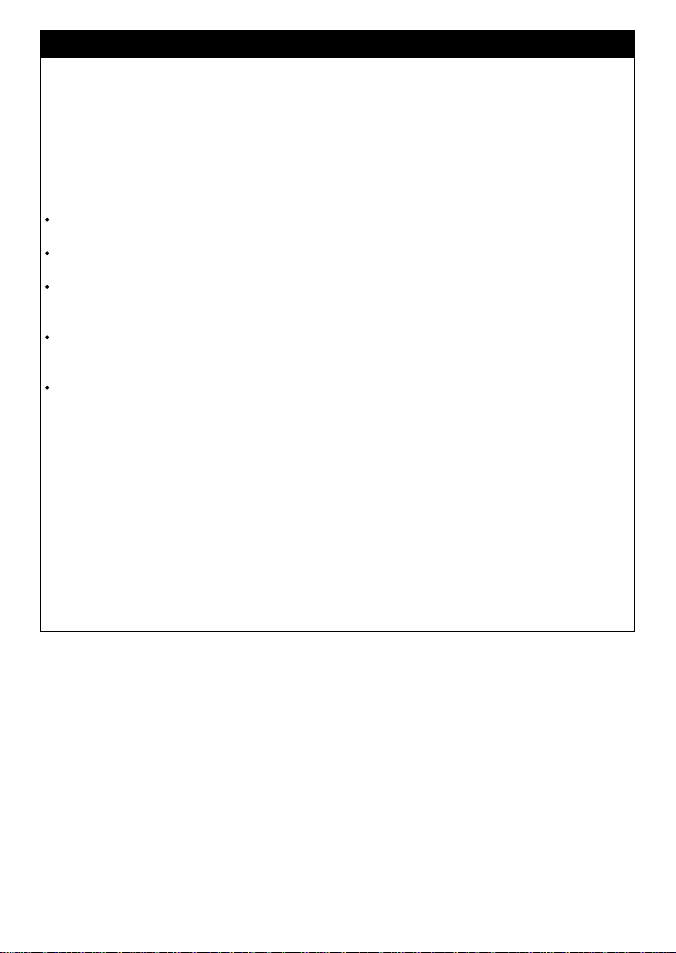
1-1 Eine typische Installation
Bedien-
Gerät
Ruder-
Steuerung
Steuerrad
Kupplung
(optional)
SteuerAntrieb
Ruder
NavBus
Zentral-Einheit
Ruderwinkel-
Geber
Reinigung und Farbanstriche
Die Bauteile des G-PILOT 3100 können
mit einem feuchten Lappen und milden
Reinigungsmitteln gesäubert werden.
Keine Scheuermittel, Benzin oder sonstige
Lösungsmittel verwenden.
Bauteile des G-PILOT 3100 nicht mit Farbe
versehen, außer die Kabel.
Optionale Instrumente
Weitere
Bedien-
Geräte
Leistungs-Schalter oder
Schalter plus Sicherung
WIND
3100
NMEA
Unterscheidung
G-PILOT 3100 - Standard-Teile
Weitere erforderliche Bauteile
Optionale Bauteile
Hinweis: Dieses ist nur ein
Installations-Beispiel. Die
tatsächliche Lieferung kann
natürlich hiervon abweichen.
Den gelieferten Antrieben sind
separate Beschreibungen
beigefügt.
SPEED
3100
Kursgeber
Kreiselgeber
Versorgung
Elektronik
Versorgung Antrieb
12 V DC
SpannungsVersorgung
GPS
NMEA
34
NAVMAN
G-PILOT 3100 Installations- und Bedienungsanleitung

1-2 Den G-PILOT 3100 mit anderen Instrumenten vernetzen
1-2-1 Andere Instrumente integrieren
Der G-PILOT 3100 kann Daten folgender
Instrumente verwenden:
GPS: für eine Wegpunkt-Ansteuerung
müssen Daten von einem GPS oder einem
Kartenplotter, z.B. aus der TRACKER
5000 Serie übermittelt werden (siehe
GPS-Modus im Bedien-Handbuch des
G- PILOT 3100). Hinweis: GPS-Daten
nur über den NMEA- Eingang.
WIND: Um den Windmodus im
G- PILOT 3100 zu nutzen, muss ein
entsprechendes Wind-Instrument angeschl
ossen werden, z.B. ein Navman WIND 3100.
SPEED: Geschwindigkeitsdaten von:
einem Navman SPEED 3100 mit
Paddelrad-Sensor
oder einem GPS oder z.B. einem
Kartenplotter der Navman Serie
TRACKER 5000, verbessern
die Steuer-Eigenschaften des
G- PILOT 3100.
Hinweis: Ein Paddelrad-Geber misst
die Geschwindigkeit durch das Wasser,
während ein GPS die Fahrt über Grund
misst. Ist eine Strömung vorhanden,
ergeben sich unterschiedliche Werte.
Empfängt der G-PILOT 3100 Daten
von beiden Sensor-Arten, nutzt die
Anlage automatisch die Werte vom
Paddelrad- Instrument.
1-2-2 NavBus
NavBus ist ein für Navman geschütztes System,
das eine Vernetzung multipler Instrumente mit
nur einem Gebersatz ermöglicht. Werden
Instrumente per NavBus verbunden:
erfolgen an einem Instrument
durchgeführte Änderungen für Alarme
oder Kalibrierungen automatisch in allen
Instrumenten vom gleichen Typ.
können mehrere Instrumente Gruppen zugeordnet werden, um von einem
Gerät die Beleuchtung aller Geräte einer
Gruppe (1, 2, 3 oder 4) gleichzeitig zu
ändern (siehe G-PILOT 3100 Bedienung, Menu BKL-GROUP im Menu
FACTORY). Wird die Beleuchtung von
einem Instrument der Gruppe 0 geändert,
erfolgt bei keinem anderen Instrument
eine Änderung.
Ertönt ein Alarm, kann dieser an jedem
G-PILOT 3100 Installations- und Bedienungsanleitung
NAVMAN
beliebigen Instrument nullgesetzt werden,
das diesen Alarm zeigt.
Weitere Informationen sind im NavBus
Installations- und Bedienungs-Handbuch
enthalten. Hinweis: GPS-Daten müssen per
NMEA erfolgen.
NavBus und der G-PILOT 3100
Es können mehrere Bediengeräte für den
G-PILOT 3100 genutzt werden.
Der G-PILOT 3100 kann über NavBus
Wind-Daten vom WIND 3100 empfangen.
Der G-PILOT 3100 kann über
NavBus Geschwindigkeits-Daten vom
SPEED 3100 empfangen.
1-2-3 NMEA
NMEA ist ein Industrie-Standard, der nicht so
fl exibel ist wie NavBus, da er separate Einund Ausgang-Verbindungen erfordert. Der
G-PILOT 3100 hat einen festgelegten NMEAEingang und zusätzlich einen Anschluss, der als
Ein- oder als Ausgang konfi gurierbar ist. (siehe
G-PILOT 3100 Bedienungs-Handbuch).
G-PILOT 3100 NMEA Eingänge
GPS: Der G-PILOT 3100 kann NMEA GPS-
Daten von einem kompatiblen GPS oder
Kartenplotter empfangen, z.B. einem der
Navman Serie TRACKER 5000:
XTE (aus APA, APB oder XTE-Folgen)
ist erforderlich, um den G-PILOT 3100 im
GPS-Modus zu betreiben.
BRG (aus APA-Folgen) und BOD (aus
APA oder APB-Folgen) ist optional und
verbessert die Eigenschaften.
COG (aus VTG-Folgen) ist optional und
kann angezeigt werden.
WIND: Der G-PILOT 3100 kann NMEA
Winddaten von einem kompatiblen
Instrument empfangen.
Wahre oder scheinbare Wind-Richtung
(aus MWV-Folgen) ist erforderlich um den
Wind-Modus zu nutzen.
SPEED: Der G-PILOT 3100 kann NMEA
Speed-Daten von einem kompatiblen Logoder GPS-Instrument empfangen.
SOG (aus VTG-Folgen) ist optional und
verbessert die Performanz.
Hinweis: Ist der G-PILOT 3100 mit einem
Wind- oder Log-Instrument der Navman 3100
Serie über NavBus verbunden, werden NMEAVerbindungen nicht benötigt.
35

G-PILOT 3100 NMEA Ausgänge
Wird der NMEA Anschluss 2 als DatenAusgang konfi guriert, können folgende Daten
gesendet werden:
entweder Kurs (HDG & HDT) und
Ruderwinkel (RSA) 1 x je Sekunde
oder Kurs (HDG) 10 x je Sekunde
(siehe Bedienungs-Handbuch G-PILOT 3100,
Werks-Menu, NMEA 2 DAT).
2 G-PILOT 3100 Lieferumfang
2-1 G-PILOT 3100 Standard-Lieferung
Zentral-Einheit
Kursgeber, mit 10 m
Kabel
Schutzkappe für das
Bediengerät
36
Ruderwinkel-Geber
Kreiselgeber, mit
10 m Kabel
Montage Bauteile, KabelAbdeckung, Entlastungs-
Schellen, Ersatz-Sicherungen
NAVMAN
Bedien-Gerät
Garantie-Karte und
Montage-Schablone
für Bediengerät
G-PILOT 3100 Installations- und Bedienungsanleitung
Dieses Installations-
Handbuch plus
Bedienungs-
Zweiader-Kabel (2 mm) für
den Leistungs-Anschluss
Handbuch
2-2 Weitere erforderliche Teile
Power supply: Spannungs-Versorgung:
der G-PILOT 3100 benötigt zwei 12 V DC
Versorgungen:
Eine Leistungs-Versorgung für die
Antriebs-Einheit
Eine Schwachstrom-Versorgung für
Zentral- Elektronik und angeschlossene
Instrumente.
Die Spannungs-Versorgung erfordert ein oder
zwei Lastschutz-Schalter oder Schalter und
Sicherungen (siehe Abschn. 3-4).
Ruder-Antrieb: der G-PILOT 3100 kann mit
12 V DC und max. 20 A folgende Antriebe
schalten: umschaltbare Hydraulikpumpe,
konstant laufendes Hydraulik-Aggregat, hydraulischen Linear-Antrieb, Getriebe-Motor
Winkelgelenk-Gestänge, um den
Ruderwinkel-Geber mit dem Ruderschaft zu
verbinden (siehe Abschn. 3-5).
3 Montage
Achtung: Eine korrekte und sorgfältige
Installation ist für einen fehlerfreien Betrieb
unabdingbar. Vor Montage-Beginn sind
dieses Handbuch und sonstige beigefügte
Informationen sorgfältig zu studieren.
Achtung
Die G-PILOT Zentraleinheit ist nicht
wasserdicht. Sie ist an einem trockenen
Ort zu montieren.
Das G-PILOT Bediengerät ist von der
Frontseite her wasserdicht. Auf der
3-1 Installations-Ablauf
Es wird empfohlen, wie folgt vorzugehen:
1 Dieses Buch und den Bauteilen
beigefügte Informationen sorgfältig lesen.
2 Sorgfältig vorplanen, wo Geräte zu
installieren sind und wie die Kabelführung
erfolgen kann (siehe Abschn. 3-2).
3 Die Zentral-Einheit montieren (siehe
Abschn. 3-3).
4 Den Ruderantrieb montieren sowie die
Versorgungs-Kabel für den Antrieb und
die Elektronik verlegen
(siehe Abschn. 3-4).
5 Den Ruderwinkel-Geber montieren (siehe
Abschn. 3-5).
6 Den Kompass-Geber montieren (siehe
Abschn. 3-6).
G-PILOT 3100 Installations- und Bedienungsanleitung
NAVMAN
Verkabelung, siehe Kabel-Tabelle, Abschn.
3-4-2.
Externe Alarm-Mittel (optional): Der externe
Ausgang schaltet 30VDC und 250mA gegen
Masse. Bei größeren Strömen ist ein Relais
erforderlich.
Weitere Bord-Instrumente (optional):
anschließbar sind Wind, Log oder GPS
Instrumente (siehe Abschn. 1-2).
Weitere Teile: Für eine System-Vernetzung
sind Kabel und Verbinder erforderlich. Die
Verdrahtung mehrerer Navman-Instrumente
wird durch die Nutzung einer NavmanAnschlussbox vereinfacht (siehe Abschn. 1-2
oder das NavBus-Handbuch).
Kupplungsverbinder und 10m VerlängerungsKabel sind als Verlängerung für Kurs-,
Kreisel- sowie Ruderwinkel-Geber verfügbar
(max. 1 Verlängerungs-Kabel pro Einheit). Für
weitere Fragen steht der Navman Fachhändler
zur Verfügung.
Rückseite befi ndet sich eine Belüftungs-
Öffnung, durch die Wasser eindringen
könnte. Die Garantie deckt keine
Schäden ab, die durch eingedrungene
Feuchtigkeit entstanden ist.
Kompass-, Kreisel- und Ruderwinkel-
Geber sind völlig wasserdicht.
Warnung: Bohrungen und MontageAusschnitte dürfen nicht die Boots-Struktur
schwächen. Im Zweifelsfall einen Bootsbauer
konsultieren.
7 Den Kreisel-Geber montieren
(siehe Abschn. 3-7).
8 Das Bediengerät und weitere
erforderliche Instrumente montieren
(siehe Abschn. 3-8).
9 Die Basis-Justierung durchführen
(siehe Abschn. 4).
10 Eine See-Erprobung durchführen
(siehe Abschn. 5).
Bestehen Zweifel, ob Bauteile an dem
entsprechend ausgewählten Platz fehlerfrei
funktionieren (Kompass, Kreisel), diese
provisorisch befestigen und erst nach
erfolgreicher Erprobung fest installieren.
37

3-2 Installations-Führer
Dieses ist eine generelle Anleitung für die Platz-Auswahl und die V erkabelung der G-PILOT 3100
Bauteile. Für diverse Teile können zusätzliche Anforderungen möglich sein.
3-2-1 Eingrenzung der
Montage- Orte
Bauteile nicht so ansetzen, dass sie
zum Festhalten verwendet werden, den
sonstigen Boots-Betrieb behindern oder
vom Wasser überfl utet werden könnten.
Bauteile nicht dort montieren, wo sie beim
Slippen oder Kranen beschädigt werden
könnten.
Keine Bauteile im Bereich von 0,5 m zur
Radar-Antenne montieren.
Montage von Kompass- und Kreisel-
Geber:
1 m Mindestabstand zu elektrischen
Störquellen, wie Batterien,
Hochstrom-Kabel, sonstige BootsKabel, Maschinen, Neonröhren,
Spannungs-Wandlern, Funk- und
Radar-Sendern und Radar-Antennen.
1 m Mindestabstand zu Bauteilen, die
Magnete enthalten, wie Lautsprecher
oder Kompasse.
3-2-2 Hinweise zur Verdrahtung
Für den G-PILOT 3100 sind 2 Arten Kabel
erforderlich:
Die Leistungs-Versorgung und der SteuerAntrieb benötigen Hochstrom-Kabel.
Den erforderlichen Querschnitt aus der
Umrechnungs-Tabelle entnehmen (siehe
Abschn. 3-4-2).
Hochstrom-Kabel mit einem Mindest-
Abstand von 1 m zu anderen elektro-
nischen Geräten verlegen.
Möglichst kurze Kabelwege nutzen.
Falls die Stärke von 2 mm (#14) ausre-
icht, kann das mitgelieferte Kabel für die
Leistungs-Versorgung benutzt werden.
Die anderen Kabel sind Schwachstrom- Kabel.
Diese Kabel mit 1m Mindestabstand zu
elektrischen Störquellen verlegen, wie
Hochstrom-Kabel, sonstige Boots-Kabel,
Maschinen, Neonröhren, Spannungs-
Wandlern, Funk- und Radar-Sendern und
Radar-Antennen.
Sind die Kabel für Ruderwinkel-Geber,
Kompass oder Kreisel zu lang, diese nicht
kürzen, sondern an passender Stelle
aufrollen.
Die Kabel für Ruderwinkel-, Kompass-
und Kreiselgeber können mittels
optionalem 10 m Kabel verlängert
werden. Je Geber darf nur einmal
verlängert werden.
Bei der Kabelverlegung:
Kabel nicht stark knicken und verdrehen
und nicht strecken.
Die Kabel in regelmäßigen Abständen
befestigen.
Kabelverbindungen dürfen nicht in der
Bilge liegen.
38
NAVMAN
G-PILOT 3100 Installations- und Bedienungsanleitung

3-3 Einbau der Zentral-Einheit
Physikalische Daten
200 mm
200 mm
WICHTIG! MinimumFreiraum 200 mm für das
Abnehmen des Gehäuses.
55 mm
Lochabstand 90 mm
140 mm
Lochabstand 184 mm
60 mm
WICHTIG! 60 mm Freiraum für die Kabelzuführung lassen.
Montage
Einen passenden Ort suchen:
An einem trockenen, kühlen Ort; wenn möglich nicht im Motoren-Raum.
In der Nähe von Strom-Versorgung und Ruderantrieb, um die Kabellängen dorthin möglichst
kurz zu halten.
Leichter Service-Zugang.
Wenn möglich an einer vibrationsfreien, vertikalen Wand.
Die Hinweise in Abschn. 3-2-1 beachten.
Die Einheit nicht mit den Kabel-Anschlüssen nach oben montieren, um das Eindringen von Nässe
und Schmutz zu verhindern.
G-PILOT 3100 Installations- und Bedienungsanleitung
NAVMAN
39
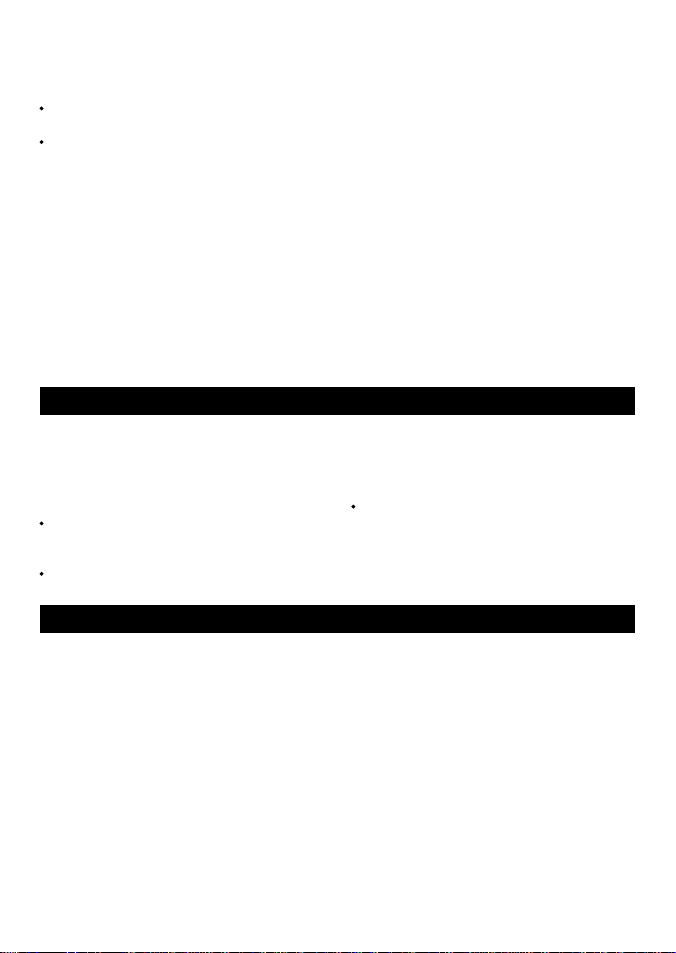
3-4 Spannungsversorgung für Zentral-Einheit und Ruderantrieb
3-4-1 Anschluss der Zentral-Einheit
Der G-PILOT 3100 benötigt eine Hoch- und eine
Schwachstrom-Versorgung, beide 12 V DC (10,5
bis 16,5 V DC)
Hinweis:
Kabel so kurz wie möglich führen.
Das Hochstrom-Kabel gemäß Tabelle
auswählen (siehe Abschn. 3-4-2).
Den Hinweisen im Abschnitt 3-2-2 folgen.
Spannungs-Versorgung 1 Schalter Konfi guration
Diese Konfi guration verwenden, wenn Pilot und
weitere Instrumente mit einem Schalter geschaltet
werden sollen.
ZentralEinheit
1 2 3 4 5 6 7 8
Entlastungsschellen
12 V DC
Versorgung,
ausreichend
zur Antriebs-
Versorgung.
Lastschalter oder Sicherung
plus Schalter, passend zur
Antriebs-Leistung
Spannungs-Versorgung: 2 Schalter Konfi guration.
Diese Konfi guration verwenden, wenn Antriebs-
Versorgung und Instrumente separat geschaltet
werden sollen.
12 V DC
Versorgung,
ausreichend zur
AntriebsVersorgung.
Lastschalter oder
Sicherung plus
Schalter, passend zur
Antriebs-Leistung
Hinweis: Werden mehr als drei Instrumente installiert, für die weiteren eine zusätzliche
Versorgung mit Schalter und Sicherung vorsehen.
40
Sicherung 1A
Kabelschellen setzen
Sicherung 1A
setzen
NAVMAN
LeistungsVersorgung
LeistungsVersorgung
Schalter
G-PILOT 3100 Installations- und Bedienungsanleitung
Klemmen-
Abdeckung
ElektronikVersorgung
1 2 3 4 5 6 7 8
Klemmen-
Abdeckung
ElektronikVersorgung

3-4-2 Anschluss der
Ruderantriebe
Die unterschiedlichen Ruderantriebe gemäß
Zeichnungen der folgenden Seiten verdrahten.
Hinweis:
Kabelverbindungen möglichst kurz führen.
Das Motor-Kabel gemäß Tabelle
auswählen.
Die Hinweise gemäß Abschnitt 3-2-2
beachten.
Um Drähte dicker als 6mm
können einzelne Litzendrähte vor der
Klemme abgekniffen werden, bis der
Durchmesser passt.
Werden mehrere Drähte in eine Klemme
gesetzt, diese vorher miteinander verdrillen.
Drahtgrößen-Tabelle
Zur Auswahl der passenden Drahtgröße:
1 Die benötigte Gesamt-Kabellänge von der Haupt-Schalttafel bis hin zur Antriebs-
Einheit messen.
2 Die Spalte mit der nächst größeren Kabellänge und die Zeile mit der für den Antrieb
erforderlichen Stromstärke wählen und aus dem Schnittpunkt der beiden Reihen die
erforderliche Kabelstärke entnehmen (für weniger als 3% Spannungs-Abfall).
Gesamt-Kabellänge von der Schalttafel bis zum Antrieb
0,7 m 1,5 m 2,2 m 3 m 3,7 m 4,5 m 5,2 m 6 m
Strom 2,5 ft 5 ft 7,5 ft 10 ft 12,5 ft 15 ft 17,5 ft 20 ft
1 amp 0,75 0,75 0,75 0,75 0,75 1,5 0,75 0,75
2 amp 0,75 0,75 0,75 0,75 0,75 1,5 1,5 1,5
3 amp 0,75 0,75 0,75 1,5 1,5 2,5 2,5 2,5
4 amp 0,75 0,75 1,5 1,5 2,5 4 2,5 4
5 amp 0,75 0,75 1,5 2,5 2,5 4 4 4
6 amp 0,75 1,5 1,5 2,5 4 4 4 6
7 amp 0,75 1,5 2,5 2,5 4 4 6 6
8 amp 0,75 1,5 2,5 4 4 8 6 6
9 amp 0,75 1,5 2,5 4 4 8 6 6
10 amp 0,75 2,5 4 4 8 8 6 10
15 amp 1,5 4 4 6 8 10 10 16
20 amp 2,5 4 6 10 10 16 16 16
2
anzuschließen,
G-PILOT 3100 Installations- und Bedienungsanleitung
NAVMAN
41

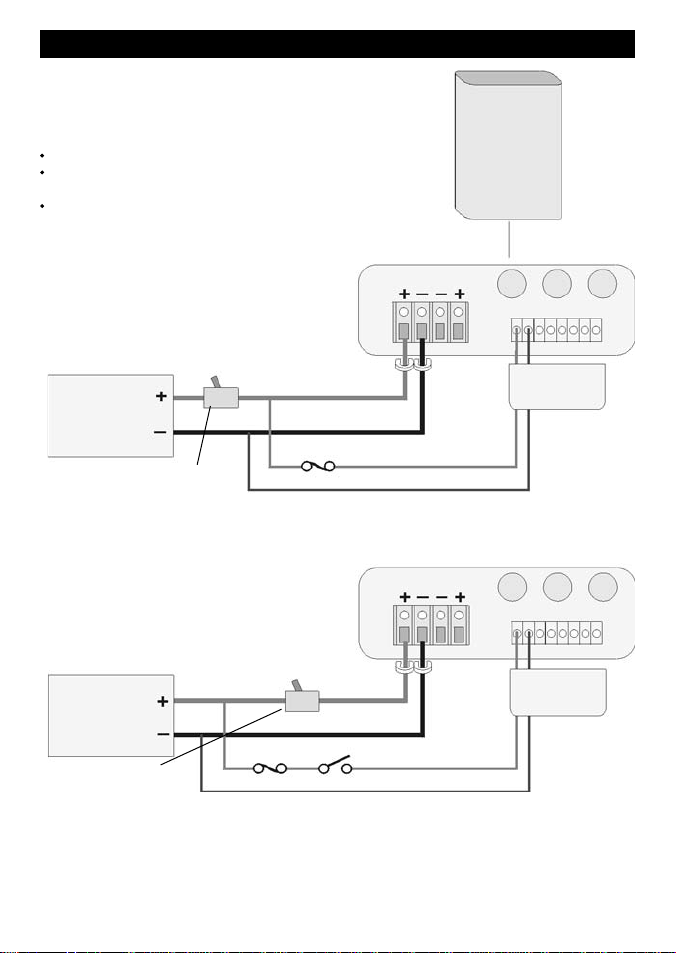
Beispiel für eine hydraulische Steuerung mit Elektropumpe.
Im Menu VESSEL, DRVE TYPE auf MTR setzen (siehe G-PILOT 3100 Bedienungsbuch).
Zentral-Einheit
1 2 3 4 5 6 7 8
Entlastungsschellen setzen
Starkstrom-Anschluss
Kein Anschluss
(siehe Abschn. 3-4-1)
Polarität hat keine
Bedeutung
Motor
Beispiel einer mechanischer Steuerung mit hydraulischem Linear-Antrieb für
Segelboote
Im Menu VESSEL, DRVE TYPE auf MTR setzen (siehe G-PILOT 3100 Bedienungsbuch).
Zentral-Einheit
Hinweis: Die Kupplungsspule
darf max. 300 mA aufnehmen
Kabelschellen setzen
Starkstrom-Anschluss (siehe
Klemmen-
Abdeckung
Abschn. 3-4-1)
Polarität hat keine
Bedeutung
Motor
Kupplungs-
Spule
1N4002 Diode oder äquivalent,
nahe der Kupplungs-Spule setzen
42
NAVMAN
G-PILOT 3100 Installations- und Bedienungsanleitung

Beispiel eines mechanischen Antriebes mit Kupplungs-Relais
Im Menu VESSEL, DRVE TYPE auf MTR setzen
(siehe G-PILOT 3100 Bedienungsbuch).
Zentral-Einheit
1 2 3 4 5 6 7 8
Kabelschellen setzen
Starkstrom-Anschluss (siehe
Abschn. 3-4-1)
Klemmen-
Abdeckung
1N4002 Diode oder äquivalent,
nahe der Kupplungs-Spule setzen
Relais-Spule
Kupplungs-
Spule
Relais-Spule
nahe der Relais-Spule setzen
Motor
Polarität hat keine
Bedeutung
1N4002 Diode oder äquivalent
Hinweis: Relais erforderlich,
wenn Kupplungs-Strom größer
Beispiel einer Installation mit Dauerläufer und Magnet-Ventilen
Im Menu VESSEL, DRVE TYPE auf SPL setzen.
(siehe G-PILOT 3100 Bedienungsbuch).
als 300 mA.
Zentral-Einheit
Kabelschellen setzen
Starkstrom-Anschluss (siehe
Abschn. 3-4-1)
Relais-Spule
Hinweis: Motor ist
nicht erforderlich bei
Pumpen-Antrieb von
der Maschine
Motor
Bedeutung
Steuerbord
Polarität
hat keine
1N4002 Diode oder
äquivalent nahe der RelaisSpule setzen
Hinweis: Relais erforderlich,
wenn Kupplungs-Strom
größer als 300 mA.
G-PILOT 3100 Installations- und Bedienungsanleitung
Backbord
NAVMAN
1 2 3 4 5 6 7 8
Klemmen-
Abdeckung
Relais-Spule
43

Magnetventil- oder Relais-Steuerung mit paralleler Zeitsteuerung
Im Menu VESSEL, DRVE TYPE auf SPL setzen. (siehe G-PILOT 3100 Bedienungsbuch).
Zentral-Einheit
1 2 3 4 5 6 7 8
Entlastungsschellen setzen
Leistungs-Versorgung
(siehe Abschn. 3-4-1)
Kein Anschluss
Steuerbord
Backbord
Zeitsteuerungs-Kontakte
44
NAVMAN
G-PILOT 3100 Installations- und Bedienungsanleitung

3-5 Ruderwinkel-Geber montieren
Physikalische Daten
Ruderschaft
90 mm
220 mm
Verbindung zum
Ruderschaft
Verbindungs-Stange mit
Anschluss-Gelenken
und Sicherungs-Muttern
Geber
Arm
LT8 Verbinder
10 m Kabel
Verbindungs-Arm
frei am Geber
drehbar
Ende der
Verbindungs-Stange
führt in eines der
Löcher auf dem Arm
Montage-Erfordernisse
Diese 2
Längen
müssen
gleich sein.
Wenn erforderlich,
durch Lochversetzung
die Länge anpassen.
Geber so anordnen,
dass die Gestänge
90°-Winkel ergeben
Wenn erforderlich,
diese Verbindung
kürzen
Hinweis:
Der Geber ist wasserdicht, sollte aber nicht vom Wasser überfl utet werden.
Den Geber auf eine vibrationsfreie Konsole montieren.
Die Hinweise in Abschn. 3-2-1 beachten.
G-PILOT 3100 Installations- und Bedienungsanleitung
NAVMAN
Gewinde = M5
Diese 2
Längen
müssen
gleich sein.
Ruderschaft und
Geberschaft
müssen parallel
verlaufen
Verbindungen
zwischen Arm
und Schaft
müssen auf einer
Ebene liegen
45

Geber-Ausrichtung
Der Geberarm ist frei drehbar. Bei Mittschiffs-Ruderlage muss der Pfeil auf dem Arm mit einem
der Nullstriche auf dem Geber übereinstimmen.
Null-Strich
Unterteil
Null-Strich
Der Geber kann entsprechend in zwei um 180° versetzten Positionen montiert werden. Empfohlen
wird die Position, bei der das Kabel außerhalb der Gestänge-Anordnung liegt.
Die Strich-Skalen grenzen
den linearen Bereich
des Gebers ein.
Empfohlen
(Ruder mittschiffs)
Nicht empfohlen, Kabel kann mit
dem Gestänge kollidieren.
Anbringungs-Beispiele
Empfehlung: U-förmige Anordnung mit den Armen parallel zur Boots-Längsrichtung.
Bootsbug
Bei Raummangel: U-förmige Anordnung
der Arme, verdreht zur Boots-Längsrichtung:
Bootsbug
46
Nicht empfohlen: Z-förmige Anordnung:
Bei großer Ruderlage, keine Linearität der Übertragung
und Möglichkeit der Gestänge-Beschädigung.
NAVMAN
G-PILOT 3100 Installations- und Bedienungsanleitung

Montage
1 Gemäß vorhergehender Beispiele einen passenden Geberplatz suchen.
2 Einen passenden Ruderschaft-Arm anfertigen.
3 Geber und Gestänge gemäß Beispielen montieren.
Ruder
mittschiffs
legen.
Wenn erforderlich
mit einer GeberKonsole die Höhe
anpassen.
Den Geber verdrehen, bis der
Armpfeil auf einen Nullstrich
zeigt. Mit je einer Schraube in
den Schlitzmitten den Geber
lose ansetzen.
Geber nachdrehen, bis
Pfeil und Nullstrich exakt
übereinstimmen. Dritte
Schraube einfügen und
festsetzen.
Ruder muss
mittschiffs
liegen.
Gelenk am
Falls erforderlich, die Stange
kürzen. Das Gelenk wieder
Ruderarm
befestigen
Stangenende in
das passendeLoch
einfügen.
ansetzen und mit der Mutter
sichern.
4 Das Kabel zur Zentrale verlegen. Hinweise aus Abschn. 3-2-2 beachten.
Wanddurchbrüche
müssen mindestens
18,5 mm groß sein.
Stecker in die Steckdose einführen.
Zentral-Einheit
G-PILOT 3100 Installations- und Bedienungsanleitung
NAVMAN
47

3-6 Kursgeber montieren
Gebermaße
Befestigungs-
Löcher
101 mm
71 mm
97 mm
LT8 Verbinder
Aufstellungsort
Folgende Bedingungen beachten:
1 m Mindestabstand zu jeder Art Eisen-
bzw. Stahl-Bauteilen wie:
Stahlrumpf, Deck, Kabine oder Ferro-
Zement-Rumpf.
Stahlteile, wie Motoren und Küchen-
Maschinen.
Orte, wo stählerne Bauteile gelagert
werden, wie Ankerkasten oder
Material-Lager.
2 m Mindestabstand zu Anlagen mit
Magneten und Geräten, die elektromagnetische Felder erzeugen, wie
Kompasse, Hochstrom-Kabel, ElektroMotoren, Funk- und Radar-Sender sowie
Bei Fiberglass- oder Holz-Rümpfen: den Geber in das Bewegungs-Zentrum setzen (bei Gleitern
liegt dieses normalerweise in Hecknähe).
Stahlrumpf, Nichtstahlkabine: Kompass
1 m über Rumpf montieren.
1 m
10 m
Sende-Antennen.
So nahe wie möglich in das Bewegungs-
Zentrum des Bootes um RichtungsBewegungen beim Stampfen und Rollen
zu minimieren. Zumindest den Kompass
so niedrig wie möglich anbringen.
An einer vibrationsarmen
vertikalen Wand.
Der Geber ist wasserdicht, sollte jedoch nicht
überfl utet werden können. Der Kompass wird
nicht durch hochwertigen VA-Stahl gestört
und auch nicht durch Kupfer und Messing.
Hinweise gemäß Abschn. 3-2-1 beachten.
Stahlrumpf, Stahlkabine: Kompass auf
einen Pfosten 1 m über Rumpf und mind. 1m
von der Kabine entfernt montieren:
Mind. 1 m
1 m
48
NAVMAN
G-PILOT 3100 Installations- und Bedienungsanleitung

Montage
1 Aufstellungsort gemäß vorhergehender Hinweise suchen.
2 Den Geber mit den beigefügten 3 Schrauben anbringen. Die vertikale Position muss
innerhalb +/-10° liegen.
Weniger als
10° 10°
Weniger als
10° 10°
3 Das Kabel zur Zentrale verlegen. Hinweise gemäß Abschn. 3-2-2 beachten.
Zentral-Einheit
Wandbohrungen
müssen mindestens
18,5mm groß sein.
Stecker auf den Steckplatz setzen.
Hinweis
Wird der Kompass bei eingeschalteter Spannung in Relation zum Kreisel bewegt, warten,
bis sich die Anzeige stabilisiert hat.
G-PILOT 3100 Installations- und Bedienungsanleitung
NAVMAN
49

3-7 Kreiselgeber montieren
Physikalische Daten
101 mm
71 mm
BefestigungsLöcher
LT8 connector
10 m
97 mm
Aufstellungsort
So nahe wie möglich in das Bewegungs-Zentrum des Bootes um Richtungs-Bewegungen beim
Stampfen und Rollen zu minimieren.
Den Geber an einer vibrationsfreien vertikalen Fläche montieren.
Der Geber ist wasserdicht, sollte jedoch nicht überfl utet werden können. Die Hinweise in Abschn.
3-2-1 beachten.
Den Geber möglichst in das Bewegungs-Zentrum setzen (bei Gleitern liegt dieses normalerweise
in Hecknähe).
50
NAVMAN
G-PILOT 3100 Installations- und Bedienungsanleitung

Montage
1 Aufstellungsort gemäß vorhergehender Hinweise suchen.
2 Den Geber mit den beigefügten 3 Schrauben anbringen. Die vertikale Position muss
innerhalb +/-10° liegen.
Weniger als
10° 10°
3 Das Kabel zur Zentrale verlegen. Hinweise gemäß Abschn. 3-2-2 beachten.
Weniger als
10° 10°
Wandbohrungen
Zentral-Einheit
müssen mindestens
18,5 mm groß sein.
Stecker auf den Steckplatz setzen.
Hinweis
Wird der Kreisel bei eingeschalteter Spannung in Relation zum Kompass bewegt, warten,
bis sich die Anzeige stabilisiert hat.
G-PILOT 3100 Installations- und Bedienungsanleitung
NAVMAN
51

3-8 Bediengerät und weitere Instrumente montieren
Das Bediengerät installieren:
1 Einen Platz wählen gemäß folgenden
Bedingungen:
Leichte Ables- und Bedienbarkeit in
der Nähe vom Steuerstand.
Zugang von hinten; Mindest-Freiraum
auf der Rückseite - 50 mm (siehe
Einbau-Zeichnung).
Die Rückseite vor Feuchtigkeit
geschützt.
Hinweise gemäß Abschn. 3-2-1 beachten.
2 Die Montagefl äche muss eben sein und
eine Wandstärke von max. 20 mm haben.
Unter Verwendung der MontageSchablone eine 50mm Bohrung in das
Zentrum der Schablone schneiden.
Beachten, dass am Schablonenrand etwas
Freiraum für die Schutzkappe verbleibt.
3 Den großen Schraubring von der
Rückseite entfernen. Das Instrument
in die Bohröffnung einsetzen und
den Schraubring von hinten handfest
aufschrauben.
Verdrahtung
Bedien-
Gerät
Zentral-
Einheit
Ausg. Kupplg. 8
NMEA 2. 7
NMEA Eing. 1 6
NMEA Rückl. 5
NavBus -, Blau 4
NavBus +, Orange 3
Masse, Schwarz 2
12 V DC +, Rot 1
Klemmen-Abdeckung
8-PinVerbinder
Grün
Seitenansicht der Display-Montage
20 mm max. Stärke
Montage-
Öffnung
50 mm
Displayfront
Freiraum 50 mm minimum
Den Hinweisen aus Abschn.
3-2-2 folgen.
Bediengerät-Kabel, erfordert 6 mm
Wanddurchbruch.
Gelb (isolieren, nicht abschneiden)
Weiß (isolieren, nicht abschneiden)
Elektronik-Versorgung
(siehe Abschn. 3-4-1)
Optionale externe Alarm-Mittel.
Benötigen diese mehr als
250 mA, ein Relais einfügen.
Kabel--
Befestigungs-
Schraube
Hinweis
Die Bediengerät-Versorgung (rot und schwarz) an die Anschlüsse 1 und 2 der Zentral-
Einheit anschließen, damit beide Geräte die selbe Spannungs-Versorgung erhalten.
52
NAVMAN
G-PILOT 3100 Installations- und Bedienungsanleitung

Anschluss weiterer Instrumente
Weitere G-PILOT
Bediengeräte
Bedien-
gerät
Den Hinweisen gemäß Abschn. 3-2-2 folgen.
Andere
Instrumente der
Serie 3100
3100
Ein GPS, z.B ein
Kartenplotter der
Serie Navman
TRACKER 5000
GPS
Geräte
Zentral-
Einheit
Ausg. Kupplg. 8
NMEA 2 7
NMEA Eing. 1 6
NMEA Rückl. 5
NavBus -, Blau 4
NavBus +, Orange 3
Masse, Schwarz 2
12 V DC +, Rot 1
Klemmen-Abdeckung
Grün (nur von
einem Gerät)
NMEA
Eing. &
Ausg.
GrünGrün
Versorgung,
NMEA Eing.
Kupplg. optional
(siehe Abschn. 3-4-2)
NMEA Eing. & Ausg.
GPS NMEA Ausg.
GPS NMEA gemeins.
Elektronik-Versorgung
(siehe Abschn. 3-4-1)
Alarm-Mittel
(siehe vorige Seite)
Hinweis:
Weitere Verdrahtungs-Informationen enthalten die den Geräten beigefügten Handbücher.
Werden mehr als 3 Bediengeräte oder sonstige Instrumente der Serie 3100 angeschlossen,
ist eine zusätzliche Spannungs-Versorgung für die weiteren Geräte erforderlich (siehe
Abschn. 3-4, bzw. das Instrumenten-Handbuch).
Die externen Alarm-Ausgänge (grün) der Navman 3100 Instrumente und der 5000er
Kartenplotter können miteinander verbunden werden, um externe Alarmmittel anzusteuern.
Bei Systemen mit diversen weiteren Instrumenten sollten NavBus Verbindungs-Boxen
verwendet werden, um die Verdrahtung zu vereinfachen (siehe NavBus-Handbuch).
G-PILOT 3100 Installations- und Bedienungsanleitung
NAVMAN
53

4 Basis-Inbetriebnahme nach Einbau
Die Durchführung ist erforderlich:
Nach Installation der G-PILOT 3100 Anlage (siehe Abschn. 3).
Nach Austausch eines defekten Teiles oder zur Einkreisung eines Problems.
Nach der Inbetriebnahme ist eine See-Erprobung erforderlich (siehe Abschn. 5).
4-1 Vorbereitung der Justierung
1 Den G-PILOT 3100 einschalten (siehe
Bedienungs-Handbuch). Wird das Ruder
bewegt, sofort wieder ausschalten und
die Anlage auf fehlerhafte Verdrahtung
untersuchen. Kontrollieren, das im Display
für einige Sekunden unten “AP3100” gezeigt
wird und dann eine Versions-Nummer.
Danach erscheint die Basis-Anzeige.
Wird dann auf AUTO geschaltet und
es ist noch keine Justierung erfolgt,
erscheint der Hinweis CAL ERROR
(Kalibrierungs- Fehler).
2 Wurde der G-PILOT 3100 vorher bereits
benutzt, wieder die Werkseinstellung
aktivieren
:
Anwender-Datenformular (zur
Eintragung der Setup-Einstellungen)
VESSEL menu
Menu-Punkt Datenwert
VSL TYPE . . . . . . . . . . . . . .
DRVE TYPE . . . . . . . . . . . . . .
WIND TYPE . . . . . . . . . . . . . .
HDG TYPE . . . . . . . . . . . . . .
MAG VAR . . . . . . . . . . . . . .
OPTIONS menu
Menu-Punkt Datenwert
DODGE ANG . . . . . . . . . . . . . .
TACK ANG . . . . . . . . . . . . . .
GYBE ANGLE . . . . . . . . . . . . . .
TACK DELY . . . . . . . . . . . . . .
TURN RATE . . . . . . . . . . . . . .
WARNUNG
Solange noch keine Ruderendlage justiert wurde (siehe Abschn. 4-2), ist noch keine automatische
Begrenzung vorhanden. Es ist dann möglich, mit dem Antrieb das Ruder bis gegen den
mechanischen Anschlag zu fahren.
54
NAVMAN
i im Menu FACTORY auf NVM RESET
gehen (siehe G-PILOT Bedienungs-
Handbuch).
ii Zum Funktions-Auruf, > drücken.
iii Zur Daten-Nullsetzung, MENU drücken.
iv Zum Abschluss AUTO drücken.
3 Nun die erforderlichen Basis-Einstellungen
durchführen und diese in das unten
gezeigte Formular eintragen. Die
Bedeutung der Menu-Kurzzeichen sind
dem Bedienungs-Handbuch zu entnehmen.
4 Nach Abschluss der Eingaben, AUTO drücken
und damit aus den Menus herausgehen.
ALARM menu
Menu-Punkt Datenwert
CE ALARM . . . . . . . . . . . . . .
XTE ALARM . . . . . . . . . . . . . .
WPT AKN . . . . . . . . . . . . . .
WND ALARM . . . . . . . . . . . . . .
(nur bei Seglern)
BAT ALARM . . . . . . . . . . . . . .
CUR ALARM . . . . . . . . . . . . . .
FACTORY menu
Menu-Punkt Datenwert
BKL GROUP . . . . . . . . . . . . . .
KEY BEEPS . . . . . . . . . . . . . .
NMEA2 DAT . . . . . . . . . . . . . .
G-PILOT 3100 Installations- und Bedienungsanleitung

4-2 Ruderwinkelgeber justieren
Bei dieser Prozedur wird die Ruderlagen-Anzeige justiert.
Hinweis:
Der Vorgang lässt sich jederzeit durch Drücken von ESC abbrechen.
Wird das Ruder nicht wie aufgefordert bewegt, oder arbeitet der Geber nicht korrekt, kann
die Justierung nicht vollendet werden. Es erscheint dann CALB FAIL im Display. Es ist dann
ESC zu drücken, das Problem zu beheben und die Justierung zu wiederholen.
Im Normalbetrieb wird der G-PILOT das Ruder 3° vor dem Anschlag stoppen.
RFU CAL
Im Menu DEVICES auf RFU CAL gehen
(siehe G-PILOT 3100 Bedienung).
ENT
CENTRE
Das Ruder exakt auf
Mittschiffs-Lage einstellen.
ENT
MAX PORT
Das Ruder nach Backbord
bis in die Endlage stellen.
ENT
MAX STBD
Das Ruder nach
Steuerbord bis in die
Endlage stellen.
ENT
ANGLE 25
Liegt das Ruder in der StBEndlage, den exakten Winkel
zur Mittschiffs-Lage messen
(in diesem Beispiel 30°).
< oder > drücken, bis die
gemessene Gradlage gezeigt
wird (in diesem Beispiel 30°).
30°
ANGLE 30
ENT
G-PILOT 3100 Installations- und Bedienungsanleitung
CENTRE
Das Ruder exakt auf die
Mittschiffs-Lage stellen.
ENT
STAND CLR
Ruderantrieb kontrollieren, dass
nichts behindert wird und alles frei
beweglich ist, weil der G-PILOT einen
automatischen Test durchführen wird.
ENT
TEST LIMS
Der G-PILOT legt das Ruder in eine
Endlage, dann in die andere und wieder
zurück zur Mittellage.
Drücken von ESC stoppt diesen Vorgang.
ENT
Gezeigter Ruderwinkel
PILOT
ACPT CAL
Das Ruder mit der Hand in beide Endlagen
führen und kontrollieren, ob die Anzeige korrekt
ist (7° in diesem Beispiel).
Mit ESC ist jederzeit die Justierung abbrechbar.
ENT
CALB DONE
Der Ruderwinkelgeber ist fertig justiert.
ENT
Ende der Justierung
NAVMAN
7°
55

5 See-Erprobung
Die See-Erprobung durchführen:
Nach erfolgreicher Basis-Einstellung
(siehe Abschn. 4).
Um die Steuer-Parameter
optimal einzustellen.
Ein freies Gewässer aufsuchen, ohne Hindernisse
und störenden Verkehr. Die See sollte ruhig sein,
wenig Wind und keine Strömung vorhanden sein.
5-1 Den Kompass justieren
Hinweis:
Der Vorgang ist jederzeit durch Drücken von ESC abzubrechen.
Dreht sich das Boot nicht wie vorgegeben, oder arbeitet der Kompass nicht, muss der Vorgang
abgebrochen werden. Der Pilot zeigt CALB FAIL. ESC drücken, den Fehler beheben und
erneut starten.
Örtliche Störungen des magnetischen Feldes können die Kurs-Anzeige beeinfl ussen. Es ist daher
die Nähe von großen Schiffen, Hafenpiers usw. zu meiden. Hierfür ist der Bootsführer verantwortlich.
Sicherstellen, dass beide Quellen den gleichen Nord-Bezug haben (wahr oder magnetisch). Ist
der Bootskompass nicht kompensiert, eine andere Referenz-Quelle wählen. Bei kompensiertem
Bootskompass die entspr. Deviations-Tabelle nutzen, um den Pilot-Kompass anzupassen.
Den G-PILOT 3100 einschalten. Mit der
Handsteuerung einen geraden Kurs bei
langsamer Geschwindigkeit steuern.
CSU CAL
Im Menu DEVICES, CSU CAL aufrufen
(siehe G-PILOT 3100 Bedienung).
Per Hand einen geraden Kurs steuern.
Die Kursanzeige darf sich bei dieser
Prozedur nicht ändern.
Der anliegende
Kurs ist z.B.
20°, gezeigt
wird 23°.
< ALIGN >
Mit < oder > die Anzeige auf den
TURN BOAT
Mittels Handsteuerung 2,5
gleichförmige Kreise
fahren, beliebig nach
BB oder StB.
Die Drehbewegung
muss weich und stetig
gen. Jeder Kreis sollte in 1 bis 2 Minuten
durchgeführt sein. Der G-PILOT erkennt,
wann die 2,5 Drehungen erfolgt sind und
startet automatisch den nächsten Schritt.
in eine Richtung erfol-
tatsächlichen Wert einstellen (hier 20°).
< ALIGN >
ENT
ACPT CAL
Dieser Schritt richtet den Kompass an.
Ist ein GPS angeschlossen, 2 x MENU
drücken, um diesen Schritt zu übergehen.
Danach den Kompass an die GPS-Werte
angleichen (siehe Abschn. 6-1-2).
Einen genauen Kompass nutzen oder ein
externes, um den exakten Kurs zu erhalten.
Bei externem GPS, möglichst schnell und
exakt geradeaus fahren.
56
Per Hand verschiedene Kurse steuern und
kontrollieren, ob aktueller und angezeigter Kurs
nahe beieinander liegen.
Zum Abbrechen der Kalibrierung, ESC drücken
ENT
CALB DONE
Der Kompass ist kalibriert
NAVMAN
ENT
Ende der Kalibrierung
G-PILOT 3100 Installations- und Bedienungsanleitung

6 Kompass und Ruder ausrichten
Kompass und Ruder lassen sich separat ausrichten.
6-1 Kompass ausrichten
Hier wird der Kompass exakt auf Null-Lage
ausgerichtet (Korrektur A-Fehler).
6-1-1 Die G-PILOT Kursanzeige nach einem
Referenz-Kompass ausrichten
Einen exakt arbeitenden Kompass oder
externen GPS für den anliegenden Steuerkurs
nutzen. Bei einem GPS einen exakten Kurs
über eine gewisse Distanz steuern.
Das Boot manuell einen geraden
Kurs steuern. Die Kompass-Anzeige
darf sich dabei nicht ändern.
Im Menu DEVICES, ALIGN
HDG aufrufen (siehe G-PILOT
3100-PILOT Bedienung).
ALIGN HDG
Die G-PILOT Kursanzeige kann nach einem
Referenz-Kompass oder einem angeschlossenen
GPS ausgerichtet werden. Seitenwind und
Strömung dürfen nur minimal sein.
6-1-2 Die G-PILOT Kursanzeige nach einem
angeschlossenen GPS ausrichten.
Möglichst schnell fahren, um einen
sicheren Kurs zu erhalten.
Das Boot manuell einen geraden Kurs
steuern. Die Kompass-Anzeige darf
sich dabei nicht ändern.
Im Menu DEVICES, ALIGN GPS
aufrufen (siehe G-PILOT 3100PILOT Bedienung).
ALIGN GPS
ENT
Der anliegende
Kurs ist z.B.
20°, gezeigt
< ALIGN >
Mit < oder > die Anzeige auf den
tatsächlichen Wert einstellen (hier 20°).
wird 23°.
< ALIGN >
Per Hand verschiedene Kurse steuern und
ENT
kontrollieren, ob aktueller und angezeigter
Kurs nahe beieinander liegen.
ENT
Der G-PILOT 3100
speichert den
GPS-Kurs.
Ende der Kalibrierung.
6-2 Ruderwinkel ausrichten
Hier erfolgt eine Ruder-Einstellung, bei der das Boot geradeaus steuert. Es dürfen kein Seitenwind
und keine Querströmung sein.
Per Hand einen geraden Kurs bei
normaler Fahrt steuern.
Der G-PILOT 3100 speichert den
ENT
CENTR RFU
Im Menu DEVICES auf CENTR RFU gehen
(G-PILOT 3100 Bedienung).
G-PILOT 3100 Installations- und Bedienungsanleitung
NAVMAN
eingestellten Ruderwinkel und setzt
diesen als neuen Ruder-Nullwert.
Ende der Kalibrierung.
57

Anhang A - Spezifi kationen
Elektrisch
Leistungsstrom-Versorgung 10,5 bis
16,5 V DC, 20A maximum.
Elektronik-Versorgung 10,5 bis
16,5 V DC:
Zentral-Einheit 80 mA.
Jedes Bediengerät 30 mA ohne
Beleuchtung, 110 mA mit voller
Beleuchtung.
Andere optionale Instrumente, siehe
deren Handbücher.
Schnittstellen
NavBus Verbindung zu anderen Navman
Instrumenten.
NMA 0183 Ausgänge HDG; HDT; RSA;
Eingänge: APA; APB; BOD; BWC; MWD;
MWV; RMA; RMB; RMC; VHW; VTG; XTE.
NMEA 0183 Anschlüsse:
NMEA 1 Eingang
NMEA 2 programmierbar als Ein- oder
Ausgang
Standard Übereinstimmung
EMC Übereinstimmung
USA (FCC): Part 15 Class B.
Europe (CD): EN50081-1, EN50082-1
Neu-Seeland und Australien (C Tick):
AS-NZS 3548.
Schutzart:
Kompass, Kreisel, Ruderwinkel-Geber:
vollständig wasserdicht.
Bediengerät: IP66 von der Frontseite,
wenn korrekt montiert.
Zentral-Einheit: erfordert einen kühlen,
trockenen und sauberen Raum.
Anschlussklemmen der Zentral-Einheit:
Anschluss Signal
1 Leistungs-Versorgung Plus, 10,5
2 Leistungs-Versorgung Minus
3 Ruderantrieb Anschluss negativ
4 Ruderantrieb Anschluss positiv
Elektronik-Anschlüsse
Anschluss Signal
1 Elektronik-Versorgung plus, 10,5
2 Elektronik-Versorgung Minus
3 NavBus +
4 NavBus 5 NMEA Rückleitg.
6 NMEA Eing. 1
7 NMEA Eing. 2
8 Antr.Kupplung / Steuer-Relais,
Bediengerät Netz-/Datenkabel:
Draht Signal
Rot Versorgung Plus, 10,5 bis 16,5V
Schwarz Versorgung Minus
Orange NavBus +
Blau NavBus Gelb Isolieren, nicht abschneiden
Weiß Isolieren, nicht abschneiden
Grün Externer Alarm, gegen Masse
bis 16,5 V DC, 20A max.
bis 16,5V DC, 80mA max.
Ausgang gegen Masse schaltend,
30 V DC, 300 mA max.
DC, 30mA ohne Beleuchtung,
110mA mit voller Beleuchtung
schaltend, 30 V DC und
250 mA max
Anhang B - Alarm und Warn-Hinweise
Alarm-Anzeige Grund der Meldung Empfohlene Aktion Hinweise
BAT ALARM Batteriespannung niedriger als der Batterien prüfen a
gesetzte Minimum-Wert G-PILOT ausschalten
CAL ERROR
Kompass-Geber sind nicht justiert (siehe Abschn. 5-2 und 6-1)
CCH ERROR Kupplungs-Strom ist zu hoch Kupplung und Anschlüsse prüfen a s
CE ALARM Der Kursfehler ist größer Den Kurs manuell korrigieren a
als der eingestellte Maximal-Wert
CSU ERROR Die Zentrale erhält Kompass-Verbindungen prüfen, a s
keine Kompass-Daten Kompass prüfen lassen
CUR ALARM Der Motorstrom überschreitet Antriebs-Mechanik untersuchen a s
den gesetzten Maximal-Wert Den Alarm-Wert erhöhen
58
Ruderwinkel- und/oder
Ruderwinkel- und/oder
Beide Geber justCAL ERROR
Beide Geber justieren a
NAVMAN
G-PILOT 3100 Installations- und Bedienungsanleitung

Alarm-Anzeige Grund der Meldung Empfohlene Aktion Hinweis
DRV ERROR Keine Änderung der Ruderanzeige Versorgungs-Spannung prüfen a s
beim Schalten des Antriebes Geber-Mechanik prüfen
Sicherungen in der Zentral-Einheit
prüfen. Ruder-Antrieb untersuchen
GPS ERROR Der Pilot empfäng keine GPS-Daten GPS-Funktionen prüfen a c s
GPS-Verbindungen prüfen
GSU ERROR Pilot empfängt keine Kreisel-Signale Verbindungen zum Kreisel a s
prüfen; Fachservice anfordern
MCU ERROR Keine Datenübertragung Anschlussverbindungen a s
zwischen Zentrale und Display überprüfen
Service für Zentrale oder Display
NAV ERROR Pilot steuert nach entsprechendem Im GPS muss die Wegpunkt- bzw.
Befehl nicht zu einem Wegpunkt Routennavigation aktiviert werden
NEXT WPT? Boot hat den Ziel-Wegpunkt erreicht. Alarm löschen mit beliebiger
Taste
(WPT AKN aktiviert im GPS-Modus) Dann mit ENT zum nächsten Wegpunkt
starten, oder mit ESC auf STBY gehen
NO DATA Beim Aktivieren des GPS-Modus GPS-Funktionen prüfen m
werden keine GPS-Daten empfangen GPS-Verbindungen prüfen
oder Beim Aktivieren des Wind-Modus Wind-Instrument prüfen m
werden keine Wind-Daten empfangen Verbindung zum Pilot prüfen
NVM ERROR Zentral-Speicher ist gestört Service erforderlich a s
PHA ERROR Ruder dreht verkehrt in Relation Ruderwinkel-Geber prüfen a s
zum Rückgeber Ruderkalibrierung durchführen
RFU ERROR Der Pilot erhält keine Kabelverbindungen u. a s
Ruderwinkel-Daten Mechanik des Gebers prüfen
ROUTE END Boot erreicht Endziel Mit ESC auf STBY oder mit ENT
einer GPS-Route auf Kompass-Modus umschalten,
und den anliegenden Kurs steuern
TRK ERROR Beim Wechsel auf GPS-Modus liegt Das Boot manuell oder durch
das Boot zu weit außerhalb vom Kurs Kompass-Pilotsteuerung auf den
Kurs zurück führen
TAK ERROR Im Windmodus will sich das Den Winkel zum Wind ändern m
Boot in die falsche Richtung legen
WND ALARM Der Windwinkel ist größer SWA ändern a
geworden als der gesetzte Alarmwert Auf Kompass-Modus wechseln
WND ERROR Der G-PILOT erhält keine Wind-Daten Wind-Instrument prüfen a c s
Verbindungen zum Piloten prüfen
XTE ALARM Boot wird über den max. Das Boot manuell auf den Kurs a
XTE-Wert vom Kurs versetzt zurück bringen
Hinweis a Alarm ertönt. Ausschalten des Signals mit beliebiger Taste. Die Alarm-Meldung
mit ESC löschen
c Der G-PILOT 3100 wechselt in den Kompass-Modus
m Der G-PILOT 3100 Modus wechselt nicht
Der G-PILOT 3100 wechselt auf STBY
G-PILOT 3100 Installations- und Bedienungsanleitung
NAVMAN
59

Anhang C - Fehlersuche
Diese Anleitung setzt voraus, dass dieses
Handbuch gelesen und verstanden wurde.
In vielen Fällen ist es möglich, Fehler zu beseitigen, ohne einen Fach-Service anzufordern. Vor
Kontakt-Aufnahme mit dem Fachservice sollte
ein Fehler gemäß dieser Anleitung gesucht
werden.
Fehlerbeseitigung innerhalb der Bauteile ist
nur durch einen von Navman NZ Limited
autorisierten Fach-Service möglich, da hierfür
spezielles ,Equipment erforderlich ist. Durch
nicht autorisiertes Öffnen von Bauteilen
erlischt jeder Garantie-Anspruch. Weitere
Informationen hierzu sind auf der Navman
Website abrufbar: www.navman.com
1 Anlage lässt sich nicht einschalten:
a Sicherung defekt oder Lastschalter
abgefallen.
b Spannung liegt außerhalb von 10., bis
16,5 V DC.
c Fehler in der Verkabelung.
2 Der G-PILOT gibt zuviele Steuerbefehle:
Der RESPONSE-Wert ist zu klein
eingestellt (siehe G-PILOT 3100
Bedienung).
3 Im Autopilot-Betrieb pendelt der Kurs
nach beiden Seiten vom Sollkurs:
a Sind diese Ausschläge nur geringfügig
ist das korrekt.
b Auf ein passenderes Profi l im Menu
MAIN wechseln (siehe G-PILOT 3100
Bedienung).
c bei größeren Abweichungen,
Einstellungen ändern, wie response,
ratio, counter rudder gain, GPS gain
(wenn GPS-Modus aktiviert ist) bzw.
wind gain (wenn Wind-Modus aktiviert
ist) - siehe G-PILOT 3100 Bedienung.
4 Wenn das Boot bei Geradeausfahrt vom
Kurs versetzt wird:
a Auf ein passenderes Profi l im Menu
MAIN wechseln (siehe G-PILOT 3100
Bedienung).
b Einstellungen ändern, wie response,
ratio, counter rudder gain, GPS gain
(wenn GPS-Modus aktiviert ist) bzw.
wind gain (wenn Wind-Modus aktiviert
ist) - siehe G-PILOT 3100 Bedienung.
5 Bei einer großen Kursänderung geht
das Boot nicht zufriedenstellend auf
den neuen Kurs:
a Auf ein passenderes Profi l im Menu
MAIN wechseln (siehe G-PILOT 3100
Bedienung).
b Die TURN RATE im Options-Menu
anpassen (siehe G-PILOT 3100
Bedienung).
c Counter rudder gain justieren (siehe
G-PILOT 3100 Bedienung).
6 Boot dreht zu hart:
TURN RATE im Options-Menu
verkleinern (siehe G-PILOT 3100
Bedienung).
7 Anzeige-Werte sind unlogisch, das Wort
SIMULATE erscheint blinkend:
Die Anlage ist auf Simulation
geschaltet (siehe G-PILOT 3100
Bedienung).
8 Das Display beschlägt:
a Feuchtigkeit ist von hinten
eingetreten. Das Boot entlüften und
die Instrumenten-Beleuchtung mit
größter Helligkeit einschalten.
b Wasser im Display. Das Gerät zum
Service einschicken.
60
NAVMAN
G-PILOT 3100 Installations- und Bedienungsanleitung

Appendix D - How to contact us www.navman.com.
NORTH AMERICA
Navman USA Inc.
30 Sudbury Rd, Acton, MA 01720.
Toll Free: +1 866 628 6261
Fax: +1 978 897 8264
e-mail: sales@navmanusa.com
web:www.navman.com
AUSTRALIA
Navman Australia Pty. Limited
Unit 2 / 5-13 Parsons St.
Rozelle, NSW 2039, Australia.
Ph: +61 2 9818 8382
Fax: +61 2 9818 8386
e-mail: sales@navman.com.au
web: www.navman.com
OCEANIA
New Zealand
Absolute Marine Ltd.
Unit B, 138 Harris Road,
East Tamaki, Auckland.
Ph: +64 9 273 9273
Fax: +64 9 273 9099
e-mail: navman@absolutemarine.co.nz
Papua New Guinea
Lohberger Engineering,
Lawes Road, Konedobu.
PO Box 810, Port Moresby.
Ph: +675 321 2122
Fax: +675 321 2704
e-mail: loheng@online.net.pg
web: www.lohberger.com.pg
SOUTH AMERICA
Argentina
Costanera Uno S.A.
Av Pte Ramón S. Castillo y Calle 13
Zip 1425 Buenos Aires, Argentina.
Ph: +54 11 4312 4545
Fax +54 11 4312 5258
e-mail:
purchase@costanerauno.com.ar
web: www.costanerauno.ar
Brazil
Equinautic Com Imp Exp de Equip
Nauticos Ltda.
Rua Ernesto Paiva, 139
Clube dos Jangadeiros
Porto Alegre - RS - Brasil
CEP: 91900-200.
Ph: +55 51 3268 6675
+55 51 3269 2975
Fax: +55 51 3268 1034
e-mail:
equinautic@equinautic.com.br
web: www.equinautic.com.br
Realmarine
Estrada do Joa 3862,
Barra da Tijuca, Rio de Janeiro,
Brazil. CEP: 22611-020.
Ph: +55 21 2483 9700
Fax: +55 21 2495 6823
e-mail: tito@realmarine.com.br
web: www.realmarine.com.br
Chile
Equimar
Manuel Rodrigurez 27
Santiago, Chile.
Ph: +56 2 698 0055
Fax +56 2 698 3765
e-mail: mmontecinos@equimar.cl
Mera Vennik
Colon 1148, Talcahuano,
4262798, Chile.
Ph: +56 41 541 752
Fax +56 41 543 489
e-mail: meravennik@entel.chile.net
G-PILOT 3100 Installation manual
CENTRAL AMERICA
Mexico
Mercury Marine de Mexico
Anastacio Bustamente #76
Interior 6 Colonia Francisco Zarabia,
Zapapan, Jalisco, C.P. 45236 Mexico.
Ph: +52 33 3283 1030
Fax: +52 33 3283 1034
web: www.equinautic.com.br
ASIA
China
Peaceful Marine Electronics Co. Ltd.
Guangzhou, Hong Kong, Dalian,
Qingdao, Shanghai
1701 Yanjiang Building
195 Yan Jiang Zhong Rd. 510115
Guangzhou, China.
Ph: +86 20 3869 8839
Fax: +86 20 3869 8780
e-mail: sales@peaceful-marine.com
web: www.peaceful-marine.com
India
Access India Overseas Pvt. Ltd.
A-98, Sector 21,
Noida - 201 301, India.
Ph: +91 120 244 2697
TeleFax: +91 120 253 7881
Mobile: +91 98115 04557
e-mail: vkapil@del3.vsnl.net.in
Esmario Export Enterprises
Block No. F-1, 3rd Floor, Surya Towers
Sardar Patel Rd, Secunderbad 500 003.
Ph: +91 40 2784 5163
Fax: +91 40 2784 0595
e-mail: gjfeee@hd1.vsnl.net.in
web: www.esmario.com
Indonesia
Polytech Nusantara,
Graha Paramita 2nd Floor,
Jln Denpasar Raya Blok D2
Kav 8 Kuningan, Jakarta 12940.
Ph: +62 21 252 3249
Fax: +62 21 252 3250
e-mail: polytech@transavia.co.id
Korea
Kumhomarine Technology Co. Ltd.
#604-842, 2F, 1118-15, Janglim1-Dong,
Saha-Gu, Busan, Korea.
Ph: +82 51 293 8589
Fax: +82 51 265 8984
e-mail: info@kumhomarine.com
web: www.kumhomarine.com
Maldives
Maizan Electronics Pte. Ltd.
Henveyru, 08 Sosunmagu.
Male', Maldives.
Mobile: +960 78 24 44
Ph: +960 32 32 11
Fax: +960 32 57 07
e-mail: ahmed@maizan.com.mv
Singapore, Malaysia, Brunei,
Indonesia and Phillipines
RIQ PTE Ltd.
Blk 3007, 81 Ubi Road 1, #02-440,
Singapore 408701.
Ph: +65 6741 3723
Fax : +65 6741 3746
e-mail: riq@postone.com
Taiwan
Seafirst International Corporation
No. 281, Hou-An Road, Chien-Chen
Dist. Kaohsiung, Taiwan R.O.C.
Ph: +886 7 831 2688
Fax: +886 7 831 5001
e-mail: seafirst@seed.net.tw
web: www.seafirst.com.tw
NAVMAN
Thailand
Thong Electronics (Thailand) Co. Ltd.
923/588 Ta Prong Road, Mahachai,
Muang, Samutsakhon 74000, Thailand.
Ph: +66 34 411 919
Fax: +66 34 422 919
e-mail: sales@thongelectronics.com
admins@thongelectronics.com
web: www.thongelectronics.com
Vietnam
Haidang Co. Ltd.
1763 Le Hong Phong St. Ward 12
District 10, Ho Chi Minh City.
Ph: +84 8 863 2159
Fax: +84 8 863 2124
e-mail: sales@haidangvn.com
web: www.haidangvn.com
MIDDLE EAST
Lebanon and Syria
Balco Stores
Balco Building, Moutran Street,
Tripoli (via Beirut). - Lebanon
P.O. Box: 622.
Ph: +961 6 624 512
Fax: +961 6 628 211
e-mail: balco@cyberia.net.lb
United Arab Emirates
Kuwait, Oman, Iran, Saudi
Arabia, Bahrain & Qatar
Abdullah Moh’d Ibrahim Trading, opp
Creak Rd. Baniyas Road, Dubai.
Ph: +971 4 229 1195
Fax: +971 4 229 1198
e-mail: sales@amitdubai.com
AFRICA
South Africa
Pertec (Pty) Ltd (Coastal Division)
16 Paarden Eiland Road.
Paarden Eiland, 7405
PO Box 527,
Paarden Eiland, 7420
Cape Town, South Africa.
Ph: +27 21 508 4707
Fax: +27 21 508 4888
e-mail: info@kfa.co.za
web: www.pertec.co.za
EUROPE
France, Belgium and Switzerland
Plastimo SA
15, rue Ingénieur Verrière,
BP435,
56325 Lorient Cedex.
Ph: +33 2 97 87 36 36
Fax: +33 2 97 87 36 49
e-mail: plastimo@plastimo.fr
web: www.plastimo.fr
Germany
Navimo Deutschland
15, rue Ingénieur Verrière
BP435- 56325 Lorient Cedex.
Ph: +49 6105 92 10 09
+49 6105 92 10 10
+49 6105 92 10 12
Fax: +49 6105 92 10 11
e-mail:
plastimo.international@plastimo.fr
website: www.plastimo.de
Italy
Navimo Italia
Nuova Rade spa, Via del Pontasso 5
16015 Casella Scrivia (GE).
Ph: +39 1096 80162
Fax: +39 1096 80150
e-mail: info@nuovarade.com
web: www.plastimo.it
Holland
Navimo Holland
Industrieweg 4,
2871 JE Schoonhoven.
Ph: +31 182 320 522
Fax: +31 182 320 519
e-mail: info@plastimo.nl
web: www.plastimo.nl
United Kingdom
Navimo UK
Hamilton Business Park
Bailey Road, Hedge End
Southhampton, Hants S030 2HE.
Ph: +44 01489 778 850
Fax: +44 0870 751 1950
e-mail: sales@plastimo.co.uk
web: www.plastimo.co.uk
Sweden, Denmark, Finland and
Norway
Navimo Nordic
Lundenvägen 2,
473 21 Henån.
Ph: +46 304 360 60
Fax: +46 304 307 43
e-mail: info@plastimo.se
web: www.plastimo.se
Spain
Navimo España
Avenida Narcís Monturiol, 17
08339 Vilassar de Dalt,
Barcelona.
Ph: +34 93 750 75 04
Fax: +34 93 750 75 34
e-mail: plastimo@plastimo.es
web: www.plastimo.es
Portugal
Navimo Portugal
Avenida de India N°40
1300-299 Lisbon.
Ph: +351 21 362 04 57
Fax: +351 21 362 29 08
e-mail: plastimo@siroco-nautica.pt
web: www.plastimo.com
Other countries in Europe
Plastimo International
15, rue Ingénieur Verrière BP435
56325 Lorient Cedex, France.
Ph: +33 2 97 87 36 59
Fax: +33 2 97 87 36 29
e-mail:
plastimo.international@plastimo.fr
web: www.plastimo.com
REST OF WORLD/
MANUFACTURERS
Navman NZ Limited
13-17 Kawana St.
Northcote.
P.O. Box 68 155,
Newton,
Auckland,
New Zealand.
Ph: +64 9 481 0500
Fax: +64 9 481 0590
e-mail: marine.sales@navman.com
web: www.navman.com
91

Made in New Zealand
MN000227A
G-PILOT 3100 Installation
Lon 174° 44.535'E
Lat 36° 48.404'S
NAVMAN
 Loading...
Loading...