


G-PILOT 3100
AUTOPILOT
Instalation Manual
Français............2
Deutsch ..........32
Nederlands.....61
www.navman.com
NAV MAN

Sommaire
Important................................................................................................3
1 In tro duc tion.........................................................................................4
1-1 Exemple d’installation ................................................................................4
1-2 Utilisation du G-PILOT 3100 avec d’autres instruments............................5
1-2-1 Connexion d’autres instruments..........................................................5
1-2-2 NavBus................................................................................................5
1-2-3 NMEA..................................................................................................5
2 Matériel du G-PILOT 3100..................................................................6
2-1 Equipements livrés avec votre G-PILOT 3100...........................................6
2-2 Autres éléments nécessaires.....................................................................7
3 Installation...........................................................................................7
3-1 Procédure d’installation..............................................................................7
3-2 Guide d’installation.....................................................................................8
3-2-1 Guide sur l’emplacement du montage ................................................8
3-2-2 Guide de câblage................................................................................8
3-3 Montage du calculateur..............................................................................9
3-4 Branchement des alimentations électriques et de l’unité de puissance...10
3-4-1 Branchement des alimentations électriques .....................................10
3-4-2 Branchement de l’unité de puissance............................................... 11
3-5 Montage du capteur d’angle de barre......................................................15
3-6 Montage du compas.................................................................................18
3-7 Montage du gyromètre.............................................................................20
3-8 Montage du boîtier et des autres instruments..........................................22
4 Réglages à quai................................................................................24
4-1 Initialisation du G-PILOT 3100.................................................................24
4-2 Etalonnage du capteur d’angle de barre..................................................25
5 Essais en mer ...................................................................................26
5-1 Etalonnage du compas ............................................................................26
6 Alignement du compas et de la barre.............................................27
6-1 Alignement du compas.............................................................................27
6-2 Alignement de la barre.............................................................................27
Appendice A - Caractéristiques techniques .....................................28
Appendice B - Messages d’alarme ....................................................28
Appendice C - En cas de problème ...................................................31
Appendice D - Comment nous contacter..........................................91
2
NAVMAN
G-PILOT 3100 Notice d’installation
Important
Il incombe au propriétaire de veiller à ce que l’appareil et le(s) capteur(s) soient installés et utilisés
de telle sorte qu’ils ne causent pas d’accidents ni de dommages corporels ou matériels. L’utilisateur
du produit est seul responsable du respect des règles de sécurité en matière de navigation.
Nous vous recommandons de porter une attention toute particulière au choix, à l’emplacement et
au montage de tous les éléments du système de pilotage automatique. Si l’installation n’est pas
correcte, le pilote automatique ne pourra pas fonctionner de manière optimale. En cas de doute,
contactez votre revendeur Navman. Veillez à ce que les trous de montage soient percés à des
endroits adaptés et n’endommagent pas la structure du bateau. N’hésitez pas à consulter un
chantier naval pour plus d’informations.
Utilisation du G-PILOT 3100
Le G-PILOT 3100 est une aide à la navigation : il est conçu pour prendre le relais du barreur pendant
une période donnée et ne doit pas être utilisé comme principal moyen de pilotage du bateau.
L’utilisation du G-PILOT 3100 n’est pas recommandée lorsque les conditions météorologiques
sont extrêmes ni lorsque vous vous trouvez dans des zones de navigation dangereuses ou à
proximité d’autres bateaux.
Les performances du G-PILOT 3100 ne sont pas supérieures à celles d’un barreur. En cas de
mauvaises conditions de navigation, barrez le bateau à la main.
Ne laissez jamais la barre sans surveillance et soyez toujours très attentif. Le barreur doit contrôler
en permanence la course du bateau et le G-PILOT 3100 et être prêt à reprendre la barre à
tout moment.
Les performances du G-PILOT 3100 peuvent être affectées par le dysfonctionnement d’une
pièce, les conditions de navigation, une installation ou une utilisation incorrecte.
NAVMAN NZ LIMITED DECLINE T OUTE RESPONSABILITE DANS LE CAS D’UNE UTILISATION
DU PRODUIT POUVANT ENTRAINER DES ACCIDENTS, DES DOMMAGES MATERIELS OU
UN NON-RESPECT DE LA LOI.
Dans un souci constant d’amélioration du G-PILOT 3100, Navman NZ Limited se réserve le
droit de modifi er les caractéristiques techniques du G-PILOT 3100 sans préavis et sans que
ces changements n’apparaissent nécessairement dans la présente version de la notice. Veuillez
contacter votre distributeur Navman pour tout renseignement complémentaire.
Langue de référence : cette notice a été traduite de l’anglais. En cas de litige relatif à
l’interprétation de la notice, la version anglaise de la notice prévaudra.
Copyright© 2003 Navman NZ Limited, Nouvelle-Zélande. T ous droits réservés. Navman est une
marque déposée de Navman NZ Limited.
G-PILOT 3100 Notice d’installation
NAVMAN
3
1 Introduction
Utilisation de la notice
Cette notice décrit les procédures de montage
et de paramétrage du G-PILOT 3100. Veuillez
vous reporter à la notice d’utilisation du
G-PILOT 3100 pour des informations sur le
mode de fonctionnement du G-PILOT 3100.
L’installation du G-PILOT 3100 comprend le
montage des différents éléments, les réglages
à quai et les essais en mer (voir sections
3, 4 et 5).
Après le changement d’un élément du système
ou en cas de problème, procéder aux réglages
à quai et aux essais en mer (voir sections
4 et 5).
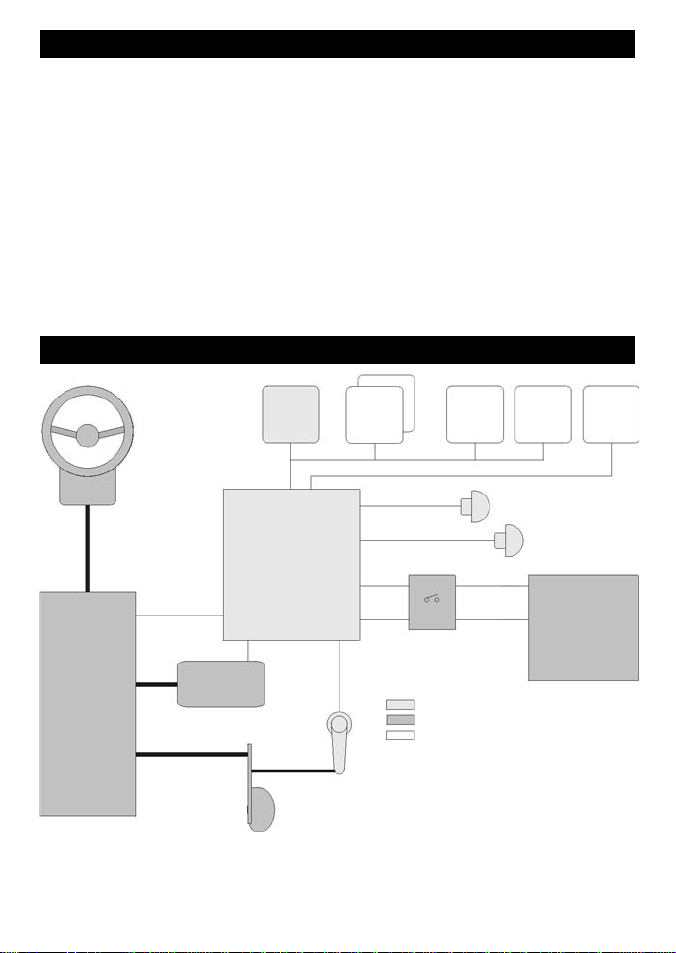
1-1 Exemple d’installation
Boîtier
Barre manuelle
NavBus
Calculateur
Pour vérifi er le fonctionnement du G-PILOT
3100, procéder aux essais en mer (voir
section 5).
Nettoyage et entretien
Nettoyer les différents éléments du G-PILOT
3100 à l’aide d’un chiffon humide ou imprégné
d’un détergent doux. Ne pas utiliser de produits
abrasifs, d’essence ou autres solvants.
Ne peindre aucun élément du G-PILOT 3100
hormis les câbles.
Boîtiers
supplé-
mentaires
NMEA
Instruments optionnels
WIND
3100
SPEED
3100
Compas
Gyromètre
Courant faible
GPS
NMEA
Commande
de barre
4
Embrayage
(option)
Unité de
puissance
Barre
Capteur
d’angle de
barre
NAVMAN
Interrupteur(s) et fusibles
Eléments livrés avec le G-PILOT 3100
Autre matériel nécessaire
Eléments optionnels
Remarque : l’installation
illustrée ci-dessus est donnée
à titre d’exemple. Pour plus
d’informations, veuillez consulter
la notice fournie avec votre unité
de puissance.
G-PILOT 3100 Notice d’installation
Courant fort
Alimentation
12 V CC
1-2 Utilisation du G-PILOT 3100 avec d’autres instruments
1-2-1 Connexion d’autres
instruments
Le G-PILOT 3100 peut recevoir des données
des instruments suivants :
GPS : le G-PILOT 3100 doit être connecté
à un instrument GPS ou à un traceur de
cartes (ex. TRACKER Navman série 5000)
pour fonctionner en mode GPS (voir notice
d’utilisation du G-PILOT 3100).
Remarque : la connexion GPS s’effectue
via l’interface NMEA.
VENT : le G-PILOT 3100 doit être connecté
à une girouette anémomètre (ex. WIND 3100
Navman) pour fonctionner en mode vent
(voir notice d’utilisation du G-PILOT 3100).
VITESSE : pour un pilotage encore plus
précis, le G-PILOT 3100 peut être connecté
à un instrument mesurant la vitesse du
bateau, tel qu’un :
SPEED 3100 Navman, équipé d’un
capteur à roue à aubes.
GPS ou traceur de cartes (ex. TRACKER
Navman série 5000).
Remarque : la vitesse mesurée par un
capteur à roue à aubes correspond à la
vitesse du bateau par rapport à la surface
de l’eau, alors que la vitesse calculée par
un GPS correspond à la vitesse sur le fond.
En présence de courant, ces deux vitesses
seront donc différentes. Si le G-PILOT 3100
est connecté à la fois à un instrument équipé
d’un capteur à roue à aubes et à un GPS,
il utilisera automatiquement les données
vitesse mesurées par le capteur à roue
à aubes.
1-2-2 NavBus
Le NavBus est un système propriétaire Navman
qui permet de créer des systèmes composés de
plusieurs instruments tout en utilisant un seul
jeu de capteurs. Lorsque des instruments sont
connectés au NavBus :
Une modifi cation des unités, des valeurs
d’alarme ou de l’étalonnage d’un instrument
se répercute automatiquement sur
l’ensemble des instruments du même type.
Chaque instrument peut être affecté à un
groupe d’instruments, appelé groupe de
rétro-éclairage (voir BKL GROUP dans
le menu FACTORY, notice d’utilisation
du G-PILOT 3100). Si vous modifiez
G-PILOT 3100 Notice d’installation
le rétro-éclairage d’un instrument du
groupe 1, 2, 3 ou 4, le rétro-éclairage
des autres instruments du groupe sera
automatiquement modifi é. Si vous modifi ez
le rétro-éclairage d’un instrument du groupe
0, ce changement n’aura d’effet sur aucun
autre instrument du système.
En cas de déclenchement d’une alarme,
vous pouvez mettre l’alarme en veille à partir
de n’importe quel instrument possédant cette
alarme.
Pour plus d’informations, se reporter à la
notice de montage et d’utilisation du NavBus.
Remarque : la connexion GPS s’effectue via
l’interface NMEA.
NavBus et G-PILOT 3100
Le G-PILOT 3100 communique
automatiquement avec les boîtiers
G-PILOT 3100 supplémentaires.
Le G-PILOT 3100 peut recevoir des
données vent d’un WIND 3100 Navman via
le NavBus.
Le G-PILOT 3100 peut recevoir des données
vitesse d’un SPEED 3100 Navman via le
NavBus.
1-2-3 NMEA
NMEA est une norme de l’industrie. Elle n’est
pas aussi souple que le NavBus car elle
nécessite des connexions dédiées entre les
instruments. Le G-PILOT 3100 est équipé
d’un port d’entrée NMEA et d’un port d’entrée
ou de sortie NMEA paramétrable (voir notice
d’utilisation du G-PILOT 3100).
Entrées NMEA du G-PILOT 3100
GPS : le G-PILOT 3100 peut recevoir de
tout instrument GPS ou traceur de cartes
compatible (ex. TRACKER Navman série
5000) les données NMEA suivantes :
XTE (depuis phrases APA, APB ou
XTE), donnée nécessaire pour utiliser le
G-PILOT 3100 en mode GPS.
BRG (depuis phrases APA) et BOD (depuis
phrases APA ou APB), données optionnelles
qui permettent d’améliorer le pilotage du
bateau.
COG (depuis phrases VTG), donnée
optionnelle qui peut être affichée par le
G-PILOT 3100.
VENT : le G-PILOT 3100 peut recevoir de toute
girouette anémomètre compatible les données
NAVMAN
5
NMEA suivantes :
La direction du vent vrai ou apparent (depuis
phrases MWV), donnée nécessaire pour
utiliser le G-PILOT 3100 en mode vent.
VITESSE : le G-PILOT 3100 peut recevoir
de tout speedomètre ou instrument GPS
compatible les données NMEA suivantes :
SOG (depuis phrases VTG), donnée
optionnelle qui permet d’améliorer le pilotage
du bateau.
Remarque : si le G-PILOT 3100 est connecté
à un instrument vitesse ou vent de la série
3100 via le NavBus, il recevra et utilisera
automatiquement les données vitesse ou vent
fournies par ces instruments ; la connexion
NMEA ne sera pas utilisée.
Sorties NMEA du G-PILOT 3100
Le port NMEA 2 peut être défini par
l’utilisateur comme entrée NMEA ou comme
sortie des données suivantes :
cap du bateau (HDG & HDT) et angle de
barre (RSA) une fois par seconde, ou
cap du bateau (HDG) dix fois par seconde
(voir NMEA 2 DA T dans le menu F ACTOR Y,
notice d’utilisation du G-PILOT 3100).
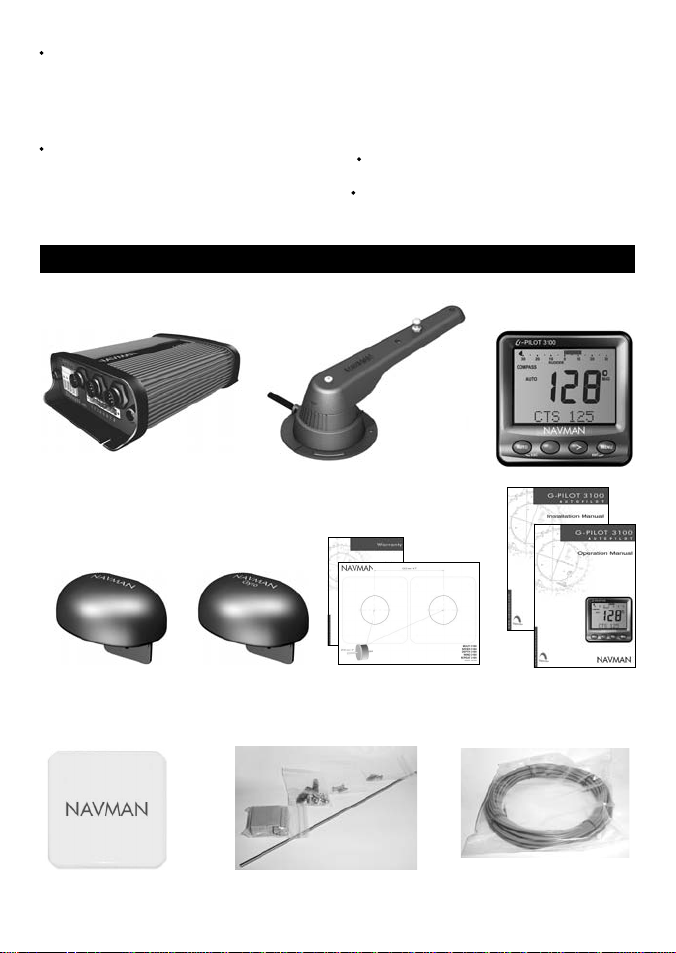
2 Matériel du G-PILOT 3100
2-1 Equipements livrés avec votre G-PILOT 3100
Calculateur
Compas (câble
10 m inclus)
Capot de protection
du boîtier
6
Capteur d’angle de barre
Gyromètre (câble
10 m inclus)
Tige fi letée, vis, protection de câbles,
serre-câbles, fusibles de rechange
Garantie et gabarit
de montage du
boîtier
NAVMAN
Boîtier
Cette notice +
notice d’utilisation
du G-PILOT 3100
Câble 2 brins 2 mm (section
2,5 mm²) pour courant fort
G-PILOT 3100 Notice d’installation

2-2 Autres éléments nécessaires
Alimentation : le G-PILOT 3100 utilise deux types
d’alimentation électrique 12 V CC nominal :
Une alimentation à courant fort pour l’unité
de puissance.
Une alimentation à courant faible pour
le système électronique et le boîtier du
G-PILOT 3100, ainsi que pour les boîtiers
G-PILOT 3100 supplémentaires et autres
instruments à bord.
Installer un ou deux interrupteurs et des fusibles
ou coupe-circuits sur les circuits d’alimentation
(voir section 3-4).
Unité de puissance : le G-PILOT 3100
peut actionner une pompe hydraulique, une
pompe à débit continu, un ensemble linéaire
hydraulique ou encore un ensemble mécanique
fonctionnant sous 12 V CC et 20 A maximum.
Bras de mèche : cet élément sert à relier la barre
au capteur d’angle de barre (voir section 3-5).
Pour le câblage, se reporter au tableau de
section des fi ls, section 3-4-2.
3 Installation
Important : le fonctionnement optimal du
G-PILOT 3100 dépend de la qualité de son
installation. Il est impératif de lire attentivement
les recommandations qui vont suivre ainsi que
les notices fournies avec les différents éléments
utilisés avant de procéder au montage.
Attention
Le calculateur du G-PILOT 3100 n’est pas
étanche. Installez-le dans un endroit sec.
Le boîtier du G-PILOT 3100 est étanche
en façade. Protégez l’arrière du boîtier
3-1 Procédure d’installation
Procédez méthodiquement à l’installation
du G-PILOT 3100 en suivant les instructions
suivantes :
1 Lire cette notice ainsi que les documents
fournis avec les différents éléments
utilisés.
2 Préparer l’installation du système :
sélectionner l’emplacement des appareils
et des câbles (voir section 3-2).
3 Installer le calculateur (voir section 3-3).
4 Installer l’unité de puissance et connecter
les alimentations à courant fort et à
courant faible (voir section 3-4).
5 Installer le capteur d’angle de barre (voir
section 3-5).
G-PILOT 3100 Notice d’installation
NAVMAN
Feux ou buzzers externes (en option) : la sortie
vers les alarmes externes est branchée à la masse
et fonctionne sous 30 V CC, 250 mA maximum.
Si les alarmes nécessitent un ampérage total
supérieur à 250 mA, installer un relais.
Autres instruments d’électronique marine
(en option) : des instruments vent, vitesse ou
GPS peuvent être connectés au G-PILOT 3100
(voir section 1-2).
Autres éléments : pour les systèmes composés de plusieurs instruments, prévoir des
câbles et connecteurs supplémentaires. Les
boîtiers de connexion Navman permettent de
simplifi er les connexions entre les différents in-
struments d’un système (voir section 1-2 ou notice de montage et d’utilisation du NavBus).
Utiliser des adaptateurs et des câbles d’extension
10 m pour rallonger les câbles du capteur d’angle
de barre, du compas et du gyromètre. Ne pas installer plus d’un câble d’extension par appareil.
Pour plus d’informations, veuillez contacter
votre revendeur Navman.
des projections d’eau afi n d’éviter toute
infi ltration susceptible d’endommager
l’appareil. La garantie ne couvre pas les
dommages causés par les infi ltrations
d’humidité ou d’eau au niveau de la face
arrière du boîtier.
Le compas, le gyromètre et le capteur
d’angle de barre sont totalement étanches.
Important : veillez à ce que les trous de
montage n’endommagent pas la structure du
bateau. En cas de doute, adressez-vous à un
chantier naval.
6 Installer le compas (voir section 3-6).
7 Installer le gyromètre (voir section 3-7).
8 Installer le boîtier et les instruments
d’électronique marine utilisés avec le
G-PILOT 3100 (voir section 3-8).
9 Procéder aux réglages à quai
(voir section 4).
10 Procéder aux essais en mer
(voir section 5).
Si vous n’êtes pas sûr de l’emplacement de
montage d’un élément du G-PILOT 3100,
installez-le de manière provisoire, sans percer
de trou de montage. Une fois les essais en
mer effectués, installez et branchez-le de
manière défi nitive.
7
3-2 Guide d’installation
Cette partie vous guide sur l’emplacement de montage et le câblage des différents éléments du
G-PILOT 3100. Pour l’installation de certains instruments, ces instructions pourront être complétées
par des recommandations supplémentaires.
3-2-1 Guide sur l’emplacement
du montage
Ne pas installer les éléments du
G-PILOT 3100 à des endroits où ils
pourraient servir d’appui, où ils gêneraient
les manœuvres ni à des endroits exposés
aux projections d’eau.
Ne pas installer les éléments du
G-PILOT 3100 à des endroits où
ils gêneraient la mise à l’eau ou le
remorquage du bateau.
Installer les éléments du G-PILOT 3100
à plus de 0,5 m du plan horizontal d’une
antenne radar.
Installer le compas et le gyromètre :
à plus de 1 m de toute source
de signaux ou d’interférences
électriques, telle qu’une batterie,
un câble électrique (courant faible
ou fort), un moteur, une lampe fl uo,
un convertisseur, une antenne ou un
émetteur/récepteur radio ou radar.
à plus de 1 m de tout corps
magnétique, tel qu’un compas.
3-2-2 Guide de câblage
Le G-PILOT 3100 utilise deux types de câbles.
L’alimentation à courant fort et l’unité de
puissance nécessitent généralement l’utilisation
de câbles courant fort :
Sélectionner la section de fi l adaptée à
votre installation à l’aide du tableau de
section des fi ls (voir section 3-4-2).
Installer les câbles courant fort à plus de
1 m de tout équipement électronique.
Veiller à ce que la longueur des câbles soit
la plus courte possible.
Le câble 2 brins (section 2,5 mm²) fourni
avec le G-PILOT 3100 peut être utilisé
comme câble courant fort si la section des
fi ls est adaptée à votre installation.
Tous les autres éléments du G-PILOT 3100
utilisent des câbles courant faible :
Installer les câbles courant faible à plus
de 1 m de toute source de signaux ou
d’interférences électriques, telle qu’un
câble électrique (courant faible ou fort), un
moteur, une lampe fl uo, un convertisseur,
une antenne ou un émetteur/récepteur
radio ou radar.
Si le câble connecté au capteur d’angle
de barre, au compas ou au gyromètre est
trop long, ne pas couper le câble mais
l’enrouler au niveau du calculateur du
G-PILOT 3100.
Le câble de l’angle de barre, du compas
ou du gyromètre peut être rallongé à
l’aide d’un câble d’extension 10 m et d’un
adaptateur. Ne pas installer plus d’un
câble d’extension par appareil.
Lors de l’installation d’un câble :
Ne pas écraser, plier ou tendre le câble.
Fixer le câble à intervalles réguliers.
Veiller à ce qu’aucun connecteur et
aucune borne exposée ne reposent en
fond de cale.
8
NAVMAN
G-PILOT 3100 Notice d’installation
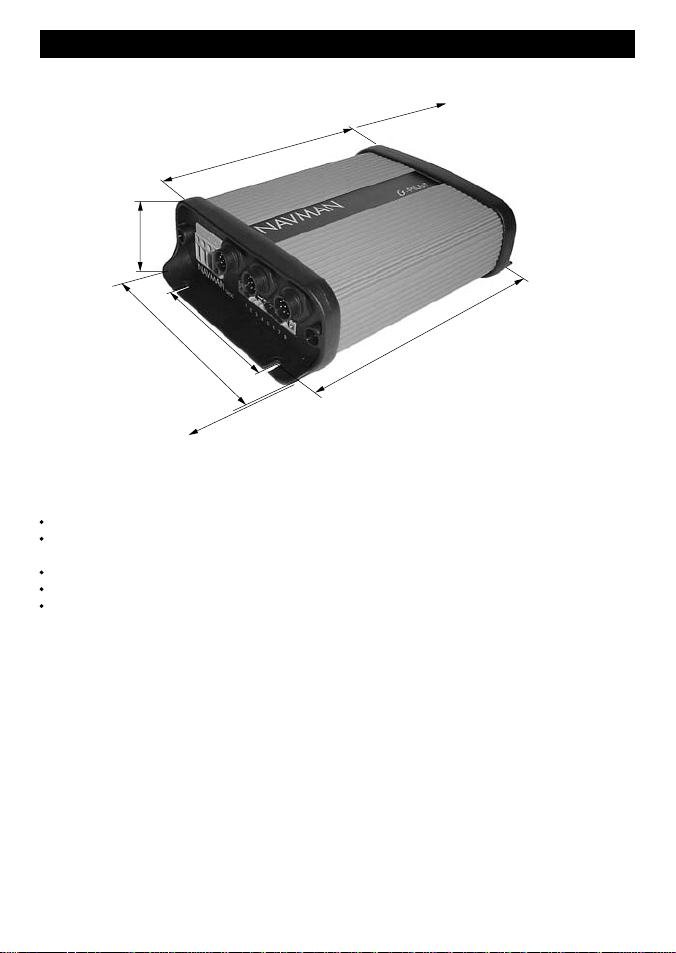
3-3 Montage du calculateur
Matériel
200 mm
200 mm
IMPORTANT : laisser un
dégagement minimum de
20 cm pour le retrait du capot
de protection.
55 mm
90 mm entre les deux vis
140 mm
184 mm entre les deux vis
60 mm
IMPORTANT : laisser un dégagement minimum de 60 mm
pour le branchement des câbles.
Installation
Choisir l’emplacement de montage de l’appareil :
Dans un endroit sec, bien ventilé et si possible hors du compartiment moteur.
A proximité de l’alimentation à courant fort et de l’unité de puissance afi n de raccourcir au
maximum la longueur du câblage courant fort.
Facilement accessible pour l’installation et l’entretien de l’appareil.
Si possible sur une surface plane et verticale qui ne vibre pas.
Suivre les instructions du guide sur l’emplacement du montage (voir section 3-2-1).
A l’aide des vis fournies, installer le calculateur de sorte que les prises de l’appareil pointent vers
le bas ou vers l’un des côtés, et non vers le haut afi n d’éviter tout risque d’infi ltration d’humidité
ou de poussière.
G-PILOT 3100 Notice d’installation
NAVMAN
9
3-4 Branchement des alimentations électriques et de l’unité de puissance
3-4-1 Branchement des
alimentations électriques
Le G-PILOT 3100 utilise deux types
d’alimentation électrique : une alimentation à
courant fort et une alimentation à courant faible,
toutes deux 12 V CC (10,5 à 16,5 V CC).
Important
Veiller à ce que la longueur des câbles soit
la plus courte possible.
Pour l’alimentation à courant fort,
sélectionner la section de fi l adaptée à
votre installation à l’aide du tableau de
section des fi ls (voir section 3-4-2).
Suivre les instructions du guide de câblage
(voir section 3-2-2).
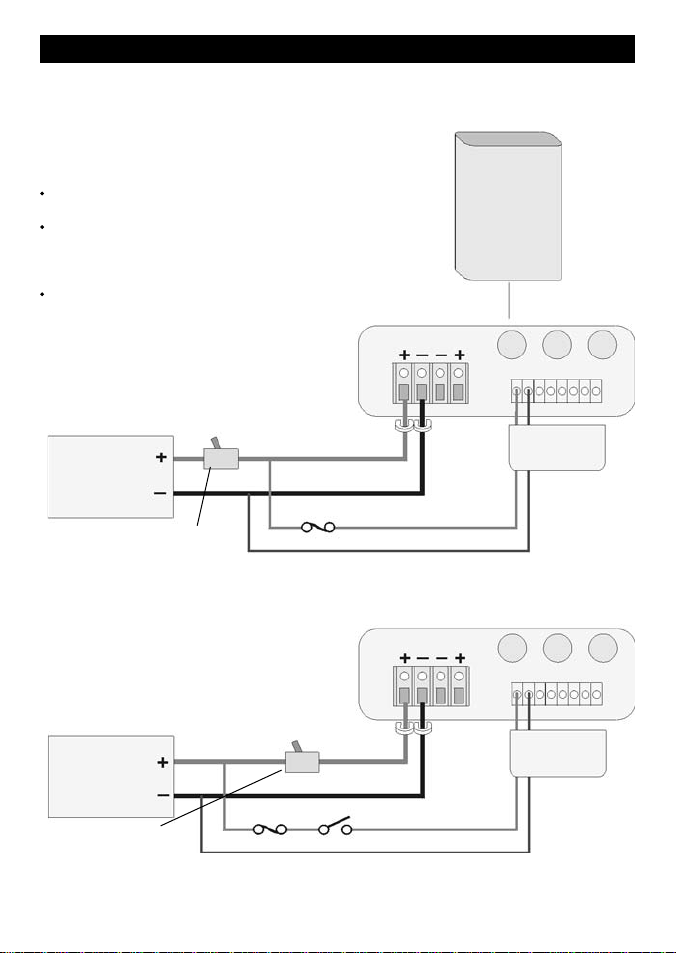
Alimentation : confi guration avec un seul
interrupteur
Optez pour ce type d’installation si vous
souhaitez utiliser un seul interrupteur pour
allumer et éteindre simultanément le G-PILOT
3100 et les autres instruments à bord.
Alimentation
12 V CC, courant
adapté à l’unité
de puissance
Interrupteur et coupe-circuit
ou fusible, courant adapté à
l’unité de puissance
Alimentation : configuration avec deux
interrupteurs
Optez pour ce type d’installation si vous
souhaitez éteindre l’unité de puissance tout
en laissant les autres instruments allumés.
Fusible 1 A
Installer des
serre-câbles
Calculateur
Courant
fort
1 2 3 4 5 6 7 8
Protection de
câbles
Courant
faible
1 2 3 4 5 6 7 8
Alimentation
12 V CC, courant
adapté à l’unité
de puissance
Interrupteur et coupe-
circuit ou fusible,
courant adapté à l’unité
de puissance
10
Installer des serre-câbles
Courant
fort
Fusible 1 A
Remarque : si votre système comprend plus de quatre boîtiers G-PILOT
3100 ou bien d’autres instruments série 3100, installer une alimentation à
courant faible supplémentaire pour ces appareils.
Interrupteur
NAVMAN
Protection
de câbles
Courant
faible
G-PILOT 3100 Notice d’installation

3-4-2 Branchement de l’unité
de puissance
Connecter l’unité de puissance en suivant
l’un des schémas de câblage proposés (voir
pages suivantes).
Important
Veiller à ce que la longueur des câbles
soit la plus courte possible.
Sélectionner la section de fi l adaptée à
votre installation à l’aide du tableau
ci-dessous.
Suivre les instructions du guide de câblage
(voir section 3-2-2).
Les fi ls d’une section supérieure à
6 mm² ne peuvent pas être connectés
directement au boîtier de raccordement
4 bornes. Installer des férules ou bien
terminer les fi ls avec un fi l de section
6 mm².
Si vous deviez connecter plusieurs
fi ls sur une même borne du boîtier de
raccordement 4 bornes, couplez les fi ls
avec soin.
Tableau de section des fi ls
Pour déterminer la section de fi l adaptée à votre installation :
1 Mesurer la longueur de câble 2 brins nécessaire, c’est-à-dire la distance séparant le calculateur
de l’alimentation à courant fort ou de l’unité de puissance.
2 Sélectionner la colonne correspondant à la longueur de câble mesurée et la ligne correspondant
à l’intensité du courant du circuit. L’intersection de la colonne et de la ligne vous donne la section
de fi l minimum recommandée (pour des systèmes 12 V, avec des chutes de tension < 3 %).
Longueur du câble (du calculateur à l’alimentation ou à l’unité de puissance)
Courant 0,7 m 1,5 m 2,2 m 3 m 3,7 m 4,5 m 5,2 m 6 m
1 amp 0,75 0,75 0,75 0,75 0,75 1,5 0,75 0,75
2 amp 0,75 0,75 0,75 0,75 0,75 1,5 1,5 1,5
3 amp 0,75 0,75 0,75 1,5 1,5 2,5 2,5 2,5
4 amp 0,75 0,75 1,5 1,5 2,5 4 2,5 4
5 amp 0,75 0,75 1,5 2,5 2,5 4 4 4
6 amp 0,75 1,5 1,5 2,5 4 4 4 6
7 amp 0,75 1,5 2,5 2,5 4 4 6 6
8 amp 0,75 1,5 2,5 4 4 8 6 6
9 amp 0,75 1,5 2,5 4 4 8 6 6
10 amp 0,75 2,5 4 4 8 8 6 10
15 amp 1,5 4 4 6 8 10 10 16
20 amp 2,5 4 6 10 10 16 16 16
Les sections de fi ls sont en mm².
G-PILOT 3100 Notice d’installation
NAVMAN
11

Exemple d’un système de direction hydraulique avec pompe hydraulique
Dans le menu VESSEL (voir notice d’utilisation du G-PILOT 3100), régler DRVE TYPE sur MTR.
Calculateur
1 2 3 4 5 6 7 8
Installer des serre-câbles.
Courant fort
Pas de connexion
(voir section 3-4-1)
La polarité n’a
pas d’importance.
Moteur
Exemple d’un système de direction mécanique avec ensemble linéaire
hydraulique pour voilier
Dans le menu VESSEL (voir notice d’utilisation du G-PILOT 3100), régler DRVE TYPE sur MTR.
Calculateur
Remarque : la bobine d’embrayage ne doit
pas consommer plus de 300 mA.
Installer des
serre-câbles.
Courant fort
Protection de
câbles
(voir section 3-4-1)
La polarité n’a
pas d’importance.
Moteur
Bobine
d’embrayage
Diode 1N4002 ou équivalent,
à installer près de la bobine.
12
NAVMAN
G-PILOT 3100 Notice d’installation

Montage d’un moteur électrique sur direction avec relais d’embrayage
Dans le menu VESSEL (voir notice d’utilisation du
G-PILOT 3100), régler DRVE TYPE sur MTR.
Calculateur
1 2 3 4 5 6 7 8
Installer des serre-câbles.
Courant fort (voir section 3-4-1)
Diode 1N4002 ou équivalent,
à installer près de la bobine.
Bobine
d’embrayage
Moteur
Contacts relais
La polarité n’a
pas d’importance.
Diode 1N4002 ou équivalent,
à installer près de la bobine.
Remarque : l’installation d’un relais
est impérative dès que le circuit
d’embrayage consomme plus de
300 mA.
Montage d’une pompe à débit continu et d’électrovannes
Dans le menu VESSEL (voir notice d’utilisation
du G-PILOT 3100), régler DRVE TYPE sur SPL-.
Installer des serre-câbles.
Courant fort (voir section 3-4-1)
Contacts relais
Remarque : les systèmes
PTO (prise de puissance
mécanique) fonctionnent
sans moteur.
Moteur
La polarité n’a
pas d’importance.
Tribord
Bâbord
G-PILOT 3100 Notice d’installation
NAVMAN
Calculateur
Diode 1N4002 ou équivalent,
à installer près de la bobine.
Remarque : l’installation
d’un relais est impérative dès
que le circuit d’embrayage
consomme plus de 300 mA.
Protection de
câbles
Bobine relais
1 2 3 4 5 6 7 8
Protection de
câbles
Bobine relais
13
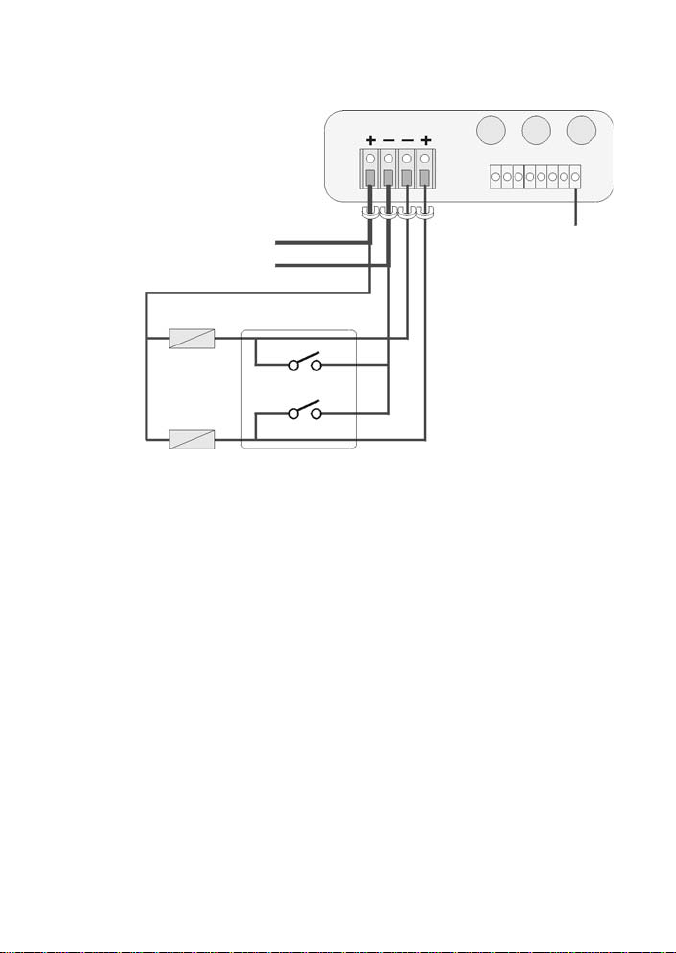
Montage d’électrovannes ou de relais avec manette de contrôle électrique
Dans le menu VESSEL (voir notice d’utilisation du G-PILOT 3100), régler DRVE TYPE
sur SPL-.
Calculateur
1 2 3 4 5 6 7 8
Installer des serre-câbles
Courant fort
(voir section 3-4-1)
Pas de connexion
Tribord
Bâbord
Manette de contrôle
14
NAVMAN
G-PILOT 3100 Notice d’installation

3-5 Montage du capteur d’angle de barre
Matériel
Mèche de
90 mm
220 mm
safran
Bras de
mèche
Tige fi letée, avec embout
facilement démontable
et contre-écrou à chaque
extrémité
Base
Connecteur LT8
Bras
Le bras pivote
librement
autour de l’axe
de la base.
L’embout de la tige
s’encastre dans un
des trous du bras.
Câble 10 m
Instructions de montage
Ces deux
distances
doivent être
égales.
Ajuster la position de
la tige sur le bras du
capteur si nécessaire.
La droite passant par
l’axe de la mèche de
safran et l’axe de la
base du capteur doit
former un angle de
90° avec le bras de
mèche.
Couper la tige si
nécessaire.
Important
Bien que le capteur d’angle de barre soit totalement étanche, il ne doit pas être immergé.
Installer le capteur sur une surface plane qui ne vibre pas.
Suivre les instructions du guide sur l’emplacement du montage (voir section 3-2-1).
G-PILOT 3100 Notice d’installation
NAVMAN
Filetage = M5
Ces deux
distances
doivent être
égales.
L’axe de la
mèche de safran
doit être parallèle
à l’axe de la base
du capteur.
Le bras de
mèche et le
bras du capteur
doivent se
déplacer sur
le même plan
horizontal.
15
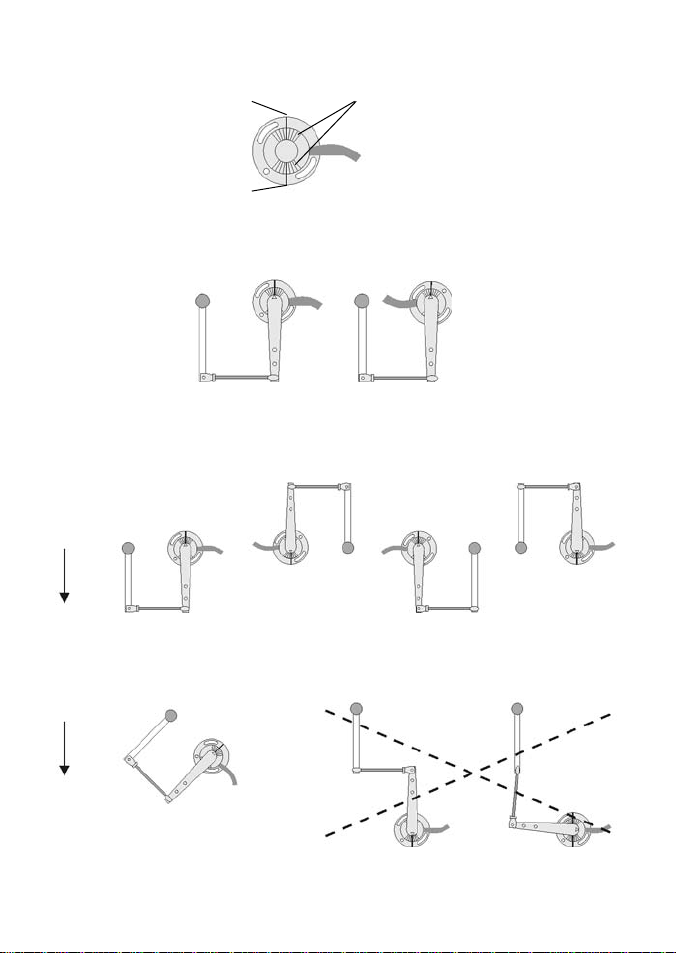
Alignement
Le bras du capteur pivote librement autour de l’axe de la base. Lorsque la barre est au centre, la
fl èche sur le bras doit pointer vers l’une des lignes de centrage de la base.
Ligne de centrage
Base
Ligne de centrage
Vous pouvez donc installer la base du capteur de deux façons différentes. Nous vous conseillons toutefois de placer la base de sorte que le câble du capteur ne se trouve pas du côté de la tige fi letée.
Les marquages
représentent les
deux échelles
linéaires du capteur.
Conseillé
(barre au centre).
Déconseillé, le câble pouvant s’enrouler
autour du bras de mèche.
Confi gurations
Conseillé : confi guration en U, le bras du capteur parallèle à l’axe longitudinal du bateau.
Exemples :
Proue
du
bateau
Acceptable : confi guration en U, le
bras du capteur non parallèle à l’axe
longitudinal du bateau. Exemple :
Proue
du
bateau
16
Déconseillé : confi guration en Z.
Exemple :
Si la barre effectue une rotation trop importante,
le capteur d’angle de barre risque de ne pas
revenir à sa position initiale.
NAVMAN
G-PILOT 3100 Notice d’installation

Installation
1 Choisir un emplacement de montage et une confi guration adaptés au capteur (voir pages
précédentes).
2 Choisir, assembler et installer un bras de mèche adapté au capteur.
3 Fixer le capteur comme suit :
Mettre la
barre au
centre.
Si nécessaire,
rehausser la base
à l’aide d’une cale.
Fixer le raccord de
couplage de la tige sur
le bras de mèche.
Si nécessaire, couper la tige à cet
endroit, puis replacer le raccord de
couplage et le contre-écrou sur la tige.
4 Connecter le câble au calculateur en suivant les instructions du guide de câblage
(voir section 3-2-2).
Faire pivoter la base de sorte
que la fl èche sur le bras du
capteur pointe vers la ligne de
centrage de la base. Introduire
deux des vis fournies dans les
fentes de la base et les visser
sans serrer.
Encastrer
l’embout de la
tige dans le trou
correspondant.
Faire pivoter la base de
sorte que la fl èche sur le
bras du capteur pointe
exactement vers la ligne
de centrage de la base.
Installer la troisième vis,
puis serrer les trois vis.
Veiller à ce que
la barre soit au
centre.
G-PILOT 3100 Notice d’installation
Les trous dans les
cloisons doivent avoir un
diamètre minimum de
18,5 mm.
NAVMAN
Calculateur
Insérer le connecteur
dans la prise.
17

3-6 Montage du compas
Matériel
Trous de montage
des vis
101 mm
71 mm
97 mm
Connecteur LT8
Emplacement de montage
Installer le compas :
à plus de 1 m de tout corps en acier ou en fer,
tel que :
une coque, un pont ou une cabine en acier
ou l’armature en acier d’une coque en
ferrociment.
un équipement en acier (moteur, appareil de
cuisson, ...).
un local de stockage d’objets en acier (coffre
des ancres, caisson de rangement, ...).
à plus de 2 m de tout corps magnétique
et de tout appareil créant des champs
électromagnétiques, tel qu’un compas, une
batterie, un câblage courant fort, un moteur
électrique, une antenne ou un émetteur/
Coque et cabine en bois ou fi bre de verre : installer le compas au niveau du centre de gravité
du bateau (sur les coques planantes, le centre de gravité se situe en général près de la poupe).
Coque en acier, cabine sans acier :
installer le compas 1 m au-dessus de la coque.
1 m
Câble 10 m
récepteur radio ou radar.
le plus près possible du centre de gravité
du bateau afi n de réduire au maximum les
mouvements du compas lorsque le bateau
tangue ou roule. Si vous ne pouvez pas
installer le compas au niveau du centre de
gravité, nous vous conseillons de le monter le
plus bas possible sur le bateau.
sur une surface plane et verticale qui ne vibre
pas.
Bien que le compas soit totalement étanche, il
ne doit pas être immergé. Les autres métaux
comme l’inox, le cuivre ou le laiton, ne perturbent
pas le fonctionnement du compas. Suivre les
instructions du guide sur l’emplacement du
montage (voir section 3-2-1).
Coque et cabine en acier :
installer le compas sur un mât, 1 m au-dessus
de la coque et à plus de 1 m de la cabine.
1 m minimum
1 m
18
NAVMAN
G-PILOT 3100 Notice d’installation

Installation
1 Choisir l’emplacement de montage du compas en suivant les instructions de la page
précédente.
2 Fixer le compas à l’aide des trois vis fournies. Utiliser un niveau pour vous assurer que le
compas est bien à la verticale (+/- 10°).
Maximum
10° 10°
3 Connecter le compas au calculateur en suivant les instructions du guide de câblage
(voir section 3-2-2).
Les trous dans les
cloisons doivent avoir
un diamètre minimum
de 18,5 mm.
Insérer le connecteur dans
la prise.
Important
Si vous deviez déplacer votre compas alors que le G-PILOT 3100 est sous tension, attendez
que le cap compas se stabilise avant de poursuivre votre route.
Maximum
10° 10°
Calculateur
G-PILOT 3100 Notice d’installation
NAVMAN
19

3-7 Montage du gyromètre
Matériel
101 mm
71 mm
Trous de
montage
des vis
Connecteur LT8
Câble 10 m
97 mm
Emplacement de montage
Installer le gyromètre le plus près possible du centre de gravité du bateau afi n de réduire au
maximum les mouvements du gyromètre lorsque le bateau tangue ou roule.
Monter le gyromètre sur une surface plane qui ne vibre pas.
Bien que le gyromètre soit totalement étanche, il ne doit pas être immergé. Suivre les instructions
du guide sur l’emplacement du montage (voir section 3-2-1).
Idéalement, le gyromètre doit être installé au niveau du centre de gravité du bateau (sur les coques
planantes, le centre de gravité se situe en général près de la poupe).
20
NAVMAN
G-PILOT 3100 Notice d’installation

Installation
1 Choisir l’emplacement de montage du gyromètre en suivant les instructions de la page
précédente.
2 Fixer le gyromètre à l’aide des trois vis fournies. Utiliser un niveau pour vous assurer que le
gyromètre est bien à la verticale (+/- 10°).
Maximum
10° 10°
Maximum
10° 10°
3 Connecter le gyromètre au calculateur en suivant les instructions du guide de câblage
(voir section 3-2-2).
Les trous dans les
cloisons doivent avoir
Calculateur
un diamètre minimum
de 18,5 mm.
Insérer le connecteur dans la prise.
Important
Si vous deviez déplacer votre gyromètre alors que le G-PILOT 3100 est sous tension,
attendez que le cap compas se stabilise avant de poursuivre votre route.
G-PILOT 3100 Notice d’installation
NAVMAN
21

3-8 Montage du boîtier et des autres instruments
Montage du boîtier
1 Sélectionner un emplacement où le boîtier sera :
facilement lisible et à proximité de la barre
manuelle.
accessible de l’arrière, avec un
dégagement minimum côté cabine de
50 mm (voir schéma de montage).
protégé de l’humidité au niveau de la face
arrière.
Suivre les instructions du guide sur
l’emplacement du montage (voir section 3-2-1).
2 La surface de montage doit être plane
et d’une épaisseur inférieure à 20 mm.
Coller le gabarit de montage à
l’emplacement choisi. Percer un trou de
montage de 50 mm de diamètre au niveau
du trou central du gabarit.
Remarque : le gabarit prévoit un espace
autour du boîtier pour l’installation du
capot de protection.
3 Dévisser l’écrou à l’arrière du boîtier.
Insérer l’appareil dans le trou de montage.
Revisser l’écrou à la main.
Branchement du boîtier
Boîtier
Calculateur
Sortie relais
d’embrayage, 8
NMEA 2, 7
Entrée NMEA 1, 6
NMEA commun, 5
NavBus -, bleu 4
NavBus +, orange 3
Masse, noir 2
Alimentation 12 V,
Important
Connecter les fi ls d’alimentation du boîtier (fi ls rouge et noir) aux bornes 1 et 2 du boîtier de
raccordement 8 bornes afi n que le boîtier et le calculateur du G-PILOT 3100 soient alimentés
par le même courant faible.
22
rouge 1
Protection de câbles
Boîtier de
raccordement
8 bornes
Vert
Montage du boîtier
Epaisseur maximum 20 mm
Trou de
montage Ø
50 mm
Boîtier
Dégagement minimum
côté cabine 50 mm
Suivre les instructions du guide
de câblage (voir section 3-2-2).
Câble du boîtier ; les trous dans les cloisons pour
le passage du câble doivent avoir un diamètre
minimum de 6 mm.
Jaune (isoler, ne pas couper)
Blanc (isoler, ne pas couper)
Courant faible (voir section 3-4-1)
Feux et buzzers externes
optionnels. Si ces alarmes
externes nécessitent un
ampérage total supérieur à
250 mA, installer un relais.
NAVMAN
G-PILOT 3100 Notice d’installation
Ecrou
Câbles

Branchement des autres instruments
Suivre les instructions du guide de câblage (voir section 3-2-2).
Boîtiers G-PILOT 3100
supplémentaires
Boîtiers
Autres
instruments
série 3100
Boîtiers
série
GPS (ex. traceur de
cartes TRACKER
Navman série 5000)
GPS
3100
Calculateur
Sortie relais
d’embrayage, 8
NMEA 2, 7
Entrée NMEA 1, 6
NMEA commun, 5
NavBus -, bleu 4
NavBus +, orange 3
Masse, noir 2
Alimentation 12 V,
rouge 1
Protection de câbles
Vert (depuis
un seul boîtier
Entrée
& sortie
NMEA
VertVert
Alimentation
Entrée NMEA
Embrayage, en option
(voir section 3-4-2)
Entrée ou sortie NMEA
Sortie NMEA GPS
NMEA GPS commun
Courant faible
(voir section 3-4-1)
uniquement)
Feux et buzzers
externes (voir page
Important
Veuillez vous reporter aux notices de montage des différents instruments pour plus
d’informations sur les branchements électriques.
Si votre système comprend plus de quatre boîtiers G-PILOT 3100 ou bien d’autres
précédente)
instruments série 3100, installer une alimentation à courant faible supplémentaire pour ces
appareils (voir section 3-4 ou notices de montage des instruments).
Les sorties alarmes externes (fi l vert) des instruments Navman série 3100 et des traceurs de
cartes Navman série 5000 peuvent être couplées pour contrôler les feux et buzzers externes.
Pour les systèmes composés de plusieurs instruments, nous vous conseillons d’utiliser des
boîtiers de connexion NavBus afi n de simplifi er les branchements entre les instruments (voir
notice de montage et d’utilisation du NavBus).
G-PILOT 3100 Notice d’installation
NAVMAN
23

4 Réglages à quai
Procéder aux réglages à quai :
après avoir installé tous les éléments du pilote automatique (voir section 3).
après avoir changé un élément du système ou en cas de problème.
Une fois les réglages à quai effectués, procéder aux essais en mer (voir section 5).
4-1 Initialisation du G-PILOT 3100
1
Allumer le G-PILOT 3100 (voir notice
d’utilisation du G-PILOT 3100). Si la barre
bouge, éteindre immédiatement l’appareil
(voir notice d’utilisation du G-PILOT 3100)
et vérifi er les branchements électriques. Le
boîtier doit affi cher le message AP3100 au
bas de l’écran, puis la version du logiciel et
enfi n le cap compas.
Si vous activez le mode AUTO alors que
le capteur d’angle de barre et le compas
n’ont pas été étalonnés, le message CAL
ERROR s’affi chera à l’écran.
2 Si le G-PILOT 3100 a déjà été utilisé, effacer
toutes les données utilisateur et rétablir les
valeurs par défaut du fabricant comme suit :
i
Sélectionner NVM RESET dans le menu
FACTORY (voir notice d’utilisation du
Tableau des données utilisateur (pour mémoriser les données de paramétrage)
Menu VESSEL
Donnée Valeur de la donnée
VSL TYPE . . . . . . . . . . . . . .
DRVE TYPE . . . . . . . . . . . . . .
WIND TYPE . . . . . . . . . . . . . .
HDG TYPE . . . . . . . . . . . . . .
MAG VAR . . . . . . . . . . . . . .
Menu OPTIONS
Donnée Valeur de la donnée
DODGE ANG . . . . . . . . . . . . . .
TACK ANG . . . . . . . . . . . . . .
GYBE ANGLE . . . . . . . . . . . . . .
TACK DELY . . . . . . . . . . . . . .
TURN RATE . . . . . . . . . . . . . .
ATTENTION
Tant que le capteur d’angle de barre n’a pas été étalonné (voir section 4-2), le G-PILOT 3100 n’a
pas de limite d’angle de barre. Lorsque vous pilotez le bateau par impulsions (mode barre), veillez
à ne pas amener la barre à fond (voir notice d’utilisation du G-PILOT 3100).
24
NAVMAN
G-PILOT 3100).
ii
Appuyer sur la touche > pour activer la
fonction.
iii
Appuyer sur la touche MENU pour
effacer les données enregistrées.
iv
Maintenir la touche AUTO enfoncée pour
quitter la page menu.
3 Entrer les données utilisateur dans
le tableau ci-dessous (pour plus
d’informations sur les données et sur la
procédure de paramétrage, se reporter à
la notice d’utilisation du G-PILOT 3100).
En face de chaque donnée, indiquer la
valeur de paramétrage sélectionnée.
4 Une fois les données entrées, maintenir la
touche AUTO enfoncée pour quitter la
page menu.
Menu ALARMS
Donnée Valeur de la donnée
CE ALARM . . . . . . . . . . . . . .
XTE ALARM . . . . . . . . . . . . . .
WPT AKN . . . . . . . . . . . . . .
WND ALARM . . . . . . . . . . . . . .
(Voiliers uniquement)
BAT ALARM . . . . . . . . . . . . . .
CUR ALARM . . . . . . . . . . . . . .
Menu FACTORY
Donnée Valeur de la donnée
BKL GROUP . . . . . . . . . . . . . .
KEY BEEPS . . . . . . . . . . . . . .
NMEA2 DAT . . . . . . . . . . . . . .
G-PILOT 3100 Notice d’installation

4-2 Etalonnage du capteur d’angle de barre
Cette procédure permet d’aligner le capteur d’angle de barre sur la barre.
Important
Pour quitter l’opération d’étalonnage à tout moment, appuyer sur la touche ESC.
Si vous ne déplacez pas correctement la barre ou si le capteur d’angle de barre ne fonctionne
pas, le G-PILOT 3100 stoppera l’étalonnage du capteur et le message CALB FAIL s’affi chera
à l’écran. Appuyer sur la touche ESC, résoudre le problème, puis recommencer l’opération
d’étalonnage.
Dans des conditions normales de fonctionnement, le G-PILOT 3100 déplacera la barre au plus
près à 3° de la butée bâbord ou tribord.
RFU CAL
Sélectionner RFU CAL dans le menu
DEVICES (voir notice d’utilisation du
G-PILOT 3100).
ENT
CENTRE
Mettre la barre au centre.
ENT
MAX PORT
Mettre la barre à fond pour
que le bateau vire sur
bâbord.
ENT
MAX STBD
Mettre la barre à fond pour
que le bateau vire sur
tribord.
ENT
ANGLE 25
Amener la barre sur la
butée tribord, puis mesurer
l’angle de barre (30° dans
cet exemple).
Appuyer sur la touche < ou > pour
remplacer l’angle affi ché par l’angle de
barre mesuré (30° dans cet exemple).
30°
ANGLE 30
ENT
G-PILOT 3100 Notice d’installation
CENTRE
Ramener la barre au centre.
ENT
STAND CLR
S’éloigner de la barre et du bras de
mèche et ôter tout ce qui pourrait
empêcher le déplacement de la barre
entre les deux butées.
TEST LIMS
Le G-PILOT 3100 déplace la barre d’une
butée à l’autre, puis ramène la barre au centre.
Appuyer sur la touche ESC à tout moment
pour arrêter le mouvement de la barre.
ENT
PILOT
ENT
Angle de barre
7°
ACPT CAL
Déplacer manuellement la barre d’une butée à
l’autre en vérifi ant si l’angle de barre affi ché est
cohérent (7° dans cet exemple). Pour annuler
l’opération d’étalonnage, appuyer sur la touche ESC.
ENT
CALB DONE
Le capteur d’angle de barre est étalonné.
ENT
Fin de l’opération
NAVMAN
d’étalonnage.
25
5 Essais en mer
Procéder aux essais en mer :
après avoir effectué les réglages à quai
(voir section 4).
pour vérifi er le fonctionnement du
G-PILOT 3100.
Effectuer ces essais au large, dans une zone
sans bateau ni obstacle. La mer doit être plate,
le vent faible et les courants nuls.
5-1 Etalonnage du compas
Important
Pour quitter l’opération d’étalonnage à tout moment, appuyer sur la touche ESC.
Si vous ne déplacez pas correctement la barre ou si le compas ne fonctionne pas, le G-PILOT 3100
stoppera l’étalonnage du compas et le message CALB FAIL s’affi chera à l’écran. Appuyer sur la touche ESC,
résoudre le problème, puis recommencer l’opération d’étalonnage.
Les variations locales des champs magnétiques peuvent perturber le fonctionnement du compas. Il incombe à
l’utilisateur d’étalonner le capteur loin de masses métalliques importantes, telles qu’une marina, un cargo, etc.
S’assurer que les deux sources compas indiquent le même nord (vrai ou magnétique). Si votre compas
magnétique n’a pas été étalonné, alors utilisez une autre source pour la mesure du cap. Si vous utilisez le
compas du bateau, veillez à appliquer les tables de déviation pour vérifi er le compas du G-PILOT 3100.
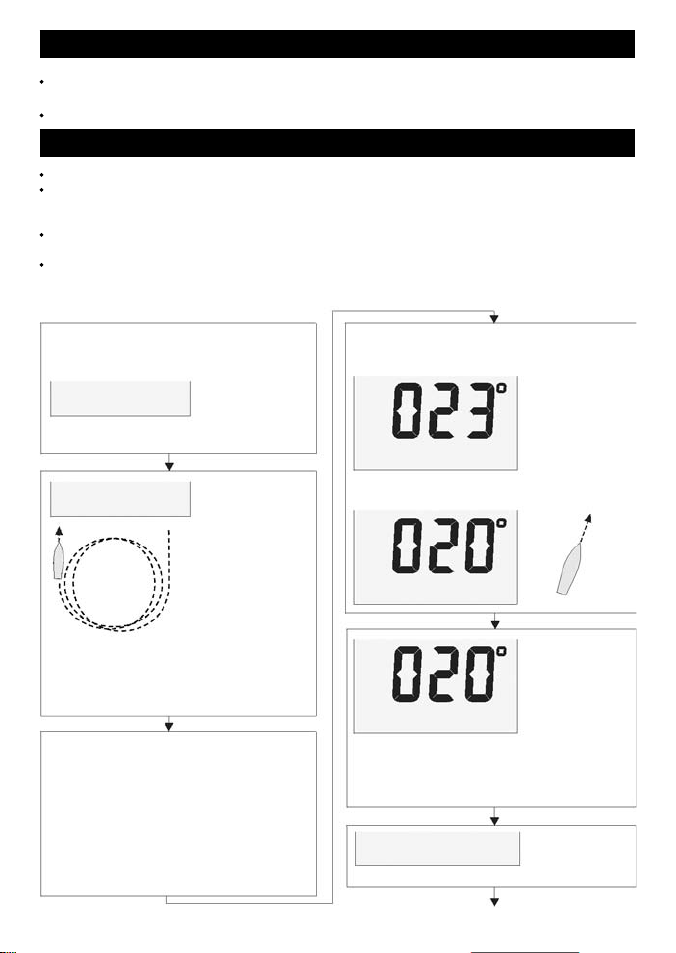
Allumer le G-PILOT 3100 (voir notice
d’utilisation du G-PILOT 3100). Barrer le
bateau à la main et naviguer en ligne droite à
faible vitesse.
CSU CAL
Sélectionner CSU CAL dans le menu DEVICES
(voir notice d’utilisation du G-PILOT 3100).
TURN BOAT
Barrer à la main
et effectuer 2,5
cercles sur bâbord
ou tribord, à vitesse
constante.
Les cercles doivent être
effectués sans à-coups,
sens. Chaque cercle doit être décrit en 1 à 2
minutes. Le G-PILOT 3100 détecte le moment
où les 2,5 tours ont été effectués et passe
automatiquement à l’étape suivante.
Cette étape permet d’aligner le compas. Si le
G-PILOT 3100 est connecté à un GPS, appuyer
à deux reprises sur la touche MENU pour passer
cette étape et valider l’opération d’étalonnage. Puis
aligner le compas sur le GPS (voir section 6-2-1).
Utiliser un compas précis ou un GPS externe
pour déterminer le cap réel suivi par le bateau. Si
vous utilisez un GPS externe, naviguez à vitesse
suffi sante pour que la mesure du cap soit précise.
26
toujours dans le même
Barrer le bateau à la main et naviguer en ligne droite.
Veiller à ce que le cap du bateau soit maintenu tout
au long de l’opération d’alignement du compas.
Exemple : cap
réel 20°, cap
affi ché 23°
< ALIGN >
Appuyer sur la touche < ou > pour remplacer le
cap affi ché par le cap réel (20° dans cet exemple).
< ALIGN >
ENT
ACPT CAL
Déplacer la barre manuelle dans différentes
directions en vérifi ant si le cap affi ché est
proche du cap réel.
Pour annuler l’opération d’étalonnage,
appuyer sur la touche ESC.
ENT
CALB DONE
Le compas est étalonné.
NAVMAN
Fin de l’opération d’étalonnage.
ENT
G-PILOT 3100 Notice d’installation

6 Alignement du compas et de la barre
Le compas et la barre peuvent être alignés séparément.
6-1 Alignement du compas
Cette procédure permet d’aligner le compas
du G-PILOT 3100 afi n que celui-ci affi che le
cap réel.
6-1-1 Alignement du compas du G-PILOT 3100
sur un compas de référence
Utiliser un compas précis ou un GPS
externe pour déterminer le cap réel suivi
par le bateau. Si vous avez recours à un
GPS externe, naviguez à vitesse suffi sante
pour que la mesure du cap soit précise.
Barrer le bateau à la main et naviguer
en ligne droite. Veiller à ce que le
cap soit maintenu tout au long de
l’opération d’alignement du compas.
Sélectionner ALIGN HDG dans
le menu DEVICES (voir notice
d’utilisation du G-PILOT 3100).
ALIGN HDG
ENT
Exemple : cap
réel 20°, cap
affi ché 23°.
Le compas peut être aligné soit sur un compas
de référence, soit sur un GPS connecté au
G-PILOT 3100. Durant l’opération d’alignement,
veiller à ce qu’il n’y ait ni vent ni courant latéral.
6-1-2 Alignement du compas du G-PILOT 3100
sur un GPS connecté au pilote automatique
Naviguer à vitesse suffi sante pour que la
mesure du cap soit précise.
Barrer le bateau à la main et
naviguer en ligne droite. Veiller
à ce que le cap du bateau soit
maintenu tout au long de l’opération
d’alignement du compas.
Sélectionner ALIGN GPS dans
le menu DEVICES (voir notice
d’utilisation du G-PILOT 3100).
ALIGN GPS
< ALIGN >
Appuyer sur la touche < ou > pour remplacer
le cap affi ché par le cap réel (20° dans cet
exemple).
Déplacer la barre manuelle dans
ENT
différentes directions en vérifi ant si le cap
affi ché est proche du cap réel.
ENT
Le G-PILOT 3100
enregistre automatiquement le cap
GPS.
< ALIGN >
Fin de l’opération d’alignement.
6-2 Alignement de la barre
Cette procédure permet de déterminer le réglage de la barre pour suivre une route droite. Durant
l’opération d’alignement, veiller à ce qu’il n’y ait ni vent ni courant latéral.
Barrer le bateau à la main et
naviguer en ligne droite à vitesse
modérée.
RFU CENTR
Sélectionner RFU CENTR dans le menu DEVICES
(voir notice d’utilisation du G-PILOT 3100).
G-PILOT 3100 Notice d’installation
NAVMAN
Le G-PILOT 3100 enregistre
ENT
automatiquement la position de la
barre et règle l’angle de barre sur 0.
Fin de l’opération d’alignement.
27

Appendice A - Caractéristiques techniques
Caractéristiques électriques
Alimentation à courant fort 10,5 à
16,5 V CC, consommation 20 A maximum.
Alimentation à courant faible 10,5 à
16,5 V CC, consommation :
Calculateur : 80 mA.
Boîtier : 30 mA sans rétro-éclairage,
110 mA avec rétro-éclairage maxi ;
Autres instruments optionnels : voir
notices des instruments.
Interfaces
Connexion NavBus vers d’autres
instruments Navman.
Sorties NMEA 0183 : HDG, HDT, RSA ;
entrées NMEA 0183 : APA, APB, BOD,
BWC, MWD, MWV, RMA, RMB, RMC,
VHW, VTG, XTE.
Ports NMEA 0183 :
NMEA 1 : entrée.
NMEA 2 : entrée ou sortie (à défi nir).
Conformité aux normes
EMC
Etats-Unis (FCC) : Part 15 Class B.
Europe (CE) : EN50081-1, EN50082-1.
Nouvelle-Zélande et Australie (C-Tick) :
AS-NZS 3548.
Etanchéité :
Compas, gyromètre et capteur d’angle
de barre : étanchéité absolue.
Boîtier : IP66 en façade si installation
correcte.
Calculateur : à installer dans un endroit
bien ventilé, sec et propre.
Branchements du boîtier de raccordement
4 bornes du calculateur
Borne Signal
1
Borne positive de l’alimentation
courant fort, 10,5 à 16,5 V CC,
20 A maxi
2 Borne négative de l’alimentation
courant fort
3 Sortie unité de puissance
courant négatif
4 Sortie unité de puissance
courant positif
Branchements du boîtier de raccordement
8 bornes du calculateur
Borne Signal
1 Borne positive de l’alimentation
courant faible, 10,5 à 16,5 V CC,
80 mA maxi
2 Alimentation courant faible
commun
3 NavBus +
4 NavBus 5 NMEA commun
6 Entrée NMEA 1
7 Entrée/sortie NMEA 2
8 Sortie relais d’embrayage,
branchement à la masse pour
allumer le relais, 30 V CC,
300 mA maxi
Câble d’alimentation/transmission de
données du boîtier
Fil Signal
Rouge Borne positive de l’alimentation,
10,5 à 16,5 V CC, 30 mA sans
rétro-éclairage, 110 mA avec
rétro-éclairage maxi
Noir Borne négative de l’alimentation
Orange NavBus +
Bleu NavBus Jaune Usage fabrication uniquement
(isoler, ne pas couper)
Blanc Usage fabrication uniquement
(isoler, ne pas couper)
Vert Alarmes externes, branchement à
la masse, 30 V CC, 250 mA maxi
Appendice B - Messages d’alarme
Message Interprétation
BAT ALARM La tension d’alimentation est inférieure à
la valeur d’alarme défi nie par l’utilisateur.
CAL ERROR
du G-PILOT 3100 n’est pas étalonné.
CCH ERROR Le courant d’embrayage est trop élevé.
CE ALARM L’erreur de cap est supérieure à la valeur
d’alarme défi nie par l’utilisateur.
28
Le capteur d’angle de barre ou le compas
NAVMAN
Solution Notes
Vérifi er les batteries. a
Désenclencher le G-PILOT 3100 si la
tension est trop basse.
Etalonner ces deux appareils a
(voir sections 5-2 et 6-1).
Vérifi er les branchements vers a s
l’embrayage.
Ramener le bateau vers le cap à a
suivre en barrant à la main.
G-PILOT 3100 Notice d’installation

Message Interprétation
CSU ERROR Le compas n’envoie pas de données au
calculateur.
CUR ALARM La consommation de l’unité de puissance
est supérieure à la valeur d’alarme défi nie
par l’utilisateur.
DRV ERROR L’angle de barre ne varie pas lorsque
l’unité de puissance fonctionne.
GPS ERROR Le GPS n’envoie plus de données au
calculateur.
GSU ERROR Le gyromètre n’envoie pas de données au
calculateur.
MCU ERROR Le calculateur n’envoie pas de données au
boîtier.
NAV ERROR Aucun waypoint n’est activé lorsque vous
essayez d’enclencher le G-PILOT 3100.
NEXT WPT? Le bateau a atteint le waypoint actif
(en mode GPS, avec la fonction WPT
AKN activée).
NO DATA Le G-PILOT 3100 ne reçoit aucune donnée
GPS en mode GPS.
ou Le G-PILOT 3100 ne reçoit aucune donnée
vent en mode vent.
NVM ERROR La mémoire du calculateur a été altérée.
PHA ERROR La barre bouge à l’inverse du capteur
d’angle de barre.
RFU ERROR Le capteur d’angle de barre n’envoie plus
de données au calculateur.
ROUTE END Le bateau a atteint le dernier waypoint de
la route GPS.
TRK ERROR Le G-PILOT 3100 est passé en mode
GPS mais le bateau est trop éloigné de la
route GPS.
TAK ERROR En mode vent, le virement de bord ou
l’empannage activé risque de mettre le
bateau bout au vent.
29
NAVMAN
Solution Notes
Vérifi er si le compas est connecté au a s
calculateur.
Faire réviser le compas.
Vérifi er si l’unité de puissance n’est a s
pas bloquée.
Augmenter la valeur d’alarme.
Vérifi er si l’unité de puissance est a s
sous tension.
Vérifi er si le capteur d’angle de barre est
connecté à la barre.
Vérifi er les fusibles du circuit du
calculateur.
Vérifi er le fonctionnement de l’unité de
puissance.
Vérifi er le fonctionnement du GPS. a c s
Vérifi er les branchements vers le GPS.
Vérifi er si le gyromètre est connecté au a s
calculateur.
Faire réviser le gyromètre.
Vérifi er si le boîtier est connecté au a s
calculateur.
Faire réviser le calculateur ou le boîtier.
Activer le GPS vers un waypoint ou le m
long d’une route.
Appuyer sur n’importe quelle touche du
boîtier pour arrêter l’alarme, puis sur la
touche ENT pour activer le prochain
waypoint ou sur la touche ESC
repasser en mode STBY.
Vérifi er le fonctionnement du GPS. m
Vérifi er les branchements vers le GPS.
Vérifi er le fonctionnement de la m
girouette anémomètre.
Vérifi er les branchements vers la girouette
anémomètre.
pour
Faire réviser le calculateur. a s
Vérifi er le capteur d’angle de barre. a s
Etalonner la barre et le capteur d’angle
de barre.
Vérifi er si le capteur d’angle de barre a s
est connecté au calculateur.
Faire réviser le capteur d’angle de barre.
Appuyer sur la touche ESC pour passer
en mode STBY ou sur la touche ENT pour
passer en mode compas et continuer à
naviguer selon le cap actuel.
Appuyer sur la touche ESC pour repasser
en mode STBY ou sur la touche ENT
pour laisser le G-PILOT 3100 ramener le
bateau vers la route GPS.
Modifi er l’angle au vent prédéfi ni. m
G-PILOT 3100 Notice d’installation

Message Interprétation
WND ALARM La variation de l’angle du vent est
supérieure à la valeur d’alarme.
WND ERROR La girouette anémomètre n’envoie plus de
données au calculateur.
XTE ALARM L’écart de route est supérieur à la valeur
d’alarme défi nie par l’utilisateur.
Solution Notes
Modifi er l’angle au vent prédéfi ni. a
Passer en mode compas.
Vérifi er le fonctionnement de la a c s
girouette anémomètre.
Vérifi er les branchements vers la
girouette anémomètre.
Ramener le bateau vers la route a
GPS en barrant à la main.
Notes
a L’alarme déclenche les buzzers interne et externes (optionnels). Pour mettre l’alarme en veille, appuyer
sur n’importe quelle touche du boîtier, puis sur la touche ESC pour ef facer le message d’alarme.
c Le G-PILOT 3100 passe en mode compas.
m Le mode de pilotage du G-PILOT 3100 ne change pas.
s Le G-PILOT 3100 passe en mode STBY.
30
NAVMAN
G-PILOT 3100 Notice d’installation

Appendice C - En cas de problème
Ce guide de dépannage ne remplace pas la
lecture ni la compréhension de cette notice.
Il est possible dans la plupart des cas de résoudre les problèmes sans avoir recours au
service après-vente du fabricant. Veuillez lire
attentivement cet appendice avant de contacter
votre revendeur Navman le plus proche.
Aucune pièce détachée n’est disponible pour
l’utilisateur. Des méthodes et un matériel de test
spécifi ques sont nécessaires pour remonter
correctement l’appareil. Toute intervention sur
un G-PILOT 3100 doit être réalisée par un centre technique agréé par Navman NZ Limited.
Toute réparation de l’appareil par l’utilisateur
entraînerait une annulation de la garantie. Pour
plus d’informations, vous pouvez consulter notre site Internet : www.navman.com.
1 Le boîtier ne s’allume pas :
a Fusible fondu ou coupe-circuit déclenché.
b Tension < 10,5 V CC ou > 16,5 V CC.
c Câble d’alimentation/transmission de
données endommagé.
2 Les corrections de cap sont trop
fréquentes :
Réglage trop bas de la réponse de barre
(voir notice d’utilisation du G-PILOT 3100,
section 7-1).
3 Lorsque vous suivez une course droite,
le bateau oscille autour de la course :
a Le bateau ne doit pas osciller autour de
la course lorsque le pilotage du
G-PILOT 3100 est optimal.
b Sélectionner un profi l adapté à la vitesse
du bateau et à l’état de la mer (voir
notice d’utilisation du G-PILOT 3100,
section 7-2).
c Si le bateau s’éloigne trop de la course,
ajuster la réponse de barre, le gain de
barre, le gain contre barre, le gain GPS
(si mode GPS activé) ou le gain vent (si
mode vent activé). Voir notice d’utilisation
du G-PILOT 3100, section 7-1.
4 Lorsque vous suivez une course droite,
le bateau s’éloigne progressivement de
la course :
a Sélectionner un profi l adapté à la vitesse
du bateau et à l’état de la mer (voir notice
d’utilisation du G-PILOT 3100, section 7-2).
b Ajuster la réponse de barre, le gain de
barre, le gain contre barre, le gain GPS
(si mode GPS activé) ou le gain vent (si
mode vent activé). Voir notice d’utilisation
du G-PILOT 3100, section 7- 1.
5 Lors d’un changement important de
cap à suivre, le bateau ne tient pas le
nouveau cap :
a Sélectionner un profi l adapté à la vitesse
du bateau et à l’état de la mer (voir
notice d’utilisation du G-PILOT 3100,
section 7-2).
b Vérifi er si le taux de virage n’est pas trop
faible (sélectionner TURN RATE dans le
menu OPTIONS ; voir notice d’utilisation
du G-PILOT 3100, section 3-7).
c Ajuster le gain contre barre (voir
notice d’utilisation du G-PILOT 3100,
section 7- 1).
6 Les corrections de barre sont trop
rapides :
Diminuer le taux de virage (sélectionner
TURN RATE dans le menu OPTIONS ;
voir notice d’utilisation du G-PILOT 3100,
section 3-7).
7 Le mot SIMULATE clignote à l’écran et
les valeurs affi chées sont incohérentes :
Appareil en mode simulation (voir notice
d’utilisation du G-PILOT 3100, section 3- 6).
8 L’écran du boîtier est embué :
a Infi ltration d’humidité par le tube
d’aération situé à l’arrière du boîtier.
Aérer le bateau ou sélectionner le niveau
de rétro-éclairage maximum.
b Infi ltration d’eau par le tube d’aération.
Retourner le boîtier au service
après-vente.
31
NAVMAN
G-PILOT 3100 Notice d’installation

Appendix D - How to contact us www.navman.com.
NORTH AMERICA
Navman USA Inc.
30 Sudbury Rd, Acton, MA 01720.
Toll Free: +1 866 628 6261
Fax: +1 978 897 8264
e-mail: sales@navmanusa.com
web:www.navman.com
AUSTRALIA
Navman Australia Pty. Limited
Unit 2 / 5-13 Parsons St.
Rozelle, NSW 2039, Australia.
Ph: +61 2 9818 8382
Fax: +61 2 9818 8386
e-mail: sales@navman.com.au
web: www.navman.com
OCEANIA
New Zealand
Absolute Marine Ltd.
Unit B, 138 Harris Road,
East Tamaki, Auckland.
Ph: +64 9 273 9273
Fax: +64 9 273 9099
e-mail: navman@absolutemarine.co.nz
Papua New Guinea
Lohberger Engineering,
Lawes Road, Konedobu.
PO Box 810, Port Moresby.
Ph: +675 321 2122
Fax: +675 321 2704
e-mail: loheng@online.net.pg
web: www.lohberger.com.pg
SOUTH AMERICA
Argentina
Costanera Uno S.A.
Av Pte Ramón S. Castillo y Calle 13
Zip 1425 Buenos Aires, Argentina.
Ph: +54 11 4312 4545
Fax +54 11 4312 5258
e-mail:
purchase@costanerauno.com.ar
web: www.costanerauno.ar
Brazil
Equinautic Com Imp Exp de Equip
Nauticos Ltda.
Rua Ernesto Paiva, 139
Clube dos Jangadeiros
Porto Alegre - RS - Brasil
CEP: 91900-200.
Ph: +55 51 3268 6675
+55 51 3269 2975
Fax: +55 51 3268 1034
e-mail:
equinautic@equinautic.com.br
web: www.equinautic.com.br
Realmarine
Estrada do Joa 3862,
Barra da Tijuca, Rio de Janeiro,
Brazil. CEP: 22611-020.
Ph: +55 21 2483 9700
Fax: +55 21 2495 6823
e-mail: tito@realmarine.com.br
web: www.realmarine.com.br
Chile
Equimar
Manuel Rodrigurez 27
Santiago, Chile.
Ph: +56 2 698 0055
Fax +56 2 698 3765
e-mail: mmontecinos@equimar.cl
Mera Vennik
Colon 1148, Talcahuano,
4262798, Chile.
Ph: +56 41 541 752
Fax +56 41 543 489
e-mail: meravennik@entel.chile.net
G-PILOT 3100 Installation manual
CENTRAL AMERICA
Mexico
Mercury Marine de Mexico
Anastacio Bustamente #76
Interior 6 Colonia Francisco Zarabia,
Zapapan, Jalisco, C.P. 45236 Mexico.
Ph: +52 33 3283 1030
Fax: +52 33 3283 1034
web: www.equinautic.com.br
ASIA
China
Peaceful Marine Electronics Co. Ltd.
Guangzhou, Hong Kong, Dalian,
Qingdao, Shanghai
1701 Yanjiang Building
195 Yan Jiang Zhong Rd. 510115
Guangzhou, China.
Ph: +86 20 3869 8839
Fax: +86 20 3869 8780
e-mail: sales@peaceful-marine.com
web: www.peaceful-marine.com
India
Access India Overseas Pvt. Ltd.
A-98, Sector 21,
Noida - 201 301, India.
Ph: +91 120 244 2697
TeleFax: +91 120 253 7881
Mobile: +91 98115 04557
e-mail: vkapil@del3.vsnl.net.in
Esmario Export Enterprises
Block No. F-1, 3rd Floor, Surya Towers
Sardar Patel Rd, Secunderbad 500 003.
Ph: +91 40 2784 5163
Fax: +91 40 2784 0595
e-mail: gjfeee@hd1.vsnl.net.in
web: www.esmario.com
Indonesia
Polytech Nusantara,
Graha Paramita 2nd Floor,
Jln Denpasar Raya Blok D2
Kav 8 Kuningan, Jakarta 12940.
Ph: +62 21 252 3249
Fax: +62 21 252 3250
e-mail: polytech@transavia.co.id
Korea
Kumhomarine Technology Co. Ltd.
#604-842, 2F, 1118-15, Janglim1-Dong,
Saha-Gu, Busan, Korea.
Ph: +82 51 293 8589
Fax: +82 51 265 8984
e-mail: info@kumhomarine.com
web: www.kumhomarine.com
Maldives
Maizan Electronics Pte. Ltd.
Henveyru, 08 Sosunmagu.
Male', Maldives.
Mobile: +960 78 24 44
Ph: +960 32 32 11
Fax: +960 32 57 07
e-mail: ahmed@maizan.com.mv
Singapore, Malaysia, Brunei,
Indonesia and Phillipines
RIQ PTE Ltd.
Blk 3007, 81 Ubi Road 1, #02-440,
Singapore 408701.
Ph: +65 6741 3723
Fax : +65 6741 3746
e-mail: riq@postone.com
Taiwan
Seafirst International Corporation
No. 281, Hou-An Road, Chien-Chen
Dist. Kaohsiung, Taiwan R.O.C.
Ph: +886 7 831 2688
Fax: +886 7 831 5001
e-mail: seafirst@seed.net.tw
web: www.seafirst.com.tw
NAVMAN
Thailand
Thong Electronics (Thailand) Co. Ltd.
923/588 Ta Prong Road, Mahachai,
Muang, Samutsakhon 74000, Thailand.
Ph: +66 34 411 919
Fax: +66 34 422 919
e-mail: sales@thongelectronics.com
admins@thongelectronics.com
web: www.thongelectronics.com
Vietnam
Haidang Co. Ltd.
1763 Le Hong Phong St. Ward 12
District 10, Ho Chi Minh City.
Ph: +84 8 863 2159
Fax: +84 8 863 2124
e-mail: sales@haidangvn.com
web: www.haidangvn.com
MIDDLE EAST
Lebanon and Syria
Balco Stores
Balco Building, Moutran Street,
Tripoli (via Beirut). - Lebanon
P.O. Box: 622.
Ph: +961 6 624 512
Fax: +961 6 628 211
e-mail: balco@cyberia.net.lb
United Arab Emirates
Kuwait, Oman, Iran, Saudi
Arabia, Bahrain & Qatar
Abdullah Moh’d Ibrahim Trading, opp
Creak Rd. Baniyas Road, Dubai.
Ph: +971 4 229 1195
Fax: +971 4 229 1198
e-mail: sales@amitdubai.com
AFRICA
South Africa
Pertec (Pty) Ltd (Coastal Division)
16 Paarden Eiland Road.
Paarden Eiland, 7405
PO Box 527,
Paarden Eiland, 7420
Cape Town, South Africa.
Ph: +27 21 508 4707
Fax: +27 21 508 4888
e-mail: info@kfa.co.za
web: www.pertec.co.za
EUROPE
France, Belgium and Switzerland
Plastimo SA
15, rue Ingénieur Verrière,
BP435,
56325 Lorient Cedex.
Ph: +33 2 97 87 36 36
Fax: +33 2 97 87 36 49
e-mail: plastimo@plastimo.fr
web: www.plastimo.fr
Germany
Navimo Deutschland
15, rue Ingénieur Verrière
BP435- 56325 Lorient Cedex.
Ph: +49 6105 92 10 09
+49 6105 92 10 10
+49 6105 92 10 12
Fax: +49 6105 92 10 11
e-mail:
plastimo.international@plastimo.fr
website: www.plastimo.de
Italy
Navimo Italia
Nuova Rade spa, Via del Pontasso 5
16015 Casella Scrivia (GE).
Ph: +39 1096 80162
Fax: +39 1096 80150
e-mail: info@nuovarade.com
web: www.plastimo.it
Holland
Navimo Holland
Industrieweg 4,
2871 JE Schoonhoven.
Ph: +31 182 320 522
Fax: +31 182 320 519
e-mail: info@plastimo.nl
web: www.plastimo.nl
United Kingdom
Navimo UK
Hamilton Business Park
Bailey Road, Hedge End
Southhampton, Hants S030 2HE.
Ph: +44 01489 778 850
Fax: +44 0870 751 1950
e-mail: sales@plastimo.co.uk
web: www.plastimo.co.uk
Sweden, Denmark, Finland and
Norway
Navimo Nordic
Lundenvägen 2,
473 21 Henån.
Ph: +46 304 360 60
Fax: +46 304 307 43
e-mail: info@plastimo.se
web: www.plastimo.se
Spain
Navimo España
Avenida Narcís Monturiol, 17
08339 Vilassar de Dalt,
Barcelona.
Ph: +34 93 750 75 04
Fax: +34 93 750 75 34
e-mail: plastimo@plastimo.es
web: www.plastimo.es
Portugal
Navimo Portugal
Avenida de India N°40
1300-299 Lisbon.
Ph: +351 21 362 04 57
Fax: +351 21 362 29 08
e-mail: plastimo@siroco-nautica.pt
web: www.plastimo.com
Other countries in Europe
Plastimo International
15, rue Ingénieur Verrière BP435
56325 Lorient Cedex, France.
Ph: +33 2 97 87 36 59
Fax: +33 2 97 87 36 29
e-mail:
plastimo.international@plastimo.fr
web: www.plastimo.com
REST OF WORLD/
MANUFACTURERS
Navman NZ Limited
13-17 Kawana St.
Northcote.
P.O. Box 68 155,
Newton,
Auckland,
New Zealand.
Ph: +64 9 481 0500
Fax: +64 9 481 0590
e-mail: marine.sales@navman.com
web: www.navman.com
91

Made in New Zealand
MN000227A
G-PILOT 3100 Installation
Lon 174° 44.535'E
Lat 36° 48.404'S
NAVMAN
 Loading...
Loading...