


G-PILOT 3100
AUTOPILOT
Operation Manual
Français............2
Deutsch ..........34
Nederlands.....64
www.navman.com
NAV MAN

Inhoud
Belangrijk.............................................................................................65
1 Introductie.........................................................................................66
1-1 Een gebruikelijke installatie......................................................................66
2 Standaard bediening........................................................................67
2-1 In- en uitschakelen...................................................................................67
2-2 De toetsen................................................................................................67
2-3 Gebruik van de G-PILOT 3100 ................................................................67
2-3-1 Opstarten van de G-PILOT 3100......................................................67
2-3-2 Gebruik van de G-PILOT 3100 .........................................................67
2-3-3 Actie in een noodgeval......................................................................68
2-3-4 Uitschakelen van de G-PILOT ..........................................................68
2-4 Instelling van de stuurstand .....................................................................68
2-5 STBY (stand-by), AUTO en HAND STEER..............................................69
2-6 Jog-besturing ...........................................................................................70
3 Bediening..........................................................................................71
3-1 Instelling achtergrondlicht scherm en toetsen..........................................71
3-2 Koersrichtings (heading)-beeldscherm ....................................................71
3-3 Balk-dataweergave ..................................................................................71
3-4 Info-dataweergave ...................................................................................71
3-5 Alarmen....................................................................................................72
3-6 Simulatiestand..........................................................................................72
3-7 Gebruik van de menu’s............................................................................72
3-8 Toetsenoverzicht......................................................................................75
4 Kompasstuurstand...........................................................................76
4-1 Kompas stuurdata....................................................................................76
4-2 Starten en stoppen van de kompasstand van de G-PILOT 3100 ............76
4-3 Koersverandering in kompasstand...........................................................77
4-4 Ontwijken in kompasstand.......................................................................78
4-5 Auto-laveren in kompasstand...................................................................78
5 GPS-stuurstand................................................................................79
5-1 GPS navigatiedata ..................................................................................79
5-2 Starten en stoppen van de GPS-stand van de G-PILOT 3100................70
5-3 Ontwijken in GPS-stand...........................................................................81
6 Windstuurstand................................................................................82
6-1 Windstuurdata..........................................................................................82
6-2 Starten van de windstand van de G-PILOT ............................................84
6-3 De SWA (geplande windhoek) veranderen in de windstand....................85
6-4 Ontwijken in windstand ............................................................................86
6-5 Auto-laveren of –gijpen in windstand.......................................................86
7 Optimaliseren stuurfunctie..............................................................88
7-1 De stuurparameters .................................................................................88
7-2 Profi elen...................................................................................................88
7-3 Aanpassen stuurparameters ...................................................................89
64
NAVMAN
G-PILOT 3100 Bedieningshandleiding
Appendix A - Specifi caties..................................................................91
Appendix B - Alarm en waarschuwingsberichten............................91
Appendix C - Problemen oplossen....................................................93
Appendix D - Contactinformatie.........................................................94
Belangrijk
Het is uitsluitend de verantwoordelijkheid van de eigenaar om het apparaat en de transducers
zodanig te installeren dat geen ongelukken, persoonlijk letsel of materiële schade worden
veroorzaakt. De gebruiker van dit product is persoonlijk verantwoordelijk voor goed
zeemanschap.
De keuze, de locatie en de installatie van alle componenten is het meest cruciale onderdeel van
elke automatische piloot installatie. Als de installatie niet correct wordt uitgevoerd, kan dit tot
gevolg hebben dat het instrument niet naar behoren functioneert. Verzekert u zich ervan dat
de installatiegaten die u maakt de constructie van de boot niet verzwakken. Raadpleeg in geval
van twijfel een bootbouwer.
Gebruik van de G-PILOT 3100:
De G-PILOT 3100 is bedoeld als een hulpmiddel voor de schipper die lange periodes aan
het roer moet staan, niet als de belangrijkste manier om de boot te sturen.
De G-PILOT 3100 is niet bedoeld voor gebruik in extreme weersomstandigheden, onder
ongunstige condities of in de buurt van andere boten, gevaarlijk water of land.
De G-PILOT 3100 kan een boot niet beter sturen dan een schipper. Wanneer de
omstandigheden ongunstig zijn dient u de boot handmatig te sturen..
Laat de helm nooit onbemand. Zorg dat er te allen tijde iemand op de uitkijk staat. De
schipper dient altijd de koers van de boot en de G-PILOT 3100 in de gaten te houden en
indien nodig het roer over te kunnen nemen.
Het functioneren van de G-PILOT 3100 kan worden beïnvloed door het niet werken van
een onderdeel, omgevingscondities, onjuist(e) installatie en gebruik.
NAVMAN NZ LIMITED WIJST ELKE AANSPRAKELIJKHEID AF VOOR GEBRUIK VAN DIT
PRODUCT WAARBIJ ONGELUKKEN OF SCHADE WORDEN VEROORZAAKT OF DIE IN
STRIJD ZIJN MET DE WET.
Omdat Navman continu werkt aan productverbetering, behouden we ons het recht voor om
veranderingen aan het product door te voeren die nog niet worden weergegeven in deze versie
van de handleiding. Neem contact op met uw leverancier indien u assistentie nodig heeft.
Bepalende taal: Deze bepaling, alle handleidingen, gebruiksaanwijzingen en andere informatie
gerelateerd aan het product (Documentatie), zouden kunnen worden vertaald, of zijn vertaald uit
een andere taal (Vertaling). Als er strijdigheden zijn tussen enige V ertaling van de Documentatie
dan is de Engelstalige versie van de Documentatie de offi ciële versie van de Documentatie.
Copyright © 2003 Navman NZ Limited, Nieuw Zeeland. Alle rechten voorbehouden. Navman is
een geregistreerd handelsmerk van Navman NZ Limited.
G-PILOT 3100 Bedieningshandleiding
NAVMAN
65
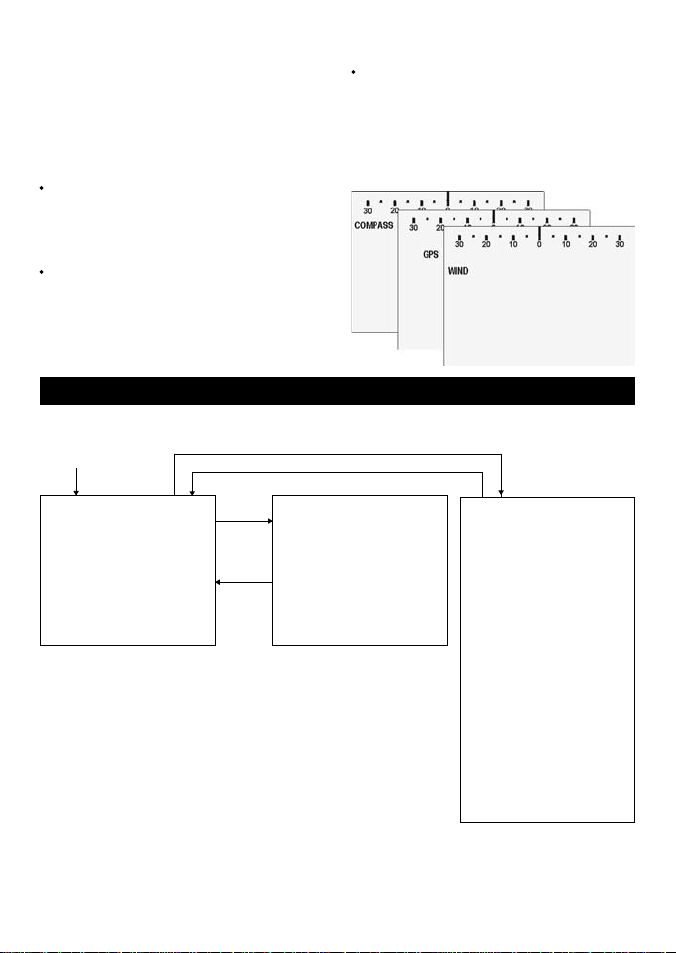
1 Introductie
De G-PILOT 3100 automatische piloot
heeft drie stuurstanden:
Kompas: de boot zeilt in een vastgestelde
kompasrichting
Wind: De boot zeilt en laveert naar een
vaste hoek t.o.v. de wind (hiervoor is een
windinstrumentaansluiting benodigd, zoals
Navman’s WIND 3100-serie).
GPS: De boot zeilt naar een bestemming
volgens een vastgestelde route (hiervoor is
een GPS-instrumentaansluiting benodigd,
zoals Navmans’s TRACKER kaartplotter).
De G-PILOT 3100 heeft drie stuurstanden
STBY (standby): De G-PILOT 3100 stuurt de
boot niet. U dient de boot met de handmatige
helm te sturen.
AUTO: De G-PILOT 3100 stuurt de boot
automatisch.
HAND STEER: De G-PILOT 3100 geeft
stuurinformatie voor de schipper welke gebruikt
kan worden om een handmatige koers te varen.
Het instrument wordt van stroom voorzien via
de stroomvoorziening aan boord.
De G-PILOT 3100 maakt deel uit van de
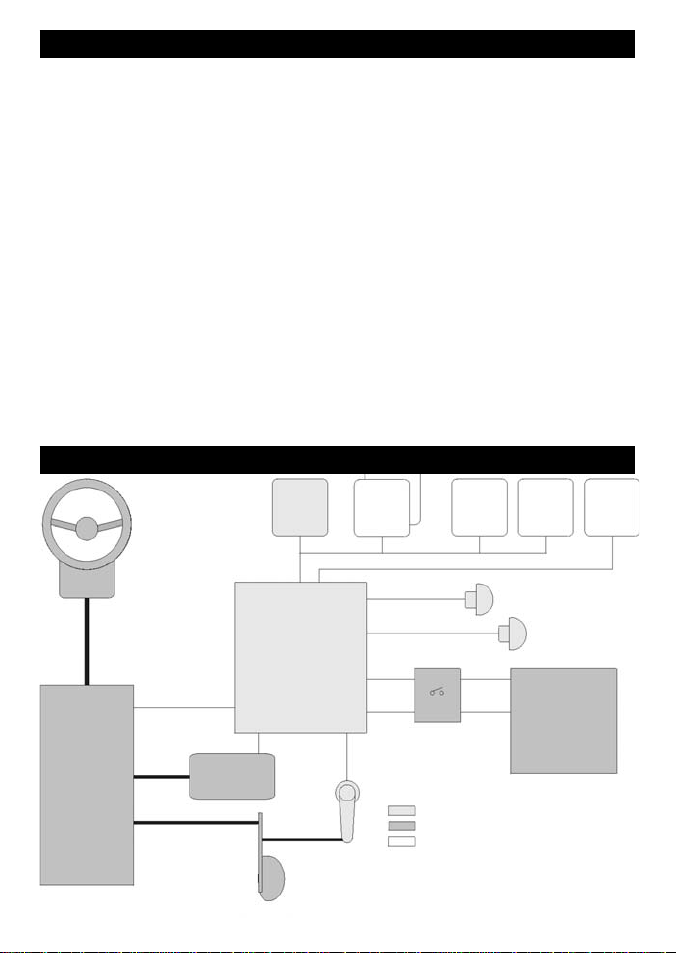
1-1 Een gebruikelijke installatie
Beeld-
scherm
Stuurwiel/helmstok
NavBus
Hoofdinstrument
Koppelingsaandrijving
(optioneel)
Roer-
bediening
66
Besturings-
aandrijving
Roer
Opmerking: Bovenstaande installatie is de meest
gebruikelijke. Indien u meer informatie nodig heeft
verwijzen we u naar de informatie die bij uw
aandrijving geleverd wordt.
NAVMAN
Navman familie voor bootelektronica voor
het meten van snelheid, diepte en wind en
repeaters. Deze instrumenten kunnen zodanig
op elkaar worden aangesloten dat ze een
geïntegreerd datasysteem voor de boot vormen.
Het functioneren van de G-PILOT 3100 wordt
verbeterd indien deze is aangesloten op een
snelheidsinstrument aan boord zoals Navman’s
SPEED 3100 of een GPS.
Gebruik van deze handleiding
Om maximaal profi jt van uw G-PILOT 3100 te
hebben, raden we u aan deze handleiding voor
installatie en gebruik aandachtig door te lezen.
Deze handleiding beschrijft hoe u de G-PILOT
3100 dient te bedienen. We verwijzen naar de
apart bijgeleverde G-PILOT Installatiehandleiding voor informatie over het installeren
en instellen van de G-PILOT voordat u tot
gebruik overgaat.
Schoonmaak en onderhoud
Maak de onderdelen van de G-PILOT 3100
schoon met een vochtige doek en een mild
schoonmaakmiddel. Gebruik geen schuurmiddelen, benzine of andere oplosmiddelen.
Meerdere
beeldscher-
men
Stroomschakelaar(s) en
zekering
Toets
Roer-
feedback-
instrument
WIND
Optionele instrumenten
Onderdelen die bij G-PILOT
geleverd worden
Andere benodigde onderdelen
Optionele onderdelen
SPEED
3100
G-PILOT 3100 Bedieningshandleiding
3100
Kompas
Gyro
Zwakstroomvoorziening
Zware stroomvoorziening
12 V DC
Stroomvoorziening
GPS
NMEA
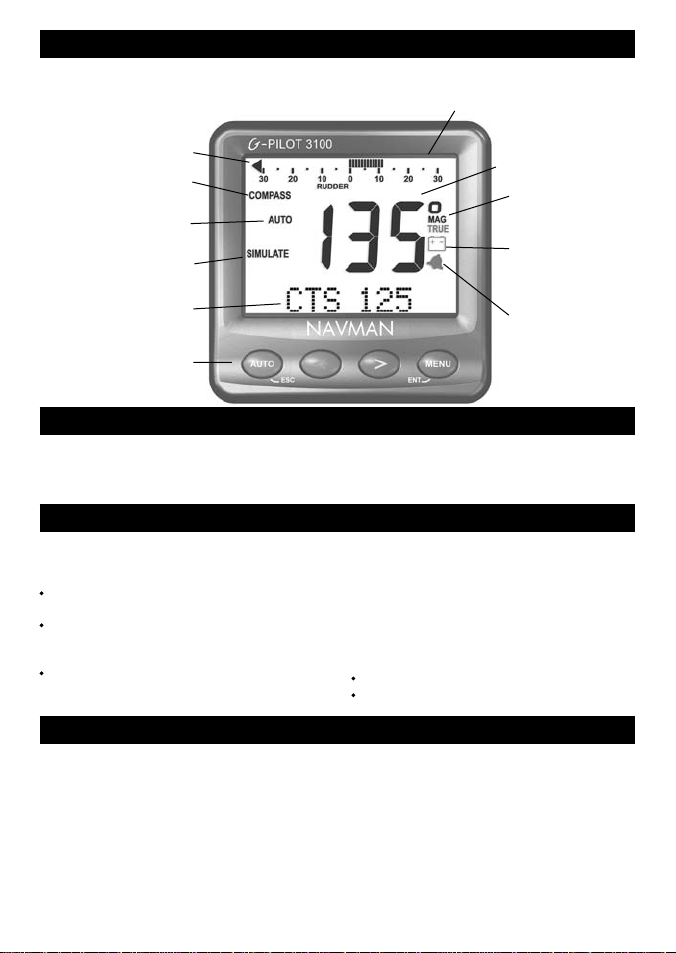
2 Standaard bediening
Het beeldscherm
(roer of koersfout, zie
Balk-data
sectie 3-3)
Stuurstand
(zie sectie 2-4)
Bediening
(zie sectie 2-5)
Simulatiesymbool
(zie sectie 3-6)
Info dataweergave
(zie sectie 3-4)
Vier toetsen
(zie sectie 2-2)
2-1 In- en uitschakelen
Schakel het apparaat in en uit via de hulpschakelaar
aan boord. Het apparaat heeft geen eigen aan/
uitschakelaar. Als de stroom uitgeschakeld wordt,
blijven al uw instellingen bewaard.
Als het woord SIMULATIE (simulatie) fl ikkert op het
scherm, dan staat het apparaat op de simulatieinstelling (zie sectie 3-6).
2-2 De toetsen
Het instrument heeft vier toetsen, AUTO (ESC)
< > en MENU (ENT).
In deze handleiding:
Betekent drukken, dat u voor minder
dan een seconde op een toets drukt;
Betekent houden dat u de toets
ingedrukt houdt totdat het beeldscherm
veranderd.
Betekent druk een toets + een andere
toets dat u deze toetsen tegelijkertijd
indrukt.
Het beeldscherm geeft een hoog piepje na een
geldige toetsaanslag en een lage piep na een
ongeldige toetsaanslag. Voor informatie over
toetsgebruik, zie secties 3-7 en 3-8.
Toetsslot
Indien het toetsslot is ingeschakeld zal de
G-PILOT toetsaanslagen negeren. Om het
toetsslot in of uit te schakelen:
Druk op AUTO + MENU.
Druk op ENT.
2-3 Gebruik van de G-PILOT 3100
2-3-1 Opstarten van de
G-PILOT 3100
1 Schakel de G-PILOT 3100 in (zie sectie
2-1). Indien de G-PILOT 3100 is aangesloten op een snelheid-,wind- of GPS-instrument dient u deze ook in te schakelen.
2 Indien nodig kunt u het achtergrondlicht
aanpassen zodat het goed leesbaar is
(zie sectie 3-1).
G-PILOT 3100 Bedieningshandleiding
3 Indien nodig, kunt u de gebruikersdata
2-3-2 Gebruik van de
G-PILOT 3100
1 Stuur de boot handmatig naar open water
2 Indien nodig kunt u de stuurstand
NAVMAN
Beeldscherm en toetsen zijn
verlicht (zie sectie 3-1)
Hoofdscherm laat
altijd koersrichting
van de boot zien
(zie sectie 3-2).
Koersrichting boot
WARE of MAG
Accusymbool fl ikkert
indien batterij bijna
leeg (zie sectie 3-5)
Alarmsymbool
fl ikkert indien alarm
klinkt (zie sectie 3-5)
111 x 111 mm
veranderen (zie sectie 3-7).
alvorens de G-PILOT te gebruiken voor
het sturen van de boot.
veranderen (zie sectie 2-4).
67
3 Inschakelen, gebruiken en uitschakelen
van de G-PILOT:
Voor kompas-stand: zie sectie 4.
Voor GPS-stand: zie sectie 5.
Voor wind-stand: zie sectie 6.
4 Het is mogelijk om de stuurstand te
veranderen terwijl u vaart, bijv.:
Verander van GPS naar kompas aan
het eind van een route.
Verander op een zeilboot van wind
naar kompas of GPS wanneer u van
zeil naar motor wisselt (zie sectie 3-4).
5 De G-PILOT kan worden aangepast om de
stuurfunctie te optimaliseren:
Indien nodig kunt u het draaitempo
aanpassen zodat de boot in een redelijk
tempo draait; ga naar TURN RATE in
het opties-menu (zie sectie 3-7)
Kies een passend profi el voor de
condities (zie sectie 7-2).
Indien nodig dient u de data in het profi el
aan te passen om de stuurfunctie te
verbeteren (zie sectie 7-3).
Indien de stuurfunctie van G-PILOT
slecht is en het sturen niet verbetert
door bovenstaande aanpassingen,
overweeg dan een complete
haveninstelling en zeetest zoals
beschreven wordt in de G-PILOT 3100
Installatiehandleiding.
2-4 Instelling van de stuurstand
De G-PILOT 3100 kan de boot op drie manieren
besturen: kompas, GPS of wind. Deze worden
de stuurstanden genoemd.
Voor een motorboot
Voor een boot zonder GPS of voor een
boot met GPS wanneer u niet naar
een waypoint wil navigeren, kiest u
de kompasstand. De G-PILOT 3100
stuurt de boot naar een ingestelde
kompaskoersrichting.
Om de G-PILOT 3100 te gebruiken om
met een GPS naar een waypoint of over
een route te navigeren, kiest u de GPSstand. De G-PILOT 3100 stuurt de boot
gebruik makende van navigatiedata van
de GPS.
Voor een zeilboot
Om te zeilen, laveren en gijpen op een
bepaalde hoek aan de wind, kiest u de
Belangrijk:
De G-PILOT 3100 kan een boot niet beter
sturen dan een schipper. De G-PILOT
3100 is niet bedoeld voor gebruik onder
extreme weersomstandigheden, in
ongunstige condities of in de buurt van
andere boten, gevaarlijk water of land.
Onder deze omstandigheden dient u de
G-PILOT uit te schakelen en de boot
handmatig te sturen.
Laat het roer nooit onbemand. Zorg dat er
te allen tijde iemand op de uitkijk staat en
wees paraat om het roer over te nemen.
Probeer het roer niet handmatig te sturen
terwijl de G-PILOT is ingeschakeld.
Lokale variaties in magnetische velden
kunnen de precisie van de kompaskoersrichting beïnvloeden. Deze variaties
zijn de verantwoordelijkheid van de gebruiker.
2-3-3 Actie in een noodgeval
Om controle over de boot te herstellen in een
noodsituatie:
Druk of op AUTO om de G-PILOT 3100
op STBY (stand-by) te zetten
of schakel de stroom uit.
Stuur de boot vervolgens handmatig.
2-3-4 Uitschakelen van de
G-PILOT 3100
Normaal gesproken schakelt u de G-PILOT
uit wanneer uw bestemming is bereikt.
windstand. Voor de windstand heeft u
een via NavBus of NMEA aangesloten
windinstrument nodig, zoals Navman’s
WIND 3100.
Om naar een ingestelde kompasrichting
te sturen kiest u de kompasstand
Om de G-PILOT 3100 te gebruiken om
met een GPS naar een waypoint of over
een route te navigeren, kiest u de GPSstand.
Opmerking voor zeilboten
Gebruik van de G-PILOT wordt niet
aangeraden in lichte, veranderlijke of
vlagerige wind.
Pas op dat u voor de wind geen klapgijp
veroorzaakt.
Voor de windstand is een accurate
kalibratie van het windinstrument nodig.
68
NAVMAN
G-PILOT 3100 Bedieningshandleiding
Instelling van de stuurstand via het menu
Ga naar STER MODE in het hoofdmenu (zie
sectie 3-7) en kies COM (kompas), GPS
of WIND.
De stuurstand instellen via een sneltoets
Houd MENU vast om rechtstreeks naar het
stuurstandmenu te gaan.
Opmerking
Voor gebruik van de GPS-stand dient
de G-PILOT data te ontvangen van een
compatibel GPS-instrument, omdat de
G-PILOT anders NO DATA weer zal
geven.
Om de G-PILOT in GPS-stand te
gebruiken, dient de GPS naar een
waypoint of over een route te navigeren
omdat de G-PILOT anders NAV ERROR
zal weergeven. Indien de boot te ver
van de geplotte route is geraakt zal de
G-PILOT de melding TRK ERROR geven
(zie sectie 5-2).
Voor gebruik van de windstand dient
de G-PILOT data te ontvangen van een
compatibel windinstrument nodig, omdat
de G-PILOT anders NO DATA weer
zal geven.
Stuurstand wordt op het beeldscherm
weergegeven
2-5 STBY (stand-by),AUTO en HAND STEER (handstuur)
De G-PILOT 3100 heeft een STBY- (stand-by), AUTO- of HAND STEER-stand:
Inschakelen
Houd AUTO + MENU vast
Druk op AUTO
STBY (stand-by)
Automatische piloot stuurt
de boot niet behalve
tijdens jog besturing.
Automatische piloot geeft
koersrichting weer maar
geeft geen stuurdata.
Stuur de boot handmatig.
Voor informatie over jog-sturen, zie sectie 2-6.
Voor informatie over het inschakelen en gebruik
van G-PILOT voor AUTO en HAND STUUR:
Voor kompasstand: zie sectie 4.
Voor GPS-stand: zie sectie 5
Voor windstand: zie sectie 6.
G-PILOT 3100 Bedieningshandleiding
AUTO
Houd
Automatische piloot stuurt
AUTO
de boot.
Automatische piloot
Druk op
geeft koersrichting en
AUTO
navigatiedata weer.
Stuur de boot niet
handmatig
NAVMAN
HAND STEER
Automatisch piloot stuurt
de boot niet.
Automatische piloot
geeft koersrichting en
navigatiedata weer.
Stuur handmatig m.b.v.
de weergegeven
navigatiedata.
CTS (course to steer
= te sturen koers) kan
worden weergegeven in
het infobeeldscherm (zie
sectie 3-4).
Koersfout (course error)
kan worden weergegeven
in de balk-data (zie
sectie 3-3).
69
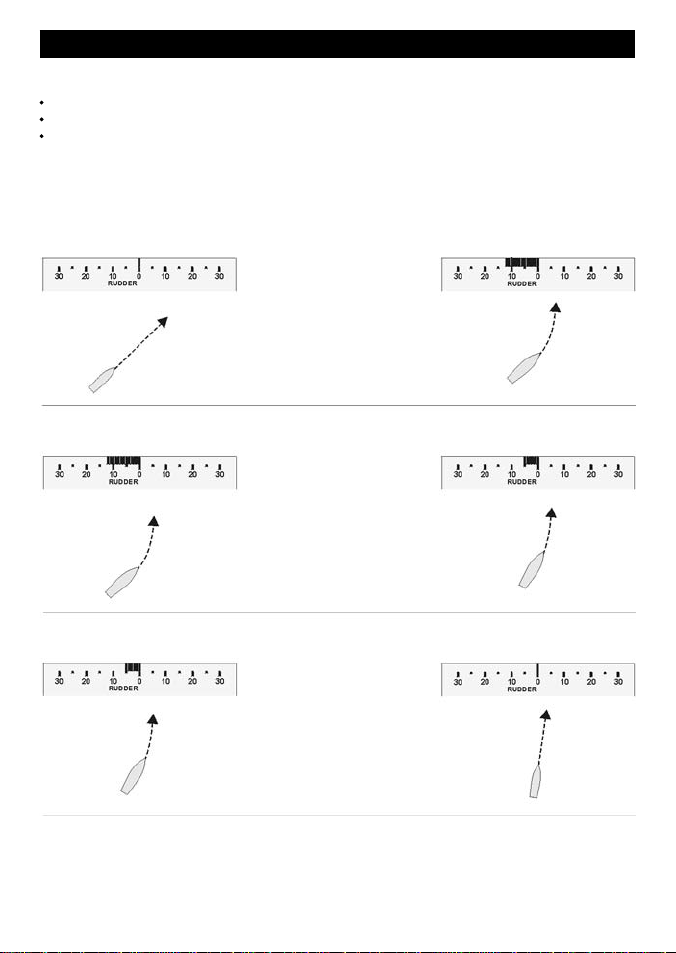
2-6 Jog-besturing
Wanneer de G-PILOT op STBY (stand-by , zie sectie 2-5) staat, dient de schipper de boot handmatig
te sturen. Indien de G-PILOT 3100 echter het roer kan draaien wordt dit jog-sturen genoemd.
Houd < ingedrukt om roer naar bakboord te draaien
Houd > ingedrukt om roer naar stuurboord te draaien
Druk kort < en > samen in om het roer naar midscheeps te draaien (deze functie kunt u niet
gebruiken totdat het de roerstandaanwijzer en het kompas gekalibreerd zijn (zie de
G-PILOT 3100 Installatiehandleiding)).
Bijvoorbeeld:
Roer midscheeps
Roer staat naar bakboord
Roer staat naar bakboord Boot gaat rechtuitDruk kort
Houd
<, ingedrukt, het
roer draait naar
bakboord en de boot
draait naar
bakboord
<, los, roer blijft
Laat
naar bakboord
staan
>, ingedrukt, het
Houd
roer draait naar
stuurboord
>, los, roer stopt
Laat
maar blijft naar
bakboord staan
< + > samen in
het roer draait naar
midscheeps.
Om het roer richting
midscheeps te stoppen
druk op ESC,
Boot blijft naar bakboord
draaien
Boot blijft naar bakboord
draaien
< of >
Waarschuwing: T otdat het de roerstandaanwijzer gekalibreerd is, is er geen roerlimiet en dient de
gebruiker ervoor te zorgen dat het roer niet tot de eindstop gedraaid wordt tijdens jog-sturen.
Opmerking: Normaal gesproken geeft het info-datascherm JOG weer tijdens een jog (zie
sectie 3-4). Indien echter CUR (aandrijvingsstroomsterkte) is geselecteerd dan wordt deze
stroomsterkte weergegeven (ook tijdens een jog) als een hulpmiddel voor het testen van de
besturingsaandrijving.
70
NAVMAN
G-PILOT 3100 Bedieningshandleiding
3 Bediening
3-1 Instelling achtergrondlicht
scherm en toetsen
Om het achtergrondlicht aan te passen gaat u
naar LAMP in het hoofdmenu (zie sectie 3-7). De
opties zijn OFF (uit) of 1 (minst fel) tot 4 (felst).
3-2 Koersrichtings (heading)beeldscherm
Koersrichting
Ware of
magnetische
koers
Het hoofdscherm geeft altijd de richting van
de boot weer:
Om MAG (magnetische) of TRUE
(ware) koersrichtingen (heading) weer
te geven gaat u naar HDG TYPE in het
opties-menu (zie sectie 3-7).
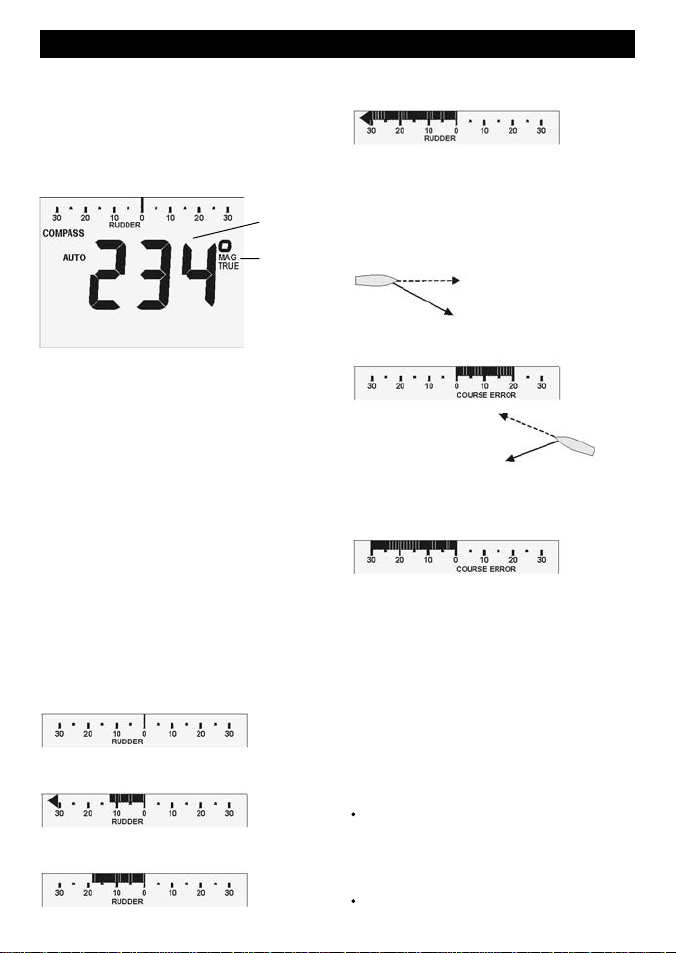
3-3 Balk-dataweergave
De balk-data bovenaan het beeldscherm
kunnen roerhoek of koersfout weergeven.
Om te kiezen wat wordt weergegeven gaat u
naar BAR-DATA in het hoofdmenu (zie sectie
3-7). De opties zijn rud. (roerhoek) of CE
(course error = koersfout). Indien het G-PILOT
3100 systeem meer dan een beeldscherm heeft
dan kunt u voor elk beeldscherm een andere
balk-dataweergave kiezen.
Roerhoek
G-PILOT stuurt het roer niet,
roer midscheeps
G-PILOT stuurt het roer, roer
is 12° naar bakboord
G-PILOT stuurt het roer niet,
roer is 18° naar bakboord
G-PILOT 3100 Bedieningshandleiding
NAVMAN
Indien het roer meer dan 30° is gedraaid dan
geeft het beeldscherm 30° weer en is het pijltje
zichtbaar:
Roerhoek is de hoek die het roer maakt met
midscheeps. Wanneer de G-PILOT 3100 het
roer stuurt ziet u een pijltje aan het eind van
de balk-data dat aangeeft in welke richting het
roer beweegt. Bijv:
Roerhoek kan zelfs als de boot handmatig
wordt gestuurd worden weergegeven.
Eigenlijke koersrichting
(heading) 90°
CTS (course to steer = te
Koersfout is 20° naar stuurboord
Eigenlijke koersrichting 290°
Koersfout is 40° naar bakboord, maar
30° is de grootste fout die kan worden
weergegeven dus het beeldscherm eeft
30° naar bakboord weer
Koersfout (course error)
De koersfout is de hoek tussen de eigenlijke
bootrichting en de bedoelde automatische
piloot koers, bijv.:
sturen koers) 110°
CTS 250°
3-4 Info dataweergave
De info-data, onderaan het scherm kan één
stuur- of navigatiedata-item weergeven. Om
de kiezen welke data wordt weergegeven, ga
naar INFO DATA in het HOOFD-menu (zie
sectie 3-7). Indien het G-PILOT 3100 systeem
meer dan een beeldscherm heeft dan kan elk
beeldscherm andere info-data weergeven.
De opties zijn:
CTS (te sturen koers): De koers naar
welke de G-PILOT 3100 van plan is de
boot te sturen; op STBY (stand-by) is er
geen CTS en geeft het beeldscherm CTS
— — — weer.
XTE, BRG, COG, DTG, TTG, SOG: GPS
71
navigatiedata (zie sectie 5-1); aansluiting
op een GPS-instrument is nodig.
WND: Windhoek (zie sectie 6-1). Om APP
(schijnbare) of TRUE (ware) windhoek weer
te geven gaat u naar WINDTYPE in het
VESSEL (vaartuig)-menu (zie sectie 3-7).
BAT: G-PILOT 3100
stroomvoedingsvoltage
CUR: Stuuraandrijvingsstroom, de
aandrijving kan getest worden door
de stroomsterkte tijdens een jog te
controleren (zie sectie 2-6).
OFF: er wordt niets weergegeven.
3-5 Alarmen
Wanneer de G-PILOT 3100 een alarmconditie
waarneemt wordt een waarschuwing
weergegeven, het alarmsymbool op het
beeldscherm fl ikkert, het interne alarm klinkt en
externe buzzers en lichten treden in werking.
Druk op een willekeurige toets om het alarm
uit te schakelen en vervolgens op ESC om het
alarmbericht te annuleren.
De G-PILOT 3100 heeft twee soorten alarmen,
interne alarmen en gebruiker gedefi nieerde
alarmen.
Om de gebruiker gedefi nieerde
alarmen in of uit te schakelen en om
de alarmcondities in te schakelen zie
ALARM-menu, sectie 3-7).
Voor een overzicht van alarmen en wat ze
betekenen, zie appendix B.
Accu-bijna-leeg-alarm
Indien de stroomvoeding van de G-PILOT
3100 onder de accu-alarm-waarde komt
geeft de G-PILOT 3100 een ACCU FOUTalarm en het accu-bijna-leeg-symbool van
de G-PILOT 3100 zal fl ikkeren. Indien de
G-PILOT op AUTO staat dan functioneert de
besturingsaandrijving misschien niet indien
het voedingsvoltage te laag is. We bevelen
overschakeling op HAND STEER aan (zie
sectie 2-5).
3-6 Simulatiestand
De simulatie-instelling biedt u de mogelijkheid
om aan wal aan het instrument te wennen.
Het woord SIMULATIE fl ikkert op het
beeldscherm.
Om Simulatie in en uit te schakelen:
1 Schakel het instrument uit (zie sectie 2-1).
72
NAVMAN
2 Houd AUTO vast terwijl u het instrument
weer inschakelt. (zie sectie 2-1).
3-7 Gebruik van de menu’s
De menu’s beschikken over data en functies
die het functioneren en het gebruik van de
G-PILOT 3100 regelen.
Bekijken of veranderen van menudata
1 Voor normaal gebruik, kies MENU.
2 Om data in het hoofdmenu (MAIN) te
selecteren:
druk op < of > totdat de benodigde data
wordt weergegeven en druk op ENT
Om data in andere menu’s te selecteren:
i druk op < of > totdat CONFIG > wordt
weergegeven; druk op ENT
ii druk op < of > totdat het gewenste
menu wordt weergegeven; druk op
ENT
Opmerking: Een > na een naam geeft
aan dat dit item een menu is.
3 Om data te veranderen:
druk een of meerdere keren op < of >
houd < of > vast om de data in stappen
van tien te veranderen
om de data naar de standaard
instelling terug te veranderen (zie
volgende pagina), druk op < + >.
4 Druk op ENT om gewijzigde data te
bewaren of op ESC om de wijziging te
negeren.
5 Druk een of meerdere keren op ESC om
het menu te verlaten of herhaal stappen
2 tot 4 om andere data te bekijken of
veranderen.
Sneltoets: Na het bekijken of veranderen
van data houdt u ESC vast om de menu’s
te verlaten
De G-PILOT geeft een lange piep wanneer
u het menu verlaat. Indien langer dan 30
seconden geen toets wordt ingedrukt dan
verlaat de G-PILOT het menu automatisch.
MAIN(hoofd)-menu
RESPONS Hoe ver de koers afwijkt voordat
de G-PILOT 3100 de koers corrigeert (1 tot 10,
A1 tot A5; standaard instelling afhankelijk van
vaartuigtype) (zie sectie 7-1).
RATIO Geeft aan in welke mate de G-PILOT
3100 het roer draait om de koers te corrigeren
G-PILOT 3100 Bedieningshandleiding
Overzicht van menu’s en data
MAIN menu
Response
Ratio
Lamp
Bar data
Info data
Steer mode
Profi le
CONFIG > menu
ALARMS > menu
Course error alarm
XTE alarm
Waypoint acknowledge
Wind alarm
Battery alarm
Current alarm
OPTIONS > menu
Counter rudder gain
Trim gain
GPS gain
Wind gain
Dodge angle
Tack angle
Gybe angle
Tack delay
Turn rate
VESSEL > menu (STBY only)
Vessel type
Drive type
Wind type
Heading type
Magnetic variation
DEVICES > menu (STBY only)
Calibrate rudder feedback unit
Centre rudder feedback unit
Calibrate compass
Align heading
Align GPS
FACTORY > menu (STBY only)
Backlight group
Key beeps
NMEA 2 data
Main control unit version number
Display unit version number
Reset NVM
G-PILOT 3100 Bedieningshandleiding
(1 tot 10, standaard instelling afhankelijk van
vaartuigtype) (zie sectie 7-2).
LAMP Felheid achtergrondlicht (1 tot 4 of UIT;
standaard = 1) (zie sectie 3-1).
BAR-DATA De data die wordt weergegeven
op de balk-weergave (CE (course error =
koersfout) of RUD (roerhoek); standaard =
RUD) (zie sectie 3-3).
INFO DATA De data die wordt weergegeven
op de info-dataweergave (CTS, XTE, BRG,
COG, DTG, TTG, SOG, WND, BAT, CUR,
UIT; standaard = CTS (te sturen koers) (zie
sectie 3-4).
STER MODE De stuurstand (COM (kompas),
GPS, WND; standaard = COM) (zie sectie 2-4).
PROFILE De huidige bruikbare reeks
stuurparameters (1 tot 5; standaard = 1) (zie
sectie 7-3).
CONFIG > Toegang tot data in andere menu’s
dan het hoofdmenu
ALARM > menu
CE ALARM De maximaal toegestane koersfout
(course error) voordat het alarm klinkt (1° tot
90° of OFF; standaard = OFF).
XTE ALARM De maximaal toegestane XTE (in
nm) voordat het alarm klinkt 0.01 tot 2 nm of
OFF; standaard = OFF).
WPT AKN Indien de gebruiker dient te
bevestigen wanneer een waypoint is bereikt
(OFF of ON; standaardinstelling = OFF) (zie
sectie 5-2).
WND ALARM (voor vaartuigtype = SAIL (zeil))
De maximale afwijking tussen de schijnbare
windhoek en SWA (set wind angle = ingestelde
windhoek) voordat het alarm klinkt (1° tot 90°
of OFF; standaardinstelling = OFF).
BAT ALARM het laagst toegestane
accuvoltageniveau voordat het alarm klinkt (7
tot 14 V of OFF; standaard = OFF).
CUR ALARM De maximaal toegestane
aandrijvingsstroomsterkte voordat het alarm
klinkt (5 tot 20 A; standaard = 10 A).
OPTIES > menu
C-RD GAIN T egenroertoename (gevoeligheid)
gebruikt voor optimaliseren van stuurfunctie (1
tot 10 of UIT ; standaardinstelling afhankelijk van
vaartuigtype) (zie sectie 7).
TRIM GAIN Trimtoename (gevoeligheid),
gebruikt voor het optimaliseren van stuurfunctie
NAVMAN
73

(1 tot 10 of UIT ; standaardinstelling afhankelijk
van vaartuigtype) (zie sectie 7).
GPS GAIN GPS toename (gevoeligheid),
gebruikt voor het optimaliseren van stuurfunctie
(1 tot 10 of UIT; standaard = 3) (zie sectie 7).
WIND GAIN Wind toename (gevoeligheid),
gebruikt voor het optimaliseren van stuurfunctie
(1 tot 10 of UIT; standaard = 1) (zie sectie 7).
DODGE ANG De hoek waarmee de koers
zal wijzigen in een ontwijkingsmanoeuvre (5°
tot 30°; standaard = 20°) (zie secties 4-4, 5-3
of 6-4).
TACK ANG De hoek waarmee de koers zal
wijzigen bij het overstag gaan (50° tot 160°
of AUTO, standaard = AUTO) (zie secties
4-5, 6-5).
GYBE ANG De hoek waarmee de koers zal
wijzigen bij het gijpen (40° tot 140° of AUTO
of OFF, standaard = AUTO) (zie secties 4-5,
6-5).
TACK DELY De vertraging tussen aangeven
overstag te gaan en het starten van de
overstagmanoeuvre (1 tot 120 sec of OFF (uit);
standaard = 30 sec) (zie secties 4-5, 6-5).
TURN RATE Instellen van de boots’ maximaal
toegestane draaisnelheid in graden per seconde
(3 tot 20, standaard = 10 graden per seconde).
VESSEL (vaartuig) > menu
Tot dit menu heeft u alleen toegang op STBY.
VESL TYPE Vaartuig type (SAIL, PLNE
(planerend), DISP (waterverplaatsend);
standaard = SAIL).
DRVE TYPE Stuuraandrijvingstype (MOTR,
SPL- of SPL+; standaard = MOTR) (zie
G-PILOT 3100 Installatiehandleiding).
WIND TYPE Het te gebruiken wind type (APP of
TRUE (waar); standaard = APP (schijnbaar)).
HDG TYPE Het kompas koersrichtingstype
(MAG of WAAR; standaard = MAG).
MAG VAR De magnetische variatie waar de
boot is (90°W tot +90°E; standaard = 19°E).
DEVICES (instrument) > menu
De items in het DEVICES-menu zijn functies
die nodig zijn om de G-PILOT te kalibreren. Dit
menu is alleen toegankelijk in STBY.
RFU CAL start de procedure om het
roerstandaanwijzer te kalibreren. (zie
G-PILOT 3100 Installatiehandleiding).
RFU CENTR Instellen roerpositie zodat de
boot een rechte lijn vaart (zie G-PILOT 3100
Installatiehandleiding).
CSU CAL start de procedure om het
kompas te kalibreren. (zie G-PILOT 3100
Installatiehandleiding).
ALIGN HDG Lijn het kompas uit met de boot
(zie G-PILOT 3100 Installatiehandleiding).
ALIGN GPS Lijn de huidige bootrichting uit naar
een GPS-richting (COG) indien beschikbaar
(zie G-PILOT 3100 Installatiehandleiding).
FACTORY(fabrieks)>menu
Dit menu is alleen toegankelijk in STBY.
BKL GROUP NavBus groepsnummer (0, 1,
2, 3 of 4, standaard + 1) (zie G-PILOT 3100
Installatiehandleiding).
KEY BEEPS KEY BEEPS Een piep wanneer
er op een toets gedrukt wordt (ON of OFF,
standaard = ON).
NMEA2 DAT NMEA 2 poortfunctie (IN, LANGZ
of SNEL, standaard = IN):
IN: NMEA2 is een input
SLOW: LANGZ: NMEA2 outputs
koersrichting & roerhoek een keer per
seconde
FAST: SNEL: NMEA2 outputs
koersrichting & roerhoek tien keer per
seconde.
MCU VX.X Geeft de G-PILOT 3100
softwareversienummer van het hoofdinstrument
(bv. MCU V1.3 is 1.3).
HCU VX.X Geeft de G-PILOT 3100
softwareversienummer van het beeldscherm
(bv. HCU V2.5 is 2.5).
NVM RESET NMEA2 DAT NMEA 2 poort
functie (IN, SLOW of FAST; standaard = IN):
1 Druk op > om de functie in te schakelen
2 Druk op ENT om de data te resetten
3 Houdt ESC vast om de menu’s te verlaten
4 Voer de haveninstelling en zeetesten uit
om de G-PILOT 3100 te kalibreren (zie
G-PILOT 3100 Installatiehandleiding).
74
NAVMAN
G-PILOT 3100 Bedieningshandleiding

3-8 Toetsenoverzicht
Stroom aan
STBY (standby)
Automatische
piloot stuurt niet,
stuur handmatig
MENU
MENU
vasthouden
Houd AUTO + MENU
vasthouden
AUTO
AUTO
AUTO
De automatische
piloot stuurt de
boot
MENU
Houd
MENU
AUTO
HAND STEER
De automatische piloot
stuurt de boot niet, stuur
handmatig
HOOFD (main)-menu gebruiken
(zie sectie 3-7)
Sneltoets naar stuurstand
verandering (zie sectie 3-7)
Jog-sturen naar bakboord
<
(zie sectie 2-6)
Jog steer to starboard
Jog-sturen naar stuurboord
>
(see section 2-6)
(zie sectie 2-6)
Roer naar midscheeps
< + >
verplaatsen (zie sectie
2-6)
Deze functies kunnen alleen worden
gebruikt in kompas- of windstand, niet
Toetsslot
Om het toetsslot in of uit te schakelen:
Houdt AUTO + MENU ingedrukt.
Druk op ENT.
in GPS-stand
MENU
<
+
MENU
>
+
<
>
Houd
<
Houd
>
AUTO
<
+
AUTO
>
+
Ontwijken naar bakboord (druk op
ESC om naar de koers terug te keren
(of, op kompasstand, druk op ENT
om de nieuwe koers aan te houden))
(zie sectie 4-4, 5-3 of 6-4)
Ontwijken naar stuurboord (druk
op ESC om naar de koers terug te
keren of, op kompasstand, druk
op ENT om de nieuwe koers aan te
houden)) (zie sectie 4-4, 5-3 of 6-4)
Verander koers 1° naar bakboord
(zie sectie 4-3 of 6-3)
Verander koers 1° naar stuurboord
(zie sectie 4-3 of 6-3)
Verander koers elke halve seconde 1°
naar bakboord (zie sectie 4-3 of 6-3)
Verander koers elke halve seconde
1° naar stuurboord (zie sectie 4-3
of 6-3)
Aftellen, dan overstag of gijpen
naar stuurboord (druk op ESC om
manoeuvre te annuleren (zie sectie
4-5 of 6-4)
Aftellen, dan overstag of gijpen naar
stuurboord (druk op ESC om
manoeuvre te annuleren (zie sectie
4-5 of 6-4)
G-PILOT 3100 Bedieningshandleiding
NAVMAN
75

4 Kompas stuurstand
De G-PILOT 3100 kan de boot op drie manieren besturen: kompas, GPS of wind. Om een passende
stand te kiezen, zie sectie 2-4. In kompasstand stuurt de G-PILOT de boot naar een vastgestelde
koers, CTS (course to steer = te sturen koers) genaamd.
4-1 Kompasstuurdata
Bootrichting, 45°
4-2 Starten en stoppen van de kompasstand van de G-PILOT 3100
Koersfout, 10° naar stuurboord
CTS (te sturen koers, de voorgenomen
automatische pilootkoers) 55°
Stuur de boot handmatig naar
open water. Vaar rechtuit op de
geplande route.
Koersrichting (heading) = 45°
Om AUTO te starten
houdt AUTO vast
AUTO:
De G-PILOT stuurt de boot automatisch.
De G-PILOT 3100 stelt de CTS in naar
de huidige koersrichting, in dit voorbeeld
45° en begint deze koers te sturen.
Om de G-PILOT uit te schakelen drukt u op AUTO
76
Bijvoorbeeld:
Om HAND STUUR te starten
houdt AUTO + MENU vast
De G-PILOT keert terug naar
STBY (stand-by). Stuur de boot handmatig.
NAVMAN
HANDSTUUR:
Stuur de boot handmatig. Geef CTS
(te sturen koers) weer in de info
data of koersfout in de balk data en
gebruik deze informatie om de boot
te sturen.
Koersrichting (heading) = 45°
CTS = 45°
G-PILOT 3100 Bedieningshandleiding

Wanneer de G-PILOT 3100 is ingeschakeld
Houd AUTO vast om naar GPS-stand te schakelen (indien vaartuig planerend PLNE (planerend)
of DISP (waterverplaatsend) is) of naar windstand (indien vaartuig is SAIL).
Golven of wind kunnen de boot van koers doen
geraken. De G-PILOT 3100 zal te boot weer op
koers brengen, bijv.:
CTS = 45°
Golf drukt de koersrichting
van de boot
Wind of stroming kunnen de boot naar een
kant van de koers drukken, bijv.:
CTS = 45°
Stroming
naar 60°
G-PILOT 3100 stuurt de
boot terug naar een
Richting wordt gehandhaafd op 45°
koersrichting van 45°
4-3 Koersverandering in kompasstand
Voor koersverandering in stappen van 1°:
druk op < om koers 1° naar bakboord te veranderen
druk op > om koers 1° naar stuurboord te veranderen
Bijvoorbeeld:
Koersrichting = 45°
CTS = 45°
Druk op <
CTS verandert naar 44°
Bootrichting komt naar 44°
Om koers in stappen van 10° te veranderen:
houd < ingedrukt om de koers iedere halve seconde 10° naar bakboord te veranderen
houd > ingedrukt om de koers iedere halve seconde 10° naar stuurboord te veranderen.
Bijvoorbeeld:
Koersrichting = 45°
CTS = 45°
Houd < een
halve seconde
ingedrukt
Koersrichting = 45°
CTS = 45°
Druk op <
CTS verandert naar 46°
Bootrichting komt naar 46°
Houd < ingedrukt
totdat CTS 15°
bedraagt
G-PILOT 3100 Bedieningshandleiding
CTS verandert naar 35°
Bootrichting komt naar 35°
NAVMAN
Bootrichting komt naar 15°
77

4-4 Ontwijken in de kompasstand (=DODGE)
Een ontwijking is een scherpe koersverandering, normaal gesproken om een obstakel te
ontwijken.
Druk op MENU + < om met de ontwijkingshoek naar bakboord te ontwijken.
Druk op MENU + > om met de ontwijkingshoek naar stuurboord te ontwijken.
Bijvoorbeeld:
Heading = 45°
CTS = 45°
Druk op
MENU + <
Druk op ENT om in de
nieuwe koersrichting
(heading) verder te
gaan
CTS (te sturen koers) verandert
met de ontwijkingshoek. Boot
verandert naar nieuwe koers,
G-PILOT piept.
Opmerking
Om verder te ontwijken drukt u meerdere keren op MENU + < of MENU + >.
Om de ingestelde ontwijkingshoek te bekijken of veranderen, ga naar DODGE ANG (ontw.hoek)
of
Druk op ESC om terug
te gaan naar eerdere
koersrichting (heading).
in het opties menu (zie sectie 3-7).
4-5 Auto-laveren in kompasstand
Auto-laveren is bedoeld om een met een zeilboot overstag te gaan. De CTS, de te sturen koers
verandert door de wendhoek.
Druk op AUTO + < om met de wendhoek naar bakboord te wenden
Druk op AUTO + > om met de wendhoek naar stuurboord te wenden..
Bijvoorbeeld:
Om het laveren op elk
willekeurig moment te
annuleren druk op ESC.
Koersrichting = 45°
CTS = 45°
Druk op AUTO + < om
een wende naar
bakboord te initiëren.
WAARSCHUWING: In kompasstand auto-laveren zal de te sturen koers (CTS) veranderen met
de wendhoek. De G-PILOT gebruikt geen data van een windinstrument. Het is mogelijk dat de
boot zal gijpen of in de wind stil komt te liggen.
Opmerking
Om op een vaste hoek aan de wind overstag te gaan gebruikt u de G-PILOT Windstand (zie sectie 6).
Om de wendhoek of wendvertraging te bekijken of veranderen, gaat u naar TACK ANG of T ACK
DELY in het opties-menu (zie sectie 3-7). Gijphoek wordt niet gebruikt in Kompasstand.
78
Het laveren is klaar wanneer de boot de nieuwe
koersrichting (heading) heeft bereikt.
Aan het einde van de laveervertraging, zal
de te sturen koers (CTS) veranderen met de
wendhoek (indien de wendhoek op AUTO
is ingesteld zal de G-PILOT de standaard
wendhoek van 100° gebruiken). De boot draait.
De boot zeilt rechtdoor terwijl de G-PILOT 3100
de laveervertraging aftelt.
Het instrument geeft een lange piep wanneer er
nog 60 en 30 seconden te gaan zijn, een korte
piep elke seconde van 10 seconden tot 1 seconde
en een lange piep die ophoudt met het beëindigen
van het aftellen.
3 seconden voordat het overstag gaan begint
NAVMAN
G-PILOT 3100 Bedieningshandleiding

5 GPS-stuurstand
De G-PILOT 3100 kan de boot op drie manieren besturen: kompas, GPS of wind. Om de meest
geschikte stand te selecteren, zie sectie 2-4. In GPS-stand gebruikt de G-PILOT data van een
GPS om de boot over een route of naar een waypoint te sturen.
5-1 GPS-navigatiedata
Voorbeeld van navigatie naar een
SOG (snelheid over grond)
COG (koers over grond)
CTS (koers te sturen)
Geplotte koers
Start
De boot vaart van de start naar de bestemming en is afgeweken van de geplotte GPS-koers van
de start tot de bestemming:
BRG Richting (van GPS) naar De GPS-richting (=peiling) tot de bestemming vanaf de boot.
bestemming
COG Koers over de grond Richting waarin de boot beweegt t.o.v. de grond.
Koersfout Het verschil tussen de te sturen koers (CTS) en de richting
(heading) van de boot.
CTS Te sturen koers Optimale te sturen koers om terug te keren naar de geplotte
koers.
DTG Afstand te gaan Afstand van de boot tot de bestemming.
SOG Snelheid over grond De huidige snelheid van de boot over de grond. Dit is niet
noodzakelijkerwijs hetzelfde als de vaarsnelheid door het water,
noch de snelheid waarmee de boot de bestemming bereikt.
TTG Tijd te gaan De geschatte tijd om de bestemming te bereiken.
XTE Cross track error De afstand van de boot naar het dichtst bijzijnde punt op de
geplotte koers. XTE kan een letter hebben: R betekent naar
rechts sturen om terug te keren op de geplotte koers, L betekent
naar links.
waypoint
Bestemming
DTG (afstand te gaan)
TTG (tijd te gaan)
BRG (GPS-richting)
XTE (afstand)
Koersfout (hoek)
Boot
G-PILOT 3100 Bedieningshandleiding
NAVMAN
79

5-2 Starten en stoppen van de GPS-stand van de G-PILOT 3100
Stuur de boot handmatig naar open water. Start de GPS-navigatie naar een waypoint op een
route of naar een op zich staand waypoint.
BRG (richting
van de GPS-koers)
Bootrichting
(heading)
Geplotte GPS-
XTE (afstand tot
GPS-koers)
koers naar een
waypoint
Om AUTO te starten
houd AUTO ingedrukt
AUTO:
De G-PILOT stuurt de boot automatisch.
Om HAND STUUR te starten
Houd AUTO + MENU ingedrukt
HANDSTEER:
Stuur de boot handmatig. Geef CTS (te sturen
koers) weer in de info data of koersfout in de
balk-data en gebruik deze informatie om de
Wanneer de G-PILOT wordt ingeschakeld indien de XTE meer dan 0,05 nm bedraagt,
boot te sturen.
of de koersrichting (heading) niet ligt binnen 30º van de BRG (GPS-peiling) dan
geeft de G-PILOT weer: TRK ERROR. Druk op ESC om terug te keren naar
kompasstand of druk op ENT zodat de G-PILOT de boot weer op
koers stuurt. Wanneer de G-PILOT is ingeschakeld gebruikt
het data van de GPS om de boot over de geplotte koers naar het waypoint te sturen.
Om de G-PILOT uit te schakelen
drukt u op AUTO
De G-PILOT keert terug naar STBY (stand-by).
Stuur de boot handmatig.
Geplotte
GPSkoers
80
NAVMAN
G-PILOT 3100 Bedieningshandleiding

Wanneer de G-PILOT 3100 is ingeschakeld
Houd AUTO ingedrukt om naar de kompasstand te veranderen.
Wind of stroming kunnen de boot van de GPS-koers duwen.
De G-PILOT 3100 zal de boot terug op koers sturen:
Stroming:
Indien de GPS een route volgt en de boot
een tussenliggend waypoint bereikt:
Indien WPT AKN (bevestigen) uit is dan
zal de G-PILOT automatisch naar het
volgende waypoint op de route sturen.
Anders geeft de G-PILOT weer NXT (volgend)
WPT?, klinkt een alarm en wordt er in de
huidige koersrichting verder gevaren.
Druk op een willekeurige toets om het
alarm uit te schakelen. Druk vervolgens
op ENT om naar het volgende waypoint
te gaan sturen of druk op ESC om naar
STBY terug te keren.
De G-PILOT zal, wanneer de boot het laatste
waypoint bereikt ROUTE END weergeven en
op de huidige koers blijven:
Druk op ESC om naar STBY te
veranderen; stuur handmatig
Druk op ENT om naar kompasstand te
veranderen en in de huidige koersrichting
te blijven varen.
Opmerking: Om naar het laatste waypoint
terug te keren als de boot er voorbij
gevaren is, herstart u de GPS-navigatie
naar het waypoint.
Om WPT AKN te bekijken of veranderen
ga naar WPT AKN in het ALARM-menu (zie
sectie 3-7).
5-3 Ontwijken in GPS-stand (=DODGE)
Een ontwijking is een scherpe koersverandering, normaal gesproken om een obstakel te
ontwijken
Druk op MENU + < om met de ontwijkingshoek naar bakboord te ontwijken.
Druk op MENU + > om met de ontwijkingshoek naar stuurboord te ontwijken.
Bijvoorbeeld:
Druk op
MENU + <
CTS (te sturen koers) verandert
met de ontwijkingshoek. Boot
verandert naar nieuwe koers,
G-PILOT piept.
Opmerking
Om verder te ontwijken drukt u meerdere keren op MENU + < of MENU + >.
Om de ingestelde ontwijkingshoek te bekijken of veranderen, ga naar DODGE ANG (ontwijk-
hoek) in het opties menu (zie sectie 3-7).
G-PILOT 3100 Bedieningshandleiding
Druk op ESC om
terug te keren naar
de eerdere
koersrichting
(heading)
WAARSCHUWING: De G-PILOT stuurt terug
naar de geplotte GPS-koers. U dient zich ervan
te verzekeren dat er geen obstakels of gevaarlijk water op deze koers liggen.
NAVMAN
81

6 Windstuurstand
De G-PILOT 3100 kan de boot op drie manieren besturen: kompas, GPS of wind. Om de meest
geschikte stand te selecteren, zie sectie 2-4. In wind-stand stuurt de G-PILOT de boot naar een
vastgestelde hoek t.o.v. de wind, SWA (geplande windhoek) genaamd.
6-1 Windstuurdata
Bootrichting (heading)
Koersfout, 10° naar stuurboord
CTS (geplande koers van de automatische
piloot, om de SWA (geplande windhoek) te
bereiken.
SWA (geplande windhoek), 45°
Windhoek kan APP (schijnbaar)
zijn of TRUE (waar)
APP Apparent wind angle (Schijnbare windhoek) De schijnbare windhoek aan boord. B voor
de hoek betekent dat de wind van bakboord komt, S betekent
dat de wind van stuurboord komt.
CTS Course to steer (Te sturen koers) De te sturen koers om de SWA (geplande
windhoek) te handhaven.
Course error (Koersfout) Het verschil tussen SCHB (windhoek) en SWA
(geplande windhoek).
SWA Set wind angle (Geplande windhoek) De gewenste windhoek
TRUE True wind angle (Ware windhoek) De ware windhoek aan boord. B voor de hoek
betekent dat de wind van bakboord komt, S betekent dat de
wind van stuurboord komt.
82
NAVMAN
Wind
G-PILOT 3100 Bedieningshandleiding

Ware en schijnbare windsnelheid en -richting
De G-PILOT info-data kan TRUE (ware windhoek) of APP (schijnbare windhoek) weergeven (zie
sectie 3-4). Ware windsnelheid en –richting zijn waarden die gecorrigeerd zijn voor snelheid van
de boot door de lucht.
Indien de boot beweegt dan verschilt de schijnbare windsnelheid van de ware
windsnelheid en de schijnbare windrichting verschilt van de ware windrichting, zoals onderstaand
weergegeven.
De boot ligt stil
Ware windsnelheid is gelijk aan de schijnbare windsnelheid en de
ware windrichting is hetzelfde als de schijnbare windrichting
De boot
ligt stil
De boot vaart tegen de wind in Schijnbare windsnelheid is groter dan de ware windsnelheid
en schijnbare windrichting ligt dichter bij recht van voren dan ware windrichting
Schijnbare
windsnelheid
28 knopen
Ware
windrichting 45º
Ware windsnelheid
20 knopen
Ware
wind-
snelheid
20
knopen
Schijnbare
windsnelheid
28 knopen
Schijnbare
windricht-
ing 30º
Bootsnelheid 10
knopen
Bootsnelheid 10
knopen
Boot vaart voor de wind Schijnbare windsnelheid is kleiner dan ware windsnelheid en
schijnbare windrichting ligt dichter bij recht van voren dan ware windrichting
Ware
wind-
snelheid 20
knopen
windrichting
Ware
135º
Apparent wind
speed 15 kts
Bootsnelheid
10 knopen
Ware
windsnelheid 20
knopen
Schijnbare
windsnelheid
15 knopen
windrichting
Bootsnelheid
10 knopen
G-PILOT 3100 Bedieningshandleiding
NAVMAN
Schijnbare
107º
83

6-2 Starten van de windstand van de G-PILOT 3100
Stuur de boot handmatig naar
open water. Vaar rechtuit op de
geplande route.
De G-PILOT info-data kan
TRUE (ware windhoek) of
Bijvoorbeeld:
Wind
APP = P40°
APP (=schijnbare windhoek)
weergeven (zie sectie 3-4).
Koersrichting = 45°
Om AUTO te starten
Houd AUTO ingedrukt
AUTO:
De G-PILOT stuurt de boot automatisch.
Om HAND STEER te starten
houd AUTO + MENU ingedrukt
HANDSTEER:
Stuur de boot handmatig. Geef CTS (te
sturen koers) weer in de info-data of
koers-fout in de balk-data en gebruik deze
informatie om de boot te sturen.
De G-PILOT 3100 stelt de te sturen koers (CTS) in naar de
huidige koersrichting (heading), in dit voorbeeld 45°, stelt
de SWA (geplande windhoek) naar de huidige windhoek en
begint naar deze windhoek te sturen.
Om de G-PILOT uit te schakelen drukt u op AUTO
De G-PILOT keert terug naar STBY (stand-by).
Stuur de boot handmatig.
Wind
APP = P40°
SWA = 40°
De G-PILOT kan ook worden ingeschakeld op de
stuurboordkoers, bijv.: of voor de wind, bijv.:
Wind
Wind
APP = S40°
SWA = 40°
84
NAVMAN
G-PILOT 3100 Bedieningshandleiding
APP = S120°
SWA = 120°

Wanneer de G-PILOT is ingeschakeld
Houd AUTO ingedrukt om naar kompasstand te veranderen
Wind of golven kunnen de
boot zo verplaatsen dat de
windhoek verschilt van de
SWA (geplande windhoek):
Wind
Wind of stroming kunnen de
boot naar een kant van een
rechte koers drukken:
Wind
Indien de windrichting verandert
zal de boots richting (heading)
veranderen zodat de geplande
windhoek hetzelfde blijft.
Wind
Nieuwe
windrichting
Golf
Stroming
Nieuwe koersrichting
De G-PILOT zal de boot naar
de SWA terugsturen
De G-PILOT zal de boot
naar de geplande SWA
sturen
Om het windalarm zo in te stellen dat
deze afgaat wanneer de windrichting te veel verandert, ga naar WND
ALARM in het ALARM-menu (zie
(heading)
sectie 3-7).
6-3 De SWA (geplande windhoek) veranderen in de windstand
Om de SWA te veranderen in stappen van 1°:
druk op < om de SWA 1° naar bakboord te veranderen
druk op > om de SWA 1° naar stuurboord te veranderen.
Bijvoorbeeld, tijdens een bakboord koers of, tijdens een stuurboord koers
Wind
Wind
SWA = 40°
Druk op <
SWA verandert naar 39°. Boot krijgt
een nieuwe windhoek van 39°
SWA = 40°
Druk op <
SWA verandert naar 41°. Boot
krijgt een nieuwe windhoek van 41°
Om de SWA in te veranderen in stappen van 10°:
houd < ingedrukt om de SWA elke halve seconde 10° naar bakboord te veranderen
houd > ingedrukt om de SWA elke halve seconde 10° naar stuurboord te veranderen.
Bijvoorbeeld:
Wind
Houd < een halve
seconde ingedrukt
Houd < ingedrukt
totdat SWA 120° is
SWA verandert naar 50°.
SWA = 40°
G-PILOT 3100 Bedieningshandleiding
Boot komt naar nieuwe
windhoek van 50°
NAVMAN
Boot komt naar nieuwe
windhoek van 120°
85

6-4 Ontwijken in windstand (=DODGE)
Een ontwijking is een scherpe koersverandering, normaal gesproken om een obstakel te ontwijken.
Druk op MENU + < om met de ontwijkingshoek naar bakboord te ontwijken.
Druk op MENU + > om met de ontwijkingshoek naar stuurboord te ontwijken.
Bijvoorbeeld:
Wind
Druk op
MENU + <
SWA verandert door de
Druk op ESC om
terug te keren naar de
voorgaande windhoek
ontwijkingshoek. Boot
komt tot een nieuwe
windhoek.
SWA = 40°
Opmerking
Om verder te ontwijken, druk meerdere keren op MENU + < of MENU + >.
Om de ontwijkingshoek te bekijken of veranderen gaat u naar DODGE ANG in het opties-menu
De G-PILOT piept.
(zie sectie 3-7).
6-5 Auto-laveren of -gijpen in windstand
Als SWA (geplande windhoek) 90° of minder is dan gaat de boot overstag, als de SWA meer dan
90° is dan gijpt de boot. Na overstag gaan of gijpen is de SWA hetzelfde als voordien, maar nu
over de andere boeg.
Druk op AUTO + < om naar bakboord overstag te gaan of te gijpen
Druk op AUTO + > om naar stuurboord overstag te gaan of te gijpen
Voorbeeld: SWA is 40°, dus de boot zal overstag gaan, niet gijpen. Indien de wendhoek niet
op AUTO staat dan zal de boot twee keer van richting veranderen: eerst door de windhoek
en dan zodat de SWA hetzelfde is als voor het overstag gaan of de gijp, maar over de
andere boeg:
Het laveren is beëindigd wanneer de boot de nieuwe windhoek bereikt
Nadat de boot de wendhoek heeft bereikt zal de
boot nogmaals draaien zodat de SWA (geplande
windhoek) hetzelfde is als voor het overstag gaan of
de gijp, maar over de andere boeg:
Om het laveren op elk
willekeurig moment te
annuleren druk op ESC.
Wind
Druk op AUTO + < om een
SWA = 40°
86
koersverandering naar
bakboord te initiëren.
Aan het einde van de laveervertraging zal
de koers veranderen met de wendhoek (in
dit voorbeeld is de wendhoek niet op AUTO
ingesteld). De boot draait.
De boot zeilt rechtdoor terwijl de G-PILOT 3100 de
laveervertraging aftelt.
Het instrument geeft een lange piep wanneer er nog
60 en 30 seconden te gaan zijn, een korte piep elke
seconde van 10 seconden tot 1 seconde en een lange
piep die ophoudt met het beëindigen van het aftellen.
3 seconden tot het begin van de wende
NAVMAN
G-PILOT 3100 Bedieningshandleiding

Voorbeeld: SWA is 120°, dus de boot zal gijpen.
De wendhoek is niet op AUTO ingesteld:
Voorbeeld: SWA is 40°. De wendhoek is op
AUTO ingesteld dus de boot zal een keer van
richting veranderen:
Wind
Eind van de
koersverandering,
Druk op AUTO + > om een gijp
naar stuurboord te initiëren.
Om de gijp op
een willekeurig
moment te
annuleren, druk
op ESC
De G-PILOT 3100 telt
de laveervertraging af.
De koers
verandert met
de gijphoek
Om de gijp op
een willekeurig
moment te
annuleren, druk
op ESC
Wind
boot is op
nieuwe SWA
De koers
verandert
zodat de SWA
voor en na de
koersverandering
hetzelfde zijn.
De G-PILOT 3100
telt de
laveervertraging af.
koersverandering naar
De koers verandert
nogmaals zodat de
SWA voor en na het
wenden hetzelfde is.
Eind van de koersverandering,
boot is op nieuwe SWA
Indien de SWA meer dan 90° bedraagt en
de gijphoek op AUTO staat dan zal de boot
gedurende de gijp een keer van richting
veranderen, zodat de SWA voor en na het
gijpen hetzelfde zijn.
bakboord te initiëren.
Er zijn vier mogelijkheden voor auto-overstag gaan of gijpen
Overstag (SWA is 90° of kleiner) Gijp (SWA is groter dan 90°)
Wind
Druk op AUTO + <
om naar bakboord
overstag te gaan
Druk op AUTO + >
om naar stuurboord
overstag te gaan
Druk op AUTO + <
om naar bakboord
te gijpen
Druk op AUTO + >
om naar stuurboord
te gijpen
TAK ERROR (wendfout) wordt weergegeven indien u andere manoeuvres probeert of als de boot
in de wind zou komen te liggen.
Opmerking
Om een wendhoek te bekijken of veranderen gaat u naar TACK ANG (wendhoek), GYBE
ANG (gijphoek) of TACK DELY (laveervertraging) in het opties-menu.
G-PILOT 3100 Bedieningshandleiding
NAVMAN
87

7 Optimaliseren stuurfunctie
7-1 De stuurparameters
De G-PILOT 3100 heeft zes stuurparameters die aangepast kunnen worden om de stuurfunctie
te optimaliseren:
Response Hoe ver de boot van koers kan geraken voordat de G-PILOT het roer
terugdraait naar de correcte koers. Een langere respons betekent dat
Om te wijzigen, ga naar RESPONSE in het hoofd-menu (zie sectie 3-7).
Ratio De roerbeweging die benodigd is om een gegeven koersverandering te
maken. Om te wijzigen gaat u naar RATIO in het hoofd-menu (zie sectie
Counter rudder gain Bepaalt hoe het roer beweegt na een grote koersverandering.Om te
Trim gain Indien er sprake is van een zijwaartse stroming of wind, dan zal de boot
zijwaarts van koers raken. De G-PILOT 3100 zal de boot automatisch
GPS gain In de GPS-stand bepaalt dit hoeveel correctie wordt toegepast om
Wind gain In de windstand bepaalt dit hoeveel correctie wordt toegepast om het
Optimum steering
Ideaal gezien zou de G-PILOT 3100 in AUTO of HANDSTUUR de boot op koers moeten sturen
zonder dat het roer te vaak beweegt.
Tip Wanneer u de stuurfunctie van de boot controleert, geef dan de koersfout op de balkdataweergave (zie sectie 3-3) en kijk hoe deze koersfout met de tijd verandert.
7-2 Profi elen
De waarden van de stuurparameters die benodigd zijn voor optimale besturing zijn afhankelijk van
vaarsnelheid, zeecondities of windcondities. Over het algemeen:
Vermindert u de ratio voor hogere bootsnelheden en verhoogt u de ratio voor lagere
snelheden.
Verhoog de respons voor kalm water; verklein de respons voor ruig water.
Verhoog windtoename voor zwaardere en/of meer stabiele winden; verminder windtoename
voor lichtere en/of onstabiele winden.
Om het veranderen van parameters, wanneer condities veranderen, te vereenvoudigen heeft
88
de boot verder van koers kan geraken voordat de G-PILOT corrigeert.
Kies uit 1 tot 10, A1 tot A5. A1 tot A5 is een adaptieve instelling waarbij
de automatische piloot probeert het aantal roercorrecties te minimaliseren en toch de gewenste koersrichting (heading) te handhaven. De
adaptieve instelling elimineert de noodzaak om de respons afhankelijk
van de weerscondities te veranderen. U heeft de keuze uit A1 (langzamere adaptie) tot A5 (snellere adaptie).
3-7). U heeft de keuze uit 1 (kleinere correcties) tot 10 (grotere correcties).
wijzigen ga naar C-RD GAIN in het opties-menu (zie sectie 3-7). U heeft de
keuze uit 1 (laag) tot 10 (hoog) en OFF (geen tegenroer toename).
naar de juiste koersrichting terugbrengen door een paar graden roer
te geven, trim genaamd. Trimtoename bepaald hoe snel de trim wordt
uitgevoerd. Om te wijzigen gaat u naar GPS GAIN in het opties-menu
(zie sectie 3-7).
de cross track error (XTE) te verwijderen. Om te wijzigen gaat u naar
GPS TOEN in het OPTIES-menu (zie sectie 3-7). U heeft de keuze uit
1 tot 10.
verschil tussen de geplande windhoek (SWA) en de ware windhoek te
reduceren. Om te wijzigen ga naar WIND GAIN in het opties-menu (zie
sectie 3-7). U heeft de keuze uit 1 tot 10.
Functie optimaal. De stuurparameters zijn
correct gewijzigd
NAVMAN
G-PILOT 3100 Bedieningshandleiding

de G-PILOT vijf stuurparameterseries in het geheugen. Elke serie wordt een profi el genoemd en
de profi elen zijn 1 tot 5 genummerd. Om een profi el te selecteren gaat u naar PROFIEL in het
HOOFD-menu (zie sectie 3-7).
1 Wanneer de G-PILOT wordt geïnstalleerd zijn de stuurparameters in alle profi elen ingesteld
naar hun standaard waarden.
2 Selecteer profi el 1 en pas de stuurparameters aan voor optimaal sturen onder bepaalde
condities (zie sectie 7-3).
3 Indien de condities veranderen en de stuurfunctie niet langer optimaal is, selecteert u een
ander profi el en past u de stuurparameters weer aan. Herhaal deze stap zoals benodigd om
de parameters in elk profi el aan te passen.
4 Wanneer u de G-PILOT gebruikt om te sturen, kies dan een profi el dat passend is voor de
huidige condities. U kunt bijvoorbeeld verschillende profi elen confi gureren voor ruige of
kalme condities.
7-3 Aanpassen stuurparameters
Probleem: het roer draait te vaak
Dit veroorzaakt slijtage aan de stuurverbindingen
en onnodig stroomverbruik.
Respons verminderen.
Ratio verminderen.
Tegenroertoename verminderen.
Probleem: raakt aan één kant van koers
Ratio verhogen.
of
Probleem: Boot raakt te ver van koers vlak voordat het roer draait om de koers
te corrigeren
Trimtoename verhogen.
Respons verhogen.
Ratio verminderen
Tegenroertoename verminderen
Trimtoename verminderen
Probleem: Slingeren van de ene op de andere kant verergert
Ratio verminderen
Probleem: na een grote koersverandering is de boot doorgeschoten. Dit
veroorzaakt slingeren totdat de boot zich op de nieuwe koers stabiliseert.
Tegenroertoename verhogen
G-PILOT 3100 Bedieningshandleiding
NAVMAN
89

Probleem: Na een grote koersverandering duurt het te lang voordat de boot zich
op de nieuwe koers stabiliseert.
Tegenroertoename verminderen
Probleem: Na een zijwaartse stroming of wind wordt de correctie te snel of te
langzaam uitgevoerd.
Als de boot een zijwaartse kracht ondervindt dan zal zij zijwaarts van koers geraken. De G-PILOT zal
de boot automatisch terugbrengen in de correcte richting door een paar graden roer te geven, trim
genaamd. Trimtoename geeft aan hoe snel de trim wordt toegepast. Trimtoename dient zo te
worden ingesteld dat de boot in ongeveer een minuut getrimd wordt. Het kan moeilijk zijn om de
instelling van de trimtoename precies goed te krijgen voor uw boot en het is eenvoudig om de
trimtoename te vaak te wijzigen. Verander de instelling in het begin langzaam en conservatief,
totdat u bekend bent met de juiste instelling.
a Het duurt langer dan een minuut om de boot te trimmen
Zijwaartse kracht begint
Trimtoename verhogen
1 minuut
b Het duurt veel minder dan een minuut om de boot te trimmen
Zijwaartse kracht begint
Trimtoename verminderen
1 minuut
Probleem: Boot drijft van GPS-koers
of
Probleem: boot slingert rond GPS-koers
of
90
NAVMAN
GPS-toename verhogen
GPS-toename verminderen
G-PILOT 3100 Bedieningshandleiding

Appendix A – Specifi caties
Elektrisch
Heavy duty stroomvoorziening 10,5 tot
16,5 V DC, max 20 A
Light duty stroomvoorziening 10,5 tot
16,5 V DC:
Hoofdinstrument: 80 mA.
Elk beeldscherm, 30 mA zonder
achtergrondlicht, 110 mA met volledig
achtergrondlicht.
Andere optionele instrumenten: lees de
bedieningshandleiding van het
instrument.
Interfaces
NavBus verbinding naar andere
Navman-instrumenten.
NMEA 0183 outputs: HDG, HDT, RSA;
inputs APA, APB, BOD, BWC, MWD,
MWV, RMA, RMB, RMC, VHW, VTG,
XTE
NMEA 0183 poorten:
NMEA 1: Input
NMEA 2: kan geprogrammeerd worden
als input of output
Overeenkomstig met standaarden
Overeenkomstig met EMC
USA (FCC): Onderdeel 15 Klasse B.
Europe (CE): EN50081-1, EN50082-1
Nieuw Zealand en Australië (C Tick):
AS-NZS 3548.
Omgeving:
Kompas, gyro, roer-feedback-instrument,
volledig waterdicht. Beeldscherm: IP66
aan de voorkant wanneer correct
geïnstalleerd.
Hoofdinstrument: heeft een koele, droge
omgeving nodig.
Hoofdinstrument contactklem verbindingen:
Contactklem Signaal
1 Heavy duty stroomvoorziening 10,5
tot 16,5 V DC, max. 20 A
2 Heavy duty negatieve stroom
3 Stuuraandrijving negatieve output
4 Stuuraandrijving positieve output
Hoofdinstrument verbindingsstekker
verbindingen:
Contactklem Signaal
1 Light duty positieve stroom, 10,5 tot
16,5 V DC, max. 80 mA
2 light duty stroomvoorziening negatief
3 NavBus +
4 NavBus 5 NMEA gemeen
6 NMEA in 1
7 NMEA in 2
8 Stuurkoppeling relaisaandrijving
output geaard om relais in te
schakelen 30 V DC, maximaal
300 mA.
Beeldscherm stroom/datakabel bedrading:
Draad Signaal
Rood Positieve stroom, 10,5 tot 16,5 V DC,
30 mA zonder achtergrondlicht, 110
mA met volledig achtergrondlicht
Zwart Negatieve stroom
Oranje NavBus +
Blauw NavBus Geel Fabrieksgebruik (isoleren, niet
inkorten)
wit Fabrieksgebruik (isoleren, niet
inkorten)
groen Extern alarm, geaard, 30 V DC en
max. 250 mA.
Appendix B – Alarm en waarschuwingsberichten
Alarmbeeldscherm Reden voor bericht Aanbevolen actie door
BAT ALARM Accuvoltage is minder dan
CAL ERROR
CCH ERROR Koppelingsstroom is te
CE ALARM Course error (koersfout) is
G-PILOT 3100 Bedieningshandleiding
minimum door gebruiker
ingestelde min. waarde
Het G-PILOT roerstand- of
kompasinstrument is niet
gekalibreerd
sterk
groter dan door gebruiker
ingestelde max. waarde
gebruiker
Controleer accu’s
Schakel G-PILOT uit indien
voltage te laag is
Kalibreer beide instrumenten
(zie sectie 5-2 en 6-1)
Controleer
koppelingsaansluiting
Stuur boot handmatig naar
koers
NAVMAN
Opmerking
a
a
a s
a
91

CSU
ERROR
CUR ALARM Stroom naar motor is groter dan door
DRV
ERROR
GPS
ERROR
GSU
ERROR
MCU
ERROR
NAV ERROR GPS navigeert niet naar een
NEXT WPT? Boot heeft waypoint bereikt
NO DATA G-PILOT ontvangt geen GPS-data
of G-PILOT ontvangt geen data
NVM
ERROR
PHA ERROR Roer draait verkeerde kant uit naar
RFU
ERROR
ROUTE
END
TRK ERROR G-PILOT heeft gewisseld naar
TAK ERROR In windstand, poging in de
WND
ALARM
WND
ERROR
XTE ALARM XTE is groter dan de max. waarde
92
Kompas stuurt geen data naar
hoofdinstrument
gebruiker ingestelde max. waarde
Roerhoek verandert niet wanneer
stuuraandrijving in werking is
GPS stuurt geen data meer naar
hoofdinstrument
Gyro stuurt geen data naar
hoofdinstrument
Hoofdinstrument stuurt geen data
naar beeldscherm
waypoint wanneer geprobeerd
wordt G-PILOT in te schakelen
(In GPS-stand en WPT AKN staat
aan)
wanneer verandert wordt naar
GPS-instelling
van het windinstrument wanneer
verandert wordt naar windstand
Er is een fout opgetreden in het
geheugen van het hoofdinstrument
roer-feedback-instrument
Roer-feedback-instrument
stuurt geen data meer naar
hoofdinstrument
Boot heeft eind van een GPS-route
bereikt
GPS-stand maar boot is te ver
van koers
verkeerde richting te wenden of
boot ligt met de kop in de wind
De windhoek is met meer dan de
alarmreactiewaarde verandert.
Windinstrument stuurt geen data
meer naar hoofdinstrument
ingesteld door gebruiker
NAVMAN
Controleer dat kompas op
hoofdinstrument is aangesloten, service
kompas
Controleer dat stuuraandrijving niet
vastzit. Verhoog de alarmwaarde
Controleer dat aandrijvingsstroom is
ingeschakeld
Controleer dat RFU is aangesloten
op roer
Controleer zekeringen aan uiteinde van
hoofdinstrument
Controleer functioneren
stuuraandrijving
Controleer functioneren GPS
Controleer GPS-verbinding
Controleer of gyro is aangesloten op
hoofdinstrument, service gyro
Service hoofdinstrument of beeldscherm
Controleer dat beeldscherm is verbonden aan hoofdinstrument
Voor service uit aan hoofdinstrument of
beeldscherm
Start GPS-navigatie naar een waypoint
of over een route
Druk op een toets om het alarm uit te
schakelen. Druk vervolgens op ENT om
naar het volgende waypoint te sturen
of druk op ESC om naar STBY terug
te keren
Controleer functioneren GPS
a s
a s
a s
a c s
a s
a s
m
m
Controleer GPS-aansluiting
Controleer functioneren windinstrument
Controleer windinstrumentaansluiting
m
Service hoofdinstrument a s
Controleer roer-feedback-instrument
Voer een roerkalibratie uit
Controleer roer-feedback-instrument
aansluiting op hoofdinstrument
Service roer-feedback-instrument
Druk op ESC om naar STBY te
veranderen of op ENT om naar de
kompasstand te veranderen, varend in
de huidige koersrichting
Druk op ESC om naar STBY te
veranderen of op ENT zodat de GPILOT de boot naar de correcte koers
stuurt.
Verander hoek t.o.v. de wind m
Verander SWA
Verander naar kompasstand
Controleer functioneren windinstrument
Controleer windinstrumentaansluiting
Stuur boot handmatig naar koers a
G-PILOT 3100 Bedieningshandleiding
a s
a s
a
a c s

Opmerking a Alarm stelt interne en externe (optionele) buzzers in werking; druk op
een willekeurig toets om het alarm uit te schakelen en druk vervolgens
op ESC om het alarmbericht te annuleren
c De G-PILOT 3100 verandert naar kompasstand
m De G-PILOT 3100 stand verandert niet
s De G-PILOT 3100 verandert naar STBY.
Appendix C – Problemen oplossen
Deze probleemwijzer gaat ervan uit dat u deze
handleiding gelezen en begrepen heeft.
Het is vaak mogelijk om moeilijkheden op te
lossen zonder dat het apparaat voor reparatie
naar de fabriek wordt gezonden. Wij verzoeken u
vriendelijk om deze sectie door te lezen voordat
u contact opneemt met uw Navman dealer.
Geen van de onderdelen dient door de gebruiker
onderhouden te worden. Om waterdichtheid en
het correct in elkaar zetten te controleren zijn
specifieke methodes en testinstrumenten
nodig. Reparaties dienen alleen uitgevoerd te
worden door servicecenters die door Navman
NZ Limited zijn goedgekeurd. Gebruikers die
zelf hun instrument onderhouden maken de
garantie ongeldig. Meer informatie vindt u op
onze website: www.navman.com.
1 Kan het instrument niet inschakelen
a Zekering doorgebrand of
stroomonderbreker in werking gesteld.
b Voltage accu ligt niet tussen 10,5 en
16,5 V DC.
c Stroom/datakabel beschadigd.
2 G-PILOT 3100 maakt te vaak
koerscorrecties:
De responswaarde is te laag (Zie
G-PILOT 3100 Bedieningshandleiding).
3 Wanneer een rechte koers gevaren
wordt gaat de boot van de ene kant van
de koers naar de andere kant:
a De boot dient van de ene kant van de
koers naar de andere kant te varen
wanneer de G-PILOT 3100
stuurfunctie is geoptimaliseerd.
b Wissel naar een profi el dat passend is
voor de snelheid van de boot en de
condities op het water (zie G-PILOT
3100 Bedieningshandleiding).
c Indien de boot te ver van de koers
afdrijft dient u respons, ratio,
tegenroertoename, GPS-toename
(indien G-PILOT op GPS-stand staat)
of windtoename aan te passen (indien
G-PILOT op windstand staat) (zie
G- PILOT 3100 Bedieningshandleiding)
4 De boot raakt van koers wanneer u een
rechte koers vaart.
a Wissel naar een profi el dat passend
is voor de snelheid van de boot en de
condities op het water (zie G-PILOT
3100 Bedieningshandleiding).
b Pas respons, ratio, tegenroertoename
(gain),GPS-toename (indien
G-PILOT op GPS-stand staat) of
windtoename aan (indien G-PILOT op
windstand staat) (zie G-PILOT 3100
Bedieningshandleiding)
5 Wanneer u een grote koersverandering
maakt volgt de boot de verwachte koers
niet:
a Wissel naar een profi el dat passend
is voor de snelheid van de boot en de
condities op het water (zie G-PILOT
3100 Bedieningshandleiding).
b Controleer of de TURN RATE (draai-
tempo) niet te laag is (ga naar TURN
RATE in het opties-menu zie G-PILOT
3100 Bedieningshandleiding).
c Pas de tegenroertoename aan (zie G-
PILOT 3100 Bedieningshandleiding).
6 Boot draait te scherp:
Verlaag de draaitempo-instelling (ga
naar TURN RATE in het opties-menu
zie G-PILOT 3100 Bedienings-
handleiding).
7 Het woord SIMULATIE fl ikkert op het
beeldscherm, de weergegeven waarden
zijn onverwacht:
Het instrument bevindt zich in de
simulatiestand (Zie G-PILOT 3100
Bedieningshandleiding).
8 Het beeldscherm beslaat:
a Vochtige lucht is door het luchtgat
de achterkant van het apparaat
binnengedrongen. Zorg dat de boot
gelucht wordt of gebruik apparaat met
felste achtergrondverlichting.
b Water is door het luchtgat de achterkant
binnengedrongen. Retourneer het
apparaat voor onderhoud.

Appendix D - How to contact us www.navman.com.
NORTH AMERICA
Navman USA Inc.
30 Sudbury Rd, Acton, MA 01720.
Toll Free: +1 866 628 6261
Fax: +1 978 897 8264
e-mail: sales@navmanusa.com
web:www.navman.com
AUSTRALIA
Navman Australia Pty. Limited
Unit 2 / 5-13 Parsons St.
Rozelle, NSW 2039, Australia.
Ph: +61 2 9818 8382
Fax: +61 2 9818 8386
e-mail: sales@navman.com.au
web: www.navman.com
OCEANIA
New Zealand
Absolute Marine Ltd.
Unit B, 138 Harris Road,
East Tamaki, Auckland.
Ph: +64 9 273 9273
Fax: +64 9 273 9099
e-mail: navman@absolutemarine.co.nz
Papua New Guinea
Lohberger Engineering,
Lawes Road, Konedobu.
PO Box 810, Port Moresby.
Ph: +675 321 2122
Fax: +675 321 2704
e-mail: loheng@online.net.pg
web: www.lohberger.com.pg
SOUTH AMERICA
Argentina
Costanera Uno S.A.
Av Pte Ramón S. Castillo y Calle 13
Zip 1425 Buenos Aires, Argentina.
Ph: +54 11 4312 4545
Fax +54 11 4312 5258
e-mail:
purchase@costanerauno.com.ar
web: www.costanerauno.ar
Brazil
Equinautic Com Imp Exp de Equip
Nauticos Ltda.
Rua Ernesto Paiva, 139
Clube dos Jangadeiros
Porto Alegre - RS - Brasil
CEP: 91900-200.
Ph: +55 51 3268 6675
+55 51 3269 2975
Fax: +55 51 3268 1034
e-mail:
equinautic@equinautic.com.br
web: www.equinautic.com.br
Realmarine
Estrada do Joa 3862,
Barra da Tijuca, Rio de Janeiro,
Brazil. CEP: 22611-020.
Ph: +55 21 2483 9700
Fax: +55 21 2495 6823
e-mail: tito@realmarine.com.br
web: www.realmarine.com.br
Chile
Equimar
Manuel Rodrigurez 27
Santiago, Chile.
Ph: +56 2 698 0055
Fax +56 2 698 3765
e-mail: mmontecinos@equimar.cl
Mera Vennik
Colon 1148, Talcahuano,
4262798, Chile.
Ph: +56 41 541 752
Fax +56 41 543 489
e-mail: meravennik@entel.chile.net
CENTRAL AMERICA
Mexico
Mercury Marine de Mexico
Anastacio Bustamente #76
Interior 6 Colonia Francisco Zarabia,
Zapapan, Jalisco, C.P. 45236 Mexico.
Ph: +52 33 3283 1030
Fax: +52 33 3283 1034
web: www.equinautic.com.br
ASIA
China
Peaceful Marine Electronics Co. Ltd.
Guangzhou, Hong Kong, Dalian,
Qingdao, Shanghai
1701 Yanjiang Building
195 Yan Jiang Zhong Rd. 510115
Guangzhou, China.
Ph: +86 20 3869 8839
Fax: +86 20 3869 8780
e-mail: sales@peaceful-marine.com
web: www.peaceful-marine.com
India
Access India Overseas Pvt. Ltd.
A-98, Sector 21,
Noida - 201 301, India.
Ph: +91 120 244 2697
TeleFax: +91 120 253 7881
Mobile: +91 98115 04557
e-mail: vkapil@del3.vsnl.net.in
Esmario Export Enterprises
Block No. F-1, 3rd Floor, Surya Towers
Sardar Patel Rd, Secunderbad 500 003.
Ph: +91 40 2784 5163
Fax: +91 40 2784 0595
e-mail: gjfeee@hd1.vsnl.net.in
web: www.esmario.com
Indonesia
Polytech Nusantara,
Graha Paramita 2nd Floor,
Jln Denpasar Raya Blok D2
Kav 8 Kuningan, Jakarta 12940.
Ph: +62 21 252 3249
Fax: +62 21 252 3250
e-mail: polytech@transavia.co.id
Korea
Kumhomarine Technology Co. Ltd.
#604-842, 2F, 1118-15, Janglim1-Dong,
Saha-Gu, Busan, Korea.
Ph: +82 51 293 8589
Fax: +82 51 265 8984
e-mail: info@kumhomarine.com
web: www.kumhomarine.com
Maldives
Maizan Electronics Pte. Ltd.
Henveyru, 08 Sosunmagu.
Male', Maldives.
Mobile: +960 78 24 44
Ph: +960 32 32 11
Fax: +960 32 57 07
e-mail: ahmed@maizan.com.mv
Singapore, Malaysia, Brunei,
Indonesia and Phillipines
RIQ PTE Ltd.
Blk 3007, 81 Ubi Road 1, #02-440,
Singapore 408701.
Ph: +65 6741 3723
Fax : +65 6741 3746
e-mail: riq@postone.com
Taiwan
Seafirst International Corporation
No. 281, Hou-An Road, Chien-Chen
Dist. Kaohsiung, Taiwan R.O.C.
Ph: +886 7 831 2688
Fax: +886 7 831 5001
e-mail: seafirst@seed.net.tw
web: www.seafirst.com.tw
Thailand
Thong Electronics (Thailand) Co. Ltd.
923/588 Ta Prong Road, Mahachai,
Muang, Samutsakhon 74000, Thailand.
Ph: +66 34 411 919
Fax: +66 34 422 919
e-mail: sales@thongelectronics.com
admins@thongelectronics.com
web: www.thongelectronics.com
Vietnam
Haidang Co. Ltd.
1763 Le Hong Phong St. Ward 12
District 10, Ho Chi Minh City.
Ph: +84 8 863 2159
Fax: +84 8 863 2124
e-mail: sales@haidangvn.com
web: www.haidangvn.com
MIDDLE EAST
Lebanon and Syria
Balco Stores
Balco Building, Moutran Street,
Tripoli (via Beirut). - Lebanon
P.O. Box: 622.
Ph: +961 6 624 512
Fax: +961 6 628 211
e-mail: balco@cyberia.net.lb
United Arab Emirates
Kuwait, Oman, Iran, Saudi
Arabia, Bahrain & Qatar
Abdullah Moh’d Ibrahim Trading, opp
Creak Rd. Baniyas Road, Dubai.
Ph: +971 4 229 1195
Fax: +971 4 229 1198
e-mail: sales@amitdubai.com
AFRICA
South Africa
Pertec (Pty) Ltd (Coastal Division)
16 Paarden Eiland Road.
Paarden Eiland, 7405
PO Box 527,
Paarden Eiland, 7420
Cape Town, South Africa.
Ph: +27 21 508 4707
Fax: +27 21 508 4888
e-mail: info@kfa.co.za
web: www.pertec.co.za
EUROPE
France, Belgium and Switzerland
Plastimo SA
15, rue Ingénieur Verrière,
BP435,
56325 Lorient Cedex.
Ph: +33 2 97 87 36 36
Fax: +33 2 97 87 36 49
e-mail: plastimo@plastimo.fr
web: www.plastimo.fr
Germany
Navimo Deutschland
15, rue Ingénieur Verrière
BP435- 56325 Lorient Cedex.
Ph: +49 6105 92 10 09
+49 6105 92 10 10
+49 6105 92 10 12
Fax: +49 6105 92 10 11
e-mail:
plastimo.international@plastimo.fr
website: www.plastimo.de
Italy
Navimo Italia
Nuova Rade spa, Via del Pontasso 5
16015 Casella Scrivia (GE).
Ph: +39 1096 80162
Fax: +39 1096 80150
e-mail: info@nuovarade.com
web: www.plastimo.it
Holland
Navimo Holland
Industrieweg 4,
2871 JE Schoonhoven.
Ph: +31 182 320 522
Fax: +31 182 320 519
e-mail: info@plastimo.nl
web: www.plastimo.nl
United Kingdom
Navimo UK
Hamilton Business Park
Bailey Road, Hedge End
Southhampton, Hants S030 2HE.
Ph: +44 01489 778 850
Fax: +44 0870 751 1950
e-mail: sales@plastimo.co.uk
web: www.plastimo.co.uk
Sweden, Denmark, Finland and
Norway
Navimo Nordic
Lundenvägen 2,
473 21 Henån.
Ph: +46 304 360 60
Fax: +46 304 307 43
e-mail: info@plastimo.se
web: www.plastimo.se
Spain
Navimo España
Avenida Narcís Monturiol, 17
08339 Vilassar de Dalt,
Barcelona.
Ph: +34 93 750 75 04
Fax: +34 93 750 75 34
e-mail: plastimo@plastimo.es
web: www.plastimo.es
Portugal
Navimo Portugal
Avenida de India N°40
1300-299 Lisbon.
Ph: +351 21 362 04 57
Fax: +351 21 362 29 08
e-mail: plastimo@siroco-nautica.pt
web: www.plastimo.com
Other countries in Europe
Plastimo International
15, rue Ingénieur Verrière BP435
56325 Lorient Cedex, France.
Ph: +33 2 97 87 36 59
Fax: +33 2 97 87 36 29
e-mail:
plastimo.international@plastimo.fr
web: www.plastimo.com
REST OF WORLD/
MANUFACTURERS
Navman NZ Limited
13-17 Kawana St.
Northcote.
P.O. Box 68 155,
Newton,
Auckland,
New Zealand.
Ph: +64 9 481 0500
Fax: +64 9 481 0590
e-mail: marine.sales@navman.com
web: www.navman.com

.

Made in New Zealand
MN000228A
G-PILOT 3100 Operation
Lon 174° 44.535'E
Lat 36° 48.404'S
NAVMAN
 Loading...
Loading...