


G-PILOT 3100
AUTOPILOT
Installation Manual
English..............3
Español...........32
Português.......61
www.navman.com
NAV MAN

Contenido
Importante............................................................................................33
1 Introducción......................................................................................34
1-1 Una instalación típica...............................................................................34
1-2 Utilizar el G-PILOT 3100 con otros instrumentos ......................35
1-2-1 Utilización de otros instrumentos..........................................................35
1-2-2 NavBus .................................................................................................35
1-2-3 NMEA....................................................................................................35
2 Hardware del G-PILOT 3100 ............................................................36
2-1 Qué se entrega con el G-PILOT 3100 .....................................................36
2-2 Piezas complementarias necesarias........................................................37
3 Instalación.........................................................................................37
3-1 Proceso de instalación.............................................................................37
3-2 Guía de instalación ..................................................................................38
3-2-1 Guía para seleccionar el emplazamiento .........................................38
3-2-2 Guía de instalación eléctrica ............................................................38
3-3 Instalación de la unidad central................................................................39
3-4 Instalación de la fuente de alimentación y del piloto................................40
3-4-1 Instalación de la fuente de alimentación...........................................40
3-4-2 Instalación del piloto..........................................................................41
3-5 Instalación de la unidad de control del timón...........................................45
3-6 Instalación del compás.............................................................................48
3-7 Instalación del giróscopo..........................................................................50
3-8 Instalación de la pantalla y otros instrumentos........................................52
4 Calibración en puerto......................................................................54
4-1 Iniciar la calibración en puerto .................................................................54
4-2 Calibración de la unidad de control del timón..........................................55
5 Pruebas en mar ................................................................................56
5-1 Calibración del compás............................................................................56
6 Alinear el compás y el timón...........................................................57
6-1 Alinear el compás.....................................................................................57
6-2 Alinear el timón.........................................................................................57
Apéndice A – Especifi caciones.......................................................... 58
Apéndice B – Alarma y mensajes de advertencias..........................58
Apéndice C – Problemas & Soluciones ............................................60
Apéndice D – Cómo contactarnos.....................................................90
32
NAVMAN
G-PILOT 3100 manual de instalación
Importante
Es responsabilidad exclusiva del propietario instalar y usar el instrumento y el/los transductores
de forma que no causen accidentes, lesiones personales o daño a la propiedad. El usuario de
este producto es único responsable de que se observen prácticas de navegación segura.
La elección, el emplazamiento y la instalación de los componentes en cualquier sistema de
piloto automático son esenciales. Una instalación incorrecta podría afectar las prestaciones de
la unidad tal y como está diseñada. En caso de duda, consultar su distribuidor Navman.
Asegurar que los agujeros taladrados no debiliten la estructura del barco. En caso de duda,
consultar un técnico especializado.
Utilización del G-PILOT 3100:
El G-PILOT 3100 solo es una ayuda para el timonel y para evitar que deba gobernar
periodos demasiado largos y no es el medio de gobierno principal del barco.
El G-PILOT 3100 no está destinado a un uso en condiciones extremas, adversas, a
proximidad de otros barcos, aguas peligrosas o cerca de tierra.
El G-PILOT 3100 no controla el barco mejor que el timonel. En condiciones adversas, se
ha de gobernar el barco manualmente.
Nunca dejar el timón desatendido. Siempre mantener vigilancia. El timonel debe
controlar tanto el rumbo del barco como el G-PILOT 3100 y estar dispuesto a gobernar
manualmente.
Las prestaciones del G-PILOT 3100 se pueden ver afectadas por fallo de una pieza, las
condiciones del entorno, o por una instalación o un uso inapropiados.
NAVMAN NZ LIMITED NIEGA TODA RESPONSABILIDAD EN CASO DE UTILIZAR ESTE
PRODUCTO DE TAL FORMA QUE PUEDA CAUSAR ACCIDENTES, DAÑO O QUE PUEDA
VIOLAR LA LEY.
Navman se reserva el derecho de efectuar cualquier cambio susceptible de mejorar el rendimiento
de este producto en cualquier momento, estos cambios podrían no constar en esta versión del
manual. Por favor, contactar su distribuidor Navman en caso de necesitar ayuda.
Idioma Rector: Esta declaración, los manuales de instrucciones, las guías de uso y otra
información pertinente al producto (Documento) pueden ser traducidas a, o han sido traducidas
de, otro idioma (Traducción). En caso de confl icto con cualquier Traducción de la Documentación,
la versión inglesa del Documento constituirá la versión ofi cial.
Derechos de autor © 2003 Navman NZ Limited, Nueva Zelanda, todos los derechos
reservados.Navman es una marca registrada de Navman NZ Limited.
G-PILOT 3100 manual de instalación
NAVMAN
33
1 Introducción
Uso de este manual
Este manual describe las instrucciones de
instalación y calibración del G-PILOT 3100.
Referirse al Manual de Funcionamiento del
G-PILOT 3100 para saber cómo utilizar el
G-PILOT 3100.
Para instalar un G-PILOT 3100, debe proceder
a la instalación, la calibración en puerto y
pruebas en mar (ver párrafos 3, 4 y 5).
Para calibrar completamente un G-PILOT
3100 después un cambio de pieza o en
caso de problema eventual, proceder a la
confi guración en puerto y a las pruebas en
mar (ver párrafos 4 y 5).
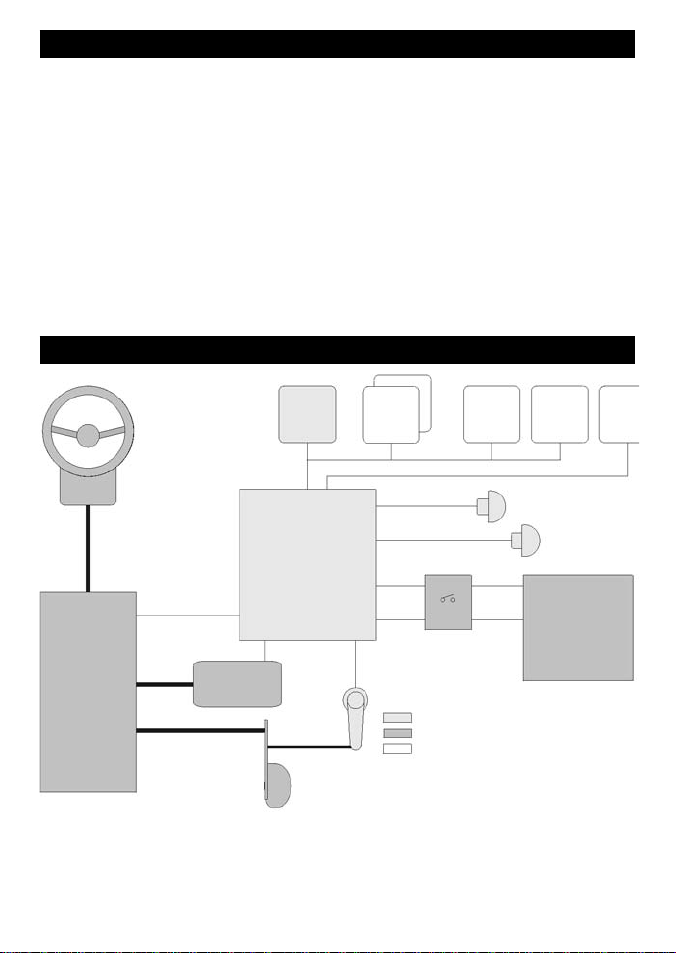
1-1 Una instalación típica
La
Rueda
de timón
Mecanismo
de embrague
(optional)
Control de
timón
pantalla
NavBus
Unidad central
Piloto
Para comprobar que el G-PILOT 3100 funciona
correctamente, proceder a las pruebas en mar
(ver párrafo 5).
Limpieza & mantenimiento
Limpiar las piezas del G-PILOT 3100 con un
paño húmedo o detergentes non agresivos.
Evitar los limpiadores abrasivos, el petroleo
u otros solventes.
No se debe pintar ninguna pieza del G-PILOT
3100, excepto los cables.
Instrumentos opcionales
Unidades
suplemen-
tarias
NMEA
Interruptor/es de
arranque, y protección
de potencia
WIND
Piezas entregadas con el G-PILOT
Piezas complementarias necesarias
Piezas opcionales
3100
Compás
SPEED
3100
Giróscopo
Baja intensidad
Alta intensidad
Alimentación
12 V DC
GPS
NMEA
Unidad de
Timón
34
control de
timón
NAVMAN
Nota: Solo se describe una
instalación típica (ver arriba).
Por favor, consultar la información
correspondiendo al piloto elegido
para más información
G-PILOT 3100 manual de instalación
1-2 Utilización del G-Pilot 3100 con otros instrumentos
1-2-1 Utilización de otros
instrumentos
El G-PILOT 3100 puede usar la información
desde estos instrumentos:
GPS: un GPS o chartplotter, por ejemplo el
chartplotter Navman serie TRACKER 5000
se debe conectar al G-PILOT 3100 para
que el G-PILOT 3100 funcione en Modo
GPS (ver Manual de Funcionamiento del G-
PILOT 3100). Nota: el GPS debe disponer
de entrada vía NMEA.
WIND (Viento): un instrumento de viento,
por ejemplo el WIND 3100 de Navman, se
debe conectar para que el G-PILOT 3100
funcione en Modo Viento (ver el Manual de
Funcionamiento del G-PILOT 3100)
SPEED (velocidad): un instrumento de
corredera, por ejemplo:
El Navman SPEED 3100 con un
sensor de ruedecilla mecánica
un GPS o un chartplotter, como el
chartplotter TRACKER 5000 Navman
se puede conectar al G-PILOT 3100
para incrementar la precisión de
gobierno.
Nota: la velocidad indicada por un sensor
de rueda es la velocidad del barco en el
agua. La velocidad indicada por un GPS es
la velocidad sobre el fondo. Si hay corriente,
estas dos velocidades serán distintas. Si
el G-PILOT 3100 está conectado a un
instrumento con sensor de rueda y un GPS,
el G-PILOT 3100 usará automáticamente la
velocidad indicada por el sensor de rueda.
1-2-2 NavBus
NavBus es un sistema de propiedad Navman
que permite la elaboración de sistema multiinstrumentos usando un conjunto único de
transductores. Cuando los instrumentos están
conectados vía NavBus:
Si cambia las unidades, las alarmas
o la calibración en un instrumento,
entonces estos valores cambiarán
automáticamente en todos los
instrumentos del mismo tipo.
Cada instrumento se asigna a un
grupo de instrumentos, llamado grupo
retroiluminado (ver BKL GROUP en
el menú FACTORY, en el manual de
G-PILOT 3100 manual de instalación
NAVMAN
Funcionamiento del G-PILOT 3100).
Si cambia la retroiluminación en un
instrumento del grupo 1, 2, 3 o 4, la
retroiluminación cambiará también en los
demás instrumentos del mismo grupo. Si
cambia la retroiluminación en el grupo 0,
entonces ningún otro instrumento se verá
afectado por este cambio.
Si se dispara una alarma, acallarla en
cualquier instrumento que indica esta
alarma.
Para más información, referirse al Manual de
instalación y funcionamiento NavBus. Nota:
la entrada GPS se debe efectuar vía entrada
NMEA.
NavBus y el G-PILOT 3100
El G-PILOT 3100 funcionará
automáticamente con unidades
adicionales.
El G-PILOT 3100 puede recibir
información de viento del WIND 3100 de
Navman vía NavBus.
El G-PILOT 3100 puede recibir
información de corredera del SPEED
3100 de Navman vía NavBus.
1-2-3 NMEA
NMEA es un estándar industrial, pero no es
tan flexible como NavBus ya que requiere
conexiones específi cas entre los instrumentos.
El G-PILOT dispone de un puerto de entrada
NMEA y un puerto que se puede confi gurar
como entrada o como salida (Ver el Manual de
Funcionamiento del G-PILOT 3100).
Entradas NMEA G-PILOT 3100
GPS: el G-PILOT 3100 puede recibir
información GPS NMEA de un GPS o un
chartplotter compatible, por ejemplo, el
chartplotter TRACKER 5000 de Navman:
XTE – Error de Traza (desde frases APA,
APB o XTE) es obligatorio para que el
G-PILOT use un Modo GPS
BRG – Demora -(de frases APA) y BOD
(de frases APA o APB) son opcionales y
mejoran el rendimiento
COG – rumbo sobre el fondo
VTG) es opcional y se puede indicar
WIND: El G-PILOT 3100 puede recibir
información de viento NMEA de un instrumento
-(de frases
35
de viento compatible:
Dirección del viento real o aparente (de
frases MWV) es obligatoria para que el
G-PILOT use Modo Wind.
SPEED: el G-PILOT 3100 puede recibir
información de corredera NMEA desde una
rueda o un instrumento GPS compatible:
SOG – velocidad sobre el fondo (de frases
VTG) es opcional y mejora el rendimiento.
Nota: si el G-PILOT 3100 está conectado a un
instrumento de corredera o de viento de la serie
Navman 3100 usando NavBus, entonces el
G-PILOT 3100 recibirá y usará automáticamente
la información de corredera o de viento, y no
necesitará conexión NMEA.
Salidas NMEA del G-PILOT 3100
NMEA
El puerto NMEA 2 se puede confi gurar como
entrada o como salida:
Rumbo (HDG & HDT) y ángulo de timón
(RSA) una vez por segundo
o rumbo (HDG) diez veces por segundo
(ver NMEA 2 DAT en el menú FACTORY,
Ver Manual de Funcionamiento del
G-PILOT 3100).
2 Hardware del G-PILOT 3100
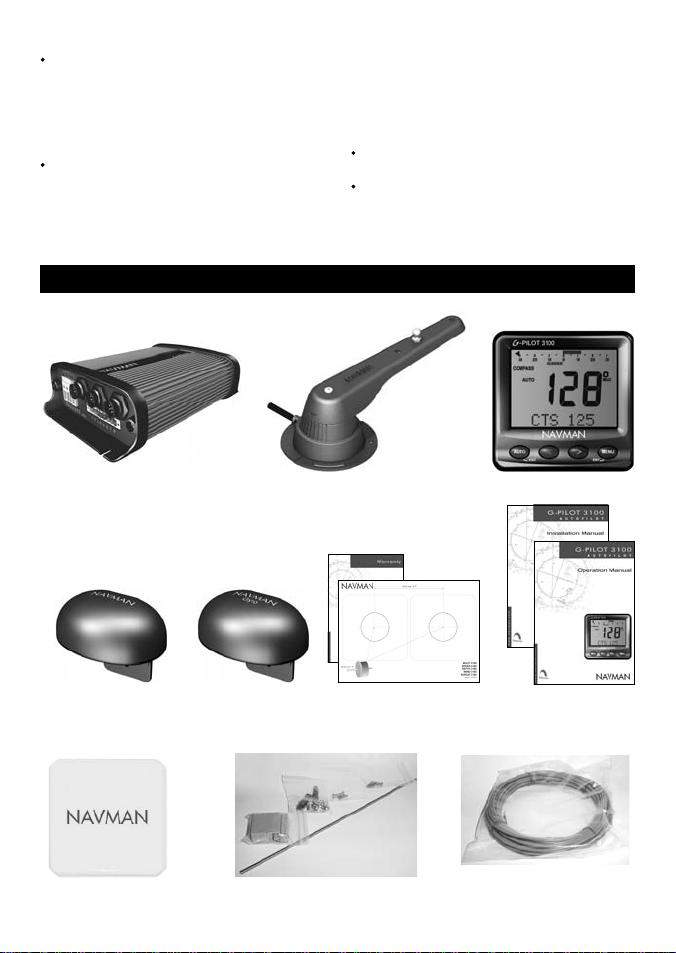
2-1 Lo que se entrega con el G-PILOT 3100
Unidad central
Compás, con 10 m
(33pies) de cable
Una tapa protectora
para la pantalla
36
Unidad de control de timón
Giróscopo, con 10
m (33pies) de cable
Hardware de montaje, funda de cable,
protector, fusibles de recambio
Garantía y plantilla
de montaje de la
unidad central
NAVMAN
Pantalla
Este manual
de Instalación y
Funcionamiento.
2 mm (#14) cable de doble torón
para cableado de alta intensidad
G-PILOT 3100 manual de instalación
2-2 Piezas complementarias
necesarias
Alimentación: El G-PILOT 3100 requiere dos
fuentes de alimentación, ambas de 12 V DC
nominal:
Una alimentación de alta intensidad para
el piloto
Una alimentación de baja intensidad para
la electrónica y la pantalla del G-PILOT
3100, esta fuente alimentará igualmente
cualquier unidad adicional y otros
instrumentos.
Las fuentes de alimentación requieren uno o
dos interruptores y fusibles o cortacircuitos (ver
párrafo 3-4).
Piloto: El G-PILOT 3100 puede alimentar una
bomba hidráulica de funcionamiento constante,
un mecanismo hidráulico lineal o un mecanismo
mecánico de 12 V DC hasta 20 A.
Conexión de timón: para unir el timón a la
unidad de control de timón ver párrafo 3-5.
Para conexión eléctrica, seleccionar tabla de
3 Instalación
Advertencia: una instalación correcta es
esencial para obtener un buen rendimiento.
Por favor, leer detenidamente este manual
y la documentación provista con los demás
instrumentos antes de la instalación.
Advertencia:
La unidad central del G-PILOT no es
estanca. Montar la unidad en un sitio seco.
La pantalla del G-PILOT es estanca
en su parte frontal. Proteger la parte
posterior de la pantalla del agua para
3-1 Instalación
El proceso de instalación recomendado es el
siguiente:
1 Leer este manual y la documentación
provista con los demás instrumentos.
2 Preparar la instalación: seleccionar el
emplazamiento del equipo y del cableado
(ver párrafo 3-2).
3 Instalar la unidad central (ver párrafo 3-3).
4 Instalar el piloto, el cableado de las
fuentes de alimentación (ver párrafo 3-4).
5 Instalar la unidad de control de timón (ver
párrafo 3-5).
6 Instalar el compás (ver párrafo 3-6).
7 Instalar el giróscopo (ver párrafo 3-7).
G-PILOT 3100 manual de instalación
NAVMAN
conexión (Wire Table) en el párrafo 3-4-2.
Beepers externos o luces (opcional ): la
salida externa está conecta a Tierra, 30 V DC
y 250 mA máximo. Si los beepers y las luces
requieren una alimentación total superior a 250
mA, instalar un relé.
Otros instrumentos marinos (opcional):
instrumentos de Viento, Corredera o GPS se
pueden conectar (ver párrafo 1-2).
Piezas complementarias: para los sistemas
multi-instrumentos, se requieren cableado y
conectadores. Las cajas de conexión Navman simplifican la interconexión de varios
instrumentos (ver párrafo 1-2 o el Manual de
Instalación y Funcionamiento NavBus).
Conectadores de acoplamiento y alargos de
10 m (33 pies) son disponibles para los cables
de la unidad de control de timón, del compás
o del giróscopo. No utilizar más de un alargo
para cada unidad.
Para más información, consultar su distribuidor
Navman.
evitar cualquier entrada de agua en el
respiradero lo que podría dañarla. La
garantía no cubre los daños causados
por humedad o entrada de agua en la
parte posterior.
El compás, giróscopo y unidad de control
de timón son totalmente estancos.
Advertencia: Asegurar que los agujeros
taladrados no delibitarán la estructura del
casco. En caso de duda, consultar un técnico
especializado.
8 Instalar la pantalla y cualquier otros
instrumentos marinos que usará con el
G-PILOT 3100 (ver párrafo 3-8).
9 Proceder a la calibración en puerto (ver
párrafo 4).
10 Proceder a las pruebas en mar (ver
párrafo 5).
En caso de duda sobre el emplazamiento de
instalación, montar y conectar el equipo de
forma temporaria, sin efectuar taladros. Una
vez terminadas las pruebas en mar, instalar y
conectar el equipo defi nitivamente
37
3-2 Guía de instalación
Este documento es una guía general para instalar y conectar las piezas del G-PILOT 3100. Las
instrucciones para una pieza particular pueden tener requerimientos suplementarios.
3-2-1 Emplazamiento
No colocar ninguna pieza donde se
podría usar como manilla, donde podría
interferir con la maniobra u donde podría
sumergirse.
No montar ninguna pieza donde podría
interferir con la botadura o la alzada del
barco.
Ninguna pieza debe montarse a 0.5 m
(20”) del radio de acción de una antena
radar.
Montar el compás y el giróscopo:
Al menos a 1 m (3pies) de cualquier
fuente eléctrica o sonora, por
ejemplo, baterías, cables de alta
tensión, otro cableado, motores, luces
fl uorescentes, luces, inversores de
potencia, emisoras radio o radar y
antenas.
Al menos a de 1 m (3pies) de material
conteniendo una fuente magnética, un
compás por ejemplo.
3-2-2 Guía eléctrica
El G-PILOT 3100 dispone de dos tipos de
cables:
La alimentación de alta intensidad y el
piloto requieren normalmente cables de alta
intensidad:
Seleccionar un calibre de cables en la
tabla de calibración correspondiente (ver
párrafo 3-4-2).
Colocar los cables de alta intensidad
al menos 1 m (3pies) de otros equipos
electrónicos del barco:
Mantener los cables tan cortos como sea
posible.
Un cable doble torón de 2 mm (#14) está
servido con el G-PILOT 3100 y se puede
usar como cable de alta intensidad si su
calibre es adecuado. Los demás cables
son de intensidad baja:
Colocar los cables de baja intensidad al
menos a 1 m (3pies) de cualquier fuente
eléctrica o sonora, por ejemplo, baterías,
cables de alta tensión, otro cableado,
motores, luces fl uorescentes, luces,
inversores de potencia, emisoras radio o
radar y antenas.
Si el cable de la unidad de control de
timón, del compás o del giróscopo es
demasiado largo, no acortarlo, enrrollarlo
cerca de la unidad de control central.
El cable de la unidad central de
timón, del compás o del giróscopo se
puede extender mediante un alargo
de 10 m (33 pies) y un conectador de
acoplamiento.No utilizar más de un
alargo para cada unidad.
Cuando coloca cualquier tipo de cable:
No aplastar, pillar o tensar el cable.
Asegurar el cable a intervalos regulares.
Asegurarse que no haya conectadores o
terminales en la sentina.
38
NAVMAN
G-PILOT 3100 manual de instalación
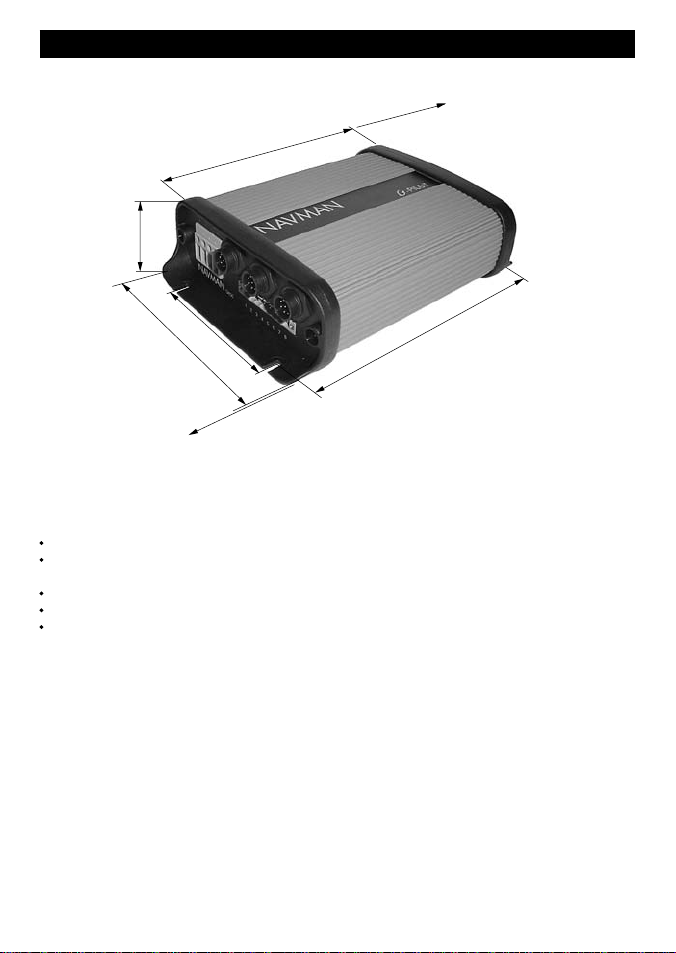
3-3 Instalar la unidad central
Esquema
200 mm (7.87")
(2.16")
55 mm
Tornillos 90 mm (3.54”) aparte
200 mm (7.87")
IMPORTANTE: permitir un
espacio de 200 mm (7.87”)
para poder sacar la tapa
140 mm (5.10")
Tornillos 184 mm (7.24") aparte
60 mm (2.36")
IMPORTANTE: permitir un espacio
de 60 mm (2.36”) para los cables
Instalación
Elegir un emplazamiento adecuado para la unidad:
En un sitio seco, fresco; si posible, no en la sala de máquinas.
Cerca de la fuente de alimentación de alta intensidad y del piloto de manera a reducir la
longitud del cableado.
Accesible para permitir la instalación y la revisión.
Si posible sobre un panel vertical que no tenga vibración.
Seguir las instrucciones de la guía de emplazamiento (ver párrafo 3-2-1).
Montar la unidad con los conectadores del cable en la parte posterior o en un lateral, usando los
tornillos servidos. No montar la unidad con los conectadores en la parte superior ya que puede
entrar polvo o humedad.
G-PILOT 3100 manual de instalación
NAVMAN
39
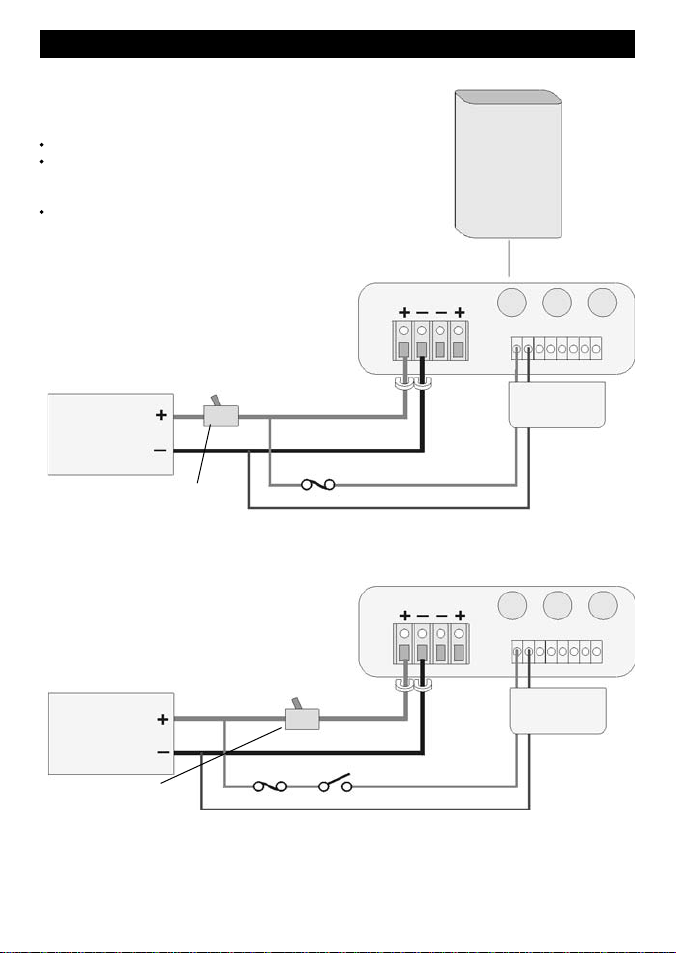
3-4 Instalar las fuentes de alimentación y el piloto
3-4-1 Instalar las fuentes de alimentación
El G-PILOT 3100 requiere una alimentación alta y baja, ambas
de 12 V DC (10.5 a 16.5 V DC).
Nota:
Mantener el cableado tan corto como sea posible.
Para la alimentación de alta intensidad, usar el calibre
de alambre indicado en la tabla correspondiente(ver
párrafo 3-4-2).
Seguir las instrucciones de la guía de conexión (ver
párrafo 3-2-2).
Alimentación: confi guración con un conectador
Elegir esta configuración para disponer de un
interruptor para activar y desactivar el G-PILOT
3100 y cualquier otro instrumento.
Unidad
central
1 2 3 4 5 6 7 8
Colocar un protector
Alimentación 12
V DC, corriente
para adecuarse
al piloto
Cortacircuito o fusible y
interruptor, voltaje para
adecuarse al piloto
Alimentación:confi guración de dos interruptores
Elegir esta configuración para poder desactivar la
alimentación del piloto y dejar los demás instrumentos
activados.
Alimentación 12
V DC, corriente
para adecuarse
al piloto
Cortacircuito
o fusible y
interruptor, voltaje
para adecuarse al
piloto
Nota: si necesita alimentar más de 3 unidades u otros instrumentos de serie 3100, colocar otro
interruptor y fusible para la alimentación de baja intensidad para estos instrumentos
40
Fusible 1 A
Colocar un protector
Fusible 1 A
NAVMAN
Switch
Alimentación
alta
intensidad
Alimentación
alta
intensidad
G-PILOT 3100 manual de instalación
Tapa
conectador
Alimentación de
baja intensidad
1 2 3 4 5 6 7 8
Tapa
conectador
Alimentación de
baja intensidad

3-4-2 Instalar el piloto
Instalar el piloto según uno de los esquemas
en las páginas siguientes.
Nota
Mantener el cableado tan corto como sea
posible.
Usar el calibre de alambre indicado en la
tabla siguiente.
Seguir las instrucciones de la guía de
conexión (ver párrafo 3-2-2).
Un alambre de calibre inferior a 6 mm²
no encajará en el repartidor de 4 vías.
Colocar una manguito o cambiar el
terminal del alambre por uno de calibre
6 mm².
Si debe colocar más de un alambre en
un terminal del repartidor de 4 vías, juntar
los alambres de forma apropiada.
Tabla de calibre de conexión
Para elegir un calibre para una instalación:
1 Medir la longitud del cable doble torón necesario, por ejemplo, la distancia de la unidad
central a la fuente de alimentación de alta intensidad al mecanismo.
2 Elegir la columna con la longitud de cable y la fi la con la corriente del circuito. La
intersección indicará el calibre preferencial (mínimo) para una pérdida de voltaje inferior a
3% en un sistema 12 V.
Longitud del cable (de la unidad de control a la fuente de alimentación o al piloto)
0.7 m 1.5 m 2.2 m 3 m 3.7 m 4.5 m 5.2 m 6 m
Corriente 2.5p 5p 7.5p 10p 12.5p 15p 17.5p 20p
1 amp 0,75 0,75 0,75 0,75 0,75 1,5 0,75 0,75
2 amp 0,75 0,75 0,75 0,75 0,75 1,5 1,5 1,5
3 amp 0,75 0,75 0,75 1,5 1,5 2,5 2,5 2,5
4 amp 0,75 0,75 1,5 1,5 2,5 4 2,5 4
5 amp 0,75 0,75 1,5 2,5 2,5 4 4 4
6 amp 0,75 1,5 1,5 2,5 4 4 4 6
7 amp 0,75 1,5 2,5 2,5 4 4 6 6
8 amp 0,75 1,5 2,5 4 4 8 6 6
9 amp 0,75 1,5 2,5 4 4 8 6 6
10 amp 0,75 2,5 4 4 8 8 6 10
15 amp 1,5 4 4 6 8 10 10 16
20 amp 2,5 4 6 10 10 16 16 16
G-PILOT 3100 manual de instalación
NAVMAN
41

Ejemplo de gobierno hidráulico con bomba hidráulica.
En el menú VESSEL (ver manual de funcionamiento del G-PILOT 3100), poner DRVE TYPE
a MTR.
Unidad central
1 2 3 4 5 6 7 8
Colacar un protector
Alimentación alta intensidad
Sin conexión
(ver párrafo 3-4-1)
La polaridad
del cableado no
importa.
Motor
Ejemplo de barcos de gobierno mecánico con mecanismo lineal hidráulico
para veleros
En el menú VESSEL (Ver manual de Funcionamiento del G-PILOT 3100), poner DRVE TYPE
a MTR.
Nota: la bobina de relé de embrague
no debe tomar más de 300mA
Unidad central
Colacar un protector
Alimentación alta intensidad
Tapa de
conectador
(ver párrafo 3-4-1)
La polaridad
del cableado no
importa.
Motor
Bobina
de relé de
embrague
42
Diodo 1N4002 o equivalente
Colocarlo cerca de la bobina de relé
NAVMAN
G-PILOT 3100 manual de instalación

Instalar un motor de propulsión eléctrica con un relé de embrague
En el menú VESSEL (ver Manual de
Funcionamiento G-PILOT 3100)
Poner DRVE TYPE a MTR.
Unidad central
1 2 3 4 5 6 7 8
Colocar un protector
Alimentación de alta intensidad
(ver párrafo 3-4-1)
Diodo 1N4002 o equivalente
Colocar cerca de la bobina de relé
Contactos relé
Bobina de
embrague
La polaridad del
cableado no importa.
Motor
Diodo 1N4002 o equivalente.
Colocar cerca de la bobina de relé
Nota: relé necesario si la el circuito
de embrague es superior a 300 mA.
Instalar una bomba constante y unas válvulas solenoide.
En el menú VESSEL (Ver manual de
Funcionamiento del G-PILOT 3100),
poner DRVE TYPE a MTR.
Colocar un protector
Alimentación de alta intensidad
Nota: Motor no es
necesario para los
sitemas de motor
PTO.
G-PILOT 3100 manual de instalación
(ver párrafo 3-4-1)
Contactos relé
Motor
La polaridad
del cableado no
importa.
Estribor
Babor
NAVMAN
Tapa de
conectador
Bobina de relé
Unidad central
1 2 3 4 5 6 7 8
Tapa de
conectador
Bobina de relé
Diodo 1N4002 o equivalente
Colocar cerca de la bobina
de relé
Nota: relé necesario si el
circuito de embrague es
superior a 300 mA.
43

Instalar válvulas solenoide o relés con con el gobierno de corrección por
impulsos
En el menú VESSEL (Ver manual de Funcionamiento del G-PILOT 3100), poner DRVE TYPE
a MTR.
Colocar un protector
Alimentación de alta intensidad
(ver párrafo 3-4-1)
Unidad central
1 2 3 4 5 6 7 8
Sin conexión
Estribor
Babor
Controles de corrección
por impulso de mandos/
gobierno
44
NAVMAN
G-PILOT 3100 manual de instalación

3-5 Instalar la unidad de control de timón
Esquema
Brazo de
90 mm
(3.5")
220 mm
(8.7")
Timón
Unión a
timón
Conexión de la varilla, con
dispositivos de retirada
rápida y tuerca de bloqueo
en cada extremidad
Base
Conectador LT8
Cable 10 m (33 pies)
El brazo gira
libremente alrededor
Arm
de la base.
La varilla de conexión
se fi ja a presión en
uno de los agujeros
del brazo.
Requerimientos de montaje
Estas 2 distancias
deben ser iguales.
Ajustar la posición de la
varilla sobre el brazo si
necesario.
Base debe ser
adyacente al brazo de
timón de manera que el
ángulo sea de 90°
Cortar la varilla
de conexión si
necesario.
Nota
La unidad es totalmente estanca pero no debería sumergirse.
Montar la unidad sobre un panel que no tenga viración.
Seguir las instrucciones de la guía de colocación (ver párrafo 3-2-1).
G-PILOT 3100 manual de instalación
NAVMAN
Rosca = M5
Estas 2
distancias
deben ser
iguales.
El brazo de timón
debe ser paralelo
en la base.
Unión timón y
brazo deben
moverse sobre el
mismo plano
45

Alineación
El brazo puede girar libremente alrededor de la base. Cuando el timón está a la vía, la fl echa en
el brazo debe apuntar a una de las líneas centrales sobre la base.
Línea central
Base
Línea central
Por lo tanto en una instalación, la base puede girarse a 2 posiciones. Recomendamos la posición
en la cual el cable queda opuesto a la varilla de conexión.
Los grupos de líneas
indican los 2 regimenes
lineales de la unidad.
Recomendado
(timón a la vía).
No recomendado, el cable choca
contra la unión al timón.
Esquemas
Recommendado: esquemas en forma de U con el brazo paralelo a la línea de eslora del barco:
Proa del
barco
Correcto: esquema en forma de U con
el brazo no paralelo a la eslora del barco,
por ejemplo:
Proa del
barco
46
No recomendado: esquema en forma de
Z,Por ejemplo:
Si el timón gira demasiado, la unidad podría no
volver al esquema en forma de Z.
NAVMAN
G-PILOT 3100 manual de instalación

Instalación
1 Encontrar un emplazamiento adecuado para la unidad y según el esquema descrito
anteriormente.
2 Elegir, ensamblar y colocar una unión de timón adecuada.
3 Colocar la unidad como descrito anteriormente:
Girar el
timón a
la vía.
Si necesario, montar
la base sobre un
bloque para ajustar
la altura.
Girar la base de manera que la
fl echa en el brazo apunte cerca de
la línea central en la base. Colocar
2 tornillos provistos sin apretar en
el medio de las ranuras.
Acoplar a la unión
de timón.
Si es necesario, cortar la
varilla de conexión en esta
Insertar el terminal
en agujero adecuado
en el brazo.
extremidad, luego volver a
colocar la unión y la tuerca
de bloqueo.
4 Conectar el cable en la parte posterior de la unidad central, siguiendo las instrucciones de
la guía eléctrica (ver párrafo 3-2-2).
Girar la base de manera que
la fl echa apunte en la línea
central en la base. Colocar
el tercer tornillo provisto,
atornillar todos los tornillos.
Asegurar que
el timón esté a
la vía.
G-PILOT 3100 manual de instalación
Taladros en los mamparos
deben tener un diámetro
mínimo de 18.5mm (0.73”).
Conectar el conectador en
el enchufe
NAVMAN
Unidad
central
47

3-6 Instalación del compás
Instalación física
Taladros de montaje
para tornillos
101 mm, (4")
71 mm, (2.8")
97 mm,
(3.8")
Conectador LT8
Emplazamiento
Montar el compás:
Al menos a 1 m (3pies) mínimo de
cualquier pieza de acero u hierro, por
ejemplo:
un casco de acero, cubierta, camarote
o refuerzo de acero en cascos de
ferro-cemento
Equipamiento de acero, por ejemplo,
motores, material de cocina
Sitios donde se estiban objetos de
acero, por ejemplo, cofre de ancla y
armarios
Al menos a 2 m (6 pies) de material con
imán y equipamiento que genera campos
magnéticos, como compás, batería,
Fibra de vidrio o casco de madera y camarote: montar el compás en el centro de movimiento
(para cascos planos, el centro de movimiento es normalmente cerca de popa):
Casco de acero, camarote no-acero:
montar compás a 1 m, (3 pies) por encima
del casco:
1 m (3p)
10 m (32.8 pies)
cableado de alta tensión, motor eléctrico,
transmisor radio u radar y antena.
Tan cerca como sea posible del centro
de movimiento del barco, para minimizar
los movimientos del compás cuando el
barco balancea o da bandazos. Si resulta
imposible montar el compás en este
centro, es normalmente mejor montarlo
tan bajo como sea posible.
Sobre un panel vertical que no tenga
vibración
La unidad es totalmente estanca sin
embargo, no debería sumegirse. El compás
no se ve afectado por otros metales como
acero inoxidable, cobre o latón. Seguir las
instrucciones de la guía de instalación (ver
párrafo 3-2-1).
Casco de acero y camarote de acero:
montar compás sobre un poste a 1 m
(3 pies) del casco y al menos a 1 m (3 pies)
del camarote:
Al menos a 1 m (3 pies)
1 m (3p)
48
NAVMAN
G-PILOT 3100 manual de instalación

Instalación
1 Elegir un emplazamiento adecuado para la unidad como descrito anteriormente.
2 Montar la unidad con los 3 tornillos provistos. Usar un nivel para asegurar que la unidad
está vertical (10°máximo).
Menos de
10° 10°
Menos de
10° 10°
3 Conectar el cable en la parte posterior de la unidad siguiendo las instrucciones (ver párrafo
3-2-2).
Unidad central
Taladros en el mamparo
deben tener un diámetro
mínimo de 18.5 mm
(0.73”).
Insertar el conectaror en el enchufe
Nota
Si mueve el compás respecto al giróscopo mientras está navegando, espere para que se
estabilice el rumbo.
G-PILOT 3100 manual de instalación
NAVMAN
49

3-7 Instalación del giróscopo
Instalación Física
101 mm, (4")
Taladros de montaje
para tornillos
71 mm, (2.8")
97 mm,
(3.8")
Conectador LT8
10 m (32.8 pies)
Emplazamiento
Montar el giróscopo tan cerca como sea posible del centro de movimiento del barco para minimizar
los movimientos del giróscopo cuando el barco se balancea y da bandazos.
Montar el giróscopo sobre un panel que no tenga vibración.
La unidad es totalmente estanca, sin embargo no debería sumergirse.
Seguir las instrucciones (ver párrafo 3-2-1).
El emplazamiento ideal es en el centro de movimientos (para cascos planos, el centro de
movimientos es normalmente cerca de popa).
50
NAVMAN
G-PILOT 3100 manual de instalación

Instalación
1 Elegir un emplazamiento adecuado para la unidad como descrito anteriormente.
2 Montar la unidad con los 3 tornillos provistos. Usar un nivel para asegurar que la unidad
está vertical (10°máximo).
Menos de
10° 10°
3 Conectar el cable en la parte posterior de la unidad siguiendo las instrucciones (ver párrafo
3-2-2).
Menos de
10° 10°
Taladros en el mamparo
Unidad central
deben tener un diámetro
mínimo de 18.5 mm
(0.73”).
Insertar el conectaror en el enchufe
Nota
Si mueve el giróscopo respecto al compás mientras está navegando, espere para que se
estabilice el rumbo.
G-PILOT 3100 manual de instalación
NAVMAN
51

3-8 Instalar la pantalla y otros instrumentos
Instalar la pantalla
1 Para la pantalla, elegir un emplazamiento
que sea:
Fácil de leer para el timonel.
Accesible por la parte posterior,
permitir un espacio mínimo de 50 mm
(2”) (ver esquema de montaje).
Parte posterior de la unidad protegida
de la humedad.
Seguir las instrucciones (ver párrafo 3-2-1).
2 La unidad se debe montar sobre un panel
horizontal de grosor inferior a 20 mm
(0.75”). Fijar la plantilla. Practicar un taladro de 50 mm (2”) en el agujero central
de la plantilla. Notar que la plantilla deja
un espacio para la tapa protectora de la
unidad.
3 Sacar la tuerca de fi jación de la parte
posterior de la unidad. Insertar el perno
dentro del taladro de montaje. Atornillar la
tuerca a mano.
Conexión de la pantalla
Unidad
central
Salida relé embrague, 8
NMEA 2, 7
NMEA en 1, 6
NMEA común, 5
NavBus -, Azul 4
NavBus +, Naranja 3
Tierra, Negro 2
12 V alimentación +, Rojo 1
Nota
Conectar los cables de alimentación (alambres rojo y negro) al terminal de los conectadores
8 vías 1 y 2 para asegurar que la pantalla y la unidad de control central tienen la misma
alimentación de baja intensidad.
Protección
conectador
Conectador 8-vías
Verde
Vista lateral del montaje de la pantalla
Grosor máximo
20 mm (0.75”)
Taladro de
fi jación
50 mm (2”)
Pantalla
Espacio mínimo de 50 mm (2”)
Seguir las instrucciones
Pantalla
Cable pantalla, taladro 6 mm (1/4”)
necesario en mamparo.
Amarillo (aislar, no cortar)
Blanco (aislar, no cortar)
(ver párrafo 3-2-2).
Alimentación baja intensidad
(ver párrafo 3-4-1)
Beepers externos opcionales
y luces para alarma externa.
Si los beepers y las luces
requieren más de 250 mA,
instalar un relé externo.
Tuerca de
fi jación
Cables
52
NAVMAN
G-PILOT 3100 manual de instalación

Conexión de instrumentos complementarios
Seguir las instrucciones (ver párrafo 3-2-2).
Pantallas G-PILOT
suplementarias
Otros
instrumentos de
la serie 3100
Un GPS, por ejemplo
El chartplotte Navman
TRACKER serie 5000
Pantalla
Unidades
3100
GPS
Unidad
central
Salida relé embrague, 8
NMEA 2, 7
NMEA en 1, 6
NMEA común, 5
NavBus -, Azul 4
NavBus +, Naranja 3
Tierra, Negro 2
12 V alimentación +, Rojo 1
Protección
conectador
Verde (desde una
sola pantalla)
NMEA
Entrada
& salida
VerdeVerde
Alimentación,
entrada NMEA
Embrague,
opcional (ver
párrafo 3-4-2)
NMEA Entrada
& salida
Salida GPS NMEA
GPS NMEA común
Alimentación baja
intensidad (ver
párrafo 3-4-1)
Beepers y luces (ver
página anterior)
Nota:
Referirse al manual de instalación de los instrumentos para más información sobre la
conexión.
En caso de añadir más de 3 unidades u otros instrumentos de la serie 3100, instalar
una fuente de alimentación de baja intensidad complementaria para los instrumentos
suplementarios (ver párrafo 3-4 o el manual de instalación de los instrumentos)
Las salidas de alarma externa (alambre verde) de instrumentos Navman serie 3100 y de
chartplotters serie 5000 se pueden interconectar para hacer funcionar los beepers y luces
externas.
En sistemas multi-instrumentos, se recomienda las cajas de conexión NavBus para
simplifi car la conexión eléctrica (ver Manual de Instalación y Funcionamiento NavBus).
G-PILOT 3100 manual de instalación
NAVMAN
53

4 Calibración en puerto
Proceder a la calibración en puerto:
Después de instalar un sistema G-PILOT 3100 (ver párrafo 3)
Después del cambio de una pieza o en caso de problema eventual
Después de la calibración en puerto, proceder a las pruebas en mar (ver párrafo 5 ).
4-1 Iniciar la calibración en puerto
1 Arrancar el G-PILOT 3100 (ver manual de
Funcionamiento del G-PILOT 3100). Si el
timón se mueve, apagar inmediatamente
(ver manual de Funcionamiento del G-PI-
LOT 3100) y buscar la conexión defectuosa.
Comprobar que la unidad indica AP3100 en
la línea inferior un par de segundos, luego
el indicativo de versión y, para terminar el
encabezado normal. Si intenta entrar AUTO
mientras la unidad de control o el compás
no han sido calibrados, el G-PILOT indicará
CAL ERROR.
2 En caso de utilización anterior del G-PILOT
3100, restablecer la calibración de usuario por
defecto:
i Ir a NVM RESET en el menú FACTORY
Tabla de datos de usuario (para grabar la información de calibración)
Menú VESSEL
Dato Valor del dato
VSL TYPE (Tipo Barco) . . . . . .. . . . . .
DRVE TYPE (Tipo Gobierno) . . . . . . . .
WIND TYPE (Viento) . . . . . . . . . . . . . . .
HDG TYPE (Demora) . . . . . . . . . . . . . . .
MAG VAR . . . . . . . . . . . . . .
Menú OPTIONS
Menú Valor del dato
DODGE ANG
TACK ANG (Angulo de virada). . . . . . . . . . . . . .
GYBE ANGLE (Angulo de trasluchada) . . . .
TACK DELY (intervalo para virar) . . . . . . .
TURN RATE (Ratio virada) . . . . . . . . . . . . .
(Angulo de esquiva) . . . . .
ADVERTENCIA
Hasta fi nalizar la calibración de la unidad de control (ver párrafo 4-2), no hay tope de timón. El
usuario debe asegurar que el timón no llegue a un tope de radio cuando usa el comando de
corrección por impulso de mandos (ver manual de Funcionamiento del G-PILOT 3100)
54
NAVMAN
(ver Manual de Funcionamiento del
G-PILOT 3100).
ii Pulsar > para activar la función.
iii Pulsar MENU para restablecer la
información.
iv Mantener AUTO para salir de los
menús.
3 Introducir los datos de usuario listados
en la tabla posterior (ver manual de
Funcionamiento del G-PILOT 3100 para
encontrar el signifi cado de cada dato y saber
como introducirlo). Introducir el valor de
usuario de cada dato al lado del título.
4 Después de la introducción del dato, mantener
AUTO para salir de los menús..
Menú ALARMS
Dato Valor del dato
CE ALARM (Error Alarma Rumbo) . . . . . . .
XTE ALARM (Error de Traza) . . . . . . . . . . .
WPT AKN (waypoint conocido) . . . . . . . . . . .
WIND ALARM (Alarma viento) . . . . . . . . . . .
(Velero únicamente)
BAT ALARM . . . . . . . . . . . . . .
CUR ALARM . . . . . . . . . . . . . .
Menú FACTORY(Fábrica)
Dato Valor del dato
BKL GROUP ( Grupo Retroiluminación) . . .
KEY BEEPS . . . . . . . . . . . . . .
NMEA2 DAT . . . . . . . . . . . . . .
G-PILOT 3100 manual de instalación

4-2 Calibración de la unidad de control
Este proceso une la unidad de control de timón al timón.
Nota
Para salir de la calibración, pulsar ESC
Si no mueve el timón como recomendado o si la unidad de control no funciona, entonces
el G-PILOT no puede fi nalizar la calibración. El G-PILOT indicará CALB FAIL. Pulsar ESC,
resolver el problema y repetir la calibración.
En modo operativo normal, el G-PILOT no girará el timón a más de 3ºdel tope.
RFU CAL
Ir a RFU CAL en el menú DEVICES
(ver manual de Funcionamiento del
G-PILOT 3100).
ENT
CENTRE
Girar el timón hasta que el
timón esté a la vía
ENT
MAX PORT
Girar el timón hasta el
tope lo que hace virar el
barco a babor
ENT
MAX STBD
Girar el timón hasta el
tope lo que hace virar el
barco a estribor
ENT
ANGLE 25
Cuando el timón llegue
al tope estribor, medir el
ángulo de timón desde la
vía (30° en este ejemplo).
Pulsar < o > para poner el ángulo
indicado al ángulo de timón medido
(30° en este ejemplo).
ANGLE 30
ENT
G-PILOT 3100 manual de instalación
30°
CENTRE
Girar el timón hasta que el
timón esté a la vía
ENT
STAND CLR
Asegurar que no haya obstrucción
en el viaje del timón entre sus
topes. El G-PILOT está a punto de
girar el timón.
ENT
TEST LIMS
El G-PILOT gira el timón a un tope, al
otro tope, luego vuelve a la vía.
Pulsar ESC para parar el timón en
cualquier momento.
ENT
Angulo de timón indicado.
PILOT
7°
ACPT CAL
Girar el timón de un tope a otro, y comprobar
que el ángulo indicado es correcto (7° en este
ejemplo). Para cancelar la calibración, pulsar ESC
ENT
CALB DONE
La unidad de control de timón está calibrada.
ENT
Fin de calibración.
NAVMAN
55

5 Pruebas en mar
Proceder a las pruebas en mar:
Después de proceder a la calibración en
puerto (ver párrafo 4).
Para comprobar el funcionamiento del
G-PILOT 3100.
Para las pruebas en mar, navegar hacía un área
despejada donde no haya barco ni obstrucción.
Idealmente, el mar debería estar en calma, la
velocidad del viento mínima y no debería haber
corriente.
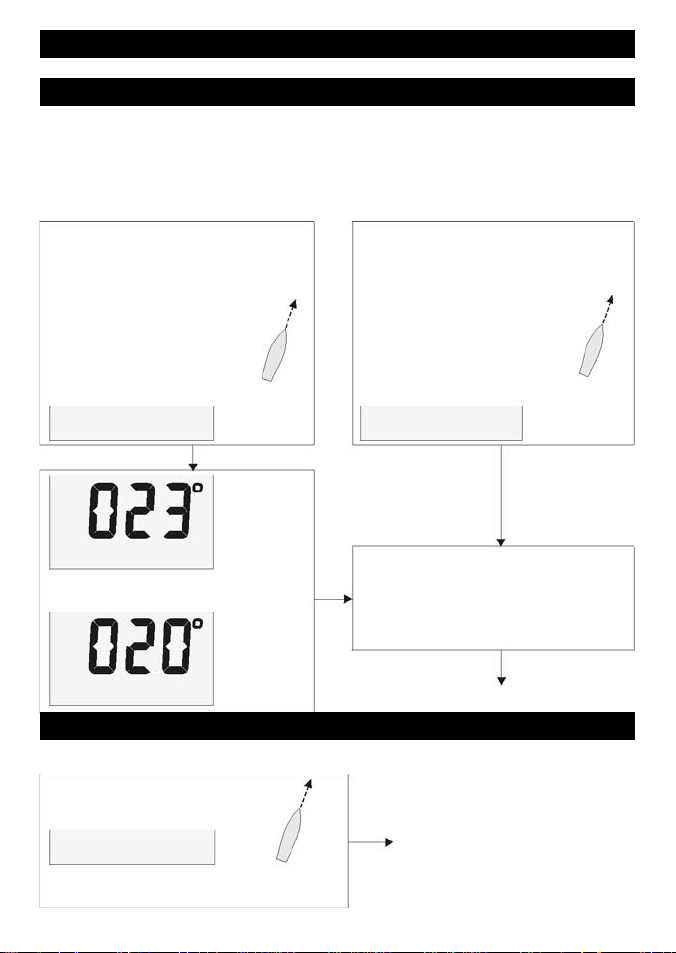
5-1 Calibración del compás
Nota
Para salir de la calibración, pulsar ESC.
Si el barco no gira como recomendado o si el compás no funciona, la calibración no se puede
fi nalizar, el G-PILOT indica CALB F AIL. Pulsar ESC, resolver el problema y repetir la calibración.
Interferencias locales en campos magnéticos pueden afectar al compás. Debe procederse a la
calibración lejos de estructuras metálicas importantes, por ejemplo, puertos deportivos, buques
grandes ;. es responsabilidad del usuario.
Asegurar que ambas fuentes tienen el mismo Norte como referencia (verdadero o magnético). Si
su compás magnético no ha sido calibrado, debe usar otra fuente para determinar el rumbo. Si
usa el compás del barco, asegurarse que la tablilla de desvíos se haya aplicado para comprobar
el compás del piloto automático.
Arrancar el G-PILOT 3100 (Ver Manual
de Funcionamiento del G-PILOT 3100).
Gobernar manualmente para navegar un
rumbo recto a poca velocidad.
CSU CAL
Ir a CSU CAL en el menú DEVICES (Ver
Manual de Funcionamiento del G-PILOT 3100)
TURN BOAT
Gobernar manualmente
para efectuar 2,5 vueltas,
girar continuadamente a
babor o a estribor.
Las vueltas deberían ser
suaves y contínuas en una
dirección. Cada vuelta se
aproximadamente. El G-PILOT detectará cuando
el barco haya efectuado 2,5 vueltas y procederá
automáticamente al próximo paso.
Este paso alinea el compás. Si el G-PILOT está
conectado a un GPS entonces pulsar MENU
dos veces para saltar este paso y acceptar la
calibración. Alinear el compás con el GPS (ver
párrafo 6-1-2).
Usar un compás exacto o un GPS externo para
encontrar el rumbo real del barco. Si usa un GPS
externo, navegar tan rápido como sea conveniente
para asegurarse que el rumbo es exacto.
56
efectuará en 1 a 2 minutos
Gobernar manualmente para navegar un
rumbo recto y asegurar que el rumbo del
barco no cambia durante este paso.
Por ejemplo, el
rumbo real es
20° y el rumbo
indicado es de
< ALIGN >
Pulsar < o > para poner el rumbo indicado
al valor del rumbo real (20° en este caso).
23°.
< ALIGN >
ENT
ACPT CAL
Gobernar manualmente a rumbos diferentes,
comprobando así que el rumbo indicado es
similar al rumbo real.
Para cancelar calibración, pulsar ESC.
ENT
CALB DONE
El compás ya está calibrado.
NAVMAN
ENT
Fin de calibración.
G-PILOT 3100 manual de instalación
6 Alinear el compás y el timón
El compás y el timón se pueden alinear por separado.
6-1 Alinear el compás
Esta operación alinea el compás del G-PILOT
3100 para que indique el rumbo correcto.
6-1-1 Alinear el compás del G-PILOT 3100 a
un compás de referencia
Usar un compás exacto o un GPS externo
para conocer el rumbo real del barco. Si
usa un GPS externo, navegar tan rápido
como sea conveniente para asegurar que
el rumbo es exacto.
Gobernar manualmente para seguir un
rumbo recto y asegurar que el rumbo
no cambia durante este proceso.
Ir a ALIGN HDG en el menú
DEVICES (Ver manual de
Funcionamiento del G-PILOT 3100)
El compás se puede alinear tanto a un compás
de referencia como a un GPS conectado al
G-PILOT 3100. Asegurar que no haya viento
u corriente cruzados.
6-1-2 Alinear el compás del G-PILOT 3100 a
un GPS conectado al G-PILOT
ALIGN HDG
ENT
Por ejemplo,
el rumbo
real es 20°
y el rumbo
< ALIGN >
Pulsar < o > para poner el rumbo indicado
al valor del rumbo real (20° en este caso).
indicado es
de 23°.
ENT
Navegar tan rápido como sea conveniente
para asegurar que el rumbo es exacto.
Gobernar manualmente para seguir
un rumbo recto y asegurar que
el rumbo no cambia durante este
proceso.
Ir a ALIGN HDG en el menú
DEVICES (Ver manual de
Funcionamiento del G-PILOT 3100)
ALIGN GPS
ENT
El G-PILOT 3100
memoriza el rumbo
GPS.
Gobernar manualmente a rumbos
diferentes, comprobando así que el rumbo
indicado es similar al rumbo real.
< ALIGN >
Fin de calibración.
6-2 Alinear el timón
Esta operación programa el timón para navegar un rumbo recto. Asegurar que no haya viento u
corriente cruzados.
Gobernar manualmente para
seguir un rumbo recto a una
velocidad de crucero normal.
CENTR RFU
Ir a CENTR RFU en el menú DEVICES (Ver
manual de Funcionamiento del G-PILOT 3100)
G-PILOT 3100 manual de instalación
NAVMAN
El G-PILOT 3100 memoriza la
ENT
posición del timón y establece el
ángulo de timón a cero.
Fin de calibración.
57

Apéndice A – Especifi caciones
Eléctrico
Alimentación de alta intensidad10.5 a
16.5 V DC, 20 A máximo
Alimentación baja intensidad10.5 a 16.5
V DC:
Unidad central: 80 mA.
Cada unidad, 30
mA sin retroiluminación, 110 mA con
retroiluminación total.
Instrumentos opcionales
complementarios: referirse al manual
de funcionamiento del instrumento.
Interfaces
Conexión NavBus a otros instrumentos.
Salidas NMEA 0183: HDG, HDT, RSA;
inputs APA, APB, BOD, BWC, MWD,
MWV, RMA, RMB, RMC, VHW, VTG,
XTE
Puertos NMEA 0183:
NMEA 1: Entrada
NMEA 2: se puede programar para ser
entrada o salida
Estandares de Conformidad
Conformidad EMC
USA (FCC): Part 15 Class B.
Europa (CE): EN50081-1, EN50082-1
Nueva Zelanda y Australia (C Tick):
Entorno:
Compás, giróscopo, unidad de control
de timón: Totalmente estanco.
Pantalla: IP66 desde la parte frontal si
montada correctamente.
Unidad central: necesita un entorno
fresco, seco y limpio.
AS-NZS 3548.
Conexiones bloque terminal de unidad
central:
Terminal Señal
1 Positivo alimentación alta intensidad,
10.5 a 16.5 V DC, 20 A máximo
2 Negativo alimentación alta tensión
3 Negativo salida mecanismo de piloto
4 Positivo salida mecanismo de piloto
Conexiones conectador Unidad central:
Terminal Señal
1 Positivo alimentación baja
intensidad, 10.5 a 16.5 V DC, 80
mA máximo
2 Alimentación baja intensidad común
3 NavBus +
4 NavBus 5 NMEA común
6 NMEA en 1
7 NMEA en 2
8 Salida relé embrague mecanismo
gobierno, conectado a tierra para
activar relé, 30 V DC, 300 mA
máximo
Alambres cable alimentación/información
unidad:
Alambre Señal
Rojo Positivo, 10.5 a 16.5 V DC, 30 mA
sin retroiluminación, 110 mA con
retroiluminación total
Negro Negativo
Naranja NavBus +
Azul NavBus Amarillo Uso fábrica (aislar, no cortar)
Blanco Uso fábrica (aislar, no cortar)
Verde Alarma externa, conectado a
tierra, 30 V DC y 250 mA max.
Apéndice B - Alarma y mensajes de advertencia
Pantalla
Alarma
BAT ALARM Voltaje batería inferior al valor mínimo
CAL ERROR
CCH ERROR La corriente de embrague es
CE ALARM El error de rumbo sobrepasa el valor
58
Causa del mensaje Recomendaciones Notas
establecido por el usuario
La unidad de control de timón o
el compás del G-PILOT no están
calibrados.
demasiado alta
máximo establecido por el usuario
NAVMAN
Comprobar baterías
Desactivar G-PILOT si el
voltaje es demasiado bajo
Calibrar ambas unidades
(ver párrafos 5-2 and 6-1)
Comprobar conexión de
embrague
Gobernar el barco a rumbo
manualmente
G-PILOT 3100 manual de instalación
a
a
a s
a

CSU
ERROR
CUR
ALARM
DRV
ERROR
Voltaje batería inferior al valor
mínimo establecido por el
usuario
La corriente motor sobrepasa
el valor máximo establecido por
el usuario
Ángulo de timón no cambia
cuando el mecanismo de timón
trabaja
GPS
ERROR
GSU
ERROR
MCU
ERROR
NAV
ERROR
NEXT
WPT?
GPS ha dejado de enviar
información a la unidad central
Giróscopo no envía información
a la unidad central
La unidad central no envía
información a la pantalla
GPS no navega a un waypoint
cuando activa el G-PILOT
El barco ha llegado al waypoint
(en Modo GPS y WPT AKN
está activo)
NO
DATA
O G-PILOT no recibe información
G-PILOT no recibe información
GPS en Modo GPS
de instrumento de viento en
Modo Viento
NVM
ERROR
PHA
ERROR
RFU
ERROR
La memoria de la unidad
central ha sido dañada
El timón gira en sentido contrario
a la información de timón
La unidad de control de
timón ha dejado de enviar
información a la unidad
ROUTE
END
TRK
ERROR
TAK
ERROR
WND
ALARM
WND
ERROR
principal
El barco ha llegado al fi nal de
una ruta GPS
El G-PILOT ha cambiado a
Modo GPS pero el barco se ha
desviado demasiado
En Modo Wind (Viento), intente
virar en sentido contrario o
dejará el barco sin viento
El ángulo ha cambiado por
valor superior al valor de
alarma
El instrumento de viento ha
dejado de enviar información a
la unidad principal
XTE
ALARM
El XTE ha sobrepasado el
valor máximo establecido por
el usuario
G-PILOT 3100 manual de instalación
Comprobar que el compás esté
conectado a la unidad central; Revisar
el compás
Comprobar que el mecanismo de piloto
no esté trabado
Incrementar el valor de alarma
Comprobar que la unidad esté en
marcha Comprobar que RFU esté
conectado al timón. Verifi car los fusibles
al interior del terminal de la unidad
central Verifi car el funcionamiento del
mecanismo de piloto
Comprobar el funcionamiento del GPS
Comprobar la conexión GPS
Verifi car que el giróscopo esté conectado a
la unidad central; Revisar el giróscopo
Verifi car que la pantalla esté conectada
a la unidad central
Revisar la unidad central o la pantalla
Iniciar navegación GPS a un waypoint o
en una ruta
Pulsar cualquier tecla para cancelar la
alarma. Luego pulsar ENT para empezar
a navegar al siguiente waypoint o pulsar
ESC para volver a Modo STBY
Comprobar el funcionamiento del GPS
Comprobar la conexión GPS
Comprobar el funcionamiento del
instrumento de viento
Comprobar la conexión del instrumento
de viento
Revisar la unidad central a s
Comprobar la unidad central de timón
Realizar una calibración del timón
Comprobar que la unidad de control
de timón está conectada a la unidad
principal. Revisar la unidad de control
de timón
Pulsar ESC para cambiar a STBY
o pulsar ENT para cambiar a Modo
compás, navegar al rumbo actual
Pulsar ESC para volver a STBY o pulsar
ENT para que el G-PILOT gobierne el
barco al rumbo correcto.
Cambiar ángulo de viento m
Cambiar SWA
Cambiar a Modo Compás
Comprobar funcionamiento del
instrumento de viento
Comprobar conexión del instrumento
de viento
Gobernar el barco a rumbo manualmente a
NAVMAN
a s
a s
a s
a c s
a s
a s
m
m
m
a s
a s
a
a c s
59

Notas a La alarma dispara los beepers interno y externo (opcional); pulsar cualquier
tecla para acallar la alarma, luego pulsar ESC para cancelar el mensaje de
alarma
c El G-PILOT 3100 cambia a Modo Compás
m El Modo del G-PILOT 3100 no cambia
s El G-PILOT 3100 cambia a STBY
Apéndice C – Problema & Soluciones
Esta guía supone que el usuario haya leído y
entendido este manual.
Muy a menudo es posible resolver ciertas
difi cultades sin tener que enviar la unidad al
fabricante para repararla. Por favor leer esta
sección detenidamente antes de contactar con
el distribuidor Navman
No existen piezas de recambio.Un equipo
técnico específi co se requiere para asegurar
que la unidad se ha montado adecuadamente.
Las reparaciones solo se efectuarán en centros
autorizados por Navman NZ Limited. Los
usuarios efectuando reparaciones invalidarán la
garantía. Puede encontrar más información en
nuestra página Internet:www.navman.com.
1 la unidad no arranca:
a fusible quemado o disyuntor
desconectado
b voltaje batería fuera de la escala 10,5
a 16,5 V DC.
c cable de alimentación/información
dañado
2 El G-PILOT 3100 hace demasiadas
correcciones de rumbo:
El valor de respuesta es
demasiado bajo (ver el Manual de
Funcionamiento del G-PILOT 3100).
3 Al navegar en rumbo recto, el barco se
desvía del rumbo:
a el barco no debería derivar de
banda a banda del rumbo cuando
el gobierno del G-PILOT 3100 está
optimizado.
b Cambiar a un perfi l más adecuado a la
velocidad del barco y las condiciones
de la mar (ver el Manual de
Funcionamiento del G-PILOT 3100).
c si el barco se desvía demasiado
del rumbo, ajustar respuesta, ratio,
Alinear corrección, sensibilidad GPS
(sí el G-PILOT está en Modo GPS) o
sensibilidad viento (sí el G-PILOT está
en Modo Viento) (ver el Manual de
Funcionamiento del G-PILOT 3100).
60
4 Al navegar en rumbo recto, el barco se
desvía del rumbo:
a Cambiar a un perfi l más adecuado a la
velocidad del barco y las condiciones
de la mar (ver el Manual de
Funcionamiento del G-PILOT 3100).
b Ajustar respuesta, ratio, indicador
de corrección, sensibilidad GPS (sí
el G-PILOT está en Modo GPS) o
sensibilidad viento (sí el G-PILOT está
en Modo Viento) (ver el Manual de
Funcionamiento del G-PILOT 3100).
5 Al efectuar un cambio de rumbo
importante, el barco no sigue el rumbo
esperado:
a Cambiar a un perfi l adecuado para la
velocidad del barco y las condiciones
de la mar (ver el Manual de
Funcionamiento del G-PILOT 3100).
b Comprobar que el ratio de bordo no
está demasiado bajo (ir a TURN RATE
en el menú OPTIONS, (ver Manual de
Funcionamiento G-PILOT 3100).
c Ajustar la corrección del timón (ver
Manual de Funcionamiento G-PILOT
3100).
6 el barco vira de forma demasiado
brusca:
Reducir el ratio de bordo (ir a TURN
RATE en el menú OPTIONS, (ver
Manual de Funcionamiento G-PILOT
3100).
7 la palabra SIMULATE parpadea en
pantalla, los valores indicados no son
los correctos:
La unidad está en Modo Simulación
(ver Manual de Funcionamiento
G-PILOT 3100).
8 la pantalla está borrosa:
a humedad ha entrado por el
respiradero en la parta posterior
de la unidad. Airear el barco o
hacer funcionar la unidad con
retroiluminación completa.
b agua ha entrada en el respiradero.
Devolver la unidad para revisión.
NAVMAN
G-PILOT 3100 manual de instalación
Appendix D - How to contact us www.navman.com.
NORTH AMERICA
Navman USA Inc.
30 Sudbury Rd, Acton, MA 01720.
Toll Free: +1 866 628 6261
Fax: +1 978 897 8264
e-mail: sales@navmanusa.com
web:www.navman.com
AUSTRALIA
Navman Australia Pty. Limited
Unit 2 / 5-13 Parsons St.
Rozelle, NSW 2039, Australia.
Ph: +61 2 9818 8382
Fax: +61 2 9818 8386
e-mail: sales@navman.com.au
web: www.navman.com
OCEANIA
New Zealand
Absolute Marine Ltd.
Unit B, 138 Harris Road,
East Tamaki, Auckland.
Ph: +64 9 273 9273
Fax: +64 9 273 9099
e-mail: navman@absolutemarine.co.nz
Papua New Guinea
Lohberger Engineering,
Lawes Road, Konedobu.
PO Box 810, Port Moresby.
Ph: +675 321 2122
Fax: +675 321 2704
e-mail: loheng@online.net.pg
web: www.lohberger.com.pg
SOUTH AMERICA
Argentina
Costanera Uno S.A.
Av Pte Ramón S. Castillo y Calle 13
Zip 1425 Buenos Aires, Argentina.
Ph: +54 11 4312 4545
Fax +54 11 4312 5258
e-mail:
purchase@costanerauno.com.ar
web: www.costanerauno.ar
Brazil
Equinautic Com Imp Exp de Equip
Nauticos Ltda.
Rua Ernesto Paiva, 139
Clube dos Jangadeiros
Porto Alegre - RS - Brasil
CEP: 91900-200.
Ph: +55 51 3268 6675
+55 51 3269 2975
Fax: +55 51 3268 1034
e-mail:
equinautic@equinautic.com.br
web: www.equinautic.com.br
Realmarine
Estrada do Joa 3862,
Barra da Tijuca, Rio de Janeiro,
Brazil. CEP: 22611-020.
Ph: +55 21 2483 9700
Fax: +55 21 2495 6823
e-mail: tito@realmarine.com.br
web: www.realmarine.com.br
Chile
Equimar
Manuel Rodrigurez 27
Santiago, Chile.
Ph: +56 2 698 0055
Fax +56 2 698 3765
e-mail: mmontecinos@equimar.cl
Mera Vennik
Colon 1148, Talcahuano,
4262798, Chile.
Ph: +56 41 541 752
Fax +56 41 543 489
e-mail: meravennik@entel.chile.net
90
CENTRAL AMERICA
Mexico
Mercury Marine de Mexico
Anastacio Bustamente #76
Interior 6 Colonia Francisco Zarabia,
Zapapan, Jalisco, C.P. 45236 Mexico.
Ph: +52 33 3283 1030
Fax: +52 33 3283 1034
web: www.equinautic.com.br
ASIA
China
Peaceful Marine Electronics Co. Ltd.
Guangzhou, Hong Kong, Dalian,
Qingdao, Shanghai
1701 Yanjiang Building
195 Yan Jiang Zhong Rd. 510115
Guangzhou, China.
Ph: +86 20 3869 8839
Fax: +86 20 3869 8780
e-mail: sales@peaceful-marine.com
web: www.peaceful-marine.com
India
Access India Overseas Pvt. Ltd.
A-98, Sector 21,
Noida - 201 301, India.
Ph: +91 120 244 2697
TeleFax: +91 120 253 7881
Mobile: +91 98115 04557
e-mail: vkapil@del3.vsnl.net.in
Esmario Export Enterprises
Block No. F-1, 3rd Floor, Surya Towers
Sardar Patel Rd, Secunderbad 500 003.
Ph: +91 40 2784 5163
Fax: +91 40 2784 0595
e-mail: gjfeee@hd1.vsnl.net.in
web: www.esmario.com
Indonesia
Polytech Nusantara,
Graha Paramita 2nd Floor,
Jln Denpasar Raya Blok D2
Kav 8 Kuningan, Jakarta 12940.
Ph: +62 21 252 3249
Fax: +62 21 252 3250
e-mail: polytech@transavia.co.id
Korea
Kumhomarine Technology Co. Ltd.
#604-842, 2F, 1118-15, Janglim1-Dong,
Saha-Gu, Busan, Korea.
Ph: +82 51 293 8589
Fax: +82 51 265 8984
e-mail: info@kumhomarine.com
web: www.kumhomarine.com
Maldives
Maizan Electronics Pte. Ltd.
Henveyru, 08 Sosunmagu.
Male', Maldives.
Mobile: +960 78 24 44
Ph: +960 32 32 11
Fax: +960 32 57 07
e-mail: ahmed@maizan.com.mv
Singapore, Malaysia, Brunei,
Indonesia and Phillipines
RIQ PTE Ltd.
Blk 3007, 81 Ubi Road 1, #02-440,
Singapore 408701.
Ph: +65 6741 3723
Fax : +65 6741 3746
e-mail: riq@postone.com
Taiwan
Seafirst International Corporation
No. 281, Hou-An Road, Chien-Chen
Dist. Kaohsiung, Taiwan R.O.C.
Ph: +886 7 831 2688
Fax: +886 7 831 5001
e-mail: seafirst@seed.net.tw
web: www.seafirst.com.tw
NAVMAN
Thailand
Thong Electronics (Thailand) Co. Ltd.
923/588 Ta Prong Road, Mahachai,
Muang, Samutsakhon 74000, Thailand.
Ph: +66 34 411 919
Fax: +66 34 422 919
e-mail: sales@thongelectronics.com
admins@thongelectronics.com
web: www.thongelectronics.com
Vietnam
Haidang Co. Ltd.
1763 Le Hong Phong St. Ward 12
District 10, Ho Chi Minh City.
Ph: +84 8 863 2159
Fax: +84 8 863 2124
e-mail: sales@haidangvn.com
web: www.haidangvn.com
MIDDLE EAST
Lebanon and Syria
Balco Stores
Balco Building, Moutran Street,
Tripoli (via Beirut). - Lebanon
P.O. Box: 622.
Ph: +961 6 624 512
Fax: +961 6 628 211
e-mail: balco@cyberia.net.lb
United Arab Emirates
Kuwait, Oman, Iran, Saudi
Arabia, Bahrain & Qatar
Abdullah Moh’d Ibrahim Trading, opp
Creak Rd. Baniyas Road, Dubai.
Ph: +971 4 229 1195
Fax: +971 4 229 1198
e-mail: sales@amitdubai.com
AFRICA
South Africa
Pertec (Pty) Ltd (Coastal Division)
16 Paarden Eiland Road.
Paarden Eiland, 7405
PO Box 527,
Paarden Eiland, 7420
Cape Town, South Africa.
Ph: +27 21 508 4707
Fax: +27 21 508 4888
e-mail: info@kfa.co.za
web: www.pertec.co.za
EUROPE
France, Belgium and Switzerland
Plastimo SA
15, rue Ingénieur Verrière,
BP435,
56325 Lorient Cedex.
Ph: +33 2 97 87 36 36
Fax: +33 2 97 87 36 49
e-mail: plastimo@plastimo.fr
web: www.plastimo.fr
Germany
Navimo Deutschland
15, rue Ingénieur Verrière
BP435- 56325 Lorient Cedex.
Ph: +49 6105 92 10 09
+49 6105 92 10 10
+49 6105 92 10 12
Fax: +49 6105 92 10 11
e-mail:
plastimo.international@plastimo.fr
website: www.plastimo.de
Italy
Navimo Italia
Nuova Rade spa, Via del Pontasso 5
16015 Casella Scrivia (GE).
Ph: +39 1096 80162
Fax: +39 1096 80150
e-mail: info@nuovarade.com
web: www.plastimo.it
Holland
Navimo Holland
Industrieweg 4,
2871 JE Schoonhoven.
Ph: +31 182 320 522
Fax: +31 182 320 519
e-mail: info@plastimo.nl
web: www.plastimo.nl
United Kingdom
Navimo UK
Hamilton Business Park
Bailey Road, Hedge End
Southhampton, Hants S030 2HE.
Ph: +44 01489 778 850
Fax: +44 0870 751 1950
e-mail: sales@plastimo.co.uk
web: www.plastimo.co.uk
Sweden, Denmark, Finland and
Norway
Navimo Nordic
Lundenvägen 2,
473 21 Henån.
Ph: +46 304 360 60
Fax: +46 304 307 43
e-mail: info@plastimo.se
web: www.plastimo.se
Spain
Navimo España
Avenida Narcís Monturiol, 17
08339 Vilassar de Dalt,
Barcelona.
Ph: +34 93 750 75 04
Fax: +34 93 750 75 34
e-mail: plastimo@plastimo.es
web: www.plastimo.es
Portugal
Navimo Portugal
Avenida de India N°40
1300-299 Lisbon.
Ph: +351 21 362 04 57
Fax: +351 21 362 29 08
e-mail: plastimo@siroco-nautica.pt
web: www.plastimo.com
Other countries in Europe
Plastimo International
15, rue Ingénieur Verrière BP435
56325 Lorient Cedex, France.
Ph: +33 2 97 87 36 59
Fax: +33 2 97 87 36 29
e-mail:
plastimo.international@plastimo.fr
web: www.plastimo.com
REST OF WORLD/
MANUFACTURERS
Navman NZ Limited
13-17 Kawana St.
Northcote.
P.O. Box 68 155,
Newton,
Auckland,
New Zealand.
Ph: +64 9 481 0500
Fax: +64 9 481 0590
e-mail: marine.sales@navman.com
web: www.navman.com
G-PILOT 3100 manual de instalação

.

Made in New Zealand
MN000212E
G-PILOT 3100 Installation
Lon 174° 44.535'E
Lat 36° 48.404'S
NAVMAN
 Loading...
Loading...