


G-PILOT 3100
AUTOPILOT
Operation Manual
Français............2
Deutsch ..........34
Nederlands.....64
www.navman.com
NAV MAN

Inhalt
Wichtig..................................................................................................35
1 Einführung ........................................................................................36
1-1 Eine typische Installation..........................................................................36
2 Basis-Bedienung..............................................................................37
2-1 Ein- und Ausschalten...............................................................................37
2-2 Tastenfunktionen......................................................................................37
2-3 Mit dem G-PILOT 3100 arbeiten..............................................................37
2-3-1 Den G-PILOT 3100 starten...............................................................37
2-3-2 Hinweise zum Autopilot-Betrieb........................................................37
2-3-3 Umschalten im Notfall.......................................................................38
2-3-4 Den G-PILOT 3100 ausschalten.......................................................38
2-4 Steuermodus wählen ...............................................................................38
2-5 STBY (Bereit), Auto- und Hand-Steuerung..............................................39
2-6 Tasten-Steuerung.....................................................................................40
3 Betriebseinstellungen......................................................................41
3-1 Display- und Tasten-Beleuchtung ............................................................41
3-2 Kurs-Anzeige............................................................................................41
3-3 Daten-Balkengrafi k...................................................................................41
3-4 Daten-Info-Anzeige..................................................................................41
3-5 Alarme......................................................................................................42
3-6 Simulations-Modus...................................................................................42
3-7 Mit den Menus arbeiten............................................................................42
3-8 Tasten-Befehlsfolgen................................................................................45
4 Kompass-Modus...............................................................................46
4-1 Kompass-Steuerungs-Parameter.............................................................46
4-2 Autopilot-Betrieb im Kompass-Modus ein- und ausschalten....................46
4-3 Kursänderung im Kompass-Modus..........................................................47
4-4 Ausweichbefehl im Kompass-Modus.......................................................48
4-5 Automatisches Kreuzen im Kompass-Modus...........................................48
5 GPS-Steuermodus............................................................................49
5-1 GPS-Navigations-Parameter ...................................................................49
5-2 Den G-PILOT 3100 auf GPS-Modus schalten.........................................50
5-3 Ausweichen im GPS-Modus.....................................................................51
6 Windsteuer-Modus...........................................................................52
6-1 Windsteuer-Parameter.............................................................................52
6-2 Den G-PILOT 3100 auf Wind-Modus schalten.........................................54
6-3 Windwinkel (SWA) im Wind-Modus ändern.............................................55
6-4 Ausweichen im Wind-Modus....................................................................56
6-5 Automatisches Kreuzen im Wind-Modus.................................................56
7 Steuer-Eigenschaften optimieren...................................................58
7-1 Die Steuer-Parameter..............................................................................58
7-2 Steuer-Profi le...........................................................................................58
7-3 Steuer-Parameter ändern ........................................................................59
34
NAVMAN
G-PILOT 3100 Installations- und Bedienungsanleitung
Anhang A - Spezifi kationen................................................................61
Anhang B - Alarm- und Warn-Anzeigen ............................................61
Anhang C - Fehlersuche.....................................................................63
Anhang D – Kontakt-Adressen...........................................................94
Wichtig
Der Eigentümer ist allein verantwortlich für den korrekten Einbau, die ordnungsgemäße
Anwendung und die betriebliche Sicherheit. Der Benutzer ist allein verantwortlich für eine
sichere Bootsführung. Jedes Instrument ist nur ein Hilfsmittel.
Die richtige Auswahl der Komponenten und ihrer Einbauorte ist für ein Autopilot-System von
entscheidender Bedeutung. Fehler hierbei führen zu unbefriedigenden Steuer-Ergebnissen oder
sogar zu vollständigen Ausfällen. Für die Einbauplanung sollte ein Navman-Fachmann hinzu
gezogen werden. Bohrungen oder Ausschnitte am Bootskörper dürfen nicht die Bootsstruktur
schwächen. Im Zweifelsfall einen Bootsbau-Fachmann hinzu ziehen.
Warnhinweise zur Nutzung des G-PILOT 3100:
Der G-PILOT 3100 soll bei längeren Seereisen den Rudergänger ersetzen, auf keinen Fall
jedoch ausschließlich als Hauptsteuerung dienen.
Der G-PILOT 3100 darf nicht bei extremer Wetterlage, in Gefahrengebieten, in Landnähe,
im Revier und in direkter Nähe anderer Verkehrsteilnehmer benutzt werden.
Bei normaler Wetterlage kann der G-PILOT 3100 ein Boot über längere Zeiträume besser
auf Kurs halten als ein Rudergänger. Unter widrigen Seebedingungen und in der Revierfahrt
sollte jedoch per Hand gesteuert werden.
Auch wenn der G-PILOT 3100 das Boot steuert, muss immer jemand die Steuerung und den
Kurs überwachen. Er muss jederzeit in der Lage sein, unverzüglich die Steuerung manuell
zu übernehmen.
Einfl üsse von außen, eine nicht sorgfältig ausgeführte Installation, oder Defekte an Bauteilen
können die Funktionen beeinfl ussen und zum Ausfall der Steuerung führen.
NAVMAN NZ L TD IST NICHT VERANTWORTLICH FÜR SCHÄDEN UND UNFÄLLE, DIE DURCH
MÖGLICHE FEHLFUNKTIONEN DIESES PRODUKTES ENTSTEHEN, SOWIE AUCH NICHT
FÜR GESETZESWIDRIGE ANWENDUNGEN.
Navman entwickelt kontinuierlich seine Produkte weiter und behält sich daher das Recht vor,
ohne Vorankündigungen, Veränderungen durchzuführen. Für Fragen steht das umfangreiche
Fachhändler-Servicenetz zur Verfügung.
Nationalsprache: Diese Erklärung, Bedienungs-Anleitungen und andere Informationen, die im
Zusammenhang mit dem Produkt stehen, sind eventuell in eine andere oder aus einer anderen
Sprache übersetzt worden. Sollten dabei irgendwelche Differenzen zwischen den Versionen
bestehen, gilt die englische Version als offi zielle Originaldokumentation.
Copyright© 2003 Navman NZ Limited, New Zealand, alle Rechte vorbehalten. Navman ist ein
registriertes Handelszeichen von Navman NZ Limited.
G-PILOT 3100 Installations- und Bedienungsanleitung
NAVMAN
35
1 Einführung
Der G-PILOT 3100 hat drei Steuer-Modi:
Kompass: Das Boot steuert einen
vorgewählten Kompass-Kurs.
Wind: Das Boot steuert einen
vorgewählten Windwinkel-Kurs (erfordert
den Anschluss eines Wind-Instrumentes,
z.B. ein Navman WIND 3100).
GPS: Das Boot steuert ein vorgegebenes
Ziel an (erfordert den Anschluss eines
GPS-Systems, wie z.B. ein Navman
TRACKER Kartenplotter).
Der G-PILOT 3100 hat drei Betriebs-Funktionen:
STBY (Bereit): Es werden nur Daten
gezeigt. Das Boot muss manuell
gesteuert werden.
AUTO: Der G-PILOT 3100 steuert das
Boot automatisch.
HAND STEER: Der G-PILOT 3100 zeigt
Informationen nach denen ein Kurs
manuell gesteuert werden kann.
Die Anlage wird von der Boots-SpannungsVersorgung gespeist.
Der G-PILOT 3100 ist Teil der Navman
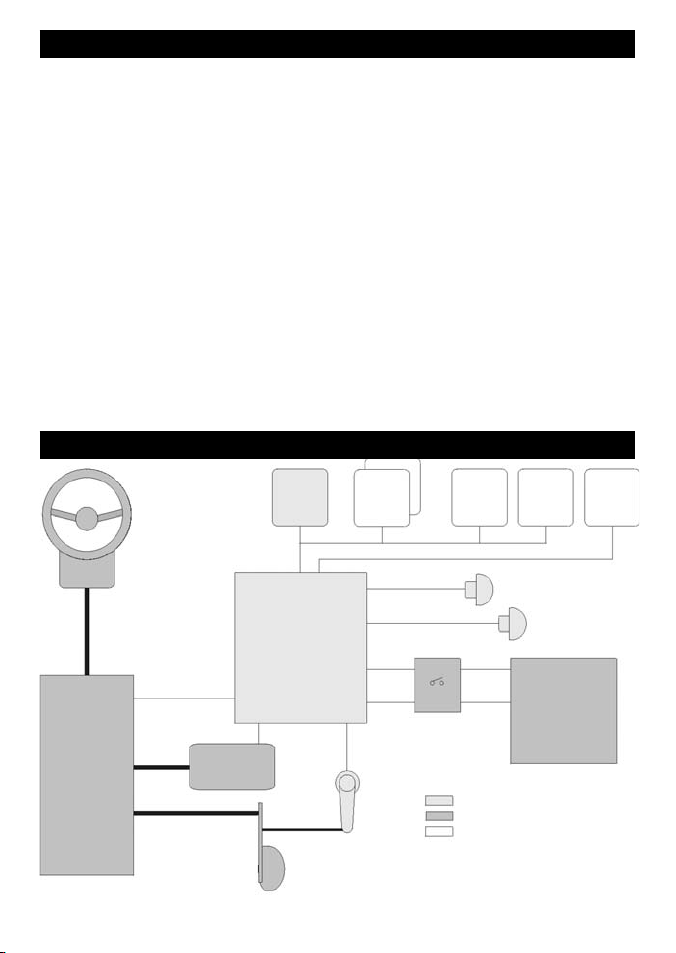
1-1 Eine typische Installation
Bedien-
Gerät
Steuerrad
NavBus
Zentral-Einheit
Instrumenten-Familie für Boote. Diese besteht
aus Gebern und Anzeigen für Geschwindigkeit,
Tiefe, Wind sowie aus Tochter-Geräten.
Sie können zu einem System verbunden
werden, mit integrierter Daten-Vernetzung.
Die Steuereigenschaften des G-PILOT 3100
werden durch Anschluss eines Logs und GPSSystems verbessert.
Dieses Handbuch nutzen
Um die Möglichkeiten des G-PILOT 3100
optimal zu nutzen, sollte dieses Handbuch
sorgfältig gelesen werden.
Dieses Buch beschreibt die unterschiedlichen
Nutzungs-Möglichkeiten des G-PILOT 3100.
Informationen zur Installation und zur BasisInbetriebnahme sind im Installations-Handbuch
des G-PILOT 3100 enthalten.
Reinigung und Wartung
Die Teile des G-PILOT 3100 mit feuchtem
Lappen und milden Reinigungsmitteln säubern.
Keine Scheuermittel, Benzin oder sonstige
Lösungsmittel verwenden. Bauteile nicht mit
Farbe versehen, außer die Kabel.
Weitere
Bedien-
Geräte
3100
SPEED
3100
Compass
Gyro
WIND
Optionale Instrumente
GPS
NMEA
Ruderwinkel-
Geber
36
Kupplung
(optional)
SteuerAntrieb
Ruder
Versorgung
Elektronik
Versorgung
LeistungsSchalter oder
Schalter plus
Schutzschalter
Unterscheidung
Ruderwinkel-
Geber
Hinweis: Dieses ist nur ein InstallationsBeispiel. Die tatsächliche Lieferung kann
hiervon abweichen. Den gelieferten Antrieben
sind separate Beschreibungen beigefügt.
NAVMAN
G-PILOT 3100 Installations- und Bedienungsanleitung
G-PILOT 3100 - Standard-Teile
Weitere erforderliche Bauteile
Optionale Bauteile
Antrieb
12 V DC
SpannungsVersorgung
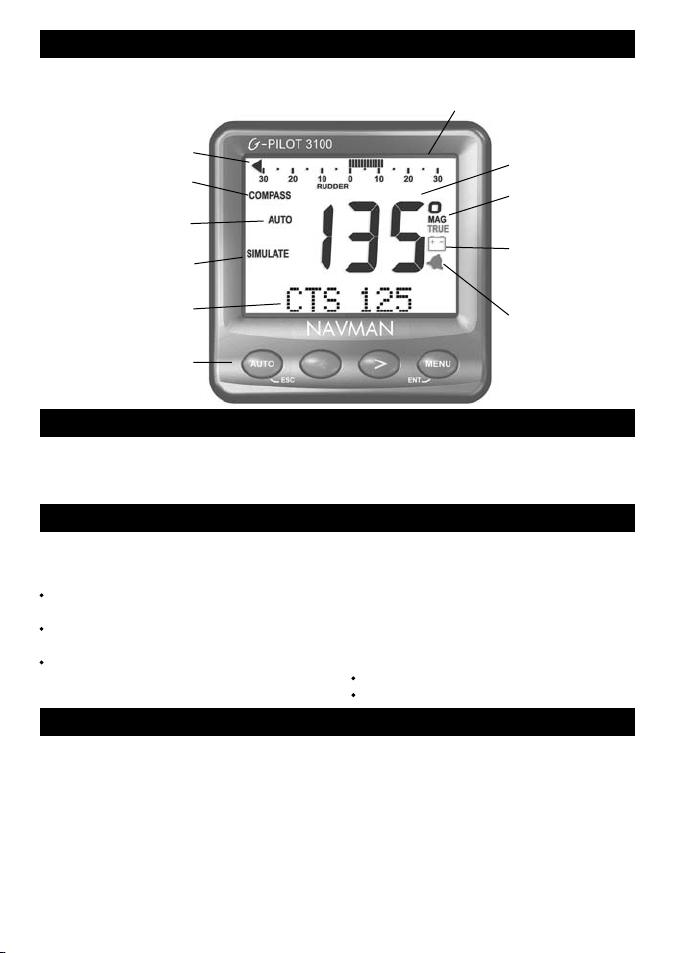
2 Basis-Bedienung
Das Bediengerät
Balken-Grafi k
(Ruderwinkel oder
Kursfehler, siehe
Abschn. 3-3)
Steuer-Modus
(siehe Abschn. 2-4)
Betriebs-Art
(siehe Abschn. 2-5)
Hinweis Simulation
(siehe Abschn. 3-6)
Daten-Information
(siehe Abschn. 3-4)
Vier Tasten
(siehe Abschn. 2-2)
Display und Tasten sind
hintergrund-beleuchtet
(siehe Abschn. 3-1)
2-1 Ein- und Ausschalten
Das Gerät mittels separatem Schalter ein- und
ausschalten. Die Anlage hat keinen eigenen
Netzschalter. Beim Ausschalten werden vom
Benutzer gesetzte Eingaben gespeichert.
Erscheint blinkend der Hinweis SIMULATE,
ist der Simulations-Modus aktiviert. (siehe
Abschn. 3-6).
2-2 Tasten-Funktionen
Das Bediengerät hat vier T asten, bezeichnet mit
AUTO (ESC)
In diesem Handbuch bedeuten:
Drücken, - die Taste für weniger als eine
Sekunde drücken.
Halten, - die Taste gedrückt halten, bis
sich eine Anzeige ändert.
Eine Taste + eine andere Taste
drücken, - beide gemeinsam drücken.
Das Bediengerät antwortet bei korrekten
< > und MENU (ENT).
Tasten-Befehl mit einem hohen und bei nicht
angenommenen Befehl mit einem tiefen Ton.
Informationen zur Tasten-Nutzung, siehe
Abschn. 3-7 und 3-8.
Tasten-Sperre
Bei gesperrter Tastenfunktion nimmt der
G-PILOT keine Befehle an. Zum Ein- und
Ausschalten der Sperr-Funktion:
AUTO + MENU drücken.
ENT drücken.
2-3 Mit dem G-PILOT 3100 arbeiten
2-3-1 Den G-PILOT 3100 starten
1 Die Spannungs-Versorgung einschalten
(siehe Abschn. 2-1). Sind weitere
Instrumente angeschlossen, auch diese
einschalten.
2 Falls erforderlich, die Display-
Beleuchtung passend einstellen (siehe
Abschn. 3-1)
3 Falls erforderlich, die Menu-Einstellungen
anpassen (siehe Abschn. 3-7).
G-PILOT 3100 Installations- und Bedienungsanleitung
2-3-2 Hinweise zum Autopilot Betrieb
1 Das Boot manuell in offenes Gewässer
steuern, bevor der G-PILOT aktiviert wird.
2 Wenn angebracht, den Steuer-Modus
wechseln (siehe Abschn. 2-4).
3 Den G-PILOT aktivieren, nutzen und
deaktivieren für den:
Kompass-Modus, (siehe Abschn. 4).
NAVMAN
Die großen Ziffern
zeigen immer den
Kompass-Kurs
(siehe Abschn. 3-2)
Kompass-Kurs
Magn. oder wahr
Batterie-Symbol
blinkt bei niedr.
Spannung
(siehe Abschn. 3-5)
Alarm-Symbol,
blinkt bei
ausgelöstem (siehe
Abschn. 3-5)
111 x 111 mm
37

GPS-Modus (siehe Abschn. 5).
Wind-Modus (siehe Abschn. 6).
4 Der Steuer-Modus kann während der
Fahrt gewechselt werden, z. B.:
Nach Zielfahrt-Ende, von GPS- auf
Kompass-Modus.
Auf einem Segelboot, vom Kompass
auf Wind- oder GPS-Modus (siehe
Abschn. 3-4).
5 Steuer-Parameter ändern, zur
Optimierung der Automatik-Steuerung:
Drehrate an das Bootsverhalten
anpassen, im Menu OPTIONS,
- TURNRATE (siehe Abschn. 3-7).
Profi l für die aktuellen See-
Bedingungen wählen
(siehe Abschn. 7-2).
Falls erforderlich, die Profi l-Werte
anpassen, um das Steuer-Verhalten
zu optimieren (siehe Abschn. 7-3).
Sollte das Steuer-Verhalten trotz
vorhergehender Maßnahmen
nicht befriedigen, eventuell eine
komplette neue Basis-Einstellung
und Justierung bei einer Probefahrt
durchführen (siehe G-PILOT 3100
Installations- Buch).
Wichtig:
Der G-PILOT kann über längere
2-4 Steuer-Modus wählen
Der G-PILOT 3100 kann die Steuerung nach
folgenden Kriterien durchführen: Kompass,
GPS oder Wind. Dieses sind die wählbaren
Steuer-Modi.
Bei einem Motorboot
Ist kein GPS vorhanden, oder wenn keine
Wegpunkt-Fahrt erfolgen soll, KompassModus wählen. Der G-PILOT 3100
steuert das Boot auf einem vorgewählten
Kompass-Kurs.
Um eine Wegpunkt- bzw. Routen-
Navigation mittels GPS durchzuführen,
den GPS-Modus wählen. Der
G- PILOT 3100 nutzt dann zusätzlich
zum Kompass die Navigations-Daten
vom GPS.
Bei einem Segelboot
Um einen bestimmten Winkel zum Wind
zu steuern, den Wind-Modus wählen.
38
NAVMAN
Zeiträume einen Kurs genauer halten
als ein Rudergänger. Er darf jedoch
nicht benutzt werden, - bei extremer
Wetterlage, in Landnähe und im Revier
sowie in direkter Nähe anderer VerkehrsTeilnehmer. Dann muss manuell
gesteuert werden.
Nie die Steuerung unbewacht lassen.
Immer den Verkehr beobachten. Jederzeit
in der Lage sein, die Steuerung manuell
zu übernehmen.
Nicht versuchen, bei aktiviertem G-PILOT
per Hand zu steuern.
Lokale Abweichungen im Erdmagnet-Feld
können den Steuerkurs beeinfl ussen.
Dieses zu berücksichtigen, liegt in der
Verantwortung des Anwenders.
2-3-3 Umschalten im Notfall
In Notfällen muss wie folgt schnell reagiert
werden:
Enweder AUTO drücken, um in den
STBY-Modus zu wechseln
oder den Netzschalter ausschalten.
Dann das Boot manuell steuern.
2-3-4 Den G-PILOT 3100
ausschalten
Nach Erreichen des Zielortes sollte der
G-PILOT ausgeschaltet werden.
Hierfür muss eine Windmess-Anlage über
NMEA oder über NavBus angeschlossen
sein, z.B. das Navman WIND 3100.
Um nach Kompass-Kurs zu steuern, den
Kompass-Modus wählen.
Um eine Wegpunkt- bzw. Routen-
Navigation mittels GPS durchzuführen,
den GPS-Modus wählen.
Hinweise für Segelboote
Nicht den Wind-Modus bei schwachen
oder laufend sich ändernden
Windrichtungen aktivieren.
Aufpassen, dass nicht versehentlich eine
gefährliche Halse passieren kann.
Für den Wind-Modus muss die
Windmess-Anlage einwandfrei
kalibriert sein.
G-PILOT 3100 Installations- und Bedienungsanleitung
Den Steuer-Modus im Menu wählen
Im MAIN-Menu auf STER MODE gehen und
COM (Kompass), GPS oder WIND wählen
(siehe Abschn. 3-7).
Den Steuer-Modus per Tasten-Kurzbefehl
wählen
Gedrückthalten von MENU, ruft direkt das
STER MODE Menu.
Hinweis
Für den GPS-Modus muss der G-PILOT
von einem kompatiblen GPS-Instrument
Navigations-Daten erhalten. Werden
diese nicht empfangen, erscheint NO
DATA im Display.
Für das Steuern im GPS-Modus, muss im
GPS die Navigation zu einem Wegpunkt
oder entlang einer Route aktiviert werden,
anderenfalls wird NAV ERROR gezeigt.
Ist die Distanz zum Sollkurs zu groß, wird
der Auto-Pilot TRK ERROR zeigen (siehe
Abschn. 5-2).
Für das Steuern im Wind-Modus muss
der G-PILOT Winddaten von einem
kompatiblen Wind-Instrument erhalten.
Wenn nicht, erscheint NO DATA im
Display.
Der Steuer-Modus erscheint links im
Display.
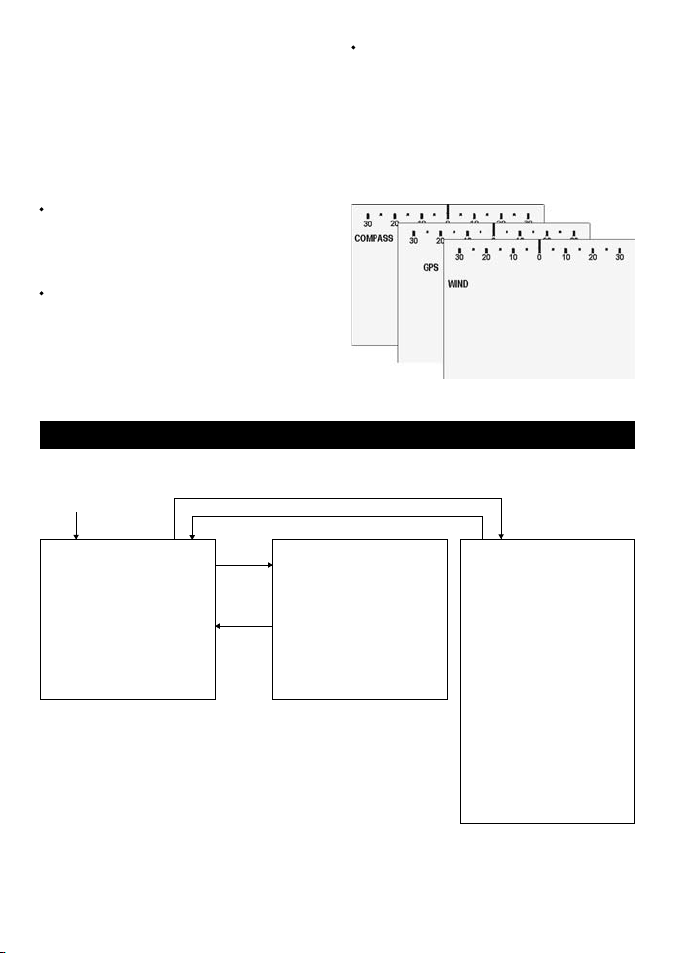
2-5 STBY (Bereit), Auto- und Hand-Steuerung
Die G-PILOT 3100 Anzeige kann auf STBY (Bereit), Auto- oder Hand-Steuerung geschaltet werden:
Spannung
einschalten
AUTO + MENU gedrückt halten
AUTO drücken
STBY (Bereit)
Der Autopilot steuert
nicht das Boot, außer per
Tasten-Befehl.
Der G-PILOT 3100 zeigt
Kurs- aber keine SteuerDaten.
Das Boot manuell steuern.
Informationen zur Tasten-Steuerung siehe
Abschn. 2-6.
Informationen zu den Steuerarten des
G-PILOT 3100 für Auto- oder Hand-Betrieb:
Kompass-Modus, siehe Abschn. 4.
GPS-Modus, siehe Abschn. 5.
Wind-Modus, siehe Abschnitt 6.
G-PILOT 3100 Installations- und Bedienungsanleitung
gedrückt
AUTO
AUTO
Der Autopilot steuert das
Boot.
halten
Der Autopilot zeigt Kurs-
AUTO
und Navigations-Daten.
drücken
Nicht per Handsteuerung
eingreifen.
NAVMAN
HAND STEER
Der Autopilot steuert nicht
das Boot.
Der Autopilot zeigt Kursund Navigations-Daten.
Das Boot manuell
steuern, gemäß DatenAnzeigen im Display.
CTS (zu steuernder Kurs)
kann groß gezeigt werden
(siehe Abschn. 3-4).
Course error (Kursfehler)
kann als Balken-Grafi k
erscheinen (siehe
Abschn. 3-3).
39
2-6 Tasten-Steuerung
Ist der G-PILOT 3100 auf STBY geschaltet (siehe Abschn. 2-5), muss das Boot manuell gesteuert
werden. Dieses kann jedoch auch per T asten-Befehle durchgeführt werden (auch als Jog-Steuerung
bezeichnet).
Drücken von < legt das Ruder nach BB
Drücken von > legt das Ruder nach StB
Gleichzeitiges Drücken und Loslassen von < und > lässt das Ruder in die Mittschiffs-Lage
gehen. (Diese Funktion ist erst aktivierbar nach Kalibrierung von Kompass und Rückgeber,
siehe G-PILOT 3100 Installation).
Beispiel:
Ruder liegt mittschiffs Boot dreht weiter nach BB.
Halten von
das Ruder nach BB.
Entsprechend dreht
das Boot.
< bewegt
Beim Loslassen von
bleibt das Ruder in der
angenommenen Lage
stehen.
Ruder liegt BB.
Ruder liegt BB. Boot geht auf gerade ausGleichzeitiges Drücken
Achtung! Solange der Ruderwinkel-Geber nicht justiert ist, besteht keine automatische EndlagenAbschaltung. Es ist dann darauf zu achten, dass das Ruder nicht gegen den mechanischen
Anschlag gefahren wird.
Hinweis: Normalerweise wird bei der Tasten-Steuerung JOG in der Info-Zeile gezeigt (siehe
Abschn. 3-4). Wurde aber im Menu auf CUR gewechselt, erscheinen diese Zeichen mit der StromAufnahme für den Ruder-Antrieb.
40
Halten von
das Ruder in Richtung
StB.
Beim Loslassen von
bleibt das Ruder in der
angenommenen Lage
stehen
und Loslassen von
+
in die Mittschiffs-Lage
gehen.
Um die Bewegung
zur Mittschiffs-Lage
abzubrechen, ESC,
oder
> bewegt
> lässt das Ruder
> drücken.
NAVMAN
<
Boot dreht weiter nach BB.
>,
<
<
G-PILOT 3100 Installations- und Bedienungsanleitung
3 Betriebs-Einstellungen
3-1 Display- und TastenBeleuchtung
Zur Regelung der Hintergrund-Beleuchtung, im
MAIN-Menu auf LAMP gehen (siehe Abschn.
3-7) und zwischen OFF oder 1 bis 4 (max.
hell) wechseln.
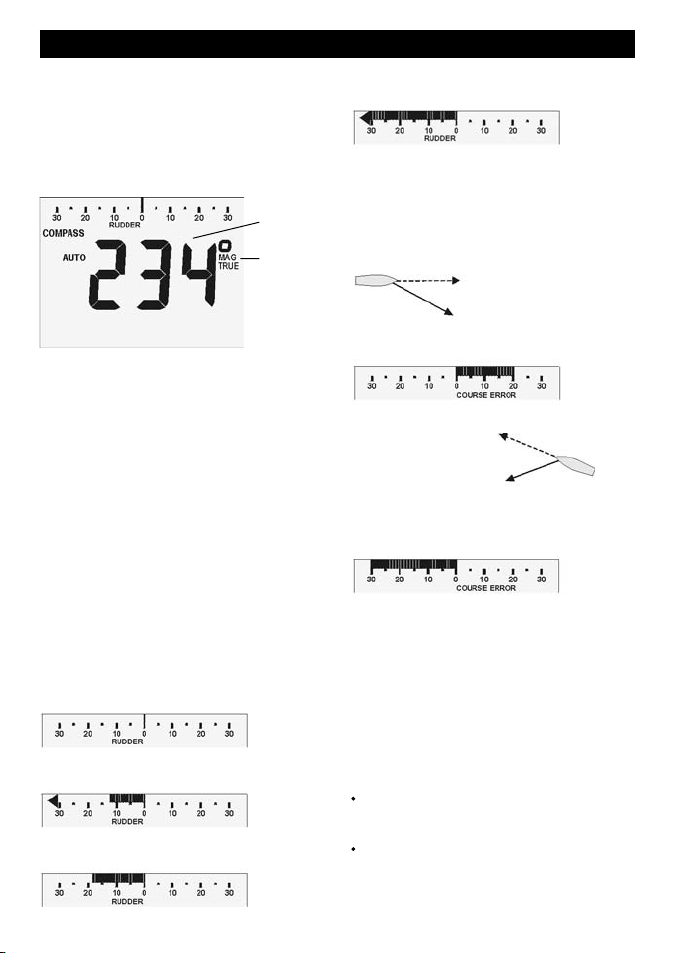
3-2 Kurs-Anzeige
Kurs
Magnetisch
oder wahr
Die großen Ziffern zeigen immer den
anliegenden Bootskurs:
Zur Wahl zwischen wahr (TRUE) oder
magnetisch (MAG), im OPTION-Menu auf
HDG TYPE gehen (siehe Abschn. 3-7).
3-3 Daten-Balkengrafi k
Die Balkengrafi k am oberen Display-Rand kann
den Ruderwinkel oder den Kursfehler zeigen.
Zur Auswahl, im MAIN-Menu auf BAR DATA
gehen (siehe Abschn. 3-7). Dann zwischen
RUD für Ruderwinkel- oder CE für KursfehlerAnzeige wählen. Sind mehrere Bedien-Geräte
vorhanden, kann die Anzeige in jedem Display
unterschiedlich gewählt werden.
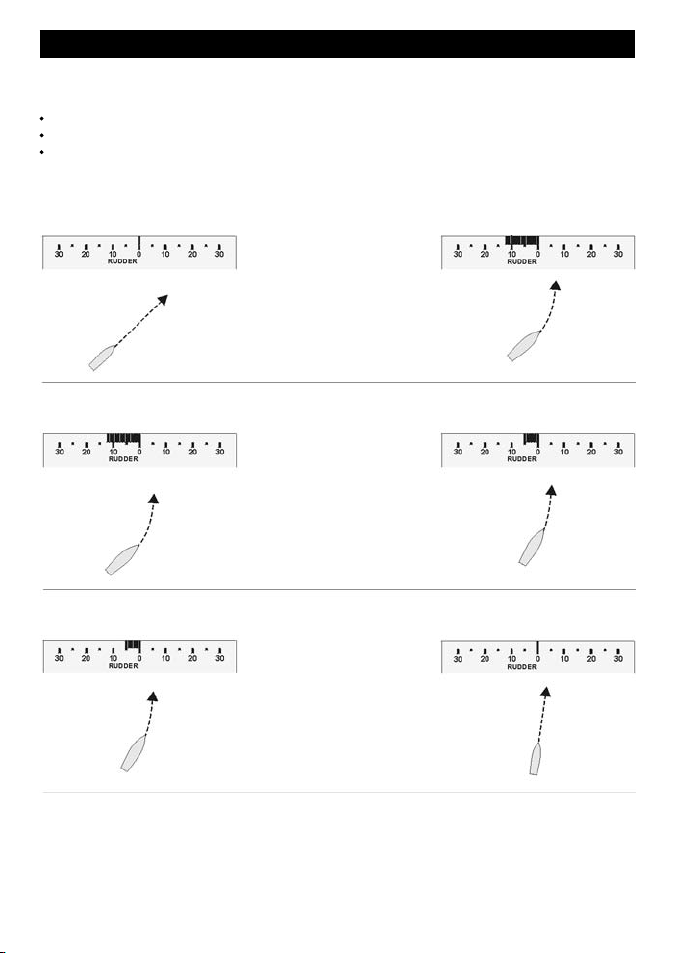
Ruderwinkel-Anzeige
Der Grafikbalken zeigt den Winkel zur
Mittschiffs-Lage, den das Ruderblatt einnimmt.
Bei jeder Steueraktion erscheint am Grafi krand
ein Pfeil, der die Richtung der Ruderbewegung
anzeigt. Zum Beispiel:
Keine Ruderbewegung.
Das Ruder steht mittschiffs.
Das Ruder bewegt sich nach BB.
der Augenblicks-Wert ist 12°.
Das Ruder wird nicht bewegt.
Es liegt auf 18° BB.
Die Grafi k-Anzeige ist auf 30° begrenzt. Eine
Weiter-Bewegung wird nur durch den End-Pfeil
angezeigt.
Die Ruderwinkel-Anzeige ist auch für die
manuelle Steuerung aktiviert.
Kursfehler-Anzeige
Der Kursfehler ist die Kurs-Differenz zwischen
aktuellem Bootskurs (Ist-Kurs) und dem
vorgegebenen Autopilot-Kurs (Soll-Kurs),
zum Beispiel:
Der Kursfehler ist 20° nach StB
Aktueller Kurs 290°
Der Kursfehler ist 40° nach BB. Da die
maximal zeigbare Anzeige 30° beträgt.
wird also auch nur 30° nach BB gezeigt.
Im STBY ist die Kursfehler-Anzeige Null.
Aktueller Kurs 90°
CTS (zu steuernder
Kurs) 110°
CTS 250°
3-4 Daten-Info-Anzeige
Die Daten-Info-Anzeige erscheint im
Display unten. Hier kann eine von mehreren
Navigations-Daten zur Anzeige gebracht
werden. Zur Auswahl im MAIN Menu, INFO
DATA anwählen (siehe Abschn. 3-7). Sind
mehrere Bediengeräte vorhanden, lassen sich
für jedes Display andere Daten aktivieren.
Die Optionen sind:
der vorgegebene Autopilot-Kurs (Soll-
Kurs). In der STBY-Funktion zeigt das
Display: CTS°- - - .
Ist ein GPS angeschlossen, sind folgende
Anzeigen wählbar (siehe Abschn. 5-1):
XTE, BRG, COG, DTG, TTG, SOG: GPS
G-PILOT 3100 Installations- und Bedienungsanleitung
NAVMAN
41

Werden Wind-Daten empfangen, können
scheinbarer (APP) oder wahrer (TRUE)
Windwinkel gezeigt werden. TRUE oder
APP wählbar im VESSEL Menu, WIND
TYPE (siehe Abschn. 3-7).
BAT: die Versorgungs-Spannung des
G-PILOT 3100.
CUR: die Stromaufnahme für den
Ruderantrieb während des Ruderlegens
(siehe Abschn. 2-6).
OFF: Es wird nichts gezeigt.
3-5 Alarme
Wenn der G-PILOT 3100 einen Alarm-Zustand
erfasst, erfolgt eine entsprechende DisplayAnzeige, das Alarm-Symbol blinkt, der interne
Pieper ertönt und angeschlossene externe
Alarm-Mittel werden aktiviert.
Ein beliebiger Tastendruck löscht die AlarmSignale. Die Alarm-Meldung wird mit ESC
gelöscht.
Im G-PILOT 3100 sind zwei Alarm-Gruppen
vorhanden, intern festgelegte und vom
Anwender defi nierte Alarme:
Um anwender-defi nierte Alarme zu
aktivieren, ist ein entsprechender
Alarmwert zu setzen (siehe Abschn. 3-7).
Liste der Alarm-Möglichkeiten und ihre
Bedeutungen, siehe Anhang B.
Alarm Batterie-Unterspannung
Fällt die Versorgungs-Spannung unter einen
eingestellten Wert, erfolgt ein Alarm. Es
werden BAT ERROR und ein blinkendes
Batterie-Symbol gezeigt. Ist der G-PILOT 3100
auf AUTO geschaltet, besteht die Möglichkeit,
dass die Steuerung nicht mehr arbeitet. Es
sollte unbedingt auf manuelle Steuerung
gewechselt werden (siehe Abschn. 2-5).
3-6 Simulations-Modus
Im Simulations-Modus kann man sich mit den
G-PILOT 3100 -Funktionen vertraut machen,
ohne das Boot zu fahren. Im Display erscheint
blinkend SIMULATE.
Simulations-Modus ein- und ausschalten
1 Das Gerät ausschalten (siehe Abschn. 2-1).
2 AUTO gedrückt halten und dabei die
Spannung einschalten (siehe Abschn. 2-1).
3-7 Mit den Menus arbeiten
In den Menus werden Steuerfunktionen und
vielfältige Parameter für den G-PILOT 3100
Betrieb eingestellt.
42
NAVMAN
Menu-Daten aufrufen und ändern
1 Im normalen Betrieb, MENU drücken
2 Zum Aufruf von Einstellungen im Menu
MAIN:
< oder > drücken, bis die gewünschte
Information erscheint.
Zum Aufruf von Daten in anderen Menus:
i < oder > drücken, bis CONFIG
gezeigt wird, dann ENT drücken.
ii < oder > drücken, bis das benötigte
nächste Menu erscheint, dann ENT
drücken.
Hinweis: Ein > hinter dem Menu zeigt an,
dass dort Unter-Menus folgen.
3 Zum Ändern von Daten:
< oder > ein- oder mehrfach drücken.
< oder > halten, um Daten in 10er
Schritten zu ändern.
Um den Menu-Punkt auf Werks-
Einstellung zurück zu setzen, < + >
gemeinsam drücken.
4 Mit ENT die neu eingestellten Werte
speichern, oder mit ESC diese ignorieren.
5 Durch ein- oder mehrfaches Drücken von
ESC, aus den Menus heraus gehen, oder
Schritte 2 bis 4 wiederholen, um andere
Einstellungen zu zeigen bzw. zu ändern.
Direkt-Ausstieg (Shortcut): Um direkt
zur Betriebs-Anzeige zurück zu kehren,
ESC gedrückt halten.
Beim Ausgang aus den Menus erfolgt ein längerer
Piepton. Erfolgt in den Menus für 30 Sekunden
kein Tasten-Befehl, schaltet der G-PILOT 3100
direkt zur Betriebs-Anzeige zurück.
Haupt-Menu MAIN
RESPONSE Die Größe der Kurs-Abweichung,
bei der eine Kurs-Korrektur durch den G-PILOT
3100 erfolgt (1 bis 10, A1 bis A5, abhängig vom
Boots-Typ) (siehe Abschn. 7-1).
RATIO die Größe des Ruderwinkels, die
vom G-PILOT 3100 eingestellt wird, um die
Kursabweichung zu korrigieren (1 bis 10,
abhängig vom Boots-Typ) (siehe Abschn. 7-2).
LAMP Die Helligkeit der Display- und TastenBeleuchtung (1 bis 4 oder OFF, eingestellt ist
1) (siehe Abschn. 3-1).
BAR DAT A Die Daten, die in der Balken-Grafi k
erscheinen sollen CE (Kursfehler) oder RUD
(Ruder-Winkel), eingestellt ist RUD (siehe
Abschn. 3-3).
G-PILOT 3100 Installations- und Bedienungsanleitung

Menu-Liste
MAIN Hauptmenu
Response (Kursempfi ndlichkeit)
Ratio (Rudermenge)
Lamp (Beleuchtung)
Bar data (Balkengrafi k-Daten)
Info data (Informations-Daten)
Steer mode (Steuermodus)
Profi le (Steuer-Profi le)
CONFIG > menu (Konfi gurationen)
ALARMS > menu (Alarmeinstellung)
Course error alarm (Kursfehler)
XTE alarm (Querversetzung)
Waypoint acknowledge
(Wegpunkt-Ankunft)
Wind alarm (max. Wind)
Battery alarm (Bordspannung)
Current alarm (Motorstrom)
OPTIONS > menu (Optionen)
Counter rudder gain
(Stützruderverstärk)
Trim gain (Trim-Verstärkung)
GPS gain (GPS-Verstärkung)
Wind gain (Windverstärkung)
Dodge angle (Ausweichwinkel)
Tack angle (Wende-Winkel)
Gybe angle (Halse-Winkel)
Tack delay (Tack-Verzögerung)
Turn rate (Drehgeschwindigk)
VESSEL > menu (STBY only)
(Boots-Daten)
Vessel type (Boots-Typ)
Drive type (Ruderantriebs-Art
Wind type (Windwinkel-Art)
Heading type (Kurs-Art)
Magnetic variation (Missweisung)
DEVICES > menu (STBY only)
(Bauteil-Justierung)
Calibrate rudder feedback unit
(Rudergeber-Justierung)
Centre rudder feedback unit
(Ruder-Nullstellung)
Calibrate compass
(Kompass-Kalibrierung)
Align heading (Kompass-Nulljustg)
Align GPS (Kompass auf GPS)
FACTORY > menu (STBY only)
(sonst. Einstellg. + Daten)
Backlight group (Beleucht.-Gruppen)
Key beeps (Tastenton)
NMEA 2 data (NMEA 2 - Daten)
Main control unit version number
(Software Zentrale)
Display unit version number
(Software Bediengerät)
Reset NVM (auf Werk-Einstellg)
G-PILOT 3100 Installations- und Bedienungsanleitung
INFO DATA Die Daten, die in der Info-Daten-
Anzeige erscheinen sollen (CTS, XTE, BRG,
COG, DTG, TTG, SOG, WND, BAT, CUR, OFF.
eingestellt ist CTS) (siehe Abschn. 3-4).
STER MODE Die Steuer-Arten, COM
(Kompass), GPS und WND (Wind); eingestellt
ist COM (siehe Abschn. 2-4).
PROFILE Zusammenstellungen von
Parametern für unterschiedliche Bedingungen
- 1 bis 5, gewählt ist 1 (siehe Abschn. 7-3).
CONFIG > Zugang zu diversen Menu-Gruppen.
ALARMS > Zugang zu Alarm-Einstellungen
CE ALARM Grenzwert für eine Kurs-Abweic-
hung, ab dem alarmiert wird, (1° bis 90° oder
OFF; eingestellt ist OFF).
XTE ALARM Grenzwert für eine KursVersetzung (XTE) in nm, ab dem alarmiert wird
(0.01 bis 2nm oder OFF; eingestellt ist OFF).
WPT AKN Ankunfts-Quittierung durch
den Anwender, bei Erreichen eines
Wegpunktes.(OFF oder ON, eingestellt ist
OFF) (siehe Abschn. 5-2).
WND ALARM Differenz-Wert für den SAILModus zwischen eingestelltem zu steuernden
Windwinkel (SWA) und anliegendem Windwinkel, ab der alarmiert werden soll (1° bis 90° und
OFF, eingestellt ist OFF).
BAT ALARM Niedrigster Wert der VersorgungsSpannung, ab der alarmiert werden soll (7 bis
14V oder OFF; eingestellt ist OFF).
CUR ALARM Maximale Stromstärke für den
Ruder-Antrieb, ab der alarmiert werden soll (5
bis 20A; eingestellt ist 10A).
OPTIONS > Einstellungs-Menus für diverse
Autopilot-Parameter.
C-RD GAIN Stützruder-Verstärkung, um das
Steuer-Verhalten bei größerem Gierwinkel zu
verbessern (1 bis 10 oder OFF; Voreinstellung
ist abhängig von der Menu-Einstellung VESL
TYPE) (siehe Abschn. 7).
TRIM GAIN Automatische Anpassung des
Ruderwinkels bei seitlicher Beeinfl ussung (1
bis 10 oder OFF; Voreinstellung ist abhängig
von der Menu-Einstellung VESL TYPE) (siehe
Abschn. 7).
GPS GAIN Verstärkungs-Anpassung an das
GPS-Signal für die Wegpunkt-Steuerung
(1 bis 10; eingestellt ist 3) (siehe Abschn. 7).
NAVMAN
43

WIND GAIN Verstärkungs-Anpassung an das
Wind-Signal bei der Windwinkel-Steuerung
(1 bis 10; eingestellt ist 1) (siehe Abschn. 7).
DODGE ANG Änderungskurs für ein AusweichManöver (dodge) im Autopilot-Betrieb (5° bis
30°), eingestellt ist 20° (siehe Abschn. 4-4,
5-3 oder 6-4).
TACK ANG Kursänderungs-Winkel für eine
Wende (50° bis 160° oder AUTO, eingestellt
ist AUTO) (siehe Abschn. 4-5, 6-5).
GYBE ANG Kursänderungs-Winkel für eine
Halse (40° bis 140° oder AUTO; eingestellt ist
AUTO) (siehe Abschn. 4-5, 6-5).
TACK DELY Verzögerungs-Zeit zwischen
dem Kreuzschlag Tasten-Befehl und der
Durchführung (1 bis 120Sek. oder OFF;
eingestellt ist 30Sek.) (siehe Abschn. 4-5,
6-5).
TURN RATE Setzt die max. erlaubte Drehrate
in Grad pro Sek. (3 bis 20, eingestellt ist
10°/sec).
VESSEL > Zugang zu den Einstellungen für
die Boots-Art.
Nur möglich in Standby (STBY).
VESL TYPE wählbar sind SAIL, PLNE (Gleiter)
oder DISP (Verdränger). Eingestellt ist SAIL.
DRVE TYPE Antriebs-Art des Bootes, - MOTR,
SPL- oder SPL+; eingestellt ist MOTR (siehe
G-PILOT 3100 Installation).
WIND TYPE Die zu nutzende Wind-Winkel Art,
APP (scheinbar) oder TRUE (wahr); eingestellt
ist APP .
HDG TYPE Die Art der Kurs-Anzeige, MAG
(magnetisch) oder TRUE (wahr); eingestellt
ist MAG.
MAG VAR Die magnetische Missweisung an
der aktuellen Boots-Position (90°W bis +90°E
(Ost); eingestellt ist 19°-E (Ost).
DEVICES > Inbetriebnahme-Einstellungen
Hier erfolgen Kalibrierungen verschiedener BasisParameter vor und während der Erst-Erprobung.
Der Zugang ist nur in STBY möglich.
RFU CAL Start der Prozedur für die
Ruderwinkel-Einstellung (siehe G-PILOT
3100 Installation).
RFU CENTR Setzt die Ruder-Position, bei der
das Boot einen geraden Kurs steuert (siehe
G-PILOT 3100 Installation).
44
NAVMAN
CSU CAL Start der Prozedur für die
Kompass-Kalibrierung (siehe G-PILOT 3100
Installation).
ALIGN HDG Richtet den Kompass auf die
Schiffs-Vorausrichtung aus (siehe G-PILOT
3100 Installation).
ALIGN GPS Richtet den Kompass-Kurs auf
den vom angeschlossenen GPS ermittelten
Kurs (COG) aus, (siehe G-PILOT 3100
Installation)
FACTORY > Hier sind Basis-Einstellungen
nach Installation durchzuführen.
Der Zugang ist nur in STBY möglich.
BKL GROUP Wahl einer Beleuchtungs-Gruppe
(0, 1, 2, 3 oder 4); eingestellt ist 1 (siehe
G-PILOT 3100 Installation).
KEY BEEPS Piepton bei jedem Tasten-Befehl
(ON oder OFF; eingestellt ist ON).
NMEA2 DAT Daten-Übertragung am
NMEA2-Anschluss (IN, SLOW (langsam)
oder FAST (schnell); eingestellt ist IN).
IN NMEA-Anschluss 2 als Daten-Eingang
geschaltet.
SLOW NMEA-Anschluss 2 als Daten-
Ausgang geschaltet, für Kurs und
Ruderwinkel, je 1 x pro Sekunde.
FAST NMEA-Anschluss 2 als Daten-
Ausgang geschaltet für Kurs 10 x pro
Sekunde.
MCU VX.X Zeigt die in der G-PILOT 3100
Zentral-Einheit enthaltene Software-Version
(z.B MCU V1.3 ist die Version 1.3).
HCU VX.X Zeigt die im G-PILOT 3100
Bediengerät enthaltene Software-Version (z.B
HCU V2.5 ist die Version 2.5).
NVM RESET Hier werden alle am G-PILOT
3100 vorgenommenen Einstellungen auf die ursprüngliche Werks-Einstellung zurück gesetzt.
Wird NVM RESET gezeigt:
1 > drücken, um die Funktion aufzurufen.
2 ENT drücken, um die Nullsetzung
durchzuführen.
3 ESC drücken, um die Menus zu verlassen.
4 Basis-Einstellungen und Justierungen
während einer Probefahrt durchführen,
um den G-PILOT 3100 neu zu kalibrieren
(siehe G-PILOT 3100 Installation).
G-PILOT 3100 Installations- und Bedienungsanleitung
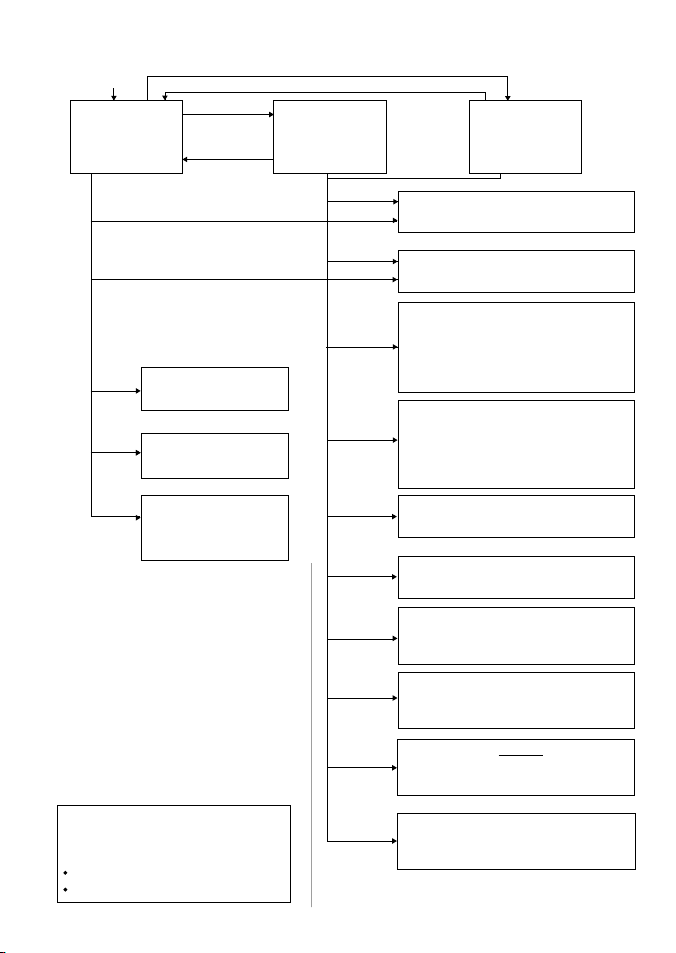
3-8 Tasten-Befehlsfolgen
Spannung
einschalten
STBY Autopilot
nicht aktiv,
manuell steuern
MENU
MENU
halten
AUTO + MENU halten
AUTO halten
AUTO
AUTO
Autopilot steuert
das Boot
MENU
MENU
halten
AUTO
HAND STEER
Autopilot nicht
aktiv, manuell
steuern
MAIN-Menu aktiviert
(siehe Abschn. 3-7)
Kurzbefehl, zum SteuermodusWechsel (siehe Abschn. 3-7)
Steuer-Befehl nach BB
<
(siehe Abschn. 2-6)
Jog steer to starboard
Steuer-Befehl nach StB
>
(see section 2-6)
(siehe Abschn. 2-6)
Ruder mittschiffs
< + >
setzen
(siehe Abschn. 2-6)
Diese Funktionen sind nur im
Kompass- oder Wind-Modus möglich,
Tasten-Sperre
Tasten-Sperre ein- oder
ausschalten
AUTO + MENU gedrückt halten
ENT drücken
G-PILOT 3100 Installations- und Bedienungsanleitung
nich im GPS-Modus
MENU
<
+
MENU
>
+
<
>
Hold
<
Hold
>
AUTO
<
+
AUTO
>
+
NAVMAN
Ausweichen nach BB (ESC drücken,
zur Rückkehr zum Kurs oder im
Kompass-Modus, für neue KursEingabe, ENT drücken) (siehe
Abschn. 4-4, 5-3, 6-4).
Ausweichen nach StB (ESC
drücken, zur Rückkehr zum Kurs
(oder im Kompass-Modus, für neue
Kurs-Eingabe, ENT drücken) (siehe
Abschn. 4-4, 5-3, 6-4).
Kurs um 1° nach BB ändern
(siehe Abschn. 4-3 oder 6-3)
Kurs um 1° nach StB ändern
(siehe Abschn. 4-3 oder 6-3)
10°-Kurs-Wechsel nach BB, jede
halbe Sekunde (siehe Abschn.
4-3, 6-3)
10°-Kurs-Wechsel nach StB, jede
halbe Sekunde
(siehe Abschn. 4-3, 6-3)
Countdown zur Wende oder Halse
nach BB (zum Abbruch, ESC
drücken) (siehe Abschn. 4-5, 6-4)
Countdown zur Kreuz oder Halse
nach StB (zum Abbruch, ESC
drücken) (siehe Abschn. 4-5, 6-4)
45

4 Kompass-Modus
Der G-PILOT 3100 kann das Boot nach drei verschiedenen Winkel-Informationen steuern,
Kompass-Kurs, GPS-Kurs und Windwinkel-Kurs. Auswahl der Modi, siehe Abschn.2-4. Im
Kompass-Modus steuert der G-PILOT nach einem vorgewählten Kurs, CTS (Course to steer).
4-1 Kompass-Steuerungs-Parameter
Boots-Kurs, 45°
4-2 Autopilot-Betrieb im Kompass-Modus ein- und ausschalten
Kursfehler, 10° nach StB
CTS (zu steuernder Sollkurs) 55°
Das Boot manuell aufs
offene Wasser steuern.
Auf den gewünschten Kurs
einsteuern.
AUTO gedrückt halten,
zum AUTO-Betrieb
AUTO:
Der G-PILOT steuert das Boot automatisch.
Der G-PILOT 3100 übernimmt den anliegenden
Kurs als zu steuernden Kurs (CTS), im Beispiel
- 45° und steuert diesen Kurs.
Zum Auto-Betrieb abschalten, AUTO drücken
46
Zum Beispiel:
Kurs = 45°
AUTO + MENU gedrückt halten,
zur Kurs-Steuerung per Hand
Der G-PILOT schaltet auf STBY zurück.
Boot manuell steuern.
NAVMAN
HANDSTEUERUNG:
Einen zu steuernden Kurs (CTS)
einstellen und per Hand nach
Kursfehler-Grafik der BalkenAnzeige steuern
Kurs = 45°
CTS = 45°
G-PILOT 3100 Installations- und Bedienungsanleitung

Bei aktiviertem Autopilot-Betrieb
AUTO gedrückt halten, um auf GPS-Modus zu wechseln (falls Vessel-T yp auf PLNE [Gleiter] oder
DISP [Verdränger] gesetzt ist) oder auf WIND-Modus (wenn Vessel-Typ auf SAIL gesetzt ist).
Wellen und Wind können das Boot vom Kurs
abbringen. Der G-PILOT 3100 wird das Boot
auf den Kurs zurück steuern, z.B.:
CTS = 45°
Wellen drehen das
Boot auf 60°
Wind oder Strömung können das Boot zu
einer Seite versetzen, z.B.:
CTS = 45°
Strömung
G-PILOT 3100 steuert zurück
auf den Kurs von 45°
Kurs verbleibt auf 45°
4-3 Kursänderung im Kompass-Modus
Kurse in 1°-Schritten ändern
< drücken, zur 1°-Kursänderung nach BB
> drücken, zur 1°-Kursänderung nach StB
Beispiel:
Bootskurs = 45°
CTS = 45°
< drücken
CTS wechselt auf 44°
Boot geht auf 44°
Kurse in 10°-Schritten ändern
< gedrückt halten, um den Kurs in 10°-Schritten je halbe Sekunde nach BB zu ändern.
> gedrückt halten, um den Kurs in 10°-Schritten je halbe Sekunde nach StB zu ändern.
Beispiel:
Bootskurs = 45°
CTS = 45°
< halbe
Sekunde halten
Bootskurs = 45°
CTS = 45°
> drücken
CTS wechselt auf 46°
Boot geht auf 46°
< halten, bis
CTS 15° zeigt
CTS wechselt auf 35°
Boot geht auf 35°
G-PILOT 3100 Installations- und Bedienungsanleitung
NAVMAN
Boot geht auf 15°
47

4-4 Ausweichbefehl (Dodge) im Kompass-Modus
Mit dem Dodge-Befehl erfolgt ein scharfer Kurswechsel, z.B. um einem Hindernis auszuweichen.
MENU + < drücken, um mit dem Dodge-Winkel nach BB auszuweichen
MENU + > drücken, um mit dem Dodge-Winkel nach StB auszuweichen
Beispiel:
Bootskurs = 45°
CTS = 45°
MENU + <
drücken
Mit ENT diesen neuen
Kurs beibehalten
CTS ändert sich gemäß dem Dodge-Winkel.
Das Boot steuert den neuen Kurs ein.
Der G-PILOT piept.
Hinweis
Um weiter auszuweichen, MENU + < oder MENU + > mehrfach drücken.
Zur Anzeige oder Änderung des Ausweich-Winkels im OPTIONS-Menu,
oder
Mit ESC auf den alten
Kurs zurück kehren.
DODGE ANG aufrufen (siehe Abschn. 3-7).
4-5 Automatisches Kreuzen (Tacking) im Kompass-Modus
Die automatische Wende (Tack) ist als große Kursänderung beim Segeln gedacht. Der Sollkurs
ändert sich dabei entsprechend dem Kreuz-Winkel.
Für die Wende nach BB, AUTO + < drücken
Für die Wende nach StB, AUTO + > drücken
Beispiel:
Ein T ack kann
jederzeit mit ESC
abgebrochen werden
Bootskurs = 45°
CTS = 45°
AUTO + < drücken, um
eine Wende nach BB zu
starten
ACHTUNG Für den Tack im Kompass-Modus benutzt der G-PILOT keine Wind-, sondern Kom-
pass-Werte. Es besteht damit auch die Möglichkeit einer Halse.
Hinweis
Um für die Wende einen festen Windwinkel zu nutzen, muss im G-PILOT 3100 der Wind-
Modus aktiviert sein (siehe Abschn. 6).
Zur Anzeige oder Änderung von Tack-Winkel und Tack-Verzögerung, im OPTION-Menu,
TACK DELY wählen (siehe Abschn. 3-7). Gybe-Winkel (Halse) wird im Kompass-Modus
nicht verwendet.
Der Gybe-Winkel (Halse) wird im Kompass-Modus nicht verwendet
48
Die Wende ist beendet, wenn das Boot den neuen Kurs
eingenommen hat.
Am Ende der Tack-Verzögerung, ändert sich
der CTS-Wert um den Tack-Winkel. Wurde im
Menu AUTO gewählt, nutzt der G-PILOT die
Voreinstellung von 100°. Das Boot beginnt
zu drehen.
Während die Tack-Verzögerung auf Null zählt,
fährt das Boot weiter geradeaus.
60 und 30 Sekunden vor der Wende erfolgen je
ein langer Piepton. In den letzten 10 Sekunden
erfolgt sekündlich ein kurzes Piepen und am
Countdown-Ende ein langes Piepen.
Noch 3 Sekunden zum Start der Wende
NAVMAN
G-PILOT 3100 Installations- und Bedienungsanleitung

5 GPS-Steuermodus
Der G-PILOT 3100 hat drei Informations-Arten, einen Kurs automatisch zu steuern, - Kompass,
GPS und Wind. Die entsprechende Auswahl ist im Abschn. 2-4 beschrieben. Für den GPS-Modus
benötigt der G-PILOT, zusätzlich zu den Kompass-Werten, Wegepunkt- bzw. Routen-Daten von
einem GPS.
5-1 GPS-Navigations-Parameter
Beispiel einer Navigation zu einem Wegepunkt:
Zielort
DTG (Distanz)
SOG (speed)
COG (Kurs)
CTS (Kurs)
Soll-Kurs-Linie
Start
Das Boot fährt vom Startort zum Zielort und wurde dabei stark von dem vom GPS errechneten
Soll-Kurs versetzt.
BRG Peilung zum Zielort Die Peilung vom Boot zum Zielort.
COG Kurs über Grund Richtung in der sich das Boot über Grund bewegt
Kurs-Fehler Die Differenz zwischen CTS und dem anliegenden Kurs.
CTS Zu steuernder Kurs Optimaler Kurs, um auf den Soll-Kurs zurück zu kehren.
DTG Distanz zum Zielort Entfernung vom Boot zum Zielort.
SOG Fahrt über Grund Die aktuelle Boots-Geschwindigkeit über Grund. Diese muss
nicht der Geschwindigkeit durch das Wasser entsprechen wie
auch nicht der Annäherungs-Geschwindigkeit an das Ziel.
TTG Zeit zum Ziel Die aus den aktuellen Fahrtdaten errechnete Zeit zum Ziel
XTE Kurs-Versetzung Die Distanz zwischen Boot und nächstem Punkt auf der
Sollkurs-Linie. Die XTE-Anzeige kann einen Zusatz-Buchstaben
enthalten. R bedeutet, nach rechts steuern (StB) und L nach
links (BB).
TTG (Zeit)
BRG (Peilung)
XTE (Distanz)
Kursfehler (Winkel)
Boot
G-PILOT 3100 Installations- und Bedienungsanleitung
NAVMAN
49

5-2 Den G-PILOT 3100 auf GPS-Modus schalten
Das Boot manuell in offenes Gewässer steuern. Im GPS die Wegpunkt-Navigation aktivieren,
entweder einen einzelnen Zielort oder einen Wegpunkt in einem Routenplan.
BRG (GPS-Kurslinie)
Boots-Kurs
Vom GPS
XTE (Distanz zur
GPS-Kurslinie)
Zur Pilot-Aktivierung,
AUTO gedrückt halten
AUTO:
geplottete
Kurslinie zum
Wegpunkt
Für Hand-Steuerung,
AUTO + MENU gedrückt halten
HANDSTEER:
GPSSollkurs
Der G-PILOT steuert das Boot automatisch.
Das Boot manuell steuern. CTS im Display
oder die Kursfehler-Grafi k aufrufen und
diese zum Steuern verwenden.
Ist im Autopilot-Betrieb der XTE-Wert größer als der im AlarmMenu eingestellte Wert, oder liegt der Bootskurs nicht innerhalb
von 30° zum Sollkurs, erfolgt ein TRK ERROR Alarm. - Mit ESC
zum Kompass-Modus wechseln oder mit ENT den Sollkurs
entsprechend neu legen.
Ist im G-PILOT der GPS-Modus aktiviert, werden die GPSDaten für die Steuerung entlang der Sollkurs-Linie verwendet.
Zum Abschalten der Auto-Steuerung, AUTO drücken
Der G-PILOT schaltet in den STBY-Modus
zurück. Das Boot manuell steuern.
50
NAVMAN
G-PILOT 3100 Installations- und Bedienungsanleitung

Wenn der G-PILOT 3100 aktiviert ist
AUTO gedrückt halten, um in den COMPASS-
Modus zu wechseln.
Strömung
Wind und Strömung können das Boot vom GPSKurs abbringen. Der G-PILOT 3100 wird das Boot
zurück auf den Kurs bringen.
Ist im GPS ein Routenplan aktiviert und das
Boot erreicht einen Zwischen-Wegpunkt:
Es wird automatisch der nächste
Wegpunkt zur Ansteuerung aktiviert,
falls der Menu-Punkt WPT AKN auf OFF
gesetzt ist.
Anderenfalls ertönt ein Alarm, in der
Anzeige erscheint NEXT WPT? und der
anliegende Kurs wird beibehalten. Mit
beliebiger Taste den Alarm löschen und
ENT drücken, um die Kursänderung zum
folgenden Wegpunkt zu starten, oder mit
Wird der Zielort erreicht, erscheint im Display
ROUTE END. Danach steuert der G-PILOT auf
dem dann anliegenden Kurs.
Mit ESC auf STBY wechseln, und das
Boot manuell steuern.
ENT drücken, um auf dem anliegenden
Kurs im COMPASS-Modus weiter zu
steuern.
Hinweis Um nach Erreichen des letzten
Wegepunktes zu diesem zurück zu kehren,
erneut die GPS-Navigation dorthin aktivieren.
ESC auf STBY wechseln.
Um den WPT AKN Modus zu zeigen oder zu
ändern, im ALARM-Menu auf WPT AKN gehen
(siehe Abschn. 3-7)
5-3 Ausweichen im GPS-Modus
Ein Ausweichmanöver als Dodge-Befehl bedeutet eine scharfe Kursänderung, um einer Havarie
zu entgehen.
MENU + < drücken, um nach BB auszuweichen.
MENU +> drücken, um nach StB auszuweichen.
Beispiel:
MENU + <
drücken
Zur Rückkehr auf
den alten Kurs, ESC
drücken.
CTS wird um den
vorgewählten Dodge-Winkel
geändert. Der G-PILOT piept
ACHTUNG: Der G-PILOT steuert dann zurück
auf den GPS-Kurs. Darauf achten, dass sich
keine Hindernisse auf dem Änderungs-Kurs
befi nden.
Hinweis
Um weiter auszuweichen, mehrfach MENU + < oder MENU + > drücken.
Um den Dogde-Winkel zu zeigen oder zu ändern, im OPTION-Menu auf DODGE ANG
gehen (siehe Abschn. 3-7).
G-PILOT 3100 Installations- und Bedienungsanleitung
NAVMAN
51

6 Windsteuer-Modus
Der G-PILOT 3100 hat drei Informations-Arten, einen Kurs automatisch zu steuern, - Kompass,
GPS und Wind. Die entsprechende Auswahl ist im Abschn. 2-4 beschrieben. Für den Wind-Modus
benötigt der G-PILOT Windwinkel-Daten (SWA) von einer Windmess-Anlage.
6-1 Windsteuer-Parameter
Boots-Kurs
Kursfehler, 10° nach StB
CTS (Pilot versucht diesen Kurs
einzunehmen, um den gesetzten
Windwinkel SWA zu erreichen)
SWA (gesetzter Windwinkel), 45°
Windwinkel, kann APP (scheinbar)
APP
CTS Zu steuernder Kurs Der zu steuernde Kurs, um den SWA (gesetzten Windwinkel)
Kursfehler Die Differenz zwischen APP (anlieg. Winkel) und SW A (gesetzter
SWA Gesetzter Windwinkel Der zu steuernde Windwinkel.
TRUE Wahrer Windwinkel Der wahre Windwinkel zum Boot. Ein P vor dem Winkelwert
52
oder TRUE (wahr) sein.
Scheinbarer Windwinkel
Der scheinbare Windwinkel am Boot. P vor der Winkel-Anzeig
bedeutet Wind von BB, S bedeutet Wind von StB.
zu halten.
Windwinkel).
bedeutet Wind von BB, ein S bedeutet Wind von StB.
NAVMAN
Wind
G-PILOT 3100 Installations- und Bedienungsanleitung

Wahre und scheinbare Wind-Richtung und Geschwindigkeit
Scheinbare Wind-Geschwindigkeit und Richtung ergeben sich aus der Messung vom fahrenden Boot
aus. Wahre Daten ergeben sich durch Vergleich mit den Fahrt- und Kurs-Werten des Bootes.
Wird das Boot bewegt, sind scheinbare Wind-Geschwindigkeit und Richtung different zur wahren
Wind-Geschwindigkeit und Richtung, wie unten gezeigt.
Boot liegt fest
Wahre Windgeschwindigkeit ist gleich der scheinbaren Geschwindigkeit.
Wahre Windrichtung ist gleich der scheinbaren Richtung.
Boot liegt fest
Boot segelt am Wind. Scheinbare Wind-Geschwindigkeit ist größer als die wahre, und die
scheinbare Windrichtung liegt näher auf voraus als die wahre.
Scheinb.
Wahre
Wind-Richtg. 45°
Wahre
WindGeschw.
20 kn
Wahre
Wind-
Geschw.
20 kn
Scheinb.
WindGeschw.
28 kn
Scheinb.
Wind-Rich-
tg. 30°
WindGeschw.
28 kn
BootsGeschw.
10kn
BootsGeschw.
10 kn
Boot segelt vor dem Wind. Scheinbare Wind-Geschwindigkeit ist kleiner als die wahre, und
die scheinbare Windrichtung liegt näher auf voraus als die wahre.
Wahre
Wind-
Geschw.
20 kn
Wahre Wind-
Richtg. 135°
Scheinb. WindGeschw. 15 kn
BootsGeschw.
10 kn
Wahre
WindGeschw.
20 kn
Scheinb.
WindGeschw.
15 kn
Scheinb.
Wind-
Richtg.
BootsGeschw.
10 kn
G-PILOT 3100 Installations- und Bedienungsanleitung
NAVMAN
107°
53

6-2 Den G-PILOT 3100 im Windmodus betreiben.
Das Boot manuell in offenes
Gewässer steuern. Auf dem
passenden Windwinkel einen
geraden Kurs steuern.
Der G-PILOT kann im Display
Beispiel:
Wind
APP = 40°
TRUE (wahre Wind-Winkel) oder
APP (scheinb. Wind-Winkel)
zeigen, (siehe Abschn. 3-4).
Zur Pilot-Aktivierung,
Bootskurs = 45°
Für Hand-Steuerung, AUTO + MENU
AUTO gedrückt halten
AUTO:
Der G-PILOT steuert das Boot automatisch.
HANDSTEER:
Das Boot manuell steuern. Hierfür entweder
die CTS-Digital-Anzeige oder die KursfehlerBalken-Grafi k verwenden.
Der G-PILOT 3100 wählt den aktuellen Kurs (hier 45°) als
CTS (zu steuernden Kurs) und den anliegenden Wind-Winkel als SWA (zu steuernden Wind-Winkel) und steuert auf
diesem Wind-Winkel.
Zum Abschalten der Auto-Steuerung, AUTO drücken
Der G-PILOT wechselt auf STBY (Bereit).
Das Boot ist manuell zu steuern.
Der G-PILOT 3100 kann auch auf dem StB-Bug
aktiviert werden, z.B.:
oder vor dem StB-Wind, z.B.:
Wind
gedrückt halten
Wind
APP = P40°
SWA = 40°
Wind
APP = S120°
APP = S40°
SWA = 120°
SWA = 40°
54
NAVMAN
G-PILOT 3100 Installations- und Bedienungsanleitung

Wenn der G-PILOT 3100 aktiviert ist:
AUTO halten, um auf Compass-Modus zu wechseln
Wind und Wellen können
das Boot zur Seite
Wind und Strömung können
das Boot seitwärts versetzen.
drücken, so dass aktueller
Windwinkel und gesetzter
(SWA) differenzieren.
Wind
Wind
Bei Windrichtungs-Änderung, wird
der G-PILOT den Kurs berichtigen,
um wieder den gesetzten Windwinkel
zu erhalten.
Wind
Neue Wind-Richtung
Welle
Der G-PILOT wird das
Boot zum SWA zurück
steuern
Strom
Der G-PILOT wird das Boot
zum SWA zurück steuern
Der Windwinkel-Alarm kann im
ALARM-Menu WND ALARM aktiviert
werden, um gewarnt zu werden,
wenn sich die Wind-Richtung zu
stark ändert (siehe Abschn. 3-7).
6-3 Windwinkel (SWA) im Windmodus ändern
Den SWA in 1°-Schritten ändern:
< drücken, um den SWA um 1° nach BB zu ändern
> drücken, um den SWA um 1° nach StB zu ändern
z.B. für eine BB-Änderung oder eine StB-Änderung
Wind
< drücken
SWA = 40°
SWA wechselt auf 39°. Boot
steuert auf den neuen Windwinkel von 39°
Den SWA in 10°-Schritten ändern:
< festhalten, um SWA in 10°-Schritten je halbe Sekunde nach BB zu ändern
> festhalten, um SWA in 10°-Schritten je halbe Sekunde nach StB zu ändern
Beispiel:
Wind
< eine halbe
Sekunde halten
SWA = 40°
Wind
< drücken
SWA wechselt auf 41°. Boot
steuert auf den neuen Windwinkel von 41°
< halten, bis
SWA 120° ist
Neuer Kurs
SWA = 40° SWA wechselt auf 50°. Boot steuert auf
den neuen Wind-Winkel von 50° ein.
G-PILOT 3100 Installations- und Bedienungsanleitung
NAVMAN
Boot steuert auf den neuen
Wind-Winkel von 120°
55

6-4 Ausweichen (Dodge) im Wind-Modus
Ein Dodge ist eine scharfe Kursänderung, um z.B. einem plötzlich auftauchenden Hindernis
auszuweichen.
MENU + < drücken, um mit dem Dodge-Winkel nach BB auszuweichen.
MENU + > drücken, um mit dem Dodge-Winkel nach StB auszuweichen.
Beispiel:
Wind
Drücken
MENU + <
Mit ESC zurück zum
ursprünglichen Winkel
SWA ändert sich um
den Dodge-Winkel. Boot
steuert den neuen Wind-
SWA = 40°
Hinweis
Eine noch größere Kursänderung erfolgt durch erneuten Dodge-Befehl.
Zur Anzeige und Änderung des Dodge-Winkels, im OPTION-Menu, DODGE ANG aufrufen,
Winkel an
Der G-PILOT piept
(siehe Abschn. 3-7).
6-5 Automatisches Kreuzen im Wind-Modus
Ist der SWA (gesetzter Wind-Winkel) 90° oder weniger, erfolgt eine Wende, ist der SWA größer
als 90° erfolgt eine Halse. Durch eine Wende, bzw. Halse ändert sich der SW A nicht. Er liegt dann
nur auf der anderen Seite.
AUTO + < drücken, um eine Wende oder Hals über BB zu drehen.
AUTO + > drücken, um eine Wende oder Hals über StB zu drehen.
Beispiel: SWA ist 40°, somit wird eine Wende erfolgen. Wurde der Kreuz-Winkel (Tack) nicht auf
AUTO gesetzt, ändert das Boot zweimal den Kurs, zuerst um den Tack-Winkel und danach auf
den gesetzten SWA-Wert, der dann nur auf der anderen Bug-Seite liegt.
Die Wende (Halse) ist beendet, wenn der alte SWA-Winkel auf der
anderen Seite anliegt.
Hat das Boot den gesetzten Kreuz-Winkel (Tack)
erreicht, erfolgt eine Kurs-Anpassung an den alten
SWA (gesetzter Wind-Winkel), nur auf der anderen
Bugseite.
Am Ende der Verzögerungs-Zeit für das
Manöver ändert das Boot den Kurs um den
Kreuz (Tack)-Winkel. (In diesem Beispiel ist
Mit ESC ist das
Manöver jederzeit
abbrechbar
Wind
der Tack-Winkel nicht auf AUTO gesetzt). Das
Boot dreht.
Das Boot segelt geradeaus, solange der G-PILOT
die Verzögerungs-Zeit nach Null zählt.
60 und 30 Sekunden vor der Wende erfolgen je ein
langer Piepton. In den letzten 10 Sekunden erfolgt
sekündlich ein kurzes Piepen und am CountdownEnde ein langes Piepen.
56
SWA = 40°
AUTO + < drücken,
um eine Wende nach
BB zu starten
3 Sekunden bis zum Start der Wende
NAVMAN
G-PILOT 3100 Installations- und Bedienungsanleitung

Beispiel: SWA-Winkel ist 120°. Es erfolgt also
eine Halse. Der Gybe(Halse)-Winkel ist nicht
auf AUTO gesetzt.
Wind
Beispiel: SWA ist 40° und der Tack-Winkel ist
auf AUTO gesetzt. Es erfolgt also eine Wende
direkt auf den neuen Kurs.
Ende der
Halse nach
AUTO + > drücken, um die
Halse über StB vorzubereiten.
Der G-PILOT 3100
zählt durch die
Verzögerungs-Zeit.
Mit ESC ist das
Manöver jederzeit
abbrechbar
Hat das Boot den
Gybe-Winkel erreicht,
erfolgt die Anpassung
an den alten SWA
(gesetzter WindWinkel)
Ende der Halse nach Erreichen des
SWA-Wertes
Der Kurs
ändert sich um
den gesetzten
Gybe (Halse)Winkel
Mit ESC ist das
Manöver jederzeit
abbrechbar
Wind
AUTO + < drücken,
um eine Wende nach
BB vorzubereiten
Ist der SWA-Winkel größer als 90° und der
Gybe-Winkel auf AUTO gesetzt, erfolgt eine
Halse direkt auf den SWA-Wert, der vorher
anlag, nur auf der anderen Seite.
Erreichen des
SWA-Wertes
Der Kurs
ändert sich
direkt auf den
vorgegebenen
SWA-Wert,
wie er vor der
Wende anlag
Der G-PILOT 3100
zählt durch die
Verzögerungs-Zeit
Es sind vier Möglichkeiten des Kreuzens vorhanden:
Wende (Tack) (SWA 90° oder kleiner) Halse (Gybe) (SWA ist größer als 90°)
Wind
AUTO + < drücken,
für eine BB-Wende
AUTO + > drücken,
für eine StB-Wende
AUTO + <
drücken, für eine
AUTO + > drücken,
für eine StB-Halse
BB-Halse
Erfolgt ein Befehl in die falsche Richtung, erscheint TACK ERROR.
Hinweis
Zur Anzeige bzw. Änderung der Einstellungen für Winkel der Wende und Halse und der
Manöver-Verzögerung, im OPTIONS-Menu, TACK ANG, GYBE ANG oder TACK DELY
anwählen (siehe Abschn. 3-7).
G-PILOT 3100 Installations- und Bedienungsanleitung
NAVMAN
57

7 Steuer-Eigenschaften optimieren
7-1 Die Steuer-Parameter
Der G-PILOT 3100 hat sechs Steuer-Parameter, die verändert werden können, um das
Steuerverhalten zu optimieren.
Kursempfindlichkeit Die Größe der Abweichung vom eingestellten Kurs, bei der ein
Rudermenge Die Größe des Ruderwinkel-Ausschlags, die erforderlich ist, einen
Stützruder-Verstärkung Um größere Kursänderungen zügig durchzuführen, muss der
Ruder-Trim Verstärkung Bei seitlicher Einwirkung von Strom oder Wind wird ein Boot einseitig
GPS-Verstärkung Hier wird für den GPS-Modus bestimmt, wie stark die Korrektur
Windwinkel-Verstärkung
Zur Einstellung, im OPTIONS-Menu WIND GAIN aufrufen. (siehe
Optimales Kurshalten
Im AUTO- wie auch im HANDSTEER-Modus sollte das Boot auf Kurs gehalten werden, ohne
dass zu häufi ge Ruder-Bewegungen erfolgen, was zu erhöhtem mechanischen Verschleiß führen
würde .
58
Ruderbefehl zur Korrektur erfolgt.Die Einstellung erfolgt im MAIN-Menu,
- RESPONSE (siehe Abschn. 3-7). Der Bereich ist dimensionslos von
1 bis 5. Ein kleiner Response-Wert lässt eine größere Kursabweichung
zu, bevor eine Korrektur erfolgt. - Weiterhin sind Einstellungen von
A1 bis A5 möglich. Die A-Größen sind adaptive Einstellungen, bei
denen der G-PILOT 3100 die Häufi gkeit der Ruderbefehle mit dem
Kursverhalten vergleicht und den Response-Wert automatisch
anpasst, mit weniger Ruderbewegungen bei trotzdem zuverlässigem
Steuerkurs. Größere A-Werte ergeben eine schnellere Adaption. Durch
eine adaptive Anpassung ist es nicht erforderlich, den Response-Wert
unterschiedlichen Wetter-Bedingungen anzupassen.
Kursfehler zu berichtigen oder das Boot auf einen neuen Kurs
einzusteuern. Die Einstellung erfolgt im MAIN-Menu, RATIO (siehe
Abschn. 3-7). Es sind Einstellungen von 1 (kleine) bis 10 (große
Ruderwinkel) möglich.
Ruderwinkel erst größer sein als in der Ratio-Einstellung vorgegeben,
jedoch deutlich vor Erreichen des neuen Kurses zurück genommen
werden, um eine zu schnelle Drehung zu verhindern. Kurz vor dem
neuen Sollkurs ist sogar ein geringer Ruderausschlag zur anderen
Seite erforderlich, um ein weiches Eindrehen zu erreichen. Dies wird
durch die Stützruder-Einstellung im OPTIONS-Menu, C-RD GAIN
erreicht. Die Einstellungen sind 1 (gering) bis 10 (stark) sowie OFF
(kein Stützruder).
vom Kurs abgedrängt. Es erfolgen entsprechend immer nur einseitige
Ruderbefehle. Dies erkennt der G-PILOT 3100 und stellt automatisch
einen entsprechenden Vorhalte-Winkel (Ruder-Trim) ein. Hierfür ist ein
bestimmter Verstärkungs-Faktor erforderlich, der im OPTIONS-Menu,
TRIM GAIN gesetzt wird (siehe Abschn. 3-7). Die Einstellungen sind 1
(gering) bis 10 (stark) sowie OFF (keine Trim-Verstellung).
erfolgen soll, um den XTE-Wert (Querversetzung vom Sollkurs) wieder
auszugleichen. Die Einstellung erfolgt im OPTIONS-Menu, GPS-GAIN
(siehe Abschn. 3-7) Der Bereich geht von 1 bis 10.
Hier wird für den Wind-Modus festgelegt, wie stark eine Korrektur erfolgen
soll, wenn gesetzter und anliegender Wind-Winkel differieren.
Abschn. 3-7). Der Bereich geht von 1 bis 10.
Optimales Steuerverhalten
Die Steuerparameter sind korrekt justiert
NAVMAN
G-PILOT 3100 Installations- und Bedienungsanleitung

Tipp Für die Kontrolle der Steuer-Eigenschaften, ist die Kursfehler-Grafi k im Display eine wertvolle
Hilfe. (siehe Abschn. 3-3). Häufi gkeit und Größe der Abweichungen geben gute Hinweise.
7-2 Steuer-Profi le
Je nach Boots-Geschwindigkeit, Wellen- und Wind-Stärken variieren die Einstellungen der SteuerParameter, um optimale Steuer-Ergebnisse zu erhalten. Generell gilt:
für höhere Geschwindigkeiten, die Rudermenge verringern, für niedrige vergrößern.
Für ruhige See, die Kurs-Empfi ndlichkeit vergrößern, für rauhe See, die Empfi ndlichkeit
verringern.
für kräftige und/oder stabilere Windlagen, die Wind-Verstärkung vergrößern, für schwache
und/oder unstabilere Winde, kleinere Werte einstellen.
Um die Anpassung an unterschiedliche Bedingungen zu vereinfachen, kann der G-PILOT 3100
fünf unterschiedliche Parameter-Zusammenstellungen speichern. Sie sind als Profi le bezeichnet
und von 1 bis 5 nummeriert. Je nach Boots-Geschwindigkeit und Wetterlage muss dann nur eines
der Profi le im MAIN-Menu, PROFILE aktiviert werden (siehe Abschn. 3-7).
1 Bei der Installation des G-PILOT 3100 sind sämtliche Profi le auf Werkseinstellung der
Parameter gesetzt.
2 Ein Profi l (z.B. 1) aufrufen und während einer Fahrt mit typischen Bedingungen die Steuer-
Parameter optimal einstellen (siehe Abschn. 7-3).
3 Ergeben sich bei einer weiteren Fahrt eindeutige andere Bedingungen, ein anderes Profi l
aufrufen und auch hier die Parameter für ein optimales Steuern einstellen. Diesen Vorgang
wiederholen, sobald sich andere Fahrt- und Seebedingungen ergeben, bis jedes Profi l
festgelegt ist.
4 Sind dann bei späteren Fahrten einem Profi l entsprechende Bedingungen vorhanden, muss
nur dieses Profi l aktiviert werden, ohne das umständlich nach passenden Einstellungen
gesucht werden muss.
7-3 Steuer-Parameter ändern
Problem: Ruder arbeitet zuviel
Problem: Kursversetzung zu einer Seite
oder
Dieses verursacht erhöhten Verschleiß und
Strom-Verbrauch.
Kursempfi nkdlichkeit (RESPONSE) verringern
Rudermenge (RATIO) verringern
Stützruder-Verstärkung (C-RDGAIN)
verringern
Rudermenge (RATIO) erhöhen
Ruder-Trimm (TRIMGAIN) erhöhen
Kursempfi nkdlichkeit (RESPONSE) erhöhen
Problem: das Boot bewegt sich zu weit vom Kurs ab, bevor das Ruder aktiviert
wird, und wird zu stark zurück geführt.
Rudermenge (RATIO) verringern
Stützruder-Verstärkung (C-RDGAIN) verringern
Ruder-Trimm (TRIMGAIN) verringern
Problem: Das Boot schaukelt sich mit den Kurs-Bewegungen immer mehr auf
Rudermenge (RATIO) verringern
Problem: Das Boot folgt bei einer großen Kursänderung erst zu langsam, reagiert
dann aber zu stark und pendelt auf den neuen Kurs ein.
Stützruder-Verstärkung (C-RDGAIN) erhöhen
G-PILOT 3100 Installations- und Bedienungsanleitung
NAVMAN
59
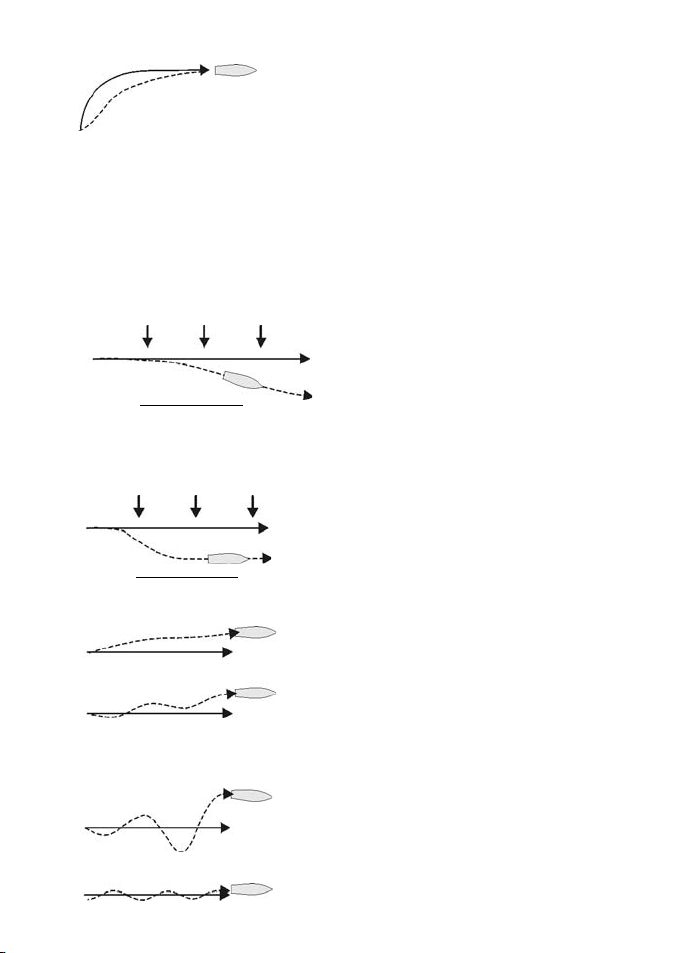
Problem: Bei einer großen Kursänderung reagiert das Boot erst zu stark, benötigt dann
jedoch lange, um den neuen Kurs zu erreichen.
Stützruder-Verstärkung (C-RDGAIN)
verringern
Bei seitlicher Wind- oder Wellen-Einwirkung, erfolgt die Korrektur zu schnell oder
zu langsam.
Wirken seitliche Kräfte auf das Boot ein, wird das Boot zur entsprechend anderen Seite vom Kurs
abgelenkt. Hierbei sind dann hauptsächlich Ruderbefehle in einer Richtung erforderlich. Dieses
erkennt der G-PILOT 3100 und verstellt die Ruder-Mittschiffs-Lage um einen gewissen Winkel,
den Ruder-Trimm, und erreicht damit ein Gegensteuern. Der Trimm-Verstärkungs-Wert (TRIMGAIN) bestimmt die Zeit, in der die passende Einstellung gefunden wird. in der Regel, 1 Minute.
Änderungen der Einstellung sollten in kleinen Stufen erfolgen, mit längeren Beobachtungspausen,
um einen optimalen Wert zu erreichen.
a Das Boot braucht zum Trimmen wesentlich mehr als eine Minute
Seiteneinfl üsse beginnen
Trimm-Verstärkung erhöhen
1 Minute
b Das Boot braucht zum Trimmen wesentlich weniger als eine Minute
Seiteneinfl üsse beginnen
Trimm-Verstärkung verringern
1 Minute
Problem: Versetzung vom GPS-Kurs
oder
Boot pendelt um den GPS-Kurs
oder
60
GPS-Verstärkung (GPS-GAIN) erhöhen
GPS-Verstärkung (GPS-GAIN) verringern
NAVMAN
G-PILOT 3100 Installations- und Bedienungsanleitung

Anhang A - Spezifi kationen
Elektrisch
Leistungsstrom-Versorgung 10,5 bis
16,5 V DC, 20 A maximum.
Elektronik-Versorgung 10,5 bis 16,5 V DC
Zentral-Einheit 80 mA
Jedes Bediengerät 30 mA
ohne Beleuchtung, 110 mA mit voller
Beleuchtung
Andere optionale Instrumente, siehe
deren Handbücher
Schnittstellen
NavBus Verbindung zu anderen Navman
Instrumenten.
NMA 0183 Ausgänge HDG; HDT; RSA;
Eingänge: APA; APB; BOD; BWC; MWD;
MWV; RMA; RMB; RMC; VHW; VTG;
XTE.
NMEA 0183 Anschlüsse:
NMEA 1: Eingang
NMEA 2: programmierbar als Ein- oder
Ausgang
Standard Übereinstimmung
EMC Übereinstimmung
USA (FCC): Part 15 Class B.
Europa (CD) : EN50081-1, EN50082-1
Neu-Seeland und Australien (C Tick):
AS-NZS 3548
Schutzart:
Kompass, Kreisel, Ruderwinkel-
Geber:
vollständig wasserdicht
Bediengerät: IP66 von der Frontseite,
wenn korrekt montiert
Zentral-Einheit: erfordert einen
kühlen, trockenen und sauberen Raum
Anschlussklemmen der Zentral-Einheit:
Anschluss
1 Leistungs-Versorgung Plus, 10,5
2 Leistungs-Versorgung Minus
3 Ruderantrieb Anschluss Minus
4 Ruderantrieb Anschluss Plus
Elektronik-Anschlüsse
Anschluss
1 Elektronik-Versorgung plus, 10,5
2 Elektronik-Versorgung Minus
3 NavBus +
4 NavBus 5 NMEA Rückleitg.
6 NMEA Eing. 1
7 NMEA Eing. 2
8 Antr.Kupplung / Steuer-Relais,
Bediengerät Netz-/Datenkabel:
Draht Signal
Rot Versorgung Plus, 10,5 bis 16,5 V
Schwarz Versorgung Minus
Orange NavBus +
Blau NavBus Gelb Isolieren, nicht abschneiden
Weiß Isolieren, nicht abschneiden
Grün Externer Alarm, gegen Masse
Signal
bis 16,5 V DC, 20 A max.
Signal
bis 16,5 V DC, 80 mA max.
Ausgang gegen Masse schaltend,
30 V DC, 300 mA max.
DC, 30 mA ohne Beleuchtung,
110mA mit voller Beleuchtung
schaltend, 30 V DC und 250 mA
Anhang B - Alarm und Warn-Hinweise
Alarm-Anzeige Grund der Meldung Empfohlene Aktion Hinweis
BAT ALARM Batteriespannung niedriger als Batterien prüfen a
der gesetzte Minimum-Wert G-PILOT ausschalten
CAL ERROR
Kompass-Geber sind nicht justiert (siehe Abschn. 5-2 und 6-1)
CCH ERROR Kupplungs-Strom ist zu hoch Kupplung und Anschlüsse prüfen a s
CE ALARM Der Kursfehler ist größer Den Kurs manuell korrigieren a
als der eingestellte Maximal-Wert
CSU ERROR Die Zentrale erhält Kompass-Verbindungen prüfen, a s
keine Kompass-Daten Kompass prüfen lassen
CUR ALARM Der Motorstrom überschreitet Antriebs-Mechanik untersuchen a s
den gesetzten Maximalwert Den Alarm-Wert erhöhen
G-PILOT 3100 Installations- und Bedienungsanleitung
Ruderwinkel- und/oder
Beide Geber justieren a
NAVMAN
61

Alarm-Anzeige
Grund der Meldung Empfohlene Aktion Hinweise
DRV ERROR Keine Änderung der Ruderanzeige Versorgungs-Spannung prüfen a s
beim Schalten des Antriebes Geber-Mechanik prüfen
Sicherungen in der Zentral-Einheit
prüfen
Ruder-Antrieb untersuchen
GPS ERROR Der Pilot empfängt keine GPS-Daten GPS-Funktionen prüfen a c s
GPS-Verbindungen prüfen
GSU ERROR Pilot empfängt keine Kreisel-Signale Verbindungen zum Kreisel a s
prüfen; Fachservice anfordern
MCU ERROR Keine Datenübertragung zwischen Anschlussverbindungen überprüfen a s
Zentrale und Display Service für Zentrale oder Display
NAV ERROR Pilot steuert nach entsprechendem Im GPS muss die Wegpunkt- bzw. m
Befehl nicht zu einem Wegpunkt Routennavigation aktiviert werden
NEXT WPT? Boot hat den Ziel-Wegpunkt erreicht. Alarm löschen mit beliebiger Taste
(WPT AKN aktiviert im GPS-Modus) Dann mit ENT zum nächsten Wegpunkt
starten, oder mit ESC auf STBY gehen
STBY
NO DATA Beim Aktivieren des GPS-Modus GPS-Funktionen prüfen m
werden keine GPS-Daten empfangen GPS-Verbindungen prüfen
oder Beim Aktivieren des Wind-Modus werden Wind-Instrument prüfen m
keine Wind-Daten empfangen Verbindungen zum Piloten prüfen
NVM ERROR Zentral-Speicher ist gestört Service erforderlich a s
PHA ERROR Ruder dreht verkehrt in Ruderwinkel-Geber prüfen a s
Relation zum Rückgeber. Ruderkalibrierung durchführen
RFU ERROR Der Pilot erhält keine Kabelverbindungen u. Mechanik a s
Ruderwinkel-Daten des Gebers prüfen
Service für den Geber erforderlich
ROUTE END Boot erreicht Endziel Mit ESC auf STBY oder mit
einer GPS-Route. ENT auf Kompass-Modus umschalten,
und den anliegenden Kurs steuern
TRK ERROR Beim Wechsel auf GPS-Modus liegt Das Boot manuell oder durch Kompass das Boot zu weit außerhalb vom Kurs Pilotsteuerung auf den Kurs zurück
führen
TAK ERROR Im Windmodus will sich das Boot in Den Winkel zum Wind ändern m
die falsche Richtung legen
WND ALARM Der Windwinkel ist größer geworden SWA ändern a
als der gesetzte Alarmwert Auf Kompass-Modus wechseln
WND ERROR Der G-PILOT erhält keine Windinstrument Funktionen prüfen a c s
Wind-Daten Kabelverbindungen prüfen
XTE ALARM Boot wird über den max. Das Boot manuell auf den Kurs a
XTE-Wert vom Kurs versetzt zurück bringen
Hinweis a Alarm ertönt. Ausschalten des Signals mit beliebiger Taste. Die Alarm-Meldung
mit ESC löschen
c Der G-PILOT 3100 wechselt in den Kompass-Modus
m Der G-PILOT 3100 Modus wechselt nicht
s Der G-PILOT 3100 wechselt auf STBY
62
NAVMAN
G-PILOT 3100 Installations- und Bedienungsanleitung

Appendix D - How to contact us www.navman.com.
NORTH AMERICA
Navman USA Inc.
30 Sudbury Rd, Acton, MA 01720.
Toll Free: +1 866 628 6261
Fax: +1 978 897 8264
e-mail: sales@navmanusa.com
web:www.navman.com
AUSTRALIA
Navman Australia Pty. Limited
Unit 2 / 5-13 Parsons St.
Rozelle, NSW 2039, Australia.
Ph: +61 2 9818 8382
Fax: +61 2 9818 8386
e-mail: sales@navman.com.au
web: www.navman.com
OCEANIA
New Zealand
Absolute Marine Ltd.
Unit B, 138 Harris Road,
East Tamaki, Auckland.
Ph: +64 9 273 9273
Fax: +64 9 273 9099
e-mail: navman@absolutemarine.co.nz
Papua New Guinea
Lohberger Engineering,
Lawes Road, Konedobu.
PO Box 810, Port Moresby.
Ph: +675 321 2122
Fax: +675 321 2704
e-mail: loheng@online.net.pg
web: www.lohberger.com.pg
SOUTH AMERICA
Argentina
Costanera Uno S.A.
Av Pte Ramón S. Castillo y Calle 13
Zip 1425 Buenos Aires, Argentina.
Ph: +54 11 4312 4545
Fax +54 11 4312 5258
e-mail:
purchase@costanerauno.com.ar
web: www.costanerauno.ar
Brazil
Equinautic Com Imp Exp de Equip
Nauticos Ltda.
Rua Ernesto Paiva, 139
Clube dos Jangadeiros
Porto Alegre - RS - Brasil
CEP: 91900-200.
Ph: +55 51 3268 6675
+55 51 3269 2975
Fax: +55 51 3268 1034
e-mail:
equinautic@equinautic.com.br
web: www.equinautic.com.br
Realmarine
Estrada do Joa 3862,
Barra da Tijuca, Rio de Janeiro,
Brazil. CEP: 22611-020.
Ph: +55 21 2483 9700
Fax: +55 21 2495 6823
e-mail: tito@realmarine.com.br
web: www.realmarine.com.br
Chile
Equimar
Manuel Rodrigurez 27
Santiago, Chile.
Ph: +56 2 698 0055
Fax +56 2 698 3765
e-mail: mmontecinos@equimar.cl
Mera Vennik
Colon 1148, Talcahuano,
4262798, Chile.
Ph: +56 41 541 752
Fax +56 41 543 489
e-mail: meravennik@entel.chile.net
CENTRAL AMERICA
Mexico
Mercury Marine de Mexico
Anastacio Bustamente #76
Interior 6 Colonia Francisco Zarabia,
Zapapan, Jalisco, C.P. 45236 Mexico.
Ph: +52 33 3283 1030
Fax: +52 33 3283 1034
web: www.equinautic.com.br
ASIA
China
Peaceful Marine Electronics Co. Ltd.
Guangzhou, Hong Kong, Dalian,
Qingdao, Shanghai
1701 Yanjiang Building
195 Yan Jiang Zhong Rd. 510115
Guangzhou, China.
Ph: +86 20 3869 8839
Fax: +86 20 3869 8780
e-mail: sales@peaceful-marine.com
web: www.peaceful-marine.com
India
Access India Overseas Pvt. Ltd.
A-98, Sector 21,
Noida - 201 301, India.
Ph: +91 120 244 2697
TeleFax: +91 120 253 7881
Mobile: +91 98115 04557
e-mail: vkapil@del3.vsnl.net.in
Esmario Export Enterprises
Block No. F-1, 3rd Floor, Surya Towers
Sardar Patel Rd, Secunderbad 500 003.
Ph: +91 40 2784 5163
Fax: +91 40 2784 0595
e-mail: gjfeee@hd1.vsnl.net.in
web: www.esmario.com
Indonesia
Polytech Nusantara,
Graha Paramita 2nd Floor,
Jln Denpasar Raya Blok D2
Kav 8 Kuningan, Jakarta 12940.
Ph: +62 21 252 3249
Fax: +62 21 252 3250
e-mail: polytech@transavia.co.id
Korea
Kumhomarine Technology Co. Ltd.
#604-842, 2F, 1118-15, Janglim1-Dong,
Saha-Gu, Busan, Korea.
Ph: +82 51 293 8589
Fax: +82 51 265 8984
e-mail: info@kumhomarine.com
web: www.kumhomarine.com
Maldives
Maizan Electronics Pte. Ltd.
Henveyru, 08 Sosunmagu.
Male', Maldives.
Mobile: +960 78 24 44
Ph: +960 32 32 11
Fax: +960 32 57 07
e-mail: ahmed@maizan.com.mv
Singapore, Malaysia, Brunei,
Indonesia and Phillipines
RIQ PTE Ltd.
Blk 3007, 81 Ubi Road 1, #02-440,
Singapore 408701.
Ph: +65 6741 3723
Fax : +65 6741 3746
e-mail: riq@postone.com
Taiwan
Seafirst International Corporation
No. 281, Hou-An Road, Chien-Chen
Dist. Kaohsiung, Taiwan R.O.C.
Ph: +886 7 831 2688
Fax: +886 7 831 5001
e-mail: seafirst@seed.net.tw
web: www.seafirst.com.tw
Thailand
Thong Electronics (Thailand) Co. Ltd.
923/588 Ta Prong Road, Mahachai,
Muang, Samutsakhon 74000, Thailand.
Ph: +66 34 411 919
Fax: +66 34 422 919
e-mail: sales@thongelectronics.com
admins@thongelectronics.com
web: www.thongelectronics.com
Vietnam
Haidang Co. Ltd.
1763 Le Hong Phong St. Ward 12
District 10, Ho Chi Minh City.
Ph: +84 8 863 2159
Fax: +84 8 863 2124
e-mail: sales@haidangvn.com
web: www.haidangvn.com
MIDDLE EAST
Lebanon and Syria
Balco Stores
Balco Building, Moutran Street,
Tripoli (via Beirut). - Lebanon
P.O. Box: 622.
Ph: +961 6 624 512
Fax: +961 6 628 211
e-mail: balco@cyberia.net.lb
United Arab Emirates
Kuwait, Oman, Iran, Saudi
Arabia, Bahrain & Qatar
Abdullah Moh’d Ibrahim Trading, opp
Creak Rd. Baniyas Road, Dubai.
Ph: +971 4 229 1195
Fax: +971 4 229 1198
e-mail: sales@amitdubai.com
AFRICA
South Africa
Pertec (Pty) Ltd (Coastal Division)
16 Paarden Eiland Road.
Paarden Eiland, 7405
PO Box 527,
Paarden Eiland, 7420
Cape Town, South Africa.
Ph: +27 21 508 4707
Fax: +27 21 508 4888
e-mail: info@kfa.co.za
web: www.pertec.co.za
EUROPE
France, Belgium and Switzerland
Plastimo SA
15, rue Ingénieur Verrière,
BP435,
56325 Lorient Cedex.
Ph: +33 2 97 87 36 36
Fax: +33 2 97 87 36 49
e-mail: plastimo@plastimo.fr
web: www.plastimo.fr
Germany
Navimo Deutschland
15, rue Ingénieur Verrière
BP435- 56325 Lorient Cedex.
Ph: +49 6105 92 10 09
+49 6105 92 10 10
+49 6105 92 10 12
Fax: +49 6105 92 10 11
e-mail:
plastimo.international@plastimo.fr
website: www.plastimo.de
Italy
Navimo Italia
Nuova Rade spa, Via del Pontasso 5
16015 Casella Scrivia (GE).
Ph: +39 1096 80162
Fax: +39 1096 80150
e-mail: info@nuovarade.com
web: www.plastimo.it
Holland
Navimo Holland
Industrieweg 4,
2871 JE Schoonhoven.
Ph: +31 182 320 522
Fax: +31 182 320 519
e-mail: info@plastimo.nl
web: www.plastimo.nl
United Kingdom
Navimo UK
Hamilton Business Park
Bailey Road, Hedge End
Southhampton, Hants S030 2HE.
Ph: +44 01489 778 850
Fax: +44 0870 751 1950
e-mail: sales@plastimo.co.uk
web: www.plastimo.co.uk
Sweden, Denmark, Finland and
Norway
Navimo Nordic
Lundenvägen 2,
473 21 Henån.
Ph: +46 304 360 60
Fax: +46 304 307 43
e-mail: info@plastimo.se
web: www.plastimo.se
Spain
Navimo España
Avenida Narcís Monturiol, 17
08339 Vilassar de Dalt,
Barcelona.
Ph: +34 93 750 75 04
Fax: +34 93 750 75 34
e-mail: plastimo@plastimo.es
web: www.plastimo.es
Portugal
Navimo Portugal
Avenida de India N°40
1300-299 Lisbon.
Ph: +351 21 362 04 57
Fax: +351 21 362 29 08
e-mail: plastimo@siroco-nautica.pt
web: www.plastimo.com
Other countries in Europe
Plastimo International
15, rue Ingénieur Verrière BP435
56325 Lorient Cedex, France.
Ph: +33 2 97 87 36 59
Fax: +33 2 97 87 36 29
e-mail:
plastimo.international@plastimo.fr
web: www.plastimo.com
REST OF WORLD/
MANUFACTURERS
Navman NZ Limited
13-17 Kawana St.
Northcote.
P.O. Box 68 155,
Newton,
Auckland,
New Zealand.
Ph: +64 9 481 0500
Fax: +64 9 481 0590
e-mail: marine.sales@navman.com
web: www.navman.com

.

Made in New Zealand
MN000228A
G-PILOT 3100 Operation
Lon 174° 44.535'E
Lat 36° 48.404'S
NAVMAN
 Loading...
Loading...