

Page 1

G-PILOT 3100
AUTOPILOT
Operation Manual
English..............3
Español...........34
Português.......64
www.navman.com
NAV MAN
Page 2

Índice
Importante............................................................................................65
1 Introdução.........................................................................................66
1-1 Um instalação típica.................................................................................66
2 Operação básica...............................................................................67
2-1 Ligar e desligar.........................................................................................67
2-2 As teclas...................................................................................................67
2-3 Como utilizar o G-PILOT 3100.................................................................67
2-3-1 Como iniciar o G-PILOT 3100...........................................................67
2-3-2 Como utilizar o G-PILOT 3100..........................................................67
2-3-3 Acção em uma emergência...............................................................68
2-3-4 Como desligar o G-PILOT 3100........................................................68
2-4 Como confi gurar o modo de leme............................................................68
2-5 STBY (modo de espera), AUT O (automático) e HAND STEER (leme manual) 69
2-6 Pilotagem vagarosa .................................................................................70
3 Operação...........................................................................................71
3-1 Ajustar a iluminação de fundo para o écran e as teclas...........................71
3-2 Visor de rumo...........................................................................................71
3-3 Visor de dados de barra...........................................................................71
3-4 Visor de dados de informações................................................................71
3-5 Alarmes....................................................................................................72
3-6 Modo de simulação..................................................................................72
3-7 Como utilizar menus ................................................................................72
3-8 Referência de teclas ................................................................................75
4 Modo de leme por bússola..............................................................76
4-1 Dados de leme por bússola .....................................................................76
4-2 Como activar e desactivar o G- PILOT 3100 no modo de bússola..........76
4-3 Como mudar de curso no modo de bússola............................................77
4-4 Como esquivar-se de tormenta no modo bússola ...................................78
4-5 Controle automático de rumo no modo bússola ......................................78
5 Modo de leme por GPS....................................................................79
5-1 Dados de navegação GPS ......................................................................79
5-2 Como activar e desactivar o G- PILOT 3100 no modo GPS....................80
5-3 Como esquivar-se de tormenta no modo GPS........................................81
6 Modo de leme pelo vento.................................................................82
6-1 Dados de leme pelo vento .......................................................................82
6-2 Como activar e desactivar o G- PILOT 3100 no modo de vento .............84
6-3 Como modifi car o SWA (ajustar o ângulo do vento) no modo de vento ..85
6-4 Como esquivar-se de tormenta no modo de vento..................................86
6-5 Controle automático de rumo no modo de vento.....................................86
7 Como melhorar o desempenho de leme........................................88
7-1 Os parâmetros de leme............................................................................88
7-2 Perfi s........................................................................................................88
7-3 Como ajustar os parâmetros de leme......................................................89
64
NAVMAN
Manual de operação do G PILOT 3100
Page 3
Apêndice A - Especifi cações..............................................................91
Apêndice B - Mensagens de alarmes e avisos.................................91
Apêndice C - Solução de problemas.................................................93
Apêndice D - Como entrar em contacto connosco..........................94
Importante
É de exclusiva responsabilidade do proprietário instalar e utilizar o instrumento e o(s) transdutor(es)
de forma a não causar acidentes, ferimentos a pessoas ou danos a propriedades. O utilizador
deste produto é o único responsável pelo cumprimento de práticas seguras de navegação.
A escolha, localização e instalação de todos os componentes de qualquer sistema de autopiloto
são questões críticas. Se a instalação não for feita de maneira correcta, a unidade não irá
funcionar em seu pleno potencial. Em caso de dúvida, consulte o representante Navman.
Assegure-se de que quaisquer furos estejam em uma posição segura e que não enfraqueçam
a estrutura do barco. Em caso de dúvida, consulte um construtor de barcos capacitado.
Como utilizar o G-PILOT 3100:
O G-PILOT 3100 foi concebido para ajudar a poupar o piloto de pilotar por períodos muito
longos e não como a principal forma de leme da embarcação.
O G-PILOT 3100 não foi concebido para utilização em condições extremas de tempo, em
condições adversas ou em águas próximas a outras embarcações, a águas perigosas ou
da terra.
O G-PILOT 3100 não controla uma embarcação melhor do que um ser humano.
Em condições adversas, pilote a embarcação manualmente.
Nunca deixe o leme desguarnecido. Vigie o tempo todo. O piloto deve sempre monitorar o
curso da embarcação e o G-PILOT 3100 e deve estar pronto para assumir a embarcação
manualmente.
O desempenho do G-PILOT 3100 pode ser afectado por falhas em alguma peça, con-
dições ambientais, instalação e utilização não apropriadas.
A NAVMAN NZ LIMITED REJEITA QUALQUER RESPONSABILIDADE POR QUALQUER
UTILIZAÇÃO DESTE PRODUTO DE MANEIRA QUE POSSA PROVOCAR ACIDENTES,
DANOS OU QUE POSSA VIOLAR A LEGISLAÇÃO.
Como a Navman está continuamente a aperfeiçoar este produto, reservamo-nos o direito de
efectuar alterações no produto a qualquer tempo e que possam não estar refl ectidas nesta
versão do manual. Entre em contacto com o escritório mais próximo da Navman, se precisar
de ajuda adicional.
Idioma prevalecente: Esta declaração, quaisquer manuais de instrução, guias de utilizadores
e outras informações relacionadas ao produto (Documentação) podem ser traduzidos de e para
qualquer outro idioma (Tradução). No evento de quaisquer confl itos entre qualquer Tradução da
Documentação, a versão da Documentação no idioma Inglês será considerada como a versão
ofi cial da Documentação.
Copyright © 2003 Navman NZ Limited, Nova Zelândia Todos os direitos reservados. Navman é
uma marca comercial registada da Navman NZ Limited.
Manual de operação do G PILOT 3100
NAVMAN
65
Page 4
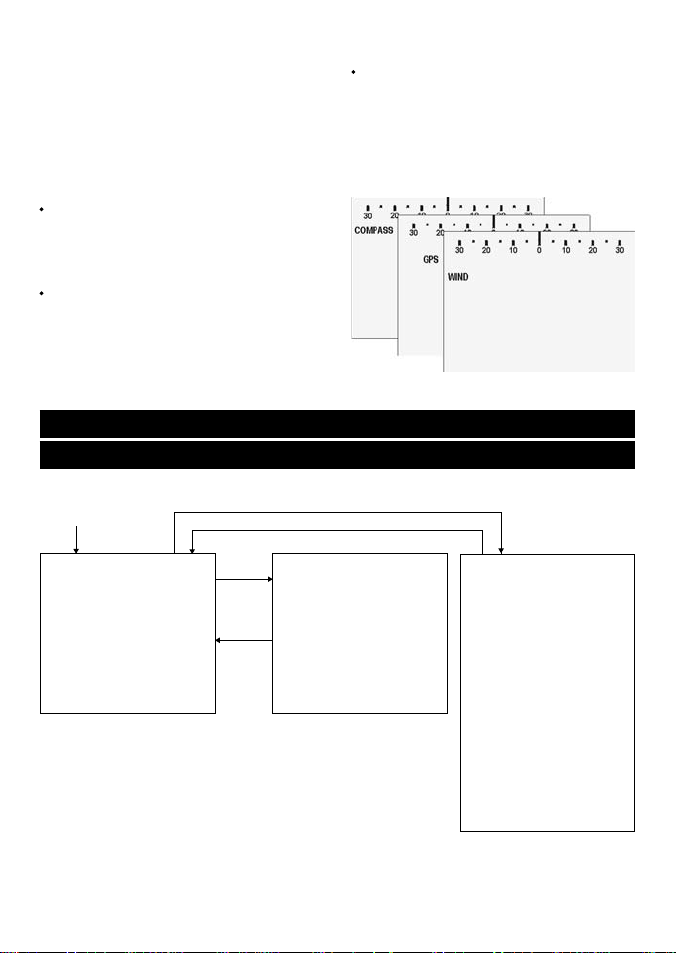
1 Introdução
O autopiloto G-PILOT 3100 possui três modos
de leme:
Bússola: A embarcação navega conforme
o rumo indicado por uma bússola.
Vento: O barco navega e orça em função
de um ângulo defi nido em relação ao vento
(é necessário que um instrumento de
medição de vento, como o da série WIND
3100 da Navman, esteja conectado).
GPS: A embarcação navega para um
destino ao longo de uma rota defi nida
previamente (é necessário que um
instrumento GPS, como o traçador de
cartas TRACER da Navman, esteja
conectado).
O G-PILOT 3100 possui três estados:
STBY (modo de espera): O G-PILOT
3100 não pilota a embarcação. Pilote a
embarcação com leme manual.
AUTO: O G-PILOT 3100 pilota a embar-
cação de maneira automática.
LEME MANUAL: O G-PILOT 3100 exibe
informações de leme para o piloto utilizá-
las para pilotar manualmente.
A unidade é alimentada com energia pela fonte
de alimentação da embarcação.
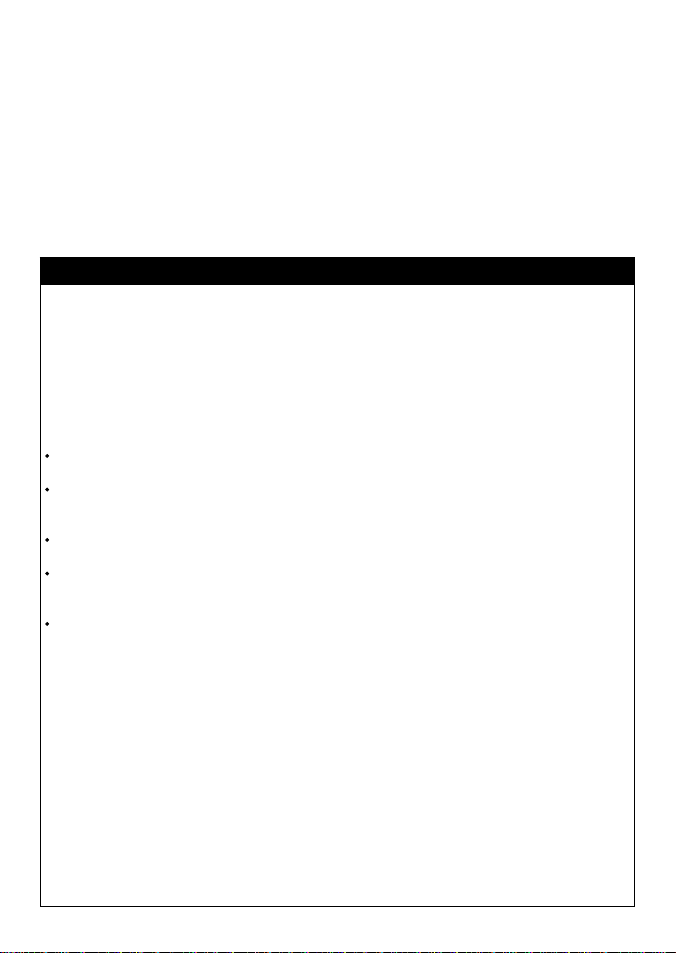
1-1 Uma instalação típica
Unidade
do
Controle do
leme
66
Leme manual
Controle de
embreagem
(opcional)
Controle de
leme
Leme
visor
NavBus
Visor
principal
O G-PILOT 3100 faz parte da família Navman
de instrumentos para embarcações, que inclui
instrumentos para velocidade, profundidade e
repetidores. Esses instrumentos podem ser
conectados entre si para compor um sistema
integrado de dados para uma embarcação. O
desempenho do G-PILOT 3100 será melhorado
se for conectado a um instrumento de medição
de velocidade da embarcação, como o SPEED
3100 da Navman ou a um GPS.
Como utilizar este manual
Para obter o máximo de benefícios, leia cuidadosamente este manual antes de utilizar o
G-PILOT 3100.
Este manual descreve como operar o G-PILOT
3100. Consulte o Manual de instalação do
G-PILOT 3100 para obter informações acerca
de como instalar e ajustar o G-PILOT 3100
antes da utilização.
Limpeza e manutenção
Limpe as peças do G-PILOT 3100 com um
pano humedecido em água ou detergente
neutro. Evite limpadores abrasivos, gasolina
ou outros solventes.
Não pinte nenhuma parte do G-PILOT 3100,
excepto os cabos.
Mais
unidades
de visor
Chave ou chaves de
energia e protecção
de energia eléctrica
Unidade de
feedback
do leme
Nota: Acima, mostramos apenas uma típica
instalação. Consulte as informações fornecidas
com sua unidade para obter mais informações.
NAVMAN
WIND
Instrumentos opcionais
Interruptor
Peças fornecidas com o G-PILOT
Outras peças necessárias
Peças opcionais
Manual de operação do G PILOT 3100
3100
Bússola
SPEED
3100
Gyro
Trabalho leve
Trabalho pesado
12 V DC
Fonte de
alimentação
GPS
NMEA
Page 5
2 Operação básica
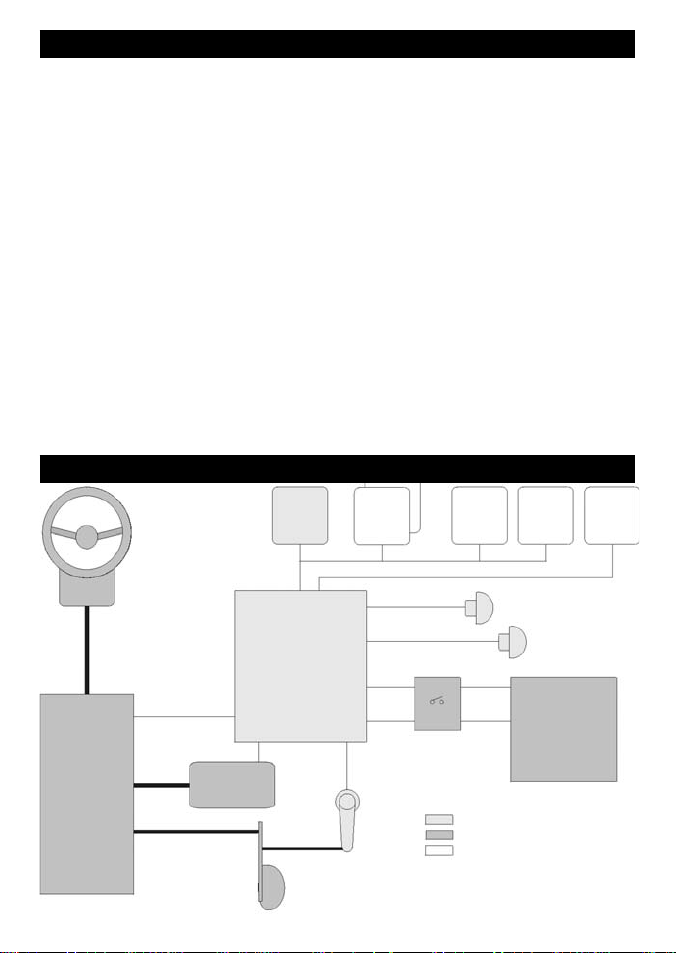
A unidade de visor
Dados de barra
(erro de leme ou curso,
consulte a secção 3-3)
Modo de leme
(consulte a secção 2-4)
(consulte a secção 2-5)
Símbolo de simulação
(consulte a secção 3-6)
Visor de informações
(consulte a secção 3-4)
Quatro interruptores
(consulte a secção 2-2)
Operação
O écran e as teclas apresentam iluminação de fundo
(consulte a secção 3-1)
2-1 Ligar e desligar
Ligue e desligue a unidade com a chave de
energia auxiliar do barco. A unidade não possui
chave de energia própria. Quando a unidade
for desligada, qualquer ajuste efectuado
será mantido.
Se a palavra SIMULATE piscar no écran LCD,
a unidade estará no modo de simulação (veja
a secção 3-6).
2-2 As teclas
A unidade possui quatro teclas, intituladas
AUTO (ESC) < > e MENU (ENT).
Neste manual:
Press (premir) signifi ca apertar a tecla
por pelo menos um segundo.
Hold (Reter) signifi ca manter a tecla
segura até que o visor seja modifi cado.
Premir uma tecla + outra tecla signifi ca
premir ambas as teclas em conjunto.
A unidade de visor emitirá um apito bem agudo,
se for premida uma tecla válida e um apito
grave, se for premida uma tecla inválida. Para
obter mais informações acerca da utilização de
teclas, consulte as secções 3-7 e 3-8.
Interruptor com chave
Quando a chave estiver ligada, o G-PILOT
ignorará qualquer pressão sobre as teclas.
Para ligar ou desligar a chave:
Prima AUTO + MENU..
Prima ENT..
2-3 Como utilizar o G-PILOT 3100
2-3-1 Como iniciar o G-PILOT 3100
1 Ligue o G-PILOT 3100 (consulte a secção
2-1). Se o G-PILOT 3100 estiver conectado
a instrumentos de medição de velocidade,
vendo ou a um GPS, ligue-os também.
2 Se necessário, ajuste a iluminação traseira
para facilitar a leitura do écran (consulte a
secção 3-1).
3 Se necessário, modifi que os dados de
utilizador (consulte a secção 3-7).
Manual de operação do G PILOT 3100
2-3-2 Como utilizar o G-PILOT 3100
1 Pilote manualmente a embarcação até
2 Se necessário, modifi que o modo de leme
3 Como conectar, utilizar e desconectar o
NAVMAN
O visor principal
sempre mostra o rumo
do barco
(consulte a secção 3-2)
Rumo da embarcação
TRUE ou MAG (REAL
ou MAGNÉTICO)
Piscará se a bateria
estiver fraca (consulte
a secção 3-5)
O símbolo de alarme
pisca quando soa o
alarme (consulte a
secção 3-5)
111 x 111 mm
(4.4" x 4.4")
águas abertas antes de utilizar o G-PILOT
para pilotar a embarcação.
(consulte a secção 2-4).
G-PILOT :
Para o modo de leme pela bússola
67
Page 6
consulte a secção 4.
Para o modo de leme pelo GPS:
consulte a secção 5.
Para o modo de Vento: consulte a
secção 6.
4 É possível modifi car o modo de leme
durante uma viagem, como, por exemplo:
Mudar de GPS para bússola no fi nal de
uma rota.
Em uma embarcação a vela, mudar
de vento para bússola ou GPS na
mudança de vela para motor (consulte
a secção 3-4).
5 O G-PILOT pode ser ajustado para optimi-
zar seu desempenho de leme:
Se necessário, ajuste a taxa de curva
de modo que a embarcação faça
curvas a uma taxa razoável; vá até
TURN RATE no menu OPTIONS
(consulte a secção 3-7).
Seleccione um perfi l apropriado para as
condições (consulte a secção 7-2).
Se necessário, ajuste os dados no
perfi l, para melhorar o desempenho de
leme (consulte a secção 7-3).
Se o desempenho de leme do G-PILOT
for fraco e os ajustes descritos acima
não melhorarem o desempenho,
estude a possibilidade de um ajuste
completo no porto e faça uma tentativa
conforme está descrito no Manual de
instalação do G-PILOT 3100.
Importante:
O G-PILOT não controla uma embarcação
melhor do que um ser humano. O G-PILOT
não foi concebido para utilização em condições extremas de clima, em condições
adversas ou em águas próximas a outras
embarcações, a águas perigosas ou da
terra. Nessas condições, desconecte o
G-PILOT e pilote manualmente.
Nunca deixe o leme desguarnecido, vigie o
tempo todo e esteja pronto para reassumir
manualmente o leme da embarcação.
Não gire o leme manualmente enquanto o
G-PILOT estiver conectado.
Variações locais no campo magnético
podem afectar a precisão do rumo
da bússola. Tais variações são de
responsabilidade do utilizador.
2-3-3 Acção em uma emergência
Para retomar o controle da embarcação em uma
situação de emergência:
Prima AUTO para colocar o G-PILOT 3100
em STBY (modo de espera)
ou desligue o(s) interruptor(es).
Então, pilote a embarcação manualmente.
2-3-4 Como desligar o G-PILOT
3100
É normal desligar o G-PILOT ao atingir o
destino.
2-4 Como confi gurar o modo de leme
O G-PILOT 3100 possui três formas de leme
da embarcação: bússola, GPS ou vento. Os
mesmos são chamados de modos de leme.
Para uma embarcação a motor
Para uma embarcação sem GPS ou para
uma embarcação com GPS, quando não
se quiser navegar para um a waypoint,
escolha o modo bússola. O G-PILOT
3100 pilota a embarcação para um
conjunto de rumos de bússola.
Para utilizar o G-PILOT 3100 com um
GPS para navegar para um waypoint
ou ao longo de uma rota, escolha o
modo GPS. O G-PILOT 3100 pilota
a embarcação utilizando dados de
navegação do GPS.
Para uma embarcação à vela
Para velejar , orçar e cambar as velas em um
ângulo determinado com o vento, escolha
68
NAVMAN
o modo vento. O modo de vento exige a
utilização de um instrumento de medição de
vento, como o WIND 3100 da Navman, para
conexão via NavBus ou NMEA.
Para pilotar seguindo um rumo pela
bússola, escolha o modo bússola.
Para utilizar o G-PILOT 3100 com um
GPS para navegar para um waypoint
ou ao longo de uma rota, escolha o
modo GPS.
Observação para embarcações à vela
O G-PILOT não é recomendado para
utilização sob a luz, ventos inconstantes
ou tempestuosos.
Tome cuidado quando estiver navegando,
para evitar uma cambagem acidental.
O modo de vento exige uma calibração
precisa do instrumento de medição
de vento.
Manual de operação do G PILOT 3100
Page 7
Como confi gurar o modo de leme no menu
Vá até a opção STER MODE (Modo de leme) no
menu MAIN (Principal) (consulte a secção 3-7) e
seleccione COM (bússola), GPS ou WIND.
Como confi gurar o modo de leme por meio
de teclas de atalho
Prima a opção MENU para ir directamente até
o menu de modo de leme.
Nota
Para seleccionar o modo GPS, o G-PILOT
deve receber dados de um instrumento
compatível com o instrumento GPS; caso
contrário, o G-PILOT exibirá NO DATA
(SEM DADOS)
Para activar o G-PILOT no modo GPS,
o GPS deve estar a navegar para um
waypoint ou ao longo de uma rota, pois,
caso contrário, o G-PILOT exibirá NAV
ERROR (ERRO DE NAVEGAÇÃO). Se
a embarcação estiver muita afastada
do curso traçado, o G-PILOT exibirá a
mensagem TRK ERROR (ERRO DE
ROTA) (consulte a secção 5-2)
Para seleccionar o modo Vento, o
G-PILOT deve receber dados de um
instrumento compatível com um instrumento de medição de vento, pois, caso
contrário, o G-PILOT exibirá NO DATA
(SEM DADOS)
O modo de pilotagem é mostrado no écran
2-5 STBY (modo de espera), AUTO (automático) e HAND
STEER (leme manual)
O G-PILOT 3100 pode funcionar em STBY (modo de espera), AUT O (automático) e HAND STEER
(leme manual)
Como activar
Prima AUTO + MENU
Prima AUTO
STBY (modo de espera)
O autopiloto não pilota o
barco excepto durante a
pilotagem vagarosa.
O autopiloto exibe o rumo,
mas não mostra dados de
leme.
Pilote a embarcação
manualmente.
Para obter mais informações sobre pilotagem vagarosa, consulte
a secção 2-6
Para obter mais informações sobre a activação e utilização do
G-PILOT 3100 nos modos AUTO (automático) e HAND STEER
(leme manual):
Para o modo de leme pela bússola consulte a secção 4.
Para o modo de leme pelo GPS: consulte a secção 5.
Para o modo Vento: consulte a secção 6.
Manual de operação do G PILOT 3100
AUTO
Prima
O autopiloto pilota a
AUTO
embarcação.
O autopiloto exibe o rumo
Prima
e os dados de navegação.
AUTO
Não pilote manualmente a
embarcação.
NAVMAN
LEME MANUAL
O autopiloto não pilota a
embarcação.
O autopiloto exibe o rumo
e os dados de navegação.
Pilote manualmente
utilizando os dados de
navegação exibidos.
CTS (curso para pilotar)
pode ser exibido no écran
de informações (consulte
a secção 3-4).
Erro de curso pode ser
exibido nos dados da barra
(consulte a secção 3-3).
69
Page 8

2-6 Pilotagem vagarosa
Quando o G-PILOT 3100 estiver no modo STBY (modo de espera, consulte a secção 2-5), o piloto
deverá pilotar a embarcação manualmente. Entretanto, o G-PILOT 3100 pode accionar o leme;
isso é chamado de pilotagem vagarosa:
mantenha premido < para girar o leme para bombordo
mantenha premido > para girar o leme para estibordo
prima e solte < e > em conjunto para accionar o leme para meia nau (essa função será
desactivada até a calibração da unidade de feedback do leme e a bússola (consulte o
Manual de Instalação do G- PILOT 3100))
Por exemplo:
O leme está a meia nau
Prima < e o leme e a
embarcação giram para
bombordo
Solte < e o leme
permanece voltado
para bombordo
A embarcação continua a
girar para bombordo
O leme está voltado para bombordo
O leme está voltado para bombordo
Mantenha premido
> e o leme gira para
estibordo
Solte >, o leme fi ca
parado, mas ainda
voltado para bombordo
Prima e solte
< + >ao mesmo tempo
o leme gira para
meia nau.
Para fazer com que o
leme pare de girar para
meia nau, prima ESC,
A embarcação continua
girando para bombordo
A embarcação continua
em frente
< ou >
Aviso Até a calibração da unidade de feedback do leme, não há limite para o leme e o usuário
deve assegurar-se de que o leme não esteja a ir para o fi nal de curso quando se utiliza
a pilotagem vagarosa.
Nota Normalmente durante uma mudança de curso, os dados de informação (consulte a secção 3-4)
exibem JOG. Entretanto, se CUR (corrente de comando) estiver seleccionado, então essa corrente
será exibida durante uma mudança de rumo como auxílio para testar o controle de leme.
70
NAVMAN
Manual de operação do G PILOT 3100
Page 9
3 Operação
3-1 Ajustar a iluminação de
fundo para o écran e as teclas.
Para ajustar a iluminação de fundo, vá até
LAMP no menu MAIN (consulte a secção 3-
7). As opções são OFF (DESACTIVAR) ou 1
(menor brilho) a 4 (maior brilho).
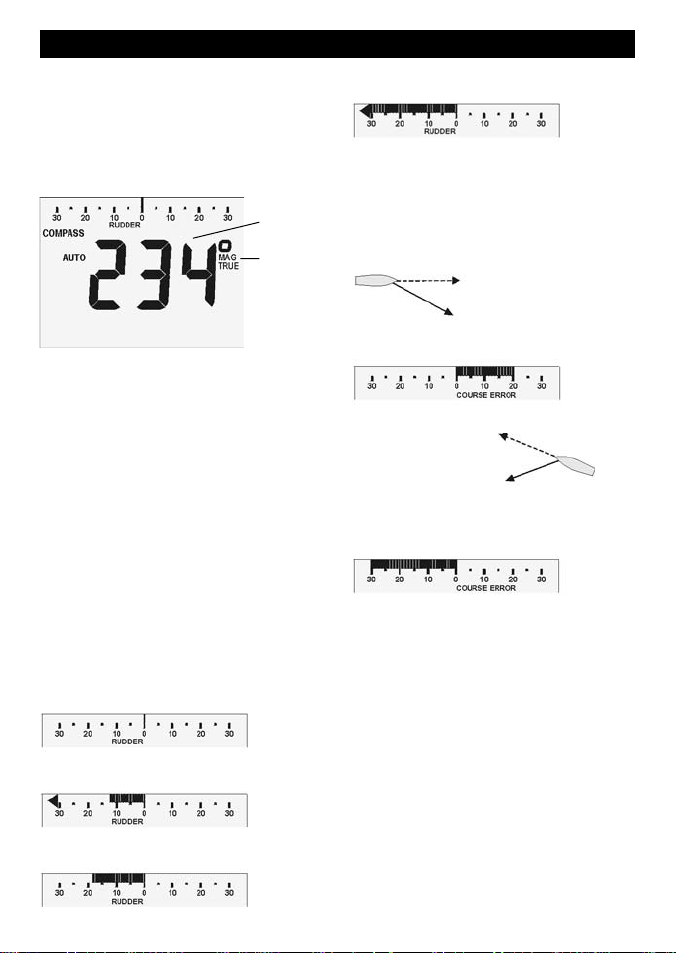
3-2 Visor de rumo
Rumo
Rumo
verdadeiro
ou
magnético
Se o leme estiver voltado 30° ou mais, o écran
mostrará 30° e aparecerá uma ponta de seta:
Ângulo de leme
O ângulo de leme é o ângulo pelo qual o leme
é girado em relação à meia nau. Quando o
G-PILOT 3100 estiver controlando o leme, será
mostrada uma ponta de seta no fi nal dos dados
da barra, indicando a direcção para a qual o
leme está a se mover. Por exemplo:
Rumo real de 90°
CTS (curso para pilotar) 110°
O écran principal sempre mostra o rumo da
embarcação:
Para exibir os rumos MAG (magnético) ou
TRUE (REAL), vá para HDG TYPE (TIPO
DE RUMO) no menu OPTIONS (OPÇÕES)
(consulte a secção 3-7).
3-3 Visor de dados de barra
Os dados da barra na parte superior do
écran podem exibir o ângulo do leme ou o
erro de curso.
Para seleccionar o que será exibido, vá para
BAR DATA (DADOS DE BARRA) no menu
MAIN (consulte a secção 3-7). As opções são
RUD (ângulo do leme) ou CE (erro de curso).
Se o sistema do G-PILOT 3100 possuir mais do
que uma unidade de écran, a barra de dados
poderá ser seleccionada de maneira diferente,
em cada unidade de écran.
O G-PILOT não está a controlar o leme,
o leme está a meia nau
O G-PILOT está a girar o leme para bombordo
e o leme está voltado a 12° para bombordo
O G-PILOT não está a controlar o leme,
leme está voltado a 18° para estibordo
Manual de operação do G PILOT 3100
NAVMAN
O erro de curso é de 20º para estibordo
Rumo real 290°
CTS 250°
O erro de curso é de 40° para
bombordo, mas 30° é o maior erro que
pode ser exibido, de forma que o écran
mostra 30° para bombordo
O ângulo do leme poderá ser exibido mesmo
se a embarcação estiver a ser pilotada
manualmente.
Erro de curso
O erro de curso é o ângulo entre o rumo real
da embarcação e o curso planejado pelo
autopiloto, como, por exemplo:
Em STBY (espera), o erro de curso é exibido
como sendo zero.
3-4 Visor de dados de informações
Os dados de informação estão na parte inferior
do écran e podem exibir um item de leme ou
dados de navegação. Para seleccionar os dados a ser exibidos, vá ate INFO DAT A no menu
MAIN (consulte a secção 3-7). Se o sistema
G-PILOT 3100 possuir mais do que uma unidade de écran, o visor de dados de informações
poderá ser seleccionado de maneira diferente
em cada unidade de écran.
71
Page 10
As opções são:
CTS: O curso no qual o G-PILOT 3100
planeja pilotar a embarcação; em STBY
(espera) não há CTS e o visor mostra
CTS - - -.
XTE, BRG, COG, DTG, TTG, SOG:
Dados de navegação GPS (consulte a
secção 5-1); precisa de conexão a um
instrumento GPS.
WND: Ângulo do vento (consulte a
secção 6-1). Para exibir o ângulo APP
(aparente) ou TRUE, vá para WIND TYPE
no menu VESSEL (EMBARCAÇÃO)
(consulte a secção 3-7). Precisa estar
conectado a um instrumento de medição
de vento.
BAT: Voltagem da fonte de alimentação
do G-PILOT 3100.
CUR: Corrente de comando de leme; o
comando deve ser testado, verifi cando a
corrente durante uma mudança de rumo
(consulte a secção 2-6).
OFF: sem exibição.
3-5 Alarmes
Quando o G-PILOT 3100 detecta uma CD de
alarme, ele exibe uma mensagem de aviso, o
símbolo de alarme pisca no écran, o apito interno soa e quaisquer apitos ou luzes externas
são accionados.
Prima qualquer tecla para emudecer o alarme
e, em seguida, prima ESC para cancelar a
mensagem de alarme.
O G-PILOT 3100 possui dois tipos de alarme,
internos e defi nidos pelo utilizador:
Para activar ou desactivar alarmes
defi nidos pelo utilizador e confi gurar a
condição de alarme (consulte o menu
ALARMES, secção 3-7).
Para consultar uma lista de alarmes e
seus signifi cados, consulte o apêndice B.
Indicador de bateria fraca
Se a voltagem de alimentação do G-PILOT
3100 cair para valores abaixo do valor de accionamento do alarme de bateria, o G-PILOT
3100 emitirá um alarme BAT ERROR (ERRO
DE BATERIA) e o símbolo de bateria fraca piscará no écran do G-PILOT 3100. Se o G-PILOT
3100 estiver no modo AUTO, o controle de pilotagem não irá funcionar, se a voltagem de
alimentação baixar muito. Recomendamos
mudar para o modo HAND STEER (LEME
MANUAL) (consulte a secção 2-5).
72
NAVMAN
3-6 Modo de simulação
O modo de simulação permite a familiarização com a unidade fora d’água. A palavra
SIMULATE pisca no visor.
Para activar ou desactivar o modo de simulação:
1
Desactive a unidade (consulte a secção 2-1).
2 Mantenha a tecla AUTO premida ao
mesmo tempo para activar a unidade
(consulte a secção 2-1).
3-7 Como utilizar menus
Os menus possuem dados e funções destinados a controlar o desempenho e o funcionamento do G-PILOT 3100.
Como visualizar e modifi car dados de menu
1 Em funcionamento normal, prima MENU.
2 Para seleccionar dados no menu MAIN:
prima < ou > até que os dados
desejados sejam exibidos; prima ENT
Para seleccionar dados em outros menus:
i prima < ou > até que seja exibido
CONFIG >; prima ENT
ii prima < ou > até que o menu
desejado seja exibido; prima ENT
Nota Um símbolo > após um nome indica
que esse item é um menu.
3 Para modifi car os dados:
prima < ou > uma ou mais vezes
mantenha a tecla < ou > premida para
modifi car os dados, em etapas de dez
para restaurar os dados para seus
valores padrão (consulte a próximo
página), prima < + >.
4 Prima ENT para armazenar os dados
modifi cados ou prima ESC para ignorar a
modifi cação.
5 Prima ESC uma ou mais vezes para sair
do menu ou repita as etapas 2 a 4 para
visualizar ou modifi car os outros dados.
Atalho Após visualizar ou modifi car os
dados, prima ESC para sair dos menus.
O G-PILOT acciona um apito longo quando se
sai do menu. Se a tecla não for premida em
até 30 segundos, o G-PILOT sairá automaticamente do menu.
Menu MAIN (PRINCIPAL)
RESPOSTA O grau de desvio de curso antes
que o G-PILOT 3100 corrija o curso (1 a 10, A1
a A5; o padrão depende to tipo de embarcação)
(consulte a secção 7-1).
Manual de operação do G PILOT 3100
Page 11
Lista de menus e dados
MAIN menu
Response
Ratio
Lamp
Bar data
Info data
Steer mode
Profi le
CONFIG > menu
ALARMS > menu
Course error alarm
XTE alarm
Waypoint acknowledge
Wind alarm
Battery alarm
Current alarm
OPTIONS > menu
Counter rudder gain
Trim gain
GPS gain
Wind gain
Dodge angle
Tack angle
Gybe angle
Tack delay
Turn rate
VESSEL > menu (STBY only)
Vessel type
Drive type
Wind type
Heading type
Magnetic variation
DEVICES > menu (STBY only)
Calibrate rudder feedback unit
Centre rudder feedback unit
Calibrate compass
Align heading
Align GPS
FACTORY > menu (STBY only)
Backlight group
Key beeps
NMEA 2 data
Main control unit version number
Display unit version number
Reset NVM
Manual de operação do G PILOT 3100
RATIO (ÍNDICE) O grau de giro do leme
efectuado pelo G-PILOT 3100 para corrigir o
curso (1 a 10; o padrão depende do tipo de
embarcação) (consulte a secção 7-2).
LAMP (LÂMPADA) O brilho da iluminação de
fundo (1 a 4 ou OFF; o padrão é = 1) (consulte
a secção 3-1).
BAR DATA (DADOS DA BARRA) Os dados
a ser exibidos no visor de barra (CE (erro de
curso) ou RUD (ângulo do leme); padrão =
RUD) (consulte a secção 3-3).
INFO DATA (DADOS DE INFORMAÇÕES)
Os dados a exibir no visor de dados de
informações (CTS, XTE, BRG, COG, DTG,
TTG, SOG, WND, BAT, CUR, OFF; padrão =
CTS) (consulte a secção 3-4).
STER MODE (MODO DE LEME) O modo de
leme (COM (bússola), GPS, WND; padrão =
COM) (consulte a secção 2-4).
PROFILE (PERFIL) O actual conjunto de
parâmetros de leme a se utilizar (1 a 5; padrão
= 1) (consulte a secção 7-3).
CONFIG > Dados de acesso em outros menus,
menos do menu principal.
ALARMS > menu
CE ALARM O erro máximo de curso permitido
antes que o alarme soe (1° a 90° ou OFF;
padrão = OFF).
XTE ALARM O erro XTE (erro transversal
à trajectória) máximo (em milhas náuticas)
permitido, antes que soe o alarme (0,01 a 2
nm ou OFF; padrão = OFF).
WPT AKN Se o utilizador deverá ser avisado
quando a embarcação chegar ao waypoint
(OFF ou ON, padrão = OFF) (consulte a secção
5-2).
WND ALARM (Se tipo de embarcação = SAIL)
O desvio máximo entre o ângulo aparente do
vendo e SWA (ângulo de deslocamento em
relação ao vento) antes que soe o alarme (1°
a 90° ou OFF; padrão = OFF).
BAT ALARM A mais baixa voltagem de bateria
permitida antes que soe o alarme (7 a 14 V ou
OFF; padrão = OFF).
CUR ALARM A máxima corrente de comando
antes que soe o alarme (5 a 20 A; padrão =
10 A).
OPTIONS > menu
C-RD GAIN Contador de ganho de leme,
utilizado para optimizar o desempenho do leme
NAVMAN
73
Page 12

(1 a 10 ou OFF; o padrão depende do tipo de
embarcação) (consulte a secção 7).
TRIM GAIN Ganho de trim, utilizado para
optimizar o desempenho de leme (1 a 10 ou
OFF; o padrão depende do tipo de embarcação)
(consulte a secção 7).
GPS GAIN Ganho de GPS, utilizado para
optimizar o desempenho de leme (1 a 10; o
padrão = 3) (consulte a secção 7).
WIND GAIN Ganho de vento, utilizado para
optimizar o desempenho de leme (1 a 10;
padrão = 1) (consulte a secção 7).
DODGE ANG O ângulo pelo qual o curso
mudará em uma esquiva (5° a 30°; padrão =
20°) (consulte as secções 4-4, 5-3 ou 6-4).
TACK ANG O ângulo pelo qual o curso mudará
em uma orçada (50° a 160° ou AUTO, padrão
= AUTO) (consulte secções 4-5, 6-5).
GYBE ANG O ângulo pelo qual o curso mudará
em uma cambagem (40° a 140° ou AUTO ou
OFF, padrão = AUTO) (consulte as secções
4-5, 6.5).
TACK DELY O retardo entre se premir o botão
tack e a embarcação começar a orçar (1 a 120
segs. ou OFF; padrão = 30 segs.) (consulte as
secções 4-5, 6-5).
TURN RATE (TAXA DE CURVA) Define a
máxima taxa de curva, em graus por segundo
(3 a 20, padrão = 10 graus por segundo).
VESSEL > menu
Somente se pode ter acesso a este menu no
modo STBY.
VESL TYPE Tipo de embarcação (SAIL, PLNE
(barco plano), DISP (deslocamento); padrão
= SAIL).
DRVE TYPE Tipo de controle de leme (MOTR,
SPL- ou SPL+; padrão = MOTR) (Consulte o
Manual de Instalação do G-PILOT 3100).
WIND TYPE O tipo de vento a ser utilizado
(APP ou TRUE; padrão = APP).
HDG TYPE O tipo de rumo das bússola (MAG
ou TRUE; padrão = MAG).
MAG VAR A declinação magnética em que
está a embarcação (90°W a +90°E; padrão
= 19°E).
DEVICES > menu
Os itens do menu DEVICES são funções utilizadas para calibrar o G-PILOT 3100. Esse menu
somente pode ser aberto no modo STBY.
RFU CAL Inicia o procedimento de calibragem
da unidade de feedback do leme (consulte o
Manual de Instalação do G-PILOT 3100).
RFU CENTR Configura o leme para uma
posição em que a embarcação navega em
linha recta (consulte o Manual de Instalação
do G-PILOT 3100).
CSU CAL Inicia o procedimento de calibragem
da bússola (consulte o Manual de Instalação
do G-PILOT 3100).
ALIGN HDG Alinha a bússola com a embarcação (consulte o Manual de Instalação do
G-PILOT 3100)
ALIGN GPS Alinha o rumo actual da embarcação com um rumo GPS (COG) se disponível
(consulte o Manual de Instalação do G-PILOT
3100).
FACTORY > menu
Somente se pode ter acesso a este menu no
modo STBY.
BKL GROUP Número de grupo NavBus (0, 1,
2, 3 ou 4, padrão = 1) (consulte o Manual de
Instalação do G-PILOT 3100).
KEY BEEPS Soa um apito quando uma tecla é
premida (ON ou OFF, padrão = ON).
NMEA2 DAT Função da porta 2 NMEA (IN,
SLOW ou FAST; padrão = IN):
IN: NMEA 2 é uma entrada
SLOW: NMEA 2 saídas de rumo e ângulo
de leme por segundo
FAST: NMEA 2 saídas de rumo, dez
vezes por segundo.
MCU VX.X Exibe o número de versão do software da unidade principal do G-PILOT 3100
(por exemplo, MCU V1.3 é a versão 1.3).
HCU VX.X Exibe o número de versão do
software da unidade do visor (por exemplo,
HCU V2.5 é a versão 2.5).
NVM RESET Esta função restaura todos os
dados de utilizador do G-PILOT 3100 para os
valores padrão de fábrica. Assim que NVM
RESET for exibido:
1 Prima > activar a função
2 Prima ENT para restaurar os dados
3 Mantenha a tecla ESC premida para sair
dos menus
4 Execute o ajuste completo no porto
e faça uma tentativa para calibrar
novamente o G-PILOT 3100 (consulte o
Manual de Instalação do G-PILOT 3100).
74
NAVMAN
Manual de operação do G PILOT 3100
Page 13

3-8 Referência de teclas
Como activar
STBY (modo de
espera)
O autopiloto
não está no
controle; pilote
manualmente
MENU
Prima
MENU
<
>
< + >
Estas funções pode ser utilizadas
somente no modo bússola ou vento,
Interruptor com chave
Para ligar ou desligar a chave:
Mantenha premidas AUTO + MENU..
Prima ENT..
Manual de operação do G PILOT 3100
Prima AUTO + MENU
Prima AUTO
AUTO
Pilote vagarosamente
para bombordo
(consulte a secção 2-6)
Pilote vagarosamente
para estibordo
(consulte a secção 2-6)
Ajuste o leme para
meia nau
(consulte a secção 2-6)
menos no modo GPS
AUTO
O autopiloto está
no controle da
embarcação
MENU
Prima
MENU
MENU
<
+
MENU
>
+
<
>
Prima
<
Prima
>
AUTO
<
+
AUTO
>
+
NAVMAN
AUTO
HAND STEER
O autopiloto
não está no
controle; pilote
manualmente
Abra o menu MAIN
(consulte a secção 3-7)
Atalho para modifi car o modo de
leme (consulte a secção 3-7).
Esquive para bombordo (prima ESC
para voltar para ao curso (ou, no
modo Compass, prima ENT para
manter o novo curso))
(consulte a secção 4-4, 5-3 ou 6-4)
Esquive para estibordo (pressione
ESC para voltar para ao curso (ou,
no modo Compass, prima ENT para
manter o novo curso))
(consulte a secção 4-4, 5-3 ou 6-4)
Mude de curso 1° para bombordo
(consulte a secção 4-3 ou 6-3)
Mude de curso 1° para estibordo
(consulte a secção 4-3 ou 6-3)
Mude de curso 10° a bombordo a
cada meio segundo
(consulte a secção 4-3 ou 6-3)
Mude de curso 10° a estibordo a
cada meio segundo (consulte a
secção 4-3 ou 6-3)
Faça uma contagem regressiva e,
em seguida, orce ou cambe para
bombordo (prima ESC para cancelar
a mudança de rumo)
(consulte a secção 4-5 ou 6-4)
Faça uma contagem regressiva e,
em seguida, orce ou cambe estibordo
(prima ESC para cancelar a mudança
de rumo)
(consulte a secção 4-5 ou 6-4)
75
Page 14

4 Modo de leme por bússola
O G-PILOT 3100 possui três formas de leme da embarcação, bússola, GPS e vento. Para seleccionar um modo apropriado, consulte a secção 2.4. No modo Compass (bússola), o G-PILOT pilota
a embarcação para um conjunto de rumos de bússola, chamado CTS (Curso para pilotar).
4-1 Dados de leme por bússola
Rumo da embarcação, 45°
4-2 Como activar e desactivar o G- PILOT 3100 no modo de bússola
Erro de curso, 10º a estibordo
CTS (curso para pilotar, o curso
planejado do autopiloto) 55°
Pilote a embarcação
manualmente até águas
abertas. Veleje directo no
curso planejado.
Para activar AUTO,
prima AUTO
AUTO:
O G-PILOT pilota a embarcação de maneira
automática.
O G-PILOT 3100 ajusta o CTS (curso para pilotar)
para o rumo actual, neste exemplo 45°, e começa o
leme nesse curso.
Para desactivar o G-PILOT, prima AUTO
76
Por exemplo:
Rumo = 45°
Para activar HAND STEER,
O G-PILOT volta ao modo STBY (espera).
Pilote a embarcação manualmente.
NAVMAN
prima AUTO + MENU
HANDSTEER:
Pilote a embarcação manualmente.
Exibe CTS nos dados de informação
ou erro de curso na barra de dados e
os utiliza para pilotar.
Rumo = 45°
CTS = 45°
Manual de operação do G PILOT 3100
Page 15

Quando o G-PILOT 3100 estiver activado
Mantenha AUTO premido para mudar para o modo GPS (se a embarcação for do tipo PLNE [barco
plano] ou DISP [deslocamento]) ou para o modo vento (se a embarcação for do tipo SAIL).
As ondas ou o vento podem desviar o curso
da embarcação. O G-PILOT 3100 pilotará a
embarcação de volta para o curso, como por
exemplo:
CTS = 45°
Ondas desviaram o rumo da embarcação
para 60°
Ventos e correntes podem empurrar a
embarcação para um dos lados do curso,
como, por exemplo:
CTS = 45°
Corrente
O G-PILOT 3100 pilota a
embarcação de volta para um
O rumo é mantido a 45°
rumo de 45°.
4-3 Como mudar o curso no modo de bússola
Para mudar de curso em etapas de 1°:
prima < para modifi car o curso em 1° para bombordo
prima > para modifi car o curso em 1° para estibordo.
Por exemplo:
Rumo = 45°
CTS = 45°
Prima <
O CTS muda para 44°
A embarcação muda para o
rumo d 44°
Para mudar de curso em etapas de 10°:
mantenha a tecla < premida para mudar o curso 10° para bombordo a cada meio segundo
mantenha a tecla > premida para mudar o curso 10° para estibordo a cada meio segundo.
Por exemplo:
Rumo = 45°
CTS = 45°
Mantenha a tecla
< premida
por meio segundo
Rumo = 45°
CTS = 45°
Prima <
O CTS muda para 46°
A embarcação muda para o
rumo d 46°
mantenha a tecla <
premida
até que CTS esteja em 15°
Manual de operação do G PILOT 3100
O CTS muda para 35°
A embarcação muda para
o rumo d 35°
NAVMAN
A embarcação muda para
o rumo d 15°
77
Page 16

4-4 Como esquivar-se de tormenta no modo de bússola
Uma esquiva é uma mudança brusca de curso, normalmente, para evitar um obstáculo.
prima MENU + < para esquivar-se para bombordo, ao ângulo de esquiva
prima MENU + > para esquivar-se para estibordo, ao ângulo de esquiva.
Por exemplo:
Rumo = 45°
CTS = 45°
Prima
MENU + <
Prima ENT para
continuar no novo rumo
CTS muda o mesmo ângulo que o de esquiva.
A embarcação continua no novo rumo.
O G-PILOT apita.
Nota
Para esquivar-se ainda mais, prima MENU + < ou MENU + > mais vezes.
Para ver ou mudar o ângulo de esquiva, vá para a opção DODGE ANG no menu OPTIONS
ou
Prima ESC para voltar
para o rumo anterior
(consulte a secção 3-7).
4-5 Controle automático de rumo no modo de bússola
O controle automático de rumo destina-se a uma embarcação à vela. O curso para leme muda
conforme o ângulo de orçada.
prima AUTO + < para orçar para bombordo pelo ângulo de mudança de rumo
prima AUTO + > para orçar para estibordo pelo ângulo de mudança de rumo.
Por exemplo:
Para cancelar a
orçada a qualquer
momento, prima ESC
Rumo = 45°
CTS = 45°
Prima AUTO + < para
iniciar uma orçada para
bombordo
AVISO: No modo automático de orçada pela Bússola, o curso para pilotar muda conforme o
ângulo de orçada. O G-PILOT não utiliza dados de qualquer instrumento de medição de vento. É
possível que a embarcação cambe ou fi que aproado para o vento.
Nota
Para orçar conforme um ângulo fi xo em relação ao vento, utilize o G-PILOT 3100 no modo
Vento (consulte a secção 6).
Para ver ou modifi car o ângulo de orçada, vá para a opção TACK ANG ou TACK DEL Y no menu
OPTIONS (consulte a secção 3-7). O ângulo de cambagem não é utilizado no modo Bússola.
O ângulo de cambagem não é utilizado no modo Bússola.
78
A orçada é encerrada quando a embarcação alcança
o novo rumo
Ao fi nal do atraso de mudança de rumo, o CTS
muda conforme o ângulo de orçada (se o ângulo
de orçada estiver confi gurado para AUTO, o
G-PILOT utilizará o ângulo padrão de orçada de
100°). A embarcação gira.
A embarcação veleja directo enquanto que o
G-PILOT 3100 faz a contagem inversa da orçada.
A unidade emite um apito longo, a 60 e 30
segundos, um apito curto a cada segundo, entre
10 segundos e 1 segundo e um apito longo que
termina quando a contagem se encerra.
faltando 3 segundos para a orçada iniciar-se
NAVMAN
Manual de operação do G PILOT 3100
Page 17

5 Modo de leme por GPS
O G-PILOT 3100 possui três formas de leme da embarcação: Para seleccionar um modo apropriado, consulte a secção 2-4. No modo GPS, o G-PILOT utiliza dados do GPS para pilotar a
embarcação ao longo de uma rota ou para um waypoint.
5-1 Dados de navegação GPS
Exemplo de navegação para um waypoint:
Destino
DTG (distância)
SOG (velocidade)
COG (azimute)
CTS (azimute)
Curso traçado
Início
A embarcação está a navegar do ponto inicial até o destino e desviou-se em relação ao curso
traçado pelo GPS, do início até o destino:
BRG Bearing to destination O azimute para o destino, com base na embarcação.
Course error A diferença entre o rumo CTS e o rumo da embarcação.
CTS Course to steer Curso óptimo de leme, para retornar ao curso traçado.
DTG Distance to go Distância entre a embarcação e o destino.
SOG Speed over ground A velocidade actual da embarcação contra o fundo. Esta não
é necessariamente a mesma velocidade do embarcação em
relação à água, nem a velocidade à qual a embarcação está
a se aproximar do destino.
TTG Time to go Tempo estimado para alcançar o destino.
XTE Cross track error A distância a partir da embarcação até o ponto mais próximo
do curso traçado. XTE pode ter uma letra: R signifi ca pilotar
para a direita para voltar ao curso traçado; L signifi ca pilotar
para a esquerda.
TTG (tempo)
BRG (azimute)
XTE (distância)
Erro de curso (ângulo)
Embarcação
Manual de operação do G PILOT 3100
NAVMAN
79
Page 18

5-2 Como activar e desactivar o G- PILOT 3100 no modo GPS
Pilote a embarcação manualmente. Inicie a navegação com um GPS para navegar para um
waypoint, para um waypoint em uma rota ou para um waypoint.
BRG (direcção
de curso GPS)
Rumo da
embarcação
Curso GPS
traçado
XTE (distância até
o curso GPS)
Para activar AUTO,
prima AUTO
AUTO:
até um
waypoint
Para activar HAND STEER,
prima AUTO + MENU
HANDSTEER:
Curso
GPS
traçado
O G-PILOT pilota a embarcação de maneira
automática.
Pilote a embarcação manualmente. Exibe
CTS nos dados de informação ou erro de
curso na barra de dados e os utiliza para
pilotar.
Quando o G-PILOT está activado, se XTE for maior do que 0,05
nm ou o rumo da embarcação não estiver dentro de 30° de BRG,
o G-PILOT exibirá TRK ERROR (ERRO DE CURSO). Prima
ESC para voltar para o modo Bússola ou prima ENT para que o
G-PILOT leve a embarcação de volta ao curso.
Quando o G-PILOT está activado, ele utiliza dados do GPS para
pilotar a embarcação ao longo do percurso traçado até o waypoint.
Para desactivar o G-PILOT, prima AUTO
O G-PILOT volta ao modo STBY (espera).
Pilote a embarcação manualmente.
80
NAVMAN
Manual de operação do G PILOT 3100
Page 19

Quando o G-PILOT 3100 estiver activado
Mantenha AUTO premido para mudar para o modo
Bússola.
Corrente:
O vento ou as correntes podem desviar a embarcação do curso GPS. O G-PILOT 3100 levará a
embarcação de volta ao curso:
Se o GPS estiver seguindo uma rota
e a embarcação atingir um waypoint
intermediário:
Se WPT AKN estiver desactivado, o
G-PILOT iniciará automaticamente o
leme para o próximo waypoint na rota.
Caso contrário, o G-PILOT exibirá NEXT
WPT? (PRÓXIMO WAYPOINT?), soará
um alarme e continuará no rumo atual.
Primar qualquer tecla para emudecer o
alarme. A seguir, prima ENT iniciar o leme
para o próximo waypoint ou prima ESC
para voltar para STBY.
Quando a embarcação atingir o waypoint fi nal,
o G-PILOT exibirá ROUTE END (FINAL DE
ROTA) e permanecerá no curso actual:
Prima ESC para mudar para STBY; pilote
manualmente
Prima ENT para mudar para o modo
Bússola e continue a navegar para o
rumo atual.
Nota Para retornar para o último waypoint, se
a embarcação o tiver ultrapassado, reinicie o
GPS para navegar para o waypoint.
Para ver ou modifi car WPT AKN, vá até a
opção WPT AKN no menu ALARMS (consulte
a secção 3-7).
5-3 Como esquivar-se de tormenta no modo GPS
Uma esquiva é uma mudança brusca de curso, normalmente para evitar um obstáculo.
prima MENU + < para esquivar-se para bombordo, ao ângulo de esquiva
prima MENU + > para esquivar-se para estibordo, ao ângulo de esquiva.
Por exemplo:
Prima
MENU + <
Prima ESC para voltar
ao rumo anterior
CTS muda o mesmo ângulo que o de esquiva.
A embarcação muda para o novo rumo.
O G-PILOT apita
AVISO: O G-PILOT pilotará a embarcação de
volta ao curso GPS traçado: Assegure-se de
não haver obstáculos ou águas perigosas no
Nota
Para esquivar-se ainda mais, prima MENU + < ou MENU + > mais vezes.
Para ver ou mudar o ângulo de esquiva, vá para a opção DODGE ANG no menu OPTIONS
caminho.
(consulte a secção 3-7).
Manual de operação do G PILOT 3100
NAVMAN
81
Page 20

6 Modo de leme pelo vento
O G-PILOT 3100 possui três formas de leme da embarcação: Para seleccionar um modo apropriado, consulte a secção 2-4. No modo vento, o G-PILOT pilota a embarcação para um dado
ângulo em relação ao vento, chamado de SWA (conjunto de rumos de bússola, chamado CTS
(ajuste do ângulo ao vento).
6-1 Dados de leme pelo vento
Rumo da embarcação
Erro de curso, 10º a estibordo
CTS (curso planejado para o autopiloto, para
chegar ao SWA [ajuste do ângulo ao vento])
SWA (ajuste do ângulo ao vento), 45°
Ângulo do vento,
pode ser APP (aparente)
ou TRUE
APP Apparent wind angle O ângulo aparente do vento em relação à embarcação. P na
frente do valor do ângulo signifi ca que o vento vem de bombordo,
S signifi ca que o vento vem de estibordo.
CTS Course to steer O curso para pilotar para manter o (ajuste do ângulo ao vento).
Course error A diferença entre APP (ângulo do vento) e SWA (ajuste do ângulo
ao vento).
SWA Set wind angle O ângulo desejado em relação ao vento.
TRUE True wind angle O ângulo verdadeiro do vento em relação à embarcação. P na
frente do valor do ângulo signifi ca que o vento vem de bombordo,
S signifi ca que o vento vem de estibordo.
82
NAVMAN
Vento
Manual de operação do G PILOT 3100
Page 21

Velocidade e a direcção verdadeiras e aparentes do vento
A velocidade e a direcção aparentes do vento são os valores medidos na embarcação. A
velocidade e a direcção verdadeiras do vento são os valores medidos para a embarcação em
relação ao ar.
Se a embarcação estiver a se movimentar, a velocidade aparente será diferente da velocidade
real do vento e a direcção aparente do vento será diferente da direcção real do vento, conforme
mostrado abaixo.
Embarcação parada
A velocidade verdadeira do vento é igual à velocidade aparente e
a direcção verdadeira do vento é a mesma que a direcção aparente do vento
Embarcação
parada
Embarcação a se mover contra o vento A velocidade aparente do vento é maior do que a
velocidade verdadeira e a direcção aparente do vento está mais próxima da recta à frente que
a direcção real do vento
Velocidade
Direcção
verdadeira
do vento a
45º
Velocidade
verdadeira do
vento 20 nós
Velocidade
verdadeira
do vento
20 nós
Velocidade
aparente do
vento 28 nós
Direcção
aparente
do vento
aparente do
vento 28 nós
30º
Velocidade
da
embarcação
Velocidade da
embarcação
10 nós
10 nós
Embarcação a se mover a favor do vento A velocidade aparente do vento é menor do que a
velocidade verdadeira e a direcção aparente do vento está mais próxima da recta à frente que
a direcção real do vento
Velocidade
verdadeira
do vento 20
nós
Velocidade
Direcção
verdadeira
do vento a
135º
Velocidade
aparente do
vento 15 nós
Velocidade
embarcação
10 nós
da
Velocidade
verdadeira
do vento
20 nós
Velocidade
aparente do
vento 15 nós
Direcção
aparente
do vento
da
embarcação
10 nós
Manual de operação do G PILOT 3100
NAVMAN
107º
83
Page 22

6-2 Como activar e desactivar o G- PILOT 3100 no modo de vento
Pilote a embarcação
manualmente para águas abertas.
Veleje directamente no ângulo
planejado em relação ao vento.
Os dados de informação do
Por exemplo:
Vento
APP = P40°
G-PILOT podem exibir TRUE
(ângulo verdadeiro do vento) ou
APP (ângulo aparente do vento)
(consulte a secção 3-4).
Para activar AUTO,
prima AUTO
AUTO:
O G-PILOT pilota a embarcação de
maneira automática.
Rumo = 45°
Para activar HAND STEER,
prima AUTO + MENU
HANDSTEER:
Pilote a embarcação manualmente. Exibe CTS
nos dados de informação ou erro de curso na
barra de dados e os utiliza para pilotar.
O G-PILOT 3100 ajusta o CTS (curso para pilotar) para
o rumo actual, neste exemplo 45°, ajusta SWA (ajuste do
ângulo do vento) para o actual ângulo do vento e começa
a pilotar nesse ângulo em relação ao vento.
Para desactivar o G-PILOT, prima AUTO
O G-PILOT volta ao modo STBY (espera).
Pilote a embarcação manualmente.
Vento
APP = P40°
SWA = 40°
O G-PILOT 3100 também pode ser activado ou desactivado para orçar para estibordo, por
exemplo:
ou quando estiver a navegar, por exemplo:
Vento
Vento
APP = S120°
APP = S40°
SWA = 120°
SWA = 40°
84
NAVMAN
Manual de operação do G PILOT 3100
Page 23

Quando o G-PILOT 3100 estiver activado
Mantenha AUTO premido para mudar para o modo Bússola.
O vento ou as ondas podem
desviar a embarcação, de
forma que o ângulo em
relação ao vento pode ser
diferente de SWA:
Vento
O vento ou as correntes
podem desviar a
embarcação para um dos
lados do curso directo:
Vento
Se a direcção do vento mudar, o rumo
da embarcação mudará para manter
o ângulo de ajuste ao vento igual.
Vento
Nova direcção do vento
Onda
O G-PILOT pilotará a
embarcação de volta
ao SWA.
Corrente
O G-PILOT pilotará a
embarcação conforme o
SWA ajustado.
Novo rumo
O alarme de vento poderá soar se
a direcção do vento mudar muito
rapidamente; vá até WND ALARM
no menu ALARMS (consulte a
secção 3-7).
6-3 Como modifi car o SWA (ajustar o ângulo do vento) no modo de vento
Para mudar o SWA em etapas de 1°:
prima < para modifi car o SWA em 1° para bombordo
prima > para modifi car o SWA em 1° para estibordo.
Por exemplo, em uma orçada para bombordo: ou em uma orçada para estibordo:
Vento
Prima <
SWA = 40°
SWA muda para 39°. A
embarcação fi ca em um novo
ângulo 39° em relação ao vento
Para mudar o SWA em etapas de 10°:
mantenha a tecla < premida para mudar SWA 10° para bombordo a cada meio segundo
mantenha a tecla > premida para mudar SWA 10° para estibordo a cada meio segundo
Por exemplo:
Vento
Mantenha
premido < durante
meio segundo
Vento
SWA = 40°
Mantenha a tecla
< premida até que
SWA esteja em 120°
Prima <
SWA muda para 41°. A
embarcação fi ca em um novo
ângulo 41° em relação ao vento
SWA = 40°
embarcação fi ca em um novo
ângulo 50° em relação ao vento
Manual de operação do G PILOT 3100
SWA muda para 50°. A
NAVMAN
A embarcação fi ca em um novo
ângulo 120° em relação ao vento
85
Page 24

6-4 Como esquivar-se de tormenta no modo de vento
Uma esquiva é uma mudança brusca de curso, normalmente para evitar um obstáculo.
prima MENU + < para esquivar-se para bombordo, ao ângulo de esquiva
prima MENU + > para esquivar-se para estibordo, ao ângulo de esquiva.
Por exemplo:
Vento
Prima
MENU + <
SWA muda o mesmo
Prima ESC para voltar
ao ângulo anterior em
relação ao vento
ângulo que o de esquiva.
A embarcação vai para o
novo ângulo em relação
SWA = 40°
Nota
Para esquivar-se ainda mais, prima MENU + < ou MENU + > mais vezes.
Para ver ou mudar o ângulo de esquiva, vá para a opção DODGE ANG no menu OPTIONS
ao vento.
O G-PILOT apita.
(consulte a secção 3-7).
6-5 Controle automático de rumo no modo de vento
Se SWA for de 90° ou menos, a embarcação cambará. Após orçar ou cambar, o valor de SWA
será o mesmo que antes da orcada ou da cambagem, mas para o lado contrário.
prima AUTO + < para orçar ou cambar para bombordo
prima AUTO + > para orçar ou cambar para estibordo
Exemplo: SWA é 40°, de modo que o barco orçará e não cambará. Se o ângulo de orçada for
confi gurado para AUTO, a embarcação mudará duas vezes de direcção, primeiro conforme o
ângulo de orçada e em seguida, para que SWA seja igual a antes, somente que do lado contrário
que antes da orçada ou da cambagem:
A orçada termina quando a embarcação atinge o novo ângulo em
relação ao vento
Após a embarcação ter atingido o ângulo de orçada,
a embarcação girará novamente de forma que SWA
(o ângulo de ajuste ao vento) seja o mesmo que o
SWA antes da orçada, mas para o lado contrário
Para cancelar a
orçada a qualquer
momento, prima ESC
Vento
SWA = 40°
86
Prima AUTO + < para
iniciar uma orçada
para bombordo
No fi nal do atraso de orçada, o curso muda
conforme o ângulo de orçada (neste exemplo,
o ângulo de orçada não foi confi gurado para
AUTO). A embarcação gira.
A embarcação veleja directo enquanto que o
G-PILOT 3100 faz a contagem inversa da orçada.
A unidade emite um apito longo, a 60 e 30
segundos, um apito curto a cada segundo, entre
10 segundos e 1 segundo e um apito longo que
termina quando a contagem se encerra.
faltando 3 segundos para a orçada iniciar-se
NAVMAN
Manual de operação do G PILOT 3100
Page 25

Exemplo: SWA é 120°, de modo que o barco
orçará e não cambará. O ângulo de orçada não
foi confi gurado para AUTO:
Vento
Prima AUTO + > para iniciar
uma cambagem para estibordo
Exemplo: SWA é 40°. O ângulo de orçada
foi confi gurado para AUTO, de forma que a
embarcação muda de direcção uma vez:
Final da orçada,
a embarcação
está em um
novo SWA
O curso muda,
de forma que
SWA seja o
mesmo que o
SWA antes da
orçada
O G-PILOT 3100
faz a contagem
inversa da
mudança de rumo
Para cancelar
uma cambagem a
qualquer tempo,
prima ESC
O G-PILOT 3100 faz
a contagem inversa
da orçada.
O curso muda
conforme o
ângulo de
cambagem
Para cancelar
uma cambagem a
qualquer tempo,
prima ESC
Vento
Prima AUTO + < para
O curso muda
novamente, de forma
que SWA seja o
mesmo que o SWA
antes da orçada
Final da orçada, a embarcação
está em um novo SWA
Se o SWA for maior do que 90° e o ângulo de
cambagem estiver confi gurado para AUTO,
a embarcação mudará de direcção uma vez
durante uma cambagem, de modo que SWA
seja igual a antes da cambagem.
iniciar uma orçada
para bombordo
Há quatro possibilidades para orçada ou cambagem automáticas:
Orçada (SWA é igual ou menor do que 90°) Cambagem (SWA é maior do que 90°)
Vento
Prima AUTO + <
para orçar para
bombordo
Prima AUTO + >
para orçar para
estibordo
Prima AUTO + <
para cambar para
bombordo
Prima AUTO + >
para cambar para
estibordo
A mensagem TAK ERROR será se se tentar outras orçadas ou se a orçada terminar com a proa
apontada para o vento.
Nota
Para ver ou modifi car o ângulo de orçada, o ângulo de cambagem ou o atraso de orçada,
vá até TACK ANG, GYBE ANG ou TACK DELY no menu OPTIONS (consulte a secção 3-7).
Manual de operação do G PILOT 3100
NAVMAN
87
Page 26

7 Como melhorar o desempenho de leme
7-1 Os parâmetros de leme
O G-PILOT 3100 possui seis parâmetros de leme que podem ser ajustados para optimizar seu
desempenho de leme:
Response A distância que o barco pode desviar-se do curso, antes que o G-PILOT
A faixa é de 1 a 10, A1 a A5. A1 a A5 é uma confi guração adaptável
Ratio O movimento de leme necessário para efectuar uma dada mudança de
Counter rudder gain Determina o quanto o leme se move após uma grande mudança de
Trim gain Se a embarcação encontrar-se lateralmente à corrente ou vento, então
GPS gain No modo GPS, determina que quanto de correcção é aplicada para
Para modifi car, vá até a opção GPS GAIN no menu OPTIONS (consulte
Wind gain No modo vento, determina o quanto de correcção é aplicada para
Leme optimizado
De maneira ideal, nos modos AUTO e HANDSTEER o G-PILOT 3100 de pilotar a embarcação
dentro do curso, sem mover muito o leme.
Dica Quando examinar o desempenho de leme da embarcação, exiba o erro de curso no visor de
dados da barra (consulte a secção 3-3) e veja como isso muda com o passar do tempo.
7-2 Perfi s
Os valores dos parâmetros de leme para a leme ideal podem variar em função da velocidade da
embarcação, condições de mar ou condições de vento. Geralmente:
Para maiores velocidades da embarcação, reduza a proporção; para velocidades menores,
88
3100 gire o leme para corrigir o curso. Uma confi guração de resposta
menor signifi ca que a embarcação pode desviar-se mais do curso,
antes que o G-PILOT 3100 o corrija. Para modifi car, vá até a opção
RESPONSE no menu MAIN (consulte a secção 3-7).
em que o autopiloto tenta minimizar o número de correcções de
leme, ao mesmo tempo que mantém o rumo desejado para o curso.
A confi guração adaptável elimina a necessidade de ajustar a resposta
em conformidade com condições de tempo variáveis. A faixa é A1
(adaptação mais lenta) a A5 (adaptação mais rápida).
curso. Para modifi car, vá até a opção RATIO no menu MAIN (consulte
a secção 3-7). A faixa vai de 1 (correcções menores) a 10 (correcções
maiores).
curso. Para modifi car, vá até a opção C-RD GAIN no menu OPTIONS
(consulte a secção 3-7). A faixa vai de 1 (baixo) a 10 (alto) e OFF (sem
contador de ganho de leme).
a embarcação desviar-se-á do curso lateralmente. O G-PILOT 3100
trará a embarcação automaticamente de volta para o rumo correcto,
aplicando alguns graus de giro ao leme, o que é chamado ajuste de o
panos. O ganho de trim defi ne o quão rapidamente o ajuste de panos
é aplicado. Para modifi car, vá até a opção TRIM GAIN no menu OP-
TIONS (consulte a secção 3-7). A faixa vai de 1 (baixo) a 10 (alto) e
OFF (sem contagem de ganho de trim).
eliminar erro de trajectória cruzada.
a secção 3-7). A faixa vai de 1 a 10.
reduzir qualquer diferença entre o ângulo em relação ao vento e o
ângulo real do vento. Para modifi car, vá até a opção WIND GAIN no
menu OPTIONS (consulte a secção 3-7). A faixa vai de 1 a 10.
Desempenho ideal
Os parâmetros de leme estão ajustados de
maneira correcta
NAVMAN
Manual de operação do G PILOT 3100
Page 27

aumente a proporção.
Para mar calmo, aumente a resposta; para mar agitado, reduza a resposta.
para ventos mais rápidos e/ou mais estáveis, aumente o ganho de vento; para ventos mais
lentos e/ou instáveis, reduza o ganho de vento.
Para simplifi car a modifi cação de parâmetros quando as condições mudam, o G-PILOT armazena
cinco conjuntos de parâmetros de leme. Cada conjunto é chamado de perfi l e os perfi s são nu-
merados de 1 a 5. Para seleccionar um perfi l a ser utilizado, vá até a opção PROFILE no menu
MAIN (consulte a secção 3-7).
1 Quando o G-PILOT está instalado, os parâmetros de leme em todos os perfi s são estabel-
ecidos em função de seus valores padronizados.
2 Seleccione o perfi l 1 e ajuste os parâmetros de leme para a pilotagem ideal em condições
típicas (consulte a secção 7-3).
3 Se as condições mudarem e o leme se afastar do ideal, seleccione outro perfi l e ajuste
novamente os parâmetros de leme. Repita esta etapa se necessário para ajustar os
parâmetros em cada perfi l.
4 Quando utilizar o G-PILOT para pilotar , seleccione um perfi l apropriado para as condições
atuais. Por exemplo, diferentes perfi s podem ser confi gurados para condições difíceis e calmas.
7-3 Como ajustar os parâmetros de leme
Problema: o leme gira com muita frequência
Isso causa desgaste da transmissão de leme
e utiliza energia.
Reduza a frequência das respostas.
Reduza a proporção.
Problema: deriva do curso para um dos lados
ou
Problema: a embarcação afasta-se muito do curso imediatamente antes do leme
girar para corrigir o curso
Problema: ocorrência de oscilações laterais
Reduza o contador de ganho de leme.
Aumente a proporção.
Aumente o ganho de trim.
Aumente a resposta.
Reduza a proporção.
Reduza o contador de ganho de leme.
Reduza o contador de ganho de trim.
Reduza a proporção.
Problema: após uma grande mudança de curso, a embarcação passa do limite
e oscila antes de estabelecer um novo curso
Aumente o contador de ganho de leme
Manual de operação do G PILOT 3100
NAVMAN
89
Page 28

Problema: após uma grande mudança de curso, a embarcação demora muito para
estabelecer um novo curso
Reduza o contador de ganho de leme
Problema: após uma corrente ou um vento lateral, a correcção é aplicada muito rapidamente
ou muito lentamente
Se a embarcação deparar-se com uma força lateral, ela sairá de curso lateralmente. O G-PILOT
levará a embarcação automaticamente para o rumo correcto, ajustando o leme em alguns graus
ao leme, o que é chamado de ajuste de pano. O ganho de trim defi ne o quão rapidamente o ajuste
de pano é aplicado. O ganho de trim deve ser ajustado para orientar a embarcação em cerca
de um minuto. Fazer com que o Ganho de trim se ajuste correctamente pode ser difícil para sua
embarcação em particular e é fácil alterar em excesso o Ganho de trim. Inicialmente, modifi que
os ajustes de maneira lenta conservadora, até que se saiba os ajustes correctos.
a A embarcação demora muito mais de um minuto para se ajustar
Inicia-se uma força lateral
Aumente o ganho de trim
1 minuto
A embarcação demora bem menos de um minuto para se ajustar
Inicia-se uma força lateral
Reduza o ganho de trim
1 minuto
Problema: deriva em relação ao curso GPS
ou
Aumente o ganho GPS
Problema: a embarcação oscila em torno do curso GPS
ou
90
Reduza o ganho GPS
NAVMAN
Manual de operação do G PILOT 3100
Page 29

Apêndice A - Especifi cações
Eléctricas
Fonte de alimentação para serviço pesado,
de 10,5 a 16,5 V DC, 20 A máximo
Fonte de alimentação para serviço leve, de
10,5 a 16,5 V DC:
Unidade principal: 80 mA.
Cada unidade de écran 30 mA
sem iluminação de fundo, 110 mA com
iluminação de fundo ao máximo.
Outros instrumentos opcionais:
consulte o manual de operação do
instrumento.
Interfaces
Conexão NavBus a outros instrumentos da
Navman.
Saídas NMEA 0183: HDG, HDT, RSA;
inputs APA, APB, BOD, BWC, MWD,
MWV, RMA, RMB, RMC, VHW, VTG, XTE
Portas NMEA 0183:
NMEA 1: Entrada
NMEA 2: Pode ser programada como
entrada ou saída
Conformidade com padrões
Conformidade com EMC
USA (FCC): FCC Parte 15 Classe B.
Europe (CE): EN50081-1, EN50082-1
Nova Zelândia e Austrália (C Tick):
AS-NZS 3548.
Ambiente:
Bússola, giroscópio, unidade de feedback
do leme totalmente à prova d’água.
Unidade do visor: IP66 visto de frente
quando montado correctamente.
Unidade principal: exige um ambiente
fresco, seco e limpo.
Conexões do bloco de terminais da unidade
principal:
Terminal Sinal
1 Fase positiva de alimentação para
trabalho pesado, 10,5 a 16,5 V DC,
2 Fase negativa de alimentação para
3 Saída negativa para controle de
4 Saída positiva para controle de
Conexões dos conectores da unidade
principal:
Terminal Sinal
1 Fase positiva de alimentação para
2 Fonte de alimentação comum para
3 NavBus +
4 NavBus 5 Conexão NMEA comum
6 NMEA in 1
7 NMEA in 2
8 Saída de controle do relê da
Fonte de alimentação da unidade de écran/
fi os dos cabos de dados:
Fio Sinal
Vermelho Fase positiva, 10,5 a 16,5 V DC,
Preto Fase negativa
Laranja NavBus +
Azul NavBus Amarelo Utilização pela fábrica (isolado, não
Branco Utilização pela fábrica (isolado, não
Verde Alarme externo, comutado ao terra,
20 A máximo
trabalho pesado
leme
leme
trabalho leve, 10,5 a 16,5 V DC, 80
mA máximo
serviço leve
embreagem de leme, comutada ao
terra para activar o relê, 30 V DC,
300 mA máximo
30 mA sem iluminação de fundo,
110 mA com iluminação de fundo
máxima.
corte)
corte)
30 V DC e 250 mA máx.
Apêndice B - Mensagens de alarmes e avisos
Visor de
alarmes
BAT ALARM A voltagem da bateria é
CAL ERROR
CCH ERROR A corrente da embreagem
CE ALARM O erro de curso excedeu ao
Manual de operação do G PILOT 3100
Razão para a mensagem Acção recomendada ao utilizador Notas
menor que o valor mínimo
confi gurado pelo utilizador
A unidade de feedback do
leme do G-PILOT ou a bússola
não está calibrada
está muito elevada
valor máximo defi nido pelo
utilizador
Examine as baterias
Desactive o G-PILOT se a voltagem
cair muito
Calibre ambas as unidades
(consulte as secções 5-2 e 6-1)
Examine a conexão da embreagem a s
Pilote a embarcação manualmente
de volta ao curso
NAVMAN
a
a
a
91
Page 30

CSU
ERROR
CUR
ALARM
DRV
ERROR
GPS
ERROR
GSU
ERROR
MCU
ERROR
NAV
ERROR
NEXT
WPT?
NO
DATA
ou O G-PILOT não está a receber
NVM
ERROR
PHA
ERROR
RFU
ERROR
ROUTE
END
TRK
ERROR
TAK
ERROR
WND
ALARM
WND
ERROR
XTE
ALARM
92
A bússola não está a enviar dados para a unidade principal
A corrente do motor excedeu
o valor máximo defi nido pelo
utilizador
O ângulo do leme não muda
quando o controle de leme
opera
O GPS parou de enviar dados
para a unidade principal
O giroscópio não está a enviar
dados para a unidade principal
A unidade principal não está a
enviar dados para a unidade
do visor
O GPS não está a navegar
para um waypoint quando se
tenta activar o G-PILOT
A embarcação atingiu um
waypoint (no modo GPS e
com WPT AKN activado)
O G-PILOT não está a receber
dados quando confi gurado
para o modo GPS
dados do instrumento de
medição de vento quando no
modo de vento
A memória da unidade principal está adulterada
O leme gira ao contrário em
relação à unidade de feedback
do leme
A unidade de feedback do
leme parou de enviar dados
para a unidade principal
A embarcação atingiu o fi nal
de uma rota GPS
O G-PILOT mudou para o
modo GPS, mas a embarcação está muito fora de curso
No modo Vento, tentativa de
orçar para o lado errado ou a
embarcação fi cará apontada
para o vento
O ângulo do vento mudou
mais do que o valor de disparo
do alarme
Um instrumento de medição
de vento parou de enviar dados para a unidade principal
XTE ultrapassou o valor máximo
defi nido pelo utilizador
Verifi que se a bússola está conectada à
unidade principal; Faça manutenção na
bússola
Verifi que esse o controle de leme não está
emperrado
Aumentar o valor do alarme
Examine se a unidade de controle está
activada
Verifi que se o RFU está conectado ao leme
Examine os fusíveis na traseira da unidade
principal de controle Confi ra o funciona-
mento do controle de leme
Examine o funcionamento do GPS
Examine a conexão do GPS
Verifique se o giroscópio está conectado
à unidade principal; Faça manutenção no
giroscópio
Examine se a unidade do visor está
conectada à unidade principal
Faça manutenção na unidade principal ou
na unidade de visor
Ligue o GPS para navegar para um waypoint
ou ao longo de uma rota
Prima qualquer tecla para cancelar o
alarme. A seguir, prima ENT para iniciar o
leme para opróximo waypoint ou prima ESC
para voltar para STBY
Examine o funcionamento do GPS
Examine a conexão do GPS
Examine o funcionamento do instrumento
de medição de vento
Examine a conexão do instrumento de
medição de vento
Faça manutenção da unidade principal a s
Examine a unidade de feedback do leme
Execute uma calibragem do leme
Verifi que se a unidade de feedback do leme
está conectada à unidade principal. Faça
manutenção na unidade de feedback do
leme
Prima ESC para mudar para STBY ou
prima ENT para mudar para o modo
bússola, navegando no rumo actual
Prima ESC para voltar para o modo STBY
ou prima ENT para que o G-PILOT pilote a
embarcação para o curso correcto.
Mude o ângulo em relação ao vento m
Mude o SWA
Mudar para o modo de bússola
Examine o funcionamento do instrumento
de medição de vento
Examine a conexão do instrumento de
medição de vento
Pilote a embarcação manualmente de volta
ao curso
NAVMAN
Manual de operação do G PILOT 3100
a s
a s
a s
a
c s
a s
a s
m
m
m
a s
a s
a
a
c s
a
Page 31

Notas a O alarme soa nos apitos interno e externo (opcional); prima qualquer
tecla para emudecer o alarme e, em seguida, prima ESC para cancelar a
mensagem de alarme
c O G-PILOT 3100 muda para o modo Bússola
m The G-PILOT 3100 mode does not change
O modo do G-PILOT 3100 não muda
s O G-PILOT 3100 muda para o modo STBY
Apêndice C - Solução de problemas
Este guia de solução de problemas pressupõe
que este manual foi lido e compreendido.
Em muitos casos, é possível resolver
difi culdades sem precisar enviar a unidade
do visor para reparos no fabricante. Siga a
secção de solução de problemas antes de
entrar em contacto com o representante
Navman mais próximo.
Não há partes que possam ser reparadas
pelo utilizador. São necessários métodos
especializados e equipamentos de teste
para assegurar que a unidade do visor seja
remontada de maneira correcta. Os reparos
na unidade somente devem ser executados por
um centro de serviços aprovado pela Navman
NZ Limited. Os utilizadores que repararem a
unidade por conta própria perderão a garantia.
Mais informações podem ser encontradas em
nosso sítio na Web: www.navman.com.
1 A unidade não funciona:
a Fusível queimado ou disjuntor
desengatado.
b A voltagem da bateria está fora da
faixa de 10,5 a 16,5 V DC.
c Cabo de dados/energia danifi cado.
2 O G-PILOT 3100 efectua correcções de
curso com muita frequência:
O valor de resposta é muito baixo
(consulte o Manual de operação do
G PILOT 3100).
3 Ao navegar em um curso recto, a em-
barcação deriva de um lado para outro
do curso:
a A embarcação deve derivar de um
lado para outro do curso quando o
leme pelo G-PILOT 3100 está optimizado.
b Mude para um perfi l apropriado para
a velocidade da embarcação e as
condições do mar (consulte o Manual
de operação do G-PILOT 3100).
c Se a embarcação desviar muito do
curso, ajuste a resposta, a proporção,
o contador de ganho do leme, o
ganho do GPS (se o G-PILOT estiver
no modo GPS) ou o ganho vento (se
o G-PILOT estiver no modo de vento)
(consulte o Manual de operação do
G-PILOT 3100).
Manual de operação do G PILOT 3100
4 Ao navegar em um curso em linha recta,
a embarcação desvia do curso:
a Mude para um perfi l apropriado para
a velocidade da embarcação e as
condições do mar (consulte o Manual
de operação do G-PILOT 3100).
b Ajuste a resposta, a proporção, o
contador de ganho do leme, o ganho
do GPS (se o G-PILOT estiver no
modo GPS) ou o ganho de vento (se
o G-PILOT estiver no modo de vento)
(consulte o Manual de operação do
G-PILOT 3100).
5 Ao efectuar uma mudança de curso
ampla, a embarcação não segue o curso
esperado:
a Mude para um perfi l apropriado para
a velocidade da embarcação e as
condições do mar (consulte o Manual
de operação do G-PILOT 3100).
b Verifi que se a taxa de curva não está
muito baixa (vá para a opção TURN
RATE no menu OPTIONS, consulte
o Manual de operação do G-PILOT
3100).
c Ajuste novamente o contador de
ganho do leme (consulte o Manual de
operação do G-PILOT 3100).
6 A embarcação vira muito
bruscamente:
Reduza a taxa de giro (vá até a opção
TURN RATE no menu OPTIONS,
consulte o Manual de operação do
G-PILOT 3100).
7 A palavra SIMULATE pisca no écran
e os valores exibidos não são os
esperados:
A unidade está no modo de simulação
(consulte o Manual de operação do
G-PILOT 3100).
8 O écran fi ca obscurecido:
a Entrou ar húmido pelo tubo de
respiro, na traseira da unidade.
Ventile a embarcação ou faça a
unidade funcionar com a iluminação
de fundo ao máximo.
b Entrou água pelo tubo de respiro.
Envie a unidade para manutenção.
NAVMAN
93
Page 32

Appendix D - How to contact us www.navman.com.
NORTH AMERICA
Navman USA Inc.
30 Sudbury Rd, Acton, MA 01720.
Toll Free: +1 866 628 6261
Fax: +1 978 897 8264
e-mail: sales@navmanusa.com
web:www.navman.com
AUSTRALIA
Navman Australia Pty. Limited
Unit 2 / 5-13 Parsons St.
Rozelle, NSW 2039, Australia.
Ph: +61 2 9818 8382
Fax: +61 2 9818 8386
e-mail: sales@navman.com.au
web: www.navman.com
OCEANIA
New Zealand
Absolute Marine Ltd.
Unit B, 138 Harris Road,
East Tamaki, Auckland.
Ph: +64 9 273 9273
Fax: +64 9 273 9099
e-mail: navman@absolutemarine.co.nz
Papua New Guinea
Lohberger Engineering,
Lawes Road, Konedobu.
PO Box 810, Port Moresby.
Ph: +675 321 2122
Fax: +675 321 2704
e-mail: loheng@online.net.pg
web: www.lohberger.com.pg
SOUTH AMERICA
Argentina
Costanera Uno S.A.
Av Pte Ramón S. Castillo y Calle 13
Zip 1425 Buenos Aires, Argentina.
Ph: +54 11 4312 4545
Fax +54 11 4312 5258
e-mail:
purchase@costanerauno.com.ar
web: www.costanerauno.ar
Brazil
Equinautic Com Imp Exp de Equip
Nauticos Ltda.
Rua Ernesto Paiva, 139
Clube dos Jangadeiros
Porto Alegre - RS - Brasil
CEP: 91900-200.
Ph: +55 51 3268 6675
+55 51 3269 2975
Fax: +55 51 3268 1034
e-mail:
equinautic@equinautic.com.br
web: www.equinautic.com.br
Realmarine
Estrada do Joa 3862,
Barra da Tijuca, Rio de Janeiro,
Brazil. CEP: 22611-020.
Ph: +55 21 2483 9700
Fax: +55 21 2495 6823
e-mail: tito@realmarine.com.br
web: www.realmarine.com.br
Chile
Equimar
Manuel Rodrigurez 27
Santiago, Chile.
Ph: +56 2 698 0055
Fax +56 2 698 3765
e-mail: mmontecinos@equimar.cl
Mera Vennik
Colon 1148, Talcahuano,
4262798, Chile.
Ph: +56 41 541 752
Fax +56 41 543 489
e-mail: meravennik@entel.chile.net
94
CENTRAL AMERICA
Mexico
Mercury Marine de Mexico
Anastacio Bustamente #76
Interior 6 Colonia Francisco Zarabia,
Zapapan, Jalisco, C.P. 45236 Mexico.
Ph: +52 33 3283 1030
Fax: +52 33 3283 1034
web: www.equinautic.com.br
ASIA
China
Peaceful Marine Electronics Co. Ltd.
Guangzhou, Hong Kong, Dalian,
Qingdao, Shanghai
1701 Yanjiang Building
195 Yan Jiang Zhong Rd. 510115
Guangzhou, China.
Ph: +86 20 3869 8839
Fax: +86 20 3869 8780
e-mail: sales@peaceful-marine.com
web: www.peaceful-marine.com
India
Access India Overseas Pvt. Ltd.
A-98, Sector 21,
Noida - 201 301, India.
Ph: +91 120 244 2697
TeleFax: +91 120 253 7881
Mobile: +91 98115 04557
e-mail: vkapil@del3.vsnl.net.in
Esmario Export Enterprises
Block No. F-1, 3rd Floor, Surya Towers
Sardar Patel Rd, Secunderbad 500 003.
Ph: +91 40 2784 5163
Fax: +91 40 2784 0595
e-mail: gjfeee@hd1.vsnl.net.in
web: www.esmario.com
Indonesia
Polytech Nusantara,
Graha Paramita 2nd Floor,
Jln Denpasar Raya Blok D2
Kav 8 Kuningan, Jakarta 12940.
Ph: +62 21 252 3249
Fax: +62 21 252 3250
e-mail: polytech@transavia.co.id
Korea
Kumhomarine Technology Co. Ltd.
#604-842, 2F, 1118-15, Janglim1-Dong,
Saha-Gu, Busan, Korea.
Ph: +82 51 293 8589
Fax: +82 51 265 8984
e-mail: info@kumhomarine.com
web: www.kumhomarine.com
Maldives
Maizan Electronics Pte. Ltd.
Henveyru, 08 Sosunmagu.
Male', Maldives.
Mobile: +960 78 24 44
Ph: +960 32 32 11
Fax: +960 32 57 07
e-mail: ahmed@maizan.com.mv
Singapore, Malaysia, Brunei,
Indonesia and Phillipines
RIQ PTE Ltd.
Blk 3007, 81 Ubi Road 1, #02-440,
Singapore 408701.
Ph: +65 6741 3723
Fax : +65 6741 3746
e-mail: riq@postone.com
Taiwan
Seafirst International Corporation
No. 281, Hou-An Road, Chien-Chen
Dist. Kaohsiung, Taiwan R.O.C.
Ph: +886 7 831 2688
Fax: +886 7 831 5001
e-mail: seafirst@seed.net.tw
web: www.seafirst.com.tw
NAVMAN
Thailand
Thong Electronics (Thailand) Co. Ltd.
923/588 Ta Prong Road, Mahachai,
Muang, Samutsakhon 74000, Thailand.
Ph: +66 34 411 919
Fax: +66 34 422 919
e-mail: sales@thongelectronics.com
admins@thongelectronics.com
web: www.thongelectronics.com
Vietnam
Haidang Co. Ltd.
1763 Le Hong Phong St. Ward 12
District 10, Ho Chi Minh City.
Ph: +84 8 863 2159
Fax: +84 8 863 2124
e-mail: sales@haidangvn.com
web: www.haidangvn.com
MIDDLE EAST
Lebanon and Syria
Balco Stores
Balco Building, Moutran Street,
Tripoli (via Beirut). - Lebanon
P.O. Box: 622.
Ph: +961 6 624 512
Fax: +961 6 628 211
e-mail: balco@cyberia.net.lb
United Arab Emirates
Kuwait, Oman, Iran, Saudi
Arabia, Bahrain & Qatar
Abdullah Moh’d Ibrahim Trading, opp
Creak Rd. Baniyas Road, Dubai.
Ph: +971 4 229 1195
Fax: +971 4 229 1198
e-mail: sales@amitdubai.com
AFRICA
South Africa
Pertec (Pty) Ltd (Coastal Division)
16 Paarden Eiland Road.
Paarden Eiland, 7405
PO Box 527,
Paarden Eiland, 7420
Cape Town, South Africa.
Ph: +27 21 508 4707
Fax: +27 21 508 4888
e-mail: info@kfa.co.za
web: www.pertec.co.za
EUROPE
France, Belgium and Switzerland
Plastimo SA
15, rue Ingénieur Verrière,
BP435,
56325 Lorient Cedex.
Ph: +33 2 97 87 36 36
Fax: +33 2 97 87 36 49
e-mail: plastimo@plastimo.fr
web: www.plastimo.fr
Germany
Navimo Deutschland
15, rue Ingénieur Verrière
BP435- 56325 Lorient Cedex.
Ph: +49 6105 92 10 09
+49 6105 92 10 10
+49 6105 92 10 12
Fax: +49 6105 92 10 11
e-mail:
plastimo.international@plastimo.fr
website: www.plastimo.de
Italy
Navimo Italia
Nuova Rade spa, Via del Pontasso 5
16015 Casella Scrivia (GE).
Ph: +39 1096 80162
Fax: +39 1096 80150
e-mail: info@nuovarade.com
web: www.plastimo.it
Holland
Navimo Holland
Industrieweg 4,
2871 JE Schoonhoven.
Ph: +31 182 320 522
Fax: +31 182 320 519
e-mail: info@plastimo.nl
web: www.plastimo.nl
United Kingdom
Navimo UK
Hamilton Business Park
Bailey Road, Hedge End
Southhampton, Hants S030 2HE.
Ph: +44 01489 778 850
Fax: +44 0870 751 1950
e-mail: sales@plastimo.co.uk
web: www.plastimo.co.uk
Sweden, Denmark, Finland and
Norway
Navimo Nordic
Lundenvägen 2,
473 21 Henån.
Ph: +46 304 360 60
Fax: +46 304 307 43
e-mail: info@plastimo.se
web: www.plastimo.se
Spain
Navimo España
Avenida Narcís Monturiol, 17
08339 Vilassar de Dalt,
Barcelona.
Ph: +34 93 750 75 04
Fax: +34 93 750 75 34
e-mail: plastimo@plastimo.es
web: www.plastimo.es
Portugal
Navimo Portugal
Avenida de India N°40
1300-299 Lisbon.
Ph: +351 21 362 04 57
Fax: +351 21 362 29 08
e-mail: plastimo@siroco-nautica.pt
web: www.plastimo.com
Other countries in Europe
Plastimo International
15, rue Ingénieur Verrière BP435
56325 Lorient Cedex, France.
Ph: +33 2 97 87 36 59
Fax: +33 2 97 87 36 29
e-mail:
plastimo.international@plastimo.fr
web: www.plastimo.com
REST OF WORLD/
MANUFACTURERS
Navman NZ Limited
13-17 Kawana St.
Northcote.
P.O. Box 68 155,
Newton,
Auckland,
New Zealand.
Ph: +64 9 481 0500
Fax: +64 9 481 0590
e-mail: marine.sales@navman.com
web: www.navman.com
Manual de operação do G PILOT 3100
Page 33

.
Page 34

Made in New Zealand
MN0000213E
G-PILOT 3100 Operation
Lon 174° 44.535'E
Lat 36° 48.404'S
NAVMAN
 Loading...
Loading...