

Page 1

NAV MAN
TRACKFISH 6600
C H A R T P L O T T E R A N D
F I S H F I N D E R
Installation and
Operation Manual
w w w . n a v m a n . c o m
F I S H 4 5 0 0 /4600
F I S H F I N D E R S
Page 2
De FISH 4500/4600/4600 is standaard ingesteld op de volgende eenheden: voet, °F
(Fahrenheit), US gallons en knopen. Zie sectie 3-6 Instelling > Eenheden om de eenheden
te veranderen.
BELANGRIJK
Het is uitsluitend de verantwoordelijkheid van de eigenaar om het instrument en de transducers zodanig te installeren en gebruiken dat geen ongelukken, persoonlijk letsel of materiële
schade worden veroorzaakt. De gebruiker van dit product is persoonlijk verantwoordelijk voor
goed zeemanschap.
NAVMAN NZ LIMITED WIJST ELKE AANSPRAKELIJKHEID AF VOOR GEBRUIK VAN DIT
PRODUCT WAARBIJ ONGELUKKEN OF SCHADE KUNNEN WORDEN VEROORZAAKT
(INCLUSIEF MOTORSCHADE) OF DIE IN STRIJD ZIJN MET DE WET.
Bepalende taal: Deze bepaling, alle handleidingen, gebruiksaanwijzingen en andere informatie gerelateerd aan het product (Documentatie), zouden kunnen worden vertaald, of zijn
vertaald uit een andere taal (Vertaling). Als er strijdigheden zijn tussen enige Vertaling van
de Documentatie dan is de Engelstalige versie van de Documentatie de officiële versie van
de Documentatie.
Brandstofcomputer: Brandstofverbruik kan drastisch veranderen, afhankelijk van de boots
lading en de zeecondities. De brandstofcomputer dient daarom niet als enige bron van
informatie te worden gebruikt m.b.t. de beschikbare hoeveelheid brandstof aan boord. De
elektronische informatie dient aangevuld te worden met visuele of andere controles van de
hoeveelheid brandstof. Dit is noodzakelijk i.v.m. gebruikersfouten, zoals het vergeten te resetten
van de gebruikte brandstof wanneer de tank wordt bijgevuld, het lopen van de motor terwijl de
brandstofcomputer niet ingeschakeld is of andere gebruikersacties die ervoor kunnen zorgen
dat het instrument onnauwkeurig is. Neem altijd voldoende brandstof mee voor de reis, plus
een reserve voor onvoorziene omstandigheden.
Deze handleiding geeft de FISH 4500/4600/4600 weer ten tijde van druk. Navman NZ Limited behoudt zich het recht voor om zonder voorafgaande mededeling veranderingen door
te voeren.
Copyright © 2004 Navman NZ Limited, Nieuw Zeeland. Alle rechten voorbehouden. NAVMAN
is een geregistreerd handelsmerk van Navman NZ Limited.
FISH 4500/4600 Installatie- en bedieningshandleiding 42
NAVMAN
Page 3

Inhoud
1 Inleiding ................................................................................................44
1-1 Voordelen van de FISH 4500/4600 .............................................................44
1-2 Hoe de FISH 4500/4600 werkt ....................................................................45
2 Standaard bediening ........................................................................... 46
3 De FISH 4500/4600 instelling .............................................................. 48
3-1 Instelling > Systeem ....................................................................................49
3-2 Instelling > Sonar ........................................................................................49
3-3 Instelling > Brandstof ..................................................................................50
3-4 Instelling > Loggen ......................................................................................52
3-5 Instelling Alarmen ........................................................................................52
3-6 Instelling > Eenheden .................................................................................53
3-7 Instelling > Communicatie ..........................................................................53
3-8 Instelling > Kalibreren .................................................................................54
4 Het gebruik van de FISH 4500/4600 ...................................................55
4-1 Verklaren van het beeldscherm ..................................................................55
4-2 Enkele en dubbele frequentie fishfinding ....................................................58
4-3 Het vinden van vis en weergave .................................................................60
4-4 Toename .....................................................................................................61
4-5 Bereik ..........................................................................................................62
5 De Beeldschermen ..............................................................................63
5-1 Sonar beeldscherm .....................................................................................64
5-2 Sonar zoombeeldscherm ............................................................................65
5-3 Sonar bodemweergave ...............................................................................66
5-4 Sonar 50/200 beeldscherm ........................................................................66
5-5 Sonar zoombeeldscherm ...........................................................................66
5-6 Brandstofbeeldscherm ................................................................................67
5-7 Databeeldscherm .......................................................................................68
5-8 Informatiebeeldscherm ..............................................................................68
6 Installatie en Onderhoud ....................................................................69
6-1 Wat er bij dit product geleverd wordt. .........................................................69
6-2 Opties en Accessoires ................................................................................69
6-3 Het beeldscherm bevestigen en verwijderen ..............................................69
6-4 Stroom- en transducerverbindingen ............................................................71
6-5 Bedradingsmogelijkheden ...........................................................................72
6-6 Systemen van meerdere instrumenten .......................................................73
6-7 Schoonmaak en onderhoud ........................................................................74
Appendix A - Specificaties .....................................................................75
Appendix B – Afmetingen ......................................................................76
Appendix C – Problemen oplossen ......................................................77
NAVMAN
FISH 4500/4600 Installatie- en bedieningshandleiding43
Page 4
1 Inleiding
Gefeliciteerd met uw keuze voor een Navman
Fishfinder. Het is nut tig om voor installatie
en gebrui k deze handleiding grondig door
te lezen.
Deze handleiding beschrijft hoe u de FISH
4500/4600/4600 en de bijbehorende dubbele
frequentie spiegeltransducer dient te installeren
en in te stellen. (Indien een ‘door-de-huid’transducer wordt gebruikt verwijzen we u naar
de handleiding die daarbij geleverd wordt.)
Deze handleiding legt ook uit hoe u de FISH
4500/4600 op een effectieve manier gebruikt
en geeft tips voor het oplossen van problemen
en voor optimaal functioneren.
Belangrijk
Het is van vitaal belang voor het functioneren van de fishfinder dat de transducer
op de juiste plaats wordt geïnstalleerd.
Volg daartoe de installatie-instructies met
grote zorg.
1-1 Voordelen van de FISH 4500/4600
De FISH 4500/4600/4600 is een kwalitatief
hoogwaardige sonar fishfinder met een dubbele frequentie die wordt geleverd met een
transducer. Het gebruikt TFT (Thin Film Transistor)-technologie voor een beeldscherm dat in
daglicht goed leesbaar is en dat ’s nachts gedimd kan worden. De bevestigingsbeugel geeft u
de mogelijkheid om de fishfinder te draaien en
kantelen voor optimaal afleesgemak.
De kleuren op de sonarbeeldschermen zijn
regelbaar, met een keuze uit vier 16-kleuren
paletten en een 8-kleuren palet. De kleuren
zijn representatief voor verschillende signaalsterktes, zodat de sonarbeeldschermen eenvoudig te lezen zijn.
De dubbele frequentie maakt het mogelijk
voor de FISH 4500/4600/4600 om te worden
gebruikt voor weergave:
• Bij een hoge frequentie van 200 kHz
• Bij een lage frequentie van 50 kHz
• Beide frequenties naast elkaar op een
gesplitst beeldscherm
• Beide frequenties gecombineerd op een
enkel beeldscherm.
Deze mogelijkheid maakt het, samen met een
variabele stroomoutput van maximaal 600 W
RMS, mogelijk dat de FISH 4500/4600/4600
zowel in diep als ondiep water goed functioneert.
De FISH 4500/4600 kan de bodem waarnemen
op een diepte van 1000 m, afhankelijk van de
helderheid van het water, de gekozen ultrasonische frequentie en het type transducer.
De NAVMAN fishfinder kan gebruikt worden om
vis te vinden of om kenmerken op de bodem te
lokaliseren, zoals riffen of wrakken en om middels een bodemprofiel te helpen uw favoriete
visplek te herkennen.
FISH 4500/4600 Installatie- en bedieningshandleiding 44
De NAVMAN fishfinder kan ook een navigatiehulp zijn door diepte-informatie te geven zodat
de dieptecontouren op kaarten geïdentificeerd
kunnen worden. De FISH 4500/4600 is met
name geschikt voor samenwerking met de
TRACKER 5500 - NAVMAN’s GPS chartplotter
met kleurenscherm en wereldwijd bereik. Deze
twee instrumenten kunnen op elkaar worden
aangesloten via NavBus of NMEA, zodat data
kan worden gedeeld.
BELANGRIJK E OPMER KING OVER GEBRUIK. Hoewel fishfinders kunnen worden
gebruikt als een navigatiehulpmiddel, wordt
precisie door veel factoren beperkt, inclusief
de plaats van de transducer. Het is de verantwoordelijkheid van de gebruiker om zich ervan
te verzekeren dat de NAVMAN fishfinder correct
wordt geïnstalleerd en gebruikt.
Met een optionele brandstofkit wordt de FISH
4500/4600 een geraffineerde en gemakkelijk
te gebruiken brandstofcomputer.
Alle NAVMAN 4000-serie fishfinders gebruiken onze nieuwe NAVMAN SBN-technologie
voor sonarverwerking om signaalverster-king,
bodemherkenning en ruisond erdr ukki ng te
verbeteren.
SBN-technologie maakt gebruik van digitale
adaptieve algoritmes die alle teruggezonden
signalen versterken. Tegelijkertijd gebruikt SBN
actieve geruisonderdrukking om sto ringen,
die door fishfinders vaak als juiste informatie
worden gezien, tegen te gaan.
Door het gebruik van SBN-technologie kan de
fishfinder reflecties van elke trilling analyseren,
wordt onjuiste retourinformatie eruit gefilterd en
wordt weergegeven wat zich in het water onder
de boot bevindt. Zie sectie 4-1 Verklaren van
het beeldscherm, voor meer informatie.
NAVMAN
Page 5
1-2 Hoe de FISH 4500/4600 werkt
De FISH 4500/4600 bestaat uit twee onderdelen:
- de aan de romp bevestigde transducer
- het beeldscherm.
De transducer genereert een ultrasonische
trilling (geluid dat niet door het menselijk oor
waarneembaar is), dat zich naar de bodem beweegt met een snelheid van zo’n 1463 m/sec,
terwijl het zich in kegelvorm uitspreidt.
Wanneer de trilling een voorwerp, zoals een vis,
of de bodem tegenkomt, wordt dit gedeeltelijk
terug naar de boot gereflecteerd als een echo.
De diepte van het voorwerp of de bodem wordt
berekend door de FISH 4500/4600 door de tijd
te meten tussen het verzenden van de trilling
en de ontvangst van de echo. Wanneer de
echo is ontvangen wordt de volgende trilling
verzonden.
De FISH 4500/4600 zet elke echo om in een
elektronisch signaal, dat als een verticale lijn
of pixels op het scherm wordt/worden weergegeven. De meest recente echo verschijnt aan
de meest rechtse kant van het beeldscherm,
terwijl de oudere echo’s naar links ‘scrollen’ om
uiteindelijk van het scherm te verdwijnen.
De scroll-snelheid hangt af van de waterdiepte
en de scroll-snelheidinstelling. Zie sectie 3-2
Instelling > Sonar, en sectie 4-1, voor meer
informatie.
Hoe de echo’s worden weergegeven is afhankelijk van:
• de fishfinder-instellingen (geselecteerde
• echo’s (verschillende vis-, bodem-, wrak-
• ruis (waterhelderheid en luchtbellen).
Zie sectie 4-1 Verklaren van het beeldscherm,
voor meer informatie.
frequentie-, bereik- en toename-instellingen)
en zeewiersoorten)
NAVMAN
FISH 4500/4600 Installatie- en bedieningshandleiding45
Page 6
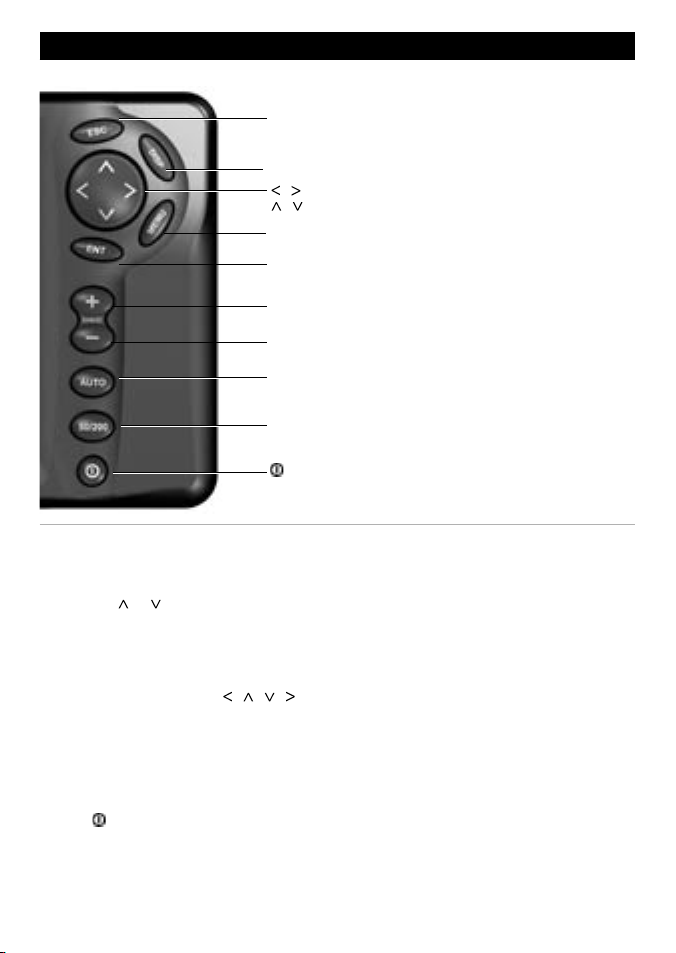
2 Standaard bediening
Toetsnamen
Ga naar het sonarbeeldscherm indien geen menu
wordt weergegeven. Indien wel een menu wordt
ESC
weergegeven worden alle veranderingen gewist en
gaat u terug naar het voorgaande menu.
Geeft het beeldschermmenu weer
DISP
Curs ortoetsen bewegen de keuze- highlight en
,
,
veranderen instellingen
Druk eenmaal om het optiemenu weer te geven;
MENU
druk nogmaals voor het instellingmenu
ENT
Bev est igt veran deringen of la at he t Toename
(gevoeligheid)beheer zien voor het sonarscherm.
Vergroot het bereik
+
_
Verkleint het bereik
Selecteert handmatig, kruis- of visstand
AUTO
Verandert de frequentie tussen 50 kHz en 200 kHz
50/200
Stroom Aan en Uit; laat de beeldschermtoetsen zien
Toetsengebruik
De fishfinder werkt met menu’s.
Om een menu-item te selecteren:
1. Druk op of om de highlight naar het
item toe te bewegen.
2. Druk op ENT om het item te selecteren.
Om een nummer, woord of instelling te
veranderen:
1. Gebruik de cursortoetsen , , , om
een nummer, een woord of instelling te
highlighten en (een) verandering(en) aan
te brengen.
2. Druk op ENT om te bevestigen; ESC om
te wissen.
Stroom aan / Autopower
Druk op om de fishfinder in te schakelen.
Indien de fishfinder is aangesloten op autopower,
wordt het automatisch ingeschakeld als de boot
FISH 4500/4600 Installatie- en bedieningshandleiding 46
wordt gestart. Hierdoor worden de machineurenteller en de optionele brandstoffuncties
geactiveerd. Een titelbeeldscherm wordt kort
weer gegeven. Vervolge ns komt alleen de
eer ste keer dat de fishfinder wordt inge -
schakeld het instellingmenu in beeld. Gebruik
dit menu om de taal te kiezen (zie sectie 3-1
Instelling > Systeem) en eenheden (zie sectie
3-6 Instelling > Eenheden).
Alle volgende keren wordt het titelbeeldscherm
gevolgd door het beeldscherm dat het meest
recentelijk werd gebruikt.
Indien de transducer niet is aangesloten, zal
boodschap: Simulatie-stand starten?
verschijnen. Druk op < of > om tussen Ja,Nee
of Nooit te kiezen. (Indien de aansluiting van
de transducer niet opzettelijk was verbroken,
dient u de fishfin de r uit te scha kelen en
verwijzen we naar Problemen oploss en in
Appendix C.)
Druk op ENT om uw selectie te bevestigen
en de start-up module zal verder gaan.
NAVMAN
Page 7
Stroom uit
Om de fishfinder uit te zetten drukt u op . Een
aftelvenster verschijnt. Houdt 3 seconden
ingedrukt totdat de fishfinder uitschakelt.
Opmerking: Indien het instrument op
autopower is aangesloten (sectie 6-5 bedradingsmogelijkheden) dan kan de fishfinder alleen worden uitgeschakeld indien het contact
van de boot wordt uitgeschakeld.
Simulatiestand
Een interne simulator stelt gebruikers in staat
om op de wal te leren hoe de fishfinder werkt.
In de simulatiestand flikkert onderin het
beeld-scherm het woord Simuleer. De
fishfinder genereert data zodanig dat de belangrijkste beeldschermen te gebruiken zijn.
Gebruik Ins telling > Sim ulatie als
volgt:
1. Druk op MENU totdat het instellingmenu
wordt weergegeven.
2. Highlight Simuleer.
3. Druk op ENT om te (de-)selecteren.
Aanpassen achtergrondverlichting
Het beeldscherm en de toetsen worden verlicht
met een keuze uit 16 helderheidsniveaus. Om
het achtergrondlicht te veranderen:
1. Druk kort op om de toetsen weer te
geven.
2. Druk op < om te dimmen of op > voor
feller licht.
3. Druk op ENT om de instelling te bewaren.
Druk twee keer op om terug te keren naar
de maximale achtergrondlichtinstelling. Druk op
ESC om het programma te verlaten.
Handmatig, kruis- of visstand
Druk op AUTO om een van de drie gebruiksstanden te kiezen:
• Kruisstand. Gebruik deze stand indien
u vaart. De FISH 4500/4600 geeft dan
duidelijk de diepte weer en past automatisch Bereik en Toename aan zodat het
bodemtracé wordt weergegeven. Diepte
wordt in grote cijfers weergegeven.
• Visstand. Gebruik deze stand indien u
vist. De FISH 4500/4600 geeft vis, het
bodemprofiel, wrakken, rotsen en andere
details, die helpen vis te vinden, duidelijk
weer. Bereik en Toename worden geoptimali-seerd om de gevoeligheid en
visvindende capaciteiten te verhogen.
• Handmatige stand. Gebruik deze
stand om de visvindende capaciteiten
van de FISH 4500/4600 nauwkeurig in
te stellen. De beste resultaten worden
meestal bereikt op deze stand, maar om
de optimale instelling voor verschillende
condities te bepalen zijn oefening en ervaring nodig. Toename, toenamedrempel,
trillings-lengte en trillingssterkte kunnen
aangepast worden. De handmatige stand
bewaart uw meest recente instelling,
zodat u deze niet steeds wanneer u deze
stand kiest opnieuw hoeft in te stellen.
NAVMAN
FISH 4500/4600 Installatie- en bedieningshandleiding47
Page 8
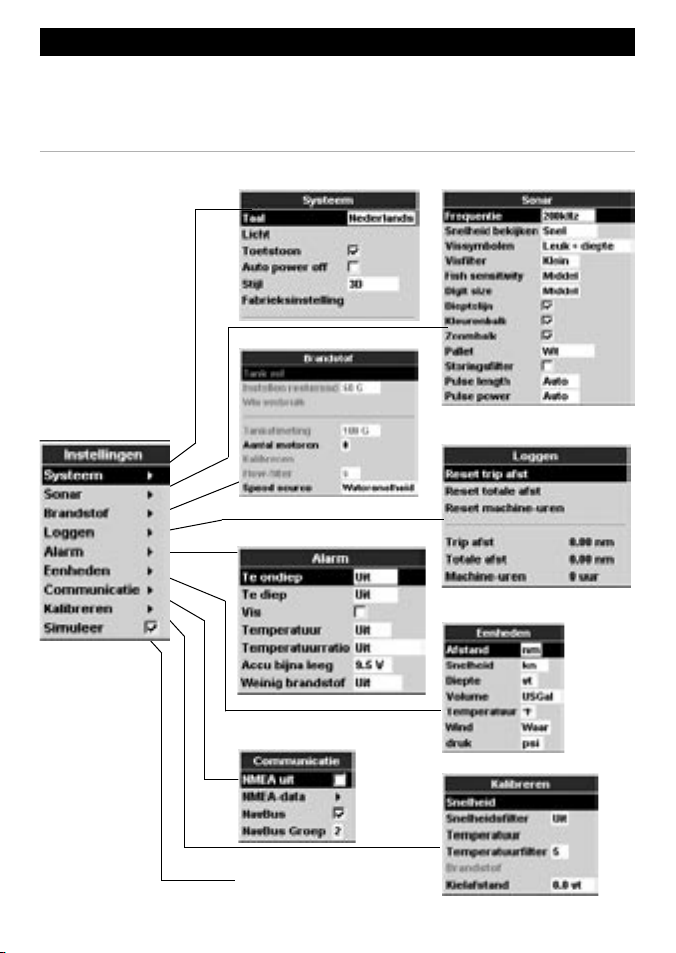
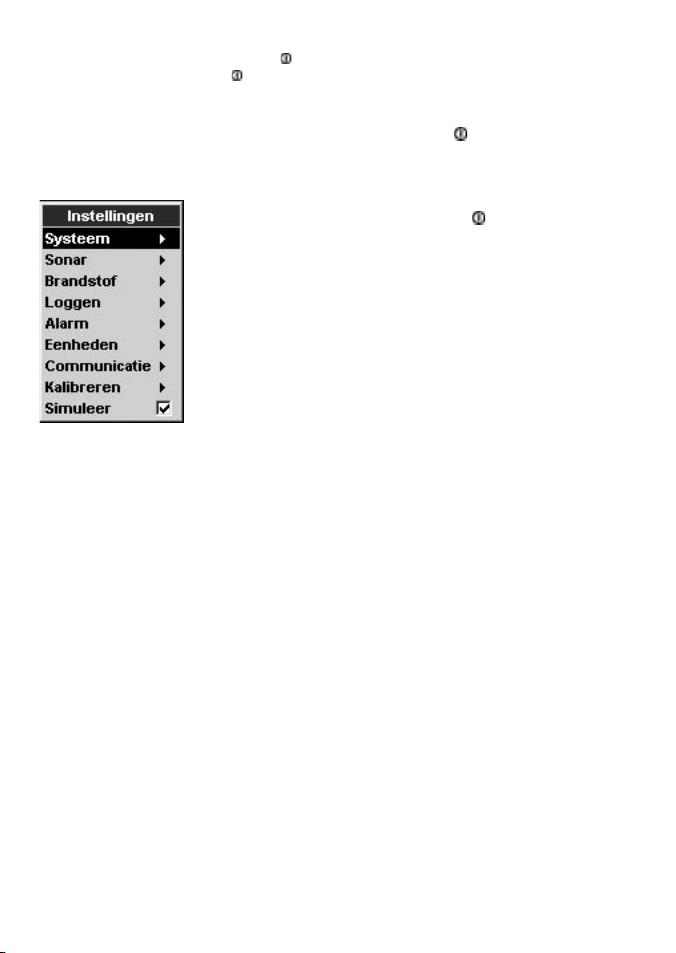
3 De FISH 4500/4600 instelling
Druk nogmaals op MENU om het instellingmenu weer te geven. Kies vervolgens met
behulp van de cursortoetsen een specifieke
optie. (Sectie 2, Standaard bediening, geeft in
meer detail het toetsengebruik weer.)
Het instellingmenu en opties
Systeem – zie sectie 3-1
Brandstof – zie sectie 3-3
Alarmen – zie sectie 3-5
Het Instellingmenu en de opties zijn onderstaand
samengevat. De standaard fabrieksinstelling
wordt indien van toepassing weergegeven.
Elke instellingsmenuoptie wordt uitgelegd in de
volgende secties.
Sonar – zie sectie 3-2
Loggen – zie sectie 3-4
Eenheden – zie sectie 3-6
Communicatie – zie sectie 3-7
Kalibratie – zie sectie 3-8
Simulatie – zie sectie 2
FISH 4500/4600 Installatie- en bedieningshandleiding 48
NAVMAN
Page 9
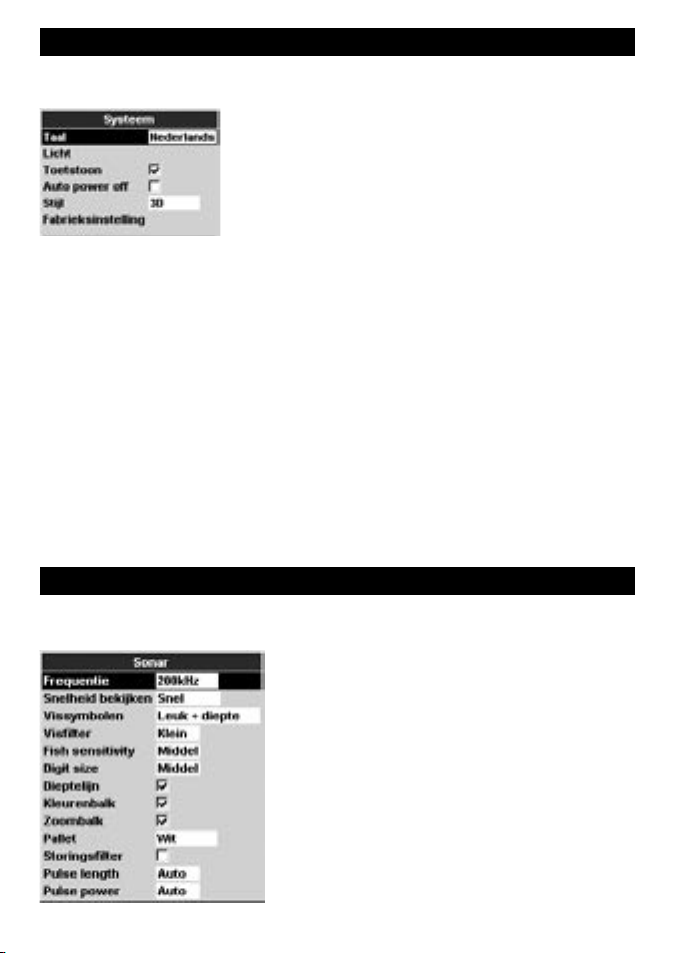
3-1 Instelling > Systeem
Druk nogmaals op MENU totdat het instellingmenu wordt weergegeven en kies dan
systeem:
Taal
Kies de taal voor het beeldscherm. De keuzemogelijkheden zijn: Engels, Italiaans, Frans,
Duits, Spaans, Nederlands, Zweeds, Portugees, Fins en Grieks.
Tip: Indien u de huidige taal niet kunt lezen,
kunt u bovenin het systeemmenuscherm de
taal veranderen.
Licht
Het achter gr ondverl ic htingsb eh eer wordt
weergegeven. De balk geeft het huidige achtergrondverlichtingsniveau weer.
Toetsenpiep
Schakelt de piep wanneer een toets wordt ingedrukt in of uit.
Auto power uit
Kies Aan zodat de fishfinder automatisch wordt
uitgeschakeld als het contact van de boot wordt
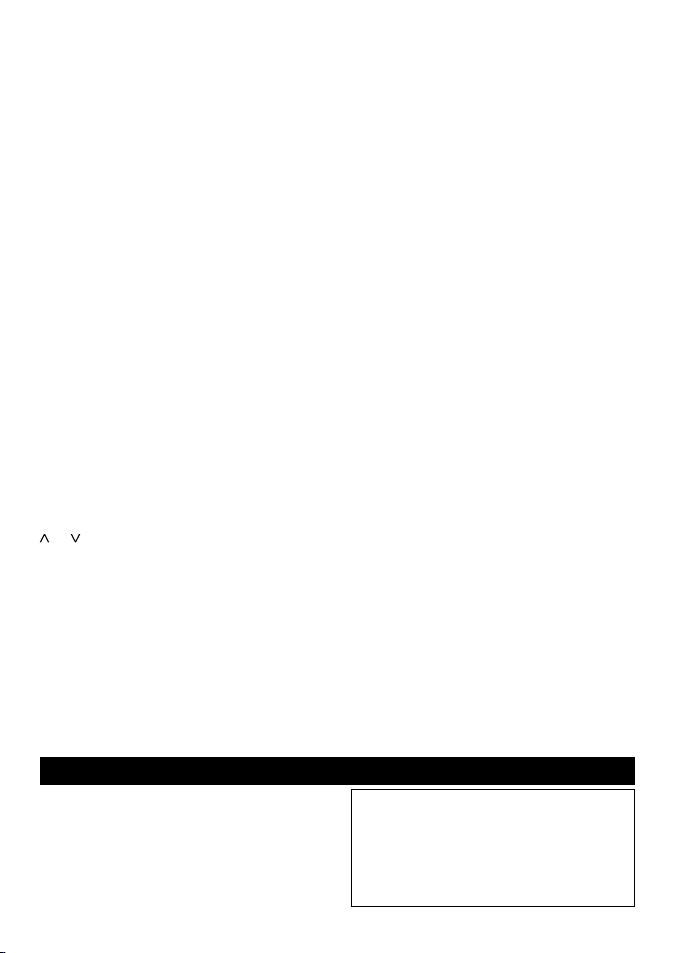
3-2 Instelling > Sonar
Druk een of meerdere keren op MENU totdat
het instellingmenu wordt weergegeven, en
kies dan Sonar:
uitgeschakeld. Dit is alleen van toepassing indien het instrument op Autopower is aangesloten. Zie sectie 6-5 Bedradingsmogelijkheden.
Stijl
Gebru ik dit om het uite rlijk van de FIS H
4500/4600 interface te kiezen. Kies Klassiek
indien u voor de fishfinder dezelfde stijl wenst
als voor de TRACKER 5500. Anders kunt u
3D kiezen voor een sterk, proportioneel lettertype.
Fabrieksinstelling
Deze optie brengt alle fishfinder instellingen (met
uitzondering van de taal) terug naar de standaard
fabrieksinstelling zoals weergegeven in sectie 3
De FISH 4500/4600 instelling.
Een waarschuwin gsvenster vraagt: Ze ke r
we t e n? Kies Ja en druk BEVES TIG ter
bevestiging.
Sonar (alleen voor FISH 4600)
Selecteren om solarfuncties in te schakelen.
De-selecteren indien het instrument alleen
als Smartcraft-beeldscherm gebruikt gaat
worden.
SmartCraft (Alleen voor FISH 4600)
Selecteren om Smartcraft-functies in te schakelen. SmartC raft is al leen verkrijgb aar me t
bepaalde Mercury-motoren; hiervoor is een
optionele SmartCraft Gateway benodigd.
Frequentie
U heeft de keuze uit 200 kHz, 50 kHz en
Gemengd. Voor informatie over het kiezen van
de geschiktste frequentie voor de watercondities verwijzen we u naar sectie 4-2 Enkele en
dubbele frequentie fishfinding.
Scrolsnelheid
Gebruik dit om de scrollsnelheid van het beeldscherm in te stellen. U hebt de keuze uit: Heel
snel, Snel, Medium, Langzaam, en Rust.
De diepte van het water is ook van invloed op
de snelheid van het scherm.
Snellere scrollsnelheden in combinatie met een
lage vaarsnelheid (tussen de 2 en 6 knopen)
geeft de vissen met de grootste precisie weer.
Medium of Langzaam scrollsnelheden resulteren in sonar informatieweergave over een
langere periode, maar in minder detail. Zie
NAVMAN
FISH 4500/4600 Installatie- en bedieningshandleiding49
Page 10
sectie 4-1 Verklaren van het beeldscherm, voor
meer informatie.
Vissymbolen
Deze verschijnen alleen op de voornaamste
sonarbeeldschermen. Vissymbolen kunnen op
drie manieren worden weergegeven:
• Als een vissymbool (Aan).
• Als een vissymbool met diepte (Aan +
diepte). De diepte wordt naast het vissymbool weergegeven.
• Uitgeschakeld (Uit) zodat de echo’s niet
in vissymbolen worden veranderd, maar
direct worden weergegeven.
Visfilter
Gebruik dit om het kleinste vissymbool weergegeven te zien. U hebt de keus uit: Klein,
Middel en Groot.
Cijfergrootte
Gebruik dit om de diepteweergave op de sonarbeeldschermen te verwijderen of veranderen. U
hebt de keus uit: Klein, Middel en Groot.
Visgevoeligheid
Gebruik deze functie om het minimale viswaarn eming snive au aan te passen . Kie s
Hoog om het maximale aantal vissen waar
te nemen.
Dieptelijn
Dit is een horizontale lijn die op en neer kan
worden bewogen door gebruik te maken van de
of cursortoetsen. De dieptelijnen kunnen
gebruikt worden om de diepte te vinden van een
vis of een ander weergegeven voorwerp. In het
sonar zoombeeldscherm markeert de dieptelijn
het midden van het gezoomde gebied.
Indien geselecteerd zal dit op alle sonarbeeldschermen worden weergegeven.
Kleurenbalk
Dit laat de kleuren zien die gebruikt zijn in het
geselecteerde kleurenpalet.
Indien geselecteerd zal dit worden weergegev en in de linker bene den hoe k van alle
sonarbeeldschermen.
Zoombalk
Dit geeft het verticale bereik weer, dat wordt
vergroot in de zoomsectie.
Indien geselecteerd zal dit worden weergegeven als een verticale scroll-bar aan de rechterkant van alle sonarbeeldschermen.
Palet
Gebruik dit om uw kleurenpalet te selecteren.
Elke kleur op het palet 3staat voor een andere
echosterkte, zoals aangeg even op de sonarschermen.
U heeft de keuze uit vijf kleurenpaletten: zwart,
blauw, wit, levendig en 8 kleuren. De
eerste vier laten meer detail zien, terwijl het
8-kleurenpalet een groter onderscheid van
signaalsterkte mogelijk maakt tussen de naast
elkaar liggende kleuren. Voor het 16-kleurenpalet staat elke kleur voor een signaalbereik
van 1.5 dB. Voor het 8-kleurenpalet beslaat
elke kleur 3 dB signaalbereik.
Storingsfilter
Dit filtert het echosignaal ter vermindering van
storende harde geluiden, zoals motorlawaai.
Selecteren om filter toe te voegen..
Trillingslengte
Dit kan gebruikt worden om de lengte van
de uitgezonden ultrasonische trilling te specificeren. Een korte trillingslengte zorgt voor
meer beeldschermprecisie, maar heeft niet
zoveel energie en reikt dus niet zo ver in het
water als een langere trilling.
U heeft de keuze uit Auto, Kort, Medium,
of Lang. De Auto stand wordt aanbevolen.
Trillingssterkte
Dit kan gebruikt worden om de sterkte van de
output van de uitgezonden ultrasonische trilling
te specificeren. Een lage sterkte neemt niet veel
stroom van de accu en geeft een helder beeld
in ondiep water.
U heeft de keuze uit Auto, Kort, Medium,
of Lang. De Auto stand wordt aanbevolen.
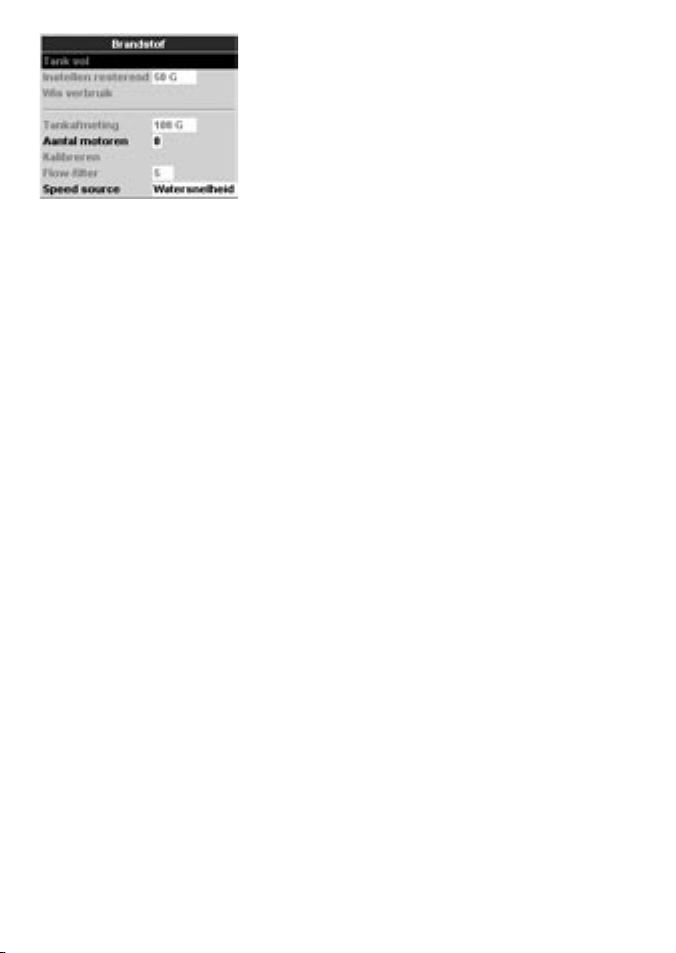
3-3 Instelling > Brandstof
Deze functies kunnen alleen worden gebruikt
indien de optionele enkele of twinmotor brandstofkit is geïnstalleerd.
Druk een of meerdere keren op MENU totdat
het Instellings menu wordt weergegeven
en kies dan Brandstof:
FISH 4500/4600 Installatie- en bedieningshandleiding 50
Waarschuwing
NAVMAN brandstofkits zijn alleen geschikt
voor benzinemotoren.
Brandstofverbruik kan drastisch veranderen, afhankelijk van de boots lading en de
zeecondities. Neem altijd voldoende brandstof mee voor de reis, plus een reserve.
NAVMAN
Page 11
We bevelen aan dat het volume van de benzinetank wordt gemeten door de tank leeg te
laten lopen en dan volledig te vullen. Na het
vullen leest u het aantal liters af van de benzinepompmeter.
Opmerking: Pas op voor luchtbellen, speciaal
in ondervloerse tanks.
Volle tank
Kies Ta n k v o l elk e kee r wanneer de
brandstoftank(s) volledig gevuld worden. Wanneer u gevraagd wordt Zeker weten? kiest
u dan Ja. Indien u dit niet doet, is de aflezing
op het brandstofbeeldscherm (zie sectie 5-6
Brandstofbeeldscherm) waardeloos en het
Weinig brandstof-alarm (zie sectie 3-5 Instelling > Alarmen) is nietszeggend.
Instelling resterend
Voordat u de tank ten dele opvult of handmatig
brandstof uit de tank verwijdert (bijv. door het
over te tappen):
1. Noteer de Resterend aflezing op het
Brandstofscherm.
2. Noteer hoeveel brandstof toegevoegd of
verwijderd wordt.
3. Bereken hoeveel brandstof zich nu in de
tank bevindt.
4. Kies Instellen resterend en pas de
afgelezen hoeveelheid aan.
Het is belangrijk dat u dit doet telkens wanneer
er brandstof wordt toegevoegd of verwijderd,
omdat anders de aflezing op het brandstof-beeldscherm (zie sectie 5-6 Brandstofbeeldscherm)
waardeloos is en het Weinig brandstof-alarm (zie
sectie 3-5 Instelling > Alarmen) nietszeggend.
Wis verbruik
Kies Wis ver bru ik om Ve rbruikt (de
hoeveelheid verbruikte brandstof) in te stellen.
Doe dit wanneer u wilt beginnen de hoeveelheid
brandstof te meten die wordt verbruikt over een
zekere afstand.
Wanneer wordt gevraagd Zeker weten?
kiest u Ja.
Tankafmeting
Voer de inhoud van de brandstoftank in.
Aantal motoren
Stel het aantal motoren in op 0, 1, of 2. Indien
0 wordt gekozen wordt de brandstoffunctie
uitgezet.
Kalibreren
Zie sectie 3-8 Instelling > Kalibreren voor
informa ti e ove r het kal ibreren van (een)
brandstoftransducer(s)
Flowfilter
De meeste motoren nemen geen constante
hoeveelheid be nzine uit de tank. Om een
stabiele brandstof-flow-aflezing te krijgen, berekent de fishfinder de flow-waarde(s) door het
gemiddelde van meerdere lezingen te nemen.
Gebruik het flowfilter om de periode waarover
het gemiddelde wordt genomen in te stellen.
Voor twinmotoren dient de brandstof-flow voor
elke motor afzonderlijk ingesteld te worden.
Het flowfilter kan worden ingesteld van 0 tot 30
seconden. Gebruik de laagste waarde die een
stabiele flow-waarde geeft. Normaalgesproken
geeft een waarde van 5 tot 10 seconden een
goed result aat vo or tweetakt carbur ateurmotoren. Injectie- of viertaktmotoren hebben
wellicht een hogere waarde nodig.
Dit is van invloed op de Brandstof-flow en
het Brandstofverbruik op het Brandstofscherm (zie sectie 5-6 Brandstofbeeldscherm),
maar het heeft geen invloed op de Brandstof
verbruikt.
Snelheidsbron
Selecteer sne lh ei ds input van watersnelheidstransducer of externe GPS-bron (een
externe GPS-bron dient via NavBus of NMEAcommunicatie op de Fishfinde r te wo rden
aangesloten – Zie sectie 3-7 Instelling > Communicatie.)
NAVMAN
FISH 4500/4600 Installatie- en bedieningshandleiding51
Page 12
3-4 Instelling > Loggen
Druk een of meerdere keren op MENU totdat
het Instellings menu wordt weergegeven
en kies Loggen:
De waarden kunnen onafhankelijk van elkaar
worden veranderd. Deze logwaarden worden
bewaard wanneer het instrument wordt uitgeschakeld.
Reset trip afst
Dit zal de tripafstand naar nul resetten.
Reset totale afst
Deze optie zal de totale afstan d naar nul
resetten.
Machine-uren resetten
Gebruik deze optie om de machine-uren naar nul
te resetten. Dit kan handig zijn nadat de motor
een onderhoudsbeurt heeft gehad of om het
aantal machine-uren tussen onderhoudsbeurten
bij te houden.
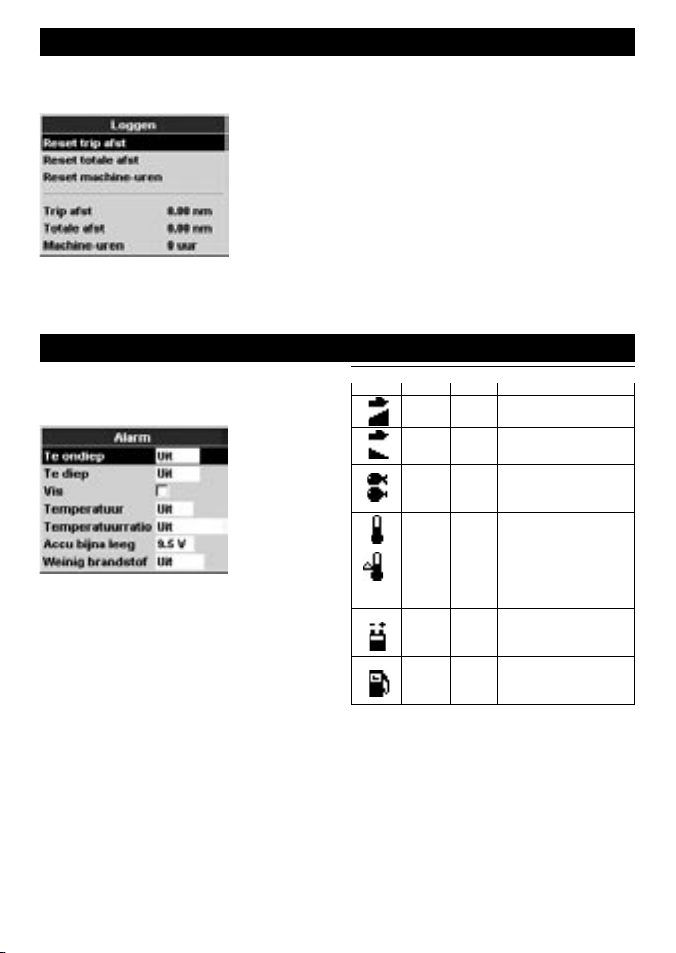
3-5 Instelling Alarmen
Druk een of meerdere keren op MENU totdat
het Instellings menu wordt weergegeven
en kies Alarmen:
Reactieinstellingen kunnen worden ged efinieerd al naar gelang geschiktheid voor de boot
of naar persoonlijke voorkeur:
FISH 4500/4600 Installatie- en bedieningshandleiding 52
Symbool Alarm- Toeter- Alarmconditie wordt
naam periode bereikt wanneer:
Te 1/5 sec diepte is minder dan
ondiep de alarmreactiewaarde
Te 1/2 sec diepte is groter dan
diep de alarmreactiewaarde
Vis 1 korte Echo komt overeen met
pieptoon het piepprofiel van een
VIS.
Temp. 1/2 sec temperatuur komt overeen
met alarmreactiewaarde
Temp. 1/2 sec Waarde van
ratio temperatuurverandering
komt overeen met de
alarmreactiewaarde
Accu 1/2 sec Voltage accu is
bijna minder dan de
leeg alarmreactiewaarde
Weinig 1/2 sec Resterende brandstof
branstof overeen met de
alarmreactiewaarde
Alarmen kunnen worden ingesteld om automatisch bepaalde condities te herkennen, zoals te
ondiep water. Alarmen die zijn ingeschakeld zijn
zichtbaar als een zwart icoon in het alarmstatusvenster of op het sonarbeeldscherm.
Wanneer een alarm dat is ingeschakeld afgaat,
zal de toeter afgaan, komt er een alarmboodschap op het scherm en wordt het alarmsta-tusicoon in rood weergegeven.
Druk op ENT of ESC om een alarm te bevesti-
gen, de toeter te stoppen en het alarmvenster
te sluiten. Dit zet het alarm niet uit.
NAVMAN
Page 13

Alarmen worden automatisch gereset
De Te ondiep, Te Diep en Accu bijna
leeg-alarmen worden automatisch gereset
wanneer de waarde buiten de alarmreactiewaarde komt.
Het Temperatuur alarm wordt automatisch
gereset wanneer de temperatuur meer dan
0,25°C onder of boven de alarmreactiewaarde
komt.
3-6 Instelling > Eenheden
Druk een of meerdere keren op MENU totdat
het Instellings menu wordt weergegeven
en kies Eenheden:
In dit voorbeeld laten we de standaard eenheden zien.
Afstand
Kies uit:
• nm (nautische mijlen)
• mi (mijlen)
• km (kilometers)
3-7 Instelling > Communicatie
Ge br ui k deze fu nc ti e wan ne er de FI SH
4500/4600 is aangesloten op andere NAVMAN
instrumenten via NavBus of enig compatibel
NMEA-instrument.
Druk een of meerdere keren op MENU totdat
het Instellings menu wordt weergegeven
en kies Communicatie:
NMEA Out
NMEA wordt over het algemeen gebruikt met
niet NAVMAN-apparatuur. Kies Aan om NMEA
datazinnen te verzenden (zie Appendix A Specificaties). Kies anders Uit.
NMEA-Data
Gebruik dit om te specificeren welke NMEA-zin-
NAVMAN
Het Temperatuurwaarde-alarm wordt automatisch gereset wanneer de temperatuursverandering meer dan 0,1°C per minuut onder
de alarmreactiewaarde valt.
Flikkerlicht en/of externe toeter
Indien een secondaire alarmindicator is vereist
dan kan een flikkerlicht en/of een externe toeter
worden geïnstalleerd. Deze kan op een passende plaats op de boot worden geplaatst. Zie
sectie 6-5 Bedradingsmogelijkheden.
Snelheid
Kies uit:
• kn (knopen)
• mpu (mijl per uur)
• k p u (k ilo me t er per
uur)
Brandstof
Kies uit:
• Liters
• USGal (VS gallons)
• ImpGal (Imperische
Gallons)
Temperatuur
Kies uit:
• °F (Fahrenheit)
• °C (Celsius)
nen verzonden zullen worden (zie Appendix A
- Specificaties en sectie 5-7 Dataweergave,
voor inform at ie over het weerge ve n van
NMEA-data).
Diepte
Kies uit:
• vt (voet)
• m (meter)
• va (vadem)
Wind
Kies uit:
• Ware
• Schijnbare
Druk
Kies uit:
• kPa
• psi
NavBus
NavBus is de geprefereerde methode voor het
verbinden van de FISH 4500/4600 aan andere
NAVMAN-instrumenten. Kies Aan indien de
instrumenten via NavBus verbonden zijn. Kies
anders Uit.
NavBus-groep
Gebruik dit wanneer een groep van NAVMANinstrumenten via NavBus aan elkaar worden
verbonden, om indien gewenst, een instrumentengroep voor achtergrondverlichting te kiezen.
Dan, als de achtergrondverlichtingsstand voor
een instrument in de groep wordt veranderd,
zullen de andere instrumenten in de groep
automatisch meeveranderen. Kies anders 0.
FISH 4500/4600 Installatie- en bedieningshandleiding53
Page 14

3-8 Instelling > Kalibreren
Druk een of meerdere keren op MENU totdat
het Instellings menu wordt weergegeven
en kies Kalibreren:
De bran dst of opties kunnen alleen
w o r d e n g ek a l i breerd wanneer de
optionele enkele of
twinmotorkit is voor
benzinemotoren is
geïnstalleerd.
Snelheid
Kalibratie is wellicht gewenst omdat verschillende rompvormen verschillende stromingskarakteristieken hebben.
Verkrijg een accurate meting van de snelheid
van de boot van een gps-ontvanger; of door
een andere boot waarvan u de vaarsnelheid
weet, te volgen; of door de tijd te meten die u
vaart over een u bekende afstand.
Opmerking: voor accurate kalibratie:
• De snelheid van een gps-ontvanger dient
groter te zijn dan 5 knopen.
• De snelheid van een andere schep-
radtransducer dient tussen de 5 en 20
knopen te zijn.
• U bereikt het beste resultaat in kalm
water met minimale stroming (tijdens
hoog- of laagwater).
Gebruik de cursortoetsen zodat de snelheid
in het venster wordt weergegeven en ver-groot
of verklein dan de weergegeven waarde zodat
deze overeenkomt met de onafhankelijk gemeten snelheidswaarde.
Snelheidsfilter
Vergroot deze instelling om een onregelmatige
snelheidsaflezing te stabiliseren. Verlagen om
de aflezingsgevoeligheid te verbeteren. Het
snelheidsfilter kan worden ingesteld van 0 tot
30 seconden.
Temperatuur
De fabrieksinstelling zou voldoende moeten
zijn voor normaal gebruik. Indien u echter het
temperatuurbeeldscherm wenst te kalibreren,
meet dan eerst de watertemperatuur met een
thermometer die accuraat is.
Gebruik de cursortoetsen om het temperatuurvenster weer te geven en vergroot of verklein
dan de weergegeven waarde zodat deze over-
FISH 4500/4600 Installatie- en bedieningshandleiding 54
eenkomt met de onafhankelijk gemeten temperatuurwaarde. De temperatuur kan worden
ingesteld op een waarde tussen 0° - 37,7°C
met een resolutie van 0,1° eenheid.
Om d e e en h e i d t e v er a n d e r e n n aa r
°F (Fahrenheit) of °C (Celsius), zie sectie 3-6
Instelling > Eenheden.
Temp.filter
Vergroot deze instelling om een onregelmatige
temp.-aflezing te stabiliseren. Verlagen om
de aflezingsgevoeligheid te verbeteren. Het
temperatuurfilter kan worden ingesteld van 0
tot 30 seconden.
Brandstof
Waarschuwing:
U di ent hee l voo rzi ch ti g te
zijn bij het uitvoeren van deze
procedure.
Onvoldoende voorzichtigheid zou
gevaarlijke condities tot gevolg
kun nen hebben , die erns tig e
zaakschade of persoonlijk letsel
zouden kunnen veroorzaken.
Kalibratie van brandstofverbruik kan de precisie
van brandstofmetingen vergroten.
Bij twinmotoren dienen beide brandstoftransducers gekalibreerd te worden. Dit kan tegelij-kertijd worden gedaan met twee draagbare
tanks of op een verschillend tijdstip als u één
draagbare tank gebruikt.
Voor kalibratie van brandstoftransducer(s) is
precieze meting van brandstofverbruik noodzakelijk. Dit doet u het eenvoudigst met een
kleine draagbare tank. U dient tenminste 15
liter brandstof te gebruiken voor een accurate
kalibratie.
Het is vaak erg moeilijk om ondervloerse tanks
tweemaal tot precies hetzelfde niveau te vullen als gevolg van grote luchtbellen. Des te
meer brandstof u gebruikt, des te accurater de
kalibratie zal zijn.
Om (een) brandstoftransducer(s) te kalibreren,
volgt u de volgende stappen:
1. Noteer het niveau van de in de tank(s)
aanwezige brandstof.
2. Verbindt de draagbare tank(s) aan de
motor via de brandstoftransducer(s).
3. Laat de motor op normale kruissnelheid
lopen totdat minimaal 15 liter benzine is
verbruikt per motor.
NAVMAN
Page 15

4. Controleer de eigenlijke hoeveelheid
brandstof die wordt gebruikt per motor door de draagbare tank(s) tot het
oorspronkelijk niveau bij te vullen. Na het
vullen leest u het aantal liters af van de
benzinepompmeter.
5. Kies Brandstof. Gebruik de cursortoetsen om de afgelezen waarde voor elke
motor zo te veranderen dat ze overeenkomen met het aantal liters dat u van
de benzinepomp heeft afgelezen.
6. Druk op ENT wanneer de afgelezen
waarde klopt.
Opmerking: Indien het erop lijkt dat de brandstofcalibratieopties na bepaalde tijd foutieve
waarden geven, controleer dan eerst dat de
moeten worden weergeeft.
Voer een positieve kielafstandwaarde in indien
de transducer zich onder het wateroppervlak
bevindt, maar weergave van de totale diepte
gewenst wordt.
Voer een negatieve kielafstandwaarde in wan-
neer weergave van de diepte onder het diepste
deel van de boot wordt gewenst (zoals de kiel,
het roer of de propeller) en de transducer zich
dichter bij het wateroppervlak bevindt.
Gebruik de cursortoetsen om Kielafstand te
kiezen en druk dan op om het Kielafstandvenster weer te geven.
Gebruik de of cursortoetsen om de waarde
aan te passen.
brandstofsensor correct is geïnstalleerd, in
overeenstemming met de bijgeleverde instructies en check vervolgens Appendix C - Problemen oplossen.
Kielafstand
Kielafstand is een dieptecorrectie die de verticale afstand tussen de dieptetransducer en
de plaats waar vanuit de diepte gemeten zou
Opmerking: De boot in de illustratie is een ’door-de-romp’-transducer
4 Het gebruik van de FISH 4500/4600
In deze sectie wordt uitgelegd hoe u de sonarbeeldschermen dient te interpreteren, wanneer
en waarom u verschillende frequenties dient te
gebruiken en hoe vissen worden gevonden en
weergegeven.
Het beschrijft ook Toename en Bereik en geeft
voorbeelden van verschillende sonarschermen.
Zie ook sectie 1-2 Hoe de FISH 4500/4600
werkt.
4-1 Verklaren van het beeldscherm
De sonarbeeldschermen laten geen vaste door
de boot gevaren afstand zien maar geven weer
wat zich in het verleden, over een bepaalde
periode, onder de boot heeft bevonden.
Dit weergegeven sonarsignaalverleden hangt
af van de diepte van het water en de scrollsnelheidsinstelling.
In ondiep water is er een korte afstand voor de
echo’s tussen de bodem en de boot. In diep water beweegt het verleden zich langzamer over
het scherm omdat het langer duurt voordat de
echo’s zich tussen de bodem en de boot bewogen hebben. Bijv. wanneer de scrollsnelheid op
Snel wordt gezet duurt het op een diepte van
meer dan 300 m ongeveer 2 minuten voordat
de verticale pixellijn zich over het scherm heeft
bewogen, terwijl dit op een diepte van 6 m
slechts ongeveer 25 sec. duurt.
De scrollsnelheid kan door de gebruiker worden
ingesteld om een langer verleden met minder
visinformatie weer te geven, of een korter
verleden met meer visdetails. Zie sectie 3-2
Instelling > Sonar.
Indien de boot voor anker ligt zullen alle echo’s
van hetzelfde gebied op de bodem komen.
Dit veroorzaakt een vlak bodemtracé op het
scherm.
Het beeldschermoverzicht geeft een typisch
sonarbeeldscherm weer met de vissymbolen
Uitgeschakeld.
Diepte van de transducer
Transducer
Wateroppervlak
Positieve
waarde
Negatieve
waarde
NAVMAN
FISH 4500/4600 Installatie- en bedieningshandleiding55
Page 16

Enkele vis
Grote
school
vissen
Kleine
school
vissen
Bodem
Sterkte van de echo’s
De kleuren geven verschillen aan in de sterkte
van de echo’s. De sterkte hangt af van verschillende factoren, zoals:
• Het formaat van de vis, school of voorwerp.
• De diepte van de vis of het voorwerp.
• De locatie van de vis of het voorwerp. (Het
gebied dat door de ultrasonische trilling
wordt bestreken is een grove kegelvorm en
de echo’s zijn het sterkst in het midden.)
• Helderheid van het water. Deeltjes of lucht
in het water verminderen de sterkte van de
echo.
• Samenstelling of dichtheid van het voor-
werp of van de bodem.
Opmerking: Snel varende planerende
rompen produceren luchtbellen en turbulent water waarmee de transducer wordt
getorpedeerd. De ultrasonische ruis die
hierdoor wordt veroorzaakt zou door de
transducer opgepikt kunnen worden en de
echte echo’s kunnen belemmeren.
Zeewier
Zachte
bodems van
modder,
wier en zand
worden
als een
dunne band
weergegeven.
Harde
bodems van
rots, steen
en koraal
worden
als een
brede band
weergegeven.
Bodemtypes
Wier, modder- en zandbodems verzwakken de
sonartrilling wat resulteert in een zwakke echo.
Harde rotsachtige of koraalbodems reflecteren
de trilling, wat resulteert in een sterke echo. Zie
sectie 5-3 Sonar bodemweergave.
Frequentie en kegelwijdte
De trilling die wordt gegen ereerd door de
FISH 4500/4600 transd ucer beweeg t zich
door het water en spreidt zich uit in een grove
kegelvorm. De wijdte van de kegel is echter
afhankelijk van de frequentie van de trilling; bij
50 kHz is het 45°, terwijl het bij 200 kHz 11° is.
De kaart geeft aan hoe de kegelwijdte verschilt
voor de gekozen frequentie. Deze getallen zijn
bij benadering.
Diepte 50 kHz 200 kHz
100
150
200
250
0
50
45°
41
83
127
166
208
11°
9
19
26
38
46
FISH 4500/4600 Installatie- en bedieningshandleiding 56
NAVMAN
Page 17

Water Kegelwijdte Kegelwijdte
diepte bij 50 kHz bij 200 kHz
10 8 2
20 16 4
30 25 6
40 33 7
50 41 9
60 50 11
70 58 13
80 66 15
90 74 17
100 83 19
150 127 26
200 166 38
300 249 58
400 331 77
500 414 96
600 497 116
700 580 135
800 663 154
900 746 173
1000 828 192
Voorbeeld van schaduw
vis is zichtbaar op beeldscherm
De verschillen in kegelwijdte zijn van invloed
op wat wordt weergegeven. Zie sectie 4-2
Enkele en dubbele frequentie fishfinding.
Schaduw
Rond gebieden waar de ultrasonische kegel
niets kan ‘zien’ wordt een schaduw gecreëerd.
Deze gebieden zijn holtes in de bodem of gebieden naast rotsen en richels, waar de sterke
echo’s van de rotsen de zwakke echo’s van
vissen verdoezelen en een dubbel bodemtracé
zouden kunnen creëren. Zie onderstaand voor
een voorbeeld van het sonarbeeldscherm in
zo’n omgeving. U ziet een dubbel bodemtracé
op het beeldscherm.
Als u met de 50 kHz frequentie met de wijde
hoek naar vis zoekt, wees dan verdacht op
een toename in schaduw. Gebruik de hoge
200 kHz frequentie in gebieden met rotsen en
richels omdat deze frequentie het schaduweffect aanmerkelijk reduceert.
Sonarweergave van hetzelfde gebied
vis is verborgen door de sterke echo
van de bodem en is niet op het scherm
zichtbaar
vis is zichtbaar op het beeldscherm
NAVMAN
FISH 4500/4600 Installatie- en bedieningshandleiding57
Page 18

4-2 Enkele en dubbele frequentie fishfinding
Wanneer gebruikt u 200 kHz?
De 200 kHz frequentie is speciaal geschikt
voor gebruik in ondiep en middeldiep water
(minder dan 150 m diep) en terwijl u snel
vaart.
Op 200 kHz wordt ruis door luchtbelletjes
gereduceerd door de smalle kegel.
De 200 kHz-frequentie genereert een trilling
met een hogere definitie die weinig schaduw
produceert en terugkomt met een goed detail van
een klein stukje bodem. Daarom heeft het een
goed bodemonderscheidend vermogen en is het
specifiek goed in het weergeven van afzonderlijke
vissen, inclusief platvissen.
Wanneer gebruikt u 50 kHz?
De 50 kHz frequentie is speciaal geschikt voor
gebruik in diep water (dieper dan 150 m).
Op 50 kHz beslaat de kegel een watergebied
dat ongeveer vier keer zo breed is als de
200 Hz kegel en dringt tot grotere diepte door
met minimaal verlies van het retoursignaal.
Het geeft het gebied echter weer met minder
defi niti e en me er schaduw verg elek en met
de 200 kHz frequentie. Dit bete kent dat een
gro ep kleine vi sse n bijv oor bee ld weerge geven zou kunnen worden als één voorwerp,
terwijl een vis vlakbij de bodem onopgemerkt
zou kunn en blijven.
Deze frequentie is handig voor het verkrijgen
van een diep, breed overzicht van het gebied
zodat interessante plekken kunnen worden
geïdentificeerd en dan in detail bekeken met
de 200 kHz frequentie.
Wanneer u de 50 / 200 kHz gebruikt
Het kan erg handig zijn om de FISH 4500/4600
tegelijkertijd op de 50 en de 200 kHz frequentie
te gebruiken in ondiep tot middeldiep (tot 150
m) water, omdat de 50 kHz-deel van het beeldscherm een overzicht van de omgeving geeft,
terwijl op het 200 kHz-deel tegelijkertijd kan
worden gekeken naar interessante details.
Gemengd frequentie
De gemengde frequentie combineert de 200 kHz
en de 50 kHz echo’s op een sonarbeeldscherm
en vult gedetailleerde echo’s in het midden van
de sonarkegel in.
Gemengde frequentie
wijde hoek,
minder gedetailleerde 50
kHz kegel
scherpe hoek,
meer gedetailleerde 200 kHz
kegel
FISH 4500/4600 Installatie- en bedieningshandleiding 58
NAVMAN
Page 19

Vergelijking van hetzelfde visscenario, weergegeven op verschillende frequenties:
Nu
30 seconden geleden
1 minuut geleden
50 kHz beeldscherm
Let op het
bredere bodemtracé
200 kHz beeldscherm
200/50 Khz beeldscherm Gemengd beeldscherm
Gesplitst
scherm
Let op de
kleinere,
duidelijker
gedefinieerde
visbogen en
meer bodemdetail
200/50 kHz
beeldscherm,
gesplitst
scherm
NAVMAN
FISH 4500/4600 Installatie- en bedieningshandleiding59
Page 20

4-3 Het vinden van vis en weergave
Waar u vis vindt
Elementen onder water, zoals riffen, wrakken
en rotspunten trekken vissen aan. Gebruik het 50
kHz of het 50 / 200 kHz frequentiebeeldscherm
om deze kenmerken te vinden en zoek vervolgens
naar vis door een aantal keren over het kenmerk
te varen terwijl u het zoombeeldscherm gebruikt
(zie sectie 5-2 Sonar zoombeeldscherm). Indien er
sprake is van stroming, dan vindt u de vis vaak aan
de stroomafwaartse kant van het kenmerk.
Wanneer u vist met de FISH 4500/4600 met
de vissymbolen Uit, dan zou er een wazige
band zicht-baar kunnen zijn tussen het bodemtracé en het wateroppervlak. Dit zou een
een thermocline – een snelle verandering in
watertemperatuur - aan kunnen geven, zoals
de overgang van een warme naar een koude
stroming. Het tempe-ratuurverschil kan een
barriere vormen waar de vissen niet doorheen
zwemmen. In zoet water vindt men vis vaak
rond een thermocline.
Vissymbolen
Het vissymbool kan aangepast of helemaal
uitgezet worden zodat de echo’s op het scherm
niet veranderen in vissymbolen. Zie sectie 3-2
Instelling > Sonar. Het verschil tussen de vissymboolfunctie Aan en Uit is:
Vissymbolen Aan
Gebruik makend van NAVMAN’s SBN sonartechnologie analyseert de fishfinder alle echo’s en
elimineert het de meeste valse signalen en onregelmatigheden, zodat de overblijvende doelen
zeer waarschijnlijk vissen zijn. Afhankelijk van de
sterkte van de overblijvende echo’s worden deze
weergegeven als kleine, middelgrote of grote
vissymbolen – met of zonder diepte. Hoewel
de SBN-verwerking
erg geavanceerd is,
is het niet onfeilbaar
en soms zal de fishfinder niet in st aat
zijn onder-scheid te
maken tussen grote
luchtbellen, lucht bevat tend afv al, een
dobber etc. en echte
vis.
De volgende sonar
b e el ds c he rm a f-
FISH 4500/4600 Installatie- en bedieningshandleiding 60
beelding geeft het vissymbool weer: On +
depth:
Vissymbool Uit
Dit voorziet ervaren gebruikers van de beste
informatie omdat elke echo weergegeven wordt,
of het nu een oppervlakteonregelmatigheid, een
thermocline of een vis is.
De afbeelding in sectie 4-1 Verklaren van het
beeldscherm, laat het sonarbeeldscherm zien
met het Vissymbool Uit. De vissen worden als
boogjes weergegeven.
Visbogen
Onder goede omstandigheden en met Vissymbool
Uit, wordt een vis die door de kegelvormige
ultrasonische trilling zwemt weergegeven als
een visboog. De 50 kHz frequentie gebruikt
een bredere kegel dan de 200 kHz frequentie.
Hierdoor kunt u de visbogen beter zien.
Een visboog verschijnt wanneer een vis de
zwakke zijkant van de sonarkegel binnenzwemt,
terwijl het een zwakke echo veroorzaakt die als
de eerste pixel van de visboog wordt weergegeven. Als de vis zich dichter naar het midden
van de kegel beweegt wordt de afstand tussen
de transducer en de vis kleiner en wordt de echo
geleidelijk ondieper weergegeven, wat het begin
van een boog produceert. Wanneer de vis direct
onder het midden van de kegel is, is de echo op
zijn sterkst en dikst. Als de vis uit het midden van
de kegel zwemt gebeurt het omgekeerde, met
een geleidelijk zwakkere en diepere echo.
Visbogen zijn soms om verschillende redenen
niet zichtbaar. Bijvoorbeeld:
• Slechte transducerinstallatie (zie Spiegel-
transducer installatiehandleiding).
• Indien de boot voor anker ligt dan zal
de vis als een horizontale streep op het
scherm verschijnen terwijl ze in en uit de
sonarstraal van de transducer zwemt. Lage
snelheden in dieper water geven de beste
visboogweergave.
• Bereik is belangrijk. Het zal veel eenvou-
diger zijn om visbogen te zien indien u de
zoomstand gebruikt om u op een bepaald
deel van het water te concentreren, i.p.v.
slechts alles op de bodem weer te geven.
Zomen vergroot de schermresolutie en is
noodzakelijk voor goede visbogen.
• Het is moeilijk om in ondiep water visbogen
NAVMAN
Page 21

te verkrijgen omdat de sonarstraal van
de transducer zich dicht bij het oppervlak
bevindt en vissen zich niet lang genoeg in
de straal bevinden om een boog te maken.
4-4 Toename
Toename (gevoeligheid) beheert de weergegeven hoeveelheid detail op het beeldscherm
van de FISH 4500/4600. Voor optimaal gebruikersgemak is het belangrijk dat u weet hoe
u de meest passende Toename (gevoeligheid)
instelt.
De NAVMAN fishfinder heeft twee Toenamest an den , Auto toe na me en Han dma ti ge
toename. Normaal gesproken bereikt u het
beste resultaat met Handmatige toename,
maar oefening en ervaring zijn vereist om de
optimale instelling voor verschillende condities
te bereiken. Daarom wordt het gebruik van Auto
toename aanbevolen terwijl u de fishfinder leert
kennen of wanneer u snel vaart.
• Op Auto toename wordt de toename au-
tomatisch aangepast om voor waterdiepte
en helderheid te compenseren.
• Op Handmatige toename kan de toename
door de gebruiker worden aangepast
om voor waterdiepte en helderheid te
compenseren.
Een hoge Toename-instelling kan de normale
achtergrondruis versterken totdat deze als
willekeurige pixels verschijnt.
Overschakelen tussen Auto en
handmatig
Om over te schakelen van Auto toename op
Handmatige toename:
1. Druk op ENT op een willekeurig sonarbeeldscherm.
2. Gebruik de of cursortoetsen om
Auto of Handmatig te highlighten en
gebruik dan de of cursortoetsen om
de gewenste stand te kiezen.
Meerdere vissen in ondiep water worden
over het algemeen weergegeven als willekeurig opgestapeld pixelblokken.
• Golfbeweging kan in verstoorde visbogen
resulteren.
Toename- en drempelinstelling
aanpassen
De Toename- en drempelinstellingen kunnen
onafhankelijk voor de beide frequenties (50
kHz en 200 kHz) worden aangepast.
Gebruik de drempel om kleuren uit het beeldscherm te verwijderen.
1. Druk op ENT op een willekeurig sonar-
beeldscherm.
2. Gebruik de of cursortoetsen om de
gewenste stand te highlighten en gebruik
vervolgens de of cursortoetsen om
het te veranderen.
Opmerking: De Toenamestan d verander t
automatisch naar handmatige toename indien
de toename of de drempel door de gebruiker
worden aangepast.
NAVMAN
FISH 4500/4600 Installatie- en bedieningshandleiding61
Page 22

Het beste resultaat bereiken
Om het beste vindvermogen voor vis en bodem
te bereiken raden we het gebruik van het sonar
A-scope-beeldscherm aan.
1. Zet de drempel op 0%.
2. Pas de toename aan totdat de drempellijn
zich net iets rechts van de ongewenste
ruis bevindt.
4-5 Bereik
Bereik is de verticale diepte die op de FISH
4500/4600 wordt weergegeven.
De NAVMAN fishfinder heeft twee bereikstanden, Auto Bereik en Handmatig Bereik:
• Op Auto bereik zal de fishfinder het
dieptebereik automatisch aanpassen zodat
de bodem altijd onderin het beeldscherm
wordt weergegeven. Autobereik wordt
aanbevolen voor normale condities.
• Op Handmatig bereik zal de fishfinder
alleen het geselecteerde dieptebereik
weergeven. In gebieden met snel wisselende bodemdieptes, zoals de zeebodem
rond rotsformaties, kan het handig zijn om
te voorkomen dat het scherm steeds een
nieuwe schaal moet kiezen om de bodem
te laten zien. Indien de bodem dieper is
dan het gespecificeerde bereik, dan wordt
het niet op het beeldscherm weergegeven.
De Bereikstand veranderen
Druk op de + of – toets om naar handmatige
bereikstand over te schakelen en om het bereik
te vergroten of te verkleinen naar de gewenste
diepte. Deze waarden kunnen ingesteld worden
op een diepte tussen 3 m en 1000 m.
Om over te scha ke len vanuit de huid ig e
Ongewenst
signaal
Toename
drempellijn
Toenamelijn
stand:
1. Druk op MENU vanuit een willekeurig
sonarbeeldscherm om het optiemenu
weer te geven.
2. Highlight Bereik en gebruik vervolgens
de cursortoetsen om Auto of Handmatig
te selecteren.
3. Druk op ENT om te bevestigen.
Zoombereik en zoomafstand
Op de sonar zoom- en sonar bodembeeldschermen is uiterst rechts op het scherm een
verticale balk zichtbaar. Dit is de zoombalk. De
zoombalk laat het zoombereik zien; dit is het
gebied dat uitvergroot wordt.
Gebruik de of cursortoetsen om het zoombereik aan te passen.
Gebruik de of cursortoetsen om de zoomafstand aan te passen.
FISH 4500/4600 Installatie- en bedieningshandleiding 62
NAVMAN
Page 23

5 De Beeldschermen
Druk op DISP om het beeldschermmenu weer te geven en kies vervolgens met behulp van de
of cursortoetsen een specifiek beeldscherm. (sectie 2 Standaard bediening, beschrijft gedetailleerder hoe u de toetsen kunt gebruiken)
Het beeldschermmenu wordt hier samengevat en elk beeldscherm wordt in de volgende secties
weergegeven.
De meeste beeldschermen beschikken over een optiemenu, zodat relevante functies snel verandert
kunnen worden.
Het beeldschermmenu
Sonarbeeldscherm met één of een gemengde frequentie (sectie 5-1)
Gesplitst sonarbeeldscherm met zoomsectie (sectie 5-2)
Vlak sonar bodemtracé in een zoomsectie (sectie 5-3)
Gesplitst sonar beeldscherm met 50 en 200 mHz frequenties (sectie 5-4)
Gesplitst sonar beeldscherm met echosterkte (sectie 5-5)
Brandstofdata (sectie 5-6)
Watertemperatuur en diepteverleden en bootdata (sectie 5-7)
Product en bedradingsinformatie (zie sectie 5-8)
We verwijzen naar sectie 3-2 Instelling > Sonar, voor informatie over het op maat instellen van
sonar beeldschermfuncties.
NAVMAN
FISH 4500/4600 Installatie- en bedieningshandleiding63
Page 24

5-1 Sonar beeldscherm
Om het sonar beeldscherm weer te geven, druk
op DISP en highlight Sonar:
Datatitel, ingesteld om bootsnelheid, watertemp. etc. weer
te geven.
Diepte (middelgrote cijfers)
Kleurenbalk
Dit beeldscherm scrollt van rechts (meest
recente echo’s) naar links (oudste echo’s) op
de geselecteerde frequentie (zie sectie 3-2
Instelling > Sonar).
Oppervlakte
Dieptelijn
Vissymbolen met diepte
Bodem
Bereik
Om items te veranderen, druk op MENU totdat
het Opties menu wordt weergegeven.
Toename wordt
uitgelegd in sectie
4-4 Toename
Bereik wordt
uitgelegd in sectie
4-5 Bereik
A-scope wordt
uitgelegd in sectie
5-5 Sonar A-scopebeeldscherm.
Datatitel
De datati te l kan In - of Uit g es ch akeld
worden.
Wanneer het aan sta at is het een functie
die u zo in kunt stellen dat er 12 data-items
worden weergegeven, zoals vaarsnelheid en
brandstofverbruik.
FISH 4500/4600 Installatie- en bedieningshandleiding 64
Om het formaat van de datatitel aan te passen
highlight u Afmeting en drukt u op ENT. U
heeft de keuze uit Klein, Middel, Groot.
Om de weergegeven data-items aan te passen:
1. Highlight u Data instelling en drukt
u op BEVESTIG. De datatitel zal zo in
formaat toenemen dat het alle twaalf
datavelden weer kan geven. Sommige
datavelden zijn blank.
2. Gebruik de cursortoetsen om van dataveld naar dataveld te bewegen.
3. Druk op ENT op een willekeurig dataveld
om de lijst van data-items die daar kunnen worden weergegeven te zien.
4. Highlight het gewenste data-item en ENT.
Het data-item wordt meteen in dat veld
weergegeven.
5. Druk op ESC wanneer u klaar bent en de
datatitel zal automatisch van het scherm
verdwijnen.
NAVMAN
Page 25

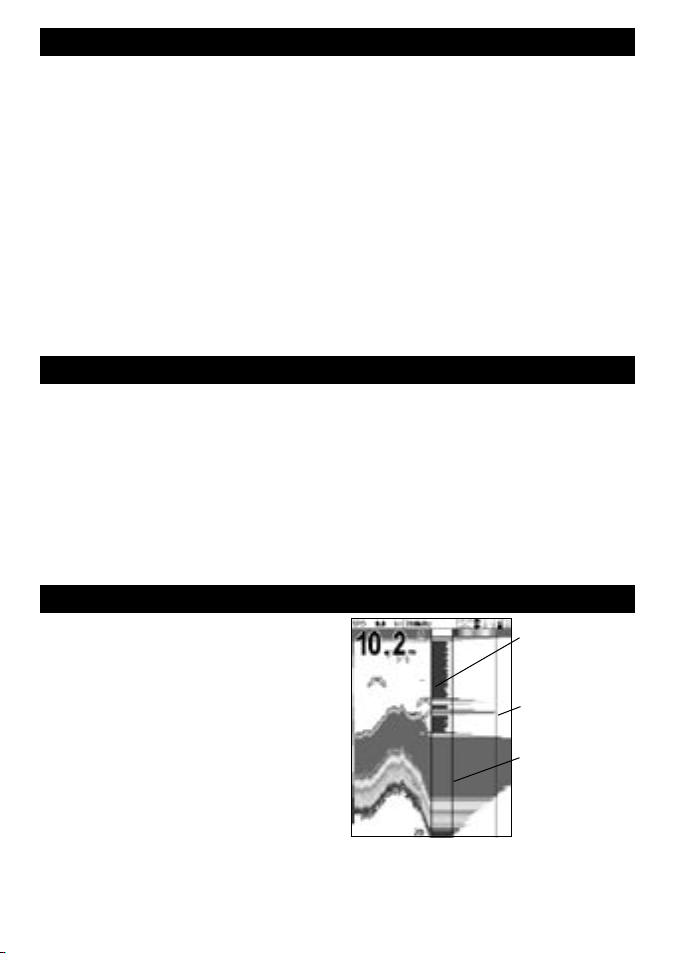
5-2 Sonar zoombeeldscherm
Om het Sonar zoombeeldscherm weer te
geven, drukt u op DISP en highlight u Sonar
Zoom:
Sonar verleden
Dieptelijn
markeert
het midden van het
gezoomde
gebied
Zoombalk
Zoomsectie
Scheidingslijn
Het gesplitste beeldscherm laat het sonar verleden aan de rechterkant zien en de zoomsectie
aan de linkerkant.
De zoombalk uiterst rechts geeft het gebied weer
dat is uitvergroot in de zoomsectie. Zie sectie
4-5 Bereik, voor informatie over het aanpassen
van het zoombereik en de zoomafstand.
Om items te veranderen, druk op MENU totdat
het Opties menu wordt weergegeven.
Bodem vastzetten
Indien Bodem vastzetten is geselecteerd, dan zal de zoomsectie zo bewegen
dat de bodem altijd in de zoomsectie wordt
weergegeven, onafhankelijk van diepteveranderingen.
Indien Bodem vastzetten niet geselecteerd
is, dan zal de bodem niet worden weergegeven
in de zoomsectie indien deze zich buiten het
door de zoombalk bestreken bereik bevindt.
Gebruik van de Bodem-vastzetten- en A-scopefuncties kunnen een goed hulpmiddel zijn bij het
bepalen van het bodemtype.
Splitsingsratio
Gebruik dit om de splitsingsratio tussen de
zoom- en de sonar verle-densectie ter veranderen. De standaard splitsingsratio is 50%.
1. Highlight Splitsingsratio en druk
op ENT. Een pijl naar links en een pijl
naar rechts zullen naast de splitsingslijn
verschijnen.
2. Gebruik de of cursortoetsen om de
plaats van de splitsingslijn aan te passen,
en druk daarna op BEVESTIG. De splitsingsratio varieert van 20% tot 80%.
Datatitel
Datatitel wordt beschreven in sectie 5-1 Sonarbeeldscherm.
Toename
Toename wordt uitgelegd in sectie 4-4 Toename.
Bereik
Bereik wordt uitgelegd in sectie 4-5 Bereik.
A-Scope
A-scoop wordt uitgelegd in sectie 5-5 Sonar
A-scopebeeldscherm.
NAVMAN
FISH 4500/4600 Installatie- en bedieningshandleiding65
Page 26
5-3 Sonar bodemweergave
Om het Sonarbodembeeldscher m weer te
geven: druk op DISP en kies SonarTab, kies
Sonar Bodem en druk op ENT.
Dit geeft een gesplitst beeldscherm weer, met
het sonar verleden aan de rechterkant en de
zoomsectie aan de linkerkant. Het bodemsignaal wordt weergegeven als een vlak tracé in
het midden van de zoomsectie.
Het weergeven van de bodem als een vlak tracé
maakt het eenvoudiger om de echosterktes van
weergegeven bodemsignalen te vergelijken. Dit
kan helpen het bodemtype en voorwerpen dicht
bij de bodem te identificeren.
De zoom balk kan alle en het zoombere ik
aangeven. Het kan de zoomafstand niet weergeven omdat dit voor elke peiling die op het
beeldscherm wordt weergegeven varieert. De
5-4 Sonar 50/200 beeldscherm
Om het Sonar 50/200 beeldscherm weer te
geven: druk op DISP, kies Sonar Tab, kies
Sonar 50/200 en druk op ENT.
Dit laat een gesplitst beeldscherm zien, met het
50 kHz sonarverleden aan de linkerkant en het
200 kHz sonarverleden rechts. Toename-instellingen kunnen onafhankelijk worden ingesteld
voor elk van de frequenties. Bereikinstellingen
zijn voor beide secties van het beeldscherm
van toepassing.
5-5 Sonar zoombeeldscherm
Om het Sonar A-scope-beeldscherm weer te
geven: druk op DISP, kies Sonar Tab, kies
Sonar A-scope en druk op ENT.
Geb ruik dit om de sona rda ta in detail te
analyseren en om Toename-instellingen te
optimaliseren.
zoombalk heeft een vaste plaats in het midden
van het beeldscherm.
Zie sectie 4-5 Bereik, voor informatie over
het aanpa ssen van het zoombereik en de
zoomafstand.
Om items te veranderen, druk op MENU totdat
het Opties menu wordt weergegeven.
Toename wordt uitgelegd in sectie 4-4 Toename.
Bereik wordt uitgelegd in sectie 4-5 Bereik.
A-scope wordt uitgelegd in sectie 5-5 Sonar
A-scopebeeldscherm.
Dat ati tel wordt uitgelegd in sectie 5-1
Sonarbeeldscherm.
Bodem vastzetten en splitsingsratio
worden uitgelegd in 5-2 Sonar-zoombeeldscherm.
Om items te veranderen, drukt u op MENU
totdat het Opties menu wordt weergegeven.
Toename wordt uitgelegd in sectie 4-4 Toename.
Bereik wordt uitgelegd in sectie 4-5 Bereik.
A-scope wordt uitgelegd in sectie 5-5 Sonar
A-scopebeeldscherm.
Datatitel wordt uitgelegd in sectie 5-1 Sonar
beeldscherm.
Splitsingsratio wordt uitgelegd in sectie
5-2 Sonar zoombeeldscherm.
Scheidingslijn
tussen sonarverleden en Ascope.
Toename-instelling (sterkste
echoweergave)
Toenamedrempel
(zwakste echoweergave)
FISH 4500/4600 Installatie- en bedieningshandleiding 66
NAVMAN
Page 27

De gebruiker kan het niveau van de sterkste en
zwakste echo’s die op de sonarbeeldschermen
worden weergegeven definiëren door gebruik
te maken van de Toename- en drempelinstellingen. Zie sectie 4-4 Toename, voor meer
informatie.
De sterkte van een echo op een bepaalde
diepte wordt weergegeven door de lengte van
de horizontale lijn op die diepte. Een sterke
echo geeft een lange lijn terwijl een zwakke
echo een korte lijn produceert.
Om items te veranderen, druk op MENU totdat
het Opties menu wordt weergegeven.
Toename wordt uitgelegd in sectie 4-4 Toename.
Bereik wordt uitgelegd in sectie 4-5 Bereik.
Dat ati tel wordt uitgelegd in sectie 5-1
Sonarbeeldscherm.
5-6 Brandstofbeeldscherm
Om het Brandstofbeeldscherm weer te
geven. Druk op DISP en kies Andere Tab,
kies Brandstof en druk ENT.
Er zijn geen keuzemogelijkheden.
(Zie sectie 3-3 Instelling > Brandstof voor
informatie over het instellen van brandstofwaarden. Indien het aantal motoren op 0
staat staat de brandstoffunctie uit).
Splitsingsratio wordt uitgelegd in sectie
5-2 Sonarzoombeeldscherm.
Visherkenning
De ech oster kte die op de A-sco pe word t
weergegeven kan helpen bij het herkennen van
het vistype. Verschillende vissoorten hebben
verschillende formaten zwemblazen. De lucht
in de zwemblaas reflecteert de ultrasonische
trilling zodat de sterkte van de echo varieert
tussen vissoorten, afhankelijk van het formaat
en de vorm van de zwemblaas.
Wanneer u in een school met vis aan het vissen bent en u vangt vis, let dan op de vissoort
en de sterkte van de echo die terugkomt op
de A-scope. Wanneer u in de toekomst die
bepaalde echo op de fishfinder ziet, is het zeer
waarschijnlijk dezelfde vissoort.
Verbruikt laat de totaal verbruikte brandstof
zien sinds de laatste reset met het opschonen
verbruikt commando.
Resterend geeft de hoeveelheid brandstof
die zich nog in de tank(s) bevindt.
Flow geeft de brandstofconsumptie per uur
weer. Voor twinm oto rin sta lla tie s wordt de
brandstofflow voor iedere motor apart weergegeven. Dit is handig om te checken of beide
motoren dezelfde lading trekken.
Verbruik is de afgelegde afstand per eenheid
verbruikte brandstof. De Fishfinder berekent
dit m.b.v. de gebruikte brandstof en de bootsne lheid (waters nelhe id of GPS-sne lheid
- afhankelijk van welke wordt geselecteerd
als snelheidsbron – zie sectie 3-3 Instelling
> Brandstof).
Hoe groter dit bedrag, des te zuiniger de motor
is. Pas uw snelheid aan en trim de boot voor
de beste verbruikcijfers.
Opmerking: indien watersnelheid is geselecteerd als de snelheidsbron, dan is kalibratie
van de bootsnelheidsmeting essentieel voor
een accurate brandstofverbruiksaflezing – zie
sectie 3-8 Instelling > Kalibreren.
NAVMAN
FISH 4500/4600 Installatie- en bedieningshandleiding67
Page 28

5-7 Databeeldscherm
5-8 Informatiebeeldscherm
Om het Databeeldscherm weer te geven: Druk
op DISP en kies Andere Tab, kies Data en
druk op ENT.
Dit laat een grafiek zien van de watertemperatuur en –diepte over de laatste 20 minuten
en de geselecteerde data-items.
De grafiek is handig om warme en koude
plekken in het water te vinden.
Om data-items te veranderen:
1. Druk op MENU totdat het Opties menu
wordt weergegeven.
2. High li ght Data-instlling en druk op
ENT.
3. Gebruik de cursortoetsen om van dataveld naar dataveld te bewegen.
4. Druk op ENT op een willekeurig dataveld
om de lijst van data-items die daar kunnen worden weergegeven te zien.
5. Highlight het gewenste data-item en
druk op ENT. Het data-item wordt direct
weergegeven.
6. Druk op ESC wanneer u klaar bent.
Om het meldingsbeeldscherm weer te geven,
druk op DISP en kies Melding. Er zijn geen
keuzemogelijkheden. Er zi jn geen keuze mogelijkheden.
Dit geeft informatie over het fishfinder modelnummer, de software- en hardwareversies en
bedradingsinformatie
Noteer de softwareversie voordat u contact
opneemt met u NAVMAN leverancier voor
technisch advies.
Voor meer informatie over bedrading, zie sectie
6-5 Bedradingsmogelijkheden.
Voor meer informatie over NMEA en NavBus,
zie sectie 6-6 Systemen van meerdere instrumenten.
FISH 4500/4600 Installatie- en bedieningshandleiding 68
NAVMAN
Page 29
6 Installatie en Onderhoud
Correcte installatie is van vitaal belang voor
een goede werking van de FISH 4500/4600. Er
zijn twee onderdelen die geïnstalleerd moeten
worden: het beeldscherm en de transducer.
Het is belangrijk dat u de hele installatiesectie
in deze handleiding leest voordat u probeert de
onderdelen te installeren.
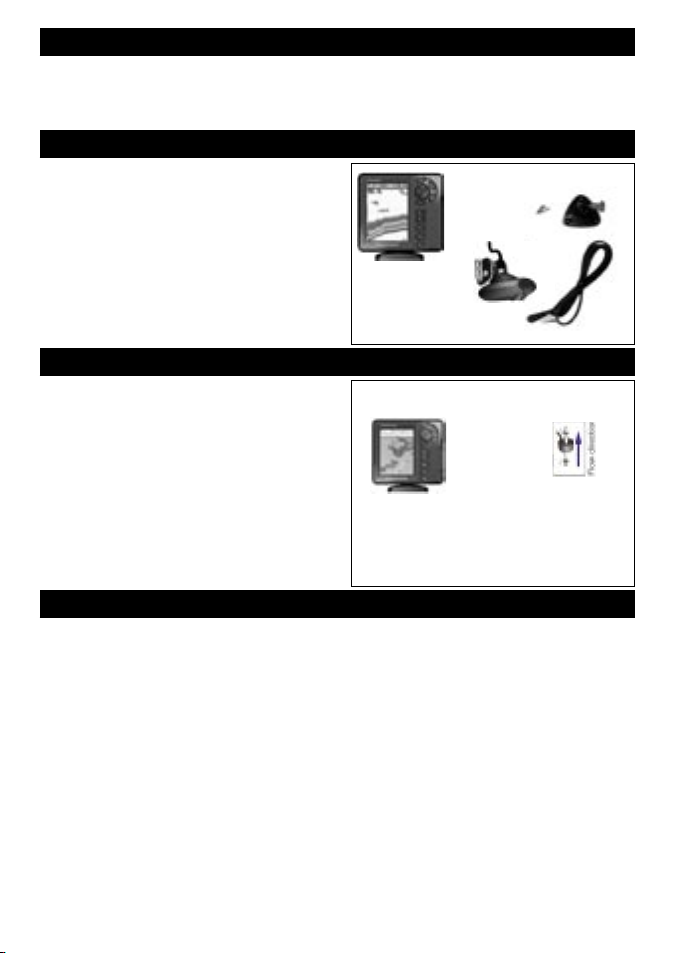
6-1 Wat er bij dit product geleverd wordt.
Standaard configuratie:
• FISH 4500/4600 beeldscherm
• Stroomkabel
• Bevestigingsbeugel
• Garantieregistratiekaart
• Deze handleiding
• Zonnehoes voor beeldscherm
• Vlakke bevestigingskit
• Dubbele frequentie spiegeltransducer
(inclusief kabelkit en schroeven)
• Spiegeltransducer installatiehandleiding.
Beeldscherm
Dubbele frequentie
spiegeltransducer
Schroeven
Bevestigingsbeugel
Stroomkabel
6-2 Opties en Accessoires
• TRACKER chartplotter serie
• ‘Door-de-romp’-dubbele frequentie transducer
• ‘Door-de-romp’-snelheids/tempera-tuurtransducer
• Brandstof-flowkit (enkele of twinmotor)
• Reserve scheprad
• SmartCraft Gateway
• REPEAT 3100 (zie sectie 6-6 Systemen
van meerdere instrumenten).
• Diesel 3200 voor brandstof-flow voor
dieselmotoren
Raadple eg uw NAVMAN levera ncier voor
meer inf ormatie.
TRACKER 5500
chartplotter
‘Door-de-romp’-snelheids/tempera-tuurtransducer
6-3 Het beeldscherm bevestigen en verwijderen
Er zijn twee bevestigingsmogelijkheden:
• Vlakke bevestiging waarvoor een
massief paneel is benodigd, met toegang
tot de achterkant voor bedrading en het
vastmaken van schroeven. Na een vlakke
bevestiging kan de FISH 4500/4600 niet
gekanteld of bewogen worden om ongewenste glans en reflectie tevoorkomen.
Kies dus met zorg de beste positie
voordat u tot installatie overgaat. Over het
algemeen is dit op een schaduwplaats.
• Beugelbevestiging waarvoor een
paneel nodig is waaraan u de beugel kunt
bevestigen. Controleer dat het paneel niet
vervormd en niet onderhevig is aan overmatige trilling. De beugel kan gekanteld
en gedraaid worden en de
FISH 4500/4600 kan na elk gebruik
worden verwijderd.
Kies een positie voor het beeldscherm waar
het:
• Tenminste 100 mm verwijderd is van het
kompas.
• Tenminste 300 mm verwijderd is van een
radiozendtoestel.
• Tenminste 1,2 m verwijderd is van alle
antennes.
• Eenvoudig kan worden gelezen tijdens
het varen door stuurman en bemanning.
• Beschermd wordt voor beschadiging
gedurende ruige zeereizen.
• Eenvoudig toegang heeft tot de 12 / 24 V
DC stroomvoorziening.
• Handig is gepositioneerd t.o.v. de trans-
NAVMAN
FISH 4500/4600 Installatie- en bedieningshandleiding69
B r a n d st of flowkit
‘Door-de-romp’dubbele frequentie
transducer
Page 30

ducerkabels.
Vlakke bevestiging
1. Maak met behulp van de vlakke bevestigingsmal een gat voor het beeldscherm in
de scheidingswand.
2. Boor met behulp van de vlakke bevestigingsmal vier gaten voor de bevestigingsbouten.
3. Schroef de vier bouten in de koperen
openingen in de achterkant van het beeldscherm.
4. Plaats het beeldscherm en draai de
ringetjes en moeren op de bouten.
Beugelbevestiging
1. Maak met behulp van de drie roestvrijstalen
schroeven de bevestigingsbeugel aan de
boot vast. Schroef de schroeven niet te
vast, omdat anders de beugel niet meer
draait.
2. Druk het beeldscherm op de beugel en
maak het stevig vast met behulp van de
knop aan de bevestigingsbeugel.
3. Maak de kabels vast.
Het beeldscherm verwijderen
Het beeldscher m kan na geb rui k worden
ver-wij-derd ter bescherming tegen de omgevingsin-vloeden en om veiligheidsredenen.
Wanneer u het beeldscherm verwijderd, zie er
dan op toe dat de stekkers die aan boord blijven
niet aan de elementen blootstaan. Druk de
stofhoezen over de uiteinden van de stekkers.
Bewaar het beeldscherm op een droge schone
plaats, zoals de optionele NAVMAN-draagtas.
FISH 4500/4600 Installatie- en bedieningshandleiding 70
NAVMAN
Page 31

6-4 Stroom- en transducerverbindingen
De FISH 4500/4600 heeft drie stopcontacten
aan de achterkant van het beeldscherm. Deze
zijn voor de:
• Stroom/datakabel (zwarte sluitmoer)
• Optionele brandstoftransducerkabel
(witte sluitmoer)
• Transducerkabel (blauwe sluitmoer).
De sluitmoeren dienen vastgedraaid te worden
voor een waterdichte verbinding.
De stroom ka bel hee ft een zwarte 8-pi n
verbindingsstekker. Druk deze stekker in het
bovenste contact, met de zwarte moer en draai
vast met de sluitmoer.
De opti onele bran dst oftransducerkabel
heeft een witte 8-pin verbindingsstekker. Druk
deze stekker in het middelste contact, met de
witte moer en draai de sluitmoer vast. (Indien de
brandstoftransducerkabel niet is geïnstalleerd
laat dan de stofhoes op zijn plaats zitten).
De sonartransducerkabel heeft een blauwe
6-pin verbindingsstekker. Druk deze stekker in
het onderste stopcontact met de blauwe moer
en draai de sluitmoer vast. Snijdt de kabel niet
door. Indien nodig kunt u de kabel verlengen
met een NAVMAN 4 m verlengkabel (u kunt
max. één verlengkabel gebruiken).
Houd, indien mogelijk, de transducerkabel uit
de buurt van andere bedrading aan boord.
Elektrische ruis van de motorbedrading, ruimpompen en andere elektrische apparatuur kunnen het beeldscherm beïnvloeden. De kortste
en meest directe verbinding naar de accu helpt
voltagedaling te voorkomen.
Kabelverbindingen dienen niet in het ruim te
liggen. Maak de kabel(s) met regelmatige tussenpozen vast.
Spiegelaquaducer met
dubbele frequentie
‘Door-de-huid’-transducers
‘Door-de-huid’-transducers worden geleverd
met een ‘Y’-verbindingsstukje voor de verbinding van beide transducers aan het onderste
stopcontact met de blauwe moer.
Opmerking: Plaat is
verbonden met pin 1,
zwarte draad
8-pin
Naar motor
Van de brandstoftank
6-pin
‘Door-de-huid’-snelheids/temperatuurtransducer
NAVMAN
Dubbele frequentie ‘door-de-huid’transducer
FISH 4500/4600 Installatie- en bedieningshandleiding71
Page 32

6-5 Bedradingsmogelijkheden
De achterkant van de fishfinder heeft drie connectoren: Zwart - voor stroom en Communicaties;
Wit - voor Brandstof en Communicaties en Blauw voor de Sonartransducer. De bijgeleverde
stroomkabel sluit aan op de Zwarte connector en bevat de volgende 8 draden:
Stroom Brandstof/ SmartCraft*
Pin
Draadkleur Functie Functie
1 Zwart Aarde (stroom & NMEA) Aarde (NMEA)
2 Bruin (niet gebruikt) +9V DC Output
3 Wit NMEA out NMEA 2 in
4 Blauw NavBus (-) or NMEA-1 in
5 Rood
6 Oranje NavBus (+) Brandstof - Stuurboord / SmartCraft*
7 Geel
8 Groen
In deze sectie worden zes bedradingsmogelijkheden beschreven:
• Standaard bedrading. De fishfinder
wordt niet automatisch gestart als de boot
wordt gestart en de motorurenteller kan
niet worden gebruikt.
• Aut o st r oo m be d rad ing . Deze di e nt
gebruikt te worden voor motorure n en
brandstof-computerfuncties.
• Secondaire alarm bedrading
• NMEA bedrading
• Brandstof bedrading enkele motor
• Brandstof bedrading dubbele motor
Zwart (8-pin) Wit (8-pin)
Brandstof - Enkel of Bakboord /
+10-32V in – via 2A zekering
Positieve stroom IN
Auto-stroom in
Aansluiting op pin 5 voor Autostroom AAN
Externe Buzzer / Licht output
Geaard– Max. 200mA.
SmartCraft*
(niet gebruikt)
NAVBUS / Brandstof waarneming
(niet gebruiken)
(niet gebruikt)
Op me rk in g: Ind ie n e en dra ad kl eu r ni et
specifiek wordt genoemd, wordt het niet in die
bedrading gebruikt.
Opmerking: De kabelplaat is verbonden aan
Pin 1 (zwarte draad) en hoeft niet geaard te
worden.
*Opmerking: SmartCraft alleen beschikbaar
voor FISH 4600.
Waarschuwing
U dient 2 Amp zekeringen te plaatsen waar
dit wordt aangegeven in de bedradingsdiagrammen.
Standaard bedrading
Hiervoor dient de FISH 4500/4600 handmatig
met de sleutel aangezet te worden.
Standaard bedrading
Zekering
Rood
Zwarte draad: Verbind deze aan het negatieve
accucontact.
Rode draad: Verbind deze aan het positieve
accucontact, na de hoofdschakelaar. Bevestig
Hoofd-
schakelaar
Geel
Zwart
een 2 Amp zekering, zoals aangegeven.
Gele draad: Verbind deze aan de zwarte draad.
Hierdoor wordt de motorurenteller uitgezet.
12 V DC
Zet de fishfinder handmatig aan wanneer de
hoofdschakelaar aan staat.
FISH 4500/4600 Installatie- en bedieningshandleiding 72
NAVMAN
Page 33

Autopower optie
Zwarte draad: Verbind deze aan het negatieve
accucontact.
Autopower optie
Naar ontstekingssysteem
Zekering
Rode draad: Verbind deze aan het positieve
accucontact na de hoofdschakelaar. Plaats een
2 Amp zekering, zoals weergegeven.
Gele draad: om gebruik te kunnen maken van
de motorurenteller en de brandstofteller en om
de fishfinder te starten wanneer de motor wordt
schakelaar
Onstekings-
Externe toeter
of licht
Zekering
gestart verbind u de gele draad met het ontstekingssysteem via een 2 Amp zekering.
Opmerking: De fishfinder kan niet worden
uitgezet als de motor loopt.
Communicatie-bedrading
NMEA-bedradingsoptie:
NMEA out: Witte draad - Gebruik deze, indien
gewenst, om de Fishfinder aan te sluiten op
andere NMEA instrumenten zoals de Navman
REPEAT 3100. (Zie sectie 6-6 Systemen van
meerdere instrumenten.)
NMEA-1 in: Blauwe draad – Gebruik deze,
indien gewenst, om een NMEA-instrument op
de Fishfinder aan te sluiten, zoals een externe
GPS-bron. Om NMEA-1 in te gebruiken, dient
Hoofd-
schakelaar
12 V DC
NMEA en NavBus-optie:
Indien zowel NMEA als NavBus gebruikt gaan
worden, gebruik dan zoals onderstaand:
NMEA out: Witte draad - NMEA output
NMEA in: NMEA-2 in (Witte connector)
NavBus: Blauwe draad - NavBus(-) en Oranje
draad NavBus(+)
In alle gevallen gaan zowel NMEA als NavBus
naar een zwarte draad (aarde).
NavBus echter worden uitgeschakeld in het
Comms menu – zie sectie 3-7 Instelling >
Communicatie.
6-6 Systemen van meerdere instrumenten
Meerd ere NAVMA N instr um enten k un nen
op elk aar wo rden a anges lo ten om data u it
te wi sselen.
De FISH 4500/4600/4600 is heel geschikt om
samen te werken met de TRACKER 5500/5600
– NAVMAN’s gps-chartplotter met Kleurenbeeldscherm en wereldwijd bereik.
Er zijn twee manieren om instrumenten met
elkaar te verbinden; NavBus of NMEA.
NavBus
NavBus is een systeem dat eigendom is van
NAVMAN en dat een combinatie van scheepsinstrumentarium mogelijk maakt waarbij van een
set transducers gebruikt wordt gemaakt. Indien
instrumenten zijn verbonden via NavBus:
• Indien de eenheden, alarmen of kalibratie
op een instrument worden vera nderd,
veranderen ze automatisch mee voor alle
instrumenten van hetzelfde type.
• Elk instrument kan worden toegewezen aan
een instrumentengroep. Indien de achtergrondverlichting wordt aangepast voor een
groep, dan wordt het automatisch veranderd
voor de andere instrumenten in die groep. De
achtergrondverlichtingsinstelling zal echter
niet veranderen voor instrumenten in andere
groepen.
• Indien een alarm klinkt, kunt u dit uitzetten
door het uit te schakelen op een willekeurig
instrument dat het alarm weergeeft.
Wit (NMEA uit)
Geel
Rood
Groen
Zwart
NAVMAN
FISH 4500/4600 Installatie- en bedieningshandleiding73
Page 34

REPEAT 3100
Repeater voor diepte,
snelheid, watertemperatuur
en accuvoltage. Accepteert
NavBus of NMEA data-input
van andere instrumenten.
DEPTH 2100
Diepterepeater
NMEA
NMEA is een industriestandaard voor verbindingen tussen zeevaartinstrumenten. Data die
verzonden wordt door een instrument via een
NMEA-lijn kan worden gelezen en weergeven
door een ander instrument dat NMEA 0183
versie 2 accepteert. Het is niet zo flexibel als
6-7 Schoonmaak en onderhoud
Het FISH 4500/4600-scherm heeft een speciaal
NAVMAN anti-reflectie laagje. Om schade hieraan te voorkomen, dient u het scherm, indien
vies of bedekt met zeezout, alleen met een
natte doek en een mild afwasmiddel schoon te
maken. Gebruik geen schuurmiddelen, benzine
of andere oplosmiddelen.
Bedek of verwij der ee n spiegeltr ansducer
wanneer u de romp verft. Indien u over de
tran sduc er verft met een verf om aanslag
tegen te gaan, gebruik dan slechts één laagje
verf en verwijder de voorgaande laag door
lichtjes te schuren.
TRACKER 5500
NAVMAN’s gps-chartplotter met kleurenbeeldscherm en wereldwijd bereik.
NavBus omdat specifieke verbindingen tussen
de instrumenten nodig zijn.
Neem contact op met u NAVMAN-leverancier
voor informatie over NAVMAN’s complete assor timen t NMEA-i nstru mente n en verb indingsmogelijkheden.
Voor een optimale werking, dient u niet over
kabels te lopen of ze ergens tussen te klemmen.
Houdt de transducer vrij van algen, verf en vuil.
Gebruik geen hogedrukreiniger om het scheprad
van de snelheidssensor te reinigen omdat het de
kogellagers zou kunnen beschadigen.
Als u de FISH 4500/4600 niet gebruikt, dan
kunt u het instrument van de beugel pakken
en bew aren in de NAVMAN -dra agta s of, als
u het instrument op de beve stigingsbeugel
geplaat st laat, bescherme n door het zonneho esje te gebruiken.
FISH 4500/4600 Installatie- en bedieningshandleiding 74
NAVMAN
Page 35

Appendix A - Specificaties
Specificaties FISH 4500 FISH 4600
Beeldschermtype:
Beeldschermformaat:
Voedingsvoltage: 10,5 tot 32 V DC
Voedingsvoltage bij 13.8 V:
Bedieningstemperatuur: 0° tot 50°C
Omgeving:
Overeenkomst met EMCstandaard:
Diepte:
Output stroom: Variabel, max 600 W RMS
Dubbele transducer frequentie: 200 kHz / 50 kHz
Gevoeligheid ontvanger:
Typische diepteverwervingstijd
na inschakeling:
Kabellengte spiegeltransducer: 10 m
Temperatuurmetingsbereik: 0° tot 37,7°C Resolutie: 0,1° eenheid
Snelheidsbereik: 1 tot 50 knopen, 57,5 mpu, 96,6 km/u
Communicaties:
NMEA Output:
NMEA (0183) is een standaard
voor het interfacen van
scheepvaartelektronica. De
Navman fishfinder kan de
volgende zinnen produceren
Brandstofcomputer:
(optionele brandstoftransducer(s)
benodigd)
SmartCraft Support: Nee Ja
TFT Color
Screen Resolution 320 high x 234 wide(pixels)
CCFL multi-level backlighting
127mm diagonaal 163mm diagonaal
400 mA min – geen achtergrondlicht
800 mA max - volledig achtergrondlicht
IP67
USA FCC Deel 15 Klasse B
Europa (CE) EN50081-1 en EN50082-1
New Zeeland en Australië (C Tick)
AS-NZS 3548
0,6 m tot 600 m met bijgeleverde transducer.
Dieptecapaciteit afhankelijk van transducertype en helderheid water. Diepte tot
1000 m kan worden bereikt onder optimale condities en met gebruik van een
1000 W dubbel element transducer.
Beter dan 10 micro Volt RMS
Dynamisch bereik 4.0 millioen tot 1 (120 dB)
2 seconden op 30 m
NMEA 0183 (Ver 2.0) 4800 baud
NavBus
DBT (Diepte Onder Transducer)
DPT (Diepte en Kielafafstand)
VHW (Snelheid)
VLW (Afgelegde afstand - Totaal & Trip)
MTW (Zeewatertemperatuur)
XDR (Accuvoltage en brandstof-flow)
Tweetakt buitenboord- en EFI benzine/gasoline motoren: 30 tot 300 pk
Viertakt buitenboord benzine/gasoline motoren: 90 tot 300 pk
Binnenboord benzine/gasoline motoren: 50 tot 300 pk
Minimum flow-ratio: 5 liter/u
Max flow-ratio: 130 liter/u
NAVMAN
450 mA min – geen achtergrondlicht
850 mA max - volledig achtergrond-
licht
FISH 4500/4600 Installatie- en bedieningshandleiding75
Page 36

Appendix B – Afmetingen
FISH 4500/4600 Installatie- en bedieningshandleiding 76
NAVMAN
Page 37

Appendix C – Problemen oplossen
In deze gids voor het oplossen van problemen
wordt ervan ui tgegaan dat u de complete
handl-leiding gelezen en begrepen heeft.
Het is vaak mogelijk om moeilijkheden op te lossen zonder dat het apparaat voor reparatie naar
de fabriek wordt gezonden. Wij verzoeken u
vriendelijk om deze sectie door te lezen voordat
u contact opneemt met uw NAVMAN dealer.
Geen van de onderdelen dient door de gebruiker onderhouden te worden. Om waterdichtheid
en het correct in elkaar zetten te controleren
zijn specifieke methodes en testinstrumenten
nodig. Gebruikers die zelf hun FISH 4500/4600
onderho uden maken hierdoor de garan tie
ongeldig.
Reparaties dienen alleen uitgevoerd te worden
door servicecenters die door NAVMAN zijn
goedgekeurd. Indien het product naar een
servicecenter wordt gestuurd, is het belangrijk
om tegelijkertijd de transducer(s) te sturen.
U kunt meer informatie vinden op onze website:
www.navman.com.
1. Problemen bij inschakelen fishfinder:
a) De FISH 4500/4600 is ontworpen voor
gebruik met een 12/24 Volt accusysteem,
waar het voltage kan variëren van 10 tot
35 volt. Indien het voltage te hoog wordt,
springt er een zekering die het beeldscherm
uitschakelt. Controleer de zekering.
b) Controleer dat aan de achterkant van het
beeldscherm de verbindingsstekker van de
stroomkabel stevig in het contact zit en dat
de sluitmoer vast zit. Voor een watervaste
verbinding dient de sluitmoer vastgedraaid
te zijn.
c) Me et het accu voltage wannee r er een
ladin g op de acc u is – doe een paar
lampen, de radio of andere op de accu
aangesloten elektrische apparatuur aan.
Als het voltage minder dan 10 V is:
- de accucontacten of bedrading naar de
contacten kan gecorrodeerd zijn.
- d e accu wordt missc hien ni et goed
opgeladen of is aan vervanging toe.
d) Controleer de stroomkabel van begin tot
eind op schade, zoals scheurtjes, breuken
en geplette of vertrapte stukken.
e) Verzekert u zich ervan dat de rode draad
is verbo nden met het positi eve accu contact en de zwarte met het negatieve
accucontact. Indien er bedrading is voor
Aut opowe r, kij k dan of de gele dr aad
verbonden is aan het ontstekingssysteem.
Co nt ro le er ook het h oo fd sc ha ke la ar circuit aan boord (zie sectie 6-5 Bedradingsmogelijkheden).
f) Controleer of er corrosie is aan de stroom-
kab elver bindi ng en maak deze ind ien
noodzakelijk schoon of vervang.
g) Controleer zekeringen die in lijn zijn ge-
plaatst met de stroomkabel. Een zekering
kan gesprongen of gecorrodeerd zijn terwijl
deze goed lijkt te zijn. Test de zekering of
vervang hem met een zekering die zeker
goed is.
2. De fishfinder kan niet uitgeschakeld
worden:
De fish fi nde r ka n op auto po we r zij n
aangesloten. In dit geval kan de fishfinder
niet worden uitgeschakeld indien de motor
loopt. (Zie Autopower bedrading in sectie
6-5 Bedradingsmogelijkheden).
3. De fishfinder vertoont
onregelmatigheden in gebruik:
a) Controleer dat er geen vuil aan de trans-
ducer is blijven hangen (bijv. wier of een
plastic zak).
b) De transducer kan zijn beschadigd tijdens
het te water laten, aan de grond lopen of
door onderweg tegen iets te zijn aangevaren. Indien de transducer geraakt is,
kan het de beugel opgeschoten zijn. Als
de transducer niet beschadigd is, plaats
het dan weer op zijn originele plaats. (Zie
de Spiegeltransducer Installatie-handleiding.)
c) Wanneer de transducer zich minder dan
0.6 m van de bodem bevindt kunnen dieptelezingen inconsistent en onregelmatig
worden.
d) Handmatige toename is misschien te laag
ingesteld, wat een zwakke bodemecho of
een gebrek aan vissignalen veroorzaakt. Als
Handmatige toename aanstaat, probeer dan
Toename te verhogen.
e) Verzekert u zich ervan dat de rode draad
is verbonden met het positieve accucontact
en de zwarte met het negatieve accucon-
NAVMAN
FISH 4500/4600 Installatie- en bedieningshandleiding77
Page 38

tact. Indien er bedrading is voor Autopower,
kijk dan of de gele draad verbonden is aan
het ontstekingssysteem. Controleer ook het
hoofdschakelaarsysteem aan boord (zie
sectie 6-5 Bedradingsmogelijkheden).
f) Verzekert u zich ervan dat de achterkant
van de on de rk an t van de transducer
iets lager is dan de voorkant en dat de
voorkant zo diep mogelijk in het water
ligt zodat er zo weinig mogelijk belletjes
ontstaan door cavitatie. (Zie de Spiegel-
transducer Installatiehandleiding).
g) Controleer de stroomkabel van begin tot
eind op schade, zoals scheurtjes, breuken
en geplette of vertrapte stukken.
h) Controleer of er geen andere fishfinder
of dieptesounder is ingeschakeld, die de
storing op deze fishfinder veroorzaakt.
i) Elektrische ruis van de boots motor of een
accessoire kan de tra nsducer en/of de
NAVMAN fishfinder storen. Dit kan ervoor
zorgen dat de fishfinder automatisch de
Toename verlaagt tenzij u Hand mati ge
toename gebruikt.
De fishfinder verwijdert zo zwakkere sig-
nalen zoals vissen of zelfs de bodem van
het scherm. Dit kan worden gecontroleerd
door andere instrumenten en accessoires
(zoals een ruimpomp ) en de mo tor uit
te schakelen totdat men het irriterende
onderdeel heeft gevonden. Om problemen met elektrische ruis te voorkomen,
probeer:
- d e stroom- en trans duc erk abe ls te
herleggen, op een afstand van andere
elektrische bedrading aan boord.
- de stroomkabel van het beeldscherm
direct aan de accu te verbinden met
een in lijn zekering.
4. De bodem wordt niet weergegeven:
a) De fishfinder staat misschien op Hand-
matig bere ik en de diept e ligt wellicht
buiten de geselecteerde waarde. U kunt
of de fishfinder op Autobereik zetten of
een ander dieptebereik kiezen (zie sectie
4-5 Bereik).
b) De diepte kan buiten het bereik van de fish-
finder liggen. In Autobereik zal het scherm
“--.-” aangeven zodat u weet dat er geen
bodem gevonden is. Als u in ondieper water komt zou er weer een bodem moeten
verschijnen.
FISH 4500/4600 Installatie- en bedieningshandleiding 78
5. De bodem wo rdt te ver naar de bovenkant van het scherm weergegeven:
De fishfinder kan op Handmatig bereik
staan en het gese le cteerde bereik is
te hoo g voor de diep te. U kunt of de
fishfinder op Au tobereik zetten of een
ander dieptebereik kiezen (zie sectie 4-5
Bereik).
6. De bodem verdwijnt of de digitale weergave vertoont onregelmatigheden:
a) Verzekert u zich ervan dat de achterkant
van de on de rk an t van de transducer
iets lager is geplaatst dan de voo rkant
en dat de voorkant zo diep mogelijk in
het water zodat er zo we ini g mogelijk
belletjes ontstaan door cavitatie. Zie de
Spiegeltransducer Installatiehandleiding,
voor meer informatie.
b) Misschien bevindt de transducer zich in
turbulent water. Luchtbelletjes in het water
verstoren de teruggezonden echo’s, wat
het moeilijk maakt voor de fishfinder om
de bodem of an der voorw erpen onder
water te vinden. Dit gebeurt vaak wanneer
u achteruit vaart. Voor een goede werking
van de fishfinder op alle vaarsnelheden
dient de transducer op een plaats te worden
geïnstall eerd waar er geli jkmatig water
over stroomt.
c) Elektrische ruis van de boots motor kan de
fishfinder storen. Probeer het gebruik van
suppressie bougies.
7. Indien de fishfinder bij inscha keli ng
piept, maar er niets op het beeldscherm
verschijnt:
Kan het zijn dat de fishfinder werkt, maar
dat de achtergrondverlichting te donker is
ingesteld. Zie sectie 2 Standaard bediening,
om het achtergrondverlichtingsniveau te
veranderen.
8. De weergegeven taal klopt niet:
Zie sectie 3-1 Instelling > Systeem.
9. Gebruikte of resterende brandstof lijkt
incorrect:
a) Indien de motor loopt terwijl de fishfinder is
uitgeschakeld, zal de fishfinder de brandstof
die gedurende die tijd wordt verbruikt niet
registreren. Het gevolg hiervan is dat de
Resterende brandstofwaarde hoger is dan
de hoeveelheid brandstof in de tank.
Om dit probl eem te voorkomen kunt u
NAVMAN
Page 39

gebruik maken van de autopower be-dradingsmogelijkheid, zoals beschreven in 6-5
Bedradingsmogelijkheden. Dit zorgt ervoor
dat de fishfinder ingeschakeld wordt zodra
het contactsleuteltje wordt omgedraaid.
b) Als de zee ruig is kan brandstof door de
brandstoftransducer heen en weer golven,
wat in incorrecte aflezingen resulteert. U
zou kunnen proberen een een-weg klep
tusse n de brandst of transdu ce r en de
brandstoftank te installeren.
c) De resterende brandstofwaarde dient na
elke tankbeurt gereset te worden (zie sectie
3-3 Instelling > Brandstof).
d) U kunt de brandstoftank als gevolg van
luchtzakken wellicht niet altijd tot hetzelfde
niveau opvullen. Dit is met name met ondervloerse tanks het geval.
e) Brandstoftransducers verslijten na bepaalde
tijd en dienen na elke 5000 liter brandstof
vervangen te worden.
10. Flow geeft Geen of weinig
brandstof aan.
a) Controleer dat het aantal motoren op 1
is ingest eld. Zie sectie 3-3 Instelling >
Brandstof.
b) Controleer dat de brandstofkabelverbind-
ingen goed in het contact zitten en dat de
sluitmoer is aangedraaid. De sluitmoer
dient vastged raaid te worden voor een
waterdichte verbinding.
c) Een brandstoftransducer kan verstopt rak-
en. Als dit zo is, verwijder dan de transducer
uit de brandstoflijn en blaas er voorzichtig
door in de tegenovergestelde richting van
de brandstofflow.
d) Controleer de brandstofkabel van begin tot
eind op schade, zoals scheurtjes, breuken
en geplette of vertrapte stukken.
e) Controleer of het brandstoffilter schoon is.
11. Een twinmotorinstallatie geeft maar
een flowratio weer:
a) Controleer of het aantal motoren op 2
is ingesteld (zie sectie 3-3 Instell ing >
Brandstof).
12. Onregelmatige Brandstofflowweergave:
a) De brandstofflowtransducer bevindt zich
wellicht te dicht bij de brandstofpomp of is
onderhevig aan overmatige trilling. Wij verwijzen u naar de installatie-instructies die bij
de brandstoftransducer geleverd worden.
b) Controleer op lekkage in de brandstoflijn of
bij het brandstofaanzuigpunt in de tank.
c) Het flow filte r is niet geschikt voor
de motor. Controleer dat de waarde niet
op nul is ingesteld en probeer dan de
waarde te verhogen totdat een regelmatige
flowratio wordt weergegeven. Zie sectie
3-3 Instelling > Brandstof.
13. Brandstofverbruik wordt niet weergegeven:
a) De boot dient te varen om het verbruik weer
te kunnen geven.
b) Controleer of het scheprad van de trans-
ducer ongehinderd rond kan draaien en dat
de twee magneetjes in het scheprad zich
op de juiste plaats bevinden.
14. Er wordt een dubbel bodemtracé
weergegeven:
a) De boot bevindt zich wellicht in een
gebied waar schaduwen worden
gecreëerd. Zie sectie 4-1 Verklaren van
het beeldscherm.
b) In ondiep water kunnen echo’s stuiteren.
Verlaag de Toename (gevoeligheid)
instelling (zie sectie 4-4 Toename) en/of
verlaag de sterkte van de sonartrilling (zie
sectie 3-2 Instelling > Sonar).
c) Verlaag het Bereik.
15. Geen Sonarweergave
Sonar is uitgeschakeld.
Zie secite 3-1 Systeem > Instelling.
NAVMAN
FISH 4500/4600 Installatie- en bedieningshandleiding79
Page 40

Made in New Zealand
MN000201D
FISH 4500 and FISH 4600
Lon 174° 44.535`E
Lat 36° 48.404`S
NAVMAN
 Loading...
Loading...