

Page 1
Communication Protocol
Profibus
DP/V1 Interface for Bayard-Alpert / Pirani Gauge
and High Pressure / Pirani Gauge
BPG400-SP
HPG400-SP
tira36e1-a (0310) 1
Page 2
About this Document
This document describes the functionality and programming of the Profibus interface of the BPG400-SP and HPG400-SP gauges. The interface hardware, the
firmware, and the communication protocol are practically the same for both gauges.
Information that applies to only one of the above gauge types is correspondingly
identified in this document.
For safety information on and technical data of the gauges, please refer
to their respective operating manuals (→ [1], [3] for BPG400-SP and
[4], [6] for HPG400-SP).
In information referring to the ionization vacuum measuring part of the gauge, the
short designations
"BA" (BPG400-SP, Bayard-Alpert measuring principle)
"HP" (HPG400-SP High Pressure Gauge)
are used. The short designation "BA/HP" means that the corresponding information
applies to both gauge types.
The designation "Pirani" is used in information referring to the Pirani vacuum
measuring part of the gauge.
Product Identification
In all communications with INFICON, please specify the information on the product
nameplate. For convenient reference copy that information into the space provided
below.
INFICON AG, LI-9496 Balzers
Model:
PN:
SN:
V W
Validity
2 tira36e1-a (0310) BPG/HPG400 v1.cp
This document applies to products with part numbers
BPG400-SP (with Profibus interface and switching functions)
353-505
353-506 (vacuum connection DN 40 CF-R)
HPG400-SP (with Profibus interface and switching functions)
353-525
353-526 (vacuum connection DN 40 CF-R)
The part number (PN) can be taken from the product nameplate.
(vacuum connection DN 25 ISO-KF)
(vacuum connection DN 25 ISO-KF)
Page 3

Intended Use
The BPG400-SP and HPG400-SP gauges allow vacuum measurement of non
flammable gases and gas mixtures (pressure ranges → [1], [3] for BPG400-SP
and [4], [6] for HPG400-SP).
The gauges can be operated with an INFICON controller or another instrument or
control device.
Functional Principle
Trademarks
The functions of the gauges are described in their respective operating manuals
(→ [1], [2], [3] for BPG400-SP and [4], [5], [6] for HPG400-SP).
The integrated Profibus interface allows operating the gauge in connection with
other suitable devices in a Profibus network according to the standard described in
[6], [7].
®
Semiconductor Equipment and Materials International, California
SEMI
tira36e1-a (0310) BPG/HPG400 v1.cp 3
Page 4

Contents
About this Document 2
Product Identification 2
Validity 2
Intended Use 3
Functional Principle 3
Trademarks 3
1 General Data 6
1.1 Data Rate 6
1.2 Device Address 6
1.3 Ident Number 6
1.4 Configuration Data 6
1.5 User Parameter Data 7
1.6 Types of Communication 7
2 Data Exchange Mode 8
2.1 Acyclic Data Transmission with Profibus DPV1 Functionality 8
2.2 Structure of the Cyclic Data Telegrams in Data Exchange Mode 9
2.2.1 Parameter Channel 10
2.2.1.1 PKE Parameter Signature Value 10
2.2.1.2 PWE Parameter Process Value 11
2.2.1.3 Error Code (Error Message) 11
2.3 Cyclic Message Telegrams 12
3 Block Model 13
3.1 Device Block 14
3.1.1 Information on the Individual Indices 15
3.1.1.1 Block Type ID 16 15
3.1.1.2 Device Type ID 17 15
3.1.1.3 Standard Revision Level ID 18 15
3.1.1.4 Device Manufacturer Identifier ID 19 15
3.1.1.5 Manufacturer Model Number ID 20 15
3.1.1.6 Software or Firmware Revision Level ID 21 15
3.1.1.7 Hardware Revision Level ID 22 15
3.1.1.8 Device Configuration ID 24 15
3.1.1.9 Device State ID 25 15
3.1.1.10 Exception Status ID 26 16
3.1.1.11 Exception Detail Alarm ID 27 17
3.1.1.12 Exception Detail Warning ID 28 19
3.1.1.13 Emission On Switch ID 202 (HPG400-SP Only) 20
3.1.1.14 Sensor Calibration Switch ID 203 (HPG400-SP Only) 21
3.1.1.15 Copy Common Exception Detail Alarm 0 ID 204 21
3.1.1.16 Copy Device Exception Detail Alarm 0 … 3 ID 205 21
3.1.1.17 Copy Manufacturer Exception Detail Alarm 0 ID 206 21
3.1.1.18 Copy Common Exception Detail Warning 0 ID 207 21
3.1.1.19 Copy Device Exception Detail Warning 1 … 4 ID 208 21
3.1.1.20 Copy Manufacturer Exception Detail Warning 0 ID 209 21
3.1.2 Device Block, Device Behavior 22
3.1.2.1 Device Block State Command 23
3.2 Analog Input Block 23
3.2.1 One Of N Analog Input Function Block / SLOT 1 24
3.2.1.1 AI Block Adjust Command (Adjustment at Atmospheric Pressure) 24
3.2.1.2 Block Type 24
3.2.1.3 Channel Instance Selector 24
3.2.1.4 PV Selector 24
3.2.2 Analog Sensor Input Function Block Instance 1 / SLOT 1 25
3.2.2.1 Process Value 25
3.2.2.2 Status 25
3.2.2.3 Data Type 26
3.2.2.4 Data Unit 26
3.2.2.5 Reading Valid 26
3.2.2.6 Full Scale 26
3.2.2.7 Safe State 27
3.2.2.8 Safe Value 27
3.2.2.9 Overrange 27
3.2.2.10 Underrange 27
3.2.3 Analog Sensor Input Function Block Instance 2 / SLOT 1 28
3.2.3.1 Process Value 28
4 tira36e1-a (0310) BPG/HPG400 v1.cp
Page 5

3.2.3.2 Status 29
3.2.3.3 Data Type 29
3.2.3.4 Data Unit 29
3.2.3.5 Reading Valid 30
3.2.3.6 Full Scale 30
3.2.3.7 Safe State 30
3.2.3.8 Safe Value 30
3.2.3.9 Overrange 31
3.2.3.10 Underrange 31
3.2.4 Analog Sensor Input Function Block Instances 3 and 4 / SLOT 1 32
3.2.4.1 Process Value 32
3.2.4.2 Status 33
3.2.4.3 Data Type 33
3.2.4.4 Data Unit 33
3.2.4.5 Reading Valid 33
3.3 Transducer Block 33
3.3.1 One Of N Vacuum Gauge Transducer Block / SLOT 1 33
3.3.1.1 One Of N Status Extension 33
3.3.2 Heat Transfer Vacuum Gauge Transducer Block / SLOT 1 33
3.3.2.1 Block Type 33
3.3.2.2 Status Extension 34
3.3.2.3 Sensor Alarm 34
3.3.2.4 Sensor Warning 34
3.3.2.5 Full Scale State 34
3.3.3 Hot Cathode Ion Gauge Transducer Block / SLOT 1 35
3.3.3.1 Block Type 35
3.3.3.2 Status Extension 35
3.3.3.3 Sensor Alarm 35
3.3.3.4 Sensor Warning 35
3.3.3.5 Emission Status 36
3.3.3.6 Emission Current (BPG400-SP Only) 36
3.3.3.7 Degas Status (BPG400-SP Only) 36
3.3.3.8 Hot Cathode Block State Command (BPG400-SP Only) 36
Appendix A: Definitions 37
Appendix B: Block Type 40
Appendix C: Electrical Connections 41
Appendix D: Literature 43
For cross-references to other documents, the symbol (→ [XY]) is used.
tira36e1-a (0310) BPG/HPG400 v1.cp 5
Page 6
1 General Data
1.1 Data Rate
1.2 Device Address
1.3 Ident Number
The gauge supports all data rates defined in the EN 50170 standard (→ [8]) up
to 12 Mbaud. Automatic data rate setting is supported. Alternatively, a fixed data
rate can be selected.
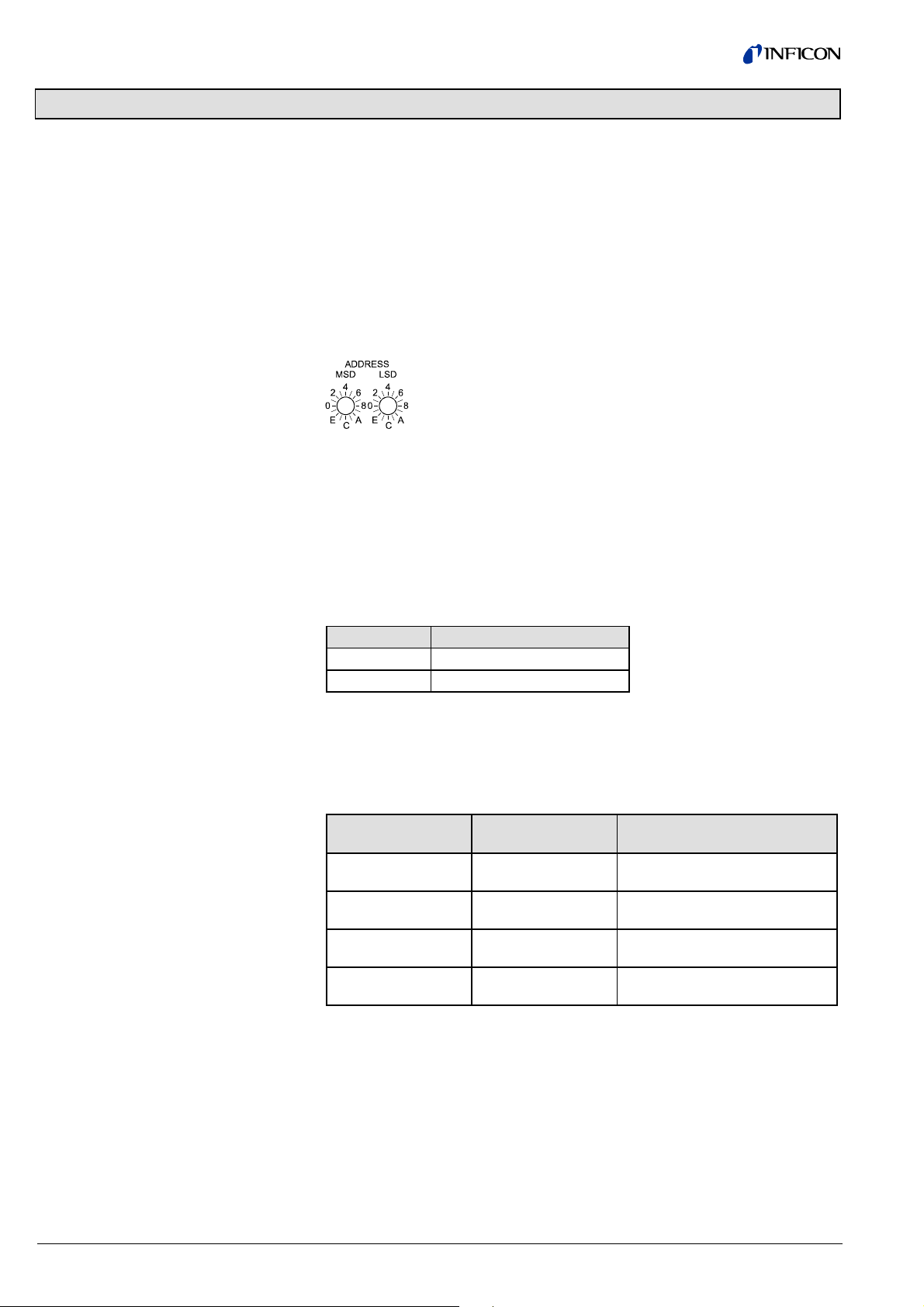
The device address ( node address) must be set via two rotary switches when the
gauge is installed.
For unambiguous identification of the gauge in a Profibus environment, a node
address is required. The node address setting is made on the gauge.
The node address (0 … 125
(00 … 7D
used for setting the high-order address nibble and the "LSD"
switch for defining the low-order address nibble.
The node address is polled by the firmware when the gauge is switched on. If the
setting deviates from the stored value, the new value is taken over into the
NVRAM. If a value >7D
stored in the device remains valid. However, the address can be set via the
Profibus master with the "Set Slave Address" service. This address setting will be
stored in the EEPROM of the gauge.
The ident numbers assigned to the gauges by the PNO (→ [7]) are:
) via the "ADDRESS" switches. The "MSD" switch is
hex
hex
(>125
) is entered, the node address setting currently
dec
) is set in hexadecimal form
dec
1.4 Configuration Data
Gauge Ident number (hexadecimal)
BPG400-SP 06A9
HPG400-SP 06A8
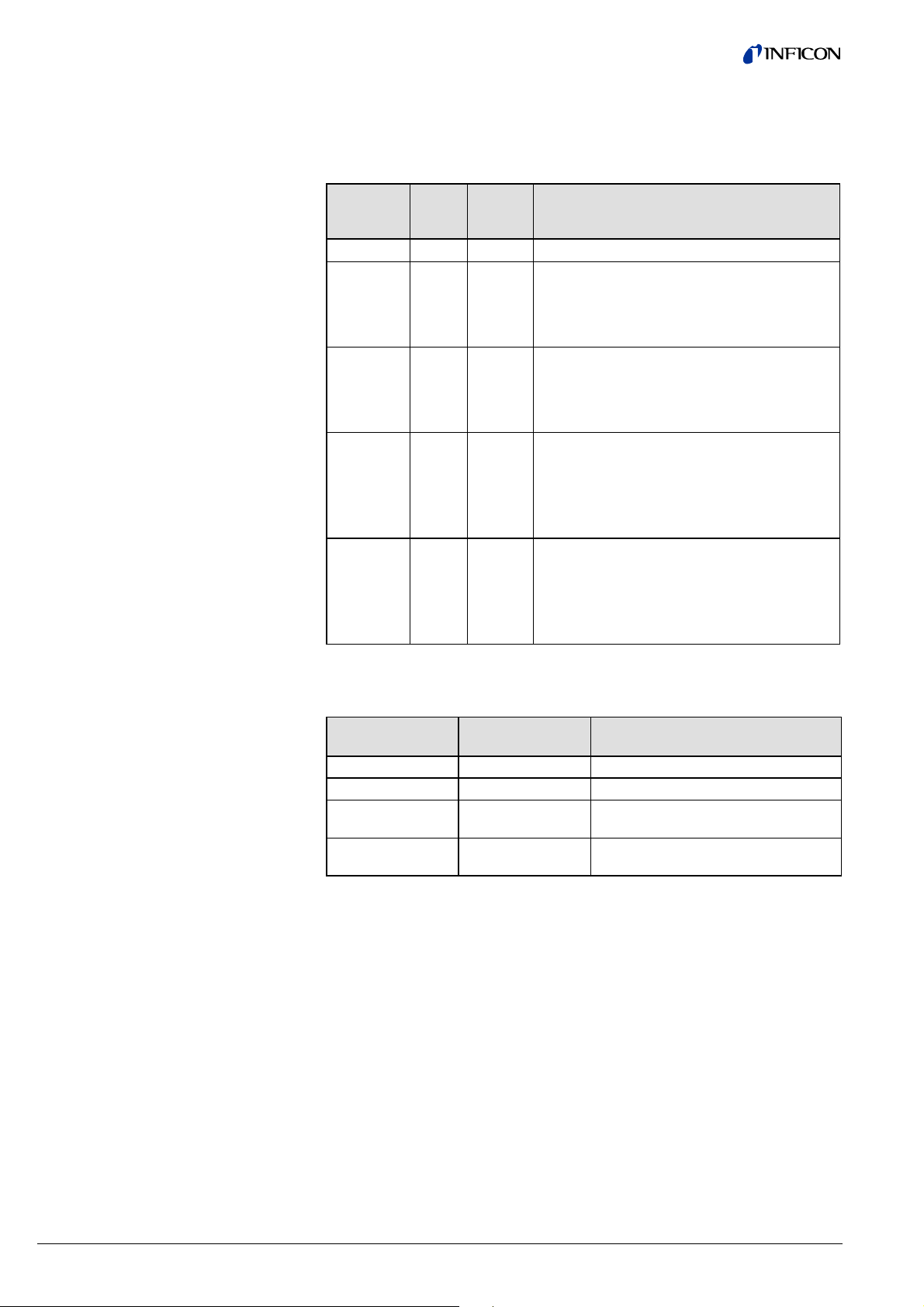
Depending on the standard telegrams used (→ section "Cyclic Message Telegrams"), the following configuration data have to be transmitted to the gauge during
the configuration phase:
Standard telegram
Master ⇒ Slave
- 2 0x44, 0x84, 0x05, 0x05, 0x05,
- 3 0x44, 0x86, 0x05, 0x05, 0x05,
1 4 0xC6, 0x87, 0x8c, 0x0A, 0x0A,
1 5 0xC6, 0x87, 0x8E, 0x0A, 0x0A,
Standard telegram
Slave ⇒ Master
Configuration data
0x03
0x08
0x05, 0x05, 0x05, 0x03
0x05, 0x05, 0x05, x08
6 tira36e1-a (0310) BPG/HPG400 v1.cp
Page 7
1.5 User Parameter Data
Depending on the pressure unit setting ( data unit), the following configuration
string has to be transmitted to the gauge (parameter data in hexadecimal format):
1.6 Types of
Communication
Pressure unit User parameter data string
COUNTS
1)
00 00 00 03 E9
Torr 00 00 00 05 15
Micron 00 00 00 05 16
mbar 00 00 00 05 1C
Pascal 00 00 00 05 1D
1)
If COUNTS is selected as pressure unit, a value is output, which can be converted into a corresponding pressure value by means of a formula (→ section
"Analog Sensor Input Function Block" for more information).
BPG400-SP and HPG400-SP work according to the Profibus DPV1 specification
and can be addressed in cyclic or acyclic data traffic (→ [7]).
Acyclic data traffic should be used to make device or process specific settings such
as definition of the Safe Values, Safe States etc. or for reading or writing of rarely
used attributes.
Cyclic data traffic is used for continuous exchange of the required process parameter values, i.e. pressure value and status indications. A number of standard
telegrams are available for cyclic data traffic. They can be selected according to
requirements (→ section "Cyclic Message Telegrams").
tira36e1-a (0310) BPG/HPG400 v1.cp 7
Page 8
2 Data Exchange Mode
2.1 Acyclic Data Transmission with Profibus
DPV1 Functionality
Block, slot and
index assignment
The reading and writing operations defined in the Profibus are based on a slot
index address scheme. In BPG400-SP / HPG400-SP, all device functions are
organized in the following blocks:
• A device block describing all organizational parameters of the gauge (serial
number, manufacturer, software version, …)
• An Analog Sensor Function Block describing the function of the pressure presentation
• An Analog Sensor Transducer Block describing the physical interface between
the gauge and the process (emission current, ion current, …).
The block model is described in detail in section "Block Model".
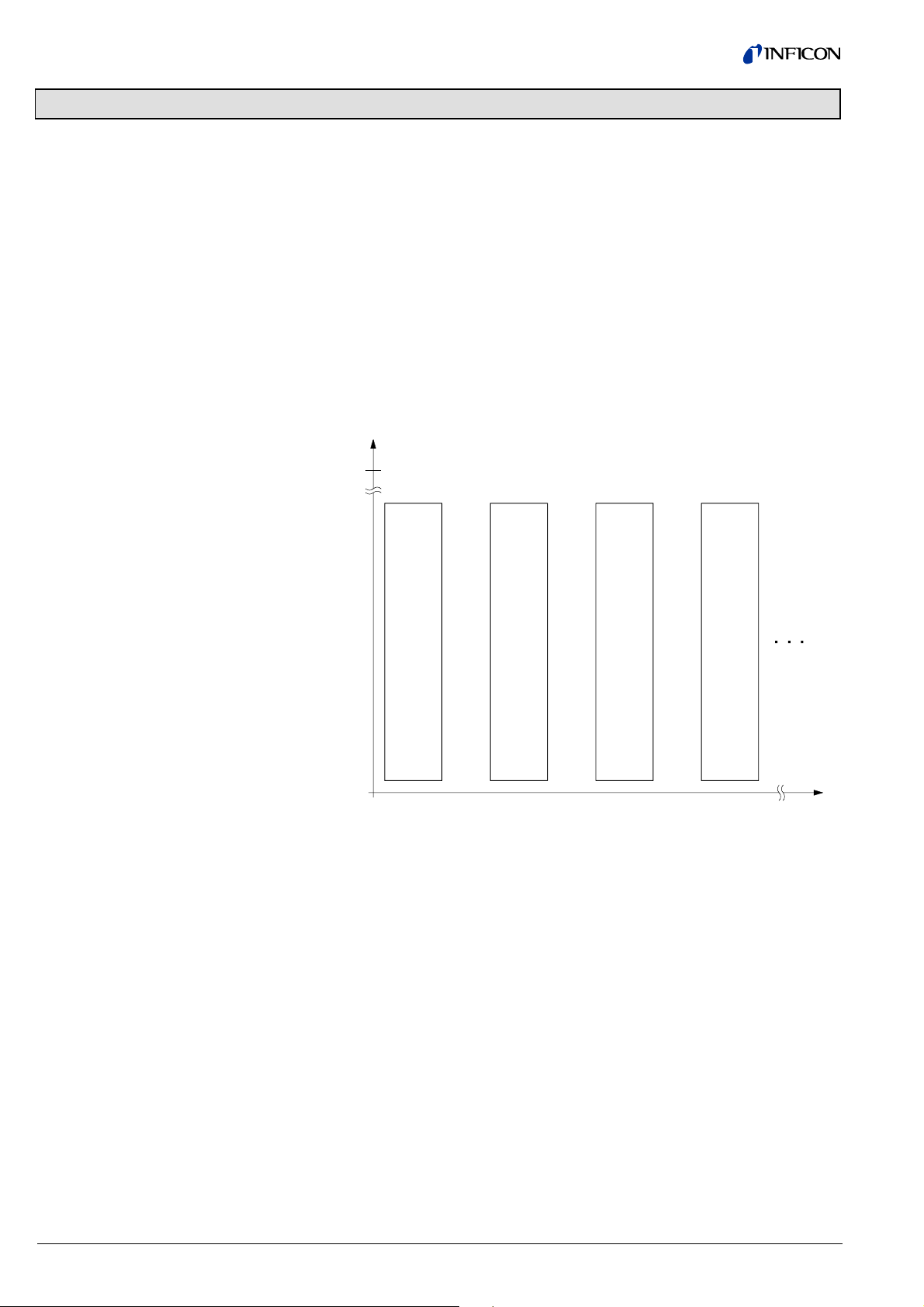
Each block is assigned to a separate slot. The exact assignment
Block ⇒ Slot ⇒ Index is described in section "Block Model". The Device Block is
assigned to Slot 0, the transducer and functional blocks to Slot 1.
Index
254
Device
Block
Block_1 Block_2 Block_3
0
There are 254 indices per slot. The indices can have a width of 255 bytes. All values that can be accessed via Profibus have to be mirrored to one of these slots/
indices.
The parameters are generally numbered in ascending order, starting with index 16.
Services such as "Degas On" or "Full scale" are numbered in descending order,
starting with index 15.
0123
8 tira36e1-a (0310) BPG/HPG400 v1.cp
Page 9
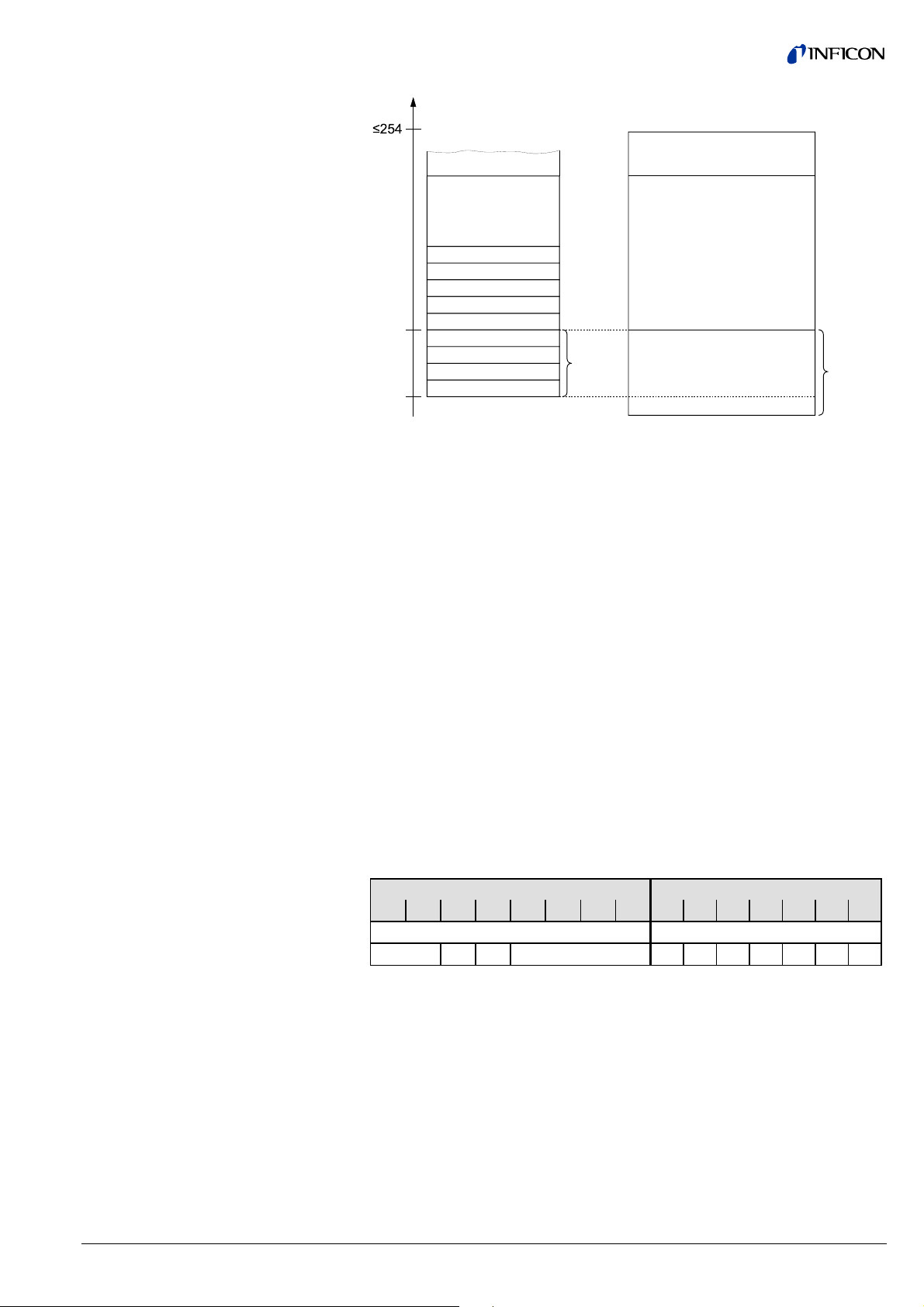
Assignment of the block elements to the slot indices
Index
2.2 Structure of the Cyclic
Data Telegrams in Data
Exchange Mode
Parameter_n
Block_x
Parameter_2
Parameter_1
16
0
In Data Exchange mode, the DP master class 1 cyclically transmits data from and
to all slaves that are connected to the bus.
In this document, data transmitted from the slave to the master are called "input
data" and data transmitted from the master to the slave are called "output data".
The input and output data of the BPG400-SP / HPG400-SP have two logic parts:
1) the parameter channel
2) the process data channel
There is a number of standard telegrams, consisting of:
a) the parameter channel only
b) the process data channel only
c) both, the parameter and process data channel
The parameter channels allows masters without Profibus DPV1 to access device
specific parameters that are not part of the normal cyclic data telegram. For masters with Profibus DPV1, no parameter channel is required.
Parameter_0
Operation_1
Operation_2
Operation_n
optional
Block_Type_Name
Attributes
Public
Operations Public
optional
Private
Input data
tira36e1-a (0310) BPG/HPG400 v1.cp 9
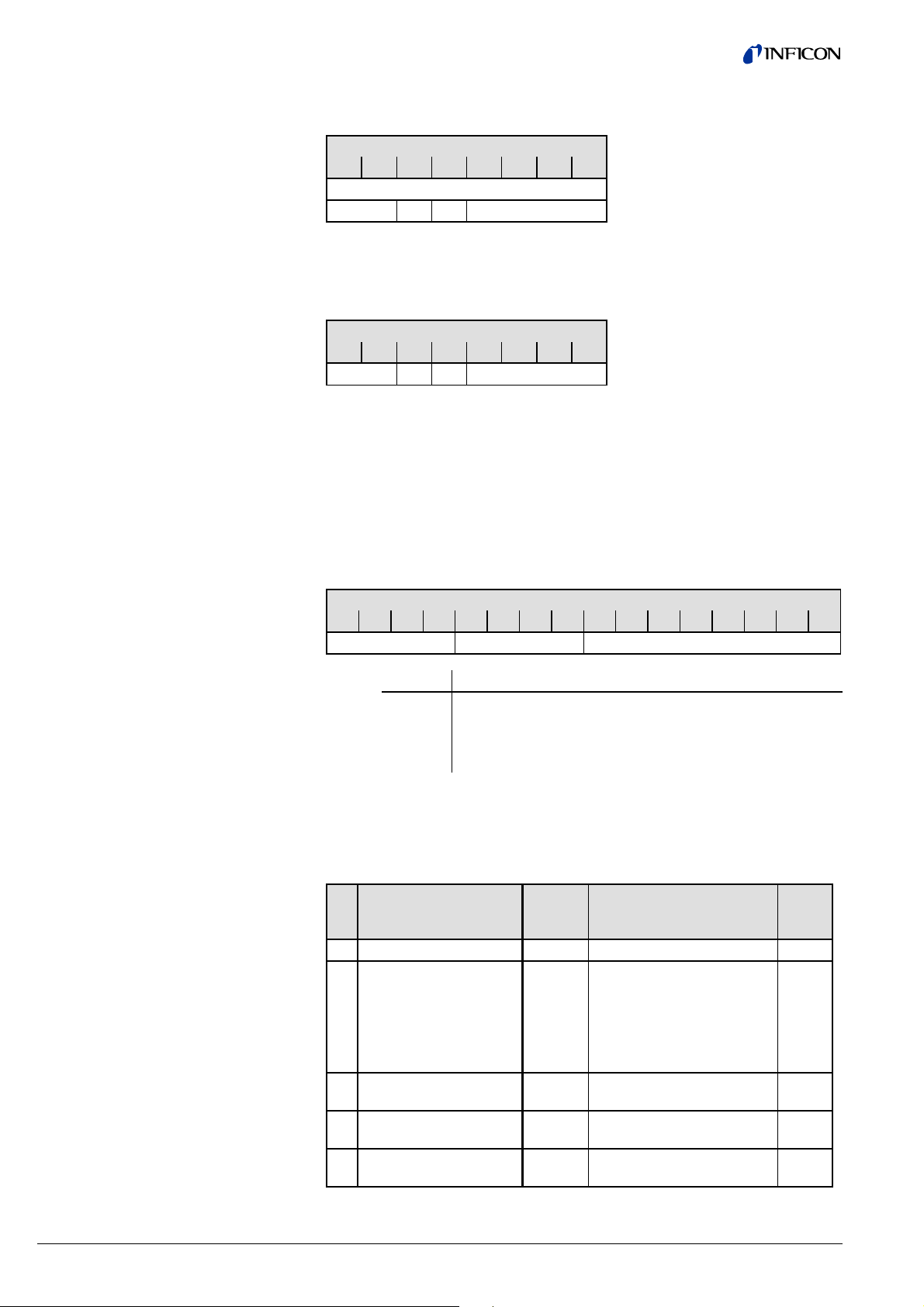
The input data (transmitted by the BPG400-SP / HPG400-SP) consist of the
8 bytes of the parameter channel (if there is a parameter channel in the standard
telegram) and of 5 … 7 bytes of process data depending on the selected standard
telegram.
Byte Byte
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15
Parameter channel Process data
PKE IND res. PWE
Where: PKE = Parameter Signature Value
IND = Sub Index
res. = reserved
PWE = Process Value
Reading or writing command and definition of the slot
Index No. of the index to be
read (→ "Block Model")
Value to be read or written
Page 10
Output data
The output data (transmitted by the master) consist of 8 bytes of the parameter
channel or, if there is no parameter channel in the standard telegram, of 0 bytes.
Byte
1 2 3 4 5 6 7 8
Parameter channel
PKE IND res. PWE
2.2.1 Parameter Channel
2.2.1.1 PKE Parameter
Signature Value
The structure of the parameter channel is described in the table below.
The parameter channel (called PKW Interface hereinafter) consists of 8 bytes.
Octets
1 2 3 4 5 6 7 8
PKE IND res. PWE
The PKW Interface allows reading and writing of slave parameters with a maximum
data length of 4 bytes. Strings cannot be read.
The slave generates exactly one response per instruction transmitted by the
master. The instruction and response cannot be blocked. This means that exactly
one instruction per output telegram can be transmitted to the slave and that exactly
one response per input telegram can be transmitted to the master. 4 bytes of actual
data can thus be transmitted at a time.
The instruction and response are represented in the first two bytes (PKE) of the
parameter channel:
Bit position
15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0
AK res. Slot
Where: Bits Meaning
15 … 12
AK Instruction/response signature
11 … 8 Reserved
7 … 0 Define the slot from which data are read or onto which a
value is to be written
Instruction signature
In Master ⇒ Slave communication, the AK field contains the instruction signature of
the master.
In Slave ⇒ Master communication, the AK field contains the instruction signature of
the slave.
AK Function
Master ⇒ Slave
(Instruction signature)
AK
normal
Function
Slave ⇒ Master
(Response signature)
AK
error
0 No instruction 0 No response
1 Read parameter value 1
Transmit parameter value
7
1)
(word)
2
Transmit parameter value
(double word)
11
Transmit parameter value
(byte)
2 Write parameter value
1 Transmit parameter value
(data type: word)
3 Write parameter value
2 Transmit parameter value
(data type: double word)
10 Write parameter value
11 Transmit parameter value
(data type: byte)
1)
Instruction cannot be executed (error code)
(word)
(double word)
(byte)
7
7
7
1)
1)
1)
10 tira36e1-a (0310) BPG/HPG400 v1.cp
Page 11
On the left of the table, the instruction signatures of the master are listed according
to their function. On the right of the table, the corresponding normal responses (AK
Normal) and error codes (AK Error) transmitted by the slave are listed.
Instruction – response
sequence
2.2.1.2 PWE Parameter
Process Value
2.2.1.3 Error Code
(Error Message)
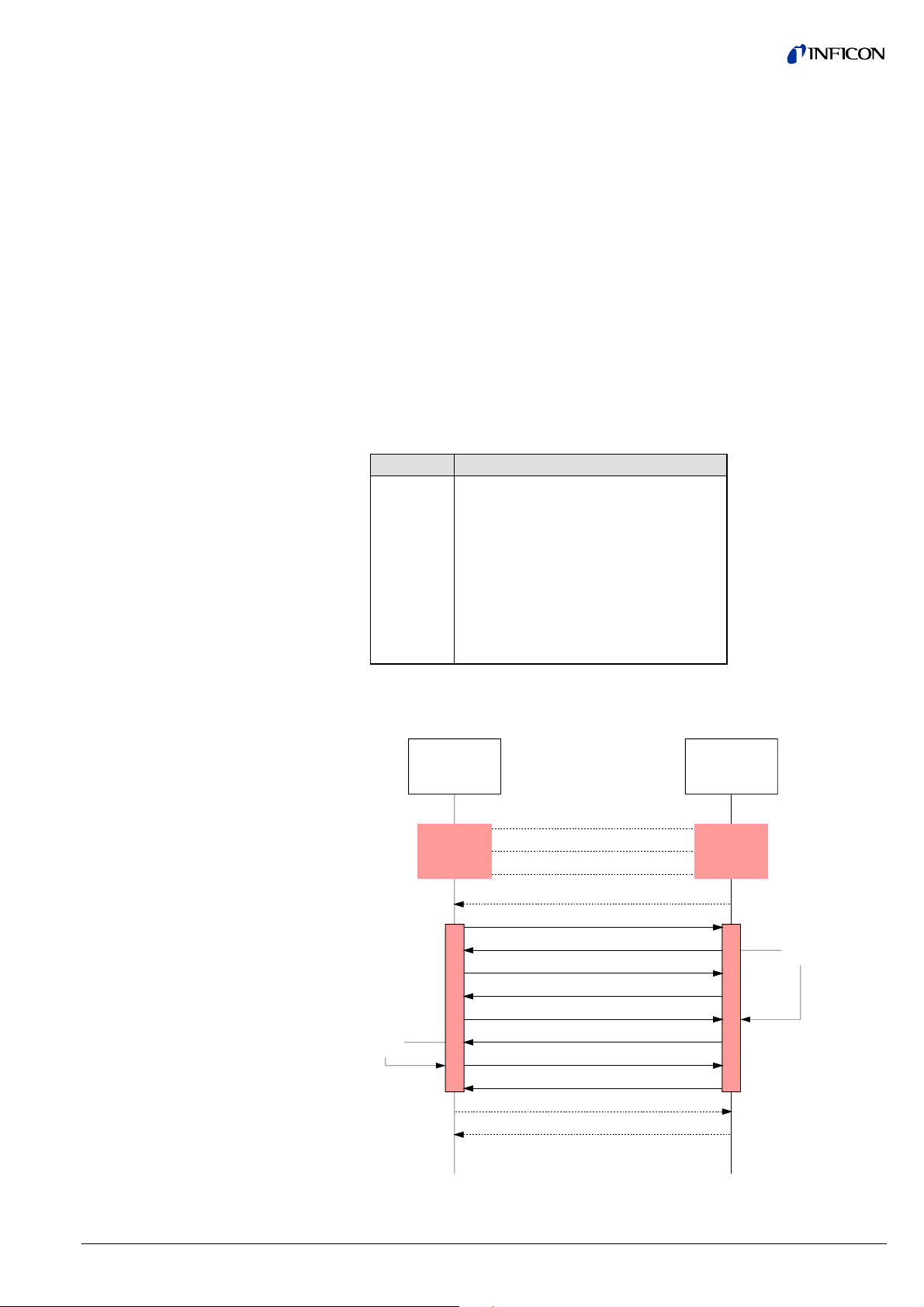
1) The master transmits an instruction to the slave and repeats that instruction
until it receives a response from the slave.
2) The slave keeps transmitting the response to the instruction until the master
transmits a new instruction.
3) The master marks the end of the first instruction cycle by setting AK to zero.
Only after that, a new instruction/response cycle may be started.
The PWE represents the data element to be transmitted.
If a byte is to be transmitted, that byte has to be in position 8 of the parameter
channel.
Integers are transmitted with bytes 7 and 8. Double integer and float values are
transmitted with bytes 5 … 8.
In the event of a transmission error (AK response signature = 7), the slave transmits an error code in byte positions 7 and 8 (data type: INT16).
Error code Meaning
0 Undefined slot
1 Parameter not changeable
2 Lower or upper value range limit overflow
3 Index error
5 Data type error
17 Instruction not allowed in this state
18 Other errors
201 Already in requested state
202 Object state conflict
The following diagram shows an example of a data request from a master to a
BPG400-SP / HPG400-SP via parameter channel.
BPG400-SP
HPG400-SP
Parameter
Request
(Server)
Fetch
Data
Store
Data
DP-Master
Parameter
Request
(Client)
AK(IS) = 0
AK(RS) = 0
AK(IS) = 0
AK(RS) = 0
AK (IS) = 1
AK(RS) = 0
AK (IS) = 1
AK(RS) = 0
AK (IS) = 1
AK(RS) = 1
AK (IS) = 0
AK(RS) = 0
AK (IS) = 0
AK(RS) = 0
tira36e1-a (0310) BPG/HPG400 v1.cp 11
Page 12
2.3 Cyclic Message
Telegrams
The message telegrams listed below are implemented in the gauge. They can be
selected according to requirements. When selecting a message telegram, ascertain
what output format of the measured value (integer/float) is required and whether a
parameter channel is needed or not. The gauge can also be operated in such a
way that the master does not transmit any output data to the slave.
Standard
telegram
1
2
3
4
5
Master
⇔
Slave
M ⇒ S
S ⇒ M
S ⇒ M
S ⇒ M
S ⇒ M
Byte Meaning
1 … 8 Parameter channel
1 Exception status
2 One Of N status extension
3 One Of N PV selector
4 … 5 Process value UINT16
1 Exception status
2 One Of N status extension
3 One Of N PV selector
4 … 7 Process value float
1 … 8 Parameter channel
9 Exception status
10 One Of N status extension
11 One Of N PV selector
12 … 13 Process value UINT16
1 … 8 Parameter channel
9 Exception status
10 One Of N status extension
11 One Of N PV selector
12 … 15 Process value float
Configuration data
In the following table, the possible reasonable combinations are listed with the
corresponding configuration data.
Standard telegram
Master ⇒ Slave
- 2 0x44, 0x84, 0x05, 0x05, 0x05, 0x03
- 3 0x44, 0x86, 0x05, 0x05, 0x05, 0x08
1 4 0xC6, 0x87, 0x8c, 0x0A, 0x0A, 0x05,
1 5 0xC6, 0x87, 0x8E, 0x0A, 0x0A, 0x05,
Standard telegram
Slave ⇒ Master
Configuration data
0x05, 0x05, 0x03
0x05, 0x05, x08
12 tira36e1-a (0310) BPG/HPG400 v1.cp
Page 13
3 Block Model
Data to the BPG400-SP / HPG400-SP can be transmitted by means of a number of
communication protocols and corresponding masters. Profibus defines a master
class 1 as normal control unit of the slave (typically a PLC) and a master class 2 as
configuration and service unit. The following communication protocols are defined
according to the Profibus DPV1 standard.
MS0 Cyclic data traffic between master class 1 and slave
MS1 Acyclic data traffic between master class 1 and slave
MS2 Acyclic data traffic between master class 2 and slave
In BPG400-SP / HPG400-SP, all functions that are made available by the gauge
via Profibus are organized in blocks. Access to the individual parameters of the
blocks is possible via acyclic services or, for byte, integer and float values, also in
cyclic data traffic via the parameter channel.
Block types
The following block types are defined in the gauge.
Device Block The Device Block contains all data that are required for de-
scribing the device and handling its state (status of Device
State Machine).
Transducer Block The physical, process specific functions or interfaces between
the BPG400-SP / HPG400-SP and the process such as
current and voltage values are represented in transducer
blocks.
The following transducer blocks are implemented:
• One of N Vacuum Gauge Transducer Block
• Heat Transfer Vacuum Gauge Transducer Block (Pirani)
• Hot Cathode Ion Gauge Transducer Block (BA/HP)
Function Block Application specific values such as pressure values that result
from or can be calculated from the values of the transducer
block are represented in the function blocks.
• One Of N Analog Input Function Block
• Analog Input Function Block, Instance 1, Instance 2,
Instance 3, Instance 4
tira36e1-a (0310) BPG/HPG400 v1.cp 13
Page 14
3.1 Device Block
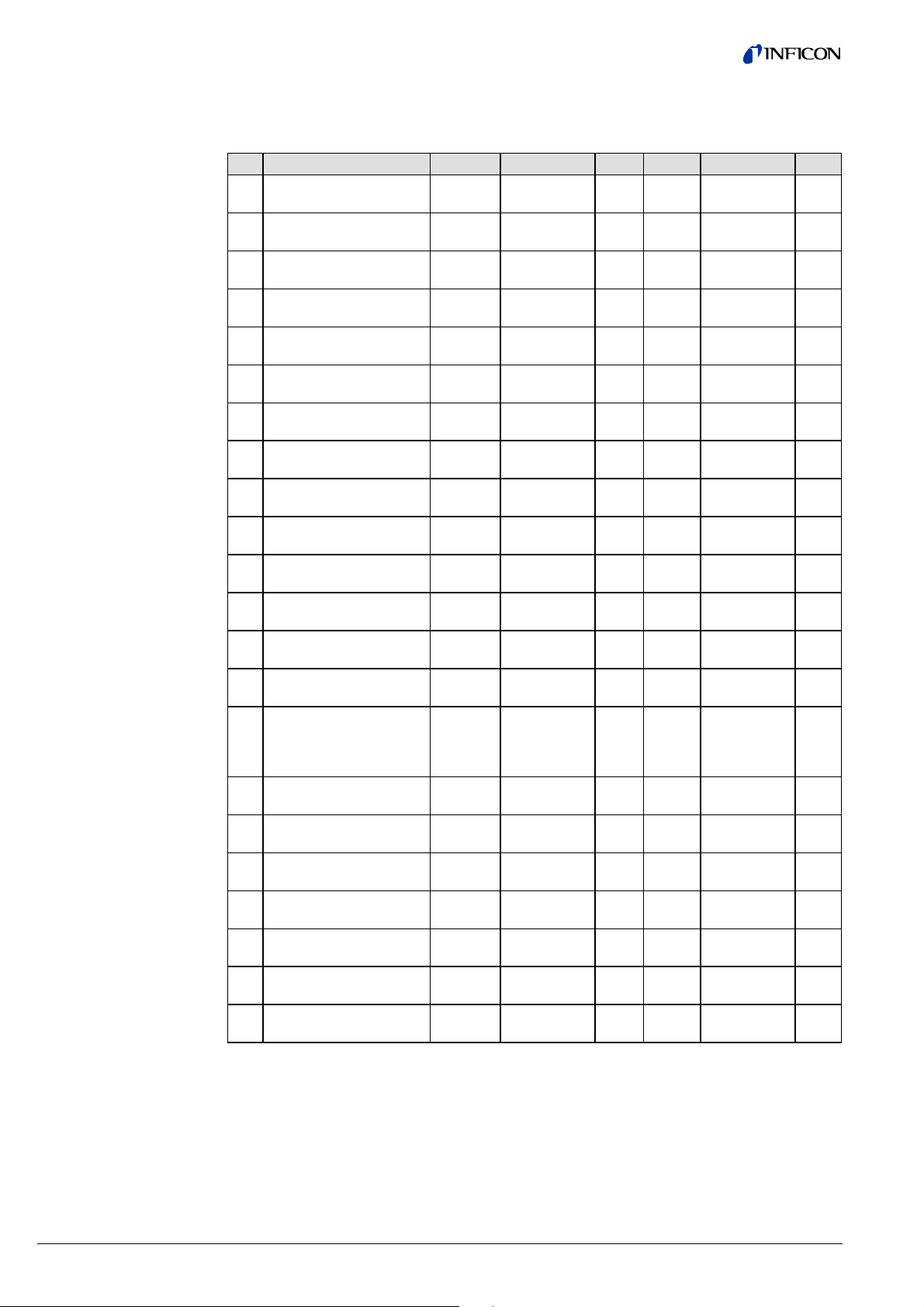
The following table lists the services and parameters integrated in the Device Block
(→ Appendix A for abbreviations).
ID Name Structure Data type Bytes Access Value Store
15 Device Block State Simple Unsigned8 1 1_R/W
2_R/W
16 Block Type Simple Octet string 4 1/2_R 1 N
17 Device Type Simple Visible string 8 1/2_R CG N
18 Standard Revision Level Simple Visible string 9 1/2_R E54-0997 N
19 Device Manufacturer
Identifier
20 Manufacturer
Model Number
21 Software or Firmware
Revision Level
22 Hardware Revision Level Simple Visible string 8 1/2_R e.g. 1.0 N
23 Serial Number Simple Visible string 30 1/2_R e.g. 100 N
24 Device Configuration Simple Visible string 50 1/2_R e.g.
25 Device State Simple Unsigned8 1 1/2_R V
26 Exception Status Simple Unsigned8 1 0_XI
27 Exception Detail Alarm Record
28 Exception Detail
Warning
202 Emission On Switch Simple Analogical to
203 Sensor Calibration
Switch
204 Common Exception
Detail Alarm 0
205 Device Exception Detail
Alarm 0 … 3
206 Manufacturer Exception
Detail Alarm 0
207 Common Exception
Detail Warning 0
208 Device Exception Detail
Warning 1 … 4
209 Manufacturer Exception
Detail Warning 0
Simple Visible string 20 1/2_R INFICON AG N
Simple Visible string 20 1/2_R e.g.
353-525
Simple Visible string 8 1/2_R e.g. 1.01 N
HPG400-SP
1/2_R
→ below
Record
Simple UINT8 1 1/2_R V
Simple UINT8 1 1/2_R V
Struct Array of
Simple UINT8 1 1/2 _R V
Simple UINT8 1 1/2 _R V
Struct Array of
Simple UINT8 1 1/2_R V
→ below
data type
value (parameter 21)
4 bytes
4 bytes
- 1/2_R V
- 1/2_R V
1 1/2_R V
4 1/2_R V
4 1/2 _R V
N
N
V
14 tira36e1-a (0310) BPG/HPG400 v1.cp
Page 15

3.1.1 Information on the
Individual Indices
3.1.1.1 Block Type ID 16
3.1.1.2 Device Type ID 17
3.1.1.3 Standard Revision Level
ID 18
3.1.1.4 Device Manufacturer
Identifier ID 19
3.1.1.5 Manufacturer Model
Number ID 20
The Block Type Parameter contains an ID which describes the block type. The
block type ID of the Device Block 1. The other defined block types are listed in
Appendix B.
The Device Type identifies the device type which is connected to the field bus via
Profibus.
The Device Type of the BPG400-SP / HPG400-SP gauges is "CG", the abbreviation of "Combination Gauge".
This parameter describes the version of the "Sensor/Actuator Network Specific
Device Model" published by the SEMI
International, California), according to which the profile of this device has been
developed.
The fixed setting of this parameter is "E54-0997".
This parameter describes the manufacturer of the device, "INFICON AG".
This parameter represents the part number of the gauge (→ section "Validity").
BPG400-SP and HPG400-SP are available with two different vacuum connection
types each, for example:
Gauge Vacuum connection Part number
HPG400-SP 25 KF 353-525
®
(Semiconductor Equipment and Materials
3.1.1.6 Software or Firmware
Revision Level ID 21
3.1.1.7 Hardware Revision Level
ID 22
3.1.1.8 Device Configuration ID 24
3.1.1.9 Device State ID 25
This parameter indicates the software version of the Profibus option in the format
"1.01".
This parameter indicates the hardware version of the gauge in the format "1.0".
This parameter indicates the device name. If the BPG400-SP is connected,
BPG400-SP is output, if the HPG400-SP is connected, HPG400-SP is output.
This parameter indicates the status of the gauge. Due to the structure of the Device
State Machine, the following statuses are possible:
Parameter value Status
0 Undefined
1 Self testing
2 Idle
3 Self test exception
4 Executing
5 Abort
6 Critical fault
The device statuses are described in detail in section "Device Block, Device
Behavior".
tira36e1-a (0310) BPG/HPG400 v1.cp 15
Page 16

3.1.1.10 Exception Status ID 26
The Exception Status describes the alarm and warning statuses of the gauge in an
"Expanded error output format".
A difference is made between warnings and errors.
Alarms and errors are divided into three groups (→ sections "Exception Detail
Alarm" and "Exception Detail Warning" for details):
• ALARM / Warning Device Common
• ALARM / Warning Device Specific
• ALARM / Warning Manufacturer
Specific
In each of the above groups, there are several error or warning conditions. The individual fields are presented in the "Exception Detail Alarm" and "Exception Detail
Warning". If an error message occurs in "Exception Detail Alarm" or "Exception
Detail Warning”, the corresponding bit is set in the Exception Status. Therefore, if
bits 0 … 6 of the Exception Status are on "0" there is no warning message pending.
If a bit is set, the actual error can be read in the corresponding group.
The Exception Status is output in cyclic data and informs on the current error status
using only one byte. If an error occurs, the current error status can be read via
acyclic services or in cyclic data exchange via the parameter channel. This ensures
that while the current error status is always available in the cyclic data, no
unnecessary data overhead is transmitted.
Bit Function Meaning
0 ALARM, device common The bit is set if an error of the Alarm
1 ALARM, device specific The bit is set if an error of the Alarm
2 ALARM, manufacturer specific The bit is set if an error of the Alarm
3
4 WARNING, device common The bit is set if an error of the Warning
5 WARNING, device specific The bit is set if an error of the Warning
6 WARNING, manufacturer
specific
7 Expanded Format Is constantly on "1" and marks the use of
--
For errors that occur independently of
the type of device used, e.g. supply
error, RAM, ROM, or EEPROM error.
For device specific errors, e.g. filament
rupture (Pirani), or cathode rupture
(BA/HP).
For errors defined by the manufacturer
that are not mentioned in the standard.
Device Common group is detected.
Device Specific group is detected.
Manufacturer Specific group is detected.
Device Common group is detected.
Device Specific group is detected.
The bit is set if an error of the Warning
Manufacturer Common group is detected.
the expanded error output format.
16 tira36e1-a (0310) BPG/HPG400 v1.cp
Page 17

3.1.1.11 Exception Detail Alarm
ID 27
If, in the Exception Status, one of the bits 0 … 2 is set, the current error can be
read in the "Exception Detail Alarm" parameter. The "Exception Detail Alarm"
parameter consists of a total of 10 bytes that inform on the error status of the
gauge.
Due to the use of the expanded error output format, these bytes have the following
structure:
ByteNoName Description Value
0 Common Exception
Detail Size
1 Common Exception
Detail 0
2 Common Exception
Detail 1
3 Device Exception
Detail Size
4 Device Exception
Detail 0
(Pirani error data)
5 Device Exception
Detail 1
(Pirani error data)
6 Device Exception
Detail 2
(BA/HP error data)
7 Device Exception
Detail 3
(BA/HP error data)
8 Manufacturer
Exception Detail Size
9 Manufacturer
Exception Detail 0
Indicates the number of subsequent bytes that contain the
Common Exception Detail Alarm.
Contains current error messages
from the Common Exception
Detail Alarm group.
Contains current error messages
from the Common Exception
Detail Alarm group.
Indicates the number of subsequent bytes that contain the
Device Exception Detail Alarm.
This error information from the
Common Exception Detail Alarm
group refers to Pirani.
This error information from the
Common Exception Detail Alarm
group refers to Pirani.
This error information from the
Common Exception Detail Alarm
group refers to BA/HP.
This error information from the
Common Exception Detail Alarm
group refers to BA/HP.
Indicates the number of subsequent bytes that contain the
Device Exception Detail Alarm.
Contains current error messages
from the Manufacturer Exception
Detail Alarm group.
2
Depending on
error status
Depending on
error status
4
Depending on
error status
Depending on
error status
Depending on
error status
Depending on
error status
1
Depending on
error status
Common Exception
Detail Alarm
Bit Common Exception Detail 0 Bit Common Exception Detail 1
00 00
10 10
2 EPROM exception 2 0
3 EPROM exception 3 0
4 RAM exception 4 0
50 50
60 60
70 70
tira36e1-a (0310) BPG/HPG400 v1.cp 17
Page 18

Device Exception
Detail Alarm
Bit Device Exception Detail 0
Referring to Pirani
1)
Bit Device Exception Detail 1
Referring to Pirani
2)
00 00
1 0 1 Electronics/sensor error Pirani
20 20
30 30
40 40
50 50
60 60
70 70
1)
This byte is a copy of Sensor
Alarm byte 0 of the Heat Transfer
Vacuum Gauge Transducer
Block Common Exception
2)
This byte is a copy of Sensor
Alarm byte 1 of the Heat Transfer
Vacuum Gauge Transducer
Block.
Detail 0.
Manufacturer Exception
Detail Alarm 0
Bit Device Exception Detail 2
Referring to BA/HP
3)
Bit Device Exception Detail 3
Referring to BA/HP
4)
00 00
10 1
Electronics/sensor error BA/HP
20 20
30 30
40 40
50 50
60 60
70 70
3)
This byte is a copy of Sensor
Alarm byte 0 of the Hot Cathode
Ion Gauge Transducer Block.
4)
This byte is a copy of Sensor
Alarm byte 1 of the Hot Cathode
Ion Gauge Transducer Block.
If there is an internal communication error in the gauge, the byte Manufacturer
Exception Detail 0 is set to "1".
18 tira36e1-a (0310) BPG/HPG400 v1.cp
Page 19
3.1.1.12 Exception Detail Warning
ID 28
If, in the Exception Status, one of bits 4 … 6 is set, the current warning can be read
in the parameter "Exception Detail Warning". The Exception Detail Warning
parameter consists of a total of 11 bytes that inform on the error status of the
gauge.
Due to the use of the expanded error output format, these bytes have the following
structure:
ByteNoName Description Value
0 Common Exception
Detail Size
1 Common Exception
Detail 0
2 Common Exception
Detail 1
3 Device Exception
Detail Size
4 Device Exception
Detail 0
5 Device Exception
Detail 1
(Pirani)
6 Device Exception
Detail 2
(Pirani)
7 Device Exception
Detail 3
(BA/HP)
8 Device Exception
Detail 4
(BA/HP)
9 Manufacturer
Exception Detail Size
10 Manufacturer
Exception Detail
Indicates the number of subsequent bytes that contain the
2
Common Exception Detail
Warning.
Contains current error messages
from the Common Exception
Depending on
warning status
Detail Warning group.
Contains current error messages
from the Common Exception
Depending on
warning status
Detail Warning group.
Indicates the number of subsequent bytes that contain the
5
Device Exception Detail Warning.
One Of N Status Extension. Depending on
warning status
This error information from the
Common Exception Detail
Depending on
warning status
Warning group refers to Pirani.
This error information from the
Common Exception Detail
Depending on
warning status
Warnings group refers to Pirani.
This error information from the
Common Exception Detail Alarm
Depending on
warning status
group refers to BA/HP.
This error information from the
Common Exception Detail Alarm
Depending on
warning status
group refers to BA/HP.
Indicates the number of subsequent bytes that contain the
1
Device Exception Detail Warning.
Contains current error messages
from the Manufacturer Exception
Depending on
warning status
Detail Alarm group.
Common Exception
Detail Warning
Bit Common Exception Detail 0 Bit Common Exception Detail 1
00 00
10 10
2 EPROM exception 2 0
3 EPROM exception 3 0
4 RAM exception 4 0
50 50
60 60
70 70
The warning bits are set in the same way as the error bits because here, warnings
have the same meaning as errors.
tira36e1-a (0310) BPG/HPG400 v1.cp 19
Page 20

Device Exception
Detail Warning
Bit Device Exception Detail 0
0 Bit set if
Reading Invalid
1 Bit set if
Device Overrange
2 Bit set if
Device Underrange
30
40
50
60
70
Device Exception Detail 1
Bit
Referring to Pirani
1)
Device Exception Detail 2
Bit
Referring to Pirani
2)
00 00
1 0 1 Electronics/sensor warning
Pirani
20 20
30 30
40 40
50 50
60 60
70 70
1)
This byte is a copy of Sensor
Warning byte 0 of the Heat
Transfer Vacuum Gauge
Transducer Block.
Device Exception Detail 3
Bit
Referring to BA/HP
3)
2)
This byte is a copy of Sensor
Warning byte 1 of the Heat
Transfer Vacuum Gauge
Transducer Block.
Device Exception Detail 4
Bit
Referring to BA/HP
4)
00 00
10 1
Electronics/sensor warning
BA/HP
20 20
30 30
40 40
50 50
60 60
70 70
3)
This byte is a copy of Sensor
Warning byte 0 of the Hot
Cathode Ion Gauge Transducer
Block.
4)
This byte is a copy of Sensor
Warning byte 1 of the Hot
Cathode Ion Gauge Transducer
Block.
Manufacturer Exception
Detail Warning 0
3.1.1.13 Emission On Switch
ID 202
(HPG400-SP Only)
If there is an internal communication error in the gauge, the byte "Manufacturer
Exception Detail 0" is set to "1" (according to the alarm condition).
The parameter contains the value of the switchover point from Pirani to HP
measurement (→ [4], [5], [6]).
This value can be read only and corresponds to the value that can be set with the
"LOW-HIGH" switch on the side of the gauge (→ [4], [6]). The value of the
switchover point is output in the currently selected data unit ( pressure unit).
20 tira36e1-a (0310) BPG/HPG400 v1.cp
Page 21

If COUNTS is selected as pressure unit, the switchover pressure can be calculated
by means of the following formula (PV is the abbreviation of Process Value):
3.1.1.14 Sensor Calibration Switch
ID 203
(HPG400-SP Only)
PV
mbar
The following settings can be made with the five possible switch positions.
Switch position Switchover
0; 1 1 mbar 28 333
2; 3 5×10-1 mbar 32 632
4; 5 2×10-1 mbar 27 867
6; 7 1×10-1 mbar 27 666
8; 9 5×10-2 mbar 27 466
This parameter represents the setting of the calibration switch "CAL ADJ", which is
used for adjusting the sensitivity of the gauge (→ [4], [6]).
The value output corresponds to the marking on the switch.
The following parameters (ID 204 … ID 209) present copies of elements
of the Exception Detail Alarm (ID 27) or the Exception Detail Warning
(ID 28). These parameters are made available in order to allow masters
that do not support the Profibus DPV1 to access the elements of the
Exception Detail Alarm and Warning via the parameter channel. Since
the parameter channel has a limited actual data length (4 bytes), the
attributes ID 27 and ID 28 cannot be read via the parameter channel.
(6 × COUNTS / 4000) - 42.5
=10
pressure
COUNTS
3.1.1.15 Copy Common Exception
Detail Alarm 0 ID 204
3.1.1.16 Copy Device Exception
Detail Alarm 0 … 3 ID 205
3.1.1.17 Copy Manufacturer Exception Detail Alarm 0 ID 206
3.1.1.18 Copy Common Exception
Detail Warning 0 ID 207
3.1.1.19 Copy Device Exception
Detail Warning 1 … 4
ID 208
3.1.1.20 Copy Manufacturer Exception Detail
Warning 0 ID 209
This parameter corresponds to the Common Exception Detail Alarm of the
Exception Detail Alarm (ID 27).
This parameter corresponds to the Device Exception Detail Alarm of the Exception
Detail Alarm (ID 27).
This parameter corresponds to the Manufacturer Exception Detail Alarm of the
Exception Detail Alarm (ID 27).
This parameter corresponds to the Common Exception Detail Warning of the
Exception Detail Warning (ID 28).
This parameter corresponds to the Device Exception Detail Warning of the
Exception Detail Warning (ID 28).
This parameter corresponds to the Manufacturer Exception Detail Warning of the
Exception Detail Warning (ID 28).
tira36e1-a (0310) BPG/HPG400 v1.cp 21
Page 22

3.1.2 Device Block, Device
Behavior
The BPG400-SP / HPG400-SP behaves as described in the status diagram below.
NORMAL
(0)
INIT
(
1
3
(1
(13)
(14)
3)
)
RUNNING
SELFTESTING
)
2
(
(
SELFTEST
EXCEPTION
)
3
(
1
)
OK
IDLE
(10)
EXECUTING
(4)
(5)
(8)
ABORT
(9)
CRITICAL
FAULT
After the start, the gauge independently runs through the INIT and SELFTESTING
status and eventually changes to the IDLE status (if there is no error) or to the
SELFTEST_EXCEPTION status (if there is a gauge error).
When data traffic is taken up, a difference has to be made between cyclic and
acyclic data traffic.
Cyclic data traffic
Acyclic data traffic
As soon as cyclic data interchange is taken up, the gauge automatically changes to
the EXECUTING status.
In acyclic data traffic, a START service has to be transmitted to bring the gauge to
the EXECUTING status.
22 tira36e1-a (0310) BPG/HPG400 v1.cp
Page 23
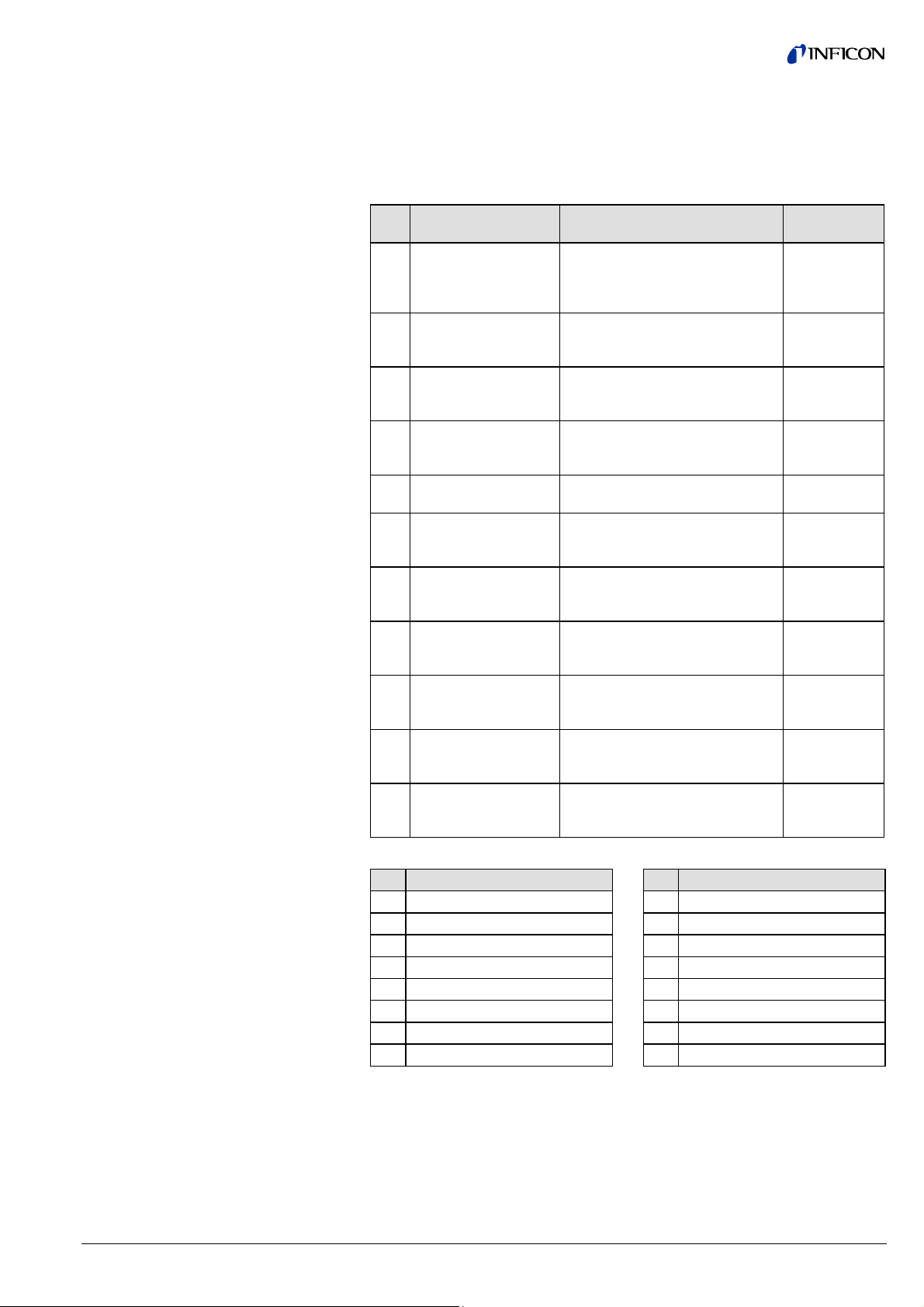
Device statuses
Status name Description
NORMAL The communication interface can respond to com-
mands. All defined blocks of the gauge exist.
RUNNING All block instances are initialized and the individual
parameters have their initial or default values.
SELFTESTING In this status, the gauge performs a selftest.
IDLE All blocks defined in the gauge are initialized and the
complete hardware has been tested and found free
of errors. The value defined in the Safe State is output as measured value.
SELFTESTEXCEPTION During the self test, an error has been detected. The
gauge has changed to the SELFTESTEXCEPTION
status. The cause of the error can be found in the
attributes Device Exception Detail Alarm/Warning of
the Device Block. The value defined in the Safe State
is output as measured value.
EXECUTING The gauge functions normally and outputs the
measured value.
ABORT The Device Block is in the ABORT status. The gauge
specific measurement functions are not carried out.
CRITICALFAULT A device error has occurred. The gauge specific
measurement functions are not carried out. The
value defined in the Safe State is output as
measured value.
3.1.2.1 Device Block
State Command
There are a number of special commands for bringing the gauge into a status it
does not automatically go to.
ID Name Structure Data type Bytes Access Store Range
15 Device Block
State
Command
ID
Name Description
value
0 Inactive No action.
1 Reset Used for reinitializing the device.
2 Abort Brings the device to the ABORT status.
3 Recover Used for bringing the device from the ABORT
4 Execute Brings the unit to the EXECUTING status, in which
5 Stop Brings the gauge to the IDLE status.
6 Perform
Diagnostic
Simple Unsigned8 1 1_R/W
2_R/W
status into the Recovered State IDLE.
the gauge functions normally. As soon as cyclic
data traffic is initialized, this status command is
executed automatically.
Stops the running activity and starts SELFTEST.
N
→ below
3.2 Analog Input Block
tira36e1-a (0310) BPG/HPG400 v1.cp 23
All gauge functions of the BPG400-SP / HPG400-SP are described in the Analog
Input Block.
Since the gauge includes two measuring systems, there are also two Analog Input
Block Instances representing the Pirani measuring part and the ionization measuring part (BA/HP) respectively.
Page 24

3.2.1 One Of N Analog Input
Function Block / SLOT 1
ID Name
15 AI Block Adjust
1)
Structure Data type Bytes Access Store
Simple Unsigned8 1 1/2_W -
Command
16 Block Type Simple Octet string 4 2_R N
46 Channel Instance
Simple Unsigned8 1 1/2_R/W N
Selector
47 PV Selector Simple Unsigned8 1 0_XI 1/2_R D
1)
The above parameters are described below.
3.2.1.1 AI Block Adjust Command
(Adjustment at Atmospheric Pressure)
3.2.1.2 Block Type
3.2.1.3 Channel Instance Selector
3.2.1.4 PV Selector
This service is used for adjusting the gauge at atmospheric pressure (→ [1], [3]
for BPG400-SP and [4], [6] for HPG400-SP). For this purpose, the value "1" has
to be transmitted.
The value of the Block Type ID is "3" (→ table in Appendix A).
The gauge has two instances of the Analog Input Function Block and two instances
of the Vacuum Gauge Transducer Block, or one instance of each block per
measuring systems (Pirani and BA/HP). There are two additional instances for
describing the switching functions (→ section "Analog Sensor Input Function
Block", Instances 3 and 4).
However, there is only one address range for both, querying and setting the corresponding parameters. The Parameter Channel Instance Selector is used for defining the parameters that are written into the address range.
If the Parameter Channel Instance Selector is set to "1", the attributes of Instance 1
are mapped into that address range and can be written or read by addressing
Slot ⇒ Instance ⇒ Parameter-ID.
The PV Selector is determined by the gauge and defines the Analog Input Function
Block Instance from which the measured value is copied into the cyclic output data
telegrams. Therefore, the value output in the cyclic data is always the measured
value of the active instance, i.e. the one that is currently measuring. While the
gauge is measuring in the BA/HP range, the measured value of the ionization
vacuum meter is output in the cyclic data and while the gauge is measuring in the
Pirani range, the measured value of the Pirani is output.
Measuring range
BPG-400-SP
Measuring range
HPG-400-SP
The measured values of Instances 3 and 4 (thresholds of the switching
functions) are not output in the cyclic data.
The pressure ranges, in which measurement is performed either by the Pirani
measuring part or by the BA/HP measuring part, and which are thus called "active",
are indicated below:
Pressure [mbar] PV Selector
5.5×10-3 < p ≤ Overrange
-10
5×10
< p < 5.5×10
1)
Overrange means pressure values >1000 mbar.
1)
-3
Pirani (=1)
BA (=2)
The activation value of the emission of the HPG400-SP can be defined
via a switch on the gauge (→ [4], [6]). The selected value is called
"p_active_threshold". The activation value of the emission can be read
with the parameter ID 202 "Emission Switch ON Switch" in the Device
Block.
Pressure [mbar] PV Selector
p_active_threshold < p < Overrange
Underrange ≤ p < p_active_threshold
1)
Overrange means pressure values >1000 mbar.
1)
Pirani (=1)
HP (=2)
24 tira36e1-a (0310) BPG/HPG400 v1.cp
Page 25

3.2.2 Analog Sensor Input
Function Block
Instance 1 / SLOT 1
Instance 1 of the Analog Sensor Input Function Blocks describes the functionality
of the Pirani measuring part of the gauge.
The following attributes are supported:
ID Name Structure Data type Bytes Access Store
19 Process Value
(PV)
Simple According to
Parameter Data
Type
- 0_XI
1_R
2_R
20 Status Simple Unsigned8 1 0_XI
D
D
1/2_R
21 Data Type Simple Unsigned8 1 2_R/W N
22 Data Units Simple Unsigned16 2 2_R/W N
23 Reading Valid Simple Boolean 1 1_R
D
2_R
24 Full Scale Simple According to
- 1/2_R N
Data Type value
(Parameter 21)
39 Safe State Simple Unsigned8 1 1/2_R/W N
40 Safe Value Simple According to
- 1/2_R/W N
Data Type value
(Parameter 21)
44 Overrange Simple According to
- 1/2_R N
Data Type value
(Parameter 21)
45 Underrange Simple According to
- 1/2_R N
Data Type value
(Parameter 21)
3.2.2.1 Process Value
BPG400-SP
HPG400-SP
The Process Value contains the measured value of the Pirani Device Instance in
the currently selected data unit (ID 22) and in the selected data type (ID 21).
If the device is not in the Executing Status (ID 25, Device Block), the value defined
in the Safe State is output.
Values output in the data unit COUNTS can be converted into a pressure value by
means of the following formulas:
Calculation of the pressure (PV is the abbreviation used for Process Value):
PV
PV
PV
PV
mbar
Torr
Micron
Pa
(COUNTS / 1000) - 12.5
=10
= 0.75006168 × PV
=10-3 × PV
= 100 × PV
Torr
mbar
mbar
Calculation of the pressure (PV is the abbreviation used for Process Value):
PV
PV
mbar
Torr
(6 × COUNTS / 4000) - 42.5
=10
= 0.75006168 × PV
mbar
PV
Micron
PV
Pa
3.2.2.2 Status
tira36e1-a (0310) BPG/HPG400 v1.cp 25
This parameter remains on "0".
=10-3 × PV
= 100 × PV
Torr
mbar
Page 26

3.2.2.3 Data Type
Two data types are supported: Float and Integer16.
In cyclic data exchange, the data type cannot be modified. The data type setting
can only be modified when the gauge is in the IDLE status. By defining the
configuration data for cyclic data exchange (selection of standard telegrams), the
data type used in the selected standard telegram is taken over. All settings
previously made in acyclic data traffic are thus overwritten.
If the data type is set in one instance, that data type setting applies to all instances.
Likewise, when a standard telegram is selected, the data type used by that
standard telegram will be valid for all instances.
Coding Data type
3 Integer16
8 Float
3.2.2.4 Data Unit
3.2.2.5 Reading Valid
The gauge supports the following pressure units:
Coding Data type
1001 COUNTS
1301 Torr
1302 mTorr (Micron)
1308 mbar
1309 Pascal
For safety reasons, it is not possible to change the pressure unit while
the gauge is cyclically interchanging data with a DP/V0 master.
The data unit setting can only be modified when the gauge is in the IDLE
status.
In cyclic data traffic, the data unit must be set in the User Parameter
Data. All settings previously made in acyclic data traffic are overwritten
(→ section "User Parameter Data").
If the data unit is set in one instance, that data unit setting applies to all
instances. Likewise, the data unit setting made in the User Parameter
Data is valid for all instances.
This parameter indicates that the pressure reading is within a valid range, which
means that:
• The gauge is in the EXECUTING status.
• There is no error (ID 26, 27 or 28 of the Device Block)
• The measured value is lower than the overrange value and higher than the
underrange value.
If this value is set to zero, the pressure reading is not valid. In such a
case, either check Exception Status (ID 26, Device Block) to find out
whether there is an error or check One Of N Status Extension (ID 120,
One Of N Vacuum Gauge Transducer Block) to find out whether the
measured value is out of the specified measuring range (overrange or
underrange mode).
3.2.2.6 Full Scale
BGP400-SP
26 tira36e1-a (0310) BPG/HPG400 v1.cp
This parameter contains the valid maximum value of the pressure reading
(1000 mbar) in the currently selected data unit and data type.
Pressure unit Full scale
COUNTS 31 000
Torr 750.06168
mTorr (Micron) 750 061.68
mbar 1 000
Pascal 100 000
Page 27

HGP400-SP
Pressure unit Full scale
COUNTS 30 333
Torr 750.06168
mTorr (Micron) 750 061.68
mbar 1 000
Pascal 100 000
3.2.2.7 Safe State
3.2.2.8 Safe Value
3.2.2.9 Overrange
When the gauge is not in the EXECUTING status (ID 25, Device Block) or if there
is a device error, a value defined by Safe State is output as pressure value. You
can select among:
• "0"
• Full scale
• Last valid value
• Safe Value (user-definable in ID 40)
Safe State Coding PV behavior
Zero 0 The Process Value (measured value ID 19) is set
to 0.
Full Scale 1 The Process Value (measured value ID 19) is set
to the full scale value (ID 24).
Hold Last Value 2 The Process Value is set to the last valid value
obtained in the EXECUTING status.
Use Safe Value 3 The Process Value (measured value ID 19) is set
to the Safe Value (ID 40).
The Safe Value is the value output with the Process Value parameter (ID 19) when
an error occurs or the gauge goes to the NOT EXECUTING status. If this value is
set to zero, it will remain on zero when the data unit is changed.
Overrange is the highest valid measured value at which Reading Valid is still on
"1".
BGP400-SP
HGP400-SP
3.2.2.10 Underrange
BGP400-SP
Pressure unit Overrange
COUNTS 31 000
Torr 750.06168
mTorr (Micron) 750 061.68
mbar 1 000
Pascal 100 000
Pressure unit Overrange
COUNTS 30 333
Torr 750.06168
mTorr (Micron) 750 061.68
mbar 1 000
Pascal 100 000
Underrange is the lowest valid measured value at which Reading Valid is still on
"1".
Pressure unit Underrange
COUNTS 20 480.7254
Torr 4.12534×10
-3
mTorr (Micron) 4.12534
mbar 5.5×10
-3
Pascal 0.55
tira36e1-a (0310) BPG/HPG400 v1.cp 27
Page 28

HGP400-SP
Pressure unit Underrange
COUNTS 27 000
Torr 7.50053×10
mTorr (Micron) 7.50053
mbar 1.0×10
Pascal 1
-2
-3
3.2.3 Analog Sensor Input
Function Block
Instance 2 / SLOT 1
Instance 2 of the Analog Sensor Input Function Block describes the functionality of
the BA/HP measuring part of the gauge.
In Instance 2, the same attributes as in Instance 1 are supported:
ID Name Structure Data type Bytes Access Store
19 Process Value
(PV)
20 Status Simple Unsigned8 1 0_XI
21 Data Type Simple Unsigned8 1 2_R/W N
22 Data Units Simple Unsigned16 2 2_R/W N
23 Reading Valid Simple Boolean 1 1_R
24 Full Scale Simple According to
39 Safe State Simple Unsigned8 1 1/2_R/W N
40 Safe Value Simple According to
44 Overrange Simple According to
45
Underrange Simple According to
Simple According to
Parameter Data
Type
Data Type value
(parameter 21)
Data Type value
(parameter 21)
Data Type value
(parameter 21)
Data Type value
(parameter 21)
- 0_XI
1_R
2_R
1/2_R
2_R
- 1/2_R N
- 1/2_R/W N
- 1/2_R N
- 1/2_R N
D
D
D
3.2.3.1 Process Value
28 tira36e1-a (0310) BPG/HPG400 v1.cp
The Process Value contains the measured value of the BA/HP Device Instance in
the currently selected data unit (ID 22) and in the selected data type (ID 21).
If the device is not in the EXECUTING status (ID 25, Device Block), the value
defined in the Safe State is output.
Values output in the data unit COUNTS can be converted into a pressure value by
means of the following formulas:
Page 29

BPG400-SP
Calculation of the pressure (PV is the abbreviation used for Process Value):
PV
mbar
(COUNTS / 2000) - 12.5
=10
HPG400-SP
3.2.3.2 Status
3.2.3.3 Data Type
PV
PV
PV
Torr
Micron
Pa
= 0.75006168 × PV
=10-3 × PV
= 100 × PV
Torr
mbar
mbar
Calculation of the pressure (PV is the abbreviation used for Process Value):
PV
PV
PV
PV
mbar
Torr
Micron
Pa
(6 × COUNTS / 16000) - 9.125
=10
= 0.75006168 × PV
=10-3 × PV
= 100 × PV
Torr
mbar
mbar
This parameter is remains on "0".
Two data types are supported: Float and Integer16.
In cyclic data traffic, the data type cannot be modified. The data type setting can
only be modified when the gauge is in the IDLE status. By defining the configuration data for cyclic data traffic (selection of standard telegram), the data type used
in the selected standard telegram is taken over. All settings previously made in
acyclic data traffic are thus overwritten.
If the data type is set in one instance, that data type setting applies to all instances.
Likewise, when a standard telegram is selected, the data type used by that
standard telegram will be valid for all instances
3.2.3.4 Data Unit
Coding Data type
3 Integer16
8 Float
The gauge supports the following pressure units:
Coding Pressure unit
1001 COUNTS
1301 Torr
1302 mTorr (Micron)
1308 mbar
1309 Pascal
For safety reasons, it is not possible to change the pressure unit while
the gauge is cyclically interchanging data with a DP/V0 master.
The data unit setting can only be modified when the gauge is in the IDLE
status.
In cyclic data traffic, the data unit must be set in the User Parameter
Data. All settings previously made in acyclic data traffic are overwritten
(→ section "User Parameter Data").
If the data unit is set in one instance, that data unit setting applies to all
instances. Likewise, the data unit setting made in the User Parameter
Data is valid for all instances.
tira36e1-a (0310) BPG/HPG400 v1.cp 29
Page 30

3.2.3.5 Reading Valid
This parameter indicates that the pressure reading is within a valid range, which
means that:
• The gauge is in the EXECUTING status.
• There is no error (ID 26, 27 or 28 of the Device Block)
• The measured value is lower than the overrange value and higher than the
underrange value.
If this value is set to zero, the pressure reading is not valid. In such a
case, either check Exception Status (ID 26, Device Block) to find out
whether there is an error or check One Of N Status Extension (ID 120,
One Of N Vacuum Gauge Transducer Block) to find out whether the
measured value is out of the specified measuring range (overrange or
underrange mode).
3.2.3.6 Full Scale
BGP400-SP
HGP400-SP
3.2.3.7 Safe State
This parameter contains the valid maximum value of the pressure reading
(1000 mbar) in the currently selected data unit and data type.
Pressure unit Full scale
COUNTS 21 602.06
Torr 1.50×10
-2
mTorr (Micron) 1.5
mbar 2.0×10
-2
Pascal 2
Pressure unit Full scale
COUNTS 24 333
Torr 7.5006168×10
mTorr (Micron) 7.5006168×10
-1
2
mbar 1
Pascal 100
When the gauge is not in the EXECUTING status (ID 25, Device Block) or if there
is a device error, a value defined by Safe State is output as pressure value. You
can select among:
• "0"
• Full scale
• Last valid value
• Safe Value (user-definable in ID 40)
Safe State Coding PV behavior
Zero 0 The Process Value (measured value ID 19) is set
to 0.
Full Scale 1 The Process Value (measured value ID 19) is set
to the full scale value (ID 24).
Hold Last Value 2 The Process Value is set to the last valid value
obtained in the EXECUTING status.
Use Safe Value 3 The Process Value (measured value ID 19) is set
to the Safe Value (ID 40).
3.2.3.8 Safe Value
The Safe Value is the value output with the Process Value Parameter (ID 19) when
an error occurs or the gauge goes to the NOT EXECUTING status. If this value is
set to zero, it will remain on zero when the data unit is changed.
30 tira36e1-a (0310) BPG/HPG400 v1.cp
Page 31

3.2.3.9 Overrange
Overrange is the highest valid measured value at which Reading Valid is still on
"1".
BGP400-SP
HGP400-SP
3.2.3.10 Underrange
BGP400-SP
Pressure unit Overrange
COUNTS 21 602.06
Torr 1.5×10
-2
mTorr (Micron) 1.5
mbar 2×10
-2
Pascal 2.0
Pressure unit Overrange
COUNTS 24 333
Torr 7.5006168×10
mTorr (Micron) 7.5006168×10
-1
2
mbar 1
Pascal 100
Underrange is the lowest valid measured value at which Reading Valid is still on
"1".
Pressure unit Underrange
COUNTS 6397.95
Torr 3.7503×10
mTorr (Micron) 3.7503×10
mbar 5.0×10
Pascal 5.0×10
-10
-7
-10
-8
HGP400-SP
Pressure unit Underrange
COUNTS 8333
Torr 7.5006168×10
mTorr (Micron) 7.5006168×10
mbar 1×10
Pascal 1×10
-6
-4
-7
-4
tira36e1-a (0310) BPG/HPG400 v1.cp 31
Page 32

3.2.4 Analog Sensor Input
Function Block
Instances 3
and 4 / SLOT 1
Instances 3 and 4 of the Analog Sensor Input Function Block describe the functionality of the two switching functions (Setpoint A / Setpoint B) of the gauge
(setting the switching functions → [2], [3] for BPG400-SP and [5], [6] for
HPG400-SP):
Instance Setpoint
3A
4B
With Process Values (ID 19), the current threshold setting (made by means of the
potentiometers) is read; with Status, the relay status (open/closed) can be read.
ID Name Structure Data type Bytes Access Store
19 Process Value
(PV)
20 Status Simple Unsigned8 1 1_R
Simple Unsigned16 - 1_R
2_R
D
D
2_R
21 Data Type Simple Unsigned8 1 2_R
N
2_W
22 Data Units Simple Unsigned16 2 2_R
N
2_W
23 Reading Valid Simple Boolean 1 1_R
D
2_R
3.2.4.1 Process Value
BPG400-SP
HPG400-SP
BPG400-SP
HPG400-SP
The Process Value contains the current setting of the threshold potentiometers for
"Setpoint A" and "Setpoint B" in the currently selected data unit and data type.
If the pressure drops below the set threshold, the relay is closed. If after that, the
pressure rises above that threshold with a hysteresis of 10%, the relay is opened
again (→ [2], [3] for BPG400-SP and [5], [6] for HPG400-SP).
The Process Value PV is output in the currently selected data unit and data type.
Values output in the pressure unit COUNTS can be converted into a pressure value
by means of the following formulas:
p
p
mbar
mbar
(COUNTS / 2000) - 12.5
=10
(COUNTS - 22 999) / 2444
=10
The threshold voltages of the Setpoint potentiometer converted into a pressure
value by means of the following formulas:
p
p
mbar
mbar
(1.23011 × U) - 9.30102999
=10
(9 × U / 10) - 6
=10
Where: U is the threshold voltage [V] of the corresponding Setpoint (A, B),
measured at the D-Sub connector (sensor cable connector) of the gauge
(→ [2], [3] for BPG400-SP and [5], [6] for HPG400-SP).
The switching functions work only at pressures <100 mbar. If a higher
threshold has been selected, the relay is only activated at pressures
lower than 100 mbar.
32 tira36e1-a (0310) BPG/HPG400 v1.cp
Page 33

3.2.4.2 Status
If the pressure drops below the set threshold, the relay is activated (normally open
contact closed). If the pressure than rises above the set threshold with a hysteresis
of 10%, the relay is deactivated again (normally open contact open).
Bit Definition
00
1 Low Alarm Exception: 0 = cleared; 1 = set
20
3 Low Warning Exception: 0 = cleared; 1 = set
40
50
60
70
3.2.4.3 Data Type
3.2.4.4 Data Unit
3.2.4.5 Reading Valid
3.3 Transducer Block
3.3.1 One Of N Vacuum Gauge
Transducer Block /
SLOT 1
3.3.1.1 One Of N Status Extension
Description → Instance 1.
Description → Instance 1.
This parameter is always on "1".
ID Name Structure Data type Bytes Access Store
120 One Of N Status
Extension
This parameter indicates whether the overrange or underrange of the gauge is
exceeded.
Bit7 Bit6 Bit5 Bit4 Bit3 Bit2 Bit1 Bit0
00000Underrange
If the gauge is operated in its overrange or underrange, the corresponding bit and
additionally the bit "Reading Invalid" is set.
If an error occurs, the bit "Reading Invalid" as well as the corresponding error bits
in Device Block (ID 26, 27, 28 Device Block) are set.
Simple UINT8 1 1_R
2_R
Overrange
Exceeded
Exceeded
V
Reading
Invalid
3.3.2 Heat Transfer Vacuum
Gauge Transducer
Block / SLOT 1
3.3.2.1 Block Type
tira36e1-a (0310) BPG/HPG400 v1.cp 33
ID Name Structure Data type Bytes Access Store
101 Block Type Simple Octet string 4 2_R
102 Status Extension Simple UINT8 1 1/2_R V
103 Sensor Alarm Struct Array of 2 bytes 2 1/2_R V
104 Sensor Warning Struct Array of 2 bytes 2 1/2_R V
140 Full Scale State Simple UINT8 1 1/2_R V
According to the table in Appendix A, the Block Type ID has the value "13".
Page 34

3.3.2.2 Status Extension
This parameter indicates whether the overrange or underrange of the Heat
Transfer Vacuum Gauge device instance is exceeded.
Bit7 Bit6 Bit5 Bit4 Bit3 Bit2 Bit1 Bit0
0 0 0 0 0 Underrange
Exceeded
Overrange
Exceeded
Reading
Invalid
If the instance is operated in its overrange or underrange, the corresponding bit
and additionally the bit "Reading Invalid" is set.
If an error occurs, the bit "Reading Invalid" as well as the corresponding error bits
in Device Block (ID 26, 27, 28 Device Block) are set.
3.3.2.3 Sensor Alarm
3.3.2.4 Sensor Warning
3.3.2.5 Full Scale State
This parameter indicates the detectable errors occurring in connection with the
Pirani measuring part. The present implementation allows detection of one error.
Bit7 Bit6 Bit5 Bit4 Bit3 Bit2 Bit1 Bit0
Byte 0 0 0 0 0 0 0 Reserved 0
Byte 1 0 0 0 0 0 0 Electronics Failure
1)
Electronics Failure includes a sensor error.
1)
0
The Sensor Alarm bits defined here are copied into the Device Block ID 27 in the
"Device Exception Detail Alarm" range of the Pirani measuring part.
This parameter indicates the detectable warnings occurring in connection with the
Pirani measuring part. The present implementation allows detection of one warning.
Bit7 Bit6 Bit5 Bit4 Bit3 Bit2 Bit1 Bit0
Byte 0 0 0 0 0 0 0 Reserved 0
Byte 1 0 0 0 0 0 0 Electronics Warning
1)
Electronics Warning indicates that the Pirani measuring part has to be adjusted
1)
0
(→ [1], [3] for BPG400-SP and [4], [6] for HPG400-SP).
The Sensor Warning bits defined here are copied into the Device Block ID 28 in the
"Device Exception Detail Warning" range of the Pirani measuring part.
This Parameter is set to "1" while the Full Scale adjustment is carried out
(→ [1], [3] for BPG400-SP and [4], [6] for HPG400-SP).
34 tira36e1-a (0310) BPG/HPG400 v1.cp
Page 35

3.3.3 Hot Cathode Ion Gauge
Transducer Block /
SLOT 1
ID Name Structure Data type Bytes Access Store Initial Value
14 Hot Cathode
Block State
Rec 1 1_W
2_W
FALSE
Command
101 Block Type Simple Octet
4 2_R 16
string
102 Status
Extension
103 Sensor
Alarm
104 Sensor
Warning
105 Emission
Status
106 Emission
Current
109 Degas
Status
Simple UINT8 1 1_R
2_R
Struct Array of
2 bytes
Struct Array of
2 bytes
2 1_R
2_R
2 1_R
2_R
Simple Boolean 1 1_R/W
2_R/W
Simple FLOAT 4 1_R/W
2_R/W
Simple Boolean 1 1_R
2_R
V0
V0
V0
V0
NV BPG400-SP
only
V BPG400-SP
only
3.3.3.1 Block Type
3.3.3.2 Status Extension
3.3.3.3 Sensor Alarm
According to the table in Appendix a, the Block Type ID has the value "16".
This parameter indicates that the overrange or underrange of the Hot Cathode Ion
Gauge instance is exceeded.
Bit7 Bit6 Bit5 Bit4 Bit3 Bit2 Bit1 Bit0
0 0 0 0 0 Underrange
Exceeded
Overrange
Exceeded
Reading
Invalid
If the instance is operated in its overrange or underrange, the corresponding bit
and additionally the bit "Reading Invalid" is set.
If an error occurs, the bit "Reading Invalid" as well as the corresponding error bits
in Device Block (ID 26, 27, 28 Device Block) are set.
This parameter indicates the detectable errors occurring in connection with the
BA/HP measuring part. The present implementation allows detection of one error.
Bit7 Bit6 Bit5 Bit4 Bit3 Bit2 Bit1 Bit0
Byte 0 0 0 0 0 0 0 0 0
Byte 1 0 0 0 0 0 0 Electronics Failure
1)
Electronics Failure includes a sensor error.
1)
0
The Sensor Alarm bits defined here are copied into the Device Block ID 27 in the
"Device Exception Detail Alarm" range of the BA measuring part.
3.3.3.4 Sensor Warning
This parameter indicates the detectable warnings occurring in connection with the
BA/HP measuring part. The present implementation allows detection of one
warning.
Bit7 Bit6 Bit5 Bit4 Bit3 Bit2 Bit1 Bit0
Byte 0 0 0 0 0 0 0 0 0
Byte 1 0 0 0 0 0 0 Electronics Warning 0
The Sensor Warning bits defined here are copied into the Device Block ID 28 in the
"Device Exception Detail Warning" range of the BA/HP measuring part.
tira36e1-a (0310) BPG/HPG400 v1.cp 35
Page 36

3.3.3.5 Emission Status
This parameter indicates the emission status of the gauge.
BPG400-SP
HPG400-SP
3.3.3.6 Emission Current
(BPG400-SP Only)
3.3.3.7 Degas Status
(BPG400-SP Only)
Emission status Bit 1 Bit 0 Meaning
False 0 0 Emission Off
TRUE 0 1 Emission current low
TRUE 1 0 Emission current high
TRUE 1 1 Degas
Emission status Bit 0 Meaning
FALSE 0 Emission Off
TRUE 1 Emission On
This parameter indicates the value of the emission current in mA.
Emission current [mA] Bit 1 Bit 0
000
0.025 0 1
510
20 1 1
This parameter indicates whether the gauge is in Degas mode.
Degas Status Bit 0 Bit 1 Meaning
FALSE 0 0 Degas Off
TRUE 1 1 Degas On
3.3.3.8 Hot Cathode Block State
Command
(BPG400-SP Only)
This service is used for activating the Degas mode via Profibus.
Byte Name Structure Data type Bytes Access
0 State Command Simple Unsigned8 1 1/2_W
1 State Command
Data Field...
State
Command
0 Inactive No action
1 Set Degas
1)
The State Command Data Field can have the following values:
0 Degas Off
1 Degas On
1)
Name Description
Activates/deactivates the Degas mode
State
This service is used for activating/deactivating the
Degas mode (p < 7.2×10
If the Degas mode has not been deactivated with
Degas Off before, it is automatically turned off after
3 minutes.
Simple Unsigned8 1 1/2_W
-6
mbar).
36 tira36e1-a (0310) BPG/HPG400 v1.cp
Page 37

Appendix A: Definitions
Data types
Definitions
Store characteristics
Abbreviation Range Data type
INT8 -27 … (27 - 1) Integer 1 byte
INT16 -215 … (2
15
- 1) Integer 2 byte
INT32 -231 … (231 - 1) Integer 4 byte
UINT8 0 … (28 - 1) Unsigned integer 1 byte
UINT16 0 … (216 - 1) Unsigned integer 2 byte
UINT32 0 … (231 - 1) Unsigned integer 4 byte
FLOAT
±3.402 × 10
38
Floating Point, IEEE 754 Short Real Number,
4 byte
VSTRING(n) ISO 646 and ISO 2375
OSTRING(n) Octet string
Term Meaning
Byte Number of bytes used by a data structure (integer value)
Store This parameter defines whether the values are stored in non-
volatile memory (→ store characteristics)
Default Manufacturer-defined value
Abbreviation Meaning
V "Volatile": Value is not saved to the RAM or EEPROM and is lost
in the event of a power failure
N "Nonvolatile": Value is saved to the RAM or EEPROM and is not
lost in the event of a power failure
Data access
Abbreviation Meaning
1_R/W Acyclically readable and writeable by a Master Class 1
2_R/W Acyclically readable and writeable by a Master Class 2
1/2_R/W Acyclically readable and writeable by a Master Class 1 and 2
1_R Acyclically readable by a master Class 1
2_R Acyclically readable by a master Class 2
1/2_R Acyclically readable by a master Class 1 and 2
1_W Acyclically writeable by a master Class 1
2_W Acyclically writeable by a master Class 2
1/2_W Acyclically writeable by a master Class 1 and 2
0_XI Cyclic output data with master Class 1
tira36e1-a (0310) BPG/HPG400 v1.cp 37
Page 38

Definitions from the Profibus
standard
The following table explains terms used in connection with the Profibus.
Term Meaning
Alert Elements Alert Elements are used to communicate notification mes-
sages from slave to master when warnings, alarms or
events are detected.
Application A software functional unit consisting of an interconnected
aggregation of function blocks, events and objects, which
may be distributed and which may have interfaces with
other applications.
Characteristic An characteristic is a property or characteristic of an entity.
(Au) In block applications a block interface is defined by
input/output parameters. These parameters have characteristics called parameter characteristics. Examples are
access rights and identification names.
(IT) The UML defines characteristics as a feature within a
classifier that describes a range of values that instances of
the classifier may hold. It is a property of a class instance
(object).
Block
(Block Instance)
Class (IT) A class represents a template for several objects and
Configuration (of a
system/device)
Data Structure An aggregate whose elements need not be of the same
Data Type A data item with certain characteristics and permissible
Device A physical entity capable of performing one or more speci-
Direction of Data Input data are transmitted from the device to the bus.
Direction of Flow A positive set point causes a flow from P to A.
Entity A particular thing, such as a person, place, process, object,
Function (1) A specific purpose of an entity.
Function Block A named block consisting of one or more input, output and
A logical processing unit of software comprising an individual, named copy of the block and associated parameters
specified by a block type, which persists from one invocation of the block to the next. Concept similar to the class/
object approach, but well suited to the automation requirements.
describes how these objects are structured internally. Objects of the same class have the same definition both for
their operations and for their information structures.
A step in system design: selecting functional units, assigning their locations and identifiers and defining their interconnections.
data type, and each of them is uniquely referenced by an
offset identifier.
operations on that data, e.g. INT8.
fied functions in a particular context and delimited by its
interfaces.
Output data are transmitted from the bus to the device.
concept, association or event.
(2) One of a group of actions performed by an entity.
contained parameters. Function blocks represent the basic
automation functions performed by an application which is
as independent as possible from the specifics of I/O devices
and the network. Each function block processes input
parameters according to a specified algorithm and an internal set of contained parameters. They produce output parameters that are available for use within the same function
block application or by other function block applications.
38 tira36e1-a (0310) BPG/HPG400 v1.cp
Page 39

Definitions from the Profibus
standard (cont.)
Term Meaning
Function Block
Application
Application of an automation system performed by a Device
Block, Function Block, Transducer Block and accompanied
elements.
Instance A set of data related to an invocation of a function block or a
class.
Internal Resolution
(ir)
The internal resolution is 16383 (3FFF
-16384 (C000
) for -100% of the range.
hex
) for 100% and
hex
Mode Determines the block operating mode and available modes
for a block instance.
Object (IT) A software entity having identity, attributes and behav-
ior.
Parameter A variable that is given a constant value for a specified
application and that may denote the application.
Device Block A Device Block is a named block. Hardware specific pa-
rameters of a field device, which are associated with a resource, are made visible through the Device Block. Similar
to transducer blocks, they insulate function blocks from the
physical hardware by a set of implementation independent
hardware parameters.
Record A set of data items of different data types treated as a unit.
Resource A resource is considered to be a logical subdivision within
the software (and possibly hardware) structure of a device.
Resources have independent control of their operation. The
definition of a resource may be modified without affecting
other resources within a device. A resource accepts and
processes data and/or events from the process and/or
communication interfaces and returns data and/or events to
the process and/or communication interfaces, as specified
by the applications utilizing the resource. An interoperable
network view of applications is provided through device resources. Each resource specifies the network visible aspects of one or more local applications (or parts of distributed applications).
Simple Variable A single variable which is characterized by a defined Data
Type.
Substitute Value In case an optional parameter has not been implemented,
the device behaves according to the substitute value for this
parameter.
Transducer Block Transducer Block is a named block. Transducer blocks
insulate function blocks from the specifics of I/O devices,
such as sensors, actuators, and switches. Transducer
blocks control access to I/O devices through a device independent interface defined for use by function blocks.
Transducer blocks also perform functions, such as calibration and linearization, on I/O data to convert it to a
device independent representation. Their interface to
function blocks is defined as one or more implementation
independent I/O channels.
Variable A software entity that may assume any one of a set of
values. The values of a variable are usually restricted to a
certain data type.
tira36e1-a (0310) BPG/HPG400 v1.cp 39
Page 40

Appendix B: Block Type
Currently defined Block Type IDs
Block Name Block Type ID
Device Block 1
Sensor Analog Input Function Block 2
One of N Channel Sensor Analog Input Function Block 3
Multi Channel Sensor Analog Input Function Block 4
Discrete Input Function Block 5
Actuation Analog Output Function Block 6
Discrete Output Function Block 7
Analog Output Function Block 8
Single Stage Controller Function Block 9
Gas Calibration Transducer Block 10
Flow Transducer Block 11
Sensor Analog Input Ambient Temperature Transducer Block 12
Heat Transfer Vacuum Gauge...
1)
13
Diaphragm Gauge 14
Cold Cathode Ion Gauge 15
Hot Cathode Ion Gauge
2)
16
Trip Point Function Block 17
Reserved 18 … 28 - 1
Manufacturer-specific 28 … 216 - 1
1)
= Pirani measuring system
2)
= BA/HP measuring system
40 tira36e1-a (0310) BPG/HPG400 v1.cp
Page 41

Appendix C: Electrical Connections
Technical data of gauges → [1],[2] [3] for BPG400-SP and [4], [5], [6] for
HPG400-SP.
Sensor cable connection
BPG400-SP, HPG400-SP
BPG400-SP, HPG400-SP
Threshold value, SP A
Threshold value, SP B
SP A
SP B
TxD
RxD
1)
Degas
+U
Measuring
b
signal
R
Id
3
6
1
4
9
11
13
14
7
8
2
12
5
10
15
RS232
Degas
1.25 AT
24V
Identification
Electrical connection
Pin 1 Relay Switching function A, common
Pin 2 Signal output (measuring signal) 0 … +10 V
Pin 3 Threshold value (Setpoint) A 0 … +10 V
Pin 4 Relay Switching function A, normally open contact
Pin 5 Supply common, GND
Pin 6 Threshold value (Setpoint) B 0 … +10 V
Pin 7 Degas on, active high
1)
+24 V
Pin 8 Supply of electronics unit +24 V
Pin 9 Relay Switching function B, Common
Pin 10 Gauge identification:
BPG400-SP: RId = 42 kOhm
HPG400-SP: R
= 56 kOhm
Id
Pin 11 Relay Switching function B, normally open contact
Pin 12 Signal common GND
Pin 13 RS232, TxD
Pin 14 RS232, RxD
Pin 15 Shielding, housing GND
9
15
1
8
D-Sub, 15 pins
female,
soldering side
1)
Degas function only for BPG400-SP; pin 7 is not connected in the HPG400-SP.
tira36e1-a (0310) BPG/HPG400 v1.cp 41
Page 42

Profibus connection
1 5
D-Sub, 9 pins, male
soldering side
6 9
Pin 1 not connected
Pin 2 not connected
Pin 3 RxD/TxD-P
Pin 4 CNTR-P
Pin 5 DGND
Pin 6 VP
1)
2)
2)
Pin 7 not connected
Pin 8 RxD/TxD-N
Pin 9 not connected
1)
Only to be connected if an optical link module is used.
2)
Only required as line termination for devices at both ends of bus cable
(
→ [7], [8]).
42 tira36e1-a (0310) BPG/HPG400 v1.cp
Page 43

Appendix D: Literature
[1] www.inficon.com
Instruction Sheet
BPG400, BPG400-SP, BPG400-SD, BPG400-SR
tima03e1
INFICON AG, LI–9496 Balzers, Liechtenstein
[2] www.inficon.com
Instruction Sheet
BPG400-SP, BPG400-SD, BPG400-SR
tima36e1
INFICON AG, LI–9496 Balzers, Liechtenstein
[3] www.inficon.com
Operating Manual
BPG400, BPG400-SP, BPG400-SD, BPG400-SR
tina03e1
INFICON AG, LI–9496 Balzers, Liechtenstein
[4] www.inficon.com
Instruction Sheet
HPG400, HPG400-SP, HPG400-SD
tima31e1
INFICON AG, LI–9496 Balzers, Liechtenstein
[5] www.inficon.com
Instruction Sheet
HPG400-SP, HPG400-SD
tima32e1
INFICON AG, LI–9496 Balzers, Liechtenstein
[6] www.inficon.com
Operating Manual
HPG400, HPG400-SP, HPG400-SD
tina31e1
INFICON AG, LI–9496 Balzers, Liechtenstein
[7] www.profibus.com
(Profibus user organization)
[8] European Standard for Profibus EN 50170
tira36e1-a (0310) BPG/HPG400 v1.cp 43
Page 44

LI–9496 Balzers
Liechtenstein
Tel +423 / 388 3111
Fax +423 / 388 3700
Original: German tira36d1-a (0310) reach.liechtenstein@inficon.com
t i r a36e1- a
www.inficon.com
 Loading...
Loading...