

Page 1

Communication Protocol
®
EtherCAT
for Bayard-Alpert Pirani Gauge
BPG402-SE
tira93e1 (2014-04) 1
Page 2
General Information
Intended Use
EtherCAT–Interface
Product Identification
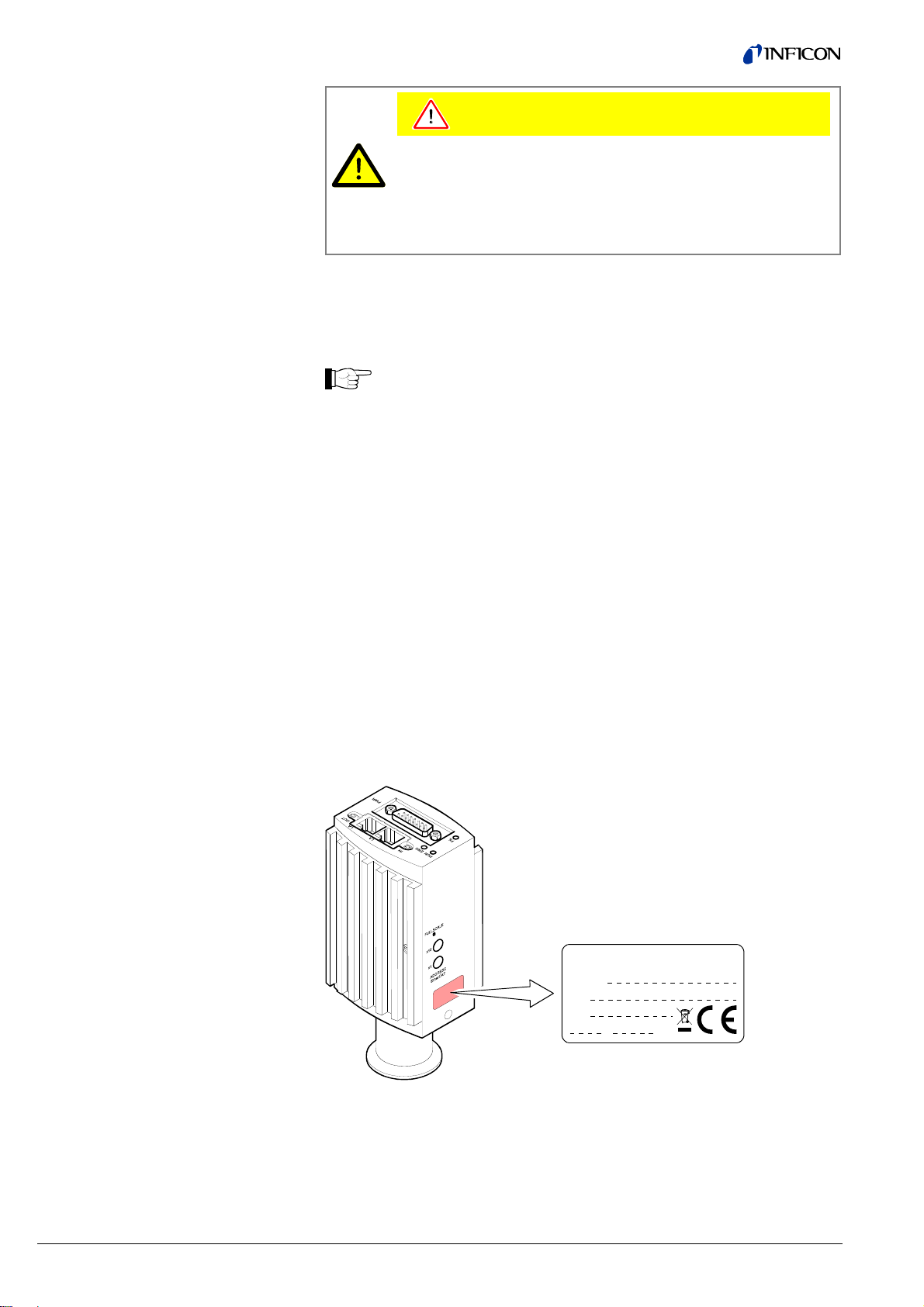
Caution
Caution: data transmission errors
Any attempt to simultaneously operate the gauge via the RS232C
Serial Interface and EtherCAT interface may result in incorrect data
and data transmission errors.
Therefore, it is inadmissible to simultaneously operate the gauge via
This Communication Protocol contains instructions for operating EtherCAT interfaces (slaves) together with a master.
The following description of the EtherCAT® interface is compliant to the EtherCAT
specification of the EtherCAT Technology Group (ETG) and to the "EtherCAT®
Semiconductor Device Profile".
This manual describes the functionality of a EtherCAT slave and supports
• ETG.5003 Part 1: Common Device Profile (CDP) V0.9.0 (→ [12]) and
• ETG.5003 Part 2080: Specific Device Profile (SDP) Vacuum Pressure Gauge
V0.4.4 (→ [13]).
We reserve the right to make technical changes without prior notice.
In all communications with INFICON, please specify the information on the product
nameplate. For convenient reference copy that information into the space provided
below.
the RS232C Serial Interface and EtherCAT interface.
For safety information, specifications and operation instructions of the
vacuum gauges refer to the appropriate documents (→ [1], [2], [3]).
INFICON AG, LI-9496 Balzers
Model:
PN:
SN:
V W
2
tira93e1 (2014-04) BPG402-SE.cp
Page 3
Validity
Trademark
This document applies to BPG402 with EtherCAT interface.
353-590 (DN 25 ISO-KF)
353-591
(DN 40 CF-R)
The part number (PN) can be taken from the product nameplate.
If not indicated otherwise in the legends, the illustrations in this document correspond to the gauges with vacuum connection DN 25 ISO-KF. They apply to gauges
with the other vacuum connection by analogy.
We reserve the right to make technical changes without prior notice.
EtherCAT® Beckhoff Automation GmbH, Deutschland
tira93e1 (2014-04) BPG402-SE.cp 3
Page 4

Contents
General Information 2
Intended Use 2
EtherCAT–Interface 2
Product Identification 2
Validity 3
Trademark 3
Contents 4
1 Technical Data 6
2 Interface Connection 7
3 Operation 8
3.1 Introduction 8
3.2 Front and Side View 8
3.3 Indicators and Switches 9
3.3.1 <RUN> LED 9
3.3.2 <ERR> LED 9
3.3.3 <LA> LED (<IN> Port) 9
3.3.4 <LA> LED (<OUT> Port) 9
3.3.5 Device Address Switch 9
4 Object Structure 10
4.1 Object Dictionary structure 10
4.2 Communication Profile Objects (0x1000…0x1FFF) 11
4.3 Manufacturer-specific Profile Objects (0x2000...0x5FFF) 12
4.3.1 Manufacturer Configuration Module 1 12
4.3.2 Manufacturer Configuration Module 2 12
4.4 Input Area (0x6000…0x6FFF) 12
4.4.1 Input Common 12
4.4.2 Input Heat Transfer 12
4.4.3 Input Common 13
4.4.4 Input Hot Cathod Ion 13
4.4.5 Input Trip Point 1 14
4.5 Configuration Area (0x8000…0x8FFF) 15
4.5.1 Configuration Hot Cathode Ion 15
4.5.2 Configuration Trip Point 1 16
4.5.3 Configuration Trip Point 2 18
4.6 Information Area (0x9000…0x9FFF) 19
4.6.1 Information Heat Transfer 20
4.6.2 Information Common 21
4.6.3 Information Hot Cathode Ion 21
4.6.4 Information Trip Point 1/2 22
4.7 Device Area (0xF000...0xAFFF) 22
4.7.1 Semiconductor Device Profile 22
4.7.2 Module Profile List 22
4.7.3 Exceptions 22
4.7.4 Active Exception Status 22
4.7.5 Active Device Warning Details 23
4.7.6 Active Device Error Details 23
4.7.7 Latched Device Warning Details 24
4.7.8 Latched Device Error Details 24
4.7.9 Device Warning Mask 25
4.7.10 Device Error Mask 25
4.7.11 Comination Gauge 25
4.7.12 Trip Point Output All 26
4.7.13 Input Latch Local Timestamp 26
4.7.14 Configure Device 26
4.7.15 Information Device 27
4.7.16 Command Degas ON / OFF 28
4.7.17 Command Emission ON / OFF 28
4.7.18 Device Reset Command 29
4.7.19 Exception Reset Command 30
4.7.20 Store Parameters Command 30
4
tira93e1 (2014-04) BPG402-SE.cp
Page 5

Appendix 32
A: Literature 32
For cross-references within this document, the symbol (→ [XY]) is used, for
cross-references to other documents, listed under literature, the symbol (→ [Z]).
tira93e1 (2014-04) BPG402-SE.cp 5
Page 6
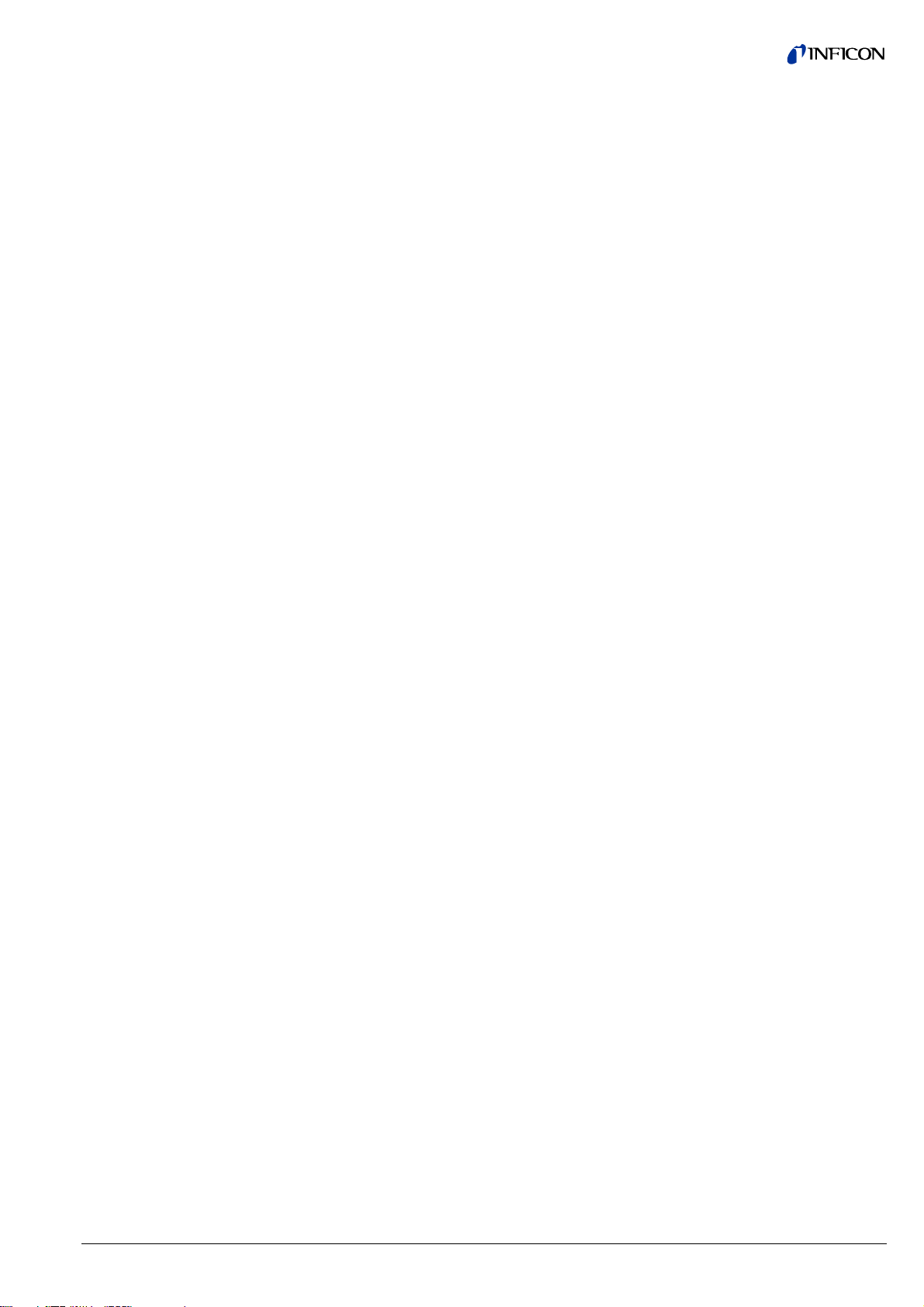
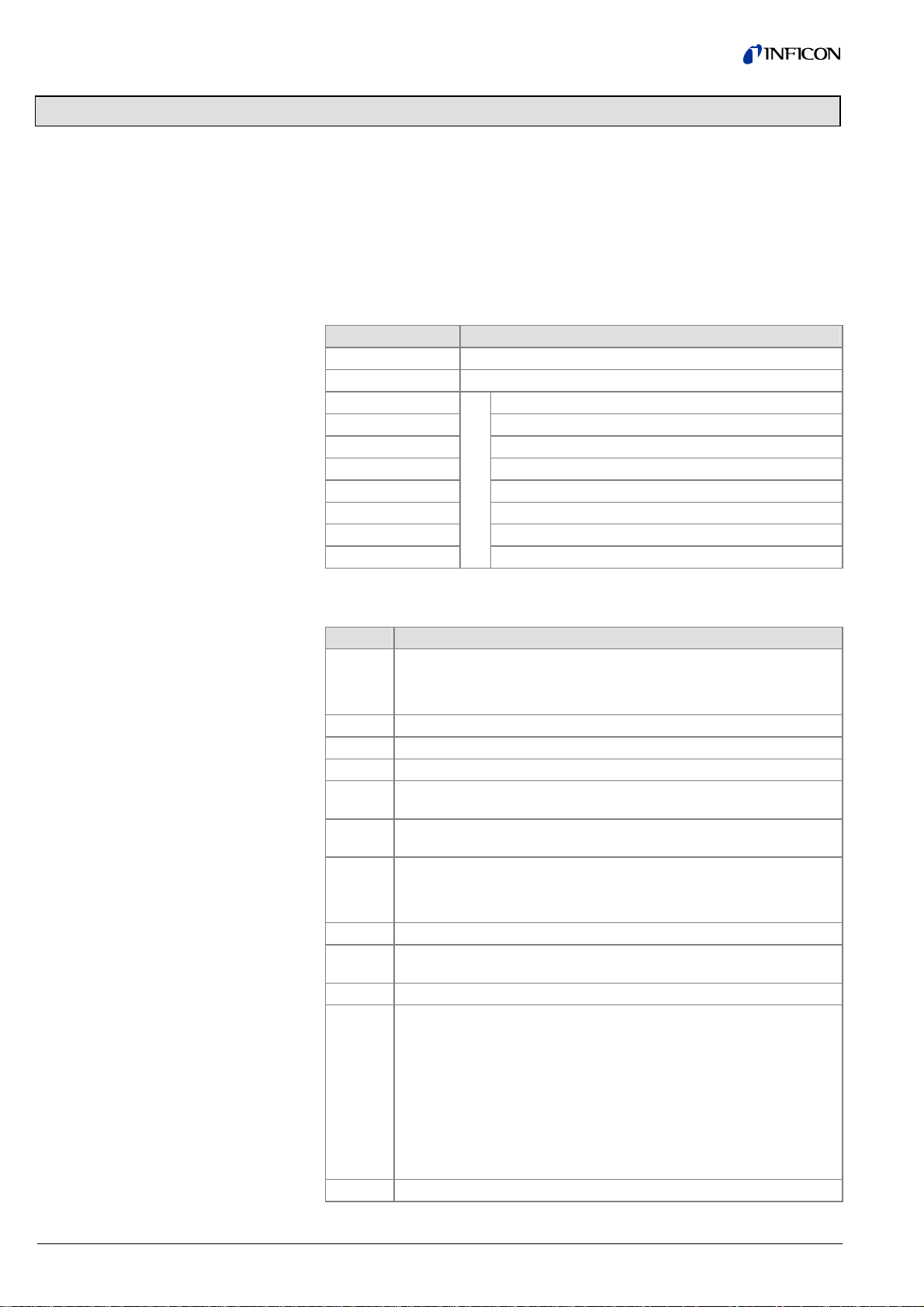
1 Technical Data
EtherCAT interface
Dimensions [mm]
Further technical data → [1], [2], [3].
Communication protocol protocol specialized for EtherCAT
Communication standards ETG.5003 Part 1: Common Device Profile (CDP)
ETG.5003 Part 2080: Specific Device Profile
(SDP) Vacuum Pressure Gauge
Data rate 100 Mbps
Node address Explicit Device Identification
Physical layer 100BASE-Tx (IEEE 802.3)
Digital functions read pressure, select units (Torr, mbar, Pa)
emission control, degas function
monitor gauge status, filament status
safe state allows definition of behavior in case of
error
detailed alarm and warning information
Analog functions 0 … 10 V analog output pressure indication
two setpoint relays A + B
Setpoint relays
Range
Relay contact
Hysteresis
Contact rating
2
-9
1×10
… 100 mbar
n.o. potential free
10 % of reading
≤30 V / ≤0.5 A (dc)
EtherCAT connector 2 × RJ45, 8-pin (socket)
<IN>: EtherCAT input
<OUT> EtherCAT output
Cable shielded, special Ethernet Patch Cable or
Crossover Cable (CAT5e quality or higher)
Cable length ≤100 m
Process data Fixed PDO mapping and configurable PDO
mapping
Mailbox (CoE) SDO requests, responses and information
ERRRUN
111
FIL
67
42
DN 25 ISO-KF
48
DN 40 CF-R
6
LA LA
OUTIN
PWR
59
tira93e1 (2014-04) BPG402-SE.cp
Page 7
2 Interface Connection
Making an EtherCAT interface
cable
Cable type
Procedure
For operating the BPG 402 gauge via EtherCAT, two interface cables conforming
to the EtherCAT standard are required.
If no such cables are available, make two according to the following indications.
Ethernet Patch Cable or Crossover Cable (CAT5e quality) with FCC68 connector.
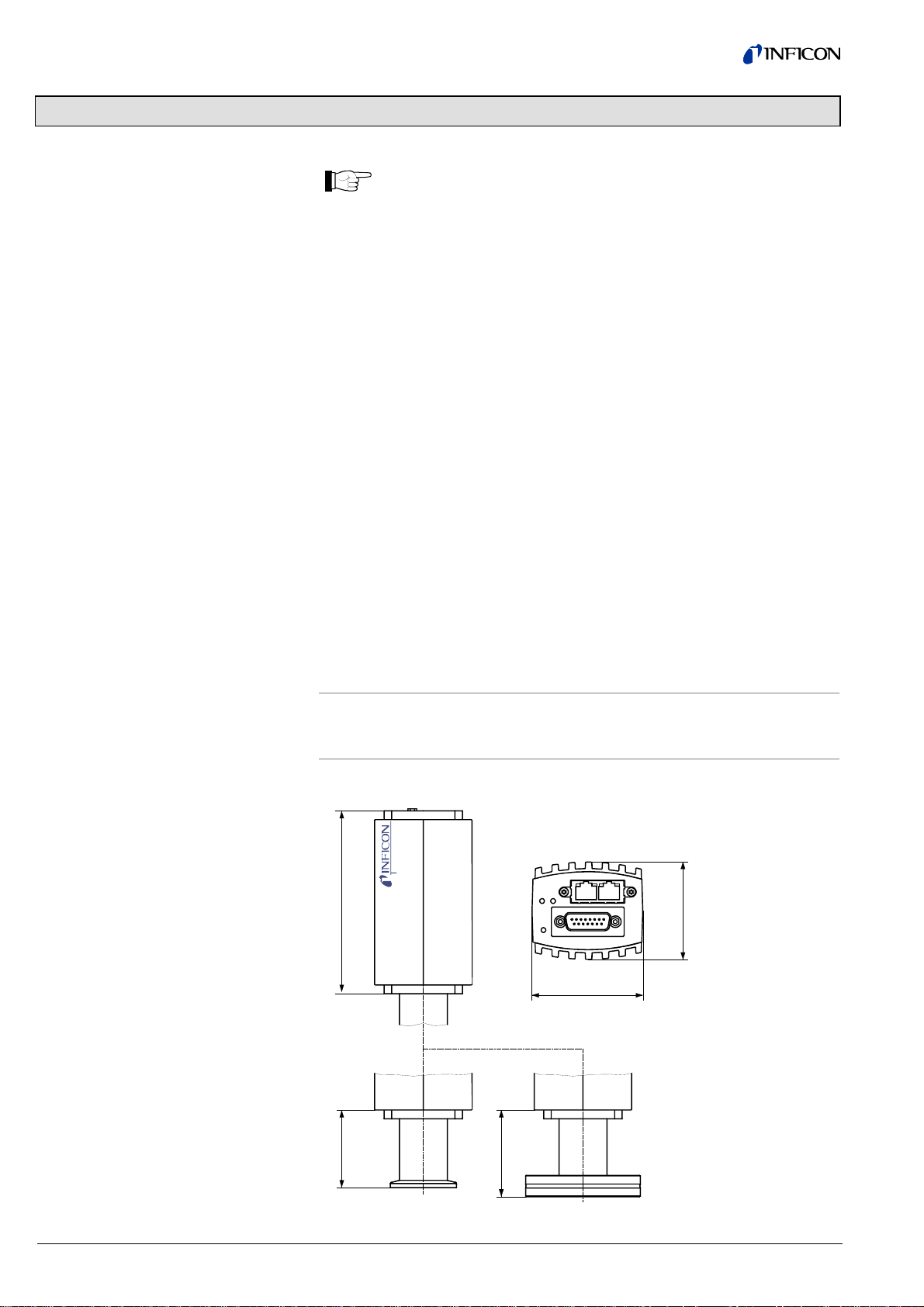
Pin assignment:
FCC68, 8-pin,
male, soldering side
81
Pin Signal Description
1 TD+ Transmission Data +
2 TD- Transmission Data -
3 RD+ Receive Data +
4 nu not used
5 nu not used
6 RD- Receive Data -
7 nu not used
8 nu not used
Pin assignment of the D-Sub 15-pin sensor connector according to the
respective operating manual (→ [1], [2], [3]).
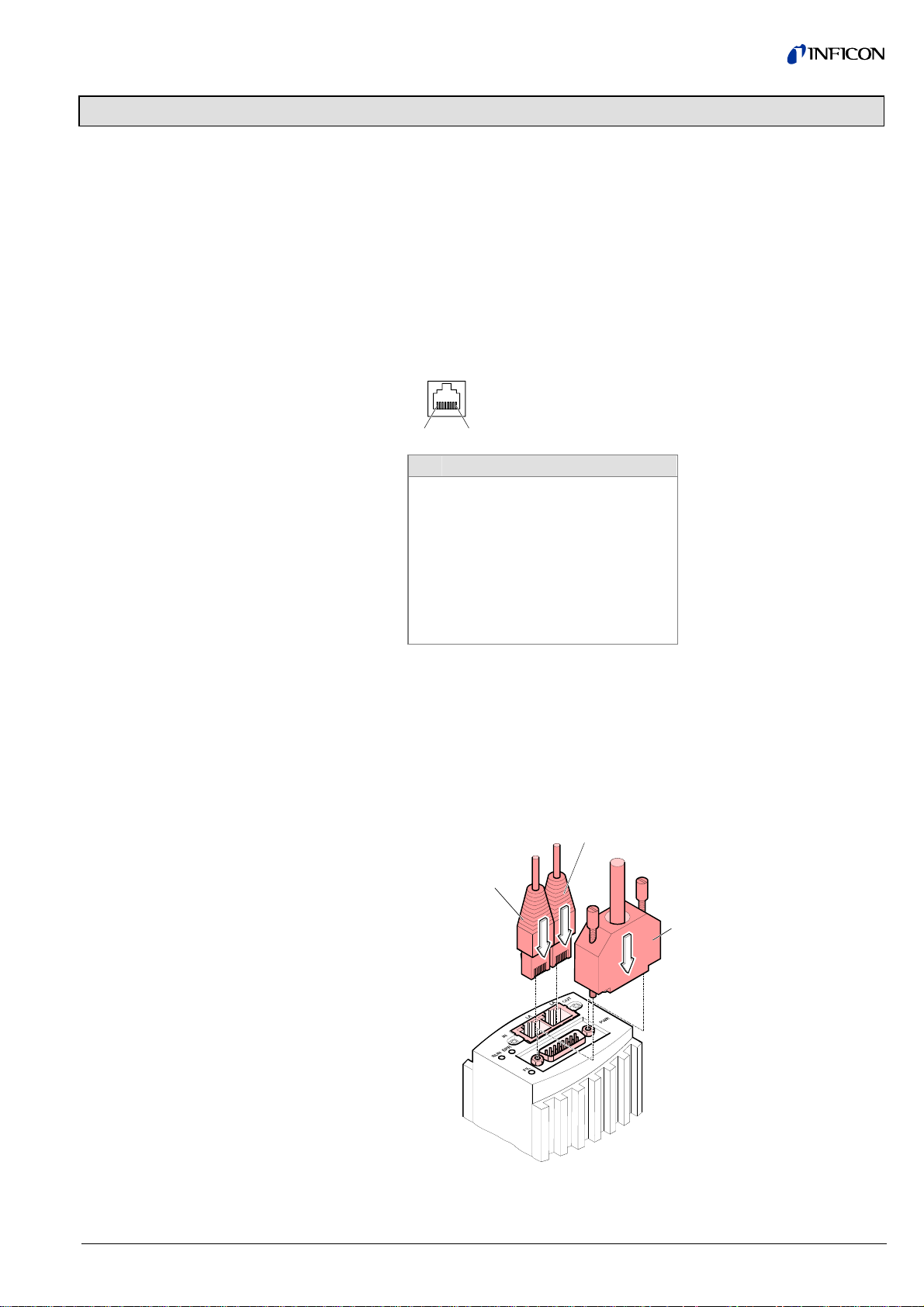
Plug the EtherCAT (and sensor) cables connector into the gauge: From the
previous device the cable connected to OUT port has to be connected to the
BPG402 <IN> port. And the cable from the BPG402 <OUT> port has to be
connected to the next device's <IN> port.
FCC68 cable
<OUT> port
FCC68 cable
<IN> port
Sensor cable
tira93e1 (2014-04) BPG402-SE.cp 7
Page 8
3 Operation
3.1 Introduction
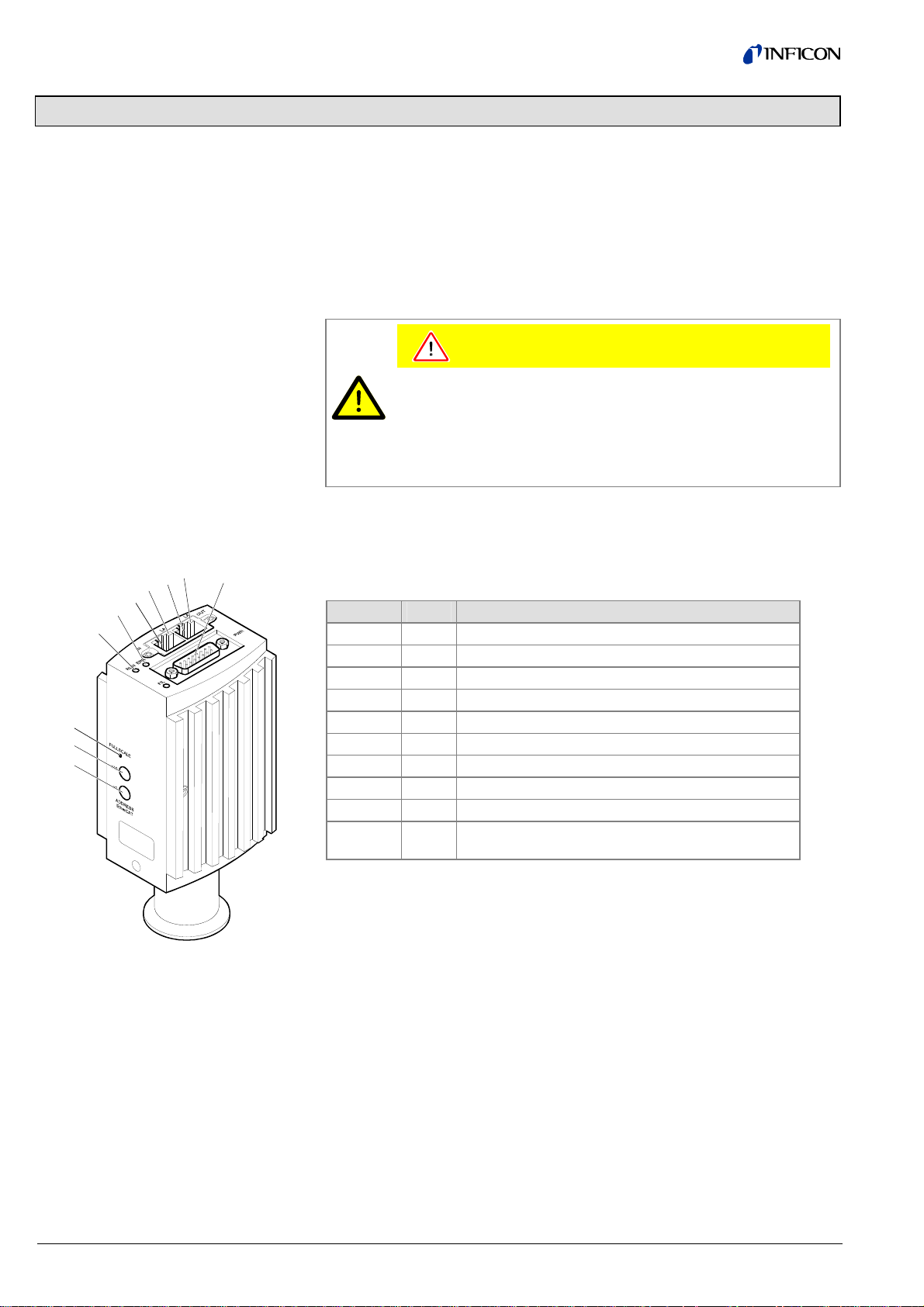
3.2 Front and Side View
9
8
7
6
5
4
3
2
1
10
Via the EtherCAT interface, the following and further data are exchanged in the
standardized EtherCAT protocol:
• Pressure reading
• Pressure unit (Torr, mbar, Pa)
• Status and error messages
• Status of the switching functions
• Set Trip Point for switching functions
Caution
Caution: data transmission errors
Any attempt to simultaneously operate the gauge via the RS232C
Serial Interface and EtherCAT interface may result in incorrect data
and data transmission errors.
Therefore, it is inadmissible to simultaneously operate the gauge via
Position Label Function
the RS232C Serial Interface and EtherCAT interface.
1 x1 Address Switch × 1, hexadecimal
2 x10 Address Switch × 10, hexadecimal
3 FIL Fullscale adjustment push button
4 RUN EtherCAT Status LED
5 ERR Error LED
6 IN EtherCAT IN connector
7 LA Link activity EtherCAT IN
8 OUT EtherCAT OUT connector
9 LA Link activity EtherCAT OUT
10 PWR Sensor cable connector
(Power, analog I/O, RS232C I/O and Relay contacts)
8
tira93e1 (2014-04) BPG402-SE.cp
Page 9
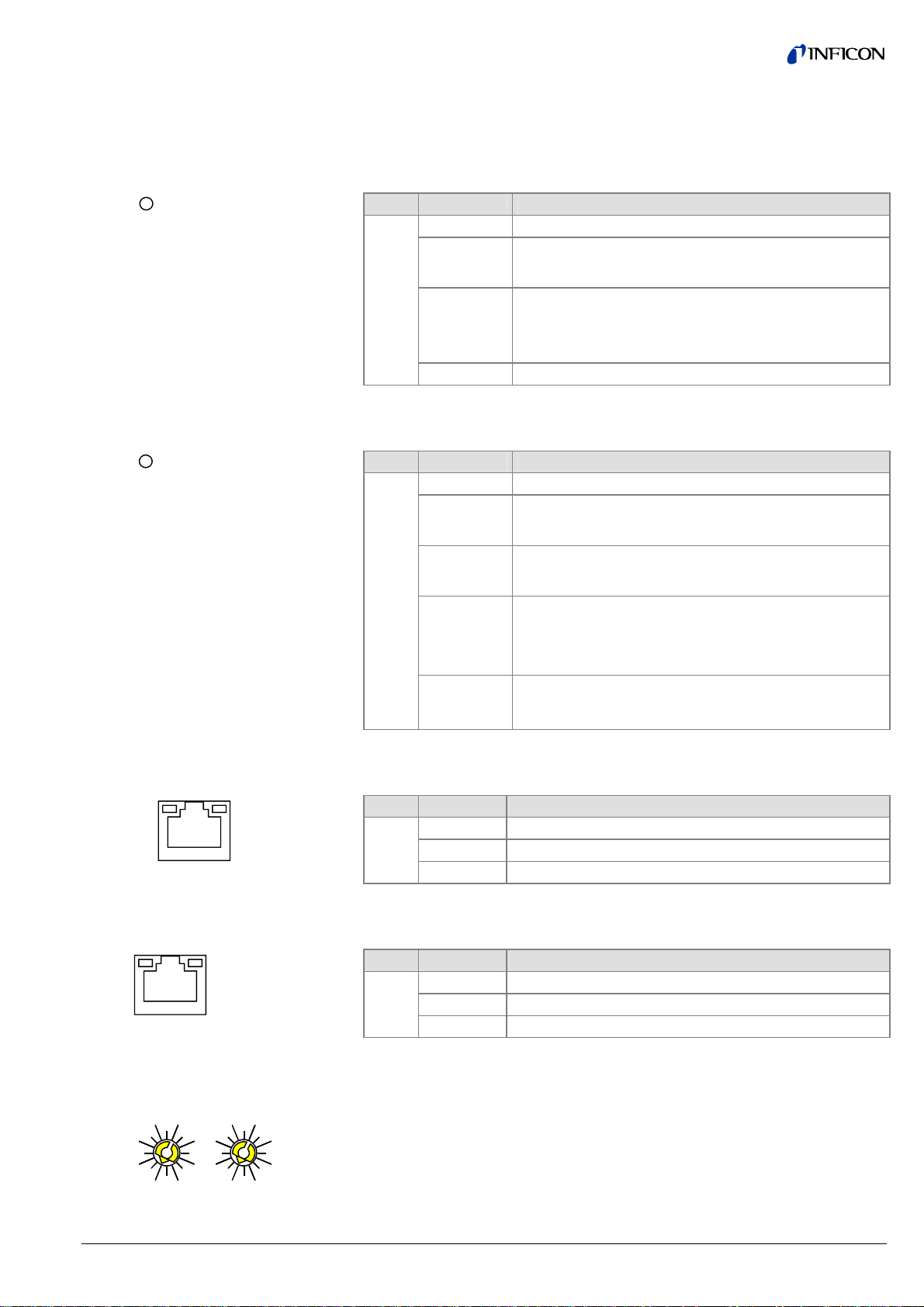
3.3 Indicators and Switches
3.3.1 <RUN> LED
RUN
3.3.2 <ERR> LED
ERR
3.3.3 <LA> LED (<IN> Port)
LA
IN
3.3.4 <LA> LED (<OUT> Port)
LA
OUT
3.3.5 Device Address Switch
x1
4
2
6
0
E
8
A
x10
4
2
6
0
E
8
A
Displays the operating status.
Color LED State Description
off INIT (initialization status) or no power applied to device.
green
blinking
(200 ms on
200 ms off)
single flash
(200 ms on
1000 ms off)
PREOP (pre-operational status).
SAFEOP (safe-operational status).
Communication of cyclic data transfer running. Input values
available, output values written to the device but not updated on device output.
on OP (operational status).
Displays the error content.
Color LED State Description
off No error or no power applied to device.
red
blinking
(200 ms on
200 ms off)
single flash
(200 ms on
1000 ms off)
double flash
(200 ms on
200 ms off
200 ms on
1000 ms off)
Error occurred (see error parameter).
Slave device application has changed the EtherCAT state
autonomously, due to local error (see error parameter).
An application watchdog timeout has occurred.
Sync Manager Watchdog timeout or communication
timeout occurred.
on A critical communication or application controller error has
occurred. Application controller is not responding any more
(PDI Watchdog Timeout detected by ESC)
Displays the input status.
Color LED State Description
off Port not connected or no power applied to device.
green
blinking Port connected and communication active.
on Port not connected but no communication.
Displays the output status.
Color LED State Description
off Port not connected or no power applied to device.
green
blinking Port connected and communication active.
on Port not connected but no communication.
During device initialization, the device address switches are read by the device
firmware. This device address is supported to the master as Explicit Device
Identification.
Example: Value of the Explicit Device ID = 0xDD (dec 221):
0x10 * 0xD (dec 208) + 0x1 * 0xD (dec 13)
tira93e1 (2014-04) BPG402-SE.cp 9
Page 10
4 Object Structure
4.1 Object Dictionary
structure
This chapter describes the CANopen over EtherCAT (CoE) Object Dictionary.
The objects in the CoE Object Dictionary can be accessed with SDO services, and
many of the dictionary objects can be mapped for cyclic communication in PDOs.
Each object is addressed using a 16-bit index and an 8-bit subindex.
The following table presents the overall layout of the standard Object Dictionary.
Index (hex.) Object dictionary area
1000 – 1FFF Communication profile area
2000 – 5FFF Manufacturer-specific profile area
6000 – 6FFF Input area
7000 – 7FFF Output area
8000 – 8FFF Configuration area
9000 – 9FFF Information area
A000 – AFFF Diagnosis area
B000 – BFFF Service Transfer area
C000 – EFFF Reserved area
F000 – FFFF
Profile Specific Area
Device area
Explanations for the abbreviations in the columns of the tables are given below:
Abbr. Description
Access SDO read/write access
• RO: object can only be read by the SDO service
• RW: object can be both read and written by the SDO service
CoE CAN application protocol over EtherCAT
Index Object Index (hex.) (address of an object)
NV Nonvolatile; attribute value is maintained through power cycles
Object Abstract representation of a particular component within a device,
which consists of data, parameters, and methods.
PDO Process Data Object. Structure described by mapping parameters
containing one or several process data entities.
PM PDO mapping
• Rx: object can be mapped into an Rx PDO
• Tx : object can be mapped into a Tx PDO
RxPDO Receive PDO. A Process Data Object received by an EtherCAT slave.
SDO Service Data Objects. CoE asynchronous mailbox communications
where all objects in the Object Dictionary can be read and written.
SI Subindex (hex.) (sub-address of an object)
Type Data Type
• BOOL, BIT = 1 bit. Boolean (0 = false, 1 = true)
• USINT, BYTE = 8 bit. Unsigned Byte
• UINT = 16 bit. Unsigned integer value
• UDINT = 32 bit. Unsigned integer value
• ULINT = 64 bit. Unsigned integer value
• REAL = 32 bit. Floating point
• V_STRING = 8×n bit. Visible string (1 byte for character)
TxPDO Transmit PDO. A Process Data Object sent from an EtherCAT slave.
10
tira93e1 (2014-04) BPG402-SE.cp
Page 11
4.2 Communication Profile
Objects
(0x1000…0x1FFF)
Index SI DataType NV Access PM Name
1000 UDINT RO Device Type
1008 V_STRING RO Manufacturer Device name: BPG402
1009 V_STRING RO Manufacturer Hardware Version
100A V_STRING RO Manufacturer Software Version
1010 0x01 UDINT RW Store Parameters
1011 0x01 UDINT RW Restore Default Parameters
1018 RO Identity Object
0x01 UDINT RO Vendor ID
0x02 UDINT RO Product Code
0x03 UDINT RO Revision Number
0x04 UDINT RO Serial Number
10F8 ULINT RO Timestamp Object
1A00 PM RW TxPDO Transmit PDO Mapping Module 1
0x01 BIT Reading Valid Module 1
0x02 BIT Overrange Exceeded Module 1
0x03 BIT Underrange Exceeded Module 1
0x04 BIT Padding Bits 1 (5 bit)
0x05 REAL Sensor Value Module 1
0x06 UDINT Trip Point Output All Instance
1A01 PM RW TxPDO Transmit PDO Mapping
1A02 PM RW TxPDO Transmit PDO Mapping Module 2
0x01 BIT Reading Valid Module 2
0x02 BIT Overrange Exceeded Module 2
0x03 BIT Underrange Exceeded Module 2
0x04 BIT Padding Bits 1 (5 bit)
0x05 REAL Sensor Value Module 2
1A03 PM RW TxPDO Transmit PDO Mapping
The objects of the communication profile describe the basic EtherCAT properties of
the BPG402 and are common to all EtherCAT slaves using the CoE
communication protocol. The objects are described in following table:
0x0820138B => 0x820 = dec 2080 ;
0x138B = dec 5003
Read:
Bit 0 = 1: slave saves the backup entries
when writing 0x1010:01 with 0x65766173
Bit 1-31 = 0
Write:
With the value 0x65766173 the backup
entries will be stored to non-volatile
memory of the slave
Read:
Bit 0 = 1: slave supports the restoring of
backup entries with the default values
when writing 0x1011:01 with 0x64616F6C
Bit 1-31 = 0
Write:
With the value 0x64616F6C the backup
entries will be restored with the default
values
Module 1, User Mapping
Module 2, User Mapping
tira93e1 (2014-04) BPG402-SE.cp 11
Page 12

4.3 Manufacturer-specific
Profile Objects
(0x2000...0x5FFF)
4.3.1 Manufacturer
Configuration Module 1
Subindex 0x02
4.3.2 Manufacturer
Configuration Module 2
Subindex 0x02
4.4 Input Area
(0x6000…0x6FFF)
4.4.1 Input Common
Subindex 0x0E
Subindex 0x11
4.4.2 Input Heat Transfer
Subindex 0x01
The manufacturer-specific profile objects contain the manufacturer's model number
and device configuration data, status and diagnostic data. The objects are
described in the following tables.
Index SI DataType NV Access PM Name
2800 0x02 REAL RW Safe Value Module 1
Safe Value: The value to be used for Safe State = Safe Value.
Index SI DataType NV Access PM Name
2801 0x02 REAL RW Safe Value Module 2
Safe Value: The value to be used for Safe State = Safe Value.
Index SI DataType NV Access PM Name
6000 0x0E BOOL RO tx TxPdoState Module 1
0x11 REAL RO tx Sensor Value Module 1
Is set if the device is not in Safe State (value (I 0x6nn0, SI 0x11) = valid)
TxPdoState Module 1
0 1 Invalid
Valid
The corrected, converted, calibrated final analog input value of the sensor.
Index SI DataType NV Access PM Name
6003 0x01 BOOL RO tx Reading Valid Module 1
0x02 BOOL RO tx Overrange Exceeded
Module 1
0x03 BOOL RO tx Underrange Exceeded
Module 1
Indicates whether the Value parameter contains a valid value within the specified
accuracy or not.
Reading Valid Module 1
0 Invalid
1 Valid
12
tira93e1 (2014-04) BPG402-SE.cp
Page 13

Subindex 0x02
Subindex 0x03
4.4.3 Input Common
Subindex 0x0E
Subindex 0x11
4.4.4 Input Hot Cathod Ion
Subindex 0x01
Subindex 0x02
Indicates whether the Value parameter contains a value in over range.
Reading Valid Module 1
0 No Overrange Exceeded
1 Overrange Exceeded
Indicates whether the Value parameter contains a value in under range.
Reading Valid Module 1
0 No Underrange Exceeded
1 Underrange Exceeded
Index SI DataType NV Access PM Name
6010 0x0E BOOL RO tx TxPdoState Module 2
0x11 REAL RO tx Sensor Value Module 2
Is set if the device is not in Safe State (value (I 0x6010, SI 0x11) = valid)
TxPdoState Module 2
0 1 Invalid
Valid
The corrected, converted, calibrated final analog input value of the sensor.
Index SI DataType NV Access PM Name
6015 0x01 BOOL RO tx Reading Valid Module 2
0x02 BOOL RO tx Overrange Exceeded
Module 2
0x03 BOOL RO tx Underrange Exceeded
Module 2
0x05 BOOL RO tx Emission Status Off/On
Module 4
0x06 BOOL RO tx Degas Status Off/On
Module 4
Indicates whether the Value parameter contains a valid value within the specified
accuracy or not.
Reading Valid Module 2
0 Invalid
1 Valid
Indicates whether the Value parameter contains a value in over range.
Reading Valid Module 2
0 No Overrange Exceeded
1 Overrange Exceeded
tira93e1 (2014-04) BPG402-SE.cp 13
Page 14

Subindex 0x03
Subindex 0x05
Subindex 0x06
4.4.5 Input Trip Point 1
Subindex 0x01
Subindex 0x02
Indicates whether the Value parameter contains a value in under range.
Reading Valid Module 3
0 No Underrange Exceeded
1 Underrange Exceeded
Emission Status Off/On Module 4
0 OFF
1 ON
Degas Status Off/On Module 4
0 OFF
1 ON
Index SI DataType NV Access PM Name
600E 0x01 BOOL RO tx Status High Trip TP1
0x02 BOOL RO tx Status Low Trip TP1
600F 0x01 BOOL RO tx Status High Trip TP2
0x02 BOOL RO tx Status Low Trip TP2
Status High Trip
0 1 High Trip not assert
High Trip assert
Status Low Trip
0 1 Low Trip not assert
Low Trip assert
14
tira93e1 (2014-04) BPG402-SE.cp
Page 15

4.5 Configuration Area
(0x8000…0x8FFF)
4.5.1 Configuration Hot
Cathode Ion
Subindex 0x01
Subindex 0x02
Subindex 0x11
Index SI DataType NV Access PM Name
8015 0x01 BOOL x RW Filament User Mode
Module 2
0x02 BOOL x RW Emission User Mode
Module 2
0x11 BYTE x RW Active Filament Module 2
0x13 REAL x RW Emission Current Module 2
Defines whether the filament selection is static as defined by "Active Filament" =
manual mode or the active filament is changed always when the filament is
switched on = automatic mode
Filament User Mode Module 4
0 1 Automatic
Manual
Defines whether the emission is switched on automatically by a different sensor
(automatic) or manually by the user (manual)
Filament User Mode Module 4
0 1 Automatic
Manual
Active Sensor filament
Subindex 0x13
Active Filament Module 4
Bit 0
Bit 1
Bit 1…7
Filament 1
Filament 2
0
Emission current in milliamps
tira93e1 (2014-04) BPG402-SE.cp 15
Page 16

4.5.2 Configuration Trip
Point 1
If "High Trip Source Index" is 0x800E1100 or 0x800F1100 the High Trip Point is
equal with the value referenced in "High Trip Point Limit".
The value defined in "High Trip Point Limit" is compared with the pressure value
referenced by the "Source Index" parameter.
If "Low Trip Source Index" is 0x800E1400 or 0x800F1400 the Low Trip Point is
equal with the value referenced in "Low Trip Point Limit".
The value defined in "Low Trip Point Limit" is compared with the pressure value
referenced by the "Source Index" parameter.
Measurement signal
(Pressure p)
High Trip
High Trip Point
Hysteresis
Low Trip
Hysteresis
Subindex 0x01
Subindex 0x02
Low Trip Point
Time t
active
activein-
in-
active
active
in-
active
Index SI DataType NV Access PM Name
800E 0x01 BOOL x RW High Trip Enable TP1
0x02 BOOL x RW Low Trip Enable TP1
0x04 BOOL x RW Override Enable TP1
0x05 BOOL x RW Override High Trip TP1
0x06 BOOL x RW Override Low Trip TP1
0x11 REAL x RW High Trip Point Limit TP1
0x12 UDINT x RW High Trip Source Index TP1
0x13 REAL X RW Percentage High Trip Source TP1
0x14 REAL x RW Low Trip Point Limit TP1
0x15 UDINT x RW Low Trip Source Index TP1
0x16 REAL x RW Percentage Low Trip Source TP1
0x17 REAL x RW High Trip Hysteresis TP1
0x18 REAL x RW Low Trip Hysteresis TP1
0x1A UDINT x RW Source Index TP1
High Trip Point
0 1 Disable
Enable
Low Trip Point
0 1 Disable
Enable
16
tira93e1 (2014-04) BPG402-SE.cp
Page 17

Subindex 0x04
Subindex 0x05
Subindex 0x06
Subindex 0x11
Subindex 0x12
Subindex 0x13
Subindex 0x14
Subindex 0x15
Subindex 0x16
Subindex 0x17
Subindex 0x18
Subindex 0x1A
Override Enable
0 1 Disable
Enable
Override High Trip
0 1 Disable
Enable
Override Low Trip
0 1 Disable
Enable
High Trip Point Limit: High limit to trigger trip point condition if Input Value (I
0x900E, SI 0x01) is above this limit.
Object index of High Trip Point Value source. Index of High Trip Point Limit (I
0x800E, SI 0x11)
Bit 16…31: Index
Bit 08…15: Subindex
Bit 00…07: reserved
It is only possible to reference to "High Trip Point Limit" (I 0x800E, SI 0x11).
Percentage of Value referenced by High Trip Source Index in [%]. If High Trip
Source Index is I 0x800E, SI 0x11 this parameter is not used.
Low Trip Point Limit: Low limit to trigger trip point condition if Input Value (I 0x900E,
SI 0x01) is below this limit.
Object index of Low Trip Point Value source. Index of Low Trip Point Limit (I
0x800E, SI 0x14)
Bit 16…31: Index
Bit 08…15: Subindex
Bit 00…07: reserved
It is only possible to reference to "Low Trip Point Limit" (I 0x800E, SI 0x14).
Percentage of Value referenced by Low Trip Source Index in [%]. If Low Trip
Source Index is I 0x800E, SI 0x14 this parameter is not used.
High Trip Hysteresis: Hysteresis value for High Trip Point.
Low Trip Hysteresis: Hysteresis value for Low Trip Point.
Object index of active source of (I 0x900E SI 0x01) Input Value.
Source Index
Bit 16…31
Bit 08…15
Bit 00…07
Index
Subindex
Reserved
tira93e1 (2014-04) BPG402-SE.cp 17
Page 18

4.5.3 Configuration Trip
Point 2
Subindex 0x01
Subindex 0x02
Subindex 0x04
Subindex 0x05
Subindex 0x06
Subindex 0x11
Subindex 0x12
Calculating the High Trip Point and Low Trip Point → 4.4.7.
Index SI DataType NV Access PM Name
800F 0x01 BOOL x RW High Trip Enable TP2
0x02 BOOL x RW Low Trip Enable TP2
0x04 BOOL x RW Override Enable TP2
0x05 BOOL x RW Override High Trip TP2
0x06 BOOL x RW Override Low Trip TP2
0x11 REAL x RW High Trip Point Limit TP2
0x12 UDINT x RW High Trip Source Index
TP2
0x13 REAL X RW Percentage High Trip
Source TP2
0x14 REAL x RW Low Trip Point Limit TP2
0x15 UDINT x RW Low Trip Source Index
TP2
0x16 REAL x RW Percentage Low Trip
Source TP2
0x17 REAL x RW High Trip Hysteresis TP2
0x18 REAL x RW Low Trip Hysteresis TP2
0x1A UDINT x RW Source Index TP2
High Trip Point
0 1 Disable
Enable
Low Trip Point
0 1 Disable
Enable
Override Enable
0 1 Disable
Enable
Override High Trip
0 1 Disable
Enable
Override Low Trip
0 1 Disable
Enable
High Trip Point limit: High limit to trigger trip point condition if Input Value (I 0x900F,
SI 0x01) is above this limit.
Object index of High Trip Point Value source. Index of High Trip Point Limit (I
0x800F, SI 0x11)
Bit 16…31: Index
Bit 08…15: Subindex
Bit 00…07: reserved
It is only possible to reference to "High Trip Point Limit" (I 0x800F, SI 0x11).
18
tira93e1 (2014-04) BPG402-SE.cp
Page 19

Subindex 0x13
Subindex 0x14
Subindex 0x15
Subindex 0x16
Subindex 0x17
Subindex 0x18
Subindex 0x1A
4.6 Information Area
(0x9000…0x9FFF)
Highest / lowest
measurement value
Percentage of Value referenced by High Trip Source Index in [%]. If High Trip
Source Index is I 0x800F, SI 0x11 this parameter is not used.
Low Trip Point Limit: Low limit to trigger trip point condition if Input Value (I 0x900F,
SI 0x01) is below this limit.
Object index of Low Trip Point Value source. Index of Low Trip Point Limit (I
0x800F, SI 0x14)
Bit 16…31: Index
Bit 08…15: Subindex
Bit 00…07: reserved
It is only possible to reference to "Low Trip Point Limit" (I 0x800F, SI 0x14).
Percentage of Value referenced by Low Trip Source Index in [%]. If Low Trip
Source Index is I 0x800F, SI 0x14 this parameter is not used.
High Trip Hysteresis: Hysteresis value for High Trip Point.
Low Trip Hysteresis: Hysteresis value for Low Trip Point.
Object index of active source of (I 0x900F SI 0x01) Input Value.
Source Index
Bit 16…31
Bit 08…15
Bit 00…07
Index
Subindex
Reserved
The Information Data object defines the input process data.
Indicated
pressure
p6'
p5'
p4'
p3'
Error
Overrange
4
3
Measurement
range
p2'
p1'
2
1
Underrange
Display range
Error
Real pressure
p0 p1 p2 p3
The "measurement range" is the range between minimum and maximum pressure,
where the reading of the gauge is within the specified measurement uncertainty
limits.
The "valid measurement information range" (display range) is the complete
pressure range where the gauge gives an indication (measurement signal). The
valid measurement information range (display range) consists of underrange,
measurement range and overrange.
tira93e1 (2014-04) BPG402-SE.cp 19
Page 20

Subindex 0x02
Subindex 0x03
Subindex 0x04
Subindex 0x05
4.6.1 Information Heat
Transfer
Subindex 0x01
Subindex 0x02
According to these definitions, 4 points are defined:
1 Lowest informational measurement value
2 Lowest precision measurement value
3 Highest precision measurement value
4 Highest informational measurement value
Index SI DataType NV Access PM Name
9000 0x02 REAL x RO Highest Informational
Measurement Value Module 1
0x03 REAL x RO Highest Precision Measurement
Value Module 1
0x04 REAL x RO Lowest Precision Measurement
Value Module 1
0x05 REAL x RO Lowest Informational
Measurement Value Module 1
Highest Informational Measurement Value: Highest value that the gauge can
measure without a specified accuracy.
Highest Precision Measurement Value: Highest valid value at which the gauge is
specified with an accuracy value. Above that value, the parameter Reading Valid is
set to invalid.
Lowest Precision Measurement Value: Lowest valid value at which the gauge is
specified with an accuracy value. Below that value, the parameter Reading Valid is
set to invalid.
Lowest value the gauge can measure without a specified accuracy.
Index SI DataType NV Access PM Name
9003 0x01 UINT RO Sensor Warning Module 1
0x02 UINT RO Sensor Alarm Module 1
Sensor Warnings
Bit 0
Bit 1
Bit 2…15
0
Electronics Warning
0
Sensor Alarms
Bit 0
Bit 1
Bit 2…15
0
Electronics Failure
0
20
tira93e1 (2014-04) BPG402-SE.cp
Page 21

4.6.2 Information Common
Index SI DataType NV Access PM Name
9010 0x02 REAL x RO Highest Informational
0x03 REAL x RO Highest Precision Measurement
0x04 REAL x RO Lowest Precision Measurement
0x05 REAL x RO Lowest Informational
Subindex 0x02
Subindex 0x03
Subindex 0x04
Subindex 0x05
4.6.3 Information Hot
Cathode Ion
Subindex 0x01
Subindex 0x02
Measurement Value Module 2
Value Module 2
Value Module 2
Measurement Value Module 2
Highest Informational Measurement Value: Highest value that the gauge can
measure without a specified accuracy.
Highest Precision Measurement Value: Highest valid value at which the gauge is
specified with an accuracy value. Above that value, the parameter Reading Valid is
set to invalid.
Lowest Precision Measurement Value: Lowest valid value at which the gauge is
specified with an accuracy value. Below that value, the parameter Reading Valid is
set to invalid.
Lowest value the gauge can measure without a specified accuracy.
Index SI DataType NV Access PM Name
9015 0x01 UINT RO Sensor Warning Module 2
0x02 UINT RO Sensor Alarm Module 2
Sensor Warnings
Bit 0
Bit 1
Bit 2…8
Bit 9
Bit 10
Bit 11
Bit 12…15
Sensor Filament 1 Warning
Sensor Filament 2 Warning
0
Electronics Warning
0
Pressure to high for Degas
0
Sensor Alarms
Bit 0
Bit 1
Bit 2…8
Bit 9
Bit 10
Bit 11
Bit 12…15
Sensor Filament 1 Alarm
Sensor Filament 2 Alarm
0
Electronics Faliure
0
Overpressure Emission OFF
0
tira93e1 (2014-04) BPG402-SE.cp 21
Page 22

4.6.4 Information Trip
Point 1/2
Subindex 0x01 (900E)
Subindex 0x01 (900F)
4.7 Device Area
(0xF000...0xAFFF)
4.7.1 Semiconductor Device
Profile
Subindex 0x01
Subindex 0x02
4.7.2 Module Profile List
Subindex 0x01
Subindex 0x02
4.7.3 Exceptions
4.7.4 Active Exception Status
Active Exception Status
Index SI DataType NV Access PM Name
900E 0x01 REAL RO Input Value Trip Point 1
900F 0x01 REAL RO Input Value Trip Point 2
Input Value Trip Point 1: Trip Point Input value as referenced by Source Index (I
0x800E, SI 0x0E).
Input Value Trip Point 2: 0 Trip Point Input value as referenced by Source Index (I
0x800F, SI 0x0E).
Index SI DataType NV Access PM Name
F000 0x01 UINT RO Index Distance
0x02 UINT RO Maximum Number of
Modules
Index Distance: Index offset between PDO entries of two consecutive modules (for
ETG.5003 = 0x10), e.g. 0x6000, 0x6010.
Maximum Number of Modules: For the BPG402 this value always is 2.
Index SI DataType NV Access PM Name
F010 0x01 UDINT RO Profile Number Module 1
0x02 UDINT RO Profile Number Module 2
Each sub-index lists the profile-number of the corresponding module.
Each sub-index lists the profile-number of the corresponding module.
Index SI DataType NV Access PM Name
F380 USINT RO tx ActiveException Status
Active Exception Status
Bit 0 Device Warning
Bit 1 Manufacturer Warning
Bit 2 Device Error
Bit 3 Manufacturer Error
Bit 4…7 0
22
tira93e1 (2014-04) BPG402-SE.cp
Page 23

4.7.5 Active Device Warning
Details
Subindex 0x01
Subindex 0x02
Subindex 0x03
Subindex 0x01
4.7.6 Active Device Error
Details
Index SI DataType NV Access PM Name
F383 0x01 UDINT RO tx Active Device Error Details Device
0x02 UDINT RO tx Active Device Error Details Module 1
0x03 UDINT RO tx Active Device Error Details Module 2
F384 0x01 UDINT RO tx Active Manufacturer Error Details
Subindex 0x01
Subindex 0x02
The "active device warning details" parameter describes the warning state of the
complete device.
Index SI DataType NV Access PM Name
F381 0x01 UDINT RO tx Active Device Warning
Details Device
0x02 UDINT RO tx Active Device Warning
Details Module 1
0x03 UDINT RO tx Active Device Warning
Details Module 2
F382 0x01 UDINT RO tx Active Manufacturer
Warning Details
Active Device Warning Details Device(Index F381)
Bit 0…2 0
Bit 3 EEPROM exception
Bit 4…31 0
Active Device Warning Details Module 1 (Index F381)
Bit 0 0
Bit 1 Electronics warning
Bit 2…31 0
Active Device Warning Details Module 2 (Index F381)
Bit 0 0
Bit 1 Electronics warning
Bit 2…31 0
Active Manufacturer Warning Details (Index F382)
Bit 0 Internal Communication Exception (between
EtherCAT-Protocol and Device-Application)
Bit 1…31 0
The "active device error details" parameter describes the error state of the
complete device.
Active Device Error Details Device (Index F383)
Bit 0 0
Bit 1 uP exception
Bit 2…31 0
Active Device Error Details Module 1 (Index F383)
Bit 0 0
Bit 1 Electronics failure
Bit 2…31 0
tira93e1 (2014-04) BPG402-SE.cp 23
Page 24

Subindex 0x03
Subindex 0x01
4.7.7 Latched Device Warning
Details
Latched Exceptions Status
Subindex 0x01
Subindex 0x02
Subindex 0x03
Subindex 0x01 (F392)
4.7.8 Latched Device Error
Details
Subindex 0x01
Subindex 0x02
Subindex 0x03
Subindex 0x01 (F394)
Active Device Error Details Module 2 (Index F383)
Bit 0 0
Bit 1 Electronics failure
Bit 2…31 0
Active Manufacturer Error Details (Index F384)
Bit 0 Internal Communication Exception (between
EtherCAT-Protocol and Device-Application)
Bit 1 Wrong software version used in base device
Bit 2 Wrong sensor type detected
Bit 3…31 0
Index SI DataType NV Access PM Name
F390 USINT RO tx Latched Exceptions Status
F391 0x01 UDINT RO tx Latched Device Warning
Details Device
0x02 UDINT RO tx Latched Device Warning
Details Module 1
0x03 UDINT RO tx Latched Device Warning
Details Module 2
F392 0x01 UDINT RO tx Latched Manufacturer
Warning Details
Latched version of 0xF380.
Latched Device Warning Details Device: Latched version of 0xF381:01.
Latched Device Warning Details Module 1: Latched version of 0xF381:02.
Latched Device Warning Details Module 2: Latched version of 0xF381:03.
Latched Manufacturer Warning Details: Latched version of 0xF382:01.
Index SI DataType NV Access PM Name
F393 0x01 UDINT RO tx Latched Device Error
Details Device
0x02 UDINT RO tx Latched Device Error
Details Module 1
0x03 UDINT RO tx Latched Device Error
Details Module 2
F394 0x01 UDINT RO tx Latched Manufacturer
Error Details
Latched Device Error Details Device: Latched version of 0xF383:01.
Latched Device Error Details Module 1: Latched version of 0xF383:02.
Latched Device Error Details Module 2: Latched version of 0xF383:03.
Latched Manufacturer Error Details: Latched version of 0xF384:01.
24
tira93e1 (2014-04) BPG402-SE.cp
Page 25

4.7.9 Device Warning Mask
Subindex 0x01
Subindex 0x02
Subindex 0x03
Subindex 0x01 (F3A2)
4.7.10 Device Error Mask
Subindex 0x01
Subindex 0x02
Subindex 0x03
Subindex 0x01 (F3A4)
4.7.11 Comination Gauge
Subindex 0x01
Subindex 0x02
Index SI DataType NV Access PM Name
F3A1 0x01 UDINT x RW Device Warning Mask
Device
0x02 UDINT x RW Device Warning Mask
Module 1
0x03 UDINT x RW Device Warning Mask
Module 2
F3A2 0x01 UDINT x RW Manufacturer Warning
Mask
Device Warning Mask Device: Mask bits for 0xF381:01 and 0xF391:01.
Device Warning Mask Module 1: Mask bits for 0xF381:02 and 0xF391:02.
Device Warning Mask Module 2: Mask bits for 0xF381:03 and 0xF391:03.
Manufacturer Warning Mask: Mask bits for 0xF382:01 and 0xF392:01.
Index SI DataType NV Access PM Name
F3A3 0x01 UDINT x RW Device Error Mask Device
0x02 UDINT x RW Device Error Mask
Module 1
0x03 UDINT x RW Device Error Mask
Module 2
F3A4 0x01 UDINT x RW Manufacturer Error Mask
Device Error Mask Device: Mask bits for 0xF383:01 and 0xF393:01.
Device Error Mask Module 1: Mask bits for 0xF383:02 and 0xF393:02.
Device Error Mask Module 2: Mask bits for 0xF383:03 and 0xF393:03.
Manufacturer Error Mask: Mask bits for 0xF384:01 and 0xF394:01.
Index SI DataType NV Access PM Name
F640 0x01 BOOL RO tx Combination Gauge
Reading Valid
0x02 BOOL RO tx Combination Gauge
Overrange Exceeded
0x03 BOOL RO tx Combination Gauge
Underrange Exceeded
0x11 REAL RO tx Combination Gauge Active
Value
0x12 UINT RO tx Combination Gauge Active
Sensor Number
Identifies whether the complete vacuum pressure gauge (with several measuring
principles) is out of its absolute overrange or absolute underrange, or in any other
failure condition.
If the bit "Overrange" is set, all modules of the gauge are in an overrange condition.
tira93e1 (2014-04) BPG402-SE.cp 25
Page 26

Subindex 0x03
If the bit "Underrange” is set, all modules of the gauge are in an underrange
condition.
Subindex 0x11
The value copied from the measurement value of the active measuring module
used for the Input PDO.
Subindex 0x12
Identifies the module that is providing the measurement value, the latter of which is
copied into the Active Value parameter for all Input PDO’s.
0 No module has a valid value
1 Heat Transfer sensor is providing the Active Value
2 Hot Cathode sensor is providing the Active Value
4.7.12 Trip Point Output All
Index SI DataType NV Access PM Name
F641 0x01 UDINT RO tx Trip Point Output All
Subindex 0x01
Status of Trip Point instances.
Trip Point Output All Instance
Bit 0
Bit 1
Bit 2
Bit 3
Bit 4…31
Status High Trip (I 0x600E, SI 0x01)
Status Low Trip (I 0x600E S,I 0x02)
Status High Trip (I 0x600F, SI 0x01)
Status Low Trip (I 0x600F, SI 0x02)
0
4.7.13 Input Latch Local
Timestamp
Index SI DataType NV Access PM Name
F6F0 0x01 UDINT RO tx Input Latch Local
0x02 UDINT RO tx Input Latch Local
Subindex 0x01
Local controller time corresponding to the input latch time in microseconds. It starts
at zero on device power-up. Mandatory if device has inputs. If device has no inputs
defined, this corresponds the time immediately prior to writing to input SM.
Subindex 0x02
Local controller time corresponding to the input latch time in microseconds. It starts
at zero on device power-up. Mandatory if device has inputs. If device has no inputs
defined, this corresponds the time immediately prior to writing to input SM.
4.7.14 Configure Device
Index SI DataType NV Access PM Name
F840 0x01 UDINT x RW Data Units
0x02 V_STRING RW Password
Subindex 0x01
Unit of the Value of the Analog Input Sensor Instance and all related parameters.
Trip Point Output All Instance
0x00220000
0xFD4E0000
0x00A10000
0x00E00000
Pascal
mbar
Torr
Counts (INFICON)
26
Instance
Timestamp module 1
Timestamp module 2
tira93e1 (2014-04) BPG402-SE.cp
Page 27

Subindex 0x02
4.7.15 Information Device
Subindex 0x01 (F940)
Subindex 0x02 (F940)
Writing the corresponding password (vendor specified value) enables Access
Rights (Index F940 Subindex 03)
Index SI DataType NV Access PM Name
F940 0x01 UDINT RO Measurement Principle
0x02 BYTE RO Number of Sensors
0x03 USINT RO Access Rights
0x04 V_STRING x RO SW Version VPG PCB
F9F0 V_STRING RO Manufacturer Serial
Number
F9F1 0x01 UDINT RO CDP Functional
Generation Number
Module 1
0x02 RO CDP Functional
Generation Number
Module 2
F9F2 0x01 UDINT RO SDP Functional
Generation Number
Module 1
0x02 UDINT RO SDP Functional
Generation Number
Module 2
F9F3 V_STRING RO Vendor Name
F9F4 0x01 V_STRING RO Semiconductor SDP
Device Name Module 1
0x02 V_STRING RO Semiconductor SDP
Device Name Module 2
F9F5 0x01 USINT RW Output Identifier Module 1
0x02 USINT RW Output Identifier Module 2
F9F6 UDINT RO Time Since Power On
F9F7 UDINT x RO Time Total Powered
F9F8 UDINT RO Firmware Update
Functional Generation
Number
Measurement principle assigned to the object instance.
The most significant nibble of the parameter represents the sensor type of the first
Module, the second most significant nibble of the parameter represents the sensor
type of the second Module, and so forth.
Measurement Principle (Index F940)
1
Capacitance Manometer
2
Piezo
3
Heat Transfer
4
Cold Cathode
5
Hot Cathode
Number of Sensors (Index F940): In this device are 2 sensors implemented.
tira93e1 (2014-04) BPG402-SE.cp 27
Page 28

Subindex 0x03 (F940)
Subindex 0x04 (F940)
4.7.16 Command Degas ON /
OFF
Subindex 0x01
Subindex 0x02
Subindex 0x03
4.7.17 Command Emission
ON / OFF
Access Rights (Index F940)
0
User
access to measurement and limited diagnostic features
1
Service
access to additional diagnostic features (vendor specific)
2
Superuser
access to vendor-specific parameters and features, e.g.
calibration parameters, model number, serial numbers
Software version of the basic device.
Execution of this command will initiate or cancel a degas operation.
Index SI DataType NV Access PM Name
FB43 0x01 V_STRING(2) RW Command
0x02 BYTE RO Status
0x03 V_STRING(3) RO Response
A degas command is initiated when the following byte sequence is sent.
Command
Byte 0 0: Degas OFF
1: Degas ON
Byte 1 Index of the Sub Sensor module has to be 2
2: Hot Cathode
Status (supported values)
0
Last command completed, no errors, no reply available
1
Last command completed, no errors, reply available
2
Last command completed, errors present, no reply
available
3
Last command completed, errors present, reply available
255
Command is executing
Response
Byte 0 See Subindex 0x02
Byte 1 Unused
Byte 2 0: Degas ON / OFF successful
1: Degas ON / OFF failed (unspecified reason)
2: Degas On failed because pressure to high
254: No previous Degas ON / OFF command issued
Execution of this command will turn on or off the gauge’s emission state.
Index SI DataType NV Access PM Name
FB44 0x01 V_STRING(2) RW Command
0x02 BYTE RO Status
0x03 V_STRING(3) RO Response
28
tira93e1 (2014-04) BPG402-SE.cp
Page 29

Subindex 0x01
Subindex 0x02
Subindex 0x03
4.7.18 Device Reset Command
An emission command is initiated when the following byte sequence is sent.
Command
Byte 0 0: Emission OFF
1: Emission ON
Byte 1 Index of the Sub Sensor module has to be 2
2: Hot Cathode
Status (supported values)
0
Last command completed, no errors, no reply available
1
Last command completed, no errors, reply available
2
Last command completed, errors present, no reply
available
3
Last command completed, errors present, reply available
255
Command is executing
Response
Byte 0 See Subindex 0x02
Byte 1 Unused
Byte 2 0: Emission ON / OFF successful
1: Emission ON / OFF failed (unspecified reason)
2: Emission On failed because pressure to high
254: No previous Emission ON / OFF command
issued
Execution of this command causes the device to emulate a complete power cycle.
This includes an ESC reset. An SDP may limit some behavior of the power cycle
emulation, but shall not exclude the EtherCAT interface.
Subindex 0x01
As consequence of an ESC reset all following devices are disconnected
from the network.
There are two versions of this command:
• Standard reset (as described above)
• Factory reset (as described above, but additionally, all parameters are restored
to as-shipped defaults).
Index SI DataType NV Access PM Name
FBF0 0x01 V_STRING(6) RW Command
0x02 BYTE RO Status
0x03 V_STRING(2) RO Response
A device reset is initiated when the following byte sequence is sent.
Command
Byte 0
Byte 1
Byte 2
Byte 3
Byte 4
Byte 5
0x74
0x65
0x73
0x65
0x72
0x00 = Standard reset, 0x66 = Factory Reset
tira93e1 (2014-04) BPG402-SE.cp 29
Page 30

Subindex 0x02
Subindex 0x03
4.7.19 Exception Reset
Command
Subindex 0x01
Subindex 0x02
Subindex 0x03
4.7.20 Store Parameters
Command
Status (supported values)
0
Reserved
1
Reserved
2
Last command completed, error, no response
3
Reserved
255
Command is executing
Response
Byte 0 See Subindex 0x02
Byte 1 Unused
Execution of this command clears the latched exceptions.
Index SI DataType NV Access PM Name
FBF1 0x01 V_STRING(5) RW Command
0x02 BYTE RO Status
0x03 V_STRING(2) RO Response
A exception reset is initiated when the following byte sequence is sent.
Command
Byte 0
Byte 1
Byte 2
Byte 3
Byte 4
0x74
0x65
0x73
0x65
0x72
Status (supported values)
0
Last command completed, no error, no response
1
Reserved
2
Last command completed, error, no response
3
Reserved
255
Command is executing
Response
Byte 0 See Subindex 0x02
Byte 1 Unused
Execution of this command will store all parameters to non-volatile memory. If a
device automatically saves all non-volatile parameters at the time they are set, this
command will not take any action.
Index SI DataType NV Access PM Name
FBF2 0x01 V_STRING(4) RW Command
0x02 BYTE RO Status
0x03 V_STRING(2) RO Response
30
tira93e1 (2014-04) BPG402-SE.cp
Page 31

Subindex 0x01
Subindex 0x02
Subindex 0x03
A device reset is initiated when the following byte sequence is sent.
Command
Byte 0
Byte 1
Byte 2
Byte 3
0x65
0x76
0x61
0x73
Status (supported values)
0
Last command completed, no error, no response
1
Reserved
2
Last command completed, error, no response
3
Reserved
255
Command is executing
Response
Byte 0 See Subindex 0x02
Byte 1 Unused
tira93e1 (2014-04) BPG402-SE.cp 31
Page 32

Appendix
A: Literature
[1] www.inficon.com
Instruction Sheet
BPG402-S, BPG402-SD, BPG402-SE, BPG402-SL, BPG402-SP
tima46d1 (German)
tima46e1 (English)
INFICON AG, LI–9496 Balzers, Liechtenstein
[2] www.inficon.com
Instruction Sheet
BPG402-SD, BPG402-SE, BPG402-SP
tima47d1 (German)
tima47e1 (English)
INFICON AG, LI–9496 Balzers, Liechtenstein
[3] www.inficon.com
Operating Manual
BPG402-S, BPG402-SD, BPG402-SE, BPG402-SL, BPG402-SP
tina46d1 (German)
tina46e1 (English)
INFICON AG, LI–9496 Balzers, Liechtenstein
[4] ETG.1000.2: Physical Layer service definition and protocol specification
[5] ETG.1000.3: Data Link Layer service definition
[6] ETG.1000.4: Data Link Layer protocol specification
[7] ETG.1000.5: Application Layer service definition
[8] ETG.1000.6: Application Layer protocol specification
[9] ETG.1020: EtherCAT Protocol Enhancements
[10] ETG.2000: EtherCAT Slave Information
[11] ETG.5001.1: Modular Device Profile – Part 1: General MDP Device
Model
[12] ETG.5003.1: Semiconductor Device profile – Part 1: Common Device
Profile (CDP)
[13] ETG.5003.2080: Semiconductor Device profile – Part 2080: Specific
Device Profile (SDP): Vacuum Pressure Gauge
[14] IEC 61158-x-12 (all parts for type 12): Industrial communication
networks – Fieldbus specifications
[15] IEC 61784-2: Industrial communication networks – Profiles – Part 2:
Additional fieldbus profiles for real-time networks based on ISO/IEC
8802-3
[16] SEMI E54 / Draft 5102A: SPECIFICATION FOR SENSOR/ACTUATOR
NETWORK SPECIFIC DEVICE MODEL FOR VACUUM PRESSURE
GAUGES
[17] SEMI E52: Practice for referencing gases, gas mixtures and vaporizable
materials used in digital mass flow controllers
32
tira93e1 (2014-04) BPG402-SE.cp
Page 33

Notes
tira93e1 (2014-04) BPG402-SE.cp 33
Page 34

LI–9496 Balzers
Liechtenstein
Tel +423 / 388 3111
Fax +423 / 388 3700
Original: English tira93e1 (2014-04) reachus@inficon.com
tira93e1
www.inficon.com
 Loading...
Loading...