

Page 1
AF-300 C11
User’s Guide
TM
Page 2

1 BEFORE USING THIS PR ODUCT...... 11
TABLE OF CONTENTS
8 MAINTENANCE AND INSPECTION.70
1-1 RECEIVING INSPECTIONS .................. 11
1-2 APPEARANCE...................................12
1-3 HANDLING THE PRODUCT.................13
1-4 CARRYING.......................................14
1-5 STORAGE AND TRANSPORTATION .......14
2 INSTALLATION AND CONNECTION 15
2-1 OPERATING E NVIRONMENT...............15
2-2 INSTALLATION METHOD...................15
2-3 CONNECTION...................................16
2-3-1 Basic connection ......................16
2-3-2 Connecting the main circuit and
ground terminals.......................17
2-3-3 Connecting the control terminals 18
2-3-4 Connection examples..................23
2-4 OTHERS...........................................27
2-4-1 Harmonic component ................ 27
2-4-2 Noise.......................................27
2-4-3 Leakage current........................27
3 OPERATION........................................28
3-1 INSPECTION AND PREPARATION BEFORE
OPERATION......................................28
3-2 OPERATION METHOD........................28
3-3 TRIAL RUN ......................................29
4 KEYPAD PANEL..................................30
4-1 NAMES AND FUNCTIONS...................30
4-2 OPERATING KEYPAD PANEL..............31
5 SELECTING FUNCTION....................33
5-1 FUNCTION SELECTION LIST ..............33
5-2 DETAILS OF EACH F UNCTION............38
6 PROTECTIVE FUNCTION..................59
6-1 LIST OF PROTECTIVE FUNCTIONS.......59
6-2 ALARM RESET .................................60
7 TROUBLESHOOTING........................61
7-1 IN CASE OF TRIPPING........................61
7-2 OTHER TROUBLE.............................67
8-1 DAILY INSPECTION...........................70
8-2 PERIODIC INSPECTION......................70
8-3 ELECTRICAL MEASUREMENTS IN THE
MAIN CIRCUIT................................. 73
8-4 INSULATION TEST ............................ 74
8-5 INQUIRIES ABOUT PRODUCTS AND
PRODUCT WARRANTY......................75
8-6 WARRANTY SERVICE........................ 76
9 SPECIFICATIONS...............................78
9-1 STANDARD SPECIFICATIONS.............. 78
9-2 COMMON SPECIFICATIONS................ 80
9-3 DIMENSIONS.................................... 84
10 OPTIONS.......................................... 87
10-1 BUILT-IN OPTIONS........................... 87
10-2 EXTERNAL OPTIONS........................ 87
11 APPLICABLE DC REACTORS.......88
12 COMPLIANCE WITH
STANDARDS....................................89
12-1 UL/CUL STANDARDS [APPLICABLE TO
PRODUCTS WITH UL/CUL MARK]...... 89
12-1-1 General........................................ 89
12-2-2 Precautions .................................. 89
12-2 COMPLIANCE WITH EMC DIRECTIVE IN
EU [APPLICABLE TO PRODUCTS WITH
CE MARK]........................................ 90
12-2-1 General........................................ 90
12-3 COMPLIANCE WITH LOW VOLTAGE
DIRECTIVE IN EU [APPLICABLE TO
PRODUCTS WITH TÜV OR CE MARK]. 90
12-3-1 General........................................ 90
12-3-2 Precautions .................................. 90
13 ELECTROMAGNETIC
COMPATIBILITY (EMC)................91
13-1 GENERAL........................................ 91
13-2 RFI FILTERS....................................91
13-3 ELECTROMAGNETIC COMPATIBILITY
(EMC) RECOMMENDED INSTALLATION
INSTRUCTIONS.................................. 94
Page 3
-1-
Safety Instructions
!
!
!
Read this operation manual carefully and familiarize yourself with the operation of the drive before installation, connection (wiring), operation or maintenance and inspection of the device. Be
familiar with the drive, safety information, and safety signs before using the drive.
In this instruction manual, safety signs are classified into the following categories.
WARNING Improper operation may result in death of serious injury.
CAUTION Improper operation may result in slight to medium injury or property damage.
Note: More serious situations than those covered by the CAUTION sign can result depending on
the circumstances. It is important that you always follow the instructions
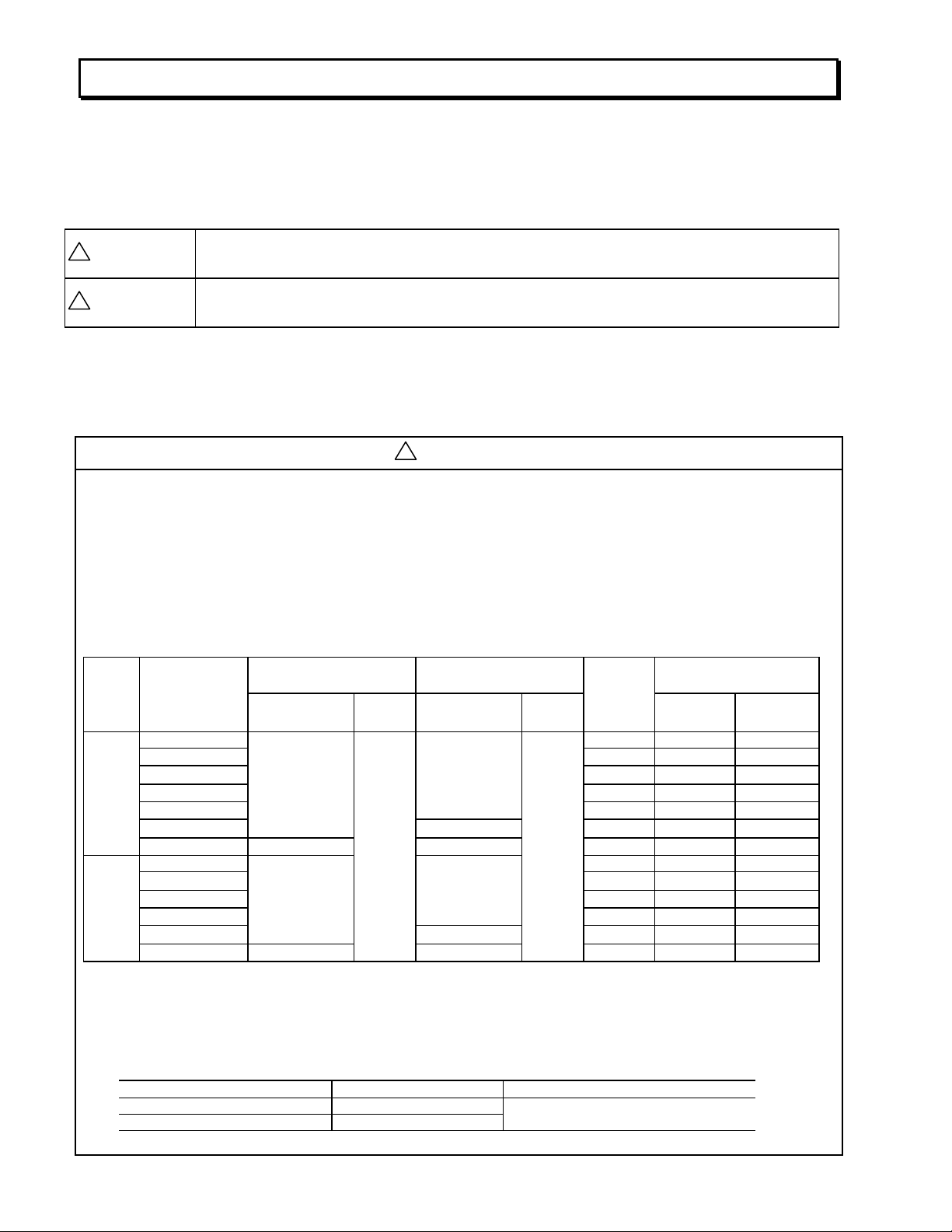
Compliance with UL/cUL standards [Applicable to products with UL/cUL mark]
CAUTION
1. [WARNING] Take care of electric shock. Be sure to turn the drive off before starting work.
2. [CAUTION] When the charge lamp is lit, the drive is still charged at a dangerous voltage.
3. [WARNING] There are two or more live parts inside the drive.
4. The drive is approved as a part used inside a panel. Install it inside a panel.
5. Perform wiring to the input, output and control terminals of the drive, referring to the table below.
Use UL certified round crimp terminal to the input and output terminals with insulation cover or
covered with reduced tube to obtain the insulation distance. Use a crimping tool recommended
by the terminal manufacturer when fabricating crimp terminals.
6. Install a fuse in the power supply to the drive, referring to the table below.
Voltage Drive type
6KC1123F12X1** 3 A4J3 JKS3
6KC1123F25X1** 6 A4J6 JKS6
6KC1123F50X1** 10 A4J10 JKS10
6KC1123001X1** 15 A4J15 JKS15
6KC1123002X1**
6KC1123003X1**
3-phase 230V input
6KC1123005X1** 15.9 (1.8) 10 (5.3) 40 A4J40 JKS40
6KC1121F12X1** 6 A4J6 JKS6
6KC1121F25X1** 6 A4J6 JKS6
6KC1121F50X1** 10 A4J10 JKS10
input
6KC1121001X1**
6KC1121002X1**
Single-phase 230V
6KC1121003X1** 15.9 (1.8)
Tightening torque
Lb • Inch[N • m]
L1/R, L2/S, L3/T
1)
U. V. W
10.6 (1.2)
10.6 (1.2)
Control
section
3.5
(0.4)
1) Only the L1/L and L2/N phases are provided for the single-phase 230V input series.
2) Use copper wires of allowable maximum temperature 60 or 75 °C.
3) Use UL certified "fast acting fuse."
Connect the power supply satisfying the characteristics shown in the table below as an input power supply
of the drive. (Short circuit rating)
Drive type Input max. volta Input current
3 Phase input AC230V
Single phase input AC240V
Applicable wire diameter
[AWG] (mm2)2)
L1/R, L2/S, L3/T
U. V. W
14 (2.1)
12 (3.3) 30 A4J30 JKS30
14 (2.1)
12 (3.3) 30 A4J30 JKS30
10 (5.3)
1)
Control
section
20
(0.5)
Fuse
[A] 3)
20 A4J20 JKS20
15 A4J15 JKS15
40 A4J40 JKS40
5,000 A or less
Recommended fuse
Gould
Company
Bussmann
Company
Page 4
-2-
Compliance with low voltage directive in EU [Applicable to products with TÜV mark]
!
CAUTION
1. Safe separation for control interface of this drive is provided when this drive is installed in
overvoltage category II. PELV(Protective Extra Low Voltage) circuit or SELV(Safety Extra
Low Voltage) circuit from external controller is connected to the interface directly.
2. Basic insulation for control interface of this drive is provided when this drive is installed in
overvoltage category III. An isolation transformer has to be installed between power supply
mains and this drive when SELV circuit from external controller is connected to this drive
directly. Otherwise supplementary insulation between control interface of this drive and
environment must be provided.
3. The ground terminal G should always be connected to the ground. Don't use only RCD
as the sole method of electric shock protection.
Dimensions of external PE conductor should be same as dimensions of input phase
conductor and capable for possible fault.
4. Use MCCB or MC that conforms to EN or IEC standard.
5. Where RCD (Residual-current-operated protective device) is used for protection in case of
direct or indirect contact, only RCD of type B is allowed on the supply side of this EE
(Electric equipment). Otherwise another protective measure shall be applied such as
separation of the EE from the environment by double or reinforced insulation or isolation of
EE and supply sy stem by the transformer.
6. The drive has to be installed in environment of pollution degree 2. If the environment is
pollution degree 3 or 4, the drive has to be installed in a cabinet of IP54 or higher.
7. Use a prescribed wire according to the EN60204 Appendix C.
8. Install the drive, AC or DC reactor, output filter in an enclosure that meets the following
requirement, to prevent a human body from touching directly to these equipment.
1) When a person can touch easily on eac h connecting terminal or live parts, install
the drive, AC or DC reactor, output filter in an enclosure with minimum degree of
protection of IP4X.
2) When a person can not touch easily on each connecting terminal or live parts, install the drive, AC or DC reactor, output filter in an enclosure with a minimum degree of protection of IP2X.
9. It is necessary to install the drive in appropriate method using an appropriate RFI filter to
conform to the EMC directive. It is customer's responsibility to check whether the equipment ,the drive is installed in, conforms to EMC directive.
Page 5
-3-
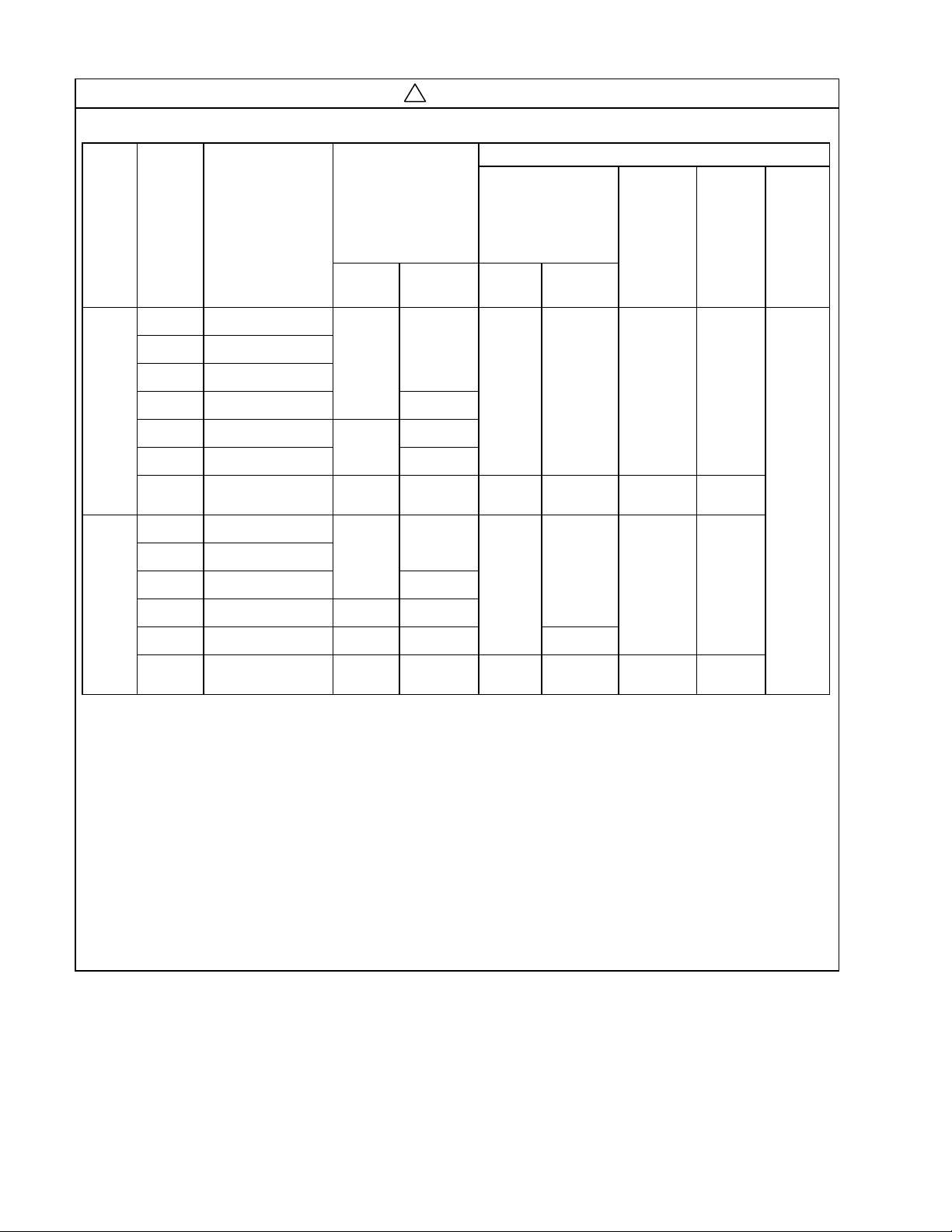
Compliance with low voltage directive in EU [Continued]
!
Recommended wire size AWG (mm2)
12
(4.0)*5
10
(6.0)*5
12
(4.0)*5
12
(4.0)*5
12
(4.0)*5
10
(6.0)*5
14
(2.5)*5
12
(4.0)*5
CAUTION
Use of wires specified in Appendix C of EN 60204 is recommended.
Power
supply
volt-
age
Nominal
applied
motor
[HP]
Drive type
1/8
1/4
1/2
1
2
3-phase 230V
3
5
1/8
1/4
1/2
1
2
Single phase 230V
3
6KC1123F12X1**
6KC1123F25X1**
6KC1123F50X1**
6KC1123001X1**
6KC1123002X1**
6KC1123003X1**
6KC1123005X1**
6KC1121F12X1**
6KC1121F25X1**
6KC1121F50X1**
6KC1121001X1**
6KC1121002X1**
6KC1121003X1**
Molded case circuit
breaker (MCCB) or
earth leakage cir-
cuit breaker (ELCB)
Rated current [A]
With
DCR
5
10
20 30
5
10 15
15 20
20 30
Without
reactor*
5
10
15
20
5
10
3
Input circuit*2
3-phase 200V
[L1/R, L2/S, L3/T],
single phase 200V
[L1/L, L2/N]
Without
reactor
(2.5)*4
(2.5)*4
(4.0)*4
With
DCR
14
(2.5)*4
14
(2.5)*4
14
14
*3
Output
*2
circuit
[U. V. W]
14
(2.5)*4
14
(2.5)*4
DCR*2
circuit
[P1]
[P(+)]
14
(2.5)*4
14
(2.5)*4
*1 The applicable frame and series of the molded case circuit breaker (MCCB) and earth
leakage circuit breaker (ELCB) vary according to the capacity of the transformer of the
equipment. For details of selection, refer to the concerning technical documents.
*2 The recommended wire size for the main circuit is the case for the low voltage directive at
ambient temperature 40 °C.
*3 The power supply impedance without a reactor is considered to be the equivalent of 0.1%
of the drive capacity, with 10% current imbalance accompanied by the voltage imbalance.
*4 Crimp terminals up to 0.29” (7.4 mm) in width (including tolerance) can be used.
*5 Crimp terminals up to 0.37” (9.5 mm) in width (including tolerance) can be used.
*6 Use the grounding cable of a size equal to or larger than that of the input power supply
cable.
Control
wiring
20
(0.5)
Page 6
-4-
Instructions on use
!
!
!
WARNING
1. This drive is designed to drive a three-phase induction motor and is not usable for a singlephase motor or any other purposes.
There is a risk of fire
2. This drive may not be used as is for an elevator, life-support system, or other purpose directly
affecting the safety of humans.
Safety precautions should be established and practiced in terms of the entire system, rather
than the independent device.
Otherwise, an accident could occur.
Instructions on transport/installation
WARNING
1. Attach the device to an incombustible material such as metal,
otherwise fire could occur
2. Do not place the device near inflammables.
Otherwise fire could occur
CAUTION
1. Do not carry the device by holding just the surface cover.
Drive may be dropped causing injury.
2. Do not allow foreign matter such as lint, paper dust, small chips of wood or metal, and dust to
enter the drive or adhere to the heat sink.
Otherwise, a disaster such as burning could occur.
3. Do not install or operate damaged drive or a drive with a missing part,
otherwise injury could occur.
4. Do not step on the product,
otherwise injury could occur.
5. When stacking up in tiers, do not exceed the number of tiers indicated on the packing
carton.
Otherwise injury could occur.
Page 7
-5-
!
!
Instructions on wiring
WARNING
1. When the drive is connected to power, connect it via a line-protection molded case
circuit breaker or an earth-leakage circuit breaker (Residual current operated
protective device).
Otherwise, fire could occur.
2. Be sure to connect the ground wire,
otherwise electric shock or fire could occur.
3. Ensure that a licensed specialist
performs the wiring work.
4. Check before starting the wiring that the power is off (OPEN),
otherwise electric shock could occur.
5. Do not wire up the drive until it has been installed securely,
otherwise electric shock or injury could occur.
6. The drive has to be grounded in accordance with the national and local safety
specification
otherwise electric shock could occur.
CAUTION
1. Check that the number of phases and the rated voltage of this product correspond to the
number of phases and voltage of the AC power supply,
otherwise fire could occur.
2. Do not connect the AC power supply to the output terminals (U, V, W),
otherwise injury could occur.
3. Check the output terminals (U,V,W) for the phase order and connect them to the motor
correctly,
otherwise fire could occur.
4. Do not connect a braking resistor directly to the DC terminals [P(+), N(-)],
otherwise fire could occur.
5. Noise is generated from the drive, motor, and wiring. Take care that this noise does
not cause malfunctions in peripheral sensors and equipment,
otherwise accidents could occur.
Page 8
-6-
Instructions on operation
!
!
!
WARNING
1. Be sure to put on the surface cover before turning the power ON (close).
Never remove the cover while the power is applied to the drive.
Otherwise electric shock could occur.
2. Never operate switches with wet fingers.
Otherwise electric shock could occur.
3. The interior of the drive may remain charged after turning off the power.
Therefore, never attempt to remove the surface cover except for wiring service and periodic
maintenance.
Otherwise electric shock could occur.
WARNING
1. When the retry function is selected, the drive may automatically restart after
tripping, depending on the cause of the trip.
(Design the machine to secure personal safety in the event of restart.)
Otherwise accident could occur.
2. Operating conditions may occasionally be different from the preset acceleration/
deceleration time or speed because of activation of the stall prevention function.
In su ch a case, personal safety must be secured through adequate machine design.
Otherwise accident could occur
3. The stop key is effective only when a function setting has been established.
Therefore install an emergency switch independently. When operation via the external signal
terminal is selected, the STOP key on the keypad panel will be disabled.
There is a risk of accidents.
4. Operation starts suddenly if alarm reset is done with a running signal input. Check that no
running signal is input before alarm reset,
otherwise accidents could occur.
5. Never touch the drive terminals when energized even if it has stopped,
otherwise electric shock could occur.
6. Never touch the keys on the keypad panel with a pointed object such as a needle,
otherwise electric shock could occur.
CAUTION
1. Never touch the heat sink because they become very hot,
Otherwise burns could occur.
2. The drive can set high-speed operation easily. Carefully check the limit of the motor and ma-
chine before changing the setting,
Otherwise injuries could occur.
3. Do not use the drive brake function for mechanical holding,
Otherwise injuries could occur.
Page 9
-7-
Instruction on maintenance/inspection, and replacement
!
!
WARNING
1. Do not commence inspection work until at least five minutes after the power has been
turned off (open).
(In addition, make sure that the charge lamp has gone off and check that the DC voltage
between terminals P(+) and N(-) does not exceed 25V DC.)
Otherwise electric shock could occur.
2. Only qualified personnel should perform maintenance and inspection or replacement opera-
tions.
(Take off all metal objects (watch, ring, etc.) before starting.)
(Use well-insulated tools.)
Otherwise electric shock or injury could occur.
3. Never modify the product,
otherwise electric shock or injury could occur.
Instruction on disposal
CAUTION
1. Since this product contains lead solder, it must be treated as industrial waste when
it is disposed of. Entrust it to a waste processing company when disposing it.
General instructions
1. The figures in this operation manual may show the drive with covers and safety screens removed to explain the structure in details. Therefore, be sure to replace the covers and
screens to their original positions and operate the drive according to the instruction manual.
Page 10

-8-
Preface
Thank you for purchasing our AF-300C11 series drive. This product is used to drive a 3phase electrical
motor at variable speed. Incorrect use of this product may result in personal injury and/or property damage.
Read all operating instructions before using this device. Since this manual does not cover the use of option
boards, etc., refer to relevant manuals for option operations.
These instructions do not purport to cover all details or variations in equipment, nor to provide for every possible contingency to be met during installation, operation, and maintenance. Should further information be
desired or should particular problems arise that are not covered sufficiently for the purchaser's purpose, the
matter should be referred to GE Fuji, Technical Service.
NOTE: The terms "inverter". "controller", and "drive are sometimes used interchangeably throughout the in-
dustry. We will use the term "drive" in this document.
AF-300C11 " and XSD" are trademarks of the General Electric Company. Energy Saver is a registered
trademark of the General Electric Company.
NOTE: Always read the complete instructions prior to applying power or troubleshooting the equipment and
follow all pr ocedures step by step.
Page 11
-9-
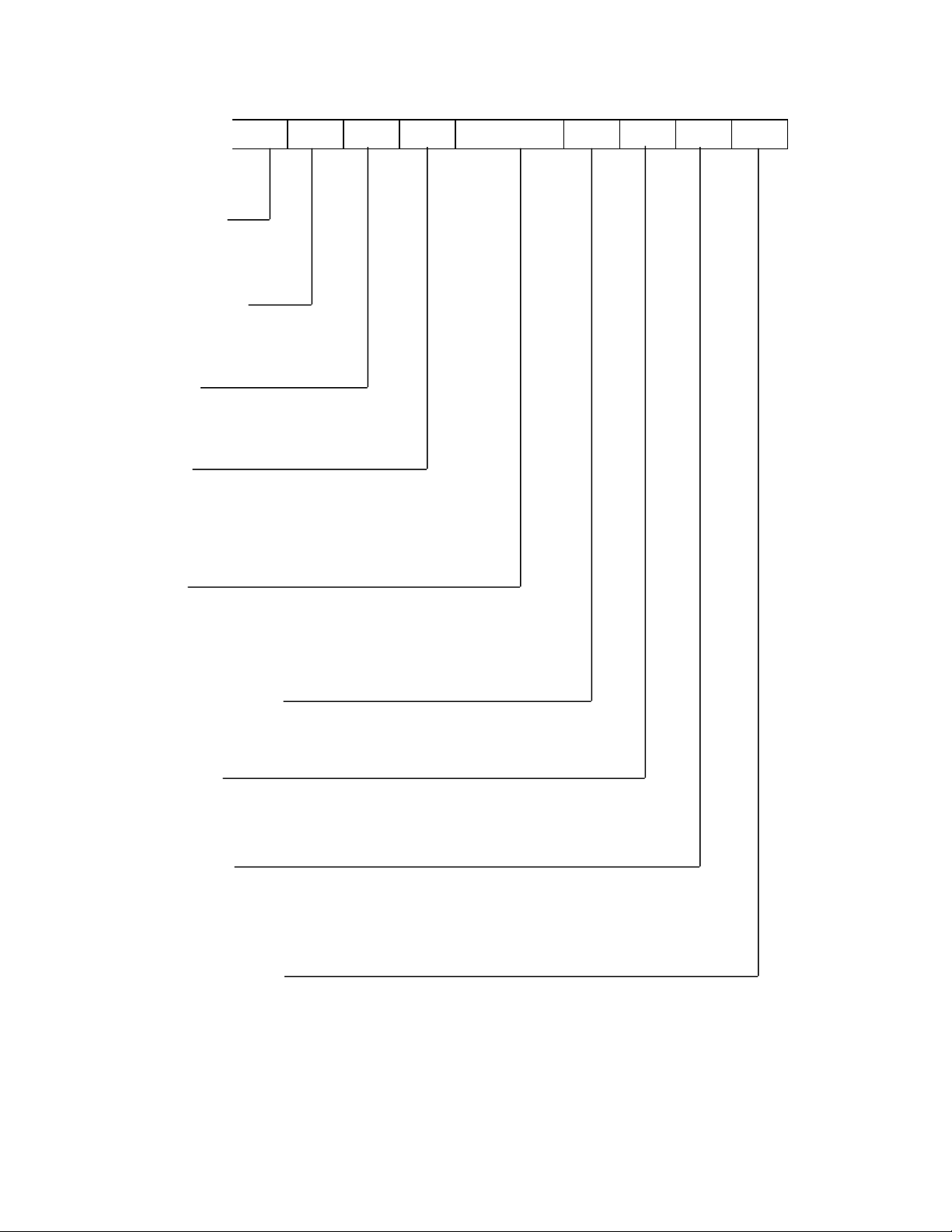
AF-300C11 Model Numbering System Diagram
Description
6K C11 N N (X/N)NN
X N X N
GE Product Code
AF-300 Drive Family
Input Voltage
2 = 230V 50/60 Hz
Input Phases
1 = Single Phase
3 = 3 Phase
Horsepower
F50 = 1/2 Hp
001=1 Hp
Factory Installed Options
X= Keypad
Enclosure Type
1=IP20
Product Revision
A = 1st Revision
B = 2nd Revision
Minor Product Revision
1 = 1st Minor Revision
2 = 2nd Minor Revision
Page 12
-10-
Enclosure
Overload
Dimensions
Weight
AF-300C11
Rated
Output
HP Rating
230VAC, 3 phase, 50/60Hz Input
230VAC, Single phase, 50/60Hz Input
Current
1/8 IP20 0.7 1.1 6KC1123F12X1 * * D5674 4.72 x 3.15 x 3.23 1.3
1/4 IP20 1.4 2.1 6KC1123F25X1 * * D5675 4.72 x 3.15 x 3.43 1.3
1/2 IP20 2.5 3.8 6KC1123F50X1 * * D5676 4.72 x 3.15 x 3.82 1.5
1 IP20 4 6.0 6KC1123001X1 * * D5677 4.72 x 3.15 x 4.80 1.8
2 IP20 7 11 6KC1123002X1 * * D5678 5.12 x 4.33 x 5.55 3.3
3 IP20 10 15 6KC1123003X1 * * D5679 5.12 x 4.33 x 5.55 3.3
5 IP20 16.5 25 6KC1123005X1 * * D5680 7.09 x 5.51 x 5.47 4.9
1/8 IP20 0.7 1.1 6KC1121F12X1 * * D5668 4.72 x 3.15 x 3.23 1.3
1/4 IP20 1.4 2.1 6KC1121F25X1 * * D5669 4.72 x 3.15 x 3.43 1.3
1/2 IP20 2.5 3.8 6KC1121F50X1 * * D5670 4.72 x 3.15 x 4.61 1.5
(A)
(150%
1min.)
AF-300C11
Model No. Catalog No.
H x W x D
(inches)
(lbs)
1 IP20 4 6.0 6KC1121001X1 * * D5671 4.72 x 3.15 x 5.59 2.0
2 IP20 7 11 6KC1121002X1 * * D5672 5.12 x 4.33 x 5.94 3.5
3 IP20 10 15 6KC1121003X1 * * D5673 7.09 x 5.51 x 5.47 4.9
* * Indicates product revision
Page 13
-11-
1 Before Using This Product
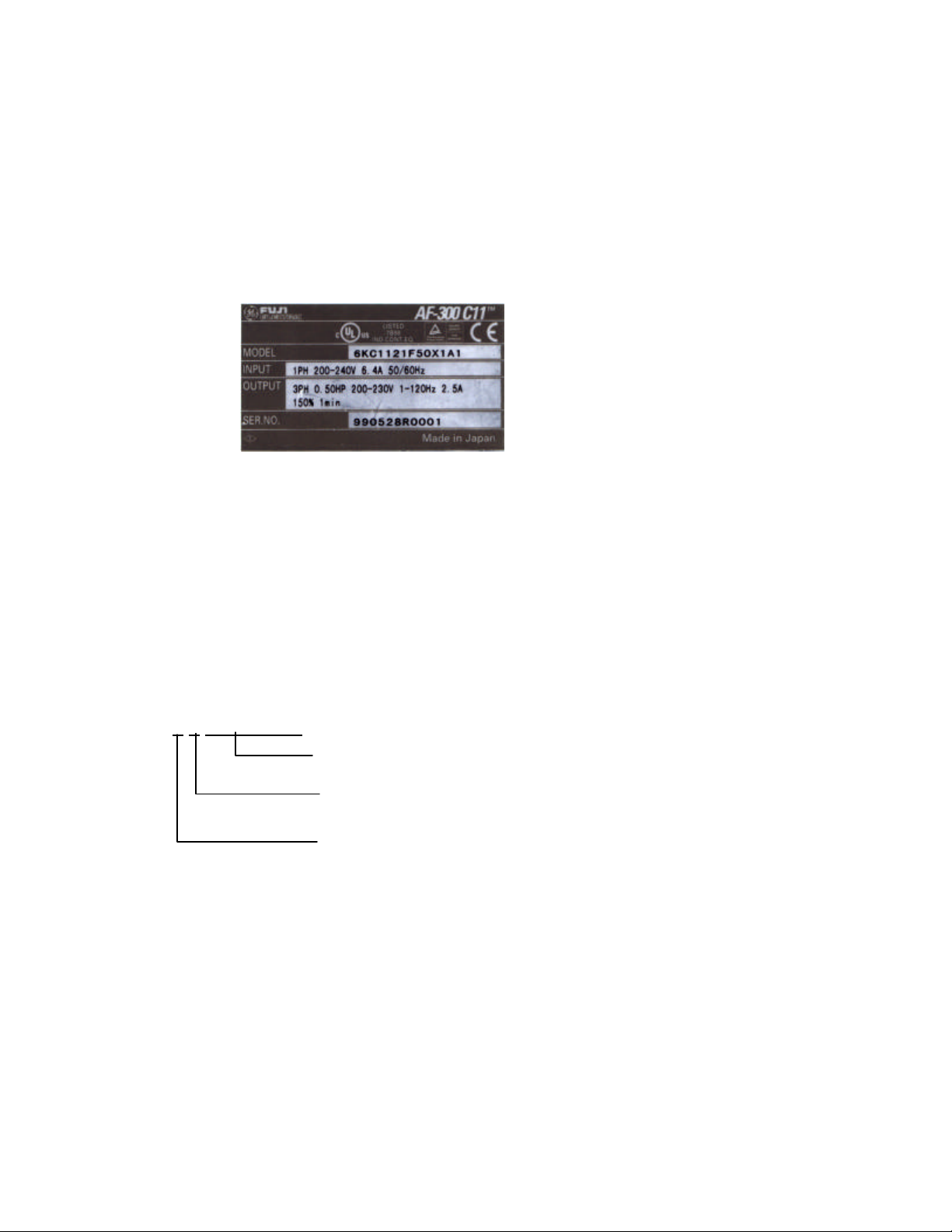
X: October, Y: November, Z: December
Production year: Last one digit of year (9: 1999)
1-1 Receiving Inspections
Unpack and check the product as explained below.
If you have any questions or problems with this product, please contact GE FUJI Drives or your local
GE distributor.
(1) Check the ratings name plate to confirm that the delivered product is the ordered one.
Figure1-1-1 Ratings nameplate
¬ MODEL : Drive Type
- INPUT : Number of input phases, rated input voltage, rated input cu rrent, rated input frequency
® OUTPUT : Number of output phases, rated output capacity, rated output voltage, output fre-
quency range, rated output current, overload capacity
!¯ SER. No. : Product number
(2) Check for damaged parts, missing parts, and dents or other damage on the covers or the main unit
upon delivery.
9 9 0528R0001
Production lot serial number
Production month:1 to 9: January to September,
Page 14

-12-
1-2 Appearance
(1)
(1) Surface cover
(2) Keypad panel
(2)
(3) Frequency setting POT (VR) (built-in POT)
(4) Ratings nameplate
(5) Heat sink
(6) Cooling fan (2 HP or more)
(7) Charge lamp CRG
(8) Control terminal block
(9) Main circuit terminal block
3-phase230V[
Single-phase 230V[G,L1/L,L2/N,P1,P(+)]
G,L1/R,L2/S,L3/T,P1,P(+)]
(10) Main circuit terminal block
[
P(+),N(-),U,V,W, G]
(4)
(9)
(3)
(5)
(7)
(6)
(9)
(8)
(10)
(7)
(8)
(10)
Page 15
-13-
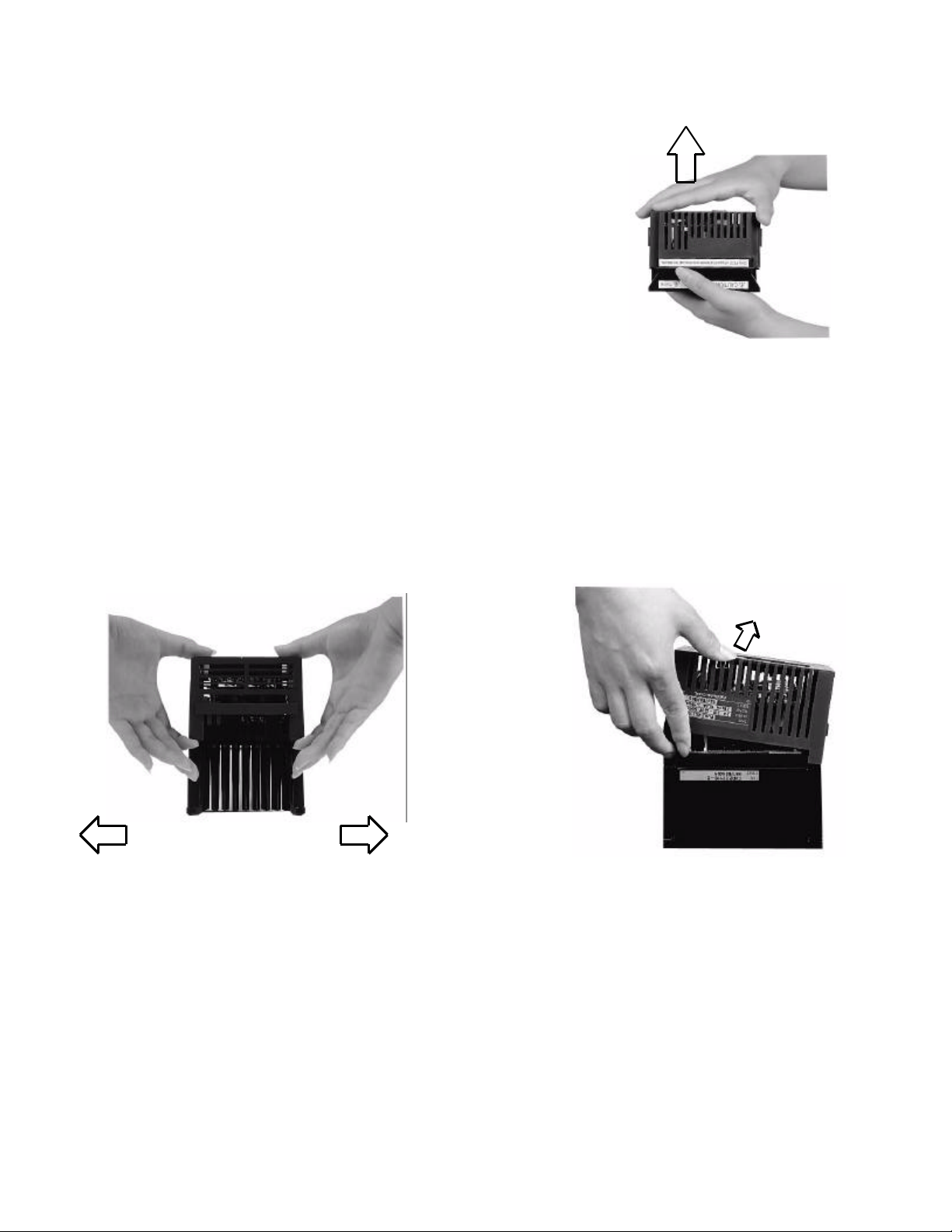
1-3 Handling the Product
Remove the surface cover as explained below.
(1) For 1/8 to 1 HP
Grasp the upper and lower parts of the cover with
both hands and pull it to the front of the drive.
(2) For 2 to 5 HP
Expand the lower part of the cover horizontally, lift the cover to the front, and then remove it.
Page 16
-14-
1-4 Carrying
Condensation or formation of ice must not
Always hold the main unit while carrying this product.
If it is carried by the cover or parts and not the main unit, the product may be damaged or dropped.
Force must not be applied to the drive cover during carrying because it is made of plastic.
1-5 Storage and transportation
Store and transportation this product under the conditions listed in Table 1-5-1.
Table 1-5-1 Storage and tra nsportation environment
Item Specifications
Storage temperature
Transportation temperature
Relative humidity 5 to 95% *1
Atmosphere
Air pressure
*1 A large change in temperature within this humidity range may cause condensation or formation of ice. Do not store this product at a place where such changes occur.
[Storage precautions]
1 Do not locate this product directly on a floor; place it on a rack or shelf.
2 To store the product in a severe atmosphere, pack it in vinyl sheet.
3 If the product must be stored at a place where it may be affected by humidity, insert a drying agent
such as silica gel and pack it in vinyl sheet.
The product must not be exposed to dust, direct sunlight, corrosive gas,
inflammable gas, oil mist, vapor, water drops, or vibration.
There must be no salt in the atmosphere.
86 to 106kPa (During storage)
70 to 106kPa (During transportation)
-25 to +65 °C
(-4 to +149 °F)
be caused by sudden temperature
changes.
Page 17
-15-
2 Installation and Connection
!
0.4”
(1 cm)
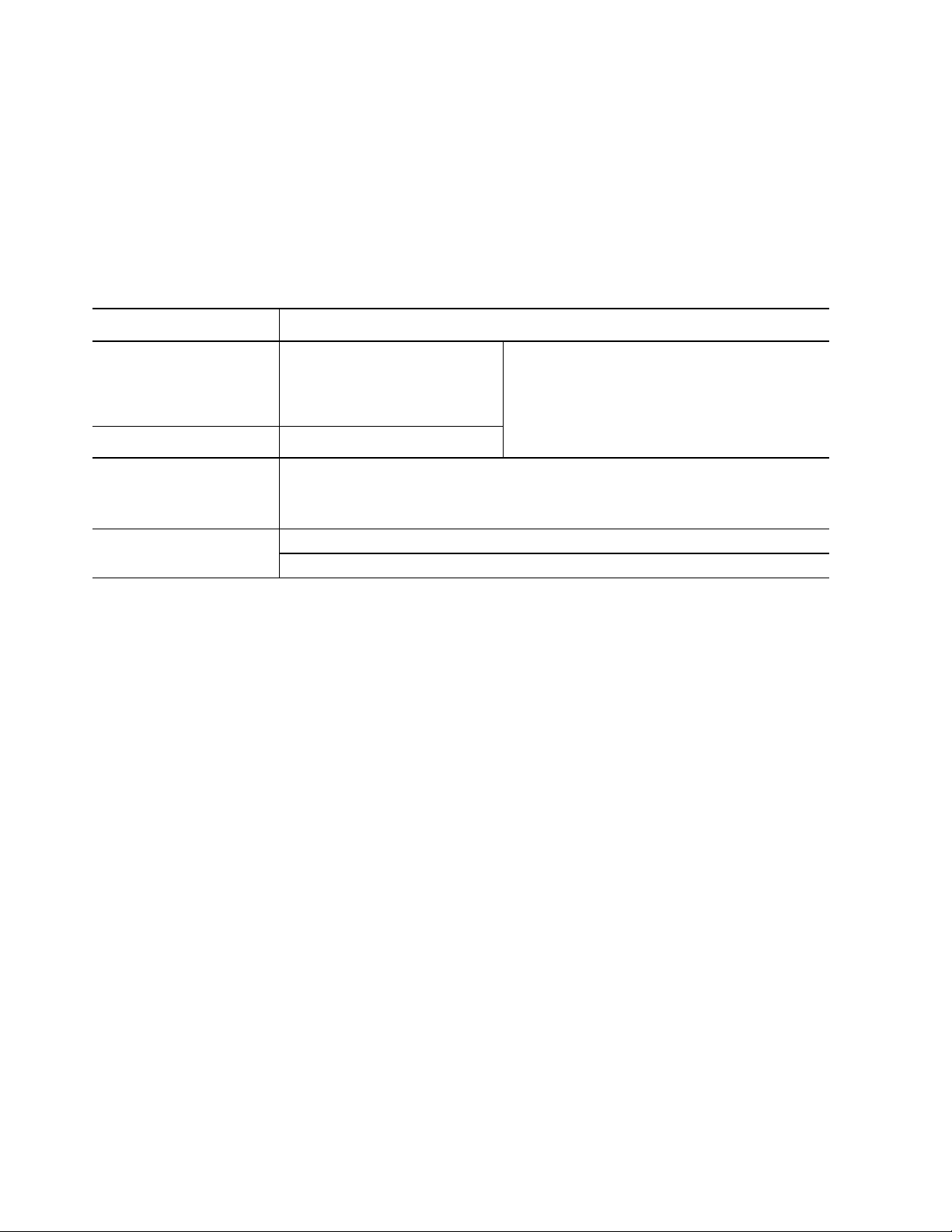
Figure 2-2-1 Installation direction and
2-1 Operating Environment
Install this product at a place satisfying the conditions listed in Table 2-1-1.
Table 2-1-1 Operating environment
Item Specifications
Place Indoor
Ambient temperature -10 to +50 °C (+14 to +122°F)
Ambient relative
humidity
Atmosphere
Altitude 3300 feet (1000m) or less ( Air pressure : 86kPa to 106kPa )
Vibration
5 to 95%RH(No condensation allowed)
The product must not be exposed to dust, direct sunlight, corro-
sive gas, inflammable gas, oil mist, vapor, or water drops.
There must be no salt in the atmosphere.
Condensation must not be caused by su dden changes in temperature.
3mm: 2 to less than 9Hz
9.8 m/s2: 9 to less than 20Hz
2 m/s2: 20 to less than 55Hz
1 m/s2: 55 to less than 200Hz
2-2 Installation Method
¬ Tightly fasten the product in the upright pos ition on a strong structure using four bolts (M4) with the
characters AF -300C11 facing the front. Be sure not
to turn the product upside down, and install it on a
horizontal su rface.
4”
(10 cm)
- Heat is generated while the drive is operating, so the
gaps shown in Figure 2-2-1 are necessary for the
0.4”
(1 cm)
passage of cooling air. The generated heat is
radiated upward by the built-in cooling fan, so do not
install this product below a device that is sensitive to
heat.
® The temperature of the heat sink increases to about
90 °C while the drive is operating. Therefore, the
surface behind where the product is located must be
able to withstand this temperature increase.
WARNING
Install this product on a nonflammable material such as metal,
otherwise fire could occur.
surrounding space
¯ When installing this product in a control panel, carefully consider the ventilation to prevent the am-
bient temperature of the drive from exceeding the specified value. Do not install it in a hermetically
sealed box from which heat is not radiated fully.
AF-300C11
4”
(10 cm)
0.4”
(1 cm)
Page 18
-16-
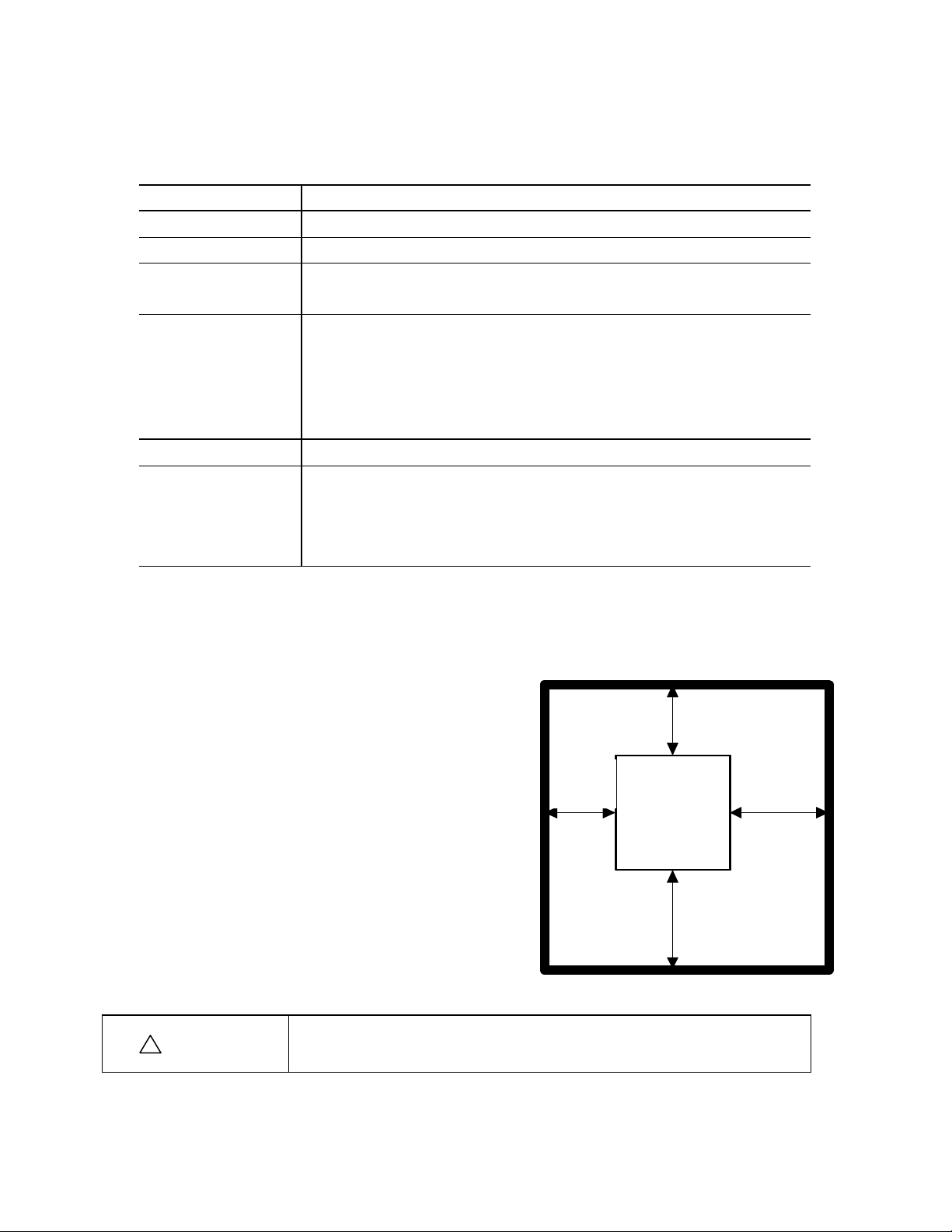
° If two or more drives need to be installed in the same device or control panel, they should be ar-
!
Do not allow foreign matter such as lint, paper dust, small chips of
wood or metal, and dust to enter the drive or adhere to the heat sink.
!
Drive
Air
Plate
Drive
ranged horizontally to minimize the influence of heat between them. If two or more drives must be
installed vertically, place a plate between them to prevent the upper drive from being affected by
heat from the lower drive.
Drive Drive
Air supply Air supply
(a) Horizontal arrangement
supply
(b) Vertical arrangement
Figure 2-2-2 How to install two or more drives
CAUTION
1.
Otherwise, a disaster such as burning could occur.
2-3 Connection
Remove the surface cover to connect the terminal blocks. Correctly connect them according to the following procedures.
2-3-1 Basic connection
¬ Always connect the power to the main power supply input terminal of the drive. If it is connected to
another terminal, the drive will be damaged (see Figure 2-3-1).
- Always ground the ground terminal to prevent disasters such as fire and electric shock and to minimize noise.
® Use a reliable crimp terminal for connection between a terminal and wire.
¯ After terminating the connection (wiring), check the following items:
a. Whether the connection is correct
b. Whether all necessary connections have been made
c. Whether there is a short-circuit or ground fault between terminals and wires
° Connection modification after power-on
The smoothing capacitor in the direct current part of the main circuit cannot be discharged quickly
after the power is turned off. Use a multimeter to check that the voltage of the direct current (DC) is
reduced to the safety range (25V dc or less) after the charge lamp goes off to avoid danger. Check
that the voltage is zero before short-circuiting a circuit because the residual voltage (electric charge)
may cause sparks.
1. Always connect the ground wire,
WARNING
otherwise electric shock and fire could occur.
2. Ensure that a licensed specialist performs the wiring work.
3. Check before starting the wiring that the power is off,
otherwise electric shock could occur.
Page 19
-17-
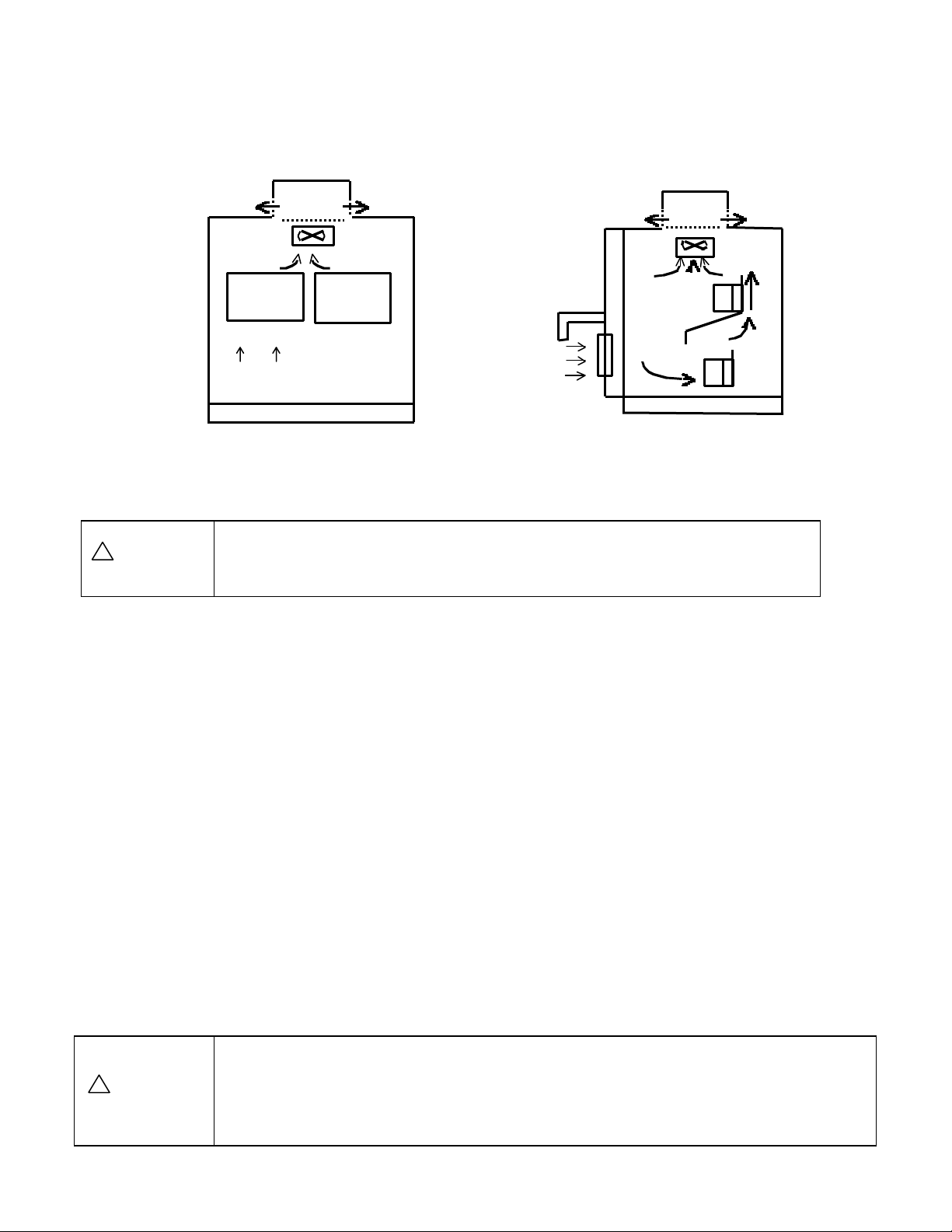
2-3-2 Connecting the main circuit and ground terminals
G G
For 3-phase 230V input
Table 2-3-1 Functions of main circuit and ground terminals
Symbol Name Explanation
L1/R,L2/S,L3/T Connects 3-phase power.(3-phase 230V input)
L1/L,L2/N
U, V, W Drive output Connects 3-phase motor.
P1, P(+) For connection of DC
P(+), N(-) For DC intermediate circuit Connected to DC link circuit terminal
G For drive grounding Ground terminal for drive chassis (case).
(1) Main power supply input terminal
1 Connect the main power supply input terminals to the
power supply via a molded case circuit breaker for circuit
protection or earth leakage circuit breaker. An earthleakage circuit breaker which can also detect DC current
is recommended. Phase -sequence matching is unnecessary.
2 It is recommended that a magnetic co ntactor is connected
to prevent any failure or accident from becoming serious
by disconnecting the drive from the power supply when
the drive protective function operates.
3 Do not turn on or off the main power supply to start or stop
the drive; instead, use the control circuit terminal
FWD/REV or the RUN/STOP key on the keypad panel. If
it is unavoidable to turn the main power supply on or off to
start or stop the drive, it must not exceed once per hour.
(2) Drive output terminal [U, V, W]
1 Connect these terminals to the 3-phase motor with the correct phase -sequence. If a motor rota-
tion direction does not correspond to the correct rotation direction, exchange any two of the U, V,
and W phases.
2 Do not connect a phase -advance capacitor or surge absorber to the drive output.
3 A very long wiring length between the drive and the motor causes a high frequency current to
flow due to floating capacity between cables, making the drive trip, increasing the leakage
current and deteriorating the accuracy in the current display. To prevent such trouble, the wi r-
ing length to the motor should not exceed 165 feet (50 m).
When the drive is operated in the low noise mode (carrier frequency: 8 to 15 kHz) and the wi ring length is long, add an optional output circuit filter.
Main power supply input
reactor
3-phase 230V [L1/R,L2/S,L3/T]
Single-phase 230V [L1/L,L2/N]
Connects single-phase power. (Single-phase 230V input)
Connects input power- factor correcting DC reactor
(optional).
(for DC bus connection).
L1/R
L2/S
G L1/L
For single-phase 230V input
AF-300C11
Figure 2-3-1 Arrangement of
main circuit and ground terminals
P(+)
P1 L3/T
P(+)
P1 L2/N
W V U N(-) P(+)
Page 20
-18-
(3) DC reactor connecting terminal [P1, P(+)]
!
Figure 2-3-2 Connection of DC reactor
P1
FWD or others
Use this terminal to connect a input power-factor co rrecting
DC reactor (optional). Remove the jumper co nnected in the
factory before connecting the DC reactor (see Figure 2-3-2).
Use diagonal cutting pliers to cut the surface cover barriers
from P1, P(+) terminals before connection.
If no DC reactor is used, do not remove the jumper.
(4) Drive grounding terminal[ G]
Always ground the drive grounding terminal [ G]
for safety and noise reduction. Grounding of the
metal frames of electric equipment has to be done
in accordance with the national and local safety
specifications in force.
1 Connect a thick and short wire to the grounding terminal
of the drive for connection with a ground electrode prepared exclusively for the drive sy stem.
1. Check that the number of phases and the rated voltage of this product
correspond to the number of phases and voltage of the AC power supply,
CAUTION
otherwise fire could occur.
2. Do not connect the AC power supply to the output terminals (U, V, W),
otherwise injury could occur.
3. Do not connect a braking resistor directly to the DC terminals
P(+), N(-),
otherwise fire could occur.
(a) Connection diagram
Top of drive
Barrier
AF-300C11
P(+)
(b) Cutting of barrier
2-3-3 Connecting the control terminals
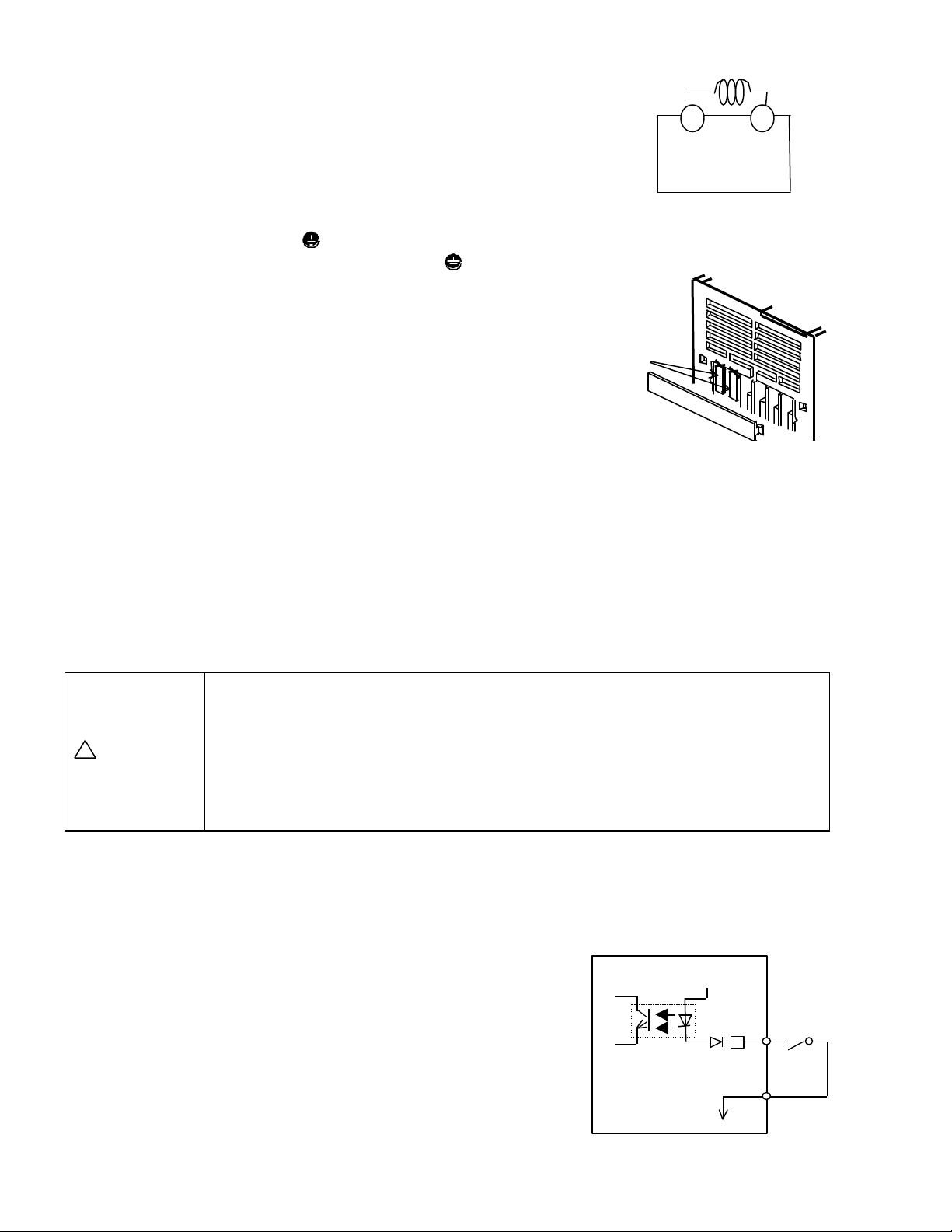
(1) Digital input terminal
Table 2-3-2 lists the functions of the control circuit terminals.
The method of connecting a control circuit terminal depends
on how its function is set. Connect the control circuit
terminals according to the set functions.
Figure 2-3-3 shows the circuit configuration.
Use a reliable contact.
+24 to +27Vdc
4.7kΩ
AF-300C11
CM
Figure 2-3-3 Digital input terminal
Page 21
-19-
(2) Run/stop command terminal (FWD, REV)
!
-
Ry
13 12 11
FWD terminal is short-circuit to CM terminal in the factory. Pressing the RUN key on the keypad
panel can start forward operation. If function F02 is 0, short-circuit FWD and CM and press the
RUN key for forward operation, or short-circuit REV and CM for reverse operation. If function F02 is
1, then short-circuit FWD and CM for forward operation, or REV and CM for reverse operation.
Regardless of whether function F02 is set to 0 or 1, short-circuiting both FWD – CM and REV – CM
brings the drive to a deceleration-stop. Refer to F02 “Operation method” for details.
(3) Analog input terminal (13, 12, 11, C1)
Use these terminals to connect external input analog voltage and analog current and frequency
setting device (POT). For connecting a contact to this circuit, use a twin contact for fine current si gnal. Do not use a contact for terminal 11.
WARNING
1. The STOP key is valid only when the function has been set. Prepare another switch for emergency stop. When the data of F02 is selecte “2” or “4”,
the operation cannot be stopped using the STOP key on the keypad panel,
otherwise accidents could occur.
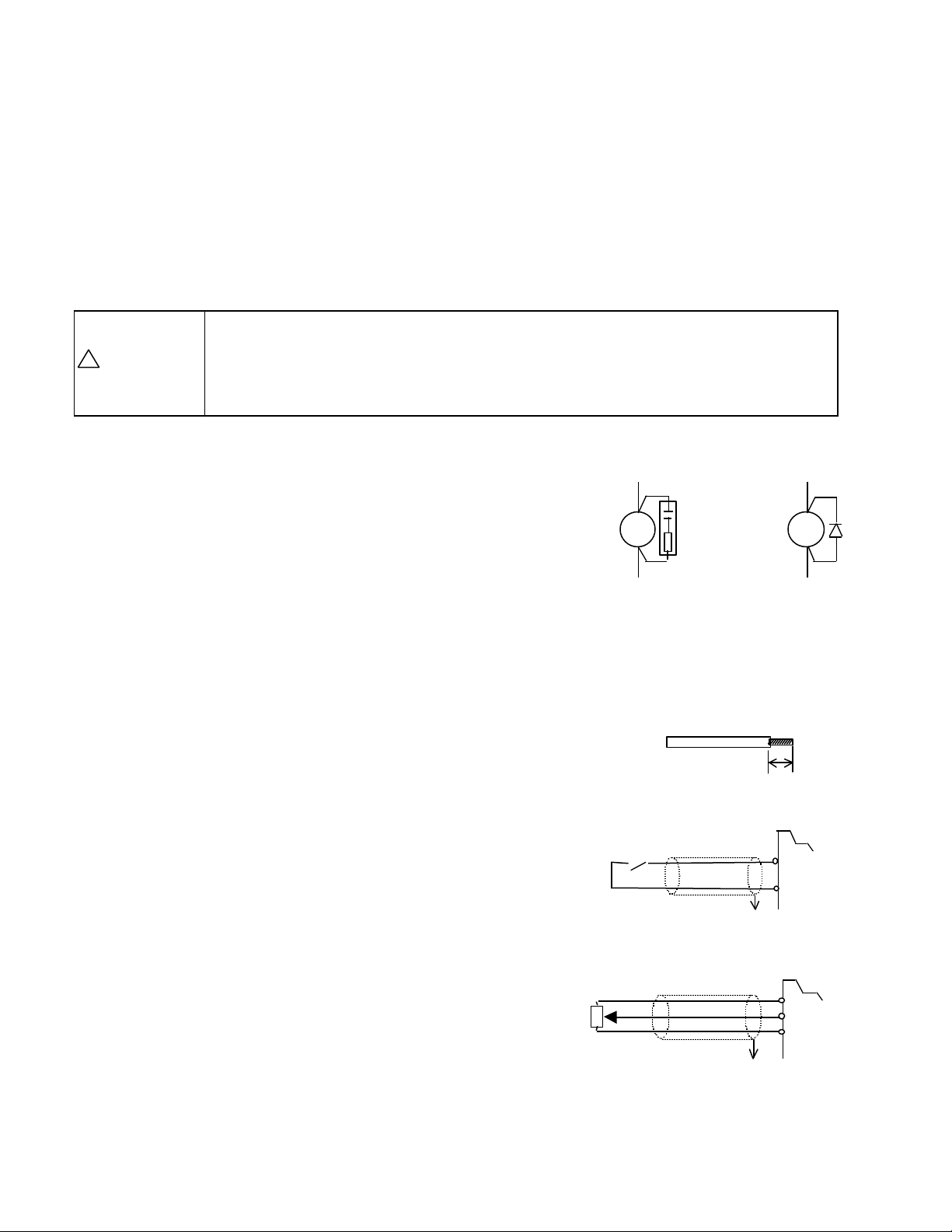
*Note the following when wiring:
(1) Surge absorber connection
When the exciting coil of the magnetic contactor or relay in
the control circuit or drive peripheral circuit is opened or
closed, a surge voltage (noise) is generated with a sudden
current change. Due to this surge voltage, the drive control
circuit or peripheral equipment may malfunction. If so, directly
connect a surge absorber to both ends of the coil. (See Figure 2-3-4).)
AC relay DC relay
MC
SK: Surge absorber D: Diode
SK
Figure 2-3-4 Surge absorber
connection diagram
(2) Co ntrol circuit wiring
1 Wires connected to control circuit terminals must be AWG
20 (0.5mm2) shielded wire or twisted vinyl wire. Remove
the sheath as shown in Figure 2-3-5 and then connect it.
2 Keep the wiring of the main circuit, external relay se-
quence circuit and control circuit as far away from each
other as possible. If they must be adjace nt, cross
them at right angles.
3 Use a twisted-pair shielded wire for long wiring
distances.
(3) Shielding sheath connection
Connect one end of the shielding sheath of a shielded
or twisted-pair shielded wire to the ground terminal as
shown in Figure 2-3-6. Do not connect the other end.
Frequency
setting POT
Figure 2.3.6 Connection of sheath
of shielded wire
0.24” ± 0.04” (6±1mm)
Figure 2-3-5 End treatment
Contact
Shielded wire
FWD
CM
To ground terminal
Shielded wire
To ground terminal
+
D
Page 22
-20-
!
CAUTION
1. Noise is generated from the drive, motor, and wiring. Take care that
this noise does not cause malfunctions in peripheral sensors and
equipment, otherwise accidents could occur.
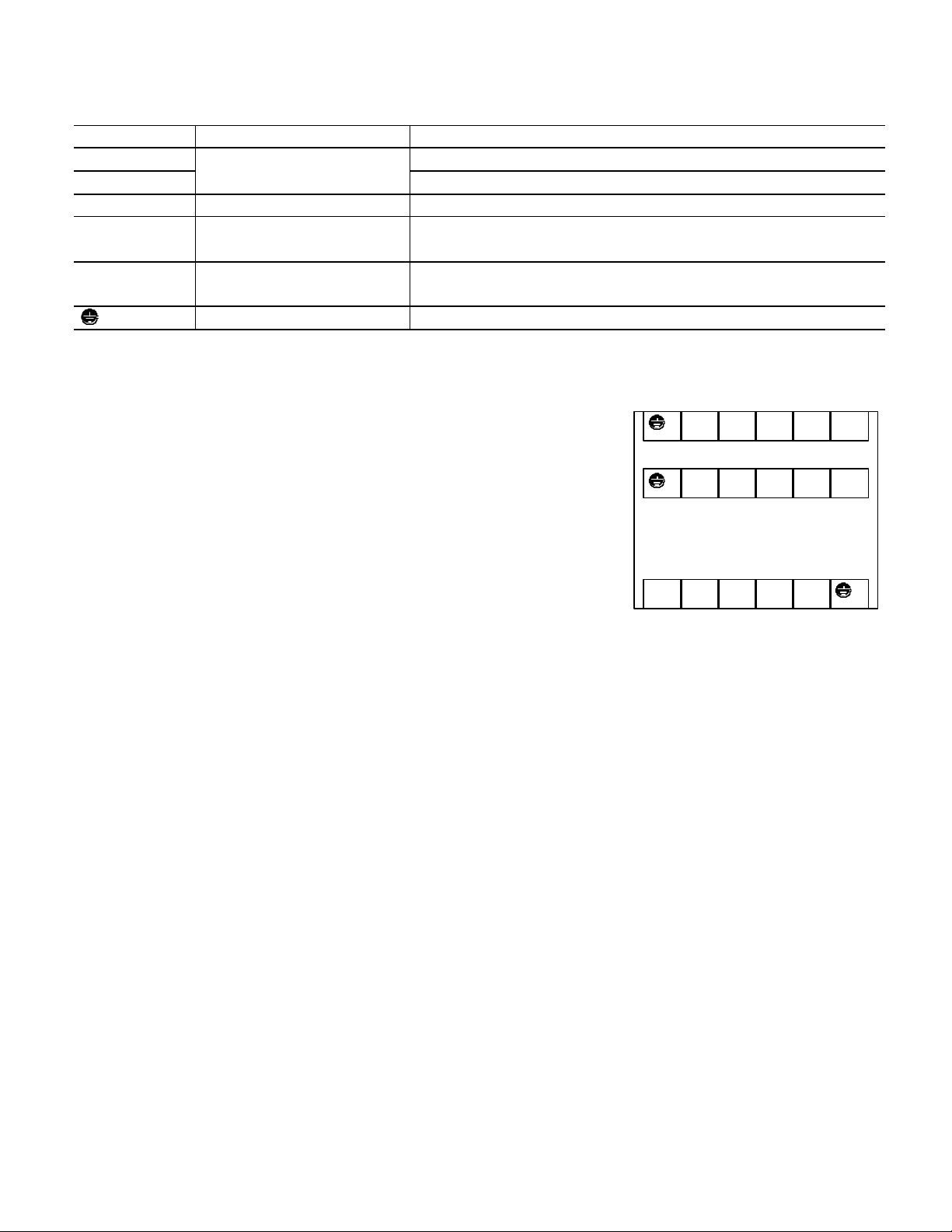
(4) Control terminal arrangement, screw size, and tightening torque
Figure 2-3-7 shows the control terminal block arrangement.
Screw size: M2.5 Tightening torque: 3.5 lb ·inch ( 0.4 N·m)
30A
30B
FM 30C
X3 X2 X1 11 CM REV
FWD
C1 13 12
Figure 2-3-7 Control terminal block arrangement
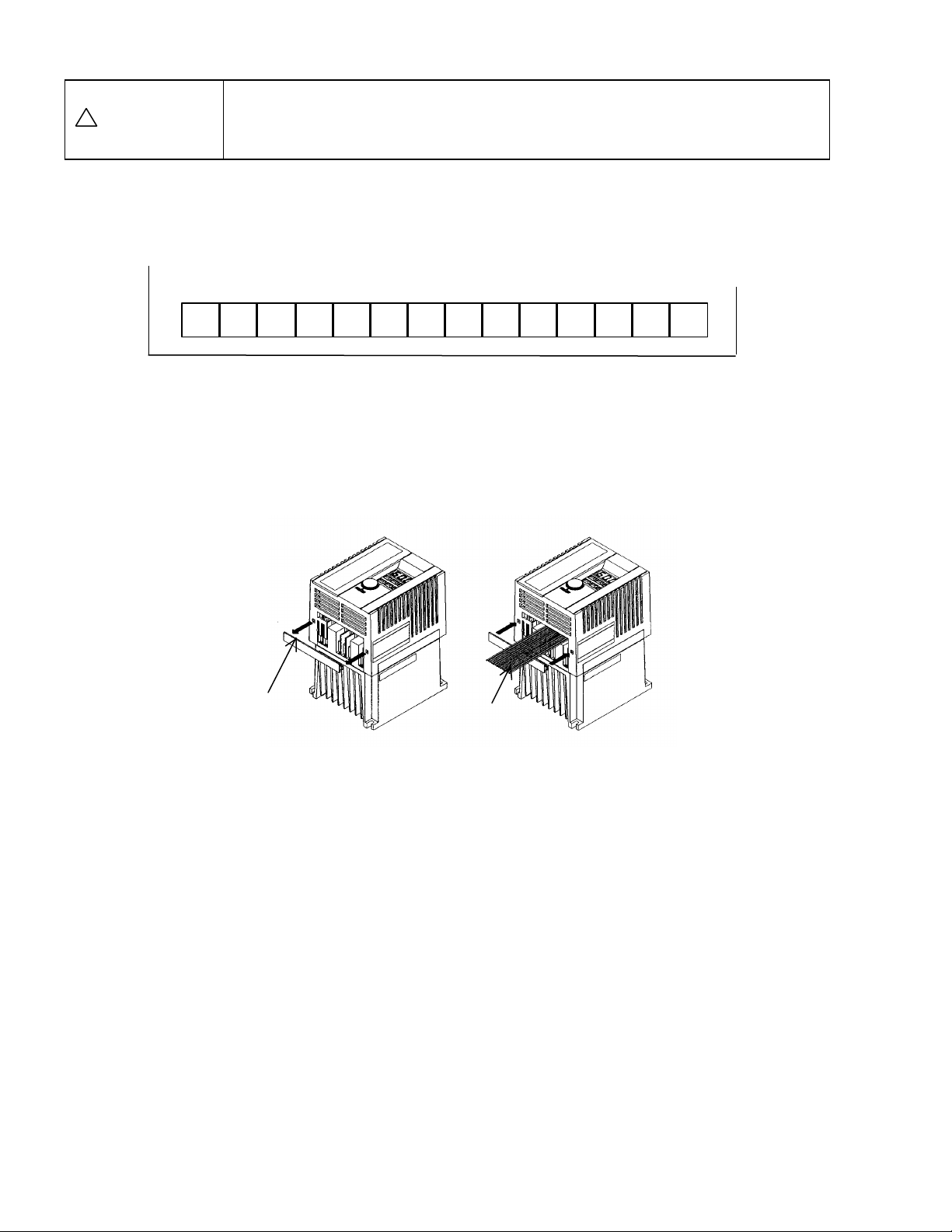
(5) Remove the plate at the bottom of the surface cover before performing drive control wiring and reinstall it after the wiring as shown in Figure 2-3-8.
Plate
Control wiring
Figure 2-3-8 How to pull out the control wiring
Page 23
-21-
Table 2-3-2 Functions of control circuit terminals
tions E01 to
Switching of X3
terminal with
Classifi-
cation
Analog
input
Digital
input
Terminal
symbol
13 Power supply for
Terminal name Detailed specifications Remarks
Used as power supply for frequency setting
variable resistor
device (POT: 1 to 5 kΩ). (+10Vdc 10mA
max.)
12 Frequency setting
voltage input
0 to +10Vdc /0 to 100%,0 to +5Vdc /0 to
100%
(Input impedance : 22 kΩ)
C1 Frequency setting
current input
4 to 20mAdc /0 to 100%
(Input impedance : 250 Ω)
11 Analog common Common terminal for analog input signals
FWD Forward operation
/stop command
REV Reverse operation
/stop command
X1 Digital input 1
X2 Digital input 2
Forward operation with FWD -CM ON and
deceleration-stop with FWD -CM OFF
Reverse operation with REV -CM ON and
deceleration-stop with REV -CM OFF
The functions listed below can be set by the
X1 to X3 terminal functions.
X3 Digital input 3
(SS1)
(SS2)
Multistep frequency
selection
(BX) Coast to stop co m-
mand
Up to four steps speed operation can be selected with SS1 and SS2 ON/OFF si gnals.
Drive output is cut immediately and the motor coasts to a stop (no alarm output) if BX
goes on.
(RST) Alarm reset The drive releases the status held after stop
with an alarm when RST changes from ON
to OFF.
(THR) External alarm input The drive stops with an alarm if THR is set to
OFF.
(WE-
Write-enable co m-
KP)
mand for keypad
(data change
allowed)
(Hz/PID
PID control cancel PID control cancel with Hz/PID ON
)
(LE) Link operation
selection
Data rewriting for each function with the keypad panel is rejected if WE -KP is OFF.
Rewriting with keypad panel is allowed if
WE-KP is ON.
PID control with Hz/PID OFF
Operation based on command from RS485
with LE ON
Drive single operation with LE OFF
(PLC) PLC signal power
input
Malfunctions due to PLC power failure are
prevented.
CM Digital common Common terminal for digital input signal
Decelerationstop with FWD CM and REVCM ON
Set with funcE03
switch SW7
Page 24

-22-
Classifi-
cation
Analog
output
Contact
output
Optional
Terminal
symbol
Terminal name Detailed specifications Remarks
FM, 11 Analog monitor Data selected between the following items is
output with DC voltage:
Output frequency
PID feedback value
Output current
DC link circuit voltage
* Up to two analog voltmeters (input impedance : 10 kΩ can be connected.
Note: Output waveform: An AC pulse is output with consistent frequency and variable
duty. The average DC voltage is proportional
to output frequency and output current (frequency : 121.6 Hz).
30A
30B
30C
Alarm output for any
fault
If the drive is stopped with an alarm, the
non-voltage contact signal (SPDT) is output
(Contact rating: 250V ac, 0.3 A, Power factor
= 0.3)
(48V dc, 0.5A for Low-voltage Directive or
42V dc, 0.5A for UL/cUL)
Whether an alarm is generated with an exci ting operation or non-exciting operation can
be switched.
DX+
DX−
RS485 RTU communication input/output
Terminal for RS485 communication (when
option board is installed)
DX+ : Non-inverted signal,
DX− : Inverted signal
Installed on optional board.
Page 25
-23-
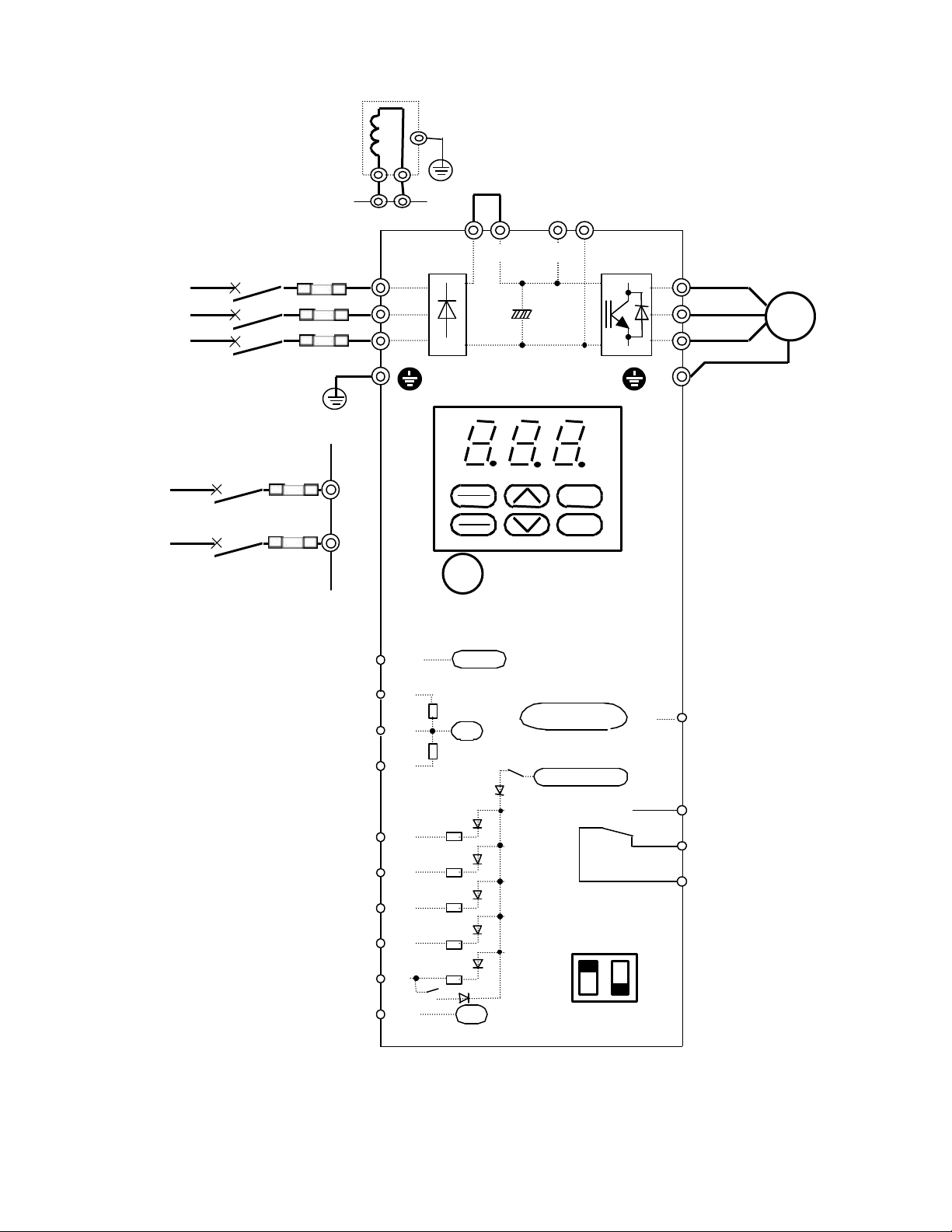
2-3-4 Connection examples
V
U
W
13
11
X1
30B
30A
X2
L3/T
N(-)
FM
C1
used to start and stop the operation and the frequency setting POT
MCCB
STOP
+10Vdc
0V
0V
PLC
+24 to +27Vdc
P1
correcting
E
X3
EXT
INT
PLC
SW7
Figure 2-3-9 Wiring diagram of keypad panel operation
P(+)
P(+)
MCCB
Fuse
Fuse
1) Keypad panel operation
When power-factor
DC reactor is used
3-phase
230V input series
200 to 230V
50/60Hz
Single-phase
230V input series
200 to 240V
50/60Hz
L1/L
L2/N
P(+)
*2
P1
L1/R
L2/S
G
PRG
RESET
FUNC
DATA
Frequency setting POT (VR)
M
3~
G
RUN
12
4.7kΩ
FWD
REV
X3
CM
X3
22kΩ
250Ω
Pulse output
EXT
INT
Analog monit or
Alarm output for any fault
30C
2 1
*1 The RUN and STOP keys on the keypad panel can be
(VR) can be used to set a frequency only by connecting the power supply and motor with functions set in the factory.
Forward rotation is set in the factory.
*2 Remove the jumper between the P1 and P(+) terminals before connecting the optional power-factor correcting DC reactor.
*3 Connect the surge absorber in parallel to coils (such as coils of the magnetic contactor and solenoid) near the drive.
Page 26
-24-
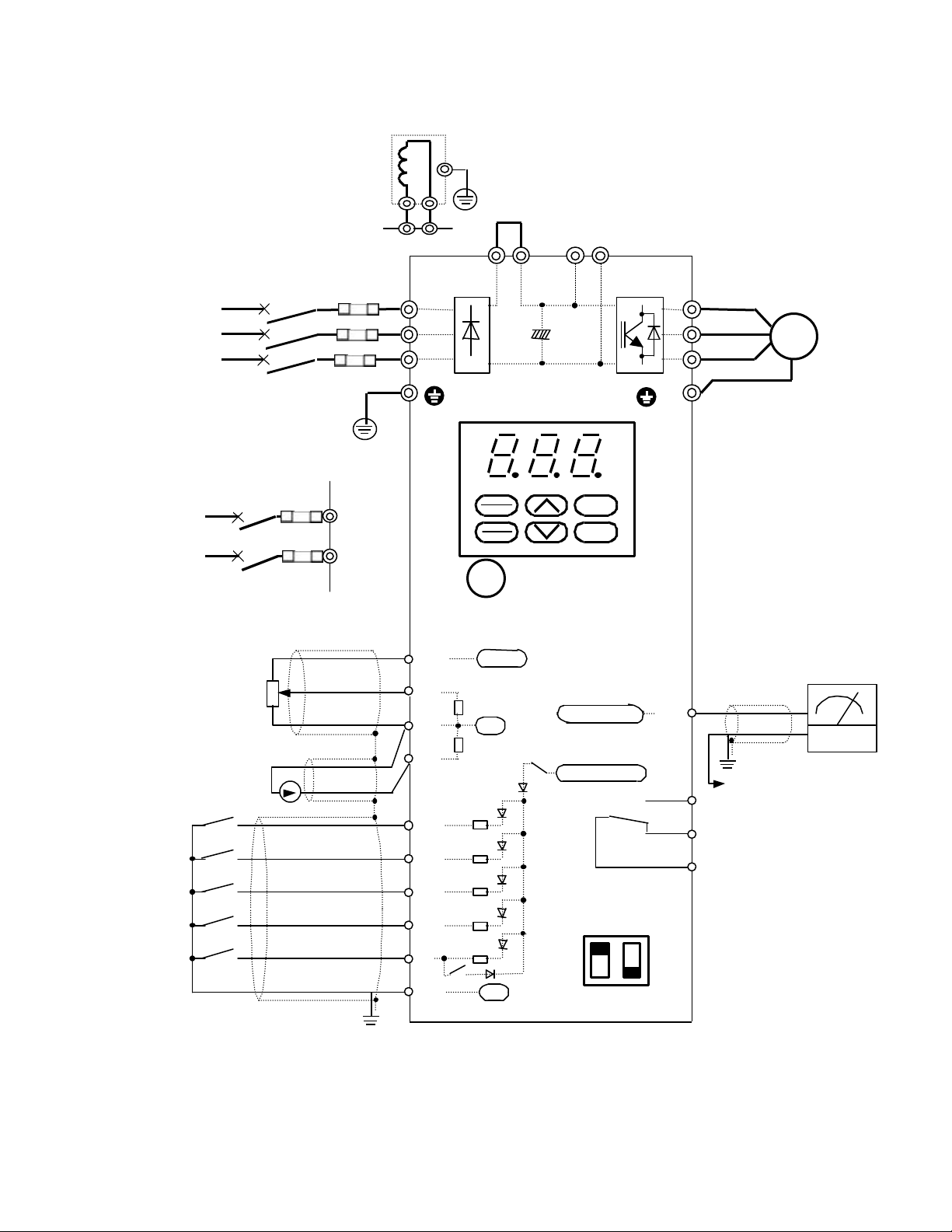
2) External operation
Use this connection to start, stop the operation and set the frequency with external signals. 0 to +10V dc can be set while
U
P1
ing
MCCB
+10Vdc
22k
0V
0V
Reverse operation
command Forward
To 11 terminal
Analog meter
G
G
+24 to +27Vdc
Figure 2-3-10 Wiring diagram of external operation
Frequency setting current
Frequency setting voltage
X3
EXT
INT
PLC
SW7
STOP
RUN
INT
PLC
MCCB
When power-factor correct
DC reactor is used
E
*2
P(+)
3-phase
230V input series
200 to 230V
50/60Hz
Single-phase
200V input series
Fuse
L1/L
L1/R
L2/S
L3/T
200 to 240V
50/60Hz
input (0 to +10Vdc)
input (4 to 20mAdc)
Forward operation
command
*1
function F01 is set to 1 and 4 to 20mA can be set while function F01 is set to 2. Set function F02 to 1~4.
*2 Remove the jumper between the P1 and P(+) terminals before connecting the optional power-factor correcting DC reactor.
*3 Connect the surge absorber in parallel to coils (such as coils of the magnetic contactor and solenoid) near the drive.
*4 Use twisted or shielded wire as control signal wire. Connect the shield to the ground terminal.
L2/N
13
12
C1
FWD
REV
X1
X2
X3
CM
To ground terminal
P1
PRG
RESET
FUNC
DATA
Frequency setting POT (VR)
Ω
250Ω
4.7kΩ
X3
EXT
P(+) N(-) P(+)
Pulse output
V
W
Analog monitor
M
3~
To ground terminal
30A
30B
Alarm output for any fault
30C
2 1
Page 27
-25-
13
FWD
11
X1
30C
30B
30A
X2
L2/S
M
FM
C1
MCCB
Pulse output
0V
To 11 terminal
+24 to +27Vdc
P L C
External thermal O/L relay
To X2 To CM terminal
SW7
2
1
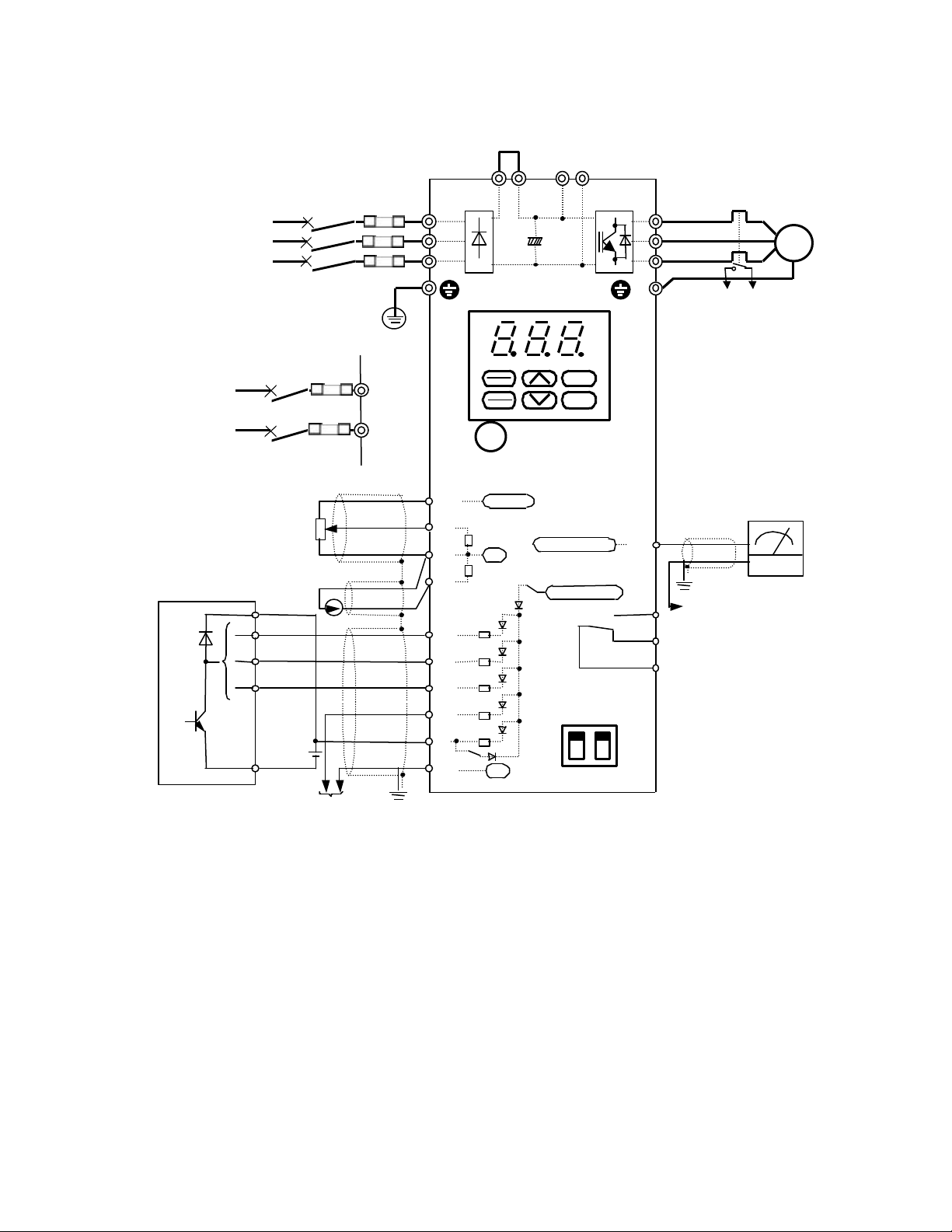
Figure 2-3-11 Connection example of PLC terminal (using THR function terminal)
G
G
To X2 To CM terminal
MCCB
PLC
INT
PRG
3~
3) Connection to PLC (when external thermal O/L relay is used)
Single-phase
3-phase 230V
input series
200 to 230V
50/60Hz
230V input series
200 to 240V
50/60Hz
FUSE
FUSE
L1/L
L2/N
EXT
P(+) N(-) P(+)
L1/R
L3/T
12
P
RESET
FUNC
DATA
Frequency setting POT (VR)
+10Vdc
22kΩ
0V
250Ω
4.7kΩ
RUN
STOP
U
V
W
terminal
terminal
Analog monitor
To ground terminal
Alarm output for any fault
Analog meter
*1 Connect the X3 terminal to the PLC power supply of 24Vdc in common and do not connect the CM and 11
*2 With this connection, because the internal power of the drive can be supplied to the external thermal O/L
*3 Set SW7 switch 1 to INT and 2 to PLC.
24Vdc : PLC power supply
terminals to the PLC common. This is to prevent the FWD and REV terminals from turning on due to sneak
path current if the PLC power supply is turned off.
relay, OH2 trip is not activated by PLC power-off with the drive turned on.
24dcV
External thermal O/L relay
REV
X3
(THR)
X3
CM
To ground terminal
INT
EXT
PLC
X3
*4 When the X3 terminal is used as the PLC terminal, no function that can be set with E03 can
be used. The X3 terminal is dedicated to the PLC.
Page 28
-26-
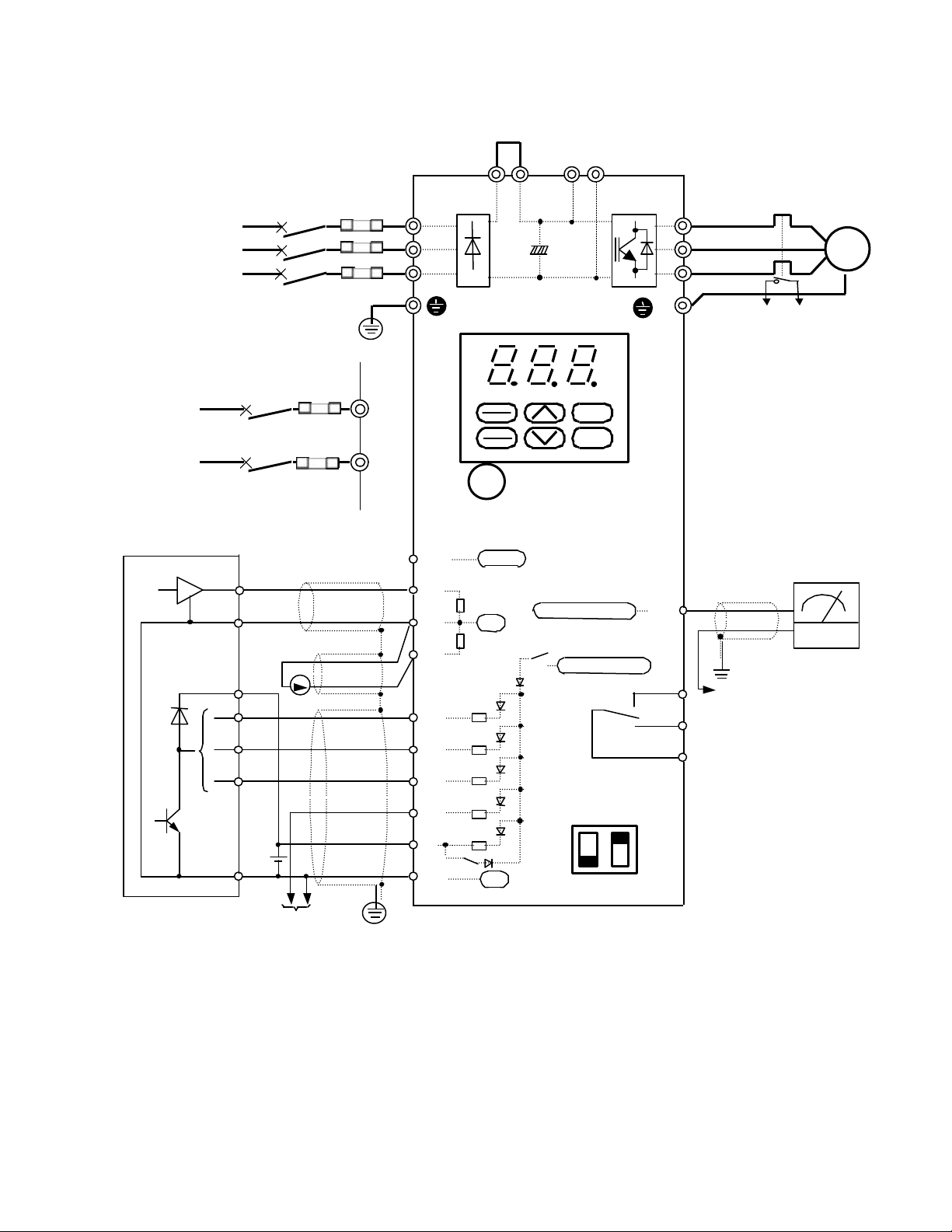
4) Connection to PLC (when analog signal is input from PLC)
12
FWD
11
X1
CM
X3
30C
30B
30A
X2
P(+)
N(-)
P(+)
0V
Analog meter
To external thermal relay
X3
EXT
INT
PLC
SW7
log frequency setting
signals from the PLC, use this connection and set the SW7 switch 1 to EXT and 2 to PLC to prevent the FWD and
With this connection, the power is supplied from the PLC power supply to the external thermal O/L relay. So, OH2 trip
minal function and use
d. The X3 terminal
MCCB
INT
EXT
PLC
STOP
PRG
FUSE
Single-phase
230V input series
200 to 240V
50/60Hz
3-phase 230V
input series
200 to 230V
50/60Hz
MCCB
FUSE
L1/L
L2/N
P1
L1/R
L2/S
L3/T
G
RESET
FUNC
DATA
Frequency setting voltage input
RUN
U
V
W
G
External thermal relay
M
3~
To X2 terminal
To CM terminal
24Vdc
13
C1
REV
(THR)
22kΩ
250Ω
4.7kΩ
X3
+10Vdc
0V
Pulse output
+24 to +27Vdc
Analog monitor
FM
2 1
P L C
24 V dc : PLC power supply
Figure 2-3-12 Connection example of PLC terminal (when analog signal is input from PLC)
*1 When the PLC power supply common may be connected to the drive 11 terminal to input ana
REV terminals from turning on due to sneak path current when the PLC power is turned off.
*2
is activated by PLC power-off with the drive turned on.
*3 To prevent drive trip with OH2 when the PLC power being turned off, do not select the THR ter
the drive electronic thermal O/L relay.
*4 When the X3 terminal is used as the PLC terminal, no function that can be set with E03 can be use
is dedicated to the PLC.
To ground terminal
To 11 terminal
Alarm output for any fault
Page 29
-27-
2-4 Others
2-4-1 Harmonic component
A harmonic component which may influence the phase -advance capacitor and generator is included
in the drive input current. If necessary , connect a power-factor correcting DC reactor (DCR) (option)
for the drive.
2-4-2 Noise
When noise generated from the drive may affect peripheral equipment, and noise generated from peripheral equipment may malfunction the drive, the following basic countermeasures should be taken.
1. When noise affects other devices via power and ground wires
· Separate the ground of the drive and that of the affected device.
· Connect a noise filter to the drive power wire.
· Use an isolation transformer to separate the power supply of the drive and that of the affected
device.
2) When another device is affected by induction or radiation
· Separate the main circuit wiring of the drive from the control wiring and wiring of the affected device.
· Encase the drive main circuit wiring in a metal tube and ground the metal tube near the drive.
· Encase the drive in a metal rack and ground the rack.
· Connect a noise filter to the drive power wire.
3) When noise generated from peripheral equipment affects the drive
· Use twisted or twisted-pair shielded wires for the drive control wiring. Ground the shields.
· Connect a surge absorber in parallel to the coil of the magnetic contactor and solenoid .
· If the power supply includes much distortion of the waveform or surge, connect an impedance
matching AC reactor for coordination of power supply.
2-4-3 Leakage current
Leakage current flows through the drive I-O wiring and motor stray capacitance when the drive
transistor is turned on and off. Table 2-3-3 lists the countermeasures for the problems caused by the
leakage current.
Table 2-3-3 Countermeasures for leakage current
1 Trip of earth leakage circuit breaker
on main power supply side
2 Trip of external thermal O/L relay
Problem Countermeasures
Set the carrier frequency lower.
Shorten the wiring between the drive and motor.
Increase the ELCB/RCD sensitivity current.
Replace the ELCB/RCD with an ELCB/RCD that is designed for high frequencies.
Set the carrier frequency lower.
Increase the thermal O/L relay set value.
Use the drive electronic thermal O/L relay.
Page 30
-28-
3 Operation
!
3-1 Inspection and Preparation before Operatio n
Check the following before operation:
(1) Check whether the connection is correct,
For 3-phase 230V series, check whether the power supply is connected correctly to the L1/R,
L2/S and L3/T terminals. For single-phase 230V series, check whether the power supply is connected correctly to the L1/L and L2/N terminals. Also check whether the drive grounding terminal
is securely connected.
G
(2) Check for short-circuits and ground faults between terminals and between live parts.
(3) Check for loose terminals, connectors, and screws.
(4) Check whether the motor is separated from mechanical equipment.
(5) Set switches to OFF before turning on the power so that the drive will not start or operate abnor-
mally at power-on.
(6) Check the following after power-on:
a) Check for alarms displayed on the keypad panel.
1. Always install the surface cover before turning on the power.
WARNING
Do not remove the surface cover during conduction,
2. otherwise electric shock could occur.
3. Do not operate a switch with wet hands,
otherwise electric shock could occur.
3-2 Operation Method
There are various operation methods. Select a method depending on the purpose and operation
specifications with reference to Chapters 4 and 5. Table 3-2-1 lists operation methods used
generally.
Table 3-2-1 General operation method
Operation method Frequency setting Running command
Operation by using
keypad panel
Built-in frequency setting POT (VR)
or
UP/DOWN key
RUN/STOP key
Operation by using
external signal
Setting by using analog voltage, analog current, and external POT (VR)
terminal
Contact input (switch)
Terminal FWD -CM
or
REV-CM
Page 31

-29-
3-3 Trial Run
The motor rotates when a frequency value and running command are input from the keypad
panel or external signal terminal. Refer to Table 3-3-1.
Use a low frequency (about 5Hz) for trial runs
A frequency can be set using the built-in frequency setting POT (VR) , and forward/stop
can be performed using the keypad panel with the functions set in the factory.
Table 3-3-1 Running command
Operation method Frequency setting Running command
Operation by using
keypad panel
Operation by using
external signal terminal
(When built-in POT (VR) is used)
The frequency increases when the variable
resistor is turned clockwise and reduces
when it is turned counterclockwise. The motor accelerates when the variable resistor is
turned clockwise during operation and decelerates when it is turned counterclockwise.
(When the UP/DOWN key is used)
Frequency increases when the UP key is
pressed.
It reduces when the DOWN key is pressed.
Operation starts when the
RUN key is pressed.
The motor decelerates and
stops when the STOP key is
pressed.
Operation starts when FWD
(REV) terminal is connected.
The motor decelerates and
stops when the FWD (REV)
terminal is disconnected.
* Operation is not stopped
although the STOP key is
pressed. (When the data of
F02 is set to “2” or “4”)
Check the following items:
a) Rotation direction
b) Whether rotation is smooth (whether there is a motor buzzing noise or abnormal vibration)
c) Whether acceleration and deceleration are smooth
d) Whether the drive cooling fan is rotating (1.5kW or more)
If no abnormality is detected, check the item again by increasi ng the frequency.
Even if the output from the drive is stopped, you will be get an electric shock when you touch the main
circuit terminals such as drive output terminals U, V and W if the voltage is supplied to the main power
supply input terminal.
The smoothing capacitor in the drive has been charged when the power is turned off and it is not discharged immediately. Before touching the electric circuit, wait until at least five minutes have elapsed
after power-off and the charge lump is off, indicating the voltage is already low.
After checking normality in the above trial run, start operation.
Page 32

-30-
Digital display
In program mode: Shows
function codes and data
!
!
tion mode and Program
In Trip mode: Resets the
trip status and change to
Function/Data key
In Operation mode: Switches
between frequency display and
during
In Program
mode: Used to read and write
Up/down keys
RUN key
This key does not function when
the data code from the external
signal (digital input) is selected
STOP key
his key does not function
when the data code from the
external signal (digital input)
I
I
I I I
I
FUNC
RUN
P R G
1. The STOP key is valid only when the function has been set.
Assign another switch to emergency stops,
WARNING
CAUTION
4 Keypad Panel
4-1 Names and Functions
otherwise accidents could occur.
2. Operation starts suddenly if alarm reset is done with an running signal
input. Check that no running signal is input before alarm reset,
otherwise accidents could occur.
1. Do not touch the heat sink,
otherwise burns could occur.
codes.
In Operation mode:
Shows the output frequency and output current,
etc.
In Trip mode: Shows a
code indicating the
causes of the trip.
Program (Reset) key
Switches between Opera-
mode.
Operation mode.
output current display
stopped and running.
various function codes and function data items.
This key is used to start operation.
The LED is on during operation.
RESET
DATA
STOP
(F02 = 1~4).
This key is used to stop operation.
T
In Operation mode:
Used to increase and
is selected (F02 = 2 or 4).
reduce the frequency
(motor speed).In Program mode: Used to
change a function co de
and data value.
Page 33

-31-
*1 Frequency is displayed as a percentage with the
least significant digit in PID control operation
rence frequency is displayed when the
FUNC
FUNC
FUNC
FUNC
FUNC
FUNC
4-2 Operating Keypad Panel
1) Switching monitor
The display can be switched between frequency display and output current display by pressing
the in Operation mode.
DATA
Frequency *1
6 0. 0
DATA
DATA
DATA
DATA
1. 2 A
Current *2
(function H20 is set to 1 or 2):
1 0. 0. for 10%
1 0 0. for 100%
*2 The refe
key is pressed in current indication.
2) Stopping operation
Operation is started when the RUN is pressed, and is stopped when the STOP is
pressed wh ile function
F 0 2
is set to
0,
1 ,or
3.
The rotation direction is:
Forward rotation with FWD -CM ON, and reverse rotation with REV–CM ON
3) Changing frequency
The frequency increases when the
is pressed and decreases when the
is
pressed while function
F 0
1
is set to
The change speed is increased when the is pressed at the same time as the
or
.
Note: Do not turn the power off for five seconds after monitor switching or function setting,
to prevent Er1 occurrence.
DATA
0
.
Page 34

-32-
FUNC
PRG
FUNC
PRG
Procedure Display
1
Press the key to set the program mode.
2
Press the
3
Press the key to display data.
4
Press the
5
Press the to save the data.
6
Changing
another
function
RESET
key to se lect a function.
DATA
key to change the data.
DATA
Press the to cancel the program mode.
RESET
6 0. 0
F 0 0
F 01
1
2
F 0 2
6 0. 0
*
* The function code display changes as shown below. The
with o0 0
F 0 0
o 1 1
set to
F 0 1
1 .
o 0 0
F 3 6
H 2 5
E 0 1
H 0 1
o 0 1
E 0 3
P 0 0
to
o 1 1
C 0 1
C 0 7
are displayed only
Page 35

Change during operation: N = impossible, Y* = possible (enabled by using ), Y= possible (enabled by using
-33-
FUNC
DATA
5 Selecting Function
5-1 Function Selection List
Table 5-1-1 Table of Function Selection List
)
F: Fundamental functions
Func-
tion
code
No.
F00
F01 Frequency command
F02
F03
Data protection
Operation method
Maximum output fre-
Name Setting range
0: Data change enabled,
1: Data protected
0:Key operation ( , key)
1:Voltage input (terminal [12])
(0 to +10Vdc, 0 to +5Vdc)
2:Current input (terminal[C1])
(4 to 20mAdc)
3:Voltage input + current input
(terminals[12]+[C1])
4:Analog (VR built in drive)
0: Keypad oper ation
1: Terminal operati on (STOP key active)
2: Terminal operation (STOP key inactive)
3: Terminal operation (STOP key active)
with GE software
4: Terminal operation (STOP key inactive)
with GE software
50 to 120Hz
Unit
-
-
-
Hz 1 60
Min.
unit
-
-
-
Factory
setting
quency
F04
F05 0
F06
F07
Base frequency 25 to 120Hz
-
Data cannot be changed.
Acceleration time 0.0 to 60.0s
Hz 1 60
-
-
s 0.1 6.0 Y
0.01 second is set when 0.0 is speci fied.
F08
F09
Deceleration time 0.1 to 60.0s
Torque boost 0,1 : Variable torque
characteristic
2 to 31: Constant torque
s 0.1 6.0 Y
-
1 13 Y
characteristic
Change
during
operation
0
4
0
N
N
N
N
N
-
0
User
setting
Page 36

Change during operation: N = impossible, Y* = possible (enabled by using ), Y= possible (enabled by using
-34-
FUNC
DATA
Func-
tion
code
F10
Name Setting range
No.
Electronic thermal
overload relay (Select)
0:Inactive
1:Active
Unit
-
Min.
unit
-
Factory
setting
1 Y*
(for 4-pole standard motor)
2:Active
(for 4-pole forced air motor)
F11
(Level) 20 to 135% of drive rated current
A 0.01
Typical
value of
GE 4-
pole
motor
F12
(Thermal time constant) 0.5 to 10.0min
min 0.1 5.0 Y*
Change
during
operation
Y*
)
User
setting
F14
Restart after momentary power failure
F15
F16
F17
Frequency limiter
(High)
(Low) 0 to 120Hz
Gain (for frequency
setting signal)
F18
F20
F21
F22
F23
F24
F25
F26
Bias frequency -120 to 120Hz
DC injection brake
(Starting freq. )
(Braking level) 0 to 100%
(Braking time ) 0.0 s (Inactive), 0.1 to 30.0 s
Starting frequency 1 to 6Hz
-
Data cannot be changed.
Stop frequency 1 to 6Hz
Motor sound
(carrier freq.)
F27
F30 FM terminal
F31
F36
(sound tone )
(Voltage adjust)
(Function) 0: Output frequency
30Ry operation mode 0: Excited when tripped
0:Inactive (Trip and alarm when
power failure occurs)
1:Inactive (Trip and alarm when
power recovers)
2:Active (Momentarily stops and
restarts at setting frequency of
before power failure)
3:Active (Momentarily stops and
restarts at starting frequency)
0 to 120Hz
0: For 0 to +10Vdc,
1: For 0 to +5Vdc
Fixed to 3Hz
0 to 15kHz
0.75kHz is set when 0 is specified
0: Level 0 1: Level 1
2: Level 2 3: Level 3
0 to 200%
1: Output current
2: PID feedback amount
3: DC link circuit voltage
1: Normally excited
-
-
0
70 Y
Hz 1
0 Y
-
-
0
Hz 1 0 Y
-
Hz
% 1 0 Y
Hz 1 1
-
Hz 1 1
kHz 1 2 Y
-
% 1 100
-
-
3.0
s 0.1 0.0 Y
-
0.0
-
0 Y
-
0 Y*
-
0
N
N
-
N
N
Y
N
Page 37

Change during operation: N = impossible, Y* = possible (enabled by using ), Y= possible (enabled by using
-35-
FUNC
DATA
Min.
E: Extension Terminal Functions
Func-
tion
code
No.
E01
E02
E03
Name Setting range Unit
X1 terminal function
X2 terminal function
X3 terminal function
Use the code values listed below to select [X1], [X2] and [X3] terminal functions.
0: Multistep frequency 1 (SS1)
-
-
-
Min.
unit
-
-
-
Factory
setting
0
2
3
1: Multistep frequency 2 (SS2)
2: Coast-to-stop command (BX)
3: Alarm reset (RST)
4: External alarm (THR)
5: Write enable command for keypad
(WE-KP)
6: PID control cancel (Hz/PID)
7: Link operation selection (LE)
Change
during
operation
N
N
N
)
User
setting
C: Control Functions of Frequency
Func-
unit
Factory
setting
tion
code
No.
Jump frequency 1
C01
C02 2 1 0 Y
C03 3 1 0 Y
(Hysteresis)
C04
C05 Multistep frequency 1 0.0 to 120Hz Hz 0.1 0.0 Y
C06 2 0.1 0.0 Y
C07 3 0.1 0.0 Y
Name Setting range
0 to 120Hz Hz 1 0 Y
0 to 30Hz Hz 1 3 Y
Unit
Change
during
operation
User
setting
Page 38

Change during operation: N = impossible, Y* = possible (enabled by using ), Y= possible (enabled by using
-36-
FUNC
DATA
P: Motor Parameters
Func-
tion
code
No.
Motor characteristics
P00
Name Setting range
0 to 10
Unit
-
Min.
unit
-
Factory
setting
2 Y
H: High Performance Functions
Func-
tion
code
No.
Operation time Operation time accumulation
H01
Trip history The contents of the last four alarms are
H02
Name Setting range
Unit
100Hr
-
Min.
unit
1 0
-
Factory
setting
---
displayed sequentially.
Data initialization 1: Initialized
H03
-
-
0
(return to factory setting value)
Auto-reset 0: Ina ctive
H04
-
-
0 Y*
1: Active (5 times fixed)
Fan Stop Operation 0: Inactive
H06
PID control
H20
(Mode select)
1: Active
0: Inactive
1: Active (Normal operation)
-
-
0 Y*
-
-
0
2: Active (Inverse operation)
(Feedback signal) 0:Terminal [12]
H21
(0 to +10Vdc) Input
1:Terminal [C1]
(4 to 20mAdc)Input
2:Terminal [12]
(+1 to +5Vdc) Input
(P-gain) 0.01 to 10.0 times (1to1000%)
H22
(I-gain) 0.0s : Inactive
H23
0.1 to 999s
(D-gain) 0.00s : Inactive
H24
0.01 to 10.0s
(Feedback filter)
H25
0.0 to 60.0s s 0.1 0.5 Y
-
-
1
-
0.01 0.01 Y
s 0.1 0.0 Y
s 0.01 0.00 Y
Change
during
operation
Change
during
operation
-
-
N
N
N
)
User
setting
User
setting
Page 39

-37-
FUNC
DATA
tion
Change during operation: N = impossible, Y* = possible (enabled by using ), Y= possible (enabled by using
O: Optional Functions
Func
code No.
o00 RTU Option 0 : Inactive 1 : Active
o01 Address 1 to 247 (Max – 31 Drives) 1 Y*
o02 Mode select on no response
error
o03 Timer 1 to 60 s s 1 2 Y*
o04 Baud rate 1 : 9600 2 : 4800
o05 Data length 0 : 8 bits (Fixed)
o06 Parity check 0 : No checking
o07 Stop bits 0 : 2bits 1 : 1bit
o08 No response error detection
time
o09 Response interval 0.00 to 1.00 s s 0.1 0.01 Y*
o10 RTU Frequency Command 0 : F01 setting is active
o11 RTU Operation Command 0 : F02 setting is active
Name Setting range Unit
0 : Er8 by 8 times communiction/checksum
errors
1 : Er8 by 8 times communiction/checksum
errors
2 : Er8 with no communication more than
timer (o03)
3 : Retry and keep running
3: 2400
1 : Even parity, 2 : Odd parity
(Automatically changed by o06 setting)
0 : (No detection)
1 to 60 s
1 : RTU setting is active
1 : RTU setting is active
Min.
unit
-
-
0 Y*
0 Y*
-
1 Y*
-
0 Y*
-
0 Y*
-
0 Y*
s 1 0 Y*
-
0 N
-
0 N
Factory
setting
Change
during
operation
)
User
setting
Note: For details on “o01” to “o11”, refer to the instruction manual that came with the optional RS485 RTU
serial communication option.
Page 40

Change during operation: N = impossible, Y* = possible (enabled by using ), Y= possible (enabled by using
-38-
FUNC
DATA
!
setting
Change during
0
N
setting
Change during
4
N
5-2 Details of Each Function
)
F00
Data protection
Set data can be locked to prevent it from being changed by mis take when using the keypad panel:
0 Data can be changed.
1 Data is protected.
Data is changed when the STOP + or key are pressed simultaneously.
Frequency command
F01
The following five values can be selected:
0 Key operation [ key]
1 Voltage input (terminal 12) (0 to + 10Vdc)
2 Current input (terminal C1) (4 to 20mA)
3 Voltage input (terminal 12) + current input (terminal C1)
4 Analog setting (POT built in drive)
Factory
operation
Factory
operation
CAUTION
High-speed operation can be set by the drive easily. Carefully check the limit of the motor and
machine before changing the setting,
otherwise injuries could occur.
Page 41

Change during operation: N = impossible, Y* = possible (enabled by using ), Y= possible (enabled by using
-39-
FUNC
DATA
F02
setting
Change during
0
N
Operation method
Factory
operation
The following four values can be selecte d:
0 Keypad operation [ RUN STOP key]
The motor runs when the RUN key is pressed and decelerates-to-stop when the STOP key is
pressed. The rotation direction depends on the FWD and REV terminals as fol lows:
FWD - CM short-circuited: Forward
REV - CM short-circuited: Reverse
Operation is impossible when both the FWD and REV terminals or none of them are short-circuited
with the CM terminal.
1 External signal (Digital input) (FWD, REV)
Forward operation with FWD-CM short-circuited and deceleration to stop with them open
Reverse operation with REV-CM short-circuited and deceleration to stop with them open
No operation with both FWD-CM and REV - CM short-circuited
STOP key active (See following page chart for detail)
2
External signal (Digital input) (FWD, REV)
Forward operation with FWD-CM short-circuited and deceleration to stop with them open
Reverse operation with REV-CM short-circuited and deceleration to stop with them open
No operation with both FWD-CM and REV - CM short-circuited
STOP key inactive (See following page chart for detail)
)
3 External signal (Digital input) (FWD, REV)
Forward operation with FWD-CM short-circuited and deceleration to stop with them open
Reverse operation with REV-CM short-circuited and deceleration to stop with them open
No operation with both FWD-CM and REV - CM short-circuited
STOP key active with GE start software (See following page chart for detail)
4
External signal (Digital input) (FWD, REV)
Forward operation with FWD-CM short-circuited and deceleration to stop with them open
Reverse operation with REV-CM short-circuited and deceleration to stop with them open
No operation with both FWD-CM and REV - CM short-circuited
STOP key inactive with GE start software (See following page chart for detail)
Note: This function can be changed only while the FWD and REV terminals are open.
Page 42

Change during operation: N = impossible, Y* = possible (enabled by using ), Y= possible (enabled by using
-40-
FUNC
DATA
GE START SOFTWARE SELECTION DURING TERMINAL OPERATION
Active : Setting 3 or 4Inactive : Setting 1 or 2
)
POWER ON
RESET
NETWORK
MODE
POWER
FWD
OUTPUT
ALARM
RESET
FWD
OUTPUT
ALARM
NETWORK
(LE-CM)
FWD
(TERMINAL)
FWD
(NETWORK)
OUTPUT
ALARM ALARM
POWER
FWD
OUTPUT
ALARM
RESET
FWD
OUTPUT
ALARM
NETWORK
(LE-CM)
FWD
. (TERMIAL)
FWD
(NETWORK)
OUTPUT
ER6
ER6
RESET
ER6
ER6
NOTE) Safety software does not work at AUTO RESET mode and PRGRAMMING mode.
STOP KEY MODE SELCTION DURING TURMINAL OPERATION
Active : Seeting 1 or 3Inactive : Setting 2 or 4
STOP KEY
(Terminal mode)
STOP KEY
(Network mode)
FWD
STOP
OUTPUT
ALARM
NETWORK
(LE-CM)
FWD
(NETWORK)
STOP
.
OUTPUT
ALARM ALARM
FWD
STOP
OUTPUT
ALARM ER6
NETWORK
(LE-CM)
FWD
. (NETWORK)
STOP
OUTPUT
ER6
Page 43

Change during operation: N = impossible, Y* = possible (enabled by using ), Y= possible (enabled by using
-41-
FUNC
DATA
!
f Maximum output frequency
setting
Change during
60Hz
N
F03
Maximum output frequency
Factory
operation
This function sets the maximum output frequency.
5 0
to The maximum output frequency can be set with a resolution of 1 Hz in a range between 50
and 120 Hz.
1 2 0
High-speed operation can be set by the drive easily. Carefully check the limit of the m otor and machine
before changing the setting,
otherwise injuries could occur.
Maximum voltage
V
CAUTION
)
Page 44

Change during operation: N = impossible, Y* = possible (enabled by using ), Y= possible (enabled by using
-42-
FUNC
DATA
setting
Change during
60Hz
N
setting
Change during
0
N
setting
Change during
6.0
Y
setting
Change during
6.0
Y
Base frequency
F04
Factory
operation
This function sets a base frequency (branch point between constant torque characteristic and constant
output characteristic).
2 5
to The base frequency can be set with a resolution of 1 Hz in a range between
1 2 0
25 and 120 Hz.
Set a frequency matching the motor characteristics.
A value exceeding the maximum frequency can be set but the output voltage is reduced.
Maximum voltage
V
f Base frequency
F05
Factory
operation
F06
Data cannot be changed.
Acceleration time
F07
0. 0
Factory
operation
The time taken to increase from 0.0 Hz to the maximum output frequency can be
to
6 0. 0
set in an increment of 0.1 s step in a range between 0.0 and 60.0 s.
)
0.01 is set when 0.0 is specified.
Deceleration time
F08
0. 1
to
6 0. 0
The time taken to increase from the maximum output frequency to 0.0 Hz can be set
in a range between 0.1 and 60.0 s. (In an increment of 0.1 s step)
Factory
operation
Page 45

Change during operation: N = impossible, Y* = possible (enabled by using ), Y= possible (enabled by using
-43-
FUNC
DATA
Wiring length
F10
F11
Values less than 9.99A can be set in 0.01A step and values more than 10.0A can be set
F09
Higher
Factory setting
Change during
Y*
setting
Change during
13
Y
setting
Change during
1
Y*
Torque boost
Factory
operation
This function can choose between 32 types of boost according to the load type and motor characteristics.
to
to
0
For square law torque loads
1
2 Lower
3 1 Higher
(fan, pump)
Output
voltage
Lower
Square law torque
)
Electronic thermal O/L relay (Select)
This function is used to select between the following three values:
0 Inactive
1 Active············4-pole standard motor
2 Active············4-pole forced air motor
Electronic thermal O/L relay(Level)
0. 1 4
to
2 2. 3
This function sets the operation level of an electronic thermal O/L relay by using an
ampere value according to the motor rated current.
20 to 135% of the drive rated current can be set.
Output frequency
Factory
operation
operation
Motor rated
in 0.1A step.
Set the value obtained by multiplying the motor rated current by coefficient K in the table below according to the wiring length between the drive and motor.
1/8 K=1.2 External thermal is
1/4 K=1 K=1.1
1/ 2 to 5 K=1
0’ 132’ 165’ Max. 330’
recommended.
Drive HP
Page 46

Change during operation: N = impossible, Y* = possible (enabled by using ), Y= possible (enabled by using
-44-
FUNC
DATA
?o—Í?ü”g?”/Í?°?(Sî’ê)?ü”g?”
[%]
F12
Factory
Change during
5.0min
Y*
Continuous permissible
120
Electronic thermal O/L relay (thermal time constant)
setting
0. 5
to
1 0. 0
This function sets the operating time of the electronic thermal O/L relay when the
current that is 150% of the operation level flows.
0.5 to 10.0 min. can be set (in 0.1 min. step).
The figure on the right shows the
Continuous perm issible current (F10=1)
1 2 0
˜ A ‘± ‹ –— e“d — ¬( F10 = 1 )
continuous permissible current
with F10 (electronic the rmal O/L
1 0 0
relay [Select]) = 1.
The figure at right shows the
continuous permissi ble cur-
Continuous permissible current (F10=2)
8 0
6 0
4 0
˜A‘±‹–—e“d—¬
2 0
Continuous permissible current (%)
0
0 0 .2 0 .4 0 .6 0 . 8 1
Output frequency/base frequency
rent with F10 (electronic
thermal O/L relay [Select]) =
2. 100% of the continuous
permissible current is the
current value set with function F11 (electronic thermal
O/L relay [Level]).
100
80
60
40
20
current (%)
0
0 0.2 0.4 0.6 0.8 1
)
operation
Output frequency/base frequency
Page 47

Change during operation: N = impossible, Y* = possible (enabled by using ), Y= possible (enabled by using
-45-
FUNC
DATA
?o—Í“d—¬?^“®?샌ƒxƒ‹?Y’è’l?
“®?ì??SÔ?@?m•ª?n
60Hz(=Í?°??ü”g?
”
50Hz30Hz20Hz5Hz
1Hz
Set with
Continued from previous page
Operating time characteristics
“ ® ? ì? ? Œ À “ Á
The graph at right shows the electronic thermal O/L relay ope rating
2 0
characteristics. Output current va lues for the electronic thermal operating levels (values set with function
F11) are plotted horizontally and op-
1 5
erating times for output current are
plotted ve rtically.
This graph is for F10 = 1 with the
base frequency of 60Hz. The charac-
1 0
teristics for output frequencies exceeding the base frequency are the
same as the cha racteristics for the
base frequency.
When function F10 is set to 2, the
F12
Operating time (minute)
5
characteristics are always the same as
those for the base frequency. The operating time with output current of
0
0 5 0 1 0 0 1 5 0 2 0 0
150% can be adjusted by using function F12 (electronic thermal O/L re-
Output current/set operating level (%)
lay (thermal time constant)).
)
(Base frequency)
Page 48

Change during operation: N = impossible, Y* = possible (enabled by using ), Y= possible (enabled by using
-46-
FUNC
DATA
setting
Operation
0
N
F15
F16
setting
Operation
70Hz
Y
setting
Operation
0Hz
Y
F14
F14 Restart mode after momentary power failure
Factory
Change during
This function determines whether operation is restarted upon recovery from momentary power failure:
Failure while drive is stopped:
The stop status is continued after recovery from the failure.
Failure during operation:
LU indication is held immediately due to undervoltage and the drive
trips with alarm output.
Failure while drive is stopped:
The stop status is continued after recovery from the failure.
Failure during operation:
LU indication is held upon recovery from the failure and the drive trips
with alarm output.
0
Inactive
1
Inactive
2
Active
)
The drive restarts with the frequency at the momentary power failure when 0.5s elapses after reco very from the fail
3
Active
The drive restarts with the starting frequency when 0.5s elapses after recovery from the failure.
2,
3
=valid upon recovery from the failure with LU being on. The table below lists ap-
proximate LU indication times for a momentary power failure during operation.
Drive HP
3 phase input
Single Phase Input
Frequency limiter (High)
Frequency limiter (Low)
This function sets the upper and lower limits of output frequencies.
0
to
1 2 0
0 to 120Hz can be set with a resolution of 1Hz.
If the upper limit and lower limit settings are reversed, the upper limit is
valid and the lower limit is ignored.
Hence, the operation is always performed with the upper limit regardless of the frequency setting.
1/8 1/4 1/2 1 2 3 5 [Second]
0.4 0.6 1.2 1.9 1.7 2.4 4.1
0.6 1.2 2.6 4.8 3.0 5.0
Factory
Factory
Change during
Change during
--
Page 49

Change during operation: N = impossible, Y* = possible (enabled by using ), Y= possible (enabled by using
-47-
FUNC
DATA
setting
operation
0
N
Factory
operation
0
Y
Bias (positive)
F17
F18
Factory
Change during
Gain
(for frequency setting signal)
This function outputs the frequency obtained by multiplying the reference frequency by a ratio.
This function selects an analog input signal level with a value from
1 to
)
4 that is set by function
0 The maximum frequency is output at +10Vdc (20mA dc).
1 The maximum frequency is output at +5Vdc (12mAdc).
When this function is used with function
valid and the gained frequency is biased.
Bias frequency
This function outputs a frequency biased for the analog freque ncy setting.
-1 2 0
100%
Frequency
setting
F 0 1
setting
.
F 1 8
1
Change during
(bias frequency ), the gain set with this function is
0
+10Vdc +5 0
20mAdc 12 4
to
1 2 0
-120 to 120Hz can be set with a resolution of 1Hz.
100%
Frequency se t-
ting
0%
0
4
Bias (negative)
+10Vdc
20mAdc
Page 50

Change during operation: N = impossible, Y* = possible (enabled by using ), Y= possible (enabled by using
-48-
FUNC
DATA
!
Output Freq.
Output voltage
Factory
operation
3.0Hz
N
F20
F21
F22
Factory
Change during
0%
Y
setting
operation
0.0s
Y
DC injection brake
setting
Change during
(starting frequency)
This function sets 3.0Hz (fixed) as the starting frequency of DC injection brake.
setting
operation
DC injection brake (Braking level)
This function sets a DC brake current level.
Levels can be set in 1% unit by assuming the level of the drive rated current to be 100%.
Factory
DC injection brake(Braking time)
This function sets the DC injection
braking time.
0.0 : No DC injection braking
0.1 to 30.0 : DC injection braking time 0.1
3Hz
Time
to 30s (in 0.1s step)
CAUTION
Do not use the drive brake func tion for
mechanical holding,
otherwise injuries could occur.
DC injection brake
)
Change during
Page 51

Change during operation: N = impossible, Y* = possible (enabled by using ), Y= possible (enabled by using
-49-
FUNC
DATA
Starting freque ncy stop frequency
Starting frequency < stop frequency
quency,
F26
F24
setting
operation
0.0-
F23
F25
setting
Operation
1Hz
N
F23
F25
1Hz
N
setting
operation
2kHz
Y
Starting frequency
Stop frequency
These functions set a starting or stop frequency in a range
from 1 to 6Hz in 1Hz step.
to
1
1Hz
6 6Hz
reverse operation
0.2Hz
Stop frequency setting
Starting frequency setting
Starting frequency setting
Stop frequency setting
FWD
REV
Starting
frequency setting
Stop
frequency setting
t Output frequency in forward/
Stop
frequency setting
Starting
frequency setting
t
If the set frequency is lower than the stop fre
the drive output is 0Hz.
Data cannot be
Factory
changed.
Factory
Change during
Motor sound
(carrier freq.)
This function changes the motor tone quality by changing the carrier frequency.
0
Factory
)
Change during
Change during
to Choose among 16 types according to the usage conditions.
1 5
Data code 0 : 0.75kHz (Low carrier)
1 : 1kHz
2 : 2kHz
15 : 10kHz (High carrier, low noise)
Note: When the drive is operating at 9kHz or higher carrier frequency, the carrier
frequency for may be reduced to 8kHz automatically to protect the drive.
Page 52

Change during operation: N = impossible, Y* = possible (enabled by using ), Y= possible (enabled by using
-50-
FUNC
DATA
Output
F27
Factory
operation
0
Y*
F30
Factory
operation
100%
Y
setting
operation
0
Y
5V
50%
100%
Factory
Change during
Motor sound
(sound tone)
This function adjusts the motor operation sound when a value of 7 or less is set with function F26.
0
Level 0
to
3
Level 3
FM terminal (voltage adjust)
This function regulates the frequency meter voltage level output to the FM terminal in the range from 0
to 200% (in 1% step).
0 (
Full scale about 0Vdc )
to
2 0 0
(Full scale about 11Vdc )
setting
)
Change during
11V 200%
Note : Output to the FM terminal is pulse output
with constant frequency and variable duty.
voltage
10V
Variable
50% 100%
Output/full scale Fixed to 121.6Hz
FM terminal (Function)
F31
This function selects the contents of output to the FM termi nal.
0
Output frequency (maximum output frequency = 100%)
1
Output current (drive rated current x 2 = 100%)
setting
Change during
Approx. 13V
2
PID feedback value (full scale = 100%)
3
DC link circuit voltage (500Vdc = 100%)
Page 53

Change during operation: N = impossible, Y* = possible (enabled by using ), Y= possible (enabled by using
-51-
FUNC
DATA
Factory
operation
0
N
F36
30Ry operation mode
setting
Change during
This function sets the operation mode of alarm output for any fault (30Ry).
F36
0
(Excited
when
tripped)
1
(Normally
excited)
Normal
operation
30A
30B
30C
30A*
30B
30C
Tripped
30A
30B
30C
30A
30B
30C
* The status without drive power supply is the same as the status when drive
is tripped.
)
Page 54

Change during operation: N = impossible, Y* = possible (enabled by using ), Y= possible (enabled by using
-52-
FUNC
DATA
Factory
operation
0
N
E01
2 N E02
3 N E03
E02
E03
t
X1 terminal function
E01
X2 terminal function
X3 terminal function
0
Multistep frequency selection 1 (SS1)
1
Multistep frequency selection 2 (SS2)
)
setting
Change during
f3
Output
f2
frequency
f1
FWD-CM ON
(SS1)-CM ON ON
(SS2)-CM ON
Drive output is cut when the BX terminal is connected to the CM terminal.
OFF input is assumed when BX is not selected.
3
Alarm reset (RST)
The alarm output is released between the RST and CM terminals when power is turned on.
The trip status is released between the RST and CM terminals when power is turned off.
(Refer to 6-2 Alarm Reset on page 60)
4
External alarm (THR)
Drive trips with OH2 when the THR te rminal is disconnected from the CM
terminal.
ON input is assumed when THR is not selected.
5
Write enable command for keypad(WE-KP)
Function change from the keypad panel is disabled when the WE-KP terminal is disconnected
from the CM terminal.
Function change from the keypad panel is enabled when the WE-KP terminal is connected to the
CM terminal.
ON input is assumed when WE-KP is not selected.
6
PID control cancel (Hz/PID)
PID control operates when the Hz/PID terminal is disconnected from the CM
terminal and does not operate when they are connected.
OFF is assumed when the Hz/PID is not selected.
Hz/PID is valid only when function
(PID control operation).
f4
H 2 0
f1 : Frequency selected with F01
(keypad panel/analog/freq. setting POT )
f2 : Frequency selected with C05
f3 : Frequency selected with C06
f4 : Frequency selected with C07
OFF input is assumed if SS1 or SS2 is not selected.
2
Coast-to-stop command
is set to
1 or
2 .
Page 55

Change during operation: N = impossible, Y* = possible (enabled by using ), Y= possible (enabled by using
-53-
FUNC
DATA
7
Link operation selection (LE)
Operation setting can be done by commands from RS485 when the LE terminal
Continued from previous page
is connected to the CM terminal.
A command from RS485 is ignored when the LE terminal is disconnected from
the CM terminal.
ON input is assumed when LE is not selected.
LE is valid only when function
o 0 0
is set to
1
(option operation).
)
Note: Set function
E 0 3
to a value from
as a PLC terminal (SW7 is set to PLC).
0
to
3
when using the X3 terminal
Page 56

Change during operation: N = impossible, Y* = possible (enabled by using ), Y= possible (enabled by using
-54-
FUNC
DATA
C05
C06
C07
C04
Factory
operation
2
Y
Jump width
C01
C02
C03
setting
operation
0.0Hz
Y
C01
0.0Hz
Y
C02
0.0Hz
Y
C03
setting
operation
3Hz
Y
Factory
operation
0.0Hz
Y
C05
0.0Hz
Y
C06
0.0Hz
Y
C07
)
Jump frequency 1, 2, 3
These functions jump frequencies to prevent overlap between the load mechanical resonance point and drive
output frequency.
Up to three jump points can be set.
These function do not operate when 0Hz is set.
No frequency is jumped during acceleration and deceleration.
If three continuous frequencies are set, the total of the
three jump widths is set as the jump width.
Factory
Jump frequency (Hysteresis)
This function sets a jump width in a range from 0 to 30Hz in 1Hz step.
Multistep frequency setting 1
Multistep frequency setting 2
Multistep frequency setting 3
setting
Change during
Change during
Output Frequency
Jump
frequency
Jump
frequency
Jump
frequency
Factory
Change during
Jump width
Frequency setting
Jump width
These functions set a multistep frequency setting from 0 to 120Hz in 0.1Hz step (for 99.9 Hz or less) or
1Hz step (for 100Hz or more) by switching the external contact signal.
The ON and OFF of terminal function SS1/SS2 (see explanation of E01, E02, and E03) switches between
the frequencies set by these functions C05, C06, and C07.
Motor characteristics
P00
This function removes abnormalities in the output current such as current vibration.
0
Current vibration is not suppressed.
to
1 0
Current vibration is minimized.
setting
Change during
Page 57

Change during operation: N = impossible, Y* = possible (enabled by using ), Y= possible (enabled by using
-55-
FUNC
DATA
Factory
---
Change during
Monitoring only.
Factory
0
Change during
Monitoring only.
H01
Operation time
setting
operation
This function displays the integration time of power supply applied to the drive.
0 to 655 are displayed to indicate 0 to 65500 hours.
If the integration time exceeds 65500 hours, 65500 is displayed continuously. While the total of power
supply times is less than one hour, the times are not integrated.
Trip history
H02
setting
This function memorizes the history of the last four protection operations.
Each data item can be called using the key.
The calling procedure is shown below:
operation
)
No. Procedure
1
2
Press the
3
Press the
key
4
Press the
key
5
Press the
key
Press the
6
key
Call H 0 2 H 0 2
Press the
FUNC
DATA
key
key
Press the
key
Press the
key
Press the
key
Display ex-
ample
O U 2
O H 2
O C 1
- - -
E n d
Remarks
The contents (history) of the latest
alarm are displayed.
The contents of the second latest alarm
are displayed.
The contents of the third latest alarm
are displayed.
The contents of the fourth latest alarm
are displayed. (This example is for no
history.)
The contents of a new alarm is stored in the data area for the history of the latest alarm. At this time, the
history of the latest alarm is stored in the data area for the second latest alarm. The histories of the second
and third latest alarms are moved in this way and the history of the fourth latest alarm is deleted.
Stored trip histories are not deleted although data initialization is executed with H03.
Page 58

Change during operation: N = impossible, Y* = possible (enabled by using ), Y= possible (enabled by using
-56-
FUNC
DATA
setting
operation
0
N
H20
Factory
operation
0
N
setting
operation
0
Y*
H04
H06
setting
operation
0
Y*
Data initialization
H03
This function initializes data items set with all functions to values set in the factory.
0
Manually set value
1
Initialized (factory set value )
The display is changed from
0 to
setting
Change during
1
when the STOP and keys are pressed simultane-
ously.
When the
FUNC
key is pressed under this condition, initial data is written and a frequency set by the
DATA
built-in POT (VR) is displayed automatically.
Factory
Change during
Auto Reset
This function selects a retry operation if the drive is tripped.
0
: Inactive
)
to
1
: The auto reset count is fixed to 5 and auto reset starts when 0.5s elapses after tripping .
Auto reset is attempted only for an overcurrent/overvoltage trip that occurs during operation.
Fan stop operation
0
: ON-OFF No control (always on)
1
: ON-OFF Control
(The fan is turned off when the drive temperature becomes low after operation is
stopped.)
PID control (Mode select)
0
: Inactive
Factory
Factory
Change during
Change during
1
: Active (Normal)
2
: Active (Inverse)
Select a PID control operation.
The feedback signal value (%) is displayed by assuming the full scale to be 100% when a PID control
operation is selected.
Page 59

Change during operation: N = impossible, Y* = possible (enabled by using ), Y= possible (enabled by using
-57-
FUNC
DATA
Factory
operation
1
N
H21
H24
H25
H22
H23
setting
operation
0.01
Y
Factory
operation
0.0s
Y
Factory
operation
0.00s
Y
Factory
operation
0.5s
Y
PID control
setting
Change during
(Feedback signal)
This function selects a PID control feedback signal.
0 Terminal 12(0 to +10Vdc)
1 Terminal C1(4 to 20mAdc)
2 Terminal 12(+1 to +5Vdc)
Factory
Change during
PID control (P-gain)
This function sets a P-gain.
)
0. 0 1
to
1 0. 0
P-gain from 0.01 to 10.0 times (1 to 1000%) (in increment of 0.01 step)
PID control (I-gain)
This function sets an integral time.
0. 0
: No integration
0. 1
to
9 9 9
(in 0.1s step for 99.9s or less, 1s step for 100s or more)
PID control (D-gain)
This function sets a derivative time.
0. 0 0
: No derivative
: Integral time 0.1 to 999s
setting
Change during
setting
Change during
0. 0 1
to
1 0. 0
: Derivative time 0.01 to 10.0s (in 0.01s step)
PID control
setting
Change during
(Feedback filter)
This function sets a filter time constant of PID feedback.
0. 0
to
6 0. 0
: Time constants 0.0 to 60.0s (in 0.1s step)
Page 60

Change during operation: N = impossible, Y* = possible (enabled by using ), Y= possible (enabled by using
-58-
FUNC
DATA
o00
Output
Normal
Deviation is positive and
Output
Inverse
Deviation is positive and
Td)
Reference
Feedback value
_
+
ween
PID arithmetic unit
setting
operation
0
Y*
PID control
In PID control, an output frequency is adjusted to a feedback value.
Use F 0 1 to set a frequency and H 2 1 to make the feedback value and the refer-
ence value equal.
frequency
Deviation
1
(1Kp ⋅+
+⋅
Tis
⋅
s
Switching bet
Normal and
Inverse operation
Drive
output
IM
AF-300C11
Kp : P-gain Td : Derivative time Ti : Integral time
operation
operation
Deviation
Deviation
frequency
frequency
frequency increases.
frequency decreases.
Factory
Change during
Option selection
(RS485 RTU communication)
0
: Option inactive
)
P
(sensor)
Always set
If
For explanations of “o01” to “o11”, refer to the instruction manual that comes with the
optional RS485 serial communication unit.
1
: Option active
1
is set, Er 8 occurs.
0
when the optional RS485 RTU serial communication unit is not used.
Page 61

-59-
6 Protective Function
6-1 List of protective functions
When the protective function is activated, drive output is instantly cut off (while the motor coasts until it is
stopped), and an alarm is issued, and the details of the alarm are displayed on the keypad panel.
Table 6-1-1 List of Protective Functions
Keypad
Alarm Name
Overcurrent
Overvoltage
panel dis-
play
OC1
OC2
OC3
OU1
OU2
OU3
During acceleration
During deceleration
While running at
constant speed
During acceleration
During deceleration
While running at
constant speed
Contents of operation
If the drive output current momentarily exceeds the ove rcurrent detection level because of an overcurrent in the
motor or the short-circuit in the output circuit, the output is
shut down, an alarm is issued, and the drive is tripped.
If the DC voltage of the main circuit exceeds the overvoltage dete ction level because of an increase in the regenerating current from the motor, etc., output is shut down, an
alarm is issued, and the drive is tripped. However, prote ction against inadvertent overvoltage loading (e.g., highvoltage line) might not be provided.
Undervoltage LU If the DC voltage of the main circuit falls below the undervoltage detection level
because of a lowered power supply, output is shut down to protect the drive. If the
restart function after momentary power failure is not activated, an alarm is issued
and the drive is tripped.
If the restart function is activated, the drive restarts automatically with no alarm.
For further details of the protective function, refer to the descriptions of Function
F14.
Overheating of
heat sink
External Alarm
Motor overload
Drive ove rload
OH1 If the temperature of the heat sink used for cooling the rectifier diodes and IGBTs
rises because of cooling fan failure, etc., protective function is acti vated to stop
operation, an alarm is issued, and the drive is tripped.
OH2 If the control circuit terminal THR (functional change of X1 to X3 terminals) is
set to OFF, an alarm is issued and the drive is tripped.
OL If the motor current exceeds the operating level set by the electronic thermal O/L
relay, output is shut down to protect the motor, an alarm is issued, and the drive is
tripped.
OLU If the output current exceeds the drive rated overload current, output is shut down,
an alarm is issued, and the drive is tripped.
Page 62

-60-
!
he drive suddenly restarts
Keypad panel
Keypad
Alarm Name
panel dis-
Contents of operation
play
Memory Error Er1 If memory error occurs, such as a missing or invalid data, output is shut down, an
alarm is issued , and the drive is tripped.
CPU Error Er3 If CPU error occurs because of noise, etc., output is shut down, an alarm is issued,
and the drive is tripped.
Er6 Detects drive operating procedure error during drive startup. FWD or REV
Operating Error
connected to terminal CM when Main power is applied to drive (F02 setting 3 or
4). Stop key on keypad is pressed in terminal operation (F02 setting 1 or 3).
RS485 Communication
Er8 If an error occurs in serial communication via the RS485, output is shut down, an
alarm is issued , and the drive is tripped. For further details, refer to the instrucError
tion manual for RS485 communication cards.
Input phase
failure (only for
3-phase 200V
Lin If one of the input three phases is lost or the imbalance ratio between phases ex-
ceeds 2%, output is shut down, an alarm is issued, and the drive trips.
series)
6-2 Alarm Reset
To release the trip status, enter the reset command by pressing the reset key or from terminal (RST) after removing the cause of the trip. Since the reset command is an edge operation, be sure to input a command string
such as OFF ON OFF as shown in Figure 6-2-1.
When releasing the trip status, set the operation command to OFF. When the operation command is set to ON,
check that operation starts after resetting.
If the cause of tripping is Er1, reset the error and initialize data. If the drive is not reset, contact GE Fuji.
10ms or more
Reset command
display
Normal display
OFF
Alarm display
ON
OFF
Normal display
WARNING
Alarm output
OFF
ON
OFF
Trip
Figure. 6-2-1 How to input the reset command
1. If alarm reset is activated with operation signal ON, t
which may be hazardous. Be sure to disable the ope rating signal when releasing the trip status,
otherwise fire could occur.
Page 63

-61-
tion
ing
Torque boost amount
No No
No No No No No No No
7 Troubleshooting
7-1 In case of tripping
In the event the drive tripping, diagnose by the help of the alarm display as shown below.
(1) Overcurrent (OC)
Can torque boost
amount be re-
duced?
yes
Reduce torque
boost amount.
Prolong time se tting.
Overcurrent during accelera
OC1
Overcurrent dur
deceleration OC2
Overcurrent while running at constant speed
OC3
Are the motor connecting terminal (U,V,W) short-circuited or
grounded?
Load excessive?
Deceleration time
correct?
yes
Acceleration time
setting too short
compared with load?
yes
yes
Can the acceler ation
time setting be pr olonged?
setting too short
compared with load?
yes
Can the deceler ation
time setting be pr olonged?
Has load changed
suddenly?
yes
No
No
yes
yes
Remove short-circuit
or ground.
yes
Reduce load or expand
drive capacity.
Faulty drive or error
because of noise. Contact GE Fuji.
No
Prolong time setting.
Reduce load or expand drive capacity.
Braking method
needs investigation.
Consult with GE Fuji.
Suppress load fluctuation
or expand drive capacity.
Page 64

-62-
Consider using DC in-
Reduce regenerating
Reduce moment of in-
Prolong decelerating
Prolong accelerating
Main circuit DC voltage exceeds protection
Does OU activate when load is removed
ing
No No No
(2) Overvoltage(OU)
Faulty drive or error
because of noise.
Contact GE Fuji.
Overvoltage during
acceleration
OU1
Power supply voltage within specified value?
Yes
suddenly.
No
level?
Yes
Overvoltage dur
deceleration OU2
Yes
No
Yes
Overvoltage while
running at constant
speed OU3
Yes
Yes
Yes
No
Yes
* Fix supply voltage to
within upper limit of
specifications.
* If caused by momen-
tary voltage surge
from power supply,
consider installing a
power-factor correcting DC reactor.
* Eliminate sudden
change of load.
* Consider increasing
drive capacity.
time.
Occurs on compl etion
of steep acceleration?
Yes
Can accelerating time be
Yes
prolonged?
No
Can the moment of inertia of load be reduced?
No No
Can decelerating time be
prolonged?
Can regenerating load be reduced?
No
DC injection brake
used?
Review braking method. Contact GE Fuji .
No
Yes
No
No
Yes
Yes
time.
ertia.
Yes
load.
jection brake.
Page 65

-63-
cuit
LU
No
No
No
No
No
Yes
Yes
Yes
Yes
Heat sink ove rheat-
Load excessive?
Probable faulty drive
Cooling air passage
Arrange peripheral
Yes
Yes
No
No
No
Yes
Yes
No
Connect alarm signal con-
circuit between
Signal from external deIs the alarm function of
Probable faulty drive or
Yes
No
No
Yes
(3) Undervoltage(LU) (4)Overheating of heat sink (OH1)
Has (momentary) power failure occurred?
ing (OH1)
Yes
Reset and restart operation. (If F14 is 0,1)
Faulty parts or loose connection in power control circuit?
Replace faulty parts and
fix connection.
Cooling fan rotating?
Power supply voltage within
specified value?
blocked up?
Any load requiring large
starting current within the
same power distribution
group?
Modify power distr ibution system to sa tisfy
specified value.
Ambient temperature
within specified value?
Reduce load.
Replace cooling fan.
Remove obstacles.
conditions to secure
specified value.
Does LU activate when ci rcuit breaker or magnetic contractor switched to ON?
Probable faulty control ci r
of drive or error because of
noise, etc. Contact GE Fuji
Yes
Power transformer capacity adequate?
Probable faulty drive.
Contact GE Fuji
(5) External alarm input (OH2)
OH2
vice connected between
control circuit terminals
THR - CM?
tact. Shortterminals THR - CM if no
signal is input.
or error because of
noise, etc. Contact GE
Fuji.
the external device operating correctly?
Remove the cause of alarm
function activation.
error because of noise.
Contact GE Fuji.
Page 66

-64-
Is electronic thermal O/L
Connect thermal O/L
Probable faulty drive or
Reduce load or increase
No
Yes
No
Yes
No
Yes
(6) Drive overload (OLU) or motor overload (OL)
OL OLU
Do characteristics of electronic thermal O/L relay
and those of motor over-
load match?
relay externally.
relay setting correct?
Set to correct level.
Load excessive?.
drive
capacity
error because of noise,
etc.. Contact GE Fuji.
Page 67

-65-
No
Yes
Communication
No
Reset analog frequency to
Analog frequency set to
Memory error
CPU error
Yes
Turn power OFF then ON
again after CHARGE lamp
Probable faulty drive.
Drive is normal. Continue
Yes
No
Yes
No
Abnormal dis-
(7) Memory error (Er1) CPU error (Er3)
play or indication goes out
Er 1
Er 3
negative value?
positive value.
has gone out.
Noise source nearby? Is data displayed on LED?
operation.
Contact GE Fuji.
(8) RS485 Communication Error (Er8) [In case RS485 communication is not used]
Error Er8
o00 is set to 1?
Probable faulty drive.
Contact GE Fuji.
Remedy faulty parts.
* For Er8 measures when using RS485, refer to the instruction manual for optional RS485
communication card.
Set o00 to 0.
Page 68

-66-
Is the inter-phase imbalance ratio
Are all the three phases of the
No
Yes
Yes
Probable faulty drive. Co ntact
No
Examine the power supply system
(9) Input phase failure (Lin) and imbalance
Lin
Connect the input wires correctly.
input voltage supplied?
within 2%?
to satisfy the specification value.
GE Fuji.
Page 69

-67-
on the keypad
No
No No No No No
No No No No No
lay contacts
ting
frequency?
Alarm displayed on
Motor does not
Does charge lamp
Press UP key and set
Remedy failed function
used.
No No
voltage?
7-2 Other trouble
(1) When motor does not rotate.
start.
and start after rese t-
ting alarm.
If no error is detected, continue operation.
Does motor run if
RUN key is pressed?
Yes
Yes
light?
keypad panel?
Is the operation
method the keypad
panel or input signal?
Forward or reverse
operation com mand
given?
Yes
Yes
Input signal Keypad panel
Yes
Note : Verify the function settings for the operation com-
mands and frequency setting values
panel.
Are circuit breaker and
magnetic contactor on
power supply side
switched ON?
Yes
Voltage of main power
supply input terminals
normal?
Yes
External wiring between control circuit
terminals FWD, REV CM connected correctly?
Investigate cause of
failed switching, and
turn them ON if there is
No
no problem.
Check for failures such
as low voltage, phase
failure, loose connection, and poor contact,
and remedy accor dingly.
Possibly of faulty Inverter Contact GE Fuji.
Yes
Replace faulty switch
or relay.
frequency.
Does drive star t
when UP key
pressed?
Execute correct frequency setting.
Defective motor.
Load excessive?
Setting of torque
boost amount cor-
rect?
Raise torque boost
amount.
Yes
Yes
No
Yes
Does frequency se tting exceed starting
and stop frequency.
Yes
Are the frequency
Yes
limiter (High) and
the frequency se t
lower than starting
Drive output term inals (U,V,W) supplied with proper
Motor wiring cor-
Yes
rect?
Load is excessive, resulting in motor lock.
Lighten load. Also, check that the brake is
adequately released if mechanical brake is
Yes
No
Yes
No
Setting of built-in POT
(VR) and connections
of external circuit wiring between control
circuit term inals
13,12,11,C1 or X1, X2,
X3 - CM correct?
Probable faulty drive.
Contact GE Fuji.
Remedy wiring error.
Remedy wiring error.
Replace faulty frequency setting POT
Yes
(VR), signal converter,
switch, or re
as appropriate.
Page 70

-68-
Motor rotates but speed
trol
rect
The motor does not rotate if the following commands are given.
1) An operation command is given while coast-to-stop command is output to the control terminals.
2) Both operation command FWD and REV are input.
(2) When motor rotates but the speed does not change .
does not change.
Change the se tting.
Maximum frequency
Yes
setting too low?
Upper/lower frequency
Yes
limiter activating?
Which frequency setting
method is in use: built-in
POT (VR), keypad panel,
analog signal, or
multistep frequency?
External wiring connections between con
terminals X1,X2,X3 CM connected correctly?
No
No
Built-in POT (VR)
Keypad panel operation
Analog signal
Multistep frequency
Remedy wiring error.
No No
Yes
Does speed change when
freq. setting POT(VR)
turned clockwise or counter
clockwise?
Does the speed
change when UP or
DOWN key depressed?
No
Can the frequency
setting signal (0 to
+10Vdc, 4 to
20mAdc) be
changed?
No
External wiring connections between
control terminals
13,12,C1 - 11 correct?
Yes
No
Yes
No
Yes
Frequencies for each
multistep selecting frequency different?
Yes
Setting of acceleration/deceleration time
excessively long?
Yes
Change setting to cor
acceleration/deceleration
time for load.
Change the setting
No
frequency.
Probable faulty
drive or error be-
No
cause of noise, etc.
Contact GE Fuji.
Yes
Replace faulty frequency setting
POT(VR) or signal
converter as appropriate.
In the following cases, change of motor speed is also restricted.
1) Bias frequency (F18) setting value is large.
2) Signals are input from both control terminals 12 and C1 and there is no significant change in the added value.
(When F01 is 3)
3) Load is excessive and stall prevention function is activated.
Page 71

-69-
Attempt made to change
tion
Function to be changed F05,
Function to be changed
Press STOP key and UP or
Yes
Yes
No
Yes
Motor generates ab-
No
No
No
Yes
(3) When motor stalls during acceleration
Motor stalls during acceleration
Acceleration time setting
too short?
Yes
Prolong time setting.
Moment of inertia of motor
or load excessive?
No
Special motor in use?
Motor terminal voltage
lowered?
Torque of load excessive?
No
Yes
Reduce torque of load or
increase drive capacity.
Yes
No
Use thicker cable for wiring between drive and m otor, or shorten wiring
length.
Setting of torque boost
amount correct?
Probable faulty drive or
error because of noise, etc.
Contact GE Fuj i.
No No
Yes
Yes Yes
No
Consult with GE Fuji..
Reduce moment of inertia
of load or increase drive
capacity.
Increase torque boost
amount.
(4) When motor generates abnormal heat
normal heat
V/f pattern fitted to m o-
tor?
Motor been continuously
operated at extremely low
speed?
Load excessive?
Is the output voltage (at
terminals U,V,W) bal-
anced?
Probable faulty drive.
Contact GE Fuji.
Change the setting.
Use motor exclusive to
drive.
Lighten load or increase
motor capacity.
Faulty motor.
(5) When function change disabled
Function change is disabled.
Any of E01, E02, E03 set
to 5?
NO
F00 set to 0?
YES
an unchangeable func
during operation?
NO
Function to be changed
F00 or H03?
NO
F02? FWD or REV ter minal connected to CM
NO
F06, F24, H01 or H02?
NO
Contact GE Fuji
YES
NO
YES
YES
YES
YES
Short-circuit between terminals X1,X2,X3 corresponding to function set to
5 and CM term inal.
Set F00 to 0.
Change function after
stopping drive.
DOWN key simultaneously.
Open FWD and REV
command.
Change other functions.
Page 72

-70-
!
8 Maintenance and Inspection
Execute the daily inspection and perio dic inspection for preventing a fault and ensuring long-term reliability.
Note the following regarding the work.
8-1 Daily Inspection
During the operation and conduction, the visual inspection for abnormal operation is executed from the outside
without removing the covers.
Inspections are usually done to check the following:
1) The expected performance (satisfying the standard specification) is obtained.
2) The environment satisfies the standard specification.
3) The keypad panel display is normal.
4) There are no abnormal sound, vibrations or unpleasant odors.
5) There are no overheating marks or discoloration.
8-2 Periodic Inspection
The periodic inspection must be executed after stopping the operation and cutting off the power source and removing the surface cover.
After power-off, time is needed for the smoothing capacitors in the DC section in the main circuit to discharge.
To prevent electric shock, make sure that the voltage falls down to the safety value (25Vdc and below) using a
multimeter after the charge lamp (CRG) goes off.
WARNING
1. Start inspection five minutes or more after turning off the power supply. (Check that the charge lamp
(CRG) goes off, and check the voltage is 25V dc or below between terminals P(+) and N(-)
There is danger of electric shock.
2. Only the designated person can perform the maintenance and replace components
(Take off any metal objects such as a watch or ring.)
(Use insulated tools.)
3. Never modify the drive.
There is danger of electric shock or injury.
Page 73

-71-
Table 8-2-1 Periodic inspection list
Check part Check item How to inspect Evaluation criteria
Environment
1) Check the ambient air tem-
perature, humidity, vibration,
atmosphere (dust, gas oil mist,
waterdrops)
2) Are foreign matter or dangerous
1) Measure by visual
i nspection and the
meter.
2) With visual in-
spection
1) The specified standard
value must be satisfied.
2) No foreign matter or
dangerous objects left
near the drive?
objects such as tools not left
around the equipment?
Voltage Are the voltages in the main circuit
and the control circuit normal?
Keypad panel 1) Is the display hard to read?
2) Are the characters complete?
Structure such as a
frame or cover
1) Abnormal sound or vibration?
2) Loose bolts (part to be
tightened) ?
3 Deformation or damage?
4) Discoloration by
overheating?
5) Stains and dust?
Common 1) Loose and missing bolts?
2) Deformation, cracks, damage,
and discoloration by
overheating and
deterioration in the
equipment and the insulation?
3) Stains and dust?
Conductor
and wire
1) Discoloration and distortion
of a conductor by overheating?
2) Cracks, crazing, and
discoloration of the wire
sheath?
Main circuit
Terminal
Not damaged? Visual inspection Not abnormal.
block
Smoothing
capacitor
1) Electrolyte leakage,
discoloration, crazing, and
swelling of a case?
2) Is a safety valve not out, and
are any valves protruding
excessively?
3) Measure the
capacitance if necessary
Measure with the multimeter.
1), 2) Visual
inspection
1) With Visual
inspection and hearing
2) Tighten more
3), 4), 5) With
visual inspection
1) Tighten more
2), 3) Visual
inspection
1), 2) Visual
inspection
1), 2) Visual
inspection
3) Measure using the
capacitance
measuring
instrument (Note)
The specified standard value
must be satisfied.
1),2) The display can be
read and is not abnormal.
1), 2), 3), 4), 5)
Not abnormal.
1), 2), 3):
Not abnormal.
Note: A discolored shortcircuiting bar does not indicate a problem.
1), 2) Not abnormal.
1), 2) Not abnormal.
3) The capacitance is
initial value x 0.85 or
more.
Page 74

-72-
Check part Check item How to inspect Evaluation criteria
Resistor 1)Unpleasant smell and crazing
of the insulation by
overheating
2)No open circuit?
Trans-
Main circuit
former and
reactor
Magnetic
contactor
and relay
Control PC
board and
connector
Control circuit
Abnormal buzzing or unpleasant
smell?
1)Rattling when operating?
2)Roughness of contact?
1)Loose screws or connectors?
2)Unpleasant smell or
discoloration?
3)Cracks, damage, deformation, or
excessive rust?
4)Electrolyte leakage or a
deformed mark on the
capacitor?
1)Olfactory and
visual inspection
2)Visual inspection
or use a multimeter
by removing a
connection on one
side.
Aural, olfactory, and
visual inspection
1)Aural
2)Visual inspection
1)Tighten more.
2)Olfactory and
visua l inspection
3),4)Visual
inspection
1)Not abnormal.
2)Less than about ±10% of
the indicated
resistance value
Not abnormal.
1), 2) Not abnormal.
1), 2), 3), 4)
Not abnormal.
Cooling
fan
(2 HP or
more)
Ventilation
way
Cooling system
(Note) Use a capa citance measuring instrument available on the market which is easy to use.
(Remark) If the equipment is stained, wipe it with a cleaning cloth, which is chemically neutral.
Vacuum-clean the dust.
1)Abnormal sound or vibration?
2)Loose of bolts?
3)Discoloration by
overheating?
Clogging-up or foreign substance on
heat sink or in take/exhaust ports?
1)Aural and visual inspection. Turn with
hand. (Make sure power
is off)
2)Tighten more
3)Visual inspection
Visual inspection Not abnormal
1)The fan must rotate
smoothly.
2), 3)Not abnormal
Page 75

-73-
Moving-
Rectifier
Power me-
Power me-
Moving-
e-
Meter
Meter
section
8-3 Electrical measurements in the Main Circuit
The indicated values depend on the meter types because of harmonic components included in the voltage and
current of the main power supply (input) and the output (motor) side of the drive. Therefore, when measuring
with a meter for the commercial power frequency, use the meters shown in Table 8-3-1.
The power-factor cannot be measured using the power-factor meter available on the market which measures the
phase difference between voltage and current. When the power-factor must be measured, measure the power,
voltage, and current on the input side and output side. Then, calculate the power-factor using the following formulas:
Three-phase
Power factor =
3 x Voltage [V] x Current [A]
Electric power [W]
x 100 [%]
Single-phase
Power factor =
Voltage [V] x Current [A]
Electric power [W]
x 100 [%]
Table 8-3-1 Meter for measuring the main circuit
Item
name
type
Symbol
iron type
Input (power supply) side
Voltage
waveform
Current
waveform
Voltmeter
Rectifier or
moving-iron
type
ter
Ammeter
Ammeter Ammeter
iron type
Output (motor) side
Voltage
waveform
Current
waveform
Wattmeter Wattmeter Voltmeter
type (*1)
ter
DC circuit
Terminal
DC voltm
ter
V
Moving-coil
type
- -
(*1) When measuring the output voltage by rectifier type meter, an error may occur. Use a digital AC power meter
for good accuracy.
Page 76

-74-
M
V
V
W
A
V
V
U
– +
L1 FM
–
+
A
S
V
R
V
T
W V N(-)
P(+)
P(+)
P1
U
L3/T
L2/S
L1/R
[In the case of 3-phase input series] [In the case of single-phase
input series]
V
N(–)
A
R
W
R
P(+)
L1/R
U
A
U
W
U
Motor
A
R
W
R
L1/L
L2/S
V
S
Power supply
A
T
W
WW
T
L3/T
V
Drive
Drive
W
V
V
A
W
3~
Power supply
V
R
L2/N
Figure 8-3-1 Diagram for connections of meters
8-4 Insulation Test
As much as possible, do not test the drive with a megger because an insulation test was done at shipping from
the factory. If a megger test must be done, test as described below. If the test method is incorrect, there is a possibility of damaging the product. Incorrect use of test specifications for the dielectric strength test may damage
products like megger test. If the dielectric strength test must be conducted, contact your local distributor or nearest GE Fuji’s sales office.
(1) Megger test for the main circuit
1) Test with a 500V dc megger.
2) If the test voltage is connected to the control circuit, remove all connection wires to the control circuit.
3) Connect the main circuit terminals using common wires as shown in Figure 8-4-1
4) Execute a megger test only between the common wire connected to the main circuit and the ground
(terminal G).
5) If the megger indicates 5MΩ or more, it is normal.
(This is the value measured with a drive only.)
G
Drive
G
(L2/N)
(None)
(L1/L)
Megger
Figure 8-4-1 Megger Test
Symbols in parentheses ( ) are for the single-phase
230V series.
Page 77

-75-
(2) Insulation test in the control circuit
The megger test and the dielectric strength test must not be executed in the control circuit because those parts
will be damaged and cannot be repaired.
Use a high-resistance multimeter for the control circuit.
1 Remove all external wiring from the control circuit terminals.
2 Execute a continuity test between grounds. If the result is 1MΩ or more, it is normal.
(3)External main circuit and sequence control circuit
Remove wiring from all the terminals of the drive in order not to apply the test voltage to the drive.
8-5 Inquiries about Products and Product Warranty
(1) Inquiries
If there is damage, a fault in the product, or questions concerning the product, contact your local distributor or GE
Fuji. Be prepared to supply the fol lowing information:
a) Drive type
b) Serial No. (equipment serial number)
c) Purchase date
d) Inquiry details (e.g., damaged part, extent of damage, questions, status of fault)
(2) Product Warranty
The warranty period is one year after purchase or 18 months from the year and month of manufacture on the
nameplate, whichever expires first.
However, the guarantee will not apply in the following cases, even if the guarantee term has rot expired:
1 .Damage was caused by incorrect use or inappropr iate repair and modification.
2. The product was used in an environment outside the standard specified range.
3. Damage was caused by dropping the product after purchase or occurred during transportation.
4. Damage was caused by an earthquake, fire, flooding, lightning, abnormal voltage or other natural calami ties and
secondary disasters
Page 78

-76-
8-6 Warranty Service
The purpose of the following section is to pr ovide
specific instructions to the user of the AF-300C11
drive regarding warranty administration and how
to obtain assistance on both in-warranty and outof-warranty equipment.
If assistance is required to determine warranty
status, call:
GE Fuji Drives USA, Inc.
Salem, VA
1-800-533-5885
(24 hours)
WARRANTY COVERAGE
Warranty period is 12 months after installation or
18 months after shipment from the Company,
whichever occurs first."
However, the guarantee will not apply in the following cases, even if the guarantee term has not
expired:
1. Damage was caused by incorrect use or ina p-
propriate repair or modification.
2. The product was used in an environment out-
side the standard specified range.
3. Damage was caused by dropping the product
after purchase or occurred during transportation.
4. Damage was caused by an earthquake, fire,
flooding, lightning, abnormal voltage or other
natural calamities and secondary disasters
Before calling the number at left to determine
warranty status, the drive serial number will be
required. This is located on the drive nameplate.
If the drive is still under warranty, further information will be required per the "in Warranty
Failure Checklist" shown on following page of
this instruction Book.
OUT-OF WARRANTY PROCEDURES
When the defect has been identified, contact
your local Authorized AF-300C11 Distributor
to order replacement unit.
MOTORS
Motor repairs on General Electric motors are
generally handled by GE Authorized Electric
Motor Servicenters or GE Apparatus Service
Shops. For specific instructions on your motor,
call the distributor from which it was purchased and be prepared to furnish complete
nameplate data.
Page 79

-
IN-WARRANTY FAILURE CHECKLIST
To assist with warranty troubleshooting, the following information is required. This data is needed to evaluate the
cause in an effort to eliminate any further failures.
Model No.:_____________________________________________________________
Serial No.:____________________________________________________________
Start-Up Date:_________________________________________________________
Failure Date:__________________________________________________________
Status When Failure Occurred (check one):
Power-Up___________ Running____________ Accel__________ Decel__________
Explanation of Failure ________________________________________________
Application Information (check Yes or No)
Input Transformer: Yes______ No______
If Yes: KVA____________________________
L1 Volts______ L2 Volts______ L3 Volts______
Power Factor Correction Capacitors: Yes______ No______
If Yes: Microfarrad_______________
Other Equipment on Same Power Yes______ No______
If Yes, what?
Line Reactor on Input Yes______ No______
Input Starter Yes______ No______
Output Starter Yes______ No______
Motor Overloads Yes______ No______
Control Terminals Used (circle if used)
30A 30B 30C FM X1 X2 X3 FWD REV CM 11 12 13 C1
Function Codes Different From Factory Settings
Function Code Setting
Failure Message (see Section 4)
Latest Fault_____________ Previous Faults: No Message_________
Function Code Setting
Hz_________________ 1._______________
A__________________ 2._______________
V__________________ 3._______________
After all of the Checklist information is acquired, contact the following number for assistance: (540) 387-5739
When returning failed parts, reference the C----# on the shipping documents that came with the replacement parts
and ship failed parts to: GE Fuji Drives USA, Inc. · Attn: Product Service Dept. · Rm 191 · 1501 Roanoke Boulevard · Salem. VA 24153
(Marked C----#)
-
77
Page 80

-
Nominal applied motor
9 Specifications
9-1 Standard Specifications
1) Three-phase 230V input
Item Specifications
Drive HP 1/8 1/4 1/2 1 2 3 5
*1 (HP)
Rated output
capacity *2 (kVA)
Voltage(V) 3-phase, 200V/50Hz, 200, 220, 230V/60Hz (Proportional to input voltage)
Rated current (A) 0.7 1.4 2.5 4.0 7.0 10.0 16.5
Overload capacity • 150% of rated current for 1 min.
Output ratings
Rated frequency (Hz) • 50, 60Hz
Phases, Voltage, Fre-
quency
Voltage/frequency
variations
Capability for voltage
dip *3
Rated input current *6
(with DCR)
Input power supply
(without DCR)
Required power supply capacity *4 (kVA)
Braking torque
*5 (%)
DC injection
Braking
braking
Protective structure
(IEC60529)
Cooling method • Self -cooling • Fan cooling
Weight (Lb) 1.3 1.3 1.5 1.8 3.3 3.3 4.9
1/8 1/4 1/2 1 2 3 5
0.28 0.56 1.0 1.6 2.8 4.0 6.6
• 3-phase 200 to 230V 50/60Hz
• Voltage: +10% to –15%
(Imbalance rate in power supply voltage: 2% or less *7)
Frequency: +5% to –5%
• When the input voltage drops 165V or more, the drive can be operated continuously.
When the input voltage drops below 165V from rated voltage, the drive can be ope rated
for 15ms.
0.59 0.94 1.6 3.1 5.7 8.3 14.0
1.1 1.8 3.4 6.4 11.1 16.1 25.5
0.3 0.4 0.6 1.1 2.0 2.9 4.9
150 100 50 30
• Starting frequency: 3Hz(fixe d), Braking current (0 to 100%),
Braking current ( 0 to 30%)
• Closed type IP20
-
78
Page 81

-
2) Single-phase 200V input series
Item Specifications
Drive HP 1/8 1/4 1/2 1 2 3
Nominal applied motor
*1 (HP)
Rated output
capacity *2 (kVA)
1/8 1/4 1/2 1 2 3
0.28 0.56 1.0 1.6 2.8 4.0
Voltage(V) • 3-phase, 200V/50Hz, 200, 220, 230V/60Hz (Proportional to input voltage)
Rated current (A) 0.7 1.4 2.5 4.0 7.0 10.0
Overload capacity • 150% of rated current for 1 min.
Output ratings
Rated frequency (Hz) • 50, 60Hz
Phases, Voltage, Fre-
quency
Voltage/frequency
variations
Capability for voltage
dip *3
• Single-phase 200 to 240V 50/60Hz
• Voltage: +10% to –10%, Frequency: +5% to –5%
• When the input voltage drops 165V or more, the drive can be operated continuously.
When the input voltage drops below 165V from rated voltage, the drive can be ope rated
for 15ms.
Rated input current *6
(with DCR)
Input power supply
(without DCR)
Required power supply capacity *4 (kVA)
Braking torque
*5 (%)
DC injection
Braking
braking
Protective structure
(IEC60529)
1.2 2.0 3.5 6.5 11.8 17.7
2.3 3.9 6.4 11.4 19.8 28.5
0.3 0.4 0.7 1.3 2.4 3.6
150 100 50 30
• Starting frequency: 3Hz(fixed), Braking current (0 to 100%),
Braking current ( 0 to 30%)
• Closed type IP20
Cooling method • Self -cooling • Fan cooling
Weight (Lb) 1.3 1.3 1.5 2.0 3.5 4.9
Notes:
*1 A 4-pole standard motor is assumed as a nominal applied motor.
*2 Drive output capacity (kVA) at 230V.
*3 When a momentary power failure occurs, while rated voltage is applied 85% of load of nomi nal motor is
given.
*4 When an optional power-factor correcting DC reactor is used.
*5 Average braking torque where an unloaded motor decelerates and stops from 60Hz
operation. (Varies according to the motor efficiency)
*6 The specification is calculated on assumption that the drive is connected to a 500 kVA-equivalent power
transformer.
*7 The inter-phase imbalance ratio (%) = ((Max. voltage) - (Min. voltage)) / (Average voltage among three
phases) x 67
-
79
Page 82

-
Control
9-2 Common specifications
Item Specifications Remarks
Maximum
output fre-
• 50 to 120Hz (in 1Hz steps)
quency
Base
frequency
Starting fre-
Setting
quency
Carrier frequency
Output frequency
• 25 to 120Hz (in 1Hz steps)
• 1 to 6Hz (in 1Hz steps)
• 0.75 to 15kHz
(Vector -distribution PWM control selectable at 7kHz or less)
When operating at a carrier frequency of 9kHz or above, the frequency
may automatically drop to 8kHz to protect the drive.
Accuracy • Analog setting:±1.0% of maximum frequency (at 25±10°C)
• Keypad panel setting:±0.01% of maximum frequency
(at –10 to +50°C)
Setting resolution
Voltage/ freq.
Character istic
Torque boost
• Analog setting: 1/256 of Maximum frequency
• Keypad panel setting: 0.1Hz(99.9Hz or less), 1Hz(100Hz or more)
• Output voltage proportional to input voltage. Base frequency
adjustable from 25 to 120Hz.
• Manual setting by code 0 to 31.
(setting for variable torque load available)
Starting torque • 150% or more (at 6Hz)
Control method
Operation
method
• Sinusoidal PWM control
(with simplified current-vibration suppression)
• Keypad operation: RUN or STOP key :
Input signal: Forward/Reverse/Stop command, Coast-to-stop
command, Trip command (External alarm),
Alarm reset
Frequency setting
(Multistep)
(Linked opera-
• Keypad operation: ,Digital setting by or key
• Built -in potentiometer
• Analog input: 0 to +5Vdc, 0 to +10Vdc, 4 to 20mAdc
• Up to 4 multistep frequencies can be set in 2-bit external signal by terminal
function selection
• Setting by RS485 serial communication (Option)
tion)
Acceleration/
deceleration
• 0.01 to 60.0s
(Independently adjustable acceleration and deceleration)
time
Frequency
limiter
• High and low limits can be set for output frequency between 0 to 100% in
Hz
Bias frequency • The bias frequency can be set from –100 to +100% in Hz.
Gain (frequency
setting signal)
• 5Vdc or 10Vdc gain can be selected.
-
80
Page 83

-
Control
Item Specifications Remarks
Frequency jump
control
• Jump frequency (3 points) and jump hysteresis width (1 point) can be pr e-
set.
Restart after
momentary
• Drive restarts without causing drive -trip when power supply recovers.
power failure
PID control • PID control function is provided standard.
Enclosure
• IP20
(IEC 60529)
Cooling method • Natural cooling for 1 HP or less, Fan cooling for 2 HP or more
Running,
stopped
• Output frequency, output current, and PID reference value/feedback value
The CRG lamp is on when the capacitor is charged.
Program mode • Function code and data code
Tripped [Cause of trip by code]
• OC1 (Overcurrent: during acceleration)
• OC2 (Overcurrent: during deceleration)
• OC3 (Overcurrent: while running at constant speed)
• OU1 (Overvoltage: during acceleration)
• OU2 (Overvoltage: during deceleration)
• OU3 (Overvoltage: while running at constant speed)
• LU (Undervoltage)
Indication
Running,
Tripped
• OH1 (Overheating: Heat sink)
• OH2 (Overheating: External alarm)
• OL (Overload: Motor)
• OLU (Overload: Drive)
• Er1 (Memory error)
• Er3 (CPU error)
• Er6 (Operation error)
• Er8 (RS485 communication error)
• Lin (Input phase failure)
• Fault history data is stored and indicated for the past four trips. Data is
retained while power is off.
-
81
Page 84

-
tect drive.
Item Specifications Remarks
Overload • Internal electronic thermal overload relay protects drive overload.
Overvoltage • Detect the excessive DC link circuit voltage to stop drive.
Overcurrent • Detect overcurrent due to overload on drive output side to protect drive
Incoming surge • Detect incoming surge voltage between AC power and the earth to protect
drive.
Undervoltage • Detect the DC link circuit undervoltage to stop drive
Overheating
• Detects the cooling fan fault or abnormal temperature rise of drive to pr o-
tect drive.
Short-circuit • Detect overcurrent due to short-circuit on drive output side to protect drive.
Ground fault
• Detects overcorrect due to ground fault on drive output side to pr o
(Detect at starting)
Motor protection • Protect general-purpose motor with electronic the rmal overload.
Input phase failure prote ction
• The drive is protected against phase failure on the input side or over-current
due to inter-phase imbalance.
(only for 3-phase
Protection
200V series)
Stall prevention • Controls frequency to prevent OC trip in case of the output current exceeds
the limit value during acceleration.
• Lowers the frequency to hold almost constant torque in case of the output
current exceeds the limit value during constant speed running.
• Controls frequency to prevent OU trip in case of the DC link circuit voltage
exceeds the limit value during deceleration.
Retry • “Retry” function can be set for the protective functions OC1 to OC3 and
OU1 to OU3.(No. of times of retry: 5, waiting time: 0.5s fixed.
Dielectric
strength test
• At 2000Vac for 1 min. between any main circuit terminals and
ground.(10mA or less)
Megger test • At 500Vdc megger test between any main circuit terminals and gr ound
(5MΩ or more)
-
82
Page 85

-
Item Specifications Remarks
Installation
location
Ambient
• Indoor use only. Do not install a dusty location(Degree of pollution: 2) or
expose to direct sunlight, corrosive gases, flammable gases.
• -10 to +50°C (+14 to +122°F )
temperature
Ambient
• 5 to 95%RH ( No condensation )
humidity
Altitude • 3300 Feet (1000 m) or less
Vibration • 3 mm: 2 to less than 9 Hz
2
: 9 to less than 20 Hz
2
: 20 to less than 55 Hz
2
: 55 to less than 200 Hz
Environment
Storage te m-
• 9.8m/s
• 2m/s
• 1m/s
• -25 to +65°C
perature
Storage humi d-
• 5 to 95% RH (No condensation)
ity
Higher
harmonics
• Terminal for connecting power-factor correcting DC reactor (DCR) is pr o-
vided as standard.
current
suppression
Charging suppression resis-
Others
• Charging suppression resistor is built -in for all drive unit.
tor
Cooling fan
• Cooling fan can be automatically stopped when drive is stopped.
ON/OFF control
P1, P(+) termi nal
-
83
Page 86

-
2.64 (67)
5 x 6) holes
0. 2 (5)
4. 33 (110)
0. 2 (5)
0.38 (9.7)
0. 31 (8)
TERMINAL 2 TERMINAL 2
3.15 (80)
2.64 (67)
5 X 6) holes
Detailed diagram for (0.2 x 0.23) hole
9-3 Dimensions
Inches (mm)
4- 0.2 x 0.23 (4 -
0.26 (6.5)
3.15 (80)
0.26 (6.5)
0.68 (17. 2)
1.48 (37.6)
TERMINAL 3TERMINAL 3
(M3 .5)(M3 .5)
.02 X 0.23 (4-
0.45 (11.5)
0.06 (1.5)
4.33 (110)
0. 06 (1.5)
Up/Down or right/left symmetry
4.72 (120)
3 - phase 230V series
Single phase 230V series
Series Model No. HP
6KC1123F12** 1/8 3.15(80) 2.70 (68.5) 1.07(27.2) 0.39(10) 1.7(43.2)
3- phase
230V
Single
phase
200V
6KC1123F25** 1/4 3.35(85) 2.89(73.5) 1.27(32.2) 0.59(15) 1.9(48.2)
6KC1123F50** 1/2 3.74(95) 3.29(83.5) 1.66(42.2) 0.98(25) 2.29(58.2)
6KC1123001** 1 4.72(120) 4.27(108.5) 2.65(67.2) 1.97(50) 3.28(83.2)
6KC1121F12** 1/8 3.15(80) 2.70 (68.5) 1.07(27.2) 0.39(10) 1.7(43.2)
6KC1121F25** 1/4 3.35(85) 2.89(73.5) 1.27(32.2) 0.59(15) 1.9(48.2)
6KC1121F50** 1/2 4.53(115) 4.07(103.5) 1.66(42.2) 0.98(25) 2.29(58.2)
6KC1121001** 1 5.51(140) 5.06(128.5) 2.65(67.2) 1.97(50) 3.28(83.2)
D D1 D2 D3 D4
Dimensions: Inches (mm)
1. 05 (26.6)
0. 38 (9.7)
** Indicates product revision
-
84
Page 87

-
4.33 (110)
0.24 (6)
2.5 (63.5)
1.24 (31.6)
2-00.2 (2-05)
3.86 (98)
0.2 (5)
0.24 (6)
0.24 (6)
5.12 (130)
4.65 (118)
0.24 (6)
TERMINAL 1TERMINAL 1
(M2 .5)
TERMINAL 2TERMINAL 2
(M3 .5)
TERMINAL 3TERMINAL 3
(M3 .5)
0.68 (17.2)
Inches (mm)
D 3
0.42 (10.7)
0.42 (10.7)
3.86 (98)
2-00.2 (2-05)
0.31 (8)
4.65 (118)
3.83 (97.2)
.02 (5)
0.24 (6)
3 - phase 230V series
Single phase 230V series
Series
3- phase 230V
Single phase 230V
Model No.
6KC1123002** 2 5.47 (139) 5.02 (127.5) 3.20 (81.2) 2.52 (64)
6KC1123003** 3 5.47 (139) 5.02 (127.5) 3.20 (81.2) 2.52 (64)
6KC1121002** 2 5.87 (149) 5.41 (137.5) 3.20 (81.2) 2.52 (64)
HP
D D1 D2 D3
Dimensions Inches(mm)
** Indicates product revision
-
85
Page 88

-
5.51 (140)
ting hole
5)
0.24 (6)
2-00.2 (2-05)
5.04 (128) 0.24 (6)
0.08 (2)
Terminal 2
(M4)
D
0.68 (17.2)
D3
2.61 (66.3)
(5)
0.2 (6)
6.61 (168)
0.24 (6)
7.09 (180)
Terminal 1
(M2.5)
0.27 (6.8)
D2
Terminal 3
(M4)
D1
5.04 (128)
2-00.2 (2-0
0.47 (12)
1.56 (39.6)
0.47 (12)
6.61 (168)
4.14 (105.2)
0.24 (6)
Layout of moun
0.2 (5)
Single phase 230V series 3 - phase 230V series
Series
3- phase 230V
Single phase 230V
Model No.
6KC1123005** 5 5.39(137) 4.94(125.5) 3.51(89.2) 2.83(72)
6KC1121003** 3 5. 39(137) 4.94(125.5) 3.51(89.2) 2.83(72)
HP
D D1 D2 D3
Dimensions Inches (mm)
-
86
Page 89

-
10 Options
10-1 Built-in Options
There is an optional built -in card for RS485 RTU serial communication. Ask at the distributer for details.
10-2 External Options
Table 10-2-1 External Options
Molded case circuit
breaker
For input power-factor
correcting
AC reactor (ACR)
DC reactor (DCR)
The molded case circuit breaker (MCCB) is connected for protecting the main
circuit wiring to the drive and for turning power on and off. The rated current or
the rated interrupting capacity varies according to the power supply specifications.
This is connected in the following cases.
When the power transformer capacity is more than 500 kVA.
When the imbalance ratio between phases of source voltage exceeds 2% (The
value is equivalent to our conventional allowable value.)
Imbalance ratio between phases = ——————————————————— x 67 [%]
Maximum voltage [V] - Minimum voltage [V]
Average voltage among three phases [V]
To reduce input harmonic current
The input power factor is improved to 0.75 to 0.85 (ACR).
The input power factor is improved to 0.9 to 0.95 (DCR).
If there is a thyristor load in the same power supply, if the capacitor for powerfactor correcting is turned on or off, or if the surge voltage in the power supply is
large (ACR only)
* The AC reactor is unnecessary when the DC reactor is used.
Magnetic contactor
(MC)
The drive can be operated without connecting the magnetic contactor. When the
drive protective function is activated, this should be connected to turn off the
power for safety.
Surge absorber This is connected to suppress the surge generated by the exciting coil when
switching on or off the magnetic contactor and the control relay.
Reactor for radio noise
suppression
Frequency setting POT
(VR)
This is used for noise suppression when the drive causes excessive noise in a ra-
dio or electronic equipment around the drive.
This is connected when the frequency is set from the control circuit termi nal us-
ing drive power.
-
87
Page 90

-
Power
Motor
Input power-factor
W
P1
11 Applicable DC reactors
Connection method
supply
L1/R(L1/L)
~
correcting DC
reactor
E
Fig. 11 -1-1 Connection method of Input power-factor correcting DC reactor (DCR)
P(+)
Symbols in parentheses ( ) are for single-phase 230V series.
L2/S
L3/T(L2/N)
G
P1
P(+)
U
V
G
M
3~
-
88
Page 91

-
L1/L
M
OL RY
12 Compliance with standards
12-1 UL/cUL standards [Applicable to products with UL/cUL mark]
12-1-1 General
The UL standards stand for Underwriters Laboratories Inc. and they are safety standards aiming at preve ntion of fire and other accidents in the United States, thereby providing protection for operators, service personnel and other persons.
The cUL standards are established by UL in the view of compliance with the CSA standards. The effect of
products certified for the cUL standards is equal to that of products certified for the CSA standards.
12-2-2 Precautions
When using the UL/cUL certified product, refer to "Compliance with UL/cUL standards" on page 1.
For connection, refer to Fig. 12-1-1.
Open Type Equipment “indoor use only ”
Suitable for use on a circuit capable or delivering not more than 5,000 rms symmetrical amperes, 240V
maximum.
When Protected by Class J Fuses.
Use 60/75 C CU wire only.
A Class 2 circuit wired with Class 1 wire.
Field wiring connection must be made by a UL Listed and CSA Certified closed-loop te rminal connector
sized for the wire gauge involved. Connector must be fixed using the crimp tool specified by the connector manufacturer.
Solid state motor overload protection is provided in each model.
FOR SINGLE PHASE
L2/N
G L1/R L2/S L3/T P1 P(+)
P(+) N(-) U V W G
POWER INPUT
FUSE
(See page 1 for rating.)
[CM] [THR]
THRMAL
Fig. 12-1-1 Recommended wiring
-
89
Page 92

-
12-2 Compliance with EMC directive in EU [Applicable to products with CE mark]
12-2-1 General
The CE mark indicated on the AF-300C11series concerns with European minister directorate di rective
89/336/EEC concerning the environmental electromagnetic compatibility EMC, and other directives are not
included.
The CE mark does not prove that the entire machine or system housing our product complies with the EMC
directive. Therefore indicatio n of the CE mark to the entire machine or system will be done at the responsibility of the manufacturer or the machine. This is because:
1) The CE mark attached on our product supposes operation of the product under certain conditions. Satisfaction of the conditions is up to the manufacturer of the machine.
2) Generally speaking, various devices are used in a machine or system as well as our product. Therefore
consideration for the entire machine or system must be paid by the manufacturer of the machine.
The EMC directive includes immunity to the incoming noise and emission of outgoing noise. The general purpose drive houses an internal element switching at a high speed which generates electric noise.
Applicable standards Immunity: EN 61800-3/1996
Emission: EN 61800-3/1996
Above-mentioned "certain conditions" include installation of a dedicated RFI filter in a metallic control panel.
Refer to in exclusive Instruction Manual for RFI Filter for details.
12-3 Compliance with low voltage directive in EU [Applicable to products with TÜV or CE mark]
12-3-1 General
The general purpose drive is applicable for the low voltage directive in EU. Compliance of the AF300C11series with EN 50178/1997 has been obtained from a testing organization in EU and compli ance with
the low voltage directive is asserted.
12-3-2 Precautions
Refer to "Compliance with low voltage directive in EU" on pages 2 and 3 when using our product as one complying with the low voltage directive in EU.
-
90
Page 93

-
13 Electromagnetic Compatibility (EMC)
13-1 General
In accordance with the provisions described in the European Commission Guidelines Document on
Council Directive 89/336/EEC,GE Fuji has chosen to classify the AF-300C11 range of Drives as "Complex Components".
Classification as a "Complex Components" allow s a product to be treated as an "apparatus", and thus
permits compliance with the essential requirements of the EMC Directive to be demonstrated to both
an integrator of AF-300C11 Drives and to his customer or the installer and the user.
AF-300C11 Drives are supplied `CE-marked', signifying compliance with EC Directive 89/336/EEC
when fitted with specified filter units installed and grounded in accordance with this sheet.
This Specification requires the following performance criteria to be met.
EMC product standard EN61800-3/1996
Immunity : Second environment ( Industrial environment )
Emission : First environment ( Domestic environment )
Finally, it is customer’s responsibility to check whether the equipment conforms to EMC
directive.
13-2 RFI Filters
It is strongly recommended that the appropriate AF -300C11 input filter is used, as shown in the followings, to limit RF current flowing into the main supply circuit. Without an input filter a AF -300C11
installation may not meet statutory requirement. AF -300 Drives contain high-power semi-conductor
devices which are switched at high speeds to synthesize a near-sinusoidal current wave form across
the frequency range of output. Rapidly-changing voltages and currents will generate some degree of
electromagnetic emission. Emissions will be predominantly conducted through the motor and the
mains supply cables, although some radiated emissions will be detected in close proximity to the
drive system. It is essential that precautions are taken both at the design stage and at the time of installation to prevent radio frequency interference (RFI) from the drive system affecting sensitive
equipment in close proximity.
The RFI filters range are designed especially for the AF -300C11 Drive and help to ensure EMC compliance of machinery an installations using the Drives. The Drives single phase series may be
mounted on top of the filter using the integral fixing positions, the intention being that valuable space
inside wiring cabinets may be saved. (Refer to Table 13-2-2)
-
91
Page 94

-
H
D
Table 13-2-1 RFI filters Dimensions
Drive HP Filter Type Rated
Three Phase
1/ 8 to 1HP
Three Phase
2 to 5HP
Single Phase
1/ 8 to 1/ 4HP
Single Phase
1/ 2 to 1HP
Single Phase
2HP
Single Phase
3HP
EFL075SP2
(EFL-0.75SP-2)
EFL370SP2
(EFL-3.7SP-2)
EFL020C117
(EFL-0.2C11-7)
EFL075C117
(EFL-0.75C11-7)
EFL150C117
(EFL-1.5C11-7)
EFL220C117
(EFL-2.2C11-7)
Max.
Current
6A
25A 9.17x4.13x5.35
4A
12A 7.09x3.39x1.50
20A 7.48x4.61x1.81
29A 9.45x5.83x1.81
Rated
Voltage
240Vac
240Vac
Dimensions
LxWxH
(mm)
9.57x3.35x3.66
(243x85x93)
(233x105x136)
7.09x3.39x1.50
(180x86x38)
(180x86x38)
(190x117x46)
(240x148x46)
Mount Dims
Y x X
(mm)
8.98x2.32
(228x59)
8.46x3.15
(215x80)
¯¯ ¯¯
¯¯ ¯¯
¯¯ ¯¯
¯¯ ¯¯
Ferrite
Ring
OF1 3.3
OF2 5.5
Total
Weight
(kg)
(1.5)
(2.5)
1.5
(0.7)
1.5
(0.7)
2.6
(1.1)
3.3
(1.4)
Fig.
13-2-1
Fig.
13-2-2
Fig.13-2-1
T
Ferrite Ring Dimensions
Part No. D
OF1
OF2
(mm) H (mm) T (mm)
0.98
(25)
1.61
(41)
2.0
(51)
2.8
(71)
0.67
(17)
0.71
(18)
-
92
Page 95

-
Fig. 13-2-2
Note : For detail, refer to the instruction manual that comes with the RFI filter.
Remark : To minimize the conducted radio disturbance in the power distribution system, the length of motor cable
should be as short as possible. And it is user’s responsibility to confirm that the apparatus, which the Drives in-
stalled in, conforms to EMC directive when longer motor cable is used or other installation conditions are different from those described in this manual.
-
93
Page 96

-
In case of single phase power supply
In case of single phase power supply
In case of single phase power supply
13-3 Electromagnetic Compatibility (EMC) Recommended Installation Instructions
It is necessary that these instructions must be followed to conformed to EMC Directive.
Follow the usual safety procedures when working with electrical equipment. All electrical connections to the filter, Drive and motor must be made by a qualified electrical technician.(Refer to Fig.
13-3-1 and Fig. 13-3-2)
Use the correct filter according to Table 13-2-1.
Install the Drive and filter in a electrically shielded metal cabinet.
The back panel of the wiring cabinet of board should be prepared for the mounting dimensions
of the filter. Care should be taken to remove any paint etc. from the mounting holes and face
area of the panel. This will ensure the best possible grounding of the filter.
Use a screened cable for the control , motor and other main wiring which are connected to the
Drive. The screens should be securely grounded.
It is important that all wire lengths are kept as short as possible and that incoming mains and
outgoing motor cables are kept well separated.
Power Supply
In case of a ferrite ring is provided with the filter, fit a ferrite ring to the motor cable with the 3
phase conductors only passing twice through the center of the ferrite.
Metal Cabinet
RCD or
MCCB
3PH
1
*1
Filter
L1
L2
L3
RFI
L1'
L2'
L3'
G G
models, L,N,L’ and N ’ are substituted
for L1,L2,L3,L1’,L2’ and L3’.
3
Ferrite Ring
*2
Drive
L1/R
L2/S
L3/T
G
2 turn
U
V
W
G
*3
2
Shielded Motor Cable
Shielding must be Electrically
Continuous and grounded at
the cabinet and the motor
models, L1/L and L2/N are substituted
forL1/R,L2/S and L3/T.
M
models, ferrite ring is unnecessary
Fig. 13-3-1 Recommended Installation
-
94
Page 97

-
W
ng
Reverse
command
50/60Hz
To 11 terminal
Frequency setting current input
Frequency setting voltage input
Motor
L’3
G
Power supply
N’
G
1-phase
200 to 240V
50/60Hz
RFI Filter
L L’
When power-factor correcti
DC reactor is used.
L1/L
Power supply
3-phase
200 to 230V
(0 to +10Vdc)
N
G
G
L2/N
RFI Filter
L1 L’1
L2 L’2
L3
G G
L1/R
L2/S
L3/T
13
P1
P(+) N(-) P(+)
Ferrite
Ring
U
V
G
In case of motor power cable,
fix a part of shield by a clamp.
Metal Cabinet
M
12
(4 to 20mAdc)
Forward operation
operation
command
11
C1
FWD
REV
X1
FM
30A
30B
30C
X2
X3
CM
In case of control wires, use shielded wires
and fix a part of shield by a clamp.
Analog monitor
Analog meter
Alarm output
for any fault
Fig. 13-3-2 Recommended installation detail inside the enclosure
-
95
Page 98

GE Fuji Drives USA, Inc.
1501 Roanoke Blvd.
Suite 435
Salem, VA 24153
1-800-543-6196
www.GEindustrial.com
INR-Si47-0562-E
GEH-6640
991213
FERGADV
 Loading...
Loading...