

GE Industrial Solutions 6KCV300DVN User Manual
6KCV300DVN
DeviceNet Interface Board
for AV/DV Drives
INSTRUCTIONS
GE Industrial SystemsGE Industrial Systems

These instructions do not purport to cover all details or variations in equipment, nor to
provide every possible contingency to be met during installation, operation, and
maintenance. If further information is desired or if particular problems arise that are
not covered sufficiently for the purchaser’s purpose, the matter should be referred to
GE Industrial Systems.
This document contains proprietary information of General Electric Company, USA
and is furnished to its customer solely to assist that customer in the installation,
testing, operation, and/or maintenance of the equipment described. This document
shall not be reproduced in whole or in part nor shall its contents be disclosed to any
third party without the written approval of GE Industrial Systems.
© 1999 by General Electric Company, USA. All rights reserved.

6KCV300DVN
TABLE OF CONTENTS
1.0 INTRODUCTION ................................................................ 9
1.1 THE MANUAL ......................................................................................... 9
1.2 DEVICENET GENERAL DESCRIPTION ....................................................... 10
2.0 HARDWARE DESCRIPTION ............................................. 11
2.1 DIMENSIONS, WEIGHT, PROTECTION DEGREE......................................... 11
2.2 INSTALLATION ....................................................................................... 12
2.3 POWER SUPPLY ..................................................................................... 13
2.4 CONNECTORS ......................................................................................... 13
2.5 DIP SWITCHES ....................................................................................... 14
2.6 LEDS ...................................................................................................... 14
2.7 TECHNICAL SPECIFICATIONS ................................................................. 15
2.8 INTERFACE ............................................................................................. 15
3.0 DEVICENET FUNCTION .................................................... 17
3.1 OBJECT DESCRIPTION ........................................................................... 18
3.1.1 Object model .................................................................................. 18
3.1.2 How objects affect behavior. ........................................................... 19
3.1.3 Defining object interface ................................................................. 20
3.1.4 I/O assembly instances ................................................................... 20
3.1.5 I/O assembly data attributes format ................................................. 20
3.2 DATA TRANSFER VIA EXPLICIT MESSAGING .......................................... 21
3.2.1 Drive parameter access .................................................................. 21
3.2.1.1 Class code ...................................................................................... 21
3.2.1.2 Class attributes ............................................................................... 21
3.2.1.3 Instance attributes ......................................................................... 22
3.2.1.4 Common services ........................................................................... 22
3.2.1.5 Object specific services .................................................................. 22
3.2.1.6 Behavior ......................................................................................... 22
3.2.1.6.1 Write drive parameter ................................................................. 22
3.2.1.6.1.1 Write drive parameter request ................................................ 22
3.2.1.6.1.2 Write drive parameter - Reply OK ............................................ 23
3.2.1.6.1.3 Write drive parameter - Reply Error ........................................ 23
3.2.1.6.2 Read drive parameter ................................................................. 24
——————
TABLE OF CONTENTS ——————
3

GEI-100431
3.2.1.6.2.1 Read Drive Parameter Request ............................................... 24
3.2.1.6.2.2 Read drive parameter - Reply OK ............................................ 24
3.2.1.6.2.3 Read drive parameter - Reply Error ......................................... 25
3.2.2 DGF option parameter access ........................................................... 25
3.2.2.1 Class code ...................................................................................... 25
3.2.2.2 Class attributes ............................................................................... 25
3.2.2.3 Instance attributes ......................................................................... 25
3.2.2.4 Common services ........................................................................... 26
3.2.2.5 Object specific services .................................................................. 26
3.2.2.6 Behavior ......................................................................................... 26
3.2.2.6.1 Write DGF parameter .................................................................. 26
3.2.2.6.1.1 Write DGF parameter request ................................................. 27
3.2.2.6.1.2 Write DGF parameter - Reply OK ............................................. 27
3.2.2.6.1.3 Write DGF parameter - Reply Error .......................................... 28
3.2.1.6.2 Read DGF parameter .................................................................. 28
3.2.1.6.2.1 Read DGF Parameter Request ................................................. 28
3.2.1.6.2.2 Read DGF parameter - Reply OK .............................................. 29
3.2.1.6.2.3 Read DGF parameter - Reply Error .......................................... 29
4.0 POLLING FUNCTION ........................................................... 31
4.1 SETTING OF POLLING PARAMETERS ...................................................... 31
4.1.1 Configuration object of the Polling parameters S->M ..................... 31
4.1.1.1 Class code ...................................................................................... 32
4.1.2 Class attributes ............................................................................... 32
4.1.3 Istance attributes ............................................................................ 32
4.1.4 Common services ........................................................................... 33
4.1.5 Object specific services .................................................................. 33
4.1.6 Behavior ........................................................................................ 33
4.1.6.1 Write Polling S->M configuration .................................................. 33
4.1.6.1.1 Write Single Polling S->M configuration .................................... 33
4.1.6.1.2 Write Single Polling S->M configuration - Reply OK ................... 34
4.1.6.1.3 Write Single Polling S->M Configuration - Reply Error .............. 34
4.1.6.1.4 Write Entire Polling S->M configuration .................................... 35
4.1.6.1.5 Write Entire Polling S->M configuration - Reply OK ................... 35
4.1.6.1.6 Write Entire Polling S->M configuration - Reply Error ............... 35
4.1.6.2 Read S->M Polling configuration .................................................. 36
4.1.6.2.1 Read Single Polling S->M configuration .................................... 36
4.1.6.2.2 Read Single Polling S->M configuration - Reply OK ................... 36
4.1.6.2.3 Read Single Polling S->M configuration - Reply Error ............... 37
4.1.6.2.4 Read Entire Polling S->M configuration ..................................... 37
4.1.6.2.5 Read Entire Polling S->M configuration - Reply OK ................... 37
4.1.6.2.6 Read Entire Polling S->M configuration - Reply Error ............... 38
4.2 OBJECT CONFIGURATION POLLING PARAMETERS M->S ...................... 39
4
—————— TABLE OF CONTENTS ——————

6KCV300DVN
4.2.1 Class code ..................................................................................... 39
4.2.2 Class attributes ............................................................................... 39
4.2.3 Instance attributes .......................................................................... 39
4.2.4 Common services ........................................................................... 40
4.2.5 Object specific services .................................................................. 40
4.2.6 Behavior ........................................................................................ 40
4.2.6.1 Write Polling M->S Configuration .................................................. 40
4.2.6.1.1 Write Single Polling M->S configuration .................................... 40
4.2.6.1.2 Write Single Polling M->S configuration - Reply OK ................... 41
4.2.6.1.3 Write Single Polling M->S configuration - Reply Error ............... 41
4.2.6.1.4 Write Entire Polling M->S configuration .................................... 42
4.2.6.1.5 Write Entire Polling M->S configuration - Reply OK ................... 42
4.2.6.1.6 Write Entire Polling M->S configuration - Reply Error ............... 42
4.2.6.2 Read M->S Polling configuration .................................................. 43
4.2.6.2.1 Read Single Polling M->S configuration .................................... 43
4.2.6.2.2 Read Single Polling M->S configuration - Reply OK ................... 43
4.2.6.2.3 Read Single Polling M->S configuration - Reply Error ............... 44
4.2.6.2.4 Read Entire Polling M->S configuration ..................................... 44
4.2.6.2.5 Read Entire Polling M->S configuration - Reply OK ................... 44
4.2.6.2.6 Read Entire Polling M->S configuration - Reply Error ............... 45
5.0 SETTING OF VIRTUAL DIGITAL I/O ..................................... 47
5.1 OBJECT CONFIGURATION VIRTUAL DIGITAL INPUTS .............................. 47
5.1.1 Class code ..................................................................................... 47
5.1.2 Class attributes ............................................................................... 48
5.1.3 Instance attributes .......................................................................... 48
5.1.4 Common services ........................................................................... 48
5.1.5 Object specific services .................................................................. 48
5.1.6 Behavior ........................................................................................ 49
5.1.6.1 Write Virtual Digital Input configuration ......................................... 49
5.1.6.1.1 Write Single Virtual Digital Input Configuration ........................... 49
5.1.6.1.2 Write Single Virtual Digital Input configuration - Reply OK .......... 49
5.1.6.1.3 Write Single Virtual Digital Input configuration - Reply Error ...... 50
5.1.6.1.4 Write Entire Virtual Digital Input configuration ............................ 50
5.1.6.1.5 Write Entire Virtual Digital Input configuration - Reply OK .......... 50
5.1.6.1.6 Write Entire Virtual Digital Input configuration - Reply Error ...... 51
5.1.6.2 Read Virtual Digital Input configuration .......................................... 51
5.1.6.2.1 Read Single Virtual Digital Input configuration ............................ 51
5.1.6.2.2 Read Single Virtual Digital Input configuration - Reply OK .......... 51
5.1.6.2.3 Read single Virtual Digital Input configuration - Reply Error ....... 52
5.1.6.2.4 Read entire Virtual Digital Input configuration ............................ 52
5.1.6.2.5 Read entire Virtual Digital Input configuration - Reply OK ........... 52
5.1.6.2.6 Read Entire Virtual Digital Input Configuration - Reply Error ...... 53
——————
TABLE OF CONTENTS ——————
5

GEI-100431
5.2 CONFIGURATION OBJECT VIRTUAL DIGITAL OUTPUT ............................ 54
5.2.1 Class code ..................................................................................... 54
5.2.2 Class attributes ............................................................................... 54
5.2.3 Instance attributes .......................................................................... 54
5.2.4 Common services ........................................................................... 55
5.2.5 Object specific services .................................................................. 55
5.2.6 Behavior ........................................................................................ 55
5.2.6.1 Write Virtual Digital Output configuration ....................................... 55
5.2.6.1.1 Write Single Virtual Digital Output configuration ......................... 56
5.2.6.1.2 Write Single Virtual Digital Output Configuration - Reply OK ....... 56
5.2.6.1.3 Write Single Virtual Digital Output configuration - Reply Error .... 56
5.2.6.1.4 Write Entire Virtual Digital Output configuration ......................... 57
5.2.6.1.5 Write Entire Virtual Digital Output configuration - Reply OK ........ 57
5.2.6.1.6 Write Entire Virtual Digital Output configuration - Reply Error .... 57
5.2.6.2 Read Virtual Digital Output configuration ....................................... 58
5.2.6.2.1 Read Single Virtual Digital Output configuration ......................... 58
5.2.6.2.2 Read Single Virtual Digital Output configuration - Reply OK ........ 58
5.2.6.2.3 Read Single Virtual Digital Output configuration - Reply Error .... 59
5.2.6.2.4 Read Entire Virtual Digital Output configuration .......................... 59
5.2.6.2.5 Read Entire Virtual Digital Output configuration - Reply OK ........ 59
5.2.6.2.6 Read Entire Virtual Digital Output configuration - Reply Error .... 60
6.0 FUNCTION ERROR CODES................................................. 61
7.0 KEYPAD INTERFACE.......................................................... 63
7.1 MAIN MENU STRUCTURE ...................................................................... 63
7.1.2 Control of warning and error messages ........................................... 63
7.2 OFFSET MENU ........................................................................................ 64
7.2.1 Edit offset ....................................................................................... 64
7.3 POLLING MENU ...................................................................................... 65
7.3.1 Edit for drive parameter assignment to the Polling I/O function ........ 65
7.4 VIRTUAL DIGITAL I/O MENU ................................................................... 67
7.5 DRIVE VIRTUAL DIGITAL I/O PARAMETER ASSIGNMENT EDITING........... 68
7.6 PASSWORD MENU ................................................................................ 69
7.6.1 Password request ........................................................................... 69
7.6.2 Edit for the password setting ........................................................... 70
7.7 6KCV300DVN INFO MENU ....................................................................... 72
7.7.1 Display node address (MAC ID) ...................................................... 73
7.7.2 Display baud rate ........................................................................... 73
7.7.3 Node status .................................................................................... 73
6
—————— TABLE OF CONTENTS ——————

6KCV300DVN
7.7.3.1 DeviceNet error types .................................................................... 74
7.7.4 Status of allocation ......................................................................... 76
7.7.5 CNXN status ................................................................................... 77
7.7.6 I/O CNXN status .............................................................................. 77
7.7.7 DUP MAC ID test (DMC) ................................................................. 78
7.7.8 Display software version (software version) .................................... 78
7.7.9 Display compatibility index (compatib. index) ................................. 78
7.8 EDIT ........................................................................................................ 79
7.9 I/O POLLING CONFIGURATION EXAMPLE................................................ 80
8.0 MISCELLANEOUS .............................................................. 83
8.1 DEFINITIONS ........................................................................................... 83
8.2 REFERENCES .......................................................................................... 83
——————
TABLE OF CONTENTS ——————
7

6KCV300DVN
1.0 INTRODUCTION
The manual describes the optional 6KCV300DVN card for connecting of
inverters and converters to DeviceNet networks.
Drives belonging to DV300 and AV300 series can be connected in network
through the 6KCV300DVN board.
This manual is intended for design engineeres and technicians responsible for
the maintenance, commissioning and operation of DeviceNet systems.
A basic knowledge of DeviceNet is assumed and may be found in the following
manuals:
- DeviceNet Specifications. Volume 1 - DeviceNet Communication Model
and Protocol (Issued by ODVA).
- DeviceNet Specifications. Volume 2 - DeviceNet Device Profiles and
Object Library (Issued by ODVA).
1.1 THE MANUAL
Chapter 2 Dimensions, board mechanical installation, electric
connections and Dipswitch setting.
Chapter 3 DeviceNet functions: description of the objects
controlled by the board, data transfer via “Explicit
messaging”.
Chapter 4 “Polling” operations for the exchange of Drive
parameters between the Master and the interface
board (M->S and S->M)
Chapter 5 Setting of virtual digital I/Os
Chapter 6 Error codes
Chapter 7 Keypad menus
Chapter 8 Definitions and references
1
9—————— INTRODUCTION ——————
GEI-100431
1.2 DEVICENET GENERAL DESCRIPTION
DeviceNet is a profile of communication for industrial systems based on CAN.
As protocol CAN (ISO 11898) is used CAN2.0A with the 1 1 bit identifier.
The 6KCV300DVN board is developed as “Slave UCMM Capable Device”
for operating only in “Predefined Master/Slave Connection Set”.
The data transfer is carried out cyclically; the Master unit reads the data supplied
by the Slaves and writes the Slave reference data; the Baud Rate supported by
the 6KCV300DVN board are:
- 125 kbit
- 250 kbit
- 500 kbit .
The physical support is given by the RS485 serial line; a maximum of 64
Slaves can be connected to the Bus.
1
10
—————— INTRODUCTION ——————

6KCV300DVN
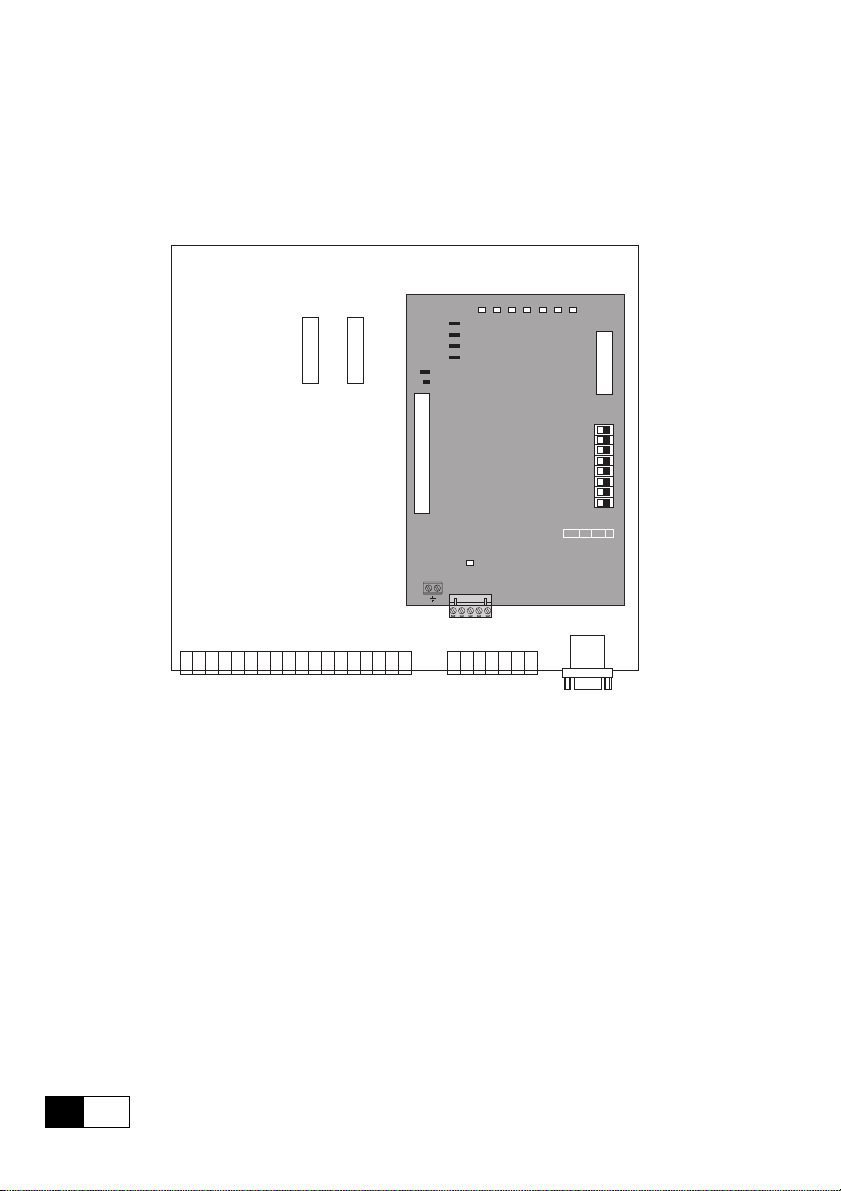
SBI DN
12
3
4
5
6
7
8
PWR RST RUN OP AL0 AL1 AL2
XS
X0
S1
ON
OFF
157mm
(6.18")
110mm
(4.33")
H1
S2
S4
S3
S5
S6
S7
S8
BA
BA
BA
BA
BA
1 2345
BUS
2.0 HARDWARE DESCRIPTION
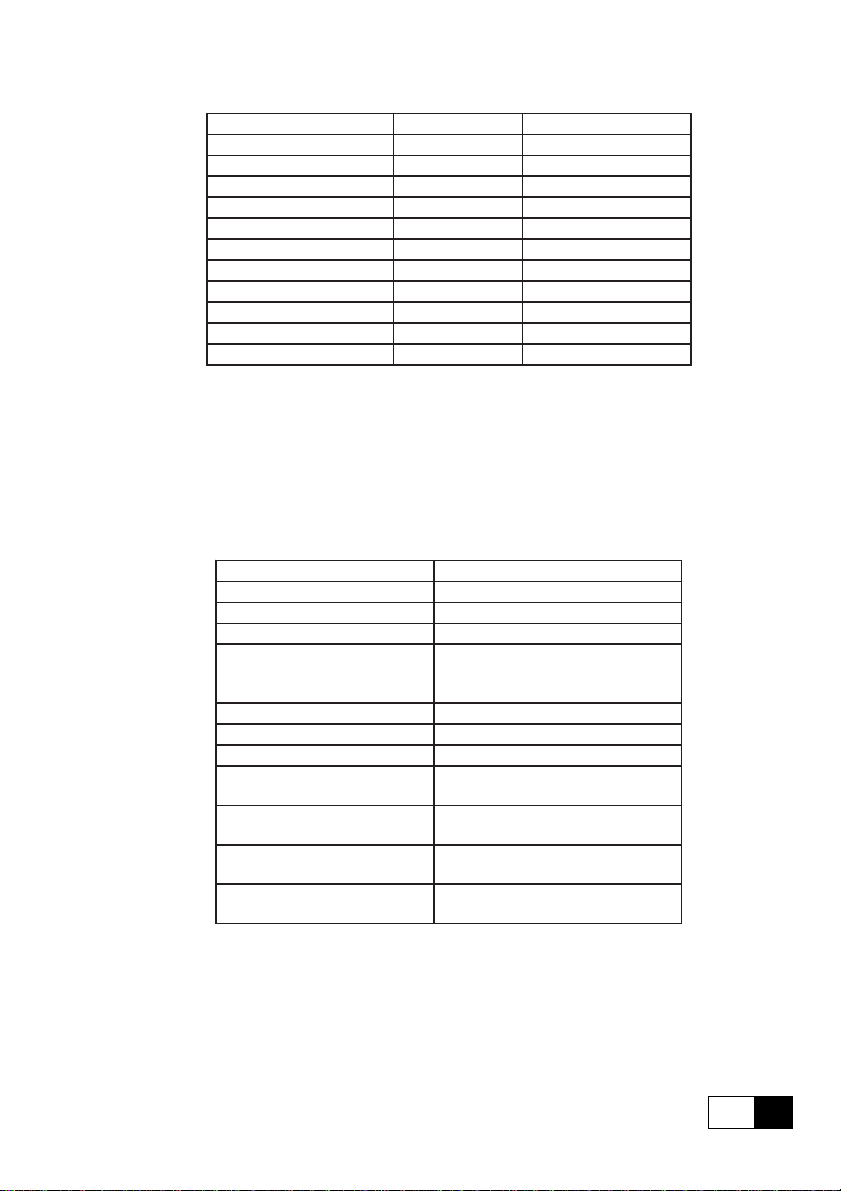
2.1 DIMENSIONS, WEIGHT, PROTECTION DEGREE
Dimensions [mm/in.] 157/6.18” (H) x 110/4.33” (L) x 23/1” (P)
Weight 200 g (7.1 oz)
Protection degree IP00
2
11—————— HARDW ARE DESCRIPTION ——————
GEI-100431
2.2 INSTALLATION
The 6KCV300DVN interface card is delivered with a kit including 4 standoffs,
4 screws, washers and a 40-pole flat cable with connectors.
1. Switch the drive off.
PWR RSTRUN OP AL0 AL1 AL2
BA
S4
BA
S3
BA
S5
BA
R-TPD32-
R-AMV32-
S6
BA
S7
S8
X0
H1
S2
BUS
1 2345
XS
SBI DN
12
3
4
5
6
8
7
OFF
S1
ON
2. Fasten with screws and standoffs the 6KCV300DVN board to the
regulation board.The BUS connector is turned in the same direction as
the regulation board terminals.
3. The flat cable is connected to the XO connector placed on the board.
4. The Baud Rate of the 6KCV300DVN board is set via the Switches 7 and
8 of the Dipswitch S1. The Baud Rate is detected only when the board is
switched on and it can be modified only by switching off and swtching on
the board again.T able 2 shows the relation between the DIP-Switches and
the selectable Baud Rate value. The Default value is 125 Kbaud.
2
12
—————— HARDWARE DESCRIPTION ——————
6KCV300DVN
Switch 8 Switch 7 Baud Rate
OFF OFF 125 kBaud
OFF ON 250 kBaud
ON OFF 500 kBaud
ON ON 125 KBaud
DN21
5. The dip switch S1 determines the Slave address. The address “0” is reserved
to the Master and it must not be used. The switches S1 -7 and S1-8 do not
determine any address. The address is detected only when the board is
switched on. If the address is modified, the Drive has to be switched off
and then switched on in order to assume the new address.
6. Connect the Bus cable to the BUS connection terminal.
7. Switch on the drive.
8. The LEDS PWR and RUN light up.
9. Switch the Device Net power supply on; the LED H1 lights up.
10. The LED OP lights up when the Master/Slave connection has been
established.
2.3 POWER SUPPLY
The power supply is provided by the XO connector, which is used to connect
the data between the 6KCV300DVN board and the Drive regulation board.
Absorbed current: 350 mA
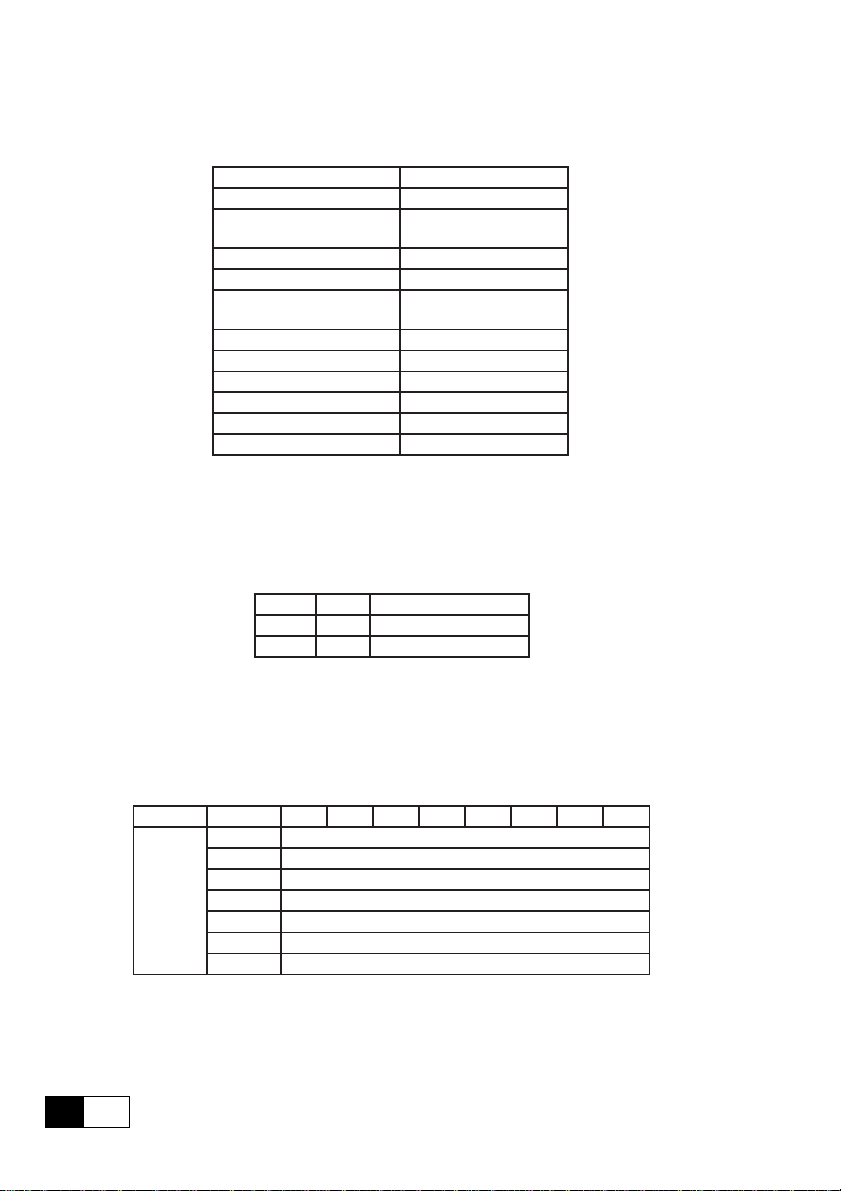
2.4 CONNECTORS
Connector : It allows to connect the ground (GNDE) of the
external power supply to the ground (PE).
Connector XS It allows to connect the ground (PE) to the
DeviceNet cable shield.
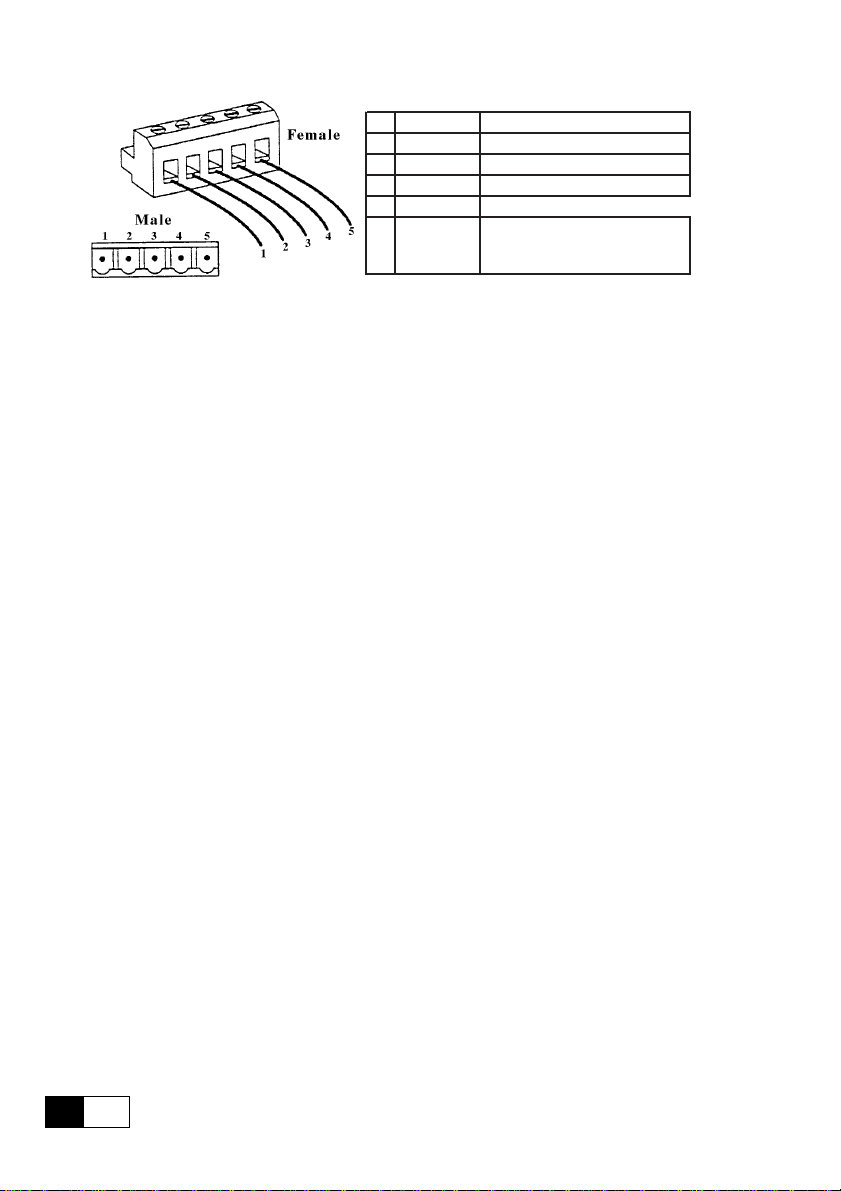
T erminal BUS See the figure below. It allows to connect the
6KCV300DVN board to the DeviceNet network.
The pins are the following:
13—————— HARDW ARE DESCRIPTION ——————
2
GEI-100431
Pin Signal Description
1 CAN_GND Ground / 0V /V2 CAN_L Can_L bus line (dominant low)
3 CAN_SHLD CAN shield
4 CAN_H CAN_H bus line (dominant high)
5 CAN_V+
CAN external positive supply
(dedicated for supply of
transceiver and optocouplers)
dn22
2.5 DIP SWITCHES
S3 Interrupt selection from selector S5 (INT1/INT2) to the microcontroller
8032 or to the interrupt input of the dual port ram (INTR). Default position
is A (interrupt to the dual port ram).
S4 Synchronisation connection for the reset signal of the 6KCV300DVN
board to the connected regulation board. Default position is ON.
S5 It is used to connect the signal INT_OPZ to the signal INT1 (S5.B) or to
the signal INT2 (S5.A). The interface board is standard set as OPTION 1,
therefore INT_OPZ is connected to the signal INT1. (Default position is
A).
S6 It is used to connect the signal OUT_OPZ to the signal OUT1 (S6.A) or
OUT2 (S6.B). Default position is B.
S7 It is used to connect the signal CEM_OPZ to the signal OPZ1 (S7.B) or to
the signal OPZ2 (S7.A). The 6KCV300DVN board is standard set as
OPTION 1, therefore CEM_OPZ is connected to the signal OPZ1. Default
position is B.
S8 Connection of the dual port ram BUSY signal to the signal RDY_EXT.
Default position is ON.
2.6 LEDS
PWR +5V power supply.
RST Reset active.
H1 +5V power supply on the RS 485 driver side. It is supplied by the Bus.
RUN It is on when the microcontroller is operating.
OP It is on when the Master/Slave connection is established.
2
14
—————— HARDWARE DESCRIPTION ——————
6KCV300DVN
AL0 It blinks when the “Duplicate MAC ID” test has not been passed.
AL1, AL2 Not used and are always off.
2.7 TECHNICAL SPECIFICATIONS
Storage temperature: -20°... +70°C (-68...+158°F)
Operating temperature: 0°... +55°C (32...+131°F)
Such temperatures are suitable to be used with those of the drive, which they
are connected to.
2.8 INTERFACE
The board has to be installed on the regulation board so that the XO connector
of the 6KCV300DVN board is placed near the XO connector of the regulation
board, thus keeping the DeviceNet connection terminal in a downward position.
As for the mechanical connection use the kit delivered with the board.
As for the electrical connection use the 40-pole flat cable included in the kit.
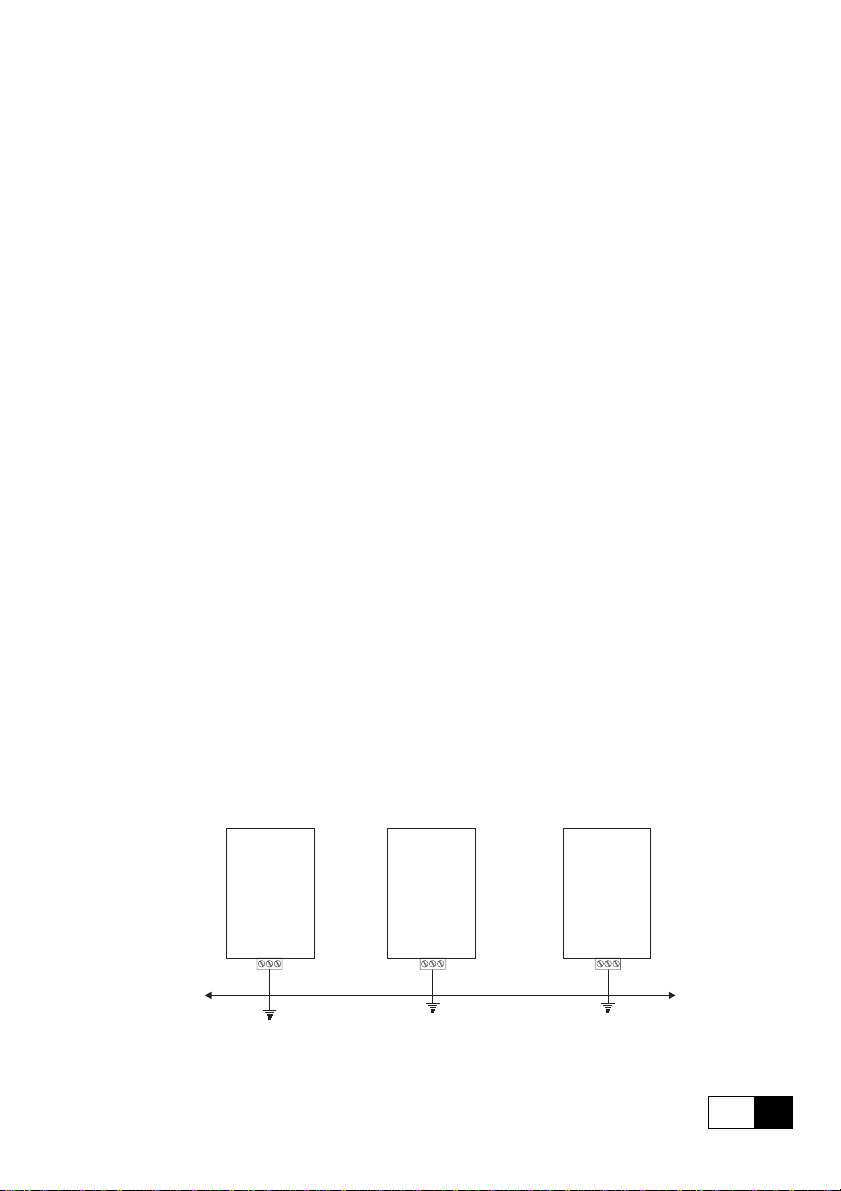
As for the Bus connection use a shielded “twisted pair cable”.
The connection among the single boards is carried out via a shielded cable
as shown in the figure below:
6KCV300DVN
6KCV300DVN 6KC300DVN
PE
Shield
2
15—————— HARDW ARE DESCRIPTION ——————


6KCV300DVN
3.0 DEVICENET FUNCTION
In this chapter are described the functions of DeviceNet managed by the
6KCV300DVN board. The main characteristics of the board are:
1. The board operates only as Slave in “Predifined Master/Slave Connection
Set”.
2. Within the “Predefined Master/Slave Connection Set” the board is a
“UCMM Capable Device”.
3. The “Explicit Messaging” is managed.
4. The “Polling” for the fast cyclical data exchange Master/Slave is managed.
5. The detection mechanism of the “Duplicate MAC ID” is implemented.
Regarding the “Explicit Messaging” the fragmentation of the data frame, with
a total of max. 38 byte, is managed.
Connection sizes
CONNECTION INSTANCE PRODUCED CONSUMED
Polled I/O 8 8
Explicit messaging 38 38
dn300ge
—————— DEVICENET FUNCTION ——————
317
GEI-100431
3.1 OBJECT DESCRIPTION
Hereafter you find the description of the objects managed by the 6KCV300DVN
board.
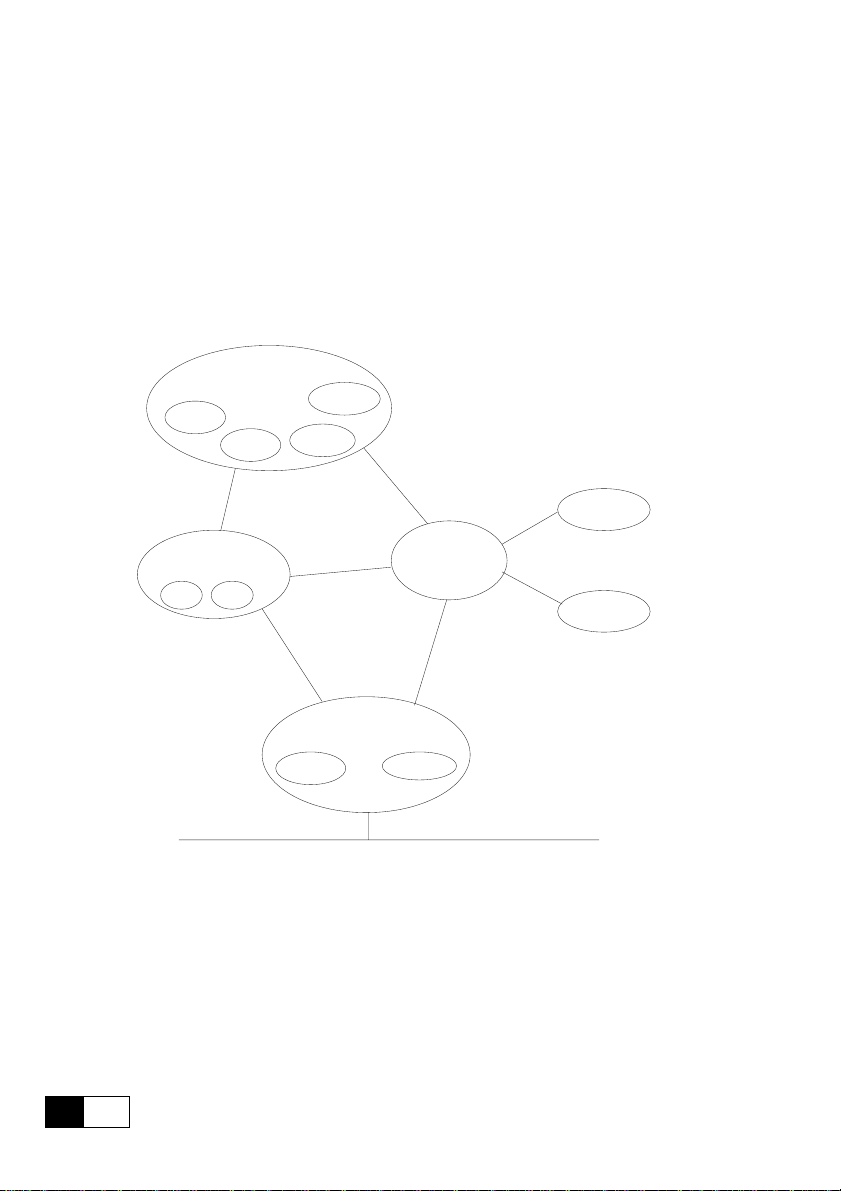
3.1.1 Object model
The Fig. 3.1 shows the 6KCV300DVN board “Object Model”.
Application Objects
DgtI/O
PollI/O
DGF par
Drive par
IDENTITY
Assembly Class
I/OI/O
Message
Router
Connection
ExplicitI/O
Figure 3.1: DeviceNet Object Model
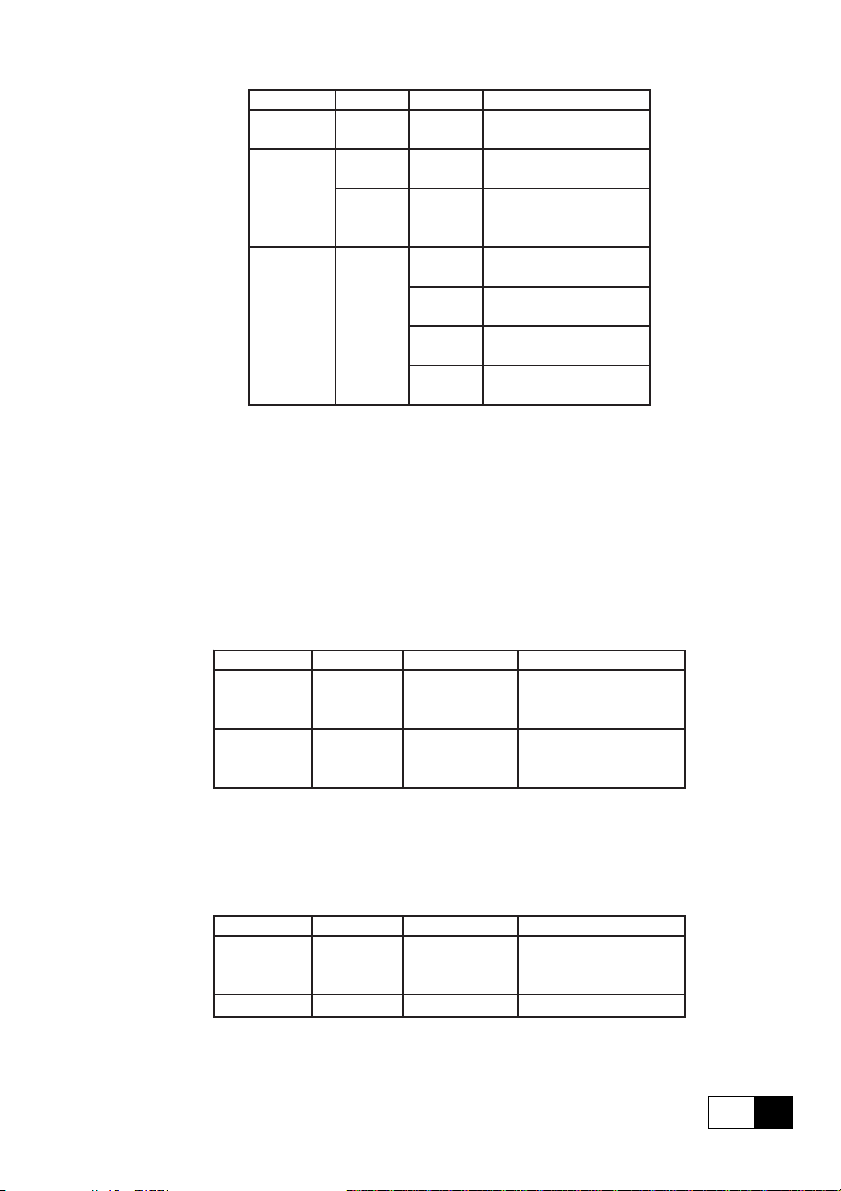
The following table shows:
1. The object classes of the 6KCV300DVN board.
2. If the class is mandatory.
3. The number of instances included in every class.
See “DeviceNet Specifications” for the Standard classes.
18
3
—————— BYTE ASSIGNMENT ——————
DeviceNet
6KCV300DVN
Object Optional/Required # of Instances
Identity Required 1
Message Router Required 1
DeviceNet Required 1
Connection Required at maximum one Explicit
Assembly Optional 0..2
Drive Parameter Access Optional many
DGF Parameter Access Optional many
Poll Slave->Master CFG Optional 1
Poll Master->Slave CFG Optional 1
Virtual Digital Input CFG Optional 1
Virtual Digital Output CFG Optional 1
dn310ge
3.1.2 How objects affect behavior.
The “Affect Behaviour” of the objects is reported in the following table:
Object
Identity
Message Router
DeviceNet
Connection
Assembly
Drive Parameter Access
DGF Option Parameter Access
Poll Slave->Master CFG
Poll Master -> Slave CFG
Virtual Digital Input CFG
Virtual Digital Output CFG
—————— DEVICENET FUNCTION ——————
Effect on Behavior
Supports “Reset Service”.
No effect
Port attributes configuration
Conteins the number of logical ports
internal or external to the
6KCi300DVNET board
Defines the I/O data format
Drive parameters read/write
DGF parameters read/write
Assignes Drive parameters to the
Polling Slave->Master Word
Assignes Drive parameters to the
Polling Master -> Slave Word
Assignes Drive parameters to the
“Virtual Digital Input ”.
Assignes Drive parameters to the
“Virtual Digital Output ”.
DN315ge
319
GEI-100431
3.1.3 Defining object interface
The object interface of the 6KCV300DVN board is the following:
Object Interface
Identity Message router
Message Router
DeviceNet Message router
Connection Message router
Assembly
Drive Parameter Access Message router
DGF Parameter Access Message router
Poll Slave->Master CFG Message router
Poll Master->Slave CFG Message router
Virtual Digital Input CFG Message router
Virtual Digital Output CFG Message router
Explicit Messaging
Connection Instance
I/O Connection or
Message Router
dn313ge
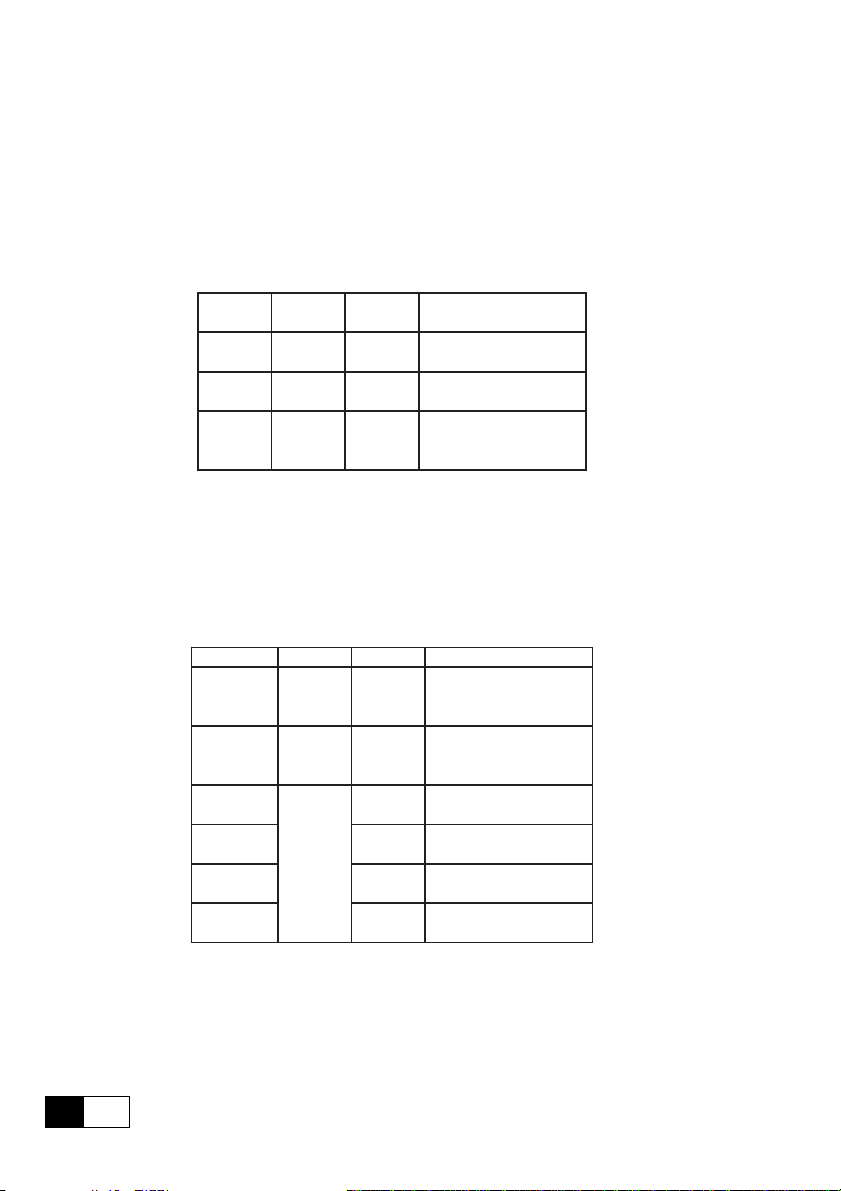
3.1.4 I/O assembly instances
The following table identifies the “I/O Assembly” instances of the
6KCV300DVN board:
Number Type Name
195 Input PMSCS Assembly Cons
194 Output PMSCS Assembly Prod
DN325
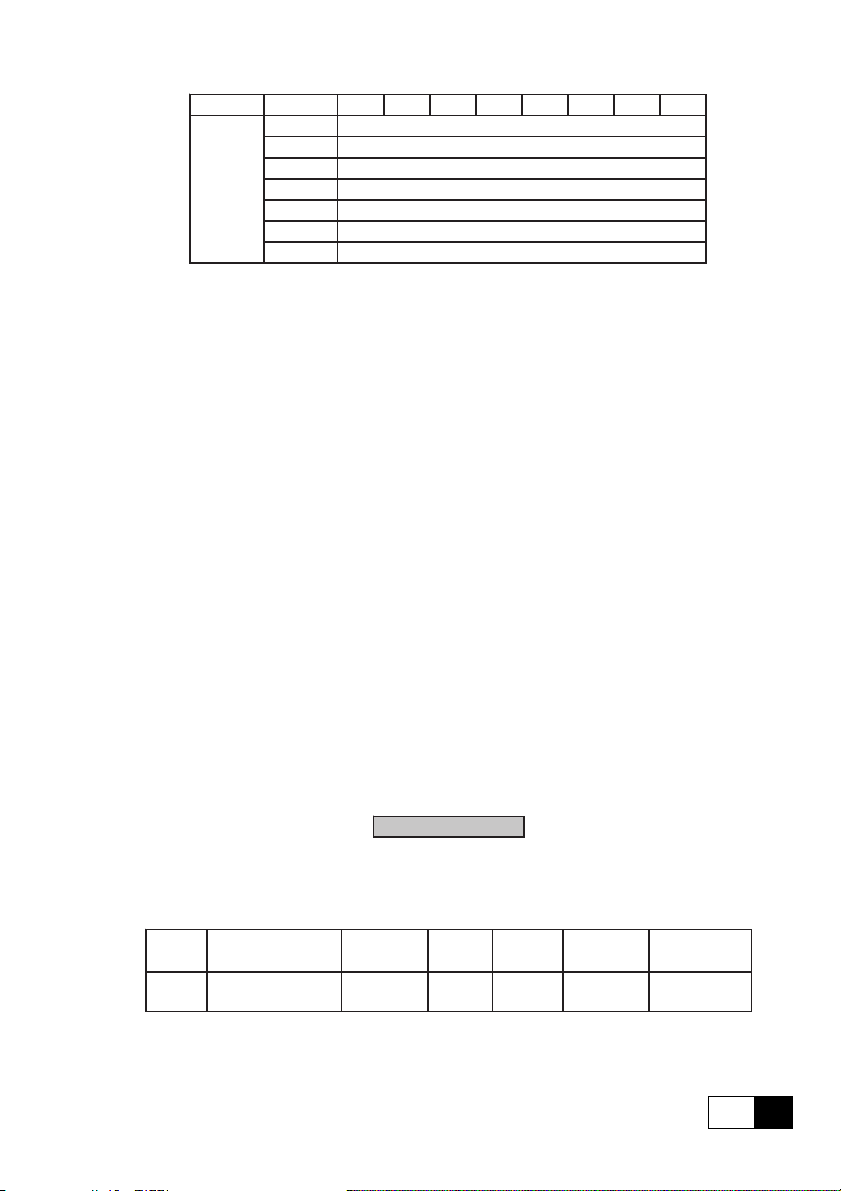
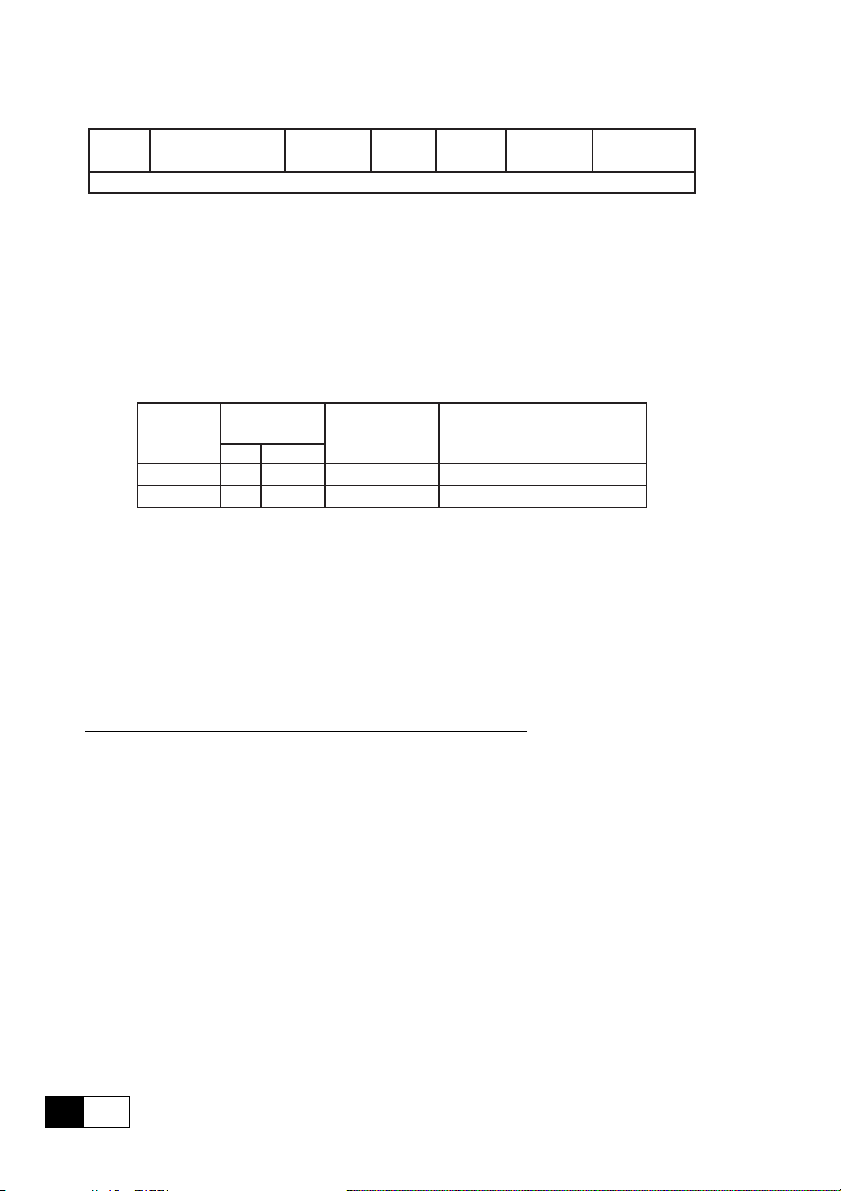
3.1.5 I/O assembly data attributes format
The “I/O Assembly” attributes format for the Input is the following:
PMSCS Assembly Cons:
Instance Byte Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0
0
1
2
195
….
….
(n2)-1
n*2
(n) is the number of consumed Words; it is 4 (8bytes).
PMSCS Assembly Prod:
20
3
—————— BYTE ASSIGNMENT ——————
word #1 to consume, low byte
word #1 to consume, high byte
word #2 to consume, low byte
….
….
word #n to consume, low byte
word #n to consume, high byte
dn330
6KCV300DVN
Instance Byte Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0
194
0
1
2
….
….
(n2)-1
n*2
word #1 to produce, low byte
word #1 to produce, high byte
word #2 to produce, low byte
….
….
word #n to produce, low byte
word #n to produce, high byte
dn335
(n) is the number of produced Words; it is 4 (8bytes).
3.2 DATA TRANSFER VIA EXPLICIT MESSAGING
The data transfer via Explicit Messaging is made through two new objects:
one for accessing the Drive parameters, the other to access the parameters of
the DGF option card.
3.2.1 Drive parameter access
For reading/writing the drive parameters the Drive Parameter Access object
is defined with the following characteristics:
- Class ID: 66h.
- Class Attribute: Revision
- Instance Attribute: This instance does not provide any attribute.
3.2.1.1 Class code
Class Code: 66hex
3.2.1.2 Class attributes
Number
1 Optional Get Revision UINT
Need in
implementation
Access Rule Name
DeviceNet
Data Type
Description
of Attribute
Revision of
this object
—————— DEVICENET FUNCTION ——————
Semantics of
values
dn345
321
3.2.1.3 Instance attributes
GEI-100431
Number
Need in
implementation
Access Rule Name
This instance does not provide attributes
DeviceNet
Data Type
Description
of Attribute
Semantics of
values
dn350
3.2.1.4 Common services
This object has no common services.
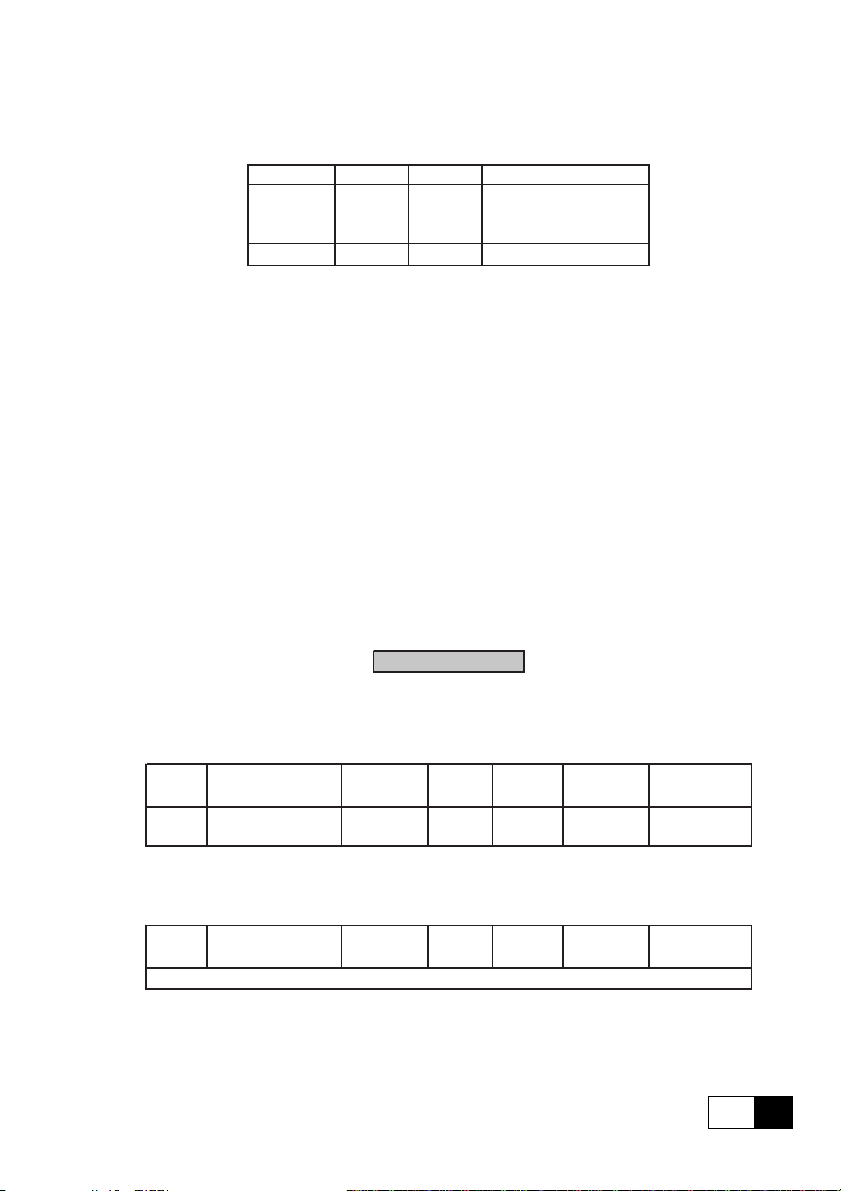
3.2.1.5 Object specific services
Service
Code
32
hex
33
hex
Need in
implementation
Class Instance
n/a Required Get_Drive_Value Read drive parameter value
n/a Required Set_Drive_Value Writes drive parameter value
Service Name Description of Service
dn355
3.2.1.6 Behavior
This object is the interface between the DeviceNet network and all Drive
parameters. The access to the Drive parameter is carried out by the parameter
index; if the parameter does not exist or may not be accessed for any reason
(for example: try to write a read only parameter) an error code will be returned.
Drive parameters in text format cannot be accessed.
In the following are repeted patterns of how the data frame of data has to be
composed for reading/writing Drive parameters.
3.2.1.6.1 Write drive parameter
In this example the writing of a Drive parameter is shown; the cases of positive
or wrong writing are distinguished.
3.2.1.6.1.1 Write drive parameter request
The data frame for writing a drive parameter is composed as follows:
22
3
—————— BYTE ASSIGNMENT ——————
6KCV300DVN
DATA TYPE FIELD VALUE MEANING
Byte
See Note
Byte
1)
Byte or W ord depending on the type of allocation executed by the Master .
2)
The number of bytes of the “Value”-field depends on the length of the
Service
Code
Class ID 66hex
1)
Instance
ID
2)
VA LU E
33hex
XXXX
XX
XX
XX
XX
Set Drive Parameter Object Specific Service.
Drive Parameter Access
Class Object.
Drive Parameter Index in
format Low byte-High
byte.
Low byte-Low word drive
parameter value.
High byte-Low word drive
parameter value.
Low byte-High word drive
parameter value.
High byte-High word
drive parameter value.
dn360
Drive parameter; i.e.: if the Drive parameter type is “Integer” the length
of VALUE is 2 bytes.
3.2.1.6.1.2 Write drive parameter - Reply OK
If the Drive parameter is written correctly , the response is:
DATA TYPE FIELD VALUE MEANING
Byte Service Code 33hex OR 80hex
Word Result 0000
Set Drive Parameter
Reply code- Object
Specific Service.
Result field equal to zero
means writing correctly
executed.
dn365
3.2.1.6.1.3 Write drive parameter - Reply Error
If the writing of the drive parameter has been rejected, the response is the
following:
DATA TYPE FIELD VALUE MEANING
Byte Service Code 33hex OR 80hex
Word Result
XXXX
Set Drive Parameter
Reply code- Object
1
Specific Service.
Drive specific error code.
dn370
1) For error codes see chapter 6.0
—————— DEVICENET FUNCTION ——————
323
GEI-100431
3.2.1.6.2 Read drive parameter
In this example is shown the reading of a Drive parameter; the cases of positive or wrong reading are distinguished.
3.2.1.6.2.1 Read Drive Parameter Request
The data frame for the Drive parameter reading is composed as follows:
DATA
TYPE
Byte
See Note
See Note1)Instance
FIELD VALUE MEANING
1)
Service
Code
Class ID 66hex
ID
32hex
XXXX
Get Drive Parameter -
Object Specific Service.
Drive Parameter Access
Class Object.
Drive Parameter Index in
format Lowbyte-High
byte.
dn375
1) Byte or W ord depending on the type of allocation executed by the Master.
3.2.1.6.2.2 Read drive parameter - Reply OK
If the Drive parameter is read correctly , the response is:
DATA TYPE FIELD VALUE MEANING
Byte
Word Result 0
Byte 1) XX
Byte 1) XX
Byte 1) XX
Byte 1) XX
Service
Code
VA LU E
32hex OR
80hex
Get Drive Parameter
Reply code- Object
Specific Service.
Result field equal to zero
means reading correctly
executed.
Low byte-Low word drive
parameter value.
High byte-Low word drive
parameter value.
Low byte-High word drive
parameter value.
High byte-High word
drive parameter value.
dn380
1) The number of bytes of the Value-field depends on the length of the Drive
parameter; i.e. if the Drive parameter type is “Integer” the length of VALUE is
2 bytes.
24
3
—————— BYTE ASSIGNMENT ——————
6KCV300DVN
3.2.1.6.2.3 Read drive parameter - Reply Error
If Drive parameter reading is rejected, the response is the following:
DATA TYPE FIELD VALUE MEANING
Byte
Word Result
Service
Code
32hex OR
80hex
XXXX
Get Drive Parameter
Reply code- Object
Specific Service.
1
Drive specific error code.
dn385
1) For error codes see chapter 6.0
3.2.2 DGF option parameter access
For reading/writing the parameters of the DGF optional card the DGF Parameter
Access object is defined with the following characteristics:
- Class ID: 67h.
Class Attribute: - Revision
Instance Attribute: - This instance does not foresee any attribute.
3.2.2.1 Class code
Class Code: 67hex
3.2.2.2 Class attributes
Number
1 Optional Get Revision UINT
Need in
implementation
Access Rule Name
3.2.2.3 Instance attributes
Number
Need in
implementation
Access Rule Name
This instance does not provide attributes
—————— DEVICENET FUNCTION ——————
DeviceNet
Data Type
DeviceNet
Data Type
Description
of Attribute
Revision of
this object
Description
of Attribute
Semantics of
values
dn345
Semantics of
values
dn350
325
GEI-100431
3.2.2.4 Common services
This object has no common services.
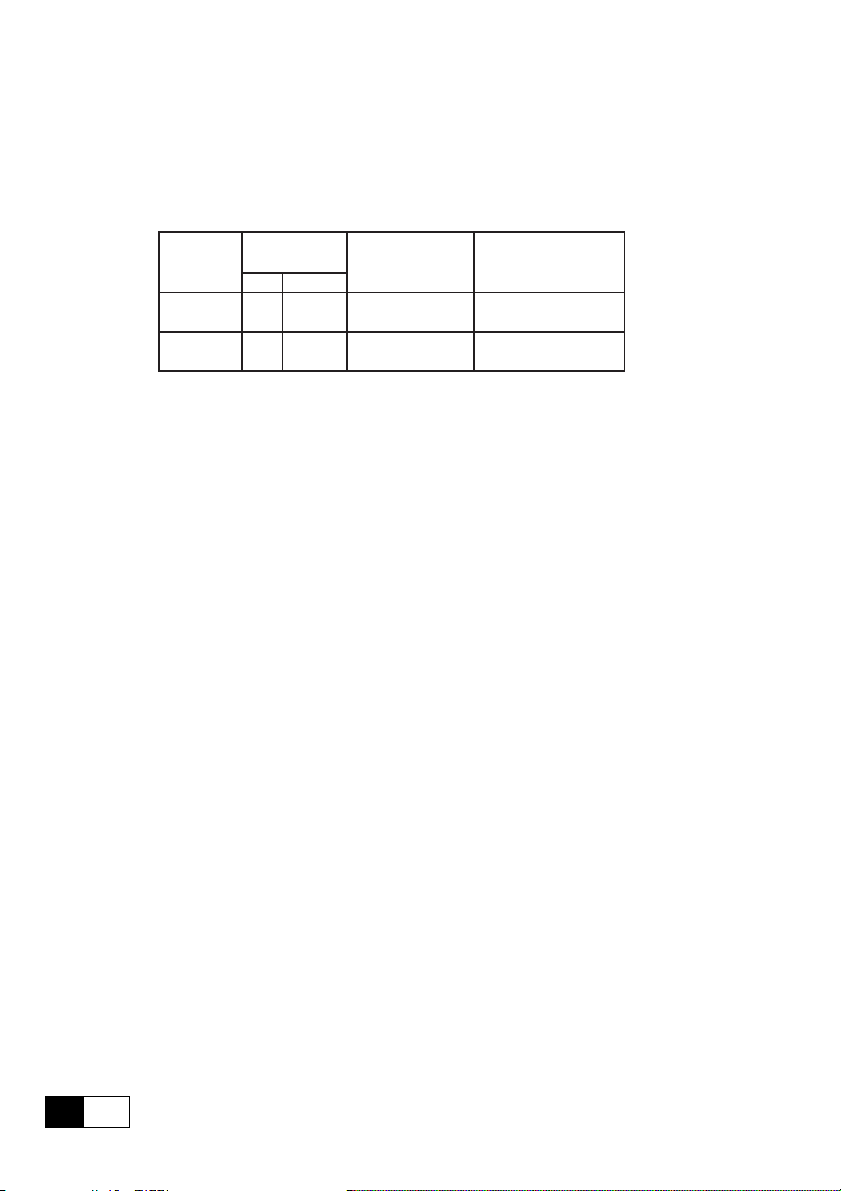
3.2.2.5 Object specific services
Service
Code
32
hex
33
hex
Need in
implementation
Class Instance
n/a Required
n/a Required
Service Name Description of Service
Get_DGF_Value
Set_DGF_Value
Read DGF option
parameter value
Writes DGF option
parameter value
dn395ge
3.2.2.6 Behavior
This object is the interface between the DeviceNet networkand all parameters
of the optional DGF card that can be mounted on the drive. The access to the
DGF parameter is made by the parameter index and the data type: if the
parameter does not exist or cannot be accessed for any reason (i.e. try to write
a read only parameter) a specific DGF error code is returned.
Hereafter are reported patterns of how to compose the data frame for read/
write DGF parameters.
3.2.2.6.1 Write DGF parameter
In this example the writing of a DGF parameter is reported; cases of positive
and wrong writing are distinguished.
26
3
—————— BYTE ASSIGNMENT ——————
 Loading...
Loading...