

Page 1

CANON Digital Galvano Scanner System
GC-251
KP-1SM30
、
SM100
Users Manual
Rev. 1.00
Be sure to read this guide before using the product.
Keep this guide carefully for future use.
Page 2

For Safe and Correct Use
To prevent injury to the user or damage to property, this guide gives information for the safe and correct use of this
product.
Before installation, operation, maintenance, or inspection, be sure to read this guide.
Markings
This guide uses the following markings:
Warning
This indicates the possibility of death or serious injury by a fire or electric shock.
Caution
This indicates the possibility of injury or damage to property.
Warning
・Do not use the product in an atmosphere of inflammable or explosive gas or vapor.
・Use the product at the specified voltage.
・Connect the power supply line correctly.
・Do not install, operate, maintain, or inspect the product with wet hands.
・Do not disassemble or alter this product.
・Do not drop or cause impact to the product.
Caution
・Before installation, operation, maintenance, or inspection, thoroughly check that the device is safe.
・When connecting a connector, check the pin numbers with the power off.
・When connecting oscilloscope probes to the test pins, be careful not to apply tension to them.
・Since this product is a precision device, use it under the specified environmental con dit io ns.
・Do not store or transport this product in a place exposed to direct sunlight, moisture, dust, or temperature of 60ºC
or higher.
CANON Digital Galvano Scanner System
Users Manual 1.00
KP-1SM Series + GC-251
2
Page 3
Contents
1. Product Outline
1.1 ··· Features ··········································································································· 5
1.2 ··· Configuration ·································································································· 5
2. Specifications
2.1 Galvano Motor (KP-1SM30, SM100) ······························································ 6
2.2 Controller (GC-251) ························································································ 7
2.3 Outline Drawing ······························································································ 8
2.4 Power Supply ································································································ 10
2.5 Connections ·································································································· 10
2.6 Connector Pin Arrangement ········································································ 11
2.7 Control Specifications ·················································································· 15
2.7.1 RS-232C command ·············································································· 16
2.7.2 High Speed Serial Communication ······················································ 20
2.8 Heat Radiation and Installation ···································································· 26
3. Software (GALILEO)
3.1 Supported PC Environment ········································································· 27
3.2 Installation ····································································································· 27
3.3 Activation ······································································································· 30
3.4 Control Screen ······························································································ 32
4. Operating Procedure (Quick Start)
4.1 Controller Activation ···················································································· 34
4.2 Step Movement ····························································································· 36
4.3 Raster Scan ··································································································· 37
4.4 Position Command Input by High-speed Serial Communication ············· 38
5. Monitor Output and Digital Input Functions
5.1 Connector Pin Arrangement ········································································ 39
5.2 Analog Monitor Output Switching ······························································· 42
5.3 Digital Input-Output Function ······································································ 45
CANON Digital Galvano Scanner System
Users Manual 1.00
KP-1SM Series + GC-251
3
Page 4

6. Other - Operation Setting
6.1 Setting Controller Activation Mode ····························································· 46
6.2 Operation that synchronizes with external trigger Signal input ··············· 48
7. Commands
7.1 List of Commands ························································································· 50
7.2 Details of Commands ··················································································· 52
8. Parameters
8.1 List of Parameters ························································································· 64
8.2 Details of Parameters ··················································································· 67
8.3 Modifying Parameters··················································································· 82
8.4 Writing Parameters into ROM ······································································ 83
8.5 Saving a Parameter File ················································································ 84
9. Safety Functions
9.1 Safety Functions ··························································································· 85
9.2 Errors ············································································································· 86
CANON Digital Galvano Scanner System
Users Manual 1.00
KP-1SM Series + GC-251
4
Page 5
r
1. Product Outline
1.1. Features
The Canon Digital Galvano Scanner System is fully digitally controlled with a high-precision
optical encoder on the galvano motor and a high-speed digital signal processor (DSP) on the
controller.
This system has the following features:
・High positioning precision
・Low temperature drift
・Fast and stable operation by a unique control system
・Easy tuning by parameter setting
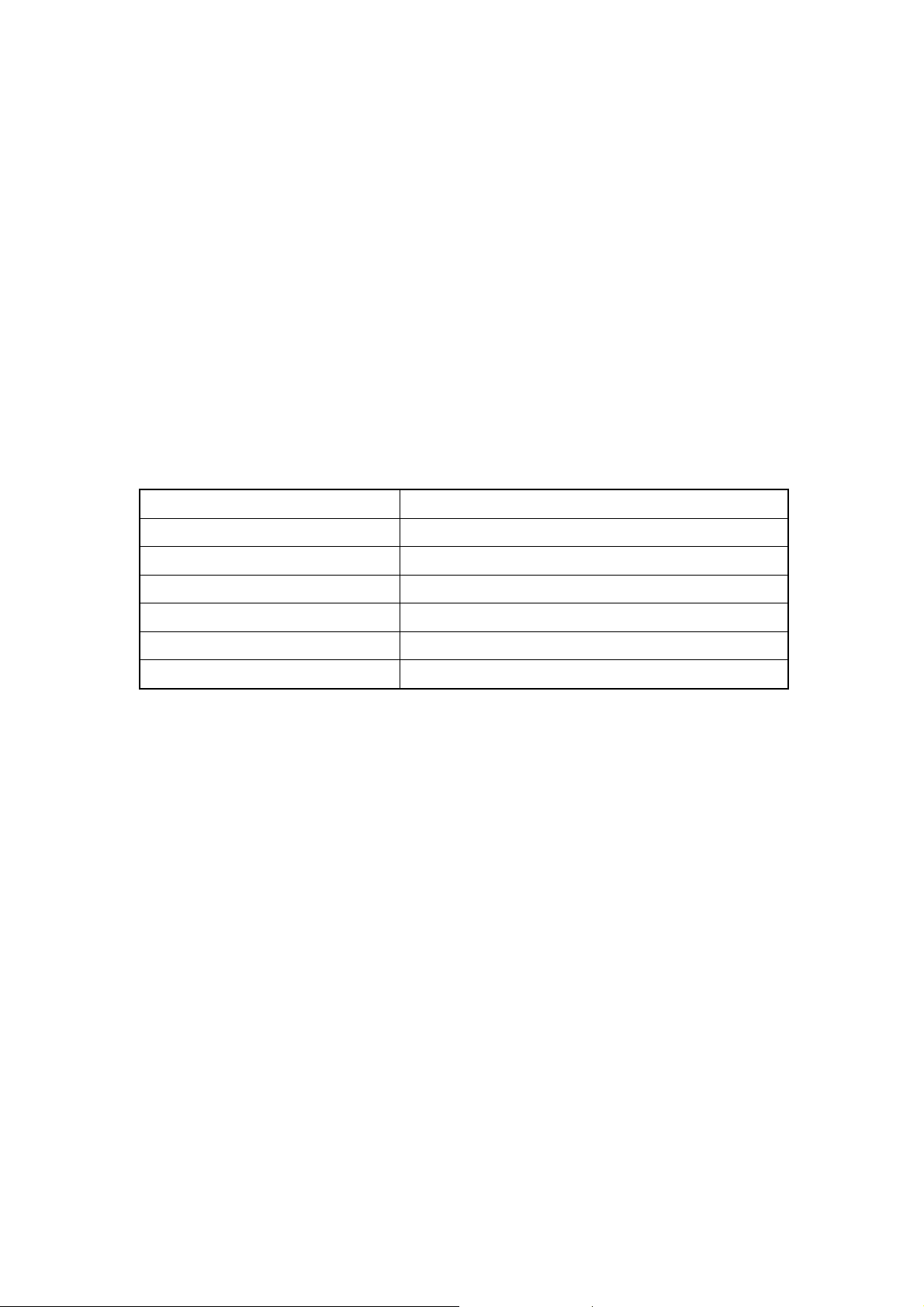
1.2. Configuration
This system supports various applications by the combination of a galvano motor and a controller.
Galvano motor: Encoder-mounted galvano motor
KP-1SM30 ・・・・ Beam diameter: φ10 to φ20 mm
KP-1SM100 ・・・・ Beam diameter: φ20 to φ30 mm
Controller: Digital servo-controller
GC-251 ・・・・ Controller for two-axis control
IF board: IF board for high-speed serial communication
GC-422 ・・・・ IF board for 5V-TTL (RS-422)
GC-LVDS ・・・・ IF board for LVDS level
Extension cable: Extension cable for galvano motor and controller connection
GM-EC ・・・・ Encoder extension cable
GM-MC ・・・・ Motor extension cable
Controller
IF Board
Galvano Motor
Encoder Signal
Board
Moto
Extension Cable
Encoder
Extension Cable
CANON Digital Galvano Scanner System
Users Manual 1.00
KP-1SM Series + GC-251
5
Page 6
2. Specifications
2.1. Galvano Motor (KP-1SM30, KP-1SM100)
Performance and shape
KP-1SM30 KP-1SM100
Conforming
beam diameter
Scan angle ±20 deg ±20 deg
Number of encoder
pulses
Command resolution 0.036 μrad 0.036 μrad
Torque constant 0.041 Nm/A 0.093 Nm/A
Weight 0.95kg 1.65kg
(Reference) Command resolution
The controller of this system divides one encoder cycle into 2048.
KP-1SM30,SM100 is controlled by the following command resolution:
83328 pulses × 2048 divisions = 170655744 pulses/rotation (360°)
360°/ 170655744 = 0.000002109° = 0.036urad
Environmental conditions
Operating temperature and humidity
Storage temperature and humidity
Note: The above operating temperature and humidity conditions depend on the operating and heat
radiation conditions.
Φ10 to φ20 Φ20 to φ30
83328 pulses/rotation 83328 pulses/rotation
23℃±10℃, 80% RH or less (No condensation)
–20 to 60ºC, 90% RH or less (No condensation)
CANON Digital Galvano Scanner System
Users Manual 1.00
KP-1SM Series + GC-251
6
Page 7
2.2. Controller (GC-251)
Performance and shape
GC-251
Number of control axes 2
Control sampling 100 kHz
Maximum drive current 10 A (each axis)
Interface
Notch filter
Weight 500 g
Environmental conditions
Operating temperature and humidity
Storage temperature and humidity
Note: The above operating temperature and humidity conditions depend on the operating and heat
radiation conditions.
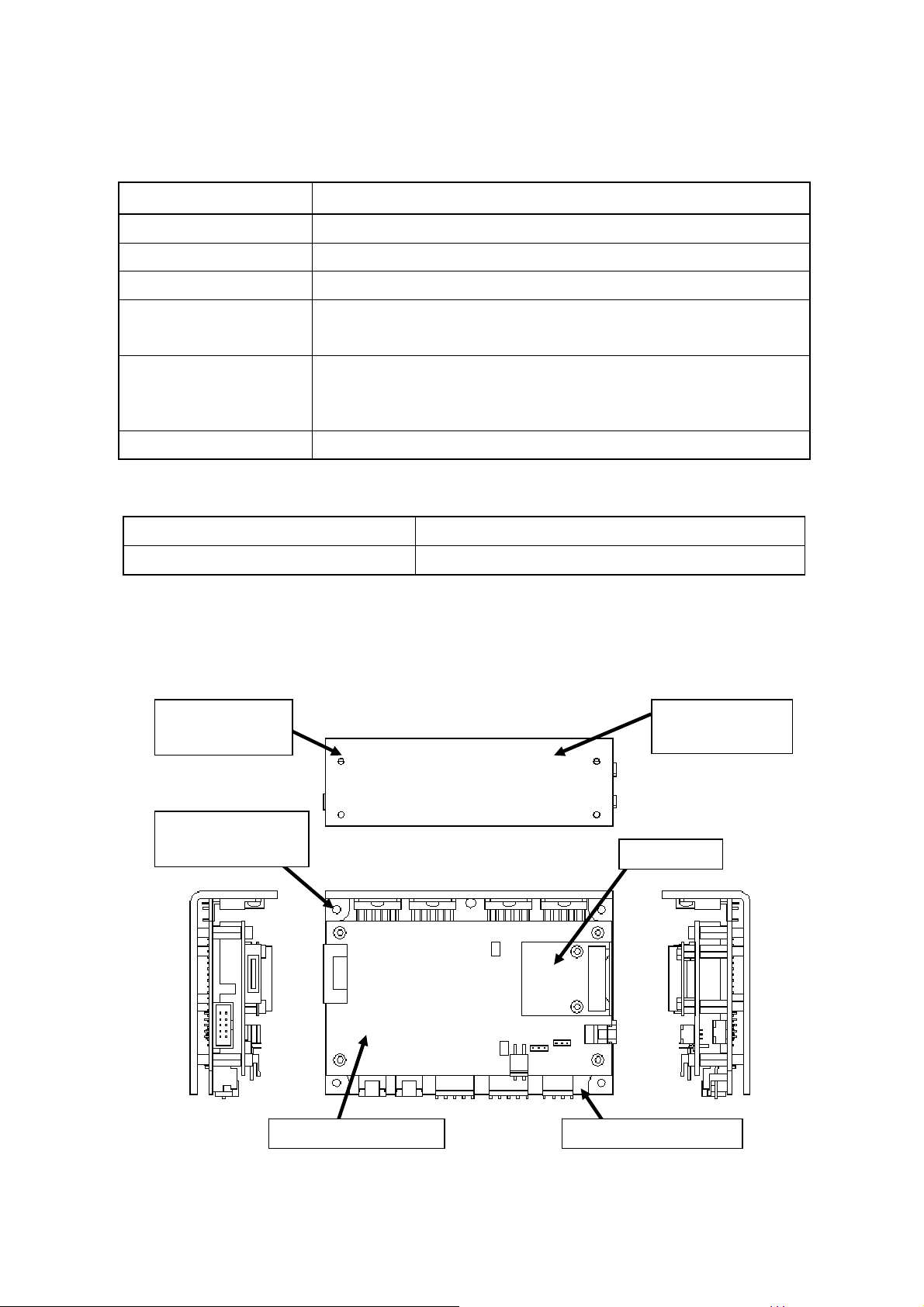
Section names
High-speed serial communication for position input (XY2-100)
Control RS-232C
Digital notch filter ×2
Digital low-pass filter ×1
Analog notch filter ×3
0 to 50ºC, 90% RH or less (No condensation)
-20 to 60ºC, 90% RH or less (No condensation)
Mounting screw
Heat radiation
hole (M3 × 4)
frame
Mounting screw
hole (φ3.5 × 4)
IF board
Digital board (upper) Analog board (lower)
CANON Digital Galvano Scanner System
Users Manual 1.00
KP-1SM Series + GC-251
7
Page 8

2.3. Outline Drawing
KP-1SM30
φ56
(126.2)
37
11. 5
7.5
3-M4 Depth 8
Φ
48
0
φ6.35 -0.01
φ34
φ36h7
KP-1SM100
TBD
Thermistor Cable
Motor CableEncorder Cable
CANON Digital Galvano Scanner System
Users Manual 1.00
KP-1SM Series + GC-251
8
Page 9

GC-251
118
7
10
4-M3
33
38
80
88
5
5
120
125
4-φ3.5
CANON Digital Galvano Scanner System
Users Manual 1.00
KP-1SM Series + GC-251
9
Page 10
2.4. Power Supply
Power supply specifications
+24 V ± 10% 10 A (max) × 2 axes (For motor drive)
+5 V ± 5% 2.8 A (For control circuit)
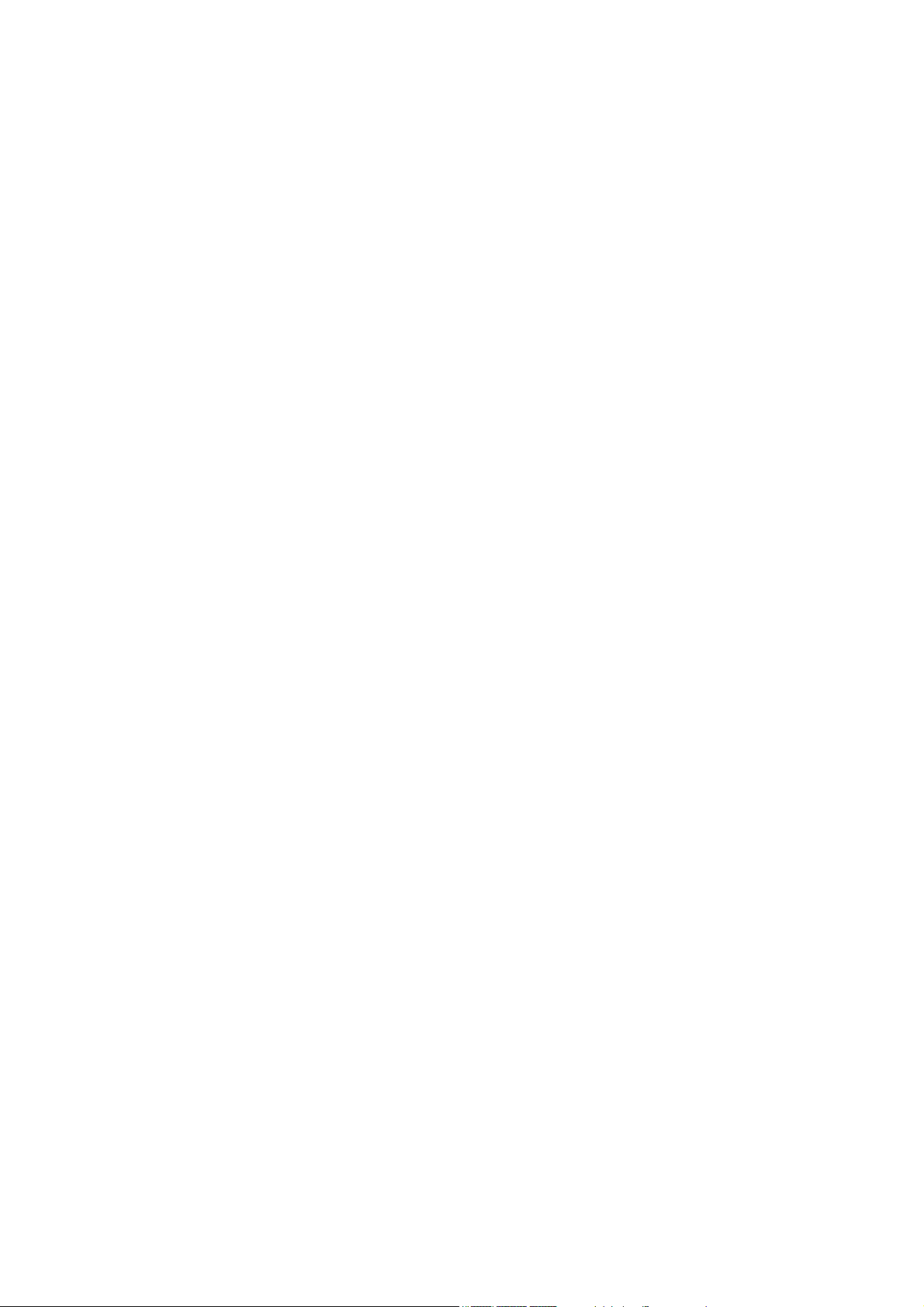
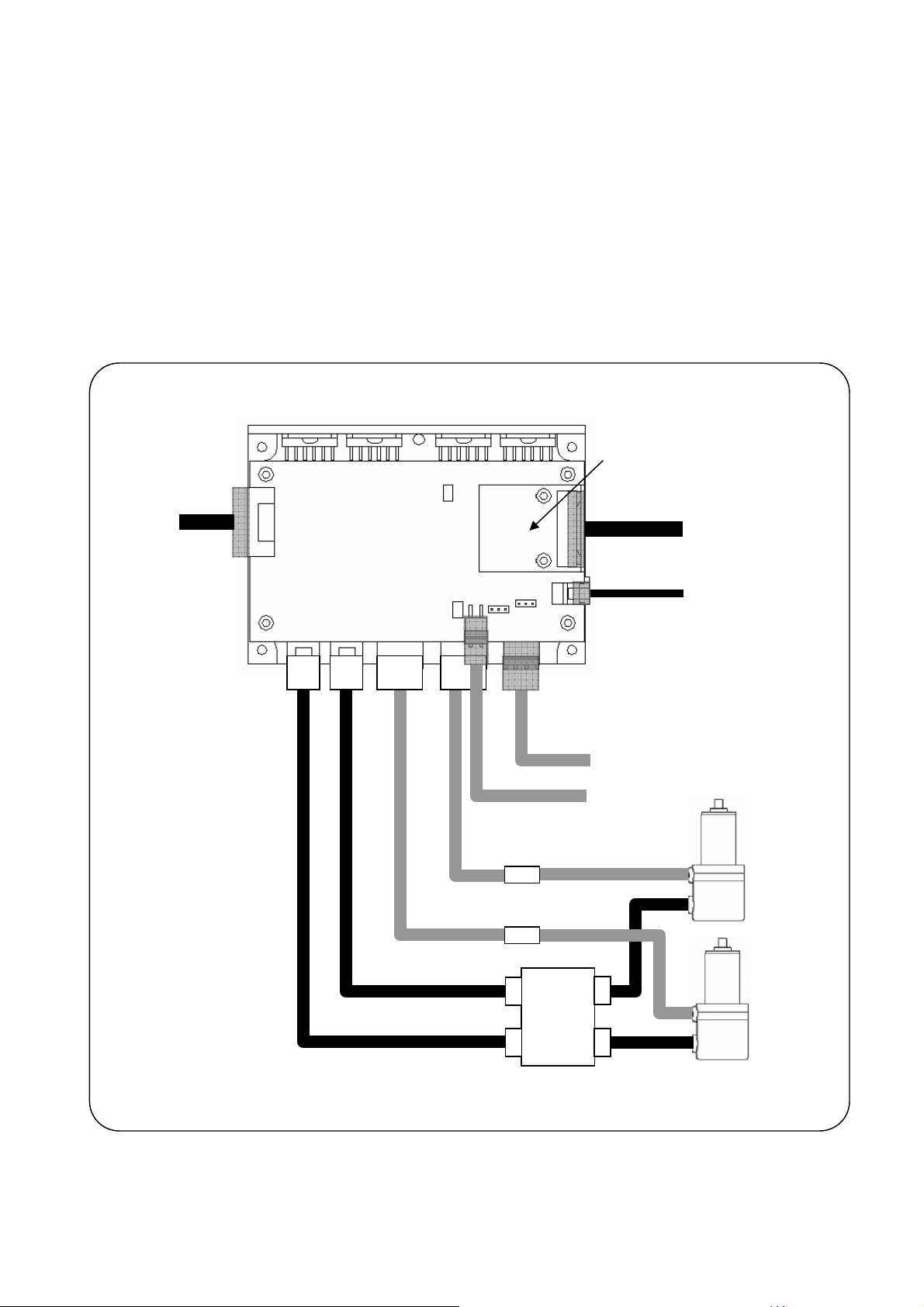
2.5. Connections
Digital
Input/Output
IF board
High Speed serial
Communication
RS-232C
+24V power
+5V power
Axis2
Axis1
Encoder Signal
Board
Galvano motor
CANON Digital Galvano Scanner System
Users Manual 1.00
KP-1SM Series + GC-251
10
Page 11

2.6. Connector Pin Arrangement
(Connector types)
⑦
⑥
⑧
③
⑤
④
⑨
①
②
①
②
③
④
⑤
⑥
Axis 1 motor encoder
Axis 2 motor encoder
+5 V power supply
+24 V power supply
RS-232C
High-speed serial communication
⑦
⑧
⑨
Digital input/output
Analog monitor
Fan power supply (+24 V)
CANON Digital Galvano Scanner System
Users Manual 1.00
KP-1SM Series + GC-251
11
Page 12
(Pin arrangement)
③+5 V power supply
Connector model number
Connector Model No. Manufacturer
Board side S2P-VH JST
Cable side VHR-2N JST
Connector pin arrangement
Pin No. Signal Description
1 +5 V
2 GND
④+24 V power supply
Connector model number
Connector Model No. Manufacturer
Board side S4P-VH JST
Cable side VHR-4N JST
Connector pin arrangement
Pin No. Signal Description
1 +24 V input for Axis 1
2 +24 V input for Axis 2
3,4 GND
⑤RS-232C
Connector model number
Connector Model No. Manufacturer
Board side S03B-PASK-2 JST
Cable side PAP-03V-S JST
Connector pin arrangement
Pin No. Signal Description
1 Send data (Signal level complying with RS-232C)
2 Receive data (Signal level complying with RS-232C)
3 GND
CANON Digital Galvano Scanner System
Users Manual 1.00
KP-1SM Series + GC-251
12
Page 13

⑥High-speed Serial Communication
Connector model number
Connector Model No. Manufacturer
Board side SM12B-PASS-1-TB JST
Cable side PAP-12V-S JST
Connector pin arrangement
Pin No.
1 CLK- Clock (-)
2 CLK+ Clock (+)
3 FS- Frame sync (-)
4 FS+ Frame sync (+)
5 XD- Axis 1 data (-)
6 XD+ Axis 1 data (+)
7 YD- Axis 2 data (-)
8 YD+ Axis 2 data (+)
9 STS- Status (-)
10 STS+ Status (+)
11 GND System GND
12 FG Frame GND
The signal levels depend on the IF board.
GC-422 - Receiver: AM26LV32C (TI), Driver: SN75179B (TI)
GC-LVDS - Receiver: SN65LVDS32 (TI), Driver: SN65LVDS179 (TI)
Signal
Name
Signal Description
⑦Digital I/O
See 5-1 , “Connector Pin Arrangement”
⑧Analog Monitor
See 5-1 , “Connector Pin Arrangement”
CANON Digital Galvano Scanner System
Users Manual 1.00
KP-1SM Series + GC-251
13
Page 14
⑨Fan Power Supply
Connector model number
Connector Model No. Manufacturer
Board side S04B-PASK-2 JST
Cable side PAP-04V-S JST
Connector pin arrangement
Pin No. Signal Description
1 +24 V Output
2 GND
2 Fan Rotation Error (Open collector Input)
3 (No connection)
CANON Digital Galvano Scanner System
Users Manual 1.00
KP-1SM Series + GC-251
14
Page 15
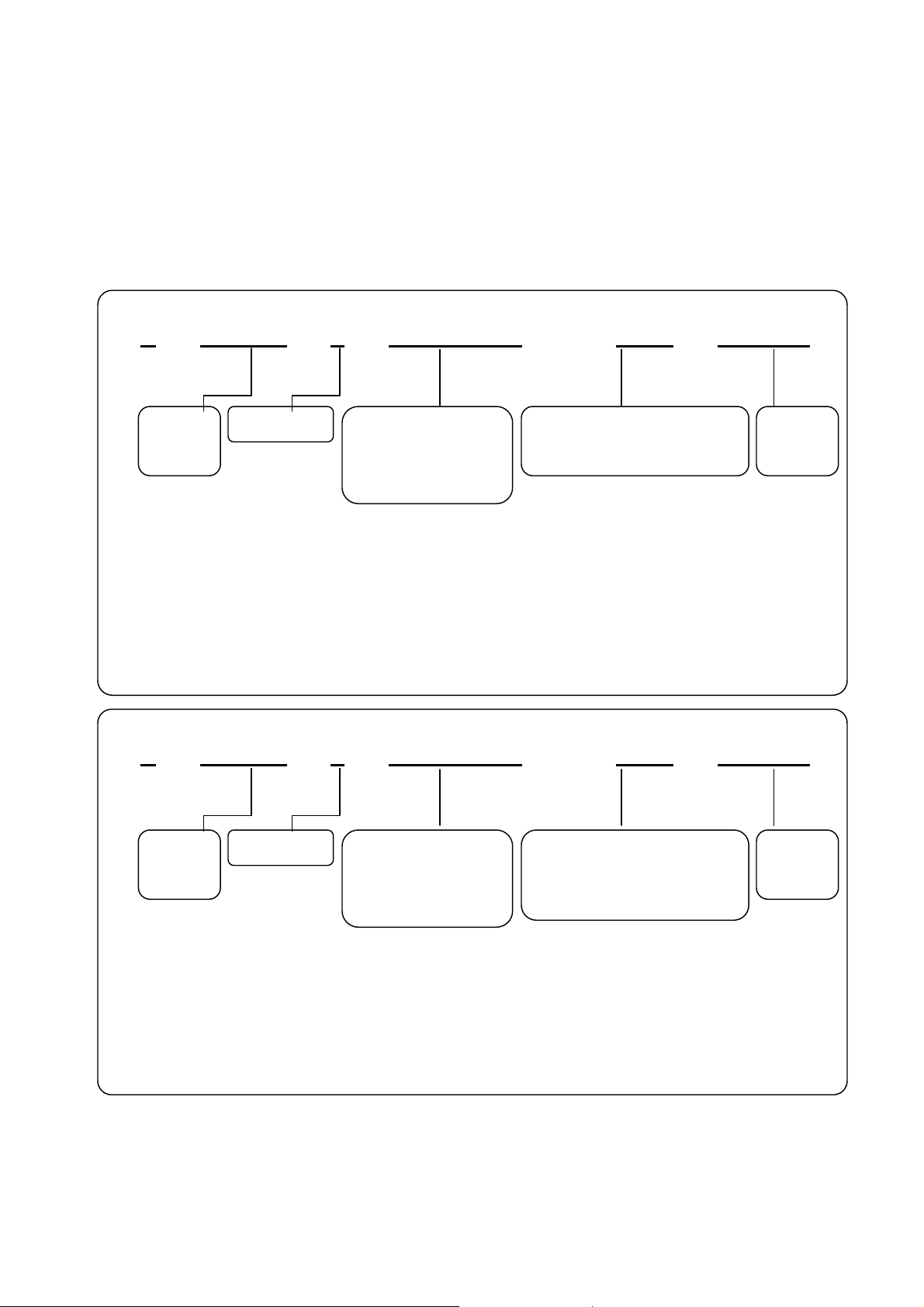
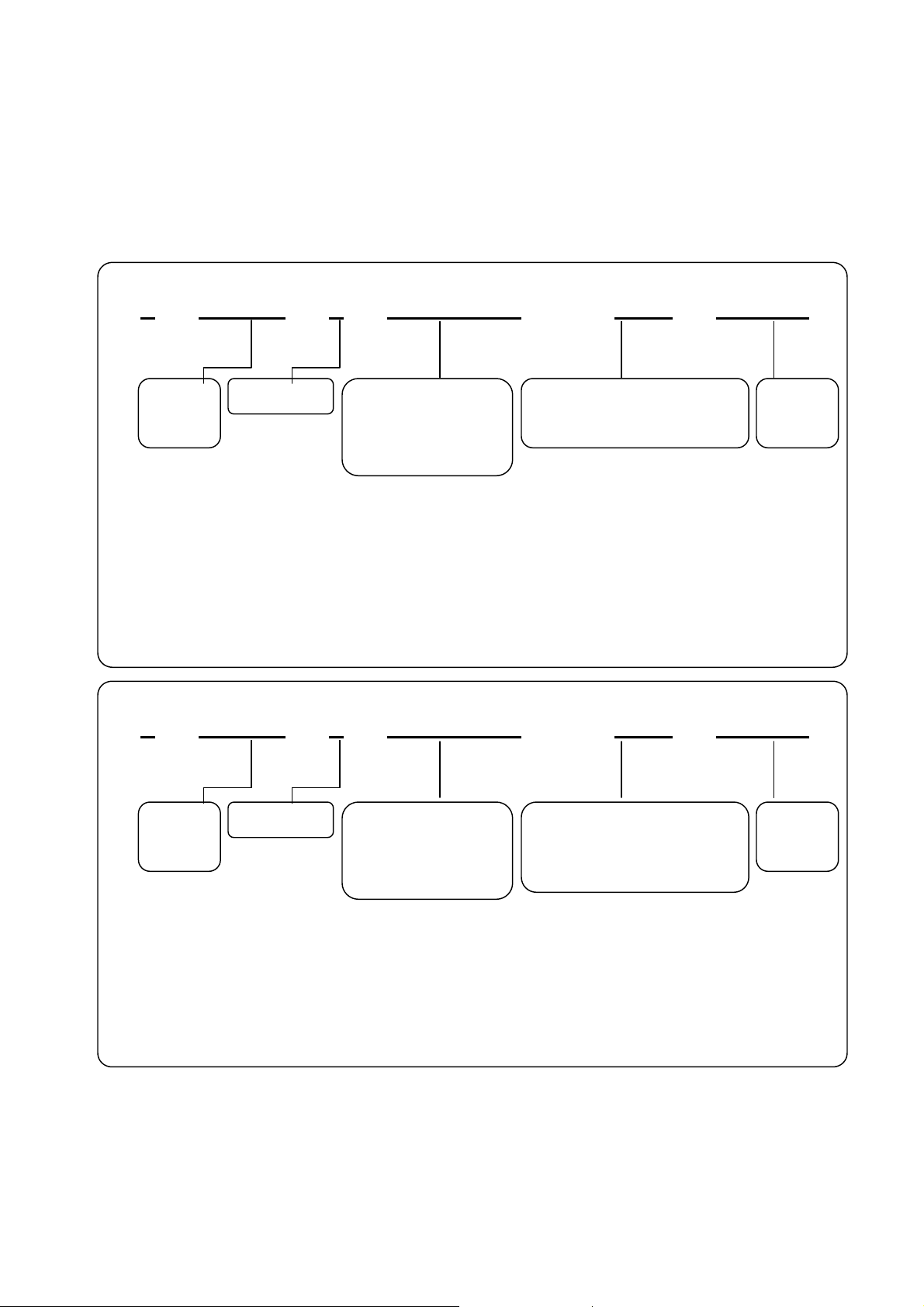
2.7. Control Specifications
The controller (GC-201, GC-101) is operated by:
• RS-232C command input
• High-speed serial communication
In addition, either the internal clock or external clock (high-speed serial communication) can be
selected for operation.
Internal Clock
Clock input
Target position
command
Operation setting
parameter setting
With the default settings at shipping, power-on activates the controller with the internal clock.
The parameter can be set so that the controller starts with the external clock after power-on.
For activation with the external clock, however, signal input by high-speed serial communication is
Clock pulses generated by the
controller internal circuit
RS-232C command High-speed serial communication
RS-232C command RS-232C command
(High-speed serial communication)
High-speed serial communication
clock pulses
command
(When RS-232C command input
mode is set, a high-speed serial
communication command is
ignored.)
External Clock
necessary at power-on.
CANON Digital Galvano Scanner System
Users Manual 1.00
KP-1SM Series + GC-251
15
Page 16
2.7.1 RS-232C command input
RS-232C command input allows the following:
• Operation setting
• Parameter setting
• Error processing
• Status check
(For details, see 7, “Commands.”)
If position data send by high-speed serial communication is disabled, RS-232C command input is
enough for the following:
• Step movement
• Raster scan (Continuous oscillation of a certain angle at a fixed frequency)
(Communication specifications)
Wiring Cross wiring
Communication rate 38400 bps
Data length 8 bits
Stop bit 1
Parity None
Data format ASCII code
Delimiter code LF (0x0a) or CR (0x0d)
CANON Digital Galvano Scanner System
Users Manual 1.00
KP-1SM Series + GC-251
16
Page 17

(Command specifications)
In response to command send, the controller returns a reply with data.
The data contents depend on the command. (For details, see 7-2, “Command Details.”)
Command send
A Axis No. C Command ID / Data Delimiter
Axis No.
1 or 2
Command
Command ID
Decimal, 3-digit
(See 7-1 for details)
Data
Added to command as
required (decimal )
E.g. Servo ON ID = 4 Data = 1
A1C004 / 1 (LF)
(ASCII code: 0x41 0x31 0x43 0x30 0x30 0x34 0x2f 0x31 0x0a)
A 1 C 0 0 4 / 1 (LF)
Command reply
A Axis No. C Command ID / Data Delimiter
Axis No.
1 or 2
Command
Command ID
Decimal, 3-digit
(See 7.1 for details)
Return value
0 or 1
Delimiter
LF or CR
Delimiter
LF or CR
E.g. Servo ON ID = 4 Data = 1
A1C004 / 1 (LF)
(ASCII code: 0x41 0x31 0x43 0x30 0x30 0x34 0x2f 0x31 0x0a)
A 1 C 0 0 4 / 1 (LF)
CANON Digital Galvano Scanner System
Users Manual 1.00
KP-1SM Series + GC-251
17
Page 18
Parameter of controller can be changed by the following sending method to controller.
Also in response to parameter send, the controller always returns a reply with data.
The data contents depend on the command. (For details, see 7-2, “Command Details.”)
When changed a parameter of it, to start it by the same setting in power supply on at the next
time; the parameter that changed, it is necessary to write in it at ROM.
Parameter send
A Axis No. P Command ID / Data Delimiter
Axis No.
1 or 2
Parameter
Command ID
Decimal, 3-digit
(See 7-1 for details)
Parameter setting
Decimal
E.g. LQ gain parameter ID = 6 Data = 4500
A1P006 / 4500 (LF)
(ASCII code: 0x41 0x31 0x50 0x30 0x30 0x36 0x2f 0x34 0x35 0x30 0x30 0x0a)
A 1 P 0 0 6 / 4 5 0 0 (LF)
Parameter reply
A Axis No. P Command ID / Data Delimiter
Axis No.
1 or 2
Parameter
Command ID
Decimal, 3-digit
(See 7-1 for details)
Parameter setting
successful / unsuccessful
0 or 1
Delimiter
LF or CR
Delimiter
LF or CR
E.g. LQ gain parameter ID = 6 Data = 4500
A1P006 / 4500 (LF)
(ASCII code: 0x41 0x31 0x50 0x30 0x30 0x36 0x2f 0x30 0x0a)
A 1 P 0 0 6 / 0 (LF)
CANON Digital Galvano Scanner System
Users Manual 1.00
KP-1SM Series + GC-251
18
Page 19
For the ROM Write of the parameter, a reply with data has been sent by all means by a controller.
The content of data is different by a parameter. (For details, see 7-3, “Parameter Details.”)
(Note) Please make the ROM write of the parameter after enough confirmation. Depending on
value for change, the controller may not start normally.
Parameter ROM Write send
E Axis No. P Command ID / Data Delimiter
Axis No.
1 or 2
Parameter
Command ID
Decimal, 3-digit
(See 7-1 for details)
Parameter setting
Decimal
E.g. LQ gain parameter ID = 6 Data = 4500
E1P006 / 4500 (LF)
(ASCII code: 0x45 0x31 0x50 0x30 0x30 0x36 0x2f 0x34 0x35 0x30 0x30 0x0a)
E 1 P 0 0 6 / 4 5 0 0 (LF)
Delimiter
LF or CR
Parameter ROM Write reply
E Axis No. P Command ID / Data Delimiter
Axis No.
1 or 2
Parameter
Command ID
Decimal, 3-digit
(See 7-1 for details)
Parameter setting
successful / unsuccessful
0 or 1
E.g. LQ gain parameter ID = 6 Data = 4500
E1P006 / 4500 (LF)
(ASCII code: 0x45 0x31 0x50 0x30 0x30 0x36 0x2f 0x30 0x0a)
E 1 P 0 0 6 / 0 (LF)
Delimiter
LF or CR
CANON Digital Galvano Scanner System
Users Manual 1.00
KP-1SM Series + GC-251
19
Page 20

T
E
2.7.2 High-speed serial communication
To control the mirror to an arbitrary position by Marking or any other application, target position data
updated as required can be given to the controller by using high-speed serial communication.
By setting, the controller can be activated in the mode of tracking a target position specified by
high-speed serial communication. (For details, see 6-1, “Setting Activation Mode.”)
(Communication specifications)
Base clock (CLK) 2 MHz
Frame sync (FS) 100 kHz
Data (DAT) 20 bits (Position data: 16 bits)
Status (STS) 20 bits
Transmission system Differential signal
Signal level
(Selectable by the optional IF board)
5V-TTL, LVDS
TimingDiagram
CLK
FS
2MHz
1234567891011121314151617181920
XDAT XData-1 XData XData+1
YDAT YData-1 YData YData+1
STS Status-1 Status Status+1
(Bit)
XDAT C2 C1 C0 D15 D14 D13 D12 D11 D10 D9 D8 D7 D6 D5 D4 D3 D2 D1 D0 P
16bit
YDAT C2 C1 C0 D15 D14 D13 D12 D11 D10 D9 D8 D7 D6 D5 D4 D3 D2 D1 D0 P
Data
STS S19S18S17S16S15S14S13S12S11S10S9S8S7S6S5S4S3S2S1S0
(Bit)
20bit
XDAT D19 D18 D17 D16 D15 D14 D13 D12 D11 D10 D9 D8 D7 D6 D5 D4 D3 D2 D1 D0
YDAT D19 D18 D17 D16 D15 D14 D13 D12 D11 D10 D9 D8 D7 D6 D5 D4 D3 D2 D1 D0
Data
STS S19S18S17S16S15S14S13S12S11S10S9S8S7S6S5S4S3S2S1S0
CLK Frequency : 2MHz
XDAT,YDA
STS S19..S0 : (StatusTable)
InputsignalfromPC : CLK,FS,XDAT,YDAT
OutputsignalfromDRIV
1234567891011121314151617181920
1234567891011121314151617181920
(16bitData) C2..C0 : Header(un-used)
(20bitData) D19..D0 : PositionData(SignedIntegerdata)
D15..D0 : PositionData(SignedIntegerdata)
P : Parity(un-used)
:STS
For the support of other communication specifications, contact the Sales Department.
CANON Digital Galvano Scanner System
KP-1SM Series + GC-251
Users Manual 1.00
20
Page 21

Note: For setting high-speed serial communication mode or controller activation in high-speed serial
communication mode at power-on, high-speed serial communication signals are necessary. Enter the
CLK, FS, and DAT signals in advance.
For how to set the activation mode, see 6-1, “Setting Activation Mode.”
CANON Digital Galvano Scanner System
Users Manual 1.00
KP-1SM Series + GC-251
21
Page 22

(Target Position Data) XDAT、YDAT
The data length of the target position data by the high-speed serial communication can be
changed by two following parameters.
The target position data length can be changed in 16bit – 20bit.
Parameter ID DATA
16: 16bit Data※
17: 17bit Data
67
18: 18bit Data
19: 19bit Data
20: 20bit Data
The least significant bit position of the target position data of high-speed serial communication
20bit data can be set by following parameter.
The right shifts this number of bit make the target position data.
Parameter ID DATA
0: 0bit position
1: 1bit position※
68
2: 2bit position
3: 3bit position
4: 4bit position
An example of the setting as follows.
(Bit) 1234567891011121314151617181920
16bit
XDAT C2 C1 C0 D15 D14 D13 D12 D11 D10 D9 D8 D7 D6 D5 D4 D3 D2 D1 D0 P
Data
YDAT C2 C1 C0 D15 D14 D13 D12 D11 D10 D9 D8 D7 D6 D5 D4 D3 D2 D1 D0 P
Parameter ID = 67 16
Parameter ID = 68 1
(Bit) 1234567891011121314151617181920
18bit
XDAT D17 D16 D15 D14 D13 D12 D11 D10 D9 D8 D7 D6 D5 D4 D3 D2 D1 D0 C1 C0
Data
YDAT D17 D16 D15 D14 D13 D12 D11 D10 D9 D8 D7 D6 D5 D4 D3 D2 D1 D0 C1 C0
Parameter ID = 67 18
Parameter ID = 68 2
CANON Digital Galvano Scanner System
KP-1SM Series + GC-251
Users Manual 1.00
22
Page 23

(Bit) 1234567891011121314151617181920
20bit
XDAT D19 D18 D17 D16 D15 D14 D13 D12 D11 D10 D9 D8 D7 D6 D5 D4 D3 D2 D1 D0
Data
YDAT D19 D18 D17 D16 D15 D14 D13 D12 D11 D10 D9 D8 D7 D6 D5 D4 D3 D2 D1 D0
Parameter ID = 67 20
Parameter ID = 68 0
With the default settings at shipping, the setting is ※ (16bit position data length, data least
significant bit 1bit position).
This communication specification has compatibility of XY2-100.
When using the scanner controller of XY2-100 specifications, please use this setting.
Motor rotating angle for the high-speed serial communication data
・ In the case of 16bit position data
Data: 1 for one pulse that can be specified up to the following positions:
Maximum position: 0xFFFF = 32767 pulses = About 5.76 deg (GM-1010)
0-pulse position: 0x8000 = 0
Minimum position: 0x0000 = –32768 pulses = About –5.76 deg (GM-1010)
If a greater angle is specified, set a magnification by using the High-speed Serial Communication
Conversion Gain parameter (Parameter ID = 13)
E.g. For x2 (Setting: 2000), the following angle can be specified:
–5.76 × 2 deg to 5.76 × 2 deg
The command resolution will be two times.
・ In the case of 20bit position data
Data: 1 for one pulse that can be specified up to the following positions:
Maximum position: 0xFFFF = 524287 pulses
0-pulse position: 0x8000 = 0
Minimum position: 0x0000 = –524287 pulses
Maximum movable range is set with Parameter ID = 0, 1 (CW limit, CCW limit).
The position data of high-speed serial communication can not exceeded this range.
CANON Digital Galvano Scanner System
KP-1SM Series + GC-251
Users Manual 1.00
23
Page 24

(Status) STS
The status of controller is sent by status line (STS) of high-speed serial communication.
The contents of status sending from a controller can be changed by the following parameter.
Parameter ID Data
1: Controller Condition
66
Each status contents are as follows.
StatusTable
S19 0 XPositionDataBit19 YPositionDataBit19 AxisFlag
S18 0 XPositionDataBit18 YPositionDataBit18 X(Y)PositionDataBit18
S17 0 XPositionDataBit17 YPositionDataBit17 X(Y)PositionDataBit17
S16 0 XPositionDataBit16 YPositionDataBit16 X(Y)PositionDataBit16
S15 0 XPositionDataBit15 YPositionDataBit15 X(Y)PositionDataBit15
S14 0 XPositionDataBit14 YPositionDataBit14 X(Y)PositionDataBit14
S13 YREADY XPositionDataBit13 YPositionDataBit13 X(Y)PositionDataBit13
S12 YALARM2 XPositionDataBit12 YPositionDataBit12 X(Y)PositionDataBit1 2
S11 YALARM1 XPositionDataBit11 YPositionDataBit11 X(Y)PositionDataBit1 1
S10 YINPOS XPositionDataBit10 YPositionDataBit10 X(Y)PositionDataBit10
S9 0 XPositionDataBit9 YPositionDataBit9 X(Y)PositionDataBit9
S8 0 XPositionDataBit8 YPositionDataBit8 X(Y)PositionDataBit8
S7 0 XPositionDataBit7 YPositionDataBit7 X(Y)PositionDataBit7
S6 0 XPositionDataBit6 YPositionDataBit6 X(Y)PositionDataBit6
S5 0 XPositionDataBit5 YPositionDataBit5 X(Y)PositionDataBit5
S4 0 XPositionDataBit4 YPositionDataBit4 X(Y)PositionDataBit4
S3 XREADY XPositionDataBit3 YPositionDataBit3 X(Y)PositionDataBit3
S2 XALARM 2 XPositionDataBit2 YPositionDataBit2 X(Y)PositionDataBit2
S1 XALARM 1 XPositionDataBit1 YPositionDataBit1 X(Y)PositionDataBit1
S0 XINPOS XPositionDataBit0 YPositionDataBit0 X(Y)PositionDataBit0
Mode-1 Mode-2 Mode-3 Mode-4
2: Current position (Axis 1)
3: Current position(Axis 2)
4: Current position(Axis1 , Axis2)
AxisFlag=0第1軸
AxisFlag=1 第2軸
1: Controller Condition
Output the status of the controller.
READY : Servo ON and ready to control by high-speed serial communication.
ALARM1 : Alarm output (priority high)
(See 5-3 Digital Input-Output Function. Same meaning as ‘Axis 1 Error 1
(priority high)’ , ‘ Axis 2 Error 1(priority high)’ )
ALARM2 : Alarm output (priority low)
(See 5-3 Digital Input-Output Function. Same meaning as ‘Axis 1 Error 2
(priority low)’ , ‘ Axis 2 Error 2(priority low)’ )
CANON Digital Galvano Scanner System
KP-1SM Series + GC-251
Users Manual 1.00
24
Page 25

INPOS : In-position signal
(When current position moves into the in-position width, this signal will
2: Current position (Axis 1)
Output the Axis 1 encoder position.
Position Data length: 20bit. 。
3: Current position (Axis 2)
Output the Axis 2 encoder position.
Position Data length: 20bit. 。
4: Current position (Axis1, Axis2)
The encoder position of the Axis 1 and the Axis 2 is alternately output.
be output.)
Position Data length: 21bit. 。
The first 1bit shows the axis (Axis Flag).
Axis Flag = 0 Axis 1
Axis Flag = 1 Axis 2
Note: After the position of the encoder is actually detected, the encoder position status is
output after a delay of 2 servo sampling. (1 servo sampling = 10μsec)
Note: Only when controlling by high-speed serial communications, the status output is output.
It is not output when operating with the internal clock (raster scan and movement in the step).
CANON Digital Galvano Scanner System
Users Manual 1.00
KP-1SM Series + GC-251
25
Page 26
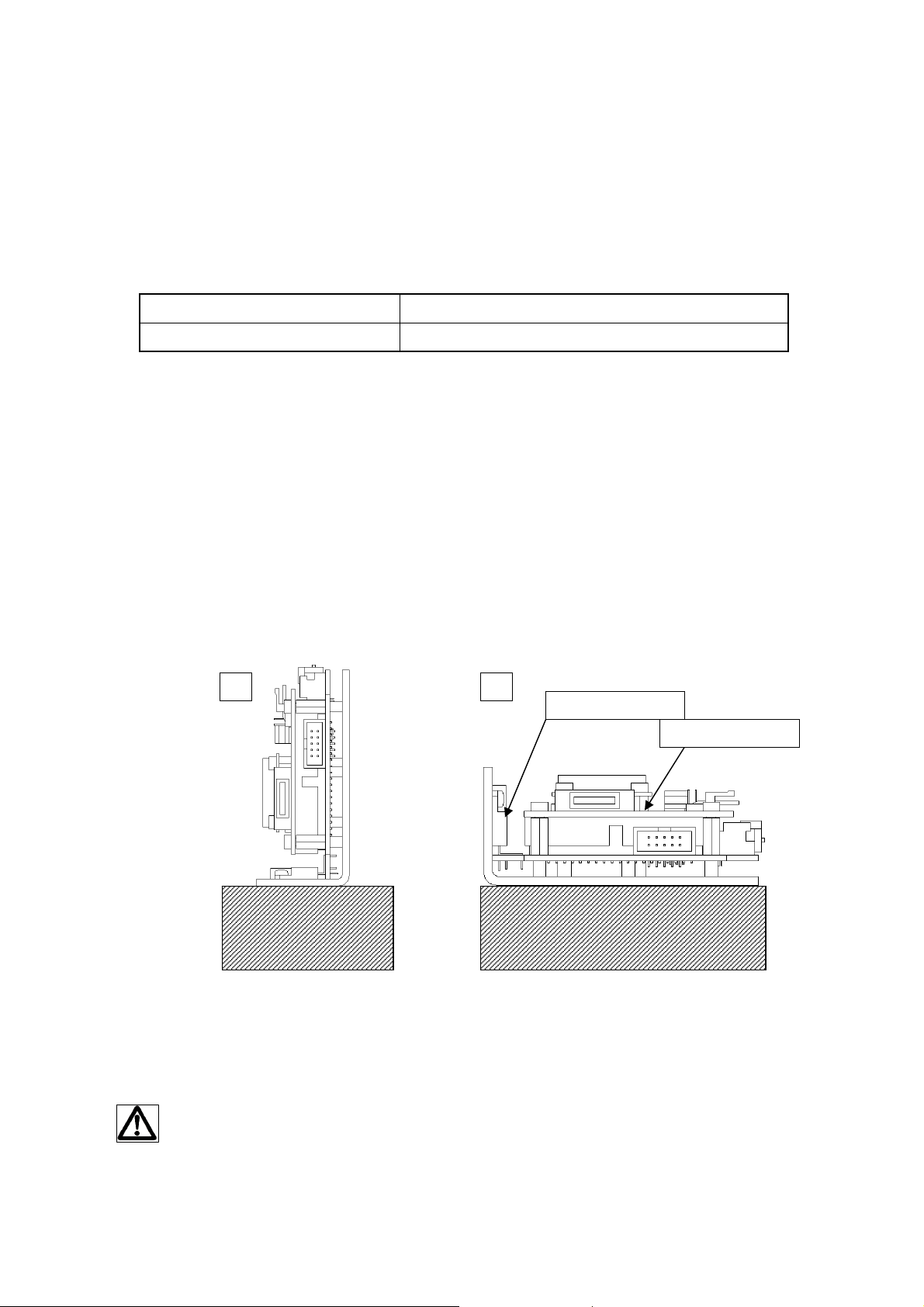
2.8. Heat Radiation and Installation
Since the controller and motor generate heat, their heat radiation should be considered carefully.
Generated heat depends on the operating conditions. Determine a heat radiation method according to
the operating conditions.
The controller and motor have a temperature detection sensor (thermistor) at the heat generating
section. As a safety function, the thermistor stops control if the detector temperature reaches:
Controller About 70ºC
Motor About 70ºC
(For details, see 9, “Safety Functions.”)
The controller and motor require heat radiation so that their temperatures will not exceed the above values.
Controller installation methods
The controller can be installed by either Method A or B below.
At installation, put the controller frame in contact with a heat-radiating structure (heat sink or cabinet).
Method A has higher heat radiation efficiency. However, select either method by considering the
operating conditions and cable routing. When installing the controller frame, apply thermal grease or
attach a thermal conductive sheet to the contact surface.
Under some operating conditions, forced air cooling by a fan is necessary. Cool the heat-radiating
structure (heat sink or cabinet) and the controller.
A B
Output amplifier
Control circuit
In addition to the output amplifier, which is the main source of heat, the control circuit section (DSP)
generates heat.
Allow as much space as possible around the equipment.
Caution
The controller becomes hot during operation.
CANON Digital Galvano Scanner System
Users Manual 1.00
KP-1SM Series + GC-251
26
Page 27

3. Software
The controller (GC-201, 101) comes with dedicated control software “GALILEO (Galvano Integrated
Leading Operator (GALILEO).”
GALILEO makes the following controller operations easy:
・Parameter setting
・Servo tuning (Frequency characteristic measurement)
・Status check
・Operation setting (Step movement and raster scan)
Most of the functions that can be performed by GALILEO can also be executed by external command
input through RS-232C connection without using GALILEO. This manual describes operations both by
GALILEO and by external command input.
Note: The following function can be executed by GALILEO only, and not by external command input:
・Frequency characteristic measurement
3.1. Supported PC Environment
Supported OS MS-Windows 2000, XP, Vista
Connection port RS-232C port (with USB-RS-232C conversion cable)
3.2. Installation
・ Insert the accessory application CD into the CD drive.
・ Execute Setup.exe in the GALILEO folder.
D:\
CANON Digital Galvano Scanner System
Users Manual 1.00
KP-1SM Series + GC-251
27
Page 28

・ Press the Next button.
・ Specify an installation folder and press the Next button.
(Recommendation: Do not change usually.)
CANON Digital Galvano Scanner System
KP-1SM Series + GC-251
Users Manual 1.00
28
Page 29

・ Press the Next button.
・ Press the Close button. This completes installation.
CANON Digital Galvano Scanner System
KP-1SM Series + GC-251
Users Manual 1.00
29
Page 30

3.3. Activation
・ Connect the controller and the PC with the optional RS-232C cable.
・ Click “START” - “Programs” - “Canon Scanner” - “GALILEO”.
・ Setting the COM port
Select the connected RS-232C port and press the OK button.
・ The control screen is displayed.
While communication with the controller has not started yet, the screen displays “DISCONNECT”
in gray at the upper left as the connection status.
Connection
Status
Note: The value of each item on the above screen depends on the controller status.
CANON Digital Galvano Scanner System
Users Manual 1.00
KP-1SM Series + GC-251
30
Page 31

・ When the power to the controller is turned on, communication automatically starts.
When communication starts, the connection status at the upper left changes to “CONNECT” in
green.
Connection
Status
GALILEO can be activated after power to the controller has been turned on. Then communication
starts automatically. (“CONNECT” is displayed.)
Note: The value of each item on the above screen depends on the controller status.
CANON Digital Galvano Scanner System
KP-1SM Series + GC-251
Users Manual 1.00
31
Page 32

3.4. Control Screen
This section explains the buttons and other items on the control screen.
② ③ ④ ⑤ ⑥
①
⑦
⑧
⑨
⑫
⑬
⑩ ⑪
The status of RS-232 connection to the controller is displayed.
①
Connection display
②
③
④
Position display
Axis selection
Origin control
(Homing to origin)
Connected: CONNECT (green)
Not connected: DISCONNECT (gray)
The encoder position of each axis is displayed.
(Unit: pulse)
Note: Since the number of encoder pulses per rotation depends on
the galvano motor, the relationship between the number of pulses
and the angle also differs with the motor type.
Select an axis for control and information display.
(#1 = Axis 1, #2 = Axis 2)
The screen can display the information of only one axis selected
here, although the position displayed at ② and the status displayed
at ⑨always show the information of both axes.
Press this button to go to or detect the origin.
The operation depends on the controller status.
(During ordinary servo control)
Moving to the origin (where the position display is 0)
Invalid during high-speed serial communication
(After servo OFF and soft reset)
CANON Digital Galvano Scanner System
Users Manual 1.00
KP-1SM Series + GC-251
32
Page 33

Starting origin detection
⑤
⑥
⑦
⑧
⑨
⑩
⑪
⑫
Servo ON/OFF Start or stop servo control.
High-speed serial
communication
selection
Tab selection
Control display
Status display The controller status of two axes is displayed.
Soft reset Press this button for soft reset.
Command input
screen
DSP version
Select the high-speed serial communication command or internal
command for position specification. (For details, see Chapter 4.)
(Start = High-speed serial communication, OFF = Internal
command)
The screen of each function can be displayed by tab selection.
(A detailed explanation of the screen is shown when each function
is displayed.)
This area displays the screen of each function selected by a tab at
⑦.
Allows direct command input.
The version of the controller software is displayed.
During troubleshooting, the support staff may ask for the version
number.
CANON Digital Galvano Scanner System
Users Manual 1.00
KP-1SM Series + GC-251
33
Page 34

4. Operating Procedure
This chapter explains how to use the system.
Operations by [GALILEO] and by [RS-232C command] are explained together.
4.1. Controller Activation
When the power (+5 V, +24 V) is turned on, the controller first does the following automatically:
・Reads saved parameters from ROM
・Homes to the origin
・Corrects the encoder (high-speed oscillation of a fixed angle)
It takes about 15 seconds until the controller is activated.
With the default settings at shipping, the controller is activated with the internal clock.
The completion of activation can be confirmed as follows:
GALILEO
Changes to
‘CONNECT’
Note: At activation, the status temporarily changes to “DISCONNECT” and the ALARM lamp lights
(about 5 s). This is not an error. Wait for a while.
CANON Digital Galvano Scanner System
Users Manual 1.00
Lit
KP-1SM Series + GC-251
34
Page 35

RS-232C command
Send Command ID14 “Status read”
SRVON, SYNC, INPOS = High
ORGN = Low
(For details, see 7-2, “Command Details.”)
and check the following:
CANON Digital Galvano Scanner System
Users Manual 1.00
KP-1SM Series + GC-251
35
Page 36

4.2. Step Movement
Execute step movement for a fixed angle.
GALILEO
②
①
③
・Select the Step Move tab. ①
・Select an axis for step movement. ②
・Specify the displacement (angle and pulse count) for relative position (STEP) and absolute
position. ③
・Press the MOVE button (either positive or negative position direction can be specified). ③
RS-232C command
・ Target value setting mode (Command ID = 10)
・ Target position setting (Command ID = 20)
・ Movement start (Command ID = 8)
CANON Digital Galvano Scanner System
Users Manual 1.00
KP-1SM Series + GC-251
36
Page 37

4.3. Raster Scan
Execute oscillation of a fixed angle at a fixed frequency.
GALILEO
①
②
③
④ ⑤
・Select the Raster Scan tab. ①
・Select an axis for raster scan. ②
・Specify the operation parameters (Scan Time, Scan Angle, and Duty). ③
・Press the Scan Start button to start operation. ④
・Press the Scan Stop button to stop operation. ⑤
RS-232C command
・ Raster scan interval setting (Parameter ID = 26)
・ Raster scan duty ratio setting (Parameter ID = 27)
・ Raster scan oscillation angle setting (Parameter ID = 28)
・ Scan start (Command ID = 23 Data = 3)
・ Scan stop (Command ID = 23 Data = 0)
CANON Digital Galvano Scanner System
Users Manual 1.00
KP-1SM Series + GC-251
37
Page 38

4.4. Position Command Input by High-speed Serial Communication
For a vector scan, give target position data to the controller by high-speed serial communication, The
data is updated as required.
Switch the controller to the status of receiving target position data by high-speed serial communication.
For switching, it is necessary to enter high-speed serial communication signals into the controller in
advance.
GALILEO
①
・Select an axis for high-speed serial communication. ①
・Switch HiSpeed Serial to Start. ②
This switching makes the controller follow target position data by high-speed serial communication.
・Switch HiSpeed Serial to OFF. ②
Input of the MOVE command is awaited.
RS-232C commands
・ Switch to high-speed serial communication (Command ID = 23 Data = 7)
・ Return to internal clock operation (Command ID = 23 Data = 0)
CANON Digital Galvano Scanner System
Users Manual 1.00
KP-1SM Series + GC-251
38
Page 39

5. Monitor Output and Digital Input Functions
The controller has an analog monitor output connector for monitoring the operation status and a
digital I/O connector for external signal input.
5.1. Connector Pin Arrangement
The controller is equipped with the following:
Analog monitor output connector ×1
Digital I/O connector ×1
Digital I/O
connector
Analog monitor output
connector
The monitor board for the evaluation that can do the analog output signal confirmation and the I/O of
a digital signal is prepared as an optional product. Please contact the Sales Department.
CANON Digital Galvano Scanner System
Users Manual 1.00
Monitor Board for
evaluation
KP-1SM Series + GC-251
39
Page 40

The signal name is displayed on the evaluation monitor board. Please check the signal after referring
to the table of the following pin arrangement.
Analog monitor output connector
Connector model number
Connector Model No. Manufacturer
Board side XG4C-1034 OMRON
Cable side XG4M-1030-T OMRON
Connector pin arrangement
Pin No.
1 A1 Axis 1 current command value
2 A2 Axis 1 analog monitor 1 (Monitor item switching)
3 A3 Axis 1 analog monitor 2 (Monitor item switching)
4 A4 Axis 1 analog monitor 3 (Monitor item switching)
5 A5 Axis 2 current command value
6 A6 Axis 2 analog monitor 1 (Monitor item switching)
7 A7 Axis 2 analog monitor 2 (Monitor item switching)
8 A8 Axis 2 analog monitor 3 (Monitor item switching)
9 A9 Analog GND
10 A10 Analog GND
The controller has three monitor terminals for each of the two axes to check the operation status.
The output signal contents can be changed and the output magnification can also be changed.
(For details, see 5.2, “Analog Monitor Output Switching.”)
Monitor Board
Signal Name
Signal Description
CANON Digital Galvano Scanner System
Users Manual 1.00
KP-1SM Series + GC-251
40
Page 41

Digital I/O connectors
Connector model number
Connector Model No. Manufacturer
Board side 8931E-020-178L KEL
Cable side 8925E-020-179 KEL
Connector pin arrangement
Monitor
Pin
No.
A1 D1 Output Axis 1 error 1 (Priority high) High : Error See Circuit 1 below.
B1 D2 Output Axis 1 error 2 (Priority low) High : Error See Circuit 1 below.
A2 D3 Output Axis 1 servo interrupt period Edge See Circuit 1 below.
B2 D4 Output Axis 2 error 1 (Priority high) High : Error See Circuit 1 below.
A3 D5 Output Axis 2 error 2 (Priority low) High : Error See Circuit 1 below.
B3 D6 Output Axis 2 servo interrupt period Edge See Circuit 1 below.
A4 DG1 - GND
B4 DG2 - GND
A5 D9 Input External Sampling Signal ↑: INT generation See Circuit 2 below.
B5 D10 Input External Trigger Signal High : ON See Circuit 2 below.
A6 D11 Input Activation mode switching See Circuit 2 below.
B6 D12 No connection
A7 DG3 - GND
B7 DG4 - GND
A8 D15 No connection
B8 D16 No connection
A9 D17 No connection
B9 D18 No connection
A10 No connection
B10 No connection
board
Signal
Name
I/O Signal Description Logic Remarks
Connection specifications
(Circuit 1)
(Circuit 2)
CANON Digital Galvano Scanner System
Users Manual 1.00
FPGA
3.3V-TTL, max. 3 mA
FPGA
3.3V-TTL
R: 100Ω Connect
R: 100Ω Connect
KP-1SM Series + GC-251
41
Page 42

5.2. Analog Monitor Output Selecting
The analog monitor output can be switched to monitor various operation and signal statuses.
This switching can be executed from [GALILEO] or [RS-232C command send].
Output contents
Terminal
A2 (Axis 1)
A6 (Axis 2)
A3 (Axis 1)
A7 (Axis 2)
A4 (Axis 1)
A8 (Axis 2)
The signal level differs between signals. The output magnification can be switched individually.
Power-on
Selection
Phase A of Encoder Head 1
Phase A of Encoder Head 2
Phase A of encoder after synthesis
* Positional deviation signal 1.46 mV / pulse
Position 0.091 mV / pulse
* Velocity 0.091 mV / pulse / 10 usec
Coarse angle
Fine angle
Phase B of Encoder Head 1
Phase B of Encoder Head 2
Phase B of encoder after synthesis
* Target position 0.091 mV / pulse
Signal Description Signal Level (At Power-on)
CANON Digital Galvano Scanner System
Users Manual 1.00
KP-1SM Series + GC-251
42
Page 43

GALILEO
③ ④
②
①
⑤
・Select the Monitor tab.①
・Select an axis for monitor output switching. ②
・Select the monitor item of each output terminal. ③
・Select an output signal magnification. ④
・Press the SET button. ⑤
CANON Digital Galvano Scanner System
Users Manual 1.00
KP-1SM Series + GC-251
43
Page 44

Note:
・The analog monitor output is from the D/A converter of the controller.
Since the output range of the D/A converter is from –3 to +3 V, output is looped by magnification
setting if it exceeds this range.
・The relationship between encoder pulse and angle depends on the galvano motor.
KP-1SM30
360° = 83328 pulses × 2048 divisions = 170655744 pulses
0.01° = 170655744 pulses / 360° ×0.01 = 4740 pulses
At the monitor output position (0.091 V/pulse), the analog monitor output changes:
0.01° = 4740 × 0.091 = 431 mV
【RS-232C Commands】
・ Monitor Output Selection (A2, A8) Command ID = 40
・ Monitor Output Selection (A3, A9) Command ID = 41
・ Monitor Output Selection (A4, A10) Command ID = 42
・ Monitor Magnification Setting (A2, A8) Command ID = 44
・ Monitor Magnification Setting (A3, A9) Command ID = 45
・ Monitor Magnification Setting (A4, A10) Command ID = 46
CANON Digital Galvano Scanner System
Users Manual 1.00
KP-1SM Series + GC-251
44
Page 45

5.3. Digital Input-Output Function
The controller has a digital input-output function for checking the status of the controller.
Pin
No.
A1
B1
B2
A3
A2
B3
In addition, the following, digital I/O is prepared as an operation setting of the controller.
Pin
NO.
A5 Input External Sampling Signal
I/O Signal Description Logic Explanation
Output Axis 1 Error 1 (Priority high) 1: Error If an error occurs, the
Output Axis 1 Error 2 (Priority low) 1: Error
Output Axis 2 Error 1 (Priority high) 1: Error
Output Axis 2 Error 2 (Priority low) 1: Error
Output Axis 1 servo interrupt period Edge These are output at a servo
Output Axis 2 servo interrupt period Edge
I/O Signal Description Logic Explanation
↑:INT
generation
corresponding error signal is
output.
According to the priority of the
error, Error 1 or 2 is output.
See 9-2, “Errors.”
interrupt timing in the
controller.
When external signal is used for
servo sampling clock.
(Do not use it usually.)
See 6-2, “Operation that
B5 Input External Trigger Signal High:ON
A6 Input Activation mode switching
synchronizes with external
trigger Signal input(raster scan)
See 6-1, “Setting Controller
Activation Mode”
CANON Digital Galvano Scanner System
Users Manual 1.00
KP-1SM Series + GC-251
45
Page 46

6. Other - Operation Setting
6.1. Setting Controller Activation Mode
Clock selection
With the default settings at shipping, a parameter is set to activate the controller with the internal clock.
When assembling the device, however, the mode can be switched for activation with an external clock
(high-speed serial communication). For this switching, the following parameter is set:
Parameter ID Data
64
P64 = 1: Activation with internal clock
P64 = 3: Activation by high-speed serial communication
Bit 1 0: Internal clock
1: High-speed serial communication
(Bit 0 of P64 is used to enable or disable encoder correction when homing to the origin; it is usually set
to 1. For details, see 8-2, “Parameter Details.”)
Activation mode
Power-on usually executes the following automatically:
・Reading parameters from EEPROM
・Starting homing and servo control
If there is a problem with the parameters read from EEPROM or if oscillation occurs when homing and
servo control are executed automatically, the power-on activation mode can be changed.
For this switching, the switches (SW1 and SW2) on the controller board and the logic of the digital I/O
terminal (A6) are combined.
CANON Digital Galvano Scanner System
Users Manual 1.00
KP-1SM Series + GC-251
46
Page 47

Axis 1
SW2
SW1
1
2
SW1
SW1-2 Terminal A6
OFF 0 Disabled Disabled
OFF 1 or open Enabled Disabled
ON 0 Enabled Disabled
ON 1 or open Enabled Enabled
OFF
ON
SW2
Auto EEPROM
Read
12
OFF
ON
Auto Homing
Axis 2
SW2-2 Terminal A6
OFF 0 Disabled Disabled
OFF 1 or open Enabled Disabled
ON 0 Enabled Disabled
ON 1 or open Enabled Enabled
: Setting at shipping
Auto EEPROM
Read
Auto Homing
CANON Digital Galvano Scanner System
Users Manual 1.00
KP-1SM Series + GC-251
47
Page 48

6.2. Operation that synchronizes with external trigger Signal input(Raster Scan)
“4-3. raster scan operation”, It can be operated synchronizing with external trigger Signal.
【The Movement Pattern】
There are two kinds of movement patterns.
①(The raster scan of one coming and going operates whenever the external trigger signal is input.)
Raster Scan position
(Current Angle Position)
Angle
External Trigger Signal
Voltage
②(The raster scan of one way operates whenever the external trigger signal is input.)
Raster Scan position
(Current Angle Position)
External Trigger Signal
Angle
Voltage
① and ② operation pattern can be selected by RS-232C command (Command ID = 23 ‘ Operation
Mode setting ‘)
CANON Digital Galvano Scanner System
Users Manual 1.00
KP-1SM Series + GC-251
48
Page 49

【Input the external trigger signal】
The external trigger signal is input from the digital I/O connector.
(See 5-1 ‘Connector Pin Arrangement)
Connector pin arrangement
Pin
NO.
B5 D10 Input External Trigger Signal High:ON See Circuit below.
Connection Specifications
3.3V TTL Input
【Operation procedure】
(Raster Scan Parameter Settings)
・Set Parameter ID =26 Raster Scan Time
・Set Parameter ID =27 Raster Scan Duty Ratio
・Set Parameter ID =28 Raster Scan Angle
(Raster Scan Operation)
Monitor Board
Signal Name
FPGA
3.3V-TTL
I/O Signal Description Logic Remarks
R : 100Ω Connector
・Send Command ID=8 Data=6 Movement Start (Movement to the Initial position
of raster scan)
・Send Command ID=23 Data=8 (One way scan)
Data=9 (One coming and going)
(Reference: Data =3 in case of continuous operation)
・Input the external trigger Signal
・Send Command ID=23 Data=0 Scan Stop
【Notes】
・ The external trigger input during raster scan move is ignored.
・ 10usec or less is uneven from the external trigger signal input at time until beginning to
・ actually operate.
Select either
CANON Digital Galvano Scanner System
Users Manual 1.00
KP-1SM Series + GC-251
49
Page 50

7. Commands
The controller has a monitor output (analog output) terminal for monitoring the RS-232C command
operation status and an external signal input terminal for controller operation.
7.1. List of Commands
ID Command Name Data Data Return Value
Soft Reset Yes 0: Auto homing
0
1 Error Clear
2 Homing Start
Servo On Yes 0: OFF
4
Control Mode Specification Yes 0: PI
7
Movement Start Yes 0: Step move start
8
9 Forced Stop
Target position Setting Mode Yes 0: Absolute
10
Thermistor Temperature Read Yes 0: Controller temperature
11
Current Position Read Yes 0: Current position
12
1: Reset only
1: ON
1: LQ
6: Initial position of raster scan
1: Relative
1: Motor temperature
1: Current target value
(Program origin)
2: Current target value
(Absolute position)
A/D converted value
of thermistor voltage
Position (Pulse)
Version Read Yes 0: Main DSP Ver
13
14 Status Read Status(16bit)
15 Error Read Error (16bit)
Acceleration Control Yes 0: OFF
18
20 Target Position Setting Yes Target position (pulse)
22 Target Velocity Setting Yes Target velocity (pulse/second)
23 Operation Mode Setting Yes See “Command Details.”
26 Parameter Value Check Yes Parameter ID Parameter value
Program Coordinate System Yes 0: Z phase
30
Monitor Output Selection
40
(A2 , A8)
CANON Digital Galvano Scanner System
Users Manual 1.00
Yes 0: Head1 A phase
1: Sub DSP Ver
1: ON
1: Program origin
1: Head2 A phase
2:Corrected A phase
KP-1SM Series + GC-251
Ver. No
50
Page 51

3:Position error
Monitor Output Selection
(A3 , A9)
41
Yes 0: Position
1: Velocity
2:Course Angle
3:Fine Angle
Monitor Output Selection
(A4 , A10)
42
Yes 0: Head1 A phase
1: Head2 A phase
2:Corrected A phase
3:Internal Target
Monitor Output Select Check Yes 0:A2 (A8) Monitor
43
1:A3 (A9) Monitor
2:A4 (A10) Monitor
Monitor magnification Setting
44
(A2, A8)
Monitor magnification Setting
45
(A2, A8)
Monitor magnification Setting
46
(A2, A8)
Monitor Magnification Setting
Check
47
Yes N: Magnification (x 2
Yes N: Magnification (x 2
Yes N: Magnification (x 2
Yes 0:A2 (A8) Monitor Magnification
1:A3 (A9) Monitor Magnification
2:A4 (A10) Monitor Magnification
N
)
N
)
N
)
101
Counter Clear Timing Yes 0: Axis 1
1: Axis 2
0 or 1
CANON Digital Galvano Scanner System
KP-1SM Series + GC-251
Users Manual 1.00
51
Page 52

7.2. Command Details
Command ID 0
Data
Return
Value
Explanation
Related
Command
Command ID 1
Data -
Return
Value
Explanation
Command ID 2
Data -
Return
Value
Explanation
Related
Command
0: Reset + Automatic homing
1: Reset only
0: Command execution successful
1: Command execution unsuccessful
This command resets the system to the initial status after activation.
However, the parameter values are retained.
If a high-priority error requiring soft reset occurs (see 9-2, “Errors” for details), execute
this command after solving the cause.
Command ID = 2: Homing Start
If only reset is executed, homing is necessary for a return.
0: Command execution successful
1: Command execution unsuccessful
If a low-priority error occurs (see 9-2, “Errors” for details), execute this command for a
return. If this command is not executed, other commands cannot be accepted. The
parameters and other set values are retained.
0: Command execution successful
1: Command execution unsuccessful
This command detects the origin.
If the status is already SYNC after origin detection, this command executes homing to
the origin only.
Command ID = 0: Soft Reset
If only soft reset is executed, origin detection is necessary.
Command
Name
Command
Name
Command
Name
Soft Reset
Error Clear
Homing Start
CANON Digital Galvano Scanner System
Users Manual 1.00
KP-1SM Series + GC-251
52
Page 53

Command ID 4
Data
Return
Value
Explanation
Command ID 7
Data
Return
Value
Explanation LQ control is usually used.
Related
Command
0: OFF
1: ON
0: Command execution successful
1: Command execution unsuccessful
This command starts or stops servo control.
Turning servo control off makes the motor axis free.
When the controller is operating on the internal clock, servo control starts at the servo
ON position.
When the controller is operating on high-speed serial communication and a target
position is entered, the scanner moves to the target position after the start of servo
control.
0: PI control
1: LQ control
0: Command execution successful
1: Command execution unsuccessful
Command
Name
Command
Name
Servo ON
Control Mode Specification
Command ID 8
Data
Return
Value
Explanation
Related
Command
0: Step move start
6: Movement to the initial position of raster scan
0: Command execution successful
1: Command execution unsuccessful
After a target position is set, this command is executed to start step movement.
Raster scan start position
Step movement procedure
Command ID = 10: Target Value Setting Mode
Command ID = 20: Target Position Setting
Command ID = 8: Data = 0: Step Movement Start
Raster scan movement procedure
Parameter ID = 26: Raster Scan Interval
Parameter ID = 27: Raster Scan Duty Ratio
Parameter ID = 28: Raster Scan Oscillation Angle
Command ID = 8 Data = 6: Movement to the raster scan initial position
Command ID = 23 Data = 3: Raster Scan Start
Command ID = 23 Data = 0: Raster Scan Stop
Command
Name
Movement Start
CANON Digital Galvano Scanner System
Users Manual 1.00
KP-1SM Series + GC-251
53
Page 54

Command ID 9
Data -
Return
Value
Explanation
Related
Command
Command ID 10
Data
Return
Value
Explanation
Related
Command
0: Command execution successful
1: Command execution unsuccessful
This command is used for a stop before the target position during movement by
Command ID = 8.
Command ID = 8 Data = 0: Movement Start
0: Absolute position
1: Relative position
0: Command execution successful
1: Command execution unsuccessful
This command is used to specify a position coordinate system for setting by “Command
ID = 20: Target Position Setting.”
Before setting a target position, this command should be executed.
Absolute position: Position with the origin as 0
Relative position: Distance from the current position
This command should be executed each time a target position is set because its setting
is not retained after the start of movement.
Step movement procedure
Command ID = 10: Target Value Setting Mode
Command ID = 20: Target Position Setting
Command ID = 8 Data = 0: Movement Start
Command
Name
Command
Name
Forced Stop
Target Value Setting Mode
CANON Digital Galvano Scanner System
Users Manual 1.00
KP-1SM Series + GC-251
54
Page 55

Command ID 11
Data
Return
Value
Explanation
0: Controller temperature
1: Motor temperature
Thermistor voltage A/D converted value
ControllerThermistorA/Dconvertedvalue
4000
3500
3000
2500
2000
1500
1000
A/Dconvertedvalue
500
0
20 30 40 50 60 70 80 90 100 110
MotorThermistorA/Dconvertedvalue
4000
3500
3000
2500
2000
1500
1000
A/Dconvertedvalue
500
0
20 30 40 50 60 70 80 90 100 110
Command
Name
Temperature(℃)
Temperature(℃)
Thermistor Temperature Read
CANON Digital Galvano Scanner System
Users Manual 1.00
KP-1SM Series + GC-251
55
Page 56

Command ID 12
0: Current position
Data
Return
Value
Explanation Command ID = 30: Program Coordinate System
Command ID 13
Data
Return
Value
Explanation
Command ID 14
Data -
Return
Value
Explanation
1: Current target value (Program origin)
2: Current target value (Absolute position)
Position (Pulse)
0: Main DSP
1: Sub DSP
Ver. No
Status (16 bits)
Each status can be checked by each bit after conversion into 16-bit display.
Bit Abbreviation Meaning Hex Format
0 SRVON Servo ON 0x0001
1 SYNC Counter 0-position confirmed 0x0002
2 INPOS Settlement in in-position range 0x0004
3 ALARM Error 0x0008
4 ORGN Homing to origin 0x0010
5 PROG Program coordinate setting 0x0020
6
7
8 MOVE Moving (including scan) 0x0100
9 CMODE Control mode 0 : PI
10 WARN Encoder signal warning 0x0400
11
12 TARGET Target position 0:Absolute position
1:Relative position
13 ACC Acceleration control 0 : OFF
1 : ON
14 SETPOS Target position set 0x4000
15
Note: Return value of the command is a decimal number.
Command
Name
Command
Name
Command
Name
1 : LQ
Current Position Read
Version Read
Status Read
0x0200
0x1000
0x2000
CANON Digital Galvano Scanner System
Users Manual 1.00
KP-1SM Series + GC-251
56
Page 57

Command ID 15
Data -
Return
Value
Explanation
Error (16 bits)
Each status can be checked by each bit after conversion into 16-bit display.
For details about errors, see 9-2, “Errors.”
Bit Abbreviation Meaning Hex Format
0 STRK Stroke over 0x0001
1 CNT Counter over 0x0002
2 INP In-position overtime 0x0004
3 SRV No clock 0x0008
4 CUR Driver overheat 0x0010
5 HOT Motor overheat 0x0020
6 FOM Format error 0x0040
7 COM Command data error 0x0080
8 PAR Parameter error 0x0100
9 STA Status error 0x0200
10 TRN Communication error 0x0400
11 ORG Homing error 0x0800
12 ENC Encoder signal error 0x1000
13 OTP Out-position error 0x2000
14 CMPER Servo OFF by hardware 0x4000
15 ETC Current saturation 0x8000
Command
Name
Error Read
Command ID 18
Data
Return
Value
Explanation This command cannot be used now.
Command ID 20
Data Target position (Pulse)
Return
Value
Explanation This command is used to set a target position by step movement.
Related
Command
0: OFF
1: ON
0: Command execution successful
1: Command execution unsuccessful
0: Command execution successful
1: Command execution unsuccessful
Step movement procedure
Command ID = 10: Target Value Setting Mode
Command ID = 20: Target Position Setting
Command ID = 8 Data = 0: Step Movement Start
Command
Name
Command
Name
Acceleration Control
Target Position Setting
CANON Digital Galvano Scanner System
Users Manual 1.00
KP-1SM Series + GC-251
57
Page 58

Command ID 22
Data Target velocity (Unit: pulse/s)
Return
Value
Explanation This command is used to set the maximum velocity of step movement.
Related
Command
0: Command execution successful
1: Command execution unsuccessful
The velocity cannot be higher than “Parameter ID = 2: Maximum velocity.”
If this command is not set, the velocity specified by “Parameter ID = 2: Maximum
velocity” is used.
Step movement procedure
Command ID = 22 Target Velocity Setting
Command ID = 10: Target Value Setting Mode
Command ID = 20: Target Position Setting
Command ID = 8 Data = 0: Movement Start
Command
Name
Target Velocity Setting
CANON Digital Galvano Scanner System
Users Manual 1.00
KP-1SM Series + GC-251
58
Page 59

Command ID 23
0: Raster scan stop or Internal Clock mode
3: Raster scan start
Data
Return
Value
Explanation
7: High-speed serial communication mode
8: Raster scan start by the external trigger signal input (one way scan)
9: Raster scan start by the external trigger signal input (Coming and going scan)
0: Command execution successful
1: Command execution unsuccessful
0: Raster scan stop or Internal clock mode
If this command is sent during a raster scan, the scanner stops after moving to the
scan start position.
This command is also used for a return from high-speed serial communication
mode to internal clock mode. In the case of two axis control, it is necessary to
execute this command for each axis.
3: Raster scan start (Continuous scan)
Raster scan starts after step movement to the scan initial position.
7: High-speed serial communication mode
This command switches the mode to high-speed serial communication from
internal clock mode. However, high-speed serial communication signals should be
input in advance. In the case of two axis control, it is necessary to execute this
command for each axis.
8: Raster scan start by the external trigger signal input (one way scan)
(For details, see 6.2, “ Operation that synchronizes with external trigger Signal
input”)
Command
Name
Operation Mode Selection
9: Raster scan start by the external trigger signal input (Coming and going scan)
(For details, see 6.2, “Operation that synchronizes with external trigger Signal
input”)
Raster scan movement procedure
Parameter ID = 26: Raster Scan Time
Related
Command
CANON Digital Galvano Scanner System
Users Manual 1.00
Parameter ID = 27: Raster Scan Duty Ratio
Parameter ID = 28: Raster Scan Angle
Command ID = 8: Data = 6: Step Movement of the raster scan initial position
Command ID = 23: Data = 3: Raster Scan Start
Command ID = 23: Data = 0: Raster Scan Stop
KP-1SM Series + GC-251
59
Page 60

Command ID 26
Data Parameter ID
Return
Value
Explanation This command returns the parameter setting of Parameter ID.
Command ID 30
Data 0: Z phase
Return
Value
Explanation For a raster scan, the center of the oscillation angle can be changed.
Command ID 40
Data 0: Encoder Head1 A phase
Return
Value
Explanation The output signal of analog monitor output A2 (the Axis1) and A8 (the Axis2) can be
Related
Command
0: Command execution successful
1: Command execution unsuccessful
1: Program Origin
0: Command execution successful
1: Command execution unsuccessful
0: Z phase
Set the Z-phase position as the center. This setting is in the default after activation.
1: Program Origin
Set the current position as the center.
When setting the program origin, move once to the desired center and then specify the
position by this command.
1: Encoder Head2 A phase
2: Corrected A phase
3: Position error
0: Command execution successful
1: Command execution unsuccessful
selected.
When the controller starts, the 3: Position error has been selected.
(For details, see 5.2, “Analog Monitor Output Selecting ”)
Command ID = 44: Monitor Magnification Setting (A2, A8 )
Command
Name
Command
Name
Command
Name
Parameter Value Check
Program Coordinate System
Monitor Output Selection (A2, A8)
CANON Digital Galvano Scanner System
Users Manual 1.00
KP-1SM Series + GC-251
60
Page 61

Command ID 41
Data 0: Position
1: Velocity
2: Course Angle
3: Fine Angle
Return
Value
Explanation The output signal of analog monitor output A3 (the Axis1) and A9 (the Axis2) can be
Related
Command
Command ID 42
Data 0: Encoder Head1 B phase
Return
Value
Explanation The output signal of analog monitor output A4 (the Axis1) and A10 (the Axis2) can be
Related
Command
Command ID 43
Data 0: A2, A8 monitor
Return
Value
Explanation The number of the monitor signal that has been selected by command ID=40, 41, and 4
Related
Command
0: Command execution successful
1: Command execution unsuccessful
selected.
When the controller starts, the 1: Velocity has been selected.
(For details, see 5.2, “Analog Monitor Output Selecting ”)
Command ID = 45: Monitor Magnification Setting (A3, A9 )
1: Encoder Head2 B phase
2: Corrected B phase
3: Internal Target
0: Command execution successful
1: Command execution unsuccessful
selected.
When the controller starts, the 3: Internal Target has been selected.
(For details, see 5.2, “Analog Monitor Output Selecting ”)
Command ID = 46: Monitor Magnification Setting (A4, A10 )
1: A3, A9 monitor
2: A4, A10 monitor
0: Command execution successful
1: Command execution unsuccessful
2 can be confirmed.
E.g. A1C040/0Return Value = 3 (Axis1 monitor A2 = Position error)
Command
Name
Command
Name
Command
Name
Monitor Output Selection (A3, A9)
Monitor Output Selection (A4, A10)
Monitor Output Select Check
CANON Digital Galvano Scanner System
Users Manual 1.00
KP-1SM Series + GC-251
61
Page 62

Command ID 44
Command
Name
Monitor Magnification Setting
(A2, A8 )
Data Magnification : N (×2N)
Return
Value
0: Command execution successful
1: Command execution unsuccessful
Explanation Magnification is specified by exponent of power-of-two.
E.g.
Data = -2 2
Data = -1 2
Data = 0 2
Data = 1 2 1 = 2 times
Data = 2 2
-2
= 0.25 times
-1
= 0.5 times
0
= 1 times
2
= 4 times
(See 5.2, “Analog Monitor Output Selecting ”)
Related
Command
Command ID 45
Command
Name
Monitor Magnification Setting
(A2, A8 )
Data Magnification : N (×2N)
Return
Value
0: Command execution successful
1: Command execution unsuccessful
Explanation Magnification is specified by exponent of power-of-two.
E.g.
Data = -2 2
Data = -1 2
Data = 0 2
Data = 1 2 1 = 2 times
Data = 2 2
-2
= 0.25 times
-1
= 0.5 times
0
= 1 times
2
= 4 times
(See 5.2, “Analog Monitor Output Selecting ”)
Related
Command
Command ID 46
Command
Name
Monitor Magnification Setting
(A2, A8 )
Data Magnification : N (×2N)
Return
Value
0: Command execution successful
1: Command execution unsuccessful
Explanation Magnification is specified by exponent of power-of-two.
E.g.
Data = -2 2
Data = -1 2
Data = 0 2
Data = 1 2 1 = 2 times
Data = 2 2
-2
= 0.25 times
-1
= 0.5 times
0
= 1 times
2
= 4 times
(See 5.2, “Analog Monitor Output Selecting ”)
Related
Command
CANON Digital Galvano Scanner System
KP-1SM Series + GC-251
Users Manual 1.00
62
Page 63

Command ID 47
Data 0: A2, A8 monitor magnification
1: A3, A9 monitor magnification
2: A4, A10 monitor magnification
Return
Value
Explanation The exponent of power-of-two.
Related
Command
Command ID 101
Data 0: Head 1
Return
Value
Explanation
Magnification : N (×2N)
1: Head 2
Timing 0 or 1
Command
Name
Command
Name
Counter Clear Timing
CANON Digital Galvano Scanner System
Users Manual 1.00
KP-1SM Series + GC-251
63
Page 64

8. Parameters
8.1. List of Parameters
ID Parameter Name
0 CW Limit
1 CCW Limit
2 Max Velocity
3 In-position Width
4 Settling Check Time
5 In-position Overtime
6 LQ Control Gain
7 Torque Constant
8 Total Inertia
9 Current Limit
10 Encoder Periodicity
11 Sampling Time
12 Origin Clearance Timing (Head 1)
13 High-speed Serial Communication Conversion Gain
14 Origin Clearance Timing (Head 2)
15 High-speed Serial Communication Offset
16 First Digital Notch Filter Central Frequency
17 Q Value of First Digital Notch Filter
18 First Digital Notch Filter Depth
19 Second Digital Notch Filter Central Frequency
20 Second Digital Notch Filter Q Value
21 Second Digital Notch Filter Depth
22 Digital Low-pass Filter Cutoff Frequency
23 First Analog Notch Filter Central Frequency
24 Second Analog Notch Filter Central Frequency
25 Third Analog Notch Filter Central Frequency
26 Raster Scan Time
27 Raster Scan Duty Ratio
28 Raster Scan Angle
29 Internal Generation Acceleration Percentage
30 Raster Scan Interval Time
31 Raster Scan Start Position
32 Z-phase Offset
33 Acceleration Time
34 Deceleration Time
36 Out-position Width
40 Feed-forward Gain
42 Overshoot Control
CANON Digital Galvano Scanner System
Users Manual 1.00
KP-1SM Series + GC-251
64
Page 65

44 Deviation Limit
48 Encoder VR adjustment Head 1 A/B-phase Offset
49 Encoder VR adjustment Head 1 A-phase Amplitude
50 Encoder VR adjustment Head 1 B-phase Amplitude
51 Encoder VR adjustment Head 2 A/B-phase Offset
52 Encoder VR adjustment Head 2 A-phase Amplitude
53 Encoder VR adjustment Head 2 B-phase Amplitude
64 DSP Operation Setting
66 High Speed Serial Status Format
67 High Speed Serial Data Length
68 High Speed Serial Data LSB Position
CANON Digital Galvano Scanner System
Users Manual 1.00
KP-1SM Series + GC-251
65
Page 66

8.2. Parameter Details
Parameter ID 0
Data Movable range (Unit: pulse)
Return Value 0: Parameter setting successful
1: Parameter setting unsuccessful
Explanation Specify the limit of the clockwise movable range viewed from the axial direction of the
motor.
In case of input or movement beyond the movable range of angle, an error is output.
Note: The relationship between the number of pulses and the angle depends on the motor.
Related
Command
/Parameter
Parameter ID 1
Data Movable range (Unit: pulse)
Return Value 0: Parameter setting successful
Explanation Specify the limit of the counterclockwise movable range viewed from the axial direction
Related
Command
/Parameter
Parameter ID 2
Data Maximum velocity (Unit: pulse/s)
Return Value 0: Parameter setting successful
Explanation This parameter is used to specify step movement by command execution.
Related
Command
/Parameter
1: Parameter setting unsuccessful
of the motor.
In case of input or movement beyond the movable range of angle, an error is output.
Note: The relationship between the number of pulses and the angle depends on the motor.
1: Parameter setting unsuccessful
This maximum velocity applies if “Command ID = 22: Target Velocity Setting” is not set.
Note: The relationship between the number of pulses and the angle depends on the motor.
Parameter
Name
Parameter
Name
Parameter
Name
CW Limit
CCW Limit
Max Velocity
CANON Digital Galvano Scanner System
Users Manual 1.00
KP-1SM Series + GC-251
66
Page 67

Parameter ID 3
Data In-position width (Unit: pulse)
Return Value 0: Parameter setting successful
1: Parameter setting unsuccessful
Explanation The end of movement is judged when a difference from the target value (number of
pulses) enters this range.
Note: The relationship between the number of pulses and the angle depends on the motor.
Related
Command
/Parameter
Bit 2 “Settlement in In-position Width” becomes 1 in status read (Command ID = 14).
Parameter
Name
In-position Width
Parameter ID 4
Data Settling check time (Unit: 10 μs)
Return Value 0: Parameter setting successful
1: Parameter setting unsuccessful
Explanation The completion of movement is judged if the position remains within the In-position
Width (Parameter ID = 3) for the set time after movement.
Note: The unit is 10 us. For 1 ms, set 100.
Related
Command
/Parameter
Parameter ID 5
Data In-position overtime (Unit: sec)
Return Value 0: Parameter setting successful
Explanation If the position remains beyond the number of pulses set by “Parameter ID = 3:
Related
Command
/Parameter
Parameter ID 6
Data LQ control gain (Unit: none)
Return Value 0: Parameter setting successful
Explanation This parameter is used to set the LQ control gain.
Related
Command
/Parameter
Bit 8 “Moving” becomes 0 in status read (Command ID = 14).
1: Parameter setting unsuccessful
In-position Width” from the target position for a time longer than this setting, an alarm is
issued and the servo is turned OFF.
When this parameter is set to 0, judgment is disabled.
Bit 2 “Moving” becomes 0 in error read (Command ID = 15).
1: Parameter setting unsuccessful
LQ control related parameters:
Total Inertia (Parameter ID = 8)
Torque Constant (Parameter ID = 7)
Parameter
Name
Parameter
Name
Parameter
Name
Settling Check Time
In-position Overtime
LQ Control Gain
CANON Digital Galvano Scanner System
Users Manual 1.00
KP-1SM Series + GC-251
67
Page 68

Parameter ID 7
Parameter
Name
Torque Constant
Data Torque constant (Unit: gf・cm / A)
Return Value 0: Parameter setting successful
1: Parameter setting unsuccessful
Explanation This parameter is used to set the torque constant of the motor.
Note: Do not change this parameter. A unique value is available depending on the
motor model. This is set at shipping.
Related
Command
/Parameter
LQ control related parameters
LQ Control Gain (Parameter ID = 6)
Total Inertia (Parameter ID = 8)
Parameter ID 8
Data Total inertia (Unit: 0.01 gf・cm
Return Value 0: Parameter setting successful
1: Parameter setting unsuccessful
Explanation This parameter is used to set the inertia due to the motor rotation shaft and the mirror.
Note: Be careful about the unit. Set a value of gf・cm
Related
Command
/Parameter
LQ control related parameters:
LQ Control Gain (Parameter ID = 6)
Torque Constant (Parameter ID = 8)
Parameter ID 9
Data Current limit (Unit: %)
Return Value 0: Parameter setting successful
1: Parameter setting unsuccessful
Explanation This parameter is used to set the upper limit of a current command value. (Setting for
each axis as a ratio to 10A)
E.g.: 90% (10A × 0.9 = 9A)
If the current remains over the upper limit for a specified time, a current saturation error
occurs.
Related
Bit 5 “Current Saturation” becomes 1 in error read (Command ID = 15).
Command
/Parameter
Parameter
Name
2
)
Parameter
Name
Total Inertia
2
multiplied by 100.
Current Limit
CANON Digital Galvano Scanner System
KP-1SM Series + GC-251
Users Manual 1.00
68
Page 69

Parameter ID 10
Data Encoder periodicity (Unit: pulse)
Return Value 0: Parameter setting successful
1: Parameter setting unsuccessful
Explanation This parameter is used to set the number of pulses per rotation of the motor encoder.
KP-1SM30,KP-1SM100: 83328 pulses
Whenever the motor model is changed, the setting of this parameter should be
changed.
Related
Command
/Parameter
Parameter ID 11
Data Sampling period (Unit: ns)
Return Value 0: Parameter setting successful
Explanation This parameter is used to set the sampling interval of the controller.
Related
Command
/Parameter
1: Parameter setting unsuccessful
The usual value is 10000 for 10 μs.
Note: This parameter usually requires no change.
Parameter
Name
Parameter
Name
Encoder Periodicity
Sampling Time
Parameter ID 12
Data Origin clearance timing (0 or 1)
Return Value 0: Parameter setting successful
1: Parameter setting unsuccessful
Explanation This parameter is related to origin detection.
The value checked by “Command ID = 101: Counter Clear Timing” is set.
Each motor has a unique value.
Note: An appropriate value is set at shipping. When only the motor is replaced, the
value should be checked and set by a command.
The Origin Clearance Timing (Head 2) parameter should be set at the same time.
Related
Command
/Parameter
Counter Clear Timing (Command ID = 101)
A1C101/ 0 (Axis 1 Head 1)
Set the value checked above.
Parameter
Name
Origin Clearance Timing (Head 1)
CANON Digital Galvano Scanner System
Users Manual 1.00
KP-1SM Series + GC-251
69
Page 70

Parameter ID 13
Data High-speed serial communication conversion gain (Unit: Multiple × 1000)
Return Value 0: Parameter setting successful
1: Parameter setting unsuccessful
Explanation High-speed serial communication data is specified by 16 bits.
Ordinary data is 1 for one pulse and can be specified up to the following positions:
Maximum position: 0xFFFF = 32767 pulses = About 5.76 deg (GM-1010)
0-pulse position: 0x8000 = 0
Minimum position: 0x0000 = –32768 pulses = About –5.76 deg (GM-1010)
If a greater angle is specified, set a magnification by using the high-speed serial
communication conversion gain (Parameter ID = 13).
E.g. For x2 (Setting: 2000), the following angle can be specified:
–5.76×2 deg to –5.76×2 deg
The command resolution will be two times.
Related
Command
/Parameter
Parameter
Name
High-speed Serial Communication
Conversion Gain
Parameter ID 14
Data Origin clearance timing (0 or 1)
Return Value 0: Parameter setting successful
1: Parameter setting unsuccessful
Explanation This parameter is related to origin detection.
The value checked by “Command ID = 101: Counter Clear Timing” is set.
Each motor has a unique value (0 or 1).
Note: An appropriate value is set at shipping. When only the motor is replaced, the
value should be checked and set by a command.
The Origin Clearance Timing (Head 1) parameter should be set at the same time.
Related
Command
/Parameter
Counter Clear Timing (Command ID = 101)
A1C101/ 1 (Axis 1 Head 2)
Set the value checked above.
Parameter
Name
Origin Clearance Timing (Head 2)
CANON Digital Galvano Scanner System
Users Manual 1.00
KP-1SM Series + GC-251
70
Page 71

Parameter ID 15
Data High-speed Serial Communication Offset (Unit: pulse)
Return Value 0: Parameter setting successful
1: Parameter setting unsuccessful
Explanation Set this parameter, when a center position of the high-speed serial communications
data is offset.
This is effective, when operating by high-speed serial communications.
0 is set usually.
E.g. Data = 100
High-speed serial communication data(16bit) 0x8000 = 100 encoder pulse position.
Related
Command
/Parameter
Parameter ID 16
Data Central frequency of the first digital notch filter (Unit: Hz)
Return Value 0: Parameter setting successful
Explanation This parameter is used to set the central frequency of the first digital notch filter.
Related
Command
/Parameter
Parameter ID 17
Data Q value of the first digital notch filter (Unit: ×100)
Return Value 0: Parameter setting successful
Explanation This parameter is used to set the Q value of the first digital notch filter.
Related
Command
/Parameter
1: Parameter setting unsuccessful
First Digital Notch Filter Q Value (Parameter ID = 17)
First Digital Notch Filter Depth (Parameter ID = 18)
1: Parameter setting unsuccessful
Set a value multiplied by 100.
First Digital Notch Filter Central Frequency (Parameter ID = 16)
First Digital Notch Filter Depth (Parameter ID = 18)
Parameter
Name
Parameter
Name
Parameter
Name
High-speed Serial Communication
Offset
First Digital Notch Filter Central
Frequency
First Digital Notch Filter Q Value
CANON Digital Galvano Scanner System
Users Manual 1.00
KP-1SM Series + GC-251
71
Page 72

Parameter ID 18
Data Depth of the first digital notch filter (Unit: dB)
Return Value 0: Parameter setting successful
1: Parameter setting unsuccessful
Explanation This parameter is used to set the depth of the first digital notch filter.
Related
Command
/Parameter
Parameter ID 19
Data Central frequency of the second digital notch filter (Unit: Hz)
Return Value 0: Parameter setting successful
Explanation This parameter is used to set the central frequency of the second digital notch filter.
Related
Command
/Parameter
Parameter ID 20
Data Second digital notch filter Q value (Unit: ×100)
Return Value 0: Parameter setting successful
Explanation This parameter is used to set the Q value of the second digital notch filter.
Related
Command
/Parameter
Parameter ID 21
Data Depth of the second digital notch filter (Unit: dB)
Return Value 0: Parameter setting successful
Explanation This parameter is used to set the depth of the second digital notch filter.
Related
Command
/Parameter
First Digital Notch Filter Central Frequency (Parameter ID = 16)
First Digital Notch Filter Q Value (Parameter ID = 17)
1: Parameter setting unsuccessful
Second Digital Notch Filter Q Value (Parameter ID = 17)
Second Digital Notch Filter Depth (Parameter ID = 18)
1: Parameter setting unsuccessful
Set a value multiplied by 100.
Second Digital Notch Filter Central Frequency (Parameter ID = 16)
Second Digital Notch Filter Depth (Parameter ID = 18)
1: Parameter setting unsuccessful
Second Digital Notch Filter Central Frequency (Parameter ID = 16)
Second Digital Notch Filter Q Value (Parameter ID = 17)
Parameter
Name
Parameter
Name
Parameter
Name
Parameter
Name
First Digital Notch Filter Depth
Second Digital Notch Filter Central
Frequency
Second Digital Notch Filter
Q Value
Second Digital Notch Filter Depth
CANON Digital Galvano Scanner System
Users Manual 1.00
KP-1SM Series + GC-251
72
Page 73

Parameter ID 22
Data Cutoff frequency of the digital low-pass filter (Unit: Hz)
Return Value 0: Parameter setting successful
1: Parameter setting unsuccessful
Explanation This parameter is used to set the cutoff frequency of the digital low-pass filter.
Related
Command
/Parameter
Parameter ID 23
Data Central frequency of the first analog notch filter (Unit: Hz)
Return Value 0: Parameter setting successful
Explanation This parameter is used to set the central frequency of the first analog notch filter.
Related
Command
/Parameter
Parameter ID 24
Data Central frequency of the second analog notch filter (Unit: Hz)
Return Value 0: Parameter setting successful
Explanation This parameter is used to set the central frequency of the second analog notch filter.
Related
Command
/Parameter
Parameter ID 25
Data Central frequency of the third analog notch filter (Unit: Hz)
Return Value 0: Parameter setting successful
Explanation This parameter is used to set the central frequency of the third analog notch filter.
Related
Command
/Parameter
1: Parameter setting unsuccessful
The setting range is from 9750 to 42820 Hz.
1: Parameter setting unsuccessful
The setting range is from 9750 to 42820 Hz.
1: Parameter setting unsuccessful
The setting range is from 9750 to 42820 Hz.
Parameter
Name
Parameter
Name
Parameter
Name
Parameter
Name
Digital Low-pass Filter Cutoff
Frequency
First Analog Notch Filter Central
Frequency
Second Analog Notch Filter Central
Frequency
Third Analog Notch Filter Central
Frequency
CANON Digital Galvano Scanner System
Users Manual 1.00
KP-1SM Series + GC-251
73
Page 74

Parameter ID 26
Parameter
Name
Raster Scan Time
Data Scan Time (Unit: See Explanation.)
Return Value 0: Parameter setting successful
1: Parameter setting unsuccessful
Explanation This command is used to set the raster scan time (operation by command).
The scan time is the set value × 10 μs.
E.g. For the interval of 100 ms, set 10000 (10000 × 10 μs = 100 ms).
CW
CW
Scan Angle
Scan Angle
(+)
(+)
0
0
Scan Angle
Scan Angle
(−)
(−)
Raster Scan Time
Raster Scan Time
CCW
CCW
Related
Command
/Parameter
Raster Scan Duty Ratio (Parameter ID = 27)
Raster Scan Angle (Parameter ID = 28)
Raster Scan Interval Time (Parameter ID = 30)
Raster Scan Start Position (Parameter ID = 31)
Parameter ID 27
Parameter
Name
Raster Scan Duty Ratio
Data Raster scan duty ratio (Unit: %)
Return Value 0: Parameter setting successful
1: Parameter setting unsuccessful
Explanation This parameter is used to set the duty ratio of raster scan (operation by command).
(See Explanation of Parameter ID = 26.)
Related
Command
/Parameter
Raster Scan Time (Parameter ID = 26)
Raster Scan Angle (Parameter ID = 28)
Raster Scan Interval Time (Parameter ID = 30)
Raster Scan Start Position (Parameter ID = 31)
CANON Digital Galvano Scanner System
KP-1SM Series + GC-251
Users Manual 1.00
74
Page 75

Parameter ID 28
Parameter
Name
Raster Scan Angle
Data Raster scan angle (Unit: degree × 10000)
Return Value 0: Parameter setting successful
1: Parameter setting unsuccessful
Explanation This parameter is used to set the angle of raster scan (operation by command).
(See Explanation of Parameter ID = 26.)
Set the scan angle × 10000.
For ±5°, set 50000 (5 × 10000).
Related
Command
/Parameter
Raster Scan Time (Parameter ID = 26)
Raster Scan Duty Ratio (Parameter ID = 27)
Raster Scan Interval Time (Parameter ID = 30)
Raster Scan Start Position (Parameter ID = 31)
Parameter ID 30
Parameter
Name
Raster Scan Interval Time
Data Raster scan Interval time (Unit: second × 100)
Return Value 0: Parameter setting successful
1: Parameter setting unsuccessful
Explanation This parameter is used to set the Interval time of raster scan (operation by command).
(See Explanation of Parameter ID = 26.)
Set the wait time (sec) × 100.
For 0.1 sec, set 10 (0.1 × 100).
CW
CW
Raster Scan Interval Time
Raster Scan Interval Time
Scan Angle
Scan Angle
(+)
(+)
0
0
Scan Angle
Scan Angle
(−)
(−)
Raster Scan Interval Time
CCW
CCW
Raster Scan Interval Time
Related
Command
/Parameter
Raster Scan Time (Parameter ID = 26)
Raster Scan Duty Ratio (Parameter ID = 27)
Raster Scan Angle (Parameter ID = 28)
Raster Scan Start Position (Parameter ID = 31)
CANON Digital Galvano Scanner System
KP-1SM Series + GC-251
Users Manual 1.00
75
Page 76

Parameter ID 31
Data Raster scan start position (Unit: 0 or 1)
Return Value 0: Parameter setting successful
1: Parameter setting unsuccessful
Explanation This parameter is used to set the start of raster scan (operation by command) from the
negative or positive side.
0: Scan start from the negative side
1: Scan start from the positive side
Related
Command
/Parameter
Raster Scan Time (Parameter ID = 26)
Raster Scan Duty Ratio (Parameter ID = 27)
Raster Scan Angle (Parameter ID = 28)
Raster Scan Interval Time (Parameter ID = 30)
Parameter
Name
Raster Scan Start Position
Parameter ID 32
Data Z-phase (0-point position) offset value (Unit: pulse)
Return Value 0: Parameter setting successful
1: Parameter setting unsuccessful
Explanation This parameter is used to set an offset from the actual Z-phase position for determining
the 0-pulse position.
Related
Command
/Parameter
Parameter ID 33
Data Acceleration time (Unit: ms)
Return Value 0: Parameter setting successful
Explanation This parameter is valid when “Command ID = 18: Acceleration Control” is ON.
Related
Command
/Parameter
1: Parameter setting unsuccessful
Set the time until the velocity reaches the value set by “Parameter ID = 2: Max Velocity”
in step movement (movement by command).
If 0 is set, the target command of the maximum velocity is followed from the start of
movement.
Acceleration control (Command ID = 18)
Maximum velocity (Parameter ID = 2)
Movement start (Command ID = 8)
Parameter
Name
Parameter
Name
Z-phase Offset
Acceleration Time
CANON Digital Galvano Scanner System
Users Manual 1.00
KP-1SM Series + GC-251
76
Page 77

Parameter ID 34
Data Deceleration time (Unit: ms)
Return Value 0: Parameter setting successful
1: Parameter setting unsuccessful
Explanation This parameter is used to set the deceleration time for a stop by “Command ID = 9:
Forced Stop.”
Related
Command
/Parameter
Parameter ID 36
Data Out-position (Unit: pulse)
Return Value 0: Parameter setting successful
Explanation An error is output if a difference from the target value exceeds the setting of this
Related
Command
/Parameter
Parameter ID 40
Data Feed-forward gain (Unit: none)
Return Value 0: Parameter setting successful
Explanation This parameter is used to set the feed-forward gain. This is usually set at shipping.
Related
Command
/Parameter
Parameter ID 42
Data Overshoot Control (Unit: none)
Return Value 0: Parameter setting successful
Explanation This parameter is used to set pole rearrangement. This is usually set at shipping.
Related
Command
/Parameter
Forced Stop (Command ID = 9)
1: Parameter setting unsuccessful
parameter becoming static.
Setting 0 is invalid.
Bit 13 “Current Saturation” becomes 1 in error read (Command ID = 15).
1: Parameter setting unsuccessful
Setting 0 disables feed-forward.
1: Parameter setting unsuccessful
Setting 100 disables pole rearrangement.
Parameter
Name
Parameter
Name
Parameter
Name
Parameter
Name
Deceleration Time
Out-position width
Feed-forward Gain
Overshoot Control
CANON Digital Galvano Scanner System
Users Manual 1.00
KP-1SM Series + GC-251
77
Page 78

Parameter ID 44
Data Deviation limit (Unit: pulse)
Return Value 0: Parameter setting successful
1: Parameter setting unsuccessful
Explanation If a deviation from the target value is great, an excess current usually flows, causing a
current saturation error.
Make adjustments so that the controller will not deviate beyond this setting.
Note: This is usually set appropriately at shipping.
Related
Command
/Parameter
Parameter ID 48
Data A/B-phase offset of encoder VR adjustment head 1 (Unit: none)
Return Value 0: Parameter setting successful
Explanation This parameter is used to adjust the offset of encoder signal.
Related
Command
/Parameter
1: Parameter setting unsuccessful
Note: This is usually set appropriately at shipping.
Parameter
Name
Parameter
Name
Deviation Limit
Encoder VR Adjustment
Head 1 A/B-phase Offset
Parameter ID 49
Data A-phase amplitude of encoder VR adjustment head 1 (Unit: none)
Return Value 0: Parameter setting successful
1: Parameter setting unsuccessful
Explanation This parameter is used to adjust the A-phase amplitude of the encoder signal.
Note: This is usually set appropriately at shipping.
Related
Command
/Parameter
Parameter ID 50
Data B-phase amplitude of encoder VR adjustment head 1 (Unit: none)
Return Value 0: Parameter setting successful
Explanation This parameter is used to adjust the B-phase amplitude of the encoder signal.
Related
Command
/Parameter
1: Parameter setting unsuccessful
Note: This is usually set appropriately at shipping.
Parameter
Name
Parameter
Name
Encoder VR Adjustment
Head 1 A-phase Amplitude
Encoder VR Adjustment
Head 1 B-phase Amplitude
CANON Digital Galvano Scanner System
Users Manual 1.00
KP-1SM Series + GC-251
78
Page 79

Parameter ID 51
Data A/B-phase offset of encoder VR adjustment head 2 (Unit: none)
Return Value 0: Parameter setting successful
1: Parameter setting unsuccessful
Explanation This parameter is used to adjust the offset of encoder signal.
Note: This is usually set appropriately at shipping.
Related
Command
/Parameter
Parameter ID 52
Data A-phase amplitude of encoder VR adjustment head 2 (Unit: none)
Return Value 0: Parameter setting successful
Explanation This parameter is used to adjust the A-phase amplitude of the encoder signal.
Related
Command
/Parameter
Parameter ID 53
Data B-phase amplitude of encoder VR adjustment head 2 (Unit: none)
Return Value 0: Parameter setting successful
Explanation This parameter is used to adjust the B-phase amplitude of the encoder signal.
Related
Command
/Parameter
1: Parameter setting unsuccessful
Note: This is usually set appropriately at shipping.
1: Parameter setting unsuccessful
Note: This is usually set appropriately at shipping.
Parameter
Name
Parameter
Name
Parameter
Name
Encoder VR Adjustment
Head 2 A/B-phase Offset
Encoder VR Adjustment
Head 2 A-phase Amplitude
Encoder VR Adjustment
Head 2 B-phase Amplitude
CANON Digital Galvano Scanner System
Users Manual 1.00
KP-1SM Series + GC-251
79
Page 80

Parameter ID 64
Data DSP operation setting (Unit: none)
Return Value 0: Parameter setting successful
1: Parameter setting unsuccessful
Explanation This parameter is used to set the activation mode. Each bit has a meaning.
Bit 0 0: No automatic encoder correction at homing to the origin
1: Automatic encoder correction at homing to the origin
Bit 1 0: Activation in internal clock mode
1: Activation in high-speed serial communication (external clock) mode
Bit 2 0: High-speed serial communication specification (XY2-100) (Usually 0)
Note: The setting is decimal.
Related
Command
/Parameter
Parameter ID 66
Data High Speed Serial Status Format (Unit: none)
Return Value 0: Parameter setting successful
Explanation The content of status output to the status line of high-speed serial communications can
Related
Command
/Parameter
1: Parameter setting unsuccessful
be selected.
1: Controller Condition
2: Current position (Axis 1)
3: Current position(Axis 2)
4: Current position(Axis1 , Axis2)
(For details, see 2.7.2, “High Speed Serial Communications”)
Parameter
Name
Parameter
Name
DSP Operation Setting
High Speed Serial Status Format
Parameter ID 67
Data High Speed Serial Data Length (Unit: bit) Range = 16〜20
Return Value 0: Parameter setting successful
1: Parameter setting unsuccessful
Explanation Position Data length of High speed serial communication can be specified.
Range = 16bit 〜 20bit
(For details, see 2.7.2, “High Speed Serial Communications”)
Related
Command
/Parameter
CANON Digital Galvano Scanner System
Users Manual 1.00
KP-1SM Series + GC-251
Parameter
Name
High Speed Serial Data Length
80
Page 81

Parameter ID 68
Data High Speed Serial Data LSB Position (Unit: bit) Range = 0 〜 4
Return Value 0: Parameter setting successful
1: Parameter setting unsuccessful
Explanation
Related
Command
/Parameter
The least significant bit position of the target position data of high-speed serial
communication 20bit data can be specified.
Range = 0bit 〜 4bit
(For details, see 2.7.2, “High-speed Serial Communications”)
Parameter
Name
High Speed Serial Data LSB Position
CANON Digital Galvano Scanner System
Users Manual 1.00
KP-1SM Series + GC-251
81
Page 82

8.3. Modifying Parameters
This section explains how to modify parameters.
GALILEO
②
④⑥
③
①
⑤
・ Select the All Parameter tab. ①
・ Select an axis for parameter settings. ②
・ The current parameter values are displayed. ③
・ Modify the parameter values as required. When a parameter value is modified, its cell turns red. ③
・ Turn the servo OFF (necessary for modifying parameters). ④
・ Press the SET button to reflect modified parameters in the controller settings. ⑤
・ Turn the servo ON. ⑥
Note: Pressing the SET button reflects modified parameters in the controller settings but does not write
them into the controller ROM. When the power is turned off and on again, the controller starts with the old
parameters read from ROM. See 8-4 for writing modified parameters into ROM.
CANON Digital Galvano Scanner System
Users Manual 1.00
KP-1SM Series + GC-251
82
Page 83

8.4. Writing Parameters into ROM
All parameters are written in the controller ROM. At activation, the parameters are automatically read
and set in the controller.
If parameters are modified, they should be written into ROM for activation with the same settings at the
next power-on.
Write modified parameters into ROM as follows:
GALILEO
②
①
⑤
③
④
・ Select the All Parameter tab. ①
・ Select an axis for parameter settings.②
・ The current parameter values are displayed. ③
・ Press the Save to EEPROM button.④
・ “Saving to EEPROM” is displayed. ⑤
Note: Some parameter settings may disable normal activation next time.
If this problem occurs, change the activation mode for no automatic homing to the origin and check the
set values. (See 6-1, “Setting Controller Activation Mode.”)
CANON Digital Galvano Scanner System
Users Manual 1.00
KP-1SM Series + GC-251
83
Page 84

8.5. Saving a Parameter File
All parameters can be saved into a PC file.
Save a parameter file as follows:
③
②
①
④
・ Select the All Parameter tab. ①
・ Select an axis for parameter settings. ②
・ The current parameter values are displayed. ③
・ Press the Save to File button. Specify a location and save the file. ④
CANON Digital Galvano Scanner System
Users Manual 1.00
KP-1SM Series + GC-251
84
Page 85

9. Safety Functions
This system has various safety functions to ensure safe use.
9.1. Safety Functions
The safety functions can be classified into hardware monitoring and software monitoring.
Hardware monitoring
・Power supply fuse +24 V line (each axis)
+5 V line
・Output amplifier overheat Temperature monitoring by thermistor (abut 80ºC)
・Motor overheat Temperature monitoring by thermistor (abut 75ºC)
(If output amplifier or motor overheat is detected, the amplifier output is shut down.)
・Output amplifier IC Shutdown function
Software monitoring
The controller status is always monitored by software and error notification is made if an abnormality
occurs.
Depending on the error type (priority), digital monitor I/O (2 bits) is used for this notification.
The details of an error can be checked by an RS-232C command.
See 9-2 for the error contents.
Note: The post-error system status and recovery method depend on the priority of the error.
See 9-2, “Errors.”
CANON Digital Galvano Scanner System
Users Manual 1.00
KP-1SM Series + GC-251
85
Page 86

9.2. Errors
Priority: High
Error Hex Monitor Item Error Condition
Setting
Change
Possible
/Impossible
(Parameter)
System
status after
error
Digital
Output
Recovery Method
Stroke over
0x0001
Counter over
In-position overtime
No clock
Driver overheat
Motor overheat
Homing error 0x0800 Homing to the origin Homing is not completed normally. Impossible
Encoder signal error
Hardware servo OFF
Current saturation
0x0002
0x0004
0x0008
0x0010
0x0020
0x1000
0x4000
0x8000
Encoder pulse count The encoder count is outside the range set
by parameters P00 (CW Limit) and P01
(CCW Limit).
Velocity (calculated from encoder
pulses)
Encoder pulse count The accumulated time based on the setting
Clock Clock pulses are not input.
A/D value of thermistor at controller
output amplifier
A/D value of thermistor at motor
coil
Encoder signal level at homing to
origin
Output amplifier shutdown function
Thermistor (controller and motor)
Output current command Current saturation (10A×P09 (Current
The velocity exceeds the setting by P02
(Maximum Velocity).
of P03 (In-position Width) exceeds the
setting of P05 (In-position Overtime).
The driver temperature exceeds the A/D
value corresponding to 70ºC. (Software
monitoring)
The motor temperature exceeds the A/D
value corresponding to 70ºC. (Software
monitoring)
An encoder signal is abnormal.
The output amplifier is shut down.
The thermistor-detected temperature
exceeds the setting. (Hardware
monitoring). Error notification by software is
usually made first.
limit)) continues for a specified time or
longer.
Possible
(P00, P01)
Possible
(P02)
Possible
(P03, P05)
Impossible
Impossible
Impossible
Impossible
Impossible
Possible
(P09)
Error output
Servo OFF
(Axis1)
Connector
A1
Monitor
Board
D1
(Axis2)
Connector
B2
Monitor
Board
D4
Soft reset
(C00)
+
Homing
(C02)
or
Power-off/on
CANON Digital Galvano Scanner System
KP-1SM Series + GC-251
Users Manual 1.00
86
Page 87

Priority: Low
Error Hex Monitor Item Error Condition
Setting
Change
Possible
/Impossible
(Parameter)
System
status after
error
Digital
Output
Recovery Method
Format error
Command data error
Parameter error
Status error
Communication error
Out-position error
0x0040
0x0080
0x0100
0x0200
0x0400
0x2000
Command format An undefined command or parameter is
sent.
Command data
Parameter value A parameter value is beyond the setting
Command description A command not valid for the current status
Communication flag Communication flag time-out occurs.
Encoder pulse count The setting of P24 (Out-position Width) is
Command data is illegal.
No data is given to a command requiring
data.
Data is given to a command requiring no
data.
Data outside the setting range is set.
range.
is sent.
exceeded.
Impossible
Impossible
Impossible
Impossible
Impossible
Possible
(P24)
Error output
only
(Axis1)
Connector
B1
Monitor
Board
D2
(Axis2)
Connector
A3
Monitor
Board
D5
Error clearance
(C01)
CANON Digital Galvano Scanner System
KP-1SM Series + GC-251
Users Manual 1.00
87
Page 88

Canon Inc.
Canon Marketing Japan Inc.
2-16-2, Konan, Minato-ku, Tokyo 108-8011
CB Sales Department Tel. 03-3740-3336
・The contents of this document are subject to change without notice.
・If you find any question, error, or omission in this document, please contact Canon.
CUD-L007-E01 © CANON INC. 2008 PRINTED IN JAPAN
 Loading...
Loading...