

Page 1

Caractéristiques
Caractéristiques
de fonctionnement
de fonctionnement
Contrôleur antipatinage – antiblocage EC-16™ de Bendix®
TROUS DE
FIXATION
(4)
SD-13-4787F
CONNECTEUR
À 18 BROCHES
FIGURE 1 – CONTRÔLEUR EC-16
CONNECTEUR
À 30 BROCHES
AFFICHAGE DE
DIAGNOSTIC
™
DESCRIPTION
GÉNÉRALITÉS
™
L’EC-16
le composant de base d’une famille de systèmes de contrôle
antiblocage de roue pour autobus, camions et tracteurs de
camions. En plus de sa fonction antiblocage, le contrôleur
EC-16
une fonction antipatinage en option. La Figure 1 illustre la
confi guration de base du contrôleur EC-16
Conçu pour minimiser le potentiel de blocage de freins
sur toutes les roues lors d’un freinage intensif, le système
antiblocage basé sur le contrôleur EC-16
véhicule de maintenir un haut degré de stabilité et de
contrôle pendant le freinage. Dans la plupart des cas, la
distance d’arrêt du véhicule est également réduite. La
partie antiblocage du système basé sur le contrôleur EC16
contrôle du dérapage de toutes les roues permet d’optimiser
le contrôle du volant et de raccourcir la distance d’arrêt.
La fonction antipatinage, en option dans le système de
contrôle antiblocage des roues du véhicule, améliore la
traction du véhicule pendant l’accélération et dans des
conditions routières difficiles. La fonction antipatinage
est intégrée à la logique antiblocage, ce qui permet de
surveiller la vitesse de rotation de roue à partir des capteurs
est un contrôleur antiblocage électronique. C’est
™
peut être assemblé et programmé pour fournir
™
.
™
permet au
™
minimise le dérapage lors d’un freinage intensif. Le
pendant l’accélération et le freinage. Le système facilite le
maintien de la stabilité du véhicule sur des surfaces de route
dangereuses et améliore la conduite et la sécurité.
™
Deux versions du contrôleur EC-16
la plus ancienne était préprogrammée à l’usine selon les
particularités du véhicule, comme le nombre de capteurs de
vitesse, l’activation de la fonction antipatinage, ainsi que le
type de fonction antipatinage (limitation de couple, freinage
du différentiel ou les deux). Un numéro de pièce était attribué
au contrôleur EC-16
fonctions programmées dans l’unité. Les versions plus
récentes contiennent une fonction d’autoconfi guration ou
d’apprentissage, qui permet au contrôleur EC-16
confi guré par l’utilisateur lorsque le dispositif est installé sur
le véhicule. Les nouvelles versions de contrôleur EC-16
contiennent donc toutes les fonctions et toutes les options
disponibles et activeront les fonctions spécifi ques requises
pour le véhicule sur lequel elles sont installées. Les nouvelles
versions du contrôleur EC-16
des véhicules utilisant seulement la fonction antiblocage
ou sur des véhicules utilisant la fonction antipatinage. La
procédure d’activation de la fonction d’autoconfi guration
et d’identifi cation de la version des contrôleurs EC-16
trouve dans la section intitulée « Confi guration du contrôleur
™
EC-16
».
™
, correspondant spécifi quement aux
sont offertes. La version
™
d’être
™
peuvent être installées sur
™
™
se
1
Page 2
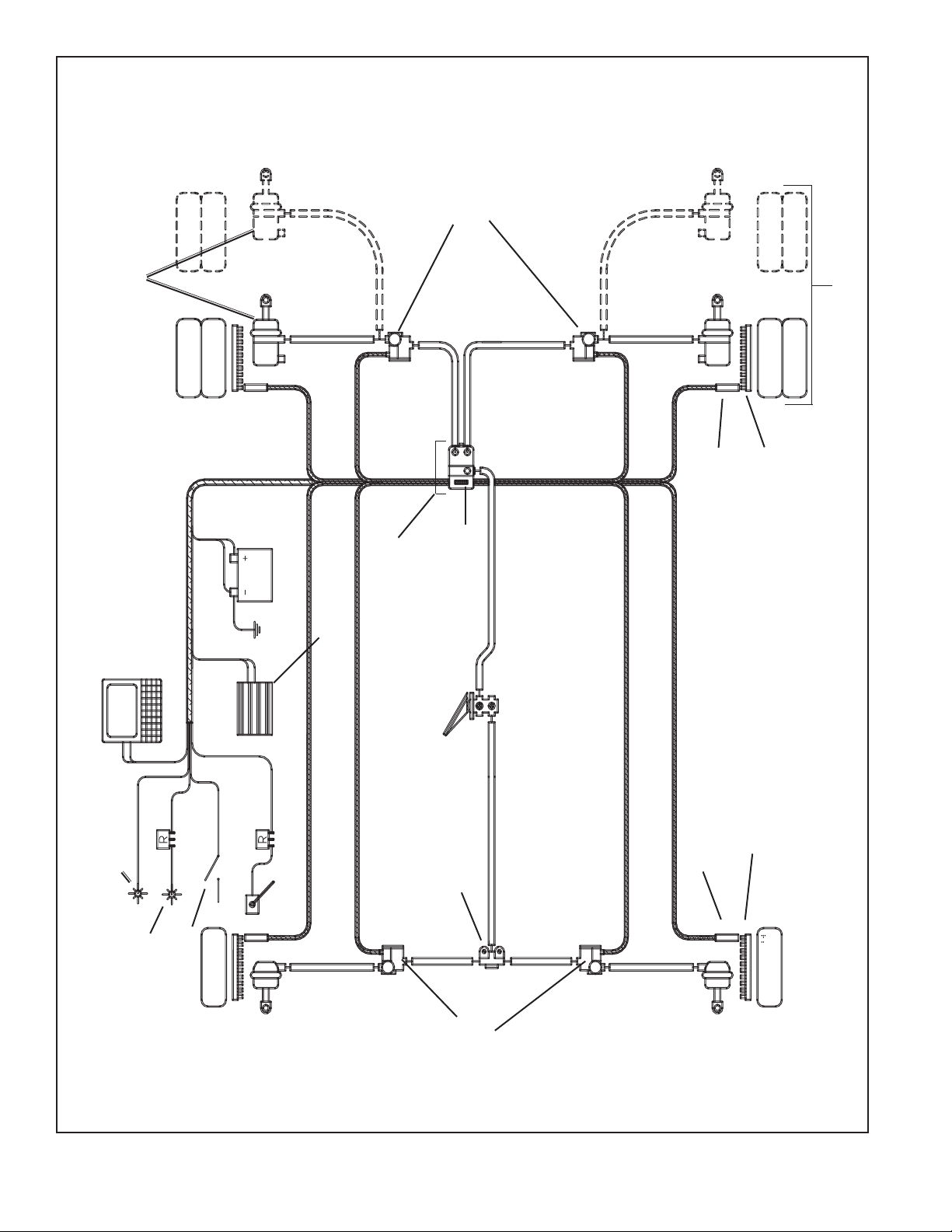
™
OU M-22
™
MODULATEURS
M-21
FREINS À RESSORT ET DE
SERVICE DE L’ESSIEU ARRIÈRE
DIAGNOSTIC
ORDINATEUR DE
BATTERIE
MODULE DE CONTRÔLE
ÉLECTRONIQUE DU MOTEUR
ENSEMBLE ANTIBLOCAGE
PONT ARRIÈRE EN TANDEM
RÉLUCTEUR
™
OU AT-2
™
ANTIPATINAGE AT-1
™
EC-16
CONTRÔLEUR
SERVICE
CAPTEUR DE VITESSE
DE ROTATION DE ROUE
CLAPET DU FREIN DE
VOYANT D’ANTIPATINAGE
VOYANT ANTIBLOCAGE
DU RALENTISSEUR
INTERRUPTEUR DE DÉSACTIVATION
DE L’ANTIPATINAGE
VALVE DE
INTERRUPTEUR D’ACTIVATION
FIGURE 2 – SCHÉMA DU SYSTÈME DU CONTRÔLEUR EC-16
2
RAPIDE
DESSERRAGE
™
™
OU M-22
™
MODULATEURS
M-21
CAPTEUR DE VITESSE
RÉLUCTEUR
DE ROTATION DE ROUE
Page 3
Afi n de fournir un contrôle antiblocage intégral sur les roues,
le contrôleur EC-16™ est utilisé conjointement avec les
composants suivants :
- Quatre capteurs de vitesse de rotation de roue
- Quatre modulateurs de pression d’air
- Un voyant d’état antiblocage installé sur le tableau de bord
- Un tiroir relais du frein de service
Lorsque l’appareil est programmé pour offrir une fonction
antipatinage, qui s’ajoute à la fonction antiblocage, les
composants suivants sont ajoutés :
- Un solénoïde antipatinage (incorporé dans le tiroir relais)
- Deux capteurs de vitesse de rotation de roue
supplémentaires (en option pour les véhicules à pont
tandem dotés d’une fonction de freinage par différentiel)
- Un voyant d’état d’antipatinage installé sur le tableau de
bord
- Connexion série au module de commande du moteur
(pour les véhicules programmés avec une fonction de
limitation de couple)
- Câblage et interrupteur de désactivation de la fonction
antipatinage
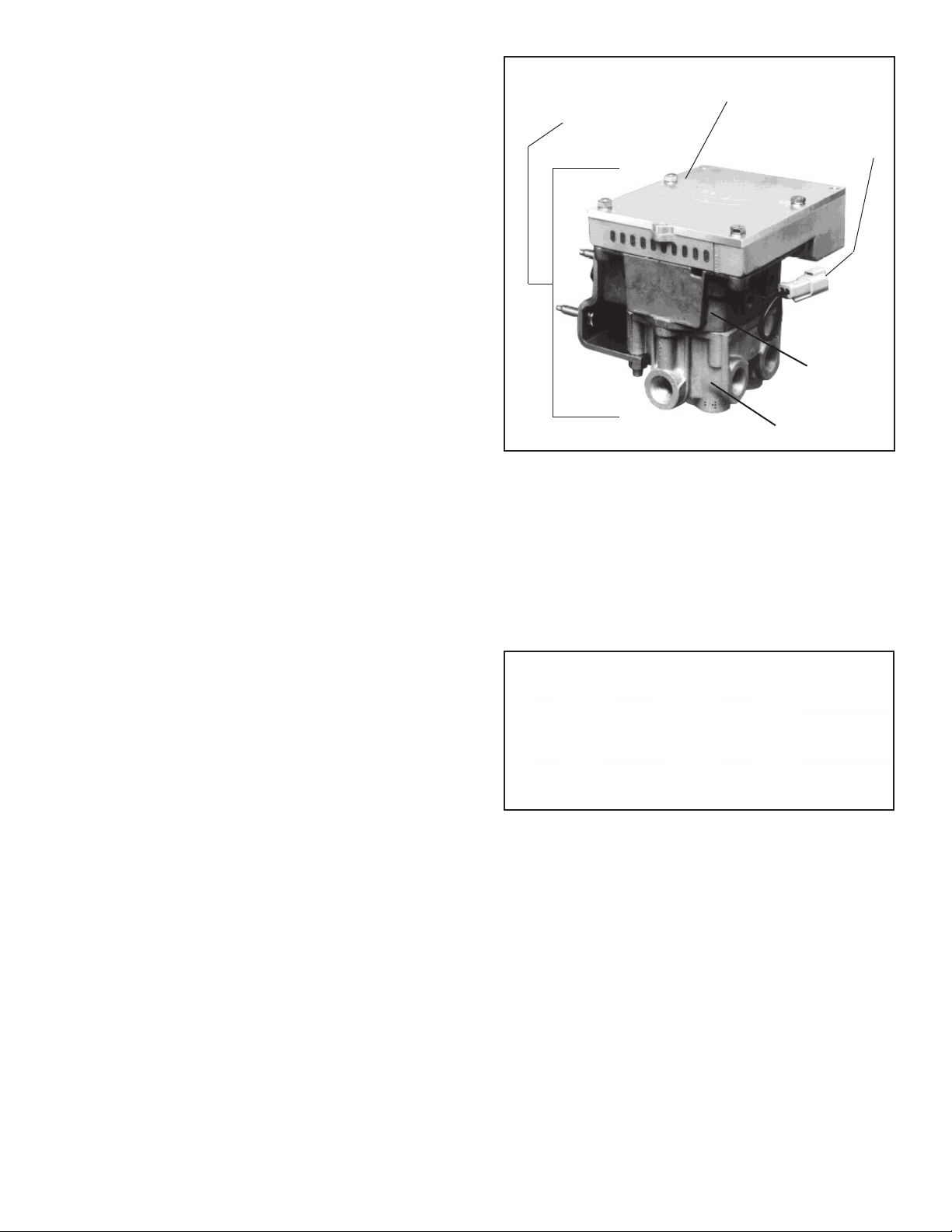
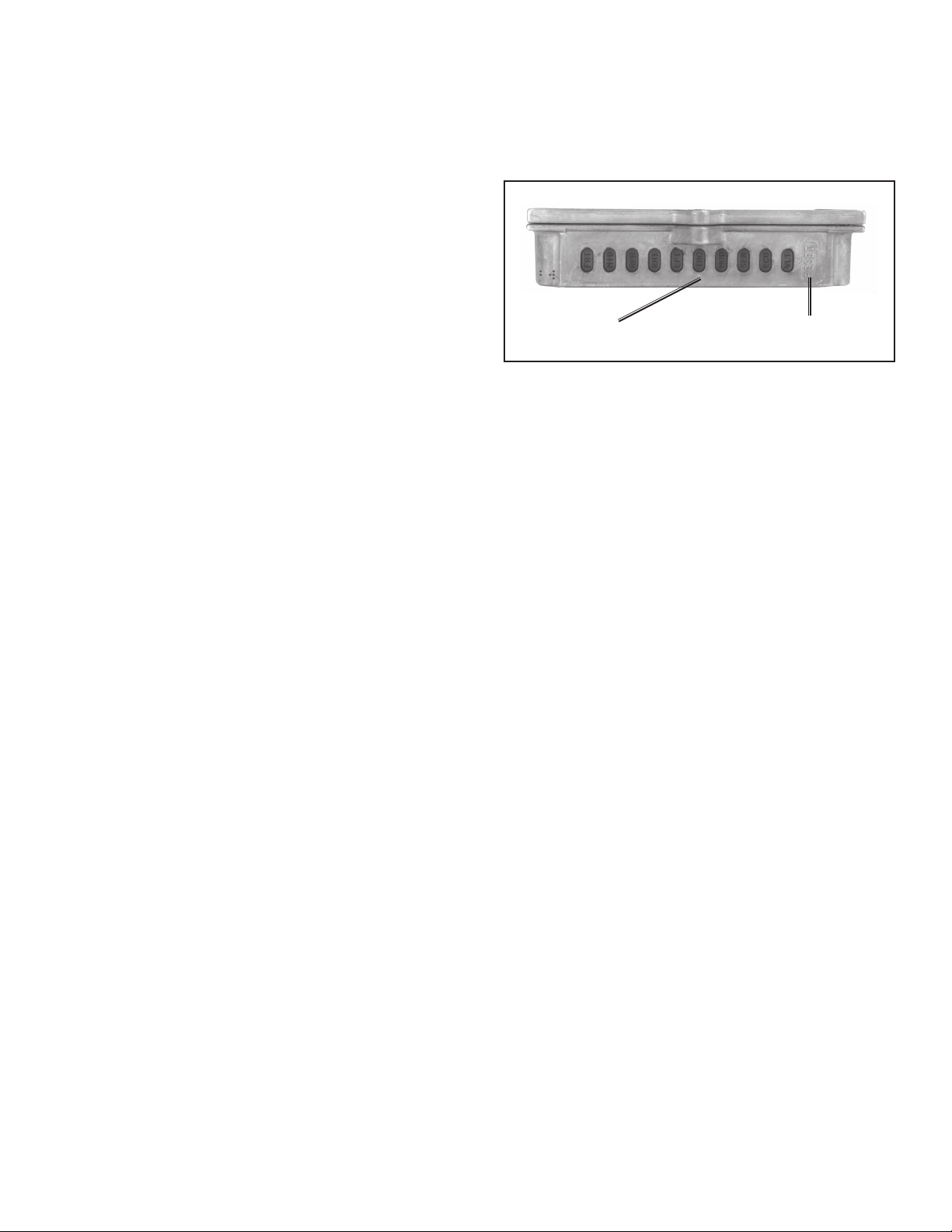
COMPOSANTS PHYSIQUES
Les composants électroniques du contrôleur EC-16™ sont
contenus dans un boîtier en aluminium moulé et protégés
de l’environnement par un composé autoréparant à la
silicone. Le boîtier en métal et la conception des composants
électroniques sont prévus pour fournir un haut degré de
protection contre le brouillage radio et électromagnétique.
L’affi cheur à DEL breveté et un interrupteur de réinitialisation
activé magnétiquement sont incorporés dans le boîtier pour
permettre le dépannage de diagnostic.
Des connecteurs électriques situés dans le logement du
contrôleur, dans le coin opposé à l’affi cheur de diagnostic,
™
connectent le contrôleur EC-16
aux composants du
système antiblocage et antipatinage : un connecteur à 30
broches et un connecteur à 18 broches Packard Electric de
série 150 « Metri pack ». En plus de ces deux connecteurs
montés sur boîtier, le contrôleur EC-16™ utilise également
un connecteur Deutsch à 2 broches, lorsque programmé
pour la fonction antipatinage en option. Le connecteur à 2
broches est relié à un solénoïde d’antipatinage situé dans
la partie supérieure de l’ensemble tiroir relais antiblocage.
(Cf. Figure 3.)
INSTALLATION
Le contrôleur EC-16™ peut être installé de deux façons
différentes. La Figure 1 illustre le modèle autonome. Ce
modèle est conçu pour être installé avec un support sur un
cadre et n’est pas fi xé au tiroir relais antiblocage.
™
L’autre contrôleur EC-16
des quatre valves différentes. Toutes les valves offrent une
est conçu pour être installé sur une
ENSEMBLE
ANTIBLOCAGE
ANTIPATINAGE
FIGURE 3 – CONTRÔLEUR EC-16™ AVEC TIROIR RELAIS
ANTIBLOCAGE ANTIPATINAGE
CONTRÔLEUR
EC-16™
CONNECTEUR À 2
BROCHES (VERS LE
SOLÉNOÏDE ANTIPATINAGE)
SOLÉNOÏDE
ANTIPATINAGE
RELAIS
ANTIPATINAGE
fonction de relais et remplacent le relais de service standard
sur les véhicules équipés d’un système antiblocage. Dans
certains cas, les valves offrent également des fonctions
spécialisées. Lorsque le contrôleur EC-16
™
est installé sur
l’une ou l’autre de ces valves, il en résulte un assemblage
final incorporant sa propre désignation de modèle. Se
reporter au tableau et à la Figure 3.
Soupape
antiblocage
AR 1 Aucune Partout Relais de
AR 2 Doseur de frein
ATR-1 Antipatinage Partout Antipatinage AT 1
ATR 2 Antipatinage et
Fonction
supplémentaire
haut le pied
doseur de frein
haut le pied
Application pour
le véhicule
Tracteurs
seulement
Tracteurs
seulement
Désignation
(Valve + EC-16)
contrôleur CR 17
Relais de
contrôleur CR 18
Antipatinage AT 2
ENTRÉES DE DONNÉES ET SORTIES DE
COMMANDE DU CONTRÔLEUR EC-16™
GÉNÉRALITÉS
Le contrôleur EC-16™ reçoit des données de plusieurs
composants du système et, en fonction de celles-ci, émet
des commandes ou fournit de l’information. Certaines
parties du contrôleur EC-16
commandes et de l’information. (Cf. Figure 4.)
ENTRÉES
- La vitesse de rotation de roue est transmise au contrôleur
EC-16™ par un faisceau de fi ls provenant des capteurs de
vitesse de rotation de roue individuels au niveau des roues
du véhicule ou dans celles-ci. Les capteurs de vitesse de
rotation de roue travaillent avec un rélucteur ou une couronne
d’impulsion pour fournir des données au contrôleur EC-16™
sous la forme d’un signal de courant alternatif dont la tension
™
reçoivent et transmettent des
3
Page 4
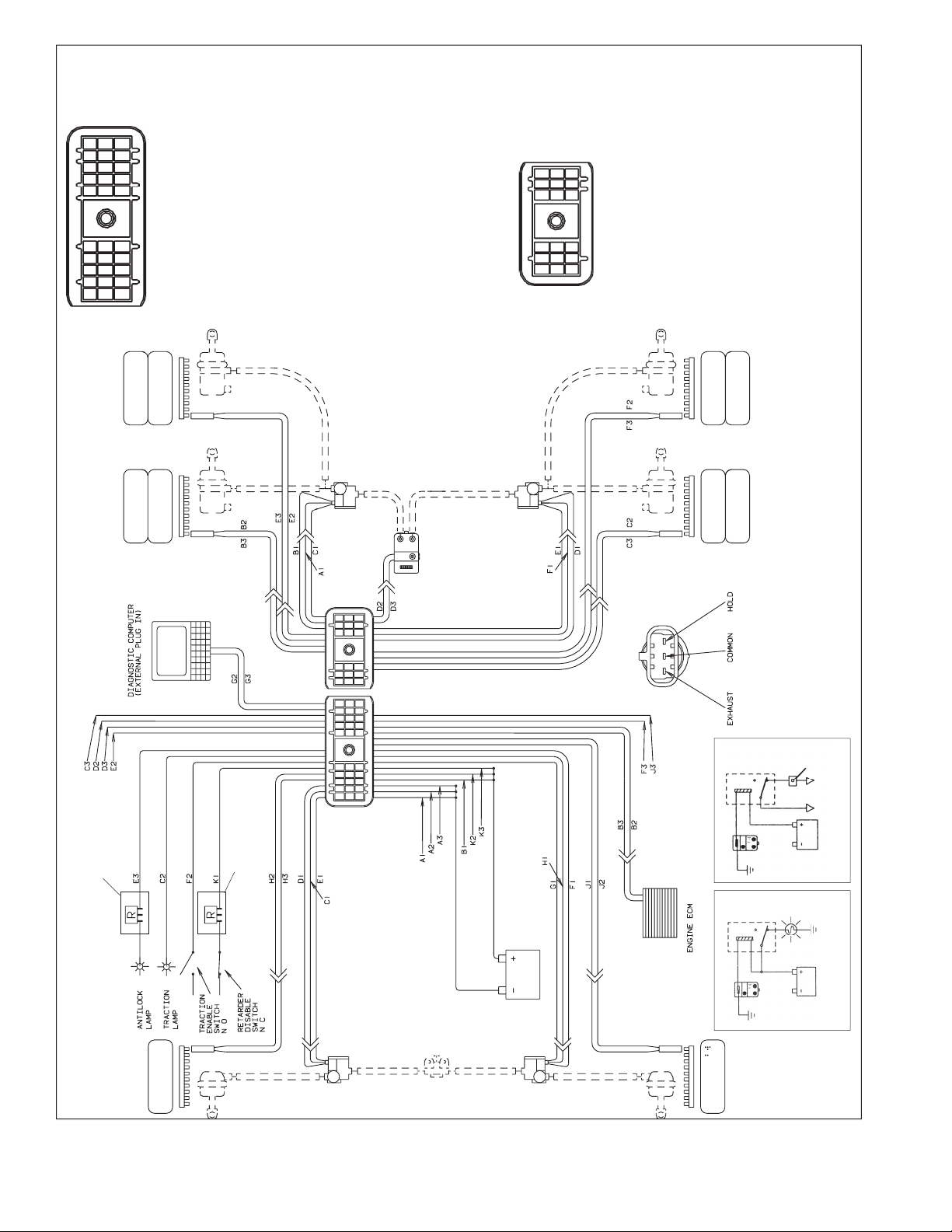
1
2
3
1
2
3
K J H G F E D C B A
A1 MASSE
A2 MASSE
A3 MASSE
B1 TENSION DE BATTERIE
B2 CONTRÔLE MOTEUR SÉRIE A
B3 CONTRÔLE MOTEUR SÉRIE B
C1 COMMUN DU MODULATEUR AVANT DROIT
C2 VOYANT ANTIPATINAGE
C3 SORTIE AUXILIAIRE
D1 MAINTIEN DU MODULATEUR AVANT DROIT
D2 NON UTILISÉ
D3 NON UTILISÉ
E1 ÉVACUATION DU MODULATEUR AVANT DROIT
E2 NON UTILISÉ
E3 VOYANT D’AVERTISSEMENT
F1 ÉVACUATION DU MODULATEUR AVANT GAUCHE
F2 INTERRUPTEUR D’ACTIVATION D’ANTIPATINAGE
F3 NON UTILISÉ
M-22
G1 MAINTIEN DU MODULATEUR AVANT GAUCHE
G2 DIAGNOSTIC SÉRIE A
G3 DIAGNOSTIC SÉRIE B
H1 COMMUN DU MODULATEUR AVANT GAUCHE
H2 SIGNAL DE VITESSE DE ROTATION DE ROUE AVANT DROIT
H3 VITESSE DE ROTATION DE ROUE AVANT DROIT
GAUCHE
J1 SIGNAL DE VITESSE DE ROTATION DE ROUE AVANT
J2 VITESSE DE ROTATION DE ROUE AVANT GAUCHE
J3 MASSE DU CHÂSSIS
K1 DÉSACTIVATION DU RALENTISSEUR
MODULATEUR
AT-1 ET AT-2 ET
CONTRÔLEUR
ANTIBLOCAGE
K2 TENSION DE BATTERIE
K3 TENSION DE BATTERIE
M-22
F E D C B A
A1 COMMUN DU MODULATEUR ARRIÈRE DROIT
A2 MASSE DU RELAIS FUTUR
A3 SORTIE AUXILIAIRE
B1 MAINTIEN DU MODULATEUR ARRIÈRE DROIT
B2 SIGNAL DE VITESSE DE ROTATION DE ROUE DU MILIEU
DROITE
GAUCHE
B3 VITESSE DE ROTATION DE ROUE DU MILIEU DROITE
C1 ÉVACUATION DU MODULATEUR ARRIÈRE DROIT
C2 SIGNAL DE VITESSE DE ROTATION DE ROUE DU MILIEU
C3 VITESSE DE ROTATION DE ROUE DU MILIEU GAUCHE
D1 ÉVACUATION DU MODULATEUR ARRIÈRE GAUCHE
CONNECTEUR SUR LE
DROITE
D2 SOURCE DU SOLÉNOÏDE D’ANTIPATINAGE
D3 MASSE DU SOLÉNOÏDE D’ANTIPATINAGE
E1 MAINTIEN DU MODULATEUR ARRIÈRE GAUCHE
E2 SIGNAL DE VITESSE DE ROTATION DE ROUE ARRIÈRE
MODULATEUR M-22
GAUCHE
E3 VITESSE DE ROTATION DE ROUE ARRIÈRE DROITE
F1 COMMUN DU MODULATEUR ARRIÈRE GAUCHE
F2 SIGNAL DE VITESSE DE ROTATION DE ROUE ARRIÈRE
F3 VITESSE DE ROTATION DE ROUE ARRIÈRE GAUCHE
ci-dessous
du relais du voyant
Consulter la cartouche
ci-dessous
du relais du voyant
Consulter la cartouche
Modulateur M-22
M-22
FIGURE 4 – SCHÉMA DU SYSTÈME DE CÂBLAGE DU CONTRÔLEUR EC-16
4
de
ralentisseur
Interrupteur
Voyant
de
Vers le
ralentisseur
Vers le
ralentisseur
Batterie
Relais de ralentisseur
tableau
de bord
Batterie
Relais de voyant
Relais
Contrôleur
antiblocage
Relais
Contrôleur
antiblocage
CAPTEUR DE VITESSE WS-20
™
Page 5

CAPTEUR DE
VITESSE VERTICAL
WS-20
™
CONNECTEUR
ÉLECTRIQUE
ORIFICE
DE DÉBIT
ORIFICE
D’ÉVACUATION
ORIFICE
D’ALIMENTATION
MODULATEUR
M-22™
ORIFICE
D’ALIMENTATION
MODULATEUR
M-21
™
ORIFICE
DE DÉBIT
CAPTEUR DE
VITESSE WS-20™
À 90°
FIGURE 5 – CAPTEURS DE VITESSE WS-20
™
et la fréquence varient en fonction de l’augmentation ou de
la réduction de la vitesse de rotation de roue. Le contrôleur
™
EC-16
est conçu pour recevoir des données sur la vitesse
de rotation de roue à partir de plusieurs modèles de capteurs
de vitesse de rotation de roue, au taux de 100 impulsions
par rotation de roue. Le contrôleur EC-16
™
peut recevoir
simultanément et interpréter individuellement des signaux
de vitesse de rotation provenant des six capteurs de vitesse
de rotation de roue. La confi guration des essieux moteurs
du véhicule et l’utilisation ou non de la fonction antipatinage
déterminent le nombre de capteurs de vitesse de rotation de
roue devant être utilisés. Un véhicule équipé d’un seul essieu
arrière (4 x 2, 4 x 4 ou 6 x 2) exige 4 capteurs de vitesse
de rotation pour les fonctions antiblocage et antipatinage.
Un véhicule équipé de deux essieux arrière (6 x 4) exige 4
capteurs de vitesse de rotation pour la fonction antiblocage
seulement avec une option d’utiliser 6 capteurs de vitesse
pour une performance accrue des fonctions antiblocage et
antipatinage.
- L’alimentation du véhicule est fournie au contrôleur
™
EC-16
à partir du commutateur d’allumage, au moyen
d’un fusible ou d’un disjoncteur. (30 ampères) Le châssis
du véhicule sert de masse au contrôleur EC-16
™
.
- Une connexion pour l’interrupteur d’activation
d’antipatinage est fournie, mais pas toujours utilisée.
L’interrupteur permet d’activer ou de désactiver manuellement
la fonction antipatinage.
SORTIES
- Les modulateurs, comme le M-21™ ou le M-22™ de
Bendix
®
, permettent au contrôleur EC-16™ de modifier
la pression d’air appliquée aux freins de service par le
conducteur. Le modulateur est une soupape pneumatique
contrôlée électriquement et située à proximité du ou des
cylindres qu’elle commande. C’est la dernière soupape
par laquelle passe de l’air lors de son cheminement
vers le cylindre de frein. Un faisceau de fi ls connecte le
modulateur au contrôleur antiblocage EC-16
™
. Les vannes
électromagnétiques à l’intérieur du modulateur fournissent
l’interface électrique entre les composants électroniques du
contrôleur EC-16
™
et le système de freinage pneumatique.
CONNECTEUR
ÉLECTRIQUE
FIGURE 6 – MODULATEURS
Le contrôleur EC-16
™
peut contrôler simultanément et de
ORIFICE
D’ÉVACUATION
façon indépendante quatre ensembles de modulateurs
individuels.
- Un voyant antiblocage sur le tableau de bord et
ses relais électriques sont connectés et contrôlés par le
contrôleur EC-16
™
et permettent d’informer conducteur de
l’état du système antiblocage.
- Une connexion au ralentisseur de moteur ou de
transmission et son relais sont fournis sur le contrôleur
™
EC-16
, qui permettent au contrôleur de désactiver
temporairement le ralentisseur pendant certains modes
de fonctionnement. Bien que le contrôleur EC-16
™
puisse
exécuter cette fonction, et que les connexions sont fournies,
cette option n’est pas toujours utilisée. L’utilisation de
la fonction de désactivation du ralentisseur n’est pas
essentielle, mais vivement recommandée pour les véhicules
équipés d’un ralentisseur.
Remarque : Le contrôleur EC-16
™
peut également
désactiver le ralentisseur en utilisant le
même protocole J1922 utilisé pour contrôler
l’antipatinage, la fonction de limitation du
couple moteur. Pour que la désactivation
redondante du ralentisseur fonctionne, le
contrôleur EC-16
™
doit être connecté au
module de commande du moteur (comme
ce serait le cas si le contrôleur EC-16
™
était
programmé pour la fonction antipatinage,
limitation de couple).
- Le lien de données permet au contrôleur EC-16
™
de
« rapporter » l’état de son fonctionnement à un ordinateur
externe spécialisé, en réponse à certaines commandes
reçues. Le matériel du lien des données de diagnostic du
contrôleur EC-16
™
est conforme à la norme J1708 de la
S.A.E. Le protocole, ou langage codé utilisé, est conforme à
la norme J1587 de S.A.E. Deux connexions sur le contrôleur
™
EC-16
sont prévues pour le lien de données, mais ne sont
pas toujours utilisées. Le lien de données n’est pas essentiel
au bon fonctionnement du contrôleur EC-16
™
.
5
Page 6

Si le contrôleur EC-16™ est programmé pour l’antipatinage,
il contient les sorties suivantes :
- Une connexion au module de commande électronique
du moteur permet au contrôleur EC-16
™
de réduire le couple
moteur dans certaines circonstances.
- Un voyant antipatinage sur le tableau de bord est
connecté et contrôlé par le contrôleur EC-16
™
; il permet
d’informer le conducteur de l’état du système antipatinage.
- Une connexion au solénoïde d’antipatinage (situé dans la
partie supérieure du tiroir relais d’antiblocage antipatinage –
cf. Figure 3) est fournie au moyen d’un connecteur Deutsch
à 2 broches.
UTILISATION - ANTIBLOCAGE
PHILOSOPHIE
Le système antiblocage du contrôleur EC-16™ de Bendix®
utilise des capteurs et des modulateurs individuels, ainsi
qu’un contrôleur électronique, pour commander les quatre
roues du véhicule. En surveillant le taux de décélération
pendant le freinage, puis en ajustant la pression d’application
des freins sur chaque roue, le contrôleur EC-16
améliorer le freinage entre le pneu du véhicule et la surface
de la route, tout en maintenant la stabilité du véhicule.
Les freins de l’essieu arrière sont contrôlés de façon
indépendante; la pression d’application des freins sur une
roue individuelle est donc ajustée uniquement sur la base de
son comportement sur la surface de la route avec laquelle
la roue est en contact.
Bien que le frein de l’essieu directeur soit contrôlé par un
modulateur individuel, le contrôleur EC-16
™
ces freins d’une manière totalement indépendante. Une
philosophie de contrôle individuel modifi é est utilisée dans
le cas du contrôleur EC-16
™
pour freins d’essieu directeur.
Cette approche différente permet de minimiser la poussée
du volant dans le cas où chaque roue serait en contact avec
une surface de route différente (par exemple une surface
glacée à proximité de la bordure et un sommet sec). Le rôle
du contrôleur EC-16
™
consiste essentiellement à contrôler
les différences de forces de freinage entre les deux freins.
La roue en contact avec le pavé sec reçoit initialement
moins de force de freinage et est amenée au point maximum
pendant l’arrêt, alors que la roue en contact avec la surface
glacée tente de maintenir un freinage maximum pendant
toute la durée de l’arrêt.
Dans le cas des véhicules équipés d’un pont arrière en
tandem (6 x 2, 6 x 4), les capteurs de vitesse de rotation de
roues sont installés au niveau des roues, sur l’essieu le plus
susceptible de se bloquer en premier. Un modulateur unique
contrôle les deux freins du côté bordure du tandem et un
autre modulateur contrôle les deux freins du côté conducteur
du tandem. Dans cette confi guration des capteurs de vitesse
et des modulateurs, les deux freins d’un côté du tandem sont
traités comme un seul, car ils réagiront fort probablement
au même type de surface de route.
6
™
peut
ne traite pas
APPLICATION DES FREINS SANS ANTIBLOCAGE
Lors d’un freinage normal, la pression d’air du clapet de frein
entre dans l’orifi ce de contrôle du tiroir relais de service. Le
tiroir relais de service achemine l’air jusqu’au modulateur
antiblocage et à travers ce modulateur situé à proximité de
la roue subissant le freinage, puis dans le cylindre de frein.
Les freins de service sont alors appliqués. Si les capteurs
de roue ne détectent pas un blocage de roue imminent, le
contrôleur EC-16
™
ne génère aucune action correctrice et
le véhicule s’arrête normalement.
APPLICATION DES FREINS ANTIBLOCAGE
Lors d’une application du frein de service où les capteurs
de vitesse de rotation de roue détectent un blocage de roue
imminent, le contrôleur EC-16
™
commence immédiatement
à modifi er l’application des freins en utilisant le ou les
modulateurs antiblocage sur la ou les roues concernées. Les
valves électromagnétiques à l’intérieur du modulateur sont
énergisées puis désénergisées par le contrôleur EC-16
™
afi n de modifi er l’application des freins. Lorsqu’une bobine
de solénoïde est énergisée, ses volets se déplacent. Tout
dépendant de la fonction du solénoïde particulier, les volets
s’ouvrent ou se ferment, causant ainsi une évacuation ou
une nouvelle application de pression d’air sur le cylindre de
frein. Les solénoïdes à l’intérieur de chaque modulateur sont
contrôlés indépendamment par le contrôleur EC-16
™
. Par
l’ouverture et la fermeture des vannes électromagnétiques
dans le modulateur approprié, le contrôleur EC-16
™
simule
en fait l’action des conducteurs lorsqu’ils appuient sur
les freins de façon répétée. Il faut toutefois se rappeler
que, contrairement au conducteur, le contrôleur EC-16
™
peut appliquer cette pression répétée sur chaque frein du
véhicule, de façon indépendante et avec une vitesse et une
précision beaucoup plus grandes.
UTILISATION – ANTIPATINAGE
PHILOSOPHIE
La fonction antipatinage est une extension naturelle de
l’antiblocage. Tout comme la fonction antiblocage aide au
contrôle et à la stabilité du véhicule pendant le freinage,
l’antipatinage aide à l’étape de l’accélération du véhicule.
Les capteurs de vitesse de rotation de roue détectent
non seulement une réduction rapide de la vitesse de
rotation de roue pour l’antiblocage, mais également des
augmentations excessives pour prévenir le patinage. La
fonction antipatinage détecte instantanément une roue qui
patine et la compare aux autres roues du véhicule, à l’avant
comme à l’arrière. Deux méthodes différentes sont utilisées
pour contrôler le patinage de roue; la limitation du couple et
le freinage différentiel. Tout dépendant du type de véhicule,
de la vitesse et de l’état de la surface de la route, chaque
méthode permet un type unique et désirable de contrôle
du patinage de roue. Idéalement, les deux méthodes sont
utilisées pour contrôler le patinage du véhicule. Bien que
toutes les nouvelles versions des contrôleurs EC-16
puissent fournir un contrôle antiblocage et antipatinage
des roues (en utilisant les deux méthodes de contrôle),
les systèmes ne sont pas tous confi gurés pour les deux
méthodes. Une ou les deux méthodes d’antipatinage seront
activées à l’étape de selon le véhicule l’autoconfi guration.
™
Page 7

Limitation de couple – Pour que le véhicule utilise la
fonction de limitation de couple, il doit être équipé d’une
commande électronique de vitesse de moteur. La fonction
de limitation de couple permet au contrôleur EC-16
™
de
réduire la vitesse du moteur à un niveau qui convient pour la
traction disponible. La limitation de couple aide à minimiser
le patinage (ou la vitesse de rotation) des roues. Cette
fonction est particulièrement utile pour minimiser une mise
en portefeuille et lorsque toutes les roues motrices sont sur
une surface glissante.
Freinage différentiel – Un véhicule qui utilise la fonction
de freinage différentiel doit être équipé d’un tiroir relais
antiblocage antipatinage, comme le tiroir relais ATR-1
™
ATR-2
de Bendix®. Les tiroirs relais ATR-1™ et ATR-2™
™
ou
contiennent un ensemble solénoïde qui fournit cette fonction.
La fonction de freinage différentiel permet au contrôleur
™
EC-16
de générer une pression en douceur sur le frein
d’une roue qui patine. Comme le différentiel du véhicule
a tendance à entraîner la roue qui présente la moindre
résistance (c.-à-d. la roue qui se trouve sur la surface la plus
glissante), une légère application des freins sur cette roue
seulement force le différentiel à entraîner la roue stationnaire
ou qui patine légèrement. Bien que le véhicule doive être
équipé d’une commande électronique de vitesse du moteur
pour utiliser la fonction de limitation de couple de la fonction
antipatinage, le freinage différentiel peut être utilisé sur
tous les véhicules. Le freinage différentiel peut être activé
seulement lorsque la vitesse du véhicule est inférieure à
40 km/h (25 mi/h) et qu’une roue motrice patine plus vite
qu’une ou plusieurs autres.
ANTIPATINAGE À DES VITESSES DE VÉHICULE DE
0 À 40 KM/H (0 À 25 MI/H)
Lorsqu’un patinage de roue est détecté et que le véhicule
est arrêté, ou lorsque le véhicule se déplace à une vitesse
pouvant aller jusqu’à 40 km/h (25 mi/h), le contrôleur EC-16
™
exécute simultanément les opérations suivantes :
ANTIPATINAGE À DES VITESSES DE VÉHICULE
SUPÉRIEURES À 40 KM/H (25 MI/H)
Si un patinage de roue se produit à une vitesse supérieure à
40 km/h (25 mi/h), le contrôleur EC-16
™
fait immédiatement
clignoter le voyant d’antipatinage sur le tableau de bord pour
aviser le conducteur d’un patinage de roue.
Si la fonction de limitation de couple est programmée,
le contrôleur EC-16
™
utilise son lien vers le module de
commande du moteur et envoie un signal pour réduire le
couple moteur à un niveau qui convient pour la traction
disponible.
LE CONTRÔLEUR EC-16
™
N’ENVERRA AUCUN SIGNAL,
MÊME MINIME, D’APPLICATION DE FREIN AU TIROIR
RELAIS ATR À DES VITESSES SUPÉRIEURES À 40 KM/H
(25 MI/H).
FONCTIONNEMENT DE L’ANTIBLOCAGE ET DE
L’ANTIPATINAGE PENDANT LA DÉFAILLANCE D’UN
COMPOSANT
Le contrôleur EC-16™ de Bendix® gère la défaillance de
l’équipement en utilisant une philosophie de sûreté intégrée.
Toute défaillance électrique unique d’un composant dédié
au contrôle de l’antiblocage ou de l’antipatinage entraîne
l’illumination simultanée des voyants d’état correspondants
sur le tableau de bord, une désactivation d’une partie ou
de l’intégralité du système antiblocage ou antipatinage et
le retour au système de freinage standard sur les roues,
qui ne sont plus alors contrôlées par le contrôleur EC-16
Tout dépendant du type de défaillance et de l’emplacement
de son occurrence, le contrôleur EC-16
™
désactive
l’intégralité ou seulement une partie du système antiblocage
et antipatinage. Toutefois, une défaillance de l’alimentation
ou du contrôleur entraînera la désactivation complète des
deux systèmes et le retour à la fonction de freinage standard
sur toutes les roues.
™
.
Il fait instantanément clignoter le voyant de patinage sur le
tableau de bord pour aviser le conducteur d’un patinage
de roue.
Si la fonction de limitation de couple est activée, le contrôleur
™
EC-16
utilise son lien vers le module de commande du
moteur et envoie un signal pour réduire le couple moteur à
un niveau qui convient à la traction disponible.
Si la fonction de freinage différentiel est confi gurée dans
le système, le contrôleur EC-16
™
énergise le solénoïde
dans le tiroir relais ATR, qui applique alors de l’air à chacun
des modulateurs d’essieu arrière. Comme les modulateurs
sont commandés par le contrôleur EC-16
™
, les vannes
électromagnétiques du modulateur approprié sont ouvertes
et fermées pour appliquer doucement des pressions
répétées seulement sur le frein de la roue qui patine. Cette
application en douceur du frein force le différentiel à entraîner
la roue stationnaire ou qui patine lentement.
Une fois le patinage de roue éliminé, le voyant du tableau
de bord s’éteint et le système antipatinage désengage la
commande.
DÉFAILLANCE SIMPLE
La liste et le tableau suivants décrivent la manière dont
les systèmes antiblocage et antipatinage répondent à la
défaillance d’un composant particulier. (Remarque : droite et
gauche; avant, milieu et arrière sont déterminés par rapport
au siège du conducteur. Le coin avant gauche est donc le
coin le plus rapproché du conducteur.)
Par exemple, si le capteur droit du milieu (« capteur RM » sur
le tableau) présente une défaillance, la fonction antiblocage
avant et arrière est activée. La fonction antipatinage est
désactivée et, comme toujours, le système est doté d’un
freinage pneumatique standard.
Modulateur avant – Si un modulateur avant présente une
défaillance, la fonction antiblocage sur cette roue est
désactivée. Les fonctions d’antiblocage et d’antipatinage
de toutes les autres roues restent actives.
Modulateur arrière – Une défaillance du modulateur arrière
désactive le système antipatinage. La fonction antiblocage
sur cette roue est également désactivée, mais cette fonction
reste active pour toutes les autres roues.
Capteur avant – La roue est toujours contrôlée par le
modulateur au moyen des données du capteur opposé. Le
système antipatinage est désactivé.
7
Page 8
Capteur arrière ou du milieu – La fonction antiblocage
sur cette roue est désactivée, mais celle de toutes les
autres roues reste active. Le contrôle de l’antipatinage est
désactivé.
Contrôleur – Les fonctions d’antiblocage et d’antipatinage
sont désactivées. Le système revient en mode normal de
freinage.
Solénoïde antipatinage – Le contrôle de l’antipatinage est
désactivé. La fonction antiblocage reste active.
Module de commande du moteur* – Si le module de
commande du moteur (ECM) ou le câblage provenant du
contrôleur EC-16
™
vers l’ECM présente une défaillance, la
fonction antipatinage est désactivée. La fonction antiblocage
reste active.
Tension* – Si la tension du système est hors norme, les
fonctions d’antiblocage et d’antipatinage sont désactivées.
Le système revient en mode normal de freinage.
Pour tous les autres problèmes, le système n’est pas
rétabli dans la zone du problème tant que l’erreur n’est pas
corrigée et que le contrôleur EC-16
™
n’est pas réinitialisé
avec l’interrupteur de réinitialisation. Il faut rappeler que
le conducteur sera avisé du problème de fonctionnement
par les voyants du tableau de bord et que le freinage
pneumatique standard sera toujours disponible sur les freins
pour lesquels le contrôleur EC-16
™
a désactivé le système.
DÉFAILLANCES MULTIPLES
En cas de défaillances multiples, le voyant du tableau de
bord réagira normalement, comme pour une défaillance
simple, et les DEL affi cheront une défaillance à la fois.
Lorsque le premier problème est corrigé et que le système
est réinitialisé, le deuxième problème est signalé par les
DEL. Ainsi, le conducteur ou le mécanicien peut effectuer le
suivi des zones de problème et le système n’est pas rétabli
tant que chaque erreur n’est pas corrigée et que le contrôleur
™
EC-16
n’est pas réinitialisé.
*Remarque : Un problème de tension et un problème
intermittent de câblage du module de
commande du moteur peuvent se « corriger
par eux-mêmes ». Par exemple, une
surtension peut faire que le système dépasse
la plage de tension pendant un moment,
ce qui fait clignoter la DEL de tension et un
problème de câblage intermittent entre le
contrôleur EC-16
™
et le module de commande
du moteur peut allumer la DEL d’antipatinage.
Pendant la période de temps d’occurrence de
ce problème, le voyant du tableau de bord
pourrait également s’allumer. Lorsque le
problème se corrige par lui-même, le système
est rétabli. Le voyant du tableau de bord et la
DEL correspondante s’éteignent.
LE SYSTÈME FONCTIONNE ENCORE (OUI/NON)
ABS avant ABS arrière Antipatinage
Capteur AvD OUI OUI OUI OUI NON OUI
Capteur AvG OUI OUI OUI OUI NON OUI
Capteur MiD OUI OUI OUI OUI NON OUI
Capteur MiG OUI OUI OUI OUI NON OUI
Capteur ArD OUI OUI OUI NON NON OUI
Capteur ArG OUI OUI NON OUI NON OUI
Modulateur AvD OUI NON OUI OUI OUI OUI
Modulateur AvG NON OUI OUI OUI OUI OUI
Modulateur ArD OUI OUI OUI NON NON OUI
Modulateur ArG OUI OUI NON OUI NON OUI
Contrôleur NON NON NON NON NON OUI
Solénoïde OUI OUI OUI OUI NON OUI
Module de
commande du
EMPLACEMENT DE LA DÉFAILLANCE
moteur*
Tension* NON NON NON NON NON OUI
*Lorsque le câblage du module de commande du moteur ou la tension
s’autocorrige, le système est rétabli.
Gauche Droit Gauche Droit
OUI OUI OUI OUI NON OUI
Freinage
standard
8
Page 9
CÂBLAGE DE L’ANTIBLOCAGE ET DE
L’ANTIPATINAGE
GÉNÉRALITÉS
Les fi ls qui transportent les données et l’alimentation entrantes
et sortantes du contrôleur EC-16
™
sont généralement
regroupés et se terminent au niveau d’un connecteur.
Les groupes de fi ls ou les faisceaux de fi ls, ainsi que les
connecteurs sont le plus souvent spécifi és ou fournis par
le constructeur du véhicule. Les connecteurs utilisés sur
le contrôleur EC-16
™
sont illustrés sur la Figure 4. Les
faisceaux de fi ls et les connecteurs sont conçus pour résister
aux intempéries et les fi ls qui entrent dans le connecteur sont
scellés à celui-ci. Le manomètre utilisé dans le faisceau de
fi ls convient spécifi quement à la tâche à exécuter.
Lors du diagnostic du câblage et du système antiblocage,
les règles générales suivantes s’appliquent et doivent être
respectées, le cas échéant :
1. Il est généralement recommandé de remplacer un
faisceau de fi ls plutôt que de réparer les fi ls individuels
d’un faisceau. Si une épissure doit être effectuée, il est
important qu’elle soit correctement soudée avec un fl ux à
base de résine (et non à base d’acide) et rendue étanche
à l’eau.
2. Ne pas percer l’isolant des fi ls lors de la vérifi cation
de la continuité. Vérifi er l’alimentation, la masse ou
la continuité en déconnectant le connecteur et en
testant les broches ou les douilles individuelles dans le
connecteur.
3. Toujours vérifi er le manuel d’utilisation du véhicule pour
identifi er les fi ls et les connecteurs. L’identifi cation des fi ls
individuels varie en fonction du type de connecteur utilisé,
du constructeur du véhicule et des caractéristiques du
système utilisé.
4. Bien que les connexions de désactivation du ralentisseur,
de lien série et d’activation/désactivation de l’antipatinage
(4 en tout) soient présentes sur tous les contrôleurs
™
EC-16
, ces fonctions ne sont pas toujours utilisées.
ENTRETIEN PRÉVENTIF
Toutes les 900 heures de fonctionnement, tous les 40 000 km
(25 000 mi) ou aux trois (3) mois :
1. Regarder si tous les fi ls et connecteurs sont bien serrés
et exempts de dommages.
2. Bien que des diagnostics d’autovérification soient
incorporés dans le contrôleur EC-16
doit être inspecté pour s’assurer qu’il est fonctionnel.
Alors que le commutateur d’allumage du véhicule
est activé, un aimant (800 gauss; pouvant soulever
85 g/3 oz) maintenu dans la zone de réinitialisation des
DEL doit allumer toutes les DEL. Si une ou plusieurs DEL
NE S’ALLUMENT PAS et que les voyants d’état indiquent
un bon fonctionnement du système, la ou les DEL qui ne
s’allument pas doivent être notées pour référence future.
Bien que les capacités de diagnostic soient limitées, le
système continuera à fonctionner comme prévu.
3. Effectuer un essai routier du véhicule en effectuant un
arrêt antiblocage à une vitesse de 30 km/h (20 mi/h). Lors
d’un arrêt antiblocage, les impulsions des solénoïdes
du modulateur créent un éclatement d’air audible de
™
, l’affi chage DEL
l’extérieur de la cabine. Les roues ne doivent pas être
« bloquées » pendant une période de temps prolongée.
Effectuer également une accélération antipatinage, en
accélérant sur une surface de route présentant une
traction réduite. Tout comme pour la fonction antiblocage,
des éclatements d’air audibles se produisent pendant le
fonctionnement du système antipatinage.
DEL D’AFFICHAGE
DE DIAGNOSTIC
FIGURE 7 – AFFICHEUR DE DIAGNOSTIC DU
CONTRÔLEUR EC-16
INTERRUPTEUR DE
RÉINITIALISATION
™
DÉPOSE DU CONTRÔLEUR EC-16™
CONTRÔLEUR EC-16™ INSTALLÉ SUR UN TIROIR
RELAIS ANTIBLOCAGE OU ANTIBLOCAGE
ANTIPATINAGE
1. Identifi er et enlever toutes les conduites d’air raccordées
à la pièce.
2. Débrancher le ou les connecteurs électriques du
contrôleur EC-16
3. Noter et marquer la position d’installation de l’ensemble
sur le véhicule. Desserrer, déposer et conserver les
écrous de la visserie d’installation fi xant le support de
l’ensemble du tiroir relais au véhicule. Déposer le tiroir
relais et le contrôleur EC-16
4. Nettoyer toute la contamination possible de l’extérieur
de l’ensemble. Éviter de contaminer les orifi ces ouverts.
5. Noter et marquer la position du contrôleur EC-16
rapport à la valve sur laquelle il est installé. Déposer et
conserver les quatre vis qui fi xent le contrôleur EC-16
à la valve, puis séparer le contrôleur EC-16
CONTRÔLEUR EC-16™ INSTALLÉ SUR UN SUPPORT
1. Débrancher le ou les connecteurs électriques du
contrôleur EC-16
2. Noter et marquer la position d’installation du contrôleur
™
EC-16
sur le véhicule. Desserrer, déposer et conserver
les écrous de la visserie d’installation fi xant le support
du contrôleur EC-16
™
EC-16
et le support du véhicule.
3. Déposer et conserver les quatre vis qui fixent le
contrôleur EC-16
™
EC-16
du support.
4. Effectuer la « Procédure initial de démarrage » de la
section DÉPANNAGE pour vérifi er le bon fonctionnement
du système.
™
.
™
du véhicule.
™
par
™
de la valve.
™
.
™
au véhicule. Déposer le contrôleur
™
à la valve, puis séparer le contrôleur
™
9
Page 10

INSTALLATION DU CONTRÔLEUR EC-16
™
CONTRÔLEUR EC-16™ INSTALLÉ SUR UN TIROIR
RELAIS ANTIBLOCAGE OU ANTIBLOCAGE
ANTIPATINAGE
1. Après avoir pris en note la relation des marques de
positionnement avant le démontage, positionner et fi xer
™
solidement le contrôleur EC-16
à la valve en utilisant
les quatre vis d’assemblage. Serrer les vis d’assemblage
à un couple de 5,6 à 9,0 Nm (50 à 80 lb/po).
™
2. Installer le contrôleur EC-16
assemblé et le tiroir relais
antiblocage sur le véhicule et les orienter dans la position
marquée avant leur dépose.
3. Raccorder toutes les conduites d’air à l’ensemble.
4. Rebrancher le ou les connecteurs électriques du
™
contrôleur EC-16
.
5. Faire un essai de fonctionnement et de fuite de la valve
avant de remettre le véhicule en service.
6. Effectuer la « Procédure initial de démarrage » de la
section DÉPANNAGE pour vérifi er le bon fonctionnement
du système.
CONTRÔLEUR EC-16™ INSTALLÉ SUR UN SUPPORT
1. Fixer solidement le contrôleur EC-16™ en utilisant les
quatre vis d’assemblage. Serrer à un couple de 5,6 à
9,0 Nm (50 à 80 lb/po).
2. Après avoir noté les marques de positionnement, installer
™
le contrôleur EC-16
sur le véhicule en utilisant la
visserie de montage conservée à l’étape de la dépose.
3. Brancher le ou les connecteurs électriques du contrôleur
™
EC-16
.
4. Effectuer la « Procédure initial de démarrage » de la
section DÉPANNAGE pour vérifi er le bon fonctionnement
du système.
DIAGNOSTIC ET REPÉRAGE D’UN
PROBLÈME DANS LE SYSTÈME
GÉNÉRALITÉS
Le contrôleur EC-16™ est doté d’un circuit d’autotest
et d’autodiagnostic qui vérifie constamment le bon
fonctionnement de l’intégralité du système antiblocage/
antipatinage, y compris la continuité du câblage. Le
contrôleur EC-16
aux besoins du véhicule et des préférences du client. Tous
les contrôleurs EC-16
avec la fonction antipatinage, qui ne sera donc pas activée
dans ces cas. Les contrôleurs EC-16
être reconfi gurés par l’utilisateur fi nal pour inclure la fonction
antipatinage. Un véhicule équipé de la fonction antipatinage
peut généralement être identifi é par la présence d’un voyant
d’état installé sur le tableau de bord, d’un interrupteur
de désactivation (pour le système antipatinage) et d’un
solénoïde d’antipatinage situé au-dessus du tiroir relais.
Des voyants distincts, commandés par le contrôleur EC-16
avisent le conducteur de l’état de l’intégralité du système
antiblocage/antipatinage. L’état des composants particuliers
est indiqué par une série de DEL étiquetées, situées dans
le boîtier du contrôleur EC-16
équipement spécial ne sont requis pour lire ou interpréter
l’affi cheur de diagnostic du contrôleur EC-16
que l’affi cheur de diagnostic du contrôleur EC-16
des voyants d’état de l’antiblocage et de l’antipatinage sur
le tableau de bord. Cette séparation permet au conducteur
d’identifi er tout problème pouvant survenir et d’éviter de
confondre les voyants de diagnostic.
Lorsque le contrôleur détecte une condition erronée, il la
mémorise, désactive la fonction antiblocage ou antipatinage
et allume le voyant sur le tableau de bord et les DEL
correspondantes sur le contrôleur EC-16
mémorisée et n’est pas effacée par une perte de puissance
au niveau du contrôleur EC-16
lorsque l’alimentation est rétablie et restent allumées
jusqu’à la correction de la défaillance. Une fois le problème
corrigé, le personnel d’entretien peut effacer les erreurs
ou réinitialiser les diagnostics du contrôleur EC-16
maintenant un aimant au-dessus du point de réinitialisation
(RESET) de l’affi cheur de diagnostic.
™
est programmé à l’usine pour répondre
™
ne sont pas programmés à l’usine
™
plus récents peuvent
™
. Aucun outil ni aucun
™
. Il est à noter
™
est séparé
™
. La défaillance est
™
. Les DEL se rallument
™
™
en
,
10
DEL DE DIAGNOSTIC
L’affi cheur de diagnostic du contrôleur EC-16™ est doté
de dix DEL et d’un interrupteur de réinitialisation activé
magnétiquement. Les six premières DEL repèrent la
zone spécifi que du problème sur le véhicule et les trois
DEL suivantes indiquent le composant défaillant ou son
câblage. Les DEL fonctionnent à partir d’un logiciel et
sont ALLUMÉES ou ÉTEINTES selon leur fonction de
surveillance. (Remarque : droite et gauche; avant et arrière
sont déterminés à partir du siège du conducteur.)
Page 11

FRT (Avant) DEL rouge
MID (Milieu) DEL rouge (cf. Remarque)
RER (Arrière) DEL rouge
RHT (Droite) DEL rouge
LFT (Gauche) DEL rouge
TRC (Antipatinage) DEL rouge
MOD (Modulateur) DEL rouge
SEN (Capteur) DEL rouge
ECU DEL rouge
VLT DEL verte
RÉINIT. + Aucune DEL
Remarque : La DEL du milieu (MID) et utilisée sur certains
véhicules seulement. Lorsque les six capteurs
de vitesse de rotation de roue ne sont pas
installés, cette DEL n’est pas utilisée dans
le processus de diagnostic. Toutefois, elle
s’allume lorsqu’un aimant est placé sur
l’interrupteur de réinitialisation (RESET) sur
l’affi cheur de diagnostic.
DEL « FRT » (Avant)
Cette DEL s’allume et reste allumée pour indiquer
l’emplacement d’un composant défaillant ou de son câblage.
Elle s’allume avec la DEL de droite ou de gauche et la DEL
du modulateur ou du capteur.
DEL « MID » (Essieu du milieu)
Cette DEL rouge est utilisée dans certaines installations
seulement. Sur les véhicules dotés de six capteurs de
vitesse de rotation de roue, cette DEL rouge s’allume et
reste allumée pour indiquer l’emplacement d’un capteur de
vitesse défectueux ou de son câblage. La DEL « MID » ne
doit pas s’allumer avec la DEL « MOD ».
DEL « RER » (Arrière)
Cette DEL s’allume et reste allumée pour indiquer
l’emplacement d’un composant défaillant ou de son câblage.
Elle s’allume avec la DEL de droite ou de gauche et la DEL
du modulateur ou du capteur.
DEL « RHT » (Droite)
Cette DEL s’allume et reste allumée pour indiquer
l’emplacement d’un composant défaillant ou de son câblage.
Elle s’allume avec la DEL de l’avant ou de l’arrière et la DEL
du modulateur ou du capteur.
DEL « LFT » (Gauche)
Cette DEL s’allume et reste allumée pour indiquer
l’emplacement d’un composant défaillant ou de son câblage.
Elle s’allume avec la DEL de l’avant ou de l’arrière et la DEL
du modulateur ou du capteur.
DEL « MOD » (Modulateur)
Cette DEL rouge s’allume et reste allumée pour indiquer un
circuit ouvert ou un court-circuit permanent ou intermittent
dans les solénoïdes d’un des quatre modulateurs M-21
ou dans le câblage les connectant au système. Lorsqu’un
problème est détecté au niveau du modulateur M-21
™
, cette
™
DEL s’allume avec deux DEL de positionnement (RHT/LFT
+ FRT/RER). REMARQUE : La DEL de positionnement MID
ne doit pas être allumée avec cette DEL. Cette DEL permet
également d’indiquer un problème au niveau de l’ATR-1
ou l’ATR-2
™
, du tiroir relais d’antiblocage antipatinage, du
™
solénoïde. Lorsqu’elle est allumée à la suite d’un problème
d’antipatinage, la DEL TRC s’allume également.
DEL « SEN » (Capteur de vitesse de rotation de roue)
Cette DEL rouge s’allume et reste allumée pour indiquer une
défaillance permanente ou intermittente. Les défaillances
indiquées sont : la roue ouverte ou court-circuitée ne se
conforme pas aux critères de conception. La DEL « SEN »
s’allumera avec deux DEL de position (RHT/LFT + FRT/
MID/RER).
DEL « ECU » Bloc de commande électronique (Electronic
Control Unit).
Lorsqu’elle est allumée, cette DEL rouge indique une
défaillance de la commande électronique. Elle reste allumée
pour toutes les défaillances du contrôleur EC-16
™
, sauf
la basse tension. Avant d’envisager le remplacement du
contrôleur, toujours vérifi er la tension du véhicule vers le
contrôleur.
DEL « VLT »
Cette DEL verte s’allume et reste allumée pendant le
fonctionnement du véhicule pour indiquer que l’alimentation
du véhicule est transmise au contrôleur. Si l’alimentation est
hors plage (inférieure à 11 V c.c. ou supérieure à 17 V c.c.),
cette DEL clignote jusqu’au retour de l’alimentation dans la
plage de tension prévue.
« RESET »
Un interrupteur magnétique situé sous la zone de
réinitialisation (RESET) de l’afficheur est utilisé pour
réinitialiser le système de diagnostic. Le dispositif répond
à un aimant dont la force est suffi sante pour soulever
un poids de 85 g (3 oz). Le fait de placer un aimant sur
cette zone (RESET) pendant quelques secondes allume
toutes les DEL pendant cette période. Dans les nouvelles
versions de contrôleur EC-16
™
, le maintien de l’aimant sur
cette zone pendant plus de 20 secondes active la fonction
d’autoconfi guration.
DEL « TRC » (Antipatinage)
Cette DEL rouge s’allume et reste allumée pour indiquer un
problème permanent dans le système antipatinage. Elle peut
s’allumer avec la DEL du modulateur (MOD) ou simplement
par elle-même. REMARQUE : Dans le cas d’un problème
intermittent avec le câblage vers le module de commande
du moteur (ECM), cette DEL s’allume. Toutefois, elle ne
s’active pas – elle s’éteint lorsque le problème se corrige
par lui-même.
CONFIGURATION DU CONTRÔLEUR EC-16
™
GÉNÉRALITÉS
Tous les contrôleurs EC-16™ fabriqués depuis le 1er août
1995 sont dotés d’une fonction d’autoconfi guration. Les
nouveaux contrôleurs EC-16
™
de rechange sont livrés
préprogrammés en usine pour des entrées de 6 capteurs de
vitesse, ainsi que pour les fonctions de freinage différentiel
et de limitation de couple pour l’antipatinage.
11
Page 12

VOYANT ANTIBLOCAGE 1ER
Voyant d’antipatinage
(Contrôleur EC-16
™
avec limitation
de couple et freinage différentiel)
Voyant d’antipatinage
(Contrôleur EC-16
™
avec limitation
ALLUMAGE
DE VOYANT
Allumé Éteint Allumé Éteint Reste éteint
ÈRE
1
EXTINCTION
DE VOYANT
2E
ALLUMAGE
DE VOYANT
2E
EXTINCTION
DE VOYANT
de couple seulement) Éteint Éteint Allumé Éteint Reste éteint
Voyant d’antipatinage
(Contrôleur EC-16
différentiel seulement)
™
avec freinage
Allumé Éteint Éteint Éteint Reste éteint
LE VOYANT
RESTE
ALLUMÉ
IDENTIFICATION DU CONTRÔLEUR EC-16™
AUTOCONFIGURABLE
Le contrôleur EC-16™ autoconfi gurable peut être facilement
identifi é sur un véhicule. Il s’agit d’observer la réaction de
l’affi cheur de diagnostic lorsque le commutateur d’allumage
est activé et que l’alimentation arrive au contrôleur EC-16
La confi guration actuelle du contrôleur EC-16
™
est affi chée
™
par les DEL de dépannage et se produit pendant la séquence
normale d’autovérifi cation. Cette revue de confi guration est
répétée à chaque activation du commutateur de démarrage.
La séquence et la manière dont les DEL s’allument sont
décrites dans la section intitulée Affi cheur de confi guration
du contrôleur EC-16
™
. Cette section doit être utilisée pour
confi rmer que le système est confi guré selon les préférences
du conducteur.
Les DEL de diagnostic des versions plus anciennes du
contrôleur EC-16
dans les articles 2 et 6 de la section intitulée Affi cheur de
confi guration du contrôleur EC-16
™
ne réagissent pas comme il est décrit
™
.
AFFICHEUR DE CONFIGURATION DU CONTRÔLEUR
™
EC-16
1. ACTIVER le commutateur d’allumage.
2. Toutes les DEL s’allument, puis s’éteignent.
3. Le nombre de capteurs actifs est affi ché par l’allumage
momentané de la DEL rouge SEN (capteur) et d’au moins
deux autres DEL rouges de repérage d’emplacement.
Aucune autre DEL n’est allumée.
A. SEN (capteur) + FRT (avant) + RER (arrière) =
Confi guration à quatre capteurs (tous les systèmes
doivent posséder au moins une confi guration à 4
capteurs).
B. SEN (capteur) + FRT (avant) + MID (milieu) + RER
(arrière) = Confi guration à 6 capteurs
4. La DEL rouge TRC s’allume par elle même pendant
quelques secondes si le couple de limitation de patinage
est actif, sinon, l’affi cheur indique la condition décrite au
numéro 5.
5. Les DEL rouges TRC et MOD s’allument pendant
quelques secondes si le freinage différentiel de patinage
est actif, sinon, l’affi cheur indique la condition décrite au
numéro 6. Aucune autre DEL n’est allumée.
6. L’afficheur de diagnostic retourne à son état de
fonctionnement normal. Si aucun problème n’est détecté
dans le système antiblocage antipatinage, toutes les
DEL rouges sont éteintes et seule la DEL verte VLT est
allumée.
12
AUTOCONFIGURATION DU CONTRÔLEUR EC-16™
Renseignements généraux importants
1. Trois aspects du système antiblocage et antipatinage
sont infl uencés par la fonction d’autoconfi guration du
contrôleur EC-16
.
A. Capteurs de vitesses de rotation de roue : Le nombre
de capteurs de vitesse connectés au contrôleur
EC-16
Le contrôleur EC-16
™
.
™
sera détecté à l’étape de l’autoconfi guration.
™
vérifie les emplacements
MID SEN (capteur de l’essieu du milieu) sur son
connecteur et détermine si un capteur est connecté
à l’essieu; il passe à la confi guration par défaut de
six capteurs dès qu’il détecte au moins un capteur
connecté. Si aucun capteur de vitesse d’essieu du
milieu n’est détecté, le contrôleur EC-16
la confi guration par défaut de quatre capteurs.
B. Module de commande électronique du moteur : Si
le contrôleur EC-16
™
est connecté au module de
commande d’une commande électronique du moteur,
la fonction de limitation de couple de l’antipatinage
est activée pendant l’autoconfi guration.
C. Tiroir relais antiblocage antipatinage : Si l’ensemble
du solénoïde du tiroir relais ATR est connecté au
contrôleur EC-16
™
, la fonction de freinage différentiel
de l’antipatinage est activée pendant le processus
d’autoconfi guration.
2. Aucune méthode ne permet de désactiver la fonction
d’autoconfi guration.
3. Comme le temps de réinitialisation par contact de
l’aimant sur la zone de réinitialisation (RESET) est
suffi samment long (20 secondes), il est improbable qu’une
autoconfi guration puisse se produire accidentellement.
4. La fonction antiblocage de base à quatre capteurs ne peut
être supprimée pendant le processus d’autoconfi guration,
car c’est la configuration minimale pour tous les
contrôleurs EC-16
™
.
5. Si un capteur de vitesse de rotation de roue est connecté
à l’une ou l’autre roue de l’essieu du milieu, le contrôleur
™
EC-16
vitesse n’est détecté sur l’essieu du milieu, le contrôleur
EC-16
confi gure les six capteurs. Si aucun capteur de
™
passe à la confi guration à quatre capteurs.
Tout capteur déconnecté est enregistré comme une
défaillance sur l’affi cheur de diagnostic à la fi n de la
séquence d’autovérifi cation du contrôleur EC-16
6. Une partie ou l’intégralité de la fonction antipatinage
peut être perdue au cours de l’autoconfi guration pour
les raisons suivantes :
™
passe à
™
.
Page 13

A. N’est pas connecté au faisceau de fi ls (module de
commande du moteur pour la limitation de couple
et le solénoïde du tiroir relais ATR pour le freinage
différentiel).
B. Un voyant de tableau de bord pour l’antipatinage est
manquant ou défectueux (ampoule manquante ou
brûlée).
C. Un interrupteur de fonction antipatinage est
manquant ou défectueux.
D. Le fait de ne pas placer l’interrupteur d’antipatinage
à la position désactivée. Le conducteur peut
reconnaître que les fonctions d’antipatinage
sont inopérantes en remarquant l’absence de
clignotement du voyant d’antipatinage au démarrage.
Le conducteur doit observer le clignotement des
voyants d’état de l’antiblocage et de l’antipatinage, le
cas échéant, à chaque démarrage. L’observation des
voyants du tableau de bord est la seule méthode de
vérifi cation de fonctionnement du système disponible
pour l’opérateur.
7. Le contrôleur EC-16
™
peut être reprogrammé jusqu’à
10 000 fois.
8. Lorsqu’un contrôleur EC-16
™
de rechange est installé sur
un véhicule ne possédant pas une ou plusieurs fonctions
préprogrammées, une défaillance est enregistrée sur le
ou les voyants du tableau de bord et sur l’affi cheur de
diagnostic du contrôleur EC-16
™
. Il est donc nécessaire
d’effectuer une procédure d’autoconfi guration.
9. Certains renseignements de configuration peuvent
être observés dans la réaction des voyants d’état du
tableau de bord sur les véhicules équipés de la fonction
antipatinage et du contrôleur EC-16
Lorsque le commutateur d’allumage est activé,
l’autovérification du contrôleur EC-16
™
autoconfi gurable.
™
est lancée.
Pendant l’autovérifi cation, les voyants du tableau de
bord clignotent ensemble, comme indiqué sur le schéma,
tout dépendant du type et de la quantité de fonctions
d’antipatinage confi gurées dans le contrôleur EC-16
™
Remarque : Pour obtenir plus d’information à ce sujet,
consulter la section DÉPANNAGE de ce document.
Processus d’autoconfi guration
Pour réussir le processus d’autoconfi guration, suivre les
étapes ci-dessous.
1. Connecter tous les faisceaux de fils de la fonction
antipatinage. Se reporter au schéma de la Figure 4.
S’assurer que tous les capteurs de vitesse de rotation
de roue présents sur le véhicule sont connectés (H2,
H3, J1, J2 sur le connecteur à 30 broches et E2, E3, F2,
F3, B2, B3, C2, C3 sur le connecteur à 18 broches). Si
le véhicule est doté d’une commande électronique du
moteur et que les fonctions antipatinage et limitation de
couple sont souhaitées, le module de commande du
moteur doit être connecté (B2 et B3 sur le connecteur
à 30 broches). Si le véhicule est équipé d’un tiroir relais
™
ATR-1
être branché au contrôleur EC-16
ou ATR-2™, le solénoïde de connexion doit
™
(D2 et D3 sur le
connecteur à 18 broches) pour bénéfi cier du freinage
différentiel d’antipatinage.
2. Si le véhicule doit être configuré avec la fonction
antipatinage, un voyant et un interrupteur d’antipatinage
doivent être installés sur le tableau de bord et être
fonctionnels. Placer l’interrupteur d’antipatinage en
position de désactivation d’antipatinage.
3. Activer le commutateur d’allumage et maintenir un
aimant sur la zone de réinitialisation (RESET) de
l’affi cheur de diagnostic du contrôleur EC-16
ce que les DEL commencent à clignoter de façon
aléatoire, puis retirer l’aimant. Si l’aimant n’est pas
retiré pendant le clignotement aléatoire des DEL, une
deuxième autoconfiguration pourrait être lancée. Il
faudra alors maintenir l’aimant pendant au moins 20
secondes sur la zone de réinitialisation (RESET). Une
fois l’autoconfi guration terminée, le contrôleur EC-16
exécute automatiquement une autovérifi cation pendant
laquelle l’affi cheur de diagnostic affi che la nouvelle
confi guration décrite sous la section intitulée Affi cheur
de confi guration du contrôleur .EC-16
Si le contrôleur EC-16
™
est confi guré pour la fonction
™
. Remarque :
antipatinage (limitation de couple, freinage différentiel
ou les deux), le voyant d’état d’antipatinage s’allume,
ainsi que les DEL correspondantes sur l’afficheur
de diagnostic du contrôleur EC-16
™
. Le voyant pour
l’antipatinage sur le tableau de bord s’allume jusqu’à
ce que l’interrupteur d’antipatinage soit placé dans la
position d’activation.
4. Placer l’interrupteur d’antipatinage en position d’activation
pour éteindre le voyant d’antipatinage sur le tableau de
bord.
5. Avant de remettre le véhicule en service, vérifier
la configuration et l’état du système en coupant le
commutateur d’allumage puis en l’activant, tout en
observant l’affi cheur de diagnostic du contrôleur EC-16
L’affi cheur de diagnostic doit indiquer la confi guration
souhaitée décrite sous la section intitulée Affi cheur de
confi guration du contrôleur EC-16
™
et aucune DEL rouge
ne doit être allumée à la fi n de l’autovérifi cation.
6. Si la confi guration semble être correcte, mais que les DEL
de diagnostic indiquent une défaillance dans le système,
.
se reporter aux renseignements sur la confi guration
générale et utiliser la section sur le Dépannage de ce
manuel pour repérer et corriger le problème.
7. Dans le cas d’une confi guration incorrecte, le processus
peut être répété si nécessaire. Une erreur commune est
d’effectuer l’autoconfi guration alors que l’interrupteur
d’antipatinage est dans la mauvaise position, ce qui
empêche l’activation de toute fonction antipatinage.
Remarque : L’interrupteur d’antipatinage doit être en
position de désactivation pour confi gurer l’antipatinage,
mais doit être placé en position d’activation pour
permettre le clignotement du voyant d’antipatinage.
DÉPANNAGE
REMARQUES IMPORTANTES AVANT LE DÉPANNAGE :
1. Déterminer si le véhicule est équipé de la fonction
antipatinage, entre autres en vérifi ant la présence du
voyant d’état de l’antipatinage sur le tableau de bord.
2. Certains véhicules sont équipés d’un « interrupteur de
désactivation » de l’antipatinage. Dans ce cas, ACTIVER
LE SYSTÈME ANTIPATINAGE AVANT D’EXÉCUTER
LE PROCESSUS DE DÉPANNAGE.
™
jusqu’à
™
™
.
13
Page 14

3. Si le véhicule est équipé de la fonction antipatinage
et d’un essieu tandem, noter le nombre d’essieux
moteurs. La DEL de diagnostic « MID » est utilisée sur
les véhicules 6 x 4.
GÉNÉRALITÉS
Alors que l’affi cheur de diagnostic du contrôleur EC-16™
repère une zone spécifi que de problème, il est encore
nécessaire de confi rmer si le problème se situe dans le
composant lui-même ou dans le câblage. La procédure de
diagnostic ci-dessous vise essentiellement à circonscrire le
problème soit au câblage soit à un composant antiblocage
ou antipatinage spécifique. Il est à noter que TOUT
PROCESSUS DE DÉPANNAGE COMMENCE PAR
L’OBSERVATION DES VOYANTS ANTIBLOCAGE ET
ANTIPATINAGE SUR LE TABLEAU DE BORD. Tout
processus de dépannage doit commencer d’abord par la
« Procédure initial de démarrage » et être suivi par les
directives contenues dans cette procédure.
CONSEILS POUR LE DÉPANNAGE
1. Commencer par observer les voyants d’état sur le
tableau de bord et par effectuer la « Procédure initial de
démarrage ».
2. Le technicien de dépannage doit enregistrer tous les
éléments trouvés et toutes les actions prises au cours
du processus de dépannage.
3. Aucun test de tension ou de résistance n’est effectué
dans le contrôleur EC-16
résistance sont effectués en commençant par la
™
. Tous les tests de tension et de
moitié
faisceau de fi ls du connecteur et en s’ÉLOIGNANT
du contrôleur EC-16™, vers un composant du système
antiblocage (modulateur, capteur de vitesse de rotation
de roue, etc.).
4. Si le problème réapparaît mystérieusement sans qu’une
cause apparente ne puisse être détectée pendant
le dépannage, inspecter attentivement la qualité de
l’alimentation électrique vers le système antiblocage.
Vérifi er le câblage du véhicule, les connecteurs de
câblage ET l’alternateur. Des défectuosités dans
ces composants peuvent générer des indications de
défaillance.
14
Page 15

RÉFÉRENCE RAPIDE POUR
L’AFFICHEUR DE DIAGNOSTIC
Cet index est présenté pour aider le personnel expérimenté et formé dans le dépannage du système de contrôle
antiblocage des roues du véhicule avec antipatinage de Bendix. Il offre une référence rapide à des sections spécifi ques
qui fournissent des procédures et des valeurs pour les tests.
RIEN D’ALLUMÉ – PASSER
À LA SECTION V
UN OU PLUSIEURS
SONT
ALLUMÉS
ALLUMÉ
(SANS
CLIGNOTEMENT)
PASSER À LA
SECTION IV
CLIGNOTEMENT – PASSER
À LA SECTION V
UN DE CE GROUPE
EST ALLUMÉ
UN DE CE GROUPE
EST ALLUMÉ
ALLUMÉ – PASSER À LA
SECTION VI A
ALLUMÉ (SANS CLIGNOTEMENT)
– PASSER À LA SECTION II
UN DE CE GROUPE
EST ALLUMÉ
UN DE CE GROUPE
EST ALLUMÉ
ALLUMÉ – PASSER À LA
SECTION VII A
ALLUMÉ – PASSER
À LA SECTION XI
ALLUMÉ – PASSER
À LA SECTION XII
15
Page 16

PROCÉDURE INITIAL DE DÉMARRAGE
COMMENCER ICI
SI LE VOYANT ANTIBLOCAGE DU TABLEAU
DE BORD S’ALLUME ET RESTE ALLUMÉ
SANS CLIGNOTER, PASSER À LA SECTION II
« INSPECTION DES DEL ALLUMÉES »
ACTIVER LE COMMUTATEUR D’ALLUMAGE
ET OBSERVER LE VOYANT ANTIBLOCAGE
SUR LE TABLEAU DE BORD.
NON
LE VOYANT ANTIBLOCAGE DU
TABLEAU DE BORD A-T-CLIGNOTÉ?
OUI
NON – Voir la remarque
LE VOYANT ANTIBLOCAGE
DU TABLEAU DE BORD
EST-IL ENCORE ALLUMÉ?
OUI – Voir la remarque
AUGMENTER LA VITESSE DU VÉHICULE
AU-DESSUS DE 11 KM/H (7 MI/H) PENDANT
AU MOINS 5 SECONDES ET OBSERVER LE
VOYANT SUR LE TABLEAU DE BORD.
PASSER À LA SECTION III
« INSPECTION DES DEL ALLUMÉES ».
LE SYSTÈME ANTIBLOCAGE
FONCTIONNE NORMALEMENT.
NOTER TOUTE PIÈCE REMPLACÉE
OU RÉPARÉE.
AVIS IMPORTANT
Les systèmes antiblocage fabriqués après le
20 janvier 1997 sont conçus pour que le voyant
d’antiblocage sur le tableau de bord s’éteigne
après une autovérification réussie des
composants électroniques et du câblage du
système. Les systèmes précédents exigeaient
une entrée de données de vitesse du véhicule
pour éteindre le voyant du tableau de bord.
Si le contrôleur EC-16™ a été remplacé récemment,
déterminer si c’est un modèle autoconfigurable (se
reporter à la section des données de service intitulé
« CONFIGURATION DU CONTRÔLEUR EC-16™ ») et
s’assurer qu’il est confi guré correctement pour le véhicule.
Si la fonction antipatinage fait partie de la confi guration,
l’interrupteur doit être placé en position d’activation.
OUI
NON
LE VOYANT SUR LE TABLEAU DE
BORD S’ALLUME OU RESTE ALLUMÉ
NON
LE VÉHICULE EST-IL ÉQUIPÉ DE
LA FONCTION ANTIPATINAGE?
OUI
COUPER LE COMMUTATEUR
D’ALLUMAGE PUIS REMETTRE
LE CONTACT ET OBSERVER
UNIQUEMENT LE VOYANT D’ÉTAT
D’ANTIPATINAGE. LE VOYANT
D’ANTIPATINAGE A-T-IL CLIGNOTÉ
PUIS S’EST-IL ÉTEINT?
NON
VÉRIFIER QUE LA FONCTION
ANTIPATINAGE EST ACTIVÉE
(UTILISER L’INTERRUPTEUR
SOUS LE TABLEAU DE BORD).
REFAIRE LE TEST
LE VOYANT D’ANTIPATINAGE
A-T-IL CLIGNOTÉ PUIS
S’EST-IL ÉTEINT?
NON
OUI
OUI
LE SYSTÈME
ANTIPATINAGE
FONCTIONNE
NORMALEMENT.
16
PASSER À LA SECTION
X « TEST DU VOYANT
D’ANTIPATINAGE SUR
TABLEAU DE BORD ».
NON
LE VOYANT
D’ANTIPATINAGE DU
TABLEAU DE BORD EST-IL
ALLUMÉ?
OUI
PASSER À LA
SECTION XI « TEST
DU MODULATEUR
D’ANTIPATINAGE ».
Page 17

SECTION I – TEST DU VOYANT D’ANTIBLOCAGE SUR LE TABLEAU DE BORD
COMMENCER ICI
E3 VERS LE RELAIS
DU VOYANT DU
TABLEAU DE BORD
DÉBRANCHER LE CONNECTEUR À 30
BROCHES DU CONTRÔLEUR EC-16
™
ET
OBSERVER LE VOYANT D’ANTIBLOCAGE
SUR LE TABLEAU DE BORD.
LE VOYANT D’ANTIBLOCAGE SUR LE
TABLEAU DE BORD EST-IL ALLUMÉ?
NON
ALORS QUE LE CONTACT EST ACTIVÉ, MESURER LA
TENSION ENTRE LES BROCHES E3 ET A1, A2, A3.
LA TENSION DOIT ÊTRE IDENTIQUE À CELLE DE LA
BATTERIE
MASSE
A1
MASSE
A2
MASSE
A3
LA TENSION EST-ELLE
CORRECTE?
NON
DEUXIÈME FOIS
JUSQU’À CE POINT?
OUI
OUI
EST-CE LA
OUI
REMPLACER LE
CONTRÔLEUR EC-16
REMPLACER LE
NON
RELAIS ET TESTER
ENCORE UNE FOIS
LA TENSION DE LA
BATTERIE
™
VÉRIFIER LE FAISCEAU DE FILS ET LE RELAIS
POUR Y DÉTECTER DES COURTS-CIRCUITS
À LA MASSE. RECONNECTER ET VÉRIFIER/
REMPLACER CE QUI SUIT :
1. AMPOULE DU VOYANT DU TABLEAU DE BORD
2. FUSIBLE
3. FIL D’ALIMENTATION DU RELAIS
4. RELAIS
APRÈS AVOIR REMPLACÉ CHAQUE
COMPOSANT, TESTER LE VOYANT DU TABLEAU
DE BORD.
REFAIRE LA « PROCÉDURE
INITIAL DE DÉMARRAGE ».
RÉPARER OU
REMPLACER LE
FAISCEAU DE FILS
MASSE
A1, A2, A3
ALIMENTATION
DU VÉHICULE
(ALLUMAGE)
E3 VERS LE
RELAIS DU
VOYANT DU
TABLEAU DE BORD
RELAIS DU
VOYANT DU
TABLEAU DE
BORD
VOYANT DU
TABLEAU DE
BORD
17
Page 18

SECTION II – INSPECTION DES DEL ALLUMÉES
COMMENCER ICI
INSPECTER LE CONTRÔLEUR
EC-16™ POUR Y DÉTECTER LA
PRÉSENCE DE DEL ALLUMÉES
ET NOTER
NON
DES DEL ROUGES
SONT-ELLES
ALLUMÉES?
OUI
NOTER ET
ENREGISTRER L’ÉTAT
DE TOUTES LES DEL
ROUGES
PASSER À
LA SECTION IV
« INSPECTION DES
DEL ALLUMÉES »
VÉRIFIER SOIGNEUSEMENT
SI LA DEL VERTE VLT EST
ALLUMÉE.
OUI (ALLUMÉE)
NON
LE VOYANT VERT CLIGNOTE-T-IL?
OUI
PASSER À LA
SECTION V « TEST DE
L’ALIMENTATION VERS LE
CONTRÔLEUR EC-16™ ».
NON (ÉTEINTE)
DES DEL ROUGES
SONT-ELLES
ALLUMÉES?
NON
OUI
REMPLACER LE
CONTRÔLEUR EC-16
PASSER À LA
SECTION V « TEST DE
L’ALIMENTATION VERS LE
CONTRÔLEUR EC-16
DEL ROUGES
™
™
».
18
PASSER À LA SECTION VIII « TEST
DE FAUSSE INDICATION CAUSÉE
PAR UN RELAIS DE VOYANT DE
TABLEAU DE BORD »
AFFICHEUR DE DIAGNOSTIC
DU CONTRÔLEUR EC-16
™
DEL VLT VERTE
Page 19

SECTION III – INSPECTION DES DEL ALLUMÉES
COMMENCER ICI
LA DEL VERTE POUR LA TENSION EST-ELLE ALLUMÉE?
PASSER À LA
SECTION V « TEST DE
L’ALIMENTATION VERS LE
CONTRÔLEUR EC-16™ »
INSPECTER LE CONTRÔLEUR EC-16
™
POUR Y
DÉTECTER LA PRÉSENCE DE DEL ALLUMÉES ET NOTER
DES DEL ROUGES
SONT-ELLES
ALLUMÉES?
OUI
OUI
LE VOYANT VERT CLIGNOTE-T-IL?
REMPLACER LE
CONTRÔLEUR EC-16
NON
NON
DES DEL ROUGES SONT-ELLES ALLUMÉES?
OUI
NOTER ET ENREGISTRER
L’ÉTAT DE TOUTES LES
DEL ROUGES
NONNON
SECTION V « TEST
DE L’ALIMENTATION
VERS LE CONTRÔLEUR
EC-16™ »
OUI
PASSER À LA
™
ALLER À LA SECTION IX « TEST
DE FAUSSE INDICATION CAUSÉE
PAR UN RELAIS DE VOYANT DE
TABLEAU DE BORD »
PASSER À LA SECTION IV
« INSPECTION DES DEL ALLUMÉES »
AFFICHEUR DE DIAGNOSTIC
DU CONTRÔLEUR EC-16
™
19
Page 20

COMMENCER ICI
SECTION IV – INSPECTION DES DEL ALLUMÉES
NOTER LA DEL ROUGE
« ECU » DANS LA
FENÊTRE DE DIAGNOSTIC
DU CONTRÔLEUR EC-16™.
AFFICHEUR DE
DIAGNOSTIC DU
CONTRÔLEUR EC-16
AFFICHEUR DE
DIAGNOSTIC DU
CONTRÔLEUR EC-16
DEL « ECU »
ALLUMÉE?
™
1 DEL DE CE
GROUPE
1 DEL DE CE
GROUPE
1 DEL DE CE
GROUPE
™
CETTE DEL EST-ELLE ALLUMÉE?
NON
AU MOINS TROIS DEL ROUGES DOIVENT
ÊTRE ALLUMÉES, DONT UNE DEL « RHT »
OU « LFT », PLUS UNE DEL « FRT » « MID »
OU « RER » ET UNE DEL « MOD » OU « SES ».
LES CONDITIONS CI-DESSUS
EXISTENT-ELLES?
OUI
NOTER LES TROIS DEL ALLUMÉES
LA DEL « MOD » EST-ELLE ALLUMÉE?
NON
LA DEL « SES » EST-ELLE ALLUMÉE?
OUI
OUI
NON
PASSER À LA SECTION V
« TEST DE L’ALIMENTATION
VERS LE CONTRÔLEUR
EC-16™ »
REMPLACER LE
CONTRÔLEUR EC-16™ ET
REFAIRE LA « PROCÉDURE
INITIAL DE DÉMARRAGE »
UTILISER LES DEUX DEL
DE POSITIONNEMENT (DROITE/
GAUCHE, AVANT/ARRIÈRE) POUR
PASSER À LA SECTION VI A « TEST
DU MODULATEUR » ET TESTER LE
MODULATEUR APPROPRIÉ.
20
UTILISER LES DEUX DEL DE
POSITIONNEMENT (DROITE/GAUCHE,
AVANT/ARRIÈRE) POUR PASSER À LA
SECTION VII A « TEST DU CAPTEUR DE
VITESSE DE ROTATION DE ROUE » ET
TESTER LE CAPTEUR APPROPRIÉ.
Page 21

COMMENCER ICI
K2
K3
SECTION V – TEST DE L’ALIMENTATION VERS LE CONTRÔLEUR EC-16
COUPER LE COMMUTATEUR
D’ALLUMAGE ET DÉBRANCHER LE
B1
CONNECTEUR DU FAISCEAU DE FILS À
30 BROCHES DU CONTRÔLEUR EC-16
ACTIVER LE COMMUTATEUR
D’ALLUMAGE ET MESURER LA TENSION
ENTRE LES BROCHES B1, K2, K3 DE LA
BATTERIE ET LES BROCHES A1, A2, A3
DE LA MASSE SUR LE CONNECTEUR
DU FAISCEAU DE FILS
LA TENSION EST-ELLE
IDENTIQUE À CELLE DE LA
BATTERIE? LA TENSION DOIT SE
SITUER ENTRE 11 ET 17 VOLTS.
A1
A2
OUI
A3
™
NON
RECONNECTER LE CONNECTEUR
AU CONTRÔLEUR EC-16™. VÉRIFIER
LA CONTINUITÉ DU CÂBLAGE DU
VÉHICULE. SE REPORTER AU
MANUEL D’ENTRETIEN DU VÉHICULE
ET VÉRIFIER LA TENSION DE LA
BATTERIE. RÉPARER OU REMPLACER
LE CÂBLAGE SI NÉCESSAIRE ET
REFAIRE LE TEST.
™
CONNECTEUR À 30 BROCHES
REMPLACER LE
CONTRÔLEUR EC-16
™
REFAIRE LA « PROCÉDURE
INITIAL DE DÉMARRAGE ».
21
Page 22

SECTION VI A – TEST DU MODULATEUR
COUPER LE COMMUTATEUR
D’ALLUMAGE. SE REPORTER À
L’ILLUSTRATION, DÉBRANCHER LE
CONNECTEUR DU FAISCEAU DE FILS
DU CONTRÔLEUR EC-16™.
COMMENCER ICI
VÉRIFIER LE CONNECTEUR AVEC UN OHMMÈTRE OU UN
VOLTMÈTRE ET VÉRIFIER QUE LES BONNES VALEURS DE
RÉSISTANCE SONT OBTENUES POUR LE MODULATEUR TESTÉ.
VALEURS DE RÉSISTANCE POUR LE MODULATEUR M-21™ DE
BENDIX®.
MAINTIEN VERS COMMUN : LECTURE DE 3,5 À 5 OHMS
ÉVACUATION VERS COMMUN : LECTURE DE 3,5 À 5 OHMS
ÉVACUATION VERS MAINTIEN : LECTURE DE 7 À 10 OHMS
COMMUN VERS LA MASSE : AUCUNE CONTINUITÉ
MAINTIEN VERS
L’ALIMENTATION DE LA BATTERIE : AUCUNE CONTINUITÉ
MAINTIEN VERS LA MASSE : AUCUNE CONTINUITÉ
ÉVACUATION VERS LA MASSE : AUCUNE CONTINUITÉ
INSPECTER LE CONNECTEUR ET LE
RECONNECTER AU CONTRÔLEUR
LES VALEURS DE
RÉSISTANCE SONT-ELLES
CORRECTES?
OUI
EC-16™. ACTIVER LE COMMUTATEUR
D’ALLUMAGE ET PASSER UN AIMANT
SUR LA ZONE DE RÉINITIALISATION
(RESET) DU CONTRÔLEUR EC-16™.
NOTER LA RÉACTION DES DEL ROUGES.
NON
PASSER À LA SECTION
VI B ET COMMENCER LE
TEST
SONT-ELLES ALLUMÉES?
CONNECTEUR À 18 BROCHES CONNECTEUR À 30 BROCHES
1
2
3
F E D C B A
F1 COMMUN DU MODULATEUR
ARRIÈRE GAUCHE
D1 ÉVACUATION DU MODULATEUR
ARRIÈRE GAUCHE
E1 MAINTIEN DU MODULATEUR
ARRIÈRE GAUCHE
A1 COMMUN DU MODULATEUR
ARRIÈRE DROIT
C1 ÉVACUATION DU MODULATEUR
ARRIÈRE DROIT
B1 MAINTIEN DU MODULATEUR
ARRIÈRE DROIT
K J H G F E D C B A
H1 COMMUN DU MODULATEUR
AVANT GAUCHE
F1 ÉVACUATION DU MODULATEUR
AVANT GAUCHE
G1 MAINTIEN DU MODULATEUR
AVANT GAUCHE
C1 COMMUN DU MODULATEUR
AVANT DROIT
E1 ÉVACUATION DU MODULATEUR
AVANT DROIT
D1 MAINTIEN DU MODULATEUR
AVANT DROIT
REFAIRE LA « PROCÉDURE
INITIAL DE DÉMARRAGE ».
DES DEL ROUGES
NON
SI CETTE ÉTAPE DE TEST
EST RÉPÉTÉE DEUX FOIS –
REMPLACER LE CONTRÔLEUR
OUI
EC-16™.
1
2
3
22
LES MÊMES DEL
ROUGES SONT-ELLES
ALLUMÉES?
NON
PASSER À LA
SECTION IV « INSPECTION
DES DEL ALLUMÉES » ET
REFAIRE LE TEST.
OUI
REMPLACER LE
CONTRÔLEUR EC-16
™
.
Page 23
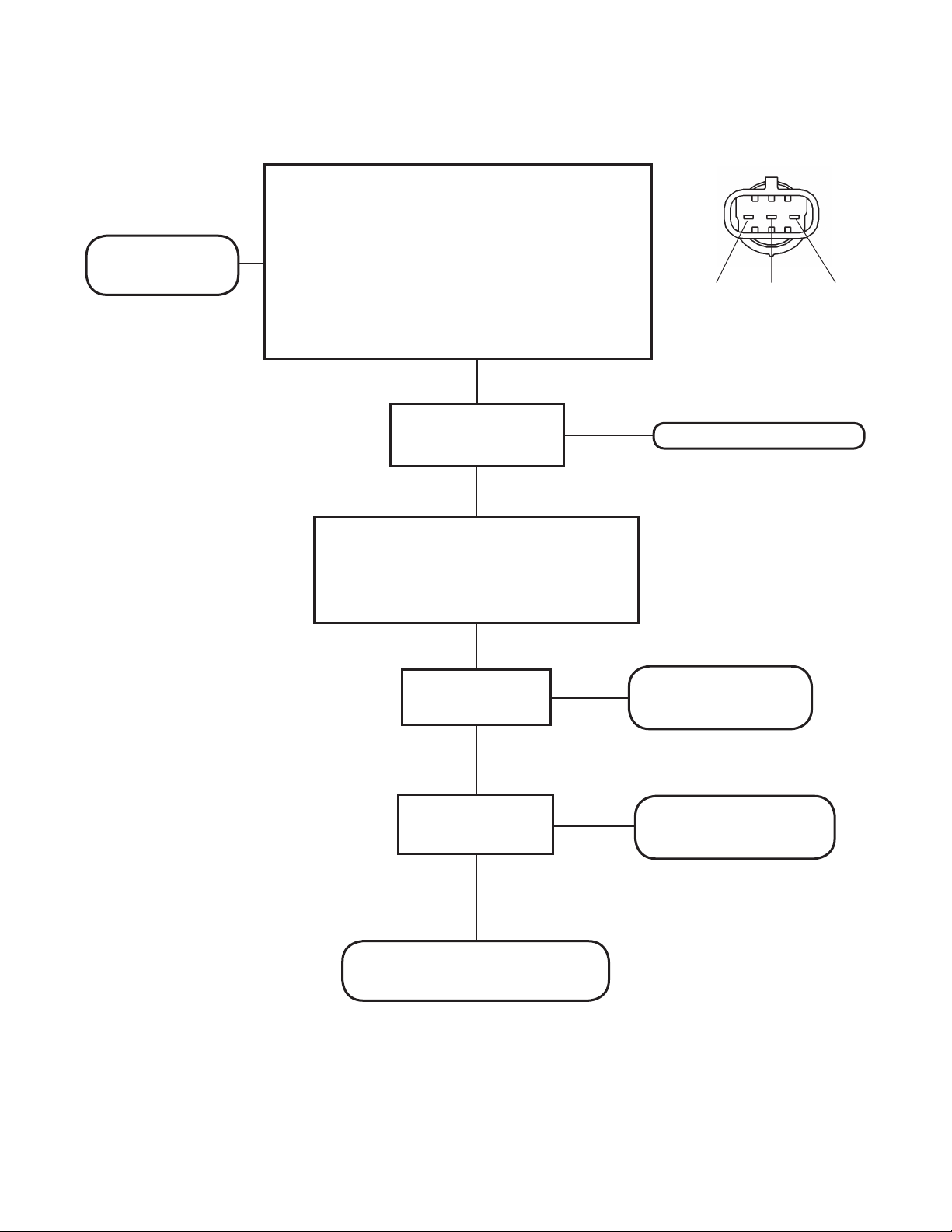
COMMENCER
ICI À PARTIR DE LA
SECTION VI A
SECTION VI B – TEST DU MODULATEUR
PASSER AU MODULATEUR, INSPECTER LE CONNECTEUR
DE FILS. DÉBRANCHER LE CONNECTEUR ET TESTER LA
RÉSISTANCE ENTRE LES BROCHES SUR LE MODULATEUR.
VALEURS DE RÉSISTANCE POUR LE MODULATEUR M-22™ DE
BENDIX®™.
MAINTIEN VERS COMMUN : LECTURE DE 3,5 À 5 OHMS
ÉVACUATION VERS COMMUN : LECTURE DE 3,5 À 5 OHMS
ÉVACUATION VERS MAINTIEN : LECTURE DE 7 À 10 OHMS
TESTER CHAQUE BROCHE AVEC LA MASSE DU VÉHICULE ET
NOTER LA NON-CONTINUITÉ.
CONNECTEUR SUR LE
MODULATEUR M-22™.
ÉVACUATION COMMUN MAINTIEN
LES LECTURES DE
RÉSISTANCE SONT-
ELLES CORRECTES?
OUI
RECONNECTER LE CONNECTEUR AU
MODULATEUR. ACTIVER LE COMMUTATEUR
D’ALLUMAGE ET PASSER UN AIMANT SUR LA ZONE
DE RÉINITIALISATION (RESET) DU CONTRÔLEUR
™
EC-16
. NOTER LA RÉACTION DES DEL ROUGES.
DES DEL ROUGES
SONT-ELLES
ALLUMÉES?
OUI
LES MÊMES DEL
ROUGES SONT-ELLES
ALLUMÉES?
NON
NON
OUI
REMPLACER LE MODULATEUR.
REFAIRE LA
« PROCÉDURE INITIAL DE
DÉMARRAGE »
RÉPARER OU
REMPLACER LE FAISCEAU DE
FILS DU MODULATEUR.
NON
PASSER À LA SECTION IV
« INSPECTION DES DEL ALLUMÉES » ET
REFAIRE LE TEST.
23
Page 24
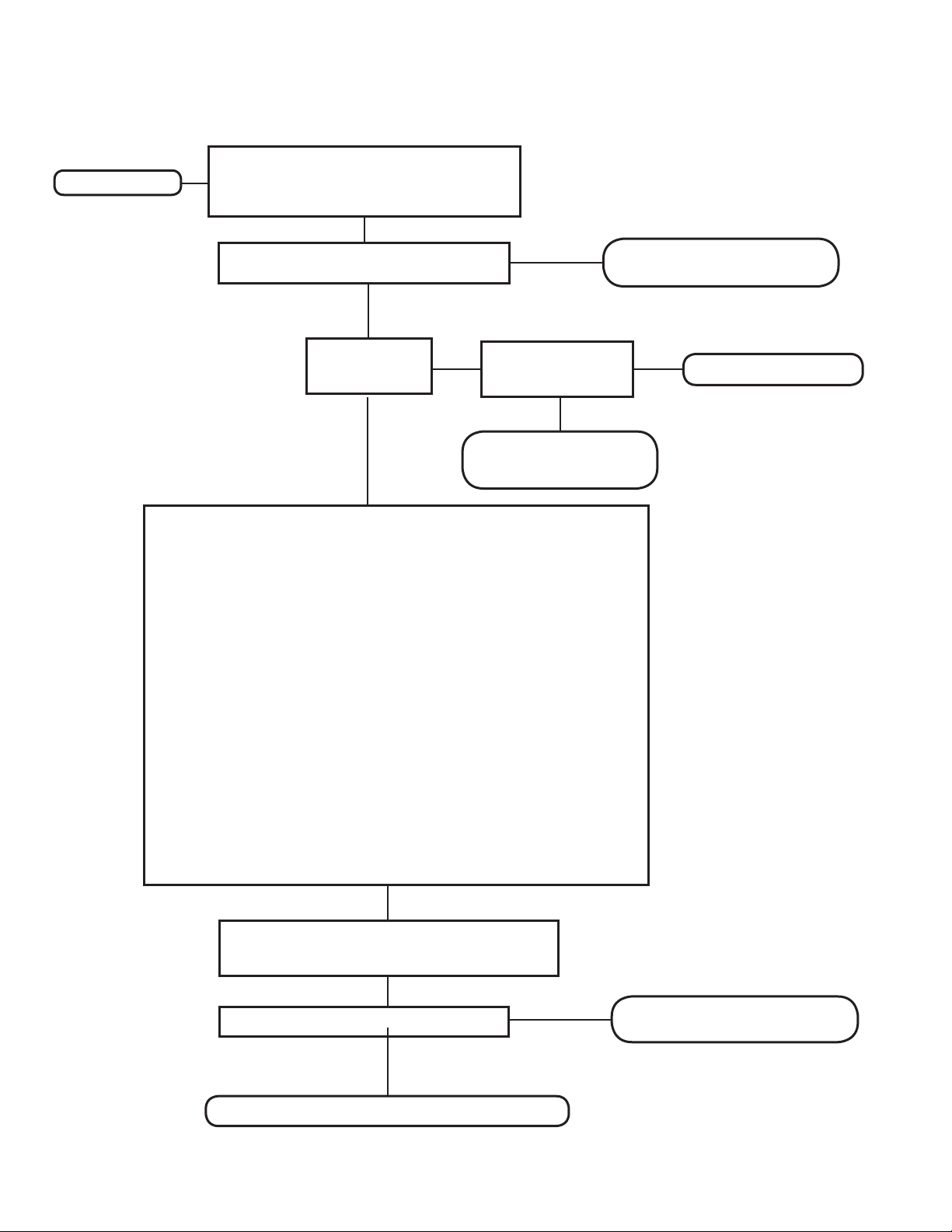
SECTION VII A – TEST DU CAPTEUR DE VITESSE DE ROTATION DE ROUE
COMMENCER ICI
AVEC LE COMMUTATEUR D’ALLUMAGE ACTIVÉ,
NOTER LES DEL ALLUMÉES. EFFECTUER UNE
RÉINITIALISATION MAGNÉTIQUE, NOTER LA
RÉACTION DES DEL ROUGES.
EST-CE LA DEUXIÈME FOIS JUSQU’À CE
POINT PENDANT LE TEST?
NON
DES DEL ROUGES
SONT-ELLES
ALLUMÉES?
NON
COUPER LE COMMUTATEUR D’ALLUMAGE ET VÉRIFIER CE QUI SUIT :
A. VÉRIFIER « L’ENTREFER » ENTRE LE CAPTEUR DE VITESSE ET LE
RÉLUCTEUR OU LA COURONNE D’IMPULSION. (L’ENTREFER DU CAPTEUR
DE VITESSE WS-20™ DE BENDIX®™ EST ENTRE 0 ET 0,38 MM (0 ET 0,015
PO).) SI L’ENTREFER DU CAPTEUR DOIT ÊTRE AJUSTÉ, VÉRIFIER SI LES
ROULEMENTS DE ROUE SONT LÂCHES OU USÉS AVANT D’AJUSTER
L’ENTREFER. SE REPORTER AU MANUEL D’ENTRETIEN DU VÉHICULE AU
SUJET DES ROULEMENTS USÉS.
B. SI L’ENTREFER DU CAPTEUR EST CORRECT, VÉRIFIER LE ROULEMENT DE
ROUE POUR Y DÉTECTER DU JEU ET VÉRIFIER S’IL EST CONFORME AUX
RECOMMANDATIONS DU FABRICANT.
C. S’ASSURER QUE LE RÉLUCTEUR OU LA COURONNE D’IMPULSION EST
EN PLACE ET VÉRIFIER SON ÉTAT. VÉRIFIER QU’AUCUNE DENT N’EST
MANQUANTE OU ENDOMMAGÉE ET QUE LE RÉLUCTEUR FONCTIONNE
CORRECTEMENT ET DE FAÇON PERPENDICULAIRE À LA FACE DU
CAPTEUR.
D. VÉRIFIER QUE LE FAISCEAU DE FILS ET LES CONNECTEURS SONT
ACHEMINÉS AU CAPTEUR.
E. VÉRIFIER QUE LES FREINS NE COLLENT PAS (TROP AJUSTÉS, AIR PIÉGÉ
DANS LE CYLINDRE, FAUX-ROND DES TAMBOURS, RESSORTS DE RAPPEL
DÉFECTUEUX, DÉFAILLANCES DU SYSTÈME DE FREIN DE STATIONNEMENT,
ETC.), PUIS CORRIGER ET REVÉRIFIER.
OUI
ROUGES SONT-ELLES
PASSER À LA SECTION VII,
PARTIE B ET COMMENCER LE
OUI
LES MÊMES DEL
ALLUMÉES?
OUI
TEST
PASSER À LA SECTION II, PARTIE B
ET COMMENCER LE TEST
NON
PASSER À LA SECTION IV.
24
REBRANCHER LES CONNECTEURS AU CONTRÔLEUR
™
ET AU CAPTEUR DE VITESSE, RÉINITIALISER
EC-16
AVEC UN AIMANT. OBSERVER LES DEL ROUGES.
DES DEL ROUGES SONT-ELLES ALLUMÉES?
NON
PASSER À LA « PROCÉDURE INITIAL DE DÉMARRAGE ».
OUI
PASSER À LA SECTION III
« INSPECTION DES DEL ALLUMÉES ».
Page 25

SECTION VII B – TEST DU CAPTEUR DE VITESSE DE ROTATION DE ROUE
COMMENCER
ICI À PARTIR DE LA
SECTION VII, PARTIE A
CONNECTEUR À 30 BROCHES
K J H G F E D C B A
J2 VITESSE DE ROTATION DE ROUE
AVANT GAUCHE
J1 SIGNAL DE VITESSE DE ROTATION
DE ROUE AVANT GAUCHE
H3 RTN DE VITESSE DE ROTATION DE
ROUE AVANT DROIT
H2 SIGNAL DE VITESSE DE ROTATION
DE ROUE AVANT DROIT
A1, A2, A3 MASSE
B1, K2, K3 ALIMENTATION
CONNECTEUR À 18 BROCHES
1
2
3
F E D C B A
LES MÊMES DEL
NON
SONT-ELLES ALLUMÉES?
OUI
COMMUTATEUR D’ALLUMAGE COUPÉ. DÉBRANCHER LE
CONNECTEUR DU CONTRÔLEUR EC-16™. MESURER LA RÉSISTANCE
ENTRE LE SIGNAL DE VITESSE (+) ET LE SIGNAL DE RETOUR (-)
QUI CONVIENT. LA RÉSISTANCE POUR LE CAPTEUR DE VITESSE
WS-20™ DE BENDIX® DOIT SE SITUER ENTRE 1500 ET 2500 OHMS.
1
SE REPORTER AU MANUEL D’ENTRETIEN DU VÉHICULE SI UN
2
3
CAPTEUR DE VITESSE AUTRE QUE LE WS-20™ EST UTILISÉ.
VÉRIFIER LA CONTINUITÉ ENTRE L’ALIMENTATION (B1, K2, K3) ET
LE SIGNAL DE VITESSE, PUIS ENTRE LA MASSE (A1, A2, A3) ET LE
SIGNAL DE VITESSE. AUCUNE CONTINUITÉ N’EST PERMISE.
LA RÉSISTANCE
OUI
EST-ELLE CORRECTE?
NON
DÉBRANCHER LE CONNECTEUR AU NIVEAU DU
CAPTEUR DE VITESSE. INSPECTER LE CONNECTEUR
ET VÉRIFIER LA RÉSISTANCE ENTRE LES DEUX
BROCHES DU CAPTEUR. LA RÉSISTANCE POUR LE
CAPTEUR DE VITESSE WS-20™ DE BENDIX® DOIT SE
SITUER ENTRE 1500 ET 2500 OHMS. VÉRIFIER LA
CONTINUITÉ ENTRE L’ALIMENTATION (B1, K2, K3) ET
LE SIGNAL DE VITESSE, PUIS ENTRE LA MASSE (A1,
A2, A3) ET LE SIGNAL DE VITESSE.
PASSER À LA SECTION III
« INSPECTION DES DEL ALLUMÉES »
NON
REMPLACER LE
CONTRÔLEUR EC-16
REMPLACER LE CAPTEUR
™
.
C3 VITESSE DE ROTATION DE ROUE
DU MILIEU GAUCHE
C2 SIGNAL DE VITESSE DE ROTATION
DE ROUE DU MILIEU GAUCHE
F3 VITESSE DE ROTATION DE ROUE
ARRIÈRE GAUCHE
F2 SIGNAL DE VITESSE DE ROTATION
DE ROUE ARRIÈRE GAUCHE
B3 VITESSE DE ROTATION DE ROUE
DU MILIEU DROITE
B2 SIGNAL DE VITESSE DE ROTATION
DE ROUE DU MILIEU DROITE
E3 VITESSE DE ROTATION DE ROUE
ARRIÈRE DROITE
E2 SIGNAL DE VITESSE DE ROTATION
DE ROUE ARRIÈRE DROITE
OUI
REBRANCHER LE CONNECTEUR
AU CAPTEUR DE VITESSE ET
AU CONTRÔLEUR EC-16™ ET
RÉINITIALISER AVEC L’AIMANT.
NOTER SI UNE DEL ROUGE EST
ALLUMÉE.
DES DEL SONT-ELLES
ALLUMÉES?
OUI
LES MÊMES DEL ROUGES
SONT-ELLES ALLUMÉES?
OUI
RÉPARER OU REMPLACER
LE FAISCEAU DE FILS DU
CAPTEUR DE VITESSE
NON
NON
REFAIRE LA « PROCÉDURE
INITIAL DE DÉMARRAGE ».
PASSER À LA SECTION III
« INSPECTION DES DEL ALLUMÉES »
25
Page 26
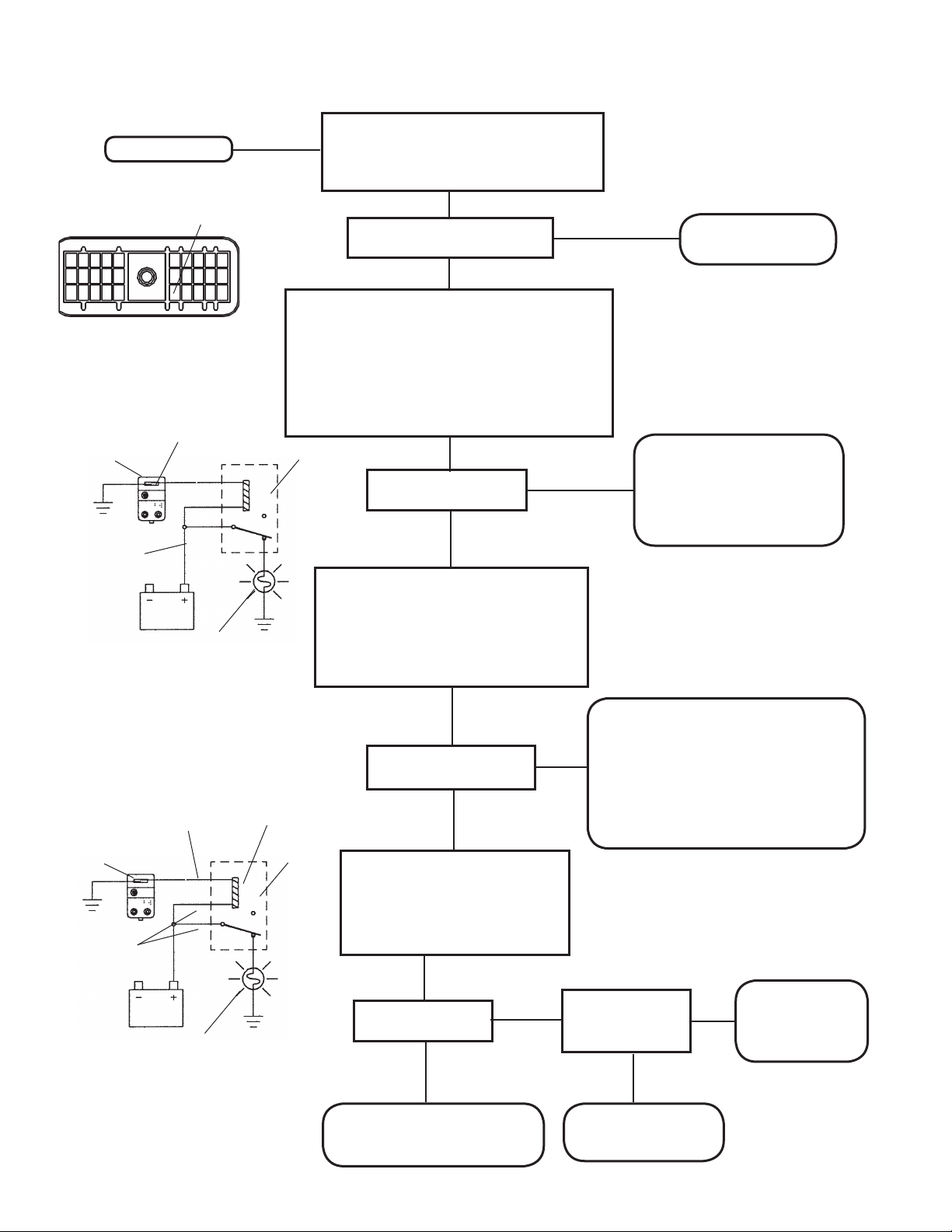
SECTION VIII – TEST DE FAUSSE INDICATION CAUSÉE
PAR UN RELAIS DE VOYANT DE TABLEAU DE BORD
COMMENCER ICI
E3 VERS LE RELAIS
DU VOYANT DU
TABLEAU DE BORD
K J H G F E D C B A
CONNECTEUR À 30 BROCHES
E3 à partir du
connecteur à
Contrôleur
EC-16
Alimentation
du véhicule
Contrôleur
EC-16
Alimentation
du véhicule ici
30 broches
™
Voyant
d’antiblocage sur
le tableau de bord
Câblage du relais de
voyant antiblocage sur
tableau de bord
Mettre à la masse
cette borne ou ce
fi l sur le relais
™
1
2
3
Bobine
ALORS QUE LE COMMUTATEUR D’ALLUMAGE
EST ACTIVÉ SUR LE CONTRÔLEUR EC-
16™, RÉINITIALISER AVEC UN AIMANT ET
OBSERVER TOUTES LES DEL ALLUMÉES.
TOUTES LES DEL
SONT-ELLES ALLUMÉES?
OUI
ENLEVER L’AIMANT DU CONTRÔLEUR EC-16™,
COUPER LE COMMUTATEUR D’ALLUMAGE ET
DÉBRANCHER LE CONNECTEUR À 30 BROCHES DU
CONTRÔLEUR EC-16™. VÉRIFIER LA CONTINUITÉ
DU FIL DU VOYANT D’AVERTISSEMENT ENTRE LA
BROCHE E3, SUR LE CONNECTEUR À 30 BROCHES
ET LA BORNE SUR LE RELAIS DU VOYANT.
Relais
DE LA CONTINUITÉ
EST-ELLE DÉTECTÉE?
OUI
REBRANCHER LE CONNECTEUR À 30
BROCHES SUR LE CONTRÔLEUR EC-16™,
ACTIVER LE COMMUTATEUR D’ALLUMAGE
ET VÉRIFIER L’ALIMENTATION DU
VÉHICULE AU NIVEAU DE LA BOBINE DU
RELAIS DU VOYANT.
NON
Relais
DE L’ALIMENTATION
EST-ELLE DÉTECTÉE?
OUI
CONNECTER L’EXTRÉMITÉ
OPPOSÉE DE LA BOBINE DU
RELAIS À LA MASSE DU VÉHICULE
ET OBSERVER LA RÉACTION SUR
LE VOYANT DU TABLEAU DE BORD.
NON
NON
POUR DE L’INFORMATION DE DÉPANNAGE.
REBRANCHER LE FAISCEAU DE
VÉRIFIER LE CÂBLAGE ET LES
CONNECTEURS DU TABLEAU DE BORD
ET CONSULTER LE MANUEL DU VÉHICULE
RÉPARER OU REMPLACER LE CAS
ÉCHÉANT ET REFAIRE LA « PROCÉDURE
REMPLACER LE
CONTRÔLEUR EC-16™
RÉPARER OU REMPLACER
LE FAISCEAU DE FILS,
FILS DU CONTRÔLEUR EC-16™
ET REFAIRE LA « PROCÉDURE
INITIAL DE DÉMARRAGE »
INITIAL DE DÉMARRAGE ».
26
Voyant
d’antiblocage sur
le tableau de bord
Câblage du relais de
voyant antiblocage sur
tableau de bord
LE VOYANT EST-IL
ALLUMÉ?
OUI
REMPLACER LE RELAIS
ET REFAIRE LA « PROCÉDURE
INITIAL DE DÉMARRAGE »
NON
EST-CE LA
DEUXIÈME FOIS
JUSQU’À CE POINT?
OUI
REMPLACER LE
CONTRÔLEUR EC-16™
ET REFAIRE LE TEST.
NON
REFAIRE LA
« PROCÉDURE
INITIAL DE
DÉMARRAGE »
Page 27

SECTION IX – TEST DE FAUSSE INDICATION CAUSÉE PAR DES
COMPOSANTS DE VITESSE DE ROTATION DE ROUE
ALORS QUE LE COMMUTATEUR
COMMENCER ICI
D’ALLUMAGE EST ACTIVÉ, MAINTENIR
UN AIMANT SUR LA ZONE DE
RÉINITIALISATION DU CONTRÔLEUR
EC-16™ ET OBSERVER LES DEL
Toutes les
DEL sont-elles
allumées?
Placer
l’aimant ici
AFFICHEUR DE DIAGNOSTIC
DU CONTRÔLEUR EC-16
™
TOUTES LES DEL SONT-ELLES
ALLUMÉES?
OUI
ENLEVER L’AIMANT
DÉSACTIVER LE COMMUTATEUR
D’ALLUMAGE ET INSPECTER L’ESSIEU ET
LA ROUE CONCERNÉS POUR Y REPÉRER
LA PRÉSENCE D’UN RÉLUCTEUR OU
D’UNE COURONNE D’IMPULSION ET
D’UN CAPTEUR DE VITESSE. VÉRIFIER
L’ENTREFER DU CAPTEUR (DISTANCE
ENTRE LE CAPTEUR DE VITESSE ET LE
RÉLUCTEUR) ET LE JEU DU ROULEMENT.
RÉAJUSTER SI NÉCESSAIRE.
CONDUIRE LE VÉHICULE À 11
KM/H (7 MI/H) OU PLUS PENDANT
AU MOINS 5 SECONDES. COUPER
LE COMMUTATEUR D’ALLUMAGE
NON
REMPLACER LE
CONTRÔLEUR EC-16
™
REFAIRE LA « PROCÉDURE
INITIAL DE DÉMARRAGE »
27
Page 28
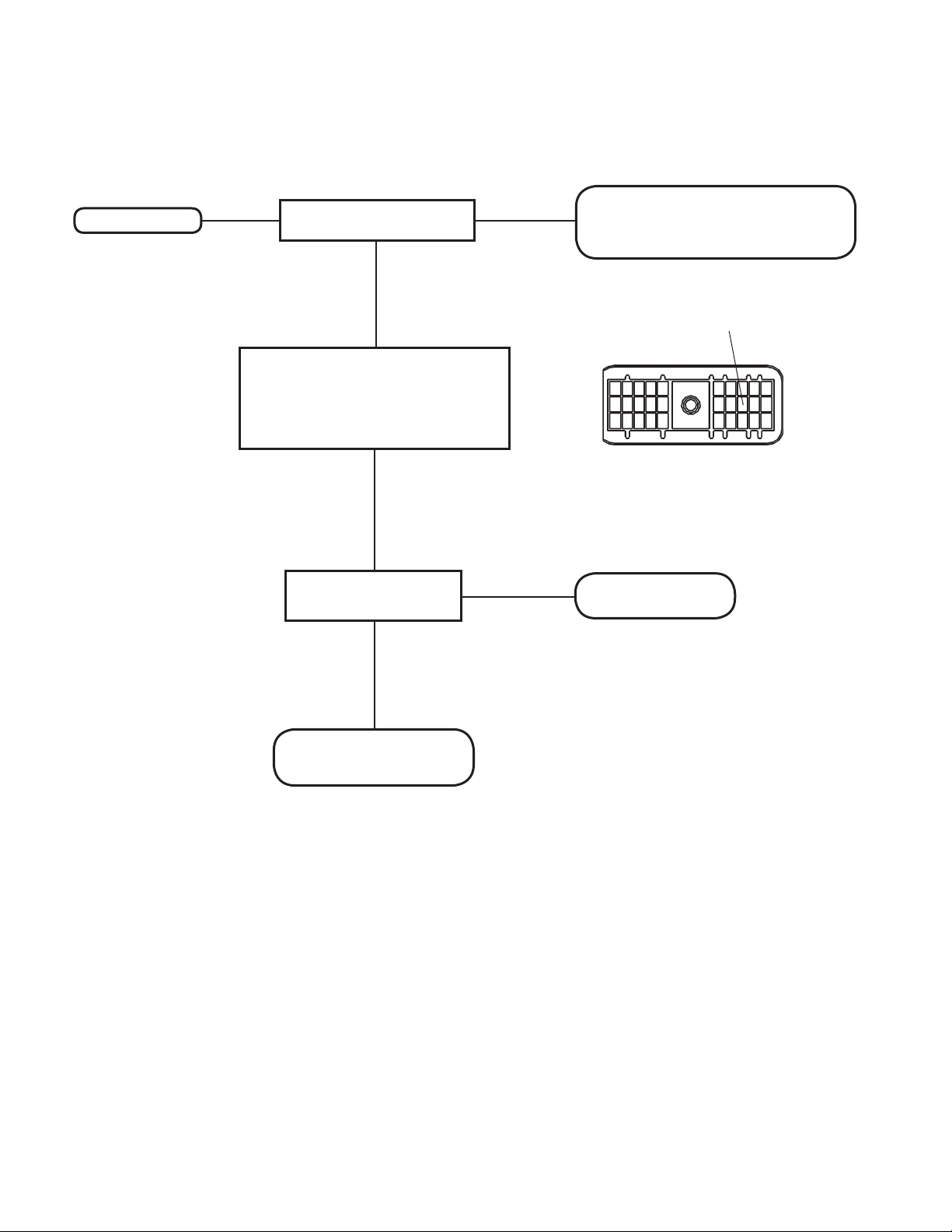
SECTION X – TEST DU VOYANT D’ANTIPATINAGE SUR LE TABLEAU DE BORD
COMMENCER ICI
EST-CE LA DEUXIÈME FOIS
JUSQU’À CE POINT?
OUI
COUPER LE COMMUTATEUR D’ALLUMAGE
ET DÉBRANCHER LE CONNECTEUR
À 30 BROCHES DU CONTRÔLEUR
EC-16™. ACTIVER LE COMMUTATEUR
D’ALLUMAGE ET VÉRIFIER LA TENSION
DU VÉHICULE À LA BORNE C2.
LA TENSION DU VÉHICULE
EST-ELLE DÉTECTÉE?
NON
OUI
REMPLACER LE VOYANT
D’ANTIPATINAGE AVEC UNE PIÈCE
QUI FONCTIONNE BIEN. REFAIRE LA
« PROCÉDURE INITIAL DE DÉMARRAGE »
C2
1
2
3
K J H G F E D C B A
CONNECTEUR À 30 BROCHES
REMPLACER LE
CONTRÔLEUR EC-16
™
NON
RÉPARER OU REMPLACER
LE FAISCEAU DE FILS ET
REFAIRE LE TEST
28
Page 29
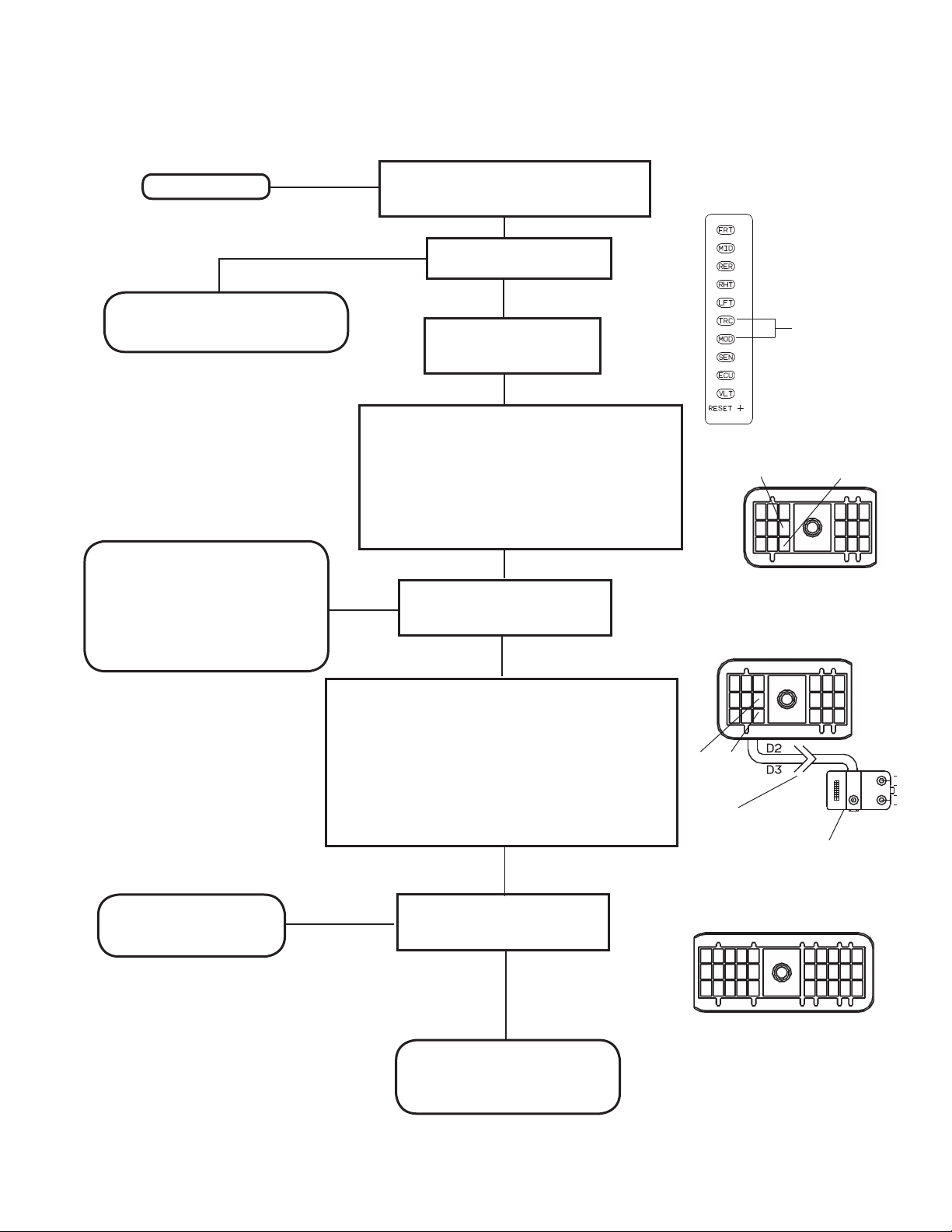
SECTION XI – TEST DU MODULATEUR D’ANTIPATINAGE
COMMENCER ICI
PASSER À LA SECTION XII « TEST
DU FAISCEAU DE FILS DU MODULE
DE COMMANDE DU MOTEUR »
VÉRIFIER L’ÉTAT DU
CONNECTEUR À 18 BROCHES ET LE
NETTOYER, REBRANCHER, ACTIVER
LE COMMUTATEUR D’ALLUMAGE ET
PASSER L’AIMANT SUR LA ZONE DE
RÉINITIALISATION DU CONTRÔLEUR
EC-16™. REFAIRE LA « PROCÉDURE
INITIAL DE DÉMARRAGE »
REMPLACER LE TIROIR
RELAIS DE L’ANTIBLOCAGE
(MODULATEUR)
ACTIVER LE COMMUTATEUR D’ALLUMAGE
ET INSPECTER LE CONTRÔLEUR EC-16™
POUR Y OBSERVER DES DEL ALLUMÉES
OUI
LA DEL « TRC » EST-ELLE
LA SEULE ALLUMÉE?
NON
LES DEL « TRC » ET
« MOD » SONT-ELLES
ALLUMÉES?
OUI
COUPER LE COMMUTATEUR D’ALLUMAGE ET
DÉBRANCHER LE CONNECTEUR À 18 BROCHES
DU CONTRÔLEUR EC-16™. VÉRIFIER LA DISTANCE
ENTRE LES BROCHES D2 ET D3. LA RÉSISTANCE
DOIT SE SITUER ENTRE 10 ET 12 OHMS. DÉPOSER
LE CONNECTEUR À 30 BROCHES ET VÉRIFIER LA
CONTINUITÉ ENTRE LA MASSE (A1, A2, A3) ET D2
ET D3. AUCUNE CONTINUITÉ N’EST PERMISE.
OUI
RÉSISTANCE CORRECTE ET
AUCUNE CONTINUITÉ À LA
MASSE?
NON
DÉBRANCHER LE CONNECTEUR À 2 BROCHES
AU NIVEAU DU MODULATEUR ET VÉRIFIER LA
RÉSISTANCE DU CONNECTEUR À MOITIÉ FIXÉ AU
TIROIR RELAIS DE L’ANTIBLOCAGE. LA RÉSISTANCE
DOIT SE SITUER ENTRE 10 ET 12 OHMS. VÉRIFIER
ENSUITE LA CONTINUITÉ ENTRE LA MASSE SUR LE
CONNECTEUR À 30 BROCHES (A1, A2, A3) ET LES DEUX
BROCHES DU CONNECTEUR À 2 BROCHES ALLANT AU
MODULATEUR. AUCUNE CONTINUITÉ N’EST PERMISE.
NON
RÉSISTANCE CORRECTE ET
AUCUNE CONTINUITÉ À LA
MASSE?
OUI
Ces DEL
sont-elles
allumées?
D2
D3
1
2
3
F E D C B A
CONNECTEUR À 18 BROCHES
F E D C B A
1
2
3
D2
D3
Connecteur à 2
broches du modulateur
Contrôleur EC-16™ et tiroir
relais de l’antiblocage
(modulateur)
CONNECTEUR À 30 BROCHES
1
2
3
RÉPARER OU REMPLACER
LE FAISCEAU DE FILS (DU
CONNECTEUR À 18 BROCHES AU
CONNECTEUR À 2 BROCHES)
K J H G F E D C B A
A1 MASSE
A2 MASSE
A3 MASSE
29
Page 30
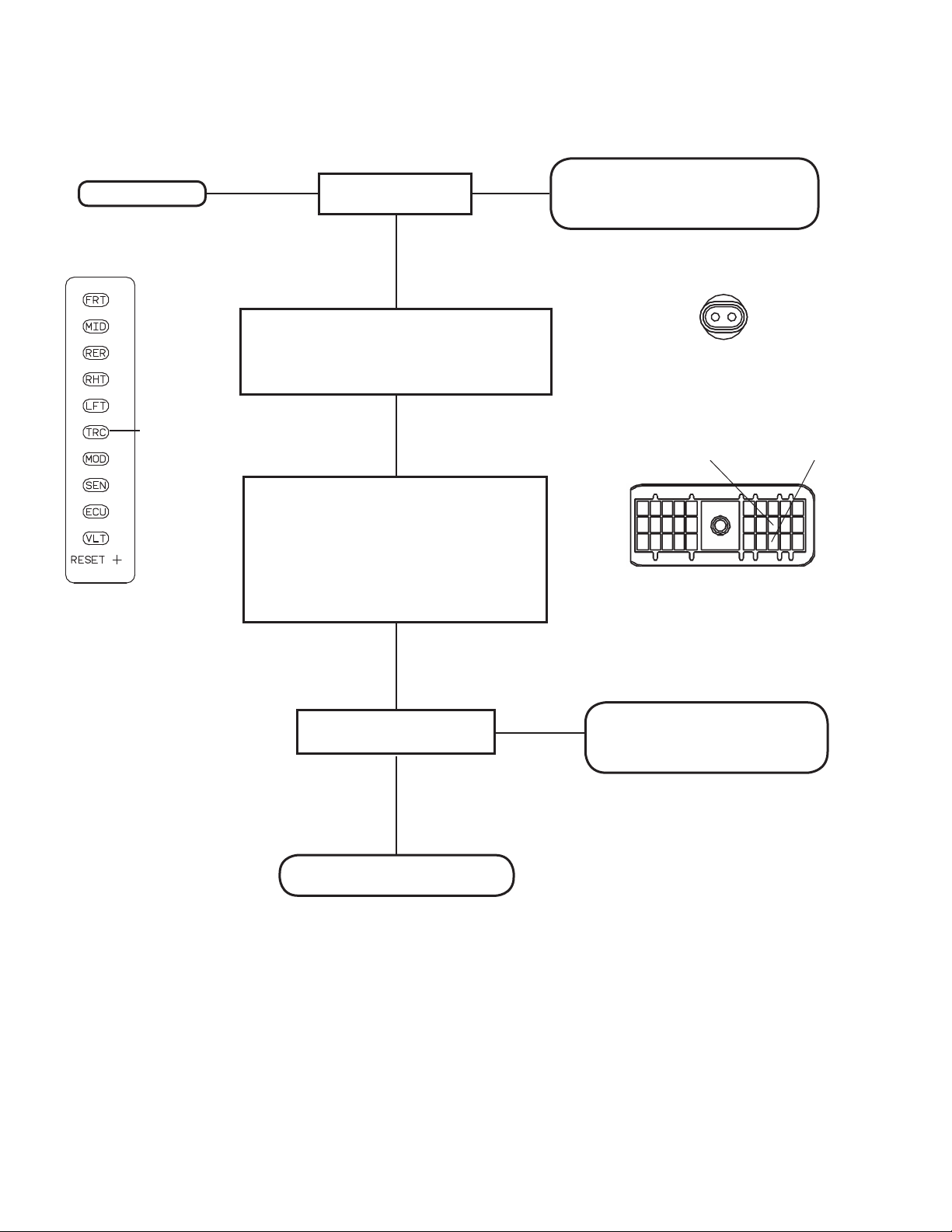
SECTION XII – TEST DU FAISCEAU DE FILS DU MODULE DE COMMANDE DU MOTEUR
COMMENCER ICI.
Allumé?
SEULE LA DEL « TRC »
EST ALLUMÉE?
OUI
COUPER LE COMMUTATEUR D’ALLUMAGE.
DÉBRANCHER LE CONNECTEUR À 30 BROCHES
DU CONTRÔLEUR EC-16™ ET DU CONNECTEUR
À 2 BROCHES AU NIVEAU DU MODULE DE
COMMANDE ÉLECTRONIQUE DU MOTEUR.
VÉRIFIER LA CONTINUITÉ DU CÂBLAGE ENTRE
LE CONNECTEUR À 30 BROCHES AU NIVEAU
DU CONTRÔLEUR EC-16™ ET LE CONNECTEUR
À 2 BROCHES AU NIVEAU DU MODULE DE
COMMANDE DU MOTEUR. LES BROCHES B2
ET B3 SUR LE CONNECTEUR À 30 BROCHES
CORRESPONDENT AUX FILS ALLANT VERS LE
CONNECTEUR À 2 BROCHES SUR LE MODULE
DE COMMANDE DU MOTEUR.
NON
PASSER UN AIMANT SUR LA ZONE
DE RÉINITIALISATION DU CONTRÔLEUR
EC-16™ ET REFAIRE LA « PROCÉDURE
INITIAL DE DÉMARRAGE »
CONNECTEUR AU NIVEAU
DU MODULE DE COMMANDE
ÉLECTRONIQUE DU MOTEUR
B3B2
1
2
3
K J H G F E D C B A
CONNECTEUR À 30 BROCHES
LA CONTINUITÉ DU CÂBLAGE
EST-ELLE CORRECTE?
NON
RÉPARER OU REMPLACER LE
FAISCEAU DE FILS DU VÉHICULE
OUI
TESTER LE MODULE DE
COMMANDE DU MOTEUR EN
SUIVANT LA PROCÉDURE INDIQUÉE
PAR LE FABRICANT.
30
Page 31

31
Page 32

32
SD-13-4787F_FR_005 © 2008 Bendix Commercial Vehicle Systems LLC. Tous droits réservés. 4/2008 Imprimé aux États-Unis
 Loading...
Loading...